

Page 1
KEPCO®
THE POWER SUPPLIER™
INSTRUCTION MANUAL
MAT FULL RACK
POWER SUPPLY
KEPCO INC.
An ISO 9001 Company.
NOTE This on-line version of the Technical
IMPORTANT NOTES:
1) This manual is valid for the following Model and associated serial numbers:
Manual includes only installation and
operating instructions. For the complete
MODEL SERIAL NO. REV. NO.
ATE 100-0.5M F19688 9
6V, 15V, 25V AND 36V MODELS
MODEL
MAT FULL RACK
POWER SUPPLY
ORDER NO. REV. NO.
manual, please contact Kepco.
2) A Change Page may be included at the end of the manual. All applicable changes and
revision number changes are documented with reference to the equipment serial num-
bers. Before using this Instruction Manual, check your equipment serial number to identify
your model. If in doubt, contact your nearest Kepco Representative, or the Kepco Docu-
mentation Office in New York, (718) 461-7000, requesting the correct revision for your par-
ticular model and serial number.
3) The contents of this manual are protected by copyright. Reproduction of any part can be
made only with the specific written permission of Kepco, Inc.
Data subject to change without notice.
©2007, KEPCO, INC.
KEPCO, INC. l 131-38 SANFORD AVENUE l FLUSHING, NY. 11352 U.S.A. l TEL (718) 461-7000 l FAX (718) 767-1102
email: hq@kepcopower.com l World Wide Web: http://www.kepcopower.com
Page 2

Page 3
Declaration of Conformity
Application of Council directives:
Standard to which Conformity is declared:
EN61010-1:2001 (Safety requirements for electrical equipment for measurement,
control and laboratory use - Part 1)
Manufacturer's Name and Address:
Importer's Name and Address:
Type of Equi pme nt:
Model No.:
73/23/EEC (LVD)
93/68/EEC (CE mark)
KEPCO INC.
131-38 SANFORD AVENUE
FLUSHING, N.Y. 11352 USA
P
O
C
E
V
I
T
A
T
N
E
S
E
R
P
E
R
Component Power Supply
[PRODUCT MODEL NUMBER]
Y
Year of Manufact ure:
I, the undersigned, declare that the product specified above, when used in conjunction with the conditions of conformance set forth in the product instruction manual, complies with the requirements of the
Low Voltage Directive 73/23/EEC, which forms the basis for application of the CE Mark to this product.
Place: KEPCO Inc.
131-38 Sanford Ave.
Flushing, N.Y.11352 USA
Saul Kupferberg
(Full Name)
Date:
228-1348 DC-COMP/INST 052704
VP OF SALES
(position)
A
Page 4

Conditions of Conformance
When this product is used in applications governed by the requirements of the EEC, the following restrictions and conditions apply:
1. For European applications, requiring compliance to the Low Voltage Directive, 73/23/EEC, this power
supply is considered a component product, designed for "built in“ applications. Because it is incomplete in construction, the end product enclosure must provide for compliance to any remaining electrical safety requirements and act as a fire enclosure. (EN61010-1:2001, Cl. 6, Cl. 7, Cl.8, and Cl. 9)
2. This power supply is designed for stationary installation, with mains power applied via a detachable
power supply cord or via direct wirin g to the source powe r term inal bloc k.
3. This power supply is considered a Class 1 (earthed) product. It is intended for use as part of equipment meant for test, measurement and laboratory use, and is designed to operate from single phase,
three wire power systems. This equipment must be installed within a suitably wired equipment rack,
utilizing a three wire (grounded) mains connection. See wiring section of this manual for complete
electrical wiring instruct ion s. (EN61 010 -1:200 1, C l.6.10.1 )
4. This power supply has secondary output circuits that are considered hazardous, and which exceed
240 VA at a potential of 2V or more.
5. The output wiring terminals of this power supply has not been evaluated for field wiring and, therefore,
must be properly configured by the end product manufacturer prior to use.
6. This power supply employs a supplementary circuit protector in the form of a circuit breaker mounted
on the front panel. This circuit breaker protects the power supply itself from damage in the event of a
fault condition. For complete circuit protection of the end product, as well as the building wiring, it is
required that a primary circuit protection device be fitted to the branch circuit wiring. (EN610101:2001, Cl. 9.5)
7. Hazardous voltages are present within this power supply during normal operation. All operator adjustments to the product are made via externally accessible switches, controls and signal lines as specified within the product operating instructions. There are no user or operator serviceable parts within
the product enclosure. Refer all servicing to qualified and trained Kepco service technicians.
B
228-1351 COND/CONFORM 052704
Page 5
SAFETY INSTRUCTIONS
1. Installation, Operation and Service Precautions
This product is designed for use in accordance with EN 61010-1 and UL 3101 for Installation Category 2,
Pollution Degree 2. Hazardous voltages are present within this product during normal operation. The
product should never be operated with the cover removed unless equivalent protection of the operator
from accidental contact with hazardous internal voltages is provided:
!
!
!
There are no operator serviceable parts or adjustments within the product enclosure.
Refer all servicing to trained service technician.
Source power must be removed from the product prior to performing any servicing.
This product is factory-wired for the nominal a-c mains voltage indicated on the rating nameplate located adjacent to the source power connection on the product's rear
panel. To reconfigure the product input for other nominal mains voltages as listed
herein, the product must be modified by a trained service technician.
2. Grounding
This product is a Class 1 device which utilizes protective earthing to ensure operator safety.
The PROTECTIVE EARTHING CONDUCTOR TERMINAL must be properly con-
!
nected prior to application of source power to the product (see instructions on installation herein) in order to ensure safety from electric shock.
PROTECTIVE EARTHING CONDUCTOR TERMINAL - This symbol indicates the
point on the product to which the protective earthing conductor must be attached.
EARTH (GROUND) TERMINAL - This symbol is used to indicate a point which is
connected to the PROTECTIVE EARTHING TERMINAL. The component installer/
assembler must ensure that this point is connected to the PROTECTIVE EARTHING TERMINAL.
CHASSIS TERMINAL -This symbol indicates frame (chassis) connection, which is
supplied as a point of convenience for performance purposes (see instructions on
grounding herein). This is not to be confused with the protective earthing point, and
may not be used in place of it.
3. Electric Shock Hazards
This product outputs hazardous voltage and energy levels as a function of normal operation. Operators
must be trained in its use and exercise caution as well as common sense during use to prevent accidental
shock.
This symbol appears adjacent to any external terminals at which hazardous voltage
!
228-1352 SAFETY - (COVER REMOVAL) 022300 C/(D BLANK)
levels as high as 500V d-c may exist in the course of normal or single fault conditions.
This symbol appears adjacent to any external terminals at which hazardous voltage
levels in excess of 500V d-c may exist in the course of normal or single fault conditions.
Page 6

TABLE OF CONTENTS
SECTION PAGE
SECTION 1 - INTRODUCTION
1.1 Scope Of Manual..................................................................................................................................... 1-1
1.2 General Description................................................................................................................................. 1-1
1.3 Specifications, Electrical.......................................................................................................................... 1-3
1.4 DC Output Ratings For 1/3, 2/3 And Full Rack Modules....................................................................... 1-4
1.5 Miscellaneous Features ......................................................................................................................... 1-8
1.6 Accessories ............................................................................................................................................. 1-8
1.7 Safety ...................................................................................................................................................... 1-9
SECTION 2 - INSTALLATION
2.1 Unpacking And Inspection....................................................................................................................... 2-1
2.2 Terminations............................................................................................................................................ 2-1
2.3 AC Input Requirement............................................................................................................................. 2-4
2.4 Cooling .................................................................................................................................................... 2-5
2.5 Installation ............................................................................................................................................... 2-5
2.6 Grounding................................................................................................................................................ 2-5
2.6.1 Safety Grounding............................................................................................................................... 2-5
2.6.2 DC (Output) Grounding...................................................................................................................... 2-6
2.6.3 Power Module To Load Interface..................................................................................................... 2-6
2.6.4 Load Connection, Local Error Sensing .............................................................................................. 2-8
2.6.5 Load Connection With Remote Error Sensing................................................................................... 2-8
2.7 Operating Configuration .......................................................................................................................... 2-9
2.8 Preliminary Check-out ............................................................................................................................ 2-9
2.8.1 Example 1: Full Scale Voltage Check................................................................................................ 2-10
2.8.2 Example 2: Full Scale Current Check:.............................................................................................. 2-11
2.8.3 Example 3: To Reset the Power Module ........................................................................................... 2-12
SECTION 3 - OPERATION
3.1 General.................................................................................................................................................... 3-1
3.2 Introduction To Controlling The MAT Power Module Output................................................................... 3-1
3.2.1 MAT/Power Module Controller System.............................................................................................. 3-3
3.2.2 MAT/TMA Pc-27 System ................................................................................................................... 3-3
3.3 Automatic (Tracking) Control Of The Crowbar Level............................................................................... 3-4
3.4 Power Module Controller/MAT Time Delays (To Obtain A Valid Status):................................................ 3-4
3.5 Power Loss Circuit .................................................................................................................................. 3-4
3.6 Remote Programming ............................................................................................................................. 3-5
3.6.1 General.............................................................................................................................................. 3-5
3.6.2 SCPI Programming............................................................................................................................ 3-6
3.6.2.1 SCPI Program Example............................................................................................................... 3-6
3.6.3 CIIL Programming.............................................................................................................................. 3-8
3.6.3.1 Examples Using CIIl To Program The MAT Power Module......................................................... 3-8
3.6.3.1.1 Example 1: Program Positive Voltage With Current Limit......................................................3-8
3.6.3.1.2 Example 2 : Program Negative Voltage With Current Limit ...................................................3-10
3.6.3.1.3 Example 3: Program Current And Voltage Limit .....................................................................3-11
APPENDIX A - CIIL COMMAND DEFINITIONS
MAT FULL RACK/ 022300
i
Page 7

LIST OF FIGURES
FIGURE TITLE PAGE
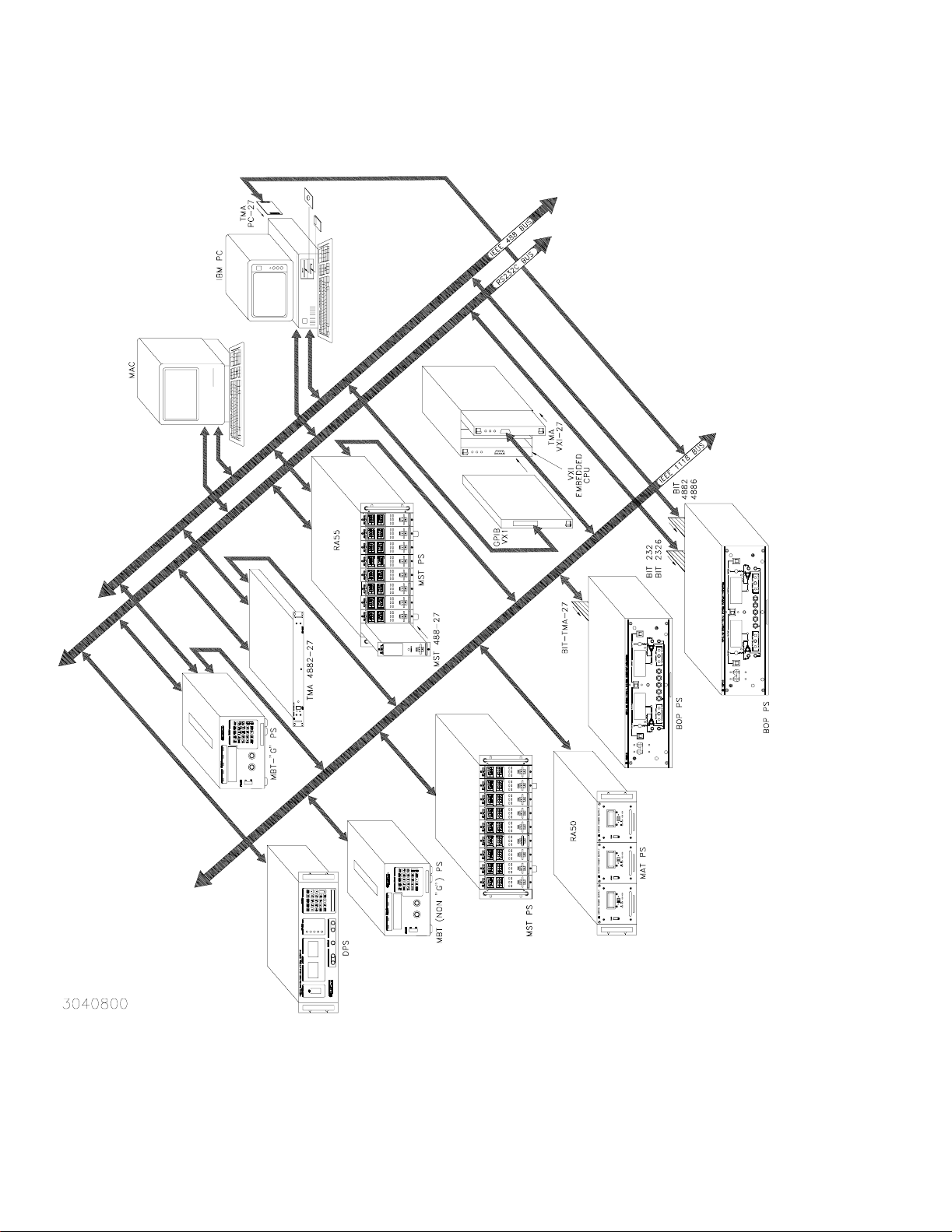
1-1 Remotely Controlled Power Supply Configurations Using Kepco Products............................................... 1-2
1-2 MAT Power Module Mechanical Outline Drawing...................................................................................... 1-6
1-3 The TMA 4882-27 Controller And MAT Power Modules ............................................................................ 1-9
2-1 Front View Of The Full Rack MAT Power Supply ...................................................................................... 2-2
2-2 Rear View Of The MAT Full Rack Power Module ...................................................................................... 2-3
2-3 MAT Module Barrier Strip With Jumpers For 115 Or 230 Va-c ............................................................... 2-5
2-4 Variation Of Output Impedance With Frequency For A Voltage Source And A Current Source................ 2-7
2-5 Load Connections, Local Sensing.............................................................................................................. 2-8
2-6 Load Connections, Remote Sensing.......................................................................................................... 2-8
3-1 Top Cover Access Points........................................................................................................................... 3-1
3-2 MAT Power Module Control Section (Top Cover Removed)...................................................................... 3-5
3-3 Tree Diagram of SCPI Commands Used with MAT Power Supplies ......................................................... 3-6
3-4 Typical Example Of MAT Power Supply Program Using SCPI Commands............................................... 3-7
A-1 FNC — Function Command ....................................................................................................................... A-1
A-2 INX — Initiate Op Code Command ............................................................................................................ A-2
A-3 FTH — Fetch Command ............................................................................................................................ A-2
A-4 SET Command........................................................................................................................................... A-3
A-5 OPN, CLS — Open, Close Relay Commands ........................................................................................... A-4
A-6 RST — Reset Command............................................................................................................................ A-4
A-7 CNF, IST — Confidence Test, Internal Self Test Commands .................................................................... A-4
A-8 STA — Status Command........................................................................................................................... A-5
ii
MAT FULLRACK 022300
Page 8

LIST OF TABLES
TABLE TITLE PAGE
1-1 MAT Power Module Features And Specifications .......................................................................................1-3
1-2 MAT Power Modules Power Output Ratings ...............................................................................................1-5
1-3 Safety Symbols ...........................................................................................................................................1-9
2-1 Internal Controls Accessible Through Top Cover .......................................................................................2-1
2-2 Front Control MAT Power Module ..............................................................................................................2-2
2-3 Rear Terminations, MAT Power Module .....................................................................................................2-3
2-4 DC Output Connector Pin Functions ...........................................................................................................2-3
2-5 Input And Output Connectors .....................................................................................................................2-4
2-6 Internal Jumper Configuration .....................................................................................................................2-9
3-1 Device Address Selection For The MAT power Module .............................................................................3-2
A-1 CIIL Subsystem Command/query Index .................................................................................................... A-1
A-2 CIIL Error Messages .................................................................................................................................. A-5
MAT 36-30 022300
iii/(vi Blank)
Page 9

1.1 SCOPE OF MANUAL
This manual contains instructions for the installation, operation, and maintenance of the Full
Rack size MAT series of voltage and current stabilized DC Power Modules manufactured by
Kepco, Inc. Flushing, New York, U.S.A.
1.2 GENERAL DESCRIPTION
The Kepco MAT Power Module with overvoltage, overcurrent, overtemperature, polarity reversal, and power loss protection is a digitally controlled precision stabilized Power Module that
delivers either stabilized voltage or current. A single front panel meter with a selector switch
constantly monitors the output voltage or the output current. The prevailing operating mode is
indicated by LED mode indicators on the front panel. Operating mode crossover is dependent
on commands from a Host Computer and the value of the load. The Power Module has a linear
and fully dissipative NPN pass transistor driven by high gain integrated circuit amplifiers. The
output of the Power Module is fully programmable
The Power Module features full range output control by means of a compatible Kepco Power
Module Controller. Control of the MAT Power Module is via the IEEE 1118 2-wire serial bus
operating at 375KHz; as many as 27 separate modules of either the MAT, MST, MBT or BOP
Series design can be addressed via the bus (see Figure 1-1). Decoders for RS232, IEEE-488
and VXI are available in modular form and stand-alone types. As shown in Figure 1-1, the following controllers are available to control of MAT Power Modules directly from a computer.
SECTION 1 - INTRODUCTION
a. Controller Model TMA PC-27 plugs into a half-card slot of a DOS-based PC and allows key-
board control of the MAT via the IEEE 1118 bus.
b. Controller Model TMA 4882-27 is free-standing and allows host computers designed for
RS232 or IEEE 488 bus communication to control the MAT via the IEEE 1118 bus.
c. Controller Model TMA-VXI-27 plugs into a slot in a VXI chassis and allows VXI-based com-
puters to control the MAT via the IEEE 1118 bus.
d. Controller Model MST 488-27 plugs into a slot in a Model RA 55 Rack Adapter and allows
host computers designed for RS232 or IEEE 488 bus communication to control the MAT via
the IEEE 1118 bus.
e. The MAT Power Module can also be directly controlled via the keypad of the MBT Series
(“G” Option) Power Supply via the IEEE 1118 bus.
An important feature of the MAT Series Power Module is the overvoltage and overcurrent protection circuits. This protection is provided by two autotracking amplifiers that have an overvoltage and overcurrent tracking range of 10% ± 3% of the nominal values above the programmed
Power Module output voltage or current (e.g., for 55V MAT which has been programmed to 2V,
the overvoltage will trip at 7.5 V (5.5V, 10% of nominal + 2V, programmed).
The MAT series Power Modules are built in several mechanical sizes according to their approximate output power rating 1/3 Rack, 2/3 Rack and Full Rack (see Mechanical Outline Drawing of
the Power Module Chassis, Figure 1-2).
Power transistors and drivers on all Power Module designs are mounted on highly efficient patented heat sink assemblies that are cooled by fans.
MAT 1/3 and 2/3 Rack size modules are designed to operate in either one of two housings
called RA 50 and RA 51. RA 50 is 5-1/4" x 19" x 25" and accepts up to three 1/3 Rack Power
Modules. RA 51 is similarly sized, but configured for one 1/3 Rack Module and one 2/3 Rack
Module. Full Rack MAT Power Modules mount directly into a standard 19 inch Equipment Rack.
MAT FULL RACK 022300
1-1
Page 10
1-2
FIGURE 1-1. REMOTELY CONTROLLED POWER SUPPLY CONFIGURATIONS USING KEPCO PRODUCTS
3040800
MAT FULL RACK 022300
Page 11
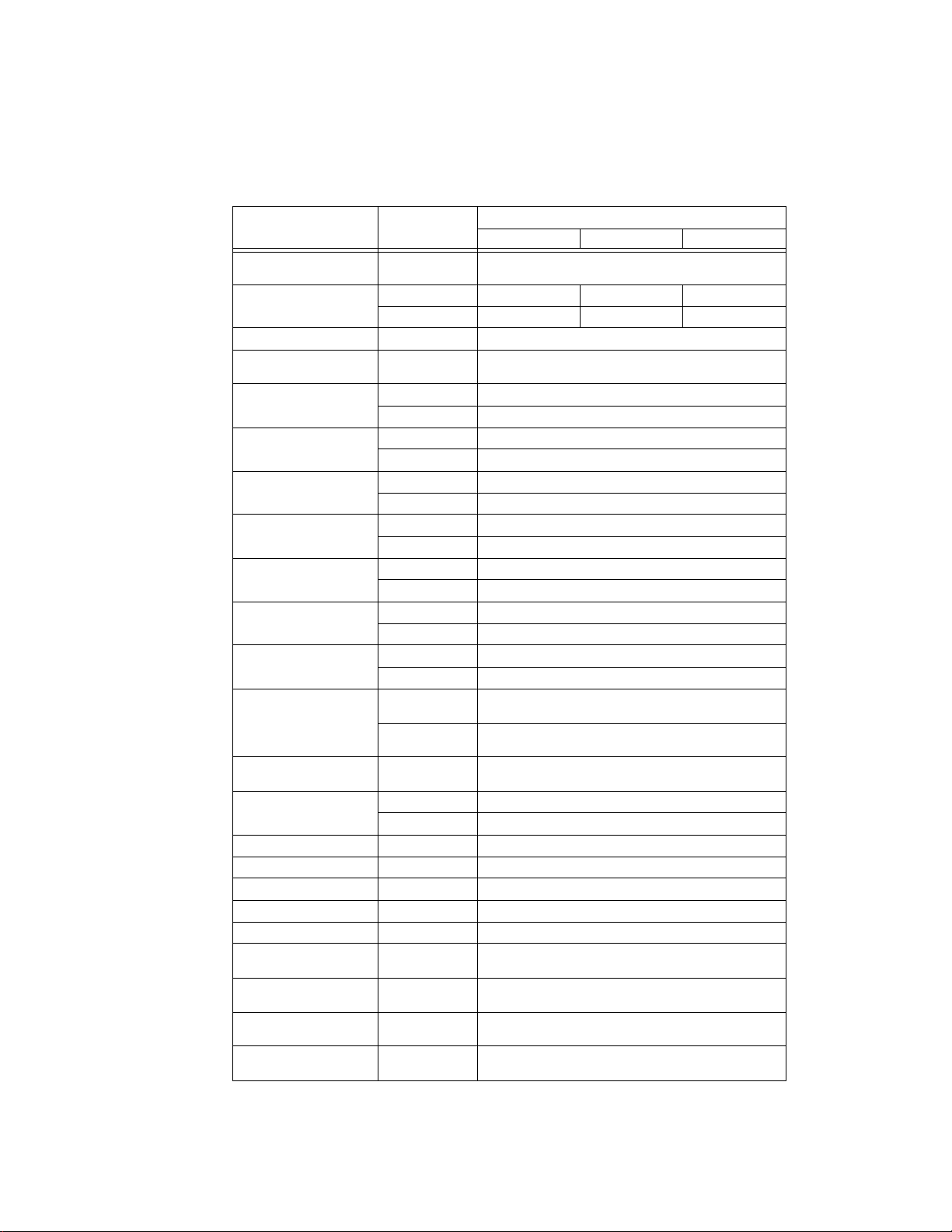
1.3 SPECIFICATIONS, ELECTRICAL
a) MAT Power Module Features And Specification
TABLE 1-1. MAT POWER MODULE FEATURES AND SPECIFICATIONS
PARAMETER CONDITION
Input Voltage Range
Input Current Max
Input Frequency RANGE 47-63 Hz
Voltage/Current Adjust-
ment Range
Programming
Resolution
Programming Accuracy
Data Read Back
Accuracy via Digital Bus
Source Effect
Load Effect
Time 8 Hour Drift
Temperature
Coefficient/°C
Ripple & Noise
Transient Recovery Voltage
Temperature
Cooling Built-in fan, air exhaust to rear
Remote Sensing Range 0.5 volts per lead (Provision for 4-terminal connection to load)
DC Output Isolation Voltage 500 Vdc
Leakage Current Output to chassis 5
Series/Parallel Operation Consult Kepco application engineering
Output Display
IndIcators 4 LEDs
Output Enable/Disable
Polarity Reversal
USER
SELECTABLE
115 VAC 7.0A 14.0A 21.0A
230 VAC 3.5A 7.0A 10.5A
RANGES
Voltage 0.024% Eo max (12 bits)
Current 0.024% Io max (12 bits)
Voltage 0.024% Eo max
Current 0.1% Io max
Volt ag e 0.1% Eo m ax
Current 0.12% Io max
Voltage 0.001% Eo max
Current 0.005% Io max
Voltage 0.002% Eo max
Current 0.024% Io max or 4 mA (whichever is greater)
Voltage 0.01% Eo max
Current 0.02% Io max
Voltage 0.01% Eo max
Current 0.02% Io max
Volt ag e
Current
Operating 0 to 50 °C
Storage -20 to +70 °C
3-1/2 digit LCD
Panel Meter
1/3 RACK 2/3 RACK FULL RACK
0 to 100% of rating, by preprogrammed setting,
rms: 0.001% Eo max or 0.3 mV (whichever is greater)
p-p: 0.01% Eo max or 3 mV (whichever is greater)
150
sec to recover within 0.1% Eo max for 10% to 100%
µ
Voltage and Current Mode,Output Enabled, Polarity
Reversed
Built in power and sensing relays controlled through IEEE
1118 b us
Built in power and sensing relays controlled through IEEE
1118 b us
MAT POWER MODULE
105-125 VAC
210-250 VAC
within inherent resolution limits
rms: 0.03% Io max
p-p: 0.3% Io max
step in rated load current
A rms or 50µA p-p @ 115V a-c
µ
Switch selectable voltage/current
MAT FULL RACK 022602
1-3
Page 12

TABLE 1-1. MAT POWER MODULE FEATURES AND SPECIFICATIONS (CONTINUED)
PARAMETER CONDITION
Overvoltage Tracks program voltage, Crowbars output and turns off input
Overcurrent Tracks program current, Crowbars output and turns off input
Protection
Source Connections
Load Connections
Remote Control
Signal Connections
Dimensions See Figure 1-2.
Weight LBS336075
Mounting Front
Filler Panels
Overtemperature
Polarity Reversal Built in diodes protect unipolar supply output
Power Loss Detects loss of ac input power, disables output
For either RA 50
or RA 51
1/3 RACK 2/3 RACK FULL RACK
Monitors heat sink temperature, Crowbars output and turns
off input
3-wire power entry, via user-configurable mating connector
(supplied) and proper gage wires (not supplied)
5-wire connection, via user-configurable mating connector
(supplied) and proper gage wires (not supplied)
DC Power Output: 2 wires
Output Sense Terminals: 2 wires
Ground: 1 wire
Two 2-wire connections via user-configurable mating
connector supplied and 22 AWG wire (not supplied).
Connectors in parallel for daisy chaining multiple power
supplies (full rack only).
Three 1/3 rack
modules plug into
RA 50. One 1/3
and one 2/3 rack
modules plug into
RA 51
MAT POWER MODULE
One 1/3 and one
2/3 rack modules
plug into RA 51
RFP 50-1: 1/3 Panel
RFP 50-2: 2/3 Panel.
Full Rack mounts
directly into 19
inch Rack
1.4 DC OUTPUT RATINGS FOR 1/3, 2/3 AND FULL RACK MODULES
a) MAT Power Module DC Output Ratings 1/3, 2/3, and Full Rack Size - see Table 1-2
b) Output range:
1) Voltage mode: 0-100% of rated voltage
2) Current mode: 0-100% of rated current
1-4
MAT FULL RACK 022300
Page 13
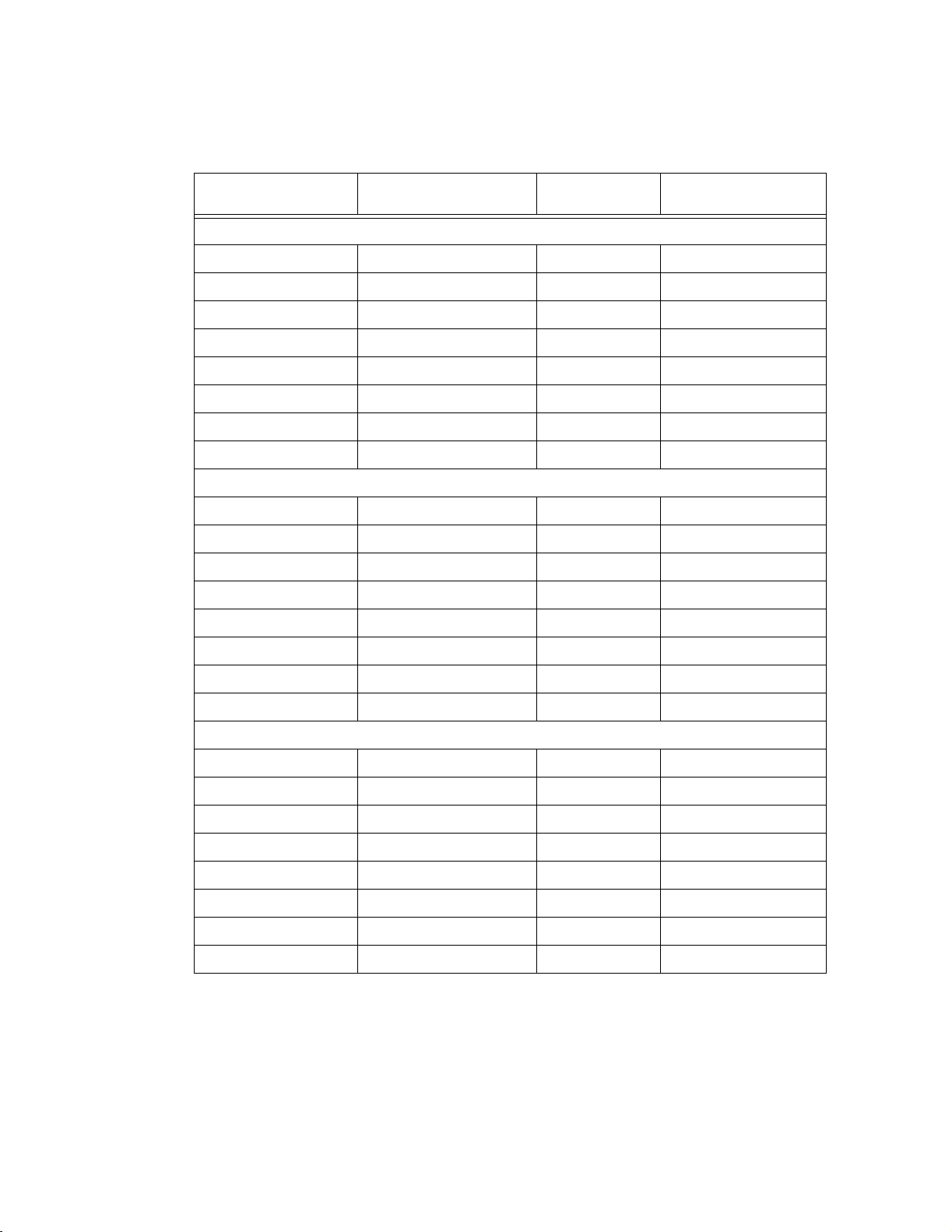
TABLE 1-2. MAT POWER MODULES POWER OUTPUT RATINGS
MODEL VOLTS
(Range)
360W MODULES-1/3 RACK SIZE-DC OUTPUT RATINGS
MAT 6-32 0-6 0-32 192
MAT 15-20 0-15 0-20 300
MAT25-14 0-25 0-14 350
MAT 36-10 0-36 0-10 360
MAT 55-7 0-55 0-7 385
MAT 75-5 0-75 0-5 375
MAT 100-3.6 0-100 0-3.6 360
MAT 150-2.4 0-150 0-2.4 360
720W MODULES-2/3 RACK-DC OUTPUT RATINGS
MAT 6-64 0-6 0-64 384
MAT 15-40 0-15 0-40 600
MAT25-28 0-25 0-28 700
MAT 36-20 0-36 0-20 720
MAT 55-14 0-55 0-14 770
AMPS
Range
POWER
(Nominal)
MAT 75-10 0-75 0-10 750
MAT 100-7.2 0-100 0-7.2 720
MAT 150-4.8 0-150 0-150 720
1080W MODULES-FULL RACK-DC OUTPUT RATINGS
MAT 6-100 0-6 0-100 600
MAT 15-60 0-15 0-60 900
MAT 25-42 0-25 0-42 1050
MAT 36-30 0-36 0-30 1080
MAT 55-20 0-55 0-20 1100
MAT 75-15 0-75 0-15 1125
MAT 100-10 0-100 0-10 1000
MAT 150-7 0-150 0-7 1050
MAT FULL RACK 022300
1-5
Page 14
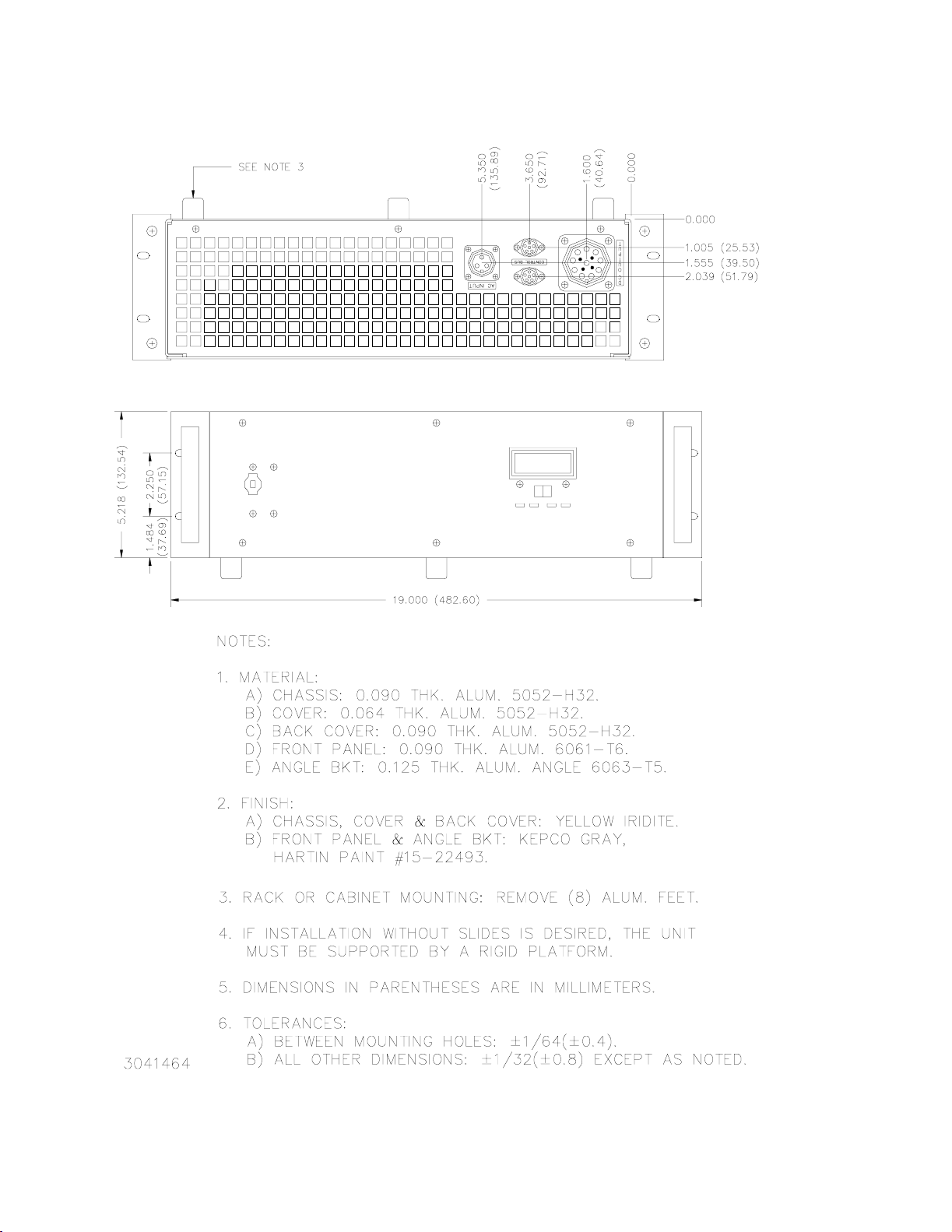
FIGURE 1-2. MAT POWER MODULE MECHANICAL OUTLINE DRAWING (SHEET 1 OF 2)
1-6
MAT FULL RACK 022300
Page 15

FIGURE 1-2. MAT POWER MODULE MECHANICAL OUTLINE DRAWING (SHEET 2 OF 2)
MAT FULL RACK 022803
1-7
Page 16

1.5 MISCELLANEOUS FEATURES
a. Mode flag: A pair of panel LED indicators indicate whether the Power Module is in voltage
mode or in current mode.
b. Remote error sensing: Separate voltage-sensing terminals permit 4-wire connections to a
load to compensate for static load effects (up to 0.5V per lead). An additional 1 volt output
voltage, beyond the nominal voltage rating of each MAT Power Module, is provided for this
purpose.
c. Storage temperature range: -20 to +70° C.
d. Cooling: The fans are high efficiency, single bearing fans with special low-noise non-metallic
blades
1.6 ACCESSORIES
a. Kepco full rack MAT Models are drilled for optional chassis slides, Kepco P/N 108-0430
(modified Jonathan 370-QD Series), two required (see Figure 1-2).
b. One 2 meter long shielded twisted pair cable with two DIN mating connectors (see Table 2-
5), one at each end (Kepco P/N 118-0699) is supplied with each Rack Adapter (RA 50 or RA
51) and with each Full Rack MAT Power Module. The Power Module Controller (see PAR.
1.2) and up to 27 MAT Power Modules can be connected in a daisy chain configuration as
shown in FIG. 1-3. The last (in the daisy chain) Power Module Control Bus Outlet must be
terminated with a Terminating Connector Assembly (Kepco P/N 195-0075) that is supplied
with the Power Module Controller.
c. AC input connector (see Table 2-5).
d. DC Output connector (see Table 2-5).
1-8
MAT FULL RACK 022803
Page 17

FIGURE 1-3. THE TMA 4882-27 CONTROLLER AND MAT POWER MODULES
1.7 SAFETY
There are no operator serviceable parts inside the case. Service must be referred to authorized
personnel. Using the power supply in a manner not specified by Kepco. Inc. may impair the protection provided by the power supply. Observe all safety precautions noted throughout this manual. Table 1-3 lists symbols used on the power supply or in this manual where applicable.
TABLE 1-3. SAFETY SYMBOLS
SYMBOL Meaning
CAUTION: RISK OF ELECTRIC SHOCK.
CAUTION: REFER TO REFERENCED PROCEDURE.
!
MAT FULL RACK 022300
WARNING
CAUTION
INDICATES THE POSSIBILITY OF BODILY INJURY
OR DEATH.
INDICATES THE POSSIBILITY OF EQUIPMENT
DAMAGE.
1-9/(1-10 Blank)
Page 18

SECTION 2 - INSTALLATION
2.1 UNPACKING AND INSPECTION
This instrument has been thoroughly inspected and tested prior to packing and is ready for
operation. After careful unpacking, inspect for shipping damage before attempting to operate.
Perform the preliminary operational check as outlined in PAR 2.8 If any indication of damage is
found, file an immediate claim with the responsible transport service.
2.2 TERMINATIONS
1. Internal Controls Accessible through top cover: Refer to Table 2-1 and Figure 3-2.
2. Front Panel: Refer to Figure 2-1 and Table 2-2.
3. Rear Panel: Refer to Figures 2-2 and Table 2-3.
Table lists Input/Output connectors for the MAT Power Module
TABLE 2-1. INTERNAL CONTROLS ACCESSIBLE THROUGH TOP COVER
REFERENCE
DESIGNATION
A1R28 I
A1R20 E
A1R15 I
A1R16 I
A1R11 V
A1R12 I
A3S1 Node Address Used to select Node address (node number or channel number) of the MAT
A1TP1 Test Points Provides four test points used for testing/calibration
NOTES:
1. These adjustments must be done in accordance with the calibration procedure (see PAR. 5.5).
O ZERO
O ZERO
CURRENT SENSING ZERO
FULL SCALE CURRENT ADJUST
(NOTE 1)
REF
REF
CONTROL PURPOSE
(NOTE 1) Used to adjust output current of power supply to initial value.
CONDITIONS: current mode, shunt at the output.
(NOTE 1) Used to adjust output voltage of power supply to zero.
CONDITIONS: voltage mode, no load.
(NOTE 1) Used to adjust current monitor amplifier to zero.
CONDITIONS: voltage mode, no load.
Used to calibrate the full scale value of the output current.
CONDITIONS: current mode, shunt at the output.
(NOTE 1) Used to calibrate full scale voltage.
CONDITIONS: voltage mode, no load.
(NOTE 1) Used to adjust internal full scale current.
CONDITIONS: current mode, shunt at the output.
Power Supply from 1 - 31
1 -CURRENT REFERENCE
2 -CURRENT MONITOR
3 - VOLTAGE REFERENCE
4 - COMMON
MAT 6V/15V/25V/36V/ 022300
2-1
Page 19

TABLE 2-2. FRONT CONTROL MAT POWER MODULE
ITEM NO.
(See Fig. 2-1)
1 AC POWER Switch/circuit Breaker Serves as an AC power switch and turns the AC power
2 VOLTAGE MODE indicator, green LED Energized in voltage mode.
3 CURRENT MODE Indicator, Yellow LED Energized in current mode.
4 VOLTAGE/CURRENT Meter with selection
switch, green LED/ yellow LED
5 OUTPUT ENABLED Indicator, green LED Energized when relay closes and voltage is present at
6 POLARITY REVERSED Indicator, green LED Energized when relay closes and polarity at power mod-
CONTROL FUNCTION
line off on overvoltage, overcurrent, overtemperature or
power loss. CAUTION: DO NOT repeatedly toggle the
circuit breaker/switch as this may cause unit to fault.
Set Power ON/OFF circuit breaker/switch on front panel
to ON. If actuator does not lock when released, wait a
few seconds before trying again. The circuit breaker is
"trip-free" design; if overload exists or the protection is
activated, contacts cannot be held closed by actuator.
Green LED energizes when meter reads output voltage.
Yellow LED energizes when meter reads output current.
the power module output terminals.
ule output terminals is reversed.
FIGURE 2-1. FRONT VIEW OF THE FULL RACK MAT POWER SUPPLY
2-2 MAT 6V/15V/25V/36V/ 041807
Page 20

TABLE 2-3. REAR TERMINATIONS, MAT POWER MODULE
ITEM NO.
(See Fig. 2-2)
1
2
3
REAR TERMINATION FUNCTION
DC OUTPUT
CONNECTOR
CONTROL BUS
CONNECTORS
AC INPUT POWER
CONNECTOR
Connects the MAT power module output lines, sensing lines and ground line to
the load (connector supplied). Refer to figure 2-2 for pin designations.
Connects MAT power module to the IEEE 1118 control bus. Two connectors (in
parallel) allow daisy chain connection of up to to 27 MAT power modules to be
connected (daisy chained) to the power module controller via the control bus
(see par. 1.2).
Accepts three prong a-c input female plug (supplied).
TABLE 2-4. DC OUTPUT CONNECTOR PIN FUNCTIONS
PIN FUNCTION
B OUTPUT TERMINAL 1
E OUTPUT TERMINAL 2
C SENSE TERMINAL 1
D SENSE TERMINAL 2
A SAFETY GROUND
FIGURE 2-2. REAR VIEW OF THE MAT FULL RACK POWER MODULE
MAT 6V/15V/25V/36V/ 022300
2-3
Page 21

TABLE 2-5. INPUT AND OUTPUT CONNECTORS
CHASSIS MOUNT MATING PLUG
AC INPUT CONNECTOR (MIL STD CONNECTOR, MS TYPE OR EQUIVALENT)
MS3102A16-10P
DC OUTPUT CONNECTORS (MIL STD CONNECTOR, MS TYPE OR EQUIVALENT)
M3102A28-5S
DIN 41524 (SOCKET)
2.3 AC INPUT REQUIREMENT
The Power Module operates on a single phase, 115 Va-c nominal line. The Power Module can
also be connected to 230 Va-c by the following procedure:
CAUTION: The following procedure is only authorized to be performed by a trained service technician.
1. Disconnect the AC Input power from the MAT Power Module and remove the six screws
from the Front Panel, see Figure 2-1. Place the panel face down on a padded surface to
avoid damage. With the front panel removed, locate the barrier terminal block mounted on
the chassis.
MS3108A16--10S
(KEPCO P/N 143-0331)
MS3106A28-5P
(KEPCO P/N 142-0358)
DIGITAL BUS CONNECTOR
DIN 41524 (PLUG)
KEPCO P/N142-0308
NOTE: Do not move the wires connected to the barrier strip, they are properly placed for both
115 Va-c and 230 Va-c operation.
2. Figure 2-3A shows the barrier terminal block set to 115 Va-c
operation. Remove the jump-
ers on the barrier strip connecting terminals 2 to 3, and terminals 4 to 5.
3. Place a jumper between terminals 3 and 4. For 230 Va-c the barrier strip appears as in Figure 2-3B.
4. Place prominent labels at the front and rear panel indicating the unit is wired for 230V a-c
operation.
To return to 115 Va-c operation reverse the procedure. Remove the jumper in step 3 and replace
the jumpers in step 2. Indicate unit is wired for 115V a-c in step 4. Replace labels to indicate unit
is wired for 115V a-c.
2-4
MAT 6V/15V/25V/36V/ 022300
Page 22

FIGURE 2-3. MAT MODULE BARRIER STRIP WITH JUMPERS FOR 115 OR 230 VA-C
2.4 COOLING
The power transistors and rectifiers in the MAT Power Module are maintained within their operating temperature range by means of special heat sink assemblies, cooled by an internal fan.
SIDE PANEL OPENINGS AND THE TOP OF THE CASE MUST BE KEPT CLEAR FROM
OBSTRUCTIONS TO ENSURE PROPER AIR CIRCULATION.
rack mounted, or installed in confined spaces, care must be taken that the ambient temperature
(the temperature immediately surrounding the Power Module) does not rise above the limit
specified.
2.5 INSTALLATION
The MAT Power Module is designed to be rack-mounted in a standard 19 inch equipment rack
(refer to Figure 1-2, Mechanical Outline Drawing).
For installation into confined spaces, care must be taken that the surrounding environment does
not exceed the maximum specified ambient temperature of 50 °C
2.6 GROUNDING
2.6.1 SAFETY GROUNDING
National and international safety standards set procedures for the grounding of a metal cover
and chassis of an instrument connected to an ac power source.
If the MAT Power Module is
The MAT Power Module is supplied with an ac female plug (MS3106A16-10S, Kepco P/N 143-
0331), that mates with a chassis mounted male receptacle (MS3102A16-10P. Kepco P/N 142-
0268). The pin designations are as follows: A is Hot, B is Safety Ground, and C is Neutral (see
Table 2-3 and Figure 2-2).
MAT 6V/15V/25V/36V/ 022300
2-5
Page 23

Keep the Power Module grounded when connected to an AC power source.
2.6.2 DC (OUTPUT) GROUNDING
DC output connections are those between the Power Module and the load, including remote
sensing connections if necessary. Despite precautions to eliminate noise such as shielding and
twisted wire-pairs, output connections may pick up radiated noise of a wide frequency. To minimize such undesired effects, one side of the Power Module output/load should be grounded.
Successful D.C. grounding depends on careful analysis of the system operation. However here,
only general guide lines are provided. One of the major points, is to avoid ground loops. Ground
loops are created when two or more points of different ground potentials in the output circuit are
grounded. A noise voltage is developed that is superimposed on the load (output potential). A
way to avoid ground loops is to investigate for points of resistance to ground. Differences in
ground potential can be avoided if the output circuit is completely isolated. A single point is then
selected along the Power Module output circuit and returned to ground with a single wire. This
method is dependent on the specific application.
The MAT Power Modules are designed with Power Isolation relays that comply with MATE
(Modular Automated Test Equipment) Test Module Adapter requirements. Each output is fully
isolated from other outputs and from ground.
WARNING
2.6.3 POWER MODULE TO LOAD INTERFACE
The general function of a voltage or current stabilized Power Module is to deliver rated output to
the load. The load may be fixed or variable; resistive, capacitive, or inductive; and may be
located close to or far away from the Power Module. The Power Module is designed for varied
applications. The aim of the following paragraphs is to instruct the user in the interface of the
Power Module to the load.
The perfect interface between a Power Module and load insures optimum performance. To
approach this state of operation, one must be familiar with certain requirements, such as interconnection guidelines, Ohm's Law and ac theory.
Load Wire Selection - A stabilized dc Power Module is not an ideal voltage or current source
with zero output impedance (voltage mode) or infinite output impedance (current mode): All voltage sources have some amount of impedance which increases with frequency and all current
sources have impedance which decreases with frequency. (See FIG. 2-4).
2-6
MAT 6V/15V/25V/36V/ 022300
Page 24

FIGURE 2-4. VARIATION OF OUTPUT IMPEDANCE WITH FREQUENCY FOR A VOLTAGE SOURCE AND A
CURRENT SOURCE
A practical model for a voltage stabilized Power Module includes a series inductance representing dc and low frequency source impedance. Load leads should have minimum voltage drops
(error sensing is discussed below) and minimum inductance (error sensing does not compensate for this). Similarly a model for a current stabilized Power Module includes a parallel capacitor representing the dc and low frequency source impedance.
These considerations are important if:
1) The load is constantly changing value
2) The load is switched "on" and "off"
3) The output of the Power Module is step programmed
4) The load is reactive
5) Dynamic output response of the Power Module is of concern
MAT 6V/15V/25V/36V/ 022300
2-7
Page 25

2.6.4 LOAD CONNECTION, LOCAL ERROR SENSING
The DC OUTPUT connector is located on the back of chassis, and is designated A6-J2 in the
schematic. Table 2-4 and Figure 2-2 provide the function and location of DC OUTPUT connector
pins.
NOTE: The sense terminals MUST be configured for either local sensing (as follows) or
remote sensing (see PAR. 2.6.5) for the MAT Power Module to operate. If left
unconnected the unit will automatically isolate the load and shut down.
For Local sensing connect Output Terminal 1 to Sense Terminal 1, and Output Terminal 2 to
Sense Terminal 2 at the DC Output connector (see Figure 2-5).
FIGURE 2-5. LOAD CONNECTIONS, LOCAL SENSING
2.6.5 LOAD CONNECTION WITH REMOTE ERROR SENSING
The MAT series of Power Modules can operate with sensing external to the Module. Sensing
should be with a twisted wire pair to reduce noise. The sensing wires must be connected as follows: Output terminal 1 to Sense Terminal 1 and Output Terminal 2 to Sense Terminal 2, each at
the load (see Figure 2-6). Refer to Table 2-4 and Figure 2-2 for DC Output connector pin functions and locations.
When the MAT Power Module is connected for remote error sensing (in the voltage mode), a situation might occur where the output capacitor C14 must be supplemented to achieve optimum
performance. If oscillations are observed at the output terminals or at the load, the load should
be decoupled with another high quality capacitor of a value equal to or greater than C14.
2-8
FIGURE 2-6. LOAD CONNECTIONS, REMOTE SENSING
MAT 6V/15V/25V/36V/ 022300
Page 26

2.7 OPERATING CONFIGURATION
The complete operating configuration is defined by
• The Model Number (e.g. MAT 100-10)
• Jumper configuration of internal boards.
Table 2-4 lists the location of the internal jumpers and their function. This information is provided
for reference purposes only, to indicate the configuration options available. Do not attempt to
alter the jumper configuration. For assistance in changing any jumper-selected parameter contact Kepco applications engineering.
TABLE 2-6. INTERNAL JUMPER CONFIGURATION
LOCATION FUNCTION
Establish the
Model
A1
Path Fault
Protection
A2
Input Power
Loss Protection
JUMPER
INSTALLED
J2-J5 J1 MAT 6-100
J2-J4 J1,J5 MAT 15-60
J2-J3, J5 J1,J4 MAT 25-42
J2-J3 J1,J4 J5 MAT 36-30
J2, J4, J5 J1,J3 MAT 55-20
J2, J4 J1,J3,J5 MAT 75-15
J2, J5 J1,J3, J4 MAT 100-10
J2 J1, J3-J5 MAT 150-7
J7
J5
(Default)
JUMPER
NOT
INSTALLED
J7
(Default)
J5
DESCRIPTION
Enables crowbar protection circuit to trip circuit
breaker and shut off unit if path fault detected.
Allows software complete control of path fault
protection. Outputs (voltage and current) are
programmed to zero and relays opened to isolate load in case of path fault.
Enables crowbar protection circuit to trip circuit
breaker and shut off unit when power loss
detected.
Disables crowbar protection circuit which trips
circuit breaker and shuts off unit when power
loss detected.
2.8 PRELIMINARY CHECK-OUT
For a preliminary electrical check-out of the MAT Power Module a Host Computer, a Power
Module Controller (see PAR. 1.2) and all the necessary interconnection cables are required.
Connect the MAT Power Module DC Output connector for local sensing: Output 1 to Sense 1,
Output 2 to Sense 2 (see Table 2-4). Connect a resistive load across Output 1 and Output 2 that
is capable of dissipating the maximum current and voltage capabilities of the Power Module.
In this procedure the MAT Power Module Control Bus address is 3, (it is set at the factory to 3).
Connect the Kepco Power Module Controller and the MAT Power Module (following check-out
uses a MAT Power Module Model 100-10 as an example) to the Control Bus. Connect the Host
Computer and the Power Module Controller to the IEEE 488 GPIB. Apply the ac power to the
units in the following sequence: MAT Power Modules first and Power Module Controller last. In
the event that this sequence is reversed (the Power Module Controller is connected first, and
then the MAT Power Module is connected second) the operator must send a IEEE 488 GPIB
MAT 6V/15V/25V/36V/ 022300
2-9
Page 27

Device Clear Interface Function via the Host Computer. For proper time delays between commands refer to PAR. 3.4. For details on the CIIL commands refer to PAR. 3.6.3 and Appendix C
as well as the Power Module Controller Manual. The following does not include the IEEE 488
Bus Commands.
1. To verify the Power Module is operational the Host Computer sends:
CNF(cr)(lf)
b. The Power Module Controller does self test
c. All MAT Power Modules output enable relays open, all Power Modules go to maximum
rating, and the Power Module Controller checks for error flags. After the test, the relays
remain open and the Power Modules are set to zero.
4. To verify the CNF command was implemented, the Host Computer sends:
STA(cr)(lf)
The Power Module Controller sends back (if no errors occur)
(sp)(cr)(lf)
5. Proceed per PAR. 2.8.1 through 2.8.3 substituting full scale voltage/current values appropiate to the model being checked
2.8.1 EXAMPLE 1: FULL SCALE VOLTAGE CHECK
Program the Power Module MAT 100-10 to full scale voltage and check that the front panel
meter reading and internal measured values are the same.
6. To program the Power Module to 100 volts, with a current limit of 10 amps the Host Computer sends:
FNC DCS :CH3 SET VOLT 100 SET CURL 10(cr)(lf)
The MAT at address 3, is now set to 100 volts, with a current limit of 10 amps.
7. To verify the FNC command was implemented, the Host Computer sends:
STA(cr)(lf)
The Power Module Controller sends back (if no errors occur):
(sp)(cr)(lf)
8. To measure the voltage at the output the Host Computer sends:
FNC DCS VOLT :CH3(cr)(lf)
The MAT at address 3 is now set to take a reading;
2-10
9. To take a reading the Host Computer sends:
MAT 6V/15V/25V/36V/ 022300
Page 28

INX VOLT(cr)(lf)
a. The MAT previously set up now starts to measure and send the proper time delay
needed for the measurement.
b. The Power Module Controller will send the time delay value back to the Host Com-
puter when it has been properly Talk Addressed (see specific IEEE 488 interface
requirements):
00(cr)(lf)
10. The Host Computer then sends:
FTH VOLT(cr)(lf)
a. The MAT then sends the measured voltage in scientific notation to the Power Module
Controller (for example 100.01 volts) which
b. The Power Module Controller in turn sends:
1.0001E2(cr)(lf)
11. Check that the front panel meter reading and the computer value are identical within the
measurement tolerance. The meter selection sewitch must be set to “voltage” for a reading.
2.8.2 EXAMPLE 2: FULL SCALE CURRENT CHECK:
Program the Power Module MAT 100-10 to full scale current and check that the front panel
meter and internal measured values are the same.
1. To program the Power Module to 10 amps, with a voltage limit of 100 volts, the Host Computer sends:
FNC DCS :CH3 SET CURR 10 SET VLTL 100(cr)(lf)
The MAT at address 3, is now set to 10 amps, with a voltage limit of 100 volts.
1. To verify the FNC command was implemented, the Host Computer sends:
STA(cr)(lf)
The Power Module Controller sends back (if no errors occur):
(sp)(cr)(lf)
2. To measure the current at the output ,the Host Computer sends:
FNC DCS CURR :CH3(cr)(lf)
The MAT at address 3 is now set to take a reading,
3. To take a reading the Host Computer sends:
INX CURR(cr)(lf)
MAT 6V/15V/25V/36V/ 022300
2-11
Page 29

d. The MAT previously set up now starts to measure and send the proper time delay
needed for the measurement.
e. The Power Module Controller will send the time delay value back to the Host Com-
puter when it has been properly Talk Addressed (see specific IEEE 488 interface
requirements):
00(cr)(lf)
1. The Host Computer then sends:
FTH CURR(cr)(lf)
a. The MAT then sends the measured current in scientific notation to the Power Module
Controller (for example 9.9998 amps) which
b. The Power Module Controller in turn sends
9.9998E0(cr)(lf)
3. Check that the front panel meter reading and the computer are identical within their measurement tolerance. The meter selection switch must be set to "Current" for a reading.
2.8.3 EXAMPLE 3: TO RESET THE POWER MODULE
4. To reset the Power Module at address 3 the Host Computer sends:
RST DCS :CH3(cr)(lf)
5. To verify the RST command was implemented, the Host Computer sends:
STA(cr)(lf)
The Power Module Controller sends back (if no errors occur):
(sp)(cr)(lf)
6. This concludes the preliminary check-out of the MAT Power Module.
2-12
MAT 6V/15V/25V/36V/ 022300
Page 30

SECTION 3 - OPERATION
3.1 GENERAL
Interconnections linking a stabilized Power Module to an AC power source and a load are critical. For optimum performance certain rules must be observed. These rules are described in
detail in PAR. 2.6.
3.2 INTRODUCTION TO CONTROLLING THE MAT POWER MODULE OUTPUT
The MAT family of Power Modules communicates remotely with a controller via the Control Bus.
Each MAT Power Module has a specific address on the bus. The address (from 1 to 31) is
selected by the switches on the top of the unit (see Figures 3-1 and 3-2 and Table 3-1). This
address is set at Kepco to 3.
The MAT family of Power Modules is controlled by the Power Module Controller (see PAR. 1.2).
For an explanation of remote programming refer to PAR 3.6 and Appendices A, B, and C, as
well as the applicable Power Module Controller Manuals.
MAT FULL RACK/022300
FIGURE 3-1. TOP COVER ACCESS POINTS
3-1
Page 31

TABLE 3-1. DEVICE ADDRESS SELECTION FOR THE MAT POWER MODULE
DECIMAL
ADDRESS
10000 1
20001 0
30001 1
40010 0
50010 1
60011 0
70011 1
80100 0
90100 1
100101 0
110101 1
120110 0
130110 1
140111 0
150111 1
161000 0
171000 1
A3S1-4
(A4)
A3S1-3
(A3)
A3S1-2
(A2)
A3S1-1
(A1)
A3S1-0
(A0)
181001 0
191001 1
201010 0
211010 1
221011 0
231011 1
241000 0
25 1 11 0 0 1
261101 0
271101 1
281110 0
291110 1
301111 0
311111 1
3-2
MAT FULL RACK/ 022300
Page 32

3.2.1 MAT/POWER MODULE CONTROLLER SYSTEM
MAT Power Modules are digitally controlled power supplies. Up to twenty seven Power Modules
at a maximum distance of 1000 feet (300 meters) can be controlled by the Power Module Controller (see PAR 1.2). The Power Module Controller communicates as a Talker/Listener with a
Host Computer over the IEEE-488 GPIB using either the Standard Commands For Programmable Instruments (SCPI, refer to PAR. 3.6.2) or the Control Interface Intermediate Language
(CIIL, refer to PAR. 3.6.3). Communications with the MAT Power Modules are accomplished via
a two-wire high speed (375 KHz) bidirectional serial communications bus, called the Control
Bus or IEEE 1118 Bus.
The Power Module Controller is designed with a microcomputer board containing a relatively
powerful CPU, 256K of RAM, programmable timers, priority interrupt circuits, an RS-232 input/
output interface port and ROM firmware (embedded software). A discrete fault line is designed
into the Power Module Controller to report catastrophic failures. Communications with an external terminal are achieved via an RS-232 communications bus and related interface card.
Power for the microcomputer board of the TMA 4882-27 Power Module Controller is provided by
a wide range input Power Supply, Kepco Model MRW 150KV. The AC input voltage can range
from 95 Volts AC to 264 Volts AC, thereby eliminating the need for an input voltage selector.
The IEEE-488 GPIB implements a number of Interface Functions from the IEEE-488 protocol
(see the Power Module Controller Operator's Manual for details on these functions). The Power
Module Controller microcomputer continuously polls all the Power Modules (via the Power Module microcontroller on Digital Card A3, see PAR. 4.25.3) on the high speed Control Bus for any
change in their Status conditions. A Status Monitor Interface is provided in the Power Module
Controller as an interface to the Host Computer for reporting catastrophic failures within the
Power Modules. If such an error is reported back to the Power Module Controller, the Host Computer then sends a Device Clear Command to open the isolation relays and reset all the Power
Modules to zero. Following that, a Status command is sent to determine the nature of the failure.
In Data Mode the Power Module Controller sends or receives messages per the IEEE 488 GPIB
protocol. The messages are Enabled when the Attention line goes high. A Handshake cycle is
performed for every ASCII character sent or received over the IEEE-488 GPIB.
3.2.2 MAT/TMA PC-27 SYSTEM
A Power Module Controller is available from Kepco that plugs directly into any DOS based computer to control the Power Modules (up to twenty seven Modules daisy-chained to a single Control Bus) without the need for an IEEE 488 GPIB. The use of the TMA PC-27 Power Module
Controller microcomputer board, the IEEE-488 GPIB interface input/output port and the RS 232
interface input/output port to be bypassed.
The TMA PC-27 Software can be loaded into a DOS based computer either as a Terminate and
Stay Resident (TSR) program, or as a stand-alone program. As a TSR it may be called from any
of the following languages TURBO C, QUICK C, POWER C, TURBO PASCAL, QUICK PASCAL, QUICK BASIC and INTERPRETED BASIC.
With the TMA Software loaded, the MAT Power Modules may be programmed over the Control
Bus using CIIL or KPL (Kepco Programming Language). KPL is a simplified command set
based on CIILand is used to facilitate input/output operations for the TMA PC-27. It has embedded in it the software that supports the TMA PC-27 and is also compatible with National Instruments NI 488 DOS Handler for the IEEE-488 GPIB.. Catastrophic error messages will remain in
memory until the cause of the failure is determined and the error condition is corrected. Additional functions not supported by CIIL have been included. A non-CIIL command, T0, calls for a
noncatastrophic error message to be erased when a command other than Status is sent. A T1
MAT FULL RACK/022300
3-3
Page 33

command causes noncatastrophic error messages to be stacked in memory until interrogated
by a Status command.
3.3 AUTOMATIC (TRACKING) CONTROL OF THE CROWBAR LEVEL
MAT Power Modules have Overvoltage and Overcurrent Tracking Amplifiers. These amplifiers
will cause a crowbar flag, send a catastrophic error to the Power Module Controller and shut the
module down if the output goes out of tolerance. Autotracking range is from 10%± 3% of nominal value above the programmed MAT Power Module output voltage or current.
3.4 POWER MODULE CONTROLLER/MAT TIME DELAYS (TO OBTAIN A VALID STATUS):
After sending a command that might affect the output of the Power Modules or their relays, it is
recommended that the Status command be sent. For information on this command see the
applicable Power Module Controller Manual. The required time delay before a valid status of the
Power Module Controller/MAT system is as follows:
• After an Open, Close, Change of Polarity, or Change of Mode wait approximately 300
milliseconds.
• After a Confidence Test command or an Internal Self Test wait approximately 400 milliseconds.
• After a Reset command wait approximately 300 milliseconds
• After an INX Command the maximum delay time is 2 seconds
3.5 POWER LOSS CIRCUIT
An Automatic Shutdown option is available when a Power Loss is detected. Dependent on the
setting of jumper J5 on the A2 Sense and Polarity Relay Board, the Power Module will shutdown
automatically or remain in operation (see Figure 3-2). If the jumper is in place the AC Input
Power circuit breaker will trip; if the jumper is removed the circuit breaker will not trip. The MAT
Power Module is supplied with the jumper installed. To access the PCB, remove the cover (see
Section 5).
3-4
MAT FULL RACK/ 022300
Page 34

FIGURE 3-2. MAT POWER MODULE CONTROL SECTION (TOP COVER REMOVED)
3.6 REMOTE PROGRAMMING
3.6.1 GENERAL
Kepco MAT Power Supplies are programmed over a control bus using either SCPI (Standard
Commands for Programmable Instruments) or CIIL (Control Interface Intermediate Language)
commands. SCPI and CIIL provide a common language conforming to IEEE488.2 for instruments used in an automatic test system. The control bus can be either the IEEE 488 standard
communication bus (General Purpose Interface Bus, GPIB), or the RS232C communication
bus.
MAT FULL RACK/022300
3-5
Page 35

3.6.2 SCPI PROGRAMMING
SCPI (Standard Commands for Programmable Instruments) is a programming language conforming to the protocols and standards established by IEEE 488.2 (reference document ANSI/
IEEE Std 488.2, IEEE Standard Codes, ForMATs, Protocols, and Common Commands). SCPI commands are sent to the MAT Power Supply as output strings within the selected programming
language (PASCAL, BASIC, etc.) in accordance with the manufacturer’s requirements for the
particular GPIB interface card used and the Kepco controller selected (see PAR 1.2.)
Figure 3-3 illustrates typical SCPI commands used for remote programming of the MAT power
supply. For the complete command set, and detailed SCPI programming information, consult
the Technical Manual for the applicable controller (the SCPI command sets among Kepco controllers are slightly different). See PAR.3.2 to establish the MAT power supply Control Bus (BITBUS) address.
ROOT : (colon)
FIGURE 3-3. TREE DIAGRAM OF SCPI COMMANDS USED WITH MAT POWER SUPPLIES
3.6.2.1 SCPI PROGRAM EXAMPLE
Figure 3-4 is an example of a program using SCPI commands to program the MAT Power Supply. The program illustrated is for a configuration using an IBM PC or compatible with a National
Instruments GPIB interface card. (It will be necessary to consult the manufacturer’s data to
achieve comparable functions with an interface card from a different manufacturer.) This program sets output voltage (Voltage mode) or voltage limit (Current mode) to 5V, and current limit
(Voltage mode) or output current (Current mode) to 1A, then reads the measured (actual) voltage and current, then prints the measurements.
INITiate
[:IMMediate]
:CONTinuous
MEASure
:CURRent?
:VOLTage?
OUTPut
[:STATe]
[SOURce:]
VOLTage
[:LEVel]
[:IMMediate]
:TRIGgered
CURRent
[:LEVel]
[:IMMediate]
:TRIGgered
FUNCtion
:MODE
STATus
:OPERation
:CONDition?
:ENABle
[:EVENt]?
:PRESet
:QUEStionable
:CONDition?
:ENABle
[:EVENt]?
SYSTem
:ERRor?
:LANGuage
3-6
MAT FULL RACK/ 022300
Page 36

/**************************************************************************/
/* Sample Program For KEPCO power supply, using National Instruments */
/* GPIB interface card and IBM PC or compatible computer */
/**************************************************************************/
#include <stdio.h>
#include "decl.h"
char rd_str[80]; // Input buffer
char dat_str[80]; // Output buffer
int bd,adr;
main() {
adr = ibfind("DEV6"); // Open DEV6 (defined by IBCONF)
bd = ibfind ("GPIB0"); // Open GPIB card
ibsic (bd); // Send Interface Clear
ibsre(bd,1); // Set remote line true
strcpy(dat_str,"VOLT 5;CURR 1"); // Define a set command
strcat(dat_str,"\r\n"); // Append delimiter
ibwrt(adr,dat_str,strlen(dat_str)); // Send string to power supply
strcpy(dat_str,"MEAS:VOLT?;CURR?"); // Define a measure command
strcat(dat_str,"\r\n"); // Append delimiter
ibwrt(adr,dat_str,strlen(dat_str)); // Send string to power supply
strset(rd_str,'\0'); // Clear input buffer
ibrd(adr,rd_str,64); // Read result of measure
printf("received : %s\n",rd_str); // Print voltage and current
}
FIGURE 3-4. TYPICAL EXAMPLE OF MAT POWER SUPPLY PROGRAM USING SCPI COMMANDS
MAT FULL RACK/022300
3-7
Page 37

3.6.3 CIIL PROGRAMMING
The CIIL command language is used on early models of Kepco power supplies and controllers.
The command functions are included here for compatibility with other equipment programmed
with CIIL commands. The CIIL command set for the MAT Power Supply is defined and
explained in Appendix C.
CIIL is the test instrumentation module programming language standard for all new Air Force
MATE test equipment programs. CIIL is a subset of a higher level language used in automatic
test equipment systems, ATLAS (Abbreviated Test Language for All Systems).
The CIIL statements sent to monitor and program Power Modules consist of CIIL operation
codes, nouns and noun modifiers, with data values expressed as ASCII integer, decimal or in
scientific notation.
3.6.3.1 EXAMPLES USING CIIL TO PROGRAM THE MAT POWER MODULE.
The following examples show the use of CIIL (Control Interface Intermediate Language). They
do not show the IEEE 488 bus commands from the Host Computer to the Power Module Controller nor do they show the proper time delays (refer to PAR. 3.4). The examples are for a MAT
150-7 model with Control Bus address 9. The ASCII characters for space, carriage return and
line feed are represented as (sp), (cr) and (lf) respectively. The MAT Power Module, the Power
Module Controller (see PAR. 1.2), a Host Computer, and the IEEE 488 must be interconnected
for this routine.
Note: Make sure the sense leads are connected to their respective load leads. When output
current is programmed, a load must be connected at the output terminals.
1. To verify the Power Module, is operational, the Host Computer sends:
CNF(cr)(lf)
The Power Module Controller does self test All MAT Power Module output relays are disabled, all Power Modules go to maximum ratings and the Power Module Controller checks
for error flags. After the test, the relays remain disabled and the Power Modules are then
set to zero.
2. To verify the CNF command was implemented the Host Computer sends:
STA(cr)(lf)
The Power Module Controller sends back (if no errors occur):
(sp)(cr)(lf)
3.6.3.1.1 EXAMPLE 1: PROGRAM POSITIVE VOLTAGE WITH CURRENT LIMIT
1. To program the Power Module MAT 150-7 to 100 volts with a current limit of 3 amps, the Host
Computer sends:
3-8
FNC DCS :CH9 SET VOLT 100 SET CURL 3(cr)(lf)
The MAT at address 9, is then set to 100 volts, with a current limit of 3 amps
MAT FULL RACK/ 022300
Page 38

2. To verify the previous command was implemented the Host Computer sends:
STA(cr)(lf)
The Power Module Controller sends back (if no errors occur)
(sp)(cr)(lf)
3. To close the Output Enable relay (connects the Power Module to the load) the Host Computer sends:
CLS :CH9(sp)(lf)
The Power Module at address 9, closes the relay
4. To verify the previous command was implemented the Host Computer sends:
STA(cr)(lf)
The Power Module Controller sends back (if no errors occur):
(sp)(cr)(lf)
5. To measure the current at the output the Host Computer sends:
FNC DCS CURR :CH9(cr)(lf)
The MAT at address 9 is now set to take a reading
6. To take a reading the the Host Computer sends:
INX CURR(cr)(lf)
a. The MAT previously set up now starts to measure and sends the proper time delay
needed for the measurement
b. The Power Module Controller will send the time delay back to the Host Computer when
it has been Talk Addressed (see specific IEEE 488 interface requirements):
00(cr)(lf)
7. The Host Computer then sends:
FTH CURR(cr)(lf)
a. The MAT then sends the measured current in scientific notation to the Power Module
Controller (for example 1.9598 amps)
b. The Power Module Controller in turn sends:
3041471
MAT FULL RACK/022300
1.9598E0(cr)(lf)
3-9
Page 39

8. To open the Output Enable relay (disconnect the load from the Power Module), the Host
Computer sends:
OPN :CH9(cr)(lf)
The Power Module relay at address 9 is open
9. To verify the previous command was implemented, the Host Computer sends:
STA(cr)(lf)
The Power Module Controller sends back (if no errors occur)
(sp)(cr)(lf)
3.6.3.1.2 EXAMPLE 2 : PROGRAM NEGATIVE VOLTAGE WITH CURRENT LIMIT
1. To program the Power Module MAT 150-7 to -120 volts with a current limit of 2 amps, the
Host Computer sends:
FNC DCS :CH9 SET VOLT -120 SET CURL 2(cr)(lf)
The MAT at address 9, is then programmed to -120 volts, with a current limit of 2 amps
2. To verify the previous command was implemented the Host Computer sends:
STA(cr)(lf)
The Power Module Controller sends back (if no errors occur):
(sp)(cr)(lf)
3. To enable output (connect the load to the Power Module), the Host Computer sends:
CLS :CH9 (sp)(lf)
The Power Module relay at address 9, closes
4. To verify the previous command was implemented the Host Computer sends:
STA(cr)(lf)
The Power Module Controller sends back (if no errors occur):
(sp)(cr)(lf)
5. To measure the voltage at the output, the Host Computer sends:
FNC DCS VOLT :CH9(cr)(lf)
The MAT at address 9 is now set to take a reading
3-10
MAT FULL RACK/ 022300
Page 40

6. To take reading the Host Computer sends:
INX VOLT(cr)(lf)
a. The MAT previously set up now starts to measure and sends the proper time delay
needed for the measurement
b. The Power Module Controller will send the time delay back to the Host Computer when
it has been Talk Addressed (see specific IEEE 488 interface requirements):
00(cr)(lf)
7. The Host Computer then sends:
FTH VOLT(cr)(lf)
a. The MAT then sends the measured (in the example it is -120.09 volts) voltage in scien-
tific notation to the Power Module Controller
b. The Power Module Controller in turn sends
-1.2009E2(cr)(lf)
8. To reset the Power Module at address 9 the Host Computer sends:
RST DCS :CH9(cr)(lf)
The MAT then programs the output to zero and opens the Output Enable relay.
9. To verify the previous command was implemented the Host Computer sends:
STA(cr)(lf)
The Power Module Controller sends back (if no errors occur)
(sp)(cr)(lf)
3.6.3.1.3 EXAMPLE 3: PROGRAM CURRENT AND VOLTAGE LIMIT
1. To program the MAT Power Module MAT 150-7 in current mode with a current of 4 amps and
a voltage limit of 100 volts, the Host Computer sends:
FNC DCS :CH9 SET CURR 4 SET VLTL 100(cr)(lf)
The MAT at address 9, is then set up as a current source giving 4 amps with a voltage limit
of 100 volts
2. To verify the previous command was implemented the Host Computer sends:
STA(cr)(lf)
The Power Module Controller sends back (if no errors occur):
MAT FULL RACK/022300
(sp)(cr)(lf)
3-11
Page 41

3. To enable the output, the Host Computer sends:
CLS :CH9(cr)(lf)
4. To verify the previous command was implemented the Host Computer sends:
STA(cr)(lf)
The Power Module Controller sends back (if no errors occur):
(sp)(cr)(lf)
5. To measure the current at the output the Host Computer sends:
FNC DCS CURR :CH9(cr)(lf)
The MAT at address 9 is now set to take a reading
6. To take a reading the Host Computer sends
INX CURR(cr)(lf)
a. The MAT previously set up now starts to measure and sends the proper time delay
needed for the measurement (See Par. 3.4).
b. The Power Module Controller will send the time delay back to the Host Computer when
it has been Talk Addressed (see specific IEEE 488 interface requirements):
00(cr)(lf)
7. The Host Computer then sends
FTH CURR(cr)(lf)
a. The MAT then sends the measured (in the example it is 3.9998 volts) current in scien-
tific notation to the Power Module Controller
b. The Power Module Controller in turn sends:
3.9998E0(cr)(lf)
8. To measure the voltage at the output, the Host Computer sends:
FNC DCS VOLT :CH9(cr)(lf)
The MAT at address 9 is now set to take a reading
3-12
MAT FULL RACK/ 022300
Page 42

APPENDIX A - CIIL COMMAND DEFINITIONS
A.1 INTRODUCTION
This appendix defines the CIIL commands used with the MAT Power Supply. Table C-1 provides
a quick reference of all CIIL commands used in the MAT Power Supply.
TABLE A-1. CIIL SUBSYSTEM COMMAND/QUERY INDEX
COMMAND PAGE COMMAND PAGE
CLS C-4 OPN C-4
CNF C-4 RST C-4
FNC C-1 SET C-3
FT H C- 2 SR N C -3
INX C-2 SRX C-3
IST C-4 STA C-5
Syntax:
Function
Description:
Example:
: This operator is used with either the SET command to program a power supply's output (stimulus
FNC
Stimulus mode: FNC DCS :CHnn <SET Command>
Sensor mode: FNC DCS <VOLT or CURR command> :CHnn
mode), or with the VOLT and CURR commands to read its output settings (sensor mode).
The first operand contains the three (3) letter mnemonic pertaining to the device on the control bus, in
this case DCS (Direct Current Source). If a reading is being set up, the modifier VOLT or CURR follows. The next operand is used to select the specific channel of the device being programmed or read
from. The MAT can control up to 27 power supplies/power modules with control bus addresses in the
range of 1 to 31.
FNC DCS :CH12 SET VOLT 15 Power supply at node address 12 commanded to 15V
FNC DCS :CH12 SET CURR 3 Power supply at node address 12 commanded to 3A
FNC DCS VOLT :CH03 Power supply at node address 3 returns value which represents
actual output voltage
FNC DCS CURR :CH21 Power supply at node address 21 returns value which represents
actual output current
NOTE: Actual output voltage and current depends on whether output is enabled or disabled
and load conditions
FIGURE A-1. FNC — Function Command
MATSVC 022300
A-1
Page 43

INX
Syntax:
Function
Description:
Example:
: Commences a data acquisition process in accordance with the preceding FNC command.
INX VOLT (initiate voltage reading)
INX CURR (initiate current reading)
The response to the INX command is a dynamic time-out value, unless a catastrophic error condition
exists, in which case an error message will be returned. If the time-out value returned is not zero, this
indicates the power supply’s output voltage or current has not yet settled. A time delay should be
observed before proceeding with the FTH command, or the command may be repeated until a zero
value is returned, but the preceding FTH command must also be repeated.
INX VOLT Power supply initiates voltage reading)
FTH VOLT Power supply sends voltage reading to controller)
FIGURE A-2. INX — Initiate Op Code Command
Syntax:
Function
Description:
Example:
: Commands the previously designated power supply to return the requested data reading.
A-2
FTH
FTH VOLT (fetch voltage reading)
FTH CURR (fetch current reading)
This command must immediately follow an INX command. The value returned is the value of the output voltage or current, whichever was requested, unless a catastrophic error condition exists, in which
case an error message will be returned. The value observed will be in scientific notation.
INX VOLT Power supply initiates voltage reading)
FTH VOLT Power supply sends voltage reading to controller)
FIGURE A-3. FTH — Fetch Command
MATSVC 022300
Page 44

SET, SRX, SRN
Syntax:
Function
Description:
: This operator is used in conjunction with FNC (in stimulus mode) to specify the output mode of the
FNC DCS :CHnn SET VOLT <value> CURL <value>
FNC DCS :CHnn SET CURR <value> VLTL <value>
SRX Set Range Maximum
SRN Set Range Minimum
power supply being programmed.
The first operand is the noun modifier and the second operand specifies the value. The first operand
field of the command contains the four(4) letter mnemonic for the output mode of the power supply.
The choices are:
VOLT VOLTAGE MODE OPERATION
VLTL VOLTAGE LIMIT
CURR CURRENT MODE OPERATION
CURL CURRENT LIMIT
The second operand field of the command contains the value assigned to the chosen output mode.
This value may be specified as accurately as the resolution of the MAT power supply allows (12 bits,
or .024% of maximum rated voltage or current). It can be directly specified in ASCII integer, decimal,
or in scientific notation.
There may be two (2) set commands, separated by a space (ASCII 32), for each power supply being
programmed. The following are the only allowable combinations:
Example:
VOLT with CURL
CURR with VLTL
The limit parameter (CURL or VLTL) may not be set without the main parameter. A polarity sign may
precede the VOLT or CURR value so that the power supply's polarity may be selected.
In the case of Kepco's MAT power supplies, the two related Op Codes, SRX and SRN are functionally
identical to the SET command, since there is only one range, 0 - maximum. The commands are
included only for compatibility.
FNC DCS :CH12 SET VOLT 5 CURL 3 Power supply at node address 12 commanded to 5V
(Voltage mode) with current limit of 3A.
FNC DCS :CH08 SET CURR 2 VLTL 17 Power supply at node address 8 commanded to 2A
(Current mode) with voltage limit of 17V
FIGURE A-4. SET Command
MATSVC 022300
A-3
Page 45

OPN, CLS
f
Syntax:
Function
Description:
Example:
Syntax:
Function
: These commands are used to connect or disconnect the power supply from the load (effective for MR
: This operator is used to return a power supply to its power-on state. The output voltage and current
OPN :CHnn
CLS :CHnn
and MGR options only).
OPN Disconnects the load from the power supply specified by the operand.
CLS Connects the load to the power supply specified by the operand.
OPN :CH22 Opens the relay of the power supply at node address 22.
CLS :CH14 Closes the relay of the power supply at node address 14.
FIGURE A-5. OPN, CLS — Open, Close Relay Commands
RST
RST DCS :CHnn
are programmed to zero and the output relay of MR and MGR models is opened.
Example:
Syntax:
Function
Description:
Example:
A-4
: Causes power supply to execute confidence test.
RST DCS :CH13 The power supply at node address 13 is reset.
FIGURE A-6. RST — Reset Command
CNF or IST
The CNF operator commands the MAT to execute the confidence test procedure defined for the MAT
power supplies (IST is functionally identical to CNF for MAT power supplies. The procedure consists o
opening all power relays, programming voltage and current to their maximum values, switching polarity, checking for error flags, then programming voltage and current to zero. The results of CNF are
obtained through the STA command.
CNF All power supplies in the daisy chain execute confidence test.
IST All power supplies in the daisy chain execute self test.
FIGURE A-7. CNF, IST — Confidence Test, Internal Self Test Commands
CNF, IST
MATSVC 022300
Page 46

STA
Syntax:
Function
Description:
STA
: Causes power supply to return operating status to controller.
This operator commands the power supply to report its present operating status. Status is reported in
the form of a message (character string) as defined below. Any catastrophic error conditions (indicated
by * in the table below) which exist will be reported, until the error condition is corrected. As required
by CIIL, all error messages begin with an ASCII “F” (Fault) followed by a 2 digit code, “07” (Halt). The
code that follows (SCSnn) indicates the type of device and the channel number. The next 3 digit code
describes the nature of the fault: “DEV” for device related errors or “MOD” for non-device errors, such
as syntax.
ERROR MESSAGE EXPLANATION
F07 DCSnn DEV Power Loss
F07 DCSnn DEV Crowbarred (MAT, MAT)
F07 DCSnn DEV Device Turned Off (BOP)
F07 DCSnn DEV Output Fault (MST)
F07 DCSnn DEV Over Temperature
F07 DCSnn DEV Overload
F07 DCSnn DEV Voltage Fault
F07 DCSnn DEV Current Fault
F07 DCSnn DEV Relay Not Opened
F07 DCSnn DEV Relay Not Closed
F07 DCSnn DEV Polarity Error
F07 DCSnn DEV Load Path Fault
F07 DCSnn MOD Invalid Command
F07 DCSnn DEV Not Ready
F07 DCSnn DEV Device Not Present
F07 DCSnn DEV Device Not Responding
F07 DCSnn DEV Invalid Voltage Range
F07 DCSnn DEV Invalid Current Range
F07 DCSnn DEV Set Modifier Error
F07 DCSnn DEV Invalid Device ID
* Catastrophic error
** Non-Catastrophic error
TABLE A-2. CIIL ERROR MESSAGES
The power supply has lost its input power. *
A shutdown occurred due to overvoltage or overcurrent. *
A shutdown occurred due to thermal causes. *
The voltage or current limit point was exceeded. *
The output voltage is not within limits (voltage mode). *
The output current is not within limits (current mode). *
The power relay failed to open. *
The power relay failed to close. *
The output polarity is not correct. *
Open or miswired load or error sense leads detected. *
Improper syntax was used. **
The output voltage or current has not settled. **
The specified power supply was not present during power up or
during the last DCL. **
The power supply has failed to communicate to the controller. **
The programmed voltage is outside the power supply's range. **
The programmed current is outside the power supply's range. **
An improper SET command was sent. **
The selected channel was not between 1-31. **
MBTSVC 022300
FIGURE A-8. STA — Status Command
A-5/(A-6 Blank)
 Loading...
Loading...