

Page 1

M...
MCA, MCS, MQA, MDKS, MDFQA
0.5 Nm ... 1100 Nm
Asynchronous servo motors / synchronous servo
motors
Operating Instructions
EN
.Nój
Ä.Nójä
Page 2

Please read these instructions before you start working!
Follow the enclosed safety instructions.
0Abb. 0Tab. 0
Page 3

Contents i
1 About this documentation 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Document history 6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Conventions used 6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Terminology used 6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Notes used 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Safety instructions 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 General safety instructions for drive components 8. . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Application as directed 9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Foreseeable misuse 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Residual hazards 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Product description 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Identification 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.1 Nameplate 13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.2 Product key 15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Technical data 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 General data and operating conditions 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1.1 Setting the switching frequency to the rated motor data 20. . . . . . . . . . . .
5 Mechanical installation 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Important notes 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Preparation 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Assembly of built−on accessories 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.1 Installation 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4 Holding brake (option) 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.1 Permanent magnet holding brakes 24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.2 Spring−applied holding brakes 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Electrical installation 28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Important notes 28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Wiring according to EMC 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Plug connectors 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.1 Power connections / holding brake 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.2 Holding brake 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.3 Fan 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.4 Feedback system 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
EN
6.4 Terminal box 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.4.1 Power connections 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.4.2 Holding brake DC 205 V − connected via rectifier (optionl) 33. . . . . . . . . . .
6.4.3 Holding brake DC 24 V (optional) 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.4.4 Fan 34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.4.5 Feedback system 35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Lenze ¯ BA 33.0006 ¯ 3.0
3
Page 4

EN
Contentsi
7 Safety engineering 36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8 Commissioning and operation 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1 Important notes 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2 Before switching on 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3 Functional test 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.4 During operation 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9 Maintenance/repair 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1 Important notes 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2 Maintenance intervals 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2.1 Motor 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2.2 Safety encoder 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2.3 Holding brake 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3 Maintenance operations 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3.1 Blower 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3.2 Fan with dust protection filter 41. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3.3 Motors with bearing relubricating devices 41. . . . . . . . . . . . . . . . . . . . . . . .
9.3.4 Motor plug connection assignment 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3.5 Power connection for plug−in connector at the cable end 42. . . . . . . . . . . .
9.3.6 Plug−in connector at the cable end 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.4 Repair 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10 Troubleshooting and fault elimination 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
Lenze ¯ BA 33.0006 ¯ 3.0
Page 5

About this documentation 1
1 About this documentation
Contents
¯ The present operating instructions are intended for safe working on and with the
motors. They contain safety instructions that must be observed.
¯ All personnel working on and with the motors must have the operating
instructions available during work and observe the information and notes
relevant for them.
¯ The operating instructions must always be complete and in a perfectly readable
state.
If the information and notes provided in this documentation do not meet your
requirements, please refer to the controller and/or gearbox documentation.
Tip!
Information and auxiliary devices related to the Lenze products can be
found in the download area at
http://www.Lenze.com
Validity
This documentation is valid for servo motors:
Type Designation
MCS Synchronous servo motors
MCA
MQA
MDFQA
MDKS Synchronous servo motors
Target group
This documentation is directed at qualified skilled personnel according to IEC 60364.
Qualified skilled personnel are persons who have the required qualifications to carry out
all activities involved in installing, mounting, commissioning, and operating the
product.
Asynchronous servo motors
EN
Lenze ¯ BA 33.0006 ¯ 3.0
5
Page 6

EN
1
About this documentation
Document history
1.1 Document history
Material number Version Description
13302706 1.0 07/2009 TD09 First edition of the operating instructions,
13340243 2.0 06/2010 TD09 Complete revision
.Nój 3.0 01/2014 TD09
separate from three−phase AC motors
1.2 Conventions used
This documentation uses the following conventions to distinguish different types of
information:
Type of information Identification Examples/notes
Spelling of numbers
Decimal separator Point In general, the decimal point is used.
Icons
Page reference
Wildcard
For instance: 1234.56
Reference to another page with
additional information
For instance: 16 = see page 16
Wildcard for options, selection data
1.3 Terminology used
Term In the following text used for
Motor Servo motors in the versions according to product key, see page 15 to
Controllers Any servo inverter
Drive system Drive systems with servo motors and other Lenze drive components
page 17 .
Any frequency inverter
6
Lenze ¯ BA 33.0006 ¯ 3.0
Page 7

About this documentation
1.4 Notes used
The following pictographs and signal words are used in this documentation to indicate
dangers and important information:
Safety instructions
Structure of safety instructions:
Danger!
(characterises the type and severity of danger)
Note
(describes the danger and gives information about how to prevent
dangerous situations)
Pictograph and signal word Meaning
Danger of personal injury through dangerous electrical
voltage.
Danger!
Danger!
Stop!
Reference to an imminent danger that may result in death
or serious personal injury if the corresponding measures are
not taken.
Danger of personal injury through a general source of
danger.
Reference to an imminent danger that may result in death
or serious personal injury if the corresponding measures are
not taken.
Danger of property damage.
Reference to a possible danger that may result in property
damage if the corresponding measures are not taken.
1
Notes used
EN
Application notes
Pictograph and signal word Meaning
Note!
Tip!
Important note to ensure troublefree operation
Useful tip for simple handling
Reference to another documentation
Lenze ¯ BA 33.0006 ¯ 3.0
7
Page 8

EN
2
2 Safety instructions
2.1 General safety instructions for drive components
Safety instructions
General safety instructions for drive components
Danger!
Disregarding the following basic safety measures may lead to severe
personal injury and damage to material assets!
Note!
Safety−related parameters of safety encoders used can be obtained from
the SISTEMA database, the Lenze AKB (Application Knowledge Base) or
the data sheet of the encoder manufacturer.
¯ Lenze drive and automation components ...
... must only be used for the intended purpose.
... must never be operated if damaged.
... must never be subjected to technical modifications.
... must never be operated unless completely assembled.
... must never be operated without the covers/guards.
... can − depending on their degree of protection − have live, movable or rotating parts
during or after operation. Surfaces can be hot.
¯ Transport and storage in a dry, low−vibration environment without aggressive
atmosphere; preferably in the packaging provided by the manufacturer.
– Protect against dust and impacts.
– Observe climatic conditions according to the technical data.
¯ Lenze drive and automation components ...
... must only be used as intended.
... must never be commissioned despite noticeable damage.
... must never be technically changed.
... must never be commissioned in an incompletely mounted state.
... must never be operated without the required covers.
... may have live, moving or rotary parts during and after operation − corresponding
to their type of protection. Surfaces may be hot.
... must not be operated with large vibrations.
... must not be operated in the frequency range of a plant or the drive system.
¯ All specifications of the corresponding enclosed documentation must be
observed.
This is vital for a safe and trouble−free operation and for achieving the specified
product features.
8
Lenze ¯ BA 33.0006 ¯ 3.0
Page 9

Safety instructions
Application as directed
¯ Only qualified skilled personnel are permitted to work with or on Lenze drive and
automation components.
According to IEC 60364 or CENELEC HD 384, these are persons ...
... who are familiar with the installation, assembly, commissioning and operation of
the product,
... possess the appropriate qualifications for their work,
... and are acquainted with and can apply all the accident prevent regulations,
directives and laws applicable at the place of use.
2.2 Application as directed
Low−voltage machines are not household appliances, but are intended as components
that are only applied for re−use for industrial or professional purposes in terms of
IEC/EN 61000−3−2.
They meet the requirements of the Low−Voltage Directive 2006/95/EC and the
harmonised standards of the IEC/EN60034 series.
2
It is permissible to use low−voltage machines with IP23 protection or less outdoors only
if special protective measures are taken.
Do not use the integrated brakes as fail−safe brakes. It cannot be ruled out that the
braking torque will be reduced due to disruptive factors that cannot be influenced.
¯ Drives
– ... must only be operated under the operating conditions and power limits
specified in this documentation.
– ... comply with the protection requirements of the EC Low−Voltage Directive.
Note!
Generally, all products this documentation is valid for meet the
requirements of the Low−Voltage Directive 2006/95/EC. Products that do
not meet the minimum efficiencies of the EU Directive 640/2009 (and
hence the ErP Directive 2009/125/EC), will not be CE−compliant as of
16th June 2011 and thus do not receive a CE designation.
In that case, the product may only be used outside the EEA.
Any other use shall be deemed inappropriate!
EN
Lenze ¯ BA 33.0006 ¯ 3.0
9
Page 10

2
2.3 Foreseeable misuse
¯ Do not operate the motors
Safety instructions
Foreseeable misuse
– ... in explosion−protected areas
– ... in aggressive environments (acid, gas, vapour, dust, oil)
– ... in water
– ... in radiation environments
Note!
Increased surface and corrosion protection can be achieved by using
adapted coating systems.
2.4 Residual hazards
EN
Protection of persons
¯ The motor surfaces can become very hot. Danger of burns when touching!
– Provide protection against accidental contact, if necessary.
¯ Highfrequency voltages can be capacitively transferred to the motor housing
through the inverter supply.
– Earth motor housing carefully.
¯ Danger of unintentional starting or electrical shocks
– Connections must only be made when the equipment is deenergised and the
motor is at standstill.
– Installed brakes are no fail−safe brakes.
10
Lenze ¯ BA 33.0006 ¯ 3.0
Page 11

Safety instructions
Motor protection
¯ Installed thermal detectors are no full protection for the machine.
– If required, limit the maximum current, parameterise the controller such that it
will be switched off after some seconds of operation with I > I
there is the danger of blocking.
– Installed overload protection does not prevent an overload under any
conditions.
¯ Installed brakes are no fail−safe brakes.
– The torque can be reduced due to disruptive factors that cannot be influenced,
e.g. by ingressing oil due to a defect shaft sealing ring on the A side.
¯ Fuses are no motor protection.
– Use current−dependent motor protection switches at average operating
frequency.
– Use installed thermal detectors at high operating frequency.
¯ Too high torques cause a fraction of the motor shaft.
– The maximum torques according to catalogue must not be exceeded.
, especially if
N
2
Residual hazards
¯ Lateral forces from the motor shaft may occur.
– Align shafts of motor and driving machine exactly to each other.
¯ If deviations from normal operation occur, e.g. increased temperature, noise,
vibration, determine the cause and, if necessary, contact the manufacturer. If in
doubt, switch off the motor.
Fire protection
¯ Fire hazard
– Prevent contact with flammable substances.
EN
Lenze ¯ BA 33.0006 ¯ 3.0
11
Page 12

3
Product description
Identification
3 Product description
3.1 Identification
Types MC., MQA
Synchronous servo motors Asynchronous servo motors
MCS MCA MQA
MT−MCS−001.iso MT−MCA−001.iso MT−MQA−001.iso
Type MD...
EN
Asynchronous servo motors Synchronous servo motors
MDFQA MDLKS
MT−MDFQA−002.iso MT−MDFKS−001.iso
12
Lenze ¯ BA 33.0006 ¯ 3.0
Page 13

3.1.1 Nameplate
Asynchronous and synchronous servo motors
Product description
Identification
Nameplate
3
IP23 MDFQA asynchronous servo motors
EN
Nameplate SYN−001.iso
Nameplate−SYN−002.iso
Lenze ¯ BA 33.0006 ¯ 3.0
13
Page 14

EN
3
Product description
Identification
Nameplate
No. Explanation
1 Manufacturer
2 Motor type
3 Lenze motor type
4 Rated voltage Ur [V]
5 Rated current Ir [A]
6 Maximum current I
7 Labelling of encoder (example: IG2048 − 5V − T; explanation 18) / resolver correction value C 416
8 Feedback/encoder or resolver data; brake data (if available): AC/DC brake voltage
9 Motor no.
10 Enclosure
11 Temperature class
12 Permissible ambient temperature range
13 8−digit identification number + 16−digit serial number
14 General motor standard
15 Circuit of the winding
16 Motor protection/thermal sensor
17 Selection number for operation on servo inverters (enter the provided selection number in C0086 to automatically optimise the
control mode)
18 Rated speed nr [rpm]
19 Rated power Pr [HP]
20 Rated power Pr [kW]
21 Continuous standstill torque M0 [Nm]
22 Rated torque Mr [Nm]
23 Rated power factor cos j
24 Rated frequency fr [Hz]
25 Valid conformities, approvals and certificates: CE identification/standard
max
[A]
Current
Braking torque
UL mark with UL file number
Example: MCA Example: MCS
MT−MCA−002.iso/dms MT−MCS−002.iso/dms
Example: MDFQA
MT−MDFQA−003.iso/dms
14
Lenze ¯ BA 33.0006 ¯ 3.0
Page 15

3.1.2 Product key
Servo motors MCA, MCS, MQA
M
Product description
Identification
Product key
3
Legend for product key
0 Type
C Compact servo motors (if required, with axial ventilation) Q Radially ventilated motor
1 Design
A Asynchronous S Synchronous
2 Motor frame size, motor length, speed
06 Square dimension 62 mm 19 Square dimension 192 mm
09 Square dimension 89 mm 20 Square dimension 200 mm
10 Square dimension 102 mm 21 Square dimension 214 mm
12 Square dimension 116 mm 22 Square dimension 220 mm
13 Square dimension 130 mm 26 Square dimension 260 mm
14 Square dimension 142 mm C...X Overall length
17 Square dimension 165 mm XX Speed in 100 min
3 Speed sensor, angle sensor
RS0 Resolver p=1 RVO Resolver p=1 "safety"
SKM Multiturn absolute value encoder with sin/cos signals, Hiperface SVS Singleturn absolute value encoder with sin/cos signals, Hiperface "safety"
SRS Singleturn absolute value encoder with sin/cos signals, Hiperface SVM Multiturn absolute value encoder with sin/cos signals, Hiperface "safety"
SRM Multiturn absolute value encoder with sin/cos signals, Hiperface
ECN Singleturn absolute value encoder with sin/cos signals, EnDat
EQN Multiturn absolute value encoder with sin/cos signals, EnDat
EQI Multiturn absolute value encoder with sin/cos signals, EnDat
CXX Incremental encoder TTL with commutation signals UVW S1S Incremental encoder with safety function
TXX Incremental encoder TTL SXX Incremental encoder sin/cos (IS2048)
HXX Incremental HTL encoder NNO No encoder
4 Brake
B0 Without brake FH Spring−applied brake 230V AC, reinforced
F1 Spring−applied brake 24V DC P1 PM brake 24V DC
F2 Spring−applied brake 24V DC, reinforced P2 PM brake 24V DC, reinforced
F5 Spring−applied brake 205V DC P5 PM brake 205V DC
F6 Spring−applied brake 205V DC, reinforced P6 PM brake 205V−DC, reinforced
FG Spring−applied brake 230V AC
−1
EN
Lenze ¯ BA 33.0006 ¯ 3.0
15
Page 16

EN
3
Product description
Identification
Product key
5 Design, shaft, concentricity/vibrational severity/direct gearbox attachment
Design
A Standard flange form A/FF with through hole, cyl. shaft without keyway
B Standard flange form A/FF with through hole, cyl. shaft with keyway
C Standard flange form C/FT with threaded holes, cyl. shaft without keyway
N Standard flange form C/FT with threaded holes, cyl. shaft with keyway (standard attachment)
F Same as version A except that flange is large V Same as version N except that flange is large
G Same as version B except that flange is large O Without flange and without keyway
U Same as version C except that flange is large P Without flange and with keyway
Shaft
11 Shaft 11x23 (MCS06) 24 Shaft 24x50 (MCS14; MCA14, 17)
14 Shaft 14x30 (MCS09; MCA 10) 28 Shaft 28x60 (MCS19; MCA19)
19 Shaft 19x40 (MCS12; MCA13) 38 Shaft 38x80 (MCA21)
Concentricity/vibrational severity/direct gearbox attachment
N or R Concentricity/vibrational severity
Z0X Direct gearbox attachment: Motor without pinion for mounting on open gearbox with pinion; flange for direct gearbox attachment without intermediate cover, with
tapered hollow shaft
Y0X Direct gearbox attachment: Motor without pinion for mounting on open gearbox with pinion; flange for direct gearbox attachment with intermediate cover, with
6 Electrical connection, enclosure, cooling, load flywheel
Electrical connection
Enclosure
Cooling
Load flywheel
7 Motor protection, electron. nameplate, color/specification, approval
Temperature protection
Electronic nameplate
Colour/specification
8 Miscellaneous
tapered hollow shaft
ST Separate circular connectors for power/brake, encoder/thermal detector, fan
SQ Shared rectangular connector for power, encoder...
KK Separate terminal boxes for power/brake, encoder/thermal detector/fan
KG Separate terminal boxes for power/brake, blower circular connectors for encoder, thermal detector
KS Terminal box for power+brake; circular connector for encoder and thermal detector; circular connector for blower
SK Circular connector for power+brake; circular connector for encoder+thermal detector; terminal box for fan
2 IP23 6 IP65 with shaft sealing ring
5 IP54 without shaft sealing ring (except for direct mounting on gearbox)
A IP64 (A−flange, without shaft sealing ring) / IP65
B IP54 with shaft sealing ring (A−bearing, oil−tight)
C IP54 with shaft sealing ring, double lip (A bearing dust−tight)
D IP65 with double−lip shaft sealing ring
S00 Self cooling/without fan F10 Blower 230V; AC; 1N
F1F Blower 230V; AC; 1N; filter F30 Blower 400V; AC; 3N
F3F Blower 400V; AC; 3N; filter F50 Blower 115V; AC; 1N
FWO Blower 480V; AC; 3N FWF Blower 480V; AC; 3N; filter
N Without additional load flywheel J With additional mass inertia
B NC thermal contact R KTY sensor
E KTY sensor; electronic nameplate
0 Standard nameplate 2 Second nameplate supplied loose
1 Standard nameplate + electronic nameplate 3 Second nameplate supplied loose + electronic nameplate
S Colour: black
U
R
Specification − UL design and CSA design, approval
Specification − UL design, approval
16
Lenze ¯ BA 33.0006 ¯ 3.0
Page 17

Servo motors MDLLL
M
Product description
Identification
Product key
3
Legend for product key
0 Type
D Three−phase AC current
1 Cooling method, ventilation
F Forced ventilated
S Natural ventilation (cooling by convection and radiation)
2 Design, housing
K Compact servo motor with square housing and cooling ribs
Q IP23 servo motor with square housing
3 Machine type
A Asynchronous machine
S Synchronous machine
4 Built−on accessories
AG Absolute value encoder
BA Brake and sin−cos absolute value encoder or SSI absolute value encoder
BI Brake, incremental encoder
BS Brake and resolver
BR Brake, resolver
IG Incremental encoder
RS Resolver
RV Resolver "safety"
5 Frame size
036; 056; 071; 100, 112, 132, 160
6 Overall length
0; 1; 2; 3; 4
7 Number of pole pairs
1, 2; 3
EN
Lenze ¯ BA 33.0006 ¯ 3.0
17
Page 18

EN
3
Product description
Identification
Product key
Feedback system
Resolver/encoder
Legend for the product key
Type
RS
RV
IG
IK
SFC
AM
Number
1
2, 3, 4...
32, 128, 512,
1024, 2048, ...
Voltage
5 V, 8 V, 15 V,
24 V, ...
Interface or signal level
Standard
T
H
H
E
S
for safety function Safety integration level (SIL)
U
K
K
F
V
Resolver
Resolver "safety"
Incremental encoder
Incremental encoder with commutation signal
Singleturn absolute value encoder
Multiturn absolute value encoder
2−pole resolver for three−phase AC motors
Number of pole pairs for resolvers
Number of steps / increments per revolution
Medium supply voltage
TTL
HTL (for incremental encoders)
Hiperface (for absolute value encoders)
EnDat
sin/cos 1 V
TTL
HTL (for incremental encoders)
Hiperface (for absolute value encoders)
EnDat
sin/cos 1 V
ss
ss
1; 2; 3; 4
Example of a complete encoder name:
AS1024−8V−K2 = Singleturn absolute value encoder with safety function;
1024 periods per revolution; 8V supply voltage;
Hiperface interface; safety integration level SIL2
Note!
If feedback systems for safety functions are used, the manufacturer’s
documentation must be observed!
18
Lenze ¯ BA 33.0006 ¯ 3.0
Page 19

Technical data
General data and operating conditions
4 Technical data
4.1 General data and operating conditions
General data
Conformity
CE 2006/95/EC Low−Voltage Directive
Approvals
UL ANSI/UL 1004−1
CSA CSA−C22.2 No. 100 Motors and Generators
Protection of persons and devices
Enclosure
Temperature class F (155 °C) IEC 60034 Exceedance of the temperature limit weakens or destroys
Permissible voltage According to limiting curve A of the pulse voltage from
EMC
Noise emission
Noise immunity
ANSI/UL 1004−6
IEC/EN 61800−3 Depending on the controller, see documentation for the
Rotating Electrical Machines
Servo and Stepper Motors
See nameplate
Degrees of protection only apply to horizontal installation
All unused connectors must be closed with protection
covers or blanking plugs.
the insulation
IEC / TS 60034−25 (image 14)
controller.
4
Operating conditions
Ambient conditions
Climatic
Transport IEC/EN 60721−3−2 2K3 (−20 °C ... +70 °C)
Storage IEC/EN 60721−3−1
Operation IEC/EN 60721−3−3
Site altitude < 1000 m amsl − without power reduction
Humidity Relative humidity £ 85 %, without condensation
Electrical
The motor connection type depends on the controller
Length of the motor cable
Length of cable for speed feedback
Mechanical
IEC/EN60721−3−3 3M6
1K3 (−20 °C ... +60 °C) < 3 months
1K3 (−20 °C ... +40 °C) > 3 months
3K3 (−20 °C ... +40 °C)
3K3 (−10 °C ... +40 °C)
3K3 (−15 °C ... +40 °C)
> +40 °C with power reduction, see
> 1000 m amsl < 4000m amsl with power reduction, see
catalogue
See inverter instructions
Without brake
With brake
with blower
catalogue
EN
Lenze ¯ BA 33.0006 ¯ 3.0
19
Page 20

4
Technical data
General data and operating conditions
Setting the switching frequency to the rated motor data
4.1.1 Setting the switching frequency to the rated motor data
The rated data are valid for operation on an inverter with a switching frequency of at
least 8 kHz. If operated at a switching frequency of f
=4 kHz, the following
ch
consequences must be observed.
Motor type Consequences
MDFQA 160 ¯ At fch = 4 kHz, the motor continuously reaches only approx. 95 %
MQA 20, 22, 26
MCA 20, 22, 26
MCS
MCA 10, 13, 14, 17, 19, 21
MDKS
of its rated torque.
¯ Strongly increased noise emission
¯ At fch = 4 kHz, the motor continuously reaches only approx. 95 %
of its rated torque.
¯ Increased noise emission
¯ All published rated data remain valid if fch = 4 kHz.
EN
20
Lenze ¯ BA 33.0006 ¯ 3.0
Page 21

Mechanical installation
5 Mechanical installation
5.1 Important notes
Danger!
Some of the motors mounted to the gearboxes are equipped with
transport aids. They are only intended for the mounting/dismounting of
the motor to the gearbox and must not be used for the entire geared
motor!
¯ Only move the drive with means of transport or hoists that have sufficient
load−bearing capacity.
¯ Ensure safe fixing.
¯ Avoid shocks!
5.2 Preparation
5
Important notes
Remove the corrosion protection from the shaft ends and flanges. If necessary, remove
dirt using standard cleaning solvents.
Stop!
Bearings or seals must not come into contact with the solvent − material
damages.
After a long storage period (> 1 year) you have to check whether moisture has
entered the motor. For this purpose, measure the insulation resistance (measuring
voltage 500 VDC). In case of values £1kWper volt of rated voltage, dry the winding.
5.3 Assembly of built−on accessories
Follow the instructions below carefully. Please note that, in the event of impermissible
alteration or modification of the motor, you will lose all entitlements to make claims
under warranty and to benefit from product liability obligations.
¯ Mount the transmission elements:
– Shocks and impacts must be avoided! They could destroy the motor.
– Always use the centre bore in the motor shaft (in accordance with DIN 332,
design D) for mounting.
– Tolerances of the shaft ends:
£ Æ 50 mm: ISO k6, > Æ 50 mm: ISO m6.
EN
¯ Only use an extractor for the disassembly.
¯ When using belts for torque/power transmission:
– Tension the belts in a controlled manner.
– Provide protection against accidental contact! During operation, surface
temperatures of up to 140°C are possible.
Lenze ¯ BA 33.0006 ¯ 3.0
21
Page 22

5
5.3.1 Installation
Important notes
¯ The mounting surface must be dimensioned for the design, weight and torque of
¯ The foot and flange faces must rest flat on the mounting surface.
Mechanical installation
Holding brake (option)
Installation
the motor.
– Incorrect motor alignment reduces the service life of the roller bearings and
transmission elements.
Impacts on shafts can cause bearing damage.
¯ Do not exceed the permissible range of ambient operating temperature ( 19).
¯ Fasten the motor securely.
¯ Ensure that the ventilation is not impeded. The exhaust air, also the exhaust air of
other machines next to the drive system, must not be taken in immediately.
¯ During operation, surfaces are hot, up to 140 °C! Ensure that guard preventing
accidental contact is in place!
EN
Ensure an even surface, solid foot/flange mounting and exact alignment if a direct
clutch is connected. Avoid resonances with the rotational frequency and double mains
frequency which may be caused by the assembly.
Use appropriate means to mount or remove transmission elements (heating) and cover
belt pulleys and clutches with a touch guard. Avoid impermissible belt tensions.
Stop!
The machines are halfkey balanced. The clutch must be halfkey balanced, too. The
visible jutting out part of the key must be removed.
Designs with shaft end at the bottom must be protected with a cover which prevents
the ingress of foreign particles into the fan.
5.4 Holding brake (option)
Important notes
As an option, the motors can be fitted with a brake. The installation of brakes (in or on
the motor) increases the length of the motor.
Ensure a correct belt tension!
Note!
The brakes used are not fail−safe because interference factors, which
cannot be influenced (e.g. oil ingress), can lead to a reduction in torque.
The brakes are used as holding brakes and serve to hold the axes at standstill or in the
deenergised state.
Emergency stops at higher speeds are possible, but high switching energy increases
wear on the friction surfaces and the hub (see wear of brakes, page 25 and 26).
22
Lenze ¯ BA 33.0006 ¯ 3.0
Page 23

Mechanical installation
Holding brake (option)
The brakes operate according to the closed−circuit principle, i.e. the brake is closed in the
deenergised state. The brakes for DC supply can be fed with a bridge−rectified DC
voltage (bridge rectifier) or with a smoothed DC voltage. Information on the permissible
voltage tolerance is provided in the respective motor catalogue.
If long motor supply cables are used, pay attention to the ohmic voltage drop along the
cable and compensate for it with a higher voltage at the input end of the cable.
The following applies to Lenze system cables:
5
Installation
U*+UB )
0.08W
ƪ
m
@L@I
ƫ
B
U* [V] Resulting supply voltage
UB [V] Rated voltage of the brake
l [m] Cable length
IB [A] Rated current of the brake
Stop!
If no suitable voltage (incorrect value, incorrect polarity) is applied to the
brake, the brake will be applied and can be overheated and destroyed by
the motor continuing to rotate.
The shortest operating times of the brakes are achieved by DC switching of the voltage
and a suppressor circuit (varistor or spark suppressor). Without suppressor circuit, the
operating times may increase. A varistor/spark suppressor limits the breaking voltage
peaks. It must be ensured that the power limit of the suppressor circuit is not exceeded.
This limit depends on the brake current, brake voltage, disengagement time and the
switching operations per time unit.
Furthermore, the suppressor circuit is necessary for interference suppression and also
increases the service life of the relay contacts (external, not integrated in the motor).
Please refer to the catalogue for servo motors for detailed information
about holding brakes.
EN
Note!
The brake cannot be readjusted. When the wear limit is reached, the
brake has to be replaced.
Lenze ¯ BA 33.0006 ¯ 3.0
23
Page 24

5
5.4.1 Permanent magnet holding brakes
These brakes are used as holding brakes and serve to hold the axes without backlash at
standstill or in the deenergised state.
When activating the brake, it must be ensured that the brake is released or engaged at
zero speed to avoid unnecessary and rapid wear of the brake.
When used solely as holding brakes, the brakes are virtually wear free on their friction
surfaces. If the max. permissible switching energy per emergency stop (see catalogue)
is not exceeded, at least 2000 emergency stop functions from a speed of 3000 rpm are
possible.
W +½@J
The holding torques specified in the catalogue only apply when the motor is at
standstill. In the case of a slipping brake, the dynamic braking torque always applies
which depends on the speed.
Mechanical installation
Holding brake (option)
Permanent magnet holding brakes
W [J] Energy
2
@ w
ges
J
w [1/s] Angular velocity w=2p n/60, n= speed [rpm]
tot
2
[kgm
] Total moment of inertia
EN
Stop!
The holding brake is only designed for a limited number of emergency
stops. Utilisation as a working brake, e.g. to decelerate a load, is not
permissible.
Note!
The brakes are maintenance−free and cannot be adjusted. In the event of
These brakes operate according to the closed−circuit principle, i.e. the brake is closed in
the deenergised state.
Brakes with a rated voltage of DC 24 V are designed for smoothed DC voltages with a
ripple of <1 %. It must be ensured that the connector on the motor side is supplied with
the minimum voltage of DC 24 V −10 %. If necessary, the voltage drop in the cable should
also be considered. If the maximum voltage DC 24 V + 5 % is exceeded, the brake can
close again. Supplying the brake with bridge−rectified DC voltage (bridge rectifier
without additional smoothing) or a DC voltage with a ripple of >1 % can lead to a
malfunctioning of the brake or an increase in the engagement and disengagement
times.
Brakes with a rated voltage of DC 205 V are designed for bridge−rectified DC voltage, i.e.
for supply via a bridge rectifier from the 230 V mains (half−wave rectifiers are not
permissible). Supplying the brake with smoothed DC voltage can lead to
malfunctioning or an increase in the engagement and disengagement times. With
regard to the minimum and maximum voltages, the same conditions apply as for brakes
with 24 V, i.e. the permissible voltage tolerance is 205 V DC +5 %, −10 %.
wear, e.g. through emergency stops, the brakes must be replaced.
24
Lenze ¯ BA 33.0006 ¯ 3.0
Page 25

Mechanical installation
Holding brake (option)
Permanent magnet holding brakes
Wear of permanent magnet brakes
If applied as directed (application as holding brakes), the permanent magnet brakes of
the servo motors are wear free and intended for long operating times. The wear on the
friction lining is due to e.g. emergency stops.
The table below describes the different reasons for wear and their impact on the
components of the permanent magnet brakes.
Component Effects Influencing factors Cause
Friction lining /
friction surface at
the armature plate
and external pole
Springs Fatigue failure of the
Permanent magnet Useless brake Temperature, overvoltage Excessive overvoltages /
Wear on the friction lining Applied friction energy
springs
Number of switching
operations of the brake
Braking during operation
(impermissible, holding
brakes!)
Emergency stops
Overlapping wear when
the drive starts and stops
Active braking by the drive
motor with the help of the
brake (quick stop)
Axial duty cycle of the
springs
temperatures
5
Stop!
In case of wear above the maximum air gap ( brake operating
instructions), application of the brake cannot be ensured. In this case, no
braking process is carried out.
EN
Lenze ¯ BA 33.0006 ¯ 3.0
25
Page 26

5
5.4.2 Spring−applied holding brakes
These brakes are used as holding brakes and serve to hold the axes without backlash at
standstill or in the deenergised state.
For permissible operating speeds and characteristics, please see the respective valid
motor catalogue. Emergency stops at higher speeds are possible, but high switching
energy increases wear on the friction surfaces and the hub.
Mechanical installation
Holding brake (option)
Spring−applied holding brakes
Stop!
The friction surfaces must always be free from oil and grease because
even small amounts of grease or oil will considerably reduce the braking
torque.
The formula below provides a simplified way to calculate friction energy per switching
cycle which must not exceed the limit value for emergency stops that depends on the
operating frequency (motor catalogue; Lenze drive solutions: Formulas,
dimensioning, and tables).
EN
Q +½@J
Depending on the operating conditions and possible heat dissipation, the surface
temperatures can be up to 130 °C.
The spring−applied brakes operate according to the closed−circuit principle, i.e. the brake
is closed in the deenergised state. The brakes can be fed with a bridge−rectified DC
voltage (bridge rectifier) or with a smoothed DC voltage. The permissible voltage
tolerance is ±10%.
@ Dw2 @
ges
M
MK* M
Q [J] Friction energy
K
J
L
Dw [1/s] Angular velocity w=2p n/60, n= speed [rpm]
MK [Nm] Characteristic torque
ML [Nm] Load torque
tot
2
[kgm
] Total mass inertia (motor + load)
For more information on spring−applied brakes, please refer to the
corresponding catalogues and operating instructions of the brakes.
Wear on spring−applied brakes
Spring−applied brakes of the INTORQ BFK458, BFK460 series and the spring−applied
brake of the MQA motors are wear resistant and designed for long maintenance
intervals.
However, the friction lining, the teeth between the brake rotor and the hub, and also the
braking mechanism are naturally subject to function−related wear which depends on
the application case (see table). In order to ensure safe and problem−free operation, the
brake must therefore be checked and maintained regularly and, if necessary, replaced
(see brake maintenance and inspection).
The following table describes the different causes of wear and their effect on the
components of the spring−applied brake. In order to calculate the useful life of the rotor
and brake and determine the maintenance intervals to be prescribed, the relevant
influencing factors must be quantified. The most important factors are the applied
friction energy, the starting speed of braking and the switching frequency. If several of
the indicated causes of wear on the friction lining occur in an application, their effects
are to be added together.
26
Lenze ¯ BA 33.0006 ¯ 3.0
Page 27

Mechanical installation
Component Effects Influencing factors Cause
Friction lining Wear on the friction lining Applied friction energy
Number of start−stop
cycles
Armature plate and
flange
Teeth of the brake
rotor
Armature plate
bracket
Springs Fatigue failure of the
Running−in of armature
plate and flange
Teeth wear (primarily at
the rotor end)
Armature plate, cap screws
and bolts are deflected
springs
Applied friction energy Friction between the brake
Number of start−stop
cycles,
Level of the braking
torque,
Dynamics of the
application,
Speed fins in operation
Number of start−stop
cycles,
Level of braking torque
Number of switching
operations of the brake
Braking during operation
(impermissible, holding
brakes!)
Emergency stops
Overlapping wear when
the drive starts and stops
Active braking by the drive
motor with the help of the
brake (quick stop)
Starting wear if motor is
mounted in a position
with the shaft vertical,
even if the brake is open
lining and the armature
plate or flange e.g. during
emergency braking or
service brake operation
Relative movement and
impacts between brake
rotor and brake hub
Load changes and impacts
due to reversal error
during interaction
between armature plate,
cap screws and guide bolts
Axial load cycle and
shearing stress on the
springs due to radial
reversing error of the
armature plate
5
Holding brake (option)
Spring−applied holding brakes
EN
Lenze ¯ BA 33.0006 ¯ 3.0
27
Page 28

EN
6
6 Electrical installation
6.1 Important notes
Electrical installation
Important notes
Danger!
Hazardous voltage on the power connections even when disconnected
from mains: residual voltage >60 V!
Before working on the power connections, always disconnect the drive
component from the mains and wait until the motor is at standstill.
Verify safe isolation from supply!
Stop!
Electrical connections must be carried out in accordance with the
national and regional regulations!
Observe tolerances according to IEC/EN 60034−1:
– Voltage ±5 %
– Frequency ±2 %
– Wave form, symmetry (increases heating and affects electromagnetic
compatibility)
Observe notes on wiring, information on the nameplate, and the connection scheme in
the terminal box.
¯ The connection must ensure a continuous and safe electrical supply, i.e.
– no loose wire ends,
– use assigned cable end fittings,
– ensure good electrical conductivity of the contact (remove residual lacquer) if an
(additional) PE connection on the motor housing is used),
– establish a safe PE conductor connection,
– tighten the plugin connector to the limit stop.
– After the connection is completed, make sure that all connections on the
terminal board are firmly tightened.
¯ The smallest air gaps between uncoated, live parts and against earth must not fall
below the following values.
Minimum requirements for basic
insulation according to IEC/EN
60664−1 (CE)
3.87 mm
¯ The terminal box has to be free of foreign bodies, dirt, and humidity.
¯ All unused cable entries and the box itself must be sealed against dust and water.
Higher requirements for UL
design
6.4 mm < 178 mm
9.5 mm > 178 mm
Motor diameter
28
Lenze ¯ BA 33.0006 ¯ 3.0
Page 29

Electrical installation
Wiring according to EMC
6.2 Wiring according to EMC
The EMC−compliant wiring of the motors is described in detail in the Operating
Instructions for the Lenze controllers.
¯ Use of metal EMC cable glands with shield connection.
¯ Connect the shielding to the motor and to the device.
6.3 Plug connectors
Stop!
¯ Tighten the coupling ring of the connector.
¯ If plugs without SpeedTec bayonet nut connectors are used, the
connector boxes for the power / encoder / fan connections must be
secured by O−rings if loadings by vibration occur:
– M17 connector box with O−ring 15 x 1.3 mm
– M23 connector box with O−ring 18 x 1.5 mm
– M40 connector box with O−ring 27 x 4.0 mm
¯ Never disconnect plugs when voltage is being applied! Otherwise, the
plugs could be destroyed! Inhibit the controller before disconnecting
the plugs!
6
EN
When connecting the cable socket to the motor connector, make sure that the aids to
orientation (pos. 1) are facing each other. Only then, trouble−free operation is ensured.
6.3.1 Power connections / holding brake
6−pole (external view of poles)
Pin Standard description Meaning M23
1
2
PE PE conductor
4
5
6
BD1
BD2
U
V
W
Holding brake +
Holding brake −
Power phase U
Power phase V
Power phase W
Lenze ¯ BA 33.0006 ¯ 3.0
29
Page 30

6
Electrical installation
Plug connectors
Holding brake
MCA 19...21, MCS 14...19, MQA 20 (external view of poles)
Pin Standard description Meaning M40
1
2
+
−
U
V
W
Not assigned
BD1
BD2
PE PE conductor
U
V
W
* At times, older documents also stated plug sizes of 1.0 (M23) and 1.5 (M40).
Holding brake +
Holding brake −
Power phase U
Power phase V
Power phase W
6.3.2 Holding brake
MDFQA
Pin Standard description Meaning
1
2
BD1
BD2
Holding brake +
Holding brake −
EN
6.3.3 Fan
Single−phase (external view of poles)
Pin Standard description Name M17
PE PE conductor
1
2
3
4
5
6
8−pole (external view of poles)
Pin Standard description Name M23
PE PE conductor
1
2
3
A
B
C
D
Three−phase (external view of poles)
Pin Standard description Name M17
PE PE conductor
1 U Fan
2 Not assigned
3 V Fan
4
5
6 W Fan
U1
U2
U+
U−
Not assigned
U1
U2
U+
U−
Not assigned
* At times, older documents also stated plug sizes of 1.0 (M23) and 1.5 (M40).
AC fan
DC fan
AC fan
DC fan
MT plug−in
connector−001.iso/dms
connector−001
M
30
Lenze ¯ BA 33.0006 ¯ 3.0
Page 31

Electrical installation
6.3.4 Feedback system
Resolver (external view of poles)
Pin Designation Meaning M23
1
2
3 +VCC ENP Supply: electronic nameplate
4
5
6
7
8
9
10
11
12
Incremental encoder / sin/cos absolute value encoder Hiperface (external view of poles)
Pin Designation Meaning M23
1 B Track B / + SIN
2
3
4
5
6
7
8 Not assigned
9 B Track B inverse / − SIN
10 Not assigned
11
12
Sin/cos absolute value encoder with EnDat interface (external view of poles)
Pin Designation Meaning M23
1 UP sensor Supply UP sensor
2
3
4 0 V sensor 0 V sensor supply
5
6
7 + U
8
9
10 GND Mass
11 Shield Shield for housing of encoder
12
13
14 Data Data EnDat interface
15
16
17 Data Data inverse EnDat interface
+Ref
−Ref
+COS
−COS
+SIN
−SIN
Not assigned
+KTY
−KTY
A
A
+ U
B
GND
Z
Z
+KTY
−KTY
Not assigned
+KTY
−KTY
B
Cycle
Cycle
B
B
A
A
1) Only for versions with electronic nameplate ENP.
* At times, older documents also stated plug sizes of 1.0 (M23) and 1.5 (M40).
Transformer windings
(reference windings)
Stator windings cosine
Stator windings
Sine
Thermal sensor KTY
Track A inverse / − COS
Track A / + COS
Supply +
Mass
Zero track inverse / − RS485
Zero track / + RS485
Thermal sensor KTY
Thermal sensor KTY
Supply + / +VCC ENP
Clock pulse EnDat interface
Clock pulse inverse EnDat
interface
Track B
Track B inverse
Track A
Track A inverse
1)
1)
MT plug−in
connector−001.iso/dms
6
Plug connectors
Feedback system
EN
Lenze ¯ BA 33.0006 ¯ 3.0
31
Page 32
6
Electrical installation
Terminal box
Feedback system
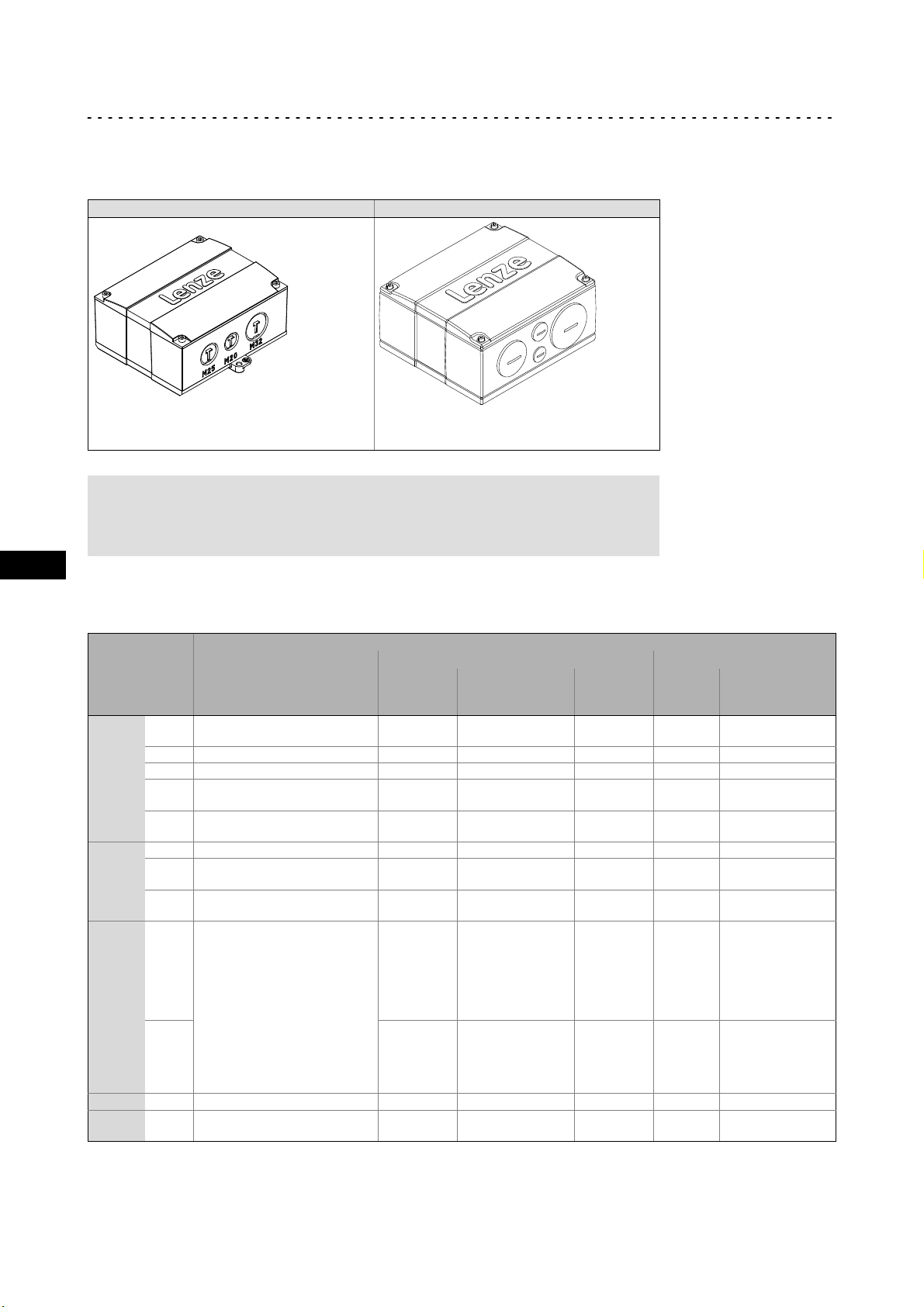
6.4 Terminal box
Terminal box with knock out Terminal box with screwed connections
MT−terminal box−001.iso MT−terminal−box−002.iso
The openings in the terminal box are cast closed
and can be opened by the customer as required.
EN
Note!
Open the holes on the underside of the knock out terminal box when the
cover is closed.
Cable glands and terminal studs for the power terminal box
Motor type /
motor size
MCA 10, 13,
14, 17
19, 21 1 x M32 x 1.5 + 1 x M25 x 1.5 0.2 ... 10 10 ... 11
20 2 x M20 + 2 x M 25 + 2 x M32 2.5 ... 16 18 ... 20
22
26
MQA 20 2 x M20 + 2 x M 25 + 2 x M32 2.5 ... 16 18 ... 20
22
26
MCS 09, 12,
14D,
14H,
14L15,
14P14,
19F15,
19J15
14L32,
14P32,
19F13,
19J30,
19P
MDFQA 160 2 x M63 x 1.5 + 1 x M16 x 1.5 M12 15.5
MDKS 056,
071
Tab. 1 Cable glands and connecting terminals
1) 4 mm2 without wire end ferrule
2) Spring terminal
Screwed connections Terminal Terminal board
Cable
cross−section
[mm2]
1 x M20 x 1.5 + 1 x M16 x 1.5 0.08 ... 2.5 10 ... 11
1 x M40x1.5 + 1 x M50x1.5 +
1 x M20x1.5 + 1 x M16x1.5
1 x M50 x 1.5 + 1 x M63 x 1.5 +
1 x M20 x 1.5 + 1 x M16 x 1.5
1 x M40x1.5 + 1 x M50x1.5 +
1 x M20x1.5 + 1 x M16x1.5
1 x M50 x 1.5 + 1 x M63 x 1.5 +
1 x M20 x 1.5 + 1 x M16 x 1.5
2 x M20 + 2 x M25 + 2 x M32
1 x M20 x 1.5 + 1 x M16 x 1.5 0.08 ... 2.5 10 ... 11
10 ... 35 18 3,2 −−−−− −−−−−
−−−−− M12 15.5
10 ... 35 18 3.2 −−−−− −−−−−
−−−−− M12 15.5
0.08 ... 2.5
0.2 ... 10 10 ... 11
Power connection
Stripping length
[mm]
1)
10 ... 11
Tightening
torque [Nm]
2)
2)
2)
2)
2)
2)
2)
Threaded
bolt
−−−−− −−−−−
−−−−− −−−−−
−−−−− −−−−−
−−−−− −−−−−
−−−−− −−−−−
−−−−− −−−−−
−−−−− −−−−−
Tightening
torque [Nm]
32
Lenze ¯ BA 33.0006 ¯ 3.0
Page 33

Cable glands for the fan terminal box
Motor type/size Screwed connection
MCA/MQA 20
1 x M 16 x 1.522
26
6.4.1 Power connections
MCA; MCS, MQA 20...22, MDLKS, SDSGA, SDSGS
Terminal Standard description Meaning
U
V
W
TP1
TP2
TB1
TB2
PE PE conductor
U
V
W
TP1
TP2
TB1
TB2
Motor winding phase U
Motor winding phase V
Motor winding phase W
PTC thermistor
Thermostat
Thermal NC contact
Electrical installation
Terminal box
Cable glands for the fan terminal box
6
MCA 26, MQA 26, MDFQA 160
Terminal Standard description Meaning
PE PE conductor
1
2
3
4
5
6
U1
V1
W1
W2
U2
V2
Start of winding phase U
Start of winding phase V
Start of winding phase W
End of winding phase W
End of winding phase U
End of winding phase V
Star connection Delta connection
(U2)
PE
(W2)
4
1
L1
(U1)
(V2)
6
5
2
3
(V1)
(W1)
L3
L2
PE
(W2)
4
1
L1
(U1)
(U2)
5
2
L2
(V1)
(V2)
6
3
(W1)
L3
6.4.2 Holding brake DC 205 V − connected via rectifier (optionl)
Terminal Standard description Meaning
~ BA1
~ BA2
+ BD1 (factory−set wiring)
− BD2 (factory−set wiring)
Switching contact, DC switching
Connection to L1 −
mains
Connection to N −
mains
Connection of
holding brake +
Connection of
holding brake −
AC−excited brake (rectifier)
N
L1
M
3~
EN
6.4.3 Holding brake DC 24 V (optional)
Terminal Standard description Meaning
BD1
BD2
Lenze ¯ BA 33.0006 ¯ 3.0
BD1
BD2
Holding brake +
Holding brake −
33
Page 34

6
Electrical installation
Terminal box
Fan
6.4.4 Fan
1−phase
Terminal Standard description Meaning
U1
U2
3−phase
Terminal Standard description Meaning
L1
L2
L3
PE PE conductor
U1
U2
PE PE conductor
U
V
W
Connection to L1 − mains
Connection to N − mains
Connection to L1 mains
Connection to L2 mains
Connection to L3 mains
EN
34
Lenze ¯ BA 33.0006 ¯ 3.0
Page 35

6.4.5 Feedback system
Resolver
Terminal Designation Meaning
B1
B2
B3 + VCC ENP Supply: electronic
B4
B5
B6
B7
B8 Not assigned
R1
R2
1) Only for versions with electronic nameplate ENP.
Incremental encoder / sin/cos absolute value encoder with Hiperface
Terminal Designation Meaning
B1
B2
B3
B4
B5
B6
B7
B8
B10 Shield − housing Shield − incremental encoder
R1
R2
+Ref
−Ref
+COS
−COS
+SIN
−SIN
+KTY
−KTY
+ U
GND
A
A
B
B
Z
Z
+KTY
−KTY
Transformer windings
(reference windings)
nameplate
Stator winding cosine
Stator winding sine
Thermal sensor KTY
B
Supply +
Mass
Track A / + COS
Track A inverse / − COS
Track B / + SIN
Track B inverse / − SIN
Zero track / + RS485
Zero track inverse / − RS485
Thermal sensor KTY
1)
Electrical installation
Terminal box
Feedback system
6
EN
Sin/cos absolute value encoder with EnDat interface
Terminal Designation Meaning
B1 + U
B2 GND Mass
B3
B4
B5
B6
B7
B8
B20
B21
B22 UP sensor UP sensor
B23 0 V sensor 0 V sensor
B24 Shield Shield for housing of encoder
B25 Not assigned
R1
R2
1) Only for versions with electronic nameplate ENP.
B
A
A
B
B
Data
Data
Cycle
Cycle
+KTY
−KTY
Supply + / + VCC ENP
Track A
Track A inverse
Track B
Track B inverse
Data EnDat interface
Data inverse EnDat interface
Clock pulse EnDat interface
Clock pulse inverse EnDat interface
Thermal sensor KTY
1)
Lenze ¯ BA 33.0006 ¯ 3.0
35
Page 36

Safety engineering7
7 Safety engineering
Motor−encoder combinations
Drive systems with Servo Drives 9400 and safety module SM301 provide speed−dependent
safety functions for safe speed monitoring and/or safe relative−position monitoring.
Observe permissible motor−encoder combinations during configuration.
ƒ Possible speed−dependent safety functions with safety module SM301:
– Safe stop 1 (SS1)
– Safe operational stop (SOS)
– Safely limited speed (SLS)
– Safe maximum speed (SMS)
– Safe direction (SDI)
– Safe speed monitor (SSM)
– Safely limited increment (SLI)
ƒ Permissible motor−encoder combinations for these functions:
Synchronous
servo motors
MCS 06 ... 19
MDXKS 56 / 71
Asynchronous
servo motors
MCA 10 ... 26
MQA 20 ... 26
Type Product key
Sin/cos absolute value, single−turn AS1024−8V−K2
Sin/cos absolute value, multi−turn AM1024−8V−K2
Resolver RV03 PL e / SIL 3
Type Product key
Sin/cos incremental IG1024−5V−V3
Resolver RV03
Encoder
Encoder
Safe speed monitoring with SM301
Single−encoder
concept
Two−encoder concept Up to PL e / SIL 3
Safe speed monitoring with SM301
Single−encoder
concept
Two−encoder concept Up to PL e / SIL 3
PL d / SIL 2
PL e / SIL 3
A "two−encoder concept" includes e.g. a resolver as motor encoder and, at the same time,
an absolute value encoder (sin/cos), an incremental encoder (TTL), or digital encoder
(SSI/bus) as position encoder on the machine.
In the case of the "2−encoder concept", the achievable risk mitigation (PL/SIL) depends on
the suitability of the encoders used.
Note!
If feedback systems for safety functions are used, the manufacturer’s
documentation must be observed!
36
Lenze
BA 33.0006 3.0
Page 37

Commissioning and operation
8 Commissioning and operation
8.1 Important notes
For trial run without output elements, lock the featherkey. Do not deactivate the
protective devices, not even in a trial run.
Check the correct operation of the brake before commissioning motors with brakes.
8.2 Before switching on
Note!
Before switch−on, you must ensure that the motor starts with the
intended direction of rotation.
Lenze motors rotate CW (looking at the driven shaft) if a clockwise
three−phase field L1 U1, L2 V1, L3 W1 is applied.
8
Important notes
Before initial commissioning, before commissioning after an extended standstill
period, or before commissioning after an overhaul of the motor, the following must be
checked:
¯ Measure the insulation resistance, in case of values £1 kWper volt of rated
voltage, dry the winding.
¯ Have all screwed connections of the mechanical and electrical parts been firmly
tightened?
¯ Is the unrestricted supply and removal of cooling air ensured?
¯ Has the PE conductor been connected correctly?
¯ Have the protective devices against overheating (temperature sensor evaluation)
been activated?
¯ Is the controller correctly parameterised for the motor?
( Controller operating instructions)
¯ Are the electrical connections o.k.?
¯ Does the motor connection have the correct phase sequence?
¯ Are rotating parts and surfaces which can become very hot protected against
accidental contact?
¯ Is the contact of good electrical conductivity if a PE connection on the motor
housing is used?
EN
Lenze ¯ BA 33.0006 ¯ 3.0
37
Page 38

EN
8
8.3 Functional test
¯ Check all functions of the drive after commissioning:
¯ Direction of rotation of the motor
¯ Torque behaviour and current consumption
¯ Function of the feedback system
8.4 During operation
Commissioning and operation
Functional test
– Direction of rotation in the disengaged state (see chapter "Electrical
connection").
Stop!
¯ Fire hazard! Do not clean or spray motors with flammable detergents
or solvents.
¯ Avoid overheating! Deposits on the drives impede the heat dissipation
required and have to be removed regularly.
Danger!
During operation, motor surfaces may not be touched. According to the
operating status, the surface temperature for motors can be up to 150°C.
For the protection against burn injuries, provide protection against
During operation, carry out inspections on a regular basis. Pay special attention to:
¯ Unusual noises
¯ Oil spots on drive end or leakages
¯ Irregular running
¯ Increased vibration
¯ Loose fixing elements
¯ Condition of electrical cables
¯ Speed variations
¯ Impeded heat dissipation
– Deposits on the drive system and in the cooling channels
– Pollution of the air filter
In case of irregularities or faults: ( 45).
contact, if necessary. Observe cooling−off times!
38
Lenze ¯ BA 33.0006 ¯ 3.0
Page 39

Maintenance/repair
9 Maintenance/repair
9.1 Important notes
Danger!
Hazardous voltage on the power connections even when disconnected
from mains: residual voltage >60 V!
Before working on the power connections, always disconnect the drive
component from the mains and wait until the motor is at standstill.
Verify safe isolation from supply!
Stop!
Repair work or replacement of defective safety encoders must only be
carried out by Lenze service personnel!
Shaft sealing rings and roller bearings have a limited service life.
Regrease bearings with relubricating devices while the low−voltage machine is running.
Only use the grease recommended by the manufacturer. If the grease drain holes are
sealed with a plug, (IP54 drive end; IP23 drive and non−drive end), remove plug before
commissioning. Seal bore holes with grease.
9
Important notes
EN
9.2 Maintenance intervals
Inspections
¯ If the machine is exposed to dirt, clean the air channels regularly.
9.2.1 Motor
¯ Only the bearings and shaft sealing rings become worn.
– Check bearings for noise (after approx. 15,000 h at the latest).
¯ In order to prevent overheating, remove dirt deposits on the drives regularly.
¯ We recommend carrying out an inspection after the first 50 operating hours. In
this way, you can detect and correct any irregularities or faults at an early stage.
9.2.2 Safety encoder
After a service life of 10 years, an inspection of the metal elastomer torque plate is
required for the encoders AS1024−8V−K and AM1024−8V−K. If no replacement is
required, an inspection interval of max. 5 years has to be observed.
Stop!
Repair work or replacement of defective safety encoders must only be
carried out by Lenze service personnel!
Lenze ¯ BA 33.0006 ¯ 3.0
39
Page 40

9
9.2.3 Holding brake
The brakes need to be checked on a regular basis to ensure safe and trouble−free
operation.
The necessary maintenance intervals primarily depend on the stress to which the brake
is subjected in an application. When a maintenance interval is being calculated, all
causes of wear must be taken into account (see notes "Wear on spring−applied brakes").
In the case of brakes which are subjected to low levels of stress, e.g. holding brakes with
emergency stop function, regular inspections at a fixed time interval are recommended.
In order to reduce the amount of work involved in maintenance, perform the inspection
at the same time as other maintenance work carried out cyclically on the machine if
possible.
If the brakes are not properly serviced, operating faults, production outages or damage
to machinery can occur. A maintenance concept adapted to the operating conditions
and the stresses to which the brakes are subjected must therefore be drawn up for every
application. For brakes, the maintenance intervals and servicing work listed in the
following table are necessary.
Maintenance/repair
Maintenance operations
Holding brake
EN
Maintenance interval for holding brake with
emergency stop
At least every 2 years
After 1 million cycles at the latest
Shorter intervals in the case of frequent emergency
stops!
The brakes of the MCS, MCA, MQA, and MDKS motors cannot be accessed from the
outside! (Maintenance work on the brakes must be carried out by Lenze Service staff
only!)
Maintenance work
Inspection of the brake integrated in the motor:
¯ Check ventilation function and
activation/deactivation
9.3 Maintenance operations
Stop!
¯ Make sure that no foreign bodies can enter the inside of the motor!
¯ Do not remove plugs when voltage is being applied!
Danger!
¯ Only work on the drive system when it is in a deenergised state!
¯ Hot motor surfaces of up to 150 °C. Observe cooling times!
¯ Remove loads acting on motors or secure loads acting on the drive!
9.3.1 Blower
If the motor is equipped with a dust protection filter, this filter must be cleaned or even
replaced at regular intervals depending on the amount of dust (if necessary, daily).
For motors equipped with a dry filter, the dust must be shaken out completely. If the
dust is wet, the filter mat must be replaced.
40
Lenze ¯ BA 33.0006 ¯ 3.0
Page 41

Maintenance/repair
Maintenance operations
Fan with dust protection filter
9.3.2 Fan with dust protection filter
Dry−type filters are used for the motors. Dry dust should be removed completely by
tapping.
Note!
The dust filter is mounted on the ventilation aggregate. Depending on
the amount of dust, the filter must be cleaned and replaced in regular
intervals!
Soiled filters reduce the amount of cooling air significantly. This leads to a higher
winding temperature, reduces its service life and may lead to damages.
When replacing the filter you must take care that all covers and filters are tightly fixed
so that there are no leaks for harmful dust!
In case of wet dust you must install new filter mats. The internal cleanness of the motor
should be checked at the latest when you replace the filter for the first time.
9
9.3.3 Motors with bearing relubricating devices
Under normal operating conditions, the bearings used have a service life of approx.
20.000 operating hours. Ex works the bearings are filled with a high−quality,
heat−resistant roller bearing grease. (The permissible operating temperature range of
the grease used is between −25°C and +120°C).
Relubrication period, type of grease and amount of grease are stated on an additional
indicating label on the motor.
Manufacturer designation
Designation of grease type according to
DIN51502
Relubrication period
Amount of grease
EN
Lenze ¯ BA 33.0006 ¯ 3.0
41
Page 42

9
Maintenance/repair
Maintenance operations
Motor plug connection assignment
9.3.4 Motor plug connection assignment
This motor−plug assignment is a rough selection of possible mechanical combinations.
Note!
When making your selection, the motor data and permissible currents of
the cables according to the system cable system manual must be
observed.
Further information is provided in the system cables system manual at:
www.Lenze.de ® Download ®Technical documentation ® Accessories
(product range) ® System manual (filter: Content type)
EN
Connector Connectable cross−section of the motor cable
EWS0001 / EWS1001 1.0 mm2, 1.5 mm2, 2.5 mm
EWS0012 / EWS1012 2.5 mm2, 4.0 mm
EWS0013 / EWS1013 6.0 mm2, 10.0 mm2, 16.0 mm
2
2
2
9.3.5 Power connection for plug−in connector at the cable end
Asynchronous servo motors
Motor type Plug size *
MCA 10I40− ... S00
13I34− ... Fx0
13I41− ... S00
14L16− ... Fx0
14L20− ... S00
14L35− ... Fx0
14L41− ... S00
17N17− ... Fx0
17N23− ... S00
17N35− ... Fx0
17N41− ... S00
19S17− ... Fx0
19S23− ... S00
19S35− ... Fx0 M40
19S42− ... S00
20X29− ... Fxx M40 EWS0013 M03 EWS1013 M06
21X17− ... Fx0 M40
21X25− ... S00
21X35− ... Fx0 EWS0013 M03 EWS1013 M06
21X42− ... S00
* At times, older documents also stated plug sizes of 1.0 (M23) and 1.5 (M40).
Spare part
designation
M23 EWS0001 M01 EWS1001 M04
M40 EWS0012 M02 EWS1012 M05
EWS0012
EWS0013
M40
M40
M40
EWS0012
EWS0013
EWS0012
EWS0013
EWS0012 M02 EWS1012 M05
EWS0012
EWS0013
Screw plug SpeedTec
Coding in the system
cable type code
M02
M03
M02
M03
M02
M03
M02
M03
Spare part
designation
EWS1012
EWS1013
EWS1012
EWS1013
EWS1012
EWS1013
EWS1012
EWS1013
Coding in the system
cable type code
M05
M06
M05
M0620X14− ... Fx0
M05
M06
M05
M06MQA 20
42
Lenze ¯ BA 33.0006 ¯ 3.0
Page 43

Synchronous servo motors
Maintenance/repair
Maintenance operations
Plug−in connector at the cable end
9
Motor type Plug size *
Spare part
designation
MDSKS 036 − 071
MDFKS 071
MCS 06
09
12
14D
14H12− ... Fx0
14H15− ... S00
14H28− ... Fx0 M40
14H32− ... S00
14L15− ... S00
14L30− ... Fx0
14P11− ... Fx0
S43.14
14P26− ... Fx0
19F12− ... Fx0
19F14− ... S00
19F29− ... Fx0
19F30− ... S00
19J12− ... Fx0
19J14− ... S00 M23 EWS0001 M01 EWS1001 M04
19J29− ... Fx0 M40 EWS0013 M03 EWS1013 M06
19J30− ... S00
19P14− ... S00 M23 EWS0001 M01 EWS1001 M04
19P29− ... Fx0
19P30− ... S00
* At times, older documents also stated plug sizes of 1.0 (M23) and 1.5 (M40).
M23 EWS0001 M01 EWS1001 M04
EWS0012
EWS0013
M23 EWS0001 M01 EWS1001 M0414L14− ... Fx0
M40
M23 EWS0001 M01 EWS1001 M04
M40
M23 EWS0001 M01 EWS1001 M04
M40
M40
M40 EWS0013 M03 EWS1013 M06
EWS0012
EWS0013
EWS0012
EWS0013
EWS0012
EWS0013
EWS0012
EWS0013
Screw plug SpeedTec
Coding in the system
cable type code
M02
M03
M02
M03
M02
M03
M02
M03
M02
M03
Spare part
designation
EWS1012
EWS1013
EWS1012
EWS1013
EWS1012
EWS1013
EWS1012
EWS1013
EWS1012
EWS1013
Coding in the system
cable type code
M05
M06
M05
M0614L32− ... S00
M05
M0614P32− ... S00
EN
M05
M06
M05
M0619P12− ... Fx0
9.3.6 Plug−in connector at the cable end
Feedback
Type of encoder Plug size *
Spare part
designation
Resolver
Incremental encoder EWS0010 F02 EWS1010 F06
Sin/cos encoder,
Hiperface
Sin/cos encoder, EnDat
Incremental encoder,
Renco R35
M23
EWS0006 F01 EWS1006 F05
EWS0010 F02 EWS1010 F06
EWS0017 F03 EWS1017 F07
EWS0023 F04 EWS1023 F08
Screw plug SpeedTec
Coding in the system
cable type code
Spare part
designation
Coding in the system
cable type code
Lenze ¯ BA 33.0006 ¯ 3.0
43
Page 44

9
Blower
Maintenance/repair
Repair
EN
Blower Plug size *
Spare part
designation
MDFKS M23 EWS0003 L01 EWS1003 L03
MCS, MCA, MQA M17 EWS0021 L02 EWS1021 L04
* At times, older documents also stated plug sizes of 1.0 (M23) and 1.5 (M40).
Screw plug SpeedTec
Coding in the system
cable type code
Spare part
designation
Coding in the system
cable type code
9.4 Repair
¯ It is recommended to have all repairs performed by Lenze Service.
¯ Delivery of spare parts is available upon request.
¯ In case of version with safety encoder, observe chapter 9.2.2!
44
Lenze ¯ BA 33.0006 ¯ 3.0
Page 45

Troubleshooting and fault elimination 10
10 Troubleshooting and fault elimination
If faults occur during operation of the drive system:
¯ First check the possible causes of malfunction according to the following table.
Note!
Also observe the corresponding chapters in the operating instructions for
the other components of the drive system.
If the fault cannot be remedied using one of the listed measures, please contact the
Lenze Service.
Danger!
¯ Only work on the drive system when it is in a deenergised state!
¯ Hot motor surfaces of up to 150 °C. Observe cooling times!
¯ Remove loads acting on motors or secure loads acting on the drive!
EN
Lenze ¯ BA 33.0006 ¯ 3.0
45
Page 46

EN
Troubleshooting and fault elimination10
Fault Cause Remedy
Motor too hot
Can only be evaluated by
measuring the surface
temperature:
¯ Non−ventilated motors
> 140 °C
¯ Externally ventilated or
self−ventilated motors
> 110 °C
Motor too hot
Can only be evaluated by
measuring the surface
temperature:
¯ Non−ventilated motors
> 140 °C
¯ Externally ventilated or
self−ventilated motors
> 110 °C
Motor suddenly stops and
does not restart
Incorrect direction of
rotation of the motor,
correct display on the
controller
Motor rotates normally but
does not reach the expected
torque
Motor turns in one direction
at maximum speed in an
uncontrolled manner
Motor rotates slowly in one
direction and cannot be
influenced by the controller
Irregular running
Vibrations
Running noises
Surface temperature > 140°C
Insufficient cooling air, blocked air
ducts.
Preheated cooling air Ensure a sufficient supply of fresh cooling air
Overload, with normal mains voltage
the current is too high and the speed
too low
Rated operating mode exceeded (S1 to
S8 IEC/EN 60034−1)
Loose contact in supply cable
(temporary single−phase operation!)
Fuse has blown (single−phasing!) Replace fuse
Overload of the drive ¯ Check load and, if necessary, reduce by means of longer
Heat dissipation impeded by deposits Clean surface and cooling fins of the drives
Insufficient cooling air, blocked air
ducts.
Preheated cooling air Ensure a sufficient supply of fresh cooling air
Overload, with normal mains voltage
the current is too high and the speed
too low
Rated operating mode exceeded (S1 to
S8 IEC/EN 60034−1)
Loose contact in supply cable
(temporary single−phase operation!)
Fuse has blown (single−phasing!) Replace fuse
Overload of the drive ¯ Check load and, if necessary, reduce by means of longer
Heat dissipation impeded by deposits Clean surface and cooling fins of the drives
Overload monitoring of the inverter is
activated
Motor cable polarity is reversed
Polarity of encoder cable reversed
Motor cable interchanged cyclically Connect the phases at the motor cable connection correctly
Motor cable interchanged cyclically Check motor connector and, if necessary, correct
Polarity of encoder cable reversed Check encoder connection and, if necessary, correct
Polarity of motor cable and encoder
cable reversed
Insufficient shielding of motor or
resolver cable
Drive controller gain too large Adjust the gains of the controllers (see Drive controller operating
Insufficiently balanced coupling
elements or machine
Inadequate alignment of drive train Realign machine unit, check foundation if necessary
Loose fixing screws Check and tighten screw connections
Foreign particles inside the motor
Bearing damage
Overload of the drive ¯ Check load and, if necessary, reduce by means of longer
Heat dissipation impeded by deposits Clean surface and cooling fins of the drives
Ensure unimpeded circulation of cooling air
Use larger drive (determined by power measurement)
Adjust rated operating mode to the specified operating conditions.
Determination of correct drive by expert or Lenze customer service
Tighten loose contact
ramp−up times
¯ Check winding temperature
Ensure unimpeded circulation of cooling air
Use larger drive (determined by power measurement)
Adjust rated operating mode to the specified operating conditions.
Determination of correct drive by expert or Lenze customer service
Tighten loose contact
ramp−up times
¯ Check winding temperature
¯ Check controller settings
¯ Reduce load caused by longer acceleration times
Check the polarity and correct
Check the polarity and correct
Checking shielding and earth connection
instructions)
Rebalance
Repair by manufacturer if necessary
ramp−up times
¯ Check winding temperature
46
Lenze ¯ BA 33.0006 ¯ 3.0
Page 47

Notes !
EN
Lenze ¯ BA 33.0006 ¯ 3.0
47
Page 48

© 01/2014 | BA 33.0006 | .Nój | 3.0 | TD09
Lenze Drives GmbH
Postfach 10 13 52
D−31763 Hameln
Germany
+49(0)5154/ 82−0
+49(0)5154/ 82−28 00
Lenze@Lenze.de
www.Lenze.com
Lenze Service GmbH
Breslauer Straße 3
D−32699 Extertal
Germany
008000/ 2446877 (24 h helpline)
+49(0)5154/ 82−13 96
Service@Lenze.de
10987654321
 Loading...
Loading...