


RGM®
User Manual
Edition: B, February 2019
Part Number: 903-800006-00
Original Documentation
Forsafe andproperuse, follow these instructions. Keep them forfuture reference.

RGM UserManual |
Record of Document Revisions
Revision Remarks
A, 10/2017 Launch version
B, 6/2018 RGM-C
Trademarks
•EtherCAT is aregistered trademark andpatented technology, licensed by Beckhoff Automation GmbH
•Windows is aregistered trademark of Microsoft Corporation
Current patents
•US Patent 8,154,228 (Dynamic Braking ForElectric Motors)
•US Patent 8,214,063 (Auto-tune of aControl System Based onFrequency Response)
Patents referring tofieldbus functions arelisted inthematching fieldbus manual.
Technical changes which improve the performance of the device may be made without prior notice!
Printed intheUnited States of America
This document is theintellectual property of Kollmorgen. All rights reserved. Nopart of this work may be reproduced inany form (by photocopying, microfilm orany othermethod)orstored, processed, copied or distributed by electronic means without thewritten permission of Kollmorgen.
Kollmorgen | kdn.Kollmorgen.com | February 2019 |
2 |

RGM UserManual |
This page intentionally left blank.
3 |
Kollmorgen | kdn.Kollmorgen.com | February 2019 |

RGM UserManual |1 Table of Contents
1 |
Table of Contents |
|
||
1 |
|
Table of Contents |
4 |
|
2 |
|
Introduction to RGM |
5 |
|
|
2.1 |
General |
6 |
|
|
|
2.1.1 About this manual |
6 |
|
|
2.2 |
Safety |
7 |
|
|
|
2.2.1 Youshould pay attention tothis |
7 |
|
|
2.3 |
Package |
7 |
|
|
|
2.3.1 Delivery Package |
7 |
|
|
2.4 Important Brake Usage Guidelines |
8 |
||
3 |
Power Supply Voltage & Current Ratings |
9 |
||
4 |
|
Maximum Speed |
10 |
|
5 |
|
Torque Ratings |
11 |
|
6 |
|
Duty Cycle |
12 |
|
7 |
|
Rotation Limits |
13 |
|
8 |
|
Accuracy & Repeatability |
14 |
|
9 |
|
Maximum Thermal Ratings |
15 |
|
10 |
Monitoring Thermistor |
16 |
||
11 |
Brake Function & Manually Releasing the Brake |
17 |
||
|
11.1 |
About the Brake Function |
17 |
|
|
11.2 |
Manually Releasing the Brake |
17 |
|
12 |
Bolting Joint-to-Joint, Mounting Screws |
19 |
||
13 |
Environmental Requirements |
20 |
||
14 |
IP Rating |
21 |
||
15 |
Joint-to-Joint Plastic Rings & Rubber Bands |
22 |
||
16 |
Rear Cover Removal & Daisy Chain Connections |
24 |
||
17 |
Daisy Chain Wire Sizes, Colors, and Functions |
27 |
||
18 |
RGM Workbench Software & Drive Commissioning |
28 |
||
19 |
Serial Cable Part Number |
29 |
||
20 |
CANopen Termination |
30 |
||
21 |
Brake Initialization |
31 |
||
|
21.1 |
RGM Enable/ Brake Initialization Procedure |
31 |
|
22 |
Regeneration Warning |
32 |
||
23 |
End Effectors |
33 |
||
24 |
Board Layout |
34 |
||
|
24.1 |
CANopen |
34 |
|
|
24.2 |
EtherCAT |
35 |
|
25 |
Data Sheets |
36 |
||
|
25.1 |
RGM14 |
37 |
|
|
25.2 |
RGM17 |
38 |
|
|
25.3 |
RGM20 |
39 |
|
|
25.4 |
RGM25 |
40 |
|
26 |
Index |
41 |
||
Kollmorgen | kdn.Kollmorgen.com | February 2019 |
4 |
RGM UserManual |2 Introduction toRGM
2 Introduction to RGM
2.1 |
General |
6 |
|
2.1.1 About this manual |
6 |
2.2 |
Safety |
7 |
|
2.2.1 Youshould pay attention tothis |
7 |
2.3 |
Package |
7 |
|
2.3.1 Delivery Package |
7 |
2.4 |
Important Brake Usage Guidelines |
8 |
5 |
Kollmorgen | kdn.Kollmorgen.com | February 2019 |

RGM UserManual |2 Introduction toRGM
2.1 General
2.1.1 About this manual
This manual describes theRGM robotic joint modules. Each RGM combines aframeless torque motor, low voltage DC drive, brake, strain wave gear, dual feedback system, andathermal sensorinasingle joint assembly tobeused inarobot configuration. Please review theentire manual which includes information on:
•Power
•Speed andTorque Ratings
•Duty Cycle
•Rotation Limits
•Thermal Ratings andMonitoring Thermistor
•Brake Function
•Installation andMounting
•RearCoverRemoval andDaisy Chaining
•Wiring
•RGM EWV
•CANopen
•EndEffectors
Kollmorgen | kdn.Kollmorgen.com | February 2019 |
6 |

RGM UserManual |2 Introduction toRGM
2.2 Safety
This section helps youtorecognize andavoid dangers topeople andobjects.
2.2.1 You should pay attention to this
Specialist staff required!
Only properly qualified personnel arepermitted toperform such tasks as transport, assembly, setup and maintenance. Qualified specialist staff arepersons who arefamiliarwith thetransport, installation, assembly, commissioning andoperation of motors andwho bring theirrelevant minimum qualifications tobearontheir duties:
•Transport: only by personnel with knowledge of handling electrostatically sensitive components.
•Mechanical Installation: only by mechanically qualified personnel.
•Electrical Installation: only by electrically qualified personnel.
•Setup: only by qualified personnel with extensive knowledge of electrical engineering anddrive technology
Thequalified personnel must know andobserve IEC 60364 / IEC 60664 andnational accident prevention regulations.
Read the documentation!
Read theavailable documentation before installation andcommissioning. Improperhandling of themotorcan cause harm topeople ordamage toproperty. Theoperatormust therefore ensure that all persons entrusted to work onthemotorhave read andunderstood themanual andthat thesafety notices inthis manual are observed.
Pay attention to the technical data!
Adhere tothetechnical data andthespecifications onconnection conditions (rating plate anddocumentation). If permissible voltage values orcurrent values areexceeded, themotors canbedamaged, forexample by overheating.
Perform a risk assessment!
Themanufacturerof themachine must generate arisk assessment forthemachine, andtake appropriate measures toensure that unforeseen movements cannot cause injury ordamage toany person orproperty. Additional requirements onspecialist staff may also result from therisk assessment.
Transport safely!
Lift andmove motors with more than 20kgweight only with lifting tools. Lifting unassisted could result inback injury.
Hot surface!
Thesurfaces of themotors canbevery hot inoperation, according totheirprotection category. Risk of minor burns! Thesurface temperature canexceed 100°C. Measure thetemperature, andwait until themotorhas cooled down below 40°C before touching it.
2.3 Package
2.3.1 Delivery Package
•Joint from theRGM series
•Thermal precaution instructions
7 |
Kollmorgen | kdn.Kollmorgen.com | February 2019 |

RGM UserManual |2 Introduction toRGM
2.4 Important Brake Usage Guidelines
TheRGM brake is designed foruseas astatic holding brake (park brake)only. It is not intended tobeused as adynamic brake ortobesuddenly engaged while theRGM is moving. Permanent damage tobrake assembly components may occurif brake is engaged while still inmotion.
During controllerandapplication software development, software bugs may cause trajectory errors orother types of errors. These errors may triggerunexpected events that cause thedrive tofault anddisable, suddenly engaging thebrake while RGM is inmotion. Toavoid accidental damage, it is recommended during development activities that users configure thefault event actions using RGM Workbench to“NONE”orset therange where theevent is triggered toavalue that is well outside normal operation. Fault event actions can bereset tooperational values afterthedevelopment process is complete andtherisk of accidental brake damage is minimized.
Theusermust determine whethertheloss of functionality andlack of fault monitoring toprotect thebrake during development activities warrants therisk of increasing operational andsafety concerns.
Forassistance indisabling fault events, please contact Kollmorgen Applications Engineering.
Kollmorgen | kdn.Kollmorgen.com | February 2019 |
8 |
RGM UserManual |3 PowerSupply Voltage & Current Ratings
3 Power Supply Voltage & Current Ratings
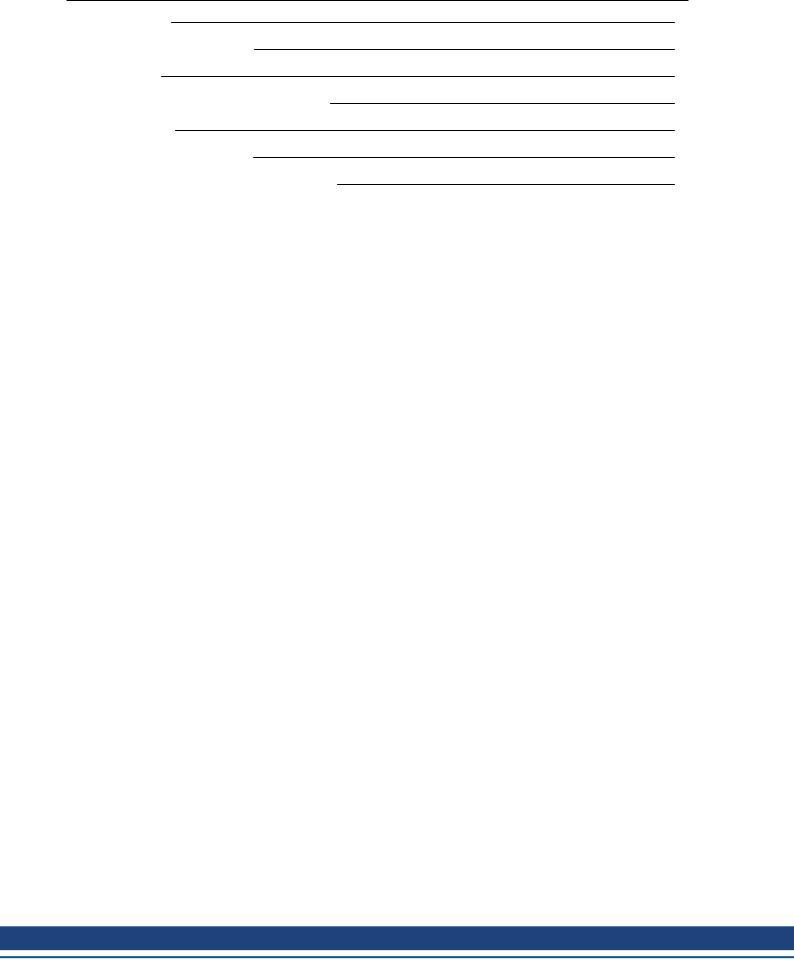
RGM requires 48VDC nominal supply voltage (44VDC minimum, 52VDC maximum). TheRGM drive will experience anOvervoltage fault at 55VDC. Kollmorgen recommends that anelectrolytic capacitorwith at least 15,000 microfarads capacitance beinstalled between theDC powersupply andthefirst joint. It is also recommended that thepowersupply becapable of handling aregenerative load (i.e., aregen resistorinthe supply is turned onif theDC bus exceeds 52VDC). As areference, fora6axis (6DOF)robot, aswitching DC supply with approximately 12Amps (600W)capacity is suggested.
Although thetable below shows currents that individual joint may draw momentarily, not all joints will draw these values simultaneously during typical robot motions. Therefore, it is not necessary toaddall values in thetable. Kollmorgen testing has shown that a12A supply should besufficient.
Model VDC |
Is Amps |
RGM 14 48+/-10% 3.80
RGM 17 48+/-10% 4.88
RGM 20 48+/-10% 7.50
RGM 25 48+/-10% 10.0
9 |
Kollmorgen | kdn.Kollmorgen.com | February 2019 |
RGM UserManual |4 Maximum Speed
4 Maximum Speed
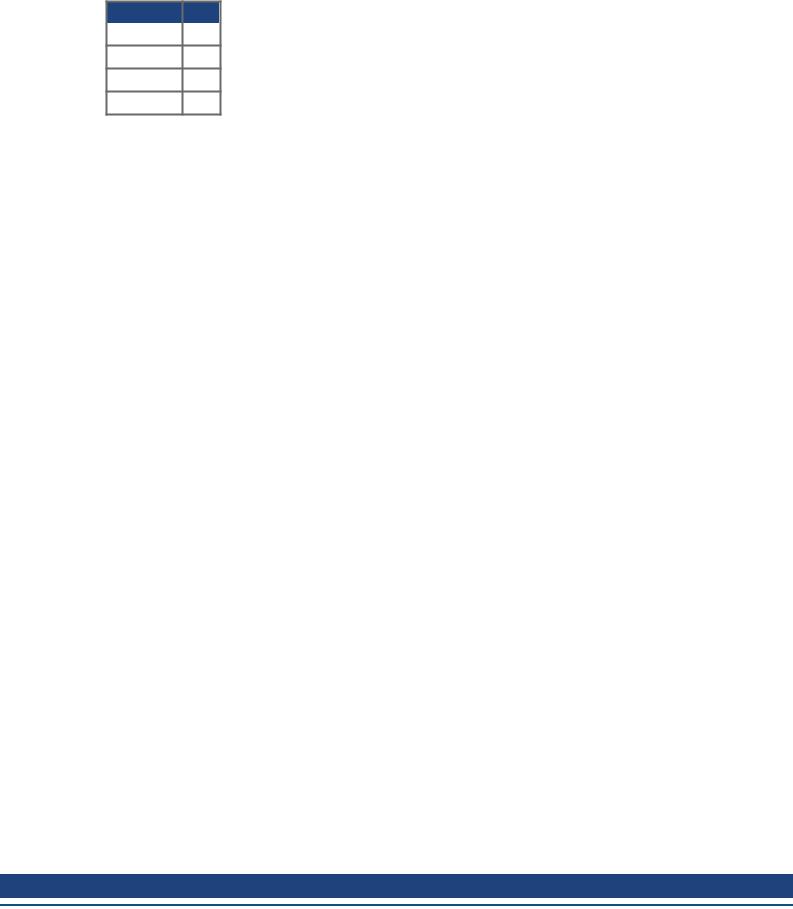
Maximum intermittent speed capability foreach RGM size is listed inthetable below. SeeDuty Cycle to determine RMS continuous speed andcontinuous torque capability based onthejoint duty cycle percentage intheintended application.
Max Speed RPM
RGM14 35
RGM17 30
RGM20 25
RGM25 20
Kollmorgen | kdn.Kollmorgen.com | February 2019 |
10 |
RGM UserManual |5 Torque Ratings
5 Torque Ratings
Maximum instantaneous (acceleration)torque capability foreach RGM size is listed inthetable below.
Max Intermittent Torque (Nm)
RGM14 34
RGM17 66
RGM20 102
RGM25 194
11 |
Kollmorgen | kdn.Kollmorgen.com | February 2019 |

RGM UserManual |6 Duty Cycle
6 Duty Cycle
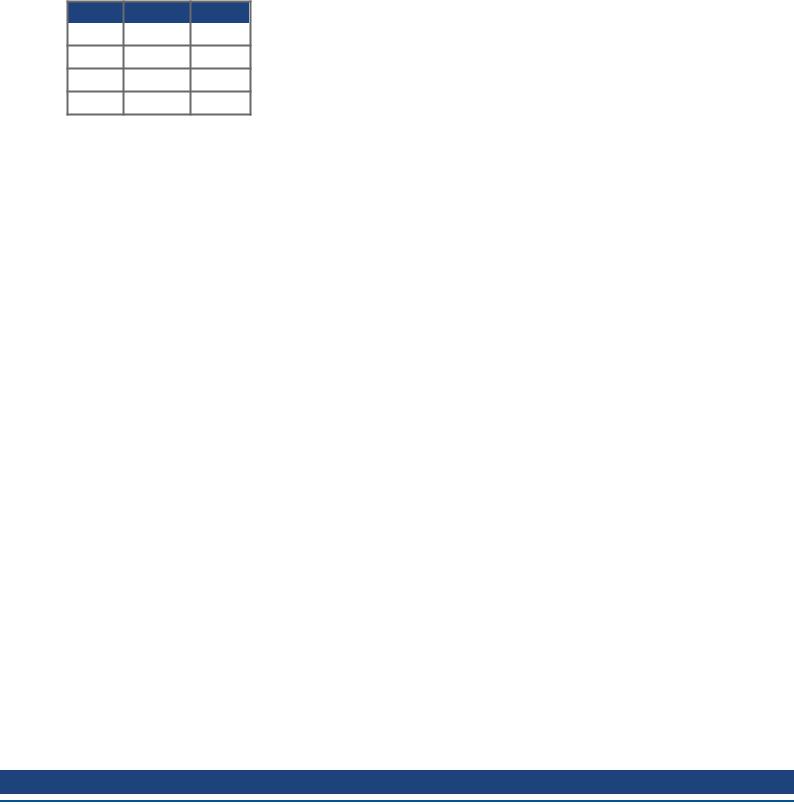
Seetables below forcontinuous torque capability at rotational speed based onsize of RGM joint andduty cycle percentage (%).
RGM14 - Continuous Torque Capability (Nm)
|
|
|
|
|
|
|
RPM |
25% |
|
|
75% |
|
100% |
50% |
|
|
||||
5 |
13.5 |
13.5 |
|
13.5 |
|
13.5 |
10 |
13.5 |
13.5 |
|
13.5 |
|
13.5 |
15 |
13.5 |
13.5 |
|
13.5 |
|
13.5 |
20 |
13.5 |
13.5 |
|
13.5 |
|
13.5 |
25 |
13.5 |
13.5 |
|
11.1 |
|
9.6 |
30 |
0.5 |
.035 |
|
0.29 |
|
0.25 |
RGM17 - Continuous Torque Capability (Nm)
|
|
|
|
|
|
|
RPM |
25% |
|
|
75% |
|
100% |
50% |
|
|
||||
5 |
49 |
49 |
|
49 |
|
49 |
10 |
49 |
49 |
|
49 |
|
44 |
15 |
49 |
49 |
|
45.5 |
|
40 |
20 |
49 |
49 |
|
40.9 |
|
35.4 |
25 |
47 |
42.7 |
|
34.9 |
|
30.2 |
RGM20 - Continuous Torque Capability (Nm)
|
|
|
|
|
|
|
RPM |
25% |
|
|
75% |
|
100% |
50% |
|
|
||||
5 |
61 |
61 |
|
61 |
|
60.7 |
10 |
61 |
61 |
|
61 |
|
56.4 |
15 |
61 |
61 |
|
60.3 |
|
52.2 |
20 |
61 |
57 |
|
49.4 |
|
42.8 |
RGM25 - Continuous Torque Capability (Nm)
|
|
|
|
|
|
|
RPM |
25% |
|
|
75% |
|
100% |
50% |
|
|
||||
5 |
133 |
133 |
|
128 |
|
111 |
10 |
133 |
118 |
|
96.6 |
|
83.7 |
15 |
79.8 |
56.4 |
|
46.1 |
|
39.9 |
Kollmorgen | kdn.Kollmorgen.com | February 2019 |
12 |

RGM UserManual |7 Rotation Limits
7 Rotation Limits
RGMunits may berotated continuously ineitherdirection when used as asingle axis. However, when assembled intoarobot with multiple axes/degrees of freedom andthe"daisy chain" wiring inthecenterof the output plate is used toconnect joint-to-joint orjoint-to-arm, themaximum rotation ineitherdirection is +/- 360° mechanical. If this angularlimit is exceeded, connecting wires may bedamaged andthewarranty will be voided.
13 |
Kollmorgen | kdn.Kollmorgen.com | February 2019 |
 Loading...
Loading...