

M
FEATURES
Security
• Programmable 28/32-bit serial number
• Programmable 64-bit encryption key
• Each transmission is unique
• 67-bit transmission code length
• 32-bit hopping code
• 35-bit fixed code (28/32-bit serial number,
4/0-bit function code, 1-bit status, 2-bit CRC)
• Encryption keys are read protected
Operating
• 2.0-6.6V operation
• Four button inputs
- 15 functions available
• Selectable baud rate
• Automatic code word completion
• Battery low signal transmitted to receiver
• Nonvolatile synchronization data
• PWM and Manchester modulation
Other
• Easy to use programming interface
• On-chip EEPROM
• On-chip oscillator and timing components
• Button inputs have internal pull-down resistors
• Current limiting on LED
• Minimum component count
output
HCS360
Code Hopping Encoder
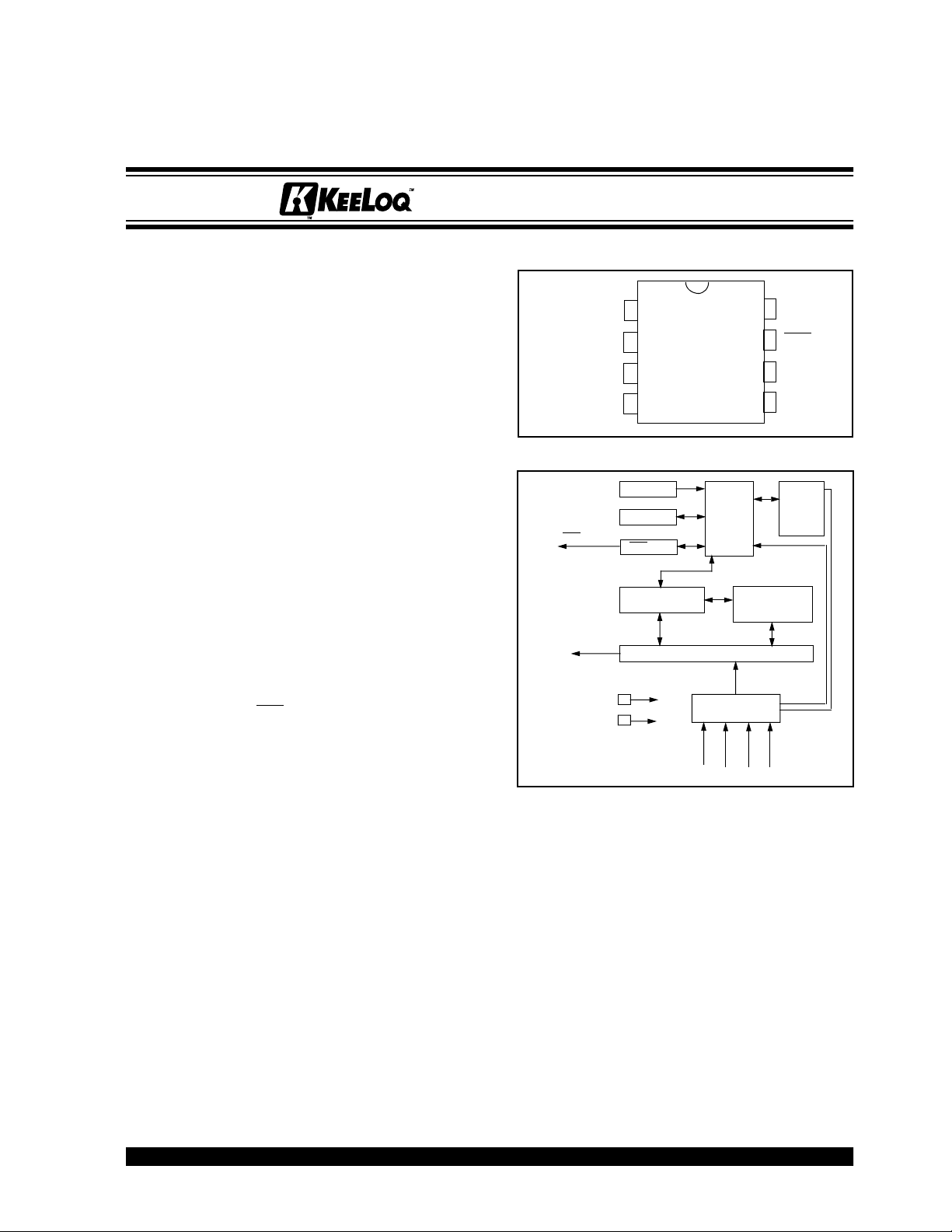
PACKA GE TYPES
PDIP, SOIC
S0
1
2
S1
3
S2
4
S3
HCS360 BLOCK DIAGRAM
Oscillator
Reset circuit
LED
PWM
LED driver
EEPROM
32-bit shift register
VSS
VDD
HCS360
Controller
Button input port
8
7
6
5
Encoder
DD
V
LED
PWM
V
SS
Power
latching
and
switching
Enhanced Features Over HCS300
• 48-bit seed vs. 32-bit seed
• 2-bit CRC for error detection
• 28/32-bit serial number select
• Two seed transmission methods
• PWM and Manchester modulation
• IR modulation mode
Typical Applications
The HCS360 is ideal for Remote Keyless Entry (RKE)
applications. These applications include:
• Automotive RKE systems
• Automotive alarm systems
• Automotive immobilizers
• Gate and garage door openers
• Identity tokens
• Burglar alarm systems
EE
OQ
K
L
is a registered trademark of Microchip Technology Inc.
*Code hopping encoder patents issued in Europe, U. S. A., R. S. A. — US: 5,517,187; Europe: 0459781
1996 Microchip Technology Inc.
Preliminary
DESCRIPTION
The HCS360 is a code hopping encoder designed for
secure Remote Keyless Entry (RKE) systems. The
HCS360 utilizes the K
which incorporates high security, a small package
outline and low cost, to make this device a perfect
solution for unidirectional remote keyless entry systems
and access control systems.
The HCS360 combines a 32-bit hopping code
generated by a nonlinear encryption algorithm, with a
28/32-bit serial number and 7/3 status bits to create a
67-bit transmission stream. The length of the
transmission eliminates the threat of code scanning
and the code hopping mechanism makes each
transmission unique, thus rendering code capture and
resend (code grabbing) schemes useless.
S
S
S1S
2
3
L
code hopping technology,
EE
OQ
DS40152C-page 1
0

HCS360
The encryption key, serial number, and configuration
data are stored in EEPROM which is not accessible via
any external connection. This makes the HCS360 a
very secure unit. The HCS360 provides an easy to use
serial interface for programming the necessary security
keys, system parameters, and configuration data.
The encryption keys and code combinations are programmable but read-protected. The keys can only be
verified after an automatic erase and programming
operation. This protects against attempts to gain
access to keys and manipulate synchronization values .
The HCS360 operates over a wide voltage range of
2.0V to 6.6V and has four button inputs in an 8-pin
configuration. This allows the system designer the
freedom to utilize up to 15 functions. The only
components required for device operation are the buttons and RF circuitry, allowing a very low system cost.
1.0 SYSTEM OVERVIEW
1.1 K
• Manufacturer’s code – a 64-bit word, unique to
each manufacturer, used to produce a unique
encryption key in each transmitter (encoder).
• Encr
and programmed into the encoder during the
manufacturing process. The encryption key
controls the encryption algorithm and is stored in
EEPROM on the encoder device.
• Lear
learning strategies to be implemented on the
decoder. The following are examples of what can
be done.
Normal Learning
The receiver uses the same information that is
transmitted during normal operation to derive the
transmitter’s secret k ey, decrypt the discrimination
value and the synchronization counter.
Secure Learn*
The transmitter is activated through a special but-
ton combination to transmit a stored 48-bit value
(random seed) that can be used for key generation or be part of the key. Transmission of the random seed can be disabled after learning is
completed.
The HCS360 is a code hopping encoder device that is
designed specifically for keyless entry systems,
primarily for vehicles and home garage door openers. It
is meant to be a cost-effective, yet secure solution to
such systems. The encoder portion of a keyless entry
system is meant to be held by the user and operated to
gain access to a vehicle or restricted area. The
HCS360 requires very few external components
(Figure 2-1).
Most keyless entry systems transmit the same code
from a transmitter every time a button is pushed. The
relative number of code combinations for a lo w end sys-
*Secure Learning patents pending.
ey Terms
yption Key – a unique 64-bit key generated
n – The HCS product family f acilitates se v eral
tem is also a relatively small number. These
shortcomings provide the means for a sophisticated
thief to create a device that ‘grabs’ a transmission and
retransmits it later or a device that scans all possible
combinations until the correct one is found.
The HCS360 employs the K
nology and an encryption algorithm to achieve a high
level of security. Code hopping is a method by which
the code transmitted from the transmitter to the receiver
is different every time a button is pushed. This method,
coupled with a transmission length of 67 bits, virtually
eliminates the use of code ‘grabbing’ or code
‘scanning’.
As indicated in the block diagram on page one, the
HCS360 has a small EEPROM array which must be
loaded with several parameters before use. The most
important of these values are:
• A 28/32-bit serial number which is meant to be
unique for every encoder
• An encryption key that is generated at the time of
production
• A 16-bit synchronization value
The serial number for each transmitter is programmed
by the manufacturer at the time of production. The
generation of the encryption key is done using a key
generation algorithm (Figure 1-1). Typically, inputs to
the key generation algorithm are the serial number of
the transmitter or seed value, and a 64-bit manufacturer’s code. The manufacturer’s code is chosen by the
system manufacturer and must be carefully controlled.
The manufacturer’s code is a pivotal par t of the overall
system security.
The 16-bit synchronization value is the basis for the
transmitted code changing for each transmission, and
is updated each time a button is pressed. Because of
the complexity of the code hopping encryption algorithm, a change in one bit of the synchronization value
will result in a large change in the actual transmitted
code. There is a relationship (Figure 1-2) between the
key values in EEPROM and how they are used in the
encoder. Once the encoder detects that a button has
been pressed, the encoder reads the button and
updates the synchronization counter. The synchronization value is then combined with the encryption key in
the encryption algor ithm and the output is 32 bits of
encrypted information. This data will change with every
button press, hence, it is referred to as the hopping
portion of the code word. The 32-bit hopping code is
combined with the button information and the serial
number to form the code word transmitted to the
receiver. The code word format is explained in detail
in Section 4.2.
EE
OQ
L
code hopping tech-
DS40152C-page 2
Preliminary
1996 Microchip Technology Inc.
HCS360
Any type of controller may be used as a receiver, but it
is typically a microcontroller with compatible firmware
that allows the receiver to operate in conjunction with a
transmitter, based on the HCS360. Section 7.0
provides more detail on integrating the HCS360 into a
total system.
Before a transmitter can be used with a particular
receiver, the transmitter must be ‘learned’ by the
receiver. Upon learning a transmitter, information is
stored by the receiver so that it may track the
transmitter, including the serial number of the
transmitter, the current synchronization value for that
transmitter and the same encryption key that is used on
the transmitter. If a receiv er receives a message of v alid
format, the serial number is checked and, if it is from a
learned transmitter, the message is decrypted and the
decrypted synchronization counter is checked against
what is stored. If the synchronization value is verified,
then the button status is checked to see what operation
is needed. Figure 1-3 shows the relationship between
some of the values stored by the receiver and the values received from the transmitter.
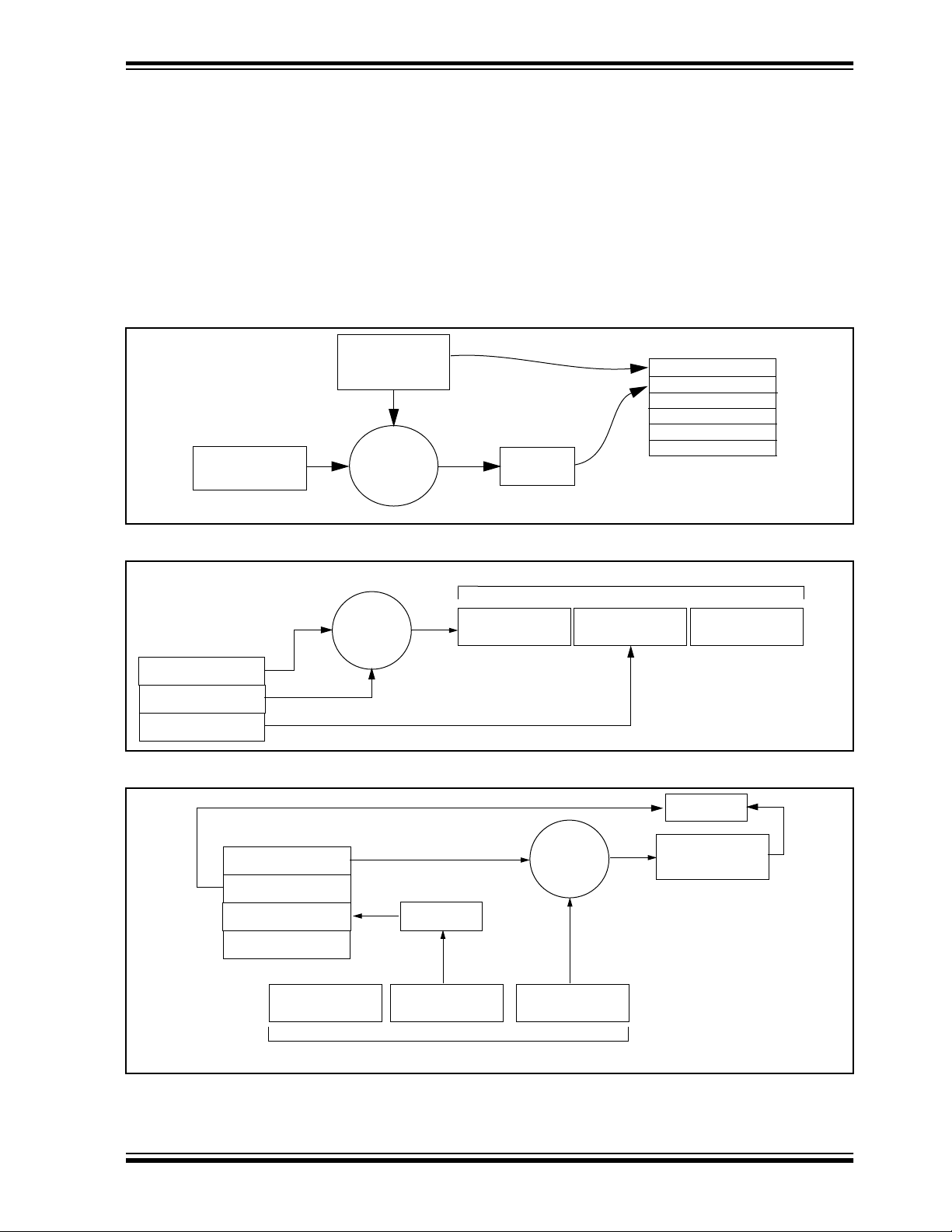
FIGURE 1-1: CREATION AND STORAGE OF ENCRYPTION KEY DURING PRODUCTION
HCS360 EEPROM Array
Serial Number
Encryption Key
Sync Counter
.
.
.
Manufacturer’s
Code
Transmitter
Serial Number or
Seed
Key
Generation
Algorithm
Encryption
Key
FIGURE 1-2: BASIC OPERATION OF TRANSMITTER (ENCODER)
Transmitted Information
EEPROM Array
Decryption Key
Sync Counter
Serial Number
KEELOQ
Encryption
Algorithm
32 Bits of
Encrypted Data
FIGURE 1-3: BASIC OPERATION OF RECEIVER (DECODER)
EEPROM Array
Decryption Key
Sync Counter
Serial Number
Manufacturer Code
Button Press
Information
Check for
Match
Serial Number
Received Information
KEELOQ
Decryption
Algorithm
32 Bits of
Encrypted Data
Serial Number
Synchronization
Counter
Button Press
Information
Check for
Match
Decrypted
1996 Microchip Technology Inc.
Preliminary
DS40152C-page 3
HCS360
2.0 DEVICE OPERATION
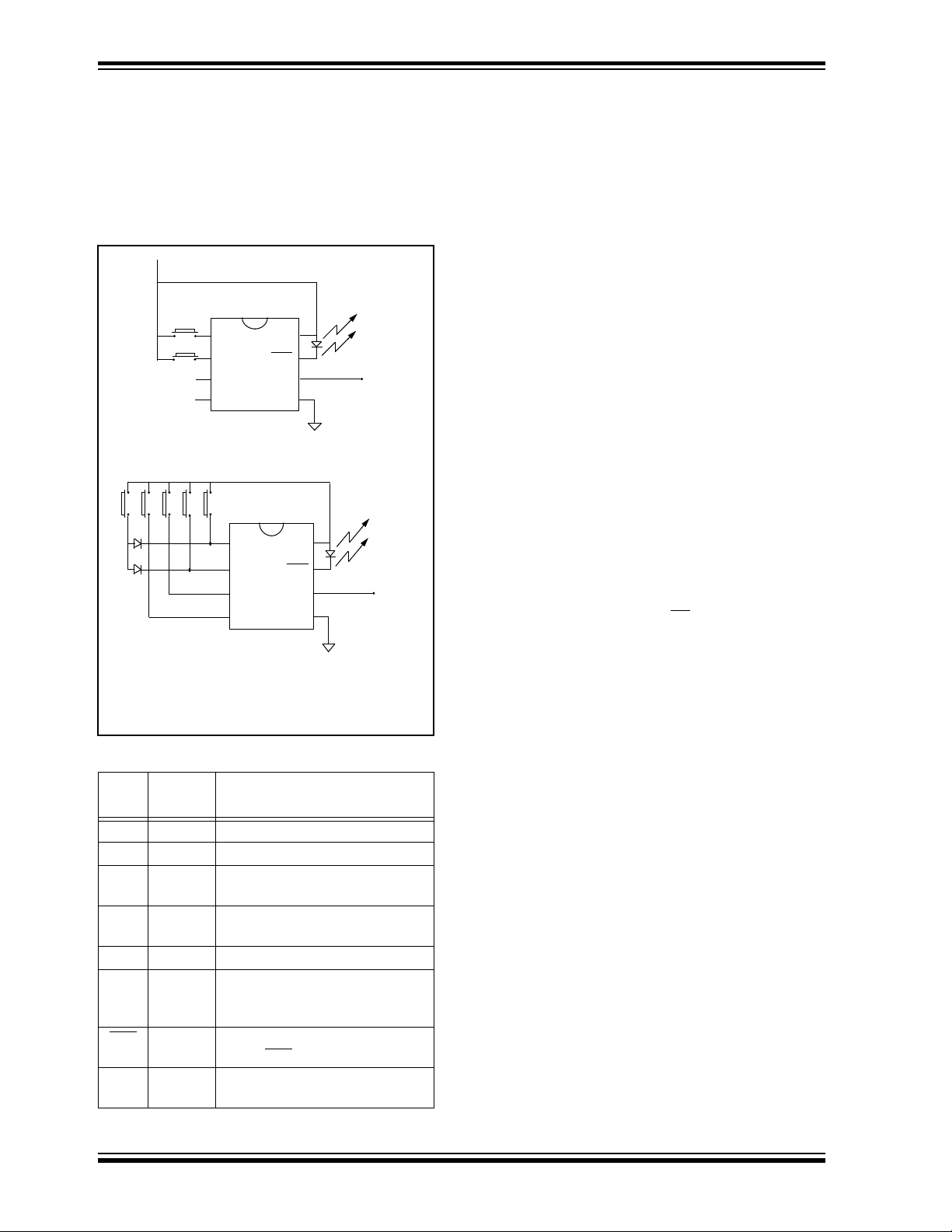
As shown in the typical application circuits (Figure 2-1),
the HCS360 is a simple device to use. It requires only
the addition of buttons and RF circuitry for use as the
transmitter in your security application. A description of
each pin is described in Table 2-1.
FIGURE 2-1: TYPICAL CIRCUITS
VDD
B0
B1
B4 B3 B2 B1 B0
Note: Up to 15 functions can be implemented by
S0
S1
S2
S3
2 button remote control
5 button remote control (Note)
pressing more than one button simultaneously or by using a suitable diode array.
S0
S1
S2
S3
VDD
LED
PWM
V
SS
VDD
LED
PWM
SS
V
Tx out
VDD
Tx out
The high security level of the HCS360 is based on the
patented K
L
technology. A block cipher type of
EE
OQ
encryption algorithm based on a block length of 32 bits
and a key length of 64 bits is used. The algorithm
obscures the information in such a way that even if the
transmission information (before coding) diff ers b y only
one bit from the information in the previous transmission, the next coded transmission will be totally different. Statistically, if only one bit in the 32-bit string of
information changes, approximately 50 percent of the
coded transmission will change. The HCS360 will wake
up upon detecting a switch closure and then delay
approximately 6.5 ms for s witch debounce (Figure 2-2).
The synchronization information, fixed information, and
switch information will be encrypted to form the hopping
code. The encrypted or hopping code portion of the
transmission will change every time a button is
pressed, even if the same button is pushed again.
Keeping a button pressed for a long time will result in
the same code word being transmitted until the button
is released or time-out occurs. A code that has been
transmitted will not occur again for more than 64K
transmissions. This will provide more than 18 years of
typical use before a code is repeated based on 10 operations per day. Overflow information programmed into
the encoder can be used by the decoder to extend the
number of unique transmissions to more than 128K.
If, in the transmit process, it is detected that a new button(s) has been pressed, a reset will immediately be
forced and the code word will not
be completed. Please
note that buttons removed will not have any effect on
the code word unless no buttons remain pressed in
which case the current code word will be completed
and the power down will occur.
TABLE 2-1 PIN DESCRIPTIONS
Name
S0 1 Switch input 0
S1 2 Switch input 1
S2 3 Switch input 2/Can also be clock
S3 4 Switch input 3/Clock pin when in
SS
V
PWM 6 Pulse width modulation (PWM)
LED
DD
V
DS40152C-page 4
Pin
Number
Description
pin when in programming mode
programming mode
5 Ground reference connection
output pin/Data pin for
programming mode
7 Cathode connection for directly
driving LED
during transmission
8 Positive supply voltage
connection
Preliminary
1996 Microchip Technology Inc.
HCS360
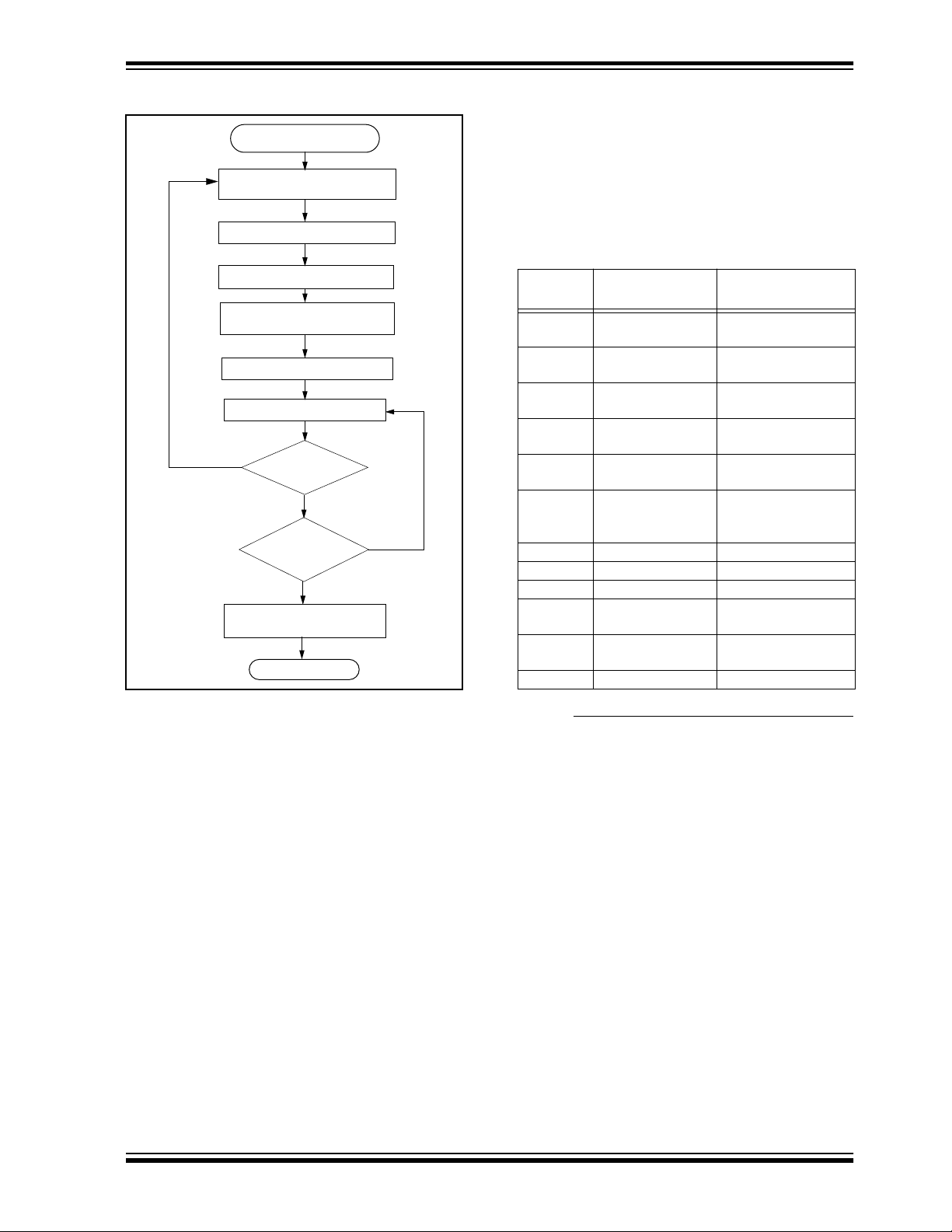
FIGURE 2-2: ENCODER OPERATION
Power Up
(A button has been pressed)
Reset and Debounce Delay
(6.5 ms)
Sample Inputs
Update Sync Info
Encrypt With
Encryption Key
Load Transmit Register
Transmit
Yes
Buttons
Added
?
No
All
Buttons
Released
?
Yes
Complete Code
Word Transmission
Stop
No
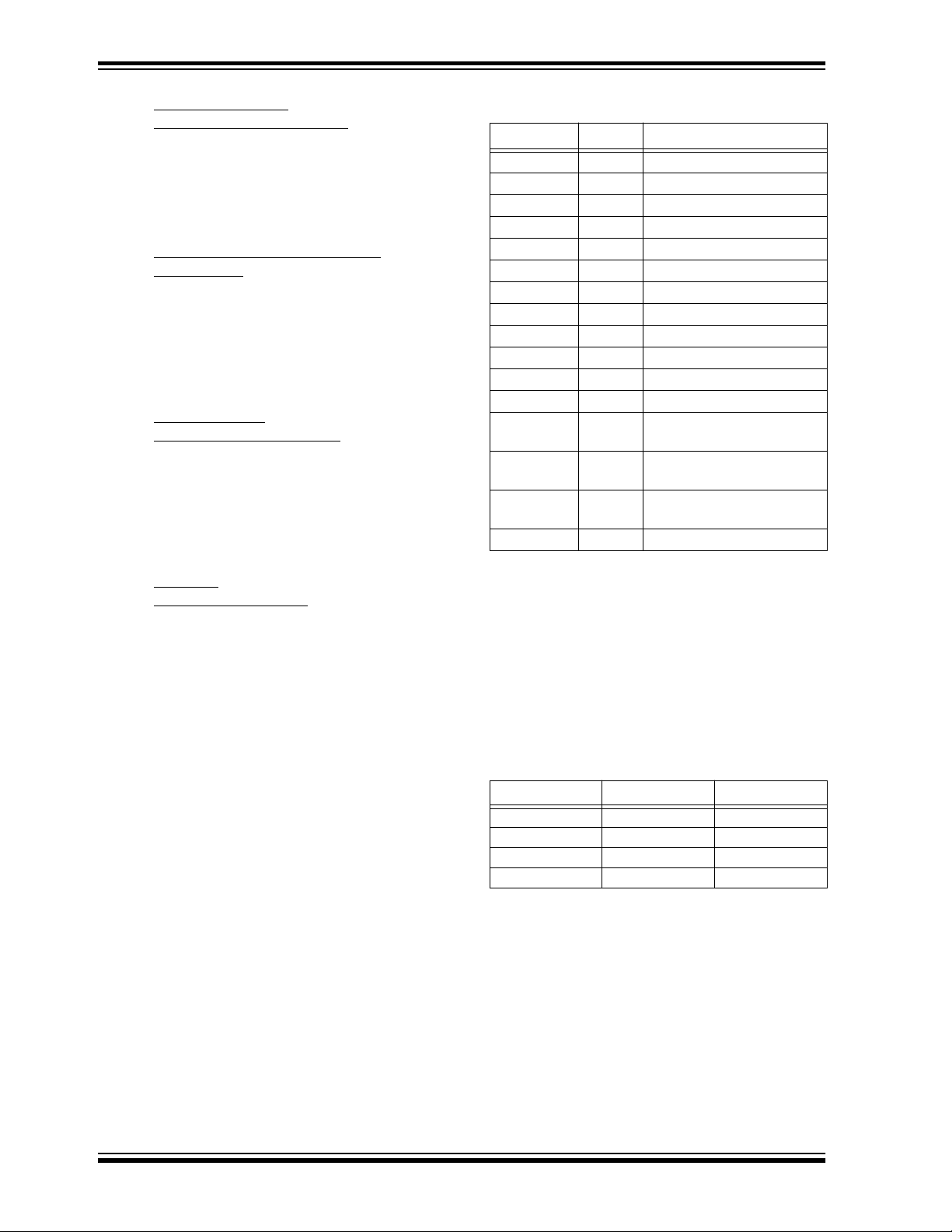
3.0 EEPROM MEMORY
ORGANIZATION
The HCS360 contains 192 bits (12 x 16-bit words) of
EEPROM memory (Table 3-1). This EEPROM array is
used to store the encryption key information,
synchronization value, etc. Fur ther descriptions of the
memory array is given in the following sections.
TABLE 3-1 EEPROM MEMORY MAP
WORD
ADDRESS
0 KEY_0 64-bit encryption
1 KEY_1 64-bit encryption
2 KEY_2 64-bit encryption
3 KEY_3 64-bit encryption
4 SYNC_A 16-bit synchroniza-
5 SYNC_B/SEED_2 16-bit synchroniza-
6 RESERVED Set to 0000H
7 SEED_0 Seed Value (word 0)
8 SEED_1 Seed Value (word 1)
7 SER_0 Device Serial
10 SER_1 Device Serial
11 CONFIG Configuration Word
MNEMONIC DESCRIPTION
key (word 0)
key (word 1)
key (word 2)
key (word 3)
tion value
tion or seed value
(word 2)
Number (word 0)
Number (word 1)
3.1 K
The 64-bit encryption key is used by the transmitter to
create the encrypted message transmitted to the
receiver. This key is created and programmed at the
time of production using a key generation algorithm.
Inputs to the key generation algorithm are the serial
number for the particular transmitter being used and a
secret manufacturer’s code. While the key generation
algorithm supplied from Microchip is the typical method
used, a user may elect to create their own method of
key generation. This may be done providing that the
decoder is programmed with the same means of creating the key for decryption pur poses. If a seed is used,
the seed will also form part of the input to the key generation algorithm.
ey_0 - Key_3 (64-Bit Encryption Ke y)
1996 Microchip Technology Inc.
Preliminary
DS40152C-page 5
HCS360
3.2 SYNC_A,
SYNC_B
(Synchronization Counter)
This is the 16-bit synchronization value that is used to
create the hopping code for transmission. This value
will be changed after every transmission. A second synchronization value can be used to stay synchronized
with a second receiver.
3.3 SEED_0,
SEED_1, and SEED_2
(Seed Word)
This is the three word (48 bits) seed code that will be
transmitted when seed transmission is selected. This
allows the system designer to implement the secure learn
feature or use this fixed code word as part of a different
key generation/trac king process or purely as a fixed code
transmission.
3.4 SER_0,
SER_1
(Encoder Serial Number)
SER_0 and SER_1 are the lower and upper words of
the device serial number , respectively. There are 32 bits
allocated for the serial number and a selectable configuration bit determines whether 32 or 28 bits will be
transmitted. The serial number is meant to be unique
for every transmitter.
TABLE 3-2 CONFIGURATION WORD
Bit Number Symbol Bit Description
0 LNGRD Long Guard Time
1 FAST 0 Baud Rate Selection
2 FAST 1 Baud Rate Selection
3 NU Not Used
4 SEED Seed Transmission enable
5 DELM Delay mode enable
6 TIMO Time out enable
7 IND Independent mode enable
8 USRA0 User bit
9 USRA1 User bit
10 USRB0 User bit
11 USRB1 User bit
12 XSER Extended serial number
enable
13 TMPSD Temporary seed transmis-
sion enable
14 MANCH Manchester/PWM modula-
tion selection
15 OVR Overflow bit
3.5 CONFIG
(Configuration Word)
The configuration word is a 16-bit word stored in
EEPROM array that is used by the device to store
information used during the encryption process, as well
as the status of option configurations. Further
explanations of each of the bits are described in the
following sections.
3.5.1 LNGRD: LONG GUARD TIME LNGRD = 1 selects the encoder to extend the guard
time between code words. This can be used to reduce
the average power transmitted over a 100ms window
and thereby transmit a higher peak power.
3.5.2 FAST 1, FAST 0 BAUD RATE SELECTION FAST 1 and FAST 0 selects the baud rate according to
Table 3-3.
TABLE 3-3 BAUD RATE SELECTION
E
T
400 0 0
200 0 1
200 1 0
100 1 1
FAST 1 FAST 0
DS40152C-page 6
Preliminary
1996 Microchip Technology Inc.
HCS360
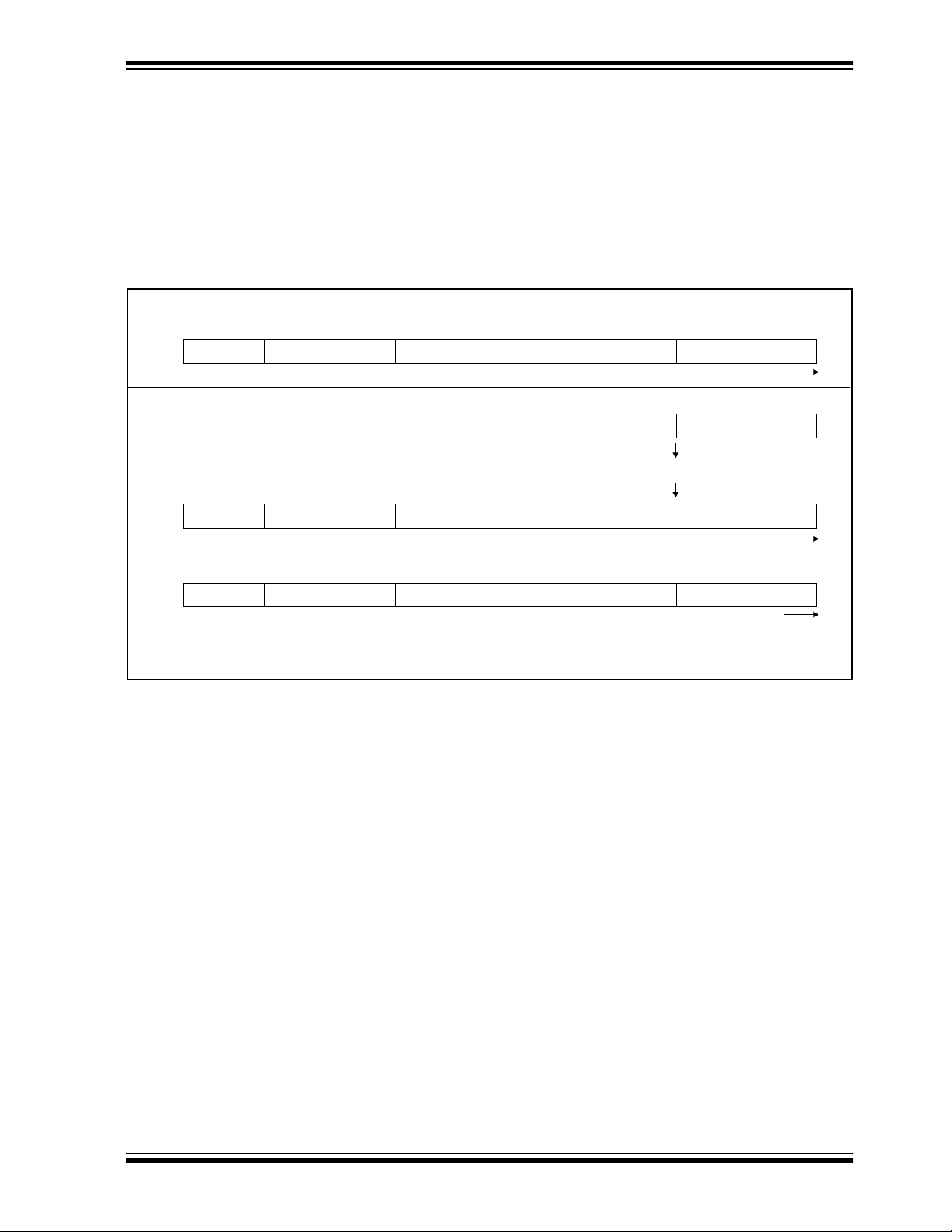
3.5.3 SEED: ENABLE SEED TRANSMISSION If SEED = 0, seed transmission is disabled. The inde-
pendent counter mode can only be used with seed
transmission disabled since SEED_2 is shared with the
second synchronization counter.
With SEED = 1, seed transmission is enabled. The
appropriate button code(s) must be activated to transmit the seed information. In this mode, the seed infor-
FIGURE 3-1: SEED TRANSMISSION
All examples shown with XSER = 1, SEED = 1
When S[3:0] = 1001, delay is not acceptable.
CRC+VLOW SER_1 SEED_2 SEED_1 SEED_0
For S[3:0] = 0x3 before delay:
CRC+VLOW SER_1 SER_0 Encrypted Data
mation (SEED_0, SEED_1, and SEED_2) and the
upper 12- or 16-bits of the serial number (SER_1) are
transmitted instead of the hop code.
Seed transmission is available for function codes
(Table 3-7) S[3:0] = 1001 and S[3:0] = 0011(delayed).
This takes place regardless of the setting of the IND bit.
The two seed transmissions are shown in Figure 3-1.
Data transmission direction
16-bit Data Word 16-bit Counter
Encrypt
Data transmission direction
For S[3:0] = 0011 after delay (Note 1, Note 2):
CRC+VLOW SER_1 SEED_2 SEED_1 SEED_0
Data transmission direction
Note 1: For Seed Transmission, SEED_2 is transmitted instead of SER_0.
2: For Seed Transmission, the setting of DELM has no effect.
1996 Microchip Technology Inc.
Preliminary
DS40152C-page 7

HCS360
≈
≈
≈
≈
≈
≈
≈
≈
≈
≈
≈
≈
≈
≈
≈
≈
3.5.4 DELM: DELAY MODE
If DELM = 1, delay transmission is enabled. A delayed
transmission is indicated by inv erting the lower nibble of
the discrimination value. The delay mode is primarily for
compatibility with previous K
DELM = 0, delay transmission is disabled (Table 3-4).
EE
OQ
L
devices. If
TABLE 3-4 TYPICAL DELAY TIMES
Number of Code
FAST1 FAST0
0 0 28
0 1 56
1 0 28
1 1 56
Words before Delay
Mode
TABLE 3-5 TYPICAL TIME-OUT TIMES
FAST 1 FAST 0
0 0 256
0 1 512
1 0 256
1 1 512
Maximum Number of
Code Words Transmitted
3.5.5 TIMO: TIME-OUT If TIMO = 1, the time-out is enabled. Time-out can be
used to terminate accidental continuous transmissions.
When time-out occurs, the PWM output is set low and
the LED is turned off. Current consumption will be
higher than in standby mode since current will flow
through the activated input resistors. This state can be
exited only after all inputs are taken low. TIMO = 0, will
enable continuous transmission (Table 3-5).
Time Before Delay Mode
(MANCH = 0)
2.9s
3.1s
1.5s
1.7s
Time Before Time-out
(MANCH = 0)
26.5s
28.2s
14.1s
15.7s
Time Ref Delay Mode
(MANCH = 1)
5.1s
6.4s
3.2s
4.5s
Time Before Time-out
(MANCH = 1)
46.9
58.4
29.2
40.7
DS40152C-page 8
Preliminary
1996 Microchip Technology Inc.

HCS360
3.5.6 IND: INDEPENDENT MODE The independent mode can be used where one
encoder is used to control two receivers. Two counters
(SYNC_A and SYNC_B) are used in independent
mode. As indicated in Table 3-7, function codes 1 to 7
use SYNC_A and 8 to 15 SYNC_B. The independent
mode also selects IR mode. In IR mode function codes
12 to 15 will use SYNC_B. The PWM output signal is
modulated with a 40 kHz carrier. It must be pointed out
the 40 kHz is derived from the internal clock and will
therefore vary with the same percentage as the baud
rate. If IND = 0, SYNC_A is used for all function codes.
If IND = 1, independent mode is enabled and counters
for functions are used according to Table 3-7.
For IND = 1 and S[3:0] ≡ 0xC, 0xD, 0xE, 0xF, Basic
Pulse Width modulation becomes:
3.5.7 USRA,B: USER BITS User bits form part of the discrimination value. The user
bits together with the IND bit can be used to identify the
counter that is used in independent mode.
3.5.8 XSER: EXTENDED SERIAL NUMBER If XSER = 1, the full 32-bit serial number [SER_1,
SER_0] is transmitted. If XSER = 0, the four most significant bits of the serial number are substituted by
S[3:0] and is compatible with the HCS200/300/301.
3.5.9 TMPSD: TEMPORARY SEED
TRANSMISSION
The temporary seed transmission can be used to disable learning after the transmitter has been used for a
programmable number of operations. This feature can
be used to implement very secure systems. After learning is disabled, the seed information cannot be
accessed even if physical access to the transmitter is
possible. If TMPSD = 1 the seed transmission will be
disabled after a number of code hopping transmissions.
The number of transmissions before seed transmission
is disabled, can be programmed by setting the synchronization counter (SYNC_A, SYNC_B) to a value as
shown in Table .
TABLE 3-6 SYNCHRONOUS COUNTER
INITIALIZATION VALUES
Synchronous Counter
Values
0000H 128
0060H 64
0050H 32
0048H 16
Number of
Transmissions
TABLE 3-7 FUNCTION CODES
S3 S2 S1 S0 IND = 0 IND = 1 Comments
Counter
1 0 0 0 1 A A
2 0 0 1 0 A A
3 0 0 1 1 A A If SEED = 1, transmit seed after delay.
4 0 1 0 0 A A
5 0 1 0 1 A A
6 0 1 1 0 A A
7 0 1 1 1 A A
8 1 0 0 0 A B
9 1 0 0 1 A B If SEED = 1, transmit seed immediately.
10 1 0 1 0 A B
11 1 0 1 1 A B
12 1 1 0 0 A B IR mode
13 1 1 0 1 A B IR mode
14 1 1 1 0 A B IR mode
15 1 1 1 1 A B IR mode
1996 Microchip Technology Inc.
Preliminary
DS40152C-page 9

HCS360
3.5.10 MANCH: MANCHESTER CODE
MODULATION
MANCH selects between Manchester code modulation
and PWM modulation. If MANCH = 1, Manchester code
modulation is selected:
If MANCH = 0, PWM modulation is selected.
3.5.11 OVR: OVERFLOW
The overflow bit is used to extend the number of possible synchronization values. The synchronization
counter is 16 bits in length, yielding 65,536 values
before the cycle repeats. Under typical use of
10 operations a day, this will provide nearly 18 years of
use before a repeated value will be used. Should the
system designer conclude that is not adequate, then
the overflow bit can be utilized to extend the number of
unique values. This can be done by programming OVR
to 1 at the time of production. The encoder will automatically clear OVR the first time that the transmitted synchronization value wraps from 0xFFFF to 0x0000.
Once cleared, OVR cannot be set again, thereby creating a permanent record of the counter overflow. This
prevents f ast cycling of 64K counter . If the decoder system is programmed to track the overflow bits, then the
effective number of unique synchronization values can
be extended to 128K. If programmed to zero, the system will be compatible with the NTQ104/5/6 devices
(i.e., no overflow with discrimination bits set to zero).
4.0 TRANSMITTED WORD
4.1 Transmission Format (PWM)
The HCS360 transmission is made up of several parts
(Figure 4-1 and Figure 4-2). Each transmission is
begun with a preamble and a header, followed by the
encrypted and then the fixed data. The actual data is
67 bits which consists of 32 bits of encr ypted data and
35 bits of fixed data. Each transmission is followed by
a guard period before another transmission can begin.
Refer to Table 8-4 and T able 8-5 for transmission timing
specifications. The encrypted portion provides up to
four billion changing code combinations and includes
the function bits (based on which buttons were activated) along with the synchronization counter value
and discrimination value. The non-encrypted portion is
comprised of the CRC bits, V
and the 28/32-bit serial number. The encrypted and
non-encrypted sections combined increase the number
of combinations to 1.47 x 10
4.2 Code Word Organization
The HCS360 transmits a 67-bit code word when a button is pressed. The 67-bit word is constructed from a
Fixed Code portion and an Encrypted Code portion
(Figure 4-3).
The Encrypted Data is generated from 4 function bits,
2 user bits, overflow bit, independent mode bit, and 8
serial number bits, and the 16-bit synchronization value
(Figure 8-4).
The Non-encrypted Code Data is made up of a V
bit, 2 CRC bits, 4 function bits, and the 28-bit serial
number. If the extended serial number (32 bits) is
selected, the 4 function code bits will not be transmitted.
LOW bits, the function bits
20
.
LOW
DS40152C-page 10 Preliminary 1996 Microchip Technology Inc.

FIGURE 4-1: TRANSMISSION FORMAT—MANCH = 0
TOTAL TRANSMISSION:
1 CODE WORD
Preamble
CODE WORD:
Sync
Encrypt
Fixed
Guard
Preamble Sync Encrypt
HCS360
LOGIC "0"
LOGIC "1"
TE
1 2 4 5 6
Preamble
13 14 15
16
123 5 7 9
4 6 8 10
Sync
Code Word
FIGURE 4-2: TRANSMISSION FORMAT—MANCH = 1
TOTAL TRANSMISSION:
Preamble
CODE WORD:
1 CODE WORD
Sync Encrypt Fixed Guard
LOGIC "0"
LOGIC "1"
Preamble Sync Encrypt
Encrypted
TX Data
TE
BIT
Fixed Code
Data
TE
Guard
Time
BPW
1 2 4 5 6
16
123
13 14 15
Preamble Sync
CODE WORD
Start bit
4
Encrypted
Data
Stop bit
Fixed Code
Data
Guard
Time
FIGURE 4-3: CODE WORD ORGANIZATION (RIGHT-MOST BIT IS CLOCKED OUT FIRST)
Fixed Code Data Encrypted Code Data
CRC
(2 bit)
VLOW
(1 bit)
CRC
(2 bit)
V
Button
Status
(4 bits)
LOW
bit
+
28-bit
Serial Number
Serial Number and
Button Status (32 bits)
1996 Microchip Technology Inc. Preliminary DS40152C-page 11
Button
Status
(4 bits)
Discrimination
bits
(12 bits)
MSB LSB
+ 32 bits of Encrypted Data
16-bit
Synch Value
67 bits
of Data
Transmitted

HCS360
5.0 SPECIAL FEATURES
5.1 Code Word Completion
Code word completion is an automatic feature that
ensures that the entire code word is transmitted, even
if the button is released before the transmission is complete and that a minimum of two words are completed.
The HCS360 encoder powers itself up when a b utton is
pushed and powers itself down after two complete
words are transmitted if the user has already released
the button. If the button is held down beyond the time
for one transmission, then multiple transmissions will
result. If another button is activated during a
transmission, the active transmission will be aborted
and the new code will be generated using the new
button information.
5.2 Long Guard Time
Federal Communications Commission (FCC) part 15
rules specify the limits on fundamental power and
harmonics that can be transmitted. Power is calculated
on the worst case average power transmitted in a
100ms window. It is therefore advantageous to
minimize the duty cycle of the transmitted word. This
can be achieved by minimizing the duty cycle of the
individual bits and by extending the guard time between
transmissions. long guard time (LNGRD) is used for
reducing the average pow er of a transmission. This is a
selectable feature. Using the LNGRD allows the user to
transmit a higher amplitude transmission if the
transmission time per 100 ms is shorter. The FCC puts
constraints on the average power that can be
transmitted by a device, and LNGRD effectively
prevents continuous transmission by only allowing the
transmission of every second word. This reduces the
average power transmitted and hence, assists in FCC
approval of a transmitter device.
5.4 Secure Learning
In order to increase the level of security in a system, it is
possible for the receiver to implement what is known as
a secure learning function. This can be done by utilizing
the seed value on the HCS360 which is stored in
EEPROM. Instead of the normal key generation method
being used to create the encryption key, this seed value
is used and there should not be any mathematical relationship between serial numbers and seeds for the best
security.
5.5 Auto-shutoff
The Auto-shutoff function automatically stops the
device from transmitting if a button inadver tently gets
pressed for a long period of time. This will prevent the
device from draining the battery if a button gets pressed
while the transmitter is in a pocket or purse. This function can be enabled or disabled and is selected by setting or clearing the time-out bit (Section 3.5.5). Setting
this bit will enable the function (turn Auto-shutoff function on) and clearing the bit will disable the function.
Time-out period is approximately 25 seconds.
5.6 VLOW: Voltage LOW Indicator
The VLOW bit is transmitted with every transmission
(Figure 4-2) and will be transmitted as a one if the
operating voltage has dropped below the low voltage
trip point, approximately 3.8V at 25 °C. This V
is transmitted so the receiver can give an indication to
the user that the transmitter battery is low.
LOW signal
5.7 LED Output Operation
During normal transmission the LED output is LOW. If
the supply voltage drops below the low voltage trip
point, the LED
1Hz during the transmission.
output will be toggled at approximately
5.3 CRC (Cycle Redundancy Check) Bits
The CRC bits are calculated on the 65 previously transmitted bits. The CRC bits can be used by the receiver
to check the data integrity before processing starts. The
CRC can detect all single bit and 66% of double bit
errors. The CRC is computed as follows:
EQUATION 5-1: CRC CALCULATION
CRC 1[ ]
and
CRC 0[ ]
with
and
Di
the nth transmission bit 0 ≤ n ≤ 64
n
DS40152C-page 12 Preliminary 1996 Microchip Technology Inc.
n 1+
CRC 1 0,[ ]
CRC 0[ ]nDin∧=
n 1+
CRC 0[ ]nDin∧( ) CRC 1[ ]
0
∧=
0=
n

HCS360
6.0 PROGRAMMING THE HCS360
When using the HCS360 in a system, the user will have
to program some parameters into the device including
the serial number and the secret key before it can be
used. The programming allows the user to input all
192 bits in a serial data stream, which are then stored
internally in EEPROM. Programming will be initiated b y
forcing the PWM line high, after the S3 line has been
held high for the appropriate length of time. S0 and S1
should be held low during the entire program cycle
(Table 6-1 and Figure 6-1). The de vice can then be programmed by clocking in 16 bits at a time, followed by
the word’s complement using S3 or S2 as the cloc k line
and PWM as the data in line. After each 16-bit word is
FIGURE 6-1: PROGRAMMING WAVEFORMS
Enter Program
Mode
S2/S3
(Clock)
PWM
(Data)
T
T
1
TCLKL
Bit 0 Bit 1 Bit 2 Bit 3 Bit 14 Bit 15
2
TDS
TDH
Data for Word 0 (KEY_0)
Repeat 12 times for each word
loaded, a programming delay is required f or the internal
program cycle to complete. The acknowledge can read
back after the programming delay (T
word and its complement have been downloaded, an
automatic bulk write is performed. This delay can take
up to Twc. At the end of the programming cycle, the
device can be verified (Figure 6-2) by reading back the
EEPROM. Reading is done by clocking the S3 line and
reading the data bits on PWM. For security reasons, it
is not possible to execute a verify function without first
programming the EEPROM. A verify operation can
only be done once, immediately following the program cycle.
TCLKH
Bit 0 Bit 1 Bit 2 Bit 3 Bit 14 Bit 15
TWC
WC). After the first
Acknowledge
Bit 17
Bit 16
Data for Word 1
Note 1: Unused button inputs to be held to ground during the entire programming sequence.
2: The V
DD pin must be taken to ground after a program/verify cycle.
FIGURE 6-2: VERIFY WAVEFORMS
End of
Programming Cycle
PWM
(Data)
TWC
S2/S3
(Clock)
Note: If a Verify operation is to be done, then it must immediately follow the Program cycle.
Begin Verify Cycle Here
Bit 0Bit191Bit190
Bit 1 Bit 2 Bit 3 Bit 15Bit 14 Bit 16 Bit 17 Bit190 Bit191
TDV
Data in Word 0
TABLE 6-1 PROGRAMMING/VERIFY TIMING REQUIREMENTS
VDD = 5.0V ± 10%
25° C ± 5 °C
Parameter Symbol Min. Max. Units
Program mode setup time T
Hold time 1 T
Program cycle time T
Clock low time T
Clock high time T
Data setup time T
Data hold time T
Data out valid time T
2
1
WC — 30 ms
CLKL 25 — µs
CLKH 25 — µs
DS 0 — µs
DH 18 — µs
DV — 24 µs
0 4.0 ms
9.0 — ms
1996 Microchip Technology Inc. Preliminary DS40152C-page 13

HCS360
7.0 INTEGRATING THE HCS360
INTO A SYSTEM
Use of the HCS360 in a system requires a compatible
decoder. This decoder is typically a microcontroller with
compatible firmware. Firmware routines that accept
transmissions from the HCS360 and decrypt the
hopping code portion of the data stream are available.
These routines provide system designers the means to
develop their own decoding system.
7.1 Learning a Transmitter to a Receiver
In order for a transmitter to be used with a decoder , the
transmitter must first be ‘learned’. Several learning
strategies can be followed in the decoder implementation. When a transmitter is learned to a decoder, it is
suggested that the decoder stores the serial number
and current synchronization value in EEPROM. The
decoder must keep track of these values for every
transmitter that is learned (Figure 7-1). The maximum
number of transmitters that can be learned is only a
function of how much EEPROM memory storage is
available. The decoder must also store the manufacturer’s code in order to learn a transmission transmitter ,
although this value will not change in a typical system
so it is usually stored as part of the microcontroller
ROM code. Stor ing the manufacturer’s code as part of
the ROM code is also better for security reasons.
It must be stated that some learning strategies have
been patented and care must be taken not to infringe.
FIGURE 7-1: TYPICAL LEARN SEQUENCE
Enter Learn
Mode
Wait for Reception
of a Valid Code
Generate Key
from Serial Number
Use Generated Key
to Decrypt
Compare Discrimination
Value with Fixed Value
Equal
?
Yes
Wait for Reception
of Second Valid Code
Use Generated Key
to Decrypt
Compare Discrimination
Value with Fixed Value
Equal
?
Yes
No
No
Counters
Sequential
?
Yes
Learn successful Store:
Serial number
Encryption key
Synchronization counter
Exit
No
Learn
Unsuccessful
DS40152C-page 14 Preliminary 1996 Microchip Technology Inc.

HCS360
7.2 Decoder Operation
In a typical decoder operation (Figure 7-2), the key generation on the decoder side is done by taking the serial
number from a transmission and combining that with
the manufacturer’s code to create the same secret key
that was used by the transmitter . Once the secret key is
obtained, the rest of the transmission can be decrypted.
The decoder waits for a transmission and immediately
can check the serial number to determine if it is a
learned transmitter. If it is, it tak es the encrypted portion
of the transmission and decrypts it using the stored key
It uses the discrimination bits to determine if the
decryption was valid. If everything up to this point is
valid, the synchronization value is evaluated.
FIGURE 7-2: TYPICAL DECODER
OPERATION
Start
No
Transmission
Received
?
Yes
No
Decrypt Transmission
Does
Serial Number
Match
?
Yes
7.3 Synchronization with Decoder
The KEELOQ technology features a sophisticated
synchronization technique (Figure 7-3) which does not
require the calculation and storage of future codes. If
the stored counter value for that particular transmitter
and the counter value that was just decrypted are within
a formatted window of say 16, the counter is stored and
the command is executed. If the counter value was not
within the single operation window, but is within the
double operation window of sa y 32K window , the tr ansmitted synchronization value is stored in temporary
location and it goes back to waiting for another transmission. When the next valid transmission is received,
it will check the new value with the one in temporary
storage. If the two values are sequential, it is assumed
that the counter had just gotten out of the single operation ‘window’, but is now back in sync, so the new synchronization value is stored and the command
executed. If a transmitter has somehow gotten out of
the double operation window, the transmitter will not
work and must be relearned. Since the entire window
rotates after each valid transmission, codes that have
been used are part of the ‘block ed’ (32K) codes and are
no longer valid. This eliminates the possibility of grabbing a previous code and retransmitting to gain entry.
Note: The synchronization method described in
this section is only a typical implementation
and because it is usually implemented in
firmware, it can be altered to fit the needs
of a particular system
FIGURE 7-3: SYNCHRONIZATION WINDOW
No
Decryption
Valid
No
No
Counter
Within 16
Counter
Within 32K
Save Counter
in Temp Location
Is
?
Yes
Is
?
Is
Yes
No
?
Yes
Execute
Command
and
Update
Counter
Entire Window
rotates to eliminate
use of previously
used codes
Double
Operation
(32K Codes)
Blocked
(32K Codes)
Current
Position
Single Operation
Window (16 Codes)
1996 Microchip Technology Inc. Preliminary DS40152C-page 15

HCS360
8.0 ELECTRICAL CHARACTERISTICS
TABLE 8-1 ABSOLUTE MAXIMUM RATINGS
Symbol Item Rating Units
DD Supply voltage -0.3 to 6.9 V
V
IN Input voltage -0.3 to VDD + 0.3 V
V
OUT Output voltage -0.3 to VDD + 0.3 V
V
OUT Max output current 25 mA
I
STG Storage temperature -55 to +125 °C (Note)
T
LSOL Lead soldering temp 300 °C (Note)
T
ESD ESD rating 4000 V
V
Note: Stresses above those listed under “ABSOLUTE MAXIMUM RATINGS” may cause permanent damage to the
device.
TABLE 8-2 DC CHARACTERISTICS
Commercial (C): Tamb = 0°C to +70°C
Industrial (I): Tamb = -40°C to +85°C
2.0V < V
Parameter Sym. Min
Operating current (avg) I
Standby current I
Auto-shutoff current
2,3
High level Input voltage V
Low level input voltage V
High level output voltage V
Low level output voltage V
sink current ILED 0.15 1.0 4.0 0.15 1.0 4.0 mA VLED = 1.5V, VDD = 6.6V
LED
Resistance; S0-S3 R
CC 0.3 1.2
CCS 0.1 1.0 0.1 1.0 µA
ICCS 40 75 160 350 µA
IH 0.55VD
D
IL -0.3 0.15VD
OH 0.7VDD 0.7VDD V IOH = -1.0mA, VDD = 2.0V
OL 0.08VD
S0-
40 60 80 40 60 80 kΩ VDD=4.0V
3
Resistance; PWM R
PW
M
80 120 160 80 120 160 kΩ VDD=4.0V
Note 1: Typical values are at 25°C.
2: Auto-shutoff current specification does not include the current through the input pulldown resistors.
3: Auto-shutoff current is periodically sampled and not 100% tested.
DD < 3.3 3.0 < VDD < 6.6
Typ
1
Max Min
Typ
1
0.7 1.6
VDD+0.3 0.55VD
D
-0.3 0.15V
D
0.08VDDV IOL = 1.0mA, VDD = 2.0V
D
Max
Uni
mA VDD = 3.3V
VDD+0.3 V
D
D
t
Conditions
V
DD = 6.6V
V
I
OH = -2.0mA, VDD = 6.6V
I
OL = 2.0mA, VDD = 6.6V
DS40152C-page 16 Preliminary 1996 Microchip Technology Inc.

FIGURE 8-1: POWER UP AND TRANSMIT TIMING
Button Press
PWM
Sn
Detect
T
BP
TTD
DB
T
Code
Word
1
Code Word Transmission
Code
Word
2
TTO
Code
Word
3
TABLE 8-3 POWER UP AND TRANSMIT TIMING REQUIREMENTS
VDD = +2.0 to 6.6V
Commercial (C): Tamb = 0°C to +70°C
Industrial (I): Tamb = -40°C to +85°C
Parameter Symbol Min Max Unit Remarks
Time to second button press TBP 10 + Code
Word Time
Transmit delay from button detect T
Debounce delay T
Auto-shutoff time-out period T
Note 1: T
BP is the time in which a second button can be pressed without completion of the first code word and the
intention was to press the combination of buttons.
2: Transmit delay maximum value if the previous transmission was successfully transmitted.
3: The auto shutoff timeout period is not tested.
TD 4.5 26 ms (Note 2)
DB 4.0 13 ms
TO 15.0 35 s (Note 3)
26 + Code
Word Time
HCS360
Code
Word
n
ms (Note 1)
FIGURE 8-2: PWM FORMAT (MANCH = 0)
TE
TE
TE
LOGIC ‘0’
LOGIC ‘1’
TBP
Preamble
TP
Header
TH
FIGURE 8-3: PWM PREAMBLE/HEADER FORMAT
Preamble Header
32 TE
Encrypted Portion
of Transmission
THOP
10 TE
Fixed portion of
Transmission
TFIX
Data Word
Transmission
Bit 0 Bit 1
Guard
Time
TG
1996 Microchip Technology Inc. Preliminary DS40152C-page 17

HCS360
FIGURE 8-4: PWM DATA WORD FORMAT
Serial Number Function Code Status
LSB
LSB
MSB MSB S3 S0 S1 S2 VLOW CRC0 CRC1
CRC
Header
Bit 0 Bit 1
Encrypted Data
Bit 30
Bit 31
Bit 32 Bit 33 Bit 58 Bit 59
Bit 60
Bit 61
Fixed Code Data
FIGURE 8-5: MANCHESTER FORMAT (MANCH = 1)
TE
TE
LOGIC ‘0’
LOGIC ‘1’
TBP
Preamble
TP
Header
TH
Encrypted Portion
of Transmission
THOP
FIGURE 8-6: MANCHESTER PREAMBLE/HEADER FORMAT
Preamble Header
Bit 62 Bit 63 Bit 64 Bit 65
Fixed portion of
Transmission
TFIX
Data Word
Transmission
Bit 0 Bit 1
Bit 66
Guard
Time
Guard
Time
TG
32 TE
FIGURE 8-7: HCS360 NORMALIZED TE VS. TEMP
1.7
1.6
1.5
1.4
1.3
1.2
E
T
1.1
1.0
0.9
0.8
0.7
0.6
-50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80 90
Temperature °C
TE Max.
TE Min.
4 TE
Typical
VDD LEGEND
= 2.0V
= 3.0V
= 6.0V
DS40152C-page 18 Preliminary 1996 Microchip Technology Inc.

TABLE 8-4 CODE WORD TRANSMISSION TIMING PARAMETERS—PWM MODE
HCS360
VDD = +2.0V to 6.6V
Code Words Transmitted
Commercial (C):Tamb = 0°C to +70°C
Industrial (I):Tamb = -40°C to +85°C
FAST1 = 0,
FAST0 = 0
Symbol Characteristic
E Basic pulse element 1 260 400 620 1 130 200 310 µs
T
BP PWM bit pulse width 3 780 1200 1860 3 390 600 930 µs
T
P Preamble duration 32 8.3 12.8 19.8 32 4.2 6.4 9.9 ms
T
H Header duration 10 2.6 4.0 6.2 10 1.3 2.0 3.1 ms
T
HOP Hopping code duration 96 25.0 38.4 59.5 96 12.5 19.2 29.8 ms
T
FIX Fixed code duration 105 27.3 42.0 65.1 105 13.7 21.0 32.6 ms
T
G Guard Time (LNGRD = 0) 16 4.2 6.4 9.9 32 4.2 6.4 9.9 ms
T
Number
of T
E
Min. Typ. Max.
Number
of T
E
FAST1 = 0,
FAST0 = 1
Min. Typ. Max. Units
— Total transmit time 259 67.3 103.6 160.6 275 35.8 55.0 85.3 ms
— PWM data rate — 1282 833 538 — 2564 1667 1075 bps
Note: The timing parameters are not tested but derived from the oscillator clock.
VDD = +2.0V to 6.6V
Code Words Transmitted
Commercial (C):Tamb = 0°C to +70°C
Industrial (I):Tamb = -40°C to +85°C
FAST1 = 1,
FAST0 = 0
Symbol Characteristic
E Basic pulse element 1 130 200 310 1 65 100 155 µs
T
T
BP PWM bit pulse width 3 390 600 930 3 195 300 465 µs
T
P Preamble duration 32 4.2 6.4 9.9 32 2.1 3.2 5.0 ms
T
H Header duration 10 1.3 2.0 3.1 10 0.7 1.0 1.6 ms
T
HOP Hopping code duration 96 12.5 19.2 29.8 96 6.2 9.6 14.9 ms
T
FIX Fixed code duration 105 13.7 21.0 32.6 105 6.8 10.5 16.3 ms
T
G Guard Time (LNGRD = 0) 32 4.2 6.4 9.9 64 4.2 6.4 9.9 ms
Number
of T
E
Min. Typ. Max.
Number
of Te
FAST1 = 1,
FAST0 = 1
Min. Typ. Max. Units
— Total transmit time 275 35.8 55.0 85.3 307 20.0 30.7 47.6 ms
— PWM data rate — 2564 1667 1075 — 5128 3333 2151 bps
Note: The timing parameters are not tested but derived from the oscillator clock.
1996 Microchip Technology Inc. Preliminary DS40152C-page 19

µ
HCS360
TABLE 8-5 CODE WORD TRANSMISSION TIMING PARAMETERS—MANCHESTER MODE
V
= +2.0V to 6.6V
DD
Commercial (C):Tamb = 0 ° C to +70 ° C
Industrial (I):Tamb = -40 ° C to +85 ° C
FAST1 = 0,
FAST0 = 0
Code Wor ds T ransmitted
FAST1 = 0,
FAST0 = 1
Symbol Characteristic
E
T
Basic pulse element 1 520 800 1240 1 260 400 620
Preamble duration 32 16.6 25.6 39.7 32 8.3 12.8 19.8 ms
P
T
H
T
Header duration 4 2.1 3.2 5.0 4 1.0 1.6 2.5 ms
START
T
T
T
STOP
T
Start bit 2 1.0 1.6 2.5 2 0.5 0.8 1.2 ms
HOP
Hopping code duration 64 33.3 51.2 79.4 64 16.6 25.6 39.7 ms
FIX
Fixed code duration 70 36.4 56.0 86.8 70 18.2 28.0 43.4 ms
Stop bit 2 1.0 1.6 2.5 2 0.5 0.8 1.2 ms
G
T
Guard Time (LNGRD = 0) 8 4.2 6.4 9.9 16 4.2 6.4 9.9 ms
Number
of T
E
Min. Typ. Max.
Number
of Te
Min. Typ. Max. Units
— Total transmit time 182 94.6 145.6 223.7 196 50.76 78.4 121.5 ms
— Manchester data rate — 1923 1250 806 — 3846.2 2500 1612.9 bps
Note: The timing parameters are not tested but derived from the oscillator clock.
= +2.0V to 6.6V
V
DD
Code Wor ds T ransmitted
Commercial (C):Tamb = 0 ° C to +70 ° C
Industrial (I):Tamb = -40 ° C to +85 ° C
Symbol Characteristic
T
Basic pulse element 1 260 400 620 1 130 200 310 µ s
E
T
P
Preamble duration 32 8.3 12.8 19.8 32 4.2 6.4 9.9 ms
T
Header duration 4 1.0 1.6 2.5 4 0.5 0.8 1.2 ms
H
T
START
T
T
T
Start bit 2 0.5 0.8 1.2 2 0.3 0.4 0.6 ms
Hopping code duration 64 16.6 25.6 39.7 64 8.3 12.8 19.8 ms
HOP
FIX
Fixed code duration 70 18.2 28.0 43.4 70 9.1 14.0 21.7 ms
Stop bit 2 0.5 0.8 1.2 2 0.3 0.4 0.6 ms
STOP
T
G
Guard Time (LNGRD = 0) 16 4.2 6.4 9.9 32 4.2 6.4 9.9 ms
Number
of T
E
FAST1 = 1,
FAST0 = 0
Min. Typ. Max.
Number
of Te
FAST1 = 1.
FAST0 = 1
Min. Typ. Max. Units
— Total transmit time 196 50.96 78.4 121.5 212 27.6 42.4 65.7 ms
— Manchester data rate — 3846.2 2500.0 1612.9 — 7692.3 5000.0 3225.8 bps
Note: The timing parameters are not tested but derived from the oscillator clock.
s
DS40152C-page 20
Preliminary
1996 Microchip Technology Inc.

NOTES:
HCS360
1996 Microchip Technology Inc. Preliminary DS40152C-page 21

HCS360
NOTES:
DS40152C-page 22 Preliminary 1996 Microchip Technology Inc.

HCS360
HCS360 PRODUCT IDENTIFICATION SYSTEM
To order or obtain information, e.g., on pricing or delivery, refer to the factory or the listed sales office.
HCS360 — /P
Package: P = Plastic DIP (300 mil Body), 8-lead
Temperature Blank = 0˚C to +70˚C
Range: I = –40˚C to +85˚C
Device: HCS360 Code Hopping Encoder
SN = Plastic SOIC (150 mil Body), 8-lead
HCS360T Code Hopping Encoder (Tape and Reel)
Sales and Suppor
Data Sheets
Products supported by a preliminary Data Sheet may have an errata sheet describing minor operational differences and recommended workarounds. To determine if an errata sheet exists for a particular device, please contact one of the following:
1. Your local Microchip sales office (see last page)
2. The Microchip Corporate Literature Center U.S. FAX: (602) 786-7277
3. The Microchip’s Bulletin Board, via your local CompuServe number (CompuServe membership NOT required).
Please specify which device, revision of silicon and Data Sheet (include Literature #) you are using.
t
1996 Microchip Technology Inc.
Preliminary
DS40152C-page 23

WORLDWIDE SALES & SERVICE
AMERICAS
Corporate Office
Microchip Technology Inc.
2355 West Chandler Blvd.
Chandler, AZ 85224-6199
Tel: 602-786-7200 Fax: 602-786-7277
Technical Support:
Web:
http://www.microchip.com
Atlanta
Microchip Technology Inc.
500 Sugar Mill Road, Suite 200B
Atlanta, GA 30350
Tel: 770-640-0034 Fax: 770-640-0307
Boston
Microchip Technology Inc.
5 Mount Royal Avenue
Marlborough, MA 01752
Tel: 508-480-9990 Fax: 508-480-8575
Chicago
Microchip Technology Inc.
333 Pierce Road, Suite 180
Itasca, IL 60143
Tel: 708-285-0071 Fax: 708-285-0075
Dallas
Microchip Technology Inc.
14651 Dallas Parkway, Suite 816
Dallas, TX 75240-8809
Tel: 972-991-7177 Fax: 972-991-8588
Dayton
Microchip Technology Inc.
Two Prestige Place, Suite 150
Miamisburg, OH 45342
Tel: 937-291-1654 Fax: 937-291-9175
Los Angeles
Microchip Technology Inc.
18201 Von Karman, Suite 1090
Irvine, CA 92612
Tel: 714-263-1888 Fax: 714-263-1338
New York
Microchip Technology Inc.
150 Motor Parkway, Suite 416
Hauppauge, NY 11788
Tel: 516-273-5305 Fax: 516-273-5335
San Jose
Microchip Technology Inc.
2107 North First Street, Suite 590
San Jose, CA 95131
Tel: 408-436-7950 Fax: 408-436-7955
Toronto
Microchip Technology Inc.
5925 Airport Road, Suite 200
Mississauga, Ontario L4V 1W1, Canada
Tel: 905-405-6279 Fax: 905-405-6253
602 786-7627
ASIA/PACIFIC
Hong Kong
Microchip Asia Pacific
RM 3801B, Tower Two
Metroplaza
223 Hing Fong Road
Kwai Fong, N.T., Hong Kong
Tel: 852-2-401-1200 Fax: 852-2-401-3431
India
Microchip Technology India
No. 6, Legacy, Convent Road
Bangalore 560 025, India
Tel: 91-80-299-4036 Fax: 91-80-559-9840
Korea
Microchip Technology Korea
168-1, Youngbo Bldg. 3 Floor
Samsung-Dong, Kangnam-Ku
Seoul, Korea
Tel: 82-2-554-7200 Fax: 82-2-558-5934
Shanghai
Microchip Technology
RM 406 Shanghai Golden Bridge Bldg.
2077 Yan’an Road West, Hongiao District
Shanghai, PRC 200335
Tel: 86-21-6275-5700
Fax: 86 21-6275-5060
Singapore
Microchip Technology Taiwan
Singapore Branch
200 Middle Road
#10-03 Prime Centre
Singapore 188980
Tel: 65-334-8870 Fax: 65-334-8850
Taiwan, R.O.C
Microchip Technology Taiwan
10F-1C 207
Tung Hua North Road
Taipei, Taiwan, ROC
Tel: 886 2-717-7175 Fax: 886-2-545-0139
EUROPE
United Kingdom
Arizona Microchip Technology Ltd.
Unit 6, The Courtyard
Meadow Bank, Furlong Road
Bourne End, Buckinghamshire SL8 5AJ
Tel: 44-1628-851077 Fax: 44-1628-850259
France
Arizona Microchip Technology SARL
Zone Industrielle de la Bonde
2 Rue du Buisson aux Fraises
91300 Massy, France
Tel: 33-1-69-53-63-20 Fax: 33-1-69-30-90-79
Germany
Arizona Microchip Technology GmbH
Gustav-Heinemann-Ring 125
D-81739 Müchen, Germany
Tel: 49-89-627-144 0 Fax: 49-89-627-144-44
Italy
Arizona Microchip Technology SRL
Centro Direzionale Colleone
Palazzo Taurus 1 V. Le Colleoni 1
20041 Agrate Brianza
Milan, Italy
Tel: 39-39-6899939 Fax: 39-39-6899883
JAPAN
Microchip Technology Intl. Inc.
Benex S-1 6F
3-18-20, Shin Yokohama
Kohoku-Ku, Yokohama
Kanagawa 222 Japan
Tel: 81-4-5471- 6166 Fax: 81-4-5471-6122
1/14/97
All rights reserved. © 1997, Microchip Technology Incorporated, USA. 1/97
M
Printed on recycled paper.
Information contained in this publication regarding device applications and the like is intended for suggestion only and may be superseded by updates. No representation or
warranty is given and no liability is assumed by Microchip Technology Incorporated with respect to the accuracy or use of such information, or infringement of patents or other
intellectual property rights arising from such use or otherwise. Use of Microchip’s products as critical components in life support systems is not authorized except with express
written approval by Microchip. No licenses are convey ed, implicitly or otherwise, under any intellectual property rights. The Microchip logo and name are registered trademarks
of Microchip Technology Inc. in the U.S.A. and other countries. All rights reserved. All other trademarks mentioned herein are the property of their respective companies.
DS40152C-page 24 Preliminary 1997 Microchip Technology Inc.
 Loading...
Loading...