

Micro Motion 1500 型变送器 带模拟输出 组态和使用手册附录-Analog Output Supplement Chinese Manuals & Guides [zh]
Page 1

P/NMMI-20015864,Rev.AA
2009年9月
高准1500型变送器
带模拟输出
组态和使用手册附录
1500***A
1500***A 1500***A
组态操作维护
Page 2

高准客户服务
地区电话号码
美国800-522-MASS(800-522-6277)(免费)
加拿大和拉丁美洲+1303-527-5200(美国)
亚洲
美国以外的客户也可发送邮件至ow.support@emerson.com.
日本
所有其他地区
英国
所有其他地区+31(0)318495555(荷兰)
35769-6803
+656777-8211(新加坡)
08702401978(免费) 欧洲
版权和商标
©2009MicroMotion,Inc.保留所有权利。MicroMotion和Emerson标志是艾默生电气公司的注册商
标和服务商标。MicroMotion、ELITE、MVD、ProLink、MVDDirectConnect以及PlantWeb均为艾默生
过程管理子公司的标志。所有其它商标均为他们各自所有者的资产。
Page 3

内容
第 1 章 仪表与控制系统的集成.................................................. 1
1.1 组态通道 C........................................................ 1
1.2 组态毫安输出 ................................................... 1
1.3 组态频率输出 ................................................... 6
1.4 组态离散输出 ................................................... 10
1.5 组态数字通讯 ................................................... 13
1.6 组态事件 ...................................................... 18
组态和使用手册附录
i
Page 4

Page 5

关于本附录
本附录结合以下手册使用:高准1000和2000系列变送器:组态和使用手册。用v6.0之
1500型带模拟输出变送器中更新或修改的章节来替换原手册中的章节。有关章节替换
指南,请见下表。
章节替换指南
高准1000和2000系列变送器中的章节:组态和使用手册用本附录中的以下章节进行替换
6.3.2通道B第1.1节
6.5组态毫安输出第1.2节
6.6组态频率输出第1.3节
6.7组态离散输出第1.4节
8.11组态事件第1.6节
8.15组态数字通讯第1.5节
通讯工具和版本
本附录中的信息假设正在使用下列之一组态变送器:
▪ProLinkIIv2.9
▪375现场手操器及相应设备描述文件:1500质量流量,Devv6、DDv1
如果您使用的是ProLinkII的早期版本或早期的手操器设备描述文件,本附录中所述的部
分特性将不可用。
组态和使用手册附录
iii
Page 6

Page 7

第1章
仪表与控制系统的集成
本章所涉及的主题:
♦组态通道C
♦组态毫安输出
♦组态频率输出
♦组态离散输出
♦组态数字通讯
♦组态事件
1.1组态通道C
ProLinkII
手操器
ProLink→组态→频率/离散输出
5、3、2、1
详细设置→组态输出→FO/DO组态→FO设置
变送器上的输入/输出端子对被称为“通道”且标识为通道A、通道B、通道C以及通道D。
您可将通道C组态为作为频率输出或离散输出运行。通道组态必须与输出接线相对应。
注意!当改变通道组态后,必须检查输出组态。通道组态改变时,通道的动作将受控于
为所选输出类型存储的组态,可能适合于过程,也可能不适合。要避免产生过程误差:
▪组态输出之前,先组态通道。
▪当改变通道组态后,确保受此通道影响的所有控制回路都处于手动控制。
▪将回路切换到自动控制之前,确保输出组态对当前过程是正确的。
1.1.1通道C的选项
表1-1通道C的选项
通道操作
频率输出(FO) 通道C
离散输出DO
1.2组态毫安输出
ProLinkII
手操器
毫安输出用于报告过程变量。毫安输出参数控制过程变量的报告方式。变送器带有一个
毫安输出:通道A.
组态和使用手册附录
ProLink→组态→模拟输出
5、3、1
详细设置→组态输出→AO设置
1
Page 8

仪表与控制系统的集成
毫安输出参数包括:
▪毫安输出过程变量
▪量程下限(LRV)与量程上限(URV)
▪AO切除值
▪附加阻尼
▪AO故障动作和AO故障值
必备条件
如果打算将毫安输出组态为体积流量,确保已经根据需要设置了体积流量类型:液体或气
体标准体积。
补充条件
重要信息
每当改变了毫安输出参数,在将仪表恢复运行之前,检查所有其他毫安输出参数。在某些情
况下,变送器会自动加载一组存储值,这些设定可能不适合于当前应用。
1.2.1组态毫安输出过程变量
ProLinkII
手操器
ProLink→组态→模拟输出→一级变量是
5、3、1、1
详细设置→组态输出→AO设置→PV是
毫安输出过程变量控制经毫安输出报告的过程变量。在1500型变送器上,它还控制频
率输出过程变量的设定。
必备条件
如果使用了HART变量,要注意改变了毫安输出过程变量的组态将会同时改变HART一级变
量(PV)和HART三级变量(TV)的组态。
毫安输出过程变量选项
表1-2毫安输出过程变量选项
过程变量ProLinkII代码手操器代码
质量流量质量流量
体积流量体积流量
气体标准体积流量
驱动增益驱动增益
(1)
气体标准体积流量
Massflo
Massflo
Gasvolflo
Drivsignl
1.2.2组态量程下限(LRV)和量程上限(URV)
ProLinkII
手操器
量程下限(LRV)和量程上限(URV)一起用于设定毫安输出,即用于定义毫安输出过程
变量与毫安输出值之间的关系。
(1)需要变送器软件v5.0或更高版本。
2
ProLink→组态→模拟输出→量程下限
ProLink→组态→模拟输出→量程上限
5、3、1、2
详细设置→组态输出→AO设置→量程
高准1500型带模拟输出变送器
Page 9

毫安输出使用4–20mA的范围表示毫安输出过程变量:
▪LRV指定了要通过4mA输出表示的毫安输出过程变量的值。
▪URV指定了要通过20mA输出表示的毫安输出过程变量的值。
▪在LRV与URV之间,毫安输出与过程变量成线性变化。
▪如果过程变量低于LRV或超过URV,变送器发出输出饱和报警。
LRV和URV的输入值基于毫安输出过程变量已组态的测量单位。
注
▪可以设置URV小于LRV。例如,可将URV设定为50而将LRV设定为100。
▪对于变送器软件v5.0及更高版本,如果改变了LRV和URV的工厂缺省值,并改变了毫
安输出过程变量,LRV和URV将不会复位为缺省值。例如,如果将毫安输出过程变量组
态为质量流量且改变为质量流量的LRV和URV,然后又将毫安输出过程变量组态为密
度,最终将毫安输出过程变量改回为质量流量,质量流量的LRV和URV复位为组态值。
早期版本的变送器软件中,LRV和URV复位为工厂缺省值。
量程下限(LRV)和量程上限(URV)的缺省值
毫安输出过程变量的每个选项都具有自己的LRV和URV。如果改变毫安输出过程变量的组
态,相应的LRV和URV被加载和使用。
仪表与控制系统的集成
LRV和URV的缺省设定值列在表1-3中。
表1-3量程下限(LRV)和量程上限(URV)的缺省值
过程变量LRVURV
所有质量流量变量
所有液体体积流量变量
气体标准体积流量
−200.000g/sec200.000g/sec
−0.200l/sec0.200l/sec
−423.78SCFM423.78SCFM
1.2.3组态AO切除值
ProLinkII
手操器
AO切除值(模拟输出切除值)确定可通过毫安输出报告的最低质量流量、体积流量或气体
标准体积流量。低于AO切除值的所有流量将报告为0。
限制
AO切除值仅当毫安输出过程变量设定为质量流量、体积流量或气体标准体积流量时生
效。如果毫安输出过程变量设定为其他过程变量,不可组态AO切除值,变送器也不会执
行AO切除功能。
ProLink→组态→模拟输出→AO切除值
5、3、1、3
详细设置→组态输出→AO设置→PVAO切除值
提示
对于大多数应用,推荐使用AO切除的缺省值。更改AO切除值之前,联系高准客户服务。
切除值的相互作用
当毫安输出过程变量设定为流量变量(质量流量、体积流量或气体标准体积流量)时,AO切
除值与质量流量切除值、体积流量切除值或气体标准体积流量切除值相互影响。变送器的输
出取决于切除值中最大的流量切除设置值。
组态和使用手册附录
3
Page 10
仪表与控制系统的集成
♦例:切除值的相互影响
组态:
▪毫安输出过程变量=质量流量
▪频率输出过程变量=质量流量
▪AO切除值=10g/s
▪质量流量切除值=15g/s
结果:如果质量流量降到15g/s以下,所有表示质量流量的输出都将报告零流量。
♦例:切除值的相互影响
组态:
▪毫安输出过程变量=质量流量
▪频率输出过程变量=质量流量
▪AO切除值=15g/s
▪质量流量切除值=10g/s
结果:
▪如果质量流量降到15g/s以下但不低于10g/s:
▪毫安输出将报告零流量。
▪频率输出将报告实际流量。
▪如果质量流量降到10g/s以下,两种输出都将报告零流量。
1.2.4组态附加阻尼
ProLinkII
手操器
附加阻尼控制作用于毫安输出的阻尼值。它仅通过毫安输出影响毫安输出过程变量的报告。对
任何通过其他方式(例如频率输出或数字通讯)报告的过程变量或用于计算的过程变量无效。
注意
附加阻尼在毫安输出固定时(例如,回路测试期间)或在毫安输出报告故障时无效。附加阻
尼也作用于传感器的仿真模式。
附加阻尼的选项
在设置附加阻尼值时,变送器将该值自动四舍五入为最接近的有效值。有效值列在表1-4中。
注意
附加阻尼受更新率和100Hz变量设置的影响。
ProLink→组态→模拟输出→AO附加阻尼
5、3、1、4
详细设置→组态输出→AO设置→PVAO附加阻尼
4
高准1500型带模拟输出变送器
Page 11

表1-4附加阻尼的有效值
更新率设置过程变量
正常
特殊
所有
100Hz变量(如果分配给
毫安输出)
100Hz变量(如果未分配
给毫安输出)
所有其他过程变量
阻尼参数的相互影响
当毫安输出过程变量设定为流量、密度或温度变量时,附加阻尼与流量阻尼、密度阻尼或
温度阻尼将相互影响。如果设置了多重阻尼参数,则首先计算过程变量的阻尼,附加阻
尼计算然后用于该计算的结果。
♦例:阻尼的相互影响
仪表与控制系统的集成
对更新率的
影响附加阻尼的有效值
20Hz0.0、0.1、0.3、0.75、1.6、3.3、6.5、
13.5、27.5、55.0、110、220、440
100Hz0.0、0.04、0.12、0.30、0.64、1.32、
2.6、5.4、11.0、22.0、44、88、176、
350
6.25Hz0.0、0.32、0.96、2.40、5.12、10.56、
20.8、43.2、88.0、176.0、352
6.25Hz0.0、0.32、0.96、2.40、5.12、10.56、
20.8、43.2、88.0、176.0、352
组态:
▪流量阻尼=1秒
▪毫安输出过程变量=质量流量
▪附加阻尼=2秒
结果:质量流量的改变以大于3秒的时间周期通过毫安输出反映出来。确切的时间周期由变
送器根据不可组态的内部算法进行计算。
1.2.5组态毫安输出故障动作和毫安输出故障值
ProLinkII
手操器
毫安输出故障动作决定了变送器在遇到内部故障时毫安输出的状态。
注意
如果最后测量值超时设定为一个非零值,则变送器直到超时时间达到时才执行故障动作。
毫安输出故障动作和毫安输出故障值的选项
表1-5毫安输出故障动作和毫安输出故障值的选项
ProLink→组态→模拟输出→AO故障动作
ProLink→组态→模拟输出→AO故障值
5、3、1、5
详细设置→组态输出→AO设置→AO1故障设置
ProLinkII代
码手操器代码毫安输出故障值毫安输出动作
(2)
上限
下限(缺省
(2)
值)
(2)如果选择了上限或者下限,则还必须组态故障值。
Upscale
Downscale(缺省
值)
(2)
(2)
缺省值:22mA
范围:21–24mA
缺省值:2.0mA
范围:1.0–3.6mA
组态的故障值
组态的故障值
组态和使用手册附录
5
Page 12

仪表与控制系统的集成
表1-5毫安输出故障动作和毫安输出故障值的选项续
ProLinkII代
码手操器代码毫安输出故障值毫安输出动作
内部零
无
IntrnlZero
None
不适用
不适用
输出与过程变量值0(零)相关的
毫安值,由量程下限和量程上限设
置确定
跟踪组态过程变量的数据;无故障
动作
注意!如果设置毫安输出故障动作或频率输出故障动作为无,确保将数字通讯故障动
作也设置为无。如果没有这样做,输出将不会报告实际的过程变量数据,而这可能导致
测量误差,或给当前过程带来意外的后果。
注意!如果数字通讯故障动作为NAN,则不能将毫安输出故障动作或频率输出故障动作
设置为无。如果试图这样做,变送器不会接受。
1.3组态频率输出
ProLinkII
手操器
ProLink→组态→频率/离散输出
5、3、2
详细设置→组态输出→FO/DO组态
频率输出用于报告过程变量。频率输出参数控制过程变量的报告方式。您的变送器具有
一个频率输出:通道C。
频率输出参数包括:
▪频率输出定标方式
▪频率输出最大脉冲宽度
▪频率输出极性
▪频率输出故障动作和频率输出故障值
限制
在
1500型变送器上,已组态为一级毫安输出的过程变量自动组态为频率输出。您不能组态
不同的过程变量。
补充条件
重要信息
每当改变频率输出参数时,在将仪表恢复运行前,检查所有其他频率输出参数。在某些情况
下,变送器会自动加载一组存储值,这些值可能不适合于当前应用。
1.3.1组态频率输出定标方式
ProLinkII
手操器
频率输出定标方式定义了脉冲输出与流量单位之间的关系。根据频率接收设备的需要设
置频率输出定标方式。
6
ProLink→组态→频率/离散输出→定标方式
5、3、2、3
详细设置→组态输出→FO/DO组态→FO定标方式
高准1500型带模拟输出变送器
Page 13

频率=流量
仪表与控制系统的集成
步骤
1.如果尚未进行步此操作,则将通道设置为频率输出方式。
2.设置频率输出定标方式。
频率=流量通过流量计算的频率
脉冲/单位用户指定代表一个流量单位的脉冲数
单位/脉冲用户指定一个脉冲代表的流量单位数
3.设定另外所需参数。
▪如果将频率输出定标方式设置为频率=流量,则设定流量系数和频率系数。
▪如果将频率输出定标方式设置为脉冲/单位,则定义代表一个流量单位的脉冲数。
▪如果将频率输出定标方式设置为单位/脉冲,则定义一个脉冲代表的流量单位数。
当不知道适当的单位/脉冲或脉冲/单位值时,使用频率=流量选项定义当前应用的频率输出。
如果选择频率=流量,那么必须提供流量系数值和频率系数值:
流量系数频率输出报告的最大流量。在此流量之上,变送器将报告A110:
频率输出饱和。
频率系数按如下方式计算:
其中:
T将所选时间单位换算为秒的系数
N每流量单位的脉冲数,根据接收设备
的要求组态
频率系数的计算结果必须在频率输出的范围内(0到10000Hz):
▪如果频率系数小于1Hz,使用较高的脉冲/流量单位值重新组态接收设备。
▪如果频率系数大于10000Hz,使用较低的脉冲/流量单位值重新组态接收设备。
提示
如果频率输出定标方式设定为频率=流量,而且频率输出最大脉冲宽度设定为一个非零值,
高准建议将频率系数设定为小于200Hz的值。
♦例:组态频率=流量
要求频率输出报告上限为2000kg/min的流量。
频率接收设备的组态为10个脉冲/千克。
解决方案:
按如下方式设定参数:
▪流量系数:2000
组态和使用手册附录
7
Page 14
仪表与控制系统的集成
▪频率系数:333.33
1.3.2组态频率输出最大脉冲宽度
ProLinkII
手操器
ProLink→组态→频率/离散输出→脉冲脉宽
5、3、2、5/6
详细设置→组态输出→FO/DO组态→最大脉冲宽度
频率输出最大脉冲宽度设置用于确保信号“接通”的持续时间足以满足频率接收设备的检
测要求。
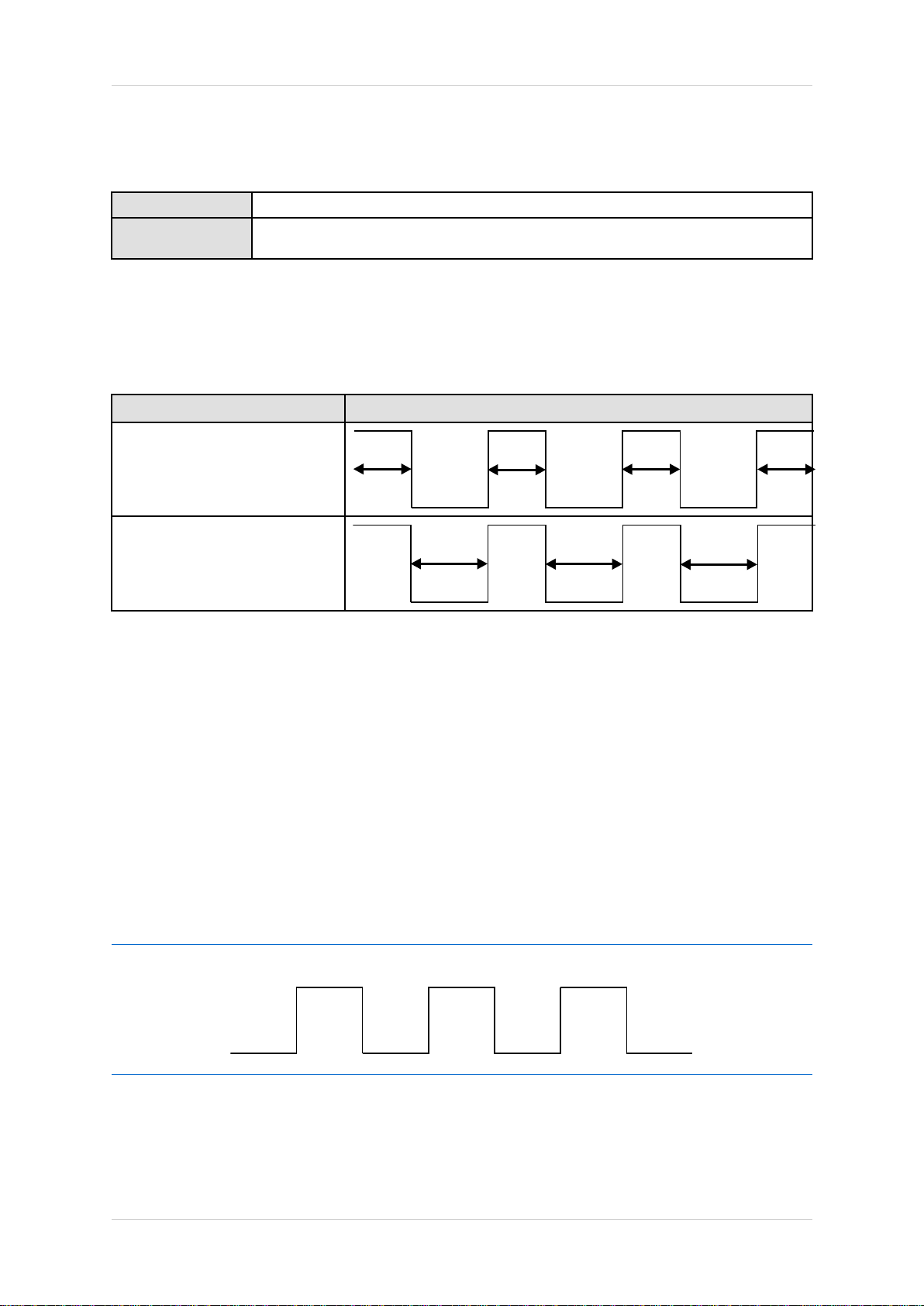
信号“接通”状态可能是高电平或0.0V,取决于频率输出组态,如表1-6中所示。
表1-6频率输出最大脉冲宽度和频率输出极性的相互影响
极性脉冲宽度
高有效
低有效
提示
▪对于典型应用,使用频率输出最大脉冲宽度的缺省值(0)。使用缺省值可生成具有50%
占空比的频率信号。频率/电压转换器、频率/电流转换器以及高准外围设备等高频计数
器通常需要约50%的占空比。
▪机电计数器和具有低扫描周期的PLC通常使用具有固定的非零状态保持时间和变化的零
状态保持时间的信号输入。大部分低频计数器对频率输出最大脉冲宽度具有特定的要求。
频率输出最大脉冲宽度
可将频率输出最大脉冲宽度设定为0或0.5毫秒与277.5毫秒之间的一个值。用户输入
值自动调整为最接近的有效值。
▪如果将频率输出最大脉冲宽度设定为0(缺省值),输出信号具有50%的占空比,
与输出频率无关。见图1-1。
图1-150%的占空比
▪如果将频率输出最大脉冲宽度设定为一个非零值,占空比取决于交越频率。
交越频率计算如下:
8
高准1500型带模拟输出变送器
Page 15

▪当频率低于交越频率时,占空比由脉冲宽度和频率确定。
▪当频率高于交越频率时,输出改变为50%的占空比。
♦例:特定PLC要求的频率输出最大脉冲宽度
频率接收设备是一种具有50毫秒指定脉冲宽度要求的PLC。交越频率为10Hz。
解决方案:将频率输出最大脉冲宽度设定为50毫秒。
结果:
▪对于低于10Hz的频率,频率输出将具有50毫秒的“接通”状态,“断开”状态
将根据需要进行调节。
▪对于高于10Hz的频率,频率输出将改变为具有50%的占空比的方形波。
1.3.3组态频率输出极性
仪表与控制系统的集成
ProLinkII
手操器
ProLink→组态→频率/离散输出→频率输出极性
5、3、2、6/7
详细设置→组态输出→FO/DO组态→极性
频率输出极性决定输出怎样指示“接通”(有效)状态。缺省值是高有效,适合于大多数应
用。低有效可能在使用低频信号的场合需要。
频率输出极性选项
表1-7频率输出极性选项
极性参考电压(断开)脉冲电压(接通)
高有效
低有效由电源、上拉电阻以及负载决定(参
0
见变送器安装手册)
由电源、上拉电阻以及负载决定(参
见变送器安装手册)
0
1.3.4组态频率输出故障动作和频率输出故障值
ProLinkII
手操器
ProLink→组态→频率/离散输出→频率故障动作
ProLink→组态→频率/离散输出→频率故障值
5、3、2、7/8
详细设置→组态输出→FO/DO组态→FO故障指示器
5、3、2、8/9
详细设置→组态输出→FO/DO组态→FO故障值
频率输出故障动作决定变送器在遇到内部故障时频率输出的动作。
注意
如果最后测量值超时设定为一个非零值,则变送器直到超时时间达到时才执行故障动作。
组态和使用手册附录
9
Page 16

仪表与控制系统的集成
频率输出故障动作选项
表1-8频率输出故障动作选项
ProLinkII代码手操器代码频率输出动作
Upscale
DownscaleDownscale
InternalZeroIntrnlZero
None(缺省值)None(缺省值)跟踪组态过程变量的数据
(3)
Upscale
(3)
组态的上限值:
▪范围:10–15000Hz
▪缺省值:15000Hz
0Hz
0Hz
注意!如果设置毫安输出故障动作或频率输出故障动作为无,确保将数字通讯故障动
作也设置为无。如果没有这样做,输出将不会报告实际的过程变量数据,而这可能导致
测量误差,或给当前过程带来意外的后果。
注意!如果数字通讯故障动作为NAN,则不能将毫安输出故障动作或频率输出故障动作
设置为无。如果试图这样做,变送器不会接受。
1.4组态离散输出
ProLinkII
手操器
离散输出用于报告特定的仪表或过程条件。离散输出参数决定报告哪一个条件以及怎样报
告。您的变送器可能没有或有一个离散输出:通道C可组态为频率输出或离散输出。
离散输出参数包括:
▪离散输出源
▪离散输出极性
▪离散输出故障动作
限制
组态离散输出前,必须将一个通道用于离散输出。
补充条件
重要信息
每当改变一个离散输出参数时,必须在仪表恢复运行之前,检查所有其他离散输出参数。在
某些情况下,变送器会自动加载一组存储值,这些设定值可能不适合于当前的应用。
ProLink→组态→频率/离散输出
5、3、2
详细设置→组态输出→FO/DO组态
1.4.1组态离散输出源
ProLinkII
手操器
离散输出源决定经离散输出报告哪一种仪表条件或过程条件。
(3)如果选择上限,您还必须组态上限值。
10
ProLink→组态→频率/离散输出→DO组态
5、3、2、DO是
详细设置→组态输出→FO/DO组态→DO是
高准1500型带模拟输出变送器
Page 17

离散输出源选项
表1-9离散输出源选项
选项显示器代码
(5)(6)
流量方向
FLSW
FLDIR
组态流量开关参数
仪表与控制系统的集成
ProLinkII代
码手操器代码条件离散输出电压
流量开关指示
正向/反向指示
FlowSwitch
Forward/Reverse
开
关
前向流
反向流
现场指定 流量开关
0V
0V
现场指定
(4)
ProLinkII
手操器
ProLink→组态→流量→流量开关设定点
5、3、,2流量开关设定点
详细设置→组态输出→FO/DO组态→流量开关设定点
5,3,2,流量开关设定点
详细设置→组态输出→FO/DO组态→流量开关变量
5、3、2滞后
详细设置→组态输出→FO/DO组态→滞后性
流量开关用于指示流量(根据组态的流量变量测量)已经降到组态的设定点以下。流量开关
的动作基于用户可组态的滞后性。
步骤
1.将离散输出源设定为流量开关,如果尚未进行此操作。
2.将流量开关变量设定为将用于控制流量开关的流量变量。
3.流量开关设定点设置为流量,低于期望的流量开关的动作点。
4.滞后性设定为高于或低于设定点的变化百分比,作为一个死区。
滞后性定义一个围绕流量点的范围,在这个范围内,流量开关不动作。缺省值为5%。
范围是0.1%到10%。
例如,如果流量开关设定点=100g/sec且滞后性=5%,流量降到95g/sec以下,离
散输出将切换到“接通”状态。在流量超过105g/sec之前,它将一直保持“接通”状
态。在这一点切换到“断开”状态且在流量低于95g/sec之前一直保持“断开”状态。
1.4.2组态离散输出极性
ProLinkII
手操器
离散输出具有两种状态:“接通”(有效)和“断开”(失效)。两个不同的电平用于代表
这些状态。离散输出极性控制哪一个电平代表哪一种状态。
(4)假设离散输出极性应设定为高有效。如果离散输出极性设定为低有效,反转电压值。
(5)如果流量开关组态为离散输出,则必须组态流量开关变量、流量开关设定点和滞后性。
(6)如果变送器组态有两个离散输出,可将两个都组态为这两个离散输出。但是它们将共享流量开关变量、流量
开关设定点和滞后性的设置。
组态和使用手册附录
ProLink→组态→频率/离散输出→DO极性
5、3、2、DO1极性
详细设置→组态输出→FO/DO组态→DO1极性
11
Page 18

仪表与控制系统的集成
离散输出极性选项
表1-10离散输出极性选项
极性离散输入电源描述
高有效
低有效
内部
外部
内部
外部
▪声明时(与DO有关的条件为真),回路输出电压
上拉,最大15V。
▪未声明时(与DO有关的条件为假),回路输出电
压0V。
▪声明时(与DO有关的条件为真),回路输出电压
上拉至现场指定值,最大30V。
▪未声明时(与DO有关的条件为假),回路输出电
压0V。
▪声明时(与DO有关的条件为真),回路输出电压
0V。
▪未声明时(与DO有关的条件为假),回路输出电压
上拉,最大15V。
▪声明时(与DO有关的条件为真),回路输出电压
0V。
▪未声明时(与DO有关的条件为假),回路输出电压
上拉至现场指定值,最大30V。
图1-2典型离散输出电路
A
A A
15V(名义值)
B
B B
3.2KΩ
C
C C
输出+
D
D D
输出−
1.4.3组态离散输出故障动作
ProLinkII
手操器
12
ProLink→组态→频率/离散输出→DO故障动作
5、3、2、DO故障指示
详细设置→组态输出→FO/DO组态→DO故障指示
高准1500型带模拟输出变送器
Page 19

仪表与控制系统的集成
离散输出故障动作决定变送器在遇到内部故障条件时离散输出的动作。
注意
如果最后测量值超时设定为一个非零值,则变送器直到超时时间达到时才执行故障动作。
注意!不要将离散输出故障动作用于故障指示器。因为离散输出始终处于“接通”或
“断开”状态,无法将故障动作与正常工作状态区分开来。
离散输出故障动作选项
表1-11离散输出故障动作选项
离散输出电压
ProLinkII代码手操器代码故障状态极性=高有效极性=低有效
上限
下限
无(缺省值)None(缺省值)
Upscale
Downscale
故障
无故障离散输出受控于离散输出源
故障
无故障离散输出受控于离散输出源
不适用
现场指定电压
0V
离散输出受控于离散输出源
0V
现场指定电压
1.5组态数字通讯
ProLinkII
手操器
数字通讯参数控制变送器怎样进行通讯。
1500型带模拟输出变送器支持以下类型的数字通讯:
▪HART/Bell202经一级毫安端子
▪Modbus/RS-485通过RS-485端子
▪Modbus/RS-485经服务端口
数字通讯故障动作作用于所有类型的数字通讯。
注意
服务端口自动响应多种连接请求。不可组态。
1.5.1组态HART/Bell202通讯
ProLinkII
手操器
ProLink→组态→设备
ProLink→组态→RS-485
5、3、3
详细设置→组态输出→HART输出
5、3、4
详细设置→组态输出→RS485设置
ProLink→组态→设备→数字通讯设置
5、3、3
详细设置→组态输出→HART输出
HART/Bell202通讯参数支持通过HART/Bell202网络与变送器的一级毫安端子之间
的HART通讯。
组态和使用手册附录
13
Page 20

仪表与控制系统的集成
HART/Bell202通讯参数包括:
▪HART地址(轮询地址)
▪回路电流模式(ProLinkII)或毫安输出动作(手操器)
▪阵发模式参数(可选)
▪HART变量(可选)
步骤
1.将协议设定为HART/Bell202。
奇偶校验、停止位和波特率自动设置。
2.将HART地址设定为0至15之间的一个值。
HART地址在网络中必须是唯一的。通常使用默认地址(0),除非处于多点通讯环境中。
提示
使用HART协议与变送器通讯的设备可通过HART地址或HART位号(软件位号)识别
变送器。可以根据其他HART设备的要求组态其中任何一个或同时组态二者。
3.检查回路电流模式(毫安输出动作)的设置且根据需要改变。
组态阵发参数
ProLinkII
手操器
启用一级毫安输出根据组态报告过程变量数据。
禁用一级毫安输出固定在4mA且不报告过程变量数据。
提示
当使用ProLinkII将HART地址设置为0时,ProLinkII即启用了回路电流模式。当
使用ProLinkII将HART地址设定为任何一个不为0的其他值时,即禁用了回路
电流模式。这种设计可方便地组态变送器的贸易交接模式,确保在设置HART地址之
后检查回路电流模式。
4.(可选)启用和组态阵发模式参数。
提示
在典型安装中,阵发模式是禁用的。仅当网络上的另一台设备需要阵发模式通讯时
才启用。
5.(可选)组态HART变量。
ProLink→组态→设备→阵发设置
5、3、3
详细设置→组态输出→HART输出
阵发模式一种特定的通讯模式,在此模式期间,变送器通过毫安输出有规律地广播HART数
字信息。阵发模式启用时,阵发模式参数控制广播的信息。
提示
在典型安装中,阵发模式是禁用的。仅当网络上的另一台设备需要阵发模式通讯时才启用。
步骤
1.启用阵发模式。
2.设置阵发模式输出。
14
高准1500型带模拟输出变送器
Page 21

仪表与控制系统的集成
一级变量
(ProLinkII)
PV(手操器)
PV电流值和量程%
(ProLinkII)
%量程/电流(手操器)
动态变量和PV电流
ProLinkII)
(
过程变量/电流(手操
器)
变送器变量
ProLinkII)
(
现场设备变量(手操
器)
变送器在每次阵发中发送一级变量(基于组态的测量单位)(例如,
14.0g/s、13.5g/s、12.0g/s)。
变送器在每次阵发中依次发送PV的量程百分比和PV的实际电流值(例如
25%和11.0mA)。
变送器在每次阵发中依次发送PV、SV、TV和QV值(基于测量单位)
和PV的实际电流值(例如50g/s、23°C、50g/s、0.0023g/cm
11.8mA)。
变送器在每次阵发中依次发送四个用户指定过程变量。
(7)
3.设置或检查阵发模式输出变量。
▪如果使用ProLinkII设置阵发模式输出为变送器变量(ProLinkII),设置
四个在每次阵发中发送的过程变量:
ProLink→组态→设备→阵发设置→阵发模式变量1–4
▪如果使用手操器设置阵发模式输出为现场设备变量,设置四个用于在每次阵发中
发送的过程变量:
详细设置→组态输出→HART输出→阵发变量1–4
▪如果将阵发模式输出设置为其他选项,检查是否已根据需要设定了HART变量。
3
、
组态HART变量(PV、SV、TV、QV)
ProLinkII
手操器
ProLink→组态→变量分配
5、3、3、1
详细设置→组态输出→HART输出→变量组态
HART变量是一组为HART使用而预定义的四个变量。HART变量包括分配一级变量(PV)、二
级变量(SV)、三级变量(TV)和四级变量(QV)。可将指定的过程变量分配为HART变量,
然后使用标准的HART方法读取或阵发该变量的过程数据。
限制
TV自动设置为与PV匹配且不能单独地组态。
HART变量选项
表1-12HART变量选项
过程变量PVSVTVQV
质量流量
体积流量
质量总量
体积总量
质量库存量
体积库存量
气体标准体积流量
气体标准体积总量
气体标准体积库存量
( )
( )
( )
üüüü
üüüü
üüüü
ü
ü
ü
ü
ü
ü
(7)这种阵发模式设置的典型应用是配合HARTTri-Loop™信号转换器使用。详细信息见Tri-Loop手册。
组态和使用手册附录
15
Page 22

仪表与控制系统的集成
HART变量与变送器输出的相互影响
HART变量通过特定的变送器输出自动报告,如表1–13中所述。
表1-13HART变量与变送器输出
HART变量报告途径注释报告
一级变量(PV)一级毫安输出如果一个组态改变,则其他的组态都将自动改变,反
之亦然。
二级变量(SV)SV必须直接组态,SV的数值只能通过数字通讯获得。
三级变量(TV)频率输出如果一个组态改变,则其他的组态都将自动改变,反
之亦然。
四级变量(QV)与输出无关QV必须直接组态且QV的数值只能通过数字通讯获得。
1.5.2组态Modbus/RS-485通讯
ProLinkII
手操器
ProLink→组态→设备
ProLink→组态→RS-485
5、3、4
详细设置→组态输出→RS485设置
Modbus/RS-485通信参数控制与变送器的RS-485端子的Modbus通讯。
Modbus/RS-485通讯参数包括:
▪协议
▪Modbus地址(从设备地址)
▪奇偶校验、停止位和波特率
▪浮点型字节顺序
▪附加通讯响应延迟
限制
要组态浮点型字节顺序或附加通讯响应延迟,必须使用
ProLinkII。
步骤
1.根据需要设置协议:
ModbusRTU(默认)
ModbusASCII
8位通讯
7位通讯
2.将Modbus地址设定为1和247之间的一个值,不包括111。(111为服务端口保留。)
3.设置奇偶校验、停止位和波特率,使之适合于网络。
奇偶校验奇校验(缺省值)
偶校验
无
停止位
波特率1200到38400(缺省值:9600)
1(缺省值)
2
4.设置为浮点型字节顺序与Modbus主机所用的字节顺序相匹配。
代码字节顺序
01–23–4
13–41–2
16
高准1500型带模拟输出变送器
Page 23

代码字节顺序
22–14–3
34–32–1
字节1、2、3和4的位结构显示在表1-14中。
表1-14浮点型字节的位结构
位定义
字
节
1SEEEEEEE
2
3
4
EMMMMMMM
MMMMMMMM
MMMMMMMM
5.(可选)基于“延迟单位”设置附加通讯响应延迟。
仪表与控制系统的集成
S=符号
E=指数
E=指数
M=尾数
M=尾数
M=尾数
延迟单位是传输一个字符所需时间的2/3,根据当前正在使用的服务端口和字符传输参
数计算所得。有效值的范围从1到255。
附加通讯响应延迟用于同步化与主机的Modbus通讯,主机以低于变送器的速度运行。
此处指定的值将被添加到变送器发送到主机的各响应中。
提示
不要设置附加通讯响应延迟除非您的Modbus主机需要。
1.5.3组态数字通讯故障动作
ProLinkII
手操器
数字通讯故障动作指定变送器在遇到内部故障时通过数字通讯报告的值。
注意
如果最后测量值超时设定为一个非零值,则变送器直到超时时间达到时才执行故障动作。
数字通讯故障动作选项
表1-15数字通讯故障动作选项
ProLinkII代码手操器代码描述
上限
下限
零
ProLink→组态→设备→数字通讯设置→数字通讯故障设置
5、3、6
详细设置→组态输出→通讯故障指示
Upscale
Downscale
IntZero-All0
▪过程变量值指示大于传感器的上限值。
▪累加器停止累加。
▪过程变量值指示小于传感器的下限值。
▪累加器停止累加。
▪流量变量转为表示0(零)流量的值。
▪密度被报告为0。
▪温度被报告为0°C,或者为使用其他测量单位的等
效值(例如32°F)。
▪驱动增益报告测量值。
▪累加器停止累加。
组态和使用手册附录
17
Page 24

仪表与控制系统的集成
表1-15数字通讯故障动作选项续
ProLinkII代码手操器代码描述
非数值(NAN)
流量归零
无(缺省值)None(缺省值)▪其他过程变量报告测量值。
Not-a-Number
IntZero-Flow0
▪过程变量报告为IEEENAN。
▪驱动增益报告测量值。
▪Modbus的比率数被报告为最大整数。
▪累加器停止累加。
▪流量报告为0。
▪其他过程变量报告测量值。
▪累加器停止累加。
▪如果变量处于运行状态,累加器将保持计数状态。
注意!如果设置毫安输出故障动作或频率输出故障动作为无,确保将数字通讯故障动
作也设置为无。如果没有这样做,输出将不会报告实际的过程变量数据,而这可能导致
测量误差,或给当前过程带来意外的后果。
注意!如果数字通讯故障动作为NAN,则不能将毫安输出故障动作或频率输出故障动作
设置为无。如果试图这样做,变送器不会接受。
1.6组态事件
ProLinkII
手操器
如果用户指定过程变量的实时测量值超过用户定义的设定点,则报告一个事件。事件用于在
过程变化时提供过程变化的通告或执行特定的变送器动作。
1500型变送器支持两种事件模式:
▪基本事件模式
▪增强事件模式
1.6.1组态基本事件
ProLinkII
手操器
“基本”事件用于提供过程变化的通告。如果用户指定的过程变量的实时测量值超过(HI)
或低于(LO)用户定义的设定点,基本事件发生(“接通”状态)。可定义多达两个基本事
件。事件状态可通过数字通讯进行查询,离散输出可组态为报告事件状态。
ProLink→组态→事件
ProLink→组态→离散事件
5、6
详细设置→组态事件
5、5
详细设置→组态离散事件
ProLink→组态→事件
5、6
详细设置→组态事件
步骤
1.从事件编号中选择事件1或事件2。
2.指定事件类型。
18
高准1500型带模拟输出变送器
Page 25

仪表与控制系统的集成
HI
LO
3.将一个过程变量分配给事件。
4.设置设定点(设定点A)的值。
5.(可选)组态离散输出,根据事件情况切换状态。
1.6.2组态增强事件
ProLinkII
手操器
“增强”事件用于在事件发生时执行特定的变送器动作。如果用户指定的过程变量的实时测
量值超过(HI)或低于(LO)用户定义的设定点,或在两个用户定义设定点范围内(IN)或在
范围外(OUT),增强事件发生(“接通”状态)。可定义多达五个增强事件。对于每一个增
强事件,可组态当增强事件发生时变送器将执行的一个或多个动作。
如果分配过程变量的测量值(
不包括在内。
x
>A
如果分配过程变量的测量值(
不包括在内。
x
<A
ProLink→组态→离散事件
5、5
详细设置→组态离散事件
x
)大于设定点(设定点A),事件发生,端点值
x
)小于设定点(设定点A),事件发生,端点值
步骤
1.从事件名称列表中选择事件1、事件2、事件3、事件4或事件5。
2.指定事件类型。
HI
LO
IN
OUT
如果分配过程变量的测量值(
不包括在内。
x
>A
如果分配过程变量的测量值(
不包括在内。
x
<A
如果分配过程变量的测量值(
之间,事件发生,端点值包括在内。
A≤
x
≤B
如果分配过程变量的测量值(
点B,事件发生,端点值包括在内。
x
≤A或
x
≥B
x
x
x
x
)大于设定点(设定点A),事件发生,端点值
)小于设定点(设定点A),事件发生,端点值
)在“范围内”,即,在设定点A和设定点B
)在“范围外”,即,小于设定点A或大于设定
3.将一个过程变量分配给事件。
4.设置所需设定点的值。
▪对于HI或LO事件,设置设定点A。
▪对于IN或OUT事件,设置设定点A和设定点B。
5.(可选)组态离散输出,根据事件情况切换状态。
6.(可选)指定事件发生时变送器将执行的一个或多个动作。为此:
▪使用ProLinkII:ProLink→组态→离散输入
▪使用手操器:详细设置→离散动作→组态离散
组态和使用手册附录
19
Page 26

仪表与控制系统的集成
增强事件动作选项
表1-16增强事件动作选项
动作ProLinkII代码手操器代码
无(缺省值)
启动传感器调零启动传感器调零
启动/停止全部累加器启动/停止全部累加器
复位质量总量复位质量总量
复位体积总量复位体积总量
复位气体标准体积总量复位气体标准体积总量
全部复位总量全部复位总量
启动仪表在线自检验启动仪表在线自检验
无
None
StartSensorZero
Start/StopTotals
ResetMassTotal
ResetVolumeTotal
ResetGasStandardVolumeTotal
ResetAllTotals
不适用
注意!在分配动作给增强事件或离散输入前,检查事件或远程输入设备的状态。如果
它处于ON(接通)状态,当一个新的组态生效时,全部分配的动作都将执行。如果这种
情况无法接受,则等待一个合适的时间,再将动作分配到事件或离散输入。
20
高准1500型带模拟输出变送器
Page 27

Page 28

©2009年MicroMotion,Inc.保留所有权利。P/NMMI-20015864,Rev.AA
*MMI-20015864*
有关最新的高准产品的技术规格,请访问我们的网站
www.micromotion.com中的PRODUCTS部分。
艾默生过程控制有限公司艾默生过程控制流量技术有限公司
上海市浦东新区新金桥路1277号江苏南京江宁区兴民南路111号
邮编:201206邮编:211100
电话:86-21-28929000电话:86-25-51177888
传真:86-21-28929001传真:86-25-51177999
服务热线:400-820-1996(免费)
广州办事处北京办事处成都办事处
广州市东风中路410-412号北京市朝阳区雅宝路10号成都市科华北路62号
健力宝大厦2107室凯威大厦十三层力宝大厦S-10-10室
邮编:510030邮编:100020邮编:610041
电话:86-20-83486098电话:86-10-58211188电话:86-28-85283100
传真:86-20-83486137传真:86-10-58211100传真:86-28-85283090
乌鲁木齐办事处西安办事处香港办事处
乌鲁木齐市五一路160号西安市长乐西路8号香港北角英皇道625号23楼
鸿福酒店1001室金花饭店303室电话:852-28029223
邮编:830000邮编:710032传真:852-28278670
电话:86-991-5802277电话:86-29-83255563
传真:86-991-5803377传真:86-29-83255076
 Loading...
Loading...