

Page 1
MMI-8S
MULTI-AXES MOTION SYSTEM
OPERATION AND INSTALLATION
MANUAL
WIN\MMIMAN1.WRI 02-02
SECTION 1: INTRODUCTION PAGE 2
SECTION 2: SR4 NETWORK CONTROL PAGE 6
SECTION 3: SMC STEP MOTION CONTROL PAGE 15
SECTION 4: MMI MECHANICAL ASSEMBLY PAGE 27
APPENDIX: QUICK REFERENCE GUIDE PAGE 35
Page 2

INTRODUCTION
controller is independent. Each supports a home sensor, limit safety loop, and six bits of general
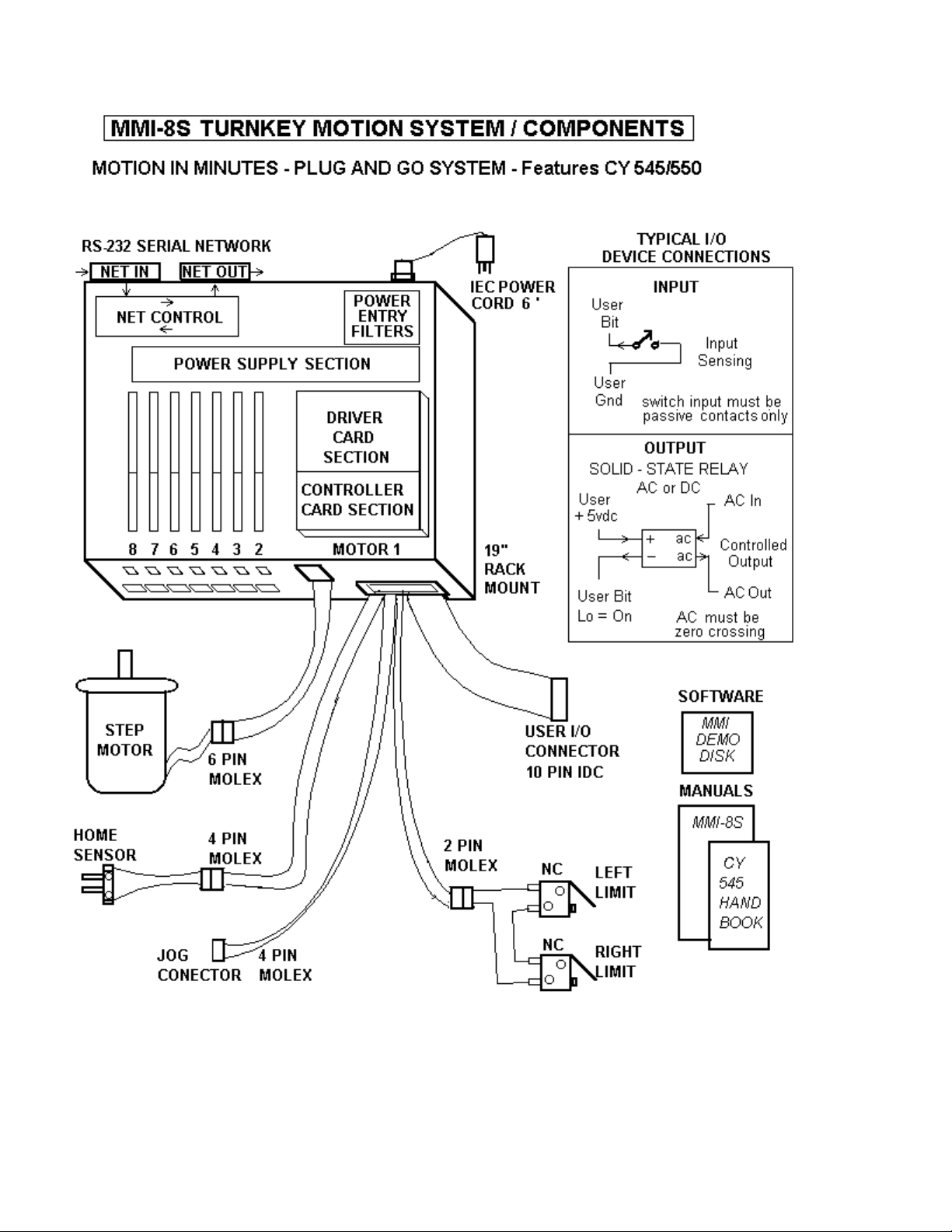
MMI Multi-Axes Motion Controllers provide control of up to eight step motors. Each motor
purpose I/O (input/output). In addition, up to eight MMI motion controllers can be "daisy-
chained" together with simple pin-to-pin DB9 serial cables for a total of 64 motors per serial port.
The MMI system consists of three major sub-assemblies: two SR4s (Serial Repeater 4-channel)
network communication controller cards; up to eight SMCs (Step Motion Controller) cards; and
the power supplies. The MMI system is packaged in a 19" format enclosure suitable for 19" rack
mount or free standing (bench-top) applications.
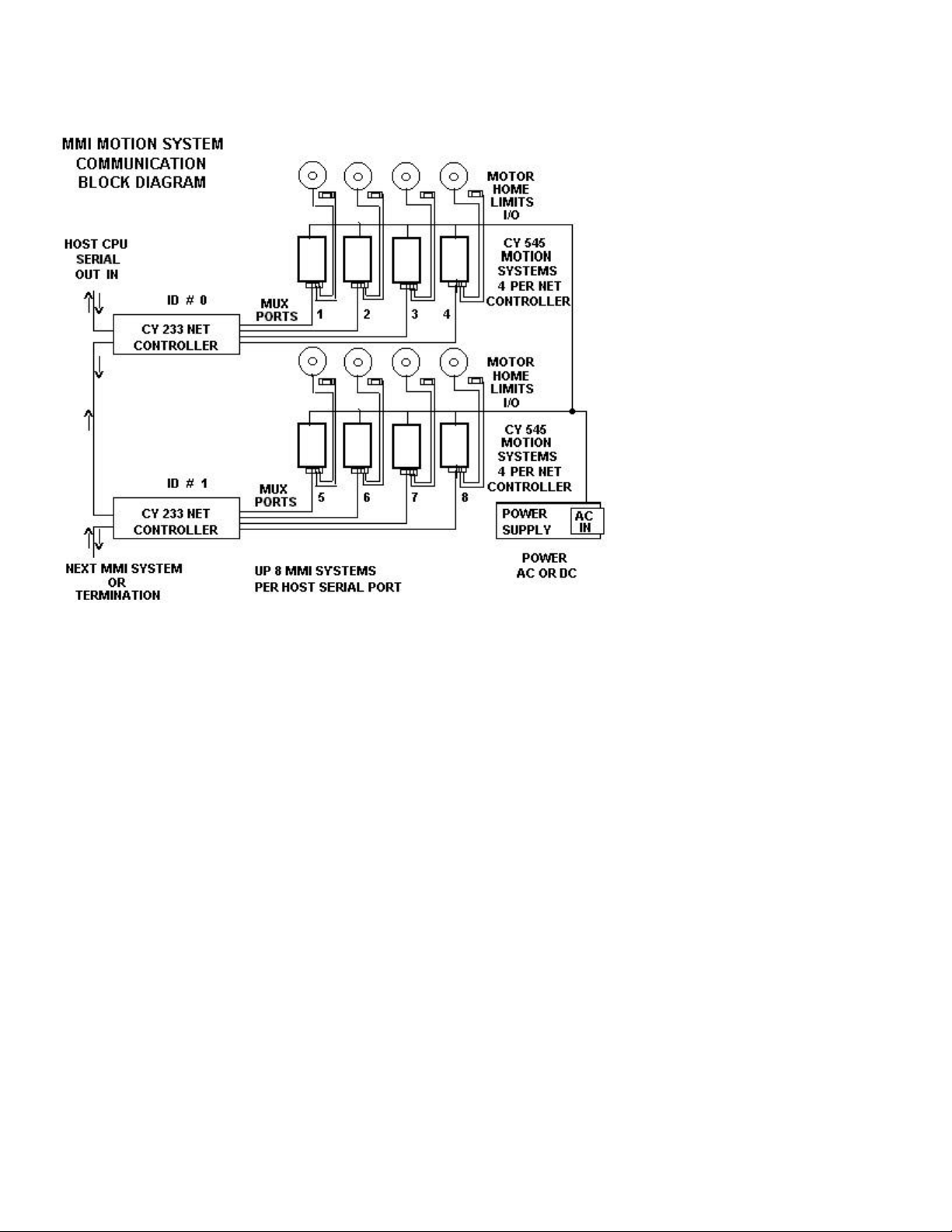
During operation, the SR4 net controllers send and receive commands from the host CPU using
the RS-232 communication port. There are 2 command sets; one for the Cybernetics CY233 net
controllers and the other for the Cybernetics CY545 (550) SMC motor controllers. The CY233
uses only 4 commands. The CY545 has 26 commands; refer to the CY545 Motion Controller
manual for details. The CY number refers to the model of microprocessor used in this system.
Page 3
Page 4
Page 5

DANGER
will either be lost or jam (lock-up) the system. In some cases, the system may begin uncontrolled
CONTRARY TO POPULAR PRACTICE, IT IS BEST TO READ THIS MANUAL BEFORE ATTEMPTING
SUDDEN AND UNEXPECTED MOTION CAN OCCUR DUE TO
PROGRAMMING ERRORS. STAY CLEAR OF THE MOTORS.
WARNING
It is the user's responsibility to insure that commands are not sent to busy systems. The motion
systems can indicate they are busy but have no way to block incoming commmunications which
motion.
ATTENTION
TO OPERATE SYSTEM. IT WILL SAVE TIME AND PRODUCE BETTER, FASTER RESULTS.
Page 6

SECTION 2: SR4 - Serial Repeater 4/channel Assembly
CONTENTS PAGE
Introduction 7
Hardware Configuration 8
Service Access 8
Table of ID and Status Codes 11
Displays & Controls 12
Mechanical Assembly 14
SR4 (CY 233) COMMAND SET SUMMARY
WRITE W Send commands to the motion system.
READ R Read status (busy) of the motion systems.
ECHO J Used to set SR-4s into pass-through mode.
ENTER < Carriage Return terminates commands.
Page 7

INTRODUCTION
multiplexer. Each motor command string must start with a net controller address. The controller
In the MMI system, two SR4 controllers are used. Each can control up to four SMC systems.
During operation, a three byte net command (address), consisting of three bytes, is prefixed to a
motion control command string. When the selected SR4 detects its address, a serial path is
connected to the addressed SMC by a 1 to 4 serial data multiplexer. The motion command is
then passed to the SMC. The command terminator character (carriage return) resets the
address compares to the setting of the SR4 address switches in the MMI. The multiplex code
selects any combination of the four output paths to the SMCs. For example, one motor system,
at a time, is selected for setup commands and then up to four motors can be directed to execute
(Go) simultaneously. When requesting information from a SMC motor system, only one of the
eight can be selected.
When a motor system is performing an operation, its Busy signal is input to the SR4's status
register. To monitor the busy status of the SMCs, a Read command (address), again consisting
of three bytes, is sent to the net controller. The SR4 will return an ASCII character equal to a
binary number. This number indicates the status of all four SMCs. Refer to the net ID address
table in this manual.
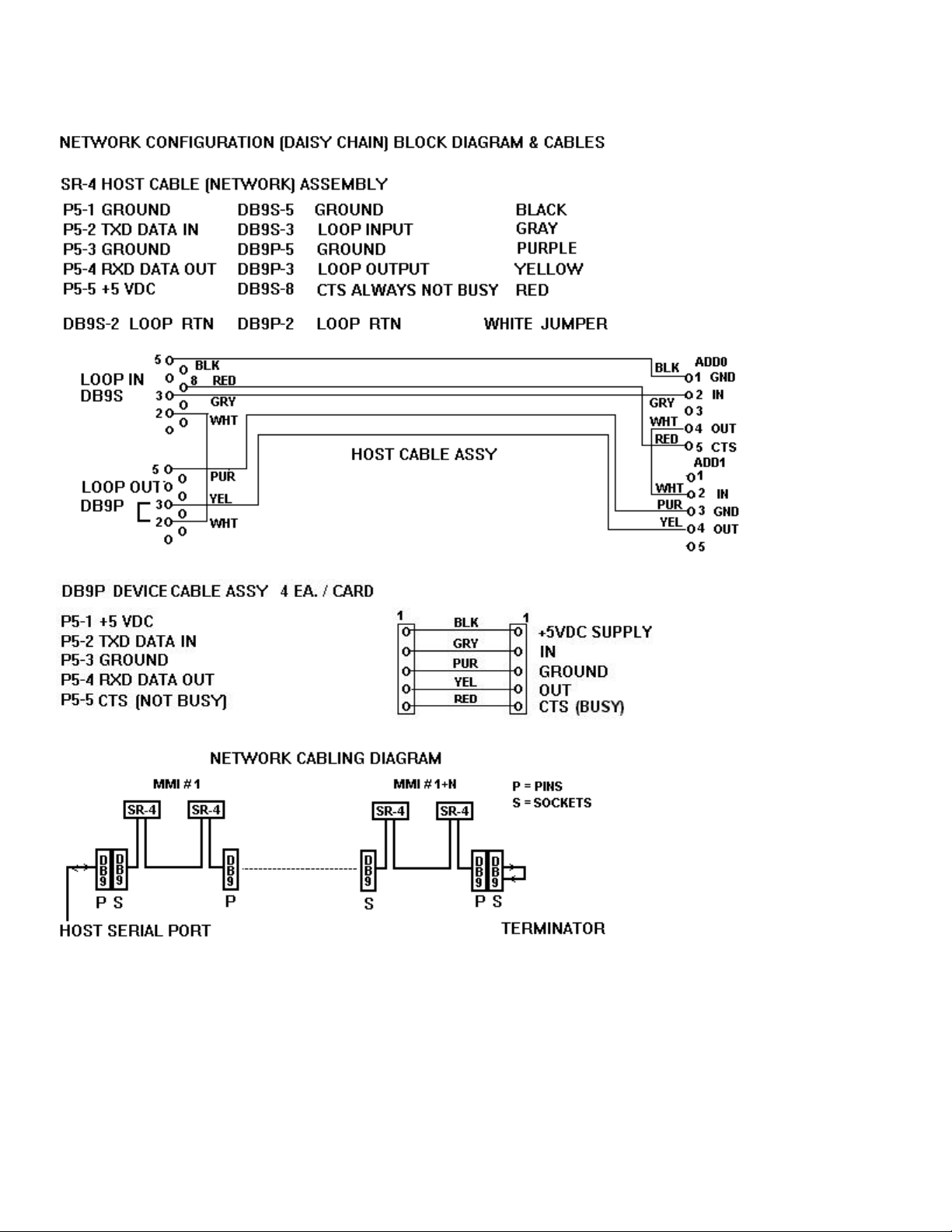
The host to MMI serial port is wired with standard RS-232 (IBM type) DB-9 connectors. Each MMI
has two connectors. The first goes to the host computer and the second to the next MMI
controller in the daisy-chain. The last controller's second connector must terminated with the
"loop jumper" DB9 plug.
The MMI normally operates in standard RS-232 format using ASCII character mode at 1200 baud
which supports the EEPROM memorys on the motor cards. Optional baud rates up to 57K baud
are possible. Parity is none, 8 data bits, and 1 stop bit.
Page 8
HARDWARE DESCRIPTION
Note: Do not attempt any procedure or remove any screws other than instructed; no user service
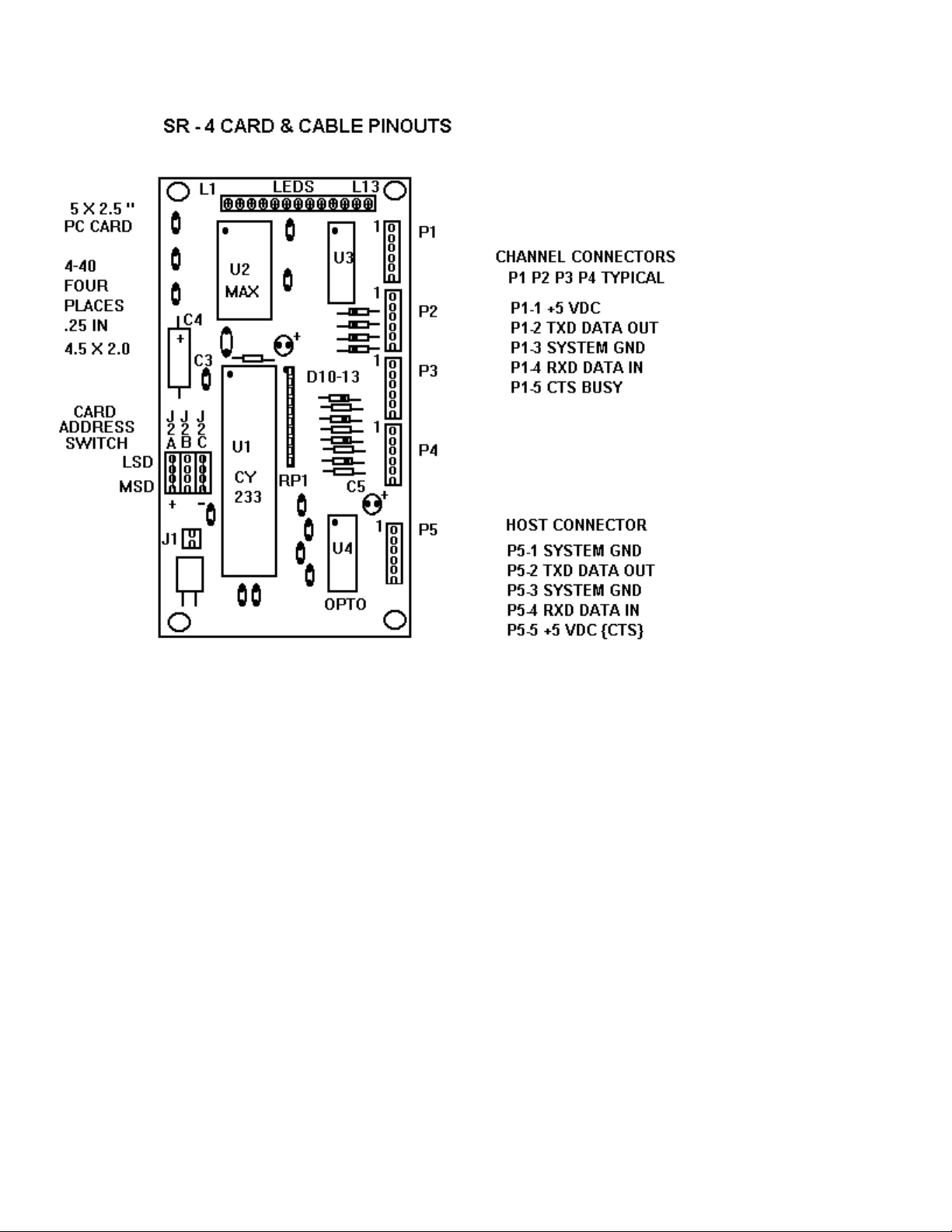
The MMI network control contains two CY233 SR4 cards, generally refered to as #0 and #1 which
is their binary address. Each card controls four SMC motor systems and includes status LEDs
and jumber posts (dip-clips) for setting its ID number. The cards are mounted to a single rail and
can be removed as a single unit as required during service.
is possible to the interior assemblies!
SERVICE ACCESS
Remove the top cover (see following procedure) and access the interior of the MMI only: (1) to
adjust the motor current (factory preset to 1 amp/coil); (2) to set the network address clips
(factory preset to #0 & #1); (3) to observe the network LED displays during programming; as
required.
TOP COVER REMOVAL PROCEDURE
(1) Remove only the four (4) corner 6/32 slotted-head screws holding the black,
top, cover; the cover edges will be retained by the front and rear panels.
(2) Pressing against the rear portion of the cover, at the raised bevel, with the thumbs,
slide the cover fully forward while keeping the cover edge under the lip of the front
panel. The rear lip of the cover will be exposed. Do not attempt to remove by sliding front
to rear.
(3) Using care not to bend the cover, lift up both rear corners of the cover slightly
above the rear panel. Pull the cover towards the rear and lift off.
(4) Replacement is the reverse of the above.
OPERATION
The CY233 microprocessor is used as an address controller for the multiplex system. When a
mode command, followed by a valid ID number, is received by the 233, the 233's address lines
select a multiplex channel. The remaining serial data (motion command string) is passed,
through the multiplexer, directly to the target device (motion system) until the detection of the
terminator charactor (carriage return) by the 233. After detecting the terminator, the 233 resets
the address lines and waits for the next mode command. If more than one controller is
connected to the serial network, invalid ID numbers and the serial data string are echoed to the
next controller down the line. If the ID is invaild for all controllers, the entire message will return
to the host CPU (echo invalid).
Note that contary to normal CY545 procedure, in a CY233 network system, all SMC motor control
commands MUST BE in LOWER case! All SR4 net commands must be in UPPER case! With that
said, it may be observed that the SMC's respond to upper case as well. Only during a query
responce will the SR4 repeaters strip off the upper case characters A to F which are seen as hex
control codes. This will not cause a malfunction but may be confusing to the user.
Page 9

WRITE MODE
on the controller card. Valid ID numbers are from 0 to F hex (1 to 16 net controllers). The second
not program the motion system EEPROMS to respond with information without a query command
example, a motion is completed. In the MMI system, the status of all four CTS signals is available
A typical command would be: R0F<; if the response was N, the binary value would be 0010 (fixed)
In general, SR4 mode commands are prefixed to SMC motion commands which are then "passed
through" to the motion systems. Only two mode commands are used in this system, the write
(W) and the read (R). A write command consists of a mode character (W), an ID number (two hex
characters), a command string (motion system data string), and a terminator (carriage return).
The ID number consists of two characters; the first or high byte is the system ID. This identifies
an MMI net controller card. The system ID of a card is selected with the jumper switches located
or low byte selects any combination of the four channels within a controller. Valid channel
numbers are from 0 to F hex. Note that F selects no motor channels and is used only to send the
Status request to the CY233 and not the motion systems.
A typical example of a message to a SMC axes would be: W0Ep 1000<. This example directs
SMC axis E (motor #1) of SR4 #0 to move to position 1000.
The write command is also used to request information (query) from the motion systems. Only
one motion channel can be requested to return information at a time. In a typical motion system,
with a CY545 motion controller, the question mark (?) command is used to query the system. Do
first (slave mode only).
A typical command would be: W0E? p<. This requests motor 1 to return its current position.
READ MODE
A read command consists only of a mode character (R), the ID number (two hex characters; note
that the second character is always F), and a terminator (carriage return). The read command is
only used to read the status of the SMC motion systems from the SR4 net controller.
STATUS
When a motion system is busy, it can not respond, normally, to the host computer. The BUSY
(also refered to as the CTS or cleared-to-send) signal is used to hold off the host until, for
as a single ASCII character. This character is equal to a binary number consisting of two bytes.
The high byte is always 0010 (4 hex); the low byte consists of four bits; each bit indicates the
status of a channel's CTS signal. Remember that the motion system MUST be in the Hand-Shake
Mode (o 0a0h; lower case only) for the status function to be valid.
1110. Refer to Code Table.
Page 10

ECHO MODE
A typical command would be J0F<; the 0 is the address of the first SR4 card and the F indicates a
Refering to the following table, note that the codes seem confusing in that they are not an orderly
In the MMI network system, with two network cards, it is necessary to engage the CY233 passthrough (echo-all) mode. This allows commands originating in a motion channel (SMC) to be
passed through successive SR4 cards down-stream in the network loop. A typical example is the
SMC system query commands. The J command format consists of a mode character (J), the ID
number (two hex characters; the second is always F), and the terminator (carriage return).
SR4 only message; J1F is the second card address. Each SR4 in the daisy-chain network must
be sent a J command during start-up procedure.
ID AND STATUS CODES
sequence of decimal numbers. They, in fact, are based on their hex-decimal values from 0 to F
(hex) . Also as the active selection signal is a LOW or 0 volts, the sequence is inverted. For
example, all devices selected is a 0 (zero) code or address; all bits are low. No devices selected
is F; all bits HI (+5 volts). Therefore, selection of the first device or E indicates 1 bit is LOW; all
others are HI. Note that the codes for the individual motor controllers are therefore E (motor #1),
D (motor #2), B (motor #3), and 7 (motor #4). The other codes allow selection of any combination
of motors. The BUSY codes correspond to these selections with the @ indicating all BUSY
followed by A to O (none busy) in decending order. Refer to PROGRAMMING section for
examples of code selection.
Page 11
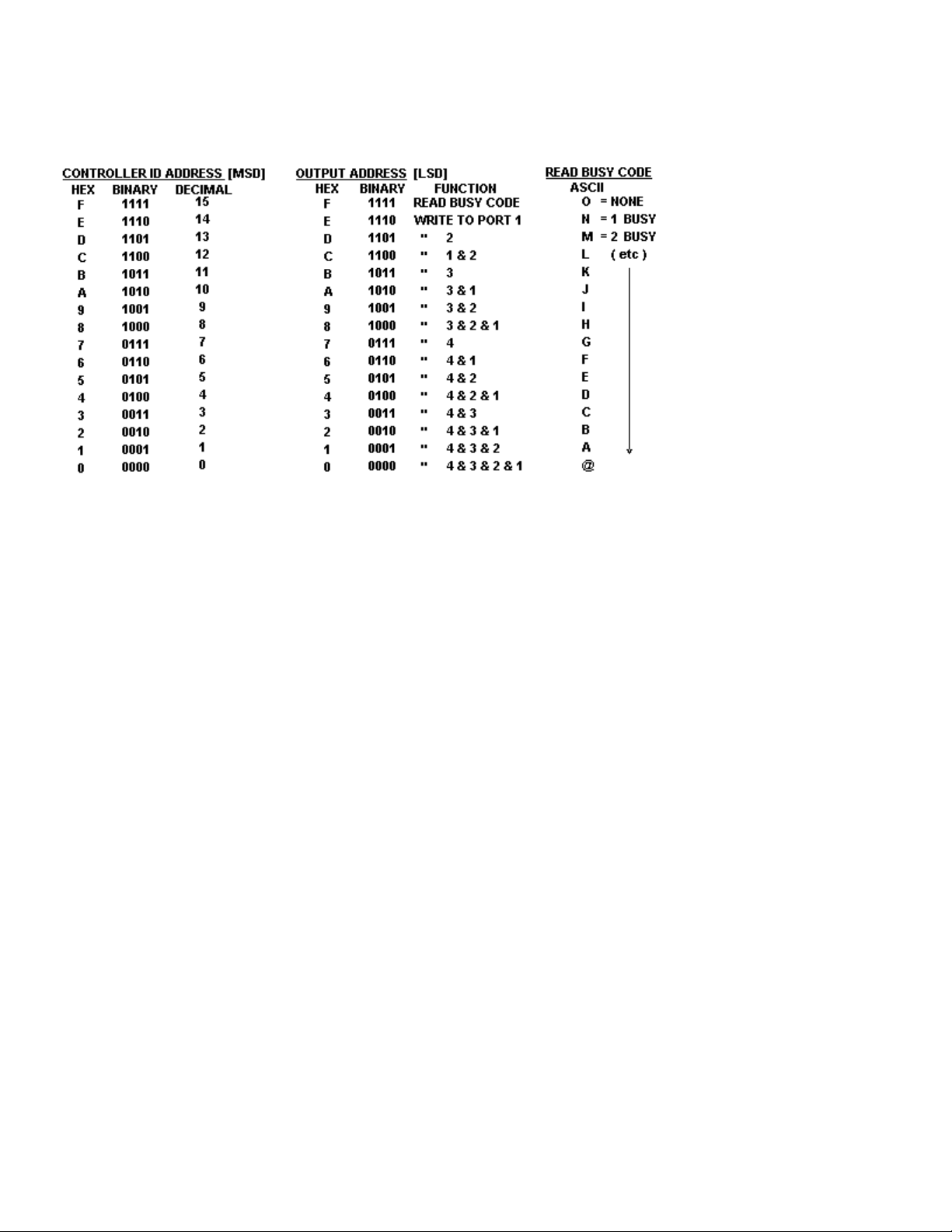
TABLE OF ID AND STATUS CODES
Page 12

LED DISPLAYS
The displays are used with the test software program to verify and demonstrate correct operation
of the MMI. They are located on each SR4 card; inside the MMI.
L 1 OUT 1 INDICATES TRANSMIT DATA TO CHANNEL 1
L 2 OUT 2 " 2
L 3 OUT 3 " 3
L 4 OUT 4 " 4
L 5 OUT DATA INDICATES TRANSMIT DATA FROM HOST CPU
L 6 IN 1 INDICATES RECEIVE DATA TO HOST CPU 1
L 7 IN 2 " 2
L 8 IN 3 " 3
L 9 IN 4 " 4
L 10 AD 0 INDICATES MOTION CHANNEL ADDRESS 1
L 11 AD 1 " 2
L 12 AD 2 " 3
L 13 AD 3 " 4
ID JUMPER SWITCH
The ID jumper switch assigns the ID number to an SR4 card. The switch consists of 3 rows of 4
posts. The center row is jumpered high or low according to the required number. The rows are
labeled J2A (high posts), J2B (signal), and J2C (low posts). All posts must be jumpered. If
addition MMI units are used, their addresses must be set according to their position in the daisy
chain.
PROGRAMMING
The MMI is, in general, transparent to the connected motion systems and requires only that the
three byte address be pre-fixed to the existing commands.
The demonstration software furnished with the MMI is intended to exercise the entire unit and to
allow transmitting commands one at a time or in complete strings in order to verify operation of
the system or to create a complete simulation of the application. This software is a simple
terminal program whose listings contain important notes. All users should read the listing for
this general information about system operations. Refer to the sample program in the
Installation and Operation section of this manual.
Page 13
Page 14
Page 15
SECTION 3: SMC - STEP MOTION CONTROLLER ASSEMBLY
ALSO REFER TO:
Cybernetic Micro Systems - CY 545 Step Motor Controller Manual
MMIDEMO program - Software Listings & Comments
CONTENTS PAGE
Introduction 17
Hardware Configuration 19
Displays & Controls 20
Installation & Test 21
Programming & Listings 25
Serial Cable Diagrams 26
CY 545 COMMAND SET SUMMARY
(In the MMI network system, all letter commands must be in lower case)
Command Function Note
A val 24 set position counter to At value Commands are lower case ASCII letters,
B bit # set or clear (/B) User Bit followed by a space, and a value if required.
C set Continuous stepping mode Values without a suffix are 0 to 255 max.
D val 16 Delay for value in milliseconds Values with 16 suffix are 65535 (64K) max.
E Enter commands to user mem Values with 24 suffix are 16777215 (16 Meg).
F val First (starting) speed of motor Add (byte count) is 64K max. Bit # is 0 to 7.
G motor Goes the number of steps
H bit # Home motor on bit #
I Initialize 545; software reset
J add Jump to address on mem page
L cnt add Loop to address for count value
N num 24 Number of steps; see Go
O mode set mOdes of CY controller
P val 24 moves to an absolute Position
Q Quit Enter commands to mem
R val set Ramp (top) speed of motor
S val Slope (acceleration) of F to R
T bit # add jump to add unTil Bit matches
W bit # Wait at add until Bit matches
X eXecute commands at Y add
Y add 16 set mem address counter to Y
Z cnt 16 add Zillion Loops to add for cnt value
0 (number) end of program or stop program
+ ( plus ) set CW direction for Go move
- ( minus ) set CCW direction for Go move
/ ( forslash ) negate prefix for /Bit commands
? command send back command val to host
"message" send back message to host
Page 16

!!!! ATTENTION !!!!
Mis-wiring of motor or power supplies WILL damage motor drivers IMMEDIATELY. Motor coils A
or B can be reversed; motor will run in the opposite direction. Pairs can be reversed; pair A in
coil B for example. CROSS-WIRING, an A and B wire crossed, WILL damage driver. Allowing
exposed motor leads to touch each other, ground, or power MAY damage driver. Refer to
Appendix D in the MS driver section for wiring schemes.
SMOKE, POPPING, ELECTRONIC ODOR, OR FUSE FAILURE
INDICATES DRIVER FAILURE.
Call the Service Center. Do NOT change fuse or attempt repair without instructions.
ADDITIONAL DAMAGE CAN OCCUR !!! Shorted drivers can easily be repaired by replacing the
socketed driver arrays.
!!!! WARNING !!!!
NEVER connect or disconnect any of the motor leads or power supply (VMM) leads before
disconnecting AC power! Unit may be safely operated WITHOUT motor. However, pause 30
seconds after power off before reconnecting motor (Bleed-Down time).
NOTE !
An understanding of the Cybernetic Motion Controller and its Command Set is required in the
following explainations . Refer to the Cybernetic Micro Systems - CY 545 OR 550 Step Motor
Controller Manual.
Page 17

Introduction
instructions such as Test, Wait, Delay, Loop which are used along with the motion instructions to
Each system includes a CI cable (controller interface cable). This 20 pin cable is divided into two
The SMC motion control system consists of two basic elements; the controller card and the MS
driver card. The controller card (CY5.4) contains the Cybernetic CY 545 or CY 550 Step Motor
Controller and a 2K character EEPROM (non-volatile) for storing application routines. Refer to
the Cybernetics 545 manual for a description of the 545 microprocessor and its "High-Level"
command set (26 characters and symbols). All actions of this system are controlled by these
commands.
Two of the eight User Bits of the 545 (USRB 0-7) are assigned to a specific function. The
remainder are for general purpose Input and Output functions (I/O) such as controlling relays or
valves (output) and reading switches (input). The command set of the Cybernetic 545 contains
provide a wide range of machine operations. The SMC system can also be discribed as a "miniPLC with motion".
The Step pulses and the Direction signal from the CY5.4 controller are connected to the motor
driver. Additionally, the Stop (PWR LED) signal shifts the driver from Park power to Full power.
A Home Sensor channel is also part of the system.
sections. The I/O section contains + 5 v power and ground as well as six User Bits. The Chassis
section connects the Home Sensor, User Bit 2, Jog Switch, and Limit Loop signals back to the
controller. Refer to Appendix A for details.
This system is self-contained and can operate independently or under the direct command of a
host computer. In Memory Mode, the host computer is used to "teach" the system by sending a
string of commands which are stored, for later execution, in the on-board memory of the
controller card. In Direct Mode, the host commands are executed immediately by the CY545. A
combination of these two modes is also possible; typically macro command strings are loaded
to memory and then executed as required by the host.
See Appendix A for CI cable See Appendix D for motor wiring
See Appendix B for homing / limits See Appendix E for driver card
See Appendix C for current adjust See Appendix F for home sensor
Page 18

Page 19

Hardware Configuration
latches (2 each), RS-232 receiver / driver, LED status lites and standard crystal (11 MHZ). Refer to
of the 545 (User Bit 6) is used as the hardware hand-shake to control communication between the
"Home" position at power-on; refer to the Home command (H). Lash-Compensation is included in
The SMC controller card contains the CY 545 motion controller, EEprom memory, memory
the Rate Table in the CY545 manual.
Serial Format
The SMC is connected as a RS-232 serial device and communicates with the host computer
through the SR4 network. The serial format is configured in the following manner: ASCII
characters, 1200 Baud, 8 data bits, no parity, and one stop bit. The CTS (Clear To Send) feature
host and the 545. When the 545 is busy, it will set the CTS signal to the SR4 status register as a
request to hold off transmission.
During operation from memory or when homing, the CTS function is not 100% busy; pulses
on/off each instruction. This is to allow interruption of routines by the host computer sending a
stop command (0 or CR). If other data is sent, incorrect operation will result. To set the SMC
100% busy during operations: (1) disable the CTS function with the Mode command. User Bit 6
will set HI or busy. (2) As the last instruction, in the memory routine, re-enable the CTS.
NOTE: the correct Mode command to defeat the CTS is: o 080h.
the correct Mode command to enable the CTS is: o 0a0h
(Any hex value starting with a letter must be preceded by a zero)
Memory Format. The memory is configured as 2K bytes of EEPROM (RAM is optional). It is not
possible to access memory above address 2047. Note that the memory is in pages of 256 bytes;
the CY545 does not allow Jump, Test, or Loop operations across page boundries. The pointer
command (Y) is used to move across boundries. A feature of the 545 memory system, the AutoStart function which recognizes special character flags in the first bytes of memory as a
command to run the following program at power-on, is not used in the MMI.
Home Function. This system uses an optical sensor to establish the starting reference or
the home routine. A major advantage of this system is Slip-Detection which provides operation
to + zero steps. See Installation and Test for a detailed home procedure.
Limit Loop Function. The CW-CCW Limits function of the 545, pin 4 & 5, is not used in this
system. Instead, the driver card will go "free or ABoRt" (CURRENT-OFF) when the Limit Loop is
opened (Fail-Safe, Hard-Soft limits). This Limit Loop is enabled by User Bit 0. Refer to the
Appendix B section of this manual.
Page 20

I/O Function. The Cybernetic User Bits are available at the CI cable connectors and can be used
as either inputs or outputs dependent on the command. Note that an output can only drive LEDs
such as those in Solid-State relays or optical isolation. An input can only be a passive switch or
isolated relay contact across the User Bit and User ground. Connecting any device, at a different
potential, to this system through the User Bits, WILL damage the User port; opto-isolation is
required. The standard CI cable is the 20 pin which provides limits and home sensor signals,
access to the User Bit I/O lines, and VCC power & ground. Refer to Appendix A of this manual.
Other Functions. The Jog function (pin 6) is available at the Jog connector of the CI Cable; see
Appendix A. External thumbwheel (pin 12) is not used. Instead refer to the I/O Path option for
thumbwheel operation or stand-alone (PLC) mode. Note that the CW-CCW inputs are available in
this system as the Emergency Stop option. Also, the Inhibit / Abort (pin 8) is not used in this
system. This Abort is not the same as the driver abort (ABR).
Reserved User Bits.
B 0 Enable Driver; must be LO to step. B0 LED will be ON.
B 1 Bit 1 is always the Home Sensor.
B 6 Bit 6 Is the Busy Bit (CTS). See mOde Command.
LED Status Displays.
OFF = Logic High or true ON = Low or false; pin # refers to CY 545 pinout.
BZ Indicates the inverse of pin 27(User Bit 6) Off = Ready;On = Busy
DR Indicates the polarity of pin 2 (direction) LO = CW
ST Indicates the polarity of pin 1 (step) LO = Step pulse
PW Indicates the polarity of pin 3 (stop) LO = Stepping
SW Indicates the polarity of pin 6 (slew) LO = Ramp speed
B0 Indicates the polarity of pin 21 (User Bit 0) LO = Enable all drivers
B1 Indicates the polarity of pin 22 (User Bit 1) LO = Home Sensor blocked
B2 Indicates the polarity of pin 23 (User Bit 2) General Purpose User Bit
Reset. To hardware reset or stop the system, cycle the AC power switch located on the rear
panel.
Software Configuration
This system is a serial device directed by ASCI character commands. It is configured exactly as
described in the Cybernetics controller manuals; except for differences as noted in this manual.
Special Commands are created to simplify use of the Basic program.
Page 21

Reserved and Special Software Commands.
selection of on-the-fly
must not cross the memory page boundry which is ever 256
CLEAR Writes 0's and CR's to memory.
LOAD [F6] Loads memory. Not same function as Basic F3 key.
EXIT [F5] Required to close comm port, close file, and clear error traps.
comma [,] Do not use comma to separate elements of 545 commands (T,L, and ? M
xx). Comma is a Basic symbol; use space instead.
[a,b,c] HP-LED command string is not used.
C Continuous Step Mode is normally not used with the CY545 unless
motion can be terminated with an external Abort signal. Refer also to the
CY550 which is an advanced version which has a larger
software commands.
Special Aspects of Some Commands.
W The Wait command causes the 545 to wait at the instruction,
therefore incoming stop commands will not be processed. Use a T
command in a jump to itself.
L, Z These loop instructions assume that the first pass of a routine
before reaching the loop command was the 1st loop pass. In
general, the loop count must be one less than required. Also
see J & T below.
T,H,W,O These commands are followed by a numeric value in Hexdecimal
which is desinated by the H following the value. The decimal and
the hex values for 0 to 7 are the same and the H can be omitted.
H Homing is a single step operation. The Busy signal is not
continuously set during homing but cycles every step. It is best
therefore that homing is executed from memory.
J, T Any Jump or Test operation, which includes L & Z commands,
bytes; 256, 512, 768, 1024, etc. Use the Y for global jumps.
Installation and Test Procedure
1. Connect AC power cord.
2. Connect motors, verify that driver current is correct for motors. See
Appendix C for current adjustment and Appendix D for motor wiring.
3. Connect CI cable. Limit Loop must be closed for motor to run.
4. Connect the serial cable and turn-on computer system.
5. Connect the AC power and turn-on power switch or supplies. Verify
that: AC neon; power is present. DC lamp; motor power (VMM) is OK. All SMC
LEDs are off except for BUSY.
Page 22

Refer to lines 500-1000 of the listings in this manual. These tests prove that the MMI system is
Exit the program (F5), refer to line 120, and increase the timebase (T value) for the host computer.
operating correctly. Typically, a motor will run back and forth several times. Observe the LED
indicator lites while the tests are running and note that each action of the system can be
monitored and that this self-test is the series of commands listed between the quotes in lines
500-1000. All actions of the system are the result of COMMANDS, refer to the back cover of the
CY 545 manual, either stored in the external memory (Memory Mode) or sent from the host
computer (Direct Mode). The third mode (Programming Mode) is when commands are sent from
the host and written into the external memory.
Computer Test Procedure
1. LOAD and RUN the Demo program which will down-load self-tests. Refer to lines 500-1000 of
the listings.
2. Verify the time delay is correct for the host computer. During testing, the system will return
the network status characters or other query information; R0FO (status) or P=000000 (position)
for example. If the returns are in segments:P=
00 00
00
with multiple line feeds between characters, the host computer is too fast for the comm card.
Re-start (shift-F5) the program.
Note the serial delay routine (GOSUB 2500) at Line 2500 is multiplied by itself; use small
increases. When set correctly, the display will have no vertical segments but also have no
excessive delay in responding to querys.
NOTE: If the message "system is busy or not connected....." appears, enter Ctrl-Break. The
system IS NOT connected to COMM 1. RESET the MMI and correct the serial cabling.
The MMI system should, when the MMIDEMO.bas is run, lite B 0 (motors enabled), lite DIR
(direction = +), BUSY lite off, and return status (none busy) to the display.
3. Motor Commands.
NOTE: Enter the following commands (Direct Mode) at the prompt. Motor E of SR4 #0 is default
(Enter Command>W0E. Symbols used below are: < = Enter key, Fx = function key.
F9 the SMC returns position; this indicates communication is OK
p 2000< motor will move to position 2000 ( 2000 steps CW )
F9 ? P returns P=0002000; position is 2000
p 0< motor returns to position 0
b 0< free motor E; B 0 LED is out
Page 23

4. Memory Commands.
Frequency). This behavior is affected by motor load, power, and speed. The normal procedure is
F7 ? y where is memory byte pointer; y=00000 after reset.
y 0< sets pointer to byte location 0; if required.
? m 21< displays 21 "command lines" of memory (F8 and type 21<).
CLEAR< fill the memory with 0's and carriage returns; STOP commands.
YES< yes; wait till 0 0 0 0....DONE.
F7 y=0000.
F8 21< memory is cleared; all zeros and carriage returns; 42 bytes.
F6 load memory; host goes to line 1000; returns ? p when done.
F7 y=xxxx; last byte of program.
y 0< set memory byte pointer to byte 0.
F8 21< memory is loaded.
x< sample motor test program in memory will run; note that memory
query (F8 21<) did not move the memory address pointer (y=0000).
F7 last address of program; pointer did move with each line of program.
y 0< reset to top of program.
x< sample motor test program in memory will run.
ADW0D< change SMC address; prompt is now W0D<:.
Repeat the above with motor # 2, for example.
Parameters. Refer to the CY 545 MANUAL, SECTIONS 1-12 (Commands), 16 (see StepMotor and
Home), 17 (Rate Tables), 19 (good sample program); sections 13,14,15 not used. Typical
commands will duplicate the down-load with different values of R, S, and F used in order to
determain the best parameters for moving the motor. Refer to the Rate Tables. Repeat Step 3
with different parameters.
Resonance. Resonance (feed-back oscillation between the motor rotor and the motor coils) is a
vibration which affects the motor behavior. Typical symptions are shuttering, dropping steps,
jumping back and forth, hard running, and excessive noise (unpleasent). All step motors exibit
resonance at approximately 100 full step/sec (Low Frequency) and at 1000 full steps/sec (Mid
to start at a speed (F command) above the low point and ramp through the mid point (S
command) to a higher speed (R command).
To determine the resonance points, set F and S to the lowest value and R above mid freq. Move
the motor sufficent steps to reach top speed. Note the points during this acceleration where the
motor exhibits abnormal behavior; these are the low frequency nodes. The motor will stall at the
mid freq. point. Resonance can be reduced by less power, decoupling the motor and load
(isolating couplers; not metal to metal), higher speeds, faster acceleration, and/or smaller step
angles.
Page 24

Programming
The sample listing is commented and contains information about how to operate a 545 system. It
Line 120 creates the time delay used between characters so that fast computers do not get ahead
The software program used with the MMI/SR4/SMC system is only a "Serial Driver" routine. The
main purpose of the program is to send and receive commands between the host and the MMI
microprocessors. The motion control software (firmware command set) is contained only in the
CY545. The QBASIC serial driver contain examples of typical operations required by the host
computer software, such as: opening the comm (serial) port, sending/receiving characters,
loading the 545 memory, handling the Busy status, and diagnostic capability. Included in the
sample program are routines of 545 commands which exercise the motion system during
manufacturing tests. Two types of routines are demonstrated; (1) downloading a string of
commands from a keyboard file and (2) loading a string of commands to EEprom memory.
is helpful to "read the listing" even for non-computer types.
Line 0-20 defines the variables and create symbols for control characters.
Line 30-100 assigns the Basic function keys for common functions.
of the serial card and the MMI.
Line 130 defines the serial port as the ACTIVE device; PRINT #ACTIVE sends characters to the
active port.
Line 200-400 creates the introduction screen display
Line 500-999 is the down-load test routine which is sent to the 545 when this program is first run.
Line 1010-1410 is the Self-Test program. The GOSUB 2500 is the time delay for the write cycle of
the EEprom memory.
Line 1500-1800 is a sample homing routine with a limited number of re-tries; loop counter, input
test, and message transmission are demonstrated in this program.
Page 25

Line 2000-2510 assemblies keyboard entries and sends them to the MMI at the Enter key ( CR =
Line 2910-3000 closes the comm ports on Exit (F5) or a computer error code other than ERROR =
carriage return or enter key). Note the special commands at line 2210-2270 which are created
commands not part of the MMI command set.
Line 2600-2750 reads any incoming characters from the MMI and prints to the host display
screen.
24 (comm port is busy).
Line 3000-3150 writes zeros (545 stop command) and carriage returns over the entire memory
(Clear command) which erases the memory. The opposite is the Load command which writes the
memory.
Line 3300-3400 is the busy error routine.
Line 4000- are the help files.
Page 26

Program Listings
See MMIDEMO program
Page 27

Serial Cables
XT TYPE. CPU DB-25 (IBM STYLE) CONTROLLER DB-9S (AT)
PIN 1 Frame Ground <------------------------> Shell (solder)
PIN 2 TX Transmit --------------------------> PIN 3 RX Receive
PIN 3 RX Receive <-------------- ---------- PIN 2 TX Transmit
PIN 5 CTS Clear <------------------------- PIN 8 DSR Ready
PIN 7 Signal Ground <------------------------> PIN 5 Signal & Frame
DB-25 to DB-9 Adaptor
AT TYPE. CPU DB-9P (IBM STYLE) CONTROLLER DB-9S (AT)
Note : DB-9 Controller is wired as a Null Modem ( pin to pin )
PIN 3 TX Transmit -------------------------> PIN 3 RX Receive
PIN 2 RX Receive <------------------------ PIN 2 TX Transmit
PIN 8 CTS Clear <------------------------ PIN 8 DSR Ready
PIN 5 Signal Ground <-----------------------> PIN 5 Signal & Frame
PIN 4 DTR Ready -----------------------> PIN 4 DTR Ready
Shell Frame Ground <-----------------------> Shell Signal & Frame
pin to pin cable
MAC DIN. CPU DIN-8 (EIA-422) CONTROLLER DB-9S (AT)
PIN 5 RX In- <------------------------ PIN 2 TX Transmit
PIN 3 TX Out- -------------------------> PIN 3 RX Receive
PIN 2 CTS Hand In <------------------------ PIN 8 DSR Ready
PIN 4 Signal Ground <----------------------> PIN 5 Signal & Frame
PIN 8 RX In+ <-----------'
PIN 1 DTR ------------------------> PIN 4 DTR
Shell Frame Ground <----------------------> Shell Signal & Frame
MAC to IBM Adaptor Cable
The Controller/Device signal DSR (Data Set Ready) is wired to the network CY233 status input
CTS (Cleared To Send). When the controller is busy, the DRS will set HI or or busy and pull CTS
HI or not Clear To Send. The host CPU should not send when the device is busy. See Status
Code Table.
If the host software ignores the CTS status signal and commands are sent to a busy motion
controller, the commands will be lost or jam the controller. Typical indications of the host failing
to obey the CTS are: motion or homing stops when host program is run, motor runs backwards
at high speed forever, or only part of a memory routine is completed.
It is the responsibility of the host software to check status for "not busy" before sending
commands to the selected device.
Page 28

SECTION 4: MMI
vdc TTL computer (VCC) and +40 vdc motor (VMM). The VCC supply is over-current protected. In
Mechanical Assembly
The MMI assembly consists of the SR4 network controllers, the SMC (CY 5.4 controller & MS 2.0)
motor drivers, all DC power supplies, and an AC power entry. The DC power supplies provide +5
addition, A 1 amp AC fuse protects the entire assembly.
NOTE: NEVER REPLACE THE FUSE.
FUSE FAILURE INDICATES DRIVER FAILURE.
The green chassis lamp indicates VMM (motor) power on. The neon lamp in the power switch
indicates that AC power is present to the MMI. The MMI has six pin motor connectors (see
Appendix D), IEC power connector, network serial connectors (refer to serial cable section), and
LED status indicators. The 20 pin CI cable connectors provides access to the spare I/O lines,
limit loop, home sensor and VCC power/ground. Refer to Appendix A.
Page 29

Page 30

MS - MiniStep translator /driver card
msman.wri 9-95
MS
OPERATION AND INSTALLATION
MANUAL
FOR MS SERIES
Page 31

Page 32

PRODUCT DESCRIPTION. The MM & MS, Series 1 & 2, stepper motor driver, is a switching type, constant- current
logic system which receives input commands from a controller (typically a microprocessor) and generates a series of
OPERATIONAL MODES. The driver can be operated in three modes: FULL-step or HALF- step, and QUAD-step only.
transistors configured in an H-bridge with two pair sourcing current and two pair sinking current. The motor winding
back to the comparator section and turns off the H-bridge transistors. After a fixed-time off to allow the transistors to
regulator which drives current pulses through the windings of a stepper motor. All stepper motors are stepped or
rotated by changing the direction of the current flow through the windings in a unique sequence. Each change of
current direction results in a step.
The driver contains two sections: (1) the step generator; and the (2) power drivers. The step generator is a digital
step signals. The power drivers receive the step signals and switch the phase of current in the motor windings.
The driver requires a minimum of four input signals: (1) the step pulse - STP, (2) the direction level - DIR, (3) the
power level - PRK, and the enable signal - ABR. The step pulse (or step clock) to the input of the driver will cause a
corresponding change of the output current resulting in one step (one unit of motor rotation). The direction input is
a digital level signal which controls the direction of motor rotation. If the signal is true (HIgh), the motor rotates in
CW direction; if the signal is false (LOw), the motor rotates in CCW direction. In addition to the step and direction
inputs, the driver will accept an output power control input. This digital input, PARK, controls the amount of current
delivered to the motor windings either run power or park power. If the signal is HI or floating, the driver is at reduced
current; if LO the driver is at full current. The enable signal, ABoRt, sets the current to either off or on. If the signal is
HI or floating, the driver is FREE (no current); if LO, the driver is enabled.
In addition to the digital input signals, the MS driver also requires a power supply input of unregulated D.C. voltage.
The driver functions to control the current furnished by the D.C. supply. The combination of a D.C. supply and the
MS driver is referred to as a current-regulated power supply, or constant- current motor driver. The driver regulates
the current through the motor winding by rapidly switching on and off the D.C. voltage. This technique is referred to
as switch-mode or chopper stabilized regulation. The driver also requires +5 TTL logic supply for the digital
sections.
In each of these modes, the output power control, PRK, is controlled by an external microprocessor. PRK is used to
reduce driver and motor heating during non-step periods.
THEORY OF OPERATION. The unique element in the driver is the current regulator device, referred to as the "driver
chip". This driver has three main inputs: (1) the phase-control, F; (2) current-control, I0; (3) current-control, I1. The
outputs of a driver are the connections to a single motor winding. Internally an output section contains four power
is connected across the bridge. If one source transistor (at one end of the winding) and one sink transistor (at the
other end) are turned on, then current flows through the winding. Alternately, if the other pair is on, then the current
will flow through the windings in the opposite direction. The D.C. Supply is connected to the top (positive) and
bottom (negative) of th H-bridge transistor pairs. An external resistor (typically 1 ohm or less) is inserted in series
between the negative of the H-bridge and the negative of the power supply negative so that the total winding current
flows through the resistor. When full winding current flows, the small voltage (400 mv) across the resistor is fed
settle and the feed-back voltage to dissipate, the bridge again turns on and current builds up in the winding until the
voltage across the sense-resistor again trips the comparator.
Page 33

The digital phase-input (F) level (HI or LO) selects which pair turns on and corresponds to the direction of current
flow through the winding. The current controls, (I0 and I1) select one of four comparators; zero, low, medium, or full.
In general, the MS series requires an unregulated source of D.C. voltage connected to VMM. The current output must
higher voltage is required only for higher step rates. In general, do not use a regulated power supply as performance
If the optional +5vdc TTL supply is not installed, then an external 150ma digital supply is connected to the TS1-8 VCC
systems with a diode in the VCC connection. In any case, controller VCC and driver VCC MUST BE COMMON or other
The output is therefore a series of current pulses equal in amplitude and separated by the period of fixed time off.
The value of the current sense resistor is pre-selected to produce a current amplitude equal to that of the current
rating of the motor winding. If I0 and I1 select a comparator other that FULL, then the sense resistor feed-back
voltage trips at less than full current. The reference voltage of the comparators is also available as an input to the
device. By externally controlling this reference input, the output current can be varied between zero and full (i.e.
microstepping).
The driver card contains three sections: (1) the step generator, which controls the digital levels of the phase (F)
inputs; (2) the drivers; and (3) the Auto-Park gate, which if installed, controls the output-current digital input, PRK,
automatically. The step generator is a counter-PROM configured as a four-eight- sixteen step counter. The outputs
of the counter are combined through PROM gates into two outputs which control the phase inputs (F) of the two
driver IC's. Each step-clock causes the step counter to toggle one step and the PROM decodes a pair of phase
commands to the drivers which cause a winding current direction change resulting in a one step rotation of he
motor. The direction input, input directly to the counter, directs the decode to produce a CW or CCW rotation.
INSTALLATION AND OPERATION. Before operating the MS & MM series, that the input connections are correct for
that mode. Refer to the installation wiring diagrams found in the back of this manual. Locations of jumpers and
signals are identified on the bottom SMCe of the unit circuit board. The configuration of the MS series requires
attention to four areas: step size jumper and PROM type, power supply voltage, motor winding connection, and
current control dial-pot setting. Refer to driver label for maximum current and voltage limits of the particular model.
Refer to the Appendix section in the rear of this manual for details.
(1) POWER SUPPLY & MOTOR CONNECTIONS
Signal Name Terminal Strip TS1 Data Connector P1
VMM TS1-1 none
equal 1.414 the full rating of one motor winding. The voltage can be between 12 and 45 volts D.C. (maximum). The
is reduced. Refer to the unit label for the VMM maximum of that model.
VCC TS1-8 P1-13 & 14, 1, 6
connections. TS1-5 is provided for ground return. TS1-8 is protected by a 6.8vdc TRANSORB. The VCC is ALSO
common through the digital control connector P1-13 & 14. The +5vdc can be furnished by: (1) the computer or
controller power supply only, or both. If the system power is not controlled by one switch, always isolate the driver
interface connections are required (opto isolation).
Page 34

GND TS1-4 & 5 P1-19, 3, 5
In all cases, ground is COMMON to all grounds; digital VCC, analog VMM, chassis ground and green wire ground (AC
except in the case of FIVE wire motors . NEVER insert dropping resistors in the power supply leads or winding leads.
the motor at full power can be firmly PARKed at low power. The motor will free-wheel only if the ABORT (ABR) line is
power ground). If a dual (VMM & VCC) supply is used, then an identical and equal ground lead is connected; 2 each
wires to TS1-4 and 5. Always bridge the supply returns and connect to chassis. If separate supplies are used,
connect the VMM supply and ground to the TS1 connector. Connect the driver VCC (P1-13&14) and ground (P1-19)
from the driver to the controller bus. Connect the VCC supply to the controller bus. IN ALL CASES, ANY VCC
BETWEEN THE CONTROLLER AND IN THE DRIVER MUST BE COMMON OR ELSE OPTICAL ISOLATION IS
REQUIRED. In all cases, connect chassis ground (green wire ground or earth) to the driver or supply grounds.
COIL-A/COIL-B TS1-2 & 3, TS1-6 & 7 none
A pair of motor windings are connected across each coil connection. Bipolar motors have FOUR leads (two pair).
Unipolar motors with SIX leads can be used provided a coil end and a center tap are connected (unused wires MUST
be INSULATED and cut off or tied back). NEVER attempt to connect the center taps of unipolar motors to VMM,
NEVER insert caps or coil filters across the windings.
(2) INPUT SIGNALS Digital Inputs P1-12/20 & 11/19 See Appendix A
Step Input (CLK) P1- 15
The step-clock (+5vdc TTL compatible) inputs to the clock pin of a 74191-type counter. The 74191 toggles on a LO to
HI transition. The Step CLK MUST be normally HI (+5vdc) and go LO only long enough to toggle th counter (100us to
1ms). Refer to TTL data books for max/min clock conditions. A pull-up resistor (4.7k) is installed on the step clock
input. Refer to AUTO-PARK for additional requirements of the clock inputs.
Direction Input (DIR) P1- 17
The direction level inputs to the 74191 counter. The input is pulled up by a 4.7k resistor. Setting the input HI or LO
reverses the direction of motor rotation. Motor rotation with respect to the state of the direction input may be
reversed by reversing the motor winding pairs.
Current Control Input (PRK) P1- 11
The current control signal shifts the output current to the motor coils between 100% power and park power. When
PRK is LO (0vdc), the unit produces FULL power. If PRK is HI (+5vdc) or floating, the units outputs at PARK power.
On units so equipped, PARK power may be preset at the medium (MED) power level. PARK condition is used to
reduce power supply requirements and motor dissipation during non-step periods. Any load which can be moved by
HI.
Abort Control Input (ABR) P1- 9 (see next)
The ABR input must be LO to step. If the input is HI or disconnected, the driver control output will output zero
current. NOTE: the driver is not OFF, power is still being regulated to the zero condition. The motor will free-wheel.
ABORT is normally only used in stand-by (position loss may occur), in series with safety switches (limits) or other
emergency stop conditions.
Other Signals (CPU ABR and HOME) P1- 10,12 & P1- 4,16
Pin 12 is the normal input to P1-9 when the ABoRt Loop is used.
Pin 4, 16 is the output signal HOME back to the controlling device.
Page 35

Spare Inputs P1- 18, 8 & P1- 20, 7
these signals to any potential or device except passive switches or relays. Door locks and other safety switches may
This series will operate either in FULL/HALF step or QUARTER step only mode. FULL/HALF requires the FH PROM to
Pins 18 and 20 can be used for other signals to/from the card. See Chassis Signals connector. Pin 20 is normally
keyed on free standing cards.
(3) Chassis Signals P1- 1 to 9 & P1- 2 to 10
These signals are normally used to provide for a convenient method of cabling the driver between the controller and
the motor, power supply, chassis assemblies.
Home Sensor Pins P1- 1, 2, 3, 4
These pins power the optical home sensor circuit. SEE APPENDIX A & F. Pin 1 is VCC +5 power, pin 2 is VLED
power, pin 3 is GND (ground), and pin 4 is the HOME input from the sensor.
Abort Loop Pins P1- 9 & P1- 10/12
These pins normally constitute the ABoRt Loop Safety (limits) System. The driver enable is output from the
controller to pin 12 (CPU ABR) and output to the loop from pin 10 (to limit loop) and returned from the loop to pin 9
(ABR). The ABR loop is NORMALLY CLOSED; opening the loop for any reason FREEs the motors. Never connect
be inserted in the loop. See Appendix B.
Spare Pins P1- 6, 5, 7, 8
These pins are used as required to provide VCC (pin 6) and GND (pin 5) to the chassis system. Pins 7 and 8 are user
pins which are generally jumped as required to the spare pins on the data connector. See Appendix A.
(4) FULL/HALF/QUARTER STEP SELECT
be installed and the mode pin to be jumped either FULL or HALF with a dip-clip jumper. The jumper pins are located
next to the top of the PROM socket. See Appendix F.
In QUAD step mode, the QD PROM is installed and the mode pin is jumped to the QUAD pin. Conversion is a field
operation.
The PROMS are also labeled with the current control selection.
HL: shifts power HIGH (100%) to LOW (25%) during parking.
HM: shifts power HIGH (100%) to MED (60%) during parking.
(5) CURRENT CONTROL DIAL
The current dial sets the 100% power level of the driver outputs as required. Refer to App C.
Page 36

APPENDIX SECTION
Page 37

Page 38

APPENDIX B: DESCRIPTION OF HOMING AND ABORT LOOP PAGE 1/2
HOMING. A major advantage of a digital Open-Loop step system is the ability to operate plus or minus zero steps (no
position 1 (one step out of the sensor). The motor is then stepped CW to any position. To slip-detect the system, the
This technique requires a control system which carries a "map" with each individual machine. The EEPROM memory
error). Two conditions are required. One is that the motor is sufficient for the load in normal operation and second,
that a reference position, commonly called the "home position", be consistently established during initialization of
the system. When step motors are rotated by counting (clocking) out a number of steps, in theory, the motion will
take place +/- zero steps. The exact mechanical position of the motor can vary by the motor step accuracy; typically
+/- 3 % of one step (non-cumlative). A proof of +/- zero step operation is, first, to reference a starting positon of the
motor or "home". During homing, the motor is stepped backwards into a switch, reversed, and then stepped forward
until the switch opens. The point of interest is not the exact mechanical position but rather on which step the switch
changed state. For that reason, only high resolution "PHOTO-LOGIC" optical-beam switches are used in TMG
systems.
SLIP-DETECTION. After the motor is home, the controller position counter is reset to the home position, typically
motor is returned to position 1. If the sensor remains open, then the motor is stepped to positon 0. If the sensor
closes, the system is operating +/- zero steps (error free). Note that a single step lost (slip) will always result in at
least a movement of 4 full steps away from the correct position. Open loop systems are slip-detected at regular
intervals to prove continuing slip-free operation.
CENTER HOME AND CONTIGUOUS SLIP DETECTION. If the home sensor is located at the center of axis motion and
a step bar is mounted along the entire motion path, then the home position can be verified each time the system
crosses the center line. A stepped bar is thin strip with a left high SMCe and a right low SMCe. The high to low edge
is the center line.
LASH COMPENSATION. A major advantage of steppers is in their "repeatability" which is typically less than .01 %
because the digital controls are not affected by temperature, aging, voltage or adjustment. This allows errors such
as lash and distortion to be zeroed-out.
Lash compensation adds or subtracts steps, at each change of direction or because of other forces, to take-up the
lash error. Lash compensation is accomplished during the slip-detection process. When the system is slip-detected
the first time, the sensor will not close at position 0 because of the lash; home LED remains off. At this point, the
system is single-stepped CCW until the sensor closes; home LED is on. The number of CCW steps is the lash
compensation value. The system is re-homed and the counter loaded with this value (see At home command). The
motor is then moved some number of steps CW, returned to position 1 (sensor open), and finally position 0 (sensor
closed). The system is +/- zero steps.
Screw distortion error occurs when the screw pitch, which is so many turns per inch, does not move the correct
distance after the correct number of turns of the motor. For example, a 10 turn screw should cause linear travel of 1
inch every 2000 steps (200 step/rev motor). If, rather than commanding the motor controller to go in 2000 step
increments, the controller moves to absolute positions such as 2000, 4001, 6003, 7999, ect.; the error is eliminated.
is suitable for this purpose.
Page 39

APPENDIX B: DESCRIPTION OF HOMING AND ABORT LOOP PAGE 2/2
detector on the motor shaft. The index can be either a disk with a tab or a long pin. During the homing operation, the
ABORT LOOP FUNCTION. In TMG systems, the ABORT loop is used to remove all winding power to the motor during
detection in order to prove correct positioning during product development, particularly during software de-bugging.
SUPER HOMING. In high resolution systems, two sensors are used. The first sensor, the home sensor, is mounted
to the motion platform in the typical configuration. The second sensor, the index sensor, is located as an index
motor is stepped backwards until the first sensor is blocked. The motor, however, continues to rotate until the
second or index mark is detected. The system is now "homed to the step". TMG systems with Super-Homing use
two identical "PHOTO-LOGIC" sensors wire-ORed together so that both must be blocked before the home signal is
detected. The H or home command of the motion controller will operate with either single or double sensors.
an out-of-bounds condition. The ABORT feature can be used to provide hard-limits, emergency stop, door interlocks, and other safety features. As the ABR input, to the driver, must be LO (ground) for the driver to step; opening
the loop will stop (free) the motor regardless of the control logic. The diagram is typical of TMG "Fail-Safe, HardSoft" limit loops.
NOTE: CONTRARY TO POPULAR PRACTICE, IT IS UNWISE AND UNSAFE TO SENSE LIMITS AND OTHER SAFETY
CONDITIONS THROUGH THE COMPUTER INPUTS PORTS.
All motion products, regardless of their final intended form, should initially incorporate home sensors and slip-
Typically, a test routine is established which passes slip-detection. Any detrimental modification or code flaw will be
flagged by this routine.
Page 40

APPENDIX C MOTOR CURRENT ADJUST PAGE 1/2
Page 41

APPENDIX D MOTOR WIRING SCHEMES PAGE 1/2
thereby doubling motor efficiency. The other alternative for the motor designers is to use a greater number of turns in the winding space. This is
translated to bipolar when the motor is used with a bipolar driver. In general, the translation is similar to a unipolar driver with dropping resistors
Performance of a stepper motor based system depends more on the electronic drivers used than it does on the motor itself. A step motor (both
PM and Hybrid type) is made to step by sequencing the orientations of the magnetic fields in two coils. The UNIPOLAR drive method of is
illustrated, in the figure, using just ONE coil of the motor. Note that the center tap of the coil is connected to the positive motor supply voltage.
An electronic circuit, represented by the switch, then connects one end or the other to ground for current to flow from the center tap to the
grounded end. The most significant factor is that only one-half of the coil is used at any given time and that the magnetic field intensity (motor
torque) is proportional to the product of the number of turns in the coil and the current passing through the coil.
Motors designed for BIPOLAR drivers will often have only four leads. However some manufactures will provide the motors in 8 wire versions to
offer a performance choice for bipolar drive users as in figures C & D. Four lead bipolar motors may use larger wire, since only half the windings
are required in the given space of the motor body. The paralleling in figure C is the equivalent of this to achieve lower winding resistance and
shown by figures B & D and results in more torque with a lower coil current but a subsequent loss of high speed torque.
Although step motors are often classified as bipolar or unipolar (2 phase or 4 phase), these terms are more accurately applied to the types of
electronic circuit used to drive the motor. Bipolar drivers can drive 4,5,6 and 8 wire motors. When the motor is described as unipolar, the
specifications are presented with the assumption that the motor will be driven with a unipolar drive. Therefore the specifications must be
in series with the center taps; referred to as L over x R with R equal to the motor winding resistance. For example, a L over 4R unipolar driver
has a resistor equal to 4 times the winding resistance. In bipolar, the L over R ratio is the ratio of the motor voltage to the supply voltage. A L
over 4R bipolar drive, for example, would be a 6 volt motor and a 24 volt power supply. Performance would be similar to the L/4R torque curve of
a unipolar motor. The figures identify the various connection options when using a bipolar driver with 6 or 8 wire motors.
A: SINGLE COILS. Identical to unipolar specification (if the supply voltage equals the specified motor voltage). Normal connection of a bipolar
driver to 6 wire motor.
B & D: SERIES COILS. This configuration will produce torque greater than the unipolar specification indicates. To stay within the power
(wattage) rating of the motor, reduce the unipolar specified current by 30%; depending on the duty-cycle of the system (park time). Note that the
torque curve of this configuration is conSMCerably fore-shortened as this motor is now the same as a motor with a rating of twice the voltage
(slower motor).
C: PARALLEL COILS. When this configuration is driven at the unipolar current, the motor will perform identical to the specification but the
motor will dissipate only one-half the power (it is twice as efficient). When the current is increased by 1.414, to drive the motor at it"s full power
rating, the motor torque is increased by approximately 60% Note that this torque curve is extended by four times (high speed system).
Resonance (vibration) of a step motion system depends on the speed and power range of the motor. Fast windings (A & C) are "quicker" and
may break into resonance easier than slow (B & D). Power windings (B & D) may deliver "excessive" power (torque) to the system and produce
resonance. In general, resonance indicates, except at the low (100 sps) and mid-frequency (1000 sps) bands, excessive power; therefore reduce
the driver current for smoother operation or wire the motor for "softer" response.
NOTES: If a motor runs "backwards" with respect to software direction, transpose the connections of ONE coil. For MS series driver cards, pins
2 & 3 or 6 & 7; SMC / MMI driver boxes, pins 1 & 3 or $ & 6.
Five wire motors are really 6 wire motors with the center tap common. The center tap must be connected to the motor supply voltage. If phases
1, 2, 3 or 4 are crossed, motor will not rotate (hums). For MS cards, pin 1 is VMM, for SMC /MMI (if connected), pin 5 is VMM and pin 2 is GND.
Systems with pin 5 & 2 connected are used to power external relays or solinoid valves. The pins are keyed (reversed). Never attempt to connect
any motor leads to pin 2 and only 5 wire center taps to pin 5. Pins 2 & 5 are normally not connected and used to store the unused leads of 6 or 8
wire motors.
Page 42

Page 43

Page 44

APPENDIX E PAGE 1/2
Page 45

APPENDIX F PAGE 1/2
Page 46

APPENDIX F PAGE 2/2
Page 47

APPENDIX I PAGE 1/1
MOLEX - WALDOM NYLON CONNECTOR SYSTEM USED BY THE MOTION GROUP
The connectors used on Motion Group equipment are nylon connectors are manufactured by Molex and are refered to as .062 style (pin diameter)
or .093 (large driver motors only). They are available from Newark, Allied, and Digi-Key and come in 1 to 36 positions with locking and mounting
tabs which snap-in to punched holes on brackets or enclosures.
TYPICAL $ POLES TYPE PART # NEWARK # USED ON
5.84/10 4 (.062) MALE HOOD 03-06-2041 31F1004 HOME SENSOR ASSEMBLY
5.95/10 4 (.062) FEMALE RECT 03-06-1041 31F1005 HOME SENSOR CABLE
1.86/5 6 (.062) MALE HOOD 03-06-2062 31F1008 STEP MOTOR ASSY
2.07/5 6 (.062) FEMALE RECT 03-06-1061 31F1009 MOTOR OUTPUT
1.86/5 6 (.093) MALE HOOD 03-06-2062 31F1008 STEP MOTOR ASSY
2.07/5 6 (.093) FEMALE RECT 03-06-1061 31F1009 MOTOR OUTPUT
(Strain Relief Hoods are available on request)
Contacts for Connector Sets .062 SIZE
6.79 FEMALE SOCKETS LARGE TAB 02-06-1103 31F1027 22-18 GUAGE WIRE
MALE PINS LARGE TAB 02-06-2103 31F1026 22-18 GUAGE WIRE
FEMALE SOCKETS SMALL TAB 02-06-1132 31F1029 30-22 GUAGE WIRE
MALE PINS SMALL TAB 02-06-2132 31F1028 30-22 GUAGE WIRE
Contacts for Connector Sets .093 SIZE
6.79 FEMALE SOCKETS LARGE TAB 02-06-1103 31F1027 22-18 GUAGE WIRE
MALE PINS LARGE TAB 02-06-2103 31F1026 22-18 GUAGE WIRE
FEMALE SOCKETS SMALL TAB 02-06-1132 31F1029 30-22 GUAGE WIRE
MALE PINS SMALL TAB 02-06-2132 31F1028 30-22 GUAGE WIRE
In general, single wires use small tab contact; double wires the large tab
Tooling
105 RATCHET TOOL .062 DIA HTR-2262 11-01-006 30F338 MAKES PERFECT CRIMPS
105 RATCHET TOOL .093 DIA HTR-XXXX 11-01-006 30F338 MAKES PERFECT CRIMPS
13 HAND TOOL HT-1921 11-01-0015 31F1049 REQUIRES PRACTICE
12 EXTRACTOR .062 DIA HT-2285 11-03-0002 30F773 SPRING LOADED PUNCH-OUT
12 EXTRACTOR .093 DIA
Nylon Connector Designer/Service Kit
Contains male/female housing assortment, hand crimper, pin extractor (not as easy to use as spring extractor; see above),
contacts, and case.
40 DESIGNER KIT .062 WM-072 30F774
40 DESIGNER KIT .093
All of the above, including custom cable sets are available from the factory.
Note: When disconnecting, grasp the mounting tabs, (not the wires) and rock from top to bottom (unseat the locking bump) rather than SMCe to
SMCe and then pull the connection apart. The connections unseat easily with the right technique.
Contact factory for Heavy Duty Connectors with Metal Shells, Retainers, and Strain-Reliefs.
Page 48

SPECIFICATIONS - MMI
PARAMETER MIN MAX UNIT
Power
Motor supply voltage 12 40 VDC
Current (no motor) 150 160 ma
PWM frequency
MD10A 18 24 Khz
Motor current
MS2.0 0.05 2.0 Amp
Step pulse input
Voltage 0 +5.0 VDC
Sink surrent 12 20 ma
Pulse high 1 uSec
Pulse low 1 uSec
Rise time 0.5 uSec
Fall time 0.5 uSec
Frequency 500 KHz
Logic ' 1' volts +1.8 +2.0 VDC
Direction input
Voltage 0 +5.0 VDC
Sink current 12 20 ma
Logic ' 1' volts +1.8 +2.0 VDC
Note: The step pulse input must be a logic 1 (high) during direction input change.
Environmental
Operating temperature -20 +50 C
Humidity (non-condensing) 0 95 %
Shock 100 G
Altitude 30.000 FT
Mechanical
Weight 3 lb
Dimensions 2" x 3.5" x 11.0"
Mounting hole centers 2.625" x 8.250"
Mounting screw size #6-32 x 1/2" max
Page 49

 Loading...
Loading...