

Kongsberg EM series, EM 3002, EM 3000, EM 2040, EM 2000 Instruction Manual
...
Instruction manual
EM Series
Multibeam echo sounders
Datagram formats


KongsbergEMSeries
Multibeamechosounder
EMdatagramformats
850-160692/R
October2013
©
KongsbergMaritimeAS
Documenthistory
Documentnumber:850-160692
Rev.K
June2009
Anewoutputdatagram,NetworkAttitudeV elocitydatagram
110,isadded.The3DvelocityinputisusedforDoppler
compensationinFMmode.Therangecorrectionsapplied
isdocumentedintheRawrangeandangle78datagram.
Installation,Runtimeandstatusdatagramsareupdatedwithextra
information.ChangesinPTNL,GGKdatagram
Rev.L
November2009
UpdatedRuntimeandInstallationparameters.UpdatedPU
informationandstatusdatagramtoallowforEM2040datagrams.
ExtraParametersaddedinMultibeamparameterssection
Rev.M
January2010
AddedSISgenerateddatagrams.Addedandmodiedcomments.
Rev.N
September2010
TypingerrorinKSSIS80formatcorrected.RFNparameter
re-introducedinInstallationdatagram(seeMultibeamParameters
section).
Rev.O
March2012GeneralupdateincludingupdatesforSIS3.9
Rev.P
June2012
UpdatedQualityfactordatagram79,addedappendixB
“Handlingof.allles”
Rev.Q
February2013GeneralupdateincludingupdatesforEM2040CandSIS4.0
Rev.R
October2013
Rawrangeandbeamangle78datagram:Qualityfactorcorrected
toQF=2500*sd/dr(WasQF=250*sd/dr).
MultibeaminstallationparametersupdatedforEM2040Dual
TX.
Copyright
©2013KongsbergMaritimeAS
TheinformationcontainedinthisdocumentremainsthesolepropertyofKongsbergMaritimeAS.Nopart
ofthisdocumentmaybecopiedorreproducedinanyformorbyanymeans,andtheinformationcontained
withinitisnottobecommunicatedtoathirdparty,withoutthepriorwrittenconsentofKongsberg
MaritimeAS.Thedocument,oranypartofit,maynotbetranslatedtoanyotherlanguagewithoutthe
writtenapprovalfromKongsbergMaritimeAS.
Disclaimer
KongsbergMaritimeASendeavourstoensurethatallinformationinthisdocumentiscorrectandfairly
stated,butdoesnotacceptliabilityforanyerrorsoromissions.
Warning
Theequipmenttowhichthismanualappliesmustonlybeusedforthepurposeforwhichitwas
designed.Improperuseormaintenancemaycausedamagetotheequipmentand/orinjury
topersonnel.Allusersmustbefamiliarwiththecontentsoftheappropriatemanualsbefore
attemptingtoinstall,operate,maintainorinanyotherwayworkontheequipment.
KongsbergMaritimeASdisclaimsanyresponsibilityfordamageorinjurycausedbyimproper
installation,useormaintenanceoftheequipment.
Supportinformation
Ifyourequiremaintenanceorrepair,contactoneofourofces,distributorsordealers.Y oucanalsocontact
ususingthefollowingaddress:km.hydrographic.support@kongsberg.com
.Ifyouneedinformationabout
ourotherproducts,visithttp://www.km.kongsberg.com.
KongsbergMaritimeAS
www.kongsberg.com

EMdatagramformats
Tableofcontents
EMDATAGRAMFORMATS..................................................7
Presentationformat...................................................................................................8
Supportinformation.................................................................................................8
INPUTDATAGRAMS..........................................................9
Position.....................................................................................................................9
Overview...................................................................................................10
GGADatagram..........................................................................................12
PTNL,GGKLocalcoordinatepositiondatagram..........................................14
TrimbleGGKDatagram..............................................................................15
VTGDatagram...........................................................................................16
Transponderposition...................................................................................17
Simrad90Position......................................................................................18
TideInput..................................................................................................20
Depth,pressureorheightinput...................................................................20
Attitude..................................................................................................................21
Overview...................................................................................................21
EMAttitudeinputformat............................................................................23
Networkattitudevelocityinputformat.........................................................24
SperryMK-39Attitudeinputformat............................................................25
HDTformat................................................................................................26
SKR80format............................................................................................26
Clockdatagrams.....................................................................................................27
Clock.........................................................................................................27
ZDAformat................................................................................................27
Soundspeeddatagrams..........................................................................................28
Overview...................................................................................................28
KongsbergMaritimeSSPformat.................................................................29
AMLSmartSensorandAMLMicroSensorformat......................................32
Depthinputdatagramsfromsinglebeamechosounder........................................33
DBSFormat...............................................................................................33
DPTFormat...............................................................................................33
Simradformat.............................................................................................34
Remotecontroldatagrams......................................................................................35
Soundspeedattransducer......................................................................................37
KSSIS80Datagram....................................................................................37
OUTPUTDATAGRAMS......................................................38
Introduction............................................................................................................38
Multibeamdata.......................................................................................................40
Depthdatagram..........................................................................................40
850-160692/R
3

KongsbergEMSeries
XYZ88......................................................................................................43
Centralbeamsechogram.............................................................................46
Rawrangeandbeamangle(F).....................................................................48
Rawrangeandbeamangle(f)......................................................................49
Rawrangeandangle78..............................................................................51
Seabedimagedatagram...............................................................................54
Seabedimagedata89..................................................................................56
Watercolumndatagram...............................................................................58
Qualityfactordatagram79..........................................................................60
Externalsensors......................................................................................................62
Attitudedatagram.......................................................................................62
Networkattitudevelocitydatagram110.......................................................64
Clock........................................................................................................66
Depth(pressure)orheightdatagram.............................................................67
Heading....................................................................................................68
Position.....................................................................................................69
Singlebeamechosounderdepth.................................................................71
Tidedatagram.............................................................................................72
Soundspeed............................................................................................................73
Surfacesoundspeed...................................................................................73
Soundspeedproledatagram......................................................................74
KongsbergMaritimeSSPoutputdatagram...................................................75
Multibeamparameters............................................................................................76
Installationparameters................................................................................76
Runtimeparameters....................................................................................84
Mechanicaltransducertilt............................................................................93
ExtraParametersdatagram...........................................................................94
PUinformationandstatus......................................................................................99
PUIDoutput..............................................................................................99
PUStatusoutput......................................................................................102
PUBISTresultoutput...............................................................................105
SISgeneratedoutput............................................................................................107
APBDatagram.........................................................................................107
DPTDatagram.........................................................................................107
RTEDatagram..........................................................................................108
WPLDatagram.........................................................................................108
KSSIS31Datagram..................................................................................109
AEM2040DETAILS.........................................................110
EM2040transducerinstallationoffsets...............................................................110
EM2040DualRX................................................................................................115
EM2040Scanningmode.....................................................................................116
BEM2040CINSTALLATIONOFFSETS..............................118
4
850-160692/R
EMdatagramformats
CHANDLINGOF.ALL–FILES............................................120
850-160692/R
5

KongsbergEMSeries
6
850-160692/R
EMdatagramformats
EMdatagramformats
ThedatainputandoutputformatstoandfromtheEMSeriesmultibeamechosounders
aredescribedinthisdocument.TheinformationappliestotheKongsbergMaritime
multibeamechosoundersintroducedafter1995.
Note
TheinformationhereinappliestotheEM3002,EM3000,EM2040,EM2000,EM
1002,EM710,EM302,EM122,ME70BO,EM300andEM120multibeamecho
sounders.Someoftheinformationmaynotberelevantforyourspecicsystem.Please
disregardthis.
InformationforEM2040isvalidforallmodelsofEM2040,unlessotherwisespecied.
TheinformationinthisdocumentisnotvalidfortheEM12,EM100,EM950andEM
1000multibeamechosounders.
Note
Inordertomeetspecialcustomerrequirements,KongsbergMaritimemayhaveto
changethedatagramformatsdescribedhere.Theformatspresentedinthisdocument
maythereforebealteredwithoutpriornotice,althoughbackwardcompatibilitywill
bemaintainedasfaraspossible.Beforesoftwareiswritteninaccordancewiththis
document,itisstronglyrecommendedtocontactKongsbergMaritimetoensurethatthe
latestversionisused,andthatanyplannedchangesaretakenintoaccount.
850-160692/R
7
KongsbergEMSeries
Presentationformat
TheformatdescriptionisaccordingtotheNMEA0183standard,ApprovedParametric
SentenceStructure,withtheASCIIcharacter(s)givenasfollows
•“x.x”denesavariablelengthnumericaleld,withoptionallyincludeddecimal
pointandsign.
•“c–c”denesavariablelengtheldofprintablecharacters.
•“x–x”denesavariablelengtheldofnumericcharacters.
•“a__”denesaxedlengtheldofalphabeticalcharacters(e.g.“aa”=twocharacter
longeld.
•“x__”denesaxedlengtheldofnumericcharacters.
Forbinaryelds,thelengthisgiveninnumberofbytesplus“U”forunsignedand
“S”forsigneddata.
Supportinformation
IfyouneedtechnicalsupportontheEMSeriessystemyoumustcontacta
KongsbergMaritimeofce.Alistofalloursupportofcesisprovidedon
http://www.km.kongsberg.com
.
YoucanalsocontactourmainsupportofceinNorway.
•Address:Strandpromenaden50,3190Horten,Norway
•Telephone:+4733023800
•Telephone,24h:+4781535355
•E-mailaddress:km.hydrographic.support@kongsberg.com
•Website:http://www.km.kongsberg.com
8
850-160692/R
Inputdatagrams
Inputdatagrams
Topics
•Positiononpage9
•Attitudeonpage21
•Clockdatagramsonpage27
•Soundspeeddatagramsonpage28
•Depthinputdatagramsfromsinglebeamechosounderonpage33
•Remotecontroldatagramsonpage35
•Soundspeedattransduceronpage37
Onlyalimitednumberofinputformatsfromexternalsensorsareaccepted.Theseare
primarilyinaccordancewiththeNMEA0183specication,orbasedupontheprinciples
ofthatspecication.
Note
ThemajorityoftheseformatshavenotbeendenedbyKongsbergMaritime.Thus,these
formatsarenotcontrolledbyKongsbergMaritime.
AlmostallinputformatsareASCII.SeriallineorEthernetinputtothemultibeamecho
sounder’sProcessingUnitismostcommon,butsomedatagrams-whicharenottime
critical-areinterfacedonserialline(s)orEthernettotheOperatorStation.
Position
Topics
•Overviewonpage10
•GGADatagramonpage12
•PTNL,GGKLocalcoordinatepositiondatagramonpage14
•TrimbleGGKDatagramonpage15
•VTGDatagramonpage16
•Transponderpositiononpage17
•Simrad90Positiononpage18
850-160692/R
9
KongsbergEMSeries
•TideInputonpage20
•Depth,pressureorheightinputonpage20
Overview
TheEMSeriesacceptspositiondatainthefollowingformats
•NMEA0183GGA
•GGK
•PTNL,GGK
•SIMRAD90
•Transponderposition
•WiththeGGAandGGKdatagrams,informationcontainedinNMEA0183GSTand
VTGdatagramswillalsobeacceptedandused.
Note
TheGSTdatagramisnotusedbythefollowingmultibeamechosounders:EM122,
EM302,EM710,EM2040,EM2040C,EM3002andME70BO.
•AdatagramformatforSonarHeaddepthisprovidedfortheEM3002,EM3000,EM
2040,EM2000andEM710.Notethattheformatisthesameasthatusedbythe
ParoscienticDigiquartzpressuresensor.Thisformatmayalsobeusedforinputof
forexamplevaryingdatumheightsorotherspecialheightinformationonallmodels.
•Adatagramformatforinputoftidalheightisprovided.
TheGGAformatgivenbelowisaccordingtotheNMEA0183version2.30description.
TheGGKformatwasoriginallydenedbytheUSArmyCorpsofEngineersfortheir
testswithkinematicGPS.Trimble’sproprietaryversionoftheformat,PTNLGGK,is
supported.Ifanychangestotheformataremade,andifitbecomespartoftheNMEA
standard,thiswillbeimplemented.
TopreservetheinherentaccuracyofthekinematicGPSdataitisnecessarytocorrect
thedataforvesselmotion.Thisrequiresaccuratetimingsynchronisationbetweenthe
motionsensorandtheGPSreceiver.Itisthereforeimperativethat
•thepositiondatagramhasaconstantandknowntimedelay,
or
•thetimestampinthedatagramisactuallythetimeofthepositionx,that
synchronisationtothe1PPSsignaloftheGPSreceiverisenabled,andthatthesystem
clockhasbeensetcorrectly.
Asneitheroftheseconditionsmaynotbepossibletoachievewithasufcientaccuracy,
theapplicationofmotioncorrectionisoperatorselectable.Motioncompensationmaybe
appliedtomostofthepositioninputdatagrams.
10
850-160692/R

Inputdatagrams
InadditiontopositiondatafromtheGGAorGGKdatagrams,speedandcourse
overgroundfromNMEAVTGdatagramsmayalsobecopiedintotheposition
outputdatagram.Thesevaluesmaybeusefulinlteringofthepositioningduring
postprocessing.IfaVTGdatagramdoesnotfollowtheGGAorGGKdatagramthe
courseandspeedeldsoftheoutputdatagramswillbesettotheirinvalidvalues.
AsanalternativetoGGA,theSIMRAD90formatpositiondatagrammaybeused.
TheSIMRAD90formatisintendedtobetheformatofchoicewhenthepositioning
systemisnotastand-aloneGPSreceiversupplyingGGAorGGKformatdatagrams.
TheSIMRAD90formatcaninadditiontogloballongitudeandlatitudecoordinatesalso
beusedforNorthingandEastingtypeprojectioncoordinates(e.g.UTM).
TocaterforapplicationswheretheEM2000orEM3000SonarHeadismountedona
subseavehicle,theoriginalSIMRAD90formathasbeenexpandedtoallowinclusion
ofthedepthofthevehicleinadditiontoitshorizontalpositioninlongitude/latitude
orNorthing/Eastingcoordinates.
SISsupportsloggingofalldatafromaJavadGPSreceiverdirectlyattachedtothe
serialportontheHWSPC.
TheJavadGPSreceiveroutputsbinarydatainadditiontotheNMEAdatagrams.The
binarycanbeusedbythirdpartysoftware(likeTerratec)tocomputemoreaccurate
positionsusingpostprocessingtools.TheJavaddatalesarestoredinaseparatefolder
andkeptseparatefromtheotherrawdatatoeasethepostprocessingofthedata.The
operatorchoosesthisdirectoryintheruntimeparametersinSIS.
ATrimbleGPSreceivercanalsobeattachedtotheseriallineoftheHWSPC.Thisis
usedforspecialpurposeslikelandsurveying.
850-160692/R
11

KongsbergEMSeries
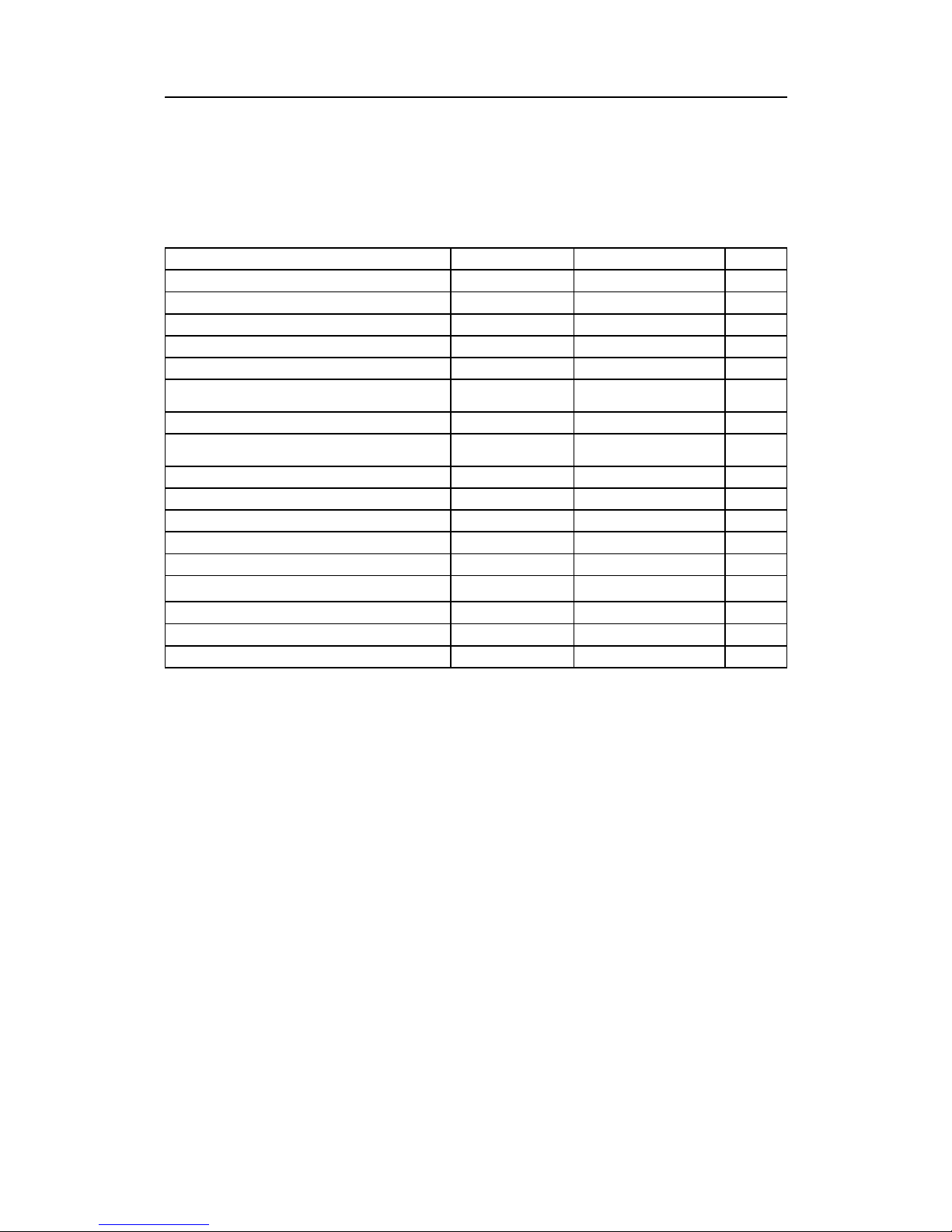
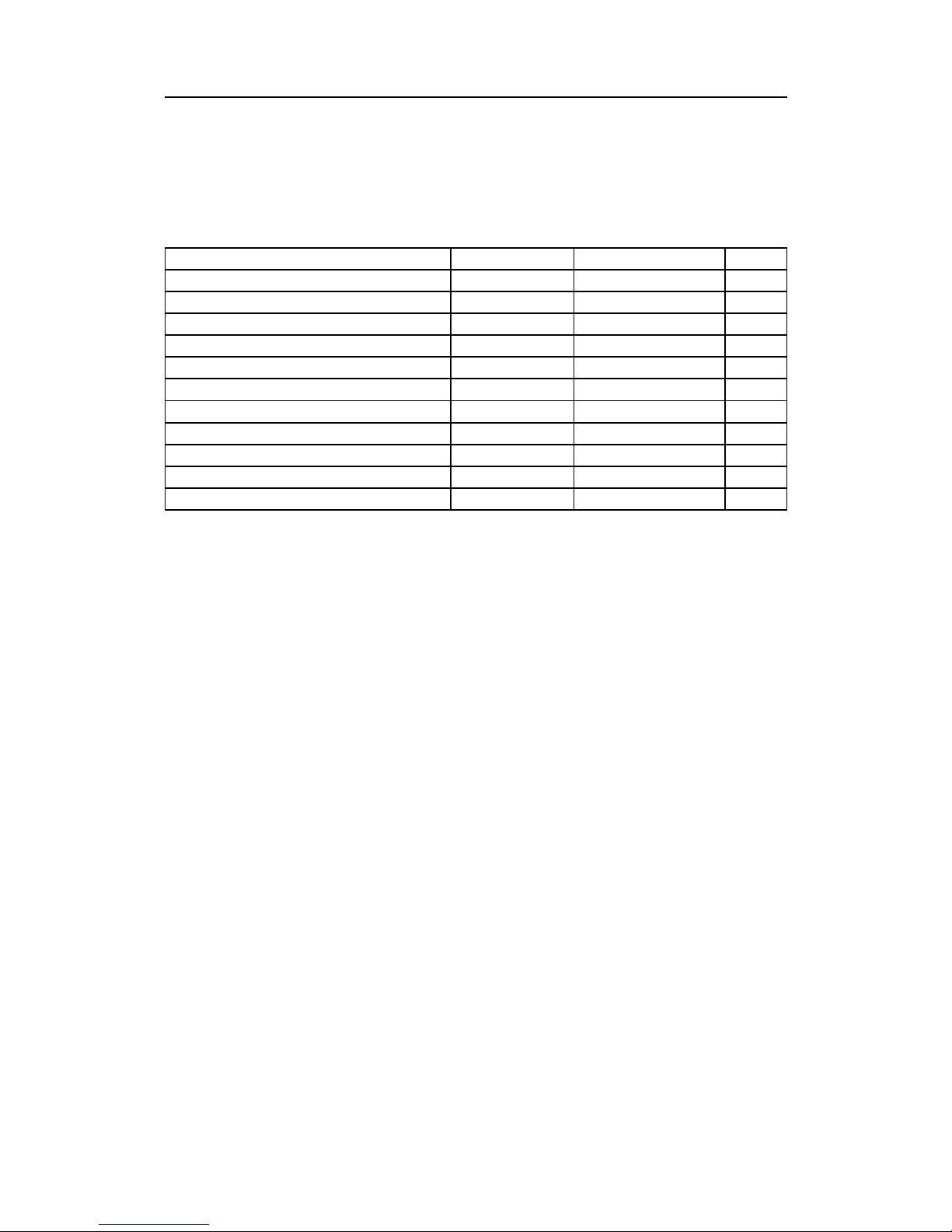
GGADatagram
Table1GGADatagram
DataDescriptionFormatValidrangeNote
Startidentier=$
Always24h
——
Talkeridentier
aa
Capitalletters
—
SentenceformatterAlwaysGGA,
——
UTCofposition
hhmmss.ss,000000to235959.9...
—
Latitudeindegreesandminutes,plusoptional
decimalminutes
llll.ll,0000to9000.0...
—
Latitude–N/S
a,
NorS
—
Longitudeindegreesandminutes,plusoptional
decimalminutes
yyyyy.yy ,
00000to18000.0...
—
Longitude–E/W
a,
EorW
—
GPSqualityindicator
x,
0to81
Numberofsatellitesinuse
xx,
00to12
—
HDOP
x.x,—
1
Antennaaltituderemeansealevel(geoid)
x.x,—
2
Unitsofantennaaltitude
M,
——
Geoidalseparation(sealevelreWGS-84)
x.x,—
2
Unitsofgeoidalseparation
M,
——
AgeofdifferentialGPSdata
x.x,——
Differentialreferencestationid
xxxx,
0000to1023
—
Checksum*hh
——
Endofsentencedelimiter=CRLF
Always0Dh0Ah
——
Notes
1TheHDOP(HorizontalDilutionOfPrecision)valuewillbescaledandcopiedtothe
”Measureofpositionxquality”eldinthepositionoutputdatagram.Thescale
factordependsupontheGPSqualityindicator’svalue:
•1-(SPSorstandardGPS)=>1000
•2-(differentialGPS)=>100
•3-(PPSorpreciseGPS)=>200,but10ifGGAistreatedasRTK.(SeeNote2)
•4-(kinematicGPSwithxedintegers)=>10
•5-(kinematicGPSwithoatingintegers)=>50
•6-(estimatedordeadreckoningmode)=>1000
•7-(manualinputmode)=>1000
•8-(testmode)=>1000,but10ifGGAistreatedasRTK.(SeeNote2)
•The”Measureofpositionxquality”eldwillbesetto65534(largestvalid
number)iftheindicatoriszero(non-validposition).
Thisscalingisusedtogiveatleastarelativelycorrectpositionxqualitychange
(intheorderofcm)iftherearedropoutsindifferential,preciseorkinematic
measurements,althoughHDOPisnotametricvalue.
12
850-160692/R

Inputdatagrams
TheGPSmanufacturersmayhavedifferentGPSqualityindicators.
2WhenthequalityfactorofaGGApositioningsysteminuseis4or5aheightoutput
datagramisautomaticallygenerated,andalsoifthequalityfactoris3or8andthe
operatorhassettheGGApositiontobeanRTKposition.Theheightisthesumof
thesetwoeldswhichareassumedpositiveupwards(antennaabovegeoid).
850-160692/R
13

KongsbergEMSeries
PTNL,GGKLocalcoordinatepositiondatagram
14
850-160692/R
Inputdatagrams
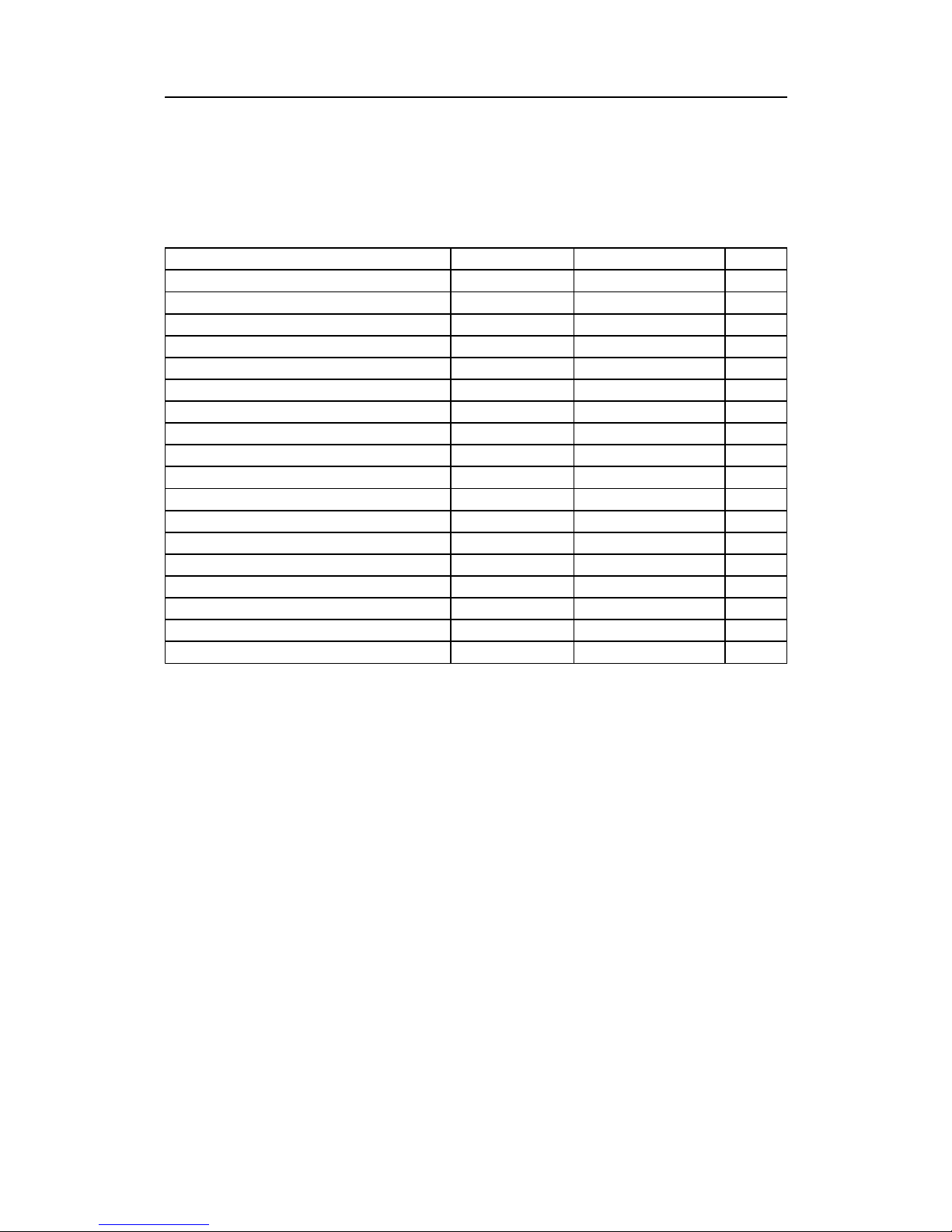
TrimbleGGKDatagram
Table2GGKDatagram
DataDescriptionFormatValidrangeNote
Startidentier=$
Always24h
——
Talkeridentier
aa
Capitalletters
—
SentenceformatterAlwaysGGK,
——
Timeofposition
hhmmss.ss,000000to235959.99...
—
Dateofposition
MMDDYY ,010100to123199
—
Latitudeindegreesandminutes,plusoptional
decimalminutes
llll.llllll,0000to9000.0...
—
Latitude–N/S
a,
NorS
—
Longitudeindegreesandminutes,plusoptional
decimalminutes
yyyyy.yyyyyy ,
00000to18000.0...
—
Longitude–E/W
a,
EorW
—
GPSqualityindicator
x,
0to31
Numberofsatellitesinuse
xx,
00to12
—
DOP
x.x,—
1
Antennaellipsoidalheight
x.x,——
Unitsofantennaellipsoidalheight
M,
——
Unitsofantennaellipsoidalheight
x.x,——
Checksum*hh
——
Endofsentencedelimiter=CRLF
Always0Dh0Ah
——
Notes
1TheDOP(DilutionOfPrecision)valuewillbescaledandcopiedtothe”Measureof
positionxquality”eldinthepositionoutputdatagram.Thescalefactordepends
upontheGPSqualityindicator’svalue
•1-(SPSorstandardGPS)=>1000
•2-(differentialGPS)=>100
•3-(kinematicGPS)=>10
The”Measureofpositionxquality”eldwillbesetto65534(largestvalid
number)iftheindicatoriszero(non-validposition).
Thisscalingisusedtogiveatleastarelativelycorrectpositionxqualitychange
(incm)iftherearedropoutsindifferential,preciseorkinematicmeasurements,
althoughDOPisnotametervalue.
TheGPSmanufacturersmayhavedifferentGPSqualityindicators.
850-160692/R
15
KongsbergEMSeries
VTGDatagram
Table3VTGDatagram
DataDescriptionFormatValidrangeNote
Startidentier=$
Always24h
——
Talkeridentier
aa
Capitalletters
—
SentenceformatterAlwaysVTG,
——
Courseoverground,degreestrue
x.x,T,0to359.9...1
Courseoverground,degreesmagnetic
x.x,M,0to359.9..1
Speedoverground,knots
x.x,N,0–1
Speedoverground,km/h
x.x,K,0–1
Modeindicator
a
A,D,E,M,SorN
—
Unitsofantennaellipsoidalheight
x.x,——
Checksum*hh
——
Endofsentencedelimiter=CRLF
Always0Dh0Ah
——
Notes
1Onlytruecourseandtherstvalidspeedeldwillbeused.
16
850-160692/R
Inputdatagrams
Transponderposition
Table4SSB-SSBLPositionDatagram
DataDescriptionFormatValidrangeNote
Start_character
$
——
Address
PSIMSSB,
——
Timehhmmss.ss,
—
2
TPcodeB01,
—
3
Status
A,
—
4
Errorcode
cc_,
—
1
Coordinatesystem(alwaysradians)
R,
——
Orientation(alwaysnorthoriented)
N,
——
SWlter
,—
1
Xcoordinate(Latitiude)
x.x,——
Ycoordinate(Longitude)
x.x,——
Depth(Sonardepthinm)
x.x,——
Expectedaccuracy(Pos.qualityinm)
x.x,——
Additionalinfo
,—
1
Firstaddvalue
,—
1
Secondaddvalue
,—
1
Checksum*hh
——
Termination
CRLF
——
Notes
1Notusedbymultibeamechosounders.
2DecodedandusedifClockSynchronisationissetfrompositiondatagram.
3Onlythistranspondertypeisacceptedbythemultibeam.
4A=OK,Vwillgivebadpositions,butdatagramwillbeacceptedforlogging.
850-160692/R
17

KongsbergEMSeries
Simrad90Position
Table5Simrad90datagram
DataDescriptionFormatLengthValidrangeNote
Startidentier=$
Always24h1
——
Talkeridentier
aa
2
Capitalletters
—
SentenceformatterAlwaysS90,
4
——
Dateofposition
DDMMYY ,
7
010100to31 1299
—
UTCofpositionashour,minute,
second,hundredthofsecond
hhmmssss,900000000to
23595999
—
Latitudeindegrees,minutesand
decimalminutes
xxxx.xxxx
90000.0000to
9999.9999
A
Hemisphereidentier
a,
2
NorS
A
Longitudeindegrees,minutesand
decimalminutes,ordepthinmeters
xxxxx.xxxx
1000000.0000to
18000.0000
A
Hemisphereordepthidentier
a,
2E,WorDA
Northingorrangeinmeters
xxxxxxxxx.x,
12000000000.0to
999999999.9
B
Eastingordepthinmeters
xxxxxxx.x,
100000000.0to
9999999.9
B
UTMzonenumber
xx,
301to60
—
Userdenedcentralmeridianlongitude
orbearing
xxxxx.xxxx
1000000.0000to
35999.9999
C
Hemisphereorbearingidentier
a,
2E,W,orB
C
Systemdescriptor
x,
20to71
Positionxqualityindicator
x,
20to9andAtoF2
Speedovergroundinm/s
xx.x,
5
00.0to99.93
Courseovergroundindegrees
xxx.x
5
000.0to359.93
Endofsentencedelimiter=,CRLFAlways2Ch0Dh0Ah
3
——
18
850-160692/R
Inputdatagrams
Notes
1Thevalueofsystemdescriptordenesthecontentofthedatagramasfollows.
•0-Thepositionislongitudelatitudeinglobalcoordinatesgivenintheelds
notedA.
•1-ThepositionisNorthingEastingontheNorthernhemispheregiveninthe
eldsnotedB.IftheprojectionisdenedtobeUTMtheUTMzonenumberora
userdenablecentralmeridianlongitudemaybegivenintheeldnotedC.
•2-Asforsystemdescriptorequalto1,butthepositionisontheSouthern
Hemisphere.
•3-Asforsystemdescriptorequalto0,butinadditionthedepthisgiveninthe
EastingeldnotedB.
•4-Asforsystemdescriptorequalto1,butinadditionthedepthisgivenin
thelongitudeeldnotedA.
•5-Asforsystemdescriptorequalto2,butinadditionthedepthisgivenin
thelongitudeeldnotedA.
Note
TheEM12,EM950andEM1000multibeamechosounderswillonlyaccept
valueslessthan3.
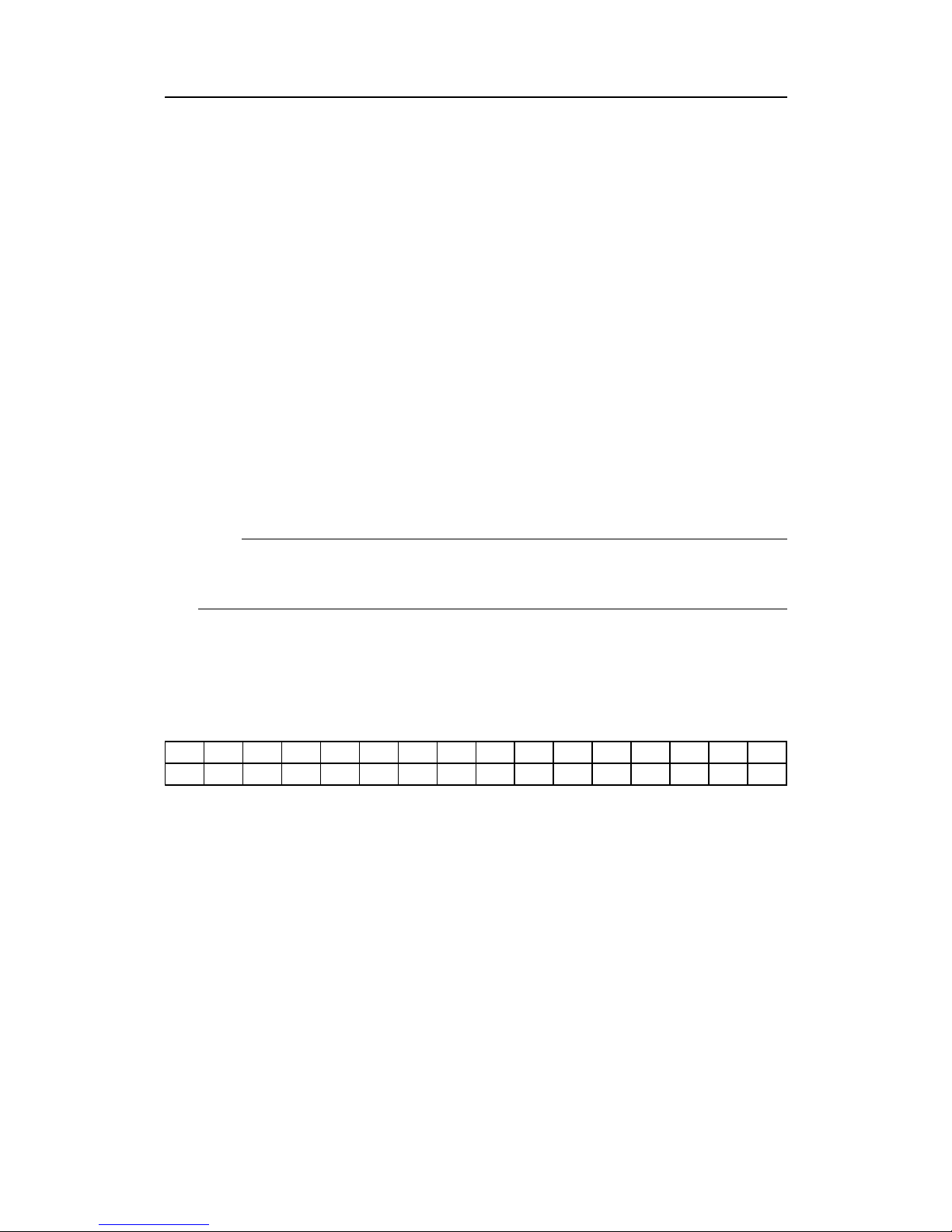
2Thepositionxqualitygiveninthepositionoutputdatagramwillbederived
fromthequalityindicator(thisdiffersfromtheoriginaldenitionoftheformat)
asfollows(inm):
Table6
FED
C
BA98
7
6
5
43210
0.010.020.050.1.02.0.512
5
1020501002005001000
3Iftheseeldshavevalidvaluestheywillbecopiedtoequivalenteldsinthe
positionoutputdatagram.Theymaybeusedinlteringofthepositioningduring
postprocessing.(Theoriginaldenitionoftheformathadlineheadinginthecourse
eldanditsusewastoorientreal-timedisplays).
850-160692/R
19
KongsbergEMSeries
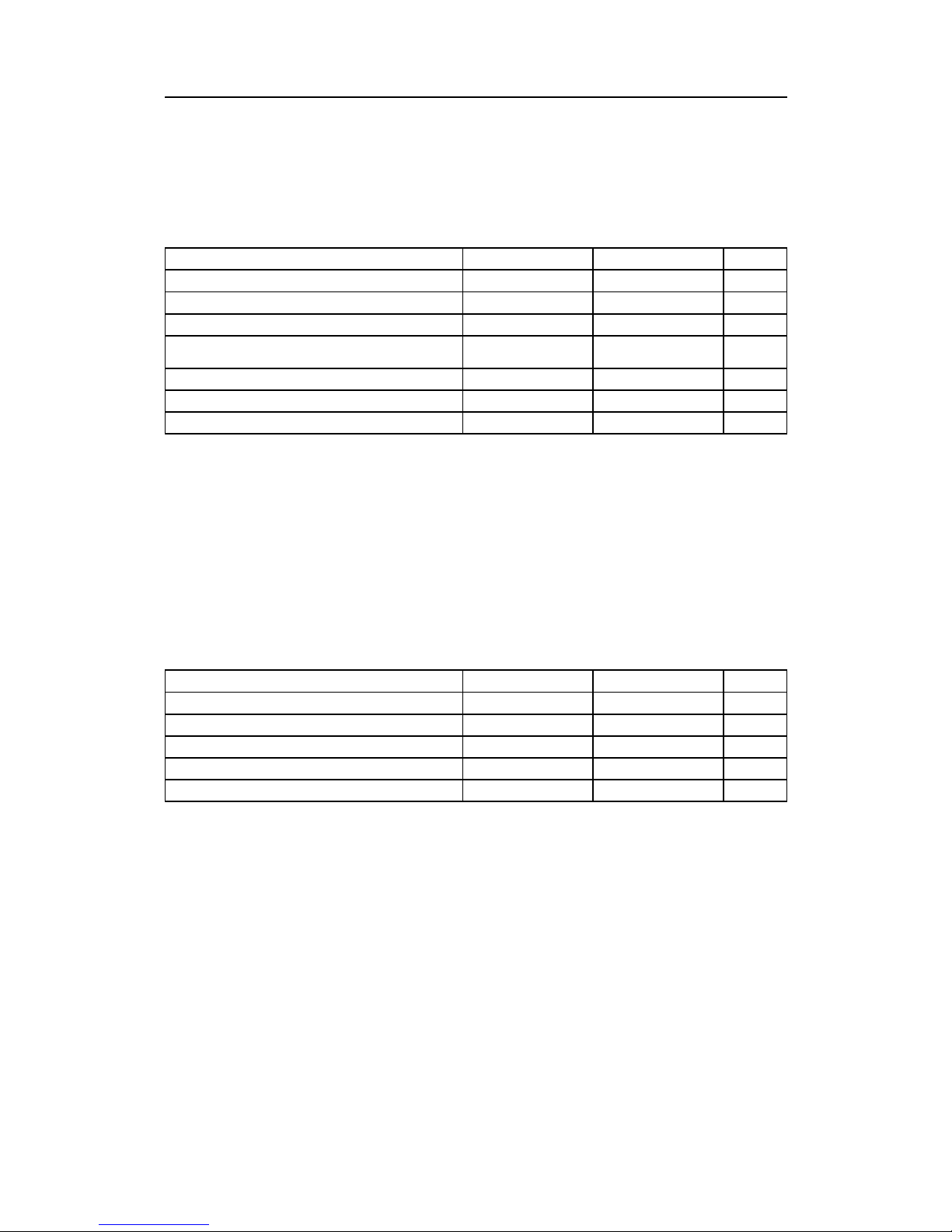
TideInput
Table7Tideinputdatagrams
DataDescriptionFormatValidrangeNote
Startidentier=$
Always24h
——
Talkeridentier
a
Capitalletter
—
Sentenceformatter
AlwaysTIDE,
——
Dateandtimeofprediction/measurement
YYYYMMDDhhmm,199601010000to
999912312359
—
Tideoffsetinmetersanddecimalmeters
x.x
±327.661
Optionalchecksum*hh
——
Endofsentencedelimiter=CRLF
Always0Dh0Ah
——
Notes
1Anegativenumberwillbeassumedtoindicateanincreaseinsealevel.
Depth,pressureorheightinput
Thisthirdpartytelegramdenitionprovidesauniversalformattoholdeitherdepth,
pressureorheightinformation.
Table8Depthpressureorheightinputdatagrams
DataDescriptionFormatValidrangeNote
Startidentier=*
Always24h
——
Sentenceidentier
ii00to091
Talkeridentier
ii00to09
—
Depthorheightinmetersanddecimalmeters
x.x—
2
Endofsentencedelimiter=CRLF
Always0Dh0Ah
——
Notes
1Asentenceidentierequalto00isusedforunderwatervehicledepth,allother
identiersarecustomerspecic(usuallyadatumheight).
2Ifinputisdepth,itwillbeusedinthedepthoutputdatagramtooffsetthetransmit
transducerdepth.
Ifinputisheight,whichwillusuallyimplyatimeorpositionvariabledatumheight,
itsusewilldependonthesentenceidentierandwillbeimplementedasrequired
byaspeciccustomer.
Depthispositivedownwards.Depthsmaybescaledandoffsetadjustedusing
constants:
output_depth[m]=scale_factor*(input_depth-offset)
20
850-160692/R

Inputdatagrams
Attitude
Topics
•Overviewonpage21
•EMAttitudeinputformatonpage23
•Networkattitudevelocityinputformatonpage24
•SperryMK-39Attitudeinputformatonpage25
•HDTformatonpage26
•SKR80formatonpage26
Overview
Attitudedataisgenerallyacceptedononeormoreserialinputport(s)as
•roll,pitch,heaveandheadingononeport,
or
•roll,pitchandheaveononeportandheadingseparatelyonanotherport.
Thedataupdaterateshouldbecommensuratewiththeexpecteddynamicsofthevessel
(typicallyupto100Hz).
Theacceptableformatforroll,pitch,heaveandoptionallyalsoheadingisa10bytelong
messageoriginallydenedintheEM1000forusewithdigitalmotionsensors.Itis
supportedbythefollowingsensorslike:
•AppliedAnalyticsPOS/MV
•PhotokineticsOctans
•SeatexMRU
•SeatexSeapath
•TSSDMS-05
•CodaOctopus
HeadingwillbeacceptedintheNMEA0183HDTformatorintheformatusedbythe
SimradRobertsonSKR80(82)gyrocompass.AcurrentlooptoRS-232convertermay
thenberequired.TheLemkuhlLR40(60)ScanRepeaterformatisalsoaccepted,asit
isthesameasthatoftheSKR80withtheexceptionofanextrastatusbyte.Notethat
iftheattitudesensoriscapableofreadingthegyrocompassandtransfertheheadingto
theattitudesensordatagram(ifitdoesnotmeasureheadingitself),thisispreferableto
interfacingthegyrocompassdirectlytothesystem.
Roll,pitchandheadingintheSperryMarineMK-39MOD2AttitudeandHeading
ReferenceSystemformatisalsoaccepted.Asecondmotionsensormustthenbeusedto
supplyheave.
Attitudedatamaybesuppliedfrommorethanonesensor.Alldatamaybelogged,but
onlyonesetaschosenbytheoperatorwillbeusedinrealtime.
850-160692/R
21

KongsbergEMSeries
EM122,EM302,EM710,EM2040andEM2040Cusefrequencymodulated(FM)
pulsestoextendthedetectionrangewhilemaintainingthehighresolution.Toproperly
takeintoaccounttheDoppler-effectwhenusingFMmode,realtime3Dvelocityinputis
neededfromthemotionsensor.Thedata,onproprietaryformat,isavailableviaEthernet
fromsomeofthemanufacturers.Currentlythreemanufacturersaresupported.
SeealsoNetworkattitudevelocityinputformatonpage24.
22
850-160692/R

Inputdatagrams
EMAttitudeinputformat
TheEMattitudeformatisa10-byteslongmessagedenedasfollows
•Byte1:Syncbyte1=00h,orSensorstatus=90h-AFh
•Byte2:Syncbyte2=90h
•Byte3:RollLSB
•Byte4:RollMSB
•Byte5:PitchLSB
•Byte6:PitchMSB
•Byte7:HeaveLSB
•Byte8:HeaveMSB
•Byte9:HeadingLSB
•Byte10:HeadingMSB
whereLSB=leastsignicantbyte,MSB=mostsignicantbyte.
Alldataarein2’scomplementbinary,with0.01°resolutionforroll,pitchandheading,
and1cmresolutionforheave.
•Rollispositivewithportsideupwith±179.99°validrange
•Pitchispositivewithbowupwith±179.99°validrange
•Heaveispositiveupwith±9.99mvalidrange
•Headingispositiveclockwisewith0to359.99°validrange.
Non-validdataareassumedwhenavalueisoutsidethevalidrange.
Howrollisassumedtobemeasuredisoperatorselectable,eitherwithrespecttothe
horizontalplane(theHippy120orTSSconvention)ortotheplanetiltedbythegiven
pitchangle(i.e.asarotationanglearoundthepitchtiltedforwardpointingx-axis).The
latterconvention(calledT ate-BryantinthePOS/MVdocumentation)isusedinsidethe
systeminalldatadisplaysandinloggeddata(atransformationisappliediftheroll
isgivenwithrespecttothehorizontal).
Notethatheaveisdisplayedandloggedaspositivedownwards(thesignischanged)
includingrollandpitchinducedleverarmtranslationtothesystem’stransmittransducer.
ThisformathaspreviouslybeenusedwiththeEM950andtheEM1000withtherst
synchronisationbytealwaysassumedtobezero.Thesensormanufacturershavebeen
requestedtoincludesensorstatusintheformatusingtherstsynchronisationbyte
forthispurpose.Itisthusassumedthat
•90hintherstbyteindicatesavalidmeasurementswithfullaccuracy
•anyvaluefrom91hto99hindicatesvaliddatawithreducedaccuracy(decreasing
accuracywithincreasingnumber)
•anyvaluefrom9Ahto9Fhindicatesnon-validdatabutnormaloperation(forexample
congurationorcalibrationmode)
•andanyvaluefromA0htoAFhindicatesasensorerrorstatus
850-160692/R
23

KongsbergEMSeries
Networkattitudevelocityinputformat
EM122,EM302,EM710,EM2040andEM2040Cusefrequencymodulated(FM)
pulsestoextendthedetectionrangeandstillmaintainingthehighresolution.Toproperly
takeintoaccounttheDoppler-effectwhenusingFMmode,realtime3Dvelocityinputis
neededfromthemotionsensor.Thedata,onproprietaryformat,isavailableviaEthernet
fromsomeofthemanufacturers.Currentlythefollowingformatsaresupported:
•SeatexBinaryformat11
•SeatexBinaryformat23
•POS-MVGRP102/103
•CodaOctopusMCOM
Fordetailsabouttheformats,pleaserefertomanufacturerdocumentation.
ThedatagramwillbeloggedintheNetworkAttitudeVelocity110datagram,andthe
rangecorrectionsappliedisdocumentedintherawrangeandangle78datagram.
24
850-160692/R

Inputdatagrams
SperryMK-39Attitudeinputformat
Theformatis18byteslong,anditisorganisedas9words.Themostsignigicantbyteof
awordistransmittedrst.
•Word1AA55h.
•Word2Statusandtime.
•Word3Heading.
•Word4Roll.
•Word5Pitch.
•Word6Headingrate.
•Word7Rollrate.
•Word8Pitchrate.
•Word9Checksum(MSB)and1’scomplementofchecksum(LSB).
Alldataarein2’scomplementbinary.Headingisgivenwithin±180°,rollandpich
within±90°.(Notehoweverthatthevalues±180°and±90°arenotpermitted,asthese
areonebittoohigh.)
HeadingismeasuredwithreferencetotrueNorth,andpositivewhenthebowpoints
eastwards.Rollisperdenitionarotationangle(Tate-Bryant)andpositivewhenthe
starboardsidegoesup.Pitchispositivewhenthebowgoesdown.
850-160692/R
25
KongsbergEMSeries
HDTformat
Table9HDTFormat
DataDescriptionFormatValidrangeNote
Startidentier=$
Always24h
——
Talkeridentier
aa
Capitalletters
—
Sentenceformatter
AlwaysHDT ,
——
Heading,degreestruex.x,T0to359.9...
—
Checksum*hh
——
Endofsentencedelimiter=CRLF
Always0Dh0Ah
——
SKR80format
TheSKR80sendsoutastreamofdatawithfourbytesforeachmeasurement.Thereis
onebyteforeachdigit
•Therstbyteforthedecimaldegree(Example:xxx.X)
•Thesecondforthedegree(Example:xxX.x)
•Thethirdforthe10’sdegree(Example:xXx.x)
•Thefourthforthe100’sdegree(Example:Xxx.x)
Thetwouppermostbitsofabytearealwayszero,thenexttwobitsgivethedigit,00
forthedecimal,01forthedegree,10forthe10’sdegree,and11forthe100’sdegree.
Thelowestfourbitsgivethedigitvaluein4-bitBCDformat.Asanexampleaheading
of234.5°willgivethefourbytes05h14h23h32h.TheLR40addsafthbyteatthe
endforstatuswiththetwoupperbitsofthestatusbytesetto11(11000000forOK,
11001010foralarm).Thisstatusbyteisignored.
26
850-160692/R
Inputdatagrams
Clockdatagrams
Topics
•Clockonpage27
•ZDAformatonpage27
Clock
Thesystemclockisusedtotimestampalldataoutput.Theclockmaybesetuponstart
ofnewsurveyorpower-upontheProcessingUnit(recommendedsourceisaNMEA
ZDAformatdatagram).Theclockwilldrift,typicallysomesecondsperday,unlessitis
synchronisedtoa1PPS(pulsepersecond)inputsignal(theclockmillisecondcounter
willbesettozerowheneverapulseisreceived).Afullycorrectclockisonlynecessaryif
theoutputdataarelatertobecombinedwithothertimecriticaldataloggedorcreatedby
othersystems,forexampleanaccuracyofuptooneminutewouldbenecessarytoapply
tidalchanges.Ifthetimestampsuppliedinthepositioninputdatagramsistobeused,itis
imperativethatthesystemclockiscorrectlysetandthat1PPSsynchronisationisused.
ZDAformat
Table10ZDAformat
DataDescriptionFormatValidrangeNote
Startidentier=$
Always24h
——
Talkeridentier
aa
Capitalletters
—
Sentenceformatter
AlwaysZDA,
——
UTC
hhmmss.ss,000000to
235959.9...
—
Day
xx,
01to+31
—
Month
xx,
01to+12
—
Year
xxxx,
0000to9999
—
Localzonehours
xx,
-13to+131
Localzoneminutes
xx,
00to+591
Optionalchecksum*hh
——
Endofsentencedelimiter=CRLF
Always0Dh0Ah
——
Notes
1Localzonetimeisnotused.Anoffsettimemaybeenteredbytheoperatortoget
thesystemclocktoshowadifferenttimethanUTC.
Note
TrimbleUTCformatisalsosupported.
850-160692/R
27

KongsbergEMSeries
Soundspeeddatagrams
Topics
•Overviewonpage28
•KongsbergMaritimeSSPformatonpage29
•AMLSmartSensorandAMLMicroSensorformatonpage32
Overview
AsoundspeedprolemaybeloadedintotheOperatorStationeitheronaseriallineor
onEthernet.FormatspreviouslyusedwithexistingKongsbergMaritimeechosounders
(KongsbergMaritimeASCIIandBinarySoundVelocityProleinputdatagrams)will
beaccepted,butsincetheirresolutionindepthislimitedto1mandthenumberof
entriesto100,anewerformatgivenbelowwithouttheselimitationsisrecommended.
ThisformatisalsoacceptedbytheKongsbergMaritimeHIPAPandHPRunderwater
positioningsystems(butnotnecessarilyvice-versa).Notethatacompleteprolemaybe
piecedtogetherfromseveraldatagramsandeditedwiththeOperatorStation’sSound
SpeedEditor.
ThenewformatiscompletelyinASCIIandallows9998entrieswithoutlimitationsin
resolution.Buttheechosounderhaveotherlimitations,checknote9.Inadditionto
depthandsoundspeed,itallowsinputofabsorptioncoefcient,pressure,temperature
andsalinityorconductivity.Thelatterparametersmaybeusedtocalculatedepth,sound
speedandabsorptioncoefcient.Useofadepthdependentabsorptioncoefcientallows
amoreaccuratedeterminationofbottombackscatterstrength.
Notethatthisdatagrammayalsobeloggedasoutput,retaininginformationnotincluded
inthestandardsoundspeedproleoutputdatagram,suchaswhereandwhentheprole
hasbeentaken.
28
850-160692/R
 Loading...
Loading...