

Page 1
Instruction manual
EM Series
Multibeam echo sounders
Datagram formats
Page 2

Page 3

KongsbergEMSeries
Multibeamechosounder
EMdatagramformats
850-160692/M
January2010
Page 4
Documenthistory
S t ra n d pr o m e n a d e n5 0
P.O. B o x1 1 1
N- 3 1 9 1H o r te n,
No rw a y
Ko n g s b e r gM a r it i m eA S
Te le p h o n e :+ 4 73 30 23 80 0
Te le fa x :+ 4 73 30 44 75 3
s ub s e a @ k on g s b e r g .c o m
w w w . k o n g s b e r g . c o m
Documentnumber:850-160692
Rev.K
Changes:
Anewoutputdatagram,NetworkAttitudeV elocitydatagram
110,isadded.The3DvelocityinputisusedforDoppler
June2009
compensationinFMmode.Therangecorrectionsappliedis
documentedintheRawrangeandangle78datagram.
Installation,Runtimeandstatusdatagramsareupdatedwithextra
information.
Someminorchangesandadditionalcomments.
ChangesinPTNL,GGKdatagram
Changes:
Rev.L
November2009
UpdatedRuntimeandInstallationparameters.
UpdatedPUinformationandstatusdatagramtoallowforEM
2040datagrams
ExtraParametersaddedinMultibeamparameterssection
Changes:
Rev.M
January2010
AddedSISgenerateddatagrams.
Addedandmodiedcomments.
Note
TheinformationcontainedinthisdocumentremainsthesolepropertyofKongsbergMaritimeAS.No
partofthisdocumentmaybecopiedorreproducedinanyformorbyanymeans,andtheinformation
containedwithinitisnottobecommunicatedtoathirdparty,withoutthepriorwrittenconsentof
KongsbergMaritimeAS.
KongsbergMaritimeASendeavourstoensurethatallinformationinthisdocumentiscorrectandfairly
stated,butdoesnotacceptliabilityforanyerrorsoromissions.
Page 5

EMdatagramformats
Tableofcontents
1EMDATAGRAMFORMATS..................................................5
1.1Presentationformat...................................................................................................5
2INPUTDATAGRAMS..........................................................6
2.1Position.....................................................................................................................6
2.1.1Overview.....................................................................................................6
2.1.2GGADatagram............................................................................................9
2.1.3PTNL,GGKLocalcoordinatepositiondatagram..........................................11
2.1.4GGKDatagram..........................................................................................13
2.1.5VTGDatagram...........................................................................................14
2.1.6Transponderposition...................................................................................15
2.1.7Simrad90datagram....................................................................................16
2.1.8TideInput..................................................................................................18
2.1.9Depthpressureorheightinput....................................................................19
2.2Attitude..................................................................................................................20
2.2.1Overview...................................................................................................20
2.2.2EMAttitudeinputformat............................................................................22
2.2.3Networkvelocityattitudeinputformat.........................................................24
2.2.4SperryMK-39Attitudeinputformat............................................................25
2.2.5HDTformat................................................................................................26
2.2.6SKR80format............................................................................................26
2.3Clockdatagrams.....................................................................................................27
2.3.1Clock.........................................................................................................27
2.3.2ZDAformat................................................................................................27
2.4Soundspeeddatagrams..........................................................................................29
2.4.1Overview...................................................................................................29
2.4.2KongsbergMaritimeSSPformat.................................................................30
2.4.3AMLSmartSensorandAMLMicroSensorformat......................................33
2.5Depthinputdatagramsfromsinglebeamechosounder........................................35
2.5.1DBSFormat...............................................................................................35
2.5.2DPTFormat...............................................................................................35
2.5.3Simradformat.............................................................................................36
2.6Remotecontroldatagrams......................................................................................37
2.7Soundspeedattransducer......................................................................................39
2.7.1KSSIS80Datagram....................................................................................39
3OUTPUTDATAGRAMS......................................................40
3.1Introduction............................................................................................................40
3.2Multibeamdata.......................................................................................................43
3.2.1Depthdatagram..........................................................................................43
3.2.2XYZ88......................................................................................................47
850-160692/M
3
Page 6

KongsbergEMSeries
3.2.3Centralbeamsechogram.............................................................................50
3.2.4Rawrangeandbeamangle(F).....................................................................52
3.2.5Rawrangeandbeamangle(f)......................................................................53
3.2.6Rawrangeandangle78..............................................................................55
3.2.7Seabedimagedatagram...............................................................................58
3.2.8Seabedimagedata89..................................................................................60
3.2.9Watercolumndatagram...............................................................................62
3.3Externalsensors......................................................................................................64
3.3.1Attitudedatagram.......................................................................................64
3.3.2Networkattitudevelocitydatagram110.......................................................66
3.3.3Clock........................................................................................................68
3.3.4Depth(pressure)orheightdatagram.............................................................69
3.3.5Heading....................................................................................................70
3.3.6Position.....................................................................................................71
3.3.7Singlebeamechosounderdepth.................................................................73
3.3.8Tidedatagram.............................................................................................74
3.4Soundspeed............................................................................................................75
3.4.1Surfacesoundspeed...................................................................................75
3.4.2Soundspeedproledatagram......................................................................76
3.4.3KongsbergMaritimeSSPoutputdatagram...................................................77
3.5Multibeamparameters............................................................................................78
3.5.1Installationparameters................................................................................78
3.5.2Runtimeparameters....................................................................................84
3.5.3Mechanicaltransducertilt............................................................................92
3.5.4ExtraParametersdatagram...........................................................................93
3.6PUinformationandstatus......................................................................................97
3.6.1PUIDoutput..............................................................................................97
3.6.2PUStatusoutput......................................................................................100
3.6.3PUBISTresultoutput...............................................................................103
3.7SISgeneratedoutput............................................................................................105
3.7.1APBDatagram.........................................................................................105
3.7.2DPTDatagram.........................................................................................105
3.7.3RTEDatagram..........................................................................................106
3.7.4WPLDatagram.........................................................................................106
3.7.5KSSIS31Datagram..................................................................................107
4
850-160692/M
Page 7
1EMDATAGRAMFORMATS
EMdatagramformats
ThedatainputandoutputformatstoandfromtheEMSeries
multibeamechosoundersaredescribedinthisdocument.The
informationappliestotheKongsbergMaritimemultibeamecho
soundersintroducedafter1995.
Note
TheinformationhereinappliestotheEM3002,EM3000,EM
2040,EM2000,EM1002,EM710,EM302,EM122,ME70,
EM300andEM120multibeamechosounders.Someofthe
informationmaynotberelevantforyourspecicsystem.Please
disregardthis.
TheinformationinthisdocumentisnotvalidfortheEM12,EM
100,EM950andEM1000multibeamechosounders.
Note
1.1Presentationformat
Inordertomeetspecialcustomerrequirements,Kongsberg
Maritimemayhavetochangethedatagramformatsdescribed
here.Theformatspresentedinthisdocumentmaythereforebe
alteredwithoutpriornotice,althoughbackwardcompatibility
willbemaintainedasfaraspossible.Beforesoftwareiswritten
inaccordancewiththisdocument,itisstronglyrecommendedto
contactKongsbergMaritimetoensurethatthelatestversionis
used,andthatanyplannedchangesaretakenintoaccount.
TheformatdescriptionisaccordingtotheNMEA0183standard,
ApprovedParametricSentenceStructure,withtheASCII
character(s)givenasfollows
•“x.x”denesavariablelengthnumericaleld,withoptionally
includeddecimalpointandsign.
•“c–c”denesavariablelengtheldofprintablecharacters.
•“x–x”denesavariablelengtheldofnumericcharacters.
•“a__”denesaxedlengtheldofalphabeticalcharacters
(e.g.“aa”=twocharacterlongeld.
•“x__”denesaxedlengtheldofnumericcharacters.
Forbinaryelds,thelengthisgiveninnumberofbytesplus“U”
forunsignedand“S”forsigneddata.
850-160692/M
5
Page 8
KongsbergEMSeries
2INPUTDATAGRAMS
Topics
•Positiononpage6
•Attitudeonpage20
•Clockdatagramsonpage27
•Soundspeeddatagramsonpage29
•Depthinputdatagramsfromsinglebeamechosounderon
page35
•Remotecontroldatagramsonpage37
•Soundspeedattransduceronpage39
Onlyalimitednumberofinputformatsfromexternalsensors
areaccepted.Theseareprimarilyinaccordancewiththe
NMEA0183specication,orbasedupontheprinciplesofthat
specication.
Note
ThemajorityoftheseformatshavenotbeendenedbyKongsberg
Maritime.Thus,theseformatsarenotcontrolledbyKongsberg
Maritime.
AlmostallinputformatsareASCII.SeriallineorEthernet
inputtothemultibeamechosounder’sProcessingUnitismost
common,butsomedatagrams-whicharenottimecritical-are
interfacedonserialline(s)orEthernettotheOperatorStation.
2.1Position
Topics
•Overviewonpage6
•GGADatagramonpage9
•PTNL,GGKLocalcoordinatepositiondatagramonpage11
•GGKDatagramonpage13
•VTGDatagramonpage14
•Transponderpositiononpage15
•Simrad90datagramonpage16
•TideInputonpage18
•Depthpressureorheightinputonpage19
2.1.1Overview
TheEMSeriesacceptspositiondatainthefollowingformats
•NMEA0183GGA
6
850-160692/M
Page 9
Inputdatagrams
•GGK
•PTNL,GGK
•SIMRAD90
•Transponderposition
•WiththeGGAandGGKdatagrams,informationcontainedin
NMEA0183GSTandVTGdatagramswillalsobeaccepted
andused.
Note
TheGSTdatagramisnotusedbythenewgeneration
multibeamechosounders,i.e.EM122,EM302,EM710,
EM2040andEM3002.
•AdatagramformatforSonarHeaddepthisprovidedforthe
EM3002,EM3000,EM2040,EM2000andEM710.Note
thattheformatisthesameasthatusedbytheParoscientic
Digiquartzpressuresensor.Thisformatmayalsobeusedfor
inputofforexamplevaryingdatumheightsorotherspecial
heightinformationonallmodels.
•Adatagramformatforinputoftidalheightisprovided.
TheGGAformatgivenbelowisaccordingtotheNMEA0183
version2.30description.
TheGGKformatwasoriginallydenedbytheUSArmyCorps
ofEngineersfortheirtestswithkinematicGPS.Trimble’s
proprietaryversionoftheformat,PTNLGGK,issupported.If
anychangestotheformataremade,andifitbecomespartofthe
NMEAstandard,thiswillbeimplemented.
TopreservetheinherentaccuracyofthekinematicGPSdatait
isnecessarytocorrectthedataforvesselmotion.Thisrequires
accuratetimingsynchronisationbetweenthemotionsensorand
theGPSreceiver.Itisthereforeimperativethat
•thepositiondatagramhasaconstantandknowntimedelay,
or
•thetimestampinthedatagramisactuallythetimeofthe
positionx,thatsynchronisationtothe1PPSsignalofthe
GPSreceiverisenabled,andthatthesystemclockhasbeen
setcorrectly.
Asneitheroftheseconditionsmaynotbepossibletoachieve
withasufcientaccuracy,theapplicationofmotioncorrection
isoperatorselectable.Motioncompensationmaybeappliedto
mostofthepositioninputdatagrams.
850-160692/M
7
Page 10

KongsbergEMSeries
InadditiontopositiondatafromtheGGAorGGKdatagrams,
speedandcourseovergroundfromNMEAVTGdatagrams
mayalsobecopiedintothepositionoutputdatagram.These
valuesmaybeusefulinlteringofthepositioningduring
postprocessing.IfaVTGdatagramdoesnotfollowtheGGA
orGGKdatagramthecourseandspeedeldsoftheoutput
datagramswillbesettotheirinvalidvalues.
AsanalternativetoGGA,theSIMRAD90formatposition
datagrammaybeused.TheSIMRAD90formatisintended
tobetheformatofchoicewhenthepositioningsystemisnot
astand-aloneGPSreceiversupplyingGGAorGGKformat
datagrams.TheSIMRAD90formatcaninadditiontoglobal
longitudeandlatitudecoordinatesalsobeusedforNorthingand
Eastingtypeprojectioncoordinates(e.g.UTM).
TocaterforapplicationswheretheEM2000orEM3000Sonar
Headismountedonasubseavehicle,theoriginalSIMRAD90
formathasbeenexpandedtoallowinclusionofthedepthofthe
vehicleinadditiontoitshorizontalpositioninlongitude/latitude
orNorthing/Eastingcoordinates.
SISsupportsloggingofalldatafromaJavadGPSreceiver
directlyattachedtotheserialportontheHWSPC.
TheJavadGPSreceiveroutputsbinarydatainadditionto
theNMEAdatagrams.Thebinarycanbeusedbythirdparty
software(likeTerratec)tocomputemoreaccuratepositionsusing
postprocessingtools.TheJavaddatalesarestoredinaseparate
folderandkeptseparatefromtheotherrawdatatoeasethepost
processingofthedata.Theoperatorchoosesthisdirectoryin
theruntimeparametersinSIS.
ATrimbleGPSreceivercanalsobeattachedtotheserialline
oftheHWSPC.Thisisusedforspecialpurposeslikeland
surveying.
8
850-160692/M
Page 11
Inputdatagrams
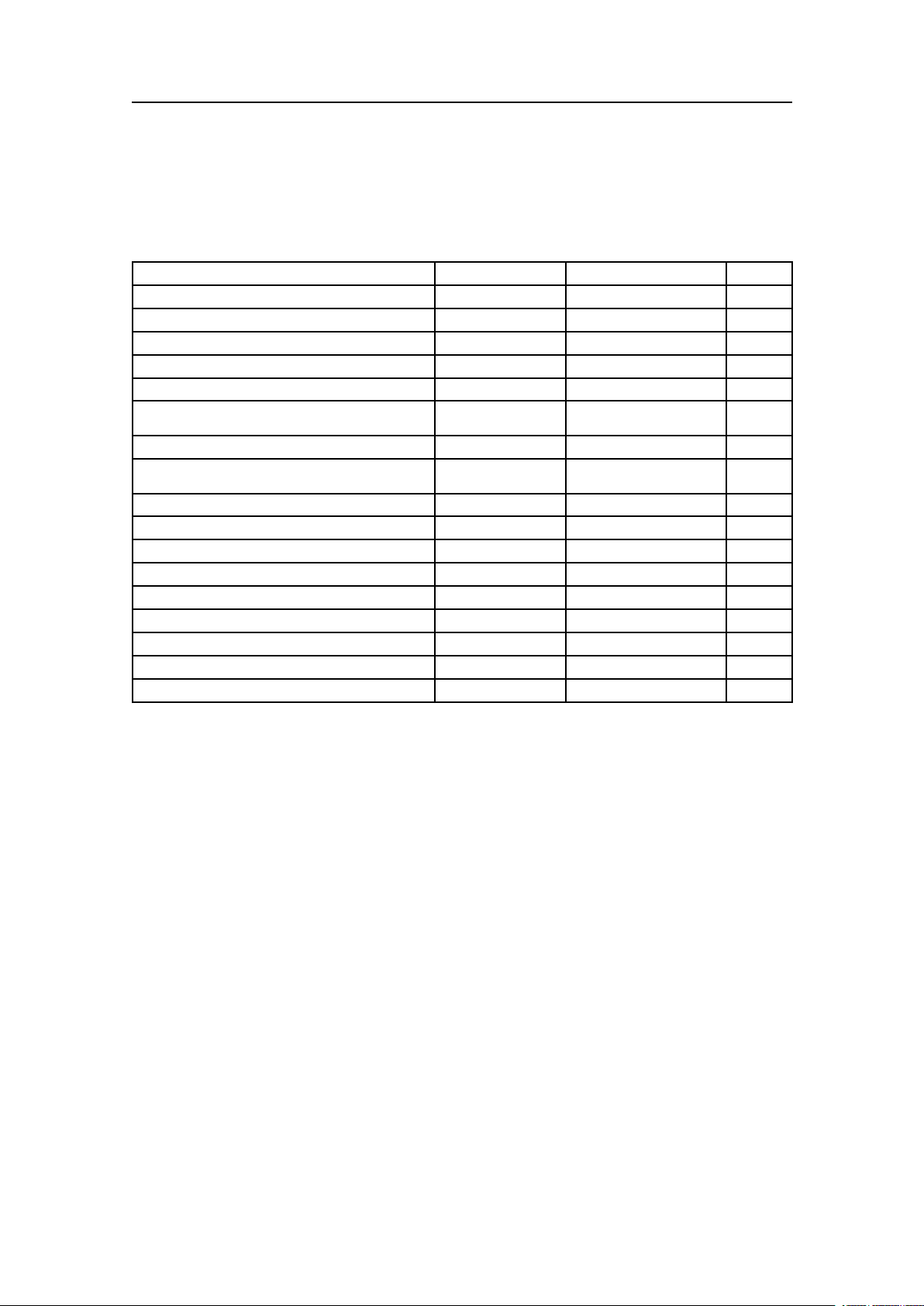
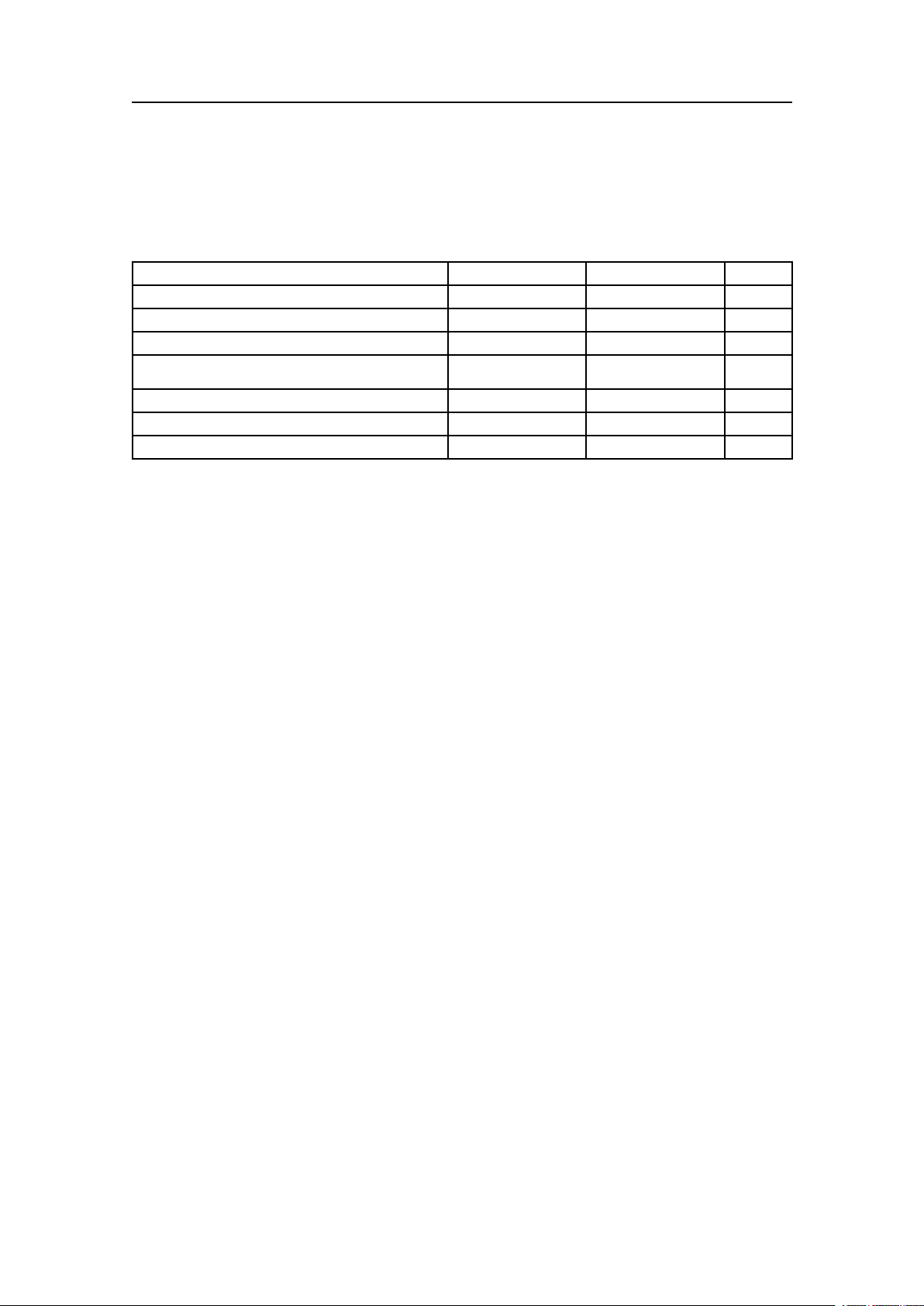
2.1.2GGADatagram
Table1GGADatagram
DataDescriptionFormatValidrangeNote
Startidentier=$
Talkeridentier
SentenceformatterAlwaysGGA,
UTCofposition
Latitudeindegreesandminutes,plusoptional
decimalminutes
Latitude–N/S
Longitudeindegreesandminutes,plusoptional
decimalminutes
Longitude–E/W
GPSqualityindicator
Numberofsatellitesinuse
HDOP
Antennaaltituderemeansealevel(geoid)
Unitsofantennaaltitude
Geoidalseparation(sealevelreWGS-84)
Unitsofgeoidalseparation
AgeofdifferentialGPSdata
Differentialreferencestationid
Checksum*hh
Endofsentencedelimiter=CRLF
Always24h
aa
hhmmss.ss,000000to235959.9...
llll.ll,0000to9000.0...
a,
yyyyy.yy ,
a,
x,
xx,
x.x,—
x.x,—
M,
x.x,—
M,
x.x,——
xxxx,
Always0Dh0Ah
——
Capitalletters
——
NorS
00000to18000.0...
EorW
0to81
00to12
——
——
0000to1023
——
——
—
—
—
—
—
—
—
1
2
2
—
Notes
1TheHDOP(HorizontalDilutionOfPrecision)valuewillbe
scaledandcopiedtothe”Measureofpositionxquality”
eldinthepositionoutputdatagram.Thescalefactor
dependsupontheGPSqualityindicator’svalue:
•1-(SPSorstandardGPS)=>1000
•2-(differentialGPS)=>100
•3-(PPSorpreciseGPS)=>200,but10ifGGAistreated
asRTK.(SeeNote2)
•4-(kinematicGPSwithxedintegers)=>10
•5-(kinematicGPSwithoatingintegers)=>50
•6-(estimatedordeadreckoningmode)=>1000
•7-(manualinputmode)=>1000
•8-(testmode)=>1000,but10ifGGAistreatedasRTK.
(SeeNote2)
850-160692/M
9
Page 12
KongsbergEMSeries
•The”Measureofpositionxquality”eldwillbeset
to65534(largestvalidnumber)iftheindicatoriszero
(non-validposition).
Thisscalingisusedtogiveatleastarelativelycorrect
positionxqualitychange(intheorderofcm)ifthereare
dropoutsindifferential,preciseorkinematicmeasurements,
althoughHDOPisnotametricvalue.
TheGPSmanufacturersmayhavedifferentGPSquality
indicators.
2WhenthequalityfactorofaGGApositioningsysteminuse
is4or5aheightoutputdatagramisautomaticallygenerated,
andalsoifthequalityfactoris3or8andtheoperatorhas
settheGGApositiontobeanRTKposition.Theheight
isthesumofthesetwoeldswhichareassumedpositive
upwards(antennaabovegeoid).
10
850-160692/M
Page 13
Inputdatagrams
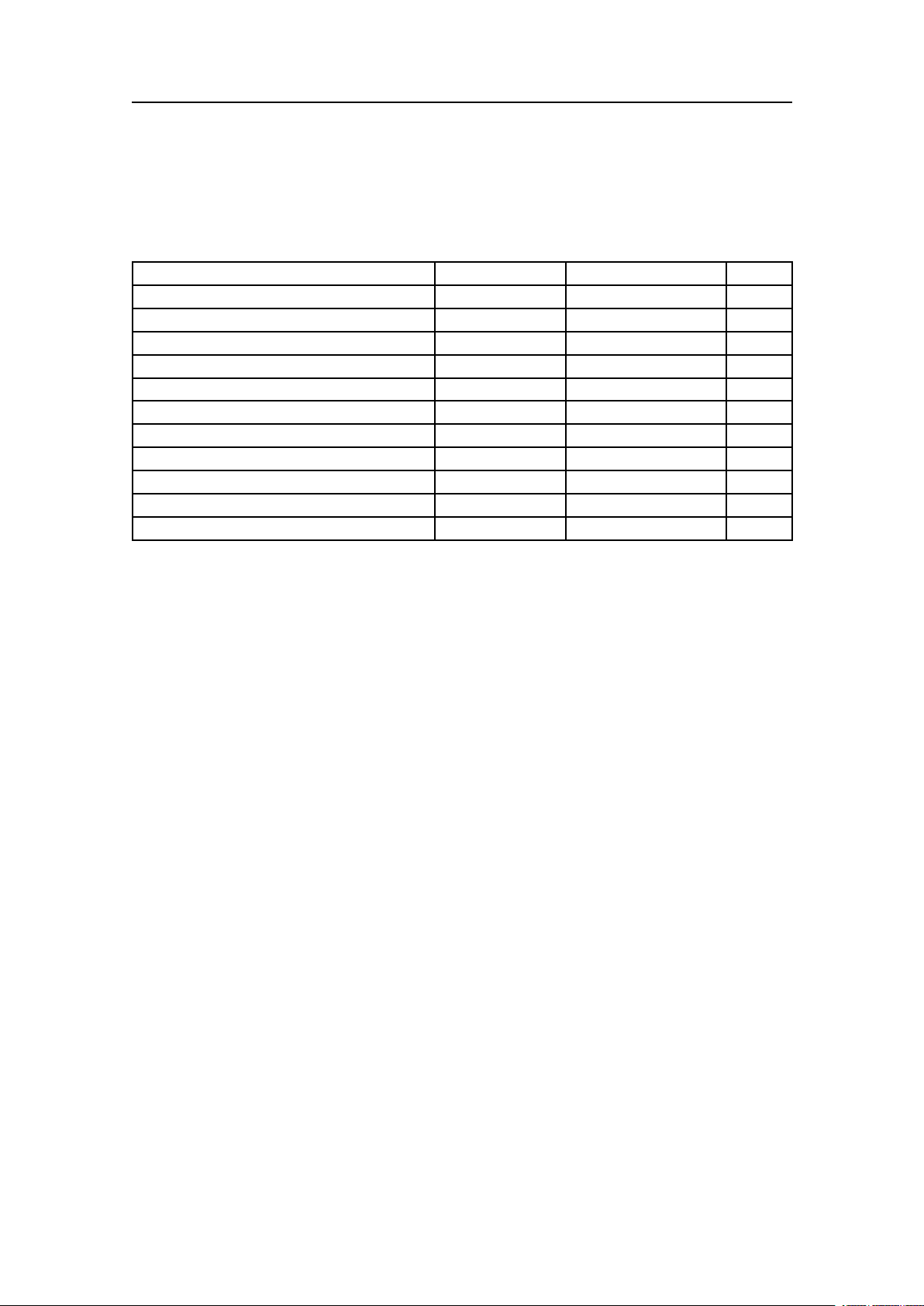
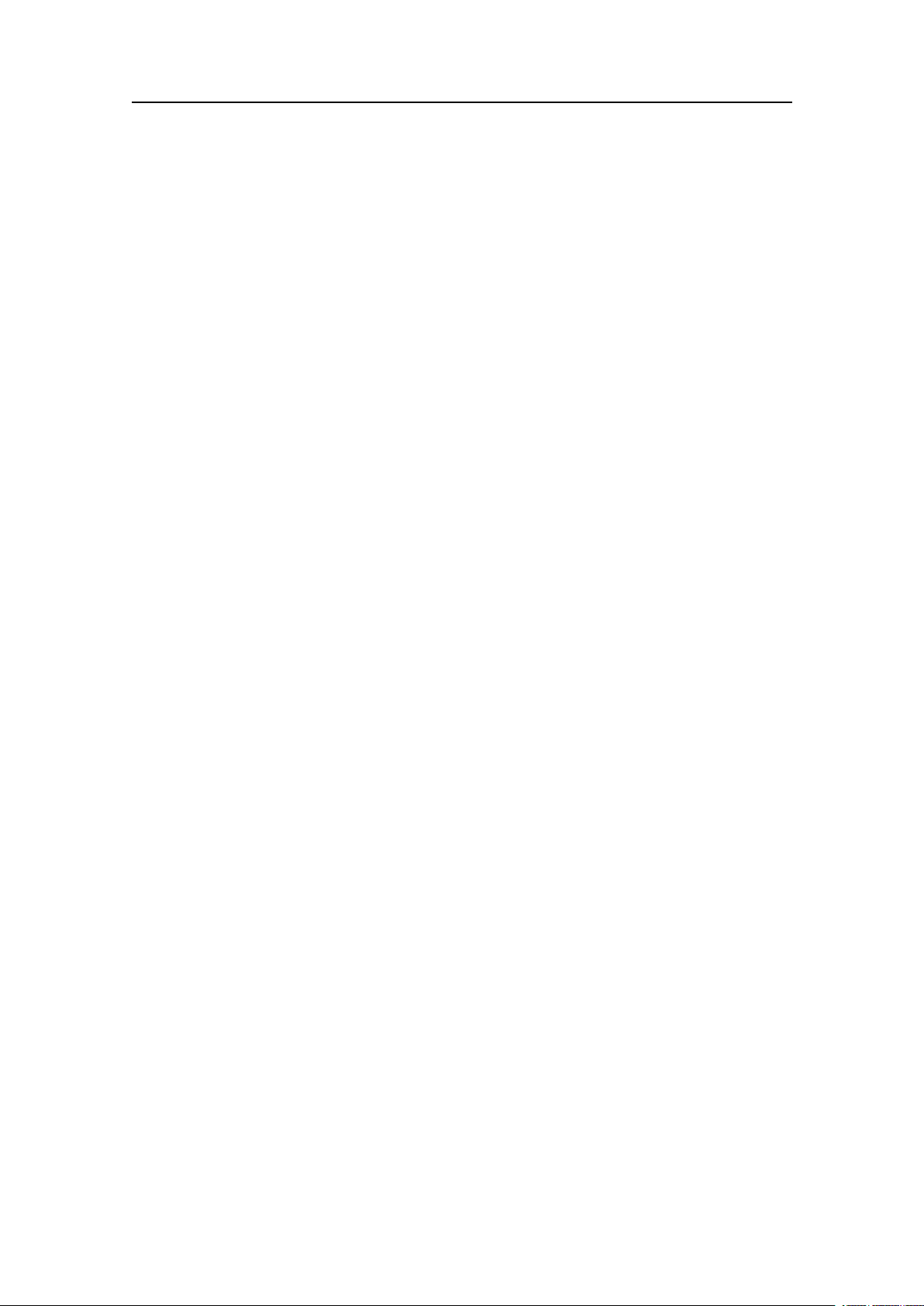
2.1.3PTNL,GGKLocalcoordinateposition datagram
Table2PTNLDatagram
DataDescriptionFormatValidrangeNote
Startidentier=$
Sentenceidentier
SentenceformatterAlwaysGGK,
Timeofposition
Dateofposition
Latitudeindegreesandminutesddmm.mmmmmmm,0000to9000.0...
Latitude–N/S
Longitudeindegreesandminutesdddmm.mmmmmmm,00000to18000.0...
Longitude–E/W
GPSqualityindicator
Numberofsatellitesinuse
DOP
Antenna/heightaboveellipsoid
Unitsofellipsoidalheight(meters)
Checksum*hh
Endofsentencedelimiter=CRLF
Always24h
AlwaysPTNL,
hhmmss.ss,000000to235959.9...
mmddyy,010100to123199
a,
a,
x,
xx,
x.x,—
EHTx.x,
M,
Always0Dh0Ah
——
——
——
NorS
EorW
0to71
00to12
——
——
——
——
—
—
—
—
—
—
—
1
Notes
1TheDOP(DilutionofPrecision)valuewillbescaledand
copiedtothe”Measureofpositionxquality”eldinthe
positionoutputdatagram.Thescalefactordependsuponthe
GPSqualityindicator’svalue
•1–(StandardGPS)=>1000.0;
•2–(RTKoat)=>50.0;
•3–(RTKx)=>10.0;
•4–(DGPS)=>100.0;
•5–(WAAS/EGNOS)=>100.0;
•6–(NetworkFloat)=>50.0;
•7–(Networkx)=>10.0;
The“Measureofpositionxquality”eldwillbeset
to65534(largestvalidnumber)iftheindicatoriszero
(non-validposition).
Thisscalingisusedtogiveatleastarelativelycorrect
positionxqualitychange(intheorderofcm)ifthereare
dropoutsindifferential,preciseorkinematicmeasurements,
althoughDOPisnotametervalue.
850-160692/M
11
Page 14

KongsbergEMSeries
TheGPSmanufacturersmayhavedifferentGPSquality
indicators.
12
850-160692/M
Page 15
Inputdatagrams
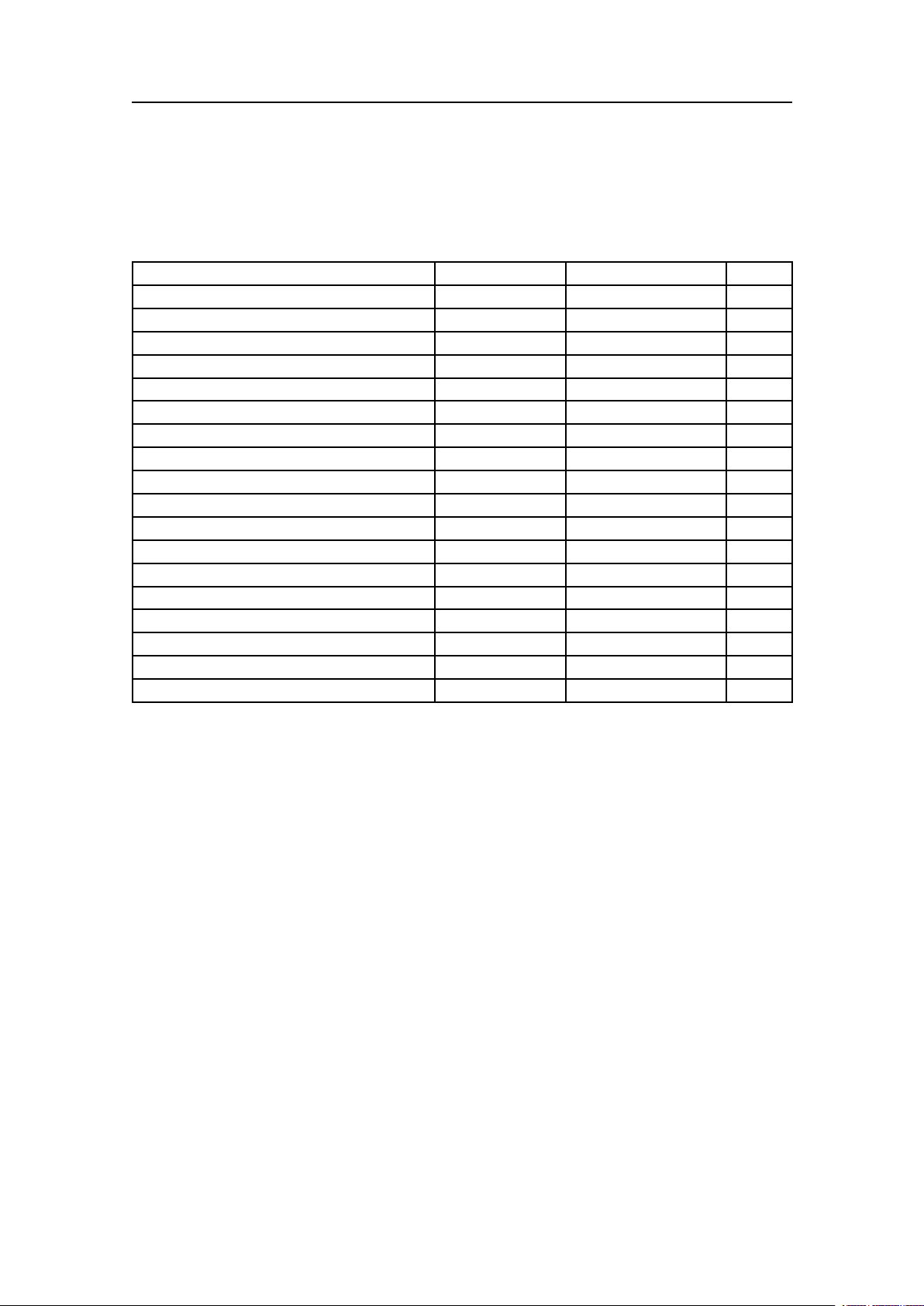
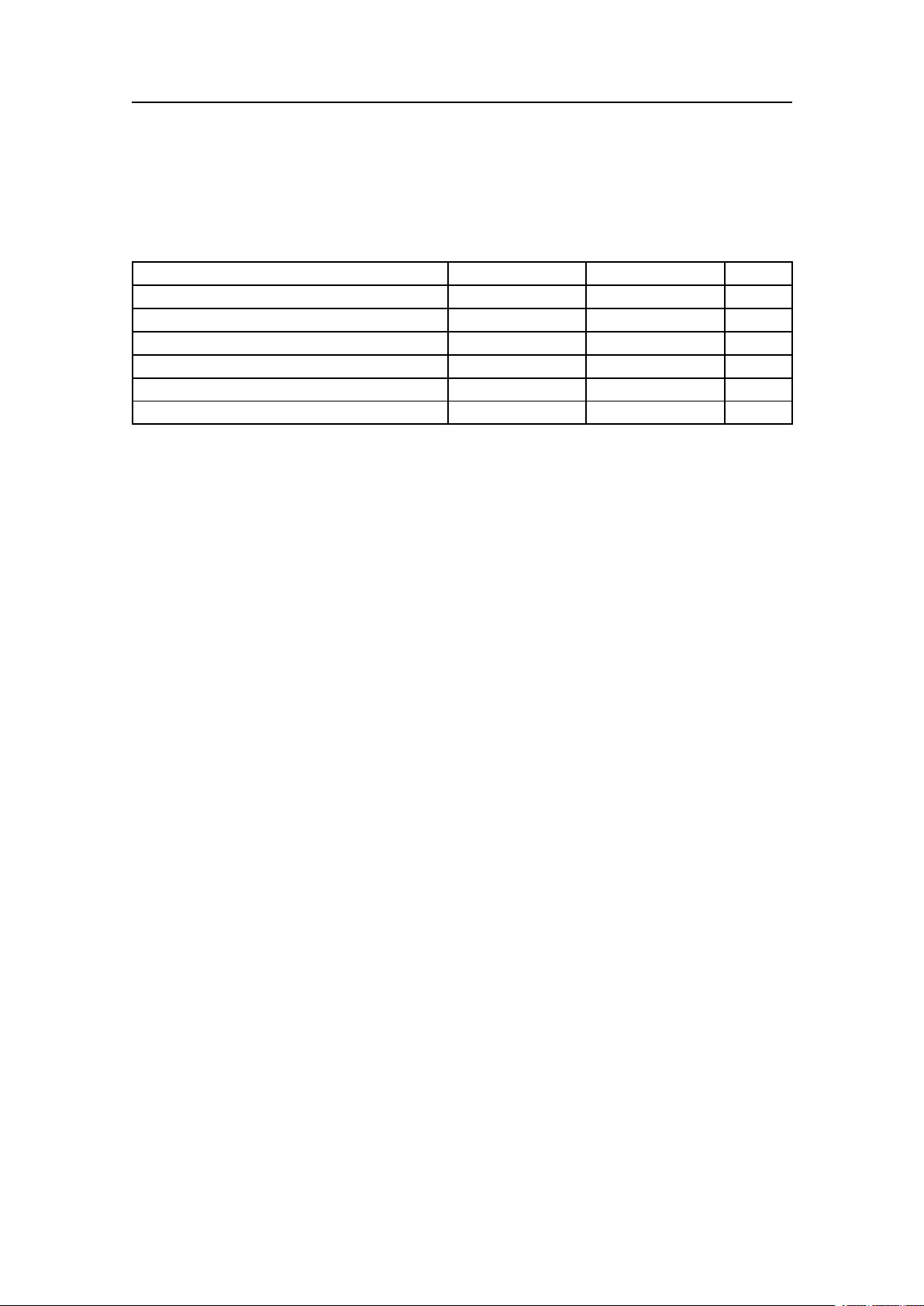
2.1.4GGKDatagram
Table3GGKDatagram
DataDescriptionFormatValidrangeNote
Startidentier=$
Talkeridentier
SentenceformatterAlwaysGGK,
Timeofposition
Dateofposition
Latitudeindegreesandminutes,plusoptional
decimalminutes
Latitude–N/S
Longitudeindegreesandminutes,plusoptional
decimalminutes
Longitude–E/W
GPSqualityindicator
Numberofsatellitesinuse
DOP
Antennaellipsoidalheight
Unitsofantennaellipsoidalheight
Unitsofantennaellipsoidalheight
Checksum*hh
Endofsentencedelimiter=CRLF
Always24h
aa
hhmmss.ss,000000to235959.99...
MMDDYY ,010100to123199
llll.llllll,0000to9000.0...
a,
yyyyy.yyyyyy ,
a,
x,
xx,
x.x,—
x.x,——
M,
x.x,——
Always0Dh0Ah
——
Capitalletters
——
NorS
00000to18000.0...
EorW
0to31
00to12
——
——
——
—
—
—
—
—
—
—
—
1
Notes
1TheDOP(DilutionOfPrecision)valuewillbescaledand
copiedtothe”Measureofpositionxquality”eldinthe
positionoutputdatagram.Thescalefactordependsuponthe
GPSqualityindicator’svalue
•1-(SPSorstandardGPS)=>1000
•2-(differentialGPS)=>100
•3-(kinematicGPS)=>10
The”Measureofpositionxquality”eldwillbeset
to65534(largestvalidnumber)iftheindicatoriszero
(non-validposition).
Thisscalingisusedtogiveatleastarelativelycorrect
positionxqualitychange(incm)iftherearedropoutsin
differential,preciseorkinematicmeasurements,although
DOPisnotametervalue.
TheGPSmanufacturersmayhavedifferentGPSquality
indicators.
850-160692/M
13
Page 16
KongsbergEMSeries
2.1.5VTGDatagram
Table4VTGDatagram
DataDescriptionFormatValidrangeNote
Startidentier=$
Talkeridentier
SentenceformatterAlwaysVTG,
Courseoverground,degreestrue
Courseoverground,degreesmagnetic
Speedoverground,knots
Speedoverground,km/h
Modeindicator
Unitsofantennaellipsoidalheight
Checksum*hh
Endofsentencedelimiter=CRLF
Always24h
aa
x.x,T,0to359.9...1
x.x,M,0to359.9..1
x.x,N,0–1
x.x,K,0–1
a
x.x,——
Always0Dh0Ah
——
Capitalletters
——
A,D,E,M,SorN
——
——
—
—
Notes
1Onlytruecourseandtherstvalidspeedeldwillbeused.
14
850-160692/M
Page 17
Inputdatagrams
2.1.6Transponderposition
Table5SSB-SSBLPositionDatagram
DataDescriptionFormatValidrangeNote
Start_character
Address
Timehhmmss.ss,
TPcodeB01,
Status
Errorcode
Coordinatesystem(alwaysradians)
Orientation(alwaysnorthoriented)
SWlter
Xcoordinate(Latitiude)
Ycoordinate(Longitude)
Depth(Sonardepthinm)
Expectedaccuracy(Pos.qualityinm)
Additionalinfo
Firstaddvalue
Secondaddvalue
Checksum*hh
Termination
$
PSIMSSB,
A,
cc_,
R,
N,
,—
x.x,——
x.x,——
x.x,——
x.x,——
,—
,—
,—
CRLF
——
——
—
—
—
—
——
——
——
——
2
3
4
1
1
1
1
1
Notes
1Notusedbymultibeamechosounders.
2DecodedandusedifClockSynchronisationissetfrom
positiondatagram.
3Onlythistranspondertypeisacceptedbythemultibeam.
4A=OK,Vwillgivebadpositions,butdatagramwillbe
acceptedforlogging.
850-160692/M
15
Page 18
KongsbergEMSeries
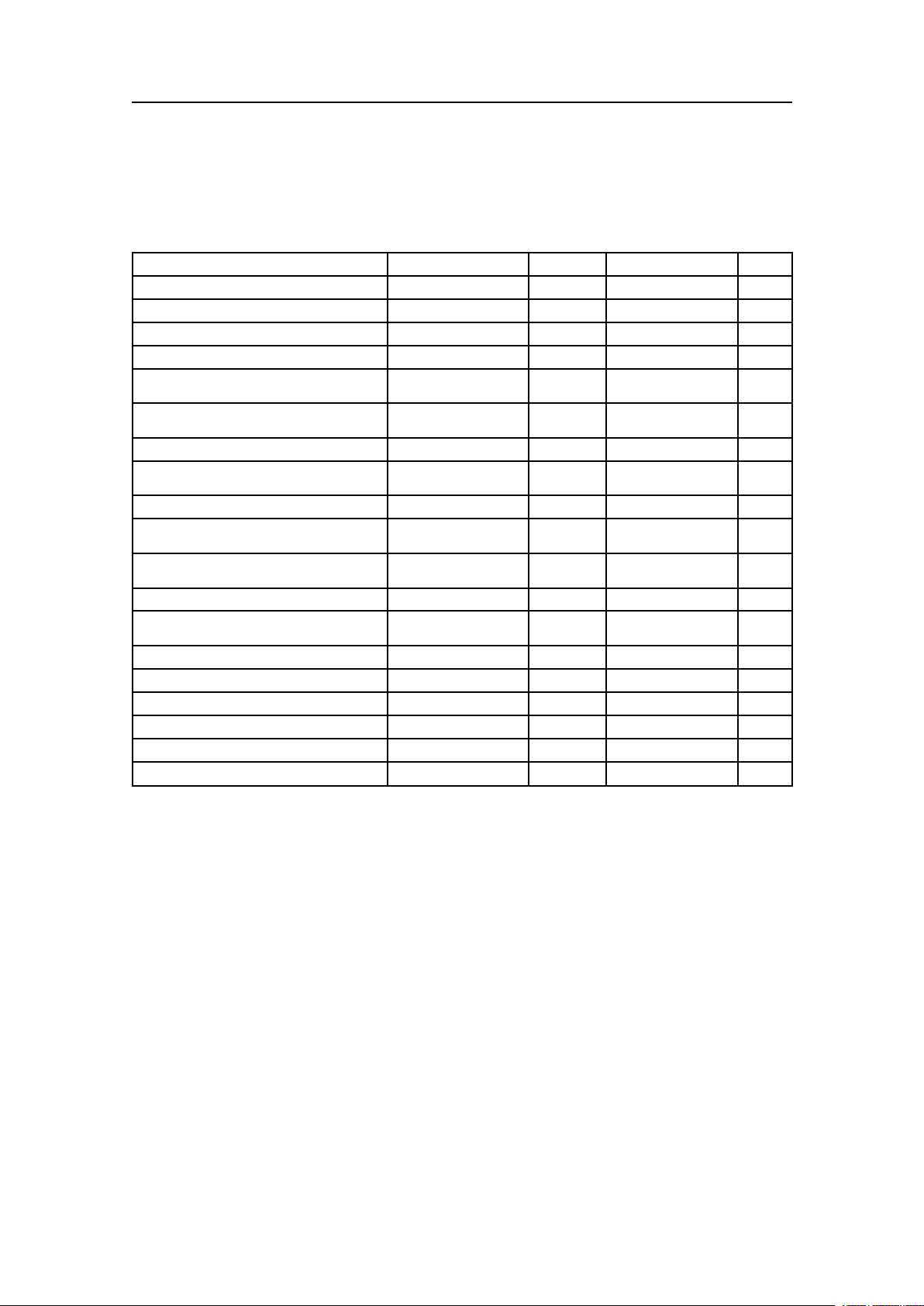
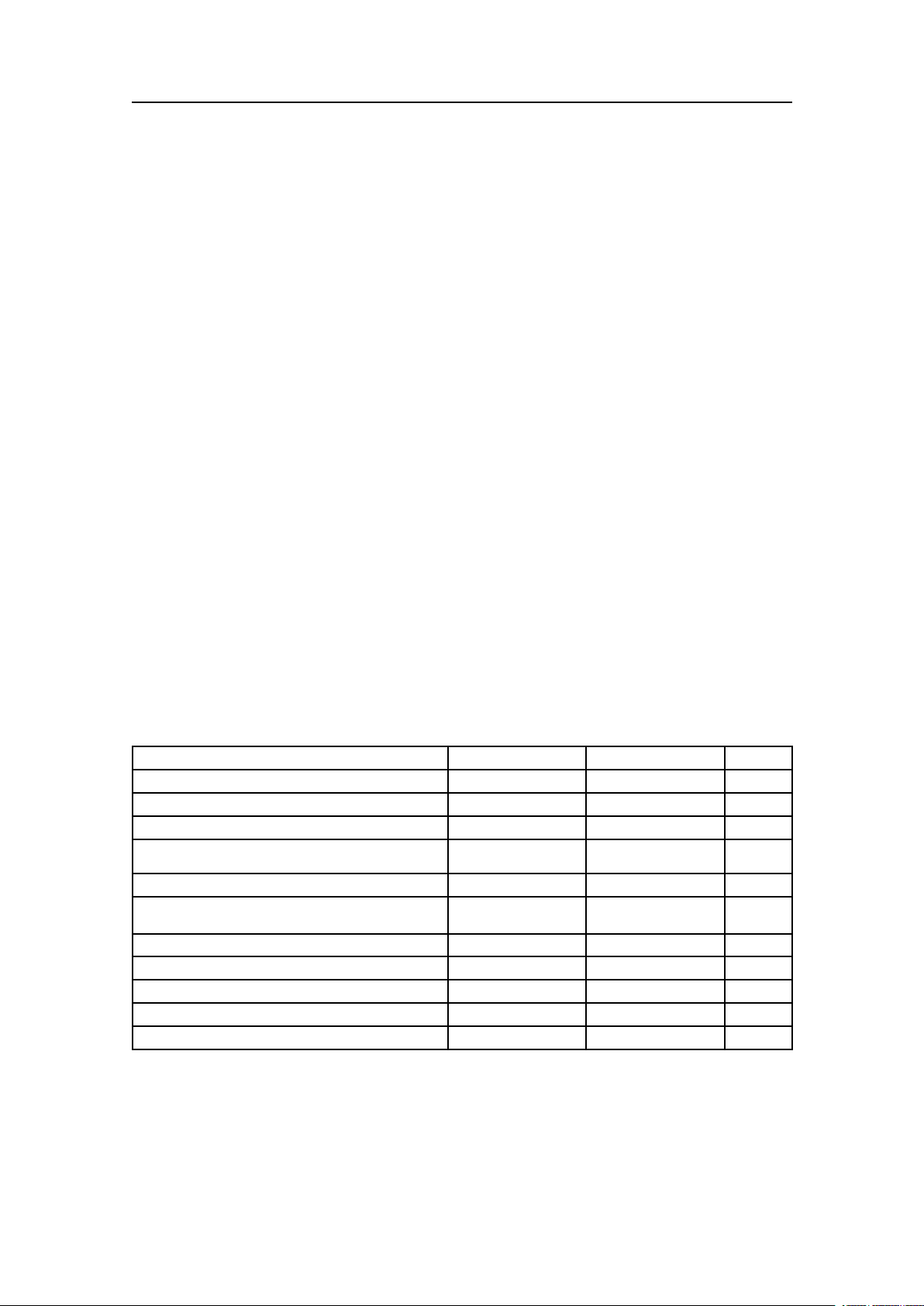
2.1.7Simrad90datagram
Table6Simrad90datagram
DataDescriptionFormatLengthValidrangeNote
Startidentier=$
Talkeridentier
SentenceformatterAlwaysS90,
Dateofposition
UTCofpositionashour,minute,
second,hundredthofsecond
Latitudeindegrees,minutesand
decimalminutes
Hemisphereidentier
Longitudeindegrees,minutesand
decimalminutes,ordepthinmeters
Hemisphereordepthidentier
Northingorrangeinmeters
Eastingordepthinmeters
UTMzonenumber
Userdenedcentralmeridianlongitude
orbearing
Hemisphereorbearingidentier
Systemdescriptor
Positionxqualityindicator
Speedovergroundinm/s
Courseovergroundindegrees
Endofsentencedelimiter=,CRLFAlways2Ch0Dh0Ah
Always24h1
aa
DDMMYY ,
hhmmssss,900000000to
xxxx.xxxx
a,
xxxxx.xxxx
a,
xxxxxxxxx.x,
xxxxxxx.x,
xx,
xxxxx.xxxx
a,
x,
x,
xx.x,
xxx.x
2
4
7
90000.0000to
2
1000000.0000to
2E,WorDA
12000000000.0to
100000000.0to
301to60
1000000.0000to
2E,W,orB
20to71
20to9andAtoF2
5
5
3
——
Capitalletters
——
010100to31 1299
23595999
9999.9999
NorS
18000.0000
999999999.9
9999999.9
35999.9999
00.0to99.93
000.0to359.93
——
—
—
—
A
A
A
B
B
—
C
C
16
850-160692/M
Page 19

Inputdatagrams
Notes
1
•Valueofsystemdescriptordenescontentofdatagramas
follows.(NotethattheKongsbergMaritimeEM12,the
EM950andtheEM1000multibeamechosounderswill
onlyacceptvalueslessthan3)
–0-Thepositionislongitudelatitudeinglobal
coordinatesgivenintheeldsnotedA.
–1-ThepositionisNorthingEastingontheNorthern
hemispheregivenintheeldsnotedB.Ifthe
projectionisdenedtobeUTMtheUTMzone
numberorauserdenablecentralmeridianlongitude
maybegivenintheeldnotedC.
–2-Asforsystemdescriptorequalto1,butthe
positionisontheSouthernHemisphere.
–3-Asforsystemdescriptorequalto0,butinaddition
thedepthisgivenintheEastingeldnotedB.
–4-Asforsystemdescriptorequalto1,butinaddition
thedepthisgiveninthelongitudeeldnotedA.
–5-Asforsystemdescriptorequalto2,butinaddition
thedepthisgiveninthelongitudeeldnotedA.
2Thepositionxqualitygiveninthepositionoutputdatagram
willbederivedfromthequalityindicator(thisdiffersfrom
theoriginaldenitionoftheformat)asfollows(inm):
Table7
FED
0.010.020.050.1.02.0.512
BA98
C
3Iftheseeldshavevalidvaluestheywillbecopiedto
equivalenteldsinthepositionoutputdatagram.Theymay
beusedinlteringofthepositioningduringpostprocessing.
(Theoriginaldenitionoftheformathadlineheadinginthe
courseeldanditsusewastoorientreal-timedisplays).
7
5
5
6
1020501002005001000
43210
850-160692/M
17
Page 20
KongsbergEMSeries
2.1.8TideInput
Table8Tideinputdatagrams
DataDescriptionFormatValidrangeNote
Startidentier=$
Talkeridentier
Sentenceformatter
Dateandtimeofprediction/measurement
Tideoffsetinmetersanddecimalmeters
Optionalchecksum*hh
Endofsentencedelimiter=CRLF
Notes
1Anegativenumberwillbeassumedtoindicateanincrease
insealevel.
Always24h
a
AlwaysTIDE,
YYYYMMDDhhmm,199601010000to
x.x
Always0Dh0Ah
——
Capitalletter
——
999912312359
±327.661
——
——
—
—
18
850-160692/M
Page 21

Inputdatagrams
2.1.9Depthpressureorheightinput
Table9Depthpressureorheightinputdatagrams
DataDescriptionFormatValidrangeNote
Startidentier=*
Sentenceidentier
Talkeridentier
Depthorheightinmetersanddecimalmeters
Endofsentencedelimiter=CRLF
Notes
1Asentenceidentierequalto00isusedforunderwater
Always24h
ii00to091
ii00to09
x.x—
Always0Dh0Ah
vehicledepth,allotheridentiersarecustomerspecic
(usuallyadatumheight)..
——
——
—
2
2Ifinputisdepth,itwillbeusedinthedepthoutputdatagram
tooffsetthetransmittransducerdepth.Ifinputisheight,
whichwillusuallyimplyatimeorpositionvariabledatum
height,itsusewilldependonthesentenceidentierandwill
beimplementedasrequiredbyaspeciccustomer.Depth
ispositivedownwards.Depthsmaybescaledandoffsetby
operatorsettableconstants:
output_depth[m]=scale_factor*(input_depth-offset)
850-160692/M
19
Page 22

KongsbergEMSeries
2.2Attitude
Topics
•Overviewonpage20
•EMAttitudeinputformatonpage22
•Networkvelocityattitudeinputformatonpage24
•SperryMK-39Attitudeinputformatonpage25
•HDTformatonpage26
•SKR80formatonpage26
2.2.1Overview
Attitudedataisgenerallyacceptedononeormoreserialinput
port(s)as
•roll,pitch,heaveandheadingononeport,
or
•roll,pitchandheaveononeportandheadingseparatelyon
anotherport.
Thedataupdaterateshouldbecommensuratewiththeexpected
dynamicsofthevessel(typicallyupto100Hz).
Theacceptableformatforroll,pitch,heaveandoptionallyalso
headingisa10bytelongmessageoriginallydenedintheEM
1000forusewithdigitalmotionsensors.Itissupportedbythe
followingsensorslike:
•AppliedAnalyticsPOS/MV
•PhotokineticsOctans
•SeatexMRU
•SeatexSeapath
•TSSDMS-05
•CodaOctopus
HeadingwillbeacceptedintheNMEA0183HDTformat
orintheformatusedbytheSimradRobertsonSKR80(82)
gyrocompass.AcurrentlooptoRS-232convertermaythen
berequired.TheLemkuhlLR40(60)ScanRepeaterformatis
alsoaccepted,asitisthesameasthatoftheSKR80withthe
exceptionofanextrastatusbyte.Notethatiftheattitudesensor
iscapableofreadingthegyrocompassandtransfertheheading
totheattitudesensordatagram(ifitdoesnotmeasureheading
itself),thisispreferabletointerfacingthegyrocompassdirectly
tothesystem.
Roll,pitchandheadingintheSperryMarineMK-39MOD2
AttitudeandHeadingReferenceSystemformatisalsoaccepted.
Asecondmotionsensormustthenbeusedtosupplyheave.
20
850-160692/M
Page 23

Inputdatagrams
Attitudedatamaybesuppliedfrommorethanonesensor.All
datamaybelogged,butonlyonesetaschosenbytheoperator
willbeusedinrealtime.
Newermultibeammodelsusesfrequencymodulated(FM)
pulsestoextendthedetectionrangewhilemaintainingthehigh
resolution.ToproperlytakeintoaccounttheDoppler-effect
whenusingFMmode,realtime3Dvelocityinputisneededfrom
themotionsensor.Thedata,onproprietaryformat,isavailable
viaEthernetfromsomeofthemanufacturers.Currentlythree
manufacturersaresupported.
SeealsoNetworkvelocityattitudeinputformatonpage24.
850-160692/M
21
Page 24

KongsbergEMSeries
2.2.2EMAttitudeinputformat
TheEMattitudeformatisa10-byteslongmessagedenedas
follows
•Byte1:Syncbyte1=00h,orSensorstatus=90h-AFh
•Byte2:Syncbyte2=90h
•Byte3:RollLSB
•Byte4:RollMSB
•Byte5:PitchLSB
•Byte6:PitchMSB
•Byte7:HeaveLSB
•Byte8:HeaveMSB
•Byte9:HeadingLSB
•Byte10:HeadingMSB
whereLSB=leastsignicantbyte,MSB=mostsignicantbyte.
Alldataarein2’scomplementbinary,with0.01°resolutionfor
roll,pitchandheading,and1cmresolutionforheave.
•Rollispositivewithportsideupwith±179.99°validrange
•Pitchispositivewithbowupwith±179.99°validrange
•Heaveispositiveupwith±9.99mvalidrange
•Headingispositiveclockwisewith0to359.99°validrange.
Non-validdataareassumedwhenavalueisoutsidethevalid
range.
Howrollisassumedtobemeasuredisoperatorselectable,either
withrespecttothehorizontalplane(theHippy120orTSS
convention)ortotheplanetiltedbythegivenpitchangle(i.e.as
arotationanglearoundthepitchtiltedforwardpointingx-axis).
Thelatterconvention(calledTate-BryantinthePOS/MV
documentation)isusedinsidethesysteminalldatadisplaysand
inloggeddata(atransformationisappliediftherollisgiven
withrespecttothehorizontal).
Notethatheaveisdisplayedandloggedaspositivedownwards
(thesignischanged)includingrollandpitchinducedleverarm
translationtothesystem’stransmittransducer.
ThisformathaspreviouslybeenusedwiththeEM950andthe
EM1000withtherstsynchronisationbytealwaysassumed
tobezero.Thesensormanufacturershavebeenrequestedto
includesensorstatusintheformatusingtherstsynchronisation
byteforthispurpose.Itisthusassumedthat
•90hintherstbyteindicatesavalidmeasurementswithfull
accuracy
22
850-160692/M
Page 25
Inputdatagrams
•anyvaluefrom91hto99hindicatesvaliddatawithreduced
accuracy(decreasingaccuracywithincreasingnumber)
•anyvaluefrom9Ahto9Fhindicatesnon-validdatabutnormal
operation(forexamplecongurationorcalibrationmode)
•andanyvaluefromA0htoAFhindicatesasensorerrorstatus
850-160692/M
23
Page 26

KongsbergEMSeries
2.2.3Networkvelocityattitudeinput
format
Newermultibeammodelsusesfrequencymodulated(FM)pulses
toextendthedetectionrangeandstillmaintainingthehigh
resolution.ToproperlytakeintoaccounttheDoppler-effect
whenusingFMmode,realtime3Dvelocityinputisneededfrom
themotionsensor.Thedata,onproprietaryformat,isavailable
viaEthernetfromsomeofthemanufacturers.Currentlythree
datagramformatsaresupported:
•SeatexBinaryformat
•POS-MVGRP102/103
•CodaOctopusMCOM
Fordetailsabouttheformats,pleasereferto:
KongsbergSeatexSeapath:“Seapath200Installationmanual”
ApplanixPOSMV:“POSMVV4UserICD”,Document#:
PUBS-ICD-000551
CodaOctopusF180:“MCOMFormatDescription”–ID
TSKW-187
ThedatagramwillbeloggedintheNetworkAttitudeV elocity
110datagram,andtherangecorrectionsappliedisdocumented
intherawrangeandangle78datagram.
24
850-160692/M
Page 27

Inputdatagrams
2.2.4SperryMK-39Attitudeinputformat
Theformatis18byteslong,anditisorganisedas9words.The
mostsignigicantbyteofawordistransmittedrst.
•Word1AA55h.
•Word2Statusandtime.
•Word3Heading.
•Word4Roll.
•Word5Pitch.
•Word6Headingrate.
•Word7Rollrate.
•Word8Pitchrate.
•Word9Checksum(MSB)and1’scomplementofchecksum
(LSB).
Alldataarein2’scomplementbinary.Headingisgivenwithin
±180°,rollandpichwithin±90°.(Notehoweverthatthevalues
±180°and±90°arenotpermitted,astheseareonebittoohigh.)
HeadingismeasuredwithreferencetotrueNorth,andpositive
whenthebowpointseastwards.Rollisperdenitionarotation
angle(Tate-Bryant)andpositivewhenthestarboardsidegoesup.
Pitchispositivewhenthebowgoesdown.
850-160692/M
25
Page 28
KongsbergEMSeries
2.2.5HDTformat
Table10HDTFormat
DataDescriptionFormatValidrangeNote
Startidentier=$
Talkeridentier
Sentenceformatter
Heading,degreestruex.x,T0to359.9...
Checksum*hh
Endofsentencedelimiter=CRLF
Always24h
aa
AlwaysHDT ,
Always0Dh0Ah
——
Capitalletters
——
——
——
2.2.6SKR80format
TheSKR80sendsoutastreamofdatawithfourbytesforeach
measurement.Thereisonebyteforeachdigit
—
—
•Therstbyteforthedecimaldegree(Example:xxx.X)
•Thesecondforthedegree(Example:xxX.x)
•Thethirdforthe10’sdegree(Example:xXx.x)
•Thefourthforthe100’sdegree(Example:Xxx.x)
Thetwouppermostbitsofabytearealwayszero,thenexttwo
bitsgivethedigit,00forthedecimal,01forthedegree,10for
the10’sdegree,and11forthe100’sdegree.Thelowestfour
bitsgivethedigitvaluein4-bitBCDformat.Asanexamplea
headingof234.5°willgivethefourbytes05h14h23h32h.The
LR40addsafthbyteattheendforstatuswiththetwoupper
bitsofthestatusbytesetto11(11000000forOK,11001010for
alarm).Thisstatusbyteisignored.
26
850-160692/M
Page 29
Inputdatagrams
2.3Clockdatagrams
Topics
•Clockonpage27
•ZDAformatonpage27
2.3.1Clock
Thesystemclockisusedtotimestampalldataoutput.The
clockmaybesetuponstartofnewsurveyorpower-uponthe
ProcessingUnit(recommendedsourceisaNMEAZDAformat
datagram).Theclockwilldrift,typicallysomesecondsperday,
unlessitissynchronisedtoa1PPS(pulsepersecond)input
signal(theclockmillisecondcounterwillbesettozerowhenever
apulseisreceived).Afullycorrectclockisonlynecessaryifthe
outputdataarelatertobecombinedwithothertimecriticaldata
loggedorcreatedbyothersystems,forexampleanaccuracyof
uptooneminutewouldbenecessarytoapplytidalchanges.If
thetimestampsuppliedinthepositioninputdatagramsistobe
used,itisimperativethatthesystemclockiscorrectlysetand
that1PPSsynchronisationisused.
2.3.2ZDAformat
Table1 1ZDAformat
DataDescriptionFormatValidrangeNote
Startidentier=$
Talkeridentier
Sentenceformatter
UTC
Day
Month
Year
Localzonehours
Localzoneminutes
Optionalchecksum*hh
Endofsentencedelimiter=CRLF
Notes
1Localzonetimeisnotused.Anoffsettimemaybeentered
bytheoperatortogetthesystemclocktoshowadifferent
timethanUTC.
Always24h
aa
AlwaysZDA,
hhmmss.ss,000000to
xx,
xx,
xxxx,
xx,
xx,
Always0Dh0Ah
——
Capitalletters
——
235959.9...
01to+31
01to+12
0000to9999
-13to+131
00to+591
——
——
—
—
—
—
—
850-160692/M
27
Page 30
KongsbergEMSeries
Note
TrimbleUTCformatisalsosupported.
28
850-160692/M
Page 31

2.4Soundspeeddatagrams
Inputdatagrams
Topics
•Overviewonpage29
•KongsbergMaritimeSSPformatonpage30
•AMLSmartSensorandAMLMicroSensorformatonpage33
2.4.1Overview
AsoundspeedprolemaybeloadedintotheOperatorStation
eitheronaseriallineoronEthernet.Formatspreviouslyused
withexistingKongsbergMaritimeechosounders(Kongsberg
MaritimeASCIIandBinarySoundVelocityProleinput
datagrams)willbeaccepted,butsincetheirresolutionindepth
islimitedto1mandthenumberofentriesto100,anewer
formatgivenbelowwithouttheselimitationsisrecommended.
ThisformatisalsoacceptedbytheKongsbergMaritimeHIP AP
andHPRunderwaterpositioningsystems(butnotnecessarily
vice-versa).Notethatacompleteprolemaybepiecedtogether
fromseveraldatagramsandeditedwiththeOperatorStation’s
SoundSpeedEditor.
ThenewformatiscompletelyinASCIIandallows9998entries
withoutlimitationsinresolution.Buttheechosounderhaveother
limitations,checknote9.Inadditiontodepthandsoundspeed,it
allowsinputofabsorptioncoefcient,pressure,temperatureand
salinityorconductivity.Thelatterparametersmaybeusedto
calculatedepth,soundspeedandabsorptioncoefcient.Useofa
depthdependentabsorptioncoefcientallowsamoreaccurate
determinationofbottombackscatterstrength.
Notethatthisdatagrammayalsobeloggedasoutput,retaining
informationnotincludedinthestandardsoundspeedprole
outputdatagram,suchaswhereandwhentheprolehasbeen
taken.
850-160692/M
29
Page 32

KongsbergEMSeries
2.4.2KongsbergMaritimeSSPformat
Table12SSPformat
DataDescriptionFormatLengthValidrangeNote
Startidentier=$
Talkeridentier
DatagramidentierAlwaysSxx,
Datasetidentier
Numberofmeasurements=N
UTCtimeofdataacquisition
Dayofdataacquisition
Monthofdataacquisition
Yearofdataacquisition
Nentriesofthenext5elds–Seenote4
–Depthinmfromwaterlevelor
PressureinMPa
–Soundvelocityinm/s
–Temperaturein°C
–Salinityin
partsperthousand
orConductivityinS/m
AbsorptioncoefcientindB/km
Datasetdelimiter
Endofrepeatcycle
Latitudeindegreesandminutes,plus
optionaldecimalminutes
Latitude–N/S
Longitudeindegreesandminutes,plus
optionaldecimalminutes
Longitude–E/W
AtmosphericpressureinMPa
FrequencyinHz
Usergivencomments
Optionalchecksum*hh
Endofdatagramdelimiter=\CRLF5Ch0Dh0Ah
Always24h1
aa
xxxxx,
xxxx,
hhmmss,
xx,
xx,
xxxx,
x.x,
x.x,
x.x,
x.x,
x.x
CRLF
llll.ll,Variable
a,
yyyyy.yy ,
a,
x.x,
xxxxxx,
c—c
2
4
600000to65535
5
7
300to313
300to123
5
2–0to12000.00
1–1400to1700.00
1–-5to45.00
1–
0–0to200.00
20Dh0Ah
5–
2
Variable
6–
2EorW6
1–0to1.00006
Variable
Variable
——
3
——
Capitalletters
S00toS53
0001to99999
000000to2359593
0000to99993
0to1.0000
0to45.00or0to
7.000
0000to9000.0...6
NorS
00000to18000.0...6
—
—
——
—
1,2
—
4
—
—
—
5
—
6
7
6
8
Notes
1Thedatagramidentieridentieswhattypeofdatais
included.ThisisshowninthefollowingtablewhereDis
depth,Pispressure,Sissalinity,Cisconductivity,cis
soundspeed,αisabsorptioncoefcient,fisfrequencyand
Lislatitude.Thenotationc(T,S)indicatesforexamplethat
thesoundspeedistobecalculatedfromthetemperatureand
salinityinputdata.Whenpressureisused,theatmospheric
30
850-160692/M
Page 33

Table13SSPformat
Inputdatagrams
pressuremustbegivenifthepressureisabsolute,otherwise
thepressuremustbegivenrethesealevelandthe
atmosphericpressuremustbezero.
Identier
S00
S01D,c,T,SD,c,α(D,T ,S,L)SameasS12,
S02D,T,SD,c(D,T,S,L),α(D,T ,S,L)SameasS22,
S03D,T,CD,c(D,T ,C,L),α(D,T,S,L)SameasS32,
S04P ,T ,SD(P,T ,S,L),c(P ,T ,S,L),α(P,T ,S,L)SameasS42,
S05P ,T ,CD(P,T ,C,L),c(P,T ,C,L),α(P ,T,C,L)SameasS52,
S06
S10
S11
S12D,c,T,SD,c,α(D,T ,S,L)
S13D,c,α,f
S20D,T,SD,c(D,T,S,L)
S21D,T,S,αD,c(D,T,S,L),α
S22D,T,SD,c(D,T,S,L),α(D,T ,S,L)
S23D,T,S,α,fD,c(D,T,S,L),α
S30D,T,CD,c(D,T ,S,L)
S31D,T,C,αD,c(D,T ,S,L),α
S32D,T,CD,c(D,T ,S,L),α(D,T,S,L)
S33D,T,C,α,fD,c(D,T ,S,L),α
S40P ,T ,SD(P,T ,S,L),c(P ,T ,S,L)
S41P ,T ,S,αD(P ,T ,S,L),c(P,T ,S,L),α
S42P ,T ,SD(P,T ,S,L),c(P ,T ,S,L),α(P,T ,S,L)
S43P ,T ,S,α,fD(P,T ,S,L),c(P ,T,S,L),α
S50P ,T ,CD(P,T ,C,L),c(P,T ,C,L)
S51P ,T ,C,αD(P ,T,C,L),c(P ,T,C,L),α
S52P ,T ,CD(P,T ,C,L),c(P,T ,C,L),α(P ,T,C,L)
S53P ,T ,C,α,fD(P ,T ,C,L),c(P ,T ,C,L),α
InputdataDatatobeused
D,cD,c
D,c,αD,c,α
D,cD,c
D,c,αD,c,α
D,c,αFrequencydependent
Comment
SameasS10,
butusedimmediately.
butusedimmediately.
butusedimmediately.
butusedimmediately.
butusedimmediately.
butusedimmediately.
SameasS11,
butusedimmediately.
—
—
—
—
—
—
Frequencydependent
Frequencydependent
Frequencydependent
Frequencydependent
2S00–S06isaspecialcasebecausethesoundspeedprole
willbetakenintouseimmediatelywithoutfurtheroperator
intervention.Thechecksumisthenmandatoryandmust
becorrect.
Furthermoreanentryforzerodepthmustbepresentandthe
prolemustbeextendedto12000m.
850-160692/M
31
Page 34

KongsbergEMSeries
3Notethattheseeldshavexedlengthandleadingzeros
mustbeused.
4Thedepthorpressureeldisalwaysrequiredwhiletheother
eldsareoptionalexceptforthoserequiredbythedatagram
identier.Theeld-delimitingcommasmustalwaysbe
includedeveniftheeldsareempty.
5Samedateandtimeforallfrequencies.
6Thepositions,atmosphericpressureandcommenteldsare
optional.Notethattheoptioneldmustnotincludea\.Itis
recommendedtoincludesensortypeinthecommenteld.
7Theeldisonlypresent/validforS13,S23,S33,S43,S53.
Thesedatagramscontainabsorptioncoefcientsdirectlyand
areonlyvalidforthegivenfrequency.Ifanechosounder
employsseveralfrequencies(eg.EM710usesfrequencies
between60and100kHz)adatagrammustbesentforeach
frequencyusedwithamaximumof10secondsbetween
eachdatagram.
8Thechecksumeldiscalculatedbetweenthe$andthe*
delimitersbyexclusiveOR’ingofallbytes.Thechecksum
isrequiredfordatagramS00,butisoptionalfortheothers.
9Thereisalimitationonthesizeofthesoundvelocityprole.
TheleusedbythePUmustbemaximum30kBand
limitedtoamaximumnumberofdepthpoints.Maximum
1000pointsforEM710,EM302andEM122.Maximum
570pointsforoldersounders.Theprolecanbeeditedand
decimatedintheSISSVPeditor.
SISwillgiveawarningandrejecttheinputproleifto
manymeasurements.
32
850-160692/M
Page 35

Inputdatagrams
2.4.3AMLSmartSensorandAMLMicro
Sensorformat
AnAMLSmartSensororAMLMicromaybeuseddirectlyfor
soundspeedproleinputonaseriallinetotheOperatorStation.
Thesensormayalsobeusedtomeasurethesoundspeedatthe
transducerdepthcontinuouslyduringsurveying.
FortheAMLMicroSensors,theeldshavebeenswappedsothe
soundspeedisalwaysthersteld.
ThesupportedAMLSmartSensormessageformatsare:
•SV=SoundV elocity
•SV&P=SoundV elocityandPressure
•SV&T=SoundV elocityandTemperature
Eachmessagefromthesensoristransmittedasasequenceof
ASCIIcharactersterminatedbyaCRLFpair.
Theacceptedmessageformatsareasfollows:
Table14SVFormat
±
xxxx.x
CR
wherexxxx.xisthemeasuredsoundspeedinm/s.
Table15SV&PFormat
xxx.xx
±
xxxx.x
±
wherethersteldisthepressureindecibarsrelativetothe
surfaceandthesecondissoundspeedinm/s.
Table16SV&TFormat
xx.xxx
±
xxxx.x
±
wherethersteldisthetemperatureindegreesCelsiusandthe
secondissoundspeedinm/s.
Note
LF
LF
CR
LF
CR
Themessageformatsabovearepresentedintableformatto
makeiteasiertoseethelocationandnumberofspacesineach
message.
850-160692/M
33
Page 36

KongsbergEMSeries
Note
The’±’charactershouldbeinterpretedasfollows.Ifthenumber
intheeldimmediatelyfollowingthischaracterisnegative,then
thischaracterwillbe“-“(minus).However ,ifthenumberinthe
eldimmediatelyfollowingthischaracterispositive,thenthis
characterwillbea””(space).
34
850-160692/M
Page 37

2.5Depthinputdatagramsfromsinglebeamecho sounder
Topics
•DBSFormatonpage35
•DPTFormatonpage35
•Simradformatonpage36
Depthdatagramsfromasinglebeamechosounderareaccepted
fordisplayandloggingonthesystem.Thefollowingformats
aresupported
•NMEA0183DBS
•NMEA0183DPT
•BinarydatagramsfromtheKongsbergMaritimeEAecho
sounderseries,referredtoastheSimradformat.
Inputdatagrams
2.5.1DBSFormat
Table17DBSFormat
DataDescriptionFormatValidrangeNote
Startidentier=$
Talkeridentier
SentenceformatterAlwaysDBS,
Depthinfeetx.x,f,
Depthinmetersx.x,M,0.1–1
Depthinfathoms
Checksum*hh
Endofsentencedelimiter=CRLF
Always24h
aa
x.x,F0.1–1
Always0Dh0Ah
——
Capitalletters
——
0.1–1
——
——
Notes
1Thedecodingprioritywillbemetereld,feeteldand
fathomeldwiththedepthvalueextractedfromtherst
eldwithvaliddata.
2.5.2DPTFormat
—
Table18DPTFormat
DataDescriptionFormatValidrangeNote
Startidentier=$
Talkeridentier
Sentenceformatter
Depthinmetersfromthetransducer
Offsetoftransducerfromwaterlineinmeters
850-160692/M
Always24h
aa
AlwaysDPT ,
x.x,
x.x,
——
Capitalletters
——
0.1–
0–1
—
—
35
Page 38

KongsbergEMSeries
Table18DPTFormat(cont’d.)
DataDescriptionFormatValidrangeNote
Maximumrangescaleinuse
Checksum*hh
Endofsentencedelimiter=CRLF
x.x,——
——
Always0Dh0Ah
——
Notes
1Anegativevalueimplyingthattheoffsetisfromthekeel
shouldnotbeused.
2.5.3Simradformat
Table19Simradformat
DataDescriptionFormatValidrangeNote
Startidentier=D
Channelidentier
TimeasHHMMSShh
Depthinmetersfromthetransducer32bitIEEE754oating
BottombackscatteringstrengthindB
Transducernumber32bitinteger
Athwartshipslopeindegrees
Always34h
x,
xxxxxxxx,
point
32bitIEEE754oating
point
32bitIEEE754oating
point
——
1to3111
00000000to235959991
0.1–1
——
——
——
Notes
1Onlythechannelidentier,depthandtimewillbedecoded
bythesystem.Theleastsignicantbyteistransmittedrst
(theIntelconvention).
Note
ThedatagrammustbesentonEthernettoProcessingUnit
UDP2.ForUDPportaddress,seePUinformationandstatus
onpage97
36
850-160692/M
Page 39

2.6Remotecontroldatagrams
Inputdatagrams
ARemoteControldatagramhasbeenimplementedtoallow
•themultibeamechosoundertostartloggingonremote
command.
•themultibeamechosoundertosendoutparameterandsound
speedproledatagrams,“IUR”,consistingofInstallation
parameters(I),soundspeedproledatagram(U)andRuntime
datagram(R),asaresponsetotheremotecommand.
•thesurveylinenumberstobesetfromaremotelocation.
Notethattheparameterandsoundspeedproledatagramsare
alwayssentoutwhenloggingisstartedoranychangesaremade
totheparametersorsoundspeed.Theymayalsobesentout
regularlyatoperatorspeciedintervals.
InadditiontotheprimaryapplicationoftheRemoteControl
datagramsasdescribedabove,theyarealsousedtoreportthe
SISpingingandloggingstatustoexternalrecipients.Formore
informationonthis,see“noticationofSISpingingandlogging
activity”intheSISOperatorManual(doc.no:850-164709).
Table20RemoteControldatagrams
DataDescriptionFormatValidrangeNote
Startidentier=$
Talkeridentier
Datagramidentier
EMmodelnumberEMX=dddd,
Responsibleoperator
SurveyidentierSID=a—a,
Surveylinenumber
Surveylineidentier(plannedlineno)
CommentCOM=a—a
Optionalchecksum*hh
Endofdatagramdelimiter=\CRLF5Ch0Dh0Ah
Always24h
aa
Rxx,R00toR201
ROP=a—a,
PLN=d..d,
PLL=d—d,
——
Capitalletters
——
—
—
—
—
—
——
——
Notes
1Rxxdeneswhatactionthesystemistotakewithrespect
topingingandloggingofdatainadditiontochangesin
theparameters.Notethatloggingofsurveydataonlocal
storageisnotaffected,thisisdeterminedbyoperatorcontrol
fromthemenuonly.
—
2
2
2
2
3
•R00-Systemtostoppinging(andloggingifon)
•R10-Systemtostopalllogging(butcontinueorstart
pinging).
850-160692/M
37
Page 40

KongsbergEMSeries
•R11-Systemtostartlogginglocallyandsendastart
sequence“IUR”consistingofaninstallationparameter
datagram(I),soundspeedproledatagram(U)anda
runtimedatagram(R).
•R12-Systemtostartlogginglocally.“IUR”willbesent.
•R13-Systemtostartloggingonnewlinetolocalstorage
only.
•R20-Systemtosend“IUR”.
•ThecurrentversionofSISdoesnotsupportR11and
R13.OnSIS,theeffectofR00,R10andR12datagrams
isexactlythesameasiftheoperatorhasusedthepinging
andloggingbuttons.
2ThecurrentversionofSIShasnosupportforROP,SID
andPLN.PLLisusedforR12toindicatelinenumberto
belogged.
3Onlyusedfor“ExternalnoticationofSISpingingand
loggingactivity”,seeSISOperatorManual.
38
850-160692/M
Page 41

2.7Soundspeedattransducer
Table21KSSIS80inputdatagram
Inputdatagrams
Inadditiontoreceivingsoundspeedattransducerfromsound
velocityprobe/sensorattachedtotheSISHWSthroughaserial
line,itisalsopossibletosendthisinformationthroughthe
Ethernet.
Note
Thedatagramformatandportaddressetc.isalsoexplainedin
the“Externalsensors”chapterintheSISReferenceManual.
2.7.1KSSIS80Datagram
SoundvelocityandtemperaturesentoverLAN(UDP)toSIS
HWS
DataDescriptionFormatValidRangeNote
Startidentier=$
TalkeridentierAlwaysKS
SentenceformatterAlwaysSIS,
DatagramIDAlways80,
Soundspeed(m/s)
Temperature(Celsius)
Endifsentencedelimiter=CRLF
Endifsentencedelimiter=CRLF
Always24h
x.x,
x.x——
Always0Dh0Ah
Always0Dh0Ah
——
——
——
——
1400.0–1.700
——
——
—
850-160692/M
39
Page 42

KongsbergEMSeries
3OUTPUTDATAGRAMS
3.1Introduction
Topics
•Introductiononpage40
•Multibeamdataonpage43
•Externalsensorsonpage64
•Soundspeedonpage75
•Multibeamparametersonpage78
•PUinformationandstatusonpage97
•SISgeneratedoutputonpage105
OutputdatagramsareusuallyloggedtodiskontheEMSeries
OperatorStation.Theoutputdatagramsmayalsobeexportedto
userprovidedprogramsontheOperatorStationoronanexternal
EthernetnetworkusingUDPprotocol(remotelogging).An
NMEADPTdepthdatagrammaybeexportedonaserialline.
Theoutputdatagramsaremostlyinbinaryformatusingsigned
orunsignedintegernumberswithlengthsof1,2or4bytes.
WithaPCbasedoperatorstationlittleendianisnormallyused,
whilebigendianisusedonUnixworkstations.Thesamebyte
orderasusedontheoperatorstationisusedfortheoutput
datagrams.
Note
Pleasebeawarethattheuseofbigendianisnotmaintainedon
thenewersounders(EM3002,EM710,EM302andEM122),
sincetheoperatorstationisPCbasedrunningWindowsorLinux.
Note
WerecommendthatsoftwarewrittentodecodeEMSeriesdata
includesacheckforthebyteorderingwithaprovisionforbyte
swapping.Suitabledataeldstocheckonarethelengtheldat
thestartofthedatagram,theEMSeriesmodelnumbereldand
possiblythedateandtimeelds.
ThebasicoutputdatagramstructureestablishedwiththeEM
100echosounderisretained.
•Alldatagrams(excepttheNMEADPTdatagram)startwith
STX,datagramtypeandtimetag,andendwithETXand
checksum(sumofbytesbetweenSTXandETX).Inaddition
thetotallengthofthedatagram(notincludingthelengtheld)
willprecedetheSTXbyte,givenasafourbytebinarynumber.
40
850-160692/M
Page 43

Outputdatagrams
•Thelengtheldisonlyincludedwhenloggingtotapeand/or
disk,butnotfordatagramsloggedtoaremotelocation.
Thelengthcanthenbederivedfromthenetworksoftware.
Systemsloggingdataremotelyshouldaddthislengthatthe
startofeachdatagram.Thislengthisrequiredifthedataare
tobeusedwithKongsbergMaritimepost-processingsystems.
•Thetimestampresolutionis1millisecondandincludes
thecentury.Thetimestampisbinary.Thedateisgiven
as10000*year(4digits)+100*month+day,forexample
19950226forFebruary26,1995.Alldateeldsinthe
outputdatagramsusethisformat.Atimeisusuallygiven(in
milliseconds)frommidnight.
•Thedatagramsidentifythemultibeamechosoundermodel
anditsserialnumber.Thesystemmodelnumberis120for
theEM120,300fortheEM300,etc.FortheEM3000D(the
dualheadsystem)themodelnumberwasoriginallygivenas
3002andtheserialnumberisthatofSonarHeadnumber1.
Howeverinthedepthdatagrammodelnumbers3003-3008
arenowusedtoalsoidentifytheactualtransmitandsampling
frequenciesofthetwoheads.Ifonlyoneheadisactivateon
theEM3000D,itiscodedasasingleheadsystem.ForEM
3002themodelnumberis3020.TheEM3002hasseparate
datagrams(depth,range,seabedimage,watercolumn)forthe
twosonarheads.
•Duecarehasbeentakentoincludeallparametersneededin
postprocessingintherelevantdatagrams,withaminimumof
dataduplication.Whereresolutionofadataeldisvariable,a
resolutiondescriptorisincluded.
•Invaliddataarealwaysidentiedbythehighestpositive
numberallowedinaeldunlessotherwisenoted.
•Areal-timeparameterdatagramhasbeenaddedtoenable
loggingofparametersnotusedinpostprocessing,butwhich
maybeimportantincheckingthequalityoftheloggeddata,
ortoallowtracingofreasonsforpossiblemalfunctions.
•Attitudedataastimecontinuousrecordsandrawranges
andbeampointinganglesareloggedtoalloweventual
postprocessingcorrections.Theloggedattitudesarevalid
atthetransmittransducer,andarecorrectedforanysensor
offsets.
•AnewRangeandbeamangledatagram(typef),isincluded,
thatcontainsmoredetails.(FromJanuary2004).
Forthenewmodelsofmultibeams,startingwiththeEM710,i.e.
EM122,EM302,EM710,EM2040andME70,threedatagram
formatshavebeenchangedandaregivennewtypenumbers
(November2005):
•XYZ88(typeX),replacestypeD.
850-160692/M
41
Page 44

KongsbergEMSeries
•Rawrangeandangle78(typeN),replacestypef.
•Seabedimagedata89(typeY),replacestypeS.
Thesenewdatagramsmakesitpossibletohavemorethan254
detectionsperping.
Thedataformatforsomeparametershasbeenchangedto
increasetheresolution.Forexamplethebackscatteramplitudes
arechangedfromonetotwobytes.
Systemswithdualswaths(fansofreceiverbeamswithdifferent
tilt)willhaveseparatedatagramsforeachswath.
Inthenewdatagrams,bothvalidandinvalidbeamsareincluded
(Thebeamindexthenbecameredundantinformationandis
thereforeremoved).Thisisdonetobeabletostoreseabedimage
dataalsoforbeamsmissingavaliddetection.
Tocoverthecompletemultibeamrange,thismanualdescribes
boththenewandthepreviousformats.
InFebruary2008,anewoutputdatagram,NetworkAttitude
Velocitydatagram110,isadded.The3Dvelocityinputisused
fordopplercompensationinFMmode.Therangecorrections
appliedisdocumentedintheRawrangeandangle78datagram.
Installation,Runtimeandstatusdatagramsareupdatedwith
extrainformation.
Someminorchangesandadditionalcomments.
42
850-160692/M
Page 45

3.2Multibeamdata
Outputdatagrams
Topics
•Depthdatagramonpage43
•XYZ88onpage47
•Centralbeamsechogramonpage50
•Rawrangeandbeamangle(F)onpage52
•Rawrangeandbeamangle(f)onpage53
•Rawrangeandangle78onpage55
•Seabedimagedatagramonpage58
•Seabedimagedata89onpage60
•Watercolumndatagramonpage62
3.2.1Depthdatagram
Note
ThisdatagramisusedforEM2000,EM3000,EM3002,EM
1002,EM300andEM120.TheXYZ88onpage47datagramis
usedfornewermodels.
Table22Depthdatagram
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=D(epthdata)(Always44h)
EMmodelnumber(Example:EM3000=3000)
Date=year*10000+month*100+day(Example:
Feb26,1995=19950226)
Timesincemidnightinmilliseconds
(Example:08:12:51.234=29570234)
Pingcounter(sequentialcounter)
Systemserialnumber
Headingofvesselin0.01°
Soundspeedattransducerindm/s
Transmittransducerdepthrewaterlevelattime
ofpingincm
Maximumnumberofbeamspossible
Numberofvalidbeams=N
zresolutionincm1U1to254
xandyresolutionincm1U1to254
Samplingrate(f)inHz
or
DepthdifferencebetweensonarheadsintheEM
3000D
4U
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U100–
2U0to35999
2U14000to16000
2U0to655361
1U48–
1U1to254
2U
2S
——
——
——
——
——
300to30000
-32768to32766
—
—
—
—
—
—
—
—
—
3
4
850-160692/M
43
Page 46

KongsbergEMSeries
Table22Depthdatagram(cont’d.)
DataDescriptionFormatValidrangeNote
Repeatcycle—Nentriesof:16*N
Depth(z)fromtransmittransducer
(unsignedforEM120andEM300)
Acrosstrackdistance(y)2S
Alongtrackdistance(x)2S
Beamdepressionanglein0.01°2S
Beamazimuthanglein0.01°
Range(one-waytraveltime)
Qualityfactor
Lengthofdetectionwindow(samples/4)
Reectivity(BS)in0.5dBresolution)
(Example:-20dB=216)
Beamnumber1U1to2546
Endofrepeatcycle
Transducerdepthoffsetmultiplier1S
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
2Sor2U
2U0to569993
2U0to655343
1U0to254
1U1to254
1S
1U
2U
——
-32768to+32766or
1to65534
-32768to327662
-32768to327662
-11000to110003
-128to+126
-1to+171
——
——
2
5
—
—
Notes
1Thetransmittransducerdepthplusthedepthoffsetmultiplier
times65536cmshouldbeaddedtothebeamdepthstoderive
thedepthsrethewaterline.Thedepthoffsetmultiplierwill
usuallybezero,exceptwhentheEM2000/3000SonarHead
isonanunderwatervehicleatadepthlargerthan655.36m.
Notethattheoffsetmultiplierwillbenegative(-1)ifthe
actualheaveislargeenoughtobringthetransmittransducer
abovethewaterline.Thismayrepresentavalidsituation,
butmayalsobeduetoanerroneouslysetinstallationdepth
ofeitherthetransducerorthewaterline.
2Thebeamdataaregivenrethetransmittransducer
orsonarheaddepthandthehorizontallocationofthe
activepositioningsystem’santenna.Heave,roll,pitch,
soundspeedatthetransducerdepthandraybending
throughthewatercolumnhavebeenapplied.OntheEM
1002/2000/3000/3002thebeamdepthsmustberegarded
assignedvaluestotakeintoaccountbeamswhichmaybe
goingupwards.OntheEM120/300thebeamdepthsare
alwayspositiveandthevaluesarethereforeunsigned.
3Therange,beamdepressionangle(positivedownwards
and90°foraverticalbeam)andbeamazimuthangle(re
vesselcenterline)aregivenrelativetothetransducer(sonar
head)atthepingtransmittime.Heave,roll,pitchandsound
speedatthetransducerdepthhavebeenapplied,butnotray
bending.Thesevaluesmaythusbedirectlyusedforanew
44
850-160692/M
Page 47

Outputdatagrams
raybendingcalculationwitharevisedsoundspeedprole
togeneratenewsoundingdepthsandpositionswithoutany
needforusingattitudedata.
Onewaytraveltime=range/samplingrate/4
Notethatifthedataneedtobereprocessedwithanewsound
speedatthetransducerdepthornewroll,pitchorheave
values,fullreprocessingstartingwiththerawrangeand
beamangledataisrequired.Attitudedataisalsorequired
inthisreprocessing,andboththesedatatypeswillinthe
futurebeloggedasstandard.
Ifthebeamazimuthanglehasavaluelargerthan35999,the
beampointinganglehasreplacedthebeamdepressionangle,
andtherawtwo-waytraveltimehasreplacedtheone-way
heaveandbeamanglecorrectedtraveltime.Thetransmittilt
angleplus54000isgiveninthebeamazimuthangleeld.
Theuseofthisdatadenitionisavailableonremoteoutput
toaportnamedas“RawDepth...”forusebyothersystems
whichdotheirownattitudeandsoundspeedprocessing.
4InanEM3000Dthetransmittransducerdepthisthatof
SonarHeadnumber1,takingintoaccountthedepthoffset
multiplierasdescribedinnote1.Therangemultiplieris
replacedbythedifferenceindepthbetweenSonarHead
number1and2,i.e.head2depthisequaltohead1depth
(possiblymodiedwithdepthoffsetmultiplier)plusthe
depthdifference.TherangesamplingratesinHzofthetwo
headsisgiventhroughtheEMmodelnumberaccording
tothefollowingtable:
Table23EM3000D
EMmodelnumber300330043005300630073008
SonarHead1
SonarHead2
139561429313956146211429314621
146211462114293142931395613956
PreviouslythemodelnumberoftheEM3000Dwasgiven
as3002withheadsampleratesof13956and14621Hz
respectively.Theheaddepthsinthiscaseshouldbeassumed
tobeequal,andalthoughthemathematicalderivationof
nalbeamdepthswouldotherwisebethesameasdescribed
above,thetransmittransducerdepthwasnotactuallyexactly
thatofthesonarheads.
5Thequalitynumber’supperbitsignieswhetheramplitude
(0)orphase(1)detectionhasbeenused.Ifamplitudethe7
lowestbitsgivethenumberofsamplesusedinthecentreof
gravitycalculation.Ifphasethesecondhighestbitsignies
whetherasecond(0)orrst(1)ordercurvethasbeen
appliedtodeterminethezerophaserange,andthe6lowest
850-160692/M
45
Page 48

KongsbergEMSeries
bitsindicatesthequalityofthet(actuallythenormalized
varianceofthetrethemaximumallowed,i.e.withalower
numberthebetterthet).
6Beam128istherstbeamonthesecondsonarheadinan
EM3000Ddualheadsystem.
46
850-160692/M
Page 49

Outputdatagrams
3.2.2XYZ88
Note
Thisdatagramreplacesthepreviousdepth(D)datagramforthe
newmultibeammodels(EM2040,EM710,EM122,EM302,
ME70).Allreceiverbeamsareincluded,checkdetectioninfo
andrealtimecleaningforbeamstatus(note4and5).
Table24XYZ88
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=X(58h,88d)
EMmodelnumber(Example:EM710=710)
Date=year*10000+month*100+day(Example:
Sep26,2005=20050926)
Timesincemidnightinmilliseconds
(Example:08:12:51.234=29570234)
Pingcounter(sequentialcounter)
Systemserialnumber
Headingofvessel(atTXtime)in0.01°
Soundspeedattransducerindm/s
Transmittransducerdepthinmrewaterlevelat
timeofping
Numberofbeamsindatagram=N
Numberofvaliddetections
SamplingfrequencyinHz
Spare4S
Repeatcycle-Nentriesof:
Depth(z)fromtransmittransducerinm
Acrosstrackdistance(y)inm
Alongtrackdistance(x)inm
Detectionwindowlengthinsamples2U
Qualityfactor
Beamincidenceangleadjustment(IBA)in0.1deg1S
Detectioninformation
Realtimecleaninginformation1S
Reectivity(BS)in0.1dBresolution
(Example:–20.1dB=FF37h=65335)
Endofrepeatcycle
Spare(always0)
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
4U
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U100–
2U0to35999
2U14000to16000
4F
2U1–1024
2U1–1024
4F
20*N
4F
4F
4F
1U0–2543
1U
2S
1U0
1U
2U
——
——
——
——
——
—
——
——
––
—
—
—
——
-128to1266
—
—
——
——
——
—
—
—
—
—
1
—
—
2
2
2
4
5
—
850-160692/M
47
Page 50

KongsbergEMSeries
Notes
1Thetransmittransducerdepthshouldbeaddedtothebeam
depthstoderivethedepthsrethewaterline.Notethatthe
transducerdepthwillbenegativeiftheactualheaveislarge
enoughtobringthetransmittransducerabovethewaterline.
Thismayrepresentavalidsituation,butmayalsobedueto
anerroneouslysetinstallationdepthofeitherthetransducer
orthewaterline.
2Thebeamdataaregivenrethetransmittransducerorsonar
headdepthandthehorizontallocation(x,y)oftheactive
positioningsystem’sreferencepoint.Heave,roll,pitch,
soundspeedatthetransducerdepthandraybendingthrough
thewatercolumnhavebeenapplied.
3Scaledstandarddeviation(sd)oftherangedetectiondivided
bythedetectedrange(dr):
Qualityfactor=250*sd/dr.
4Thisdatagrammaycontaindataforbeamswithandwithout
avaliddetection.Eightbits(0-7)givesdetailsaboutthe
detection:
A)Ifthemostsignicantbit(bit7)iszero,thisbeamhasa
validdetection.Bit0-3isusedtospecifyhowtherangefor
thisbeamiscalculated
0:Amplitudedetect
1:Phasedetect
2-15:Futureuse
B)Ifthemostsignicantbitis1,thisbeamhasaninvalid
detection.Bit4-6isusedtospecifyhowtherange(andx,y,z
parameters)forthisbeamiscalculated
0:Normaldetection
1:Interpolatedorextrapolatedfromneighbourdetections
2:Estimated
3:Rejectedcandidate
4:Nodetectiondataisavailableforthisbeam(all
parametersaresettozero)
5-7:Futureuse
Theinvalidrangehasbeenusedtollinamplitudesamples
intheseabedimagedatagram.
5Arealtimedatacleaningmodulemayagoutbeams.
Negativevaluesindicatesthatthisbeamisaggedout,and
isnottobeused.
6Duetoraybending,thebeamincidenceangleatthebottom
hitwillusuallydifferfromthebeamlaunchangleatthe
transducerandalsofromtheanglegivenbyastraight
48
850-160692/M
Page 51

Outputdatagrams
linebetweenthetransducerandthebottomhit.The
differencefromthelatterisgivenbythebeamincidence
angleadjustment(IBA).Thebeamincidenceanglerethe
horizontal,correctedfortheraybending,canbecalculated
asfollows:
BAC=atan(z/abs(y))+IBA.
BACispositivedownwardsandIBAwillbepositivewhen
thebeamisbendingtowardsthebottom.Thisparameter
canbehelpfulforcorrectingseabedimagerydataandin
seabedclassication.
850-160692/M
49
Page 52

KongsbergEMSeries
3.2.3Centralbeamsechogram
Note
ThisdatagramisonlyavailableforEM120andEM300.
Table25Centralbeamsechogram
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=K(Always4Bh)
EMmodelnumber(Example:EM3000=3000)
Date=year*10000+month*100+day(Example:
Feb26,1995=19950226)
Timesincemidnightinmilliseconds
(Example:08:12:51.234=29570234)
Pingcounter(sequentialcounter)
Systemserialnumber
Meanabsorptioncoefcientin0.01dB/km
Pulselengthinμs2U50–1
RangetonormalincidenceusedinTVG
StartrangesampleofTVGrampifnotenough
dynamicrange(0else)
StoprangesampleofTVGrampifnotenough
dynamicrange(0else)
NormalincidenceBSindB(BSN)
(Example:-20dB=236)
ObliqueBSindB(BSO)
(Example:-1dB=255)
Txbeamwidthin0.1°
TVGlawcrossoveranglein0.1°
Numberofincludedbeams(N)
Repeatcycle—Nentriesof:6*N
beamindexnumber1U0to2532
sparebytetogetevenlength(Always0)
numberofsamplesperbeam=Ns
startrangeinsamples2U1–3
Endofrepeatcycle
Repeatcycle–ΣNsentriesof:
Sampleamplitudesin0.5dB
(Example:-30dB=196)
Endidentier=ETX(Always03h)
Endofrepeatcycle
Sparebyteifrequiredtogetevenlength(Always
0ifused)
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
4U
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U100–
2U1to200001
2U1to163841
2U0to16384
2U0to16384
1S
1S
2U1to3001
1U20to3001
1U1–
1U
2U1–
ΣNs
1S
1U
0–1U
1U
2U
——
——
——
——
——
-50to+101
-60to01
—
——
—
-128to+126
——
——
——
——
—
—
—
—
—
—
—
—
50
850-160692/M
Page 53

Outputdatagrams
Notes
1Thesampleamplitudesarenotcorrectedinaccordancewith
thedetectionparametersderivedfortheping,asisdonefor
theseabedimagedata.
2Thebeamindexnumberisthebeamnumber-1.
3Therangeforwhichtherstsampleamplitudeisvalidfor
thisbeamgivenasatwo-wayrange.Thedetectionrangeis
givenintherawrangeandbeamangledatagram.Notethat
dataareprovidedregardlessofwhetherabeamhasavalid
detectionornot.
850-160692/M
51
Page 54

KongsbergEMSeries
3.2.4Rawrangeandbeamangle(F)
Note
OnlyusedforEM3000
Table26Rawrangeandbeamangledatagrams
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=F(Always46h)
EMmodelnumber(Example:EM3000=3000)
Date=year*10000+month*100+day(Example:
Feb26,1995=19950226)
Timesincemidnightinmilliseconds
(Example:08:12:51.234=29570234)
Pingcounter(sequentialcounter)
Systemserialnumber
Maximumnumberofbeamspossible
Numberofvalidreceivebeams=N
Soundspeedattransducerindm/s
Repeatcycle–Nentriesof:8*N
–Beampointinganglein0.01°2S
–Transmittiltanglein0.01°
–Range(two-waytraveltime)
–Reectivity(BS)in0.5dBresolution1S
–Beamnumber1U1to254
Endofrepeatcycle
Spare(Always0)
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
4U
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U100–
1U48–
1U1to254
2U14000to16000
2U-2999to29991
2U0to655341
1U
1U
21U
——
——
——
——
——
——
-11000to110001
-128to126
——
——
——
—
—
—
—
—
—
—
—
Notes
1Thebeampointingangleispositivetoportandthetransmit
tiltangleispositiveforwardsforanormallymounted
systemlookingdownwards.Therangeresolutionintimeis
theinverseoftherangesamplingrategiveninthedepth
datagrams.
52
850-160692/M
Page 55

Outputdatagrams
3.2.5Rawrangeandbeamangle(f)
Newdatagram,addedJanuary2004.Thisdatagramreplaces
theoldFdatagram.
Note
UsedforEM120,EM300,EM1002,EM2000,EM3000and
EM3002
Table27Rawrangeandbeamangledatagrams
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=f(Always66h)
EMmodelnumber(Example:EM3000=3000)
Date=year*10000+month*100+day(Example:
Feb26,1995=19950226)
Timesincemidnightinmilliseconds
(Example:08:12:51.234=29570234)
Pingcounter(sequentialcounter)
Systemserialnumber
Numberoftransmitsectors=Ntx
Numberofvalidreceivebeams=N
Samplingfrequencyin0.01Hz(F)
ROVdepthin0.01m4S
Soundspeedattransducerin0.1m/s
Maximumnumberofbeamspossible
Spare1
Spare2
Ntxentriesof:20*Ntx
TiltanglerefTXarrayin0.01°2S
Focusrangein0.1m(0=Nofocus)
Signallengthinμs
Transmittimeoffsetinμs
CenterfrequencyinHz
Bandwidthin10Hz2U1to65535
Signalwaveformidentier
Transmitsectornumber1U0to99
Nentriesof:12*N
BeampointinganglerefRXarrayin0.01°2S
Rangein0.25samples(R)
Transmitsectornumber1U0to19
Reectivity(BS)in0.5dBresolution1S
Qualityfactor
4U
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U100–
2U1to20
2U1to1999
4U
2U14000to16000
2U1to1999
2U
2U
2U0to65535
4U
4U
4U
1U0to991
2U0to655352
1U0to254
——
——
——
——
——
100to100000*100
——
-2900to2900
——
——
——
——
-11000to11000
-128to127
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
850-160692/M
53
Page 56

KongsbergEMSeries
Table27Rawrangeandbeamangledatagrams(cont’d.)
DataDescriptionFormatValidrangeNote
Detectionwindowlengthinsamples
(/4ifphase)
Beamnumber
Spare
Spare(Always0)
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
1U1to254
2S
2U
1U0
1U
1U
-1999to19993
——
——
——
Notes
10=cw,1=FM
2Twowaytraveltime=R/(4*F/100)
3Thebeamnumbernormallystartsat0.
—
—
54
850-160692/M
Page 57

Outputdatagrams
3.2.6Rawrangeandangle78
Note
ThisdatagramreplacesthepreviousRawrangeandbeamangle
fdatagramforthenewmultibeammodels(EM2040,EM710,
EM302,EM122,ME70).Allreceiverbeamsareincluded,
checkdetectioninfoandrealtimecleaningforbeamstatus(see
note3and4).
Table28Rawrangeandbeamangle78datagram
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=N(4eh,78d)
EMmodelnumber(Example:EM710=710)
Date=year*10000+month*100+day(Example:
Sep26,2005=20050926)
Timesincemidnightinmilliseconds
(Example:08:12:51.234=29570234)
Pingcounter(sequentialcounter)
Systemserialnumber
Soundspeedattransducerin0.1m/s
Numberoftransmitsectors=Ntx
Numberofreceiverbeamsindatagram=Nrx
Numberofvaliddetections
SamplingfrequencyinHz
Dscale4U
Repeatcycle1Ntxentriesof:
TiltanglereTXarrayin0.01°2S
Focusrangein0.1m(0=Nofocusingapplied)
Signallengthins
SectortransmitdelayrerstTXpulse,ins
CentrefrequencyinHz
Meanabsorptioncoeff.in0.01dB/km
Signalwaveformidentier
Transmitsectornumber1U0–
SignalbandwidthinHz
EndofRepeatcycle1
Repeatcycle2Nrxentriesof:
BeampointinganlgereRXarrayin0.01°2S
Transmitsectornumber1U0–
Detectioninfo
4U
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U100–
2U14000to16000
2U1–
2U1–
2U1–
4F
24*Ntx
2U0to65534
4F
4F
4F
2U
1U0to991
4F
16*Nrx
1U
——
——
——
——
——
——
—
——
-2900to29006
——
——
——
——
——
——
-11000to110006
—
—
—
—
—
—
—
—
5
—
—
—
3
850-160692/M
55
Page 58

KongsbergEMSeries
Table28Rawrangeandbeamangle78datagram(cont’d.)
DataDescriptionFormatValidrangeNote
Detectionwindowlengthinsamples2U
Qualityfactor
Dcorr
Twowaytraveltimeins4F
Reectivity(BS)in0.1dBresolution2S
Realtimecleaninginfo1S
Spare
EndofRepeatcycle2
Spare(Always0)
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
Notes
1U0to2542
1S
1U
1U
1U
2U
——
—
—
——
—
——
——
——
——
5
5
4
10=cw,1=FMupsweep,2=FMdownsweep.
2Scaledstandarddeviation(sd)oftherangedetectiondivided
bythedetectedrange(dr):
Qualityfactor=250*sd/dr.
3Thisdatagrammaycontaindataforbeamswithandwithout
avaliddetection.Eightbits(0-7)givesdetailsaboutthe
detection:
A)Ifthemostsignicantbit(bit7)iszero,thisbeamhasa
validdetection.Bit0-3isusedtospecifyhowtherangefor
thisbeamiscalculated
0:Amplitudedetect
1:Phasedetect
2-15:Futureuse
B)Ifthemostsignicantbitis1,thisbeamhasaninvalid
detection.Bit4-6isusedtospecifyhowtherange(andx,y,z
parameters)forthisbeamiscalculated
0:Normaldetection
1:Interpolatedorextrapolatedfromneighbourdetections
2:Estimated
3:Rejectedcandidate
4:Nodetectiondataisavailableforthisbeam(all
parametersaresettozero)
5-7:Futureuse
Theinvalidrangehasbeenusedtollinamplitudesamples
intheseabedimagedatagram.
56
850-160692/M
Page 59

Outputdatagrams
4Forfutureuse.Arealtimedatacleaningmodulemayag
outbeams.Bit7willbesetto1ifthebeamisaggedout.
Bit0-6willcontainacodetellingwhythebeamisagged
out.
5TheDopplercorrectionappliedinFMmodeisdocumented
hereusingpreviouslyunused(spare)elds.Thisallows
theuncorrectedslantrangestoberecreatedifdesired.The
correctionisscaledbyacommonscalingconstantforall
beamsandthenincludedinthedatagramusingasigned8bit
valueforeachbeam.Theuncorrectedrange(two-waytravel
time)canbereconstructedbysubtractingthecorrection
fromtherangeinthedatagram:
T(uncorrected)=T(datagram)-D(corr)/D(scale)
6Theanglesarerelativetothetransducerarrays,exceptfor
ME70,wheretheanglesarerelativetothehorizontalplane
850-160692/M
57
Page 60

KongsbergEMSeries
3.2.7Seabedimagedatagram
Note
ThisdatagramisusedforEM2000,EM3000,EM3002,
EM1002,EM300andEM120.TheSeabedImageData89
datagramisusedfornewermodels.
Table29Seabedimagedatagram
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=(Seabedimagedata)(Always
53h)
EMmodelnumber(Example:EM3000=3000)
Date=year*10000+month*100+day(Example:
Feb26,1995=19950226)
Timesincemidnightinmilliseconds
(Example:08:12:51.234=29570234)
Pingcounter(sequentialcounter)
Systemserialnumber
Meanabsorptioncoefcientin0.01dB/km
Pulselengthinμs2U50–1
Rangetonormalincidenceusedtocorrectsample
amplitudesinno.ofsamples
StartrangesampleofTVGrampifnotenough
dynamicrange(0else)
StoprangesampleofTVGrampifnotenough
dynamicrange(0else)
NormalincidenceBSindB(BSN)
(Example:-20dB=236)
ObliqueBSindB(BSO)(Example:–1dB=255)1S
Txbeamwidthin0.1°
TVGlawcrossoveranglein0.1°
Numberofvalidbeams(N)
Repeatcycle–Nentriesof:6*N
beamindexnumber1U0to2532
sortingdirection
numberofsamplesperbeam=Ns
centresamplenumber2U1–4
Endofrepeatcycle
Repeatcycle–ΣNsentriesof:
Sampleamplitudesin0.5dB
(Example:–30dB=196)
Endofrepeatcycle
Sparebyteifrequiredtogetevenlength
(Always0ifused)
4U
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U100–
2U1to200001
2U1to16384
2U0to16384
2U0to16384
1S
2U1to300
1U20to300
1U1to254
1S
2U1–
ΣNs
1S
0–1U
——
——
——
——
——
-50to10
-60to0
—
-1or13
——
-128to126
——
—
—
—
—
—
—
—
—
—
—
—
—
—
58
850-160692/M
Page 61

Outputdatagrams
Table29Seabedimagedatagram(cont’d.)
DataDescriptionFormatValidrangeNote
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
1U
2U
——
——
Notes
1Theseeldshaveearlierhadotherdenitions.
2Thebeamindexnumberisthebeamnumber-1.
3Therstsampleinabeamhaslowestrangeif1,highest
if-1.Notethattherangesamplingrateisdenedbythe
samplingrateinthedepthoutputdatagramandthatthe
rangesintheseabedimagedatagramarealltwo-wayfrom
timeoftransmittotimeofreceive.
4Thecentresamplenumberisthedetectionpointofabeam.
850-160692/M
59
Page 62

KongsbergEMSeries
3.2.8Seabedimagedata89
Note
ThisdatagramreplacesthepreviousSeabeadimage(S)
datagramforthenewmultibeammodels(EM2040,EM710,EM
302,EM122,ME70).
Table30Seabedimagedata89datagram
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=Y(59h,89d)
EMmodelnumber(Example:EM710=710)
Date=year*10000+month*100+day(Example:
Sep26,2005=20050926)
Timesincemidnightinmilliseconds
(Example:08:12:51.234=29570234)
Pingcounter(sequentialcounter)
Systemserialnumber
SamplingfrequencyinHz
Rangetonormalincidenceusedtocorrectsample
amplitudesinno.ofsamples
NormalincidenceBSin0.1dB(BSN)2S
ObliqueBSin0.1dB(BSO)2S
Txbeamwidthalongin0.1°
TVGlawcrossoveranglein0.1°
Numberofvalidbeams(N)
Repeatcycle–Nentriesof:6*N
Sortingdirection1S
Detectioninfo
Numberofsamplesperbeam=Ns
Centresamplenumber
Endofrepeatcycle
Repeatcycle–ΣNsentriesof:
Sampleamplitudesin0.1dB
(Example:-30.2dB=FED2h=65234d)
Endofrepeatcycle
Spare(Always0)
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
4U
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U100–
4F
2U1to16384
2U1to300
2U20to300
2U1–
1U
2U1–
2U1–3
ΣNs
2S
1U
1U
2U
——
——
——
——
——
——
——
——
—
-1or11
—
——
——
——
——
——
—
—
—
—
—
—
—
2
—
Notes
1Therstsampleinabeamhaslowestrangeif1,highestif
-1.Notethattherangesintheseabedimagedatagramareall
two-wayfromtimeoftransmittotimeofreceive.
60
850-160692/M
Page 63

Outputdatagrams
2Thisdatagrammaycontaindataforbeamswithandwithout
avaliddetection.Eightbits(0-7)givesdetailsaboutthe
detection:
A)Ifthemostsignicantbit(bit7)iszero,thisbeamhasa
validdetection.Bit0-3isusedtospecifyhowtherangefor
thisbeamiscalculated
0:Amplitudedetect
1:Phasedetect
2-15:Futureuse
B)Ifthemostsignicantbitis1,thisbeamhasaninvalid
detection.Bit4-6isusedtospecifyhowtherange(andx,y,z
parameters)forthisbeamiscalculated
0:Normaldetection
1:Interpolatedorextrapolatedfromneighbourdetections
2:Estimated
3:Rejectedcandidate
4:Nodetectiondataisavailableforthisbeam(all
parametersaresettozero)
5-7:Futureuse.
Theinvalidrangehasbeenusedtollinamplitudesamples
intheseabedimagedatagram.
3Thecentresamplenumberisthedetectionpointofabeam.
850-160692/M
61
Page 64

KongsbergEMSeries
3.2.9Watercolumndatagram
Note
UsedforEM122,EM302,EM710,EM2040,EM3002and
ME70.
Thereceiverbeamsarerollstabilized.
Table31W atercolumndatagram
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=k(Always6Bh)
EMmodelnumber(Example:EM3000=3000)
Date=year*10000+month*100+day(Example:
Feb26,1995=19950226)
Timesincemidnightinmilliseconds
(Example:08:12:51.234=29570234)
Pingcounter(sequentialcounter)
Systemserialnumber
Numberofdatagrams
Datagramnumbers2U1toNd2
Numberoftransmitsectors=Ntx
Totalno.ofreceivebeams
Numberofbeamsinthisdatagram=Nrx
Soundspeedin0.1m/s(SS)
Samplingfrequencyin0.01Hzresolution(SF)
TXtimeheave(attransducer)incm2S
TVGfunctionapplied(X)
TVGoffsetindB(C)1S
Spare
Ntxentriesof:
TiltanglereTXarrayin0.01°2S
Centerfrequencyin10Hz
Transmitsectornumber1U0to19
Spare
Nrxentriesof:
Beampointinganglerefverticalin0.01°2S
StartRangesamplenumber
Numberofsamples(Ns)
Detectedrangeinsamples(DR)
Transmitsectornumber1U0to19
Beamnumber1U0to254
4U48to65535
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U100–
2U1toNd2
2U1to20
2U1toNd
2U1toNd
2U14000to16000
4U1000to40000001
1U20to404
4U
2U1000to50000
1U
2U0to65534
2U0to655346
2U0to655343
——
——
——
——
–1000to1000
—
——
—
-1100to1100
——
-11000to11000
—
—
—
—
—
—
—
—
—
4
—
—
—
—
—
—
5
62
850-160692/M
Page 65

Outputdatagrams
Table31Watercolumndatagram(cont’d.)
DataDescriptionFormatValidrangeNote
Nsentriesof:
Sampleamplitudein0.5dBresolution
Sparebyteifrequiredtogetevenlength(always
0ifused)
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
1S
0–1U
1U
2U
-128to126
——
——
——
Notes
1Thesamplerateisnormallydecimatedtobeapproximately
thesameasthebandwidthofthetransmittedpulse.
2Maximum64kBinonedatagram.Morethan1datagram
mayberequiredtotransferthedata.Example:500mrange
*160beams*1Byte/0.1mpersamplegives800kB.This
requires13datagrams.Anumberofcompletebeamswillbe
transferredineachdatagram.
—
ForEM3002themaximumnumberofdatagramsNdis16
andthemaximumnumberofbeamsNbis254.Fornew
multibeamsstartingwithEM710thisisincreasedtoallow
forupto32datagramsand512beams.
3TotalRangeinmeters=Soundspeed*detectedrange/
(samplerate*2)=SS10*DR/(FS100*2)=5*SS*DR/
FS(FS100=FS/100,SS10=SS/10).Therangeissettozero
whenthebeamhasnobottomdetection.
4TheTVGfunctionappliedtothedataisXlogR+2AlphaR
+OFS+C.TheparametersXandCisdocumentedinthis
datagram.OFSisgainoffsettocompensateforTXSource
Level,Receiversensitivityetc.
5The1Ubeamnumber(validrange0-254)isredundant
informationandislimitedtoamaximumof255beams.For
systemswithmorethan255beamsthisparameterwillbeset
to255(invalid).
6From01.01.2008,thisnumberwillalwaysbeaneven
number,duetoalignments
850-160692/M
63
Page 66

KongsbergEMSeries
3.3Externalsensors
Topics
•Attitudedatagramonpage64
•Networkattitudevelocitydatagram110onpage66
•Clockonpage68
•Depth(pressure)orheightdatagramonpage69
•Headingonpage70
•Positiononpage71
•Singlebeamechosounderdepthonpage73
•Tidedatagramonpage74
3.3.1Attitudedatagram
Table32Attitudedatagram
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=A(ttitudedata)(Always041h)
EMmodelnumber(Example:EM3000=3000)
Date=year*10000+month*100+day(atstartof
datarecord)
(Example:Feb26,1995=19950226)
Timesincemidnightinmilliseconds(atstartof
datarecord)
(Example:08:12:51.234=29570234)
Attitudecounter(sequentialcounter)
Systemserialnumber
Numberofentries=N
Repeatcycle–Nentriesof:12*N
–Timeinmillisecondssincerecordstart2U0to65534
–Sensorstatus
–Rollin0.01°2S
–Pitchin0.01°2S
–Heaveincm
–Headingin0.01°
Endofrepeatcycle
Sensorsystemdescriptor
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
4U
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U100–
2U1–
2U
2S
2U0to35999
1U
1U
2U
——
——
——
——
——
—
—
-18000to18000
-18000to18000
-1000to10000
—
——
——
—
—
—
—
1
—
—
—
—
2
64
850-160692/M
Page 67

Outputdatagrams
Notes
1Thesensorstatuswillbecopiedfromtheinputdatagram’s
twosyncbytesifthesensorusestheEMformat.Seethe
inputformatdescriptionforfurtherdetails.
2Thesensorsystemdescriptorwillshowwhichsensorthe
dataisderivedfrom,andwhichofthesensor’sdatahave
beenusedinrealtimebybitcoding:
•xx00xxxx–motionsensornumber1
•xx01xxxx–motionsensornumber2
•xxxxxxx1–headingfromthesensorisactive
•xxxxxx0x–rollfromthesensorisactive
•xxxxx0xx–pitchfromthesensorisactive
•xxxx0xxx–heavefromthesensorisactive
850-160692/M
65
Page 68

KongsbergEMSeries
3.3.2Networkattitudevelocitydatagram
110
Table33Networkattitudevelocitydatagram110
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=n(etworkdata)(Always6Eh,
110d)
EMmodelnumber(Example:EM710=710)
Date=year*10000+month*100+day(Example:
Feb08,2007=20070208)
Timesincemidnightinmilliseconds(Example:
08:12:51.234=29570234)
NetworkAttitudecounter(sequentialcounter)
Systemserialnumber
Numberofentries=N
Sensorsystemdescriptor
Spare
Repeatcycle–Nentriesof:
–Timeinmillisecondssincerecordstart2U0to65535
–Rollin0.01°2S
–Pitchin0.01°2S
–Heaveincm
–Headingin0.01°
–Numberofbytesininputdatagram(Nd)
–NetworkattitudeinputdatagramasreceivedNxx1U
Endofrepeatcycle
Sparebyteifrequiredtogetevenlength
(always0ifused)
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
4U
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U100–
2U1–
1U
1U
——
2S
2U0to35999
1U1to254
———
0–1U
1U
2U
——
——
——
——
——
—
——
-18000to18000
-18000to18000
-1000to10000
—
——
——
——
—
—
—
1
—
—
—
—
—
—
2
Notes
1Thesensorsystemdescriptorshowswhichsensorthedata
isderivedfrom,andwhichofthesensor’sdatahavebeen
usedinrealtimebybitcoding:
•xx10xxxx–motionsensornumber3(network)
•xxxxxxx1–headingfromthesensorisactive
•xxxxxx0x–rollfromthesensorisactive
•xxxxx0xx–pitchfromthesensorisactive
•xxxx0xxx–heavefromthesensorisactive
2Completeinputdatagram.Headeriskeptforidentication:
POSM/V:$GRP102or$GRP103
66
850-160692/M
Page 69

Outputdatagrams
CodaOctopus:0xE8
Seapath:q
From01.01.2008anextrabytewillbeadded,attheendof
theinputdatagram,ifneededforalignment.
850-160692/M
67
Page 70

KongsbergEMSeries
3.3.3Clock
Table34Clockdatagrams
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=C(lockdata)(Always043h)
EMmodelnumber(Example:EM3000=3000)
Date=year*10000+month*100+day(atstartof
datarecord)
(Example:Feb26,1995=19950226)
Timesincemidnightinmilliseconds(atstartof
datarecord)
(Example:08:12:51.234=29570234)
Clockcounter(sequentialcounter)
Systemserialnumber
Date=year*10000+month*100+day(from
externalclockinput)
(Example:Feb26,1995=19950226)
Timesincemidnightinmilliseconds(fromexternal
clockdatagram)
(Example:08:12:51.234=29570234)
1PPSuse(activeornot)(0=inactive)
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
4U
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U100–
4U
4U0to86399999
1U
1U
2U
——
——
——
——
——
——
—
——
——
—
—
1
Notes
1Showsifthesystemclockissynchronisedtoanexternal1
PPSsignalornot.
68
850-160692/M
Page 71

Outputdatagrams
3.3.4Depth(pressure)orheightdatagram
Table35Depth(pressure)orheightdatagram
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=h(eightdata)(Always068h)
EMmodelnumber(Example:EM3000=3000)
Date=year*10000+month*100+day(Example:
Feb26,1995=19950226)
Timesincemidnightinmilliseconds
(Example:08:12:51.234=29570234)
Heightcounter(sequentialcounter)
Systemserialnumber
Heightincm
Heigthtype1U0to1001
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
4U
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U100–
4S
1U
2U
——
——
——
——
——
-4294967296to
4294967295
——
——
—
—
—
—
Notes
10:TheheightisderivedfromtheGGKorGGAdatagram
andistheheightofthewaterlevelattheverticaldatum
(possiblymotioncorrected).
Heightisderivedfromtheactivepositionsystemonly.
1-99:TheheighttypeisasgivenintheDepth(pressure)
orheightinputdatagram.
100:TheinputisdepthtakenfromtheDepth(pressure)or
heightinputdatagram.
200:Inputfromdepthsensor.
850-160692/M
69
Page 72

KongsbergEMSeries
3.3.5Heading
Table36Headingdatagrams
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=H(eadingdata)
(Always048h)
EMmodelnumber(Example:EM3000=3000)
Date=year*10000+month*100+day(atstartof
datarecord)
(Example:Feb26,1995=19950226)
Timesincemidnightinmilliseconds(atstartof
datarecord)
(Example:08:12:51.234=29570234)
Headingcounter(sequentialcounter)
Systemserialnumber
Numberofentries=N
Repeatcycle–Nentriesof:4*N
–Timeinmillisecondssincerecordstart2U0to65534
–Headingin0.01°
Endofrepeatcycle
Headingindicator(activeornot)(0=inactive)
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
4U
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U100–
2U1–
2U0to35999
1U
1U
2U
——
——
——
——
——
—
——
——
——
—
—
—
—
—
70
850-160692/M
Page 73

Outputdatagrams
3.3.6Position
Table37Positiondatagrams
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=P(ositiondata)
(Always050h)
EMmodelnumber(Example:EM3000=3000)
Date=year*10000+month*100+day(Example:
Feb26,1995=19950226)
Timesincemidnightinmilliseconds
(Example:08:12:51.234=29570234)
Positioncounter(sequentialcounter)
System/serialnumber
Latitudeindecimaldegrees*20000000(negative
ifsouthernhemisphere)
(Example:32°34’S=-651333333)
Longitudeindecimaldegrees*10000000(negative
ifwesternhemisphere)
(Example:110.25°E=1102500000)
Measureofpositionxqualityincm
Speedofvesselovergroundincm/s
Courseofvesselovergroundin0.01°
Headingofvesselin0.01°
Positionsystemdescriptor1U1to2542
Numberofbytesininputdatagram
PositioninputdatagramasreceivedVariable
Sparebyteifrequiredtogetevenlength
(Always0ifused)
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
4U
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U100–
4S
4S
2U
2U0–1
2U0to359991
2U0to35999
1U–254
0–1U
1U
2U
——
——
——
——
——
——
——
—
—
——
——
——
—
—
—
1
—
—
3
Notes
1Thesedatawillbevalidonlyifavailableasinput.
Thecalculationisdoneaccordingtotheselectedposition
inputformat.
SeePositiononpage6.
2Thepositionsystemdescriptorshowswhichsourcethisdata
isfromanditsreal-timeusebybitcoding:
•xxxxxx01-positionsystemno1
•xxxxxx10–positionsystemno2
•xxxxxx11–positionsystemno3
•10xxxxxx–thepositionsystemisactive,systemtime
hasbeenused
850-160692/M
71
Page 74

KongsbergEMSeries
•11xxxxxx-thepositionsystemisactive,inputdatagram
timehasbeenused
•xxxx1xxx–thepositionmayhavetobederivedfromthe
inputdatagramwhichistheninSIMRAD90format.
3Completeinputdatagramexceptheaderandtail(suchas
NMEA0183$andCRLF).
72
850-160692/M
Page 75

Outputdatagrams
3.3.7Singlebeamechosounderdepth
Thisdatagramwillcontaintheproleactuallyusedinthereal
timeraybendingcalculationstoconvertrangeandangletoxyz
data.Itwillusuallybeissuedtogetherwiththeinstallation
parameterdatagram.
Table38Singlebeamechosounderdepthdatagram
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=E(chosounderdata)(Always
045h)
EMmodelnumber(Example:EM3000=3000)
Date=year*10000+month*100+day(atstartof
datarecord)
(Example:Feb26,1995=19950226)
Timesincemidnightinmilliseconds(atstartof
datarecord)
(Example:08:12:51.234=29570234)
Echosoundercounter(sequentialcounter)
Systemserialnumber
Date=year*10000+month*100+day(frominput
datagramifavailable)
(Example:Feb26,1995=19950226)
Timesincemidnightinmilliseconds(frominput
datagramifavailable)
(Example:08:12:51.234=29570234)
Echosounderdepthfromwaterlineincm
Sourceidentier(S,T ,1,2or3)ASCII
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
4U
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U100–
4U
4U0to86399999
4U0to1200000
1U
2U
——
——
——
——
——
——
——
——
—
—
—
—
—
1
Notes
1Identiesthesourcedatagramtype,i.e.NMEADBS,
NMEADPTorEA500serieschannel1-3respectively.
850-160692/M
73
Page 76

KongsbergEMSeries
3.3.8Tidedatagram
Table39Tidedatagram
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=T(idedata)(Always054h)
EMmodelnumber(Example:EM3000=3000)
Date=year*10000+month*100+day(Example:
Feb26,1995=19950226)
Timesincemidnightinmilliseconds
(Example:08:12:51.234=29570234)
Tidecounter(sequentialcounter)
Systemserialnumber
Date=year*10000+month*100+day(frominput
datagram)
(Example:Feb26,1995=19950226)
Timesincemidnightinmilliseconds(frominput
datagram)
(Example:08:12:51.234=29570234)
Tidaloffsetincm2S
Spare(Always0)
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
4U
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U100–
4U
4U0to86399999
1U
1U
2U
——
——
——
——
——
——
-32768to32766
—
——
——
—
—
—
—
74
850-160692/M
Page 77

Outputdatagrams
3.4Soundspeed
Topics
•Surfacesoundspeedonpage75
•Soundspeedproledatagramonpage76
•KongsbergMaritimeSSPoutputdatagramonpage77
3.4.1Surfacesoundspeed
Table40Surfacesoundspeeddatagram
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=G(Always047h)
EMmodelnumber(Example:EM3000=3000)
Date=year*10000+month*100+day(atstartof
datarecord)
(Example:Feb26,1995=19950226)
Timesincemidnightinmilliseconds(atstartof
datarecord)
(Example:08:12:51.234=29570234)
Soundspeedcounter(sequentialcounter)
Systemserialnumber
Numberofentries=N
Repeatcycle–Nentriesof:4*N
–Timeinsecondssincerecordstart2U0to65534
–Soundspeedindm/s(incl.offset)
Endofrepeatcycle
Spare(Always0)
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
4U
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U100–
2U1–
2U14000to15999
1U
1U
2U
——
——
——
——
——
——
——
——
——
—
—
—
—
850-160692/M
75
Page 78

KongsbergEMSeries
3.4.2Soundspeedproledatagram
Thisdatagramwillcontaintheproleactuallyusedinthereal
timeraybendingcalculationstoconvertrangeandangletoxyz
data.Itwillusuallybeissuedtogetherwiththeinstallation
parameterdatagram.
Table41Soundspeedproledatagram
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=U(Always055h)
EMmodelnumber(Example:EM3000=3000)
Date=year*10000+month*100+day(atstartof
datarecord)
(Example:Feb26,1995=19950226)
Timesincemidnightinmilliseconds(atstartof
datarecord)
(Example:08:12:51.234=29570234)
Prolecounter(sequentialcounter)
Systemserialnumber
Date=year*10000+month*100+day
(whenprolewasmade)
(Example:Feb26,1995=19950226)
Timesincemidnightinmilliseconds
(whenprolewasmade)
(Example:08:12:51.234=29570234)
Numberofentries=N
Depthresolutionincm2U1to254
Repeatcycle—Nentriesof:8*N
–Depth4U0to1200000
–Soundspeedindm/s
Endofrepeatcycle
Sparebytetogetevenlength(Always0)
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
4U
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U100–
4U
4U0to86399999
2U1–
4U14000to17000
1U
1U
2U
——
——
——
——
——
——
——
——
——
——
—
—
—
—
—
—
—
—
76
850-160692/M
Page 79

Outputdatagrams
3.4.3KongsbergMaritimeSSPoutput datagram
Thisdatagramwillcontaintheproleactuallyusedinthereal
timeraybendingcalculationstoconvertrangeandangletoxyz
data.
Table42KongsbergMaritimeSSPoutputdatagram
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=W(Always057h)
EMmodelnumber(Example:EM3000=3000)
Date=year*10000+month*100+day(atstartof
datarecord)
(Example:Feb26,1995=19950226)
Timesincemidnightinmilliseconds(atstartof
datarecord)
(Example:08:12:51.234=29570234)
SSPcounter(sequentialcounter)
Systemserialnumber
InputdatagramstartingwithSentenceformatter
andendingwithComment
Sparebyteifrequiredtogetevenlength(Always
0ifused)
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
4U
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U100–
Variable
0–1U
1U
2U
——
——
——
——
——
——
——
——
——
—
—
—
850-160692/M
77
Page 80

KongsbergEMSeries
3.5Multibeamparameters
Topics
•Installationparametersonpage78
•Runtimeparametersonpage84
•Mechanicaltransducertiltonpage92
•ExtraParametersdatagramonpage93
3.5.1Installationparameters
ThisdatagramisanASCIIdatagramexceptfortheheaderwhich
isformattedasinallotheroutputdatagrams.Thedatagramis
issuedasastartdatagramwhenloggingisswitchedonandasa
stopdatagramwhenloggingisturnedoff,i.e.atthestartand
endofasurveyline.Itmayalsobesenttoaremoteportasan
informationdatagram.Itisusuallyfollowedbyasoundspeed
proledatagram.
InthedatagramallASCIIeldsstartwithauniquethree
characteridentierfollowedby“=”.Thisshouldbeusedwhen
searchingforaspeciceldasthepositionofaeldwithin
thedatagramisnotguaranteed.Thenumberorcharacterpart
followingisinavariableformatwithaminussignanddecimal
pointifneeded,andwith“,”astheelddelimiter.Theformat
mayatanytimelaterbeexpandedwiththeadditionofnewelds
atanyplaceinthedatagram.
FortheEM3000andEM3002thetransducer1dataarefor
theSonarHeadandthetransducer2dataareforthesecond
SonarHeadofanEM3000DoranEM3002.Forothernew
EMsystemswithseparatetransmitandreceivetransducers,
transducer1referstothetransmittransducer,andtransducer2
referstothereceivetransducer.
Table43Installationparameters
DataDescriptionExampleFormatV alidrangeNote
Numberofbytesindatagram
Startidentier=STX
Typeofdatagram=Iori(nstallation
parameters)
orr(emoteinformation)
EMmodelnumberEM3000=30002U
Date=year*10000+month*100+day
Timesincemidnightinmilliseconds08:12:51.234=
Surveylinenumber
Systemserialnumber
Serialnumberofsecondsonarhead
—
Always02h1U
Start=049h
Stop=069h
Remoteinfo=70h
Feb26,2009=
20090226
29570234
—
—
—
4U
1U
4U
4U0to86399999
2U0to65534
2U100–
2U100–
—
——
——
——
——
1
—
—
—
—
78
850-160692/M
Page 81

Outputdatagrams
Table43Installationparameters(cont’d.)
DataDescriptionExampleFormatV alidrangeNote
WaterlineverticallocationinmWLZ=x.x,
SystemmainheadserialnumberSMH=x.x,ASCII
HullUnitHUN=x,
HullUnittiltoffset
Transducer1verticallocationinm
Transducer1alonglocationinm
Transducer1athwartlocationinm
Transducer1headingindegrees
Transducer1rollindegreesrehorizontal
Transducer1pitchindegrees
Transducer1noofmodulesS1N=x—x,ASCII
Transducer2verticallocationinm
Transducer2alonglocationinm
Transducer2athwartlocationinm
Transducer2headingindegrees
Transducer2rollindegreesrehorizontal
Transducer2pitchindegrees
Transducer2noofmodulesS2N=x—x,ASCII
TXarraysize(0=0.5º,1=1º,2=2º)S1S=x,ASCII
RXarraysize(1=1º,2=2º)S2S=x,ASCII
System(sonarhead1)gainoffsetGO1=x.x,ASCII
Sonarhead2gainoffsetGO2=x.x,ASCII
OuterbeamoffsetOBO=x.x,ASCII
High/LowFrequencyGainDifferenceFGD=x.x,ASCII
Transmitter(sonarheadno1)software
version
Receiver(sonarhead2)softwareversionRSV=c—c,ASCII
BSPsoftwareversionBSV=c—c,ASCII
ProcessingunitsoftwareversionPSV=c—c,ASCII
DDSsoftwareversionDDS=c—c,ASCII
OperatorstationsoftwareversionOSV=c—c,ASCII
DatagramformatversionDSV=c—c,ASCII
Depth(pressure)sensoralonglocation
inm
Depth(pressure)sensorathwartlocation
inm
Depth(pressure)sensorverticallocation
inm
Depth(pressure)sensortimedelayin
millisec
Depth(pressure)sensoroffsetDSO=x.x,ASCII
Depth(pressure)sensorscalefactorDSF=x.x,ASCII
HUT=x.x,
S1Z=x.x,ASCII
S1X=x.x,ASCII
S1Y=x.x,ASCII
S1H=x.x,ASCII
S1R=x.x,ASCII
S1P=x.x,ASCII
S2Z=x.x,ASCII
S2X=x.x,ASCII
S2Y=x.x,ASCII
S2H=x.x,ASCII
S2R=x.x,ASCII
S2P=x.x,ASCII
TSV=c—c,ASCII
DSX=x.x,ASCII
DSY=x.x,ASCII
DSZ=x.x,ASCII
DSD=x—x,ASCII
ASCII
ASCII
ASCII
——
100–1
0or1
——
——
——
——
——
——
——
——
——
——
——
——
——
——
——
——
——
——
——
——
——
—
—
—
—
—
—
—
——
——
——
——
——
——
—
2
2
2
2
2
2
2
850-160692/M
79
Page 82

KongsbergEMSeries
Table43Installationparameters(cont’d.)
DataDescriptionExampleFormatV alidrangeNote
Depth(pressure)sensorheaveDSH=aa,ASCII
Activepositionsystemnumber
Positionsystem1motioncompensationP1M=x,
Positionsystem1timestampusedP1T=x,
Positionsystem1verticallocationinmP1Z=x.x,
Positionsystem1alonglocationinmP1X=x.x,
Positionsystem1athwartlocationinmP1Y=x.x,
Positionsystem1timedelayinsecondsP1D=x.x,
Positionsystem1geodeticdatum
Positionsystem2motioncompensationP2M=x,
Positionsystem2timestampuseP2T=x,
Positionsystem2verticallocationinmP2Z=x.x,
Positionsystem2alonglocationinmP2X=x.x,
Positionsystem2athwartlocationinmP2Y=x.x,
Positionsystem2timedelayinsecondsP2D=x.x,
Positionsystem2geodeticdatum
Positionsystem3motioncompensationP3M=x,
Positionsystem3timestampuseP3T=x,
Positionsystem3verticallocationinmP3Z=x.x,
Positionsystem3alonglocationinmP3X=x.x,
Positionsystem3athwartlocationinmP3Y=x.x,
Positionsystem3timedelayinsecondsP3D=x.x,
Positionsystem3geodeticdatum
Positionsystem3onseriallineor
Ethernet
Motionsensor1verticallocationinm
Motionsensor1alonglocationinm
Motionsensor1athwartlocationinm
Motionsensor1rollreferenceplane
Motionsensor1timedelayinmilliseconds
Motionsensor1rolloffsetindegreesMSR=x.x,ASCII
Motionsensor1pitchoffsetindegreesMSP=x.x,ASCII
Motionsensor1headingoffsetindegreesMSG=x.x,ASCII
Motionsensor2verticallocationinm
Motionsensor2alonglocationinm
Motionsensor2athwartlocationinm
Motionsensor2rollreferenceplane
Motionsensor2timedelayinmilliseconds
Motionsensor2rolloffsetindegreesNSR=x.x,ASCII
Motionsensor2pitchoffsetindegreesNSP=x.x,ASCII
APS=x,ASCII
P1G=c—c,ASCII
P2G=c—c,ASCII
P3G=c—c,ASCII
P3S=x,ASCII0forEthernet
MSZ=x.x,ASCII
MSX=x.x,ASCII
MSY=x.x,ASCII
MRP=aa,
MSD=x—x,ASCII
NSZ=x.x,ASCII
NSX=x.x,ASCII
NSY=x.x,ASCII
NRP=aa,
NSD=x—x,ASCII
ASCII
ASCII
ASCII
ASCII
ASCII
ASCII
ASCII
ASCII
ASCII
ASCII
ASCII
ASCII
ASCII
ASCII
ASCII
ASCII
ASCII
ASCII
ASCIIHOorRP
ASCIIHOorRP
INorNI3
0to2
0or14
0or1
——
——
——
——
——
0or14
0or1
——
——
——
——
——
0or14
0or1
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
7
5
5
5
6
6
6
6
6
6
6
80
850-160692/M
Page 83

Outputdatagrams
Table43Installationparameters(cont’d.)
DataDescriptionExampleFormatV alidrangeNote
Motionsensor2headingoffsetindegreesNSG=x.x,ASCII
GyrocompassheadingoffsetindegreesGCG=x.x,ASCII
RollscalingfactorMAS=x.x,ASCII
Transducerdepthsoundspeedsource
Activeheadingsensor
Activerollsensor
ActivepitchsensorportnoAPI=x,
ActiveheavesensorportnoAHE=x,
ClocksourceCLS=x,ASCII(0),1to3
ClockoffsetinsecondsCLO=x,ASCII
Attitudevelocitysensornumber
AttitudevelocitysensorUDPportaddress
AttitudevelocitysensorEthernetport
AttitudevelocitysensorIPaddress
(Ethernet2)
AttitudevelocitysensorIPnetworkmask
(Ethernet2)
MulticastsensorIPaddress(Ethernet2)MCAn=225.0.0.1,ASCII
MulticastsensorUDPportnumber
MulticastsensoridentierMCIn=aaaah,ASCIISeePUSetup
Multicastpositionsystemnumber
CartographicprojectionCPR=aaa,ASCII
Responsibleoperator
SurveyidentierSID=c—c,ASCII
Surveylineidentier(plannedlineno)
CommentCOM=c—c,ASCII
SparebyteifrequiredtogetevenlengthAlways0ifused
Endidentier=ETX
ChecksumofdatabetweenSTXandETX
SHC=x,ASCII
AHS=x,ASCII
ARO=x,ASCII
VSN=1,ASCII
VSU=3000,ASCII
VSE=1,ASCII
VSI=192.168.2.1,ASCII
VSM=255.255.0.0,ASCII
MCUn=x—x,ASCII
MCPn=x,ASCII
ROP=c—c,ASCII
PLL=x—-x,
Always03h1U
—
ASCII
ASCII
ASCII
0–1U
2U
—
——
——
0or18
1to4
1to4
1to4
1to4
0–210
1024–6553511
1–212
—
—
—
1024–6553515
command
0–316
——
——
——
——
—
——
——
——
6
—
—
—
—
9
13
14
15
15
17
Notes
1Serialnumberofheadno2ifthatheadistheonlyoneinuse
withtheEM3000D,otherwisetheserialnumberofheadno
1intheEM3000DortheonlyheadintheEM3000.
2Aversionnumberisgivenas3alphanumericalelds
separatedbydecimalpoints,plusdateasyymmdd(for
example3.02.11991124).
3IN=theheaveofanunderwatervehicleispresumedtobe
measuredbythevehicle’sdepthsensorandtheheavesensor
inputisnotusedbysystem.
41=thepositionsaremotioncompensated
850-160692/M
81
Page 84

KongsbergEMSeries
0=thepositionsarenotmotioncompensated
50=thesystemhasuseditsowntimestampforthevalid
timeofthepositions
1=thesystemhasusedthetimestampofthepositioninput
datagram(externaltime).
6Ifentriesforasecondmotionsensorarenotincluded
althoughtwosensorsarebeingused,theyarepresumedto
havethesameparameters.
7Positionsystemnumber-1.
80=Transducerdepthsoundspeedisusedastheinitialentry
thesoundspeedproleusedintheraytracingcalculations.
1=TransducerdepthsoundspeedisNOTusedfor
raytracingcalculations.
Notethatthesourceofthesoundspeedatthetransducer
depth(andthissoundspeedisalwaysusedtocalculate
beampointinganglesifrequired)isloggedintheruntime
datagram.
9(0-notset)
1–ZDA
2–ActivePOS
3–Operatorstation
10Weassumeattitudevelocitydataiscomingfromoneofthe
existing(serialinputtype)motionsensors.
0–Attitudevelocitysensornotconnected.
1–Motionsensor1isusedforattitudevelocitydata(MSx).
2–Motionsensor2isusedforattitudevelocitydata(NSx).
(IfVSN=0,theotherVSxparametersarenotrelevantand
neednottobesent.)
11V aluedependsonsensortype:
SeatextSeapath:Selectable(default3001)
ApplanixPOS-MV:5602
CodaOctopusF-180:3000
121–UsetheexistingEthernetportusedforcommunication
totopside(SIS).
2–UseEthernet2(ifavailable).Networkaddressandmask
setupbyVSIandVSM.
13IfVSE=2,Ethernet2issetupwiththisIPaddress.
14IfVSE=2,Ethernet2issetupwiththisnetmask.
82
850-160692/M
Page 85

15Sensorinputdatagramstobeprovidedongivenformats.
Note
AvailablefromSISversion3.7.
Outputdatagrams
xxxxxxxxxxxxxxxxxxxxxx1x
xxxxxxxxxxxxxxxxxxx1xxxx
xxxxxxxx1xxxxxxxxxxxxxxx
xxxxxxx1xxxxxxxxxxxxxxxx
xxxxxx1xxxxxxxxxxxxxxxxx
xxxxx1xxxxxxxxxxxxxxxxxx
xxxx1xxxxxxxxxxxxxxxxxxx
—
NMEAGGA
—
NMEAZDA
—
NMEAGLL
—
OwnShip’sData,position
—
ROVDepthandSoundspeedfromOwnShip’sData
—
SoundVelocity(SOUNDVELOCTYPROFILE_DATA)
—
AttitudeSagemformat
16Thisnumberindicateswhichpositionsystemthatwillarrive
viathismulticast.
0–nopositionwillbereceivedfromMulticast,default
value.
1–positionsystem1
2–positionsystem2
3–positionsystem3
17ThecommenteldmaycontainanyASCIIcharacters.
850-160692/M
83
Page 86

KongsbergEMSeries
3.5.2Runtimeparameters
Table44Runtimeparameters
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=R(untimeparameter)
(Always052h)
EMmodelnumber(Example:EM710=710)
Date=year*10000+month*100+day(atstart
ofdatarecord)
(Example:june26,2009=20090626)
Timesincemidnightinmilliseconds(atstartof
datarecord)
(Example:08:12:51.234=29570234)
Pingcounter2U0to65535
Systemserialnumber
OperatorStationstatus
ProcessingUnitstatus(CPU)
BSPstatus
SonarHeadorTransceiverstatus
Mode1U0–2
Filteridentier
Minimumdepthinm2U0to10000
Maximumdepthinm2U1to12000
Absorptioncoefcientin0.01dB/km
Transmitpulselengthinμs2U1to5000013
Transmitbeamwidthin0.1degrees2U1to300
TransmitpowerremaximumindB
Receivebeamwidthin0.1degrees1U5to80
Receivebandwidthin50Hzresolution1U1to25510
Mode2or
ReceiverxedgainsettingindB
TVGlawcrossoverangleindegrees
Sourceofsoundspeedattransducer
Maximumportswathwidthinm2U10to200008
Beamspacing1U0to36
Maximumportcoverageindegrees1U10to1108
Yawandpitchstabilizationmode1U
Maximumstarboardcoverageindegrees1U10to1108
Maximumstarboardswathwidthinm2U10to200008
4U
1U
1U
2U
4U
4U0to86399999
2U100–
1U
1U
1U
1U
1U0to2553
2U1to200004
1S
1U
1U2to30
1U0to3
——
——
——
——
——
—
—
—
—
0to–50
—
0to50
—
—
—
—
1
1
1
1
—
—
—
—
—
12
—
5
7
84
850-160692/M
Page 87

Outputdatagrams
Table44Runtimeparameters(cont’d.)
DataDescriptionFormatValidrangeNote
Transmitalongtiltin0.1deg.or
Durotongspeedindm/s
Filteridentier2or
HiLofrequencyabsorptioncoefcientratio
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
2S
2U
1U0to255
1U
2U
-300to300
20000to25000
0to120
——
——
Notes
1Thetablebelowshowsthesystemerrorstatuscodedbyone
bitforeachdetectederror.Thestatusbitissettooneif
errorisdetected.
Table45Multibeamsystemstatus
9
11
OperatorStationstatus
BitnumberFunctionModel
xxxxxxxx
ProcessingUnitstatus(CPU)
BitnumberFunctionModel
xxxxxxx1
xxxxxx1x
xxxxx1xx
xxxx1xxx
xxx1xxxx
xx1xxxxxExternaltriggersignalnotdetectedAllmodels
x1xxxxxx
1xxxxxxx
BSPstatusEM2000,EM3000andEM3002
BitnumberFunctionModel
xxxxxxx1
xxxxxx1x
xxxxx1xx
xxxx1xxx
xxx1xxxx
xx1xxxxx
x1xxxxxx
1xxxxxxx
Forfutureuse
CommunicationerrorwithBSP
CommunicationerrorwithSonarHeadorTransceiver
Attitudenotvalidforthisping
Headingnotvalidforthisping
Systemclockhasnotbeensetsincepowerup
CPUerror(fromSIS3.6)
HullUnitnotrespondingEM1002
Attitudevelocitydatanotvalidforthisping
ErroronRXdatareceivedbyBSP1
(Maybeabadhighspeedlink)
ToomuchseabedimagedataonBSP1
InvalidcommandreceivedbyBSP1
ErrorsonBSP1
ErroronRXdatareceivedbyBSP2
(Maybeabadhighspeedlink)
ToomuchseabedimagedataonBSP2
InvalidcommandreceivedbyBSP2
ErrorsonBSP2
—
Allmodels
Allmodels
Allmodels
Allmodels
Allmodels
EM122,EM302,
EM710,EM2040
EM122,EM302,
EM710,EM2040
EM2000,
EM3000,EM3000D,
EM3002,EM3002D
EM3000,EM3000D
EM3000,EM3000D
EM3002,EM3002D
EM3000D,EM3002D
EM3000D
EM3000D
EM3002,EM3002D
850-160692/M
85
Page 88

KongsbergEMSeries
Table45Multibeamsystemstatus(cont’d.)
OperatorStationstatus
BSPstatusEM1002
BitnumberFunctionModel
xxxxxxx1
BSPstatusEM120andEM300
xxxxxxx1
xxxxxx1x
xxxxx1xx
xxxx1xxx
xxx1xxxx
xx1xxxxx
x1xxxxxx
1xxxxxxx
BSPstatusEM122,EM302EM710andEM2040
BitnumberFunctionModel
xxxxxxx1
xxxxxx1x
xxxxx1xx
xxxx1xxx
xxx1xxxx
xx1xxxxx
x1xxxxxx
1xxxxxxx
SonarHeadstatusEM2000,EM3000andEM3002
BitnumberFunctionModel
xxxxxxx1
xxxxxx1x
xxxxx1xx
xxxx1xxx
xxx1xxxx
xx1xxxxx
x1xxxxxx
1xxxxxxx
SamplenumbererrorinRXdatareceivedfromSPRX
SamplenumbererrorinRXdatareceivedfromSPRX
MissingRXheaderdatafromSPRX
MissingsampledatafromSPTX
MissingsecondRXheaderdatafromSPTX
BadsyncTRU–PU–BSP
BadparametersreceivedfromPU
InternalsyncprobleminBSP
ChecksumerrorinheaderfromSPTX
ErroronRXdatareceivedbyBSP1
ErroronRXdatareceivedbyBSP3
ErrorsonBSP3
ErrorsonBSP1
ErroronRXdatareceivedbyBSP2
ErroronRXdatareceivedbyBSP4
ErrorsonBSP4
ErrorsonBSP2
TemperaturetohighonSonarHead1
DatalinkfailureonSonarHead1
DCSupplyVoltagesinSonarHead1isoutofrange
Spare
TemperaturetohighonSonarHead2
DatalinkfailureonSonarHead2
DCSupplyVoltagesinSonarHead2isoutofrange
Spare
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
EM2000,
EM3000,EM3000D,
EM3002,EM3002D
EM2000,
EM3000,EM3000D,
EM3002,EM3002D
EM2000,
EM3000,EM3000D,
EM3002,EM3002D
—
EM3000D,
EM3002D
EM3000D,
EM3002D
EM3000D,
EM3002D
—
TransceiverstatusEM120andEM300
BitnumberFunctionModel
xxxxxxx1
Transmitvoltage(HV)outofrange
86
—
850-160692/M
Page 89

Table45Multibeamsystemstatus(cont’d.)
OperatorStationstatus
xxxxxx1x
xxxxx1xx
xxxx1xxx
xxx1xxxx
xx1xxxxx
x1xxxxxx
1xxxxxxx
TransceiverstatusEM122,EM302,EM710andEM2040
BitnumberFunctionModel
xxxxxxx1
xxxxxx1x
xxxxx1xxErroronTransmitter
xxxx1xxxErroronReceiver
xxx1xxxxNotimplemented
xx1xxxxxNotimplemented
x1xxxxxxNotimplemented
1xxxxxxxNotimplemented
TransceiverstatusEM1002
BitnumberFunctionModel
xxxxxxx1
xxxxxx1x
xxxxx1xx
xxxx1xxx
xxx1xxxx
xx1xxxxx
Lowvoltagepoweroutofrange
Timeouterror(SPRXwaitsforSPTX)
ReceivechannelDCoffset(s)outofrange
IllegalparameterreceivedfromPU
Internalcommunicationerror(SPTX–SPRXsync)
Timeouterror(SPTXwaitsforSPRX)
Defectivefuse(s)intransmitter
Transmitvoltage(HV)outofrange
Lowvoltagepoweroutofrange
Transmitvoltage(HV)outofrange
Lowvoltagepoweroutofrange
Transmitvoltage(HV)tohigh
ErrorincommandfromPU(Illegalparameter)
ErrorincommandfromPU(Badchecksum)
ErrorincommandfromPU(Baddatagramlength)
Outputdatagrams
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
2Mode
Pingmode(EM3000)
•xxxx0000-Neareld(4º)
•xxxx0001-Normal(1.5º)
•xxxx0010-Targetdetect
Pingmode(EM3002)
•xxxx0000-WideTxbeamwidth(4°)
•xxxx0001-NormalTxbeamwidth(1.5°)
Pingmode(EM2000,EM710,EM1002,EM300,EM302,
EM120andEM122)
•xxxx0000-V eryShallow
•xxxx0001-Shallow
•xxxx0010-Medium
850-160692/M
87
Page 90

KongsbergEMSeries
•xxxx0011-Deep
•xxxx0100-Verydeep
•xxxx0101-Extradeep
Pingmode(EM2040)
•xxxx0000-200kHz
•xxxx0001-300kHz
•xxxx0010-400kHz
TXpulseform(EM2040,EM710,EM302andEM122)
•xx00xxxx-CW
•xx01xxxx-Mixed
•xx10xxxx-FM
DualSwathmode(EM2040,EM710,EM302andEM122)
•00xxxxxx-Dualswath=Off
•01xxxxxx-Dualswath=Fixed
•10xxxxxx-Dualswath=Dynamic
3Thelteridentierbyteisusedasfollows:
•xxxxxx00-SpikeltersettoOff
•xxxxxx01-SpikelterissettoWeak
•xxxxxx10-SpikelterissettoMedium
•xxxxxx11-SpikelterissettoStrong
•xxxxx1xx-Slopelterison
•xxxx1xxx-SectortrackingorRobustBottomDetection
(EM3000)ison
•0xx0xxxx-RangegateshaveNormalsize
•0xx1xxxx-RangegatesareLarge
•1xx0xxxx-RangegatesareSmall
•xx1xxxxx-Aerationlterison
•x1xxxxxx-Interferencelterison
4Theusedabsorptioncoefcientshouldbederivedfromraw
rangeandangle78datagramor,foroldersystems,fromthe
seabedimageorcentralbeamsechogramdatagramifitis
automaticallyupdatedwithchangingdepthorfrequency.
Thisabsorptioncoefcientinthisdatagramisvalidatthe
followingfrequency
•EM120/122:12kHz
•EM300/302:31.5kHz
•EM710:85kHz
•ME70BO:85kHz
•EM1002:95kHz
88
850-160692/M
Page 91

•EM2000:200kHz
•EM3000/3002:300kHz
•EM2040:300kHz
5Thesoundspeed(atthetransducerdepth)sourceidentier
isusedasfollows:
•00000000-Fromrealtimesensor
•00000001-Manuallyenteredbyoperator
•00000010-Interpolatedfromcurrentlyusedsound
speedprole
•00000011-CalculatedbyME70TRU
6Thebeamspacingidentierisusedasfollows:
•00000000-Determinedbybeamwidth(FFTbeamformer
ofEM3000)
•00000001-Equidistant(InbetweenforEM122andEM
302)
Outputdatagrams
•00000010-Equiangle
•00000011-Highdensityequidistant(InbetweenforEM
2000,EM120,EM300,EM1002)
7Theyawandpitchstabilizationidentierissetasfollows:
•xxxxxx00-Noyawstabilization
•xxxxxx01-Yawstabilizationtosurveylineheading
(Notused)
•xxxxxx10-Y awstabilizationtomeanvesselheading
•xxxxxx11-Y awstabilizationtomanuallyentered
heading
•xxxx00xx-Headinglter,hard
•xxxx01xx-Headinglter,medium
•xxxx10xx-Headinglter,weak
•1xxxxxxx-Pitchstabilizationison.
8Portswathwidthandcoveragewasinearlierversionsthe
sumofportandstarboard
9EM3002,EM2040,EM3000,EM710,EM302,andEM
122:
Transmitalongtiltvalue,usedtooffsetthealong-shiptilting
oftransmitfan(called“AlongDirection”inSISandcanbe
setfromtheRuntimeparameters–SounderMainmenu).
EM1002:
SoundspeedinDurotong(SSD)fortheEM1002transducer.
Thisvalue(settozeroifnotavailable)dependsonthe
watertemperature.SSDcanbeusedtocalculatethewater
temperatureindegreeC:
850-160692/M
89
Page 92

KongsbergEMSeries
•Temp=-0.013913*SSD+313.565
10Receiverbandwidthvalues1to254forreceiverbandwidth
50Hzto12.7kHz.Avalueof255indicatesbandwidth
largerthan12.7kHz.
11Filteridentier2orHiLofrequencyabsorptioncoeff:
Penetrationlter(EM710,EM302andEM122)
•xxxxxx00-Penetrationlter=Off
•xxxxxx01-Penetrationlter=Weak
•xxxxxx10-Penetrationlter=Medium
•xxxxxx11-Penetrationlter=Strong
Detectmode(EM3002andEM2040)
•xxxx00xx-Detectmode:Normal
•xxxx01xx-Detectmode:Waterway
•xxxx10xx-Detectmode:Tracking
•xxxx11xx-Detectedmode:Minimumdepth
Phaseramp(EM2040,EM3002,EM710,EM302and
EM122)
•xx00xxxx-Shortphaseramp
•xx01xxxx-Normalphaseramp
•xx10xxxx-Longphaseramp
SpecialTVG(EM3002andEM2040)
•x0xxxxxx-NormalTVG
•x1xxxxxx-SpecialTVG
HiLofrequencyabsorptioncoefcientratio(EM1002)
0–120
12Mode2orRXxedgain
RXarrayuse(EM2040)
•xxxxxx00-Off(RXinactive)
•xxxxxx01-RX1(port)active
•xxxxxx10-RX2(starboard)active
•xxxxxx11-BothRXunitsactive
Pulselength(EM2040)
•xxxx00xx-ShortCW
•xxxx01xx-MediumCW
•xxxx10xx-LongCW
•xxxx11xx-FM
ReceiverxedgainsettingindB(EM2000,EM1002,EM
3000,EM3002,EM300,EM120)
90
850-160692/M
Page 93

13Transmitpulselength
ThetransmitpulselengthmaynotbethesameforallTX
sectors,andthepulsformsmayvary.Thepulselengthgiven
hereis1/(transmitbandwidth)forthecentresector.FM
pulse:1/sweepbandwidth.ThetotalTXpulselengthfor
eachsectorcanbefoundintherangeandangledatagram.
Outputdatagrams
850-160692/M
91
Page 94

KongsbergEMSeries
3.5.3Mechanicaltransducertilt
Table46Mechanicaltransducertiltdatagrams
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=J(Always4Ah)
EMmodelnumber(Example:EM1002=1002)
Date=year*10000+month*100+day(atstart
ofdatarecord)
(Example:Feb26,1995=19950226)
Timesincemidnightinmilliseconds
(atstartofdatarecord)
(Example:08:12:51.234=29570234)
Tiltcounter(sequentialcounter)
Systemserialnumber
Numberofentries=N
Repeatcycle–Nentriesof:4*N
–Timeinmillisecondssincerecordstart2U0to65534
–Tiltin0.01degrees
Endofrepeatcycle
Spare(Alwayszero)
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
4U
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U100–
2U1–
2S
1U
1U
2U
——
——
——
——
——
—
-1499to+14991
——
——
——
—
—
—
—
—
Notes
1Thistiltangleisthemeasuredmechanicaltiltofahullunit
suchasthatoftensuppliedwiththeEM1002.Itispositive
whenthetransduceristiltedforwards.
92
850-160692/M
Page 95

Outputdatagrams
3.5.4ExtraParametersdatagram
Thisdatagramisusedtogivesupplementaryinformation,and
containsinformationasspeciedbytheContentidentier.
Table47ExtraParameters3
DataDescriptionFormatValidrangeNote
Numberofbytesindatagram
Startidentier=STX(Always02h)
Typeofdatagram=3(33h,51d)
EMmodelnumber(Example:EM710=710)
Date=year*10000+month*100+day(Example:
Sep26,2005=20050926)
Timesincemidnightinmilliseconds
(Example:08:12:51.234=29570234)
Pingcounter(sequentialcounter)
Systemserialnumber
Contentidentier
Arrayofvariablelength
4U
1U
1U
2U
4U
4U0to86399999
2U0to65535
2U
2U1
variable2
——
——
——
——
——
—
—
—
Sparebyteifrequiredtogetevenlength(Always
0)
Spare(always0)
Endidentier=ETX(Always03h)
ChecksumofdatabetweenSTXandETX
Notes
1Contentidentier.
2Arrayofvariablelength.Thisarrayisdescribedforeach
3.5.4.1Contentidentier=1:TheCalib.txtle
The‘Arrayofvariablelength’containsatexteldof100
characters,containingthelename“calib.txt”.Thereafter,the
contentsofthelefollows.
Ident.Informationcontents
1
Calib.txtleforangleoffset
2
Logallheights
3
Soundvelocityattransducer
4
Soundvelocityprole
contentidentier.
0–1U
1U0
1U
2U
—
—
——
——
850-160692/M
93
Page 96

KongsbergEMSeries
Filelayout
Theangularcorrectiontableismadewith1degreestep,from
100degreesportto100degreesstarboard(201elements).The
angularoffsetinthislehasbeenaddedtothebeamanglesin
therawrangeandangledatagram.
File
EM300
Line1Forcomments
Line2—″—
Line3—″—
Line4—″—
Line5—″—
1000.0x.x
......
-1000.0x.x
Comment
Nameofechosounder
InfoBSoffsetAngleoffset
3.5.4.2Contentidentier=2:Logallheights
Thisdatagramcongurationisusedforloggingparameter
settingsrelatedtothedenitionofadditionalapprovedposition
qualityfactors.Eachofthethreepositioningsystemsavailablein
thePUshasasetofparameters.
The‘Arrayofvariablelength’isusedasfollows:
DataDescriptionFormatValidrangeNote
Activepositioning
system
Qualityfactor
settingforpos.
system1,2,3.
Numberofquality
factorsforpos.
system1,2,3
Variablenoofentriesfollows=totalnumberofallquality
factors:
Qualityfactor4S
4S
3*4S1=PUdecodesQ-factor.Default
3*4S
0–2
0=ExternalPUdecode
0–n2
0–m4
1
3
Limit
4S0cmdefault=notused
5
Notes
1Eachpositioningsystemhasitsownindividualsetting.
Value‘1’indicatesthatthePUshoulddecodethequality
factorsinthetraditionalway.Thisisthedefault.
Value‘0’indicatesthatthePUshouldskipqualityfactor
decodingasthisisperformedexternally.ThePUshould
alwaystransmittheheightdatagram‘h’.
94
850-160692/M
Page 97

Outputdatagrams
2Eachpositioningsystemhaveanindependentsetof
additionalqualityfactors.Thenumberofqualityfactorsfor
eachsystemmustbespecied.Defaultvalueis0.
3Eachqualityfactorisdescribedbytwoentries,thequality
factoritselfandalimit,formingapair.Thisresultsina
variablenumberofsuchpairs,dependingonhowmany
additionalqualityfactorsissetbytheoperator.Ifnoquality
factorsaredened,nopairsareincluded.Thesequenceof
pairsisimportant.First,allpairsforpositioningsystem1is
listed,ifany.Nextanypairsforpositioningsystem2andat
theend,anypairsforpositioningsystem3.
4Aqualityfactorisapositivenumber.Currentlynoupper
limitisimposed.
5Uncertaintyinpositionxincm.Thisuncertaintyis
associatedwiththequalityfactorvalue.Currentlynotused.
3.5.4.3Contentidentier=3:Soundvelocityat
transducer
Thearrayofvariablelengthwillcontainthereceiveddatagram
containingthesoundvelocityattransducer.
Table48Currentsoundvelocity
DataDescriptionFormatValidrangeNote
Timesincemidnightinmilliseconds
(Example:08:12:51.234=29570234)
Soundvelocity
4U0to863999991
4F
m/s
Notes
1TimegiveninreceivedOwnShipsdata.
IfsoundvelocityisfromNMEALCVdatagram,thisvalue
issetto7FFFFFFFh.
3.5.4.4Contentidentier=4:Soundvelocity
prole
Thearrayofvariablelengthwillcontainthereceiveddatagram
containingthesoundvelocityprole.
Table49SOUNDSPEEDPROFILE_DATA
—
NameT ypeDataDescription
header
header,messageIDint32
header,time,secondsint32
header,time,microSeconds
header,sizeint32
850-160692/M
uniquemessageIDacrossthePSS-CSI2interface
Secondssince1970-01-0100:00:00UTC
int32Microseconds
thesizeinbytesoftheentiremessage(including
header)
95
Page 98

KongsbergEMSeries
Table49SOUNDSPEEDPROFILE_DATA(cont’d.)
NameT ypeDataDescription
header,sourceIDint32
header,destinationIDint32
sequenceNumberint32
Thecurrentsoundspeedincludingdepthandtemperature.
soundSpeedPoint,depth
soundSpeedPoint,soundSpeed
soundSpeedPoint,temperature
ThetimetheofcialSSPwasrecorded.
time,secondsint32
time,microSeconds
numberOfPointsInOfcialSSP
Repeatcycle-Nentriesof:12*NArraycontainingtheofcialsoundspeedpoints
soundSpeedPoint,depth
soundSpeedPoint,soundSpeed
soundSpeedPoint,temperature
Endofrepeatcycle
real32Depthinmeters
real32
real32
int32Microseconds
int32
real32Depthinmeters
real32
real32
theIDofthecomponentsendingthemessage.
theIDofthecomponentreceivingthemessage.
Anumberincrementedforeachtransmissionof
thismessage.
Soundspeedinm/s.
TemperatureindegreesCelsius
Secondssince1970-01-0100:00:00UTC
Thenumberofelementsinthe‘ofcialSSP’array.
sortedwithascendingdepthorder.
Soundspeedinm/s.
TemperatureindegreesCelsius
Table50Commondatatypes
Basicdatatypes
int324
real324
Size
(bytes)
Description
32-bitsignedinteger(two’scomplement)
32-bitoatingpoint(IEEE754)
96
850-160692/M
Page 99

3.6PUinformationandstatus
Topics
•PUIDoutputonpage97
•PUStatusoutputonpage100
•PUBISTresultoutputonpage103
3.6.1PUIDoutput
ThePUIddatagramisbroadcastedeverysecondafterthePU
ispoweredup,untilahostprocessortakescommandofthe
ProcessingUnitthroughaPU0datagram.ThePU0datagram
mayhoweverorderthebroadcastofthisdatagramtocontinue.
ThebroadcastissenttoEthernetadress157:237:255:255onPort
1999.Thebroadcastwillresumeifthehostprocessorsendsa
P00datagramwhichreleasesitscontrolofthePU.
Outputdatagrams
Table51PUIdoutputdatagrams
DataDescriptionExampleFormatValidrangeNote
Startidentier=STX
Typeofdatagram=0
EMmodelnumber10022U
Date=year*10000+month*100+day
Timesincemidnightinmilliseconds08:12:51.234=
Byteorderag
Systemserialnumber
UDPportno1
UDPportno2
UDPportno3
UDPportno4
Systemdescriptor
PUsoftwareversion
BSPsoftwareversion
SonarHead/Transceiversoftware
version
SonarHead/Transceiversoftware
version
HostIPaddress
Spare0ifnotused
Spare0ifnotused
Endidentier=ETX
ChecksumofdatabetweenSTXand
ETX
Always02h1U
Always30h1U
Feb26,1995=
19950226
29570234
Always12U
—
—
—
—
—
—
—
—
Sonarhead1
softwareversion
Sonarhead2
softwareversion
—
Always03h1U
4U
4U0to86399999
2U100–
2U
2U
2U
2U
4U
16U
16U
16U
16U
4U
8U
1U
2U
——
——
—
—
—
—
—
—
—
ASCIIstring
ASCIIstring6)
ASCIIstring6)
ASCIIstring6)
—
—
—
—
—
1)
2)
2)
3)
—
4)
4)
4)
4)
5)
7)
850-160692/M
97
Page 100

KongsbergEMSeries
Notes
1“1002”mustbereplacedwiththenameofthesystem.1002
isforEM1002,120forEM120,300forEM300,710for
EM710,2000forEM2000,3000forEM3000,3020for
EM3002,302forEM302,122forEM122,121forEM
121A,850forME70.
TheEMmodelnumberandchecksumarerequired.
2Thesystemtimeanddatewillstartat0onpowerup,i.e.the
hostprocessormustalwayssettheclockinitsrstsetup
command.
3Thebyteorderofthewholedatagramisindicatedbythis
ag.
4DatagramsaretobesenttothedifferentPUUDPportsas
follows(inadditiontouseofPUserialports):
•Port1:Commanddatagrams
•Port2:Sensordatagramsexceptmotionsensor
•Port3:Firstmotionsensor
•Port4:Secondmotionsensor
5Systemdescriptor.(Informationforinternaluse):
00xxxxxxh–OldCPUcard
01xxxxxxh–VIPerorCoolMonster
02xxxxxxh–CT7
03xxxxxxh–Kontron
04xxxxxxh–KontronandBSP67BforEM710
05xxxxxxh–ConcurrentThechnologiesCP432CPU
xxxxxx00h–AllotherEM
xxxxxx00h–EM2040:SingleRX
xxxxxx01h–EM2040:DualRX
xxxxxx01h–EM1002S
xxxxxx02h–EM952
xxxxxx03h–EM1002:withHullUnit
xxxxxx04h–EM1002S:withHullUnit
xxxxxx05h–EM952:withHullUnit
xxxxxx08h–EM3001
xxxxxx09h–EM3002longpulseavailable
xxxxx1xxh–EM3002Rxgainnotavailable
6Thersttwoelements,PUsoftwareversionandBSP
softwareversion,arethesameforallechosounders.Thelast
twowillvary,dependingonwhichechosounderyouhave:
98
850-160692/M
 Loading...
Loading...