

Page 1

PATHpilot Pro 2.0
用户手册 V1.0
联想集团服务器存储事业部
Page 2

1
PATHpilot Pro 2.0 用户手册 V1.0
版权声明
联想集团有限公司 2004 年版权所有。如事先未得到联想集团有限公司任何书面许可,本文
件中的任何部分都不得进行复制,或以任何形式、任何手段进行转载。
联想集团有限公司对本材料未作任何形式的担保,包括对具体用途的商品性和适用性的隐
含担保。联想集团有限公司对本材料中可能出现的任何错误都不承担任何责任。联想集团有限
公司未做出对本手册中的信息更新或保持是最新信息的承诺。第三方的品牌和名称是他们相应
的拥有者的产权。
Page 3

2
PATHpilot Pro 2.0 用户手册V1.0
第 1 章 绪论..........................................................................................................................4
概述................................ ................................................................................................ 4
工作原理.........................................................................................................................5
故障切换的条件 .............................................................................................................. 6
路径识别.........................................................................................................................6
硬盘 ID...........................................................................................................................7
逻辑磁盘访问..................................................................................................................7
逻辑盘分配 .....................................................................................................................8
性能................................ ..............................................................................................10
第二章 配置和故障切换.......................................................................................................11
单主机,单控制器,单 HBA .........................................................................................11
单主机,单控制器,双 HBA ......................................................................................... 12
单主机,双控制器,4 HBA ........................................................................................... 13
单主机,双控制器 ,例一............................................................................................. 14
单主机,双控制器,例二 ..............................................................................................16
双主机、双控制器的集群配置....................................................................................... 19
SAN 多点集群拓扑结构 .................................................................................................22
第三章 运行 PATHpilot Pro.................................................................................................. 23
启动................................ ..............................................................................................23
路径视图....................................................................................................................... 25
硬盘视图....................................................................................................................... 28
事件日志....................................................................................................................... 30
工具条 .......................................................................................................................... 31
如何配置路径................................................................................................................ 34
PATHpilot Pro的口令..................................................................................................... 34
如何更改刷新间隔......................................................................................................... 35
如何注册一台服务器
..................................................................................................... 35
删除服务器 ................................................................................................................... 36
更改服务器信息 ............................................................................................................36
如何登录、退出服务器.................................................................................................. 36
如何改变路径监测间隔和稳定性阀值............................................................................. 36
故障切换/故障回切 例一 ...............................................................................................37
故障切换/故障回切 例二 ...............................................................................................39
附录 A 安装 PATHpilot 软件................................ ..............................................................40
系统要求....................................................................................................................... 41
控制器要求 ................................................................................................................... 41
配置存储子系统 ............................................................................................................41
安装程序....................................................................................................................... 41
在 Windows 系统下的安装和运行................................................................................... 42
在 Linux 和 Solaris 系统下安装....................................................................................... 46
Linux 系统下运行 PATHpilot .......................................................................................... 50
Solairs 系统下运行 PATHpilot......................................................................................... 50
安装 PATHpilot 的注意事项............................................................................................ 51
在 Windows 系统下卸载 PATHpilot................................................................................. 51
Page 4

3
PATHpilot Pro 2.0 用户手册 V1.0
在 Linux 和 Solaris 系统下卸载 PATHpilot....................................................................... 52
附录 B 事件....................................................................................................................... 52
Page 5
4
PATHpilot Pro 2.0 用户手册V1.0
第 1 章 绪论
概述
联想PATHpilot Pro是用来管理主机操作系统与RAID存储系统中逻辑设备之间的多条数据
路径的工具软件,目的是降低数据丢失风险。PATHpilot Pro通过故障检测、自动故障切换和I/O
重新路由定向功能来保证操作的可靠性。PATHpilot Pro支持Windows操作系统上的集群,并支
持带有一致性镜像缓存架构的容错RAID系统。(在多服务器的拓扑中,PATHpilot Pro必须在每
台服务器上进行独立安装,否则故障切换可能失效)。 PATHpilot Pro是一个透明的数据路径管
理工具:在 PATHpilot Pro管理数据路径时,用户无需参与;仅仅在需要进行事件监控或者改变
默认配置时才需要用户的介入。
PATHpilot Pro支持:
l 路径监控和路径失败的日志记录;
l 多路径故障切换;
l 自动故障回切;
l 安装过程中的逻辑设备自动分配;
l 用户手动路径切换;
PATHpilot Pro是一个Client/Server体系结构。客户端是一个图形化的用户界面称作PICC
(Path Information Control Console),用于显示数据路径的配置和状态。您可以通过PICC
来管理数据路径:
l 查看端口分配;
l 查看事件;
l 查看改变主要路径;
l 查看改变次要路径;
l 查看失效路径;
l 查看逻辑盘分配和为了均衡负载改变逻辑盘分配;
配置的改变信息会在PICC事件屏上显示出来。(在Windows操作系统中,事件也在Windows
事件查看器中显示。在 Linux和Solaris操作系统中,事件会在系统日志中显示。)
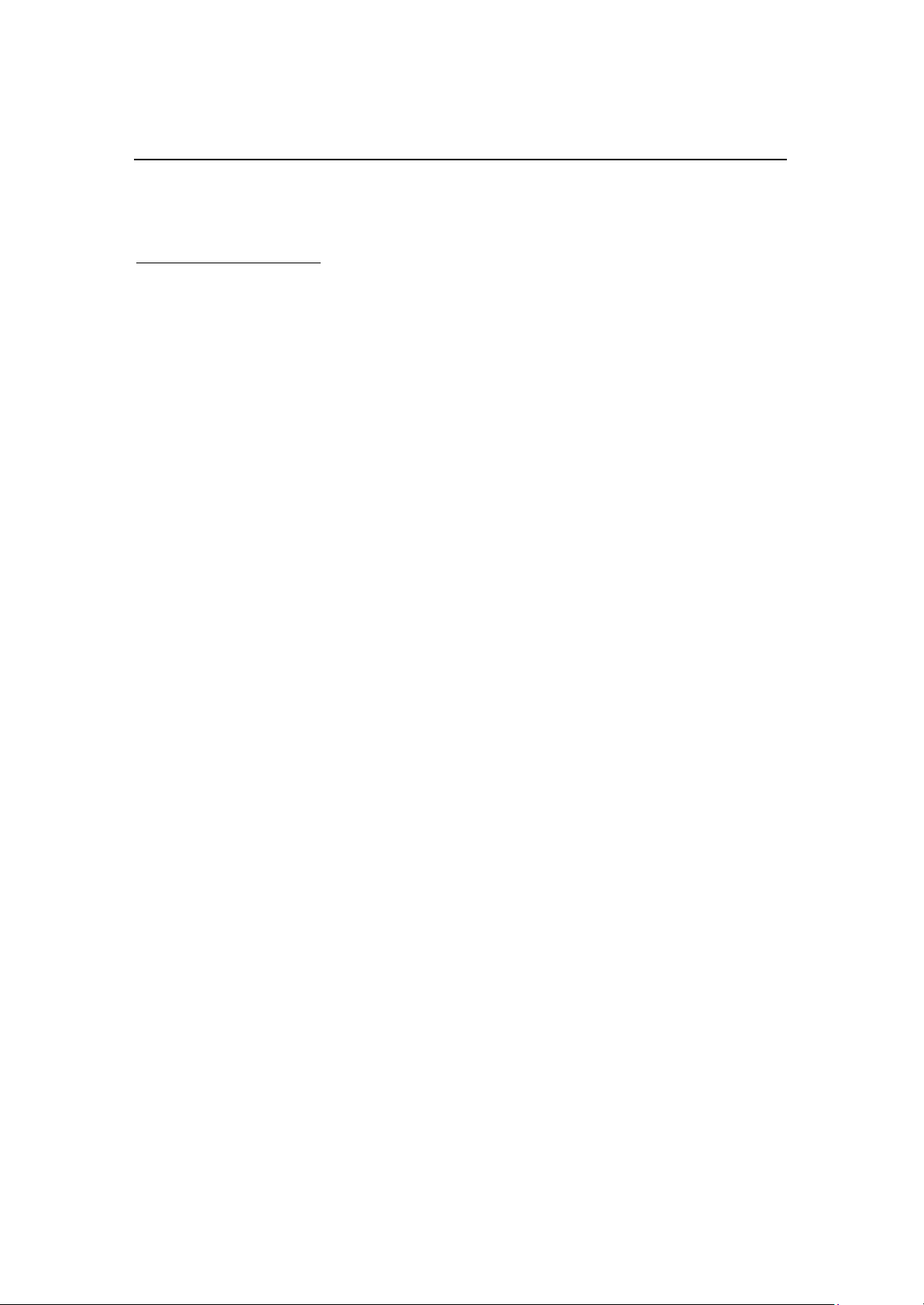
服务器包括PIC(Path Information Control)驱动。PIC驱动是一个操作系统的过滤驱动,
该驱动安装在一台连接存储设备的主机上,并且它的位置在用户应用程序和HBA设备驱动之间。
所有的应用程序执行的I/O操作都要通过PIC驱动过滤后转给HBA卡的驱动。
Page 6
5
PATHpilot Pro 2.0 用户手册 V1.0
图1-1PIC 驱动在主机/服务器上的安装位置
在多于一台主机的系统中,可以在一台主机上安装客户端,而在所有的主机上安装服务器
端。这样以来, PICC可以查看所有主机到逻辑盘之间的路径。您可以通过注册服务器来识别每
台服务器(当前客户端运行的服务器不需要注册),并通过口令来进入每台服务器。
工作原理
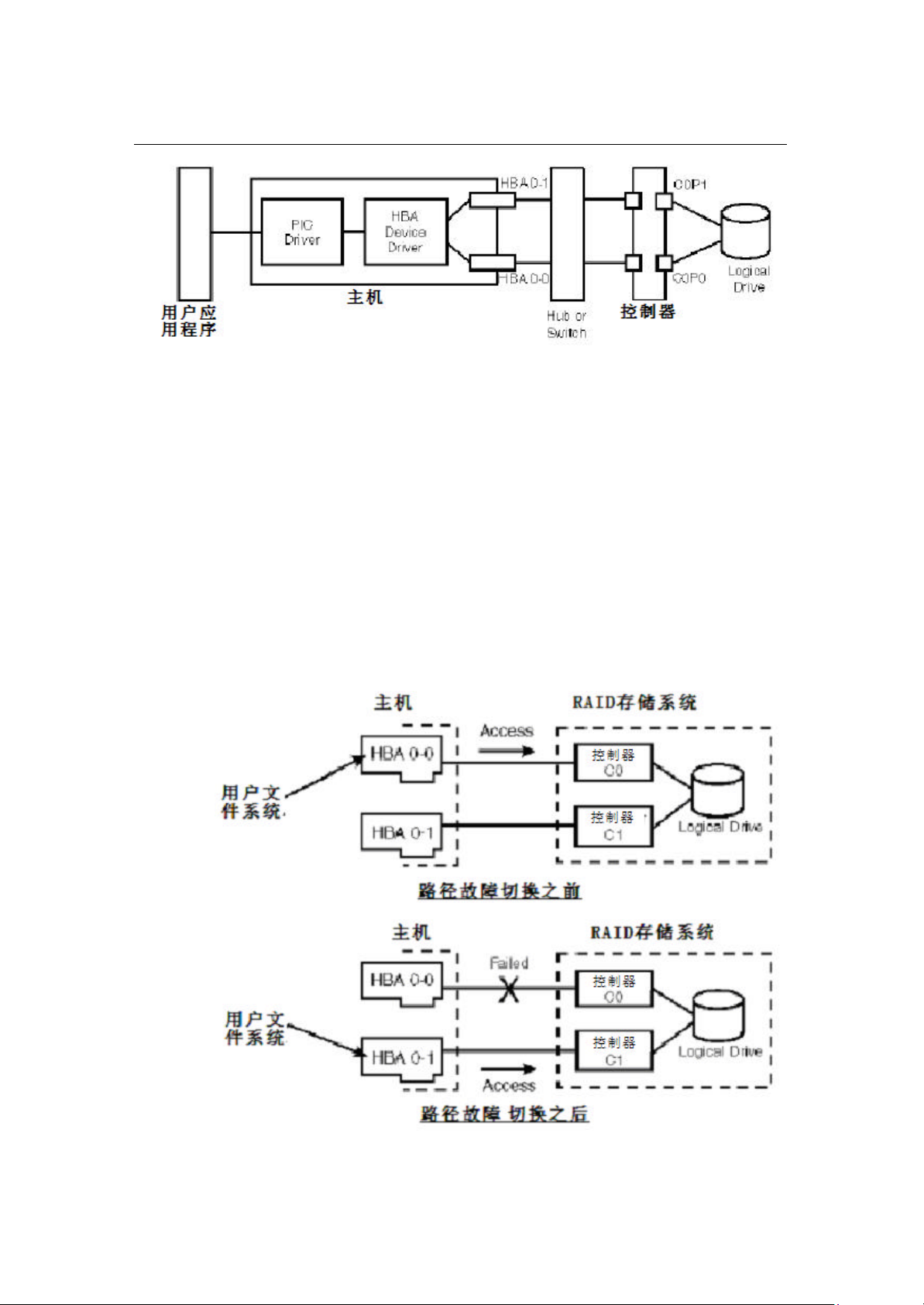
PATHpilot Pro PIC驱动被安装后,从用户应用程序到一个阵列的逻辑盘所有的操作都通过
PIC驱动来进行。被HBA设备驱动送回超时响应的任何操作都被认为是路径失效。当PATHpilot
Pro发现失效路径时,它从失效路径转到次要路径(故障切换)。如果次要路径也失败了,
PATHpilot Pro将再次将失败路径转换为其他可选路径,直到试完所有的路径。如图1-2,通
过HBA 0-0存取逻辑盘上数据。在这个例子中,当路径失效时,PIC驱动将重新路由使得通过HBA
0-1存取逻辑盘。
Page 7
6
PATHpilot Pro 2.0 用户手册V1.0
图1-2 路径故障切换
注意:该例子只被用来说明PATHpilot Pro数据路径和路径失效的概念,而不是说明一个特别的
体系结构。
在PATHpilot Pro中,主机和逻辑盘之间的首选路径被称为主要路径。 PATHpilot Pro安装
时自定义主要路径。如果您希望改变此配置,安装后可以重新定义一个新的主要路径。主要路
径之外的路径通称次要路径。
当路径失效时,PATHpilot Pro通过经由失效路径对逻辑盘的尝试存取来监控失效路径的状
态。当经由失效路径的尝试存取不再返回超时信息时,PATHpilot Pro将活动路径重新切换到此
前的失效路径。从次要路径返回到此前失败路径的过程称为故障回切。
PATHpilot Pro也支持用户通过手动方式实现路径切换,这使得您可以选择一个新的主要路
径并切换到新路径,此配置改变在重新引导系统后仍然有效。手动路径切换对系统管理员灵活配
置路径资源非常有用。
PATHpilot Pro对一个逻辑盘最多可以管理32条路径。这包括一条活动路径和最多31个
次要路径。一个安装PATHpilot Pro 的RAID存储系统上每个逻辑盘只有一条活动路径。
故障切换的条件
操作失败或者超时都会造成路径的中断,导致故障切换。部分的操作失败可能并不会导致
路径的故障切换,但仍有可能使得系统的可用性或者性能受到影响。造成路径失效的组件包括:
l HBA故障;
l 线路故障;
l 交换机故障;
l 控制器故障;
l 用户交互式介入;
l 操作超时。
路径识别
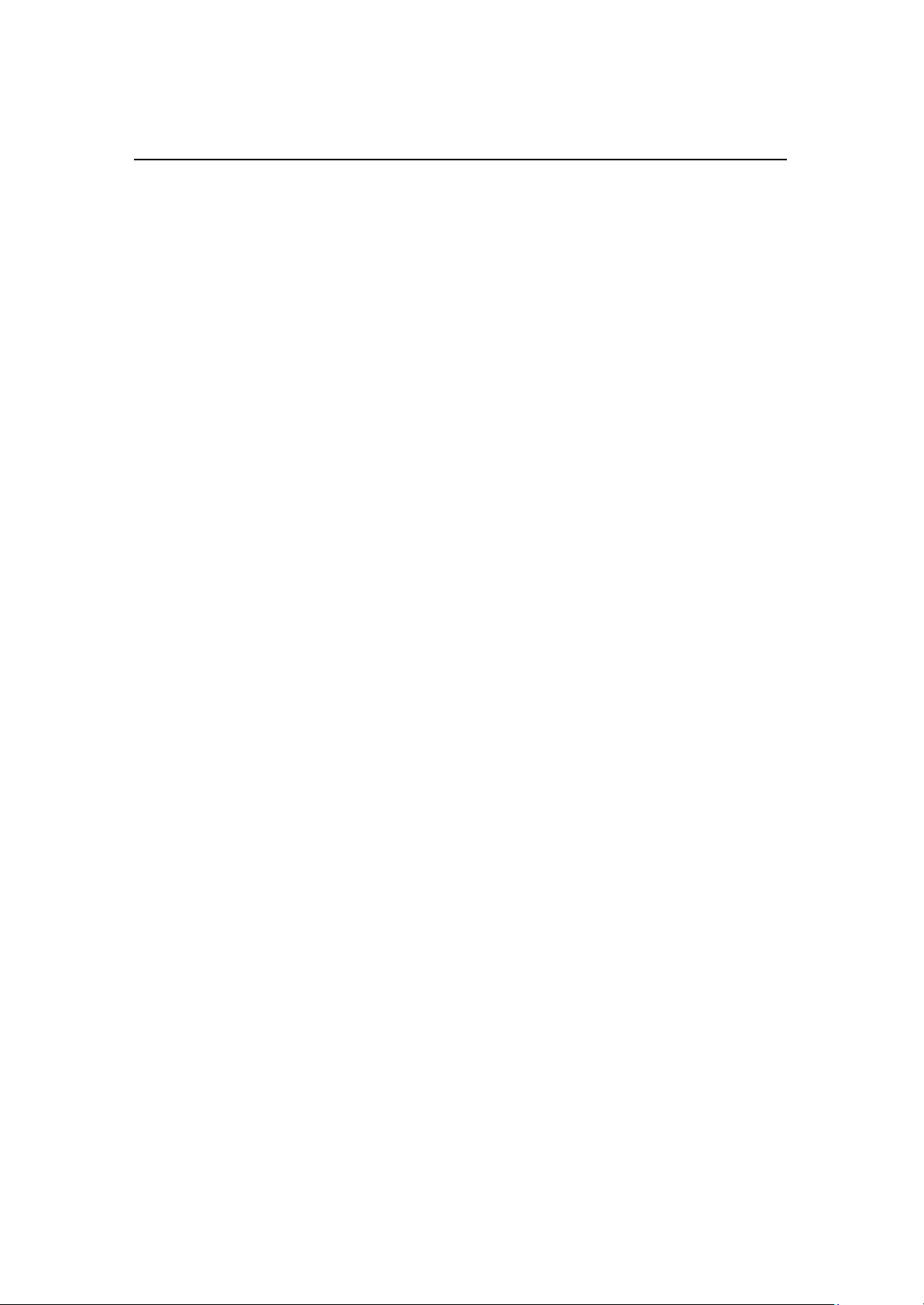
所有的操作系统把光纤环路看作一个访问存储设备的SCSI总线,因此, FC环或者FC Fabric
也采用SCSI的逻辑访问方法来访问存储设备。图1-3举例说明了一个典型的RAID存储子系统的
体系结构。 RAID存储子系统具有两个端口,主机具有两个FC HBA,它们分别通过独立的光纤线
缆进行连接。
Page 8
7
PATHpilot Pro 2.0 用户手册 V1.0
图1-3多路径体系结构
主机和逻辑盘之间的路径被定义为它的SCSI地址。每条路径有一个唯一的SCSI地址,包括:
l 端口号-主机或者HBA的端口号;
l 总线号-总线号或者路径ID;
l 目标ID-目标(Target)的ID;
l LUN-逻辑单元序列号。
在RAID控制器配置中,操作系统在主机和逻辑盘之间辨认路径方法如下:
l 路径1:端口号X-总线J-目标A-LUN M
l 路径2:端口号Y-总线K-目标B-LUN N
硬盘 ID
硬盘ID是操作系统用来识别逻辑盘而设定的数值。硬盘ID被显示在PICC上以识别逻辑盘。
以NT为例:当NT启动时,会通过通往逻辑盘的所有可用路径找到所有的逻辑盘,然后,依
序给硬盘编号(Disk0, Disk1, ... Disk63)。NT并不知道是否在不同的路径上存在着相同的逻
辑盘。
当您安装PATHpilot Pro时,它会查找出哪些逻辑盘是同一个逻辑盘,此后, PATHpilot或
者创建一个新的硬盘ID,或者挑选一个操作系统创建的已存在的硬盘ID使用指派给每个逻辑盘
(具体选用哪种方式,因操作系统而异)。当从磁盘管理器或者其他的相当环境中,会发现
PATHpilot Pro 指派的硬盘ID是可访问的磁盘,而安装PATHpilot之前的硬盘ID可能是不可访问
(这也因操作系统而异)。通过PATHpilot Pro,您可以通过不同的路径访问具有相同的硬盘ID
的同一逻辑盘。
逻辑磁盘访问
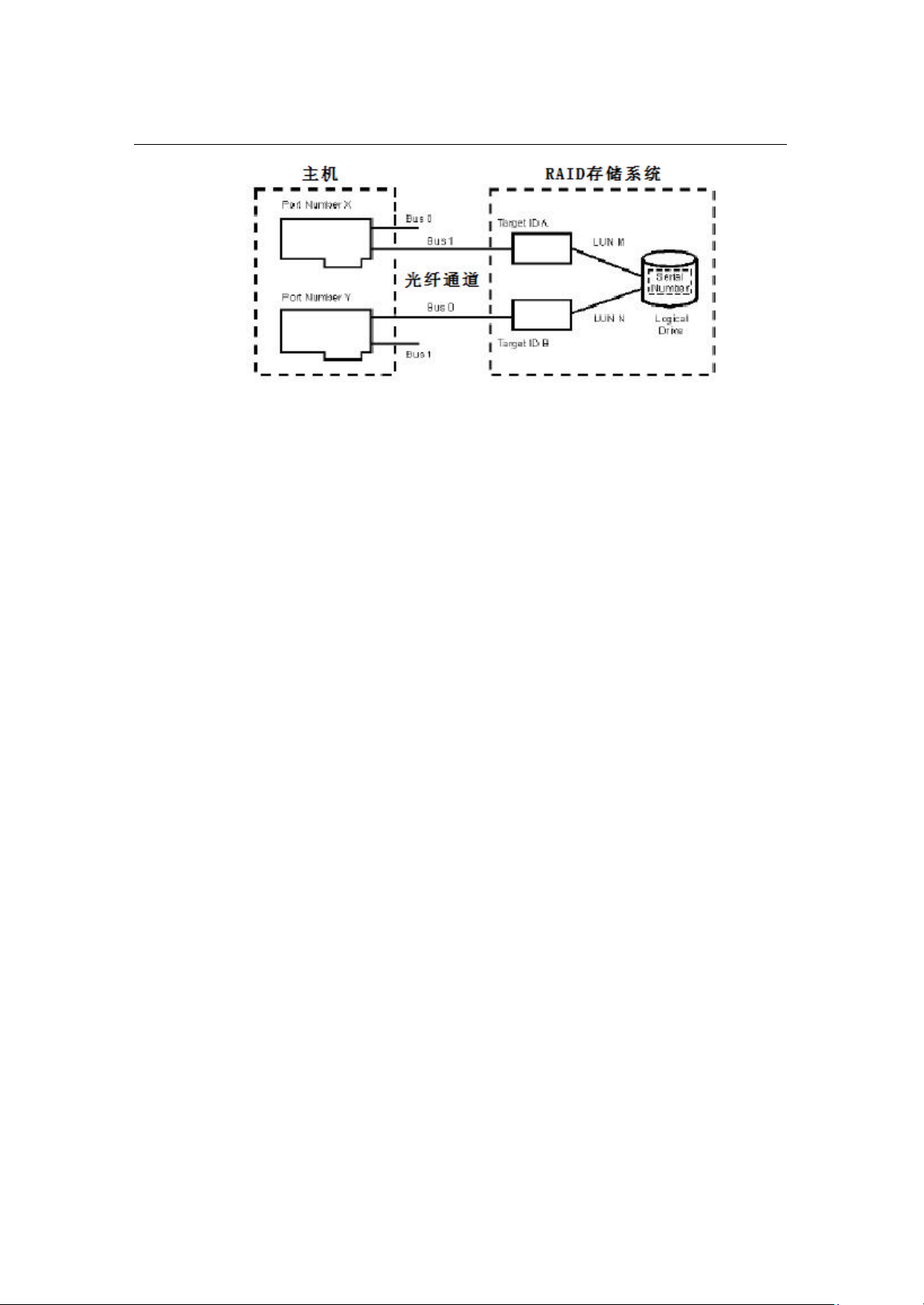
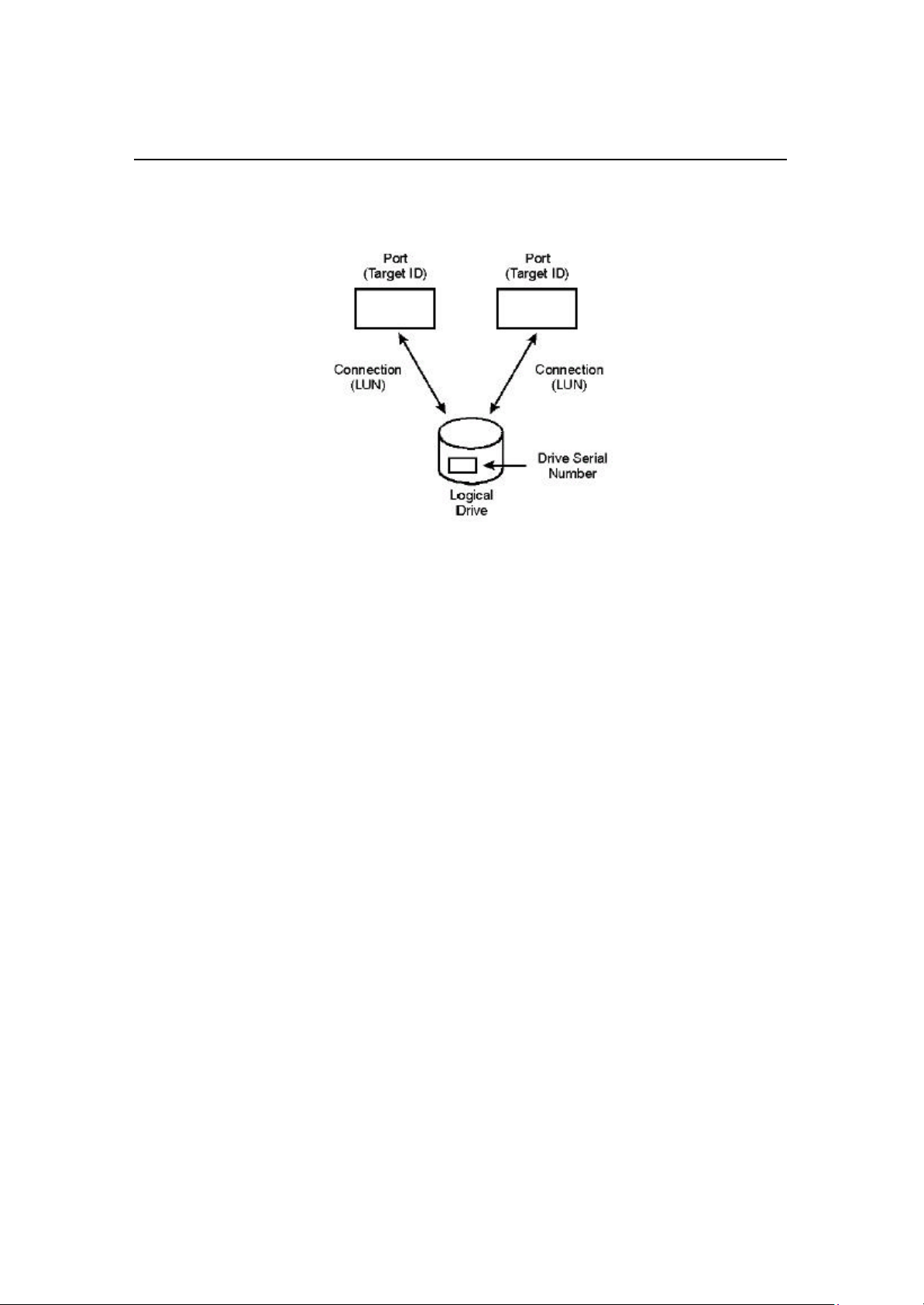
一个RAID存储系统可以有多个端口来连接主机和逻辑盘。当多个端口连接一个逻辑盘时,
操作系统为每条路径(路径由Target ID和LUN构成)分配一个地址。每个逻辑盘有一个唯一的序
号签名,这个序号签名在逻辑盘创建时由控制器Firmware分配。PIC驱动程序通过序号签名来识
Page 9
8
PATHpilot Pro 2.0 用户手册V1.0
别逻辑盘。PIC驱动还假设一个逻辑盘即使通过不同的路径访问也总是返回同一个序号签名。图
1-4显示连接到两个主机端口上的一个逻辑盘。这个逻辑盘具有一个序号但却有两个不同的地
址。
图1-4 逻辑盘访问
系统盘映射是一个明确限定通过特定控制器主机端口访问逻辑磁盘的特性。5.4版本(包括
该版本)以前的Fimware使用LUN Mapping来设置此特性。6.0版本(包括6.0版本)以后的Firmware
使用SANmapping?来设置此特性。无论使用哪种方法,设置此特性为ALL都意味着所有的系统盘
可以通过所有的控制器主机端口进行访问,可以到达所有的HBAs。
逻辑盘分配
PATHpilot Pro支持逻辑盘通过可用路径进行自动和手动的分配。分配完成之后(自动或者
手动),PATHpilot Pro记忆所选择的到逻辑盘的主要路径并继续使用其他的路径。PATHpilot Pro
创建并维护包括最近路径配置的配置文件。
在安装过程中,PATHpilot Pro把逻辑盘均分到所有的可用路径上,这是PATHpilot Pro初
始化安装默认的操作。当对硬件配置发生变化或者创建了新的逻辑盘时,PATHpilot Pro会自动
的重新分配逻辑盘。重新启动系统使配置生效时,PATHpilot Pro会发现新的配置,重新对逻辑
盘进行分配、并重置各个主要路径。
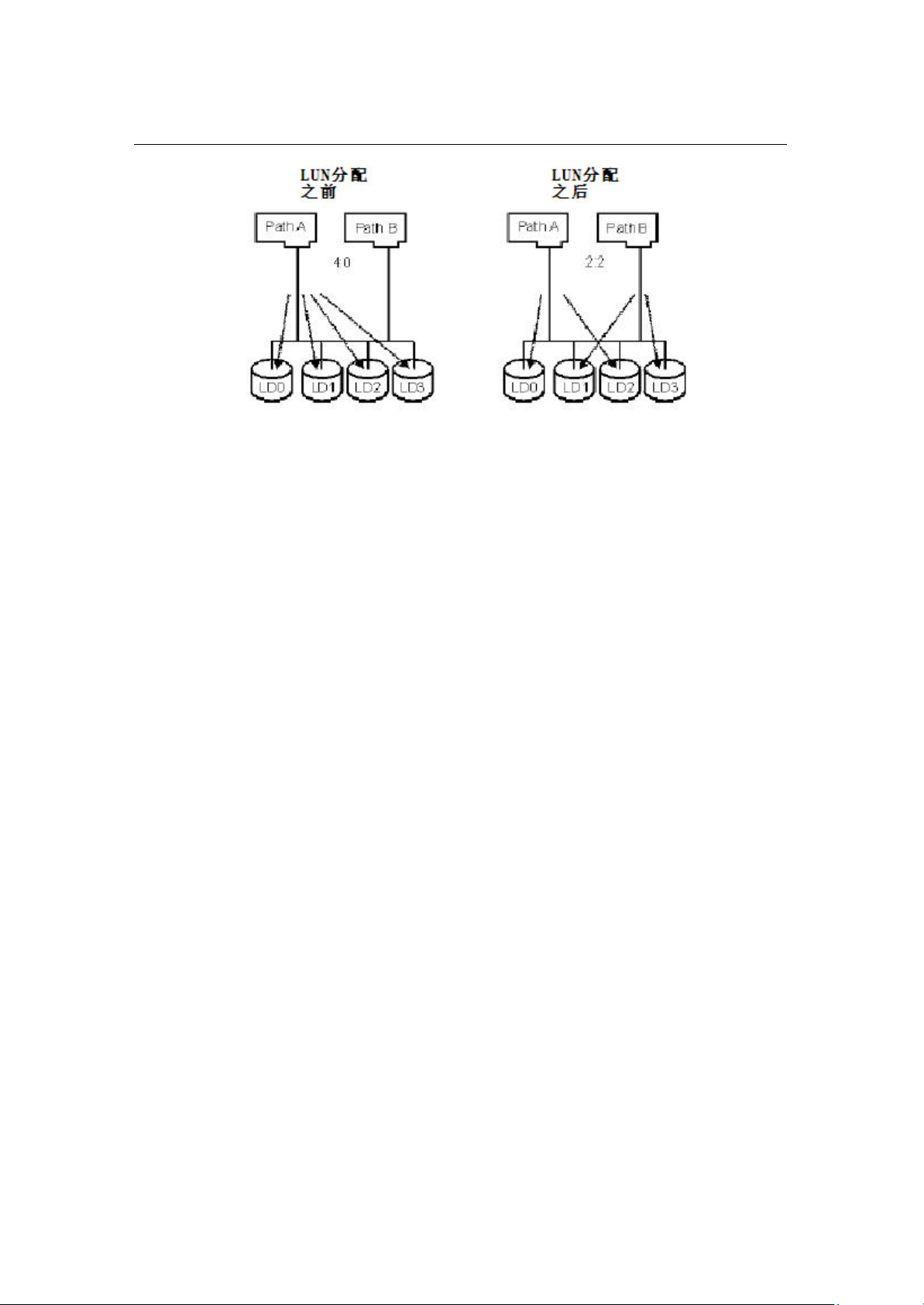
PATHpilot Pro使用LUN计数的方法自动分配对逻辑盘的访问路径。分配是建立在逻辑盘数
目和路径数目的基础上的,对逻辑盘的读/写操作数的多少并不影响路径分配。图 1-5显示了逻
辑盘使用LUN计数法分配的例子。在此例中,四个逻辑盘(LD0-LD3)有两条路径(A和B )可用。
当没有使用LUN计数法分配路径之前,所有四个逻辑磁盘全部通过A路径进行访问。LUN计数分配
法使得两条路径上的LUN数目达到平均。
Page 10
9
PATHpilot Pro 2.0 用户手册 V1.0
图1-5 LUN计数平衡路径分配
注意: 如果在初始化PATHpilot安装后,发现逻辑盘的分配不平均,可以利用eArray
Director察看逻辑盘的映射参数设置是否正确。
PATHpilot Pro也允许用户手动分配对逻辑盘的存取路径。手动进行路径的分配可以使用
PICC来实现。当希望根据对逻辑盘的读/写负载不同来分配存取路径时,手工分配方式非常有效。
可以通过PICC为逻辑磁盘分配最优的路径,提高数据访问效率。
注意: PATHpilot不支持根据对逻辑磁盘读写操作的数目不同来进行自动负载均衡。如
果要根据读写操作的数目优化路径分配,就需要通过手动方式分配路径。
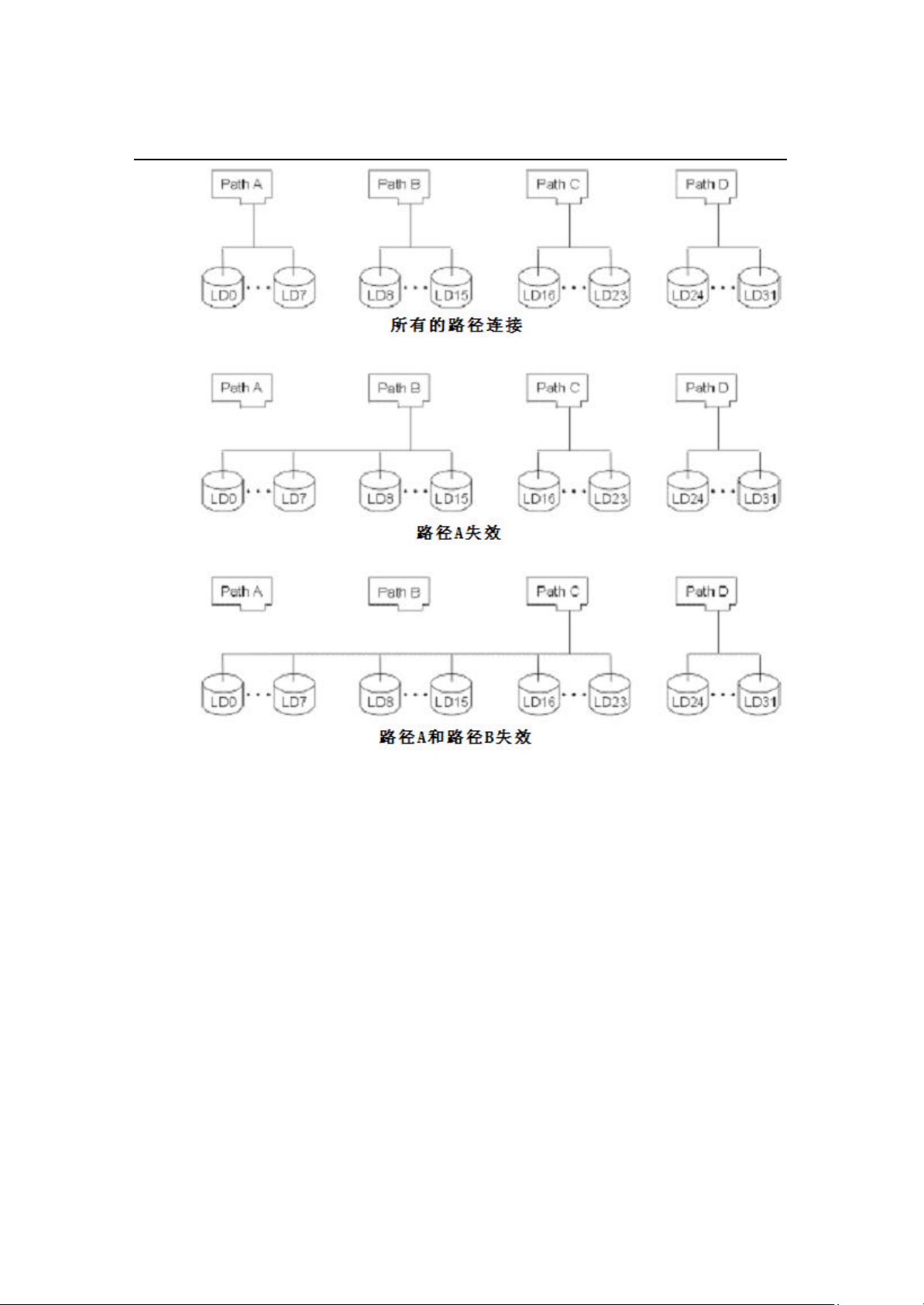
逻辑盘的分配在故障切换的情况下不能实现平衡分配。在故障回切之后,逻辑盘分配会回
到故障切换之前的设置状态。例如:图1-6中的阵列,该阵列包含32个逻辑盘, 4条路径,每条
路径有8个逻辑盘。( 在此配置中,每条路径都是它连接的逻辑盘的主要路径,同时又是其他路
径上逻辑盘的次要路径)。该例中如果A路径失败,对0-7磁盘的读/写操作通过B路径,那么 B
路径此时可以看到0-15的逻辑盘,C路径看到16-23的逻辑盘,D路径看到24-31的逻辑盘 ;如果B
路径失败, 0-23逻辑盘的读/写操作就通过C路径,24-31的读写操作依然通过D路径。在每条路
径都恢复后,每条路径上的逻辑盘的分配都恢复到初始状态。
Page 11
10
PATHpilot Pro 2.0 用户手册V1.0
图1-6 故障切换过程中的逻辑盘分配
性能
一个RAID控制器的失效也可能导致故障切换。在这种情况下,当接管控制器可用时,与失
效控制器到接管控制器切换过程相关的某些操作可能中断数据传输。用户可能遇到下列情况:
l I/O操作停止;
l PICC标记路径错误;
l PICC显示次要路径;
l PICC事件查看器中显示一个事件;
l I/O操作在次要路径中进行;
发生下列情况时, PATHpilot Pro可能不会故障切换:
l HBA设备的超时值设置为无限大;
l 不是严重错误;
Page 12

11
PATHpilot Pro 2.0 用户手册 V1.0
当路径回切到主要路径时,性能并不再受影响。
在故障切换后,性能可能会降低,因为数据传输的路径数减少了。当处理器的利用率很高
时,PICC配置的更新会降低。
第二章 配置和故障切换
在需要可替换路径控制的系统(比如PATHpilot Pro)中,存储系统必须被配置成从用户应
用程序至少有两条路径(一个主要路径、一个次要路径)到达逻辑盘。一般来讲,主要路径是
对逻辑磁盘数据访问的缺省路径;次要路径是当主要路径失败时替换的备用路径。PATHpilot
Pro可以支持1到31个备用路径。系统中的冗余可能来自:
l 多个HBA卡;
l 多个集线器或交换机;
l 多个控制器。
在全冗余配置中,RAID控制器必须配置为“multiport”拓扑结构。逻辑盘到控制器主机端
口的映射属性LUN 映射必须被设置为ALL,这样才能保证可以通过所有的控制器主机端口访问逻
辑盘。主机到逻辑盘映射( SANmapping)必须被设置为“所有的主机HBA都具有访问逻辑盘的权
限”(配置工作可以通过控制器管理软件完成,例如eArray Director)。
以下是一些配置例子,这些例子配有系统组件简要描述配置和配置的优点。为了描述路径
冗余,这些例子中到每个逻辑盘最少有两条途径。但并不是所有的路径被显示在图中。另外,
除了第一个例子,其他全部配置使用多块HBA。为了避免单点故障,不推荐采用双端口的HBA卡
配置冗余路径。
单主机,单控制器 ,单
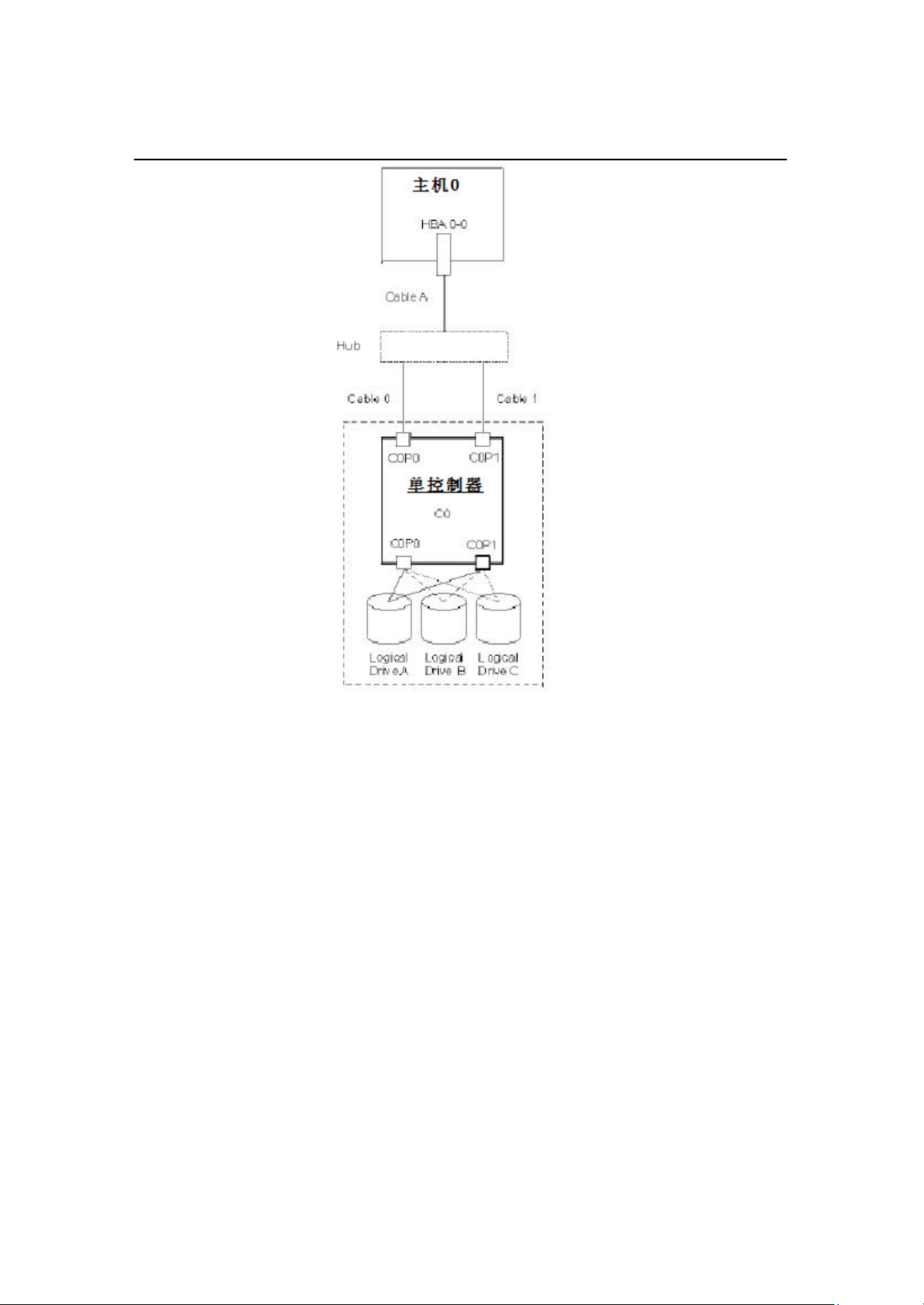
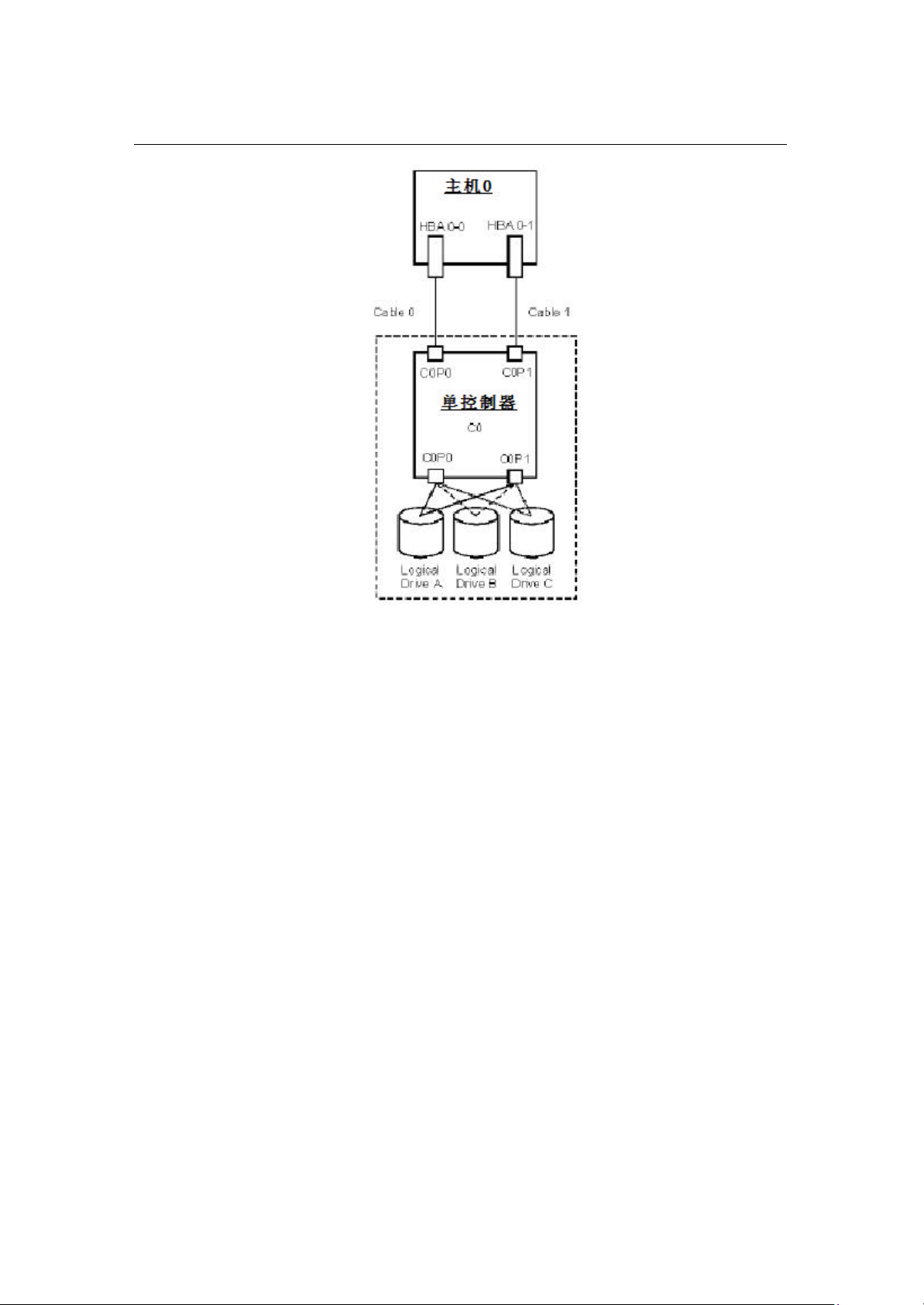
使用PATHpilot Pro的最简单的配置是一个单主机、一个HBA通过集线器连接到到一个控制
器。在这种配置中,从集线器到控制器端口的两条线缆产生了冗余。
注意:这种配置有3个故障点:HBA、线缆和集线器。该配置仅是一种非常简单的冗余配置。
HBA
Page 13
12
PATHpilot Pro 2.0 用户手册V1.0
在这种配置下,PATHpilot Pro可以找到两条路径通往每个逻辑盘:
逻辑盘A路径1:HBA 0-0/ cable A/ hub/ cable 0/ C0P0
逻辑盘A路径2:HBA 0-0/ cable A/ hub/ cable 1/ C0P1
逻辑盘B路径1:HBA 0-0/ cable A/ hub/ cable 0/ C0P0
逻辑盘B路径2:HBA 0-0/ cable A/ hub/ cable 1/ C0P1
逻辑盘C路径1:HBA 0-0/ cable A/ hub/ cable 0/ C0P0
逻辑盘C路径2:HBA 0-0/ cable A/ hub/ cable 1/ C0P1
单主机,单控制器 ,双 HBA
在单主机、单控制器、双HBA卡配置中,主机必须通过两条线缆连接到服务器,实现冗余路
径故障切换。在这个例子中,主机通过主要路径连接到一个逻辑盘,主要路径描述为:HBA 0 -0
/ cable 0 / port C0P0。次要路径为:HBA0-1 / cable 1 / port C0P1。如果主要路径中的任
何一个组件出现故障, PATHpilot Pro通过次要路径把数据发送到逻辑盘。
Page 14
13
PATHpilot Pro 2.0 用户手册 V1.0
在这个配置中, PATHpilot Pro可以找到两条路径到每个逻辑盘:
逻辑盘A 路径1: HBA 0-0/ cable 0/ C0P0
逻辑盘A 路径2: HBA 0-1/ cable 1/ C0P1
逻辑盘B 路径1: HBA 0-0/ cable 0/ C0P0
逻辑盘B 路径2: HBA 0-1/ cable 1/ C0P1
逻辑盘C 路径1: HBA 0-0/ cable 0/ C0P0
逻辑盘C 路径2: HBA 0-1/ cable 1/ C0P1
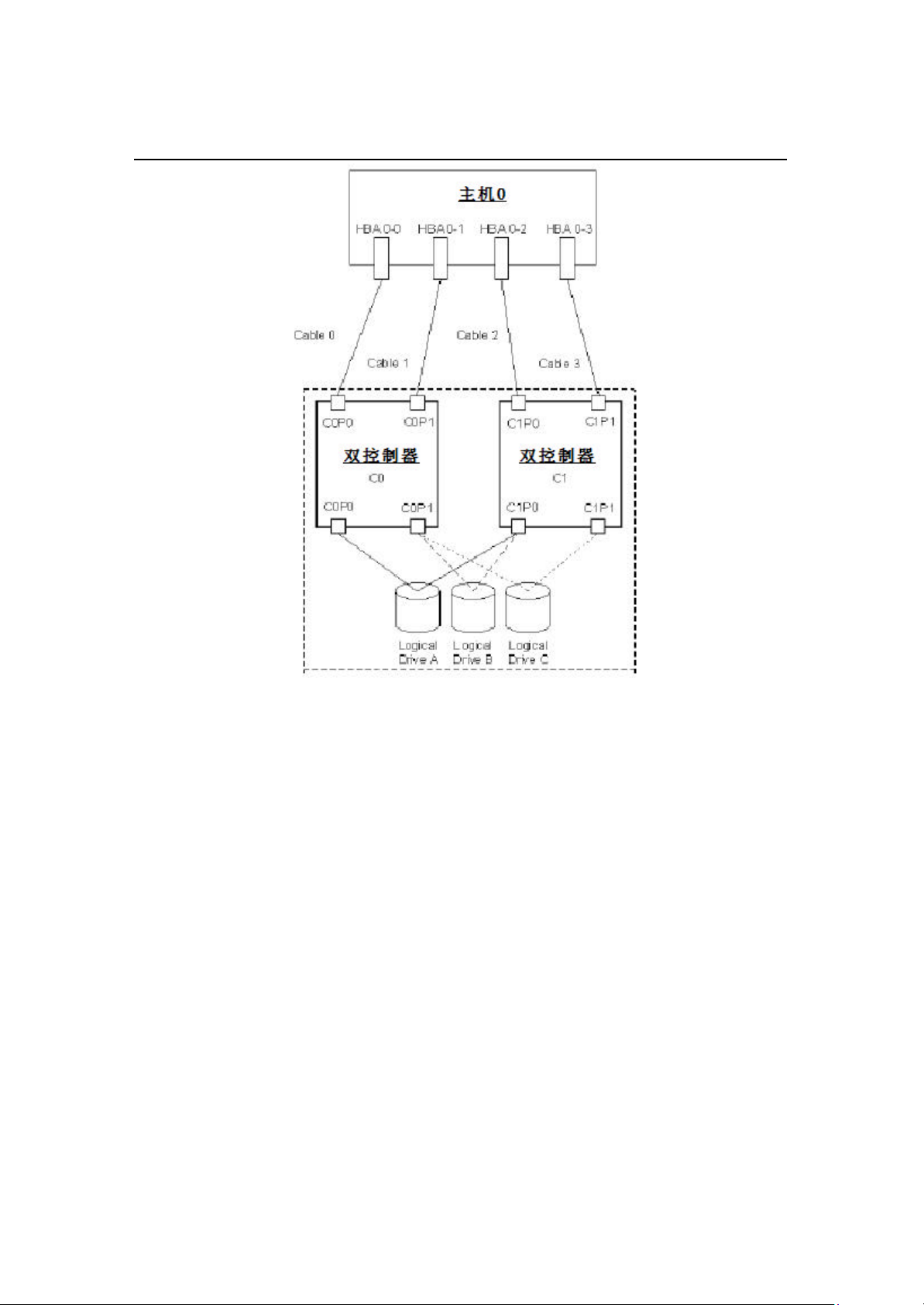
单主机,双控制器,四 HBA
在一台主机,一个控制器和4个HBA卡的配置中,主机通过4条线缆连接到控制器。这种配置
可以取得高性能的读/写操作。
Page 15
14
PATHpilot Pro 2.0 用户手册V1.0
按照图示进行LUN的配置,在这个图示的配置中, PATHpilot Pro可以为每个逻辑盘找到两
条路径:
逻辑盘A 路径1: HBA 0-0/ cable 0/ C0P0
逻辑盘A 路径2: HBA 0-2/ cable 2/ C1P0
逻辑盘B 路径1: HBA 0-1/ cable 1/ C0P1
逻辑盘B 路径2: HBA 0-2/ cable 2/ C1P0
逻辑盘C 路径1: HBA 0-1/ cable 1/ C0P1
逻辑盘C 路径2: HBA 0-3/ cable 3/ C1P1
如果从主机到逻辑盘的路径中有任何组件发生故障,PATHpilot Pro通过次要路径来把数据
发送到逻辑盘。单个组件的故障不会影响到控制器通道。
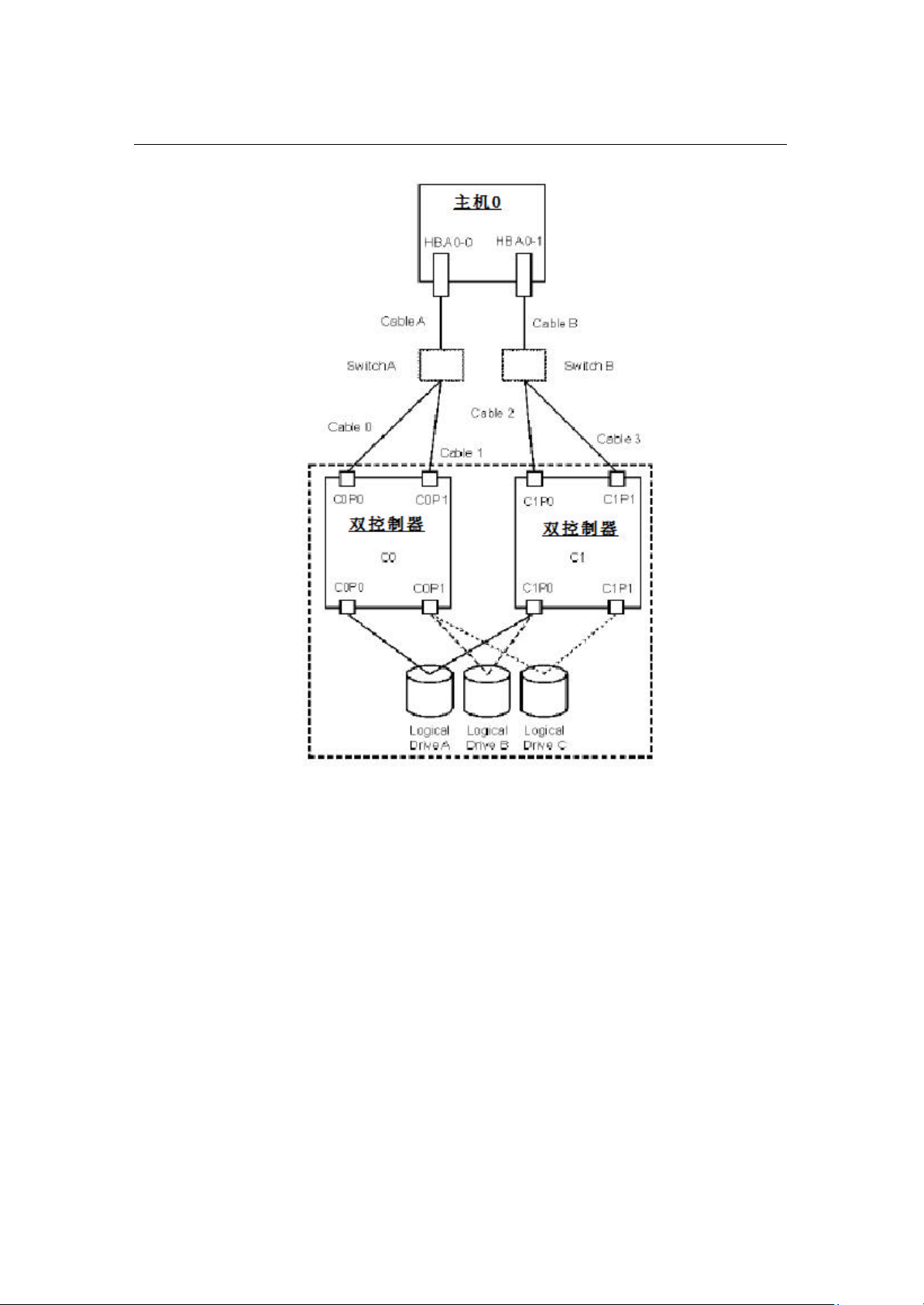
单主机,双控制器 ,例一
最简单的单主机双控制器配置在主机中使用两个HBA,每个HBA连接到一个单独的控制器,
而且每个HBA通过单独的一条线缆连接到一个交换机。每个交换机使用两根线缆连接到一个控制
器。不同的路径通过不同的交换机,因此单个硬件故障不会影响到所有的通往LUN的路径。
Page 16
15
PATHpilot Pro 2.0 用户手册 V1.0
在这个配置中, PATHpilot Pro可以找到两条通往每个逻辑盘的路径:
逻辑盘A 路径1: HBA 0-0/ cable A/ switch A/ cable 0/ C0P0
逻辑盘A 路径2: HBA 0-1/ cable B/ switch B/ cable 2/ C1P0
逻辑盘B 路径1: HBA 0-0/ cable A/ switch A/ cable 1/ C0P1
逻辑盘B 路径2: HBA 0-1/ cable B/ switch B/ cable 2/ C1P0
逻辑盘C 路径1: HBA 0-0/ cable A/ switch A/ cable 1/ C0P1
逻辑盘C 路径2: HBA 0-1/ cable B/ switch B/ cable 3/ C1P1
如果从主机到一个逻辑盘中的任何一个组件出现故障,PATHpilot Pro会通过次要路径发送数据
到逻辑盘。HBA或者交换机的故障会导致一个控制器不能访问(下一个例子就能够避免一个控制
器的不能访问)。如果逻辑盘A上需要预留资源并断开通过控制器C0访问逻辑盘A的通路,控制
器C1就可以接管到逻辑盘A上的数据操作,当然这过程是通过使用SCSI命令集中的Target
Reset、LU Reset或者供应商的其他特定命令来完成。这些操作都是由PATHpilot Pro自动完成
的。
Page 17

16
PATHpilot Pro 2.0 用户手册V1.0
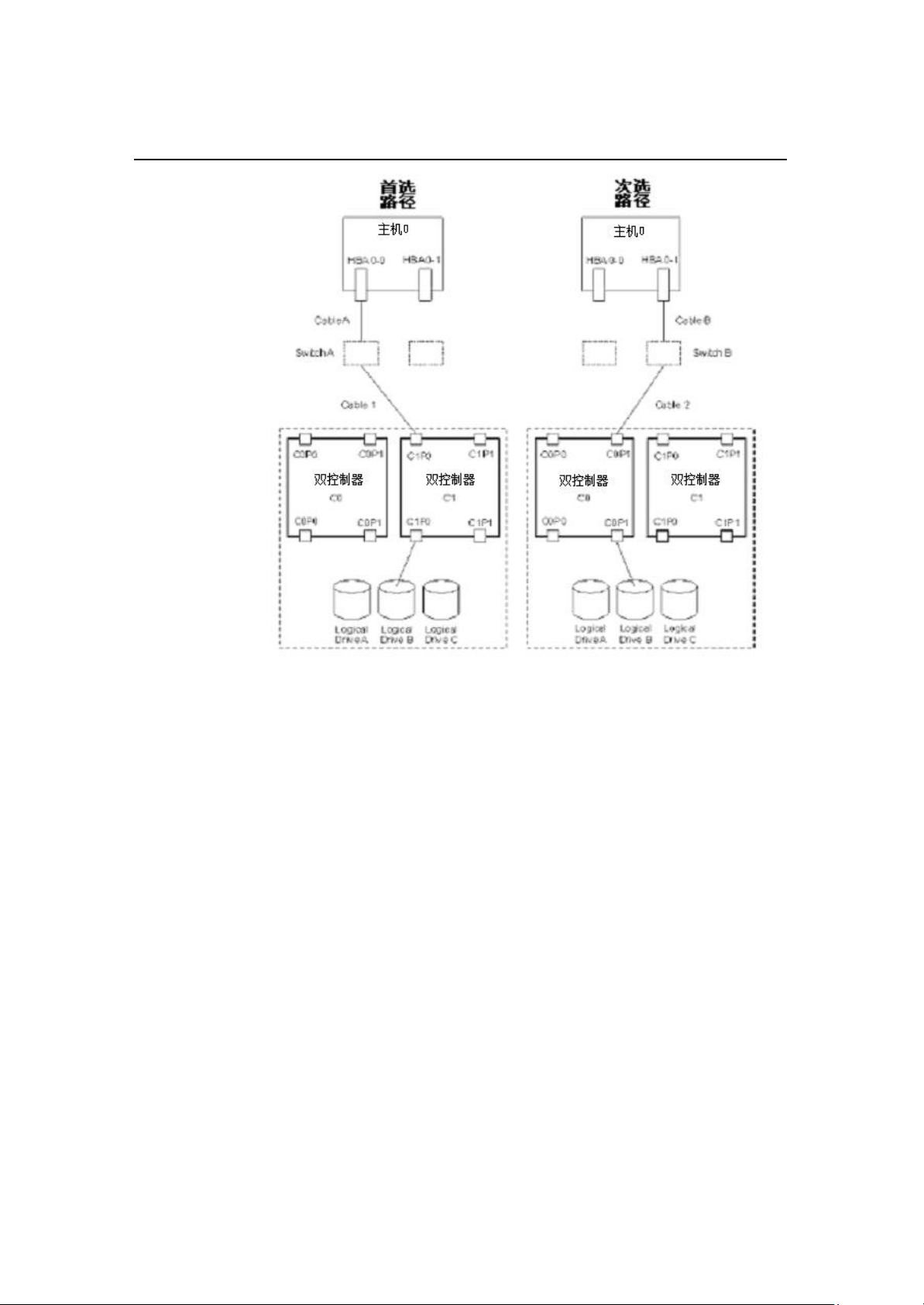
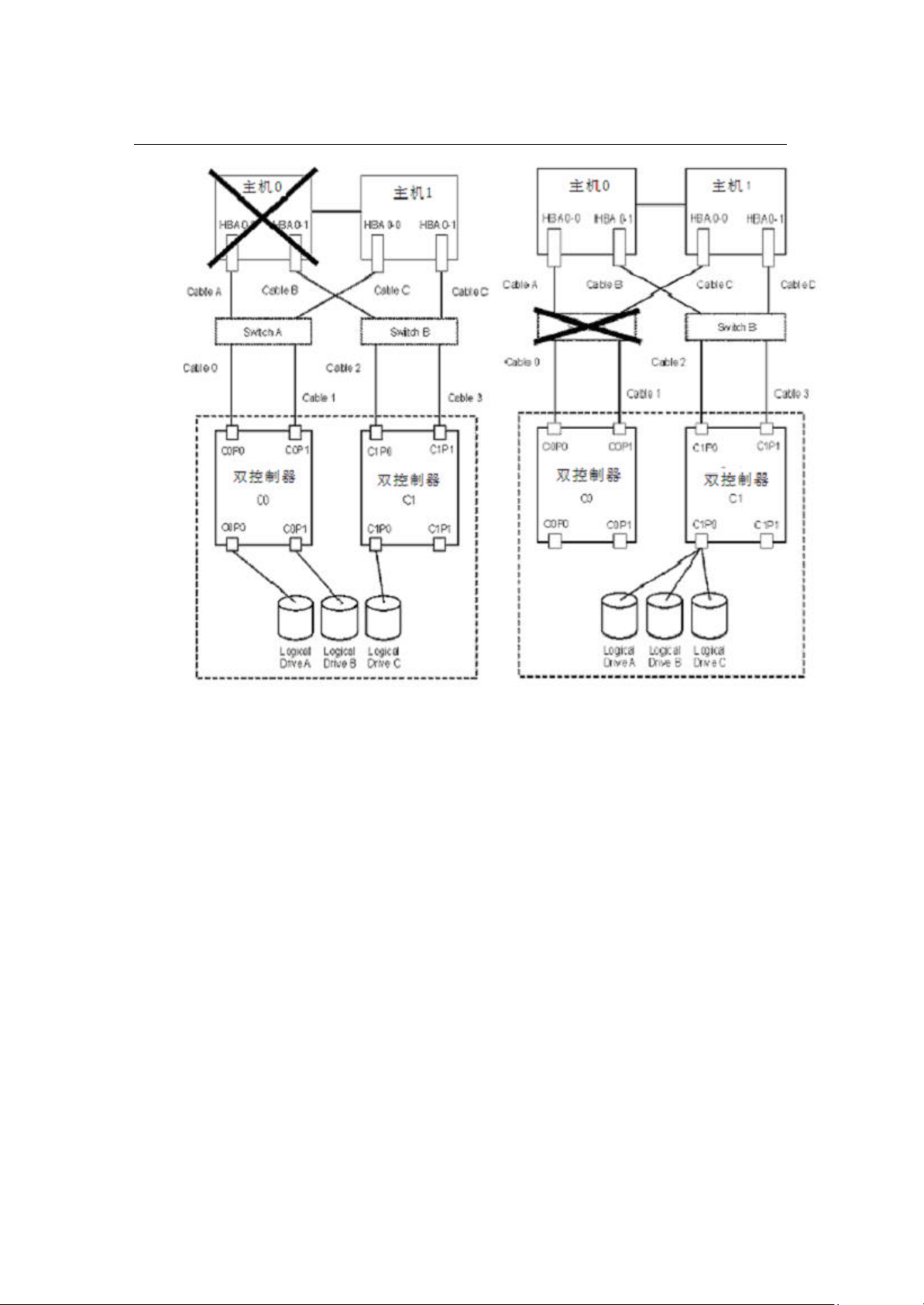
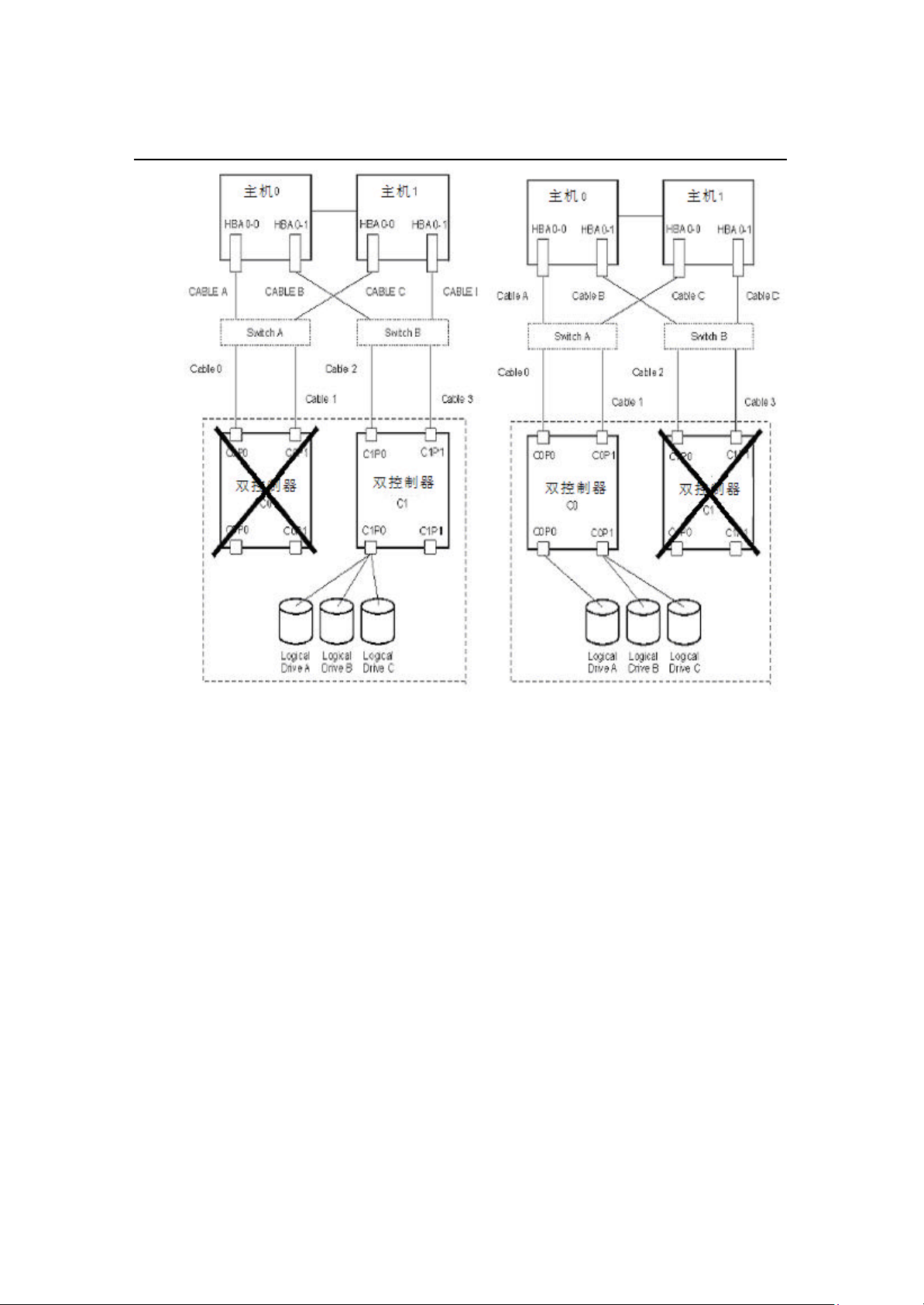
单主机,双控制器 ,例二
本例展示了一个更加强健的单主机、双控制器的配置。这种配置的优点在于:一个HBA或者
交换机的故障不会影响到一个控制器不能访问。这种配置使用了与前例相同的组件,不同点是:
每个交换机分别与两个控制器相连。
在这个图示的配置中, PATHpilot Pro可以找到两条通往每个逻辑盘的路径:
逻辑盘A 路径1: HBA 0-0/ cable A/ switch A/ cable 0/ C0P0
逻辑盘A 路径2: HBA 0-1/ cable B / switch B/ cable 3/ C1P1
逻辑盘B 路径1: HBA 0-0/ cable A/ switch A/ cable 1/ C1P0
逻辑盘B 路径2: HBA 0-1/ cable B/ switch B/ cable 2/ C0P1
逻辑盘C 路径1: HBA 0-1/ cable B/ switch B/ cable 3/ C1P1
逻辑盘C 路径2: HBA 0-0/ cable A/ switch A/ cable 0/ C0P0
如果从主机到逻辑盘路径的任何一个组件出现故障,PATHpilot将通过次要路径发送数据。
Page 18

17
PATHpilot Pro 2.0 用户手册 V1.0
下图显示了故障切换的过程:
Page 19
18
PATHpilot Pro 2.0 用户手册V1.0
Page 20

19
PATHpilot Pro 2.0 用户手册 V1.0
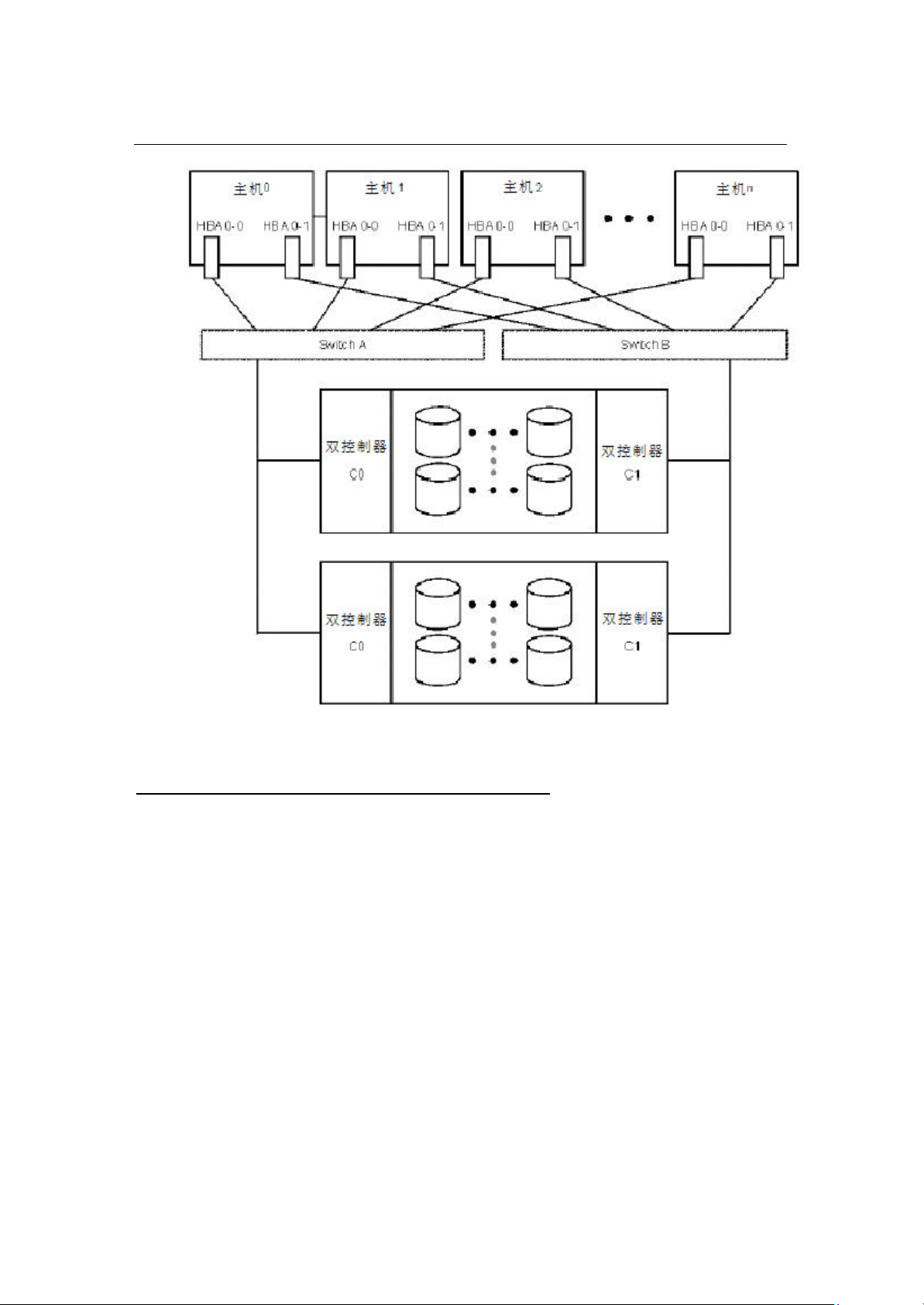
双主机、双控制器的集群配置
双主机、双控制器的集群配置创建了一个提供高级别系统可靠性的冗余配置。在这种配置
中,任何组件的故障并不能导致存储系统的失败。此外,由于主机可以在不干扰读写操作的情
况下离线,因此主机服务更具有实际意义。双交换机配置使得路径中的任何单个硬件故障都不
会影响到逻辑盘的访问。
双主机集群配置中的主机之间通过集群心跳线连接。主机必须运行Windows NT或者Windows
2000操作系统。主机还必须安装Microsoft的集群故障切换软件。
在这种配置中,每个主机有两个HBAs,有两个交换机,每个HBA连接到一个单独的交换机,
每个交换机连接到一个单独的控制器。如果一条路径中的任何组件发生故障,PATHpilot Pro
会通过次要路径传送数据。
Page 21

20
PATHpilot Pro 2.0 用户手册V1.0
下列图片显示了故障回切是如何发生的:
Page 22
21
PATHpilot Pro 2.0 用户手册 V1.0
Page 23
22
PATHpilot Pro 2.0 用户手册V1.0
SAN 多点集群拓扑结构
SANmapping是一种限制主机存取配置系统盘的特性。在多台主机连接到一个或多个控制器
或一个存储局域子网( SAN)中时SANmapping很有用。主机通过FC-AL或交换方式连接到控制器
上。如果没有SANmapping,每个主机都可以完全存取所有系统盘。当主机系统启动时,操作系
统(比如Windows NT)试图进入所有的系统盘,因此,任何Windows NT系统都可以访问阵列上
的任何数据。
当创建新的配置时,系统盘的映射属性默认设置为所有的控制器/主机端口允许所有主机访
问。使用SANmapping,所有的系统盘的映射属性被重新设置为限制存取,即需要通过特定控制
器/主机端口才能接收主机访问逻辑磁盘或者改变逻辑盘映射分配关系。
注意:确定在安装SAN多点集群之前,您一定要了解系统盘的映射属性的含义。
Page 24
23
PATHpilot Pro 2.0 用户手册 V1.0
第三章 运行 PATHpilot Pro
启动
启动PATHpilot Pro控制台的程序链接:开始 ->程序->PATHpilot->PICC。PICC(Path
Information Control Console)启动后屏幕显示如下。(如图3-1)。
Page 25
24
PATHpilot Pro 2.0 用户手册V1.0
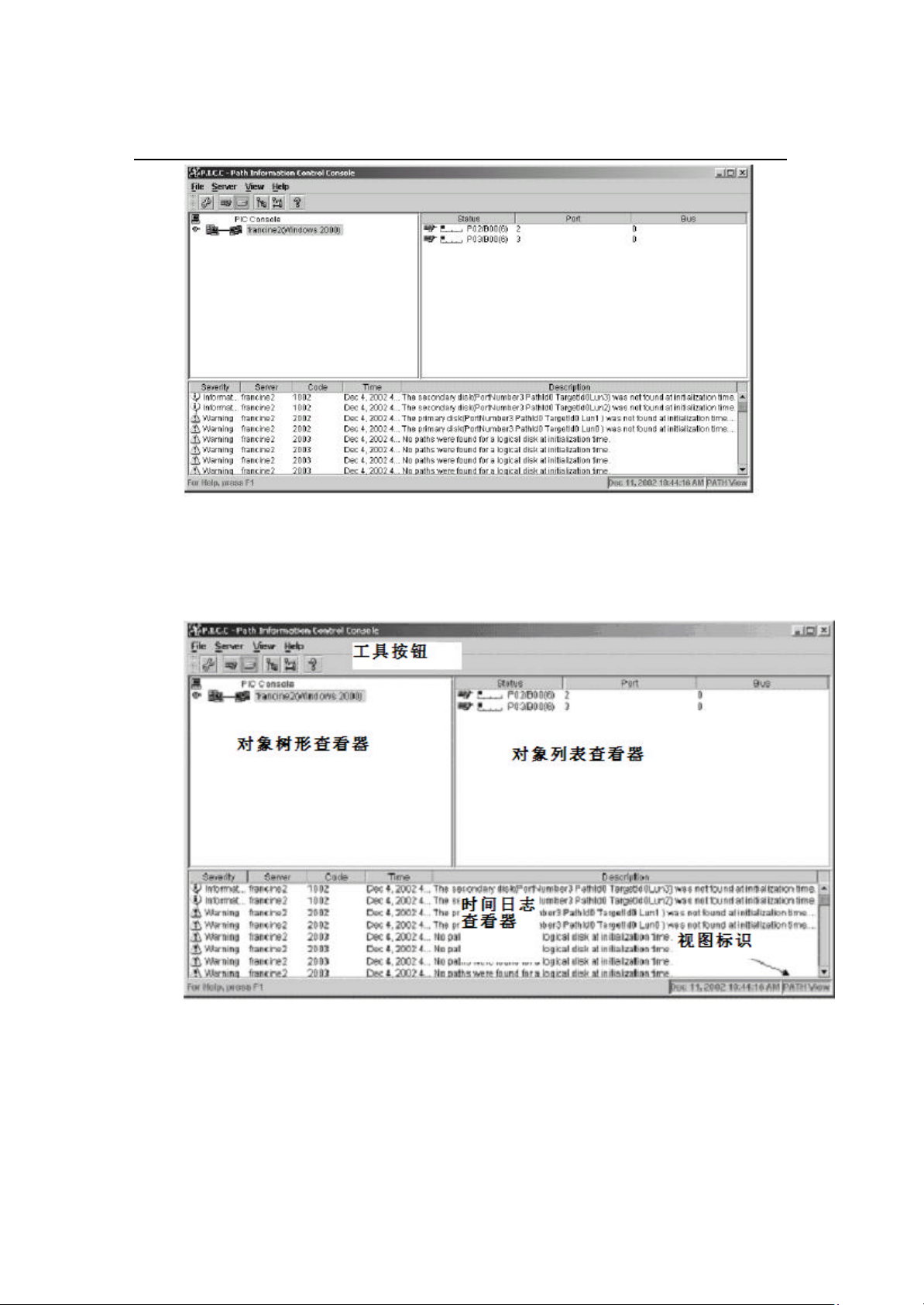
图3-1 PICC屏幕
控制台显示路径配置和路径状态,是用户管理路径的接口。支持路径监测、事件查看和路
径管理。控制台分为四个部分:工具条、对象树形查看器、对象列表查看器和事件日志查看器
(图3-2)。
图3-2 路径信息控制台窗口构成
PICC视窗上有两个视图可选:路径视图和硬盘视图。路径视图,显示了所有的可用路径;
硬盘视图,显示了所连接的所有磁盘。正在查看的视图、日期和时间都在屏幕右下角显示出来。
Page 26

25
PATHpilot Pro 2.0 用户手册 V1.0
路径视图
路径视图显示了所有的具有可用路径的对象。路径视图仅显示每个逻辑磁盘的活动路径。
(如果需要查看一个逻辑磁盘的所有可用路径可以通过磁盘视图)。当PATHpilot Pro启动时,
路径视图是默认的显示,如图3-3所示:
图3-3 路径视图屏幕
对象树形查看器显示了主机;对象列表查看器显示了主机上的HBA卡,提供了状态、端口号、
总线号等信息。HBA状态反映了路径的可用或失败状态。双击主机名、单击展看切换开关或者单
击工具条上的展开按钮都可以展开对象树形查看器的详细内容,如图3-4:
图3-4 展开路径的视图屏幕
在扩展的路径视图中,对象树形查看器显示了主机名、 HBA标识符、HBA上的端口。图3-5
解释了HBA标识符的定义(表 3-1解释了HBA标识符和Target标识符的格式):
图3-5 HBA标识符和Target标识符定义
Page 27

26
PATHpilot Pro 2.0 用户手册V1.0
当对象树形查看器中的主机突出显示时,在对象列表查看器中只显示与那台主机相连的逻
辑盘的信息。如果突出显示目标标识符,则对象列表显示器中显示的是连接到主机端口的所有
逻辑盘。如图3-6例示了目标标识符被突出显示时的路径视图详细信息:
图3-6 路径视图详细信息
此时对象列表查看器列出了连在一个HBA上的所有逻辑盘的详细信息,列的标题也相应变为
磁盘( Drive)、LUN、控制器厂商(Vendor)和控制器类型(Model)。此时的状态显示了HBA
和逻辑盘之间的连接。
表3-1描述了对象树形查看器屏幕显示的一些信息;表 3-2描述了对象列表查看器屏幕中的
一些信息。
Page 28

27
PATHpilot Pro 2.0 用户手册 V1.0
表3-1 对象树形查看器的详细信息
Page 29

28
PATHpilot Pro 2.0 用户手册V1.0
表3-2 对象列表查看器的详细信息
硬盘视图
使用硬盘视图可以查看到逻辑盘的所有可用路径。硬盘视图显示了所有监测到的可用磁盘。
利用“ View”下拉菜单中选择“Disk View”就可以查看硬盘视图。(在路径显示状态的对象列
表显示器中双击路径图标或者点击工具条中的磁盘视图按钮)。
图3-7 未展开的硬盘视图
展开硬盘视图可以查看与逻辑磁盘相连的路径更详细的信息,单击展开切换开关或双击主
机名都可以展开视图,如图3-8:
Page 30

29
PATHpilot Pro 2.0 用户手册 V1.0
图3-8展开后硬盘视图
表3-3描述了对象树形查看器中的信息;表3-4描述了对象列表查看器中的信息。
表3-3 对象树形查看器中的信息
表3-4 对象列表查看器的信息
Page 31

30
PATHpilot Pro 2.0 用户手册V1.0
事件日志
当从初始设置改变路径配置的事件发生时,路径信息控制管理器会记录这些变化并在事件
日志查看窗口中显示出来(如图3-9):
图3-9 事件日志
事件日志查看窗口显示了路径活动的连续更新,包括:安全级别(Severity列)、事件是
哪个主机报告的(Server列)、事件错误代码(Code)、事件发生日期和时间(Time)、事件简要
描述( Description列)。对于PATHpilot Pro来讲,事件仅仅描述路径故障切换、故障回切和
Page 32

31
PATHpilot Pro 2.0 用户手册 V1.0
路径其他相关活动。而与其他配置相关的事件不会显示出来。PATHpilot Pro能够看到事件的完
全列表见<附录B事件>。表3-5描述了事件日志查看器中的图标:
表3-5 事件日志信息
工具条
工具条方便了路径视图和硬盘视图之间的切换,并且可以进行路径配置,如图3-10:
图3-10 PATHpilot的工具条
注意:选择视图下拉菜单的Toolbar 可显示或隐藏工具条。
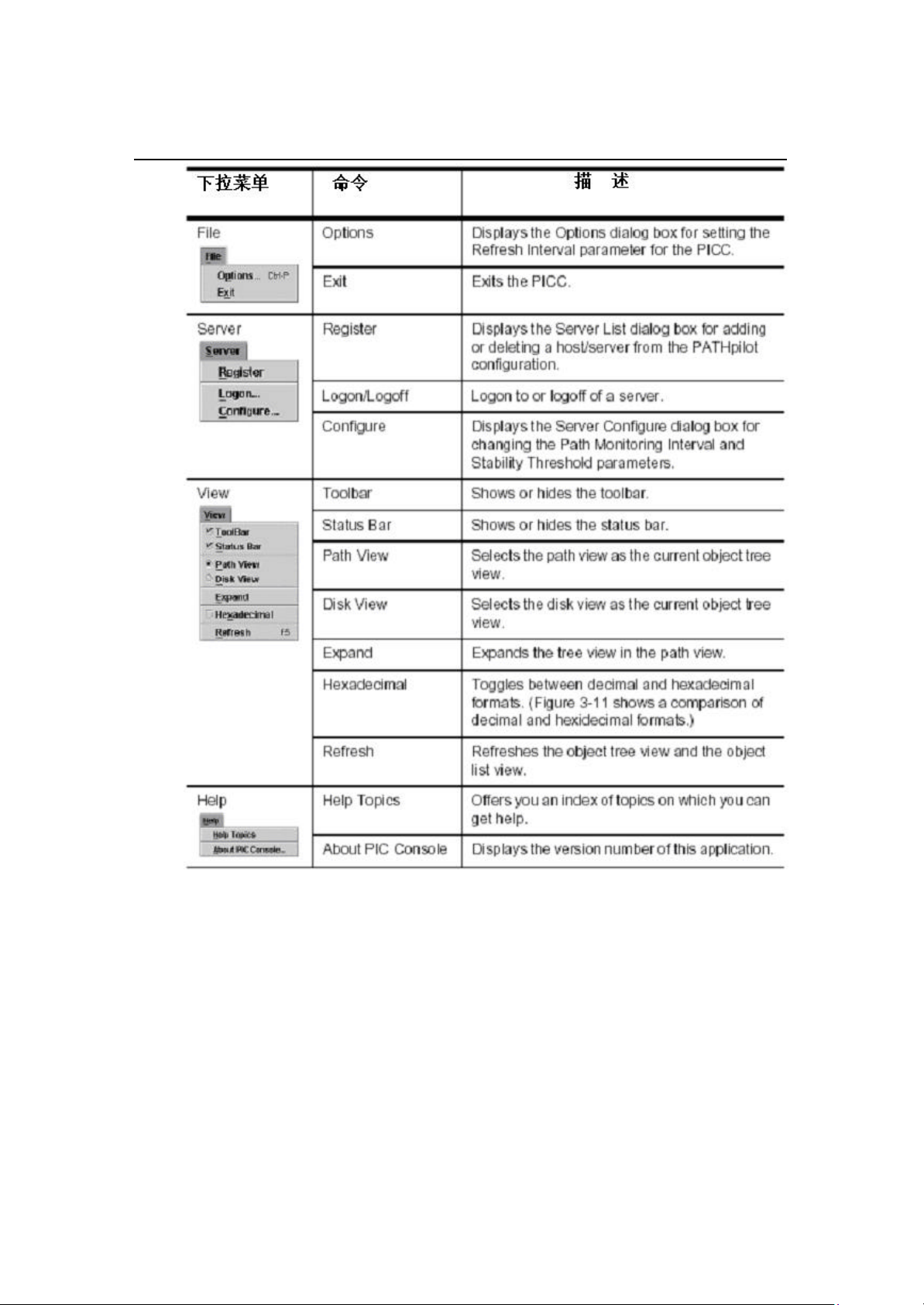
工具条具有4个下拉菜单和6个按钮。4个下拉菜单和它们所能执行的操作如表3-6。6个按钮
以及它们所能执行的操作如表3-7:
表3-6 工具条的下拉菜单
Page 33
32
PATHpilot Pro 2.0 用户手册V1.0
表 3-7 工具条的菜单按钮
Page 34

33
PATHpilot Pro 2.0 用户手册 V1.0
图3-11 十进制和十六进制格式的对比
Page 35

34
PATHpilot Pro 2.0 用户手册V1.0
如何配置路径
注意:必须使用口令来改变一个配置的路径。关于口令以及如何设置口令的内容在
“PATHpilot Pro的口令”一节中详细介绍。
如果希望为逻辑盘改变路径,当不知道硬盘有哪些可用路径时,按如下步骤操作:
单击工具条上的硬盘视图按钮;
1.
2. 展开磁盘树;
3. 在对象列表查看器中双击带有 Active 状态的磁盘路径,则视图窗口将改变为路径视图;
4. 从对象列表查看器中拖动硬盘图标到目的硬盘路径图标处来更改配置。
当要改变的路径是已知的时,可以参照如下步骤:
1. 单击工具条上的路径视图按钮;
2. 展开路径树;
3. 单击希望改变配置的路径,硬盘信息出现在对象列表视图中;
4. 单击希望改变路径配置的硬盘,则硬盘的可用路径图标被蓝色方框环绕 ,如果可以通过两
条或更多的路径访问磁盘,则所有的可行路径图标全部被蓝框包围;
5. 拖动对象列表查看器中的硬盘图标到目的磁盘路径图标处就可以更改配置。配置改变后被
保存到注册表中,新的路径变为主要路径。
PATHpilot Pro 的口令
每台服务器有一个登录口令来防止非授权使用,当进行如下操作时,PICC需要您输入口令:
l 改变服务器的配置;
l 配置一条路径。
口令是系统级用户 picadmin 的系统口令 。用户 picadmin 必须有管理员的特权。如果
picadmin 用户和其口令在主机操作系统中没有设定,将无法改变服务器的配置或者配置路径。
必须首先设置 picadmin 用户和口令,然后才能进行相关的修改和变更。
当你执行的操作需要输入口令时,PICC 自动弹出口令登录对话框,如下所示:
Page 36
35
PATHpilot Pro 2.0 用户手册 V1.0
如何更改刷新间隔
刷新间隔是 PICC 在收集新的路径信息之前等待的总时间,从 5 秒到 600 秒。默认的时间长
度为 30 秒,更改间隔有如下步骤:
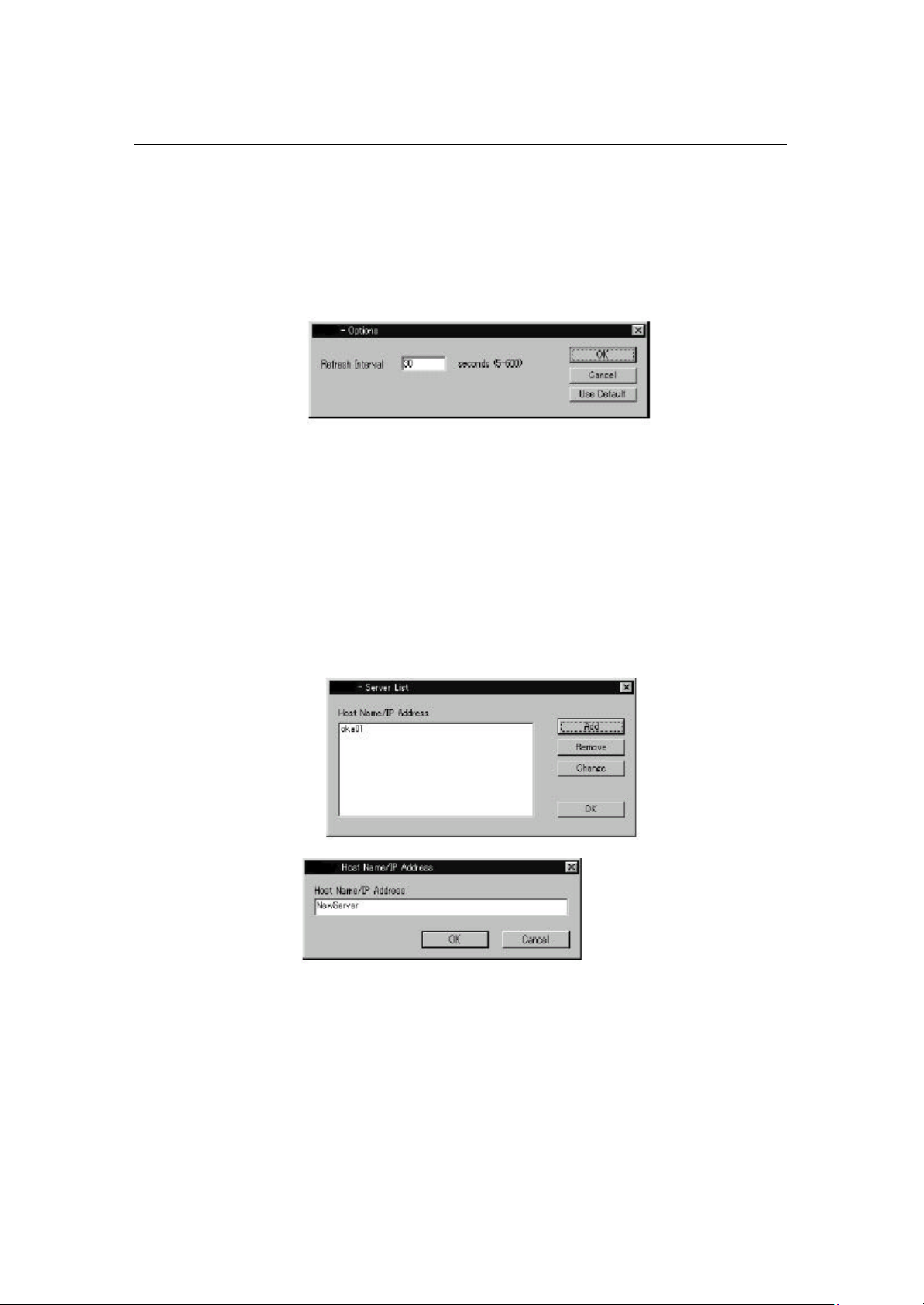
1. 单击工具条上的 File 下拉菜单;
2. 选择 Option 选项,弹出下面的对话框:
在文本框中,输入合适的间隔时间;
3.
4. 单击 OK 按钮。
如何注册一台服务器
在多于一台主机的配置中,在一台主机上安装客户端、在所有的主机上安装服务器端。当
客户端和服务器在不同的主机上时,客户端必须注册该服务器,使 PICC 找到该服务器上的逻辑
盘。使用下列步骤来注册一台服务器:
1. 单击工具条上的 Sever 下拉菜单;
2. 选择 Register,出现下面的列表对话框:
3. 单击 Add 按钮,主机名/IP 地址对话框弹出:
4. 键入所要添加的服务器的主机名或者 IP 地址;
5. 单击 OK 按钮,新定义的服务器名被添加到服务器列表中;
6. 重复 3-5 步来添加多个服务器;
7. 单击 OK 按钮。
在添加完服务器之后, PICC 更新树形列表,开始监测新的服务器。
Page 37

36
PATHpilot Pro 2.0 用户手册V1.0
删除服务器
使用服务器列表对话框中的 Remove 按钮来删除列表中的服务器。
更改服务器信息
使用服务器列表对话框中的 Change 按钮来更改列表中的服务器的主机名和 IP 地址。
如何登录、退出服务器
如果服务器有密码保护时,在进行如下操作之前必须首先登录:
l 改变服务器的配置;
l 配置路径。
当选择”Logon”时,PICC 弹出登录对话框,让用户输入登录口令,步骤如下:
1. 在 PICC 的对象树形查看器中,单击希望登录的服务器;
2. 单击工具条上的 Server 下拉菜单;
3. 选择 Logon,弹出下面的对话框:
4. 输入口令;
5. 单击 OK 按钮;
如果要从服务器注销,步骤如下:
1.在 PICC 的对象树形查看器中,选择要退出的服务器;
2.单击工具条上的 Server 下拉菜单;
3.选择 Logoff。
如何改变路径监测间隔和稳定性阀值
路径监测间隔和稳定性阀值是直接影响到 PATHpilot Pro 性能的两个参数,可以在配置时
为每台服务器设定这两个参数,所有的服务器不必设定相同的值,不同的服务器应该有合适的
参数以达到最好的性能。
Page 38

37
PATHpilot Pro 2.0 用户手册 V1.0
路径监测间隔
路径监测间隔(Path Monitoring Interval)是 PATHpilot Pro 从开始等待到确定一个失
败路径是否重新可用的总时间。在一条路径出现故障之后, PATHpilot Pro 利用通过这条路径
访问逻辑盘的方法,不停的对该条路径进行测试,如果不能访问,PATHpilot Pro 等待一条路
径监测间隔的时间再次开始访问逻辑盘。有效的间隔是 0-30 秒,默认值为 10 秒。
稳定性极限
稳定性阀值(Stability Threshold) 是 PATHpilot Pro 在确定路径修复之后,必须成功访问
逻辑盘的总次数。在故障切换发生时, PATHpilot Pro 利用通过失败路径进入逻辑盘的方法,
监测该路径,当路径修复之后,PATHpilot Pro 可以进入逻辑盘。但在完全修复之前,PATHpilot
Pro 不止一次的试着访问该路径,当尝试的次数等于稳定性极限值的时候,就激活了故障回切。
当在尝试次数小于稳定性阀值时发现了一个新的故障,则重置该值。稳定性阀值的范围是 2-30,
默认值为 2。
改变路径检测间隔和稳定性阀值的步骤:
1. 单击工具条的 Server 下拉菜单;
2. 选择 Configure,弹出如下对话框:
3.在文本框中,键入路径监测间隔值和稳定性阀值;
4.单击 OK 按钮。
故障切换/故障回切 例一
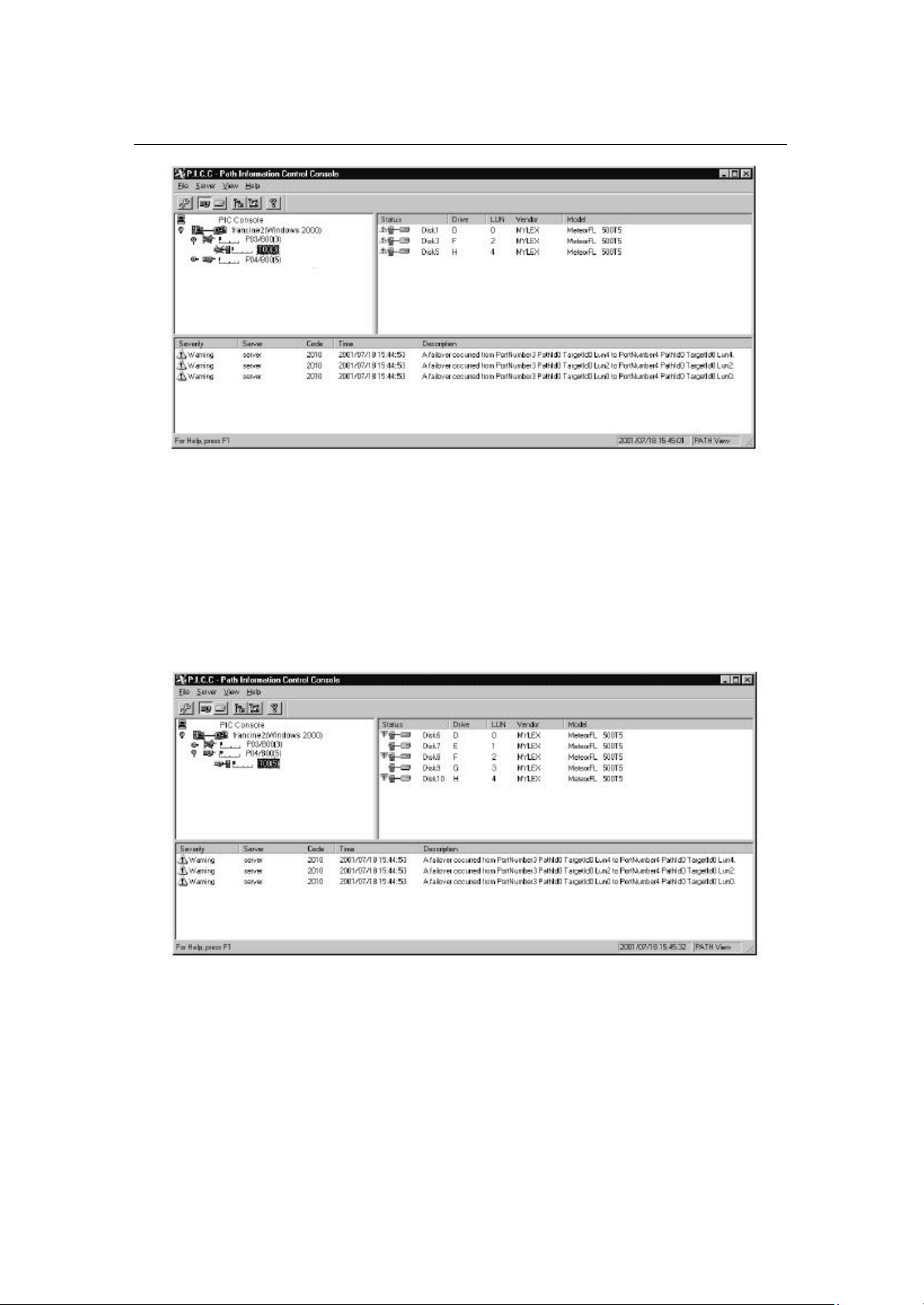
起初,逻辑磁盘 D、F 和 H 通过通道 P03/B00(如图 3-12)访问。逻辑盘 E、G 通过通道 P04/B00
(如图 3-13)访问。
Page 39

38
PATHpilot Pro 2.0 用户手册V1.0
图 3-12 路径 P03/B00 上的逻辑盘
图 3-13 路径 P04/B00 上的逻辑盘
当路径 P03/B00 上监测到故障时,出现一个警告图标, PATHpilot Pro 迫使路径故障切换
到次要路径。“ X”出现在失败路径上,事件日志中也显示该事件(如图 3-14)。
Page 40
39
PATHpilot Pro 2.0 用户手册 V1.0
图 3-14 故障切换事件日志
故障切换/故障回切 例二
在该例中,磁盘 D、E、F、G 和 H 都可以通过路径 P04/B00 进行访问,因此,这些逻辑盘的
失败的主要路径会故障切换到路径 P04/B00。结果是,所有的磁盘可以通过路径 P04/B00(如图
3-15)。
图 3-15 磁盘通过次要路径访问
在硬盘视图中可以看到主要路径上标有错误状态,次要路径处于切换后的使用状态(如图
3-16)。
Page 41

40
PATHpilot Pro 2.0 用户手册V1.0
图 3-16 故障回切中的硬盘路径
在路径的故障切换发生后, PATHpilot Pro 不断尝试通过失败路径访问逻辑盘以达到判定
路径是否恢复。当 PATHpilot Pro确认路径恢复时,会进行路径的故障回切(如图 3-17),事
件日志察看器中会显示这个事件。
图3-17 路径重新生效和故障回切
附录 A 安装 PATHpilot 软件
本章节内容主要介绍 PATHpilot Pro 2.0 管理软件的安装,包括系统要求、安装方式(典型安
装和定制安装)、安装的注意事项、卸载方法等。
PATHpilot 冗余路径管理软件支持 Windows MSCS 环境;如是是多台服务器的情况下,
PATHpilot 必须在所有的服务器上安装,否则不能实现故障切换功能。
Page 42

41
PATHpilot Pro 2.0 用户手册 V1.0
系统要求
PATHpilot Pro 2.0 支持的操作系统包括:
l Windows 2000 SP3/SP4 (不包括 Windows 2000 DataCenter)
l Windows NT4.0 SP6A 及以上
l Solaris 8.0(SPARC)
l Linux RedHat7.2(Kernel 2.4.7-10)
PATHpilot Pro 2.0冗余路径管理软件支持 SureFibre400R1 和 SureFibre400R2 两种配置,
控制器的 Firmware 要求为 8.50 或 9.02。
服务器系统必须配置支持 FC-AL (Fibre Channel Arbitrated Loop) 拓扑的 HBA 卡,HBA
卡驱动必须在安装 PATHpilot 之前安装。
控制器要求
SureFibre400控制器包括FFx和 FFx2[即单双控两种配置],Firmware 版本为 7.70或更高。
PATHpilot 要求满足下列条件:
l 服务器和客户端网卡必须安装有 TCP/IP 网络协议;
l 安装双 HBA 连接必要的 FC HUB 或 FC SWITCH;
配置存储子系统
需要配置存储系统首先使得所有主机能够访问逻辑磁盘,并且要决定哪台主机可以访问相
应的逻辑磁盘。通过 eArray Director 管理软件设置控制器端口拓扑结构为“MultiPort”保证
所有主机能够访问逻辑磁盘;同时,使用 SANmapping 来设定哪台主机可以访问相应的逻辑磁盘。
注意:PATHpilot Pro 不支持控制器工作在 MTID (Multiple target ID) 拓扑方式。
安装程序
PATHpilot 软件的安装是由安装程序完成的,安装程序依次安装 PATHpilot 服务软件
(PICS)、PATHpilot PICC 软件并更新操作系统中相关参数。安装程序将引导完成 PATHpilot
的安装过程,在任何时候如果希望停止安装,单击 Cancel 按钮;希望退回前一个屏幕,单击
Back 按钮。下面列示了不同操作系统下 PATHpilot 的安装程序:
操作系统 安装程序
Windows NT/2000 setupwin32.Exe
Solaris Sparc ./setupsolarisSparc.bin
Red Hat Linux ./setuplinux.bin
Page 43

42
PATHpilot Pro 2.0 用户手册V1.0
在 Windows 系统下的安装和运行
1. 运行安装程序来开始安装,安装程序首先加载安装向导,之后弹出欢迎屏幕
2. 单击 Next 按钮,出现安装协议界面
3. 如果同意协议内容,选择“I accept the terms of this license agreement”,并单击Next
按钮,则出现下面窗口;如果不同意协议内容,选择“ I do not accept the terms of this
license agreement”,此时会弹出对话框询问“Do you want to exit”,此时选择Yes退
出安装。
Page 44

43
PATHpilot Pro 2.0 用户手册 V1.0
说明:
安装程序推荐的安装路径是C:\Program Files\LSI\PATHpilot,您也可以单击Brower来选择其他指
定的安装路径。
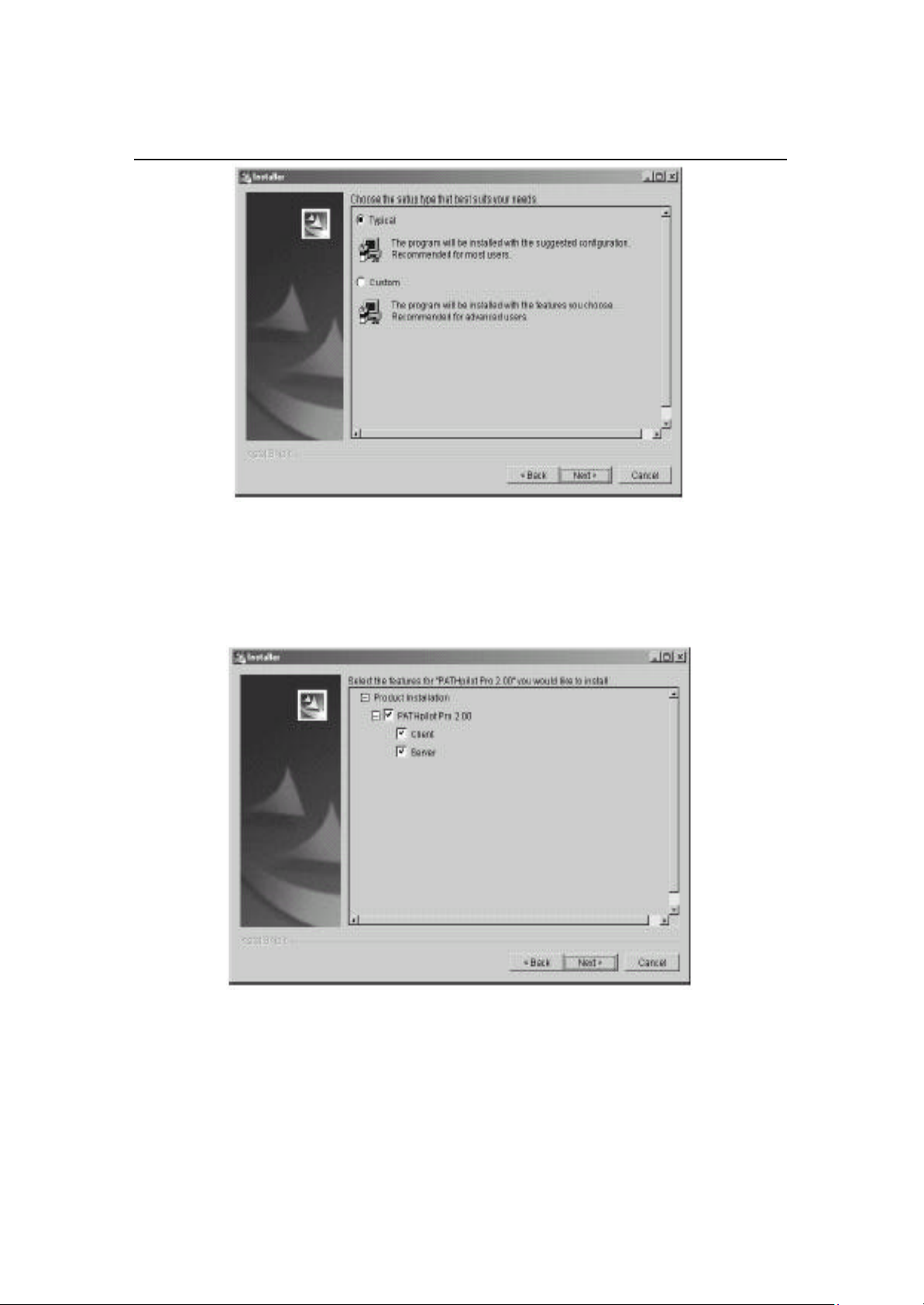
4. 单击 Next,选择安装类型
有两种安装类型供选择:典型(Typical)安装和定制(Custom)安装
l Typical 安装方式将默认安装客户端和服务器端两个组件;
l Custom 安装方式将根据用户选项来安装客户端或者服务器端组件;
如果选择 Custom 方式,单击 Next,出现下列窗口:
Page 45

44
PATHpilot Pro 2.0 用户手册V1.0
此时,根据需求请选择希望安装的程序组件。
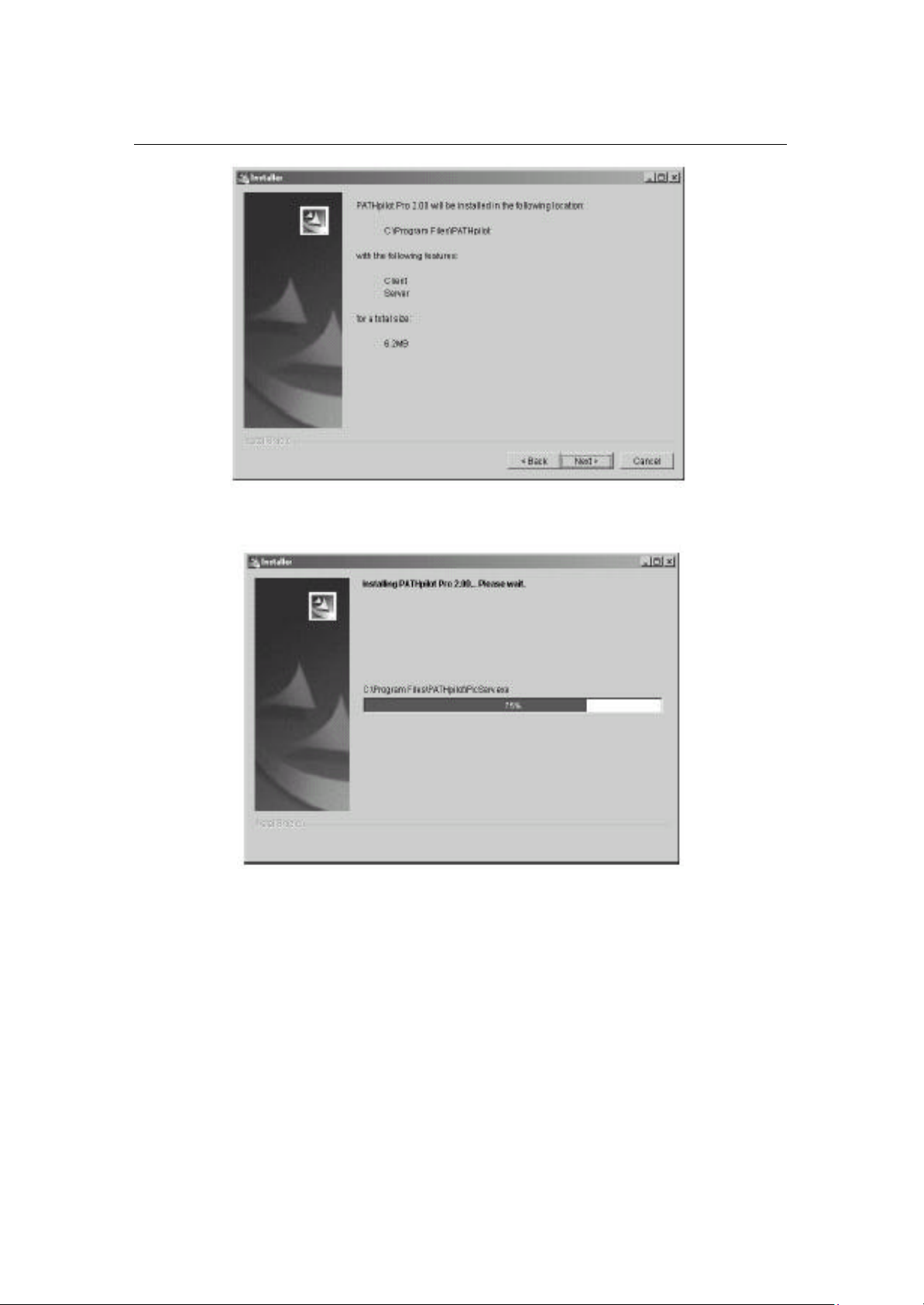
5. 单击 Next,出现确认窗口,如下图所示。
6. 确认之后,单击Next,安装PATHpilot,安装程序会显示安装进程。
Page 46

45
PATHpilot Pro 2.0 用户手册 V1.0
PATHpilot安装完成之后,显示如下的界面:
7. 单击Next,提示是否重新启动系统。
Page 47

46
PATHpilot Pro 2.0 用户手册V1.0
8. 如果希望马上重新启动,单击Yes,否则,单击No。
注意:PATHpilot安装完成后必须重新启动系统才开始起作用。PATHpilot是一个透明管理工具,
在系统启动后自动运行。
在 Linux和 Solaris系统下安装
1. 运行安装程序来开始安装,安装程序首先加载安装向导,之后弹出欢迎屏幕
2.单击 Next 按钮,出现安装协议界面
Page 48

47
PATHpilot Pro 2.0 用户手册 V1.0
3.如果同意协议内容,选择“I accept the terms of this license agreement”,并Next,
会出现下面的窗口;如果不同意协议内容,选择“I do not accept the terms of this license
agreement”此时,弹出对话框询问“ Do you want to exit”,此时选择Yes退出
说明:
安装程序推荐的安装路径是/opt/LSI/PATHpilot,您也可以单击Brower来选择其他指定的安装路
径。
4. 单击 Next,选择安装类型
Page 49
48
PATHpilot Pro 2.0 用户手册V1.0
有两种安装类型供选择:典型(Typical)安装和定制(Custom)安装
l Typical 安装方式将默认安装客户端和服务器端两个组件;
l Custom 安装方式将根据用户选项来安装客户端或者服务器端组件;
如果选择 Custom 方式,单击 Next,出现下列窗口:
此时,根据需求请选择希望安装的程序组件!
5. 单击 Next,出现确认窗口
Page 50
49
PATHpilot Pro 2.0 用户手册 V1.0
注意:PATHpilot Pro 在 Linux 系统上占用的空间是 60.1MB,在 Solaris 下安装占用空间 91.7MB。
6. 确认之后,单击Next,安装PATHpilot,安装程序会显示安装进程
7.PATHpilot安装完成之后,显示如下的界面:
Page 51

50
PATHpilot Pro 2.0 用户手册V1.0
下面的内容中讲述如何运行 PATHpilot:
Linux 系统下运行PATHpilot
在 Linux 操作系统下,系统重新启动会自动运行 PATHpilot,PICC 画面自动打开。您也可
以从屏幕底部通过弹出菜单来启动 PATHpilot Pro。
如果是通过命令行启动 PICC 屏幕,则到/opt/LSI/PATHpilot 目录,运行下面命令:
./picc
如果PICC屏幕没有显示任何连接,则必须运行PATHpilot的服务器组件。运行方式是到
/etc/init.d目录下运行下列命令:
./pics start
Solairs 系统下运行 PATHpilot
在 Solairs 操作系统下,启动 PATHpilot 服务需要重新启动操作系统,然后执行下列步骤:
1. 单击菜单条上的 Applications 按钮;
2. 单击 pop-up 菜单上的 Applications 按钮,将出现Applications Manager 窗口;
3. 到 PATHpilot 目录下;
4. 双击 PATHpilot 图标,显示 PICC 界面。
如果 PICC 屏幕没有显示任何连接, 此时必须启动 PATHpilot 的服务器组件。到
/etc/init.d 目录下运行下面的命令:
./pics start
Page 52
51
PATHpilot Pro 2.0 用户手册 V1.0
安装 PATHpilot 的注意事项
注意:如果是在以前已经安装有 PATHpilot 的系统上再重新安装 PATHpilot,先前安装时的路
径配置文件不会被删除或覆盖,这将导致各逻辑磁盘在所有可用路径并没有达到负载均衡。此
时,需要手动重新指定逻辑磁盘路径。
注意:PATHpilot 仅在 Qlogic? HBAs 上进行过测试。
注意:Qlogic QLA2200 FC HBAs 下,可能会出现“device not ready”的错误,您可以通过改
变 HBA 的连接模式来解决问题:
1. 重启系统,根据提示同时摁住<Ctrl>+<Q>来进入 Qlogic Fast!UTIL配置工具;
注意:早期的 Qlogic HBA 采用<Alt>+<Q>进入配置工具。具体描述:BIOS 版本小于 1.76
的 Qla2200 HBA 卡和 BIOS 版本小于 1.24 的 Qla23XX HBA 卡采用<Alt>+<Q>。
2. 在 Fast!UTIL 菜单中选择 Configuration Settings;
3.在 Configuration Settings 菜单中选择 Extended Firmware Settings;
4.在 Extended Firmware Settings 中设置“Connection Mode”参数为“0”(loop only)。
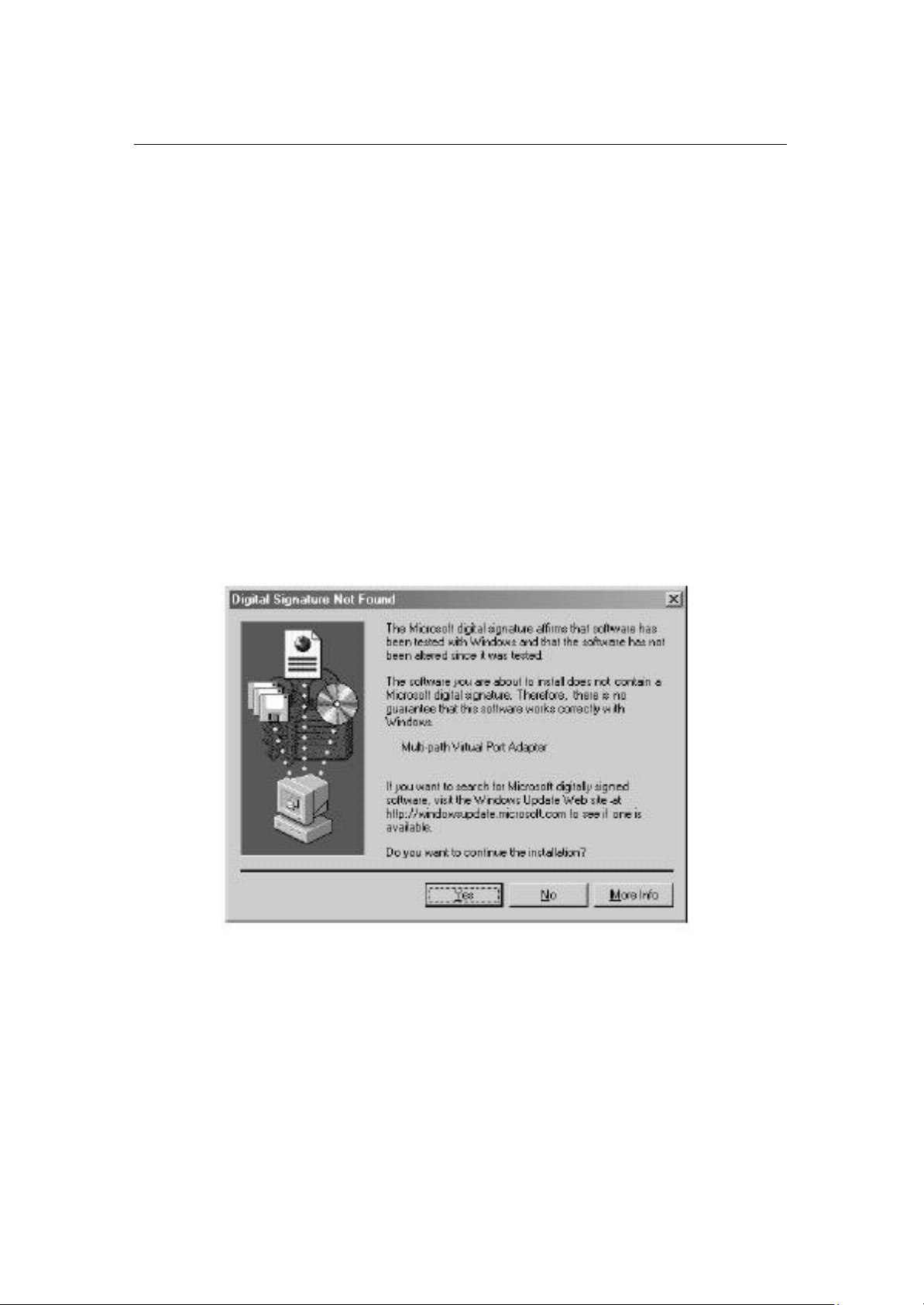
注意:在安装过程中,可能会出现如下警告:
没有关系,单击“ Yes”,可与继续正常安装
在 Windows 系统下卸载 PATHpilot
运行下列任一方法来卸载 PATHpilot:
l 开始菜单->程序->PATHpilot->uninstaller;
Page 53
52
PATHpilot Pro 2.0 用户手册V1.0
l 控制面板->添加/删除程序;
在 Linux 和 Solaris 系统下卸载 PATHpilot
在 Linux 系统下,从桌面上的弹出菜单的卸载程序就可以卸载 PATHpilot。
在 Solaris 系统下:
1.从 Application Manager window/PATHpilot 目录下运行卸载程序;
2.采用命令行模式卸载,到/opt/LSI/PATHpilot/_uninst,运行命令:./uninstaller.bin;
在卸载完成之后,必须删除/opt/LSI/PATHpilot目录和相关的jre目录。
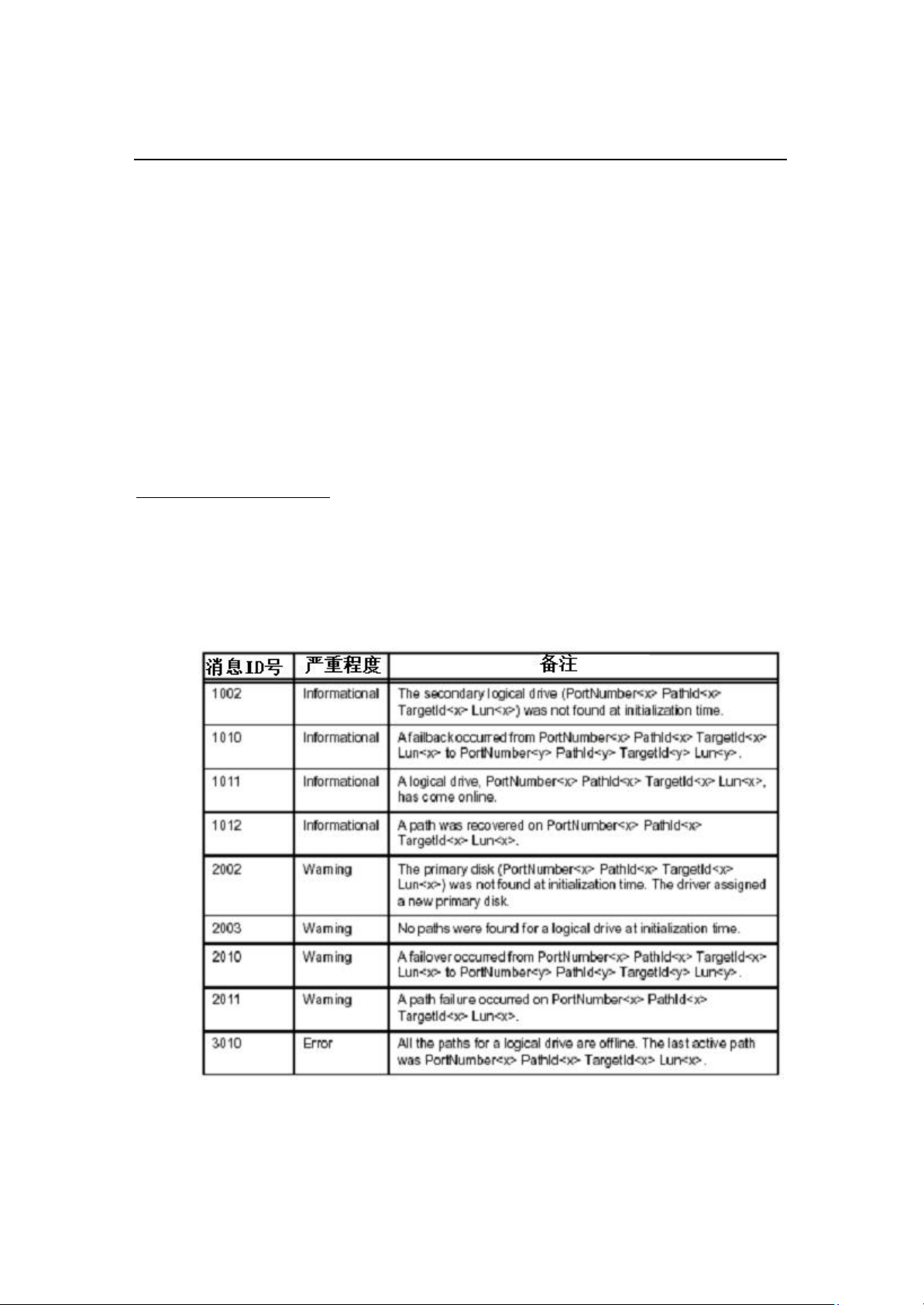
附录 B 事件
事件在PICC的事件日志查看器中显示,在Windows操作系统中,这些事件也可以在Windows
事件查看器中看到。在 Linux和Solaris系统中,可以在系统日志中看到这些事件。下表列出了
在PATHpilot Pro事件日志查看器中可能出现的事件信息:
表B-1 事件信息
 Loading...
Loading...