

Mitsubishi Electric CR800-D, CR800-R, CR800-Q User Manual
Mitsubishi Electric Industrial Robot
BFP-A3625
CR800-D/R/Q series controller
Preventive Maintenance Function
User’s Manual

Safety Precautions
Always read the following precautions and the separate "Safety
Manual" before starting use of the robot to learn the required
measures to be taken.
CAUTION All teaching work must be carried out by an operator who has received special
training. (This also applies to maintenance work with the power source turned
ON.)
Enforcement of safety training
CAUTION For teaching work, prepare a work plan related to the methods and procedures of
operating the robot, and to the measures to be taken when an error occurs or
when restarting. Carry out work following this plan. (This also applies to
maintenance work with the power source turned ON.)
Preparation of work plan
WARNING Prepare a device that allows operation to be stopped immediately during teaching
work. (This also applies to maintenance work with the power source turned ON.)
Setting of emergency stop switch
CAUTION During teaching work, place a sign indicating that teaching work is in progress on
the start switch, etc. (This also applies to maintenance work with the power source
turned ON.)
Indication of teaching work in progress
DANGER Provide a fence or enclosure during operation to prevent contact of the operator
and robot.
Installation of safety fence
CAUTION Establish a set signaling method to the related operators for starting work, and
follow this method.
Signaling of operation start
CAUTION As a principle turn the power OFF during maintenance work. Place a sign
indicating that maintenance work is in progress on the start switch, etc.
Indication of maintenance work in progress.
CAUTION Before starting work, inspect the robot, emergency stop switch and other related
devices, etc., and confirm that there are no errors.
Inspection before starting work
The points of the precautions given in the separate "Safety Manual" are given below.
Refer to the actual "Safety Manual" for details.
DANGER When automatic operation of the robot is performed using multiple control devices
(GOT, programmable controller, push-button switch), the interlocking of operation
rights of the devices, etc. must be designed by the customer.
CAUTION Use the robot within the environment given in the specifications. Failure to do so
could lead to a drop or reliability or faults. (Temperature, humidity, atmosphere,
noise environment, etc.)
CAUTION Transport the robot with the designated transportation posture. Transporting the
robot in a non-designated posture could lead to personal injuries or faults from
dropping.
CAUTION Always use the robot installed on a secure table. Use in an instable posture could
lead to positional deviation and vibration.
CAUTION Wire the cable as far away from noise sources as possible. If placed near a noise
source, positional deviation or malfunction could occur.
CAUTION Do not apply excessive force on the connector or excessively bend the cable.
Failure to observe this could lead to contact defects or wire breakage.
CAUTION Set work masses, including hands, so as not to exceed the rated load or permitted
torque.
Exceeding either of these can cause an alarm or breakdown.
WARNING Securely install the hand and tool, and securely grasp the workpiece.
Failure to observe this could lead to personal injuries or damage if the object
comes off or flies off during operation.
WARNING Securely ground the robot and controller. Failure to observe this could lead to
malfunctioning by noise or to electric shock accidents.
CAUTION Indicate the operation state during robot operation. Failure to indicate the state
could lead to operators approaching the robot or to incorrect operation.
WARNING When carrying out teaching work in the robot's movement range, always secure
the priority right for the robot control. Failure to observe this could lead to personal
injuries or damage if the robot is started with external commands.
CAUTION Keep the jog speed as low as possible, and always watch the robot. Failure to do
so could lead to interference with the workpiece or peripheral devices.
CAUTION After editing the program, always confirm the operation with step operation before
starting automatic operation. Failure to do so could lead to interference with
peripheral devices because of programming mistakes, etc.
CAUTION Make sure that if the safety fence entrance door is opened during automatic
operation, the door is locked or that the robot will automatically stop. Failure to do
so could lead to personal injuries.
CAUTION Never carry out modifications based on personal judgments, or use non-
designated maintenance parts.
Failure to observe this could lead to faults or failures.
WARNING When the robot arm has to be moved by hand from an external area, do not place
hands or fingers in the openings. Failure to observe this could lead to hands or
fingers catching depending on the posture.
CAUTION Do not stop the robot or apply emergency stop by turning the robot controller's
main power OFF. If the robot controller main power is turned OFF during
automatic operation, the robot accuracy could be adversely affected. Moreover, it
may interfere with the peripheral device by drop or move by inertia of the arm.
CAUTION Do not turn off the main power to the robot controller while rewriting the internal
information of the robot controller such as the program or parameters. If the main
power to the robot controller is turned off while in automatic operation or rewriting
the program or parameters, the internal information of the robot controller may be
damaged.
DANGER Do not connect the Handy GOT when using the GOT direct connection function of
this product. Failure to observe this may result in property damage or bodily injury
because the Handy GOT can automatically operate the robot regardless of
whether
the operation rights are enabled or not.
DANGER Do not connect the Handy GOT to a programmable controller when using an iQ
Platform compatible product with the CR800-R/CR800-Q controller. Failure to
observe this may result in property damage or bodily injury because the Handy
GOT can automatically operate the robot regardless of whether the operation
rights are enabled or not.
DANGER Do not remove the SSCNET III cable while power is supplied to the multiple CPU
system or the servo amplifier. Do not look directly at light emitted from the tip of
SSCNET III connectors or SSCNET III cables of the Motion CPU or the servo
amplifier. Eye discomfort may be felt if exposed to the light.
(Reference: SSCNET III employs a Class 1 or equivalent light source as specified
in JIS C 6802 and IEC60825-1 (domestic standards in Japan).)
DANGER Do not remove the SSCNET III cable while power is supplied to the controller.
Do not look directly at light emitted from the tip of SSCNET III connectors or
SSCNET III cables. Eye discomfort may be felt if exposed to the light.
(Reference: SSCNET III employs a Class 1 or equivalent light source as specified
in JIS C 6802 and IEC60825-1 (domestic standards in Japan).)
DANGER Attach the cap to the SSCNET III connector after disconnecting the SSCNET III
cable. If the cap is not attached, dirt or dust may adhere to the connector pins,
resulting in deterioration connector properties, and leading to malfunction.
CAUTION Make sure there are no mistakes in the wiring. Connecting differently to the way
specified in the manual can result in errors, such as the emergency stop not being
released. In order to prevent errors occurring, please be sure to check that all
functions (such as the teaching box emergency stop, customer emergency stop,
and door switch) are working properly after the wiring setup is completed.
CAUTION Use the network equipments (personal computer, USB hub, LAN hub, etc)
confirmed by manufacturer. The thing unsuitable for the FA environment (related
with conformity, temperature or noise) exists in the equipments connected to USB.
When using network equipment, measures against the noise, such as measures
against EMI and the addition of the ferrite core, may be necessary. Please fully
confirm the operation by customer. Guarantee and maintenance of the equipment
on the market (usual office automation equipment) cannot be performed.
CAUTION To maintain the safety of the robot system against unauthorized access from
external devices via the network, take appropriate measures. To maintain the
safety against unauthorized access via the Internet, take measures such as
installing a firewall.
■ Revisions
Revision Date
Instruction Manual No.
Revision Details
BFP-A3625
• First print
2018-09-20
This indicates an item for which incorrect handling could present imminent
danger of death or serious injury.
This indicates an item for which incorrect handling could present a danger of
death or serious injury.
This indicates an item for which incorrect handling could present a danger of
injury. It could also present a danger of just physical damage.
• No part of this manual may be reproduced by any means or in any form, without prior consent from
Mitsubishi.
• The details of this manual are subject to change without notice.
• The specification value is based on our standard test method.
• An effort has been made to make full descriptions in this manual. However, if any discrepancies or
unclear points are found, please contact your dealer.
• This specifications is original.
• Company names and product names described in this document are trademarks or registered
trademarks of each company.
• and TM are omitted in the text of this guide.
Copyright(C) 2018 MITSUBISHI ELECTRIC CORPORATION ALL RIGHTS RESERVED
R
Warning
Danger
Caution
Introduction
Thank you for purchasing the Mitsubishi industrial robot "MELFA Smart Plus Card/Card Pack Option".
This instruction manual explains the "Preventive Maintenance Function" that can be used with the MELFA
Smart Plus Card/Card Pack Option.
This product provides features that support maintenance and inspection so that the robot can be used for a
long time without trouble.
Efficient maintenance is supported though notification of the time of maintenance parts replacement or
overhaul based on the actual operating status of the robot.
Furthermore, due to the feature of estimating the parts replacement time or the recommended
maintenance time, this function can be used for decision making on the maintenance cycle.
To ensure correct usage of the product, always read through this manual before starting to use
"Preventive maintenance function".
For details of basic robot operation, refer to the separate "Instruction Manual / Detailed Explanations of
Functions and Operations".
Notation method in this document

Contents
1. Before starting use ................................................................................................................................................................................................... 1
1.1 Contents of the instruction manual ........................................................................................................................................................... 1
1.2 Compatible products ......................................................................................................................................................................................... 2
1.3 Related manuals .................................................................................................................................................................................................. 3
1.4 Maintaining the robot ......................................................................................................................................................................................... 4
1.4.1 Type of maintenance and inspection ............................................................................................................................................... 4
1.4.2 Inspecting/replacing timing belt ........................................................................................................................................................... 5
1.4.3 Lubrication ....................................................................................................................................................................................................... 6
1.4.4 Replacing the battery ................................................................................................................................................................................ 7
1.4.5 About Overhaul ............................................................................................................................................................................................. 8
2. Basic specifications ................................................................................................................................................................................................. 9
2.1 Overview of basic specification of the preventive maintenance function .......................................................................... 9
2.1.1 Maintenance simulation ........................................................................................................................................................................... 10
2.1.2 Consumption degree calculation function ..................................................................................................................................... 12
2.1.3 Target models/target axes ..................................................................................................................................................................... 16
2.2 How to utilize the preventive maintenance function ........................................................................................................................ 18
3. Startup and initial settings .................................................................................................................................................................................... 20
3.1 Enabling the preventive maintenance function .................................................................................................................................. 21
3.2 Initial setting of the preventive maintenance function .................................................................................................................... 24
3.2.1 Setting how to notify .................................................................................................................................................................................. 24
3.2.2 Setting signals ............................................................................................................................................................................................... 25
3.3 Setting of maintenance simulation ............................................................................................................................................................ 26
4. Basic screen structure ............................................................................................................................................................................................ 30
5. Total score .................................................................................................................................................................................................................... 32
6. Consumption degree calculation function ................................................................................................................................................... 34
7. Operating information ............................................................................................................................................................................................. 37
8. Maintenance simulation ........................................................................................................................................................................................ 38
8.1 "1 Cycle" operation ............................................................................................................................................................................................. 40
8.2 Program operation .............................................................................................................................................................................................. 45
9. When consumption occurred ............................................................................................................................................................................. 50
9.1 Consumption Degree ........................................................................................................................................................................................ 50
9.1.1 Maintenance parts ...................................................................................................................................................................................... 50
9.1.2 Overhaul parts ............................................................................................................................................................................................... 51
9.1.3 Servo ON time ............................................................................................................................................................................................... 53
10. Maintenance ................................................................................................................................................................................................................ 54
10.1 Warning Pause ............................................................................................................................................................................................. 55
10.2 Maintenance Reset .................................................................................................................................................................................... 56
10.3 Backup and restore .................................................................................................................................................................................... 57
10.3.1 Backup (robot personal computer) .................................................................................................................................. 58
10.3.2 Restore (personal computer robot) ................................................................................................................................. 59
10.4 Maintenance Log ......................................................................................................................................................................................... 60
10.4.1 Maintenance Log screen ............................................................................................................................................................. 60
10.4.2 Data to be recorded in the maintenance log .................................................................................................................... 61
11. Batch management of maintenance information .................................................................................................................................... 62
11.1 Functional overview ................................................................................................................................................................................... 62
11.2 Output data ..................................................................................................................................................................................................... 63
11.3 Request ID (MelfaRXM.ocx) specified by RequestService ................................................................................................. 64
12. Robot (system) status variables ....................................................................................................................................................................... 66
12.1 Robot (system) status variable list .................................................................................................................................................... 66
Consumption degree calculation function .................................................................................................................................................. 66
MELFA Smart Plus ..................................................................................................................................................................................................... 68
12.2 Consumption degree calculation function ..................................................................................................................................... 69
12.2.1 Serial number ..................................................................................................................................................................................... 69
12.2.2 Operating information .................................................................................................................................................................... 71
12.2.3 Maintenance Log .............................................................................................................................................................................. 77
12.2.4 Consumption degree ...................................................................................................................................................................... 89
12.2.5 Consumption status ........................................................................................................................................................................ 98
12.2.6 Notification ........................................................................................................................................................................................... 106

12.3 MELFA Smart Plus ..................................................................................................................................................................................... 112
12.3.1 MELFA Smart Plus card .............................................................................................................................................................. 112
13. Parameter ...................................................................................................................................................................................................................... 114
13.1 Common to preventive maintenance functions .......................................................................................................................... 114
13.2 Consumption degree calculation function ..................................................................................................................................... 115
13.2.1 Setting parameters .......................................................................................................................................................................... 115
13.2.2 Data acquisition parameter ........................................................................................................................................................ 116
13.2.3 Operation parameters ................................................................................................................................................................... 120
14. Dedicated input/output signals .......................................................................................................................................................................... 126
14.1 Consumption degree calculation function ..................................................................................................................................... 126
15. Troubleshooting ......................................................................................................................................................................................................... 130
15.1 Error number list .......................................................................................................................................................................................... 130
15.1.1 Common to preventive maintenance functions .............................................................................................................. 130
15.1.2 Consumption degree calculation function .......................................................................................................................... 131
15.1.3 MELFA Smart Plus card .............................................................................................................................................................. 134
Chapter
Title
Description
1
Before starting use
Explains the structure of this manual, products compatible
with this function, related manuals, and
maintenance/inspection.
2
Basic specifications
Explains the specification of the preventive maintenance
function.
3
Startup and initial settings
Explains how to start the preventive maintenance function
and the initial setting method.
4
Basic screen structure
Each preventive maintenance function is explained using
examples of the RT ToolBox3 Preventive Maintenance
screens.
5
Total score
6
Consumption degree
calculation function
7
Operating information
8
Maintenance simulation
9
When consumption occurred
Explains actions to take when consumption is detected.
10
Maintenance
Explains pause of warning occurrence related to this
function and operation at the time of maintenance using
examples of the RT ToolBox3 Preventive Maintenance
screens.
11
Batch management of
maintenance information
Explains how to collectively manage maintenance
information of the entire production line with the host
system.
12
Robot (system) status
variables
Explains robot (system) status variables, parameters, and
dedicated input/output signals related to the preventive
maintenance function.
13
Parameter
14
Dedicated input/output signals
15
Troubleshooting
Explains error details related to the preventive
maintenance function and actions to take.
1. Before starting use
1.1 Contents of the instruction manual
This function can be used with the RT ToolBox3 Preventive Maintenance screen, parameters, status
variables, and dedicated input/output signals.
In this manual, the following structure is used to explain how the preventive maintenance function using
examples of the RT ToolBox3 Preventive Maintenance screens.
For functions and operation methods provided in the standard robot controller, refer to the "Instruction
Manual" supplied for the robot controller.
Before starting use 1
1.2 Compatible products
Item
Description
Remarks
1)
Robot arm
Vertical multi-joint
type RV-FR series
RV-2FR series,
RV-4FR series,
RV-7FR series,
RV-13FR series,
RV-20FR series
Standard model
6-axis robot only
Horizontal multi-joint
type RH-FR series
RH-3FRH series,
RH-6FRH series,
RH-12FRH series,
RH-20FRH series,
RH-3FRHR series
Standard model only
2)
Robot controller
CR800-D
Ver.A3 or later
CR800-R
Ver.A3 or later
CR800-Q
Ver.A3 or later
3)
Robot total engineering
support software
(Note 1)
RT ToolBox3
Ver.1.30G or later
Robot program
language:
MELFA-BASIC VI
RT ToolBox3 mini
(Note 2)
Ver.1.30G or later
RT ToolBox3 Pro
Ver.1.30G or later
4)
Function expansion card
MELFA Smart Plus
Card Pack
(Note 3)
A type (2F-DQ510)
AB type (2F-DQ520)
Either one
MELFA Smart Plus
Card
(Note 3)
A type (2F-DQ511)
Vertical multi-joint type
Horizontal multi-joint type
2) Robot controller
CR800 series
3) Robot total engineering support software
4) Function expansion card
1) Robot arm
RT ToolBox3
The following products are compatible with this function.
Note 1) Must be purchased separately.
Note 2) When RT ToolBox3 mini is used, simulation on RT ToolBox3 cannot be used.
Note 3) In this instruction manual, "MELFA Smart Plus card" may be used as the general term for MELFA
Smart Plus card pack and MELFA Smart Plus card.
Before starting use 2
Manual name
Description
Robot Arm Setup & Maintenance
Explains the procedures required to operate the robot arm
(unpacking, transportation, installation, confirmation of operation),
and the maintenance and inspection procedures.
Detailed explanations of functions
and operations
Explains details on the functions and operations such as each
function and operation, commands used in the program,
connection with the external input/output device, and parameters,
etc.
CR800 Series Controller Instruction
Manual
Troubleshooting
Explains the causes and remedies to be taken when an error
occurs. Explanations are given for each error No.
RT ToolBox3 / RT ToolBox3 mini
User's Manual
The operation manuals for the robot total engineering support
software "RT ToolBox3", "RT ToolBox3 mini", "RT ToolBox3 Pro"
(Option).
MELFA Smart Plus User’s Manual
Describes the installation method and setting method of MELFA
Smart Plus card (Option).
Communication Middleware Manual
(MelfaRXM.ocx)
The operation manual for ActiveX controller "MelfaRXM.ocx" that
communicates with the robot controller.
Ethernet Function Instruction
Manual
The operation manual for the Ethernet function that enables
Ethernet communication with PCs using the TCP/IP protocol.
Also, explains the SLMP connection.
1.3 Related manuals
The following manuals are related to the preventive maintenance function.
Before starting use 3
1.4 Maintaining the robot
No.
Type of inspection and
maintenance works
Description
Operating
time
(Note1)
1
Daily inspection
Inspection works to be performed every day
before starting operation for the safe use of the
robot.
2
Periodic
inspection
Monthly
inspection
Inspection and maintenance works to be
performed every month.
Every 300 hr
3
6-month
inspection
Inspection and maintenance works to be
performed every 6 months.
Every 1,800 hr
4
2-year
inspection
Inspection and maintenance works to be
performed every 2 years.
Every 7,200 hr
5
Battery
replacement
Replacement of the backup battery of the robot.
Replace the battery every year regardless of
the operating hours.
6
Lubrication
Lubrication of each axis of the robot.
Refer to "1.4.3 Lubrication" for the lubrication
schedule.
This function supports maintenance and inspection so that the robot can be used for a long time without
trouble.
Efficient maintenance is supported though notification of the time of maintenance parts replacement or
overhaul based on the actual operating status of the robot. However, in order to prevent failure
beforehand and ensure prolonged service life and safety of the robot, we strongly recommend periodic
maintenance and inspection be carried out.
This chapter explains maintenance and inspection of parts that are subject to this function.
For details on robot inspection items, implementation time of periodic inspection, calculation of operating
time, and maintenance and inspection procedures, refer to "5. Maintenance and Inspection" in the
separate volume "Instruction Manual/Robot Arm Setup & Maintenance".
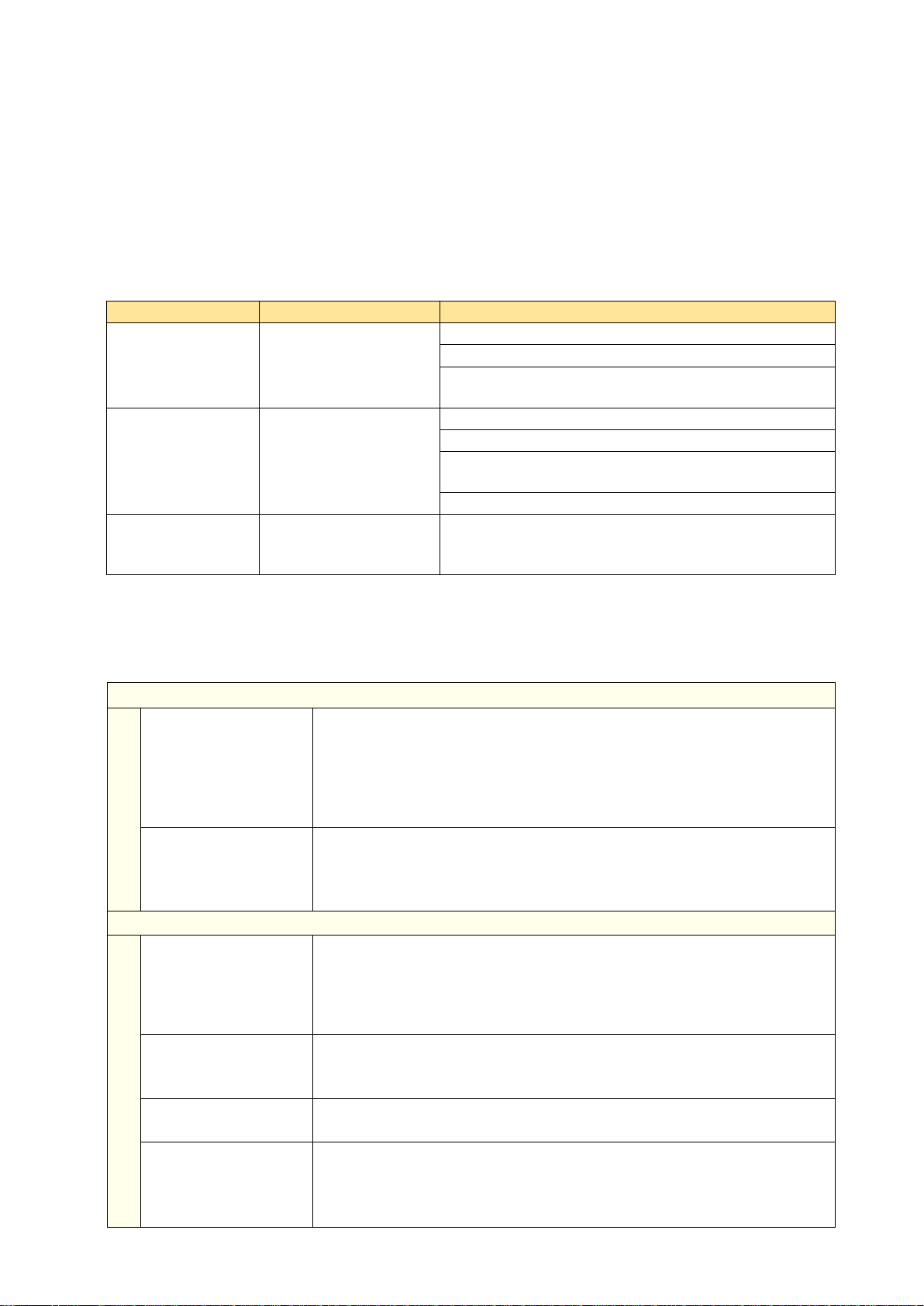
1.4.1 Type of maintenance and inspection
There are two types of maintenance and inspection, daily inspection and periodic inspection.
The following table shows the type of maintenance and inspection.
Type of maintenance and inspection
Note 1) Robot operating hours are based on 15 hours/day, 20 days/month. If the robot operates 8
hours/day, the operation hours per month are about half the above condition. Therefore,
monthly inspection shall be performed once every two months.
Before starting use 4
The timing belt can be replaced by customers; however, if adjustment is not
appropriate, it could lead to failure of related parts. When the timing belt needs to be
replaced, we recommend that you contact our Mitsubishi Service Department to
request replacement.
If you need to remove the timing belt for repair and others, measure the tension
before removing the belt.
When installing the belt, make sure to install with the same degree of tension as
before removal.
Failure to do so could shorten the service life of the belt and related parts.
Caution
Caution
1.4.2 Inspecting/replacing timing belt
This robot uses a timing belt for the drive conveyance system.
Compared to gears and chains, the timing belt does not require lubrication and has a low noise. However,
if the belt usage method and tension adjustment are inadequate, the life could drop and noise could be
generated. depending on the robot working conditions, elongation will occur gradually over a long time.
The tension must be confirmed during the periodic inspection.
The inspection/replacement method of the timing belt differs depending on the model. Perform
inspection/replacement by referring to "5. Maintenance and Inspection" in the separate volume
"Instruction Manual/Robot Arm Setup & Maintenance".
Timing belt replacement period
The timing belt life is greatly affected by the robot working conditions, so a set time cannot be given.
However, if the following symptoms occur, replace the belt.
1) The belt tension value becomes less than the guideline value.
2) Position mismatch or gear teeth skipping occurs.
3) Cracks or wear occurs on the belt.
4) The tooth bottom of the belt is worn out and the core is exposed.
Before starting use 5
1.4.3 Lubrication
Robot type
Lubrication interval
RV-2FR / RV-2FRL
All axes: 6,000 hr
RV-4FR / RV-4FRL
RV-7FR / RV-7FRL
All axes: 24,000 hr
RV-7FRLL
RV-13FR / RV-13FRL
RV-20FR
J1 axis to J3 axis: 20,000 hr
J4 axis to J6 axis: 24,000 hr
RH-3FRH series
RH-6FRH series
RH-12FRH series
RH-20FRH series
J1 axis to J2 axis: 24,000 hr
Shaft part (ball screw / spline): 2,000 km/travel
RH-3FRHR series
J1 axis to J2 axis: 6,000 hr
Shaft part: 2,000 km/travel
• The lubrication intervals are the cumulative value of operation at maximum speed. In
case of intermittent operation or slow specified speed, the lubrication interval can be
• Since the lubrication interval changes depending on the operation status of the
• Avoid excessive lubrication as it could cause grease leakage. Also, lubrication shall
Caution
Grease is used for the reduction gears of the robot. Grease has various roles, such as suppressing of
wear of reduction gears, removal of frictional heat, and prevention of burn-in.
If you use a robot for a long period of time, the grease will deteriorate due to loads during operation
(operating speed, operation frequency, heat generation condition, and others.). Degraded grease loses
initial performance and adversely affects machine service life.
Therefore, periodic replacement of grease is essential.
Lubrication intervals, lubrication locations, lubrication specifications and lubrication methods for grease
are different for each model.
Lubricate the robot before the lubrication interval shown in the following table elapses.
In addition, before the servo ON time reaches the specified hours (24,000 hours), overhaul work to
replace the grease inside the robot is necessary.
If it is unavoidable that overhaul cannot be performed at the specified interval, lubricate at the lubrication
intervals shown in the following table.
For details on overhaul, refer to "1.4.5 About Overhaul".
Refer to "5. Maintenance and Inspection" in the separate volume "Instruction manual/Robot Arm Setup &
Maintenance" for lubrication locations, lubrication specifications, and lubrication methods.
Lubrication interval
extended accordingly.
robot, make decisions as necessary so that grease will not run out.
be performed a maximum of three times. For maintenance after that, overhaul work
is required to replace the grease inside.
Before starting use 6

1.4.4 Replacing the battery
An absolute encoder is used for the position detector, so while power of controller is turned off the
position must be saved by the backup battery. These batteries are installed when the robot is shipped
from the factory, but as these are consumable parts, they must be replaced periodically by the customer.
The guideline for replacing the battery is one year, but this will differ according to the robot's usage state.
When a battery-related error occurred, replace the battery of the robot arm.
The robot arm battery replacement method differs depending on the model. Refer to "5. Maintenance and
Inspection" in the separate volume "Instruction Manual/Robot Arm Setup & Maintenance".
Before starting use 7
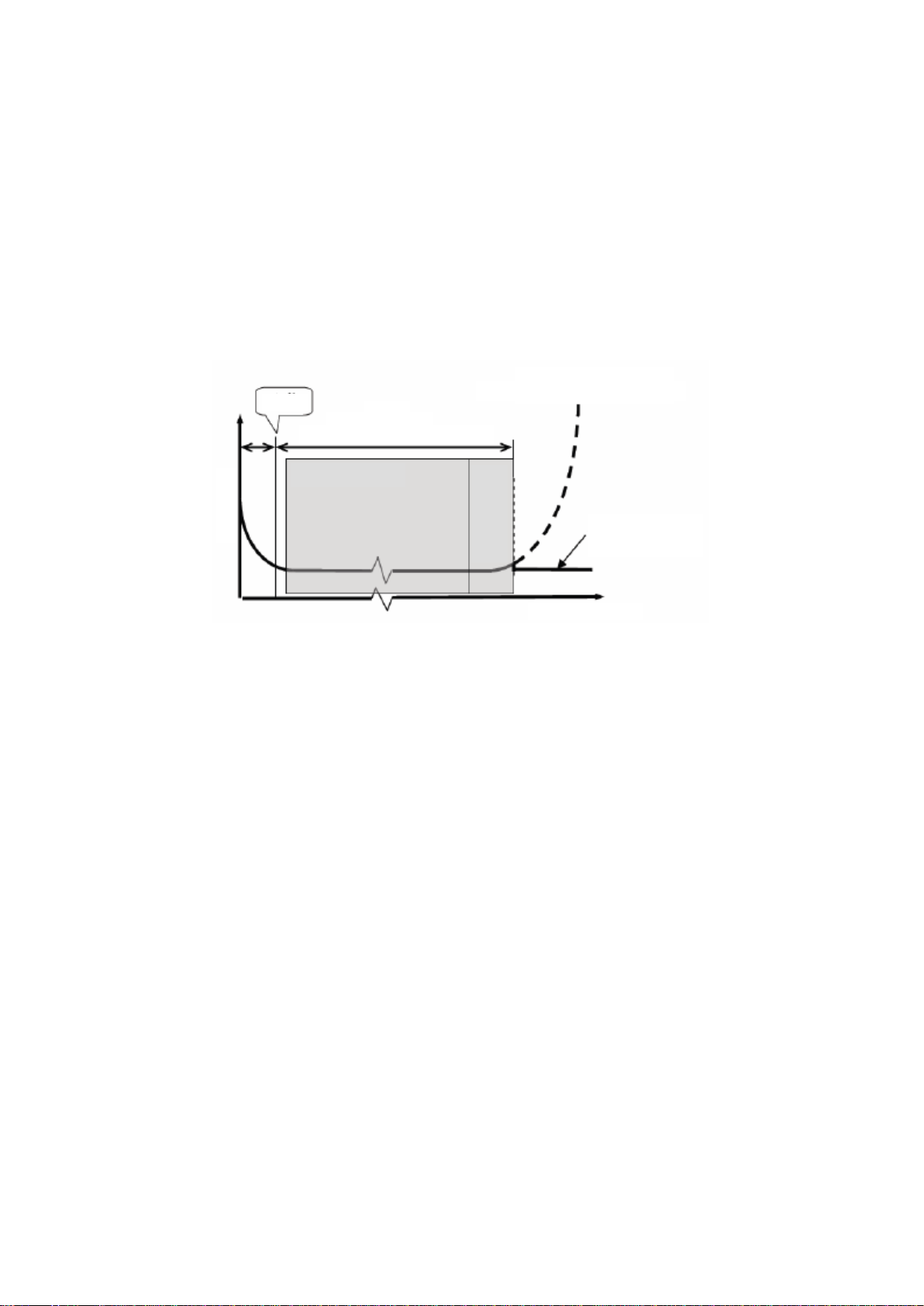
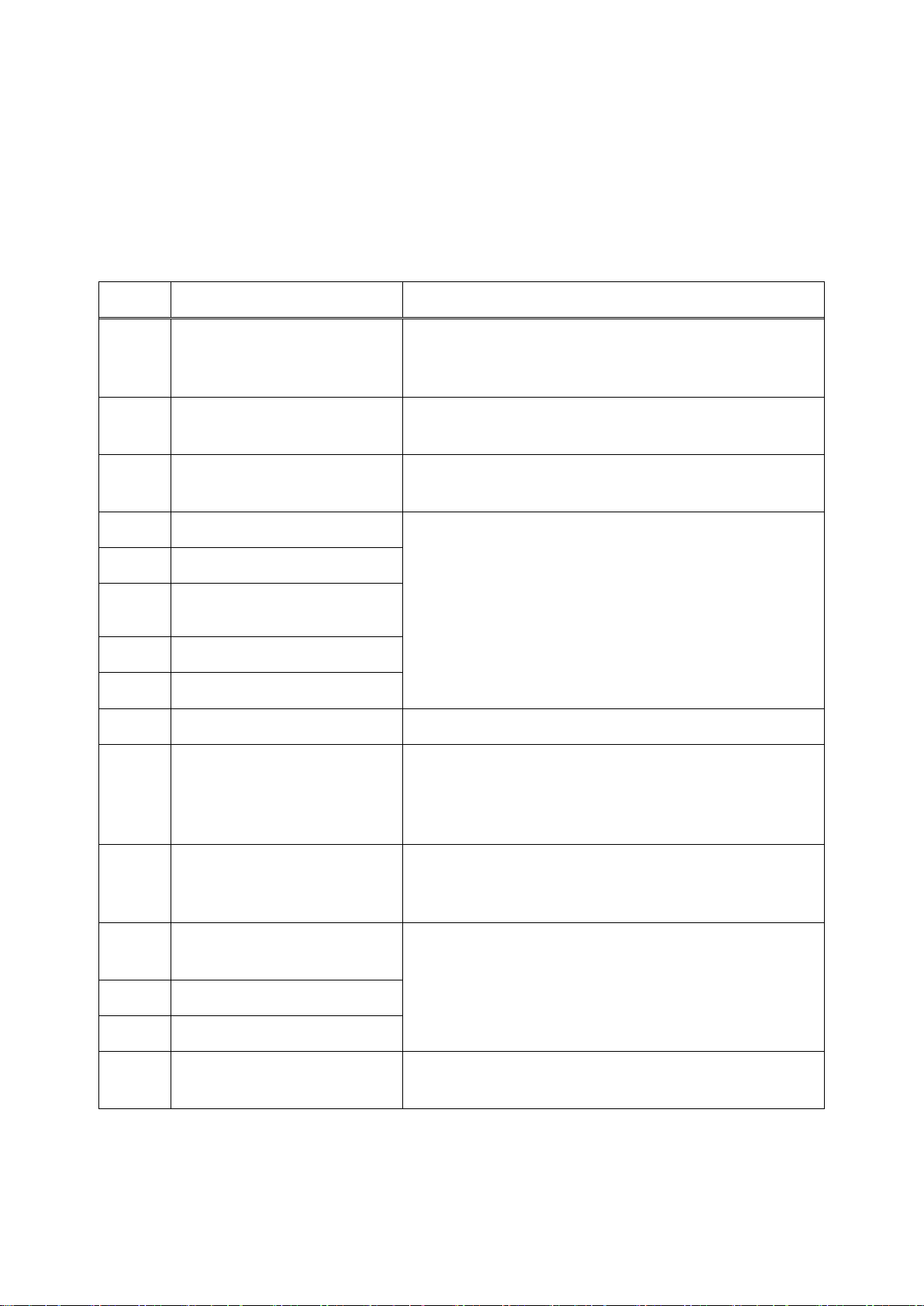
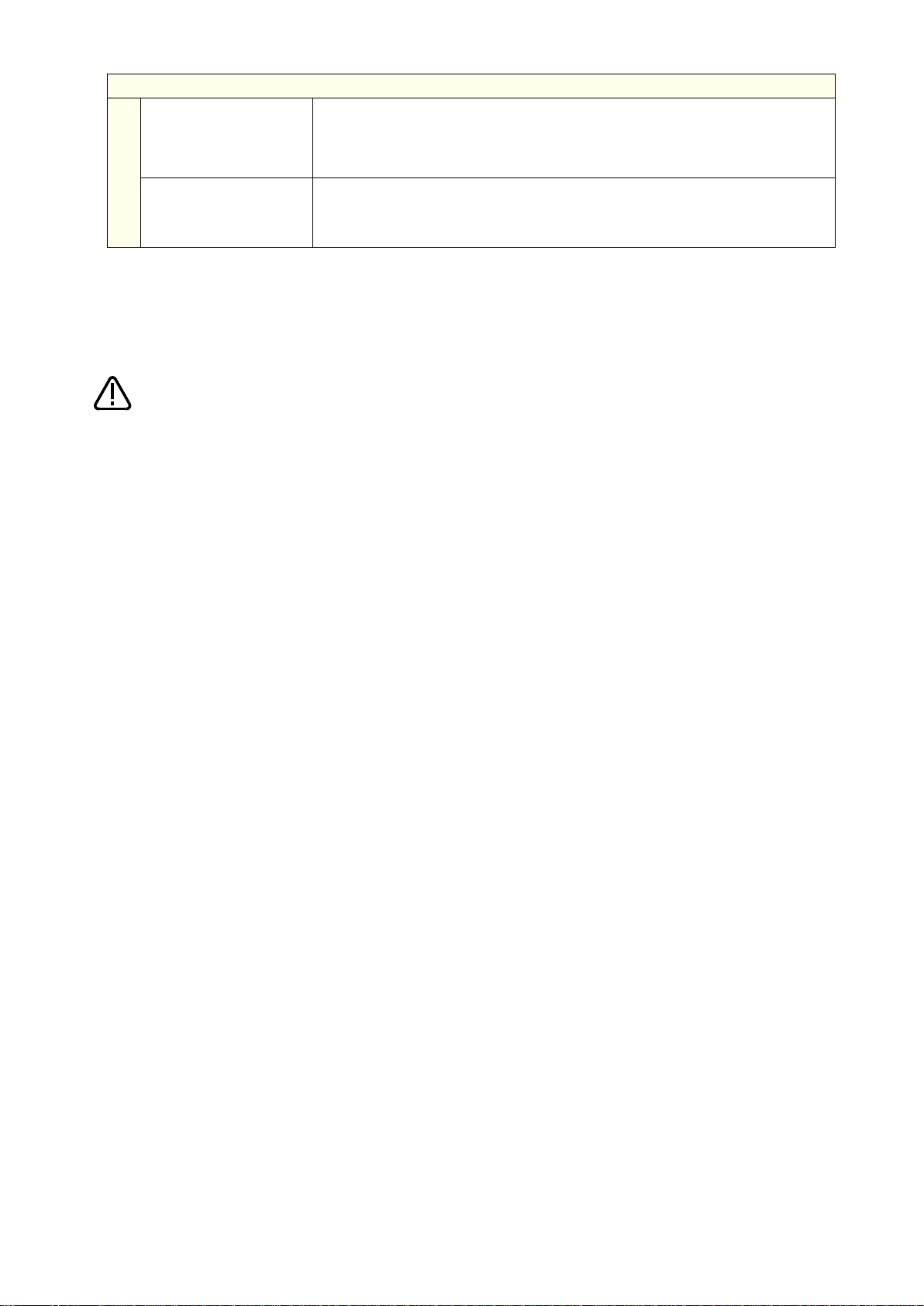
1.4.5 About Overhaul
Predetermined time period
If overhaul is not performed
If overhaul is performed
Servo-on time
Failure rate
λ
Periodic inspection
Overhaul
Shipment
Robots which have been in operation for an extended period of time can suffer from wear and other forms
of deterioration. In regard to such robots, we define overhaul as an operation to replace parts running out
of specified service life or other parts which have been damaged, so that the robots may be put back in
shape for continued use.
As a rule of thumb, it is recommended that overhaul be carried out before the total amount of servo-on
time reaches the specified time (24,000 hours for the robot arm and 36,000 hours for the controller).
(Refer to the figure below.)
However, the degree of the equipment's wear and deterioration presumably varies depending on their
operating conditions. Especially for operation with high load and frequency, the maintenance cycle may
be shorter.
Before starting use 8
Function
Overview
1
Maintenance
simulation
Using the real machine or simulations on RT ToolBox3, this function
estimates the parts replacement time or the recommended maintenance
time when specific motion patterns are repeated.
This can be used for pre-study of maintenance cycles or parts-friendly
operation verification of robots.
(Refer to "8 Maintenance simulation".)
2
Consumption
degree calculation
function
This function calculates the consumption degree [%] of robot components
based on the actual operating status (motor speed, load status, and
others), and displays/notifies the period up to maintenance/inspection or
overhaul.
This supports efficient maintenance through notification of maintenance
timing and deciding the maintenance priority order.
<Target parts>
Maintenance parts : Grease, timing belt
Overhaul parts : Reduction gear, bearing, ball screw, ball spline
(Refer to "6 Consumption degree calculation function ".)
The consumption degree of the robot arm is saved in the robot controller, thus it is
necessary to use the correct combination of the robot arm and robot controller.
To replace the robot arm or robot controller only, perform backup/restore of
preventive maintenance information to migrate the preventive maintenance
information.
(For backup/restore, refer to "
When using this function by upgrading from a non-compatible controller software
version to a compatible controller software version, the consumption degree during
the period of the non-compatible software version is not added up, thus the result of
consumption degree calculation function cannot be the correct value.
Caution
2. Basic specifications
2.1 Overview of basic specification of the preventive maintenance function
The preventive maintenance function roughly consists of the following two functions.
The maintenance simulation can be checked on the preventive maintenance function screen of
RT ToolBox3.
Information on preventive maintenance by the consumption degree calculation function can be checked
on the Preventive Maintenance screen, status variables, and parameters of RT ToolBox3. The following
features are also available.
• Allows preventive maintenance information to be output to the host system of your production line and
collectively managed.
(Compatible with MelfaRXM.ocx and SLMP)
• If you are using a CR800 series Ver.A3 or later robot controller, by enabling this function using the
MELFA Smart Plus card, this function can be used by taking over the previous consumption degree
even during operation of the robot. (For compatible cards, refer to "1.2 Compatible products , 4) Function
extension card".)
10.3 Backup and restore".)
Basic specifications 9
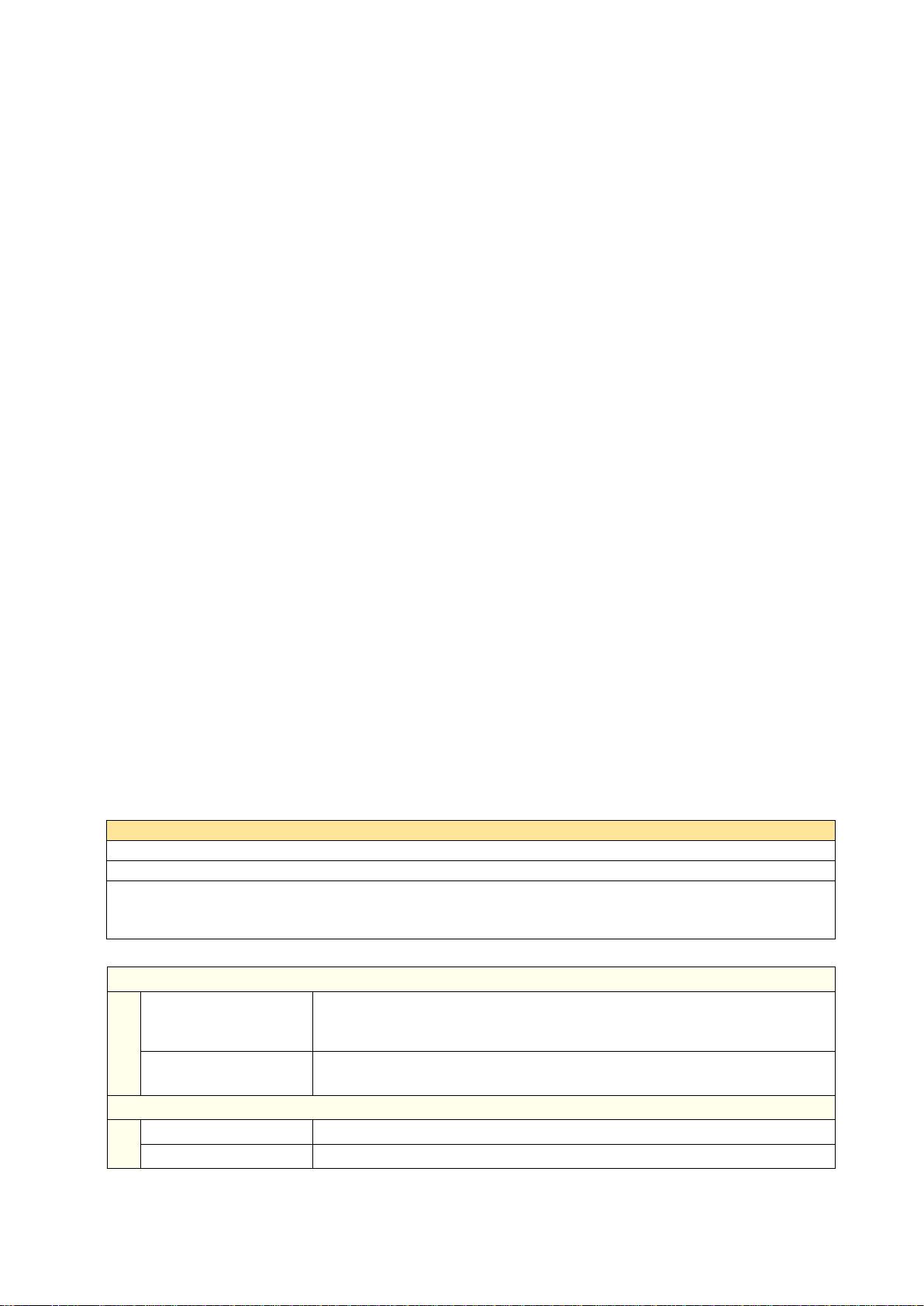
2.1.1 Maintenance simulation
Output data
Number of years up to the time of replenishing grease (for each joint axis)
Number of years up to the time of timing belt replacement (for each joint axis)
Number of years up to the recommended maintenance time for overhaul parts (for each joint axis)
(Of reduction gear, bearing, ball screw, and ball spline, the part for which there is the shortest number of years of
maintenance)
Estimation method
Real machine (online)
· Program operation
· Estimates the number of years from the current consumption degree of the
robot.
Simulation
· 1 Cycle operation, Program operation
· Estimates the number of years from the brand new robot state.
Usage
Usage
RT ToolBox3 Preventive Maintenance screen (Refer to 8.Maintenance simulation)
Setting item
· Operation hours per day, operation days per month
Using the real machine (online) or simulations on RT ToolBox3, this function estimates the parts
replacement time or the recommended maintenance time when specific motion patterns (robot
programs) are repeated.
Maintenance simulation estimates the following items.
1) Number of years up to the time of replenishing grease
2) Number of years up to the time of timing belt replacement
3) Recommended number of years up to the maintenance time for overhauling parts
(Of reduction gear, bearing, ball screw, and ball spline, the part for which there is the shortest
number of years of maintenance)
There are two types of estimation methods, "Program operation" and "1 Cycle operation".
For the real machine (online), estimation is possible using "Program operation", and for simulation, in
addition to "Program operation", "1 Cycle operation" can also be used.
•1 Cycle operation: Specify the start line and end line of the robot program to estimate the parts
replacement/ the recommended maintenance time based on its 1 cycle operation
pattern.
Because 1 cycle can be accurately specified on a robot program, it is possible to
more accurately estimate the number of years when 1 cycle operation is repeated
than when using Program operation.
The estimation result of the number of years is from the brand new robot state.
• Program operation: While running a robot program automatically, the parts replacement/ the parts
replacement/ the recommended maintenance time is estimated based on the
operation pattern from when the start button is pressed to when the end button is
pressed.
Accurate 1 cycle (start line and end line) cannot be specified but Program
operation is used when it is difficult to specify 1 cycle on the program, such as
when the program uses external signals.
The estimation result for a real machine (online) is the number of years from the
current consumption degree of the robot.
The estimation result for simulation is the number of years from the brand new
robot state.
* For models and joint axes subject to this function, refer to "2.1.3 Target models/target axes".
Basic specifications 10
When RT ToolBox3 mini is used, simulation on RT ToolBox3 cannot be used.
The recommended number of years up to the replacement/maintenance time output
by this function is the value calculated when the specified operation is repeated.
Also, the result may vary depending on the performance of the personal computer
used and the load status. The actual time changes depending on the actual
operating status or load status of the robot.
Use as reference values for planning of maintenance and inspection.
Correctly set hand work conditions (weight, center of gravity, shape) actually used. If
the settings differ from the actual robot settings, the consumption degree cannot be
calculated correctly.
Use parameters HNDDAT* and WRKDAT* to set hand work conditions and use
Loadset commands to specify hand work conditions.
For details of hand work condition setting, refer to the separate "Instruction
Manual/Detailed Explanations of Functions and Operations".
Do not use M_TIMER(8) while programming. This function uses M_TIMER(8) for the
estimation of parts replacement time and maintenance time. If M_TIMER(8) is used
while programming, the number of years of replacement and maintenance cannot be
estimated accurately.
After changing to M_TIMER(1) to M_TIMER(7), perform the maintenance simulation.
Caution
Note on 1 Cycle operation
(1) For command line that waits for signals to be input or robot status changes, use a comment to
set the stop time.
For a program waiting for input of signal from outside or change of the robot status variable, comment
out that portion and instead set a stop time (assumed) and specify the start line and end line including
that line.
(2) Use a program with no infinite loop.
A program that executes an infinite loop does not give the correct calculation result.
Check that the program is not an infinite loop in a FOR or GOTO statement.
(3) Include all instructions required for 1 cycle in the line selection range.
When selecting the start line and end line of a program, specify line numbers in such a way that all
instructions such as jump destinations of Gosub or hand word settings required for the robot to
perform 1 cycle operation are included in the range.
When sending/receiving external signals, set the stop time as a substitute for the signal
sending/receiving time and specify the line numbers including that line.
(4) About robot program "ESTPROG.prg"
When executing 1 cycle operation, "ESTPROG" is displayed as the robot program on the operating
panel.
This is a program that is automatically generated when 1 cycle operation is executed. After 1 cycle
operation, you can delete this program if it is unnecessary.
Basic specifications 11
2.1.2 Consumption degree calculation function
Target parts
Output data
Maintenance parts
Grease
Timing belt
Grease consumption degree [%] (for each joint axis)
Timing Belt consumption degree [%] (for each joint axis)
Total Score (Consumption Degree [%], Up to Maintenance
[h])*1
Overhaul parts
Reduction gear
Bearing
Ball screw/ball spline
Gear consumption degree [%] (for each joint axis)
Bearing consumption degree [%] (for each joint axis)
Ball Screw/Ball Spline consumption degree [%] (for each joint
axis)
Total Score (Consumption Degree [%])*2
Operating Information
-
Servo ON Time [h], Operation Time [h], Actual Operation
Time [h], Power ON Time [h], Servo ON Count [times], Motor
Cumulative Rotation Count [rotation] (for each joint axis)
Information confirmation
Information
· Consumption Degree: See above
· Up to Maintenance: See above (Total Score Maintenance Parts)
· Operating Information: See above
· [Consumption Status]: Existence of wear in each target part
· Maintenance Log: Log data under Maintenance Reset (date & time, parts, joint
axes)
Check method
RT ToolBox3 Preventive Maintenance screen (Refer to 5. Total score,
6 Consumption degree calculation function)
[Parameters] (Refer to 13.2.2 Data acquisition parameter.)
[Status Variable] (Refer to 12.2 Consumption degree calculation function)
Setting/operation
Setting item
· Notification Day setting: Warning Remaining Number of Days, Operation Time of
a Day, Notification Interval
· How to Notify setting (maintenance parts): Warning Occurrence, Signal Output
· How to Notify setting (overhaul parts): Warning Occurrence, Signal Output
· ["I/O Signals assignment"]
Setting method
RT ToolBox3 Preventive Maintenance screen (Refer to 3.2.1.Setting how to
notify)
[Parameters] (Refer to 13.2.1 Setting parameters.)
Operation item
· Maintenance Reset (reset of consumption degree)
· [Notification Pause]
Operation method
RT ToolBox3 Preventive Maintenance screen
(Refer to 10.1 Warning Pause, 10.2 Maintenance Reset)
[Parameters] (Refer to 13.2.3 Operation parameters.)
[I/O Signal]*1(Refer to 14 Dedicated input/output signals.)
This function calculates the consumption degree [%] of robot components based on the actual operating
status (motor speed, load status, and others), and calculates the period up to maintenance/inspection or
overhaul.
Consumption Degree [%] is calculated based on the recommended maintenance time of each part as 100
[%].
Beside consumption degree [%] of each robot component, the Total Score (Consumption Degree [%] and
Up to Maintenance) of maintenance parts (grease, timing belt), and the Total Score (Consumption
Degree [%]) of overhaul parts (reduction gear, bearing, ball screw, ball spline) are calculated, respectively
and are displayed on the comprehensive evaluation screen.
*1: Of the maintenance parts (grease, timing belt), the Consumption Degree [%] and Up to Maintenance
[h] of the part (joint axis) having the least remaining time are used.
*2: Of the overhaul parts (reduction gear, bearing, ball screw, ball spline), the Consumption Degree [%] of
the part (joint axis) having the least up to maintenance time is used.
Basic specifications 12
Notification
Notification content
· [Consumption Status] (maintenance parts): Output for each part, for each joint
axis
· [Consumption Status] (overhaul parts): Output for each part, for each joint axis
· Servo ON Time*2
Notification method
RT ToolBox3 Preventive Maintenance screen
*3
(3.2.1.Setting how to notify)
Warning Occurrence
*1
(Refer to 3.2.1.Setting how to notify)
Signal Output
*1
(Refer to 3.2.2 Setting signals.)
Caution
[About calculation of the consumption degree]
• The consumption degree of each part is calculated on the assumption that the robot
• The consumption degree of each part is used as a reference value for supporting the
maintenance and inspection schedule calculated based on the robot operating status.
• Irrespective of the consumption degree, carry out daily inspection and periodic
• When the servo ON time exceeds the specified time (24,000 hours) or the
consumption degree exceeds the warning remaining number of days, we recommend
• Reset operation of the consumption degree of each part must not be executed except
• For the total score of maintenance parts and overhaul parts, the value of the part
• The remaining time is a reference value calculated based on the operating status of
*1 Setting is required.
*2 Notification of overhaul intervals by servo ON time follows "How to notify the consumption degree of
overhaul parts".
*3 A maintenance message is displayed.
* For models and joint axes subject to this function, refer to "2.1.3 Target models/target axes".
is used in the environment (ambient temperature, humidity) within the specification
scope described in the instruction manual (standard specifications).
It does not guarantee the service life of the robot.
maintenance and inspection described in the instruction manual (Standard
Specifications Manual, Robot Arm Setup & Maintenance).
you perform overhaul of the robot arm.
during maintenance or part replacement.
among all joint axes having the least remaining time (Up to Maintenance) to the
recommended maintenance time is output, respectively. For that reason, the
consumption degree of the total score could be smaller than the maximum
consumption degree value of each part.
the robot from the previous maintenance time. Also, the remaining time is when you
use the robot in the same way as before.
Therefore, if operation is changed, the remaining time may increase or decrease.
Basic specifications 13
Correctly set hand work conditions (weight, center of gravity, shape) actually used.
If the settings differ from the actual robot settings, the consumption degree cannot
be calculated correctly.
Use parameters HNDDAT* and WRKDAT* to set hand work conditions and use
Loadset commands to specify hand work conditions.
For details of hand work condition setting, refer to the separate "Instruction
Manual/Detailed Explanations of Functions and Operations".
Depending on the operating status at startup, correct results may not be obtained
at the beginning due to fluctuations until sufficient data is accumulated.
When the preventive maintenance function is valid, the maintenance forecast is not
displayed and warning signals of maintenance forecast are not output.
information is reset by the preventive maintenance function or maintenance
forecast, the information in the other function is reset as well.
[About the robot controller]
• When using this function by upgrading from a non-compatible controller software
version to a compatible controller software version, the consumption degree during
the period of the non-compatible software version is not added up, thus the result of
• The consumption degree of the robot arm is saved in the robot controller, thus it is
Caution
Caution
Caution
Caution
consumption degree calculation function cannot be the correct value.
necessary to use the correct combination of the robot arm and robot controller.
To replace the robot arm or robot controller only, perform backup/restore of
preventive maintenance information to migrate the preventive maintenance
information.
(For backup/restore, refer to "10.3 Backup and restore".)
When the
Basic specifications 14

<< MEMO >>
Basic specifications 15
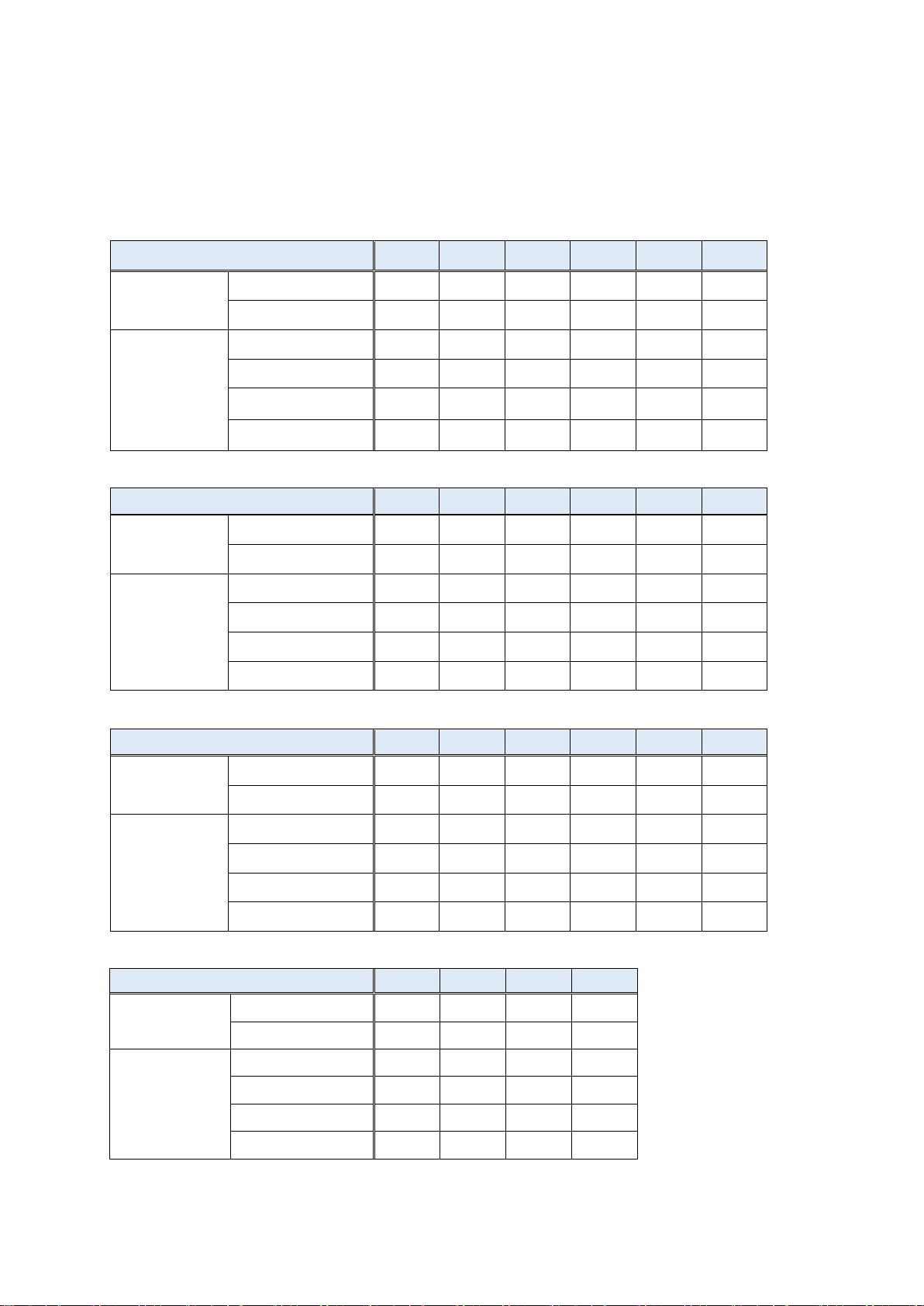
2.1.3 Target models/target axes
Joint axis
J1 axis
J2 axis
J3 axis
J4 axis
J5 axis
J6 axis
Maintenance
parts
Grease
Timing belt
Overhaul parts
Reduction gear
Bearing
Ball screw
- - - - -
-
Ball spline
- - - - -
-
Joint axis
J1 axis
J2 axis
J3 axis
J4 axis
J5 axis
J6 axis
Maintenance
parts
Grease
Timing belt
-
Overhaul parts
Reduction gear
Bearing
-
Ball screw
- - - - -
-
Ball spline
- - - - -
-
Joint axis
J1 axis
J2 axis
J3 axis
J4 axis
J5 axis
J6 axis
Maintenance
parts
Grease
Timing belt
- - -
Overhaul parts
Reduction gear
Bearing
- - -
Ball screw
- - - - -
-
Ball spline
- - - - -
-
Joint axis
J1 axis
J2 axis
J3 axis
J4 axis
Maintenance
parts
Grease
-
Timing belt
-
-
Overhaul parts
Reduction gear
-
-
Bearing
-
-
*1
Ball screw
-
-
*2
-
Ball spline
- - -
2
(1) Consumption degree calculation function/maintenance simulation
The table below shows the joint axes for which target parts of the consumption degree calculation
function of each robot type are used.
(Compatible robots are the standard models only.)
(: Uses target parts, -: Not use target parts)
(1) RV-2FR / RV-2FRL
(2) RV-4FR / RV-4FRL / RV-7FR / RV-7FRL
Basic specifications 16
(3) RV-13FR / RV-13FRL / RV-20FR / RV-7FRLL
(4) RH-3FRH / RH-6FRH / RH-12FRH / RH-20FRH
*1: For RH-3FRH, J3 axis does not use a bearing, shown as (-).
*2: RH-3FRH uses a ball screw/spline but this function assumes that the J3 axis uses a ball screw and
the J4 axis uses a ball spline.

Joint axis
J1axis
J2 axis
J3 axis
J4 axis
Maintenance
parts
Grease
-
Timing belt
Overhaul parts
Reduction gear
-
-
Bearing
-
Ball screw
-
-
*3
-
Ball spline
- - -
*3
(5) RH-3FRHR
*3:The RH-3FRHR series uses a ball screw/spline but this function assumes that the J3 axis uses a ball screw and
the J4 axis uses a ball spline.
Basic specifications 17

2.2 How to utilize the preventive maintenance function
The preventive maintenance function assumes the following usages.
(1) At system startup
It is possible to estimate the replacement time of maintenance parts or the recommended maintenance
time of overhaul parts when an operation pattern of the robot is repeated using "Maintenance Simulation".
This function can be used for planning a maintenance schedule when starting up a system.
(For details, refer to "8 Maintenance simulation".)
(2) System operation time (at periodic inspection)
You can check the consumption degree using the "Consumption degree calculation function".
Because the consumption degree calculation function calculates the consumption degree based on the
actual robot operation status (motor speed, loads, and others), you can check the current robot
consumption degree and remaining time to replacement/maintenance.
This function is useful for reviewing or planning a maintenance schedule.
(For function details, refer to "6 Consumption degree calculation function".)
(3) System operation time (when a part is consumed)
As a result of the remaining time to replacement/maintenance calculated by the consumption degree
calculation function, if the set remaining time is reached, that effect is notified by the method you set.
Check detailed information and arrange or carry out maintenance.
By carrying out appropriate maintenance, it is possible to prevent the production line from stopping due
to a sudden failure of the robot and reduce down time.
(For function details, refer to "6 Consumption degree calculation function".)
Basic specifications 18

<< MEMO >>
Basic specifications 19
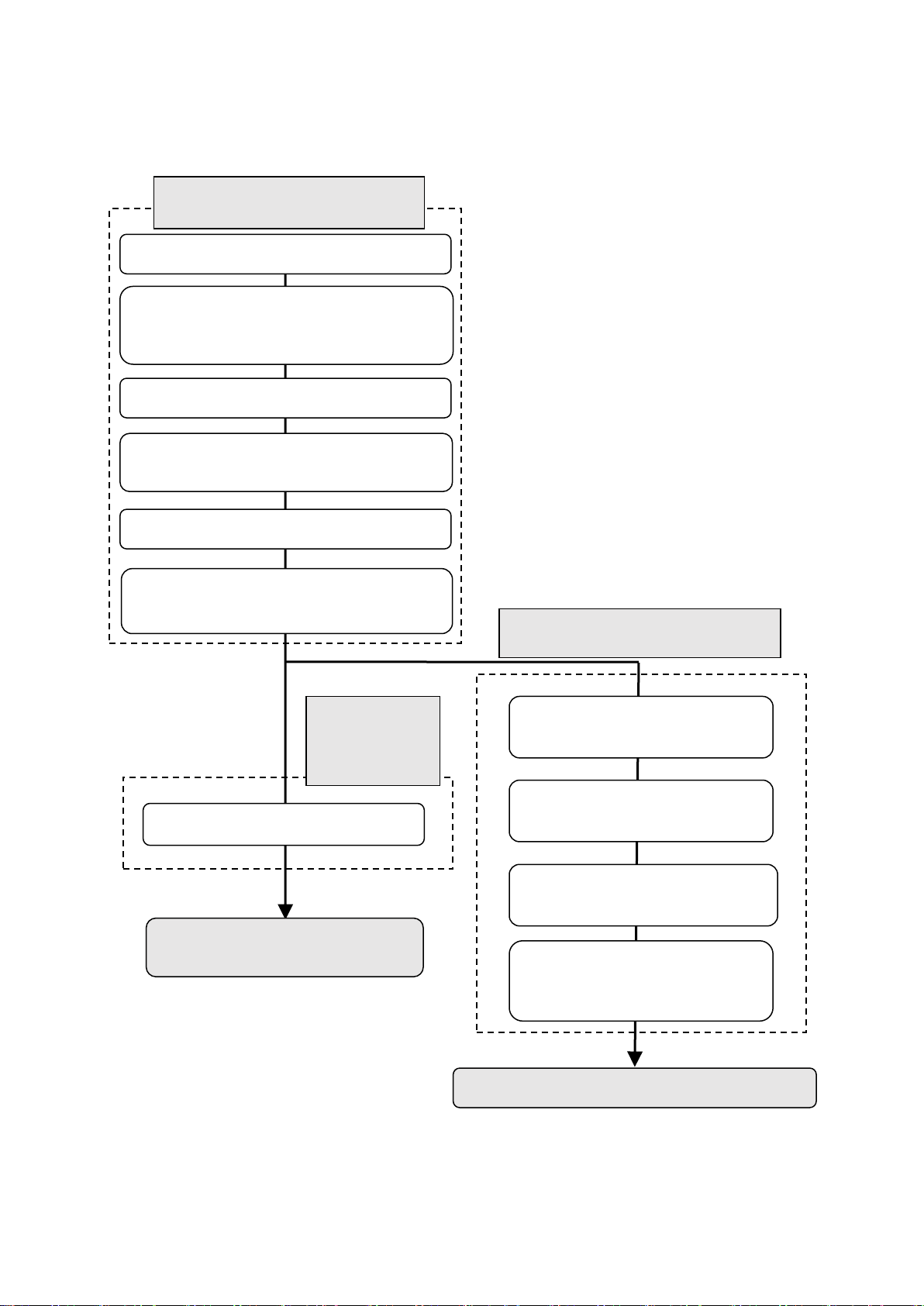
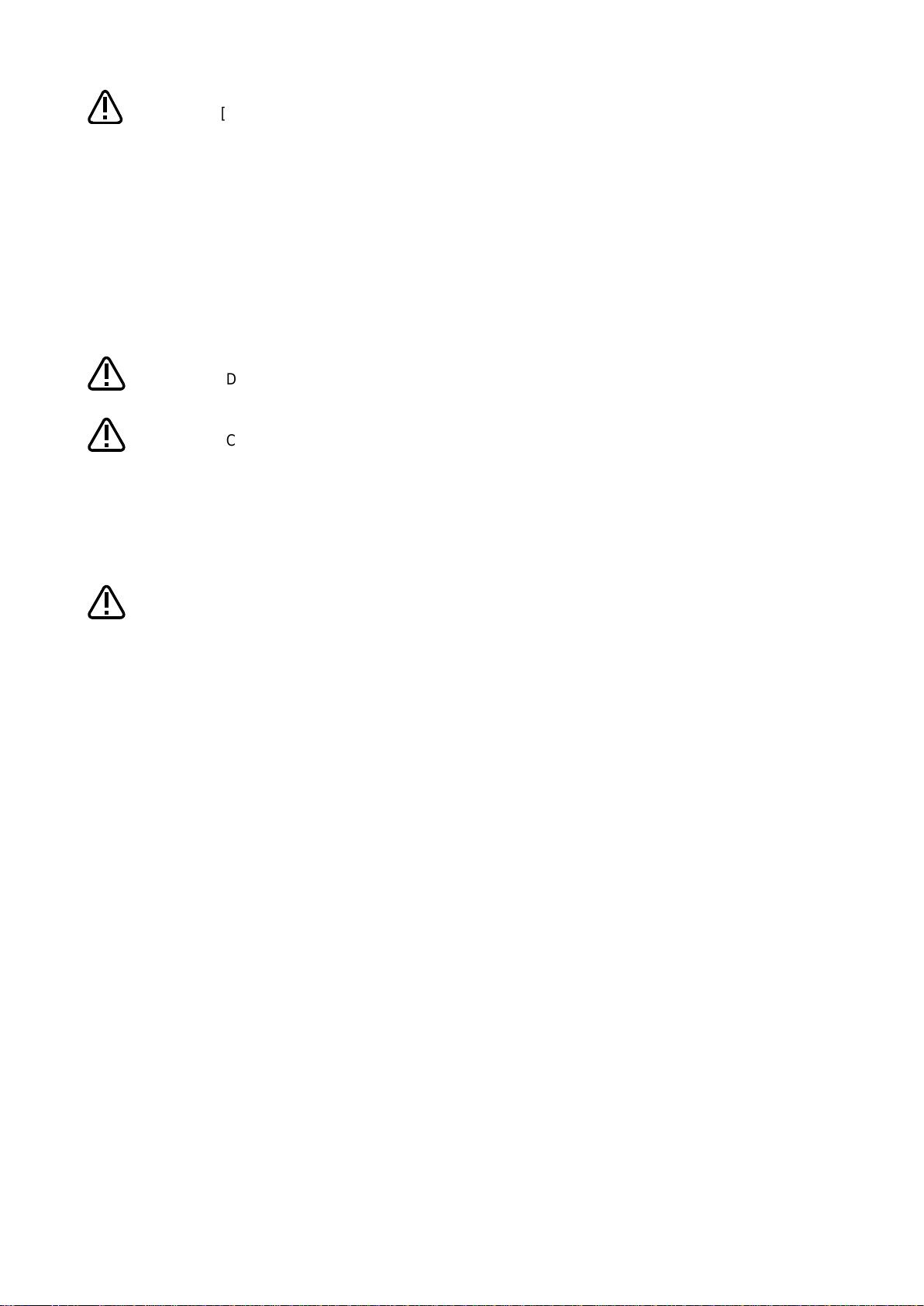
3. Startup and initial settings
7. Set the notification method.
Now you can use the preventive
4. Start the preventive
simulation mode.
1. Get the function code of the
"MELFA Smart Plus Card".
4. Set the MELFA Smart Plus enable
parameter.
3. Turn on the power of the robot controller.
2. Insert the "MELFA Smart Plus Card" or
controller.
1. Turn off the power of the robot controller.
2. Enter the function code of the
"MELFA Smart Plus Card".
5. Restart the robot controller.
3. Set the MELFA Smart Plus
enable parameter.
Initial setting of
function (3.2)
enance function (3.1)
Maintenance simulation can be used.
Setting of maintenance simulation
(3.3)
6. Check if the preventive maintenance
function is in enable state.
• Consumption degree calculation
Maintenance simulation
(RT ToolBox3 simulation)
This section describes the procedure to start the preventive maintenance function.
Validation of the preventive maint
"MELFA Smart Plus Card Pack" into the
the preventive
maintenance
• Maintenance simulation (real
machine (online))
maintenance function in
Startup and initial settings 20
 Loading...
Loading...