

Page 1
Installation, Operation and Maintenance Manual
Variable Frequency Drives
Air-Cooled, LiquiFlo™ and LiquiFlo 2.0™
For Centrifugal Chillers
With MicroTech 200™ or MicroTech II™ Control
IOMM VFD-2
Group: Chiller
Part Number: 331375701
Effective: Sept. 2005
Supercedes: IOMM VFD
Page 2
Table of Contents
Introduction...........................................3
Environmental Conditions................................5
Harmonic Distortion.........................................5
General Description..............................6
Air-Cooled/LiquiFlo (LF ), Standard Features.6
LiquiFlo 2.0 (LF 2.0), Standard Features.........7
Codes/Standards...............................................7
Quality Assurance ............................................7
A-C/LiquiFlo, Nomenclature ...........................7
LiquiFlo 2.0, Nomenclature.............................7
Definition of Terms...............................9
Installation........................................... 11
Cooling Requirements for VFDs....................13
Separate Cooling Module (LF VFD 090, 120 and
all LF 2.0)....................................................15
Wiring, General..............................................21
Power Wiring.................................................21
Terminal Sizes................................................23
Optional Line Reactor Installation, Air-Cooled/LF
Only.............................................................25
VFD/Chiller Interconnection Wiring Diagram30
VFD Dimensions .................................32
Air-Cooled .....................................................32
LiquiFlo...........Error! Bookmark not defined.
LiquiFlo 2.0.....Error! Bookmark not defined.
MicroTech™ 200 VFD Control..........41
VFD Chiller Control States............................41
Control Sequence, MicroTech 200.................42
WDC/WCC, Dual Compressor VFD Operation43
MicroTech 200 Controller VFD Menu Screens43
MicroTech II™ VFD Control.............50
General Description: ......................................50
Sequence of Operation...................................50
Interface Panel Screens, MT II.......................52
Operation, Small A/C SP600 & LF 2.057
Using the Interface.........................................57
Using the LEDs..............................................59
About Alarms.................................................61
About Faults...................................................64
Troubleshooting.............................................73
Operation, Large A/C, PF700H.........77
Using the Interface.........................................77
Using the LEDs..............................................80
Faults and Alarms...........................................80
Troubleshooting.............................................87
Operation, LF .....................................90
Using the Interface.........................................90
Using the LEDs..............................................93
Troubleshooting.............................................95
Indices: Figures & Tables.................103
"Information and illustrations cover the McQuay International products at the time of publication and we reserve the right to make changes
“McQuay" is a registered trademark of McQuay International LiquiFlo and Reliance are trademarks of Rockwell Automation.
Manufactured in an ISO Certified facility
©2005 McQuay International
in design and construction at anytime without notice".
2 IOMM VFD-2
Page 3
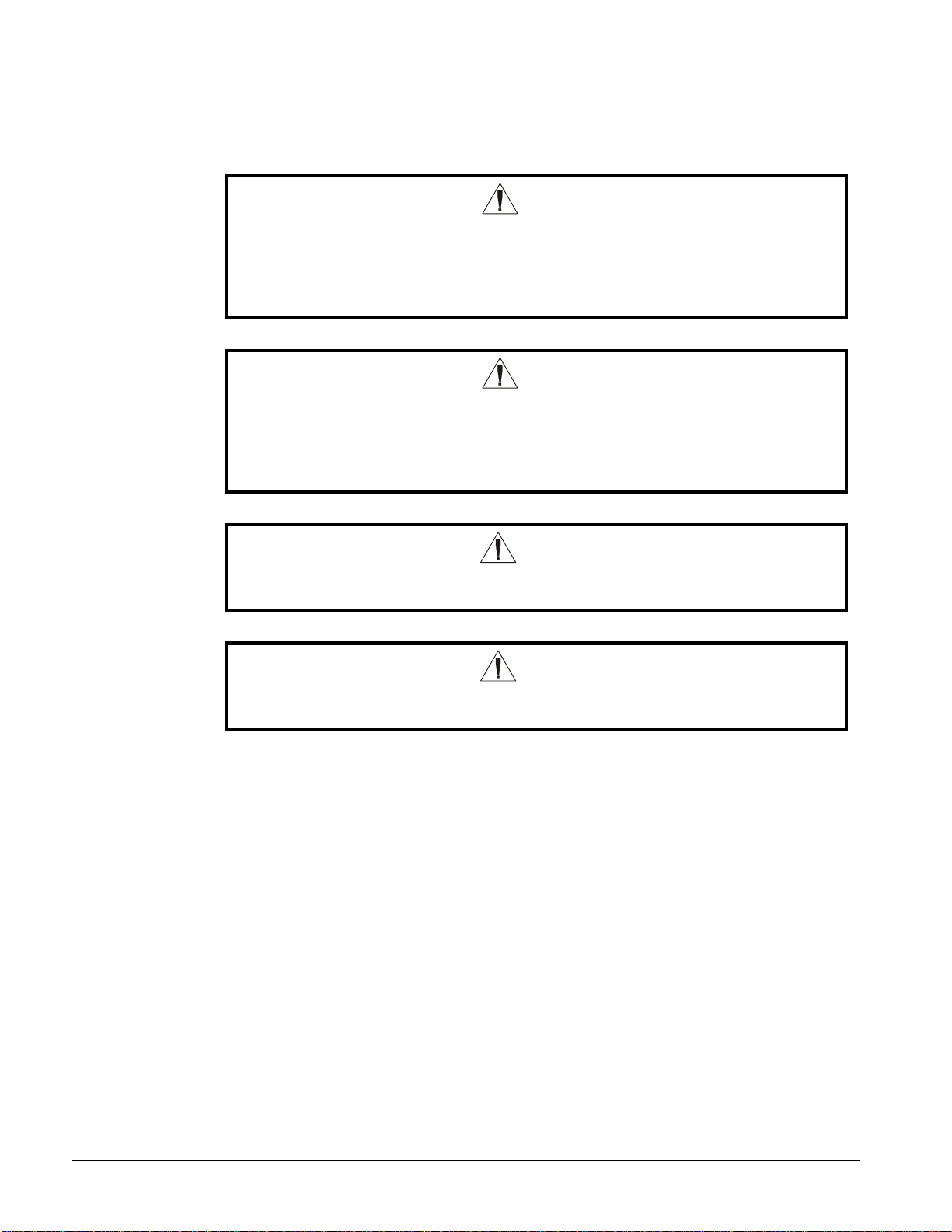
DANGER
Only qualified electrical personnel familiar with the construction and operation of
this equipment and the hazards involved should install, adjust, operate, or service
this equipment. Read and understand this ma nual and other applicable manuals
in their entirety before proceeding. Failure to observe this precaution could result
in severe bodily injury or loss of life.
DANGER
DC bus capacitors re tain hazardous voltages after power has been disconnected.
After disconnecting input power to the unit, wait five (5) minutes for the DC bus
capacitors to discharge, and then check the voltage with a voltmeter to ensure the
DC capacitors are discharged before touching any internal components. Failure
to observe this precaution could result in severe bodily injury or loss of life.
CAUTION
The user is responsible for conforming to all applicable local, national and
international codes. Failure to observe this precaution could result in damage to,
or destruction of the equipment.
The drive contains printed circuit boards that are static-sensitive. Anyone who
touches the drive components should wear an anti-static wristband. Erratic
machine operation and damage to, or destruction of, equipment can result if this
Failure to observe this precaution can result in bodily injury.
Introduction
This manual covers Air-Cooled, LiquiFlo (LF ) and LiquiFlo 2.0 (LF 2.0) VFDs on
centrifugal chillers with MicroTech 200™ or the newer MicroTech II™ controllers. Many
issues are the same for both and are treated in common. Where differences occur,
information will be designated as being for a specific VFD or controller model.
The above three types of VFDs have four family designations as show in Table 1 and Table
2. Each of these VFD families has a separate section in this manual. There is considerable
overlap in programming methods and general operation of the drives, but they are in
separate sections to avoid confusion. The beginning page number for each control section
in the manual is noted in the tables.
WARNING
procedure is not followed.
IOMM VFD-2 3
Page 4
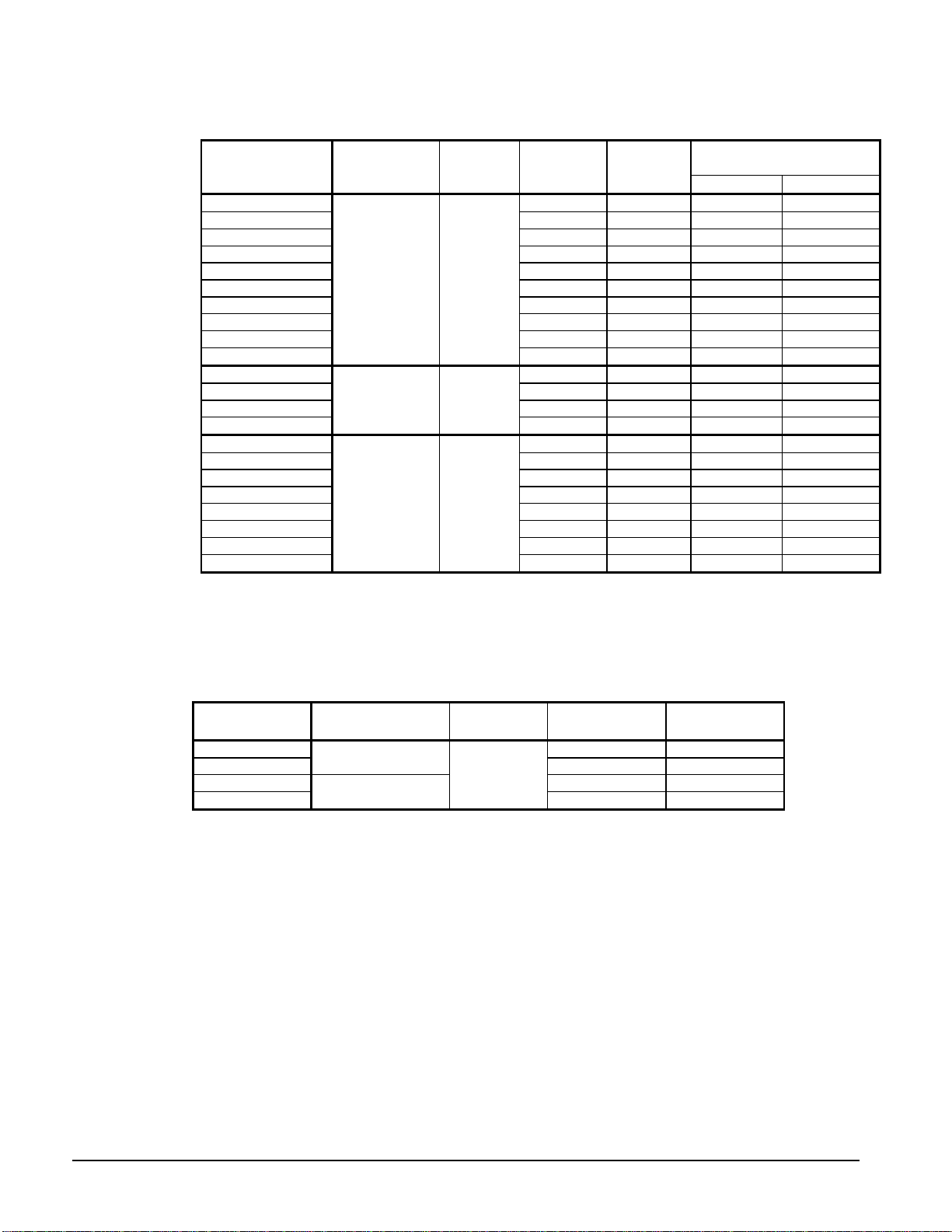
Table 1, Model Sizes, Air-Cooled/LiquiFlo
L=Shipped loose, M=Mounted, A=Air-cooled, W=Water-cooled
VFD Model
VFD 009LA 87 Air RC 100
VFD 009MA 87 Air RC 100
VFD 012LA 114 Air R1 130
VFD 012MA 114 Air R1 130
VFD 015LA 142 Air R2 160
VFD 015MA 142 Air R2 160
VFD 017LA 164 Air R3 200
VFD 017MA 164 Air R3 200
VFD 023LA 225 Air R4 250
VFD 023MA
VFD 024LA 237 Air RY STD.
VFD 024MA 237 Air RY STD.
VFD 028LA 273 Air RY STD.
VFD 028MA
VFD 047LW 414 Water RD 500
VFD 047MW 414 Water RD 500
VFD 060LW 500 Water R7 600
VFD 060MW 500 Water R7 600
VFD 072LW 643 Water R8 750
VFD 072MW 643 Water R8 750
VFD 090LW 890 Water RM 900
VFD120LW
VFD Family
Designation
SP 600 Page 57
PF700H Page 77
LF Page 90
Page
Location
Max.
Amps
225 Air R4 250
273 Air RY STD.
1157 Water R9 1200
Cooling
Optional Line Reactor
(Note 1)
Size Amp Rating
NOTES
1. Line reactors are optional on all sizes except Models VFD 024 and 028, where they are included as
standard.
2. Electrical characteristics: 380/460 VAC ±10%, 3 phase, 50/60 Hertz, ±5 Hz.
3. Optional line reactors are 3% impedance.
Table 2, Model Sizes, LiquiFlo 2.0
VFD Model
VF 2037 368 Water
VF 2055
VF 2080 809 Water
VF 2110
VFD Family
Designation
LF 2.0, Frame 3
LF 2.0, Frame 4
Page
Location
Page 57
Max. Amps Cooling
553 Water
1105 Water
WSC and WDC single and dual compressor, and WCC dual compressor chillers can be
equipped with Variable Frequency Drives (VFD). A VFD starts the compressor motor and then
modulates the compressor speed in response to load, evaporator pressure, and condenser
pressure, as sensed by the chiller microprocessor. Despite the small power penalty attributed to
the VFD internal losses, a chiller can achieve outstanding overall efficiency by using a VFD.
VFDs are effective when there is a reduced load, combined with a low compressor lift (lower
condenser water temperatures), dominating the operating hours.
The traditional method of controlling centrifugal compressor capacity is by inlet guide vanes.
Slowing down the compressor, thereby reducing the impeller tip speed, can also reduce
capacity. However, sufficient impeller tip speed must always be maintained to meet the
chiller’s discharge pressure requirements. The speed control method is more efficient than
guide vanes by themselves.
In actual practice, a combination of the two techniques is used. The microprocessor slows the
compressor (to a programmed minimum percent of full load speed) as much as possible,
4 IOMM VFD-2
Page 5

considering the need for sufficient tip speed, to make the required compressor lift. Then the
guide vanes take over for further capacity reduction. This methodology provides the optimum
efficiency under any operating condition.
Inlet guide vanes control compressor capacity based on a signal from the microprocessor, which
is sensing changes in the leaving chilled water temperature. The guide vanes vary capacity by
changing the angle and flow of the suction gas entering the impeller. The impeller takes a
smaller “bite” of the gas. Reduced gas flow results in less capacity. Compressors start
unloaded (guide vanes closed) in order to reduce the starting effort. A vane-closed switch (VC)
signals the microprocessor that the compressor vanes are closed.
VFDs can be found on centrifugal chillers with the older MicroTech 200 controller (sometimes
referred to as MicroTech I or just plain MicroTech) or the newer MicroTech II™ controller.
The two MicroTech controller versions are easily differentiated as shown below. The
MicroTech II panel shown below is the initial version known as Panel 1. Panel 2, shown on
page 50, replaced it in mid-2005.
MicroTech 200 Control Panel
MicroTech II Operator Interface Panel 1
Operation and adjustment of the VFD involves settings on both the VFD itself and also to the
chiller controller, either MicroTech 200 controller or MicroTech II controller. This manual
consists of a section relating to VFD operation common to both chiller controllers and also
separate sections for the settings specific to either of the chiller MicroTech controllers.
NOTE: VFDs are programmed differently in the factory for 50 and 60 hertz applications. It is
prudent to verify this by checking the settings sticker in the unit and the actual unit settings
using the Reliance manual shipped with the VFD unit as a reference.
Environmental Conditions
Operating Temperature (inside NEMA 1 enclosure) 32° to 131°F (0°C to 55°C)
Ambient T em perature (outside NEMA 1 enclosure) 32° to 104°F (0°C to 40°C)
Storage Temperature (Ambient) 32° to 131°F (0°C to 55°C)
Humidity 5% to 95% (non-condensing)
AC line distribution system capacity shall not exceed 85,000 amps symmetrical available fault
current.
Harmonic Distortion
Harmonic distortion, the effect that any variable frequency drive has on the electrical system
supplying it power, is a consideration on most applications and is discussed in detail in Catalog
Starter, which can be obtained from the local McQuay sales office or on www.mcquay.com.
IOMM VFD-2 5
Page 6

General Description
The VFD will not generate damaging voltage pulses at the motor terminals when applied
within 500 feet of each other. The VFD drive complies with NEMA MG1 section
30.40.4.2, which specifies these limits at a maximum peak voltage of 600 volts and a
minimum rise time of 0.1 microseconds.
All VFDs require cooling. Models VFD 019 and VFD 028, rated at 273 amps or less, are
air-cooled. All others are water-cooled.
Factory-mounted, water-cooled VFDs have VFD cooling water combined in the factory
with the compressor oil cooling system.
Freestanding water-cooled VFDs require field-installed chilled water supply and return
piping for the VFD. Models VFD 090 and 120 and all LF 2.0 models have an intermediate
cooling module, field installed, between the cooling source and the VFD.
Water-cooled VFD’s have a liquid-cooled heatsink assembly enabling liquid cooling of the
drive though a single inlet and outlet connection point.
There is a temperature-regulating valve located in the drive. It must be set to maintain 95°F
(35°C) leaving coolant temperature. This is necessary to prevent condensation from
forming in the heatsink. Minimum entering coolent temperature is 40°F (4.4°C).
Air-Cooled/LiquiFlo (LF ), Standard Features
• Electronic overload circuit designed to protect an AC motor, operated by the VFD
output, from extended overload operation on an inverse time basis. This electronic
overload is UL and NEC recognized as adequate motor protection. No additional
hardware, such as motor overload relays, or motor thermostats are required.
• An LED display that digitally indicates:
Frequency output Input kW DC bus voltage
Voltage output Elapsed time Motor RPM
Current output Time stamped fault indication
• The VFD is capable of maintaining operation through power dips up to 10 seconds
without a controller trip, depending upon load and operating conditions. In this
extended ride-through, the drive uses the energy generated by the load inertia of the
motor as a power source for electronic circuits.
• An isolated 0-20mA, 4-20mA, or 0-4, 0-8, 0-10 V analog speed input follower.
• An isolated 0-10V or 4-20mA output signal proportional to speed or load.
• Standard I/O expansion interface card with the following features:
• Four isolated 24VDC programmable digital inputs
• One frequency input (0 to 200Hz) for digital control of speed or trim reference
• Four programmable isolated digital outputs (24 VDC rated)
• One Form A output relay rated at 250 VAC or 24VDC
• Two NO/NC programmable output relays rated at 250 VAC or 24 VDC
• The VFD includes the following standard protective circuit features:
• Output phase-to-phase short circuit condition
• Total ground fault under any operating condition
• High input line voltage
• Low input line voltage
• Loss of input or output phase
• External fault (This protective circuit will permit wiring to a remote normally
closed equipment protection contact to shut down the drive.)
6 IOMM VFD-2
Page 7

LiquiFlo 2.0 (LF 2.0), Standard Features
• NEMA 1 enclosure with hinged door.
• Package includes a circuit breaker with shunt trip with AIC rating of 65,000 amps.
• Full motor voltage is applied regardless of the input voltage.
• Efficiency at rated load and 60 hertz is 97%.
• Drive thermal overload is 110% for 60 seconds in volts per hertz mode and 150% for
five seconds in sensorless vector mode.
• Achieves IEEE519 using actively controlled IGBT front-end maximum of 5% THD.
• 0.99 power factor at full load and provides power factor correction at lighter loads.
• IGBT switching: 2kHz carrier frequency.
• The entire drive package is UL/CUL listed.
• Optional multi language LCD keypad.
• Power line dip ride through capability for up to 10 seconds.
• Adjustable auto restart (number of restarts and time delay between attempts are
selectable.) Display indicates when controller is attempting to restart.
• Control power transformer for chiller unit controls
Codes/Standards
• VFDs are UL 508 listed
• VFDs are designed to comply with the applicable requirements of the latest standards
of ANSI, NEMA, National Electric Code (NEC), NEPU-70, IEEE 519-1992, FCC Part
15 Subpart J, CE 96.
Quality A ssurance
• Every VFD is functionally tested under motor load. During this test the VFD is
monitored for correct phase current, phase voltages, and motor speed. Correct current
limit operation is verified by simulating a motor overload.
• Scrolling through all parameters verifies proper factory presets. The computer port also
verifies that the proper factory settings are loaded into the drive.
• Every VFD’s heatsink is tested to verify proper embedding of the tubing for flow of
coolant liquid. Thermal tests are performed on the VFD to verify that the cooling
occurs within the correct temperature range.
A-C/LiquiFlo, Nomenclature
VFD XXX M A
Variable Frequency Drive
2037 through 2110 (LF 2)
Model Number
009 through 120
Cooling Method
A=Air-cooled
W=Water-cooled
Mounting
M=Factory-mounted
L= Shipped Loose for
Field Mounting
LiquiFlo 2.0, Nomenclature
Since all LF 2.0 models are field-mounted and water-cooled, there are no characters after
the Model Number, typically VFD 2037.
IOMM VFD-2 7
Page 8
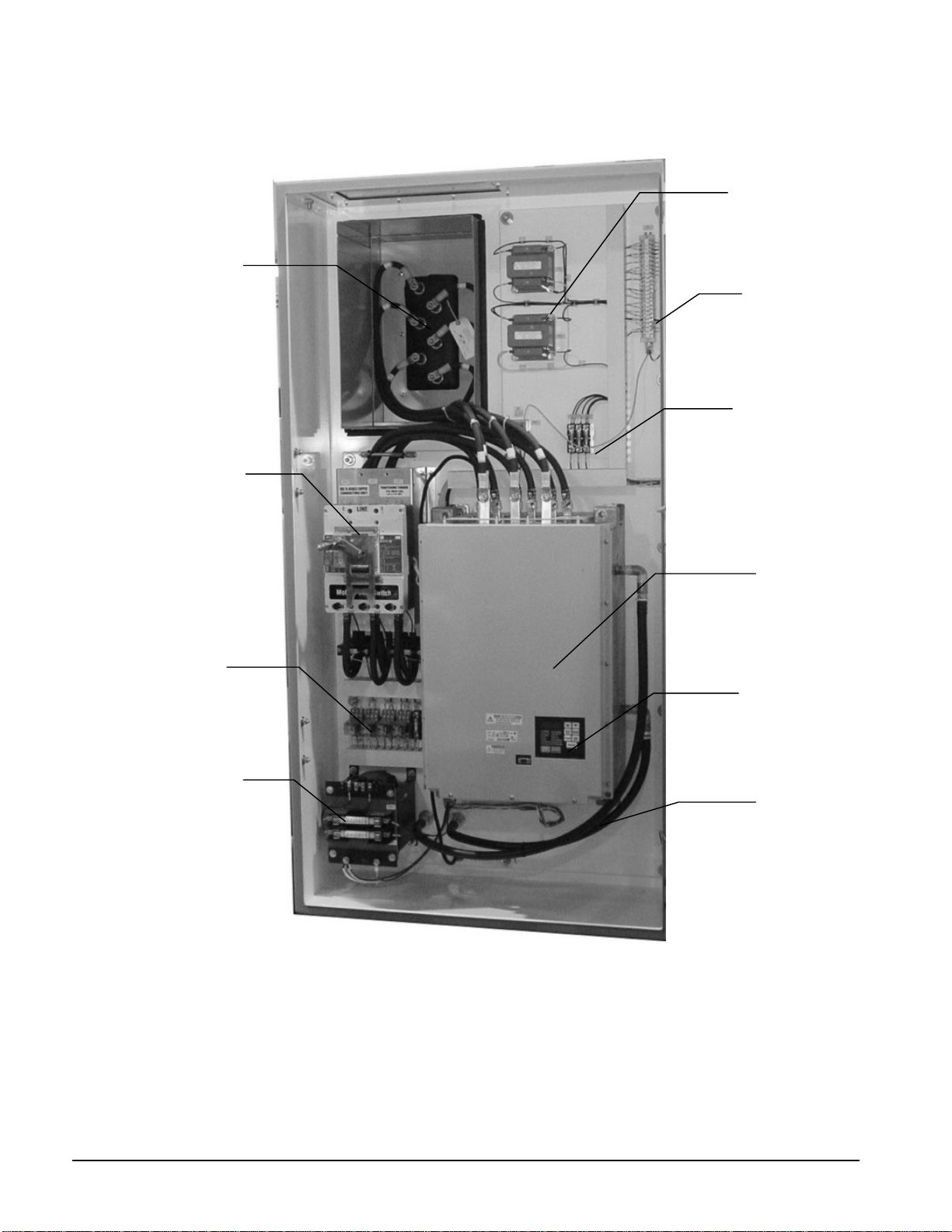
Figure 1, LiquiFlo, Internal Component s, Factory Mounted, Water-Cooled Model
Optional Meter
Transformers (2)
Motor Terminals
Fuses
Disconnect Switch
Terminal Board
Motor Control
Relays (MCR)
Control
Transformer
w/ Fuses
Drive Unit
Keyboard/Display
Cooling Water
Lines
8 IOMM VFD-2
Page 9
Definition of Terms
Acc2
Active LEWT Setpoint
Analog in loss
Anig Cal Chksum
Autotune
AutoT MagRot
AutoT Rs Stat
CAN Bus Fit
Command Speed
DB
Dec2
Decel Inhibit
Demand Limit
Dig in Conflict
Drive OL
Esc/Prog
Flux Amps
Full Load
FVC
HIM
IGBT
IntDBResOvrHeat
Lift Temperature
Lift Temperature Control
Speed
Low evap pressure inhibit
setpoint
Manual Load Setpoint
Maximum Pulldown Rate
MCB
MCR
Minimum Amp Setpoint
Minimum Rate Setpoint
Minimum Speed
Mod
Net
Network Setpoint
NP Hz
OIM
PCB
Continued next page.
Acceleration time 2
The current Leaving Evaporator Water Temperature Setpoint
Analog input loss
Analog input calculation check sum, math function
Set point adjustments made automatically, not used by McQuay
Autotune rotate, not used by McQuay
Autotune static, not used by McQuay
Controlled area network bus fit
The speed command issued by the MicroTech controller to the VFD
Dynamic breaking (not used on McQuay units)
Deceleration 2, not used by McQuay
Deceleration inhibited
The maximum amp draw as established by the Demand Limit setpoint
Digital input conflict, contradictory instructions
Drive overload
Exit a menu, cancel a change to a parameter, or toggle between program and
process (user) display screens.
Amount of current out of phase with the fundamental voltage component
The vane open switch closes and the speed output = 100%. Or
Load pulses exceed the full load setpoint timer (default 300 cumulative
seconds) and the speed output = 100%. Or
% RLA is above or equal to Max Amp Limit or Demand Limit. Or
The evaporator pressure is below the low evap. pressure inhibit setpoint.
Flux vector control
Human interface module
Insulated Gate Bi-polar Transistors
Dynamic breaking resistor temp. exceeded setpoint(not used on McQuay
units)
Saturated condenser refrigerant temperature minus saturated evaporator
temperature.
The minimum speed to maintain lift and avoid surge. The controller
continuously calculates the minimum operating speed in all modes, based on
the lift temperature.
The low evaporator pressure that inhibits any further compressor loading
MicroTech controller manual operation of the guide vanes for testing
Maximum pulldown rate of chilled water in degrees per minute
Main control board
Motor control relay
MicroTech controller minimum unloading setpoint
Pulldown rate for MicroTech 200 controller
The minimum speed allowed, usually set at 70%
Module
Network
Chilled water setpoint from an external source
Operator interface module
Printed circuit board
IOMM VFD-2 9
Page 10
Precharge
PWM
Rapid Shutdown
RLA
RMI
Softloading
Speed
Stage Delta
SVC
Parameters
Throughout this manual, you will see references to parameter names and numbers that
identify them for the drive. This manual uses the same format that will be shown on the
keypad/display to refer to parameters:
P.nnn H.nnn R.nnn
Where: nnn is a number
P designates general parameters
H designates Volts/Hertz parameters
R designates optional RMI parameters
Precharge capacitors
Pulse-width-modulated
If there is a fault, the MicroTech switches the state to VFD OFF. This includes
changing the Unit Control Panel switch to OFF.
Rated Load Amps, the maximum motor amps
Remote meter interface, located in the VFD panel
Extended ramp-up in capacity, set in the MicroTech controller
Speed signal to the compressor motor from the variable frequency drive (VFD)
based on analog output (0 – 10 VDC) from the MicroTech controller.
Multi compressor (or dual compressor unit) on/off cycling temperature delta-T
Sensorless vector control
CAUTION
The original parameters values set by the McQuay startup technician must never be
changed by anyone not specifically trained and experienced with these VFDs. Damage
to the chiller or drive could occur.
10 IOMM VFD-2
Page 11
Installation
Mounting Arrangement s
Depending on size and type, VFDs may be factory-mounted with power and control wiring
factory-installed or free-standing, requiring field mounting remote from the unit and fieldwiring of power and control wiring. Because of dimension restrictions for shipping, some
“factory-mounted” VFDs for some large chillers are shipped separate from the unit.
Mounting supports are on the unit and preassembled cable kits are provided. Mounting and
wiring on site are the customer’s responsibility and can be subcontracted to McQuay
Factory Service if desired.
Factory-Mounted (extra cost option):
The VFD is mounted on the chiller unit with the back
of the VFD against the motor terminal box and wired directly to the motor. This
arrangement is only available on WSC/WDC 063, 079, or 087 units and with LF.
On models WSC/WDC 048/050, the VFD (LF only) is factory-mounted on the front of the
chiller unit and connected to the motor with conduit and cable.
Free-standing (standard):
Floor-mounted, separate from the chiller unit, and field wired to
the compressor motor. This is available on all VFDs and is the only VFD arrangement
available for WDC/WCC 100 and 126 dual compressor units.
Brackets and cable (extra cost option):
VFDs (LF only) for WSC 100 to 126 single
compressor units may be shipped separately from the chiller unit and furnished with
mounting brackets and interconnecting cables for field mounting and connection by others.
This option must be clearly specified when chillers are ordered since brackets are welded
onto the evaporator during its construction.
Table 3, VFD Mounting Arrangements
Chiller
Size
WSC/WDC 050 X X X
WSC/WDC 063 X X X
WSC/WDC 079 X X X
WSC/WDC 087 X X X
WSC 100 - 126 X X X
WDC 100 – 126,
WCC 100 - 126
Factory- Mounted Free-Standing Brackets & Cables Free-Standing
X X
Air-Cooled/LiquiFlo LiquiFlo 2.0
Receiving
Since factory-mounted VFDs are mounted and wired at the factory, this section will only
apply to free-standing units.
The unit should be inspected immediately after receipt for possible damage.
All McQuay centrifugal VFDs are shipped FOB factory and all claims for handling and
shipping damage are the responsibility of the consignee.
Rigging
Extreme care must be used when rigging the equipment to prevent damage. See the
certified dimension drawings included in the job submittal for the center of gravity of the
unit. Consult the local McQuay sales office for assistance if the drawings are not available.
IOMM VFD-2 11
Page 12
Air-Cooled, The unit can be lifted by fastening the rigging hooks to the two lifting eyes
located on the top of the unit.
LiquiFlo; The unit can be lifted by fastening the rigging hooks to the four lifting eyes
located on the top of the unit.
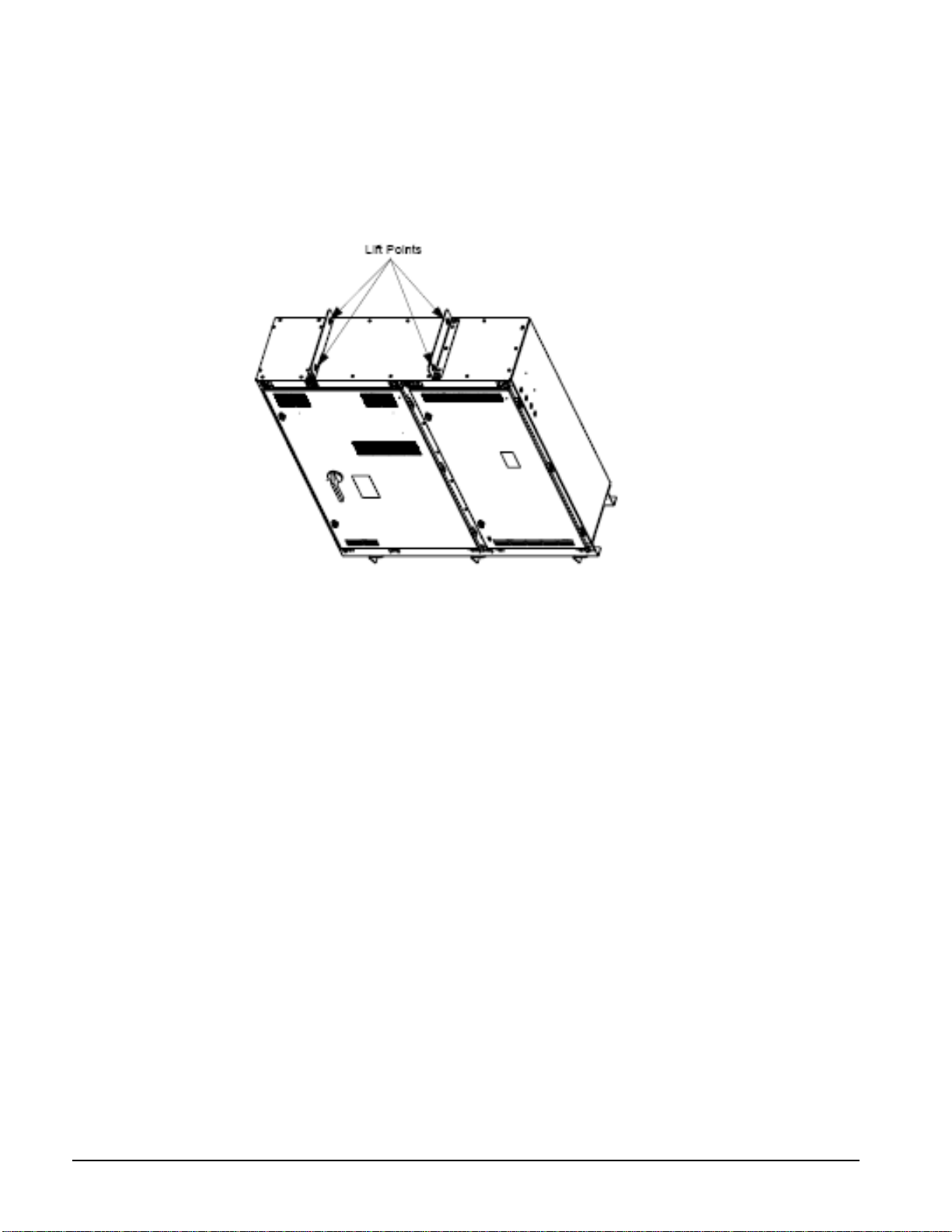
LiquiFlo 2.0:
Figure 2, LF 2.0, Lifting Point s
Use the following procedure to lift and mount the LiquiFlo 2.0 drive:
Step 1. Using an overhead or portable hoist (minimum 2 ton rated capacity), attach a
free-fall chain to the chain secured to the drive. Take up any vertical slack in the chain.
Step 2. Using the hoist, lift the drive from the horizontal shipping pallet.
Step 3. Position the drive.
Step 4. Machine or floor-mount the drive enclosure using 1/2-inch bolts, grade 5 or
better, with compression washers.
Location and Mounting
Location
Consider the following guidelines: •
• Verify that NEMA 1 enclosure drives can be kept clean and dry.
• The area chosen should allow the space required for proper air flow. A minimum of 6-
inch clearance is required wherever vents are located.
• Be sure that the NEMA 1 enclosure is installed away from oil, coolants, or other
airborne contaminants.
• Do not install the drive above 1000 meters (3300 feet) without derating output power.
For every 91.4 meters (300 feet) above 1000 meters (3300 feet), derate the output
current 1%.
• Verify that the drive location meets the environmental conditions specified on page 5.
• Floor-mounted units should be attached to the floor with the C-channel rails provided.
12 IOMM VFD-2
Page 13

Clearance
The VFDs must be mounted on a level concrete or steel base and must be located to provide
adequate service. Local codes or the National Electric Code (NEC) can require more
clearance in and around electrical components and must be checked.
Mounting
Make sure that the floor or structural support is adequate to support the weight of the unit
shown on the dimension drawing.
Standard NEMA 1 and NEMA 12 VFDs must be installed indoors in an area that is not
exposed to direct water spray. Do not install in areas where the ambient temperature falls
below 32°F (0°C) or exceeds 104°F (40°C) enclosed, or 122°F (50°C) open unless this was
noted at the time of order placement and special precautions were taken to protect against
these abnormal temperatures.
Heatsink temperatures can run as high as 158°F (70°C) during normal operation. Do not
mount the starter in contact with any material that cannot accept this heat. The VFD must
be mounted with the heat sink fins oriented vertically in an area that will not experience
excessive shock or vibration.
Grounding the Drive
Use the following steps to ground the drive:
Step 1. Open the door of the enclosure.
Step 2. Run a suitable equipment grounding conductor unbroken from the drive
enclosure ground lug to earth ground. See figure 2.2. Tighten these grounding
connections to the proper torque.
Step 3. Close the door of the enclosure.
Safety Precautions
Electrical codes require that all equipment (VFD, motor, operator station, etc.) be properly
grounded. An incoming disconnect must be locked open before wiring or servicing the
starter, motor, or other related equipment. The equipment must only be serviced by
qualified personnel fully trained and familiar with the equipment.
The opening of the branch circuit protective device may be an indication that a fault current
has been interrupted. To reduce the risk of electrical shock, current carrying parts and other
components of the starter should be inspected and replaced if damaged.
Equipment is at line voltage when AC power is connected. Pressing the Stop push-button
does not remove AC mains potential. All phases must be disconnected before it is safe to
work on machinery or touch motor terminals and control equipment parts.
Cooling Requirements for VFDs
Air-cooled VFDs: all air-cooled have self-contained cooling systems and require no field
work.
Water-cooleed, factory-mounted VFDs: VFD cooling water piping is factory-connected
to the chiller’s oil cooling system. See Figure 3. Cooling water piping is to the normal
chiller oil-cooling system connections.
Freestanding VFDs: VFD cooling water piping must be field connected on freestanding
units. See Figure 4. Cooling water is connected directly to models 047LA through 072LW.
Models 090LW and 120LW, and all LF 2.0 units, are always freestanding and have a
separate cooling module that must be field piped to the cooling water supply and also
interconnected to the VFD. See page 15 for detailed installation instructions.
IOMM VFD-2 13
Page 14
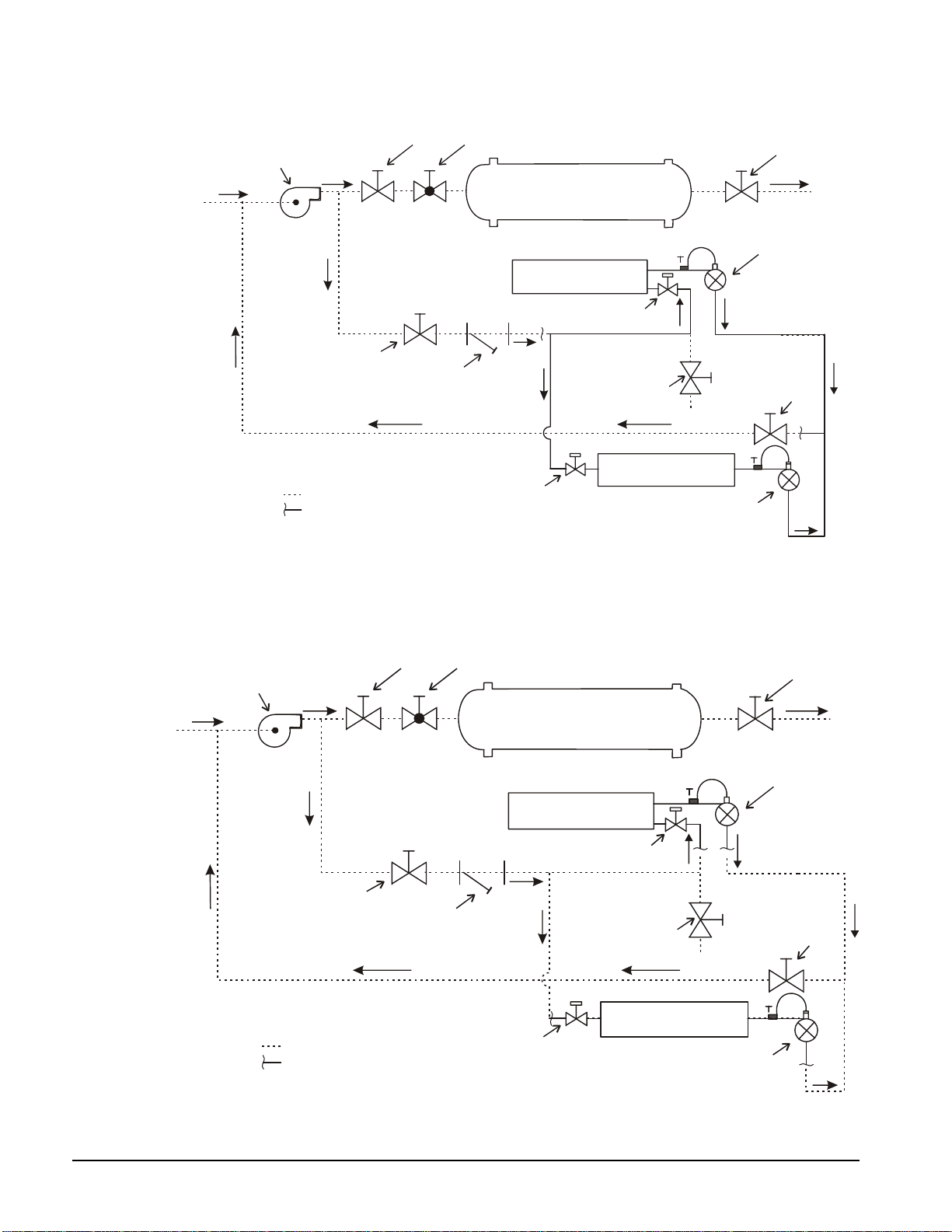
Figure 3, VFD 047 through 072, Cooling Water Piping for Factory-M ount ed VFD
*
CHILLED
WATER
PUMP
STOP
VALVE
*
STOP
VALVE
Field Supplied Piping Components
*
Field Piping
Connection Point
*
BALANCING
VALV E
*
STRAINER
MAX. 40 MESH
CHILLER
VFD HEAT
EXCHANGER
SOLENOID
VALV E
(Factory Mounted)
SOLENOID
VALV E
(Factory Mounted)
*
DRAIN VALVE
OR PLUG
COMPRESSOR
OIL COOLER CIRCUIT
WATER
REGULATING
VALV E
(Factory Mounted)
*
STOP
VALVE
WATER
REGULATING
VALV E
(Factory Mounted)
*
STOP
VALV E
Figure 4, VFD 047 – 120 and all LF 2.0, Cooling Water Piping f or Free- Standing VFD
*
CHILLED
WATER
PUMP
STOP
VALV E
*
STOP
VALVE
Field Supplied Piping Components
*
Field Piping
Connection Point
*
BALANCING
VALV E
*
STRAINER
MAX. 40 MESH
CHILLER
COMPRESSOR
OIL COOLER CIRCUIT
SOLENOID
VALV E
(Factory Mounted)
SOLENOID
VALV E
(Factory Mounted)
*
DRAIN VALVE
OR PLUG
VFD HEAT
EXCHANGER
WATER
REGULATING
VALV E
(Factory Mounted)
*
STOP
VALV E
WATER
REGULATING
VALV E
(Factory Mounted)
*
STOP
VALVE
14 IOMM VFD-2
Page 15
NOTE: In some cases, the “VFD HEAT EXCHANGER” may be a separate-mounted cooling module that is, in turn, connected
to the VFD.
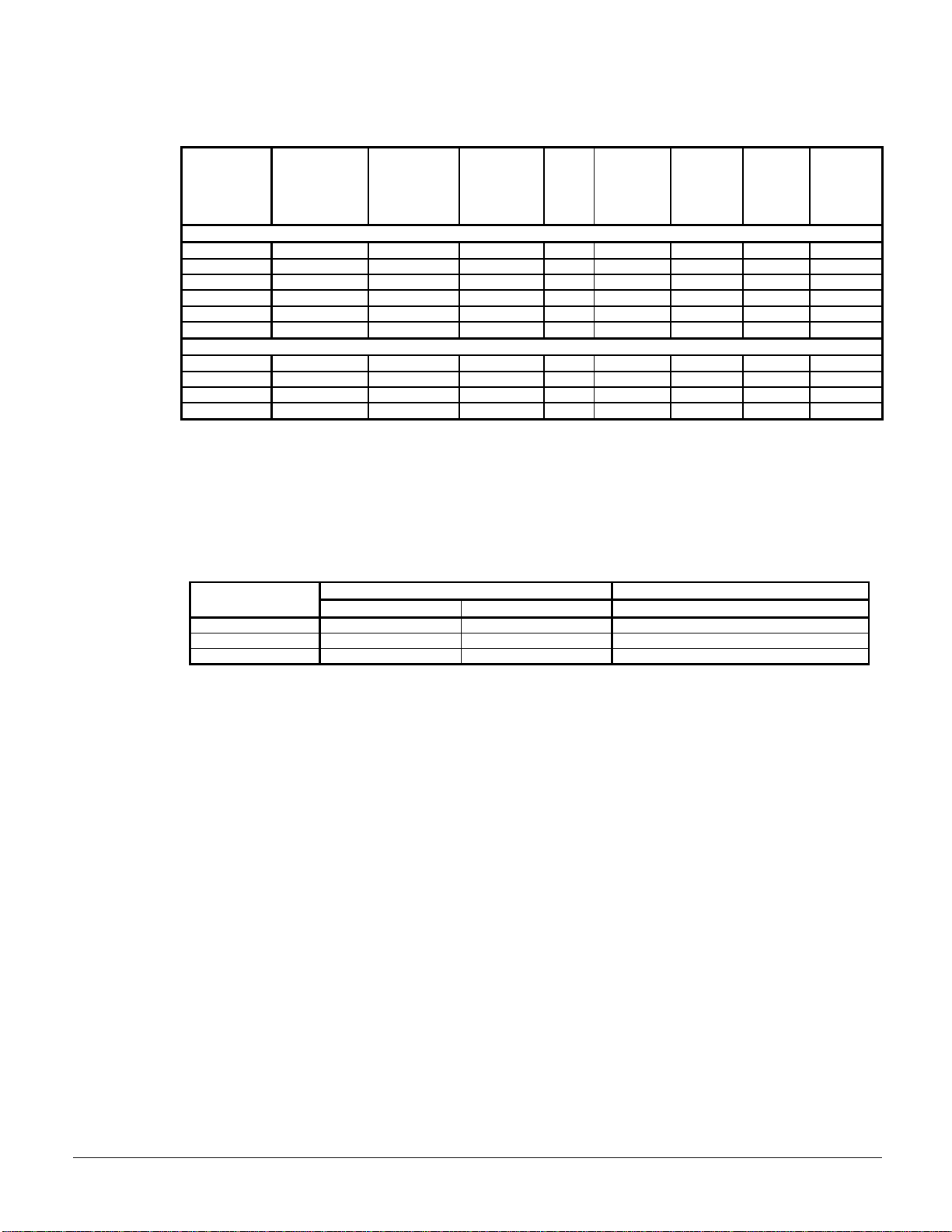
Table 4, Cooling Requirements
Combined
McQuay
Drive Model
Number
VFD 009-028 N/A N/A Air N.A. 104 40 NA N/A
VFD 047 1.0 7/8 in. Water (1) 2.0 90 40 10 (2) 300
VFD 060 1.0 7/8 in. Water (1) 2.0 90 40 30 (2) 300
VFD 072 1.0 7/8 in. Water (1) 2.5 90 40 30 (2) 300
VFD 090 1 1/4 1.0 in. Water (1) (3) 7.0 90 40 30 (2) 300
VFD 120 1 1/4 1.0 in. Water (1) (3) 7.0 90 40 30 (2) 300
VF 2037 N/A 3/4 NPT Water (1) (3) 7.0 90 40 N.A. 180
VF 2055 N/A 3/4 NPT Water (1) (3) 7.0 90 40 N.A. 180
VF 2080 N/A 3/4 NPT Water (1) (3) 15.0 90 40 N.A. 180
VF 2110 N/A 3/4 NPT Water (1) (3) 15.0 90 40 N.A. 180
Notes:
1. Cooling water must be from the closed, chilled water circuit with corrosion inhibitors for steel and copper, and must be
piped across the chilled water pump.
2. The pressure drop is given for the maximum coolant temperature (maximum flow). The water-regulating valve will
reduce the flow when the coolant temperature is below the maximum in the table. The pressure drop includes the drop
across the solenoid valve, heat exchanger and water regulating valve.
3. Models VFD 090and 120 and all LF 2.0 models have a separate self-contained cooling loop with a recirculating water
pump and heat exchanger, but have the same cooling source water piping as all water-cooled VFDs.
Comp. Oil and
VFD Cooling
Copper Tube
Size
VFD Cooling
Only, Copper
Tube Size
Type K or L
Coolant
Method
Air-Cooled/LF
LF 2.0
Flow
(gpm)
Max.
Entering
Coolant
Temp. (° F)
Min.
Entering
Coolant
Temp(° F)
Pressure
Drop
(feet)
Max.
Pressure
(Water
Side) psi
Table 5, Chiller Cooling Water Connection Sizes
Chiller Unit
WDC/WCC 100/126 1 1/2 in. FPT ¾ in. MPT 1 1/2 in. FPT
WSC/WDC 050 Not Required Air-Cooled Not Required
All Others 1 in. FPT 3/4 in MPT 1 in. FPT
Free-Standing VFD, LF and LF 2.0 Factory-Mounted VFD, LF Only
To Oil Cooler To VFD Combined
Separate Cooling Module (LF VFD 090, 120 and all LF 2.0)
The cooling module for the LF models VDF 090 and 120 has a self-contained coolant
temperature control system and no associated programming of the VDF is required. All cooling
modules used with LF 2.0 VFD models are controlled by the VFD and require VFD programming
as shown on page 19. This is done by McQuay at startup.
Closed loop cooling system operation
• A pump circulates a glycol/ water mixture (coolant) through the VFD heat sink, a coolant
reservoir and a small plate heat exchanger. Heat is removed from the VFD heat sink and
rejected to the plate heat exchanger.
• The pump and control valve are controlled by the VFD control system on LF 2.0 VFD models
and self-contained on LF models.
• The plate heat exchanger is cooled by water from the chilled water system
Installation steps:
• Place cooling loop module in desired location.
• Attach coolant and chilled water piping. Seven to nine gpm of coolant will be circulated. A
40 mesh strainer is required at the drive inlet. Include service isolation valves in the coolant
and chilled water inlet and outlet piping.
IOMM VFD-2 15
Page 16

• Wire according to the supplied wiring diagrams.
16 IOMM VFD-2
Page 17
The following is required from the customer's chilled water supply for the McQuay VFD cooling
loop to perform properly.
Water Quality:
Water must be compatible with components supplied in the cooling loop; brass, copper, stainless
steel and neoprene rubber seals. Supply water circulates through a copper brazed stainless steel,
plate type heat exchanger by way of a stainless steel and brass ball valve and associated stainless
steel, brass and copper piping.
Water Source:
Clean and non-corrosive chilled water must be used as the coolant.
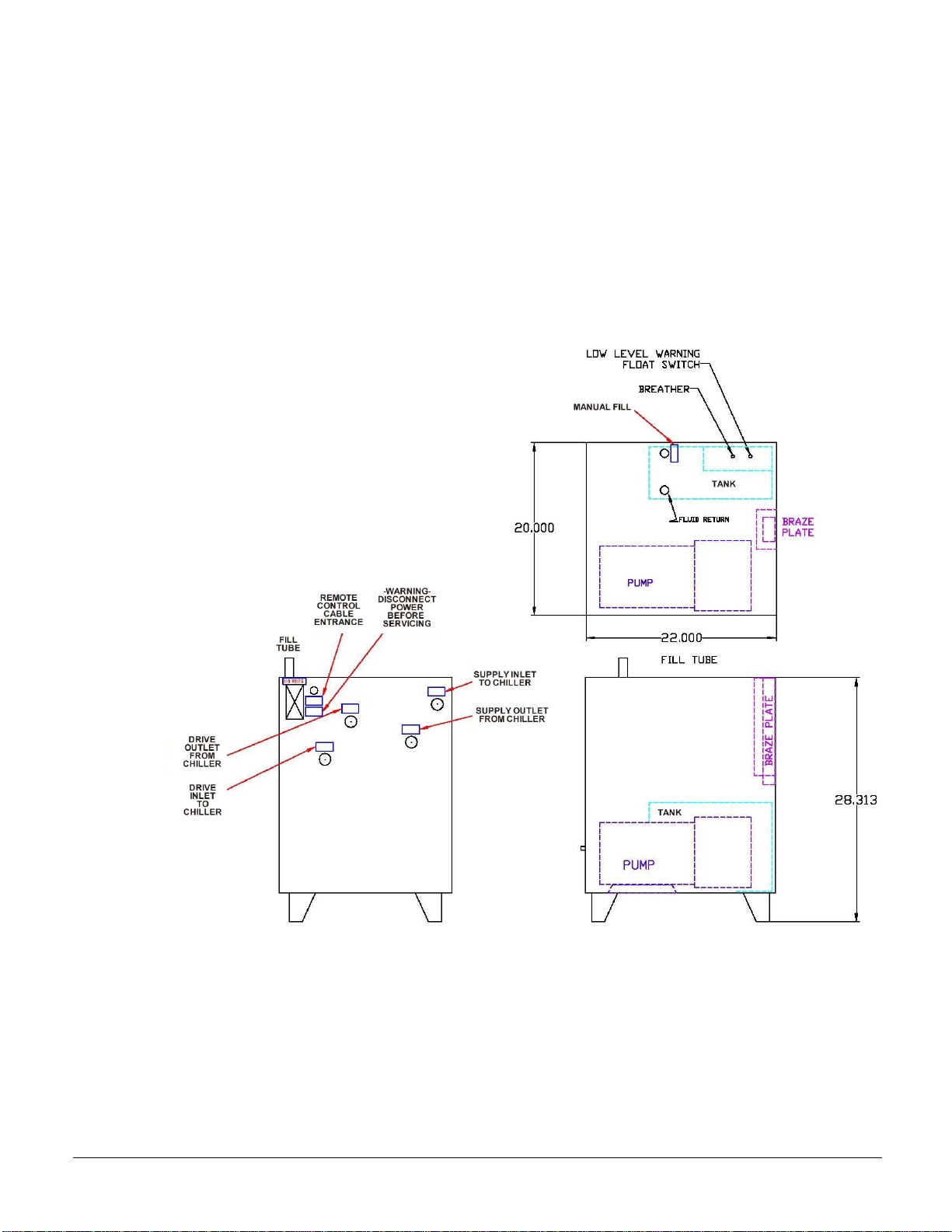
Figure 5, Cooling Module Dimensions
Weights
Shipping weight: 300 lbs (136 kg)
Dry weight: 250 lbs (114 kg)
Operating weight: 270 lbs. (123 kg)
IOMM VFD-2 17
Page 18
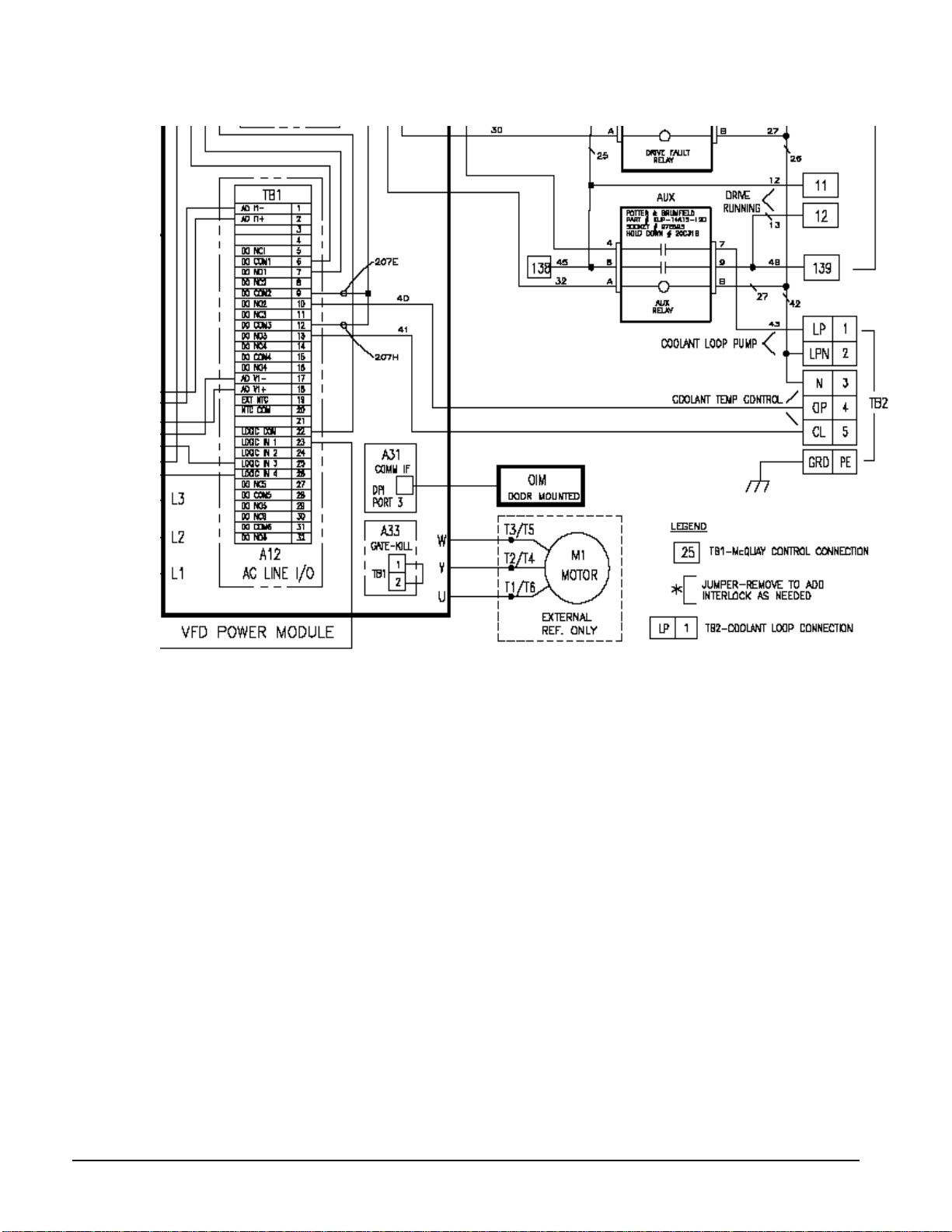
Figure 6, LF 2.0 Remote Cooling Module Int erconnect i ng Wiring
TB2 is the terminal board located in the remote module.
TB1 is a terminal board located in the VFD.
Field Wiring:
• TB1-10 (DO NO2) to TB2-4 (OP, Open)
• TB1-13 (DO NO3) to TB2-5 (CL, Close)
• Wire 42 (Aux Relay) to TB2-3 (Neutral)
• Wire 42 (Aux Relay) to TB2-2 (LPN, Loop Pump Neutral)
• Aux Relay Terminal 7 to TB2-1 (LP, Loop Pump)
• GRD (PE) to Ground
18 IOMM VFD-2
Page 19

Maximum Static Pressure:
300 psi nominal limited by ball valve and piping pressure ratings.
Requirements for proper operation of the drive/ cooling module
cooling loop.
Cooling Loop Liquid:
25% inhibited (corrosion protected) propylene glycol (DOWFROST or equivalent)
concentration by volume with distilled water. Non-inhibited or silicate containing glycols
may cause equipment damage.
Coolant Volume:
Approx. 1 gallon is required with side-by-side connection of cooling module to the drive
cabinet. More coolant volume will be required if coolant loop is located up to 20 feet away
from drive.
Coolant Maintenance:
The coolant liquid should be checked and refreshed as needed on a yearly basis. The pH
should be maintained between 8.0 and 10.0. A 50% solution of sodium hydroxide or
potassium hydroxide can be used to raise pH if falls below 8.0. Any time the coolant falls
below a pH of 7.0 the loop should be flushed and coolant replaced. Any time the coolant
appears other than water white it should be replaced.
Remote Mounted Cooling Loop:
The maximum distance the cooling loop can be installed away from the drive cabinet
connections is 20 feet. Careful planning of remote mounting is required to minimize
coolant flow restrictions introduced by piping connections.
Cooling Module Parameters Set in LF 2.0 VFD models
LF 2.0 drives control the operation of the cooling module. The parameters are set by
McQuay at chiller commissioning.
How to Monitor Cooling Loop Operation
FX-05 Screen Navigation (see Figure 7)
After power-up the process temperature will be displayed.
Alarms
When an alarm is present the alarm LED will blink fast and the error code will flash. The
following is a list of the error code.
• E0: OK
• E1: Low Level Fault
• E2: Fluid Over-Temperature Fault
• E3: Fluid Under-Temperature Fault
• E4: Fluid Low Flow Fault
To acknowledge the alarms hold the φ key for 3 seconds. The alarm error code will be
displayed and the reset led will light while the button is depressed. After the φ key is
released the process temperature will be displayed.
To view the alarm summary hold both the ↵ ↓ keys for 3 seconds. To exit the alarm
summary screen press the φ key or the screen will automatically time out after 10 seconds.
IOMM VFD-2 19
Page 20
Figure 7, FX05 Display Panel
ALARM RESET PUMP ON
Fx05
Operation
The FX controller controls to a fixed loop water setpoint.
20 IOMM VFD-2
Page 21
Wiring, General
Unit-Mounted: Unit mounted VFDs have factory-wired control wiring plus power wiring
from the VFD to the compressor motor terminals. The VFDs only require a power supply.
Cable entrance is shown on the dimension drawings beginning on page 32 for LF and page
Error! Bookmark not defined. for LF 2.0 models. An exception is on models LF models
090 and 120 and all LF 2.0 models that require some interconnection control wiring from
the VFD to the remote cooling module as described in the section beginning on page 15.
Freestanding: Freestanding units require both field control and power wiring from the
VFD to the chiller and. some interconnection control wiring on models 090 and 120.
Wiring Diagram: The control and power wiring diagram is located on page 25.
Power Wiring
Wiring, fuse and wire size must be in accordance with local codes and the National Electric
Code (NEC).
CAUTION
Voltage unbalance not to exceed 2% with a resultant current unbalance of 6 to
10 times the voltage unbalance per NEMA MG-1, 1998 Standard. This is an
important requirement to avoid excessive motor or drive heating.
WARNING
Qualified and licensed electricians must perform wiring. Shock hazard exists.
Power wiring to compressors must be in proper phase sequence. Motor rotation is set up
for clockwise rotation facing the lead end with phase sequence of 1-2-3. Care must be
taken that the proper phase sequence is carried through the VFD to the compressor. With
the phase sequence of 1-2-3 and L1 connected to T1 and T6, L2 connected to T2 and T4,
and L3 connected to T3 and T5, rotation is proper. See diagram in terminal box cover.
The McQuay start-up technician will check the phase sequence.
CAUTION
Connections to terminals must be made with copper lugs and copper wire.
Care must be taken when attaching leads to compressor terminals.
Note: Do not make final connections to motor terminals until wiring has been
checked and approved by a McQuay technician.
Under no circumstances should a compressor be brought up to speed unless proper
sequence and rotation have been established. Serious damage can result if the compressor
starts in the wrong direction. Such damage is not covered by product warranty.
Compressor Motor Terminal Insulation
It is the installing contractor's responsibility to insulate the compressor motor terminals (as
described below) when the unit is installed in a high humidity location that could cause
condensate to form on the motor terminals. The terminals are cooled to 45°F to 50°F as a
result of the motor cooling. The required material can be ordered and shipped in as a kit
(775123601).
IOMM VFD-2 21
Page 22

This is to be done after the McQuay start-up technician has checked for proper phase
sequence and motor rotation.
Following this verification by the McQuay technician, the contractor should apply the
following items.
Materials required:
1. Loctite® brand safety solvent (12 oz. package available as McQuay part number
350A263H72)
2. 3M™ Co. Scotchfil brand electrical insulation putty (available in a 60-inch roll as
McQuay part number 350A263H81)
3. 3M Co. Scotchkote™ brand electrical coating (available in a 15 oz. can with brush as
McQuay Part Number 350A263H16)
4. Vinyl plastic electrical tape
The above items are available at most electrical supply outlets.
Application procedure:
1. Disconnect and lock out the power source to the compressor motor.
2. Using the safety solvent, clean the motor terminals, motor barrel adjacent to the
terminals, lead lugs, and electrical cables within the terminal 4OX to remove all dirt,
grime, moisture and oil.
3. Wrap the terminal with Scotchfil putty, filling in all irregularities. The final result
should be smooth and cylindrical.
4. Doing one terminal at a time, brush the Scotchkote coating on the motor barrel to a
distance of up to '/2" around the terminal and on the wrapped terminal, the rubber
insulation next to the terminal, and the lug and cable for approximately 10". Wrap
additional Scotchfil insulation over the Scotchkote coating.
5. Tape the entire wrapped length with electrical tape to form a protective jacket.
6. Finally, brush on one more coat of Scotchkote coating to provide an extra moisture
barrier.
22 IOMM VFD-2
Page 23
General Wiring Practice
1. Never connect input AC power to the motor output terminals T1/U, T2/V or
T3/W.
2. Power wiring to the motor must have the maximum possible separation from all
other wiring. Do not run control wiring in the same conduit; this separation
reduces the possibility of coupling electrical noise between circuits. Minimum
spacing between metallic conduits containing different wiring groups should be
three inches (76 mm).
3. Minimum spacing between different wiring groups should be six inches (152
mm).
4. Wire runs outside of an enclosure should be run in metallic conduit or have
shielding/armor with equivalent attenuation.
5. Different wire groups should cross at 90 degrees whenever power and control
wiring cross.
6. Different wire groups should be run in separate conduits.
7. Adhere to local electrical codes.
8. The National Electrical Code and Canadian Electrical Code requires that an
approved circuit disconnecting device be installed in series with the incoming
AC supply in a location readily accessible to personnel installing or servicing
this equipment. If a disconnect switch is not supplied with the starter, one must
be installed.
9. Supply lines and motor lines may enter the enclosure from the top, bottom or
sides. Wire connections can be determined to best suit specific installations.
Wire runs should be properly braced to handle both starting and fault currents.
Size power cable per local electrical codes. Long lengths of cable to the motor
of over 150 feet must be de-rated.
Terminal Sizes
Compressor Motor Terminals
Power wiring connections at the motor are “spark plug” type terminals with threaded
copper bar, sized per the following table.
Table 6, Chiller Compressor Motor Terminal Sizes
Type/Size Comp. Size Terminal Size
Low Voltage to 275 A, to 575 V CE 050 0.375-16 UNC2A, 0.94 in. long
Low Voltage to 750 A, to 575V CE 063-126 0.635-11 UNC-2A, 1.88 in. long
VFD Terminals
For field wiring freestanding VFDs, the outgoing terminals and incoming power
block terminals are determined by the VFD size listed in Table 8. For factorymounted VFDs, the outgoing terminals are factory-connected to the compressor
motor.
When wiring to a VFD with a disconnect switch or circuit breaker, the incoming lug
size is determined by the device size as shown in Table 9.
IOMM VFD-2 23
Page 24
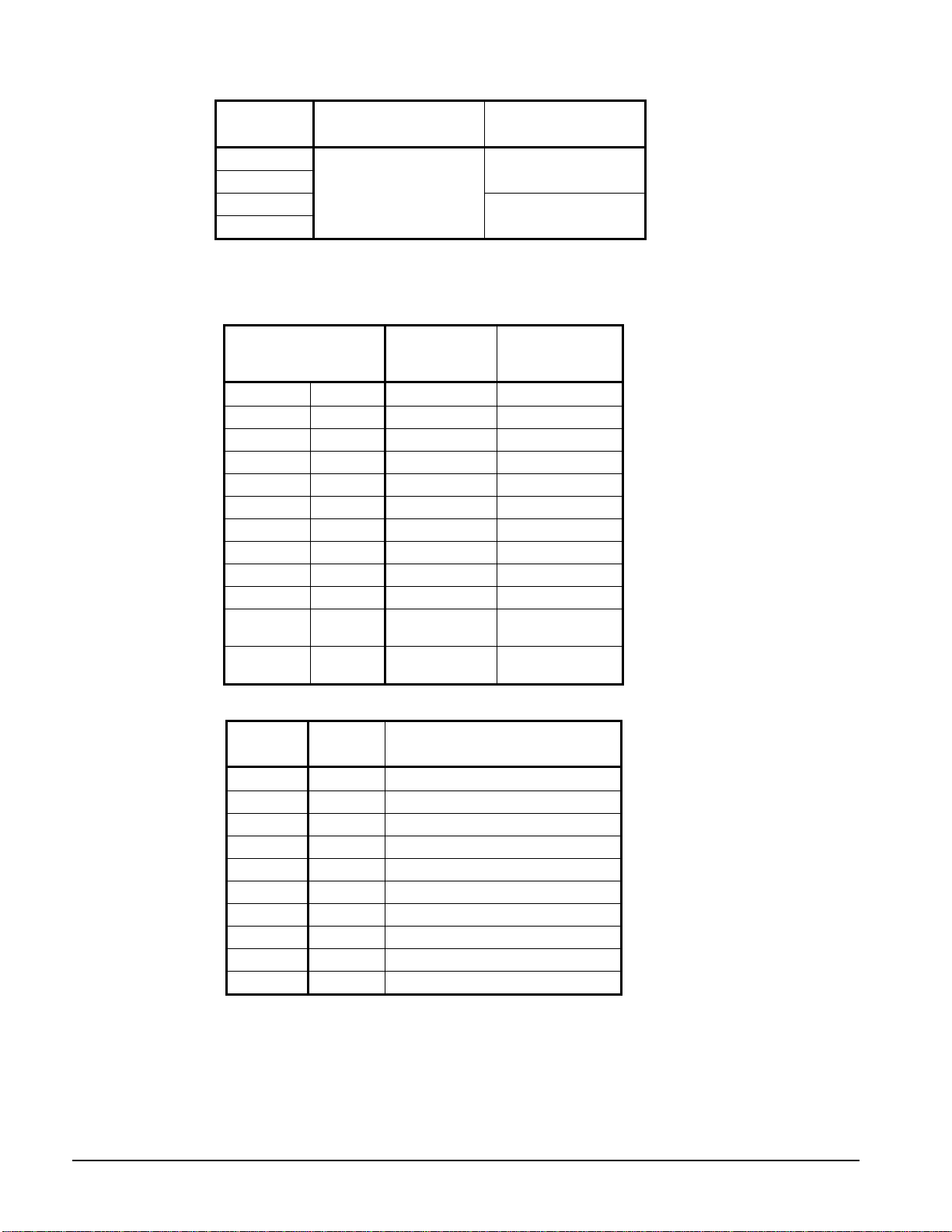
Table 7, LiquiFlo 2.0, Terminal Size Range
VFD Size
VF2037
VF2055
VF2080
VF2110
Incoming Terminals Outgoing
Terminals
Incoming connecti on is
to the standard circuit
breaker. See
Table 9.
(3) 1.5 inch wide tab
w/ 0.472 inch hole
(3) 2.25 inch wide tab
w/ 0.56 inch hole
Table 8, Air-Cooled/LiquiFlo, Outgoing, Incoming Power Block,
Terminal Size Range
Incoming
VFD Size
Power Block
Terminals
VFD 009 SP600 #14 – 1/00 #14 – 1/00
VFD 012 SP600 #4 – 3/0 #4 – 3/0
VFD 015 SP600 #14 - 250 #14 - 250
VFD 017 SP600 #14 - 250 #14 - 250
VFD 023 SP600 #14 - 250 #14 - 250
VFD 024 PF700H 4/0 - 350 4/0 - 350
VFD 028 PF700H 4/0 - 350 4/0 - 350
VFD 047 LF (2) #4 - 500 (2) #6 - 300
VFD 060 LF (2) #4 - 500 (2) #4 - 350
VFD 072 LF (2) #4 - 500 (2) #4 - 350
VFD 090 LF (2) #4 - 500
VFD 120 LF (2) #4 - 500
Outgoing
Terminals
2 in. x 1/4 in. bus
(1) 9/16 in. hole
2 in. x 1/4 in. bus
(1) 9/16 in. hole
Table 9, Incoming Terminal Size Range, Disconnects & Circuit Breakers
Max
RLA
Size
74 100 (1) #6- 300
93 125 (1) #6- 300
148 200 (1) #6- 300
163 220 (1) 4/0 - 500
185 250 (2) 3/0 - 500
296 400 (2) 3/0 - 500
444 600 (3) 1/0 - 500
593 800 (4) 250 – 500
889 1200 (5) 300 – 600
1185 1600 (5) 300 - 600
NOTE: (X) is the number of terminals per phase.
Incoming Terminal, Disconnect
Switch or Circuit Breaker
24 IOMM VFD-2
Page 25

Optional Line Reactor Installation, Air-Cooled/LF Only
Mounting Options
Optional line reactors can be mounted in the VFD enclosure on free-standing units and must
be field-mounted and wired when the VFD is factory-mounted. When the reactor is installed
in the VFD enclosure, a much larger enclosure is required and it is too large to mount on the
chiller.
VFD Line Harmonics
VFDs have many benefits, but care must be taken when applying VFDs due to the effect of
line harmonics on the building electric system. VFDs cause distortion of the AC line because
they are nonlinear loads, that is, they don't draw sinusoidal current from the line. They draw
their current from only the peaks of the AC line, thereby flattening the top of the voltage
waveform. Some other nonlinear loads are electronic ballasts and uninterruptible power
supplies.
Reflected harmonic levels are dependent on the source impedance and the KVA of the of the
power system to which the drive is connected. Generally, if the connected power source has
a capacity greater than twice the drive’s rated amps (see Table 1 or Table 2 for rated amps),
the installation will conform to IEEE Standard 519 with no additional attenuation.
Presumably, the application on which this drive is applied has been checked for harmonic
levels. If not, contact the local McQuay office.
The IEEE 519-1991 Standard
The Institute of Electrical and Electronics Engineers (IEEE) has developed a standard that
defines acceptable limits of system current and voltage distortion. A simple form is available
from McQuay that allows McQuay to determine compliance with IEEE 519-1991. Line
harmonics and their associated distortion may be critical to AC drive users for three reasons:
1. Current harmonics can cause additional heating to transformers, conductors, and
switchgear.
2. Voltage harmonics upset the smooth voltage sinusoidal waveform.
3. High-frequency components of voltage distortion can interfere with signals transmitted
on the AC line for some control systems.
The harmonics of concern are the 5
by three, and high magnitude harmonics are usually not a problem.
Current Harmonics
An increase in reactive impedance in front of the VFD helps reduce the harmonic currents.
Reactive impedance can be added in the following ways:
1. Mounting the drive far from the source transformer.
2. Adding line reactors.
3. Using an isolation transformer.
Voltage Harmonics
Voltage distortion is caused by the flow of harmonic currents through a source impedance. A
reduction in source impedance to the point of common coupling (PCC) will result in a
reduction in voltage harmonics. This may be done in the following ways:
1. Keep the point of common coupling (PCC) as far from the drives (close to the power
source) as possible.
2. Increase the size (decrease the impedance) of the source transformer.
th
, 7th, 11th, and 13th. Even harmonics, harmonics divisible
IOMM VFD-2 25
Page 26
3. Increase the capacity of the busway or cables from the source to the PCC.
4. Make sure that added reactance is "downstream" (closer to the VFD than the source) from
the PCC.
DANGER
High voltage is used in the operation of line/load reactors. Use Extreme caution to
avoid contact with high voltage when operating, installing or repairing equipment
containing line/load reactors.
INJURY OR DEATH MAY RESULT IF SAFETY PRECAUTIONS ARE NOT
OBSERVED
DANGER
Even if the upstream disconnect/protection device is open, a drive or inverter
down stream of the line/load reactor may feed back high voltage to the reactor.
The inverter or drive safety instructions must be followed.
INJURY OR DEATH MAY RESULT IF THE SAFETY PRECAUTIONS ARE NOT
OBSERVED
CAUTION
An upstream disconnect/protection device must be used as required by the
National Electrical Code
CAUTION
The frame of line/load reactors must be grounded at least at one of the reactor’s
mounting holes.
This section is intended for use by personnel experienced in the operation and maintenance
of electronic drives, inverters and similar types of power electronic equipment. Because of
the high voltages required by the equipment connected to line reactors and the potential
dangers presented by rotating machinery, it is essential that all personnel involved in the
operation and maintenance of line/load reactors know and practice the necessary safety
precautions for this type of equipment. Personnel should read and understand the
instructions contained in this section before installing, operating or servicing line/load
reactors and the drive to which the reactor is connected
AGENCY A PPROVALS:
UL-508, File E180243 Component Recognized (1 amp – 2400 amps)
UL-508, File E180243 UL Listed Nema 1 units (1 amp – 2400 amps)
CSA C22.2, File LR29753-13 CSA Certified (1 amp – 1200 amps)
Class H, 200 C, File E66214, Type 180-36, UL Recognized Insulation System
CE
26 IOMM VFD-2
Page 27
Ambient Temperature
Maximum ambient temperature is 45°C (113°F).
Figure 8, Line Reactor Dimensions, Models VFD 009 - 017
Figure 9, Line Reactor Dimensions, Models VFD 047 - 072
Table 10, Line Reactor Data
VFD Model
009MA 13.2 (335) 13.2 (335) 13.2 (335) 86 (39) 6-0 6-4=45, 2-0=500
012MA–017MA 13.2 (335) 13.2 (335) 13.2 (335) 98 (44) 2-0000
023MA 17.0 (432) 17.0 (432) 24.0 (610) 151 (69) 00-500
024-028 See Note 3
047MW-060MW 17.0 (432) 17.0 (432) 24.0 (610) 225 (102) See Note 2
072MW 24 (610) 24 (610) 30 (762) 393 (178) See Note 2
090LW-120LW See Note 3 See Note 4
Width “A”
in. (mm)
NOTES:
1. Models 012MA through 023MA have box lugs, one wire per lug.
2. Models 047MW through 072MW have copper tabs with (1) 0.656 hole.
3. Models 024LA/MA through 028LA/MA have reactor as standard and it is mounted in VFD.
Wiring required to incoming reactor terminals.
4. Models 090LW through 120LW have (2) 0.656 holes, and are always shipped loose with reactors
factory-mounted in VFD. Wiring required to incoming terminals.
Depth “C”
in. (mm)
Height “B”
in. (mm)
Weight
lbs (kg)
Wire
Range
Torque
In. lb.
2-1=150, 1/0-
2/0=180, 3/0-
4/0=250
00=180, 000-
0000=250
250-350=325,
500=375
IOMM VFD-2 27
Page 28
Mounting
NEMA 1 enclosures designed for floor mounting must be mounted with the enclosure base
horizontal for proper ventilation. Wall mounting a floor mounted enclosure with the base
against the wall will cause the reactor to over heat resulting in equipment damage.
Allow a minimum side, front, and back clearances of 12 inches (305 mm) and vertical
clearances of 18 inches (457 mm) for proper heat dissipation and access. Do not locate the
enclosure next to resistors or any other component with operating surface temperatures above
260°F (125°C).
Allow a minimum side, front, and back clearances of 12 inches (305 mm) and vertical
clearances of 18 inches (457 mm) for proper heat dissipation and access. Do not locate the
enclosure next to resistors or any other component with operating surface temperatures above
260°F (125°C).
Select a well ventilated, dust-free area away from direct sunlight, rain or moisture, where the
ambient temperature does not exceed 45°C (113°F).
Do not install in or near a corrosive environment.
Avoid locations where the reactor will be subjected to excessive vibrations.
Where desirable, enclosures may be mounted on vibration isolating pads to reduce audible
noise. Standard vibration control pads made from neoprene or natural rubber and selected for
the weight of the enclosed reactor are effective.
Reactor Power Wiring
WARNING
Input and output power wiring to the reactor must be performed
by authorized personnel in accordance with the NEC
and all local electrical codes and regulations.
Verify that the power source to which the reactor is to be connected is in agreement with the
nameplate data on the reactor. A fused disconnect switch or circuit breaker should be
installed between the reactor and its source of power in accordance with the requirements of
the NEC and all local electrical codes and regulations. Refer to the drive, inverter, or other
electrical equipment user manual for selection of the correct fuse rating and class.
The reactor is suitable for use on a circuit capable of delivering not more than 65,000 rms
symmetrical amperes at 480 volts when protected by Bussman type JJS, KTK, KTK-R, PP or
T class fuses.
Reactors are designed for use with copper conductors with a minimum temperature rating of
75°C. Table 10 lists the wire range for the power input and output connections by VFD
model.
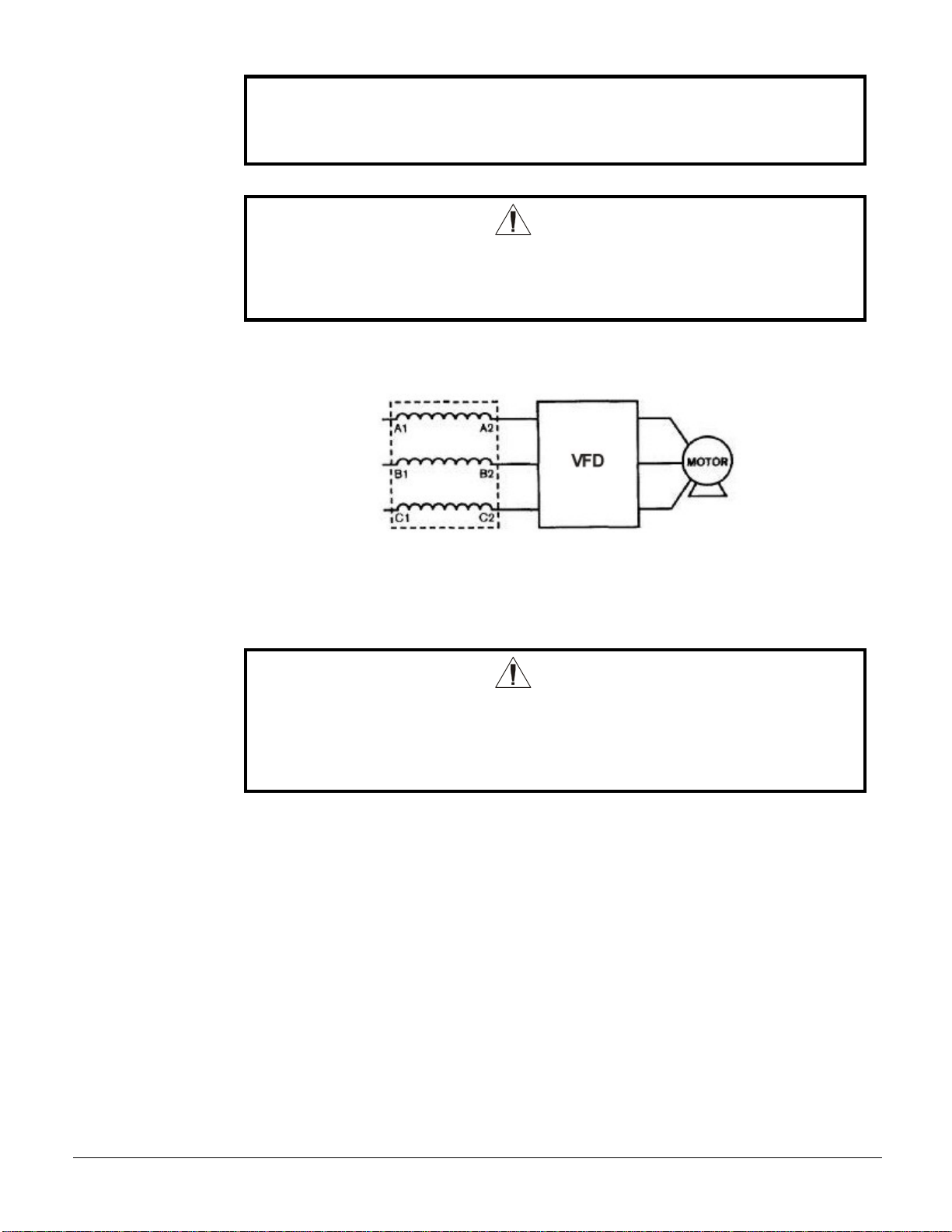
Refer to
Figure 10 for a typical electrical diagram of a reactor in its proper location, upstream of a
VFD.
Where desirable, a flexible conduit connection to the reactor enclosure should be made to
reduce audible noise.
28 IOMM VFD-2
Page 29
Failure to connect reactors supplied as a component part of a drive system or
other power electronic system according to the system interconnection diagram
supplied by the System Engineer will result in equipment damage, injury, or
death.
WARNING
If a line reactor or a line reactor and a load reactor are used with a drive equipped
with a bypass circuit, the reactors must be removed from the motor circuit in the
bypass mode. Damage to the motor and other equipment will result if this
warning is not observed.
Figure 10, Line Reactor Wiring
Grounding
A stud is provided in the reactor enclosure for grounding the enclosure. The enclosure must
be grounded.
WARNING
The frame of line/load reactors must be grounded at the designated grounding
terminal or one of the reactor mounting holes if no designated grounding terminal
is provided. The enclosure of reactors supplied in enclosures must be grounded.
INJURY OR DEATH MAY RESULT IF SAFETY PRECAUTIONS ARE NOT
OBSERVED.
IOMM VFD-2 29
Page 30
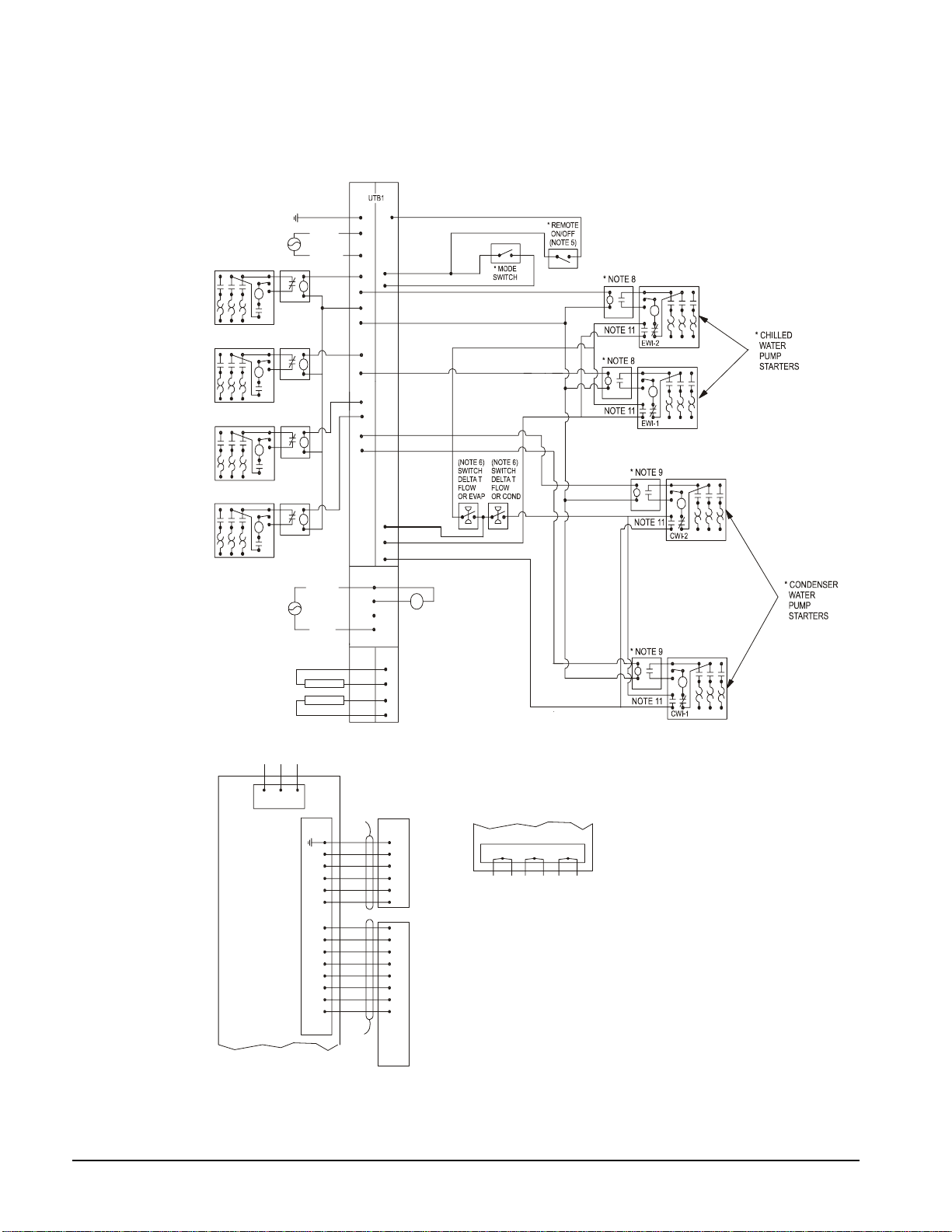
VFD/Chiller Interconnection Wiring Diagram
A
A
A
A
Figure 11, Control and Power Wiring Diagram
MICROTECH CONTROL
BOX TERMINALS
(115V) (24V)
PE
54
85
86
70
80
55
74
86
86
EP2
H
O
C
* COOLING
TOWER
FOURTH
STAGE
STARTER
* NOTE 10
H
O
A
GND
POWER
* NOTE 7
NEUTRAL
C4
* COOLING
TOWER
THIRD
STAGE
STARTER
* COOLING
TOWER
SECONDH
STAGE
STARTER
* COOLING
TOWER
FIRST
STAGE
STARTER
* NOTE 10
H
O
A
* NOTE 10
H
O
A
* NOTE 10
H
O
A
COOLING TOWER
BYPASS VALVE
COOLING TOWER VFD
L1 L2 L3
COMPRESSOR
MOTOR
STARTER
(NOTE 1)
-LOAD-
C3
C2
C1
COMMON
23(5A)
24(5)
11(6 )
1-10 VDC
1-10 VDC
CP1
CP2
79
73
78
77
76
75
POWER
COMPRESSOR CONTROL
NOTE 2
GND
25
1
2
3
4
11
12
22
NOTE 2
81
82(NO)
83(NC)
84
MICROTECH
BOX TERMINALS
115 VAC
See notes on following page.
T3-S
EF
CF
52
71
71
53
CTB1
LESS
THAN
30V
OR
24VAC
H
O
C
EP1
H
O
C
CP2
ALARM RELAY
A
(NOTE 4)
H
O
C
CP1
STARTER LOAD SIDE TERMINBALS
PE
L1
L2
23
24
25
1
2
3
4
11
11
12
22
VFD
UV W
T4 T3 T5T1 T6 T2
COMPRESSOR TERMINALS
- COMPRESSOR CONTROL
SCHEMATIC 330342201
- LEGEND: 330343001
* FIELD SUPPLIED ITEM
330387901-0A
30 IOMM VFD-2
Page 31

NOTES for Wiring Diagram
1. Compressor motor VFDs are either factory-mounted and wired, or shipped separate for
field-mounting and wiring. VFDs must be provided by McQuay. All line and load side power
conductors must be copper.
2. If VFDs are freestanding, then field control wiring between the starter and the control panel
is required. Minimum wire size for 115 Vac is 12 GA for a maximum length of 50 feet. If
greater than 50 feet, refer to McQuay for recommended wire size minimum. Wire size for
24 Vac is 18 GA. All wiring to be installed as NEC Class 1 wiring system and must be made
with copper wire and copper lugs only. All 24 Vac wiring must be run in separate conduit
from 115 Vac wiring.
3. Main power wiring between VFD and motor terminals is factory-installed when chillers are
supplied with unit-mounted VFDs.
4. Six conductors are used between the VFD and the motor as shown in the wiring diagram.
Wiring of free-standing VFDs must be in accordance with the NEC and connection to the
compressor motor terminals must be made with copper wire and copper lugs only.
5. LF models VFD 090 and 120 and all LF 2.0 models require field wiring between the VFD
and the field mounted cooling module per instruction beginning on page 15.
IOMM VFD-2 31
Page 32

VFD Dimensions
6.0
8.0
m
Air-Cooled
Figure 12, VFD 009LA/023LA, Air-Cooled, Free-Standing
(203.2)
Power Wiring
(152.4)
Entry Panel
2.0
(50.8)
14.0
(355.6)
Removable
Lifting Eyes
Note: Remove before drilling
to prevent metal particles fro
falling into drive components.
VM
AM
72.0
(1828.8)
36.0 (914.4)
19.1 (485.1)
Unit Weights
Model VFD 009 VFD 012 VFD 015 VFD 017 VFD 023
Operating Weight, lb (kg) 725 (329) 725 (329) 796 (361) 796 (361) 796 (361)
Shipping Weight, lb. (kg) 795 (361) 795 (361) 866 (393) 866 (393) 866 (393)
32 IOMM VFD-2
Page 33

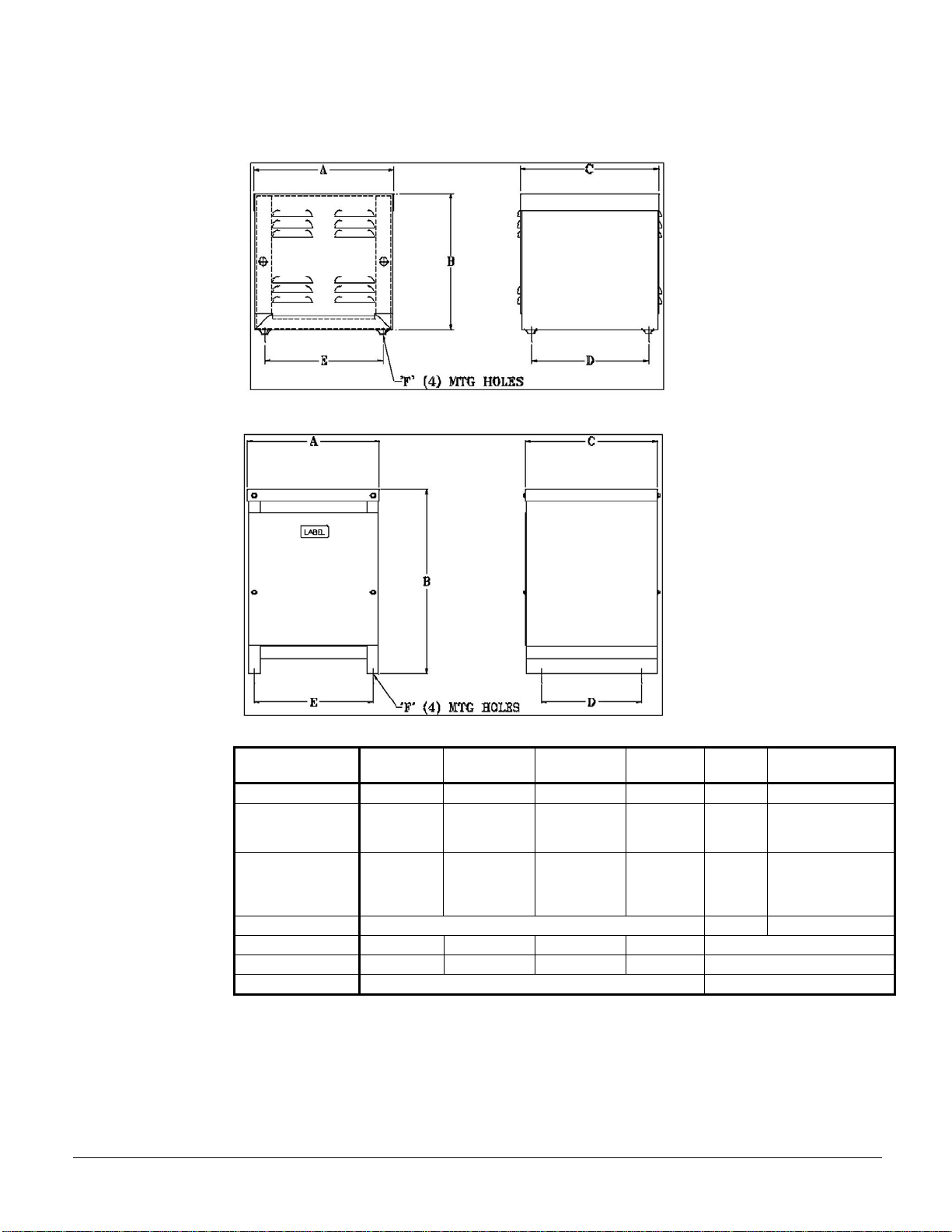
Figure 13, VFD 024LA/028LA, Air-Cooled, Free-Standing
Unit Weights
Model VFD 024LA VFD 028LA
Operating Weight, lb. (kg) 1206 (548) 1206 (548)
Shipping Weight, lb (kg) 1326 (602) 1326 (602)
IOMM VFD-2 33
Page 34

Figure 14, VFD 009MA/028MA (Air-Cooled), Unit Mount ed
NOTE: Incoming cable entrance is top-left. Outgoing wiring is factory-installed.
34 IOMM VFD-2
Page 35

LiquiFlo
Figure 15, VFD 047LW, Water-Cooled, Free- Standing
NOTES: Power entry for unit-mounted VFD is on top, left hand.
Unit Weights
Model VFD 047LW
Operating Weight, lb. (kg) 982 (446)
Shipping Weight, lb (kg) 1070 (486)
IOMM VFD-2 35
Page 36

Figure 16, VFD 060LW/072LW, Water-Cooled, Free-Standing
12.0
6.0
T
(
)
3.0 (76.2)
12.0
(304.8)
(152.4)
(304.8)
POWER WIRING
ACCESS PANEL
12.0
(304.8)
POWER WIRING
ACCESS PANEL
15.0
(381)
3.0 (76.2)
12.0
(304.8)
Note: Remove before drilling
to prevent metal particles from
falling into drive components.
60.0
(1524)
9.0
(228.6)
72.0
(1828.8)
19.1
(485.1)
OUTLET VALVE
3/4 (19.1) NPT
3.5
(88.9)
7.5
190.5
INLET VALVE
3/4 (19.1) NP
18.6
(473.2)
NOTES: Power entry for unit-mounted VFD is on top, left hand.
Unit Weights
Model VFD 060 VFD 072
Weight lb. (kg) 1272 (577) 1272 (577)
36 IOMM VFD-2
Page 37

A
A
A
A
Figure 17, VFD 090LW/120LW, Water-Cooled, Free-Standing Only
3.38
(85.8)
TYP
16.0
(406.4)
72.0
(1828.8)
10.5
(266.7)
11. 9
(302.3)
24.3
(617.2)
LINE LEAD ACCESS
COVER PLATE
11. 9
(302.3)
78.2
(1986.3)
Note: Remove before drilling
to prevent metal particles from
falling into drive components.
MOTOR LEAD ACCESS
COVER PLATE
POWER
ON
W
DRIVE
F
ULT
PUMPMOTOR
RUNNING
B
POWE
ON
W
DRIVE
F
ULT
PUMP
MOTOR
RUNNING
B
(614.7)
R
24.2
FAN
AIR
FLOW
NOTE: T he shipped loose, field installed, closed loop cooling module is shown installed adjacent to
the VFD. It can also be install separated from it. See page 15 for installation instructions.
Unit Weights
Model VFD 090 VFD 120
Weight lb. (kg) 1800 (817) 1800 (817)
IOMM VFD-2 37
Page 38

Figure 18, VFD 047MW-072MW, Water-Cooled, Unit Mounted
A
A
(
8.00
4.00
4.00
POWER WIRING
16.00
ENTRY PANEL
38.00
15.26
38.0
APPROX.)
ON
OFF
72.00
VM
SS1
AM
SS2
38 IOMM VFD-2
Page 39

LiquiFlo 2.0
Figure 19, VF 2037-2055;Free Standing
NOTE: Closed loop cooling module is also required.
Unit Shipping Weights
Model VF 2037 VF 2055
Weight lb. (kg) 1600 (726) 1600 (726)
IOMM VFD-2 39
Page 40

Figure 20, VF 2080-2110, Free Standing
NOTE: Closed loop cooling module is also required.
Unit Shipping Weights
Model VF 2080 VF 2110
Weight lb. (kg) 2000 (908) 2000 (908)
40 IOMM VFD-2
Page 41

MicroTech™ 200 VFD Control
Figure 21, MicroTech 200 Control Panel
frequency drive to the MicroTech to indicate the speed of the motor. The actual percent
motor speed is within 1% of the analog output signal from the MicroTech controller.
Digital Input, DI 10, is wired to a switch on the compressor that indicates when the vanes
are 100% open (VO switch). If the switch is open, the status of the vanes is Not Open. If
the switch is closed, the status of the vanes is Open.
The MicroTech 200™ unit
controller has control wiring to
the variable frequency drive
instead of to a motor starter.
The MicroTech controller
provides the speed setpoint
signal to a hardwired input on
the VFD. The output on the
MicroTech AOX (auxiliary
output) board is configured
(using jumpers) to provide a 010 VDC signal to a hard wired
analog input on the VFD.
There is no feedback signal
required from the variable
VFD Chiller Control States
There are seven VFD chiller control states viewable as shown below. They are based on
the unit status. See Table 12 on page 45 for relationships.
MicroTech: Menu 1, Screen 2, States
MicroTech 200
VFD Off
VFD Start
VFD Running: Adjust Speed & Open Vanes
VFD Running: Hold Minimum Speed & Adjust Vanes
VFD Routine Shutdo wn
VFD Locked Speed
VFD Override Capacity Control
VFD Off: The VFD is turned off, the speed output is 0%, and the vanes are closed.
VFD Start: The VFD is turned on, the speed output is minimum speed, and the vanes are
modulated to maintain the leaving evaporator setpoint. (VFD running, hold minimum
speed, and adjust vanes mode.)
VFD Running Adjust Speed & Open Vanes: The VFD remains on, the speed output is
modulated to maintain the leaving evaporator setpoint, and the vanes are pulsed to the open
position. This mode drives the vanes open and uses the speed to control capacity based on
the evaporator leaving water setpoint.
IOMM VFD-2 41
Page 42

VFD Running Hold Minimum Speed & Adjust Vanes: The VFD remains on, the speed
output is held at Minimum Speed, and the vanes are modulated to maintain the evaporator
leaving water setpoint. This mode occurs when the load (tons) can be satisfied with the
vanes not fully open while at minimum speed. Decreasing speed can no longer reduce
capacity, so the vanes maintain temperature control. When the load increases, the vanes
will pulse open until the vane open switch shows that the vanes are full open. At this point,
the MicroTech controller changes the mode to VFD Running: Adjust Speed and Open
Va nes.
VFD Routine Shutdown: The VFD remains on, the speed output remains the same,
dependent on the prior state, and the vanes are driven closed.
VFD Locked Speed: The MicroTech has a VFD LOCKED Speed Setpoint that can be
selected either “ON” or “OFF” from the MicroTech controller keypad. When the VFD
Locked Speed mode is set to ON, the VFD speed will be locked at the locked speed setpoint
(keypad adjustable). The purpose of this mode is to allow proper setup (calibration, testing,
etc.) of the chiller at a constant speed with constant conditions.
NOTE: Do not set the drive minimum speed above the factory setpoint to limit
reduced speed. A control incompatibility will result between the MicroTech
controller and the drive.
Override Capacity Control: Any capacity override (see Capacity Overrides on page 48)
that forces the VFD out of normal speed control. To return to normal speed control, the
capacity override condition is corrected.
First level capacity overrides hold speed and vane position while waiting for the condition
to correct.
If the override condition becomes critical (second level capacity override), speed and vane
position will be modulated in an attempt to correct the critical condition.
Control Sequence, MicroTech 200
VFD Off: The VFD is turned off, the speed output is 0%, and the vanes are closed. If the
chiller is turned on and if there is a load, the chiller will go through its start sequence; and
when the unit status reaches Motor Control Relay (MCR) Started, the VFD status
(MicroTech II controller Menu 1 Screen 2) will switch to “VFD Start”.
VFD Start: The VFD is turned on, the speed output is minimum speed, and the vanes are
modulated to maintain the chilled water setpoint (Active Setpoint on keypad/display). At
the same time, the minimum speed will continually be re-calculated based on the lift
temperature.
In the start mode, capacity control is “Hold Minimum Speed & Adjust Vanes” to satisfy the
Active Setpoint (leaving chilled water temperature). When the vanes have been pulsed to
the full open position, the Vane Open (V.O) switch closes, the VFD mode changes to “VFD
Running” adjust speed, open vanes”.
VFD Running Adjust Speed & Open Vanes: The VFD remains on, the speed
output is modulated to maintain the Active Setpoint, and the vanes are driven to the open
position. As the load decreases; if the Speed equals the lift temperature control speed, and
the Leaving Evaporator Water Temperature (LEWT) is less than the active setpoint minus
one-half the control band, the mode switches to “VFD Running: Hold Minimum Speed &
Adjust Vanes”. Otherwise, the controller stays in this mode.
If any capacity override exists, the VFD mode changes to the ”Override Capacity Control”
mode (see Capacity Overrides on page 48).
42 IOMM VFD-2
Page 43

VFD Running Hold Minimum Speed & Adjust Vanes: The VFD remains on,
the command speed is held at Minimum Speed, and the vanes are modulated to maintain the
Active Setpoint. As the load increases; if the vane open switch closes, and the LEWT is
greater than the active setpoint plus ½ the control band, the mode switches to “VFD
Running Adjust Speed & Open Vanes”. Otherwise, the controller stays in this mode with
the speed at Minimum Speed and the vanes being controlled to satisfy the Active Setpoint.
If any capacity override exists, the VFD mode changes to the “Override Capacity Control”
mode.
VFD Routine Shutdown: The VFD remains on, the speed output remains constant,
and the vanes are driven closed. This state is used during a routine shutdown of the chiller.
If there is a rapid shutdown cause by a fault alarm, the state switches to “VFD Off”.
Rapid Shutdown: If there is a fault alarm, the mode immediately switches to VFD
OFF. ”Rapid Shutdown” also occurs by changing the front panel “Stop/Auto” switch on the
MicroTech to “Stop”.
WDC/WCC, Dual Compressor VFD Operation
The MicroTech 200 controller has the capability to control a dual compressor VFD chiller
or two stand-alone VFD chillers with interconnecting network communications, including
all lead/lag load balance functions.
The lead compressor starts and runs the same as a single VFD compressor, controlling
speed and vane position based on Leaving Evaporator Water Temperature (LEWT). When
the capacity of the lead compressor reaches an equivalent user defined speed, LEWT offset,
and pull down rate, it indicates to the master control panel that it is time to enable the lag
(second) compressor to satisfy additional cooling requirements.
When the master control panel sees the enable lag indication, it checks the LEWT and if it
is greater than the active setpoint plus the lag Start UP (S/U) Delta T, it will start the lag
delay timer (keypad adjustable). At this time, the MicroTech control will record the
evaporator chilled water Delta T for reference to determine lag compressor shutdown.
NOTE: Operation assumes constant chilled water flow for dual compressor, VFD
units.
The MicroTech is constantly looking at the recorded startup evaporator Delta T, the user
adjustable offset from the delta T, and the active setpoint. As the load decreases, and the
evaporator Delta T drops below the recorded Startup Delta T minus the user adjustable
offset, and the LEWT is below the active setpoint minus the control band plus user defined
offset, the user adjustable lag compressor shutdown timer (same time as the lag start timer)
is activated. When the timer times out, and the above conditions still exist, the lag
compressor will be shut down.
MicroTech 200 Controller VFD Menu Screens
The MicroTech controller screens are modified from standard when VFD software is
loaded into the microprocessor in the factory. VFDs require special software as described
in this section. The screens are grouped by “menus” that are further broken down to screen
numbers. Fields noted with an (*) are only active when a VFD is used. Arrows indicate
that addition related screens are located above or below.
IOMM VFD-2 43
Page 44

Menu 1, Screen 2– Unit Status
This entire screen only appears when a VFD is used.
1.Unit Status hh:mm mon-dd-yy
VFD:Off (etc)
Cmnd VFD Speed= XXX%Vanes=Not Open(Open)
Lift Ctl Speed= XXX%
Menu 2, Screen 2 – Water Temps and Flows
2. Water Temps/Flow hh:mm mon-dd-yy
(*) PulldwnRate= X.X° /M Evap Flow= XXXgpm
Ent Ht Rcvy=N/A °F Cond Flow= XXXgpm
Lvg Ht Rcvy=N/A °F
Menu 3, Screen 2 – Refrigerant Temps/Press
3.Refrig Temps/Press hh:mm mon-dd-yy
Lift Press= XX.Xpsi
Lift Temp= XX.XºF
(*) Calc Lift Speed= XXX%
Menu 9, Screen 1 – Network Status
9. Network Status hh:mm mon-dd-yy
Master Command=Auto Compress Req. One
Slave Command=Stop Status=Lead&Lag Off
Lead Unit=Slave (*) LagShtdwnDT = XX°F
Menu 11, Screen 1 – Control Mode
11.Control Mode hh:mm mon-dd-yy
Mode= Manual Off (etc)
(*) MinVFDSpeedSpt =XXX% (*) Max Speed Spt =XXX%
Menu 11, Screen 2 – Control Mode Setpoints
This entire screen only appears when a VFD is used.
11.Control Mode hh:mm mon-dd-yy
Sample Time =XXSec Max Spd Step = XX%
Mod Limit = X.XºF Lock VFD Speed Off (On)
Deadband = X.XºF Lock Speed @ XXX%
Menu 13, Screen 1 – Motor Amp Setpoints
13. Motor Amp Spts hh:mm mon-dd-yy
Amp Reset=No Reset Active Spt =XXX%
Reset Signal=XX.Xma (*) Min Amp Spt =XXX%
Network Spt =XXXA (*) Max Amp Spt =XXX%
44 IOMM VFD-2
Page 45

Menu 13, Screen 2 – Motor Amp Setpoints
13. Motor Amp Spts hh:mm mon-dd-yy
Soft Load =Off (*) Dual Speed Spt = XXX%
Begin Amp Lim= XX% (*)LagPDRateSpt = X.X°/M
Ramp Time= XXMin
Menu 23, Screen 1 – Dual / Netw ork Set poi nts
23. Dual / Net Spts hh:mm mon-dd-yy
Slave Address=01.01 Start-up=Unload
LL Mode=Auto (*)LagStrtup DT=X.X°F
LL SwOver=N/A 00:00 (*) LagShtdnOffst= X.X°
Menu 26, Screen 3 – Unit Setup
26. Unit Setup hh:mm Mon-dd-yy
Full Load Amp = XX Hi Mtr Cur = Enable
(*) Vane Open Switch Yes No Str Tran = Enable
Low Mtr Cur = Enable Starter Flt = Enable
Table 11, MicroTech 200, VFD Setpoints
Item Default Setpoints Ranges MicroTech Keypad Menu
Sample Time 10 Sec. (1 to 63 Sec.) Menu 11 Screen 2
Deadband 0.5% (00.2 to 91%) Menu 11 Screen 2
Mod Limit 2.5ºF (1.0 to 10ºF) Menu 11 Screen 2
Maximum Speed Steps 2% (1 to 5%) Menu 11 Screen 2
Motor Current
Motor Current Threshold 5% (1 to 20%) Menu 22 Screen 3
Minimum Amp Setpoint 10% (5 to 100%) Menu 13 Screen 1
Maximum Amp Setpoint 100% (0 to 100%) Menu 13 Screen 1
Locked VFD Speed On for Start-up /set up (On / Off) Menu 11 Screen 2
Locked VFD Speed Off for VFD operation (On / Off) Menu 11 Screen 2
Locked Speed 100% for Start-up Set up NA Menu 11 Screen 2
NOTE: Setpoints shown above apply only to Menu 11, Screen 1, through Menu 26, Screen 3.
Set From Compressor
Nameplate RLA
NA Menu 26 Screen 3
Table 12, MicroTech Unit Status vs VFD Status
Unit Status: MicroTech Menu 1 Screen 1 VFD Status: MicroTech Menu 1 Screen 2
All Systems Off VFD Off
Off: Alarm VFD Off
Off: Ambient Lockout VFD Off
Off: Front Panel Switch VFD Off
Off: Manual VFD Off
Off: Remote Contacts VFD Off
Off: Remote Communications VFD Off
Off: Time Schedule VFD Off
Start Requested VFD Off
Waiting: Low Sump Temperature VFD Off
Evaporator Pump Off VFD Off
Evaporator Pump On: Recirculate (used for chillers) VFD Off
Continued on next page.
IOMM VFD-2 45
Page 46

Unit Status: MicroTech Menu 1 Screen 1 VFD Status: MicroTech Menu 1 Screen 2
Evaporator Pump On: Cycle Timers (used for chillers) VFD Off
Evaporator Pump On: Waiting For Load (used for chillers) VFD Off
Condenser Pump Off VFD Off
Oil Pump Off VFD Off
Oil Pump On: Pre-Lubrication VFD Off
Condenser Pump On: Waiting for Flow VFD Off
Evaporator Pump On: Waiting for Flow VFD Off
Startup Unloading VFD Off
MCR Started VFD Start
Running OK
-OrRunning Capacity Override
Can have either VFD status shown to the right.
MCR Off: Rapid Shutdown VFD Off
Shutdown: Unloading VFD Routine Shutdown-Or-VFD Off
MCR Off: Routine Shutdown VFD Off
Condenser Pump Off: Shutdown VFD Off
Evaporator Pump Off Shutdown VFD Off
Post Lubrication VFD Off
Shutdown: Oil Pump Off VFD Off
VFD Running; Hold Minimum Speed & Adjust Vanes
VFD Running; Adjust Speed & Open Vane
VFD Start Then,
VFD Running; Capacity Override
Or-
46 IOMM VFD-2
Page 47

Figure 22, MicroTech 200 VFD Speed Control State Diagram
VFD Off
Command Speed is held at 0%
Vanes closed
Motor
Relay
is
closed
Motor Relay
is closed AND
Locked Speed
is ON
Command Speed starts at 70% full speed and
Vanes are
Full Open
Override corrects
Command Speed >
Minimum Speed
Command Speed and vane position held constant
except if override becomes critical, then modualte
Command Speed always >= MinimumSpeed
VFD Running Adj. Speed
Open Vanes
Speed Modulating to chilled water
except when driven faster by MinSpeed
Vanes continuously pulsed Open
VFD Start
increases with Minimum Speed
Vanes modulating to chilled water
Capacity Overrides effect Vane modulations
VFDCapOverrides
Command Speed & Vane position
Any
Override
exists
Vanes
Open
AND
LEWT >
Spt + .5CB
Any Override
exists
VFD Running Hold Min
Command Speed equals Minimum Speed
Override Corrects
Command Speed
equals
Minimum Speed
Speed Adj. Vanes
Vanes modulating to LEW T
Vane Closed
Switch is
Closed
OR
UnitStatus
is Rapid
Shutdown
Unit Status
is any
Shutdown
Command Speed
>
Locked
Speed is
OFF
VFD locked speed
Command Speed equals Locked speed set point
except when driven faster by Minimum Speed
Vanes modulating to LEWT
LEWT leaving evap water temperature
CB Control Band
MinSpeed
AND LEWT < Spt- .5CB
Unit Status
is any
Shutdown
Unit Status
is any
Shutdown
Unit Status
is any
Shutdown
VFD Routine Shutdown
Command Speed held 0%
vanes continuosly pulsed closed
Vane Closed
Switch isOpen
IOMM VFD-2 47
Page 48

Capacity Overrides (Override Types Listed by Priority)
The following explains certain control functions and setpoints of interest.
NOTE: Stp = Setpoint
1. Max Amp Limit
If the motor current is greater than 100% RLA, Hold Command Speed, pulse vanes
closed for two seconds once every two minutes.
If the motor current is greater than 105% RLA, If Command Speed is 10% greater than
Minimum Speed, reduce Command Speed by 5%. If Command Speed is within 10% of
Minimum Speed, reduce Command Speed by 2%. Close the vanes by one two-second
pulse. Wait 15 seconds to see the if motor current corrects before repeating the process.
2. Manual Loading
Manual Load setpoint is adjustable from the keypad display.
If Manual Loading is Enabled.
Pulse vanes open OR closed to drive the motor current %RLA to the Manual Load
Setpoint.
3. Minimum Amp Limit
Minimum Amp setpoint is adjustable from the keypad display.
Range 5% to 100% in 1% increments. Default value is 10%.
If the motor current %RLA is less than Minimum Amp Setpoint, hold vane position and
command speed.
If the motor current %RLA is 5% below the Minimum Amp Setpoint, open vanes and
hold command speed.
4. Manual Amp Limit
User defined capacity limit adjustable from the keypad display from 0% to 100%.
If the motor current %RLA exceeds the Network setpoint, hold Command Speed and
vane position.
If the motor current %RLA is 5% greater than the Network setpoint, reduce command
speed by 1% every five seconds. If the command speed should be reduced to minimum
speed, close the vanes.
5. Network Capacity Limit
Network provided capacity limit setpoint. The setpoint is limited in the software from
0% to 100%.
If the motor current %RLA exceeds the Network setpoint, hold Command Speed and
vane position.
If the motor current %RLA is 5% greater than the Network setpoint, reduce command
speed by 1% every five seconds. When the command speed is reduced to minimum
speed, close the vanes.
6. Max Pulldown Rate
Max Pull Down Rate setpoint is an adjustable setpoint
(range 0.1 to 5.0°F/minute in 0.1°F increments, default is 1.0°F/minute)
Pulldown rate = leaving evap. water temp one minute ago, minus leaving evap. water
temp now.
If the Pulldown rate exceeds the setpoint, hold command speed and vane position.
48 IOMM VFD-2
Page 49

7. Demand Limit
Establishes a demand limit between 10 and 100% RLA based on a 4-20 mA signal
input.
If the motor current %RLA is greater than the demand limit, hold command speed and
vane position.
If the motor current %RLA is 5% greater than the demand limit, reduce command
speed by 1% every five seconds. If the command speed is reduced to Minimum Speed,
close the vanes.
8. Softloading
Establishes a soft load capacity limit between 10 and 100% RLA based on time from
the first start of the day.
If the motor current %RLA is greater than the soft load capacity, limit hold command
speed and vane position.
If the motor current %RLA is 5% greater than the soft load capacity, limit reduce
command speed by 1% every five seconds. If Command Speed is reduced to Minimum
Speed, close the vanes.
9. Low Evap. Pressure
If the evaporator refrigerant pressure is less than 38.0 psi (default), hold speed and vane
position.
If the evaporator refrigerant pressure is less than 31.0 psi (default), hold speed and
close vanes.
Low evaporator pressure shutdown alarm setpoint is 26.0 psi (default).
Note: The above pressures must be set at unit design conditions.
10. High Discharge Temperature
If the discharge temperature is higher than 170º F, pulse the load solenoid if the vanes
are not fully open.
If the vanes are full open, increase command speed at the rate of 1% every five
seconds.
IOMM VFD-2 49
Page 50

MicroTech II™ VFD Control
General Description:
Figure 23, MicroTech II Operator Interface Panel 1
Figure 24, MicroTech II Operator
Interface Panel 2
when the vanes are 100% open. If the switch is open, the status of the vanes is Not
Open. If the switch is closed, the status of the vanes is Open.
The following describes the software for
centrifugal chillers with variable speed
drive and the MicroTech II controller.
Complete information on the MicroTech
II controller operation is contained in the
Operating Manual OM CentrifMicro II.
Variable Frequency Drive (VFD)
Control:
Digital output NO1, (terminal J12) on the
compressor controller is wired to the CR
relay (Compressor Relay). The CR relay
energizes the MCR (Motor Control Relay)
which enables the variable frequency
drive instead of a standard motor. Analog
output Y1 (terminal J4) on the compressor
controller provides the speed setpoint
signal to the VFD. The output is a 0-10
VDC analog output signal, hard wired to
the VFD.
There is no feedback signal required from
the variable frequency drive to the
MicroTech II controller to indicate the
speed of the motor. The actual percent
motor speed is within 1% of the analog
output signal from the MicroTech II
controller.
Digital Input ID9 (terminal J7) on the
compressor controller is wired to the Vane
Open switch (VO switch) that indicates
Or
If the compressor controller pulses a load output for the vanes to load for a cumulative
time of 300 seconds (user adjustable), the MicroTech II controller will assume the
compressor is fully loaded the same as if the V.O. switch closed (one unload pulse will
reset the timer).
Sequence of Operation
Compressor Off:
The VFD is turned off, the speed output is 0%, and the vanes are closed. If the chiller is
turned on and if there is a load, the chiller will go through its start sequence. The MCR
will be energized, the speed signal will be set to minimum speed, and the VFD will start
the compressor. When the compressor starts, it will be in the VFD Running, hold speed,
adjust vanes mode.
50 IOMM VFD-2
Page 51

VFD Running, Hold Minimum Speed, Adjust Vanes:
The VFD remains on, the command speed is held at Minimum Speed, and the vanes are
modulated to maintain the Active LEWT Setpoint. As the load increases; if the vane open
switch closes or the MicroTech II controller pulses the vanes open for a cumulative 300
seconds (default), and the LEWT is greater than the active setpoint, the mode switches to
“VFD Running Adjust Speed, Open Vanes”. Otherwise, the controller stays in this mode
with the speed at Minimum Speed and the vanes being controlled to satisfy the Active
LEWT Setpoint.
VFD Running, Adjust Speed, Open Vanes:
The VFD remains on, the speed output is modulated to maintain the Active LEWT Setpoint,
and the vanes are driven to the open position. As the load decreases, if the speed equals the
lift temperature control speed and the LEWT is less than the active LEWT setpoint, the
mode switches to “VFD Running, Hold Minimum Speed, Adjust Vanes”. Otherwise, the
controller stays in this mode.
Compressor Shutdown:
The VFD remains on, the speed output remains constant, and the vanes are driven closed
(shutdown unload state). This state is used during a routine shutdown of the chiller. If
there is a rapid shutdown caused by a fault alarm, the MCR will be immediately deenergized, the speed signal will go to zero, and the compressor state will go directly to
Postlube.
WDC, Dual Compressor VFD Operation
The MicroTech II controller has the capability to control a dual compressor VFD chiller or
multiple stand alone VFD chillers with interconnecting network communications, including
all compressor staging and load balance functions. (See OMCentrifMicro II for set up of
multiple compressor staging).
General Dual Compressor VFD Operation
The first compressor starts and runs as a single VFD compressor controlling speed and vane
position based on LEWT (L
the first compressor reaches “Full Load” and LEWT is greater than stage delta, and the
slope (pull down rate) is less than the user adjustable minimum rate setpoint, the next
compressor will be enabled.
eaving Evaporator Water Temperature). When the capacity of
Dual Compressor Unit Stage Down
When “Compressor Capacity” exceeds calculated system load (internal algorithm), the
“next off” compressor will be disabled. When the “next off” compressor is disabled, the
controller will unload the compressor by closing the vanes (shutdown unload) to unload the
compressor. The load balance function will make the other compressor follow. When the
shutdown unload timer expires, or the vane close switch closes (which ever occurs first),
the MCR will de-energized, and the controller will transition to the post lube sequence. At
the end of the post lube timer, the oil pump will be turned off and the controller will
transition to the off sequence.
IOMM VFD-2 51
Page 52

Interface Panel Screens, MT II
NOTE: This section contains the MicroTech II controller and Operator Interface Panel display
screens. Figure 25 is the setpoint screen on the initial production panel (Panel 1). Figure 26
shows the screen used on the second issue panel (Panel 2) that went into production mid-2005.
Figure 25, MOTOR (VFD) Setpoint Screen, Panel 1
VFD related settings are #9 through #12.
Password: T = Technician Level, M = Manager Level, O = Operator Level
Description No. Default Range Password Comments
Nominal Capacity 14 Design
Oil No Start Diff
(above Evap Temp)
Lift @ Max Speed 12
Speed @ 0 Lift 11 50% 0 to 100% T
Minimum Speed 10 70% 60 to 100% T Min VFD speed, has priority over SPs 11 & 12
VFD 9 No No, Yes T VFD on unit or not
Maximum Rate 8
Minimum Rate 7
Soft Load Ramp 6 5 min 1 to 60 min M
Initial Soft Load
Amp Limit
Soft Load Enable 4 OFF OFF, ON M Soft load on (using SP 5 and SP 6) or off
Maximum Amps 3 100% 40 to 100% T
Minimum Amps 2 40% 20 to 80% T % RLA below which unloading is inhibited
Demand Limit
Enable
13
5 40% 20 to 100% M Initial amps as % of RLA. Used with SP 4 and SP 6
1 OFF OFF, ON O
40 °F 30 to 60 °F
40 °F 30 to 60 °F
0.5 °F/min
0.1 °F/min
NOTE: Shaded settings are VFD related.
0 to 9999
Tons
0.1 to 5.0
°F/min
0.0 to 5.0
°F/min
Determines when to shut off a compressor
T
T
M
M
Minimum Delta-T between oil sump temperature
and saturated evaporator temperature
Temp lift at 100 % speed (cond sat – evap sat
temp)
Lift @ min speed as a % of 100 % lift. SP 10 has
priority over this setting.
Inhibits loading if LWT change exceed the setpoint
value.
Additional compressor can start if LWT change is
below setpoint.
Time period to go from initial load point (% RLA) set
in SP 5 to 100% RLA
% RLA above which loading is inhibited (Load Limit)
Unloading is forced at 5% above this value.
ON sets %RLA at 0% for 4 mA external signal and
at 100% RLA for 20 mA signal
52 IOMM VFD-2
Page 53

Figure 26, MOTOR (VFD) Setpoint Screen, Panel 2
Table 13, MOTOR Setpoint Settings
VFD related settings are #12 through #15.
Password: T = Technician Level, M = Manager Level, O = Operator Level
Description No. Default Range Password Comments
Lift @ Max VFD
Speed
VFD Speed @ 0 Lift 14 50% 0 to 100% T
VFD Minimum Speed 13 70% 60 to 100% T Min VFD speed, has priority over SPs 11 & 12
VFD 12 No No, Yes T VFD on unit or not
Oil No Start Diff
(above Evap Temp)
Nominal Capacity 10 Design
Maximum LWT Rate 9
Minimum LWT Rate 8
Soft Load Ramp Time 7 5 min 1 to 60 min M
Initial Soft Load Amp
Limit
Soft Load Enable 5 OFF OFF, ON M Soft load on (using SP 5 and SP 6) or off
Nameplate RLA 4 N.A. N.A. N.A. Not used on these chillers
Maximum Amps 3 100% 40 to 100% T
Minimum Amps 2 40% 20 to 80% T % RLA below which unloading is inhibited
Demand Limit Enable 1 OFF OFF, ON O
15
11
6 40% 20 to 100% M Initial amps as % of RLA. Used with SP 4 and SP 6
40 °F 30 to 60 °F
40 °F 30 to 60 °F
0 to 9999
Tons
0.5 °F/min
0.1 °F/min
0.1 to 5.0
°F/min
0.0 to 5.0
°F/min
T Temp lift at 100 % speed (cond sat – evap sat temp)
Lift @ min speed as a % of 100 % lift. SP 10 has
priority over this setting.
T
M
M
Minimum Delta-T between oil sump temperature and
saturated evaporator temperature
Determines when to shut off a compressor, factory
set
Inhibits loading if LWT change exceed the setpoint
value.
Additional compressor can start if LWT change is
below setpoint.
Time period to go from initial load point (% RLA) set
in SP 5 to 100% RLA
% RLA above which loading is inhibited (Load Limit)
Unloading is forced at 5% above this value.
ON sets %RLA at 0% for 4 mA external signal and
at 100% RLA for 20 mA signal
IOMM VFD-2 53
Page 54

Setpoint 11 on Panel 1 (setpoint 14 on Panel 2) sets the % speed at 0 degrees F Lift,
point A in Figure 25.
Setpoint 12 on Panel 1 (setpoint 15 on Panel 2) sets the lift in degrees F at the 100
% speed point, point B in Figure 26.
Figure 27, Operating Envelope, Setpoint s 11 and 12 Settings
Typical Variable Frequency Drive Operating Envelope
120
110
100
90
80
70
Minimum Speed
60
50
Percent Speed
“A”
40
Operating Envelope
Lift Temperature Control Speed
Maximum Speed
“B”
30
20
10
0
0 1020304050607080
Saturated Temperature Difference (°F)
(Condenser Saturation Temperature Minus Evaporator Saturation Temperature)
Figure 28, View I/O Screen
The MicroTech II controller View I/O Screen, shown to the
right, displays the compressor motor speed, as controlled by
the VFD, at the bottom of the screen. This is information
only and no settings are made on this screen.
54 IOMM VFD-2
Page 55

Table 14, MicroTech II, Settings and Ranges (Single Compressor)
MicroTech II VFD Default Setpoint Range
Motor Current Comp. Nameplate RLA N.A. UC-SC-(4) N/A
Motor Current Threshold (1) 5% 1 to 20% UC-SA-(4)
Minimum Amp Setpoint (2) 10% 5 to 100% UC-SC-(1) Set -Motor-(2)
Maximum Amp Setpoint 100% 0 to 100% UC-SC-(1) Set -Motor-(3)
VFD Yes yes/no UC-SU-(10) Set -Motor-(9)
Minimum Speed 70% 70 to 100% UC-SU-(10)
Setpoint 11 on
Panel 1 (setpoint
14 on Panel 2)
Speed 50% (@ 0°F lift, “Y” axis
Lift
NOTES:
1. Motor Current Threshold, current at which a low current fault occurs.
2. Minimum Amp Setpoint, Minimum unloading amp setpoint.
3. The OITS is the preferred place t o adju st setpo ints. The unit contro ller is th e second choice and the
compressor controller should never be used.
40°F (@100% speed, X
axis
sets the % speed
at 0 degrees F
Lift, point A in
Figure 25.
Setpoint 12 on
Panel 1 (setpoint
15 on Panel 2)
sets the lift in
degrees F at the
100 % speed
point, point B in
Figure 26.
Keypad
Location
UC-SU-(10)
UC-SU-(10)
OITS
Locations
Set-Alarms-
(12)
Set -Motor-
(10)
Set -Motor-
(11)
Set -Motor-
(12)
Table 15, MicroTech II, Settings and Ranges (Multiple Compressor Includes
Duals)
MicroTech II VFD Default Setpoints Range Keypad OITS Locations
Max Comp. On 2 for Dual 1 to 16 UC-SC-(2) Modes-(9)
Stage Delta 1°F 0.5 to 5.0°F UC-SC-(3) Water-(6)
Nominal Capacity Unit Design Tons N.A. UC-SC-(5) Motor-(14)
Unload Timer (1) 030 sec
Min LWT Rate 0.1°F 0.0 to 5.0°F UC-SU-(7 Motor-(7)
NOTE: 1. This must be set longer than the mech. vane speed to unload the compressor.
10 to 240
sec.
UC-SC-(6) Timers-(6)
Code: UC = Unit Controller CC = Compressor Controller
OITS = Operator Interface Touch Screen V = View Menu Keypad or OITS Screen
A = Alarm Menu Keypad Or OITS Screen S = Set Menu Keypad or OITS Screen
C = Compressor Menus U = Unit Menus
Example:
Setpoint location for VFD Minimum speed = UC-SU-(10). The location would be the U
C
ontroller, Set Unit Setpoints Menu, Screen 10. OITS locations are S = Setpoint screen,
nit
“Alarms” or “Motor”, and the number of the setpoint on the screen.
Additional Setpoints, the following two setpoints are at Technician level and are located at
UC-SC-(8) and not on the OITS. They are for exclusive use of factory trained service
technicians.
IOMM VFD-2 55
Page 56

VFD Mode = Auto (auto/manual), this allows the VFD speed output signal to be manually
j
controlled for testing, or to be automatic for normal operation. The MicroTech II controller
will not allow the speed signal to go below the calculated lift control speed.
VFD Speed Manual Setpoint = 100%,
when the unit is started for the first time, and set
up for design, or to check the operation and performance of the unit, it is necessary to run
the unit at a constant fixed speed of 100%. To accomplish this, set the VFD Minimum
Speed to 100% [UC-SU-(10) or OITS-S-Motor-(10)], then set up and adjust the unit. When
testing is complete, set the minimum speed back to the original setpoint. Do not set the
drive minimum speed to 100% to set up or test the unit at full speed, as the controller will
not know that the drive will not respond to it’s speed signal. The controller will try to
control the LEWT setpoint with speed and a control conflict will result.
Figure 29, MicroTech II VFD Speed Control State Diagram
OFF Manual Switch
AUTO Remot e Switch
Shutdown Manual Switch
VanesOpen
Switch Closed or
Loading
continuously Full
Vanes L oad timer
expired (5min.) and
reached Min.
SpeedLine
VFD Running,Adj. Speed
While holding Open Vanes
Speed Mod ulating to chilled water
Vanes Loaded continuously
Capacity Override s- Corrective action
applies to Speed
COMPRESSOR STATE
RUN-Load Speed
RUN-Unlo ad Speed
RUN-Hold Speed
RUN-Unlo ad Speed- Evap Pre ss
RUN-Hold Speed-Ev ap Press
RUN-Hold Speed-Pu ll-dow n Rate
RUN-Unlo ad Speed -Max Amps
RUN-Hold Speed-Max Amps
Compressor OFF
Compressor MotorRelays
CR & LR are off, and VFD Speed 0%
Vanes closed
Dual Compressor Transition States
Startup Tr ansition
Loads Vanes to LEWT control and
reduces speed at a fixed rate to Min.
Speed Line
The starting and running
compressor arebum ped
to 100% speed.
Startup Unloading
Speed is locked the vanes are unloaded
totheUnloadtimer.
Full loadflag set and
over Stage DeltaT .
and More thatone
Compressor set.
Vanes Open
Switch
Closed or
Loading
continuously
Full Vanes
Load timer
expired
(5min.)
VFDSpeed
=
MinSpeed
AND LEWT < Spt
Unit Status
is any
Shutdown
VFDSpeed
=
MinSpeed
Full load flag setand over
Stage Delta T.
Likely Capcity override
limited and More than one
Compr set.
VFD Running, Hold Min
Speed, Ad
VFD Speed equals Minimum Speed
Vanes modulating to LEWT
CapacityOverrides- Corrective action
applies to Vanes
Motor Relayis
closed & VF D
Speed = Min
Speed %
. Vanes
Unit Status
is any
Shutdown
COMPRESSOR STATE (BOX)
OFF-Unit State or
OFF-Manual Switch
OFF-Evap FlowRecirculate(30sec.)
OFF-Low Oil Sump Temp
OFF-Staging (Next ON)
OFF-Awaiting Load
PRELUBE Vanes Open
PRELUBE-Timer = 30(30 sec.)
PRELUBE ( 6 sec.)
Vane Closed
Switch is
Closed
OR
UnitStatus
is Rapid
Shutdown
COMPRESSOR STATE
RUN-Load Vanes
RUN-Unload Vanes
RUN-Hold Vanes
RUN-Hold Vanes-Pu ll-do wn Rate
RUN-Unload Vanes-Max Amps
RUN-Hold Vanes-Max Amps
RUN-Unload Vanes-Evap Press
RUN-Hol d Vanes-E vap Pres s
COMPRESSOR STATE
SHUTDOWN Unload
POSTLUBE Timer=30 (30sec.)
LEW T leaving evap water temper ature
CB Control Band
Compressor Shutdown
Command Speed held 0%
vanes continuosly pulsedclosed
Vane Closed
Switch isOpen
Notes:
1. The above pressures must be set at unit design conditions.
2. Low evaporator pressure shutdown alarm setpoint is 26.0 psi (default)
3. If the discharge temperature is higher than 170º F, pulse the load solenoid if the
vanes are not fully open.
56 IOMM VFD-2
Page 57

Operation, Small A/C SP600 & LF 2.0
r
r
The SP600 and LF 2.0 VFDs share the same interface modules and their operation is the same except
for some differences in parameters, (which are outside the purview of this manual) and differences in
some faults and alarms. The faults and alarms are given separately later in this section.
Warning
Only qualified electrical personnel familiar with the construction and operation of
this equipment and the hazards involved should install, adjust, operate, or service
this equipment. Read and understand this ma nual and other applicable manuals in
their entirety before proceeding. Failure to observe this precaution could result in
severe bodily injury or loss of life.
The status of the drive can be viewed on the Operator Interface Module (OIM) or on various LEDs.
Using the Interface
The LCD Operator Interface Module is a keypad/display that enables programming, monitoring, and
controlling the drive.
Figure 30, Operator Interface Module
Refer to Figure 31 fo
display description.
Refer to Table 16 fo
key descriptions.
CAUTION
Stop and start keys are
never used to start or stop
the drive/compressor.
These functions are
controlled by the chiller
MicroTech II only.
Powering Up and Adjusting the LCD OIM
• The first time the LCD OIM is powered up, you will be prompted to select a language for
the display text. If the Start-Up routine has not been completed, the Start-Up menu is
displayed immediately following the language selection screen.
Selecting the Fast Power Up Feature
• The fast power up feature bypasses the initialization screen at power up, and the Main
Menu is displayed immediately. To select this feature, select Fast PwrUp Mode from the
Display menu.
Adjusting the Screen Contrast
• To adjust the screen contrast, select Contrast from the Display menu.
IOMM VFD-2 57
Page 58

Resetting the Display
• Do not reset the display to “factory settings” as these may be the display manufacturer’s
settings and not the McQuay factory settings.
Figure 31, Display Description
Table 16, Key Descriptions
Key Function
Scroll through options or user function keys, move cursor to the left.
Scroll through options or user functions keys, move cursor to the
right.
Scroll through options, increase a value, or toggle a bit.
Scroll through options, decrease a value, or toggle a bit.
ESC/PROG
HAND
AUTO
F1
Exit a menu, cancel a change to a parameter, or toggle between
program and process (user) display screens.
Enter a menu, select an option, or save changes to parameter value
Enable Hand (manual) reference control.
Release Hand (manual) reference control.
Stop the drive. Clear a fault if the OIM is the control source.
Start the drive if the OIM is the control source.
F1 though F4: Predefined or user-configured functions. The definition
of each key is shown directly above the key on the display. See item
in figure B.3.
From the main menu, use the
or keys to scroll through the sub menus. The
Diagnostics menu is if primary interest to the operator. When selected, press the Enter key,
58 IOMM VFD-2
Page 59

to select it. Then use the scroll keys, up, down, right, or left, to select the item of
interest.
Using the LEDs
Determining Precharge Board Status Using the LED Indicators (Frames
5 & 6 Only)
Precharge is an internal function that is used automatically when powering up the control.
There is no operator function required. Precharge LEDs give the status of the board. They
are located above the Line Type jumper shown in Figure 32.
In addition to the LED signal, a fault in the precharge function will also show on the
display.
Figure 32,
Location of Precharge Status LED
Table 17, Precharge Board LED Indicators
Name Color State Description
Power ON Green Steady Indicates when pre-charge board power supply is operational
Indicates one of the following alarms occurred causing the
pre-charge to momentarily stop firing: • Line Loss • Low Phase
Alarm Yellow Steady
Fault Red Steady
(single-phase dropped below 80% of line voltage) • Input
frequency out of range (momentarily) Note: An alarm
condition automatically resets when the condition no longer
exists
Indicates one of the following faults: • DC Bus short • DC Bus
not charged • Input frequency out of range • Overtemperature
Note: A fault indicates a malfunction that needs to be
corrected prior to restarting. A fault condition is only reset after
cycling power.
LED Drive Status
Figure 33, Location of the Ready LED
IOMM VFD-2 59
Page 60

Table 18, Ready LED Status Functions
Color State Description
Green
Yellow
Red
Flashing Drive ready, but not running and no faults are present.
Steady Drive running, no faults are present.
Flashing The drive is not ready. Check parameter 214 (Start Inhibits).
Steady
Flashing
Steady A fault has occurred.
Determining Drive
Status Using the
Status LEDs
Two status LEDs are located
on the DPI Communications
Interface board on the front
of the power module. The
LEDs indicate of the status
of the inverter and the
rectifier. Note that if the
LEDs are off, it indicates it is
not receiving power.
An alarm condition exists. Check parameters 211 (Drive Alarm 1) and
212 (Drive Alarm 2).
An alarm condition exists. Check parameters 211 (Drive Alarm 1) and
212 (Drive Alarm 2).
Table 19, Status
LED Definitions
Color State Description
60 IOMM VFD-2
Page 61

Green
Yellow
Red
Flashing Drive ready, but not running and no faults are present.
Steady Drive running, no faults are present.
Flashing The drive is not ready. Check parameter 214 (Start Inhibits).
Steady
Flashing A fault has occurred
Steady A non-resettable fault has occurred.
An alarm condition exists. Check parameters 211 (Drive Alarm 1)
and 212 (Drive Alarm 2).
About A larms
Alarms indicate conditions that may affect drive operation or application performance.
There are two alarm types, as described in Table 20. Alarms do not shut down a unit, but
often lead to a :fault that will.
Table 20, Types of Alarms
Type Alarm Description
User-
1
Configurable
Non-
2
Configurable
The drive indicates alarm conditions in the following ways:
These alarms alert the operator of conditions that, if left untreated, may
lead to a fault condition. The drive continues to operate during the
alarm condition. The alarms are enabled or disabled using Alarm Config
1 (259). The status of these alarms is shown in Drive Alarm 1 (211).
These alarms alert the operator of conditions caused by improper
programming and prevent the drive from starting until the problem is
resolved. These alarms are always enabled. The status of these alarms
is shown in Drive Alarm 2 (212).
• Yellow LED visible from the front of the drive.
• Ready LED on the drive cover (see Table 18).
• Alarm name and bell graphic on the LCD OIM. The alarm is displayed as long as
the condition exists. The drive automatically clears the alarm when the condition
causing it is removed.
• Alarm status parameters. Two 16-bit parameters, Drive Alarm 1 (211) and Drive
Alarm 2 (212), indicate the status of type 1 and type 2 alarms, respectively.
• No external signal is available for alarms.
About the Alarm Queue
The drive automatically retains a history of alarms that have occurred in the alarm queue.
The alarm queue is accessed using the OIM or PC software.
The alarm queue holds the eight most recent alarms. The last alarm to occur is indicated in
queue entry #1. As new alarms are logged into the queue, existing alarm entries are shifted
(for example, entry #1 will move to entry #2). Once the queue is full, older alarms are
discarded from the queue as new alarms occur.
All entries in the alarm queue are retained if power is lost. Alarms are automatically cleared
when the alarm condition goes away.
The alarm queue can be cleared using the OIM by selecting “Clr Alarm Queue”, or by using
a PC software tool.
IOMM VFD-2 61
Page 62

Alarm Descriptions
Table 21, Alarm Descriptions, SP600
Alarm Type Description
Analog In
Loss
Bipolar
Conflict
Decel
Inhibit
Dig In
ConflictA
Dig In
ConflictB
Dig In
ConflictC
DigIn Bad
Value
Drive OL
Level 1
Drive OL
Level 2
Flux Amps
Ref Rang
IntDBRes
OvrHeat
IR Volts
Range
Ixo Vlt
Rang
MaxFreq
Conflict
Continued on next page.
An analog input is configured for alarm on signal loss and signal loss has
1
occurred.
Parameter 190 (Direction Mode) is set to Bipolar or Reverse Dis and one of
2
more of the following digital input functions is configured: Fwd/Rev or Run Fwd.
Note that the default is Reverse Dis.
The drive is being inhibited from decelerating.
Digital input functions are in conflict. Combinations marked with an (X) will
cause an alarm.
Acc2 / Dec2 Accel 2 Decel 2 Fwd / Rev
2
Acc2 / Dec2
Accel 2
Decel 2
Fwd / Rev
Digital input functions are in conflict. Combinations marked with an (X) will
cause an alarm
Start Stop–CF Run Run Fwd Fwd/Rev
Start
2
Stop–CF
Run
Run Fwd
Fwd / Rev
More than one physical input has been configured to the same input function.
Multiple configurations are not allowed for the following input functions:
Forward/Reverse Run Bus Regulation Mode B
Speed Select 1 Stop Mode B Acc2 / Dec2
2
Speed Select 2 OIM Control Accel 2
Speed Select 3 Stop Mode B Decel 2
Run Forward
2 Unsupported function selected in Digital In”x” Sel parameters (361-366).
The calculated IGBT temperature requires a reduction in PWM carrier
1
frequency. If Drive OL Mode (150) is disabled and the load is not reduced, an
overload fault will eventually occur.
The calculated IGBT temperature requires a reduction in Current Limit. If Drive
1
OL Mode (150) is disabled and the load is not reduced, an overload fault will
eventually occur.
2 Result of autotune procedure (61).
The drive has temporarily disabled the dynamic braking regulator because the
1
resistor temperature has exceeded a predetermined value.
The drive autotuning default is Calculate and the value calculated for IR Drop
2
Volts is not in the range of acceptable values. This alarm should clear when all
motor nameplate data is properly entered.
Motor leakage inductance is out of range.
The sum of Maximum Speed (82) and Overspeed Limit (83) exceeds Maximum
Freq (55). Raise Maximum Freq (55) or lower Maximum Speed (82) and/or
2
Overspeed Limit (83) so that the sum is less than or equal to Maximum Freq
(55).
X X
X
X
X X
X X
X X X
X
62 IOMM VFD-2
Page 63

Alarm Type Description
Motor Type (40) has been set to Sync Prm Mag or Sync Reluc, and one or
Motor Type
Cflct
more DC functions (for example, DC Boost, DC Brake, etc.) have been
2
activated. DC injection functions are imcompatible with synchronous motors
and may demagnetize them.
NP Hz
Conflict
Power
Loss
Prechrg
Actv
Fan/pump mode is selected in Torq Perf Mode (53), and the ratio of Motor NP
2
Hertz (43) to Maximum Freq (55) is greater than 26.
1 Drive has sensed a power line loss.
1 Drive is in the initial DC bus precharge state.
Sleep/Wake configuration error. When Sleep-Wake Mode [178] = Direct,
Sleep
Config
possible causes include: - Drive is stopped and Wake Level [180] < Sleep
Level [182] - Digital Inx Sel [361 to 366] is not set to one of the following:
Stop=CF, Run, Run Forward, or Run Reverse.
Speed Ref
Cflct
Under-
Voltage
VHz Neg
Slope
Waking
2 Speed Ref A Sel (90) or PI Reference Sel (126) is set to Reserved.
1
The bus voltage has dropped below a predetermined value.
Custom V/Hz mode has been selected in Torq Perf Mode (53) and the V/Hz
2
slope is negative.
The wake timer is counting toward a value that will start the drive.
Table 22, Alarm Descriptions (LF 2.0
NOTE: Ty pe, 1=Auto-resettable 2=Non-resettable 3=User-configurable
Alarm Type Description
Analog In Loss 1
Bipolar Conflict 2
Dig In ConflictA 2
Dig In ConflictB 2
An analog input is configured for alarm on signal loss and signal loss has
occurred.
Parameter 190 (Direction Mode) is set to Bipolar or Reverse Dis and one of more
of the following digital input functions is configured: Fwd/Rev, Run Fwd, Run Rev,
Jog Fwd, or Jog Rev.
Digital input functions are in conflict. Combinations marked with a will cause an
Acc2/Dec2
Accel2
Cecel2
Jog
Jog Fwd
Jog Rev
Fwd/Rev
Digital input functions are in conflict. Combinations marked with a will x cause an
Start
Start
Stop-CF
Run
Run Fwd
Run Rev
Jog
Jog Fwd
Jog Rev
Fwd/Rev
Acc2/
Dec2
x x x x x
x x x x x
x x x x
x x x x
x x
x x
x x
x x
Accel2 Cecel2 Jog
x x
x
x
x x
x
x
x x
Stop
-CF
Run
alarm.
alarm.
Run
Fwd
Continued next page.
Run
Rev
Jog
Jog
Fwd
Jog
Fwd
Jog
Rev
Jog
Rev
Fwd/R
ev
X
x
Fwd/
Rev
IOMM VFD-2 63
Page 64

Alarm Type Description
More than one physical input has been configured to the same input function.
Multiple configurations are not allowed for the following input functions:
Forward/Reverse Run Reverse
Dig In ConflictC 2
Drive OL Level 1 1
Drive OL Level 2 1
Flux Amps Ref
Rang
IntDBRes OvrHeat 1
IR Volts Range 2
MaxFreq Conflict 2
Motor Type Cflct 2
NP Hz Conflict 2
Power Loss 1 Drive has sensed a power line loss.
Prechrg Actv 1 Drive is in the initial DC bus precharge state.
Speed Ref Cflct 2 Speed Ref x Sel or PI Reference Sel is set to “Reserved”.
Under-Voltage 1 The bus voltage has dropped below a predetermined value.
VHz Neg Slope 2
2 Result of autotune procedure (61).
Speed Select 1 Jog Forward Acc2 / Dec2
Speed Select 2 Jog Reverse Accel 2
Speed Select 3 OIM Control Decel 2
Run Forward Stop Mode B Run
The calculated IGBT temperature requires a reduction in PW M carrier frequency.
If Drive OL Mode (150) is disabled and the load is not reduced, an overload fault
will eventually occur.
The calculated IGBT temperature requires a reduction in Current Limit. If Drive OL
Mode (150) is disabled and the load is not reduced, an overload fault will
eventually occur.
The drive has temporarily disabled the dynamic braking regulator because the
resistor temperature has exceeded a predetermined value.
The drive autotuning default is Calculate and the value calculated for IR Drop
Volts is not in the range of acceptable values. This alarm should clear when all
motor nameplate data is properly entered.
The sum of Maximum Speed (82) and Overspeed Limit (83) exceeds Maximum
Freq (55). Raise Maximum Freq (55) or lower Maximum Speed (82) and/or
Overspeed Limit (83) so that the sum is less than or equal to Maximum Freq (55).
Motor Type (90) has been set to Sync Prm Mag or Sync Reluc, and one or more
DC functions (for example, DC Boost, DC Brake, etc.) have been activated. DC
injection functions are incompatible with synchronous motors and may
demagnetize them.
Fan/pump mode is selected in Torq Perf Mode (53), and the ratio of Motor NP
Hertz (43) to Maximum Freq (55) is greater than 26.
Custom V/Hz mode has been selected in Torq Perf Mode (53) and the V/Hz slope
is negative.
Bus Regulation Mode
B
About Faults
Faults indicate conditions within the drive that require immediate attention. The drive
responds to a fault by initiating a coast-to-stop sequence and turning off power to the motor.
A flashing red LED indicates a fault has occurred and a fault signal will appear in the
chiller touchscreen. A steady red LED indicates that it is non-resettable.
Table 23, Fault Types
Type Fault Description
If the drive is running when this type of fault occurs, and Auto Rstrt
AutoReset/Run
1
(Not used on
McQuay units)
Non-
2
Resettable
User-
3
Configurable
Tries (174) is set to a value greater than 0, a user-configurable timer,
Auto Rstrt Delay (175) begins. When the timer reaches zero, the drive
attempts to automatically reset the fault. If the condition that caused the
fault is no longer present, the fault will be reset and the drive will be
restarted.
This type of fault normally requires drive or motor repair. The cause of
the fault must be corrected before the fault can be cleared. The fault will
be reset on power up after repair.
These faults can be enabled/disabled to either annunciate or ignore a
fault condition using Fault Config 1 (238).
64 IOMM VFD-2
Page 65

The drive indicates faults in the following ways:
• Ready LED on the drive cover (see section 12.3).
• Drive status parameters Drive Status 1 (209) and Drive Status 2 (210).
• Entries in the fault queue (see section 12.5.1).
• Pop-up screen on the LCD OIM. See figure 12.4. The screen displays:
• Fault number
• Fault name
• Time that has elapsed since fault occurred.
Figure 34, Sample Fault Screen
NOTES:
1. Press any F Key to acknowledge the fault
2. The fault screen is displayed until it is acknowledged by pressing any F-key or cleared in the
drive by other means.
on the LCD OIM
About the Fault Queue
The drive automatically retains a history of faults that have occurred in the fault queue.
The fault queue is accessed using the OIM or VS Utilities software.
The fault queue holds the eight most recent faults. The last fault to occur is indicated in
queue entry #1. As new faults are logged into the queue, existing fault entries are shifted
(for example, entry #1 will move to entry #2). Once the queue is full, older faults are
discarded from the queue as new faults occur.
All entries in the fault queue are retained if power is lost.
The Time Stamp
For each entry in the fault queue, the system also displays a fault code and time stamp
value. The time stamp value is the value of an internal drive-under-power timer at the time
of the fault. The value of this timer is copied to PowerUp Marker (242) when the drive
powers up. The fault queue time stamp can then be compared to the value in PowerUp
Marker to determine when the fault occurred relative to the last drive power up.
The time stamp is cleared when the fault queue is cleared.
IOMM VFD-2 65
Page 66

Clearing Faults
A fault condition can be cleared by the following:
Step 1. Press the ESC/Prog key or any F-Key to acknowledge the fault and remove the
fault pop-up from the LCD OIM screen.
Step 2. Address the condition that caused the fault. The cause must be corrected before the
fault can be cleared.
Step 3. After corrective action has been taken, clear the fault using one of the following:
• Setting Fault Clear (240) to Clear Faults (1).
• Press F1 (Cflt) from the fault queue screen.
• Issuing a Stop-Clear Faults command from the control source.
Resetting faults will clear the faulted status indication. If any fault condition still exists, the
fault will be latched, and another entry made in the fault queue.
Note that performing a fault reset does not clear the fault queue. Clearing the fault queue is
a separate action. See the Fault Clear (240) parameter description.
The table beginning on the following page, describes drive faults and corrective
actions. It also indicates the fault type as:
1 Auto-resettable 2 Non-resettable 3 User-configurable
Table 24, SP600 Fault Descriptions and Corrective Actions
Fault No. Type Description Action
Analog In
Loss
Anlg Cal
Chksum
Auto Rstrt
Tries
AutoTune
Aborted
DB
Resistance
Decel Inhibit 24 3
Drive
OverLoad
Excessive
Load
FluxAmpsRef
Rang
29 1,2
108 2
33 3
80
69
64
79
78
An analog input is configured to fault
on signal loss. A signal loss has
occurred. Configure with Anlg In 1, 2
Loss (324, 327).
The checksum read from the analog
calibration data does not match the
checksum calculated.
Drive unsuccessfully attempted to
reset a fault and resume running for
the programmed number of Auto Rstrt
Tries (174). Enable/disable with Fault
Config 1 (238).
The autotune procedure was canceled
by the user.
Resistance of the internal DB resistor
is out of range.
The drive is not following a
commanded deceleration because it is
attempting to limit bus voltage.
Drive rating of 110% for 1 minute or
150% for 3 seconds has been
exceeded.
Motor did not come up to speed in the
allotted time.
The value for flux amps determined by
the autotune procedure exceeds the
programmed Motor NP FLA (42).
1. Check parameters. 2. Check for
broken/loose connections at
inputs.
Replace drive.
Correct the cause of the fault and
manually clear.
Restart procedure.
Replace resistor.
1. Verify input voltage is within
drive specified limits. 2. Verify
system ground impedance follows
proper grounding techniques. 3.
Disable bus regulation and/or add
dynamic brake resistor and/or
extend deceleration time.
Reduce load or extend Accel Time
(140).
1. Uncouple load from motor. 2.
Repeat Autotune (61).
1. Reprogram Motor NP FLA (42)
with the correct motor nameplate
value. 2. Repeat Autotune (61).
Continued next page.
Fault No. Type Description Action
66 IOMM VFD-2
Page 67

Function
Loss
Ground
Fault
Heatsink
OvrTemp
HW Over
Current
Incompat
MCB-PB
I/O Comm
Loss
I/O Board
Fail
I/O
Mismatch
IR Volts
Range
Motor
Overload
Over
Speed
Limit
Over
Voltage
Parameter
Chksum
2 1 Function loss input is open. Check remote wiring.
13 1
8 1
12 1
106 2
121 2
122 Board failure.
120 Incorrect I/O board identified.
77
7 1, 3
25 1
5 1
100 2
Continued next page.
A current path to earth ground
greater than 25% of drive rating.
Heatsink temperature exceeds a
predefined value of 90°C (195°F).
The drive output current has
exceeded the hardware current
limit.
Drive rating information stored on
the power board is incompatible
with the Main Control board.
Loss of communication to I/O
board.
The drive autotuning default is
Calculate and the value calculated
for IR Drop Volts is not in the range
of acceptable values.
Internal electronic overload trip.
Enable/disable with Fault Config 1
(238).
Functions such as slip
compensation or bus regulation
have attempted to add an output
frequency adjustment greater than
that programmed in Overspeed
Limit (83).
DC bus voltage exceeded
maximum value.
The checksum read from the board
does not match the checksum
calculated.
Check the motor and external
wiring to the drive output
terminals for a grounded
condition.
1. Check for blocked or dirty
heat sink fins. Verify that
ambient temperature has not
exceeded 40°C (104°F) NEMA
Type 1 installations or 50°C
(122°F) for Open type
installations. 2. Check fan.
Check programming. Check
for excess load, improper DC
boost setting, DC brake volts
set too high or other causes of
excess current. Motor
dynamics cannot be
accommodated by autotuning.
Manual tuning of the current
loop required. Consult
technical support.
Load compatible version files
into drive.
Cycle power.
1. Cycle power. 2. If fault
repeats, replace I/O board
Restore I/O board to original
configuration, or If new
configuration is desired, reset
fault.
Re-enter motor nameplate
data.
An excessive motor load
exists. Reduce load so drive
output current does not
exceed the current set by
Motor NP FLA (42).
Remove excessive load or
overhauling conditions or
increase Overspeed Limit (83).
Monitor the AC line for high
line voltage or transient
conditions. Bus overvoltage
can also be caused by motor
regeneration. Extend the
ecal time or install dynamic
brake option.
1. Restore defaults. 2. Reload
user set if used.
IOMM VFD-2 67
Page 68

Fault No. Type Description Action
1. Clear the fault or cycle
power to the drive. 2. Program
the drive parameters as
needed.
Clear fault.
1. Check the wiring between
the drive and motor. 2. Check
motor for grounded phase. 3.
Replace drive.
1. Check the motor and drive
output terminal wiring for a
shorted condition. 2. Replace
drive.
1. If adapter was not
intentionally disconnected,
check wiring to the port.
Replace wiring, port expander,
adapters, Main Control board
or complete drive as required.
2. Check OIM connection.
1. Check communication
adapter board for proper
connection to external
network. 2. Check external
wiring to adapter on port. 3.
Verify external network fault.
Monitor the incoming AC line
for low voltage or line power
interruption.
1. Check for damaged output
transistors. 2. Replace drive.
Clear the fault or cycle power
to the drive.
1. Cycle power to the drive. 2.
If problem persists, replace
drive.
1. Restore defaults. 2.
Reprogram parameters.
Check load requirements and
Current Lmt Val (148) setting.
Params
Defaulted
Phase
Imbalance
Phase U to
Grnd
Phase V to
Grnd
Phase W to
Grnd
Phase UV
Short
Phase VW
Short
Phase UW
Short
Port 1-6 DPI
Loss
Port 1-6 Net
Loss
Power Loss 3 1, 3
Power Unit 70
Pwr Brd
Chksum1
Pwr Brd
Chksum2
Replaced
MCB-PB
Shear Pin 63 3
48
37
38
39
40
41
42
43
8186
7176
104
105 2
107 2
The drive was commanded to
write default values to
EEPROM.
Phase current displayed in
Imbalance Display (221) >
percentage set in Imbalance
Limit (49) for time set in
Imbalance Time (50).
A phase-to-ground fault has
been detected between the
drive and motor in this phase.
Excessive current has been
detected between these two
output terminals.
DPI port stopped
communicating. An attached
peripheral with control
capabilities via Logic Source Sel
(89) (or OIM control) was
removed. The fault code
indicates the offending port
number (81 = port 1, etc.)
The network card connected to
DPI port stopped
communicating. The fault code
indicates the offending port
number (71 = port 1, etc.)
DC bus voltage remained below
85% of nominal for longer than
Power Loss Time (185).
Enable/disable with Fault Config
1 (238).
One or more of the output
transistors were operating in the
active region instead of
desaturation. This can be
caused by excessive transistor
current or insufficient base drive
voltage.
The checksum read from the
EEPROM does not match the
checksum calculated from the
EEPROM data.
The checksum read from the
board does not match the
checksum calculated.
Main Control board was
replaced and parameters were
not programmed.
Programmed Current Lmt Val
(148) has been exceeded.
Enabled/disable with Fault
Config 1 (238).
68 IOMM VFD-2
Page 69

Fault No. Type Description Action
SW Over
Current
Trnsistr
OvrTemp
Under
Voltage
UserSet1
Chksum
UserSet2
Chksum
UserSet3
Chksum
36 1
9 1
4 1, 3
101 2
102 2
103 2
The drive output current has
exceeded the software current.
Output transistors have
exceeded their maximum
operating temperature.
DC bus voltage fell below the
minimum value of 160V DC at
200/240V input, 300V DC at
400/480V input or 375V DC at
575V input. Enable/disable with
Fault Config 1(233).
The checksum read from the
user set does not match the
checksum calculated.
Check for excess load,
improper DC boost setting. DC
brake volts set too high.
1. Check for blocked or dirty
heat sink fins. Verify that
ambient temperature has not
exceeded 40°C (104°F) for
NEMA Type 1 installations or
50°C (122°F) for Open type
installations. 2. Check fan.
Monitor the incoming AC line
for low voltage or power
interruption.
Re-save user set.
Table 25, LF 2.0 Fault Descriptions and Corrective Actions
Fault No. Type Description Action
1. Verify proper input voltage.
2. Check line sync board and
AC Line Lost 227 Input power Lost
An analog input is configured
Analog In
Loss
Auto Rstrt
Tries
AutoTune
Aborted
Auxiliary Input 2 1 Input is open. Check remote wiring.
Decel Inhibit 24 3
Drive
OverLoad
Excessive
Load
29 1 3
33 1
80
64
79
to fault on signal loss. A
signal loss has occurred.
Configure with Anlg In 1, 2
Loss (324, 327).
Drive unsuccessfully
attempted to reset a fault and
resume running for the
programmed number of Auto
Rstrt Tries (174).
Enable/disable with Fault
Config 1 (238).
The autotune procedure was
canceled by the user.
The drive is not following a
commanded deceleration
because it is attempting to
limit bus voltage.
Drive rating of 110% for 1
minute or 150% for 3
seconds has been exceeded.
Motor did not come up to
speed in the allotted time.
Continued next page.
fuse.
3. Check AC line I/O board.
4. 4. Verify connection between
boards.
1. Check parameters.
2. 2. Check for broken/loose
connections at inputs.
Correct the cause of the fault and
manually clear.
Restart procedure.
1. Verify input voltage is within
drive specified limits.
2. Verify system ground
impedance follows proper
grounding techniques.
3. Disable bus regulation and/or
add dynamic brake resistor
and/or extend deceleration
time.
Reduce load or extend Accel Time
(140).
1. Uncouple load from motor.
2. Repeat Autotune (61).
IOMM VFD-2 69
Page 70

Fault No. Type Description Action
The value for flux amps
FluxAmpsRe
f Rang
Ground Fault 13 1
High AC Line 222 Input line voltage is too high.
HW
OverCurrent
I/O Board
Comm Loss
I/O Board
Fail
I/O Board
Mismatch
Incompat
MCB-PB
Input Amp
Imbalance
Input Volt
Imbalance
Inverter Dsat
U, V, W
Inverter
OverCurrent
U, V, W
Invtr Base
Temp
Invtr Gate
Kill
Invtr IGBT
Temp
IR Volts
Range
Line
Frequency
Low DC Bus 223 The bus voltage is too low. Verify proper input voltage.
Motor I
Imbalance
Motor
Overload
78
12 1
121 2
122 Board failure.
120
106 2
225
226
200
201
202
203
204
205
8 1
207
9 1
77
228
37
7 1 3
determined by the autotune
procedure exceeds the
programmed Motor NP FLA
(42).
A current path to earth
ground in excess of 7% of
drive rated amps has been
detected at one or more of
the drive output terminals.
The drive output current has
exceeded the hardware
current limit.
Loss of communication to
I/O board.
Incorrect I/O board
identified.
Drive rating information
stored on the power board is
incompatible with the Main
Control board.
Input phase current
imbalance exceeded limits.
Input voltage imbalance
exceeded limits.
High current was detected in
an IGBT.
High current was detected in
an IGBT.
Base temperature exceeded
limit.
Inverter gate kill contact is
open.
Output transistors have
exceeded their maximum
operating temperature.
The drive autotuning default
is Calculate, and the value
calculated for IR Drop Volts
is not in the range of
acceptable values.
Line frequency not in the
range of 47-63 Hz.
Phase current displayed in
Imbalance Display (221) >
percentage set in Imbalance
Limit (49) for time set in
Imbalance Time (50).
Internal electronic overload
trip. Enable/disable with
Fault Config 1 (238).
1. Reprogram Motor NP FLA (42)
with the correct motor
nameplate value.
2. Repeat Autotune (61).
Check the motor and external
wiring to the drive output terminals
for a grounded condition.
Reduce input voltage to meet
specification of 480 ±10%.
Check programming. Check for
excess load, improper DC boost
setting, DC brake volts set too high
or other causes of excess current.
Cycle power.
1. Cycle power.
2. If fault repeats, replace I/O
board
Restore I/O board to original
configuration, or If new
configuration is desired, reset fault.
Load compatible version files into
drive.
Check for loose connection in input
power wiring.
Check for problem in input power
distribution.
1. Check for loose connection in
IGBT wire harness.
2. Check IGBTs.
1. Verify proper motor data is
entered.
2. Reduce current limit.
Check for proper temperature and
flow rate of coolant.
Close gate kill contact.
Check for proper temperature and
flow rate of coolant.
Re-enter motor nameplate data.
Verify connection between AC Line
Sync and AC Line I/O boards.
Clear fault.
An excessive motor load exists.
Reduce load so drive output
current does not exceed the
current set by Motor NP FLA (42).
70 IOMM VFD-2
Page 71

OverSpeed
Limit
OverVoltage 5 1
Parameter
Chksum
Params
Defaulted
Phase U to
Grnd
Ph V
To Grnd
Phase W to
Grnd
Phase UV
Short
Phase VW
Short
Phase UW
Short
Port 1-5 DPI
Loss
Port 1-5 Net
Loss
Power Loss 3
Precharge
closed
Precharge
open
25 1
100 2
48
38
39
40
41
42
43
81
85
71
75
233
234
Functions such as slip
compensation or bus
regulation have attempted to
add an output frequency
adjustment greater than that
programmed in Overspeed
Limit (83).
DC bus voltage exceeded
maximum value.
The checksum read from the
board does not match the
checksum calculated.
The drive was commanded
to write default values to
EEPROM.
A phase-to-ground fault has
been detected between the
drive and motor in this
phase.
Excessive current has been
detected between these two
output terminals.
DPI port stopped
communicating. An attached
peripheral with control
capabilities via Logic Source
Sel (89) (or OIM control) was
removed. The fault code
indicates the offending port
number (81 = port 1, etc.)
The network card connected
to DPI port stopped
communicating. The fault
code indicates the offending
port number (71 = port 1,
etc.)
DC bus voltage remained
below 85% of nominal for
1
longer than Power Loss
3
Time (185). Enable/disable
with Fault Config 1 (238).
Precharge was closed when
it should be open.
Precharge was open when it
should be closed.
Remove excessive load or
overhauling conditions or increase
Overspeed Limit (83).
Monitor the AC line for high line
voltage or transient conditions. Bus
overvoltage can also be caused by
motor regeneration. Extend the
ecal time or install dynamic brake
option.
1. Restore defaults.
2. Reload user set if used.
1. Clear the fault or cycle power to
the drive.
2. Program the drive parameters
as needed.
1. Check the wiring between the
drive and motor.
2. Check motor for grounded
phase.
3. Replace drive.
1. Check the motor and drive
output terminal wiring for a shorted
condition.
2. Replace drive.
1. If module was not intentionally
disconnected, check wiring to the
port. Replace wiring, port
expander, modules, Main Control
board or complete drive as
required.
2. Check OIM connection.
1. Check communication board for
proper connection to external
network.
2. Check external wiring to module
on port.
3. Verify external network fault.
Monitor the incoming AC line for
low voltage or line power
interruption.
1. Check AUX contacts on
precharge.
2. Check input bit 0 in rectifier
parameter 216 to view status of
input.
3. Check wiring.
1. Check AUX contacts on
precharge.
2. Check input bit 0 in rectifier
parameter 216 to view status of
input.
3. Check wiring.
IOMM VFD-2 71
Page 72

Pwr Brd
Chksum1
104
The checksum read from the
EEPROM does not match
the checksum calculated
from the EEPROM data.
Clear the fault or cycle power to
the drive.
Pwr Brd
Chksum2
Rctfr I/O
Board
Rctfr Not OK 232
Rctfr Over
Volt
Rctfr Pwr
Board
Rectifier
Base Temp
Rectifier
Dsat U, V, W
Rectifier
Ground Fault
Rectifier
IGBT Temp
Rectifier IOC
U, V, W
Rectifier
Checksum
Reactor
Temp
Rectifier IT
Overload
Rectifier I2T
Overload
Replaced
MCB-PB
Ride Thru
Abort
105 2
236
224 The bus voltage is too high.
235
217
208
209
210
216
218
211
212
213
229
214
219
220
107 2
221 Input power loss timed out.
The checksum read from the
board does not match the
checksum calculated.
Loss of communication to
I/O board.
Board failure.
A fault was detected in the
rectifier other than one
specifically decoded.
Drive rating information
stored on the power board is
incompatible with the Main
Control board.
The checksum read from the
board does not match the
checksum calculated.
Excessive rectifier
temperature measured.
Rectifier overcurrent
High current was detected in
an IGBT.
Excessive ground current
measured.
Excessive calculated IGBT
temperature.
The checksum read from the
board does not match the
checksum calculated.
Temperature switch in
reactor opened.
Short-term current rating of
rectifier exceeded.
Long-term current rating of
rectifier exceeded.
Main Control board was
replaced and parameters
were not programmed.
1. Cycle power to the drive.
2. If problem persists, replace
drive.
Cycle power.
1. Cycle power.
2. 2. If fault repeats, replace
I/O board
Look at rectifier parameter 243 to
see fault code.
Monitor the AC line for high line
voltage or transient conditions.
Bus overvoltage can also be
caused by motor regeneration.
Extend the decel time or install
dynamic brake option.
Load compatible version files into
drive.
1. Cycle power to the drive.
2. If problem persists, replace
drive.
Check for proper temperature and
flow rate of coolant.
1. Check for loose connection in
IGBT wire harness.
2. Check IGBTs.
Check for grounded input wiring.
Check for proper temperature and
flow rate of coolant.
1. Verify proper motor data is
entered.
2. Reduce current limit.
1. Restore defaults.
2. Reload user set if used.
Check for proper temperature and
fan operation.
Low input voltage can result in
increased current load. Provide
proper input voltage to the drive.
Low input voltage can result in
increased current load. Provide
proper input voltage to the drive.
1. Restore defaults.
2. Reprogram parameters.
1. Verify input power and
connections.
2. Check Line Sync board.
3. Check AC Line I/O board.
Continued next page.
Fault No. Type Description Action
Shear Pin 63 3 Programmed Current Lmt Check load requirements and
72 IOMM VFD-2
Page 73

SW
OverCurrent
UnderVoltage 4 1 3
UserSet1
Chksum
Set2 102 2
Set3 103 2
36 1
101 2
Troubleshooting
Val (148) has been
exceeded. Enabled/disable
with Fault Config 1 (238).
The drive output current has
exceeded the software
current.
DC bus voltage fell below
the minimum value of 407V
DC at 400/480V input or
204V DC at 200/240V input.
Enable/disable with Fault
Config 1(233).
The checksum read from
the user set does not match
the checksum calculated.
Current Lmt Val (148) setting.
Check for excess load, improper
DC boost setting. DC brake volts
set too high.
Monitor the incoming AC line for
low voltage or power interruption.
Re-save user set.
Common Symptoms and Corrective Actions
Table 26, No Start From Terminal Block Logic
Indication(s) Cause(s) Corrective Action
Clear fault: • Press OIM stop key if
that OIM is control source. •Cycle
Flashing red
Ready LED.
Incorrect
operation from
the terminal
block.
Continued next page.
Drive is faulted.
Incorrect input wiring. • 2-wire
control requires Run, Run
Forward, or Run Reverse input(s).
• 3-wire control requires Start and
Stop inputs • Jumper from terminal
7 to 8 is required.
Incorrect digital input
programming. • Mutually exclusive
choices have been made. • 2-wire
and 3-wire programming may be
conflicting. • Exclusive functions
(i.e, direction control) may have
multiple inputs configured. • Stop if
factory default and is not wired or
is open. • Start or Run
programming may be missing.
Logic Source Sel is not set to
Terminal Blk.
power. • Set Fault Clear (240) to 1. •
Toggle terminal block stop or
terminal block reset digital input if
terminal block is the control source.
Wire inputs correctly and/or install
jumper.
Program Digital In”x” Sel (361-366)
for correct inputs.
Set Logic Source Sel to Terminal
Blk.
IOMM VFD-2 73
Page 74

Table 27, No Start From Terminal Block Logic (Continued)
Indication(s) Cause(s) Corrective Action
Incorrect digital input
programming.
Flashing yellow
Ready LED and
DigIn CflctB
indication on
LCD OIM.
Drive Status 2.
(210) shows
type 2 alarm(s).
• Mutually exclusive choices
have been made.
• 2-wire and 3-wire
programming may be
conflicting.
• Exclusive functions (i.e,
direction control) may have
multiple inputs configured.
• Stop if factory default and is
not wired or is open.
• Start or Run programming
may be missing.
Program Digital In”x” Sel (361-366)
to resolve conflicts.
Remove multiple selections for the
same function
Install stop button to apply a signal
at stop terminal.
Table 28, No Start From OIM
Indication Cause(s) Corrective Action
Drive is programmed for 2-wire
control and Logic Source Sel (89)
None
Flashing or
steady red Ready
LED.
Flashing yellow
Ready LED.
Drive Status 1
(209) indicates
logic control
source.
= All Ports. OIM start and network
start are disabled for 2-wire
control.
Active fault. Reset fault.
Enable input is open. Close terminal block enable input.
The terminal block stop input is
open and control source is set to
All Ports.
Start inhibit bits are set. Check status in Start Inhibits (214).
Logic Source Sel (89) is not equal
to the desired OIM (Local OIM,
DPI Port 2, or DPI Port 3). DPI
Port 2 is required for remote OIM.
If 2-wire control is required, no
action is necessary. If 3-wire control
is required, program Digital Inx Sel
(361-366) for correct inputs.
Close terminal block stop input.
Verify setting of Logic Source Sel
(89). The OIM Control digital input
effectively sets the control source to
the lowest attached OIM port.
Table 29, No Response to Changes in Speed Command
Indication Cause(s) Corrective Action
LCD OIM Status
Line indicates “At
Speed” and
output is 0 Hz.
None
None
Speed reference
from analog input
No value is coming from the
source of the command.
Incorrect reference source has
been programmed.
Incorrect reference source is
being selected via remote device
or digital inputs.
Improper reference common
signal wiring.
1. If the source is an analog input,
check wiring and use a meter to
check for presence of signal. 2.
Check Commanded Freq (2) for
correct source.
1. Check Speed Ref Source (213)
for the source of the speed
reference. 2. Reprogram Speed Ref
A Sel (90) for correct source.
1. Check Drive Status 1 (209), bits
12 - 15 for unexpected source
selections. 2. Check Dig In Status
(216) to see if inputs are selecting
an alternate source. 3. Reprogram
digital inputs to correct Speed Sel x
option.
1. Verify that common is properly
connected to AnlgIn(-) terminal.
74 IOMM VFD-2
Page 75

Table 30, Motor Will Not Accelerate to Commanded Speed
Indication Cause(s) Corrective Action
Acceleration time is
excessive.
Drive is forced into
current limit,
slowing or stopping
acceleration.
Speed command
source or value is
not as expected.
Programming is
preventing the
drive output from
exceeding limiting
values.
Incorrect value in Accel Time “x”
(140, 141).
Excess load or short
acceleration time.
Improper speed command.
Incorrect programming.
Reprogram Accel Time “x” (140,
141).
Check Drive Status 2 (210), bit 10 to
see if the drive is in current limit.
Remove excess load or reprogram
Accel Time “x” (140, 141).
Check for the proper speed
command using steps 1 through 7 in
table 12.11.
Check Maximum Speed (82) and
Maximum Freq (55) to insure that
speed is not limited by
programming.
Table 31, Motor Operation is Unstable
Indication Cause(s) Corrective Action
Motor data was incorrectly
None
entered or autotune was not
performed.
Table 32, Stopping the Drive Results in a Decel Inhibit Fault
1. Correctly enter motor nameplate
data. 2. Perform static or rotate
autotune procedure (61).
Indication Cause(s) Corrective Action
Decel Inhibit fault
screen.
LCD status line
indicates Faulted.
The bus regulation feature is
enabled and is halting
deceleration due to excessive
bus voltage. Excess bus voltage
is normally due to excessive
regenerated energy or unstable
AC line input voltages.
Internal timer has halted drive
operation.
1. Reprogram bus regulation
(parameters161 and 162) to
eliminate any Adjust Freq
selection.
2. Disable bus regulation
(parameters 161 and162) and
add a dynamic brake.
3. Correct AC input line instability
or add an isolation transformer.
4. Reset drive
Troubleshooting the Drive w/ the LCD OIM
The LCD OIM provides immediate visual notification of alarm or fault conditions as well
as the following diagnostic information:
• Entries in the fault queue
• Fault parameters
• Drive status parameters
• Selected device version and status information
• OIM version information
Accessing the Fault Queue
The drive automatically retains a history of the last eight faults that have occurred in the
fault queue.
To access the fault queue, press the F4 key at the process display screen, or see Figure 35 to
access the fault queue from the Main Menu.
IOMM VFD-2 75
Page 76

Figure 35, Accessing the Fault Queue
Figure 36, Sample Fault Queue Entry
The drive can be reset (as if the power were cycled) by pressing the F3 (Dres) function
key while in the "View Fault Queue" screens. The reset function is active only while
the drive is stopped. During a reset, drive communication with peripheral devices will
stop until the reset function completes.
CAUTION:
Pressing F3 (Dres) will immediately cause the drive to be reset. This may result
in communication errors in other devices attached to the drive which could
result in machine damage.
76 IOMM VFD-2
Page 77

Operation, Large A/C, PF700H
The status of the drive can be viewed on the Human Interface Module (HIM) or on
various LEDs.
Using the Interface
Figure 37, Human Interface Module (HIM)
The interface module can be removed to provide security against tampering with the
control. To do so, first press the ALT key, release it and then press the left arrow
(REMOVE) key, This procedure allows the module to be removed without causing a
fault. Then press the tab on top of the module and slide the module upwards and out.
One function of the module is to program the various parameters that control the
VFD/chiller operation. Programming is to be done only by service technicians who are
factory trained and authorized to work on VFDs.
The module is used by the operator to troubleshoot the drive by viewing faults, and to
clear faults after corrective action has been taken, as explained later in this section.
IOMM VFD-2 77
Page 78

Figure 38, LCD Display, Main Menu
LEDs
Illumination of a yellow LED indicates the presence of an alarm, a red LED indicated a
fault.
Viewing Faults and Alarms
The primary area of interest to the operator is viewing drive alarms and faults. Alarms are
problems that do not shut down the drive/compressor. They may eventually turn into faults,
which do stop the compressor.
From the main menu, use the Up or Down arrows,
Figure 38. Press the Enter key,
to select this menu. Then use these navigating keys to
reach a desired menu as shown in Figure 39.
or ,to select Diagnostics. See
78 IOMM VFD-2
Page 79

Figure 39, HIM Menu Structure
IOMM VFD-2 79
Page 80

Using the LEDs
Drive LEDs
Figure 40, Front Panel LED Indications
# Name Color State Description
PWR
1
(Power)
PORT(1) Green –
MOD(1) Yellow –
2
NET A(1) Red –
Green Steady
NET B(1) Red –
Illuminates when power is
applied to the drive.
Status of DPI port internal
communications (if present).
Status of communications
module (when installed).
Status of network (if
Status of secondary network
(if connected).
connected).
This section provides information to guide you in
troubleshooting the PF 700H control family. Included is a
listing and description of drive faults (with possible solutions,
when applicable) and alarms.
Faults and Alarms
A fault is a condition that stops the drive. There are three fault types:
Table 33, Fault Types
Type Fault Description
When this type of fault occurs, and [Auto Rstrt Tries] is set to a value
1
2
3
Auto-Reset
Run
Non-
Resettable
User
Configurable
An alarm is a condition that, if left untreated, may stop the drive. There are two alarm
types:
greater than “0,” a user-configurable timer, [Auto Rstrt Delay] begins.
When the timer reaches zero, the drive attempts to automatically reset
the fault. If the condition that caused the fault is no longer present, the
fault will be reset and the drive will be restarted.
This type of fault normally requires drive or motor repair. The cause of
the fault must be corrected before the fault can be cleared. The fault will
be reset on power up after repair
These faults can be enabled/disabled to annunciate or ignore a fault
condition.
Table 34, Alarm Types
Type Alarm Description
1
2
User
Configurable
Non-
Configurable
These alarms can be enabled or disabled through [Alarm Config 1]. It is
recommended that factory setting not be changed.
These alarms are always enabled.
Drive Status
The condition or state of the drive is constantly monitored. Any changes will be indicated
through the LEDs and/or the Human Interface module (HIM).
Clearing Alarms
Alarms clear automatically when the condition that caused the alarm is no longer present.
80 IOMM VFD-2
Page 81

HIM Indication
The LCD HIM also provides visual notification of a fault or alarm condition on the top line.
Manually Clearing Faults
Table 35, Fault/Alarm Types, Description and Actions
NOTE: See Table 33 and Table 34 for definition of fault/alarm types.
No. Name
1 PrechargeActv 1
2 Auxiliary In 1 Auxiliary input interlock is open. Check remote wiring.
3 Power Loss 1, 3 1
Fault
Alarm
Drive received a start command while in
the DC bus precharge state.
DC bus voltage remained below [Power
Loss Volts] for longer than [Power Loss
Time]. Enable/Disable with [Fault Config 1]
Continued next page.
Description Action (if appropriate)
Monitor the incoming AC
line for low voltage or line
power interruption.
IOMM VFD-2 81
Page 82

No. Name
4 UnderVoltage 1, 3 1
5 OverVoltage 1
6 Motor Stall 1
7 MotorOverload 1, 3
8 HeatsinkOvrTp 2 1
9 IGBT OverTemp 1
10 System Fault 2
12 OverCurrent 1
13 Ground Fault 1
14 InverterFault 2
15 Load Loss 3 1
16 Motor Therm 3 1
17 Input Phase 3 1
21 OutPhasMissng 2
22 NP Hz Cnflct 2
23 MaxFreqCnflct 2
Fault
Alarm
Description Action (if appropriate)
DC bus voltage fell below
the minimum value of
333V for 400/480V drives
and 461V for 600/ 690V
drives. Enable/ Disable
with [Fault Config 1]
DC bus voltage exceeded
maximum value.
Motor is operating at high
current and low frequency
and is not accelerating.
Internal electronic
overload trip.
Enable/Disable with
[Fault Config 1).
Heatsink temperature
exceeds maximum
allowable value. 85
degrees C = Alarm 90
degrees C = Fault
Output transistors have
exceeded their maximum
operating temperature
due to excessive load.
Hardware problem exists
in the power structure.
The drive output current
has exceeded the
hardware current limit.
A current path to earth
ground greater than 25%
of drive rating. Ground
fault level is 50% of the
drive's heavy duty current
rating. The current must
appear for 800ms before
the drive will fault.
Hardware problem in the
power structure.
Option board thermistor
input is greater than limit.
One input line phase
missing.
Zero current in one output
motor phase.
Fan/pump mode is selected in [Motor Cntl Sel] and the ratio of [Motor
NP Hertz] to [Maximum Freq] is greater than 26.
The sum of [Maximum Speed] and [Overspeed Limit] exceeds
[Maximum Freq]. Raise [Maximum Freq] or lower [Maximum Speed]
and/or [Overspeed Limit] so that the sum is less than or equal to
[Maximum Freq].
Monitor the incoming AC line for low
voltage or power interruption.
Monitor the AC line for high line voltage
or transient conditions. Bus overvoltage
can also be caused by motor
regeneration. Extend the decel time or
install dynamic brake option.
1. Run Autotune 2. Reduce Load
1. Run Autotune 2. Verify settings of
[Motor Overload Factor] and [Motor
Overload Frequency]. 3. Reduce load so
drive output current does not exceed the
current set by [Motor NP FLA].
1. Verify that maximum ambient
temperature has not been exceeded. 2.
Check fan. 3. Check for excess load. 4.
Check carrier frequency
1. Verify that maximum ambient
temperature has not been exceeded. 2.
Check fan. 3. Check for excess load.
1. Cycle power. 2. Replace drive.
Check programming. Check for excess
load, improper DC boost setting, DC
brake volts set too high or other causes
of excess current. Check for shorted
motor leads or shorted motor.
Check the motor and external wiring to
the drive output terminals for a grounded
condition.
1. Cycle power. 2. Replace drive.
1. Check user-supplied fuses 2. Check
AC input line voltage.
1. Check motor wiring. 2. Check motor
for open phase.
Continued on next page.
82 IOMM VFD-2
Page 83

No. Name
24 Decel Inhibit 3 1
25 OverSpd Limit 1
26 VHz Neg Slope 2 [Motor Cntl Sel] = “Custom V/Hz” & the V/Hz slope is negative.
27 SpdRef Cnflct 2 [Speed Ref x Sel] or [PI Reference Sel] is set to “Reserved”.
28 BrakResMissing 2 No brake resistor detected.
Fault
Alarm
Drive cannot follow
commanded decel due to bus
limiting.
Functions such as Slip
Compensation or Bus
Regulation have attempted to
add an output frequency
adjustment greater than that
programmed in [Overspeed
Limit].
Description Action (if appropriate)
1. Verify that input voltage is
within specified limits. 2. Verify
that system ground impedance
follows proper grounding
techniques. 3. Disable bus
regulation and/or add dynamic
brake resistor and/or extend
deceleration time.
Remove excessive load or
overhauling conditions or
increase [Overspeed Limit].
1. Program [Bus Reg Mode x] to
not use brake. 2. Install brake
resistor.
An analog input is configured
29 Anlg In Loss 1, 3 1
30 MicroWatchdog 2 1
32 Fan Cooling 3
33 AutoReset Lim 2
34 CAN Bus Flt 1
37 HeatsinkUndTp 1
44 Device Change 2
45 Device Add 2 New option board added. Clear fault.
47 NvsReadChksum 2
to fault on signal loss. A signal
loss has occurred. Configure
with [Anlg In 1, 2 Loss]
Microprocessor watchdog
timeout.
Fan is not energized at start
command.
Drive unsuccessfully
attempted to reset a fault and
resume running for the
programmed number of [Flt
RstRun Tries]. Enable/Disable
with [Fault Config 1]
Sent message not
acknowledged.
Ambient temperature is too
low.
New power unit or option
board installed of different
type.
Error reading [Elapsed MWh]
and [Elapsed Run Time] from
EEPROM.
1. Check parameters. 2. Check
for broken/loose connections at
inputs.
1. Cycle Power. 2. Replace
control.
Correct the cause of the fault and
manually clear.
1. Cycle Power. 2. Replace
control.
Raise ambient temperature.
Clear fault and reset drive to
factory defaults.
48 ParamsDefault 2
50 MotorCalcData 2
54 Zero Divide 2
The drive was commanded to
write default values to
EEPROM.
Incorrect motor nameplate
data.
This event called from
arithmetical functions if divider
is zero.
1. Clear the fault or cycle power
to the drive. 2. Program the drive
parameters as needed.
Check motor nameplate data.
1. Cycle Power. 2. Replace
control.
Continued on next page.
IOMM VFD-2 83
Page 84

No. Name
63 Shear Pin 3
65 I/O Removed 2 Option board removed.
70 Power Unit 2
71 Periph Loss 2
81 Port DPI Loss 2
Fault
Alarm
Programmed [Current Lmt Val]
has been exceeded.
Enable/Disable with [Fault
Config 1]
One or more of the output
transistors were operating in the
active region instead of
desaturation. This can be
caused by excessive transistor
current or insufficient base drive
voltage.
The communications card has a
fault on the network side.
DPI port stopped
communicating. A SCANport
device was connected to a drive
operating DPI devices at 500k
baud.
Description Action (if appropriate)
Check load requirements and
[Current Lmt Val] setting.
1. Clear fault.
1. Check DPI device event queue
and corresponding fault
information for the device.
1. If adapter was not intentionally
disconnected, check wiring to the
port. Replace wiring, port
expander, adapters, Main Control
Board or complete drive as
required. 2. Check HIM
connection. 3. If an adapter was
intentionally disconnected and the
[Logic Mask] bit for that adapter is
set to “1”, this fault will occur. To
disable this fault, set the [Logic
Mask] bit for the adapter to “0.”
94 Hardware Enbl
95 AutoT Rs Stat 2 Autotune Rs Static Test failed.
96 AutoT Lm Rot 2 Autotune Lm rotate test failed.
97 AutoT MagRot 2
98 AutoT Saturat 2
99 UserSet Timer 2
100 Param Chksum 2
104 PwrBrd Chksum 2
Enable signal missing from
control terminal block.
Autotune magnetizing current
rotate test failed.
Autotune saturation curve test
failed.
User Set load or save not
completed in less than 5 sec.
The checksum read from the
board does not match the
checksum calculated.
The checksum read from the
EEPROM does not match the
checksum calculated from the
EEPROM data.
Continued next page.
1. Check control wiring. 2. Check
position of hardware enable
jumper. 3. Check digital input
programming.
1. Verify that motor is not rotating
when autotune is enabled. 2.
Check motor connections.
1. Check motor nameplate data. 2.
Check motor connections. 3.
Verify that Accel Time < (Base
Speed/40) x 33 sec. Note: 33 sec.
= time limit to bring motor to 40
Hz.
1. Check motor nameplate data. 2.
Check motor connections. 3.
Verify that Accel Time < (Base
Speed/40) x 33 sec. (see above).
1. Check motor nameplate data. 2.
Check motor connections.
Replace main control.
1. Restore defaults. 2. Cycle
power. 3. Reload User Set if used.
1. Cycle power. 2. Replace drive.
84 IOMM VFD-2
Page 85

No. Name
Fault
Alarm
Description Action (if appropriate)
Drive rating information stored
106 MCB-PB Config 2
on the power board is
incompatible with the main
1. Reset fault or cycle power. 2.
Replace control board.
control board.
107 New IO Option 2
New option board added to
control.
1. Restore defaults. 2. Reprogram
parameters.
113 Fatal App 2 Fatal Application error. 1. Replace control board.
114 AutoT Enable 2
Autotune enabled but not
started.
Press the Start key within 20 seconds
of enabing autotune
120 I/O Change 2 Option board replaced. Reset Fault.
121 I/O Comm Loss 2
.I/O Board lost
communications with the Main
Control Board.
Check connector. Check for induced
noise. Replace I/O board or Main
Control Board.
Digital input functions are in conflict. Combinations marked with a “X” will
133 DigIn CnflctA 2
cause an alarm. * Jog 1 and Jog 2
Acc2/
Dec2
Acc2
Dece2
Acc2/
Dec2
Acc2 Dece2 Jog*
X X
X
X
Jog
Jog
Fwd
Rev
Fwd/
Rev
134
DigIn CnflctB 2
135 DigIn CnflctC 2
Continued on next page.
Jog*
Jog
Fwd
Jog
Rev
Fwd/
Rev
X X
X X
X X
X X
.A digital Start input has been configured without a Stop input or other
functions are in conflict. combinations that conflict are marked with a “X ”
and will cause an alarm.
Stop
Start
Start
Stop
-CF
Run
Run
Fwd
Run
Rev
Jog*
Jog
Fwd
Jog
Rev
Fwd/
Rev
-CF
X X X X X
X X X X X
X X X X
X X X X
X X
X X
X X
X X
* Jog1 and Jog 2
Run
Run
Fwd
Run
Rev
Jog*
Jog
Fwd
Jog
Rev
Fwd/
Rev
More than one physical input has been configured to the same input
function. Multiple configurations are not allowed for the following inputs
Forward/Reverse Run Reverse Bus Regulation Mode B
Speed Select 1 Jog Forward Acc2 / Dec2
Speed Select 2 Jog Reverse Accel 2
Speed Select 3 Run Decel 2
Run Forward Stop Mode B
IOMM VFD-2 85
Page 86

No. Name
136 BipolarCnflct . 2
143 TB Man Conflict 2
147 Start AtPwrUp 1
148 IntDB OvrHeat 1
149 Waking 1 The W ake timer is counting toward a value that will start the drive.
150 Sleep Config 2
Fault
Alarm
Parameter 190 [Direction Mode] is set to “Bipolar” or “Reverse Dis” and
one or more of the following digital input functions is configured:
“Fwd/Reverse,” “Run Forward,” “Run Reverse,” “Jog Forward” or “Jog
Reverse.”
[TB Man Ref Sel] is using an
analog input that is programmed
for another function.
[Start At PowerUp] is enabled. Drive may start at any time within 10
seconds of drive powerup.
The drive has temporarily disabled the DB regulator because the resistor
temperature has exceeded a predetermined value.
Sleep/Wake configuration error. With [Sleep-Wake Mode] = “Direct,”
possible causes include: drive is stopped and [Wake Level] < [Sleep
Level].“Stop=CF,” “Run,” “Run Forward,” or “Run Reverse.” is not
configured in [Digital Inx Sel].
Description Action (if appropriate)
Check parameter settings to avoid
problem.
Table 36, Fault/Alarm Cross Reference
Name No. Fault Alarm Name No. Fault Alarm
Anlg In Loss 29 X X MCB-PB Config 106 X
AutoReset Lim 33 X MicroWatchdog 30 X
AutoT Enable 114
AutoT Lm Rot 96
AutoT MagRot 97
AutoT Rs Stat 95
AutoT Saturat 98
Auxiliary In 2
BipolarCnflct 136
BrakResMissng 28 X OutPhasMissng 21 X
CAN Bus Flt 34
Decel Inhibit 24
Device Add 45
Device Change 44
DigIn CnflctA 133
DigIn CnflctB 134
DigIn CnflctC 135 X Port DPI Loss 81 X
Fan Cooling 32
Fatal App 113
Ground Fault 13
Hardware Enbl 94
HeatsinkOvrTp 8
HeatsinkUndTp 37
I/O Change 120 X SpdRef Cnflct 27 X
I/O Comm Loss 121
I/O Removed 65
IGBT OverTemp 9
Input Phase 17 X X UnderVoltage 4 X X
IntDB OvrHeat 148
InverterFault 14 X VHz Neg Slope 26 X
Load Loss 15 X X Waking 149 X
MaxFreqCnflct 23
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
Motor Stall 6
Motor Therm 16
MotorCalcData 50
MotorOverload 7
New IO Option 107
NP Hz Cnflct 22
NvsReadChksum 47
OverCurrent 12
OverSpd Limit 25
OverVoltage 5
Param Chksum 100
ParamsDefault 48
Periph Loss 71
Power Loss 3
Power Unit 70
PrechargeActv 1
PwrBrd Chksum 104
Shear Pin 63
Sleep Config 150
Start AtPwrUp 147
System Fault 10
TB Man Conflict 143
UserSet Timer 99
Zero Divide 54
X
X X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
X
86 IOMM VFD-2
Page 87

Troubleshooting
Table 37, No Start
Drive does not Start from Start or Run Inputs wired to the terminal block.
Cause(s) Indication Corrective Action
Clear fault. • Press Stop • Cycle
Drive is Faulted Flashing red status light
Incorrect input wiring. See Installation
Manual for wiring examples.
• 2 wire control requires Run, Run
Forward, Run Reverse or Jog input.
• 3 wire control requires Start and Stop
inputs.
• Jumper from terminal 25 to 26 is
required.
Incorrect digital input programming.
• Mutually exclusive choices have been
made (i.e., Jog and Jog Forward).
• 2 wire and 3 wire programming may be
conflicting.
• Exclusive functions (i.e, direction control)
may have multiple inputs configured.
• Stop is factory default and is not wired.
None
None
Flashing yellow status
light and “DigIn CflctB”
indication on LCD HIM.
[Drive Status 2] shows
type 2 alarm(s).
power • Set [Fault Clear] to 1 •
“Clear Faults” on the HIM
Diagnostic menu.
Wire inputs correctly and/or
install jumper.
Program [Digital Inx Sel] for
correct inputsStart or Run
programming may be missing.
Program [Digital Inx Sel] to
resolve conflicts Remove
multiple selections for the same
function. Install stop button to
apply a signal at stop terminal.
Table 38, No Start from HIM
Drive does not Start from HIM.
Cause(s) Indication Corrective Action
Drive is programmed for 2 wire control.
HIM Start button is disabled for 2 wire
control.
None
Table 39, No Speed Change
Drive does not respond to changes in speed command.
Cause(s) Indication Corrective Action
LCD HIM
Status Line
No value is coming from the source of
the command.
Incorrect reference source has been
programmed.
Incorrect Reference source is being
selected via remote device or digital
inputs.
indicates
“At Speed”
and output
is 0 Hz.
None
None
If 2 wire control is required, no
action needed.
If 3 wire control is required,
program [Digital Inx Sel] for
correct inputs
1. If the source is an analog input,
check wiring and use a meter to check
for presence of signal.
2. Check [Commanded Speed] for
correct source
3. Check [Speed Ref Source] for the
source of the speed reference.
4. Reprogram [Speed Ref A Sel] for
correct source.
5. Check [Drive Status 1], bits 12 and
13 for unexpected source selections.
6. Check [Dig In Statusto see if inputs
are selecting an alternate source.
7. 7. Reprogram digital inputs to
correct “Speed Sel x” option.
Table 40, No Acceleration
IOMM VFD-2 87
Page 88

Motor and/or drive will not accelerate to commanded speed
Cause(s) Indication Corrective Action
Acceleration time is excessive. None Reprogram [Accel Time x].
Excess load or short acceleration times
force the drive into current limit,
slowing or stopping acceleration.
Speed command source or value is not
as expected.
Programming is preventing the drive
output from exceeding limiting values.
None Check [Drive Status 2], bit 10 to see if
the drive is in Current Limit. Remove
excess load or reprogram [Accel Time
x].
None Check for the proper Speed Command
using Steps 1 through 7 above.
None Check [Maximum Speed and [Maximum
Freq] to assure that speed is not limited
by programming.
Table 41, Unstable Operation
Motor operation is unstable.
Cause(s) Indication Corrective Action
Motor data was incorrectly entered or
Autotune was not performed.
None
1. Correctly enter motor nameplate data.
2. Perform “Static” or “Rotate” Autotune
procedure
3. Set gain parameters to default values.
Table 42, Stopping Gives Decel Fault
Stopping the drive results in a Decel Inhibit fault.
Cause(s) Indication Corrective Action
Decel
Inhibit
fault screen
LCD Status
Line
indicates
“Faulted”.
1. See Attention statement
2. Reprogram parameters 161/162 to
eliminate any “Adjust Freq” selection.
3.Disable bus regulation (parameters
161 &162) and add a dynamic brake
4. Correct AC input line instability or
add an isolation transformer.
5. Reset drive.
The bus regulation feature is enabled and is
halting deceleration due to excessive bus voltage.
Excess bus voltage is normally due to excessive
regenerated energy or unstable AC line input
voltages.
Internal timer has halted drive operation
88 IOMM VFD-2
Page 89

Diagnostics Menu
When a fault trips the drive, use this menu to access detailed data about the drive.
Table 43, Fault menu
Option Description
Faults View fault queue or fault information, clear faults or reset drive.
Status Info View parameters that display status information about the drive.
Device Version View the firmware version and hardware series of components.
HIM Version View the firmware version and hardware series of the HIM.
Parameter Menu
Refer to Viewing and Editing Parameters
Device Select Menu
Use this menu to access parameters in connected peripheral devices.
Memory Storage Menu
Drive data can be saved to, or recalled from, User and HIM sets. User sets are files stored
in permanent nonvolatile drive memory. HIM sets are files stored in permanent nonvolatile
HIM memory.
Table 44, Memory Storage
Option Description
HIM Copycat
Device -> HIM
Device <- HIM
Device User Sets
Reset To Defaults Restore the drive to its factory-default settings
Save data to a HIM set, load data from a HIM set to active drive
memory or delete a HIM set
Save data to a User set, load data from a User set to active
drive memory or name a User set.
Preferences Menu
The HIM and drive have features that you can customize.
Option Description
Drive Identity
Change Password
User Dspy Lines
User Dspy Time Set the wait time for the User Display or enable/disable it.
User Dspy Video
Reset User Dspy
.
Add text to identify the drive.
Enable/disable or modify the password.
Select the display, parameter, scale and text for the User Display.
The User Display is two lines of user-defined data that appears
when the HIM is not being used for programming.
Select Reverse or Normal video for the Frequency and User
Display lines
Return all the options for the User Display to factory default
values.
IOMM VFD-2 89
Page 90

Operation, LF
The status of the drive can be viewed on the Operator Interface Module (OIM) or on
various LEDs.
Using the Interface
Figure 41, Keypad/Display
The front-panel keypad/display is used to monitor the drive. The functions available at the
keypad depend on what mode the keypad/display is in and what is selected as the drive
control source. It operates in two modes:
1. Monitor Mode (the default mode), used to monitor specific drive outputs as well as
enter the speed or frequency reference for the drive.
2. Program Mode, used to view and adjust drive parameter values, and examine the error
log.
Regardless of the control source selection, the keypad/display can be used to stop the drive
and reset drive faults.
See Table 46 for a description of the Drive status LEDs.
Note: The STOP/RESET key can be disabled by parameter R055. This must be done so
that only the chiller MicroTech II controller can stop or start the drive/compressor.
Monitor Mode
Monitor mode is the keypad/display’s default mode during drive operation, or it is entered
by pressing the PROGRAM key until the PROGRAM LED turns off. The following output
data can be displayed in monitor mode:
• Speed
• Volts
• Amps
• Hz
90 IOMM VFD-2
• kW
• Torque (vector regulation only)
• Selected reference (speed or torque)
Page 91

To select a value to monitor, press the ENTER key until the LED turns on next to the
desired display item. Pressing the ENTER key advances you through each of the displays.
Note: All of the LEDs turn on to indicate the selected reference display.
Figure 42, Example of a Monitor Mode Displ ay
Displaying the Selected Reference
In monitor mode, you can display the speed reference (speed and frequency), or the torque
reference the drive is using while it is running, (RUNNING LED is on, JOG LED is off).
Follow these steps to display the selected reference:
Step 1 If you are not already in monitor mode, access it by pressing the PROGRAM key
until the PROGRAM LED turns off.
Step 2 Press the ENTER key repeatedly to advance through each of the monitor mode
LEDs. All of the monitor mode LEDs will then turn on at once and the reference
will be displayed. Note that the displayed speed reference value is scaled based on
P.028. The torque reference value is displayed in percent.
If the selected reference is negative, and its value is greater than 999, the SPEED LED will
flash.
The Display
The display portion of the keypad/display is a four-character, seven-segment LED. At drive
power-up, SELF is displayed as the drive performs power-up self diagnostics. During drive
operation, the display indicates parameter numbers, parameter values, fault or alarm codes,
and drive output values.
Display Range
Normally, a minus (-) sign is used as one of the four characters in the display to indicate a
negative value. If a value (including the minus sign) exceeds four characters, the display
will drop the minus sign and display four digits. In this case, the SPEED LED will flash to
indicate that the displayed value is a negative number. Refer to the examples in the
following table.
A decimal point to the right of the last digit in the display indicates there is further
resolution (examples A and E below), unless a decimal point already appears as part of the
number displayed (example G below). In either case, the system uses the full resolution of
the number for drive control, not the displayed value.
IOMM VFD-2 91
Page 92

Table 45, Display Range Examples
Example If the actual number is …
A 1000.5 1000 Not Flash
B -999 -999 Not Flash
C -1000 1000 Flash
D -99.9 -99.9 Not Flash
E -1000.5 1000 Flash
F -9.99 -9.99 Not Flash
G -100.25 100.2 Flash
H -9.999 9.999 Flash
It will appear on the
display as …
And the SPEED LED will …
This does not apply for the speed display. For the speed display, the FORWARD REVERSE
LEDs indicate actual speed reference polarity.
The Keypad
The drive’s keypad has nine membrane keys that are used to monitor, program, and control
the drive.
Use the AUTO/MAN key to switch between the auto speed reference and
AUTO
MAN
the manual speed reference as shown below.
AUTO/MAN
Status
AUTO Selected
Control Source (P.000)
Local keypad/display
(P.000=LOCL)
Terminal Strip Remote
Inputs (P.000=rE)
Option Port (P.000=OP) Network
Serial Port
(P.000=SerL)
Speed Reference
Source
Terminal Strip
Terminal Strip
Terminal Strip
Note: Manual speed reference is not allowed on McQuay Centrifugal Chillers.
Use the ▲ and ▼ keys to:
• Step through the drive parameter menus and error log when the
▲
▼
ENTER
keypad/display is in program mode.
• Increase (or decrease) a numeric value (such as the reference or a
parameter value).
Hold down these keys to increase the scroll speed.
Use the ENTER key to:
• Display a parameter (or a selection) value in program mode.
• Save a value.
• Move through each monitor display item when in monitor mode.
92 IOMM VFD-2
Page 93

Use the FORWARD/REVERSE key to select the direction of motor
FORWARD
REVERSE
rotation when the control source is local (REMOTE LED is off). This key
is ignored if the control source is not local (REMOTE LED is on). See
the FORWARD and REVERSE LED descriptions for more information.
Note: Local control source is not allowed on McQuay Centrifugal Chillers.
Use the PROGRAM key to move between program and monitor modes.
PROGRAM
RUN
JOG
The PROGRAM LED turns on when the keypad/display is in program
mode and turns off when the keypad/display is in monitor mode.
Use the RUN/JOG key to toggle between run and jog when in local
control (REMOTE LED is off). When run is selected, pressing the
START key results in continuous drive operation. When JOG is selected,
pressing the START key results in drive operation only until the START
key is released.
Note: Do not run in local control. Do not JOG. Compressor may run
without lubrication.
This key is ignored if the control source is not local (REMOTE LED is
on). See the RUN and JOG LED descriptions for more information.
Use the START key to apply power to the motor in local control
START
(REMOTE LED is off). See the RUNNING LED description for more
information.
Note: Local control is not allowed on McQuay Centrifugal Chillers.
Compressor may run without lubrication.
STOP
RESET
If the drive is running (RUNNING LED is on), the STOP/RESET key
stops the drive. If the drive is not running (RUNNING LED is off),
pressing this key resets drive faults.
Using the LEDs
The keypad contains eight LEDs that show the present drive status. The following
table describes what each drive status LED means.
IOMM VFD-2 93
Page 94

Table 46, Drive Status LEDs
LED
RUNNING
REMOTE
JOG
AUTO
FORWARD
REVERSE
PROGRAM
PASSWORD
LED
Status
On Output power is being applied to the motor.
Off Output power is not being applied to the motor.
The drive is being controlled (START, RUN/JOG,
On
Off The drive is being controlled from the keypad. (Not Allowed)
Flashing The network connection is lost.
On
Off
On
Off
Flashing
On The motor is running in the forward direction.
Off The motor direction is not forward.
Flashing
On
Off
On The keypad/display is in program mode.
Off The keypad/display is in monitor mode.
On
Off Parameters can be modified from the keypad.
FORWARD/REVERSE, speed reference) from a source other
than the keypad.
(Not Allowed)
The drive is receiving its speed reference from the terminal strip
input or network option.
The drive is receiving its speed reference from the local keypad
or serial port (OIM or CS3000), i.e., using a manual reference.
(Not Allowed)
The requested motor direction is forward; the actual motor
direction is reverse (REVERSE LED is on).
(Not Allowed)
Parameters cannot be modified from the keypad without entering
the correct password into P.051 (Programming Disable).
Note that disabling program changes by means of P.051 does not
prevent parameter changes being made from the serial port or
the network.
Meaning
Table 47 describes the values that will be displayed when the corresponding monitor
mode LED is on.
Table 47, Monitor Mode LEDs
Monitor Mode LED Corresponding Display When LED Is On (Actual Values)
SPEED Motor speed is displayed.
VOLTS Drive output volts are displayed. This value is not DC bus volts.
AMPS Drive output amps are displayed.
Hz Drive output frequency in hertz is displayed.
Output power of the drive in kilowatts is displayed. Note that this
KW
TORQUE
ALL LEDs Selected speed reference or torque reference (in %) is displayed.
is intended for display purposes as a general indication of kilowatt
output and should not be used for control or exact metering
purposes.
Motor output torque is displayed in percent. (Valid only for vector
regulation).
94 IOMM VFD-2
Page 95

Troubleshooting
DANGER
DC bus capacitors retain hazardous voltages after input power has been
disconnected. After disconnecting input power, wait five (5) minutes for the DC
bus capacitors to discharge and then check the voltage with a voltmeter to ensure
the DC bus capacitors are discharged before touching any internal components.
Failure to observe this precaution could result in severe bodily injury or death.
The drive can display two kinds of error codes; alarms and faults, to signal a problem
detected during self-tuning or drive operation. Fault and alarm codes are shown in Table 48
and Table 49. A special type of fault code, which occurs rarely, is the fatal fault code.
Alarm Codes
An alarm condition is signified by a two- or three-letter code flashing on the display. The
drive will continue to operate during the alarm condition. The cause of the alarm should be
investigated to check that it does not lead to a fault condition. The alarm code remains on
the display as long as the alarm condition exists and clears when the condition causing it is
corrected.
Fault Codes
A fault condition is also signified by a two- or three-letter code flashing on the display. If a
fault occurs, the drive coasts to stop and the RUNNING LED turns off. The first fault
detected is maintained flashing on the display, regardless of whether other faults occur after
it. The fault code remains on the display until it is cleared by the operator using the
STOP/RESET key or using the fault reset input from the selected control source.
Error Log
The drive automatically stores all fault codes for faults that have occurred in the system
error log. The error log is accessible through the keypad or the OIM. There is no visual
indication that there are faults in the log. You must access the error log to view the faults.
The error log holds the 10 most recent faults that have occurred. The last fault to occur is
the first one to appear on the display when you access the error log. The faults in the log
are numbered sequentially. The most recent fault is identified with the highest number (up
to 9). Once the log is full, older faults are discarded from the log as new faults occur.
For each entry in the error log, the system also displays the day and time that the fault
occurred. The day data is based on a relative 247-day counter (rolls over after 247.55).
Scrolling through the error screens will give the day, for example, 117, which would be 117
days from the 0 day.
The time is based on a 24-hour clock. The first digits of the clock data represent hours.
The last two digits represent minutes. For example, 10:17 PM would be 22.17. The clock
can be reset using R030 (Elapsed Time Meter Reset).
See page 46 for details on adjusting the time stamp.
All entries in the error log and the day and time data are retained if power is lost.
IOMM VFD-2 95
Page 96

Identifying Alarm Codes and Corrections
VFD drive alarm codes are shown in Table 48. Note that the alarm code will only be
displayed for as long as the problem exists. Once the problem has been corrected, the
alarm code will disappear from the display.
Table 48, List of Alarm Codes
Code
Hldc High DC bus
I-Ac V/Hz identification
I-En V/Hz identification
LIL Low AC input line AC input line is low. For
S-Ac Vector self-tuning
S-En Vector self-tuning
Alarm
Description
voltage
procedure active
procedure
enabled
active
enabled
Alarm Cause Correction Action
The DC bus is charged
above the trip threshold. (If
U.018 > 415, DC bus is
above 741 VDC. If U.018 ≤
415, DC bus is above 669
VDC.)
V/Hz identification
procedure is enabled and
in progress.
H.020 = On; V/Hz
identification procedure
has been enabled but not
started.
SVC, indicates DC bus is
being regulated. No
corrective action is
required.
Vector self-tuning is
enabled and in progress.
U.008 = On; vector selftuning has been enabled
but not started.
Increase the deceleration time in
P.0002, P.018.
Install optional snubber resistor
braking kit.
Verify that the AC input is within
specification. Install an isolation
transformer if required.
Check the actual line voltage against
U.018.
Allow identification procedure to
finish.
Press keypad STOP/RESET to
cancel identification procedure if
desired.
Proceed with V/Hz identification
procedure, start drive and allow
procedure to begin. Display will
change to I-Ac when drive is started.
Change H.020 to OFF to cancel
identification and clear I-En if
desired.
Adjust line voltage parameter (H.021
or U.018) to match actual Ac line
voltage.
Allow vector self-tuning procedure to
finish.
Press keypad STOP/RESET to
cancel vector self-tuning procedure if
desired.
Proceed with vector self-tuning, start
drive and allow self-tuning procedure
to begin. Display will change to S-Ac
when drive is started.
Change U-008 to OFF to cancel selftuning and clear S-En if desired.
Note: Only properly trained and qualified service personnel should change the program or
operating parameters.
96 IOMM VFD-2
Page 97

Identifying Fault Codes and Recovering
DANGER
DC bus capacitors retain hazardous voltages after input power has been
disconnected. After disconnecting input power, wait five minutes for the DC bus
capacitors to discharge and then check the voltage with a voltmeter to ensure the
DC bus capacitors are discharged before touching any internal components.
Failure to observe this precaution could result in severe bodily injury or death.
VFD drive fault codes are shown in Table 49. To clear a single fault that has occurred so
that the drive can be started again, correct any problems indicated by the fault code and
press the STOP/RESET key on the keypad, or assert the fault reset from the selected control
source (P000). Because multiple faults can occur and only the first will be displayed, you
must access the error log repeatedly in order to view all of the faults that have occurred and
correct them.
Table 49, List of Fault Codes
Code Alarm Description Fault Cause Correction Action
Aln
bYC
CHS
EC
EEr
EL Encoder loss
FL Function loss
Hld
HIL High line voltage
HU High Dc bus voltage
Analog input signal
loss
DC bus charging
bypass contactor
Default parameter
restore (check sum
error)
Earth current failure
(ground fault)
Non-volatile memory
write failure
High time
identification aborted
Continued on next page.
P.011 = 4 or 5 and 4 to 20 mA
analog input is below 1 mA.
Charging bypass contactor did
not close or contact closure
was not sensed by the system.
During drive operation:
Regulator board failure.
After: Regulator board
replacement.
Unintentional grounding.
Failure to write on non-volatile
memory.
Drive is not detecting feedback
from the encoder.
Function loss input on control
terminal is opened.
Identification process for B/Hz
has been aborted.
Input voltage more than 15%
above nominal.
DC bus voltage too high
(capacitor protection).
Deceleration time too short.
Verify that P.011 is set correctly. Check
that the analog input source supply ≥ 1
mA.
Check operation of the bypass contactor.
Verify the contactor is closing when the
proper bus voltage is applied. Replace
contactor.
Contact McQuay or replace regulator
board.
Contact McQuay.
Check isolation between ground and
output terminals. Possible leakage,
current sensor defects; replace sensor.
Connect CS3000 software to upload
parameters or record by hand. Then
replace regulator board. Parameter
values will be lost when power is cycled.
Check the connection between the
encoder and the drive. Check the
encoder/motor coupling.
Check external interlocks at terminals 16,
20.
See H.019 for identification result.
Check actual line voltage against U.018
or H.021.
Check input line voltage; if necessary,
add transformer.
Increase deceleration time
P.002/P.018/P.023 versus Maximum
Speed/Hz (P.004). Install DB option with
resistors.
IOMM VFD-2 97
Page 98

Code Alarm Description Fault Cause Correction Action
Verify that proper voltage is being applied
to the drive. Check all phases.
Voltage ripple on DC bus due
to missing input phase or an
IPL Input phase loss
LU Low DC bus voltage Input rectifier diodes defective.
NCL Network comm loss
Nld
OC
OCA
Ocb
OCd
Identification request
not yet performed
(V/Hz only)
Overcurrent (steady
state) – Trips
between 185 and
200% load (based
on inverter type
current) check
power module rating
Overcurrent (at
acceleration)
Overcurrent (at DC
braking)
Overcurrent (at
deceleration)
imbalance between phases.
DC bus voltage too low. Line
dip too long (P.042).
Communications with the
AutoMax network have been
lost.
Drive started but Identification
Result = Zero.
Output phase-to-phase short.
Bus voltage line-to-line.
Ground fault.
Momentary overload.
Bad motor.
Torque boost / V/Hz too high
(V/Hz).
Motor unknown to regulator
(V/Hz
Parameter settings (vector).
Encoder wired incorrectly,
wrong PPR.
Overcurrent condition occurred
while accelerating.
Acceleration time too short.
DC voltage too high. Check parameters H.006, H.007.
Overcurrent condition occurred
while decelerating.
Deceleration time too short.
Check input voltage, line fuses. If
necessary, add transformer. Check value
of Ride Through Time (R042), Line
Voltage (H.021, U.018). Check DC bus
voltage. If incorrect, replace diode set.
Check network cabling from network
master to network option board. Check
that network master is operating properly.
Reset fault. Perform Identification
Request. Restart drive.
Check isolation between each output line.
Check transistor modules for correct
output. If incorrect, possible board defect;
replace. Possible Hall effect current
sensor defective; replace.
Check isolation between ground and
output terminals. Possible leakage
current sensor defect; replace sensor.
Check for motor overload; reduce load on
motor.
Check motor for correct operation.
Check parameters H.001, H.002, and/or
H.003. Enable Identification Request
(H.020)
Check that regulator was updated with
actual motor characteristics via
Identification Request (H.020).
Check Encoder PPR (U.001), Motor Poles
(U.002), Base Frequency (U.003), Motor
Nameplate Amps (U.004), Magnetizing
Current (U.006), Speed Regulator Prop.
Gain (U.012).
Check encoder wiring. Perform vector
self-tuning.
See OC fault corrective actions. Increase
acceleration time (P00l, P017, P021).
See OC fault corrective actions. Increase
deceleration time (P002, P018, P022).
Continued on next page.
98 IOMM VFD-2
Page 99

Code Alarm Description Fault Cause Correction Action
Vector: Check parameters Encoder PPR
(U.001), Motor Poles (U.002), Base
Frequency (U.003).
V/Hz: Check DC bus voltage; increase
decelerating time. Check values Max
Speed (P004) Overfreq. (H.022). Check
slip compensation (H.004). If H.016 ON,
check motor size versus Power Module
size, recheck setting of P005 (too high).
Check ambient temperature, cooling fan,
minimum clearances around drive.
Vector: Check actual/Motor Rated
Nameplate Amps (U.004)
V/Hz: Check actual current/Torque Boost
(H.003).
Check that Power Module is sized
correctly.
Reduce load on motor (for example, at
low frequency).
Check that Power Module is sized
correctly. Reduce load on motor (e.g., at
low frequency).
Check output lines to the motor.
Check connections and cable of all 3
phases and motor windings. Replace
any damaged cable.
Check Encoder PPR (U.001), Motor
Poles (U.002), Base Frequency (U.003),
Motor Nameplate RPM Speed (U.005).
Check Reg. Proportional (U.01 2)
Integral Gain (U.01 3)
Check cables between Regulator board
and Power Module.
Power Module must be configured by
Reliance service personnel.
Check load to Power Module. Check
Power Module sizing versus application.
Check DC Braking Current value (H.007).
Check Torque Boost (H.003).
Check connection cable and
communication port setup.
OF Overfrequency
OH
OL Motor overload
OPL
OSP
PUc
PUn
PUo
SF
SrL
UAr
UbS
Drive
overtemperature
Motor output phase
loss
Overspeed (vector
only)
Missing power
module ID connector
Power module not
Identified
Drive power
electronic overload
Self-tuning status
(Vector only)
Communication loss
between
regulator/PC/OIM
Spurious host PC
comm interrupt
Asymmetrical bus
charge
Drive has exceeded maximum
allowable output frequency.
Regenerating energy is too
high. Stability or slip
compensation circuit adds
frequency reference. If H.016
ON, searching current is too
high. Motor is too small.
Cooling fan failure.
Excess motor current. V/Hz:
Torque boost too high, therm.
overload level too low.
Excess load on motor, for
example, at too low speeds.
Loss of phase connection.
Phase lost between drive and
motor.
RPM above 130% Maximum
Speed (P.004), speed
regulator response not
optimized.
Bad or disconnected cable
between Regulator and Power
Module.
Drive parameters have been
restored to power-up defaults.
Regulator has not been
configured to match Power
Module.
Power Module overloaded.
Too high DC Braking Current
(H.007) or Torque Boost
(H.003).
See parameter U.009
Serial Port communication
cable, PC or OIM
communication port setup.
Regulator board failure. Replace Regulator board.
Bad Power Module. Contact McQuay.
Note: If extensive troubleshooting or corrective actions are necessary, only properly trained and
qualified technicians should be used.
IOMM VFD-2 99
Page 100

Accessing, Reading, and Clearing the Faults in the Error Log
The following procedure shows how to access and clear the error log. Note that you cannot clear a
single entry from the error log. The entire log, including all of the fault codes, and the day and time
stamp of each fault, will be cleared simultaneously using this procedure.
Step 1. Press the PROGRAM key.
The First Menu General parameters are
displayed. The PROGRAM LED will turn on.
Step 2. Press the ▼key until Err is displayed.
Step 3. Press the ENTER key.
If no faults have occurred, Err will be displayed
again. If only one fault has occurred, the fault
code will be displayed as the first entry in the log.
If more than one fault has occurred, the first entry
is the latest fault that occurred.
100 IOMM VFD-2
 Loading...
Loading...