

Page 1
API Guide
MODEL:
KDS-EN6, KDS-DEC6
P/N: 2900-300839 Rev 1 www.KramerAV.com
Page 2

KDS-EN6, KDS-DEC6 - Overview
i
Contents
Overview 1
Terms 1
How to Access the Console 2
Astparam Configuration API 3
Overview 3
How to Access astparam 4
List of astparams 5
Getting KDS-6 Board's IP Address 24
Application Scenario: 25
FAQs: 26
Generic Configuration: 26
Unicast (KVM over IP) 32
Multicast (M to 1 group) 32
Mult icas t (M t o N group) 33
IIC 33
UART 34
Console APIs 36
Debug Console APIs 36
Link Manager APIs 37
Video Over IP Driver Statistic/Control APIs 37
Display Driver Statis tic/Control APIs 38
OSD APIs 38
Configurations APIs 40
IIC APIs 41
UART Port 1 APIs 41
Configuration Option List 42
Page 3
Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - Overview
Kramer KDS
Default is Telnet port 24
Use "root" to log in.
Overview
This document describes the commands that can be used for KDS-6 console. KDS-6 uses
Linux OS and the console is operated by BusyBox shell.
Using console APIs, developers can control KDS-6 firmware and extend the product's features
and capabilities.
-6 is based on Aspeed A6.4.3 firmware.
Terms
.
No password is required.
• Commands starting with "$" – Console commands executed under the Linux shell console.
The default value of multicast IP (multicast_ip) is 225.0.10x.xxx. Please use this
multicast_ip value.
• The ‘ast_send_event -1 xxx’ command has a new shortcut named ‘e’. All of the following
‘ast_send_evnt -1 xxx’ commands can be replaced with the shortcut command like ‘e xxx’.
They are exactly the same.
1
Page 4
KDS-EN6, KDS-DEC6 - Overview
Default is Telnet port 24
Use "root" to log in.
How to Access the Console
• Telnet
Every KDS-6 host/c lient FW has Telnet and a Telnet client built in. a developer can use
one KDS-6's Telnet client to connect to any other KDS-6 board. Or write their own
program using Telnet protocol to connect to any KDS-6 board through the Ethernet
network.
.
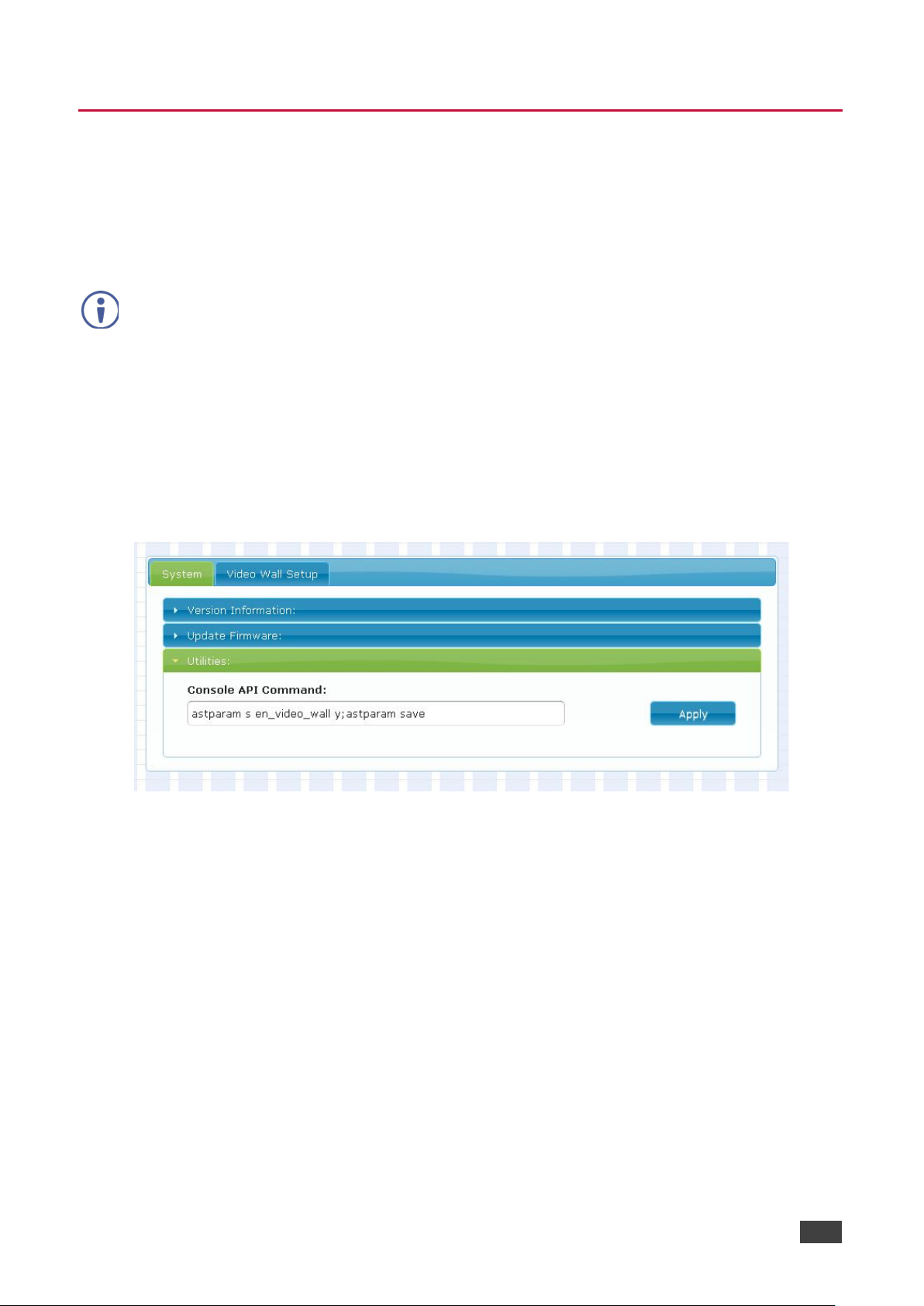
• Web UI
Use this approach when you need to modify astparam and prefer to enter commands via a
web interface instead of a console.
To modify astparam via a web interface:
1. Connect to the device’s Web UI
2. Enter astparam commands in “System->Utilities->Console API command:”
Note: You can enter multiple commands in a single line, separated by a semicolon (;).
No password is required.
Kramer Electronics Ltd.
2
Page 5
Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - Astparam Configuration API
Astparam Configuration API
Overview
KDS-6 firmware includes many configurable features. Most of the configuration are done using
the “Configuration API” called astparam. astparam is the console command to access these
system configurations.
astparam can be saved in flash ROM, so that system configuration is not lost when the system
loses power. Typical applications of astparam are:
• Enable/disable firmware features like serial over IP or video wall.
• Configure factory default firmware features
• Prepare an SPI flash image for production, including default astparam settings.
• Enable/Disable firmware features on end customer side.
The format of astparam is a key=value string pair. For example, a astparam:
“en_video_wall=y” means astparam key “en_video_wall”’s value is “y”. Both “key” and “value”
are ANSI string and case sensitive. The firmware decides how to use it.
Note: The firmware does not validate the astparam. So, any type error could cause
unexpected results. The advantage is that a user can add any astparam key/value pair, even if
KDS-6’s reference firmware doesn’t need it. Both RO and RW astparams can be modified or
even removed.
The firmware reserves two flash partitions for system configuration. One is read only (RO) the
other is read-write (RW).
Note: BOTH ‘RO’ and ‘RW’ partitions are actually read/writable. Their usage is just defined
differently.
The firmware treats the setting in the RO partition as the system’s factory default settings. It is
recommended to save non-factory default changes in the RW partition (including the random
ethaddr). When firmware boots up, it takes astparam in the following priority order: RW > RO >
firmware default. Firmware uses the value in RW if the astparam exists. If the astparam is not
available in RW partition, then the value in RO partition is used. Firmware hard coded value is
used only when the astparam doesn’t exist in both RO and RW partition.
on a production line.
When the firmware starts up, both RO and RW configurations are read from flash and saved in
RAM.
Note: All configuration modifications are saved in RAM until the "astparam save [ro]"
command is called.
3
Page 6
Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - Astparam Configuration API
The process of "reset_to_default.sh" erases the RW partition but keeps the 'ethaddr' value (by
rewriting it after partition erase.). Since everything in the RW is gone, the firmware takes
values from the RO partition, which is the 'factory default'.
How to Access astparam
The most fundamental and powerful way to access astparam is through the “astparam”
Console API command. Most of alternative approaches are just a wrap of the “astparam”
command.
$ astparam OPTIONS [KEY] [VALUE]
OPTIONS
• r : read from RO partition cache file. [KEY] is required.
• w: write to RO partition cache file (not save to flash ROM yet). [KEY] and [VALUE] are
required. If [VALUE] is empty the [KEY] will be removed.
• g : read from RW partition cache file. [KEY] is required.
• s : write to RW partition cache file (not save to flash ROM yet). [KEY] and [VALUE] are
required. If [VALUE] is empty the [KEY] will be removed.
• flush : clear all settings in RW partition cache file including random generated MAC
address. "./astparam save" is needed to clear all settings in flash ROM.
• dump: dump all parameters in RW partition cache file.
• dump ro: dump all parameters in RO partition cache file.
• dd: dump all parameters in RW partition directly from flash ROM.
• dd ro: dump all parameters in RO partition directly from flash ROM.
• save: save all parameters in RW partition cache file into flash ROM.
• save ro: save all parameters in RO partition cache file into flash ROM.
Examples:
• Read "ip_mode" setting from RO partition cache file:
$./astparam r ip_mode
• Read "ip_mode" setting from RW partition cache file:
$./astparam g ip_mode
• Write "ip_mode" setting as "autoip" to RW partition cache file:
$./astparam s ip_mode autoip
• Clear all settings in RW partition cache file:
$./astparam flush
• Clear ip_mode setting in RW partition cache file:
$./astparam s ip_mode
• Write RW partition cache file back to SPI flash ROM’s RW partition:
4
Page 7
KDS-EN6, KDS-DEC6 - Astparam Configuration API
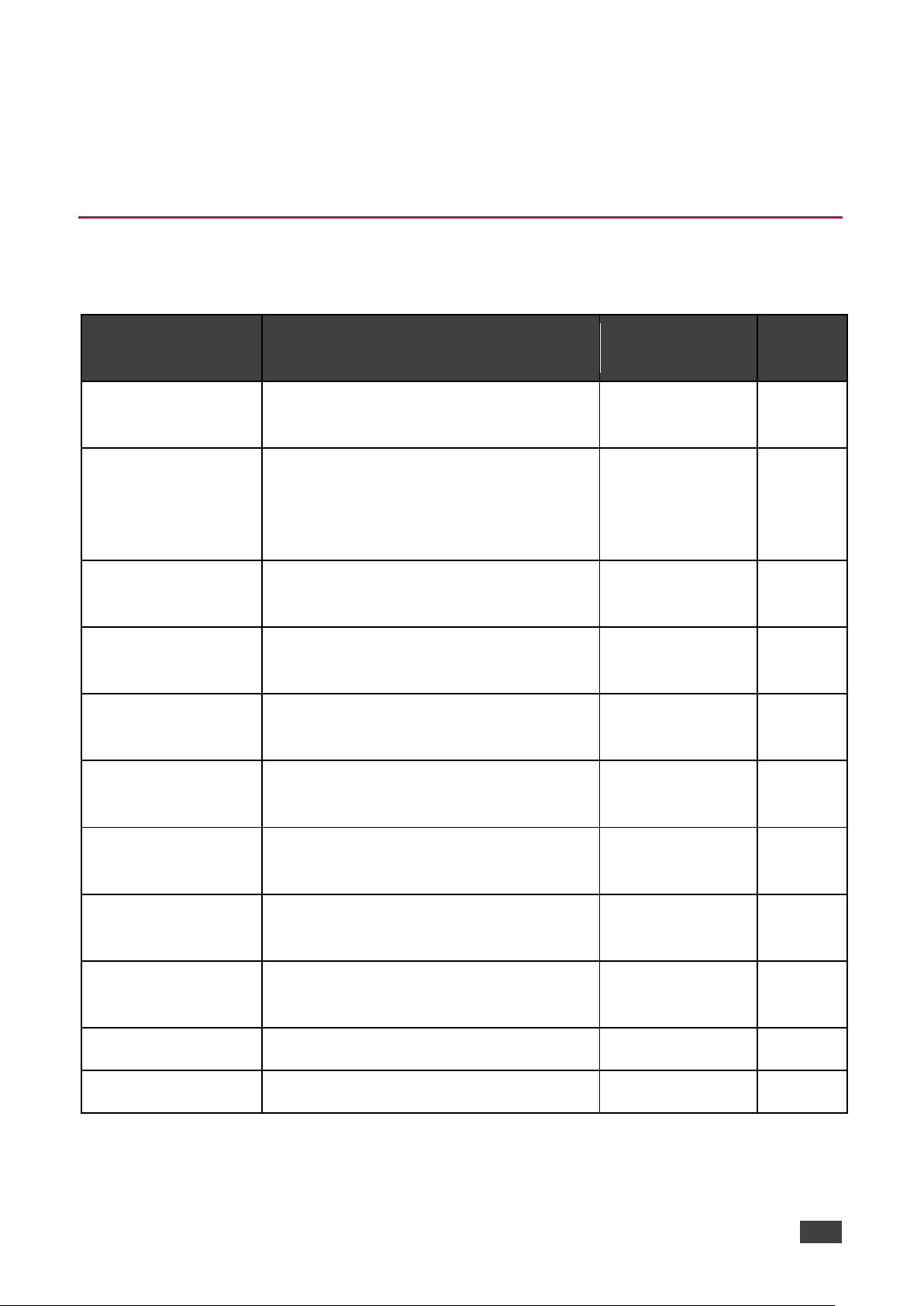
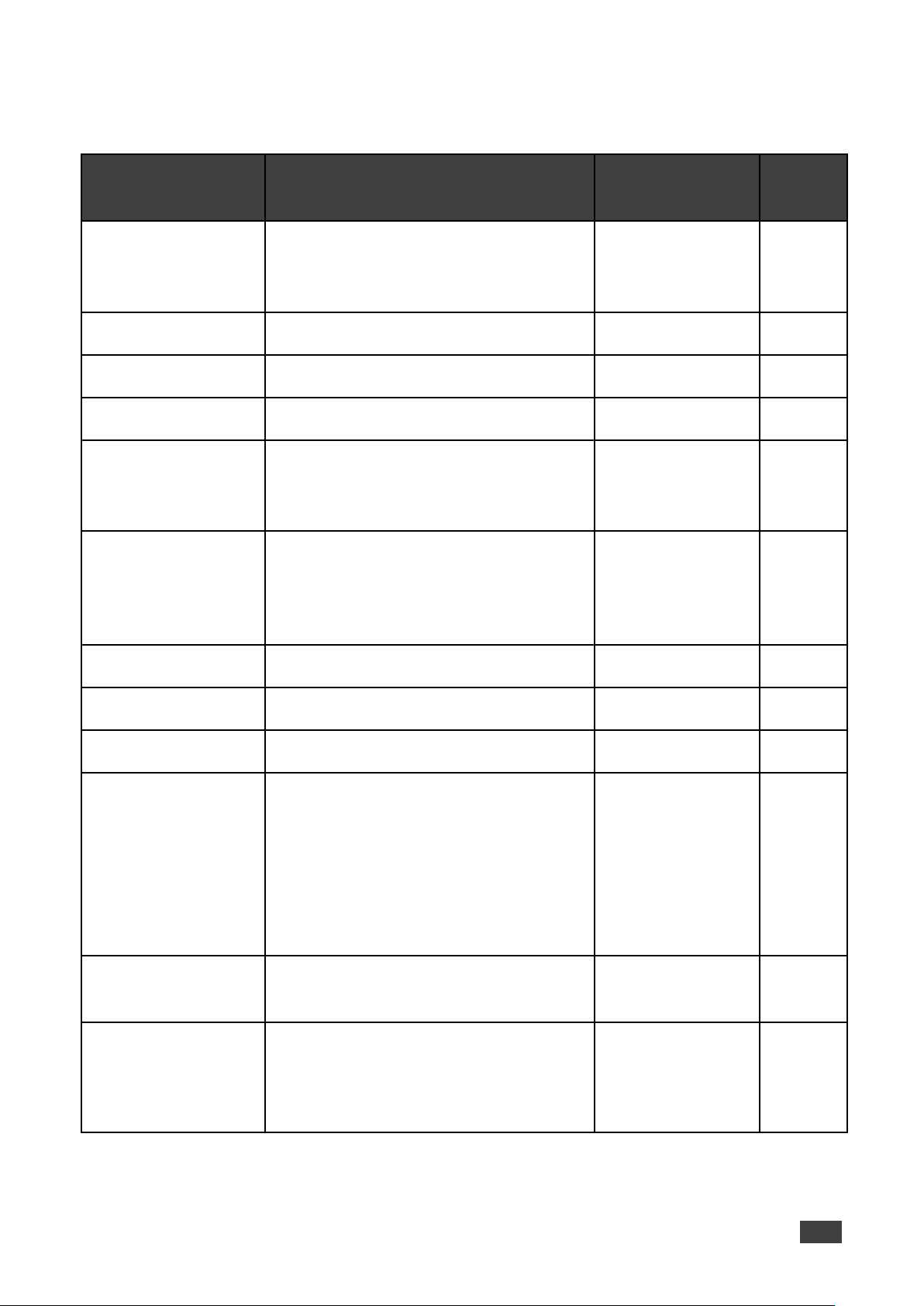
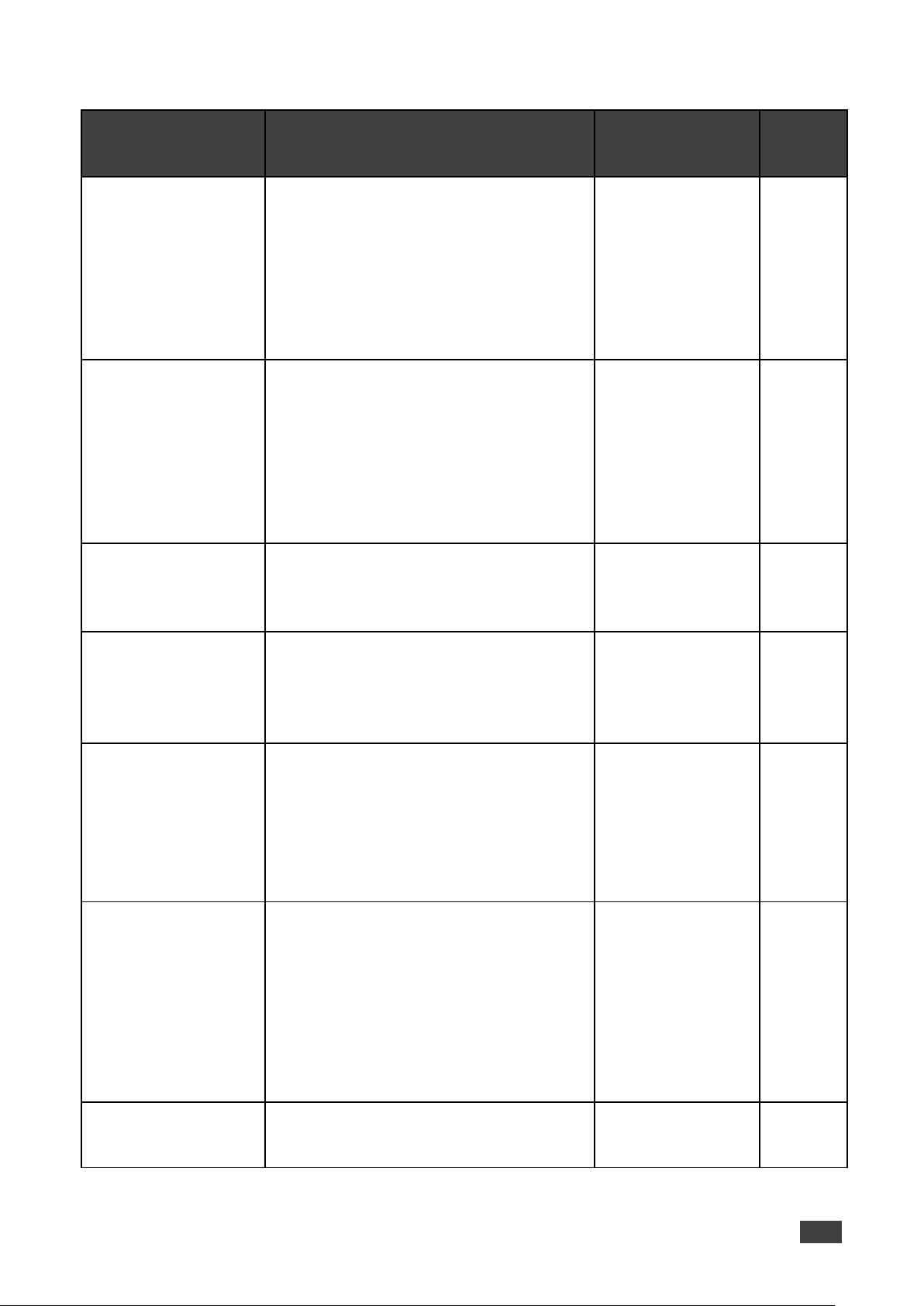
Key
Description
Value
Host/
scenario
pc2tv:
H/C
astaccess
Host: ‘y’ boot up default accept connection
y:
H/C
multicast_on
Configure casting mode
y: Multicast mode
H/C
ui_feature
y:
C
ignore_e_button_link
y:
H/C
ignore_e_button_link
y:
H/C
pwr_led_type
default:
H/C
en_log
‘y’ show debug message on debug
y:
H/C
stop_on_boot_test_fa
y:
H/C
telnetd_param
‘-p 24’: use IP port 24.
-p 24
H/C
lm_link_off_timeout
15: 15 seconds
C
$./astparam save
• Write RO partition cache file back to SPI flash ROM’s RO partition:
$./astparam save ro
List of astparams
Generic Settings
Kramer Electronics Ltd.
_1
from client.
Client: ‘y’ boot up default auto connect to
host.
(bold is default)
usb_only:
n:
n: Unicast mode
n:
n:
n:
Client
console.
il
share_usb:
n:
n:
5
Page 8
Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - Astparam Configuration API
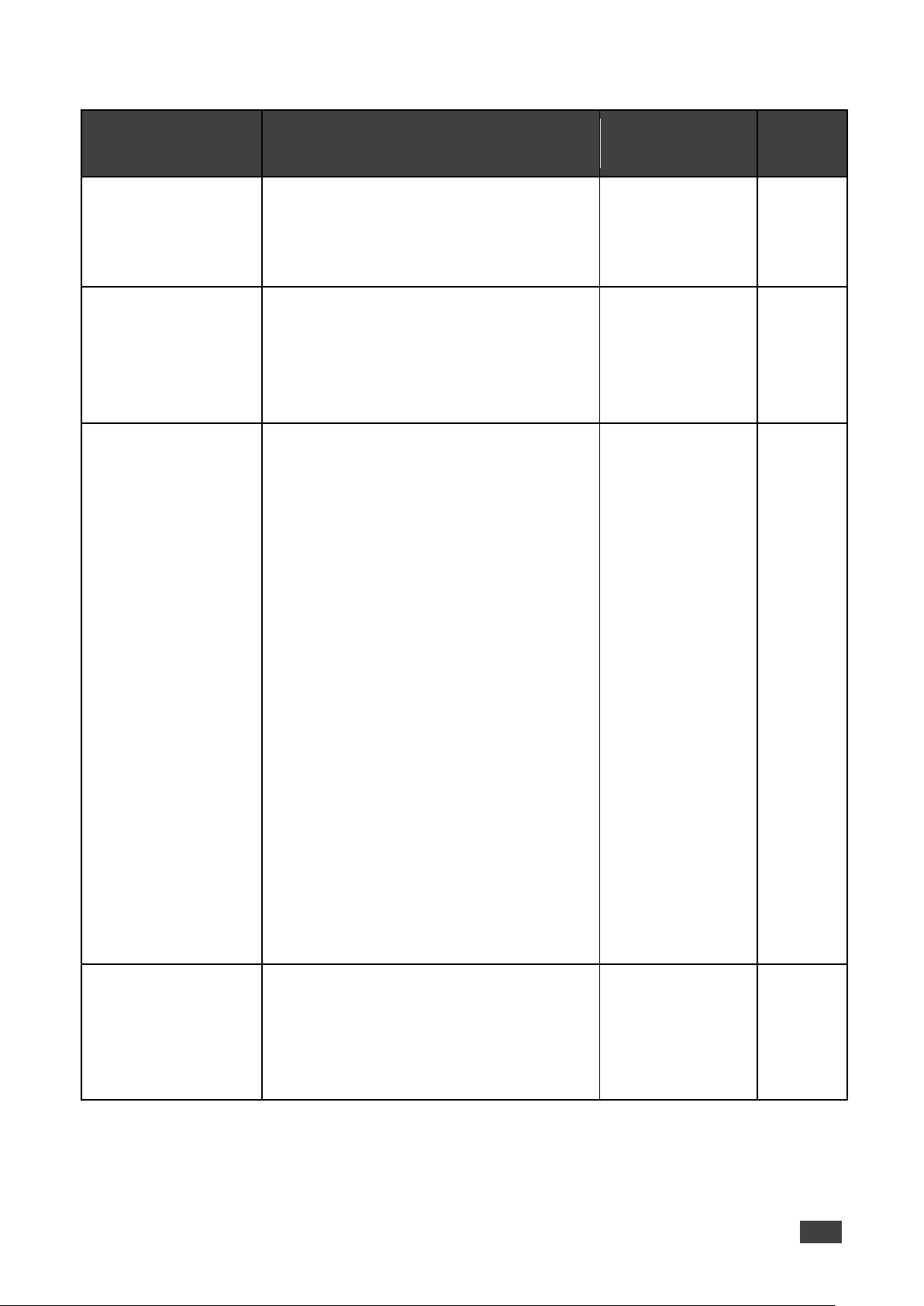
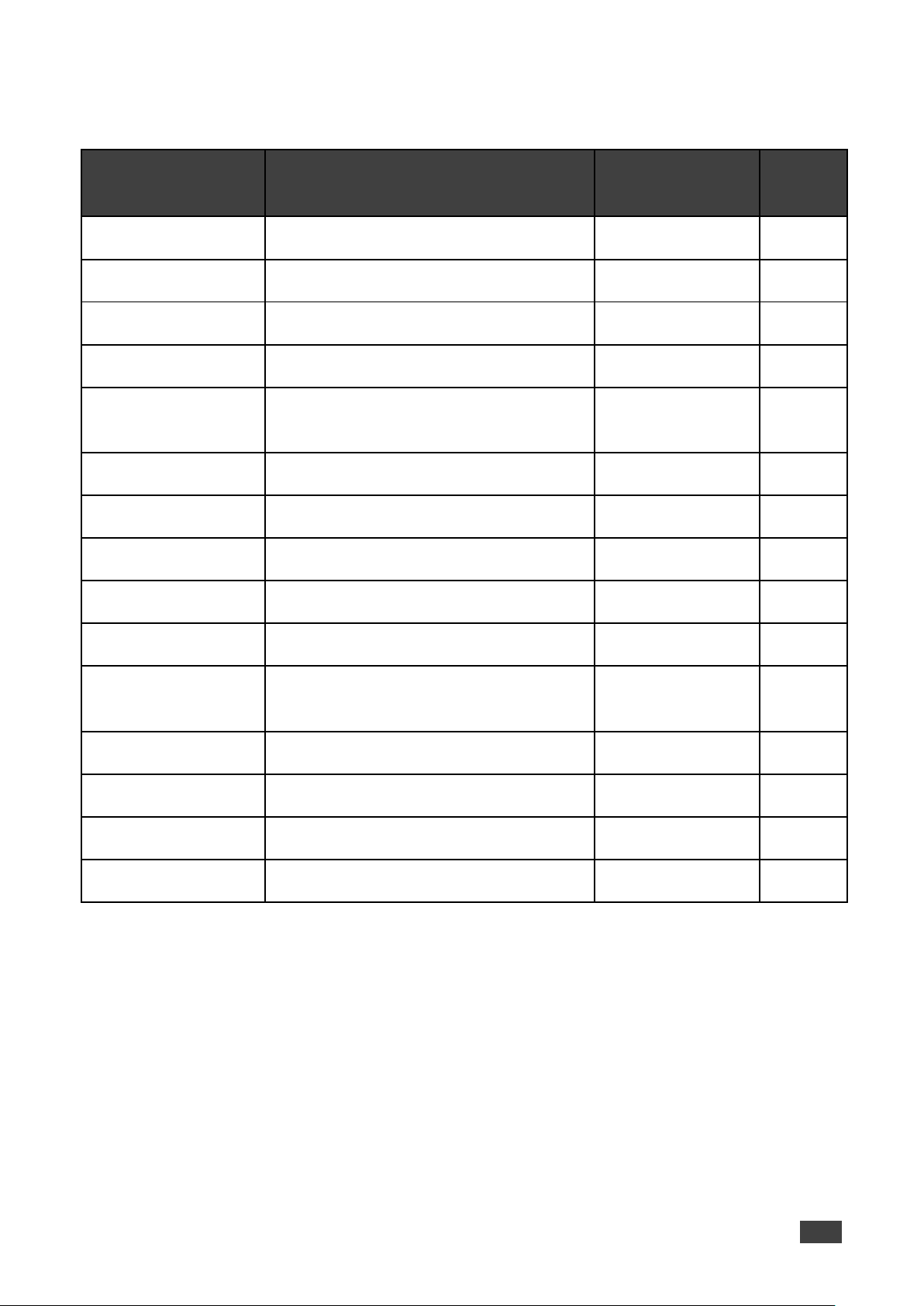
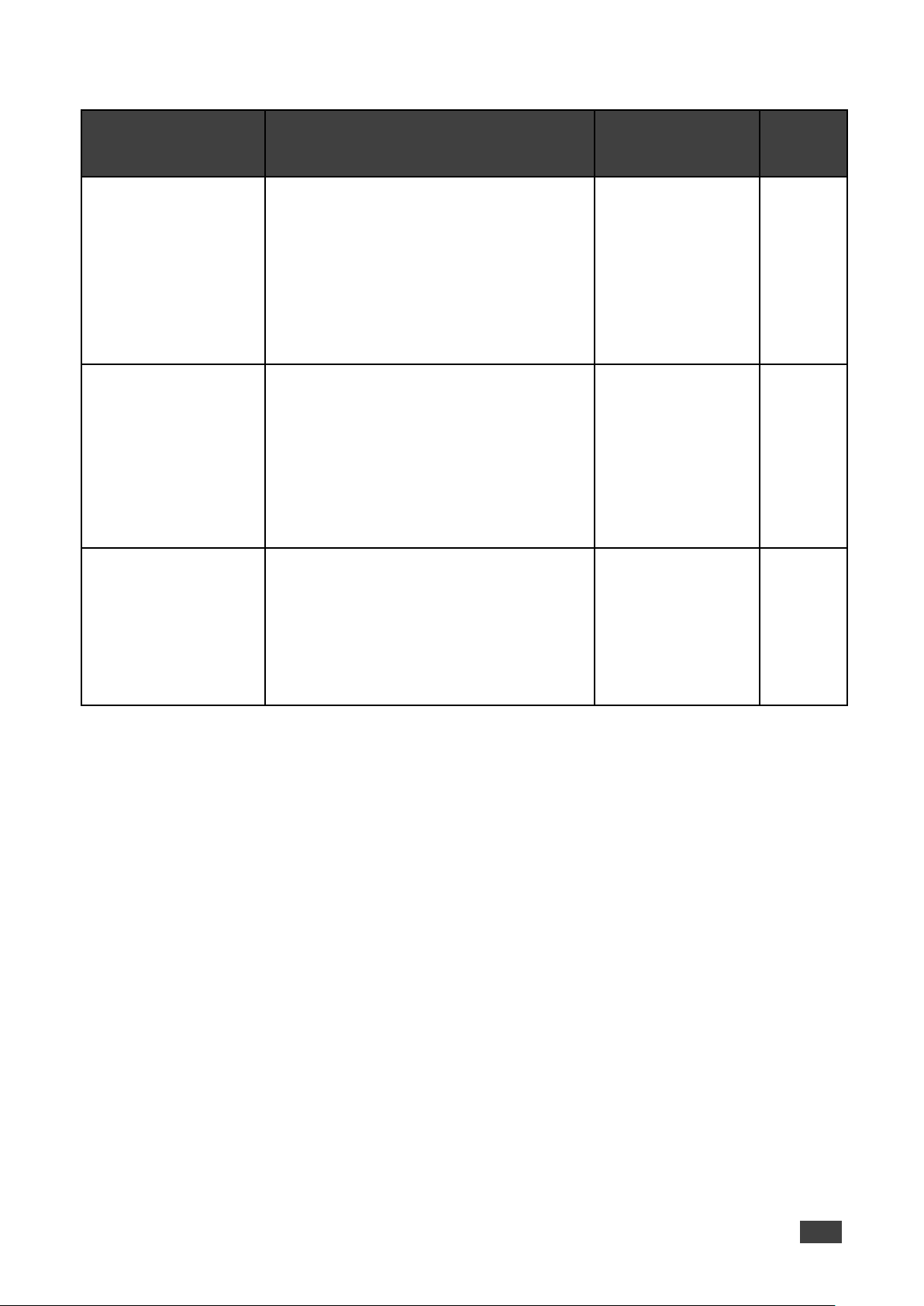
Key
Description
Value
Host/
cs_gpio_inv
[>= A5.3.3] Invert 4-bits DIP switch value.
0000
H/C
soc_op_mode
[>= AST1520][>= A6.2.0] Config backward
0: as it is
H/C
web_ui_cfg
Used to customize Web UI. The default
C
board_revision
[>= AST1520] Used to indicate firmware
300:
H
Default value is '0000', means all 4bits
(CH0,CH1,CH2,CH3) no invert. To invert
CH1, for example, set the value to '0100'.
compatibility mode.
value is automatically generated based on
enabled functions during first time boot up.
The value is a series of characters:
e: essential functions (can’t be disabled)
n: network
v: video
w: video wall
a: audio (i2s)
u: usb
s: serial over ip
r: IR
Character order does not matter.
Example 1: To enable all UI elements, set
the value to ‘envwausr’.
Example 2: 'envas' means show ‘essential
functions’, 'network', 'video', 'audio', and
'serial over ip' modules.
(bold is default)
1: AST1500
compatible
2: AST1510
compatible
Client
different kind of HW board design.
300: [Host] AST152x v1.x reference board.
301: [Host] AST1520 v2.x splitter loopback
design with HDCP 2.2 support
301:
6
Page 9
Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - Astparam Configuration API
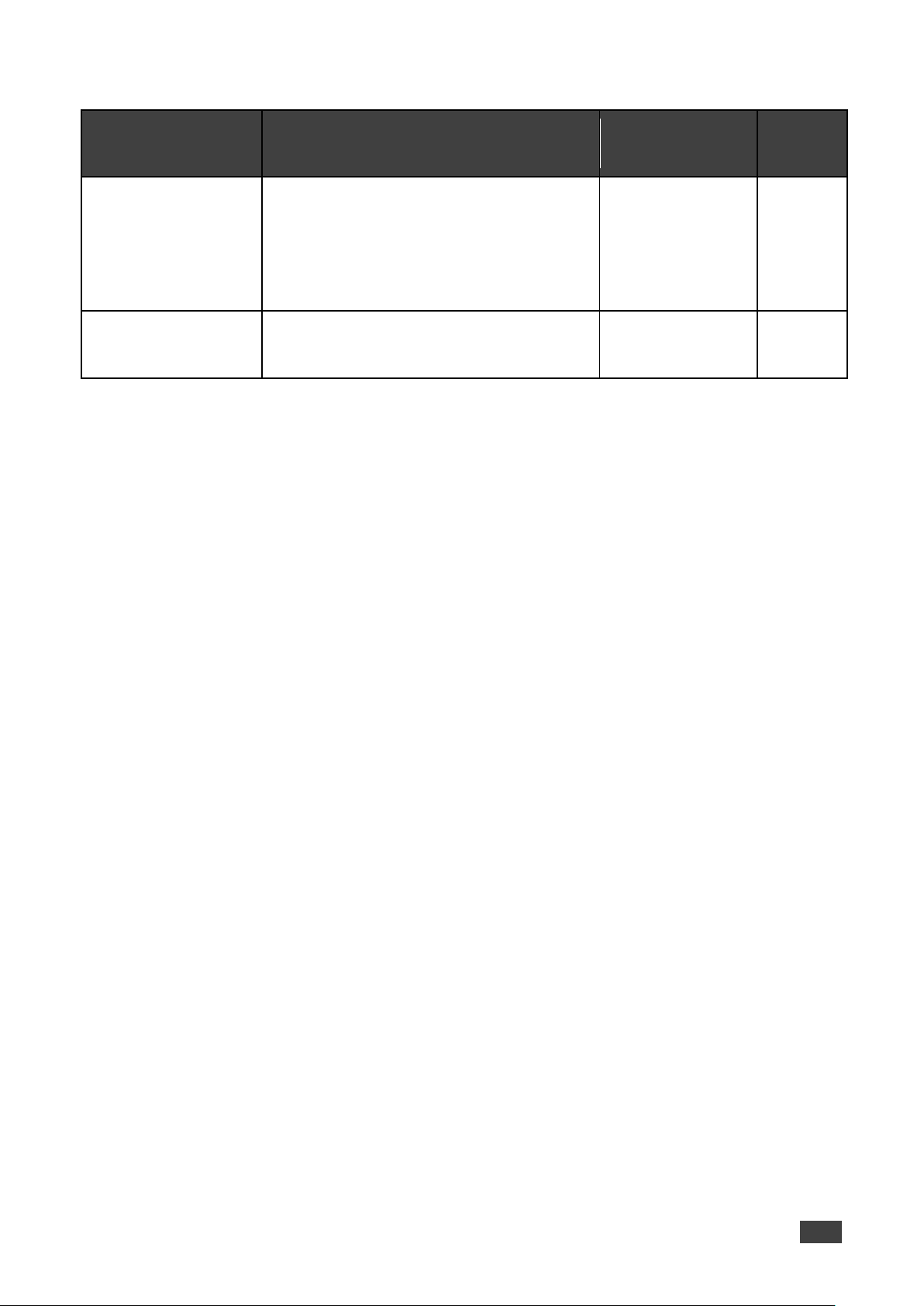
Key
Description
Value
Host/
ui_default_res
[>= A6.1.0] Change the bootup and GUI
640x480@60
C
ui_show_text
‘y’ to display diagnostic information on the
y: Display
C
(bold is default)
Client
default resolution. Default resolution is
640x480@60Hz.
Note: System reboot is required for
ui_default_res to be applied.
bottom of the GUI. ‘n’ to hide it.
n: Hide
7
Page 10
KDS-EN6, KDS-DEC6 - Astparam Configuration API
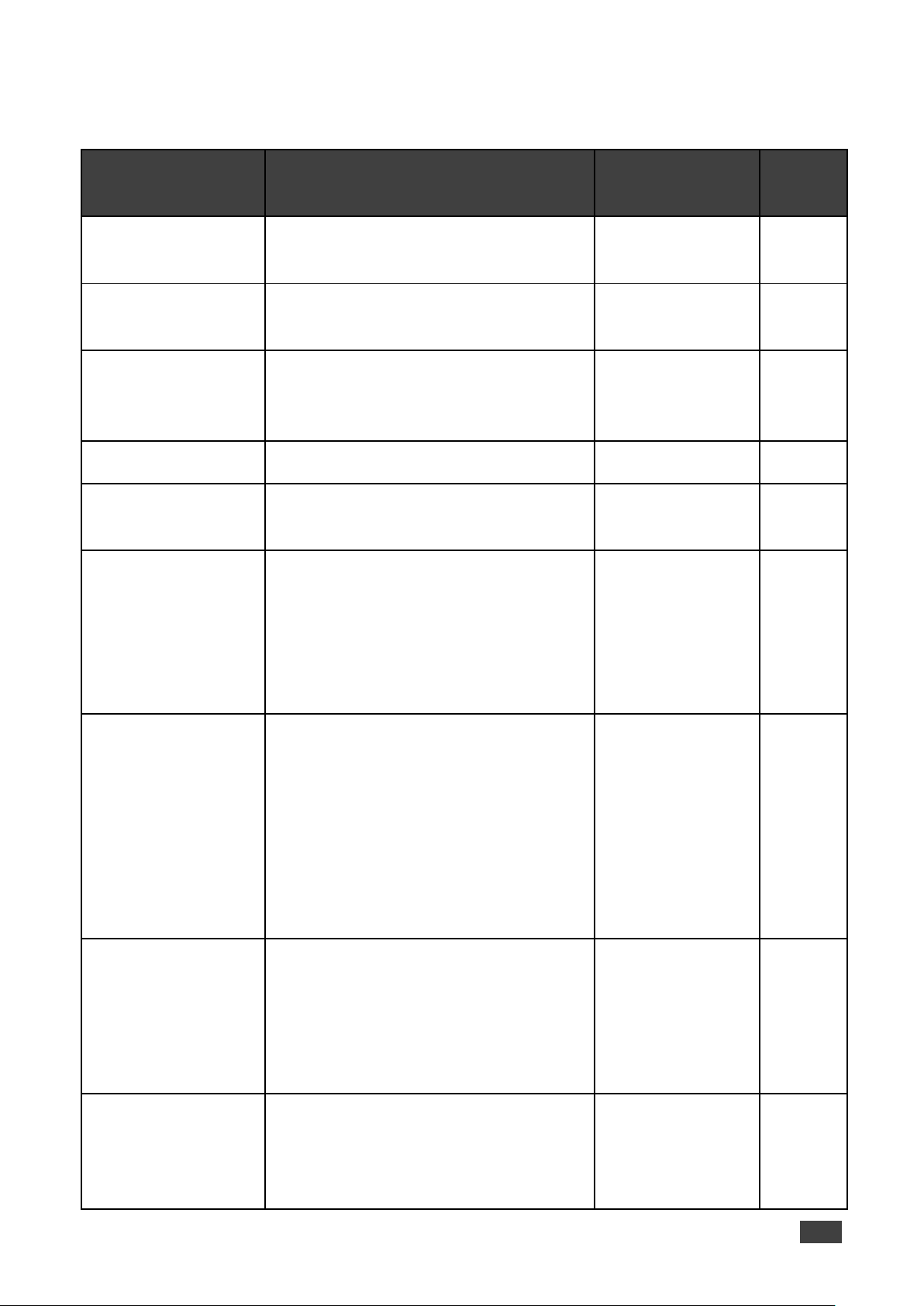
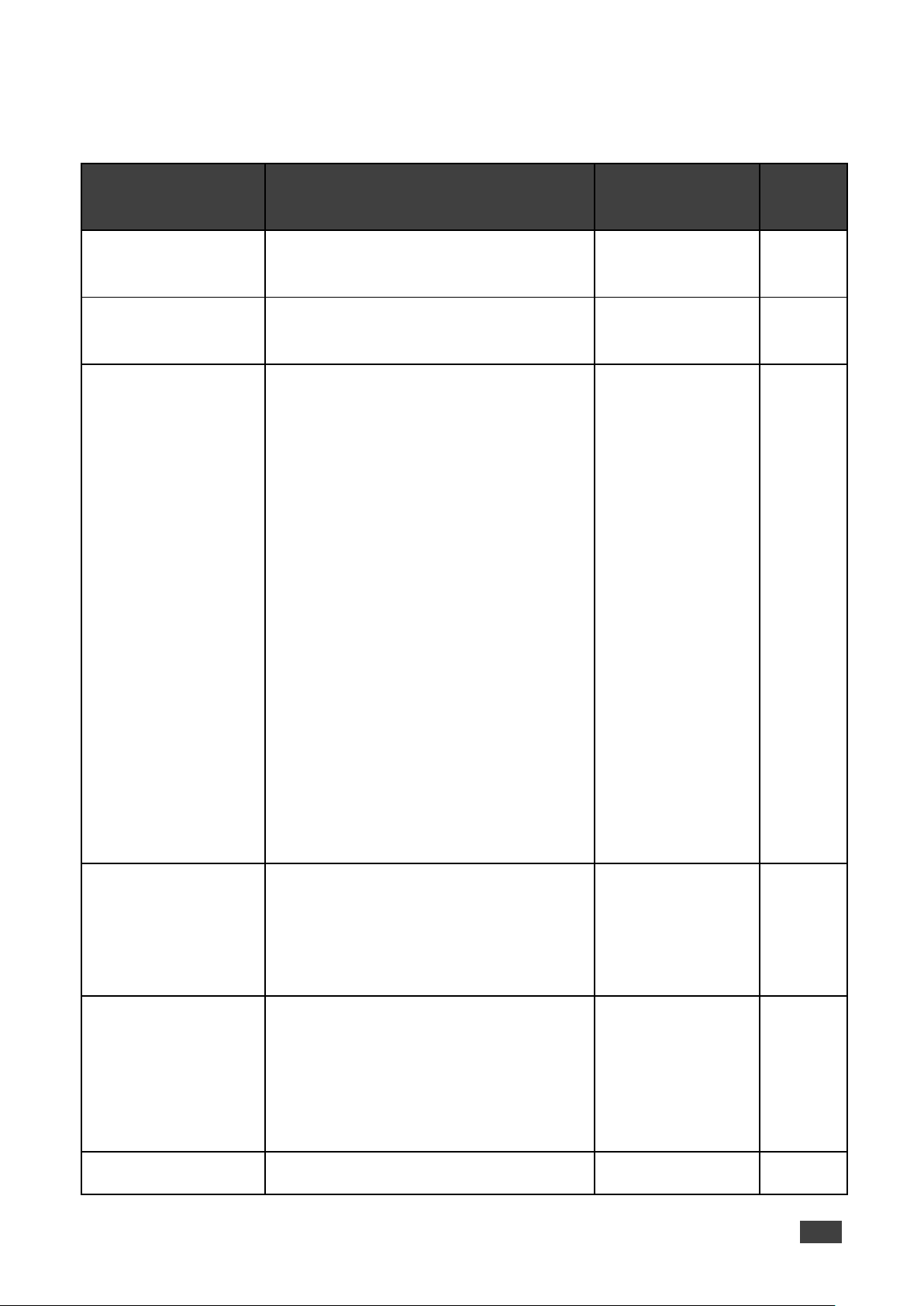
Key
Description
Value
Host/
ip_mode
static:
H/C
netmask
H/C
gatewayip
[> A 1.38]
H/C
hostname_prefix
ast: For AST1500
H/C
hostnamebydipswitch
Use default hostname_id based on 4-bits
y:
H/C
hostname_id
Overwrite “hostnamebydipswitch”
H/C
ch_select
H/C
reset_ch_on_boot
Resets link related astparam on boot, to
y: enable
H/C
jumbo_mtu
[>= AST1510]
1500:
H/C
IP Network Setting
Kramer Electronics Ltd.
(bold is default)
Client
dhcp:
autoip:
ipaddr H/C
ast2: For AST1510
ast3: For AST1520
DIP switch.
n:
Host default is ‘y’
Client default is ‘n’
multicast_ip H/C
prevent the user from entering the wrong
channel setting. The following astparam
is cleared to the default value:
ch_select
multicast_ip
hostname_id
multicast_ip_prefix Uses a different multicast IP prefix.
Default value is ‘225.0.10’ which means
multicast IP is ‘225.0.10x.xxx’ where x’s
value depends on 4-bits DIP switch.
n: disable
8000:
225.0.10 H/C
8
Page 11
KDS-EN6, KDS-DEC6 - Astparam Configuration API
Key
Description
Value
Host/
btn1_short
H/C
btn1_long
H/C
btn1_short_on_boot
H/C
btn1_short_on_eth_of
H/C
btn1_long_on_eth_off
H/C
btn2_short
H/C
btn2_long
H/C
btn2_short_on_boot
H/C
btn2_long_on_boot
H/C
btn2_short_on_eth_of
H/C
btn2_long_on_eth_off
H/C
btn_init
H/C
btn1_delay
H/C
btn2_delay
H/C
Button: (> A3.2)
Kramer Electronics Ltd.
(bold is default)
Client
btn1_long_on_boot H/C
f
f
9
Page 12
KDS-EN6, KDS-DEC6 - Astparam Configuration API
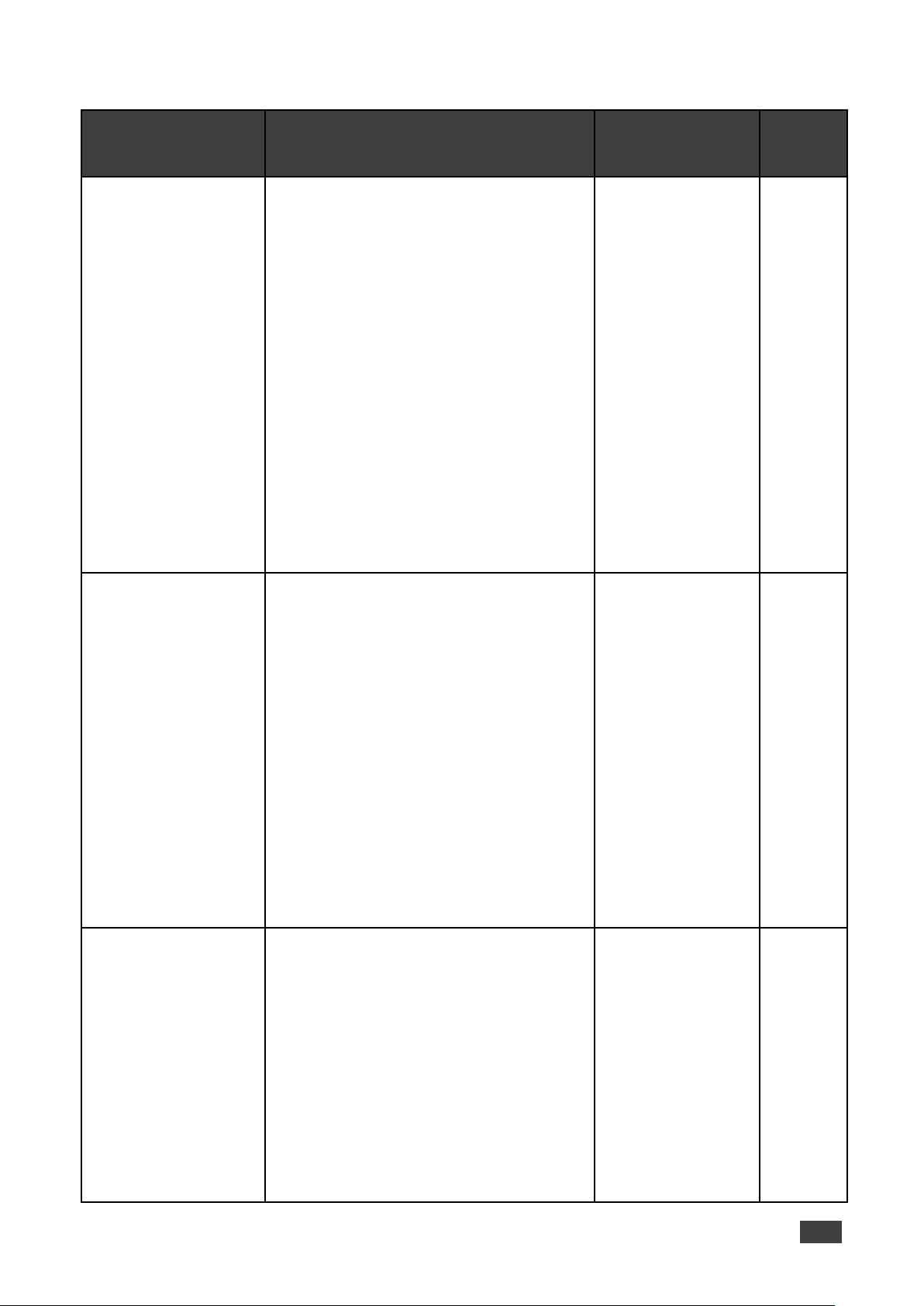
Key
Description
Value
Host/
no_video
y: disable VideoIP
H/C
ast_video_quality_mo
-1: Video mode
H
v_bcd_threshold
0: anti-dither off
H
v_1080i_to_720p
H/C
en_video_wall
y:
H/C
profile
[< A6.0.0] Select ‘giga’ or ‘analog’.
auto:
H
v_chunk_size
[OP_MODE < 3] Used to control video
64512
H
v_type
[>= AST1520] Overwrite “video type”
0: VGA
H/C
Video over IP
Kramer Electronics Ltd.
de
[>= A6.x.x] Revised the naming to:
auto, 10M, 50M, 100M, 150M, 200M.
SoC V1 and V2 only support ‘auto’.
(bold is default)
n: enable VideoIP
0: Graphic mode
1: anti-dither 1
2: anti-dither 2
n:
10M:
50M:
100M:
150M:
200M:
Client
network stream’s burst size. A smaller
value smooths the Ethernet switch’s
loading, but may causes video streaming
performance issues.
Default value is ‘64512’. Use ‘7376’ when
you want to smooth the video stream
packets. Don’t touch this setting unless
you know what you are doing.
v_ignore_cts7_33 HDMI compliant test (CTS 7-33) requires
the HDMI source to always output a DVI
signal when the downstream sink is not
an HDMI sink (EDID is not HDMI device).
Set this option to ‘y’ to ignore this
requirement.
setting. Default value is received from the
GPIO pin (HDMI or VGA).
n: follow CTS
y: ignore CTS
1: disable
2: HDMI
3: DVI
H/C
10
Page 13
Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - Astparam Configuration API
Key
Description
Value
Host/
v_loopback_type
[>= AST1520] Set video loopback port
0: VGA
H
v_output_timing_conv
[>= AST1520] Force specific video output
0: Pass-Through
C
v_eng_drv_option
[>= AST1520] 32bits bitmap VE driver
0: Default value
H/C
type. Overwrite HW GPIO setting. Default
value is gotten from GPIO pin.
Default value when GPIO pin is set to
enable:
AST1525: the same as v_type setting.
AST1520:
‘board_revision’ == 301, default 2
(HDMI).
If the board is ‘301’ type and has VGA
loopback, please set
v_loopback_type to ‘0’.
v_dual_port to ‘1’.
Otherwise
[<= A6.2.6] Default as v_type setting.
[> A6.2.6] Default as 0 (VGA).
(bold is default)
1: disable
2: HDMI
3: DVI
Client
ert
timing.
Examples:
00000000: Pass-Through
80000010: Full HD 1080p60
8000001F: Full HD 1080p50
8000005F: Ultra HD 2160p30
8000005E: Ultra HD 2160p25
80000004: HD 720p60
81000061: WXGA 1366x768@60
81000040: WXGA+ 1440x900@60
81000051: WUXGA 1920x1200@60
8100003C: SXGA+ 1400x1050@60
options to tweak driver behavior. Default
value is 0.
0x00000001: [>=A6.0.0][Host] Convert
2160p30Hz to 1080p
0x00000002: [>=A6.0.0][Host] Convert
2160p60Hz (YUV420) to 1080p60Hz
0x00010000: [>=A6.1.0][Client] Do not
black out after switching to new video
source
11
Page 14
Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - Astparam Configuration API
Key
Description
Value
Host/
v_dual_port
[>= AST1520] Dual output mode. Client
1: enable
H/C
v_rx_drv
[>= A6.0.0] Used to specify HDMI
cat6023: for
H
v_src_unavailable_tim
Wait for a v_src_unavailable_timeout ms
10000: 10 seconds
C
v_turn_off_screen_on
Turn off video output sync after
y: Turn off
C
v_analog_edge_
[>= A6.1.12] For VGA analog video input
37: default value
H
loopback_edid_patch
Copy EDID patch option for local
00000000
H
eout
set to ‘1’ to output video signal to both
VGA and HDMI port. Host set to ‘1’ to
output HDMI input to VGA loopback port.
Default value:
Host: 0
Client: 1
receiver driver used. Default value for
different SoC version:
AST1500: cat6023
AST1510: cat6023
AST1520: it6802
AST1525: it6802
before entering power save. Set to ‘-1’
means never timeout.
(bold is default)
0: disable
IT6604, IT6605
chip
it6802: for IT6802
chip
-1: never timeout
Client
_pwr_save
connected host stops streaming video to
client.
v_rx_drv_option Special bitmap options for HDMI receiver
driver. (IT6604, IT6802…)
0x00000002: Always report HDMI audio
as 2Ch 48KHz
0x00000004: Always report HDMI audio
is ON
detect
only. Used to adjust edge detection
threshold value. Default value should be
fine in most of cases. Increase the value
when edge detection is not accurate.
Valid range is 0~255. Good value range:
15~64. Set the value too high or too low
may cause bad result.
n: Do not turn off.
Will switch back to
GUI screen
0: default
H
loopback video port.
12
Page 15
Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - Astparam Configuration API
Key
Description
Value
Host/
remote_edid_patch
Copy EDID patch option for remote client.
H
v_input_select
[>=AST1520][>=A6.3.0]
auto
H
v_dual_input
[>=AST1520][>=A6.3.0]
y: has
H
Default values:
AST1500: 00230017
AST1510: 00000005
AST1520/AST1525:
[FW < A6.3.0] 00000000
[FW >= A6.3.0] 00000001
Configure different types of input select
mode:
auto: auto detect. always controlled by
GPIO.
detect_sync: auto switch after video lost
fixed: fixed selection
Specify if the HW board has dual input
port or not. This astparam is optional.
The FW will automatically detect the HW
configuration based on the availability of
EDID ROM of both ports.
(bold is default)
detect_sync
fixed
n: doesn’t have
Client
13
Page 16

Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - Astparam Configuration API
Key
Description
Value
Host/
edid_use
By design, all connected client and host
primary:
H/C
v_hdmi_hdr_mode
[FW >= A6.3.0]
0: HDR
C
loopback video port’s EDID is received by
host’s VE driver. All EDID info rm a tion
also contains the ‘edid_use’ flag. The
host VE driver will ONLY write the
received EDID into EEPROM when the
‘edid_use’ is set to ‘primary’. So,
‘edid_use’ flag is used to control whether
a host should write a received EDID into
EEPROM or not. Different casting mode
has different ‘edid_use’ default value.
By default:
Unicast Mode: All client’s ‘edid_use’ will
ALWAYS be ‘primary’. host loopback’s
‘edid_use’ default is ‘primary’.
Multicast Mode: All host and client
‘edid_use’ default is ‘secondary’. And
“press and hold Button 2 on device
reboot” can force the device to be
‘primary’.
In most of cases, leaving ‘edid_use’ as
default is fine.
(bold is default)
secondary:
Client
passthrough
1: Force HDR off
14
Page 17

KDS-EN6, KDS-DEC6 - Astparam Configuration API
Key
Description
Value
Host/
en_video_wall
Enable video wall feature. Please also
y: enable
H/C
vw_rotate
[>= AST1520] Clock-wise rotate output
0: No rotate
C
hdcp_always_on
[Host >=A5.3.1]
y: enable
H/C
hdcp_always_on_22
[Host >=A6.0.0]
y: enable
H/C
v_reject_hdcp
Don’t accept HDCP video source.
y: enable
H
hdcp_cts_option
[FW >= A6.2.0] 32bits bitmap options for
0x00000000:
H/C
Video Wall
Kramer Electronics Ltd.
(bold is default)
check the value of astparam ,web_ui_cfg,
n: disable
for the video wall Web UI.
picture.
Console API:
3: 180 degree
6: 270 degree
echo 3 >
/sys/devices/platform/display/vw_rotate
HDCP
Key Description Value
(bold is default)
Client
Host/
Client
[Client >=A6.1.0]
n: disable
Always enable HDCP 1.4
[Client >=A6.1.0]
n: disable
Always enable HDCP 2.2.
n: disable
HDCP CTS test.
0x80000000: Disable auto SiI9678/9679
firmware update.
0x00000001: HDCP 2.2 Only firmware
0x00000002: HDCP 1.x Only firmware
15
Page 18

KDS-EN6, KDS-DEC6 - Astparam Configuration API
Key
Description
Value
Host/
no_usb
y:
H/C
share_usb
Default value: (when
y:
H/C
share_usb_auto_mod
When ‘share_usb_auto_mode == y’,
y:
H/C
share_usb_on_first_
[>A6.1.8] Applied to ‘share_usb == y’
y: auto connect first
H
usb_set_addr_hack
It is a hack for some buggy BIOS to be
0: disable
H
usb_hid_urb_interval
Set to 35 to resolve some USB HID long
0: ASAP
H
usb_quirk
[>=A5.3.3] 32bits bitmap options for
0:
H
usb_fast_switch
Set to ‘y’ to enable ‘usb fast switch’
n: Disable
C
USB over IP
Kramer Electronics Ltd.
e
peer
‘share_usb_auto_mode’ is ‘n’)
Multicast mode: ‘share_usb = y’.
Unicast mode: ‘share_usb = n’.
‘share_usb’ setting will automatically
change depends on the setting of casting
mode (‘multicast_on’).
mode.
When value is ‘y’, the first connected
client automatically requests USBoIP
function. By enabling this feature,
USBoIP automatically enabled when
there is only one client connected to host
under multicast mode.
(bold is default)
n:
n:
n:
peer
n:
Client
able to recognize USBoIP devices. The
problem is rarely seen.
latency issue.
Applies to both KMoIP and USBoIP.
resolving some vhub compatibility issues.
VHUB_QUIRK_BULK_SSPLIT (0x1UL
<< 0)
mode. This enhances about 2 seconds of
USB switching time, but sac r ifices video
switching time from 2 to 5 seconds.
1: enable
35: 35ms
y: Enable
16
Page 19
KDS-EN6, KDS-DEC6 - Astparam Configuration API
Key
Description
Value
Host/
usb_default_policy
The default/global exporting policy used
auto_export
C
usb_conflict_policy
Policy used when a device has different
auto_export
C
usb_disable_classes
Policy setup to disable per USB classes.
per_interface
C
usb_enable_classes
Policy setup to enable per USB classes.
same as
C
usb_disable_devices
Policy setup to disable per USB’s PnP ID.
C
usb_enable_devices
Policy setup to enable per USB’s PnP ID.
C
USB over IP Exporting Policy: (> A 5.2.2)
Kramer Electronics Ltd.
when a specific policy is not available.
interfaces with conflict exporting policy.
(>A5.1.0 b1701)
There is no default value. Each class
should be separated by a space. For
example, usb_disable_classes=audio
video printer.
(bold is default)
no_auto_export
no_auto_export
audio
comm
hid
physical
still_image
printer
mass_storage
cdc_data
cscid
content_sec
video
personal_healthcar
e
audio_video
diagnostic
wireless_controller
misc
app_spec
vendor_spec
Client
There is no default value. Each class
should be separated by a space. For
example, usb_enable_classes=audio
video printer.
There is no default value. Each device
should be separated by a space. For
example,
usb_disable_devices=0781:000c
0770:1234.
“usb_disable_class
es”
17
Page 20
Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - Astparam Configuration API
There is no default value. Each device
should be separated by a space. For
example,
usb_enable_devices=0781:000c
0770:1234.
18
Page 21

KDS-EN6, KDS-DEC6 - Astparam Configuration API
Key
Description
Value
Host/
no_kmoip
Enable/disable KMoIP function.
y: disable KMoIP
H/C
kmoip_ports
Specify which client USB port can use
all: all USB ports
C
kmoip_hotkeys
Specify 8 set of hotkeys.
C
kmoip_token_interval
This is a per client setting. Set the idle
100
C
usb_busid_map
A mapping list to map USB busid to USB
C
kmoip_poll_interval
[FW >= A6.3.0] Used to set KMoIP’s USB
H/C
KMoIP: (> A 5.1.0)
Kramer Electronics Ltd.
KMoIP function when USBoIP session is
running. The value can be ‘all’ or a list of
port numbers, Ex: ‘1 2’. USB port number
can be re-mapped by ‘usb_busid_map’
astparam.
(bold is default)
n: enable KMoIP
1: USB port 1
2: USB port 2
3: USB port 3
4: USB port 4
5: USB port 5
Note: Firmware
version A5.1.0 ~
A5.1.4 uses ‘all’ as
default value. The
value was changed
to ‘1 2’ starting from
A5.2.1.
Client
timeout value (in milliseconds) for holding
an access token. For example, the
default value is 100ms, which means
once client A acquires keyboard/mouse
access, other clients can only
successfully acquire the access (token)
after client A is idle longer than 100ms.
Normally, you don’t need to set this value
(leave it as default). It is used to work
around a bad mouse, which keeps
reporting pointer activities and hence
blocks all other client keyboard/mouse
input.
port. Use default value unless you have a
different hardware layout.
poll interval. Both host and client must be
set to the same value. Unit is in ms.
Default value should be good for most
19
Page 22
Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - Astparam Configuration API
cases:
AST1500: 35
AST1510: 35
AST1520: 10 [FW >=A6.3.0], 35 [FW <
A6.3.0]
20
Page 23
KDS-EN6, KDS-DEC6 - Astparam Configuration API
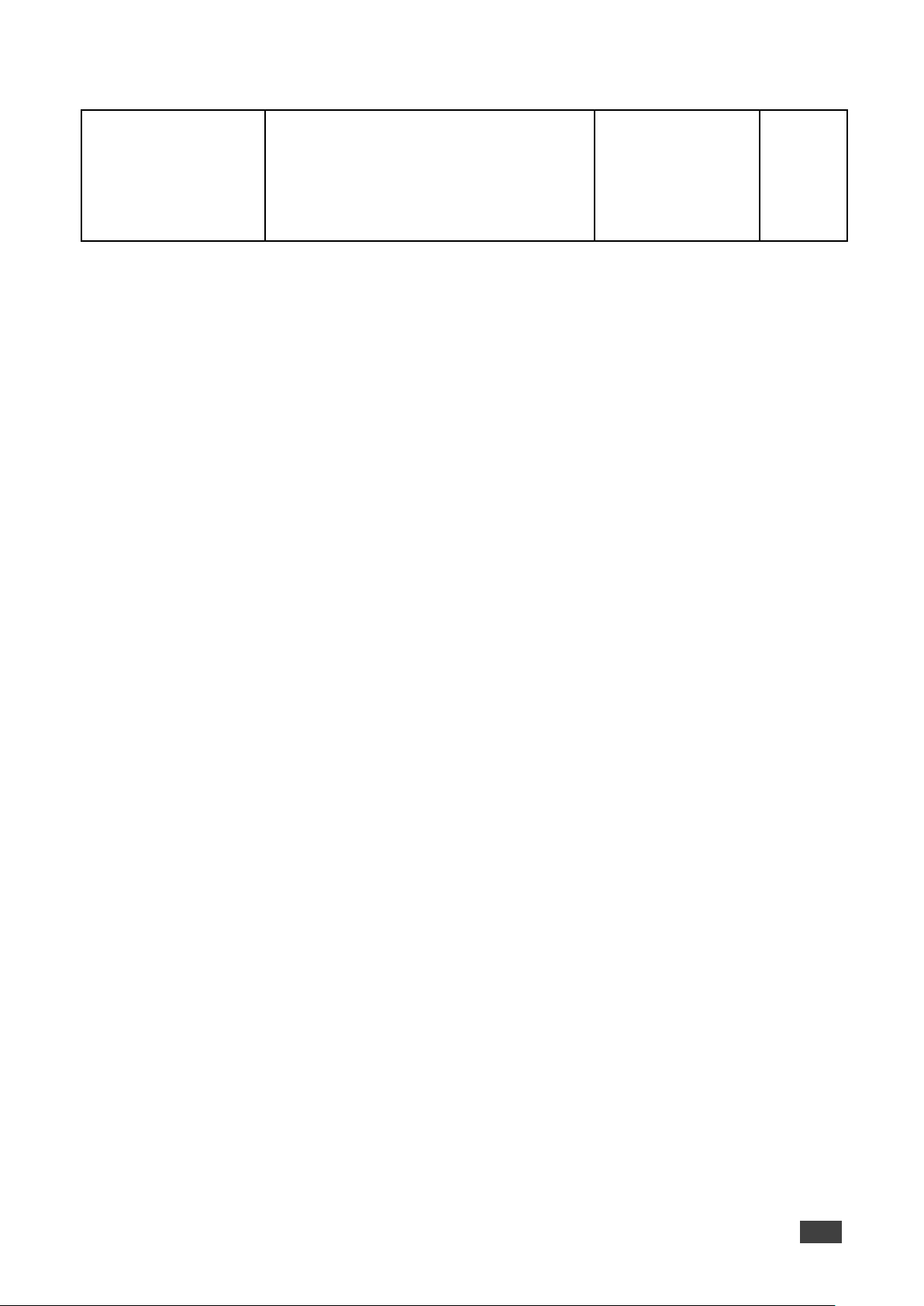
Key
Description
Value
Host/
no_i2s
y: disable I2SoIP
H/C
a_io_select
[FW >= b1733] Used to select audio input
auto:
H/C
Audio over IP (I2S over IP)
Kramer Electronics Ltd.
source.
Host:
auto: auto select analog when host’s
analog line in plugged
hdmi: fixed hdmi audio
analog: fixed analog audio/in
Client:
auto: auto dual output.
hdmi: fixed hdmi audio out
analog: fixed analog audio out/in
[FW >= A6.1.1][>=AST152x] Set this on
client to select audio output port. Default
is ‘auto’ which means dual output.
[FW >= A6.3.0] [>=AST151 0][Host Only ]
Host add extra ‘auto_1’ and ‘auto_2’
mode and redefined ‘auto’.
auto: When HDMI/DVI video port is used,
auto select audio port per analog line in
plug. When VGA video port is used,
ALWAYS use analog audio port.
auto_1: Always select audio port per
analog line in plug.
auto_2: Always select audio port per
video port used. When HDMI/DVI video
port is used, HDMI always use HDMI
audio port. When VGA video port is used,
always use analog audio port.
(bold is default)
n: enable I2SoIP
hdmi:
analog:
[FW>= A6.3.0][Host
Only]
auto_1:
auto_2:
Client
21
Page 24
Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - Astparam Configuration API
Key
Description
Value
Host/
a_analog_in_vol
[>=AST1510][FW >= A6.3.0]
echo [value] >
-1,0,1,2 ~,100
H/C
a_analog_out_vol
[>=AST1510][FW >= A6.3.0]
-1,0,1,2 ~,100
H/C
Key
Description
Value
Host/
no_ir
y:
H/C
Set analog audio’s input volume. Range
from 0 to 100 %.
Default value ‘-1’ means use driver builtin default value.
This setting requires system reset to take
effect. To runtime change the volume,
please use following command:
/sys/devices/platform/150
0_i2s/analog_in_vol
Set analog audio’s output volume. Range
from 0 to 100 %.
Default value ‘-1’ means use driver builtin default value.
This setting requires system reset to take
effect. To runtime change the volume,
please use following command:
(bold is default)
Client
IR over IP
echo [value] >
/sys/devices/platform/150
0_i2s/analog_out_vol
(bold is default)
n:
Client
22
Page 25
KDS-EN6, KDS-DEC6 - Astparam Configuration API
Key
Description
Value
Host/
no_soip
y: Disable SoIP
H/C
soip_type2
y:
H/C
soip_guest_on
y:
H/C
s0_baudrate
115200-8n1
H/C
soip_type2_token_tim
[>=A1.38]
1,2,3... seconds
H/C
ch_select_soip2
[>=A5.3.0]
N/A
C
Key
Description
Value
Host/
no_pwrbtn
y:
H/C
Serial over IP
Kramer Electronics Ltd.
eout
(bold is default)
Client
n: Enable SoIP
n:
n:
GPIO over IP (Push Button over IP)
(bold is default)
n:
Client
23
Page 26

Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - Astparam Configuration API
Getting KDS-6 Board's IP Address
Kramer KDS-6 FW default runs "static ip" and uses the following address: 192.168.1.39.
If the device is set to "autoip" and uses 169.254.xxx.xxx private IP domain, the IP of the target
KDS-6 board can be resolved by its hostname using mDNS protocol..
The following are the methods of resolving the IP address using "autoip" mode:
• Client's GUI – The client's GUI displays the client's IP address and the connected host's IP
address.
• Console APIs – Two console APIs are provided:
• astresname: use this command to resolve a target's IP address by providing target's
hostname.
• node_list: use this command to list all KDS-6 boards' hostname and IP address.
• From PC – Use the mDNS libraries, such as:
• Bonjour
• pyZeroConfig
• From PC: Developer can reference to "node_list" sample code to implement PC version of
node_list.
24
Page 27

Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - Application Scenario:
Application Scenario:
With Console APIs, developers have more controls over KDS-6 FW, enabling development of
new application scenarios. Console APIs are designed to support following application
scenarios:
• KVM over IP: Extension of built-in 1 to 1 unicast mode. The client is able to choose which
host to connect to. Console APIs provide APIs for developers to enable a client to connect
to a specific host.
• Multicast M to 1 group: Extension of built-in multicast mode. In this mode, there are
multiple video sources but a single group of monitors. This group of clients always displays
the same video source from one of the hosts. Console APIs provide APIs to enable a host
to change video source for display.
• Multicast M to N group: Extension of built-in multicast M to N mode. In this mode, there are
multiple video sources and multiple groups of monitors. Console APIs provide APIs to
enable clients to join different multicast groups.
• Extra IIC remote communication:
• Extra UART port remote communication:
25
Page 28

Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - FAQs
FAQs
Generic Configuration:
How do I discover all KDS-6 boards in the same LAN?
1. Use Telnet or the debug console to connect to the target board.
2. Start discover all: $./node_list
3. Start discover hosts: $./node_list -t host
4. Start discover clients: $./node_list -t client
The results appear on the console.
How do I use the node_list feature without going through KDS-6 board? For example, using a PC.
Request a "node_list" sample code.
How do I find the target client board's current multicast group?
1. Use Telnet or the debug console to connect to the target board.
2. Get the current multicast ip: $./astparam g multicast_ip.
3. To read the default value from the DIP switch: $./astconfig channel
The result is a four bits value (B0B1B2B3). that maps to multicast ip 225.0.B0.B1B2B3.
How do I turn on/off the debug console's debug message?
• To turn off: $dmesg -n 1 && setconsole /dev/ttyS1
• To turn on: $dmesg -n 8 && setconsole -r
How do I configure IP settings?
KDS-6 firmware supports three kinds of ip mode settings:
• autoip: 169.254.xxx.xxx private IP domain is used and auto-generated on boot.
• dhcp client: Use DHCP client to get an IP address. A DHCP server is required to use this
mode.
• static ip: Use a static IP address, th at can be configured through th e Console API.
26
Page 29

KDS-EN6, KDS-DEC6 - FAQs
1. To configure the IP mode: $./ astparam s ip_mode mode (where "mode" can be: autoip,
dhcp, static)
2. To configure a static IP address:
• IP: $./astpara m s i paddr xxx.xxx.x xx.xxx
• Netmask: $./astparam s netmask xxx.xxx.xxx.xxx
• Default gateway: $./astparam s gatewayip xxx.xxx.xxx.xxx
3. Reboot the system to apply the above IP configuration changes.
How do I configure hostname_id?
Host:
1. hostname_id will overwrite “hostnamebydipswitch” setting.
Kramer Electronics Ltd.
2. Set hostname_id by: $./astparam s hostname_id XXXX
3. If you want to save the setting into flash and keeps the setting after reboot:
• $./astparam s reset_ch_on_boot n
• $./astparam save
4. Trigger hostname change: $./ast_send_event -1 e_chg_hostname
Client:
1. Set hostname_id by: $./astparam s hostname_id XXXX
2. If you want to save the setting to flash and keep the setting after reboot:
• $./astparam s reset_ch_on_boot n
• $./astparam save
3. Trigger hostname change: $./ast_send_event -1 e_chg_hostname
Note: See hostname_id in the Configuration Option List section on page 42
for details
What is the relationship between hostname and hostname_id?
KDS-6 board's "hostname" is constructed by "hostname_id". For example:
• For a host board with "hostname_id" as "ABCD", the board's "hostname" is "ast-
gatewayABCD".
The board's IP can by resolved by $./astresname ast-gatewayABCD.local
• For client board with "hostname_id" as "1234", the board's "hostname" is "ast-client1234".
The board's IP can be resolved by $./astresname ast-client1234.local
27
Page 30

Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - FAQs
How do I dynamically toggle between Graphic Mode and Video Mode?
1. Use Telnet or the debug console to connect to the host board.
2. Current quality mode can be get by: $cat /sys/devices/platform/videoip/QualityMode
3. Toggle quality mode by sending a "button 2" press event:
$./ast_send_event -1 e_button_pairing
How do I dynamically change Anti-Dithering mode?
1. Use Telnet or the debug console to connect to the host board.
2. Get the current quality mode: $cat /sys/devices/platform/videoip/bcd_threshold
3. Toggle anti-dithering mode by sending a "button 2 long press" event:
$./ast_send_event -1 e_button_pairing_1
How do I dynamically change snoop mode?
1. Use Telnet or the debug console to connect to the host board.
2. Get the current video loopback state:
$cat /sys/devices/platform/videoip/LoopbackEnable
• 0: currently not enabled
• 1: enabled
3. Toggle "snoop" mode by sending a "button 2" long press event:
$./ast_send_event -1 e_button_pairing_1
How do I dynamically connect/disconnect a client?
1. Use Telnet or the debug console to connect to the client board.
2. Get the current link manag er stat e: $cat /var/ast_device_status
See Link Manager APIs on page 37
3. Toggle the "link" mode by sending a "button 1" event UNDER stable state:
Wait state "s_idle" or "s_srv_on"
$./ast_send_event -1 e_button_link
for details.
How do I dynamically enable/disable remote access (host)?
1. Use Telnet or the debug console to connect to the host board.
2. Get the curr ent link manager state: $cat /var/ast_device_status
See Link Manager APIs on page 37
for details
28
Page 31

Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - FAQs
3. Toggle the "link" mode by sending a "button 1" event UNDER stable state:
Wait state "s_idle" or "s_srv_on" or "s_attaching"
$./ast_send_event -1 e_button_link
How do I force update EDID of a target client?
1. Use Telnet or the debug console to connect to the client board.
2. Wait for link manager state "s_srv_on"
$echo primary > /sys/devices/platform/videoip/edid_use
How do I force update EDID of the video loopback port (host)?
1. Use Telnet or the debug console to connect to the host board.
2. Wait for link manager state "s_srv_on" or "s_attaching"
$echo primary > /sys/devices/platform/videoip/edid_use
Under multicast USB mode, how do I know the current USB state of a client?
1. Use Telnet or the debug console to connect to the client board.
2. Dump the link manager state by:
$./ast_send_event -1 e_debug
/usr/local/bin$ cat lm_params
[FW >= A3.20]
lmparam g SHARE_USB_STATE
3. The "SHARE_USB_STATE" is the current USB state.
s_idle: Stopped USB redirection
s_srv_on: Using USB redirection
others states: Not stable state
How do I find the status of the video source?
• When video source is not available:
• Host: $cat /sys/devices/platform/videoip/State will be DETECTING_MODE
• Client: $cat /sys/devices/platform/videoip/State will be WAITING_HOST_MODE
• When video is streaming
• Host: $cat /sys/devices/platform/videoip/State will be OPERATING
• Client: $cat /sys/devices/platform/videoip/State will be OPERATING
How do I check if the Ethernet cable is connected and works?
$cat /sys/devices/platform/ftgmac/link_state
29
Page 32

Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - FAQs
How do I know which client (IP) is using the host's USB redirection under multicast mode?
1. Use Telnet or the debug console to connect to the host board.
2. Request link manager's status by: $./ast_send_event -1 e_debug
3. Get the client's IP address by: /usr/local/bin$ cat lm_params | grep USB_CLIENT_IP
How do I know whether a monitor is connected?
1. Use Telnet or the debug console to connect to the host or client board in interests.
2. $cat /sys/devices/platform/display/monitor_info | grep "attached="
How do I dump the attached monitor's EDID?
1. Use Telnet or the debug console to connect to the host or client board in interests.
2. $cat /sys/devices/platform/display/monitor_info
How do I know if the video timing (resolution...) is in use?
1. Use Telnet or the debug console to connect to the client board.
2. $cat /sys/devices/platform/display/timing_info
How do I get the device’s hostname?
1. Use Telnet or the debug console to connect to the device.
2. For the short version of hostname: $lmparam g HOSTNAME_ID
3. For the long version of hostname: $hostname
How do I get the device’s IP address?
1. Use Telnet or the debug console to connect to the device.
2. $lmparam g MY_IP
How do I get the device’s MAC address?
1. Use Telnet or the debug console to connect to the device.
2. $lmparam g MY_MAC
3. [A3.50] Query current connected host IP on client:
4. Use Telnet or the debug console to connect to the client.
5. $lmparam g GWIP
30
Page 33

Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - FAQs
How do I stop a client’s connection?
1. Use Telnet or the debug console to connect to the client.
2. $e e_stop_link
How can a client request USB redirection access under multicast mode?
1. Use Telnet or the debug console to connect to the client.
2. $e msg_e_request_usb
Note: If the client currently has USB redirection access, the above command stops the
redirection session. You can query the current USB redirection status to avoid this condition.
How do I configure as multicast mode?
1. Use Telnet or the debug console to connect to the target device.
2. $astparam s multicast_on y
3. Config USB over IP mode:
• $astparam s share_usb_auto_mode y
4. $astparam save
5. $reboot
How do I configure as unicast mode?
1. Use Telnet or the debug console to connect to the target device.
2. #astparam s multicast_on n
3. Config USB over IP mode:
• [>= A3.54]: $astparam s share_usb_auto_mode y
• [< A3.54]: $astparam s share_usb n
4. $astparam save
5. $reboot
Can I overwrite multicast IP?
There are 2 ways to overwrite the multicast IP:
• astparam "multicast_ip" – you must set "reset_ch_on_boot" to "n" and do the "astparam
save" command to save it into flash ROM, so that the setting won't disappear after box
reset.
31
Page 34
Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - FAQs
• astparam "multicast_ip_prefix" – used to construct the default multicast ip value's prefix.
When "multicast_ip" is not set, firmware is construct default multicast ip as
${MULTICAST_IP_PREFIX}${ch0}.${ch1}${ch2}${ch3}. For example, the default value of
"multicast_ip_prefix" is "225.0.10". So, for a DIP switch setting of 0110, the default
multicast ip is 225.0.100.110.
Unicast (KVM over IP)
How can a client connect to a specified host under unicast mode?
1. Use Telnet or the debug console to connect to the client board.
2. [>= A5.1.0] Change multicast ip: $./astparam s multicast_ip 225.0.B0.B1B2B3 =>
where B0,B1,B2,B3 are mapped to the 4-bits DIP switch
3. Set target ch_select as target host's hostname_id or IP:
hostname_id: $./astparam s ch_select hostname_id
IP: $./astpara m s ch_selec t xxx.xxx.xxx.xx x
4. Trigger client to re-connect: $./ast_send_event -1 e_reconnect
Multicast (M to 1 group)
How to change Host's multicast group from XXXX to 1001?
1. Use Telnet or the debug console to connect to the host board.
2. Stop Link: $./ast_send_event -1 e_stop_link
3. Change multicast ip: $./astparam s multicast_ip 225.0.1.001
4. Change the hostname_id: $./astparam s hostname_id 1001
5. Trigger hostname change: $./ast_send_event -1 e_chg_hostname
6. If you want to save the setting into flash and keep the setting after reboot:
$./astparam s reset_ch_on_boot n
$./astparam save
7. Restart Link: $./ast_send_event -1 e_reconnect
32
Page 35
Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - FAQs
Multicast (M to N group)
How to change the target client board's multicast group?
1. Use Telnet or the debug console to connect to the target board.
2. Change multicast ip: $./astparam s multicast_ip 225.0.B0.B1B2B3 => where
B0,B1,B2,B3 are mapped to the 4-bits DIP switch
3. Change the ch_select to connect to: $./astparam s ch_select B0B1B2B3
4. If you want to save the setting into flash and keep the setting after reboot:
$./astparam s reset_ch_on_boot n
$./astparam save
5. Trigger client to re-connect: $./ast_send_event -1 e_reconnect
IIC
How to read/write target board's IIC channel?
1. Use Telnet or the debug console to connect to the target board.
2. All following values are treated as hex number
3. [>=A3.0] Initial IIC bus: $echo BusNum BusSpeed > /sys/devices/platform/i2c/bus_init
4. Setup the IIC slave's address: $echo BusNum DevAddr >
/sys/devices/platform/i2c/io_select
5. To read offs et X:
$echo X 1 > /sys/devices/platform/i2c/i_range
$cat /sys/devices/platform/i2c/io_value
6. To write offset X to value Y: $echo X Y > /sys/devices/platform/i2c/io_value
Why is the sysfs approach used for IIC access?
IIC access consumes a very high percentage of the CPU resources. Using the sysfs approach,
we ensure that developers' IIC access won't impact system performance.
33
Page 36
Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - FAQs
UART
How to read/write the target board's UART port 1 (/dev/ttyS0)?
1. Make sure "Serial over IP" feature is disabled. (Reboot is needed for taking effect.)
2. Use telnet or debug console to attach to target board.
3. [~A1.32]
• Use stty to configure the UART port 1. Ex: $stty 115200 -F /dev/ttyS0 => set UART
port 1's baud rate to 115200.
• To start read: $cat /dev/ttyS0 & => UART data will be redirected to console
• To sto p read: $ pkill c at
• To start write: $cat > /dev/ttyS0 => console input will be redirected to UART
• To stop write: press "ctrl+c" (0x03)
4. [A1.33~]
• Use "microcom" to direct access /dev/ttyS0.
ex: microcom -t 10000 -s 115200 -X /dev /ttyS0
Please google "busybox microcom" for usage details
How to configure UART port 1 (/dev/ttyS0) for non-Serial over IP usage?
• UART port 1 is used for "Serial over IP" feature. Developers who want to manually control
UART port 1 need to disable "Serial over IP" feature.
• To configure UART port 1, please use "stty" command. See Console APIs on page 36 for
details.
How to enable debug console repeater mode?
1. Use the host debug console to Telnet to client.
2. Create pipe: $mknod p1 p && mknod p2 p
3. Enable bi-directional repeater mode by:
Host:
• Start read: $cat p1 &
• Start write: $cat > p2
Client:
• Start read: $cat p2 &
• Start write: $cat > p1
34
Page 37

Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - FAQs
[A1.2 Firmware] How to have functions like Serial over IP without going through the host board's UART port 1? For example, controlling all host/client boards through a network attached PC.
We call it "Serial over IP guest mode".
Please request sample code if you need this feature.
35
Page 38
KDS-EN6, KDS-DEC6 - Console APIs
Console APIs
Debug Console APIs
● Turn on/off application debug message
○ NA ME: setconsole
○ EXAMPLE:
■ Turn off: $setconsole /dev/ttyS1
■ Turn on: $setconsole -r
● Turn on/off kernel debug message
○ NA ME: dmesg
○ EXAMPLE:
■ Turn off: $dmesg -n 1
■ Turn on: $dmesg -n 8
Kramer Electronics Ltd.
● Reboot system
○ NA ME: reboot
○ EX AMPLE: $reboot
● Telnet client
○ NAME: telnet
○ EXAMPLE:
■ t elnet to IP 169.254.0.101 port 24
■ $t elnet 169.254. 0.101 24
■ telnet to ast-client0000.local port 24
■ $telnet ast-client0000.local 24
● List all KDS-6 devices:
○ NA ME: node_list
○ OPTIONS
■ t : specif y the device type to list
○ EXAMPLE
■ Lis t all clients:
■ $./node_list -t client
■ List all hosts:
■ $./node_list -t host
● Get IP from hostname:
○ NA ME: astr esname
○ EXAMPLE:
■ G et "ast-gateway0001.local"'s IP address:
36
Page 39
KDS-EN6, KDS-DEC6 - Console APIs
■ $./astresname ast-gateway0001.local
● To kill a running process by process name:
○ NAME: pkill
○ EXAMPLE:
■ kill a process named "abc"
■ pkill -9 abc
Link Manager APIs
● Send event to link manager
○ NA ME: ast_send_event
○ OPTIONS:
■ e_stop_link: stop link
■ e_reconnect: restart link
■ e_chg_hostname: notify hostname change
■ e_but t on_link: trigg er a "button 1" press event
■ e_button_link_1: trigger a "button 1" long press event
■ e_but t on_pair ing: trigger a "button 2" press event
■ e_but t on_pair ing_1: trigger a "button 2" long press event
■ e_debug: s ave current link manager states into ./lm_params
○ EXAMPLE:
■ $./ast_send_event -1 e_chg_hostname
Kramer Electronics Ltd.
● Get current link manager state
○ CO MMAND: $cat /var/ast_device_status
○ RESULT: (Host)
■ s_idle: Client connection is not allowed. (loopback mode)
■ s_attaching: Client is connecting or video source is not available.
■ s_s r v_on: All functions are ready to work or working.
■ ot her st ates: non-stable states
○ RESULT: (CLIENT)
■ s_idle: Client is not connected to Host
■ s_s r v_on: Client is connected to Host
■ ot her st ates: non-stable states
Video Over IP Driver Statistic/Control APIs
The interface is presented as files and located under /sys/devices/platform/videoip/.
● Connect ed client list:
○ FI LE: unlink
○ USAGE: cat /sys/devices/platform/videoip/unlink
37
Page 40
KDS-EN6, KDS-DEC6 - Console APIs
Display Driver Statistic/Control APIs
The interface is presented as files and located under /sys/devices/platform/display/.
● Attached monitor information:
○ FILE: monitor_info
○ USAGE: cat /sys/devices/platform/display/monitor_info
● Video timing informat ion :
○ FILE: timing_info
○ USAGE: cat /sys/devices/platform/display/timing_info
● [>=A3.54]Turn on/off display:
○ FILE: screen_off
○ USAGE:
Kramer Electronics Ltd.
■ Turn off screen: echo 1 > /sys/devices/platform/display/screen_off
■ Turn on screen: echo 0 > /sys/devices/platform/display/screen_off
■ Show status: cat > /sys/devices/platf orm/display/scr een_off
■ enable: m eans screen is off
■ disable: m eans screen is on
OSD APIs
By using the following script, the user can dynamically show OSD messages.
● Turn ON:
○ ./osd_on.sh
○ USAGE:
■ To show "This is OSD string":
■ ./osd_on.sh “This is OSD string”
■ The OSD string takes ‘printf’ like special character input, for example:
■ Use f ollowing code for reserved characters:
○ Environment Var iables: Please see the comments in osd_on.sh
■ OSD_STR
■ . / os d_on.sh “Line 1 \n Line 2”
■ \x3A: ‘:’
■ \n: CR
■ \t: tab
38
Page 41

KDS-EN6, KDS-DEC6 - Console APIs
● Turn OFF:
Kramer Electronics Ltd.
■ OSD_FONT_SIZE
■ OSD_FONT_COLOR
■ OSD_TRANSPARENT
■ OSD_MAX_Y_SIZE
○ ./osd_off.sh
○ USAG E: To disable OSD message after 5 seconds:
■ . / os d_off.sh 5 &
Note: The maximum number of characters an OSD string can show is software limited to
128 characters.
39
Page 42

Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - Configurations APIs
Configurat i ons API s
Current firmware reserved two flash sections for system configuration. One is read only (RO)
the other is read-write (RW). By factory default, there are configurations saved in the flash
read only (RO) section. When the firmware starts up, both RO and RW configurations are read
from flash and saved in RAM. All configuration modif ic at io ns are saved in RAM until
"./astparam save" is called.
● Access configurations from RO/RW section:
○ NA ME: astpar am
○ OPTIONS
■ r : read from RO section
■ g : read from RW section
■ s : write to RW section
■ flush : clear all settings in RW section including randomly generated MAC
address. "./astparam save" is needed to clear all settings in flash memory.
■ dum p: dump all parameters in RW section
■ dum p ro: dump all parameters in RO section
■ dd: dump all parameters in RW section directly from flash
■ dd r o: dump all parameters in RO section directly from flash
■ save: save all parameters in RW section into flash
○ EXAMPLE:
■ r ead "ip_mode" setting from RO section:
■ $./astparam r ip_mode
■ read "ip_mode" setting from RW section:
■ $./astparam g ip_mode
■ write "ip_m ode" setting as "autoip" to RW section:
■ $. / astpar am s ip_mode autoip
■ clear all settings in RW section:
■ $./astparam flush
■ clear ip_m ode setting in RW section:
■ $./astparam s ip_mode
● Reset setting to factory default:
○ NA ME: reset _to_default.sh
○ DESCRIPTION:
■ r eset RW section but keeps the random generated MAC address. A system
reboot is required to take effect.
○ EXAMPLE:
■ $./reset_to_default.sh
40
Page 43

KDS-EN6, KDS-DEC6 - Configurations APIs
IIC APIs
● [>= A3.0] Initial IIC bus:
○ NA ME: bus_init
○ DESCRIPT ION: Used to initial IIC bus speed. Must be set at least once in order to
○ EX AMPLE: Set bus number 1 using 40000Hz
● Select IIC bus and device:
○ NA ME: io_select
○ DESCRIPT ION: Used to set IIC slave device's bus number and device address
○ EX AMPLE: choose bus number 1 and device address 9a
Kramer Electronics Ltd.
work.
■ $echo 1 40000 > /sys/devices/platf orm/i2c/bus_init
■ $echo 1 9a > /sys/devices/platform/i2c/io_select
● Read/Write IIC slave:
○ NA ME: io_value
○ DESCRIPT ION: Used to read or write value. Set "i_range" for read range.
○ EXAMPLE:
■ To write 0xaa to IIC device offset 0xbb:
■ $echo 0xbb 0xaa > /sys/devices/platform/i2c/io_value
■ To read 5 bytes from offset 0xbb:
■ $echo 0xbb 0x5 > /sys/devices/platform/i2c/i_range
■ $cat /sys/devices/platform/i2c/io_value
● Setting range of IIC read:
○ NA ME: i_rang e
○ DESCRIPTION: Used to set the range for read. See "io_value" for example.
UART Port 1 APIs
● Setup /dev/ttyS0:
○ NAME: stty
○ DESCRIPTION: http://linux.about.com/od/lna_guide/a/gdelna38t01.htm
○ Example: set baudrate to 115200
■ $stty 115200 -F /dev/ttyS0
41
Page 44
Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - Configuration Option List
Configuration Option Li st
Configuration options are settings saved in flash. These settings are used by KDS-6 FW. The
KDS-6 FW reserves two flash partitions for this purpose, one is read only (RO) and the other is
read-write (RW). Factory default settings are saved in the RO partition. Changes are saved in
the RW partition. When the same configuration name is defined in both partitions, the setting in
the RW partition is used (unless specially noted).
● ch_select
○ DESCRIPT ION: Used by client FW only. If defined, client FW uses it to resolve target
host's IP address, otherwise 4-bits DIP s witch will be used as ch_select.
○ O PTIONS: IP or host's hostname_id
○ DEF AULT: 4-bits DIP switch
○ PARTITION: [A1.32]RO, RW
● hostname_id
○ DESCRIPT ION: If defined, FW will use hostname_id to create the board's hostname
(See FAQ: What is the relationship between hostname and hostname_id?
defined, default value will be used.
○ OPTIONS: any string without '.'
○ DEFAULT:
■ When hostnamebydipswitch == y: 4-bits DIP swit ch
■ When hostnamebydipswitch == n: mac address
○ PARTITION: [A1.32]RO, RW
● ip_mode
○ DESCRIPTION: Used to configure how FW allocates it's IP address.
○ OPTIONS:
■ aut oip: Auto-generated. Use 169.254.xxx.xxx private IP domain.
■ dh c p : Use DHCP client. A DHCP server is required.
■ static: Use static assigned IP address. The flash configurations "ipaddr" and
"netmask" are used.
○ DEFAULT: autoip
○ PARTITION: RO, RW
). If not
● ipaddr
○ DESCRIPT ION: Used when "ip_mode" is "static". If not defined, default value is used.
○ DEFAULT:
■ Host : 169. 254.0.222
■ Cllien t: 169.254.0.111
○ PARTITION: RO, RW
● netmask
○ DESCRIPT ION: Used when "ip_mode" is "static". If not defined, default value is used.
42
Page 45

KDS-EN6, KDS-DEC6 - Configuration Option List
● gatewayip
● s0_baudrate
Kramer Electronics Ltd.
○ DEFAULT: 255.255.0.0
○ PARTITION: RO, RW
○ DESCRIPT ION: Used when “ip_mode” is “static”. If not defined, default value is used.
○ DEFAULT: 169.254.0.254
○ PARTITION: RO, RW
○ DESCRIPT ION: The static baud rate used under RS-232 over IP Type 2 mode. For
example: "115200-8n1" means using "115200" baud rate with data bits "8", parity
"None" and stop bits "1".
○ DEFAULT: 115200-8n1
○ PARTITION: RO, RW
● multicast_ip
○ DESCRIPTION: Multicast group used under multicast mode. Always map the
multicast_ip to 225.0.B0.B1B2B3 format where B0, B1, B2 and B3 are originally
mapped from 4-bits DIP switch. Do not use a different multicast_ip, unless you know
what you are doing.
[A3.50] Starting from firmware A3.50, the default value of multicast IP
(multicast_ip) changes from 225.0.x.xxx to 225.0.10x.xxx. Please use the new
multicast_ip value when using fw version A3.50 and up.
○ OPTIONS: any valid multicast IP
○ DEFAULT: mapping from 4-bits DIP switch:
■ [<A3.50] 225.0.B0.B1B2B3
■ [ > = A3.50] 225.0.10B0.B1B2B3
○ PARTITION: [A1.32]RO, RW
● hostnamebydipswitch
○ DESCRIPT ION: If "hostname_id" is not defined, the KDS-6 FW selects the
"hostname_id" according to the definition of "hostnamebydipswitch". If 'y' the value of
the 4-bits DIP switc h is used. Otherwise, the MAC address is used.
○ OPTIONS: y , n
○ DEFAULT:
■ Ho s t: y
■ Clie nt: n
■ Clie nt for USB only FW: y
○ PARTITION: RO, RW
● reset_ch_on_boot
○ DESCRIPTION: Set to 'y' to reset channel related settings to the setting of the 4-bits
DIP switch after board reset. By using this feature, the modification of multicast group
or unicast target disappears after board reset. The following settings are reset:
43
Page 46

KDS-EN6, KDS-DEC6 - Configuration Option List
■ multicast_ip
■ ch_select
■ hostname_id
○ OPTIONS: y , n
○ DEF AULT: y
○ PARTITION: RO, RW
● ast_video_quality_mode
○ DESCRIPT ION: Used to configure "Graphic Mode" or "Video Mode". This setting only
takes effect each time video capturing starts. This setting only applies to the host
board. Pressing "button 2" changes this setting. The recommended way of
dynamically changing the quality mode is to use "button 2 event".
○ OPTIONS:
■ 0: graphic mode
■ -1: video mode
○ DEFAULT: -1
○ PARTITION: RO, RW
Kramer Electronics Ltd.
● v_bcd_threshold
○ DESCRIPTION: Used to configure "Anti-Dithering Mode". This setting only takes
effect each time video capturing starts. This setting only applies on the host board.
Pressing and holding "button 2" changes this setting. The recommended way of
dynamically changing this setting is to use "button 2 event".
○ OPTIONS:
■ 0: Off
■ 1: Ant i-dithering 1
■ 2: Ant i-dithering 2
○ DEF AULT: 0
○ PARTITION: RO, RW
● no_soip
○ DESCRIPTION: Used to turn ON/OFF "Serial Over IP" feature. This setting only takes
effect on system reboot.
○ OPTIONS:
■ y: Disable "Serial Over IP" feature
■ n: Enable "Serial Over IP" feature
○ DEFAULT: Default value is configured by manufacturer using "autoterm".
○ PARTITION: RO, RW
● soip_type2
○ DESCRIPT ION: Used to configure "Serial Over IP" operating mode when "Serial Over
IP" feature is enabled. This setting only takes effect on system reboot and "Serial
Over IP" feature is enabled.
○ OPTIONS:
■ n: Use "Serial over IP type 1"
■ y: Use "Serial over IP type 2"
○ DEFAULT: Default value is configured by manufacturer using "autoterm"
44
Page 47

KDS-EN6, KDS-DEC6 - Configuration Option List
○ PARTITION: RO, RW
● [A1.2 Firmware] soip_guest_on
○ DESCRIPTION: Used to configure "Serial Over IP" operating mode to "guest mode".
This setting only takes effect on system reboot and "Serial Over IP" feature is
enabled.
○ OPTIONS:
■ n: Use typical "Serial Over IP" mode, in which host and client are paired
together.
■ y: Use "guest mode", in which both host and client boards' UART port 1 are
controlled by an external network controller (for example a PC).
○ DEFAULT: n. Can be configured by manufacturer using "autoterm"
○ PARTITION: RO, RW
● multicast_on
○ DESCRIPTION: Used to configure unicast/multicast operation mode. Since the
operation mode of “USB over IP” will be different between multicast and unicast mode.
So, when you change ‘multicast_on’, remember to config ‘USB over IP’ mode as well.
See ‘share_usb’ and ‘share_usb_auto_mode’ below.
○ OPTIONS:
Kramer Electronics Ltd.
■ n: unicast mode
■ y: multicast mode
○ DEF AULT: n
○ PARTITION: RO, RW
● share_usb
○ DESCRIPTION: Used to configure USB over IP’s operation mode. There are two USB
over IP operation modes. ‘share USB’ mode is typically used in multicast mode. In this
mode, only one client can request the USB over IP access at a time.
○ OPTIONS:
■ n: default mode for unicast mode
■ y: share USB mode. default mode for multicast mode
○ DEFAULT:
■ n
○ PARTITION: RO, RW
● [>=A3.54] share_usb_auto_mode
○ DESCRIPTION: A new setting used to overwrite the setting of ‘share_usb’ depending
on the setting of ‘multicast_on’.
○ OPTIONS:
■ y: enable. The value of ‘share_usb’ is always:
■ shar e_us b will be ‘n’ under unicast mode
45
Page 48

Kramer Electronics Ltd.
KDS-EN6, KDS-DEC6 - Configuration Option List
■ shar e_us b will be ‘y’ under multicast mode
■ n: disable.
○ DEFAULT:
■ n: For backward compatibility. The default value is ‘n’.
○ PARTITION: RO, RW
46
Page 49
P/N:
2900-300839
1
Rev:
SAFETY WARNING
Disconnect the unit from the power supply before opening and servicing
For the latest information on our products and a list of Kramer distributors, visit our Web site where
updates to this user manual may be found.
We welcome your questions, comments, and feedback.
www.KramerAV.com
info@KramerAV.com
 Loading...
Loading...