

Magtrol DSP6000 User Manual
Model DSP6000Model DSP6000
Model DSP6000
Model DSP6000Model DSP6000
High Speed PHigh Speed P
High Speed P
High Speed PHigh Speed P
Dynamometer ControllerDynamometer Controller
Dynamometer Controller
Dynamometer ControllerDynamometer Controller
rogrammablerogrammable
rogrammable
rogrammablerogrammable
UserUser
User
UserUser
’s Manual’s Manual
’s Manual
’s Manual’s Manual
MAGTROL, INC.MAGTROL, INC.
MAGTROL, INC.
MAGTROL, INC.MAGTROL, INC.
Sales and TSales and T
Sales and T
Sales and TSales and T
Buffalo, New York 14224 USA
Tel: (716) 668-5555 or 1-800-828-7844
wwww
ww
wwww
Hysteresis Brakes and Clutches
While every precaution has been exercised
in the compilation of this document,
Magtrol, Inc. assumes no responsibility
for errors or omissions. Additionally, no
liability is assumed for any damages that
may result from the use of the information
contained within this publication.
echnical Assistanceechnical Assistance
echnical Assistance
echnical Assistanceechnical Assistance
70 Gardenville Parkway
Fax: (716) 668-8705
w.w.
mm
w.
w.w.
Manufacturers of:
Motor Test Equipment
agtragtr
m
agtr
mm
agtragtr
oo
l.cl.c
oo
o
l.c
o
oo
l.cl.c
oo
!
mm
m
mm
74M041 062200
®
LabVIEW
National Instruments Corporation.
RadioShack
the RadioShack Corporation.
is a registered trademark of
®
is a registered trademark of

Safety NotesSafety Notes
Safety Notes
Safety NotesSafety Notes
1. Make sure that all Magtrol dynamometers and electronic products are earthgrounded, to ensure personal safety and proper operation.
2. Check line voltage before operating the DSP6000.
3. Make sure that dynamometers and motors under test are equipped with
appropriate safety guards.
iii

This page intentionally left blank.
iv

TT
able of Contentsable of Contents
T
able of Contents
TT
able of Contentsable of Contents
SALES AND TECHNICAL ASSISTANCE .............................................................................................. ii
SAFETY NOTES..................................................................................................................................... iii
1 - INTRODUCTION ................................................................................................................................ 1
About This Manual ............................................................................................................................................. 1
Shipping .............................................................................................................................................................. 1
UNPACKING YOUR DSP6000 ............................................................................................................................................ 1
About the Model DSP6000 Dynamometer Controller ....................................................................................... 1
FEATURES ......................................................................................................................................................................... 1
SPECIFICATIONS ................................................................................................................................................................. 2
Front Panel .......................................................................................................................................................... 3
Figure 1. Front Panel .................................................................................................................................... 3
ENABLING SECONDARY FUNCTIONS ..................................................................................................................................... 3
FRONT PANEL CONTROLS AND BUTTONS ............................................................................................................................. 4
Vacuum Fluorescent Display (VFD) .................................................................................................................. 5
STATUS DISPLAY MESSAGES ..............................................................................................................................................5
DISPLAYING DESIRED INFORMATION .................................................................................................................................... 5
Rear Panel ........................................................................................................................................................... 6
Figure 2. Rear Panel ..................................................................................................................................... 6
Figure 3. Brake Connector ............................................................................................................................ 6
Figure 4. Accessory Torque/Speed Output.................................................................................................... 6
Figure 5. Dynamometer Connector ............................................................................................................... 6
REAR PANEL FUNCTIONS ....................................................................................................................................................7
2 - ABOUT THE PID LOOP..................................................................................................................... 8
P (Proportional Gain) ......................................................................................................................................... 8
I (Integral) .......................................................................................................................................................... 8
D (Derivative) .................................................................................................................................................... 8
Figure 6. PID Loop ....................................................................................................................................... 8
Setting The Correct PID'S For Your Motor ........................................................................................................ 8
3 - INSTALLATION................................................................................................................................ 10
Setting Unit for Line Voltage ........................................................................................................................... 10
Figure 7. Cover for Voltage Selector, Fuses ...............................................................................................10
Checking Your DSP6000 .................................................................................................................................. 10
4 - THE DSP6000 AS A STAND-ALONE UNIT (LOCAL CONTROL) ................................................. 12
Setting Desired Operating Parameters .............................................................................................................. 12
SET DISPLAY TO DESIRED POWER UNITS (WATTS OR HP) .................................................................................................. 12
SET DISPLAY TO DESIRED TORQUE UNITS .........................................................................................................................12
SET UP DISPLAY FOR DYNAMOMETER ............................................................................................................................... 12
SET UP COMMUNICATIONS WITH PC .................................................................................................................................12
SET UP AUXILIARY INPUT ................................................................................................................................................ 12
SET TORQUE CONTROL ....................................................................................................................................................12
SET SPEED CONTROL ....................................................................................................................................................... 13
SET OPEN LOOP CONTROL ...............................................................................................................................................13
SET UP I/O PARAMETERS ................................................................................................................................................ 13
Setting Dynamometer Load .............................................................................................................................. 14
Using Internal Memory..................................................................................................................................... 14
STORING DATA POINTS ....................................................................................................................................................14
RECALLING DATA POINTS ................................................................................................................................................ 14
v

EXITING THE MEMORY MODE .......................................................................................................................................... 14
CLEARING THE MEMORY .................................................................................................................................................. 14
5 - THE DSP6000 WITH A PC (REMOTE CONTROL) ......................................................................... 15
About the GPIB Interface ................................................................................................................................. 15
Figure 8. GPIB (IEEE-488) Interface .........................................................................................................15
I
NSTALLING THE GPIB (IEEE-488) CONNECTOR CABLE ................................................................................................... 15
CHANGING THE GPIB PRIMARY ADDRESS .........................................................................................................................15
Checking the DSP6000-To-PC Connection...................................................................................................... 16
Programming .................................................................................................................................................... 16
CODES FOR CR - LF ....................................................................................................................................................... 16
DSP6000 Command Set ................................................................................................................................... 16
COMMAND SET FOR DSP6000.........................................................................................................................................17
Acquiring Speed-Torque Data .......................................................................................................................... 20
Selecting the Baud Rate for the RS-232 Interface ............................................................................................ 20
Figure 9. Connector Pin-Out ...................................................................................................................... 20
6 - CALIBRATION ................................................................................................................................. 21
Closed-Box Calibration .................................................................................................................................... 21
Calibration Schedule ......................................................................................................................................... 21
Basic Calibration Process ................................................................................................................................. 21
INITIAL CALIBRATION PROCEDURE .................................................................................................................................... 21
TORQUE OFFSET AND GAIN .............................................................................................................................................. 21
ACCESSORY TORQUE OFFSET AND GAIN ............................................................................................................................22
AUXILIARY INPUT OFFSET AND GAIN ................................................................................................................................22
ALTERNATE CALIBRATION PROCEDURE.............................................................................................................................. 22
Figure 10. Alternative Calibration ................................................................................................................ 23
7 - TROUBLESHOOTING ..................................................................................................................... 24
APPENDIX A: LABVIEW® PROGRAMMING EXAMPLES................................................................. 25
Simple Read ...................................................................................................................................................... 25
Torque Stabilized .............................................................................................................................................. 26
Speed Stabilized ................................................................................................................................................ 27
APPENDIX B: INERTIA CORRECTION .............................................................................................. 28
Inertial Effect on Motor Test Data.................................................................................................................... 28
Procedure for Inertia Correction ....................................................................................................................... 28
KEY CONDITIONS ............................................................................................................................................................ 28
APPENDIX C: FRONT PANEL/DISPLAY MENU FLOW CHARTS..................................................... 29
Dyno Setup Menu ............................................................................................................................................. 29
Com Setup Menu .............................................................................................................................................. 30
Aux Setup Menu ............................................................................................................................................... 31
Power Units Menu ............................................................................................................................................ 31
Torque Units Menu ........................................................................................................................................... 32
APPENDIX D: SCHEMATICS .............................................................................................................. 33
Encoder/Switch Board ...................................................................................................................................... 33
Power Supply .................................................................................................................................................... 33
DSP & Memory ................................................................................................................................................ 34
Analog I/O ........................................................................................................................................................ 35
GLOSSARY OF ABBREVIATIONS AND TERMS................................................................................ 36
MAGTROL LIMITED WARRANTY ....................................................................................................... 37
vi

1 - Introduction1 - Introduction
1 - Introduction
1 - Introduction1 - Introduction
ABOUT THIS MANUAL
This manual contains information about the DSP6000
Dynamometer Controller and procedures for optimal
use. To obtain the best results from your unit, please
follow the procedures for operation.
SHIPPING
Your DSP6000 was packaged carefully for shipping.
Please notify your carrier and Magtrol Customer Service
if you believe your unit was damaged in shipping.
UNPACKING YOUR DSP6000
1. Save all shipping cartons and packaging material
until you inspect the DSP6000.
2. Inspect the DSP6000 for any evidence of damage
in shipping.
3. Make sure the carton contains the following:
• DSP6000 Dynamometer Controller
• Line cord
• User's Manual for the DSP6000
• Calibration certificate
ABOUT THE MODEL DSP6000 DYNAMOMETER CONTROLLER
Magtrol's Model DSP6000 Dynamometer Controller
provides superior motor testing capabilities by using
state-of-the-art digital signal processing technology.
The DSP6000 both controls the dynamometer and
provides digital readouts on the front panel. The
DSP6000 is designed to work with all Magtrol load cell
dynamometers, including the following dynamometer
models:
001-DH 015-DH 008-DH 517-DE
601-DH007-DH508-DH518-DE
004-DH 507-DH 018-DH 001-DTH
005-DH017-DH518-DH002-DTH
505-DH 517-DH 528-DH 003-DTH
FEATURES
Fast, full curve data acquisition
Free-run to locked rotor in seconds.
High-speed data acquisition
120 torque and speed points per second via IEEE
(GPIB) bus.
Speed and torque operating modes
Each mode provides independent PID settings for
improved dynamometer control.
Programmable digital PID values
Controlled and stored either with Magtrol M-Test
software or manually.
Single point or programmed load control
Single or multi-point torque and speed stabilized testing
using Magtrol M-Test software.
Two standard computer interfaces
RS-232 and IEEE-488.
Additional analog input
Accepts any ± 5 VDC transducer.
Vacuum fluorescent display
Displays torque, speed, power, auxiliary input and PID
values.
Many torque measurement options
Includes English, metric, and SI torque readings as
standard.
Closed box calibration of torque and auxiliary input
Eliminates need to open box for adjustments.
The DSP6000 is designed to work with any personal
computer using an IEEE-488 or an RS-232 interface,
or as a stand-alone unit. In a computer-controlled
environment, the DSP6000 provides the following
motor testing capabilities:
• Proportional (P), plus Integral (I), plus
Derivative (D) closed loop control (PID loop).
• Torque (Q) and Speed (N) data acquisition at a
rate of up to 120 readings per second.
• Automatic progressive loading in either
decreasing or increasing speed mode.
• Ability to remove the Effects of Inertia from
dynamically obtained data. (See Appendix B)
• Complete curve capability for most motor
types, including single/poly phase induction,
AC/DC series, PMDC, brushless DC, air and
internal combustion (if suitably coupled).
1
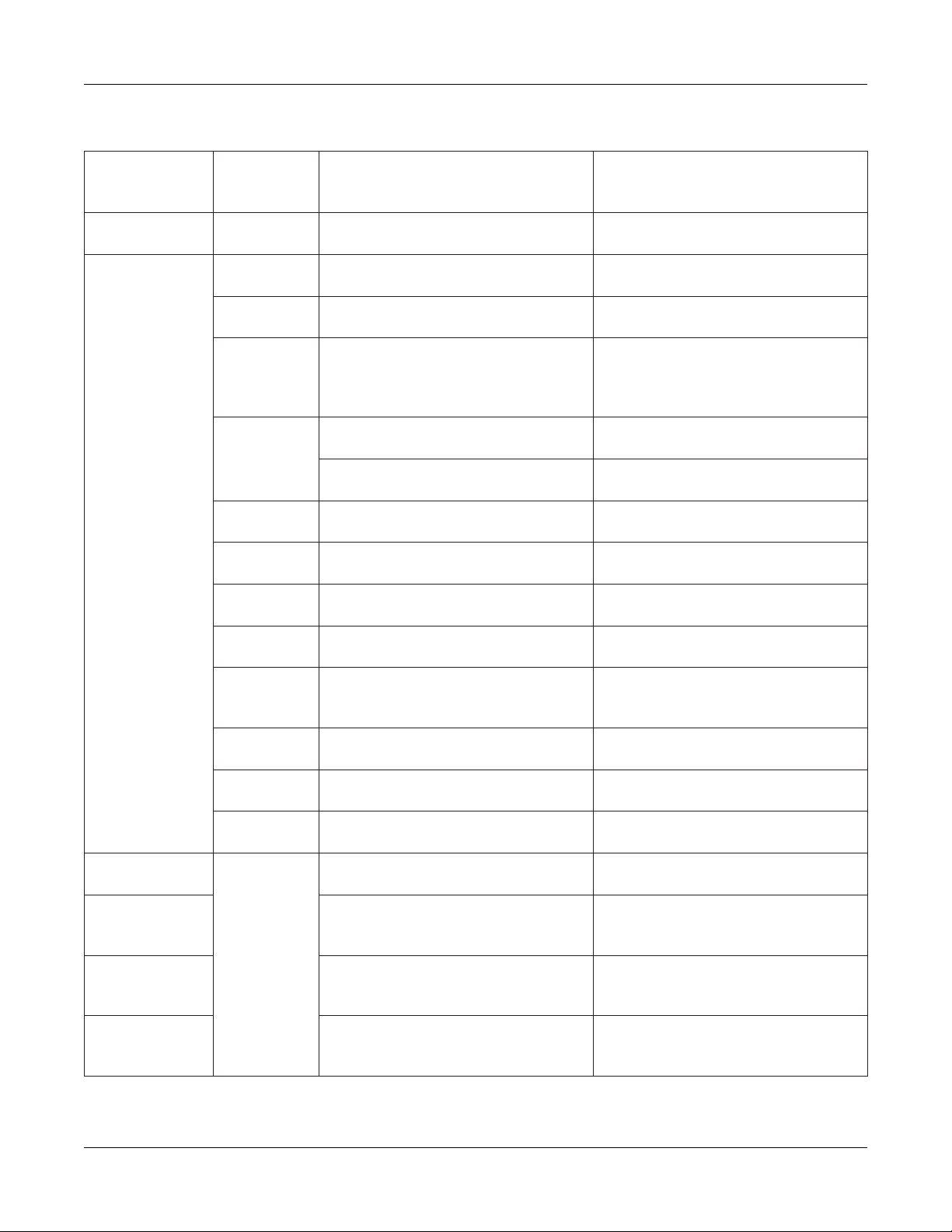
SPECIFICATIONS
Magtrol Model DSP6000 Dynamometer ControllerChapter 1 - Introduction
snoisnemiD
thgieW
erutarepmeTgnitarepO
ytidimuHevitaleR
ycaruccA
tneiciffeoCerutarepmeT
tupnI.xuA
tuOlrtC
tuptuOdeepS/euqroTyrosseccA
)mm02x5(sesuF
stnemeriuqeRrewoP
stnemeriuqeRegatloV
deepSmumixaM
euqroTmumixaM
egatloVecnailpmoCmumixaM
bl5.61
C°52otC°81
%08<
:deepS
:euqroT
:xuA
CDV5±
CDV3-0
:euqroT
:deepS
:ekarB
:)V021(rewoP
:)V042(rewoP
AV57
MPR999,99
stinu0002
CDV54
H"5.3xD"8.31xW"91
MPR000,001otMPR01morfgnidaerfo%10.0
)V2±(egnarfo%2.0
)V5±(egnarfo%1.0
C°/egnarfo%100.0
CDV2±
elcycytud%05,ver/seslupLTT06
A52.1
A1
Am008
Am513
zH05/06V042/021
ASC/LU
CEI
ASC/LU
CEI
052V
V052
V052
V052
BS
T
BS
T
2
Magtrol Model DSP6000 Dynamometer Controller Chapter 1 - Introduction
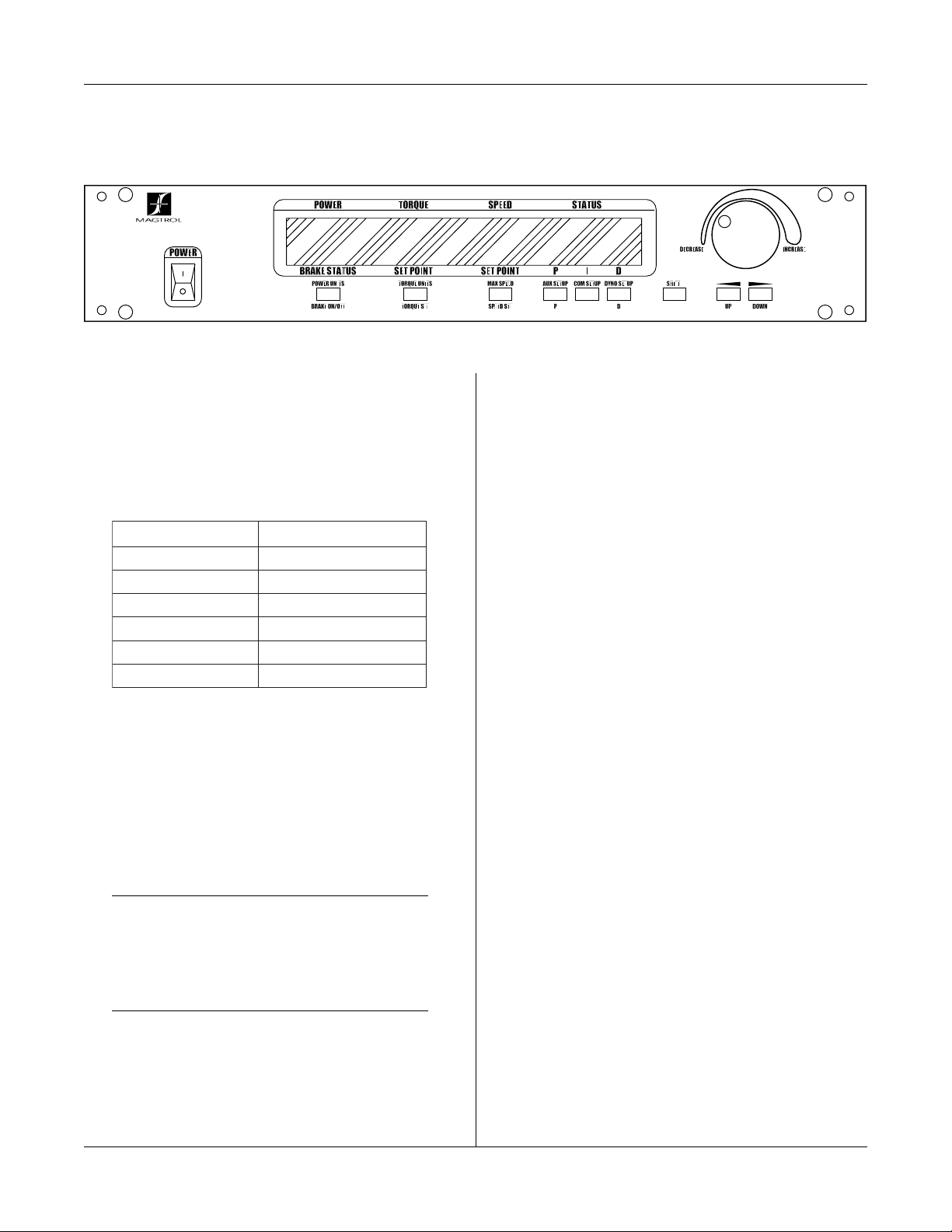
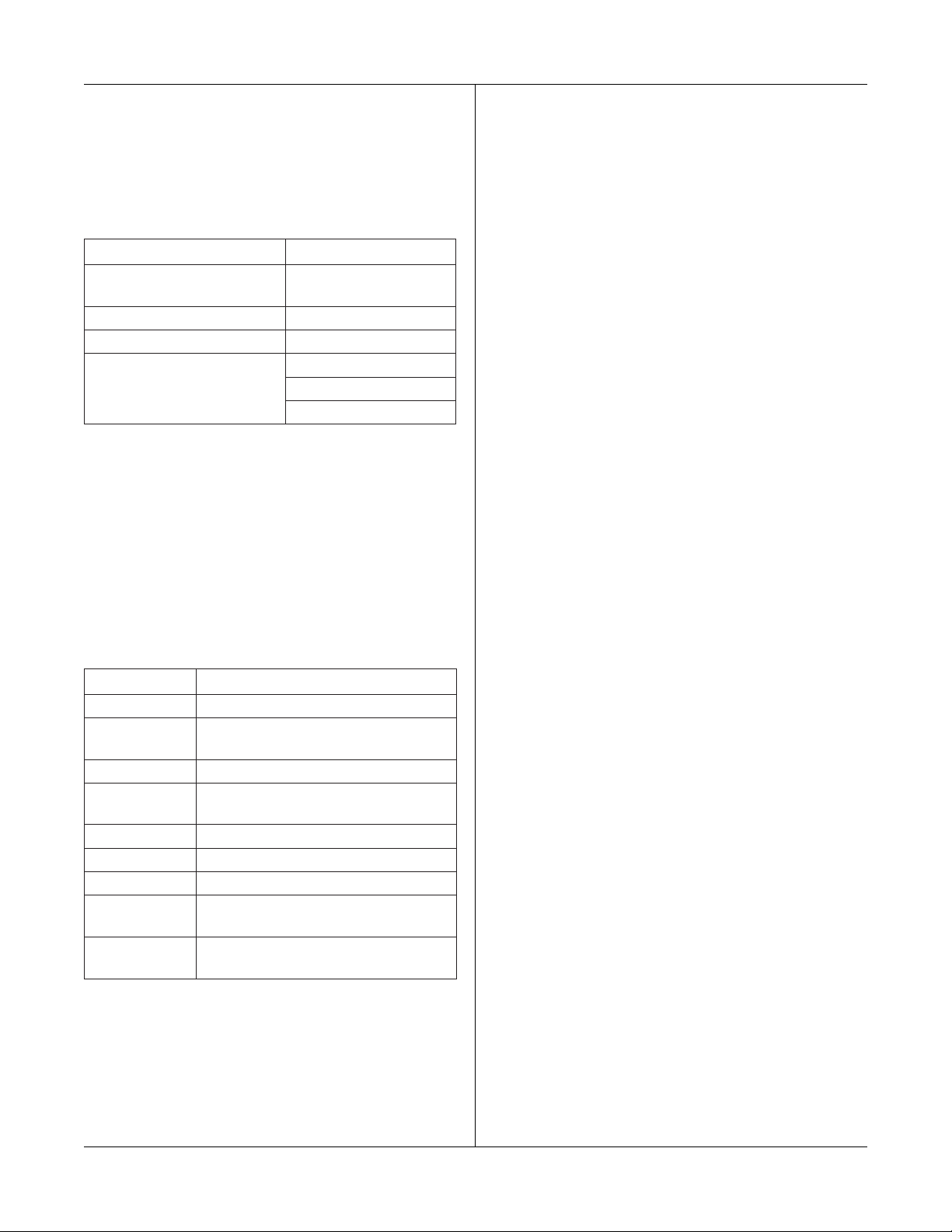
FRONT PANEL
Figure 1. Front Panel
MODEL DSP6000
DYNAMOMETER CONTROLLER
The front panel provides a power switch, eight control
buttons, a Decrease/Increase Dial, and Vacuum
Fluorescent Display (VFD). The front panel controls
and buttons, from left to right, are:
• Power switch
• Six double-function control buttons:
noitcnuFyramirPnoitcnuFyradnoceS
FFO/NOEKARBSTINUREWOP
TESEUQROTSTINUEUQROT
TESDEEPSDEEPSXAM
PPUTESXUA
IPUTESMOC
DPUTESONYD
• Three single-function control buttons:
• SHIFT (to enable secondary functions printed
in blue above control buttons)
!
• Up/Left arrow
(scroll up, increase
magnitude)
"
• Down/Right arrow
(scroll down,
decrease magnitude)
• Decrease/Increase Dial
ENABLING SECONDARY FUNCTIONS
To enable the secondary function of the double-function
control buttons:
1. Press the blue SHIFT button and release it. (The
word SHIFT appears in the display.)
2. Press a control button to enable the function shown
in blue letters above the control button:
POWER UNITS, TORQUE UNITS, AUX SETUP,
COM SETUP or DYNO SETUP.
3. Press the SHIFT button again to exit the secondary
function.
NOTE: Refer to the table, “Front Panel
Controls and Buttons” later in
this chapter for further
explanation of button features
and use.
3
FRONT PANEL CONTROLS AND BUTTONS
Magtrol Model DSP6000 Dynamometer ControllerChapter 1 - Introduction
elgniS/slortnoC
noitcnuF
snottuB
REWOP
TES
-elbuoD
noitcnuF
snottuB
REWOP
STINU
EKARB
FFO/NO
EUQROT
STINU
EUQROT
DEEPSXAM
TESDEEPS.nottubsihtsserP.gnidaoldeepsroftnioptesswohS
PUTESXUA
.nottubsiht
.nottubsiht
.peeb
.nottubsiht
.nottubsiht
esUoTnoitcnuF
otOsserPNOrewopnrutotIsserP
.FFOrewopnrut
sserpneht;esaelerdnaTFIHSsserP
.nottubsihtsserP.NOroFFOekarbselggoT
sserpneht;esaelerdnaTFIHSsserP
.nottubsihtsserPgnidaoleuqrotroftnioptesswohS
dnoceslitnunottubsihtdlohdnasserP
sserpneht;esaelerdnaTFIHSsserP
sserpneht;esaelerdnaTFIHSsserP
.FFOroNOrewopsnruT
.sttaWotyalpsidrewopsteS
sserP.erusaemfotinuderisedsteS
PU ! NWODro " eesotnottub
elbaneotTFIHSsserP.snoitpo
.noitpo
.gnidaolpoolneporoftnioptesswohS
.rellortnocehtfoegnardeepsehtsteS
.FFOroNOyalpsidyrailixuasnruT
.ecivedtupniyrailixuafognilacssteS
P.nottubsihtsserP.niaglanoitroporpstsujdA
I.nottubsihtsserP.largetnistsujdA
ONYD
PUTES
D.nottubsihtsserP.evitaviredstsujdA
TFIHS
TFEL/PU ! .sserP
THGIR/NWOD " .sserP
ESAERCED
ESAERCNI/
LAID
PUTESMOC
.nottubsiht
.nottubsiht
.nottublortnocderisedsserp
sserpneht;esaelerdnaTFIHSsserP
.tsartnocyalpsid
sserpneht;esaelerdnaTFIHSsserP
.redocne
neht,esaelerdnanottubsihtsserP
.nottublortnocevoba
.)deeps.xamroeuqrot
.)deeps.xamroeuqrot
.esiwkcolcretnuocroesiwkcolcnruT
.detcelesretemarap
ehtsesaercnirosesaerceD
dnasserddayramirpBIPGstsujdA
stsujdaoslA.etarduab232-SR
deepsdnastinueuqrottupnistceleS
eulbninettirwnoitcnufehtsetautcA
nehwegnahcfoedutingamsesaercnI
,deeps(eulavlaciremunagnitsujda
nehwegnahcfoedutingamsesaerceD
,deeps(eulavlaciremunagnitsujda
4
Magtrol Model DSP6000 Dynamometer Controller
Chapter 1 - Introduction
VACUUM FLUORESCENT DISPLAY (VFD)
The VFD provides information about the control
functions, the motor under test, and an auxiliary input
device (if connected). The displays, from left to right,
are:
woRpoTwoRmottoB
REWOP
)sttaWropHnidesserpxe(
EUQROT)EUQROT(TNIOPTES
DEEPS)DEEPS(TNIOPTES
SUTATSroTUPNIXUA
YALPSID
P
I
D
SUTATSEKARB
)FFOroNO(
The DSP6000 is shipped with the Contrast setting at
zero (lowest) in order to prolong display life. If it is
necessary to increase the contrast for improved
readability, use the lowest possible setting to achieve
that result. Using a setting higher than necessary may
cause display segments to burn-in over a period of time,
resulting in uneven illumination from segment to
segment.
STATUS DISPLAY MESSAGES
egasseMgninaeM
TFIHS.desserpsawnotubtfihS
XUA
DEEPSXAM
RORREO/I
STINU
QCATSAF
ETOMER
NWODPMAR
PUPMAR
.delbane
.retupmoc
dnadehcattasitinuyrailixuA
.MPRrotommumixaM
morftnessawdnammoctcerrocnI
.tnemerusaemfotinueuqroT
.edomdeeps-hgihniatadgniriuqcA
.delbaneCPaivlortnocetomeR
ybdeepsrotomesaerceD
.rotomnodaolgnisaercni
ybdeepsrotomesaercnI
.rotomnodaolgnisaerced
DISPLAYING DESIRED INFORMATION
Local control:
1. Press SHIFT and release; then press POWER
UNITS to see UNITS displayed.
!
2. Press UP
or DOWN
available choices.
3. Press SHIFT to exit.
4. Press SHIFT and release; then press TORQUE
UNITS to see UNITS displayed.
!
5. Press UP
or DOWN
options for units.
6. Press SHIFT to exit.
7. Press RECALL to view memory contents; last in =
first out.
8. Press SHIFT to exit.
Remote control:
Refer to “DSP6000 Command Set” in Chapter 4 - The
DSP6000 with a PC for a list of commands recognized
by the DSP6000.
Auxiliary Input:
1. Press SHIFT and release; then press AUX SETUP.
2. Rotate Decrease/Increase Dial to select scale.
3. Press SHIFT to exit.
"
to scroll through
"
to scroll through
5
Magtrol Model DSP6000 Dynamometer ControllerChapter 1 - Introduction
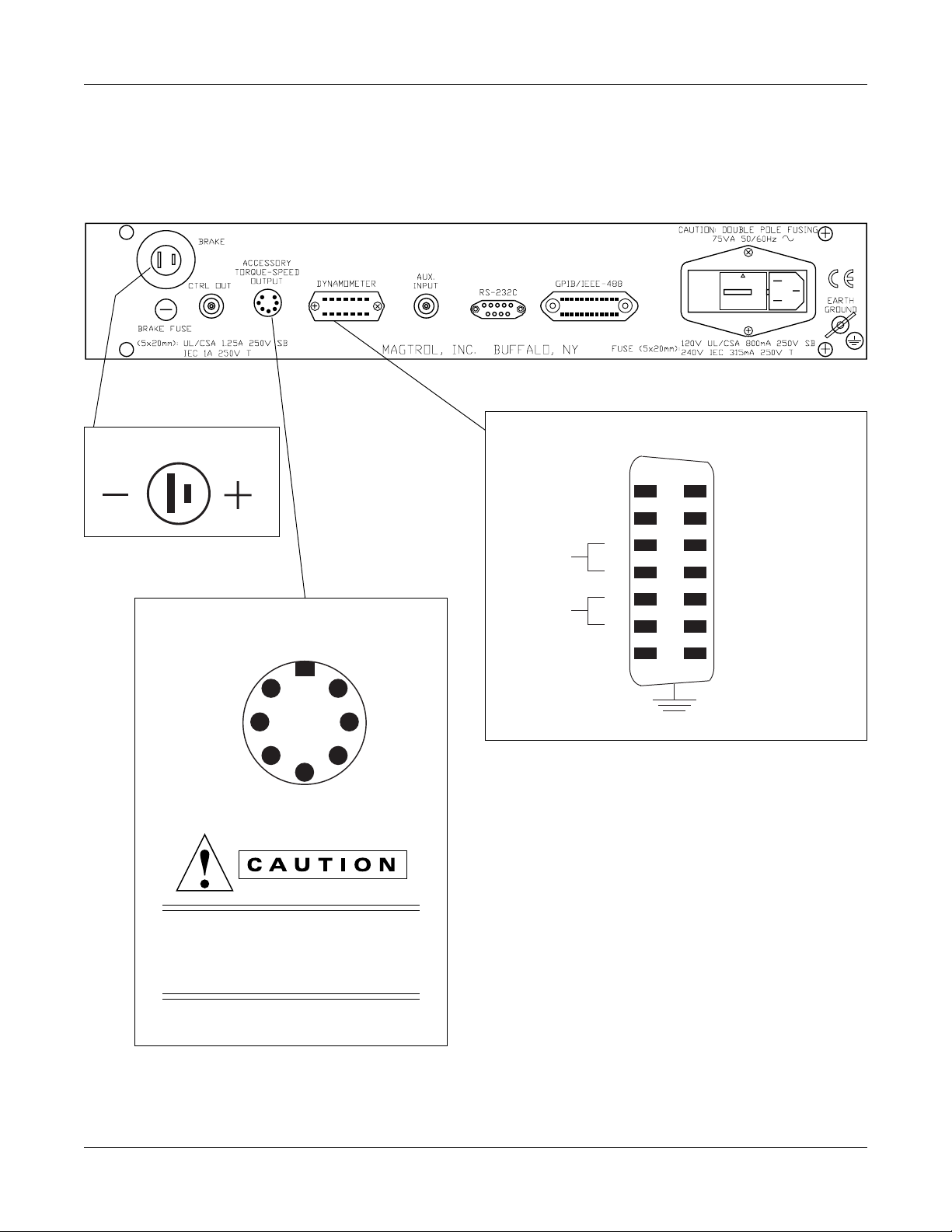
1
2
3
4
5
6
7
8
9
10
11
12
13
14
COMMON
D.P.
TACH. SIGNAL
N/C
D.P.
TORQUE COMMON
TORQUE SIGNAL
N/C
N/C
+
-
+
-
TACH. +5.0 VDC
ISOLATED
22 VDC
ISOLATED
22 VDC
CONNECTOR SHELL
& CABLE SHIELD
REAR PANEL
The rear panel provides connectors and receptacles for connecting to appropriate equipment.
Figure 2. Rear Panel
Figure 3. Brake Connector
Figure 4. Accessory Torque/Speed Output
TACH.
COMMON
TACH.
SIGNAL
TORQUE
COMMON
67
D.P.
13
45
2
N/C
TORQUE
OUTPUT
Figure 5. Dynamometer Connector
D.P.
6
For use with Magtrol Readouts
only. Connecting another device
to this output may cause
equipment failure.
Magtrol Model DSP6000 Dynamometer Controller Chapter 1 - Introduction
g
g
g
g
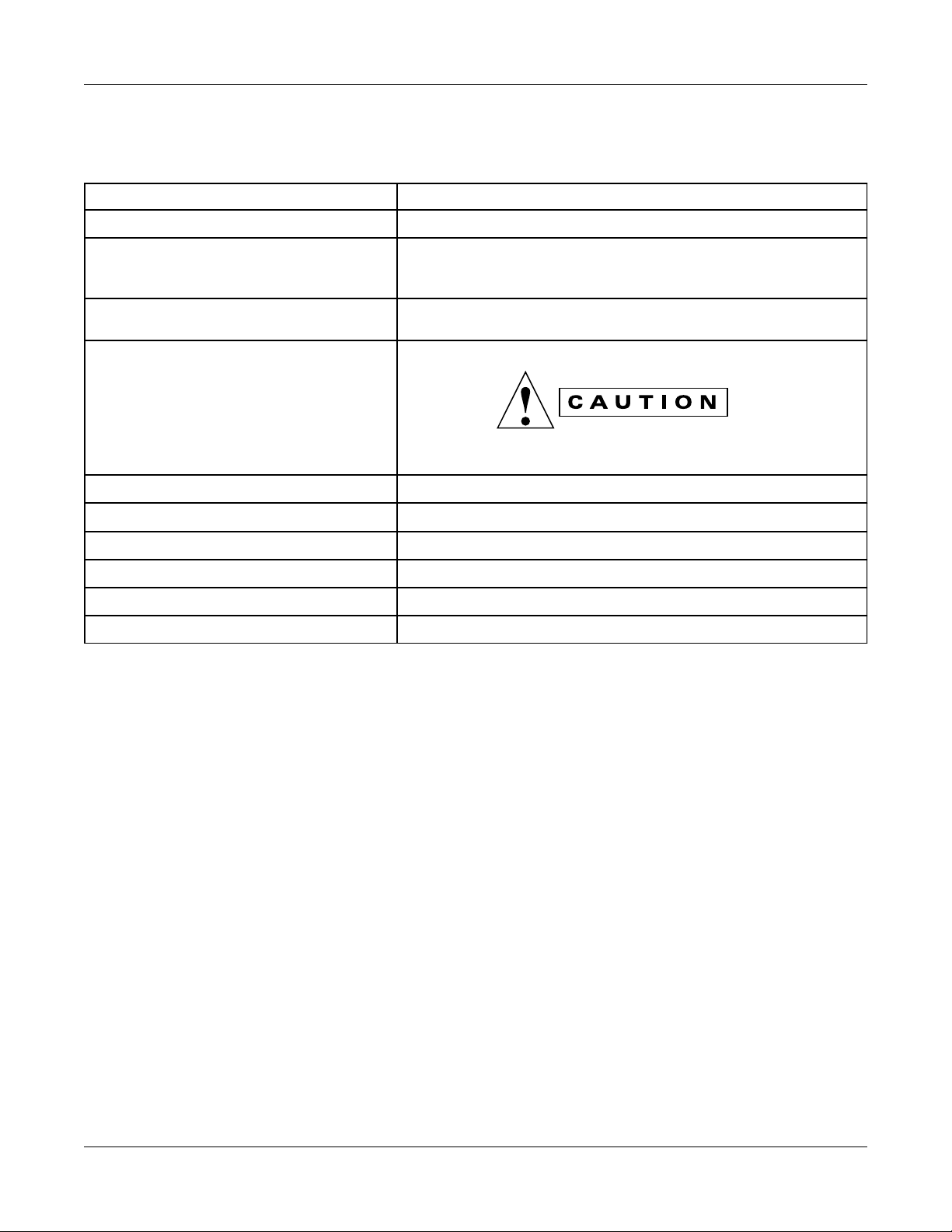
REAR PANEL FUNCTIONS
The rear panel, from left to right, provides the following functions:
Label Function
BRAKE Connect dynamometer brake cable here
Contains brake fuse (5 x 20mm)
BRAKE FUSE
CTRL OUT
ACCESSORY TORQUE-SPEED OUTPUT
UL/CSA 1.25A 250V SB
IEC 1A 250V T
Connect to Model 5241 Power Amplifier when usin
Dynamometer
Connect accessory output cable here (optional).
HD-825
For use with Ma
this output may cause equipment failure.
DYNAMOMETER Connect dynamometer si
AUX INPUT Connect auxiliary instrument cable here
RS-232C Use this socket for RS-232 connector cable
GPIB/IEEE-488 Use this socket for GPIB cable (meets IEEE-488 specifications)
POWER Attach power cord here
EARTH GROUND Attach earth
trol Readouts only. Connecting another device to
nal cable here
round here
7
2 - About the PID L2 - About the PID L
2 - About the PID L
2 - About the PID L2 - About the PID L
oopoop
oop
oopoop
The DSP6000 has PID adjustment capability for both
the speed and torque modes to provide you with the
best system response. The PID Loop comprises the
following three variables:
P = Proportional Gain
I = Integral
D = Derivative
The setpoint is the desired load or speed. Error is the
difference between the setpoint and the actual
measurement.
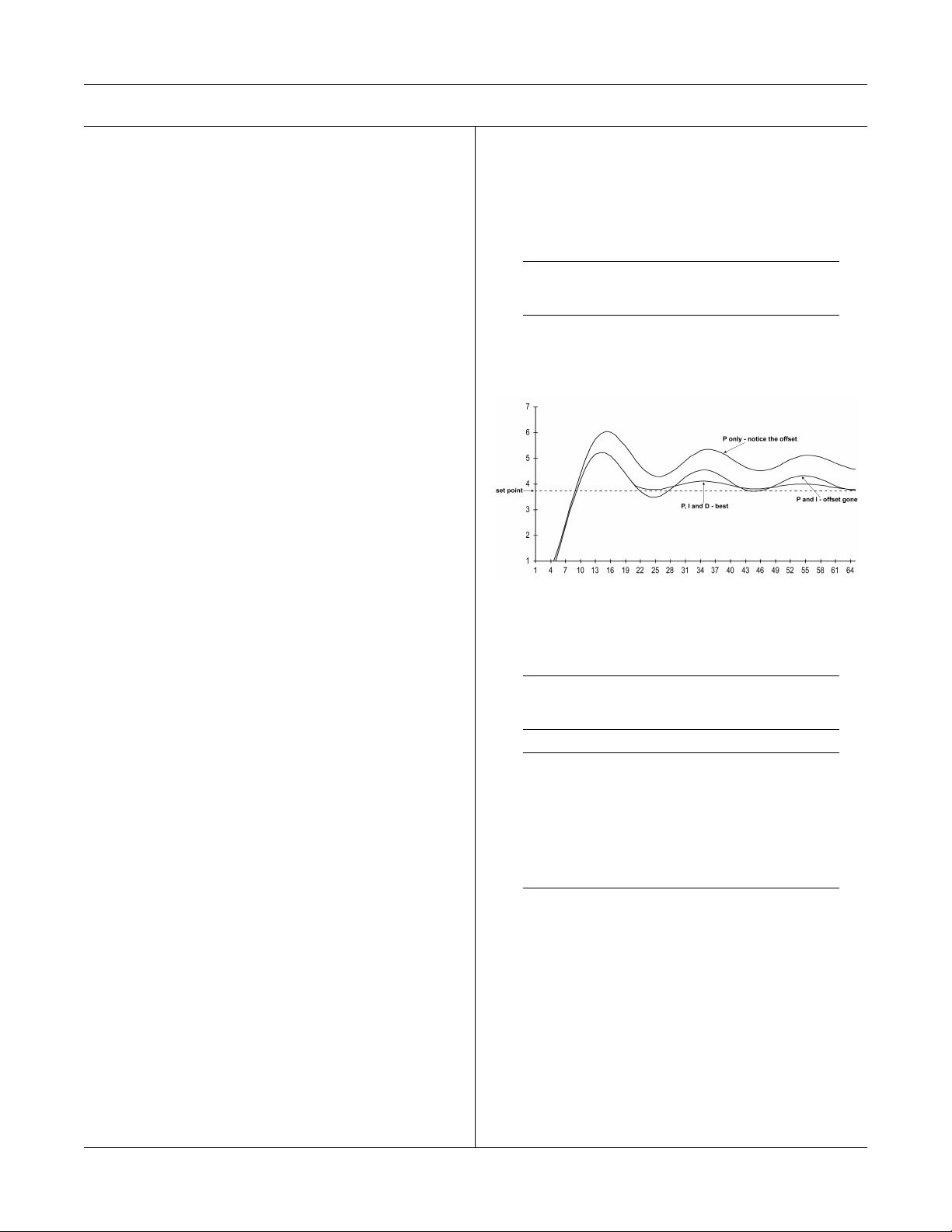
P (PROPORTIONAL GAIN)
With proportional gain, the controller output is
proportional to the error or to a change in measurement.
Deviation from the setpoint is usually present.
Increasing proportional gain will make the PID loop
unstable. Increasing integral value eliminates this
instability. For best loop control, set the proportional
gain as high as possible without causing the loop to
become unstable.
I (INTEGRAL)
With integral, the controller output is proportional to
the amount of time the error is present. Increasing the
integral value eliminates the offset from the setpoint. If
the response becomes oscillatory, increase the derivative
value.
D (DERIVATIVE)
With derivative, the controller output is proportional to
the rate of change of the measurement or error.
Derivative can compensate for a changing measurement.
Derivative takes action to inhibit more rapid changes
of the measurement than proportional gain.
When a setpoint change occurs, the derivative causes
the controller gain to go the "wrong" way when the
measurement gets close to the setpoint. Derivative can
be used to control overshoot. If derivative is used, higher
gain and integral values are usually necessary.
Magtrol offers a comprehensive motor-test program
which would satisfy most of your needs. Call Magtrol
Sales at 1-800-828-7844 or 1-716-668-5555 to request
your custom software.
NOTE: To set PID values, see Chapter 3
- Installation.
Figure 6. PID Loop
SETTING THE CORRECT PID'S FOR YOUR MOTOR
NOTE: Each type of motor may have it's
own optimum PID setting.
NOTE: The PID settings are scaled to the
maximum speed setting;
therefore the maximum speed
setting should be adjusted to just
higher than the free-run speed of
the motor being tested.
When testing a new motor where the optimal PID's are
unknown:
1. Begin with the Proportional Gain (P) and the
Integral (I) both set to a low value and the Derivative
(D) set to zero. This will allow the best opportunity
for finding the optimum in the lowest amount of
steps.
2. Using the DSP6000 in the speed mode: Set the
speed target at approximately 90% of the free-run
speed.
8
 Loading...
Loading...