

Microcom Technologies GpLV, Gp User Manual
User Guide
Part Number: 0451-0024
Issue Number: 2
COMMANDERGGpp
model sizes 1 to 4
0.75kW to 110kW
(1HP to 150HP)
COMMANDERGGpp LVLV
model sizes 1 to 3
0.37kW to 22kW
(0.5HP to 30HP)
General Purpose Variable Speed Drive
for induction motors

General information
The manufacturer accepts no liability for any
consequences resulting from inappropriate ,
negligent or incorrect installation or adjustment of
the optional operating parameters of the equipment
or from mismatching the variable speed drive
(Drive) with the motor.
The contents of this User Guide are believed to be
correct at the time of printing. In the interests of a
commitment to a policy of continuous development
and improvement, the manufacturer reserves the
right to change the specification of the product or
its performance, or the contents of the User Guide,
without notice.
All rights reserved. No parts of this User Guide may
be reproduced or transmitted in any form or by any
means, electrical or mechanical including
photocopying, recording or by any informationstorage or retrieval system, without permission in
writing from the publisher.
Important...
Drive software version
This product is supplied with the latest version of
user-interface and machine-control software. If this
product is to be used with other Control Techniques
variable speed drives in an existing system, there
may be some differences between their software
and the software in this product. These differences
will cause a difference in functions. This may also
apply to variable speed drives returned from a
Control Techniques Service Centre.
If there is any doubt, contact a Control Techniques
Drive Centre.
Copyright © March 2000 Control Techniques Drives Ltd
Author: RFD
Issue Code: gpxu2
Issue Date: March 2000
S/W Version: V03.XX.07 onward

Contents
Chapter
1 Introduction 1-1
1.1 How this User Guide can help you 1-1
1.2 Model sizes 1-1
1.3 Configuration layers 1-2
1.4 Default configurations 1-2
1.5 Operating mode 1-2
1.6 User-interface modes 1-2
1.7 Macro configurations 1-3
1.8 Plug-in option modules 1-4
1.9 Serial communications 1-4
2 Getting Started 2-1
2.1 How to use this chapter 2-1
2.2 Making signal and power connections 2-1
2.3 Introduction to the display and keypad 2-6
Display and keypad 2-6
Resetting the Drive 2-7
2.4 Working with software parameters 2-7
Parameters 2-7
Types of parameter 2-7
Adjusting parameter values 2-7
Making new values effective, and saving
them 2-7
Parameter 0.00 2-8
2.8 Setting up operating limits 2-15
Minimum and maximum frequencies 2-15
Acceleration rate 2-15
Deceleration rate 2-15
Braking resistor 2-15
Torque producing current limit 2-16
Voltage-control modes 2-16
Boost voltage 2-17
Voltage/frequency characteristic 2-17
3 Setting Up the Drive
(Macro Configurations) 3-1
3.1 How to use this chapter 3-1
3.2 Enabling a different macro configuration3-1
3.3 Macro 0
(default configuration)
3.4 Macro 1
3.5 Macro 2
3.6 Macro 3
3.7 Macro 4
3.8 Macro 5
3.9 Macro 6
3.10 Macro 7
General purpose
Easy mode
Motorized potentiometer
Preset frequencies
Torque control
PID (set-point control)
Axis-limit control
Brake control
3-2
3-9
3-15
3-21
3-27
3-33
3-38
3-45
2.5 How macro configurations change the
arrangement of the Menu 0 parameters 2-8
2.6 Initial setting up 2-9
Restoring the Drive to a default
configuration 2-9
Enabling Macro 1 2-10
Configuring the Drive for the motor 2-10
Autotune 2-12
Changing the user interface mode 2-12
2.7 Operating instructions 2-13
Terminal mode 2-13
Keypad mode 2-14
Trip and enable 2-14
Commander GP User Guide
Issue code: gpxu2
d2
i

Appendix
A Programming Instructions A-1
A.1 Electrical connections A-1
A.2 Preparation A-1
A.3 Status mode A-2
A.4 Displaying the parameter
number in Status mode A-2
A.5 Entering Parameter mode
and returning to Status mode A-2
A.6 Selecting a parameter to access A-3
A.7 Changing the value of a parameter A-4
A.8 Saving new parameter values A-6
A.9 Flashing and non-flashing digits A-6
A.10 Negative values A-6
A.11 Changing the setting
of a bit parameter A-6
A.12 Selecting a different option A-7
A.13 Restoring the Drive to a default
configuration A-7
A.14 Summary of key operation A-7
B Security B-1
B.1 User-defined Security B-1
B.2 Setting-up User Security B-1
B.3 Unlocking User Security B-1
B.4 Locking User Security B-1
B.5 Summary B-1
C Signal Connections C-1
D Menu 0 Parameters D-1
D.1 Introduction D-1
D.2 Fixed-function parameters common
to all macro configurations D-2
D.3 Parameters specific to the macro
configurations D-8
E Diagnostics E-1
E.1 Status indications E-1
E.2 Alarm indications E-1
E.3 Trip codes E-2
ii
Commander GP User Guide
Issue code: gpxu2
d2
1 Introduction
1.2 Model sizes
This User Guide refers to the models listed below.
1.1 How this User Guide
can help you
If this is your first encounter with a
Commander Gp Drive, read this User Guide
before referring to the accompanying
Installation Guide.
This User Guide is arranged on a step-by-step basis
to lead you through the following:
• Learning how to operate the Commander
Gp (Drive)
• When to refer to the Installation Guide
• Setting up the Commander Gp for basic
applications
Advanced programming of the
Commander Gp
For advanced programming of the Commander Gp,
refer to the Commander Gp Advanced User Guide. This
contains descriptions of all the advanced
parameters, as well as additional information, and
can be obtained from the Drive Centres and
distributors listed at the end of this User Guide.
The advanced parameters in software version
V03.01.07 onward can be accessed by use of the
UD71 Basic serial communications large option module
(see Serial communications later in this chapter).
Model size Model code Nominal
rating for
standard AC
motors
kW
at 380VHPat 460V
GPD 1401 0.75 1.0
GPD 1402 1.1 1.5
GPD 1403 1.5 2.0
GPD 1404 2.2 3.0
GPD 1405 4.0 5.0
GPD 2401 5.5 7.5
GPD 2402 7.5 10
GPD 2403 11.0 15
GPD 3401 15.0 25
GPD 3402 18.5 30
GPD 3403 22.0 30
GPD 3404 30.0 40
GPD 3405 37.0 50
GPD 4401 45.0 75
GPD 4402 55.0 100
GPD 4403 75.0 125
GPD 4404 90.0 150
GPD 4405 110.0 150
Variable speed drives may be
hazardous if misused. Carefully
follow the instructions in this
Warning
User Guide and the Installation
Guide.
Commander GP User Guide
Issue code: gpxu2
Model size Model code Nominal rating
for standard
AC motors
KW
at 380VHPat 460V
GPD 1201 0.37 0.5
GPD 1202 0.55 0.75
GPD 1203 0.75 1.0
GPD 1204 1.1 1.5
GPD 1205 2.2 3.0
GPD 2201 3.0 4.0
GPD 2202 4.0 5.0
GPD 2203 5.5 7.5
GPD 3201 7.5 10
GPD 3202 11 15
GPD 3203 15 20
GPD 3204 22 30
Introduction 1-1

1.3 Configuration layers
1.5 Operating mode
The Drive has three layers of configuration, starting
from the base layer (1) as follows:
1. Default configuration
2. User-interface mode
3. Macro configuration
Each of the upper layers (2, 3) is superimposed on its
preceeding layer.
1.4 Default configurations
The Drive has a separate default configuration for the
AC supply conditions in Europe or in the USA. These
two default configurations are distinguished as
follows:
European
USA
The Drive is despatched from the factory in the
appropriate default configuration for the continent
in which it is to be sold. The default configuration
is Macro 0 (described in Macro configurations later in
this chapter).
The default configuration also defines the following
functions:
Europe
• Ability to select positive-logic for the digital
• Ability to adjust the current-loop PI gains
USA
• Ability to select digital control by two or
• Frequency demand indication
(These functions apply to Macro 0 only.)
Key used in this User Guide
AC supply voltage at 50Hz
AC supply voltage at 60Hz
control inputs
three wires
For use with standard AC induction motors.
The Drive applies power to the motor at frequencies
which are controlled by the user. The motor speed
is a result of the output frequency of the Drive and
slip due to the mechanical load.
The Drive can power a number of motors connected
in parallel (each motor must be protected against
overload; this is described in the Installation Guide).
The Drive can improve the performance of the
motor by applying the following:
• Slip compensation
• Fixed boost or Open-loop Vector operation
Fixed boost applies a fixed voltage boost at low
frequencies.
Open-loop Vector operation maintains almost
constant flux by dynamically adjusting the
motor voltage according to the load on the
motor.
1.6 User-interface modes
The motor can be started and stopped, the
direction of rotation reversed and the speed
changed by operation of the Drive in either of the
following user-interface modes:
Terminal mode
Applying signals from electrical contacts, a
system controller or PLC to digital and analog
inputs on the Drive.
For the USA default configuration, the Drive can
be configured for digital control by momentary
contacts.
Keypad mode
Manual operation of the keypad on the front
panel of the Drive. Minimal signal connections
are made to the Drive.
The following key denotes the default
configuration:
EUR> 50Hz AC supply (Europe)
USA> 60Hz
When no key is stated, the information applies to
both default configurations.
AC supply (USA)
1-2 Introduction
Commander GP User Guide
Issue code: gpxu2

1.7 Macro configurations
The Drive can be used to control the motor speed in
various ways for different types of application. To
reduce the number of adjustments to the Drive for
each type of application, eight macro configurations
(0 to 7) are available.
Macro 3
Preset frequencies
Four preset frequencies that are selected by external
contacts.
The macro configuration can be used in Terminal
mode only.
Each macro configuration requires specific signal
connections to be made to the Drive.
The macro configurations are as follows:
Macro 0
General purpose (default configuration)
Analog frequency control for general-purpose
applications.
The output frequency of the Drive is controlled by a
frequency reference. The motor speed will follow the
frequency reference so long as the maximum
permissible output current of the Drive is not
exceeded. These principles also apply to all other
macro configurations except Macro 4.
The macro configuration can be used in either
Keypad or Terminal mode.
The frequency can be controlled in either of the
following ways...
• Terminal mode: An analog frequency
reference signal applied to the Drive
• Keypad mode: By a user pressing keys on
the front panel of the Drive
Macro 1
Easy mode
Frequency control for basic applications. This is
similar to Macro 0, except, for simplicity, fewer
adjustments are required.
The macro configuration can be used in either
Keypad or Terminal mode.
The principles of controlling motor speed are the
same as for Macro 0.
The principles of controlling motor speed are the
same as for Macro 0.
Macro 4
Torque control
The motor torque is defined by a torque demand.
The motor speed will vary continuously as a result
of the difference between the load torque and the
torque demand up to a maximum speed which is
defined by a speed over-ride level.
The torque demand is supplied by an analog torque
reference signal that is applied to the Drive.
The macro configuration can be used in Terminal
mode only.
Macro 5
PID control
The Drive is operated with a frequency reference
and an analog feedback device in order to
dynamically maintain the speed to a user-defined
set-point under PID control.
The macro configuration can be used in Terminal
mode only.
The principles of controlling motor speed are the
same as for Macro 0.
Macro 6
Axis-limit control
Axis-limit control is used for applications which
require the process to be automatically stopped
when a position limit has been reached. A bipolar or
unipolar frequency reference can be used.
The macro configuration can be used in Terminal
mode only.
Macro 2
Motorized potentiometer
The frequency is controlled incrementally by
operation of up and down contacts.
The macro configuration can be used in Terminal
mode only.
The principles of controlling motor speed are the
same as for Macro 0.
Commander GP User Guide
Issue code: gpxu2
The principles of controlling motor speed are the
same as for Macro 0.
Macro 7
Brake control
Frequency control with brake control for crane or
hoist applications.
The macro configuration can be used in Terminal
mode or Keypad mode.
The principles of controlling motor speed are the
same as for Macro 0.
Introduction 1-3

1.8 Plug-in option modules
Operation of the Drive can be extended by the use
of plug-in option modules. The following modules
are available from the supplier of the Drive; an
appropriate User Guide is included with each
module:
Small option modules
UD50 Additional I/O
UD55 Cloning (parameter copying)
Large option modules
UD71 RS232/RS485 serial
communications
1.9 Serial communications
The Drive can be configured and fully controlled
from a system controller or PLC operating on a
RS232 or a 4-wire RS485 serial communications link.
A Basic serial communications large option module
must be fitted in the Drive. More information can
be obtained from a Drive Centre or distributor
listed at the end of this User Guide.
Serial communications can be used in conjunction
with Terminal mode or Keypad mode.
1-4 Introduction
Commander GP User Guide
Issue code: gpxu2
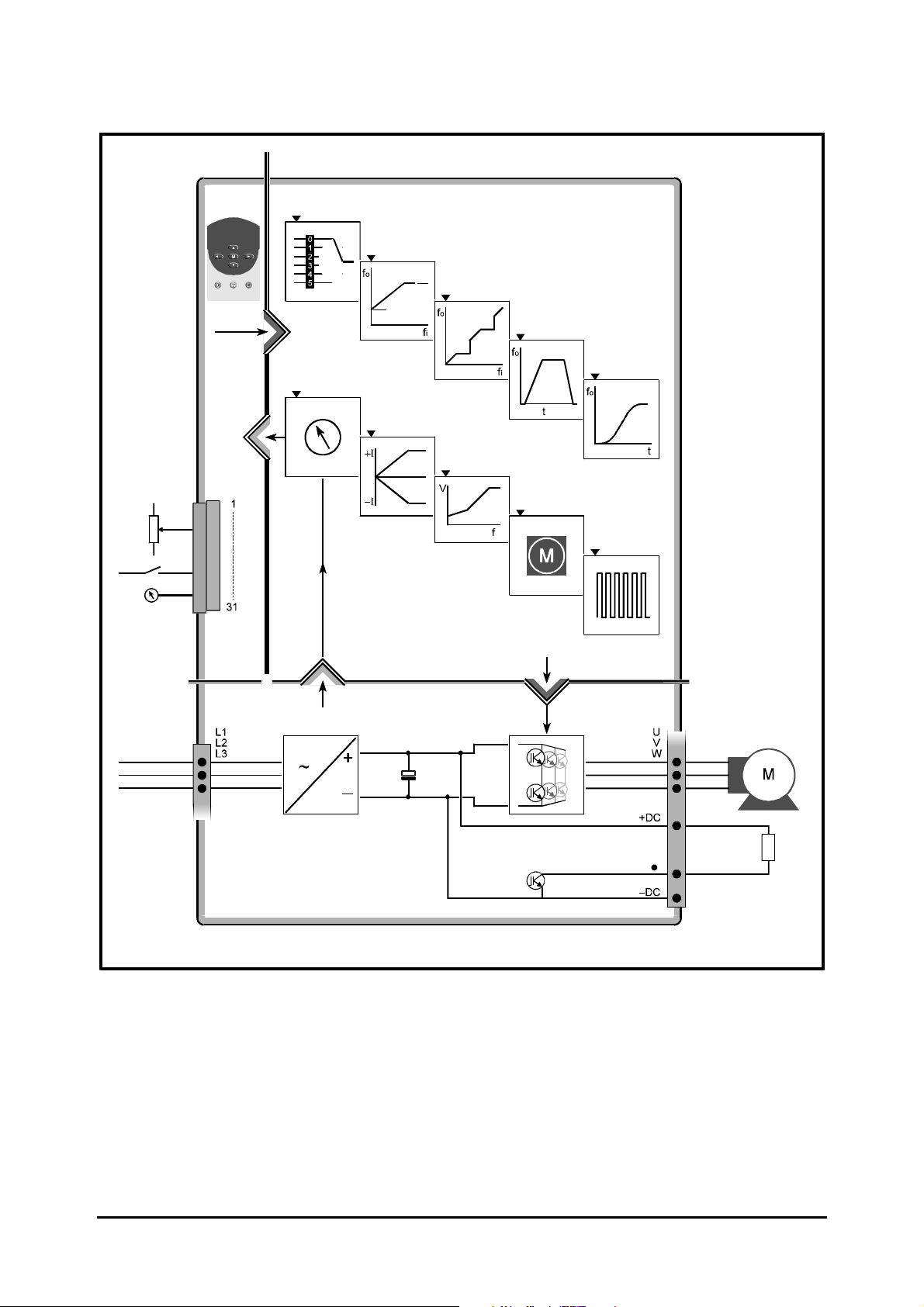
User interface
Display and
keypad
External
control and
monitoring
(analog and
digital)
User
control
Frequency reference
selection
Minimum and maximum
frequency limits
Monitoring
Current limit
Stop mode
Spinning motor sync.
Functions of the software
(controlled by the macro configurations)
Skip frequencies
Acceleration and
deceleration ramps
Voltage control
Motor parameters
S-ramp
PWM switching
frequency
Drive
Control
Monitoring
AC supply
DC bus
Power circuits
Figure 1–1 Block diagram of the Drive showing the main functions of the software,
and power connections (signal connections vary according to the
macro configuration)
Optional braking
resistor
Commander GP User Guide
Issue code: gpxu2
Introduction 1-5

1-6 Introduction
Commander GP User Guide
Issue code: gpxu2
2 Getting Started
2.2 Making signal and power
connections
2.1 How to use this chapter
It is recommended that you follow the instructions
in this chapter in the order that they appear. You
will be led through the initial stages of setting up
the Drive (in Macro 1 Easy mode) as well as being able
to familiarize yourself with operating the Drive.
The Drive must be operated
only by personnel having the
Warning
Warning
Warning
Warning
necessary training or
experience.
If this is the first time the
Drive has been operated,
ensure that no damage or
safety hazard could arise from
the motor starting
unexpectedly.
The motor must be fixed down
and the shaft guarded against
inadvertent contact.
Do not change parameter
values without careful
consideration; wrong values
may cause damage or a safety
hazard.
Stored charge
Warning
The Drive contains capacitors
that remain charged to a
potentially lethal voltage after
AC supply has been
the
disconnected. If the Drive has
been energized, the
must be isolated at least
ten minutes before work may
continue.
AC supply
Isolation
Warning
For instructions on removing the terminal covers,
see Mounting the Drive and RFI filter in Chapter 2
Installing the Drive in the Installation Guide.
The control circuits and
terminals are isolated from the
power circuits only by basic
insulation to IEC664–1. The
installer must ensure that all
external control circuits are
separated from human contact
by at least one layer of
insulation rated for use at the
AC supply voltage.
Notes
Keep a note of changes
When changing the values of parameters,
make a note of the new values in case they
need to be entered again.
Saving the changes
For new parameter-values to apply after
AC supply to the Drive is interrupted,
the
new values must be saved. This is described
in Saving new parameter-values in Appendix A
Programming Instructions.
Commander GP User Guide
Issue code: gpxu2
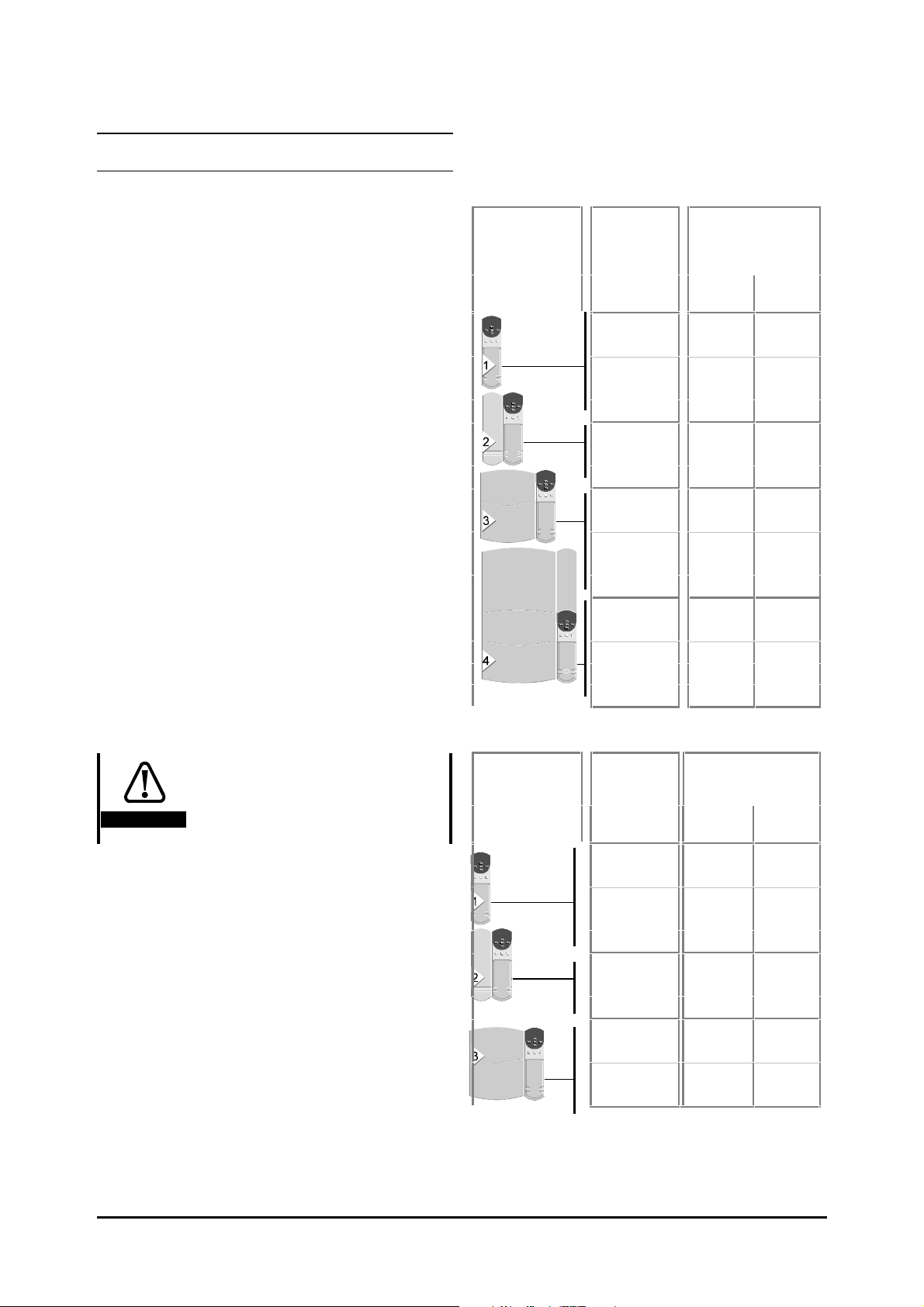
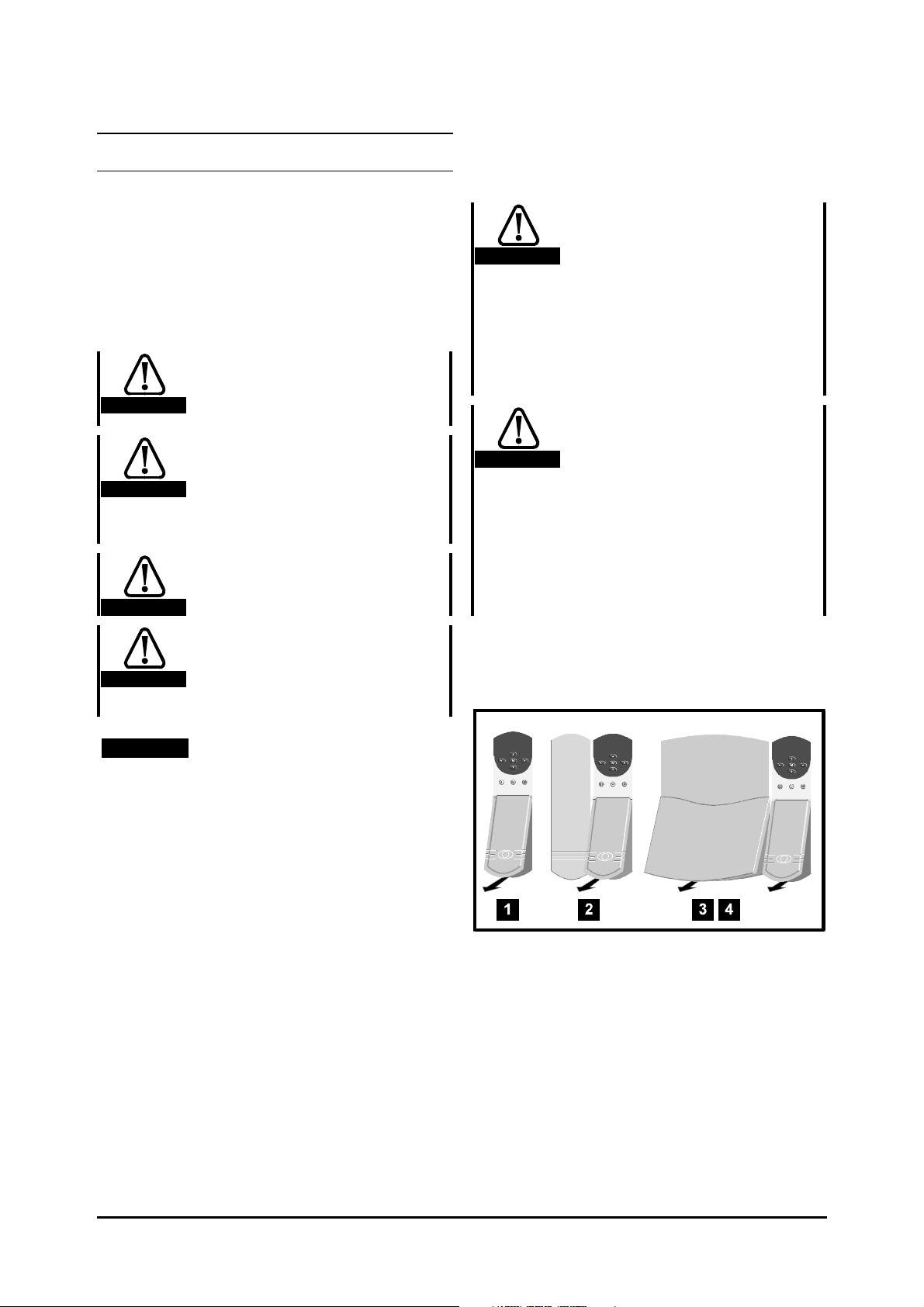
Figure 2–1 Removing the terminal covers for
access to the connectors
Getting Started 2-1
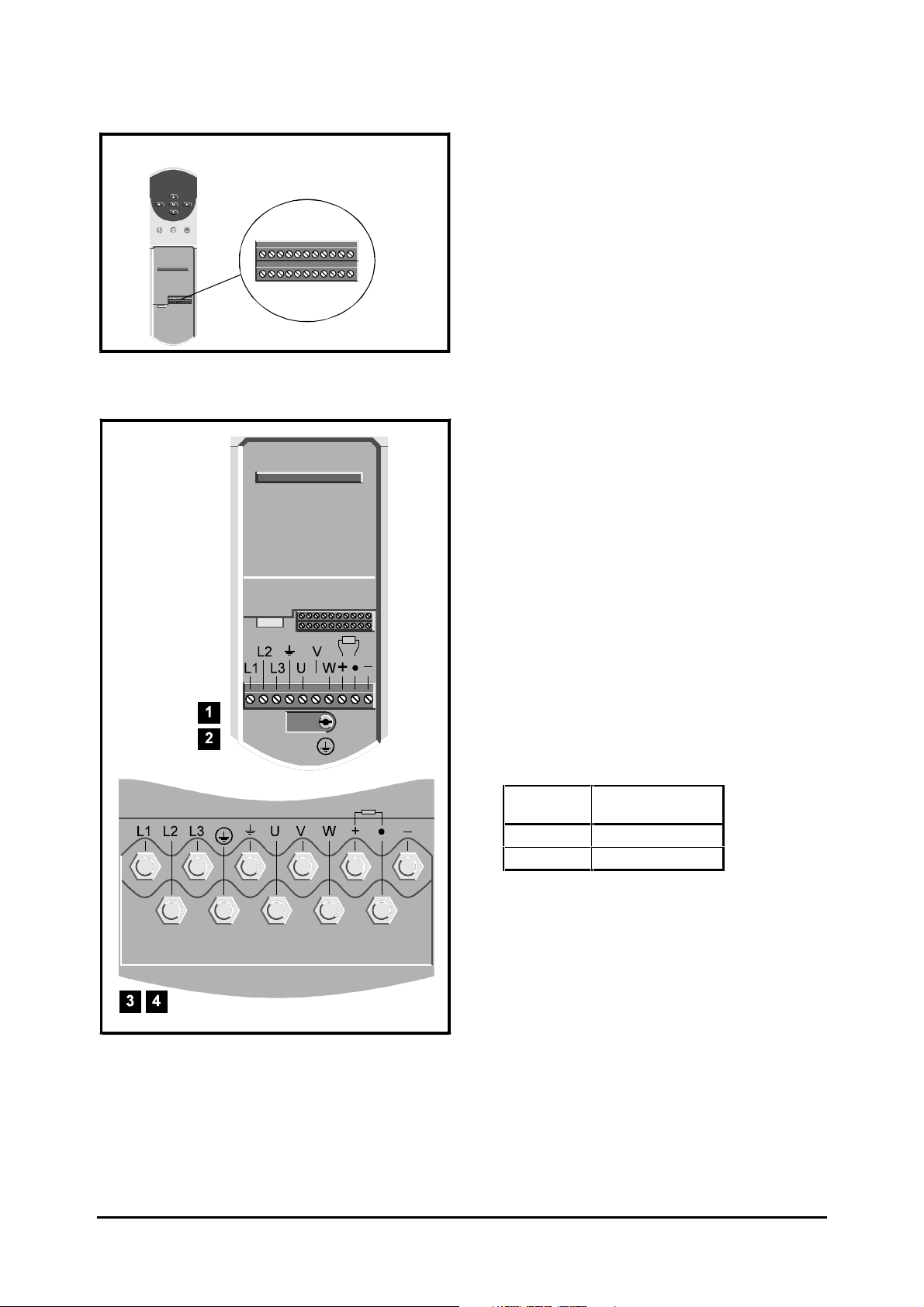
111
21 31
Figure 2–2 Location of the signal connector
1. Observe the safety warnings and cautions given
in Chapter 1 Safety information of the Installation
Guide and in this chapter.
2. Refer to the following:
• Chapter 2 of the Installation Guide in order
to install the Drive
• Figure 2–2 for the location of the
signal connector
• Figure 2–3 for the locations of the
power connections
• Figure 2–5 or 2–6 in this chapter in order to
make the signal and power connections for
operation in Terminal or Keypad mode.
Note that Macros 2, 3, 4, 5, 6 operate only in
Terminal mode. If one of these macro
configurations is to be enabled after the
initial setting up covered in this chapter, you
may wish to set up the Drive now in
Terminal mode in order to learn how to
operate it in this mode.
Signal connector for all models The two
terminal blocks of the signal connector can be
unplugged from the Drive by pulling them
downward.
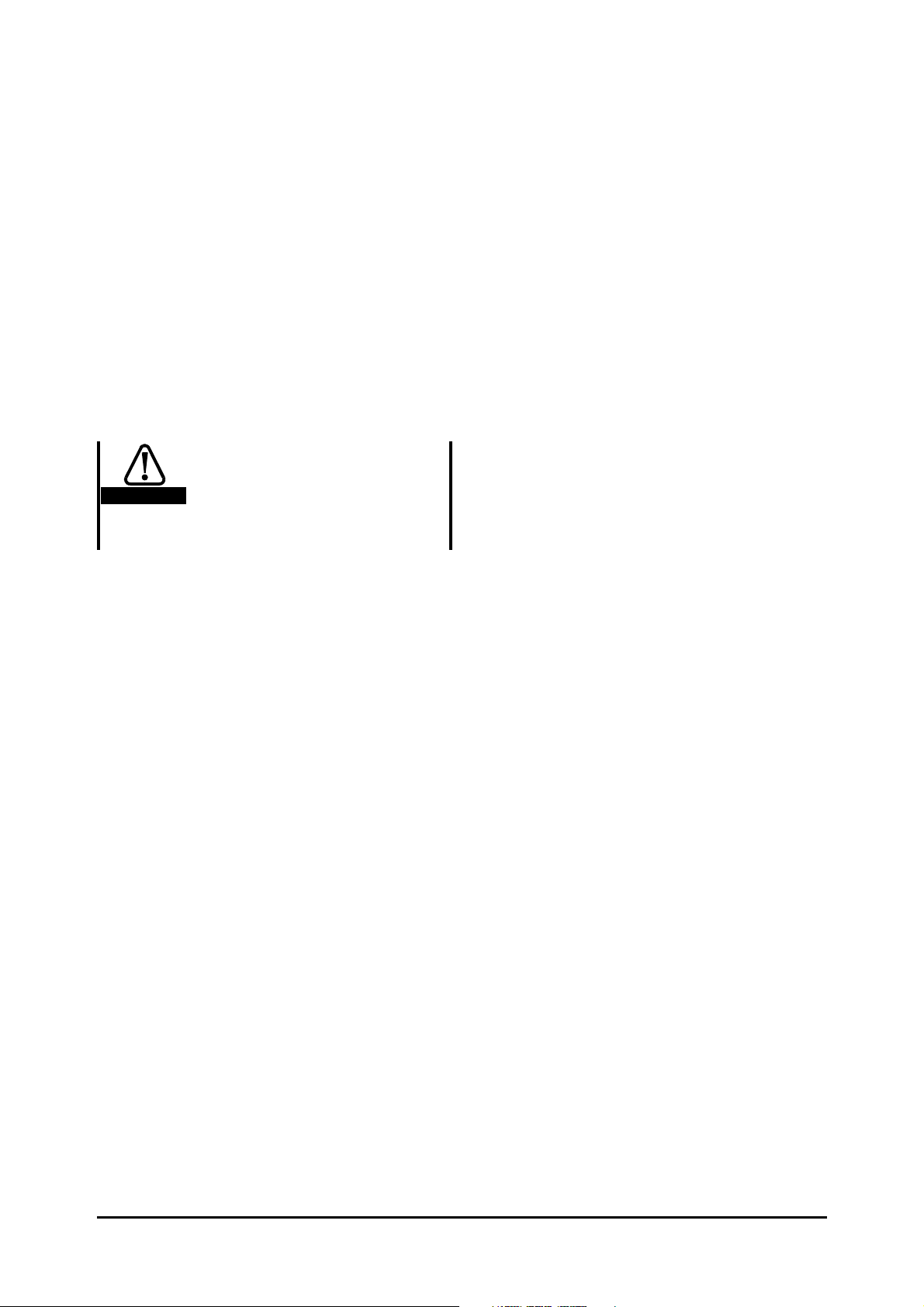
Figure 2–3 Locations of the power connectors
Power connector for model sizes 1
and 2 The power connector can be unplugged
from the Drive by pulling it downward.
Power connections to model sizes 3
and 4 The power connections are made to
M10 studs located in the power section of the
Drive.
3. Note that the default user-interface mode is
as follows:
Continent User-interface
mode
EUR Terminal
USA Keypad
(Instructions for changing the user-interface
mode are given later.)
2-2 Getting Started
Commander GP User Guide
Issue code: gpxu2
4. When connecting a motor to the Drive, observe
the following:
• Preferably the motor should be identical to
the motor that is to be used in the
application, but this is not essential.
• The motor shaft must not be attached to
any equipment, or exposed.
5. No motor thermistor connection is required at
this stage, but a thermistor will be required
later if the Drive is to be operated in any macro
configuration except Macros 1 and 5. When
Macro 1 or Macro 5 is enabled, the thermistor is
ignored by the Drive. (Instructions for
connecting a motor thermistor to the signal
connector are given for each macro
configuration in Chapter 3 Setting Up the Drive.)
After having made control
connections, carefully check
Warning
that terminal 30 is open-circuit
to ensure the Drive is in the
Stop state when the
AC supply
is first connected.
6. After re-fitting the terminal cover, connect the
Drive to the
AC supply.
Commander GP User Guide
Issue code: gpxu2
Getting Started 2-3
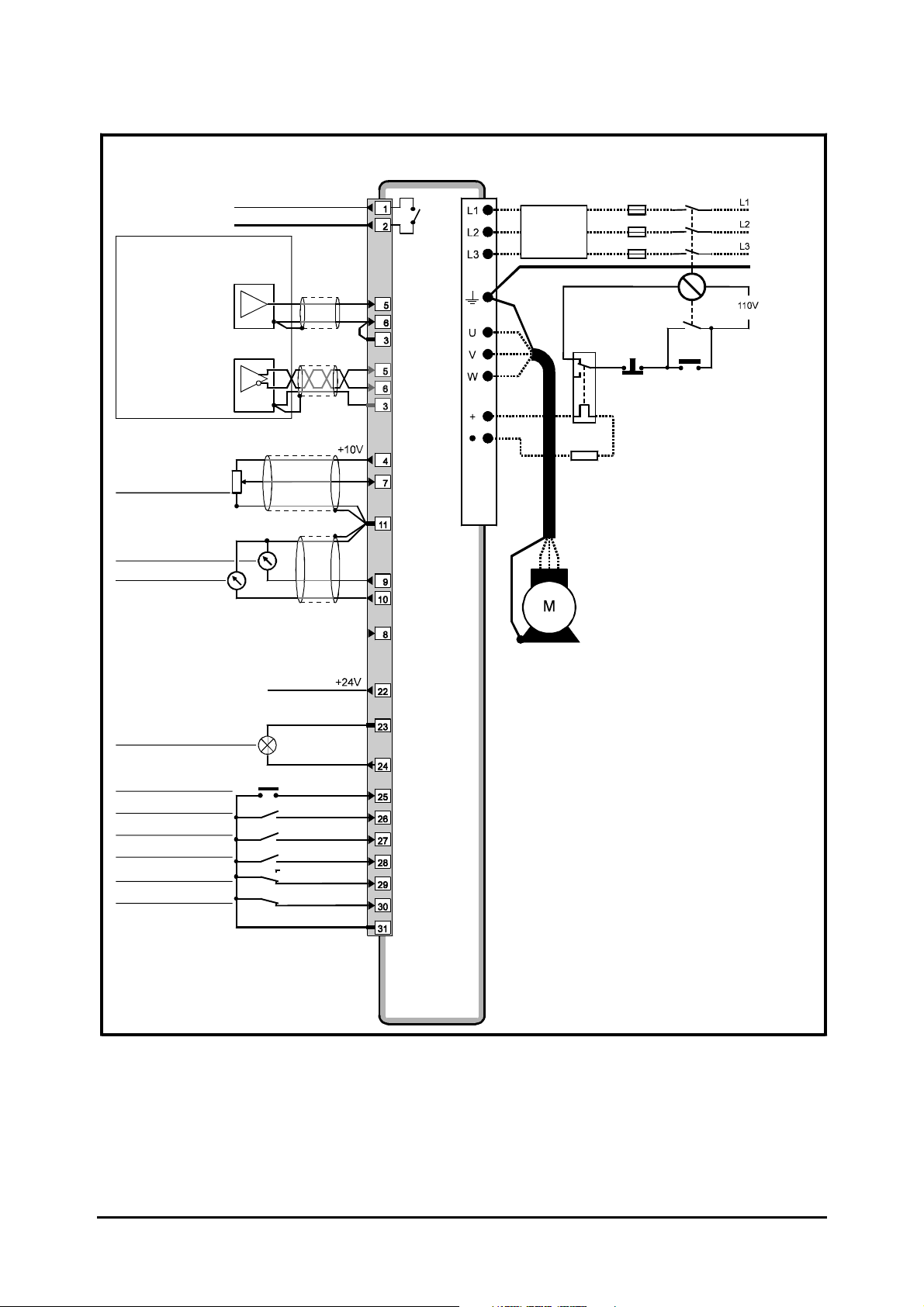
Refer to the Installation Guide for
cable sizes and fuse ratings
Status relay
Drive healthy
Analog frequency reference 1
(remote)
Connections for
single-ended input
Connections for
differential input signal
Analog frequency
reference 2
(local)
SPEED
TORQUE
signal
0V common
0V common
0V common
Signal
connector
Power
terminals
Optional
RFI filter
Thermal
protection
device
Stop
Optional braking resistor
Refer to the Installation Guide for sizing
of the optional braking resistor
Start /
Reset
0V common
AT SPEED
RESET
JOG SELECT
RUN FORWARD
RUN REVERSE
LOCAL / REMOTE
External trip
REMOTE
LOCAL
0V common
Figure 2–5 Power connections, and signal connections for Terminal mode (Macro 1 only)
2-4 Getting Started
Commander GP User Guide
Issue code: gpxu2
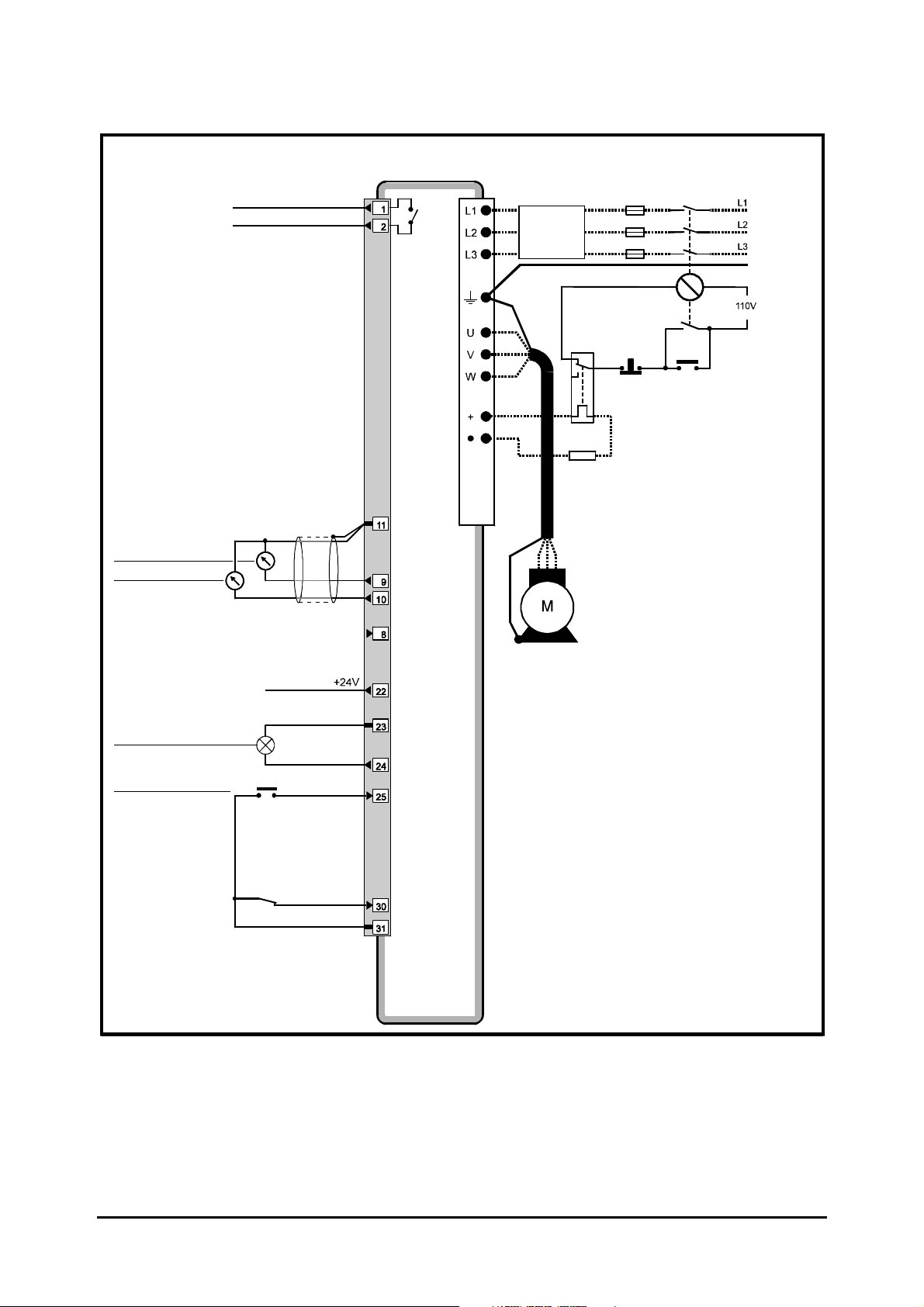
Refer to the Installation Guide for
cable sizes and fuse ratings
Status relay
Drive healthy
SPEED
TORQUE
0V common
Signal
connector
Encoder
Power
Optional
RFI filter
Thermal
protection
device
Stop Start /
Optional braking resistor
Refer to the Installation Guide for sizing
of the optional braking resistor
Reset
0V common
AT SPEED
RESET
External trip
0V common
Figure 2–6 Power connections, and signal connections for Keypad mode (Macro 1 only)
Commander GP User Guide
Issue code: gpxu2
Getting Started 2-5
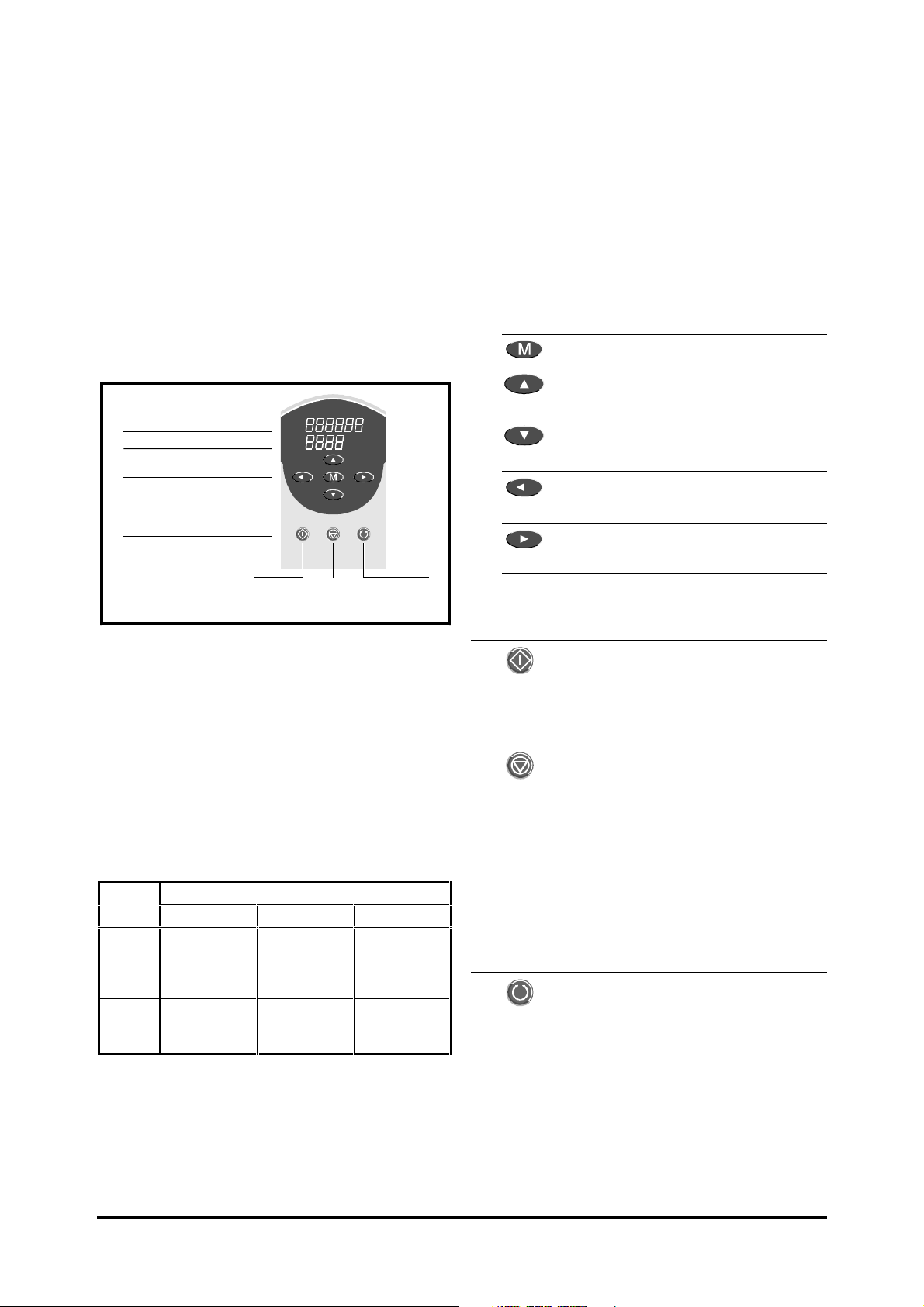
2.3 Introduction to the
display and keypad
Display and keypad
The display and keypad are used for the following:
• Reading and changing the values of software
parameters that are used to configure,
control and monitor the Drive
• Displaying the operating status of the Drive
• Displaying fault and trip codes
Upper display
Lower display
Programming keys
Control keys
Run Stop
Reset
Figure 2–7 Display and keypad
Forward /
Reverse
Programming keys
These are used for the following:
• Changing the mode of operation of the
display
• Selecting a parameter to edit
• Editing the selected parameter
• Saving new values given to parameters
The functions of the programming keys are as
follows:
Change the display mode
Select a parameter
Increase the value of a digit
Select a parameter
Decrease the value of a digit
Display the parameter number
Select the next left display digit
Display the parameter number
Select the next right display digit
Control keys
The functions of the control keys are as follows:
Display
The display has three display modes as follows...
• Status mode
Used to indicate the status of the Drive
• Parameter mode
Used for selecting a parameter to edit
• Edit mode
Used for editing the selected parameter
... and shows the following:
Display Display mode
Status Parameter Edit
Upper Value of
parameter (
Lower Status of the
Drive
Value of
0)
parameter (0)
Parameter
number (0.10)
rdY
Operating instructions for the display and keypad
are given in Appendix A Programming Instructions.
Value of
parameter (0)
(selected digit
flashes)
Parameter
number (0.10)
(RUN) Start the Drive running.
The RUN key is active only when the Drive is
operating in Keypad mode (parameter 0.05
Reference select set at 4).
(STOP–RESET) The three functions of
this key are as follows:
• Stop the Drive
• Reset the Drive after it has tripped
• Make new parameter-values take effect
The STOP-RESET key is active when the Drive
is operating in Keypad mode. This key acts only
as RESET when the Drive is operating in
Terminal mode (parameter 0.05 Reference select
set at 0, 1, 2, 3 or 5).
(FWD/REV) Change the direction of
rotation of the motor. (This is not enabled by
default, and is described later in this chapter in
Enabling reverse direction in Keypad mode.)
2-6 Getting Started
Commander GP User Guide
Issue code: gpxu2
Resetting the Drive
Types of parameter
Terminal mode
When the Drive is stopped, press:
Alternatively, close the RESET contact (see
Figure 2–5).
Keypad mode
When the Drive is stopped, press:
When the Drive is running, press and hold...
... then press:
Release both keys at the same time.
2.4 Working with
software parameters
Parameters
The software parameters are contained in a menu
named Menu 0. Each parameter has a number as
well as a name. These are represented in this User
Guide as (for example, parameter 03 in Menu 0):
0.03 Acceleration rate
When the value of a parameter is referred to, it is
indicated as [0.03].
Variable and bit parameters
There are two types of parameter, as follows:
• Bit parameters
• Variable parameters
Bit parameters can be set at 0 or 1 to carry out the
following:
• Enable and disable functions
• Select from two options
Variable parameters can be set at any value within
the specified range to carry out the following:
• Enter values
• Select from more than two options
No distinction is made in the parameter numbering
system between variable and bit parameters. When
a bit parameter is selected on the Drive display, the
word bit appears.
Read–write and read-only
Both types of parameter can be as follows:
• Read–write (
• Read-only (
Read–write parameters are programmable by the
user. Read-only parameters are for information
purposes; they cannot be programmed.
The settings of read–write and read-only
parameters can be read on the display or remotely
using serial communications.
RW)
RO)
Adjusting parameter values
Instructions on adjusting parameter values are given
in Appendix A Programming Instructions.
Commander GP User Guide
Issue code: gpxu2
Making new values effective,
and saving them
The new value of most parameters takes effect as
soon as it is entered. Some parameters (such as the
destination-selection parameters for the analog
inputs) require the Drive to be reset before their
new values take effect.
Unless a save procedure is carried out, the new value
will be lost when the
the Drive (described in Saving new parameter-values
in Appendix A Programming Instructions).
AC supply is disconnected from
Getting Started 2-7
Parameter 0.00
Parameter 0.00 is a special read–write parameter
that is used for the following:
• Saving new values given to parameters
• Controlling security
• Enabling macro configurations
These functions are controlled by the user entering
specific values, as shown below:
Value Function
Saving new parameter-values
The Drive can be running or stopped
(described in Appendix A Operating Instructions)
1000
Controlling security
The Drive can be running or stopped
(described in Appendix B Security and Accessing the
Advanced Parameters)
0 ~ 255 User security code
2000 Lock security
Restoring the Drive to a default configuration
The Drive must be stopped
(described later in this chapter)
1233 Restore default values to all parameters for
1244 Restore default values to all parameters for
Selecting Macros 0 to 7
The Drive must be stopped
(described in Chapter 3 Setting Up the Drive)
2001 Macro 1 Easy mode
2002 Macro 2 Motorized potentiometer
2003 Macro 3 Preset speeds
2004 Macro 4 Torque control
2005 Macro 5 PID (set-point) control
2006 Macro 6
2007 Macro 7
2009 Macro 0 General purpose
2010 Macro 0 General purpose
The Drive must be reset to make a newly selected
function or configuration take effect.
50Hz
AC supply frequency (Europe)
60Hz
AC supply frequency (USA)
Axis-limit control
Brake control
(USA default configuration)
(EUR default configuration)
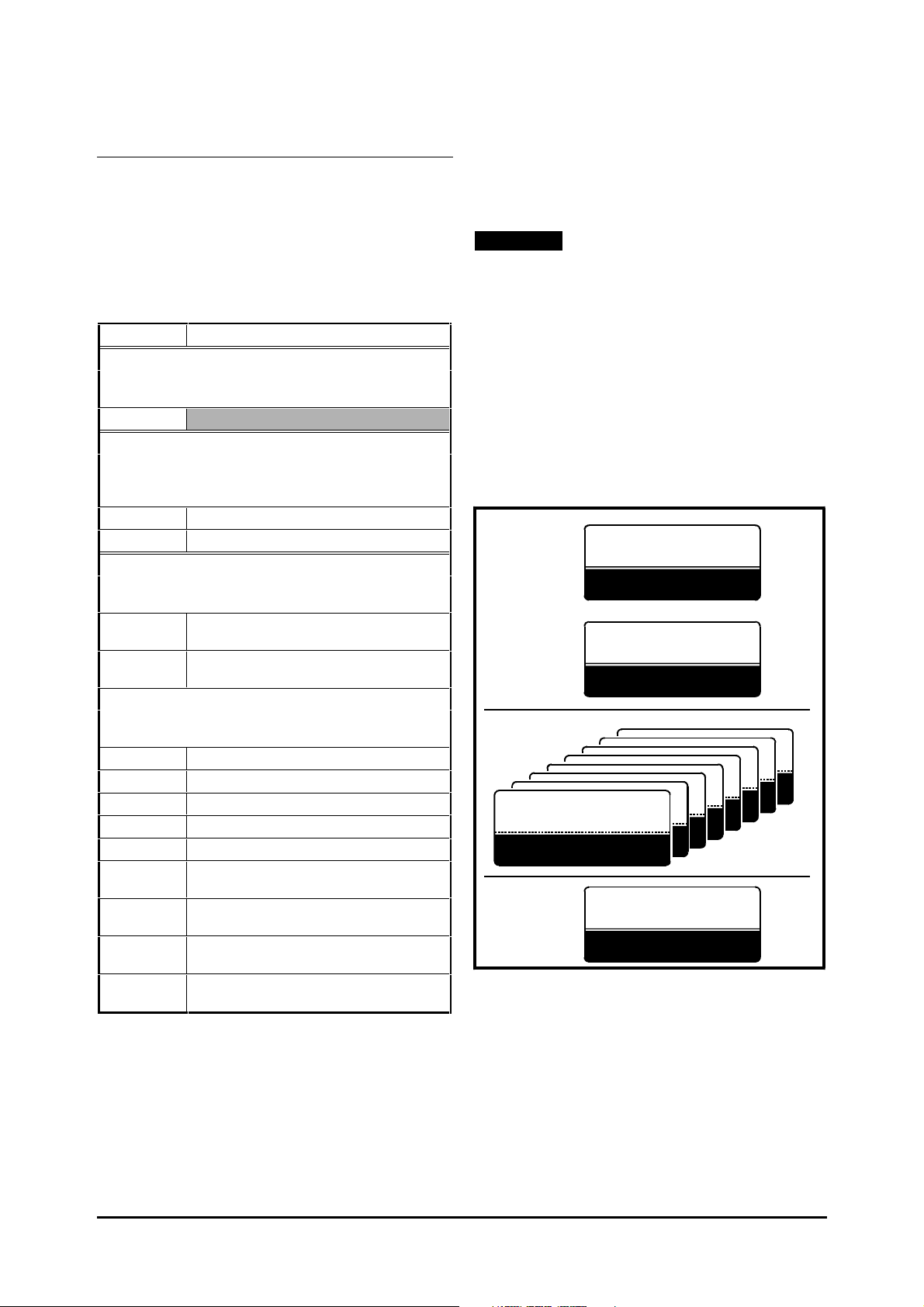
2.5 How macro configurations
change the arrangement of
the Menu 0 parameters
Note
Do not confuse the term Macro with the
term Menu. Menu 0 contains parameters;
macro configurations re-define some of
these parameters to perform specific
functions. Menu 0 always exists, but is
affected by the macro configuration that is
enabled.
Only one macro configuration can be
enabled at a time.
Menu 0 contains 51 parameters which are arranged
in four groups, as shown in Figure 2–8.
Common to
all macros
Configuration and saving
parameter
Fixed-function parameters
Specific to
each macro
0.11 ~ 0.30
Re-programmable parameters
Common
to all
macros
Fixed-function parameters
Figure 2–8 How the Menu 0 parameters are
grouped and the relationship with
the macro configurations
0.00
0.01 ~ 0.10
Macro 0
1
0.31 ~ 0.50
7
6
5
4
3
2
Instructions for using parameter 0.00 are given at
the appropriate places in this User Guide
2-8 Getting Started
Commander GP User Guide
Issue code: gpxu2
Macro 0
2.6 Initial setting up
When Macro 0 is enabled, the re-programmable
parameters have their default functions.
Macro 1
When Macro 1 Easy Mode is enabled, none of the
re-programmable parameters are available.
Macros 2 to 7
When one of these macro configurations is enabled,
the functions of some re-programmable parameters
are specific to the macro configuration.
Other factors that affect the
re-programmable parameters
In addition to the changes caused by the macro
configurations, the functions of some
re-programmable parameters are changed by the
default configuration of the Drive (EUR or USA)
These are are shown in Appendix D Menu 0
Parameters.
Where to find information on
parameters
The functions of the parameters are listed for each
macro configuration in Chapter 3 Setting Up the Drive.
The functions of the parameters for each macro
configuration are described in detail in Appendix D
Menu 0 Parameters.
Noting the user values
A parameter table for each macro configuration in
Chapter 3 Setting Up the Drive has a column for you
to note the values entered in the parameters.
Restoring the Drive
to a default configuration
Do not attempt to restore the
Drive to a default
configuration when the Drive is
Warning
Restoring the Drive to a default configuration is not
essential for initial setting up, but should be used
for achieving the following:
• When one of the macros 2 to 7 is currently
• Intentionally restoring all parameters to
• Changing (or re-applying) the default
1. Enter either of the following values in
parameter 0.00:
EUR> (Europe, 50Hz
USA> (USA, 60Hz
running.
Restoring the Drive to a
default configuration enables
Macro 0 and returns all
parameters to their default
values including the motor
parameters. (If any one of the
macros 1 to 7 has been enabled,
the Drive still reverts to
Macro 0.)
After restoring the Drive to a
default configuration, it will be
necessary for the required
parameter values to be
re-entered before the Drive is
next run.
enabled, and a different macro
configuration is required
their default values (this includes the motor
parameters)
configuration for the continent in which the
Drive is to be used
AC supply): 1233
AC supply): 1244
Commander GP User Guide
Issue code: gpxu2
2. Press
3. Set 0.00 at 1000.
4. Press
(RESET key).
(RESET key).
Getting Started 2-9
The following conditions now apply:
• All the default values (including those of the
motor parameters) take effect
• Macro 0 is enabled
If required, any other macro configuration can be
enabled.
Enabling Macro 1
Do not attempt to enable any
macro configuration when the
Drive is running.
Warning
Note
If the Drive is to be operated in Macro 1 or
5 and a braking resistor is to be used, now
set parameter 0.15 at FASt. Then follow
the instructions below.
The setting of parameter 0.15 must be
changed now because the function of this
parameter is changed when one of these
macro configurations is enabled.
1. Set parameter 0.00 at 2001.
2. Reset the Drive.
The configuration layers (see Chapter 1 Introduction)
are now as follows:
1. Appropriate default configuration for the
continent (EUR or USA)
2. Macro 1 Easy mode
Configuring the Drive for the motor
The values of the motor
parameters affect the
Warning
Caution
protection of the motor and
the safety of the system.
When entering values, make
sure they are relevant to the
motor that is to be used. The
default values in the Drive
should not be relied upon.
The motor parameters should
be set to within 10% of the
required values for the motor.
Failure to do this may result in
poor response.
It is essential that the correct
value is entered in parameter
0.46 Motor – rated current. This
affects the thermal protection
of the motor.
Keep a note of the values given
to the motor parameters, since
motor parameters are restored
to their default values when
the Drive is restored to a
default configuration (this
must be done if the Drive has
been used with Macro 2 to 7
enabled and a different macro
configuration is to be enabled)
2-10 Getting Started
Commander GP User Guide
Issue code: gpxu2
Enter the motor ratings in the motor parameters of
Model
GPD 3201
GPD 3401
GPD 3402
GPD 3202
GPD 3403
GPD 3203
GPD 3404
GPD 3405
GPD 3204
GPD 4401
GPD 4402
GPD 4403
GPD 4404
GPD 4405
the Drive, as follows:
Default value Range Unit
0.41 PWM switching frequency
3 3, 4.5, 6, 9, 12 kHz
0.42 Motor – number of poles
4 2 ~ 32 poles
0.43 Motor – power factor
0.92 0 ~ 1.0
(See Autotune later in this chapter)
0.44 Motor – rated voltage (Standard models)
400 (EUR)460 (USA) 0 ~ 480 V
0.44 Motor – rated voltage (LV models)
220 0 ~ 240 V
Enter the rated value.
0.45 Motor – rated speed
0 0 ~ 6000 RPM
When 0.45 is set at 0, no slip compensation is applied by
the Drive. When a value greater than zero is entered, slip
compensation is applied but instability can occur with
motor loads that have predominant inertia. To avoid this
instability, set 0.45 at 0. The value can be changed at a
later time.
0.46 Motor – rated current
FLC
(see the following Values
of FLC table)
Ensure that the motor current-rating applies to the
winding configuration used.
0.47 Motor – rated frequency
50 (EUR) 60 (USA) 0 ~ 1000.0 Hz
Enter the rated value.
0 ~ FLC A
When the number of motor poles
is not known
Example
Rated motor speed: 1450 RPM
AC
supply frequency: 50Hz
P ==
××==50 120
1450
414.
Therefore, the number of poles = 4
(The inaccuracy of the calculation is caused by slip,
in this case 50
RPM.)
Values of FLC
Model FLC (A)
GPD 1201
GPD 1401
GPD 1202
GPD 1402
GPD 1203
GPD 1403
GPD 1204
GPD 1404
GPD 1205
GPD 1405
GPD 2201
GPD 2401
GPD 2202
GPD 2402
GPD 2203
GPD 2403
2.1
2.8
3.8
5.6
9.5
12
16
25
FLC (A)
34
40
46
60
70
74
96
124
156
180
202
Saving the values
Use the following procedure:
1. Set parameter 0.00 at 1000.
Calculate the number of poles from the following:
f
120
××
P
==
N
Where:
AC supply frequency
f
N Rated full-load speed of the motor
The number of poles will be the whole number
immediately below the value of P. Enter this whole
number in 0.42.
Commander GP User Guide
Issue code: gpxu2
2. Press
. The display returns to Parameter
mode. Do not press any keys within eight
seconds; the display then enters Status mode.
3. Momentarily press
to reset the Drive.
Getting Started 2-11
Autotune
Autotune is a sequence of tests performed by the
Drive. The results of the tests are subsequently
used by the Drive for controlling the motor.
Autotune should be used after the motor
parameters have been entered, but before the Drive
is used. Normally (and if the motor is not changed),
Autotune needs performing only once.
During the following
procedures, the Drive will
Warning
Note
To stop the test at any time, press .
The motor will then coast to a stand-still
and the test will not be completed.
If the Drive trips
If the Drive trips during the test, note the trip code
that appears on the upper display and refer to
Appendix E Diagnostics. The test will not be
completed.
Direction of rotation
power the motor and cause
the shaft to rotate at up to
2
/3 full speed. Before
starting, make sure it will be
safe for the motor to be run.
1. Ensure the motor is unloaded and at a stand-still.
2. Ensure the EXTERNAL TRIP contact is closed.
3. Follow this step only if the Drive has previously
been set up and both of the following have
occurred...
• The setting of parameter 0.07 Voltage mode
selector has been changed to Ur
• A different motor is now connected to the
Drive
... change the setting of parameter 0.07 to
Ur_I. (See Open-loop voltage control modes later
in this chapter.)
4. Disconnect, then after at least 10 seconds,
re-connect the
to measure the stator resistance of the motor
— it is essential for the Drive to be aware of the
actual value of stator resistance for Autotune
to be performed correctly).
5. Set parameter 0.40 Autotune enable at 1. The
following tests are performed:
• The motor is accelerated up to two-thirds
rated frequency in the forward direction
while the magnetizing current is measured
• The motor is decelerated to a stand-still
6. Parameter 0.43 Motor – power factor is
automatically updated.
7. Parameter 0.40 is automatically returned to zero.
AC supply (this causes the Drive
Saving the values
1. Set parameter 0.00 at 1000.
Stored charge
Warning
The motor shaft should rotate clockwise as viewed
from the free end of the shaft during Autotune. If
the shaft rotates in the reverse direction, stop the
test, remove the
connections. If required, change the motor phase
connections and repeat Autotune.
Procedure
The Drive contains capacitors
that remain charged to a
potentially lethal voltage after
AC supply has been
the
disconnected. If the Drive has
been energized, the
must be isolated at least
ten minutes before work may
continue.
AC supply and check the motor
AC supply
Note
If the settings of parameters 0.41 to 0.47
are changed by a user after Autotune has
been performed, it is essential that
Autotune is repeated.
2-12 Getting Started
2. Press
mode. Do not press any keys within eight
seconds; the display then enters Status mode.
3. Momentarily press
. The display returns to Parameter
to reset the Drive.
Changing the user-interface mode
Change the user-interface mode, as required. If jog
is required, select Terminal mode (jog is available
only in Macros 0, 1, 4).
User-interface mode Set parameter 0.05 at...
Terminal 0
Keypad 4
Note
The main function of parameter 0.05 is a
reference selector which has other settings
that operate the Drive in Terminal mode.
At this stage, do not use any of these other
settings.
Use of parameter 0.05 is described for
Macros 0 and 1 in Chapter 3 Setting Up the
Drive.
Commander GP User Guide
Issue code: gpxu2
2.7 Operating instructions
Before completing the initial setting up of the Drive,
you will need to learn how to operate it. Refer to
the following instructions for Terminal mode or
Keypad mode, as appropriate.
Terminal mode
Variable frequency
In Terminal mode (with Macro 1), the Drive can
control the motor as follows:
• Run (forward and reverse)
• Jog/Preset frequency (forward and reverse)
1. Ensure the control signal connections shown in
Figure 2–5 are made.
2. Check that the FREQUENCY potentiometer is
set at minimum.
3. Ensure that the EXTERNAL TRIP contact is
open.
4. Connect the Drive to the
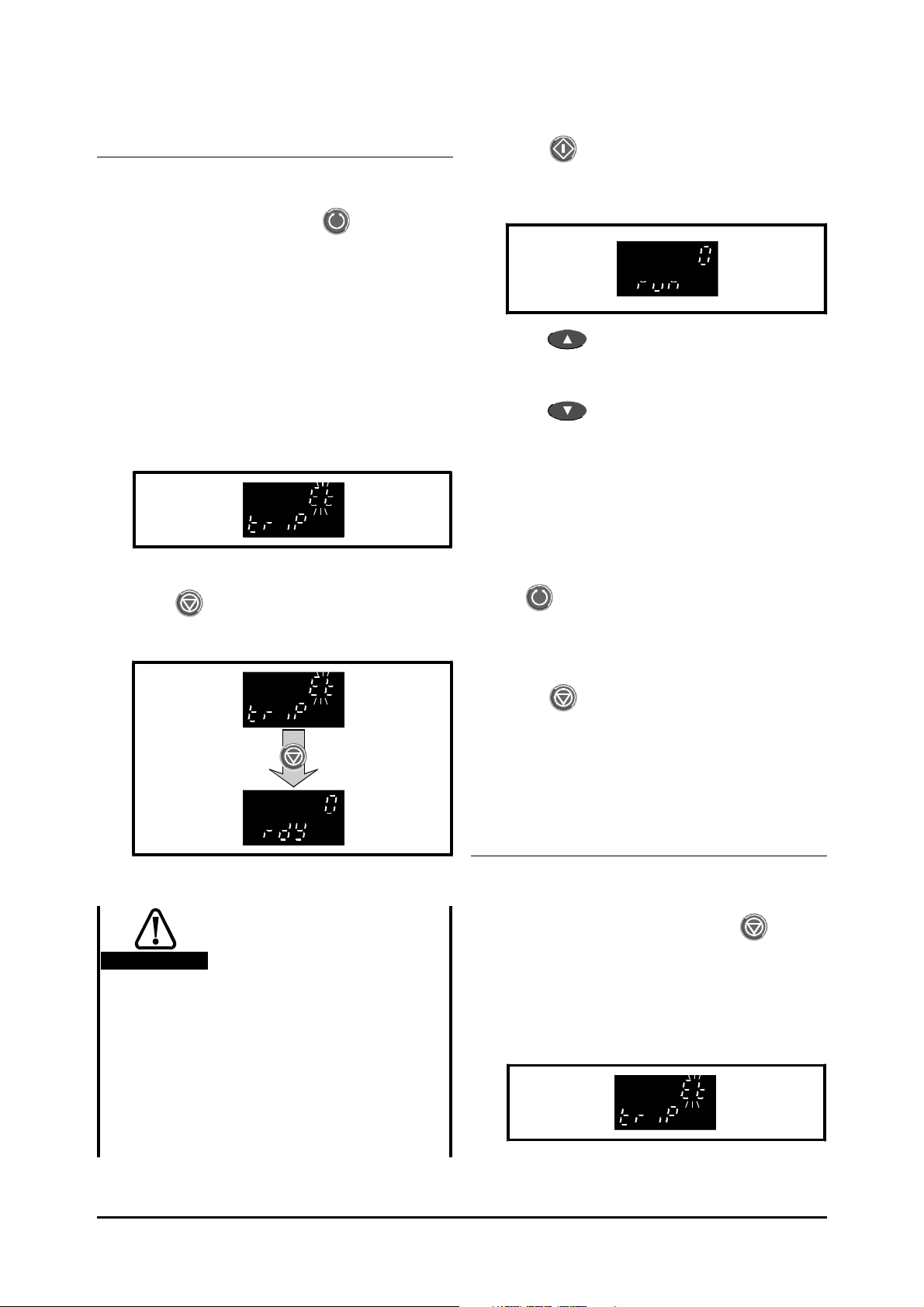
5. The display indicates as follows:
6. Close the EXTERNAL TRIP contact.
7. Press
contact.
8. The display indication changes as follows:
or momentarily close the RESET
AC supply.
11. Advance the FREQUENCY potentiometer.
12. The value shown by the upper display increases
accordingly, and the motor speed increases.
13. Open the RUN FORWARD contact. The
following occur:
• The value of the upper display reduces
to zero
• The lower display shows dEC, then rdY
• The motor speed reduces to zero
14. If required, repeat steps 10 to 13 using the
RUN REVERSE contact.
If you do not require the use of jog / preset
frequency, go to Trip and Enable later in this
chapter
Jog/Preset frequency
The jog function can be used alternatively as a
preset frequency. The default value is 1.5Hz.
1. Close the JOG/PRESET SELECT contact. Then
close the RUN FORWARD contact. It is
essential that the contacts are closed in this
order, otherwise the Drive will run forward (or
reverse) normally at variable speed.
The display indicates a fixed low speed that
cannot be changed by the FREQUENCY
potentiometer. The motor runs at this low
speed.
2. Open the RUN FORWARD contact to stop
the Drive.
9. Ensure parameter 0.10 Motor speed is displayed
(default).
10. Close the RUN FORWARD contact. The display
indicates as follows:
Commander GP User Guide
Issue code: gpxu2
3. If required, repeat steps 1 and 2 using the
RUN REVERSE contact.
4. If the JOG/PRESET SELECT contact is opened
before the RUN FORWARD or RUN REVERSE
contact, the motor speed will become
controlled by the FREQUENCY potentiometer.
Go to Trip and Enable later in this chapter
Getting Started 2-13
Keypad mode
Motor direction in Keypad mode
In Keypad mode (with Macro 1), (FWD/REV) is
disabled by default; the Drive can control the motor
in the forward direction only. For reverse
operation, see the Commander Gp Advanced User Guide.
9. Press
10. The upper display should indicate zero; the
lower display will indicate as follows:
to start the Drive running.
Variable frequency
1. Ensure the control signal connections shown in
Figure 2–6 are made.
2. Ensure that the EXTERNAL TRIP contact is open.
3. Connect the Drive to the
4. The display indicates as follows:
5. Close the EXTERNAL TRIP contact.
6. Press
7. The display indication changes as follows:
AC supply.
11. Press to increase the speed. The value
of the upper display increases and the motor
speed increases.
12. Press
of the upper display decreases and the motor
speed decreases.
When the Drive is configured to accept a
bipolar speed reference, continuing to press
this key after the motor has stopped will cause
the speed to increase in the reverse direction.
(For operation with a bipolar speed reference,
see the Commander Gp Advanced User Guide.)
13. If
speed at a convenient value and then press this
key. The speed reduces to zero then increases
to the set value in the opposite direction.
14. Press
occur:
• The value of the upper display reduces
to zero
• The lower display shows dEC, then rdY
• The motor speed reduces to zero
to decrease the speed. The value
(FWD/REV) has been enabled, set the
to stop the Drive. The following
Ensure parameter 0.10 Motor speed is displayed
(default).
If the Drive has been used
previously in keypad mode,
Warning
check that the value of
parameter 0.35 is zero
before proceeding with the
next step. If it is not zero,
use the speed control keys as
appropriate to set
parameter 0.35 at zero.
If parameter 0.35 is not
zero, when the Drive is
started it will immediately
accelerate to the speed set
in this parameter.
2-14 Getting Started
Trip and enable
1. If the Drive trips, and a motor is connected, the
motor will coast. See Appendix E Diagnostics.
To clear a trip, momentarily press
Terminal mode only, momentarily close the
RESET contact.
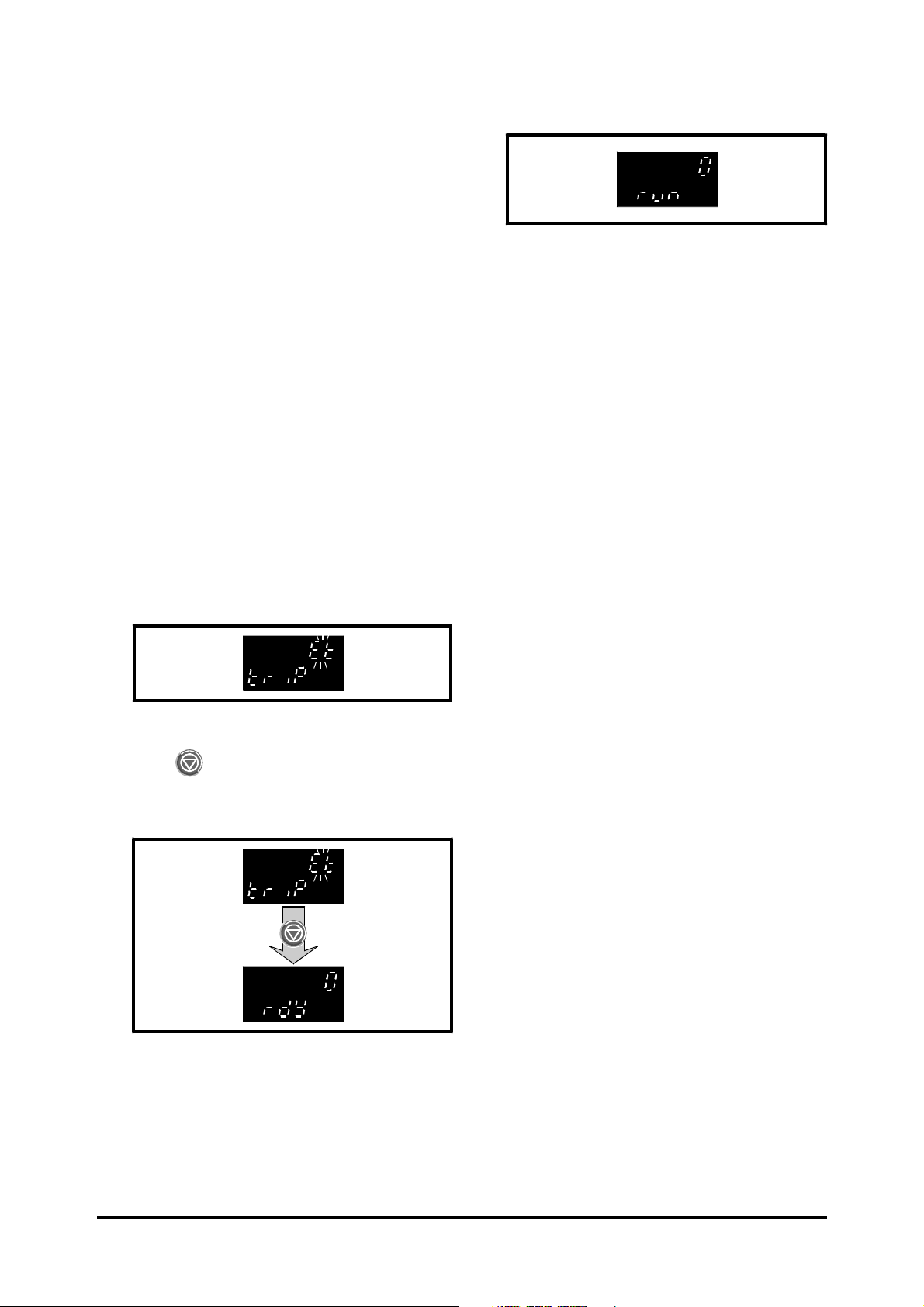
2. If the EXTERNAL TRIP contact is opened while
the Drive is stopped or running, the Drive trips
(and the motor will coast). The display will
indicate as follows:
Commander GP User Guide
or, for
Issue code: gpxu2
2.8 Setting up operating limits
Unit
s/100Hz
Deceleration rate
Minimum and maximum frequencies
Do not set the maximum
frequency at a value that is
excessive for the motor.
Warning
If the intended maximum
frequency affects the safety of
the machinery, additional
independent over-speed
protection must be used.
Set parameter 0.02 Maximum frequency at the
required value. When initially setting up the Drive,
leave 0.01 Minimum frequency at the default value of
zero so that the motor shaft does not rotate as
soon as a
RUN command is received. When it is
known to be safe to do so, set 0.01 at the required
value.
Note the following:
• Slip compensation can cause the output
frequency of the Drive to exceed [0.02].
For operation at motor speeds
greater than twice base speed,
contact the supplier of the
Caution
motor.
Default values and range
0.01 Default value Range Unit
0 0 ~ [0.02] Hz
0.02 Default value Range Unit
50 Hz (EUR)
60 Hz (USA)
0 ~ 1000 Hz
Acceleration rate
To adjust the acceleration rate, adjust parameter
0.03 Acceleration rate. Increase the value to
increase the time taken for acceleration (ie. reduce
the acceleration rate).
Range Default Unit
0 ~ 3200 5 s/100Hz
To adjust the deceleration rate, adjust parameter
0.04 Deceleration rate. Increase the value to
increase the time taken for deceleration (ie. reduce
the deceleration rate).
Range Default
0 ~ 3200 10
If the Drive trips when decelerating the motor and
the display indicates OU, this indicates that the
maximum permissible
DC-bus voltage has been
exceeded during braking. Increase the value of
0.04 Deceleration rate or, if a braking resistor is not
currently connected, return to Planning the
installation in Chapter 2 Installing the Drive in the
Installation Guide for instructions on connecting a
braking resistor.
Braking resistor
The Drive does not contain a
braking resistor; when
Warning
If a braking resistor is being used, set the following
parameter at FASt in order to prevent instability:
Macro Parameter
0 2 3 4
1 5 6 7 See the Commander Gp Advanced User Guide
For Macros 1 and 5, the Note at the beginning of
Enabling Macro 1 earlier in this chapter gave
instructions for changing the setting of this
parameter. When Macro 6 or 7 is enabled, the
setting is made automatically. See 0.15 Ramp mode
selector in Appendix D Menu 0 Parameters.
required, an external
braking resistor must be
used (see the Installation
Guide).
Depending on the setting of
parameter 0.15, failure to
connect a braking resistor
when one is required may
result in deceleration times
being extended or the Drive
tripping during braking
which would leave the
motor free to coast.
0.15 Ramp mode selector
If the required acceleration cannnot be achieved, it
may be necessary to increase the value of
0.06 Current limit.
Commander GP User Guide
Issue code: gpxu2
Getting Started 2-15
Torque-producing current limit
Model
GPD 3201
GPD 3401
GPD 3402
GPD 3202
GPD 3403
GPD 3203
GPD 3404
GPD 3405
GPD 3204
GPD 4401
GPD 4402
GPD 4403
GPD 4404
GPD 4405
The value of FLC is given in the following table.
Set parameter 0.06 Current limit at the required
percentage of rated motor torque (or rated active
torque-producing current).
The current limit is used to protect the motor and
Drive from excessive current and applies under
motoring and regenerating conditions. When the
Drive is operating in torque control, the current
limit limits the value of torque demand.
The total motor current comprises a magnetizing
current and an active (torque-producing) current.
Since the maximum torque produced by the motor
is proportional to the value of parameter 0.06
Current limit, this current limit is a torque-producing
current limit.
When 0.06 is set at its maximum value, the
maximum total motor current is as follows:
150% x FLC
Where FLC is the rated (full-load) current of the
Drive.
The maximum value of 0.06 is given by the
following (but cannot exceed 400 (%)):
Values of FLC
Model FLC (A)
GPD 1201
GPD 1401
GPD 1202
GPD 1402
GPD 1203
GPD 1403
GPD 1204
GPD 1404
GPD 1205
GPD 1405
GPD 2201
GPD 2401
GPD 2202
GPD 2402
GPD 2203
GPD 2403
25
12
16
2.1
2.8
3.8
5.6
9.5
FLC (A)
34
40
46
60
70
74
96
124
156
180
202
22
( . ) ( cos )
15 1
[. ]
MAX
==
−−−−
cos [ . ]
φφ
φφ
FLC
××××
046
100
(%)006
Where:
[0.46] = Value of Motor – rated current
cosφ is the power factor of the motor.
Note
The results from these equations may not
correspond exactly with the maximum
output current from the Drive, since the
Drive may round up the calculated figure.
Voltage-control modes
The default setting is as follows:
Macro 1: Fd
Macros 0, 2, 3, 4, 5, 6, 7: Ur_I
To change the voltage control mode, select the
required setting in parameter 0.07 Voltage mode
selector, as follows:
Setting Function
Vector modes
Ur_S
Ur_I
Ur
Fd
0 Motor stator resistance is measured each
time the Drive is started.
1 Motor stator resistance is measured at
power-up if the
closed and no other trip condition exists.
2 Motor stator resistance is not measured
(use this mode only after having used
Ur_S or Ur_I to measure the stator
resistance).
Fixed boost mode
3 Fixed voltage boost that can be manually
adjusted by parameter 0.08 Boost voltage.
EXTERNAL TRIPEXTERNAL TRIP contact is
2-16 Getting Started
The Vector modes give better performance at low
speed than the fixed-boost mode, but require the
stator resistance to be accurately measured by the
Drive.
Commander GP User Guide
Issue code: gpxu2
Note
If parameter 0.39 Synchronize to a spinning
motor is to be set at 1, for reliable
operation of the Drive, set parameter 0.07
at Fd.
When Ur_I is selected, the
AC
Warning
motor might kick when the
supply is connected to the
Drive (with the
contact already closed).
EXTERNAL TRIP
Boost voltage
Use this procedure only when 0.07 Voltage mode
selector has been set at Fd.
Where actions apply to a particular control mode,
the following key is used:
K> Keypad mode
T> Terminal mode
1. Connect the load to the motor.
2. Close the EXTERNAL TRIP contact.
3. Ensure the frequency reference is zero.
4. K> Press
T> Close the RUN FORWARD or RUN
REVERSE contact.
Increase the frequency reference to a value
slightly above zero. If the motor shaft does
not rotate, increase the value of parameter
0.08 Boost voltage sufficiently to cause the
shaft to rotate.
Default value: 3%
Range: 0 ~ 25%
5. If the motor is noisy and becomes unnecessarily
heated, reduce the value of 0.08.
6. Stop the Drive.
Save the new parameter-value.
Voltage/frequency characteristic
If the motor is to drive a pump or fan where the load
can vary, set parameter 0.09 Dynamic V/f select at 1.
This selects an automatic voltage/frequency
characteristic which reduces power consumption
and acoustic noise in the motor when lightly loaded.
For an explanation of the effects of the
voltage/frequency characteristic, see parameter 0.09
Dynamic V/f select in Appendix D Menu 0 Parameters.
Commander GP User Guide
Issue code: gpxu2
Getting Started 2-17

2-18 Getting Started
Commander GP User Guide
Issue code: gpxu2
3 Setting Up the Drive
(Macro Configurations)
Do not change parameter
values without careful
Warning
consideration; wrong values
may cause damage or a safety
hazard.
3.2 Enabling a different
macro configuration
Do not attempt to enable any
macro configuration when the
Drive is running.
Warning
Note
Notes
Keep a note of changes
When changing the values of parameters,
make a note of the new values in case they
need to be entered again.
Saving the changes
For new parameter-values to apply after
AC supply to the Drive is interrupted,
the
new values must be saved. Refer to
Saving new parameter-values in Appendix A
Programming Instructions.
3.1 How to use this chapter
When setting up the Drive for the first time, you
must first have followed Chapter 2 Getting Started;
Macro 1 Easy mode will then be enabled. Whether
you keep Macro 1 or enable a different macro
configuration, the settings you made in Chapter 2
will remain unchanged. During the course of setting
up the Drive, you may need to change some of these
settings. If so, refer again to Chapter 2.
It is recommended that you follow the instructions
in this chapter in the order that they appear. You
will be led through the following:
• • Enabling the required macro
configuration (if a macro other than
Macro 1 is required)
• • Changing the signal connections
accordingly
• • Adjusting parameters that are
specific to the macro configuration
• • A list of subsidiary functions that
can be set up
Only one macro configuration can be
enabled at a time.
Enabling a different macro
configuration after getting started
with Macro 1
If Macro 1 is to remain enabled, ignore this section
and go to Macro 1 later in this chapter.
1. To enable a different macro configuration, set
parameter 0.00 as follows:
Macro Function Setting
2 Motorized potentiometer
(frequency control by up and
down contacts)
3 Four preset frequencies
(selected by digital control
signals)
4 Torque control 2004
5 PID (set-point) control 2005
6 Axis-limit control 2006
7 Brake control 2007
0 General purpose
(USA default configuration)
General purpose
(EUR default configuration)
Note
The values of the fixed parameters are not
changed when any one of these macro
configurations is enabled.
When Macro 0 is enabled, the
functions of parameters
Caution
0.27 to 0.29 differ between
the EUR and USA default
configurations.
2002
2003
2009
2010
Commander GP User Guide
Issue code: gpxu2
2. Reset the Drive.
3. Go to the relevant section in this chapter for
the macro configuration that has been enabled.
Setting Up the Drive 3-1
Enabling a different macro
configuration after using Macros 2 to 7
If any one of the macros from 2 to 7 has been
enabled (after the instructions in this chapter have
previously been followed), proceed as follows...
1. Go to Initial setting up in Chapter 2 Getting
Started. Start proceeding through that section
by referring to Restoring the Drive to a default
configuration.
2. Follow the remainder of Initial setting up.
3. Return to this chapter and follow Enabling a
different macro configurationafter getting started
with Macro 1 earlier in this chapter.
3.3 Macro 0
General purpose
(
default configuration
Features
Specific features
Macro 0 places the Drive in a default configuration
for general-purpose use.
When a UD50 small option module is fitted in the
Drive, the following additional functions become
automatically available for Macro 0 only:
• Volt-free relay contact which closes when
the Drive is AT OR BELOW MINIMUM SPEED
• Volt-free relay contact which closes when
the Drive is AT SPEED
• DRIVE RUNNING digital output
• MOTOR CURRENT OVERLOAD ALARM
digital output
• (EXCESSIVE) HEATSINK TEMPERATURE
ALARM digital output
• MOTOR CURRENT MAGNITUDE
analog output
• Frequency offset can be selected and
applied
• Operation in torque mode can be selected
• A bipolar or unipolar frequency reference
can be applied
To change the functions of the UD50 or to enable
the UD50 to be used with other macro
configurations, see the Commander Gp Advanced User
Guide. With Drive software versions V03.01.05, a
UD50 cannot be used with any of the other macro
configurations.
)
Standard features
• Macro 0 operates in Terminal or Keypad
mode
• In Terminal mode, digital control by
RUN FORWARD, RUN REVERSE and
JOG SELECT contacts
• Local and remote analog frequency inputs,
or setting of frequency by use of the keypad
• Keypad control of speed can be
uni-directional or bi-directional
• Selection of analog input modes
• Adjustable Jog/Preset frequency
• Adjustment of minimum and maximum
frequencies
• Adjustment of acceleration and deceleration
ramps
• S-ramp
• Skip frequencies
• Selection of stopping modes
• Selection of braking mode
• Motor thermistor input
• Negative logic for the digital inputs
(EUR> positive logic can be selected)
• EUR> Adjustment of current-loop PI gains
• USA> Indication of frequency demand
• USA> Digital control by three-wire
momentary contacts can be selected
• SPEED and TORQUE analog outputs
• AT SPEED digital output
• External trip digital input
• Drive RESET digital input
3-2 Setting Up the Drive
Commander GP User Guide
Issue code: gpxu2
 Loading...
Loading...