

Page 1
50
403020
GPS Basics
Введение в GPS (Глобальная Навигационная Система).
Версия 1.0
Русская
Page 2
Содержание
1. Что такое GPS и зачем она ..................... 5
2 Краткий обзор........................................... 6
2.1 Космический сегмент. .......................................... 6
2.2 Сегмент Управления. ........................................... 8
2.3 Сегмент пользователя. ....................................... 9
3. Как работает ...........................................10
3.1 Простая навигация. .............................................11
3.1.1 Определение координат спутника. ...................... 11
3.1.2 Вычисление расстояния до
спутника...................................................... 13
3.1.3 Источники ошибок. .............................................. 14
3.1.4 Почему армейские приёмники более точны? ..... 18
3.2 Дифференциальное координирование. .............19
3.2.1 Референц - станция. ............................................ 20
3.2.2 Ровер. ................................................................... 20
3 2.3 Некоторые подробности. .................................... 20
3.3 Дифференциальные фазовые GPS измерения и
разрешение неоднозначности. ............................... 22
3.3.1 Фаза несущей, C/A и Р коды. .............................. 22
3.3.2 Почему используется фаза несущей? ................ 23
3.3.3 Двойное вычисление разностей. ........................ 23
3.3.4 Неоднозначность и Разрешение
Неоднозначности.......................................................... 24
4. Геодезические
...................................................................... 26
4.1 Введение. ........................................................... 27
4.2 Система координат GPS. .................................. 28
4.3 Местные системы координат. ............................ 29
4.4 Проблемы с высотой. ........................................ 30
4.5 Трансформация. ................................................. 31
4.6 Картографические проекции и координаты на
плоскости. ............................................................... 34
4.6.1 Поперечная проекция Меркатора. ..................... 35
4.6.2 Проекция Ламберта. ............................................ 37
5. Геодезические GPS
...................................................................... 38
5.1 Методики GPS измерений................................. 39
5.1.1 Статика. ................................................................ 40
5.1.2 Измерения быстрой статикой. ............................. 42
5.1.3 Кинематические измерения. ............................... 44
5.1.4 RTK измерения. .................................................... 45
5.2 Подготовка к измерениям. ................................ 46
5.3 Советы бывалого.
................................................................................. 46
Глоссарий. ................................................... 48
Further Reading ........................................... 59
2
Основы GPS -1.0.1ru
Page 3
Краткий обзор.
Предисловие.
1. Что такое GPS и зачем она
2 Краткий обзор
3. Как работает
4. Геодезические
5. Геодезические GPS
Глоссарий.
Index
4
5
6
10
26
38
48
60
Основы GPS -1.0.1ru
3
Краткий обзор.
Page 4
Предисловие.
Почему мы написали эту книжку и
кому она адресована?
На предприятиях Leica, среди
всевозможного оборудования
производятся аппаратные и
программные средства для GPS
измерений. Они используются
профессионалами во многих областях
человеческой деятельности для
решения разнообразнейших задач.
Лишь одно объединяет почти всех
наших потребителей – это то, что они
не специалисты в GPS или
квалифицированные геодезисты. Они
используют GPS как инструмент,
чтобы решить поставленную перед
ними задачу. Поэтому, полезно
получить некоторые основные
сведения о том, что такое GPS и как
она работает.
Эта книжка предназначена, для того
чтобы новичок или потенциальный
потребитель GPS несколько расширил
свой кругозор в области GPS и
геодезии. Это - не полное техническое
руководство по GPS или учебник по
геодезии. Существует много
различных источников, из которых Вы
можете почерпнуть более детальную
информацию на эту тему из других
многочисленных источников.
Издание разбито на две основные
части. В первой рассказано о GPS и
объяснено как она работает. Во
второй описаны основные принципы
геодезии.
Предисловие.
4
Основы GPS -1.0.1ru
Page 5
1. Что такое GPS и зачем она
GPS – сокращение от NAVSTAR GPS, что
является аббревиатурой от Глобальная
НАВигационная Система для Определения
местоположения по Времени И Дальности.
GPS – это решение одной из самых давних
и наиболее неприятных проблем человека.
Она предоставляет ответ на вопрос, «В
каком месте на планете Земля я
нахожусь?».
Можно вообразить, что на этот вопрос
есть простой ответ. Вы можете легко
определить своё местоположение
относительно объектов окружающих вас
на местности. Но что, если таких
объектов вокруг Вас нет? Что, если Вы
находитесь в сердце пустыни или на
просторах океана? В течение многих
столетий, эта проблема решалась с
помощью навигации по солнцу и звездам.
Также, на земле, геодезисты и геологи
использовали опорные геодезические
пункты, от которых выполнялись
измерения или поиск пути.
Эти методы помогают не всегда. Солнце и
звезды не видны сквозь облака. И даже с
помощью наиболее точных методов
измерений нельзя с высокой точностью
определить своё местоположение.
После второй мировой войны, это стало
очевидным Министерству обороны США,
которое приступило к решению проблемы
точного, абсолютного координирования. В
течение следующих 25 лет были
осуществлены несколько проектов и
экспериментов, включая Transit, Timation,
Loran, Decca и т.д. Все эти проекты
позволяли определять координаты, но
были ограничены по точности или
функциональным возможностям.
В начале 1970-ых, был предложен новый
проект - GPS. Эта концепция обещала
удовлетворить все потребности
правительства США, а именно,
необходимость в определении
местоположения с высокой точностью, в
любой точке земной поверхности, в
любое время, в любых
метеорологических условиях.
GPS – это спутниковая система, которая
использует созвездие из 24 спутников
для обеспечения пользователя точными
координатами. Теперь давайте
определимся с тем, что значит «точно».
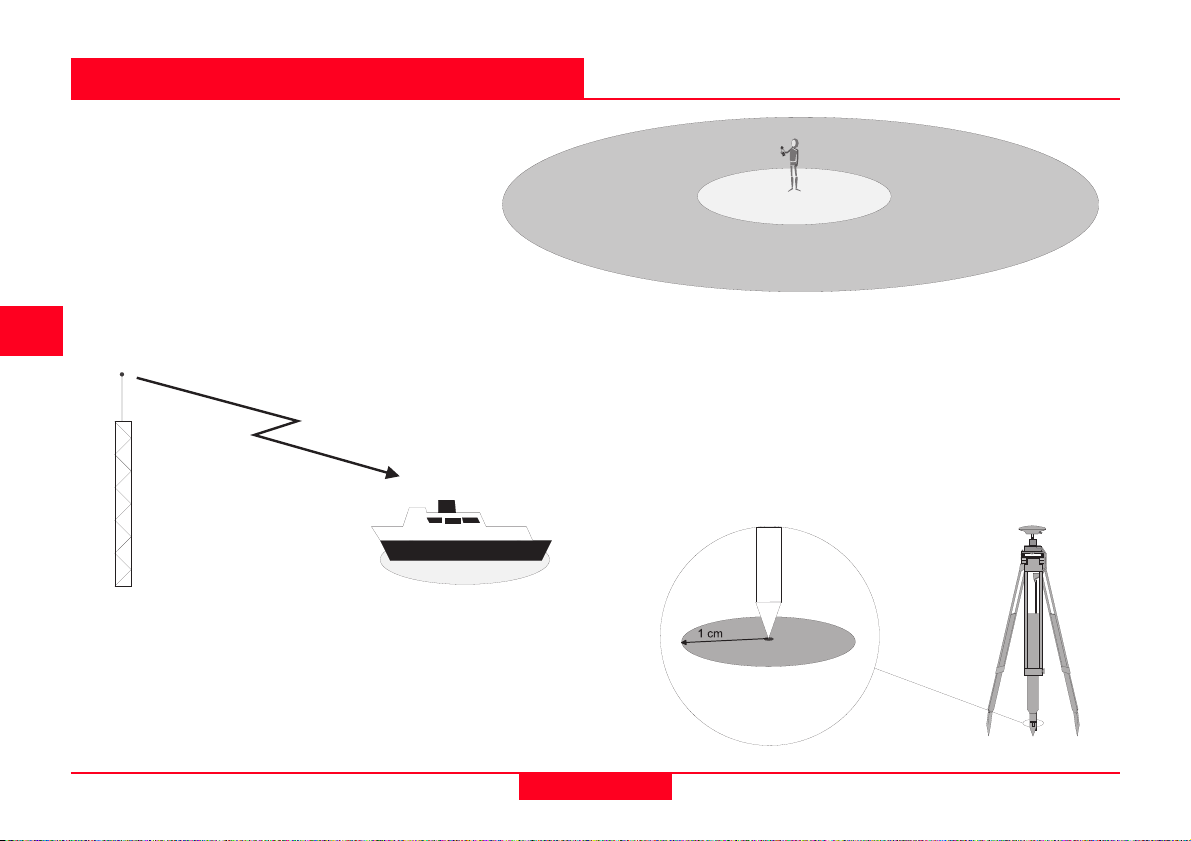
Для путешественника или солдата в
пустыне необходима точность 15 м.
Кораблю в прибрежных водах необходима
точность 5 м. Землеустроителю
необходима точность 1 см или менее. GPS
может использоваться для решения всех
этих задач, разница только в
используемых GPS приёмниках и методик
измерений.
Изначально GPS задумывалась для
военного использования в любое время
на всей поверхности Земли. Вскоре после
того, как были сделаны первые
предложения, стало очевидно, что
гражданские пользователи могут также
использовать GPS, и не только для
персонального координирования (что
было предназначено для военных).
Первые две главных гражданских
областей применения это морская
навигация и геодезия. В настоящее время
диапазон задач решаемых с помощью
GPS расширился от навигации
автотранспорта до автоматизации
управления строительной техникой.
4
4
5
Основы GPS -1.0.0ru
5
Что такое GPS и зачем она
Краткий обзор
Page 6
2 Краткий обзор
2.1 Космический сегмент.
Полная структура GPS состоит из трех
различных сегментов:
• Космический Сегмент - Спутники,
облетающие по орбите Землю.
• Сегмент Управления - Станции,
расположенные вблизи от экватора,
необходимые для управления
спутниками.
• Сегмент Пользователя – Любой, кто
принимает и использует сигнал GPS.
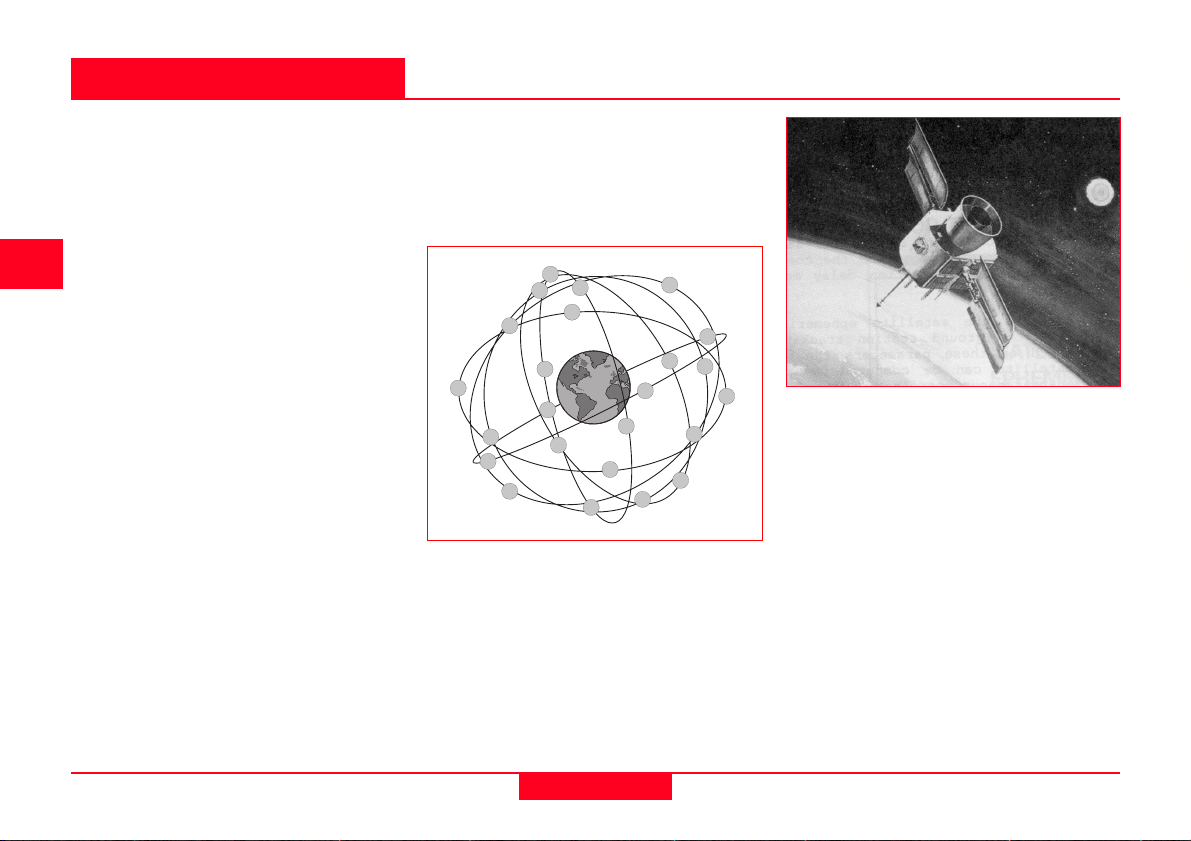
Космический Сегмент состоит из 24
спутников, облетающих по орбите Землю
на высоте приблизительно 20 200 км
каждые 12 часов. В настоящее время на
орбитах находятся 26 действующих
спутников.
Созвездие спутников GPS.
Космический сегмент спроектирован
таким образом, что в любой момент в
вашем распоряжении будет минимум 4
спутника, видимых выше 15° над
горизонтом в любой точке земной
поверхности. Четыре спутника - минимум,
который необходим для решения
большинства прикладных задач.
Опыт показывает, что обычно в поле
зрения находятся, по крайней мере, 5
спутников, видимых большую часть суток
выше 15°, а весьма часто в вашем
распоряжении будет 6 или 7 видимых
спутников.
Спутник GPS.
Каждый спутник GPS имеет несколько
очень точных бортовых атомных часов
(эталонов частот). Часы работают на
основной частоте 10.23 MГц. Она
используется для генерирования
сигналов, которые передаются
спутником.
Краткий обзор
6
Основы GPS -1.0.0ru
Page 7
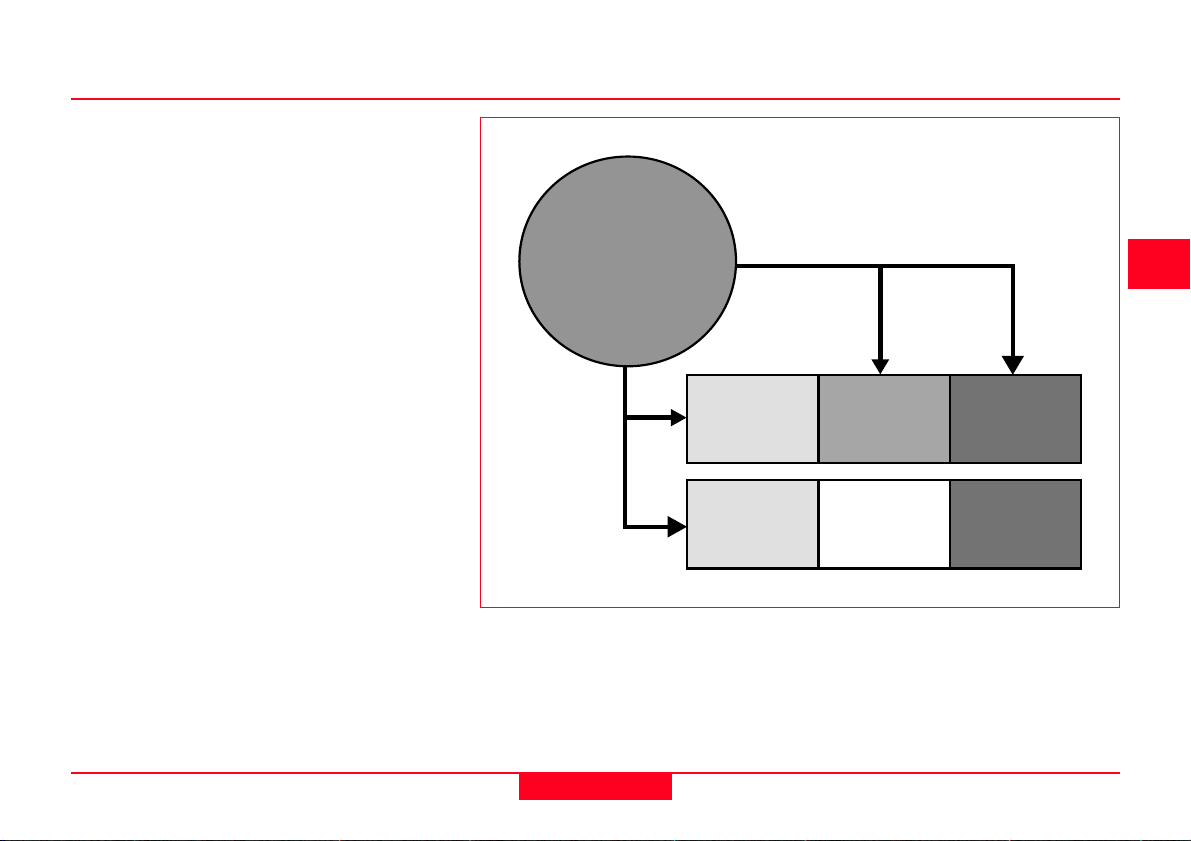
Спутник постоянно передаёт две несущие
волны. Эти несущие волны находятся в Lполосе (используемой для радиопередач),
и перемещаются к земле со скоростью
света. Эти несущие образуются из
основной частоты, генерируемой очень
точными атомными часами:
• несущая L1 передаётся в диапазоне
1575.42 МГц (10.23 X 154)
• несущая L2 передаётся в диапазоне
1227.60 МГц (10.23 X 120).
Затем несущая L1 модулируется двумя
кодами. C/A кодом или кодом Грубого /
Захвата с частотой 1.023 MГц (10.23/10) и
Р-кодом или Точным Кодом с частотой в
10.23 MГц. Несущая L2 модулируется
только одним кодом – Р-кодом с частотой
10.23 МГц.
Каждый спутник имеет свой
индивидуальный код, по которому его
идентифицирует приёмник. Коды могут
быть также использованы как основа для
измерения псевдодальностей, а по ним и
вычисляются координаты.
основной
частоты
10.23 МГц
x154
x120
Структура сигнала GPS.
L1
1575.42 Mhz
L2
1227.60 Mhz
ч10
C/A Code
1.023 Mhz
4
5
P-Code
10.23 Mhz
P-Code
10.32 Mhz
Основы GPS -1.0.0ru
7
Краткий обзор
Page 8
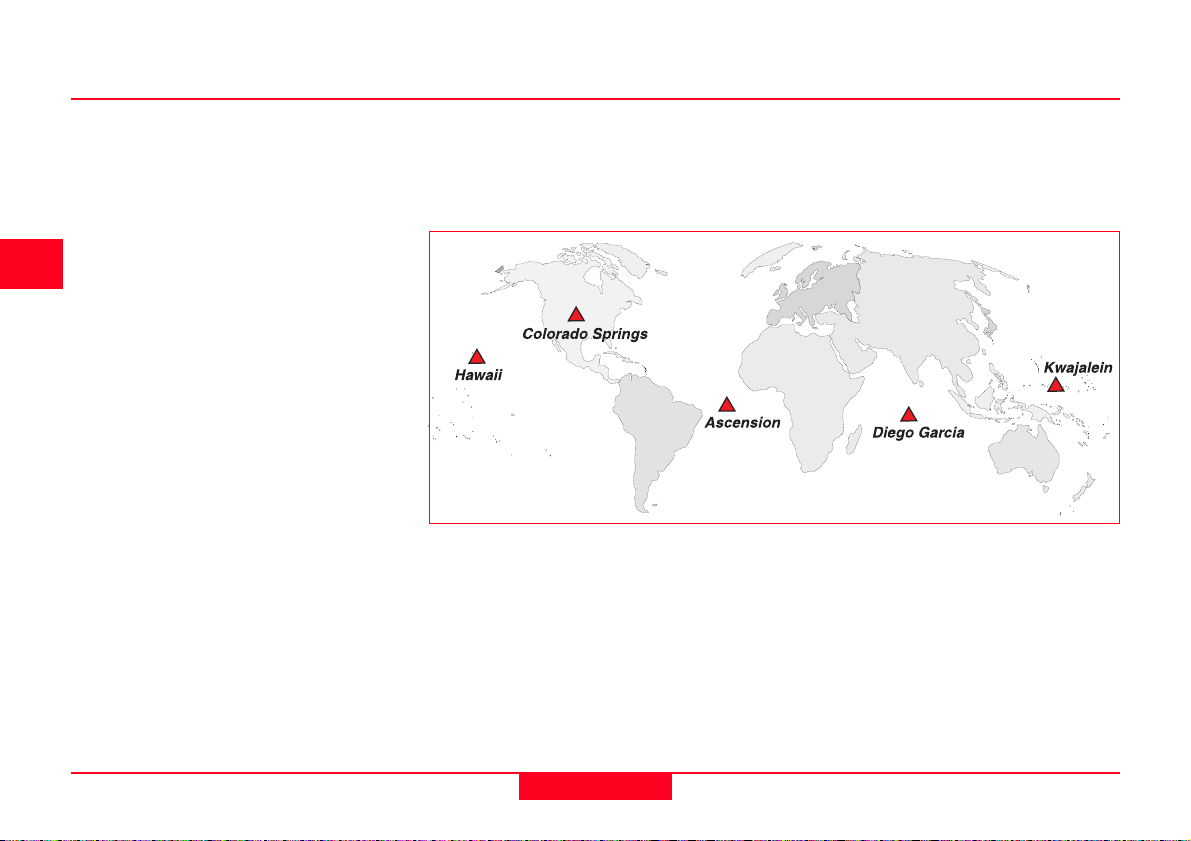
2.2 Сегмент Управления.
Сегмент Управления состоит из одной
главной станции управления, 5
контрольных станций и 4 наземных
антенн, равномерно распределенных
вблизи экватора.
Сегмент Управления отслеживает
спутники GPS, обновляет их орбитальное
положение и выполняет калибровку и
синхронизацию их часов.
Следующая важная функция - это
определение орбиты каждого спутника и
предсказание траектории его движения
на следующие 24 часа. Эта информация
загружается в каждый спутник и входит в
передаваемый сигнал. Это позволяет
GPS приёмнику иметь информацию о том,
где может находиться каждый спутник,
что пригодится для его быстрого
обнаружения на небесной сфере.
Спутниковые сигналы принимаются на
станциях в Асценсионе, Диего Гарсия и
Кваджалейне. Затем измерения
отсылаются главной станции управления
в Колорадо Спрингс где они
обрабатываются с целью обнаружения
ошибок в сигнале каждого спутника.
Затем информация отсылается назад
четырём контрольным станциям,
оборудованным наземными антеннами, и
загружается в спутники.
Расположение станций Сегмента Управления.
Краткий обзор
8
Основы GPS -1.0.0ru
Page 9

2.3 Сегмент пользователя.
Сегмент пользователя включает любого,
использующего GPS приёмник для
приёма сигналов GPS и определения
своего местоположения и/или времени.
Обычные сферы применения в пределах
сегмента пользователя – это навигация
транспортных средств, туризм,
геодезические измерения, судовождение,
воздушное передвижение, управление
строительной техникой и т. д.
4
5
Основы GPS -1.0.0ru
9
Краткий обзор
Page 10
3. Как работает
Существует несколько различных методов
для получения координат с помощью GPS.
Выбор зависит от точности, необходимой
потребителю и типа имеющегося GPS
приёмника. Вообще говоря, методы могут
быть разделены на три основных класса:
Автономная навигация - используется единственный (автономный)
приёмник. Используется туристами, штурманами для навигации судов
находящихся вдали от берега и военными. Точность определения координат
около 100 м для гражданских потребителей и приблизительно 20 м для
военных потребителей.
Дифференциальное координирование. Более известное как
DGPS, позволяет получать координаты с точностью 0.5 - 5 м.
Используется для прибрежного кораблевождения, сбора данных
для ГИС (Географическая Информационная Система), в
сельском хозяйстве и т. д.
Дифференциальные фазовые измерения. Позволяет
получить точность 0.5 - 20 мм. Используется для
геодезических измерений, управления строительной
техникой и т. д.
Как работает GPS
10
Основы GPS -1.0.1ru
Page 11

3.1 Простая навигация.
3.1.1 Определение координат спутника.
Это - наиболее простая методика,
которую используют GPS приёмники, для
мгновенного получения координат и
высоты и/или точного времени.
Получаемая точность может быть выше
100 м (обычно около 30 - 50 м) для
гражданских пользователей и 5 – 15 м
для военных. Причины возникновения
столь большой разницы между
гражданскими и военными
пользователями приведены позже в этом
разделе. Приемники, используемые для
операций данного типа обычно маленьких
размеров, портативные карманные
устройства с низкой ценой.
Определение координат с помощью GPS основано на измерении расстояния от
спутников до GPS приёмника, находящегося на поверхности Земли. Это расстояние до
каждого спутника может быть определено GPS приёмником. Основная идея – решение
обратной засечки, которую множество геодезистов используют в своей ежедневной
работе. Если Вы знаете, расстояние до трёх точек относительно собственного
положения, то Вы можете определить координаты точки стояния относительно этих
трёх точек. По расстоянию до одного спутника, мы знаем, что положение приёмника
должно быть некоторой точкой на поверхности воображаемой сферы, центром
которой является спутник. Определив точку пересечения трёх воображаемых сфер,
мы получим положение приёмника.
4
5
6
Карманный GPS приёмник.
Основы GPS -1.0.1ru
Пересечение трех воображаемых сфер.
11
Как работает GPS
Page 12
Проблема состоит в том, что по сигналу
GPS можно определить лишь
псевдодальности и время.
Таким образом, для решения имеются
четыре неизвестных величины:
координаты (X, Y, Z) и время
прохождения сигнала. Выполнив
измерения сигналов от четырёх
спутников, мы получим четыре
уравнения, которые могут быть решены,
что позволит определить эти
неизвестные величины.
Для определения трёхмерного положения и
времени нужны, по крайней мере, четыре
спутника.
Как работает GPS
12
Основы GPS -1.0.1ru
Page 13
3.1.2 Вычисление расстояния до спутника.
Для того чтобы вычислить расстояние до
каждого спутника используется один из
законов движения Исаака Ньютона:
Расстояние = Скорость x Время
Например, можно вычислить расстояние,
пройденное поездом, если Вы знаете,
скорость его движения и время, в течение
которого он двигался с этой скоростью.
Для GPS измерений необходим приёмник,
вычисляющий расстояние от приёмника
до спутника.
Скорость – это скорость прохождения
радиосигнала. Радиоволны
распространяются со скоростью света,
290 000 км в секунду (186 000 миль в
секунду).
Время – это время, затраченное
радиосигналом на прохождение от
спутника до GPS приёмника. Вычислить
его немного тяжелей, так как необходимо
знать, когда радиосигнал покинул спутник
и когда он достиг приёмника.
Вычисление времени.
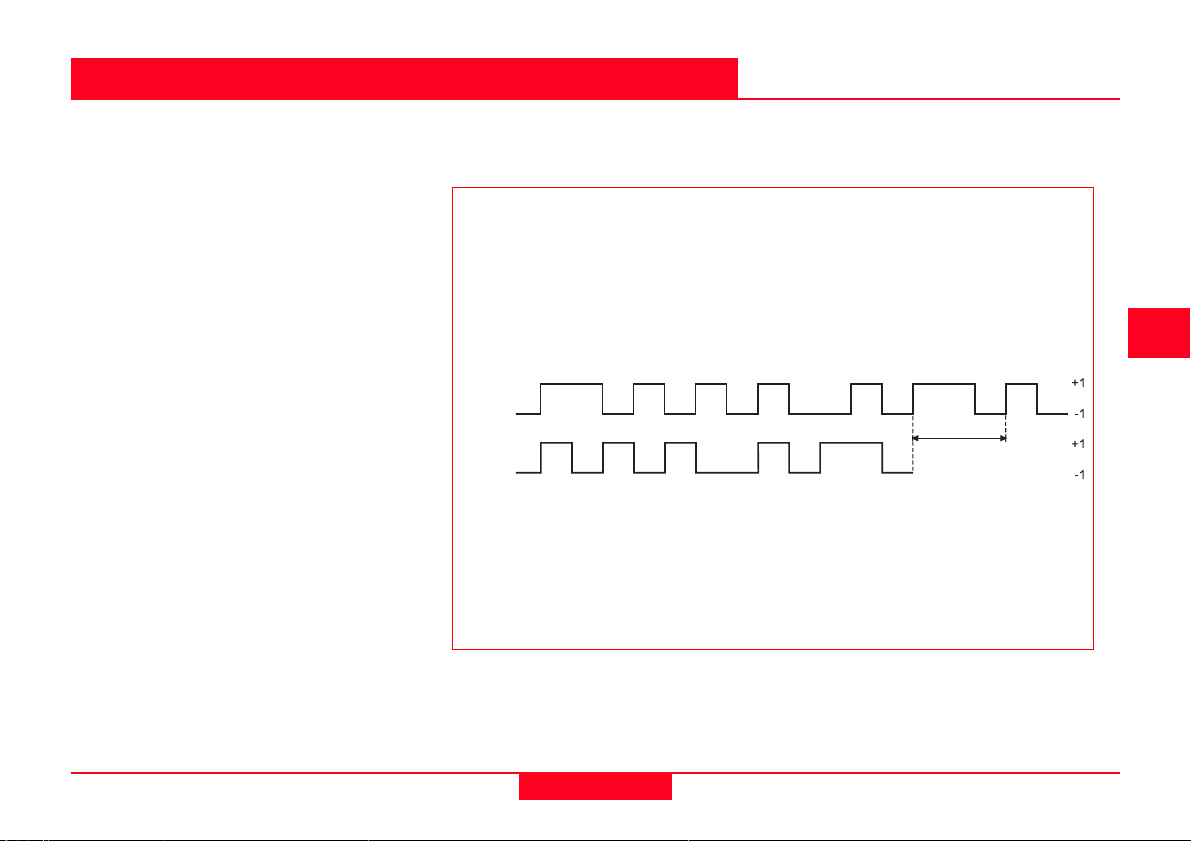
Сигнал спутника модулирован двумя кодами - C/A кодом и Р-кодом (см.
раздел 2.1). C/A код основан на сигналах времени генерируемых очень
точными атомными часами. Приёмник также снабжён часами, которые
используются для генерации соответствующего C/A кода. После чего GPS
приёмник способен «найти соответствие» или корреляцию кода, полученного
от спутника с кодом сгенерированным приёмником.
Сигнал
приёмника
Сигнал
спутника
C/A код – это цифровой код, называемый «псевдослучайным», т. е.
появляющийся случайным образом. В действительности он далеко не
случаен и повторяется тысячу раз каждую секунду.
Таким образом, мы можем вычислить время, затрачиваемое радиосигналом на
прохождение от спутника до GPS приёмника.
Время,
необходимое
сигналу, чтобы
достигнуть
приёмника
4
5
6
Основы GPS -1.0.1ru
13
Как работает GPS
Page 14
3.1.3 Источники ошибок.
До сих пор мы принимали, что координаты
полученные с помощью GPS очень точны
и свободны от ошибок, но это далеко не
так, потому что существуют несколько
источников ошибок, которые снижают
точность координат полученных с
помощью GPS от (теоретически)
нескольких метров до нескольких
десятков метров. Эти источники ошибки:
1. Ионосферные и атмосферные
задержки
2. Ошибки часов спутника и приёмника
3. Переотражение
4. Геометрическое Снижение Точности
5. Избирательный Доступ (S/A)
6. Шифрование кодовых данных - Anti
Spoofing (A-S)
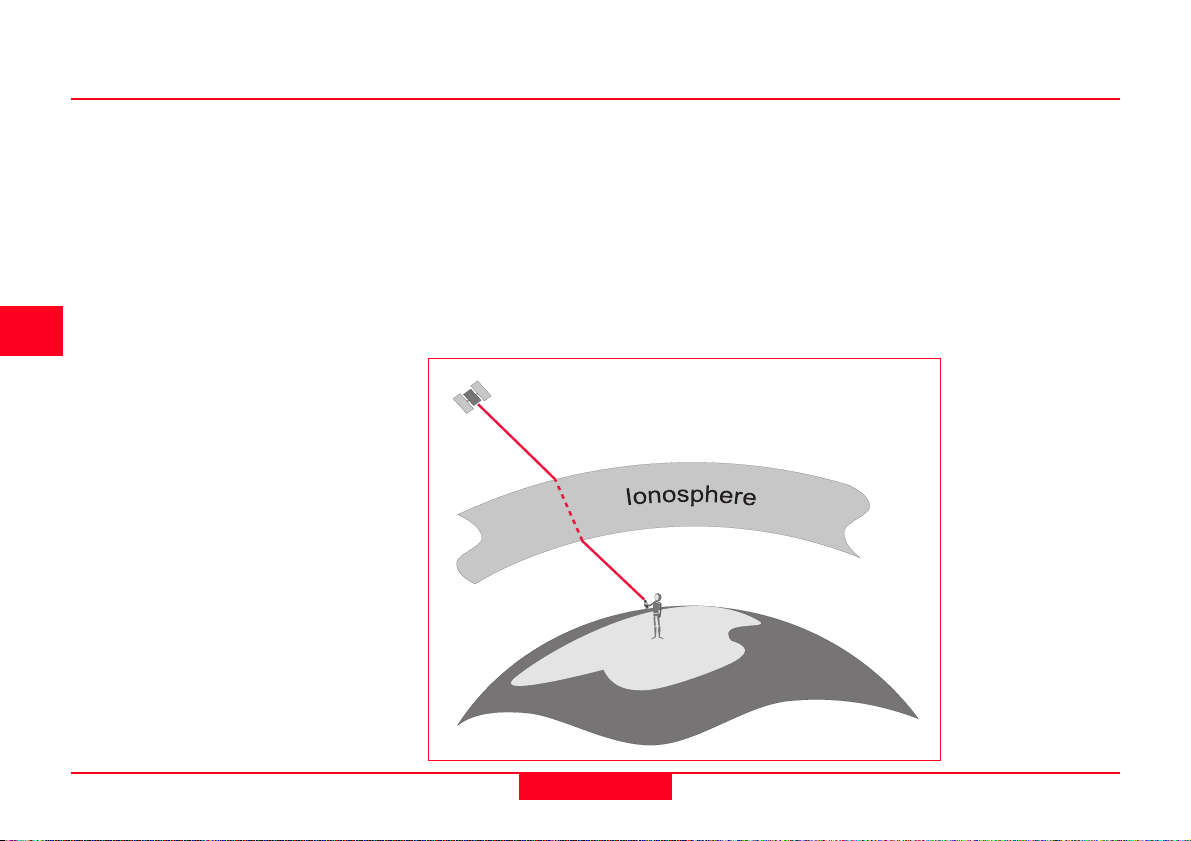
1. Ионосферные и атмосферные
задержки.
Поскольку спутниковый сигнал проходит
через ионосферу, его прохождение может
быть замедлено, эффект, подобный
преломлению луча света проходящего
через стекло. Эти атмосферные задержки
могут привести к ошибке в вычислении
дальности, поскольку воздействуют на
скорость сигнала. (Свет имеет постоянную
скорость только в вакууме).
Ионосфера не вызывает постоянной
задержки сигнала. Есть несколько
факторов, которые оказывают влияние
на величину задержки, вызванной
ионосферой.
Как работает GPS
14
Основы GPS -1.0.1ru
Page 15
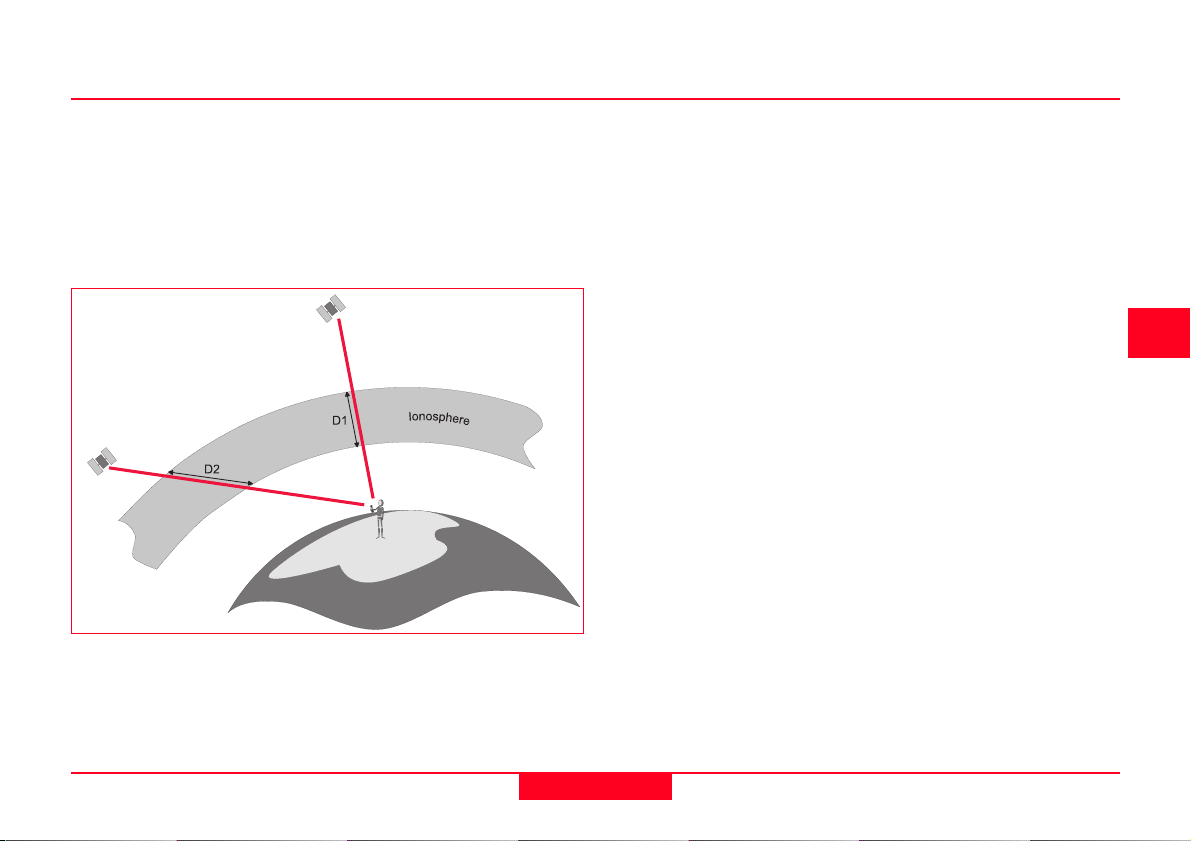
a. Возвышение спутника. Задержка
сигналов спутников находящихся низко
над горизонтом будет больше, чем
сигналов спутников расположенных
высоко. Это происходит из-за увеличения
расстояния, которое сигнал проходит
через атмосферу.
Высокий спутник
Низкий спутник
b. Плотность ионосферы, на которую
воздействует солнце. Ночью влияние
ионосферы весьма низкое. Днём солнце
увеличивает воздействие ионосферы и
замедляет сигнал.
Количество, на которое увеличивается
плотность ионосферы, изменяется в
соответствии с циклом солнечной
активности.
Солнечная активность достигает
максимума приблизительно каждые 11
лет. Следующий пик (солнечный
максимум)
ожидается около
2000 года.
В дополнение к
этому могут также
происходить
беспорядочные
солнечные
вспышки, которые
также
воздействуют на
ионосферу.
Ионосферные
ошибки могут быть
смягчены с
помощью одного из
двух методов:
- Первый метод
заключается в осреднении эффекта
снижения скорости света, вызванного
ионосферой. Этот поправочный
коэффициент может быть затем
применён к вычислениным дальностям.
Однако в этом случае мы полагаемся на
некие средние условия, а очевидно, что
эти средние условия далеко не
постоянны. Поэтому этот метод не
оптимальное решение для уменьшения
ионосферной ошибки.
- Второй метод заключается в
использовании «двухчастотных» GPS
приёмников. Такие приёмники измеряют
сигналы GPS L1 и L2. Известно что, когда
радиосигнал проходит через ионосферу
то скорость его замедляется, обратно
пропорционально частоте.
Следовательно, если сравнить время
приёма двух сигналов, то можно точно
оценить время задержки прохождения
сигнала. Заметьте, что это возможно
только с помощью двухчастотных GPS
приёмников. В настоящее время
большинство используемых приёмников
одночастотные.
c. Воздействие на сигнал GPS водяных
паров. Водяной пар, содержащийся в
атмосфере, также может воздействовать
на сигнал GPS. Это воздействие, которое
может приводить к снижению точности
определения координат, может быть
компенсировано с помощью моделей
атмосферы.
4
5
6
Основы GPS -1.0.1ru
15
Как работает GPS
Page 16
2. Ошибки часов спутников и
приёмника.
Даже притом, что часы спутника очень
точны (ошибка приблизительно 3
наносекунды), они иногда слегка уходят
вперёд или назад, что вызывает
небольшие ошибки, воздействующие на
точность определения координат.
Министерство обороны США
контролирует часы спутников с помощью
Сегмента Управления (см. раздел 2.2) и
может исправить любой обнаруженный
ход часов.
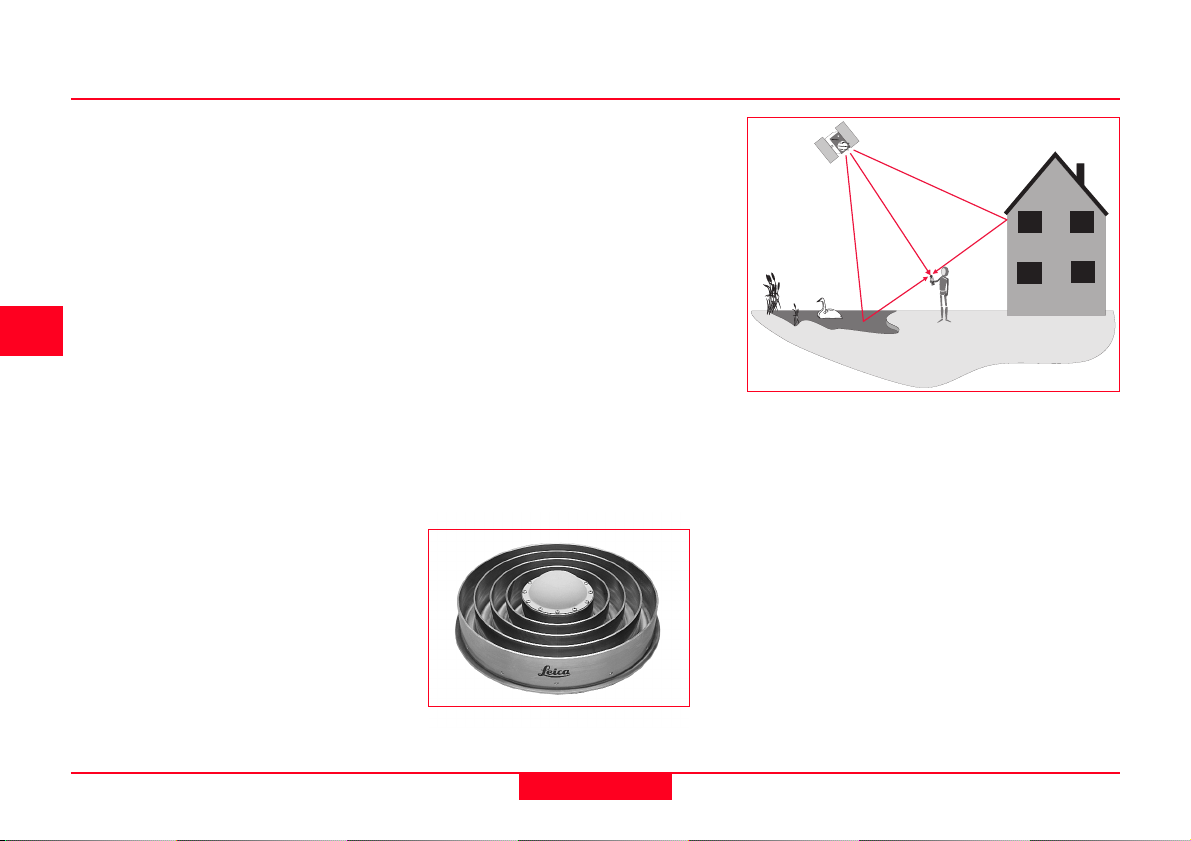
3. Ошибки из-за переотражения.
Переотражение происходит, когда
антенна приёмника установлена
рядом с большой отражающей
поверхностью типа озера или здания.
Спутниковый сигнал не достигает
антенны по прямой, а сначала
попадает на близлежащий объект.
В результате на антенну попадает
отражённый сигнал, что образует
ложное измерение.
Переотражение может быть
уменьшено с помощью специальных
GPS антенн с встроенным защитным
экраном (круглый, металлический
диск приблизительно 50 см (2 фута) в
диаметре), который предотвращают
приём низко распространяющихся
сигналов.
Для получения высочайшей точности,
предпочтительней использовать антенну
типа Choke-Ring, которая состоит из 4
или 5 концентрических колец вокруг
антенного модуля, которые
отфильтровывают любой не прямой
сигнал.
Переотражение воздействует только на
высокоточные измерения, такие,
например как геодезические измерения.
Простые карманные навигационные
приёмники не используют методы
фильтрации переотражённых сигналов.
Как работает GPS
Антенна Choke-Ring (кольцевой
дроссель).
16
Основы GPS -1.0.1ru
Page 17
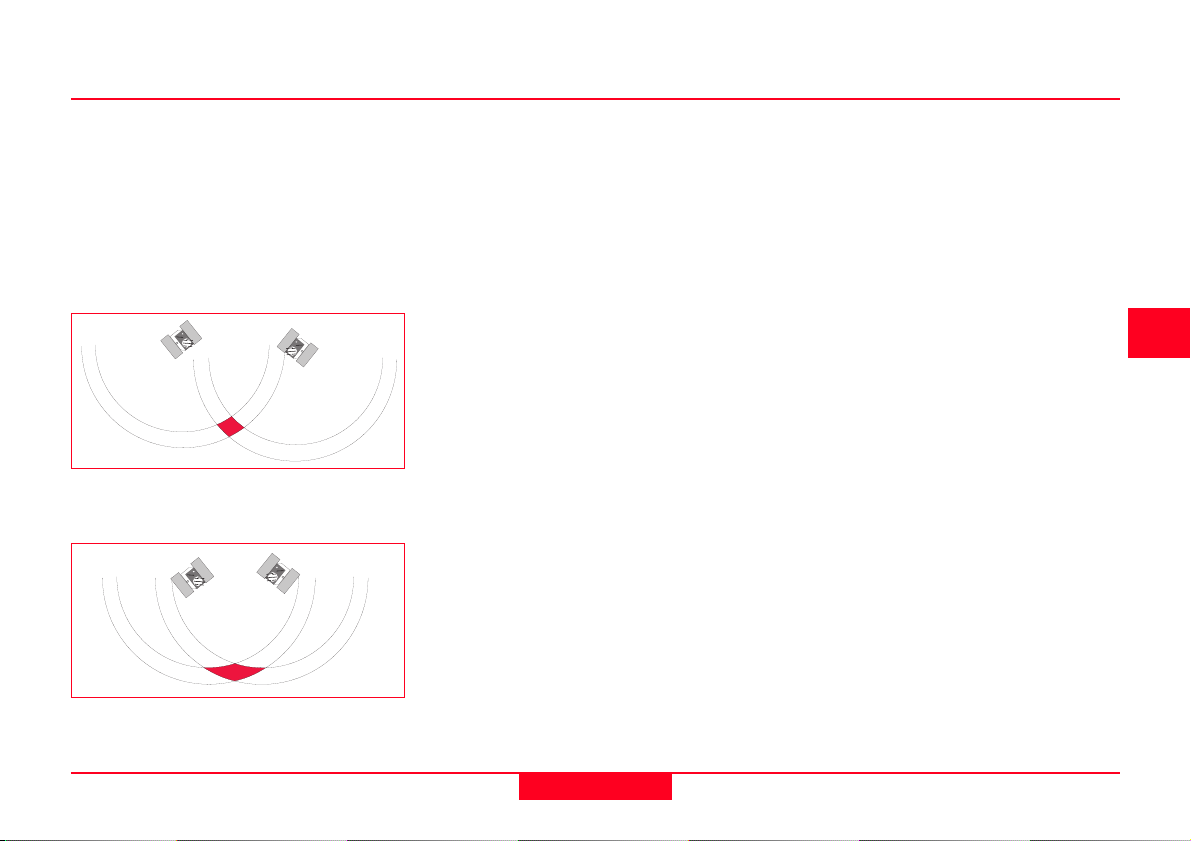
4. Геометрическое снижение
точности.
Геометрическое снижение точности (DOP)
- мера строгости спутниковой геометрии и
связано с расположением спутников на
небесной сфере. DOP может усилить
воздействие ошибок определения
координат спутника. Принцип может быть
лучше проиллюстрирован схемами:
Хорошо расположенные спутники низкая неопределенность положения
Плохо расположенные спутники высокая неопределенность положения
На определение дальности до спутника
воздействуют все выше описанные
ошибки. В случае, когда спутники
расположены на небесной сфере
достаточно широко, искомое положение
может находиться в пределах
заштрихованной области на схеме, и
границы возможной ошибки малы.
Когда спутники расположены близко друг
к другу, размер заштрихованной области
увеличивается, что увеличивает
неопределенность положения.
В зависимости от типа измерений могут
быть вычислены различные типы
геометрического снижения точности или
DOP.
VDOP - снижение точности по высоте.
Дает снижение точности в вертикальном
направлении.
HDOP - снижение точности в плане. Дает
снижение точности в горизонтальном
направлении.
PDOP - снижение точности положения.
Дает снижение точности трёхмерного
положения.
GDOP - геометрическое снижение
точности. Дает снижение точности
трёхмерного положения и времени.
Наиболее полезный DOP – это GDOP, так
как это комбинация всех коэффициентов.
Некоторые приемники, однако,
вычисляют PDOP или HDOP, которые не
включают временную составляющую.
Лучший путь уменьшения GDOP – это
наблюдение как можно большего
количества спутников. Помните, однако,
что на сигналы от низко расположенных
спутников ошибки воздействуют в
большей степени.
Общее правило при геодезических GPS
измерениях - лучше наблюдать спутники
с углами возвышения 15° и выше.
Наиболее точные координаты будут
вычисляться в случае низкого GDOP,
(обычно 8 или меньше).
4
5
6
Основы GPS -1.0.1ru
17
Как работает GPS
Page 18
3.1.4 Почему армейские
приёмники более точны?
5. Избирательный доступ (S/A).
Избирательный доступ – это процесс
воздействия на GPS сигнал
Министерством обороны США.
Предназначен он для того, чтобы частные
лица и недружелюбные иностранцы не
пользовались полной точностью GPS.
Воплощается воздействием на
спутниковые часы техникой известной
как «добавление псевдослучайного
сигнала», который слегка изменяет
время. К тому же передаваемые
эфемериды (или траектория движения
спутника) слегка отличаться от той, что в
действительности. Конечный результат
состоит в снижении точности
определения координат.
Стоит отметить, что S/A воздействует на
гражданских потребителей,
использующих один GPS приёмник, для
получения автономного положения. На
потребителей использующих
дифференциальные измерения S/A
существенно не воздействуют.
В настоящее время (август 2000)
правительство США отключило S/A.
6. Шифрование кодовых данных Anti-Spoofing (A-S).
Шифрование кодовых данных, подобно S/
A, является намеренным с целью
препятствовать доступу к Р-кодовой
части сигнала GPS гражданским лицам и
неприятелю и следовательно вынудить их
использовать C/A код, к которому
применён S/A.
A-S шифрует Р-код в результате чего
получается сигнал, называемый Y-кодом.
Только пользователи, имеющие
армейские GPS приёмники (США и их
союзники) могут расшифровывать Y-код.
Армейский ручной GPS приёмник (с
любезного разрешения Rockwell)
Армейские приёмники более точны,
потому что они не используют C/A код
для вычисления времени прохождения
сигнала от спутника до приёмника, для
этого они используют Р-код.
Несущая модулируется Р-кодом с
частотой 10.23 Гц и C/A кодом с частотой
1.023 Гц. Следовательно с помощью Ркода дальности могут быть вычислены
значительно точнее (в 10 раз), поскольку
этот код генерируется 10 раз в секунду, а
C/A код один раз в секунду.
Р-код часто подвергается шифрованию
(A-S) как это описано в предыдущем
разделе. Это означает, что только
военные, снабжённые специальными GPS
приёмниками, могут считывать этот
зашифрованный Р-код (также
называемый Y-кодом).
По этим причинам, пользователи военных
GPS приёмников обычно получают
координаты с точностью около 5 м, а
гражданские пользователи сопоставимых
GPS приёмников получат координаты с
точностью лишь 15 -100 м.
Как работает GPS
18
Основы GPS -1.0.1ru
Page 19
3.2 Дифференциальное координирование.
Многие из ошибок, воздействующие на
измерение дальности до спутника могут
быть полностью устранены или, по
крайней мере, существенно уменьшены, с
помощью дифференциальных измерений.
DGPS позволяет гражданскому
потребителю увеличивать точность
определения координат со 100 м до 2-3 м
или менее, что крайне необходимо для
многих чисто гражданских целей.
4
5
6
Основы GPS -1.0.1ru
DGPS референц-станция передающая поправки пользователям.
19
Как работает GPS
Page 20

3.2.1 Референц - станция.
3.2.2 Ровер.
3 2.3 Некоторые подробности.
Антенна референц приёмника
установлена на точке с предварительно
определёнными координатами. Приёмник,
который установлен на подобной точке с
известными координатами, называется
референц - станцией или базовой
станцией (базой).
После включения приёмник начинает
отслеживать спутники. Затем он может
вычислять координаты в автономном
режиме с помощью методов, упомянутых
в разделе 3.1.
Поскольку он находится на точке с
известными координатам, то он имеет
возможность очень точно оценить каковы
должны быть дальности до различных
спутников.
Поэтому базовый приёмник может
определить разность между
вычисленными и измеренными
дальностями. Эти разности называются
поправками.
Базовый приёмник обычно
подсоединяется к устройству для
передачи данных по радиоканалу
(радиомодем), с помощью которого и
передаются эти дифференциальные
поправки.
Ровер находится на другом конце этой
цепочки принимая поправки. Ровер
снабжён радиомодемом позволяющим
принимать поправки в дальности,
передаваемые базовой станцией.
Ровер также вычисляет дальности до
спутников как это описано в разделе 3.1,
а приняв их применяет к вычисленным
дальностям. Это позволяет намного
более точно вычислять координаты, чем
при использовании не исправленных
дальностей.
С помощью этой методики, уменьшаются
все ошибки, перечисленные в разделе
3.1.3, следовательно в результате
получаться более точные координаты.
Также следует отметить, что
неограниченное число роверов могут
принимать поправки от одной
единственной базовой станции.
Выше процесс DGPS был описан весьма
поверхностно. В реальной жизни, это
более сложная методика.
Одна из существенных проблем – это
радиомодем. Существует много типов
радиомодемов, которые работают в
различных диапазонах радио частот и
передают данные на различные
расстояния. Эффективность
радиомодема зависит от ряда факторов:
• Диапазон радио частот
• Мощность радиомодема
• Тип и «усиление» радиоантенны
• Положение антенны
В настоящее время развёрнуты сети GPS
приёмников и мощных
радиопередатчиков, передающие на
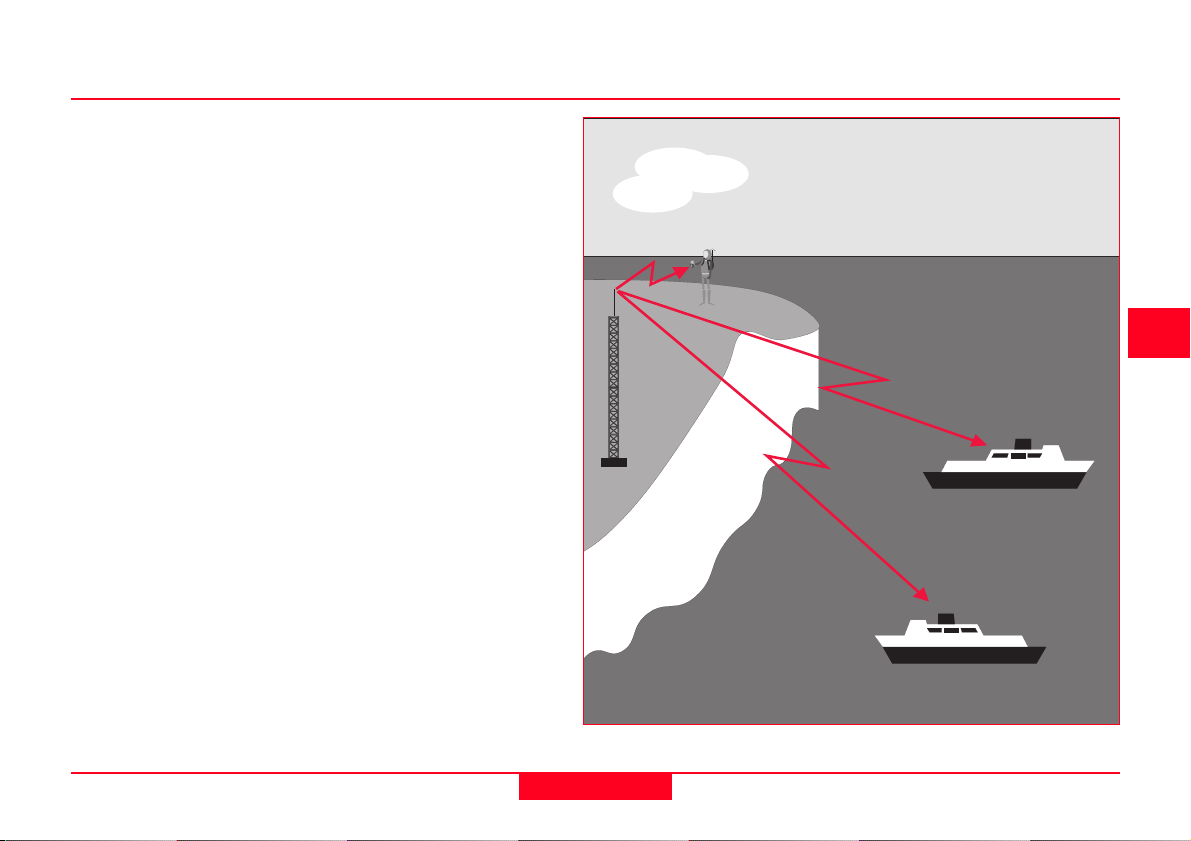
защищённой «только морской» частоте.
Они называются Радиомаяками.
Пользователям этой службы (главным
образом персонал, занимающийся
навигацией морских судов в прибрежных
водах) необходимо приобрести лишь один
ровер, который может принимать
поправки от радиомаяков. Такие системы
были установлены вдоль побережий
многих стран.
Как работает GPS
20
Основы GPS -1.0.1ru
Page 21

Другие устройства, такие как мобильные
телефоны, могут быть также
использованы для передачи данных.
В дополнение к Системе Радиомаяков,
существуют также другие системы,
которые охватывают радиосигналом
большие территории, работая на
коммерческой основе. Существуют также
правительственные системы типа WAAS в
Соединенных Штатах, система
Европейского Космического агентства
(ESA) и система Японского
правительства.
Существует общеиспользуемый формат
передаваемых по радиоканалу GPS
данных, называемый RTCM. Он создан
Радио Технической Комиссией Морских
Служб, спонсируемая промышленностью
некоммерческая организация. Этот
формат обычно используется во всем
мире.
4
5
6
Основы GPS -1.0.1ru
21
Как работает GPS
Page 22

3.3 Дифференциальные фазовые GPS измерения и разрешение
неоднозначности.
3.3.1 Фаза несущей, C/A и Р коды.
Дифференциальные фазовые GPS
измерения используются главным образом
в геодезии и связанных отраслях
промышленности для достижения точности
относительного координирования на
уровне 5 - 50 мм. Используемая методика
отличается от выше описанных методов и
включает большой объём статистических
вычислений.
Это дифференциальная методика, суть
которой состоит в том, что всегда
одновременно используются минимум два
GPS приёмника. Этот метод одно из
ответвлений дифференциального
координирования, описанного в разделе
3.2.
Базовый приёмник всегда устанавливается
в точке с фиксированными или известными
координатами. Другой приёмник(и)
свободно перемещается вокруг. Поэтому
они и называются роверами (бродяги).
Между базовым приёмником и ровером
вычисляется базовая линия.
Основная методика вычислений всё та же,
что и описанная выше – измерение
расстояний до четырёх спутников и
вычисление координат по этим
дальностям.
Большая разница состоит в способе, с
помощью которого эти расстояния
вычисляются.
Теперь полезно будет дать определения различных компонентов сигнала GPS.
Фаза несущей. Синусоидальная волна сигнала L1 или L2, которая генерируется
спутником. Несущая L1 генерируется с частотой 1575.42 МГц, а несущая L2 с частотой
1227.6 МГц.
Код C/A. Код грубого захвата. Модулирует несущую L1 с частотой 1.023 МГц.
Р-код. Точный код. Модулирует несущую L1 и L2 с частотой 10.23 МГц.
Обратитесь также к схеме приведённой в разделе 2.1.
Что такое модуляция?
Несущие волны предназначены для переноса двоичных C/A и Р кодов с помощью
процесса, называемого модуляцией. Модуляция – это добавление кодов к несущей
волне. Коды – это двоичные коды. Это означает, что они могут иметь значения только
1 или -1. Каждый раз в момент изменения значения кода изменяется фаза несущей.
C/A код
Несущая
модулированная
Р-кодом
Р-код
Модуляция несущей.
Как работает GPS
22
Основы GPS -1.0.1ru
Page 23

3.3.2 Почему используется фаза несущей?
3.3.3 Двойное вычисление разностей.
Фаза несущей используется, потому что с
помощью неё можно более точно
выполнять измерения, чем используя Рили C/A коды. Несущая L1 имеет длину
волны 19.4 см. Если мы могли бы
измерить число длин волны (целую и
дробную её части) между спутником и
приёмником, то Вы получили бы с очень
высокой точностью дальность до
спутника.
Большая часть ошибки образующейся при
выполнении измерений в автономном
режиме происходит из-за недостатков
часов приёмника и спутника. Один из путей
обойти эти ошибки состоит в том, чтобы
использовать методику называемую
Двойное Вычисление разностей.
Если два GPS приёмника выполняют
измерение до двух различных спутников,
смещения часов приёмников и спутников
аннулируются, тем самым удаляется
любой источник ошибки, который может
входить в уравнение.
4
5
6
Основы GPS -1.0.1ru
Двойное вычисление разностей.
23
Как работает GPS
Page 24

3.3.4 Неоднозначность и Разрешение Неоднозначности.
После удаления ошибок часов с помощью
двойного вычисления разностей, можно
определить целое число длин волны
несущей плюс её дробную часть между
спутником и антенной приёмника.
Проблема в том, что имеется множество
«наборов» возможных целых длин волны
для каждого наблюдаемого спутника.
Таким образом, решение неоднозначно. С
помощью статистических расчётов можно
разрешить эту неоднозначность и
определить наиболее вероятное решение.
Далее мы приведём схему процесса
разрешения неоднозначности. Некоторые
сложные вещи в этом объяснении
отсутствуют, но всё же вам будет полезно
с ней ознакомиться.
Код, полученный в результате
дифференциальных измерений, может
быть использован для получения:
1.
2.
приблизительного
положения. Точный ответ
должен лежать гденибудь в пределах этого
круга.
Волновой фронт от
отдельного спутника
попадает как внутрь,
так и за пределы круга.
Искомая точка должна
лежать где-нибудь на
одной из линий,
образованных этими
волновым фронтом
внутри круга.
Как работает GPS
24
Основы GPS -1.0.1ru
Page 25

3.
Далее…
В случае наблюдения
второго спутника,
образуется второй
набор волновых
фронтов или
фазовых линий.
Искомая точка
должна находится на
одном из
пересечений двух
наборов фазовых
линий.
5.
Добавим третий
спутник. Это ещё
более сузит круг
поиска.
4
5
6
4.
Основы GPS -1.0.1ru
Добавим третий
спутник – это
позволит нам сузить
круг поиска. Точка
должна находиться
на пересечении всех
трёх фазовых линий.
25
6.
Как только
конфигурация
спутникового
созвездия
изменится,
появится
тенденция к
развороту вокруг
одной из точек,
которая и
представляет
наиболее
вероятное
решение.
Как работает GPS
Page 26

4. Геодезические
Так как GPS становится всё более и
более популярным геодезическим и
навигационным инструментом,
геодезистам и навигаторам необходимо
понять, как GPS координаты
взаимосвязаны со стандартными
геодезическими системами координат.
Общая причина ошибок GPS измерений –
это результат неправильного понимания
этих зависимостей.
Геодезические
26
Основы GPS -1.0.1ru
Page 27

4.1 Введение.
Определение координат с помощью GPS
позволяет достигнуть фундаментальной
цели геодезии - определение абсолютного
положения с одинаковой точностью в
любом месте на земной поверхности.
Используя классические геодезические и
топографические методы, мы всегда
определяем положение относительно
исходных геодезических пунктов, с
точностью зависящий от расстояния до
этих пунктов. Поэтому GPS
предоставляет существенное
преимущество перед обычными
методами.
Наука геодезия – это основа для GPS, и,
наоборот, GPS превратилась в главный
инструмент геодезии. Это станет
очевидным, если мы посмотрим на цели
геодезии:
1. Создание и обслуживание
национальных и глобальных
трёхмерных геодезических опорных
сетей на поверхности земли, с учётом
того, что их положение изменяется со
временем из-за смещений центров,
закрепляющих пункты этих сетей.
2. Измерение и представление
геодинамических явлений (движение
полюсов Земли, приливно-отливные я
вления и подвижки земной коры).
3. Определение гравитационного поля
земли, включая его временные
изменения.
Хотя большинство потребителей никогда
не коснутся любой из вышеупомянутых
задач, необходимо чтобы любой
использующий GPS оборудование имел
общее представление о геодезии.
Основы GPS -1.0.1ru
27
Геодезические
Page 28

4.2 Система координат GPS.
Хотя Земля и может показаться
однородной сферой, если взглянуть на
неё из космоса, но поверхность её далека
от равномерной. Т. к. GPS должна помочь
определить координаты в любой точке на
земной поверхности она использует
систему геодезических координат, в
основе которой лежит эллипсоид.
Эллипсоид (также называемый
сфероидом) – это сплюснутая или
раздавленная сфера.
Эллипсоид выбран потому, что он больше
всего похож на сферу Земли. Этот
эллипсоид не имеет никакой физической
поверхности, но является математически
определенной поверхностью.
Фактически, как будет показано далее,
существует много различных эллипсоидов
или математических определений земной
поверхности. Эллипсоид, используемый в
GPS, называется WGS84 или Всемирной
Геодезической Системой 1984.
Точка на поверхности земли (заметьте,
что это не поверхность эллипсоида),
может быть определена широтой,
долготой и эллипсоидальной высотой.
Альтернативный метод определения
положения точки – это Декартова
(прямоугольная) система координат, с
помощью отрезков по осям координат X,
Y, и Z от начала координат или центра
сфероида. Этот метод, прежде всего
используемый GPS для определения
положения точки в пространстве.
Z
0
∆Y
Долгота
X
Определение координат точки P в
Геодезической и Декартовой системе
координат.
Поверхность
Земли
Высота
Широта
P
∆Z
Y
∆X
Геодезические
28
Основы GPS -1.0.1ru
Page 29

4.3 Местные системы координат.
Также, как система GPS координат,
система местных координат или
координат используемых для выполнения
геодезических работ в различных
государствах основана на местном
(референц) эллипсоиде, наилучшим
образом представляющим геоид (см.
раздел 4.4) в районе проведения работ.
Обычно, эти координаты будут
проектироваться на плоскость, для
получения прямоугольных координат в
зональной системе координат (см. раздел
4.5).
Референц - эллипсоиды, используемые в
большинстве местных систем координат
во всем мире были определены много лет
назад, ещё до появления методов
космической геодезии. Создание этих
эллипсоидов имело целью получить
поверхность наилучшим образом
представляющую интересующую
территорию, но их нельзя было
применять в других регионах Земли.
Поэтому каждая страна определила свою
собственную картографическую
проекцию / пространственную систему
координат, основанную на референц эллипсоиде.
При использовании GPS, вычисляются
координаты относительно эллипсоида
WGS84. Существующие каталоги
координат обычно составлены из
координат в местной системе и поэтому
GPS координаты должны быть
преобразованы в эту местную систему.
Эллипсоид WGS84
Зависимость между эллипсоидами и
земной поверхностью.
Земли (топографическая)
Поверхность
Референцэллипсоид
Основы GPS -1.0.1ru
29
Геодезические
Page 30

4.4 Проблемы с высотой.
Сущность GPS воздействует также и на
измерение высоты.
Все высоты, измеренные с помощью GPS
относятся к поверхности эллипсоида
WGS84. Они называются
эллипсоидальными высотами.
В существующих каталогах обычно
указаны ортометрические высоты
(отметки), измеренные относительно
среднего уровня моря.
Средний уровень моря соответствует
поверхности называемой геоидом. Геоид
может быть определен как
эквипотенциальная поверхность, т. e. в
любой точке на поверхности геоида сила
тяжести имеет постоянное значение.
Геоид имеет сложную форму и не
соответствует эллипсоиду. Плотность
земли, однако, воздействует на геоид,
вызывая повышения в более плотных и
понижения в менее плотных регионах.
Зависимость между геоидом,
эллипсоидом и земной поверхностью
показана на рисунке ниже.
Поскольку на большинстве существующих
карт указаны ортометрические высоты
(относительно геоида), большинство
потребителей GPS также требует, чтобы
их высоты были ортометрическими.
Эта проблема решена с помощью модели
геоида, предназначенной для
преобразования эллипсоидальных высот
P
H
h
N
h = H + N
Где
h = эллипсоидальная высота
H = ортометрическая высота
N = превышение геоида над референц-эллипсоидом
Зависимость между ортометрической и
эллипсоидальной высотами.
в ортометрические. На относительно
равнинных территориях поверхность
геоида можно принять за сравнительно
равномерную. В таких регионах с
помощью некоторых методов
преобразования можно создать модель
высот, по которой можно
интерполировать геоидальные высоты.
Топографическая
поверхность
Эллипсоид
Геоид
Геодезические
30
Основы GPS -1.0.1ru
Page 31

4.5 Трансформация.
Цель трансформации состоит в том, чтобы
преобразовать координаты из одной
системы в координаты в другой системе.
Существуют несколько различных методов
трансформации. Какой из них использовать
зависит от результатов, которые вам
необходимы.
Процесс выполнения полевых работ для
определения параметров трансформации
для каждого из методов один и тот же.
Во-первых, необходимо иметь координаты в
обеих системах координат (т. е. в WGS84 и в
местной системе), по крайней мере, трёх (а
лучше четырёх) общих пунктов. Чем больше
общих пунктов Вы включите в вычисления,
тем больше будет избыточность
необходимая для выявления ошибок.
Общие пункты (т. е. пункты с координатами
в обеих системах) мы получим, выполнив
GPS измерения на пунктах с известными
местными координатами и
ортометрическими высотами (например, на
пунктах существующих геодезических
сетей).
После этого можно вычислить параметры
трансформации с помощью одного из
методов трансформации.
Важно отметить, что результаты
трансформации должны использоваться
только в зоне ограниченной общими
пунктами. Для трансформации координат
точек вне этой зоны вычисленные
параметры использовать нельзя. Для этих
точек нужно выполнить новую
трансформацию использовав лишь
соответствующую часть предыдущих точек.
Трансформация имеет отношение лишь к точкам в пределах
зоны ограниченной общими пунктами.
Основы GPS -1.0.1ru
31
Геодезические
Page 32

Трансформация Гельмерта.
X
S
Y
S
Z
S
X
L
Y
L
Z
L
ω
Y
ω
Z
ω
X
P
T
P
S
P
L
P
S
P
L
T
ωX,!ωY,!ω
Z
Трансформация Гельмерта по 7
параметрам предлагает математически
строгое преобразование. Она вполне
относительно начала координат другой
системы, затем разворот осей X, Y и Z и
изменение масштаба при переходе от
одного эллипсоида к другому.
удовлетворяет точности GPS измерений и
качеству исходных данных (каталожных
координат).
Опыт показал, что точность GPS
измерений, обычно, гораздо выше
точности измерений, выполненных с
помощью традиционных оптических
приборов.
В подавляющем большинстве случаев
ранее определённые координаты пунктов
будут отличаться от вновь определённых
с помощью GPS (более точных), что
приводит к искажениям сети.
Трансформируя точку из одной системы в
другую лучше иметь дело с началом
системы координат, а не с поверхностью,
на которой находится точка.
Для того чтобы трансформировать
координаты из одной системы в другую
должно быть известно положение
относительно друг друга начала
координат и осей эллипсоида. По этой
информации может быть определено
пространственное смещение по осям X, Y
= координаты в WGS84
= координаты в местной системе
= вектор смещения начала координат по осям X, Y и Z
= углы разворота
Трансформация Гельмерта по 7 параметрам.
Референцллипсоид
Эллипсоид
WGS84
и Z начала одной системы координат
Геодезические
32
Основы GPS -1.0.1ru
Page 33

Другие методы трансформации.
Несмотря на то, что трансформация
Гельмерта является математически строгим
методом, она не может точно учесть
искажения координат в местной системе, к
тому же для точного определения высоты
необходимо иметь превышения геоида над
референц-эллипсоидом.
Поэтому, Leica предоставляет в ваше
распоряжение ряд других методов
трансформации.
Для так называемого метода
интерполяции, не нужно иметь ни какой
информации о референц-эллипсоиде или
картографической проекции.
Несовместимость с местными
координатами устраняется растягиванием
или сжатием всех GPS координат с целью
равномерно вписать их в систему местных
координат.
Вы можете также построить модель высот.
Она позволит компенсировать отсутствие
превышений геоида над референцэллипсоидом, если в вашем распоряжении
достаточное количество реперов.
В качестве альтернативы методу
интерполяции может быть использован
Метод одного шага. Высоты и координаты в
этом случае также используются
раздельно. Для трансформации
координаты WGS84 проектируются на
временную поперечную проекцию
Меркатора, а затем вычисляются
смещения, углы разворота и масштаб
«реальной» проекции относительно
временной. Высотная трансформация – это
одномерная высотная аппроксимация.
Этот метод трансформации может быть
использован в регионах, где референцэллипсоид и картографическая проекция
неизвестны и где геоид достаточно
равномерная поверхность.
Точка спроектированная
на поверхность модели
высот
Mit Hilfe von 4 PaЯpunkten generiertes Hцhenmodell
Использование обоих выше описанных
методов должно быть ограничено
территорией приблизительно 15 x 15 км,
(10x10 мили).
Комбинация методов Гельмерта и
Интерполяции воплощена в Пошаговом
методе. Этот метод использует плановую
трансформацию Гельмерта для получения
координат и высотную интерполяцию для
получения высоты. В этом случае Вы
должны знать параметры референцэллипсоида и картографической проекции.
Модель высот
Поверхность
эллипсоида
Ортометрическая
высота в общем
пункте
Основы GPS -1.0.1ru
33
Геодезические
Page 34

4.6 Картографические проекции и координаты на плоскости.
o
a
b
c
d
e
f
g
h
i
a'
b'
d'
e'
f'
h'
i'
Большинство геодезистов работают в
прямоугольной системе координат. Это
означает, что положение точки
определяется Northings (x), Eastings (y) и
ортометрической высотой (высота над
уровнем моря). Картографические
проекции позволяют геодезистам
представлять трёхмерные криволинейные
поверхности на плоском куске бумаги.
Карта с сеткой прямоугольных координат.
0 102030405060708090100110 N
0 102030405060708090100110 E
Геодезические
Такие картографические проекции
выглядят как плоскости, но фактически
определяют математический алгоритм
для перевода координат с эллипсоида на
плоскость.
Процесс проецирования на плоскость
представлен на схеме. Точки с
поверхности сфероида проецируются на
Основная идея картографической проекции.
34
плоскую поверхность по направлению от
центра сфероида.
Схема также отражает проблему,
заключающуюся в том, что невозможно
перенести без искажений линии с
эллипсоида на плоскость. Искажения
отсутствуют только там где плоскость
пересекает сфероид (точки с и g).
Основы GPS -1.0.1ru
Page 35

4.6.1 Поперечная проекция Меркатора.
Поперечная проекция Меркатора – это
конформная проекция. Это означает, что
углы, измеренные на поверхности
искажены не будут.
Основой проекции является цилиндр,
который немного меньше сфероида и
сплюснут. Метод, используемый во многих
странах, и особенно подходит для
больших территорий расположенных
вблизи экватора.
Поперечная проекция Меркатора
определяется:
• Смещением начала координат
• Широтой начала координат
• Осевым меридианом
• Масштабом на осевом меридиане
• Шириной зоны
Циллиндр
Поперечная проекция Меркатора.
Сфероид
Основы GPS -1.0.1ru
35
Геодезические
Page 36

Смещение начала координат
выполняется для того, чтобы начало
координат располагалось в нижнем левом
углу зоны. Используется это лишь для
более удобного обращения с
координатами, поскольку отрицательных
координат в данном случае не будет.
Широта начала координат определяет
широту оси цилиндра. Это обычно
экватор (в северном полушарии).
Осевой меридиан определяет северное
направление сетки координат и долготу
оси проекции.
Масштаб изменяется в направлении
восток – запад. Поскольку цилиндр
обычно меньше сфероида, масштаб на
осевом меридиане слишком мал, равен
единице на эллипсах пересечения, а
затем увеличивается до максимума на
краях проекции.
Масштаб в направлении север - юг не
изменяется. По этой причине Поперечная
проекция Меркатора наиболее подходит
для картографирования территорий
вытянутых в меридианальном
направлении.
Ширина зоны определяет часть
сфероида в направлении восток - запад,
к которой применяется проекция.
N
0
Параметры поперечной проекции Меркатора.
Ширина зоны
Осевой
меридиан
Эллипсы
сечения
E
Универсальная Поперечная проекция Меркатора (UTM).
Проекция UTM охватывает земной шар между 80°N и 80°S широты. Она является
разновидностью поперечной проекции Меркатора, с раз и навсегда
установленными параметрами. UTM – это разбиение на 6° по долготе зоны с
перекрытием соседних зон 30'. Один из определяющих параметров в данном
случае номер зоны или осевой меридиан (при указании одного подразумевается
другой).
Геодезические
36
Основы GPS -1.0.1ru
Page 37

4.6.2 Проекция Ламберта.
Проекция Ламберта – это также
конформная проекция, основой которой
является конус, который пересекает
сфероид. Это идеальная поверхность для
небольших территорий округлой формы,
например островов и полярных областей.
Проекция Ламберта определяется:
• Смещением начала координат
• Широтой начала координат
• Осевым меридианом
• Широтой 1-й стандартной параллели
• Широтой 2-й стандартной параллели
Смещение начала
координат выполняется
N
для того, чтобы начало
координат располагалось
в нижнем левом углу
зоны. Используется это
лишь для более удобного
обращения с
координатами, поскольку
отрицательных координат
в данном случае не будет.
Ширина зоны
Широта начала
координат определяет
широту начала координат
проекции.
Осевой меридиан
определяет северное
направление сетки
координат и долготу оси
0
Параметры проекции Ламберта.
проекции.
Широта 1-й стандартной параллели
определяет широту первого пересечения
конусом сфероида. Также определяет
место где влияние масштаба в
направлении север - юг нулевое.
Широта 2-й стандартной параллели
определяет вторую широту пересечения
конусом сфероида. В этом месте влияние
масштаба будет также нулевым.
1/6
зоны
ширины
зоны
2/3 ширины
1/6
зоны
ширины
Стандартная
параллель
Осевой
меридиан
Стандартная
параллель
E
Между стандартными параллелями
масштаб слишком маленький и слишком
большой за их пределами, что
определяется широтами стандартных
параллелей, в которых он является
нулевым. Масштаб в направлении восток
- запад не изменяется.
Основы GPS -1.0.1ru
37
Геодезические
Page 38

5. Геодезические GPS
Для геодезиста или инженера вероятней
важней всего является практика
выполнения GPS измерений, нежели
теоретические знания по GPS.
Подобно любому инструменту, GPS
приёмник настолько хорош на практике
насколько умело с ним обращается
оператор. Правильное планирование и
подготовка к измерениям существенно
влияют на успешность измерений также
как и осознание возможностей и
ограничений GPS.
Почему используется GPS?
GPS имеет большие преимущества по
сравнению с традиционными
геодезическими методами:
1. Не требуется прямая видимость между
точками
2. Может быть использована в любое
время дня или ночи при любой погоде
3. Предоставляет результаты с очень
высокой геодезической точностью
4. Больший объём работ может быть
выполнен быстрее с меньшими
трудозатратами
Ограничения.
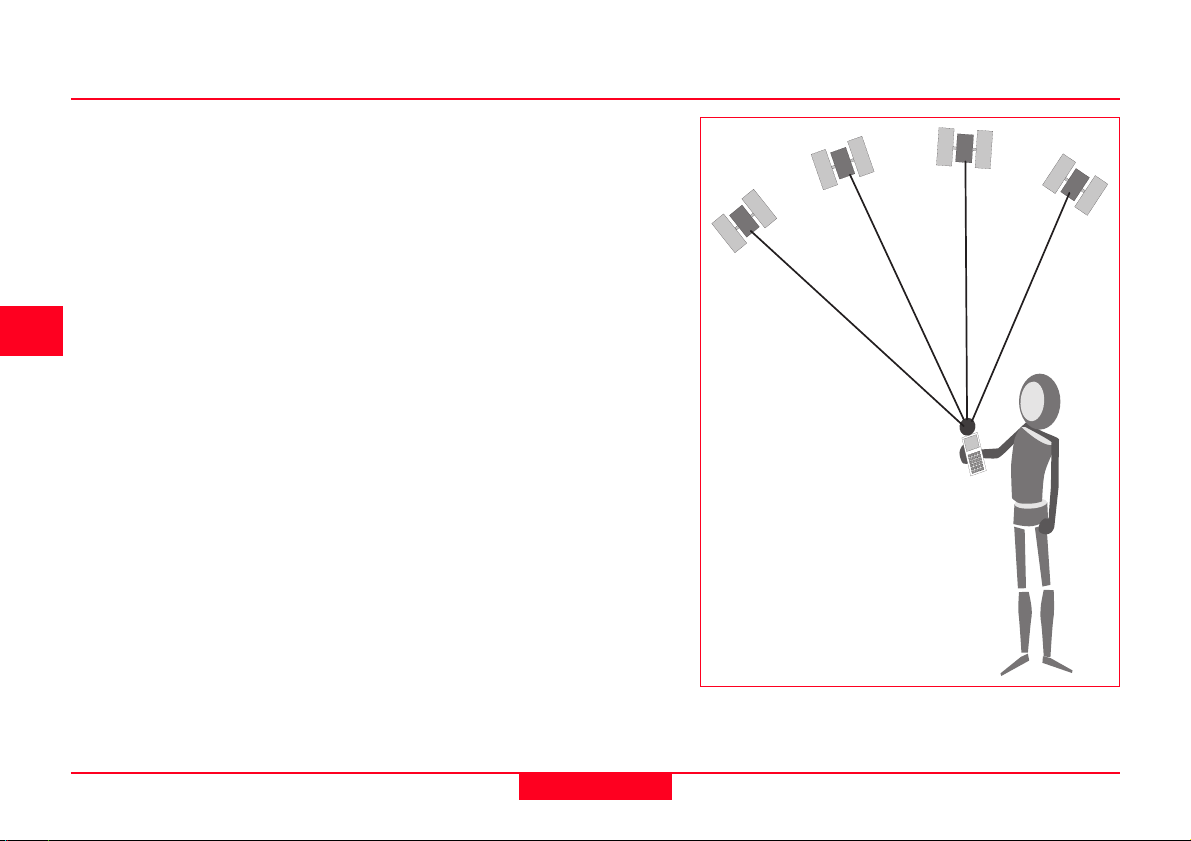
Для использования GPS необходимо
чтобы в поле зрения GPS антенны
находилось, по крайней мере, 4 спутника.
Иногда, спутниковые сигналы могут
блокироваться высокими зданиями,
деревьями и т. д. Следовательно, GPS
нельзя использовать в закрытом
помещении. Также трудно использовать
GPS в центре города или лесистой
местности.
Из-за этих ограничений в некоторых
случаях может быть экономически
эффективней использовать тахеометр
или комбинировать GPS и обычные
измерения.
Четыре спутника в поле зрения
приёмника.
Геодезические GPS
38
Большие объекты могут блокировать
сигнал GPS.
Основы GPS -1.0.1ru
Page 39

5.1 Методики GPS измерений.
Существует несколько методик
измерений, которые могут
использоваться с большинством
геодезических GPS приёмников.
Геодезист должен выбрать
соответствующую методику измерений,
для решения поставленной перед ним
задачи.
Статика - Используется для измерения
длинных линий, развития геодезических
сетей, изучения движений тектонических
платформ и т. д. Предлагает высокую
точность на длинных расстояниях, но
сравнительно медленные измерения.
Быстрая статика - Используется для
развития съёмочных сетй, сетей
сгущения и т. д. Предлагает высокую
точность на базовых линиях до 20 км намного быстрее обычной статики.
Кинематика - Используется для
топографической съёмки и для быстрого
определения координат большого
количества точек. Очень эффективный
способ измерения большого количества
близко расположенных точек. Однако
если сигналы спутников преграждают
различные препятствия: деревья, мосты,
высокие здания и т. д., и при этом
отслеживаются менее 4-х спутников, то
приёмник должен быть повторно
инициализирован, на что уйдёт 5-10
минут.
Методика обработки называемая On-theFly (Непрерывно, «слёту»)) (OTF)
призвана уменьшить это ограничение.
RTK – Для измерений кинематикой в
реальном времени, используется
радиомодем для передачи роверу
спутниковых данных полученных базой.
Этот способ позволяет вычислять
координаты непосредственно в поле в
реальном времени. Используется для
того же, что и кинематика. Очень
эффективный путь выполнения
топографической съёмки, поскольку
результаты будут получены сразу же
после выполнения полевых работ. Эта
методика, однако, полагается на
радиосвязь, которая подвержена
интерференции от других источников
радиоизлучения, а также необходима
прямая видимость между базой и
ровером.
Основы GPS -1.0.1ru
39
Геодезические GPS
Page 40

5.1.1 Статика.
Это был первый метод, разработанный
для GPS измерений. Он может быть
использован для измерений длинных
линий (обычно 20 км (16 миль) и более).
Один приёмник устанавливают на точке,
координаты которой точно известны в
системе WGS84. Он называется
референц – станцией. Другой приёмник,
расположенный на другом конце базовой
линии называется ровером.
Данные записываются обоими
приёмниками одновременно. Важно
выполнять запись данных каждым
приёмником с одной и той же частотой
(интервалом в записи данных). Обычно
это 15, 30 или 60 секунд.
Приёмники выполняют запись данных в
течение некоторого отрезка времени.
Этот период зависит от длины линии,
числа наблюдаемых спутников и
спутниковой геометрии (которую
характеризует такой показатель как
«снижение точности» или DOP). За
правило считается, что статика должна
выполняться в течение минимум 1 часа
на линиях 20 км с пятью спутниками и
преобладающим значением GDOP 8.
Длинные линии требуют более
длительного периода наблюдений.
После достаточного накопления данных
приёмники можно выключить. Затем
ровер может перемещаться на
следующую определяемую точку для
измерения следующей базовой линии.
Очень важно выполнить избыточные
измерения в сети. Например, выполнить
измерения на точках, по крайней мере,
дважды или выполнить измерения
дополнительных векторов, чтобы
избежать проблем, которые иначе не
были бы обнаружены.
Намного увеличить производительность
можно добавив ещё несколько роверов.
Для увеличения эффективности при
наличии трёх приёмников необходима
хорошая координация между членами
полевой бригады. Примеры приведены на
следующей странице.
Геодезические GPS
40
Основы GPS -1.0.1ru
Page 41

1
2
3
Сеть ABCDE должна быть определена с
помощью трёх приёмников. Координаты
А известны в WGS84. Приёмники
расположены в точках A, B и Е. Запись
GPS данных выполняется в течение
необходимого периода времени.
4
В завершение из В перемещается в C,
определяется линия ЕС.
Основы GPS -1.0.1ru
По истечении нужного периода
измерений приёмник из точки E
перемещается в D, а из B в C.
Определяется треугольник ACD.
5
Конечный результат – это измеренная
сеть ABCDE. На каждой точке
измерения выполнены три раза и
каждая следовательно, определена, по
крайней мере дважды. Это обеспечит
избыточность. Любые грубые ошибки
будут выявлены и некачественные
измерения можно будет удалить.
41
Затем из А в E, а из C в B.
Определяется треугольник BDE.
Геодезические GPS
Page 42

5.1.2 Измерения быстрой статикой.
При измерениях быстрой статикой
выбирается база относительно которой
работает один или более роверов.
Как правило, быстрая статика
используется для сгущения
существующих сетей, создания
съёмочных сетей и т. д.
Если вам предстоит работать в районе где
ранее никаких GPS измерений не
производилось, прежде всего
запланируйте измерения на пунктах
местных геодезических сетей. Это
позволит вычислить параметры
трансформации и следовательно все
точки определённые с помощью GPS в
этом районе можно легко перевычислить
в местную систему координат.
Как было рассказано ранее в разделе 4.5
должны быть выполнены измерения, по
крайней мере, на 4-х пунктах с
известными координатами по периметру
района работ. Вычисленные параметры
трансформации будут действительны для
района охватываемого этими пунктами.
База обычно устанавливается на
исходном пункте, координаты которого
могут быть включены в трансформацию.
Если в вашем распоряжении нет никаких
исходных точек, то она может быть
установлена где-нибудь в пределах
определяемой сети.
Затем ровер перемещаясь посещает
каждый из известных пунктов. Период
измерений на каждой из точек зависит от
длины базовой линии до базы и GDOP.
Данные записываются, а затем
обрабатываются в офисе.
Затем, с целью выявления грубых ошибок
должны быть выполнены контрольные
измерения. Например, повторно
отнаблюдайте на точках, в другое время
суток.
При работе с двумя или более роверами,
необходимо чтобы они работали
одновременно. Это позволит в течение
обработки использовать каждый
приёмник на выбор либо как базу, либо
как ровер, что является наиболее
эффективным способом GPS измерений,
но возникают трудности в синхронизации
действий операторов приёмников.
Другой способ получения избыточных
измерений – это установка двух базовых
станций и использование одного ровера
для измерения на точках, как это
показано на примере приведённом на
следующей странице.
Геодезические GPS
42
Основы GPS -1.0.1ru
Page 43

1
2
3
4
5
Сеть 1, 2, 3, 4, 5 должна
быть определена от
базы R с помощью трёх
GPS приёмников.
Альтернатива…
1
Базы устанавливаются
в точках R и 1. Ровер
выполняет измерения в
точке 2.
Основы GPS -1.0.1ru
База установлена, один
ровер выполняет
измерения на точке 1, а
другой на точке 3.
После выполнения
измерений ровер
перемещается в
точку 3.
После окончания
необходимого периода
измерений один ровер
перемещается на точку
2, а другой на точку 4.
Затем один ровер
может возвратиться в
офис, пока другой
выполняет измерения
на точке 5.
Конечный результат
показан выше. На
следующий день
измерения будут
повторены для того,
чтобы выявить грубые
ошибки.
4532
Затем в точку 4... … и затем в точку 5. Конечный результат -
43
сеть измеренная с
необходимой
избыточностью.
Геодезические GPS
Page 44

5.1.3 Кинематические измерения.
Кинематическая методика обычно
используется для топографической
съёмки, регистрации траекторий
движения транспортных средств и т. д.,
хотя с появлением RTK популярность
этого метода уменьшается.
Используется перемещающийся ровер,
чьи координаты могут быть вычислены
относительно базы.
В начале ровер должен осуществить так
называемую инициализацию, которая по
существу является измерением быстрой
статикой, что даёт возможность
программному обеспечению в течение
постобработки разрешить
неоднозначность. База и ровер
включаются и остаются абсолютно в
стационарном состоянии в течение 5-20
минут, собирая данные. (Фактическое
время зависит от длины базовой линии и
числа наблюдаемых спутников).
После измерений ровер может свободно
передвигаться. Пользователь имеет
возможность выбрать: записывать
координаты с предварительно
установленным интервалом в записи,
записывать отдельные координаты или
записывать комбинацию этих данных. Эта
часть измерений обычно называется
кинематической цепочкой.
1 2 3
Выполнение инициализации
между ровером и базой.
Основное на чём нужно сосредоточиться
при выполнении кинематических
измерений – это то, что не нужно
проходить с ровером слишком близко в
объектам, которые могут блокировать
спутниковый сигнал. Если в любой
момент число отслеживаемых ровером
спутников снизится до менее, чем
четырёх, то Вы должны остановиться, и
выйти на место, где отслеживаются 4 или
более спутников и снова выполнить
инициализацию перед продолжением
измерений.
Затем ровер может начать
движение. Координаты могут
быть записаны с
предопределенным
интервалом …
Кинематика on-the-fly («с лёту»).
Это вариант кинематических измерений,
который позволяет преодолеть
необходимость инициализации и
последующей переинициализации, в
случае потери приёма сигналов спутников.
Кинематика «с лёту» – это метод
обработки измерений в течение
постобработки. В начале измерений,
оператор сразу же может начать движение
с ровером по заданной траектории и
выполнять запись данных. Если ровер во
время движения окажется под деревом и
потеряет приём сигналов, система
автоматически повторно
инициализируется.
... а также если нужно в
отдельных точках
Геодезические GPS
44
Основы GPS -1.0.1ru
Page 45

5.1.4 RTK измерения.
RTK – это кинематика в реальном
времени. Кинематика on-the-fly,
выполняемая в реальном времени.
База снабжена радиомодемом,
передающим данные, которые она
принимает от спутников.
Ровер также имеет радиомодем и
принимает сигналы от базы. Ровер также
принимает спутниковые данные
непосредственно от спутников с помощью
его собственной GPS антенны. Эти два
набора данных могут быть совместно
обработаны ровером для разрешения
неоднозначности и получения очень
точных координат относительно базы.
Как только база будет установлена и
начнёт передачу данных с помощью
радиомодема, ровер может быть
активизирован.
После того, как он начнёт отслеживать
спутники и принимать данные от базы он
может начать процесс инициализации.
Подобно инициализации, выполняемой в
кинематике on-the-fly с постобработкой
основное отличие заключается в том, что
она выполняется в реальном времени.
Как только инициализация завершится,
неоднозначности будут разрешены и
ровер может начать запись координат
точек. В этот момент точность
определения базовых линий будет на
уровне 1 - 5 см.
Важно поддерживать контакт с базой,
иначе ровер может потерять
определённую неоднозначность. Это
приводит к потере точности результатов.
Дополнительную головную боль Вы может
получить при измерениях вблизи
различных препятствий блокирующих
сигналы спутников - высокие здания,
деревья и т. д.
RTK быстро становятся обще
используемым методом выполнения
измерений с высокой точностью на
небольших участках и может быть
использована для работ, для которых
обычно используется тахеометр –
топографическая съёмка, разбивка, и т. д.
Радиосвязь.
Большинство RTK GPS систем использует
небольшие модемы УВЧ диапазона.
Радиосвязь – это часть RTK системы, с
которой большинство пользователей
испытывают трудности. При попытке
оптимизировать эффективность
радиосвязи стоит обратить внимание на
следующие факторы:
1. Мощность радио передачи. Вообще
говоря, чем больше мощности, тем
выше эффективность. Однако
большинство стран юридически
ограничивает выходную мощность
радиопередатчиков до 0.5 - 2 Вт.
2. Высота антенны передатчика. На
радиосвязь влияет прямая видимость
между передатчиком и приёмником.
Чем выше положение антенны, тем
менее вероятный, что у вас возникнут
проблемы с прямой видимостью. Это
также увеличит дальность действия
передатчика. То же самое применимо и
к принимающей антенне.
Другие факторы, влияющие на качество
радиосвязи, включают длину кабеля
радиоантенны, (длинный кабель означает
большие потери мощности сигнала) и тип
используемой радиоантенны.
Основы GPS -1.0.1ru
45
Геодезические GPS
Page 46

5.2 Подготовка к
измерениям.
5.3 Советы бывалого.
Перед выходом в поле, геодезист должен
подготовиться к измерениям. Основное
на чём нужно сосредоточиться
перечислено ниже:
1. Лицензии на пользование радиосвязью.
2. Электропитание оборудование.
3. Запасные кабеля.
4. Взаимосвязь между частями
оборудования
5. Координаты референц-станции.
6. Карты памяти – имеете ли Вы
достаточный объём памяти для записи
данных?
7. График измерений. Первым делом
нужно получить достаточный объём
информации для определения
параметров трансформации, затем
нужно запланировать достаточное
число избыточных измерений.
В течение измерений статикой и быстрой
статикой, всегда заполняйте полевой
журнал на каждый точке. Образец
полевого журнала приведён на
следующей странице.
В течение измерений статикой и быстрой
статикой жизненно важно правильно
измерить высоту антенны. Это один из
наиболее часто встречающихся
источников ошибок при выполнении GPS
измерений. Измеряйте высоту антенну в
начале и конце измерений на точке. В
течение кинематических и RTK
измерений антенну, обычно прикрепляют
на вехе с фиксированной высотой.
В течение измерений статикой и быстрой
статикой, GPS антенна должна быть
абсолютно неподвижной. Это также
относится и к инициализации быстрой
статикой кинематических измерений (но
не к кинематическом измерениям on-thefly или RTK измерениям). Любые
смещения или вибрация антенны могут
неблагоприятно сказаться на
результатах.
Геодезические GPS
46
Основы GPS -1.0.1ru
Page 47

Лист полевого журнала
Описание точки
Приемник No
Вид операции
Тип антенны
Высота антенны
Начало измерений
Конец измерений
Кол-во эпох
Кол-во спутников
GDOP
Основы GPS -1.0.1ru
Дата
Оператор
Примечания
47
Примечания
Геодезические GPS
Page 48

Глоссарий.
Альманах
Группа орбитальных грубых спутниковых
данных используемых для вычисления
координат спутника, времени
восхождения, угла возвышения и азимута.
Неоднозначность
Неизвестное целое число циклов
восстановленной фазы несущей,
содержащееся в непрерывной серии
измерений от отдельного спутника до
отдельного приёмника.
Шифрование кодовых данных (A-S)
Шифрование Р-кода (для образование Yкода).
Атмосферная задержка
распространения сигнала
Запаздывание сигнала спутника в
тропосфере земли.
Азимут
Горизонтальный угол измеренный по
часовой стрелке от направления
(например, северного направления
меридиана).
Ширина полосы частот
Ширина спектра сигнала (представление
частотной области сигнала) выраженный
в Герцах.
Базовая линия
Длина трехмерного вектора между парой
точек, на которых были выполнены
одновременные GPS измерения и
обработаны дифференциальными
методами.
Направление
Термин, используемый в навигации для
описания угла между опорным
направлением (например, географическим
меридианом, магнитным меридианом,
осевым меридианом зоны) и траекторией
движения.
Частота биения
Любая из двух дополнительных частот
полученных при смешении сигналов двух
частот. Частоты биений равны сумме или
разности первоначальных частот,
соответственно.
Двоичная двухфазная модуляция
Фаза изменяется от 0° до 180° (что в
двоичном виде представляется 0 или 1,
соответственно) на постоянной частоте
несущей. Это можно описать следующей
формулой:
Y=Acos (wt+p),
где амплитудная функция A - это
последовательность значений +1 и -1 (для
представления изменения фазы от 0° до
180° соответственно). Сигналы GPS
двухфазно модулированы.
C/A код
GPS код Грубого / Захвата,
модулированный (наложенный) на GPS
сигнал L1. Это последовательность 1023
псевдослучайных двоичных двухфазных
модуляций на несущей GPS с частотой
1.023 МГц, таким образом период
повторения кода одна миллисекунда.
Декартовы координаты
Координаты точки в пространстве по трём
взаимно перпендикулярным осям (x, y, z)
от начала координат.
Глоссарий
48
Основы GPS -1.0.1ru
Page 49

Несущая
Радиоволна, имеющая, по крайней мере,
одну характеристику (например, частота,
амплитуда, фаза), которая может быть
изменена с помощью модуляции.
Фаза биения несущей
Фаза сигнала, который останется, когда
входящий доплеровски смещённый сигнал
спутника войдёт в резонанс (появится
сигнал разностной частоты) с номинально
постоянной опорной частотой,
сгенерированной в приёмнике.
Несущая частота
Частота немодулированного
фундаментального выходного сигнала
радиопередатчика. Несущая частота GPS
L1 - 1575.42 МГц, , несущая частота GPS
L2 - 1227.60 МГЦ.
Чип
Интервал времени нуль или единица в
коде бинарного импульса
Частота чипа
Число чипов в секунду (например, C/A
код: 1.023*106 cps)
Ход часов
Постоянная разность в отсчётах по двум
часам.
Код
Система, используемая для связи, в
которой произвольно выбранные строки
нулей и единиц принимают определённые
значения.
Уплотненные данные
Необработанные данные, уплотненные
выше указанного интервала времени
(уплотнение по времени) в одном
отдельном измерении для регистрации.
Конформная проекция
Картографическая проекция, в которой
не искажаются углы при переходе с
эллипсоида на плоскость.
Сегмент Управления
Наземные службы системы GPS,
эксплуатируемые Американским
Правительством, которые отслеживают
спутниковые сигналы, определяет орбиты
спутников, и закладывают эфемериды в
память спутников.
Угол отсечки (маска)
Минимальный угол возвышения, ниже
которого спутники GPS больше не
отслеживаются приёмником.
Срыв цикла
Внезапное прекращение подсчёта целого
числа циклов в измерениях фазы биения
несущей в результате временной потери
приёма сигнала спутника GPS.
Сообщение с данными
Сообщение, включенное в GPS сигнал, в
котором находится информация о
расположении спутника, поправки в часы
и техническое состояние спутников.
Включена грубая информация о
состоянии других спутников созвездия.
DGPS
Дифференциальные GPS измерения.
Термин, обычно используемый для GPS
измерений, в которых используются
дифференциальные поправки для
достижения более высокой точности
определения координат (0.5 - 5 м), чем
при измерениях в автономном режиме.
Основы GPS -1.0.1ru
49
Глоссарий
Page 50

Уклонение отвесной линии
Угол между нормалью к эллипсоиду и
вертикалью (истинной отвесной линией).
Обычно раскладывается на
составляющие в направлениях по
меридиану и перпендикулярном к нему.
Синхронизация задержки
Методика, с помощью которой
полученный код (сгенерированный часами
спутника) сравнивается с внутренним
кодом (сгенерированным часами
приёмника) и затем смещается во
времени до совпадения этих двух кодов.
Разности измерений
Существует возможность определения
разности между измерениями
выполненными разными приёмниками,
между измерениями на различные
спутники и между измерениями
выполненными в разное время. Хотя
возможны различные
комбинации сложилось так, что
вычисление разностных GPS фазовых
измерений производится в выше
упомянутом порядке - сначала между
приёмниками, затем между спутниками и
в завершение по времени.
Одинарная разность измерений (между
приёмниками) – это мгновенная разность
фаз принятого сигнала, измеренного
двумя приёмниками, одновременно
наблюдавшими один спутник
Двойная разность измерений (между
приёмниками и спутниками) получается в
результате вычитания одинарной
разности для одного спутника от
соответствующей одинарной разности
для выбранного опорного спутника.
Тройная разность (между приёмниками,
спутниками и временем) – это разность
между двойной разностью в одной эпохе
времени и той же самой двойной
разностью в другой эпохе времени.
Дифференциальное координирование
Определение относительных координат
между двумя или более приёмниками,
которые одновременно отслеживают одни
и те же сигналы GPS.
Снижение точности (DOP)
Описание чисто геометрического вклада в
неопределенность вычисления координат.
Коэффициент DOP указывает на
геометрическую строгость созвездия
спутников во время измерений.
Стандартные члены в случае GPS
измерений это:
GDOP три координаты плюс смещение
часов.
PDOP три координаты
HDOP две плановые координаты
VDOP только высота
TDOP только смещение часов
HTDOP плановые координаты и
время.
Смещение Доплера
Очевидное изменение в частоте
полученного сигнала из-за скорости
изменения дальности между
передатчиком и приёмником.
Глоссарий
50
Основы GPS -1.0.1ru
Page 51

Эксцентриситет
Отношение расстояния от центра эллипса
до его фокуса к главной полуоси.
e = (1 – b2/a2) 1/2
где а и b – это главная и малая полуоси
эллипса, соответственно.
Превышение (отметка)
Высота над геоидом. См.
Ортометрическая высота.
Эллипсоид
В геодезии, если не определено иначе,
математическая фигура, образованная
вращением эллипса вокруг его малой
полуоси (иногда также называется
сфероидом). Две величины определяют
эллипсоид: длина главной полуоси оси и
сжатие f.
Эллипсоидальная высота
Вертикальное расстояние от эллипсоида
до точки над ним.
Эфемериды
Список координат или местоположений
астрономического объекта в зависимости
от времени.
Эфемеридная ошибка
Разность между фактическим
положением спутника и положением,
предсказанным по спутниковым
орбитальным данным (эфемеридам).
Эпоха
Отдельный зафиксированный момент
времени, используемый в качестве
опорной точки на шкале времени.
Эквипотенциальная поверхность
Математически определенная поверхность,
на которой потенциал силы тяжести имеет
одно и тоже значение. Пример такой
поверхности - геоид.
Сжатие
Касается эллипсоидов.
f = (a - b) /a = 1 - (1 - e2) 1/2,
где a – главная полуось
b - малая полуось
e - эксцентриситет
Фундаментальная (основная) частота
Основная частота, используемая в GPS - 10
23 МГц, частоты несущей L1 и L2 - это
произведения неких целых чисел на
основную частоту:
L1 = 154F = 1575.42 МГц
L2 = 120F = 1227.60 МГц.
GDOP
Геометрическое снижение точности.
Геоцентрический
Касается центра земли.
Геодезия
Изучает размеры и форму Земли.
Геодезические координаты
Координаты, определяющие положение
точки относительно эллипсоида.
Геодезические координаты – это либо
широта, долгота и эллипсоидальная
высота, либо Декартовы
(пространственные прямоугольные)
координаты
Основы GPS -1.0.1ru
51
Глоссарий
Page 52

Геодезический референц-эллипсоид
Математическая модель, предназначенная
для наилучшего представления части или
всего геоида. Определяется эллипсоидом и
зависимостью между эллипсоидом и
точкой на топографической поверхности
принятой за начало координат данного
референц-эллипсоида. Эта зависимость,
может быть определена шестью
величинами, в основном (но не
обязательно) геодезической широтой,
долготой и высотой начала координат,
двумя составляющими уклонения отвеса в
начале координат и геодезическим
азимутом линии от начала координат до
некоторой другой точки.
Геоид
Эквипотенциальная поверхность, которая
совпадает со средним уровнем моря, а на
суше может быть продолжена под
континенты. Эта поверхность - всюду
перпендикулярна к направлению силы
тяжести.
Геоидальная высота
См. превышение геоида.
Превышение геоида
Расстояние от поверхности референцэллипсоида до геоида измеренное по
нормали к эллипсоиду.
GPS
Глобальная система определения
местоположения (Глобальная
Навигационная Система).
GPS время
Непрерывная система времени,
основанная на Универсальном
Синхронизированном Времени (среднее
время по Гринвичу) (UTC) начиная с 6-ого
января 1980.
Среднее время по Гринвичу (GMT)
Среднее солнечное время по Гринвичу.
Используется как первооснова
стандартного времени во всём мире.
Большой круговой курс
Термин, используемый в навигации. Самый
короткий путь между двумя точками.
Сетка координат
Сетка координат на плоскости,
представляющая параллели и меридианы
эллипсоида.
Гравитационная постоянная
Константа пропорциональности в законе
силы тяжести Ньютона
G = 6.672*10-11 m3s-2kg-1
Наклонение
Угол между орбитальной плоскостью
объекта и некоторой опорной плоскостью
(например, экваториальной плоскостью).
Целочисленный член смещения
См. Неоднозначность.
Глоссарий
52
Основы GPS -1.0.1ru
Page 53

Ионосферная задержка
Волна, распространяющаяся через
ионосферу (которая является
неоднородной и рассеивающей средой)
задерживается. Фаза зависит от
насыщенности ионосферы электронами и
воздействует на несущие сигналы.
Групповая задержка зависит от
рассеяния, а также модуляции сигнала
(коды). Фаза и групповая задержка
имеют одно и то же значение но с
противоположными знаками.
Кинематическое координирование
Периодическое определение координат
перемещающимся приёмником, каждый
набор координат, определяемых из
отдельного набора данных, и обычно
вычисляемых в реальном времени.
Элементы орбиты Кеплера
Позволяют описать любую
астрономическую орбиту
a – главная полуось
e - эксцентриситет
w – аргумент перигея
W - прямое восхождение восходящего
узла
I - наклонение
n - истинная аномалия
Проекция Ламберта
Конформная коническая
картографическая проекция, с помощью
которой эллипсоид проектируется на
плоскость, сфера оборачивается конусом.
Широта
Угол между нормалью к эллипсоиду и
экваториальной плоскостью. Широта
имеет нулевое значение на экваторе и
90° на полюсах.
L-полоса
Полоса радиочастот, простирающаяся от
390 МГц до 1550 МГц. Частоты L1 и L2
несущих, передаваемые GPS спутниками,
лежат в пределах этой L-полосы.
Обработка по методу наименьших
квадратов
Процесс отыскания неизвестных
параметров, минимизацией суммы
квадратов поправок в измерения.
Меридиан
Воображаемая линия, соединяющая
северный и южный полюса и
пересекающая экватор под 90°.
Ошибка из-за переотражения
Ошибка координирования, происходящая
из-за интерференции между
радиоволнами, которые проходят между
передатчиком и приёмником двумя путями
различных длин.
NAVSTAR
Аббревиатура от Навигационной системы
со Временем и Дальностью,
первоначальное название GPS.
Основы GPS -1.0.1ru
53
Глоссарий
Page 54

Ионосферная задержка
Волна, распространяющаяся через
ионосферу (которая является
неоднородной и рассеивающей средой)
задерживается. Фаза зависит от
насыщенности ионосферы электронами и
воздействует на несущие сигналы.
Групповая задержка зависит от
рассеяния, а также модуляции сигнала
(коды). Фаза и групповая задержка
имеют одно и то же значение но с
противоположными знаками.
Кинематическое координирование
Периодическое определение координат
перемещающимся приёмником, каждый
набор координат, определяемых из
отдельного набора данных, и обычно
вычисляемых в реальном времени.
Элементы орбиты Кеплера
Позволяют описать любую
астрономическую орбиту
a – главная полуось
e - эксцентриситет
w – аргумент перигея
W - прямое восхождение восходящего
узла
I - наклонение
n - истинная аномалия
Проекция Ламберта
Конформная коническая
картографическая проекция, с помощью
которой эллипсоид проектируется на
плоскость, сфера оборачивается конусом.
Широта
Угол между нормалью к эллипсоиду и
экваториальной плоскостью. Широта
имеет нулевое значение на экваторе и
90° на полюсах.
L-полоса
Полоса радиочастот, простирающаяся от
390 МГц до 1550 МГц. Частоты L1 и L2
несущих, передаваемые GPS спутниками,
лежат в пределах этой L-полосы.
Обработка по методу наименьших
квадратов
Процесс отыскания неизвестных
параметров, минимизацией суммы
квадратов поправок в измерения.
Меридиан
Воображаемая линия, соединяющая
северный и южный полюса и
пересекающая экватор под 90°.
Ошибка из-за переотражения
Ошибка координирования, происходящая
из-за интерференции между
радиоволнами, которые проходят между
передатчиком и приёмником двумя путями
различных длин.
NAVSTAR
Аббревиатура от Навигационной системы
со Временем и Дальностью,
первоначальное название GPS.
NMEA
Национальная Ассоциация производителей
Морского Электронного Оборудования.
Определила стандарт (NMEA 0183) для
установки взаимодействия между морским
электронным оборудованием, связным
оборудованием и навигационным
оборудованием. Этот стандарт
используется для получения времени и
координат с помощью GPS оборудования
используемого для решения
многочисленных задач.
Сеанс измерений
Промежуток времени, в течение которого
накапливаются GPS данные одновременно
двумя или более приёмниками.
Глоссарий
54
Основы GPS -1.0.1ru
Page 55

Ортометрическая высота
Расстояние от геоида до точки измеренное
по отвесной линии проходящей через точку
(высота над средним уровнем моря). См.
также превышение.
P-код
Точный GPS код - очень длинная
(приблизительно 1014 бит)
последовательность псевдослучайных
двоичных двухфазных модуляций на
несущей GPS, со скоростью чипов 10.23
МГц, которая не повторяется
приблизительно 267 дней. Каждый однонедельный сегмент Р-кода уникален для
каждого GPS спутника, и
переустанавливается каждую неделю.
Доступ к Р-коду ограничен Американским
Правительством.
PDOP
Снижение точности определения
координат. См. снижение точности.
Фазовые измерения
См. Восстановление фазы несущей.
Координирование точки
Координаты, полученные отдельным
приёмником по псевдодальностям,
определённым по сигналам спутников.
Пост-обработка
Процесс вычисления координат не в
реальном времени, по данным
предварительно полученными GPS
приёмниками.
Услуга по точному координированию
(PPS)
Самый высокий уровень точности
определения координат, обеспечиваемый
GPS. Основан на двухчастотном Р-коде.
Задержка распространения
См. Атмосферная задержка
распространения, и Ионосферная
задержка.
Псевдолит
Наземная дифференциальная GPS
станция, которая передает сигнал со
структурой, подобной структуре сигнала
передаваемого реальным GPS спутником.
Код псевдослучайного шума (PRN)
Любая группа двоичных
последовательностей, которая появляется
в кажущемся беспорядке подобно шуму, но
которая может быть
точно распределена.
Сидерический день
Интервал времени между двумя
последовательными верхними
кульминациями весеннего равноденствия.
Точка (станция)
Местоположение, в котором установлен
приёмник для определения координат.
Космический сегмент
Часть целостной системы GPS, которая
находится в космосе, то есть спутники.
Солнечный день
Интервал времени между двумя
последовательными верхними
кульминациями Солнца.
Режим возведения в квадрат
Метод, используемый для трэкинга GPS
сигналов L2, при котором удваивается
несущая частота и не используется Р-код.
Канал скворинг (возведение в квадрат)
типа
Канал приёмника GPS, который умножает
полученный сигнал сам на себя для
получения второй гармоники несущей,
которая не содержит модуляцию кода.
Основы GPS -1.0.1ru
55
Глоссарий
Page 56

Ортометрическая высота
Расстояние от геоида до точки измеренное
по отвесной линии проходящей через точку
(высота над средним уровнем моря). См.
также превышение.
P-код
Точный GPS код - очень длинная
(приблизительно 1014 бит)
последовательность псевдослучайных
двоичных двухфазных модуляций на
несущей GPS, со скоростью чипов 10.23
МГц, которая не повторяется
приблизительно 267 дней. Каждый однонедельный сегмент Р-кода уникален для
каждого GPS спутника, и
переустанавливается каждую неделю.
Доступ к Р-коду ограничен Американским
Правительством.
PDOP
Снижение точности определения
координат. См. снижение точности.
Фазовые измерения
См. Восстановление фазы несущей.
Координирование точки
Координаты, полученные отдельным
приёмником по псевдодальностям,
определённым по сигналам спутников.
Пост-обработка
Процесс вычисления координат не в
реальном времени, по данным
предварительно полученными GPS
приёмниками.
Услуга по точному координированию
(PPS)
Самый высокий уровень точности
определения координат, обеспечиваемый
GPS. Основан на двухчастотном Р-коде.
Задержка распространения
См. Атмосферная задержка
распространения, и Ионосферная
задержка.
Псевдолит
Наземная дифференциальная GPS
станция, которая передает сигнал со
структурой, подобной структуре сигнала
передаваемого реальным GPS спутником.
Код псевдослучайного шума (PRN)
Любая группа двоичных
последовательностей, которая появляется
в кажущемся беспорядке подобно шуму, но
которая может быть
Сидерический день
Интервал времени между двумя
последовательными верхними
кульминациями весеннего равноденствия.
Точка (станция)
Местоположение, в котором установлен
приёмник для определения координат.
Космический сегмент
Часть целостной системы GPS, которая
находится в космосе, то есть спутники.
Солнечный день
Интервал времени между двумя
последовательными верхними
кульминациями Солнца.
Режим возведения в квадрат
Метод, используемый для трэкинга GPS
сигналов L2, при котором удваивается
несущая частота и не используется Р-код.
точно распределена.
Глоссарий
56
Основы GPS -1.0.1ru
Page 57

Канал скворинг (возведение в квадрат)
типа
Канал приёмника GPS, который умножает
полученный сигнал сам на себя для
получения второй гармоники несущей,
которая не содержит модуляцию кода.
Услуга стандартного координирования
(SPS)
Уровень точности координирования,
предоставляемый GPS по одночастотному
C/A - коду.
Измерения статикой
Выражение статика используется в связи с
GPS для всех задач решаемых некинематическими методами измерений.
Включает следующие рабочие режимы:
• Статические измерения
• Измерения быстрой статикой
Измерения Stop & Go (Продвижение с
остановкой)
Термин Stop & Go измерения используется
в связи с GPS для особого вида
кинематических измерений. После
инициализации (определения
неоднозначностей) на первой точке, ровер
должен перемещаться по другим точками
без потери сигналов спутников. Для
получения решения с достаточной
точностью необходимо всего лишь
несколько эпох измерений. В случае потери
приёма сигнала спутников необходимо
вновь выполнить инициализацию.
Часовой пояс
Часовой пояс = Местное время Гринвичское Среднее время (GMT).
Заметьте, что Гринвичское Среднее время
приблизительно равно GPS времени.
Топография
Форма земной поверхности, в каком либо
районе.
Трансформация
Процесс преобразования координат из
одной системы в другую.
Transit
Предшественник GPS. Спутниковая
навигационная система, которая
эксплуатировалась с 1967 по 1996 г.
Поперечная проекция Меркатора
Конформная цилиндрическая
картографическая проекция, которая
может быть представлена в виде цилиндра,
обёрнутого вокруг Земли.
Транслокация
Метод, при котором одновременно
используются данные из отдельных
станций, для определения относительного
положения одной станции относительно
другой. См дифференциальное
координирование.
Всемирное время
Локальное солнечное среднее время на
Гринвичском меридиане
UT Сокращение для Всемирного
Времени
UTO UT полученное непосредственно по
наблюдениям звезд
UT1 UTO исправленное за движение
полюсов
UT2 UT1 исправленное за сезонные
колебания скорости вращения
Земли
UTC Всемирное Синхронизированное
Время, унифицированная атомная
система времени, удерживаемая
очень близко к UT2 смещениями
шкалы времени.
Основы GPS -1.0.1ru
57
Глоссарий
Page 58

Пользовательский эквивалент ошибки
дальности (UERE)
Вклад в ошибку измерения дальности
отдельного источника ошибок,
преобразованный в единицы измерения
дальности, учитывая, что источник
ошибки некоррелирован со всеми
другими источниками ошибки.
Сегмент пользователя
Часть системы GPS, в которую входят
приёмники сигналов GPS.
UTM
Универсальная Поперечная проекция
Меркатора. Форма поперечной проекции
Меркатора. Проекция состоит из
различных зон, каждая шириной 6° с
масштабом на осевом меридиане 0.996.
Используемая зона зависит от
местоположения на земле.
Y- к од
Зашифрованная версия Р-кода, который
передаётся спутником GPS, находящимся
в режиме шифрования кодовых данных.
WGS84
Всемирная Геодезическая Система 1984.
Система, к которой относятся все GPS
измерения и результаты обработки.
Зенитное расстояние
Вертикальный угол с 0° в горизонте и 90°
непосредственно над головой (в зените).
Глоссарий
58
Основы GPS -1.0.1ru
Page 59

Библиография
GPS Theory and Practice B. Hofmann-Wellenhof, H. Lichtenegger and J. Collins.
ISBN 3-211-82839-7 Springer Verlag.
GPS Satellite Surveying Alfred Leick.
ISBN 0471306266 John Wiley and Sons.
Satellite Geodesy: Foundations, Methods and Applications Gunter Seeber.
ISBN 3110127539 Walter De Gruyter.
Understanding GPS: Principles and Applications
Elliot D. Kaplan (Ed.).
ISBN 0890067937 Artech House.
The Global Positioning System: Theory and Applications
Bradford W. Parkinson and James J. Spilker (Eds.).
ISBN 9997863348 American Institute of Aeronautics and Astronautics.
Основы GPS -1.0.1ru
59
ГлоссарийБиблиография
Page 60

Индекс
А
Азимут 48
Альманах 48
Антенна Choke-Ring 16
Атмосферная задержка распространения
сигнала 48
Б
Базовая линия 48
Базовый приемник 20
Большой круговой курс 53
Быстрая статика 39, 42
В
Водяной пар. См. источники ошибок
Восстановленная фаза несущей 56
Всемирное время 58
WGS 84 58
Г
Геодезический референц-эллипсоид 52
Геодезия 52
Геоид 52
Геометрическое снижение точности (GDOP)
См. Снижение точности (DOP)
Геоцентрический 52
Гравитационная постоянная 53
GPS 52
GPS время 53
Глоссарий
Д
Дальность 55
Двоичная двухфазная модуляция 48
Двойная разность 23, 50
Декартовы координаты 28, 49
Дифференциальное координирование
(DGPS) 10, 19, 20, 50
Дифференциальные фазовые из
мерения 22
Долгота 28, 54
З
Задержка распространения 55
Зенитное расстояние 58
И
Избирательный доступ (S/A). См.
Источники ошибок
Измерения быстрой статикой 56
Измерения статикой 57
Измерения Stop & Go 57
Ионосферная задержка 14, 53
Источники ошибок 14
Шифрование кодовых данных AntiSpoofing (A-S) 18, 48
Геометрическое снижение
точности 17, 51
Переотражение 16, 54
Ошибки часов спутника и приемника 16
Избирательный доступ (S/A) 18, 56
Водяной пар 15
Y- к о д 58
60
К
Канал приемника 56
Канал скворинг (возведения в квадрат)
типа 57
Картографическая проекция 34
Проекция Ламберта 37, 53
Поперечная проекция
Меркатора 35
Универсальная поперечная проекция
Меркатора 36
Кинематика 39, 44, 53
Кинематика в
реальном времени (RTK) 39, 45, 56
Кинематика On the Fly (OTF) 39, 44
Код 49
Код псевдослучайного шума (PRN) 55
Конфигурация спутникового созвездия 56
Конформная проекция 49
Координирование точки 55
Космический сегмент 57
Л
L-полоса 54
М
Методики измерений (GPS) 39
Кинематика 39, 44
Кинематика On the Fly (OTF) 39, 44
Быстрая статика 39, 42
Кинематика в реальном
времени (RTK) 39, 45, 56
Статика 39, 40
Меридиан 54
Основы GPS -1.0.1ru
Page 61

Н
Наклонение 53
Направление 48
Необработанные данные 56
Неоднозначность 24, 45, 48
Несущая 49
NAVSTAR 5, 54
NMEA 54
О
Обработка по методу наименьших
квадратов 54
Ортометрическая высота 30, 54
Осевой меридиан 36, 37
Относительное координирование 56
Ошибка из-за переотражения 54
П
Пользовательский эквивалент ошибки
дальности (UERE) 58
Поперечная проекция Меркатора 58
Пост-обработка 55
Превышение (отметка)51
Превышение геоида 30, 33, 52
Проекция. См. Картографическая проекция
Проекция Ламберта 37, 53
Псевдодальность 55
Псевдолит 55
P-код 55
Р
Радиосвязь 45
Разность измерений 50
Разрешение неоднозначности 22, 24
Расстояние до спутника 13
Режим возведения в квадрат 57
Ровер-приемник 20
RINEX 56
RTCM 21, 56
RTK 39, 45, 56
С
Сегмент пользователя 58
Сегмент управления 8, 49
Сетка координат 53
Сжатие 52
Сидерический день 57
Синхронизация задержки 50
Система координат 28
Декартова 28, 49
GPS 28
Местная 29
Смещение Доплера 51
Смещение начала координат 36, 37
Снижение точности (DOP) 51
GDOP 17, 51, 52
HDOP 17, 51
HTDOP 51
PDOP 17, 51, 55
TDOP 51
VDOP 17, 51
Созвездие спутников 56
Солнечный день 57
Сообщение с данными 50
Среднее время по Гринвичу (GMT) 53
Срыв цикла 50
Стандартная параллель 37
Статика 39, 40
C/A код 7, 13, 18, 22, 49
Т
Топография 57
Точка (Станция) 57
Транзит (Transit) 58
Транслокация 58
Трансформация 31, 58
Трансформация Гельмерта 32
Трансформация координат 31
Гельмерт 32
Интерполяция 33
Метод одного шага 33
Пошаговый метод 33
У
Угол отсечки (маска) 50
Уклонение отвесной линии 50
Уплотненные данные 49
Услуга по точному координированию
(PPS) 55
Услуга стандартного координирования
(SPS) 57
UTM 58
Ф
Фаза биения несущей 49
Фаза несущей 22, 23, 49
Фазовые измерения 55
Фундаментальная (основная) частота 52
Основы GPS -1.0.1ru
61
Глоссарий
Page 62

Х
Ход часов 49
Ц
Целочисленный член смещения 53
Ч
Часовой пояс 57
Частота биения 48
Частота чипа 49
Чип 49
Часы (спутника и приемника) 16
Ш
Ширина зоны 36
Ширина полосы частот 48
Широта 28, 53
Широта начала координат 36, 37
Шифрование кодовых данных Anti-Spoofing
(A-S). См. Источники ошибок
Э
Эквипотенциальная поверхность 51
Эксцентриситет 51
Элементы орбиты Кеплера 53
Эллипсоид 28, 51
Эллипсоидальная высота 30, 51
Эпоха 51
Эфемериды 51
Глоссарий
62
Основы GPS -1.0.1ru
Page 63

Фирма Leica Geosystems AG,
Heerbrugg, Switzerland, была
сертифицирована как компания,
которая обеспечивает систему
контроля качества, отвечающую
Международным стандартам для
систем контроля и управления
качеством (стандарт ISO 9001) и
систем охраны окружающей среды
(стандарт ISO 14001).
Тотальный контроль качества
(TQM) - это наше обязательство
перед клиентами.
Обратитесь к вашему местному
представителю фирмы Leica для
получения более подробной
информации о нашей программе TQM
727506-1.0.1ru
Напечатано в Швейцарии - Авторские права
Leica Geosystems AG, Heerbrugg, Швейцария 2001
Перевод исходного текста (713282-1.0.1en)
Leica Geosystems AG
CH-9435 Heerbrugg
(Switzerland)
Telefon +41 71 727 31 31
Fax +41 71 727 47 02
www.leica-geosystems.com
 Loading...
Loading...