

Page 1

www.DanaherMotion.com
Digital servo amplifier
®
SERVOSTAR
601...620
Assembly, Installation, Setup
Edition 03/04
Filesr601_e.xxx
EU order No.: 90162
NA: M-SS-004-0216
Page 2
Previous versions :
Edition Remarks
05/98 First edition
08/98 a few corrections
09/98
01/99 614 added, various minor corrections
02/99 Interface relay for digital outputs (pages 26, 43)
06/99 various corrections, cables and connectors removed, choke box added
08/99 24V tolerance, encoder wiring, ventilation
11/99 Packaging, regen resistor
12/99 Option -AS- integrated, ground-bolt, master-slave
04/00 various corrections, setup software on CDROM only, motors 6SM27LL and 6SM37VL added
06/00 Wiring diagrams electr. gearing, warning and error messages, recommended torque
08/00 Wiring diagram in chapter III.9.2 corrected
07/01
02/02 Dimensions BARxxx corrected
06/02
07/03 several corrections, DeviceNet expansion card added, directives and standards page revised, new cover design
09/03 Ethernet expansion card and Single axis controller expansion card added
03/04 new regen resistors BAR(U), several corrections
various minor corrections, parameter description removed, parameter setting for multi-axis systems and on/off switching
behavior added, Installation/setup divided into two chapters
S610-30 and options -I/O-14/08- and -2CAN - incorporated, hardware-description incorporated for PROFIBUS and SER
COS, nameplate, motor list and connector assignment corrected, LED-display corrected, error messages expanded
Frontpage new design, corrections to US English, motor table removed, order numbers added,
last page new design and contents, new; connection to diff. mains supply networks, block diagram to ch.III
-
PC-AT is a registered trademark of International Business Machines Corp.
MS-DOS is a registered trademark of Microsoft Corp.
WINDOWS is a registered trademark of Microsoft Corp.
HIPERFACE is a registered trademark of Max Stegmann GmbH
EnDat is a registered trademark of Dr. Johannes Heidenhain GmbH
SERVOSTAR is a registered trademark of Kollmorgen Corporation.
Manufactured under one or more of the following US patents:
4,434,389 4,447,771 4,456,934 4,463,299 4,479,078
4,490,661 4,504,755 4,508,988 4,532,461 4,538,080
4,541,575 4,543,520 4,551,646 4,559,485 4,562,399
4,572,999 4,579,012 4,633,151 4,644,199 4,647,824
4,661,756 4,670,696 4,675,547 4,679,313 4,682,093
4,686,437 4,698,537 4,729,160 4,763,049 4,763,056
4,763,057 4,733,149 4,782,272 4,797,592 4,857,816
4,868,475 4,868,970 4,912,381 4,926,063 4,935,080
4,943,760 4,954,739 4,992,716 5,051,634 5,144,183
5,173,651 5,194,786 5,399,908 5,435,517 5,530,396
5,574,636 5,606,791 5,625,265 5,633,793 5,646,467
5,715,590 5,736,916 5,739,648 5,754,732 5,789,841
5,829,118 5,912,638 5,949,202 5,949,359 5,998,905
6,002,234
Technical changes which improve the performance of the equipment may be made without prior notice !
Printed in the Federal Republic of Germany
All rights reserved. No part of this work may be reproduced in any form (by printing, photocopying, microfilm or any other method)
or stored, processed, copied or distributed by electronic means without the written permission of Danaher Motion Corporation.
Page 3
Kollmorgen 03/04 Contents
Drawing Page
Contents ...............................................3
Safety instructions ........................................6
European directives and standards..............................7
-/UL-conformance ......................................7
Abbreviations and symbols ...................................8
1 General
1.1 About this manual ..................................................................................11
1.2 Prescribed use (Use as directed) of the servo amplifier .....................................................12
1.3 Nameplate .......................................................................................13
1.4 Instrument description ..............................................................................13
1.4.1 Package supplied ............................................................................13
1.4.2 The digital servo amplifiers of the series SERVOSTAR 600 ............................................14
1.4.3 Operation directly from supply...................................................................14
1.4.4 Digital servo amplifier concept ..................................................................15
1.5 Connection to different mains supply networks ...........................................................16
1.6 Components of a servo system .......................................................................17
1.7 Technical data ....................................................................................18
1.7.1 External fusing...............................................................................18
1.7.2 Allowable ambient conditions, ventilation, mounting position ...........................................19
1.7.3 Conductor cross-sections ......................................................................19
1.7.4 Recommended torque .........................................................................19
1.7.5 LED display .................................................................................19
1.8 Grounding system..................................................................................20
1.9 Control for motor-holding brake .......................................................................20
1.10 Regen circuit ......................................................................................21
1.11 Switch-on and switch-off behavior .....................................................................22
1.11.1 Stop function to EN 60204 (VDE 0113)............................................................22
1.11.2 Emergency Stop strategies .....................................................................23
2 Installation
2.1 Important instructions ...............................................................................25
2.2 Assembly ........................................................................................26
2.2.1 Dimensions .................................................................................27
2.3 Wiring ...........................................................................................28
2.3.1 Connection diagram ..........................................................................30
2.3.2 Example of connections for multi-axis system ......................................................31
2.3.3 Pin assignments .............................................................................32
2.3.4 Notes on connection techniques .................................................................33
2.3.4.1 Shielding connection to the front panel ........................................................33
2.3.4.2 Technical data for connecting cables .........................................................34
2.4 Setup software ....................................................................................35
2.4.1 General ....................................................................................35
2.4.1.1 Use as directed ..........................................................................35
2.4.1.2 Software description ......................................................................35
2.4.1.3 Hardware requirements ....................................................................36
2.4.1.4 Operating systems........................................................................36
2.4.2 Installation under WINDOWS 95 / 98 / 2000 / ME / NT / XP ............................................36
- A.4.028.6/10
- A.4.031.1/52
- A.4.031.3/01, 1/35
- A.4.031.3/6
- A.4.031.4/15
- A.4.031.4/14
- A.4.031.1/02
- A.4.031.1/19
- A.4.031.4/21
- A.4.029.4/25
SERVOSTAR®601...620 Installation Manual 3
Page 4

Contents 03/04 Kollmorgen
Drawing Page
3 Interfaces
- A.4.031.1/47
3.1 Power supply .....................................................................................38
3.1.1 Mains supply connection (X0) ...................................................................38
3.1.2 24V auxiliary supply (X4).......................................................................38
3.1.3 DC-link (X7) .................................................................................38
- A.4.031.1/21,25
3.2 Motor connection with brake (X9) ......................................................................39
3.3 External regen resistor (X8) ..........................................................................39
- A.4.031.1/17,18
3.4 Feedback ........................................................................................40
3.4.1 Resolver connection (X2) ......................................................................40
3.4.2 Encoder (X1) ................................................................................41
- A.4.031.1/26
- A.4.031.1/27
3.5 Control signals, monitor signals .......................................................................42
3.5.1 Analog inputs (X3) ............................................................................42
3.5.2 Analog outputs (X3)...........................................................................43
3.5.3 Digital control inputs (X3) ......................................................................44
3.5.4 Digital control outputs (X3) .....................................................................45
- A.4.031.1/23
- A.031.1/22
- A.4.031.1/24
- A.4.031.1/20
3.6 Encoder simulations ................................................................................46
3.6.1 Incremental encoder simulation - A quad B position output (X5) ........................................46
3.6.2 SSI encoder simulation - position output (X5) .......................................................47
- A.4.031.1/11
- A.4.031.1/12
3.6.3 Interface for master-slave operation, encoder input ..................................................48
3.6.3.1 Connection to a SERVOSTAR master, 5V signal level (X5) ........................................48
- A.4.031.1/16,3/2
3.6.3.2 Connection to encoders with 24V signal level (X3) ...............................................49
3.6.3.3 Connection to a sine-cosine encoder (X1)......................................................49
3.7 Interface for stepper-motor controls (pulse-direction) .......................................................50
- A.4.031.1/44,43
- A.4.031.3/2
3.7.1 Connection to stepper-motor controller with 5V signal level (X5)........................................51
3.7.2 Connection to stepper-motor controller with 24V signal level (X3).......................................51
3.8 RS232 interface, PC connection (X6) ...................................................................52
3.9 CANopen Interface (X6) .............................................................................53
- A.4.031.1/10,45
- A.4.031.1/13,14
- A.4.031.1/15, 1/36
4Setup
4.1 Important notes ....................................................................................55
4.2 Parameter setting ..................................................................................57
4.2.1 Multi-axis systems ............................................................................57
4.2.1.1 Node address for CAN-bus .................................................................57
4.2.1.2 Baud rate for CAN-bus ....................................................................57
- A.4.031.4/37
4.2.2 Key operation / LED display ....................................................................58
4.2.2.1 Key operation............................................................................58
4.2.2.2 Status display ...........................................................................58
- A.4.031.3/4
4.2.2.3 Standard menu structure ...................................................................59
4.2.2.4 Extended menu structure...................................................................59
- A.4.031.3/3
4.3 Error messages ...................................................................................60
4.4 Warning messages .................................................................................61
5 Extensions / Accessories
5.1 Option -AS-, restart lock for personal safety ..............................................................63
5.1.1 Advantages of the -AS- option ..................................................................63
5.1.2 Functional description .........................................................................63
5.1.3 Block diagram ...............................................................................64
5.1.4 Signal diagram (sequence) .....................................................................64
5.1.5 Installation / Setup ............................................................................65
5.1.5.1 Safety instructions ........................................................................65
5.1.5.2 Functional test ...........................................................................65
5.1.5.3 Connection diagram.......................................................................65
5.1.6 Application examples .........................................................................66
5.1.6.1 Moving single axes or axis-groups in setting-up operation .........................................66
5.1.6.2 Switching off grouped axes with separate working areas ..........................................66
5.1.6.2.1 Control circuit.......................................................................66
5.1.6.2.2 Mains supply circuit ..................................................................67
5.2 Expansion card -I/O-14/08-...........................................................................68
5.2.1 Fitting the expansion card ......................................................................68
5.2.2 Technical data ...............................................................................68
5.2.3 Light emitting diodes (LEDs) ....................................................................68
5.2.4 Position of the connectors ......................................................................69
5.2.5 Connector assignments........................................................................70
5.2.6 Select motion task number (Sample) .............................................................70
5.2.7 Connection diagram ..........................................................................71
- A.4.031.1/32,30
- A.4.031.1/30
- A.4.031.1/311
- A.4.031.3/05
- A.4.031.4/42
- A.4.012.4/33
4 SERVOSTAR®601...620 Installation Manual
Page 5

Kollmorgen 03/04 Contents
Drawing Page
5.3 Expansion card -PROFIBUS- .........................................................................72
5.3.1 Position of the connectors ......................................................................72
5.3.2 Fitting the expansion card ......................................................................72
5.3.3 Connection technology ........................................................................73
5.3.4 Connection diagram ..........................................................................73
5.4 Expansion card -SERCOS-...........................................................................74
5.4.1 Position of the connectors ......................................................................74
5.4.2 Fitting the expansion card ......................................................................74
5.4.3 Light emitting diodes (LEDs) ....................................................................75
5.4.4 Connection technology ........................................................................75
5.4.5 Connection diagram ..........................................................................75
5.5 Expansion card -DeviceNet- ..........................................................................76
5.5.1 Position of the connectors ......................................................................76
5.5.2 Fitting the expansion card ......................................................................76
5.5.3 Connection technology ........................................................................77
5.5.4 Connection diagram ..........................................................................77
5.5.5 Combined Module/Network Status LED ...........................................................77
5.6 Expansion card- ETHERNET - ........................................................................78
5.6.1 Fitting the expansion card ......................................................................78
5.6.2 Connectors .................................................................................78
5.6.3 LEDs ......................................................................................78
5.6.4 Position of the connectors ......................................................................79
5.6.5 Connection diagram ..........................................................................79
5.7 Expansion card for Single Axis Controller -SAC- ..........................................................80
5.7.1 Fitting the expansion card ......................................................................80
5.7.2 Technical data ...............................................................................80
5.7.3 Position of the connectors ......................................................................81
5.7.4 Connector assignments........................................................................81
5.7.4.1 RS-232 communication X17 (SubD 9-pin, plug) .................................................81
5.7.4.2 RS-485 communication X17 (SubD 9-pin, plug) .................................................82
5.7.4.3 DeviceNet communication X16 (Phönix, 5-pin) ..................................................82
5.7.4.4 Digital inputs/outputs, connector X18 (SubD 26-pin, socket) .......................................83
5.8 Expansion module -2CAN- ...........................................................................84
5.8.1 Position of the connectors ......................................................................84
5.8.2 Fitting the expansion module ...................................................................84
5.8.3 Connection technology ........................................................................85
5.8.4 Connector assignments........................................................................85
5.8.5 Connection diagram ..........................................................................85
5.9 Accessories ......................................................................................86
5.9.1 External 24V DC / 5A supply ....................................................................86
5.9.2 External 24V DC / 20A supply ...................................................................87
5.9.3 External regen resistor BARxxx .................................................................88
5.9.4 External regen resistor BAR(U)xxx ...............................................................89
5.9.5 Motor choke box 3YL-20 .......................................................................90
6 Appendix
6.1 Transport, storage, maintenance, disposal...............................................................91
6.2 Removing faults/warnings............................................................................92
6.3 Glossary .........................................................................................94
6.4 Order numbers ....................................................................................96
6.5 Index ............................................................................................97
- A.031.4/62
- A.4.031.1/41
- A.4.031.4/69
- A.4.037.4/02
- A.031.4/62
- A.4.031.1/56
- A.4.045.4/14, 4/15
- A.4.045.4/10, 31.1/60
- A.4.031.1/58,61, 45.1/28
- A.4.031.4/70
- A.4.037.4/08
- A.4.037.4/07
- A.4.012.4/33
- A.4.947.4/22
- A.4.947.4/25
- A.4.030.4/10
SERVOSTAR®601...620 Installation Manual 5
Page 6
Safety instructions 03/04 Kollmorgen
Safety Instructions
l
l
l
l
Only properly qualified personnel are permitted to perform activities such as
transport, installation, setup and maintenance. Properly qualified persons
are those who are familiar with the transport, assembly, installation, setup
and operation of the product, and who have the appropriate qualifications
for their job. The qualified personnel must know and observe:
IEC 364 and CENELEC HD 384 or DIN VDE 0100
IEC-Report 664 or DIN VDE 0110
National Accident Prevention Regulations or BGV A2
Read this documentation before carrying out installation and setup.
Incorrect handling of the servo amplifier can lead to personal injury or
material damage. It is vital that you keep to the technical data and
information on connection requirements (on the nameplate and in the
documentation).
The manufacturer of the machine must generate a hazard analysis for the
machine, and take appropriate measures to ensure that unforeseen
movements cannot cause injury or damage to any person or property.
The servo amplifiers contain electrostatically sensitive components which
may be damaged by incorrect handling. Ground yourself before touching the
servo amplifier by touching any unpainted metal surface. Avoid contact with
highly insulating materials (artificial fabrics, plastic film etc.). Place the
servo amplifier on a conductive surface.
l
l
l
l
l
Do not open the units. Keep all covers and switchgear cabinet doors closed
during operation. Otherwise there are deadly hazards, with the possibility of
severe danger to health or material damage.
During operation, servo amplifiers, according to their degree of enclosure
protection, may have uncovered live components. Control and power
connections may be live, even if the motor is not rotating.
Servo amplifiers may have hot surfaces during operation. Since the front
panel is used for cooling, it can reach temperatures above 80°C (176°F).
Never undo the electrical connections to the servo amplifier while it is live.
There is a danger of electric arcing with damage to contacts and danger to
persons.
Wait at least five minutes after disconnecting the servo amplifier from the
mains supply voltage before touching live sections of the equipment (e.g.
contacts) or undoing connections. Capacitors can still have dangerous
voltages present up to five minutes after switching off the supply voltages.
To be sure, measure the voltage in the DC-link circuit and wait until it has
fallen below 40V.
6 SERVOSTAR®601...620 Installation Manual
Page 7
Kollmorgen 03/04
European directives and standards
Servo amplifiers are components that are intended to be incorporated into electrical plant and machines for in
dustrial use.
When the servoamplifiers are built into machines or plant, the intended operation of the amplifier is forbidden
until it has been established that the machine or plant fulfills the requirements of the EC Machinery Directive
98/37/EG and the EC Directive on EMC (89/336/EEC).
To fulfill the EC Machinery directive (98/37/EG), the following standards have to be applied:
EN 60204-1 (Safety and electrical equipment of machines)
EN 292 (Safety of machines)
-
The manufacturer of the machine must produce a hazard analysis for the machine and take appropria
te measures to ensure that unforeseen movements do not result in personal injury or material dama
ge.
To fulfill the Low Voltage Directive 73/23/EEC, the following standards have to be applied:
EN 60204-1 (Safety and electrical equipment of machines)
EN 50178 (Equipment of high voltage plant with electronic devices)
EN 60439-1 (Low-voltage switchgear and controlgear assemblies)
To fulfill the EC EMC regulations (89/336/EEC), the following standards have to be applied:
EN 61000-6-1 or EN 61000-6-2 (noise immunity within the domestic range/industrial range)
EN 61000-6-3 or EN 61000-6-4 (noise emission within the domestic range/industrial range)
The manufacturer of the machine or plant is responsible for ensuring that they meet the limits required by the
EMC regulations. Advice on the correct installation for EMC – such as shielding, grounding, arrangement of
connectors and cable routing – can be found in this documentation.
The machine / plant manufacturer must examine whether with its machine / plant still further or other
standards or EEC guidelines are to be used.
Conformity
Conformity with the EC Directive on EMC 89/336/EEC and the Low Voltage Directive 73/23/EEC is mandatory
for servoamplifiers supplied within the European Union.
To fulfill the EMC directive, the standard EN 61800-3 is applied.
-
-
In the reference to noise immunity and noise emission the servoamplifier fulfills the requirement to the catego
ry second environment (industrial environment).
The servo amplifiers have been tested by an authorized testing laboratory in a defined configuration with the
system components which are described in this documentation. Any divergence from the configuration and in
stallation described in this documentation means that you will be responsible for carrying out new measure
ments to ensure that the regulatory requirements are fulfilled.
To fulfill the Low Voltage Directive, the standard EN 50178 has to be applied.
-
SERVOSTAR®601...620 Installation Manual 7
-
-
Page 8

Directives and standards 03/04 Kollmorgen
UL and cUL- Conformance
UL (cUL)-certified servo amplifiers (Underwriters Laboratories Inc.) fulfil the relevant U.S. and Canadian stan
dard (in this case UL 840 and UL 508C).
This standard describes the fulfilment by design of minimum requirements for electrically operated power con
version equipment, such as frequency converters and servo amplifiers, which is intended to eliminate the risk
of fire, electric shock, or injury to persons, being caused by such equipment. The technical conformance with
the U.S. and Canadian standard is determined by an independent UL (cUL) inspector through the type testing
and regular check-ups.
Apart from the notes on installation and safety in the documentation, the customer does not have to observe
any other points in direct connection with the UL (cUL)-certification of the equipment.
UL 508C
-
-
UL 508C describes the fulfilment by design of minimum requirements for electrically operated power conversi
on equipment, such as frequency converters and servo amplifiers, which is intended to eliminate the risk of fire
being caused by such equipment.
UL 840
UL 840 describes the fulfilment by design of air and insulation creepage spacings for electrical equipment and
printed circuit boards.
-
8 SERVOSTAR®601...620 Installation Manual
Page 9
Kollmorgen 03/04 Abbreviations / symbols
Abbreviations used in this manual
The abbreviations used in this manual are explained in the table below.
Abbrev. Meaning
AGND Analog ground
AS Restart Lock, option
BTB/RTO Ready to operate
CAN Fieldbus (CANopen)
CE Communité Européenne (EC)
CLK Clock signal
COM Serial interface for a PC-AT
DGND Digital ground
DIN German Institute for industrial Standards
Disk Magnetic storage (diskette, hard disk)
EEPROM Electrically erasable programmable memory
EMC Electromagnetic compatibility
EMI Electromagnetic interference
EN European standard
ESD Electrostatic discharge
IEC International Electrotechnical Commission
IGBT Insulated Gate Bipolar Transistor
INC Incremental Interface
ISO International Standardization Organization
LED Light-emitting diode
MB Megabyte
MS-DOS Operating system for PC-AT
Abbrev Meaning
NI Zero pulse
NSTOP Limit-switch input for CCW rotation (left)
PC-AT Personal computer with 80x86 Processor
PELV Protected low voltage
PGND Ground for the interface
PSTOP Limit-switch input for CW rotation (right)
PWM Pulse-width modulation
RAM Volatile memory
Rregen Regen resistor
RBext External regen resistor
RBint Internal regen resistor
RES Resolver
ROD 426 A quad B encoder
PLC Programmable logic controller
SRAM Static RAM
SSI Synchronous serial interface
UL Underwriters Laboratory
VAC AC voltage
VDC DC voltage
VDE Verein deutscher Elektrotechniker
XGND Ground for the 24V supply
Symbols used in this manual
danger to personnel from
electricity and its effects
ð p.
Keys on the servo amplifier panel :
U
U
see page (cross-ref.) l special emphasis
press once : move up one menu item, increase number by one
U
press twice in rapid succession : increase number by ten
press once : move down one menu item, decrease number by one
press twice in rapid succession : decrease number by ten
U
hold right key pressed, and then press left key as well :
to enter number, “Return” function
general warning
general instructions
mechanical hazard
SERVOSTAR®601...620 Installation Manual 9
Page 10

03/04 Kollmorgen
This page has been deliberately left blank.
10 SERVOSTAR®601...620 Installation Manual
Page 11
Kollmorgen 03/04 General
1 General
1.1 About this manual
This manual describes the digital servo amplifiers of the SERVOSTAR®600 series
(standard version, 1.5 to 20 Amps nominal current).
Note:
SERVOSTAR 601 is sold in Europe only
In this manual you can find information about:
Technical data of the servo amplifiers Chapter I
l
Assembly / installation Chapter II
l
Interfaces Chapter III
l
Setup the servo amplifier Chapter IV
l
Accessories Chapter V
l
Transport, storage, maintenance, disposal of the servo amplifiers Chapter VI
l
A more detailed description of the expansion cards which are currently available and the digital
connection to automation systems can be found on the accompanying CD-ROM in Acrobat-Reader
format (system requirements: WINDOWS > 95 with Internet browser, Acrobat Reader > 4.0) in
English, German Italian and French versions.
You can print this documentation on any standard printer. A printed copy of the documentation is
available from us at extra cost.
This manual makes the following demands on qualified personnel :
Transport : only by personnel with knowledge in handling electrostatically
sensitive components.
Installation : only by electrically qualified personnel
Setup : only by personnel with extensive knowledge of electrical
engineering / drive technology
SERVOSTAR®601...620 Installation Manual 11
Page 12
General 03/04 Kollmorgen
1.2 Prescribed use (Use as directed) of the servo amplifier
The servo amplifiers are components which are built into electrical equipment or machines, and can
only be used as integral components of such equipment.
The manufacturer of the machine must generate a hazard analysis for the machine, and take
appropriate measures to ensure that unforeseen movements cannot cause injury or damage to any
person or property.
The SERVOSTAR 600 family of servo amplifiers can be connected directly to symmetrically earthed
(grounded) three-phase industrial mains supply networks [TN-system, TT-system with earthed
(grounded) neutral point, not more than 5000 rms symmetrical amperes, 480VAC maximum].
The servo amplifiers must not be operated directly on power supply networks >230V without an
earth (ground) or with an asymmetrical earth (ground).
Connection to different mains supply networks (with additional isolating transformer) ð p.16.
Periodic overvoltages between outer conductor (L1, L2, L3) and housing of the servo amplifier may
not exceed 1000V (peak value).
Transient overvoltages (< 50µs) between the outer conductors may not exceed 1000V.
Transient overvoltages (< 50µs) between outer conductors and housing may not exceed 2000V.
If the servo amplifiers are used in residential areas, or in business or commercial premises, then
additional filter measures must be implemented by the user.
The SERVOSTAR 600 family of servo amplifiers is only intended to drive specific brushless
synchronous servomotors, with closed-loop control of torque, speed and/or position. The rated vol
tage of the motors must be at least as high as the DC-link voltage of the servo amplifier.
-
The servo amplifiers may only be operated in a closed switchgear cabinet, taking into account the
ambient conditions defined on page 19 and the dimensions shown on page 26. Ventilation or cooling may be necessary to prevent enclosure ambient from exceeding 45°C (113°F).
Use only copper wire. Wire size may be determined from EN 60204 (or table 310-16 of the NEC
60°C or 75°C column for AWG size).
We only guarantee the conformance of the servo amplifiers with the standards for industrial areas
(page 7), if the components (motors, cables, amplifiers etc) are delivered by Danaher Motion.
Option -AS-, restart lock for personnel safety
The -AS- restart lock is exclusively intended to provide safety for personnel, by preventing the res
tart of a system. To achieve this personnel safety, the wiring of the safety circuits must meet the
safety requirements of EN60204, EN292 and EN 954-1.
The -AS- restart lock must only be activated,
— when the motor is no longer rotating (setpoint = 0V, speed = 0rpm, enable = 0V).
Drives with a suspended load must have an additional safe mechanical blocking
(e.g. by a motor-holding brake).
— when the monitoring contacts (KSO1/2 and BTB/RTO) for all servo amplifiers are
wired into the control signal loop (to recognize a cable break).
The -AS- restart lock may only be controlled by a CNC if the control of the internal safety relay is
arranged for redundant monitoring.
The -AS- restart lock must not be used if the drive is to be made inactive for the following reasons :
1. - cleaning, maintenance and repair operations
- long inoperative periods
In such cases, the entire system should be disconnected from the supply by the personnel,
and secured (main switch).
-
2. - emergency-stop situations
In an emergency-stop situation, the main contactor is switched off
(by the emergency-stop button or the BTB-contact in the safety circuit).
12 SERVOSTAR®601...620 Installation Manual
Page 13
Kollmorgen 03/04 General
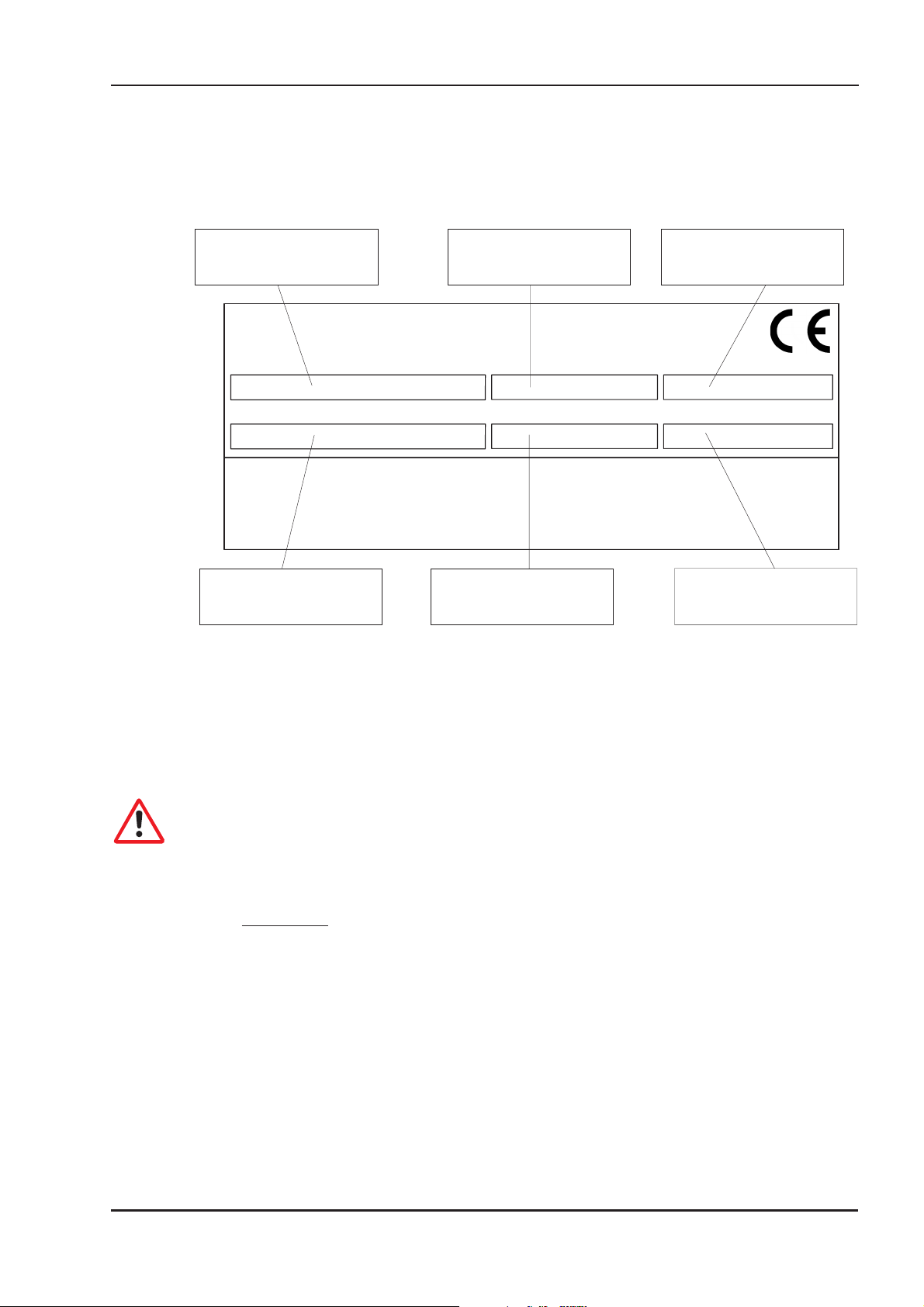
1.3 Nameplate
The nameplate depicted below is attached to the side of the servo amplifier.
The information described below is printed in the individual fields.
Danaher Motion GmbH
Wacholderstr. 40-42
D-40489 Düsseldorf
www.DanaherMotion.net
Typenbezeichnung
Spannungsversorgung
Model Number
Power Supply
Electrical supply
Installed load
1.4 Instrument description
1.4.1 Package supplied
Serial numberServo amplifier type
Customer Support
Europe Tel. +49 (0)203 / 99790
Italy 3 36 594260
North America 1 80 777-3786
Tel. + 9 (0) 2 /
Te l. + ( 0)
Ser. Nr
Nennstrom
Ser. No.
Nom. Current
Output current
in S1 operation
CONNECT-module
and options
Bemerkung
Schutzart
Enclosure Rating
Comment
Encl.Rating
When you order a SERVOSTAR 600 series amplifier, you will receive:
— SERVOSTAR 6xx
— mating connectors X3, X4, X0A, X0B, X7, X8
The mating SubD connectors and motor connector X9 are not part of the package!
— Assembly, Installation and Setup Instructions
— Online documentation on CD-ROM
— Setup software DRIVE.EXE on CD-ROM
Accessories:
— AC synchronous servomotor (linear or rotary)
— motor cable (pre-assembled), or both motor connectors separately, with motor cable as a
— feedback cable (pre-assembled, see application note “Cables and connectors”) or both
— motor choke 3YL-20 (ð p.90), for cable length above 25m
— external regen resistor (ð p.73)
— communications cable to the PC(ð p.52) or Y-adapter (ð p.57) for setting parameters of up
— power cable, control cables, fieldbus cables (as lengths)
(must be ordered separately)
cut-off length
feedback connectors separately, with feedback cable as length
to 6 servo amplifiers from one PC
SERVOSTAR®601...620 Installation Manual 13
Page 14
General 03/04 Kollmorgen
1.4.2 The digital servo amplifiers of the series SERVOSTAR 600
Servoamplifiers of the SERVOSTAR 640/670 series are described in additional manuals.
Standard version
6 current ratings (1.5 A -Europe only-,3A,6A,10A,14A,20A)
l
three instrument widths : 70 mm for 1.5A up to 10A rated current
l
100 mm for 14A rated current
120 mm for 20A rated current
wide range of rated voltage (3x208V
l
shield connection directly at the servo amplifier
l
two analog setpoint inputs
l
integrated CANopen (default 500 kBaud), for integration into CAN bus systems and for
l
–10%
to 3x480V
setting parameters for several amplifiers via the PC-interface of one amplifier
integrated RS232, electrically isolated, integrated pulse-direction interface
l
Open architecture
open hardware and software architecture
l
slot for an expansion card
l
integrated macro language, including compiler
l
prepared for all conceivable customer-specific extensions
l
+10%
)
Options
l -AS- built-in safety relay (personnel-safety starting lock-out), ð p. 63
l I/O expansion card, ð p. 68
l PROFIBUS DP expansion card, ð p. 72
l SERCOS expansion card, ð p. 74
l DeviceNet expansion card, ð p. 76
l Ethernet expansion card, ð p. 78
l Single Axis Controller expansion card, ð p. 80
l
-2CAN- Expansion module, separated connectors for CAN bus and RS232, ð p. 84
l
Third party expansion cards (ModBus, FireWire, LightBus etc. - contact distributors for further
information)
1.4.3 Operation directly from supply
Electrical supply
l
Directly off grounded 3 phase system,
230V
208V
-10%
-10%
... 480V
... 480V
TN-system or TT-system with grounded neutral point, max. 5000 rms symmetrical amperes.
Connection to other mains supply networks only with insulating transformer ð p. 16
l
Fusing (e.g. fusible cutout) provided by the user
l
single-phase supply (e.g. for setup) is possible
+10%
+10%
,50Hz,
,60Hz
Auxiliary supply voltage 24VDC
l
Electrically isolated, internal fusing (3.15 AT), from an external 24VDC psu, e.g. with insulating
transformer
Power input filter
l
Interference suppression filter for the supply input (to Class A) is integrated
l
Interference suppression filter for the 24V aux. supply (to Class A) is integrated
14 SERVOSTAR®601...620 Installation Manual
Page 15
Kollmorgen 03/04 General
1.4.4 Digital servo amplifier concept
Operation and parameter setting
With our user-friendly software for setup through the serial interface of a PC
l
Direct operation by means of two keys on the servo amplifier and a 3-character LED display
l
for status display in case there is no PC available
Fully programmable via RS232 interface
l
Power section
Power supply: B6 rectifier bridge, directly off 3-phase earthed (grounded)
l
supply system, integral power input filter and inrush circuit
All shielding connections directly on the amplifier
l
Output stage: IGBT- module with isolated current measurement
l
Regen circuit: with dynamic distribution of the regen power between several
l
amplifiers on the same DC-link circuit. Internal regen resistor as
standard, external regen resistors if required
DC-link voltage 260 — 900 VDC, can be switched in parallel
l
Completely digital control
Digital current controller (space vector pulse-width modulation, 62.5 µs)
l
digital speed controller adaptable to most different load conditions (65µs or 250 µs)
l
Integral position controller with adaptation possibilities for customer needs (250 µs)
l
l Pulse direction interface integrated for connection of a servomotor to a stepping motor
control
l Evaluation of the resolver signals and sine-cosine signals of a high-resolution encoder
l Encoder simulation (incremental or SSI)
Auxiliary functions
l Adjustable setpoint ramps
l 2 analog monitor outputs
l
4 programmable digital inputs (normally, two are defined as limit-switch inputs)
l
2 programmable digital outputs
l
Freely programmable combinations of all digital signals
Integrated safety
l
Safe electrical separation to EN 50178 between the power input / motor connections and the
signal electronics, provided by appropriate insulation/creepage distances and complete electri
cal isolation
l
Soft-start, overvoltage recognition, short-circuit protection, phase-failure monitoring
l
Temperature monitoring of servo amplifier and motor
(when using our motors with our pre-assembled cables)
-
SERVOSTAR®601...620 Installation Manual 15
Page 16
General 03/04 Kollmorgen
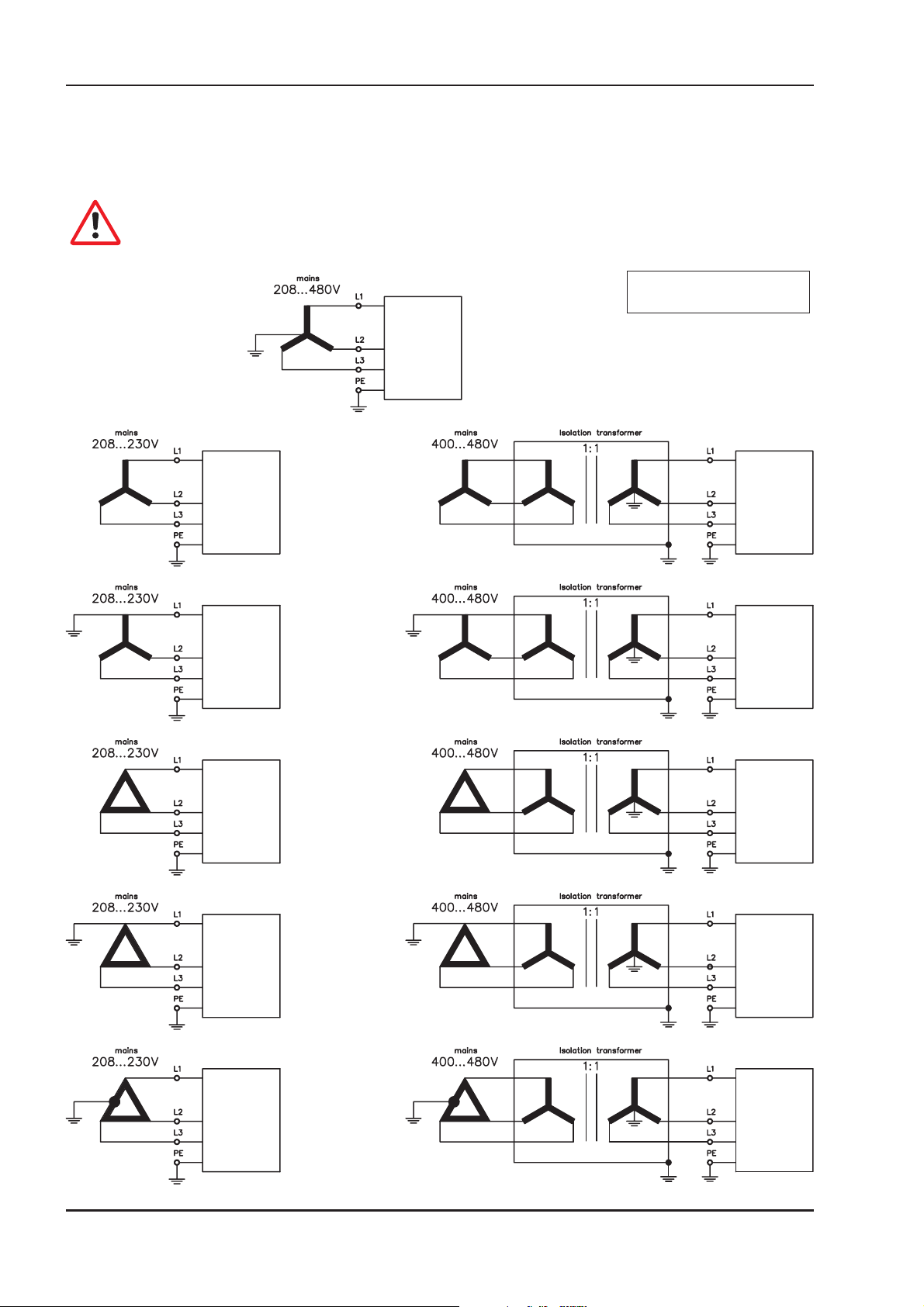
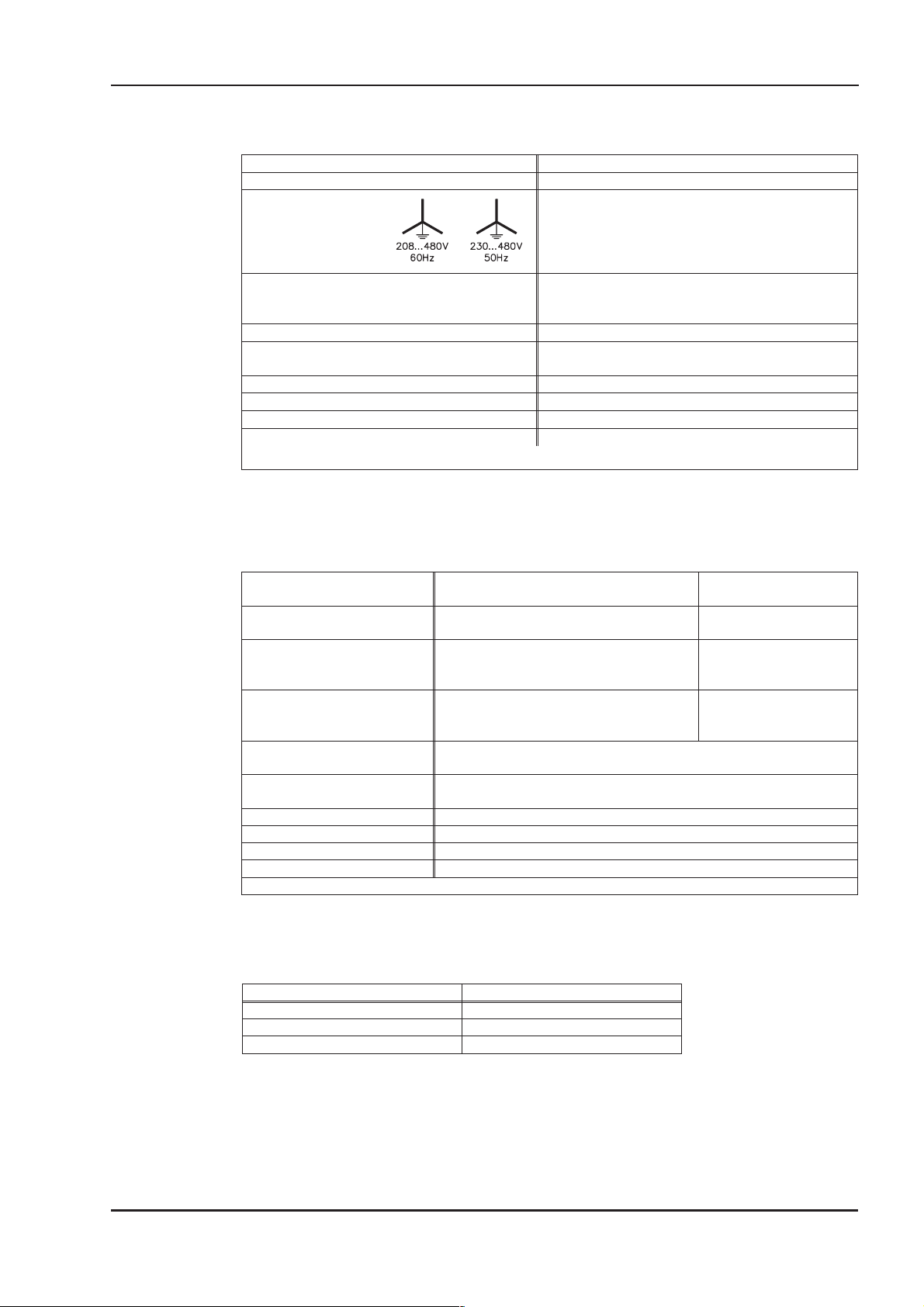
1.5 Connection to different mains supply networks
On this page you'll find all possible connection variations to different mains supply networks.
An isolating transformer is always required for 400...480V mains networks without
earth(ground) and for networks with asymmetrical earth(ground).
208V with 60Hz only
SERVOSTAR
230...480V with 50Hz or 60Hz
SERVOSTAR
SERVOSTAR
SERVOSTAR
SERVOSTAR
SERVOSTAR
SERVOSTAR
SERVOSTAR
SERVOSTAR
SERVOSTAR
SERVOSTAR
16 SERVOSTAR®601...620 Installation Manual
Page 17
Kollmorgen 03/04 General
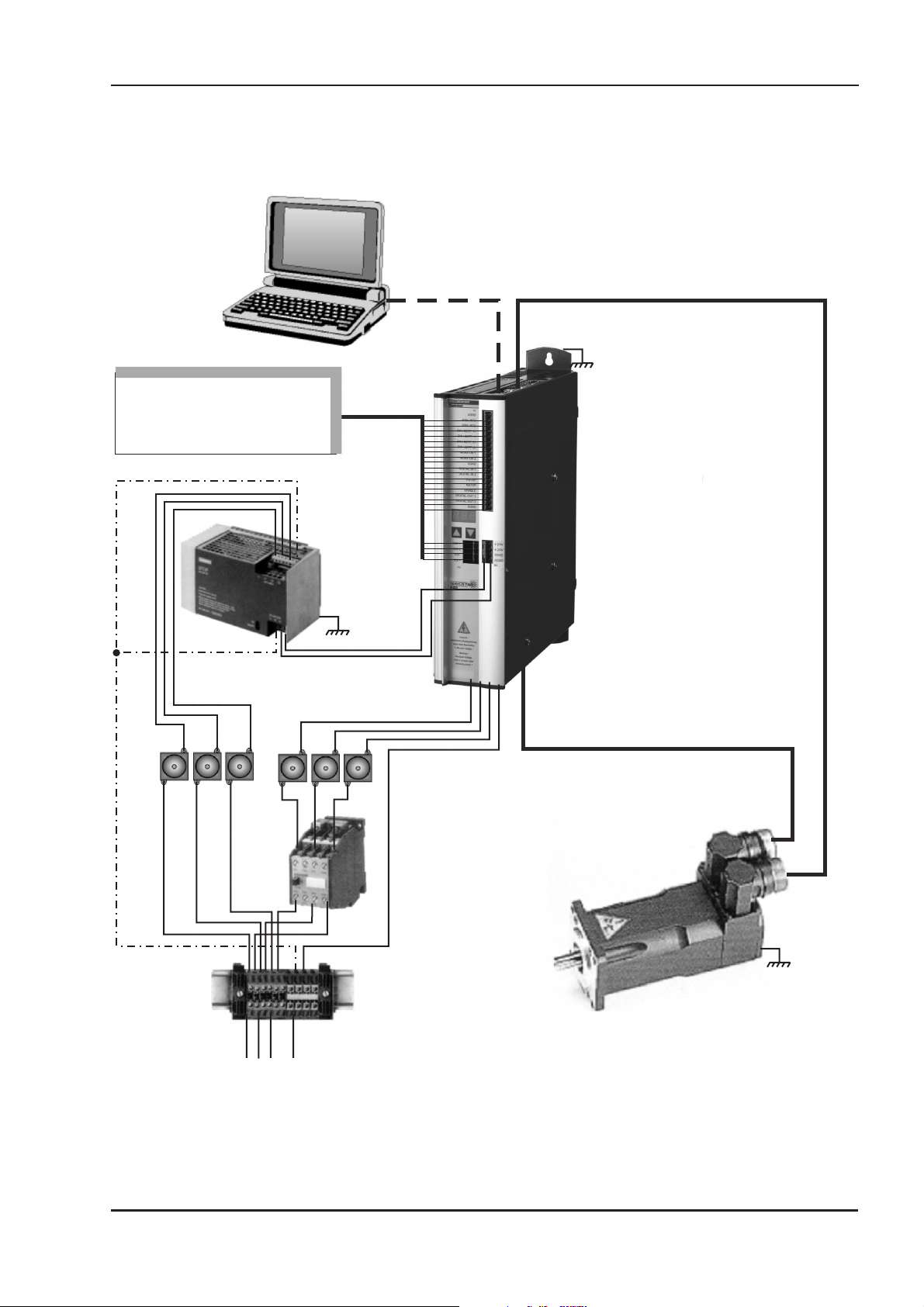
1.6 Components of a servo system
PC
Control / PLC
24V supply
Option -AS-
terminals
SERVOSTAR 600
fuses
drive contactor
motor
SERVOSTAR®601...620 Installation Manual 17
Page 18
General 03/04 Kollmorgen
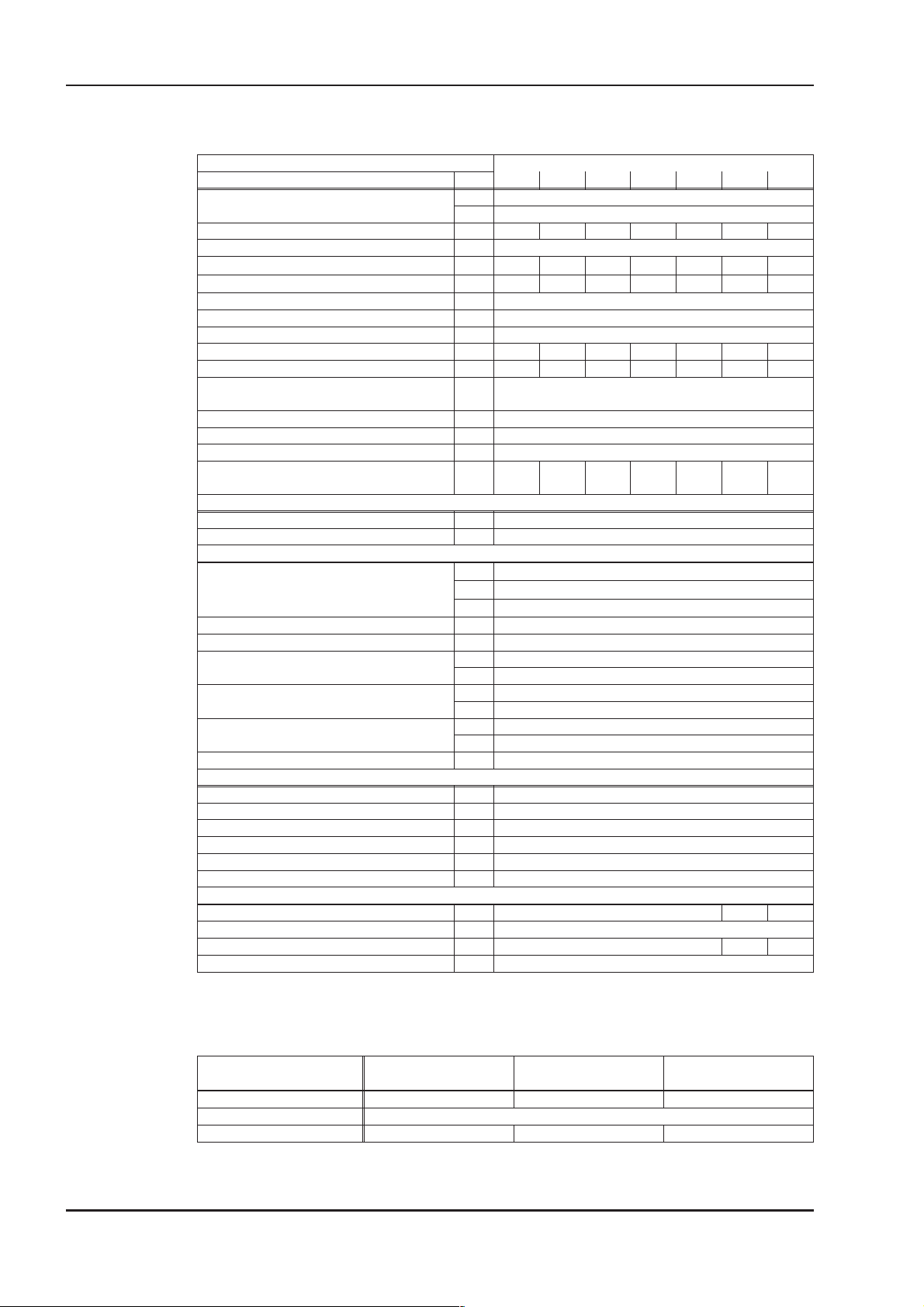
1.7 Technical data
SERVOSTAR
Rated data DIM 601 603 606 610 610-30 614 620
Rated supply voltage (grounded system)
V~ 3 x 230V
V~ 3 x 208V
-10%
-10%
Rated installed load for S1 operation kVA 124771014
Rated DC-link voltage V= 260 - 675
A
Rated output current (rms value, ± 3%)
Peak output current (max. ca. 5s, ± 3%)
1.5 3 6 10 10 14 20
rms
A
3 6 12 20 30 (2s) 28 40
rms
Clock frequency of the output stage kHz 8 (16 with VDCmax=400V)
Technical data for regen circuit — ð p.21
Overvoltage protection threshold V 450...900
Max. load inductance mH 150 75 40 25 24 15 12
Min. load inductance mH 25 12 7,5 4 4 2,5 2
Form factor of the output current
(at rated data and min. load inductance)
— 1.01
Bandwidth of subordinate current controller kHz > 1.2
Residual voltage drop at rated current V 5
Quiescent dissipation, output stage disabled W 15
Dissipation at rated current (incl. power
supply losses, without regen dissipation)
W 30 40 60 90 90 160 200
Internal fusing (external fusing ð p.18)
Auxiliary supply 24V — internal 3.15 AT
Regen resistor — internal, electronic
Inputs
Setpoint ½, resolution 14bit/12bit V
Common-mode voltage max. V
Input resistance to AGND
kW
Digital inputs V according to IEC 1131
Digital outputs, open collector V according to IEC 1131
BTB/RTO output, relay contacts
Aux. power supply, electrically isolated without brake
Aux. power supply, electrically isolated with
brake (consider voltage loss!)
V DC max. 30, AC max. 42
mA 500
V 24 (-0% +15%)
A1
V 24 (-0% +15%)
A3
Max. output current, brake A 2
Connections
Control signals — Combicon 5.08 / 18 pole , 2,5mm²
Power signals — Power Combicon 7.62 / 4x4 + 1x6-pole, 4mm²
Resolver input — SubD 9pole (socket)
Sine-cosine encoder input — SubD 15pole (socket)
PC-interface, CAN — SubD 9pole (plug)
Encoder simulation, ROD (EEO) / SSI — SubD 9pole (plug)
Mechanical
Weight kg 4 5 7.5
Height without connectors mm 275
Width mm 70 100 120
Depth without connectors mm 265
... 480V
... 480V
±10
±10
20
+10%
+10%
,50Hz
,60Hz
1.7.1 External fusing
Fusible cutouts or similar
(Fuse UL time delay)
AC supply F
24V supply F
Regen resistor F
N1/2/3
H1/2/3
B1/2
(x=SorS-Rfor480V applications x=NorN-Rfor230V applications)
SERVOSTAR
601 / 603
SERVOSTAR
606 / 610
SERVOSTAR
614 / 620
6 AT (FRx-6) 10 AT (FRx-10) 20 AT (FRx-25)
max. 12 AF (max. FRx-12)
4 A (FRS-6) 6 A (FRS-6) 6 AF(FRS-10)
18 SERVOSTAR®601...620 Installation Manual
Page 19
Kollmorgen 03/04 General
1.7.2 Allowable ambient conditions, ventilation, mounting position
Storage temperature/humidity, storage duration
Transport temperature / humidity
Supply voltage tolerances
Input power
Aux. power supply
Ambient temperature in operation
Humidity in operation
Site altitude
Pollution level Pollution level 2 to EN60204/EN50178 Enclosure protection IP 20 Mounting position Ventilation
Make sure that there is sufficient forced ventilation within the switchgear cabinet.
1.7.3 Conductor cross-sections
Following EN 60204 (for AWG: table 310-16 of the NEC 60°C or 75°C column), we recommend for
single-axis systems:
AC connection
DC-link
Motor cables up to 25 m length
Motor cables 25 to 100 m length,
with motor choke 3YL-20
(consult our customer service)
Resolver, thermostat-motor
Encoder, thermostat-motor
Setpoints, monitors, AGND 0.25 mm² (22 awg) twisted pairs, shielded
Control signals, BTB, DGND 0.5 mm² (20 awg)
Holding brake (motor) min. 0.75 mm² (18 awg), 600V,105°C (221°F), shielded, check voltage drop
+24 V / XGND max. 2.5 mm² (14 awg), check voltage drop
For multi-axis systems, please note the special operating conditions in your installation
Technical data for connection cables ð p.34 .Observe our application note “Cables and connectors”.
SERVOSTAR 601-610 : 1.5 mm² (14 awg)
SERVOSTAR 614/620 : 4 mm² (12 awg)
SERVOSTAR 601-610 : 1.5 mm² (14 awg)
SERVOSTAR 614/620 : 4 mm² (12 awg)
SERVOSTAR 601-610 : 1-1.5 mm² (14 awg)
SERVOSTAR 614/620 : 2.5 mm² (12 awg)
SERVOSTAR 601-606 : 1 mm² (14 awg)
SERVOSTAR 610-620 : 2.5 mm² (12 awg)
4x2x0.25 mm² (22awg) twisted pairs, shielded, max.100m,
capacitance <120pF/m
7x2x0,25 mm² (22 awg) twisted pairs, shielded, max.50m,
capacitance <120pF/m
ð p.91
ð p.91
min 3x 230V
min 3x 208V
24 VDC (-0% +15%)
0 to +45°C (32 to 113°F) at rated data
+45 to +55°C (113 to 131°F) with power derating
rel. humidity 85%, no condensation
up to 1000m a.m.s.l. without restriction
1000 — 2500m a.m.s.l. with power derating 1.5%/100m
generally vertical. ð p.26
forced convection by built-in fan
AC / max 3x 480V
-10%
AC / max 3x 480V
-10%
+10%
,50Hz
+10%
,60Hz
2.5% / K
600V,105°C (221°F),
twisted
600V,105°C (221°F),
shielded for lengths>20cm
600V,105°C (221°F),
shielded,
capacitance <150pF/m
600V,105°C (221°F),
shielded,
capacitance <150pF/m
1.7.4 Recommended torque
Connector Recommended torque
X3, X4 0.5 to 0.6 Nm (4.43 to 5.31 in lb)
X0A, X0B, X7, X8, X9 0.5 to 0.6 Nm (4.43 to 5.31 in lb)
Ground bolt 3.5 Nm (31 in lb)
1.7.5 LED display
A 3-character LED display shows the amplifier status after switching on the 24V supply
(ð p.58). During operation of the amplifier via the keys on the front panel, the parameter and
function numbers (ð p.59) are displayed, as well as the numbers of any errors which occur
(ð p.60).
SERVOSTAR®601...620 Installation Manual 19
Page 20
General 03/04 Kollmorgen
1.8 Grounding system
AGND — ground for analog inputs/outputs, internal analog/µC ground
DGND — ground for digital inputs/outputs, optically isolated
XGND — ground for external 24V aux. voltage, optically and inductively isolated
PGND — ground for encoder simulation, RS232, CAN, optically isolated
The potential isolation is shown in the block diagram (ð p. 37).
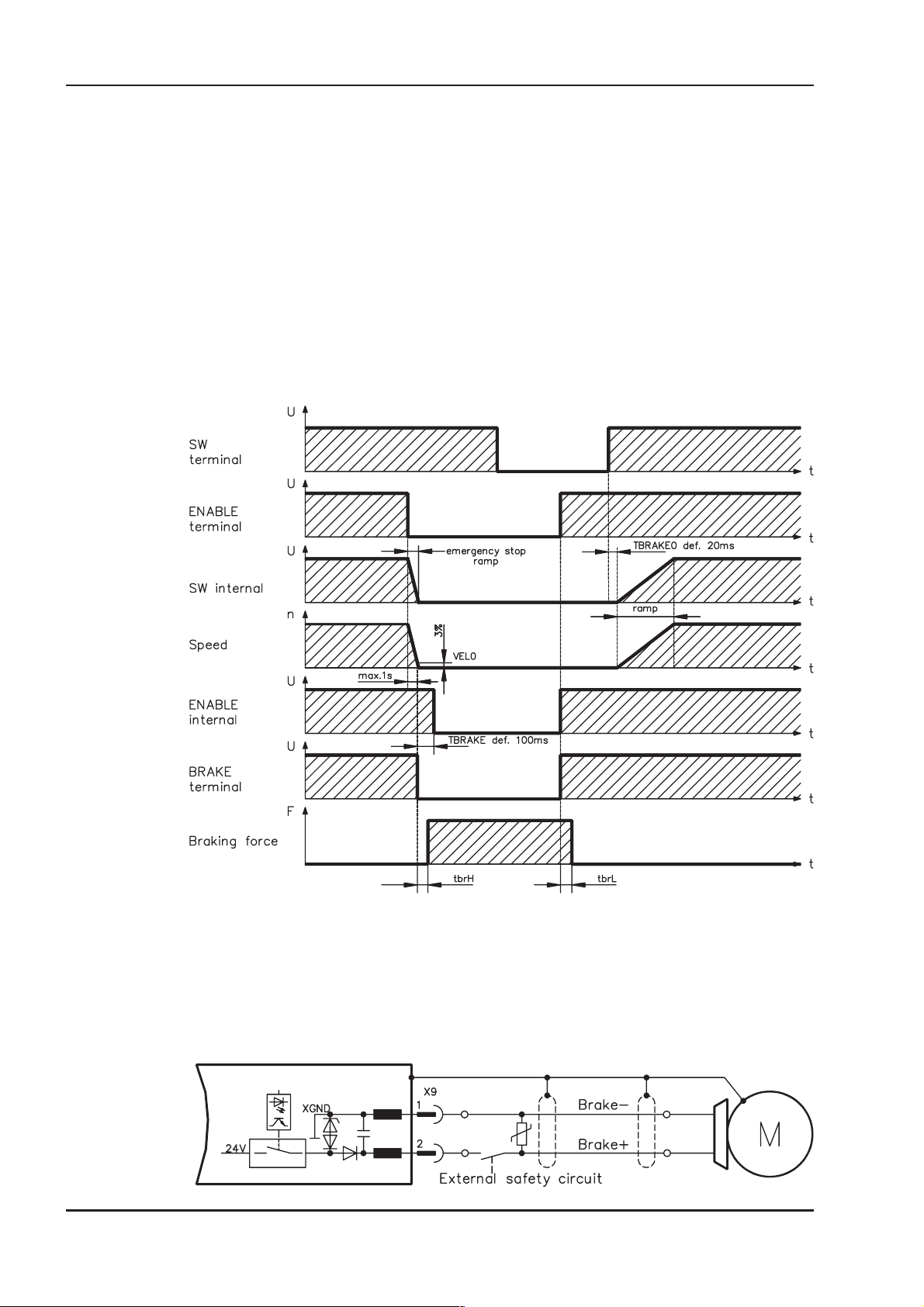
1.9 Control for motor-holding brake
A 24V / max. 2A holding brake in the motor can be controlled directly by the servo amplifier. This
function does not ensure personnel safety! The brake function must be enabled through the
BRAKE parameter (setting: WITH BRAKE). In the diagram below you can see the time and functio
nal relationships between the ENABLE signal, speed setpoint, speed and braking force.
-
During the internal ENABLE delay time of 100ms the speed setpoint of the servo amplifier is
internally driven down a 10ms ramp to 0V. The brake output is switched on when 3% of the final
speed is reached. The rise (tbrH) and fall (tbrL) times of the holding brake which is built into the
motors are different for the various types of motor (see motor manual). A description of the
interface can be found on page 39 .
A safe (for personnel) operation of the holding brake requires an additional “make” (n.o.) contact in
the brake circuit and a suppressor device (varistor) for the recommended brake circuit diagram :
SERVOSTAR 600
20 SERVOSTAR®601...620 Installation Manual
Page 21
Kollmorgen 03/04 General
1.10 Regen circuit
During braking with the aid of the motor, energy is fed back to the servo amplifier. This energy is
converted into heat in the regen resistor. The regen circuit (thresholds) are adjusted to the supply
voltage with the help of the setup software.
Our customer service can help you with the calculation of the regen power which is required. A des
cription of the interface can be found on page 39 .
Internal regen resistor : SERVOSTAR 601/603 66 W
SERVOSTAR 606-620 33 W
External regen resistor : SERVOSTAR 601-620 33 W
Functional description :
1.- Individual amplifiers, not coupled through the DC-link (DC+, DC-)
The circuit starts to respond at a DC-link voltage of 400V, 720V or 840V (depending on the
supply voltage). If the energy which is fed back from the motor, as an average over time or
as a peak value, is higher than the preset regen power, then the servo amplifier will output
the status “regen power exceeded” and the regen circuit will be switched off. At the next
internal check of the DC-link voltage (after a few ms) an overvoltage will be detected and the
Servo amplifier will be switched off with the error message “Overvoltage F02" (ð p.60). The
BTB/RTO contact (terminal X3/2,3) will be opened at the same time (ð p.45)
2.- Several servo amplifiers coupled through the DC-link circuit (DC+, DC-)
Thanks to the built-in regen circuit with its patented power distribution, several amplifiers
(even with different current ratings) can be operated off a common DC-link. This is achieved
by an automatic adjustment of the regen thresholds (which vary, because of tolerances).
The regen energy is distributed equally among all the amplifiers. The combined power of
all the amplifiers is always available, as continuous or peak power. The switch-off takes
place as described under 1. (above) for the servo amplifier with the lowest switch-off
threshold (resulting from tolerances). The RTO (BTB) contact of this amplifier (terminals
X3/2,3) will be opened at the same time (ð p.45).
-
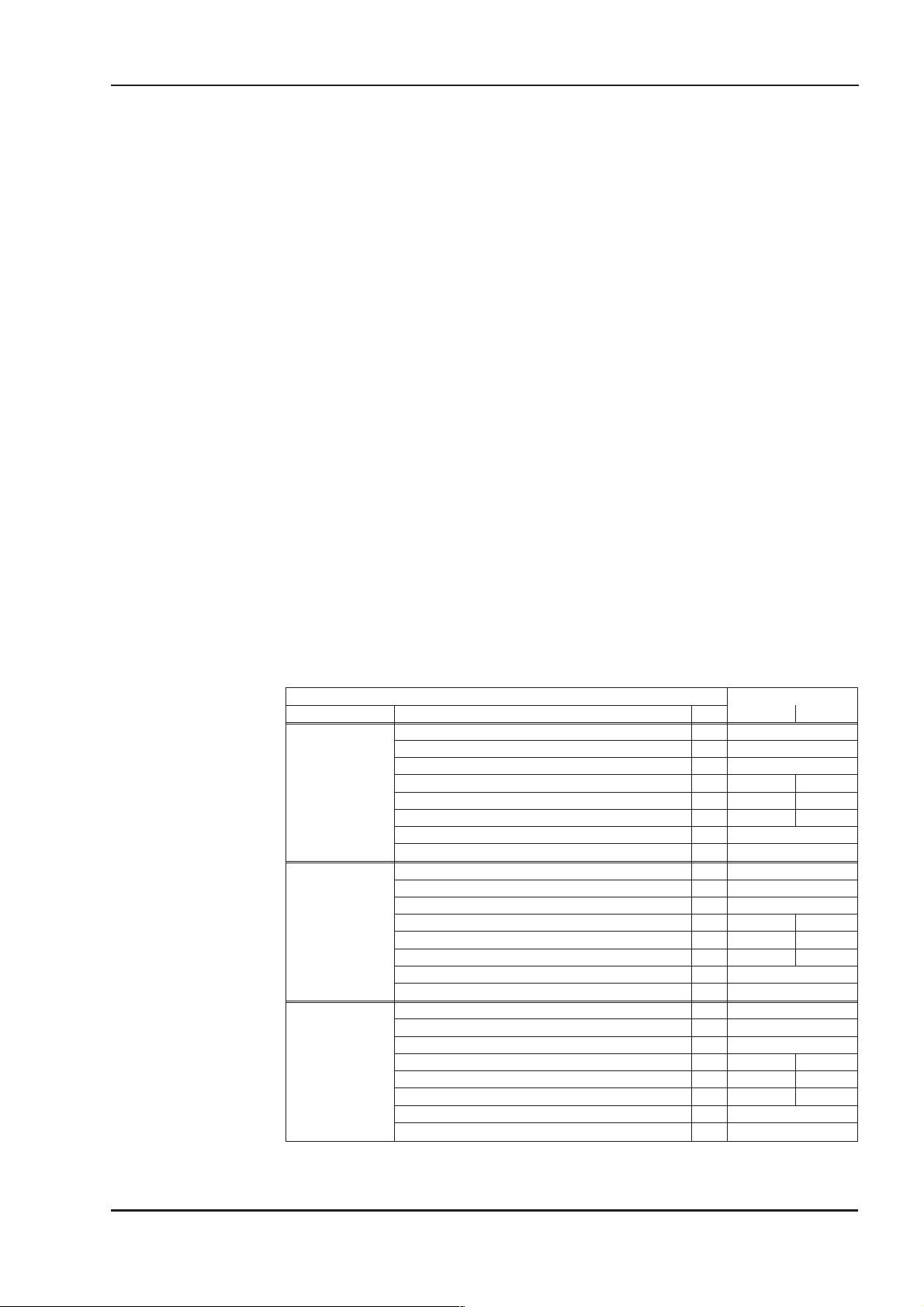
Regen circuit: technical data SERVOSTAR
Supply voltage Rated data DIM 601 - 603 606 - 620
Upper switch-on level of regen circuit V 400 - 430
Switch-off level of regen circuit V 380 - 410
Overvoltage F02 V 450
3 x 230 V
3 x 400 V
3 x 480 V
Continuous power of regen circuit (R
Continuous power of regen circuit (R
Pulse power, internal (R
Pulse power, external (R
External regen resistor
Upper switch-on level of regen circuit V 720 - 750
Switch-off level of regen circuit V 680 - 710
Overvoltage F02 V 800
Continuous power of regen circuit (R
Continuous power of regen circuit (R
Pulse power, internal (R
Pulse power, external (R
External regen resistor
Upper switch-on level of regen circuit V 840 - 870
Switch-off level of regen circuit V 800 - 830
Overvoltage F02 V 900
Continuous power of regen circuit (R
Continuous power of regen circuit (R
Pulse power, internal (R
Pulse power, external (R
External regen resistor
max. 1s) kW 2.5 5
Bint
max. 1s) kW 5
Bext
max. 1s) kW 8 16
Bint
max. 1s) kW 16
Bext
max. 1s) kW 10.5 21
Bint
max. 1s) kW 21
Bext
) W 80 200
Bint
) max. kW 0.25 0.75
Bext
W
) W 80 200
Bint
) max. kW 0.4 1.2
Bext
W
) W 80 200
Bint
) max. kW 0.5 1.5
Bext
W
33
33
33
SERVOSTAR®601...620 Installation Manual 21
Page 22
General 03/04 Kollmorgen
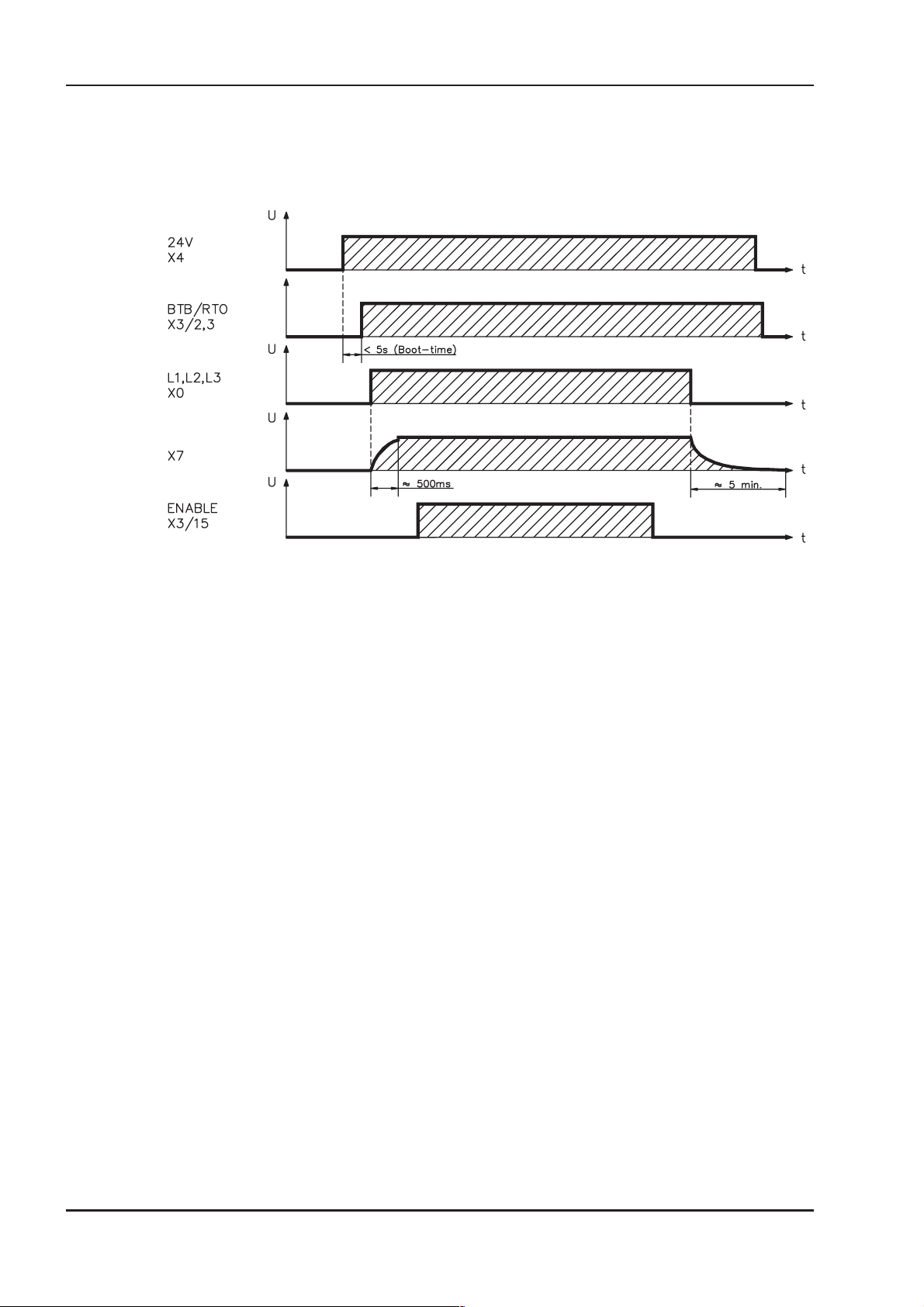
1.11 Switch-on and switch-off behavior
The diagram below illustrates the correct functional sequence for switching the servo amplifier on
and off.
DC-link
1.11.1 Stop function to EN 60204 (VDE 0113)
If a fault occurs (ð p.60) the output stage of the servo amplifier is switched off and the BTB/RTO
contact is opened. In addition, a global error signal can be given out at one of the digital outputs
(terminals X3/16 and X3/17) (see online help for the setup software). These signals can be used by
the higher-level control to finish the current PLC cycle or to shut down the drive (with additional
brake or similar.).
Instruments which are equipped with a selected “Brake” function use a special sequence for
switching off the output stage (ð p.20).
The -AS- option can be used to switch off the drive via a positive-action (approved by the Trade
Liability Association) safety relay, so that personnel safety is ensured at the drive shaft (ð p.63).
The Stop functions are defined in EN 60204 (VDE 0113), Para. 9.2.2, 9.2.5.3.
There are three categories of Stop functions:
Category 0: Shut down by immediately switching off the supply of energy to the
drive machinery (i.e an uncontrolled shut-down);
Category 1: A controlled shut-down, during which the supply of energy to the drive
machinery is maintained to perform the shut-down, and where the energy
supply is only interrupted when the shut-down has been completed;
Category 2: A controlled shut-down, where the supply of energy to the drive machinery
is maintained.
Every machine must be equipped with a Stop function to Category 0. Stop functions to Categories 1
and/or 2 must be provided if the safety or functional requirements of the machine make this
necessary.
You can find additional information and implementation examples in our application note “Stop and
Emergency Stop functions with SERVOSTAR 600”.
22 SERVOSTAR®601...620 Installation Manual
Page 23

Kollmorgen 03/04 General
1.11.2 Emergency Stop strategies
The Emergency Stop function is defined in EN 60204 (VDE 0113), Para. 9.2.5.4.
Implementation of the Emergency Stop function :
You can find wiring recommendations in our application note
“Stop and Emergency Stop functions with SERVOSTAR 600”
Category 0:
The controller is switched to “disable”, the electrical supply (400VAC) is disconnected.
The drive must be held by an electromagnetic holding device (brake).
In multiaxis systems with connected DC-link bus (intermediate circuit) the motor leads have
to be disconnected by a changeover switch (contactor, e.g. Siemens 3RT1516-1BB40) and
short-circuited by resistors connected in a star configuration.
Category 1:
If hazardous conditions can result from an emergency stop switch-off with an unbraked
run-down, then the drive can be switched off by a controlled shut-down.
Stop Category 1 permits electromotive braking with a switch-off when zero speed has
been reached. Safe shut-down can be achieved, when the loss of the mains supply is not
rated as a fault and the control takes over the disabling of the servoamplifier.
In the normal situation, only the supply power is switched off in a safe manner.
The 24V auxiliary supply remains switched on.
SERVOSTAR®601...620 Installation Manual 23
Page 24

General 03/04 Kollmorgen
This page has been intentionally left blank.
24 SERVOSTAR®601...620 Installation Manual
Page 25
Kollmorgen 03/04 Installation
2 Installation
2.1 Important instructions
Protect the servo amplifier from impermissible stresses. In particular, do not let any
l
components become bent or any insulation distances altered during transport and handling.
Avoid contact with electronic components and contacts.
Check the combination of servo amplifier and motor. Compare the rated voltage and current of
l
the units. Carry out the wiring according to the connection diagram on page 28.
Make sure that the maximum permissible rated voltage at the terminals L1, L2, L3 or +DC,
l
–DC is not exceeded by more than 10% even in the most unfavorable case
(see EN 60204-1 Section 4.3.1). An excessive voltage on these terminals can lead to
destruction of the regen circuit and the servo amplifier. Use the SERVOSTAR 600
servo amplifiers only on an earthed (grounded) 3-phased supply system, to drive a synchro
nous servomotor.
The fusing of the AC supply input and the 24V supply is installed by the user (ð p.18).
l
Take care that the servo amplifier and motor are earthed (grounded) properly. Do not use
l
painted (non-conductive) mounting plates.
Route power and control cables separately. We recommend a separation of at least 200mm.
l
This improves the interference immunity required by EMC regulations. If a motor power cable
is used which includes cores for brake control, the brake control cores must be
separately shielded. Earth (ground) the shielding at both ends (ð p.30).
l Install all heavy-current cables with an adequate cross-section, as per EN 60204. (ð p.19).
l Wire the BTB/RTO contact in series into the safety circuit of the installation.
Only in this way is the monitoring of the servo amplifier assured.
l Install all shielding with large areas (low impedance), with metallised connector housings or
shield connection clamps where possible. Notes on connection techniques can be found on
page 33 and in the application note “Cables and connectors”.
l Ensure that there is an adequate flow of cool, filtered air into the bottom of the switchgear ca-
binet. Observe page 19 .
l It is permissible to alter the servo amplifier settings by using the setup software.
Any other alterations will invalidate the warranty.
-
Caution
Never disconnect the electrical connections to the servoamplifier while it is live. In un
favorable circumstances this could result in destruction of the electronics.
Residual charges in the capacitors can have dangerous levels up to 300 seconds after
switching off the mains supply voltage. Measure the bus voltage at the DC-link pins
(+DC/-DC), and wait until the voltage has fallen below 40V.
Control and power connections can still be live, even when the motor is not rotating.
SERVOSTAR®601...620 Installation Manual 25
Page 26
Installation 03/04 Kollmorgen
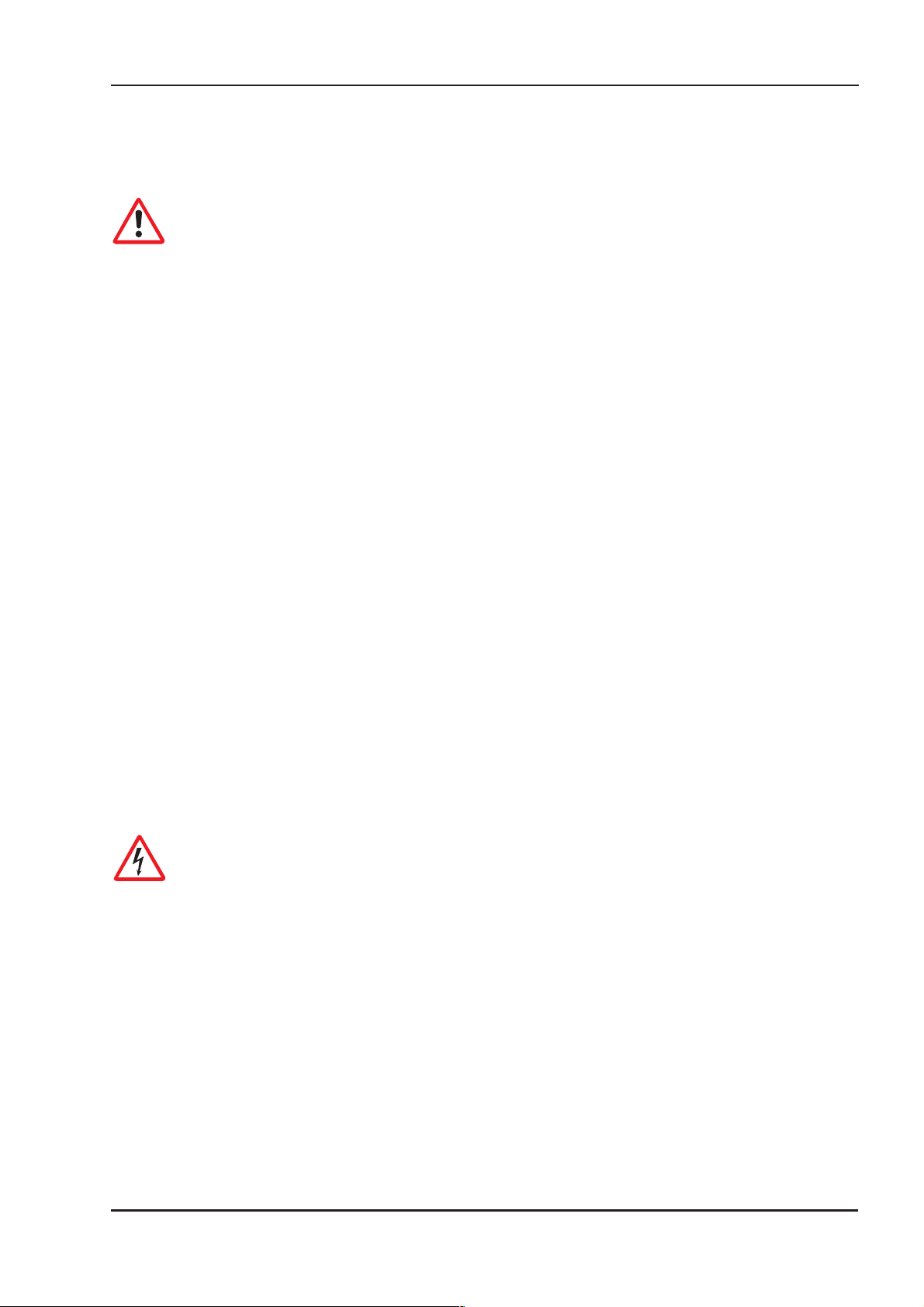
2.2 Assembly
Material:2or4hexagon socket screws to DIN 912, M5
Tool required:4mmAllen key
SERVOSTAR
601-610
SERVOSTAR
601-610
SERVOSTAR
614
SERVOSTAR
620
SERVOSTAR 600
26 SERVOSTAR®601...620 Installation Manual
Page 27
Kollmorgen 03/04 Installation
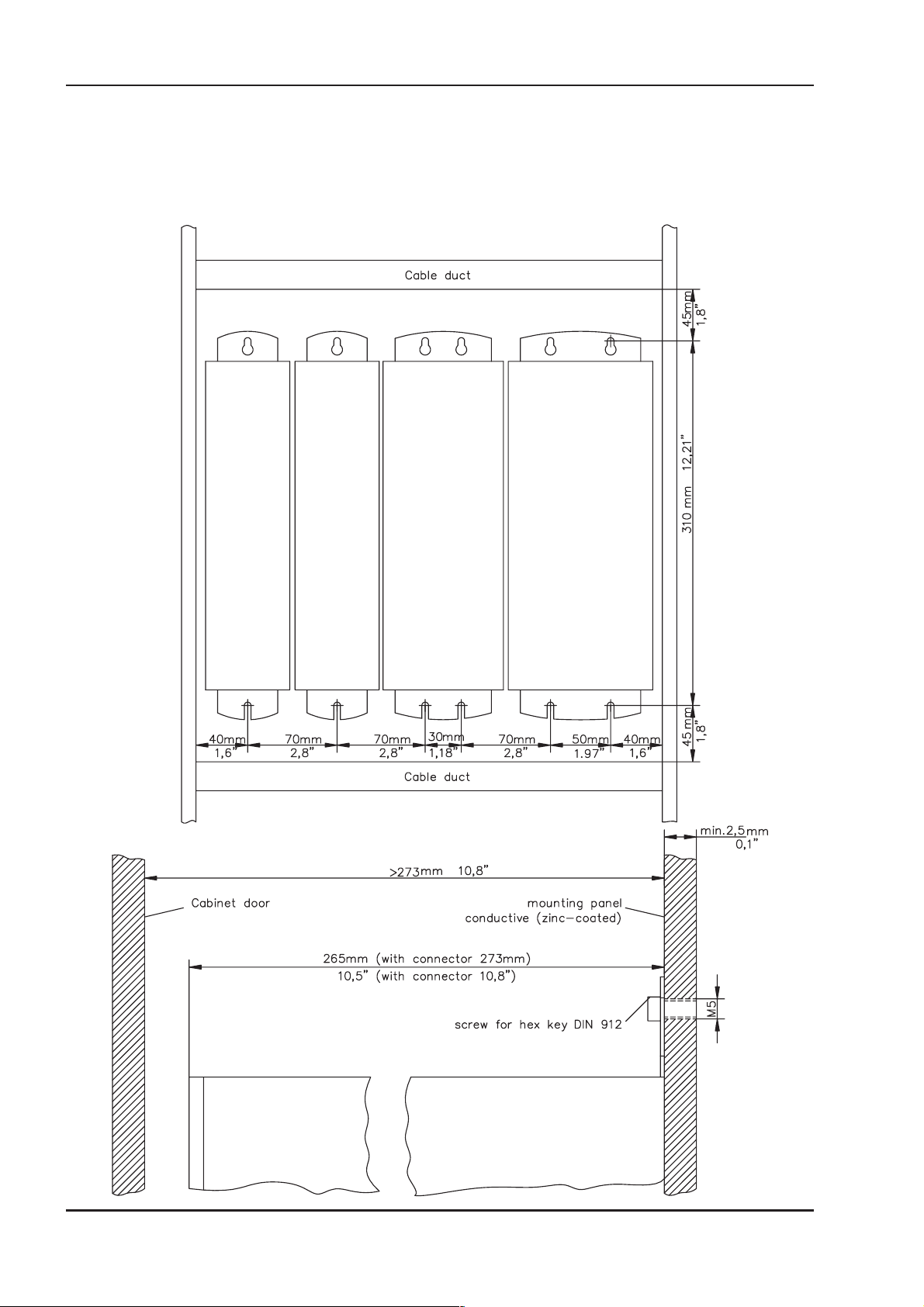
2.2.1 Dimensions
SERVOSTAR 601/603/606/610
SERVOSTAR 614
SERVOSTAR 620
SERVOSTAR®601...620 Installation Manual 27
Page 28
Installation 03/04 Kollmorgen
2.3 Wiring
Only professional staff who are qualified in electrical engineering are allowed to install the
servo amplifier.
The installation procedure is described as an example. A different procedure may be sensible or
necessary, depending on the application of the equipment.
We provide further know-how through training courses (on request).
Caution !
Only install and wire up the equipment when it is not live, i.e. when neither the mains
power supply nor the 24 V auxiliary voltage nor the operating voltages of any other
connected equipment is switched on.
Take care that the cabinet is safely disconnected (with a lock-out, warning signs etc.).
The individual voltages will be switched on for the first time during setup.
Note !
The ground symbol
X, which you will find in all the wiring diagrams, indicates that
you must take care to provide an electrically conductive connection with the largest
possible surface area between the unit indicated and the mounting plate in the switchgear cabinet.
This connection is for the effective grounding of HF interference, and must not be
confused with the PE- symbol W (a protective measure to EN 60204).
Use the following connection diagrams:
— Power and control connections : Page 30
— Multi-axis systems, example : Page 31
— Resolver : Page 40
— High-resolution encoder : Page 41
— Encoder simulation ROD : Page 46
— Encoder simulation SSI : Page 47
— Master-slave interface : Page 48
— Pulse direction interface : Page 50
— RS232 / PC : Page 52
— CAN-interface : Page 53
— Option -AS- : Page 65
— Expansion card -I/O-14/08- : Page 71
— Expansion card PROFIBUS : Page 73
— Expansion card SERCOS : Page 75
— Expansion card DeviceNet : Page 77
— Expansion card Ethernet : Page 79
— Expansion card SAC : Page 81
— Expansion module -2CAN- : Page 85
28 SERVOSTAR®601...620 Installation Manual
Page 29
Kollmorgen 03/04 Installation
The following notes should assist you to carry out the installation in a sensible sequence, without
overlooking anything important.
Site
Ventilation
Assembly
Cable selection
Grounding
Shielding
Wiring
In a closed switchgear cabinet. Observe page 19 .
The site must be free from conductive or corrosive materials.
For the mounting position in the cabinet ð p.26
Check that the ventilation of the servo amplifier is unimpeded
and keep within the permitted ambient temperature ð p.19 .
Keep the required space clear above and below the servo amplifier
ð p.26.
Assemble the servo amplifier and power supply close together
on the conductive, grounded mounting plate in the cabinet.
Select cables according to EN 60204 ð p.19
EMC-compliant (EMI) shielding and grounding (ð p.30)
Earth (ground) the mounting plate, motor housing and CNC-GND
of the controls.
Notes on connection techniques are on page 33
— Route power leads and control cables separately
— Wire the BTB/RTO contact in series into the safety
— loop of the installation
— Connect the digital control inputs to the servo amplifier
Final check
— Connect up AGND (also if fieldbuses are used)
— Connect the analog setpoint, if required
— Connect up the feedback unit (resolver and/or encoder)
— Connect the encoder simulation, if required
— Connect the expansion card (see according notes from page 63)
— Connect the motor leads
— Connect shielding to EMI connectors at both ends
— Use motor chokes (3YL20) for lead lengths >25m
— Connect motor-holding brake, connect shielding to EMI
— connectors at both ends
— If required, connect the external regen resistor
— (with fusing)
— Connect aux. supply
— (for max. permissible voltage values ð p.19)
— Connect main power supply
— (for max. permissible voltage values ð p.19)
— Connect PC (ð p.52).
— Final check of the implementation of the wiring,
— according to the wiring diagrams which have been used.
SERVOSTAR®601...620 Installation Manual 29
Page 30
Installation 03/04 Kollmorgen
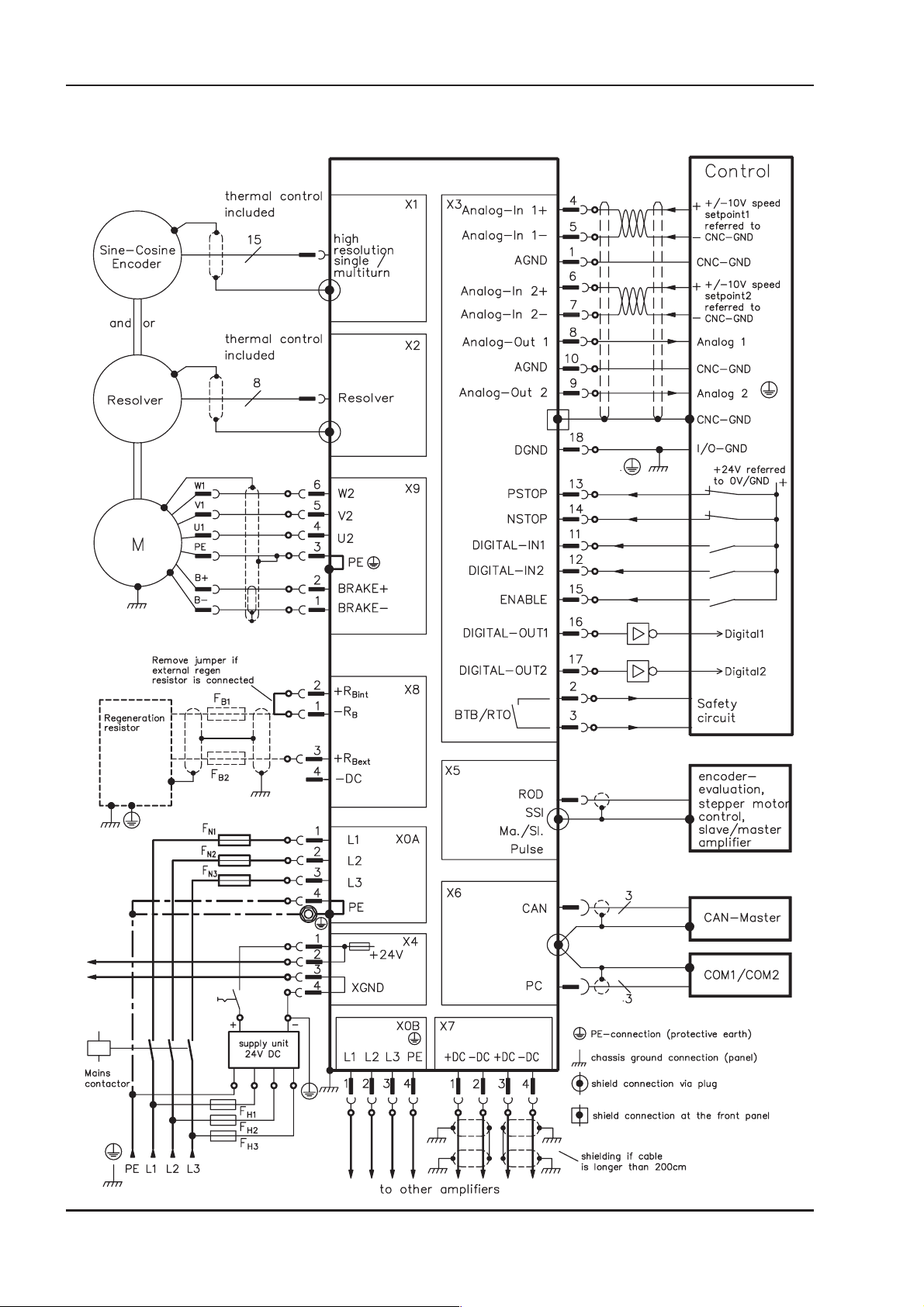
2.3.1 Connection diagram
Reference Safety Instructions (ð p.6) and
Use As Directed (ð p.12) !
SERVOSTAR 600
ð p.42
ð p.41
ð p.43
ð p.40
ð p.39
ð p.44
ð p.39
ð p.38
ð p.38
ð p.45
ð p.46
ð p.47
ð p.48
ð p.50
ð p.53
ð p.52
ð p.38
30 SERVOSTAR®601...620 Installation Manual
Page 31

Kollmorgen 03/04 Installation
2.3.2 Example of connections for multi-axis system
Reference Safety Instructions (ð p.6) and
Use As Directed (ð p.12) !
SERVOSTAR 600
MM
SERVOSTAR 600
Power supply
SERVOSTAR 600
M
SERVOSTAR®601...620 Installation Manual 31
Page 32

Installation 03/04 Kollmorgen
2.3.3 Pin assignments
32 SERVOSTAR®601...620 Installation Manual
Page 33

Kollmorgen 03/04 Installation
2.3.4 Notes on connection techniques
Please consider our application note “Cables and connectors”
2.3.4.1 Shielding connection to the front panel
Remove the outer covering of the cable
and the shielding braid from the cores
for the required length. Secure the cores
with a cable tie.
Remove the outer covering of the cable
over a length of about 30mm, without
damaging the shielding braid.
Pull a cable tie through the slot in the
shielding rail (front panel) of the servo
amplifier.
SERVOSTAR 600
SERVOSTAR 600
Use the cable tie to clamp the shielding
braid of the cable firmly to the shielding
rail.
SERVOSTAR®601...620 Installation Manual 33
Page 34

Installation 03/04 Kollmorgen
2.3.4.2 Technical data for connecting cables
Further information on the chemical, mechanical and electrical characteristics of the cables can be
obtained from our customer service.
Observe the restrictions in the chapter "Conductor cross-sections" on page 19 .
Insulation material
Sheathing - PUR (polyurethane, code 11Y)
Core insulation - PETP (polyesteraphtalate, code 12Y)
Capacitance
Motor cable - less than 150 pF/m
RES-/Encoder-cable - less than 120 pF/m
Technical data
— The brackets in the cable designation indicate the shielding.
— All cables are suitable for use as trailing cables.
— The technical data refer to the use as moveable cables.
Operating life : 1 million bending cycles
Operation-
Cores
[mm²]
(4x1.0) number -30 / +80 -22 / 176 10 100
(4x1.5) number -30 / +80 -22 / 176 10,5 105
(4x2.5) number -30 / +80 23 / 158 12,6 125
(4x4) number -30 / +80 23 / 158 14,7 150
(4x1.0+(2x0.75)) color -30 / +80 -22 / 176 10,5 100
(4x1.5+(2x0.75)) number -30 / +80 14 / 176 11,5 120
(4x2.5+(2x1)) color -30 / +80 -22 / 176 14,2 145
(4x2x0,25) color
(7x2x0.25) color
Coretype
Temperature
range
[°C]
-30 / +80
-30 / +80
Operation-
Temperature
range
[°F]
-22 / 176 7,7 70
-22 / 176 9,9 80
Outside
diameter
[mm]
Bending
radius
[mm]
Remarks
twisted
pairs
34 SERVOSTAR®601...620 Installation Manual
Page 35

Kollmorgen 03/04 Installation
2.4 Setup software
2.4.1 General
This chapter describes the installation of the setup software DRIVE.EXE for the
SERVOSTAR 600 digital servo amplifiers.
We offer training and familiarization courses on request.
2.4.1.1 Use as directed
The setup software is intended to be used for setting up and storing the operating parameters for
the SERVOSTAR 600 series of servo amplifiers. The attached servo amplifier can be setup with the
assistance of the software - during this process the drive can be controlled directly by the service
functions.
Only professional personnel who have the relevant expertise described on page 11 are
permitted to carry out online parameter setting for a drive which is running.
Sets of data which are stored on data media are not safe against unintended alteration
by other persons. After loading a set of data you must therefore check all parameters
thoroughly before enabling the servo amplifier.
2.4.1.2 Software description
The servo amplifiers must be adapted to the requirements of your installation. Usually you will not
have to carry out this parameter setting yourself on the amplifier, but on a PC, with the assistance of
the setup software. The PC is connected to the servo amplifier by a null-modem cable. The setup
software provides the communication between SERVOSTAR 600 and the PC.
You will find the setup software on the accompanying CD-ROM and at the Danaher Motion web site
in the Danaher Motion download area.
With very little effort you can alter parameters and instantly observe the effect on the drive, since
there is a continuous (online) connection to the amplifier.
Simultaneously, important actual values are read out from the amplifier and displayed on the PC
monitor (oscilloscope function).
Any interface modules (expansion cards) which may be built into the amplifier are automatically
recognized, and the additional parameters which are required for position control or motion-block
definition are made available.
Sets of data can be stored on data media (archived) and loaded again. Sets of data which are sto
red on data media can be printed.
We supply you with motor-specific default sets of data for the most common combinations of servo
amplifier and motor. In most applications you will be able to use these default values to get your
drive running without any problems.
-
SERVOSTAR®601...620 Installation Manual 35
Page 36

Installation 03/04 Kollmorgen
2.4.1.3 Hardware requirements
The PC interface (X6, RS232) of the servo amplifier is connected to the serial interface of the PC by
a null-modem cable (not a null-modem link cable !)(ð p.52).
Connect / disconnect the interface cable only when the supply is switched off for both
the PC and the servo amplifier.
The interface in the servo amplifier is electrically isolated by an optocoupler, and is at the same
potential as the CANopen interface.
Minimum requirements for the PC:
Processor : 80486 or higher
Operating system : WINDOWS 95(c) / 98 / 2000 / ME / XP, WINDOWS NT 4.0
Graphics adapter : Windows compatible, color
Drives : hard disk with at least 5 MB free space
CD-ROM drive
Main memory : at least 8MB
Interface : one free serial interface (COM1:, 2:, 3: or COM4:)
2.4.1.4 Operating systems
WINDOWS 95(c) / 98 / 2000 / ME / NT / XP
DRIVE.EXE is executable under WINDOWS 95(c) / 98 / 2000 / ME / XP and WINDOWS NT 4.0.
The HTML help system is not available under WINDOWS 95a and 95b.
WINDOWS FOR WORKGROUPS 3.xx, DOS, OS2 Unix, Linux
DRIVE.EXE is not executable under WINDOWS 3.xx, DOS, OS2, Unix and Linux.
In emergency, operation is possible through an ASCII terminal emulation (without user-interface).
Interface settings : 9600 bps, no parity, no handshake
2.4.2 Installation under WINDOWS 95 / 98 / 2000 / ME / NT / XP
An installation program called SETUP.EXE can be found on the CD-ROM which makes it easy to install the setup software on your PC.
Connection to the serial interface of the PC:
Connect the interface cable to a serial interface on your PC and the PC interface (X6) of the
SERVOSTAR 600 (ð p.52).
Switch-on:
Switch on your PC-AT and the monitor.
After the start phase (boot-up) is finished, the Windows user-interface appears on the screen.
Installation:
Click on START (Taskbar), then on Run. Enter the program call in the entry window:
x:\setup.exe (with x= the correct drive letter for CD-ROM drive).
Click on OK and follow the instructions.
Setting up the graphics card (font size)
Please note that the screen resolution must at least be 800x600 Pixel.
Click on the desktop with the right mouse button. The dialogue window “Properties” will appear.
Select the file card “Settings”. Set the Font size to “Small Fonts”. Follow the instructions provided
by the system.
36 SERVOSTAR®601...620 Installation Manual
Page 37

Kollmorgen 03/04 Interfaces
3 Interfaces
All important interfaces are shown in this Chapter. The precise location of the connectors and
terminals can be seen on page 32. The block diagram below is just an overview.
SERVOSTAR®601...620 Installation Manual 37
Page 38

Interfaces 03/04 Kollmorgen
3.1 Power supply
3.1.1 Mains supply connection (X0)
— Directly to earthed (grounded) 3~ supply, integrated EMI filter
— Fusing (e.g. fusible cut-outs) provided by the user ð p.18
SERVOSTAR 600
3.1.2 24V auxiliary supply (X4)
— Electrically isolated, external 24VDC supply, e.g. with insulating transformer
— Required current rating ð p.18
— Integrated EMI filter for the 24V auxiliary supply
SERVOSTAR 600
3.1.3 DC-link (X7)
Can be connected in parallel. A patented circuit distributes the regen power among all the amplifiers
connected to the same DC-link circuit. (Connection example ð p.31).
38 SERVOSTAR®601...620 Installation Manual
Page 39

Kollmorgen 03/04 Interfaces
3.2 Motor connection with brake (X9)
Lead length £ 25m
SERVOSTAR 600
Lead length >25m
For lead lengths above 25m the choke box 3YL-20 must be wired into the motor lead,
close to the amplifier.
SERVOSTAR 600
3.3 External regen resistor (X8)
Remove the plug-in link between the terminals X8/1 (-RB) and X8/2 (+R
SERVOSTAR 600
bint
).
SERVOSTAR®601...620 Installation Manual 39
Page 40

Interfaces 03/04 Kollmorgen
3.4 Feedback
3.4.1 Resolver connection (X2)
Our rotatory servomotors have 2-pole hollow-shaft resolvers built in as a standard. It is possible to
connect 2...36-pole resolvers to the SERVOSTAR 600.
If lead lengths of more than 100m are planned, please contact our customer service.
The thermostat contact in the motor is connected via the resolver cable to the SERVOSTAR 600
and evaluated there.
SERVOSTAR 600
SubD9
12pol.round
colors for European cables only
40 SERVOSTAR®601...620 Installation Manual
Page 41

Kollmorgen 03/04 Interfaces
3.4.2 Encoder (X1)
As an option, our servomotors can be fit with a single-turn or multiturn sine-cosine encoder. Prefer
red types are ECN1313 and EQN1325.
This encoder is used by the SERVOSTAR 600 as a feedback device for drive tasks which require
highly precise positioning or extremely smooth running.
If lead lengths of more than 50m are planned, please consult our customer service.
The thermostat contact in the motor is connected via the encoder cable to the SERVOSTAR 600
and evaluated there.
SERVOSTAR 600
SubD15
17pol.round
-
colors for European cables only
SERVOSTAR®601...620 Installation Manual 41
Page 42

Interfaces 03/04 Kollmorgen
3.5 Control signals, monitor signals
3.5.1 Analog inputs (X3)
The servo amplifier is equipped with two differential inputs for analog setpoints which are
programmable. AGND (X3/1) must always be joined to the CNC-GND of the controls as a ground
reference.
Technical characteristics
— Differential-input voltage max. ± 10 V
— Resolution 1.25 mV
— Ground reference : AGND, terminal X3/1
— Input resistance 20 kW
— Common-mode voltage range for both inputs ± 10 V
SERVOSTAR 600
Input analog-in.1 (terminals X3/4-5)
Differential input voltage max. ± 10 V, resolution 14-bit, scalable
Standard setting : speed setpoint
Input analog-in.2 (terminals X3/6-7)
Differential input voltage max. ± 10 V, resolution 12-bit, scalable
Standard setting : torque setpoint
Application examples for setpoint input analog-in.2:
— adjustable external current limit
— reduced-sensitivity input for setting-up/jog operation
— pre-control / override
Fixing the direction of rotation
Standard setting : clockwise rotation of the motor shaft (looking at the shaft end)
— Positive voltage between terminal X3/4 (+ ) and terminal X3/5(-)or
— Positive voltage between terminal X3/6 (+ ) and terminal X3/7(-)
To reverse the direction of rotation, swap the connections to terminals X3/4-5 and. X3/6-7 or
change the ROT. DIRECTION parameter in the “Speed controller” screen.
42 SERVOSTAR®601...620 Installation Manual
Page 43

Kollmorgen 03/04 Interfaces
3.5.2 Analog outputs (X3)
Technical characteristics
— Reference ground is analog-GND (AGND, terminal X3/1 and X3/10)
— Output resistance : 2.2kW
— Output voltage ±10V
— Resolution : 10 bit.
SERVOSTAR 600
Programmable analog outputs Analog-out 1 / Analog-out 2
The terminals X3/8 (Analog-out 1) or X3/9 (Analog-out 2) can have the following analog signals
assigned to them:
Standard setting :
Analog-out 1 : Tachometer voltage VTA (speed)
The output delivers ±10V at the preset limit speed.
Analog-out 2 : Current setpoint IDC (torque)
The IDC-monitor delivers ± 10V at the preset peak current Ipeak (effective r.m.s. value).
You can use the terminals X3/8 (Analog-out 1) or X3/9 (Analog-out 2) to output converted analog
values for digital measurements which are contained in the servo amplifier.
You can find a list of pre-programmed functions on the "analog I/O" screen of our setup software.
SERVOSTAR®601...620 Installation Manual 43
Page 44

Interfaces 03/04 Kollmorgen
3.5.3 Digital control inputs (X3)
All digital inputs are electrically isolated through optocouplers.
Technical characteristics
— Reference ground is digital-GND (DGND, terminal X3/18)
— The logic is PLC-compatible according to IEC 1131
SERVOSTAR 600
ENABLE input
The output stage of the servo amplifier is activated by the enable signal
(terminal X3/15, input 24V, active-high).
In the inhibited state (low signal) the motor which is attached does not have any torque.
Programmable digital inputs :
You can use the digital inputs PSTOP / NSTOP / DIGITAL-IN1 and DIGITAL-IN2 to initiate
preprogrammed functions that are stored in the servo amplifier.
You can find a list of pre-programmed functions on the "digital I/O" screen of our setup software.
If an input is freshly assigned to a pre-programmed function, then the data set must be stored in the
EEPROM of the servo amplifier, and the 24V auxiliary supply of the servo amplifier must be
switched off and on again (to reset the amplifier software).
Limit-switches PSTOP / NSTOP
Terminals X3/13 and X3/14 are normally programmed for the connection of limit switches. If these
inputs are not needed for the connection of limit switches, then they are programmable for other
input functions.
Limit-switch positive/negative (PSTOP / NSTOP, terminals X3/13 and X3/14), high level in normal
operation (fail-safe for a cable break).
A low signal (open) inhibits the corresponding direction of rotation, the ramp function remains
effective.
DIGITAL-IN 1 / DIGITAL-IN 2
The digital inputs on terminal X3/11 (DIGITAL-IN 1) or terminal X3/12 (DIGITAL-IN 2) can be logi
cally combined in a pre-programmed function.
-
44 SERVOSTAR®601...620 Installation Manual
Page 45

Kollmorgen 03/04 Interfaces
3.5.4 Digital control outputs (X3)
Technical characteristics
— Reference ground is digital-GND (DGND, terminal X3/18)
— All digital outputs are floating
— DIGITAL-OUT1 and 2 : PLC compatible according to IEC 1131
BTB/RTO : Relay output, max. 30VDC or 42VAC, 0.5A
SERVOSTAR 600
Ready-to-operate contact BTB/RTO
Operational readiness (terminals X3/2 and X3/3 ) is signaled by a floating relay contact.
The contact is closed when the servo amplifier is ready for operation, the signal is not influenced
by the enable signal, the I²t- limit, or the regen threshold.
All faults cause the BTB/RTO contact to open and the switch-off of the output stage.
A list of the error messages can be found on page 60.
Programmable digital outputs DIGITAL-OUT1/2:
You can use the digital outputs DIGITAL-OUT1 (terminal X3/16) and DIGITAL-OUT2 (terminal
X3/17) to output messages from pre-programmed functions that are stored in the servo amplifier.
You can find a list of pre-programmed functions on the "digital I/O" screen of our setup software.
If an input is freshly assigned to a pre-programmed function, then the data set must be stored in the
EEPROM of the servo amplifier, and the 24V auxiliary supply of the servo amplifier must be swit
ched off and on again (to reset the amplifier software).
Evaluate the outputs via inverting interface relays (see connection diagram), for example
Phönix DEK-REL-24/I/1 (turn-on delay 6 ms, turn-off delay 16ms).
-
The described logic in the SETUP SOFTWARE manual and the online help refers to
the output of the inverting interface relays. Consider the delay of the applied relay !
SERVOSTAR®601...620 Installation Manual 45
Page 46

Interfaces 03/04 Kollmorgen
3.6 Encoder simulations
3.6.1 Incremental encoder simulation - A quad B position output (X5)
The incremental-encoder interface is part of the package supplied. Select the encoder function
ROD (screen page “Encoder”). In the servo amplifier, the position of the motor shaft is calculated
from the cyclic-absolute signals of the resolver or encoder. Incremental-encoder compatible pulses
are generated from this information. Pulses are output on the SubD-connector X5 as two signals, A
and B, with 90° phase difference and a zero pulse.
The resolution (lines before quadrature) can be changed with the RESOLUTION parameter:
Encoder function (ENCMODE) Feedback system Resolution Zero position
Resolver 16...1024
ROD (1)
ROD interpolation (3)
EnDat / HIPERFACE
Incremental encoders wit
hout absolute data channel
16...4096 and
8192...524288 (2n)
4...128
TTL lines per sine line
You can also adjust and store the position of the zero pulse within one mechanical turn
(parameter NI-OFFSET).
one per revolution
(only if A=B=1)
one per revolution
(only if A=B=1)
analog pass through
from X1 to X5
The drivers are supplied from an internal supply voltage.
PGND must always be connected to the controls.
The max. admissible cable length is 10 m.
Connections and signal description for incremental-encoder interface :
SERVOSTAR 600
46 SERVOSTAR®601...620 Installation Manual
Page 47

Kollmorgen 03/04 Interfaces
3.6.2 SSI encoder simulation - position output (X5)
The SSI interface (synchronous serial absolute-encoder simulation) is part of the delivered
package. Select the encoder function SSI (screen page “Encoder”). In the servo amplifier, the posi
tion of the motor shaft is calculated from the cyclically absolute signals from the resolver or encoder.
This information is used to create a position output in a format that is compatible with the standard
SSI-absolute-encoder format. 24 bits are transmitted.
SINGLE TURN selected: The upper 12 bits are fixed to ZERO, the lower 12 bits contain the posi
tion information. For 2-pole resolvers, the position value refers to the position within one turn of the
motor, for 4-pole resolvers it is within half a turn, and for 6-pole resolvers it is within a third of a turn.
Exception
bits are set to 1 (data invalid!) until a homing run is performed.
: If an encoder with a commutation track is used as the feedback unit, then the upper 12
-
-
MULTI TURN selected: The upper 12 bits contain the number of motor turns, the lower 12 bits con
tain the position information.
The signal sequence can be output in Gray code (standard) or in binary code (parameter
SSI-CODE). The servo amplifier can be adjusted to the clock frequency of your SSI-evaluation with
the SSI-TAKT parameter (200 kHz or 1.5MHz and inverted).
Drivers are supplied from internal supply voltage. PGND must always be connected.
Connection and signal description for SSI interface :
The count direction for the SSI interface is upwards when the motor shaft is rotating clockwise (loo
king at the shaft end).
SERVOSTAR 600
-
-
SERVOSTAR®601...620 Installation Manual 47
Page 48

Interfaces 03/04 Kollmorgen
3.6.3 Interface for master-slave operation, encoder input
This interface can be used to link several SERVOSTAR amplifiers together in master-slave
operation.
The parameters for the slave amplifiers are set up with the aid of the setup software.
The resolution (no. of pulses/turn) can be adjusted. The analog setpoint inputs are out of action.
AGND and DGND (connector X3) must be joined together !
Signal diagram (for encoders with RS422 or 24V output)
3.6.3.1 Connection to a SERVOSTAR master, 5V signal level (X5)
This interface can be used to link several SERVOSTAR amplifiers together in master-slave operation. Up to 16 slave amplifiers can be controlled by the master via the encoder output. The connector X5 must be used.
Edge frequency: 1,5MHz, slew rate tv £ 0,1µs
AGND and DGND (connector X3) must be joined together !
SERVOSTAR 600
SERVOSTAR 600
48 SERVOSTAR®601...620 Installation Manual
Page 49

Kollmorgen 03/04 Interfaces
3.6.3.2 Connection to encoders with 24V signal level (X3)
This interface can be used to operate the SERVOSTAR as a slave, mastered by an encoder with
24V signal level (master-slave operation). The digital inputs DIGITAL-IN 1 and 2 at connector X3
must be used.
Edge frequency: 250 kHz, slew rate tv £ 0,1µs
AGND and DGND (connector X3) must be joined together !
SERVOSTAR 600
3.6.3.3 Connection to a sine-cosine encoder (X1)
This interface can be used to operate the SERVOSTAR as a slave, mastered by a sine-cosine
encoder (master-slave operation). The connector X1 must be used.
Edge frequency: 250 kHz
AGND and DGND (connector X3) must be joined together !
The cable colors in the wiring diagram are valid for the European 4x2x0,25mm² cable.
SERVOSTAR 600
SERVOSTAR®601...620 Installation Manual 49
Page 50

Interfaces 03/04 Kollmorgen
3.7 Interface for stepper-motor controls (pulse-direction)
This interface can be used to connect the servo amplifier to a third-party stepper-motor controller.
The parameters for the servo amplifier are set up with the aid of the setup software (electrical gea
ring). The number of steps can be adjusted, so that the servo amplifier can be adjusted to the
pulse-direction signals of any stepper-motor controller. Various monitoring signals can be output.
The analog setpoint inputs are out of action.
AGND and DGND (connector X3) must be joined together !
Speed profile and signal diagram
-
Note:
Encoder Input A quad B offers more EMI suppression.
50 SERVOSTAR®601...620 Installation Manual
Page 51

Kollmorgen 03/04 Interfaces
3.7.1 Connection to stepper-motor controller with 5V signal level (X5)
This interface can be used to connect the servo amplifier to a stepper-motor controller with 5V sig
nal level. The connector X5 must be used.
Edge frequency: 1,5MHz
AGND and DGND (connector X3) must be joined together !
SERVOSTAR 600
-
3.7.2 Connection to stepper-motor controller with 24V signal level (X3)
This interface can be used to connect the servo amplifier to a stepper-motor controller with 24V signal level. The digital inputs DIGITAL-IN 1 and 2 at connector X3 must be used.
Edge frequency: 250 kHz
AGND and DGND (connector X3) must be joined together !
SERVOSTAR 600
SERVOSTAR®601...620 Installation Manual 51
Page 52

Interfaces 03/04 Kollmorgen
3.8 RS232 interface, PC connection (X6)
The setting of the operating, position control, and motion-block parameters can be carried out with
an ordinary commercial PC.
Connect the PC interface (X6) of the servo amplifier while the supply to the equipment is swit
ched off via a normal commercial 3-core null-modem cable to a serial interface on the PC.
Do not use a null-modem link cable!
The interface is electrically isolated through an optocoupler, and is at the same potential as the
CANopen interface.
The interface is selected and set up in the setup software.
Further notes can be found on page 35.
With the optional expansion card -2CAN- the two interfaces for RS232 and CAN, which otherwise
use the same connector X6, are separated onto two connectors (ð p.84).
SERVOSTAR 600
Interface cable between the PC and servo amplifiers of the
SERVOSTAR 600 series:
-
(View : looking at the face of the built-in SubD connectors, this corresponds to the solder side of the
SubD sockets on the cable)
52 SERVOSTAR®601...620 Installation Manual
Page 53

Kollmorgen 03/04 Interfaces
3.9 CANopen Interface (X6)
The interface for connection to the CAN bus (default 500 kBaud). The integrated profile is based on
the communication profile CANopen DS301 and the drive profile DSP402. The following functions
are available in connection with the integrated position controller:
Jogging with variable speed, reference traverse (zeroing), start motion task, start direct task, digital
setpoint provision, data transmission functions and many others.
Detailed information can be found in the CANopen manual. The interface is electrically isolated by
optocouplers, and is at the same potential as the RS232 interface. The analog setpoint inputs can
still be used.
With the optional expansion card -2CAN- the two interfaces for RS232 and CAN, which otherwise
use the same connector X6, are separated onto two connectors ð p.84).
If the analog setpoint inputs are not used, then AGND and DGND (connector X3) must be joi
ned together !
SERVOSTAR 600
-
CAN bus cable
To meet ISO 11898 you should use a bus cable with a characteristic impedance of 120 W. The
maximum usable cable length for reliable communication decreases with increasing transmission
speed. As a guide, you can use the following values which we have measured, but they are not to
be taken as assured limits:
Cable data: Characteristic impedance 100-120 W
Cable capacitance max. 60 nF/km
Lead resistance (loop) 159.8 W/km
Cable length, depending on the transmission rate
Transmission rate (kbaud) max. cable length (m)
1000 20
500 70
250 115
Lower cable capacitance (max. 30 nF/km) and lower lead resistance
(loop, 115 W/km) make it possible to achieve greater distances.
(Characteristic impedance 150 ± 5WÞterminating resistor 150 ± 5W).
For EMC reasons, the SubD connector housing must fulfill the following conditions:
— metal or metallised housing
— provision for cable shielding connection in housing, large-area connection
SERVOSTAR®601...620 Installation Manual 53
Page 54

Interfaces 03/04 Kollmorgen
This page has been intentionally left blank.
54 SERVOSTAR®601...620 Installation Manual
Page 55

Kollmorgen 03/04 Setup
4 Setup
4.1 Important notes
Only professional personnel with extensive knowledge in the fields of electrical/ drive
technology are allowed to setup the servo amplifier.
The procedure for setup is described as an example. Depending on the application,
a different procedure may be sensible or necessary.
In multi-axis systems, setup each servo amplifier individually.
The manufacturer of the machine must generate a hazard analysis for the machine,
and take appropriate measures to ensure that unforeseen movements cannot cause in
jury or damage to any person or property.
Caution !
Check that all live connecting elements are protected from accidental contact.
Deadly voltages can be present, up to 900V.
Never disconnect any of the electrical connections to the servo amplifier while it is live.
Capacitors can still have residual charges with dangerous levels up to 300 seconds af
ter switching off the supply power.
Heat sinks and front panels of the amplifier can reach a temperature of up to
80°C(176°F) in operation. Check (measure) the heat sink temperature. Wait until the
heat sink has cooled down below 40°C (104°F) before touching it.
-
-
Warning !
If the servo amplifier has been stored for longer than 1 year, then the DC-link capacitors will have to be re-formed.
To do this, disconnect all the electrical connections.
Supply the servo amplifier for about 30 min. from single-phase 230VAC to the termi
nals L1 / L2. This will re-form the capacitors.
Further information on setup :
The adaptation of parameters and the effects on the control loop behavior are descri
bed in the manual for the setup software and in the online help of the setup software.
The setup of the expansion card (if present) is described in the corresponding manual
on the CD-ROM.
We can provide further know-how through training courses (on request).
-
-
SERVOSTAR®601...620 Installation Manual 55
Page 56

Setup 03/04 Kollmorgen
The following instructions should help you to carry out the setup in a sensible order, without any
hazards to people or machinery.
Check installation
Inhibit
Enable signal
Switch on 24V
auxiliary voltage
Switch on PC,
start setup software
Check displayed
parameters,
and correct
if necessary
Supply voltage : set to the actual mains supply voltage
Rated motor voltage : at least as high as the DC-link voltage of the amplifier
Motor pole-no. : must match the motor (see motor manual)
Feedback : must match the feedback unit in the motor
I
RMS
I
PEAK
Limit speed : maximum is the rated motor speed (on nameplate)
Regen power : maximum is the permitted regen resistor dissipation
Station address : unique address (see setup software manual)
ð p. 25ff. Disconnect the servo amplifier from the supply.
0V on terminal X3/15 (Enable)
24VDC on terminal X4/1, ground on terminal X4/3
After the initialization procedure (about 0.5 sec.) the status is
shown in the LED display (ð p.58)
Select the interface to which the servo amplifier is connected,
The parameters which are stored in the SRAM of the servo
amplifier are transferred to the PC.
Caution !
It is especially important to check the following parameters.
If you do not set them properly, parts of the system can be
damaged or destroyed.
: maximum is the motor standstill current I0(on nameplate)
: maximum is 4 x motor standstill current I
0
Check
safety devices
Switch on
supply power
Apply 0V setpoint
Enable
Setpoint
Optimization
Setup
the expansion card
Caution !
Make sure that any unintended movement of the drive
cannot cause danger to machinery or personnel.
through the ON/OFF button of the contactor control
0V on terminals X3/4-5 or X3/6-7
(500 ms after switching on the supply power) 24VDC on
terminal X3/15, motor stands with standstill torque M
apply a small analog setpoint, about 0.5V is recommended,
to terminals X3/4-5 or X3/6-7
If the motor oscillates, the parameter Kp in the menu
page “speed controller” must be reduced
- the motor is endangered!
Optimize speed, current and position controllers
see setup instructions in the corresponding
manual on the CD-ROM
0
56 SERVOSTAR®601...620 Installation Manual
Page 57

Kollmorgen 03/04 Setup
4.2 Parameter setting
A default parameter set is loaded into your servo amplifier by the manufacturer. This contains valid
and safe parameters for the current and speed controllers.
A database for motor parameters is stored in the servo amplifier. During setup you must select the
data set for the motor that is connected and store it in the servo amplifier. For most applications
these settings will already provide good to very good control loop characteristics.
An exact description of all parameters and the possibilities for optimizing the control loop character
istics can be found in the manual “Setup Software DRIVE.EXE”.
4.2.1 Multi-axis systems
Using a special multilink cable, you can connect up to six servo amplifiers together and to your PC :
Cable type -SR6Y- (for 4 amplifiers) or -SR6Y6- (for 6 amplifiers)
With the PC connected to just one servo amplifier you can now use the setup software to select all
four / six amplifiers through the preset station addresses and set up the parameters.
PC
-
Cable -SR6Y-
COMx
RS232
Add.:
01
4.2.1.1 Node address for CAN-bus
During setup it makes sense to preset the station addresses for the individual amplifiers and the
baud rate for communication by means of the keypad on the front panel (ð p.59).
4.2.1.2 Baud rate for CAN-bus
After changing the station address and baud rate you must turn the 24V auxiliary supply of
the servo amplifier off and on again.
X6
PC/CAN
Baud rate identical for all amplifiers,
X6
CAN
Add.:
02
see table below
X6
CAN
Add.:
03
X6
CAN
Add.:
04
Coding of the baud rate in the LED display :
Coding Baud rate in kbit/s Coding Baud rate in kbit/s
0 10 5 250
1 20 6 333
2 50 7 500
3 100 8 666
4 125 9 800
10 1000
SERVOSTAR®601...620 Installation Manual 57
Page 58

Setup 03/04 Kollmorgen
4.2.2 Key operation / LED display
In this chapter the two possible operation menus and the use of the keys in the front panel are
shown. Normally, the SERVOSTAR 600 only places the standard menu at your disposal. If you
want to attend the amplifier via the detailed menu, you must keep the right key pressed while swit
ching on the 24V-supply.
-
4.2.2.1 Key operation
The two keys can be used to perform the following functions:
Key symbol Functions
press once : go up one menu item, increase number by one
U
U
U
U
press twice in rapid succession : increase number by ten
press once : go down one menu item, decrease number by one
press twice in rapid succession : decrease number by ten
press and hold right key, then press left key as well :
enter a number, return function name
4.2.2.2 Status display
58 SERVOSTAR®601...620 Installation Manual
Page 59

Kollmorgen 03/04 Setup
4.2.2.3 Standard menu structure
ð p.57
4.2.2.4 Extended menu structure
ð p.57
ð p.57
SERVOSTAR®601...620 Installation Manual 59
Page 60

Setup 03/04 Kollmorgen
4.3 Error messages
Errors which occur are shown in coded form by an error number in the LED display on the front
panel. All error messages result in the BTB/RTO contact being opened, and the output stage of the
amplifier being switched off (motor loses all torque). If a motor-holding brake is installed, it will be
activated.
Number Designation Explanation
F01*
F02*
F03*
F04
F05*
F06
F07
F08*
F09
F10
F11
F12
F13*
F14
F15
F16*
F17
F18
F19*
F20
F21
F22
F23
F24
F25
F26
F27
F28
F29
F30
F31
F32
heat sink temperature
overvoltage
following error message from the position controller
feedback cable break, short circuit, short to ground
undervoltage
motor temperature
aux. voltage internal aux. voltage not OK
overspeed motor running away, speed is too high
EEPROM checksum error
Flash-EPROM checksum error
brake cable break, short circuit, short to ground
motor phase motor phase missing (cable break or similar)
internal temperature internal temperature too high
output stage fault in the output stage
I²t max I²t max. value exceeded
supply - BTB/RTO 2 or 3 phases missing in the supply feed
A/D converter
regen regen circuit faulty or incorrect setting
supply phase
Slot fault Hardware fault of the expansion card
Handling fault Software fault of the expansion card
Short circuit to earth
(ground)
CAN Bus off CAN Bus total communication error
Warning Warning displays as error
Commutation error Encoder systems only
Limit switch Homing error (hardware limit switch reached)
AS-option Operating error for AS-option
reserved reserved
SERCOS SERCOS error
Emerg. Stop Timeout Emerg. Stop Timeout
reserved reserved
system error system software not responding correctly
heat sink temperature too high
limit is set by manufacturer to 80°C (176°F)
overvoltage in DC-link
limit depends on the mains supply voltage
undervoltage in DC-link
limit is set by manufacturer to 100V
motor temperature too high
limit is set by manufacturer to145°C (293°F)
error in the analog-digital conversion, usually caused by excessive
EMI
a supply phase is missing
(can be switched off for 2-phase operation)
SERVOSTAR 640/670 only: short circuit to earth (ground)
* = These error messages can be cancelled by the ASCII command CLRFAULT, without executing a reset. If
only these errors are present, and the RESET button or the I/O-function RESET is used, the CLRFAULT com
mand is also all that is carried out.
-
60 SERVOSTAR®601...620 Installation Manual
Page 61

Kollmorgen 03/04 Setup
4.4 Warning messages
Faults which occur, but which do not cause a switch-off of the amplifier output stage (BTB/RTO con
tact remains closed), are indicated in the LED display on the front panel by a coded warning num
-
ber.
Number Designation Explanation
n01
n02
n03*
n04*
n05
n06*
n07*
n08
n09
n10*
n11*
n12
n13*
n14
n15
n16-n31
n32
I²t I²t threshold exceeded
regen power preset regen power reached
S_fault exceeded preset contouring error
response monitoring response monitoring (fieldbus) is active
supply phase supply phase missing
Sw limit-switch 1 passed software limit-switch 1
Sw limit-switch 2 passed software limit-switch 2
motion task error a faulty motion task was started
no reference point no reference point set at start of motion task
PSTOP PSTOP limit-switch activated
NSTOP NSTOP limit-switch activated
Only sine encoders with ENDAT or HIPERFACE format.
motor default values loaded
expansion card expansion card not functioning correctly
SinCos feedback
Table error Velocity current table INXMODE 35 error
reserved reserved
Firmware beta version The firmware is an unreleased beta version
Reset RESET is active at DIGITAL IN x
A
Motor number stored in encoder memory different from number
stored in drive memory, default parameters loaded
Sine encoder “wake & shake mode” , ends if drive is enabled and
wake & shake is done.
-
* = These warning messages lead to a controlled shut-down of the drive (braking with the emergency ramp)
SERVOSTAR®601...620 Installation Manual 61
Page 62

Setup 03/04 Kollmorgen
This page has been intentionally left blank.
62 SERVOSTAR®601...620 Installation Manual
Page 63

Kollmorgen 03/04 Extensions / Accessories
5 Extensions / Accessories
5.1 Option -AS-, restart lock for personal safety
5.1.1 Advantages of the -AS- option
A frequently required application task is the protection of personnel against the restarting of drives.
This can not be achieved by an electronic inhibit, but must be implemented with mechanical ele
ments (positively driven relay contacts).
-
To get round this problem, up to now either the main contactor in the mains supply line was swit
ched off, or another contactor was used to disconnect the motor from the servo amplifier.
The disadvantages of this method are :
— the DC-link has to be charged up again at restart
— wear on the contacts of the contactors, caused by switching under load
— extensive wiring required, with additional switching components
The -AS- option avoids these disadvantages. A safety relay in the servo amplifier is activated either
by the PLC or manually. Positively driven contacts provide a safe disconnection of the servo ampli
fier, the setpoint input of the servo amplifier is inhibited, and a signal is sent to the safety circuit.
The suggested circuits (ð p. 66) fulfills safety category 1 (EN 954-1). You can fulfill safety category
3, if you use a mains contactor with suited supervision.
Advantages of the -AS- option :
— the DC-link remains charged up, since the mains supply line remains active
— only low voltages are switched, so there is no contact wear
— very little wiring is required
— the functionality and the personnel safety when using the circuit recommendations
in this documentation have been approved by the Trade Liability Association.
5.1.2 Functional description
An additional connector (X10) is mounted on the front panel of the SERVOSTAR 600. The coil connections and a make (n.o.) contact of a safety relay are made available through 4 terminals on this
connector.
-
-
The 24VDC safety relay in the servo amplifier (approved) is controlled externally. All the relay con
tacts have positive action.
Two contacts switch off the driver supply of the output stage in the servo amplifier, and short the
internal setpoint signal to AGND (0 V).
The make (n.o.) contact used for monitoring is looped into the control circuit.
If the safety relay is not energized, then the monitoring contact is open and the servo amplifier is
ready for operation.
If the drive is electronically braked, the servo amplifier is disabled and the motor-holding brake is
on, then the safety relay is energized (manually or by the controls).
The supply voltage for the driver circuit of the output stage is switched off in a safe manner, the
internal setpoint is shorted to 0V, and the monitoring contact bridges the safety logic in the control
circuit of the system (monitoring of protective doors etc.)
Even if the output stage or driver is destroyed, it is impossible to start the motor.
If the safety relay itself is faulty, then the monitoring contact cannot bridge the safety logic of the
system. Opening the protective devices will then switch off the system.
-
SERVOSTAR®601...620 Installation Manual 63
Page 64

Extensions / Accessories 03/04 Kollmorgen
5.1.3 Block diagram
5.1.4 Signal diagram (sequence)
64 SERVOSTAR®601...620 Installation Manual
Page 65

Kollmorgen 03/04 Extensions / Accessories
5.1.5 Installation / Setup
5.1.5.1 Safety instructions
Observe "Use as directed" on page 12.
l
The monitoring contacts (KSO1/2) for each amplifier with an -AS- option must be looped into
l
the control circuit. This is vital, so that a malfunction of the internal safety relay or a cable bre
ak can be recognized.
If the -AS- option is automatically activated by a control system (KSI1/2), then make sure that
l
the output of the control is monitored for possible malfunction. This can be used to prevent a
faulty output from activating the -AS- option while the motor is running.
It is vital to keep to the following functional sequence when the -AS- option is used:
l
1. Brake the drive in a controlled manner (speed setpoint = 0V)
2. When speed = 0 rpm, disable the servo amplifier (enable = 0V)
3. If there is a suspended load, apply an additional mechanical block to the drive
4. Activate the -AS- option
5.1.5.2 Functional test
The functioning of the restart lock must be tested during setup, after every alteration in the wiring of
the system, or after exchanging one or more components of the system.
-
1. Stop all drives, with setpoint 0V, disable drives,
mechanically block any suspended loads
2. Activate the -AS- option.
3. Open protective screens (but do not enter hazardous area)
4. Pull off the X10 connector from an amplifier: the mains contactor must drop out
5. Reconnect X10. Switch on mains contactor again.
6. Repeat steps 4 and 5 for each individual servo amplifier.
5.1.5.3 Connection diagram
SERVOSTAR 600
SERVOSTAR®601...620 Installation Manual 65
Page 66

Extensions / Accessories 03/04 Kollmorgen
5.1.6 Application examples
5.1.6.1 Moving single axes or axis-groups in setting-up operation
In setting-up operation, people will frequently be within the danger zone of the machinery. Axes will
normally be moved under the control of permission switches. An additional switch-off of the unused
axes, by means of the restart lock, increases the safety margin and avoids the repeated switching
of main contactors or motor contactors.
5.1.6.2 Switching off grouped axes with separate working areas
Even when several SERVOSTAR 600 are operating off a common mains supply and DC-link, it is
possible to set up groups for separate working areas. These groups can then be switched off sepa
rately for personnel safety. For this purpose, we have provided you with a suggested circuit (mains
supply circuit and control circuit for 2 separate working groups which have interconnected DC-links
and a common mains supply voltage).
5.1.6.2.1 Control circuit
The suggested circuit fulfills safety category 1 (EN 954-1). You can fulfill safety category 3, if you
use a mains contactor with suited supervision.
-
66 SERVOSTAR®601...620 Installation Manual
Page 67

Kollmorgen 03/04 Extensions / Accessories
5.1.6.2.2 Mains supply circuit
SERVOSTAR
SERVOSTAR SERVOSTAR SERVOSTAR SERVOSTAR
SERVOSTAR®601...620 Installation Manual 67
Page 68

Extensions / Accessories 03/04 Kollmorgen
5.2 Expansion card -I/O-14/08-
This chapter describes the I/O-expansion card -I/O-14/08-. It only describes the additional features
that the expansion card makes available for the SERVOSTAR 600.
If you ordered the expansion card together with the servo amplifier, then it will be delivered already
inserted into the expansion slot of the servo amplifier and screwed fast.
The -I/O-14/08- provides you with 14 additional digital inputs and 8 digital outputs. The functions of
the inputs and outputs are fixed. They are used to initiate the motion tasks that are stored in the
servo amplifier and to evaluate signals from the integrated position control in the higher-level
control.
The functions of the inputs and signal outputs correspond exactly to the functions that can be assig
ned to the digital-I/O on connector X3 of the SERVOSTAR 600.
The 24VDC supply for the expansion card is taken from the controller. All inputs and outputs are
electrically isolated from the servo amplifier by optocoupler.
5.2.1 Fitting the expansion card
If you want to retrofit the I/O expansion card into a SERVOSTAR 600, proceed as follows:
Use a suitable screwdriver to lever off the cover of the option slot.
l
Take care that no small items (such as screws) fall into the open option slot.
l
l Push the expansion card carefully into the guide rails that are provided, without twisting it.
l Press the expansion card firmly into the slot, until the front cover touches the fixing lugs. This
ensures that the connectors make good contact.
l Screw the screws on the front cover into the threads in the fixing lugs.
5.2.2 Technical data
Control inputs 24V / 7mA, PLC-compatible
Signal outputs 24V / max. 500mA, PLC-compatible
Supply inputs, to IEC 1131
Fusing (external) 4 AT
Connectors MiniCombicon, 12-pole, coded on PIN1 and 12 respectively
Cables
Waiting time between 2 motion tasks depends on the response time of the control system
Addressing time (min.) 4ms
Starting delay (max.) 2ms
Response time of digital outputs max. 10ms
24V (18 ... 36V) / 100mA plus total current of the outputs (de
pends on the input wiring of the controls)
Data – up to 50m long : 22 x 0.5mm², unshielded,
Supply – 2 x 1mm², check voltage drop
-
-
The 24VDC voltage has to be supplied by an electrically isolated power supply, e.g.
with insulating transformer.
5.2.3 Light emitting diodes (LEDs)
Two LEDs are mounted next to the terminals on the expansion card. The green LED signals that
the 24V auxiliary supply is available for the expansion card. The red LED signals faults in the out
puts from the expansion card (overload, short-circuit).
-
68 SERVOSTAR®601...620 Installation Manual
Page 69

Kollmorgen 03/04 Extensions / Accessories
5.2.4 Position of the connectors
Coding
Plan view of the connectors as
built in
SERVOSTAR®601...620 Installation Manual 69
Page 70

Extensions / Accessories 03/04 Kollmorgen
5.2.5 Connector assignments
Connector X11A
Terminal Function Description
1 In A0 Motion task no., LSB
2 In A1 Motion task no., 2
3 In A2 Motion task no., 2
4 In A3 Motion task no., 2
5 In A4 Motion task no., 2
6 In A5 Motion task no., 2
7 In A6 Motion task no., 2
8 In A7 Motion task no., MSB
Polls the reference switch. If a digital input on the basic unit is used as
9 In Reference
10 In FError_clear Clear the warning of a following error or the response monitoring.
11 In Start_MT Next
12 In Start_Jog v=x
a reference input, then the input on the I/O expansion card will not be
evaluated.
The following task, that is defined in the motion task by “Start with I/O”
is started. The target position of the present motion task must be rea
ched before the following task can be started.
The next motion block can also be started by an appropriately configu
red digital input on the basic unit.
Start of the setup mode "Jog Mode" with a defined speed. After selec
ting the function, you can enter the speed in the auxiliary variable “x”.
The sign of the auxiliary variable defines the direction. A rising edge
starts the motion, a falling edge cancels the motion.
1
2
3
4
5
6
-
-
-
Connector X11B
Terminal Function Description
Continues the motion task that was previously interrupted.
1 In MT_Restart
2 In Start_MT I/O
3 Out InPos
4 Out
5 Out FError
6 Out PosReg1
7 Out PosReg2
8 Out PosReg3
9 Out PosReg4
10 Out PosReg5 Can only be adjusted by ASCII commands.
11 Supply 24VDC auxiliary supply voltage
12 Supply I/O-GND Digital-GND for the controls
Next-InPos
PosReg0 Can only be adjusted by ASCII commands.
The motion task can also be continued by an appropriately configured
digital input on the basic unit.
Start of the motion task that has the number that is presented,
bit-coded, at the digital inputs (A0 to A7).
The digital function with the same name, in the basic unit, starts the
motion task with the address from the digital inputs on the basic unit.
When the target position for a motion task has been reached (the InPosition window), this is signaled by the output of a HIGH-signal.
A cable break will not be detected
The start of each motion task in an automatically executed sequence
of motion tasks is signaled by an inversion of the output signal. The
output produces a Low signal at the start of the first motion task of the
motion task sequence.
The form of the message can be varied by using ASCII commands.
Contouring-error (low-active).
The preset function of the corresponding position register is indicated
by a HIGH-signal.
5.2.6 Select motion task number (Sample)
Motion task no.
(decimal
174 10101110
A7 A6 A5 A4 A3 A2 A1 A0
Motion task no. (binary)
70 SERVOSTAR®601...620 Installation Manual
Page 71

Kollmorgen 03/04 Extensions / Accessories
5.2.7 Connection diagram
SERVOSTAR 600
-I/O-14/08
AGND and DGND (connector X3) must be joined together !
SERVOSTAR®601...620 Installation Manual 71
Page 72

Extensions / Accessories 03/04 Kollmorgen
5.3 Expansion card -PROFIBUS-
This chapter describes the PROFIBUS expansion card for the SERVOSTAR 600.
Information on the range of functions and the software protocol can be found in the manual
"Communication profile PROFIBUS DP".
If you ordered the expansion card together with the servo amplifier, then the expansion card is
already fitted and screwed into the slot when the servo amplifier is delivered.
The PROFIBUS expansion card has two 9-pin Sub-D sockets wired in parallel.
The supply voltage for the expansion card is provided by the servo amplifier.
5.3.1 Position of the connectors
5.3.2 Fitting the expansion card
If you want to retrofit the PROFIBUS expansion card into a SERVOSTAR 600, proceed as
follows:
l
Use a suitable screwdriver to lever off the cover of the option slot.
l
Take care that no small items (such as screws) fall into the open option slot.
l
Push the expansion card carefully into the guide rails that are provided, without twisting it.
l
Press the expansion card firmly into the slot, until the front cover touches the fixing lugs. This
ensures that the connectors make good contact.
l
Screw the screws on the front cover into the threads in the fixing lugs.
72 SERVOSTAR®601...620 Installation Manual
Page 73

Kollmorgen 03/04 Extensions / Accessories
5.3.3 Connection technology
Cable selection, cable routing, shielding, bus connector, bus termination and transmission times are
all described in the “Installation guidelines for PROFIBUS-DP/”, Order No. 2.111, from PNO, the
PROFIBUS User Organization.
5.3.4 Connection diagram
SERVOSTAR 600
AGND and DGND (connector X3) must be joined together !
SERVOSTAR®601...620 Installation Manual 73
Page 74

Extensions / Accessories 03/04 Kollmorgen
5.4 Expansion card -SERCOS-
This chapter describes the SERCOS expansion card for SERVOSTAR 600.
Information on the range of functions and the software protocol can be found in the manual
"IDN Reference Guide SERCOS".
If you ordered the expansion card together with the servo amplifier, then the expansion card is
already fitted and screwed into the slot when the servo amplifier is delivered.
AGND and DGND (connector X3) must be joined together !
5.4.1 Position of the connectors
5.4.2 Fitting the expansion card
The expansion card can be retrofitted from firmware version 4.30. Proceed as follows:
l
Use a suitable screwdriver to lever off the cover of the option slot.
l
Take care that no small items (such as screws) fall into the open option slot.
l
Push the expansion card carefully into the guide rails that are provided, without twisting it.
l
Press the expansion card firmly into the slot, until the front cover touches the fixing lugs. This
ensures that the connectors make good contact.
l
Screw the screws on the front cover into the threads in the fixing lugs.
74 SERVOSTAR®601...620 Installation Manual
Page 75

Kollmorgen 03/04 Extensions / Accessories
5.4.3 Light emitting diodes (LEDs)
RT: indicates whether SERCOS telegrams are being correctly received. In the final Communi-
cation Phase 4 this LED should flicker, since cyclical telegrams are being received.
TT: indicates that SERCOS telegrams are being transmitted.
In the final Communication Phase 4 this LED should flicker,
since cyclical telegrams are being transmitted.
Check the stations addresses for the controls and the servo amplifier if:
- the LED never lights up in SERCOS Phase 1 or
- the axis cannot be operated, although the RT LED is lighting up cyclically.
Err : indicates that SERCOS communication is faulty or suffering from interference.
If this LED is very bright, then communication is suffering strong interference,
or is non-existent.
Check the SERCOS transmission speed for the controls and the servo amplifier
(BAUDRATE) and the fibre-optic connection.
If this LED flickers, this indicates a low level of interference for Sercos communication,
or the optical transmitting power is not correctly adjusted to suit the length of cable.
Check the transmitting power of the (physically) previous SERCOS station.
The transmitting power of the servo amplifier can be adjusted in the setup software
DRIVE.EXE on the SERCOS screen page, by altering the LWL length parameter for
the cable length.
5.4.4 Connection technology
For the optical fibre (LWL) connection, only use SERCOS components to the SERCOS Standard
IEC 61491.
Receive data: The optical fibre carrying receive data for the drive in the ring structure
is connected to X13 with an FSMA connector.
Transmit data: Connect the optical fibre for the data output to X14 with an FSMA connector.
5.4.5 Connection diagram
Layout of the SERCOS bus system in ring topology, with optical fibre cables (schematic).
SERVOSTAR®601...620 Installation Manual 75
Page 76

Extensions / Accessories 03/04 Kollmorgen
5.5 Expansion card -DeviceNet-
This chapter describes the DeviceNet expansion card for SERVOSTAR 600.
Information on the range of functions and the software protocol can be found in the manual
"DeviceNet communication profile".
If you ordered the expansion card together with the servo amplifier, then the expansion card is
already fitted and screwed into the slot when the servo amplifier is delivered.
5.5.1 Position of the connectors
5.5.2 Fitting the expansion card
If you want to retrofit the DeviceNet expansion card into a SERVOSTAR 600, proceed as
follows:
l
Use a suitable screwdriver to lever off the cover of the option slot.
l
Take care that no small items (such as screws) fall into the open option slot.
l
Push the expansion card carefully into the guide rails that are provided, without twisting it.
l
Press the expansion card firmly into the slot, until the front cover touches the fixing lugs. This
ensures that the connectors make good contact.
l
Screw the screws on the front cover into the threads in the fixing lugs.
76 SERVOSTAR®601...620 Installation Manual
Page 77

Kollmorgen 03/04 Extensions / Accessories
5.5.3 Connection technology
Cable selection, cable routing, shielding, bus connector, bus termination and transmission times are
all described in the “DeviceNet specification, volumes I, II, release 2.0", published by ODVA
5.5.4 Connection diagram
SERVOSTAR 600
AGND and DGND (connector X3) must be joined together!
5.5.5 Combined Module/Network Status LED
LED is To indicate:
Device is not online.
off
green
flashing
green
flashing
red
red
The device has not completed the Dup_MAC_ID test yet.
The device may not be powered.
The device is operating in a normal condition and the device is online with connections in the estab
lished state.
- The device is allocated to a Master
The device is operating in a normal condition and the device is online with no connections in the
established state.
The device has passed the Dup_MAC_ID test, is online, but has no established connections to ot
her nodes.
This device is not allocated to a master.
Configuration missing, incomplete or incorrect.
Recoverable fault and/or one or more I/O Connections are in the Timed–Out state.
- The device has an unrecoverable fault; may need replacing.
- Failed communication device. The device has detected an Error that has rendered it incapable of
communicating on the network (e.g. Duplicate MAC ID, or Bus–off).
-
-
SERVOSTAR®601...620 Installation Manual 77
Page 78

Extensions / Accessories 03/04 Kollmorgen
5.6 Expansion card- ETHERNET -
The Ethernet option card enables ASCII communication with SERVOSTAR via a TELNET connec
tion. This card can be used with 10BaseT or 100BaseTX Ethernet.
The card is automatically set to the required transmission rate when it is connected to the network.
The IP-address, subnet mask, gateway address and MAC-address can be set through software. If
the local network has a DHCP server, then the Ethernet option card can acquire the IP-address,
subnet mask and gateway address from the DHCP server. If not, then the settings must be made
manually. The MAC address must always be set manually.
5.6.1 Fitting the expansion card
The operation of the Ethernet expansion card requires a special firmware. Please con
tact our customer support.
If you want to retrofit the Ethernet expansion card in the SERVOSTAR 600, proceed as follows:
Use a suitable screwdriver to lever off the cover of the option slot.
l
Take care that no small items (such as screws) fall into the open option slot.
l
Push the expansion card carefully into the guide rails that are provided, without twisting it.
l
Press the expansion card firmly into the slot, until the front cover touches the fixing lugs. This
l
ensures that the connectors make good contact.
l Screw the screws on the front cover into the threads in the fixing lugs.
-
-
5.6.2 Connectors
XDATA: RJ-45-Ethernet
The connection of the card to the local network is made via an RJ-45 patch cable.
5.6.3 LEDs
LINK
10:
100
indicates whether an Ethernet connection is established.
indicates whether the card is operating in 10BaseT mode (transmission rate = 10 Mbit/s);
blinks if data is being sent or received.
indicates whether the card is operating in 100BaseTX mode (transmission rate = 100 Mbit/s);
blinks if data is being sent or received.
78 SERVOSTAR®601...620 Installation Manual
Page 79

Kollmorgen 03/04 Extensions / Accessories
5.6.4 Position of the connectors
5.6.5 Connection diagram
SERVOSTAR®601...620 Installation Manual 79
Page 80

Extensions / Accessories 03/04 Kollmorgen
5.7 Expansion card for Single Axis Controller -SAC-
This section describes the Motion Controller expansion card -SAC-. Only those additional features
are described which this expansion card makes available for theSERVOSTAR 600.
If you ordered the expansion card together with the servo amplifier, then the expansion card is
already installed into the slot when the servo amplifier is delivered.
The -SAC- provides you with 10 additional digital inputs and 5 digital outputs (X18), a serial commu
nication interface (X17) and an optional DeviceNet interface (X16).
The 24V DC operating voltage for the expansion card is provided by the control system.
All inputs and outputs on X18 are isolated via optocouplers, and thus floating with regard to the
servo amplifier.
5.7.1 Fitting the expansion card
If you want to retrofit the SAC expansion card to the SERVOSTAR 600, proceed as follows:
Use a suitable screwdriver to lever off the cover of the option slot.
l
Take care that no small items (such as screws) fall into the open option slot.
l
Push the expansion card carefully into the guide rails that are provided, without twisting it.
l
Press the expansion card firmly into the slot, until the front cover touches the fixing lugs. This
l
ensures that the connectors make good contact.
l Screw the screws on the front cover into the threads in the fixing lugs.
5.7.2 Technical data
Supply inputs as per IEC 1131
10 control inputs 24V / 7mA , PLC-compatible, IEC 1131
5 signal outputs 24V, PLC-compatible
Processor type STPC-Elite
Processor speed 100 MHz
Onboard RAM type SDRAM
Onboard ROM size 16 MB
Communication with the amplifier DPRAM
Software watchdog Yes
Serial communikation interface
DeviceNet interface 5-pole Phönix clamp connector
Fusing for 24V supply (external) 4 AT
-
24V (18 … 36V) / 100mA plus the summed currents of the
outputs (depends on the input circuit of the control system)
RS-232
RS-485 Full Duplex link
RS-485 Half Duplex link
The 24V DC supply voltage must be provided by an electrically isolated source (e.g. via an isolating
transformer).
80 SERVOSTAR®601...620 Installation Manual
Page 81

Kollmorgen 03/04 Extensions / Accessories
5.7.3 Position of the connectors
5.7.4 Connector assignments
5.7.4.1 RS-232 communication X17 (SubD 9-pin, plug)
SERVOSTAR 600, X17
SERVOSTAR®601...620 Installation Manual 81
Page 82

Extensions / Accessories 03/04 Kollmorgen
5.7.4.2 RS-485 communication X17 (SubD 9-pin, plug)
State as delivered: RS485 full duplex mode
Connection diagram for full-duplex mode:
SERVOSTAR 600, X17
RS485 Half Duplex Modus is adjustable throught the setup software DRIVE.EXE
Connection diagram for half-duplex mode
SERVOSTAR 600, X17
5.7.4.3 DeviceNet communication X16 (Phönix, 5-pin)
Cable selection, cable routing, shielding, bus connector, bus termination and transmission times are
all described in the “DeviceNet Specification, Volume I, II, Edition 2.0”, published by the ODVA.
AGND and DGND (connector X3) must be linked together!
SERVOSTAR 600
82 SERVOSTAR®601...620 Installation Manual
Page 83

Kollmorgen 03/04 Extensions / Accessories
5.7.4.4 Digital inputs/outputs, connector X18 (SubD 26-pin, socket)
Connection diagram
SERVOSTAR 600
Pin assignments for connector X18 (SubD 26-pin)
Pin Description Pin Description
1 IN 3 Input 3 14 OUT 4 Output 4
2 OUT 1 Output 1 15 OUT 5 Output 5
3 GND IN 1-4 Ground for inputs 1-4 16 GND OUT 3-5 Ground for outputs 3-5
4 GND IN 5-8 Ground for inputs 5-8 17 GND OUT 3-5 Ground for outputs 3-5
5 IN 6 Input 6 18 IN 7 Input 7
6 GND OUT 3-5 Ground for outputs 3-5 19 IN 2 Input 2
7 IN 5 Input 5 20 IN 1 Input 1
8 GND IN 9-10 Ground for inputs 9-10 21 GND OUT 1-2 Ground for outputs 1-2
9 IN 8 Input 8 22 GND IN 1-4 Ground for inputs 1-4
10 IN 4 Input 4 23 GND IN 5-8 Ground for inputs 5-8
11 OUT 2 Output 2 24 IN 10 Input 10
12 GND OUT 1-2 Ground for outputs 1-2 25 IN 9 Input 9
13 OUT 3 Output 3 26 GND IN 9-10 Ground for inputs 9-10
SERVOSTAR®601...620 Installation Manual 83
Page 84

Extensions / Accessories 03/04 Kollmorgen
5.8 Expansion module -2CAN-
Connector X6 of the SERVOSTAR is assigned to the signals for the RS232 interface and the CAN
interface. It is therefore not the standard pin assignment for these interfaces, and a special cable is
required to be able to use both interfaces simultaneously.
The -2CAN- expansion module provides the interfaces on separate Sub-D connectors. The two
CAN connectors are wired in parallel. A termination resistor (120 W) for the CAN bus can be swit
ched into circuit if the SERVOSTAR is at the end of the bus.
-
5.8.1 Position of the connectors
5.8.2 Fitting the expansion module
If you want to retrofit the -2CAN- expansion module into a SERVOSTAR 600, proceed as follows:
l
Use a suitable screwdriver to lever off the cover of the option slot.
l
Take care that no small items (such as screws) fall into the open option slot.
l
Screw the distance pieces into the fixing lugs of the option slot.
l
Place the expansion module onto the option slot.
l
Screw the screws into the threads of the distance pieces.
l
Plug the Sub-D9 socket into connector X6 on the SERVOSTAR
84 SERVOSTAR®601...620 Installation Manual
Page 85

Kollmorgen 03/04 Extensions / Accessories
5.8.3 Connection technology
Standard shielded cables can be used for the RS232 and CAN interfaces.
If the servo amplifier is the last device on the CAN bus, then the switch for the bus ter
mination must be set to ON.
Otherwise, the switch must be set to OFF (condition as delivered).
5.8.4 Connector assignments
RS232 CAN1=CAN2
X6A Pin Signal X6B=X6C Pin Signal
1 Vcc 1
2 RxD 2 CAN-Low
3 TxD 3 CAN-GND
44
5 GND 5
66
7 7 CAN-High
88
99
5.8.5 Connection diagram
-
SERVOSTAR®601...620 Installation Manual 85
Page 86

Extensions / Accessories 03/04 Kollmorgen
5.9 Accessories
5.9.1 External 24V DC / 5A supply
Technical data
Input voltage 120 / 230V
Input current 0,9 / 0,6A
Frequency 50/60Hz
Primary fuse 3,15AT
Output voltage 24V ± 1%
Max. output current 5A
Residual ripple <150mVss
Switching peaks <240mVss
Output fuse short circuit proof
Temperature range 0...+60°C (140°F)
Type of mounting
Weight 0,75kg
DIN-rails, vertical mounting
Keep a clear space of 50mm above and below the instrument
86 SERVOSTAR®601...620 Installation Manual
Page 87

Kollmorgen 03/04 Extensions / Accessories
5.9.2 External 24V DC / 20A supply
Technical data
Input voltage 3 x 400VAC ± 10%
Input current ca. 1,1A
Frequency 50/60Hz
Primary fuse none
Output voltage 24V ± 1%
Max. output current 20A
Residual ripple <0,1%
Output fuse short circuit proof
Test voltage acc. to VDE 0550
Temperature range -20...+60°C (-4...140°F)
Type of mounting
Weight 3,5kg
on the supplied mounting plate
Keep the required space clear
SERVOSTAR®601...620 Installation Manual 87
Page 88

Extensions / Accessories 03/04 Kollmorgen
5.9.3 External regen resistor BARxxx
Caution:
Surface temperature may exceed 200°C.
Observe the requested free space.
Do not mount to combustible surface
88 SERVOSTAR®601...620 Installation Manual
Page 89

Kollmorgen 03/04 Extensions / Accessories
5.9.4 External regen resistor BAR(U)xxx
Caution:
Surface temperature may exceed 200°C.
Observe the requested free space.
Do not mount to combustible surface
SERVOSTAR®601...620 Installation Manual 89
Page 90

Extensions / Accessories 03/04 Kollmorgen
5.9.5 Motor choke box 3YL-20
Technical data:
Nom. data Sym DIM 3 YL-20
Rated current
Frequency
Inductance
I
0rms
f
max
L mH 1.2
A Max.3x20
kHz 8.3
90 SERVOSTAR®601...620 Installation Manual
Page 91

Kollmorgen 03/04 Appendix
6 Appendix
6.1 Transport, storage, maintenance, disposal
Transport : — only by qualified personnel
— only in the manufacturer’s original recyclable packaging
— avoid shocks
— temperature –25 to +70°C (-13...158°F), max. 20K/hr rate of change
— humidity max. 95% relative humidity, no condensation
— the servo amplifiers contain electrostatically sensitive components which can
— be damaged by incorrect handling
— Discharge yourself before touching the servo amplifier. Avoid contact with
— highly insulating materials (artificial fabrics, plastic films etc.).
— Place the servo amplifier on a conductive surface.
— if the packaging is damaged, check the unit for visible damage.
— In this case, inform the shipper and the manufacturer.
Packaging : — cardboard box, can be recycled
— Dimensions: SERVOSTAR 601-610 (HxWxD) 125x415x350 mm
SERVOSTAR 614/620 (HxWxD) 170x415x350 mm
— Labeling : nameplate outside at the box
Storage : — only in the manufacturer’s original recyclable packaging
— the servo amplifiers contain electrostatically sensitive components which can
— be damaged by incorrect handling
— Discharge yourself before touching the servo amplifier. Avoid contact with
— highly insulating materials (artificial fabrics, plastic films etc.),
— Place the servo amplifier on a conductive surface.
— max. stacking height 8 cartons
— storage temperature –25 to +55oC(-13...131°F),
max.20K/hr. rate of change
— humidity relative humidity max. 95%, no condensation
— storage duration < 1 year without restriction
> 1 year : capacitors must be re-formed before
setting up the servo amplifier.
To re-form, remove all electrical connections, and
supply the servo amplifier for about 30 min. from
230VAC, single-phase, on terminals L1 / L2.
Maintenance : — the servo amplifiers do not require any maintenance
— opening the enclosure invalidates the warranty
Cleaning : — if the casing is dirty, clean with Isopropanol or similar cleaning agent
Do not immerse or spray.
— dirt inside the unit must be cleaned by the manufacturer
— dirty protective grill (fan) may be cleaned with a dry brush
Disposal : — the servo amplifier can be reduced to its principal components by removing
the screws (aluminum heat sink and front panel steel housing sections,
electronics boards)
— disposal should be carried out by a certified disposal company.
— We can give you suitable addresses.
SERVOSTAR®601...620 Installation Manual 91
Page 92

Appendix 03/04 Kollmorgen
6.2 Removing faults/warnings
The table below should be regarded as a “First-aid” box. Depending on the conditions in your instal
lation, there may be a wide variety of reasons for the fault. In multi-axis systems there may be furt
her hidden causes of a fault. Our customer service can give you further assistance with problems.
Fault possible causes
HMI message:
communication
fault
F01 message:
heat sink
temperature
F02 message:
overvoltage
F04 message:
feedback unit
F05 message:
undervoltage
F06 message:
motor temperature
F07 message:
aux. voltage
F08 message:
motor runs away
(overspeed)
F11 message:
brake
F13 message:
internal temperatu
re
F14 message:
output stage fault
F16 message:
mains BTB/RTO
F17 message:
A/D converter
— wrong cable used
— cable plugged into wrong position
in servo amplifier or PC
— wrong PC interface selected
— permissible heat sink temperature
exceeded
— regen power is insufficient. regen power
limit was reached and the regen resistor
was switched off. This causes excessive
voltage in the DC-link circuit.
— supply voltage too high
— feedback connector not properly inserted
— feedback cable is broken, crushed or
otherwise damaged
— supply voltage not present or too low
when servo amplifier is enabled
— motor thermostat has been activated
— feedback connector is loose or break in
feedback cable
— the aux. voltage produced by the servo
amplifier is incorrect
— motor phases swapped
— feedback set up incorrectly
— short-circuit in the supply cable for the
motor-holding brake
— motor-holding brake is faulty
— fault in brake cable
— no brake connected, although the
brake parameter is set to "WITH"
— permissible internal temperature exceeded — improve ventilation
-
— motor cable has short-circuit/ground short
— motor has short-circuit / ground short
— output module is overheated
— output stage is faulty
— short-circuit / short to ground in the
external regen resistor
— enable was applied, although the
supply voltage was not present.
— at least 2 supply phases are missing
— error in the analog-digital conversion,
usually caused by excessive EMI
Measures to remove the cause of
the fault
— use null-modem cable
— plug cable into the correct sockets
on the servo amplifier and PC
— select correct interface
— improve ventilation
— shorten the braking time RAMP or
use an external regen resistor
with a higher power rating and
adjust the regen power parameter
— use mains transformer
— check connector
— check cable
— only enable the servo amplifier
when the mains supply voltage
has been switched on
delay > 500 ms
— wait until motor has cooled down,
then check why it became so hot
— tighten connector or use
new feedback cable
— return the servo amplifier to the
manufacturer for repair
— correct motor phase sequence
— set up correct offset angle
— remove short-circuit
— replace motor
— check shielding of brake cable
— brake parameter set to "WITHOUT"
— replace cable
— replace motor
— improve ventilation
— return the servo amplifier to the
manufacturer for repair
— remove short-circuit / ground short
— only enable the servo amplifier
when the mains supply voltage
has been switched on
— check electrical supply
— reduce EMI,
check screening and grounding
-
-
92 SERVOSTAR®601...620 Installation Manual
Page 93

Kollmorgen 03/04 Appendix
Fault possible causes
F25 message:
Commutation error
F27 message:
error AS-option
— wrong cable
— wrong phasing
— -AS-24V relay AND hardware enable AND
software enable are active
— servo amplifier not enabled
— break in setpoint cable
— motor phases swapped
motor does not rotate
— brake not released
— drive is mechanically blocked
— no. of motor poles set incorrectly
— feedback set up incorrectly
— gain too high (speed controller)
motor oscillates
— shielding in feedback cable has a break
— AGND not wired up
—I
or I
rms
drive reports
following error
motor overheating
— setpoint ramp is too long
—I
peak
set too high — reduce I
rms/Ipeak
— Kp (speed controller) too low
— Tn (speed controller) too high
drive too soft
— PID-T2 too high
— T-Tacho too high
— Kp (speed controller) too high
drive runs
roughly
— Tn (speed controller) too low
— PID-T2 too low
— T-Tacho too low
— offset not correctly adjusted for analog
axis drifts at
setpoint = 0V
setpoint provision
— AGND not joined to the CNC-GND of the
controls
n12 message:
Motor default values
loaded
n14 message:
Wake & shake active
— Motor number stored in sine encoders
EEPROM different than what drive is
configured for
— Wake & shake not executed — Enable the drive
is set to low
measures to remove the cause of
the fault
— check wiring
— check resolver poles (RESPOLES)
check motor poles (MPOLES)
check offset (MPHASE)
— check PLC programming and
wiring
— apply enable signal
— check setpoint cable
— correct motor phase sequence
— check brake control
— check mechanism
— set no. of motor poles
— set up feedback correctly
— reduce Kp (speed controller)
— replace feedback cable
— join AGND to CNC-GND
— increase I
rms
or I
peak
(keep within motor data !)
— shorten setpoint ramp +/-
rms/Ipeak
— increase Kp (speed controller)
— use motor default value for
Tn (speed controller)
— reduce PID-T2
— reduce T-Tacho
— reduce Kp (speed controller)
— use motor default value for
Tn (speed controller)
— increase PID-T2
— increase T-Tacho
— adjust setpoint-offset (analog I/O)
— join AGND and CNC-GND
— If n12 is displayed, default values
for the motor are loaded.
Motor number will be automatically
stored in EEPROM with SAVE.
SERVOSTAR®601...620 Installation Manual 93
Page 94

Appendix 03/04 Kollmorgen
6.3 Glossary
C Clock Clock signal
Common-mode voltage The maximum amplitude of a disturbance (on both
inputs) which a differential input can eliminate
CONNECT- modules Modules built into the servo amplifier, with integrated
position control, which provide special versions of the
interface for the connection to the higher-level control
Continuous power of regen circuit Mean power which can be dissipated in the regen circuit
20
-1
Counts Internal count pulses, 1 pulse = 1/2
Current controller Regulates the difference between the current setpoint
and the actual value to 0
Output: power output voltage
D DC-link Rectified and smoothed power voltage
Disable Removal of the enable signal (0V or open)
E Enable Enable signal for the servo amplifier (+24V)
F Final speed Maximum value for speed normalization at ±10V
Fieldbus interface CANopen, PROFIBUS, SERCOS etc.
G GRAY-code Special method of representing binary numbers
H Holding brake Brake in the motor, which can only be used when the
motor is at a standstill
I I²t threshold Monitoring of the actually required r.m.s. current
Input drift Temperature and age-dependent alteration of an analog
input
Incremental encoder interface Position signaling by 2 signals with 90° phase
difference, not an absolute position output
Ipeak, peak current The effective value of the peak current
Irms, effective current The r.m.s. value of the continuous current
K Kp, P-gain Proportional gain of a control loop
L Limit-switch Switch limiting the traverse path of the machine;
implemented as n.c. (break) contact
M Machine The complete assembly of all connected parts or
devices, of which at least one is movable
Monitor output Output of an analog measurement
Motion-block Data packet with all the position control parameters
which are required for a motion task
Multi-axis system Machine with several independently driven axes
N Natural convection Free movement of air for cooling
O Optocoupler Optical connection between two electrically
independent systems
turn
94 SERVOSTAR®601...620 Installation Manual
Page 95

Kollmorgen 03/04 Appendix
P P-controller Control loop with purely proportional behavior
Phase shift Compensation for the lag between the electromagnetic
and magnetic fields in the motor
PID-controller Control loop with proportional, integral and
differential behavior
PID-T2 Filter time constant for the speed controller output
Position controller Regulates the difference between the position setpoint
and the actual position to 0
Output : speed setpoint
Potential isolation Electrically decoupled
Power contactor System protection device with phase monitoring
Pulse power of the regen circuit Maximum power which can be dissipated in the
regen circuit
R Regen circuit Converts superfluous energy, which is fed back
during braking, into heat in the regen resistor
Reset New start of the microprocessor
Resolver-digital converter Conversion of the analog resolver signals into
digital information
Reversing mode Operation with a periodic change of direction
Ring core Ferrite rings for interference suppression
ROD-Interface Incremental position output
S Servo amplifier Control device for regulating the position of a
servomotor
Setpoint ramps Limits for the rate of change of the speed setpoint
Short to ground Electrically conductive connection between a
phase and PE (protective earth (ground))
Short-circuit here: electrically conductive connection between
two phases
Speed controller Regulates the difference between the speed setpoint
and the actual value to 0
Output : current setpoint
SSI-interface Cyclic-absolute, serial position output
Supply filter Device to divert interference on the power supply
cables to PE
T T-tacho, tachometer time constant Filter time constant in the speed feedback
of the control loop
Tachometer voltage Voltage proportional to the actual speed
Thermostat Temperature-sensitive switch built into the
motor winding
Tn, I-integration time Integral section of a control loop
Z Zero pulse Output once per turn from incremental encoders,
used to zero the machine
SERVOSTAR®601...620 Installation Manual 95
Page 96

Appendix 03/04 Kollmorgen
6.4 Order numbers
In the table below you'll find the order numbers for the servo amplifiers, options and accessories.
Type European order number North America order code
SERVOSTAR 601
SERVOSTAR 603
SERVOSTAR 606
SERVOSTAR 610
SERVOSTAR 610-30
SERVOSTAR 614
SERVOSTAR 620
89700 Not available in North America
89701 S60300-NA (S60301-NA with -AS- option)
89702 S60600-NA (S60601-NA with -AS- option)
89703 S61000-NA (S61001-NA with -AS- option)
102192 S610-3000-NA (S610-3001-NA with -AS- option)
90846 S61400-NA (S61401-NA with -AS- option)
89704 S62000-NA (S62001-NA with -AS- option)
Option -AS-
Expansion card PROFIBUS DP
Expansion card SERCOS
Expansion card -I/0-14/08Expansion card DeviceNet
Expansion card Ethernet
Expansion card SAC
Expansion module -2CAN-
RS232 cable
RS232 multilink cable -SR6YRS232 multilink cable -SR6Y6-
Power supply 24V/5A
Power supply 24V/20A
Regen resistor BAR250
Regen resistor BAR500
Regen resistor BAR1500
Motor choke box 3YL-20
Product CDROM
90058 see order code in brackets
90056 OPT-PB
90879 OPT-SE
90057 OPT-EI
103571 OPT-DN
104974 Not available in North America
Not available in Europe OPT-MD
101174 Not available in North America
90067 A-97251-004
90060 A-SR6Y
92042 Not available in North America
83034 Not available in North America
81279 Not available in North America
90068 BAR-250-33
90069 BAR-500-33
90070 BAR-1500-33
90074 3YL-20
90079 KOL-1270
96 SERVOSTAR®601...620 Installation Manual
Page 97

Kollmorgen 03/04 Appendix
6.5 Index
! 24Vaux. supply, interface ...........38
A abbreviations ..................9
AGND .....................20
ambient temperature ..............19
AS-Option ...................63
assembly ....................26
Assignment...................96
B Baudrate ....................57
block diagram (overview) ...........37
brake ......................20
BTB/RTO....................45
C CANopen-Interface...............53
CE conformity ..................7
choke 3YL-20 .................90
conductor cross-sections............19
connection diagram ..............30
connection techniques .............33
D DC-link interface ................38
DeviceNet expansion card ...........76
DGND .....................20
disposal ....................91
E Emergency Stop strategies ..........23
EMI.......................25
encoder
emulations .................46
interface ..................41
interface master-slave ...........48
error messages ................60
Ethernet expansion card ............78
external fusing .................18
F forming .....................55
G Glossary ....................94
ground symbol .................28
grounding
connection diagram ............30
installation .................29
H hardware requirements.............36
holding brake..................20
humidity ....................91
I inputs
analog setpoints ..............42
DIGI-IN 1/2.................44
enable ...................44
NSTOP...................44
PSTOP...................44
installation
hardware ..................28
software ..................36
K key operation ..................58
L LC-Display ...................58
LED display ..................19
Limit Switch Inputs ...............44
M mains supply connection, interface ......38
mains supply networks .............16
maintenance ..................91
master-slave ..................48
monitor outputs.................43
motor
interface ..................39
motor choke
connection example ............31
motor holding brake ..............20
mounting position ...............19
multi-axis systems
connection example ............31
N nameplate ...................13
NSTOP .....................44
O options .....................14
other operating systems ............36
outputs
BTB/RTO..................45
DIGI-OUT 1/2 ...............45
Monitor1/2 .................43
P Package supplied ...............13
Packaging ...................91
Parameter setting ...............57
PC cable ....................52
PC connection .................52
PGND .....................20
pin assignments ................32
pollution level..................19
protection....................19
PSTOP .....................44
pulse-direction, interface ............50
R Regen circuit ..................21
resolver
interface ..................40
ROD interface .................46
RS232/PC, interface ..............52
S SAC expansion card ..............80
safety instructions ................6
setpoint inputs .................42
Setup ......................55
SETUP.EXE ..................36
shielding
connection diagram ............30
installation .................29
site .......................29
site altitude ...................19
SSI, interface..................47
stacking height .................91
standards ....................7
storage .....................91
storage duration ................91
storage temperature ..............91
supply voltage .................19
Switch-on and switch-off behavior .......22
system components, overview .........17
T technical data .................18
torque, connectors ...............19
transport ....................91
U use as directed .................12
servo amplifier ...............12
setup software ...............35
V ventilation
Installation .................29
Tech.Data .................19
W Warning messages ...............61
wiring ......................29
X XGND .....................20
SERVOSTAR®601...620 Installation Manual 97
Page 98

www.DanaherMotion.com
Sales and Service
We are committed to quality customer service. In order to serve in the most effective way,
please contact your local sales representative for assistance.
If you are unaware of your local sales representative, please contact us.
Europe
Visit the European Danaher Motion web site at www.DanaherMotion.net for Setup Software upgrades,
application notes, technical publications and the most recent version of our product manuals.
Danaher Motion Customer Support - Europe
Internet www.DanaherMotion.net
E-Mail virtapp@danahermotion.net
Phone: +49(0)203 - 99 79 - 0
Fax: +49(0)203 - 99 79 - 155
North America
Visit the North American Danaher Motion web site at www.DanaherMotion.com for Setup Software
upgrades, application notes, technical publications and the most recent version of our product manuals.
Danaher Motion Customer Support North America
Internet www.DanaherMotion.com
E-Mail customer.support@danahermotion.com
Phone: (815) 226 - 2222
Fax: (815) 226 - 3148
 Loading...
Loading...