

Kongsberg EM - REV M, EM 3002, EM 3000, EM 2040, EM 2000 Instruction Manual
...
Instruction manual
EM Series
Multibeam echo sounders
Datagram formats


KongsbergEMSeries
Multibeamechosounder
EMdatagramformats
850-160692/M
January2010

Documenthistory
Documentnumber:850-160692
Rev.K
June2009
Changes:
Anewoutputdatagram,NetworkAttitudeV elocitydatagram
110,isadded.The3DvelocityinputisusedforDoppler
compensationinFMmode.Therangecorrectionsappliedis
documentedintheRawrangeandangle78datagram.
Installation,Runtimeandstatusdatagramsareupdatedwithextra
information.
Someminorchangesandadditionalcomments.
ChangesinPTNL,GGKdatagram
Rev.L
November2009
Changes:
UpdatedRuntimeandInstallationparameters.
UpdatedPUinformationandstatusdatagramtoallowforEM
2040datagrams
ExtraParametersaddedinMultibeamparameterssection
Rev.M
January2010
Changes:
AddedSISgenerateddatagrams.
Addedandmodiedcomments.
Note
TheinformationcontainedinthisdocumentremainsthesolepropertyofKongsbergMaritimeAS.No
partofthisdocumentmaybecopiedorreproducedinanyformorbyanymeans,andtheinformation
containedwithinitisnottobecommunicatedtoathirdparty,withoutthepriorwrittenconsentof
KongsbergMaritimeAS.
KongsbergMaritimeASendeavourstoensurethatallinformationinthisdocumentiscorrectandfairly
stated,butdoesnotacceptliabilityforanyerrorsoromissions.
S tr a n dp r om e n ad en5 0
P.O .B o x1 1 1
N- 3 1 9 1H o rt en ,
No rw a y
Ko n g s b e r gM a r i t i m eA S
Te le p h on e :+ 4 73 30 23 80 0
Te le fa x:+ 4 73 30 44 75 3
s ub s e a @k on g s b e rg . c o m
w w w .k o n g s b e r g . c o m

EMdatagramformats
Tableofcontents
1EMDATAGRAMFORMATS..................................................5
1.1Presentationformat...................................................................................................5
2INPUTDATAGRAMS..........................................................6
2.1Position.....................................................................................................................6
2.1.1Overview.....................................................................................................6
2.1.2GGADatagram............................................................................................9
2.1.3PTNL,GGKLocalcoordinatepositiondatagram..........................................11
2.1.4GGKDatagram..........................................................................................13
2.1.5VTGDatagram...........................................................................................14
2.1.6Transponderposition...................................................................................15
2.1.7Simrad90datagram....................................................................................16
2.1.8TideInput..................................................................................................18
2.1.9Depthpressureorheightinput....................................................................19
2.2Attitude..................................................................................................................20
2.2.1Overview...................................................................................................20
2.2.2EMAttitudeinputformat............................................................................22
2.2.3Networkvelocityattitudeinputformat.........................................................24
2.2.4SperryMK-39Attitudeinputformat............................................................25
2.2.5HDTformat................................................................................................26
2.2.6SKR80format............................................................................................26
2.3Clockdatagrams.....................................................................................................27
2.3.1Clock.........................................................................................................27
2.3.2ZDAformat................................................................................................27
2.4Soundspeeddatagrams..........................................................................................29
2.4.1Overview...................................................................................................29
2.4.2KongsbergMaritimeSSPformat.................................................................30
2.4.3AMLSmartSensorandAMLMicroSensorformat......................................33
2.5Depthinputdatagramsfromsinglebeamechosounder........................................35
2.5.1DBSFormat...............................................................................................35
2.5.2DPTFormat...............................................................................................35
2.5.3Simradformat.............................................................................................36
2.6Remotecontroldatagrams......................................................................................37
2.7Soundspeedattransducer......................................................................................39
2.7.1KSSIS80Datagram....................................................................................39
3OUTPUTDATAGRAMS......................................................40
3.1Introduction............................................................................................................40
3.2Multibeamdata.......................................................................................................43
3.2.1Depthdatagram..........................................................................................43
3.2.2XYZ88......................................................................................................47
850-160692/M
3

KongsbergEMSeries
3.2.3Centralbeamsechogram.............................................................................50
3.2.4Rawrangeandbeamangle(F).....................................................................52
3.2.5Rawrangeandbeamangle(f)......................................................................53
3.2.6Rawrangeandangle78..............................................................................55
3.2.7Seabedimagedatagram...............................................................................58
3.2.8Seabedimagedata89..................................................................................60
3.2.9Watercolumndatagram...............................................................................62
3.3Externalsensors......................................................................................................64
3.3.1Attitudedatagram.......................................................................................64
3.3.2Networkattitudevelocitydatagram110.......................................................66
3.3.3Clock........................................................................................................68
3.3.4Depth(pressure)orheightdatagram.............................................................69
3.3.5Heading....................................................................................................70
3.3.6Position.....................................................................................................71
3.3.7Singlebeamechosounderdepth.................................................................73
3.3.8Tidedatagram.............................................................................................74
3.4Soundspeed............................................................................................................75
3.4.1Surfacesoundspeed...................................................................................75
3.4.2Soundspeedproledatagram......................................................................76
3.4.3KongsbergMaritimeSSPoutputdatagram...................................................77
3.5Multibeamparameters............................................................................................78
3.5.1Installationparameters................................................................................78
3.5.2Runtimeparameters....................................................................................84
3.5.3Mechanicaltransducertilt............................................................................92
3.5.4ExtraParametersdatagram...........................................................................93
3.6PUinformationandstatus......................................................................................97
3.6.1PUIDoutput..............................................................................................97
3.6.2PUStatusoutput......................................................................................100
3.6.3PUBISTresultoutput...............................................................................103
3.7SISgeneratedoutput............................................................................................105
3.7.1APBDatagram.........................................................................................105
3.7.2DPTDatagram.........................................................................................105
3.7.3RTEDatagram..........................................................................................106
3.7.4WPLDatagram.........................................................................................106
3.7.5KSSIS31Datagram..................................................................................107
4
850-160692/M
EMdatagramformats
1EMDATAGRAMFORMATS
ThedatainputandoutputformatstoandfromtheEMSeries
multibeamechosoundersaredescribedinthisdocument.The
informationappliestotheKongsbergMaritimemultibeamecho
soundersintroducedafter1995.
Note
TheinformationhereinappliestotheEM3002,EM3000,EM
2040,EM2000,EM1002,EM710,EM302,EM122,ME70,
EM300andEM120multibeamechosounders.Someofthe
informationmaynotberelevantforyourspecicsystem.Please
disregardthis.
TheinformationinthisdocumentisnotvalidfortheEM12,EM
100,EM950andEM1000multibeamechosounders.
Note
Inordertomeetspecialcustomerrequirements,Kongsberg
Maritimemayhavetochangethedatagramformatsdescribed
here.Theformatspresentedinthisdocumentmaythereforebe
alteredwithoutpriornotice,althoughbackwardcompatibility
willbemaintainedasfaraspossible.Beforesoftwareiswritten
inaccordancewiththisdocument,itisstronglyrecommendedto
contactKongsbergMaritimetoensurethatthelatestversionis
used,andthatanyplannedchangesaretakenintoaccount.
1.1Presentationformat
TheformatdescriptionisaccordingtotheNMEA0183standard,
ApprovedParametricSentenceStructure,withtheASCII
character(s)givenasfollows
•“x.x”denesavariablelengthnumericaleld,withoptionally
includeddecimalpointandsign.
•“c–c”denesavariablelengtheldofprintablecharacters.
•“x–x”denesavariablelengtheldofnumericcharacters.
•“a__”denesaxedlengtheldofalphabeticalcharacters
(e.g.“aa”=twocharacterlongeld.
•“x__”denesaxedlengtheldofnumericcharacters.
Forbinaryelds,thelengthisgiveninnumberofbytesplus“U”
forunsignedand“S”forsigneddata.
850-160692/M
5

KongsbergEMSeries
2INPUTDATAGRAMS
Topics
•Positiononpage6
•Attitudeonpage20
•Clockdatagramsonpage27
•Soundspeeddatagramsonpage29
•Depthinputdatagramsfromsinglebeamechosounderon
page35
•Remotecontroldatagramsonpage37
•Soundspeedattransduceronpage39
Onlyalimitednumberofinputformatsfromexternalsensors
areaccepted.Theseareprimarilyinaccordancewiththe
NMEA0183specication,orbasedupontheprinciplesofthat
specication.
Note
ThemajorityoftheseformatshavenotbeendenedbyKongsberg
Maritime.Thus,theseformatsarenotcontrolledbyKongsberg
Maritime.
AlmostallinputformatsareASCII.SeriallineorEthernet
inputtothemultibeamechosounder’sProcessingUnitismost
common,butsomedatagrams-whicharenottimecritical-are
interfacedonserialline(s)orEthernettotheOperatorStation.
2.1Position
Topics
•Overviewonpage6
•GGADatagramonpage9
•PTNL,GGKLocalcoordinatepositiondatagramonpage11
•GGKDatagramonpage13
•VTGDatagramonpage14
•Transponderpositiononpage15
•Simrad90datagramonpage16
•TideInputonpage18
•Depthpressureorheightinputonpage19
2.1.1Overview
TheEMSeriesacceptspositiondatainthefollowingformats
•NMEA0183GGA
6
850-160692/M

Inputdatagrams
•GGK
•PTNL,GGK
•SIMRAD90
•Transponderposition
•WiththeGGAandGGKdatagrams,informationcontainedin
NMEA0183GSTandVTGdatagramswillalsobeaccepted
andused.
Note
TheGSTdatagramisnotusedbythenewgeneration
multibeamechosounders,i.e.EM122,EM302,EM710,
EM2040andEM3002.
•AdatagramformatforSonarHeaddepthisprovidedforthe
EM3002,EM3000,EM2040,EM2000andEM710.Note
thattheformatisthesameasthatusedbytheParoscientic
Digiquartzpressuresensor.Thisformatmayalsobeusedfor
inputofforexamplevaryingdatumheightsorotherspecial
heightinformationonallmodels.
•Adatagramformatforinputoftidalheightisprovided.
TheGGAformatgivenbelowisaccordingtotheNMEA0183
version2.30description.
TheGGKformatwasoriginallydenedbytheUSArmyCorps
ofEngineersfortheirtestswithkinematicGPS.Trimble’s
proprietaryversionoftheformat,PTNLGGK,issupported.If
anychangestotheformataremade,andifitbecomespartofthe
NMEAstandard,thiswillbeimplemented.
TopreservetheinherentaccuracyofthekinematicGPSdatait
isnecessarytocorrectthedataforvesselmotion.Thisrequires
accuratetimingsynchronisationbetweenthemotionsensorand
theGPSreceiver.Itisthereforeimperativethat
•thepositiondatagramhasaconstantandknowntimedelay,
or
•thetimestampinthedatagramisactuallythetimeofthe
positionx,thatsynchronisationtothe1PPSsignalofthe
GPSreceiverisenabled,andthatthesystemclockhasbeen
setcorrectly.
Asneitheroftheseconditionsmaynotbepossibletoachieve
withasufcientaccuracy,theapplicationofmotioncorrection
isoperatorselectable.Motioncompensationmaybeappliedto
mostofthepositioninputdatagrams.
850-160692/M
7

KongsbergEMSeries
InadditiontopositiondatafromtheGGAorGGKdatagrams,
speedandcourseovergroundfromNMEAVTGdatagrams
mayalsobecopiedintothepositionoutputdatagram.These
valuesmaybeusefulinlteringofthepositioningduring
postprocessing.IfaVTGdatagramdoesnotfollowtheGGA
orGGKdatagramthecourseandspeedeldsoftheoutput
datagramswillbesettotheirinvalidvalues.
AsanalternativetoGGA,theSIMRAD90formatposition
datagrammaybeused.TheSIMRAD90formatisintended
tobetheformatofchoicewhenthepositioningsystemisnot
astand-aloneGPSreceiversupplyingGGAorGGKformat
datagrams.TheSIMRAD90formatcaninadditiontoglobal
longitudeandlatitudecoordinatesalsobeusedforNorthingand
Eastingtypeprojectioncoordinates(e.g.UTM).
TocaterforapplicationswheretheEM2000orEM3000Sonar
Headismountedonasubseavehicle,theoriginalSIMRAD90
formathasbeenexpandedtoallowinclusionofthedepthofthe
vehicleinadditiontoitshorizontalpositioninlongitude/latitude
orNorthing/Eastingcoordinates.
SISsupportsloggingofalldatafromaJavadGPSreceiver
directlyattachedtotheserialportontheHWSPC.
TheJavadGPSreceiveroutputsbinarydatainadditionto
theNMEAdatagrams.Thebinarycanbeusedbythirdparty
software(likeTerratec)tocomputemoreaccuratepositionsusing
postprocessingtools.TheJavaddatalesarestoredinaseparate
folderandkeptseparatefromtheotherrawdatatoeasethepost
processingofthedata.Theoperatorchoosesthisdirectoryin
theruntimeparametersinSIS.
ATrimbleGPSreceivercanalsobeattachedtotheserialline
oftheHWSPC.Thisisusedforspecialpurposeslikeland
surveying.
8
850-160692/M
Inputdatagrams
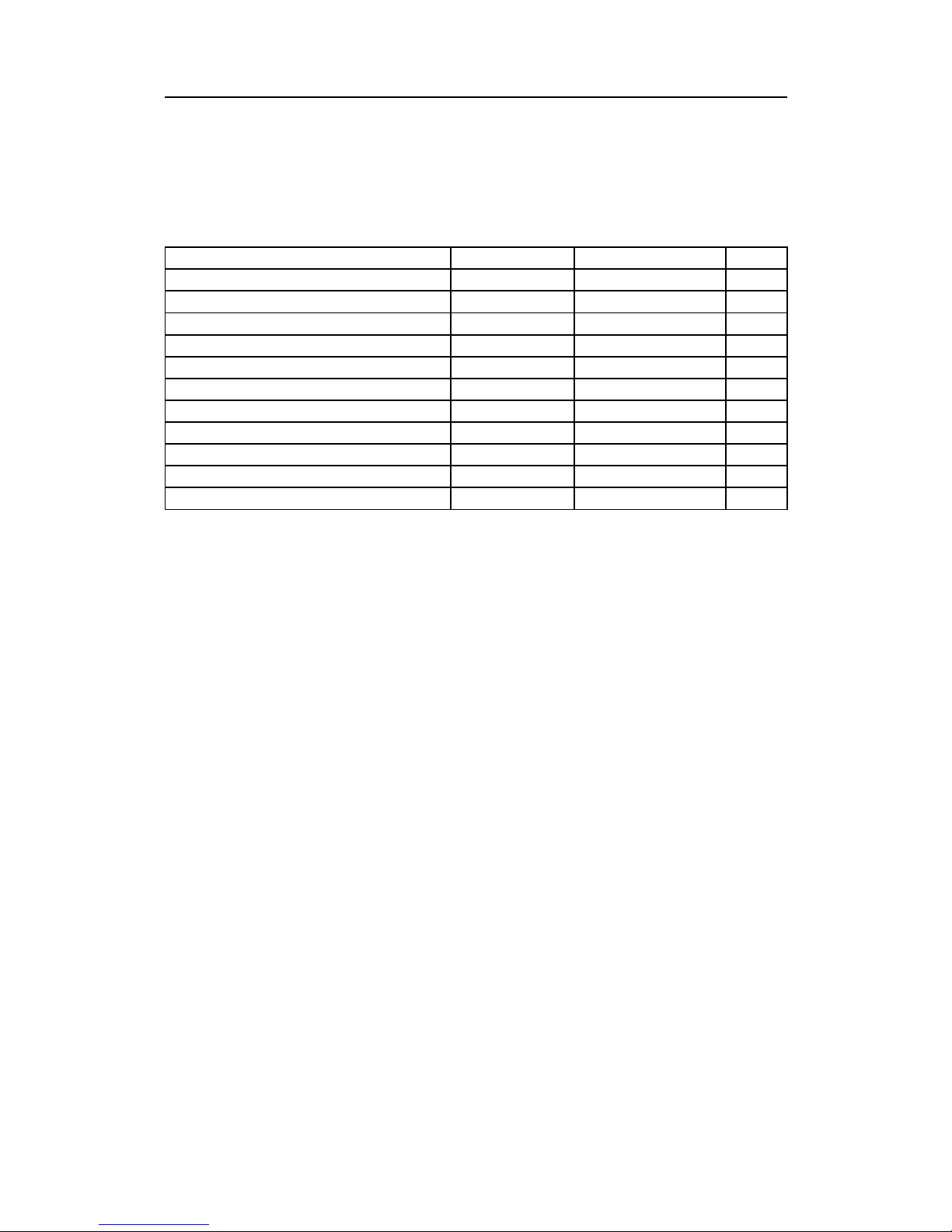
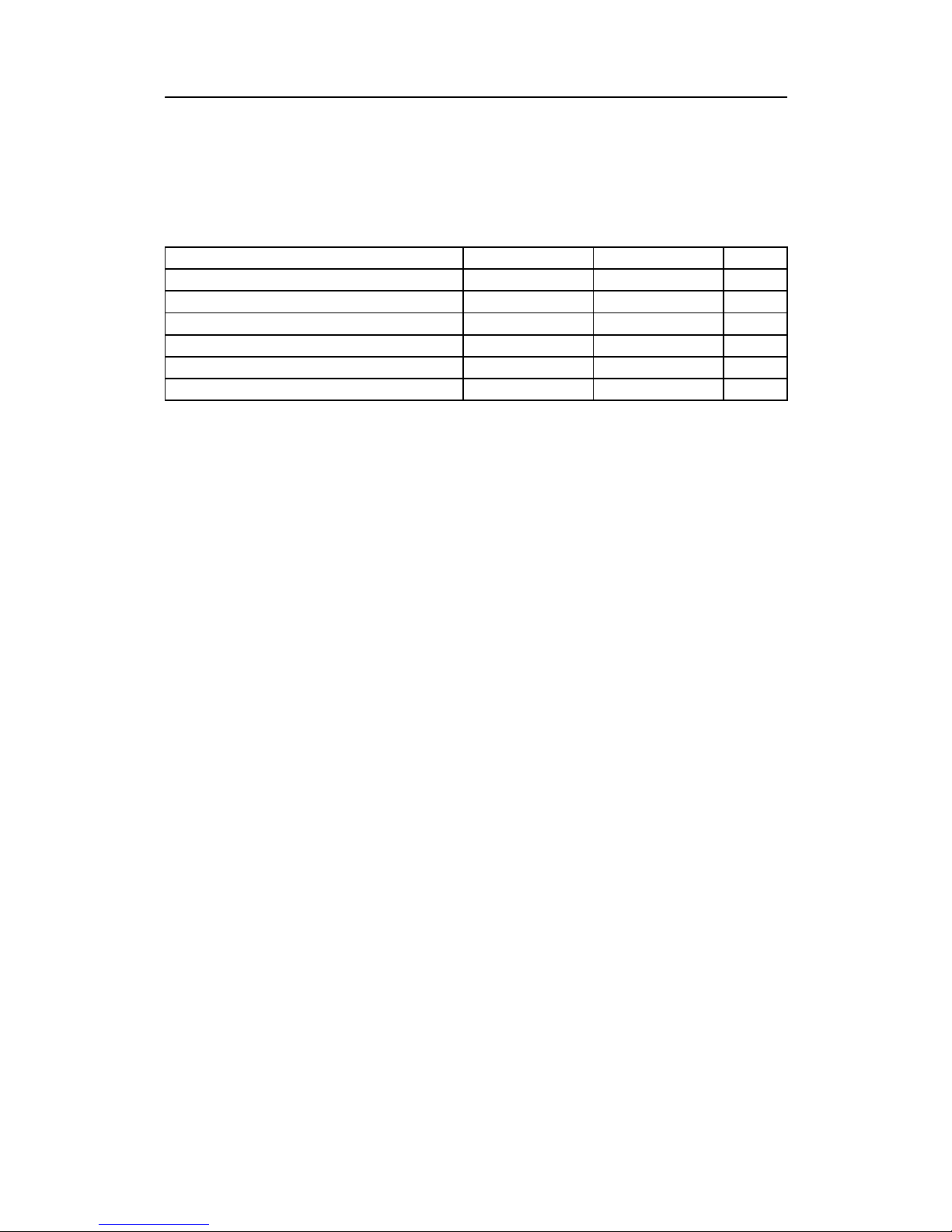
2.1.2GGADatagram
Table1GGADatagram
DataDescriptionFormatValidrangeNote
Startidentier=$
Always24h
——
Talkeridentier
aa
Capitalletters
—
SentenceformatterAlwaysGGA,
——
UTCofposition
hhmmss.ss,000000to235959.9...
—
Latitudeindegreesandminutes,plusoptional
decimalminutes
llll.ll,0000to9000.0...
—
Latitude–N/S
a,
NorS
—
Longitudeindegreesandminutes,plusoptional
decimalminutes
yyyyy.yy ,
00000to18000.0...
—
Longitude–E/W
a,
EorW
—
GPSqualityindicator
x,
0to81
Numberofsatellitesinuse
xx,
00to12
—
HDOP
x.x,—
1
Antennaaltituderemeansealevel(geoid)
x.x,—
2
Unitsofantennaaltitude
M,
——
Geoidalseparation(sealevelreWGS-84)
x.x,—
2
Unitsofgeoidalseparation
M,
——
AgeofdifferentialGPSdata
x.x,——
Differentialreferencestationid
xxxx,
0000to1023
—
Checksum*hh
——
Endofsentencedelimiter=CRLF
Always0Dh0Ah
——
Notes
1TheHDOP(HorizontalDilutionOfPrecision)valuewillbe
scaledandcopiedtothe”Measureofpositionxquality”
eldinthepositionoutputdatagram.Thescalefactor
dependsupontheGPSqualityindicator’svalue:
•1-(SPSorstandardGPS)=>1000
•2-(differentialGPS)=>100
•3-(PPSorpreciseGPS)=>200,but10ifGGAistreated
asRTK.(SeeNote2)
•4-(kinematicGPSwithxedintegers)=>10
•5-(kinematicGPSwithoatingintegers)=>50
•6-(estimatedordeadreckoningmode)=>1000
•7-(manualinputmode)=>1000
•8-(testmode)=>1000,but10ifGGAistreatedasRTK.
(SeeNote2)
850-160692/M
9

KongsbergEMSeries
•The”Measureofpositionxquality”eldwillbeset
to65534(largestvalidnumber)iftheindicatoriszero
(non-validposition).
Thisscalingisusedtogiveatleastarelativelycorrect
positionxqualitychange(intheorderofcm)ifthereare
dropoutsindifferential,preciseorkinematicmeasurements,
althoughHDOPisnotametricvalue.
TheGPSmanufacturersmayhavedifferentGPSquality
indicators.
2WhenthequalityfactorofaGGApositioningsysteminuse
is4or5aheightoutputdatagramisautomaticallygenerated,
andalsoifthequalityfactoris3or8andtheoperatorhas
settheGGApositiontobeanRTKposition.Theheight
isthesumofthesetwoeldswhichareassumedpositive
upwards(antennaabovegeoid).
10
850-160692/M

Inputdatagrams
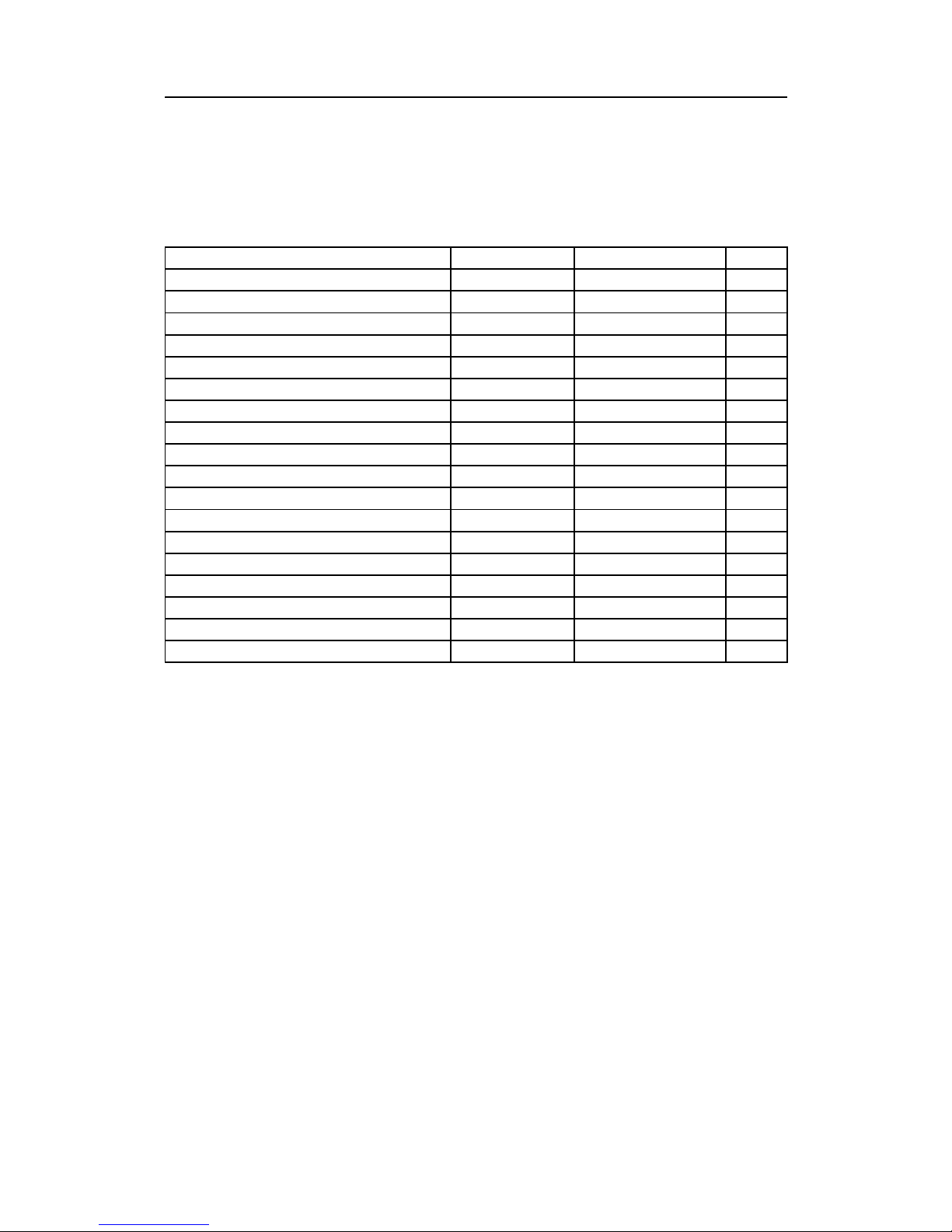
2.1.3PTNL,GGKLocalcoordinateposition
datagram
Table2PTNLDatagram
DataDescriptionFormatValidrangeNote
Startidentier=$
Always24h
——
Sentenceidentier
AlwaysPTNL,
——
SentenceformatterAlwaysGGK,
——
Timeofposition
hhmmss.ss,000000to235959.9...
—
Dateofposition
mmddyy,010100to123199
—
Latitudeindegreesandminutesddmm.mmmmmmm,0000to9000.0...
—
Latitude–N/S
a,
NorS
—
Longitudeindegreesandminutesdddmm.mmmmmmm,00000to18000.0...
—
Longitude–E/W
a,
EorW
—
GPSqualityindicator
x,
0to71
Numberofsatellitesinuse
xx,
00to12
—
DOP
x.x,—
1
Antenna/heightaboveellipsoid
EHTx.x,
——
Unitsofellipsoidalheight(meters)
M,
——
Checksum*hh
——
Endofsentencedelimiter=CRLF
Always0Dh0Ah
——
Notes
1TheDOP(DilutionofPrecision)valuewillbescaledand
copiedtothe”Measureofpositionxquality”eldinthe
positionoutputdatagram.Thescalefactordependsuponthe
GPSqualityindicator’svalue
•1–(StandardGPS)=>1000.0;
•2–(RTKoat)=>50.0;
•3–(RTKx)=>10.0;
•4–(DGPS)=>100.0;
•5–(W AAS/EGNOS)=>100.0;
•6–(NetworkFloat)=>50.0;
•7–(Networkx)=>10.0;
The“Measureofpositionxquality”eldwillbeset
to65534(largestvalidnumber)iftheindicatoriszero
(non-validposition).
Thisscalingisusedtogiveatleastarelativelycorrect
positionxqualitychange(intheorderofcm)ifthereare
dropoutsindifferential,preciseorkinematicmeasurements,
althoughDOPisnotametervalue.
850-160692/M
11

KongsbergEMSeries
TheGPSmanufacturersmayhavedifferentGPSquality
indicators.
12
850-160692/M
Inputdatagrams
2.1.4GGKDatagram
Table3GGKDatagram
DataDescriptionFormatValidrangeNote
Startidentier=$
Always24h
——
Talkeridentier
aa
Capitalletters
—
SentenceformatterAlwaysGGK,
——
Timeofposition
hhmmss.ss,000000to235959.99...
—
Dateofposition
MMDDYY ,010100to123199
—
Latitudeindegreesandminutes,plusoptional
decimalminutes
llll.llllll,0000to9000.0...
—
Latitude–N/S
a,
NorS
—
Longitudeindegreesandminutes,plusoptional
decimalminutes
yyyyy.yyyyyy ,
00000to18000.0...
—
Longitude–E/W
a,
EorW
—
GPSqualityindicator
x,
0to31
Numberofsatellitesinuse
xx,
00to12
—
DOP
x.x,—
1
Antennaellipsoidalheight
x.x,——
Unitsofantennaellipsoidalheight
M,
——
Unitsofantennaellipsoidalheight
x.x,——
Checksum*hh
——
Endofsentencedelimiter=CRLF
Always0Dh0Ah
——
Notes
1TheDOP(DilutionOfPrecision)valuewillbescaledand
copiedtothe”Measureofpositionxquality”eldinthe
positionoutputdatagram.Thescalefactordependsuponthe
GPSqualityindicator’svalue
•1-(SPSorstandardGPS)=>1000
•2-(differentialGPS)=>100
•3-(kinematicGPS)=>10
The”Measureofpositionxquality”eldwillbeset
to65534(largestvalidnumber)iftheindicatoriszero
(non-validposition).
Thisscalingisusedtogiveatleastarelativelycorrect
positionxqualitychange(incm)iftherearedropoutsin
differential,preciseorkinematicmeasurements,although
DOPisnotametervalue.
TheGPSmanufacturersmayhavedifferentGPSquality
indicators.
850-160692/M
13
KongsbergEMSeries
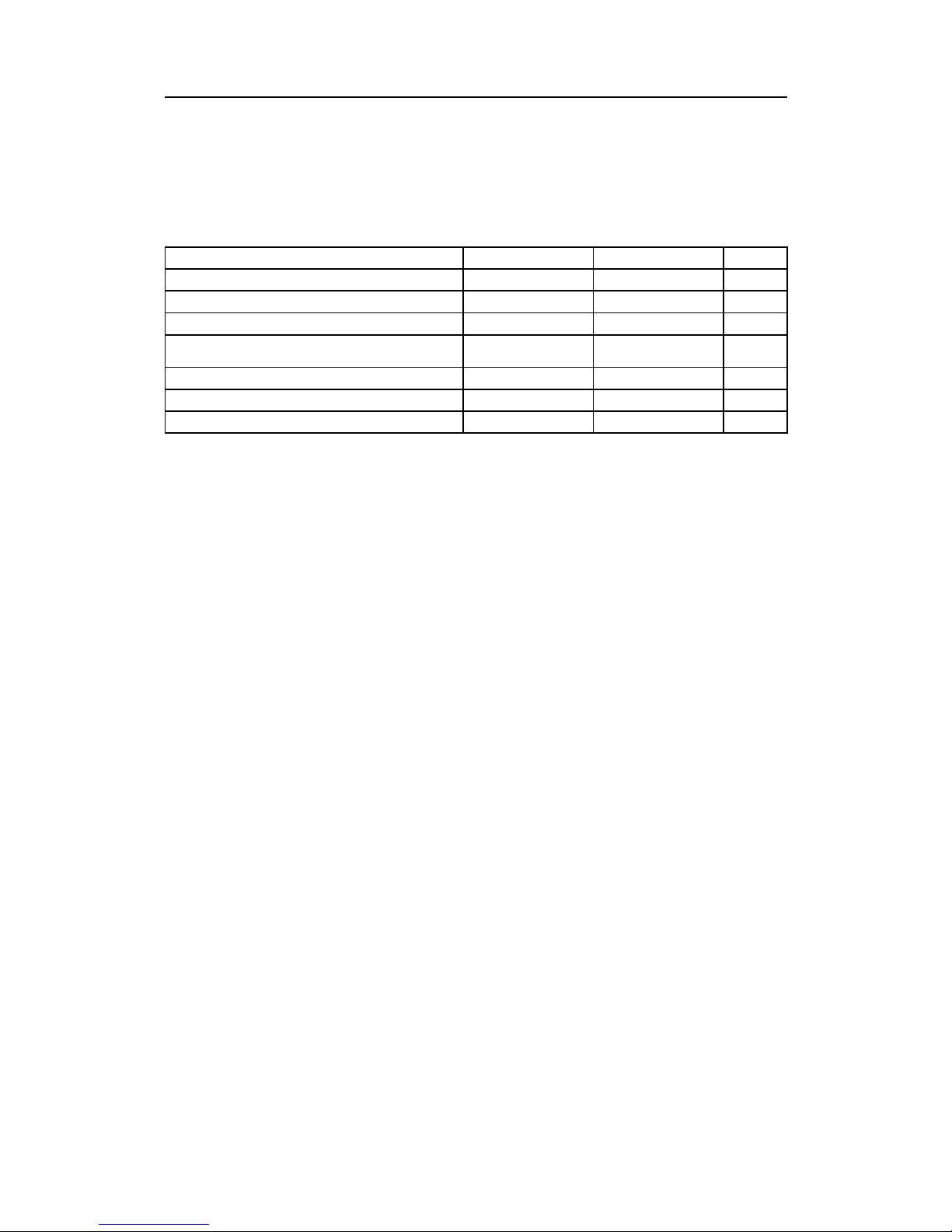
2.1.5VTGDatagram
Table4VTGDatagram
DataDescriptionFormatValidrangeNote
Startidentier=$
Always24h
——
Talkeridentier
aa
Capitalletters
—
SentenceformatterAlwaysVTG,
——
Courseoverground,degreestrue
x.x,T,0to359.9...1
Courseoverground,degreesmagnetic
x.x,M,0to359.9..1
Speedoverground,knots
x.x,N,0–1
Speedoverground,km/h
x.x,K,0–1
Modeindicator
a
A,D,E,M,SorN
—
Unitsofantennaellipsoidalheight
x.x,——
Checksum*hh
——
Endofsentencedelimiter=CRLF
Always0Dh0Ah
——
Notes
1Onlytruecourseandtherstvalidspeedeldwillbeused.
14
850-160692/M
Inputdatagrams
2.1.6Transponderposition
Table5SSB-SSBLPositionDatagram
DataDescriptionFormatValidrangeNote
Start_character
$
——
Address
PSIMSSB,
——
Timehhmmss.ss,
—
2
TPcodeB01,
—
3
Status
A,
—
4
Errorcode
cc_,
—
1
Coordinatesystem(alwaysradians)
R,
——
Orientation(alwaysnorthoriented)
N,
——
SWlter
,—
1
Xcoordinate(Latitiude)
x.x,——
Ycoordinate(Longitude)
x.x,——
Depth(Sonardepthinm)
x.x,——
Expectedaccuracy(Pos.qualityinm)
x.x,——
Additionalinfo
,—
1
Firstaddvalue
,—
1
Secondaddvalue
,—
1
Checksum*hh
——
Termination
CRLF
——
Notes
1Notusedbymultibeamechosounders.
2DecodedandusedifClockSynchronisationissetfrom
positiondatagram.
3Onlythistranspondertypeisacceptedbythemultibeam.
4A=OK,Vwillgivebadpositions,butdatagramwillbe
acceptedforlogging.
850-160692/M
15
KongsbergEMSeries
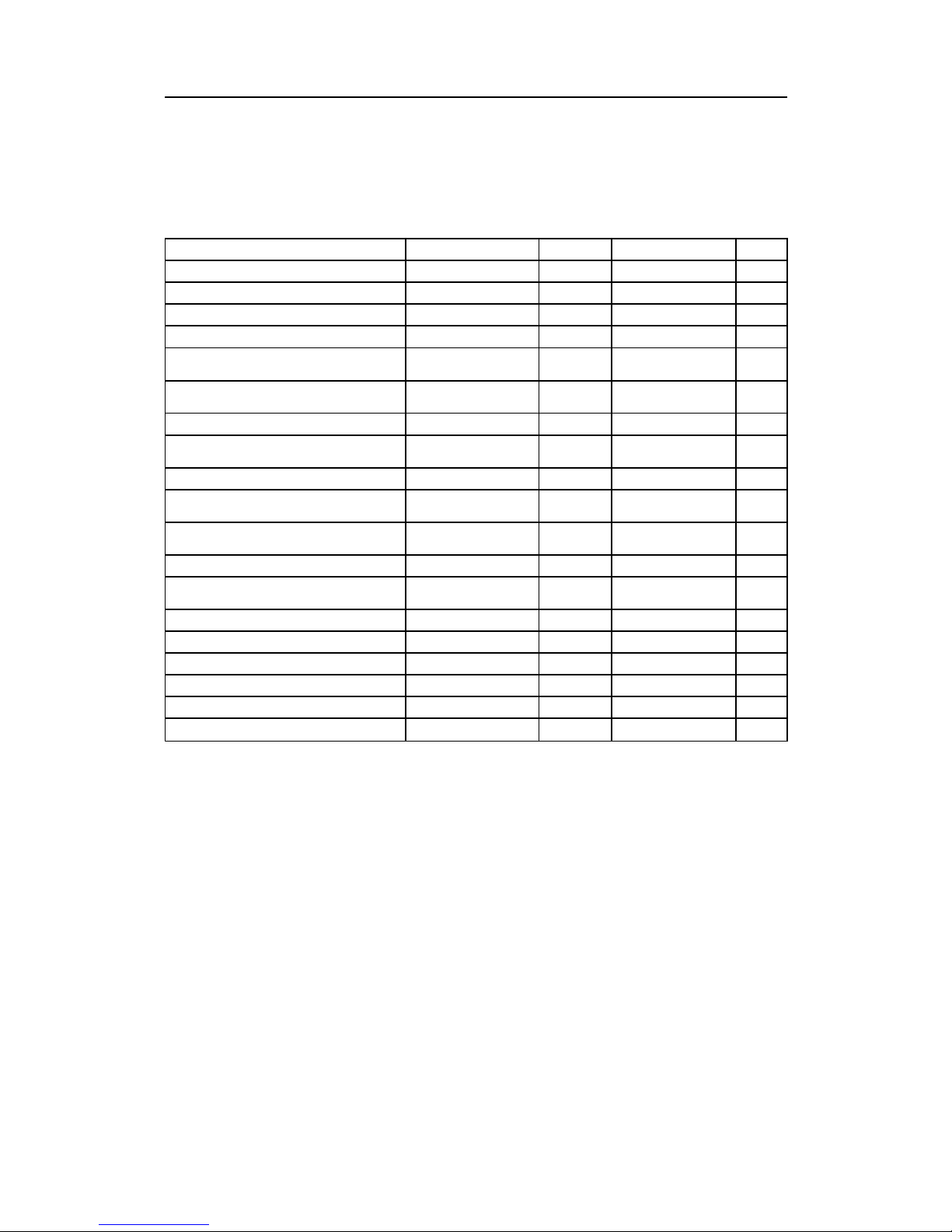
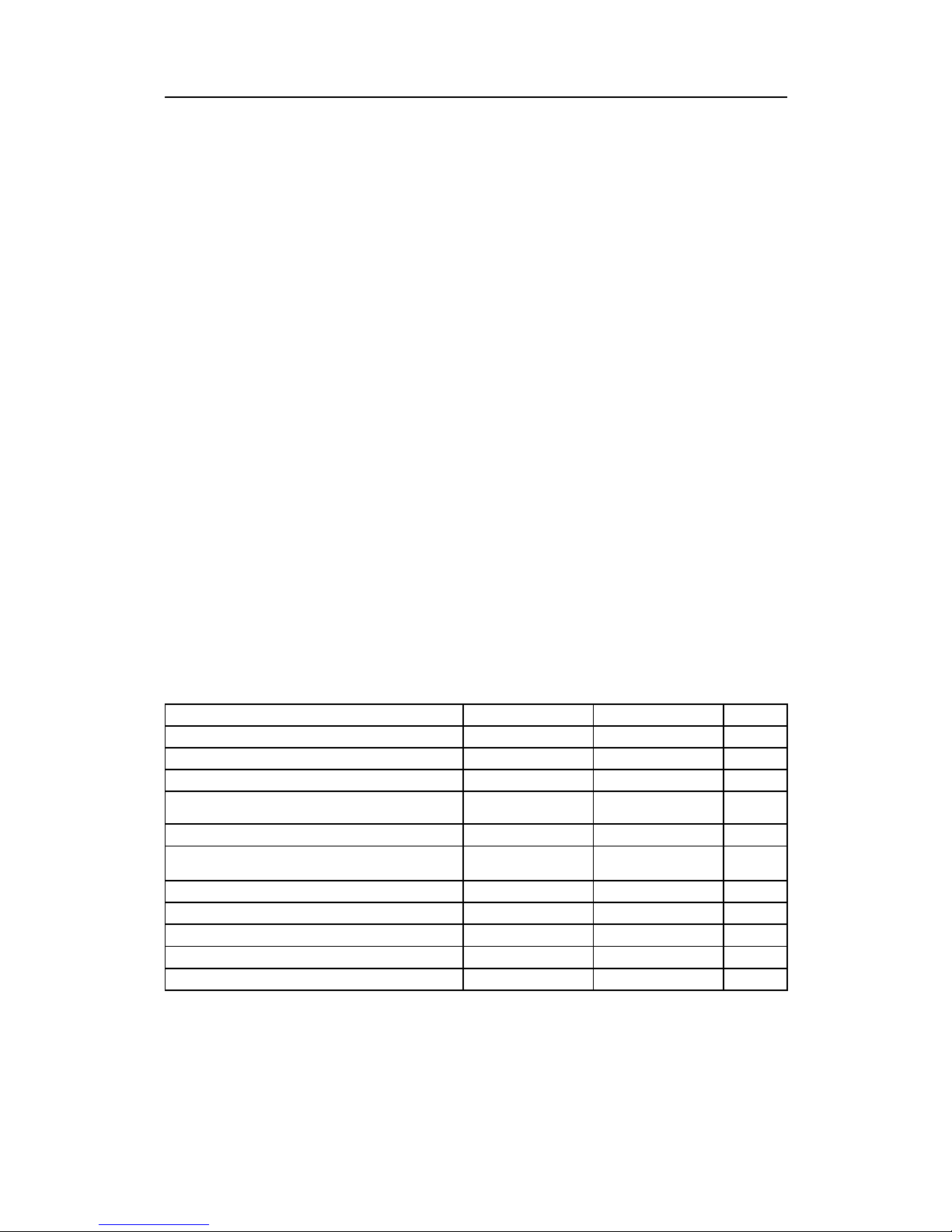
2.1.7Simrad90datagram
Table6Simrad90datagram
DataDescriptionFormatLengthValidrangeNote
Startidentier=$
Always24h1
——
Talkeridentier
aa
2
Capitalletters
—
SentenceformatterAlwaysS90,
4
——
Dateofposition
DDMMYY ,
7
010100to31 1299
—
UTCofpositionashour,minute,
second,hundredthofsecond
hhmmssss,900000000to
23595999
—
Latitudeindegrees,minutesand
decimalminutes
xxxx.xxxx
90000.0000to
9999.9999
A
Hemisphereidentier
a,
2
NorS
A
Longitudeindegrees,minutesand
decimalminutes,ordepthinmeters
xxxxx.xxxx
1000000.0000to
18000.0000
A
Hemisphereordepthidentier
a,
2E,WorDA
Northingorrangeinmeters
xxxxxxxxx.x,
12000000000.0to
999999999.9
B
Eastingordepthinmeters
xxxxxxx.x,
100000000.0to
9999999.9
B
UTMzonenumber
xx,
301to60
—
Userdenedcentralmeridianlongitude
orbearing
xxxxx.xxxx
1000000.0000to
35999.9999
C
Hemisphereorbearingidentier
a,
2E,W,orB
C
Systemdescriptor
x,
20to71
Positionxqualityindicator
x,
20to9andAtoF2
Speedovergroundinm/s
xx.x,
5
00.0to99.93
Courseovergroundindegrees
xxx.x
5
000.0to359.93
Endofsentencedelimiter=,CRLFAlways2Ch0Dh0Ah
3
——
16
850-160692/M

Inputdatagrams
Notes
1
•Valueofsystemdescriptordenescontentofdatagramas
follows.(NotethattheKongsbergMaritimeEM12,the
EM950andtheEM1000multibeamechosounderswill
onlyacceptvalueslessthan3)
–0-Thepositionislongitudelatitudeinglobal
coordinatesgivenintheeldsnotedA.
–1-ThepositionisNorthingEastingontheNorthern
hemispheregivenintheeldsnotedB.Ifthe
projectionisdenedtobeUTMtheUTMzone
numberorauserdenablecentralmeridianlongitude
maybegivenintheeldnotedC.
–2-Asforsystemdescriptorequalto1,butthe
positionisontheSouthernHemisphere.
–3-Asforsystemdescriptorequalto0,butinaddition
thedepthisgivenintheEastingeldnotedB.
–4-Asforsystemdescriptorequalto1,butinaddition
thedepthisgiveninthelongitudeeldnotedA.
–5-Asforsystemdescriptorequalto2,butinaddition
thedepthisgiveninthelongitudeeldnotedA.
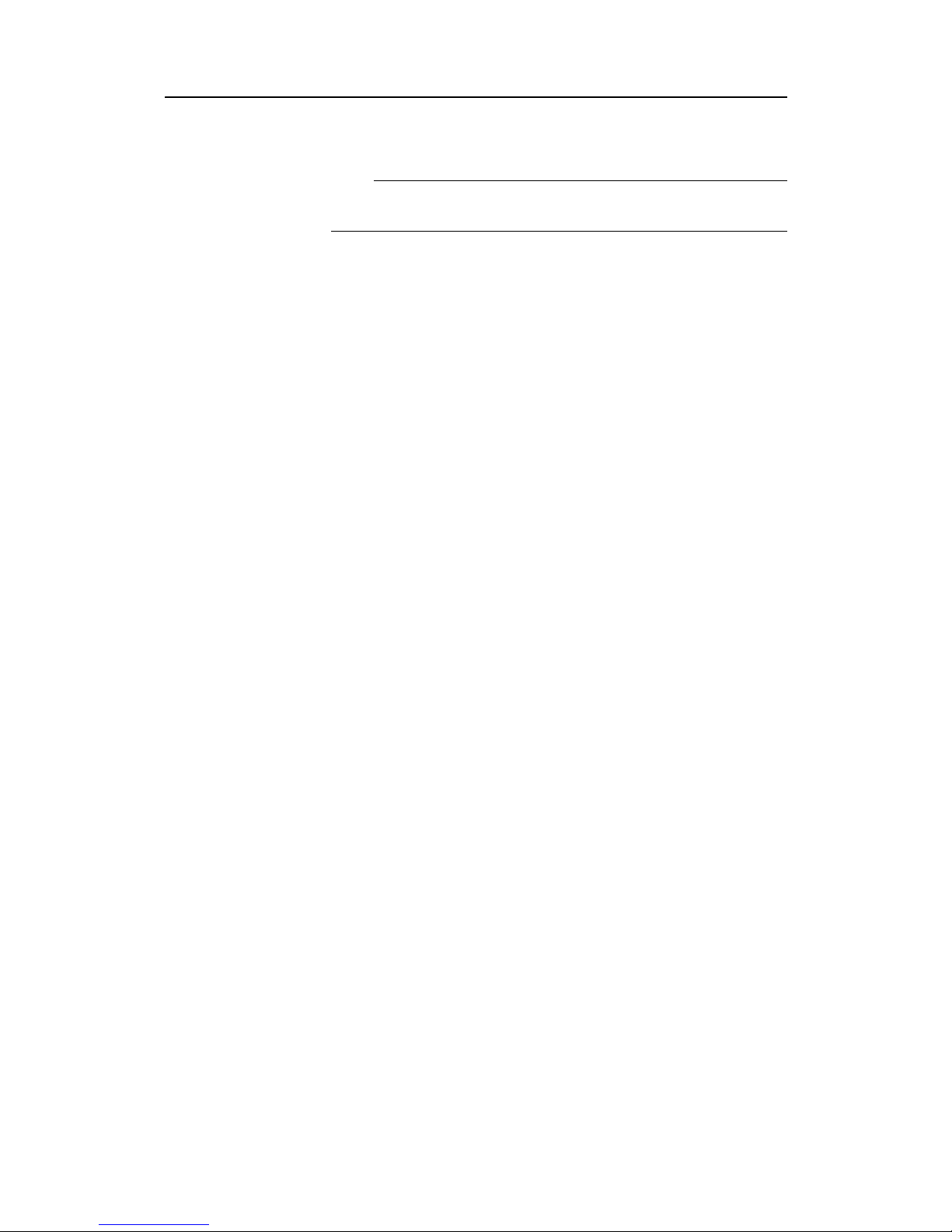
2Thepositionxqualitygiveninthepositionoutputdatagram
willbederivedfromthequalityindicator(thisdiffersfrom
theoriginaldenitionoftheformat)asfollows(inm):
Table7
FED
C
BA98
7
6
5
43210
0.010.020.050.1.02.0.512
5
1020501002005001000
3Iftheseeldshavevalidvaluestheywillbecopiedto
equivalenteldsinthepositionoutputdatagram.Theymay
beusedinlteringofthepositioningduringpostprocessing.
(Theoriginaldenitionoftheformathadlineheadinginthe
courseeldanditsusewastoorientreal-timedisplays).
850-160692/M
17
KongsbergEMSeries
2.1.8TideInput
Table8Tideinputdatagrams
DataDescriptionFormatValidrangeNote
Startidentier=$
Always24h
——
Talkeridentier
a
Capitalletter
—
Sentenceformatter
AlwaysTIDE,
——
Dateandtimeofprediction/measurement
YYYYMMDDhhmm,199601010000to
999912312359
—
Tideoffsetinmetersanddecimalmeters
x.x
±327.661
Optionalchecksum*hh
——
Endofsentencedelimiter=CRLF
Always0Dh0Ah
——
Notes
1Anegativenumberwillbeassumedtoindicateanincrease
insealevel.
18
850-160692/M

Inputdatagrams
2.1.9Depthpressureorheightinput
Table9Depthpressureorheightinputdatagrams
DataDescriptionFormatValidrangeNote
Startidentier=*
Always24h
——
Sentenceidentier
ii00to091
Talkeridentier
ii00to09
—
Depthorheightinmetersanddecimalmeters
x.x—
2
Endofsentencedelimiter=CRLF
Always0Dh0Ah
——
Notes
1Asentenceidentierequalto00isusedforunderwater
vehicledepth,allotheridentiersarecustomerspecic
(usuallyadatumheight)..
2Ifinputisdepth,itwillbeusedinthedepthoutputdatagram
tooffsetthetransmittransducerdepth.Ifinputisheight,
whichwillusuallyimplyatimeorpositionvariabledatum
height,itsusewilldependonthesentenceidentierandwill
beimplementedasrequiredbyaspeciccustomer.Depth
ispositivedownwards.Depthsmaybescaledandoffsetby
operatorsettableconstants:
output_depth[m]=scale_factor*(input_depth-offset)
850-160692/M
19

KongsbergEMSeries
2.2Attitude
Topics
•Overviewonpage20
•EMAttitudeinputformatonpage22
•Networkvelocityattitudeinputformatonpage24
•SperryMK-39Attitudeinputformatonpage25
•HDTformatonpage26
•SKR80formatonpage26
2.2.1Overview
Attitudedataisgenerallyacceptedononeormoreserialinput
port(s)as
•roll,pitch,heaveandheadingononeport,
or
•roll,pitchandheaveononeportandheadingseparatelyon
anotherport.
Thedataupdaterateshouldbecommensuratewiththeexpected
dynamicsofthevessel(typicallyupto100Hz).
Theacceptableformatforroll,pitch,heaveandoptionallyalso
headingisa10bytelongmessageoriginallydenedintheEM
1000forusewithdigitalmotionsensors.Itissupportedbythe
followingsensorslike:
•AppliedAnalyticsPOS/MV
•PhotokineticsOctans
•SeatexMRU
•SeatexSeapath
•TSSDMS-05
•CodaOctopus
HeadingwillbeacceptedintheNMEA0183HDTformat
orintheformatusedbytheSimradRobertsonSKR80(82)
gyrocompass.AcurrentlooptoRS-232convertermaythen
berequired.TheLemkuhlLR40(60)ScanRepeaterformatis
alsoaccepted,asitisthesameasthatoftheSKR80withthe
exceptionofanextrastatusbyte.Notethatiftheattitudesensor
iscapableofreadingthegyrocompassandtransfertheheading
totheattitudesensordatagram(ifitdoesnotmeasureheading
itself),thisispreferabletointerfacingthegyrocompassdirectly
tothesystem.
Roll,pitchandheadingintheSperryMarineMK-39MOD2
AttitudeandHeadingReferenceSystemformatisalsoaccepted.
Asecondmotionsensormustthenbeusedtosupplyheave.
20
850-160692/M

Inputdatagrams
Attitudedatamaybesuppliedfrommorethanonesensor.All
datamaybelogged,butonlyonesetaschosenbytheoperator
willbeusedinrealtime.
Newermultibeammodelsusesfrequencymodulated(FM)
pulsestoextendthedetectionrangewhilemaintainingthehigh
resolution.ToproperlytakeintoaccounttheDoppler-effect
whenusingFMmode,realtime3Dvelocityinputisneededfrom
themotionsensor.Thedata,onproprietaryformat,isavailable
viaEthernetfromsomeofthemanufacturers.Currentlythree
manufacturersaresupported.
SeealsoNetworkvelocityattitudeinputformatonpage24.
850-160692/M
21

KongsbergEMSeries
2.2.2EMAttitudeinputformat
TheEMattitudeformatisa10-byteslongmessagedenedas
follows
•Byte1:Syncbyte1=00h,orSensorstatus=90h-AFh
•Byte2:Syncbyte2=90h
•Byte3:RollLSB
•Byte4:RollMSB
•Byte5:PitchLSB
•Byte6:PitchMSB
•Byte7:HeaveLSB
•Byte8:HeaveMSB
•Byte9:HeadingLSB
•Byte10:HeadingMSB
whereLSB=leastsignicantbyte,MSB=mostsignicantbyte.
Alldataarein2’scomplementbinary ,with0.01°resolutionfor
roll,pitchandheading,and1cmresolutionforheave.
•Rollispositivewithportsideupwith±179.99°validrange
•Pitchispositivewithbowupwith±179.99°validrange
•Heaveispositiveupwith±9.99mvalidrange
•Headingispositiveclockwisewith0to359.99°validrange.
Non-validdataareassumedwhenavalueisoutsidethevalid
range.
Howrollisassumedtobemeasuredisoperatorselectable,either
withrespecttothehorizontalplane(theHippy120orTSS
convention)ortotheplanetiltedbythegivenpitchangle(i.e.as
arotationanglearoundthepitchtiltedforwardpointingx-axis).
Thelatterconvention(calledTate-BryantinthePOS/MV
documentation)isusedinsidethesysteminalldatadisplaysand
inloggeddata(atransformationisappliediftherollisgiven
withrespecttothehorizontal).
Notethatheaveisdisplayedandloggedaspositivedownwards
(thesignischanged)includingrollandpitchinducedleverarm
translationtothesystem’stransmittransducer.
ThisformathaspreviouslybeenusedwiththeEM950andthe
EM1000withtherstsynchronisationbytealwaysassumed
tobezero.Thesensormanufacturershavebeenrequestedto
includesensorstatusintheformatusingtherstsynchronisation
byteforthispurpose.Itisthusassumedthat
•90hintherstbyteindicatesavalidmeasurementswithfull
accuracy
22
850-160692/M
Inputdatagrams
•anyvaluefrom91hto99hindicatesvaliddatawithreduced
accuracy(decreasingaccuracywithincreasingnumber)
•anyvaluefrom9Ahto9Fhindicatesnon-validdatabutnormal
operation(forexamplecongurationorcalibrationmode)
•andanyvaluefromA0htoAFhindicatesasensorerrorstatus
850-160692/M
23

KongsbergEMSeries
2.2.3Networkvelocityattitudeinput
format
Newermultibeammodelsusesfrequencymodulated(FM)pulses
toextendthedetectionrangeandstillmaintainingthehigh
resolution.ToproperlytakeintoaccounttheDoppler-effect
whenusingFMmode,realtime3Dvelocityinputisneededfrom
themotionsensor.Thedata,onproprietaryformat,isavailable
viaEthernetfromsomeofthemanufacturers.Currentlythree
datagramformatsaresupported:
•SeatexBinaryformat
•POS-MVGRP102/103
•CodaOctopusMCOM
Fordetailsabouttheformats,pleasereferto:
KongsbergSeatexSeapath:“Seapath200Installationmanual”
ApplanixPOSMV:“POSMVV4UserICD”,Document#:
PUBS-ICD-000551
CodaOctopusF180:“MCOMFormatDescription”–ID
TSKW-187
ThedatagramwillbeloggedintheNetworkAttitudeV elocity
110datagram,andtherangecorrectionsappliedisdocumented
intherawrangeandangle78datagram.
24
850-160692/M

Inputdatagrams
2.2.4SperryMK-39Attitudeinputformat
Theformatis18byteslong,anditisorganisedas9words.The
mostsignigicantbyteofawordistransmittedrst.
•Word1AA55h.
•Word2Statusandtime.
•Word3Heading.
•Word4Roll.
•Word5Pitch.
•Word6Headingrate.
•Word7Rollrate.
•Word8Pitchrate.
•Word9Checksum(MSB)and1’scomplementofchecksum
(LSB).
Alldataarein2’scomplementbinary.Headingisgivenwithin
±180°,rollandpichwithin±90°.(Notehoweverthatthevalues
±180°and±90°arenotpermitted,astheseareonebittoohigh.)
HeadingismeasuredwithreferencetotrueNorth,andpositive
whenthebowpointseastwards.Rollisperdenitionarotation
angle(Tate-Bryant)andpositivewhenthestarboardsidegoesup.
Pitchispositivewhenthebowgoesdown.
850-160692/M
25
KongsbergEMSeries
2.2.5HDTformat
Table10HDTFormat
DataDescriptionFormatValidrangeNote
Startidentier=$
Always24h
——
Talkeridentier
aa
Capitalletters
—
Sentenceformatter
AlwaysHDT ,
——
Heading,degreestruex.x,T0to359.9...
—
Checksum*hh
——
Endofsentencedelimiter=CRLF
Always0Dh0Ah
——
2.2.6SKR80format
TheSKR80sendsoutastreamofdatawithfourbytesforeach
measurement.Thereisonebyteforeachdigit
•Therstbyteforthedecimaldegree(Example:xxx.X)
•Thesecondforthedegree(Example:xxX.x)
•Thethirdforthe10’sdegree(Example:xXx.x)
•Thefourthforthe100’sdegree(Example:Xxx.x)
Thetwouppermostbitsofabytearealwayszero,thenexttwo
bitsgivethedigit,00forthedecimal,01forthedegree,10for
the10’sdegree,and11forthe100’sdegree.Thelowestfour
bitsgivethedigitvaluein4-bitBCDformat.Asanexamplea
headingof234.5°willgivethefourbytes05h14h23h32h.The
LR40addsafthbyteattheendforstatuswiththetwoupper
bitsofthestatusbytesetto11(11000000forOK,11001010for
alarm).Thisstatusbyteisignored.
26
850-160692/M
Inputdatagrams
2.3Clockdatagrams
Topics
•Clockonpage27
•ZDAformatonpage27
2.3.1Clock
Thesystemclockisusedtotimestampalldataoutput.The
clockmaybesetuponstartofnewsurveyorpower-uponthe
ProcessingUnit(recommendedsourceisaNMEAZDAformat
datagram).Theclockwilldrift,typicallysomesecondsperday,
unlessitissynchronisedtoa1PPS(pulsepersecond)input
signal(theclockmillisecondcounterwillbesettozerowhenever
apulseisreceived).Afullycorrectclockisonlynecessaryifthe
outputdataarelatertobecombinedwithothertimecriticaldata
loggedorcreatedbyothersystems,forexampleanaccuracyof
uptooneminutewouldbenecessarytoapplytidalchanges.If
thetimestampsuppliedinthepositioninputdatagramsistobe
used,itisimperativethatthesystemclockiscorrectlysetand
that1PPSsynchronisationisused.
2.3.2ZDAformat
Table11ZDAformat
DataDescriptionFormatValidrangeNote
Startidentier=$
Always24h
——
Talkeridentier
aa
Capitalletters
—
Sentenceformatter
AlwaysZDA,
——
UTC
hhmmss.ss,000000to
235959.9...
—
Day
xx,
01to+31
—
Month
xx,
01to+12
—
Year
xxxx,
0000to9999
—
Localzonehours
xx,
-13to+131
Localzoneminutes
xx,
00to+591
Optionalchecksum*hh
——
Endofsentencedelimiter=CRLF
Always0Dh0Ah
——
Notes
1Localzonetimeisnotused.Anoffsettimemaybeentered
bytheoperatortogetthesystemclocktoshowadifferent
timethanUTC.
850-160692/M
27
KongsbergEMSeries
Note
TrimbleUTCformatisalsosupported.
28
850-160692/M
 Loading...
Loading...