

Maxsine EP100 Quick Manual

Maxsine
EP
100 AC SERVO
QuickGuide
Maxsine Electric Co.,Ltd
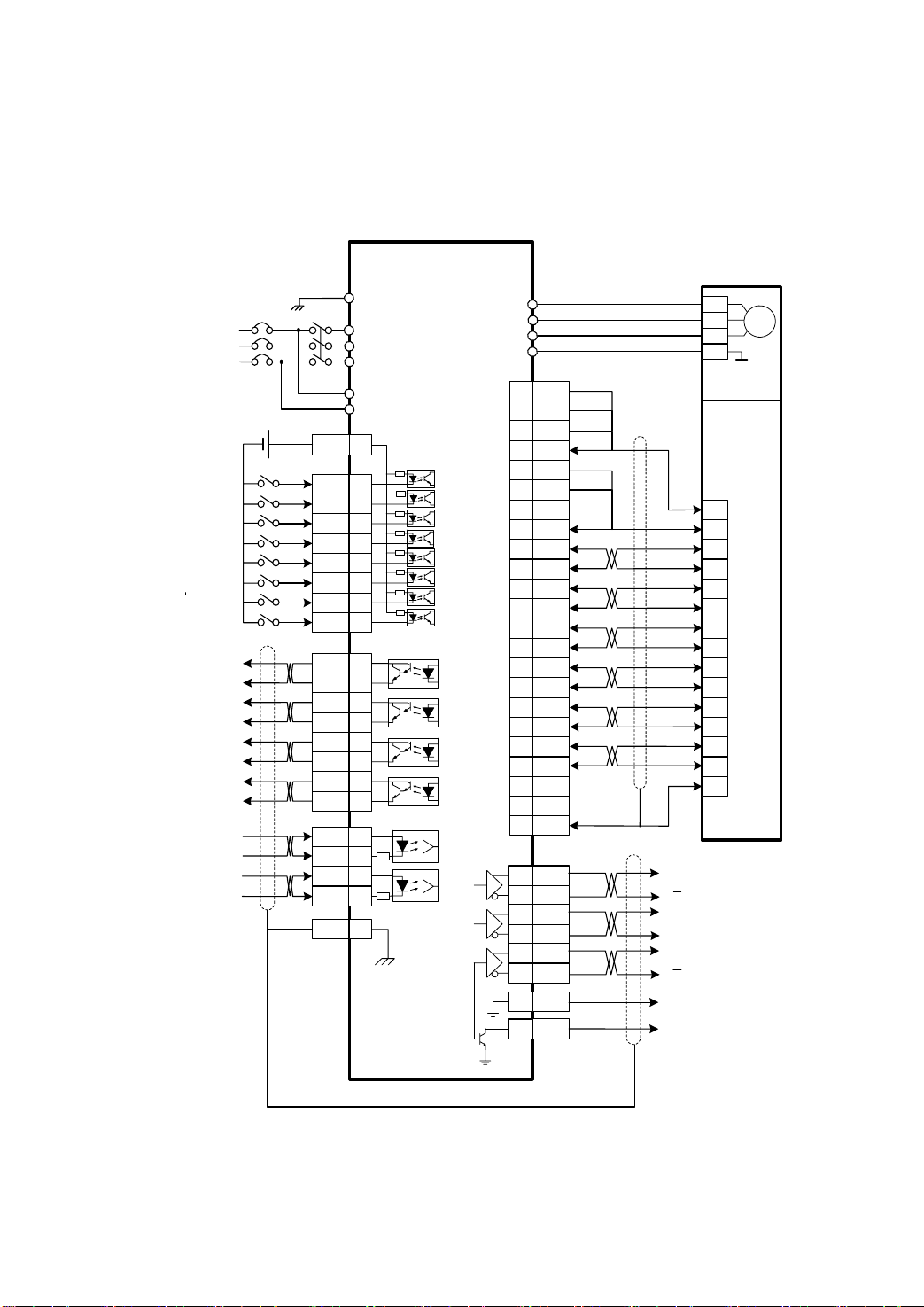
1.1 Standard wiring
Position control
3 Phase
AC220V
DC
12~24V
Servo ON(Enabled)
Alarm Clear
CCW Drive Inhibition
CW Drive Inhibition
Deviation Counter Clear
Command Pulse Inhibition
CCW Torque Limit
CW Torque Limit
Servo Ready
Servo Alarm
Positioning Completed
Mechanical Brake Release
Position Command
PULSE
Position Command
SIGN
NFB MC
COM+ 18
SON 10
ALRS 11
FSTP 12
RSTP 13
CLE 14
INH 15
FIL 16
RIL 17
SRDY+ 8
SRDY- 25
ALM+ 26
ALM- 27
COIN+ 28
COIN- 29
BRK+ 30
BRK- 31
PULS+ 32
PULS- 33
SIGN+ 34
SIGN- 35
FG 36
Maxsine
EP100(B) SERVO DRIVER
PE
R
S
T
r
t
CN1
4.7k
CN1
CN1
220
220
26LS31
Driver
Ground of
Metal Case
26LS32
Receiver
A
B
Z
CN2
CN1
U
V
W
PE
14 5V
15 5V
16 5V
17 5V
18 0V
19 0V
20 0V
21 0V
1 A+
2 A3 B+
4 B5 Z+
6 Z7 U+
8 U-
9 V+
10 V11 W+
12 W22 0V
23 0V
26 FG
1 OA+
2 OA-
3 OB+
4 OB-
5 OZ+
6 OZ-
9 GND
7
SERVOMOTOR
2
3
4
1
4 Pins Connector
For Motor Power
2
3
4
7
5
8
6
9
10
13
11
14
12
15
1
15 Pins Connector
For Optical Encoder
A
A
B
Output Signals
B
of Encoder
Z
Z
Ground of
GND
CZ
Encoder Signal
Z
Z Signal of Encoder
(OC Output)
Picture 1.1 Standard wiring for position control
2
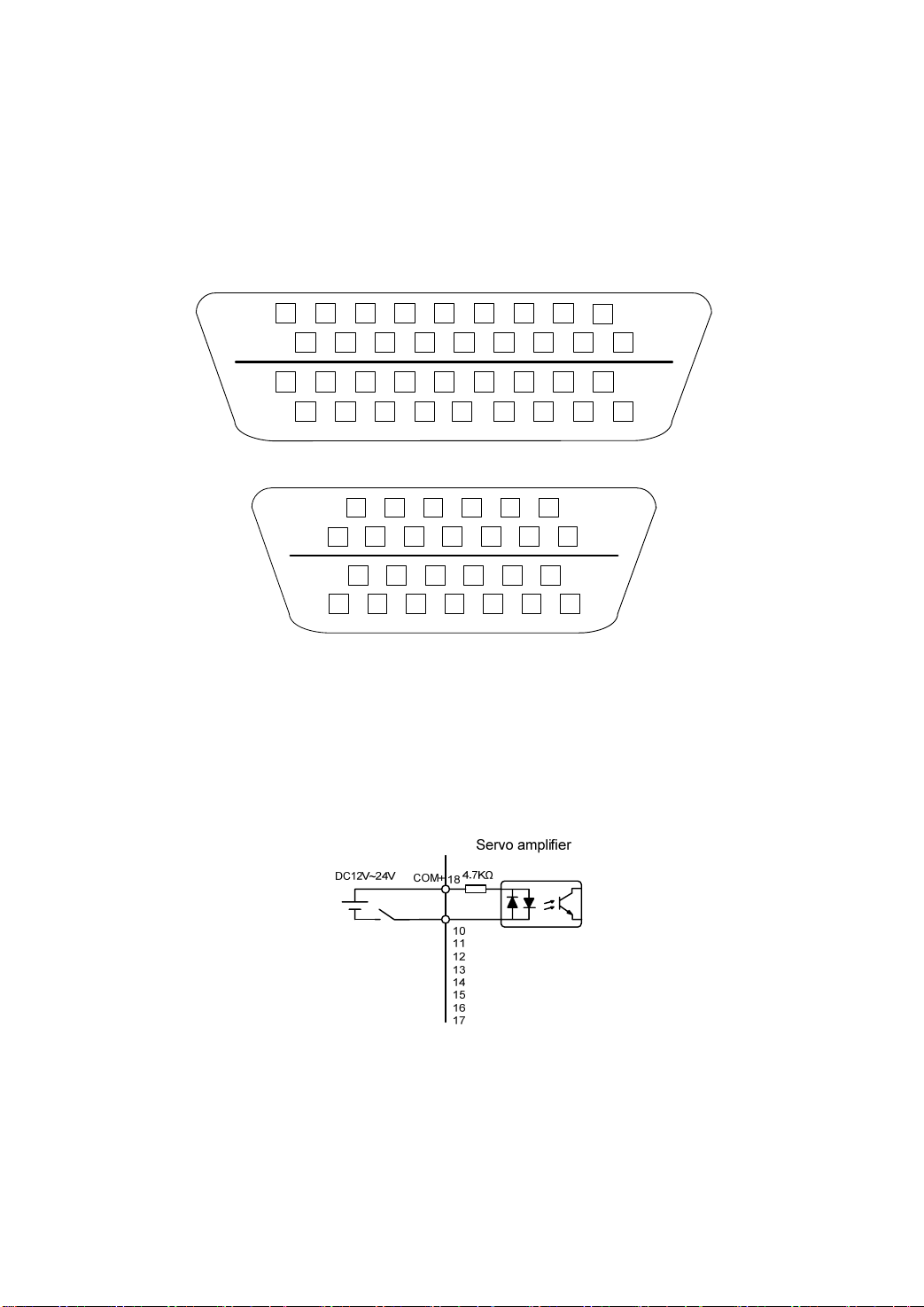
1.2 Terminal disposition for interface
Figure 3.1 is the disposition chart of terminal connector CN1 for the servo driver. CN1 is
the connector with 36 cores. Figure 3.2 is the disposition chart of terminal connector CN2 for
the servo driver. CN2 is the connector with 26 cores.
12
14
16
18 6
11
13
15
17
28
30
32
34
36
27
29
31
3335
Figure 2.1 the soldering lug of the CN1 plug(face to lug)
8
10
12
7
9
11
13
21
23
25
20
22
24
26
Figure 2.2 the soldering lug of the CN2 plug(face to lug)
1.3 Input/output interface type
1.3.1 Switch value input interfaces
810
79
25
4
5223201
2426
23
2
1921
6
5
19
18
24
13
1517
1416
z The range of external DC power supply is 12~24V, and the minimum input current is
100mA .
z Inverting the polarity of DC power source, which is provided by the user, can cause the servo
driver damage.
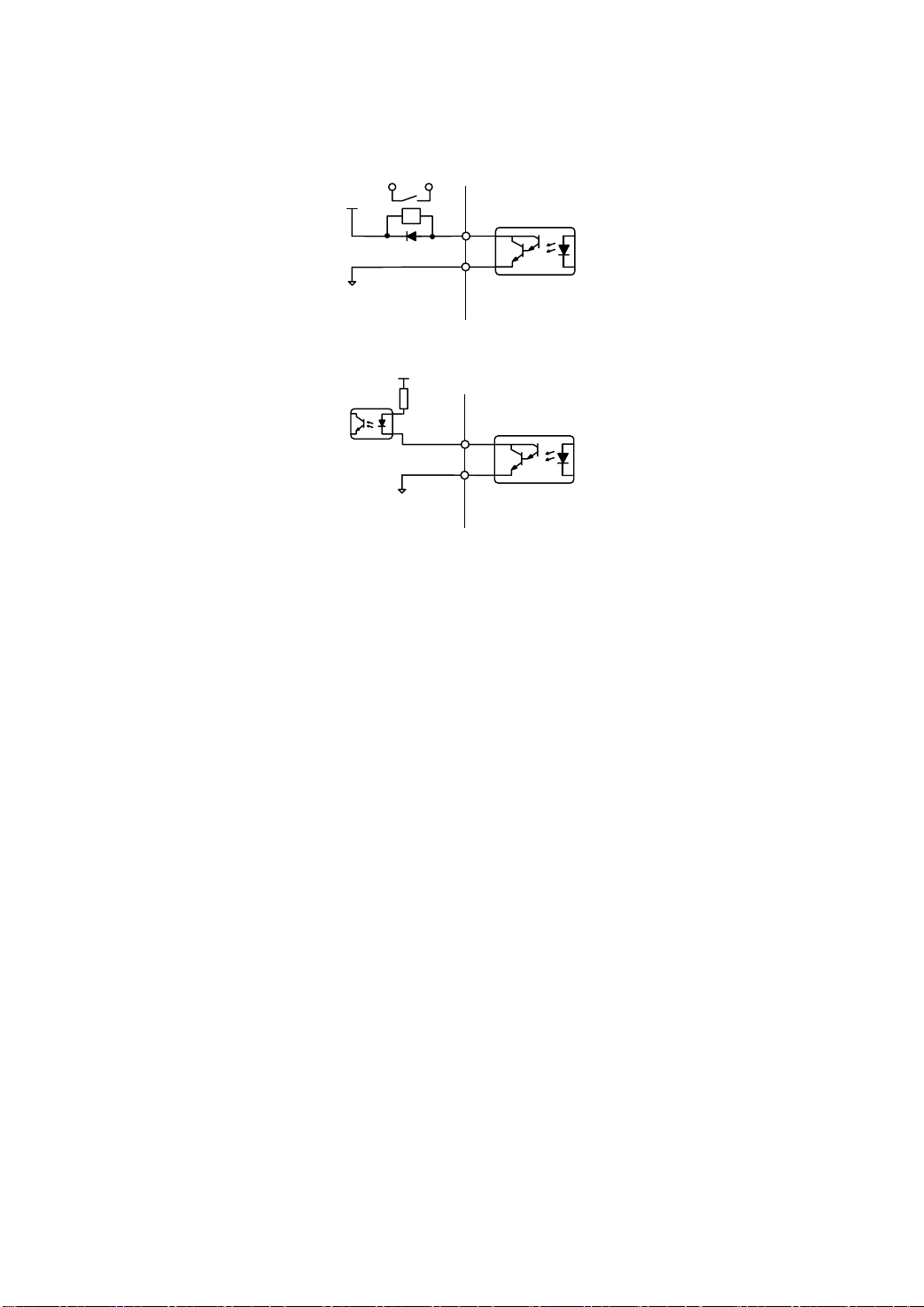
1.3.2 Switch value output interfaces
VCC
max 25V
Ground
Relay
Servo amplifier
8
26
28
30
25
27
28
29
Max Output 50mA
Relay connection
VCC
max 25V
Ground
Photo-coupler connection
The outputs use Darlington photo-coupler. It can be connected with relay, photo-coupler.
z
Servo amplifier
8
26
28
Max Output 50mA
30
25
27
28
29
z Inverting the polarity of DC power source, which is provided by the user, can cause the servo
driver damage.
z Open-collector circuit is used to transfer the outputs signal. the maximum current is 50mA,
the maximum voltage of external DC power supply is 25V. loads of the output signal should
be limited in that range, if not or directly connect to the power, can cause the servo driver
damage.
z When using relay like inductive loads, a free-wheel diode must be connected with the inductive
load in parallel. If the diode connects in wrong direction can cause damage to the output circuit.
z Owing to the low level of output is approximately 1V and cannot satisfy the TTL low-level
request, therefore cannot directly connect with the TTL circuit.
4
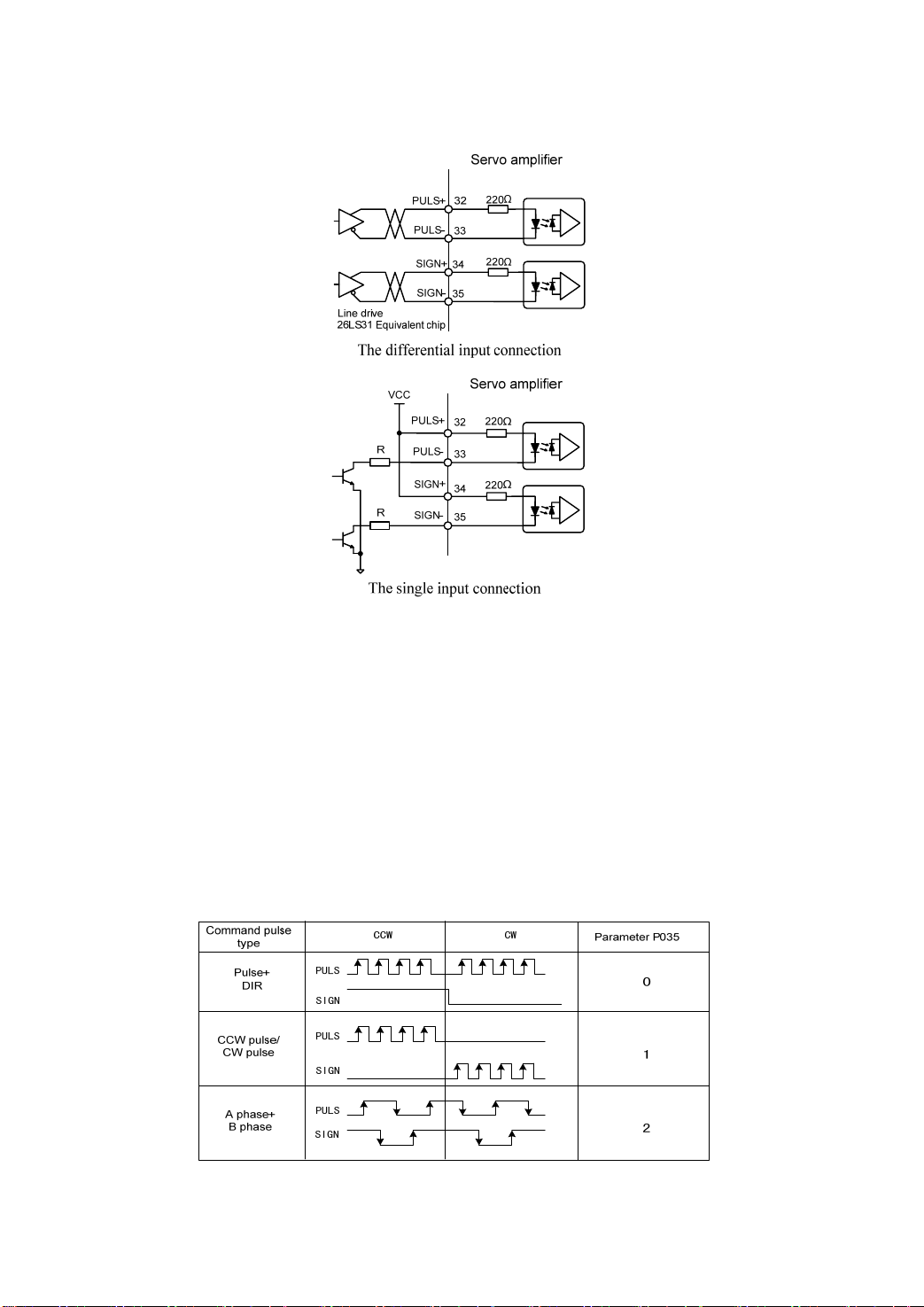
1.3.3 Pulse interfaces
z
The differential input connection is recommended for a correct transfer.
The RS422 driver(e.g AM26LS31、MC3487) is used to make the differential connection.
z
The action frequency will be fall down under a single connection. Base on the input circuit,
z
the driver current is in the range of 10~15mA , the maximum voltage of external DC power
supply is 25V, the R value will be got, Experience data:VCC=24V, R=1.3~2k; VCC=12V,
R=510~820Ω; VCC=5V, R=82~120Ω.
z Under the single connection, inverting the polarity of DC power source, which is provided by the
user, can cause the servo driver damage.
z The input mode、timing and parameters of the pulse are shown below, the arrow indicates the
counting edge. When use the mode of A、B phase, the maximum of the four times the frequency
is 500kHz.
Input pulse mode
5

The maximum frequency is 500kHz
The maximum frequency is 500kHz
Parameter demand Pulse waveform of position command
Differential Single end
>2μs t >5μs
t
ck ck
t t
>1μs
h
h
tl>1μs
t <0.2μs t <0.3μs
t <0.2μs t <0.3μs
t >1μs
t >8μs t >10μs
tqh>4μs
tql>4μs
t <0.2μs t <0.3μs
t <0.2μs t <0.3μs
t >1μs
ql
>>2.5μs
tl>>2.5μs
t >2.5μs
tqh>5μs
t
>5μs
t >2.5μs
rh rh
rl rl
s s
qck qck
qrh qrh
qrl qrl
qs qs
The maximum frequency is 125kHz
Input pulse timing and parameters
6
 Loading...
Loading...