

Lasertex HPI-3D User Manual

Laser Measurement System HPI-3D
User
manual

www.lasertex.eu
www.lasertex.eu
Laser measurements systems.
Measurement systems with data acquisition.
Laser technique.
Research and Development Company Ltd.
UL. RADZIONKOWSKA 17,
51-506 WROCLAW, POLAND
Tel/fax. 071-3466684
email: lasertex@lasertex.com.pl
Laser Measurement System HPI-3D
User manual
Rev. E10
Wroclaw 2017

CONTENTS
www.lasertex.eu
1. INTRODUCTION ................................................................................................... 1-1
A. SAFETY CONSIDERATIONS ..................................................................................... 1-1
B. WARNINGS ............................................................................................................ 1-2
C. COMPLIANCE INFORMATION ................................................................................ 1-2
2. QUICK START ....................................................................................................... 2-1
A. MAIN FEATURES .................................................................................................... 2-1
B. HOW IT WORKS ...................................................................................................... 2-1
i. Linear optics ...................................................................................................... 2-2
ii. Angular optics ................................................................................................... 2-2
iii. Wollaston optics ........................................................................................... 2-4
C. HOW TO START ...................................................................................................... 2-5
3. PREPARATIONS ................................................................................................... 3-1
A. SOFTWARE INSTALLATION .................................................................................... 3-1
B. ELEMENTS OF THE LASER SYSTEM ........................................................................ 3-9
C. INTERFEROMETER SETUP FOR MEASUREMENT ...................................................... 3-12
D. POWERING THE SYSTEM ON ................................................................................ 3-16
i. Starting hardware ........................................................................................... 3-16
ii. Starting software ............................................................................................. 3-16
E. GETTING BASIC INFORMATION FROM THE SYSTEM. ............................................ 3-18
F. RECORDING MODE .............................................................................................. 3-25
G. FLAT MIRROR MEASUREMENTS - OPTION ............................................................ 3-25
4. BEAM ALIGNMENT ............................................................................................. 4-1

CONTENTS
www.lasertex.eu
A. INTRODUCTION ..................................................................................................... 4-1
B. ELECTRONIC ALIGNMENT TOOLS .......................................................................... 4-2
C. BASIC RULES OF BEAM ALIGNMENT ...................................................................... 4-2
D. PREPARATIONS ...................................................................................................... 4-4
i. Diaphragm ......................................................................................................... 4-4
ii. Laser head alignment elements .......................................................................... 4-6
iii. Electronic Beam Alignment tool ................................................................... 4-7
E. BEAM ALIGNMENT PROCESS FOR LINEAR OPTICS ................................................. 4-8
F. BEAM ALIGNMENT PROCESS FOR ANGULAR OPTICS ............................................. 4-9
G. BEAM ALIGNMENT PROCESS FOR WOLLASTON OPTICS ...................................... 4-12
H. BEAM ALIGNMENT OF LINEAR OPTICS WITH ANGLE ETALON ............................ 4-14
I. BEAM ALIGNMENT OF ANGULAR OPTICS WITH BEAM BENDER .............................. 4-17
i. Laser Head initially not aligned ...................................................................... 4-17
ii. Laser Head initially aligned ............................................................................ 4-20
5. MEASUREMENTS - POSITIONING ............................................................... 5-1
A. GENERAL DESCRIPTION ........................................................................................ 5-1
i. Positioning in brief ............................................................................................ 5-1
B. MEASUREMENT SETUP .......................................................................................... 5-4
i. Principles ........................................................................................................... 5-4
ii. Principles – base temperature compensation .................................................... 5-5
iii. Measurement Setup Preparations ................................................................. 5-6
C. SOFTWARE DESCRIPTION ..................................................................................... 5-10
i. Introduction..................................................................................................... 5-10
ii. Display Panel .................................................................................................. 5-10
iii. Positioning Plot Panel ................................................................................. 5-11
iv. Positioning Measurement Values Panel ......................................................... 5-12
v. Positioning Control Panel ............................................................................... 5-12
vi. Pull down menu - File ..................................................................................... 5-15
vii. CNC path generation .................................................................................. 5-15
viii. Compensation table preparation .................................................................. 5-17

CONTENTS
www.lasertex.eu
ix. Pull down menu - Edit .................................................................................... 5-18
x. Machine error limits ........................................................................................ 5-19
xi. Positioning points generation ......................................................................... 5-21
xii. Configuration of Positioning measurement ................................................ 5-22
xiii. Pull down menu – Measurement ................................................................ 5-28
D. PREPARATIONS FOR MEASUREMENT ................................................................... 5-29
i. Measurement window ..................................................................................... 5-29
ii. 1D and 3D measurements ............................................................................... 5-30
iii. Measurements in machine coordinate system ............................................. 5-30
iv. Setting measurement points ............................................................................ 5-31
E. RULES OF AUTOMATIC POSITIONING MEASUREMENT ........................................ 5-31
F. REMARKS ON MEASUREMENTS AND ON DATA ANALYSIS .................................. 5-32
G. MACHINE ERROR COMPENSATION ..................................................................... 5-37
i. Absolute and Incremental data formats .......................................................... 5-38
ii. Siemens data format ........................................................................................ 5-39
iii. Fanuc data format ....................................................................................... 5-40
6. MEASUREMENTS – DYNAMIC POSITIONING ......................................... 6-1
A. GENERAL DESCRIPTION ........................................................................................ 6-1
i. Positioning in brief ............................................................................................ 6-1
B. MEASUREMENT SETUP .......................................................................................... 6-4
i. Principles ........................................................................................................... 6-4
ii. Principles – base temperature compensation .................................................... 6-5
iii. Measurement Setup Preparations ................................................................. 6-6
C. SOFTWARE DESCRIPTION ....................................................................................... 6-9
i. Introduction..................................................................................................... 6-10
ii. Display Panel .................................................................................................. 6-10
iii. Positioning Plot Panel ................................................................................. 6-11
iv. Positioning Control Panel ............................................................................... 6-12
v. Pull down menu - File ..................................................................................... 6-13
vi. CNC path generation ...................................................................................... 6-13

CONTENTS
www.lasertex.eu
vii. Compensation table preparation .................................................................. 6-15
viii. Pull down menu - Edit ................................................................................ 6-16
ix. Configuration of Positioning measurement .................................................... 6-17
D. PREPARATIONS FOR MEASUREMENT ................................................................... 6-18
i. Measurement window ..................................................................................... 6-18
ii. Measurements in machine coordinate system ................................................. 6-19
E. RULES OF AUTOMATIC POSITIONING MEASUREMENT ........................................ 6-19
F. REMARKS ON MEASUREMENTS AND ON DATA ANALYSIS .................................. 6-20
G. MACHINE ERROR COMPENSATION ..................................................................... 6-21
i. Absolute and Incremental data formats .......................................................... 6-22
ii. Siemens data format ........................................................................................ 6-23
iii. Fanuc data format ....................................................................................... 6-24
7. MEASUREMENTS - STRAIGHTNESS ............................................................ 7-1
A. GENERAL DESCRIPTION ........................................................................................ 7-1
B. MEASUREMENT SETUP – ANGULAR OPTICS ......................................................... 7-1
i. Principles ........................................................................................................... 7-1
ii. Application Notes .............................................................................................. 7-4
iii. Measurement Setup Preparations ................................................................. 7-5
C. MEASUREMENT SETUP – WOLLASTON OPTICS ..................................................... 7-8
i. Principles ........................................................................................................... 7-8
ii. Application Notes ............................................................................................ 7-11
iii. Measurement Setup Preparations ............................................................... 7-12
D. MEASUREMENT SETUP – 3D METHOD ................................................................ 7-15
i. Principles ......................................................................................................... 7-15
ii. Application Notes ............................................................................................ 7-15
iii. Measurement Setup Preparations ............................................................... 7-16
E. SOFTWARE DESCRIPTION ..................................................................................... 7-18
i. Introduction..................................................................................................... 7-19
ii. Display Panel .................................................................................................. 7-20
iii. Straightness Plot Panel ............................................................................... 7-21

CONTENTS
www.lasertex.eu
iv. Operation Mode Panel .................................................................................... 7-24
v. Straightness Measurement Values Panel ....................................................... 7-25
vi. Straightness Control Panel ............................................................................. 7-27
vii. Straightness pull-down menus .................................................................. 7-28
viii. Reports ......................................................................................................... 7-31
F. STRAIGHTNESS MEASUREMENTS PROCEDURE .................................................... 7-32
i. Measurement procedure – Angular optics - preparations .............................. 7-32
ii. Measurement procedure – Angular optics ...................................................... 7-34
iii. Measurement procedure – Wollaston optics – preparations ....................... 7-34
iv. Measurement procedure – Wollaston optics ................................................... 7-35
v. Measurement procedure – 3D method - preparations .................................... 7-35
vi. Measurement procedure – 3D method ............................................................ 7-35
8. MEASUREMENTS - FLATNESS ....................................................................... 8-1
A. GENERAL DESCRIPTION ........................................................................................ 8-1
B. MEASUREMENT SETUP .......................................................................................... 8-1
C. SOFTWARE DESCRIPTION ....................................................................................... 8-4
D. ALIGNMENT OF OPTICS FOR THE FLATNESS MEASUREMENTS .............................. 8-8
i. Optical path alignment of the axis “1”. ............................................................ 8-9
ii. Optical path alignment of the axes: “3”, “6”, “8”. ........................................... 8-9
iii. Optical path alignment of the axes: “5” and “7” ........................................ 8-10
iv. Optical path alignment of the axes: “2” and “4” ............................................ 8-11
E. MEASUREMENT PROCEDURE ............................................................................... 8-12
9. MEASUREMENTS – PITCH/YAW .................................................................... 9-1
A. GENERAL DESCRIPTION ........................................................................................ 9-1
B. MEASUREMENT SETUP .......................................................................................... 9-1
C. SOFTWARE DESCRIPTION ....................................................................................... 9-3
D. MEASUREMENT PROCEDURE ................................................................................. 9-8
10. MEASUREMENTS - SQUARENESS .......................................................... 10-1
A. GENERAL DESCRIPTION ...................................................................................... 10-1

CONTENTS
www.lasertex.eu
B. MEASUREMENT SETUP ........................................................................................ 10-1
C. SOFTWARE DESCRIPTION ..................................................................................... 10-5
D. ALIGNMENT OF OPTICS FOR THE SQUARENESS MEASUREMENTS ....................... 10-9
E. MEASUREMENT PROCEDURE ............................................................................. 10-11
11. MEASUREMENTS - PARALLELISM ......................................................... 11-1
A. GENERAL DESCRIPTION ...................................................................................... 11-1
B. MEASUREMENT SETUP ........................................................................................ 11-1
C. SOFTWARE DESCRIPTION ..................................................................................... 11-5
D. ALIGNMENT OF OPTICS FOR THE PARALLELISM MEASUREMENTS ...................... 11-9
E. MEASUREMENT PROCEDURE ............................................................................. 11-12
12. MEASUREMENTS - VIBRATION .............................................................. 12-1
A. GENERAL DESCRIPTION ...................................................................................... 12-1
B. MEASUREMENT SETUP ........................................................................................ 12-1
C. SOFTWARE DESCRIPTION ..................................................................................... 12-4
D. MEASUREMENT PROCEDURE ............................................................................... 12-8
13. MEASUREMENTS - DYNAMIC ................................................................. 13-1
A. GENERAL DESCRIPTION ...................................................................................... 13-1
B. MEASUREMENT SETUP ........................................................................................ 13-1
i. Dynamic measurements of distance, velocity or acceleration ........................ 13-1
ii. Dynamic measurements of angle ................................................................... 13-4
iii. Dynamic measurements of straightness (Wollaston) ................................. 13-6
C. SOFTWARE DESCRIPTION ..................................................................................... 13-8
D. MEASUREMENT PROCEDURE ............................................................................. 13-12
14. MEASUREMENTS – ANGULAR POSITIONING .................................. 14-1
A. GENERAL DESCRIPTION ...................................................................................... 14-1
B. MEASUREMENT SETUP ........................................................................................ 14-1
i. Characteristics of Wally – Rotary Measurement System ............................... 14-3
ii. Theory of operation .......................................................................................... 14-6
iii. Rotary measurements – hardware preparations ......................................... 14-7

CONTENTS
www.lasertex.eu
iv. Rotary measurements – battery charging...................................................... 14-10
v. Rotary measurements – elimination of error sources ................................... 14-10
C. SOFTWARE DESCRIPTION ................................................................................... 14-11
i. Connecting with Wally ................................................................................. 14-11
ii. Measurements of the rotation angle .............................................................. 14-12
iii. Measurements of angular positioning ...................................................... 14-15
iv. Pull down menu - File ................................................................................... 14-15
v. CNC path generation for in-axis measurements ........................................... 14-16
vi. CNC path generation for off-axis measurements .......................................... 14-19
vii. Pull down menu - Edit .............................................................................. 14-27
viii. Machine error limits .................................................................................. 14-29
ix. Positioning points generation ....................................................................... 14-30
x. Configuration of Positioning measurement .................................................. 14-31
xi. Pull down menu – Measurement .................................................................. 14-33
D. MEASUREMENT PROCEDURE ............................................................................. 14-34
i. Rules of automatic positioning measurement ............................................... 14-34
ii. Remarks on measurements and data analysis ............................................... 14-35
15. MEASUREMENTS - VELOCITY ................................................................. 15-1
A. GENERAL DESCRIPTION ...................................................................................... 15-1
B. MEASUREMENT SETUP ........................................................................................ 15-1
C. SOFTWARE DESCRIPTION ..................................................................................... 15-3
D. MEASUREMENT PROCEDURE ............................................................................... 15-8
16. CONNECTING LASER HEAD TO MACHINE ........................................ 16-1
A. GENERAL DESCRIPTION ...................................................................................... 16-1
B. EXTENSION CONNECTOR .................................................................................... 16-2
i. Extension Connector pinout ............................................................................ 16-2
ii. Extension Cable EX1 ....................................................................................... 16-3
iii. Encoder type outputs ................................................................................... 16-6
C. HPI-3D IN A MACHINE CONTROL LOOP ........................................................... 16-10
17. CONFIGURATION ........................................................................................ 17-1

CONTENTS
www.lasertex.eu
18. PRINCIPLES OF OPERATION .................................................................... 18-1
A. THE RULES OF LASER DISPLACEMENT MEASUREMENTS ...................................... 18-1
B. THE CONSTRUCTION OF REAL INTERFEROMETERS .............................................. 18-2
C. THE INFLUENCE OF THE OUTSIDE CONDITIONS ON THE MEASUREMENT ACCURACY
18-5
D. THE ACCURACY OF LASER INTERFEROMETERS .................................................... 18-6
i. Errors caused by the environment .................................................................. 18-6
ii. Dead path error ............................................................................................... 18-6
iii. Cosine error ................................................................................................. 18-7
iv. Abbe error ........................................................................................................ 18-8
v. Laser stability error ......................................................................................... 18-9
vi. Other errors ..................................................................................................... 18-9
vii. A summary of laser measurement system errors ...................................... 18-10
19. TROUBLESHOOTING .................................................................................. 19-1
20. TECHNICAL DATA ....................................................................................... 20-1
A. SYSTEM SPECIFICATIONS ..................................................................................... 20-1
B. LASER HEAD ........................................................................................................ 20-1
C. LASER HEAD OUTPUTS - ANALOG ...................................................................... 20-2
D. LASER HEAD OUTPUTS – DIGITAL, TYPE 1 .......................................................... 20-2
E. LASER HEAD OUTPUTS – DIGITAL, TYPE 2 .......................................................... 20-2
F. LASER HEAD OUTPUTS – EXTENSION CONNECTOR PINOUT .............................. 20-3
G. SYSTEM WORK CONDITIONS ................................................................................ 20-4
H. POWER SUPPLY .................................................................................................... 20-4
I. PC INTERFACE ..................................................................................................... 20-4
J. ENVIRONMENT COMPENSATION ......................................................................... 20-4
21. INDEX ..................................................................................................................... 1

INTRODUCTION
1-1 www.lasertex.eu
1
1. INTRODUCTION
Laser measurement system HPI-3D is a two frequency laser interferometer
intended to be used mainly in machine geometry measurements. Its small size and
low weight simplify transportation and make the instrument especially useful for
service applications. Software version for Windows XP/Vista/7/8 and automation of
many measurement processes make the interferometer easy to use. Software,
compliant with ISO 230-2 and similar norms, enable making rapports and diagrams.
It is possible to choose statistical results processing according to norms: ISO 230-2
(European), VDI/DGQ 3441 (German), NMTBA (USA), BSI BS 4656 Part 16 (British)
and PN-93 M55580 (Polish).
Laser Measurement System HPI-3D is highly configurable device although
already in its basic configuration it allows performing the complicated measurements
at highest possible precision. Available options will be described below in this user
manual.
Very good technical parameters of the interferometer allow using it in scientific
laboratories, for precision positioning, for scaling optical and magnetic measurement
systems, etc.
a. Safety considerations
The Laser Interferometer HPI-3D is a Safety Class I product designed and
tested in accordance with international safety standards. It is also a Class II Laser
product conforming to international laser safety regulations. The instrument and the
manual should be inspected and reviewed for safety markings and instructions
before operation.

INTRODUCTION
1-2 www.lasertex.eu
1
b. Warnings
Although the laser measurement system HPI-3D is design to be used in harsh
environment, the following conditions must be met:
The Laser Head must not be put near strong magnetic fields.
The head should not be unscrewed from its base and if it is, it may not be put
on a heat sink (e.g. thick metal plate).
The head must not be thrown or dropped.
Keep the optical components clean and avoid scratching them.
When the optics is dusted, clean it with pure alcohol.
Do not use the system beyond its work conditions.
c. Compliance Information
INTRODUCTION
1-3 www.lasertex.eu
1
EC-DECLARATION OF CONFORMITY 2012
Wroclaw, 2012-04-20
Manufacturer
LASERTEX Co LTD.
Radzionkowska 17
51-506 Wrocław
Poland
Hereby certifies on its sole responsibility that the following product:
Laser Measurement System HPI-3D
which is explicitly referred to by this Declaration meet the following directives and standard(s):
Directive 2006/95/EC
Electrical Apparatus
Low Voltage Directive
- EN 61010-1:2011
Directive 2006/42/EU
Machinery Directive
- EN 60825-1:2007
Directive 2004/108/EU
Electromagnetic Comatibility:
- EN 61326-1:2006
- EN 61000-4-2:2011
- EN 61000-4-6:2007
- EN 61000-4-8:2010
- EN 61000-4-11:2007
- EN 55011:2007
- EN 55022:2011
Documentation evidencing conformity with the requirements of the Directives is kept available for
inspection at the above Manufacture.
President, Janusz Rzepka PhD

QUICK START
2-1 www.lasertex.eu
2
2. QUICK START
The information presented in this chapter is only for quick start. More detailed
information can be found in the following chapters.
a. Main features
The HPI-3D is a device for contact measurement of the velocity of the moving
object.
The device operates according to the laser interferometer principle (see
Principles of Operation chapter). The Doppler shift phenomenon is used.
The basic measurement unit is the wavelength of the laser, i.e. 632nm.
The functionality of the instrument depends on the type of used optical
components.
The HPI-3D is can be used either as a stand alone device or with a PC
computer and the dedicated HPI Software.
b. How it works
The HPI-3D measures shift of the moving element in relevance to the reference
element as shown in the figure 2.1. It is important to notice, that the relative
movement and not the absolute position of any of the elements is detected!
QUICK START
2-2 www.lasertex.eu
2
LASER HEAD
Horizontal & Vertical polarization
Horizontal polarization
Vertical polarization
Reference element
Moving element
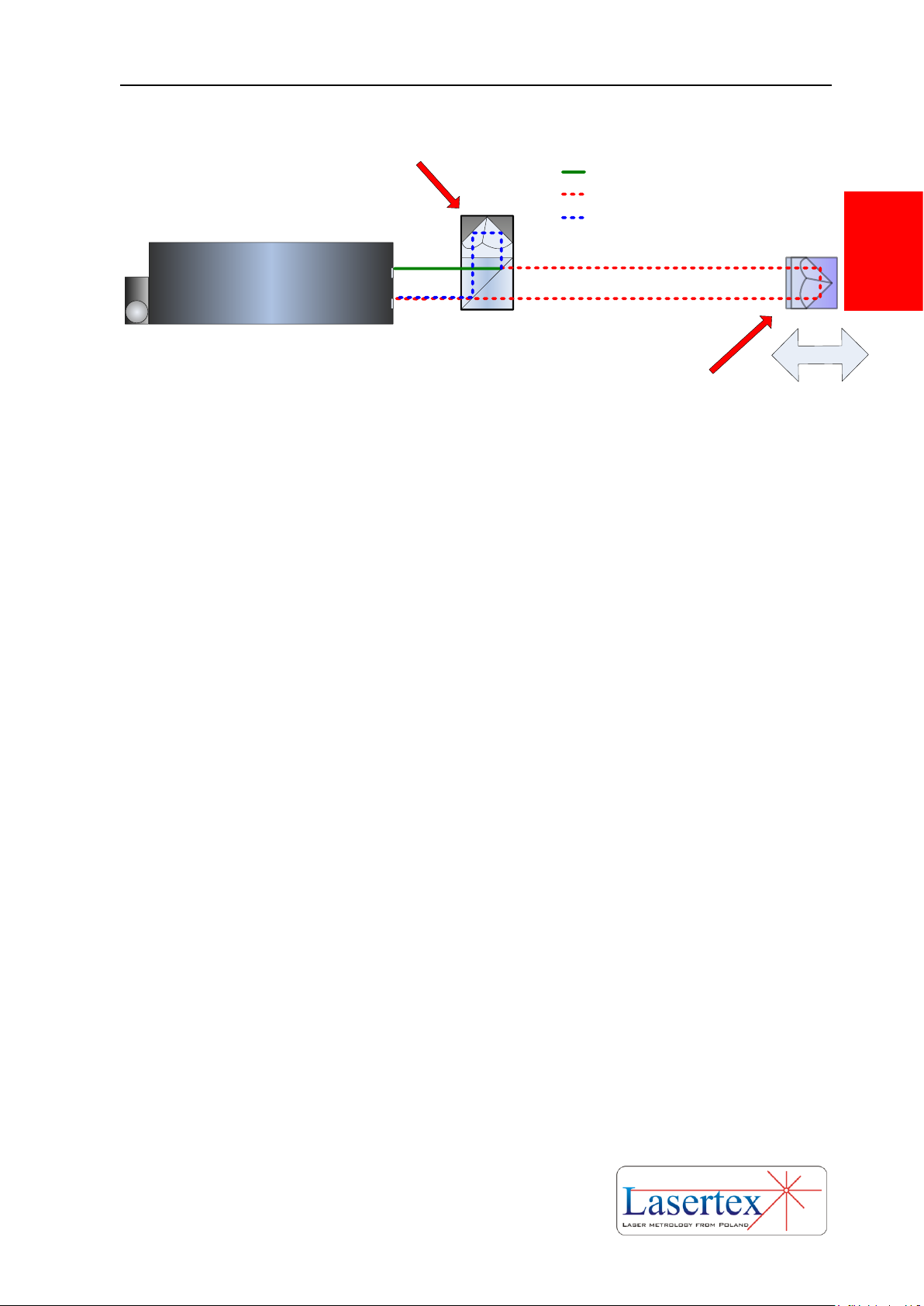
FIG. 2.1. ILLUSTRATION OF THE PRINCIPLE OF OPERATION - LINEAR OPTICS
i. Linear optics
i. To the linear optics belong Linear Interferometer IL1 and Linear
Retroreflector RL1.
The operation of the HPI-3D with the linear optics used is shown in the figure
2.1. The laser outputs the laser beam consisting of two polarizations: Horizontal (H)
and Vertical (V). The Reference element (IL1) splits the beam into two parts. The H
polarized beam is reflected back to laser and the V polarized beam is directed into the
measurement path. The frequency of the V beam is changed according to the Doppler
Effect when the moving element is in motion.
The linear optics is mainly used for measurement of:
Shift
Velocity
Acceleration
Vibrations
Straightness with 3D method
Squareness with 3D method (RE3D element required)
Parallelism with 3D method (RE3D element required)
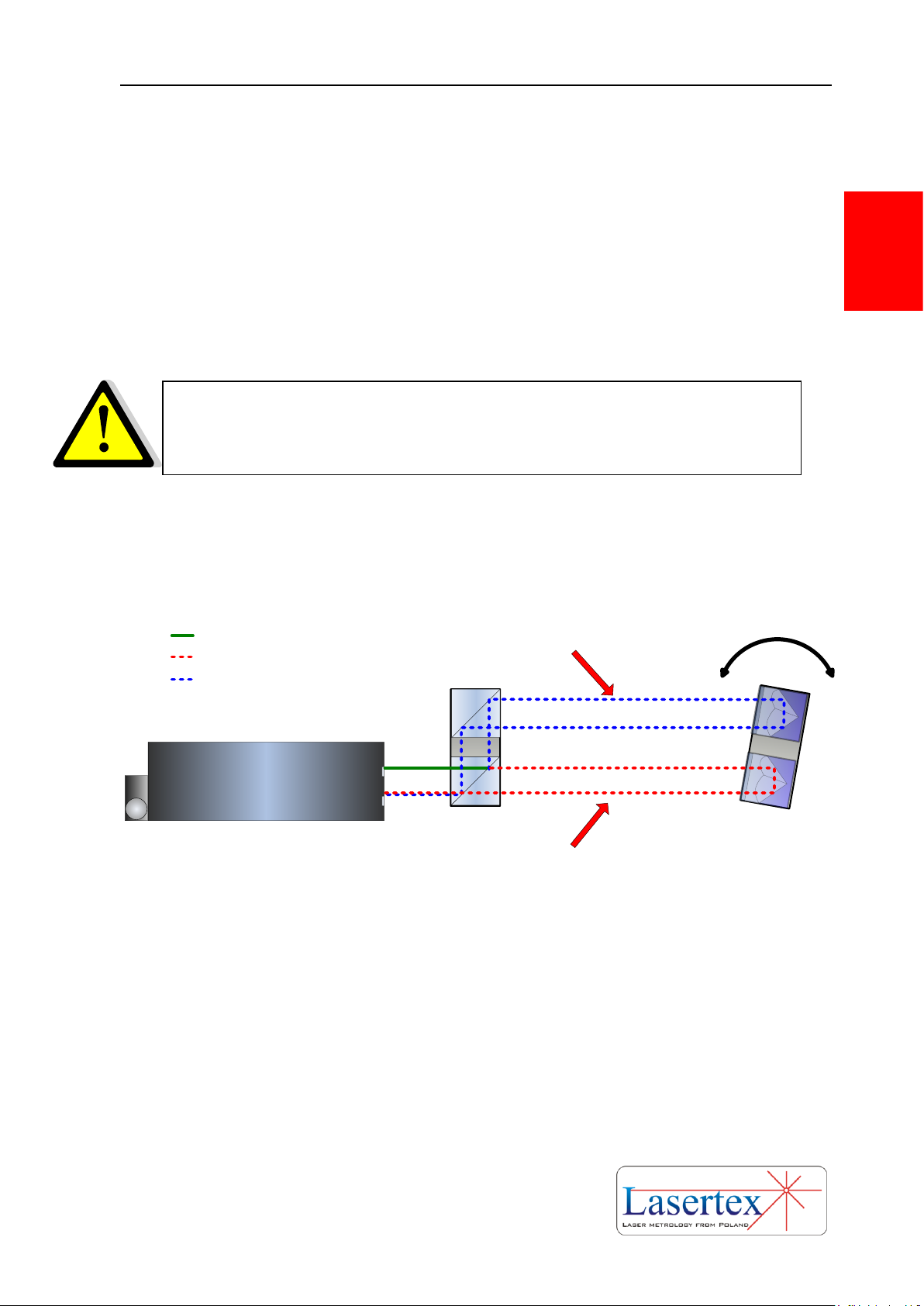
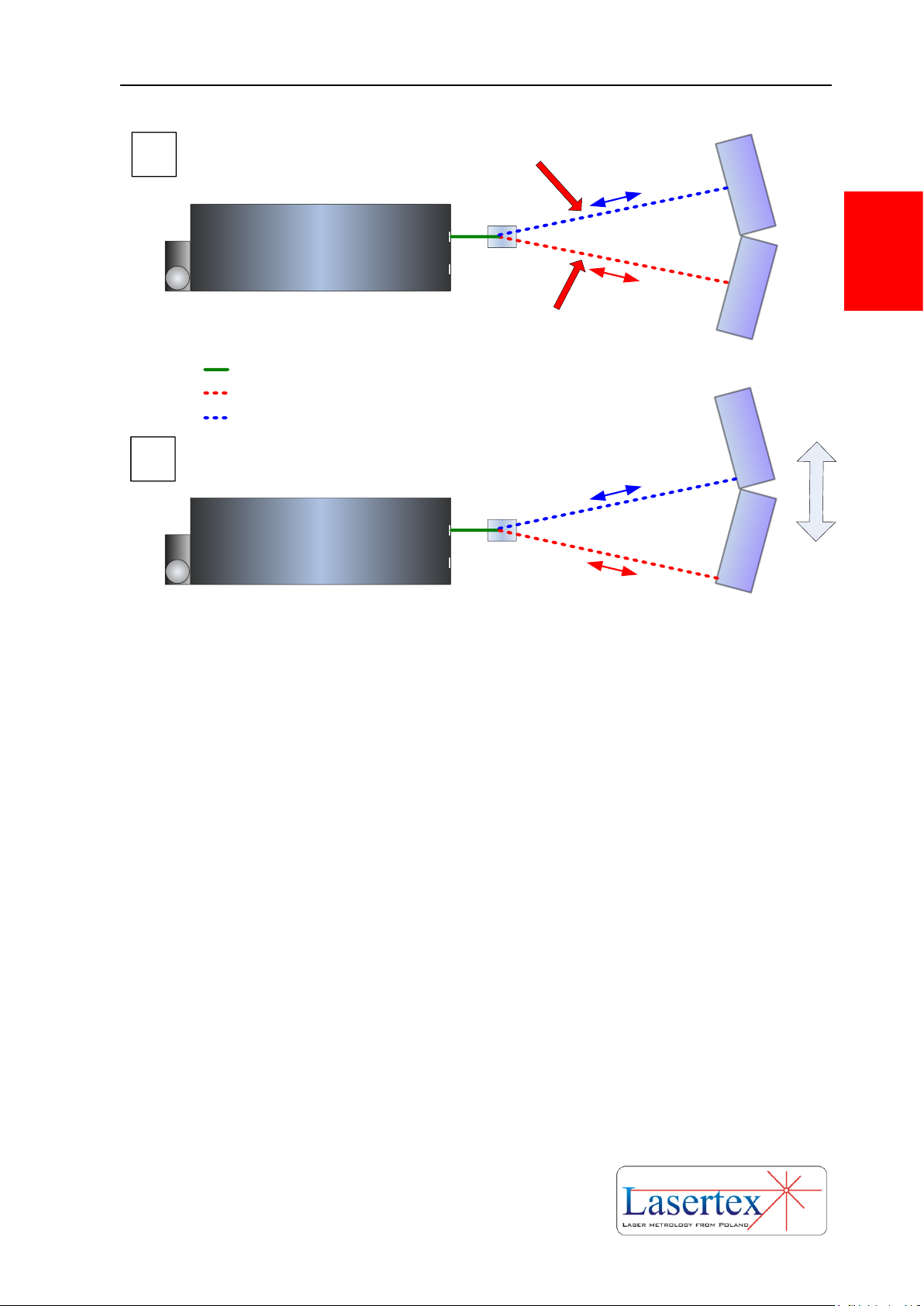
ii. Angular optics
To the angular optics belong Angular Interferometer IK1 and Angular
Retroreflector RK1.
QUICK START
2-3 www.lasertex.eu
2
The operation of the HPI-3D with the angular optics used is shown in the
figure 2.2. The laser outputs the laser beam consisting of two polarizations:
Horizontal (H) and Vertical (V). The IK1 splits the beam into two parts. Both beams
are directed into the measurement path but are parallel shifted by 50.8 mm. The
frequency of both beams is changed according to the Doppler Effect when the RK1
element is in motion.
The frequency change of both beams is the same when RK1 and IK1 are shifted
linearly. In this case no measured signal is detected by the laser head.
The laser detects movement only when the IK1 and RK1 are rotated against
each other. In this case the frequency change of the H beam is different from the
frequency change of the V beam.
RK
1
IK1
LASER HEAD
Horizontal & Vertical polarization
Horizontal polarization
Vertical polarization
Beam Path 1
Beam Path 2
FIG.2.2. ILLUSTRATION OF THE PRINCIPLE OF OPERATION - ANGULAR OPTICS
The angular optics is mainly used for measurement of:
Small angles
Straightness with Angular method
Flatness
Pitch
Yaw
The laser head with angular optics is insensitive to linear
movements.
QUICK START
2-4 www.lasertex.eu
2
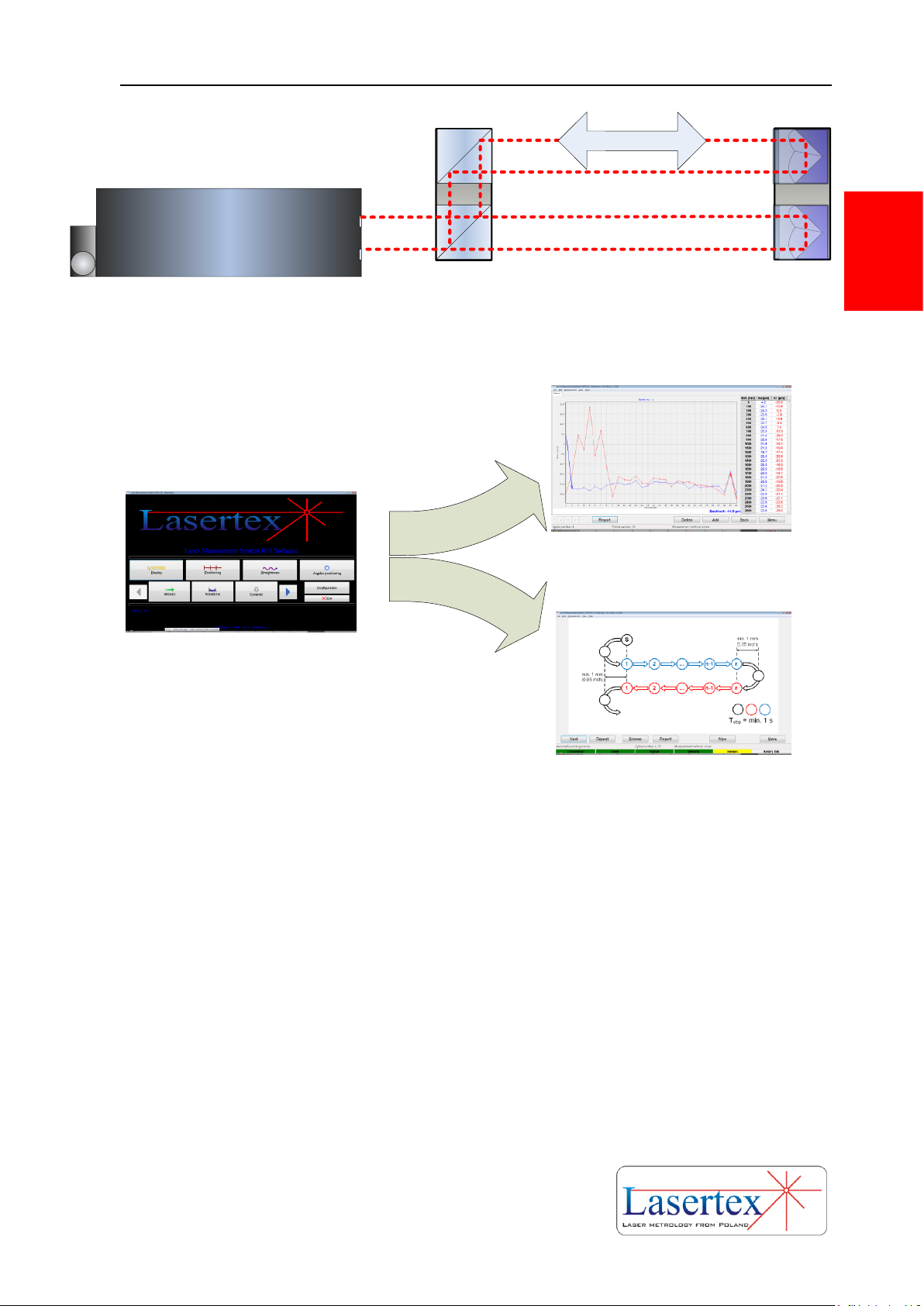
iii. Wollaston optics
To the angular optics belong Wollaston Prism WP2 and Wollaston
Retroreflector WRP2.
The operation of the HPI-3D with the Wollaston optics used is shown in the
figure 2.3. The laser outputs the laser beam consisting of two polarizations:
Horizontal (H) and Vertical (V). The WP2 splits the beam into two parts. Both beams
are directed into the measurement path. There is a certain angle between the beams.
The frequency of both beams is changed according to the Doppler Effect when the
WP2 element is in motion.
The frequency change of both beams is the same when WP2 and WP2 are
shifted linearly. In this case no measured signal is detected by the laser head.
The laser detects movement only when the WP2 is moved perpendicular to the
beam from the laser. In this case the frequency change of the H beam is different from
the frequency change of the V beam, because the lengths of beam paths 1 and 2 are
different – see figure 2.3
The laser head with Wollaston optics is insensitive to linear
movements.
QUICK START
2-5 www.lasertex.eu
2
LASER HEAD
WP2
WRP2
LASER HEAD
WP2
WRP2
Horizontal & Vertical polarization
Horizontal polarization
Vertical polarization
Beam Path 1
Beam Path 2
A
B
FIG.2.3. ILLUSTRATION OF THE PRINCIPLE OF OPERATION - WOLLASTON OPTICS.
BEAMS RETURING TO THE LASER ARE IN THE PLANE OF THE DRAWING.
The Wollaston optics is mainly used for measurement of:
Straightness with Wollaston method
Axes squareness (with REW element)
Axes parallelism (with REW element)
c. How to start
QUICK START
2-6 www.lasertex.eu
2
1. Install HPI software from CD or from www.lasertex.eu
LASER HEAD
2. Mount Laser Head, and optical elements on the measured
machine. Connect power supply to the Laser Head.
LASER HEAD
USB
Bluetooth
3. Run HPI Software and connect PC with laser over
USB or over Bluetooth interface
QUICK START
2-7 www.lasertex.eu
2
LASER HEAD
4. Align optical path
5. Start measurements
PREPARATIONS
3-1 www.lasertex.eu
3
3. PREPARATIONS
The Laser Interferometer HPI-3D requires an installation of software "HPI
Software” on a hard disc of a PC computer. The hardware requirements are:
Windows XP/Vista/7/8 system,
CR-ROM
Pentium processor, 1 GHz or better
SVGA graphic card
USB 2.0 or Bluetooth 2.0
a. Software installation
The software installation package is located on the USB memory stick that is
included to the measurement system. HPI_Software_Install application can be
launched from the USB memory. The installation process should start automatically.
FIG. 3.1. ICON OF THE SETUP APPLICATION.
Following components have to be installed for proper operation of HPI-3D
system:
HPI Software application,
Directory of the languages Languages,
FTDI Driver for USB,
documents folder with the manual and other documents (depending on a
system version),
Database BDE (Borland Database Environments)
PREPARATIONS
3-2 www.lasertex.eu
3
During the installation process necessary parameters have to be set by the user.
In the figure 3.2 there is shown a first windows that appears during installation. It
allows choosing the installation language.
FIG.3.2. INSTALLATION LANGUAGE SETUP WINDOW.
FIG.3.3. WELCOME WINDOW.
PREPARATIONS
3-3 www.lasertex.eu
3
FIG.3.4. USER INFORMATION WINDOW.
FIG.3.5. PROGRAM DESTINATION FOLDER WINDOW.
PREPARATIONS
3-4 www.lasertex.eu
3
FIG.3.6. WINDOW APPEARING WHEN THE FOLDER NAME DOES NOT EXISTS IN THE CURRENT
INSTALLATION PATH.
FIG.3.7. MENU START FOLDER SLECTION WINDOW.

PREPARATIONS
3-5 www.lasertex.eu
3
FIG.3.8. DESKTOP ICON SETUP WINDOW.
FIG.3.9. WINDOW WITH INSTALLATION INFORMATION.
PREPARATIONS
3-6 www.lasertex.eu
3
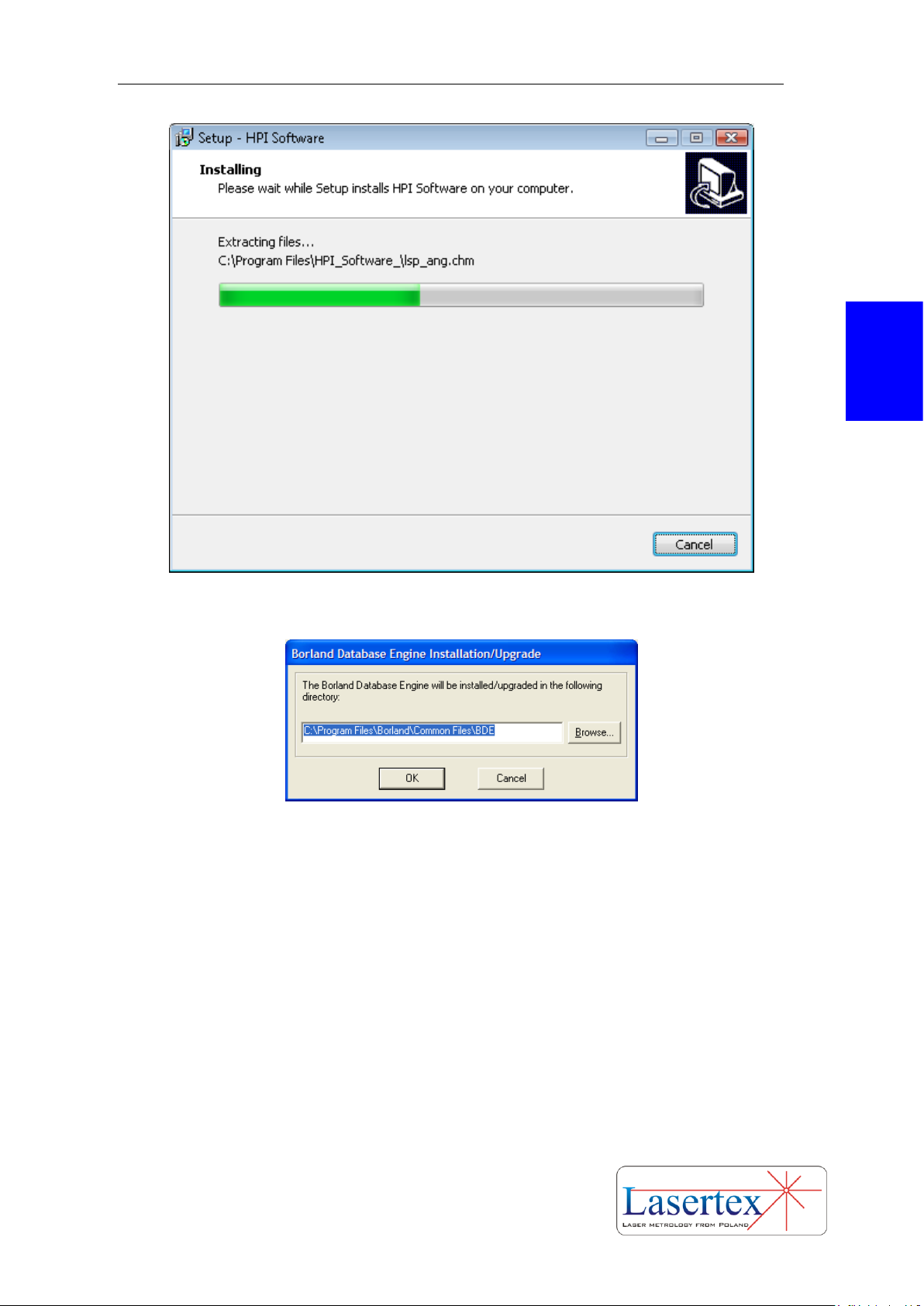
FIG.3.10. INSTALLATION WINDOW DURING DATA COPY OPERATION.
FIG.3.11. BDE (BORLAND DATABASE ENVIRONMENT) DESTINATION FOLDER WINDOW.
PREPARATIONS
3-7 www.lasertex.eu
3
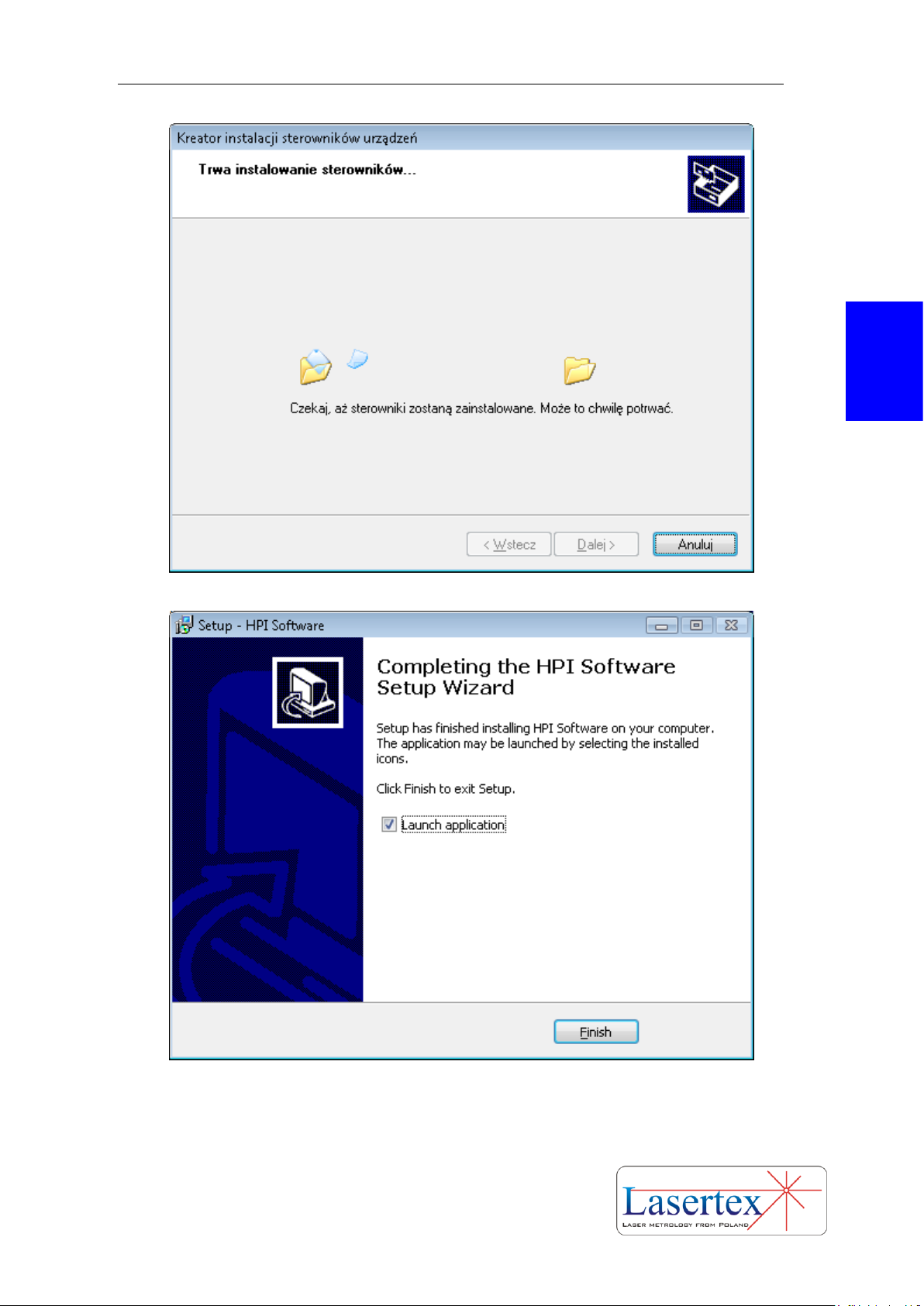
FIG.3.12. FTDI DRIVER INSTALLATION.
FIG.3.13. INSTALLATION SUMMARY WINDOW
PREPARATIONS
3-8 www.lasertex.eu
3
In most cases, the installation is semi-automatic requiring only confirmation by
the Enter key.
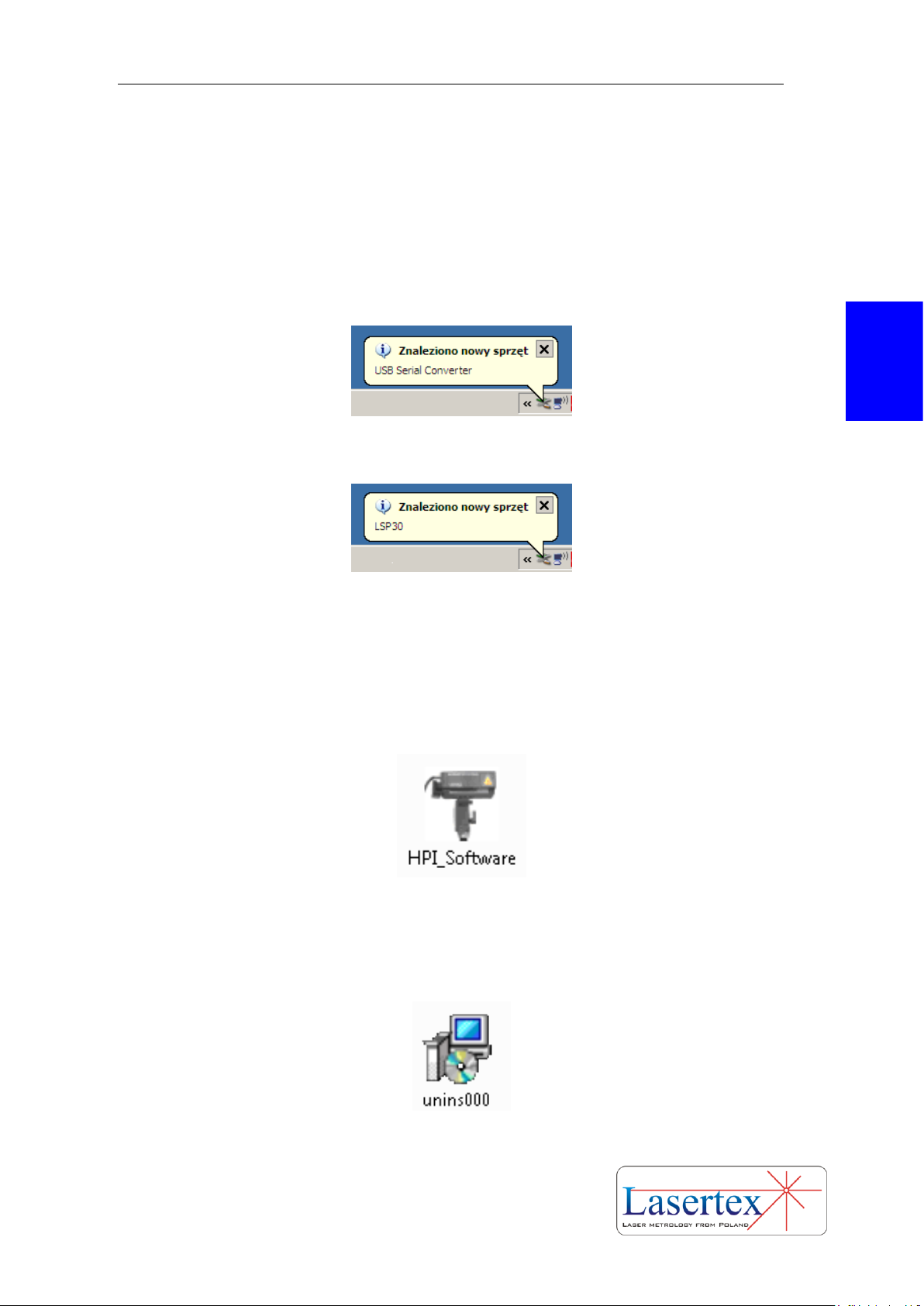
When the software is installed on the computer, also drivers should be
installed. To complete this process, the system has to be connected by a USB cable to
your PC. Driver installation is performed automatically by Windows.
FIG.3.14. MESSAGE APPEARING WHEN THE NEW USB DEVICE IS FOUND.
FIG.3.15. MESSAGE APPEARING WHEN THE DRIVER FOR HPI-3D DEVICE IS INSTALLED.
The HPI Software application can be launched from the HPI Software folder
located in Programs tab in Windows Start Menu (assuming that the installation
settings are not changed). The application can also be launched from the desktop, if
the shortcut is created during installation.
FIG.3.16. ICON OF HPI SOFTWARE APPLICATION.
In order to uninstall the HPI Software application please choose Uninstall HPI
Software from Menu Start.
FIG.3.17. ICON OF HPI SOFTWARE DEINSTALLATION APPLICATION
PREPARATIONS
3-9 www.lasertex.eu
3
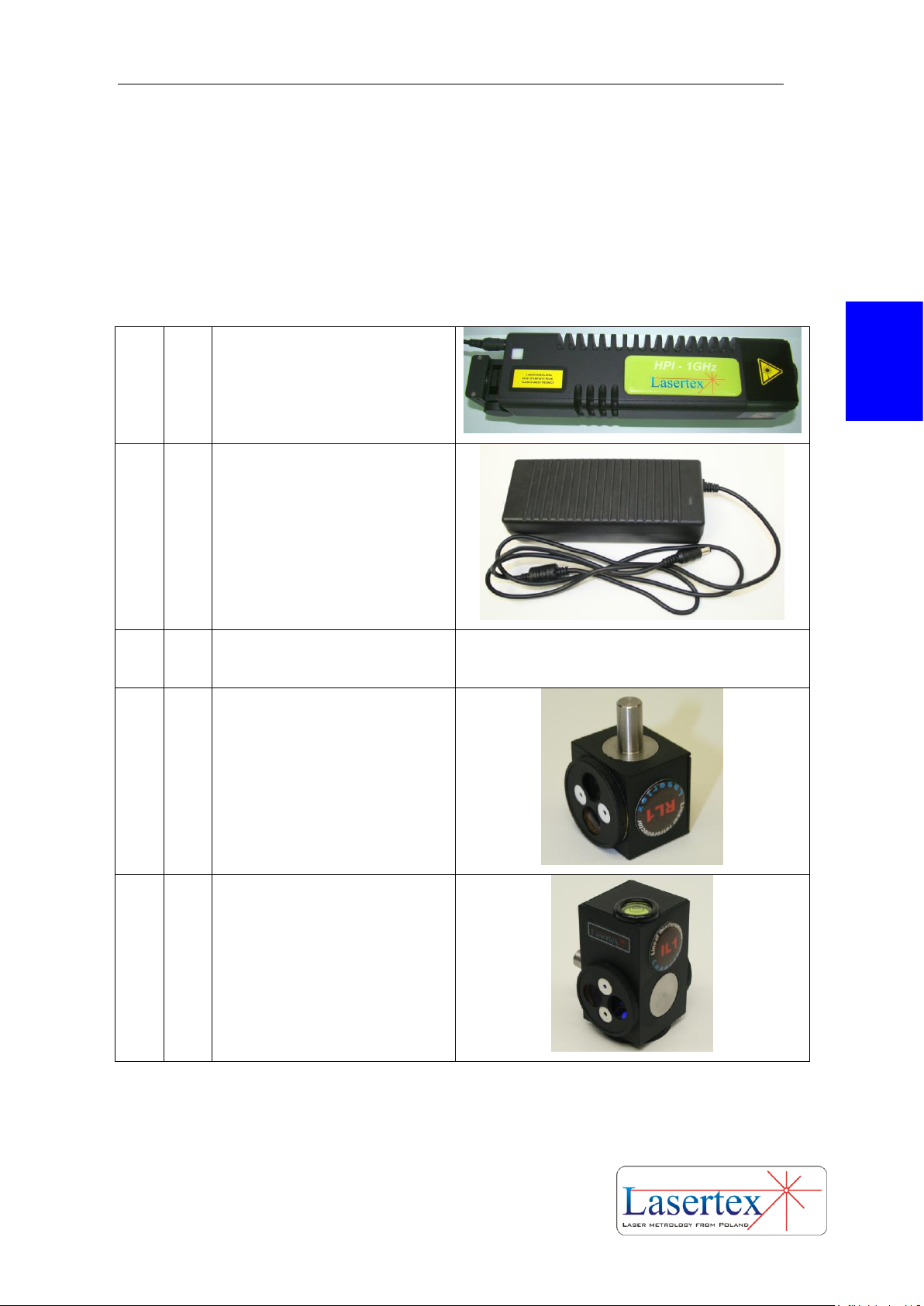
b. Elements of the Laser System
Number of the system elements is configurable and its configuration is related
to the required application. Following items are included in the standard set (for
linear measurements):
1.
1
pcs
Laser head
2.
1
pcs
Power Supply
3.
1
pcs
Tripod stand
4.
1
pcs
Linear retro-
reflector RL1
5.
1
pcs
Linear
interferometer IL1
 Loading...
Loading...