

Page 1
Inverter
i700
i700 servo inverter _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
E70ACM...
Reference manual EN
Ä.J(yä
13410788
L
Page 2

Contents
Contents
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
1 About this documentation _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 12
1.1 Conventions used _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 13
1.2 Terminology used _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 14
1.3 Definition of notes used _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 15
1.4 Structure of the parameter descriptions _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 16
2 Parameter handling _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 18
2.1 Parameter transfer during initialisation _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 18
2.2 Storage parameter set (par001.*) and total parameter set (par000.*) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 19
2.2.1 Saving a parameter set from the i700 to a file (export) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 20
2.2.2 Loading the stored parameter set to the i700 (import) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 20
2.2.3 Monitoring of the parameter import (error report) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 20
2.3 Cyclic redundancy check (CRC) - parameter set comparison on the basis of the checksum _ _ _ _ _ 21
0x2030 - Parameter set: Validity check (CRC)
3 Communication with the controller _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 22
3.1 Acceleration of the system (initialisation) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 22
3.2 Process data (cyclic PDO transfer) and PDO mapping _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 24
3.2.1 Synchronisation with "Distributed clocks" (DC) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 25
3.3 Parameter data transfer (SDO communication) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 26
3.3.1 Object directory _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 26
3.3.2 SDO abort codes _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 27
3.3.3 ESI: EtherCAT Slave Information file (device description) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 27
3.4 Activating the control via PDO _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 28
0x2824 | 0x3024 - Device control via PDO: Activation
3.5 Lenze control and status word _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 28
0x2830 | 0x3030 - Lenze control word
0x2831 | 0x3031 - Lenze status word
0x2833 | 0x3033 - Lenze statusword 2
3.6 Ethernet over EtherCAT (EoE) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 31
3.6.1 System architecture _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 31
3.6.2 Supported protocols and services _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 32
3.6.3 Display of EoE-specific information _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 32
0x2020 - EoE information
3.6.4 GCI-SDO communication (TCP port 9410) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 33
3.6.4.1 Structure of the EtherCAT data telegram _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 34
3.6.4.2 Assignment of user data areas P0 ... P4 _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 36
3.6.4.3 Error codes _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 37
3.6.4.4 Telegram example 1:
Querying the heatsink temperature (read request) _ _ _ _ _ _ _ _ _ _ _ _ _ 38
3.6.4.5 Telegram example 2:
Querying the software version of the i700 (read request) _ _ _ _ _ _ _ _ _ _ 40
3.6.4.6 Telegram example 3:
Setting the LV warning threshold in the i700 (write request) _ _ _ _ _ _ _ _ 42
4 Device settings _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 44
4.1 Behaviour in case of error _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 44
0x10F1 - ECAT: Behaviour in case of error
4.2 Device identification data _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 46
0x2000 - Device: Data
0x2001 - Device: Name
4.3 Function "Optical device recognition" _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 46
0x2021 - Device: Optical recognition
4.4 Device commands _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 47
0x2022 - Device command
2 Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 3

Contents
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.5 Monitoring of the DC-bus voltage _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 48
0x2540 - Device: Voltage values
4.6 Real-time information (distributed clock) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 50
0x2580 - ECAT DC: Real-time information
5 Motor control & motor settings _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 52
5.1 Required commissioning steps (short overview) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 54
5.1.1 Servo control for synchronous motor (SM) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 54
5.1.2 Servo control for asynchronous motor (ASM) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 55
5.1.3 V/f characteristic control for asynchronous motor (ASM) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 56
5.2 Commissioning functions (short overview) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 57
0x2822 | 0x3022 - Axis command
0x2823 | 0x3023 - Axis command: Progress
0x2825 | 0x3025 - Axis: Operating mode
0x2832 | 0x3032 - Identification: Status word
5.2.1 Enable/inhibit operation via control word _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 59
5.2.2 Saving changed parameters safe against mains failure _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 60
5.3 Wiring check by means of manual test modes _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 61
0x2835 | 0x3035 - Manual test mode: Settings
5.3.1 Manual test mode "voltage/frequency" _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 62
5.3.2 Manual test mode "current/frequency" _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 63
5.4 Manual control _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 65
0x2836 | 0x3036 - Manual jog: Settings
5.5 Setting the control mode _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 69
0x2C00 | 0x3400 - Motor control
5.6 Accepting/adapting plant parameters _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 70
5.7 Compensating for inverter influence on output voltage _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 71
0x2DE0 | 0x35E0 - Advanced settings
0x2947 | 0x3147 - Inverter characteristic: Voltage grid points (y)
5.8 Setting the motor parameters for the servo control _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 75
5.8.1 Lenze motor: Easy loading of motor data from the catalogue via the »PLC-Designer« _ _ 75
5.8.2 Motors of other manufacturers or no catalogue data available: Three possibilities to create the
setting _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 75
0x2C08 | 0x3408 - motor: Setting method - motor parameters
5.8.2.1 Enter motor nameplate data _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 76
5.8.2.2 Set motor parameters manually _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 76
5.8.2.3 Determine motor parameters automatically via "motor parameter identification"
78
5.8.3 Motor parameters (object descriptions) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 81
0x2C01 | 0x3401 - Motor: Common parameters
0x2C02 | 0x3402 - Motor (ASM): Parameter
0x2C03 | 0x3403 - Motor (SM): Parameter
0x6075 | 0x6875 - Motor rated current
0x6076 | 0x6876 - Motor rated torque
5.9 Setting the feedback system for the servo control _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 85
5.9.1 General settings _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 86
0x2C45 | 0x3445 - open circuit in the feedback system: Response
0x2C46 | 0x3446 - feedback system: Specifiable number of revolutions
0x2C5F | 0x345F - Feedback system: Parameter CRC
5.9.2 Settings for "resolver" version _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 87
0x2C43 | 0x3443 - Resolver: Number of pole pairs
0x2C44 | 0x3444 - Resolver error compensation: Parameter
5.9.3 Settings for "encoder" version _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 89
0x2C40 | 0x3440 - Encoder: Type
0x2C42 | 0x3442 - Encoder: Parameter
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 3
Page 4

Contents
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.9.4 Additional settings for SinCos absolute value encoders with HIPERFACE® protocol _ _ _ 91
0x2C41 | 0x3441 - Hiperface: Parameter
5.9.5 Detection of changed settings of the feedback system _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 94
5.10 Synchronous motor (SM): Pole position identification _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 95
5.10.1 Monitoring of the pole position identification _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 96
0x2C60 | 0x3460 - Monitoring of pole position identification: Response
5.10.2 Pole position identification PPI (360°) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 96
0x2C61 | 0x3461 - Pole position identification PPI (360°)
5.10.3 Pole position identification PPI (min. movement) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 99
0x2C62 | 0x3462 - Pole position identification PPI (min. movement)
5.10.4 Pole position identification PPI (without movement) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 102
0x2C63 | 0x3463 - pole position identification PLI (without movement)
5.11 Setting control loops _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 105
5.11.1 Setting and optimising the current controller _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 105
0x2941 | 0x3141 - Current controller: Feedforward control
0x2942 | 0x3142 - Current controller: Parameter
0x2943 | 0x3143 - Motor: Current setpoint - filter time
5.11.1.1 Manual test mode "Current pulse" _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 108
5.11.2 Determining the total moment of inertia _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 111
0x2910 | 0x3110 - Moments of inertia
5.11.3 Setting the speed controller _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 113
0x2900 | 0x3100 - Speed controller: Parameter
0x2901 | 0x3101 - Speed controller: Gain - adaptation
0x2902 | 0x3102 - Speed controller: Load starting value
0x2903 | 0x3103 - Speed: Speed setpoint - filter time
0x2904 | 0x3104 - Speed: Actual speed - filter time
5.11.4 Setting the position controller _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 116
5.11.5 Setting the field controller (ASM) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 118
5.11.6 Setting the field weakening controller (ASM) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 119
5.11.7 Field weakening operation - synchronous motor (SM) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 121
5.12 Fine adjustment des motor model _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 122
5.12.1 Correction of the stator leakage inductance (Lss)... _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 122
5.12.2 Synchronous motor (SM): Compensating for temperature and current influences _ _ _ 128
5.12.3 Asynchronous motor (ASM): Identifying the Lh saturation characteristic _ _ _ _ _ _ _ _ _ 129
5.12.4 Estimating the optimal magnetising current _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 131
0x2980 | 0x3180 - Position controller: Gain
0x2981 | 0x3181 - Position controller: Gain - adaptation
0x2982 | 0x3182 - Position controller: Output signal limitation
0x2983 | 0x3183 - Position: Select a new actual position
0x2984 | 0x3184 - Determine target position: Mode
0x29C0 | 0x31C0 - Field controller: Parameter
0x29E0 | 0x31E0 - Field weakening controller: Parameter
0x29E1 | 0x31E1 - field: Field set value limitation
0x29E2 | 0x31E2 - DC link circuit voltage: Filter time
0x29E3 | 0x31E3 - motor: Actual voltage - filter time
0x29E4 | 0x31E4 - Voltage reserve range
0x2C04 | 0x3404 - Motor: Lss saturation characteristic - inductance grid points (y)
0x2C05 | 0x3405 - Motor: Lss saturation charcteristic - reference for current grid points (x)
5.12.1.1 Example for determining the saturation characteristic _ _ _ _ _ _ _ _ _ _ _ 125
0x2C06 | 0x3406 - Motor (SM): Magnet characteristic (current) - grid points
0x2C07 | 0x3407 - Motor (ASM): Lh saturation characteristic - inductance grid points (y)
4 Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 5

Contents
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.13 Parameterising filter elements in the setpoint path _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 132
5.13.1 Jerk limitation _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 132
0x2945 | 0x3145 - Torque: Setpoint jerk limitation
5.13.2 Notch filters (band-stop filters) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 132
0x2944 | 0x3144 - Torque: Notch filter setpoint torque
5.14 Parameterising the V/f characteristic control _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 136
5.14.1 Defining the V/f characteristic shape _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 137
0x2B00 | 0x3300 - VFC: V/f characteristic - shape
0x2B01 | 0x3301 - VFC: V/f characteristic - define reference point
0x2B02 | 0x3302 - VFC: User-definable V/f characteristic - frequency grid points (x)
0x2B03 | 0x3303 - VFC: User-definable V/f characteristic - voltage grid points (y)
5.14.2 Activating the voltage vector control (lmin controller) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 140
0x2B04 | 0x3304 - VFC: Voltage vector control - setpoint current
0x2B05 | 0x3305 - VFC: Voltage vector control parameter
5.14.3 Setting the voltage boost _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 141
0x2B06 | 0x3306 - VFC: Voltage boost
5.14.4 Setting the load adjustment _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 142
0x2B07 | 0x3307 - VFC: Load adjustment parameter
5.14.5 Defining the behaviour at the current limit (Imax controller) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 143
0x2B08 | 0x3308 - VFC: Imax controller - Parameter
5.14.6 Setting the slip compensation _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 145
0x2B09 | 0x3309 - VFC: Slip compensation - Parameter
5.14.7 Setting the oscillation damping _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 146
0x2B0A | 0x330A - VFC: Oscillation damping - Parameter
5.14.8 Optimising pull-out slip limitation _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 148
0x2B0C | 0x330C - VFC: Override point of field weakening
5.14.9 Display parameter _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 148
0x2B0B | 0x330B - VFC: Setpoint frequency
5.14.10 "Flying restart" function _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 149
0x2BA0 | 0x33A0 - Flying restart: Activate
0x2BA1 | 0x33A1 - Flying restart: Current
0x2BA2 | 0x33A2 - Flying restart: Start frequency
0x2BA3 | 0x33A3 - Flying restart: Integration time
0x2BA4 | 0x33A4 - Flying restart: Min. deviation
0x2BA5 | 0x33A5 - Flying restart: Delay time
0x2BA6 | 0x33A6 - Flying restart: Result
5.15 "DC-injection braking" function _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 153
0x2B80 | 0x3380 - DC-injection braking: Current
5.16 "Short-circuit braking" function _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 154
5.17 Setting the switching frequency _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 155
0x2939 | 0x3139 - Switching frequency
5.18 Frequency and speed limitations _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 156
6 Holding brake control _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 157
6.1 Operating modes _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 157
6.1.1 Triggering via control word via external control (Lenze setting) _ _ _ _ _ _ _ _ _ _ _ _ _ _ 158
6.1.2 Triggering via state machine of device _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 158
6.1.3 No brake connected _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 159
6.2 Display of the holding brake status _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 159
6.3 Basic signal flow _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 159
6.4 Settings _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 161
0x2820 | 0x3020 - brake control: settings
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 5
Page 6

Contents
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
7 CiA402 device profile _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 163
7.1 Supported drive modes _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 165
7.2 Applied units and scaling for position and velocity _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 165
7.3 General CiA402 parameters _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 166
0x60FD | 0x68FD - Digital inputs
0x6404 | 0x6C04 - Motor manufacturer
0x6502 | 0x6D02 - Supported drive modes
0x67FF | 0x6FFF - Device profile number
7.4 Device control _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 168
0x6040 | 0x6840 - CiA402 controlword
0x6041 | 0x6841 - Statusword
0x605A | 0x685A - Quick stop option code
0x6060 | 0x6860 - Modes of operation
0x6061 | 0x6861 - Modes of operation display
0x6085 | 0x6885 - Quick stop deceleration
7.4.1 Commands for the device status control _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 171
7.4.1.1 Shutdown _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 172
7.4.1.2 Switch on _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 173
7.4.1.3 Enable operation _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 174
7.4.1.4 Activate quick stop _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 175
7.4.1.5 Disable operation _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 176
7.4.1.6 Disable voltage _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 177
7.4.1.7 Fault reset _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 178
7.4.2 Device states _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 179
7.4.2.1 Not ready to switch on _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 181
7.4.2.2 Switch on disabled _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 182
7.4.2.3 Ready to switch on _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 183
7.4.3 Selection of the operating mode _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 189
7.5 Parameters for the scaling of physical values _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 190
0x607E | 0x687E - Polarity
0x6080 | 0x6880 - Max. motor speed
0x608F | 0x688F - Position encoder resolution
0x6090 | 0x6890 - Velocity encoder resolution
7.6 Parameters for actuation of the position control _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 192
0x6062 | 0x6862 - Position demand value
0x6063 | 0x6863 - Position actual internal value
0x6064 | 0x6864 - Position actual value
0x6065 | 0x6865 - Following error window
0x6066 | 0x6866 - Following error time out
0x6067 | 0x6867 - Position window
0x6068 | 0x6868 - Position window time
0x60F4 | 0x68F4 - Following error actual value
0x60FA | 0x68FA - Control effort
0x60FC | 0x68FC - Position demand internal value
7.4.2.4 Switched on _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 184
7.4.2.5 Operation enabled _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 185
7.4.2.6 Quick stop is active _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 186
7.4.2.7 Fault reaction active _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 187
7.4.2.8 Fault _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 188
6 Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 7

Contents
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
7.7 Velocity mode (vl) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 195
7.7.1 Default mapping _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 195
7.7.2 Object description _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 196
0x6042 | 0x6842 - vl target velocity
0x6043 | 0x6843 - vl velocity demand
0x6044 | 0x6844 - vl velocity actual value
0x6046 | 0x6846 - vl velocity min max amount
0x6048 | 0x6848 - vl velocity acceleration
0x6049 | 0x6849 - vl velocity deceleration
7.7.3 Signal flow (servo control) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 198
7.7.4 Signal flow (V/f characteristic control) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 200
7.8 Cyclic sync position mode (csp) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 202
7.8.1 Default mapping _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 203
7.8.2 Object description _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 204
0x607A | 0x687A - Target position
0x60C0 | 0x68C0 - Interpolation sub mode select
0x60C2 | 0x68C2 - Interpolation time period
0x60E0 | 0x68E0 - Positive torque limit value
0x60E1 | 0x68E1 - Negative torque limit value
7.8.3 Signal flow _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 206
7.8.4 Control commands & status information _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 208
7.9 Cyclic sync velocity mode (csv) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 209
7.9.1 Default mapping _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 210
7.9.2 Object description _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 211
0x606C | 0x686C - Velocity actual value
0x60B1 | 0x68B1 - Velocity offset
0x60FF | 0x68FF - Target velocity
7.9.3 Signal flow (servo control) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 212
7.9.4 Signal flow (V/f characteristic control) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 214
7.9.5 Control commands & status information _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 216
7.10 Cyclic sync torque mode (cst) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 217
7.10.1 Default mapping _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 218
7.10.2 Object description _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 219
0x2946 | 0x3146 - Cyclic sync torque mode: Speed limitation
0x6071 | 0x6871 - Torque demand
0x6072 | 0x6872 - Max torque
0x6073 | 0x6873 - Max current
0x6074 | 0x6874 - Torque demand
0x6077 | 0x6877 - Torque actual value
0x6078 | 0x6878 - Current actual value
0x6079 | 0x6879 - DC link circuit voltage
0x60B2 | 0x68B2 - Torque offset
7.10.3 Signal flow _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 223
7.10.4 Control commands & status information _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 225
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 7
Page 8

Contents
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
7.11 Touch probe (TP) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 226
7.11.1 Default mapping _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 227
7.11.2 General functional principle _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 228
7.11.3 Filtering the touch probe signal _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 229
0x2500 - Touch probe (TP): Debounce time
7.11.4 Compensation of runtime delays _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 229
0x2D00 | 0x3500 - Touch probe (TP): Dead time compensation
7.11.5 Touch probe function _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 231
0x60B8 | 0x68B8 - Touch probe function
7.11.6 Touch probe status _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 232
0x60B9 | 0x68B9 - Touch probe status
7.11.7 Time stamps and positions detected _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 233
0x2D01 | 0x3501 - Touch probe (TP): Time stamp
0x60BA | 0x68BA - Touch probe pos1 pos value
0x60BB | 0x68BB - Touch probe pos1 neg value
0x60BC | 0x68BC - Touch probe pos2 pos value
0x60BD | 0x68BD - Touch probe pos2 neg value
8 Monitoring functions _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 235
8.1 24-V supply voltage monitoring _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 235
8.2 Monitoring of the power section and device utilisation (Ixt) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 236
0x2D40 | 0x3540 - Ixt utilisation
8.3 Monitoring of the heatsink temperature _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 239
0x2D84 | 0x3584 - Heatsink temperature
8.4 Monitoring of the motor utilisation (I²xt) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 241
0x2D4E | 0x354E - Motor utilisation (I²xt): Motor overload warning threshold
0x2D4F | 0x354F - Motor utilisation (I²xt): Actual utilisation
0x2D50 | 0x3550 - motor utilisation (I²xt): Motor overload error
0x2D4C | 0x354C - Motor utilisation (I²xt): Parameter for the thermal model
0x2D4D | 0x354D - Motor utilisation (I²xt): User-definable characteristic
8.4.1 Example of how to enter the characteristic for standard and servo motors _ _ _ _ _ _ _ 246
8.4.2 UL 508-compliant I²xt motor overload monitoring _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 248
8.5 Motor temperature monitoring _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 250
0x2D49 | 0x3549 - Motor temperature monitoring: Parameters
8.5.1 Spec. charact. curve for motor temperature sensor _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 252
8.6 Motor speed monitoring _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 253
0x2D44 | 0x3544 - Motor speed monitoring
8.7 Motor phase failure monitoring _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 254
0x2D45 | 0x3545 - Motor phase failure detection
8.7.1 Limits of the motor phase failure monitoring _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 255
8.7.2 Monitoring 2: In the "enable operation" state transition _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 256
8.7.3 Monitoring 1: In "operation enabled" status _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 256
8.7.4 Monitoring with regard to short circuit and earth fault _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 257
8.8 Monitoring of the ultimate motor current _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 258
0x2D46 | 0x3546 - Monitoring: Ultimate motor current
8 Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 9

Contents
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
9 Diagnostics & error management _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 259
9.1 LED status displays _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 260
9.2 Indication of fault and warning (error code) _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 261
0x603F | 0x683F - Error code
0x284F | 0x304F - Current fault
9.2.1 Response of the device in the event of an error _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 262
0x605E | 0x685E - Response to error
0x2826 | 0x3026 - Quick stop: Duration in the event of a fault
9.2.2 Resetting the error/fault _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 264
0x2840 | 0x3040 - Delay time: Reset error
0x2841 | 0x3041 - Reset error
9.3 History buffer _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 265
0x10F3 - Diagnostics: History buffer
9.4 CiA402 error codes / error messages _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 267
Error code 0x0000: No error
Error code 0x2320: Short circuit or earth leakage on motor side
Error code 0x2340: Short circuit on motor side
Error code 0x2351: Motor utilisation (I²xt) > [value] %
Error code 0x2380: Fault - utilisation of the power section (Ixt) too high
Error code 0x2381: Warning - Utilisation of the power section (Ixt) too high
Error code 0x2382: Fault - device utilisation (Ixt) too high
Error code 0x2383: Warning - device utilisation (Ixt) too high
Error code 0x2384: Ultimate motor current reached
Error code 0x2385: Output current > [value] A (maximum device current)
Error code 0x2386: Clamp is active
Error code 0x2387: Clamp responded too often
Error code 0x3210: DC link circuit - overvoltage [value] V
Error code 0x3220: DC link circuit - undervoltage [value] V
Error code 0x4210: Module temperature too high, [value]
Error code 0x4280: Internal fault - module temperature monitoring
Error code 0x4310: Motor temperature too high, [value]
Error code 0x4380: Motor temperature sensor
Error code 0x5112: 24-V supply
Error code 0x6010: Watchdog reset
Error code 0x6310: Incorrect parameter set download
Error code 0x6320: Parameter error in object [value]
Error code 0x7121: PLI - motor blocked
Error code 0x7303: Error in feedback system
Error code 0x7380: Hiperface communication error
Error code 0x7381: Hiperface: Invalid absolute value - motor speed too high
Error code 0x8180: ECAT DC - synchronisation required
Error code 0x8181: EtherCAT communication
Error code 0x8280: Sync Manager - address [value]
Error code 0x8281: Sync Manager - actual size [value]
Error code 0x8282: Sync Manager - settings [value]
Error code 0x8283: PDO Mapping: Object unknown (index [value])
Error code 0x8284: No PDO mapping object (index [value])
Error code 0x8285: Too many mapped objects (max. number = [value])
Error code 0x8286: PDO mapping - error
Error code 0x8700: Sync controller
Error code 0x8701: Time-out during synchronisation with EtherCAT Sync signal
Error code 0xFF00: Fatal internal error
Error code 0xFF01: Fatal internal communication error, cycle [value]
Error code 0xFF02: Brake
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 9
Page 10

Contents
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Error code 0xFF03: Fatal internal error - overflow task [value]
Error code 0xFF04: PLI - motor movement too large
Error code 0xFF05: STO inhibited
Error code 0xFF06: Max. speed reached
Error code 0xFF07: Impermissible during identification or in the test mode
Error code 0xFF08: Impossible during identification
Error code 0xFF09: Motor phase failure
Error code 0xFF0A: Motor phase failure - phase U
Error code 0xFF0B: Motor phase failure - phase V
Error code 0xFF0C: Motor phase failure - phase W
Error code 0xFF0D: No resolver connected --> command cannot be executed.
Error code 0xFF0E: Speed too low --> command cannot be executed.
Error code 0xFF0F: No resolver connected --> command cannot be executed.
Error code 0xFF10: Time-out
Error code 0xFF11: Numerical problem
Error code 0xFF12: Inverter error too big
Error code 0xFF13: Identification aborted
Error code 0xFF14: Not allowed in state 'operation enabled' or 'quick stop active'
Error code 0xFF15: No Hiperface absolute value encoder connected --> command cannot be executed
Error code 0xFF16: Connected Hiperface absolute value encoder is not supported
Error code 0xFF17: Connected Hiperface absolute value encoder is not supported --> command cannot be executed
Error code 0xFF18: Communication timeout in the manual control mode
Error code 0xFF19: Internal error during identification
9.5 Identification data _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 280
0x1000 - Device: Type
0x1001 - Error memory
0x1008 - ECAT: Manufacturer's device name
0x1009 - Device: Hardware version
0x100A - Device: Software version
0x1018 - ECAT: Identification data
9.6 Diagnostics parameters _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 281
0x10F8 - ECAT DC: Current time
0x2D81 | 0x3581 - Counter: Operating time
0x2D82 | 0x3582 - motor: Actual voltage - Veff, phase-phase
0x2D83 | 0x3583 - Motor: Phase currents
0x2D8A | 0x358A - Speed monitoring: Actual speed error
10 Service/internal _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 283
0x2DD0 | 0x35D0 - field: Values
0x2DD1 | 0x35D1 - motor: Currents
0x2DD2 | 0x35D2 - Position: Target position interpolated
0x2DD3 | 0x35D3 - Target speeds
0x2DD4 | 0x35D4 - Speed controller: Output signal
0x2DD5 | 0x35D5 - torque: Target torque
0x2DD6 | 0x35D6 - Torque: Filter cascade
0x2DD7 | 0x35D7 - Voltage values
0x2DDC | 0x35DC - Slip: Actual slip
0x2DDD | 0x35DD - Device: Actual output frequency
0x2DDE | 0x35DE - motor: Actual position of rotor angle
0x2DDF | 0x35DF - Axis: Device data
10.1 Firmware update _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 288
10 Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 11
Contents
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
11 Appendix _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 289
11.1 Table of attributes _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 289
11.2 Structure of the parameter set file _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 310
11.2.1 File header _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 310
11.2.2 Data header _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 311
11.3 Communication objects _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 313
0x1600 - RPDO-->Axis A: Cyclic sync position mode (csp)
0x1601 - RPDO-->Axis A: Cyclic sync torque mode (cst)
0x1602 - RPDO-->Axis A: Cyclic sync velocity mode (csv)
0x1603 - RPDO-->Axis A: Velocity mode (vl)
0x1604 - RPDO-->Axis A: Touch probe (TP)
0x1605 - RPDO-->Axis A: Freely configurable (user)
0x1606 - RPDO-->Axis A: Torque limits
0x1607 - RPDO --> Axis A: Speed Limits
0x1610 - RPDO-->Axis B: Cyclic sync position mode (csp)
0x1611 - RPDO-->Axis B: Cyclic sync torque mode (cst)
0x1612 - RPDO-->Axis B: Cyclic sync velocity mode (csv)
0x1613 - RPDO-->Axis B: Velocity mode (vl)
0x1614 - RPDO-->Axis B: Touch probe (TP)
0x1615 - RPDO-->Axis B: Freely configurable (user)
0x1616 - RPDO-->Axis B: Torque limits
0x1617 - RPDO --> Axis B: Speed limits
0x1A00 - Axis A-->TPDO: Cyclic sync position mode (csp)
0x1A01 - Axis A-->TPDO: Cyclic sync torque mode (cst)
0x1A02 - Axis A-->TPDO: Cyclic sync velocity mode (csv)
0x1A03 - Axis A-->TPDO: Velocity mode (vl)
0x1A04 - Axis A-->TPDO: Touch probe (TP)
0x1A05 - Axis A-->TPDO: Freely configurable (user)
0x1A06 - Axis A-->TPDO: Additional status information
0x1A10 - Axis B-->TPDO: Cyclic sync position mode (csp)
0x1A11 - Axis B-->TPDO: Cyclic sync torque mode (cst)
0x1A12 - Axis B-->TPDO: Cyclic sync velocity mode (csv)
0x1A13 - Axis B-->TPDO: Velocity mode (vl)
0x1A14 - Axis B-->TPDO: Touch probe (TP)
0x1A15 - Axis B-->TPDO: Freely configurable (user)
0x1A16 - Axis B-->TPDO: Additional status information
0x1C00 - Sync Manager: Communication type
0x1C12 - Sync Manager 2 (RPDO-->Device): PDO mapping
0x1C13 - Sync Manager 3 (RPDO-->Device): PDO mapping
0x1C32 - Sync Manager 2 (RPDO-->Device): Parameter
0x1C33 - Sync Manager 3 (Device-->TPDO): Parameter
11.4 Licences _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 324
Index _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 325
Your opinion is important to us _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ 336
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 11
Page 12
1 About this documentation
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
1 About this documentation
Danger!
The controller is a source of danger which may lead to death or severe injury of persons.
To protect yourself and others against these dangers, observe the safety instructions
before switching on the controller.
Please read the safety instructions in the mounting instructions and in the hardware
manual for the i700 servo inverter. Both instructions are included in the scope of supply
of the drive controller.
Target group
This documentation addresses to all persons who want to parameterise, configure, and diagnose
the i700 servo inverter.
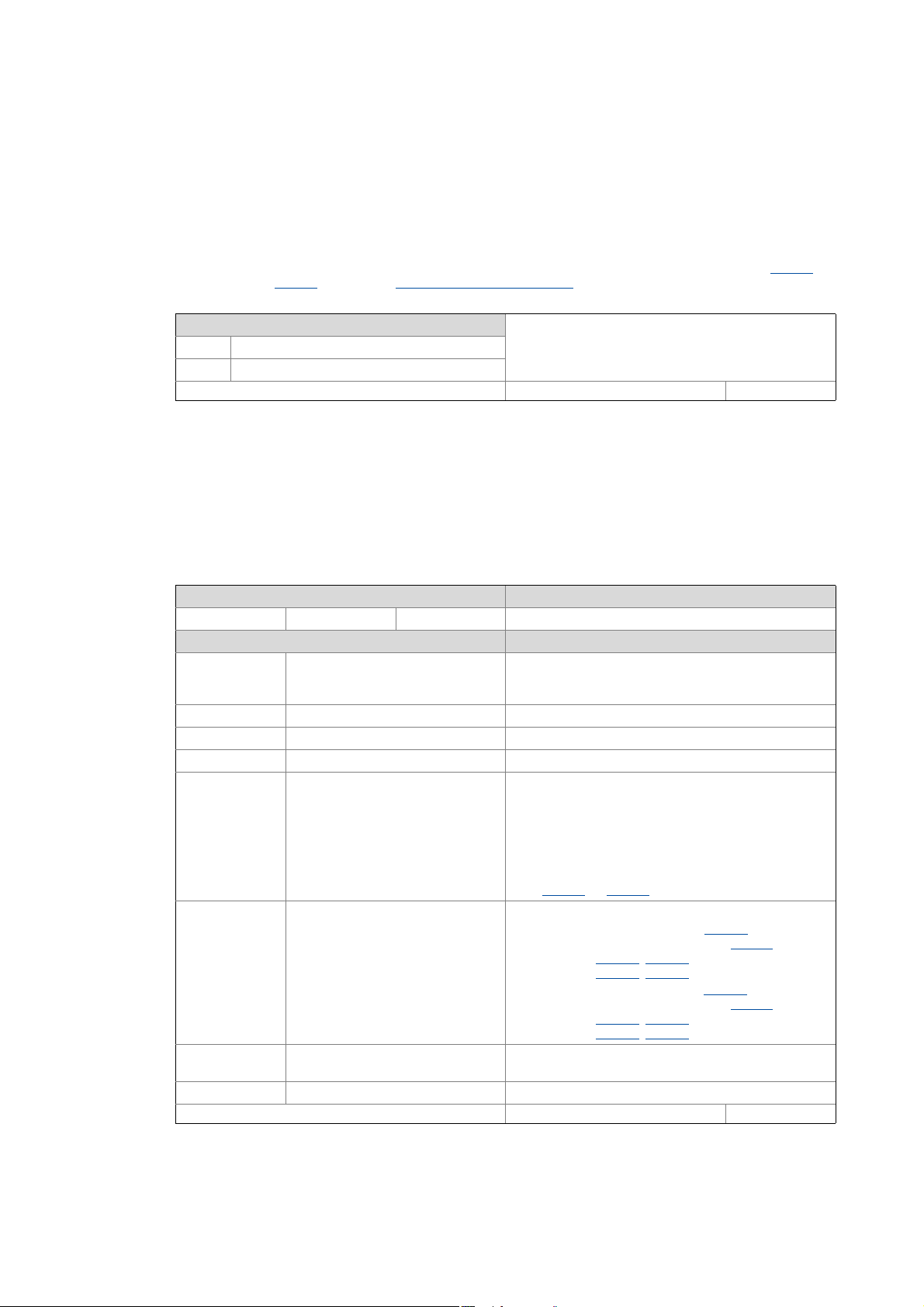
Validity
The information in this documentation are valid for the following standard devices:
Product series Type designation From software version
i700 servo inverter E70ACM... 01.00
Screenshots/application examples
All screenshots in this documentation are application examples. Depending on the firmware
version of the i700 servo inverter and the software version of the engineering tools installed (»PLC
Designer« or »EASY Starter«), the screenshots in this documentation may deviate from the screen
representation.
Document history
Version Description
1.5 03/2014 TD05 Extensions & corrections; Adaptation to software version V01.06
1.4 10/2013 TD05 Extensions & corrections;
Adaptation to software versions V01.04 and V01.05
1.3 03/2013 TD05 Extensions & corrections; Adaptation to software version V01.03
1.2 10/2012 TD05 Extensions & corrections; Adaptation to software version V01.02
1.1 07/2012 TD05 First edition
Tip!
Information and tools regarding the Lenze products can be found in the Internet:
http://www.lenze.com
12 Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Download
Page 13
1 About this documentation
1.1 Conventions used
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
1.1 Conventions used
This documentation uses the following conventions to distinguish between different types of
information:
Type of information Writing Examples/notes
Spelling of numbers
Decimal separator Point The decimal point is always used.
Example: 1234.56
Hexadecimal number 0x For hexadecimal numbers, the prefix "0x" is used.
Example: 0x60F4
Binary number 0b For binary numbers, the prefix "0b" is used.
Example: 0b00010111
Text
Version information Blue text colour All information that only applies to a certain controller
Program name » « The Lenze »PLC Designer« PC software...
Window italics The Message window ... / The Options dialog box...
Variable name Set bEnable to TRUE to...
Control element bold The OK button... / The Copy command... / The Properties
Sequence of menu
commands
Shortcut <bold> Press <F1> to open the online help.
Program code Courier
Keyword Courier bold
software version or higher is identified accordingly in this
documentation.
Example: This function extension is available from software
version V3.0!
tab... / The Name input field...
If the execution of a function requires several commands,
the individual commands are separated by an arrow: Select
Open to...
File
If a command requires a combination of keys, a "+" is placed
between the key symbols:
Use <Shift>+<ESC> to...
IF var1 < var2 THEN
a = a + 1
END IF
Hyperlink underlined
Icons
Page reference ( 13) Optically highlighted reference to another page. In this
Step-by-step instructions
Optically highlighted reference to another topic. In this
documentation it is activated by mouse-click.
documentation it is activated by mouse-click.
Step-by-step instructions are indicated by a pictograph.
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 13
Page 14
1 About this documentation
1.2 Terminology used
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
1.2 Terminology used
Term Meaning
Engineering Tools Software solutions for simple engineering at all stages
»EASY Navigator« – Ensures easy operator guidance
• All practical Lenze engineering tools at a glance
• Tools can be selected quickly
• Clearly arranged, simplifying the engineering process from the start
»EASY Starter« – Simple tool for service technicians
• Especially developed for the commissioning and maintenance of Lenze
devices
• Graphical user interface with few buttons
• Simple online diagnostics, parameterisation and commissioning
• No risk of accidentally changing the application
• Ready applications can be loaded to the device
»PLC Designer« – for process programming
• Creation of individual programs
• Programming of Logic & Motion in accordance with IEC 61131-3 (IL, LAD,
FBD, ST, SFC, and CFC editor), is based on CoDeSys V3
• Certified function blocks according to PLCopen Part 1 + 2
• Graphical DIN 66025 editor (G-code) with DXF import
• Integrated visualisation for an easy process representation
• All important pieces of information at a glance during commissioning
Lenze Controller The Lenze Controller (abbreviated: "Controller") is the central component of the
Engineering PC Use the Engineering PC and the engineering tools installed to configure and
HIPERFACE® HIPERFACE® stands for High Performance Interface and is a universal interface between
Object "Container" for one or several parameters which can be used to parameterise or monitor
Index For the purpose of addressing, each object is provided with a unique index.
Subindex If an object contains several parameters, the individual parameters are stored under
Touch probe A "Touch probe" is an event which can for instance be actuated in an edge-controlled
automation system which (by means of the runtime software) controls the Logic and
Motion functionalities.
The Lenze Controller communicates with the field devices via the fieldbus.
parameterise the system.
The Engineering PC communicates with the Lenze Controller via Ethernet.
EtherCAT® is a real-time capable Ethernet system with top performance.
EtherCAT® is a registered trademark and patented technology licensed by Beckhoff
Automation GmbH, Germany.
motor feedback system and inverter.
HIPERFACE® is a registered trademark of the SICK STEGMANN GmbH.
the i700 servo inverter.
In this documentation the index is represented as a hexadecimal value and is identified
by a prefixed "0x", e.g. "0x1000".
"subindexes".
In this documentation the colon is used as a separator between the index and the
subindex, e.g. "0x1018:1".
manner via a digital input to detect an actual value (that changes quickly) at the time of
activation and to process it further within the program afterwards.
14
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 15
1 About this documentation
1.3 Definition of notes used
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
1.3 Definition of notes used
The following signal words and symbols are used in this documentation to indicate dangers and
important information:
Safety instructions
Layout of the safety instructions:
Danger!
(characterises the type and severity of danger)
Note
(describes the danger and gives information about how to prevent dangerous
situations)
Pictograph Signal word Meaning
Danger! Danger of personal injury through dangerous electrical voltage
Danger! Danger of personal injury through a general source of danger
Stop! Danger of property damage
Application notes
Pictograph Signal word Meaning
Note! Important note to ensure trouble-free operation
Reference to an imminent danger that may result in death or serious personal
injury if the corresponding measures are not taken.
Reference to an imminent danger that may result in death or serious personal
injury if the corresponding measures are not taken.
Reference to a possible danger that may result in property damage if the
corresponding measures are not taken.
Tip! Useful tip for simple handling
Reference to another document
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 15
Page 16
1 About this documentation
1.4 Structure of the parameter descriptions
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
1.4 Structure of the parameter descriptions
All parameters which you can use to parameterise or monitor the i700 servo inverter are stored
within "objects".
• For the purpose of addressing, each object is provided with a unique index. In this
documentation the index is represented as a hexadecimal value and is identified by a prefixed
"0x", e.g. "0x1000".
• If an object contains several parameters, they are stored in "subindexes". In this documentation
the colon is used as a separator between the index and the subindex, e.g. "0x1018:1".
Note!
This documentation is valid for the i700 servo inverter in the single axis version (single
inverter) and also as double axis (double inverter).
For parameters referring to one axis, both indexes (for axis A and axis B) are listed in the
parameter description. For a single axis, only the first index is relevant in this case.
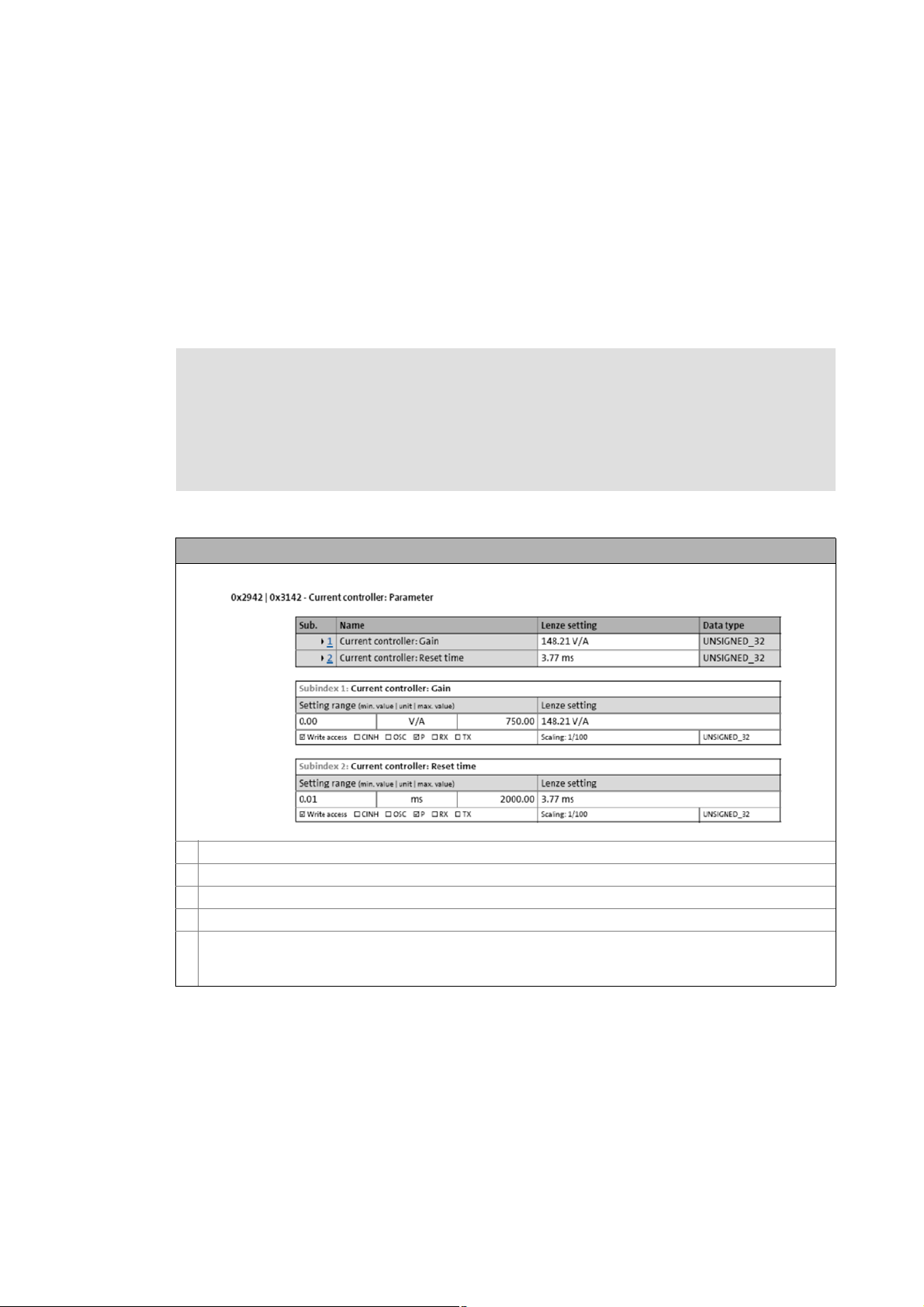
Each parameter description is structured according to the following pattern:
Example: Structure of the parameter descriptions in this documentation
Object index for axis A
Object index for axis B (only relevant for double axis)
Parameter or object name
If the object contains several parameters: Overview table with list of all subindexes
Table with detailed information about the corresponding parameter:
• Explanations & references (optional)
• Display options/possible settings, Lenze setting, attributes (for the meaning see the following table)
16
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 17
1 About this documentation
1.4 Structure of the parameter descriptions
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
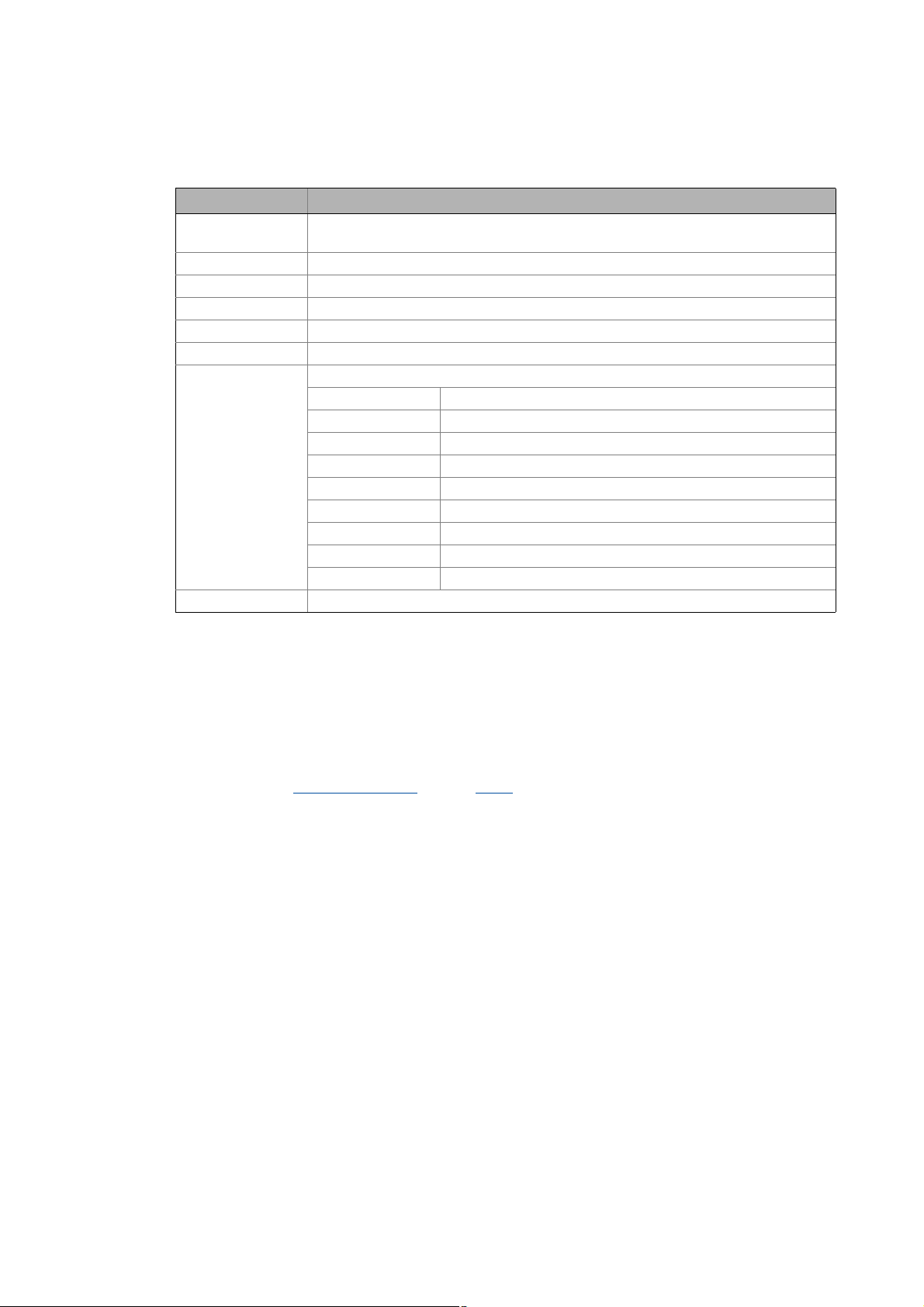
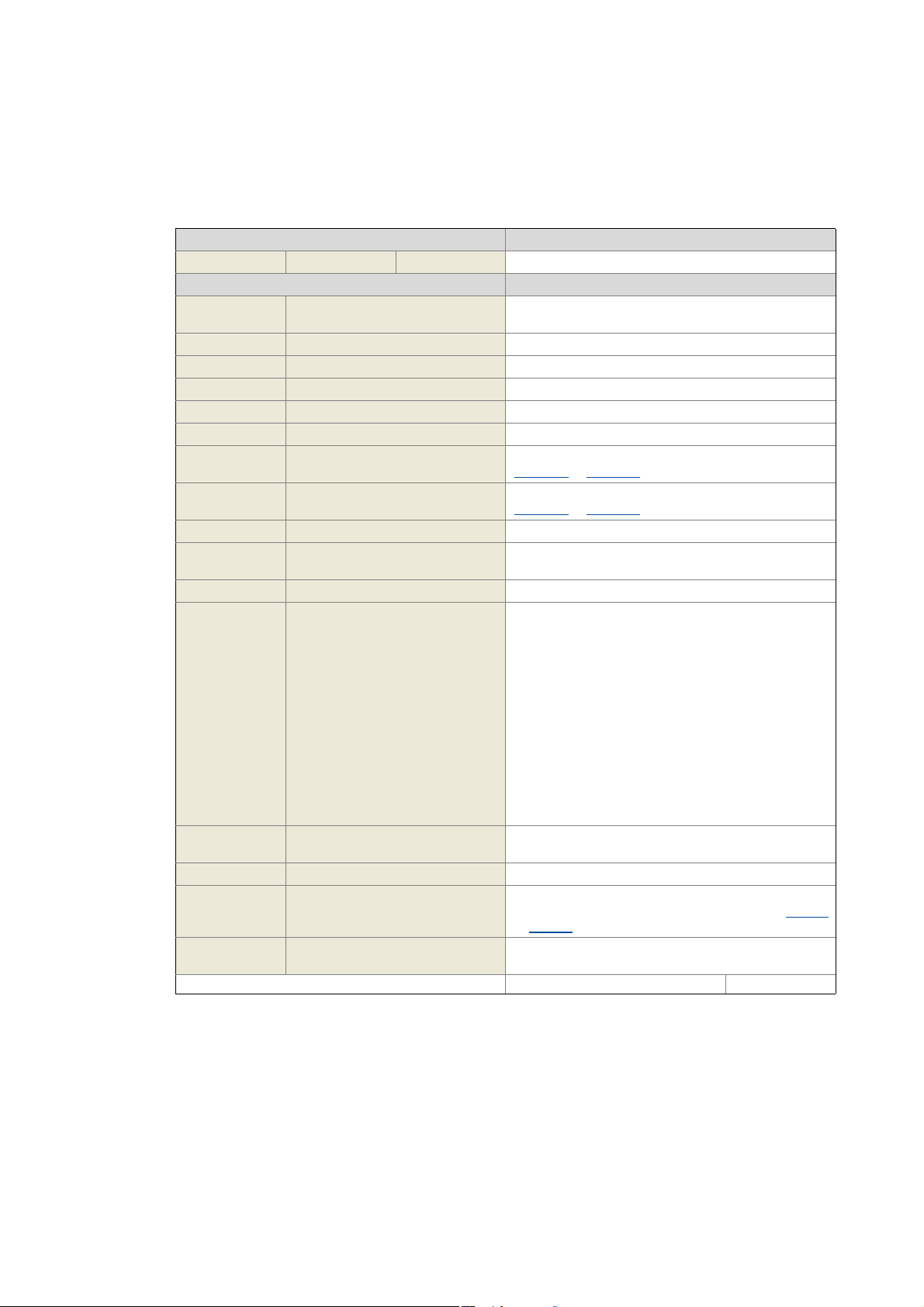
Parameter attributes
Name Meaning
Write access = Parameter can be written to.
= Parameter can only be read.
CINH = Parameter can only be written to if controller inhibit is set.
OSC = Parameter can be recorded by means of the oscilloscope function.
P = Parameter can be persisted.
Tx = Parameter can be mapped into the TPDO.
Rx = Parameter can be mapped into the RPDO.
Data type Data type of the parameter:
INTEGER_8 1 byte, with sign
INTEGER_16 2 bytes with sign
INTEGER_32 4 bytes with sign
UNSIGNED_8 1 byte without sign
UNSIGNED_16 2 bytes without sign
UNSIGNED_32 4 bytes without sign
UNSIGNED_64 8 bytes without sign
STRING(xx) ASCII string (with character length xx)
ARRAY [] OF... ARRAY
Scaling Scaling of the parameter
Tip!
To find a specific object or parameter in this documentation, you can use the following
navigation helps:
• At the beginning of each main chapter, all objects which are described in the respective
chapter are listed in a table.
•In the Table of attributes
reference to the detailed description.
and the Index, all objects/parameters are listed with a
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 17
Page 18

2 Parameter handling
2.1 Parameter transfer during initialisation
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
2 Parameter handling
2.1 Parameter transfer during initialisation
During the acceleration of the system, the controller and the controllers exchange configuration
data (e.g. bus cycle and PDO mapping). With regard to this, observe the following particular features
for the i700 servo inverter:
Parameter download
The i700 servo inverter itself does not
settings deviating from the i700 servo inverter "Lenze setting" (default) are maintained centrally in
the controller and are stored there permanently (persistently). During the initialisation at run-up,
only these deviations are transferred to the i700 servo inverter by the controller. Like this it is
ensured that the i700 servo inverter works with the parameter settings provided for it.
Firmware download (optional)
store parameter settings safe against mains failure. All
If required, the firmware of the i700 servo inverter can be stored together with the »PLC Designer«
project. During the run-up, the controller then checks whether the firmware version in the i700
servo inverter complies with the firmware version stored in the project for this device. If this is not
the case, the controller loads the firmware version stored in the project to the i700 servo inverter.
Like this, it can be ensured for "Device replacement" service work that the replacement device also
works with the same firmware version as the original device.
18
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 19

2 Parameter handling
2.2 Storage parameter set (par001.*) and total parameter set (par000.*)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
2.2 Storage parameter set (par001.*) and total parameter set (par000.*)
For the storage of the i700 servo inverter parameters, two different parameter sets are provided,
which are stored in different parameter set files in the higher-level controller:
Storage parameter set (par001.i7psf)
• Only contains the parameters of the i700 servo inverter which are writable and identified with
the "P" attribute (persistent).
• Parameters can be read out from the i700 servo inverter and saved to the file. Conversely, the
parameters stored can be written to the i700 servo inverter again.
• Recommended for storage and archiving of the controllers settings.
Total parameter set (par000.i7psf)
• Contains all parameters of the i700 servo inverter, including the mere display parameters which
vary permanently during operation.
• The total parameter set can only be read from the i700 servo inverter.
• Use for purposes of service and diagnostics.
The structure of the parameter set file is described in the appendix.
Structure of the parameter set file ( 310)
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 19
Page 20

2 Parameter handling
2.2 Storage parameter set (par001.*) and total parameter set (par000.*)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
2.2.1 Saving a parameter set from the i700 to a file (export)
Reading out and storing the parameters from the i700 servo inverter is initiated and controlled from
the higher-level controller. For reading out a parameter set, the corresponding parameter values are
summarised in a parameter set file (par001.* or par000.*) in the i700 servo inverter and are then
transferred as a file to the controller via EtherCAT.
2.2.2 Loading the stored parameter set to the i700 (import)
Loading a stored parameter set file to the i700 servo inverter is initiated and controlled from the
higher-level controller, just like in the case of the read-out. The storage parameter set file is
transferred to the i700 servo inverter as a file via EtherCAT, and the parameter settings are loaded
(imported).
For logical reasons, it is only possible to transfer "storage parameter set files" (par001.*) to the i700
servo inverter. Display parameters are updated under normal operating conditions and do not need
to be loaded.
Note!
In the case of Lenze controllers, the parameter set files are transferred as "files" via GCI
("Generic Communication Interface").
• GCI is a Lenze-specific application protocol which uses CoE ("CANopen over
EtherCAT").
• Other control manufacturers may also use FoE ("File Access over EtherCAT") for the
transfer.
2.2.3 Monitoring of the parameter import (error report)
When the parameter import has been completed, the "parErr.i7psf" error report file is created. This
file is recreated automatically during every import.
On the basis of the error report it can be determined whether errors have occurred during the
parameter import:
• Parameters that have been transferred with errors are listed there together with their index,
subindex, and error code (SDO abort code).
• If no errors have occurred, this data area of the file is blank. However, the headers including the
checksum are available and valid nevertheless.
20
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 21
2 Parameter handling
2.3 Cyclic redundancy check (CRC) - parameter set comparison on the basis of the checksum
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
2.3 Cyclic redundancy check (CRC) - parameter set comparison on the basis of the checksum
Each parameter set features an individual checksum (CRC32), which is composed of the settings of
all storable indexes (P-flag) of the parameter set. When a setting changes, there is also a change in
the checksum.
Cyclic redundancy check (CRC):
By comparison of the checksums of parameter sets it can be determined very quickly whether
parameter sets are identical or not. In particular, it is thus determined for the i700 servo inverter
whether the parameter set stored in the controller is identical to that in the i700 servo inverter and
therefore does not have to be loaded again.
0x2030 - Parameter set: Validity check (CRC)
Checksum for quick comparison of the storage parameter set (par001.i7psf)
• If the checksum shown here is identical to the checksum of the parameter set file stored in the Lenze Controller,
it is not necessary to write the parameter set file to the i700 servo inverter.
• If the checksums are different, however, there are deviations between the parameter set available in the Lenze
Controller and that in the i700 servo inverter.
• The checksum cannot be used for comparison of the total parameter set (par000.i7psf).
Display area (min. value | unit | max. value) Initialisation
0 4294967295
Write access CINH OSC P RX TX UNSIGNED_32
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 21
Page 22
3 Communication with the controller
3.1 Acceleration of the system (initialisation)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
3 Communication with the controller
"EtherCAT control technology" communication manual
Here you will find detailed information on the EtherCAT configuration and
commissioning of Lenze devices in the EtherCAT network.
Objects described in this chapter
Object Name Data type
Axis A Axis B
0x2020 EoE information RECORD
0x2824
0x2830
0x2831
0x2833
0x3024 Device control via PDO: Activation UNSIGNED_8
0x3030 Lenze control word UNSIGNED_16
0x3031 Lenze status word UNSIGNED_16
0x3033 Lenze statusword 2 UNSIGNED_16
Tip!
The communication objects important for the integration of the controller with external
control are described in the appendix.
Communication objects
( 313)
3.1 Acceleration of the system (initialisation)
Stop!
Before switching on the i700 servo inverter for the first time, check the entire wiring with
regard to completeness, short circuit, and earth fault.
To establish communication, the i700 servo inverter must be supplied with voltage. During the
acceleration of the system, the controller and the drive exchange configuration data.
The controller transmits the following configuration data to the i700 servo inverter:
•Bus cycle
• This is the basic cycle within which the EtherCAT bus is actuated. The bus cycle is given as a
multiple of 125 μs.
• The bus cycle equals the communication cycle within which the process data are exchanged
cyclically. New process data are only accepted and generated in the Servo-Inverter i700
maximally every 250 μs.
22
• Parameter set determined during commissioning.
• Among other things, it includes information about feedforward control values, the mains
voltage and the switching frequency as well as controller parameters adapted to the motor
module which are used for the motor control.
• Configuration of the process data transmitted cyclically via EtherCAT (PDO mapping)
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 23
3 Communication with the controller
3.1 Acceleration of the system (initialisation)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Note!
If no data for the initialisation of the controller are transmitted, the i700 servo inverter
uses the "Lenze setting" for the parameters.
Power up/Power down
In the case of "Power up" and "Power down", no undefined states can occur that cause
damage to the device or motor movements which are not requested or not braked.
In the case of a voltage failure/dip, there is no immediate response by the i700 servo
inverter. The functionality is to be maintained for as long as possible.
24-V supply voltage monitoring
Persistent data storage
A complete, persistent storage of the drive configuration which remains the same even
though the controller is switched off from time to time is carried out in the higher-level
controller instead of in the i700 servo inverter. Hence, the controller needs to transmit
the configuration data again to the i700 servo inverter after a power up.
( 235)
However, in the case of a power down, the following device data are stored persistently
in the i700 servo inverter:
• Power-on and elapsed-hour meter (0x2D81
• History buffer
( 265)
or 0x3581 for axis B)
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 23
Page 24
3 Communication with the controller
3.2 Process data (cyclic PDO transfer) and PDO mapping
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
3.2 Process data (cyclic PDO transfer) and PDO mapping
"EtherCAT control technology" communication manual
Here you will find some detailed information on the configuration of the process data
objects (PDO mapping) with the »PLC Designer«.
Cyclic process data are transferred cyclically between the controller (master) and the controllers
(slaves) as so-called Process Data Objects (PDOs).
• The i700 servo inverter supports the following bus cycle times of the EtherCAT:
0.125 ms*
0.250 ms
0.500 ms
1.000 ms
... (only integer multiple of 1 ms)
10.000 ms (max. cycle time)
* Note: With a bus cycle time of 0.125 ms, the process data is updated only every 0.250 ms, as
this is the fastest control cycle for the setpoint and actual value transfer.
• The processing time of a process date through the drive is t=max[bus cycle, 0.250 ms]. If the
entire chain from the control via the drive back to the control is considered, a process data needs
2 bus cycles in addition (for Lenze C3200) . Thus, the turnaround time for a PDO can be indicated
with 3 bus cycles.
• For the process data communication, the i700 servo inverter supports the mapping of max. 32
process data objects (PDOs) with a total max. size of 100 bytes per direction of transmission.
• A fixed PDO mapping preconfigured by Lenze is available for every CiA402 operating mode
supported by the i700 servo inverter. Every PDO mapping includes of several objects from the
Object directory
• For every axis, further fixed, preconfigured PDO mappings can be used for touch probe
functionality.
• In addition to the fixed, preconfigured PDO mappings, freely configurable PDO mappings are
available for every axis which can be used for individual PDO mapping. A maximum of 8 objects
from the Object directory
.
can be configured per direction of transmission.
24
• The configuration of the PDOs actually transmitted between the controller and the i700 servo
inverter is carried out via the »PLC Designer«.
• Experience shows that most i700 servo inverters are operated in one of the available CiA402
operating modes (csp, csv, cst or vl). We therefore recommend to use and activate the fixed
PDO mapping preconfigured by Lenze for the selected operating mode. In doing so all
parameters that usually need to be replaced during a cyclic PDO transfer can be accessed.
• If you wish to use touch probe functionality in addition, optionally and additionally activate
the fixed, preconfigured PDO mapping for touch probe functionality.
• Moreover, the PDO mappings that can be freely configured by the user can be optionally
activated. However, we recommend to use these freely configurable PDO mappings in special
cases only, if no standard PDO mapping is suitable for the case of application at hand. Special
thought should be given to the aspect of traceability in case of service.
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 25
3 Communication with the controller
3.2 Process data (cyclic PDO transfer) and PDO mapping
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Object Info
Axis A Axis B
RPDO mapping – configuration of the process data (setpoints) from the controller to the i700 servo inverter
0x1600 0x1610 Fixed, preconfigured PDO mapping object for "Cyclic sync position mode (csp)
0x1601 0x1611 Fixed, preconfigured PDO mapping object for "Cyclic sync torque mode (cst)
0x1602 0x1612 Fixed, preconfigured PDO mapping object for "Cyclic sync velocity mode (csv)
0x1603 0x1613 Fixed, preconfigured PDO mapping object for "Velocity mode (vl)
0x1604 0x1614 Fixed, preconfigured PDO mapping object for "Touch probe (TP)
0x1605 0x1615 Freely configurable PDO mapping object
0x1606 0x1616 Fixed, preconfigured PDO mapping object for torque limit values
TPDO mapping – configuration of process data (actual values) from the i700 servo inverter to the controller
0x1A00 0x1A10 Fixed, preconfigured PDO mapping object for "Cyclic sync position mode (csp)
0x1A01 0x1A11 Fixed, preconfigured PDO mapping object for "Cyclic sync torque mode (cst)
0x1A02 0x1A12 Fixed, preconfigured PDO mapping object for "Cyclic sync velocity mode (csv)
0x1A03 0x1A13 Fixed, preconfigured PDO mapping object for "Velocity mode (vl)
0x1A04 0x1A14 Fixed, preconfigured PDO mapping object for "Touch probe (TP)
0x1A05 0x1A15 Freely configurable PDO mapping object
"
"
"
"
"
"
"
"
"
"
3.2.1 Synchronisation with "Distributed clocks" (DC)
The "Distributed clocks" (DC) function enables an exact time adjustment for applications where
several auxiliary axes carry out a coordinated movement at the same time. The data is accepted
synchronously with the PLC program. In the case of the DC synchronisation, all slaves are
synchronised with a reference clock, called the "DC master".
"EtherCAT control technology" communication manual
Here you will find some detailed information about DC synchronisation.
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 25
Page 26

3 Communication with the controller
3.3 Parameter data transfer (SDO communication)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
3.3 Parameter data transfer (SDO communication)
In addition to the cyclic process data transfer, parameter data can be transferred as so-called SDOs
(Service Data Objects) in a non-cyclic manner within an individual datagram between the controller
(master) and the controllers (slaves).
• SDO communication is implemented according to the EtherCAT-CoE protocol, using a mailbox.
• SDO communication enables read or write access to all indices contained in the object directory
of the i700 servo inverter.
• The turnaround time for an SDO (request by the control, transport via the bus, processing in the
drive, transport of the response back to the control) is between 1ms and 100ms plus 2*bus
cycle time (typically 10 ms).
3.3.1 Object directory
The object directory contains the specific indices for all axes. The object directory is structured
according to specifications of the EtherCAT Technology Group (ETG):
Range Index area
Device Axis A Axis B
Communication Area 0x1000 - 0x1FFF
Identification data 0x1000 - 0x1018 - -
Sync manager 0x1C00 - 0x1C33 - -
PDO mapping - 0x1600 - 0x1606
0x1A00 - 0x1A05
Manufacturer specific area 0x2000 - 0x5FFF
Device settings 0x2000 - 0x27FF - -
Axis identification - 0x2800 - 0x281F 0x3000 - 0x301F
Axis control - 0x2820 - 0x283F 0x3020 - 0x303F
Error management - 0x2840 - 0x28FF 0x3040 - 0x30FF
Motor control & motor settings - 0x2900 - 0x2CFF 0x3100 - 0x34FF
Touch probe - 0x2D00 - 0x2D3F 0x3500 - 0x353F
Monitoring functions - 0x2D40 - 0x2D7F 0x3540 - 0x357F
Diagnostics - 0x2D80 - 0x2DBF 0x3580 - 0x35BF
Service/internal - 0x2DC0 - 0x2E3F 0x35C0 - 0x363F
Reserved - 0x2E40 - 0x2FFF 0x3640 - 0x37FF
CiA402 profile specific area 0x6000 - 0xDFFF
Device profile CiA402 - 0x6000 - 0x67FF 0x6800 - 0x6FFF
0x1610 - 0x1616
0x1A10 - 0x1A15
26
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 27
3 Communication with the controller
3.3 Parameter data transfer (SDO communication)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
3.3.2 SDO abort codes
If an SDO request is evaluated negatively, a corresponding abort code is output:
SDO abort code Description
0x0000 0000 No error
0x0503 0000 The status of the toggle bit has not changed.
0x0504 0000 SDO protocol time-out
0x0504 0005 The space in the main memory is not sufficient.
0x0601 0000 Access to object not supported.
0x0601 0001 Read access to a write-protected object.
0x0601 0002 Write access to a write-protected object.
0x0602 0000 Object is not listed in the object directory.
0x0604 0041 Object cannot be mapped into the PDO.
0x0604 0042 The number and/or length of the mapped objects would exceed the PDO length.
0x0604 0043 General parameter incompatibility
0x0604 0047 General internal device incompatibility
0x0606 0000 Access has failed because of hardware errors.
0x0607 0010 Wrong data type or parameter length.
0x0607 0012 Wrong data type (parameter length is too large).
0x0607 0013 Wrong data type (parameter length is too small).
0x0609 0011 Subindex does not exist.
0x0609 0030 The value range for parameters is too large (only for write access).
0x0609 0031 The parameter value is too high.
0x0609 0032 The parameter value is too low.
0x0800 0000 General error
0x0800 0020 Data cannot be transferred or saved to the application.
0x0800 0021 Data cannot be transferred or saved to the application because of local control.
0x0800 0022 Data cannot be transferred/saved to the application because of current device state.
3.3.3 ESI: EtherCAT Slave Information file (device description)
The EtherCAT Slave Information file (EtherCAT Device Description file) contains all information
about the device (operating modes, parameters, …).
• The EtherCAT Slave Information file is integrated by the EtherCAT network configuration tool in
order to be able to configure and commission the devices.
• Part of the information contained in the EtherCAT Slave Information file can be uploaded online
by the EtherCAT master by accessing the EtherCAT EEPROM of the device. The description of the
object directory can also be identified online.
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 27
Page 28
3 Communication with the controller
3.4 Activating the control via PDO
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
3.4 Activating the control via PDO
0x2824 | 0x3024 - Device control via PDO: Activation
This object serves to switch off all RPDOs (from the device's point of view) so that the device is exclusively controlled
via SDOs.
• This is, for instance, required for manual enable of commissioning functions and test modes via the (0x6040
control word 0x6840
Selection list (Lenze setting printed in bold)
0Off
1Activate
Write access CINH OSC P RX TX UNSIGNED_8
for axis B). Enable/inhibit via control word
3.5 Lenze control and status word
0x2830 | 0x3030 - Lenze control word
Via the Lenze control word, the control functions can be influenced.
Setting range (min. value | unit | max. value) Lenze setting
0x0000 0xFFFF 0x0000
Value is bit-coded: ( =bit set) Info
Write access CINH OSC P RX TX UNSIGNED_16
Bit 0 Flying restart: Completed Via this bit, the control reports the acceptance of the
Bit 1 Flying restart: Blocked "1" ≡ Block flying restart process
Bit 2 Reserved
Bit 3 Reserved
Bit 4 Speed controller: Load I component "1" ≡ Set starting value of the torque
Bit 5 Position: Traverse to new actual
Bit 6 Activate DC-injection braking or
Bits 7-15 Reserved
position
short-circuit braking
speed found to the "Flying restart" function. The flying
restart process is now completed.
• In case of servo control, this corresponds to the I
component of the speed controller, in case of V/f
operation to the modulation of the slip
compensation.
• As long as this bit is set to "1", the I component and
the slip compensation are set to the starting value set
in 0x2902
"1" ≡ Set/relatively shift actual position
• Axis A: Set the actual position (0x6064
consideration of the set resolution (0x608F
value set in 0x2983
value set in 0x2983
• Axis B: Set the actual position (0x6864
consideration of the set resolution (0x688F
value set in 0x3183
value set in 0x3183
"1" ≡ Trigger DC-injection braking for asynchronous
motor or short-circuit braking for synchronous motor
(or 0x3102 for axis B).
) under
) to the
(0x2984 = 0), or shift it by the
(0x2984 = 1).
) under
) to the
(0x3184 = 0), or shift it by the
(0x3184 = 1).
28
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 29
3 Communication with the controller
3.5 Lenze control and status word
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
0x2831 | 0x3031 - Lenze status word
In the Lenze status word, messages are combined that go beyond the CiA specification.
Display area (min. value | unit | max. value) Initialisation
0x0000 0xFFFF
Value is bit-coded: Info
Bit 0 Position controller: In limitation Position mode: Output of the position controller in
Bit 1 Speed: Limited speed setpoint 1 Input of speed controller 1 in limitation
Bit 2 Speed controller: In limitation Output of speed controller 1 in limitation
Bit 3 Torque: Limited target torque Target torque in limitation
Bit 4 Motor: Limited current setpoint Setpoint current in limitation
Bit 5 Speed: Limited speed setpoint 2 Torque mode: Input of speed controller 2 in limitation
Bit 6 Upper speed limit is active Torque mode: Speed is limited to the upper speed limit
Bit 7 Lower speed limit is active Torque mode: Speed is limited to the lower speed limit
Bit 8 Flying restart in progress ... V/f operation: "Flying restart process" function is active
Bit 9 Flying restart: Ready for operation V/f operation: "Flying restart process" function has
Bit 10 Limited output frequency V/f operation: Setpoint frequency in limitation
Bit 11 Asynchronous motor magnetised In case of servo control for synchronous motor (SM):
Bit 12 Motor phase failure detection in
progress ...
Bit 13 Feedback: Open circuit Position feedback is interrupted
Bit 14 Delay time: 'Reset error' is active The error cannot be reset before the delay time has
Bit 15 Clamp is active V/f operation: Clamp (short-time inhibit of the inverter)
Write access CINH OSC P RX TX UNSIGNED_16
limitation
(0x2946:1
(0x2946:2
acquired speed
• Bit is always set.
In case of servo control for asynchronous motor (ASM):
• Bit is set if the difference between setpoint and actual
• Bit is reset if the difference has increased to 15 % of
In case of V/f operation:
• Bit is set if the rotor time constant has been passed
Motor phase failure detection is active
expired. The remaining delay time is displayed in 0x2840
(or 0x3040
is active
or 0x3146:1 for axis B)
or 0x3146:2 for axis B)
flux is smaller than 10 % of setpoint flux.
setpoint flux.
seven times, calculated from the time the controller
has been enabled and no restart on the fly has been
active and the total motor current has reached 20 %
of the rated motor current for the first time.
Otherwise 0.
for axis B).
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 29
Page 30
3 Communication with the controller
3.5 Lenze control and status word
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
0x2833 | 0x3033 - Lenze statusword 2
From version 01.03
Display area (min. value | unit | max. value) Initialisation
0x0000 0xFFFF
Value is bit-coded: Info
Bit 0 Feedback modification Changes in the settings of the feedback system have
Bit 1 Manual test mode active A manual test mode is active
Bit 2 Manual control mode active Manual control mode is active
Bit 3 Angle tracking control: Active Reserved
Bit 4 Absolute value encoder selected From version 01.06
Bit 5 Absolut position available From version 01.06
Bit 6 DC-injection braking or short-circuit
braking: Active
Bit 7-15 Reserved
Write access CINH OSC P RX TX UNSIGNED_16
been executed. The status bit is reset at controller
enable.
(0x2825
(0x2825
Absolute feedback system selected (parameterised)
Initialisation of the selected feedback system is
completed. All information of the feedback system have
been transmitted.
From version 01.06
DC-injection braking for asynchronous motor or shortcircuit braking for synchronous motor is active
or 0x3025 = 1, 2 or 3)
or 0x3025 = 4)
• In case of the "resolver" device variant, this bit is set if
the resolver pole pair number "1" is set in 0x2C43
for axis B).
0x3443
• In case of the "enco der" devi ce variant, thi s bit is se t if
the encoder type "2: Hiperface absolute value
encoder" is set in 0x2C40
• In case of an error in the feedback system, this bit is
set to "0" as long as the error exists.
(or 0x3440 for axis B).
(or
30
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 31

3 Communication with the controller
EoE
Virtual switch
OS
EoE Endpoint to
Operating Systems
EtherCAT Mailbox
EtherCAT
Sockets
esdcp (Lenze)
DHCP Client
TCP/IP Stack
Ethernet Driver
Ethernet over EtherCAT (EoE)
EASY
Starter
Engineering
PC
EASY
Starter
Engineering
PC
Ethernet
EtherCAT EtherCAT EtherCAT
Ethernet Ethernet
EtherCATEtherCAT
EtherCAT Master
Controller
(e.g. Beckhoff CX1020)
GCI Services
(read/write files)
GCI Services
(read/write parameter)
EtherCAT bus
Ethernet
Switch
Terminals
(e.g. Beckhoff EL6614)
EtherCAT bus EtherCAT bus
Global
Network
(DHCP Server)
i700 servo inverter
Virtual File System Object Dictionary
3.6 Ethernet over EtherCAT (EoE)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
3.6 Ethernet over EtherCAT (EoE)
From version 01.05, the i700 servo inverter supports the "Ethernet over EtherCAT (EoE)" protocol.
The "Ethernet over EtherCAT (EoE)" protocol serves to send standard Ethernet telegrams via the
EtherCAT network without the real-time communication of the EtherCAT process data being
affected.
This extension allows for establishing a parameter communication (SDO communication) with the
Servo-Inverters i700 on the EtherCAT bus via a standard Ethernet connection (e.g.from a PC with
»EASY Starter«).
3.6.1 System architecture
The following illustration shows the system architecture for an EtherCAT network with EoE nodes.
This network provides access per PC with »EASY Starter« via two interfaces:
A. Access via an Ethernet-Switchport terminal (e.g. Beckhoff EL6614)
B. Access via control (e.g. Beckhoff CX1020)
For this purpose, the control has to support IP routing and the "EoE Endpoint to Operating
Systems" functionality according to the "ETG.1500 master classes" specification.
[3-1] System architecture for an EtherCAT network with EoE nodes
The IP address allocation in the network can both be made statically by the EtherCAT master via
configuration and via a higher-level infrastructure which can be connected to the Ethernet
Switchport terminal.
The PC used for diagnostic purposes can get the IP address via the Ethernet Switchport terminal if
this supports a DHCP server or BOOTP mechanism or it must feature a statically allocated IP itself in
the same subnetwork.
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 31
Page 32
3 Communication with the controller
3.6 Ethernet over EtherCAT (EoE)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
3.6.2 Supported protocols and services
•ARP
•DHCP Client
•ESDCP
•ICMP (ping)
•IP
•UDP/TCP
• GCI-SDO communication (TCP port 9410)
3.6.3 Display of EoE-specific information
The following object serves to read out the EoE-specific information for diagnostic purposes.
0x2020 - EoE information
From version 01.05
• The subcodes 1 ... 6 display the IP and Ethernet settings configured by the control during initialisation.
• The subcodes 7 and 8 display the traffic via EoE in Rx and Tx direction. The displayed values can be reset to "0" by
entering any value.
Sub. Name Lenze setting Data type
1 Virtual MAC address STRING(32)
2 IP address STRING(32)
3 Subnet mask STRING(32)
4 Default gateway STRING(32)
5 DNS server STRING(32)
6 DNS name STRING(50)
7 Rx packets UNSIGNED_32
8 Tx packets UNSIGNED_32
Write access CINH OSC P RX TX
32
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 33

3 Communication with the controller
3.6 Ethernet over EtherCAT (EoE)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
3.6.4 GCI-SDO communication (TCP port 9410)
The TCP port 9410 serves to establish a parameter communication with the i700 servo inverter. The
PC (client) used for parameter setting and the i700 servo inverter (server) communication with each
other by exchanging data via the Ethernet telegrams which are fed into the cyclic EtherCAT
telegrams (see also System architecture
• The parameter data of the i700 servo inverter are stored in "objects". The objects serves, for
instance, to set operating parameters and motor data or query diagnostic information.
• The parameter data are transmitted as SDOs (Service Data Objects) and confirmed by the
receiver, i.e. the transmitter receives a feedback whether the transmission was successful.
• The transmission of the parameter data usually is not time-critical.
• The parameter communication enables the writing and reading access to the object directory of
the i700 servo inverter.
).
Note!
• Only one communication connection at a time is possible via the TCP port 9410, i.e.
only one client at a time can be connected to the i700 servo inverter.
• In case of a writing access to parameter data, make sure that the changes made are
not automatically saved in the i700 servo inverter.
The »EASY Starter« serves to upload the parameters of the i700 servo inverter and
save them as a file. This file can then be imported to the Engineering tool (e.g. »PLC
Designer«).
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 33
Page 34

3 Communication with the controller
EtherCAT
Header
IP Header
TCP/IP
Header
GCI Header
P0 ... P4
EtherCAT
Footer
GMQGMT GSV GTI SIZE SIZE res res
3.6 Ethernet over EtherCAT (EoE)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
3.6.4.1 Structure of the EtherCAT data telegram
The GCI protocol is used for communication.
The EtherCAT data telegram is shown below. Here, the GCI header represents the part of the
program that is independent of the type of command transmitted.
[3-2] Structure of the GCI header within the EtherCAT frame
Field Size Description
GMT 1 byte GCI message type
0x01 Reserved
GSV 1 byte GCI service identification
0x82 Read parameters
0x83 Write parameters
GMQ 1 byte GCI message qualifier
Bit 7 rsp (Request/Response)
GTI 1 byte GCI transaction ID
SIZE 2 bytes Length of the user data
res 2 bytes Reserved
0Request
1Response
Bit 6 a (Abort)
0 Data transfer OK
1 Abort of the data transfer
• The transfer is either aborted by the client or the server of a
parameter data telegram.
• A message is aborted without any confirmation. If the client waits
for its message to be confirmed, it will receive the abort notice
instead.
Bit 5 ... bit 0 res (reserved)
0b000000 Data contents = 0
0x00 Serial number (transaction identification)
• For each client a definite serial number (0 ... 255) is allocated.
...
• The serial number in the multitasking environment is used for
0xFF
• The user data area or the data telegram contains the parameter data.
Assignment of user data areas P0 ... P4
0x14 20 bytes
0x114 276 bytes
0x0000 Data contents = 0
referencing to the calling tasks (reverse transaction).
... ...
34
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 35

3 Communication with the controller
3.6 Ethernet over EtherCAT (EoE)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Read parameters
The service identification (GSV) = 0x82 in the GCI header serves to read parameter data from the
i700 servo inverter:
Client
(PC)
Request
Confirmation
Request
GMT GSV GMQ GTI SIZE SIZE res res
0x01 0x82 0x00 0xXX 0xXX 0xXX 0x00 0x00
Response
GMT GSV GMQ GTI SIZE SIZE res res
0x01 0x82 0x80 0xXX 0xXX 0xXX 0x00 0x00
User data
User data
(error code)
Indication
Response
Server
(i700)
Write parameters
The service identification (GSV) = 0x83 in the GCI header serves to write parameter data to the i700
servo inverter:
Client
(PC)
Request
Confirmation
Request
GMT GSV GMQ GTI SIZE SIZE res res
0x01 0x83 0x00 0xXX 0xXX 0xXX 0x00 0x00
Response
GMT GSV GMQ GTI SIZE SIZE res res
0x01 0x83 0x80 0xXX 0xXX 0xXX 0x00 0x00
User data
User data
(error code)
Indication
Response
Server
(i700)
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 35
Page 36

3 Communication with the controller
3.6 Ethernet over EtherCAT (EoE)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
3.6.4.2 Assignment of user data areas P0 ... P4
Range Byte 1 Byte 2 Byte 3 Byte 4
P0 Status/error code Data type Reserved
P1 Index Reserved Reserved
P2 Subindex Reserved Reserved*
P3 Parameter value
P4 Parameter value
* When the data type VISIBLE_STRING is transmitted, byte 4 contains the number of the characters attached.
Data type in P0 / byte 3
ID Data type Data length
0x01 INTEGER_8 1 byte
0x02 INTEGER_16 2 bytes
0x03 INTEGER_32 4 bytes
0x04 INTEGER_64 8 bytes
0x05 UNSIGNED_8 1 byte
0x06 UNSIGNED_16 2 bytes
0x07 UNSIGNED_32 4 bytes
0x08 UNSIGNED_64 8 bytes
0x09 FLOATING_POINT 4 bytes
0x0A VISIBLE_STRING max. 256 bytes
0x0B OCTET_STRING max. 256 bytes
Parameter value in P3 and P4
Depending on the data type, the parameter value assigns 1 ... 8 bytes. The data is stored in the LittleEndian format, i.e. first the low byte or low word, then the high byte or high word:
Data length
of parameter value
1 byte
2 bytes
4 bytes
8 bytes
Data area P3 Data area P4
Byte 1 Byte 2 Byte 3 Byte 4 Byte 1 Byte 2 Byte 3 Byte 4
Value 0x00 0x00 0x00 0x00 0x00 0x00 0x00
Low byte High byte
Value
Double word
Low word High word
Low byte High byte Low byte High byte
Lower-order double word Higher-order double word
Low word High word Low word High word
Low byte High byte Low byte High byte Low byte High byte Low byte High byte
0x00 0x00 0x00 0x00 0x00 0x00
0x00 0x00 0x00 0x00
Value
Value
36
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 37

3 Communication with the controller
3.6 Ethernet over EtherCAT (EoE)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
3.6.4.3 Error codes
The error code is located in the User data area P0, byte 1 and byte 2.
User data area P0
Byte 1 Byte 2 Byte 3 Byte 4
Error code Data type Reserved
Example error code 0x9002
Low byte High byte
0x02 0x90
Note!
The other user data contents correspond to those of an error-free message.
Possible error codes
Error code Definition Description
Decimal hex
33803 0x840B Invalid type Invalid parameter type
33804 0x840C Limit violation Invalid parameter value
33806 0x840E Unknown parameter Invalid parameter index
33812 0x8414 Invalid size Invalid parameter format
33813 0x8415 Not in select list Parameter is not in the selection list
33814 0x8416 Read not allowed Parameter read is not allowed
33815 0x8417 Write not allowed Parameter write is not allowed
33816 0x8418 CINH not set Controller inhibit is not set
33829 0x8425 Invalid subindex Invalid parameter subindex
33837 0x842D Access not allowed Parameter access not allowed
36873 0x9009 Wrong GMT received The general telegram identification does not correspond
to the GCI communication.
36874 0x900A Unknown server request Internal error in the GCI
36878 0x900E SRV timeout
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 37
Page 38

3 Communication with the controller
3.6 Ethernet over EtherCAT (EoE)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
3.6.4.4 Telegram example 1: Querying the heatsink temperature (read request)
The heatsink temperature of the i700 servo inverter is to be read.
• Object to be read: 0x2D84:1
• Assumption: ϑ = 43°C
Request
• SDO command (GSV) = 0x82 = "Read parameter"
• GCI Message Qualifier (GMQ) = 0x00 = 0b00000000 = "Request"
• Transaction ID (GTI) here "0" (optional consecutive number 0 ... 255)
• Length of the user data (SIZE) = 0x0014 = 20 bytes
GCI header
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
GMT GSV GMQ GTI SIZE SIZE res res
0x01 0x82 0x00 0x00 0x14 0x00 0x00 0x00
Fixed Read
parameters
Request Transactions ID Length of the user data = 20 bytes Reserved
User data area P0
Byte 1 Byte 2 Byte 3 Byte 4
Reserved Data type Reserved
0x00 0x00 0x00 0x00
User data area P1 User data area P2
Byte 1 Byte 2 Byte 3 Byte 4 Byte 1 Byte 2 Byte 3 Byte 4
Index Reserved Subindex Reserved
0x84 0x2D 0x00 0x00 0x01 0x00 0x00 0x00
Index = 0x2D84 Subindex = 1
User data area P3 User data area P4
Byte 1 Byte 2 Byte 3 Byte 4 Byte 1 Byte 2 Byte 3 Byte 4
0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
Optional for
read request
Reserved Reserved
38
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 39

3 Communication with the controller
3.6 Ethernet over EtherCAT (EoE)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Response
GCI Message Qualifier (GMQ) = 0x80 = 0b10000000 = "Response"
GCI header
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
GMT GSV GMQ GTI SIZE SIZE res res
0x01 0x82 0x80 0x00 0x14 0x00 0x00 0x00
Fixed Read
User data area P0
Byte 1 Byte 2 Byte 3 Byte 4
0x00 0x00 0x02 0x00
parameters
Reserved Data type Reserved
Response Transactions ID Length of the user data = 20 bytes Reserved
INTEGER_16
User data area P1 User data area P2
Byte 1 Byte 2 Byte 3 Byte 4 Byte 1 Byte 2 Byte 3 Byte 4
Index Reserved Subindex Reserved
0x84 0x2D 0x00 0x00 0x01 0x00 0x00 0x00
Index = 0x2D84 Subindex = 1
User data area P3 User data area P4
Byte 1 Byte 2 Byte 3 Byte 4 Byte 1 Byte 2 Byte 3 Byte 4
Parameter value Reserved
0xAE 0x01 0x00 0x00 0x00 0x00 0x00 0x00
Read value = 0x01AE
= 430 = 43.0 [°C]
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 39
Page 40

3 Communication with the controller
3.6 Ethernet over EtherCAT (EoE)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
3.6.4.5 Telegram example 2: Querying the software version of the i700 (read request)
The software version of the i700 servo inverter is to be read.
• Object to be read: 0x100A
• Assumption: Software version = "1.5.0.9999 (release)"
Request
• SDO command (GSV) = 0x82 = "Read parameter"
• GCI Message Qualifier (GMQ) = 0x00 = 0b00000000 = "Request"
• Transaction ID (GTI) here "1" (optional consecutive number 0 ... 255)
• Length of the user data (SIZE) = 0x0014 = 20 bytes
GCI header
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
GMT GSV GMQ GTI SIZE SIZE res res
0x01 0x82 0x00 0x01 0x14 0x00 0x00 0x00
Fixed Read
parameters
Request Transactions ID Length of the user data = 20 bytes Reserved
User data area P0
Byte 1 Byte 2 Byte 3 Byte 4
Reserved Data type Reserved
0x00 0x00 0x00 0x00
User data area P1 User data area P2
Byte 1 Byte 2 Byte 3 Byte 4 Byte 1 Byte 2 Byte 3 Byte 4
Index Reserved Subindex Reserved
0x0A 0x10 0x00 0x00 0x00 0x00 0x00 0x00
Index = 0x100A No subindex
User data area P3 User data area P4
Byte 1 Byte 2 Byte 3 Byte 4 Byte 1 Byte 2 Byte 3 Byte 4
0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
Optional for
read request
Reserved Reserved
40
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 41

3 Communication with the controller
3.6 Ethernet over EtherCAT (EoE)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Response
• GCI Message Qualifier (GMQ) = 0x80 = 0b10000000 = "Response"
• Length of the user data =
20 bytes of standard user data area P0 ... P4 plus
21 bytes of attached string (incl. \0 termination) = 41 bytes
GCI header
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
GMT GSV GMQ GTI SIZE SIZE res res
0x01 0x82 0x80 0x01 0x29 0x00 0x00 0x00
Fixed Read
User data area P0
Byte 1 Byte 2 Byte 3 Byte 4
0x00 0x00 0x0A 0x00
parameters
Reserved Data type Reserved
Response Transactions ID Length of the user data = 41 bytes Reserved
VISIBLE_STRING
User data area P1 User data area P2
Byte 1 Byte 2 Byte 3 Byte 4 Byte 1 Byte 2 Byte 3 Byte 4
Index Reserved Subindex Reserved
0x0A 0x10 0x00 0x00 0x00 0x00 0x00 0x00
Index = 0x100A No subindex
User data area P3 User data area P4
Byte 1 Byte 2 Byte 3 Byte 4 Byte 1 Byte 2 Byte 3 Byte 4
Reserved Reserved
0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
Note!
The read parameter value of data type VISIBLE_STRING (here: "1.5.0.9999 (release)")
follows subsequent to the standard user data area.
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 41
Page 42

3 Communication with the controller
3.6 Ethernet over EtherCAT (EoE)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
3.6.4.6 Telegram example 3: Setting the LV warning threshold in the i700 (write request)
The warning threshold for the low-voltage detection (LV) is to be set in the i700 servo inverter to
400 V.
• Object to be written: 0x2540:2
Request
• SDO command (GSV) = 0x83 = "Write parameter"
• GCI Message Qualifier (GMQ) = 0x00 = 0b00000000 = "Request"
• Transaction ID (GTI) here "42" (optional consecutive number 0 ... 255)
• Length of the user data (SIZE) = 0x0014 = 20 bytes
GCI header
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
GMT GSV GMQ GTI SIZE SIZE res res
0x01 0x83 0x00 0x2A 0x14 0x00 0x00 0x00
Fixed Write
parameters
Request Transactions ID Length of the user data = 20 bytes Reserved
User data area P0
Byte 1 Byte 2 Byte 3 Byte 4
Reserved Data type Reserved
0x00 0x00 0x06 0x00
UNSIGNED_16
User data area P1 User data area P2
Byte 1 Byte 2 Byte 3 Byte 4 Byte 1 Byte 2 Byte 3 Byte 4
Index Reserved Subindex Reserved
0x40 0x25 0x00 0x00 0x02 0x00 0x00 0x00
Index = 0x2540 Subindex = 2
User data area P3 User data area P4
Byte 1 Byte 2 Byte 3 Byte 4 Byte 1 Byte 2 Byte 3 Byte 4
Parameter value Reserved
0x90 0x01 0x00 0x00 0x00 0x00 0x00 0x00
Value to be written = 0x0190
= 400 [V]
42
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 43

3 Communication with the controller
3.6 Ethernet over EtherCAT (EoE)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Response
GCI Message Qualifier (GMQ) = 0x80 = 0b10000000 = "Response"
GCI header
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7 Byte 8
GMT GSV GMQ GTI SIZE SIZE res res
0x01 0x83 0x80 0x2A 0x14 0x00 0x00 0x00
Fixed Write
User data area P0
Byte 1 Byte 2 Byte 3 Byte 4
0x00 0x00 0x06 0x00
parameters
Reserved Data type Reserved
Response Transactions ID Length of the user data = 20 bytes Reserved
UNSIGNED_16
User data area P1 User data area P2
Byte 1 Byte 2 Byte 3 Byte 4 Byte 1 Byte 2 Byte 3 Byte 4
Index Reserved Subindex Reserved
0x40 0x25 0x00 0x00 0x02 0x00 0x00 0x00
Index = 0x2540 Subindex = 2
User data area P3 User data area P4
Byte 1 Byte 2 Byte 3 Byte 4 Byte 1 Byte 2 Byte 3 Byte 4
Parameter value Reserved
0x90 0x01 0x00 0x00 0x00 0x00 0x00 0x00
Written value (reflected)
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 43
Page 44
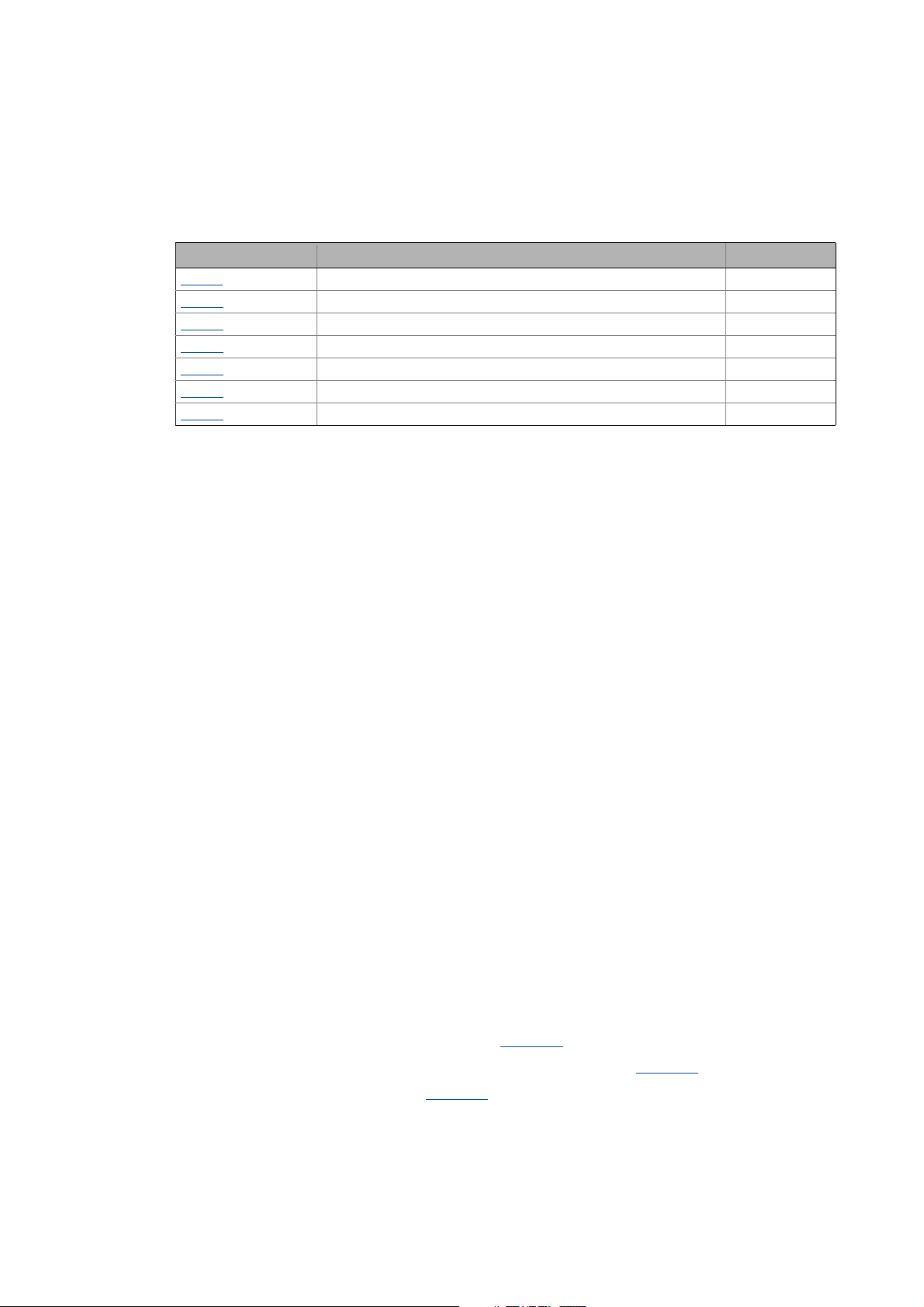
4 Device settings
4.1 Behaviour in case of error
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4 Device settings
Objects described in this chapter
Object Name Data type
0x10F1
0x2000
0x2001
0x2021
0x2022
0x2540
0x2580
4.1 Behaviour in case of error
ECAT: Behaviour in case of error RECORD
Device: Data RECORD
Device: Name STRING(128)
Device: Optical recognition RECORD
Device command UNSIGNED_32
Device: Voltage values RECORD
ECAT DC: Real-time information RECORD
The i700 servo inverter features three different EtherCAT monitoring modes:
• Sync0 monitoring when DC mode is used
• PDO frame failure detection when DC mode is used
• Monitoring to EtherCAT line interruption
Sync0 monitoring when DC mode is used
This monitoring mode checks whether the Sync0 Signals are generated at the correct time in the
i700 servo inverter if the "Distributed Clock mode" (DC mode) has been selected and the i700 servo
inverter is in the "Operational" status.
• If no Sync0 signals arrive anymore during double the Sync0 cycle time, the i700 servo inverter
changes to the "Safe-Operational" status and triggers an error (CiA402 error code 0x8700). 0x32
is returned as bus status (AL status code).
• After "Pre-Operational" has changed to "Safe-Operational", the generation of Sync0 pulses has
to be started within 5 seconds. If this is not the case, or if a change from "Safe-Operational" to
"Operational" is requested without the signals being generated accordingly, this error is
triggered as well.
• This monitoring mode cannot be configured.
PDO frame failure detection when DC mode is used
This monitoring mode checks whether an EtherCAT-PDO telegram (Sync Manager 2 Event) has
arrived between two Sync0 signals if the "Distributed Clock mode" (DC mode) has been selected. For
this purpose, the i700 servo inverter is provided with an internal frame failure error counter which
is increased by the value "3" in case of a frame failure. For every PDO received correctly, the error
counter is reduced by the value "1".
44
This monitoring mode can be configured via the 0x10F1:2
• From version 01.04, monitoring is activated in the Lenze setting (0x10F1:2
• If a value higher than "0" is set in 0x10F1:2
the set value, the i700 servo inverter changes to the "Safe-Operational" status and triggers an
error (CiA402 error code 0x8700).
: If the internal frame failure error counter reaches
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
object:
="20").
Page 45

4 Device settings
4.1 Behaviour in case of error
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Tip!
It is reasonable to set a value ≥"4" in 0x10F1:2
to tolerate a failed PDO and prevent two PDO
failures in a row.
The following table lists some possible settings:
Permitted PDO failures in a row Monitoring threshold (0x10F1:2)
0 1 ... 2
1 4 ... 5
2 7 ... 8
3 10 ... 11
From version 01.02, an extrapolator is available in the i700 servo inverter for the motor control
which can extrapolate the setpoints for one cycle. If two PDO frames fail in a row, no extrapolation
takes place anymore. The last value is frozen.
Monitoring to EtherCAT line interruption
This monitoring mode generally checks whether there is an EtherCAT line interruption.
• If this is the case, the i700 servo inverter changes to the "Safe-Operational" status and triggers
an error (CiA402 error code 0x8181).
• This monitoring mode cannot be configured and functions with and without "Distributed Clock
mode" (DC mode).
0x10F1 - ECAT: Behaviour in case of error
Response of the device in the event of an error
Sub. Name Lenze setting Data type
1 Local Error Reaction 2: Device-specific status UNSIGNED_32
2 Synchronisation: Error threshold 20 UNSIGNED_32
Subindex 1: Internal device response
Selection list (Lenze setting printed in bold) Info
2 Device-specific status An error response is carried out by the i700 servo inverter
Write access CINH OSC P RX TX UNSIGNED_32
Subindex 2: Synchronisation: Error threshold
Setting for PDO frame failure detection
• If the internal frame failure error counter reaches the value set here, the Servo-Inverter i700 changes to the
"Safe-Operational" status and triggers an error (CiA402 error code 0x8700).
• From version 01.04, the PDO frame failure detection is activated in the Lenze setting "20".
Setting range (min. value | unit | max. value) Lenze setting
03220
Write access CINH OSC P RX TX UNSIGNED_32
only.
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 45
Page 46

4 Device settings
4.2 Device identification data
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.2 Device identification data
0x2000 - Device: Data
Type code (Lenze ID), serial number and manufacturing date of the device
Sub. Name Lenze setting Data type
1 Device: Product designation STRING(50)
2 Device: Serial number STRING(50)
3 Device: Manufacturing date STRING(50)
Write access CINH OSC P RX TX
0x2001 - Device: Name
Any device name (e.g. "Wheel drive") can be set in this object for the purpose of device identification.
Write access CINH OSC P RX TX STRING(128)
4.3 Function "Optical device recognition"
0x2021 - Device: Optical recognition
In the case of applications with multiple interconnected controllers, it may be difficult to locate a device that has
been connected online. The "Optical device recognition" function serves to locate the i700 servo inverter by means
of blinking LEDs.
• A setting of "1: Start" in subindex 1 activates the function:
• The two LEDs "RDY" and "ERR" on the front of the i700 servo inverter will blink for the time period set in
subindex 2 with a blinking frequency of 20 Hz. Then the function is deactivated automatically.
• The LEDs on the RJ45 sockets are not used for this function.
• If the function is reactivated within the time set, the time is extended correspondingly.
• With the setting "0: Stop" in subindex 1 the function can be aborted/deactivated prematurely.
Sub. Name Lenze setting Data type
1 Start optical recognition 0: Stop UNSIGNED_8
2 Optical recognition: Blinking time 5 s UNSIGNED_16
Subindex 1: Start optical recognition
Selection list (Lenze setting printed in bold)
0Stop
1Start
Write access CINH OSC P RX TX UNSIGNED_8
46
Subindex 2: Optical recognition: Blinking time
Setting range (min. value | unit | max. value) Lenze setting
0 s 6000 5 s
Write access CINH OSC P RX TX UNSIGNED_16
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 47

4 Device settings
4.4 Device commands
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.4 Device commands
Note!
The execution of a device command may lead to an interruption of the EtherCAT
communication with the master and to a standstill of the axis!
0x2022 - Device command
Selection list (Lenze setting printed in bold) Info
0No command
1000 Load Lenze setting Load default parameter set
1100 Restart device Device restart
Write access CINH OSC P RX TX UNSIGNED_32
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 47
Page 48

4 Device settings
4.5 Monitoring of the DC-bus voltage
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.5 Monitoring of the DC-bus voltage
For the device as a whole, the DC-bus voltage is monitored with regard to undervoltage and
overvoltage.
• The voltage monitoring is active in the device statuses "Ready to switch on
"Operation enabled
" and "Quick stop is active".
• The warning thresholds for the monitoring are adjustable and preset for a rated mains voltage
of 400 V in the Lenze setting.
• The error thresholds for the monitoring result from the set rated mains voltage:
Mains Undervoltage thresholds Overvoltage thresholds
Rated
voltage
0x2540:1
60 V 430 V 10 V 15 V 795 V 60 V 50 V
230 V
400 V
480 V
Greyed out = read access only or threshold specified
eff
eff
eff
Warning threshold
0x2540:2
Error threshold
0x2540:3
Threshold "Reset
error"
0x2540:4
Warning threshold
0x2540:5
200 V 225 V 800 V 790 V
285 V 430 V 800 V 790 V
490 V 535 V 800 V 790 V
", "Switched on",
Error threshold
0x2540:6
Threshold "Reset
error"
0x2540:7
0x2540 - Device: Voltage values
Sub. Name Lenze setting Data type
1 Mains: Rated voltage 1: 400 Veff UNSIGNED_8
2 Undervoltage (LU): Warning threshold 430 V UNSIGNED_16
3 Undervoltage (LU): Error threshold 285 V UNSIGNED_16
4 Undervoltage (LU): Threshold 'Reset error' 430 V UNSIGNED_16
5 Overvoltage (OU): Warning threshold 795 V UNSIGNED_16
6 Overvoltage (OU): Error threshold 800 V UNSIGNED_16
7 Overvoltage (OU): Threshold 'Reset error' 790 V UNSIGNED_16
Subindex 1: Mains: Rated voltage
Selection of the mains voltage used with which the i700 servo inverter is operated.
Selection list (Lenze setting printed in bold)
0 230 Veff
1 400 Veff
2 480 Veff
3Reserved
4 60 V (setting-up operation)
Write access CINH OSC P RX TX UNSIGNED_8
48
Subindex 2: Undervoltage (LU): Warning threshold
Warning threshold for monitoring with regard to undervoltage
• If the DC-bus voltage of the i700 servo inverter falls below the threshold value set here, the device reports a
warning. Reset is effected with a hysteresis of 10 V.
Setting range (min. value | unit | max. value) Lenze setting
0 V 800 430 V
Write access CINH OSC P RX TX UNSIGNED_16
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 49

4 Device settings
4.5 Monitoring of the DC-bus voltage
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Subindex 3: Undervoltage (LU): Error threshold
Display of the error threshold for monitoring with regard to undervoltage
• If the DC-bus voltage of the i700 servo inverter falls below the threshold value shown here, the device reports an
error and the motor module changes to the "Fault" error status. An automatic restart after mains recovery is not
possible.
Display area (min. value | unit | max. value) Initialisation
0 V 800 285 V
Write access CINH OSC P RX TX UNSIGNED_16
Subindex 4: Undervoltage (LU): Threshold 'Reset error'
Display of the error reset threshold for monitoring with regard to undervoltage
Display area (min. value | unit | max. value) Initialisation
0 V 800 430 V
Write access CINH OSC P RX TX UNSIGNED_16
Subindex 5: Overvoltage (OU): Warning threshold
Warning threshold for monitoring with regard to overvoltage
• If the DC-bus voltage of the i700 servo inverter exceeds the threshold value set here, the device reports a
warning. Reset is effected with a hysteresis of 10 V.
Setting range (min. value | unit | max. value) Lenze setting
0 V 800 795 V
Write access CINH OSC P RX TX UNSIGNED_16
Subindex 6: Overvoltage (OU): Error threshold
Display of the error threshold for monitoring with regard to overvoltage
• If the DC-bus voltage of the i700 servo inverter exceeds the threshold value shown here, the device reports an
error and the motor module changes to the "Fault" error status.
Display area (min. value | unit | max. value) Initialisation
0 V 800 800 V
Write access CINH OSC P RX TX UNSIGNED_16
Subindex 7: Overvoltage (OU): Threshold 'Reset error'
Display of the error reset threshold for monitoring with regard to overvoltage
Display area (min. value | unit | max. value) Initialisation
0 V 800 790 V
Write access CINH OSC P RX TX UNSIGNED_16
Related topics:
24-V supply voltage monitoring
( 235)
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 49
Page 50

4 Device settings
4.6 Real-time information (distributed clock)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.6 Real-time information (distributed clock)
0x2580 - ECAT DC: Real-time information
All time information provided in this object is based on UTC and transmitted in the format defined by EtherCAT for
this purpose: In nanoseconds, at a width of 64 bits, based on a date of January 01, 2000, (2000-01-01) and a time of
00:00.
There are various ways for the i700 servo inverter to receive its real-time information from the outside:
• From the (EtherCAT) master (DC synchronous in the EtherCAT state "Safe-Operational" or "Operational").
• By writing to subindex 4 (ECAT DC: Current time).
Sub. Name Lenze setting Data type
1 ECAT DC: Status real-time information 0: No real-time information received
yet
2 ECAT DC: Time stamp first real-time
information
3 ECAT DC: Time stamp last real-time
information
4 ECAT DC: Current time UNSIGNED_64
UNSIGNED_8
UNSIGNED_64
UNSIGNED_64
Subindex 1: ECAT DC: Status real-time information
Selection list (read only) Info
0 No real-time information received yet The i700 servo inverter has not yet received any real-time
1 Receive at least one piece of real-time
information
2 Synchronous - cyclically updated The i700 servo inverter receives cyclically updated real-
Write access CINH OSC P RX TX UNSIGNED_8
Subindex 2: ECAT DC: Time stamp first real-time information
Display of the time when the i700 servo inverter received its first real-time information from the outside since
switch-on.
• In the "No real-time information received yet" status, a value of "0" is displayed.
Display area (min. value | unit | max. value) Initialisation
0 ns 264-1
Write access CINH OSC P RX TX UNSIGNED_64
information from the outside since switch-on.
• The i700 servo inverter is still operating with a time
which is based on the time when the device was
switched off last or which is based on the time stamp
of the firmware (whichever time is later).
The i700 servo inverter has at least once received one
piece of real-time information from the outside since
switch-on.
• The first and the last time the i700 servo inverter has
received real-time information are displayed in
subindices 2 and 3.
time information from the outside.
• The i700 servo inverter reports this status if it is e.g.
DC synchronous in the EtherCAT state "SafeOperational" or "Operational".
50
Subindex 3: ECAT DC: Time stamp last real-time information
Display of the time when the i700 servo inverter received its last real-time information from the outside.
Display area (min. value | unit | max. value) Initialisation
0 ns 264-1
Write access CINH OSC P RX TX UNSIGNED_64
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 51

4 Device settings
4.6 Real-time information (distributed clock)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Subindex 4: ECAT DC: Current time
Display of the time information the i700 servo inverter is currently using (time of the device if you will).
• The contents are updated every time this subindex is read.
• Depending on the status (see subindex 1), this time information is more or less precise:
• In the "No real-time information received yet" status, the clock is generally slow compared to real time. This
may mean weeks or even months if the i700 servo inverter was switched off for a long time.
• In the "Receive at least one piece of real-time information" status, the clock is accurate to the second unless
the time of the last time information (subindex 3) does not date back several days.
• In the "Synchronous - cyclically updated" status, the clock is accurate to the μs with the clock of the higherlevel master.
• Due to the synchronisation with an external master, this clock is also able to go backwards. TwinCAT uses the
PC clock e.g. as its time base!
Setting the time:
• The clock is set by writing a value.
• If the i700 servo inverter is in the "No real-time information received yet" status before the writing process, it
will then change to the "Receive at least one piece of real-time information" status.
• If the i700 servo inverter is in the "Synchronous - cyclically updated" status during the writing process, it will
ignore the written value.
Setting range (min. value | unit | max. value) Lenze setting
0ns2
Write access CINH OSC P RX TX UNSIGNED_64
64
-1
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 51
Page 52

5 Motor control & motor settings
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5 Motor control & motor settings
This chapter describes the commissioning of the motor control in a recommended sequence.
Objects described in this chapter
Object Name Data type
Axis A Axis B
Axis control
0x2822
0x2823
0x2825
0x2832
0x2835
0x2836
Controller settings
0x2900
0x2901
0x2902
0x2903
0x2904
0x2910
0x2939
0x2941
0x2942
0x2943
0x2944
0x2945
0x2947 0x3147 Inverter characteristic: Voltage grid points (y) RECORD
0x2980
0x2981
0x2982 0x3182 Position controller: Output signal limitation UNSIGNED_32
0x2983
0x2984
0x29C0
0x29E0
0x29E1
0x29E2
0x29E3
0x29E4
V/f operation
0x2B00
0x2B01
0x2B02
0x2B03
0x2B04
0x3022 Axis command UNSIGNED_32
0x3023 Axis command: Progress UNSIGNED_8
0x3025 Modes of operation UNSIGNED_8
0x3032 Identification: Status word UNSIGNED_16
0x3035 Manual test mode: Settings RECORD
0x3036 Manual jog: Settings RECORD
0x3100 Speed controller: Parameter RECORD
0x3101 Speed controller: Gain - adaption UNSIGNED_16
0x3102 Speed controller: Load value INTEGER_16
0x3103 Speed: Speed setpoint - filter time UNSIGNED_16
0x3104 Speed: Actual speed - filter time UNSIGNED_16
0x3110 Moments of inertia RECORD
0x3139 Switching frequency UNSIGNED_8
0x3141 Current controller: Feedforward control UNSIGNED_8
0x3142 Current controller: Parameter RECORD
0x3143 Motor: Current setpoint - filter time UNSIGNED_16
0x3144 Torque: Notch filter torque setpoint RECORD
0x3145 Torque: Jerk limitation setpoint UNSIGNED_16
0x3180 Position controller: Gain UNSIGNED_32
0x3181 Position controller: Gain - adaption UNSIGNED_16
0x3183 Position: Select new actual position INTEGER_32
0x3184 Determine target position: Mode UNSIGNED_8
0x31C0 Field controller: Parameter RECORD
0x31E0 Field weakening controller: Parameter RECORD
0x31E1 Field set value limitation UNSIGNED_16
0x31E2 DC link circuit voltage: Filter time UNSIGNED_16
0x31E3 Motor voltage act. value: Filter time UNSIGNED_16
0x31E4 Voltage reserve range UNSIGNED_8
0x3300 VFC: V/f characteristic - shape UNSIGNED_8
0x3301 VFC: V/f characteristic - define reference point RECORD
0x3302 VFC: User-definable V/f characteristic - frequency grid points (x) RECORD
0x3303 VFC: User-definable V/f characteristic - voltage grid points (y) RECORD
0x3304 VFC: Voltage vector control - current setpoint UNSIGNED_32
52 Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 53

5 Motor control & motor settings
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Object Name Data type
Axis A Axis B
0x2B05 0x3305 VFC: Voltage vector control parameter RECORD
0x2B06
0x2B07
0x2B08
0x2B09
0x2B0A
0x2B0B
0x2B0C
0x2B80
0x2BA0
0x2BA1
0x2BA2
0x2BA3
0x2BA4
0x2BA5
0x2BA6
Motor settings
0x2C00
0x2C01
0x2C02
0x2C03
0x2C04
0x2C05
0x2C06
0x2C07
0x2C08
0x6075 0x6875 Motor rated current UNSIGNED_32
0x6076
Feedback system
0x2C40 0x3440 Encoder: Type UNSIGNED_8
0x2C41
0x2C42
0x2C43
0x2C44
0x2C45
0x2C46
0x2C5F
Pole position identification
0x2C60
0x2C61
0x2C62
0x2C63
Advanced settings
0x2DE0
0x3306 VFC: Voltage boost UNSIGNED_16
0x3307 VFC: Load adjustment - parameter RECORD
0x3308 VFC: Imax controller - parameter RECORD
0x3309 VFC: Slip compensation - parameter RECORD
0x330A VFC: Oscillation damping - parameter RECORD
0x330B VFC: Frequency setpoint INTEGER_16
0x330C VFC: Override point of field weakening INTEGER_16
0x3380 DC-injection braking: Current UNSIGNED_16
0x33A0 Flying restart: Activate UNSIGNED_8
0x33A1 Flying restart: Current UNSIGNED_16
0x33A2 Flying restart: Start frequency INTEGER_16
0x33A3 Flying restart: Integration time UNSIGNED_16
0x33A4 Flying restart: Min. deviation UNSIGNED_16
0x33A5 Flying restart: Delay time UNSIGNED_16
0x33A6 Flying restart: Result RECORD
0x3400 Motor control UNSIGNED_8
0x3401 Motor: Common parameters RECORD
0x3402 Motor (ASM): Parameter RECORD
0x3403 Motor (SM): Parameter RECORD
0x3404 Motor: Lss saturation characteristic - inductance grid points (y) RECORD
0x3405 Motor: Lss saturation charcteristic - reference for current grid points (x) UNSIGNED_16
0x3406 Motor (SM): Magnet characteristic (current) - grid points RECORD
0x3407 Motor (ASM): Lh saturation characteristic - inductance grid points (y) RECORD
0x3408 Motor: Motor parameter setting method UNSIGNED_8
0x6876 Motor rated torque UNSIGNED_32
0x3441 Hiperface: Parameter RECORD
0x3442 Encoder: Parameter RECORD
0x3443 Resolver: Number of pole pairs UNSIGNED_8
0x3444 Resolver error compensation: Parameter RECORD
0x3445 Open circuit in feedback system: Response UNSIGNED_8
0x3446 Feedback system: Specifiable number of revolutions UNSIGNED_16
0x345F Feedback system: Parameter CRC UNSIGNED_32
0x3460 Monitoring pole position identification: Response UNSIGNED_8
0x3461 Pole position identification PPI (360°) RECORD
0x3462 Pole position identification PPI (min. movement) RECORD
0x3463 Pole position identification PPI (without movement) RECORD
0x35E0 Advanced settings RECORD
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 53
Page 54

5 Motor control & motor settings
5.1 Required commissioning steps (short overview)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.1 Required commissioning steps (short overview)
The following subchapters provide information on the individual commissioning steps required for
a specific control mode/motor type combination.
5.1.1 Servo control for synchronous motor (SM)
Required commissioning steps
1. Wiring check by means of manual test modes
2. Setting the control mode
3. Accepting/adapting plant parameters
4. Setting the motor parameters for the servo control
5. Set motor monitoring:
• Monitoring of the motor utilisation (I²xt)
• Motor temperature monitoring
6. Setting the feedback system for the servo control
7. Only required for other manufacturers' motors:
• Setting and optimising the current controller
• Correction of the stator leakage inductance (Lss)...
• Synchronous motor (SM): Pole position identification
8. Only required for the automatic calculation of the speed controller parameters:
Determining the total moment of inertia
9. Setting the speed controller
10. Setting the position controller
Optional commissioning steps (additional function or fine adjustment)
A. Compensating for inverter influence on output voltage
B. Synchronous motor (SM): Compensating for temperature and current influences
C. Jerk limitation
D. Notch filters (band-stop filters)
E. "Short-circuit braking" function
54
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 55

5 Motor control & motor settings
5.1 Required commissioning steps (short overview)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.1.2 Servo control for asynchronous motor (ASM)
Required commissioning steps
1. Wiring check by means of manual test modes
2. Setting the control mode
3. Accepting/adapting plant parameters
4. Setting the motor parameters for the servo control
5. Set motor monitoring:
• Monitoring of the motor utilisation (I²xt)
• Motor temperature monitoring
6. Setting the feedback system for the servo control
7. Only required for other manufacturers' motors:
Setting and optimising the current controller
8. Only required for the automatic calculation of the speed controller parameters:
Determining the total moment of inertia
9. Setting the speed controller
10. Setting the position controller
11. Only required for other manufacturers' motors:
• Setting the field controller (ASM)
• Setting the field weakening controller (ASM)
Optional commissioning steps (additional function or fine adjustment)
A. Compensating for inverter influence on output voltage
B. Correction of the stator leakage inductance (Lss)...
C. Asynchronous motor (ASM): Identifying the Lh saturation characteristic
D. Estimating the optimal magnetising current
E. Jerk limitation
F. Notch filters (band-stop filters)
G. "DC-injection braking" function
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 55
Page 56

5 Motor control & motor settings
5.1 Required commissioning steps (short overview)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.1.3 V/f characteristic control for asynchronous motor (ASM)
Required commissioning steps
1. Wiring check by means of manual test modes
2. Setting the control mode
3. Accepting/adapting plant parameters
4. Compensating for inverter influence on output voltage
5. Only required if voltage vector control, DC-injection braking, or flying restart process is activated:
Setting and optimising the current controller
6. Defining the V/f characteristic shape
7. Setting the voltage boost
8. Setting the load adjustment
9. Activating the voltage vector control (lmin controller)
10. Defining the behaviour at the current limit (Imax controller)
Optional commissioning steps (additional function or fine adjustment)
A. "Flying restart" function
B. "DC-injection braking" function
C. Setting the slip compensation
D. Setting the oscillation damping
56
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 57

5 Motor control & motor settings
5.2 Commissioning functions (short overview)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.2 Commissioning functions (short overview)
For a quick commissioning, the i700 servo inverter provides various functions which serve to
automatically calculate and set the parameters. These functions can be executed via the following
object:
0x2822 | 0x3022 - Axis command
Via the cross-reference in the information column, a detailed description of the respective function is provided.
Selection list (Lenze setting printed in bold) Info
0No command
1 Inverter characteristic: Load Lenze setting Loading the standard inverter characteristic
2 Estimating the optimal magnetising current Estimating the optimal magnetising current
3 Motor model parameters: Determine from
motor data by approximation
4 Current controller: Calculate controller
parameters
5 Speed controller: Calculate controller
parameters
6 Position controller: Calculate controller
parameters
7 Field controller: Calculate controller
parameters
8 Field weakening controller: Calculate
controller parameters
9 Identify resolver error Identify resolver error
10 VFC: Calculate Imin controller parameters V/f operation: Activating the voltage vector control
11 VFC: Calculate Imax controller parameters V/f operation: Defining the behaviour at the current
12 VFC: Calculate flying restart controller
parameters
13 Lh saturation characteristic : Load Lenze
setting
14 Get Hiperface information from encoder From version 01.03
Write access CINH OSC P RX TX UNSIGNED_32
Enter nameplate data and have motor model
parameters determined automatically
Calculate current controller parameters
Calculate speed controller parameters
Calculate position controller parameters
Calculate field controller parameters
Calculate field weakening controller parameters
limit (Imax controller)
V/f operation: "Flying restart" function
Load standard Lh saturation characteristic
Read type code, number of increments and number of
distinguishable revolutions out of the encoder and
automatically enter them into the corresponding
Hiperface parameters.
Additional settings for SinCos absolute value encoder
with HIPERFACE® protocol
0x2823 | 0x3023 - Axis command: Progress
Display of the current progress of the activated commissioning function
Display area (min. value | unit | max. value) Initialisation
0 100 0
Write access CINH OSC P RX TX UNSIGNED_8
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 57
Page 58

5 Motor control & motor settings
5.2 Commissioning functions (short overview)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
0x2825 | 0x3025 - Axis: Operating mode
This object serves to activate different commissioning test modes and procedures for the automatic parameter
identification.
Via the cross-reference in the information column, a detailed description of the respective function is provided.
Selection list (Lenze setting printed in bold) Info
0 CiA402 mode active Normal operation (CiA402 operating modes active)
CiA402 device profile
1 Manual test mode: Voltage/frequency Test mode "Voltage/frequency"
2 Manual test mode: Current/frequency Test mode "Current/frequency"
3 Manual test mode: Current pulse Test mode "Current pulse"
4 Manual control mode Manual control
5 Pole position identification PPI (360°) Synchronous motor (SM): Pole position identification
6 Pole position identification PPI (min.
movement)
7 Pole position identification PPI (without
movement)
8 Identify inverter characteristic Compensating for inverter influence on output
9 Identify motor parameters Have motor parameters identified by the i700 servo
10 Identify Lh saturation characteristic Asynchronous motor (ASM): Identifying the Lh
Write access CINH OSC P RX TX UNSIGNED_8
• PLI without motion from version 01.03.
voltage
inverter
saturation characteristic
0x2832 | 0x3032 - Identification: Status word
Display of the status of an activated function for automatic parameter identification.
Display area (min. value | unit | max. value) Initialisation
0 65535 0
Value is bit-coded: Info
Bit 0 Enable identification An identification was activated via 0x2825 (or 0x3025
Bit 1 Identification in progress The identification selected via 0x2825 (or 0x3025 for axis
Bit 2 Identification complete Identification has been completed
Bit 3 Identification failed The identification failed or has been aborted by
Bits 4-15 Reserved
Write access CINH OSC P RX TX UNSIGNED_16
for axis B) with a value > 4.
B) is carried out (changes to 1 after the controller enable).
controller inhibit.
58
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 59

5 Motor control & motor settings
5.2 Commissioning functions (short overview)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.2.1 Enable/inhibit operation via control word
The operating mode can only be selected in 0x2825 (or 0x3025f or axis B) when operation is
inhibited (pulse inhibit). In order to start the corresponding procedure after the selection, the
operation must be enabled explicitly.
Required steps to enable the operation after an STO:
1. Apply the STO terminals of the axis to 24 V.
2. Use the control word (0x6040
after another:
Command Setting in the control word Notes
Shutdown 6 A changeover from the "Switch on disabled" device
Switch on
Enable operation
or 0x6840 for axis B) to execute the following commands one
status to the "Ready to switch on
place.
7 The switch-on inhibit which is active after switch-on or
reset of an error (acknowledgement) is deactivated. A
changeover to the "Switched on
place.
15 The operation is enabled and an active quick stop is quit
again. A changeover to the "Operation enabled
status takes place.
" device status takes
" device status takes
" device
Access to the control word via SDO access
The control word is part of the standard mapping and is preset in the cyclic interface. In this
configuration, the control word commands have to be initiated by the controller via PDO access. If
this is not possible, for instance, since a manual intervention through the controller is not intended,
it is possible to switch off the control via PDO and carry out the enable via an SDO access:
1. Set the object 0x2824
2. An SDO access to the control word (0x6040
(or 0x3024 for axis B) to "0: Off" to switch off the control via PDO.
or 0x6840 for axis B) serves to execute the
commands given above one after another.
3. After having executed the commands in the object 0x2824
(or 0x3024 for axis B), select
"1: Activate" to re-activate the control via PDO.
Inhibit operation via control word (pulse inhibit)
In order to inhibit the enabled operation without using the STO terminals, use the control word
(0x6040
Command Setting in the control word Notes
Disable operation
or 0x6840 for axis B) to execute the following command:
7 The pulse inhibit is set. When the automatic brake
operation is activated, it is waited for the parameterised
brake closing time until the brake is applied before the
pulse inhibit is set. It is changed back to the "Switched
on" device status.
In this case, a subsequent renewed enable only requires (without using the STO terminals) the
control word command "Enable operation
" (setting "15").
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 59
Page 60

5 Motor control & motor settings
5.2 Commissioning functions (short overview)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.2.2 Saving changed parameters safe against mains failure
If control parameters are changed during the commissioning phase, e.g. by the functions for
automatic parameter identification, the changed control parameters must be uploaded from the
i700 servo inverter into the controller for permanent storage.
Note!
Currently, the changed controller parameters cannot be transferred directly into the
object list of the corresponding axis using the »PLC Designer« but only indirectly via the
»EASY Starter« (see the following instructions).
How to transfer parameters changed in the i700 servo inverter into the PLC project:
In the »EASY Starter«:
1.
2. Go to the Device view and select the corresponding i700 servo inverter.
3. Go to the Project menu and select the Device parametersImport device parameters
4. Save PLC project.
Upload parameter set and save as Lenze parameter file (*.gdc).
In the »PLC Designer«:
command to import the Lenze parameter file (*.gdc) into the selected device.
60
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 61

5 Motor control & motor settings
5.3 Wiring check by means of manual test modes
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.3 Wiring check by means of manual test modes
Before the parameterisation of the actual control is started, the wiring of the motor (power and
encoder connection) should be checked for errors and, if required, should be corrected.
• For this purpose, the following manual test modes can be activated via object 0x2825
0x3025
for axis B) when the controller is inhibited:
• Manual test mode "voltage/frequency"
• Manual test mode "current/frequency"
• The parameters for the test modes can be adapted via object 0x2835 (or 0x3035 for axis B). For
this, observe the notes in the description of the respective test mode.
0x2835 | 0x3035 - Manual test mode: Settings
Sub. Name Lenze setting Data type
1 Manual test mode: Current setpoint 0 % INTEGER_16
2 Manual test mode: Frequency 0.0 Hz INTEGER_16
3 Manual test mode: Starting angle 0.0 ° INTEGER_16
(or
Subindex 1: Manual test mode: Setpoint current
Selection of the r.m.s. value of a phase current for test mode
•100% ≡ rated motor current (0x6075
Setting range (min. value | unit | max. value) Lenze setting
0 % 1000 0 %
Write access CINH OSC P RX TX INTEGER_16
Subindex 2: Manual test mode: Frequency
Selection of the frequency for test mode
Setting range (min. value | unit | max. value) Lenze setting
-1000.0 Hz 1000.0 0.0 Hz
Write access CINH OSC P RX TX Scaling: 1/10 INTEGER_16
Subindex 3: Manual test mode: Starting angle
Selection of the starting angle for test mode
Note!
In the case of the synchronous motor, a jerky compensating movement occurs after controller enable if the pole
position of this movement does not correspond to the starting angle.
Setting range (min. value | unit | max. value) Lenze setting
-1000.0 ° 1000.0 0.0 °
Write access CINH OSC P RX TX Scaling: 1/10 INTEGER_16
or 0x6875 for axis B)
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 61
Page 62

5 Motor control & motor settings
U
outfout
U
rated
f
rated
---------------
⋅=
n
act
f
out
zp
motor
-------------------
60⋅=
5.3 Wiring check by means of manual test modes
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.3.1 Manual test mode "voltage/frequency"
Functional description
In this test mode, a rotating field voltage with the set output frequency f
terminals after controller enable.
• If the frequency selection is positive, the motor should rotate clockwise when one is looking at
the A-side of the motor. If this is not the case, there is a simple rotating movement in the motor
phases.
• The level of the output voltage is determined via the following equation:
Equation for calculating the output voltage
Axis A Axis B Symbol Description Dimension unit
0x2D82 0x3582 V
0x2835:2 0x3035:2 f
0x2B01:1
0x2B01:2
Greyed out = read access only
0x3301:1 V
0x3301:2 f
Current output voltage V
out
Output frequency for test mode Hz
out
V/f rated voltage V
rated
V/f base frequency Hz
rated
is output at the motor
out
By means of the manual "Voltage/frequency" test mode, the wiring of the feedback system can also
be checked.
• If the feedback system is set correctly, the following actual speed should be shown:
Equation for calculating the actual speed
Axis A Axis B Symbol Description Dimension unit
0x606C 0x686C n
0x2835:3
0x2C01:1
Greyed out = read access only
0x3035:3 f
0x3401:1 zp
Velocity actual value rpm
act
Output frequency for test mode Hz
out
Motor - number of pole pairs
Motor
62
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 63

5 Motor control & motor settings
5.3 Wiring check by means of manual test modes
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Preconditions for the execution
• The motor must be able to rotate freely.
• The controller is free of errors and is in the "Switched on
" device status.
Response of the motor during the execution
The motor rotates as a function of the set output frequency.
How to activate the manual test mode "voltage/frequency":
1. If the controller is enabled, inhibit the controller.
Enable/inhibit operation via control word
2. Set object 0x2825
(or 0x3025 for axis B) to "1" to change to the "Voltage/frequency" test
mode.
3. Enable the controller to start the test mode.
4. To stop the test mode:
• Inhibit controller.
•Set object 0x2825
(or 0x3025 for axis B) to "0" to change back to the CiA402 mode.
( 59)
5.3.2 Manual test mode "current/frequency"
Functional description
In this test mode, three phase currents are injected in the connected motor after controller enable.
• Via the following objects, the test mode can be adapted:
Object Info Data type
Axis A Axis B
0x2835:1 0x3035:1 r.m.s. value of a phase current
• Selection in [%] relative to the rated motor current.
0x2835:2
0x2835:3
• The current phase currents can be read via the following objects:
Object Info Data type
Axis A Axis B
0x2D83:1 0x3583:1 Motor current zero system INTEGER_32
0x2D83:2 0x3583:2 Motor current phase U INTEGER_32
0x2D83:3 0x3583:3 Motor current phase V INTEGER_32
0x2D83:4 0x3583:4 Motor current phase W INTEGER_32
Greyed out = read access only
0x3035:2 Frequency INTEGER_16
0x3035:3 Starting angle INTEGER_16
INTEGER_16
Advantages compared to the manual test mode "voltage/frequency":
• The current does not set freely, but is controlled to a defined value.
• If a synchronous motor is connected, the generated torque can be predicted.
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 63
Page 64

5 Motor control & motor settings
5.3 Wiring check by means of manual test modes
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Preconditions for the execution
• The motor must be able to rotate freely.
• The controller is free of errors and is in the "Switched on
Response of the motor during the execution
The motor rotates as a function of the set output frequency.
" device status.
Stop!
In the case of the synchronous motor, a jerky compensating movement occurs after
controller enable if the pole position of this movement does not correspond to the
starting angle.
How to activate the manual test mode "current/frequency":
1. If the controller is enabled, inhibit the controller.
Enable/inhibit operation via control word
2. Set object 0x2825
mode.
3. Enable the controller to start the test mode.
4. To stop the test mode:
• Inhibit controller.
•Set object 0x2825
(or 0x3025 for axis B) to "2" to change to the "Current/frequency" test
(or 0x3025 for axis B) to "0" to change back to the CiA402 mode.
( 59)
64
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 65

5 Motor control & motor settings
5.4 Manual control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.4 Manual control
As an alternative wiring check, the "Manual control" mode can be activated.
Functional description
The "manual control" mode enables manual operation of the i700 servo inverter via the »EASY
Starter« PC tool .
• In the manual control mode both the current and the frequency are run to the set final value via
a parameterisable ramp time. The ramp times constitute the time span during which the
respective parameter is run from zero to the final value.
• In the manual control mode holding brakes, if any, are automatically released. Holding brake
control ( 157)
Note!
Controlled synchronous motors (SM) can only be traversed under various restrictions:
Restriction 1:
• Either make minor changes/leaps of the "Manual jog: Frequency" parameter or select
the "Manual jog: Ramp time - frequency" very high.
Restriction 2:
range is not left or that the field weakening range is not reached.
• Provide a reserve of approximately 20 % towards the voltage limit. The voltage
requirement is proportional to the speed and thus proportional to the frequency; the
voltage limit is determined by the DC-bus voltage.
• For 400-V motors in combination with a 400-V mains, "voltage range" roughly
describes the range below the rated motor speed.
Restriction 3:
that the friction and load torques of the machine at final speed (= proportional to the
parameter "Manual jog: Frequency") can be overcome.
The speed variation per control cycle may only be very minor.
The "Manual jog: Frequency" parameter must be so low that the voltage
The "Manual jog: Setpoint current" parameter must be selected so high
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 65
Page 66

5 Motor control & motor settings
5.4 Manual control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Comparison of the test mode "current/frequency" and the "manual control" mode
The following table shows the differences between the two modes:
Test mode "Current/frequency" Mode "Manual control"
Current setpoint is pending immediately after controller
enable.
•100% ≡ rated motor current (0x6075
axis B)
Axis A Axis B Parameter Axis A Axis B Parameter
0x2835:1
--(No ramp can be set) 0x2836:3
Test frequency is pending immediately after controller
enable.
Axis A Axis B Parameter Axis A Axis B Parameter
0x2835:2
--(No ramp can be set) 0x2836:4
Starting angle is pending immediately after controller
enable or the rotating field starts with the starting angle.
• In the case of the synchronous motor, a jerky
compensating movement occurs once if the starting
angle does not correspond to the current pole
position of the synchronous motor.
Axis A Axis B Parameter
0x2835:3
Duration unlimited.
(If permitted by the device utilisation and motor
temperature.)
0x3035:1 Current setpoint 0x2836:1 0x3036:1 Current setpoint (final value)
0x3035:2 Test frequency 0x2836:2 0x3036:2 Test frequency (final value)
0x3035:3 Starting angle
or 0x6875 for
Current setpoint is run to the final value via a
parameterisable ramp time after controller enable.
• 100 % ≡ rated axis current (0x2DDF:1 or 0x35DF:1 for
axis B)
0x3036:3 Ramp time
Test frequency is run up to the final value via a
parameterisable ramp time after controller enable (and
is also run down again). The frequency ramp starts when
the current setpoint has reached its final value.
0x3036:4 Ramp time
Starting angle is the current commutation angle.
• For the synchronous motor, therefore no
compensating movement should be effected.
Duration adjustable.
The time starts with the start of the frequency ramp
(when the current setpoint has run up to its final value).
• If the test frequency is not rewritten within the time
set for the time monitoring, the frequency is
decreased to zero via the parameterised ramp.
• When 0 Hz has been reached, the controller changes
to the error status and is inhibited. After the error has
been acknowledged, the "Switch on disabled
status has to be changed to the "Operation enabled
device status again before manual control can be
continued.Enable/inhibit operation via control
word
Axis A Axis B Parameter
0x2836:5
0x3036:5 Time span for time monitoring
" device
"
66
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 67
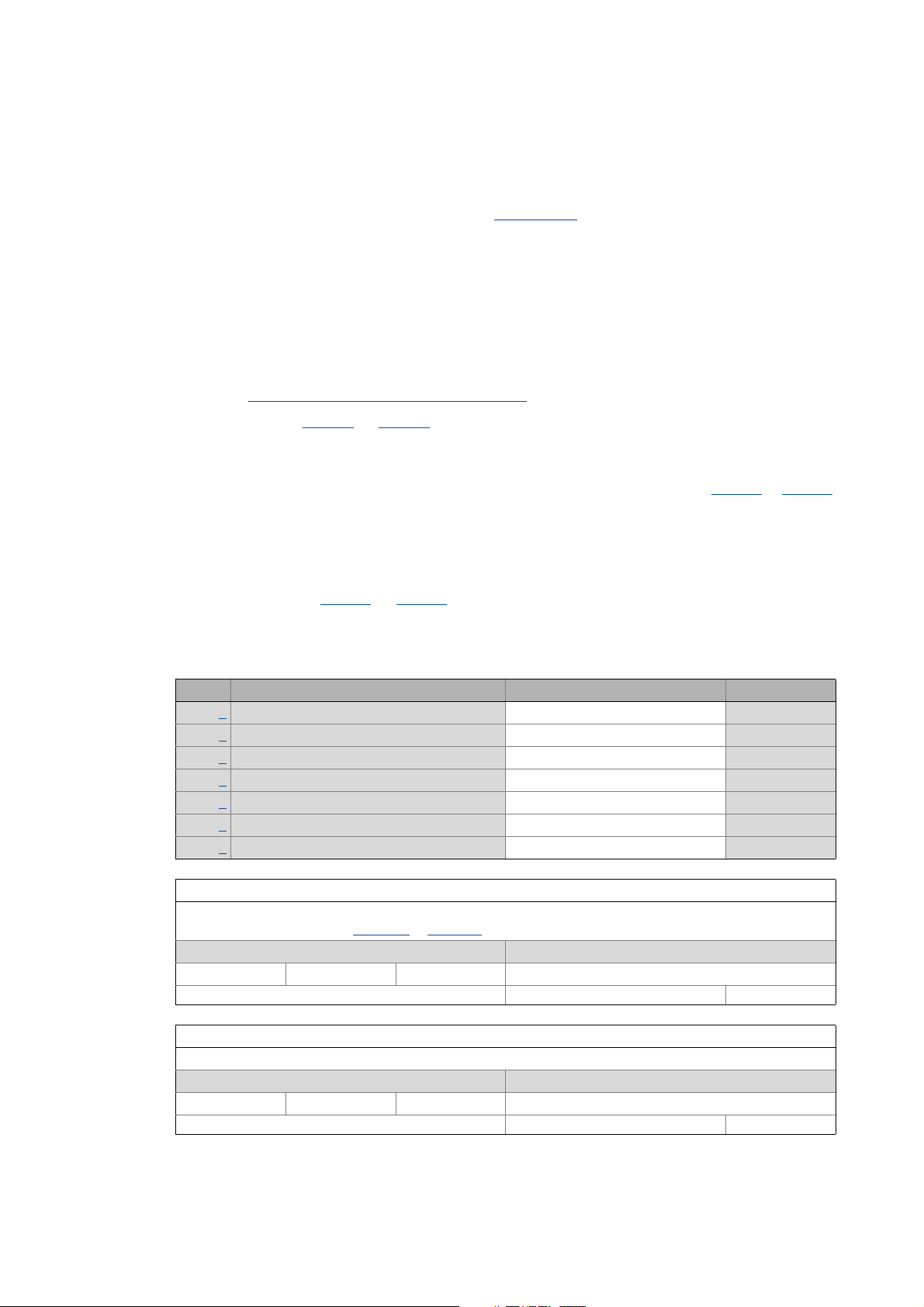
5 Motor control & motor settings
5.4 Manual control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Preconditions for the execution
• The motor must be able to rotate freely.
• The controller is free of errors and is in the "Switched on
" device status.
Response of the motor during the execution
The motor rotates according to the manual jog commands.
How to activate the manual control:
1. If the controller is enabled, inhibit the controller.
Enable/inhibit operation via control word
2. Set object 0x2825
(or 0x3025 for axis B) to "4" to change to the "Manual control" mode.
3. Enable the controller to start the manual control.
• In the »EASY Starter«, the controller can be enabled via the operator dialog for manual
control. The operator dialog also takes priority over the control word (0x6040
for axis B).
• The possible settings for the manual control mode are described in the following.
( 59)
or 0x6840
4. To stop the manual control:
• Inhibit controller.
•Set object 0x2825
0x2836 | 0x3036 - Manual jog: Settings
Sub. Name Lenze setting Data type
1 Manual jog: Current setpoint 30 % UNSIGNED_16
2 Manual jog: Frequency 0.0 Hz INTEGER_16
3 Manual jog: Ramp time - current 0 ms UNSIGNED_16
4 Manual jog: Ramp time - frequency 500 ms UNSIGNED_16
5 Manual jog: Time monitoring 2500 ms UNSIGNED_32
6 Manual jog: Current controller - gain 20.00 V/A UNSIGNED_32
7 Manual jog: Current controller - reset time 20.00 ms UNSIGNED_32
Subindex 1: Manual jog: Setpoint current
Selection of the current setpoint for the manual control
•100% ≡ rated axis current (0x2DDF:1
Setting range (min. value | unit | max. value) Lenze setting
0 % 200 30 %
Write access CINH OSC P RX TX UNSIGNED_16
(or 0x3025 for axis B) to "0" to change back to the CiA402 mode.
or 0x35DF:1 for axis B)
Subindex 2: Manual jog: Frequency
Selection of the frequency for manual control
Setting range (min. value | unit | max. value) Lenze setting
-1000.0 Hz 1000.0 0.0 Hz
Write access CINH OSC P RX TX Scaling: 1/10 INTEGER_16
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 67
Page 68

5 Motor control & motor settings
5.4 Manual control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Subindex 3: Manual jog: Ramp time - current
Time span during which the current setpoint is run from zero to the final value set.
Setting range (min. value | unit | max. value) Lenze setting
0 ms 1000 0 ms
Write access CINH OSC P RX TX UNSIGNED_16
Subindex 4: Manual jog: Ramp time - frequency
Time span during which the frequency is run from zero to the final value set.
Setting range (min. value | unit | max. value) Lenze setting
0 ms 10000 500 ms
Write access CINH OSC P RX TX UNSIGNED_16
Subindex 5: Manual jog: Time monitoring
Time span for time monitoring
• The manual control features a time monitoring function which is coupled to a write access to subindex 2
(Manual jog: Frequency).
• If no write access to the subindex 2 takes place within the time period set here, the frequency is lead to zero via
the parameterised ramp. When the 0 Hz have been reached, the inverter changes to the error status and is
inhibited. After acknowledging the error, switch the CiA402 state machine from the "switch on inhibited" back
to the "operation enabled" status before proceeding with manual jog.
Setting range (min. value | unit | max. value) Lenze setting
0 ms 100000 2500 ms
Write access CINH OSC P RX TX UNSIGNED_32
Subindex 6: Manual jog: Current controller gain
Setting range (min. value | unit | max. value) Lenze setting
0.00 V/A 750.00 20.00 V/A
Write access CINH OSC P RX TX Scaling: 1/100 UNSIGNED_32
Subindex 7: Manual jog: Current controller reset time
Setting range (min. value | unit | max. value) Lenze setting
0.01 ms 2000.00 20.00 ms
Write access CINH OSC P RX TX Scaling: 1/100 UNSIGNED_32
68
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 69

5 Motor control & motor settings
5.5 Setting the control mode
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.5 Setting the control mode
The i700 servo inverter supports different modes for open-loop/closed-loop motor control:
• Servo control for synchronous motor (SM)
• Servo control for asynchronous motor (ASM)
• V/f characteristic control for asynchronous motor (ASM)
Servo control
The field-oriented servo control is based on a decoupled, separated control of the torque-producing
and field-producing current component. The motor control is based on a fed back, field-oriented and
cascaded controller structure and enables dynamic and stable operation in all four quadrants. It can
be used for synchronous motors (SM) and asynchronous motors (ASM).
V/f characteristic control
The V/f characteristic control is a motor control mode for typical frequency inverter applications on
the basis of a simple and robust control mode for the operation of asynchronous motors with linear
or square-law load torque characteristics (e.g. fans). This motor control mode is also suitable for
group drives and special motors.
0x2C00 | 0x3400 - Motor control
Setting of the mode for open-loop/closed loop motor control
Selection list (Lenze setting printed in bold) Info
1 Servo control - synchronous motor (SM) Servo control for synchronous motor (SM)
2 Servo control - asynchronous motor (ASM) Servo control for asynchronous motor (ASM)
3Reserved From version 01.03
6 VFC: V/f characteristic control V/f characteristic control for asynchronous motor (ASM)
Write access CINH OSC P RX TX UNSIGNED_8
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 69
Page 70

5 Motor control & motor settings
5.6 Accepting/adapting plant parameters
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.6 Accepting/adapting plant parameters
The "plant parameters" summarise all parameters which result from the combination of motor and
load. These characterise the transfer behaviour of the entire controlled system including the
required monitoring modes.
• The plant parameters depend on the application in which the controller and motor are used.
• When a Lenze motor is selected, respective plant parameters are suggested for the load-free
operation. This enables the motor to be moved without any load. During operation with a load
it is required to change the plant parameters according to the load. Details on how to determine
the adapted plant parameters are described in the corresponding objects.
Overview of plant parameters
Object Info Lenze setting Control
Axis A Axis B Value Unit Servo V/f
0x6080 0x6880 Max motor speed 6075 r/min
0x6073 0x6873 Max current 150 %
0x2900:1
0x2900:2
0x2900:3
0x2904
0x2D44:1
0x3100:1 Speed controller: Gain 0.00038 Nm/rpm
0x3100:2 Speed controller: Reset time 15.0 ms
0x3100:3 Speed controller: Rate time 0.00 ms
0x3104 Speed: Actual speed - filter time 0.6 ms
0x3544:1 Motor speed monitoring: Threshold 8000 r/min
70
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 71
5 Motor control & motor settings
2 Rated device current⋅
2 1.8 Rated motor current ⋅⋅
5.7 Compensating for inverter influence on output voltage
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.7 Compensating for inverter influence on output voltage
Note!
In the V/f characteristic control mode the procedure described below is recommended
because a well-adapted inverter characteristic leads to a significantly improved drive
behaviour during V/f operation.
Functional description
An inverter generates a three-phase voltage system with pulse width modulation. Inherent to its
functional principle, the inverter also generates current-dependent and switching frequencydependent losses which influence the output voltage. The motor voltage actually provided at the
output terminals is not measured in order to compensate for deviations if need be. Instead, an
adjustment is made by means of the inverter characteristic to compensate for deviations.
Among other things, the inverter characteristic depends on the length of the motor cable and at
least has to be individually determined once for the connected motor by means of the device
command "Calculate inv. characteristic". For an automatic determination of the motor parameters,
this ensures that the current has a sinusoidal form.
Danger!
This procedure may only be carried out during commissioning, not during operation!
During the procedure the motor is energised so that:
• it cannot be excluded that the connected mechanical components may move!
• the windings heat up.
If you repeat the procedure, ensure that the motor is not thermally overloaded
(particularly if no temperature feedback is used).
Identification of the inverter characteristic - procedure
If no error is pending, the motor is energised during the procedure with a maximum DC current
corresponding to the lower of the two following values:
or
• Ideally, the first value should be reached, the second value is to ensure that the load on the
motor is not too high during this test.
• During the procedure, the motor current increases to the maximum value specified and falls
back to "0" to repeat the cycle with a negative current sign. Altogether, the maximum value is
reached four times.
• The switching frequency of the inverter is set to rated switching frequency and after the
procedure, it is reset to the original value.
• If the switching frequency should be changed later during operation, the characteristic will
automatically be adapted to the current switching frequency.
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 71
Page 72

5 Motor control & motor settings
5.7 Compensating for inverter influence on output voltage
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Preconditions for the execution
• The motor may be firmly braked.
• The controller is free of errors and is in the "Switched on
Response of the motor during the execution
If the motor is not firmly braked, it will move slightly.
" device status.
How to determine the inverter characteristic:
1. If the controller is enabled, inhibit the controller.
Enable/inhibit operation via control word
2. Set object 0x2825
Identification" operating mode.
3. Enable the controller to start the procedure.
Note: By means of controller inhibit, the started procedure can be cancelled any time.
Characteristic values that have already been determined are rejected in this case.
(or 0x3025 for axis B) to "8" to change to the "Inverter characteristic:
( 59)
After successful completion...
...the controller will be inhibited automatically and the points of the determined inverter
characteristic will be set in object 0x2947
• For permanent storage, the changed settings must be uploaded to the controller from the i700
servo inverter.
The »EASY Starter« serves to save the parameter settings of the i700 servo inverter as parameter
file (*.gdc). In the »PLC Designer«, this file can then be imported in the corresponding axis.
Saving changed parameters safe against mains failure
• The inverter characteristic must only be detected again if the controller, motor, or motor cable
has changed e.g. due to an exchange.
• The controller inhibit automatically set by the procedure can be deactivated via the
Controlword (0x6040
In the event of an error
If an error occurs during the procedure or the pulse inhibit gets active (e.g. due to short-time
undervoltage), the procedure is terminated with controller inhibit without a change in settings.
or 0x6840 for axis B) (setting = 7, 15).
(or 0x3147 for axis B).
( 60)
72
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 73

5 Motor control & motor settings
5.7 Compensating for inverter influence on output voltage
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Advanced settings
For characteristic detection, the current controller is parameterised automatically at the beginning
of the identification process. For motors with a very low stator leakage inductance (< 1 mH), an
automatic parameter setting may fail and the actual identification process is aborted with an error
message like e.g. "short circuit".
• For such a case, it is possible to set the current controller manually via the object 0x2942
0x3142
for axis B).
• Whether the current controller is to be selected automatically or the values below 0x2942
0x3142
0x2DE0 | 0x35E0 - Advanced settings
Sub. Name Lenze setting Data type
1 Current controller: Setting for identification 0: Automatic setting UNSIGNED_8
2 Sensorless SM: Injection signal during test
for axis B) are active, is selected via the object 0x2DE0:1 (or 0x35E0:1 for axis B).
mode
0: Off UNSIGNED_8
(or
(or
Subindex 1: Current controller: Setting for identification
Selection list (Lenze setting printed in bold)
0 Automatic setting
1 Manual setting (0x2942/0x3142)
Write access CINH OSC P RX TX UNSIGNED_8
Subindex 2: Sensorless SM: Injection signal during test mode
Selection list (Lenze setting printed in bold)
0Off
1On
Write access CINH OSC P RX TX UNSIGNED_8
Loading the standard inverter characteristic
If an incorrect inverter characteristic has been determined or none at all, it is possible to load a
device-typical standard inverter characteristic.
How to load the standard inverter characteristic:
1. Set object 0x2822
• The progress of the procedure is shown in object 0x2823
2. For permanent storage: After completion of the procedure, upload the inverter
characteristic set in 0x2947
inverter.
The »EASY Starter« serves to save the parameter settings of the i700 servo inverter as
parameter file (*.gdc). In the »PLC Designer«, this file can then be imported in the
corresponding axis. Saving changed parameters safe against mains failure
(or 0x3022 for axis B) to "1".
(or 0x3023 for axis B).
(or 0x3147 for axis B) to the controller from the i700 servo
( 60)
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 73
Page 74

5 Motor control & motor settings
5.7 Compensating for inverter influence on output voltage
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
0x2947 | 0x3147 - Inverter characteristic: Voltage grid points (y)
y values of the 17 grid points of the inverter characteristic
Sub. Name Lenze setting Data type
1 IC: y1 = U01 (x = 0.00 %) 0.00 V UNSIGNED_16
2 IC: y2 = U02 (x = 6.25 %) 0.00 V UNSIGNED_16
3 IC: y3 = U03 (x = 12.50 %) 0.00 V UNSIGNED_16
4 IC: y4 = U04 (x = 18.75 %) 0.00 V UNSIGNED_16
5 IC: y5 = U05 (x = 25.00 %) 0.00 V UNSIGNED_16
6 IC: y6 = U06 (x = 31.25 %) 0.00 V UNSIGNED_16
7 IC: y7 = U07 (x = 37.50 %) 0.00 V UNSIGNED_16
8 IC: y8 = U08 (x = 42.75 %) 0.00 V UNSIGNED_16
9 IC: y9 = U09 (x = 50.00 %) 0.00 V UNSIGNED_16
10 IC: y10 = U10 (x = 56.25 %) 0.00 V UNSIGNED_16
11 IC: y11 = U11 (x = 62.50 %) 0.00 V UNSIGNED_16
12 IC: y12 = U12 (x = 68.75 %) 0.00 V UNSIGNED_16
13 IC: y13 = U13 (x = 75.00 %) 0.00 V UNSIGNED_16
14 IC: y14 = U14 (x = 81.25 %) 0.00 V UNSIGNED_16
15 IC: y15 = U15 (x = 87.50 %) 0.00 V UNSIGNED_16
16 IC: y16 = U16 (x = 93.25 %) 0.00 V UNSIGNED_16
17 IC: y17 = U17 (x = 100.00 %) 0.00 V UNSIGNED_16
Write access CINH OSC P RX TX
74
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 75

5 Motor control & motor settings
5.8 Setting the motor parameters for the servo control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.8 Setting the motor parameters for the servo control
If the servo control (SM, ASM) is applied, it is required to parameterise the so-called motor model
first. These are electrical variables which are provided in the i700 servo inverter as parameters.
5.8.1 Lenze motor: Easy loading of motor data from the catalogue via the »PLC-Designer«
For Lenze motors with a standard feedback system installed by Lenze, the required motor
parameters are provided by the »PLC Designer« during the motor selection by means of catalogues
and automatically copied to the i700 servo inverter in the default setting.
In this case, you can directly go to the next commissioning step:
Setting the feedback system for the servo control
5.8.2 Motors of other manufacturers or no catalogue data available: Three possibilities to create the setting
For motors of other manufacturers or if there are no catalogue data available for the motor, three
alternative possibilities for setting the motor parameters are provided:
A. Enter motor nameplate data
(and have motor model parameters determined automatically)
B. Set motor parameters manually
C. Determine motor parameters automatically via "motor parameter identification"
The following subchapters provide detailed information on the three alternative methods. The
Engineering tool saves the used method to the following object so that the suitable
parameterisation dialogs are available the next time an online connection is present.
0x2C08 | 0x3408 - motor: Setting method - motor parameters
Selection list (Lenze setting printed in bold) Info
1 Select from catalogue (Lenze motor) For Lenze motors with a standard feedback system
2 Enter motor nameplate data (other motors) Enter motor nameplate data
3 Manually (other motors) Set motor parameters manually
4 Identification in progress (all motors) Determine motor parameters automatically via
Write access CINH OSC P RX TX UNSIGNED_8
installed by Lenze, the required motor parameters are
provided by the »PLC Designer« during the motor
selection by means of catalogues and automatically
copied to the i700 servo inverter in the default setting.
(and have motor model parameters determined
automatically)
"motor parameter identification"
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 75
Page 76
5 Motor control & motor settings
5.8 Setting the motor parameters for the servo control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.8.2.1 Enter motor nameplate data
If the equivalent circuit data of the motor required for the motor model are not known, they can
automatically be determined by approximation by the i700 servo inverter by means of the motor
nameplate data before they are set.
How to have the equivalent circuit data determined by the i700 servo inverter:
1. Set the complete motor nameplate data in object 0x2C01
2. Set the rated motor current in object 0x6075
(or 0x6875 for axis B).
(or 0x3401 for axis).
3. Set object 0x2822
(or 0x3022 for axis B) to "3" in order to have the equivalent circuit data
determined by approximation.
• The progress of the procedure is shown in object 0x2823
4. For permanent storage: Upload the set equivalent circuit data to the controller from the
i700 servo inverter after the procedure has been completed:
• For asynchronous motor (ASM): Object 0x2C02
• For synchronous motor (SM): Object 0x2C03
The »EASY Starter« serves to save the parameter settings of the i700 servo inverter as
parameter file (*.gdc). In the »PLC Designer«, this file can then be imported in the
corresponding axis. Saving changed parameters safe against mains failure
5.8.2.2 Set motor parameters manually
If all required motor data are known (e.g. by means of a data sheet provided by the motor
manufacturer), they can be set manually in the following parameters:
Object Name Required for
Axis A Axis B
0x2C01:1 0x3401:1 Motor: Number of pole pairs
0x2C01:2 0x3401:2 Motor: Stator resistance (value at 20°C)
0x2C01:3
0x2C01:4
0x2C01:5 0x3401:5 Motor: Rated frequency
0x2C01:6
0x2C01:7
0x2C01:8 0x3401:8 Motor: Rated cosine phi
0x2C01:9
0x2C02:1
0x2C02:2
0x2C02:3
0x2C03:1
0x2C03:2
0x2C03:3
0x6075
0x6076
Greyed out = read access only
0x3401:3 Motor: Stator leakage inductance
0x3401:4 Motor: Rated speed
0x3401:6 Motor: Rated power
0x3401:7 Motor: Rated voltage
0x3401:9 Motor: Insulation class
0x3402:1 Motor (ASM): Rotor resistance (value at 20 °C)
0x3402:2 Motor (ASM): Mutual inductance
0x3402:3 Motor (ASM): Magnetising current
0x3403:1 Motor (SM): e.m.f. constant (KELL)
0x3403:2 Motor (SM): Pole position
0x3403:3 Motor (SM): Temperature coefficient - magnets
0x6875 Motor rated current
0x6876 Motor rated torque
(or 0x3023 for axis B).
(or 0x3402 for axis B).
(or 0x3403 for axis B).
( 60)
SM ASM
76
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 77

5 Motor control & motor settings
I
Phase
I
µN
L
h
L
ss
L
sr
R
s
R
r
s
U
Phase
I
Phase
L
s
R
s
U
Phase
e.m.f.
5.8 Setting the motor parameters for the servo control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Motor equivalent circuit
Async. motor Synchronous motor
Axis A Axis B Symbol Description Dimension unit
0x2C01:2 0x3401:2 RsMotor stator resistance (value at 20°C) Ω
0x2C01:3
-- L
0x2C02:1
0x2C02:2
0x2C02:3
- - s Slip
- - e.m.f. Electromotive force
0x3401:3 LssMotor stator leakage inductance (ASM) H
L
Motor stator inductance (SM) H
s
Motor rotor leakage inductance (is assumed to be equal to
sr
)
L
ss
0x3402:1 RrMotor rotor resistance (value at 20°C) Ω
0x3402:2 LhMutual motor inductance H
0x3402:3 IμNMotor magnetising current A
H
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 77
Page 78

5 Motor control & motor settings
Rated device current
1
2
-- -
Rated motor current⋅
5.8 Setting the motor parameters for the servo control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.8.2.3 Determine motor parameters automatically via "motor parameter identification"
Danger!
This procedure may only be carried out during commissioning, not during operation!
• During the procedure the motor is energised so that:
• it cannot be excluded that the connected mechanical components may move!
• the windings heat up.
If you repeat the procedure, ensure that the motor is not thermally overloaded
(particularly if no temperature feedback is used).
Functional description
The motor parameters listed in the table below can be determined automatically via the motor
parameter identification function if they are not known. The resistance values are converted via the
actual motor temperature into values that correspond to a temperature of 20°C. If a thermal
detector is not connected, a temperature value of 90°C is assumed.
Object Name Required for
Axis A Axis B
0x2C01:2
0x2C01:3
0x2C02:1
0x2C02:2
0x2C02:3
Sequence of the motor parameter identification
The apparent resistance of the plant is determined for approx. 30 different frequencies. Then a
mathematical procedure is used to extract the electrical parameters of the motor.
• Since the procedure starts with very low frequencies and always considers several complete
periods, the whole process takes approx. 3 minutes.
• During the procedure, the motor is energised with a current, the r.m.s. value of which
corresponds to the lower of the following two values:
0x3401:2 Motor: Stator resistance (value at 20°C)
0x3401:3 Motor: Stator leakage inductance (Lss)
0x3402:1 Motor (ASM): Rotor resistance (value at 20 °C)
0x3402:2 Motor (ASM): Mutual inductance (Lh)
0x3402:3 Motor (ASM): Magnetising current
or
SM ASM
78
Tip!
If an asynchronous motor is to be identified, the identification should be executed with half
the rated motor current in order to achieve an optimal result. For this purpose, the rated
device current has to be higher than half the rated motor current. In case of a synchronous
motor, this is irrelevant.
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 79

5 Motor control & motor settings
5.8 Setting the motor parameters for the servo control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
After the parameters have been extracted from the impedance, they are checked for consistency
with the required rated values. If an inconsistent parameter set is detected, is this an indication of
faulty rated values on the nameplate.
Preconditions for the execution
• The synchronous motor must be able to rotate freely.
• The asynchronous motor may be firmly braked.
• The controller is free of errors and is in the "Switched on
• The motor parameters listed in the following table are excluded from the automatic
determination and must therefore be adapted to the motor used (see motor nameplate before
the determination.
Object Name
Axis A Axis B
0x6075 0x6875 Motor rated current
(The current amount for the procedure is derived from this specification)
0x2C01:2
0x2C01:4
0x2C01:5
0x2C01:6
0x2C01:7
Response of the motor during the execution
• A DC current is superimposed over the identification current that keeps the motor idling. After
the controller enable, the shaft will adjust once, which is irrelevant to measurement though.
• With asynchronous motors, slight rotations might possibly occur. Their influence on the
measurements is, however, not worth mentioning.
0x3401:2 Motor: Stator resistance
(Default setting is used as starting value for the automatic determination.)
0x3401:4 Motor: Rated speed
0x3401:5 Motor: Rated frequency
0x3401:6 Motor: Rated power
0x3401:7 Motor: Rated voltage
" device status.
Note!
• In case of uncertainties, the measurement should be repeated several times to check
if the results for the stator resistance, the leakage inductance of the stator and the
rotor resistance differ widely. This should not be the case.
• The mutual inductance and the cos(ϕ) values are not that important for the
diagnostics, because they are strongly non-linear.
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 79
Page 80

5 Motor control & motor settings
5.8 Setting the motor parameters for the servo control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
How to carry out the motor parameter identification:
1. If the controller is enabled, inhibit the controller.
Enable/inhibit operation via control word
2. Set object 0x2825
identification" operating mode.
3. Enable the controller to start the procedure.
Note: By means of controller inhibit, the procedure started can be cancelled any time, if
required, without a change in settings.
After successful completion...
...the controller is automatically inhibited and the determined motor data are set in the
corresponding objects (0x2C01
• For permanent storage, the changed settings must be uploaded to the controller from the i700
servo inverter.
The »EASY Starter« serves to save the parameter settings of the i700 servo inverter as parameter
file (*.gdc). In the »PLC Designer«, this file can then be imported in the corresponding axis.
Saving changed parameters safe against mains failure
• The controller inhibit automatically set by the procedure can be deactivated via the
Controlword (0x6040
(or 0x3025 for axis B) to "9" to change to the "Motor: Parameter
and 0x2C02 or 0x3401 and 0x3402 for axis B).
or 0x6840 for axis B) (setting = 7, 15).
( 59)
( 60)
In the event of an error
If an error occurs during the procedure or the pulse inhibit gets active (e.g. due to short-time
undervoltage), the procedure is terminated with controller inhibit without a change in settings.
Advanced settings
For motor parameter detection, the current controller is parameterised automatically at the
beginning of the identification process. For motors with a very low stator leakage inductance
(< 1 mH), an automatic parameter setting may fail and the actual identification process is aborted
with an error message like e.g. "short circuit".
• For such a case, it is possible to set the current controller manually via the object 0x2942
0x3142
• Whether the current controller is to be selected automatically or the values below 0x2942
0x3142
for axis B).
for axis B) are active, is selected via the object 0x2DE0:1 (or 0x35E0:1 for axis B).
(or
(or
80
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 81

5 Motor control & motor settings
5.8 Setting the motor parameters for the servo control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.8.3 Motor parameters (object descriptions)
0x2C01 | 0x3401 - Motor: Common parameters
Sub. Name Lenze setting Data type
1 Motor: Number of pole pairs UNSIGNED_8
2 Motor: Stator resistance 13.5000 ohms UNSIGNED_32
3 Motor: Stator leakage inductance 51.000 mH UNSIGNED_32
4 Motor: Rated speed 4050 rpm UNSIGNED_16
5 Motor: Rated frequency 270.0 Hz UNSIGNED_16
6 Motor: Rated power 0.25 kW UNSIGNED_16
7 Motor: Rated voltage 225 V UNSIGNED_16
8 Motor: Rated cosine phi 0.80 UNSIGNED_16
9 Motor: Insulation class 4: F (cut-off temperature = 155 °C) UNSIGNED_8
10 Motor: Designation STRING(50)
Subindex 1: Motor: Number of pole pairs
Display area (min. value | unit | max. value) Initialisation
0 255
Write access CINH OSC P RX TX UNSIGNED_8
Subindex 2: Motor: Stator resistance
Setting range (min. value | unit | max. value) Lenze setting
0.0000 Ohm 125.0000 13.5000 ohms
Write access CINH OSC P RX TX Scaling: 1/10000 UNSIGNED_32
Subindex 3: Motor: Stator leakage inductance
Setting range (min. value | unit | max. value) Lenze setting
0.000 mH 500.000 51.000 mH
Write access CINH OSC P RX TX Scaling: 1/1000 UNSIGNED_32
Subindex 4: Motor: Rated speed
Setting range (min. value | unit | max. value) Lenze setting
0 r/min 50000 4050 rpm
Write access CINH OSC P RX TX UNSIGNED_16
Subindex 5: Motor: Rated frequency
Setting range (min. value | unit | max. value) Lenze setting
0.0 Hz 1000.0 270.0 Hz
Write access CINH OSC P RX TX Scaling: 1/10 UNSIGNED_16
Subindex 6: Motor: Rated power
Setting range (min. value | unit | max. value) Lenze setting
0.00 kW 655.35 0.25 kW
Write access CINH OSC P RX TX Scaling: 1/100 UNSIGNED_16
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 81
Page 82

5 Motor control & motor settings
5.8 Setting the motor parameters for the servo control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Subindex 7: Motor: Rated voltage
Setting range (min. value | unit | max. value) Lenze setting
0 V 65535 225 V
Write access CINH OSC P RX TX UNSIGNED_16
Subindex 8: Motor: Rated cosine phi
Setting range (min. value | unit | max. value) Lenze setting
0.00 655.35 0.80
Write access CINH OSC P RX TX Scaling: 1/100 UNSIGNED_16
Subindex 9: Motor: Insulation class
Selection list (Lenze setting printed in bold)
0 Y (cut-off temperature = 90°C)
1 A (cut-off temperature = 105 °C)
2 E (cut-off temperature = 120°C)
3 B (cut-off temperature = 130°C)
4 F (cut-off temperature = 155°C)
5 H (cut-off temperature = 180°C)
6 G (cut-off temperature > 180°C)
Write access CINH OSC P RX TX UNSIGNED_8
Subindex 10: Motor: Designation
Write access CINH OSC P RX TX STRING(50)
0x2C02 | 0x3402 - Motor (ASM): Parameter
Sub. Name Lenze setting Data type
1 Motor (ASM): Rotor resistance 0.0000 Ohm UNSIGNED_32
2 Motor (ASM): Mutual inductance 0.0 mH UNSIGNED_32
3 Motor (ASM): Magnetising current 0.00 A UNSIGNED_16
Subindex 1: Motor (ASM): Rotor resistance
Setting range (min. value | unit | max. value) Lenze setting
0.0000 Ohm 214748.3647 0.0000 Ohm
Write access CINH OSC P RX TX Scaling: 1/10000 UNSIGNED_32
Subindex 2: Motor (ASM): Mutual inductance
Setting range (min. value | unit | max. value) Lenze setting
0.0 mH 214748364.7 0.0 mH
Write access CINH OSC P RX TX Scaling: 1/10 UNSIGNED_32
Subindex 3: Motor (ASM): Magnetising current
Setting range (min. value | unit | max. value) Lenze setting
0.00 A 500.00 0.00 A
Write access CINH OSC P RX TX Scaling: 1/100 UNSIGNED_16
82
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 83

5 Motor control & motor settings
5.8 Setting the motor parameters for the servo control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
0x2C03 | 0x3403 - Motor (SM): Parameter
Sub. Name Lenze setting Data type
1 Motor (SM): e.m.f. constant (KELL) 41.8 V/1000 rpm UNSIGNED_32
2 Motor (SM): Pole position resolver -90.0 ° INTEGER_16
3 Motor (SM): Temperature coefficient -
magnets (kTN)
4 Motor (SM): Pole position encoder 0.0 ° INTEGER_16
Subindex 1: Motor (SM): e.m.f. constant (KELL)
Setting range (min. value | unit | max. value) Lenze setting
0.0 V/1000 rpm 100000.0 41.8 V/1000 rpm
Write access CINH OSC P RX TX Scaling: 1/10 UNSIGNED_32
Subindex 2: Motor (SM): Pole position resolver
Setting range (min. value | unit | max. value) Lenze setting
-179.9 ° 179.9 -90.0 °
Write access CINH OSC P RX TX Scaling: 1/10 INTEGER_16
-0.110 %/°C INTEGER_16
Subindex 3: Motor (SM): Temperature coefficient - magnets (kTN)
Setting range (min. value | unit | max. value) Lenze setting
-1.000 %/°C 0.000 -0.110 %/°C
Write access CINH OSC P RX TX Scaling: 1/1000 INTEGER_16
Subindex 4: Motor (SM): Pole position encoder
From version 01.03
Setting range (min. value | unit | max. value) Lenze setting
-179.9 ° 179.9 0.0 °
Write access CINH OSC P RX TX Scaling: 1/10 INTEGER_16
0x6075 | 0x6875 - Motor rated current
The rated motor current set here serves as a reference value for the following objects:
• 0x6073 | 0x6873 - Device: Max. current
• 0x6078 | 0x6878 - Current actual value
• 0x2835 | 0x3035 - Manual test mode: Settings
• 0x2C61 | 0x3461 - Pole position identification PPI (360°)
• 0x2C62 | 0x3462 - Pole position identification PPI (min. movement)
• 0x2D4D | 0x354D - Motor utilisation (I²xt): User-definable characteristic
Setting range (min. value | unit | max. value) Lenze setting
0.001 A 500.000 1.300 A
Write access CINH OSC P RX TX Scaling: 1/1000 UNSIGNED_32
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 83
Page 84

5 Motor control & motor settings
5.8 Setting the motor parameters for the servo control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
0x6076 | 0x6876 - Motor rated torque
The rated motor torque set here serves as a reference value for the following objects:
• 0x6071 | 0x6872 - Target torque
• 0x6072 | 0x6872 - Max. torque
• 0x6074 | 0x6874 - Torque demand
• 0x6077 | 0x6877 - Torque actual value
• 0x60B2 | 0x68B2 - Torque offset
• 0x60E0 | 0x68E0 - Positive torque limit value
• 0x60E1 | 0x68E1 - Negative torque limit value
• 0x2DD6 | 0x35D6 - Torque: Filter cascade
Setting range (min. value | unit | max. value) Lenze setting
0.001 Nm 1000.000 0.600 Nm
Write access CINH OSC P RX TX Scaling: 1/1000 UNSIGNED_32
84
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 85

5 Motor control & motor settings
5.9 Setting the feedback system for the servo control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.9 Setting the feedback system for the servo control
After setting the motor parameters, the feedback system for the servo control must be set.
Note!
The feedback system has already been preselected by the hardware of the available
device version. Either the objects for resolver evaluation or the objects for encoder
evaluation are effective. Access to ineffective objects of hardware not available is
ignored.
The following table shows which parameters are valid for which feedback system:
Object Name
Axis A Axis B
General settings
0x2C45 0x3445 Open circuit in feedback system: Response
0x2C46 0x3446 Feedback system: Specifiable number of revolutions
Settings for "resolver" version
0x2C03:2 0x3403:2 Motor (SM): Pole position resolver
0x2C43
Settings for "encoder" version
0x2C03:4 0x3403:4 Motor (SM): Pole position encoder
0x2C40
0x2C42:1
0x2C42:2
0x2C42:3 0x3442:3 Encoder: Angle drift - Actual angle error
0x2C42:4 0x3442:4 Encoder: Signal quality - Actual amplitude
Additional settings for SinCos absolute value encoders with HIPERFACE® protocol
0x2C41:1 0x3441:1 Hiperface: Determined type code
0x2C41:2
0x2C41:3
0x2C41:4
0x2C41:5 0x3441:5 Hiperface: Serial number
0x2C41:6 0x3441:6 Hiperface: Raw data - Actual position
0x2C41:7 0x3441:7 Hiperface: Detected Increments / revolution
0x2C41:8 0x3441:8 Hiperface: Type code supported by firmware
0x2C41:9 0x3441:9 Hiperface: Encoder type
0x2C41:10 0x3441:10 Hiperface: Period length linear encoder
Greyed out = read access only
0x3443 Resolver: Number of pole pairs
0x3440 Encoder: Type
0x3442:1 Encoder: Increments / revolution
0x3442:2 Encoder: Supply voltage
0x3441:2 Hiperface: User def. encoder - type code
0x3441:3 Hiperface: User def. encoder - specifiable revolutions
0x3441:4 Hiperface absolute value fault: Response
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 85
Page 86

5 Motor control & motor settings
5.9 Setting the feedback system for the servo control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.9.1 General settings
Encoder open-circuit monitoring
In the Lenze setting the resolver/encoder cable is monitored for open circuit.
Danger!
If the encoder/resolver is used as motor encoder:
Safe operation of the motor is no longer ensured in the event of an error!
• For safety reasons, always select "Fault" (Lenze setting) as a response for the (opencircuit) monitoring of the encoder/resolver!
• In order to prevent interference injections when an encoder is used, only use shielded
motor and encoder cables!
When does the open-circuit monitoring system respond?
Resolver Multi encoder
• If there is an open circuit in the encoder cable.
• If the impedance of the resolver is too high.
• In the case of interference injections (EMC
interferences).
0x2C45 | 0x3445 - open circuit in the feedback system: Response
If there is an open circuit in the encoder cable, the response set here is triggered.
Selection list (Lenze setting printed in bold) Info
0 No response
1Fault • In the device statuses "not ready to start" and "switch-
2 Warning
Write access CINH OSC P RX TX UNSIGNED_8
Display parameter
• If there is an open circuit in the encoder cable.
on inhibited", a warning is output.
• In all other device statuses, the error response set
here is executed.
0x2C46 | 0x3446 - feedback system: Specifiable number of revolutions
From version 01.03
Is set by the firmware according to the available version:
0: No absolute value encoder (sin/cos encoder) or resolver with number of pole pairs > 1
1: Hiperface encoder SingleTurn or resolver with number of pole pairs = 1
>1: Hiperface encoder MultiTurn
Display area (min. value | unit | max. value) Initialisation
0 65535
Write access CINH OSC P RX TX UNSIGNED_16
86
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 87

5 Motor control & motor settings
5.9 Setting the feedback system for the servo control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
0x2C5F | 0x345F - Feedback system: Parameter CRC
From version 01.03
Display area (min. value | unit | max. value) Initialisation
0 4294967295
Write access CINH OSC P RX TX UNSIGNED_32
5.9.2 Settings for "resolver" version
0x2C43 | 0x3443 - Resolver: Number of pole pairs
Setting range (min. value | unit | max. value) Lenze setting
1101
Write access CINH OSC P RX TX UNSIGNED_8
Note!
Resolvers with a number of pole pairs > 1 are no absolute value encoders.
• Thus, bit 4 in the Lenze status word 2 (0x2833
• The "distinguishable revolutions" specification in 0x2C46
set to "0".
The following applies to synchronous motors:
• In case of integer ratios of the number of pole pairs of the motor (0x2C01:1
0x3401:1
for axis B) to the number of pole pairs of the resolver, the pole position
identification is only required once.
• In case of non-integer ratios, a pole position identification has to be executed after
every 24-V switching operation of the i700 servo inverter.
Synchronous motor (SM): Pole position identification
Resolver error compensation, resolover error identification
The actual position determined via the resolver does not exactly correspond to the actual physical
position. There will always be some greater or lesser deviation. The resolver error characteristic
shows the deviation as a function of the rotor position. It usually behaves in a typical way due to the
following causes:
Cause Remedy
The inductances of the sine and cosine track of the
resolver have slightly different values.
Sine and cosine track do not magnetise orthogonally to
each other.
or 0x3033 for axis B) remains set to "0".
(or 0x3446 for axis B) is also
or
( 95)
Adaptation of the gains for the digital-analog converters
supplying the resolver tracks.
• In the Lenze setting, the gains for both resolver tracks
are preset identically.
Correction of the angle by means of which the two
resolver tracks are supplied in a manner relative to one
another.
The i700 servo inverter provides the possibility to determine the resolver error characteristic of the
connected resolver which can be used for the automatic generation of optimal settings for
minimising the resolver error (resolver error compensation).
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 87
Page 88

5 Motor control & motor settings
5.9 Setting the feedback system for the servo control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Preconditions for the execution
• The motor is operated in speed open-loop control and servo control.
• During the resolver error identification, the speed should be constant, if possible, and greater
than 500 rpm.
Response of the motor during the execution
• The response of the motor corresponds to the speed setpoint.
• The motor may be running rough during identification. This is due to the identification method.
How to identify the resolver error characteristic:
1. Set object 0x2822
• The progress of the procedure is shown in object 0x2823
• After successful completion of the resolver error identification, the following
parameters of the resolver error compensation are automatically written. The resolver
now operates with these settings.
2. For permanent storage: After the procedure has been completed, upload the changed
parameters (0x2C44
(or 0x3022 for axis B) to "9".
(or 0x3023 for axis B).
or 0x3444 for axis B) from the i700 servo inverter into the Controller.
The »EASY Starter« serves to save the parameter settings of the i700 servo inverter as
parameter file (*.gdc). In the »PLC Designer«, this file can then be imported in the
corresponding axis. Saving changed parameters safe against mains failure
Note!
The detected gain can take values between 0 ...100 %.
• With a setting of 0 %, the gain of the corresponding resolver track is only 95 % of the
Lenze setting.
• With a sensible resolver error compensation only one of the two gains is adapted. The
other remains at 100 %.
0x2C44 | 0x3444 - Resolver error compensation: Parameter
Sub. Name Lenze setting Data type
1 Resolver error compensation: Angle 0 INTEGER_16
2 Resolver error compensation: Cosine track gain 100 % UNSIGNED_16
3 Resolver error compensation: Sine track gain 100 % UNSIGNED_16
Subindex 1: Resolver error compensation: Angle
[´] = angular minutes
Setting range (min. value | unit | max. value) Lenze setting
-100 100 0
Write access CINH OSC P RX TX INTEGER_16
( 60)
88
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 89

5 Motor control & motor settings
5.9 Setting the feedback system for the servo control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Subindex 2: Resolver error compensation: Cosine track gain
Setting range (min. value | unit | max. value) Lenze setting
0 % 100 100 %
Write access CINH OSC P RX TX UNSIGNED_16
Subindex 3: Resolver error compensation: Sine track gain
Setting range (min. value | unit | max. value) Lenze setting
0 % 100 100 %
Write access CINH OSC P RX TX UNSIGNED_16
Deactivating the resolver error compensation
For the deactivation of the resolver error compensation, the corresponding parameters must be
reset to the Lenze setting again.
5.9.3 Settings for "encoder" version
The use of an incremental sin/cos encoder is preset. If a sin/cos absolute value encoder with
HIPERFACE® protocol is connected instead, select "2" in 0x2C40
encoder parameters (e.g. supply voltage) accordingly.
0x2C40 | 0x3440 - Encoder: Type
Selection list (Lenze setting printed in bold)
1 Sin/cos encoder
2 Hiperface absolute value encoder
Write access CINH OSC P RX TX UNSIGNED_8
0x2C42 | 0x3442 - Encoder: Parameter
Sub. Name Lenze setting Data type
1 Encoder: Increments / revolution 1024 UNSIGNED_32
2 Encoder: Supply voltage 5.0 V UNSIGNED_8
3 Encoder: Angle drift - Actual angle error INTEGER_16
4 Encoder: Signal quality - Actual amplitude UNSIGNED_8
Subindex 1: Encoder: Increments / revolution
Setting range (min. value | unit | max. value) Lenze setting
1 131072 1024
Write access CINH OSC P RX TX UNSIGNED_32
(or 0x3440 for axis B) and adapt the
Subindex 2: Encoder: Supply voltage
Setting range (min. value | unit | max. value) Lenze setting
5.0 V 12.0 5.0 V
Write access CINH OSC P RX TX Scaling: 1/10 UNSIGNED_8
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 89
Page 90

5 Motor control & motor settings
5.9 Setting the feedback system for the servo control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Subindex 3: Encoder: Angle drift - Actual angle error
From version 01.03
Display area (min. value | unit | max. value) Initialisation
-3276.8 ° 3276.7
Write access CINH OSC P RX TX Scaling: 1/10 INTEGER_16
Subindex 4: Encoder: Signal quality - Actual amplitude
From version 01.03
The signal quality indicates the actual amplitude of the SinCos analog signals with regard to 1 Vss = 100 %.
• In case of higher-order drives, the signal quality should be between 95 % and 105 %.
• There is no need for optimisation if the signal quality is within the tolerance zone for the analog encoder signals
given in the data sheet of the encoder manufacturer.
Display area (min. value | unit | max. value) Initialisation
0 % 255
Write access CINH OSC P RX TX UNSIGNED_8
Determination and display of the current angular drift
The value displayed in the 0x2C42:3
object (or 0x3422:3 for axis B) indicates whether too much or
too less pulses, caused by EMC, have been detected by the device-internal counter unit. This value
is detected differently, depending on the encoder type:
In case of an incremental sin/cos encoder, the pulses are counted between two zero pulse events of
the Z track. In an error-free status, this value corresponds to the set number of increments. The
accuracy of this procedure corresponds to a line graduation of the encoder of ± 1. The difference
between set number of increments and counted pulses is converted to an angle with an accuracy of
±0.1°. A disadvantage is that only after one complete encoder revolution, an updated value of the
angular drift is available and thus the update rate depends on the speed.
In case of a sin/cos absolute value encoder with HIPERFACE® protocol, no Z track is available. Here,
instead, the position is regularly read out of the encoder. When the encoder is read out for the first
time (after power-up or removal of an open circuit), the encoder position is used to initialise the
device-internal counter unit and set a device-internal position. All other read-out processes from
the encoder are used to generate a difference between the device-internal position and the encoder
position. In an error-free status, the difference is zero. The accuracy of the process, however, is,
speed-dependent due to the dead time of the communication with the encoder and thus restricted
towards the zero pulse procedure. An advantage here, however, is that the update rate does not
depend on the speed but on the communication rate only. The update rate is encoder-specific and
generally is within the range between 30 ... 50 ms.
An evaluation of the angular drift regarding an error response is not provided in the Servo-Inverter
i700. This has to be carried out in the control system.
90
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 91

5 Motor control & motor settings
5.9 Setting the feedback system for the servo control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.9.4 Additional settings for SinCos absolute value encoders with HIPERFACE® protocol
Absolute value encoders are especially suitable for:
• Synchronous motors operated in the "servo control" mode. The synchronous motor (SM) servo
control requires a pole position angle. This has to be detected only once during commissioning
and saved as offset towards the absolute position in the axis data.
• Positioning modes in which homing is to be carried out only once.
The analog evaluation of the sin/cos tracks causes a high resolution. With regard to the storage of
the position information, we distinguish between singleturn and multiturn encoders:
• Singleturn: Storage within one revolution
• Multiturn: Storage within a number of revolutions
Supported encoder types with HIPERFACE® protocol
The following encoder types are supported by the i700 servo inverter:
Type Increments/revolution Absolute revolutions Type code
(0x2C41:1
AM1024-8V-H (SRM50) 1024 4096
AM1024-8V-K2 1024 39
AM16-8V-H (SEL37) 16 71
AM16-8V-H (SEL52) 16 71
AM512-8V-H (SCM70) 512 7
AS1024-8V-H (SRS50) 1024 1
AS1024-8V-K2 1024 34
AS16-8V-H (SEK37) 16 66
AS16-8V-H (SEK52) 16 66
AS512-8V-H (SCS70) 512 2
(Multiturn)
(Singleturn)
| 0x3441:1)
39
34
Use of a non-supported encoder type
If an encoder is to be used, the type code of which is not listed in the table of the supported encoder
types, this encoder can be introduced to the i700 servo inverter via the subindices 2 and 3 of the
hiperface parameters described in the following. Please also observe the notes in the description of
subindex 8.
Reading data out of the encoder
The "Determine data of the Hiperface encoder" function in the object 0x2822
(or 0x3022 for axis B)
serves to read the type code, number of increments and number of distinguishable revolutions out
of the encoder and automatically enter then into the corresponding Hiperface parameters.
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 91
Page 92

5 Motor control & motor settings
5.9 Setting the feedback system for the servo control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
0x2C41 | 0x3441 - Hiperface: Parameter
Sub. Name Lenze setting Data type
1 Hiperface: Determined type code 0 UNSIGNED_8
2 Hiperface: User def. encoder - type code 0 UNSIGNED_8
3 Hiperface: User def. encoder - specifiable
revolutions
4 Hiperface absolute value fault: Response 1: Trouble UNSIGNED_8
5 Hiperface: Serial number STRING(50)
6 Hiperface: Raw data - Actual position UNSIGNED_32
7 Hiperface: Detected Increments / revolution UNSIGNED_16
8 Hiperface: Type code supported by firmware 0: Not supported UNSIGNED_8
9 Hiperface: Encoder type 0: Rotary transducer UNSIGNED_8
10 Hiperface: Period length linear encoder UNSIGNED_32
Subindex 1: Hiperface: Determined type code
Type code read out of the encoder
If a sin/cos encoder is set in 0x2C40
Display area (min. value | unit | max. value) Initialisation
0 255 0
Write access CINH OSC P RX TX UNSIGNED_8
(or 0x3440 for axis B) or a communication error has occurred, this value is zero.
1 UNSIGNED_16
Subindex 2: Hiperface: User-defined encoder - type code
If the encoder is not supported by the firmware (see subindex 8):
Here, manually set the type code displayed in the subindex 1.
Setting range (min. value | unit | max. value) Lenze setting
0 255 0
Write access CINH OSC P RX TX UNSIGNED_8
Subindex 3: Hiperface: User-defined encoder - number of revolutions
If the encoder is not supported by the firmware (see subindex 8):
Here, manually set the number of distinguishable revolutions.
Stop!
A wrong setting of the number of distinguishable revolutions may cause a breakdown!
Setting range (min. value | unit | max. value) Lenze setting
1 65535 1
Write access CINH OSC P RX TX UNSIGNED_16
Subindex 4: Hiperface absolute value fault: Response
Selection of the response to communication problems or unknown encoder
Selection list (Lenze setting printed in bold)
0 No response
1Fault
2 Warning
Write access CINH OSC P RX TX UNSIGNED_8
92
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 93

5 Motor control & motor settings
5.9 Setting the feedback system for the servo control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Subindex 5: Hiperface: Serial number
From version 01.03
The displayed serial number can be used for detecting an encoder exchange
Write access CINH OSC P RX TX STRING(50)
Subindex 6: Hiperface: Raw data - Actual position
From version 01.03
The encoder-internal position value is output without being converted
Display area (min. value | unit | max. value) Initialisation
0 4294967295
Write access CINH OSC P RX TX UNSIGNED_32
Subindex 7: Hiperface: Detected Increments / revolution
From version 01.03
Encoder increment according to type code or encoder nameplate
Display area (min. value | unit | max. value) Initialisation
0 65535
Write access CINH OSC P RX TX UNSIGNED_16
Subindex 8: Hiperface: Type code supported by firmware
From version 01.03
If an encoder is connected that is not supported by the firmware, it will be displayed here.
In this case, the same response takes place as in case of a communication error. The error can be removed by
manually setting the type code displayed in subindex 1 in subindex 2. This serves to signalise to the firmware that
the number of distinguishable revolutions is as well set correctly in the subindex 3 by the user.
Selection list (read only)
0 Not supported
1 Supported by firmware
Write access CINH OSC P RX TX UNSIGNED_8
Subindex 9: Hiperface: Encoder type
From version 01.05
Detected encoder type (rotary/linear)
Selection list (read only)
0 Rotary encoder
1 Linear encoder
Write access CINH OSC P RX TX UNSIGNED_8
Subindex 10: Hiperface: Period length of linear encoders
From version 01.05
In case of a linear encoder, here the period length or scaling is displayed in [nm]. In case of a rotary encoder, the value
"0" is displayed.
Display area (min. value | unit | max. value) Initialisation
0 nm 4294967295
Write access CINH OSC P RX TX UNSIGNED_32
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 93
Page 94

5 Motor control & motor settings
5.9 Setting the feedback system for the servo control
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Communication error monitoring
Communication with the encoder is monitored by the protocol and by generating a checksum. If a
violation of the communication protocol or a defect frame is detected, a response occurs as a
function of the device status and the setting in subindex 4 (Hiperface communication error:
Response):
Device status Response in the event of an error
Not ready to switch on
Switch on disabled
Ready to switch on
Switched on
Operation enabled
Quick stop is active
Fault reaction active
Fault
(depending on the error responses set in the Subindex 4
0: No Response 1: Trouble 2: Warning
Warning
Warning
- Fault Warning
- Fault Warning
- Fault Warning
- Fault Warning
- Warning
- Warning
)
5.9.5 Detection of changed settings of the feedback system
Bit 0 of the Lenze statusword 2 (0x2833 or 0x3033 for axis B) indicates whether the settings of the
feedback system have been changed during operation. Bit 0 is set to"1" if one of the following
objects have been changed since the last controller inhibit:
Object Name
Axis A Axis B
0x2C40 0x3440 Encoder: Type
0x2C41:2
0x2C41:3
0x2C41:5 0x3441:5 Hiperface: Serial number
0x2C42:1
0x608F 0x688F Position encoder resolution
0x3441:2 Hiperface: User defined - Type code
0x3441:3 Hiperface: User defined - Number of revolutions
0x3442:1 Encoder: Increments / revolution
After a controller enable, bit 0 of the Lenze status word 2 is always reset to "0".
94
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 95

5 Motor control & motor settings
5.10 Synchronous motor (SM): Pole position identification
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.10 Synchronous motor (SM): Pole position identification
Note!
Only required:
• For servo control with synchronous motor of a third-party manufacturer.
• For servo control with synchronous motor and use of incremental encoders (TTL or
sin/cos encoders as well as resolvers).
• After changes of the motor feedback system, e.g. encoder exchange.
For the control of a permanent-magnet synchronous motor, the pole position – the angle between
motor phase U and the field axis of the rotor – must be known.
• For Lenze motors with an absolute value encoder or resolver, the pole position is already set
correctly.
• When incremental encoders (TTL or sin/cos encoders without absolute position information)
are used, a pole position identification (PPI) is always required after switching on the mains
(initialisation), even with Lenze motors.
Functions for pole position identification
For the identification of the pole position of the currently activated motor encoder, the following
three functions are available:
• Pole position identification PPI (360°)
• Pole position identification PPI (min. movement)
• Pole position identification PPI (without movement)
Danger!
In case of firmly braked motors (e.g. for hanging loads), only the "pole position
identification PLI (without motion)" function may be used!
For the other two functions "Pole position identification PLI (360°)" and "Pole position
identification PLI (min. motion)" the motor must not be braked or blocked during the
pole position identification!
The functions should yield similar results. Due to e.g. friction, bearing forces, and a trapezoidal field
profile, the results may deviate. Here, the function that includes one full revolution (360°) will
provide the most precise results and the function without any motion will provide the most
inaccurate results. An increase in the percentage of the current amplitude helps provide more
precise results.
You can find detailed information on the respective function in the following subchapters.
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 95
Page 96

5 Motor control & motor settings
5.10 Synchronous motor (SM): Pole position identification
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.10.1 Monitoring of the pole position identification
If an error occurs during the pole position identification or the pulse inhibit gets active (e.g. due to
short-time undervoltage), the procedure is terminated with controller inhibit without a change in
settings.
If the motor was braked or blocked during the procedure, this will be recognised at the end of the
measurement and no change is made either (exception: "Pole position identification PLI (without
motion").
The error response can be parameterised:
0x2C60 | 0x3460 - Monitoring of pole position identification: Response
If the pole position identification is aborted, the response set here is triggered.
• If this behaviour is not wanted, deactivate the monitoring by selecting "0: No response".
Selection list (Lenze setting printed in bold)
0 No response
1Fault
2 Warning
Write access CINH OSC P RX TX UNSIGNED_8
5.10.2 Pole position identification PPI (360°)
Danger!
The motor must not be braked or blocked during the pole position identification! For this
reason, this function is not permitted for hanging loads!
Stop!
Check the correct parameterisation of the followng monitoring modes before carrying
out the pole position identification to prevent the motor from being permanently
damaged in the event of an error:
• Monitoring of the motor utilisation (I²xt)
• Monitoring of the ultimate motor current
Functional description
If servo control for synchronous motor is set and if no error is pending, the current is increased to
141 % of the rated motor current along a ramp first after controller enable. The rotor thus provides
the necessary basis for further proceeding.
The commutation angle is changed (for 2 s) from 45° to 0° along a ramp. This brings the rotor
reliably into a defined position. Afterwards, the commutation angle is changed from 0° to 360°
along a ramp, passing through approximately 45° every 4 s. Thus, the motor carries out a complete
electrical revolution, resulting in a mechanical rotation of the motor shaft in positive direction
(clockwise when looking at the A-side of the motor). Within the 360° several measurements are
carried out and evaluated.
( 241)
( 258)
96
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 97

5 Motor control & motor settings
5.10 Synchronous motor (SM): Pole position identification
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Preconditions for the execution
• The motor must not be braked or blocked during the pole position identification.
• The controller is free of errors and is in the "Switched on
Response of the motor during the execution
During the pole position identification the rotor aligns itself. The motor shaft moves by max. one
electrical revolution which causes the corresponding movement of the connected mechanical
components!
" device status.
How to execute the pole position identification PPI (360°):
1. If the controller is enabled, inhibit the controller.
Enable/inhibit operation via control word
2. Set object 0x2825
PPI (360°)" operating mode.
(or 0x3025 for axis B) to "5" to change to the "Pole position identification
( 59)
3. Enable the controller to start the procedure.
Note: By means of controller inhibit, the procedure started can be cancelled any time, if
required, without a change in settings.
After successful completion of the pole position identification...
...controller inhibit is set automatically and the pole position specified in object 0x2C03:2
0x3403:2
• For permanent storage, the changed settings must be uploaded to the controller from the i700
• The controller inhibit automatically set by the procedure can be deactivated via the
Adapt pole position identification PPI (360°)
The above-described procedure for pole position identification can be adjusted to the respective
machine and the prevailing moments of inertia by means of the parameters described in the
following.
for axis B) for the activated feedback system is set.
servo inverter.
The »EASY Starter« serves to save the parameter settings of the i700 servo inverter as parameter
file (*.gdc). In the »PLC Designer«, this file can then be imported in the corresponding axis.
Saving changed parameters safe against mains failure
Controlword (0x6040
or 0x6840 for axis B).Enable/inhibit operation via control word ( 59)
( 60)
(or
Stop!
If there is no temperature monitoring in the motor and/or the I²xt motor monitoring and
the maximum current monitoring are not parameterised correctly, the motor might be
damaged permanently when the current amplitude is set too high (e.g. to the maximum
value!
Monitoring of the motor utilisation (I²xt)
Monitoring of the ultimate motor current
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 97
( 241)
( 258)
Page 98

5 Motor control & motor settings
5.10 Synchronous motor (SM): Pole position identification
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
0x2C61 | 0x3461 - Pole position identification PPI (360°)
Sub. Name Lenze setting Data type
1 PPI (360°): Current amplitude 100 % UNSIGNED_16
2 PPI (360°): Ramp time 40 s UNSIGNED_16
3 PPI (360°): Direction of rotation 0: Field: CW UNSIGNED_8
4 PPI (360°): Error tolerance 20 ° UNSIGNED_8
5 PPI (360°): Absolute current amplitude UNSIGNED_32
Subindex 1: PPI (360°): Current amplitude
Adjustment of the current amplitude in percent
• For large machines and high mass inertia values or for linear direct drives, the current amplitude usually has to
be increased.
• A Lenze setting of "100 %" corresponds to 141 % of the rated motor current (0x6075
Note!
If the current amplitude is set to > 100 %, the device utilisation (Ixt) monitoring and/or one of the motor monitoring
functions may respond and cause the abort of the pole position identification.
Setting range (min. value | unit | max. value) Lenze setting
1 % 1000 100 %
Write access CINH OSC P RX TX UNSIGNED_16
or 0x6875 for axis B).
Subindex 2: PPI (360°): Ramp time
Adjustment of the ramp time in percent
• For large machines and high mass inertia values, the ramp time usually has to be increased.
• For small machines, a reduction of the ramp time can speed up the pole position identification process.
Setting range (min. value | unit | max. value) Lenze setting
1 s 600 40 s
Write access CINH OSC P RX TX UNSIGNED_16
Subindex 3: PPI (360°): Direction of rotation
Selection of the travel direction
• In some situations it may be helpful to reverse the travel direction for the pole position identification (e.g. for
linear motor at the end stop).
Selection list (Lenze setting printed in bold)
0Field: CW
1Field: CCW
Write access CINH OSC P RX TX UNSIGNED_8
Subindex 4: PPI (360°): Error tolerance
Error tolerance for the plausibility check
• If the rotor position detected via the encoder system is not within the tolerance zone around the position that is
output in a controlled manner, the pole position identification is aborted and the error response parameterised
is tripped.
• When optimising the pole position identification by means of the objects listed before, it may be sensible to first
increase the tolerance zone in order to evaluate the entire throughput based on an oscislloscope recording. This
is especially required in case of mechanically coupled motors, as here, the preset tolerance zone is quickly
exceeded due to the feedbacks of mass inertia, friction and static friction. After the deviations with iteratively
optimised PPI behaviour are in the common tolerance zone again, the value can/has to be reduced to 20 ° again.
Setting range (min. value | unit | max. value) Lenze setting
15 ° 50 20 °
Write access CINH OSC P RX TX UNSIGNED_8
98
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
Page 99

5 Motor control & motor settings
5.10 Synchronous motor (SM): Pole position identification
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Subindex 5: PPI (360°): Absolute current amplitude
Display of the absolute current amplitude
Display area (min. value | unit | max. value) Initialisation
0.00 A 42949672.95
Write access CINH OSC P RX TX Scaling: 1/100 UNSIGNED_32
5.10.3 Pole position identification PPI (min. movement)
Danger!
The motor must not be braked or blocked during the pole position identification! For this
reason, this function is not permitted for hanging loads!
Stop!
Check the correct parameterisation of the followng monitoring modes before carrying
out the pole position identification to prevent the motor from being permanently
damaged in the event of an error:
• Monitoring of the motor utilisation (I²xt)
• Monitoring of the ultimate motor current
Functional description
If servo control for synchronous motor is set and if no error is pending, the current position is
memorised after controller enable, and the current is increased along a ramp for 10 s to 35 % of the
rated motor current. This will cause the rotor to align, which, however, is compensated by a position
control. If the rotor makes an electrical movement of more than 20°, an error message is output, and
the value measured is discarded. This might occur in the case of motors with considerable detent
torques.
If the current has reached its final value, a plausibility check is executed after a short interval: In
order to detect a non-permissible blocking of the motor, a positive and negative test angle (± 20°)
relative to the current position are defined after the identification. The motor must align itself to
these two test angles within a tolerance of 25 %.
Preconditions for the execution
• The motor must not be braked or blocked during the pole position identification.
( 241)
( 258)
• The controller is free of errors and is in the "Switched on
Response of the motor during the execution
The motion of the motor will maximally correspond to the set "Max. permissible motion" (Lenze
setting: 20°). If a greater motion is detected via the encoder system, the pole position identification
is cancelled and the parameterised error response (Lenze setting: Fault) is triggered.
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05 99
" device status.
Page 100

5 Motor control & motor settings
5.10 Synchronous motor (SM): Pole position identification
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
How to execute the pole position identification PPI (min. movement):
1. If the controller is enabled, inhibit the controller.
Enable/inhibit operation via control word
2. Set object 0x2825
(min. movement)" operating mode.
3. Enable the controller to start the procedure.
Note: By means of controller inhibit, the procedure started can be cancelled any time, if
required, without a change in settings.
After successful completion of the pole position identification...
...controller inhibit is set automatically and the pole position specified in object 0x2C03:2
0x3403:2
• For permanent storage, the changed settings must be uploaded to the controller from the i700
• The controller inhibit automatically set by the procedure can be deactivated via the
for axis B) for the activated feedback system is set.
servo inverter.
The »EASY Starter« serves to save the parameter settings of the i700 servo inverter as parameter
file (*.gdc). In the »PLC Designer«, this file can then be imported in the corresponding axis.
Saving changed parameters safe against mains failure
Controlword (0x6040
(or 0x3025 for axis B) to "6" to change to the "Pole position identification
or 0x6840 for axis B).Enable/inhibit operation via control word ( 59)
( 59)
(or
( 60)
Adapt pole position identification PPI (min. movement)
The above-described procedure for pole position identification can be adjusted to the respective
machine and the prevailing moments of inertia by means of the parameters described in the
following.
Stop!
If there is no temperature monitoring in the motor and/or the I²xt motor monitoring and
the maximum current monitoring are not parameterised correctly, the motor might be
damaged permanently when the current amplitude is set too high (e.g. to the maximum
value!
Monitoring of the motor utilisation (I²xt)
Monitoring of the ultimate motor current
( 241)
( 258)
100
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
 Loading...
Loading...