

TRANSISTORIZED INVERTER
FR-S500
INSTRUCTION MANUAL (Detailed)
FR-S
500E
-NA
TRANSISTORIZED INVERTER INSTRUCTION MANUAL (Detailed)
SIMPLE INVERTER
FR-S520E-0.1K to 3.7K-NA
FR-S540E-0.4K to 3.7K-NA
FR-S510WE-0.1K to 0.75K-NA
Thank you for choosing this Mitsubishi Transistorized inverter.
This instruction manual (detailed) provides instructions for advanced use of the FRS500 series inverters.
Incorrect handling might cause an unexpected fault. Before using the inverter, always
read this instruction manual and the instruction manual (basic) [IB-0600210ENG]
packed with the product carefully to use the equipment to its optimum.
This section is specifically about safety matters
Do not attempt to install, operate, maintain or inspect the inverter until you have read
through this instruction manual (basic) and appended documents carefully and can
use the equipment correctly. Do not use the inverter until you have a full knowledge
of the equipment, safety information and instructions.
In this instruction manual (detailed), the safety instruction levels are classified into
"WARNING" and "CAUTION".
WARNING
CAUTION
Note that even the level may lead to a serious consequence
according to conditions. Please follow the instructions of both levels because they are
important to personnel safety.
Assumes that incorrect handling may cause hazardous
conditions, resulting in death or severe injury.
Assumes that incorrect handling may cause hazardous
conditions, resulting in medium or slight injury, or may cause
physical damage only.
CAUTION
1. Electric Shock Prevention
WARNING
While power is on or when the inverter is running, do not open the front cover. You
may get an electric shock.
Do not run the inverter with the front cover or wiring cover removed. Otherwise,
you may access the exposed high-voltage terminals or the charging part of the
circuitry and get an electric shock. Also, the inverter's ability to withstand
earthquakes will deteriorate.
Even if power is off, do not remove the front cover except for wiring or periodic
inspection. You may access the charged inverter circuits and get an electric shock.
Before starting wiring or inspection, check to make sure that the 3-digit LED inverter
monitor is off, wait for at least 10 minutes after the power supply has been switched
off, and check to make sure that there are no residual voltage using a tester or the
like.
This inverter must be grounded. Grounding must conform to the requirements of
national and local safety regulations and electrical codes. (JIS, NEC section 250,
IEC 536 class 1 and other applicable standards)
Any person who is involved in the wiring or inspection of this equipment should be
fully competent to do the work.
Always install the inverter before wiring. Otherwise, you may get an electric shock
or be injured.
Perform setting dial and key operations with dry hands to prevent an electric
shock.
Do not subject the cables to scratches, excessive stress, heavy loads or pinching.
Otherwise, you may get an electric shock.
Do not change the cooling fan while power is on. It is dangerous to change the
cooling fan while power is on.
When you have removed the front cover, do not touch the connector above the 3-
digit monitor LED display. Otherwise, you get an electrick shock.
A-1
2. Fire Prevention
CAUTION
Mount the inverter on an incombustible surface. Installing the inverter directly on or near
a combustible surface could lead to a fire.
If the inverter has become faulty, switch off the inverter power. A continuous flow of
large current could cause a fire.
Do not connect a resistor directly to the DC terminals P, N. This could cause a fire.
3. Injury Prevention
CAUTION
Apply only the voltage specified in the instruction manual to each terminal to
prevent damage, etc.
Always connect to the correct terminal to prevent damage, etc.
Always make sure that polarity is correct to prevent damage, etc.
While power is on or for some time after power-off, do not touch the inverter as it is
hot and you may get burnt.
4. Additional Instructions
Also note the following points to prevent an accidental failure, injury, electric shock,
etc.
(1) Transportation and installation
CAUTION
When carrying products, use correct lifting gear to prevent injury.
Do not stack the inverter boxes higher than the number recommended.
Ensure that installation position and material can withstand the weight of the
inverter. Install according to the information in the instruction manual.
Do not install or operate if the inverter is damaged or has parts missing.
When carrying the inverter, do not hold it by the front cover or setting dial; it may
fall off or fail.
Do not stand or rest heavy objects on the inverter.
Check the inverter mounting orientation is correct.
Prevent other conductive bodies as screws and metal fragments or other
flammable substance as oil from entering the inverter.
As the inverter is a precision instrument, do not drop or subject it to impact.
Use the inverter under the following environmental conditions: This could cause
the inverter damage.
Ambient
Temperature
Ambient humidity 90%RH maximum (non-condensing)
Storage
temperature
Atmosphere
Environment
Altitude/
vibration
-10°C to +50°C (14°F to 122°F) (non-freezing)
-20°C to +65°C (-4°F to 149°F) *
Indoors (free from corrosive gas, flammable gas, oil mist,
dust and dirt)
2
Max.1000m (3280.80 feet) above sea level 5.9m/s
(conforming to JIS C 60068-2-6)
or less
*Temperatures applicable for a short time, e.g. in transit.
A-2
(2) Wiring
CAUTION
Do not fit capacitive equipment such as power factor correction capacitor, radio
noise filter (option FR-BIF(-H)) or surge suppressor to the output of the inverter.
The connection orientation of the output cables U, V, W to the motor will affect the
direction of rotation of the motor.
(3) Trial run
CAUTION
Check all parameters, and ensure that the machine will not be damaged by a
sudden start-up.
When the load GD
output current may vary when the output frequency is in the 20Hz to 30Hz range.
If this is a problem, set the Pr.72 "PWM frequency selection" to 6kHz or higher.
(When setting the PWM to a higher frequency, check for noise or leakage current
problem and take countermeasures against it.)
(4) Operation
2
is small (at the motor GD or smaller) for 400V from 1.5K to 3.7K, the
WARNING
When you have chosen the retry function, stay away from the equipment as it will
restart suddenly after an alarm stop.
The [STOP] key is valid only when the appropriate function setting has been made.
Prepare an emergency stop switch separately.
Make sure that the start signal is off before resetting the inverter alarm. A failure to
do so may restart the motor suddenly.
The load used should be a three-phase induction motor only. Connection of any
other electrical equipment to the inverter output may damage the equipment.
Do not modify the equipment.
Do not perform parts removal which is not instructed in this manual. Doing so may
lead to fault or damage of the inverter.
A-3
CAUTION
The electronic thermal relay function does not guarantee protection of the motor
from overheating.
Do not use a magnetic contactor on the inverter input for frequent starting/stopping
of the inverter.
Use a noise filter to reduce the effect of electromagnetic interference. Otherwise
nearby electronic equipment may be affected.
Take measures to suppress harmonics. Otherwise power supply harmonics from
the inverter may heat/damage the power capacitor and generator.
When a 400V class motor is inverter-driven, please use an insulation-enhanced
motor or measures taken to suppress surge voltages. Surge voltages attributable to
the wiring constants may occur at the motor terminals, deteriorating the insulation of
the motor.
When parameter clear or all clear is performed, reset the required parameters
before starting operations. Each parameter returns to the factory setting.
The inverter can be easily set for high-speed operation. Before changing its
setting, fully examine the performances of the motor and machine.
In addition to the inverter's holding function, install a holding device to ensure safety.
Before running an inverter which had been stored for a long period, always
perform inspection and test operation.
(5) Emergency stop
CAUTION
Provide a safety backup such as an emergency brake which will prevent the
machine and equipment from hazardous conditions if the inverter fails.
When the breaker on the inverter primary side trips, check for the wiring fault (short
circuit), damage to internal parts of the inverter, etc. Identify the cause of the trip,
then remove the cause and power on the breaker.
When any protective function is activated, take the appropriate corrective action,
then reset the inverter, and resume operation.
(6) Maintenance, inspection and parts replacement
CAUTION
Do not carry out a megger (insulation resistance) test on the control circuit of the
inverter.
(7) Disposing of the inverter
CAUTION
Treat as industrial waste.
(8) General instructions
Many of the diagrams and drawings in this instruction manual (detailed) show the inverter
without a cover, or partially open. Never operate the inverter in this manner. Always replace
the cover and follow this instruction manual (detailed) when operating the inverter.
A-4

CONTENTS
1. WIRING 1
1.1 Standard connection diagram and terminal specifications ..2
1.1.1 Standard connection diagram ....................................................................... 2
1.1.2 Explanation of main circuit terminals............................................................. 3
1.2 Main circuit terminals ...............................................................6
1.2.1 Terminal block layout ....................................................................................6
1.2.2 Cables, wiring length, and crimping terminals............................................... 8
1.2.3 Wiring instructions ......................................................................................... 9
1.2.4 Selection of peripheral devices ...................................................................10
1.2.5 Leakage current and installation of ground leakage circuit breaker............ 12
1.2.6 Power-off and magnetic contactor (MC)...................................................... 16
1.2.7 Regarding the installation of the power factor improving reactor ................ 17
1.2.8 Regarding noise and the installation of a noise filter................................... 18
1.2.9 Grounding precautions................................................................................ 19
1.2.10 Power supply harmonics .............................................................................20
1.2.11 Inverter-driven 400V class motor ................................................................ 21
1.3 How to use the control circuit terminals ...............................22
1.3.1 Terminal block layout ..................................................................................22
1.3.2 Wiring instructions ....................................................................................... 22
CONTENTS
1.3.3 Changing the control logic........................................................................... 23
1.4 Input terminals.........................................................................25
1.4.1 Run (start) and stop (STF, STR, STOP) .....................................................25
1.4.2 Connection of frequency setting potentiometer and
output frequency meter (10, 2, 5, 4, AU).....................................................28
1.4.3 External frequency selection (REX, RH, RM, RL)....................................... 29
1.4.4 Indicator connection and adjustment (AM).................................................. 31
1.4.5 Control circuit common terminals (SD, 5, SE)............................................. 32
1.4.6 Signal inputs by contactless switches......................................................... 32
1.5 How to use the input signals
(assigned terminals RL, RM, RH, STR)..................................33
1.5.1 Multi-speed setting (RL, RM, RH, REX signals):
Pr. 60 to Pr. 63 setting "0, 1, 2, 8"
Remote setting (RL, RM, RH signals):
Pr. 60 to Pr. 63 setting "0, 1, 2"...................................................................33
1.5.2 Second function selection (RT signal): Pr. 60 to Pr. 63 setting "3" .............33
1.5.3 Current input selection "AU signal": Pr. 60 to Pr. 63 setting "4" .................. 33
I
1.5.4 Start self-holding selection (STOP signal): Pr. 60 to Pr. 63 setting "5"....... 34
1.5.5 Output shut-off (MRS signal): Pr. 60 to Pr. 63 setting "6"........................... 34
1.5.6 External thermal relay input: Pr. 60 to Pr. 63 setting "7"............................. 35
1.5.7 Jog operation (JOG signal): Pr. 60 to Pr. 63 setting "9".............................. 35
1.5.8 Reset signal: Pr. 60 to Pr. 63 setting "10"................................................... 36
1.5.9 PID control valid terminal: Pr. 60 to Pr. 63 setting "14"............................... 37
1.5.10 PU operation/external operation switchover: Pr. 60 to Pr. 63 setting "16".. 37
1.6 Connection to the Stand-Alone Option................................. 38
1.6.1 Connection of the brake unit (BU type)....................................................... 38
1.6.2 Connection of the high power factor converter (FR-HC)............................. 39
1.6.3 Connection of the power regeneration common converter (FR-CV)........... 40
1.7 Handling of the RS-485 connector ........................................41
1.7.1 Connection of the parameter unit (FR-PU04) ............................................. 41
1.7.2 Wiring of RS-485 communication ............................................................... 42
1.8 Design information ................................................................. 45
2. FUNCTIONS 47
2.1 Function (Parameter) list........................................................48
2.2 List of parameters classified by purpose of use..................61
2.3 Explanation of functions (parameters) ................................. 63
2.3.1 Torque boost (Pr. 0 , Pr. 46 ) ...................................................................... 63
2.3.2 Maximum and minimum frequency (Pr. 1 , Pr. 2 ) ...................................... 64
2.3.3 Base frequency, base frequency voltage (Pr.3 , Pr.19 , Pr.47 ).................. 65
2.3.4 Multi-speed operation (Pr. 4, Pr. 5, Pr. 6, Pr. 24 to Pr. 27, Pr. 80 to Pr. 87)66
2.3.5 Acceleration/deceleration time (Pr. 7 , Pr. 8 , Pr. 20 , Pr. 44 , Pr. 45 ) ....... 67
2.3.6 Selection and protection of a motor (Pr. 9 , Pr. 71 , H7 )............................ 69
2.3.7 DC injection brake (Pr. 10 , Pr. 11 , Pr. 12 ) ............................................... 71
2.3.8 Starting frequency (Pr. 13 )......................................................................... 72
2.3.9 Load pattern selection (Pr. 14 )................................................................... 73
2.3.10 Jog operation (Pr.15 , Pr.16 )...................................................................... 74
2.3.11 RUN key rotation direction selection (Pr.17 ).............................................. 74
2.3.12 Stall prevention function and current limit function (Pr. 21 ) ....................... 75
2.3.13 Stall prevention (Pr. 22 , Pr. 23 , Pr. 28 ).................................................... 77
2.3.14 Acceleration/deceleration pattern (Pr. 29 ) ................................................. 79
2.3.15 Extended function display selection (Pr. 30 ).............................................. 80
2.3.16 Frequency jump (Pr. 31 to Pr. 36 )............................................................. 80
2.3.17 Speed display (Pr. 37 ) ............................................................................... 81
II

2.3.18 Biases and gains of the frequency setting voltage (current)
(Pr. 38 , Pr. 39 , C2 to C7 )......................................................................... 82
2.3.19 Start-time ground fault detection selection (Pr. 40 ) .................................... 86
2.4 Output terminal function parameters ....................................86
2.4.1 Up-to-frequency (Pr. 41 )............................................................................. 86
2.4.2 Output frequency detection (Pr. 42 , Pr. 43 )............................................... 87
2.5 Current detection function parameters .................................88
2.5.1 Output current detection functions (Pr. 48 , Pr. 49 ).................................... 88
2.5.2 Zero current detection (Pr. 50 , Pr. 51 )....................................................... 89
2.6 Display function parameters ..................................................90
2.6.1 Monitor display (Pr. 52 , Pr. 54 ).................................................................. 90
2.6.2 Setting dial function selection (Pr. 53 )........................................................ 91
2.6.3 Monitoring reference (Pr. 55 , Pr. 56 ).........................................................92
2.7 Restart operation parameters ................................................92
2.7.1 Restart setting (Pr. 57 , Pr. 58 , H6 )...........................................................92
CONTENTS
2.8 Additional function parameters .............................................95
2.8.1 Remote setting function selection (Pr. 59 ) ................................................. 95
2.9 Terminal function selection parameters ...............................98
2.9.1 Input terminal function selection (Pr. 60 , Pr. 61 , Pr. 62 , Pr. 63 )..............98
2.9.2 Output terminal function selection (Pr. 64 , Pr. 65 ) .................................. 100
2.10 Operation selection function parameters ...........................101
2.10.1 Retry function (Pr. 66 , Pr. 67 , Pr. 68 , Pr. 69 ) ........................................101
2.10.2 PWM carrier frequency (Pr. 70 , Pr. 72 )................................................... 103
2.10.3 Voltage input selection (Pr. 73 ) ................................................................104
2.10.4 Input filter time constant (Pr. 74 ) ..............................................................105
2.10.5 Reset selection/PU stop selection (Pr. 75 )............................................... 105
2.10.6 Cooling fan operation selection (Pr. 76 )...................................................107
2.10.7 Parameter write disable selection (Pr. 77 ) ...............................................108
2.10.8 Reverse rotation prevention selection (Pr. 78 ).........................................109
2.10.9 Operation mode selection (Pr. 79 ) ........................................................... 109
2.10.10PID control (Pr. 88 to Pr. 94 )................................................................... 113
2.11 Auxiliary parameters .............................................................120
2.11.1 Slip compensation (Pr. 95 , Pr. 96 , Pr. 97 ).............................................. 120
2.11.2 Automatic torque boost selection (Pr. 98 )................................................ 121
2.11.3 Motor primary resistance (Pr. 99 )............................................................. 122
2.12 Maintenance parameters ......................................................122
III
2.12.1 Maintenance output function (H1, H2 ) ..................................................... 122
2.12.2 Current average value monitor signal (H3, H4, H5)................... 123
2.13 Calibration parameters ......................................................... 126
2.13.1 Meter (frequency meter) calibration (C1 )................................................. 126
2.14 Clear parameters................................................................... 129
2.14.1 Parameter clear (CLr ) .............................................................................. 129
2.14.2 Alarm history clear (ECL )......................................................................... 129
2.15 Communication parameters................................................. 130
2.15.1 Communication settings (n1 to n7 , n11 ) ................................................ 132
2.15.2 Operation and speed command source (n8 , n9 ) .................................... 147
2.15.3 Link startup mode selection (n10 )............................................................ 148
2.15.4 E2PROM write selection (n12 )................................................................. 150
2.16 Parameter unit (FR-PU04) setting........................................ 151
2.16.1 PU display language selection (n13 ) ....................................................... 151
2.16.2 PU buzzer control (n14 )........................................................................... 151
2.16.3 PU contrast adjustment (n15 ) .................................................................. 152
2.16.4 PU main display screen data selection (n16 )........................................... 152
2.16.5 Disconnected PU detection/PU setting lock selection (n17 ).................... 153
3. PROTECTIVE FUNCTIONS 155
3.1 Errors (Alarms)...................................................................... 156
3.1.1 Error (alarm) definitions ............................................................................ 157
3.1.2 To know the operating status at the occurrence of alarm
(only when FR-PU04 is used) ................................................................... 165
3.1.3 Correspondence between digital and actual characters........................... 165
3.1.4 Resetting the inverter................................................................................ 165
3.2 Troubleshooting.................................................................... 166
3.2.1 Motor remains stopped ............................................................................. 166
3.2.2 Motor rotates in opposite direction............................................................ 167
3.2.3 Speed greatly differs from the setting ....................................................... 167
3.2.4 Acceleration/deceleration is not smooth ................................................... 167
3.2.5 Motor current is large ................................................................................ 167
3.2.6 Speed does not increase .......................................................................... 167
3.2.7 Speed varies during operation.................................................................. 167
3.2.8 Operation mode is not changed properly.................................................. 168
3.2.9 Operation panel display is not operating................................................... 168
3.2.10 Parameter write cannot be performed ...................................................... 168
IV
3.2.11 Motor produces annoying sound...............................................................168
4. SPECIFICATIONS 169
4.1 Specification list....................................................................170
4.1.1 Ratings ...................................................................................................... 170
4.1.2 Common specifications ............................................................................. 173
4.2 Outline drawings ...................................................................175
APPENDIX 179
APPENDIX 1 Parameter Instruction Code List .............................180
CONTENTS
V
1. WIRING
This chapter explains the basic "wiring" for use of this product. Always
read the instructions before use.
For description of "installation", refer to the instruction manual (basic).
1.1 Standard connection diagram and terminal
specifications .....................................................
1.2 Main circuit terminals ........................................ 6
1.3 How to use the control circuit terminals.......... 22
1.4 Input terminals.................................................... 25
1.5 How to use the input signals (assigned
terminals RL, RM, RH, STR) ..............................
1.6 Connection to the Stand-Alone Option ............ 38
1.7 Handling of the RS-485 connector...................... 41
2
33
1.8 Design information............................................. 45
<Abbreviations>
•PU
Operation panel and parameter unit (FR-PU04)
•Inverter
Mitsubishi transistorized inverter FR-S500 series
•FR-S500
Mitsubishi transistorized inverter FR-S500 series
•Pr.
Parameter number
Chapter 1
Chapter 2
Chapter 3
Chapter 4
1
Standard connection diagram and terminal specifications
1.1 Standard connection diagram and terminal
specifications
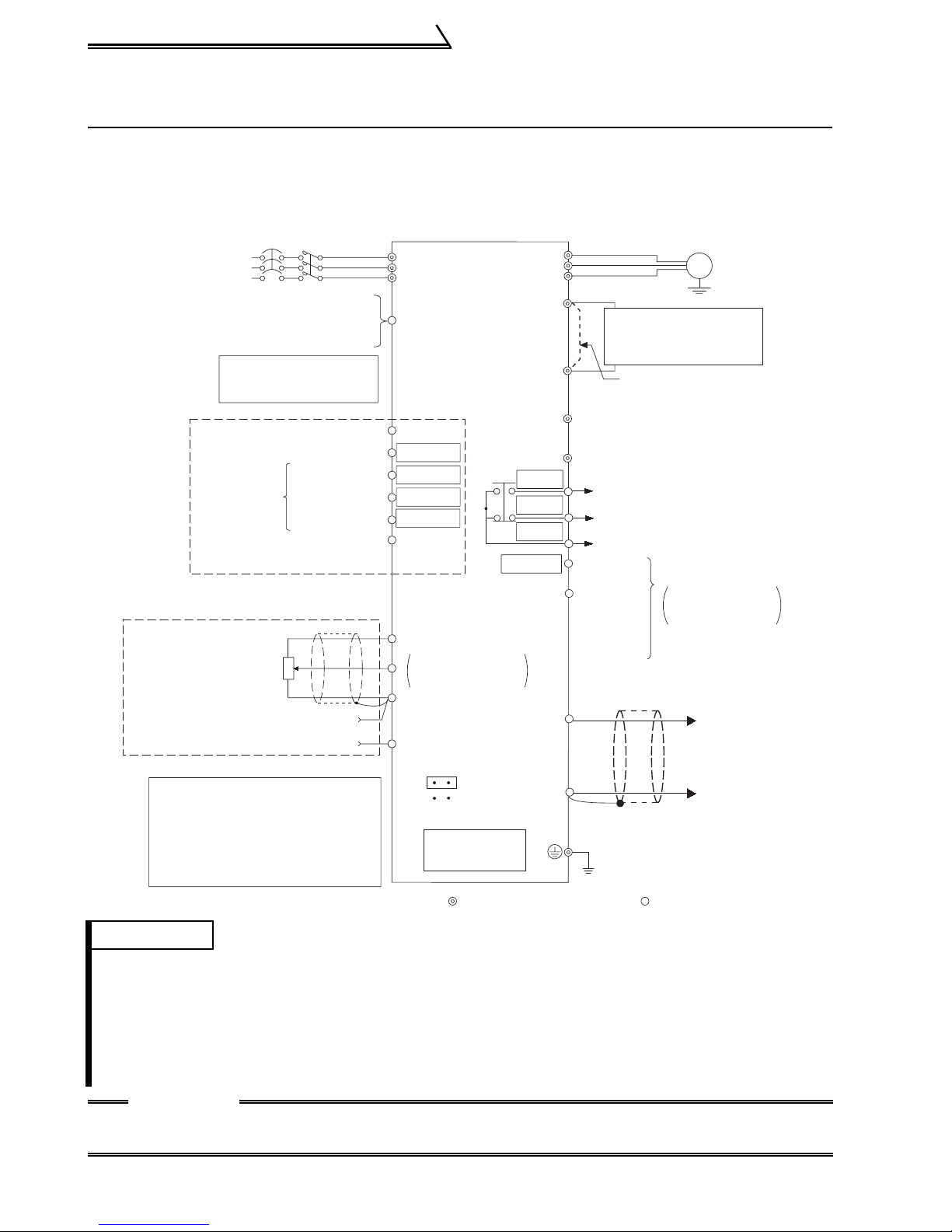
1.1.1 Standard connection diagram
Three-phase 200V power input
Three-phase 400V power input
NFB MC
Three-phase AC
power supply
External transistor common
24VDC power supply
Contact input common (source)
Take care not to short
terminals PC-SD.
Forward rotation start
Control input
signals
(No voltage
input allowed)
Frequency setting signals (Analog)
Frequency setting
potentiometer
1/2W1kΩ
Reverse rotation start
Multi-speed
selection
Contact input common
3
*4
1
Current input(-)
4 to 20mADC(+)
When using the current input as
the frequency setting signal, set
"4" in any of Pr. 60 to Pr. 63 (input
terminal function selection), assign
AU (current input selection) to any
of terminals RH, RM, RL and STR
and turn on the AU signal.
High speed
Middle speed
Low speed
2
Inverter
R/L1
S/L2
T/L3
PC
STF
STR
*5
*5
RH
*5
RM
RL
*5
SD
10
(+5V)
0 to 5VDC
2
0 to 10VDC
5
(Common)
4
(4 to 20mADC)
SINK
*3
SOURCE
RS-485
Connector
*1
*2
*6
*6
*6
*6
RUN
Selected
U
V
W
P1
P/+
N/-
PR
A
B
C
SE
AM
Running
Open
collector
output
common
5
Motor
IM
Ground
Power factor improving
DC reactor
(FR-BEL: Option)
Jumper:
jumper when FR-BEL
is connected.
Alarm output
Remove this
Operation status
output
Open collector
outputs
(+)
Analog signal
output
(0 to 5VDC)
(-)
Ground
REMARKS
*1. The N/- terminal is not provided for the FR-S520E-0.1K to 0.75K-NA.
*2. The PR terminal is provided for the FR-S520E-0.4K to 3.7K-NA. (not used)
*3. You can switch the position of sink and source logic. Refer to page 23.
*4. When the setting potentiometer is used frequently, use a 2W1kΩ potentiometer.
*5. The terminal functions change with input terminal function selection (Pr. 60 to Pr. 63). (Refer to page 98.)
(RES, RL, RM, RH, RT, AU, STOP, MRS, OH, REX, JOG, X14, X16, (STR) signal selection)
*6. The terminal function changes according to the setting of output terminal function selection (Pr. 64, Pr. 65).
(Refer to page 100.) (RUN, SU, OL, FU, RY, Y12, Y13, FDN, FUP, RL, Y93, Y95, LF, ABC signal selection)
CAUTION
To prevent a malfunction due to noise, keep the signal cables more than 10cm away
from the power cables.
Control circuit terminalMain circuit terminal
2
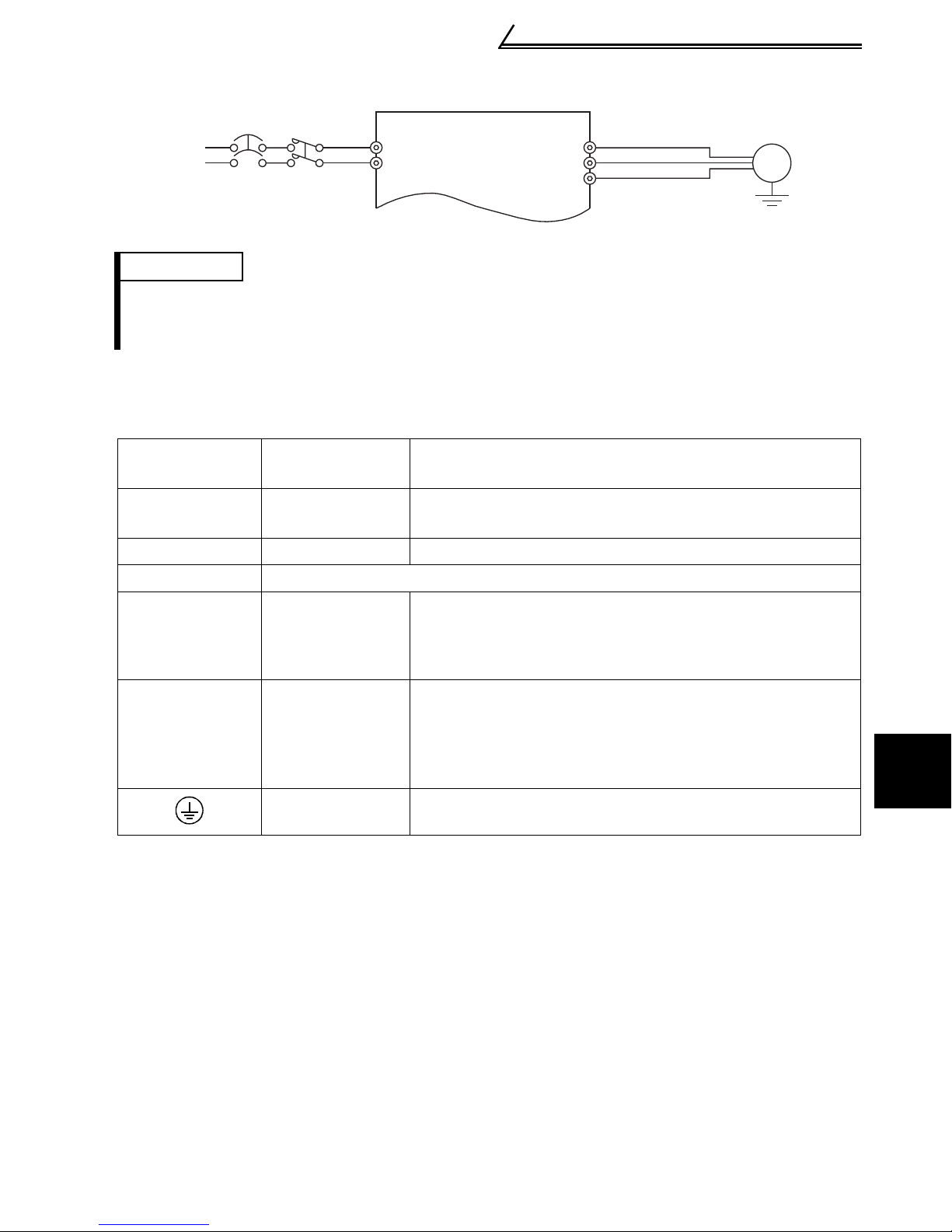
Single-phase 100V power input
Standard connection diagram and terminal specifications
NFB
Power
supply
MC
R/L1
S/L
Motor
U
2
V
W
IM
Ground
REMARKS
•To ensure safety, connect the power input to the inverter via a magnetic contactor and earth leakage
circuit breaker or no-fuse breaker, and use the magnetic contactor to switch power on-off.
•The output is three-phase 200V.
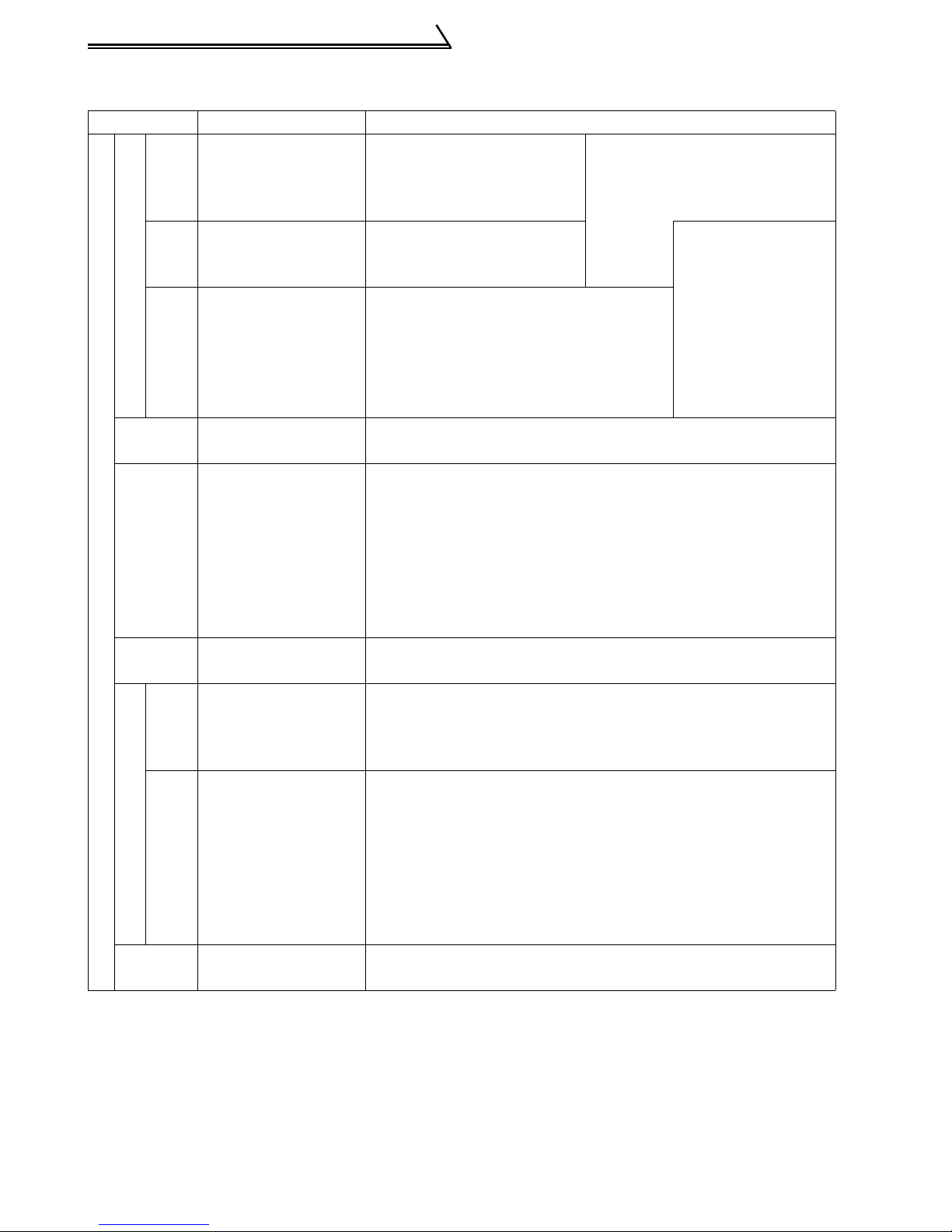
1.1.2 Explanation of main circuit terminals
(1) Main circuit
Terminal
Symbol
R/L1, S/L2,
T/L3 (*1)
U, V, W Inverter output
Terminal Name Description
AC power input
Connect to the commercial power supply.
Connect a three-phase squirrel-cage motor.
PR (*2)
P/+, N/−
P/+, P1
Brake unit
connection
Power factor
improving DC
reactor
connection
Connect the brake unit (BU), power regeneration
common converter (FR-CV) or high power factor
converter (FR-HC). (The N/- terminal is not provided for
the FR-S520E-0.1K to 0.75K-NA.)
Remove the jumper across terminals P - P1 and connect
the optional power factor improving DC reactor (FRBEL(-H)).
(The single-phase 100V power input model cannot be
connected.)
Do not use PR terminal.
Ground For grounding the inverter chassis. Must be grounded.
*1. When using single-phase power input, terminals are R/L1 and S/L2.
*2. The PR terminal is provided for the FR-S520E-0.4K to 3.7K-NA.
1
WIRING
3
Standard connection diagram and terminal specifications
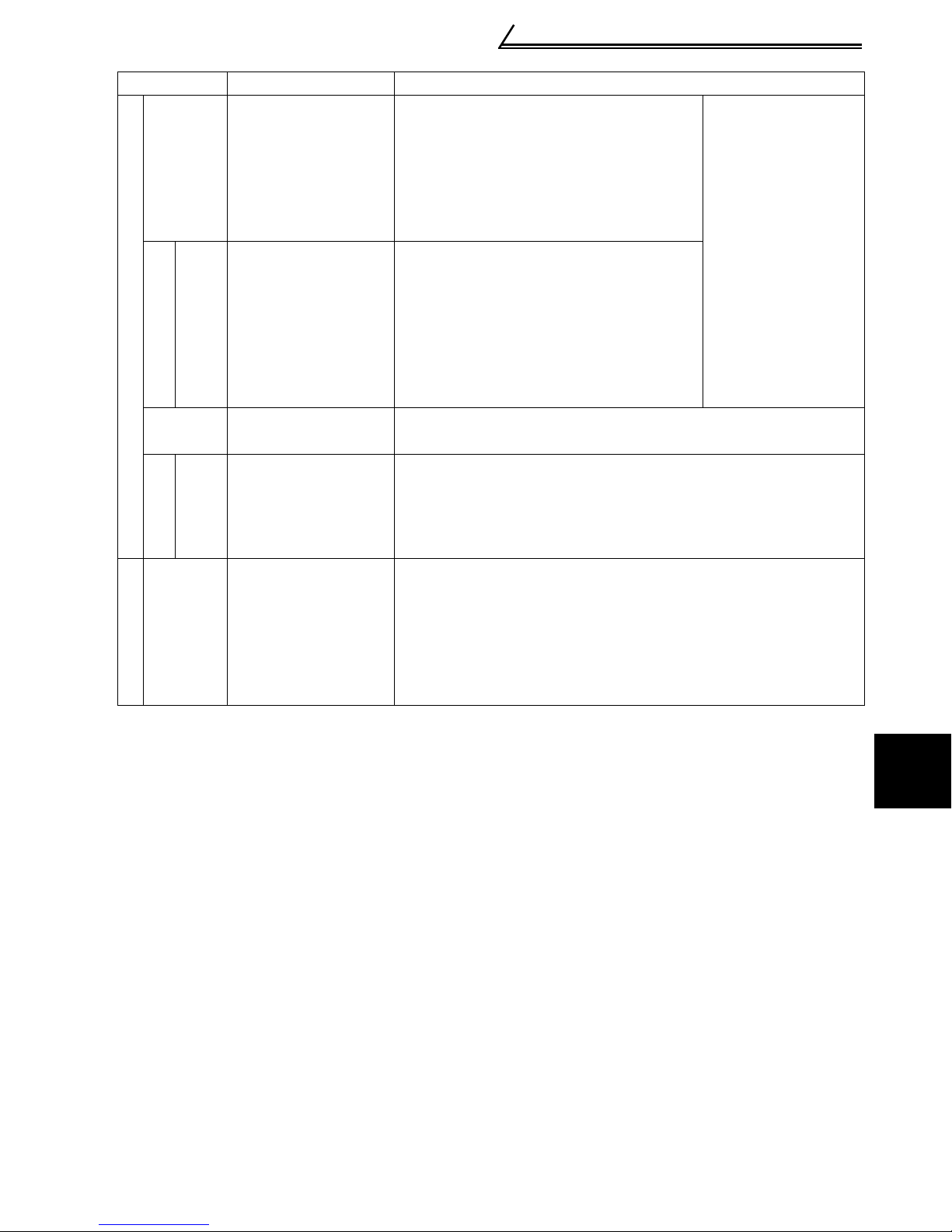
(2) Control circuit
Symbol Terminal Name Definition
Turn on the STF signal to
start forward rotation and
turn it off to stop.
Turn on the STR signal to
start reverse rotation and
turn it off to stop.
Turn on the RH, RM and RL signals in
appropriate combinations to select
multiple speeds.
The priorities of the speed commands
are in order of jog, multi-speed setting
(RH, RM, RL, REX) and AU.
Common to the contact input terminals (STF, STR, RH, RM,
RL). (*6)
When connecting the transistor output (open collector output),
such as a programmable controller (PLC), connect the positive
external power supply for transistor output to this terminal to
prevent a malfunction caused by undesirable currents.
This terminal can be used as a 24VDC, 0.1A power output
across terminals PC-SD.
When source logic has been selected, this terminal serves
as a contact input common.
5VDC, Permissible load current 10mA.
Inputting 0 to 5VDC (or 0 to 10V) provides the maximum output
frequency at 5V (10V) and makes input and output proportional.
Switch between 5V and 10V using Pr. 73 "0-5V, 0-10V selection".
Input resistance 10kΩ. Maximum permissible input voltage 20V
Input 4 to 20mADC. It is factory set at 0Hz for 4mA and at
60Hz for 20mA.
Maximum permissible input current 30mA. Input resistance
approximately 250Ω.
Turn ON signal AU for current input.
Turning the AU signal on makes voltage input invalid. Use any of
Pr. 60 to Pr. 63 (input terminal function selection) to set the AU
signal.
Common terminal for the frequency setting signals
(terminal 2, 4) and indicator connection (terminal AM). (*6)
Input signals
STF
STR
RH
Contact input
RM
RL
SD
(*1)
PC
(*1)
10
Frequency setting
5
Forward rotation
start
Reverse rotation
start
Multi-speed
selection
Contact input
common (sink)
External
transistor
common, 24VDC
power supply,
contact input
common (source)
Frequency setting
power supply
Frequency setting
2
(voltage signal)
Frequency setting
4
(current signal)
Frequency setting
input common
When the STF and STR
signals are turned on
simultaneously, the stop
command is given.
The terminal
functions change
with input terminal
function selection
(Pr. 60 to Pr.63).
(*3)
4
Standard connection diagram and terminal specifications
Symbol Terminal Name Definition
Changeover contact output indicates
that the inverter protective function has
Output signals
A
B
C
RUN
Open collector
SE
Indicator
Alarm output
Inverter
running
Open collector
common
Analog signal
AM
output
activated and the output stopped.
230VAC 0.3A, 30VDC 0.3A. Alarm:
discontinuity across B-C (continuity
across A-C), Normal: continuity across
B-C (discontinuity across A-C).(*5)
Switched low when the inverter output
frequency is equal to or higher than the
starting frequency (factory set to 0.5Hz
variable). Switched high during stop or
DC injection brake operation. (*2)
Permissible load 24VDC 0.1A (a
voltage drop is 3.4V maximum when
the signal is on)
Common terminal for inverter running terminal RUN.
The output signal across terminals AM-5 is factory set to about
5VDC at 60Hz and is proportional to the corresponding output
frequency.
Frequency permissible load current 1mA
Output signal 0 to 5VDC
The function of the
terminals changes
according to the
output terminal
function selection
(Pr. 64, Pr.65).
(*4)
(*6)
Using the parameter unit connection cable (FR-CB201 to
——
RS-485
connector
205), the parameter unit (FR-PU04) can be connected.
Communication operation can be performed using RS-485.
For details of RS-485 communication, refer to page 42.
Communication
*1. Do not connect terminals SD and PC each other or to the ground.
For sink logic (factory setting), terminal SD acts as the common terminal of contact input.
For source logic, terminal PC acts as the common terminal of contact input. (Refer to
page 23 for switching method.)
*2. Low indicates that the open collector output transistor is on (conducts). High indicates
that the transistor is off (does not conduct).
*3. RL, RM, RH, RT, AU, STOP, MRS, OH, REX, JOG, RES, X14, X16, (STR) signal
selection (Refer to page 98.)
*4. RUN, SU, OL, FU, RY, Y12, Y13, FDN, FUP, RL, Y93, Y95, LF, ABC signal selection
(Refer to page 100.)
*5. To be compliant with the European Directive (Low Voltage Directive), the operating
capacity of relay outputs (A, B, C) should be 30VDC 0.3A.
*6. Terminals SD, SE and 5 are isolated from each other. Do not ground.
1
WIRING
5
Main circuit terminals
r
r
1.2 Main circuit terminals
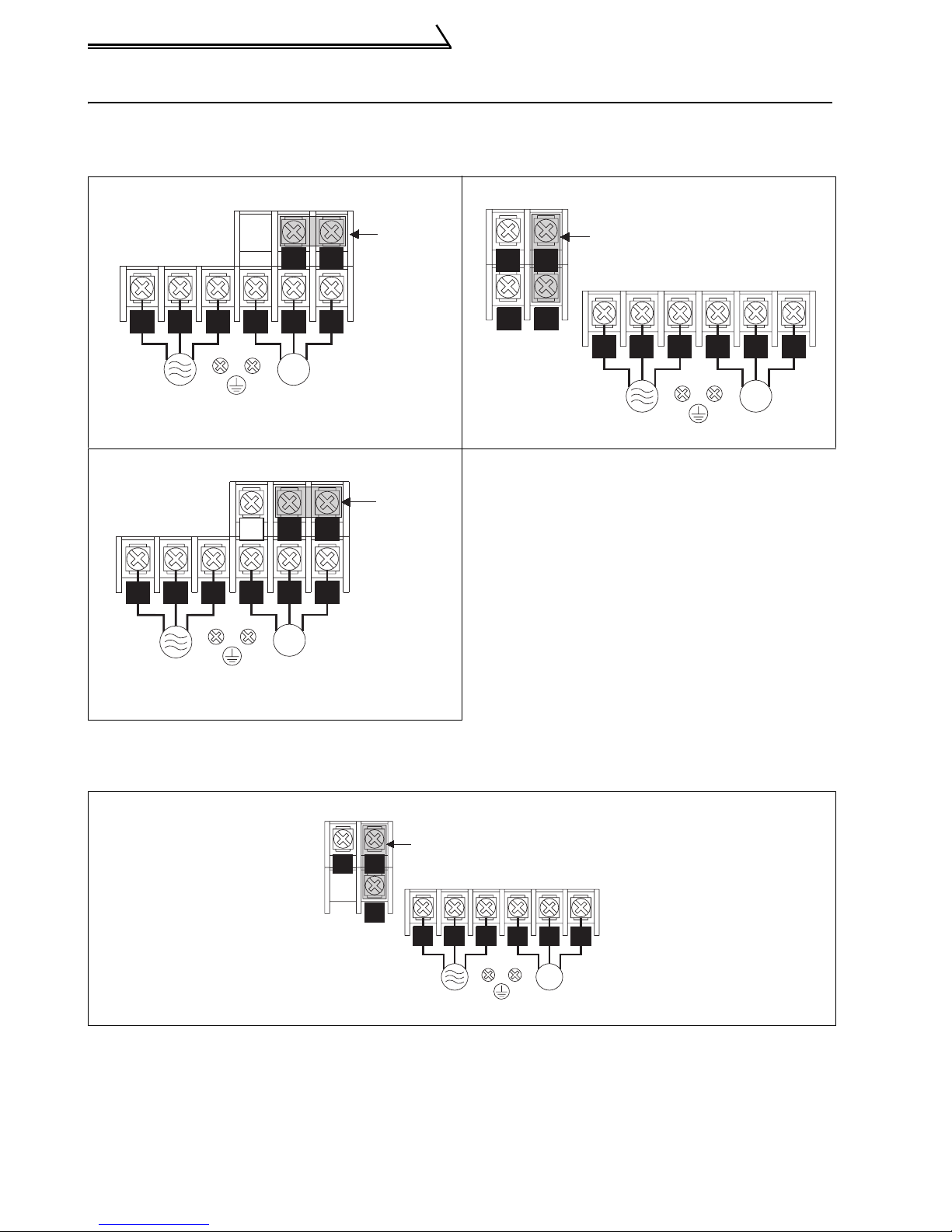
1.2.1 Terminal block layout
1) Three-phase 200V power input
• FR-S520E-0.1K, 0.2K-NA • FR-S520E-1.5K, 2.2K, 3.7K-NA
P/+
P1
R/L1 S/L2 T/L3
Power supply
U V W
IM
Motor
• FR-S520E-0.4K, 0.75K-NA
P1
IM
P/+
R/L1 S/L2
T/L3
Power supply
PR
U V W
Motor
Jumpe
Jumpe
N/-
PR
P/+
P1
Jumper
R/L1 S/L2 T/L3
Power supply
U V W
IM
Motor
2) Three-phase 400V power input
• FR-S540E-0.4K, 0.75K, 1.5K, 2.2K, 3.7K
-NA
Jumper
P/+
N/-
P1
R/L1 S/L2 T/L3
Power supply
6
U V W
IM
Motor
Main circuit terminals
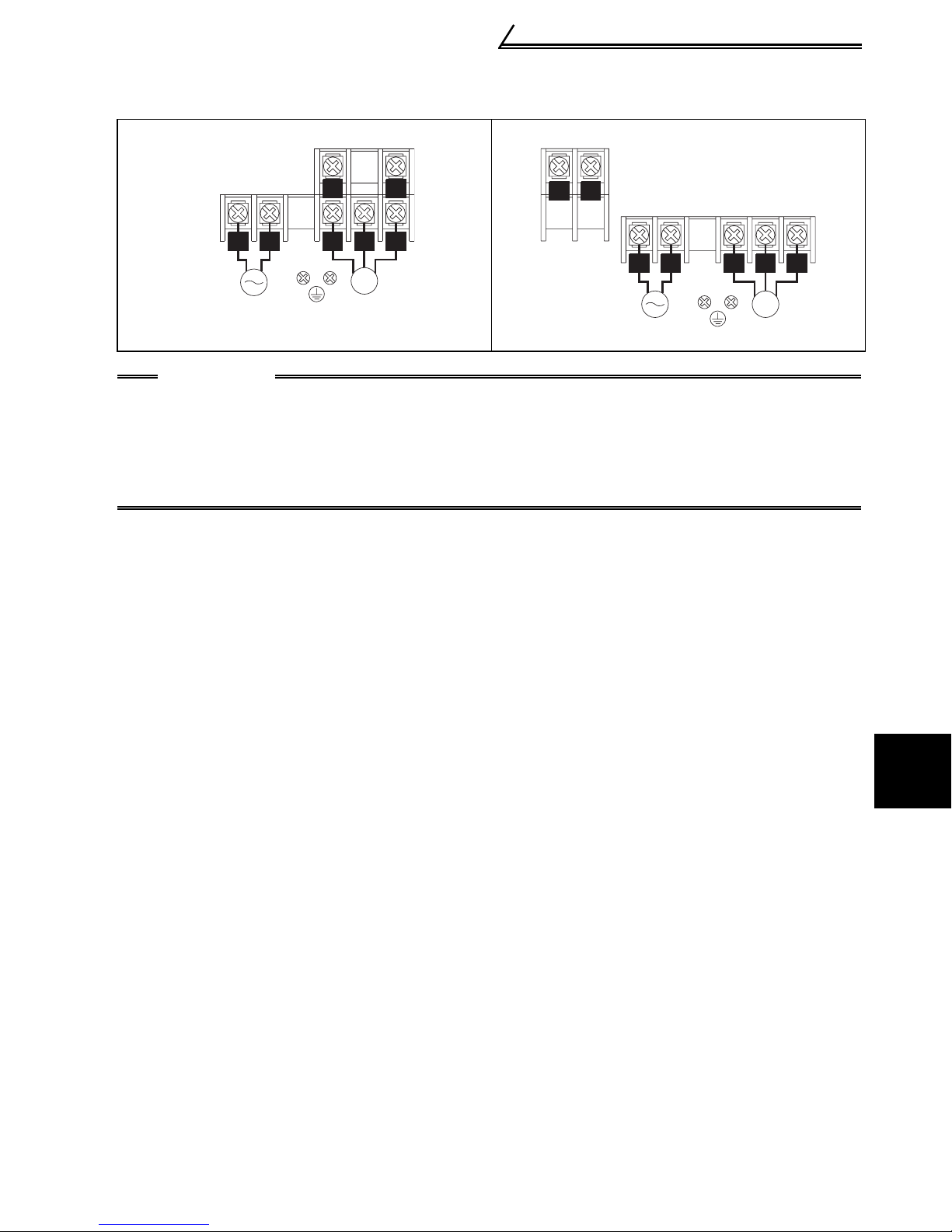
3) Single-phase 100V power input
• FR-S510WE-0.1K, 0.2K, 0.4K-NA • FR-S510WE-0.75K-NA
R/L1 S/L2
Power supply
P/+N/-
U V W
IM
Motor
N/-
P/+
R/L1 S/L2
Power supply
U V W
IM
Motor
CAUTION
•Make sure the power cables are connected to the R/L1, S/L2, T/L3 of the inverter.
Never connect the power cable to the U, V, W of the inverter. (Phase need not be
matched)
•Connect the motor to U, V, W. At this time, turning on the forward rotation switch
(signal) rotates the motor in the counterclockwise direction when viewed from the
motor shaft.
1
WIRING
7
Main circuit terminals
1.2.2 Cables, wiring length, and crimping terminals
The following table indicates a selection example for the wiring length of 20m (65.62
feet).
1) Three-phase 200V power input
PVC Insulation
Cable
2
mm
R, S, T
U, V, W
PVC Insulation
Cable
2
mm
Applied Inverter
FR-S520E-0.1K
to 0.75K-NA
FR-S520E-
1.5K, 2.2K-NA
FR-S520E-
3.7K-NA
Ter-
minal
Screw
size
M3.5 1.2 2-3.5 2-3.5 2 2 14 14 2.5 2.5
M4 1.5 2-4 2-4 2 2 14 14 2.5 2.5
M4 1.5 5.5-4 5.5-4 3.5 3.5 12 12 4 2.5
Tightening
Torque
⋅
m
N
Crimping
R, S, T U, V, W
2) Three-phase 400V power input
Applied Inverter
FR-S540E-0.4K
to 3.7K-NA
Ter-
minal
Screw
size
M4 1.5 2-4 2-4 2 2 14 14 2.5 2.5
Tightening
Torque
⋅
m
N
Crimping
R, S, T U, V, W R, S, T U, V, W R, S, T U, V, W R, S, T U, V, W
Terminal
Terminal
mm
R, S, T
mm
Cable
2
U, V, W
Cable
2
AWG
R, S, T
AWG
U, V, W
3) Single-phase 100V power input
PVC Insulation
Cable
2
mm
Applied Inverter
FR-S510WE-
0.1K
to 0.4K-NA
FR-S510WE-0.75KNA
Termi-
nal
Screw
size
M3.5 1.2 2-3.5 2-3.5 2 2 14 14 2.5 2.5
M4 1.5 5.5-4 2-4 3.5 2 12 14 4 2.5
Tightening
Torque
⋅
m
N
2
Cable
AWG
Crimping
Terminal
mm
R, S U, V, W R, S U, V, W R, S U, V, W R, S U, V, W
Wiring length
100m (328.08 feet) maximum. (50m (164.04 feet) maximum for the FR-S540E-
0.4K-NA.)
CAUTION
•When the wiring length of the 0.1K and 0.2K of the three-phase 200V and
single-phase 100V class and the 0.4K and 0.75K of the three-phase 400V class
is 30m (98.43 feet) or more, set the carrier frequency to 1kHz.
•When automatic torque boost is selected in Pr. 98 "automatic torque boost
selection (motor capacity)", the wiring length should be 30m (98.43 feet)
maximum. (Refer to page 121.)
8

Main circuit terminals
1.2.3 Wiring instructions
1) Use insulation-sleeved crimping terminals for the power supply and motor cables.
2) Application of power to the output terminals (U, V, W) of the inverter will damage the
inverter. Never perform such wiring.
3) After wiring, wire offcuts must not be left in the inverter.
Wire offcuts can cause an alarm, failure or malfunction. Always keep the inverter
clean.
When drilling a control box etc., take care not to let wire offcuts enter the inverter.
4) Use cables of the recommended size to make a voltage drop 2% maximum.
If the wiring distance is long between the inverter and motor, a main circuit cable
voltage drop will cause the motor torque to decrease especially at the output of a
low frequency.
5) For long distance wiring, the high response current limit function may be reduced or
the devices connected to the secondary side may malfunction or become faulty
under the influence of a charging current due to the stray capacity of wiring.
Therefore, note the maximum overall wiring length.
6) Electromagnetic wave interference
The input/output (main circuit) of the inverter includes high frequency components,
which may interfere with the communication devices (such as AM radios) used near
the inverter. In this case, install a FR-BIF(-H) optional radio noise filter (for use on
the input side only) or FR-BSF01 or FR-BLF line noise filter to minimize
interference.
7) Do not install a power capacitor, surge suppressor or radio noise filter (FR-BIF(-H)
option) on the output side of the inverter.
This will cause the inverter to trip or the capacitor and surge suppressor to be
damaged. If any of the above devices are connected, remove them. (When using
the FR-BIF(-H) radio noise filter with a single-phase power supply, connect it to the
input side of the inverter after isolating the T phase securely.)
8) Before starting wiring or other work after the inverter is operated, wait for at least 10
minutes after the power supply has been switched off, and check that there are no
residual voltage using a tester or the like. The capacitor is charged with high
voltage for some time after power off and it is dangerous.
1
WIRING
9
Main circuit terminals
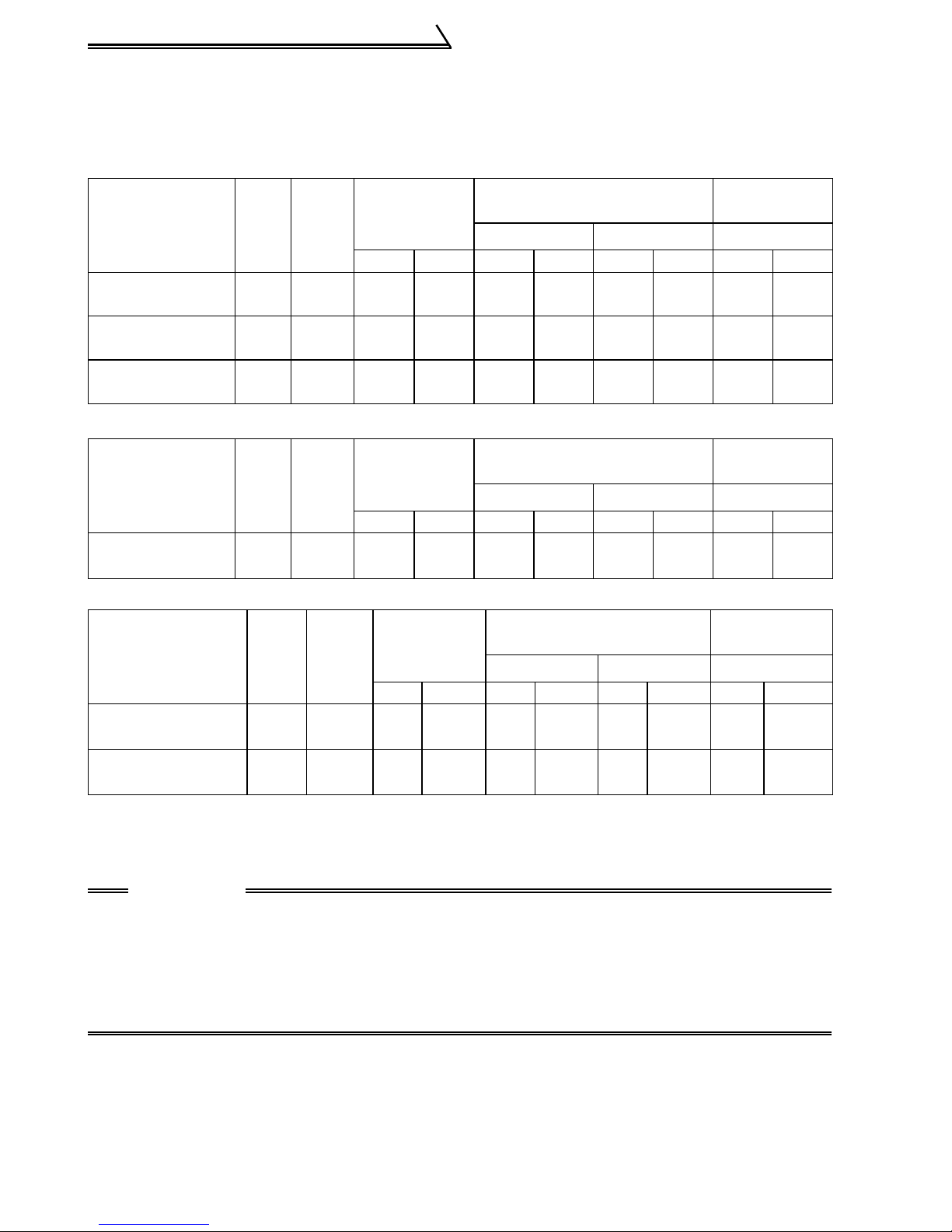
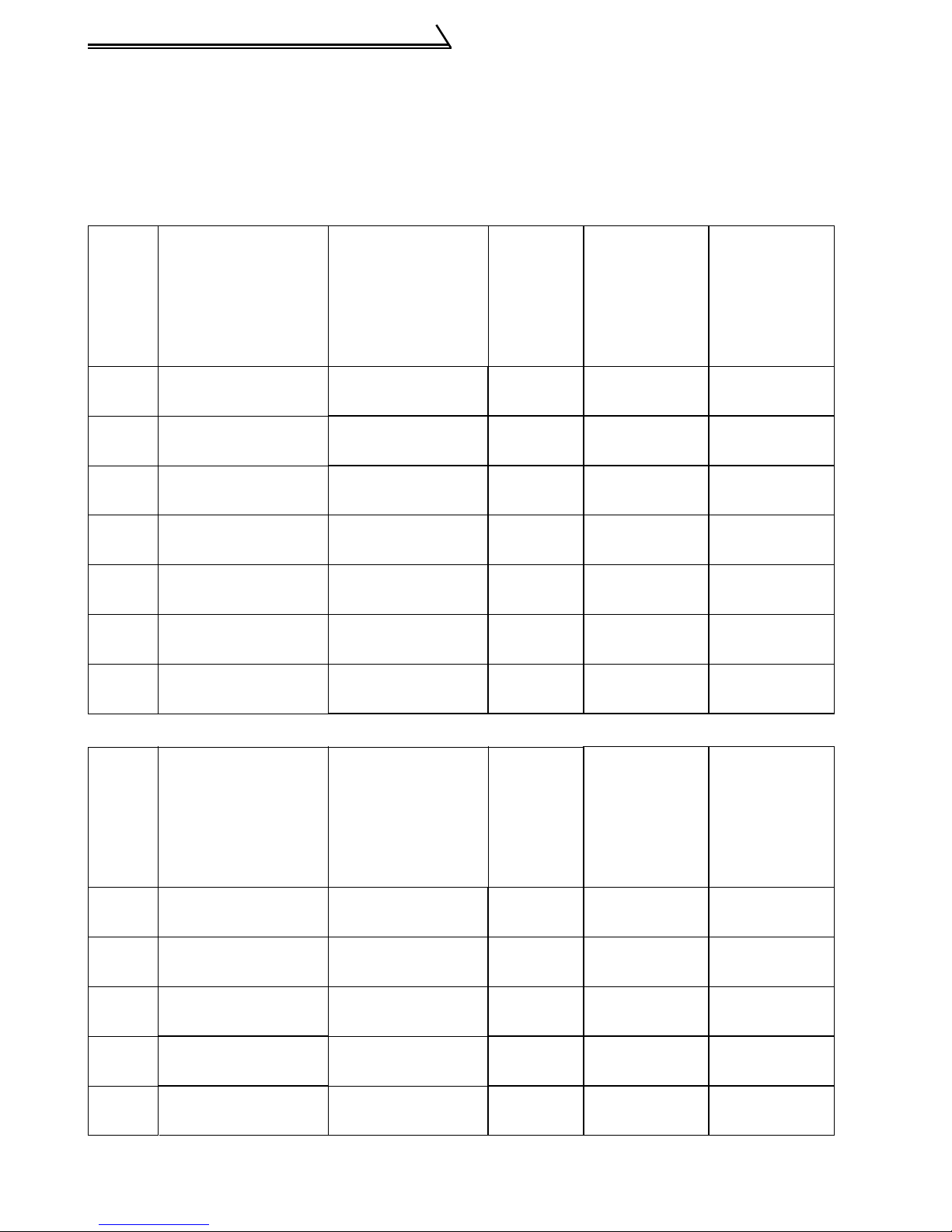
1.2.4 Selection of peripheral devices
Check the capacity of the motor applicable to the inverter you purchased. Appropriate
peripheral devices must be selected according to the capacity.
Refer to the following list and prepare appropriate peripheral devices:
1) Three-phase 200V power input
Motor
Output
(kW
(HP))
0.1
(1/8)
0.2
(1/4)
0.4
(1/2)
0.75
(1)
1.5
(2)
2.2
(3)
3.7
(5)
Applied Inverter
Type
FR-S520E-0.1K-NA
FR-S520E-0.2K-NA
FR-S520E-0.4K-NA
FR-S520E-0.75K-NA
FR-S520E-1.5K-NA
FR-S520E-2.2K-NA
FR-S520E-3.7K-NA
No-fuse Breaker
(NFB *1, 4) or
Earth Leakage
Circuit Breaker
(ELB) (Refer to
page 12) (*2, 4)
30AF/5A S-N10
30AF/5A S-N10
30AF/5A S-N10 FR-BAL-0.4K FR-BEL-0.4K
30AF/10A S-N10 FR-BAL-0.75K FR-BEL-0.75K
30AF/15A S-N10 FR-BAL-1.5K FR-BEL-1.5K
30AF/20A S-N10 FR-BAL-2.2K FR-BEL-2.2K
30AF/30A
Magnetic
Contactor
(MC)
(Refer to
page 16 )
S-N20,
S-N21
Power Factor
Improving AC
Reactor
(Refer to page
17)
FR-BAL-0.4K
(*3)
FR-BAL-0.4K
(*3)
FR-BAL-3.7K FR-BEL-3.7K
Power Factor
Improving DC
Reactor
(Refer to page
FR-BEL-0.4K
FR-BEL-0.4K
17)
(*3)
(*3)
2) Three-phase 400V power input
No-fuse Breaker
Motor
Output
(kW
(HP))
Applied Inverter
Type
(NFB *1, 4) or
Earth Leakage
Circuit Breaker
(ELB) (Refer to
page 12) (*2, 4)
0.4
(1/2)
0.75
(1)
1.5
(2)
2.2
(3)
3.7
(5)
FR-S540E-0.4K-NA
FR-S540E-0.75K-NA
FR-S540E-1.5K-NA
FR-S540E-2.2K-NA
FR-S540E-3.7K-NA
30AF/5A S-N10
30AF/5A S-N10
30AF/10A S-N10
30AF/15A S-N10
30AF/20A
Magnetic
Contactor
(MC)
(Refer to
page 16)
S-N20,
S-N21
Power Factor
Improving AC
Reactor
(Refer to page
17)
FR-BAL-
H0.4K
FR-BAL-
H0.75K
FR-BAL-
H1.5K
FR-BAL-
H2.2K
FR-BAL-
H3.7K
Power Factor
Improving DC
Reactor
(Refer to page
17)
FR-BEL-
H0.4K
FR-BEL-
H0.75K
FR-BEL-
H1.5K
FR-BEL-
H2.2K
FR-BEL-
H3.7K
10
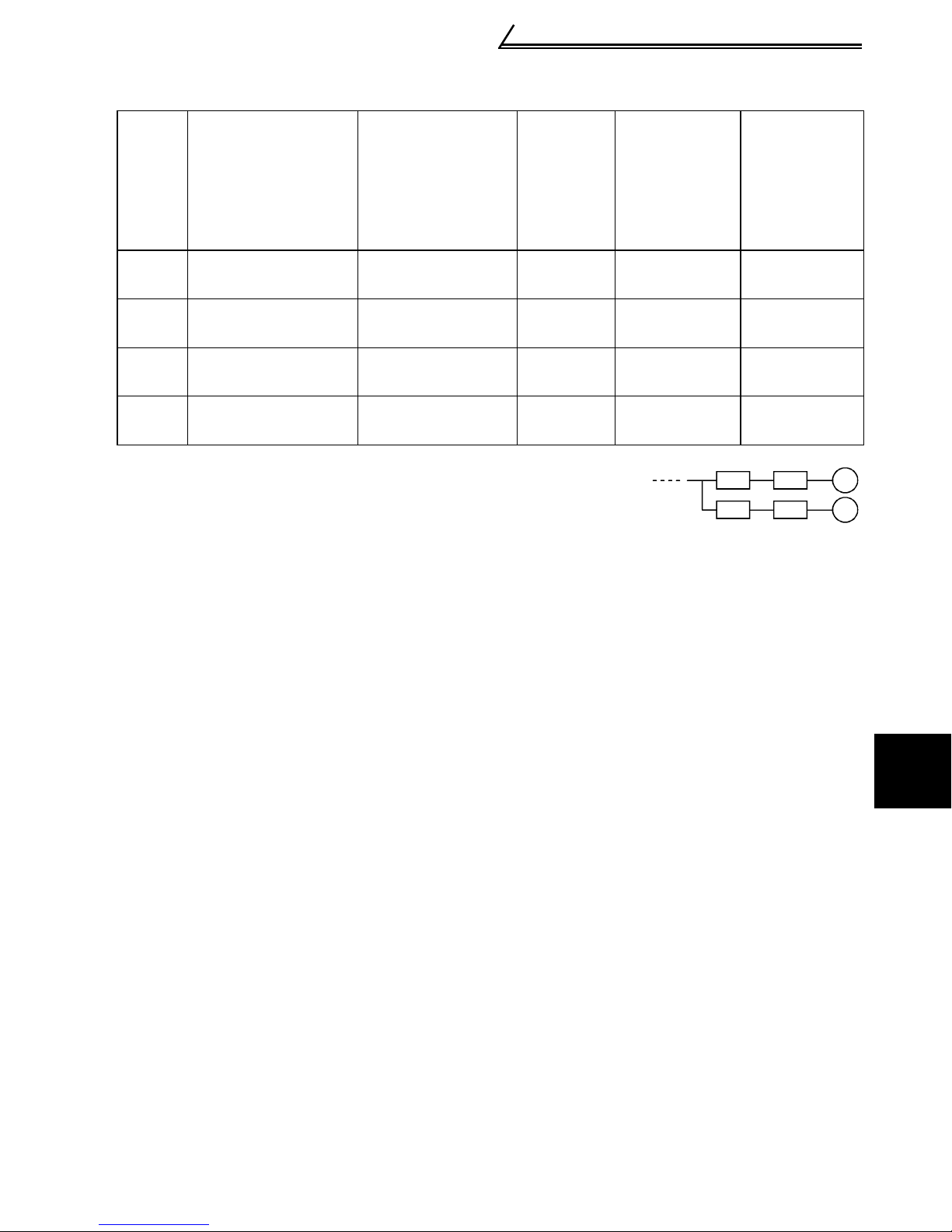
3) Single-phase 100V power input
Main circuit terminals
No-fuse Breaker
Motor
Output
(kW
(HP))
Applied Inverter
Type
(NFB *1, 4) or
Earth Leakage
Circuit Breaker
(ELB) (Refer to
Magnetic
Contactor
(MC)
(Refer to
page 16)
Power Factor
Improving AC
Reactor
(Refer to page
17) (*3)
Power Factor
Improving DC
Reactor
(Refer to page
17) (*5)
page 12) (*2, 4)
0.1
(1/8)
0.2
(1/4)
0.4
(1/2)
0.75
(1)
*1. •Select the NFB according to the inverter power
FR-S510WE-0.1K-NA
FR-S510WE-0.2K-NA
FR-S510WE-0.4K-NA
FR-S510WE-0.75K-NA
30AF/10A S-N10 FR-BAL-0.75K
30AF/15A S-N10 FR-BAL-1.5K
30AF/20A
30AF/30A
supply capacity.
•Install one NFB per inverter.
S-N20,
S-N21
S-N20,
S-N21
FR-BAL-2.2K
FR-BAL-3.7K
NFB
NFB INV
INV
*2. For installations in the United States or Canada, the circuit breaker must be inverse
time or instantaneous trip type.
*3. The power factor may be slightly lower.
*4. When the breaker on the inverter primary side trips, check for the wiring fault (short
circuit), damage to internal parts of the inverter, etc. Identify the cause of the trip,
then remove the cause and power on the breaker.
*5. The single-phase 100V power input model does not allow the power factor improving
DC reactor to be fitted.
IM
IM
1
WIRING
11
Main circuit terminals
1.2.5 Leakage current and installation of ground leakage
circuit breaker
Due to static capacitances existing in the inverter I/O wiring and motor, leakage
currents flow through them. Since their values depend on the static capacitances,
carrier frequency, etc., take the following countermeasures.
(1) To-ground leakage currents
Leakage currents may flow not only into the inverter's own line but also into the
other line through the ground cable, etc.
These leakage currents may operate ground leakage circuit breakers and ground
leakage relays unnecessarily.
Countermeasures
• If the carrier frequency setting is high, decrease the carrier frequency (Pr. 72) of the
inverter.
Note that motor noise increases. Selection of Soft-PWM control (Pr. 70) will make it
unoffending. (Factory setting)
• By using earth leakage circuit breakers designed for harmonic and surge
suppression in the inverter's own line and other line, operation can be performed
with the carrier frequency kept high (with low noise).
12
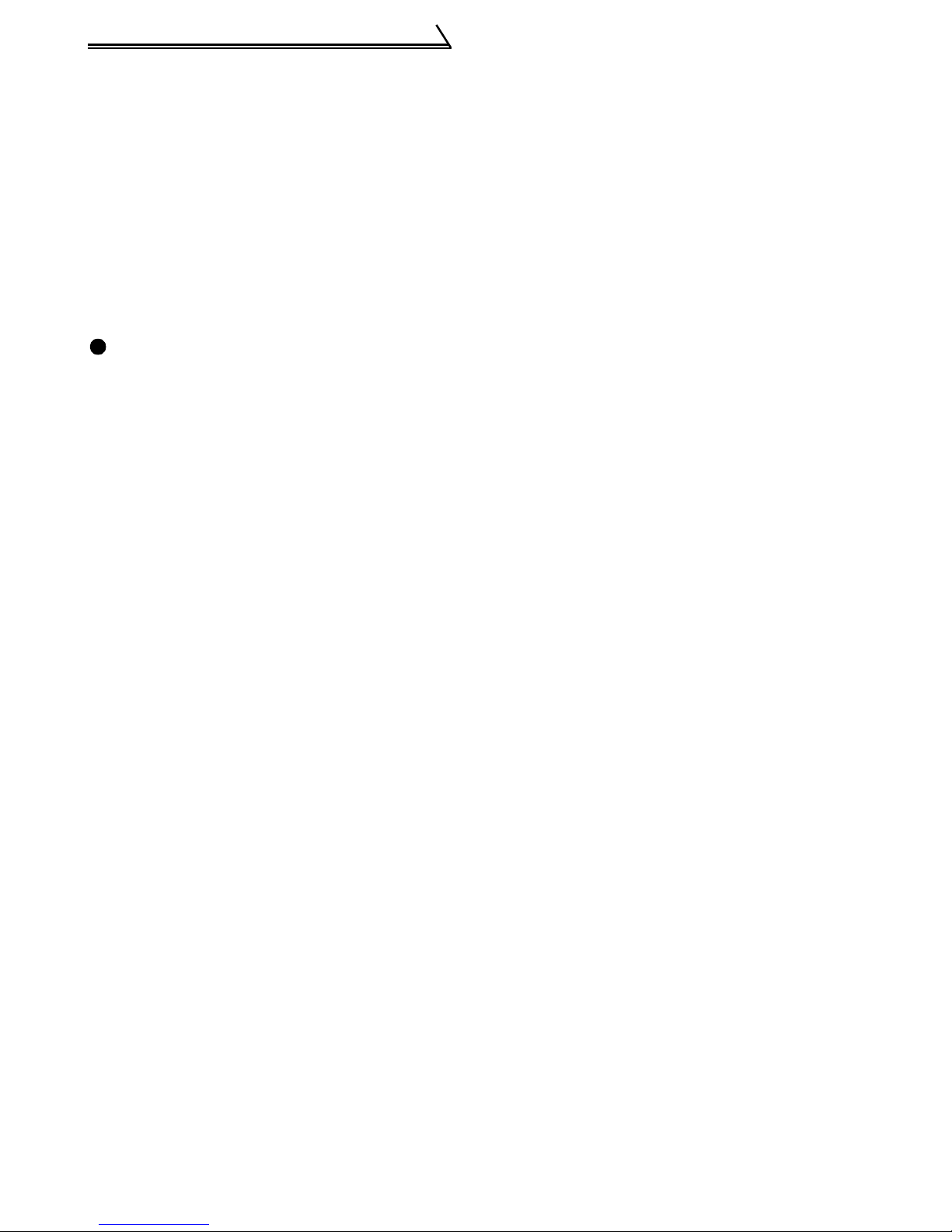
(2) Line-to-line leakage currents
Main circuit terminals
Harmonics of
leakage currents
flowing in static
capacities between
the inverter output
cables may operate
the external thermal
Power
supply
NFB
Inverter
Line-to-Line Leakage Current Path
Thermal relay
Line static
capacitances
Motor
IM
relay unnecessarily.
Countermeasures
• Use the electronic thermal relay function of the inverter.
• Decrease the carrier frequency. Note that motor noise increases. Selection of
Soft-PWM (Pr. 70) makes it unoffending.
To ensure that the motor is protected against line-to-line leakage currents, it is
recommended to use a temperature sensor to directly detect motor temperature.
Installation and selection of no-fuse breaker
Install a no-fuse breaker (NFB) on the power receiving side to protect the wiring of
the inverter primary side. Select the NFB according to the power supply side power
factor (which depends on the power supply voltage, output frequency and load).
Especially for a completely electromagnetic NFB, one of a slightly large capacity
must be selected since its operation characteristic varies with harmonic currents.
(Check it in the data of the corresponding breaker.) As an ground leakage breaker,
use the Mitsubishi ground leakage breaker designed for harmonics and surge
suppression. (Refer to page 10 for the recommended models.)
CAUTION
•Select the NFB according to the inverter power supply capacity.
•Install one NFB per inverter.
1
WIRING
13
Main circuit terminals
)
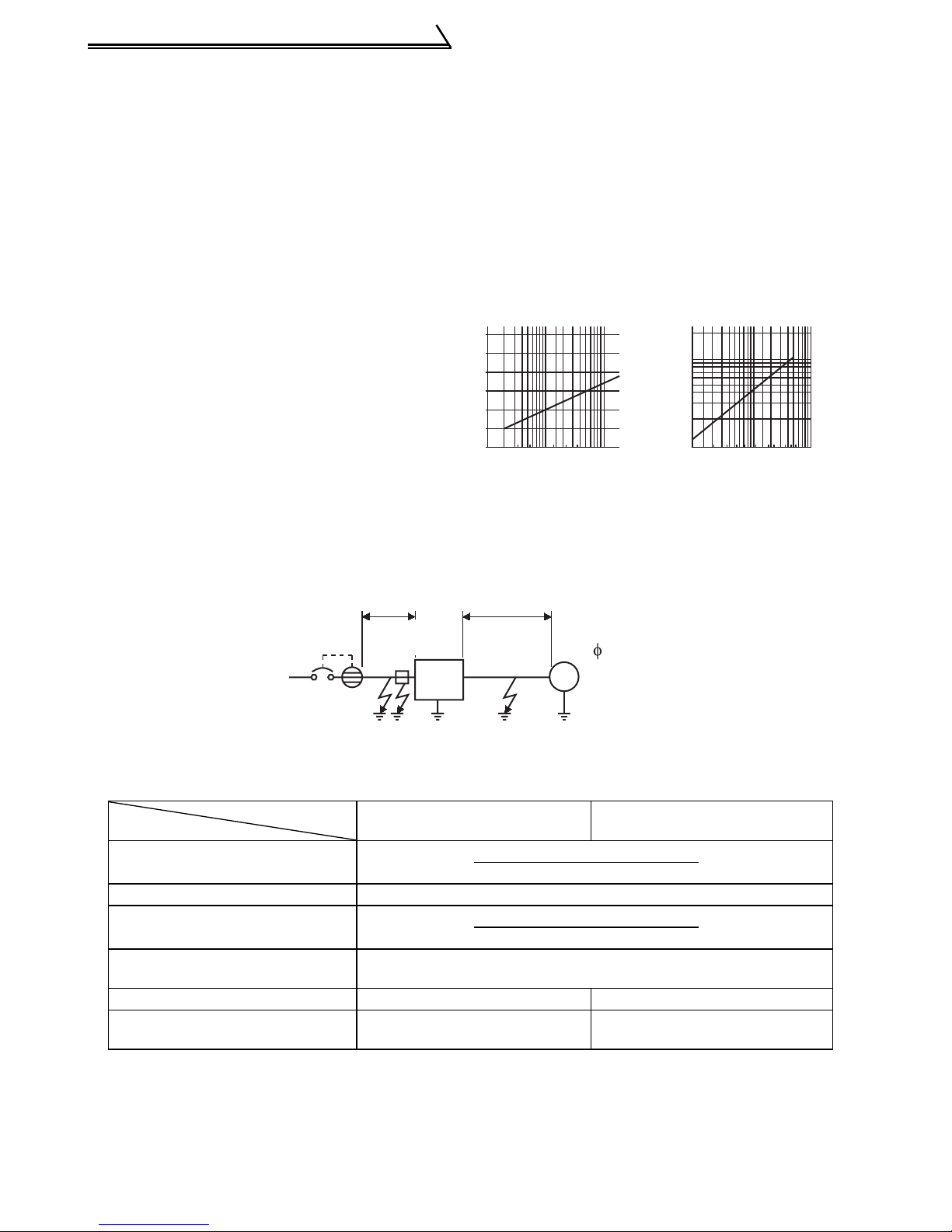
(3) Selecting the rated sensitivity current for the earth leakage circuit
breaker
When using the earth leakage circuit breaker with the inverter circuit, select its rated
sensitivity current as follows, independently of the PWM carrier frequency:
• Breaker for harmonic and surge
Rated sensitivity current:
I
∆n ≥ 10 × (lg1+Ign+lg2+lgm)
• Standard breaker
Rated sensitivity current:
I
∆n ≥ 10 × {lg1+lgn+3 × (lg2+lgm)}
lg1, lg2 : Leakage currents of cable
path during commercial
power supply operation
lgn* : Leakage current of noise
filter on inverter input side
lgm : Leakage current of motor
during commercial power
supply operation
* Note the leakage current value of the
noise filter installed on the inverter
input side.
Example of leakage
current per 1km in cable
path during commercial
power supply operation
when the CV cable is
routed in metal conduit
(200V 60Hz)
120
100
80
60
40
20
0
Leakage current (mA)
2 3.5 8 142238 80
5.5 3060100
Cable size (mm)
150
2
Leakage current
example of three-phase
induction motor
during commercial
power supply
operation
(200V 60Hz)
2.0
1.0
0.7
0.5
0.3
0.2
0.1
1.5 3 .7
Leakage current (mA)
Motor capacity (kW
2.2
7.5 15 2 21137
5.5 18.5
55
45
30
<Example>
22
2mm ×5m
Noise
NV
filter
Ig1 Ign Ig2 Igm
Breaker for harmonic and
Leakage current (Ig1) (mA)
Leakage current (Ign) (mA) 0 (without noise filter)
Leakage current (Ig2) (mA)
Motor leakage
current (Igm) (mA)
Total leakage current (mA) 1.66 4.78
Rated sensitivity current
(mA) (≥ Ig
× 10)
2mm ×70m
3
Inverter
IM
200V
1.5kW
surge
20 ×
20 ×
5m
1000m
70m
1000m
0.16
30 100
Standard breaker
= 0.10
= 1.40
14
Main circuit terminals
CAUTION
•The ground leakage circuit breaker should be installed to the primary (power
supply) side of the inverter.
•In the connection neutral point grounded system, the sensitivity current
becomes worse for ground faults on the inverter secondary side. Grounding
must conform to the requirements of national and local safety regulations and
electrical codes. (JIS, NEC section 250, IEC 536 class 1 and other applicable
standards)
•When the breaker is installed on the secondary side of the inverter, it may be
unnecessarily operated by harmonics if the effective value is less than the
rating. In this case, do not install the breaker since the eddy current and
hysteresis loss increase and the temperature rises.
•General products indicate the following models: BV-C1, BC-V, NVB, NV-L, NVG2N, NV-G3NA, NV-2F, ground leakage relay (except NV-ZHA), NV with AA
neutral wire open-phase protection
The other models are designed for harmonic and surge suppression: NV-C/
NV-S/MN series, NV30-FA, NV50-FA, BV-C2, ground leakage alarm breaker
(NF-Z), NV-ZHA, NV-H
1
WIRING
15
Main circuit terminals
r
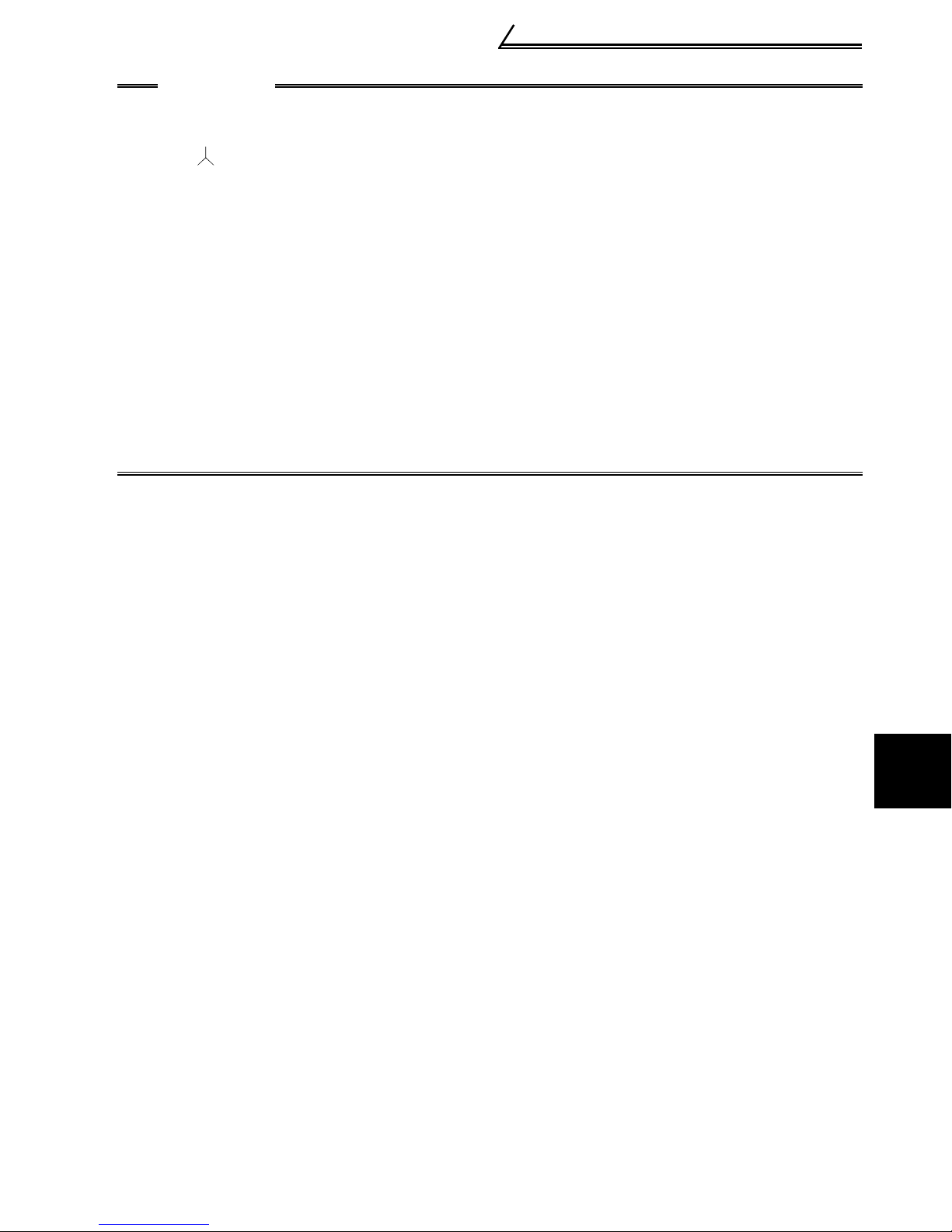
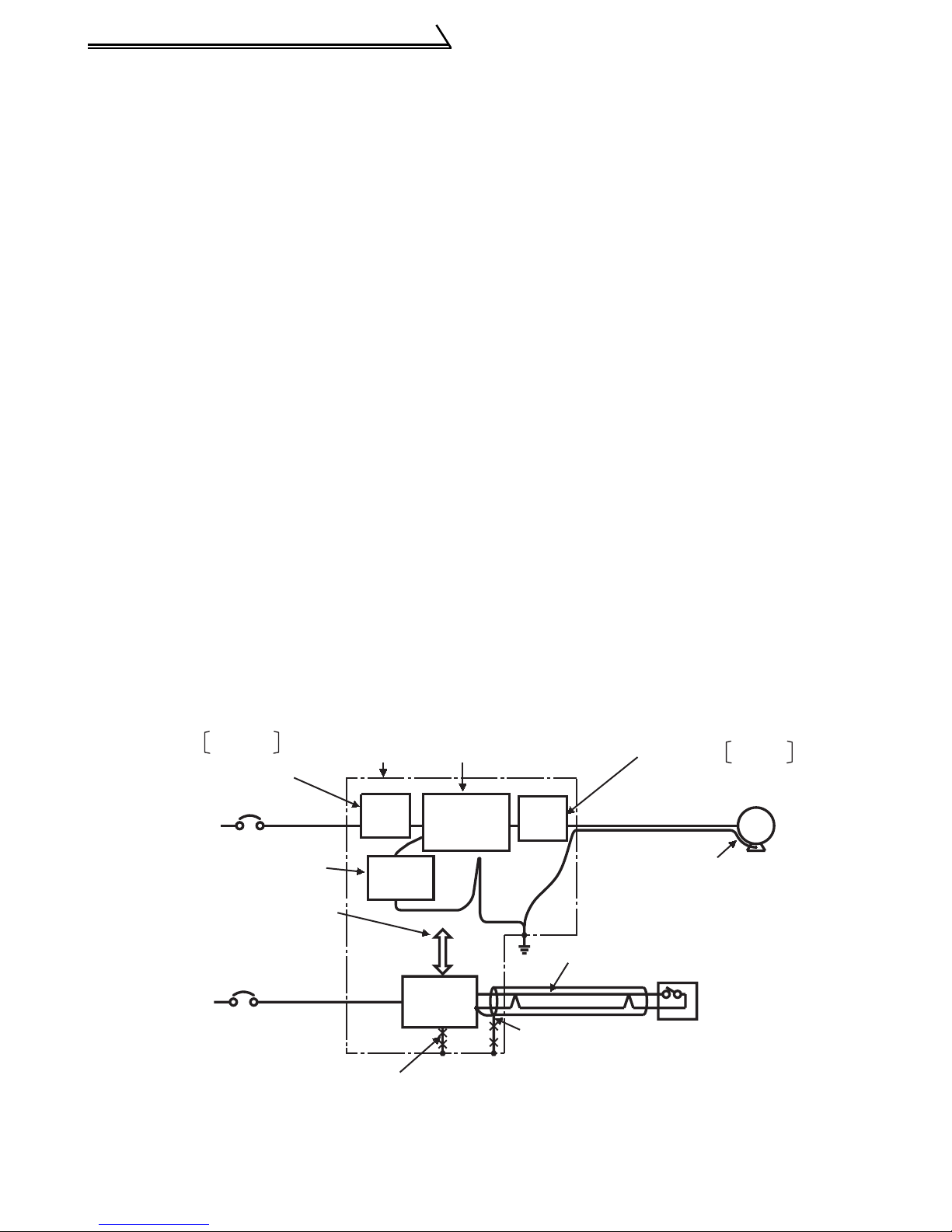
1.2.6 Power-off and magnetic contactor (MC)
(1) Inverter input side magnetic contactor (MC)
On the inverter's input side, it is recommended to provide an MC for the following
purposes. (Refer to page 10 for selection)
1) To release the inverter from the power supply when the inverter protective function
is activated or the drive becomes faulty (e.g. emergency stop operation)
2) To prevent any accident due to an automatic restart at restoration of power after an
inverter stop made by a power failure
3) To rest the inverter for an extended period of time
The control power supply for inverter is always running and consumes a little power.
When stopping the inverter for an extended period of time, powering off the inverter
will save power slightly.
4) To separate the inverter from the power supply to ensure safe maintenance and
inspection work
The inverter's input side MC is used for the above purpose, select class JEM1038AC3 for the inverter input side current when making an emergency stop during
normal operation.
REMARKS
The MC may be switched on/off to start/stop the inverter. However, since repeated inrush
currents at power on will shorten the life of the converter circuit (switching life is about 100,000
times), frequent starts and stops must be avoided. Turn on/off the inverter start controlling
terminals (STF, STR) to run/stop the inverter.
As shown on the right,
always use the start signal
(ON or OFF across
terminals STF or STR-SD)
to make a start or stop.
(Refer to page 25)
*1. When the power supply
is 400V class, install a
step-down transformer.
Power
supply
Operation ready
NFB
OFF
Start/Stop
ON
MC
MC
T (*1)
MC
RA
R/L1
S/L2
T/L3
Inverter
STF(STR)
SD
U
V
W
To
moto
A
B
C
(2) Handling of output side magnetic contactor
In principle, do not provide a magnetic contactor between the inverter and motor and
switch it from off to on during operation. If it is switched on during inverter operation, a
large inrush current may flow, stopping the inverter due to overcurrent shut-off. When
an MC is provided for switching to the commercial power supply, for example, switch it
on/off after the inverter and motor have stopped.
MC
Operation
OFF
RA
Inverter Start/Stop Circuit Example
RA
16
Main circuit terminals
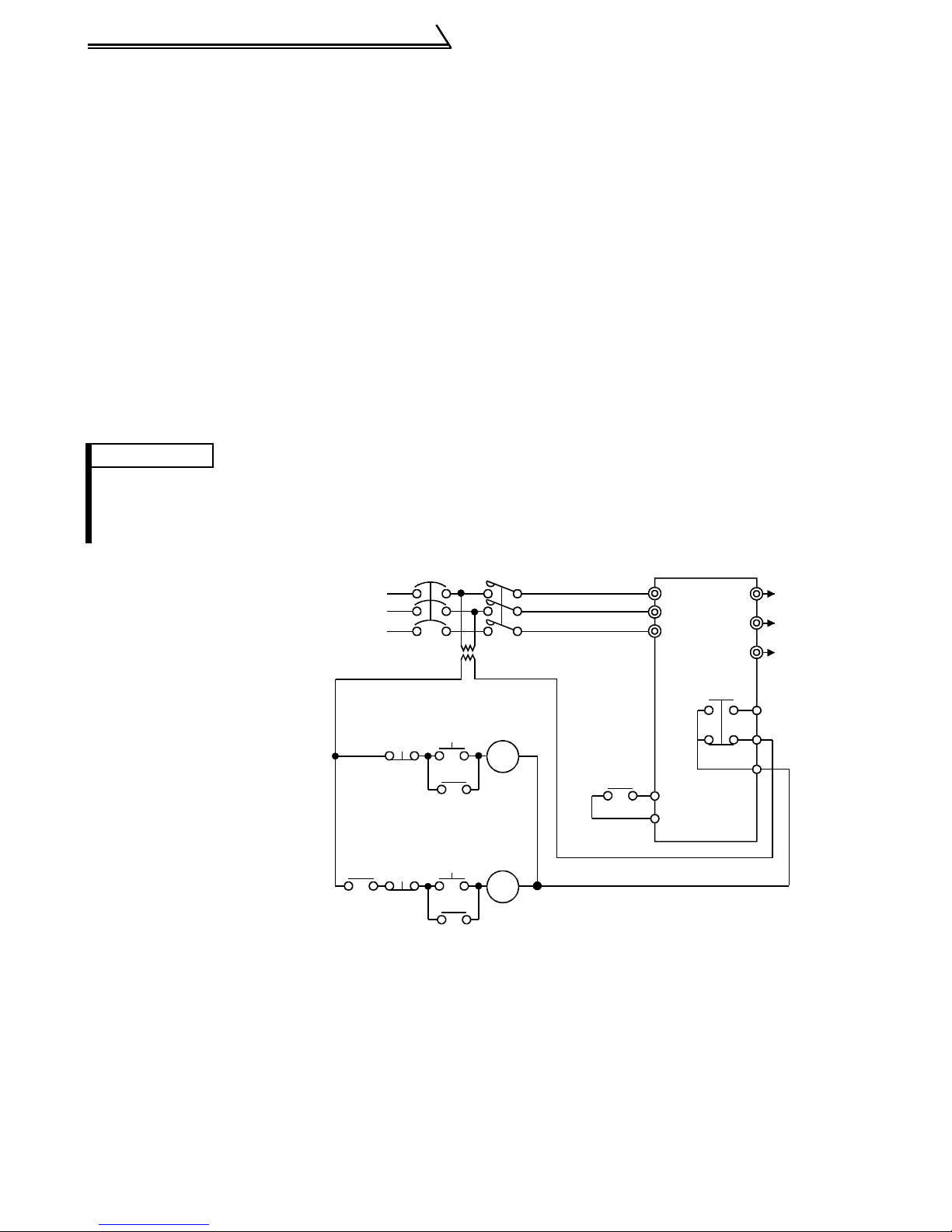
1.2.7 Regarding the installation of the power factor
improving reactor
When the inverter is installed near a large-capacity power transformer (500kVA or
more with the wiring length of 10m (32.81feet) or less) or the power capacitor is to be
switched, an excessive peak current will flow in the power supply input circuit,
damaging the converter circuit. In such a case, always install the power factor
improving reactor (FR-BEL(-H) or FR-BAL(-H)).
Power
supply
NFB
FR-BAL(-H)
R
S
TZ
Inverter
X
R
Y
S
T
P
FR-BEL(-H)(*)
P1
U
V
W
Power supply equipment
1500
1000
500
capacity (kVA)
Power factor
improving reactor
installation range
010
Wiring length (m)
REMARKS
*When connecting the FR-BEL(-H), remove the jumper across terminals P-P1.
The wiring length between the FR-BEL(-H) and the inverter should be 5m(16.40feet)
maximum and as short as possible.
Use the cables which are equal in size to those of the main circuit. (Refer to page 8)
1
WIRING
17
Main circuit terminals
r
1.2.8 Regarding noise and the installation of a noise filter
Some noise enters the inverter causing it to malfunction and others are generated by
the inverter causing the malfunction of peripheral devices. Though the inverter is
designed to be insusceptible to noise, it handles low-level signals, so it requires the
following general countermeasures to be taken.
(1) General countermeasures
• Do not run the power cables (I/O cables) and signal cables of the inverter in parallel
with each other and do not bundle them.
• Use twisted shield cables for the detector connecting and control signal cables and
connect the sheathes of the shield cables to terminal SD.
• Ground the inverter, motor, etc. at one point.
• Capacitances exist between the inverter's I/O wiring, other cables, ground and
motor, through which leakage currents flow to cause the earth leakage circuit
breaker, ground leakage relay and external thermal relay to operate unnecessarily.
To prevent this, take appropriate measures, e.g. set the carrier frequency in Pr. 72 to
a low value, use a ground leakage circuit breaker designed for suppression of
harmonics and surges, and use the electronic thermal relay function built in the
inverter.
• The input and output of the inverter main circuit include high-degree harmonics,
which may disturb communication devices (AM radios) and sensors used near the
inverter. In this case, install a FR-BIF(-H) optional radio noise filter (for use on the
input side only) or FR-BSF01 line noise filter to minimize interference.
<Noise reduction examples>
Install filter
on inverter's input side.
Inverter
power supply
Install filter FR-BIF
on inverter's input side.
Separate inverter and power line
by more than 30cm (3.94inches)
and at least 10cm (11.81inches)
from sensor circuit.
Control
power supply
FR-BSF01
Do not ground control
box directly.
Do not ground
control cable.
Control
box
FRBSF01
FR-BIF
Reduce carrier
frequency.
Inverter
Power
supply
for sensor
Install filter
on inverter's output side.
FR-BSF01
FRBSF01
Use 4-core cable for motor
power cable and use one
cable as ground cable.
Use twisted pair shielded cable.
Sensor
Do not ground shield but connect
it to signal common cable.
IM
Moto
18
Main circuit terminals
1.2.9 Grounding precautions
Leakage currents flow in the inverter. To prevent an electric shock, the inverter and
motor must be grounded. Grounding must conform to the requirements of national
and local safety regulations and electrical codes.
(JIS, NEC section 250, IEC 536 class 1 and other applicable standards)
Use the dedicated ground terminal to ground the inverter. (Do not use the screw in
the casing, chassis, etc.)
Use a tinned* crimping terminal to connect the ground cable. When tightening the
screw, be careful not to damage the threads.
*Plating should not include zinc.
Use the thickest possible ground cable. Use the cable whose size is equal to or
greater than that indicated in the following table, and minimize the cable length.
The grounding point should be as near as possible to the inverter.
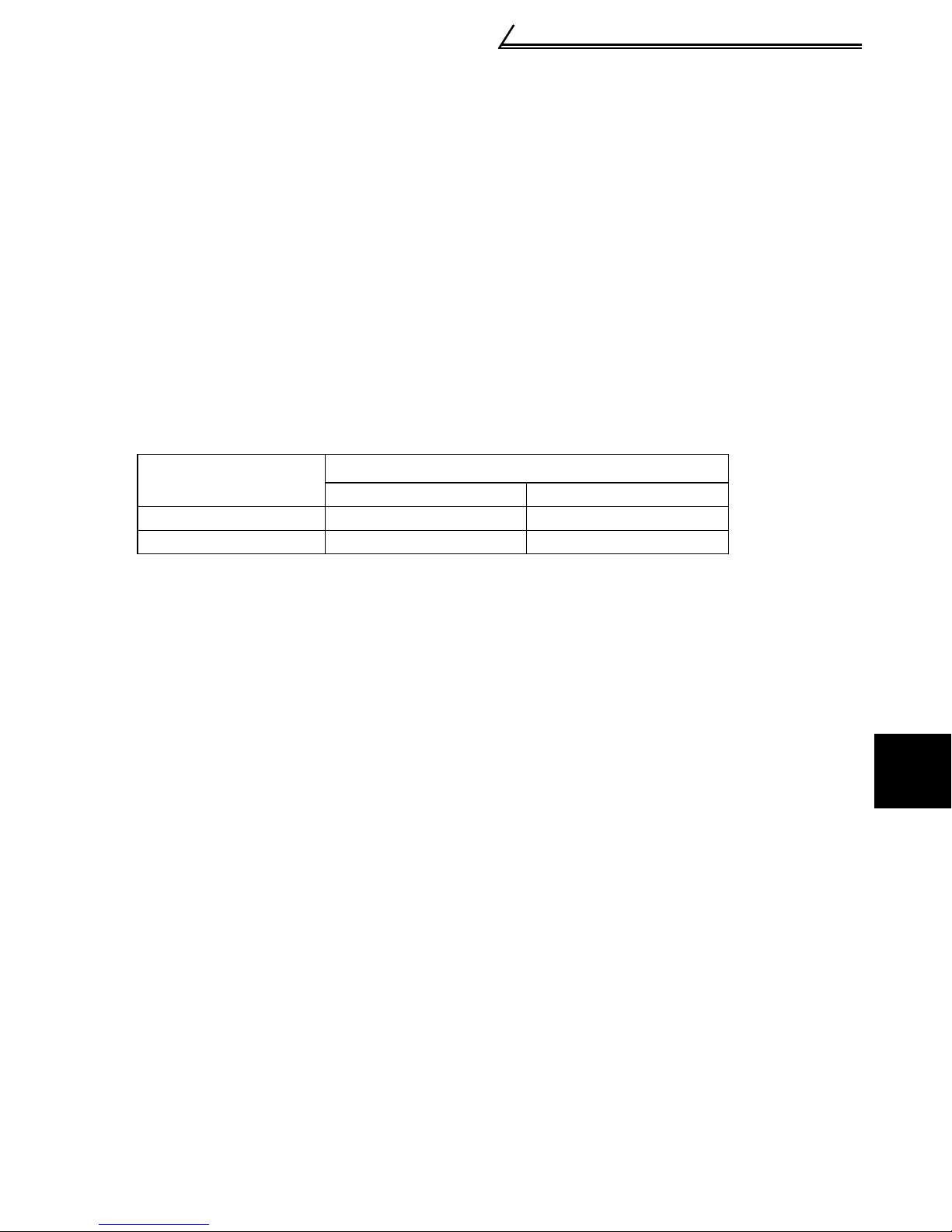
2
Motor Capacity
200V class, 100V class 400V class
2.2kW or less 2 (2.5) 2 (2.5)
3.7kW 3.5 (4) 2 (4)
Ground Cable Size (Unit: mm
For use as a product compliant with the Low Voltage Directive, use PVC cable
whose size is indicated within parentheses.
)
Ground the motor on the inverter side using one wire of the 4-core cable.
1
WIRING
19
Main circuit terminals
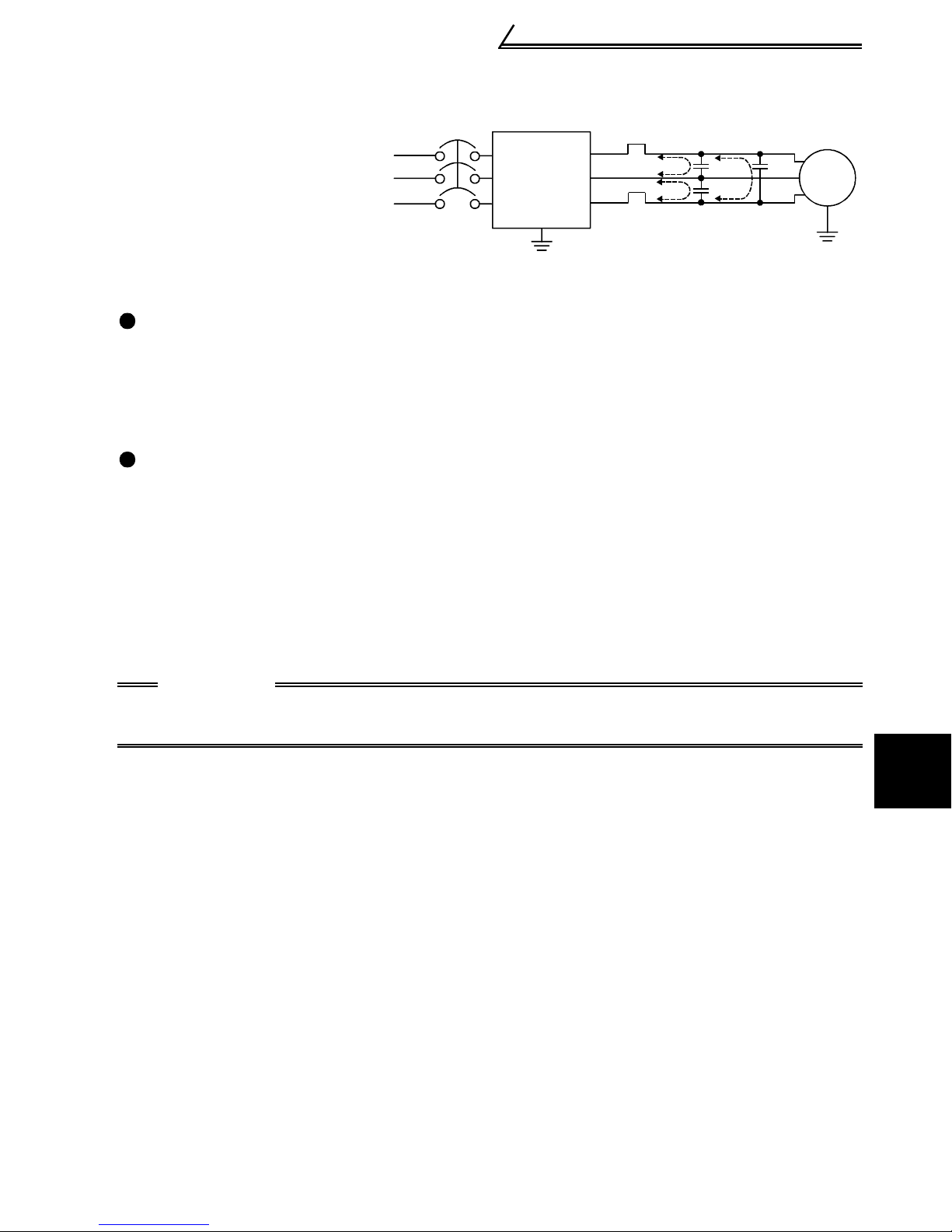
1.2.10 Power supply harmonics
The inverter may generate power supply harmonics from its converter circuit to affect
the power generator, power capacitor etc. Power supply harmonics are different from
noise and leakage currents in source, frequency band and transmission path. Take the
following countermeasure suppression techniques.
The following table indicates differences between harmonics and noise:
Item Harmonics Noise
Frequency
Environment To-electric channel, power impedance To-space, distance, wiring path
Quantitative
understanding
Generated amount Nearly proportional to load capacity
Affected equipment
immunity
Suppression example Provide reactor. Increase distance.
Normally 40th to 50th degrees or less
(up to 3kHz or less)
Theoretical calculation possible
Specified in standard per equipment
High frequency (several 10kHz
to 1GHz order)
Random occurrence,
quantitative grasping difficult
Change with current variation
ratio (larger as switching speed
increases)
Different depending on maker's
equipment specifications
Suppression technique
Harmonic currents produced
on the power supply side by
the inverter change with such
conditions as whether there
are wiring impedances and a
power factor improving reactor
NFB
FR-BAL
FR-BAL(-H)
FR-BEL
FR-BEL(-H)
Inverter
Motor
IM
(FR-BEL(-H) or FR-BAL(-H))
and the magnitudes of output
frequency and output current
on the load side.
Do not provide power factor
improving capacitor.
For the output frequency and output current, we understand that they should be
calculated in the conditions under the rated load at the maximum operating frequency.
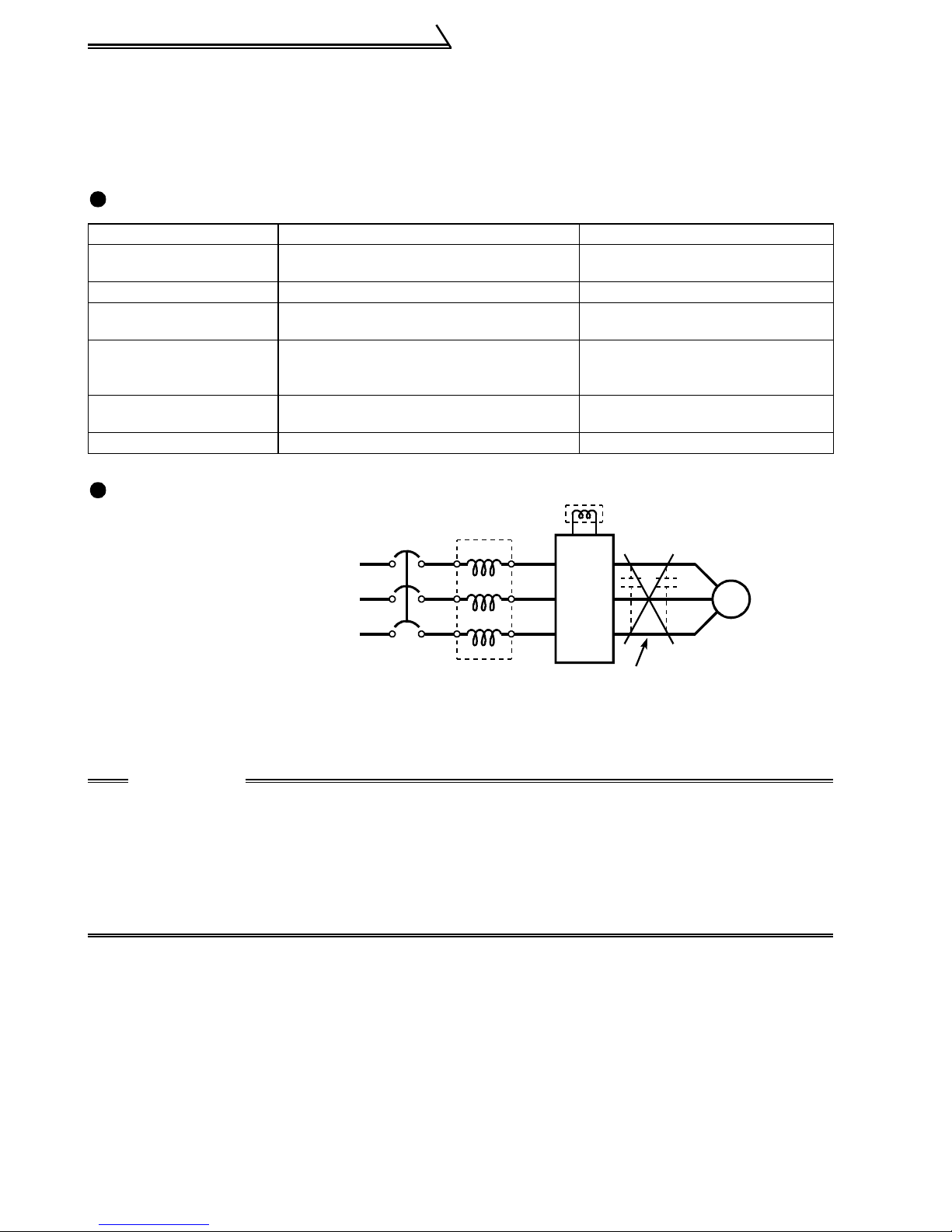
CAUTION
The power factor improving capacitor and surge suppressor on the inverter
output side may be overheated or damaged by the harmonic components of the
inverter output. Also, since an excessive current flows in the inverter to activate
overcurrent protection, do not provide a capacitor and surge suppressor on the
inverter output side when the motor is driven by the inverter. To improve the
power factor, insert a power factor improving reactor on the inverter's primary
side or DC circuit. For full information, refer to page 17.
20

Main circuit terminals
1.2.11 Inverter-driven 400V class motor
In the PWM type inverter, a surge voltage attributable to wiring constants is generated
at the motor terminals. Especially for a 400V class motor, the surge voltage may
deteriorate the insulation. When the 400V class motor is driven by the inverter,
consider the following measures:
•Measures
It is recommended to take either of the following measures:
(1) Rectifying the motor insulation
For the 400V class motor, use an insulation-enhanced motor. Specifically
1) Specify the "400V class inverter-driven, insulation-enhanced motor".
2) For the dedicated motor such as the constant-torque motor and low-vibration
motor, use the "inverter-driven, dedicated motor".
(2) Suppressing the surge voltage on the inverter side
On the secondary side of the inverter, connect the optional surge voltage
suppression filter (FR-ASF-H).
1
WIRING
21

How to use the control circuit terminals
1.3 How to use the control circuit terminals
1.3.1 Terminal block layout
In the control circuit of the inverter, the terminals are arranged as shown below:
Terminal arrangement
of control circuit
10 2 5 4
PC SE
RUN
A BC
Terminal screw
size: M3
Tightening torque: 0.5N m to 0.6N m
SD SD STF
Terminal screw size: M2
Tightening torque: 0.22N m to 0.25N m
Wire size: 0.3mm
STR
RM RH
2
to 0.75mm
AMRLRL
2
1.3.2 Wiring instructions
1) Terminals, SE and 5 are common to the I/O signals isolated from each other. Do not
ground them.
Avoid connecting the terminal SD and 5 and the terminal SE and 5.
2) Use shielded or twisted cables for connection to the control circuit terminals and run
them away from the main and power circuits (including the 200V relay sequence
circuit).
3) The input signals to the control circuit are micro currents. When contacts are
required, use two or more parallel micro signal contacts or a twin contact to prevent
a contact fault.
*Information on bar terminals
Introduced products (as of Oct., 2003): Phoenix Contact Co.,Ltd.
Terminal Screw Size
M3 (A, B, C terminals)
M2
(Other than the above)
Bar Terminal Model
(With Insulation
Sleeve)
Al 0.5-6WH A 0.5-6 0.3 to 0.5
Al 0.75-6GY A 0.75-6 0.5 to 0.75
Al 0.5-6WH A 0.5-6 0.3 to 0.5
Bar Terminal Model
(Without Insulation
Sleeve)
Wire Size (mm
2
)
Bar terminal crimping terminal: CRIMPFOX ZA3 (Phoenix Contact Co., Ltd.)
CAUTION
When using the bar terminal (without insulation sleeve), use care so that the
twisted wires do not come out.
22

How to use the control circuit terminals
1.3.3 Changing the control logic
The input signals are set to sink
logic.
To change the control logic, the
jumper connector under the setting
dial must be moved to the other
position.
Change the jumper connector
position using tweezers, a pair of
long-nose pliers etc.
Change the jumper connector
position before switching power on.
CAUTION
•Make sure that the front cover is installed securely.
•The front cover is fitted with the capacity plate and the inverter unit with the
rating plate. Since these plates have the same serial numbers, always replace
the removed cover onto the original inverter.
•The sink-source logic change-over jumper connector must be fitted in only
one of those positions. If it is fitted in both positions at the same time, the
inverter may be damaged.
1) Sink logic type
• In this logic, a signal switches on when a current flows from the corresponding signal
input terminal.
Terminal SD is common to the contact input signals. Terminal SE is common to the
open collector output signals.
Power supply
STF
STR
SD
• Connecting a positive terminal of the
R
R
external power supply for transistor
output to terminal PC prevents a
malfunction caused by an undesirable
current. (Do not connect terminal SD
AY40
transistor
output module
1
2
RUN
SE
STF
STR
AX40Inverter
1
R
R
9
24VDC
Inverter
24VDC
(SD)
of the inverter with terminal 0V of the
external power supply. When using
terminals PC-SD as a 24VDC power
supply, do not install an external
power supply in parallel with the
inverter. Doing so may cause a
9
9
10
24VDC SD
PC
malfunction in the inverter due to an
undesirable current.)
Current flow
1
WIRING
23

How to use the control circuit terminals
2) Source logic type
• In this logic, a signal switches on when a current flows into the corresponding signal
input terminal.
Terminal PC is common to the contact input signals. For the open collector output
signals, terminal SE is a positive external power supply terminal.
PC
Power
supply
STF
STR
R
R
• Connecting the 0V terminal of the
external power supply for transistor
output to terminal SD prevents a
malfunction caused by an undesirable
current.
AY80
transistor
output module
10
Inverter
RUN
SE
24VDC
9
1
2
PC
STF
STR
24VDC
SD
AX80
1
R
R
9
Inverter
24VDC
(SD)
Current flow
24

Input terminals
1.4 Input terminals
1.4.1 Run (start) and stop (STF, STR, STOP)
To start and stop the motor, first switch on the input power supply of the inverter
(switch on the magnetic contactor, if any, in the input circuit during preparation for
operation), then start the motor with the forward or reverse rotation start signal.
(1) Two-wire type connection (STF, STR)
A two-wire type connection is shown
on the right.
1) The forward/reverse rotation
signal is used as both the start
and stop signals. Switch on
either of the forward and reverse
rotation signals to start the motor
in the corresponding direction.
Power
supply
Forward
rotation start
Reverse
rotation start
NFB
R, S, T
Inverter
STF
STR (Pr.63= "- - -" )
SD
Switch on both or switch off the
start signal during operation to
decelerate the inverter to a stop.
2) The frequency setting signal may
either be given by entering 0 to
5VDC (or 0 to 10VDC) across
frequency setting input terminals
2-5 or by setting the required
values in Pr. 4 to Pr. 6 "multispeed setting" (high, middle, low
speeds). (For multi-speed
Across
STF-SD
(STR)
Output frequency
ON
2-wire type connection example
Time
operation, refer to page 29.)
3) After the start signal has been input, the inverter starts operating when the
frequency setting signal reaches or exceeds the "starting frequency" set in Pr. 13
(factory-set to 0.5Hz).
If the motor load torque is large or the "torque boost" set in Pr. 0 is small, operation
may not be started due to insufficient torque until the inverter output frequency
reaches about 3 to 6Hz.
If the "minimum frequency" set in Pr. 2 (factory setting = 0Hz) is 6Hz, for example,
merely entering the start signal causes the running frequency to reach the
minimum frequency of 6Hz according to the "acceleration time" set in Pr. 7.
4) To stop the motor, operate the DC injection brake for the period of "DC injection
brake operation time" set in Pr. 11 (factory setting = 0.5s) at not more than the DC
injection brake operation frequency or at not more than 0.5Hz.
To disable the DC injection brake function, set 0 in either of Pr. 11 "DC injection
brake operation time" or Pr. 12 "DC injection brake voltage".
In this case, the motor is coasted to a stop at not more than the frequency set in
Pr. 10 "DC injection brake operation frequency" (0 to 120Hz variable) or at not
more than 0.5Hz (when the DC injection brake is not operated).
5) If the reverse rotation signal is input during forward rotation or the forward rotation
signal is input during reverse rotation, the inverter is decelerated and then
switched to the opposite output without going through the stop mode.
1
WIRING
25

Input terminals
(2) Three-wire type connection (STF, STR, STOP)
A three-wire type connection is shown on
the right. Assign the start self-holding
signal (STOP) to any of the input terminals.
Power
supply
To make a reverse rotation start, set Pr. 63
to "- - -" (factory setting).
1) Short the signals STOP-SD to enable
the start self-holding function. In this
case, the forward/reverse rotation signal
functions only as a start signal.
(Note) Assign the stop signal to any of
Pr. 60 to Pr. 62 (input terminal
function selection).
2) If the start signal terminals STF (STR)SD are shorted once, then opened, the
start signal is kept on and starts the
inverter. To change the rotation direction,
short the start signals STR (STF)-SD
once, then open it.
3) The inverter is decelerated to a stop by
Start
opening the signals STOP-SD once. For
the frequency setting signal and the
Stop
operation of DC injection brake at a stop
time, refer to paragraphs 2) to 4) in (1)
Two-wire type connection. The right
diagram shows 3-wire type connection.
4) When the signals JOG-SD are shorted, the STOP signal is invalid and the JOG
signal has precedence.
5) If the output stop signals MRS-SD are shorted, the self-holding function is not
deactivated.
DC Injection Brake and Coasting to Stop Functionality
NFB
Forward
Stop
rotation start
Reverse
rotation start
Output frequency
3-wire type connection example
ON
R, S, T
Inverter
STF
STR (Pr.63= "- - -" )
STOP
SD
ON
Time
External Operation or Combined
Operation
Mode
Terminals STF
(STR)-SD
DC Injection
Brake
DC injection
brake enabled
DC injection
brake disabled
disconnected
(*1)
DC injection brake
operated at not
more than "DC
injection brake
operation
frequency" set in
Pr. 10
Coasted to a stop
at not more than
"DC injection
brake operation
frequency" set in
Pr. 10
*1: Also stopped by the . Refer to page 105.
Operation
Pr. 79 = "0", "2", "3"
Set frequency
changed to 0Hz
DC injection brake
operated at 0.5Hz
or less.
Coasted to a stop
at 0.5Hz or less.
STOP
RESET
PU Operation or Combined
Operation
Pr. 79 = "0", "1", "4"
Stop key
DC injection brake
operated at not
more than "DC
injection brake
operation
frequency" set in
Pr. 10
Coasted to a stop
at not more than
"DC injection
brake operation
frequency" set in
Pr. 10
Set frequency
changed to 0Hz
DC injection brake
operated at 0.5Hz
or less.
Coasted to a stop
at 0.5Hz or less.
26

Start signal
terminal
Across STF-SD
Across STR-SD
DC injection brake disabledDC injection brake enabled
Starting frequency
Pr.13
(*1)
0.5Hz
Output frequency
ON
DC injection brake
operation
frequency Pr. 10
3Hz
0.5Hz
0.5s
DC injection
brake operation
time Pr. 11
(*3)
(*2)
DC injection
brake operation
time Pr. 11
ON
0.5Hz
0.5s
(*3)
Start/Stop Timing Chart (for two-wire type)
ON
Input terminals
DC injection brake
not operated
(*4)
3Hz
Coasted to
a stop
Time
Start
signal
terminal
Across
STF-SD
Across
Starting
frequency
Pr.13
(*1)
0.5Hz
Output frequency
Start signal switched on
while DC injection brake
is being operated
Forward
rotation
Reverse
rotation
0.5Hz
3Hz
ON
ON ON
DC injection brake operation
frequency Pr. 10
Forward
rotation
3Hz
DC injection brake
operation time Pr. 11
ON
(*4)
DC injection
brake enabled
Time
0.5s
(*3)
STR-SD
Forward-Reverse Rotation Switch-Over Timing Chart
REMARKS
*1. The "starting frequency" in Pr. 13 (factory-set to 0.5Hz) may be set between 0 and 60Hz.
*2. If the next start signal is given during DC injection brake operation, the DC injection brake
is disabled and restart is made.
*3. The "DC injection brake operation time" in Pr. 11 (factory-set to 0.5s) may be set between
0 and 10s.
*4. The frequency at which the motor is coasted to a stop is not more than the "DC injection
brake operation frequency" set in Pr. 10 (factory setting = 3Hz; may be set between 0 and
120Hz) or not more than 0.5Hz.
*5. The "starting frequency" in Pr. 13, "DC injection brake operation time" in Pr. 11 and "DC
injection brake operation frequency" in Pr. 10 are the factory-set values.
1
WIRING
27

Input terminals
1.4.2 Connection of frequency setting potentiometer and
output frequency meter (10, 2, 5, 4, AU)
The analog frequency setting input signals that may be entered are voltage and
current signals.
For the relationships between the frequency setting input voltages (currents) and
output frequencies, refer to the following diagram. The frequency setting input signals
are proportional to the output frequencies. Note that when the input signal is less than
the starting frequency, the output frequency of the inverter is 0Hz.
If the input signal of 5VDC (or 10V, 20mA) or higher is entered, the output frequency
does not exceed the maximum output frequency.
Frequency setting
voltage gain frequency
Frequency setting
current gain frequency
(Hz)
Maximum frequency
Minimum frequency
(1 to 120Hz)
(0 to 120Hz)
(0 to 120Hz)
Input voltage is
proportional to
output
frequency.
Pr.1
Pr.38
Pr.39
Starting frequency
Output frequencies
(0 to 60Hz)
0.5
0
Frequency setting signal
Pr.13
5V
(10V)
(20mA)
Pr.2
Pr.73
Relationships between Frequency Setting Inputs and Output Frequencies
REMARKS
For the way to calibrate the output frequency meter, refer to page 126.
(1) Voltage input (10, 2, 5)
Enter the frequency setting input signal of 0 to 5VDC (or 0 to 10VDC) across the
frequency setting input terminals 2-5. The maximum output frequency is reached
when 5V (10V) is input across terminals 2-5.
The power supply used may either be the inverter's built-in power supply or an external
power supply. For the built-in power supply, terminals 10-5 provide 5VDC output.
For operation at 0 to 5VDC, set "0" in
Pr. 73 to the 0 to 5VDC input. Use
terminal 10 for the built-in power
supply.
For operation at 0 to 10VDC, set "1" in
Pr. 73 to the 0 to 10VDC input.
+5V 10
2
0 to 5VDC
5
0 to 10VDC
2
5
28

Input terminals
(2) Current input (4, 5, AU)
To automatically perform operation under constant pressure or temperature control
using a fan, pump etc., enter the controller output signal of 4 to 20mADC across
terminals 4-5.
Terminals AU-SD must be shorted to use the 4 to 20mADC signal for operation.
(Assign the signal AU using any of Pr. 60 to Pr. 63.)
When the multi-speed signal is input, the current input is ignored.
Automatic/manual
signal switching
Manual operation
Frequency setting
potentiometer
Automatic signal
4-20mADC
AU
SD
10
2
Inverter
5
4
Across
AU-SD
Operation
Automatic
operation
4 to 20mA
OFFON
Manual
operation
0 to 5V
(0 to 10V)
Manual-Automatic Switching
1.4.3 External frequency selection (REX, RH, RM, RL)
Up to 15 speeds (*) may be selected for an external command forward rotation start or
up to 7 speeds for an external command reverse rotation start according to the
combination of connecting the multi-speed select terminals REX, RH, RM and RL-SD,
and multi-speed operation can be performed as shown below by shorting the start
signal terminal STF (STR)-SD.
Speeds (frequencies) may be specified as desired from the operation panel or
parameter unit as listed below.
CAUTION
• * Change the setting of Pr. 63 "STR terminal function selection" to "8", and
assign and use as the 15-speed select signal (REX).
Has precedence over the main speed setting signal (0 to 5V, 0 to 10V, 4 to
20mADC).
1
Speed 1
(high speed)
Speed 2
(middle speed)
Speed 3
(low speed)
Output frequency (Hz)
ON ON ON ON
RH
ON ON ON ON
RM
RL
REX
Speed 5
Speed 4
Speed 6
Speed 7
ONONON
Time
29
RH
RM
RL
REX
Speed 9
Speed 8
Output frequency (Hz)
Speed 10
Speed 11
Speed 12
Speed 13
Speed 14
Speed 15
ON ON ON ON
ON ON ON ON
ON ON ON ON
ONON ON ON ON ON ON ON
WIRING
Time

Input terminals
Multi-Speed Setting
Terminal Input
Speed
Speed 1
(high
speed)
Speed 2
(middle
speed)
Speed 3
(low
speed)
Speed 4 OFF OFF Pr. 24
Speed 5 OFF OFF Pr. 25 Pr. 6 setting when Pr. 25="- - -"
Speed 6 OFF OFF Pr. 26 Pr. 5 setting when Pr. 26="- - -"
Speed 7 OFF Pr. 27 Pr. 6 setting when Pr. 27="- - -"
Speed 8 OFF OFF OFF Pr. 80 0Hz when Pr. 80="- - -"
Speed 9 OFF OFF Pr. 81 Pr. 6 setting when Pr. 81="- - -"
Speed 10 OFF OFF Pr. 82 Pr. 5 setting when Pr. 82="- - -"
Speed 11 OFF Pr. 83 Pr. 6 setting when Pr. 83="- - -"
Speed 12 OFF OFF Pr. 84 Pr. 4 setting when Pr. 84="- - -"
Speed 13 OFF Pr. 85 Pr. 6 setting when Pr. 85="- - -"
Speed 14 OFF Pr. 86 Pr. 5 setting when Pr. 86="- - -"
Speed 15 Pr. 87 Pr. 6 setting when Pr. 87="- - -"
External
setting
REX-
SD*
OFF OFF OFF Pr. 4 0 to 120Hz
OFF OFF OFF Pr. 5 0 to 120Hz
OFF OFF OFF Pr. 6 0 to 120Hz
OFF OFF OFF OFF
RH-SDRM-SDRL-
SD*
ON
ON
ON
ON ON
ON ON
ON ON
ON ON ON
ON
ON ON
ON ON
ON ON ON
ON ON
ON ON ON
ON ON ON
ON ON ON ON
Parameter
Frequency
setting
potentiometer
Set Frequency
Range
0 to 120Hz, - - -
0 to max. setting
Remarks
Pr. 6 setting when Pr. 24="- - -"
*When using the REX signal, an external command cannot be used to make a
reverse rotation start.
Power supply
Forward rotation
Multi-speed
selection
Multi-Speed Operation Connection Example
REMARKS
*1. When the frequency setting potentiometer is connected, the input signal of the frequency
setting potentiometer is ignored if the multi-speed select signal is switched on. (This also
applies to the 4 to 20mA input signal.)
*2. For a reverse rotation start, set Pr. 63 to "- - -" (factory setting) to make the STR signal of
terminal STR valid.
R
S
T
STF
REX
RH
RM
RL
SD
Inverter
*2
30
10
2
5
U
V
W
IM Motor
*1
Frequency
setting
potentiometer

1.4.4 Indicator connection and adjustment (AM)
A full-scale 5VDC analog signal can
be output from across terminals AM-
5.
The analog output level can be
calibrated by the operation panel or
parameter unit (FR-PU04). Terminal
AM function selection can be set in
Pr. 54 "AM terminal function
selection".
Terminal AM is isolated from the
control circuit of the inverter. The
cable length should not exceed
30m.
The output signal from terminal AM
delays about several 100ms in
output and therefore cannot be used
as a signal for control which requires
fast response.
AM
5
Inverter
Meter
5V full scale
Analog meter
Input terminals
CPU
AM
circuit
AM
5
5VDC
Terminal AM Output Circuit
Adjustment
Set the reference output value of the inverter which outputs the full-scale voltage
5VDC.
Set it in Pr. 55 for frequency monitoring reference, or in Pr. 56 for current monitoring
reference.
Use the terminal AM output calibration parameter C1 to adjust the output voltage.
[Example] 1. To set the output across AM-5 to 5VDC at the inverter output
frequency of 90Hz, set 90Hz in Pr. 55. (Factory setting: 50Hz)
2. To set the output across AM-5 to 5VDC at the inverter output current of
20A, set 20A in Pr. 56. (Factory setting: rated inverter current)
CAUTION
•Refer to page 126 for the procedure of indicator adjustment.
1
WIRING
31

Input terminals
1.4.5 Control circuit common terminals (SD, 5, SE)
Terminals SD, 5, and SE are all common terminals (0V) for I/O signals and are isolated
from each other.
Terminal SD is a common terminal for the contact input terminals (STF, STR, RH, RM,
RL).
Terminal 5 is a common terminal for the frequency setting analog input signals and
indicator terminal "AM". It should be protected from external noise using a shielded or
twisted cable.
Terminal SE is a common terminal for the open collector output terminal (RUN).
1.4.6 Signal inputs by contactless switches
If a transistor is used instead of a
+24V
contacted switch as shown on the
right, the input signals of the
inverter can control terminals STF,
STR, RH, RM, RL.
STF, etc.
Inverter
SD
External signal input using transistor
REMARKS
1.When using an external transistor connected to an external power supply, use terminal PC
to prevent a malfunction from occurring due to a leakage current. (Refer to page 23.)
2.Note that an SSR (solid-state relay) has a relatively large leakage current at OFF time and it
may be accidentally input to the inverter.
32

How to use the input signals (assigned terminals
A
1.5 How to use the input signals
(assigned terminals RL, RM, RH, STR)
RL, RM, RH, STR)
These terminals can be
changed in function by
setting Pr. 60 to Pr. 63.
Pr. 60 "RL terminal function selection"
Pr. 61 "RM terminal function selection"
Pr. 62 "RH terminal function selection"
Page 98
Pr. 63 "STR terminal function selection"
1.5.1 Multi-speed setting (RL, RM, RH, REX signals):
Pr. 60 to Pr. 63 setting "0, 1, 2, 8"
Remote setting (RL, RM, RH signals):
Pr. 60 to Pr. 63 setting "0, 1, 2"
• By entering frequency commands into the RL, RM, RH and REX signals and turning
on/off the corresponding signals, you can perform multi-speed operation (15
speeds). (For details, refer to page 29.)
• If the operation panel is away from the control box, you can perform continuous
variable-speed operation with signal contacts, without using analog signals. (For
details, refer to page 95.)
1.5.2 Second function selection (RT signal): Pr. 60 to Pr. 63 setting "3"
Pr. 44 "second acceleration/deceleration time"
Pr. 45 "second deceleration time"
Pr. 46 "second torque boost"
Pr. 47 "second V/F (base frequency)"
To set any of the above functions, turn on this
"RT signal".
Start
Second acceleration
/deceleration
Inverter
STF (STR)
RT
SD
1.5.3 Current input selection "AU signal": Pr. 60 to Pr. 63 setting "4"
When a fan, pump etc. is
used to perform operation
of constant- pressure/
temperature control,
automatic operation can
be performed by entering
the 4-20mADC output
signal of a regulator into
across terminals 4-5.
When the 4-20mADC signal is used to perform operation, always short the AU signal.
REMARKS
The current input is ignored if the multi-speed signal is input.
Automatic/manual
signal switching
Manual operation
Frequency setting
potentiometer
utomatic signal
4-20mADC
33
AU
SD
10
2
5
4
Operation
Inverter
Across
AU-SD
ON
Automatic
operation
4 to 20mA
OFF
Manual
operation
0 to 5V
(0 to 10V)
1
WIRING

How to use the input signals (assigned terminals
RL, RM, RH, STR)
1.5.4 Start self-holding selection (STOP signal): Pr. 60 to Pr. 63
setting
"5"
This connection example is used when you want
to self-hold the start signal (forward rotation,
*
STOP
reverse rotation).
* Connected to the STOP signal to avoid
Stop
forward or reverse rotation if forward or
reverse rotation and stop are turned on
simultaneously.
Forward
rotation
Reverse
rotation
(Wiring example for sink logic)
SD
STF
STR
1.5.5 Output shut-off (MRS signal): Pr. 60 to Pr. 63 setting "6"
Short the output stop terminal MRS-SD during inverter output to cause the inverter to
immediately stop the output. Open terminals MRS-SD to resume operation in about
10ms. Terminal MRS may be used as described below:
(1) To stop the motor by
mechanical brake (e.g.
electromagnetic brake)
Terminals MRS-SD must be
shorted when the mechanical
brake is operated and be opened
before motor restart.
Output frequency
(2) To provide interlock to
disable operation by the
inverter
After MRS-SD have been shorted,
the inverter cannot be operated if
the start signal is given to the
inverter.
Across
MRS Across
SD
STF (STR)
SD
(3) To coast the motor to stop
The motor is decelerated according to the preset deceleration time and is stopped
by operating the DC injection brake at 3Hz or less. By using terminal MRS, the
motor is coasted to a stop.
Motor coasted
to stop
0.5Hz
ON
ON
Pr. 13
"starting
frequency"
34

How to use the input signals (assigned terminals
r
A
A
A
RL, RM, RH, STR)
1.5.6 External thermal relay input: Pr. 60 to Pr. 63 setting "7"
When the external thermal relay or thermal relay built in
the motor is actuated, the inverter output is shut off and
an alarm signal is given to keep the motor stopped to
protect the motor from overheat. Even if the thermal
relay contact resets, the motor cannot be restarted
unless the reset terminals RES-SD are shorted for more
Inverter
Thermal relay
U
V
W
OH
SD
Moto
IM
than 0.1s and then opened or a power-on reset is made.
The function may therefore be used as an external
emergency stop signal input.
1.5.7 Jog operation (JOG signal): Pr. 60 to Pr. 63 setting "9"
(1) Jog operation using external signals
Jog operation can be started/stopped by shorting the jog mode select terminals JOGSD and shorting/opening the start signal terminals STF or STR-SD. The jog frequency
and jog acceleration/deceleration time are set in Pr. 15 (factory setting 5Hz, variable
between 0 and 120Hz) and Pr. 16 (factory setting 0.5s, variable between 0 and 999s),
respectively, and their settings can be changed from the operation panel or parameter
unit.
The JOG signal has precedence over the multi-speed signal. (External)
cross JOG -
Forward rotation
cross STF-
Reverse rotation
cross STR-
SD
SD
SD
Forward
0.5Hz
rotation
Output frequency
ON
Jog frequency Pr. 15
3Hz
DC injection brake
Reverse
rotation
ON
ON
Time
1
WIRING
35

How to use the input signals (assigned terminals
A
A
RL, RM, RH, STR)
1.5.8 Reset signal: Pr. 60 to Pr. 63 setting "10"
Used to reset the alarm stop state established when the inverter's protective function
is activated. The reset signal immediately sets the control circuit to the initial (cold)
status, e.g. initializes the electronic thermal relay function protection circuit. It shuts off
the inverter output at the same time. During reset, the inverter output is kept shut off.
To give this reset input, short terminals RES-SD for more than 0.1s. When the shorting
time is long, the operation panel or parameter unit displays the initial screen, which is
not a fault.
After opening terminals RES-SD (about 1s), operation is enabled.
The reset terminal is used to reset the inverter alarm stop state. If the reset terminal is
shorted, then opened while the inverter is running, the motor may be restarted during
coasting (refer to the timing chart below) and the output may be shut off due to
overcurrent or overvoltage.
Setting either "1" or "15" in reset selection Pr. 75 allows the accidental input of the
reset signal during operation to be ignored.
(For details, refer to page 105.)
When motor is restarted
during coasting, inverter
cross RES cross
STF (STR)-
activates current limit to
start acceleration.
Coasting
Output frequency
SD
(Hz)
SD
ON
ON
Coasting to stop
(Indicates motor speed)
Ordinary
acceleration
Coasting time
ON
T
T: Should be longer than the time of
coasting to stop.
CAUTION
Frequent resetting will make electronic thermal relay function invalid.
36

How to use the input signals (assigned terminals
RL, RM, RH, STR)
1.5.9 PID control valid terminal:
Pr. 60 to Pr. 63 setting
"14"
To exercise PID control, turn on the X14 signal. When this signal is off, ordinary
inverter operation is performed. For more information, refer to page 113.
♦Related parameters♦
Pr. 88 "PID action selection", Pr. 89 "PID proportional band", Pr. 90 "PID integral time", Pr. 91
"PID upper limit", Pr. 92 "PID lower limit", Pr. 93 "PID action set point for PU operation", Pr. 94
"PID differential time" (Refer to page 113.)
1.5.10 PU operation/external operation switchover:
setting
"16"
Pr. 60 to Pr. 63
You can change the operation mode.
With "8" set in Pr. 79 "operation mode selection", turning on the X16 signal shifts the
operation mode to the external operation mode and turning off the X16 signal shifts it
to the PU operation mode. For details, refer to page 109.
♦Related parameters♦
Pr. 79 "operation mode selection" (Refer to page 109.)
1
WIRING
37

Connection to the Stand-Alone Option
1.6 Connection to the Stand-Alone Option
The inverter accepts a variety of stand-alone option units as required.
Incorrect connection will cause inverter damage or accident. Connect and operate the
option unit carefully in accordance with the corresponding option unit manual.
1.6.1 Connection of the brake unit (BU type)
Connect the BU type brake unit correctly as shown below. Incorrect connection will
damage the inverter. Remove jumpers across terminals HB-PC and TB-HC and
connect a jumper across terminals PC-TB of the brake unit.
Power
supply
NFB
Connect a
jumper.
T(Caution 4)
MC
OFF
PC
ON
MC
HCHBHA TB
OCR
MC
Remove
jumpers.
BU(-H) type brake unit
Inverter
R/L1
S/L2
T/L3
(Caution 3)
P/+
Discharge resistor
P
N/-
U
V
W
PR
Motor
IM
N
OCR
CAUTION
1. The wiring distance between the inverter, brake unit and discharge resistor
should be within 2m. If twisted wires are used, the distance should be within
5m.
2. If the transistors in the brake unit should become faulty, the resistor can be
unusually hot, causing a fire. Therefore, install a magnetic contactor on the
inverter's power supply side to shut off a current in case of fault.
3. The N terminal is not provided for the FR-S520E-0.1K to 0.75K.
4. When the power supply is 400V class, install a step-down transformer.
38

Connection to the Stand-Alone Option
1.6.2 Connection of the high power factor converter (FR-HC)
When connecting the high power factor converter (FR-HC) to suppress power supply
harmonics, perform wiring securely as shown below. Incorrect connection will damage
the high power factor converter and inverter.
Power
supply
NFB
(Caution 2)
MC1MC2
S
R
TR4S4T4 N
From FR-HCL02
MC2
MC1
FR-HCL01
High power factor converter (FR-HC)
P
S4
R4
R3
External box
R2
R
S3
S2
S
T4
T3
T2
T
(Caution 2)
Y1 or Y2 RDY RSO SE
(Caution 5)
Inverter
R
(Caution 2)
S
T
(Caution 1)
SD
RES (Caution 4)
MRS (Caution 4)
P
(Caution 6)
N
CAUTION
1. Use sink logic (factory setting) when the FR-HC is connected. The FR-HC
cannot be connected when source logic is selected.
2. The power input terminals R, S, T must be open. Incorrect connection will
damage the inverter. Opposite polarity of terminals N, P will damage the
inverter.
3. The voltage phases of terminals R, S, T and terminals R4, S4, T4 must be
matched before connection.
4. Use Pr. 60 to Pr. 63 (input terminal function selection) to assign the terminals
used for the RES and MRS signals.
5. Do not insert NFB between terminals P-N (P - P, N - N)
6. The N terminal is not provided for the FR-S520E-0.1K to 0.75K.
1
WIRING
39

Connection to the Stand-Alone Option
A
1.6.3 Connection of the power regeneration common
converter (FR-CV)
When connecting the FR-CV type power regeneration common converter, connect the
inverter terminals (P, N) and FR-CV type power regeneration common converter
terminals as shown below so that their signals match with each other.
Three-phase
C power
supply
NFB
MC1
Dedicated stand-alone
reactor (FR-CVL)
R/L11
S/L21
T/L31
R2/L12
S2/L22
T2/L32
FR-CV power regenerative
common converter
(Caution 3)
1
R2/L
2
S2/L
3
T2/L
(Caution 6)
R/L11
S/L21
T/MC1
(Caution 5)
P/L+
N/L-
P24
SD
RDYA
RDYB
RSO
SE
R
(Caution 2)
S
T
Inverter
P
N
(Caution 7)
PC
(Caution 1)
SD
MRS (Caution 4)
RES (Caution 4)
U
V
W
IM
CAUTION
1. Use sink logic (factory setting) when the FR-CV is connected. The FR-CV
cannot be connected when source logic is selected.
2. The power input terminals R, S, T must be open. Incorrect connection will
damage the inverter. Opposite polarity of terminals N, P will damage the
inverter.
3. The voltage phases of terminals R/L11, S/L21, T/MC1 and terminals R2/L1,
S2/L2, T2/L3 must be matched before connection.
4. Use Pr. 60 to Pr. 63 (input terminal function selection) to assign the terminals
used for the RES and MRS signals.
5. Do not insert NFB between terminals P-N (P/L+ - P, N/L− - N)
6. Make sure to connect the terminal R/L11, S/L21, T/MC1 to the power supply.
Running the inverter without connecting the terminals will damage the
power regeneration common converter.
7. The N terminal is not provided for the FR-S520E-0.1K to 0.75K.
40

Handling of the RS-485 connector
1.7 Handling of the RS-485 connector
<RS-485 connector pin layout>
View A of the inverter (receptacle
side)
8) to 1)
View A
View A
1) SG
2) P5S
3) RDA
4) SDB
5) SDA
6) RDB
7) SG
8) P5S
CAUTION
1. Do not plug the connector to a computer LAN port, fax modem socket,
telephone modular connector etc.. The product could be damaged due to
differences in electrical specifications.
2. Pins 2 and 8 (P5S) are provided for the parameter unit power supply. Do not
use them for any other purpose or when making parallel connection by RS485 communication.
3. Refer to page 132 for the communication parameters.
1.7.1 Connection of the parameter unit (FR-PU04)
When connecting the parameter unit to the RS-485 connector, use the optional
parameter unit connection cable (FR-CB2 ).
CAUTION
When the parameter unit is used, the operation other than the stop key
STOP
( ) of the operation panel is disabled.
RESET
Refer to page 151 for the parameters related to parameter unit setting.
1
WIRING
41

Handling of the RS-485 connector
1.7.2 Wiring of RS-485 communication
Use the RS-485 connector to perform communication operation from a personal
computer etc.
When the RS-485 connector is connected with a personal, FA or other computer
by a communication cable, a user program can run and monitor the inverter or
read and write to the parameters. For parameter setting, refer to page 130.
•Conforming standard: EIA-485 (RS-485)
•Transmission format: Multidrop link system
•Communication speed: Max. 19200bps
•Overall extension: 500m
Refer to page 130 for the setting related to RS-485 communication operation.
<System configuration examples>
(1) Connection of a computer to the inverter (1:1 connection)
Station 0
Inverter
RS-485
connector
RJ-45 connector 2)
RS-485
interface/
terminal
Computer
Station 0
Inverter
RS-485
connector
RJ-45 connector 2)
10BASE-T cable 1)
RS-232C
cable
RS-232C RS-485
converter
Computer
RS-232C
connector
Max. 15m
10BASE-T cable 1)
Computer-inverter connection cable
Refer to the following for the cable (RS-232C
⇔RS-485 converter) for connection of
the computer having the RS-232C interface with the inverter.
Example of product available on the market (as of April, 2004)
Model Maker
FA-T-RS40 *
Mitsubishi Electric Engineering Co., Ltd.
*The converter cable cannot connect two or more inverters (the computer and
inverter are connected on a 1:1 basis). Since the product is packed with the RS232C cable and RS-485 cable (10BASE-T + RJ-45 connector), the cable and
connector need not be prepared separately.
REMARKS
Refer to the following when fabricating the cable on the user side.
Example of product available on the market (as of April, 2004)
Product Model Maker
1) 10BASE-T cable
2) RJ-45 connector 5-554720-3 Tyco Electronics Corporation
* Do not use pins No. 2, 8 (P5S).
SGLPEV-T 0.5mm
42
× 4P
Mitsubishi Cable Industries, Ltd.

Handling of the RS-485 connector
(2) Combination of computer and multiple inverters (1:n connection)
Station n
RS-485
interface/
terminal
Computer
Station 0
Inverter
RS-485
connector
Distribution
terminal
10BASE-T cable 1)
Station 1
(Max. 32 inverters)
Inverter
RS-485
connector
RJ-45 connector 2)
Inverter
RS-485
connector
Termination
resistor
Station 1
Station 2
Station n
Computer
RS-232C
cable
RS-232C
connector
Max. 15m
(49.2feet)
Converter
Inverter
RS-485
connector
Distribution
terminal
Inverter
RS-485
connector
Inverter
RS-485
connector
Termination
10BASE-T cable 1)
RJ-45 connector 2)
resistor
REMARKS
Refer to the following when fabricating the cable on the user side.
Example of product available on the market (as of April, 2004)
Product Model Maker
1) 10BASE-T cable SGLPEV-T 0.5mm × 4P* Mitsubishi Cable Industries, Ltd.
2) RJ-45 connector 5-554720-3 Tyco Electronics Corporation
* Do not use pins No. 2, 8 (P5S) of the 10BASE-T cable.
1
WIRING
43

Handling of the RS-485 connector
<Wiring methods>
1) Wiring of one RS-485 computer and one inverter
Computer Side Terminals
Signal
name
RDA
RDB
SDA
SDB
RSA
RSB
CSA
CSB
SG
FG
Description
Receive data
Receive data
Send data
Send data
Request to send
Request to send
Clear to send
Clear to send
Signal ground
Frame ground
Cable connection and signal direction
10 BASE-T Cable
(*1)
0.2mm or more
2
RS-485 connector
2) Wiring of one RS-485 computer and "n" inverters (several inverters)
Cable connection and signal direction
Computer
RDA
RDB
SDA
SDB
RSA
RSB
CSA
CSB
SG
FG
(*1)
10 BASE-T Cable
RDB
RDA
SDB
SDA
RDB
RDA
SDB
SDA
RDB
RDA
SG SGSG
Station 1 Station 2 Station n
SDB
Inverter
SDA
SDB
RDA
RDB
SG
Terminating
resistor
(*2)
SDA
Inverter
Inverter Inverter
REMARKS
*1. Make connection in accordance with the instruction manual of the computer to be used
with. Fully check the terminal numbers of the computer since they change with the model.
*2. The inverters may be affected by reflection depending on the transmission speed or
transmission distance. If this reflection hinders communication, provide a terminating
resistor. When the RS-485 connector is used for connection, a terminating resistor cannot
be fitted, so use a distributor. Connect the terminating resistor to only the inverter remotest
from the computer. (Terminating resistor: 100
Ω)
44

Design information
k
1.8 Design information
1) Provide electrical and mechanical interlocks for MC1 and MC2 which are used for
commercial power supply-inverter switchover.
When the wiring is incorrect or if there is a commercial power supply-inverter
switch-over circuit as shown below, the inverter will be damaged by leakage current
from the power supply due to arcs generated at the time of switchover or chattering
caused by a sequence error.
2) If the machine must not be restarted when power is restored after a power failure,
provide a magnetic contactor in the inverter's primary circuit and also make up a
sequence which will not switch on the start signal.
If the start signal (start switch) remains on after a power failure, the inverter will
automatically restart as soon as the power is restored.
3) Since the input signals to the control circuit are on a low level, use two or more
parallel micro signal contacts or a twin contact for contact inputs to prevent a
contact fault.
4) Do not apply a large voltage to the contact input terminals (e.g. STF) of the control
circuit.
5) Always apply a voltage to the alarm output terminals (A, B, C) via a relay coil, lamp
etc.
6) Make sure that the specifications and rating match the system requirements.
1) Commercial power supply-inverter
3) Low-level signal contacts
switchover
MC1
Power
supply
R
S
T
Inverter
U
V
W
MC2
Leakage current
Interloc
IM
Low-level signal contacts Twin contact
1
WIRING
45

MEMO
46

2. FUNCTIONS
This chapter explains the "functions" for use of this product. For simple
variable-speed operation of the inverter, the factory settings of the
parameters may be used as they are. Set the necessary parameters to
meet the load and operational specifications. Refer to the instruction
manual (basic) for the operation procedures. Always read the
instructions before using the functions.
2.1 Function (Parameter) list ................................................. 48
2.2 List of parameters classified by purpose of use ........... 61
2.3 Explanation of functions (parameters)........................... 63
2.4 Output terminal function parameters ............................. 86
2.5 Current detection function parameters .......................... 88
2.6 Display function parameters ........................................... 90
2.7 Restart operation parameters.......................................... 92
2.8 Additional function parameters ...................................... 95
2.9 Terminal function selection parameters......................... 98
2.10 Operation selection function parameters ...................... 101
2.11 Auxiliary parameters ........................................................ 120
2.12 Maintenance parameters ................................................. 122
2.13 Calibration parameters .................................................... 126
2.14 Clear parameters .............................................................. 129
2.15 Communication parameters ............................................ 130
2.16 Parameter unit (FR-PU04) setting ................................... 151
Chapter 1
CAUTION
As the contact input terminals RL, RM, RH, STR, open collector
output terminal RUN and contact output terminals A, B, C can be
changed in functions by parameter setting, their signal names
used for the corresponding functions are used in this chapter
(with the exception of the wiring examples). Note that they are
not terminal names.
REMARKS
Parameter copy
Use of the parameter unit (FR-PU04) allows the parameter values to
be copied to another FR-S500 series inverter. After batch-reading the
parameters of the copy source inverter, you can connect the
parameter unit to the copy destination inverter and batch-write the
parameters.
For the operation procedure, refer to the instruction manual of the
parameter unit (FR-PU04).
Chapter 2
Chapter 3
Chapter 4
47

Function (Parameter) list
2.1 Function (Parameter) list
CAUTION
indicates that the setting can be changed during operation if Pr. 77 "parameter
write disable selection" has been set to "0" (factory setting). (Note that the Pr. 53, Pr.
70 and Pr. 72 values can be changed only during PU operation.)
Parameter List
Parameter
Indica-
tion
0 Torque boost 0 to 15% 0.1%
1 Maximum frequency 0 to 120Hz 0.1Hz 60Hz 64
2 Minimum frequency 0 to 120Hz 0.1Hz 0Hz 64
3 Base frequency 0 to 120Hz 0.1Hz 60Hz 65
4
5
6
7 Acceleration time 0 to 999s 0.1s 5s 67
8 Deceleration time 0 to 999s 0.1s 5s 67
9
30
79
Multi-speed setting
(high speed)
Multi-speed setting
(middle speed)
Multi-speed setting
(low speed)
Electronic thermal O/L
relay
Extended function
display selection
Operation mode
selection
Name
Setting
Range
0 to 120Hz 0.1Hz 60Hz 66
0 to 120Hz 0.1Hz 30Hz 66
0 to 120Hz 0.1Hz 10Hz 66
0 to 50A 0.1A
0, 1 1 0 80
0 to 4, 7, 8 1 0 109
Minimum
Setting
Increments
Factory
Setting
6%/5%/
4%/
(*1)
Rated
output
current
Refer
To:
Cus-
tomer
Setting
63
69
*1. The factory setting varies with the inverter capacity: 5% for FR-S540E-1.5K and 2.2K, 4%
for FR-S540E-3.7K.
48

Function (Parameter) list
The extended function parameters are made valid by setting "1" in Pr. 30 "extended
function display selection". (For more detailed information on the way to set Pr. 30,
refer to the instruction manual (basic).)
Func-
tion
Standard operation functions
Para-
meter
Indica-
tion
10
11
12
13
14
15 Jog frequency 0 to 120Hz 0.1Hz 5Hz 74
16
17
19
20
21
22
23
Name Setting Range
Parameters 0 to 9 are basic function parameters.
DC injection
brake
operation
frequency
DC injection
brake
operation time
DC injection
brake voltage
Starting
frequency
Load pattern
selection
Jog
acceleration/
deceleration
time
RUN key
rotation
direction
selection
Base frequency
voltage
Acceleration/
deceleration
reference
frequency
Stall
prevention
function
selection
Stall
prevention
operation
level
Stall
prevention
operation level
compensation
factor at
double speed
0 to 120Hz 0.1Hz 3Hz 71
0 to 10s 0.1s 0.5s 71
0 to 15% 0.1% 6% 71
0 to 60Hz 0.1Hz 0.5Hz 72
0: For constant-torque
loads,
1: For variable-torque
loads,
2: For vertical lift loads,
3: For vertical lift loads
0 to 999s 0.1s 0.5s 74
0: Forward rotation,
1: Reverse rotation
0 to 800V, 888, - - - 1V - - - 65
1 to 120Hz 0.1Hz 60Hz 67
0 to 31, 100 1 0 75
0 to 200% 1% 150% 77
0 to 200%, - - - 1% - - - 77
Minimum
Setting
Increments
1073
1074
Factory
Setting
Refer
To:
Cus-
tomer
Setting
Parameter List
2
FUNCTIONS
49

Function (Parameter) list
Parameter List
Func-
tion
Standard operation functions
Para-
meter
24
25
26
27
28
29
31
32
33
34
35
36
Indica-
tion
Name Setting Range
Multi-speed
setting
0 to 120Hz, - - - 0.1Hz - - - 66
(speed 4)
Multi-speed
setting
0 to 120Hz, - - - 0.1Hz - - - 66
(speed 5)
Multi-speed
setting
0 to 120Hz, - - - 0.1Hz - - - 66
(speed 6)
Multi-speed
setting
0 to 120Hz, - - - 0.1Hz - - - 66
(speed 7)
Stall
prevention
operation
reduction
0 to 120Hz 0.1Hz 60Hz 77
starting
frequency
0: Linear acceleration/
Acceleration/
deceleration
pattern
deceleration,
1: S-pattern acceleration/
deceleration A,
2: S-pattern acceleration/
deceleration B
Parameter 30 is basic function parameter.
Frequency
jump 1A
Frequency
jump 1B
Frequency
jump 2A
Frequency
jump 2B
Frequency
jump 3A
Frequency
jump 3B
0 to 120Hz, - - - 0.1Hz - - - 80
0 to 120Hz, - - - 0.1Hz - - - 80
0 to 120Hz, - - - 0.1Hz - - - 80
0 to 120Hz, - - - 0.1Hz - - - 80
0 to 120Hz, - - - 0.1Hz - - - 80
0 to 120Hz, - - - 0.1Hz - - - 80
Minimum
Setting
Increments
Factory
Setting
Refer
To:
1079
Cus-
tomer
Setting
37 Speed display 0, 0.1 to 999 0.1 0 81
Frequency
38
setting voltage
gain frequency
Frequency
39
setting current
gain frequency
Start-time
40
ground fault
detection
selection
1 to 120Hz 0.1Hz 60Hz 82
1 to 120Hz 0.1Hz 60Hz 82
0: Not detected
1: Detected
50
1086

Function (Parameter) list
Func-
tion
Output terminal functions
Second functions
Current detection
Para-
meter
41
42
43
44
45
46
47
48
49
50
51
Indica-
tion
Name Setting Range
Up-tofrequency
0 to 100% 1% 10% 86
sensitivity
Output
frequency
0 to 120Hz 0.1Hz 6Hz 87
detection
Output
frequency
detection for
0 to 120Hz, - - - 0.1Hz - - - 87
reverse
rotation
Second
acceleration/
deceleration
0 to 999s 0.1s 5s 67
time
Second
deceleration
0 to 999s, - - - 0.1s - - - 67
time
Second
torque boost
0 to 15%, - - - 0.1% - - - 63
Second V/F
(base
0 to 120Hz, - - - 0.1Hz - - - 65
frequency)
Output current
detection level
0 to 200% 1% 150% 88
Output current
detection
0 to 10s 0.1s 0s 88
period
Zero current
detection
0 to 200% 1% 5% 89
level
Zero current
detection
0.05 to 1s 0.01s 0.5s 89
period
Minimum
Setting
Increments
Factory
Setting
Refer
To:
Cus-
tomer
Setting
Parameter List
2
FUNCTIONS
51

Function (Parameter) list
Parameter List
Func-
tion
Display functions
Para-
meter
52
53
54
55
56
Indica-
tion
Name Setting Range
0: Output frequency,
Operation
panel display
data selection
1: Output current,
100:Set frequency
during stop/output
frequency during
operation
Frequency
setting
operation
selection
AM terminal
function
selection
0: Setting dial
frequency setting
mode
1: Setting dial
potentiometer mode
0: Output frequency
monitor
1: Output current
monitor
Frequency
monitoring
0 to 120Hz 0.1Hz 60Hz 92
reference
Current
monitoring
0 to 50A 0.1A
reference
Minimum
Setting
Increments
Factory
Setting
Refer
To:
1090
1091
1090
Rated
output
92
current
Cus-
tomer
Setting
57
functions
58
Automatic restart
Restart
coasting time
Restart
cushion time
0 to 5s, - - - 0.1s - - - 92
0 to 60s 0.1s 1s 92
0: Without remote
setting function
1: With remote setting
function
With frequency setting
storage function
2: With remote setting
function
Without frequency
setting storage
1095
Additional function
59
Remote
setting
function
selection
function
52

Function (Parameter) list
Func-
tion
Terminal function selection
Operation selection functions
Para-
meter
60
61
62
63
64
65
66
67
68
69
Indica-
tion
Name Setting Range
RL terminal
function
selection
RM terminal
function
selection
RH terminal
function
selection
STR terminal
function
0: RL, 1: RM, 2: RH,
3: RT, 4: AU, 5: STOP,
6: MRS, 7: OH,
8: REX, 9: JOG,
10: RES, 14: X14,
16: X16,
- - -: STR (The STR
signal can be
assigned to the STR
terminal only.)
selection
RUN terminal
function
selection
0:RUN, 1:SU, 3:OL,
4:FU, 11:RY, 12:Y12,
13:Y13, 14:FDN,
15:FUP, 16:RL,
A, B, C
terminal
function
selection
93:Y93, 95:Y95 98:LF,
99:ABC
(The Y93 signal can
be assigned to the
RUN terminal only.)
0: OC1 to 3, OV1 to 3,
THM, THT, BE, GF,
Retry
selection
OHT, OLT, PE, OPT
1: OC1 to 3,
2: OV1 to 3,
3: OC1 to 3, OV1 to 3
0: No retry
Number of
retries at
alarm
occurrence
1 to 10:
Without alarm output
during retry operation
101 to 110:
With alarm output
during retry operation
Retry waiting
time
Retry count
display erase
0.1 to 360s 0.1s 1s 101
0: Cumulative count
erase
Minimum
Setting
Increments
Factory
Setting
Refer
To:
1098
1198
1298
1- - -98
10100
199100
10101
10101
10101
Cus-
tomer
Setting
Parameter List
2
FUNCTIONS
53

Function (Parameter) list
Parameter List
Func-
tion
Operation selection
Para-
meter
70
Indica-
tion
Name Setting Range
Soft-PWM
setting
71 Applied motor
functions
PWM
72
frequency
selection
73
74
0-5V/0-10V
selection
Input filter
time constant
Minimum
Setting
Increments
Factory
Setting
Refer
To:
Presence/absence of
Soft-PWM control can
be selected.
When Soft-PWM is
valid, the metallic tone
of motor noise can be
11103
changed into
unoffending composite
tone.
0: Soft-PWM invalid
1: Soft-PWM valid
0, 100:
Thermal characteristic
for Mitsubishi
standard motor
1, 101:
Thermal characteristic
for Mitsubishi
constant-torque motor
1069
(Thermal characteristic
for Mitsubishi constanttorque motor is
selected with the RT
signal ON when 100
and 101 are set.)
0 to 15 1 1 103
0: For 0 to 5VDC input
1: For 0 to 10VDC input
10104
0: 2-step moving
average processing
1 to 8:
Exponential
11105
average value of 2n
at the setting of n
Cus-
tomer
Setting
54

Function (Parameter) list
Func-
tion
Operation selection functions
Multi-speed operation function
Para-
meter
75
76
77
78
80
81
82
83
Indica-
tion
Name Setting Range
0: Reset normally
enabled/PU stop
key disabled
1: Enabled at alarm
occurrence only/PU
Reset
selection/PU
stop selection
stop key disabled
14:Reset normally
enabled/normally
decelerated to stop
15: Enabled at alarm
occurrence only/
normally
decelerated to stop
Cooling fan
operation
selection
0: Operation started at
power on
1: Cooling fan ON/
OFF control
0: Write is enabled
only during a stop
Parameter
write disable
selection
1: Write disabled
(except some
parameters)
2: Write during
operation enabled
0: Both forward
Reverse
rotation
prevention
selection
rotation and reverse
rotation enabled,
1: Reverse rotation
disabled,
2: Forward rotation
disabled
Parameter 79 is basic function parameter.
Multi-speed
setting
0 to 120Hz, - - - 0.1Hz - - - 66
(speed 8)
Multi-speed
setting
0 to 120Hz, - - - 0.1Hz - - - 66
(speed 9)
Multi-speed
setting
0 to 120Hz, - - - 0.1Hz - - - 66
(speed 10)
Multi-speed
setting
0 to 120Hz, - - - 0.1Hz - - - 66
(speed 11)
Minimum
Setting
Increments
Factory
Setting
Refer
To:
114105
11107
10108
10109
Cus-
tomer
Setting
Parameter List
2
FUNCTIONS
55

Function (Parameter) list
Parameter List
Func-
tion
Multi-speed operation function
PID control
Slip compensation
Para-
meter
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
Indica-
tion
Name Setting Range
Multi-speed
setting
0 to 120Hz, - - - 0.1Hz - - - 66
(speed 12)
Multi-speed
setting
0 to 120Hz, - - - 0.1Hz - - - 66
(speed 13)
Multi-speed
setting
0 to 120Hz, - - - 0.1Hz - - - 66
(speed 14)
Multi-speed
setting
0 to 120Hz, - - - 0.1Hz - - - 66
(speed 15)
PID action
selection
20: PID reverse action,
21: PID forward action
PID
proportional
0.1 to 999%, - - - 0.1% 100% 113
band
PID integral
time
PID upper
limit
PID lower
limit
0.1 to 999s, - - - 0.1s 1s 113
0 to 100%, - - - 0.1% - - - 113
0 to 100%, - - - 0.1% - - - 113
PID action set
point for PU
0 to 100% 0.01% 0% 113
operation
PID
differential
0.01 to 10s, - - - 0.01s - - - 113
time
Rated motor
slip
0 to 50%, - - - 0.01% - - - 120
Slip
compensation
0.01 to 10s 0.01s 0.5s 120
time constant
Constantoutput region
slip
0, - - - 1 - - - 120
compensation
selection
Automatic
torque boost
selection
0.1 to 3.7kW, - - - 0.01kW - - - 121
(Motor
capacity)
Minimum
Setting
Increments
Factory
Setting
Refer
To:
120113
Cus-
tomer
Setting
99
Automatic torque boost
Motor primary
resistance
0 to 50
Ω, - - - 0.01Ω - - - 122
56

Maintenance parameters
Function (Parameter) list
Func-
tion
Maintenance function
Parame-
ters
H1 (503)
H2 (504)
H3 (555)
H4 (556)
H5 (557)
Indi-
cation
Additional parameters
Func-
tion
Additional
Parame-
ters
H6 (162)
function
H7 (559)
Indi-
cation
Name Setting Range
Maintenance
timer
Maintenance
timer alarm output
set time
Current average
time
Data output mask
time
Current average
value monitor
signal output
reference current
Name Setting Range
Automatic restart
after instantaneous
power failure
selection
Second electronic
thermal O/L relay
0 to 999
0 to 999, - - -
0.1 to 1s 0.1s 1s 123
0 to 20s 0.1s 0s 123
0.1 to 999A 0.1A 1A 123
0, 1, 10 1 1 92
0 to 50A, - - - 0.1A - - - 69
Minimum
Setting
Increments
1
(1000h)
1
(1000h)
Minimum
Setting
Increments
Factory
Setting
36
(36000h)
Factory
Setting
Refer
To:
0122
122
Refer
To:
Cus-
tomer
Setting
Parameter List
Cus-
tomer
Setting
Parameter for manufacturer setting
Func-
tion
–
Parame-
ters
b1 (560)
b2 (561)
Indi-
cation
Name Setting Range
Minimum
Setting
Increments
Parameter for manufacturer setting. Do not set.
Factory
Setting
Refer
To:
Cus-
tomer
Setting
2
FUNCTIONS
57

Function (Parameter) list
Calibration parameters
Func-
tion
Parameter List
Parame-
ters
cation
C1 (901)
C2 (902)
C3 (902)
C4 (903)
C5 (904)
C6 (904)
Calibration parameters
C7 (905)
C8 (269) Parameter for manufacturer setting. Do not set.
Indi-
Name Setting Range
AM terminal
calibration
Frequency
setting voltage
0 to 60Hz 0.1Hz 0Hz 82
bias frequency
Frequency setting
voltage bias
Frequency setting
voltage gain
0 to 300% 0.1% 0% (*) 82
0 to 300% 0.1%
Frequency
setting current
0 to 60Hz 0.1Hz 0Hz 82
bias frequency
Frequency setting
current bias
Frequency setting
current gain
0 to 300% 0.1% 20% (*) 82
0 to 300% 0.1%
Minimum
Setting
Incre-
Factory
Setting
Refer
To:
ments
126
96%
(*)
100%
(*)
82
82
Cus-
tomer
Setting
0: Not executed
CLr Parameter clear
1: Parameter clear
10129
10: All clear
0: Not cleared,
1: Alarm history
clear
10129
Clear parameters
ECL
Alarm history
clear
* Factory settings may differ because of calibration parameters.
58

Communication Parameters
Func
tion
Parame-
ter
n1 (331)
n2 (332)
Indica-
tion
Communication
station number
Communication
speed
n3 (333) Stop bit length
Parity check
n4 (334)
presence/
absence
Number of
n5 (335)
communication
retries
Communication
n6 (336)
check time
interval
n7 (337)
n8 (338)
Communication Parameters
n9 (339)
n10
(340)
n11
(341)
n12
(342)
Waiting time
setting
Operation
command source
Speed command
source
Link startup
mode selection
CR/LF selection
2
E
PROM write
selection
Name Setting Range
0 to 31: Specify
the station
number of the
inverter.
48: 4800bps,
96: 9600bps,
192: 19200bps
0, 1: (Data length 8),
10, 11: (Data
length 7)
0: Absent,
1: With odd parity
check,
2: With even
parity check
0 to 10, - - - 1 1 132
0 to 999s, - - - 0.1s - - - 132
0 to 150ms, - - - 1 - - - 132
0: Command
source is
computer,
1: Command
source is
external
terminal
0: Command
sourse is
computer,
1: Command
source is
external
terminal
0: As set in Pr. 79.
1: Started in
computer link
operation mode.
0: Without CR/LF,
1: With CR,
without LF
2: With CR/LF
0: Write to RAM
and E2PROM
1: Write to RAM
only
Function (Parameter) list
Minimum
Setting
Incre-
Factory
Setting
Refer
To:
ments
10132
1 192 132
11132
12132
10147
10147
10148
11132
10150
Cus-
tomer
Setting
Parameter List
2
FUNCTIONS
59

Function (Parameter) list
PU parameters
When the parameter unit (FR-PU04) is used, operation from the operation panel is
not accepted. (The stop key ( ) is valid)
Func
tion
Parameter List
Parame-
ter
n13
(145)
n14
(990)
Indica-
tion
PU display
language
selection
PU buzzer
control
STOP
RESET
Name Setting Range
0: Japanese,
1: English,
2: German,
3: French,
4: Spanish,
5: Italian,
6: Swedish,
7: Finish
0: Without sound,
1: With sound
Minimum
Setting
Incre-
Factory
Setting
Refer
To:
ments
11151
11151
Cus-
tomer
Setting
n15
(991)
PU contrast
adjustment
0 (Light)
158152
63 (Dark)
0: Selectable
between
output
frequency and
output current
n16
(992)
PU parameters
PU main display
screen data
selection
100:
(during stop):
Set frequency,
output current
10152
(during
operation):
Output
frequency, output
current
0: Without
disconnected
PU error,
1: Error at
n17
(993)
disconnected PU
detection/PU
setting lock
disconnected
PU,
10:Without
10153
disconnected
PU error (PU
operation
disable)
REMARKS
1.The parameter number in parentheses is the one for use with the parameter unit (FR-PU04).
2. Set "9999" when setting a value "- - -" using the parameter unit (FR-PU04).
3. The decimal places of a value 100 or more (3 digits or more) cannot be displayed.
60

List of parameters classified by purpose of use
2.2 List of parameters classified by purpose of use
Set the parameters according to the operating conditions. The following list indicates
purpose of use and corresponding parameters.
Purpose of Use
Use of extended function parameters Pr. 30
Operation mode selection
Acceleration/deceleration time/pattern
adjustment
Selection of output characteristics
optimum for load characteristics
Output frequency restriction (limit) Pr. 1, Pr. 2
Operation over 60Hz
Adjustment of frequency setting signals
and outputs
Motor output torque adjustment Pr. 0, Pr. 98
Brake operation adjustment Pr. 10, Pr. 11, Pr. 12
Related to operation
Multi-speed operation
Jog operation Pr. 15, Pr. 16
Frequency jump operation Pr. 31, Pr. 32, Pr. 33, Pr. 34, Pr. 35, Pr. 36
Automatic restart operation after
instantaneous power failure
Slip compensation setting Pr. 95 to Pr. 97
Setting of output characteristics matching
the motor
Electromagnetic brake operation timing Pr. 42, Pr. 64, Pr. 65
Sub-motor operation
Operation in communication with
personal computer
operation
Operation under PID control
Related to application
Noise reduction Pr. 70, Pr. 72
Parameter numbers which must be set
Pr. 53, Pr. 79
(Communication parameters n10, n17)
Pr. 7, Pr. 8, Pr. 16, Pr. 20, Pr. 29, Pr. 44, Pr. 45
Pr. 3, Pr. 14, Pr. 19, Pr. 44, Pr. 45
Pr. 1, Pr. 38, Pr. 39,
calibration parameter C4, C7
Pr. 38, Pr. 39, Pr. 73,
calibration parameter C2 to C7
Pr. 1, Pr. 2, Pr. 4, Pr. 5, Pr. 6, Pr. 24, Pr. 25, Pr.
26, Pr. 27, Pr. 80, Pr. 81, Pr. 82, Pr. 83, Pr. 84,
Pr. 85, Pr. 86, Pr. 87
Pr. 57, Pr. 58, additional parameter H6
Pr. 3, Pr. 19, Pr. 71
Pr. 0, Pr. 3, Pr. 7, Pr. 8, Pr. 44, Pr. 45,
Pr. 46, Pr. 47, additional parameter H7
Communication parameters n1 to n12
Pr. 60 to Pr. 65, Pr. 73, Pr. 79, Pr. 88
to Pr. 94
Parameter Numbers
2
FUNCTIONS
61

List of parameters classified by purpose of use
Purpose of Use
Frequency meter calibration
Display of monitor on operation panel or
parameter unit (FR-PU04)
Related to
monitoring
Display of speed, etc. Pr. 37, Pr. 52
Parameter numbers which must be set
Pr. 54, Pr. 55, Pr. 56,
calibration parameter C1
Pr. 52, Communication parameter n16
Parameter Numbers
Function write prevention Pr. 77
Reverse rotation prevention (Pr. 17), Pr. 78
Current detection Pr. 48 to Pr. 51, Pr. 64, Pr. 65
Motor stall prevention Pr. 21, Pr. 22, Pr. 23, Pr. 28
Related to incorrect
operation prevention
Input terminal function assignment Pr. 60 to Pr. 63
Output terminal function assignment Pr. 64, Pr. 65
Increased cooling fan life Pr. 76
Motor protection from overheat Pr. 9, Pr. 71
Automatic restart operation at alarm stop Pr. 66 to Pr. 69
Others
Setting of ground fault overcurrent
protection
Pr. 40
Inverter reset selection Pr. 75
Maintenance timer output Maintenance parameters H1 to H5
62

Explanation of functions (parameters)
2.3 Explanation of functions (parameters)
2.3.1 Torque boost (Pr. 0 , Pr. 46 )
Increase this value for use when the
inverter-to-motor distance is long or
motor torque is insufficient in the low
speed range (stall prevention is
activated).
Motor torque in the low-frequency
range can be adjusted to the load to
Pr.0
Pr.46
Setting range
increase the starting motor torque.
Parameter Name Factory Setting Setting Range Remarks
The factory setting varies according
0 Torque boost 6%/5%/4% 0 to 15%
46
Second torque
boost
- - -
0 to 15%,
- - -
to the inverter capacity. (Refer to the
following table for details.)
- - -: Function invalid. Setting is
enabled when Pr. 30 = "1".
<Setting>
•Assuming that the base frequency voltage is 100%, set the 0Hz voltage in %.
Use the RT signal to switch between two different torque boosts. (Turn on the RT
signal to make Pr. 46 valid(*).)
voltage
Output
0 Output frequency (Hz)
REMARKS
* The RT signal acts as the second function selection signal and makes the other second functions valid.
When using an inverter-dedicated motor (constant-torque motor), make setting as
indicated below.
(If the factory set Pr. 71 value is changed to the setting for use with a constant-torque
motor, the Pr. 0 setting changes to the corresponding value in the following table.)
Inverter Type Inverter Capacity Factory Setting Constant-torque Motor Setting
FR-S520E
FR-S510WE
FR-S540E
0.1K to 0.75K
1.5K to 3.7K 4%
0.4K, 0.75K 6% 6% (no change)
1.5K
2.2K
3.7K 4%
6%
5%
6% (no change)
4%
3%
CAUTION
•Selecting automatic torque boost control makes this parameter setting invalid.
•A too large setting may cause the motor to overheat or result in an
overcurrent trip. The guideline is about 10% at the greatest.
♦Related parameters♦
• RT signal (second function "Pr. 46") setting⇒ Pr. 60 to Pr. 63 "input terminal function selection"
(refer to page 98)
• Constant-torque motor setting ⇒ Pr. 71 "applied motor" (refer to page 69)
• Automatic torque boost control selection ⇒ Pr. 98 "automatic torque boost selection (motor
capacity)" (refer to page 121)
2
FUNCTIONS
63

Explanation of functions (parameters)
2.3.2 Maximum and minimum frequency (Pr. 1 , Pr. 2 )
You can clamp the upper and
lower limits of the output
frequency.
Output frequency (Hz)
Pr.1
Pr.2
0
(4mA)
Parameter Name Factory Setting Setting Range
1 Maximum frequency 60Hz 0 to 120Hz
2 Minimum frequency 0Hz 0 to 120Hz
Set frequency
5,10V
(20mA)
<Setting>
•Use Pr. 1 to set the upper limit of the output frequency. If the frequency of the
frequency command entered is higher than the setting, the output frequency is
clamped at the maximum frequency.
•Use Pr. 2 to set the lower limit of the output frequency.
REMARKS
When using the potentiometer (frequency setting potentiometer) connected across terminals
2-5 to perform operation above 60Hz, change the Pr. 1 and Pr. 38 (Pr. 39 when using the
potentiometer across terminals 4-5) values.
If the Pr. 2 setting is higher than the Pr. 13 "starting frequency" value, note
that the motor will run at the frequency set in Pr. 2 according to the
acceleration time setting by merely switching the start signal on, without
entry of the command frequency.
♦Related parameters♦
• Starting frequency setting⇒ Pr. 13 "starting frequency" (refer to page 72)
• Maximum frequency setting using external potentiometer
⇒ Pr. 30 "extended function display selection" (refer to page 80),
CAUTION
Pr. 38 "frequency setting voltage gain frequency",
Pr. 39 "frequency setting current gain frequency" (refer to page 82)
64

Explanation of functions (parameters)
2.3.3 Base frequency, base frequency voltage
(Pr.3 , Pr.19 , Pr.47 )
Used to adjust the inverter
outputs (voltage, frequency) to
the motor rating.
Pr.19
Output voltage
Output
frequency (Hz)
Pr.3
Pr.47
Parameter Name
3 Base frequency 60Hz 0 to 120Hz
19
47
*1. 1.9 times greater than the power supply voltage for the FR-S510WE-0.1K to 0.75K.
*2. Twice greater than the power supply voltage for the FR-S510WE-0.1K to 0.75K.
Base frequency
voltage
Second V/F
(base frequency)
Factory
Setting
- - -
- - -
Setting
Range
0 to 800V,
888, - - -
0 to 120Hz,
- - -
Remarks
888: 95% of power supply voltage (*1)
- - -: Same as power supply voltage (*2)
Setting is enabled when Pr. 30 = "1".
- - -: Function invalid
Setting is enabled when Pr. 30 = "1".
<Setting>
•In Pr. 3 and Pr. 47, set the base frequency (motor's rated frequency).
Use the RT signal to switch between these two different base frequencies.
(Turn on the RT signal to make Pr. 47 valid.) (*)
When running the standard motor, generally set the "base frequency" to the rated
frequency of the motor. When running the motor using commercial power supplyinverter switch-over operation, set the base frequency to the same value as the
power supply frequency.
If only "50Hz" is given on the motor rating plate as the frequency, always set the
"base frequency" to "50Hz". If it remains at "60Hz", the voltage may become too low
and torque shortage occurs, resulting in an overload trip. Special care must be taken
when "1" is set in Pr. 14 "load pattern selection".
•Set the base voltage (e.g. rated voltage of motor) in Pr. 19.
CAUTION
1. Set 60Hz in Pr. 3 "base frequency" when using a Mitsubishi constant-torque
motor.
2. When automatic torque boost is selected, Pr. 47 is invalid. When automatic
torque boost is selected, setting "- - -" or "888" in Pr. 19 uses the rated
output voltage.
REMARKS
* The RT signal serves as the second function selection signal and makes the other second
functions valid.
♦Related parameters♦
When rated motor frequency is "50Hz" ⇒ Pr. 14 "load pattern selection" (refer to page 73)
•
• RT signal (second function "Pr. 47") setting ⇒ Pr. 60 to Pr. 63 (input terminal function selection)
• Motor setting ⇒ Pr. 71 "applied motor" (refer to page 69)
• Automatic torque boost selection ⇒ Pr. 98 "automatic torque boost selection (motor capacity)"
2
FUNCTIONS
(refer to page 98)
(refer to page 121)
65

Explanation of functions (parameters)
S
1
2.3.4 Multi-speed operation (Pr. 4 , Pr. 5 , Pr. 6 ,
Pr. 24 to Pr. 27 , Pr. 80 to Pr. 87 )
Used to switch between the predetermined running speeds.
Any speed can be selected by merely switching on/off the corresponding
contact signals (RH, RM, RL, REX signals).
By using these functions with Pr. 1 "maximum frequency" and Pr. 2 "minimum
frequency", up to 17 speeds can be set.
This function is valid in the external operation mode or in the combined
operation mode which is available when Pr. 79 = "3" or "4".
peed
(high speed)
Output frequency (Hz)
Speed 2
(middle speed)
Speed 3
(low speed)
Speed 5
Speed 4
Speed 6
Speed 7
Time
Speed 8
Output frequency (Hz)
Speed 10
Speed 9
Speed 11
Speed 12
Speed 13
Speed 14
Speed 15
Time
RH
RM
RL
REX
ON ON
ON ON ONON
Priority: RL>RM>RH
Parameter Name
Multi-speed setting
(high speed)
Multi-speed setting
(middle speed)
Multi-speed setting
(low speed)
Multi-speed setting
(speeds 4 to 7)
Multi-speed setting
(speeds 8 to 15)
24 to 27
80 to 87
<Setting>
4
5
6
•Set the running frequencies in the corresponding parameters.
Each speed (frequency) can be set as desired between 0 and 120Hz during inverter
operation.
When the parameter of any multi-speed setting is read, turn the to change the
setting.
In this case, press the ( ) to store the frequency. (This is also enabled in
SET
the external mode.)
The setting is reflected by pressing the ( ).
•Assign the terminals used for signals RH, RM, RL and REX using Pr. 60 to Pr. 63.
(When terminal assignment is changed using Pr. 60 to Pr. 63, the other functions may
be affected. Please make setting after confirming the function of each terminal.)
ON
ON
RH
ON ON ON ON
ON ON ON ON
ONON ON ON ON ON ON ON
ONONON
Factory
Setting
RM
RL
EX
Setting
Range
60Hz 0 to 120Hz
30Hz 0 to 120Hz
10Hz 0 to 120Hz
WRITE
- - -
- - -
0 to 120Hz,
0 to 120Hz,
SET
66
WRITE
- - -
- - -
"- - -" = no setting. Setting
enabled when Pr. 30 = "1".
"- - -" = no setting. Setting
enabled when Pr. 30 = "1".
ON ON ON ON
Remarks

Explanation of functions (parameters)
)
CAUTION
1. The multi-speed settings override the main speeds (across terminals 2-5, 45, setting dial). When the multi-speed settings and setting dial are used in
the combined operation mode (Pr. 79=3), the multi-speed settings have
precedence.
2. The multi-speeds can also be set in the PU or external operation mode.
3. For 3-speed setting, if two or three speeds are simultaneously selected,
priority is given to the set frequency of the lower signal.
4. Pr. 24 to Pr. 27 and Pr. 80 to Pr. 87 settings have no priority between them.
5. The parameter values can be changed during operation.
6. When using this function with the jog signal, the jog signal has precedence.
REMARKS
The frequency-set external terminals have the following priority:
Jog > multi-speed operation > AU (terminal 4) > terminal 2
♦Related parameters♦
Maximum, minimum frequency setting ⇒ Pr. 1 "maximum frequency", Pr. 2 "minimum frequency"
•
(refer to page 64)
• Assignment of signals RH, RM, RL, REX to terminals ⇒ Pr. 60 to Pr. 63 (input terminal function
selection) (refer to page 98)
• External operation mode setting ⇒ Pr. 79 "operation mode selection" (refer to page 109)
• Computer link mode ⇒ Pr. 79 "operation mode selection" (refer to page 109), communication
parameter n10 "link startup mode selection" (refer to page 148)
• Speed command source ⇒ Communication parameter n9 "speed command source"
(refer to page 147)
2.3.5 Acceleration/deceleration time (Pr. 7 , Pr. 8 ,
Pr. 20 , Pr. 44 , Pr. 45 )
Used to set motor acceleration/
deceleration time.
Set a larger value for a slower
speed increase/decrease or a
smaller value for a faster speed
increase/decrease.
Parameter Name
7 Acceleration time 5s 0 to 999s ---------8 Deceleration time 5s 0 to 999s ----------
Acceleration/
20
44
45
deceleration reference
frequency
Second acceleration/
deceleration time
Second deceleration
time
Factory
Setting
60Hz 1 to 120Hz
5s 0 to 999s
- - -
Pr.20
Pr.7
Pr.44
Output frequency (Hz
Setting
Range
0 to 999s,
- - -
Running
frequency
Constant speed
Acceleration Deceleration
Acceleration
time
Setting is enabled when
Pr. 30 = "1".
Setting is enabled when
Pr. 30 = "1".
- - -:
acceleration time=
deceleration time.
Deceleration
time
Remarks
Setting is
enabled when
Pr. 30 = "1".
Time
Pr.8
Pr.45
2
FUNCTIONS
67

Explanation of functions (parameters)
<Setting>
•Use Pr. 7 and Pr. 44 to set the acceleration time required to reach the frequency set
in Pr. 20 from 0Hz.
•Use Pr. 8 and Pr. 45 to set the deceleration time required to reach 0Hz from the
frequency set in Pr. 20.
•Pr. 44 and Pr. 45 are valid when the RT signal is on. (When the RT signal is on, the
other second functions (Pr. 44, Pr. 45, Pr. 46, Pr. 47, additional parameter H7) are
also selected.)
•Set "- - -" in Pr. 45 to make the deceleration time equal to the acceleration time (Pr. 44).
CAUTION
1. In S-shaped acceleration/deceleration pattern A (refer to page 79), the set
time is the period required to reach the base frequency set in Pr. 3.
• Acceleration/deceleration time formula when the set frequency is the base
frequency or higher
t =
4
×
9
T
(Pr.3)
× f
2
5
2
+
T
9
T: Acceleration/deceleration time setting (s)
f : Set frequency (Hz)
•Guideline for acceleration/deceleration time at the base frequency of 60Hz
(0Hz to set frequency)
Frequency setting (Hz)
Acceleration/
deceleration time (s)
5 5 12
15 15 35
60 120
2. If the Pr. 20 setting is changed, the settings of calibration functions Pr. 38
and Pr. 39 (frequency setting signal gains) remain unchanged.
To adjust the gains, adjust calibration functions Pr. 38 and Pr. 39.
3. When the setting of Pr. 7, Pr. 8, Pr. 44 or Pr. 45 is "0", the acceleration/
deceleration time is 0.04s.
4. If the acceleration/deceleration time is set to the shortest value, the actual
motor acceleration/deceleration time cannot be made shorter than the
shortest acceleration/deceleration time which is determined by the
mechanical system's J (moment of inertia) and motor torque.
♦Related parameters♦
• Base frequency setting ⇒ Pr. 3 "base frequency" (refer to page 65)
• Acceleration/deceleration pattern, S-pattern acceleration/deceleration A
⇒ Pr. 29 "acceleration/deceleration pattern" (refer to page 79)
• Calibration function ⇒ Pr. 38 "frequency setting voltage gain frequency"
Pr. 39 "frequency setting current gain frequency" (refer to page 82)
• RT signal setting ⇒ Pr. 60 to Pr. 63 (input terminal function selection) (refer to page 98)
• Jog acceleration/deceleration time ⇒ Pr. 16 "jog acceleration/deceleration time"
(refer to page 74)
68

Explanation of functions (parameters)
2.3.6
Selection and protection of a motor (Pr. 9 , Pr. 71 , H7 )
Set the motor used and protect the motor from overheat.
This feature provides the optimum protective characteristics, including reduced
motor cooling capability, at low speed.
POINT
•When using the Mitsubishi constant-torque motor
Set "1" in Pr. 71 for V/F control or automatic torque boost control.
The electronic thermal relay function is set to the thermal characteristic of the
constant-torque motor.
•When you selected the Mitsubishi constant-torque motor, the values of the following
parameters are automatically changed. (only when the setting values of those
parameters are at factory setting)
Pr. 0 "torque boost", Pr. 12 "DC injection brake voltage"
Para
meter
Electronic thermal
9
O/L relay
71 Applied motor 0
H7
Second electronic
(559)
thermal O/L relay
Name
Factory
Setting
Rated output
current
- - -
Setting
Range
0 to 50A
0, 1,
100, 101
0 to 50A,
- - -
Remarks
- - -: Without second electronic
thermal relay function
Setting is
enabled
when
Pr. 30 = "1"
• The parameter number in parentheses is the one for use with the parameter unit (FR-PU04).
<Setting>
•Refer to the following list and set Pr. 71 according to the motor used.
Setting "100 or 101" changes thermal characteristic of the electronic thermal relay function
to thermal characteristics of a Mitsubishi constant-torque motor when the RT signal is ON.
Pr. 71 Setting Thermal Characteristic of the ElectronicThermal Relay Function
0, 100 Thermal characteristics of a standard motor
1, 101
•Set the rated current [A] of the motor in Pr. 9. (Normally set the rated current at 50Hz.)
•Setting "0" in Pr. 9 disables electronic thermal relay function (motor protective
function). (The protective function of the inverter is activated.)
•When setting second electronic thermal relay function, set the motor rated current
value in the additional parameter H7. The second electronic thermal relay function is
valid when the RT signal is on. (When the RT signal is on, other second functions
(Pr.44 to Pr.47) are also selected.)
CAUTION
•When two or more motors are connected to the inverter, they cannot be
protected by the electronic thermal relay function. Install an external thermal
relay to each motor.
•When a difference between the inverter and motor capacities is large and the
setting becomes less than half amount of the inverter rated current, the
protective characteristics of the electronic thermal relay function will be
deteriorated. In this case, use an external thermal relay.
•A special motor cannot be protected by the electronic thermal relay function.
Use an external thermal relay.
Thermal characteristics of a Mitsubishi constant-torque motor
(This provides a 100% continuous torque characteristic in the low-speed region.)
2
FUNCTIONS
69

Explanation of functions (parameters)
REMARKS
•When running two motors with one inverter, you can set the electronic thermal relay function
of each inverter.
First Motor Electronic Thermal Relay
Pr. 71
applied
motor
0
1
100
101
Pr. 9
setting
0
0.1 to 50A
0
0.1 to 50A
0
0.1 to 50A
0
0.1 to 50A
Function
RT = OFF RT = ON
standard
constant-
torque
standard
constant-
torque
standard ...................Thermal characteristic for
standard motor
constant-torque ........Thermal characteristic for
constant-torque motor
Second Motor Electronic Thermal
Relay Function
additional
parameter
RT = OFF RT = ON
H7 setting
- - -, 0
0.1 to 50A
- - 0
0.1 to 50A
- - -, 0
0.1 to 50A
- - 0
0.1 to 50A
- - -, 0
0.1 to 50A
- - 0
0.1 to 50A
- - -, 0
0.1 to 50A
- - 0
0.1 to 50A
standard
standard
standard
standard
constant-
torque
constant-
torque
constant-
torque
constant-
torque
..... Output current value is used to
perform integration processing.
..... Perform integration processing
using output current of 0A.
..... Electronic thermal relay function
is not activated (cumulative
value clear)
Set this parameter correctly according to the motor used.
Incorrect setting may cause the motor to overheat and burn.
CAUTION
70

Explanation of functions (parameters)
2.3.7 DC injection brake (Pr. 10 , Pr. 11 , Pr. 12 )
By setting the DC injection brake
voltage (torque), operation time
and operation starting frequency,
the stopping accuracy of
positioning operation, etc. or the
timing of operating the DC
injection brake to stop the motor
can be adjusted according to the
load.
Output frequency (Hz)
DC injection
brake voltage
Pr.12
"Operation
voltage"
Pr.11 "Operation time"
Pr.10
"Operation
frequency"
Time
Time
Parameter Name
10
11
12 DC injection brake voltage 6% 0 to 15%
* The factory setting varies according to the inverter capacity. (Refer to the following table for details.)
DC injection brake
operation frequency
DC injection brake
operation time
Factory
Setting
3Hz 0 to 120Hz
0.5s 0 to 10s
Setting
Range
Remarks
Setting is enabled when
Pr. 30 = "1".
(When Pr. 11 is set to "0s" or
Pr. 12 is set to "0%", DC
injection brake is not
operated.)
<Setting>
•Use Pr. 10 to set the frequency at which the DC injection brake operation is started.
•Use Pr. 11 to set the period during when the brake is operated.
•Use Pr. 12 to set the percentage of the power supply voltage.
•Change the Pr. 12 setting to 4% when using the inverter-dedicated (constant-torque
motor).
(If the Pr. 12 value remains unchanged from the factory setting and Pr. 71 is changed
to the setting for use of the constant-torque motor, the Pr. 12 setting is automatically
changed to 4%.)
.
CAUTION
Install a mechanical brake. No holding torque is provided.
2
FUNCTIONS
71

Explanation of functions (parameters)
2.3.8 Starting frequency (Pr. 13 )
The starting frequency at
which the start signal is
turned on can be set in the
range 0 to 60Hz.
Output frequency
(Hz)
Setting range
Pr.13
60
0
Frequency setting signal (V)
Time
Foward rotation
Parameter Name
13 Starting frequency 0.5Hz 0 to 60Hz Setting is enabled when Pr. 30 = "1".
Factory
Setting
Setting
Range
ON
Remarks
CAUTION
The inverter will not start if the frequency setting signal is less than the value
set in Pr. 13 "starting frequency".
For example, when 5Hz is set in Pr. 13, the motor will not start running until the
frequency setting signal reaches 5Hz.
CAUTION
Note that when Pr. 13 is set to any value lower than Pr. 2 "minimum
frequency", simply turning on the start signal will run the motor at the
preset frequency even if the command frequency is not input.
♦Related parameters♦
• Minimum frequency setting ⇒ Pr. 2 "minimum frequency" (refer to page 64)
72

Explanation of functions (parameters)
2.3.9 Load pattern selection (Pr. 14 )
You can select the optimum output characteristic (V/F characteristic) for the
application and load characteristics.
Pr.14=0
For constant-torque
loads
(e.g. conveyor, cart)
100%
Output
voltage
Base frequency
Output frequency (Hz)
(Factory setting)
Parameter Name
14
Load pattern
selection
Pr.14=1
For variable-torque
loads
(Fan, pump)
100%
Output
voltage
Base frequency
Output frequency (Hz)
Factory
Setting
1 0, 1, 2, 3
Pr.0
Pr.46
Setting
Range
Pr.14=2
For lift
100%
Forward
rotation
Output
voltage
Reverse
rotation
Base frequency
Output frequency (Hz)
Boost for forward rotation
...Pr. 0 (Pr.46) setting
Boost for reverse rotation
...0%
Pr.0
Pr.46
Remarks
0: For constant-torque loads
1: For variable-torque loads
2: For vertical lift loads
3: For vertical lift loads
Pr.14=3
For lift
100%
Reverse
rotation
Output
voltage
Forward
rotation
Base frequency
Output frequency (Hz)
Boost for forward rotation
...0%
Boost for reverse rotation
...Pr. 0 (Pr.46) setting
Setting is
enabled when
Pr. 30 = "1".
CAUTION
1. When automatic torque boost control is selected, this parameter setting is
ignored.
2. Pr. 46 "second torque boost" is made valid when the RT signal turns on.
The RT signal acts as the second function selection signal and makes the
other second functions valid.
♦Related parameters♦
•
Automatic torque boost ⇒ Pr. 98 "automatic torque boost selection (motor capacity)"
(refer to page 121)
•Boost setting ⇒ Pr. 0 "torque boost", Pr. 46 "second torque boost" (refer to page 63)
•Assignment of RT signal to terminal when second torque boost is used
⇒ Pr. 60 to Pr. 63 (input terminal function selection) (refer to page 98)
2
FUNCTIONS
73

Explanation of functions (parameters)
2.3.10 Jog operation (Pr.15 , Pr.16 )
To start/stop jog operation in the
external operation mode, choose the
jog operation function in input terminal
function selection, turn on the jog
signal, and turn on/off the start signal
utput frequency (Hz)
Pr.20
Jog frequency
setting range
Pr.15
Forward
rotation
(STF, STR).
You can choose the jog operation
Pr.16
mode from the parameter unit (FRPU04) and perform jog operation
using the or .
FWD
REV
JOG signal
STF signal
ON
ON
(Can be read as the basic parameters when the FR-PU04 is connected.)
Set the frequency and acceleration/deceleration time for jog operation.
Parameter Name Factory Setting Setting Range Remarks
15 Jog frequency 5Hz 0 to 120Hz
16
Jog acceleration/
deceleration time
0.5s 0 to 999s
Setting is enabled when
Pr. 30 = "1".
CAUTION
•In S-shaped acceleration/deceleration pattern A, the acceleration/deceleration
time is the period of time required to reach Pr. 3 "base frequency", not Pr. 20
"acceleration/deceleration reference frequency".
•The acceleration time and deceleration time cannot be set separately for jog
operation.
•The Pr. 15 "Jog frequency" value should be equal to or higher than the Pr. 13
"starting frequency" setting.
•Assign the jog signal using any of Pr. 60 to Pr. 63 (input terminal function
selection).
♦Related parameters♦
Assignment of jog signal to terminal ⇒ Pr. 60 to Pr. 63 (input terminal function selection)
•
•Acceleration/deceleration pattern S-shaped acceleration/deceleration A
⇒ Pr. 29 "acceleration/deceleration pattern" (refer to page 79)
2.3.11 RUN key rotation direction selection (Pr.17 )
RUN
Used to choose the direction of rotation by operating the key of the operation
panel.
Parameter Name
17
RUN key rotation
direction selection
Refer to (page 65)
Refer to , (page 67)
(refer to page 98)
Factory
Setting
00, 1
Setting
Range
74
RUN
Remarks
0: Forward rotation
1: Reverse rotation
Setting is enabled
when Pr. 30 = "1".

Explanation of functions (parameters)
2.3.12 Stall prevention function and current limit function
(Pr. 21 )
You can make setting to prevent stall caused by overcurrent and/or to prevent the
inverter from resulting in an overcurrent trip (to disable high-response current
restriction that limits the current) when an excessive current flows due to sudden
load fluctuation or ON-OFF on the output side of a running inverter.
• Stall prevention
If the current exceeds the stall prevention operation level (Pr.22), the output
frequency of the inverter is automatically varied to reduce the current.
• High response current limit
If the current exceeds the limit value, the output of the inverter is shut off to
prevent an overcurrent.
Parameter Name
21
Pr. 21
Setting
016
117
218
319
420
521
622
723
824
925
10 26
11 27
12 28
13 29
14 30
15 31
* When "Operation not continued for OL signal
output" is selected, the "OLT" alarm code
(stopped by stall prevention) is displayed and
operation stopped.
(Alarm stop display " ")
Stall prevention
function selection
High
Response
Current
Limit
:
Activated
: Not
activated
Stall
Prevention
Operation
Selection
:
Activated
: Not
activated
speed
Constant
Acceleration
Factory
Setting
0 0 to 31, 100
OL Signal
Output
:
Operation
continued
:
Operation
not
continued
(*)
Deceleration
Setting
Range
Pr. 21
Setting
100
Regene
Setting is enabled when Pr. 30 =
"1".
High
Response
Current
Limit
:
Activated
:Not
activated
Driving
rative
Remarks
Stall
Prevention
Operation
Selection
:
Activated
:Not
activated
speed
Constant
Acceleration
OL Signal Output
:
Operation continued
:
Operation not
continued(*)
Deceleration
2
FUNCTIONS
75

Explanation of functions (parameters)
CAUTION
•If the load is heavy, the lift is predetermined, or the acceleration/deceleration
time is short, the stall prevention may be activated and the motor not stopped
in the preset acceleration/deceleration time. Therefore, set optimum values to
the Pr. 21 and stall prevention operation level.
•When the high response current limit has been set in Pr. 21 (factory setting),
torque will not be provided at the Pr. 22 setting of 170% or higher. At this time,
make setting so that the high response current limit is not activated.
•In vertical lift applications, make setting so that the high response current
limit is not activated. Torque may not be produced, causing a drop due to
gravity.
CAUTION
Always perform test operation.
Stall prevention operation performed during acceleration may increase the
acceleration time.
Stall prevention operation performed during constant speed may cause
sudden speed changes.
Stall prevention operation performed during deceleration may increase the
deceleration time, increasing the deceleration distance.
76

Explanation of functions (parameters)
2.3.13 Stall prevention (Pr. 22 , Pr. 23 , Pr. 28 )
Set the output current level (% value to the inverter rated current) at which the
output frequency will be adjusted to prevent the inverter from stopping due to
overcurrent etc.
During high-speed operation above the rated motor frequency, acceleration
may not be made because the motor current does not increase. To improve
the operating characteristics of the motor in this case, the stall prevention
level can be reduced in the high frequency region. This function is effective for
performing operation up to the high speed range on a centrifugal separator
etc. Normally, set 60Hz in Pr. 28 "stall prevention operation reduction starting
frequency" and 100% in Pr. 23.
Parameter Name
22
23
28
Stall prevention
operation level (%)
Stall prevention operation
level
Stall prevention operation
level compensation factor at
double speed
Stall prevention operation
reduction starting frequency
Pr.22
When
Pr.28
120Hz
="- - -"Pr.23
Pr.23
Output
frequency (Hz)
Factory
Setting
150% 0 to 200%
- - -
60Hz 0 to 120Hz
Reduction ratio
compensation factor (%)
Setting
Range
0 to 200%,
- - -
Setting example
(Pr.22=
150
112.5
90
75
Stall prevention
operation level (%)
Pr.23=100%, Pr.28= Hz)
0
- - -: Pr. 22
60
80100120
Remarks
equally
150%,
Setting is
enabled
when
Pr. 30 = "1".
60
Output
frequency (Hz)
<Setting>
•Generally, set 150% (factory setting) in Pr. 22 "stall prevention operation level".
Setting "0" in Pr. 22 disables stall prevention operation.
•To reduce the stall prevention operation level in the high frequency range, set the
reduction starting frequency in Pr. 28 "stall prevention operation reduction starting
frequency" and the reduction ratio compensation factor in Pr. 23.
Formula for stall prevention operation level
Stall prevention operation level (%) = A + B ×[
where, A =
•By setting "- - -" (factory setting) in Pr. 23, the stall prevention operation level is
constant at the Pr. 22 setting up to 120Hz.
Pr. 28 (Hz)
output frequency (Hz) 120Hz
× Pr. 22 (%)
, B =
77
Pr. 22-A
Pr. 22-B 100
Pr. 28 (Hz)
]×[
× Pr. 22 (%)
Pr. 23-100
2
]
FUNCTIONS

Explanation of functions (parameters)
REMARKS
When the high response current limit is set in Pr. 21 "stall prevention function selection"
(factory setting), do not set any value above 170% in Pr. 22. The torque will not be developed
by doing so.
If the Pr. 22 value is set to higher than 170%, make setting in Pr. 21 to disable the high
response current limit.
In vertical lift applications, make setting so the high response current limit is not activated.
Torque may not be produced, causing a drop due to gravity.
CAUTION
Do not set a small value as the stall prevention operation current. Otherwise,
torque generated will reduce.
Test operation must be performed.
Stall prevention operation during acceleration may increase the acceleration
time.
Stall prevention operation during constant speed may change the speed
suddenly.
Stall prevention operation during deceleration may increase the deceleration
time, increasing the deceleration distance.
to Refer to to (page 66)
78

Explanation of functions (parameters)
2.3.14 Acceleration/deceleration pattern (Pr. 29 )
Set the acceleration/deceleration pattern.
Set value 0
[Linear
acceleration/deceleration]
Output
frequency (Hz)
Parameter Name
29
Acceleration/
deceleration pattern
<Setting>
Pr. 29
Setting
0
1
2
Function Description
Linear
acceleration/
deceleration
S-pattern
acceleration/
deceleration A (*)
S-pattern
acceleration/
deceleration B
Time
Set value 1
[S-pattern
acceleration/deceleration A]
fb
Output
frequency (Hz)
Factory
Setting
0 0, 1, 2 Setting is enabled when Pr. 30 = "1".
Acceleration is made to the set frequency linearly.
(Factory setting)
For machine tool spindle applications, etc.
Used when acceleration/deceleration must be made in a short
time to a high-speed region of not lower than the base
frequency. Acceleration/deceleration is made in a pattern
where fb (base frequency) acts as the inflection point of an S
shape, and you can set the acceleration/deceleration time
which matches the motor torque reduction in the constantoutput operation region of not lower than the base frequency.
For prevention of load shifting in conveyor and other
applications. Since acceleration/deceleration is always made in
an S shape from f2 (current frequency) to f1 (target frequency),
this function eases shock produced at acceleration/
deceleration and is effective for load collapse prevention, etc.
Setting
Range
Time
[S-pattern
acceleration/deceleration B]
f1
f2
Output
frequency (Hz)
Remarks
Set value 2
Time
2
CAUTION
* As the acceleration/deceleration time, set the time taken to reach the Pr. 3
"base frequency" value, not the Pr. 20 "acceleration/deceleration reference
frequency" value.
♦Related parameters♦
Base frequency (acceleration/deceleration time setting) setting ⇒ Pr. 3 "base frequency"
•
• Pr. 20 "acceleration / deceleration reference frequency" ⇒ refer to page 67
• For setting of "1" (S-pattern acceleration/deceleration A)
⇒ Pr. 44 "second acceleration/deceleration time", Pr. 45 "second deceleration time" (refer to
page 67)
FUNCTIONS
(refer to page 65)
79

Explanation of functions (parameters)
2.3.15 Extended function display selection (Pr. 30 )
Used to display the extended function parameters.
Refer to page 48 for the extended function parameter list.
Refer to the instruction manual (basic) for the parameter setting method.
Parameter Name
30
Extended function
display selection
Factory
Setting
00, 1
Setting
Range
Remarks
0: Without display,
1: With display
2.3.16 Frequency jump (Pr. 31 to Pr. 36 )
When it is desired to avoid
resonance attributable to the
natural frequency of a
mechanical system, these
Pr.36
Pr.35
parameters allow resonant
frequencies to be jumped. Up
to three areas may be set,
Pr.34
Pr.33
with the jump frequencies set
to either the top or bottom
point of each area.
The value set to 1A, 2A or 3A
Pr.32
Pr.31
Running frequency (Hz)
is a jump point and operation
is performed at this frequency.
Parameter Name
31 Frequency jump 1A --- 0 to 120Hz,--32 Frequency jump 1B --- 0 to 120Hz,--33 Frequency jump 2A --- 0 to 120Hz,--34 Frequency jump 2B --- 0 to 120Hz,--35 Frequency jump 3A --- 0 to 120Hz,--36 Frequency jump 3B --- 0 to 120Hz,---
Factory
Setting
Setting Range Remarks
Frequency jump
2A
1B
1A
• - - -: Function invalid
•Setting is enabled when Pr.
30 = "1"
3B
3A
2B
<Setting>
•To fix the frequency at 30Hz between Pr. 33 and Pr. 34
(30Hz and 35Hz), set 30Hz in Pr. 33 and 35Hz in Pr. 34.
•To jump to 35Hz between 30 and 35Hz, set 35Hz in
Pr. 33 and 30Hz in Pr. 34.
CAUTION
During acceleration/deceleration, the running frequency within the set area is
valid.
REMARKS
Write disable error " " occurs if the frequency jump setting ranges overlap.
Pr.34:35Hz
Pr.33:30Hz
Pr.33:35Hz
Pr.34:30Hz
80

Explanation of functions (parameters)
2.3.17 Speed display (Pr. 37 )
You can change the output frequency indication or set frequency of the
operation panel and parameter unit (FR-PU04) to the motor speed or machine
speed.
Parameter Name
37 Speed display 0 0, 0.1 to 999
Factory
Setting
Setting
Range
0:Output
frequency
Remarks
Setting is enabled
when Pr. 30 = "1".
<Setting>
• To display the machine speed, set in Pr. 37 the machine speed for 60Hz operation.
CAUTION
•The motor speed is converted from the output frequency and does not match
the actual speed.
•When you want to change the monitor (PU main display) of the operation
panel, refer to Pr. 52 "operation panel display data selection" and
communication parameter n16 "PU main display screen data selection".
•Since the operation panel indication is 3 digits, make a setting so that the
monitor value does not exceed "999". If the Pr. 1 value is higher than 60Hz and
Pr. 1 value × Pr. 37 value > 60Hz × 999
(write error) occurs when Pr. 1 or Pr. 37 is written.
REMARKS
When the speed is set in Pr. 37 (Pr. 37 ≠ 0), the speed is monitored and displayed in the
monitor/frequency setting mode.
At this time, setting can be made in the minimum setting (display) increments of 0.01r/min.
Due to the limitations on the resolution of the set frequency, the indication in the second
decimal place may differ from the setting.
CAUTION
Make sure that the running speed setting is correct.
Otherwise, the motor might run at extremely high speed, damaging the
machine.
♦Related parameters♦
•
To choose running speed monitor display ⇒
• FR-PU04 display switching ⇒ Communication parameter n16 "PU main display screen data
selection" (refer to page 152)
Pr. 52 "operation panel display data selection"
(refer to page 90)
2
FUNCTIONS
81

Explanation of functions (parameters)
2.3.18 Biases and gains of the frequency setting voltage (current)
(Pr. 38 , Pr. 39 , C2 to C7 )
You can set the magnitude (slope) of the output frequency as desired in relation
to the external frequency setting signal (0 to 5V, 0 to 10V or 4 to 20mADC).
The "bias" and "gain" functions are used to adjust the relationship between the
input signal entered from outside the inverter to set the output frequency, e.g. 0
to 5V, 0 to 10V or 4 to 20mADC, and the output frequency.
Factory setting
( Pr.38 )
(Across
terminals
Output
frequency (Hz)
C2
0Hz( )
Parameter Name Factory Setting
38
39
C2 (902) *2
C3 (902) *2 Frequency setting voltage bias 0% *1 0 to 300%
C4 (903) *2 Frequency setting voltage gain 96% *1 0 to 300%
C5 (904) *2
C6 (904) *2 Frequency setting current bias 20% *1 0 to 300%
C7 (905) *2 Frequency setting current gain 100% *1 0 to 300%
*1.Factory settings may differ because of calibration parameters.
*2.The parameter number in parentheses is the one for use with the parameter unit (FR-PU04).
0V
(0% C3 *1)
Frequency setting voltage signal
Frequency setting voltage gain
frequency
Frequency setting current gain
frequency
Frequency setting voltage bias
frequency
Frequency setting current bias
frequency
(96% C4 *1)
2-5)
5V or 10V
Pr.73
( Pr.39 )
Output
frequency (Hz)
C5
0Hz( )
60Hz 1 to 120Hz
60Hz 1 to 120Hz
0Hz 0 to 60Hz
0Hz 0 to 60Hz
4mA
(20% C6 *1)
Frequency setting current signal
Factory setting
Setting
Range
(Across
terminals
4-5)
20mA
(100% C7 *1)
Remarks
Setting is enabled
when Pr. 30 = "1".
POINT
•Bias setting for 0-5VDC (0-10VDC) input Use calibration parameters C2, C3
•Gain setting for 0-5VDC (0-10VDC) input Use Pr. 38, calibration parameter
•Bias setting for 4-20mADC input Use calibration parameters C5, C6
•Gain setting for 4-20mADC input Use Pr. 39, calibration parameter
(For 4 to 20mADC input, set "4" in any of Pr. 60 to Pr. 63 (input terminal
function selection) and assign AU (current input selection) to any of terminals
RH, RM, RL and STR, and turn on the AU signal.)
for setting.
C4 for setting.
for setting.
C7 for setting.
82

Explanation of functions (parameters)
<Setting>
(1) How to change the highest frequency
(2) Adjusting the deviation of the highest frequency from the Pr. 38 (Pr. 39) setting.
(2)-1) Make adjustment with a voltage applied directly across terminals 2-5 (with a
current flowing across terminals 4-5)
(2)-2) Make adjustment at any point without a voltage applied across terminals 2-5
(without a current flowing across terminals 4-5)
Changing example When you want to use the 0 to 5VDC input frequency setting
potentiometer to change the 5V frequency from 60Hz(factory
setting) to 50Hz
POINT
•Pr. 38 is an extended function parameter. Pr. 30 must be set to "1".
•Change Pr. 38 "frequency setting voltage gain frequency" to 50Hz.
(1) How to change the highest frequency
DisplayOperation
Confirm the RUN indication and operation
1.
mode indication.
The inverter must be at a stop.
The inverter must be in the PU operation mode.
MODE
PU
EXT
(Press the .)
2.
Press the to choose the parameter
setting mode.
Turn the until the
3.
parameter number 38 "frequency
setting voltage gain frequency" appears.
Pr. 30 must be set to "1".
(For the Pr. 30 setting method, refer to
the instruction manual (basic).)
MODE
RUN
PU
EXT
The parameter
number read
previously
appears.
4.
Pressing the shows the currently
set value.
Turn the to change
5.
the set value to .
6. Press the to set the value.
SET
(60Hz)
"50.0" (50Hz)
SET
By turning the , you can read another parameter.
Press the to show the setting again.
Press the twice to show the next parameter.
The monitor/frequency setting indication cannot be changed to just 50Hz
... Why?
The calibration parameter C4 "frequency setting voltage gain" value must
be set. (Refer to next page (2).)
REMARKS
To change the value to more than 60Hz, Pr. 1 "maximum frequency" must be set to more than 60Hz.
SET
SET
SET
SET
Flicker ... Parameter setting complete!!
83
2
FUNCTIONS

Explanation of functions (parameters)
*
Changing example Changing the calibration parameter C4 "frequency setting
voltage gain" value
POINT
The calibration parameter C4 is an extended function parameter. Pr. 30 must be set to "1".
(2) Adjusting a deviation of the highest frequency from the Pr. 38 (Pr. 39) setting.
(2)-1 Making adjustment with a voltage applied directly across
terminals 2-5 (with a current flowing across terminals 4-5)
DisplayOperation
Confirm the RUN indication and operation
1.
mode indication.
The inverter must be at a stop.
The inverter must be in the PU operation mode.
MODE
PU
EXT
MODE
(Press the )
Press the to choose the parameter
2.
setting mode.
Turn the to show " ".
3.
Pr. 30 must be set to "1".
(For the Pr. 30 setting method, refer to
the instruction manual (basic).)
4.
Press the to show " ".
SET
SET
When adjusting Pr. 38
Turn the until the calibration
5.
parameter C4 "frequency setting
voltage gain" appears.
Press the to show the analog
6.
SET
voltage value (%).
Apply a 5V voltage.
7.
(Turn the external potentiometer
connected to across terminals 2-5 to
the maximum (any position).)
SET
5
6
4
7
3
2
8
1
9
10
*The value is nearly 100 (%) in the
maximum position of the potentiometer.
Analog voltage
value (%) across
terminals 2-5
*
CAUTION
After performing operation in step 7, do not touch the until completion of
calibration.
RUN
PU
EXT
The parameter
number read
previously
appears.
Press the to set the value.
8.
SET
• By turning the , you can read another parameter.
• Press the to return to the indication (step 4).
• Press the twice to show the next parameter ( ).
The frequency meter (indicator) connected to across terminals AM-5 does
not indicate just 50Hz ... Why?
The calibration parameter C1 "AM terminal calibration" value must be set.
(For the setting method, refer to the instruction manual (basic).)
When write is performed, an error ( ) is displayed.
The gain and bias frequency settings are too close.
SET
Flicker ... Parameter setting complete!!
(Adjustment complete)
*The value is nearly 100 (%) in the
maximum position of the potentiometer.
SET
SET
84

Explanation of functions (parameters)
(2)-2 Making adjustment at any point with a voltage not applied across
terminals 2-5 (without a current flowing across terminals 4-5)
DisplayOperation
1.
Confirm the RUN indication and operation
mode indication.
The inverter must be at a stop.
The inverter must be in the PU operation mode.
MODE
PU
EXT
(Press the )
2.
Press the to choose the parameter
setting mode.
Turn the to show " ".
3.
Pr. 30 must be set to "1".
(For the Pr. 30 setting method, refer to
the instruction manual (basic).)
MODE
RUN
PU
EXT
The parameter
number read
previously
appears.
4.
Press the to show " ".
SET
When adjusting Pr. 38
Turn the until the
5.
calibration parameter C4 "frequency
setting voltage gain" appears.
6.
Press the to show the analog
SET
voltage value (%).
(The maximum value can be displayed by
merely turning the clockwise or
counterclockwise in this status by one
pulse's worth of turns (there is tactile
feedback because of the notch type).)
Turn the to the maximum
7.
value (100%) or any point.
8.
Press the to set the value.
SET
SET
Current
SET
operation
Analog voltage
value (%)
*
*The value is 100 (%) in the
maximum position of the
potentiometer.
SET
*
2
Turn the to read another parameter.
Press the to return to the indication (step 4).
Press the twice to show the next parameter ( ).
REMARKS
For the way to change the output frequency setting of the frequency setting potentiometer,
refer to the instruction manual (basic).
Flicker ... Parameter setting complete!!
*The value is 100 (%) in the maximum
position of the potentiometer.
FUNCTIONS
SET
SET
85

Output terminal function parameters
2.3.19 Start-time ground fault detection selection (Pr. 40 )
You can choose whether to make ground fault detection at start valid or invalid.
Ground fault detection is executed only right after the start signal is input to the
inverter.
Protective function will not activate if a ground fault occurs during operation.
Parameter Name
Start-time ground
40
fault detection
selection
Factory
Setting
00, 1
Setting
Range
Remarks
0: Ground fault detection for
protection is not executed.
1: Ground fault detection for
protection is executed.
Setting is
enabled when
Pr. 30 = "1".
CAUTION
1. If a ground fault is detected with "1" set in Pr. 40, alarm output " " is
detected and the output is shut off.
2. If the motor capacity is less than 0.1kW, ground fault protection may not be
provided.
REMARKS
When a ground fault is detected with "1" set in Pr. 40, an approximate 20ms delay occurs at
every start.
2.4 Output terminal function parameters
2.4.1 Up-to-frequency (Pr. 41 )
The ON range of the up-tofrequency signal (SU) output
when the output frequency
reaches the running frequency
can be adjusted between 0 and
±100% of the running frequency.
This parameter can be used to
ensure that the running
frequency has been reached to
provide the operation start
signal etc. for related
equipment.
Output
Output signal
(SU)
Start signal
frequency (Hz)
OFF
Running
frequency
ON OFF
ON OFF
Adjustable
range
Pr.41
Time
Parameter Name
41 Up-to-frequency 10% 0 to 100% Setting is enabled when Pr. 30 = "1".
Use Pr. 64 or Pr. 65 (output terminal function selection) to assign the terminal used for
SU signal output.
CAUTION
Using Pr. 64 or Pr. 65 to change the terminal assignment may affect the other functions.
Please make setting after confirming the function of each terminal. (Refer to page 100.)
♦
Related parameters♦
• Assignment of SU signal to terminal ⇒ Pr. 64 "RUN terminal function selection", Pr. 65 "A, B, C
Factory
Setting
terminal function selection" (refer to page 100)
Setting
Range
86
Remarks

Output terminal function parameters
2.4.2 Output frequency detection (Pr. 42 , Pr. 43 )
The output frequency
detection signal (FU) is
output when the output
Forward
rotation
frequency reaches or
exceeds the setting. This
Output
Output
signal
FU
frequency (Hz)
ON
OFF OFF OFF
function can be used for
electromagnetic brake
operation, open signal, etc.
You can also set the
detection of the frequency
used exclusively for reverse
rotation.
This function is effective for switching the timing of electromagnetic brake
operation between forward rotation (rise) and reverse rotation (fall) during
vertical lift operation, etc.
Pr.42
Reverse
rotation
ON
Time
Pr.43
Parameter Name
42
43
Output frequency
detection
Output frequency
detection for reverse
rotation
Factory
Setting
6Hz 0 to 120Hz
- - -
Setting
Range
0 to 120Hz,
- - -
Remarks
- - -: Same as
Pr. 42 setting
Setting is
enabled when
Pr. 30 = "1".
<Setting>
Refer to the above chart and set the corresponding parameters.
•When Pr. 43 "output frequency detection for reverse rotation" ≠ "- - -", the Pr.42
setting applies to forward rotation and the Pr.43 setting applies to reverse rotation.
•Use Pr. 64 or Pr. 65 (output terminal function selection) to assign the terminal used
for FU signal output.
CAUTION
Using Pr. 64 or Pr. 65 to change the terminal assignment may affect the other
functions. Make setting after confirming the function of each terminal.
2
♦Related parameters♦
• Assignment of FU signal to terminal ⇒ Pr. 64 "RUN terminal function selection", Pr. 65 "A, B, C
, Refer to , (page 67).
Refer to (page 63).
Refer to (page 65).
terminal function selection" (refer to page 100)
87
FUNCTIONS

Current detection function parameters
2.5 Current detection function parameters
2.5.1 Output current detection functions
(Pr. 48 , Pr. 49 )
If the output remains higher than the
Pr. 48 setting during inverter operation
for longer than the time set in Pr. 49,
Output current
detection
signal (Y12)
100ms
OFF OFF
ON
the output current detection signal
(Y12) is output from the inverter's open
Pr.48
collector output or contact output
terminal.
Parameter Name
48
49
Output current
detection level
Output current
detection period
Output current
Factory
Setting
150% 0 to 200%
0s 0 to 10s
Setting
Range
Pr.49
Time
Remarks
Setting is enabled when
Pr. 30 = "1"
<Setting>
Parameter
Number
48
49
Set the output current detection level.
100% is the rated inverter current.
Set the output current detection period. Set the time from when the output
current has risen above the Pr. 48 setting until the output current detection
signal (Y12) is output.
Use Pr. 64 or Pr. 65 (output terminal function selection) to assign the terminal used for
Y12 signal output.
Description
CAUTION
•Once turned ON, when the output current has risen above the preset
detection level, the output current detection signal is held for at least 100ms
(approximately).
•Using Pr. 64 or Pr. 65 (output terminal function selection) to change terminal
assignment may affect the other functions. Make setting after confirming the
function of each terminal.
♦Related parameters♦
• Assignment of Y12 signal to terminal ⇒ Pr. 64 "RUN terminal function selection", Pr. 65 "A, B, C
terminal function selection" (refer to page 100)
88

Current detection function parameters
2.5.2 Zero current detection (Pr. 50 , Pr. 51 )
When the inverter's
output current falls
to "0[A]", torque will
not be generated.
This may cause a
gravity drop when
the inverter is used
in vertical lift
application.
Start signal
Output
current 0 [A]
Zero current
detection signal
output (Y13)
OFF
ON
Pr.50
OFF OFF
Pr.51
detection period
100ms
ON ON
Pr.50
"zero
current
detection
level"
Pr.51
detection period
To prevent this, the output current "zero" signal can be output from the inverter
to close the mechanical brake when the output current has fallen to "0[A]".
Parameter Name
50 Zero current detection level 5% 0 to 200%
51 Zero current detection period 0.5s 0.05 to 1s
Factory
Setting
Setting
Range
Remarks
Setting is enabled when
Pr. 30 = "1"
POINT
If the output is lower than the Pr. 50 setting for longer than the time set in Pr.
51 during inverter operation, the zero current detection (Y13) signal is output
from the inverter's open collector output terminal or contact output terminal.
<Setting>
Parameter Description
Set the zero current detection level.
50
51
Use Pr. 64 or Pr. 65 (output terminal function selection) to assign the terminal used for
Y13 signal output.
CAUTION
•If the current falls below the preset detection level but the timing condition is
not satisfied, the zero current detection signal is held on for about 100ms.
•When the terminal functions are changed using Pr. 64, Pr. 65, the other
functions may be affected. Please make setting after confirming the function
of each terminal.
•When running (connecting) multiple motors with one inverter in due order, the
zero current detection signal (Y13) may be output. Set 13% or more for the 0.1K
and 8% or more for the 0.2K.
(when the total capacity of motors is less than the zero current detection level
and the motor capacity per inverter is less than the zero current detection level)
Set the level of zero current detection in terms of the percentage of the rated
inverter current from the output current value of 0 [A].
Set the zero current detection period.
Set a period of time from when the output current falls to or below the Pr. 50
setting to when the zero current detection signal (Y13) is output.
2
FUNCTIONS
♦Related parameters♦
• Assignment of Y13 signal to terminal ⇒ Pr. 64 "RUN terminal function selection", Pr. 65 "A, B, C
terminal function selection" (refer to page 100)
89

Display function parameters
2.6 Display function parameters
2.6.1 Monitor display (Pr. 52 , Pr. 54 )
You can choose the display of the operation panel "monitor/frequency setting
screen".
Parameter Name
Operation panel
52
54
display data
selection
AM terminal function
selection
Factory
Setting
00, 1, 100
00, 1
Setting
Range
Remarks
Setting is enabled when Pr. 30 = "1"
POINT
You can also use the to change the display. (Refer to the instruction manual
•
SET
(basic) for the operation procedure.)
•The analog voltage output terminal AM is available for signal output. (Make
selection using the Pr. 54 "AM terminal function selection" value.)
<Setting>
Parameter Setting
Signal Type Unit
Output frequency Hz 0/100 0
Output current A 1 1
Pr. 52 Pr. 54
Operation panel
LED
AM terminal
When "100" is set in Pr. 52, the monitored values during stop and during operation
differ as indicated below.
Full-Scale Value of AM
Level Meter
Pr. 55 "frequency monitoring
reference"
Pr. 56 "current monitoring
reference"
During running/stop During stop During running
Output frequency Output frequency Set frequency Output frequency
REMARKS
•During an error, its definition appears.
•During reset, the values displayed are the same as during a stop.
•For selection of the parameter unit (FR-PU04) monitor display, refer to the communication
parameter n16 "PU main display screen data selection". (Page 152)
CAUTION
The unit displayed on the operation panel is only A and other units are not
displayed.
♦Related parameters♦
• Speed display ⇒ Pr. 37 "speed display" (refer to page 81)
• Adjustment of AM level meter full-scale value ⇒ Calibration parameter C1 "AM terminal
• Monitoring reference ⇒Pr. 55 "frequency monitoring reference", Pr. 56 "current monitoring
reference" (refer to page 92)
Pr. 52
0 100
calibration" (refer to page 126)
90
 Loading...
Loading...