

Page 1
UPGRADE NOTICE for BDS5T / VSA
The following are features of the MC3 board that is incorporated into the BDS5T and the VSA.
NOTICE: Some changes may be required to existing wiring or probram in order to make the BDS5T
compatible to the BDS5 or the VSA, or the VSA compatible to the VFS5.
HARDWARE:
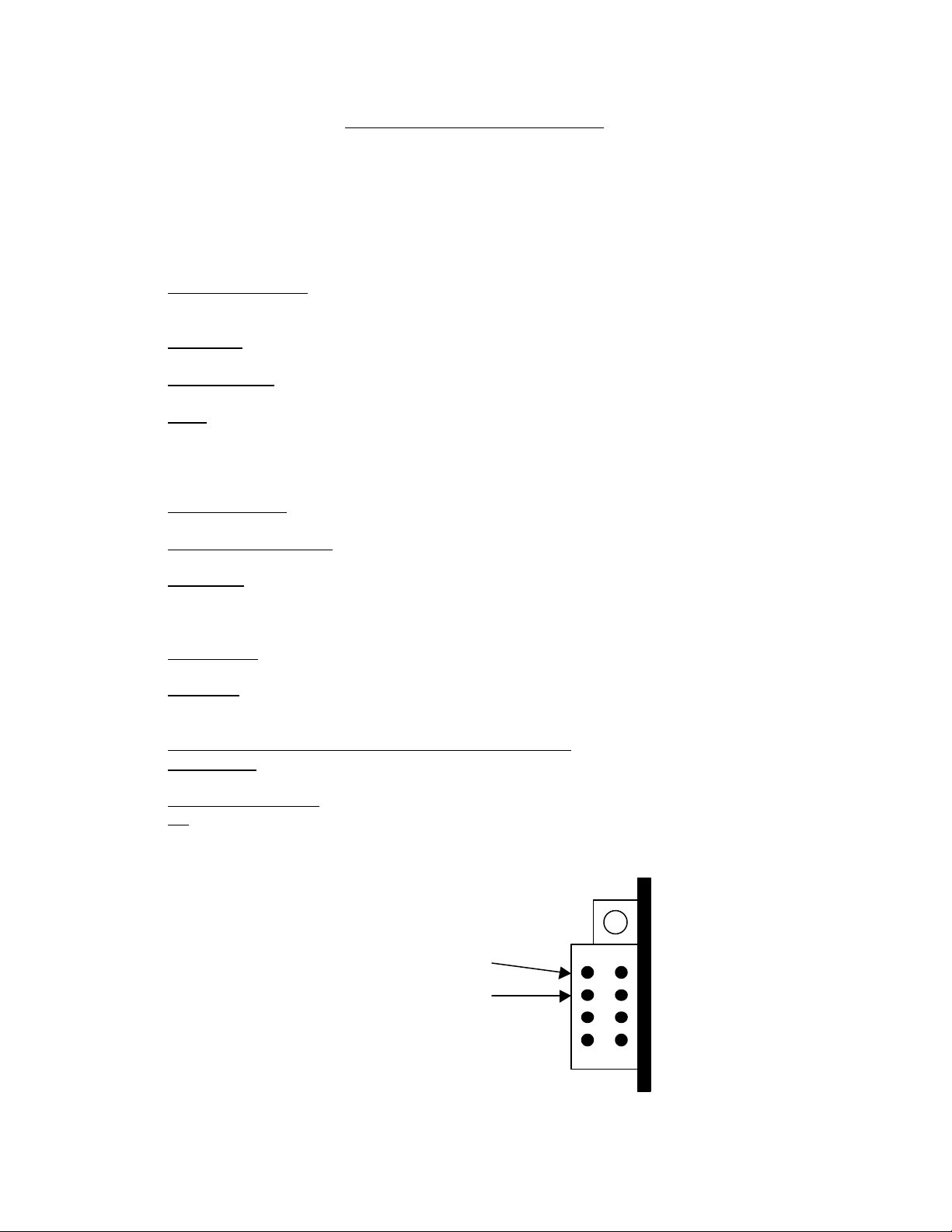
• On-board analog input
The analog input is on the connector T1 of the BDS5T and connector C10 on the VSA, Pin 5 is Diff.
Hi and Pin 6 is Diff. Low.
• Tach output
Scaled for 1750 RPM/volts
• Communications
To convert from RS232 to RS485 install a jumper between pins 9 and 10 on connector J1
• Inputs
Built-in filters
SOFTWARE:
• Program Execution
Twice as fast as BDS5
• PL, PLIM, TRIP, and PDF
State is remembered through power-down
• A2D Switch
When using the on-board analog input set A2D to 1. When using the encoder input for master / slave
application set A2D to 0. The gear ration when using the on-board analog input is GEARI / GEARO =
700 / 16384 for 10 volts = 10000 RPM.
• CAM function
Cam now has 1024 points, NORM ) ECAM starts the CAM function.
• PDF switch
Set to 1 for brushless motors. For induction motor control if PDF=1, the auto tune feature is available.
If PDF=0, the control scheme is identical to the VFS5 and the auto tune feature is not available.
• Supports 10-bit resolver resolution for higher speed applications.
• User variables
2,000 user variables (x1 – x2000)
• Program memory is 27K
• “P”
May be omitted when printing one variable.
Diff Hi
Diff Lo
Front View of Connector C10 on VSA, T1 on BDS5T
Page 2

Page 3
BDS5
I
NSTALLATION AND SETUP MANUAL
Old Number M93101 - I
New Number MB5000H
SSUE 4
Page 4

Page 5
BDS5 T
ECHNICAL MANUAL CONFIGURATION
T
NSTALLATION AND SETUP MANUAL
( I
ECHNICAL MANUAL CONFIGURATION
M93101 )
PAGE NO.
-- ...............................Title P age..................................................................................................................... 0
-- ...............................Technical Manual Configuration................................................................................. 0
-- ...............................Configuration Table..................................................................................................... 0
-- ...............................Customer Response...................................................................................................... 0
-- ...............................Copyright Page ............................................................................................................ 0
-- ...............................Foreword...................................................................................................................... 0
-- ...............................How to Use This Manual............................................................................................. 0
i-ii................................T able of Contents......................................................................................................... 0
iii / (iv blank)..............List of Figures.............................................................................................................. 0
v / (vi blank)................List of Tables...............................................................................................................0
vii / (viii blank)...........List of Drawings .......................................................................................................... 0
1-1 -- 1-16...................Text Pages....................................................................................................................0
2-1 -- 2-26...................Text Pages....................................................................................................................0
3-1 -- 3-10...................Text Pages....................................................................................................................0
4-1 -- 4-4.....................Text Pages....................................................................................................................0
5-1 -- 5-6.....................Text Pages....................................................................................................................0
DESCRIPTION
ISSUE NO.*
A-1 / (A-2 blank)........Appendix A Warranty Information............................................................................. 0
B-1 -- B-22..................Appendix B Drawings.................................................................................................0
C-1 -- C-12..................Appendix C Error Codes............................................................................................. 0
D-1 -- D-2...................Appendix D Regional Sales Offices ........................................................................... 0
E-1 / (E-2 blank).........Appendix E On-line Reference Guide ........................................................................ 0
Glossary-i -- xiv..........Glossary....................................................................................................................... 0
Index-i -- iv.................Index............................................................................................................................ 0
* Zero in this column indicates an original page
Page 6
ONFIGURATION TABLE
C
ONFIGURATION TABLE
C
NSTALLATION AND SETUP MANUAL
( I
BDS5
M93101 )
RECORD
ISSUE NO.
(Revision) DATE CHANGED PAGES/BRIEF DESCRIPTION OF CHANGE CHANGE NO.
3
4
15 Mar 95
10 Nov 95
Replaces issue dated 15 Feb 95
Add Appendix E and include On-line Reference Guide Disk
OF REVISIONS
Original Release
- -
Page 7
T
HANK YOU
Thank you and congratulations for choosing Industrial Drives' servo products for your motion control
requirements. W e seek to provide our custom ers with quality products, excellent support and outs tanding
value. In an effort to provide you with dependable and useful docum entation, we off er you an opportunity
to critique this manual with your comments and suggestions. Your feedback on this reader comments
form is very important to us. Please answer the questions below and return the form to:
!
INDUSTRIAL DRIVES -
Technical Manual Department
201 Rock Road
Radford, VA 24141
U.S.A.
FAX: 703/731/0847
Name: Title:
Company:
Street Address:
City: State: Zip:
Telephone: Fax:
Product:
Manual Part Number:
Please check the rating that best represents your opinion on each topic.
Excellent Good Fair Poor
1. Overall clarity and readability.
2. Organization of the manual.
3. Information completeness.
4. Information accuracy.
5. Installation procedures.
6. Ability to quickly find information you need.
7. Graphics.
8. Figures (usefulness).
9. Tables (usefulness).
10. Overall rating of this manual.
!!!!
!!!!
!!!!
!!!!
!!!!
!!!!
!!!!
!!!!
!!!!
!!!!
Please list any errors.
What did you like least about this manual?
What did you like most about this manual?
How would you improve this manual?
Signature: Date:
Page 8

Page 9
Copyright 1993, Industrial Drives, A Kollmorgen Division. All rights reserved.
Printed in the United States of America.
NOTICE:
Not for use or disclosure outside of Industrial Drives except under written agreement.
All rights reserved. No part of this book shall be reproduced, stored in a retrieval system, or transmitted by any
means, electronic, mechanical, photocopying, recording, or otherwise without the written permission from the
publisher. While every precaution has been taken in the preparation of the book, the publisher assumes no
responsibility for errors or omissions. Neither is any liability assumed for damages resulting from the use of the
information co ntained herein.
This document is proprietary information of Industrial Drives, A Kollmorgen Division, furnished for customer use
ONLY. No other uses are authorized without written permission of Industrial Drives.
Information in this document is subject to change without notice and does not represent a commitment on the part of
Industrial Drives or the Kollmorgen Corporation. Therefore, information contained in this manual may be updated
from time-to-time due to product improvements, etc., and may not conform in every respect to former issues.
IBM-PC is a trademark of International Business Machines Corporation.
OPTO-22 is a trademark of the OPTO-22 Company.
U.L. is a trademark of Underwriters Laboratories.
N.E.C. is a trademark of the National Electric Code.
GOLDLINE, BDS4, BDS5, PSR4/5, Motion Link, PC-Scope, and Macro Moves are trademarks of the Kollmorgen
Corporation.
WARNING
Dangerous voltages, currents, temperatures, and energy levels exist in this
product and in the associated servo motor(s). Extreme caution should be
exercised in the application of this equipment. Only qualified individuals
should attempt to install, set-up, and operate this equipment. Ensure that the
motor, drive, and the end-user assembly are all properly grounded per NEC
requirements.
INDUSTRIAL DRIVES
201 Rock Road
Radford, VA 24141
Phone: 703/639/2495
Fax: 703/731/0847
Page 10

Page 11

BDS5 F
OREWORD
F
OREWORD
The commitment to quality at Industrial Drives is our
first priority. In all aspects of our business: research,
development, product design and customer service,
we strive to guarantee total quality. This pledge is
founded on a solid history of innovative technologi cal
achievements dating back to 1948. One of the finest
tributes to that achievement can now be seen at the
Smithsonian which has on display the first stellar
inertial navigation system developed by Dr. Charles
Stark Draper. This system contains the first models
of torque motors built by the founding organization of
Industrial Drives. During the period of 1948 to 1960,
our "firsts" in the industry numbered more than a
dozen; they ranged from the simple but invaluable
(such as the direct-drive DC torque motor and movie
theater projection motors) to the exotic: submarine
periscope drive motors for the U.S. Navy, electric
drives, Curtis Wright electric brake coils, and
numerous other innovations.
For more than a decade, Industrial Drives (known in
the early days as part of Inland Motor Division of
Kollmorgen) has c ontinued to enhance its
sophisticated engineering solutions to pioneer new
product development.
The results of these and other efforts has encouraged
some of the most significant innovations in the servo
industry. We developed the application of servo
motors and drives in the Machine Tool market. We
were the first with water-cooled servos, the integral
brake, the flux forcing concept and the brushless
motor. We developed the electronically commutated
electric car motor. Industrial Drives pioneered rare
earth magnet development for the servo motor
industry.
Between 1974 and 1980, Industrial Drives continued
to lead the industry in servo application innovations.
Our commitment to engineering excellence never
waivered. In fact, that commitment grew stronger
with the development of brushless submarine and
submersible motors (visiting the Titanic graveyard),
multi-axis electronic drives and antenna pedestal
drives (delivering unprecedented accuracy and
revolutionizing the entire industrial automation
process).
The decade of the 1980's brought continued
advancements in technology and penet ration of new
markets requiring precise motion control. Already in
the fifth generation of brushless products, Industrial
Drives continues to lead the way with digital servo
positioning capability and our newest motor offering,
the GOLDLINE Series, incorporating the very latest
high-energy, rare earth magnets (neodymium iron
boron). Once again, we are setting the standards that
others only hope to duplicate. Recently
acknowledged by the Frost and Sullivan Foundation,
a leading market specialist in the motion control
industry, Industrial Drives and its parent, Kollmorgen
Corporation, continue to rank first in servo
technology.
Other achievements? Yes, too many in fact to
mention. Each achievement stands as a testimony to
the committed quality and excellence in design
technology. This constancy of purpose is unyielding
in an era of rapidly changing technology.
Page 12
BDS5 H
OW TO USE THIS MANUAL
H
OW TO USE THIS MANUAL
INTRODUCTION
This Installation and Setup Manual is designed to
help you properly install a BDS5 Servo System. You
do not have to be an expert in motion control to
operate the system however this manual does assume
you have the fundamental und erstanding of basi c
electronics and motion control concepts. Many of
these are explained in the glossary of this manual.
The BDS5 is a programmable motion control device.
An understanding of c omputer programming
techniques will be beneficial to all users. For
applications that require complex programs, a
professional programmer should be consulted.
RECOMMENDATIONS
It is recommended that you read this entire manual
before you attempt to install the BDS5 so you can
promptly find any information you need. This will
also familiarize you with system components, and
their relationship to one another.
After installation and before you apply your own
application check all system functions and features to
insure you have installed your BDS5 properly.
Proper installation can prevent potential difficulties
before they cause harm to your system. Be sure to
follow all instructions carefully and pay special
attention to safety.
CONVENTIONS
To assist you in understanding the material in this
manual, conventions have been estab l ished to
enhance reader comprehension. Explanations of
these conventions are as follows:
Safety warnings, cautions, and notes present
•
material that is important to user safety. Be sure
to read any safety notices you see as they could
prevent equipment damage, personal injury, or
even death to you or a co-worker.
• Bold
•
•
•
•
text highlights other important information
that is critical to system operations.
CAPITALIZED text stresses attention to the
details of the procedure.
Underlined text emphasizes crucial words in
sentences that could be misunderstood if the
word is not recognized.
DOUBLE BLOCKED
that are to be typed into the computer by the
user to interface with the BDS5.
SINGLE BLOCKED
that are displayed by the BDS5 on the computer
terminal to inform the user of system operations
or problems.
text defines words
text defines words
Page 13

OW TO USE THIS MANUAL
H
BDS5
ABBREVIATIONS
CCW Counter Clockwise
CW Clockwise
D/L Direction Limit
GC Goldline Cable
GCS Goldline Cable Set
LED Light Emitting Diode
NEC National Electrical Code
P/N Part Number
R/D Resolver-to-Digital
Regen Regeneration
TL Test Limits
UL Underwriters Laboratories
NOTICE:
This manual is the first of a two part manual
structure. The
the user on the normal operating procedures and
practices to be used with the BDS5. Programming is
explained as well as other software considerations.
User's Manual
is intended to instruct
Page 14

BDS5 T
ABLE OF CONTENTS
T
ABLE OF CONTENTS
CHAPTER 1. SYSTEM DESCRIPTION
1.1 Introduction..................................................... 1-1
1.2 Product Description ........................................ 1-1
1.3 Features........................................................... 1-1
1.4 Part Number Description................................ 1-3
1.4.1 BDS5 Model Number.................................. 1-4
1.4.2 Compensation Module Model Number........ 1-5
1.4.3 PSR4/5 Model Number................................ 1-6
1.4.4 ER-External Resistor Kit Model Number....1-7
1.4.5 Molex Assembly Tools................................ 1-7
1.5 Specifications and Ratings.............................. 1-8
1.6 Theory of Operation......................................1-12
1.7 Simplified Schematic Diagram
and System Diagram..................................... 1-13
CHAPTER 2. INSTALLATION
2.1 Introduction..................................................... 2-1
2.2 Safety Information .......................................... 2-1
2.3 Unpacking And Inspection.............................. 2-2
2.4 Installation Requirements................................ 2-2
2.4.1 Environmental Considerations..................... 2-2
2.4.2 Enclosures.................................................... 2-2
2.5 Mounting......................................................... 2-2
2.5.1 Mounting the BDS5..................................... 2-2
2.5.2 Mounting the PSR4/5................................... 2-3
2.5.3 Mounting the External Regen Resistor ........ 2-3
2.6 Wiring............................................................. 2-3
2.6.1 Wiring the Ground....................................... 2-4
2.6.2 Wiring the Power Connections .................... 2-4
2.6.2.1 Wiring the Motor......................................2-4
2.6.2.2 Motor Protection....................................... 2-5
2.6.2.3 Motor Thermostat.....................................2-5
2.6.2.4 Motor Brake.............................................. 2-5
2.6.2.5 Wiring the DC Bus....................................2-6
2.6.2.6 Wiring the AC Line................................... 2-6
2.6.2.7 Wiring the Regen Resistor........................2-6
2.6.3 Wiring the PSR4/5 Front Panel
Connectors...................................................... 2-6
2.6.3.1 Wiring the Control Power to C1 ............... 2-6
2.6.3.2 Wiring to the PSR4/5 Fault
Output on C1...................................................2-6
2.6.3.3 Wiring PSR4/5 Connector C2................... 2-6
2.6.4 Wiring the BDS5 Front Panel
Connectors...................................................... 2-7
2.6.4.1 Wiring C1, Encoder Equivalent................ 2-7
2.6.4.2 Encoder Equivalent Input.......................... 2-9
2.6.4.3 Pulse Input (OPT2 Card) .......................... 2-9
2.6.4.4 Encoder Equivalent Output....................... 2-9
2.6.4.5 Wiring C2, Customer I/O ........................ 2-10
2.6.4.6 Wiring C3, Resolver............................... 2-11
2.6.4.7 Wiring C4, Logic Power Supply............. 2-11
2.6.4.8 Wiring C5, Serial Communications........ 2-12
2.6.4.9 Wiring C6, Fan Power (20 Amp
Units Only)................................................... 2-14
2.6.4.10 Wiring C7, Standard I/O....................... 2-14
2.6.4.11 Wiring C8, Optional I/O.......................2-15
2.6.4.12 J1 Configuration Jumper....................... 2-16
2.6.5 Establishing Communications.................... 2-16
2.6.5.1 Required Data Format............................. 2-16
2.6.5.2 First Transmission................................... 2-16
2.6.5.3 Checking the Control Power...................2-17
2.6.5.4 If You Can't Communicate......................2-18
2.7 Initial Check-Out...........................................2-18
2.7.1 Checking Discrete Inputs...........................2-19
2.7.2 Checking General Purpose Outputs ........... 2-19
2.7.3 Cycle Ready............................................... 2-20
2.7.4 Checking STATUS.................................... 2-20
2.7.5 Checking Encoder Output.......................... 2-20
2.7.6 Checking Encoder Input............................. 2-20
2.7.7 Checking Pulse Input (Optional)................ 2-20
2.7.8 Checking Analog Input (Optional)............. 2-20
2.7.9 Checking the Resolver ............................... 2-21
2.7.10 Checking the Resolver Cable................... 2-21
2.7.11 Checking the AC Line Voltages............... 2-22
2.7.12 Checking the DC Bus Voltage................. 2-22
2.7.13 Checking the Motor................................. 2-23
CHAPTER 3. OPERATION
3.1 Introduction..................................................... 3-1
3.2 Start-Up and Checkout.................................... 3-1
3.2.1 If You Get ERROR 17, FEEDBACK
LOSS .............................................................. 3-2
3.2.2 If You Get ERROR 14, POWER BUS........ 3-2
3.2.3 If Your BDS5 System is Unstable................ 3-2
3.2.4 Jogging the Motor ........................................ 3-3
3.2.5 Low Speed Adjustment................................ 3-3
3.3 System Compensation..................................... 3-4
3.3.1 Critical Damping.......................................... 3-4
3.3.2 Underdamping..............................................3-4
3.3.3 Overdamping................................................3-5
3.3.4 Ringing.........................................................3-5
3.4 Tuning............................................................. 3-5
3.4.1 If Your System Is Completely Unstable.......3-6
3.4.2 Reducing ILIM.............................................3-6
3.5 Tune Command............................................... 3-6
i
Page 15

ABLE OF CONTENTS
T
BDS5
3.6 Tuning The BDS5 Yourself............................3-7
3.6.1 Tuning the Velocity Loop ............................3-7
3.6.2 Tuning the Position Loop.............................3-7
3.7 RECORD and PLAY......................................3-8
3.8 Problems..........................................................3-9
3.8.1 Overloading the Motor.................................3-9
3.8.2 Compliance ..................................................3-9
3.8.3 Non-Linear Mechanics.................................3-9
3.8.4 Resonance..................................................3-10
3.8.5 Low-Pass Filters.........................................3-10
CHAPTER 4. MAINTENANCE
4.1 Introduction ..................................................... 4-1
4.2 Preventative Maintenance...............................4-1
4.2.1 Transient Voltages .......................................4-1
4.2.2 Surge Current...............................................4-2
4.2.3 Electrical Noise............................................4-2
4.2.4 Radio Frequency Energy..............................4-2
4.3 Periodic Maintenance......................................4-2
4.3.1 Ventilation....................................................4-3
4.3.2 Grounding Integrity......................................4-3
CHAPTER 5. TROUBLESHOOTING
APPENDIX A. WARRANTY INFORMATION
APPENDIX B. DRAWINGS
APPENDIX C. ERROR CODES
APPENDIX D. REGIONAL SALES OFFICES
APPENDIX E. ON-LINE REFERENCE GUIDE
5.1 Introduction ..................................................... 5-1
5.2 Spare Parts ......................................................5-1
5.2.1 BDS5 Spare Parts List..................................5-1
5.2.2 PSR4/5 Spare Parts List...............................5-1
5.2.3 Ordering Information...................................5-2
5.3 LED Status Indicators.....................................5-2
5.3.1 BDS5 LED's................................................. 5-2
5.3.2 PSR4/5 LED's ..............................................5-2
5.4 Error Log.........................................................5-3
5.4.1 Error Levels..................................................5-3
5.4.2 DEP..............................................................5-4
5.4.3 Error History................................................5-4
5.4.4 Displaying Error Messages ..........................5-4
5.4.5 Firmware Errors...........................................5-4
5.5 Enable and fault logic......................................5-5
5.5.1 Firmware Faults, Area 1...............................5-5
5.5.2 Fault Logic, Area 2.......................................5-5
5.5.3 Fault Latch, Area 3.......................................5-5
5.5.4 Ready Latch, Area 4.....................................5-5
5.5.5 ACTIVE, Area 5..........................................5-5
5.5.6 Relay and STATUS Control, Area 6............5-6
5.5.7 Motor Brake.................................................5-6
5.5.8 Output Relay................................................5-6
5.6 Factory Support and Repair Policies...............5-6
ii
Page 16

BDS5 L
IST OF FIGURES
L
FIGURE PAGE FIGURE PAGE
IST OF FIGURES
1.1 BDS5 Model Number Scheme........................ 1-4
1.2 Compensation Model Number Scheme........... 1-5
1.3 PSR4/5 Model Number Scheme..................... 1-6
1.4 External Regen Resistor Model
Number Scheme..............................................1-7
2.1 Safety-Alert Symbols...................................... 2-1
2.2 Master BDS5 and Slave BDS5....................... 2-8
2.3 Encoder Phasing For Clockwise Rotation....... 2-8
2.4 BDS5 (C1)...................................................... 2-9
3.1 Critical Damping............................................. 3-4
3.2 Underdamping.................................................3-5
3.3 Overdamping...................................................3-5
3.4 Ringing............................................................3-5
iii / (iv blank)
Page 17

BDS5 L
IST OF TABLES
L
TABLE PAGE TABLE PAGE
IST OF TABLES
1.1 BDS5 Model Number Scheme........................ 1-4
1.2 PSR4/5 Model Number Scheme..................... 1-6
1.3 External Regen Resistor Model
Number Scheme..............................................1-7
1.4 Specifications.................................................. 1-8
1.5 Environmental Specifications ....................... 1-12
1.6 Mechanical Specifications............................ 1-12
2.1 Motor Cable Color Code.................................2-4
2.2 PSR4/5 Logic Power....................................... 2-7
2.3 Communications Requirements.....................2-12
2.4 Terminal Wiring............................................2-13
2.5 PC Wiring..................................................... 2-14
2.6 PSR4/5 C2 Wiring........................................2-17
2.7 Target of PRD vs. R/D Resolution................2-21
2.8 Target of PRD vs. R/D Resolution After
Clockwise /4 Revolution............................... 2-21
2.9 Goldline Resolver Cable Wiring................... 2-21
2.10 PRD Range for "Zero Position".................. 2-23
3.1 Tuning Criterion..............................................3-4
3.2 Allowed Tune Command Stability Settings.... 3-6
3.3 Velocity Loop Bandwidth vs. KVI ................. 3-7
3.4 Velocity Loop Bandwidth vs. KP
5.1 Error Severity Levels and Actions..................5-7
MAX
.......... 3-8
v / (vi blank)
Page 18

Page 19
BDS5 L
IST OF DRAWINGS
L
DRAWING PAGE
D-93030 BDS5 System Overview.........................................................1-14
A-84847 Typical BDS5 System Interconnect........................................ 1-16
A-96372M BDS5 Connectors................................................................2-25
A-84732 BDS5 Enable Fault Logic Diagram........................................B-3
A-93103 BDS5 Wiring Diagram .......................................................... B-4
A-93703 Mounting Hole Pattern BDS4A, BDS5, PSR4/5A.................B-11
A-62370 Outline B-102-X-12,14........................................................... B-13
A-62371 Outline B-104,6,-X-12,14.......................................................B-14
IST OF DRAWINGS
A-43268 Outline B-20X-X-21,31,23,33-(S)..........................................B-15
A-63093 Outline B-40X-X-A1,A3,B1,B3(-S).......................................B-16
A-63099 Outline B-602,4-X-A1,A3,B1,B3(-S)..................................... B-17
A-63100 Outline B-606-X-A1,A3,B1,B3(-S)........................................ B-18
A-63097 Outline B-802,4-X-A1,A3,B1,B3(-S)..................................... B-19
A-63096 Outline B-806-X-A1,A3,B1,B3(-S)........................................ B-20
A-93569 Outline & Dimension BDS5-3 & 6 Amp................................B-21
A-93571 Outline & Dimension BDS5-10 Amp.....................................B-22
A-93570 Outline & Dimension BDS5-20 Amp.....................................B-23
A-93880 Outline & Dimension BDS5-30/40 Amp................................B-24
A-96010 Outline & Dimension BDS5-55 Amp.....................................B-25
A-93581 Outline & Dimension PSR4/5A-12 & 20 Amp.......................B-26
A-93031 Outline & Dimension PSR4/5-50 & 75 Amp.......................... B-27
C-84723 PSR4/5 Simplified Schematic.................................................B-28
A-84888 Velocity Loop Tuning Flow Chart..........................................B-29
vii / (viii blank)
Page 20

Page 21
BDS5 C
HAPTER
C
YSTEM DESCRIPTION
S
1
HAPTER
YSTEM DESCRIPTION
1 - S
1.1 INTRODUCTION
The information in this chapter will enable you to
understand the BDS5's basic functions and features.
These concepts will allow you to apply them to your
own unique applications.
1.2 PRODUCT DESCRIPTION
The BDS5 is a full-featured, high-performance,
brushless positioning servo in one compact enclosure
it is the smallest, totally-integrated package
available to motion control users. The BDS5
combines a positioner, a servo amplifier, and an I/O
interface into one unit. The BDS5 sets new standards
for motion control with its simple BASIC-like
command structure and sophisticated decision-making
capability. The BDS5 provides the outstanding servo
performance that you have come to expect from
Industrial Drives. Using a high-performance
microprocessor, the BDS5 does not have to
compromise on either positioner software or servo
performance. This single microprocessor closes all
servo loops, resulting in a truly integrated positioning
system. The BDS5 has the features and performance
you need in your next positioning application.
1.3 FEATURES
The BDS5 offers a wide feature set to accommodate
real world positioning requirements:
LOW COST
•
The BDS5 i s very affordable--even though it is full of
advanced features. Use all or only a portion of these
features to accomplish your application.
EASY TO INSTALL
•
The BDS5 is easy to install because the servo
amplifier and the positioner are integrated into one
package. Many interconnects, including the
tachometer and encoder, are eliminated.
SIMPLE PROGRAMMING LANGUAGE
•
The BDS5 uses simple BASIC-like commands such as
RUN, GOTO (for branching), and GOSUB /
RETURN (for subroutines). In addition to a simple
comparison statement, advanced IF / ELIF / ELSE /
END IF statements result in more readable and less
error-prone programs. You can comment every line in
your program.
1-1
Page 22

HAPTER
C
YSTEM DESCRIPTION
1 - S
BDS5
ADVANCED MOTION CONTROL MOVES
•
The simple language does not prevent you from
solving complex proble ms. The BDS5 has separa te
acceleration and deceleration rates, as well as linear,
half S-curve, and full S-curve acceleration profiles.
The BDS5 has Macro Moves for applications where
simple indexes cannot do the job. A Macro Move is a
combination of up to 30 accelerations, traverses, and
decelerations, which are fully precalculated for faster
execution. You can program teach modes where
position end points can be changed by a factory
operator
MASTER/SLAVE - ELECTRONIC GEARBOX
•
The electronic gearbox is used to link two motors
together so that the velocity of the slave is
proportional to the velocity of the master. The ratio
can be from 32767:1 to 1:32767 and can be negative
to allow the slave to move in the opposite direction.
Also, the "index-on-gearing" feature permits phase
adjustments.
MASTER/ SLAVE - PROFILE REGULATION
•
With profile regulation you can control the slave's
motion profile according to an external master motor
or frequency. Profile regulation modifies the velocity
and acceleration of the slave axis without affecting the
final position of the move. You can use profile
regulation to implement "feed rate override."
MOTION GATING AND REGISTRATION
•
The BDS5 can precalculate moves to begin motion
within one millisecond after a transition on the GATE
input. This provides rapid and repeatable motion
initiation. The BDS5 has the ability to capture the
current position within 25 microseconds after a
transition of the HOME input. This results in fast
homing and accurate registration sequences.
MATHEMATICS Algebraic math is provided for
•
commands such as:
12 2 3
XXX
The BDS5 has 100 program labels, 50 user-definable
variables, and 50 user-definable switches. It also has
15 mathematical/logical operations and over 150
system variables.
()
=× +
Quantities such as position, velocity, and acceleration
are automatically scaled into user-defined units. This
feature lets you program the BDS5 in convenient units,
such as feet, inches, miles, RPM, and degrees.
SUPERIOR SERVO LOOP CONTROL
•
The BDS5 offers smooth, high-resolution control.
Standard BDS5 position repeatability is better than
one arc-minute, bidirectional. The BDS5 has a 32-bit
position word. The BDS5 position loop completely
eliminates the digital dither normally associated with
positioning systems. Long-term speed stability is
0.01%. The standard system converter (12-bit)
provides a resolution of 0.0005 RPM and a maximum
speed of 8000 RPM.
SELF-TUNING
•
The BDS5 c an tune itself. You do not have to b e a
servo expert to set up a system quickly. Just specify
the desired bandwidth, and let the BDS5 do the rest.
POWERFUL MICROPROCESSOR
•
The heart of the BDS5 is the 16-bit processor that
delivers high performance. The result: the BDS5 can
control a motor and execute its motion program faster
than a standard positioner can.
DIGITAL SERVO LOOPS
•
Both the position and velocity loops are totally digital.
The digital loops give the BDS5 features not available
in standard velocity drives, such as self-tuning, very
low velocity offset, and digitally-adjustable servo
tuning parameters. The optional analog input permits
you to use the BDS5 as an analog velocity drive.
FEED-FORWARD GAIN
•
The digital feed-forward gain reduces following error
and motion initiation delay, thereby increasing
machine throughput.
DIAGNOSTICS
•
The BDS5 offers a complete set of error diagnostics.
When an error occurs, the BDS5 displays an English
USER UNITS
•
1-2
Page 23

BDS5 C
HAPTER
YSTEM DESCRIPTION
1 - S
language error message. The BDS5 remembers the
last 20 errors even thr ough power loss. In addition,
the BDS5 lets you write your own error handler.
During a fault condition, you can use the error handler
to set outputs, alert an operator, and shut down your
process smoothly. The BDS5 offers trace and singlestep modes so that you can debug your program. The
BDS5 has complete fault monitoring, including travel
limit switches, feedback loss, and software position
limits, as well as hardware safety circuits (watchdogs)
and checksums for more reliable and safer operation.
I/O
•
The BDS5 has up to 32 I/O sections that you connect
via ribbon cable to standard OPTO-22 compatible I/O
boards or to INDUSTRIAL DRIVES I/O-32. The
I/O-32 provides either fixed 24-volt or removable,
industry standard, optically-isolated I/O in a
GOLDLINE style package.
SERIAL COMMUNICATIONS
•
The BDS5's serial communications provide a powerful
link to other popular factory automation devices such
as PLC's, process control computers, and smart
terminals. The BDS5 offers RS-232 for most
terminals and RS-422/RS-485 for multidrop
communications. With multidrop you can put up to 26
axes on one serial line. The BDS5 can autobaud from
300 baud to 19.2k baud, eliminating the need to set
dip switches to start communicating.
MOTION LINK
•
Industrial Drives also offers MOTION LINK, a
powerful, menu-driven communications package for
your IBM-PC (c) compatible computer. With this
package, the BDS5's programs and variables can be
retrieved from or saved to a disk drive. Also, on-line
help and a full screen editor are built into MOTION
LINK.
MENU-DRIVEN SOFTWARE
•
The BDS5's programming language allows you to
write operator-friendly, menu-driven software. By
incorporating an INDUSTRIAL DRIVES Data Entry
Panel, or any other serial co mmunicati ons device, the
operator can be prompted for specific process data.
MONITOR MODE
•
The BDS5 provides interactive communications and
permits all system variables and parameters to be
examined and modified at any time--even during
actual program execution or while the motor is
running.
1.4 PART NUMBER DESCRIPTION
A model number is printed on a gold and black tag on
the front of your BDS5, PSR4/5, Compensation Card
and External Regen Resistor modules. The model
number identifies how the equipment is configured.
Each component is described to explain what the
model configurations are. You should verify that the
model numbers represent the equipment desired for
your application. Also verify the compatibility
between components of the servo system. The model
numbers are as follows:
1-3
Page 24
HAPTER
C
YSTEM DESCRIPTION
1 - S
BDS5
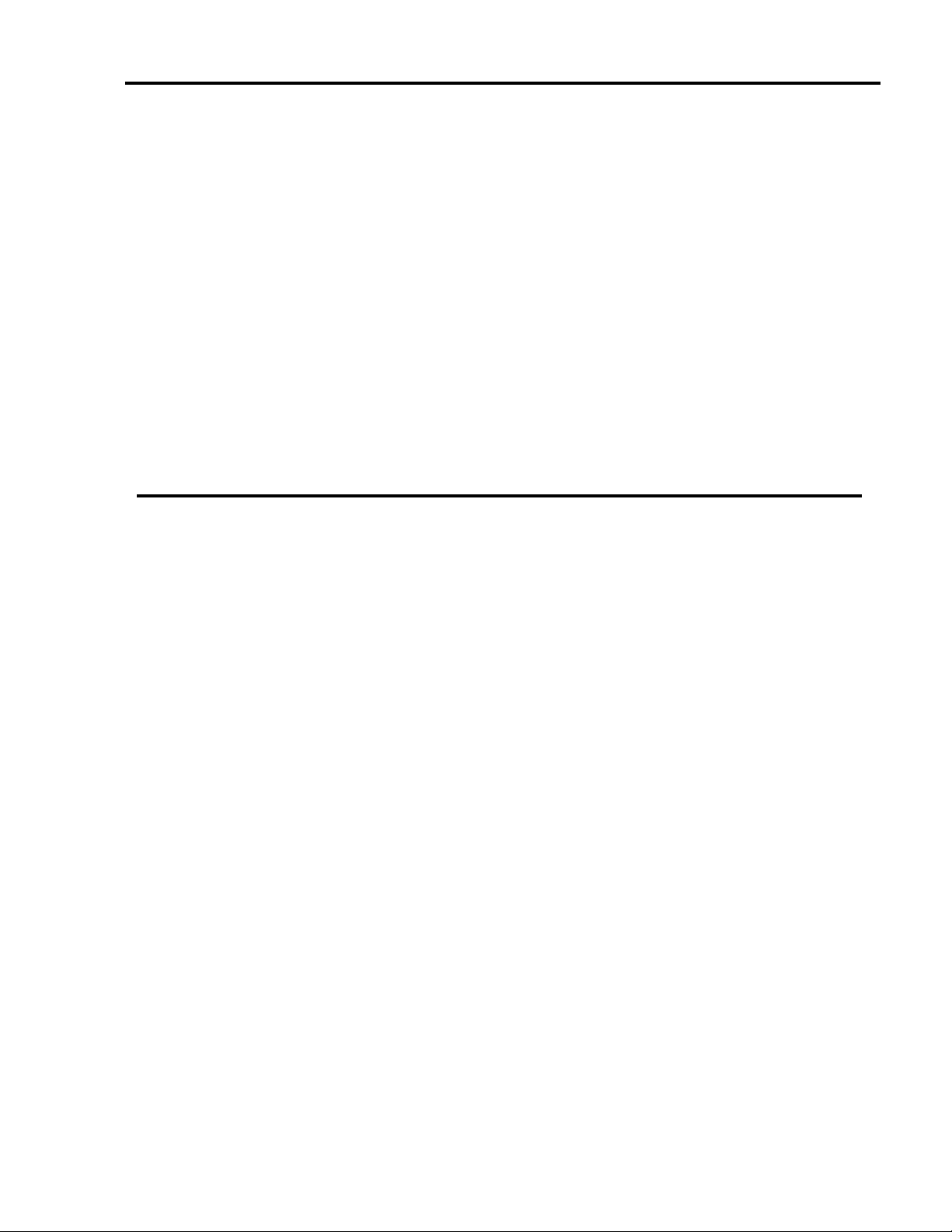
1.4.1 BDS5 Model Number
B D S 5 A - 2
A B C D E F G H I
UL Designator
Voltage and Current Ratings User Program
Options Firmware Version
Motor and Winding R/D Resolution
Figure 1.1. BDS5 Model Number Scheme
Table 1.1. BDS5 Model Number Scheme
LEGEND DEFINITION
A
A
V
B
1
2
C
03
06
10
20
30
40
55
D
0
E
0
1
F
0
1
2
9
G
0
1
H
0
I
Motor and Wi nding
R/D Resolution
2
4
Firmware Version Firmware Version ( Assigned by Industri al Drives, not normally specified when ordering)
User Program User Program (This is reserved for systems that are programmed by Industrial Drives. This
UL Designator
UL Listed (standar d)
Non - UL Listed
Voltage Rating
115 VAC
230 VAC
Current Rating
3 Amps/Phase
6 Amps/Phase
10 Amps/Phase
20 Amps/Phase
30 Amps/Phase
40 Amps/Phase
55 Amps/Phase
Mechanical Options (0 indicates st andard feature)
Standard
Communication Options
RS-232 (standard)
RS-422/RS-485
Input Options
Encoder Input (standard)
Analog Input
Pulse Input
No Input
I/O Options
8 I/O (standard)
32 I/O
R/D Accuracy Options
8 ARC min (standard)
Motor and Wi nding
Specifies Motor Model Type, Winding
R/D Resolution
12-Bit (4096 counts /rev)
14-Bit (16384 counts /rev)
Most current f irmware supplied -- unless otherwise s pecified.
is not normally s pecified when ordering.)
4 0 - 0 0 0 1 0 \ 6 0 5 C - 2 - / ______
1-4
Page 25
BDS5 C
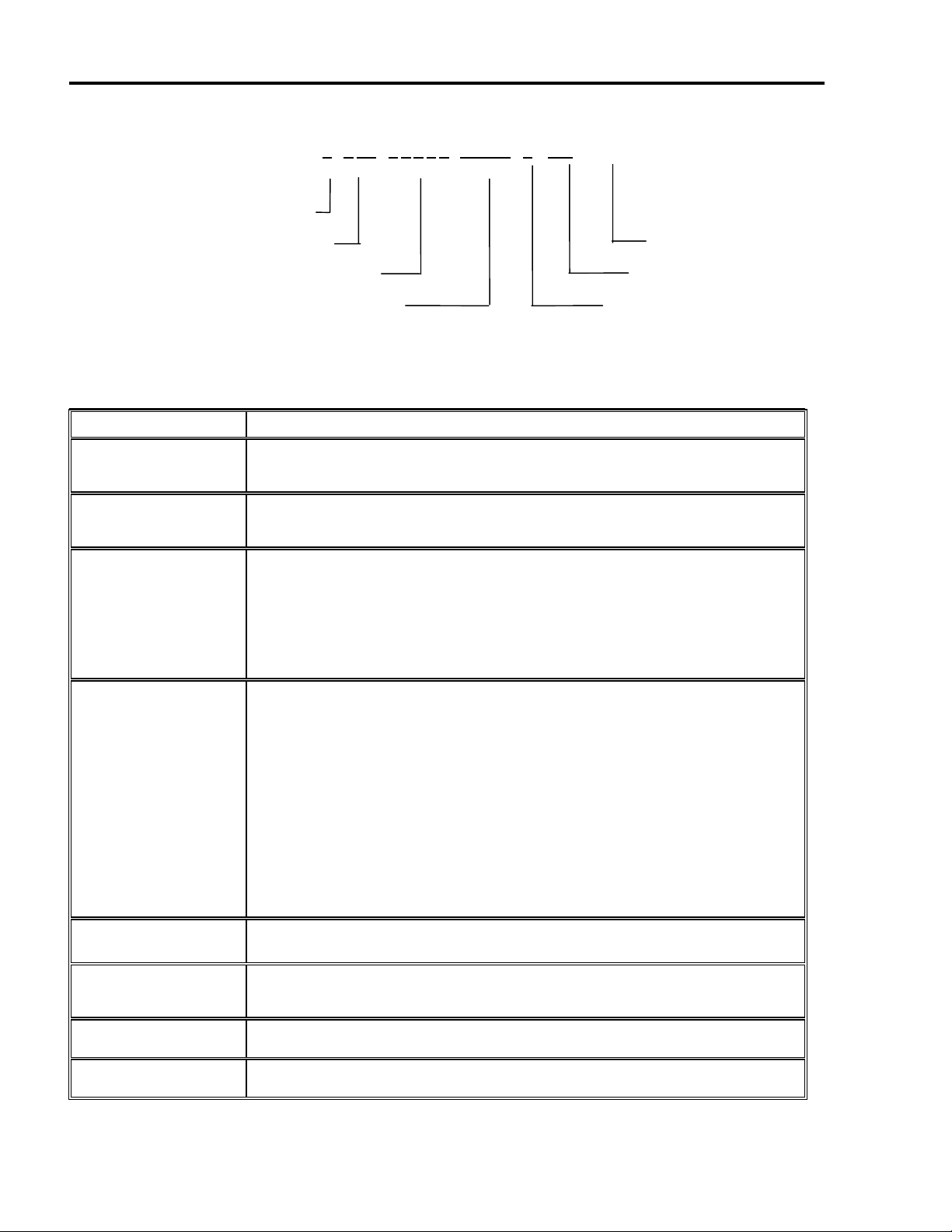
1.4.2 Compensation Module Model Number
/ 2 0 4 A
2 0 3
A B H
Voltage Rating Motor and Winding
Current Rating
Figure 1.2. Compensation Model Number Scheme
A partial model number is printed on a gold and black
tag on the front of the compensation module (the black
plastic box secured to the front of your BDS5 by two
screws). See Figure 1.2 for the descriptions of the
model number (that is, what ABB and HHHH mean).
The model number is as follows:
The compensation module depends on your motor and
the voltage and current rating of your BDS5. It is
important that the motor, the BDS5, and the
compensation module model numbers all agree. For
example, if your BDS5 model number is
CAUTION
HAPTER
YOU MUST HAVE THE
PROPER COMPENSATION
MODULE INSTALLED FOR
YOUR MOTOR AND BDS5.
THE COMPENSATION
MODULE CHANGES IF THE
AMPLIFIER RATINGS
CHANGE, EVEN FOR THE
SAME MOTOR.
YSTEM DESCRIPTION
1 - S
BDS5-203-00000\204A
then your compensation module model number must
be:
203/204A
and your motor must be a 204A. An example of a
204A motor model number is:
B-204-A
-1-101/2021,
,
-21.
Failure to install the proper
compensation module can
cause damage to the BDS5,
the motor, or both.
1-5
Page 26
HAPTER
C
YSTEM DESCRIPTION
1 - S
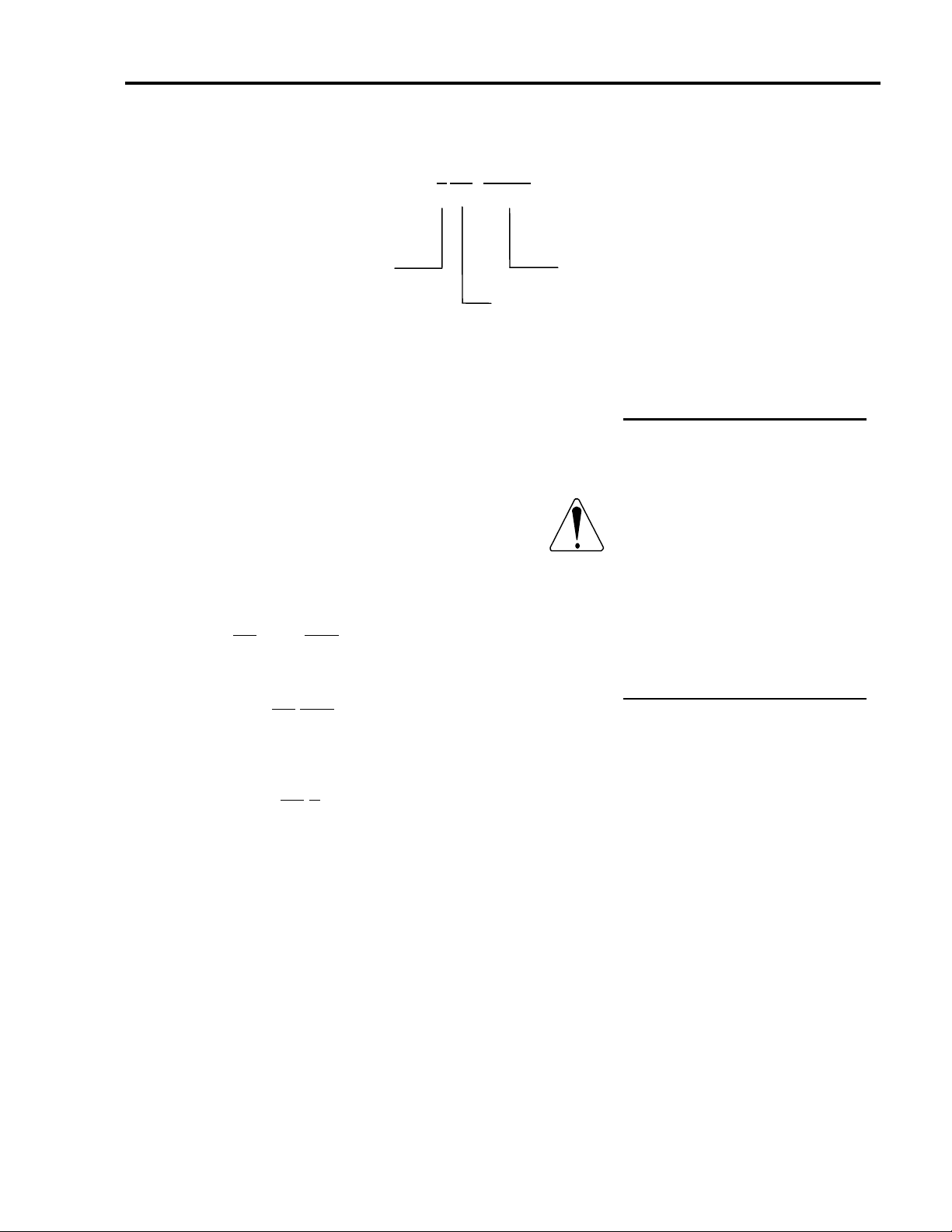
1.4.3 PSR4/5 Model Number
BDS5
P S R 4 / 5A - 2 2 0
A B C D E
UL Designator Options
Voltage Rating Current Rating
Figure 1.3. PSR4/5 Model Number Scheme
Table 1.2. PSR4/5 Model Number Scheme
- 0 0 0 3
LEGEND DEFINITIONS
A
A
V
B
1
2
C
12
20
50
75
UL Designator
UL Listed (standard)
Non - UL Listed
Voltage Rating
115 VAC
230 VAC
Current Rating
12 Amps/Phase
20 Amps/Phase
50 Amps/Phase
75 Amps/Phase
D
E
E
1-6
00
00
01
02
03
00
Mechanical Options
No Option (standard)
Electrical Regen Options for 12 and 20 Amp Models Only
Standard Internal 40 W Regen (standard)
External Regen (230 VAC Only) 8.8 Ohms, 400 W., Requires ER-01 Resistor
Kit
External Regen (115 VAC Only) 5.5 Ohms, 200 W., Requires ER-02 Resistor
Kit
External Regen (230 VAC Only) 5.8 Ohms, 700 W., Requires ER-03 Resistor
Kit
Electrical Regen Options for 50 and 75 Amp Models Only
No internal shunt regeneration (standard)
Requires external regeneration resistor kit ER-2X
Page 27
BDS5 C
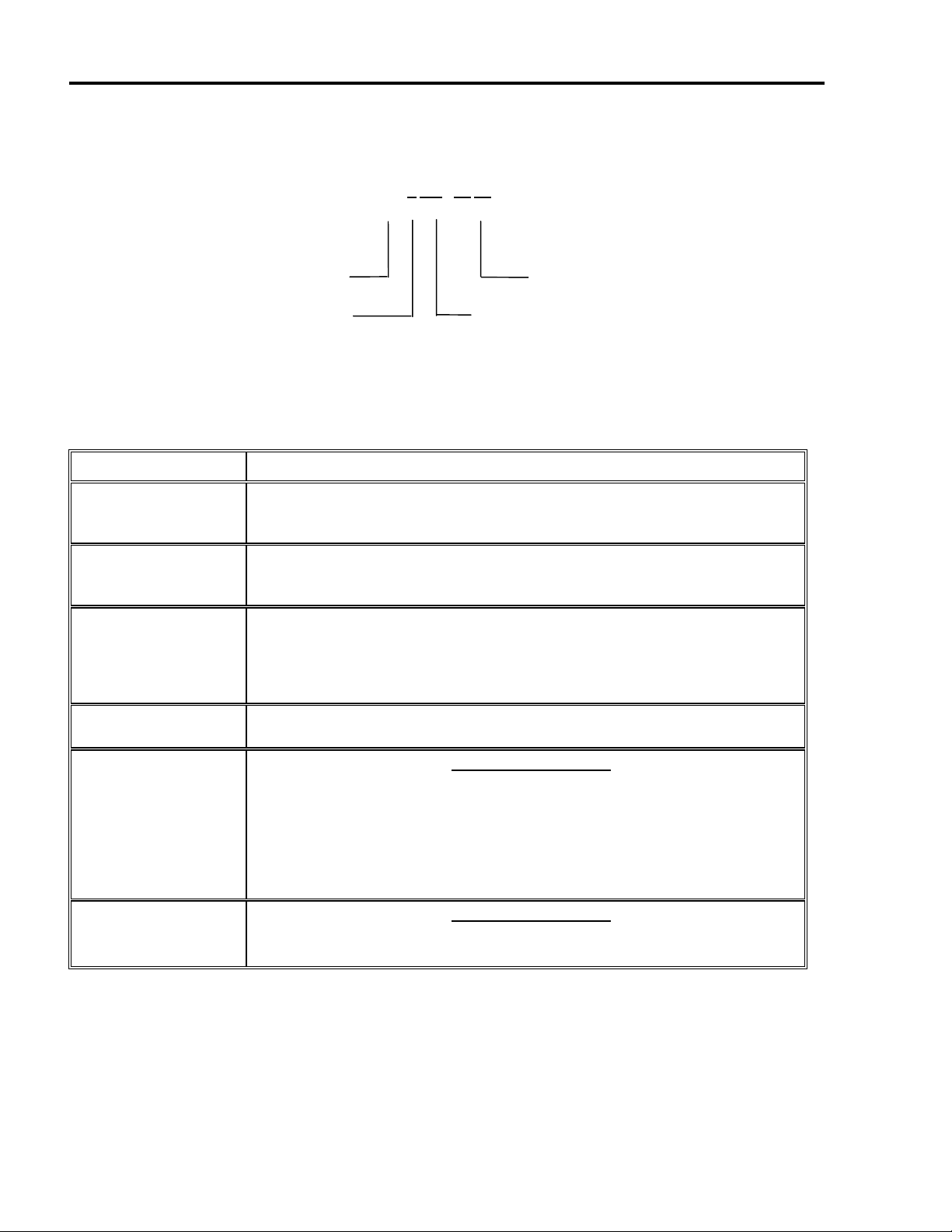
1.4.4 ER-External Resistor Kit Model Number
Contact Industrial Drives Application Engineering to size regeneration capability.
NOTE
E R - 0 1 / X X
A B
Resistor Rating Options
Figure 1.4. External Regen Resistor Model Number Scheme
HAPTER
YSTEM DESCRIPTION
1 - S
Table 1.3. External Regen Resistor Model Number Scheme
LEGEND DEFINITIONS
A
01
02
03
20
21
22
23
B
00
1.4.5 Molex Assembly Tools
GOLDLINE series electronics (BDS4's, BDS5's, and
PSR4/5's) use Molex MINI-FIT JR. series connectors.
The necessary connectors and pins are included in
your BDS5 and PSR4/5 connector kits.
Resistor Rating
8.8 Ohms, 400 W., 230V, 12 & 20 Amp Models Only
5.5 Ohms, 200 W., 115V, 12 & 20 Amp Models Only
5.8 Ohms, 700 W., 230V, 12 & 20 Amp Models Only
4.5 Ohms, 500 W., 230V, 50 & 75 Amp Models Only
4.4 Ohms, 1000 W., 230V, 50 & 75 Amp Models Only
2.2 Ohms, 1000 W., 230V, 75 Amp Models Only
2.2 Ohms, 2000 W., 230V, 75 Amp Models Only
Options
None available at this printing.
You can obtain the crimping and extraction tools from
your nearest Mo l ex distributor or by contacti ng Molex
at (708) 969-4550.
Hand Crimping Tool Molex Order# 11-01-0122
Extractor Tool Molex Order# 11-03-0038
1-7
Page 28
HAPTER
C
YSTEM DESCRIPTION
1 - S
BDS5
1.5 SPECIFICATIONS AND RATINGS
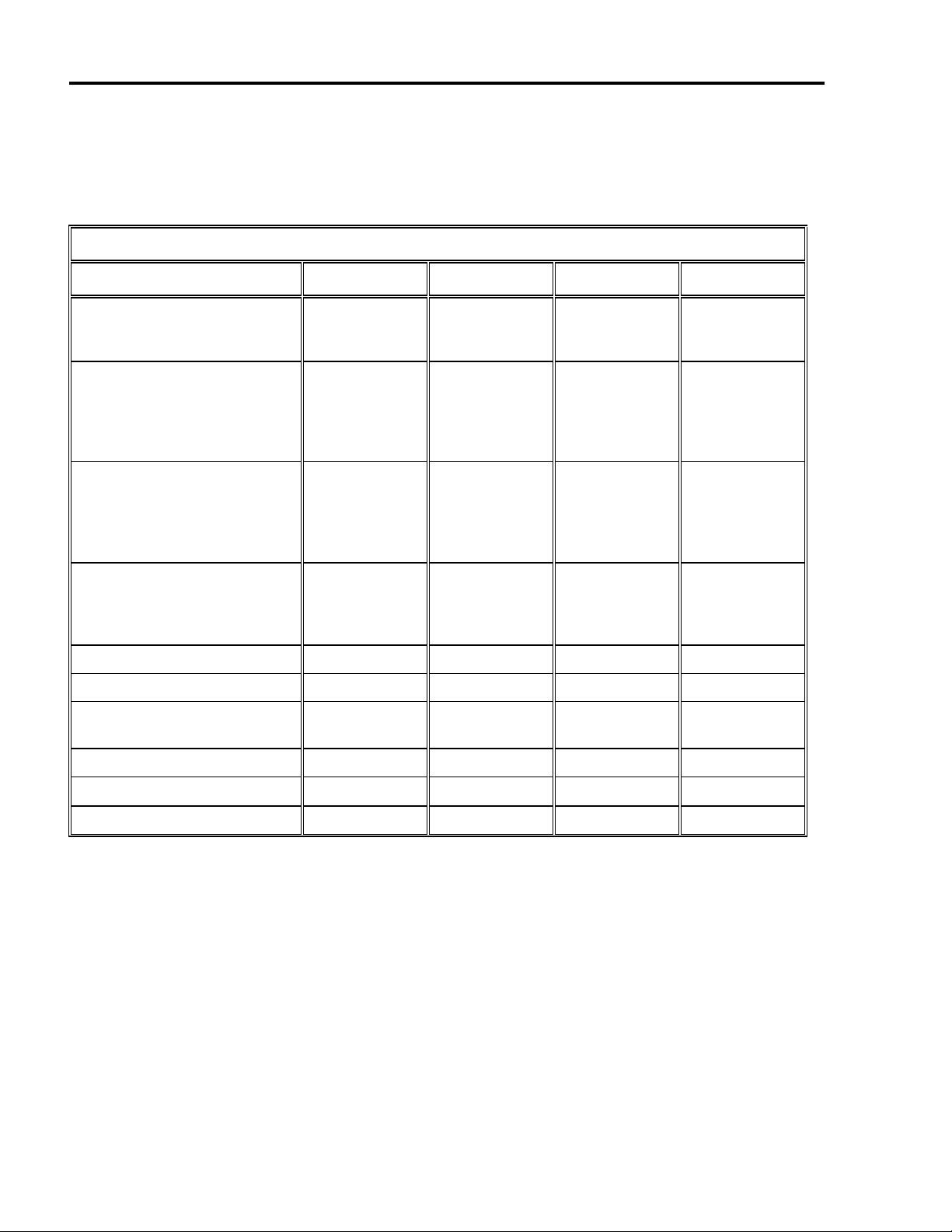
Table 1.4. Specifications
BDS5-1XX-(90-160 VAC L-L OUTPUT TO MOTOR)
DESCRIPTION BDS5-103 BDS5-106 BDS5-110 BDS5-120
Main DC Bus
Minimum
Maximum
130 VDC
225 VDC
130 VDC
225 VDC
130 VDC
225 VDC
130 VDC
225 VDC
±
15-20 VDC
@0.25 AMPS
Unregulated Logic Bus
+8-12 VDC
@1.00 AMPS
Output Current
(RMS/∅) Convection
Cooled (45°C AMB)
Continuous (RMS)
Peak (2.0 sec) (RMS)
Output KVA
(@ 160 VDC Bus)
Continuous (45°C AMB)
Peak (2.0 sec) (RMS)
Internal Heat Dissipation 30 WATTS 40 WATTS 60 WATTS 110 WATTS
PWM Switching Frequency 10.0 kHz 10.0 kHz 10.0 kHz 10.0 kHz
Motor Current Ripple
Frequency ±10%
Resolver Excitation Frequency 8.5 kHz 8.5 kHz 8.5 kHz 8.5 kHz
Form Factor RMS/AVG
Fan (115 VAC) N/A N/A N/A 0.2 AMPS
3.0 AMPS
6.0 AMPS
0.6 KVA
1.2 KVA
20.0 kHz 20.0 kHz 20.0 kHz 20.0 kHz
≤
1.01
±
15-20 VDC
@0.25 AMPS
+8-12 VDC
@1.00 AMPS
6.0 AMPS
12.0 AMPS
1.2 KVA
2.4 KVA
≤
1.01
±
15-20 VDC
@0.25 AMPS
+8-12 VDC
@1.00 AMPS
10.0 AMPS
20.0 AMPS
2.0 KVA
4.0 KVA
≤
1.01
±
15-20 VDC
@0.25 AMPS
+8-12 VDC
@1.00 AMPS
Fan
Cooled
20.0 AMPS
40.0 AMPS
4.0 KVA
8.0 KVA
≤
1.01
1-8
Page 29
BDS5 C
Table 1.4. Specifications (Cont.)
HAPTER
YSTEM DESCRIPTION
1 - S
BDS5-2XX-(160-253 VAC L-L OUTPUT TO MOTOR)
DESCRIPTION BDS5-203 BDS5-206 BDS5-210 BDS5-220
Main DC Bus
Minimum
Maximum
225 VDC
360 VDC
225 VDC
360 VDC
225 VDC
360 VDC
130 VDC
225 VDC
±
15-20 VDC
@0.25 AMPS
Unregulated Logic Bus
+8-12 VDC
@1.00 AMPS
Output Current
(RMS/∅) Convection
Cooled (45°C AMB)
Continuous (RMS)
Peak (2.0 sec) (RMS)
Output KVA
(@ 160 VDC Bus)
Continuous (45°C AMB)
Peak (2.0 sec) (RMS)
Internal Heat Dissipation 35 WATTS 50 WATTS 75 WATTS 150 WATTS
PWM Switching Frequency 10.0 kHz 10.0 kHz 10.0 kHz 10.0 kHz
Motor Current Ripple
Frequency ±10%
Resolver Excitation Frequency 8.5 kHz 8.5 kHz 8.5 kHz 8.5 kHz
Form Factor RMS/AVG
Fan (115 VAC) N/A N/A N/A 0.2 AMPS
3.0 AMPS
6.0 AMPS
1.2 KVA
2.4 KVA
20.0 kHz 20.0 kHz 20.0 kHz 20.0 kHz
≤
1.01
±
15-20 VDC
@0.25 AMPS
+8-12 VDC
@1.00 AMPS
6.0 AMPS
12.0 AMPS
2.0 KVA
4.0 KVA
≤
1.01
±
15-20 VDC
@0.25 AMPS
+8-12 VDC
@1.00 AMPS
10.0 AMPS
20.0 AMPS
4.0 KVA
8.0 KVA
≤
1.01
±
15-20 VDC
@0.25 AMPS
+8-12 VDC
@1.00 AMPS
20.0 AMPS
40.0 AMPS
8.0 KVA
16.0 KVA
≤
1.01
1-9
Page 30
HAPTER
C
YSTEM DESCRIPTION
1 - S
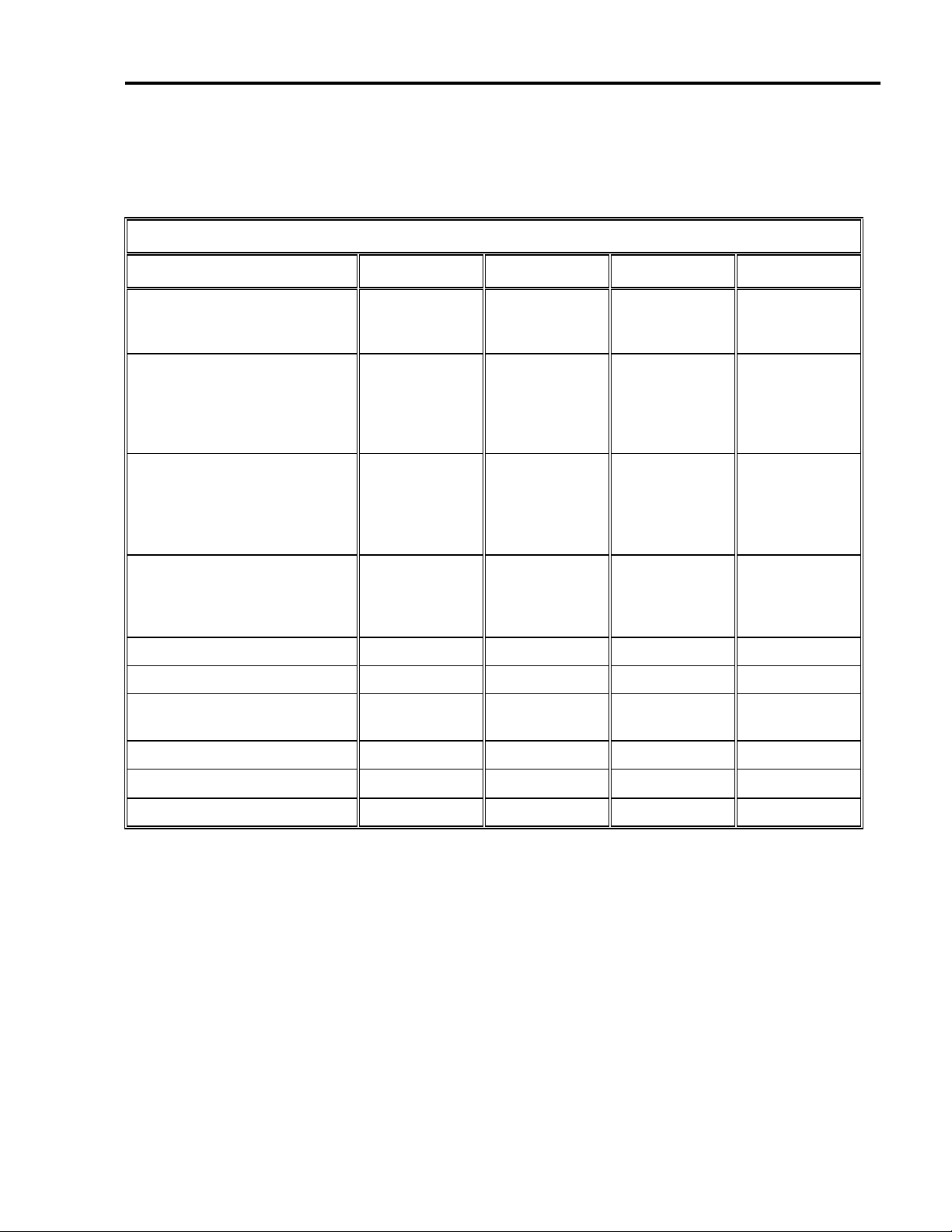
Table 1.4. Specifications (Cont.)
PSR4/5-1XX-(90 - 160 VAC L-L INPUT)
DESCRIPTION PSR4/5-112- PSR4/5-120-
Main AC Line Input Voltage 90-160 VAC 90-160 VAC
Phase 1-3 1-3
Frequency 47-63 Hz 47-63 Hz
BDS5
Current Cont. (RMS) 3-Phase
Single-Phase
Peak (2.0 sec) 3-Phase
Single-Phase
Peak (50.0 msec) 3-Phase
Single-Phase
Control AC Line Input Voltage 90-132 VAC 90-132 VAC
Phase 1 1
Frequency 47-63 Hz 47-63 Hz
Main DC Bus Output Voltage
(Nominal 115 VAC Input)
Current 115 VAC
Regeneration Shunt Resistor (Internal) 15 OHM 7.5 OHM
Shunt Regulator Current (PK) 15.3 AMPS 30.6 AMPS
Power Dissipation (Cont.) 40 WATTS 40 WATTS
Power Dissipation (PK) 3.5 KW 7.0 KW
Internal Heat Dissipation 120 WATTS 120 WATTS
Regeneration Shunt Resistor (External Min) 5.5 OHM 5.5 OHM
12.0 AMPS
10.0 AMPS
24.0 AMPS
20.0 AMPS
50.0 AMPS
42.0 AMPS
160 VDC
1.1 AMPS RMS
20.0 AMPS
16.0 AMPS
40.0 AMPS
32.0 AMPS
80.0 AMPS
64.0 AMPS
160 VDC
1.1 AMPS RMS
Shunt Regulator Current (PK) 41.8 AMPS 41.8 AMPS
Power Dissipation (Cont.) 200 WATTS 200 WATTS
Power Dissipation (PK.) 9.6 KW 9.6 KW
Soft-Start Surge Current (Max) 80 AMPS 80 AMPS
Charge Time (Max) 25 MSEC 25 MSEC
1-10
Page 31

BDS5 C
Table 1.4. Specifications (Cont.)
HAPTER
YSTEM DESCRIPTION
1 - S
PSR4/5-2XX-(160 - 253 VAC L-L INPUT)
DESCRIPTION PSR4/5-212- PSR4/5-220-
Main AC Line Input Voltage 160 - 253 VAC 160 - 253 VAC
Phase 1-3 1-3
Frequency 47-63 Hz 47-63 Hz
Current Cont. (RMS) 3 Phase
Single Phase
Peak (2.0 sec) 3 Phase
Single Phase
Peak (50.0 msec) 3 Phase
Single Phase
Control AC Line Input Voltage 90-132 VAC 90-132 VAC
Phase 1 1
Frequency 47-63 Hz 47-63 Hz
Main DC Bus Output Voltage
(Nominal 115 VAC Input)
Current 115 VAC
Regeneration Shunt Resistor (Internal) 25 OHM 12 OHM
Shunt Regulator Current (PK) 15 AMPS 30 AMPS
Power Dissipation (Cont.) 40 WATTS 40 WATTS
Power Dissipation (PK) 5.6 KW 11.2 KW
Internal Heat Dissipation 120 WATTS 150 WATTS
Regeneration Shunt Resistor (External Min) 8.8 OHM 8.8 OHM
12.0 AMPS
10.0 AMPS
24.0 AMPS
20.0 AMPS
50.0 AMPS
42.0 AMPS
325 VDC
1.1 AMPS RMS
20.0 AMPS
16.0 AMPS
40.0 AMPS
32.0 AMPS
80.0 AMPS
64.0 AMPS
325 VDC
1.1 AMPS RMS
Shunt Regulator Current (PK) 44.3 AMPS 44.3 AMPS
Power Dissipation (Cont.) 400 WATTS 400 WATTS
Power Dissipation (PK) 17.3 KW 17.3 KW
Soft Start Surge Current (Max) 150 AMPS 150 AMPS
Charge Time (Max) 25 MSEC 25 MSEC
1-11
Page 32

HAPTER
C
YSTEM DESCRIPTION
1 - S
BDS5
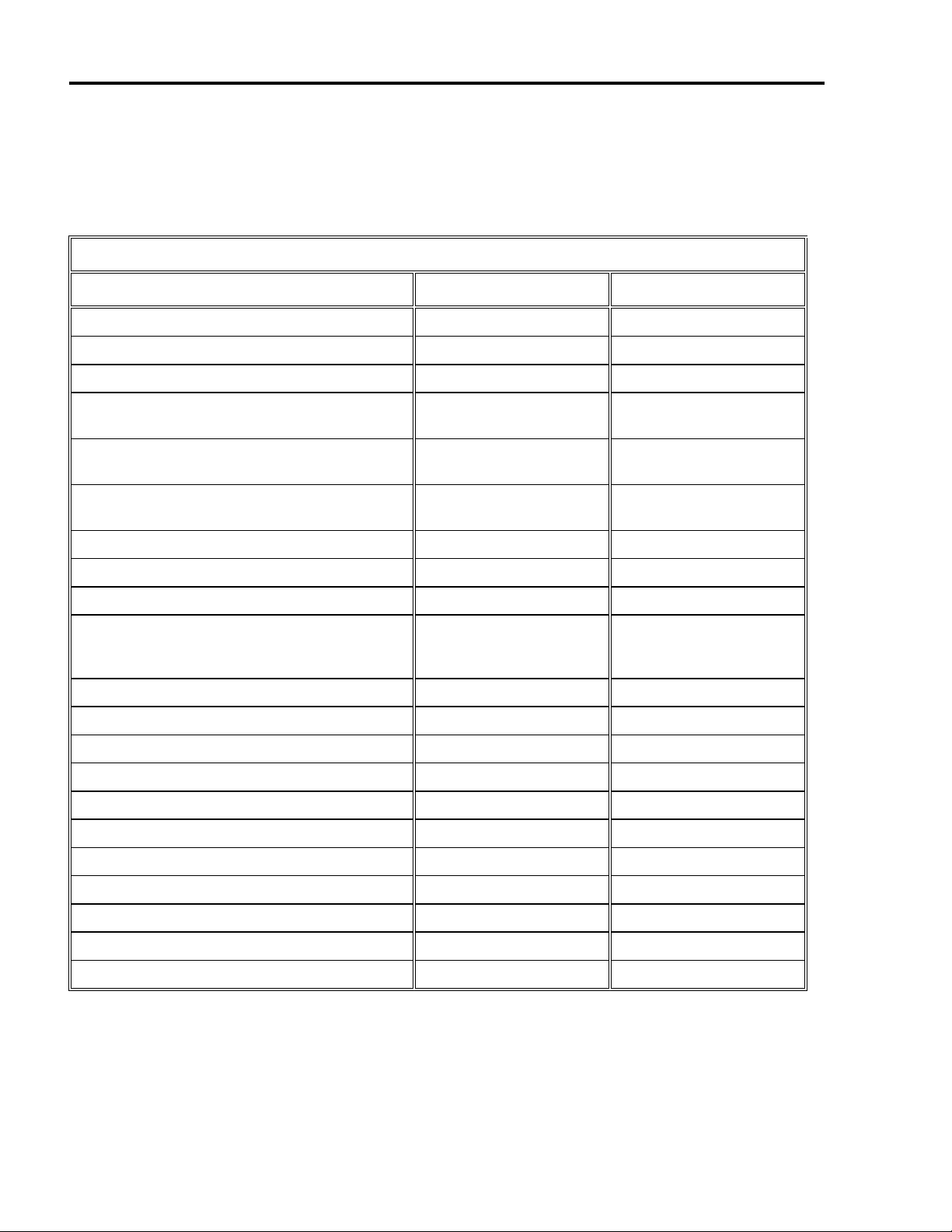
Table 1.5. Environmental Specifications
Operating Temperature*:
3, 6, & 10 AMP Units (Convection Cooled)
20 Amp Units (Internal Fan Cooled)
Storage Temperature -20o C to 70o C
Humidity (Non-Condensing) 10% to 90%
* For operation ambients above 45°C, consult the Applications Group at Industrial Drives.
Table 1.6. Mechanical Specifications
o
C to 45o C
0
o
C to 45o C
0
MODEL WIDTH HEIGHT DEPTH
NUMBER MM IN. MM IN. MM IN.
BDS5-X03- 56 2.20 340 13.49 280 11
BDS5-X06- 76 2.99 340 13.49 280 11
BDS5-X10- 98 3.86 340 13.49 280 11
BDS5-X20- 98 3.90 340 13.49 280 11
PSR4/5-
X12 & X20-
1.6 THEORY OF OPERATION
76 3.00 340 13.49 280 11
DISCRETE INPUTS
•
Drawing D-93030 shows a system overview.
MICROPROCESSOR SYSTEM
•
The BDS5 is a digital positioner and servo drive
combined into one unit. The velocity loop is 100%
digital. The BDS5 has battery backup RAM to
remember your p rogram and most variables through
power-down.
RESOLVER-TO-DIGITAL CONVERTER
•
The BDS5 is based on a Resolver-to-Digital (R/D)
converter. The R/D generates a tachometer signal for
your convenience. However, the BDS5 does not use
the analog tach signal.
SERIAL PORT
•
The BDS5 has a serial port for communications. This
port allows you to monitor the operation, issue
commands, and transmit a program.
The BDS5 has 23 discrete inputs, including REMOTE
ENABLE which is on Connector C2 only. Note that
two signals, HOME and CYCLE, can be input to the
BDS5 on two connectors, C2 and C7. Connector C2
provides these three signals with optical isolation.
Connector C7 expects non-isolated TTL signals on a
26-pin ribbon cable connector. Optional Connector
C8 expects non-isolated TTL signals on a 50-pin
ribbon cable connector.
DISCRETE OUTPUTS
•
The BDS5 has 10 discrete outputs. Notice that O1
appears both on Connector C2 with optical isolation
and on Connector C8.
ENCODER INPUT
•
The BDS5 accepts external inputs in encoder format.
This can come from a master motor in a master/slave
system. Note that you must use a resolver, even if you
use a feedback encoder with the BDS5.
1-12
Page 33

BDS5 C
HAPTER
YSTEM DESCRIPTION
1 - S
ENCODER EQUIVALENT OUTPUT
•
The BDS5 provides encoder format output derived
from the R/D converter.
ANALOG INPUT (O PT1 CARD)
•
As an option, the BDS5 can accept a ±10 volt analog
input. This input is converted to digital format by the
BDS5. Gain and offset adjustments are made digitally
inside the BDS5, not with potentiometers.
PULSE INPUT (OPT2 CARD)
•
The BDS5 can accept special pulse inputs. The
standard BDS5 can accept signals directly from
encoders or encoder-like devices. As an option, the
BDS5 can accept other pulse formats, such as
count/direction or up/down.
LED'S
•
The BDS5 provides LED's for diagnostics. These
LED's are on the front panel of the BDS5. The LED's
are listed below:
ACTIVE
SYS OK
CPU
FAULT
RELAY
CURRENT LOOP COMPENSATION
•
The BDS5 has analog current loops. The current loop
compensation components are all contained in the
compensation module located on the front of the
BDS5. The current loop compensation changes when
you change the motor model. You must install the
correct compensation module when changing motor
models.
YOU MUST HAVE THE
PROPER COMPENSATION
MODULE INSTALLED FOR
YOUR MOTOR
CAUTION
Failure to install the proper
compensation module can
cause damage to the BDS5,
the motor, or both.
1.7 SIMPLIFIED SCHEMATIC
DIAGRAM AND SYSTEM DIAGRAM
Drawings D-93030 and A-84847 illustrate a BDS5
servo system with all of the major components.
1-13
Page 34

HAPTER
C
24 VOLT DC
CUSTOMER
SUPPLIED
-
+
IN COMMON
YSTEM DESCRIPTION
1 - S
I/O DC
COMMON
REMOTE
HOME
CYCLE
HOME
CYCLE
LIMIT
MOTION
GATE
MANUAL
I1
I2
I3
I4
I5
I6
I7
I8
I9
I10
I11
I12
I13
I14
I15
I16
C2-PIN 5
C2-PIN 15
C2-PIN 9
C2-PIN 19
C2-PIN 8
C2-PIN 18
C7-PIN 9
C7-PIN 13
C7-PIN 11
C7-PIN 15
C7-PIN 17
C7 (EVEN PINS)
C7 STANDARD I/O
C8 (EVEN PINS)
C8-PIN 33
C8-PIN 31
C8-PIN 29
C8-PIN 27
C8-PIN 25
C8-PIN 23
C8-PIN 21
C8-PIN 19
C8-PIN 17
C8-PIN 15
C8-PIN 13
C8-PIN 11
C8-PIN 9
C8-PIN 7
C8-PIN 5
C8-PIN 3
C8-PIN 1
C8 OPTIONAL I/O
ALTERNATE POWER SOURCE
FOR REMOTE, HOME, AND
CYCLE ONLY !
OPTICAL
ISOLATOR
OPTICAL
ISOLATOR
OPTICAL
ISOLATOR
INPUT BUFFERS
AND PULL-UP
74HC14
INPUT BUFFERS
AND PULL-UP
74LS540
RS-232
RS-485
TXD
RXD
TD+
TD-
RD+
RD-
C5-PIN 3
C5-PIN 2
120 OHM
C5-PIN 6
C5-PIN 7
120 OHM
C5-PIN 8
C5-PIN 9
MICROCOMPUTER SYSTEM
MICROPROCESSOR
BATTERY
BACK-UP
RAM
3
J1
452
7
J1
8
ROM
BDS5
1
1K
6 1K
+5
1-14
DIFF CMD HI
DIFF CMD LO
IN A
IN A
IN B
IN B
C2-PIN 11
C2-PIN 1
C1-PIN 5
C1-PIN 10
C1-PIN 4
C1-PIN 9
ANALOG
TO PULSE
CONVERTER
OPTIONAL
SN75175
SN75175
CH A
CH B
ENCODER
TO
DIGITAL
BDS5 SYSTEM OVERVIEW
Page 35

BDS5 C
75155
75156
75156
RD TD
HARDWARE
WATCHDOG
HAPTER
24 VOLT
OPTICAL
ISOLATOR
1 - S
"RELAY"
( N. O. )
YSTEM DESCRIPTION
"ACTIVE"
LED
"SYS OK"
LED
"CPU"
LED
"FAULT"
LED
"RELAY"
LED
C2-PIN 17
C2-PIN 16
C2-PIN 10
C2-PIN 20
RELAY
01 HI
01 LO
ISSUE
D-93030
SHULER
2
12-17-92
COPY CODEI
8
9
7
5
6
4
2
3
1
COMPENSATION
CARD
PIN 10
PIN 5
PIN 9
PIN 4
PIN 8
PIN 3
RESOLVER
TO
DIGITAL
CONVERTER
A-PHASE
CURRENT
LOOP
B-PHASE
CURRENT
LOOP
C-PHASE
CURRENT
LOOP
C3-PIN 4
C3-PIN 10
C3-PIN 1
C3-PIN 9
C3-PIN 3
BUS +
REF HI
REF LO
SIN HIC3-PIN 7
SIN LO
COS HI
COS LO
PWM
POWER
STAGE
BUS -
ABSOLUTE
VALUE
CIRCUIT
CURRENT
SAMPLE
CURRENT
SAMPLE
CURRENT
SAMPLE
TACH SCALING = 1000 RPM/V
DIGITAL
TO
ENCODER
OUTPUT BUFFERS
5 VOLTS = FULL SCALE
CH A
CH B
CH Z
WITH OPEN
COLLECTORS
ULN2803A
Ma
Mb
Mc
GND
1.0K
4700pf
75174
75174
75174
3.01K
C8 OPTIONAL I/O
C7 STANDARD I/O
MOTOR
RESOLVER
C2-PIN 2
C2-PIN 12
C1-PIN 1
C1-PIN 6
C1-PIN 2
C1-PIN 7
C1-PIN 3
C1-PIN 8
C8-PIN 35
C8-PIN 47
C8-PIN 45
C8-PIN 43
C8-PIN 41
C8-PIN 39
C8-PIN 37
C7-PIN 21
C7-PIN 19
C7-PIN 23
C2-PIN 4
C2-PIN 14
STATUS
01
02
03
04
05
06
07
08
CYCLE
READY
I MONITOR
COMMON
TACH
MONITOR
COMMON
OUT A
OUT A
OUT B
OUT B
OUT Z
OUT Z
1-15
Page 36

HAPTER
C
YSTEM DESCRIPTION
1 - S
BDS5
4
ISSUE
MASTER
ENCODER
A-84847
TERMINAL
OR
PC COMPATIBLE
ACTIVE
SYS OK
FAULT
RELAY
MODEL No
SERIAL No
BUS+
BUS-
CPU
T
1
J1
Ma
Mb
Mc
MODEL No.
REV No.
C5
INDUSTRIAL
DRIVES
GND
C1
C2
C3
C4
BDS5
EXTERNAL REGEN RESISTOR
D.C. BUS
REGEN
OVERLOAD
BLOWN FUSE
C1
MODEL No
C2
SERIAL No
INDUSTRIAL
DRIVES
PSR
BUS+
BUS-
La
Lb
Lc
GND
CUSTOMER I/O
(OPTO-22 COMPATIBLE)
CYCLE READY
O7
O8
GATE
MOTION
CYCLE
LIMIT
HOME
STATUS
MANUAL
115 VAC,
1 PHASE
O1
O2
O3
O4
O5
O6
I1
I2
I3
I4
I5
I6
I7
I8
I9
I10
I1
I2
I3
I4
I5
I6
4
ISSUE
A-84847
R. FURR
1-14-91
1-16
230 VAC,
3 PHASE
OR
115 VAC,
1 PHASE
GOLDLINE
MOTOR
TYPICAL BDS5 SYSTEM INTERCONNECT
COPY CODE
I
Page 37

BDS5 C
HAPTER
C
NSTALLATION
I
2.1 INTRODUCTION
2
HAPTER
NSTALLATION
2 - I
The information in this chapter will familiarize you
with safety information, unpacking and inspection,
installation requirements, mounting procedures and
wiring for installing the BDS5, PSR4/5 and/or
External Regen Resistors. Read the entire chapter
carefully. The chapter contains an extensive checkout
procedure because most installation problems are
caused by incorrect wiring or poor wiring practices.
Complete the entire checkout procedure before
attempting to put your BDS5 system into operation.
2.2 SAFETY INFORMATION
The purpose of this section is to alert you to possible
safety hazards associated with this equipment and the
precautions you can take to reduce the risk of personal
injury and damage to the equipment.
Safety notices in this manual provide important
information. Read and be familiar with these
instructions before attempting installation, operation,
or maintenance. Failure to observe these precautions
could result in serious bodily injury, damage to the
equipment, or operational difficulty.
WARNING
Figure 2.1. Safety-Alert Symbols
The safety-alert symbols are illustrated in Figure 2.1.
When you see these symbols in this manual, be alert to
the potential for personal injury. Follow the
recommended precautions and safe operating practices
included with the alert symbols.
"
Warning
to potential danger or harm. Failure to follow warning
notices could result in personal injury or death.
"
Caution
which if not followed, could result in personal injury
and/or equipment damage.
"
Note
understanding or use of these products.
" refers to personal safety. They alert you
" directs attention to general precautions,
" highlights information critical to your
CAUTION
NOTE
2-1
Page 38

HAPTER
C
NSTALLATION
2 - I
BDS5
2.3 UNPACKING AND INSPECTION
Electronic components in
this amplifier are static
sensitive. Use proper
CAUTION
Upon receipt of the equipment, closely inspect
components to ensure that no damage has occurred in
shipment. If damage is detected, notify the carrier
immediately.
Carefully remove packing material and remove the
equipment from the shi pping container. Do not
dispose of shipping materials until the packing list has
been checked. Parts that are contained within the
shipment, but not physically attached to the
equipment, should be verified against the packing list.
If any parts are missing, notify Industrial Drives at
once.
procedures when handling
component boards.
2.4 INSTALLATION REQUIREMENTS
from physical and environmental damage. Refer to
specifications for complete system dimensions.
Allow sufficient clearance for
the large "regenerative" heat
producing resistor(s)
mounted at the upper edge
CAUTION
of the PSR4/5 unit and the
externally mounted regen
(shunt regulator) power
resistor(s).
2.5 MOUNTING
The BDS5 and PSR4/5 should be mounted in a cabinet
or other suitable enclosure to protect them from
physical and environmental damage.
The PSR4/5 and the BDS5 are provided with
protective guards over the power terminal blocks.
After wiring is complete, ALWAYS REPLACE THE
PROTECTIVE GUARDS TO REDUCE SHOCK
HAZARD.
Proper installation and field wiring are of prime
importance when considering the application of servo
amplifiers. Many problems may be avoided if
installation of the equipment is done properly. Users
should familiarize themselves with and follow
installation and wiring instruction in addition to all
applicable codes, laws, and standards. Pay special
attention to the following topics when installing
Industrial Drives' equipment.
2.4.1 Environmental Considerations
The environment that this equipment is placed in can
have dramatic effects on its operation. Industrial
Drives recommends that the BDS5 and PSR4/5 be
operated and stored under the following conditions:
Operating Temperature: 0° C to 45° C
•
Storage Temperature: -20° C to 70° C
•
Humidity: 10% to 90% (Non Condensing)
•
2.4.2 Enclosures
It is suggested that the BDS5 and PSR4/ 5 be mounted
in a cabinet or other suitable enclosure to protect them
REPLACE THE POWER
TERMINAL GUARDS AFTER
WARNING
WIRING THE SYSTEM!
2.5.1 Mounting the BDS5
Refer to drawing A-93703 in Appendix B for
mounting dimensions. The BDS5 and PSR4/5 should
be mounted in the vertical position. Since these units
are convection cooled, there should be a minimum of
25 millimeters (1 inch) of unobstructed space above
and below the units. In addition, there should be a
minimum of 20 millimeters (0.8 inch) between units to
ensure proper airflow for these convection-cooled
units.
2.5.2 Mounting the PSR4/5
The PSR4/5 Power Supply module may be mounted
on either side of the BDS5. However, a 20 millimeter
(0.8 inch) space is required between units.
Some PSR4/5's have resistors which dissipa te the
energy returned to the PSR4/5 during regenerative
braking. These are referred to as regen resistors.
Some applications require externally mounted regen
2-2
Page 39

BDS5 C
HAPTER
NSTALLATION
2 - I
resistors, while others may require none at all. To
determine if your PSR4/5 has internal regen resistors,
check its model number.
REGEN RESISTORS GET
HOT!
If your PSR4/5 has internal
CAUTION
NOTE
Refer to appropriate outline and dimension drawings
in Appendix B for more information:
A-93569BDS5 3 and 6 Amp Unit
A-93571BDS5 10 Amp Unit
A-93570BDS5 20 Amp Unit
A-93880BDS5 30 and 40 Amp Unit
A-93010BDS5 55 Amp Unit
A-93581PSR4/5 12 and 20 Amp Unit
A-93031PSR4/5 50 and 75 Amp Unit
regen resistors, allow
sufficient clearance above the
PSR4/5.
Refer to Drawing A-93703 for
more information concerning
mounting.
2.5.3 Mounting the External Regen Resistor
External mounting of regen resistors is an option on
PSR4/5's. To determine if your unit uses external
regen resistors, check its model number. Also, the
model number indicates the standard resistor value.
These resistors should be enclosed to reduce shock
hazard. Regen resistors get hot! They are a burn
hazard and they are a fire hazard. They can produce
enough heat to melt insulation. Enclos e these
resistors! The enclosure must provide ventilation and
withstand high temperatures. Do not mount the
resistors underneath the BDS5 or PSR4/5.
EXTERNAL REGEN
RESISTORS ARE A SHOCK
HAZARD!
Mount these resistors
WARNING
CAUTION
properly! Enclose these
resistors to protect personnel
and equipment!
EXTERNAL REGEN
RESISTORS GET HOT!
If you are using external regen
resistors, allow sufficient
clearance around the
resistors. Enclosures must
provide ventilation.
2.6 WIRING
The customer is responsible for providing proper
circuit breaker or fuse protection. The customer is
responsible for providing proper wire gauge and
insulation rating for all wiring, including motor, AC
line, DC bus, and External Regen Resistor
connections. The customer is responsible for making
sure that all system wiring and electrical protection
comply with all applicable national and local electric
codes.
Drawing A-93103 is the System Wiring Diagram. It is
a seven-sheet drawing. Carefully read all of Drawing
A-93103 before wiring your BDS5 system, including
all of the notes on the last sheet. Refer to BDS5
Connectors Diagram A-96372M, provided at the end
of this chapter, for connector locations.
Carefully read all seven
sheets of Drawing A-93103
before wiring your BDS5
WARNING
system, including ALL of the
notes on the last sheet.
When wiring your BDS5 system, obse rve the
following guidelines:
1. Twist all AC leads to minimize electromagnetic
emissions (noise).
2-3
Page 40

HAPTER
C
NSTALLATION
2 - I
BDS5
2. Avoid running signal l eads in close proximity to
power leads, motor stator leads, or other sources
of electromagnetic noise. Run signal leads in
separate conduit from power leads. Shields are
recommended for signal leads.
3. Minimize lead lengths.
4. Connect the BDS5 system according to the
System Wiring Diagram, A-93103; pay close
attention to the grounding scheme and notes.
2.6.1 Wiring the Ground
Ground terminals are provided on the front of BDS4's,
BDS5's, and PSR4/5's. These ground screws are
directly below the Power Terminal Block of each unit.
To prevent shock hazard and to ensure proper
operation of the system, the BDS5, PSR4/5, and the
motor must be grounded. Each BDS5 and PSR4/5 has
two ground screws on the front of its chassis.
GROUND YOUR BDS5,
PSR4/5, and motor
PROPERLY! Failure to
WARNING
One of the ground screws on the PSR4/5 should be
connected to Earth Ground or Machine Ground. The
other should be connected to the adjacent BDS5
ground screw, along with the ground wire fro m the
motor. The ot her ground screw on the B DS5 chassis
should then be connected to the next BDS5, etc. Use
10 AWG or larger wire for grounding between BDS5's
and PSR4/5's and from PSR4/5 to Earth Ground or
Machine Ground.
provide proper grounding can
result in a shock hazard.
2.6.2 Wiring the Power Connections
This section discusses how to wire the PSR4/5 and
BDS5 power connections.
To prevent equipment
damage, the AC Line and the
DC bus must be connected as
CAUTION
indicated by the System
Wiring Diagram, A-93103.
for operation from either a 115 volt or a 230 volt AC
Line. The PSR4/5 and the BDS5 must both have the
same voltage rating. Operating a PSR4/5 or a BDS5
with incorrect voltage can damage the units.
Use the proper AC Line
voltage. PSR4/5's and BDS5's
are configured at the factory
for 115 volt or 230 volt AC
Line voltage. See the model
CAUTION
number description at the
beginning of this chapter to
determine the required
voltage for your PSR4/5 and
BDS5.
2.6.2.1 Wiring the Motor
Connect Pins A, B, and C of the motor connector
through a motor cable to Ma, Mb, and Mc,
respectively, on the Power Terminal Block located on
the front of the BDS5 amplifier. Connect Pin D of the
motor connector through the same motor cable to the
BDS5 chassis ground screw located directly beneath
the Power Terminal Block.
IT IS VERY IMPORTANT THAT YOU WIRE THE
MOTOR PROPERLY. Brushless permanent magnet
motors are not like induction motors. You cannot
simply interchange two phases to reverse the direction
of rotation.
Standard Industrial Drives motor cable has the color
code as shown in Table 2.1.
Table 2.1. Motor Cable Color Code
Motor
Connector
Pin A M
Pin B M
Pin C M
WARNING
Incorrect motor wiring can
cause erratic or runaway
motor operation. Use of
factory supplied cable sets is
highly recommended.
Wire
Marker
a
b
c
BDS5 Power
Terminal
Terminal M
Terminal M
Terminal M
a
b
c
The PSR4/5 and BDS5 are configured at the factory
2-4
Page 41

BDS5 C
HAPTER
NSTALLATION
2 - I
2.6.2.2 Motor Protection
Under normal conditions, you do not need to add
protection for your motor; the BDS5 is normally
configured to limit the continuous current below the
rating of the motor. However, if the drive is oversized
(that is, it can provide continuous current that greatly
exceeds the motor's continuous current rating), you
may want to add motor overload relays in series with
the motor. Also, you can wire a contactor in series
with the motor leads. ALWAYS BE CAREFUL TO
WIRE THE MOTOR PROPERLY.
2.6.2.3 Motor Thermostat
Industrial Drives brushless motors have a thermostat.
The thermostat contacts are closed during normal
operation and open when the motor overheats. The
BDS5 does not provide a direct input for the motor
thermostat. You should connect the thermostat
contacts to a BDS5 general purpose input, and
program your BDS5 to bring about an orderly
shutdown when the thermostat opens. The thermostat
ratings are:
Rated Voltage: 277 VAC at 60 Hz
250 VAC at 50 Hz
WARNING
NOTE
LATCH THE MOTO R
THERMOSTAT!
DO NOT CONNECT THE
THERMOSTAT DIRECTLY TO
THE BDS5 REMOTE ENABLE
OR LIMIT INPUTS.
The motor thermostat resets
(closes) when the motor
cools. This can allow the
motor to restart operation
unexpectedly after a motor
thermostat fault unless the
thermostat is latched. Always
latch the thermostat.
B series (GOLDLINE) motors
have the thermostat wired to
the resolver connector at the
motor.
BR series motors have the
thermostat wired to the power
connector at the motor.
Rated Current: 2.5 Amps at power factor of 1.0
1.6 Amps at power factor of 0.6
Resistance: 50 m Ohms
The thermostat resets (closes) when the motor cools.
The customer is responsible for making sure that the
motor does no t begin moving unexpecte dly when the
thermostat closes. Do not connect the thermostat
directly in line with the BDS5 REMOTE ENABLE or
LIMIT inputs, as this may allow the system to begin
operatio n unexpectedly. Yo u must la tch the
thermostat switch, either in hardware or software. IT
CAN TAKE SEVERAL MINUTES FOR THE
MOTOR TO COOL ENOUGH TO ALLOW THE
THERMOSTAT TO CLOSE. UNEXPECTE D
OPERATION SEVERAL MINUTES AFTER A
FAULT IS A SAFETY HAZARD!
Some electrical noise from the motor leads will couple
capacitively with the thermostat leads. This
occasionally causes false thermostat trips. That is,
your controller senses that the thermostat opened even
though the thermostat contacts were closed . If this
occurs you can use the thermostat contacts to energize
a relay and then connect the relay contacts to your
controller. The electrical noise does not normally
cause relay contacts to open.
2.6.2.4 Motor Brake
Fail safe brakes are an option with INDUSTRIAL
DRIVES motors. With GOLDLINE motors, the brake
connections are available as blue flying leads on the
resolver cable. They are available in more than one
voltage rating, so check the model number of your
motor carefully to determine the voltage and current
required by the brake on your motor. Normally, you
should control the brake with the STATUS input
discussed in Chapter 4.
2-5
Page 42

HAPTER
C
NSTALLATION
2 - I
BDS5
2.6.2.5 Wiring the DC Bus
Connect the DC Bus from the PSR4/5 Power Terminal
Block (BUS+, BUS-) to the BDS5 Power Terminal
Block (BUS+, BUS-). You must observe polarity of
DC Bus connections: always connect BUS+ to BUS+
and connect BUS- to BUS-. For the PSR4/5-12 and 20, the DC Bus can be connected to any combination
of 3 BDS4's or BDS5's (for example, 2 BDS5's and 1
BDS4). The PSR4/5-50 and -75 can be connected to
any combination of 6 BD S4's or BDS5's, altho ugh no
more than 3 units can be on one side of the PSR4/5.
Refer to Note 8 on A-93103.
Failure to observe polarity of
the DC Bus can result in
WARNING
CAUTION
personal injury.
Failure to observe the polarity
of the DC Bus will result in
damage to the PSR4/5 and
BDS5.
2.6.2.6 Wiring the AC Line
Connect the three-phase AC Line to La, Lb, and Lc on
the Power Terminal Block located on the front of the
PSR4/5 unit.
2.6.3 Wiring the PSR4/5 Front Panel Connectors
This section will discuss wiring of the PSR4/5 front
panel connectors, C1 and C2. The mating connectors
for C1 and C2 are supplied with the PSR4/5.
2.6.3.1 Wiring the Control Power to C1
The Control Power for the PSR4/5 is 115 VAC.
Connect the Control Power to Connector C1 of the
PSR4/5. Connect one 115 VAC line to Pin 2 and the
other to Pin 3. Other 115 VAC connections (such as
fans on 20 Amp BDS4's and BDS5's) can be made
from Connector C1 Pin 5 (one side of the 115 VAC
line) and Pin 6 (the other side). See Drawing A-93103
for more information.
2.6.3.2 Wiring to the PSR4/5 Fault Output on C1
The PSR4/5 Fault Output Contact closes
approximately 250 milliseconds after power is applied
to the PSR4/5. This contact opens if a fault occurs in
the PSR4/5. This is a relay contact from Pin 1 to Pin 4
of Connector C1. You can connect this contact to
your controller or to a BDS4/5 remote inhibit. You
should inhibit the entire system if a PSR4/5 fault
occurs! See Note 2 of A-93103.
The PSR4/5 will work with a single-phase AC Line.
Depending on the PSR4/5 model number, either 110
VAC or 220 VAC single-phase input lines may be
connected to any two terminals, La, Lb, or Lc. Note
that the PSR4/5 must be derated for single-phase AC
Line operation. A 12-Amp PSR4/5 with a singlephase AC Line can only provide 10 Amps; a 20-Amp
PSR4/5 with a single-phase AC line can only provide
16 Amps.
The PSR4/5 must be derated
when operated from a single-
CAUTION
phase AC Line.
2.6.2.7 Wiring the Regen Resistor
If an external regen resistor is used, wire it to the
External Regen Resistor Co nnector on the PSR4/5.
Note that you must specify that you need an external
regen resistor when ordering your PSR4 / 5 as this is an
option. Refer to Notes 3 and 11 on System Wiring
Diagram A-93103.
The ratings of this relay are:
2 amps at 28 Volts DC, resistive.
1 amp at 120 Volts AC, resistive.
INHIBIT YOUR SYSTEM IF A
PSR4/5 FAULT OCCURS!
YOU MUST WIRE YOUR
CAUTION
SYSTEM FOR THIS
FUNCTION!
2.6.3.3 Wiring PSR4/5 Connector C2
Connector C2 is the Logic Power Supply for the
BDS5. Wire the Logic Power Supply from Connector
C2 on the PSR4/5 to Connector C4 of the BDS5.
Each logic power supply voltage is connected to two
pins so that you can wire from the PSR4/5 to the
nearest BDS4 or BDS5. For example, +18 volts
appears side by side on Pins 1 and 5. Note that the
PSR4/5 12 and 20 amp models can have a maximum
of three units (axis) connected, while the 50 and 75
2-6
Page 43

BDS5 C
HAPTER
NSTALLATION
2 - I
amp models made have six units connected. Table 2.2
lists the ratings of the PSR4/5 logic power supplies.
Table 2.2. PSR4/5 Logic Power
CURRENT
VOLTAGE
+ 18 VDC ±20%
- 18 VDC ±20%
COMMON --- 3, 7 3, 7
+ 10 VDC ±20%
LOGIC POWER SUPPLY MAXIMUM RATINGS
(PER
AXIS)
0.25 AMP 1, 5 1, 5
0.25 AMP 2, 6 2, 6
1 AMP 4, 8 4, 8
BDS5
Connector
C4 PIN
PSR4/5
Connector
C2 PIN
Failure to observe the polarity
of the logic power supply will
result in damage to the
CAUTION
PSR4/5 and BDS5
Connecting more than a total
of three units (either BDS4's
or BDS5's) to one PSR4/5 (12
CAUTION
& 20 amp models) can
damage the PSR4/5.
2.6.4 Wiring the BDS5 Front Panel Connectors
This section will discuss wiring of the BDS5 front
panel connectors: C1, C2, C3, C4, C5, and C6 (C6 is
on 20 Amp units only). Mating connectors for C1-C6
are supplied with the BDS5.
2.6.4.1 Wiring C1, Encoder Equivalent
The Encoder Equivalent Connector connects encoder
inputs and encoder equivalent outputs. The BDS5
uses standard encoder format (A-B quadrature). This
format has excellent noise immunity because only one
channel changes at a time. As an option, pulse inputs
in different formats are also supported.
The Encod er Equivalent Connector is used for
master/slave systems. If your BDS5 is the slave axis,
then connect the output from the master to INA and
INB. If your BDS5 is the master axis, connect OUTA,
OUTB, and OUTZ to the inputs on the slave axies.
See Figure 2.2 and/or Drawing A-93103 for
connection diagrams.
All encoder signals are differential (as opposed to
single-ended) to increase noise immunity. This means
that each signal is transmitted with its logical inverse
(for example, OUTA and OUTA'). Logical inverse
means that if OUTA is 5 volts, then OUTA' is 0 volts
and that if OUTA is 0 volts, then OUTA' is 5 volts.
(Note that Drawing A-93103 shows the inverse of
OUTA as OUTA with a bar drawn directly above it;
here, the inverse of OUTA will be designated OUTA'.)
The encoder equivalent inputs and outputs conform to
RS-485. One standard RS-485 output can drive up to
32 standard RS-485 inputs, provided that the
interconnecting cable's capacitance is small enough.
Capacitance increases with cable length, which implies
that the transmitter (OUT's) and receivers (IN's)
should be as close to each other as is practical.
You should use 120 ohm cable. For longer distances
(over a 100 feet), consider using reduced capacitance
cables such as those available from Black Box
(Pittsburgh, PA). The cable should be run from point
to point, as opposed to branching out from a single
point. Branches could cause reflections (a
transmission line effect) that can interfere with the
signals. If the cable is very long, ringing (also a
transmission line effect) may occur. If this happens,
you should connect a 120 ohm resistor across each
signal and its logical inverse at both ends of the cable.
The Encoder Equivalent Connector uses RS-485
compatible 75174 line drivers and 75175 line
receivers, which are available from many IC
manufacturers, including Texas Instruments.
2-7
Page 44

HAPTER
C
NSTALLATION
2 - I
THE COMMONS OF MASTER/SLAVE BDS5's MUST
BE CONNECTED. THIS IS ACCOMPLISHED
THROUGH CONNECTOR C4 IF THE BDS5's
SHARE ONE PSR4/5.
OUT A
OUT B
OUT Z
CONNECTOR C1
1
7 6 2
8
3
9
4
10
5
IN B (OPTIONAL)
IN A (OPTIONAL)
OUT A
OUT B
OUT Z
CONNECTOR C1
6
1
7
2
8
3
4
10 9 5
SLAVE BDS5
IN B (OPTIONAL)
(SEE NOTE 13,
LAST SHEET)
IN A (OPTIONAL)
BDS5
MASTER BDS5
NOTE 13 - IF THE BDS5 USES THE OPTIONAL ANALOG INPUT CARD (BDS5 - OPT1), THE OPTIONAL ENCODER INPUTS
IN CONNECTOR C1 ARE NOT USED.
REFERENCE TO NOTE 13 LAST SHEET STATES,
WIRE THROUGH AN OPTO-22
STYLE DC INPUT MODULE TO
CONNECTOR C7 (PIN 9)
Figure 2.2. Master BDS5 and Slave BDS5 (Part of Drawing A-93103)
The BDS5 uses the same phasing for the encoder
inputs and outputs; for clockwise rotation, Channel A
leads Channel B. For standard systems, the inputs are
Channel A (Pins 5, 10) and Channel B (Pins 4, 9).
The outputs are Channel A (Pins 1, 6), Channel B
(Pins 2, 7), and the marker channel, Channel Z (Pins 3,
CHANNEL A
8). There is no input Channel Z, though this signal
often would be connected to HOME (see
Manual
). Refer to Figure 2.3 for a phasing diagram.
The logic power supply common is not available on
Connector C1. If you are wiring from one BDS5 to
User's
CHANNEL B
another BDS5 on the same PSR4/5, then you need not
connect common, as the commons of the two drives
will be connected through the logic power supply
connector, C4. If you need to connect to common,
you must obtain it from Connector C2 or C4. BE
SURE THAT THE COMMON OF THE BDS5 AND
OF THE ENCODER POWER SUPPLY ARE
CHANNEL Z
Figure 2.3. Encoder Phasing For Cloc kwise
Rotation
ELECTRICALLY CONNECTED TO EACH
OTHER.
2-8
Page 45

BDS5 C
HAPTER
NSTALLATION
2 - I
6 1 OUT A
7 2 OUT B
8 3 OUT Z
9 4 IN B (Standard)
10 5 IN A (Standard)
IN B
IN A
OUT A
OUT B
OUT Z
(Standard)
(Standard)
Figure 2.4. BDS5 (C1)
2.6.4.2 Encoder Equivalent Input
The encoder and pulse inputs are for signals from a
master encoder (for example, an encoder on another
motor, or the encoder output of another BDS5). The
BDS5 can also use an encoder for feedback in some
cases. The encoder equivalent input is not available
when the analog input (OPT1 Card) or pulse input
(OPT2 Card) is installed.
If the encoder input is being used for a velocity
command, as is the case for electronic gearbox
applications, then you must be careful to connect the
encoder input for the correct direction of rotation. If
the BDS5 is being used as a velocity drive, and
another controller is closing a position loop, reversing
the encoder inputs can cause the BDS5 to run away or
oscillate. BE CAREFUL TO CONNECT THE
ENCODER/PULSE INPUT SO THAT THE
DIRECTION IS CORRECT !
Phase the encoder/pulse input
correctly. Incorrect phasing
of the encoder input can
WARNING
cause excursions,
oscillations, or runaways.
1. Control the BDS5 from a stepper-motor
controller. For this function, configure the
BDS5 as an electronic gearbox and select the
format that is compatible with your controller.
2. Input a single-phase clock from your computer.
There are occasions when you want to control
the BDS5 with a unidirectional clock (for
example, feedrate override). The Pulse Input
option accepts a single-phase clock, such as
would be generated from an electronic
timer/counter chip.
The Pulse Input Option board (BDS5-OPT2) is
mounted inside the BDS5 unit. This board accepts
pulse inputs in three formats: count/direction,
up/down, or single-phase. Use the toggle switch on
the board to select the formats. See Drawing A-93146
for more information.
2.6.4.4 Encoder Equivalent Output
The Encoder Equivalent Output provides position
information to another device in the system. The
output is in standard encoder format. The Encoder
Equivalent Output must be phased correctly. If the
BDS5 is being used as a velocity drive, and another
controller is closing a position loop, reversing the
Encoder Equivalent Output can cause the BDS5 to run
away or oscillate. BE CAREFUL TO CONNECT
THE ENCODER EQUIVALENT OUTPUT SO
THAT THE DIRECTION IS CORRECT!
Phase the Encoder Equivalent
Output correctly. Incorrect
phasing of the Encoder
Equivalent Output can cause
WARNING
excursions, oscillations, or
runaways.
Note that if your BDS5 is configured with the optional
analog input, then encoder equivalent inputs are not
available. The outputs are still available.
Systems with the optional
analog inputs do not have
NOTE
encoder equivalent inputs.
2.6.4.3 Pulse Input (OPT2 Card)
As an option, you can also purchase your BDS5 with a
Pulse Input option. This option allows you to:
2-9
Page 46

HAPTER
C
NSTALLATION
2 - I
2.6.4.5 Wiring C2, Customer I/O
Connector C2 ha s a variety of signals:
Analog Input Pins 1, 11
•
The BDS5 accepts an analog input as an option. This
option is specified when you order your system. If
you use the analog input, then the encoder input is not
available. If you use the analog input, refer to the
User’s Manual paragraph 4.11 for a program that
configures the BDS5 as a velocity drive.
The input is scaled for ±10 volts = full scale. Input
impedance is > 20 k Ohm. The analog input is
differential; that is, the input voltage is taken to be the
voltage at Pin 11 minus the voltage a t Pin 1.
Differential (two-wire) signals have highe r noise
immunity than single-wire signals, since noise picked
up by the wires is eliminated when the two voltages
are subtracted.
BDS5
Tach Monitor Pin 2
•
Tach monitor indicates velocity. It is referenced to
Common and scaled for 1000 RPM clockwise = +1
volt. This output has a 1k Ohm resistor in series and a
4700 pF filter capacitor connected to Common.
I Monitor Pin 4
•
I monitor is a Common-referenced signal scaled for
full (peak) current = 5 volts. This output has a 3.01k
Ohm resistor in series. I Monitor is always positive.
Common Pins 12, 14, 15
•
Logic Power Supply Common is provided on several
pins since it is used in several places. Do not connect
shields to Common.
Shield Pins 3, 13
•
Typically, one of the two wires will be at a voltage
nominally the same as Common. Preferably, this wire
should be connected to Pin 1. It is important to note
that swapping Pins 1 and 11 reverses the polarity of
this input.
When using the analog input you must be careful to
shield it properly. You should use shielded, twistedpair cable. Connect the shield to Pin 13 or 3 on
Connector C2 on the BDS5, or to the frame at the
source of the signal, or at both ends. Determining the
best shield connection is often a matter of trial-anderror. Begin by wiring the shield only at the BDS5.
If the BDS5 is being used as an analog velocity drive,
then you must be careful to connect the analog input
with the correct polarity, since the polarity determines
the direction of rotation. If the BDS5 is being used as
a velocity drive, and a different controller is closing a
position loop, reversing the polarity of the analog
input can cause the BDS5 to run away or oscillate. BE
CAREFUL TO CONNECT THE ANALOG INPUT
SO THAT ITS POLARITY IS CORRECT!
Phase the analog input
correctly. Incorrect polarity of
the analog input can cause
WARNING
excursions, oscillations, or
runaways.
The shield pins are connected directly to the BDS5
frame. You should connect shields from cables to the
shield pins.
Relay Pins 16, 17
•
These two pins are connected to a set of normally
open relay contacts. The contacts are open on powerup, and close after the power-up self-tests and
autobauding. The relay is controlled by the watchdog
timer. If the contacts open once the BDS5 is running,
then there is a serious fault and you cannot depend on
the microprocessor to operate properly. Always wire
all BDS5 relays to disconnect all power in the event of
the relay contacts opening. These contacts are rated
for a maximu m current of 1 Amp and a maximum
voltage of 115 volts AC or DC. The maximum
switched power is 30 Watts DC or 60 volt-amps AC.
CYCLE/CYCLE RETURN Pins 8, 7
•
CYCLE is on Pin 8; CYCLE RETURN is on Pin 7.
CYCLE is normally used to start a cycle of a user
program; it can also be used as a general purpose
input. CYCLE is optically isolated. CYCLE should
be pulled up to between 12 and 30 volts with reference
to CYCLE RETURN (not Common) to turn on, or
activate, the CYCLE input. Exceeding 30 volts could
damage this input. Observe polarity when connecting
CYCLE and CYCLE RETURN.
2-10
Page 47

BDS5 C
HAPTER
NSTALLATION
2 - I
Note that CYCLE is also available on Connector C7.
The CYCLE signal on the Connector C7 is not
optically isolated. If you use both CYCLE inputs,
then the BDS5 will sense that CYCLE is on if the
CYCLE signal from either Connector C2 or C7 is on.
REMOTE/REMOTE RETURN Pins 9, 6
•
REMOTE is on pin 9; REMOTE RETURN is on pin
6. REMOTE is an input that must be activated for the
BDS5 to be enabled. REMOTE is optically isolated.
It should be pulled up to between 12 and 30 volts with
reference to REM O TE RETURN (not common) to
activate the REMOTE input. Exceeding 30 volts
could damage this input. Observe polarity when
connecting REMOTE and REMOTE RE TURN.
HOME/HOME RETURN Pins 19, 18
•
HOME is on pin 19; HOME RETURN is on pin 18.
HOME is intended to be connected to a home limit
switch; it can also be used as a general purpose input.
HOME is optically isolated. HOME should be pulled
up to between 12 and 30 volts with reference to
HOME RETURN (not Common) to activate the
HOME input. Exceeding 30 volts could damage this
input. Observe polarity when connecting HOME and
HOME RETURN.
Note that HOME is also available on Connector C7.
The HOME signal on Connector C7 is not optically
isolated. If you use both HOME inputs, then the
BDS5 will sense that HOME is on if the HOME signal
from either Connector C2 or C7 is on.
I/O DC P in 5
•
Using BDS5 internal power
supply (I/O DC) for any
purpose except power for
CAUTION
•
O1 is an optically-isolated output. It is a solid state
relay rated for 0.25 Amps and 30 VDC maximum.
Only DC voltages, with the more positive voltage on
Pin 10, may be applied to this output. You must
observe polarity when connecting O1. You should
install a 0.25 amp fuse in series with O1, as it is not
fused internally.
Note that O1 is also available on Connector C8. The
O1 signal on Connector C8 is not optically isolated.
You can use both O1 signals at the same time.
HOME, CYCLE, and REMOTE
ENABLE can da mage the
PSR4/5.
O1 Pins 10, 20
2.6.4.6 Wiring C3, Resolver
Connect the resolver leads
correctly. Incorrect motor
resolver phasing can cause
erratic operation, runaway, or
WARNING
Install the resolver cable between the motor and the
BDS5. Make the connection at the motor resolver
connector and Connector C3 on the BDS5.
damage to the system. Use of
Industrial Drives resolver
cable sets is highly
recommended.
I/O DC is provided for occasions when you do not
need optical isolation for HOME, CYCLE, and
REMOTE ENABLE. An unregulated, low current
power supply is provided on I/O DC to power those
three inputs. Do NOT use I/O DC as a power supply
for anything except these three isolated inputs!
If you want to use I/O DC, then connect the return
lines (HOME RETURN, CYCLE RE TURN, and/or
REMOTE RETURN) to Common. Then you can
connect HOME, CYCLE, and/or REMOTE ENABLE
to I/O DC (usual ly through a relay contact) to activat e
those inputs.
If you are making your own resolver cables, you must
obtain the procedure from INDUSTRIAL DRIVES to
make cables.
2.6.4.7 Wiring C4, Logic Power
Supply
Wiring C4 is discussed above with "Wiring PSR4/5
Connector C2" since these two connectors are
connected to each other.
2-11
Page 48

HAPTER
C
NSTALLATION
2 - I
BDS5
2.6.4.8 Wiring C5, Serial Communications
Connector C5, the Serial Communications Connector,
is on the front of the BDS5. It is a 9-pin, D-type, subminiature plug connector (DE-9P). The
communications cabl e must have the mating DE-9S
connector. See the System Wiring Diagram (A-93103,
Sheet 3). Note that wiring for RS-232 and RS-485 is
completely different. Refer to the model number to
determine if your unit is RS-232 or RS-485. Be sure
that the common of the BDS5 and the power supply
common of your computer or terminal are electrically
connected to each other, whether you are using
RS-232 or RS-485. Use the COM pin on the serial
connector (Connector C5) for the BDS5 common.
RS-232 VS RS-485
•
The BDS5 can communicate with a terminal or a
computer over a serial data line with EIA RS-232-C,
the most common electrical interface for terminals and
personal computers. It can also communicate with
EIA RS-485, a standard that supports multiple devices
on one serial line. RS-485 is an upgrade of RS-422;
RS-422 is restricted to one transmitter per serial line;
otherwise, the devices will work with RS-485 devices.
You should specify the communication standard that
you want when you order your BDS5.
When choosing between RS-232 and RS-485, there
are a number of factors to take into consideration.
RS-232 is much more common than RS-485. Most
terminals and computer serial ports are RS-232;
however, RS-485 is becoming more available on
personal computers. RS-485 is differential; RS-232 is
single-ended. To illustrate this, RS-232 transmits one
output, TxD. Alternatively, RS-485 simultaneously
transmits TxD+ and TxD-, the logical inverse of
TxD+. (Logical inverse means that if TxD+ = 1, then
TxD- = 0). RS-232 transmitters typically have seriesterminated outputs, while RS-485 transmitters do not.
All this makes RS-485 less susceptible to noise and
able to transmit over much longer distances. On the
other hand, RS-232 is easier to use and much less
susceptible to transmission line effects. RS-232 is also
less expensive. A major advantage of RS-485 is that it
allows multidrop communication, where many axes
can be connected on one serial line.
If you have an RS-232 terminal or computer, and you
want to use RS-485, either for multidrop or for noise
immunity, then you can purchase an RS-232-to-RS485 converter. For example, Anaheim Automation
(Anaheim, CA) produces Model DC 2170 for this
purpose.
The RS-232 serial input and outputs connect to 75155
line driver/receivers. The RS-485 serial input and
outputs connect to 75176B line driver/receivers.
These chips are available from many IC
manufacturers, including Texas Instruments.
Table 2.3. Communication Requirements
To Communicate With Your BDS5, You Will Need:
RS-232 Terminal
or
IBM-PC Compatible with Communication
Software
or
RS-485 Terminal
and
Connector for Your Terminal
DE-9S Connector (Provided with BDS5)
3-Wire-with-Shield Cable (RS-232)
5-Wire-with-Shield Cable (RS-485)
*
Use one of the conductors to connect the power
supply commons. The shield should not be used for
this connection, but should connect to earth ground.
LINE TERMINATION
•
The BDS5 provides line termination for RS-485. An
RS-485 line may need to be terminated to reduce
ringing on long cables. (In this se ction, Line refers
specifically to the RxD+/RxD- pair or the TxD+/TxDpair.)
A line is terminated by connecting a resistor from
RxD+ to RxD- or TxD+ to TxD-. Terminating
resistors are provided inside the BDS5. These
resistors are connected by installing jumpers across
Pins 3 and 4, and across Pins 7 and 8 on J1 on the
front of the BDS5. The lines should only be
terminated at the end of the communication cable.
For example, if you are using several BDS5's in
multidrop, then you should install the jumpers only on
the units at the ends of the serial cable.
*
*
2-12
Page 49

BDS5 C
CONNECTING TO A TERMINAL
•
Connect the pins on the DE-9S connector that came
with your BDS5 as follows:
Table 2.4. Terminal Wiring
WIRING TO MOST RS-232 TERMINALS
BDS5
(DE-9)
Female
1 SHIELD* 1
NOTE
For RS-485, you should install
jumpers across Pins 3-4 and
7-8 on J1 on the front of the
BDS5 at the end of the
communication cable. If the
device you are using to
communicate with the BDS5
is at one end of the line, you
should terminate the line at
that end with a 120 ohm
resistor.
HAPTER
NSTALLATION
2 - I
Terminal
(DB-25)
Male or Female
DISTANCE
•
RS-232 generally works well up to 50 feet using
standard cable. Special low capacitance cable can
extend this range up to 500 feet, although the baud rate
may need to be reduced. These cables are available
from many companies, including Black Box
(Pittsburgh, PA).
RS-485 can be used up to 4000 feet. Be forewarned,
however, that using very long cables may be more
difficult than just making the connections. Special
attention must be paid to AC loading, transmission line
effects, noise pickup, and common-mode voltages. It
would be wise to have a person who is knowledgeable
in these matters to review the cable design beforehand.
Again, baud rates may need to be reduced as the
length increases, and low capacitance cables may be
required.
You can obtain a copy of the specification for RS-232
or RS-485 by contacting:
Electronic Industries Association
Engineering Department
2001 Eye Street, N.W.
Washington, D.C. 20006
2RxD
3TxD
5COM7
* Usually, you will only connect the shield at one
end. Sometimes, the shield should be connected
at both ends. This is system dependent and
generally found by trial and error.
The table above assumes that your terminal has an
RS-232 serial port which is configured as Data
Terminal Equipment (DTE), the usual configura tion.
If your terminal is configured as Data
Communications Equipment ( DCE), then interc hange
Pins 2 and 3 at one end of the cable.
Note that handshaking signals (CTS, DTR, etc.) are
not supported.
←
→
TxD 2
RxD 3
2-13
Page 50

HAPTER
C
NSTALLATION
2 - I
BDS5
•
CONNECTING TO A COMPUTER
Connect the pins on the DE-9 connector that came
with your BDS5 as follows:
Table 2.5. PC Wiring
WIRING TO AN IBM-PC COMPATIBLE COMPUTER
BDS5 IBM-PC
(DE-9P) (DB-25S)
Female Female
1 SHIELD* 1 1 SHIELD* FRAME
2 RxD <-- TxD 2 2 RxD <-- TxD 3
3 TxD --> RxD 3 3 TxD --> RxD 2
5COM75COM5
BDS5 IBM-AT
(DE-9P) (DE-9S)
Female Female
+
* Usually, you will only connect the shield at one
end. Sometimes, the shield should be connected
at both ends. This is system dependent and
generally found by trial and error.
+ The PC-AT doe s not have a pin for shield. If you
want to hook the shield to the PC-AT end of the
cable, you must connect it directly to the frame of
the computer.
If you use a computer, you will need communications
software. The recommended communications
software for use with the BDS5 is Motion Link, an
Industrial Drives software package that is specially
designed for t he BDS5. Other communications
software packages include XTALK, QMODEM,
PROCOM, KERMIT, and PC-TALK. See the
Manual
for more information about Motion Link.
User's
2.6.4.9 Wiring C6, Fan Power (20 Amp Units Only)
Connect the 115 VAC Control Power from the PSR4/5
(Connector C1) to the fan power connector on all 20
Amp BDS4's (Connector C4) and BDS5's (Connector
C6). As the wiring diagram (A-93103, Sheet 1)
shows, 115 VAC appears side by side on each
connector, similar to the logic power supply
connector. This allows you to "daisy-chain" the
Control Power to each unit that requires it.
Connector C6 is only used on
BDS5 and BDS4 amplifiers
with continuous ratings of 20
NOTE
Amps and above.
The table above assumes your PC has an RS-232 serial
port that is configured as Data Terminal Equipment
(DTE), t he usual configuration. If your port is
configured as D ata Communications Equipment
(DCE), then interchange Pins 2 and 3 at one end of the
cable.
Note that handshaking signals (CTS, DTR, etc.) are
not supported.
If the PC-compatible computer is AC-line powered
(that is, not battery powered), use extreme caution
when interconnecting the PC to the BDS5 serial port.
Both the PC and the BDS5 must share the same power
supply common. If they do not, the voltage difference
between the two commons could damage either or
both machines.
Make sure that the Computer
and BDS5 share the same
power supply common.
Either your computer or the
CAUTION
BDS5 or both can be damaged
if the commons are not at the
same potential.
2.6.4.10 Wiring C7, Standard I/O
C7 is a 26-pin ribbon cable connector. It provides
non-isolated, 5-volt TTL-level inputs and outputs and
directly interfaces to 8-line OPTO-22 compatible I/O
boards. These boards are widely available and use
industry standard optical isolation modules, available
from several companies, including Potter and
Brumfield, Grayhill, Gordos, OPTO-22, and Crydom.
This connector is on top of the BDS5.
Note that you must provide a separate power supply
when using standard OPTO-22 compatible I/O boards.
This supply must provide 5 volts DC to power the I/O
modules on the BDS5 side of the isolation. The
common of this supply will normally be connected to
the common of the BDS5 t hrough the even numbered
pins on Connector C7. DO NOT USE THE BDS5
5 VDC POWER SUPPLY TO POWER I/O
MODULES!
Additionally, a second power supply may be needed to
provide power for those devices which are isolated
from the BDS5 by the I/O modules. The common of
this supply should not be connected to the BDS5
common.
2-14
Page 51

BDS5 C
If MOTION is off during power-up, the BDS5
will autobaud.
HAPTER
NSTALLATION
2 - I
You must provide an
additional power supply for
NOTE
•
HOME is the input for the home limit switch. It is
also the registration input. If your application has both
a home limit switch and a registration input, use
HOME for the registration input and connect the home
limit switch to a general purpose input. This input can
be used as a general purpose input if these primary
functions are no t required.
HOME is available on two connectors. See the
description of HOME on Connector C2 in section
2.6.4.5.
LIMIT Pin 11
•
This input must be turned on for normal operation.
Connect the normally closed contacts of the overtravel
limit switches in series with LIMIT.
If your application does not allow you to use hardware
travel limit switches, then you must hardwire LIMIT
on. If you are not using Connector C7 you can
hardwire LIMIT on by installing a jumper directly on
C7 between Pins 11 and 12. The BDS5 is shipped
from the factory with this jumper installed.
CYCLE Pin 13
•
CYCLE is an input that is normally used to start a
cycle of a user program. It can be used as a general
purpose input if this primary function is not required.
See the description of CYCLE on Connector C2
above.
MOTION Pin 15
•
MOTION is used to enable motion of any kind. If
MOTION is off, then no motion will be allowed.
MOTION is often connected to a stop button.
the I/O modules.
HOME Pin 9
If your application does not allow you to use
MOTION, then you must hardwire it on. If you are
not using Connector C7, you can hardwire MOTION,
by installing a jumper directly on C7 between Pins 15
and 16. The BDS5 is shipped from the factory with
this jumper installed.
GATE Pin 17
•
The GATE input starts precalculated motion profiles.
It is used to synchronize motion with external events.
This line may be used as a general purpose input if its
primary function is not used
.
O7, O8 Pins 19, 21
•
O7 and O8 are general purpose outputs.
CYCLE READY Pin 23
•
CYCLE READY is an output that indicates that the
BDS5 is ready for the CYCLE line to be activated.
CYCLE READY is often connected to PLC's or to a
lamp on an operator panel.
2.6.4.11 Wiring C8, Optional I/O
C8 is a 50-pin ribbon cable connector as shown in
drawing A-93103. It provides non-isolated, 5 volt
TTL-level inputs and outputs and directly interfaces to
24-line, OPTO-22 compatible I/O boards. These
boards are widely available and use industry standard
optical isolation modules. This connector is optional.
It is on top of the BDS5.
Note that you must provide a separate power supply
when using standard OPTO-22 compatible I/O boards.
This supply must provide 5 volts DC to power the I/O
modules on the BDS5 side of the isolation. The
common of this supply will normally be connected to
the common of the BDS5 t hrough the even numbered
pins on Connector C7. DO NOT USE THE BDS5
5 VDC POWER SUPPLY TO POWER I/O
MODULES!
Additionally, a second power supply may be needed to
provide power for those devices which are isolated
from the BDS5 by the I/O modules. The common of
this supply should not be connected to the BDS5
Common.
2-15
Page 52

HAPTER
C
NSTALLATION
2 - I
BDS5
You must provide an
additional power supply for
NOTE
O1-O6 Odd numbered Pins from 37 to 47
•
O1-O6 are general purpose outputs.
STATUS Pin 35
•
The STATUS output indicates the status of the BDS5.
You can configure STATUS to indicate "active" or
"ready to be activated" with the software switch
STATMODE. See the Enable and Fault Logic
Diagram, Drawing A-84732, for more information.
The state of the STATUS output is undefined for up to
25 milliseconds on power-up.
WARNING
MANUAL P in 33
•
MANUAL is used to change the BDS5 from AUTO
mode to MANUAL mode. For more information,
refer to User’s Manual Chapter 4. MANUAL may be
used as a general purpose input if its primary function
is not required.
I1-I16 Odd numbered Pins from 1 to 31
•
I1-I16 are general purpose inputs.
the I/O modules.
STATUS may turn on for up to
25 milliseconds after powerup.
2.6.4.12 J1 Configuration Jumper
Jumper J1 connects the RS-485 line terminators.
Refer to the section on line termination for
information.
Motion Link. For more information on Motion Link,
refer to the
User's Manual
.
2.6.5.1 Required Data Format
The BDS5 and your terminal must use the same format
for serial data. RS-232-C and RS-485 describe
hardware only. There are other specifications left to
up to the user: full- or half-duplex, the number of bits
per character, whether or not parity is used, the
number of stop bits, and the baud rate. Full-duplex
means both the terminal and the BDS5 can send and
receive at the same time. Half-duplex means only one
system can talk at a time. Bits per character refers to
the number of actual data bits sent at one time. The
parity is a bit sent for error detection. The number of
start and stop bits sets a minimum delay between
characters. The baud rate is the rate at which bits are
transmitted and received.
The BDS5 requirements are:
Full-duplex
8 bits per character
No parity
1 Start bit
1 Stop bit
Baud rates equal 300, 600, 1200, 2400, 4800,
9600, or 19200.
Most terminals and computers will allow you to set
these options with little difficulty. Motion Link sets
these requirements automatically.
2.6.5.2 First Transmission
Before you attempt to establish communications, you
must:
1. Mount the BDS5 and PSR4/5 system as
described earlier in this chapter.
2. Make all connections as described in the earlier
sections of this chapter, especially connecting
the BDS5 serial connector to your terminal or
computer.
2.6.5 Establishing Communications
Industrial Drives supplies a communications package
called, Motion Link, that is designed especially for
communicating with the BDS5. Other terminal
emulators can also be used as long as the required data
format is followed. This manual is written for use with
2-16
Page 53

BDS5 C
HAPTER
NSTALLATION
2 - I
2.6.5.3 Checking the Control Power
SHOCK HAZARD!
115 VAC is present on the
Control Power. Be very
WARNING
NOTE
Turn off control power. Remove PSR4/5 Connector
C1. Turn on control power. Use an AC voltmeter to
confirm that the voltage on PSR4/5 Connector C1,
Pins 2 and 3 is 115 VAC +/- 15%.
Turn off control power. Re-install PSR4/5 Connector
C1. Remove PSR4/5 Connector C2. Turn on control
power. Use a DC voltmeter to confirm the logic
supply (measure the pins in the PSR4/5 Connector
C2).
careful when measuring these
voltages.
Control Power is the 115 VAC
connection at PSR4/5
Connector C1, pins 3 and 4.
If the CPU LED is not blinking...
Check the logic voltages from Table 2.6 above. If one
or more of the voltages are missing, a fuse in the
PSR4/5 opened because the logic supply was
miswired. You may have miswired either Connector
C2 on the PSR4/5, Connector C4 on any BDS5, or
Connector C3 on any BDS4. Check your wiring
carefully.
Make sure the MOTION input is off (contacts are
open) when you power-up the BDS5. If the contacts
are closed, open them and power-down the BDS5 and
immediately power-up again. If the CPU LED is still
not blinking, contact the factory.
1. If you are using Motion Link with an IBM-PC,
type "ML" from DOS to start Motion Link.
Motion Link will establish communications.
Refer to User’s Manual for more information on
installing and runni ng Motion Link.
2. Whether you are using a terminal or a PC, press
the return key 5 to 10 times, pressing the key
about twice per second.
Table 2.6. PSR4/5 C2 Voltages
+18 Volts ±20% Pins 1 and 5
-18 Volts ±20% Pins 2 and 6
Common Pins 3 and 7
+10 Volts ±20% Pins 4 and 8
If none of these voltages are present, check control
power (115 VAC) on PSR4/5 Connector C1, Pins 2
and 3. If one or more of the voltages are missing, one
or more fuse in the PSR4/5 may be open. Refer to the
spare parts lists in Chapter 5 for descriptions of the
fuses.
Turn off control power. Re-install PSR4/5 Connector
C2.
Turn on control power. The green CPU LED on the
front of the BDS5 should begin flashing, about 10
times per second. This indicates that the BDS5 is
autobauding to establish communications.
These steps cause carriage return characters to be sent
to the BDS5. When autobauding, the BDS5 looks for
these characters and uses them to determine the
or speed at which your terminal is transmitting.
rate
Once the baud rate is determined, the BDS5 can
establish communications with your terminal or
computer.
Then the BDS5 should print this message (or one
similar to it) on your terminal:
BDS5 V02.0.4
(C) 1991 INDUSTRIAL DRIVES
-->
The green SYS OK LED on the front of the BDS5
should turn on and remain on at all times after powerup (and auto bauding). T he "-->" means that your
BDS5 is in the "interactive mode" and is ready to
accept commands.
baud
2-17
Page 54

HAPTER
C
NSTALLATION
2 - I
BDS5
2.6.5.4 If You Can't Communicate...
If the BDS5 does not respond, then check to be sure
that Connector C5 is wired properly. A common
mistake is that of having the transmit and receive lines
swapped. Also, make sure that none of the wires in
the cable are broken.
If the CPU LED has stopped blinking...
the BDS5 has established communications. However,
the transmission from the BDS5 is not being displayed
on your terminal. Check carefully for miswired cable,
broken wires, or possibly a shorted transmit line from
the BDS5 to your terminal.
If the CPU LED is still blinking...
the BDS5 has not established communications. You
can determine that your terminal is working by
disconnecting the serial cable at your terminal. Then,
temporarily connect the transmit and receive pins to
each other (usually Pins 2 and 3 on a 25-Pin DB-25
connector) and press a few keys. The characters that
you type should appear on the terminal screen. If they
do not, then your terminal is not functioning properly.
If your terminal is functioning prop erly...
3. If there is no response, then the terminal may not be
properly connected.
If you do not have an oscilloscope...
you may be able to use a digital voltmeter. Many
digital voltmeters are quite sensitive and can detect
character transmissions. You should see some activity
(change in voltage) on the meter display every time
you press a key.
If you think the cable is correct, but you still cannot
communicate...
your terminal may not be configured for the data
format listed on page 16. Check the manual for your
terminal or computer (virtually all IBM-PC compatible
computers conform to this format). If you are using a
terminal, be sure your terminal is set properly.
2.7 INITIAL CHECK-OUT
This section will discuss the procedure for checking
most of the wiring on the system before enabling your
BDS5. Communications must be established with
your BDS5 before continuing.
the serial communications cable may have open
circuits (br oken or missing wires) or may not be
connected to the proper pins. You can determine if
your serial cab le has open circuits by connecting your
terminal on one end and disconnecting the cable on the
BDS5 end. Again, temporarily connect the transmit
and receive pins (this time on the far end of the cable),
then type on the keyboard. The characters that you
type should appear on the terminal screen. If they do
not, then your cable is not functioning proper ly.
If your cable i s functioning properly...
the serial cable may still be the problem. You can
determine if your cable is wired properly with an
oscilloscope. For RS-232 systems, disconnect the
cable from Connector C5. Connect ground on the
scope probe to Pin 5 of the DE-9 connector on the
cable. Use the oscilloscope to monitor Pin 2, with the
time base between 1 and 20 milliseconds/division and
the voltage sensitivity to 5 volts/division. While
monitoring Pin 2, press several ke ys on t he keyboard.
The oscilloscope display should show Pin 2 changing
between ±9 volts every time you press a key. If not,
check Pin 3. If Pin 3 is responding, then Pins 2 and 3
are reversed. Remove power and exchange Pins 2 and
In this section, the BDS5 will be used to check wiring
to most of the BDS5 inputs and outputs. You will
need to enter some BDS5 commands. This section
will use a few commands that are described in more
detail elsewhere in this manual. The first command is
the print command. You can print the discrete inputs.
For example, after the BDS5 has printed the prompt "-
->," you can type:
P LIMIT
and the BDS5 will print 1 or 0. 1 means that the input
is on, indicating that the contacts are closed. 0 means
that the input is off, indicating that the contacts are
open.
2-18
Page 55

BDS5 C
__I1 __I2 __I3 __I4
NOTE
In this manual, instructions
that you enter will be shown
in italics and surrounded by a
double line box. The response
from the BDS5 will be in plain
upper case letters.
__I5 __I6 __I7 __I8
__I9 __I10 __I11 __I12
__I13 __I14 __I15 __I16
__CYCLE __GATE __HOME __LIMIT
HAPTER
NSTALLATION
2 - I
2.7.1 Checking Discrete Inputs
You can check the state of all of the discrete inputs
with the print command. This process will be
demonstrated with the hardware travel limit switch,
LIMIT. If you are not using the LI MIT switch, you
can substitute another hardware switch, such as
CYCLE or HOME which are available on Connector
C2. In this case, substitute the words "CYCLE" or
"HOME" for "LIMIT" in the following discussion.
1. Open the switch contacts.
2. Verify that the contacts are open. If you are
using an Industrial Drives Input Module or an
industry standard OPTO-22 compatible input
module, there will be an LED on each input to
indicate its state. The LED will be off if the
contacts are open.
3. Use your terminal to enter:
P LIMIT
__MANUAL __MOTION __REMOTE
**
Note that if a fault condition exists, the state (on
or off) of REMOTE may not be available. In this
case, the value of REMOTE will print as -1.
**
2.7.2 Checking General Purpose Outputs
You can check all of the general purpose outputs by
turning them on and then off. Be careful. The
procedure in this section will activate all of the general
purpose outputs. Be sure that activating an output will
not cause a hazard to personnel or damage to
equipment.
Commands in this section will
turn on all general purpose
outputs. Be certain that this
WARNING
is not a safety hazard. Make
sure this will not damage
equipment.
4. The BDS5 should respond with "0" indicating
that the contacts are open.
5. Close the switch contacts.
6. Verify that the contacts are closed. (LED should
be on.)
7. Use your terminal to enter:
P LIMIT
8. The BDS5 should respond with "1" indicating
that the contacts are closed.
Repeat this process for each discrete input that you are
using:
1. Turn on O1 by typing:
O1 ON
2. Verify that the output is on. If you are using an
Industrial Drives Input Module, or an industry
standard OPTO-22 compatible input module,
there will be an LED on each output to indicate
its state. The LED will be on if the output is on.
3. Turn off O1 by typing:
O1 OFF
2-19
Page 56

HAPTER
C
NSTALLATION
2 - I
BDS5
4. Verify that the output is off.
Repeat this process for each discrete output that you
are using:
__O1 __O2 __O3 __O4
__O5 __O6 __O7 __O8
2.7.3 Cycle Ready
CYCLE READY cannot be checked without a
program. The
Later, when you are familiar with programming, you
can write a program that turns CYCLE READY on.
Check this output at that time.
User's Manual
discusses this topic.
2.7.4 Checking STATUS
Check STATUS later in this chapter when the BDS5 is
active. The STATUS output will turn on when you
enable the BDS5.
If the results are not what you expected, use an
oscilloscope to verify that all four signals are reaching
Connector C1.
Note that encoder equivalent inputs are not available if
your system has analog input.
2.7.7 Checking Pulse Input (Optional)
If you have a pulse input option, connect your pulse
input to Connector C1. Stop the pulse train. Type:
P PEXT
Now inject a few pulses. Type:
P PEXT
PEXT should have changed by the number of pulses
you injected. If the results are not what you expected,
make sure that you have set the pulse format switch
properly. Then, use an oscilloscope to verify that all
four signals are reaching Connector C1.
2.7.5 Checking Encoder Output
Check the encoder output with a two-channel
oscilloscope. Place Channel 1 on OUTA and Channel
2 on OUTA'. Rotate the motor by hand. You should
see the encoder output on your scope. Repeat this
process for OUTB and OUTB' and for OUTZ and
OUTZ'. Note that OUTZ changes state only at one
point during a full motor revolution.
2.7.6 Checking Encoder Input
If you have encoder input, connect your encoder to
Connector C1. The encoder should not be moving.
Type:
P PEXT
Now rotate the encoder. Type:
P PEXT
PEXT should have changed when you ro t ated the
encoder shaft.
2.7.8 Checking Analog Input (Optional)
If you have analog input, connect your input voltage to
Connector C2. Adjust the voltage to zero volts. Type:
P PEXT
Wait a few seconds and type:
P PEXT
PEXT shoul d not have changed or should have
changed very little. Now raise the input voltage to a
few volts. Type:
P PEXT
and PEXT should have changed much more than it did
with the input zeroed.
2-20
Page 57

BDS5 C
2.7.10 Checking the Resolver Cable
2.7.9 Checking the Resolver
Follow this procedure if you are experiencing
The BDS5 provides a feedback loss circuit which is
designed to detect broken wires; it can detect
relatively few wiring errors. You should use the
following procedure to verify feedback circuit.
problems with the resolver. Disconnect the resolver
cable at both ends and use an ohm meter to verify this
resolver cable wiring table:
Table 2.9. Goldline Resolver Cable Wiring
HAPTER
NSTALLATION
2 - I
The feedback loss circuit is
designed to detect broken
wires. In general, it does not
WARNING
Turn the motor shaft by hand until the R/D converter
output is within the ranges listed below. You can
display the R/D output by repeatedly typing:
The standard R/D resolution is 12 bits. The resolution
of your BDS5 is listed as part of the model number,
which is shown on the front of the drive and described
at the beginning o f t his chapter.
Rotate the motor shaft by hand until PRD is in the
target range listed below:
Table 2.7. Target of PRD vs. R/D
R/D Resolution 12-Bit 14-Bit 16-Bit
Target Minimum
Target Maximum
Now rotate the motor shaft approximately 1/4
revolution CLOCKWISE. PRD should now fall in the
range listed below:
Table 2.8. Target of PRD Versus R/D
Resolution After Clockwise 1/4 Revolution
R/D Resolution 12-Bit 14-Bit 16-Bit
Target Minimum
Target Maximum
If PRD does not fall into the range as listed above,
then either the resolver is improperly wired or the
feedback circuitry is not functioning correctly. The
first step is to check the cable.
detect wiring errors.
P PRD
Resolution
0
250
800
1300
0
1000
3500
5500
0
4000
12500
22500
BDS5
C3
1Sine LowB
2 Shield No Connect
3Cosine LowC
4 Reference High F
5 Shield No Connect
6 Not Used No Connect
7Sine HighA
8 Shield No Connect
9Cosine HighD
10 Reference Low E
11 Shield No Connect
12 Not Used No Connect
Flying Lead Thermostat (Black) T
Flying Lead Thermostat (Black) U
Flying Lead Optional Brake (Blue) N
Flying Lead Optional Brake (Blue) P
Flying Lead Optional Tach (Black) R
Flying Lead Optional Tach (White) S
The following procedure uses
an oscilloscope to measure
the amplitude of signals with
a frequency of 8 kHZ. Some
digital voltmeters can
NOTE
measure the amplitude of
signals at high frequencies
(like 8 kHZ). However, many
meters are designed to read
60 Hz and cannot be relied
upon to read 8 kHZ signals.
Signal Resolver
Connector
2-21
Page 58

HAPTER
C
If the cable is correct, check the resolver reference
signal. Install the resolver cable at both ends.
Connect an oscilloscope probe to Connector C3, Pin 4
(extend the probe with a short length of wire to reach
inside the connector housing if necessary) and connect
the probe ground to common (Connector C3, Pin 10).
Apply control power (115 VAC). The reference signal
should be between 11.8 and 12.0 V peak-to-peak (4.17
and 4.24 V RMS) at a frequency of about 8 KHZ. If
necessary, adjust the reference amplitude with
potentiometer 219. This potentiometer is located
between Connectors C2 and C3 and can be adjusted
from the front of the unit without disassembly.
NSTALLATION
2 - I
BDS5
WAIT 5 MINUTES FOR THE
DC BUS to DISCHARGE!
The DC Bus is connected to
WARNING
Remove the BUS+ and BUS- leads from the PSR4/5
Power Terminal Block. Disconnect Connector C2
from the PSR4/5.
large capacitors inside the
PSR4/5. These capacitors can
store a lot of energy.
If the reference signal is correct and the feedback
circuitry is not working, your BDS5 may be
malfunctioning. Conta ct the factory.
2.7.11 Checking the AC Line Voltages
SHOCK HAZARD!
Large voltages are present on
the AC Line. Be very careful
WARNING
Open the circuit breaker or remove the fuses in the AC
Line.
Turn on the AC Line. Use an AC voltmeter to check
and record the 1- or 3-phase line-to-line voltage at the
circuit breaker or fuse holders. Turn off the AC Line.
Note the model number of the PSR4/5 and refer to the
Model Number Tables, in Chapter 1, to confirm
correct AC Li ne voltage.
when measuring these
voltages.
Turn on Control Power to PSR4/5 Connector C1 and
turn on the AC Line to the PSR4/5 Power Terminal
Block (La, Lb, and Lc).
SHOCK HAZARD!
Large voltages are present on
La, Lb, Lc, BUS+ and BUS-.
WARNING
Check and record the DC Bus output voltage at BUS+
with respect to BUS- on the PSR4/5 Power Terminal
Block. It should be approximately 325 VDC for
230 VAC line voltage, or 162 VDC for 115 VAC line
voltage.
REMOVE THE AC LINE VOLTAGE. WAIT 5
MINUTES FOR THE DC BUS TO DISCHARGE.
Reconnect the BUS+ and BUS- leads to the Power
Terminal Block on the PSR4/5. Be careful to
reconnect the leads with the correct polarity. Reinstall Connector C2 on the PSR4/5.
Be very careful when
measuring these voltages.
2.7.12 Checking the DC Bus Voltage
Remove the AC Line. Wait 5 MINUTES for the DC
BUS to discharge.
2-22
WARNING
OBSERVE POLARITY OF THE
DC BUS!
When interconnecting
Industrial Drives GOLDLINE
Series Products, connect
BUS+ to BUS+ and connect
BUS- to BUS-.
Page 59

BDS5 C
HAPTER
NSTALLATION
2 - I
2.7.13 Checking the Motor
The MOTOR command is provided to ensure that
your BDS5 is properly configured for your motor.
Type:
MOTOR
The BDS5 should respond with something like:
MOTOR = B-204B
You can then verify that your motor is a 204B.
Always check the motor nameplate to verify that you
have wired the correct motor to your BDS5. This
should agree with the part of your BDS5 model
number as described in chapter 1.
Wiring the BDS5 to a motor
for which it is not configured
can cause the system to
WARNING
become unstable. Verify that
you are connecting the
correct motor.
To display PRD, type:
P PRD
Table 2.10. PRD Range for "Zero Position"
PRD
R/D Resolution
12-Bit
14-Bit
16-Bit
4. Turn on (close contacts of) LIMIT, MOTION,
and REMOTE.
5. Turn on Control Power only.
6. Put the BDS5 into the zeroing mode. Type:
ZERO ON
7. Turn on AC Line.
8. Enable the BDS5. Type:
Less
Than
25
100
400
PRD
Greater
Than
4070
16300
65000
Verify that motor wiring is correct. IT IS VERY
IMPORTANT THAT YOU WIRE T HE MOTOR
PROPERLY. Brushless motors are not like induction
motors. You cannot simply interchange two phases to
reverse the direction of rotation. You MUST connect
Pin A of the motor connector to Ma of the BDS5
power connector, Pin B of the motor connector to Mb,
and Pin C of the motor connector to Mc.
Follow this procedure to check motor wiring:
1. Turn off the AC Line and the Control Power.
2. Remove all loads from the motor. The motor
must be able to rotate freely for this test.
3. Rotate the motor by hand until PRD is in the
zero position as shown in Table 2.10. Note that
the position must be less than the small number
greater than
OR
the large number.
EN
The motor may move a small amount, but PRD should
remain in the zero position. Type:
P PRD
If the motor rotates to the zero position, then type:
DIS
ZERO OFF
and continue to the next section.
2-23
Page 60

HAPTER
C
If the motor rotated to the wrong position, then you
must stop and correct this problem. Either the resolver
is improperly wired, the motor is improperly wired,
the motor is not functioning properly, or the resolver is
not functioning properly. In most cases, the wiring is
the problem. Check your motor and resolver wiring
carefully. Follow the procedure in "Checking the
Resolver Cable" in section 2.7.10. If you have wired
the motor through motor-overload relays, verify that
the relay is closed. Contact the factory if your motor
does not rotate to the zero position and you can not
correct the problem.
WARNING
NSTALLATION
2 - I
DO NOT PROCEED IF YOUR
MOTOR IS NOT ZEROING
PROPERLY.
BDS5
2-24
Page 61

BDS5 C
MODEL No.
REV No.
C2 LOGIC POWER (to BDS5 C4)
ACTIVE
SYS OK
CPU
FAULT
6
1
7
2
8
3
C1
9
4
5
10
1 +18 VDC
2 -18 VDC
3 COMMON
5 +18 VDC
6 -18 VDC
7 COMMON
8 +10 VDC4 +10 VDC
HAPTER
NSTALLATION
2 - I
RELAY
T
1
J1
5
9
6
1
C5
MODEL No.
SERIAL No.
KOLLMORGEN
Industrial Drives
BUS+
BUS-
11
1
2
12
13
3
14
4
15
5
C2
16
6
21
17
7
87
8
18
9
19
10
20
1 FAULT RLY
2 115 VAC HI
1
7
2
8
3
9
4
10
5
11
612
5
1
2
6
3
7
4
8
BDS5
C3
C4
3 115 VAC LO
MODEL No.
SERIAL No.
(SEE INSIDE BACK COVER FOR BDS5 CONNECTOR TABLES)
KOLLMORGEN
Industrial Drives
D.C. BUS
REGEN
OVERLOAD
BLOWN FUSE
C1 CONTROL INPUT POWER
4 FAULT RLY
5 115 VAC HI
6 115 VAC LO
4
1
5
6
5
6
7
8
2
3
1
2
3
4
PSR
C1
C2
BUS+
BUS-
Ma
Mb
Mc
GND
La
Lb
Lc
GND
BDS5 CONNECTORS
RICK FURR
01-30-95
A-96372M
Issue
3
2-25
Page 62

HAPTER
C
NSTALLATION
2 - I
BDS5
2-26
Page 63

BDS5 C
HAPTER
C
PERATION
O
3
HAPTER
3 - O
PERATION
3.1 INTRODUCTION
The information in this chapter will enable you to
become familiar with system components and their
dependence upon one another. Also, it will help you
ensure each component is configured and functions
properly. At this point, all safety stops and other
precautions should be in place and working properly.
Be prepared to stop the machine if necessary.
3.2 START-UP AND CHECKOUT
You should now be ready to supply power to test the
servo systems functions and features. Work with only
one axis section at a time. Confirm all other BDS5
amplifiers are inhibited, meaning the enable circuits
are open ( high).
Appropriate precautions should be taken to stop the
machine if necessary. Limit switches and safety
devices should be in place.
THE MOTOR MAY MOVE
UNEXPECTEDLY!
BE PREPARED TO DISABLE
THE BDS5!
Commands in this section will
enable the BDS5. The system
WARNING
This section discusses how to enable the BDS5.
Follow this procedure:
1. Turn on (close contacts of) LIMIT, MOTION,
and REMOTE.
2. Turn on Control Power.
may be unstable. The motor
may begin oscillating or run
away. Be prepared to disable
the BDS5 quickly. You can
disable the BDS5 by turning
off (opening the contacts) of
LIMIT or REMOTE.
3. Turn on the AC Line.
4. Enable the BDS5. Type:
EN
3-1
Page 64

HAPTER
C
3 - O
PERATION
BDS5
The motor should be still. If your motor is
oscillating, disable the BDS5 by typing:
DIS
3.2.1 If You Get ERROR 17, FEEDBACK LOSS
If the BDS5 generates ERROR 17, FEEDBACK
LOSS, then a lead in the resolver cable is probably
broken. First, verify that the cable is wired correctly
using the procedure in "Checking the Resolver Cable"
in section 2.7.10.
If the cable appears to be wired correctly, use an
oscilloscope to verify that the sine (Connector C3,
Pin 7) and the cosine (Connector C3, Pin 9) are
present. Note that the amplitudes of both these
signals vary with motor position, so you will need to
rotate the motor by hand to force sine and cosine to
their maximum values. Expect a sine wave with a
maximum peak-to-peak level of about 6.5 Volts at
8 kHZ.
If both sine and cosine are present on the connector
and your BDS5 continues to generate ERROR 17,
your unit may be malfunctioning; contact the factory.
3.2.2 If You Get ERROR 14, POWER BUS
ERROR 14, "POWER BUS," is generated when the
BDS5 detects either an undervoltage or an
overvoltage. If the BDS5 cannot be enabled because
ERROR 14 continually reoccurs, it is probably
because of undervoltage. Return to "Checking the
AC Line Voltage" and "Checking the DC BUS
Voltage" beginning in section 2 .7.11 to e nsure that
the DC Bus is present.
If this error occurs only when the system is powered
up, it is probably because your program attempts to
enable the BDS5 before bus voltage is present.
OK2EN is a switch that is ON when your BDS5 can
be enabled without generating a fault. You can delay
enabling the BDS5 until bus voltage is present by
modifying your program to wait for OK2EN to be
ON.
TIL OK2EN EQ ON
EN
If the error occurs occasionally, it could be
overvoltage or undervoltage. Overvolta ge is usually
caused by regenerative energy from a deceleration
which forces the DC BUS voltage to rise above the
BDS5 overvoltage level--about 200 VDC for
115 VAC line voltage systems and about 400 VDC
for 230 VAC. If the error occurs only during
deceleration, it is probably an overvoltage error. This
can be corrected by reducing the deceleration rate
(although often, it must be reduced dramatically) or
by adding increased regeneration capability. Contact
Industrial Drives Application Engineering to add
regeneration capability.
Undervoltage is caused by the loss of the AC Line.
The undervoltage detection level is set well under 100
VDC (70 VAC) so that low line (from "brown out")
almost never causes a n undervoltage fault. Your
system may include protective circuits that remove
power from the BDS5 when a problem is detected
elsewhere in the system. This can cause the BDS5 to
generate ERROR 14 and lead you to suspect the
BDS5 of causing the original problem. If the
problem occurs only rarely, you may have to
purchase or rent a device to monitor the DC BUS
voltage to determine the cause.
3.2.3 If Your BDS5 System is Unstable...
If the motor was oscillating, you need to retune your
system. First, try to stabilize the system with the
TUNE command. Type:
TUNE 10 2
Enable the drive. If your system is stable, you can
skip ahead to the next section. If you want to
improve the response, see Section 3.5 for details on
the TUNE command.
If your system is not stable, disable the BDS5. You
need to detune the system. First, disable the position
loop. Type:
PL OFF
Disable the integrating velocity loop (in other words,
enable the proportional velocity loop). Type:
PROP ON
3-2
Page 65

BDS5 C
HAPTER
3 - O
PERATION
On power-up, the integrating velocity loop will be
enabled (that is, PROP is turned off) and the position
loop will be turned on. Be careful to turn PROP on
and PL off every time you power-up until you
stabilize the system for an integrating loop.
PROP is turned off and PL is
turned on at power-up. If you
are following this procedure
to stop oscillations, be certain
WARNING
Now enable the drive by typing:
EN
Reduce the proportional gain (KPROP) until
oscillations stop. Type:
KPROP = KPROP/2
You may need to repeat this command a few times.
After oscillations stop, enable the position loop by
typing:
to turn PROP on and PL off
every time you power-up the
drive.
PLIM OFF
Now type:
J 10
and the motor should rotate at 10 RPM. If PROP is
on, the motion will be very unsteady. You need an
integrating velocity loop for good low speed
performance.
Disable the BDS5 and enable the software position
limits. Type:
DIS
PLIM ON
3.2.5 Low Speed Adjustment
SKIP THIS SECTION IF YOU HAD TO TURN
PROP ON TO STABILIZE YOUR SYSTEM. The
BDS5 has a low-speed adjustment. This adjustment
helps smooth very low-speed motion. This
adjustment is made with the variable KC which is
normally set to 200. This value of KC produces
sufficiently smooth low speed performance for almost
all applications. However, if your application is very
demanding, you may want to adjust KC somewhat. It
is rare for this procedure to be required.
PL ON
Next, reduce the position loop gain (KP) until
oscillations stop. Type:
KP = KP/2
You may need to repeat this command a few times.
If you need to tune your system for better
performance, see Section 3.3.
3.2.4 Jogging the Motor
If you can enable the BDS5 without motor
oscillations, then you can jog the motor. First, you
should temporarily disable the BDS5 software
position limits. Type:
1. Turn PL off by typing:
PL OFF
2. Twist the motor shaft back and forth lightly at
about 1 or 2 twists per second. You should
feel very slight "graininess." This graininess is
similar to the feel of anti-backlash gears. If
you want to make the graininess more
pronounced (so that you can feel it), set KC to
zero. Type:
KC = 0
3. Adjust KC so that the graininess is minimized.
The best way to do this is by attaching a mirror
to the motor shaft and shining a laser onto the
mirror and observing the reflected dot about
10-20 feet from the motor. You can attempt to
"feel" the graininess, but that measurement is
so coarse that you should pr obably just set KC
to 200 and skip this procedure. The normal
3-3
Page 66

HAPTER
C
3 - O
PERATION
BDS5
range for KC is between 175 and 225. This
adjustment must be repeated when either the
motor or the amplifier is changed out.
4. Restore PL. Type:
PL ON
This completes the initial check-out.
3.3 SYSTEM COMPENSATION
Feedback systems (like a motor controller) require
tuning to attain high performance. Tuning is the
process whereby the position and velocity loop gains
are set, attempting to optimize the performance of a
system (a BDS5 and a motor connected to a load) to a
three-part criterion:
Table 3.1. Tuning Criterion
Noise Susceptibility
Response
Stability
Stability measures how controlled the system is.
Stability can be measured with damping ratio or with
overshoot in response to a step command. A
discussion of different levels of stability follows.
3.3.1 Critical Damping
Generally, the most desirable amount of damping is
Critical Damping. Critically damped systems
respond as fast as possible with little or no overshoot.
In Figure 3.1, the graph shows the response of a
BDS5 TACH signal (on Connector C2, Pin 2) to a
square wave input when the system is critically
damped.
Tuning is normally a laborious procedure requiring
an experienced person. However, the BDS5 provides
many tools to aid tuning, making it a much simpler
process than it has been in the past.
In a broad sense, the performance of a system is
characterized by its noise susceptibility, response, and
stability. These quantities tend to be mutually
exclusive. The system designer must decide what
noise susceptibility (in the form of a "busy" motor) is
acceptable.
"Busyness" is random activity in the motor and can
often be felt on the motor shaft. Busyness in a motor
should not be confused with PWM noise. PWM
noise is high pitched, relatively constant noise and
cannot be felt on the motor shaft.
Response is a measure of the system's quickness.
Response can also be characterized by bandwidth and
by rise time in response to a step command.
Normally, designers want high bandwidth, though
sometimes the response is purposely degraded to
reduce stress on mechanical components. This is
called
detuning
range from 20 to 60 Hz. Typical position loop
bandwidths range from 0.1 to 0.2 times the velocity
loop bandwidth.
. Typical velocity loop bandwidths
Figure 3.1. Critical Damping
3.3.2 Underdamping
Sometimes the system is tuned for critical damping
and the system is still too slow. In these cases, you
may be willing to accept less than critical damping.
For applications that can work properly with a
slightly underdamped system, you may reduce the
stability to improve the response. The graph in
Figure 3.2 shows a BDS5 slightly underdamped.
3-4
Page 67

BDS5 C
HAPTER
3 - O
PERATION
Figure 3.2. Underdamping
3.3.3 Overdamping
An overdamped system is very stable but has a longer
response time than critically damped or underdamped
systems. Also, overdamped systems are noisier than
less damped systems with the same response rate.
The graph in Figure 3.3 shows an overdamped
system.
Figure 3.4. Ringing
3.4 TUNING
The TUNE command shakes
the motor vigorously. Secure
WARNING
The BDS5 is usually shipped with a tuning that will
work reasonably well with the load inertia between 0
to 4 times the rotor inertia. Many applications have
approximately matching inertia. If your system does,
you may not have to adjust the tuning of your BDS5.
The following section describes how you can re-tune
your system.
NOTE
the motor before tuning.
When tuning a system, it may
be desirable to disable the
BDS5 quickly. You can use K,
the KILL command, to disable
with a one-letter command.
Figure 3.3. Overdamping
3.3.4 Ringing
When you are tuning the BDS5 you may tune it so
that the response rings. Ringing is caused when you
attempt to tune the BDS5 for either too rapid
response (too high bandwidth) or too much stability
(too much damping) or both. The only solution is to
reduce the bandwidth or the stability or both. In
Figure 3.4, the graph shows a system that rings.
The BDS5 provides self-tuning. This is a feature that
senses the inertial load of your system and then
attempts to set tuning parameters accordingly. Note
that self-tuning is not fool-proof. You may need to
adjust one or two of the tuning parameters to get
exactly the response you need.
3-5
Page 68

HAPTER
C
3 - O
PERATION
BDS5
THE MOTOR MAY
OSCILLATE!
Unloaded motors tuned for a
large inertia load may become
WARNING
unstable when the system is
activated. If the system
becomes unstable, remove
the power immediately.
3.4.1 If Your System Is Completely Unstable...
If your system is completely unstable when you
enable it, remove power immediately. After restoring
power, but before enabling the BDS5, turn off the
switch PL, reduce KV to 100, and reduce KVI to 0.
This should make the system stable.
;TYPE THESE LINES ONLY IF YOUR
;BDS5 IS UNSTABLE WHEN YOU
;ENABLE IT. DON'T FORGET TO
;RESTORE PL WHEN YOU HAVE
;FINISHED TUNING.
PL OFF
KVI = 0
KV = 100
does respo nd fast enough), then you a re done. Do not
forget to restore ILIM to its original value.
The TUNE command shakes
the motor vigorously. You
may need to reduce ILIM
before executing the TUNE
CAUTION
NOTE
command to protect your
machine. Do not forget to
restore ILIM when tuning is
complete.
The TUNE command can
cause the motor to overspeed.
You may need to reduce ILIM
to prevent overspeed errors.
Do not forget to restore ILIM
when tuning is complete.
3.5 TUNE COMMAND
When you enter a TUNE command, you specify the
response time and the stability level. The response
time is specified in the form of bandwidth. The
higher the bandwidt h, the faster the re sponse. The
level of stability is specified as follows:
If the BDS5 is still unstable, remove power and
contact the factory. If it is stable, continue on with
tuning. Do not forget to turn PL back on when you
have finished tuning. Also, PL is always turned o n
during the BDS5 power-up.
3.4.2 Reducing ILIM
You may need to reduce ILIM before executing the
TUNE command since the TUNE command causes
the motor to "shake" at about 15 Hz and at full
torque. This may damage some machines. Also,
lightly loaded motors can overspeed if ILIM is too
high. You should r aise ILIM to the highest level that
does not cause problems, because the tuning may not
be acceptable if ILIM is too low. The effect can be
that the torque the BDS5 produces is "swamped out"
by friction. If you are not sure how much ILIM is
necessary, reduce ILIM to a low value (say 5 or 10%)
and gradually raise it. If the tuning is acceptable (that
is, it does not ring or overshoot excessively, and it
Table 3.2. Allowed Tune Command
Stability Settings
1
2
3
WARNING
Enable the BDS5 and type this command:
TUNE 30 2
The BDS5 will shake the motor and set the tuning so
that the velocity loop has a bandwidth of
Slightly overdamped
Critically damped
Slightly underdamped
The drive will be enabled and
the motor will turn. Make sure
the motor is secured. Even if
the BDS5 is disabled, it will
enable long enough to
execute the TUNE command.
3-6
Page 69

BDS5 C
HAPTER
3 - O
PERATION
approximately 30 Hz and is critically damped. The
allowed bandwidths are 5, 10, 15, 20, 25, 30, 40, and
50 Hz.
The tune command does not always provide an
acceptable tuning. If not, you can tune the BDS5
yourself.
3.6 TUNING THE BDS5 YOURSELF
If you use the TUNE command, and the resulting
tuning variables cause the system to oscillate, there
are generally two reasons:
1. The bandwidth in the TUNE command is set
too high for the system to function properly.
2. The low-pass filter is set too low (this only
applies if LPF is on).
In either case, first raise the low-pass filter frequency
(LPFHZ) to as high a level as is acceptable. You may
even decide to remove it by setting LPF to off.
and increase KVI to make the system more
responsive.
You need to make several decisions: Is the unit
underdamped? Is the system response too fast? Is
the system ringing? Is there a resonance present?
Then, take the action listed on Drawing A-84888.
There is a close relationship between the response of
the system and the variable KVI. Response is often
measured by the system
frequency with which the system response falls to
70% of the nominal response. For example, if your
velocity command was a sine wave with peaks of
±100 RPM, the bandwidth would be the frequency
that the response fell to a sine wave with peaks of
±70 RPM. The relationship between velocity loop
bandwidth and KVI is shown in Table 3.3.
Table 3.3. Velocity Loop Bandwith vs. KVI
KVI
1400 5 Hz
bandwidth
VELOCITY LOOP
. Bandwidth is the
BANDWIDTH
If the TUNE command does not provide a suitable set
of tuning variables, then you have the op tion of
tuning the BDS5 yourself. You will need an
oscilloscope. Connect an oscilloscope channel to
TACH MONITOR on Connector C2, Pin 2; atta c h
the scope ground to COMMON on Connector C2, Pin
14. Use the TUNE command to get as close as
possible.
3.6.1 Tuning the Velocity Loop
The drive will be enabled and
the motor will turn. Make sure
WARNING
Drawing A-84888 shows how to manually tune an
integrating velocity loop. This procedure sets KV
and KVI. First, you should use the TUNE command
to set KV and KVI close to optimum values. Apply
DC bus voltage to the BDS5. Follow the instructions
shown on Drawing A-84888. The motor should start
and stop every second. Press the escape key to enter
the monitor mode where you can change tuning
constants. The tach should be on the oscilloscope,
showing the motor performance. As the drawing
notes, you should increase KV for increased stability
the motor is secured.
2650 10 Hz
4000 15 Hz
5000 20 Hz
6250 25 Hz
7500 30 Hz
8750 40 Hz
10000 50 Hz
If you are using a proportional velocity loop (PROP
is on), then adjust KPROP until the motor is
performing appropriately.
3.6.2 Tuning the Position Loop
Once the velocity loop is tuned, you can tune the
position loop. Break program execution and stop
motion by typing S. Type in the following
commands:
The drive will be enabled and
the motor will turn. Make sure
WARNING
the motor is secured.
3-7
Page 70

HAPTER
C
PEMAX 30000
ZPE ;ZERO POSITION
PL ON
KF=0
RUN 80
The motor shoul d again begin turning. Now adjust
KP until the motor is performing appropriately.
Table 3.4 shows the relationship between a properly
tuned position loop (that is, the highest setting for
KP) and velocity loop bandwidth. Note that the
position loop bandwidth will be substantially lower
than the velocity loop bandwidth (usually by a factor
of 5 to 10).
Table 3.4. Velocity Loop Bandwidth vs.
KP
MAX
500 5 Hz
1000 10 Hz
3 - O
PERATION
;ERROR TO AVOID
;POSITION ERROR
;OVERFLOW WHEN
;ENABLING POSITION
;LOOP
KP
MAX
VELOCITY LOOP
BANDWIDTH
BDS5
3.7 RECORD AND PLAY
The RECORD command allows you to record most
BDS5 variables in real time for later playback. You
can simultaneously record up to four variables. You
can record any variable except PE, REMOTE,
TMR1, TMR2, TMR3 , TMR4, VAVG, VXAVG, or
any user switches. You can specify the time between
points from one millisecond to one minute. You can
record up to 1000 instances of 1 variable, 500
instances of 2 variables, 333 instances of 3, and 250
instances of 4 variables.
The format of the RECORD command is
RECORD <Number> <Time> <1 to 4 Variables>
Where number is the number of intervals over which
the variables will be recorded, and time is the time in
milliseconds of each interval.
Note: <Number> <= 1000 for 1 Variable
<Number> <= 500 for 2 Variables
<Number> <= 333 for 3 Variables
<Number> <= 250 for 4 Variables
For example,
1500 15 Hz
2000 20 Hz
2500 25 Hz
3000 30 Hz
4000 40 Hz
5000 50 Hz
If you want to eliminate some or all of the following
error, you can raise KF as high as unity feedforward (Unity is defined as KF = 16384). However,
the larger you make KF, the more you must reduce
KP to eliminate overshoot and thus reduce the
position loop performance. If you cannot get the
desired performance from the position loop, then try
reducing ACC and DEC to reduce overshoot. This
can be a good way to limit overshoot in the position
loop, and you may be able to raise KP slightly (about
20%) to improve performance.
405$ ;BEGINNING LABEL
EN ;ENABLE BDS5
RECORD 500 1 VFB ;RECORD VFB FOR
J 1000 ;1/2 SECOND JOG
B ;1000 RPM
Records the velocity response of the BDS5 to a jog
command.
After data is recorded, you can use the PLAY
command to print each point on the screen. However,
Motion Link provides all the routines to retrieve, plot,
print, and store recorded data on your computer and
line printer.
The RECORD command is useful when tuning a
system because you can display the BDS5 response to
commands without an oscilloscope. However, it is
not limited to tuning. For example, you can record
VCMD to plot a motion profile, or you can plot
VEXT to watch the external encoder/analog input.
You can also plot user variables to watch the
performance of your program.
3-8
Page 71

BDS5 C
Reducing ACC and DEC.
•
3.8 PROBLEMS
Reducing the load on the motor.
•
HAPTER
3 - O
PERATION
Some times there are problems tuning. Usually the
TUNE command will provide you with a tuning that
is either acceptable or close to acceptable. If not, you
can tune the system yourself. Sometimes there are
physical factors that prevent you from attaining the
performance you need. These problems fall into four
categories:
1. Overloading the Motor
2. Compliance
3. Resonance
4. Changing Load Inertia or Reflected Inertia
3.8.1 Overloading the Motor
Overloading the motor is the most common problem
for positioning systems (that is, systems with PL on).
If you overload the system, the position error can
grow to very large values. When the command stops,
the motor "reels in" the following error and can
overshoot excessively. It looks like a tuning problem,
but it is actually caused by the motor being
undersized, ACC or DEC being set to o high, or ILIM
being set too low.
Increasing ILIM (if it is less than IMAX).
•
Using a BDS5 with a higher current rating.
•
Using a motor with more peak stall torque.
•
3.8.2 Compliance
In compliant systems, the load is not tightly coupled
to the motor shaft. If you move the load by hand, you
can feel springiness. Compliant systems often are
very stable when you tune with lower target
bandwidths. However, they oscillate vigorously at
low frequencies when you try to tune them for higher
bandwidths.
When a system is compliant, it has the following
characteristics:
There is springiness between the motor and the
•
load or at the motor mounting plate.
The TUNE command calculates tuning
•
variables that cause the system to oscillate.
The frequency of oscillation is less than
•
100 Hz.
When a motor is overloaded, it has the following
characteristics:
The system overshoots, sometimes excessively,
•
but does not ring or oscillate.
Reducing ACC and DEC eliminates the
•
problem.
Turning off PL eliminates the problem.
•
The motor current is near or at saturation
•
during a large part of the move. Use the BDS5
RECORD function to record ICMD.
If ICMD is equal to ILIM for more than a few
milliseconds, then your system is saturated.
Overloading the motor can be corrected by the
following actions:
Compliance can be corrected by the following
actions:
Reduce the bandwidth of the system.
•
Stiffen the machine so the load is not springy.
•
3.8.3 Non-Linear Mechanics
BDS5 tuning is based on linear control theory. The
most important requirement of a linear motor
controller is that the total reflected inertia should not
change substantially during operation. Load inertia
includes all the inertia reflected to the motor, such as
inertia through ge arboxes and le adscrews. Inertia can
change in ways that are easy to understand, such as
the inertia of a spool of cable decreasing when the
cable is unrolled. It can also change in less intuitive
3-9
Page 72

HAPTER
C
ways, such as chain drives (which have load in one
direction but are unloaded in the other) and systems
with excessive backlash (where there is no load when
gear teeth are not touching).
When the inertia changes, the system has the
following characteristics:
System performance is excellent when the
•
motor is in some positions and unacceptable
when the motor is in other positions.
Reducing the bandwidth eliminates the
•
problem.
If the system performance is poor because of
changing inertia, you can make the follo wing
corrections:
Correct the system mechanics so that inertia is
•
constant.
Detune (that is, reduce the b andwidth of) the
•
system. If the times when your system will
have excessively changing inertia are
predictable, you can write your program to
detune your system in these regions.
3 - O
PERATION
3.8.4 Resonance
BDS5
Enable the low-pass filter (LPF) and reduce
•
LPFHZ, if necessary.
Reduce the bandwidth of the system.
•
Shorten the length and increase the diameter of
•
shafts and lead screws.
3.8.5 Low-Pass Filters
The LPF switch enables the low-pass filter. It can be
turned on and off when the drive is operating. The
frequency of the low-pass filter is stored in LPFHZ in
Hz. It can also be changed when the drive is
operating. For example, if LPFHZ is 200 and LPF is
on, then a 200 Hz low-pass filter is run in the BDS5.
The filter can be modeled as two cascaded, low-pass,
single-pole filters, both with a 3 dB frequency of 200
Hz. LPFHZ should be set as high as possible, since it
degrades the system performance.
For example, the following sequence sets the low-
pass filter to 250 Hz and enables the drive.
LPF ON ;ENABLE LOW_PASS FILTER
LPFHZ 250;SET BREAK FREQ. TO 250
;HZ
Resonance is a high frequency (> 500 Hz) where the
system mechanics oscillate. Normally, systems with
resonance will be very stable when you tune with
lower target bandwidths. As you increase the target
bandwidth, you will begin to hear a fairly pure, high
pitch. If you want to decrease resonance, use shorter,
larger diameter driving shafts. Often, the low-pass
filter can help you raise the bandwidth 20% or 30%,
but this can be a difficult trial-and-error process: you
slowly lower the low-pass filter frequency (LPFHZ)
and attempt to raise the target bandwidth for tuning.
When your system has a resonance, it will have the
following characteristics:
The system will make a clear, high pitch
•
(>500 Hz). Do not confuse this problem with
compliance, which has a low pitch.
If the system performance is poor because of
changing inertia, you can make the follo wing
corrections:
NOTE
If the low-pass filter is on, the
TUNE command may not work
well.
3-10
Page 73

BDS5 CHAPTER 4 - MAINTENANCE
Page 74

CHAPTER 4 - MAINTENANCE BDS5
Page 75

BDS5 C
HAPTER
C
AINTENANCE
M
4
HAPTER
4 - M
AINTENANCE
4.1 INTRODUCTION
The information in this chapter will enable you to
maintain the systems components ensuring smooth,
efficient operation of the motor. Preventative
maintenance of the equipment is also specified along
with periodic maintenance. Follow these practices
when operating your servo system.
4.2 PREVENTATIVE MAINTENANCE
Preventative maintenance can prevent situations that
will damage your equipment. Four types of
preventive maintenance are presented below.
Following each of the procedures can reduce
problems with and add life to your equipment
.
Preventative maintenance to
this equipment must be
performed by qualified
personnel familiar with the
CAUTION
construction, operation, and
hazards involved with the
application.
Preventative maintenance should be performed with
the BDS5 system out of operation and disconnected
from all sources of power.
4.2.1 Transient Voltages
All transient-producing
devices must be properly
suppressed.
NOTE
Solid state controls of the BDS5 may be affected by
transient voltages. These voltages are in excess of the
specified voltage for any given circuit. When these
peak voltages occur, even for less than a second,
permanent damage to the BDS5 can occur.
In order to help avoid transient voltages that may
interfere with electronic circuit functions within the
PSR4/5 and BDS5, all switched inductive devices or
their wiring (solenoids, relay coils, starter coils, etc.)
must be suppressed. A 220 ohm, 1/2 watt resistor in
series with a 0.5 micro farad, 600 volt capacitor or
equivalent is suggested.
4.2.2 Surge Current
CAUTION
Electronic components in this
amplifier are static sensitive.
Use proper procedures when
handling component boards.
Excessive current greater than that of the specified
limits of the PSR4/5 and BDS5 can cause permanent
damage to the system. Current limiting means are
recommended to protect from these currents.
4-1
Page 76

CHAPTER
4 - M
AINTENANCE
BDS5
If the short circuit inrush
current generated by the
power source is in excess of
5000 amps RMS symmetrical
current, an isolation
transformer or line inductor
CAUTION
Input transformers step up or step down input voltage
and can be either autotransformers or isolation
transformers. Isolation transformers help eliminate
the following:
Damaging AC line voltage transients reaching
•
the PSR4/5 and BDS5.
Damaging currents which may develop if a
•
point inside the PSR4/5 or BDS5 becomes
grounded.
must be utilized in the
incoming power circuit.
Failure to observe this
precaution could result in
damage to, or destruction of
the PSR4/5 and BDS5.
Use twisted-pair wiring for control circuits of
•
the BDS5.
Follow good grounding practices when wiring
•
the PSR4/5 and BDS5. Be careful not to create
a grounding loop with multiple ground paths.
Follow the NEC's provisions on grounding.
4.2.4 Radio Frequency Energy
This equipment generates
NOTE
This equipment uses, and can radiate radio frequency
energy and must be installed and used in accordance
with this installation and service manual in order to
prevent possible interference with radio
communications or other electronic equipment.
radio frequency energy.
4.3 PERIODIC MAINTENANCE
4.2.3 Electrical Noise
The low levels of energy in the BDS5 control circuits
may cause them to be vulnerable to electrical noise.
Sources of electrical noise are those pieces of
equipment that have l arge, fast changing vo ltages and
currents when they switch on and off. These devices
have the capability of inducing critical current and
voltage transients on their respective power lines.
These transients must be accommodated for with
noise immunity provisions.
Electrical noise is prevented with the same methods
as Surge Current and Transient Voltages. However,
there are other methods of preventing electrical noise.
Such as:
Maintain physical separation between electrical
•
noise sources and the BDS5 amplifier.
Maintain physical separation between electrical
•
noise sources and the BDS5 control wiring.
This can be accomplished by using separate
conduits or wiri ng trays for control wiring and
power wiring.
Periodically you will need to inspect your equipment
for possible problems to insure ongoing safe and
efficient operation. Periodic maintenance should be
performed at scheduled intervals to insure proper
equipment performance. It must be performed by
qualified personnel familiar with the construction,
operation, and hazards involved with the BDS5 and
its application. Power should be disconnected during
all maintenance procedures.
4.3.1 Ventilation
The PSR4/5 and BDS5 should be mounted vertically
to allow maximum ventilation of the components.
This configuration allows the heat generated by the
components to vent through the top and draft in
cooler ai r through the bottom. The top and bottom of
the components are vented to allow this drafting to
occur. These ventilation passages should be kept
open. If the PSR4/5 requires auxiliary cooling with
fans, inspect the fans on a regular basis.
4-2
Page 77

BDS5 C
4.3.2 Grounding Integrity
The method empl oyed for grounding or insulating the
equipment from ground should be checked to assure
its integrity on a regular basis. This check should be
performed with the power off and the testing
equipment grounded.
HAPTER
4 - M
AINTENANCE
4-3
Page 78

CHAPTER
4 - M
AINTENANCE
BDS5
4-4
Page 79

BDS5 C
HAPTER
C
ROUBLESHOOTING
T
5
HAPTER
ROUBLESHOOTING
5 - T
5.1 INTRODUCTION
The information in this chapter will enable you to
order spare parts and isolate and resolve common
system hardware problems. The BDS5 aids in
diagnostic eva luation through its LED Status
Indicators and the BDS5 Error Log. Both of these
features are explained to assist you in finding
solutions. As another part of Industrial Drives'
obligation to it's customers, Factory Support and
Repair is also defined.
5.2 SPARE PARTS
There are no user serviceable parts on the BDS5.
There are several fuses that are user serviceable on
the PSR4/5. Remember, the PSR4/5 can be damaged
by ESD (Electro-static discharge). Observe proper
ESD protection practices.
The PSR4/5 can be damaged
by ESD (electro-static
discharge). Observe proper
CAUTION
ESD protection practices.
Connector Kit for 3, 6, and 10 Amp BDS5's
(BDS5-x03, BDS5-x06 and BDS5-x10):
BDS5C-100
5.2.2 PSR4/5 Spare Parts List
Connector Kit:
PSR4C-100
1.5 Amp Glass Fuse A-78896-008 Qty. 2
4.0 Amp Glass Fuse A-78896-012 Qty. 1
Regen Fuses:
Internal Regen, 12 Amp Units (PSR4/5-x12-xx00)
5 Amp Fuse: A-80552-007
Internal Regen, 20 Amp Units (PSR4/5-x20-xx00)
8 Amp Fuse: A-80552-009
8.8 Ohms External Regen, 230 Volt Units
(PSR4/5-2xx-xx01)
12 Amp Fuse: A-80552-002
5.2.1 BDS5 Spare Parts List
Connector Kit for 20 Amp BDS5's (BDS5-x20):
BDS5C-101
5-1
Page 80

CHAPTER
ROUBLESHOOTING
5 - T
BDS5
5.5 Ohms External Regen, 115 Volt Units
(PSR4/5-1xx-xx02)
10 Amp Fuse: A-80552-001
Soft-Start without Regen (PSR4/5-xxx-xx80)
6 Amp Fuse: A-80552-008
5.2.3 Ordering Information
If you need to order parts for the BDS5 and/or
PSR4/5, you can order them through your local
distributor. For a complete list of Industrial Drives'
representatives contact us directly at:
INDUSTRIAL DRIVES
201 Rock Road
Radford, VA 24141
U.S.A.
Telephone: 703/639-2495
FAX: 703/731-0847
TWX: 710/875-3743
This LED indicates the state of the software watchdog
protection circuit. It is on during normal operation
and blinks for the most serious errors. This LED also
blinks during autobauding.
FAULT
•
This LED indicates that a fault has occurred. A fault
is an error that is serious enough to disable the BDS5.
You can turn the FAULT LED on or off from your
program. The FAULT LED is turned off when you
enable the BDS5.
RELAY
•
This LED indicates the status of the BDS5 relay. It is
on when the relay contacts are closed and off
otherwise.
5.3.2 PSR4/5 LED's
The PSR4/5-X12 and PSR4/5-X20 (12 and 20 Amp
versions) have 4 indication LE D's:
5.3 LED STATUS INDICATORS
5.3.1 BDS5 LED's
The BDS5 provides LED's for diagnostics. These
LED's are on the front panel of the BDS5. When the
BDS5 is powered up, all LED's on the front panel
turn on to verify they are operational. The states (on
or off) of each LED are listed below.
ACTIVE
•
This LED shows whether the BDS5 is active.
"Active" means that the BDS5 is enabled and the
REMOTE input switch is on. This LED is on when
the BDS5 is active and off when it is not active.
SYS OK
•
This LED indicates the state of the hardware
watchdog protection circuit. It should be on during
normal operation. However, it is off during
autobauding. If SYS OK turns off, take the BDS5 out
of service and contact the factory.
D.C. BUS
•
This green LED is on when AC Line Voltage is
applied.
REGEN
•
This yellow LED turns on when the PSR4/5 regen
circuit is active.
OVERLOAD
•
This red LED indicates a fault. It turns on when the
PSR4/5 circuitry detects that the regen resistor has
absorbed too much energy. It is turned off when
power is removed and then reapplied. Normally, this
is caused when the motor decelerates too rapidly or
too often. If you get this fault, you may need to
increase the power rating of your regen resistor and
the PSR4/5 may need to be modified at the factory. If
your system has an internal regen resistor, you will
need a new PSR4/5 power supply designed for
external regen. Contact the factory.
•
5-2
CPU
BLOWN FUSE
•
Page 81

BDS5 C
HAPTER
ROUBLESHOOTING
5 - T
This red LED indicates a fault. It turns on when the
fuse that protects the regen resistor has absorbed too
much energy. You must remove power and replace
the fuse. The spare parts list at the end of this chapter
provides ordering information for this fuse. If the
fuse blows during normal operation, see the section
above on "OVERLOAD" because similar conditions
cause both faults and similar actions must be taken to
correct the conditions. If you replace the fuse and it
blows within a few seconds of applying power, then
the regen transistor is probably shorted. The PSR4/5
must be returned to the factory for repair.
The PSR4/5-X50 and PSR4/5-X75 (50 and 75 Amp
versions) have 3 indication LE D's:
D.C. BUS
•
This green LED is on when AC Line Voltage is
applied.
REGEN
•
This yellow LED turns on when the PSR4/5 regen
circuit is active.
FAULT
•
5.4.1 Error Levels
The BDS5's response to an error depends on the
error's severity. There are four levels of severity,
listed below in increasing order:
Table 5.1. Error Severity Levels and
Actions
1.
Errors which cause warnings.
2.
Errors which cause a program break and stop
motion, in addition to Level 1 Actions.
3.
Errors which disable the system and set the
FAULT LED, in addition to Level 2 Actions.
Errors which disable almost all BDS5
4.
functions (includ ing communications) and
flash the CPU LED to indicate the error
number. These are called firmware errors.
When any error except a firmware error occurs, a
message is displayed on the screen. The following
items are printed: the error number, the offending
entry, and an abbreviated error message. For
example, disable the drive and type in a jog:
This red LED indicates an overtemperature fault. It
turns on when the PSR4/5 thermostat opens. It turns
off when the thermostat closes. If this fault occurs, it
means that the regen resistor is on too often or for too
long. If you get this fault, you may need to increase
the power rating o f your regen resistor and the
PSR4/5 may need to be modified at the factory.
Contact the factory.
5.4 ERROR LOG
The BDS5 responds to a variety of conditions, both
internal and external, hardware and software, which
are grouped in a single broad category: errors. An
error indicates that there is a problem somewhere.
More serious errors are grouped as faults.
DIS
J 100
The BDS5 will respond with:
ERR 50 'J 100' BDS5 INHIBITED
The error number (50), the offending entry (the whole
line), and the error message (you cannot command a
jog when the drive is inhibited) are given on one 80character line. The error message starts at character
40 so that if a 40-character display is used, the error
message will not be printed. You can display the line
directly, either with the Motion Link editor (GOTO A
LINE NUMBER selection or ^Q^I), or with the
BDS5 Editor (P command).
Sometimes only an entry is bad and not the whole
line. In this case only the bad entry is printed. For
example,
PROP 2
generates:
ERR 83 '2' ;BAD OR OUT OF RANGE
5-3
Page 82

CHAPTER
ROUBLESHOOTING
5 - T
BDS5
since PROP is a switch and cannot be set to 2. If the
error comes from the program, the line number of the
offending entry is also printed. Use the Editor to
enter these lines at the top of the user program:
11$
PROP 2
B
Exit the Editor and type:
RUN 11
and the response should be:
ERR 83 LINE 2 '2' ;BAD OR OUT OF
;RANGE
This message shows that the error occurred on line 2.
You can enter the Editor and type:
P 2
and the line:
PROP 2
will be displayed.
This causes the Error History to be sent to the
terminal, with the most recent error sent first. When
the BDS5 is powered up, a "DRIVE POWERED UP"
message is inserted into Error History even though
this is not an actual error.
To clear the Error History, type:
ERR CLR
Error History remains intact even through powerdown.
5.4.4 Displaying Error Messages
The ERR command can also be used to display an
abbreviated description of the error. For example,
type:
ERR 50
The BDS5 responds with:
ERR 50 BDS5 INHIBITED
You may display messages for errors from 1 through
999. If you type in an error number that the BDS5
does not recognize, it will respond with:
5.4.2 DEP
If your BDS5 prints to a Data Entry Panel (DEP-01)
or any other 40 character wide display, the standard
error messages will not print properly. The problem
is that error messages are based on an 80 character
wide display and the DEP-01 is only 40 characters
wide. To correct this problem, the BDS5 provides
the DEP switch, which, when turned on, cuts all error
messages down to 40 characters. If your BDS5 prints
to a DEP-01, type:
DEP ON
5.4.3 Error History
The BDS5 stores the twenty most recent errors in the
Error History. To display the entire Error History,
type:
ERR HIST
ERROR NOT FOUND.
A description of all errors is given in Appendix C.
5.4.5 Firmware Errors
Firmware errors are an indication of a serious
problem with the BDS5. These errors stop
communications, disable the drive, and flash the CPU
LED. The CPU LED flashes several times, then turns
off and pauses. The number of flashes represents the
error number. These error numbers range from 2 to
9. See Appendix C for information on these errors.
Contact the factory should one of these errors occur.
5-4
Page 83

BDS5 C
HAPTER
ROUBLESHOOTING
5 - T
5.5 ENABLE AND FAULT LOGIC
This section of this chapter discusses how the BDS5
is enabled and disabled. This discussion will center
around Drawing A-84732 "BDS5--ENABLE and
FAULT LOGIC DIAGRAM." This drawing has six
areas, each of which is labeled with an encircled
number, 1-6. Note that this drawing is a functional
diagram; it does not directly represent the actual
hardware and software used to implement these
functions.
5.5.1 Firmware Faults, Area 1
Area 1 shows how firmware faults are combined.
Firmware faults are the most serious errors. They
include checksums (to help verify computer memory),
watchdogs (to help verify that the computer is
running prope rly), and the 5-volt logic power supply
monitor.
These circuits are designed to watch the basic
operation of the microprocessor. They do not
generate error messages because the detected fault
affects the microprocessor directly. Instead, they just
blink the Central Processing Unit (CPU) LED.
As shown on Drawing A-84732, firmware faults set a
latch to turn off communications and blink the CPU
LED. The CPU LED blinks in cycles consisting of 2
to 8 blinks and a pause. The number of blinks
corresponds to the error number, which you can look
up in Appendix C. The only way to reset these faults
is to power-down the BDS5. These faults are serious
and you should consult the factory if they occur. Do
not confuse these faults with autobauding on powerup. When auto bauding, the CPU LED blinks at a
constant rate, about three times per second. The
autobaud mode is described in the User’s Manual.
5.5.2 Fault Logic, Area 2
The large OR gate in Area 2 combines three types of
faults: hardware, software, and firmware. The
circuits that generate these faults are typical of motor
controllers and are listed on the drawing. These
faults are err ors that are ser i ous enough to disab l e the
BDS5, as described in Appendix C.
5.5.3 Fault Latch, Area 3
The latch in Area 3 turns on the FAULT LED, the
FAULT software switch, and the FAULT output on
Connector C8. Any fault sets this latch; you can also
write your program to turn it on if you detect a fault
condition. The fault latch can be reset by:
1. Turning FAULT off,
2. Typing the enable command (EN), or
3. Powering down the BDS5.
5.5.4 Ready Latch, Area 4
Area 4 shows the logic required to make the drive
ready. If there are no faults, the EN command sets
the ready latch. This turns the READY software
switch on. This latch is reset with the Kill (K)
command, the Disable (DIS) command, or a fault.
These turn READY off.
5.5.5 ACTIVE, Area 5
Area 5 shows that ACTIVE will be on if both
READY and REMOTE are on. This turns on the
ACTIVE LED. It also allows the BDS5 to actively
control the motor.
REMOTE (Remote Enable) is an isolated input that is
accessed from Connector C2 on the front of the drive.
You can print REMOTE with the P command. It
must be 1 to activate the BDS5. Note that some
faults "hide" the value of the REMOTE input from
the BDS5 microprocessor. This does not normally
matter because all faults must be cleared before the
drive will enable. If this condition exists, the BDS5
will print REMOTE as "-1".
5.5.6 Relay and STATUS Control, Area 6
Area 6 shows how software switch STATUS and the
relay work. You can configure STATUS to indicate
either drive READY (but not necessarily ACTIVE)
or drive ACTIVE. The difference is in how you want
to use STATUS. STATUS can be used for an
interlock. In this case, you want STATUS to indicate
drive ACTIVE. If the BDS5 becomes inactive for
any reason (including the REMOTE input turning
off), then STATUS will turn off. As an alternative,
5-5
Page 84

CHAPTER
ROUBLESHOOTING
5 - T
BDS5
you can use STATUS to indicate that the BDS5 is
ready for the REMOTE input to turn on. That is, if
REMOTE turns on, the BDS5 will be ACTIVE. In
this case, you want STATUS to indicate drive
READY.
The software switch STATMODE controls which
state STATUS will indicate. If STATMODE is on,
then STATUS will indicate drive READY. If
STATMODE is off, then STATUS will indicate drive
ACTIVE.
The operation of STATUS is shown by the and-gate
and or-gate in area 6. If STATMODE is on, then
READY will turn on STATUS through the and-gate.
If STATMODE is off, then only ACTIVE (from area
5) will turn on STATUS through the o t he r leg of the
or-gate. The STATUS output on optional Connector
C8, Pin 35, is always the same as the STATUS
software switch. Note, however, that the state of the
STATUS output is undefined for 25 milliseconds
after power-up.
STATUS may turn on for up to
25 milliseconds during power-
WARNING
up.
5.5.7 Motor Brake
Industrial Drives motors can be purchased with an
optional brake. The brake is fail-safe in that if no
current is applied the brake is active. If you set
STATMODE to 0, you can use STATUS to control
the brake. Then, when the BDS5 is disabled or
powered down, the brake will be active.
5.5.8 Output Relay
One way to use the relay is to interconnect it with the
main power contactor. In this case, a hardware
watchdog fault will disconnect all power to the
system.
The SYS OK LED indicates that there is not a
hardware watchdog fault. If this LED goes out, you
should remove the BDS5 from operation and contact
the factory.
5.6 FACTORY SUPPORT AND REPAIR POLICIES
Industrial Drives is committed to helping you install,
operate, maintain and troubleshoot your BDS5 servo
system. If your BDS5 did not pass the "Initial Check
Out" tests or is not operating properly, then contact
the Field Service Department of Industrial Drives.
Please see the
software or programming questions. Be prepared to
provide the full BDS5 and PSR4/5 model numbers
listed on the front of your BDS5 and PSR4/5.
Contact us at:
INDUSTRIAL DRIVES
ATTN: Field Service Dept.
201 ROCK ROAD
RADFORD, VA 24141
TELEPHONE: 703/639-2495
User's Manual
703/731-0847 (FAX)
710/875-3743 (TWX)
before calling about
The relay (Connector C2, pins 16 and 17) represents
the state of the hardware watchdog. The hardware
watchdog makes a system more reliable because the
watchdog is independent of the microprocessor. If
the processor is not working, the watchdog will
usually detect it (though this is not guar anteed).
On power-up, the contacts are open until the BDS5
passes its power-up self tests. Then the contacts close
and the BDS5 begins normal operation. Note that if
the BDS5 is set to autobaud on power-up, the
contacts will not close until after autobauding and
establishing communications.
5-6
Page 85

BDS5 A
PPENDIX
A
ARRANTY INFORMATION
W
A
PPENDIX
A - W
ARRANTY INFORMATION
Industrial Dri ves, a Kollmorgen Divi sion, warrants
that equipment, delivered by it to the Purchaser, will
be of the kind and quality described in the sales
agreement and/or catalog and that the equipment will
be free of defects in design, workmanship, and
material.
The terms and conditions of this Warranty are
provided with the product at the time of shipping or
in advance upon request.
The items described in this manual are offered for
sale at prices to be established by Industrial Drives
and its authorized dealers.
A-1
Page 86

APPENDIX
A - W
ARRANTY INFORMATION
BDS5
A-2
Page 87

BDS5 A
PPENDIX
A
RAWINGS
D
B
PPENDIX
B - D
RAWINGS
PAGE
NUMBER
B-3
B-4
B-11
B-13
B-14
B-15
B-16
B-17
B-18
B-19
B-20
B-21
B-22
TITLE
BDS5 Enable Fault Logic Diagram
BDS5 Wiring Diagram
Mounting Hole Pattern BDS4A, BDS5, PSR4/5A
Outline B-102-X-12,14
Outline B-104,6,-X-12,14
Outline B-20X-X-21,31,23,33-(S)
Outline B-40X-X-A1,A3,B1,B3(-S)
Outline B-602,4-X-A1,A3,B1,B3(-S)
Outline B-606-X-A1,A3,B1,B3(-S)
Outline B-802,4-X-A1,A3,B1,B3(-S)
Outline B-806-X-A1,A3,B1,B3(-S)
Outline & Dimension BDS5-3 & 6 Amp
Outline & Dimension BDS5-10 Amp
DRAWING
NUMBER
A-84732
A-93103
A-93703
A-62370
A-62371
A-43268
A-63093
A-63099
A-63100
A-63097
A-63096
A-93569
A-93571
B-23
B-24
B-25
B-26
B-27
B-28
B-29
Outline & Dimension BDS5-20 Amp
Outline & Dimension BDS5-30/40 Amp
Outline & Dimension BDS5-55 Amp
Outline & Dimension PSR4/5A-12 & 20 Amp
Outline & Dimension PSR4/5-50 & 75 Amp
PSR4/5 Simplified Schematic
Velocity Loop Tuning Flow Chart
A-93570
A-93880
A-96010
A-93581
A-93031
C-84723
A-84888
B-1
Page 88

PPENDIX
A
B - D
RAWINGS
BDS5
THIS PAGE INTENTIONALLY LEFT BLANK
B-2
Page 89

4
ISSUE
A-84732
HARDWARE FAULTS
OVER TEMPERATURE
BUS VOLTAGE
+/-12 VOLT SUPPLY
OVER CURRENT
FEEDBACK LOSS
HARDWARE WATCHDOG
COMPENSATION BOARD
MICROPROCESSOR
4
ISSUE
A-84732
03-04-91
SCHULER
FIRMWARE FAULTS
UP FAIL
ROM CHECKSUM
SOFTWARE WDOG
5 VOLT SUPPLY
" DIS "
COMMAND
" K "
COMMAND
" REMOTE " INPUT
C2-PIN 9
C2-PIN 6
SOFTWARE FAULTS
FOLLOWING ERROR
OVERTRAVEL
GEARBOX OVERFLOW
INTERNAL ERRORS
MOTOR PARAMETERS OUT
OF RANGE
POWER UP
" EN "
COMMAND
OPTICAL
ISOLATION
SET
RESET
SET
LATCH
RESET
LATCH
4
SET
LATCH
RESET
" FAULT "
SOFTWARE SWITCH
3
" READY "
SOFTWARE
SWITCH
5
" STATUS "
SOFTWARE
SWITCH
6
" STATMODE "
SOFTWARE SWITCH
TURN OFF
COMMUNICATION
1
" ACTIVE "
SOFTWARE
SWITCH
HARDWARE
WATCHDOG
2
COPY CODE
I
BLINK
" CPU "
LED
" FAULT "
LED
ACTIVATE
DRIVE
" ACTIVE "
LED
" SYS OK "
LED
HALT MICROPROCESSOR
RELAY
" RELAY "
LED
STATUS OUTPUT
C8-PIN 35
C2-PIN 17
C2-PIN 16
(OPTIONAL)
BDS5-ENABLE/FAULT LOGIC DIAGRAM
A-84732 Sheet 1 of 1 B-3
Page 90

B-4 A-93103 Sheet 1 of 7
(MOTOR SYSTEM
RESOLVER AND
THERMOSTAT CABLE)
USE GOLDLINE
CABLE ASSEMBLY
GC-R-4/5-XX
(SEE NOTES 1 & 10)
CONNECTOR PRESENT
ON 20 AMP & LARGER
UNITS ONLY
TO OTHER
BDS4's
AND/OR
BDS5's
(SEE NOTE 8)
(MOTOR POWER CABLE) USE INDUSTRIAL DRIVES CABLE ASSEMBLY. EXAMPLE: MODEL NO.
FOR A B-20X MOTOR IS GC-M2-4/5-XX (SEE NOTE 10). THERMAL OVERLOAD PROTECTION
IS NOT PROVIDED INTERNAL TO AMPLIFIER AND MUST BE PROVIDED EXTERNAL. REFER TO
NATIONAL ELECTRICAL CODE FOR PROPER SIZING OF OVERLOAD PROTECTION. IT IS
8
RECOMMENDED THAT MOTOR WIRING BE A SHIELDED CABLE. USE PROPER SIZE WIRE. USE
14
COPPER WIRE AND 60°C OR 75°C TABLE FROM NEC FOR WIRE SIZE.
I
84451 TDG 4-30-92
7
8
84826 TDG
9
84924 TDG
10
COPY CODE
9-01-9284719 EWR
10-29-92
1-11-93
CONNECTOR C6
GND.
SCREW
GRN/
YEL
APP'D.DATEECN NO.ISS.
CJF
CJF
RCF
CJF
CONNECTOR C3
SHIELD
SHIELD
7
8
9
10
SHIELD
SHIELD
11
12
3
1
4
2
CONNECTOR C4
5
6
7
8
POWER TERMINAL
BUS-
Ma Mb Mc
2
3
4
84051 V. ALLIE
5
84129 EWR 8-21-91 G.H.E.
6
BUS+
1
2
3
4
5
6
115 VAC HI
115 VAC LO
+18 VDC UNREGULATED
1
-18 VDC UNREGULATED
2
3
4
GND.
SCREW
3-12-9183906 V. ALLIE
4-17-9183964 V. ALLIE
5-21-9184008 V. ALLIE
7-01-91 C.J.F.
COMMON
+10 VDC UNREGULATED
SEE NOTE 6
SEE NOTE 4
APP'D.DATEECN NO.ISS.
G.H.E.
C.J.F.
G.H.E.
Kollmorgen Industrial Drives
DWN. BY:VADATE
EXTERNAL REGEN RESISTOR
CONNECTOR
(ALWAYS PRESENT ON PSR4/5
50 AMP & LARGER. OPTIONAL
ON PSR4/5 12 & 20 AMPS.)
GND.
SCREW
RADFORD, VIRGINIA
CHK. BY:
1-09-91
PSR4/5BDS5
CONNECTOR C1
4
1
5
2
6
3
CONNECTOR C2
1
5
2
6
3
7
4
8
POWER TERMINAL MACHINE
BUS-
BUS+
LcLbLa
SEE NOTES
4 & 7
GND.
SCREW
CIRCUIT
BREAKERS
OR FUSES
(CUSTOMER
SUPPLIED)
SEE NOTES ON LAST PAGE
SEE NOTE 3
CONTROL POWER
115 ±15%
AC INPUT,
50-60 Hz
(SEE NOTES 5,
7, & 12)
10
NORMALLY OPEN
AUXILIARY CONTACT
FROM MAIN
POWER CONTACTOR
(NOT REQUIRED
FOR 12 AND 20
AMP PSR4/5)
OR
EARTH
GROUND
BDS5 WIRING DIAGRAM
(PSR4/5 & MOTOR CONNECTIONS)
DATE
APP'D. BY:
GHEFDO
DATE
1-11-91 1-10-91
SCALE
1:1
DWG. NO.
A-
11
LOGIC COMMON SHOULD BE TIED
TO MACHINE OR EARTH GROUND
EITHER EXTERNAL OR THROUGH
CUSTOMER EQUIPMENT
DWG. NO.
SHEET 1 OF 7
93103
EMERGENCY
STOP
OVERLOAD RELAY
(ONLY FOR PSR 50 &
75 AMP UNITS)
(SEE NOTE 11)
FAULT CONTACTS
SEE NOTE 2
MOMENTARY
PUSHBUTTON
TO ENERGIZE
MAIN POWER
MAIN POWER
CONTACTOR
POWER CONTACTS OF
MAIN POWER CONTACTOR
MAIN POWER
3 PHASE OR
SINGLE PHASE
SHEET 1 OF 7
A-
ISSUE
14
10
CAD DWG.
ISSUE
1493103
Page 91

DWG. NO.
A-
SHEET 2 OF 7
93103
ISSUE
14
+5 VOLT DC
ENCODER AND
I/O POWER
SUPPLY
(CUSTOMER SUPPLIED)
COMMON OF ENCODER SUPPLY
MUST BE TIED TO BDS5 COMMON
COMMON
MASTER
ENCODER
+5 V
OUT Z
OUT Z
OUT B
OUT A
OUT A
OUT B
+
-
OUT A
OUT B
OUT Z
IN B (OPTIONAL)
IN A (OPTIONAL)
WIRE THROUGH AN OPTO-22
STYLE DC INPUT MODULE TO
CONNECTOR C7 (PIN 9)
OCCASIONALLY THE ENCODER
OUTPUTS MUST BE TERMINATED
AT THE BDS5 WITH A 120 ohm,
1/2 WATT RESISTOR TO REDUCE
RINGING.
CONNECTOR C1
6
7
8
9
10 5
OUT A
1
OUT B
2
OUT Z
3
IN B (OPTIONAL)
4
(SEE NOTE 13,
LAST SHEET)
IN A
(OPTIONAL)
SLAVE BDS5
THE COMMONS OF MASTER/SLAVE BDS5's MUST
BE CONNECTED. THIS IS ACCOMPLISHED
THROUGH CONNECTOR C4 IF THE BDS5's
SHARE ONE PSR4/5.
IN B (OPTIONAL)
IN A (OPTIONAL)
OUT A
OUT B
OUT Z
CONNECTOR C1
7 6 2
8
9
10
1
3
4
5
OUT A
OUT B
OUT Z
MASTER BDS5
CONNECTOR C1
6
1
7
2
8
3
IN B (OPTIONAL)
4
10 9 5
(SEE NOTE 13,
LAST SHEET)
IN A (OPTIONAL)
SLAVE BDS5
WIRE THROUGH AN OPTO-22
STYLE DC INPUT MODULE TO
CONNECTOR C7 (PIN 9)
MASTER ENCODER AND SLAVE BDS5
ISS. ECN NO.
COPY CODE
APP'D.
DATE
ISS.
11
12
13
14
ECN NO.
85228 TDG
85244 LLS
85698 LLS
85972 MAW
DATE
5-7-93
5-18-93
3-16-94
6-14-94
APP'D.
SCM
SCM
SGD
Kollmorgen Industrial Drives
RADFORD, VIRGINIA
DWN. BY:VADATE
1-25-91
CHK. BY:
B-5 A-93103 Sheet 2 of 7
DATE
MASTER BDS5 AND SLAVE BDS5
BDS5 WIRING DIAGRAM
(C1 ENCODER EQUIVALENT)
APP'D. BY:
DATE
SCALE
1:1
DWG. NO.
A-
93103
SHEET 2 OF 7
ISSUE
14
Page 92

B-6 A-93103 Sheet 3 of 7
BDS5
(DE-9S)
FEMALE
COM
5
9
TXD
RXD
6
1
SHIELD
COM
RXD
TXD
CUSTOMER
TERMINAL
C5 SERIAL RS-232 INTERCONNECT
IBM-PC
(DB-25S)
FEMALE
BDS5
(DE-9S)
FEMALE
5
9
6
1
PIN 13
PIN 7
SHIELD
PIN 1
PIN 25
PIN 14
EXAMPLE: TO IBM-PC (RS-232 ONLY)
DEP01-00-1-0
(DE-9S) FEMALE
ALWAYS MAKE
THE DEP01
CONNECTION
LAST IN THE
STRING FOR
PROPER
TERMINATION.
9
5
1
6
PIN 1 NORMALLY
NOT CONNECTED
COPY CODE
ISS. ECN NO. DATE APP'D.
BDS5 (DE-9S)
FEMALE
AXIS 1
5
9
1
SHIELD
6
DEP01 SERIAL (RS-485 ONLY) TO C5
ISS. ECN NO. DATE APP'D.
SEE DETAIL J1 FOR
JUMPER LOCATION
IMPEDANCE
TERMINATION
JUMPERS
120
120
5
J1
6
INACTIVE
1K
STATE
TERMINATION
JUMPERS
C5 SERIAL RS-485 INTERCONNECT
EXAMPLE: IBM-AT (RS-232 ONLY)
BDS5 (DE-9S)
FEMALE
AXIS 2
BDS5
(DE-9S)
FEMALE
J1
34
J1
BDS5
(DE-9S)
FEMALE
5
1
BDS5 (DE-9S)
FEMALE
AXIS 32
87
9
6
55
11
5
1
2
J1
1
SHIELD
99
66
Kollmorgen Industrial Drives
DWN. BY:
1-25-91
VA
9
6
1K
DATE
COM
RD-
RD+
TDTD+
SHIELD
+5
IBM-AT
(DE-9S)
FEMALE
6
J1
5
+5
1K
2
J1
1
RADFORD, VIRGINIA
CHK. BY:
COM
TXD-
TXD+
RXDRXD+
CUSTOMER
TERMINAL
EXAMPLE: DEP01-00-0-0 (RS-232 ONLY)
9
5
6
1
EXAMPLE: MOST RS-232 TERMINALS
IMPEDANCE & INACTIVE STATE
TERMINATION JUMPERS
1K
ONLY INSTALL JUMPERS ON THE
LAST BDS5 AXIS IN THE STRING
ON EACH BDS5 AXIS
87
34
J1J1120
DATE
APP'D. BY:
120
SEE DETAIL
J1 FOR
JUMPER
LOCATION
DATE
DWG. NO. SHEET 3 OF 7
A-
DEP01-00-0-0
(DB-25P)
MALE
BDS5
(DE-9S)
FEMALE
5
9
6
1
SHIELD
BDS5
(DE-9S)
FEMALE
5
9
6
1
SHIELD
FOR SHORT
DISTANCES,
LESS THAN
6 FEET, A
RIBBON
CABLE MAY
BE USED.
BDS5 WIRING DIAGRAM
SCALE
1:1
PIN 13
PIN 7
PIN 1
DB-25P
MALE
PIN 13
PIN 7
PIN 1
T1
1
3
J1
5
{
7
CONN.
C5
DETAIL J1
(C5 SERIAL PORT)
DWG. NO. SHEET 3 OF 7
A-
93103
PIN 25
PIN 14
PIN 25
PIN 14
BDS5 MC2
CARD
2
4
6
8
ISSUE
ISSUE
1493103
14
Page 93

DWG. NO. SHEET 4 OF 7
93103
A-
ISSUE
14
OPTIONAL ANALOG INPUT
SEE NOTE 13, LAST SHEET
SCHEMATIC OF OPTIONAL ANALOG
INPUT CARD (BDS5-OPT1). THE
ANALOG INPUT IS SCALED FOR ±10
VOLTS = FULL SCALE. IF YOU USE
THE ANALOG INPUT, SEE APPENDIX F
OF THE BDS5 MANUAL FOR INSTRUCTIONS
ON HOW TO CONFIGURE THE BDS5 AS A
VELOCITY DRIVE.
THE HARDWARE WATCHDOG RELAY CONTACTS
CAN DRIVE UP TO 1 AMP RESISTIVE,
AND THE CONTACTS ARE RATED FOR 115 VAC.
THE RELAY MUST BE DERATED FOR INDUCTIVE
LOADS.
O1 IS AN OPTICALLY ISOLATED
OUTPUT. IT IS A SOLID STATE
RELAY RATED FOR 0.25 AMPS
AND 30 VDC. YOU MUST OBSERVE
POLARITY WHEN CONNECTING O1.
DIFF HI
±10V
DIFF LO
DIFF LO (OPTIONAL)
DIFF HI (OPTIONAL)
O1 LO
O1 HI
10k
10k
.01UF
RELAY
RELAY
10k
10k
16.2k.01UF
SHIELD
CONNECTOR C2
CUSTOMER I/O
16.2k
-
+
11
12
13
14
15
16
17
18
19 9
1
2
3
4
5
6
7
8
1020
±8V
SHIELD
COMMON
TACH MONITOR
COMMON
I MONITOR
COMMON
I/O DC
TACH MONITOR IS A COMMON-REFERENCED
SIGNAL SCALED FOR 1000 RPM CLOCKWISE
= +1 VOLT. THIS SIGNAL HAS A 1k ohm
RESISTOR IN LINE AND A 4700PF FILTER
CAPACITOR CONNECTED TO COMMON.
I MONITOR IS A COMMON-REFERENCED
SIGNAL SCALED FOR FULL CURRENT
= 5 VOLTS. THIS SIGNAL HAS A 3.01k ohm
RESISTOR IN LINE.
NON-ISOLATED POWER SUPPLY. SEE
CHAPTER 2 "WIRING C2, CUSTOMERS
I/O" BEFORE USING.
REMOTE RETURN
HOME RETURN
CYCLE RETURN
CYCLE
HOME
REMOTE
+
24 VOLT DC
ISOLATED POWER
SUPPLY
(CUSTOMER SUPPLIED)
-
COPY CODE
DATEISS. ECN NO.
APP'D.
ISS.
ECN NO.
DATE
APP'D.
Kollmorgen Industrial Drives
RADFORD, VIRGINIA
DWN. BY:
DATE
CHK. BY:
1-31-91
VA
B-7 A-93103 Sheet 4 of 7
DATE
APP'D. BY:
DATE
BDS5 WIRING DIAGRAM
(CONNECTOR C2)
SCALE
DWG. NO. SHEET 4 OF 7
1:1
A-
93103
ISSUE
14
Page 94

B-8 A-93103 Sheet 5 of 7
DWG. NO. SHEET 5 OF 7
93103
A-
ISSUE
14
SIGNALPIN
N/C
1
3
N/C
N/C
5
7
N/C
HOME
9
11
LIMIT
CYCLE
13
15
MOTION
17
GATE
O8
19
O7
21
23
CYCLE READY
N/C25
EVEN
SIGNAL RETURN/
PINS
COMMON
A WIDE SELECTION OF ISOLATION MODULES, BOTH INPUT AND OUTPUT,
ARE AVAILABLE FROM SEVERAL SOURCES. A TYPICAL I/O CONFIGURATION,
USING DC ISOLATION MODULES, IS ILLUSTRATED. HOWEVER, YOUR I/O
IS NOT LIMITED TO ONLY DC MODULES AS THE FOLLOWING LIST INDICATES.
MODULE TYPE INPUT MODULE LOAD VOLTAGE
INPUT AC
OUTPUT AC
INPUT DC
OUTPUT DC
PIN 1
POLARIZING
KEY
C7
(STANDARD)
PIN 25
90-280VAC
N/A
3-32VDC
N/A
PIN 2
TOP VIEW OF BDS5
(20-AMP UNIT SHOWN)
N/A
120-240VAC
N/A
10-60VDC
PIN 2
PIN 26
PIN 1
POLARIZING
KEY
PIN 25
PIN 1
ISOLATED OUTPUT
ISOLATED OUTPUT
ISOLATED OUTPUT
ISOLATED INPUT
ISOLATED INPUT
ISOLATED INPUT
ISOLATED INPUT
ISOLATED INPUT
OPTO-22 TYPE
8 POSITION I/O BOARD
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
NOTES:
1. VFS5 USES PIN 23 CYCLE READY AS METER
DRIVE INPUT. (CONNECT TO PIN 1 OF C8 ON
BDS5-EXT1-I/O CARD).
PIN 25
+5 VOLTS DC
+
ENCODER AND
I/O POWER
-
SUPPLY
(CUSTOMER SUPPLIED)
-+
+
CYCLE READY
+
O7
+
O8
+
+
+
+
+
-
LOAD
LOAD
LOAD
GATE
MOTION
CYCLE
LIMIT
HOME
THE COMMON OF THIS
SUPPLY IS CONNECTED
TO THE BDS5 COMMON
THROUGH THE RIBBON
CABLE BY THE
EVEN NUMBERED PINS.
THE COMMON OF
THIS ISOLATED
SUPPLY MUST NOT
BE CONNECTED TO
THE BDS5 COMMON
24 VOLT DC
+
ISOLATED POWER
SUPPLY
(CUSTOMER SUPPLIED)
COPY CODE
ISS. ECN NO. DATE APP'D.
ISS. ECN NO. DATE APP'D.
Kollmorgen Industrial Drives
BDS5 WIRING DIAGRAM
RADFORD, VIRGINIA
DWN. BY:
VA
DATE
2-7-91
CHK. BY:
DATE
APP'D. BY:
DATE
SCALE
1:1
DWG. NO. SHEET 5 OF 7
(C7 STANDARD I/O)
93103 14
A-
ISSUE
Page 95

NOTES:
1. VFS5 USES BDS5-EXT1-I/O WITH FILTERED
INPUTS AND POWER METER DRIVER.
2. INPUT #16 (PIN 1) IS POWER METER INPUT. PIN 49
IS METER DRIVE OUT
SIGNAL
PIN
MET. OUT
49
O1
47
45
O2
43
O3
41
O4
O5
39
37
O6
35
STATUS
33
MANUAL
I1
31
I2
29
I3
27
25
I4
23 I5
I6
21
I7
19
17
I8
15
I9
13
I10
I11
11
I12
9
I13
7
I14
5
I15
3
I16 *
1
EVEN
SIGNAL
PINS
RETURN/
COMMON
* POWER METER INPUT
ON VFS5 ONLY
ISS. ECN NO. DATE APP'D.
PIN 50
C8
(OPTIONAL)
PIN 2
POLARIZING
KEY
PIN 1
TOP VIEW OF BDS5
(20-AMP UNIT SHOWN)
A WIDE SELECTION OF ISOLATION MODULES, BOTH INPUT AND OUTPUT,
ARE AVAILABLE FROM SEVERAL SOURCES. A TYPICAL I/O CONFIGURATION,
USING DC ISOLATION MODULES, IS ILLUSTRATED. HOWEVER, YOUR I/O
IS NOT LIMITED TO ONLY DC MODULES AS THE FOLLOWING LIST INDICATES.
MODULE TYPE INPUT MODULE LOAD VOLTAGE
COPY CODE
INPUT AC
OUTPUT AC
INPUT DC
OUTPUT DC
ISS. ECN NO. DATE APP'D.
90-280VAC
N/A
3-32VDC
N/A
PIN 49
POLARIZING
KEY
PIN 1
LOGIC SUPPLY
INPUT
+5 VOLTS DC
ENCODER AND
I/O POWER
SUPPLY
(CUSTOMER SUPPLIED)
THE COMMON OF THIS
SUPPLY IS CONNECTED
TO THE BDS5 COMMON
THROUGH THE RIBBON
CABLE, BY THE
EVEN NUMBERED PINS.
PIN 50
PIN 2
N/A
120-240VAC
N/A
10-60VDC
Kollmorgen Industrial Drives
VA
DATE
2-7-91
DWN. BY:
--
++
PIN 49
PIN 1
OPTO-22 TYPE
24 POSITION I/O BOARD
RADFORD, VIRGINIA
CHK. BY:
DATE
ISOLATED OUTPUT
ISOLATED OUTPUT
ISOLATED OUTPUT
ISOLATED OUTPUT
ISOLATED OUTPUT
ISOLATED OUTPUT
ISOLATED OUTPUT
ISOLATED INPUT
ISOLATED INPUT
ISOLATED INPUT
ISOLATED INPUT
ISOLATED INPUT
ISOLATED INPUT
ISOLATED INPUT
ISOLATED INPUT
ISOLATED INPUT
ISOLATED INPUT
ISOLATED INPUT
ISOLATED INPUT
ISOLATED INPUT
ISOLATED INPUT
ISOLATED INPUT
ISOLATED INPUT
ISOLATED INPUT
APP'D. BY:
DATE
DWG. NO. SHEET 6 OF 7
93103
A-
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
-
LOAD
O1
LOAD
O2
LOAD
O3
LOAD
O4
LOAD
O5
LOAD
O6
LOAD
STATUS
MANUAL
I1
I2
I3
I4
I5
I6
I7
I8
I9
I10
I11
I12
I13
I14
I15
I16
TO METER (+)
TO METER (-)
CYCLE READY
POWER METER
INPUT
THE COMMON OF
THIS ISOLATED
SUPPLY MUST NOT
BE CONNECTED TO
THE BDS5 COMMON
24 VOLT DC
+
ISOLATED POWER
SUPPLY
(CUSTOMER SUPPLIED)
BDS5 WIRING DIAGRAM
(C8 OPTIONAL I/O)
SCALE
1:1
DWG. NO. SHEET 6 OF 7
93103
A-
ISSUE
14
ISSUE
14
B-9 A-93103 Sheet 6 of 7
Page 96

B-10 A-93103 Sheet 7 of 7
NOTES:
1.
WARNING: THE MOTOR THERMOSTAT AUTOMATICALLY RESETS WHEN THE MOTOR
COOLS. THE CUSTOMER IS RESPONSIBLE FOR LATCHING THIS SIGNAL TO
INHIBIT OPERATION AFTER A MOTOR THERMOSTAT FAULT. CONNECT THERMOSTAT
USING TWISTED PAIR WIRE.
7
2.
CAUTION: THE PRS4/5 FAULT CONTACTS (RATED 115 VAC 1AMP) MUST BE WIRED
10
IN SERIES WITH THE OVERLOAD RELAY AS SHOWN ON SHEET 1.
ON 12 & 20 AMP PSR4/5: THIS CONTACT IS NORMALLY OPEN AND WILL CLOSE
WITHIN 250 MSEC. AFTER APPLICATION OF CONTROL AND MAIN POWER.
THIS CONTACT OPENS IN FAULT CONDITIONS.
ON 50 & 75 AMP PSR4/5 THIS CONTACT CLOSES ON APPLICATION OF CONTROL
POWER AND WILL OPEN IN FAULT CONDITION.
3.
CAUTION: RESISTOR IS CONNECTED TO HIGH VOLTAGE; ENSURE SUFFICIENT
ELECTRICAL CLEARANCE WHEN MOUNTING. RESISTOR MAY BECOME VERY HOT
DURING OPERATION. DO NOT MOUNT NEAR MATERIALS THAT ARE FLAMMABLE
OR DAMAGED BY HEAT. VENTILATION MAY BE REQUIRED.
SEE WIRING DRAWING FOR SPECIFIC REGEN RESISTOR KIT. EACH KIT HAS
DIFFERENT SERIES/PARALEL RESISTOR CONNECTIONS TO OBTAIN SPECIFIC
RESISTANCE AND POWER RATING.
4.
WIRE SIZES, BREAKERS AND FUSES FOR PSR4/5:
PSR4/5-X12 HAS A MAXIMUM MAIN POWER INPUT CURRENT OF 12 AMPS RMS,
PSR4/5-X20 HAS A MAXIMUM MAIN POWER INPUT CURRENT OF 20 AMPS RMS,
PSR4/5-X50 HAS A MAXIMUM MAIN POWER INPUT CURRENT OF 50 AMPS RMS,
PSR4/5-X75 HAS A MAXIMUM MAIN POWER INPUT CURRENT OF 75 AMPS RMS.
THE ACTUAL APPLICATION MAY REQUIRE LESS CURRENT. USE 600 VAC
INSULATED WIRE AND REFER TO LOCAL ELECTRICAL CODES FOR PROPER WIRE
SIZE FOR THE CURRENTS LISTED ABOVE. FUSES FOR MAIN POWER SHOULD
BE A U.L. RATED TIME DELAY TYPE, SUCH AS, BUSS FRN-R SERIES.
THE POWER BUS BETWEEN A PSR4/5 AND BDS5 SHOULD USE THE FOLLOWING
WIRE GAUGE WITH 600 VAC INSULATION:
PSR4/5-X12, 14 AWG (OR LARGER) WIRE,
PSR4/5-X20, 10 AWG WIRE,
PSR4/5-X50, BUS BARS SUPPLIED WITH UNIT, OR 8 AWG (OR LARGER) WIRE,
PSR4/5-X75, BUS BARS SUPPLIED WITH UNIT, OR 8 AWG (OR LARGER) WIRE.
5.
ALL SIGNAL AND CONTROL WIRES TO BE 22-18 AWG WIRE. THE CRIMP
TERMINALS FOR 22-18 AWG WIRE ARE SUPPLIED FOR USE WITH BDS5
CONNECTORS C1, C2, C3, C4, C6 AND PSR4/5 CONNECTORS C1 AND
C2. FOR 16 AWG WIRE USE MOLEX #39-00-0078 TERMINALS.
6.
IN THE BDS5 3 AMP THRU 20 AMP AND THE PSR4/5 12 AMP AND 20 AMP,
THE SCREWS IN THE POWER TERMINAL BLOCKS ARE CAPTIVE. DO NOT ATTEMPT
TO REMOVE THEM TO USE RING TERMINALS. USE LOCKING SPRING SPADE
TERMINALS SUCH AS HOLLINGSWORTH #XSS20954S OR #SS20947SF FOR 16
AWG WIRE AND #XSS20836 OR #SS20832F FOR 12/10 AWG WIRE.
(ALL WIRES TO BE COPPER WITH MIN. TEMP RATING OF 60°C)
ALL AC LINES SHOULD BE TWISTED CABLES.
7.
8.
THE TOTAL NUMBER OF AXES ALLOWED, PER PSR4/5, DEPENDS ON THE
PSR4/5 MODEL AND THE COMBINATION OF BDS4's AND/OR BDS5's:
PSR4/5-X12: A MAXIMUM OF 4 BDS4s OR 3 BDS5s,
PSR4/5-X20: A MAXIMUM OF 4 BDS4s OR 3 BDS5s,
PSR4/5-X50: A MAXIMUM OF 6 BDS4s OR 6 BDS5s,
PSR4/5-X75: A MAXIMUM OF 6 BDS4s OR 6 BDS5s.
(IF THE BDS's ARE MIXED, THEN THE TOTAL NUMBER OF AXES THAT CAN BE
USED WOULD BE THE MAXIMUM GIVEN FOR THE BDS5s.)
AXIS EXPANSION ON THE PSR4/5 50 AND 75 AMP UNITS ARE ALSO LIMITED
TO A MAXIMUM OF 4 BDS4s OR 3 BDS5s ON EITHER SIDE OF THE PSR4/5.
9.
THE BDS5 IS CONFIGURED AT THE FACTORY FOR EITHER RS-232 OR RS-485.
10.
XX IN THE CABLE NUMBER STANDS FOR CABLE LENGTH IN METERS. CABLE
LENGTH IS AVAILABLE FROM 3 TO 75 METERS IN INCREMENTS OF 3 METERS.
11.
A THERMAL OVERLOAD RELAY IS SUPPLIED IN THE REGEN RESISTOR KIT FOR
THE 50 AND 75 AMP PSR4/5's. THE THERMAL OVERLOAD RELAY, INCLUDED
IN THE KIT, WAS SIZED FOR YOUR RESISTANCE AND POWER RATING. THE
OUTPUT CONTACTS OF THE RELAY MUST BE WIRED TO DROP POWER TO THE
MAIN POWER CONTACTOR IN A FAULT CONDITION, AS SHOWN ON SHEET 1.
12.
DO NOT WIRE CONTROL POWER (PSR4/5 CONNECTOR C1) THROUGH THE MAIN
POWER CONTACTOR. THIS IS SO THAT CONTROL POWER WON'T BE REMOVED
IF PSR4/5 FAULT CONTACTS OPEN (THIS WOULD TURN OFF ANY FAULT LEDS).
13.
IF THE BDS5 USES THE OPTIONAL ANOLOG INPUT CARD (BDS5-OPT1), THE
OPTIONAL ENCODER INPUTS IN CONNECTOR C1 ARE NOT USED.
14.
RECOMMENDED TORQUES FOR CONNECTION TO TERMINAL BLOCKS AND GROUND.
A.
BDS4/5-3 TO 20 AMP AND PSR4/5-12 AND 20 AMP
B.
BDS4/5-30 TO 55 AMP
C.
PSR4/5-50 TO 75 AMP
FOR GROUNDING TO MACHINE OR EARTH GROUND, A SCREW LUG SHOULD BE
ATTACHED TO GROUND SCREW OR STUD. RECOMMENDED TORQUE OF 12 IN/LB
FOR GROUND SCREWS AND 20 IN/LB FOR GROUND STUDS. MAY ALSO REFER
TO NATIONAL ELECTRICAL CODE (NEC) OR UL STANDARD 486B FOR
RECOMMENDED TORQUES
THERMAL OVERLOAD PROTECTION DOES NOT PROVIDE INTERNAL TO AMPLIFIER
AND MUST BE PROVIDED EXTERNAL. REFER TO NATIONAL ELECTRICAL CODE
FOR PROPER SIZING OF OVERLOAD PROTECTION.
DWG. NO. SHEET 7 OF 7
93103
A-
MAX TORQUE PER UL IS 12 IN/LB, EXTERNAL REGEN, MAIN POWER AND
BUS CONNECTION.
MAX TORQUE 12 IN/LB GROUND SCREW
MAX TORQUE 20 IN/LB MOTOR, BUS CONNECTION AND GROUND STUD
MAX TORQUE 20 IN/LB MAIN POWER, BUS CONNECTION AND GROUND STUD
MAX TORQUE 12 IN/LB EXTERNAL REGEN CONNECTION
ISSUE
14
ISS.
ECN NO.
COPY CODE
DATE
APP'D.
ISS.
ECN NO. DATE APP'D.
Kollmorgen Industrial Drives
BDS5 WIRING DIAGRAM
RADFORD, VIRGINIA
SCALE
VA
DATEDWN. BY:
2-13-91
CHK. BY:
DATE
APP'D. BY: DATE
1:1
DWG. NO. SHEET 7 OF 7
A-
(NOTES)
ISSUE
93103 14
Page 97

THIRD ANGLE PROJECTION
UNLESS OTHERWISE SPECIFIED
ANG. DIM. ±1 DEGREE
METRIC
X DEC. PLACES ±.4
XX DEC. PLACES ±.13
[INCHES]
XX DEC. PLACES ±.015 IN.
XXX DEC. PLACES ±.005 IN.
DO NOT SCALE DWG. USE DIMENSIONS ONLY.
ALL DIMENSIONS ARE MILLIMETERS.
UNLESS OTHERWISE SPECIFIED.
DWG. NO.
A-
SHT 1 OF 2
93703
ISSUE
2
METRIC
356
328 MIN
340 MAX
61
33
20
BDS4
3 AMP
6 AMP
BDS5
3 AMP
6 AMP
20 20
23 23
20MM BETWEEN ALL UNITS FOR COOLING
88
33
20
BDS4
10 AMP
BDS5
10 AMP
107
33
20
BDS4
20 AMP
BDS5
20 AMP
20
23
81
33
20
PSR4/5
12 AMP
20 AMP
40
23
1-A 25mm MINIMUM FREE SPACE SHOULD BE MAINTAINED AROUND THE SYSTEM.
2-LOCATE THE HIGHEST CURRENT BDS4/5 AMPLIFIER NEXT TO THE PSR4/5 POWER
SUPPLY AND REMAINING BDS4/5 AMPLIFIERS IN DESCENDING ORDER.
B
COPY CODE
ISS. ECN NO.
DATE APP'D.2ISS. ECN NO.
84949 TDG
DATE APP'D.
1-20-93
CJF
Kollmorgen Industrial Drives
RADFORD, VIRGINIA
DWN. BY:
TDG
DATE
1-6-93
B-11 A-93703 Sheet 1 of 2
DATECHK. BY:
APP'D. BY:
CJF
DATE
1-8-93
CAD DWG.
MOUNTING HOLE PATTERN
BDS4A, BDS5A, PSR4/5A
SCALE
1:4
DWG. NO.
A-
SHT 1 OF 2
93703
ISSUE
2
Page 98

B-12 A-93703 Sheet 2 of 2
THIRD ANGLE PROJECTION
UNLESS OTHERWISE SPECIFIED
ANG. DIM. ±1 DEGREE
METRIC
X DEC. PLACES ±.4
XX DEC. PLACES ±.13
[INCHES]
XX DEC. PLACES ±.015 IN.
XXX DEC. PLACES ±.005 IN.
METRIC
20MM BETWEEN ALL UNITS FOR COOLING
138
28 80
28
158
100
DO NOT SCALE DWG. USE DIMENSIONS ONLY.
ALL DIMENSIONS ARE MILLIMETERS.
UNLESS OTHERWISE SPECIFIED.
140
30
80
DWG. NO.
SHT 2 OF 2
93703 2
A-
ISSUE
SEE NOTES ON SHEET 1.
COPY CODE
ISS. ECN NO. DATE APP'D.
343
BDS4 BDS4
40 AMP
BDS5
328
30 AMP
40 AMP
28 80 28
PSR4/5
55 AMP30 AMP
50 AMP
75 AMP
BDS5
55 AMP
100
30 80
CAD DWG.
APP'D.DATEECN NO.ISS.
Kollmorgen Industrial Drives
RADFORD, VIRGINIA
DATEDATE
TDG
1-6-93
CHK. BY:DWN. BY: DATE
APP'D. BY:
MOUNTING HOLE PATTERN
BDS4A, BDS5A, PSR4/5A
SCALE
1/4
DWG. NO.
A-
SHT 2 OF 2
93703
ISSUE
2
Page 99

THIRD ANGLE PROJECTION
METRIC
±3.0 [.12]
59.0
[2.32]
UNLESS OTHERWISE SPECIFIED
ANG. DIM. ±1 DEGREE
RESOLVER LEADS
457 [18.0] MIN. LGTH.
MOTOR & THERMOSTAT LEADS
457 [18.0] MIN. LGTH.
70.0
METRIC
X DEC. PLACES ±.4
XX DEC. PLACES ±.13
+1.5 [.06]
-0.0 [.00]
[2.76]
SQUARE
60.00
XX DEC. PLACES ±.015 IN.
XXX DEC. PLACES ±.005 IN.
±.5 [.02]
23.00
[.90]
18.0
[.71]
MIN.
+.012
-.007
[2.362]
[INCHES]
DO NOT SCALE DWG.USE DIMENSIONS ONLY.
ALL DIMENSIONS ARE MILLIMETERS WITH INCHES
IN BRACKETS.UNLESS OTHERWISE SPECIFIED.
A 0.08 TIR
[.003]
183.2
[7.21]
2.36
[.093]
159.0
9.54
[.375]
MAX.
±1.0 [.04]
DWG. NO.
62370 2
A-
ISSUE
A 0.08 TIR
5.80 [.228] DIA. THRU
(4) HOLES EQ. SPACED
ON 75.00 [2.953] DIA. B.C.
NOTES:
1-PRESSURE ON SHAFT SEAL MUST NOT EXCEED 0.21 kg/cm2 [3 PSI]
2-MOTOR CAN BE MOUNTED IN ANY POSITION.
3--12 MODEL HAS BEEN DESIGNED WITH INTENT TO MEET IP-65 SEALING.
-14 MODEL HAS BEEN DESIGNED WITH INTENT TO MEET IP-65 SEALING,
EXCEPT FOR MOUNTING FACE.
4-ELECTRICAL HOOK-UP PER HD-100.
C
B
ISS. ECN NO. DATE APP'D.
COPY CODE
2
[.003]
APP'D.DATEECN NO.ISS.
GLK84634
8-4-92
S.P.
11.00
[.433]
-A-
0.035
[.0014]
+.008
-.003
8.50
8.40
INDUSTRIAL DRIVES
CHK. BY:DWN. BY:
DATE
12-90
J.S.
B-13 A-62370 Sheet 1 of 1
[.335]
[.331]
RADFORD, VIRGINIA
A KOLLMORGEN DIVISION
APP'D. BY:
5-91
4.00
3.97
MKB
[.157]
[.156]
KEYWAY DETAIL
DATEDATE
5-91
SCALE
HALF
STANDARD OPTIONS
MODEL
NO.
OUTLINE
B-102-X-12,14
DWG. NO.
A-
-12
-14
CAD DWG
SHAFT
SEAL
YES
NO
ISSUE
262370
Page 100

B-14 A-62371 Sheet 1 of 1
METRIC
X DEC. PLACES ±.4
XX DEC. PLACES ±.13
THIRD ANGLE PROJECTION
UNLESS OTHERWISE SPECIFIED
ANG. DIM. ±1 DEGREE
METRIC
RESOLVER LEADS
457 [18.0] MIN. LGTH.
MOTOR & THERMOSTAT LEADS
457 [18.0] MIN. LGTH.
±3.0 [.12]
59.0
[2.32]
+1.5 [.06]
-0.0 [.00]
70.0
(2.76)
SQUARE
A 0.08 TIR
[.003]
5.80 [.228] DIA. THRU
(4) HOLES EQ. SPACED
ON 75.00 [2.953] DIA. B.C.
NOTES:
1-PRESSURE ON SHAFT SEAL MUST NOT EXCEED 0.21 kg/cm2 [3 PSI]
2-MOTOR CAN BE MOUNTED IN ANY POSITION.
3--12 MODEL HAS BEEN DESIGNED WITH INTENT TO MEET IP-65 SEALING.
-14 MODEL HAS BEEN DESIGNED WITH INTENT TO MEET IP-65 SEALING,
EXCEPT FOR MOUNTING FACE.
4-ELECTRICAL HOOK-UP PER HD-100.
B
ISS. ECN NO. DATE APP'D.
COPY CODE
C
8-4-92
GLK846342
60.00
APP'D.DATEECN NO.ISS.
XX DEC. PLACES ±.015 IN.
XXX DEC. PLACES ±.005 IN.
±.5 [.02]
30.00
[1.18]
20.0
[.79]
MIN.
+.012
-.007
[2.362]
14.00
[.551]
-A-
0.035
[.0014]
S.P.
[INCHES]
+.008
-.003
DATE
12-90
DO NOT SCALE DWG.USE DIMENSIONS ONLY.
ALL DIMENSIONS ARE MILLIMETERS WITH INCHES
IN BRACKETS.UNLESS OTHERWISE SPECIFIED.
A 0.08 TIR
[.003]
2.36
[.093]
9.54
[.375]
11.00
10.90
[.433]
[.429]
KEYWAY DETAIL
INDUSTRIAL DRIVES
RADFORD, VIRGINIA
A KOLLMORGEN DIVISION
CHK. BY:DWN. BY:
J.S.
5-91
APP'D. BY:
MKB
"A" MAX
±1.0 [.04]
"B"
DATEDATE
5-91
5.00
4.97
[.197]
[.196]
244.2 (9.61)B-106
B-104
213.7 (8.41)
OUTLINE
B-104,6,-X-12-14
DWG. NO.
SCALE
HALF
A-
62371
DWG. NO.
62371 2
A-
STANDARD OPTIONS
MODEL
NO.
-12
-14
220.0 (8.66)
189.5 (7.46)
ISSUE
CAD DWG
SHAFT
SEAL
YES
NO
"B""A" MAXMODEL
ISSUE
2
 Loading...
Loading...