

Page 1

DCS 6000
Technical specifications
Digital Conference System
DCS 6000
External Microphone Control
RS232 protocol
Please refer to ‘Revision History’ at page 4 for compatibility to releases prior to Release 5.1.
Danish Interpretation Systems DIS
Page 2

Danish Interpretation Systems Technical Specifications
1 List of Contents
1 List of Contents ............................................................................................................................ 2
1.1 Revision history................................................................................................................... 4
2 Introduction and document overview.......................................................................................... 5
2.1 Restrictions in DCS6000..................................................................................................... 5
2.2 Voting Concepts .................................................................................................................. 5
2.2.1 Voting session............................................................................................................... 5
2.2.2 Attendance check.......................................................................................................... 6
2.2.3 Late Attendance ............................................................................................................ 6
2.3 Notation................................................................................................................................ 7
3 Serial Protocol.............................................................................................................................. 8
3.1 Package format.................................................................................................................... 8
3.2 CRC Calculation.................................................................................................................9
3.3 Encoding .............................................................................................................................. 9
3.4 Message types .................................................................................................................... 10
3.4.1 CU reset (CU external)........................................................................................... 10
3.4.2 Change binary Control Mode (external CU).......................................................... 10
3.4.3 Send Control Message to CU (external CU).......................................................... 10
3.4.4 Receive Control Message from CU (CU external)................................................11
3.5 Building a control message – step by step....................................................................... 11
4 DCS 6000 Messages................................................................................................................... 12
4.1 Addresses in the DCS 6000 system.................................................................................. 12
4.2 Group addresses................................................................................................................ 12
4.3 Messages from the external unit to the CU..................................................................... 12
The following sections describe the messages from each message group.................................. 13
4.3.1 Messages in EXTERNAL_CONTROL_GRP............................................................ 13
4.3.2 Messages in MICROPHONE_CONTROL_GRP....................................................... 14
4.3.3 MICROPHONE_PRIORITY...................................................................................... 17
4.3.4 Messages in EXTERNAL_AUDIO_CONTROL_MU............................................... 18
4.3.5 Messages in Voting_CONTROL_GRP......................................................................21
4.4 Summary of control messages (External Unit CU)................................................... 24
4.5 Messages from the CU to the external unit..................................................................... 26
Copyright © 2006 DIS DCS6000 RS232 MANUAL REV I.DOC 12-09-2006
No part of this publication may be reproduced or utilized in any form or by any means without permission in writing from the
publisher
Page 3

Danish Interpretation Systems Technical Specifications
Messages in MAIN_GRP............................................................................................................ 27
4.5.1 Messages in EXTERNAL_CONTROL_GRP............................................................ 27
4.5.2 Messages in MICROPHONE_STATUS_GRP........................................................... 28
4.5.3 Messages in EXTERNAL_AUDIO_STATUS_MU .................................................. 33
4.5.4 Messages in VOTING_STATUS_GRP...................................................................... 35
4.5.5 Messages in UNIT_ATTENDANCE_STATUS_GRP............................................... 38
4.5.6 Messages in UNIT_VOTE_STATUS_GRP............................................................... 40
4.6 Summary of status control messages (CU External control unit) ........................... 41
5 Controlling Microphones........................................................................................................... 44
5.1 CRC Calculation...............................................................................................................44
5.1.1 CU Reset message....................................................................................................... 44
5.1.2 Entering binary microphone control mode ................................................................. 44
5.2 Registering with the CU ................................................................................................... 44
5.2.1 Power up of the CU after connecting.......................................................................... 45
5.2.2 Power up of the CU before connecting....................................................................... 46
5.3 The Heart Beat process..................................................................................................... 47
5.4 Retrieving the microphone system status ....................................................................... 47
6 Additional detailed example....................................................................................................... 50
6.1 Example - Registration with the CU ............................................................................... 50
6.1.1 Step (1) – Entering Microphone Control Mode.......................................................... 50
6.1.2 Step(2) – Requesting registration in the CU............................................................... 52
6.1.3 Step(3) – Registration reply from the CU................................................................... 53
6.2 Example 2 – Turning on the microphone of a delegate................................................. 55
Copyright © 2006 DIS DCS6000 RS232 MANUAL REV I.DOC 12-09-2006
No part of this publication may be reproduced or utilized in any form or by any means without permission in writing from the
publisher
Page 4
Danish Interpretation Systems Technical Specifications
1.1 Revision history
21-07-2003 A Initial version of the document.
25-02-2004 B Corrected a fault in section 3.4.4 Control Job Received (CU external).
Format of the message corrected
17-06-2004 C Updates and additions to the descriptions.
03-07-2004 D A section with summary of the control messages and status of control messages
has been added. Examples of the code has been added in chapter 6
10-10-2004 E Commands in section 4.3.2, 4.3.3 and 4.5.3 have been changed as part of the
firmware release 5.1.
Applications made for previous releases have to be updated reflecting those
changes.
The actual sections are marked with a frame around the text.
14-02-2006 F Commands for voting control (license option).
08-05-2006 G Correction to registration, when using voting control.
18-05-2006 H Addition to voting control (secret voting + 5-button voting)
12-09-2006 I Addition of message for setting up microphone speak priority. Refer to ‘4.3.3
MICROPHONE_PRIORITY’
Copyright © 2006 DIS DCS6000 RS232 MANUAL REV I.DOC 12-09-2006
No part of this publication may be reproduced or utilized in any form or by any means without permission in writing from the
publisher
Page 5

Danish Interpretation Systems Technical Specifications
2 Introduction and document overview
The DCS 6000 system offers the possibility of controlling the microphones from a PC, AMX or other
external control unit via a serial connection. This text documents how this feature is used; how
external control of the DCS 6000 system is executed.
The protocol used on the cable between the central unit (CU) of the DCS 6000 system and the external
control unit is described in general in section 3.
Parts of this protocol encapsulate the protocol used on the DCS 6000 bus and thus enable the CU and
the external control unit to communicate as if the latter was a unit on the bus. The parts of the DCS
6000 protocol, which are relevant for controlling the microphones are described in section 4.
Section 5 summarizes and exemplifies how to use the protocol described in sections 3 and 4 to control
the microphone application.
Additional detailed examples are shown in section 6.
2.1 Restrictions in DCS6000
The RS232 protocol control described herein provides descriptions for an external control unit to do
microphone control, audio settings and voting in the DCS6000 system. Basic functionality is hereby
made available, however some restrictions need mentioning:
- The Voting control functionality is protected by a license feature within the CU.
- There is no support for Dual microphone units or units sharing a microphone.
- There is no support for Voting units without microphones.
For voting functionality to become available, the CU must be provided with a CU license key that
enables voting and voting control through the RS232 connection.
2.2 Voting Concepts
2.2.1 Voting session
Voting sessions are controlled (setup/opened/closed) from an external control unit.
First, the following voting parameters must be setup from external control:
- Voting Type (3-Button Voting or 5-Button Voting)
- Secret Voting (Open Voting or Secret Voting)
Printed in Denmark
5
Page 6
Danish Interpretation Systems Technical Specifications
3-Button voting sessions provide the delegates with the option to make a selection among three
alternatives: (typically Yes, Abstain and No), whereas 5-button voting sessions offer 5 alternatives
(typically ++, +, 0, - and --).
During an Open voting session, the votes are captured by the voting units, and the voting units show to
the delegate, which button was pressed. If a voting session is defined as Secret, the voting units still
register, when the delegates vote, but they do not reveal, which button was pressed.
A voting session is opened and closed from an external control unit. Only during an open voting
session, the delegates are able to cast their votes.
During an Open voting session, the CU informs about votes received from the delegates. And,
furthermore, the CU continuously transmits interim results, both when running Open and Secret voting
sessions. When the voting session is closed, the CU informs about the final voting result.
The voting result remains in the CU until the next voting session is started, or until the CU is reset. The
result is available for an external control unit to read as long as it is valid.
2.2.2 Attendance check
Prior to a voting session, it is often desireable to sustain, how many delegates are actually present. In
order to determine the number of delegates present, an Attendance Check is carried out. From an
external control unit the CU is commanded to start an attendance check. A single button (the ‘Present’
button) starts flashing on the microphone units, and the delegates can acknowledge their presence by
pressing this button.
During an attendance check, the CU informs the external control unit about units, where the delegate
has pressed the ‘Present’ button. Furthermore, the CU continuously informs the latest number of
present delegates (interim result). When the Attendance check is ended, the CU reports the final
attendance check result.
The CU stores the final result until next time an attendance check is started, or until the CU is reset.
This result can be read from the CU as long as it is valid.
2.2.3 Late Attendance
Late Attendance is defined as the ability to vote despite a delegate has not participated in a previous
attendance check. The CU allows late attendance.
In order to keep a correct attendance check result, the CU actually updates the attendance check result
if late attendance occurs during a voting session.
6
Printed in Denmark
Page 7

Danish Interpretation Systems Technical Specifications
After completion of a voting session, the attendance check result consists of delegates, who
participated in the actual attendance check plus delegates participating only in the voting session (late
attendance).
2.3 Notation
The RS232 protocol is defined byte for byte (1 byte = 8 bits). This document uses the following
notation to describe these bytes:
Type of notation Syntax Example
ASCII representation ’value’ ‘m’
Decimal representation <value> <109>
Hexadecimal representation [value] [6D]
The example shows, that the byte-value of the 8-bits ..01101001..
can be perceived as the ASCII character ‘m’, as the decimal value 109 or as the hexadecimal value
0x6D.
Printed in Denmark
7
Page 8

Danish Interpretation Systems Technical Specifications
3 Serial Protocol
All communication between the CU and the external control unit is done through a serial connection
either via RS232 or RS422. The format of the serial data is 8 data bits, 1 stop bit and no parity.
Possible bit rates are 2400, 4800, 9600, 19200, 38400, 57600 and 115200 bits/s. The default is 115200
bits/s. Hardware flow control is used on the serial port.
The CU provides a possibility to save the settings in a configuration. Whenever the CU powers up, the
settings stored in the configuration are applied. The bit rate setting is part of the configuration, and is
applied after power up.
3.1 Package format
Communication between the CU and an external control unit consists of binary packages (messages).
Each binary message consists of bytes. The format of the packages sent between the CU and the
external control unit is as follows:
<START> <Message Type> <ID> <Data Byte 0> . . . <Data Byte N> <CRC> <STOP>
START is the constant 0xFC that indicates the start of a message
Message Type is a byte indicating the type of the message. The message types used is described in
section 3.4.
ID is a byte identifying this message in a stream of messages. Each time a message is sent this number
is incremented. When the maximum allowed value, 63, is reached the counter is wrapped. Separate
counters are used for message from the CU and messages to the CU.
Data byte 0 – Data byte N is the actual message to be sent.
CRC is an 8-bit CRC value for the message. The CRC is calculated over the bytes between the Start
and CRC. The calculation is described in section 3.2.
STOP is the constant 0xFD that indicates the end of a message.
8
Printed in Denmark
Page 9
Danish Interpretation Systems Technical Specifications
3.2 CRC Calculation
An 8-bit CRC calculation with the polynomial x8+x2+x+1 is used for the serial communications. A C
implementation of a function calculating the CRC value of a message is given below:
unsigned char CalcCRC(unsigned char *Message, unsigned char Length)
{
UCHAR Crc;
UINT k;
Crc = 0;
for (k=0; k < Length; k++)
Crc = CrcTable[Crc ^ (*Message++)];
return Crc;
}
The variable CrcTable used above refers to this array:
unsigned char CrcTable[]={
0, 7, 14, 9, 28, 27, 18, 21, 56, 63, 54, 49, 36, 35, 42, 45,
112, 119, 126, 121, 108, 107, 98, 101, 72, 79, 70, 65, 84, 83, 90, 93,
224, 231, 238, 233, 252, 251, 242, 245, 216, 223, 214, 209, 196, 195, 202, 205,
144, 151, 158, 153, 140, 139, 130, 133, 168, 175, 166, 161, 180, 179, 186, 189,
199, 192, 201, 206, 219, 220, 213, 210, 255, 248, 241, 246, 227, 228, 237, 234,
183, 176, 185, 190, 171, 172, 165, 162, 143, 136, 129, 134, 147, 148, 157, 154,
39, 32, 41, 46, 59, 60, 53, 50, 31, 24, 17, 22, 3, 4, 13, 10,
87, 80, 89, 94, 75, 76, 69, 66, 111, 104, 97, 102, 115, 116, 125, 122,
137, 142, 135, 128, 149, 146, 155, 156, 177, 182, 191, 184, 173, 170, 163, 164,
249, 254, 247, 240, 229, 226, 235, 236, 193, 198, 207, 200, 221, 218, 211, 212,
105, 110, 103, 96, 117, 114, 123, 124, 81, 86, 95, 88, 77, 74, 67, 68,
25, 30, 23, 16, 5, 2, 11, 12, 33, 38, 47, 40, 61, 58, 51, 52,
78, 73, 64, 71, 82, 85, 92, 91, 118, 113, 120, 127, 106, 109, 100, 99,
62, 57, 48, 55, 34, 37, 44, 43, 6, 1, 8, 15, 26, 29, 20, 19,
174, 169, 160, 167, 178, 181, 188, 187, 150, 145, 152, 159, 138, 141, 132, 131,
222, 217, 208, 215, 194, 197, 204, 203, 230, 225, 232, 239, 250, 253, 244, 243};
The CRC calculation is done byte by byte, starting with the Message Type and ending with the last
data byte, both included.
Examples on CRC calculations are found in section 5.1
3.3 Encoding
Since the values used for the start and stop delimiters occasionally have to be used inside the
messages, the data in the packets are encoded to avoid using these values. In order to achieve this a
third control value Escape, with the value 0xFE, is introduced. Whenever one of the values 0xFC,
0xFD and 0xFE are needed in a message, they are replaced with a two byte sequence as detailed here:
Value to be
sent
0xFC {Escape} 0
0xFD {Escape} 1
0xFE {Escape} 2
Encoding of the contents of the binary message is done after the CRC calculation.
Encoded as
Printed in Denmark
9
Page 10

Danish Interpretation Systems Technical Specifications
3.4 Message types
The following sections describe the types of messages that are sent between the CU and the external
control unit. For each message type the format of the messages of this type is shown, this description
excludes the start/stop delimiters and the CRC. The field <ID> in the following descriptions refers to
the identifier byte introduced in section 3.1.
3.4.1 CU reset (CU external)
When the CU powers up, it transmits a binary message on the serial interface, in order to inform
external control units, that the DCS 6000 system (CU) has been turned on.
The format of the CU reset message is:
<START> ‘r’ <ID> <CRC> <STOP>
3.4.2 Change binary Control Mode (external CU)
This message is sent from the external controller to the CU in order to change the binary control mode
of the serial interface. The message format is either
<START> ‘m’ <ID> ‘c’ ‘m’ <CRC> <STOP>
which changes the mode to microphone control mode. Or
<START> ‘m’ <ID> ‘q’ <CRC> <STOP>
which leaves the microphone control mode.
3.4.3 Send Control Message to CU (external CU)
This message is used to send a DCS 6000 message to the CU asking it to perform some operation or
deliver some data. The messages available are discussed in section 4.3. The format of the message is:
<START> ‘j’ <ID> <Chain> <MSB addr> <LSB Addr> <Message Group> <Data 1> <Data 2> <Data 3> <CRC> <STOP>
Chain is the chain number the control job originates from. This field exists because the command can
be used to simulate control jobs originating from messages on the DCS 6000 bus. Just set this value to
0.
LSB addr and MSB addr are the least respectively the most significant bytes of the external control
units address. See section 5.2 on how to obtain a unique address for an external control unit.
Message Group defines the message group of the message to send. The message groups are defined in
section 4.3.
10
Printed in Denmark
Page 11

Danish Interpretation Systems Technical Specifications
Data 1, Data 2 and Data 3 are the actual data bytes to send to the CU. Typically the function to be
executed is defined by Message Group + Data 1 while Data 2 and Data 3 are the parameters top the
function. In the case that not all of the data bytes are needed the rest are set to 0.
3.4.4 Receive Control Message from CU (CU external)
This message encapsulates DCS 6000 commands sent from the CU to external control unit. The format
of the message is
<START> 'c' <ID> <MSB addr> <LSB addr> <Message Group> <len> <Data 1>..<Data N> <CRC> <STOP>
MSB addr and LSB addr are the least respectively the most significant bytes of the address of the
receiver of the message. The external controller should only take note of the message if the address is
its own or the group address for a group it is currently a member of. See section 4.2 for a list of
relevant group addresses.
Message Group is the message group of the message sent by the CU. The message groups are defined
in section 4.5.
Len is the number of data send (N)
Data 1 to Data N are the data bytes sent in the message.
3.5 Building a control message – step by step
When a message is to be transferred via the serial connection, the follow steps are done in the order
shown below:
1. The Message Type and contents is decided.
2. ID is added.
<Message Type>
3. CRC check sum is added.
<Message Type> <ID> <Data Byte 0> . . . <Data Byte N>
4. Encoding of the message is done with respect to escape characters
<Message Type> <ID> <Data Byte 0> . . . <Data Byte N> <CRC>
5. Finally, START and STOP delimiters are added.
<START>
<Message Type>
<Data Byte 0> . . . <Data Byte N>
<ID>
<Data Byte 0> . . . <Data Byte N>
<CRC>
<Message Type> <ID> <Data Byte 0> . . . <Data Byte N> <CRC>
<STOP>
Printed in Denmark
11
Page 12
Danish Interpretation Systems Technical Specifications
4 DCS 6000 Messages
The RS232 binary protocol is used to transfer DCS 6000 system commands between the CU and the
external control unit. General definitions for the communication are described in sections 3.4.3 and
3.4.4. This section describes the details for the commands that can be sent via the RS232 protocol.
4.1 Addresses in the DCS 6000 system
Units, connected to the CU and provided with ability to initiate communication in the DCS 6000
system are assigned unique addresses. This goes for microphone units, interpreter sets and for external
control units as well. The CU is responsible for assigning addresses to various units.
Addresses are assigned in a random order at the first power up of the CU.
In order to obtain an address, an external control unit must pass through a registration. See section 5.2.
External control units are assigned addresses in the range 3900-3999 or 4040-4049.
Unique addresses allow the CU to send control messages directly to a single unit. Furthermore, it is
possible for the CU to distinguish the sender of a control message from all other unit by means of the
unique address.
4.2 Group addresses
All messages sent from the CU is either directed at a single unit or at a group of units identified by a
group address. The group addresses that the external controller is a member of is:
Group Address Comments
All units 4000 The external unit is always a member of this group
Control Units 4013 The external unit is always a member of this group
An external control unit must react only upon a control message carrying either the unique controller
unit address or one of the above group addresses.
4.3 Messages from the external unit to the CU
The messages that an external control unit can send to the CU when the binary interface is in the
microphone control mode are divided into three groups:
• The EXTERNAL_CONTROL_GRP group consisting of messages to do with the registering and
monitoring of external control units. The value corresponding to EXTERNAL_CONTROL_GRP
is 27.
• The EXTERNAL_AUDIO_CONTROL_MU group that contains messages for controlling the
volume controls of the CU. The value corresponding to EXTERNAL_AUDIO_CONTROL_MU
is 28.
12
Printed in Denmark
Page 13
Danish Interpretation Systems Technical Specifications
• The MICROPHONE_CONTROL_GRP with messages regarding switching microphone on/off,
controlling the request queue etc. The value corresponding to
MICROPHONE_CONTROL_GRP is 18.
• The VOTING_CONTROL_GRP with messages to start and stop attendance check and voting
sessions, and to request voting results. The value corresponding to VOTING_CONTROL_GRP
is 52.
The following sections describe the messages from each message group.
4.3.1 Messages in EXTERNAL_CONTROL_GRP
The following subsections describe each of the messages in the group. The message format
descriptions have the same meaning as in section 3.4.3.
EXTERNAL_NEW_UNIT
Command item value: 1
Message format:
<START> ‘j’ <ID> <0> <15> <173> <27> <1> <Capabilities> <External Identity> <CRC> <STOP>
This message is used by an external control unit to register to the CU. The result of registration in the
CU is an address assigned to external control unit for unique identification. This message should be
sent with the group address for external controllers (4013) as sender address.
When registering in the CU, the external control unit indicates, which functionality the external
controller is capable of running. This is indicated by the parameter Capabilities:
Capabilities Value Description
Only Microphone
Functionality
Microphone and
Voting Functionality
2 The external controller supports only microphone
functionality.
10 The external controller supports microphone
functionality and also voting functionality
(Open/Close voting sessions).
The registering unit to identify it can use the External Identity. The CU includes the External Identity,
when the assigned address is transmitted to the external control unit. The External Identity can be
assigned any 8-bit value; also 0.
EXTERNAL_HEART_BEAT_RESPONSE
Command item value: 4
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <27> <4> <0> <0> <CRC> <STOP>
The external control unit should send this message as reply to EXTERNAL_HEART_BEAT_REQUEST
messages from the CU in order to indicate that the external controller is still present.
Printed in Denmark
13
Page 14

Danish Interpretation Systems Technical Specifications
4.3.2 Messages in MICROPHONE_CONTROL_GRP
The following subsections describe each of the messages in the group. The message format
descriptions have the same meaning as in section 3.4.3.
MICROPHONE_CONTROL_DELEGATE_OFF_ACTIVATE
Command item value: 1
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <18> <1> <0> <0> <CRC> <STOP>
When this command is issued to the CU all active delegate microphones are deactivated (chairman
units are unaffected) and cannot be reactivated until the delegate off is deactivated.
MICROPHONE_CONTROL_DELEGATE_OFF_DEACTIVATE
Command item value: 2
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <18> <2> <0> <0> <CRC> <STOP>
This command is used to re-allow delegate microphones to be activated after
MICROPHONE_CONTROL_DELEGATE_OFF_ACTIVATE has been used.
MICROPHONE_CONTROL_MUTE_ACTIVATE
Command item value: 3
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <18> <3> <0> <0> <CRC> <STOP>
This command mutes all delegate microphones (chairman units are unaffected).
MICROPHONE_CONTROL_MUTE_DEACTIVATE
Command item value: 4
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <18> <4> <0> <0> <CRC> <STOP>
This command is used to un-mute the delegate microphones after the above command has been used.
MICROPHONE_CONTROL_NEXT_ON
Command item value: 7
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <18> <7> <0> <0> <CRC> <STOP>
Disables the delegate microphone that has been active for the longest time, and activates the first
delegate microphone in the request list.
14
Printed in Denmark
Page 15

Danish Interpretation Systems Technical Specifications
MICROPHONE_CONTROL_CLEAR_REQUEST_LIST
Command item value: 8
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <18> <8> <0> <0> <CRC> <STOP>
Clears the request list.
MICROPHONE_CONTROL_SET_MAXSPEAKERS
Command item value: 12
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <18> <12> <Max Speakers> <0> <CRC> <STOP>
Set the maximum number of simultaneously active delegate microphones to Max Speakers. Chairman
units are not included in this count. Regardless of the setting of this parameter the maximum number
of active microphones (delegates + chairmen) is 8. The range of Max Speakers is 0-8.
MICROPHONE_CONTROL_SET_MAXREQUESTS
Command item value: 13
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <18> <13> <Max Requests> <0> <CRC> <STOP>
Sets the maximum number of delegates in the request queue to Max Requests the range is 0-255.
MICROPHONE_CONTROL_MICROPHONE_ON
Command item value: 14
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <18> <14> <Microphone Addr MSB> <Microphone Addr LSB> <CRC>
<STOP>
Activates the microphone with the address 256*Microphone Address MSB + Microphone Address
LSB. See section 5.2 for a description of how to find the microphone addresses.
MICROPHONE_CONTROL_MICROPHONE_OFF
Command item value: 15
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <18> <15> <Microphone Addr MSB> <Microphone Addr LSB> <CRC>
<STOP>
Deactivates the microphone with the address 256*Microphone Address MSB + Microphone Address
LSB.
Printed in Denmark
15
Page 16
Danish Interpretation Systems Technical Specifications
MICROPHONE_CONTROL_REQUEST_ON
Command item value: 16
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <18> <16> <Microphone Addr MSB> <Microphone Addr LSB> <CRC>
<STOP>
Places the delegate microphone with the address 256*Microphone Address MSB + Microphone
Address LSB at the back of the request queue.
MICROPHONE_CONTROL_REQUEST_OFF
Command item value: 17
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <18> <17> <Microphone Addr MSB> <Microphone Addr LSB> <CRC>
<STOP>
Remove the delegate microphone with the address 256*Microphone Address MSB + Microphone
Address LSB from the request queue.
MICROPHONE_CONTROL_SYSTEM_OPERATION_MODE
Command item value: 18
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <18> <18> <Operation Mode> <0> <CRC> <STOP>
This command is used to change the operation mode of the microphone application. The mode is set
according to the value of Operation Mode with the following relation between the value and the new
mode:
Operation Mode Number
Auto 0
Manual 1
FIFO 2
MICROPHONE_CONTROL_REQUEST_SYSTEM_STATUS
Command item value: 20
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <18> <20> <0> <0> <CRC> <STOP>
This command is used to prompt the CU for status messages describing the state of the microphone
application. The messages that the CU sends as answer to this are described in section 4.5.2.
16
Printed in Denmark
Page 17
Danish Interpretation Systems Technical Specifications
4.3.3 MICROPHONE_PRIORITY
This message is used to setup the speak priority for microphone units (chairman units and delegate
units).
Message format:
<START> 'j' <ID> <0> <MSB addr> <LSB Addr> <25> <Microphone Addr MSB> <Microphone Addr LSB> <Speak
Priority> <CRC> <STOP>
The message defines the microphone speak priority for the microphone unit, which has the address
256* Microphone Addr MSB + Microphone Addr LSB to the value of the Speak Priority.
The speak priority defines the rights of a microphone unit, according to the following table:
Speak Priority Description
0 No right to speak
1 Default delegate priority
2,3,4 High delegate priorities
5 Chairman priority
Default, delegate microphone units are assigned a speak priority of 1, and chairman units are assigned
a speak priority of 5.
The speak priority 0 should only be assigned to units, where the user is not allowed to turn on the
microphone.
In the operation modes Manual and FIFO, the request lists is ordered in accordance with microphone
speak priorities. Microphone units with high speak priorities always preceedes units with default speak
priority. Units with speak priority of 0 are not allowed into the request list. Furthermore, the request
list does not apply to chairman units either. No matter the operation mode, a unit with chairman
priority is always turned on, when pressing the Speak button.
Printed in Denmark
17
Page 18

Danish Interpretation Systems Technical Specifications
3
6
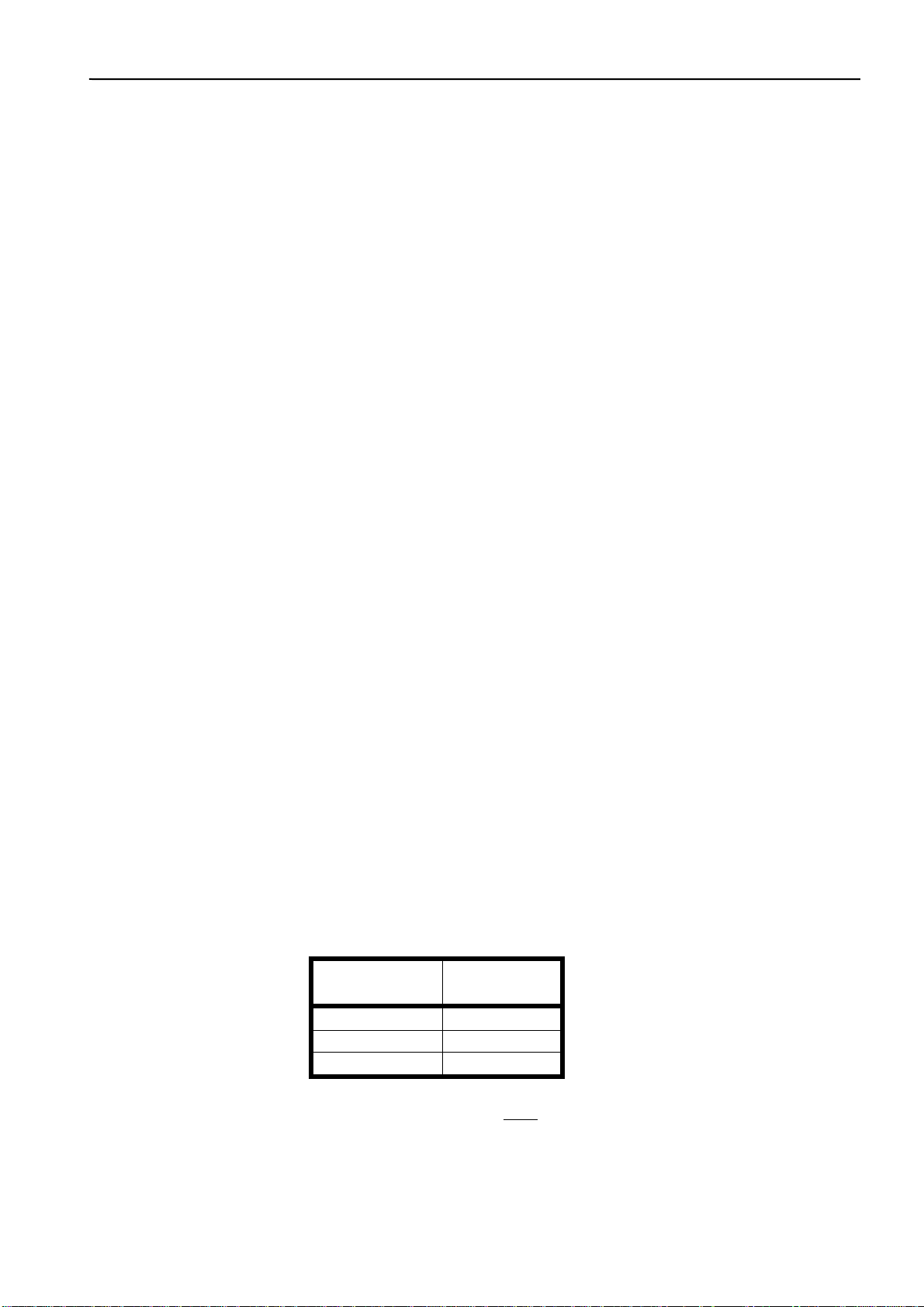
4.3.4 Messages in EXTERNAL_AUDIO_CONTROL_MU
The messages in this message group are used to control the settings of the amplifiers in the system.
The numbers
The messages in this message group are used to control the settings of the amplifiers in the system.
The numbers used to specify the amplifiers in the description of each message refers to the diagram
below.
DM
a
CU60x0 Original Audio Volume Control
1
2
Ext Out.
5
DM
CS/IS/DM
AO/IS
b
c
d
4
e
Ext Inp.
The following sections describe each of the messages from this group. The first data byte in each
message is called the command item. The sections are named after the command item for the message.
The message format in each section only includes the data bytes following the command item.
18
Printed in Denmark
Page 19

Danish Interpretation Systems Technical Specifications
AUDIO_CONTROL_MU_SPEAKER_VOLUME
Command item value: 2
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <28> <2> <Gain Level> <0> <CRC> <STOP>
This command is used to set the gain in amplifier 6. The new gain is given in dB by the parameter
Gain Level which must be in the range –41dB - 0dB. Setting the gain to –41dB results in switching the
amplifier off (thus blocking the signal).
AUDIO_CONTROL_MU_SPEAKER_UP
Command item value: 3
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <28> <3> <0> <0> <CRC> <STOP>
This command increments the gain in amplifier 6. If the gain is already set to 0dB nothing happens.
AUDIO_CONTROL_MU_SPEAKER_DOWN
Command item value: 4
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <28> <4> <0> <0> <CRC> <STOP>
This command decrements the gain in amplifier 6. If the amplifier is switched off nothing happens. If
the gain is set to -40dB before the command is issued the amplifier is switched off.
AUDIO_CONTROL_MU_LINE_OUT_VOLUME
Command item value: 5
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <28> <5> <Gain Level> <0> <CRC> <STOP>
This command is used to set the gain in amplifier 5. The new gain is given in dB by the parameter
Gain Level which must be in the range –41dB - + 20dB. –41dB results in switching the amplifier off
(thus blocking the signal).
AUDIO_CONTROL_MU_MIC_TO_SPEAKER
Command item value: 6
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <28> <6> <Gain Level> <0> <CRC> <STOP>
This command is used to set the gain in amplifier 2. The new gain is given in dB by the parameter
Gain Level which must be in the range –41dB - + 20dB. –41dB results in switching the amplifier off
(thus blocking the signal).
Printed in Denmark
19
Page 20

Danish Interpretation Systems Technical Specifications
AUDIO_CONTROL_MU_MIC_TO_LINE_OUT
Command item value: 7
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <28> <7> <Gain Level> <0> <CRC> <STOP>
This command is used to set the gain in amplifier 1. The new gain is given in dB by the parameter
Gain Level which must be in the range –41dB - + 20dB. –41dB results in switching the amplifier off
(thus blocking the signal).
AUDIO_CONTROL_MU_LINEIN_TO_SPEAKER
Command item value: 8
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <28> <8> <Gain Level> <0> <CRC> <STOP>
This command is used to set the gain in amplifier 4. The new gain is given in dB by the parameter
Gain Level which must be in the range –41dB - + 20dB. –41dB results in switching the amplifier off
(thus blocking the signal).
AUDIO_CONTROL_MU_LINEIN_TO_LINEOUT
Command item value: 9
Message format: <START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <28> <9> <Gain Level> <0> <CRC> <STOP>
This command is used to set the gain in amplifier 3. The new gain is given in dB by the parameter
Gain Level which must be in the range –41dB - + 20dB. –41dB results in switching the amplifier off
(thus blocking the signal).
AUDIO_CONTROL_MU_LINE_IN_LEVEL
Command item value: 13
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <28> <13> <Gain Level> <0> <CRC> <STOP>
This command is used to set the gain in amplifier e. The new gain is given in dB by the parameter
Gain Level. The range for Gain Level is –37dB – 0dB with –37 meaning off.
AUDIO_CONTROL_MU_REQUEST_STATUS
Command item value: 20
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <28> <20> <0> <0> <CRC> <STOP>
This message is used to prompt the CU for status messages describing the gain settings of the
amplifiers in the system. The messages the CU sends as answer to this are described in section 4.5.3.
20
Printed in Denmark
Page 21

Danish Interpretation Systems Technical Specifications
4.3.5 Messages in Voting_CONTROL_GRP
The following control messages controls voting sessions and attendance check sessions in the CU.
Again, the message format descriptions have the same meaning as in section 3.4.3.
COMMAND_ITEM_VOTING_CONTROL_TYPE_OF_VOTING
Command item value: 1
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <52> <1> <Type of Voting> <0> <CRC> <STOP>
The Type of Voting parameter defines, which type of voting session is to take place. Type of Voting is
defined prior to execution of a voting session.
Type of Voting Value Description
3-Button Voting 3 Three voting alternatives will be available
– typically Yes, Abstain and No.
5-Button Voting 5 Five voting alternatives will be available –
typically ++, +, 0, - and --.
COMMAND_ITEM_VOTING_CONTROL_SECRET_VOTING
Command item value: 3
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <52> <3> <Secret Voting> <0> <CRC> <STOP>
The Secret Voting parameter defines, whether votes are kept secret by the system, or whether it is
acceptable for delegates to view votes cast by other delegates..
Secret Voting Value Description
Open voting 0 Votes are revealed by the DCS6000
system.
Secret Voting 1 Votes are kept secret by the DCS6000
system. Units do not reveal votes, and the
CU does not distribute status of cast votes
to external control units, only the
interim/final results.
VOTING_CONTROL_START_ATTENDANCE_CHECK
Command item value: 11
Message format:
Printed in Denmark
21
Page 22

Danish Interpretation Systems Technical Specifications
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <52> <11> <0> <0> <CRC> <STOP>
An attendance check (or presence check) among delegates is conducted in order to determine, how
many are actually participating the meeting – how many votes can be cast from the present delegates.
This command is sent to the CU to start an attendance check. If the CU accepts the command to start
an attendance check, it issues the VOTING_STATUS_ATTENDANCE_CHECK_STARTED message of
the VOTING_STATUS_GRP.
As soon as an attendance check session is started, the CU continuously informs the external control
unit about the current result (interim result). Two times every second, the CU sends the message
VOTING_STATUS_INTERIM_ATTENDANCE_CHECK_RESULT carrying the latest result. Be aware,
that the CU distinguishes between interim result and final result – while the attendance check is
running the CU only sends VOTING_STATUS_INTERIM_ATTENDANCE_CHECK_RESULT
(including interim result) – when the attendance check is finished the CU only sends
VOTING_STATUS_ATTENDANCE_CHECK_RESULT (including final result).
When a delegate presses the ‘Present’ button, the CU sends a UNIT_ATTENDANCE_STATUS_GRP
message with information about the microphone unit address(es), where the present button(s) was
pressed. If the activity among the delegates is high, the CU gathers several addresses in one
UNIT_ATTENDANCE_STATUS_GRP message. Notice, in order to be able to deliver as much
information as possible a dedicated message group is used for this purpose. It is thereby possible to
convey information of up to 4 present delegates in one message.
When an attendance check is started, it continues until it is stopped from the external control (see the
VOTING_CONTROL_STOP_ATTENDANCE_CHECK message below).
In case the CU experiences faults in communication, it cancels the ongoing attendance check session
and issues VOTING_STATUS_ATTENDANCE_CHECK_CANCELLED.
It is not possible to start an attendance check, while a voting session is running.
VOTING_CONTROL_STOP_ATTENDANCE_CHECK
Command item value: 12
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <52> <12> <0> <0> <CRC> <STOP>
This command is used to stop an ongoing attendance check. The CU acknowlegdes the command by
the VOTING_STATUS_ATTENDANCE_CHECK_STOPPED followed by the final attendance check
result (VOTING_STATUS_ATTENDANCE_CHECK_RESULT).
VOTING_CONTROL_REQUEST_ATTENDANCE_RESULT
Command item value: 14
22
Printed in Denmark
Page 23

Danish Interpretation Systems Technical Specifications
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <52> <14> <0> <0> <CRC> <STOP>
Once an attendance check has been completed successfully, the external control unit can request the
attendance check result. The attendance check result remains in the CU until the next attendance check
session is started, or until the CU is reset.
The VOTING_CONTROL_REQUEST_ATTENDANCE_RESULT results in the CU repeating the
information about all microphone unit addresses, where the ‘Present’ button was pressed
(UNIT_ATTENDANCE_CHECK_GRP) followed by the final attendance check result
(VOTING_STATUS_ATTENDANCE_CHECK_RESULT).
VOTING_CONTROL_OPEN_VOTING
Command item value: 16
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <52> <16> <0> <0> <CRC> <STOP>
This command is issued to start a voting session in the CU. The CU responds to the command by
VOTING_STATUS_VOTING_OPENED, and hereafter the delegates may cast their votes from the
microphone units. A voting session cannot be started, if an attendance check is running.
Once the voting session is running, the CU continuously informs about votes cast, and the current
results (interim results). Two times per second, the CU sends informs about the interim results of each
voting alternative (Yes, Abstain and No), this is done using the control message
VOTING_STATUS_INTERIM_VOTING_RESULT.
Each vote cast by a delegate is informed to the external control unit with the control message
UNIT_VOTE_STATUS_GRP. This includes information about the microphone unit address, where the
delegate is located, and the vote that was cast. Also here, a dedicated message group is used, so that it
is possible for the CU to send information of up to 4 votes in one message.
The voting session continues until it is closed by the external controller (using the command
VOTING_CONTROL_CLOSE_VOTING – see below). Or until the CU experiences communication
faults, in which case the voting session is cancelled (VOTING_STATUS_VOTING_CANCELLED).
VOTING_CONTROL_CLOSE_VOTING
Command item value: 18
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <52> <18> <0> <0> <CRC> <STOP>
A voting session is closed by this command. Closing a voting session results in the CU acknowledging
by the final voting results VOTING_STATUS_VOTING_RESULTS (one message per voting option)
Printed in Denmark
23
Page 24

Danish Interpretation Systems Technical Specifications
followed by the message VOTING_STATUS_VOTING_CLOSED. Notice, the order of these messages
is opposite to the attendance check.
VOTING_CONTROL_REQUEST_VOTING_DETAILS
Command item value: 21
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <52> <21> <0> <0> <CRC> <STOP>
Also, the result of a voting session remains in the CU until start of the next voting session or reset of
the CU. With this command the CU is requested to deliver the details of the latest completed voting
session.
The voting result consists of individual votes; which vote was cast from which microphone unit
(UNIT_VOTE_STATUS_GRP) followed by the final voting result of each voting option
(VOTING_STATUS_VOTE_RESULTS).
4.4 Summary of control messages (External Unit CU)
The table below lists all the commands available for an external control unit to control the CU.
EXTERNAL_CONTROL_GRP (=27):
Command Item value Comment
EXTERNAL_NEW_UNIT
EXTERNAL_HEART_BEAT_RESPONSE
MICROPHONE_CONTROL_GRP (=18):
Command Item value Comment
MICROPHONE_CONTROL_DELEGATE_OFF_ACTIVATE
MICROPHONE_CONTROL_DELEGATE_OFF_DEACTIVATE
MICROPHONE_CONTROL_MUTE_ACTIVATE
MICROPHONE_CONTROL_MUTE_DEACTIVATE
MICROPHONE_CONTROL_NEXT_ON
MICROPHONE_CONTROL_CLEAR_REQUEST_LIST
MICROPHONE_CONTROL_SET_MAXSPEAKERS
MICROPHONE_CONTROL_SET_MAXREQUESTS
1 Request registration in the CU
4 Confirm that the RS232 connection
is working
1 Activate the Delegate Off.
2 Deactivate the Delegate Off
3 Mute all delegates
4 Stop muting all delegates
7 Turn on the first delegate from the
delegate list
8 Clear the request list
12 Set the maximum number of open
delegate microphones
13 Set the size of the request list
24
Printed in Denmark
Page 25

Danish Interpretation Systems Technical Specifications
MICROPHONE_CONTROL_MICROPHONE_ON
MICROPHONE_CONTROL_MICROPHONE_OFF
MICROPHONE_CONTROL_REQUEST_ON
MICROPHONE_CONTROL_REQUEST_OFF
14 Turn on a delegate microphone.
15 Turn off a delegate microphone
16 Set a delegate in the request list
17 Remove a delegate from the request
list
MICROPHONE_CONTROL_SYSTEM_OPERATION_MODE
18 Set the operation mode of the
system
MICROPHONE_CONTROL_REQUEST_SYSTEM_STATUS
20 Request status of the microphone
system.
MICROPHONE_PRIORITY (=25):
This message group is not split further into command items.
EXTERNAL_AUDIO_CONTROL_MU (=28):
Command Item value Comment
AUDIO_CONTROL_MU_SPEAKER_VOLUME
2 Set the volume of delegate
loudspeakers
AUDIO_CONTROL_MU_SPEAKER_UP
3 Increment the volume of delegate
loudspeakers
AUDIO_CONTROL_MU_SPEAKER_DOWN
4 Decrement the volume of
delegate loudspeakers
AUDIO_CONTROL_MU_LINE_OUT_VOLUME
AUDIO_CONTROL_MU_MIC_TO_SPEAKER
7 Set the volume of LineOut
8 Adjust the audio level from
speaking delegates to delegate
loudspeakers
AUDIO_CONTROL_MU_MIC_TO_LINE_OUT
12 Adjust the audio level from
speaking delegates to LineOut
AUDIO_CONTROL_MU_LINEIN_TO_SPEAKER
13 Adjust the audio level from
LineIn to delegate loudspeakers
AUDIO_CONTROL_MU_LINEIN_TO_LINEOUT
14 Adjust the audio level from
LineIn to LineOut
AUDIO_CONTROL_MU_LINE_IN_LEVEL
AUDIO_CONTROL_MU_REQUEST_STATUS
15 Set the LineIn level.
16 Request the audio settings.
Printed in Denmark
25
Page 26

Danish Interpretation Systems Technical Specifications
VOTING_CONTROL_MU (=52):
Command Item value Comment
VOTING_CONTROL_TYPE_OF_VOTING
VOTING_CONTROL_SECET_VOTING
VOTING_CONTROL_START_ATTENDANCE_CHECK
VOTING_CONTROL_STOP_ATTENDANCE_CHECK
VOTING_CONTROL_REQUEST_ATTENDANCE_RESULT
1 3-Button or 5-Button voting.
3 Open or Secret voting.
11 Start an attendance check
12 Stop an attendance check
14 Request the CU to deliver the
results of the most recent
attendance check.
VOTING_CONTROL_OPEN_VOTING
VOTING_CONTROL_CLOSE_VOTING
VOTING_CONTROL_REQUEST_VOTING_DETAILS
16 Open (=start) a voting session.
18 Close (=end) a voting session.
21 Request the CU to deliver the
results of the most recent voting
session.
4.5 Messages from the CU to the external unit
When the binary service interface is in the microphone control mode the CU sends messages in the
following message groups to the external controller:
• The MAIN_GRP group with messages regarding the connection and disconnection of
microphone units. The value corresponding to this group is 0.
• The EXTERNAL_AUDIO_STATUS_MU_GRP group consisting of status messages about the
settings of the amplifiers in the system. The value corresponding to this group is 29.
• The MICROPHONE_STATUS_GRP group that contains messages about the status of the
microphone application. The value corresponding to this group is 23.
• The EXTERNAL_CONTROL_GRP group used in the registering and monitoring of external
control units. The value corresponding to this group is 27.
• The VOTING_STATUS_GRP group that informs about attendance check and voting sessions.
The value corresponding to this group is 53.
• The UNIT_ATTENDANCE_CHECK_GRP group informs about microphone unit addresses of
delegates, who has pressed the ‘Present’ button. The value corresponding to this group is 58.
• The UNIT_VOTE_STATUS_GRP group used by the CU to inform about votes and unit address
from votes cast from microphone units. The value corresponding to this group is 69.
26
Printed in Denmark
Page 27

Danish Interpretation Systems Technical Specifications
Messages in MAIN_GRP
The following subsections describe each of the messages in the group. The message format
descriptions have the same meaning as in section 3.4.4.
MAIN_FOUND_UNIT
Command item value: 26
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <0> <8> <26> <Unit Type> <Addr MSB> <Addr LSB> <SerialNumber
Byte 1> <SerialNumber Byte 2> <SerialNumber Byte 3> <Unit Functionality> <CRC> <STOP>
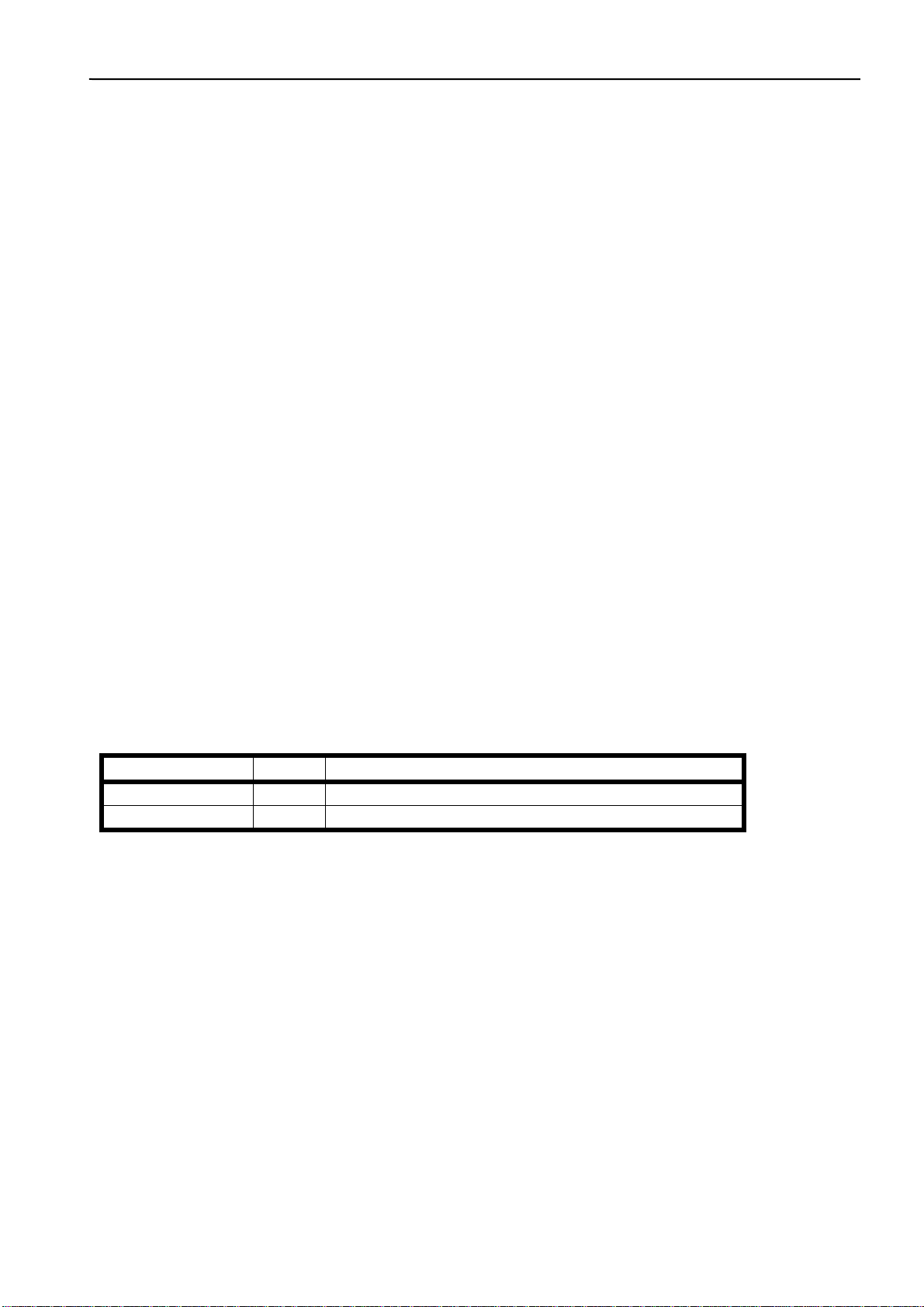
The CU sends this message to the external control unit when a new unit is registered. The Unit Type
field specifies what type of unit was registered. The relation between the unit type and the number is
shown in the table below.
Type of unit Unit Type Number
Delegate Microphone 1
MU Box Delegate Microphone 6
Chairman Microphone 2
MU Box Chairman Microphone
Messages reporting about other unit types can be ignored.
The CU has assigned the address 256*Address MSB + Address LSB to the new unit. The serial number
for the unit is stored in the three bytes Serial Number 1, Serial Number 2 and Serial Number 3. On the
boxes and the displays of the units the serial numbers are written as three numbers between 0 and 255
with dots between (Serial Number 1.Serial Number 2.Serial Number 3).
The Unit Functionality indicates support for chip card, voting and microphone sharing – to be
disregarded.
7
MAIN_LOST_UNIT
Command item value: 4
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <0> <8> <4> <Unit Type> <Addr MSB> <Addr LSB> <SerialNumber Byte
1> <SerialNumber Byte 2> <SerialNumber Byte 3> <Unit Functionality> <CRC> <STOP>
The CU sends this message to the external control unit when a unit is lost (for example if it is
disconnected from the system or the communication with the unit breaks down because of faulty
cables). The parameters are the same as for the MAIN_FOUND_UNIT message.
4.5.1 Messages in EXTERNAL_CONTROL_GRP
The following subsections describe each of the messages in the group. The message format
descriptions have the same meaning as in section 3.4.4.
Printed in Denmark
27
Page 28

Danish Interpretation Systems Technical Specifications
EXTERNAL_UNIT_ADDRESS
Command item value: 2
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <27> <4> <2> <Addr MSB> <Addr LSB> <External Identity> <CRC>
<STOP>
The CU sends this message to tell the external control unit what address it has been assigned. The
address is 256*Address MSB + Address LSB.
The External Identity is the value, which the registering unit has already sent to the CU.
EXTERNAL_HEART_BEAT_REQUEST
Command item value: 3
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <27> <2> <3> <Error Information> <CRC> <STOP>
The CU periodically requests a “heart beat“ from the external control unit by sending this message.
The external control unit is required to respond to this message with an
EXTERNAL_HEART_BEAT_RESPONSE message. This is done in order to monitor if the external
controller is still present. This message is always sent to the control units group address (4013).
The message includes error information from the CU – to be disregarded.
4.5.2 Messages in MICROPHONE_STATUS_GRP
The following subsections describe each of the messages in the group. The message format
descriptions have the same meaning as in section 3.4.4.
MICROPHONE_STATUS_DELEGATE_OFF_ACTIVE
Command item value: 1
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <23> <3> <1> <Control Unit Addr MSB> <Control Unit Addr LSB>
<CRC> <STOP>
This message is sent when a control unit/chairman unit activates the delegate off mode. The address of
the unit that issued the command to enter this mode is 256*Control Unit Address MSB + Control Unit
Address LSB.
MICROPHONE_STATUS_DELEGATE_OFF_INACTIVE
Command item value: 2
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <23> <4> <2> <Control Unit Addr MSB> <Control Unit Addr LSB>
<Delegate Off Status> <CRC> <STOP>
This message signifies that a control/chairman unit that previously made the system enter the delegate
off mode no longer requires this mode to be active. The address of the unit is 256*Control Unit MSB +
Control Unit LSB.
28
Printed in Denmark
Page 29

Danish Interpretation Systems Technical Specifications
The Delegate Off Status indicates whether the delegate off restriction is imposed to the system by
another control units/chairman unit.
MICROPHONE_STATUS_DELEGATE_MUTE_ACTIVE
Command item value: 3
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <23> <3> <3> <Control Unit Addr MSB> <Control Unit Addr LSB>
<CRC> <STOP>
The unit with address 256*Control Unit Addr MSB + Control Unit Addr LSB has muted the delegate
microphones.
MICROPHONE_STATUS_DELEGATE_MUTE_INACTIVE
Command item value: 4
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <23> <4> <4> <Control Unit Addr MSB> <Control Unit Addr LSB>
<Mute Status> <CRC> <STOP>
The unit with address 256*Control Unit MSB + Control Unit LSB that previously had the delegate
microphones muted no longer requires this.
The Mute Status indicates whether another control unit/chairman unit is muting the delegate
microphones.
MICROPHONE_STATUS_MICROPHONE_IN_REQUEST
Command item value: 7
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <23> <4> <7> <Microphone Addr MSB> <Microphone Addr LSB>
<Request Position> <CRC> <STOP>
This message signifies that the microphone with the address 256*Microphone Address MSB +
Microphone Address LSB is in the request queue at position Request Position (where position 1 is the
first to be allowed to speak).
This message is only delivered as part of a microphone system status; it does not necessarily indicate a
recent change of the status of the concerned microphone.
MICROPHONE_STATUS_MICROPHONE_IN_SPEAK
Command item value: 8
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <23> <3> <8> <Microphone Addr MSB> <Microphone Addr LSB> <CRC>
<STOP>
The microphone with the address 256*Microphone Address MSB + Microphone Address LSB is active.
This message is only delivered as part of a microphone system status; it does not necessarily indicate a
recent change of the status of the concerned microphone.
Printed in Denmark
29
Page 30

Danish Interpretation Systems Technical Specifications
MICROPHONE_STATUS_MICROPHONE_ON
Command item value: 9
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <23> <3> <9> <Microphone Addr MSB> <Microphone Addr LSB> <CRC>
<STOP>
The CU sends this message to signal that the microphone with the address 256*Microphone Address
MSB + Microphone Address LSB has been activated.
MICROPHONE_STATUS_MICROPHONE_OFF
Command item value: 10
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <23> <3> <10> <Microphone Addr MSB> <Microphone Addr LSB> <CRC>
<STOP>
The CU sends this message to signal that the microphone with the address 256*Microphone Address
MSB + Microphone Address LSB has been deactivated.
MICROPHONE_STATUS_REQUEST_ON
Command item value: 11
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <23> <4> <11> <Microphone Addr MSB> <Microphone Addr LSB>
<Request Position> <CRC> <STOP>
This message signifies that the microphone with the address 256*Microphone Address MSB +
Microphone Address LSB has been put in the request queue at position Request Position.
MICROPHONE_STATUS_REQUEST_OFF
Command item value: 12
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <23> <4> <12> <Microphone Addr MSB> <Microphone Addr LSB>
<Request Position> <CRC> <STOP>
This message is sent when the unit with the address 256*Microphone Address MSB + Microphone
Address LSB has been removed from the request queue (either because it’s deleted from the list or
because it’s moved to the speak list) while it was at position Request Position. The external control
unit should use this message and MICROPHONE_STATUS_REQUEST_ON to maintain its own copy
of the request queue.
MICROPHONE_STATUS_MAX_REQUESTS
Command item value: 14
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <23> <2> <14> <Max Requests Value> <CRC> <STOP>
Sent to signify that the maximum number of requests allowed in the queue has been set to Max
Requests Value. The message is sent both when the value has been changed and as part of the system
status.
30
Printed in Denmark
Page 31

Danish Interpretation Systems Technical Specifications
Command item value:
MICROPHONE_STATUS_MAX_SPEAKERS
Command item value: 15
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <23> <2> <15> <Max Speakers Value> <CRC> <STOP>
Sent to signify that the maximum number of simultaneous active delegate microphones has been set to
Max Speakers Value. The message is sent both when the value has been changed and as part of the
system status.
MICROPHONE_STATUS_SYSTEM_OPERATION_MODE
Command item value: 16
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <23> <3> <16> <Operation Mode> <All Units> <CRC> <STOP>
This message is sent to signify that the microphone application is in Operation Mode mode. The
values used for Operation Mode are the same as in section 4.3.2.
The All Units indicate, whether the change of operation mode applies to all units – to be disregarded.
MICROPHONE_STATUS_MICROPHONE_UNIT_STATUS
18
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <23> <8> <18> <Addr MSB> <Addr LSB> <SerialNumber Byte 1>
<SerialNumber Byte 2> <SerialNumber Byte 3> <Unit Type and Status> <Unit Functionality> <CRC> <STOP>
The Unit Type and Status includes the following information:
Information Stored in Meaning
Unit Type Bits 0 – 3 1 It is a delegate unit
2 It is a chairman unit
6 It is a delegate MU box
7 It is a chairman MU box
The Unit Functionality is to be disregarded.
Lost Indicator Bit 4 0 Not Lost
1 Lost
MICROPHONE_STATUS_UPDATE_START
Command item value: 19
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <23> <1> <19> <CRC> <STOP>
Printed in Denmark
31
Page 32

Danish Interpretation Systems Technical Specifications
The CU sends this message to tell that a complete update on the status of the microphone control
application will be sent.
MICROPHONE_STATUS_UPDATE_STOP
Command item value: 20
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <23> <1> <20> <CRC> <STOP>
The CU sends this message to tell that it has just finished sending a complete update on the status of
the microphone control application.
MICROPHONE_STATUS_MICROPHONE_ACTIVITY_STATUS
Command item value: 22
Message format:
For CU versions 3.x.x the format is:
<START> 'c' <ID> <MSB addr> <LSB addr> <23> <6> <22> <Addr MSB> <Addr LSB> <State A> <Request Position>
<State B> <CRC> <STOP>
For CU versions 5.x.x the format is:
<START> 'c' <ID> <MSB addr> <LSB addr> <23> <8> <22> <Addr MSB> <Addr LSB> <State A> <Request Position>
<State B> <Microphone Priority> <Individual Settings> <CRC> <STOP>
32
Printed in Denmark
Page 33

Danish Interpretation Systems Technical Specifications
This message gives the following status information about the microphone with the address
256*Microphone Address MSB + Microphone Address LSB
Information Stored in Meaning
Microphone State Bit 0 of State A 1 Microphone is on
0 Microphone is off
Request State Bit 1 of State A 1 Microphone is in the request queue
0 Microphone is not in the request queue
Microphone Mute
State
Bit 2 of State A 1 Microphone is muted
0 Microphone is not muted
Request Position Request Position The microphones position in the request queue. This
number is undefined if the microphones isn’t in request.
Delegate Off State Bit 0 of State B 1 The microphone is a chairman unit and has activated
the delegate off state.
0 The microphone hasn’t activated the delegate off state.
Muting State Bit 1 of State B 1 The microphone is a chairman unit muting the system
0 The microphone does not mute the system.
4.5.3 Messages in EXTERNAL_AUDIO_STATUS_MU
The following subsections describe each of the messages in the group. The message format
descriptions have the same meaning as in section 3.4.4. The amplifier numbers in the following refers
to the diagram in section 4.3.3.
AUDIO_STATUS_MU_SPEAKER_VOLUME
Command item value: 2
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <29> <2> <2> <Gain Level> <CRC> <STOP>
The CU sends this message when the gain setting for amplifier 6 is changed. The new setting in dB is
in the field Gain Level. A setting of –41dB signifies that the amplifier is switched off.
AUDIO_STATUS_MU_SPEAKER_ON
Command item value: 3
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <29> <1> <3> <CRC> <STOP>
The CU sends this message when the speakers on the delegate microphones are switched on.
Printed in Denmark
33
Page 34

Danish Interpretation Systems Technical Specifications
AUDIO_STATUS_MU_SPEAKER_OFF
Command item value: 4
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <29> <1> <4> <CRC> <STOP>
The CU sends this message when the speakers on the delegate microphones are switched off.
AUDIO_STATUS_MU_LINEOUT_VOLUME
Command item value: 5
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <29> <2> <5> <Gain Level> <CRC> <STOP>
This message signifies that the gain setting of amplifier 5 have been changed to Gain Level dB. A
setting of –41dB means the amplifier is switched off.
AUDIO_STATUS_MU_MIC_TO_SPEAKER
Command item value: 6
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <29> <2> <6> <Gain Level> <CRC> <STOP>
This message signifies that the gain setting of amplifier 2 have been changed to Gain Level dB. A
setting of –41dB means the amplifier is switched off.
AUDIO_STATUS_MU_MIC_TO_LINEOUT
Command item value: 7
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <29> <2> <7> <Gain Level> <CRC> <STOP>
This message signifies that the gain setting of amplifier 1 have been changed to Gain Level dB. A
setting of –41dB means the amplifier is switched off.
AUDIO_STATUS_MU_LINEIN_TO_SPEAKER
Command item value: 8
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <29> <2> <8> <Gain Level> <CRC> <STOP>
This message signifies that the gain setting of amplifier 8 have been changed to Gain Level dB. A
setting of –41dB means the amplifier is switched off.
34
Printed in Denmark
Page 35

Danish Interpretation Systems Technical Specifications
AUDIO_STATUS_MU_LINEIN_TO_LINEOUT
Command item value: 9
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <29> <2> <9> <Gain Level> <CRC> <STOP>
This message signifies that the gain setting of amplifier 3 has been changed to Gain Level dB. A
setting of –41dB means the amplifier is switched off.
AUDIO_STATUS_MU_LINE_IN_LEVEL
Command item value: 14
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <29> <2> <14> <Gain Level> <CRC> <STOP>
This message signifies that the gain setting of amplifier e have been changed to Gain Level dB. A
setting of –41dB means the amplifier is switched off.
AUDIO_STATUS_MU_STATUS_START
Command item value: 20
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <29> <1> <20> <CRC> <STOP>
This message is sent to signal that the CU will send a complete status of the audio settings (all of the
above messages).
AUDIO_STATUS_MU_STATUS_STOP
Command item value: 21
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <29> <1> <21> <CRC> <STOP>
This message means that a complete audio settings status has just been sent.
4.5.4 Messages in VOTING_STATUS_GRP
The following subsections describe status messages of voting activity in the CU. The message format
descriptions have the same meaning as in section 3.4.4.
VOTING_STATUS_TYPE_OF_VOTING
Command item value: 1
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <53> <2> <1> <Type of Voting> <CRC> <STOP>
3-Button voting or 5-button voting.
Printed in Denmark
35
Page 36

Danish Interpretation Systems Technical Specifications
Type of Voting Value Description
3-Button Voting 3 Three voting alternatives will be available
– typically Yes, Abstain and No.
5-Button Voting 5 Five voting alternatives will be available –
typically ++, +, 0, - and --.
VOTING_STATUS_SECRET_VOTING
Command item value: 3
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <53> <3> <1> <Secret Voting> <CRC> <STOP>
The Secret Voting parameter defines, whether votes are kept secret by the system, or whether it is
acceptable for delegates to view votes cast by other delegates..
Secret Voting Value Description
Open voting 0 Votes are revealed by the DCS6000
system.
Secret Voting 1 Votes are kept secret by the DCS6000
system.
VOTING_STATUS_ATTENDANCE_CHECK_STARTED
Command item value: 11
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <53> <1> <11> <CRC> <STOP>
This message informs that an attendance has started in the CU.
VOTING_STATUS_ATTENDANCE_CHECK_STOPPED
Command item value: 12
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <53> <1> <12> <CRC> <STOP>
This message informs that an attendance has stopped in the CU.
VOTING_STATUS_ATTENDANCE_CHECK_CANCELLED
Command item value: 13
Message format:
36
Printed in Denmark
Page 37

Danish Interpretation Systems Technical Specifications
<START> 'c' <ID> <MSB addr> <LSB addr> <53> <1> <13> <CRC> <STOP>
This message informs that an attendance is cancelled by the CU.
This only happens in case of communication problems. After cancellation of an attendance check, the
CU does not store any attendance check result.
VOTING_STATUS_INTERIM_ATTENDANCE_RESULT
Command item value: 14
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <53> <3> <14> <MSB result> <LSB result> <CRC> <STOP>
While an attendance check is running, the CU informs about the interim attendance check result in this
message twice every second. Two data bytes carry the interim result, and it interim result is found
from the following calculation:
Interim Result = 256*MSB result + LSB result
VOTING_STATUS_ATTENDANCE_RESULT
Command item value: 15
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <53> <3> <15> <MSB result> <LSB result> <CRC> <STOP>
When an attendance check completes, the CU informs about the final attendance check result in this
message. Again, two data bytes carry the final result, and the final result is found from the following
calculation:
Final Result = 256*MSB result + LSB result
Note that the CU may update attendance result during a voting session if a delegate who did not
participate in the initial attendance check casts a vote during the voting session. This will cause the
final attendance result message to be resend with updated result.
VOTING_STATUS_VOTING_OPENED
Command item value: 16
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <53> <1> <16> <CRC> <STOP>
This message informs that a voting session is opened in the CU. From this point on, it is possible for
the delegates to cast their votes.
VOTING_STATUS_VOTING_CLOSED
Command item value: 18
Printed in Denmark
37
Page 38

Danish Interpretation Systems Technical Specifications
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <53> <1> <18> <CRC> <STOP>
This message informs that a voting session is closed in the CU. Immediately before this message, the
CU has distributed the final voting result (VOTING_STATUS_VOTING_RESULTS).
VOTING_STATUS_VOTING_CANCELLED
Command item value: 19
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <53> <1> <19> <CRC> <STOP>
This message informs that a voting session is cancelled by the CU. No voting result is available after
this.
VOTING_STATUS_INTERIM_VOTING_RESULTS
Command item value: 21
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <53> <4> <21> <alternativ> <MSB result> <LSB result> <CRC>
<STOP>
This message includes the interim voting result of one of the voting alternatives:
Alternativ=1 Number of Yes-votes = 256*MSB result + LSB result
Alternativ=2 Number of Abstain-votes = 256*MSB result + LSB result
Alternativ=3 Number of No-votes = 256*MSB result + LSB result
VOTING_STATUS_VOTING_RESULTS
Command item value: 22
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <53> <4> <21> <alternativ> <MSB result> <LSB result> <CRC>
<STOP>
This message includes the final voting result of one of the voting alternatives:
Alternativ=1 Number of Yes-votes = 256*MSB result + LSB result
Alternativ=2 Number of Abstain-votes = 256*MSB result + LSB result
Alternativ=3 Number of No-votes = 256*MSB result + LSB result
4.5.5 Messages in UNIT_ATTENDANCE_STATUS_GRP
This message group contains presence indications from microphone units, where the ‘Present’ button
has been pressed. The group is not split into command items. Instead, it includes information of up to 4
38
Printed in Denmark
Page 39

Danish Interpretation Systems Technical Specifications
Address 1
microphone unit addresses, where delegates have acknowlegded their presence. The message format
has the same meaning as in section 3.4.4.
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <58> <8> <Presence MSB addr1> <Presence LSB addr1> <Presence MSB
addr2> <Presence LSB addr2> <Presence MSB addr3> <Presence LSB addr3> <Presence MSB addr4> <Presence
LSB addr4> <CRC> <STOP>
For each of the 4 possible microphone unit addresses, 16 bits are transmitted from the CU – 12 bits for
the address, 1 bit for presence indication and 3 bits are unused (=0):
The addresses of present units:
= 16* <Presence MSB addr1> + <Presence LSB addr1[Bit3-Bit0]>
Presence Address 1 = <Presence LSB addr1[Bit4]>
Address 2 = 16* <Presence MSB addr2> + <Presence LSB addr2[Bit3-Bit0]>
Presence of Address 2 = <Presence LSB addr2[Bit4]>
Address 3 = 16* <Presence MSB addr3> + <Presence LSB addr3[Bit3-Bit0]>
Presence of Address 3 = <Presence LSB addr3[Bit4]>
Address 4 = 16* <Presence MSB addr4> + <Presence LSB addr4[Bit3-Bit0]>
Presence of Address 4 = <Presence LSB addr4[Bit4]>
The presence of a delegate has been confirmed positively only, if the address is not 0 and the Presence
of Address bit is set for the related address.
Example:
Imagine, that the CU has received presence indications from microphone units with addresses 1 and
34. And, assume that the CU ‘packs’ the presence indications of both units in the same message. That
results in the CU sending the following message:
<START> 'c' <ID> <15> <173> <58> <8> <0> <17> <2> <0> <0> <0> <0> <18> <CRC> <STOP>
Receiving address is:
256 * <MSB addr> + <LSB addr> = 256*15 + 173 = 4013
The CU sends this message to the address group ‘Control Units’, which has the value 4013.
For Address 1 we receive:
<Presence MSB addr1><Presence LSB addr1> = <0><17>
Printed in Denmark
39
Page 40

Danish Interpretation Systems Technical Specifications
Address 1 = 16* <Presence MSB addr1> + <Presence LSB addr1 [Bit3-Bit0]>
= 16 * 0 + 1 = 1
Presence = <Presence LSB addr1 [Bit4]>
= 1 (Address 1 is present)
For Address 2 we receive:
<Presence MSB addr2><Presence LSB addr2> = <2><18>
Address 2 = 16*2 + 2 = 34
Presence = 1 (Address 34 is present)
For Address 3 and Address 4 there is no information (all is 0).
4.5.6 Messages in UNIT_VOTE_STATUS_GRP
This message group includes votes from microphone units. The message group is not split into
command items. Instead, it includes information of up to 4 microphone unit addresses, where delegates
have acknowlegded their presence. The message format has the same meaning as in section 3.4.4.
Message format:
<START> 'c' <ID> <MSB addr> <LSB addr> <58> <8> <Vote MSB addr1> <Vote LSB addr1> <Vote MSB addr2>
<Vote LSB addr2> <Vote MSB addr3> <Vote LSB addr3> <Vote MSB addr4> <Vote LSB addr4> <CRC> <STOP>
For each of the 4 possible votes 16 bits are transmitted from the CU – 12 bits for the vote and 4 bits for
the vote.
Addresses and votes:
Address 1 = 16*Presence MSB addr1 + Presence LSB addr1[Bit3-Bit0]
Vote1 = Presence LSB addr1[Bit7-Bit4]
Address 2 = 16*MSB addr2 + Presence LSB addr2[Bit3-Bit0]
Vote 2 = Presence LSB addr2[Bit7-Bit4]
Address 3 = 16*MSB addr3 + Presence LSB addr3[Bit3-Bit0]
Vote 3 = Presence LSB addr3[Bit7-Bit4]
Address 4 = 16*MSB addr4 + Presence LSB addr4[Bit3-Bit0]
Vote 4 = Presence LSB addr4[bit7-Bit4]
Votes are defined as follows:
Yes: Vote=1
Abstain: Vote=2
No: Vote=3
40
Printed in Denmark
Page 41

Danish Interpretation Systems Technical Specifications
The votes of a delegate is only valid, if the address is not 0 and the Vote is not 0:
Example:
Imagine, that the CU has received a Yes-vote from address 3 and a No-vote from address 20.
The CU ‘packs’ the votes of both units into the same message.
<START> 'c' <ID> <15> <173> <69> <8> <0> <19> <1> <52> <0> <0> <0> <18> <CRC> <STOP>
For Address 1 we have:
Address 1 = 16* <Vote MSB addr1> + <Vote LSB addr1 [Bit3-Bit0]>
= 16 * 0 + 3 = 3
Vote 1 = <Vote LSB addr1 [Bit7-Bit4]>
= 1 (Yes-vote from address 3)
For Address 2 we have:
Address 2 = 16* <Vote MSB addr2> + <Vote LSB addr2 [Bit3-Bit0]>
= 16 * 0 + 3 = 3
Vote 2 = <Vote LSB addr2 [Bit7-Bit4]>
= 3 (No-vote from address 20)
For Address 3 and Address 4 there is no information (all is 0).
4.6 Summary of status control messages (CU External control unit)
Below, all the status control messages that can be sent from the CU to an external control unit are
listed.
MAIN_GRP (=1):
Command Item value Comment
MAIN_LOST_UNIT
MAIN_FOUND_UNIT
EXTERNAL_CONTROL_GRP (=27):
Command Item value Comment
EXTERNAL_UNIT_ADDRESS
4 A unit has become passive (lost) in
the DCS6000 system
26 A unit has become active (found) in
the DCS6000 system
2 Registration reply to an external
control unit.
Printed in Denmark
41
Page 42

Danish Interpretation Systems Technical Specifications
EXTERNAL_HEART_BEAT_REQUEST
3 Request to external control units to
confirm RS232 communication
MICROPHONE_STATUS_GRP (=23):
Command Item value Comment
MICROPHONE_STATUS_DELEGATE_OFF_ACTIVE
MICROPHONE_STATUS_DELEGATE_OFF_INACTIVE
MICROPHONE_STATUS_DELEGATE_MUTE_ACTIVE
MICROPHONE_STATUS_DELEGATE_MUTE_INACTIVE
1 Delegate Off is active
2 Delegate Off is no longer active
3 All speaking delegates are muted
4 Speaking delegates are no longer
muted
MICROPHONE_STATUS_MICROPHONE_IN_REQUEST
MICROPHONE_STATUS_MICROPHONE_IN_SPEAK
MICROPHONE_STATUS_MICROPHONE_ON
MICROPHONE_STATUS_MICROPHONE_OFF
7 A delegate is in request
8 A delegate is speaking
9 A delegate microphone is turned on
10 A delegate microphone is turned
off
MICROPHONE_STATUS_REQUEST_ON
11 A delegate is inserted in the request
list
MICROPHONE_STATUS_REQUEST_OFF
12 A delegate is removed from the
request list
MICROPHONE_STATUS_MAX_REQUESTS
MICROPHONE_STATUS_MAX_SPEAKERS
14 Size of request list
15 Number of delegates allowed being
open simultaneously.
MICROPHONE_STATUS_SYSTEM_OPERATION_MODE
MICROPHONE_STATUS_MICROPHONE_UNIT_STATUS
MICROPHONE_STATUS_UPDATE_START
MICROPHONE_STATUS_UPDATE_STOP
MICROPHONE_STATUS_MICROPHONE_ACTIVITY_STATUS
16 Operation Mode
18 Status of a single microphone unit
19 Start of a status stream
20 Status stream is ended
22 Status of a single microphone unit
EXTERNAL_AUDIO_STATUS_MU (=29):
Command Item value Comment
AUDIO_STATUS_MU_SPEAKER_VOLUME
AUDIO_STATUS_MU_SPEAKER_ON
AUDIO_STATUS_MU_SPEAKER_OFF
AUDIO_STATUS_MU_LINEOUT_VOLUME
AUDIO_STATUS_MU_MIC_TO_SPEAKER
2 Volume of delegate loudspeakers
3 Delegate loudspeakers turned on
4 Delegate loudspeakers turned off
5 Volume of LineOut
6 Audio level from speaking
delegates to delegate loudspeakers
AUDIO_STATUS_MU_MIC_TO_LINEOUT
7 Audio level from speaking
42
Printed in Denmark
Page 43

Danish Interpretation Systems Technical Specifications
delegates to LineOut
AUDIO_STATUS_MU_LINEIN_TO_SPEAKER
8 Audio level from LineIn to delegate
loudspeakers
AUDIO_STATUS_MU_LINEIN_TO_LINEOUT
AUDIO_STATUS_MU_LINE_IN_LEVEL
AUDIO_STATUS_MU_STATUS_START
AUDIO_STATUS_MU_STATUS_STOP
9 Audio level from LineIn to LineOut
14 LineIn level.
20 Start of Audio status stream
21 End of Audio status stream
VOTING_STATUS_GRP (=53):
Command Item value Comment
VOTING_STATUS_TYPE_OF_VOTING
VOTING_STATUS_SECRET_VOTING
VOTING_STATUS_ATTENDANCE_CHECK_STARTED
VOTING_STATUS_ATTENDANCE_CHECK_STOPPED
VOTING_STATUS_ATTENDANCE_CHECK_CANCELLED
VOTING_STATUS_INTERIM_ATTENDANCE_RESULT
VOTING_STATUS_ATTENDANCE_RESULT
VOTING_STATUS_VOTING_OPENED
VOTING_STATUS_VOTING_CLOSED
VOTING_STATUS_VOTING_CANCELLED
VOTING_STATUS_INTERIM_VOTING_RESULTS
VOTING_STATUS_VOTING_RESULTS
1 3-Button voting or 5-Button voting
3 Open or Secret voting
11 An attendance check is started
12 An attendance check is stopped
13 An attendance check is cancelled
14 Interim attendance check results
15 Final attendance check
16 A voting session is started
17 A voting session is ended
19 A voting session is cancelled
21 Interim voting resuls
22 Final voting results
UNIT_ATTENDANCE_STATUS_GRP (=58)
UNIT_VOTE_STATUS_GRP (=69)
Printed in Denmark
43
Page 44

Danish Interpretation Systems Technical Specifications
5 Controlling Microphones
The purpose of this section is to give a short summary of how the methods described in the rest of the
manual can be used to control the system.
5.1 CRC Calculation
5.1.1 CU Reset message
When the CU is powered up, the very first control message to send to the external control unit is a ‘CU
reset’ message.
It has the format:
<START> ‘r’ <ID> <CRC> <STOP>
The CRC-checksum is calculated from the bytes ‘r’ <ID>
With ID=0, the CRC becomes 136 and the complete message gets the following contents:
[252] [114] [0] [136] [253]
5.1.2 Entering binary microphone control mode
The binary microphone control mode is entered by the ‘Change Mode’ control message. It has the
following format:
<START> ‘m’ <ID> ‘c’ ‘m’ <CRC> <STOP>
With ID=0, the CRC becomes 101 and the complete message gets the following contents:
[252] [109] [0] [99] [109] [101] [253]
See also 6.1.1.
5.2 Registering with the CU
Basically, there are two different ways to get the communication between the CU and an external
control unit up and running. These scenarios are described below.
44
Printed in Denmark
Page 45

Danish Interpretation Systems Technical Specifications
5.2.1 Power up of the CU after connecting
When the connection to the CU is done prior to putting power on the CU, the external control unit will
receive start up information from the CU at power up, the ‘CU reset’ message. This is the initial
message indicating, that the CU is powered up.
In order for the external control unit to be able to control the microphone functionality of the CU, it is
necessary to make the CU enter the binary microphone control mode. Furthermore, the external control
unit must perform a registration in the CU.
The following sequence shows, how the start up and registration takes place:
External
Control Unit
CU
CU Reset
CU Reset
CU ResetCU Reset
<START> 'r' <ID> <CRC> <STOP>
ASCII Text
ASCII Text
ASCII TextASCII Text
'Loading....'
Change binary control Mode
Change binary control Mode
Change binary control ModeChange binary control Mode
<START> 'm' <ID> 'c' 'm' <CRC> <STOP>
Register External controller
Register External controller
Register External controllerRegister External controller
<START> 'j' <ID> <0> <15> <173> <27>
<2> <1> <Ext. ID> <CRC> <STOP>
Controller Address
Controller Address
Controller AddressController Address
<START> 'c' <ID> <15> <173> <27>
<4> <2> <New Addr MSB> <New Addr LSB>
<Ext. ID> <CRC> <STOP>
The CU initiates communication by
a 'CU reset' message.
After the binary 'CU reset' message,
the CU sends a stream of ASCII text.
Notice, the text does not include
any <START> and <STOP>
indications.
All ASCII text is to be disregarded.
The CU is directed to the
microphone control mode.
Registration is initiated by the
external control unit.
The CU confirms the registration by
returning an address to the external
control unit.
Figure 1 - Start up and registration
Printed in Denmark
45
Page 46

Danish Interpretation Systems Technical Specifications
After the ‘CU reset’ message, the CU transmits an ASCII text. This text is not wrapped in <START>
and <STOP> delimiters, so it should simply be dismissed.
Inside the CU, an initialization phase takes place after sending of the ‘CU reset’ message. The external
control unit may respond to immediately to the ‘CU reset’ message by putting the CU in binary
microphone control mode, and by initiating registration in the CU, but the CU is unable to reply to the
registration for approximately 3 seconds after the ‘CU reset’ message.
5.2.2 Power up of the CU before connecting
If the external control unit connects to the CU after power up of the CU, the setup of binary
microphone control mode and registration of external controller may take place immediately.
External
Control Unit
Change binary control Mode
Change binary control Mode
Change binary control ModeChange binary control Mode
<START> 'm' <ID> 'c' 'm' <CRC> <STOP>
Register External controller
Register External controller
Register External controllerRegister External controller
<START> 'j' <ID> <0> <15> <173> <27>
<2> <1> <Ext. ID> <CRC> <STOP>
Controller Address
Controller Address
Controller AddressController Address
<START> 'c' <ID> <15> <173> <27>
<4> <2> <New Addr MSB> <New Addr LSB>
<Ext. ID> <CRC> <STOP>
Figure 2 - Connecting to a CU after CU power up.
CU
The external control unit connects
to the CU after power up of the CU.
The serial connection is already
initialized.
The CU is put in microphone control
mode.
Registration is initiated by the
external control unit.
The CU confirms the registration by
returning an address to the external
control unit.
46
Printed in Denmark
Page 47

Danish Interpretation Systems Technical Specifications
5.3 The Heart Beat process
After the external controller has been registered in the CU, it becomes part of the heart beat process.
The heart beat process consists of a pair of control messages, a reply from the CU and a response from
the external control unit. Every 5 seconds, the CU sends a Heart Beat Request to the external control
unit, and by responding by a Heart Beat Reply, the external control unit indicates, that it is an active
controller.
If the CU does not receive reply to 3 consecutive Heart Beat Requests, it assumes, that the control unit
has lost control of the CU.
The following sequence shows the Heart Beat communication:
External
Control Unit
Heart Beat Request
Heart Beat Request
Heart Beat RequestHeart Beat Request
<START> 'c' <ID> <15> <173> <27> <2>
<3> <Error Information> <CRC> <STOP>
Heart Beat Response
Heart Beat Response
Heart Beat ResponseHeart Beat Response
<START> 'j' <ID> <0> <Addr MSB> <Addr LSB>
<27> <4> <0> <0> <CRC> <STOP>
CU
Every 5 seconds, the CU requests
the external control unit to give a
'Heart Beat'.
Figure 3 - Heart Beats
5.4 Retrieving the microphone system status
After completing registration, the system status must be aligned between the external control unit and
the CU. The status of the CU must be transferred to the external control unit.
The complete status of the microphone system can be retrieved from the CU in two sets of
information:
- Microphone control system status
- Microphone audio system status
Printed in Denmark
47
Page 48

Danish Interpretation Systems Technical Specifications
The following sequence illustrates retrieval of the microphone control system status.
External
Control Unit
LOOP
LOOP
Request Control System Status
Request Control System Status
Request Control System StatusRequest Control System Status
Microphone Control Status Start
Microphone Control Status Start
Microphone Control Status Start Microphone Control Status Start
Microphone Unit Status
Microphone Unit Status
Microphone Unit StatusMicrophone Unit Status
Microphone Activity Status
Microphone Activity Status
Microphone Activity StatusMicrophone Activity Status
Operation Mode
Operation Mode
Operation ModeOperation Mode
Max Speakers
Max Speakers
Max SpeakersMax Speakers
Max Requests
Max Requests
Max RequestsMax Requests
Delegate Off Active/
Delegate Off Active/
Delegate Off Active/Delegate Off Active/
Delegate Off Inactive
Delegate Off Inactive
Delegate Off InactiveDelegate Off Inactive
Mute Active/
Mute Active/
Mute Active/Mute Active/
Mute Inactive
Mute Inactive
Mute InactiveMute Inactive
MIcrophone In Speak
MIcrophone In Speak
MIcrophone In SpeakMIcrophone In Speak
Request for Microphone Control
System status
Microphone control system status
Start indication
For all microphone units, the CU
sends 'Microphone Unit Status' and
'Microphone Activity Status'.
The Speak-list is transferred, one
microphone unit at a time.
LOOP
Microphone In Request
Microphone In Request
Microphone In RequestMicrophone In Request
The Request list is transferred, also
one unit at a time.
Figure 4 - Retrieval of Microphone Control System Status
48
Printed in Denmark
Page 49

Danish Interpretation Systems Technical Specifications
The following sequence shows retrieval of Microphone Audio System status:
External
Control Unit
Request MU Audio System Status
Request MU Audio System Status
Request MU Audio System StatusRequest MU Audio System Status
MU Audio Status Start
MU Audio Status Start
MU Audio Status Start MU Audio Status Start
Speaker Volume
Speaker Volume
Speaker VolumeSpeaker Volume
LineOut Volume
LineOut Volume
LineOut VolumeLineOut Volume
Mic to Speaker
Mic to Speaker
Mic to SpeakerMic to Speaker
Mic to LineOut
Mic to LineOut
Mic to LineOutMic to LineOut
LineIn to Speaker
LineIn to Speaker
LineIn to SpeakerLineIn to Speaker
LineIn to LineOut
LineIn to LineOut
LineIn to LineOutLineIn to LineOut
Request for Microphone Audio
System status
Microphone audio system status
Start indication
LineIn Level
LineIn Level
LineIn LevelLineIn Level
Speaker On/
Speaker On/
Speaker On/Speaker On/
Speaker Off
Speaker Off
Speaker OffSpeaker Off
MU Audio Status Stop
MU Audio Status Stop
MU Audio Status Stop MU Audio Status Stop
Figure 5 - Retrieval of Microphone Audio System Status
Printed in Denmark
Microphone Audio System status
Stop indication
49
Page 50

Danish Interpretation Systems Technical Specifications
6 Additional detailed example
6.1 Example - Registration with the CU
The first example shows how registration with the CU is done from AMX. The AMX equipment is
connected to the CU via the RS232 connection. The CU has already been powered up.
Three steps must be passed:
- Step (1) - The CU must be put in Microphone Control Mode
- Step (2) – A registration request must be transmitted from AMX
- Step (3) – The registration reply is received in AMX
6.1.1 Step (1) – Entering Microphone Control Mode
Entering the microphone control mode is done by sending a ‘Change Binary Control Mode’ message.
Below, the contents of the control message for entering the microphone control mode is decided, stepby-step as explained in 3.5.
Step (1.A) – Decide the Message Type and contents
From chapter 3.4.2 the Message Type is ASCII character ‘m’, which corresponds to the binary value
<109> or hexadecimal value [0x6D].
The contents are also found in chapter 3.4.2 to be ‘c’ ‘m’.
Step (1.B) – Decide the ID of the message
The ID of a control message indicates, which number the message has in a sequence of messages sent
from the AMX to the CU.
For this example, the ID is given the value <0>.
Now, the unfinished control message looks like this:
‘m’ <0> ‘c’ ‘m’
Step (1.C) – CRC calculation
In order to prevent transmission errors, a CRC-check sum is added to the control message.
CRC calculation is done byte for byte starting with CRC-value=0 and the first byte (‘m’). These are
exclusive or’d and used as index in the lookup table.
Going byte by byte gives the following table of results:
50
Printed in Denmark
Page 51

Danish Interpretation Systems Technical Specifications
Byte Last CRC-value Table lookup index New CRC-value
‘m’ = <109> = [6D] <0> = [0] [6D]^[0] = [6D]
<4>
= <109>
<0> = [0] <4> = [4] [0]^[4] = [4] = <4> <28>
‘c’= <99> = [63] <28> = [1C] [63]^[1C] = [7F]
<122>
= <127>
‘m’ = <109> = [6D] <122> = [7A] [6D]^[7A] = [17]
‘e’ = <101>
= <23>
Resulting CRC-value is <109>.
Now, the unfinished control message looks like this:
‘m’ <0> ‘c’ ‘m’ ’e’
Step (1.D) – Check for encoding of escape characters
In order to avoid problems with the special values (252, 253 and 254) it is checked, if any of these
values are part of the message to send. For this example, that is not the case.
No modification is required.
Step (1.E) – Adding start and stop delimiters to the control message
The final step is to include the start and stop delimiters:
<252> ‘m’ <0> ‘c’ ‘m’ ‘e’ <253>
or in decimal:
<252> <109> <0> <99> <109> <101> <253>
Hexadecimal:
[FC] [6D] [00] [63] [6D] [65] [FD]
Printed in Denmark
51
Page 52

Danish Interpretation Systems Technical Specifications
6.1.2 Step(2) – Requesting registration in the CU
After entering microphone control mode, it is time to send a registration request to the CU. The control
message required to do registration is
Again the five steps of above must be completed to find the full control message to send:
Step Action Control Message
1
Deciding MessageType and contents.
Message Type: ‘j’.
Contents: <0> <15> <173> <27> <1> <12> <External
Identity>
For this example the External Identity is set to 60.
2 Deciding the ID of the message.
The ID before was 0, so now 1 is used.
3 CRC calculation
The CRC of the message becomes 184.
4 Check for Escape characters
No use of values 252, 253 or 254.
5 Addition of start and stop <252> ‘j’ <1> <0> <15> <173>
The resulting control message becomes:
<252> ‘j’ <1> <0> <15> <173> <27> <1> <2> <60> <184> <253>
or
[FC] [6A] [01] [00] [0F] [AD] [1B] [01] [02] [3C] [B8] [FD]
EXTERNAL_NEW_UNIT
in the
EXTERNAL_CONTROL_GRP.
‘j’
+
<0> <15> <173> <27> <1>
<2> <60>
‘j’ <1> <0> <15> <173> <27>
<1> <2> <60>
‘j’ <1> <0> <15> <173> <27>
<1> <2> <60> <184>
‘j’ <1> <0> <15> <173> <27>
<1> <2> <60> <184>
<27> <1> <2> <60> <184>
<253>
52
Printed in Denmark
Page 53

Danish Interpretation Systems Technical Specifications
6.1.3 Step(3) – Registration reply from the CU
The Registration Reply is received from the CU (
EXTERNAL_CONTROL_GRP)
. The following reply is received:
[FC] [63] [01] [0F] [AD] [1B] [04] [02] [0F] [3C] [3C] [D1] [253]
<252> ‘c’ <1> <15> <173> <27> <4> <2> <15> <60> <60> <209> <253>
When receiving a control message from the CU, the external control unit must go through the 5 steps
of control message building in opposite order:
1.Find and remove <start> and <stop> indications
‘c’ <1> <15> <173> <27> <4> <2> <15> <60> <60> <209>
2.Strip Escape characters.
‘c’ <1> <15> <173> <27> <4> <2> <15> <60> <60> <209>
3.Identify the CRC-check sum and verify the correctness.
‘c’ <1> <15> <173> <27> <4> <2> <15> <60> <60>
4.Identify and remove the ID of the message.
‘c’ + <15> <173> <27> <4> <2> <15> <60> <60>
5.Identify the message type in order to understand the contents of the control message.
‘c’ means control message from the CU. It has the following format:
<START> 'c' <ID> <MSB addr> <LSB addr> <Message Group> <len> <Data 1>..<Data N> <CRC>
<STOP>
So, the contents can now be identified:
MSB addr = 15
LSB addr = 173
Message Group = 27
len = 4
Data = <2> <15> <60> <60>
Further steps are required to fully retrieve the information of the control message.
EXTERNAL_UNIT_ADDRESS in
Printed in Denmark
53
Page 54

Danish Interpretation Systems Technical Specifications
6.Receiver address checking
Besides the above 5 steps, the external control unit must verify that the control message needs to be
treated. This is done by checking the receiver address.
Receiver Address = MSB addr * 256 + LSB addr = 4013
4013 is the group address of external control units, and that naturally needs to be handled.
7.Determining the message group and the contents of the control message:
The message group is 27, and the command item is 2 (EXTERNAL_UNIT_ADDRESS).
The contents of the control message has the following format:
<START> 'c' <ID> <MSB addr> <LSB addr> <27> <4> <2> <Addr MSB> <Addr LSB> <External Identity> <CRC>
<STOP>
where the new address applying to the control unit is extracted as part of the data:
New External Unit Addr = Addr MSB * 256 + Addr LSB = 3900
and
External Identity = 60
So, in the future communication between the external control unit and the CU, the external control unit
must use the address 3900.
54
Printed in Denmark
Page 55

Danish Interpretation Systems Technical Specifications
6.2 Example 2 – Turning on the microphone of a delegate.
Assume, that a control unit has connected to a CU, entered microphone control mode and registered in
the CU. Furthermore, the microphone status has been retrieved from the CU.
Now, a chairman wants to turn on the microphone of a delegate. Assume this is the microphone with
the address number 10.
To turn the microphone, the external control unit must send the control message
MICROPHONE_CONTROL_MICROPHONE_ON (MICROPHONE_CONTROL_GRP).
Message format:
<START> ‘j’ <ID> <0> <MSB addr> <LSB Addr> <18> <14> <Microphone Addr MSB> <Microphone Addr LSB> <CRC>
<STOP>
With address=3900 and ID=45, we get the following:
‘j’ <45> <0> <15> <60> <18> <14> <0> <10>
CRC-calculation gives 140, and with <Start> and <Stop> added, the control message to send becomes:
<252> ‘j’ <45> <0> <15> <60> <18> <14> <0> <10> <140> <253>
or
[FC] [6A] [2D] [00] [0F] [3C] [12] [0E] [00] [0A] [8C] [fD]
Printed in Denmark
55
 Loading...
Loading...