

Page 1
KEPCO®
THE POWER SUPPLIER™
OPERATOR MANUAL
ATE-DMG SERIES
POWER SUPPLY
MODELS
KEPCO INC.
An ISO 9001 Company.
ATE 6-100DMG, ATE 15-50DMG,
ATE 25-40DMG, ATE 36-30DMG,
ATE 55-20DMG, ATE 75-15DMG,
ATE 100-10DMG, ATE 150-7DMG
ORDER NO. REV. NO.
IMPORTANT NOTES:
1) This manual is valid for the following Model and associated serial numbers:
MODEL SERIAL NO. REV. NO.
2) A Change Page may be included at the end of the manual. All applicable changes and
revision number changes are documented with reference to the equipment serial numbers. Before using this Instruction Manual, check your equipment serial number to identify
your model. If in doubt, contact your nearest Kepco Representative, or the Kepco Documentation Office in New York, (718) 461-7000, requesting the correct revision for your particular model and serial number.
3) The contents of this manual are protected by copyright. Reprodu ction of any part can be
made only with the specific written permission of Kepco, Inc.
Data subject to change without notice.
©2014, KEPCO, INC,
P/N 243-1324d
KEPCO, INC. 131-38 SANFORD AVENUE FLUSHING, NY. 11355 U.S.A. TEL (718) 461-7000 FAX (718) 767-1102
email: hq@kepcopower.com World Wide Web: http://www.kepcopower.com
Page 2

Page 3
Declaration of Conformity
Application of Council directives:
Standard to which Conformity is declared:
EN61010-1:2001 (Safety requirements for electrical equipment for measurement,
control and laboratory use - Part 1)
Manufacturer's Name and Address:
Importer's Name and Address:
Type of Equipment:
Model No.:
73/23/EEC (LVD)
93/68/EEC (CE mark)
KEPCO INC.
131-38 SANFORD AVENUE
FLUSHING, N.Y. 11355 USA
P
O
C
E
V
I
T
A
T
N
E
S
E
R
P
E
R
Component Power Supply
[PRODUCT MODEL NUMBER]
Y
Year of Manufacture:
I, the undersigned, declare that the product specified above, when used in conjunction with the conditions of conformance set forth in the product instruction manual, complies with the requirements of the
Low Voltage Directive 73/23/EEC, which forms the basis for application of the CE Mark to this product.
Place: KEPCO Inc.
131-38 Sanford Ave.
Flushing, N.Y.11355 USA
Saul Kupferberg
(Full Name)
Date:
228-1348 DC-COMP/INST 042314 A
VP OF SALES
(position)
Page 4

Conditions of Conformance
When this product is used in applications governed by the requirements of the EEC, the following restrictions and conditions apply:
1. For European applications, requiring com plian c e to the Low Voltage Directive, 73/23/EEC, this power
supply is considered a component product, designed for “built in“ applications. Because it is incomplete in construction, the end product enclosure must provide for compliance to any remaining electrical safety requirements and act as a fire enclosure. (EN61010-1:2001, Cl. 6, Cl. 7, Cl.8, and Cl. 9)
2. This power supply is designed for stationary installation, with mains power applied via a detachable
power supply cord or via direct wiring to the source power terminal block.
3. This power supply is considered a Class 1 (earthed) product. It is intended for use as part of equipment meant for test, measurement and laboratory use, and is designed to operate from single phase,
three wire power systems. This equipment must be installed within a suitably wired equipment rack,
utilizing a three wire (grounded) mains connection. See wiring section of this manual for complete
electrical wiring instructions. (EN61010-1:2001, Cl.6.10.1)
4. This power supply has secondary output circuits that are considered hazardous, and which exceed
240 VA at a potential of 2V or more.
5. The output wiring terminals of this power supply has not been evaluated for field wiring a nd, th erefore ,
must be properly configured by the end product manufacturer prior to use.
6. This power supply employs a supplementary circuit protector in the form of a circuit breaker mounted
on the front panel. This circuit breaker protects the power supply itself from damage in the event of a
fault condition. For complete circuit protection of the end product, as well as the building wiring, it is
required that a primary circuit protection device be fitted to the branch circuit wiring. (EN61010-1:2001,
Cl. 9.5)
7. Hazardous voltages are present within this power supply during normal operation. All operator adjustments to the product are made via externally accessible switches, controls and signal lines as specified within the product operating instructions. There are no user or operator serviceable parts within
the product enclosure. Refer all servicing to qualified and trained Kepco service technicians.
B 228-1351 COND/CONFORM 042314
Page 5
SAFETY INSTRUCTIONS
!
!
!
!
!
1. Installation, Operation and Service Precautions
This product is designed for use in accordance with EN 61010-1 and UL 3101 for Installation Category 2,
Pollution Degree 2. Hazardous volt age s ar e p rese nt wi th in this p roduct du ring no rmal o per ation. The pr oduct should never be operated with the cover removed unless equivalent protection of the operator from
accidental contact with hazardous internal voltages is provided:
There are no operator serviceable part s or adjustment s within the product enclosure.
Refer all servicing to trained service technician.
Source power must be removed from the product prior to performing any servicing.
This product is factory-wired for the nominal a-c mains voltage indicated on the rating nameplate located adjacent to the source power connection on the product's rear
panel. To reconfigure the product input for other nominal mains voltages as listed
herein, the product must be modified by a trained service technician.
2. Grounding
This product is a Class 1 device which utilizes protective earthing to ensure operator safety.
The PROTECTIVE EARTHING CONDUCTOR TERMINAL must be properly connected prior to application of source power to the product (see instructions on installation herein) in order to ensure safety from electric shock.
PROTECTIVE EARTHING CONDUCTOR TERMINAL - This symbol indicates the
point on the product to which the protective earthing conductor must be attached.
EARTH (GROUND) TERMINAL - This symbol is used to indicate a point which is
connected to the PROTECTIVE EARTHING TERMINAL. The component installer/
assembler must ensure that this point is connected to the PROTECTIVE EARTHING TERMINAL.
CHASSIS TERMINAL -This symbol indicates frame (chassis) connection, which is
supplied as a point of convenience for performance purposes (see instructions on
grounding herein). This is not to be confused with the protective earthing point, an d
may not be used in place of it.
3. Electric Shock Hazards
This product outputs hazardous voltage and energy levels as a function of normal operation. Operators
must be trained in its use and exercise ca ution as well a s common sense during use to prevent a ccidental
shock.
This symbol appears adjacent to any external te rminals at wh ich haza rdous volt age
levels as high as 500V d-c may exist in the course of normal or single fault conditions.
This symbol appears adjacent to any external te rminals at wh ich haza rdous volt age
levels in excess of 500V d-c may exist in the course of normal or single fault conditions.
228-1352 SAFETY - (COVER REMOVAL) 042314 C/(D BLANK)
Page 6

Page 7

TABLE OF CONTENTS
SECTION PAGE
SECTION 1 - INTRODUCTION
1.1 Scope of Manual ..................................................................................................................................... 1-1
1.2 General Description................................................................................................................................. 1-1
1.3 Specifications.......................................................................................................................................... 1-1
1.4 Local Control........................................................................................................................................... 1-1
1.5 Remote Control....................................................................................................................................... 1-1
1.6 Features.................................................................................................................................................. 1-5
1.6.1 Overvoltage/Overcurrent Protection.................................................................................................. 1-5
1.6.1.1 Programmable Overvoltage/Overcurrent Delay........................................................................... 1-5
1.6.1.2 Crowbar Circuit............................................................................................................................ 1-6
1.6.2 Non-volatile Storage of Programmed Sequences or Active Settings ................................................ 1-6
1.6.3 User-defined Voltage/Current Limits.................................................................................................. 1-6
1.7 Equipment Supplied................................................................................................................................ 1-6
1.8 Accessories............................................................................................................................................. 1-6
1.9 Safety...................................................................................................................................................... 1-7
SECTION 2 - INSTALLATION
2.1 Unpacking and Inspection....................................................................................................................... 2-1
2.2 Terminations and Controls...................................................................................................................... 2-1
2.3 Source Power Requirements .................................................................................................................. 2-5
2.4 Cooling.................................................................................................................................................... 2-6
2.5 Preliminary Operational Check................................................................................................................ 2-6
2.6 Installation............................................................................................................................................... 2-7
2.6.1 Grounding.......................................................................................................................................... 2-7
2.6.1.1 A-C (Safety) Ground.................................................................................................................... 2-7
2.6.1.2 Isolation from Ground. ................................................................................................................. 2-7
2.7 Fast Mode Conversion of the Ate Power Supply..................................................................................... 2-7
2.7.1 Precautions........................................................................................................................................ 2-8
2.7.2 Lag Network Adjustment.................................................................................................................... 2-8
2.7.3 Crowbar Operation, Fast Mode ......................................................................................................... 2-8
2.7.4 Manual Change-over, Slow/fast Mode............................................................................................... 2-8
2.8 Operating Configuration.......................................................................................................................... 2-9
SECTION 3 - OPERATION
3.1 General.................................................................................................................................................... 3-1
3.1.1 Safety Grounding............................................................................................................................... 3-1
3.1.2 D-C (Output) Grounding ................................................................................................... ................. 3-1
3.1.3 Power Supply/Load Interface............................................................................................................. 3-2
3.1.3.1 Load Wire Selection ..................................................................................................................... 3-2
3.2 Load Connection..................................................................................................................................... 3-3
3.2.1 General.............................................................................................................................................. 3-3
3.2.2 Load Connection, Method I (Local Error Sensing)............................................................................. 3-4
3.2.3 Load Connection, Method II (Remote Error Sensing)........................................................................ 3-5
3.2.4 Load Connection, Method III...................................... ................................................... ..................... 3-6
3.3 Overvoltage Crowbar, Setup and Check................................................................................................. 3-7
3.3.1 Setup and Check Procedure.............................................................................................................. 3-7
3.4 Local Mode Operation (Keypad Operation)............................................................................................. 3-7
3.4.1 Front Panel Keypad and LCD............................................................................................................ 3-8
3.4.1.1 Command Entry Status................................................................................................................ 3-8
3.4.1.2 Data Entry Status......................................................................................................................... 3-8
3.4.1.3 Display (LCD)............................................................................................................................... 3-8
3.4.1.4 Keypad Functions........................................................................................................................ 3-8
3.4.2 Turning the Power Supply On............................................................................................................ 3-10
3.4.3 Setting Local Mode............................................................................................................................ 3-11
3.4.4 Adjusting LCD Contrast.......................................... ... ................................................... ..................... 3-11
3.4.5 Enabling/Disabling Audible Beeps..................................................................................................... 3-11
3.4.6 Enabling/Disabling DC Output Power................................................................................................ 3-11
ATE-DMG042314 i
Page 8

TABLE OF CONTENTS
SECTION PAGE
3.4.7 Reset................................................................................................................................................. 3-11
3.4.8 Setting Output Voltage or Current..................................................................................................... 3-12
3.4.9 Setting Overvoltage or Overcurrent Protection................................................................................. 3-12
3.4.10 Changing Protection Delay ............................................................................................................... 3-12
3.4.11 Changing Maximum Voltage or Current Value ................................................................................. 3-13
3.4.12 Storing Power Supply Output Settings.............................................................................................. 3-13
3.4.13 Recalling Stored Output Settings...................................................................................................... 3-13
3.4.14 Enabling Remote Analog Control...................................................................................................... 3-14
3.4.15 Local Mode Programming of the Power Supply................................................................................ 3-14
3.4.15.1 Creating or Modifying a Program (Program Edit Mode).............................................................. 3-14
3.4.15.1.1 Modifying Programmed Time Interval..................................................................................... 3-14
3.4.15.1.2 Time Interval Accuracy...........................................................................................................3-15
3.4.15.1.3 Display Program Option.........................................................................................................3-15
3.4.15.2 Running a Program..................................................................................................................... 3-15
3.4.15.3 Stepping Through a Program...................................................................................................... 3-15
3.4.15.4 Cycling a Program....................................................................................................................... 3-15
3.4.15.5 Running a Program Once ........................................................................................................... 3-17
3.4.15.6 Stopping a Program.................................................................................................................... 3-17
3.4.15.7 Stopping a Running Program............................................. ... ...................................................... 3-17
3.4.15.8 Sample Program......................................................................................................................... 3-17
3.4.16 Calibration......................................................................................................................................... 3-17
3.5 Analog Remote Programming ................................................................................................................ 3-18
3.6 Digital Remote Mode Programming........................................................................................................ 3-19
3.6.1 IEEE 488 (GPIB) Bus Protocol ......................................................................................................... 3-19
3.6.2 DCL Control...................................................................................................................................... 3-21
3.6.3 Changing the GPIB Address................................................................................................
3.6.4 Enabling Remote Analog Control...................................................................................................... 3-21
3.6.5 Programming Techniques to Optimize performance ........................................................................ 3-21
3.7 SCPI Programming................................................................... .............................................................. 3-22
3.7.1 SCPI Messages ................................................................................................................................ 3-22
3.7.2 Common Commands/Queries .......................................................................................................... 3-22
3.7.3 SCPI Subsystem Command/Query Structure................................................................................... 3-22
3.7.3.1 ABORt Subsystem...................................................................................................................... 3-23
3.7.3.2 DIAG Subsystem......................................................................................................................... 3-23
3.7.3.3 DISPlay Subsystem .................................................................................................................... 3-23
3.7.3.4 INITiate Subsystem..................................................................................................................... 3-23
3.7.3.5 LIST Subsystem.......................................................................................................................... 3-23
3.7.3.6 MEASure Subsystem.................................................................................................................. 3-23
3.7.3.7 OUTPut Subsystem .................................................................................................................... 3-23
3.7.3.8 Protection Subsystem................................................................................................................. 3-23
3.7.3.9 STATus Subsystem .................................................................................................................... 3-23
3.7.3.10 TRIGger subsystem.....................................................................................................
3.7.3.11 [SOURce:]VOLTage and [SOURce:]CURRent Subsystems ...................................................... 3-24
3.7.3.12 CALibrate Subsystem ................................................................................................................. 3-24
3.7.4 Program Message Structure............................................................................................................. 3-24
3.7.4.1 Keyword...................................................................................................................................... 3-26
3.7.4.2 Keyword Separator ..................................................................................................................... 3-27
3.7.4.3 Query Indicator............................................................................................................................ 3-27
3.7.4.4 Data............................................................................................................................................. 3-27
3.7.4.5 Data Separator ............................................................................................................................ 3-27
3.7.4.6 Message Unit Separator ............................................................................................................. 3-27
3.7.4.7 Root Specifier.............................................................................................................................. 3-27
3.7.4.8 Message Terminator................................................................................................................... 3-28
3.7.5 Understanding The Command Structure .......................................................................................... 3-28
3.7.6 Program Message Syntax Summary................................................................................................ 3-29
3.7.7 SCPI Program Examples.................................................................................................................. 3-29
............. 3-21
............... 3-24
ii ATE-DMG042314
Page 9

TABLE OF CONTENTS
SECTION PAGE
APPENDIX A - IEEE 488.2 COMMAND/QUERY DEFINITIONS
A.2 *CLS — Clear Status Command............................................................................................................ A-1
A.3 *ESE — Standard Event Status Enable Command ............................................................................... A-1
A.4 *ESE? — Standard Event Status Enable Query.................................................... ................................ A-2
A.5 *ESR? — Event Status Register Query ................................................................................................. A-2
A.6 *IDN? — Identification Query................................................................................................................. A-2
A.7 *OPC — Operation Complete Command............................................................................................... A-2
A.8 *OPC? — Operation Complete Query.................................................................................................... A-2
A.9 *OPT? — Options Query........................................................................................................................ A-3
A.10 *RCL — Recall Command...................................................................................................................... A-3
A.11 *RST — Reset Command...................................................................................................................... A-3
A.12 * SAV — Save Command ...................................................................................................................... A-3
A.13 *SRE — Service Request Enable Command......................................................................................... A-4
A.14 *SRE? — Service Request Enable Query.............................................................................................. A-5
A.15 *STB? — Status Byte Register Query.................................................................................................... A-5
A.16 *TRG — Trigger Command.................................................................................................................... A-5
A.17 *TST? — Self Test Query.................................................................................................................... .. . A-5
APPENDIX B - SCPI COMMAND/QUERY DEFINITIONS
B.1 Introduction.................................................................................................................................... ......... B-1
B.2 ABORt Command................................................................................................................................... B-2
B.3 CAL
B.4
B.5 CALibrate:PASSword Command............................................................. ... ........................................ B-4
B.6
B.7
B.8 CALibrate:STATus? Query......................................................... ......................................................... B-4
B.9
B.10
B.11
B.12 DIAG:EXT Command........................................................................................................................... B-5
B.13
B.14
B.15 DISPlay:CONTrast? Query........................................................... ................................................ ...... B-6
B.16
B.17
B.18 DISPlay:TEXT Command........................................................... ................................................ ... ... ... B-6
B.19
B.20
B.21 INITiate:CONTinuous Command........................................................................................................ B-7
B.22
B.23
B.24 LIST:CURRent Command............................................................................ ... ..................................... B-7
B.25
B.26
B.27 [SOUR:]LIST:CURRent:PROTect? Query................................................... ..................................... B-8
B.28
B.29
B.30
B.31 [SOUR:]LIST:INDex? Query ............................. ................................................ .................................. B-9
B.32 [SOUR:]LIST:SEQuence:NEXT Command.......................................................... ... .......................... B-9
B.33
ibrate:CURRent:LEVel Command................................................................................................. B-3
CALibrate:CURRent[:DATA] Command ............................................................................................ B-3
CALibrate:SAVE Command.............. ................................................ ................................................ ... B-4
CALibrate:STATus Command................................. ............................................... ... .......................... B-4
CALibrate:VOLTage:LEVel Command............................................................................................... B-4
CALibrate:VOLTage[:DATA] Comm and................................. ... ................................................ ......... B-5
CALibrate:ZERO Command............................................................. ... ................................................ B-5
DIAG:EXT? Query................................................................................................................................ B-5
DISPlay:CONTrast Command ................................ .. .......................................................................... B-5
DISPlay:MODE Command ...................................................................................................... ... ... ...... B-6
DISPlay:MODE? Query..................................... ... ............................................... ................................ B-6
DISPlay:TEXT? Query......................................................................................................................... B-6
INITiate[:IMMediate] Command......................................................................................... .. ... ............ B-7
INITiate:CONTinuous Query............................. ... ............................................... ................................ B-7
INSTrument:STATe Command................................................ ................................................ ............ B-7
[SOUR:]LIST:CURRent? Query ........................................ ................................................ ................. B-7
[SOUR:]LIST:CURRent:PROTect Command.............................................................................. ...... B-8
[SOUR:]LIST:DWELl Command ........................................ ... .............................................................. B-8
[SOUR:]LIST:DWELl? Query.............................................................. .. .............................................. B-9
[SOUR:]LIST:INDex Command.................................................. ... ...................................................... B-9
[SOUR:]LIST:SEQuence:NEXT? Query ................................................ ... ........................................ B-9
ATE-DMG042314 iii
Page 10

TABLE OF CONTENTS
SECTION PAGE
B.34 [SOUR:]LIST:SEQuence:STARt Command...................................................................................... B-9
B.35
B.36 [SOUR:]LIST:VOLTage Command...................................................................................................... B-10
B.37
B.38
B.39 [SOUR:]LIST:VOLTage:PROTect Query ............................................................ .. ............................. B-10
B.40
B.41 MEASure[:VOLTage][:SCALar][:DC]? Query ................................................................................... B-10
B.42
B.43 OUTPut[:STATe] Query................................................................................... ..................................... B-11
B.44 OUTPut:PROTection:DELay Command............................................................................................ B-11
B.45
B.46 PROGram:SELect:STATe Command................................................................................................. B-11
B.47 PROGram:SELect:STATe? Query...................................................................................................... B-11
B.48
B.49 READ[:VOLTage][:SCALar][:DC]? Query ...................................................................................... ... B-12
B.50
B.51
B.52 [SOURce:]CURRent:LIMit:HIGH Command ... ... .... ... ............................................................. B-12
B.53 [SOURce:]CURRent:LIMit:HIGH? Query .............................................................................. B-12
B.54 [SOURce:]CURRent:[:LEVel]MODE Command............................................................................... B-13
B.55 [SOURce:]CURRent:[:LEVel]MODE? Query......................... ............................................... ............ B-13
B.56
B.57
B.58 [SOURce:]CURRent:PROTection:CLEar Command............................... ........................................ B-14
B.59
B.60
B.61 [SOURce:]CURRent:[:LEVel]TRIGgered[:AMPlitude]? Query............................ ... ... .................... B-14
B.62
B.63
B.64 [SOURce:]VOLTage:[:LEVel]TRIGgered[:AMPlitude] Command .................................................. B-15
B.65
B.66
B.67
B.68 [SOURce:]VOLTage:[:LEVel]MODE Command................................................................................ B-15
B.69
B.70
B.71 [SOURce:]VOLTage:PROTection[:LEVel]? Query........................................................................... B-16
B.72
B.73
B.74 [SOURce:]FUNCtion:MODE? Query................................................................................................. B-17
B.75
B.76
B.77 STATus:OPEReration:ENABle? Query ..................................................... ... ..................................... B-18
B.78
B.79
B.80 STATus:QUEStionable[:EVENt]? Query............................................................................ ... ............ B-19
B.81
B.82
B.83 STATus:QUEStionable:ENABle? Query............................................................................................ B-19
B.84
B.85
B.86
B.87 SYSTem:KLOCk Command..................................... ............................................... ... .......................... B-20
B.88 SYSTem:KLOCk? Query.............................. ............................................... ........................................ B-20
B.89
B.90 SYSTem:LANGuage Command................................................. ................................................ ... ...... B-20
[SOUR:]LIST:SEQuence:STARt? Query.................................................................................. ... ...... B-9
[SOUR:]LIST:VOLTage? Query ...................................... ................................................ ... ................. B-10
[SOUR:]LIST:VOLTage:PROTect Command................................................ ... .................................. B-10
MEASure[:SCALar]:CURRent[:DC]? Query................................................ ..................................... B-10
OUTPut[:STATe] Command.............................................................. ................................................ ... B-11
OUTPut:PROTection:DELay Query................................................................................................... B-11
READ[:SCALar]:CURRent[:DC]? Query........................................ ... ................................................ B-12
[SOURce:]CURRent[:LEVel][:IMMediate][:AMPlitude] Command ................................................ B-12
[SOURce:]CURRent[:LEVel][:IMMediate][:AMPlitude] Query....................................................... B-12
[SOURce:]CURRent:PROTection[:LEVel] Command...................................................................... B-13
[SOURce:]CURRent:PROTection[:LEVel]? Query..................................... ..................................... B-14
[SOURce:]CURRent:PROTection:TRIPped? Query....................................................................... B-14
[SOURce:]CURRent:[:LEVel]TRIGgered[:AMPlitude] Command..................... ............................. B-14
[SOURce:]VOLTage[:LEVel][:IMMediate][:AMPlitude] Command.................................. ... ... ......... B-14
[SOURce:]VOLTage[:LEVel][:IMMediate][:AMPlitude]? Query...................................................... B-15
[SOURce:]VOLTage:[:LEVel]TRIGgered[:AMPlitude]? Query............................. ... ... .................... B-15
[SOURce:]VOLTage:LIMit:HIGH Command......................................... .. ........................................... B-15
[SOURce:]VOLTage:LIMit:HIGH? Query .................................... ... ................................................ ... B-15
[SOURce:]VOLTage:[:LEVel]MODE? Query............................................... ..................................... B-16
[SOURce:]VOLTage:PROTection[:LEVel] Command ...................................................................... B-16
[SOURce:]VOLTage:PROTection:CLEar Command........................................................................ B-17
[SOURce:]VOLTage:PROTection:TRIPped? Query........................................................................ B-17
STATus:OPERation:CONDition Query.............................................................................................. B-17
STATus:OPEReration:ENABle Command......................................................................................... B-17
STATus:OPERation[:EVENt] Query....................................................................................... ... ......... B-18
STATus:PRESet Command................................................................................................................. B-18
STATus:QUEStionable:CONDition? Query ........................................... ... ........................................ B-19
STATus:QUEStionable:ENABle Command................................................................ ... .................... B-19
SYSTem:ERRor[:NEXT]? Query........................................................................................................ B-19
SYSTem:ERRor:CODE? Query................................................ ... ................................................ ... ... B-20
SYSTem:ERRor:CODE:ALL? Query.................................................... .. ........................................... B-20
SYSTem:LANGuage? Query .............................................................................................................. B-20
iv ATE-DMG042314
Page 11

TABLE OF CONTENTS
SECTION PAGE
B.91 SYSTem:PASSword:CENable Command....................................................... .. ................................ B-22
B.92
B.93 SYSTem:PASSword:STATe? Query......................................... ................................................ ... ...... B-22
B.94
B.95
B.96 SYSTem:VERSion Query........................................................... ... ................................................ ... ... B-23
SYSTem:PASSword:CDISable Command........................................ .. .............................................. B-22
SYSTem:SECurity:IMMediate Command......................................................................................... . B-22
SYSTem:SET Command......................................... ............................................... ............................. B-23
ATE-DMG042314 v
Page 12

LIST OF FIGURES
FIGURE TITLE PAGE
1-1 ATE-DMG Series Programmable Power Supply......................................................................................... viii
1-2 Mechanical Outline Drawing....................................................................................................................... 1-8
2-1 ATE-DMG Full Rack Series Front Panel.................................................................................................... 2-2
2-2 ATE-DMG Full Rack Series Rear Panel..................................................................................................... 2-3
2-3 Location of Internal Controls ...................................................................................................................... 2-4
2-4 A-C Input Source Voltage Selection, ATE-DMG Full Rack Series............................................................. 2-5
2-5 LCD Power On Defaults............................................................................................................................. 2-6
2-6 Required Steps for ATE “Fast Mode” Conversion...................................................................................... 2-9
3-1 Typical Output Impedance vs. Frequency Plot for Stabilized d-c Sources................................................. 3-2
3-2 Standard Jumper Link Connections for Local (Front Panel) Control of
Output Voltage, Output Current and VP Crowbar Level (Slow Mode)..................................................... 3-4
3-3 Load Connection Method I, Local Error Sensing........................................................................................ 3-5
3-4 Load Connection, Method II Using Remote Error Sensing. ....................................................................... 3-6
3-5 Load Connection, Method III................................. ... ... ............................................................................... 3-6
3-6 LCD Power On Defaults............................................................................................................................. 3-11
3-7 A11 Assembly Connector and Pin Locations ............................................................................................. 3-18
3-8 Tree Diagram of SCPI Commands Used with ATE-DMG Power Supply................................................... 3-25
3-9 Message Structure................................ ............................................... ... ... ................................................ 3-26
3-10 Typical Example of ATE-DMG Power Supply Program Using SCPI Commands ...................................... 3-30
A-1 GPIB Commands ........................................................................................................ .. ............................. A-4
B-1 Programming the Output............................................................................................................................ B-2
B-2 Using Calibration Commands and Queries................................................................................................ B-3
B-3 Using Display Commands.......................................................................................................................... B-6
B-4 Using LIST Commands and Queries.......................................................................................................... B-8
B-5 Programming Current........................................................................................................................ ... ... ... B-13
B-6 Programming Voltage................................................................................................................................. B-16
B-7 Using Status Commands and Queries............................................................ ........................................... B-18
B-8 Using System Commands and Queries..................................................................................................... B-23
vi ATE-DMG042314
Page 13
LIST OF TABLES
TABLE TITLE PAGE
1-1 ATE-DMG D-C Output Ratings and output impedance ...............................................................................1-2
1-2 ATE-DMG Series Specifications .................................................................................................................1-2
1-3 ATE Dynamic Specifications, Resistive Load .............................................................................................1-4
1-4 Overvoltage/Overcurrent Settings ...............................................................................................................1-4
1-5 ATE Static Specifications ............................................................................................................................1-5
1-6 Accessories .................................................................................................................................................1-6
1-7 Safety Symbols ...........................................................................................................................................1-7
2-1 Front Panel Controls, Indicators and Terminations .....................................................................................2-1
2-2 Rear Panel Terminations ............................................................................................................................2-3
2-3 Internal Controls and Their Functions .........................................................................................................2-4
2-4 Input/Output Pin Assignments for Remote Control ........................................................................... ..........2-5
3-1 Key Functions .............................................................................................................................................3-9
3-2 Memory Location Worksheet ......................................................................................................................3-16
3-3 Sample Program (Model ATE 25-40DMG) .................................................................................................3-17
3-4 Connector A11J5 Pin Functions .................................................................................................................3-18
3-5 IEEE 488 (GPIB) Bus Interface Functions ..................................................................................................3-20
3-6 IEEE 488 (GPIB) Bus Command Mode Messages .....................................................................................3-20
3-7 IEEE 488 (GPIB) Bus Data Mode Messages ..............................................................................................3-21
3-8 Rules Governing Shortform Keywords ........................................................................................................3-26
A-1 IEEE 488.2 Command/query Index ...........................................................................................................A-1
A-2 Standard Event Status Enable Register and Standard Event Status Register Bits ...................................A-1
A-3 Service Request Enable and Status Byte Register Bits .............................................................................A-5
B-1 SCPI Subsystem Command/query Index ........................................................................................
B-2 Operation Condition Register, Operation Enable Register,
and Operation Event Register Bits ........................................................... .................................. .............B-17
B-3 Questionable Event Register, Questionable Condition Register
and Questionable Condition Enable Register Bits ..................................................................................B-19
B-4 Error Messages ..........................................................................................................................................B-21
B-5 Factory Default Calibration Passwords ......................................................................................................B-22
B-6 Master Passwords .....................................................................................................................................B-22
..........B-1
ATE-DMG042314 vii
Page 14
FIGURE 1-1. ATE-DMG SERIES PROGRAMMABLE POWER SUPPLY
viii ATE-DMG042314
Page 15

1.1 SCOPE OF MANUAL
This manual contains instructions for the installation, operation and maintenance of the ATEDMG series of voltage and current stabilized d-c power supplies, manufactured by Kepco, Inc.,
Flushing, New York, U.S.A.
1.2 GENERAL DESCRIPTION
The Kepco ATE-DMG with programmable overvoltage protector is a precision stabilized power
supply which can deliver either stabilized output voltage or current. The prevailing operating
mode is indicated by LED mode indicators on the front panel. Operating mode crossover is
automatic and may be monitored remotely by commands provided via the GPIB port. A digital
front panel display shows the output vo ltage and ou tput cu rrent. T his powe r supp ly has a line ar
and fully dissipative NPN pass transistor section driven by high-gain, integrated circuit amplifiers. The output of the power supply is fully programmable via either the GPIB port or the front
panel keypad. Terminals are also provided for remote e rror sensing, as well as for the connection of the output capacitor directly at the load.
The ATE-DMG power supply features user-selectable “slow” or “fast” operating modes. Slow
mode operation is recommended for applications demanding a constant voltage source. Fast
mode operation is best if the output voltage must change rapidly, either in response to an external programming signal or, if the ATE-DMG is used as a current stabilizer.
SECTION 1- INTRODUCTION
The ATE-DMG power supply is delivered for “slow mode” operation. See Section 2, par.
2.7 for converting the ATE-DMG power supply to “fast mode” operation.
A continuously adjustable overvoltage protection circuit is a built-in feature. The trigger point of
the overvoltage protector may be set (or checked) unde r actual op erating co nditions by th e front
panel accessible setup controls (refer to Section 2 of this manual).
Power transistors and drivers on all ATE-DMG designs are mounted onto highly efficient, patented heat sink assemblies which are cooled by low-noise fans. The ATE-DMG main chassis
assemblies, as well as the wraparound covers, are constructed from cold-rolled steel The front
panels are made from aluminum (refer to the “Mechanical Outline Drawing,” Figure 1-2).
1.3 SPECIFICATIONS
Table 1-1 lists the output parameters applicable to individual models. Table 1-2 lists general
specifications applicable to all full-rack models except where otherwise noted. Table 1-3 lists
dynamic specifications and Table 1-5 lists static specifications. Mechanical specifications are
presented in the mechanical outline drawing, Figure 1-2.
1.4 LOCAL CONTROL
Front panel keypad entries are utilized for setting and adjusting output voltage and current
under local control. The keypad's keys are organized to either directly execute commands, or to
introduce a program that can either be run once or cycled. Calibration of the unit is facilitated by
a password -protected, menu-driven procedure from the front panel.
1.5 REMOTE CONTROL
The ATE-DMG Power Supply can be remotely controlled directly via the IEEE 488.2 (GPIB) bus
using SCPI commands. All features available in local mode can also be accessed remotely. In
ATE-DMG OPER 042314 1-1
Page 16
addition, output voltage and current can also be controlled by external analog reference voltages (see PAR. 3.5).
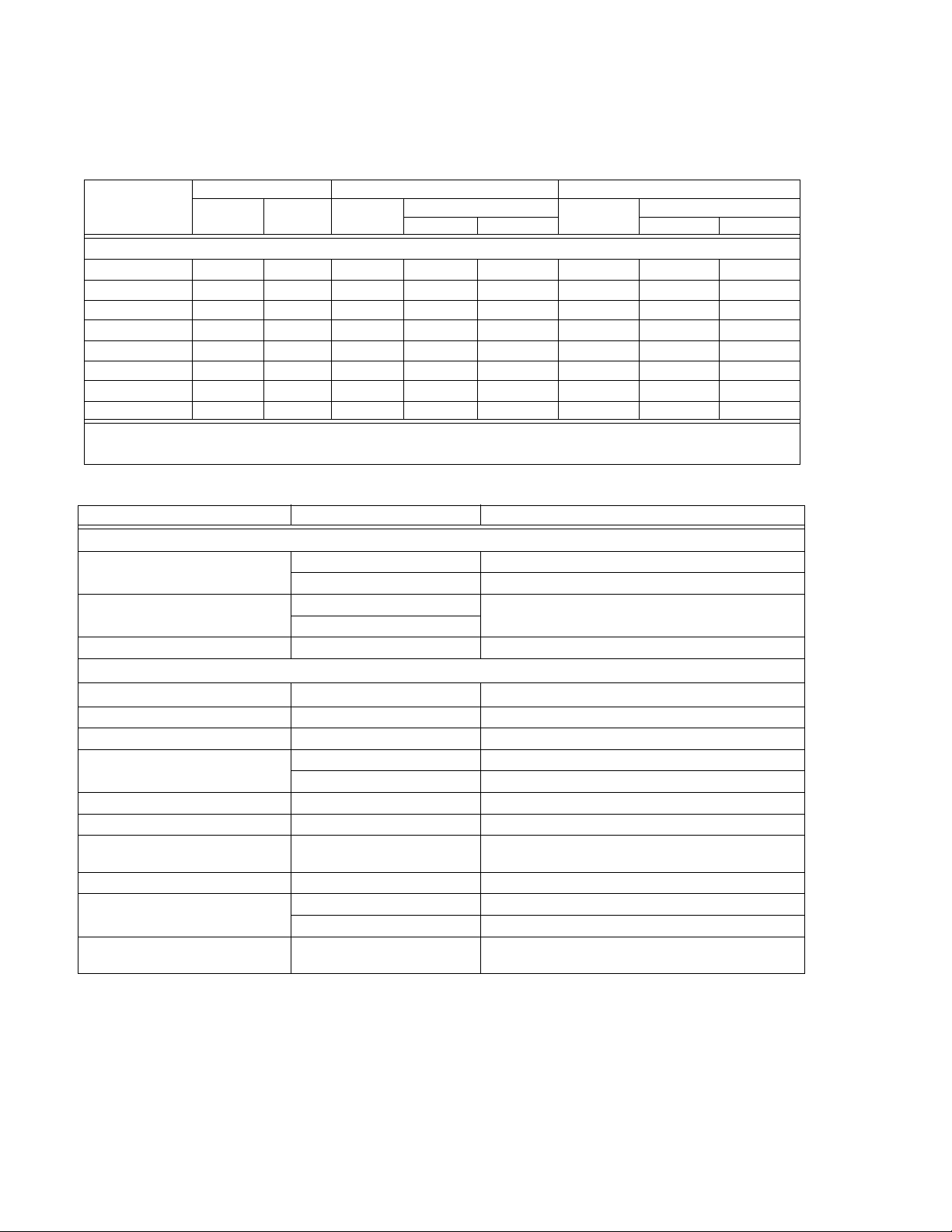
TABLE 1-1. ATE-DMG D-C OUTPUT RATINGS AND OUTPUT IMPEDANCE
MODEL
d-c OUTPUT RANGE OUTPUT IMPEDANCE VOLTAGE MODE OUPUT IMPEDANCE CURRENT MODE
VOLTS AMPS SERIES R
SERIES L
SLOW FAST SLOW FAST
(1)
SHUNTR
(2)
SHUNT C
(3)
SIZE “E” FULL-RACK (1000 Watt)
ATE 6-100DMG 0-6 0-100 1.2 0.5H5H 12k 22000F15F
ATE 15-50DMG 0-15 0-50 6 0.5H5H 30k 12000F6F
ATE 25-40DMG 0-25 0-40 12.5 1H10H 50k 11000F4F
ATE 36-30DMG 0-36 0-30 24 1H10H 72k 9500F3F
ATE 55-20DMG 0-55 0-20 55 2H20H 110k 5200F2.25F
ATE 75-15DMG 0-75 0-15 0.1m 2H20H 150k 3400F1.5F
ATE 100-10DMG 0-100 0-10 0.2m 4H40H 200k 1200F0.75F
ATE 150-7DMG 0-150 0-7 0.42m 4H40H 300k 1050
(1) For determining dynamic impedance in voltage mode.
(2) Based on 0.5mA load effect in FAST mode.
(3) For determining dynamic impedance in current mode.
F0.3F
TABLE 1-2. ATE-DMG SERIES SPECIFICATIONS
SPECIFICATION RATING/DESCRIPTION CONDITION
INPUT CHARACTERISTICS
A-C Voltage nominal: 104, 115, 208, 230Va-c User selectable, See PAR. 2.3
Tolerance: ± 8.7%
Frequency nominal: 50, 60 Hz
Tolerance: ± 3Hz
Current 20A a-c maximum Max load, 125V a-c
OUTPUT CHARACTERISTICS
d-c Output Series Pass Transistor
Type of Stabilizer Automatic crossover Voltage/Current
Voltage 0 to 100% of rating
Current 0 to +55oC 0-100% of rating Usable range limited to approximately 1% to 100%.
+55 to +65oC 0-90% of rating
Static Specifications See Table 1-5
Dynamic Specifications See Table 1-3
Error sense 0.5V per load wire (0.25V for 6V
model)
Isolation Voltage 500V d-c or peak Between each output terminal and chassis ground
Leakage current Output to Ground 5 microamperes max. rms at 115V a-c
50 microamperes max. p-p at 115V a-c
Software Overvoltage
Protection (OVP)
See Table 1-4 and PAR. 3.4.3. Digital setting, local or remote.
Voltage allowance
Action: crowbar the output.
1-2 ATE-DMG OPER 042314
Page 17
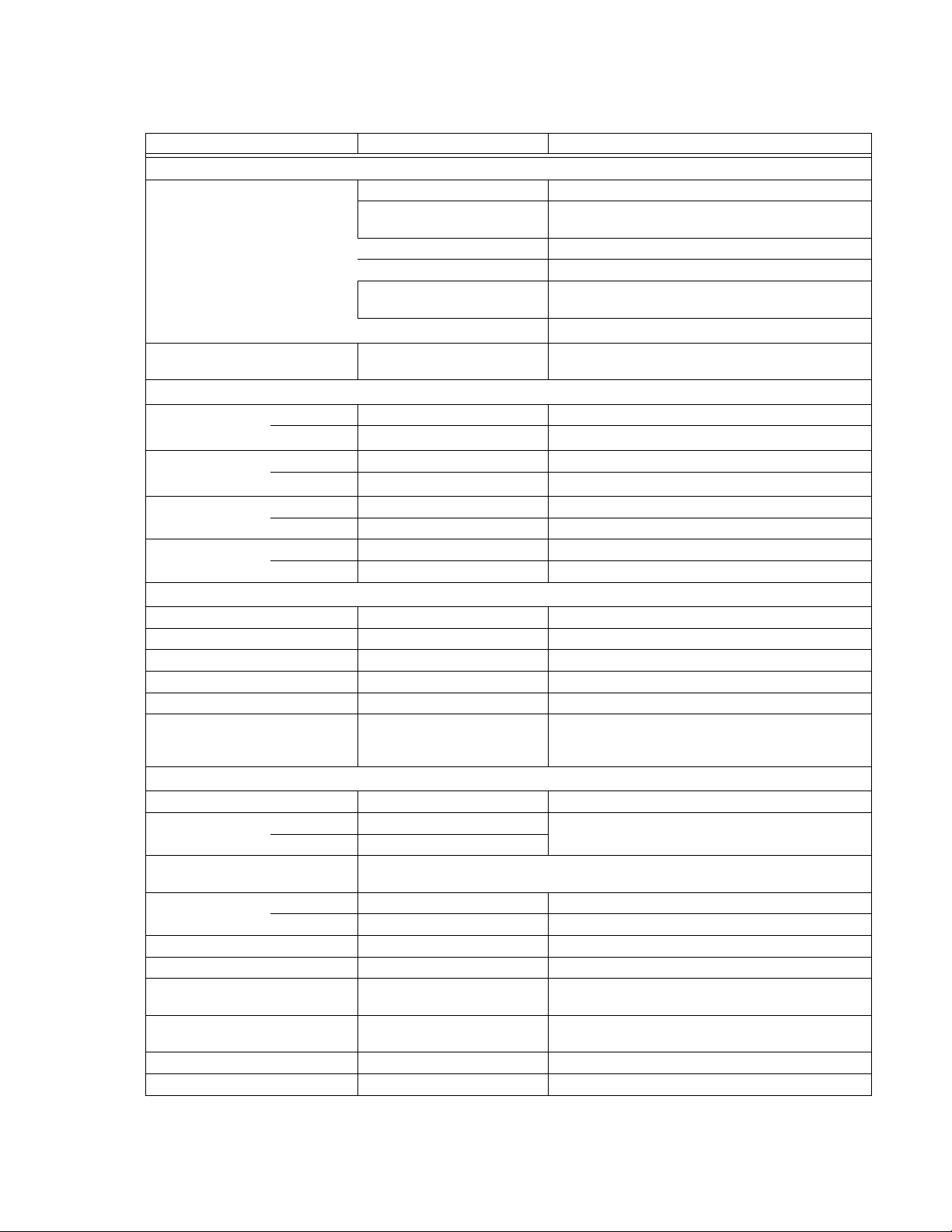
TABLE 1-2. ATE-DMG SERIES SPECIFICATIONS (Continued)
SPECIFICATION RATING/DESCRIPTION CONDITION
OUTPUT CHARACTERISTICS (CONTINUED)
Hardware Overvoltage Protection
(OVP)
Control range 1.6% or 3V (whichever is
Trigger time: normal 50 microseconds Slow mode
Trigger time: delayed 500 microseconds Fast mode
Temperature Coefficient:
Software Overcurrent Protection
(OCP)
Type Crowbar
greater) to 110%Eo max.
Threshold: Minimum 0.5 volts, or 2% E
max. whichever is greater.
0.02%max of E
max per °C.
O
See Table 1-4 and PAR. 3.4.3. Digital setting, local or remote.
Local (manual)
O
Action: crowbar the output.
CONTROL
Voltage Local Digital with 12 bits resolution Front panel keypad (24 keys)
Remote Digital with 12 bits resolution Using GPIB (SCPI commands)
Current Local Digital with 12 bits resolution Digital: using front panel (24) keypad
Remote Digital with 12 bits resolution Using GPIB (SCPI commands)
Programming
accuracy
Readback/Display
accuracy
Voltage <0.03% E
Current <0.03% I
Voltage <0.05% E
Current <0.03% I
max.
O
max.
O
max
O
max (see condition) <0.05% IO max for 6V and 15V models
O
GENERAL (ENVIRONMENTAL) CHARACTERISTICS
Operating Temperature 0 to +50°C Derate output power 10% at temperatures above +55°C.
Storage Temperature -20 to 70°C
Humidity 0 to 95% RH Non condensing, operating & storage
Shock 20g, 11msec ±50% half sine Non operating, 3-axes, 3 shocks each axis
Vibration 5-10Hz 10mm, double amplitude Non operating, 3-axes, 1 hour each axis
Cooling Forced air High efficiency, single bearing fans, permanently lubri-
cated with special low-noise non-metallic blades. Exhaust
to rear.
PHYSICAL CHARACTERISTICS
Weight 96 lbs. 43.6Kg) Packed for Shipment
Dimensions inches 6-31/32 x 19 x 20-1/64 See Figure 1-2
mm 177 x 482.6 x 506.8
a-c source connections
d-c output connections
Rear panel Binding post I
Rear panel compression studs I
User port 50-terminal connector
Indicators Three LED’s Voltage/Current/OVP
Remote control
programming
Digital display
front panel
Mounting (in Std. 19 in, racks) Mounting ears supplied
Finish: Fed. Std. 595 Dark and light gray, Color 26440
Terminal block
One standard
GPIB connector
Voltage, current, mode, status,
menu, program, etc.
<3.0A
O
3.0A
O
Rear,
SCPI & IEEE 488.2 Commands
2 x 16 character alphanumeric LCD with LED backlight
ATE-DMG OPER 042314 1-3
Page 18
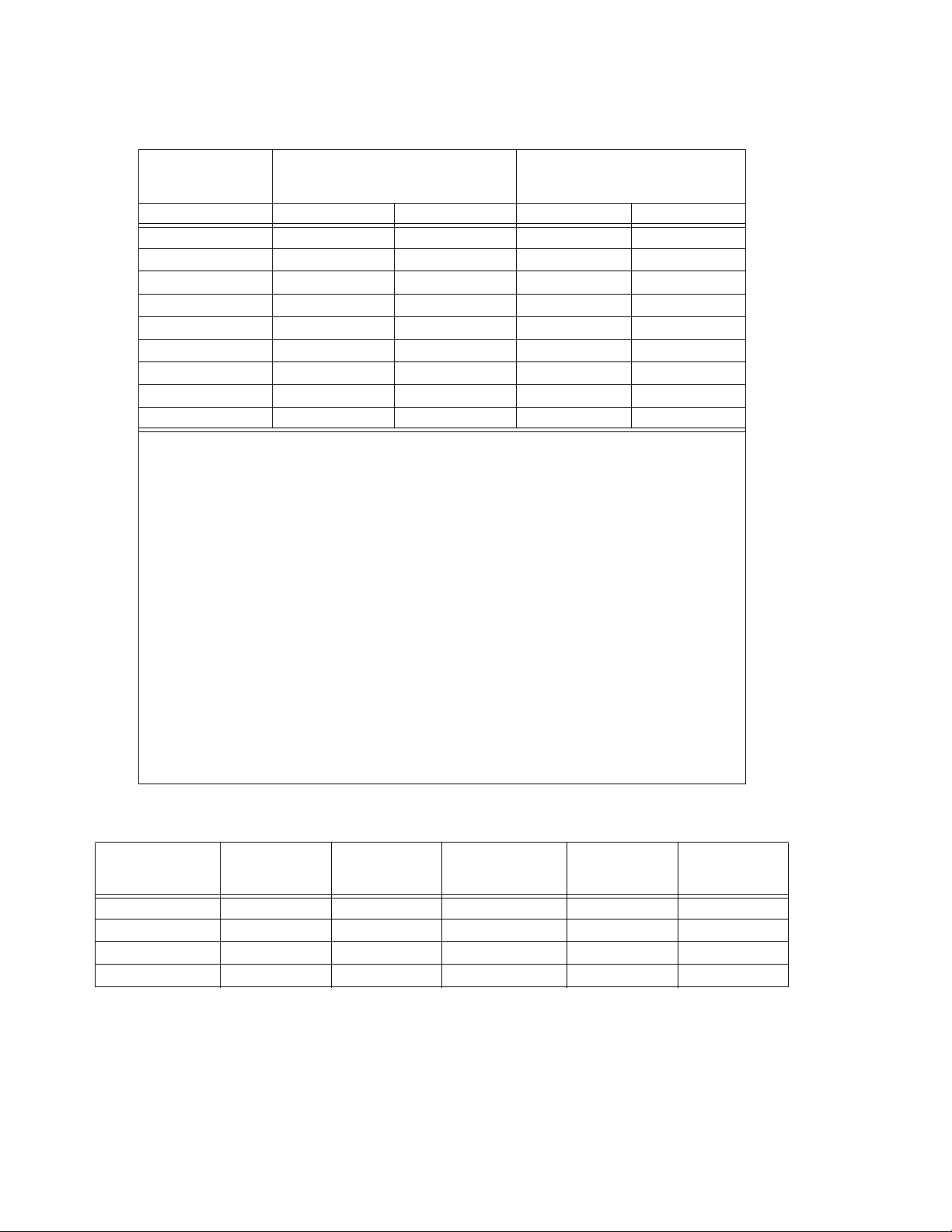
TABLE 1-3. ATE DYNAMIC SPECIFICATIONS, RESISTIVE LOAD
OUTPUT
VOLTAGE RATING
PROGRAMMING BANDWIDTH
(FAST MODE)
(KHz)
Typical minimum Typical maximum
6V 23.0 16.0 7.0 10.0
15V 20.0 10.6 8.0 15.0
25V 11.5 8.0 14.0 10.0
36V 8.0 6.4 20.0 20.0
55V 4.8 4.0 33.0 25.0
75V 4.3 3.5 37.0 40.0
100V 2.7 2.5 60.0 45.0
150V 1.8 1.7 88.0 95.0
325V 1.5 0.937 110.0 170.0
NOTES:
VOLTAGE RECOVERY FOR A STEP-LOAD CURRENT IN FAST MODE: The t i me required for the stabilized output
1.
voltage to recover to within 0.1% (10mV for ATE 75-15DMG) of the output voltage setting, for a 10 to 100% step in rated
load current is typically less than 50usec., 100usec. maximum.
2. CURRENT RECOVERY FOR STEP-LOAD VOLTAGE IN SLOW MODE: The stabilized output current recovers from a
step in load (compliance) voltage with an exponential response, the time constant of which is determined by the load
resistance and the tabulated output capacitance (See Table 1-1).
3. PROGRAMMING SPEED: The speed with which the power supply output responds to external programming signals is
determined by:
a) T he PROGRAMMING TIME CONSTANT (
the value of the output capacitor (C
given by the product of the feedback capacitor and the feedback resistor:
the “fast” mode, the PROGRAMMING TIME CONSTANT and bandwidth (-3dB) for the Voltage Control Channel is shown above.
For the Current Control Channel, the PROGRAMMING TIME CONSTANT in Fast Mode is 25usec. typical,
50usec. maximum. (80usec. for the ATE 325-0.8M).
b) The MAXIMUM RATE OF CHANGE that the power suppl y outpu t can respond to in Slow Mode is given by the
setting of the power supply's current control setting (ILIM), divided by the ATE output capacitor (C
1-1):
MAXIMUM RATE OF CHANGE = I
), given in the “slow” mode by either the load resistance (R
, see Table 1-1): = RL CO, or by the FEEDBACK TIME CONSTANT,
O
PROGRAMMING TIME CONSTANT
(FAST MODE)
sec)
= R
. whichever is greater. In
f Cf
.
LIM/CO
) and
L
see Table
O
TABLE 1-4. OVERVOLTAGE/OVERCURRENT SETTINGS
MODEL NUMBER
MAXIMUM
OVERVOLTAGE
SETTING
MAXIMUM
OVERCURRENT
SETTING
MODEL NUMBER
ATE 6-100DMG 6.5V 110A ATE 55-20DMG 60V 22A
ATE 15-50DMG 16.5V 55A ATE 75-15DMG 82V 16A
ATE 25-40DMG 27V 44A ATE 100-10DMG 110V 11A
ATE 36-30DMG 39V 33A ATE 150-7DMG 165V 7.7A
MAXIMUM
OVERVOLTAGE
SETTING
MAXIMUM
OVERCURRENT
SETTING
1-4 ATE-DMG OPER 042314
Page 19
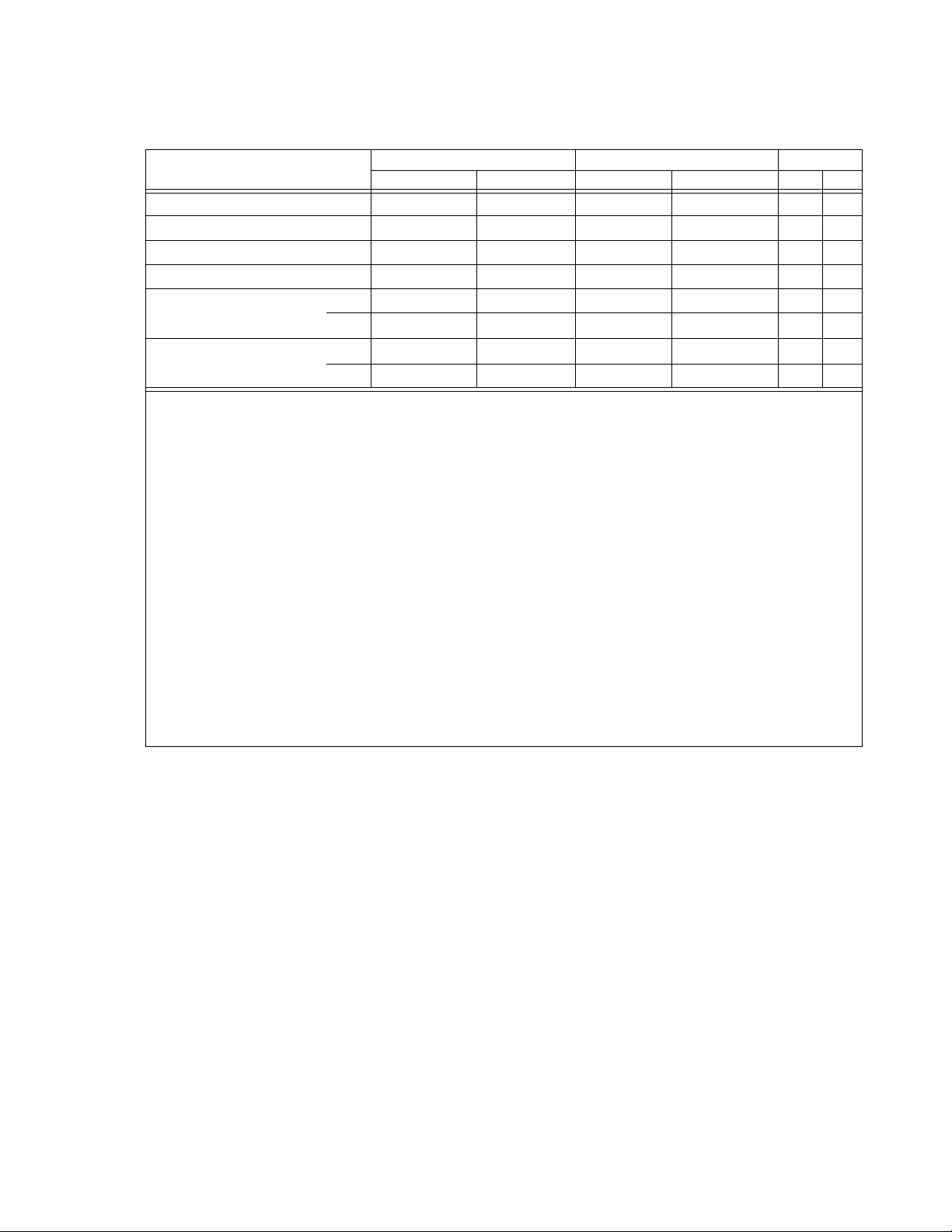
TABLE 1-5. ATE STATIC SPECIFICATIONS
E
O preampErefRfRi
EiO1RfRi+EIiOR
f
++=
IO%
E
Opreamp
1 Volt
------------------------------ -
100%=
INFLUENCE QUANTITY
SOURCE VOLTAGE (min. - max.)
LOAD (no load - full load):
TIME (8 hour drift)
Temperature per °C
Ripple and noise
Ripple and noise
(1) For I
(2) One terminal grounded so that common mode current does not flow through load or current sense resistor.
(3) Bandwidth: 20Hz - 10 MHz.
(4) Preamplifier offsets are given for the calculat ion of the output effects of preamplifiers (A, B) if either of these amplifiers is used for operational
programming. In this case, the value of the external feedback and input resistors, the amplifier offsets and the reference voltage variations are
combined in the “Error Equation,” which represents the “worst case” output effects for the application at hand:
(2)(5)
(Slow mode)
(2)(5)
(Fast mode)
>50A, load effect = 2mA typ., 5mA max in slow mode. The output capacitor adds 0 - 6 mA to current mode load effect.
O
rms: <0.1mV <0.3mV
p-p:
rms: <1mV
p-p:
OUTPUT EFFECTS VOLTAGE MODE OUTPUT EFFECTS CURRENT MODE OFFSETS
TYPICAL MAXIMUM TYPICAL MAXIMUM E
<0.0005% E
<0.001% E
<0.005% E
<0.005% E
(3)
(3)
max. <0.001% EO max. <0.002% IO max. <0.005% IO max.
O
max. <0.002% EO max.
O
max. <0.01% EO max. <0.01% IO max. <0.02% IO max.
O
max. <0.01% EO max. <0.01% IO max. <0.02% IO max.
O
<0.01% I
<1mV <3mV
<3mV
<10mV
<30mV
(4)
(4)
<0.1% I
<0.01% IO max. <0.03% IO max.
<0.1% IO max. <0.3% IO max.
(1)
<0.5 mA
max. <0.03% IO max.
O
max. <0.3% IO max.
O
<1 mA
(1)
IOIIO
<1nV
V
<1
––
<1nV
V
<20
<2nV
V
<20
––
––
––
––
(4)
where:
NOTE 1: Variations in the value of the feedback and input resistors are considered secondary effects in the error equation.
NOTE 2: In the voltage mode of operation, the calculated preamp output effect
voltage channel to find out the total ef fect on th e output volt age of the ATE power supply. The (fixed) gain of the ATE volt age channel is given by
GAIN = E
preamplifier offsets on the tot al output current may be expressed as a percentage of I
(5) For high voltage ATE 325-0.8M the maximum output ripple and noise is 10mV rms and 50 mV p-p.
E
O(preamp)
E
ref
E
iO
I
iO
R
f
R
i
O max
= Total Preamp Output Voltage change
= Change in the Voltage Reference
= Change in Offset Voltage
= Change in Offset Current
= External Feedback Resistor
= External Input Resistor
/10, where E
is the maximum rated output voltage of each ATE model. In the current mode of operation, the effect of the
O max
E
O(preamp)
, must be multiplied by the (fixed) gain of the ATE
by the equation:
O max.
1.6 FEATURES
1.6.1 OVERVOLTAGE/OVERCURRENT PROTECTION
Overvoltages and Overcurrent protection values can be individually programmed via the front
panel keypad or remotely via the IEEE 488.2 (GPIB) using SCPI commands (refer to PARs.
3.4.9 and 3.7). When overv oltage or overcurrent is detect ed, the power supply is programmed
to 0 volts with a small current and the power supply responds as if an *RST command was
received over the GPIB bus. See Table 1-4 for maximum programmable settings.
1.6.1.1 PROGRAMMABLE OVERVOLTAGE/OVERCURRENT DELAY
Changing the output settings may cause large output transients (common with reactive loads)
that can trip the overvoltage/overcurrent protection. The ATE-DMG can be programmed to delay
sensing of overvoltage/overcurrent protection when output settings are changed to avoid inadvertent tripping. After the delay, the programmed overcurrent/overvoltage setting is effective.
Protection can be delayed up to approximately 8 seconds after the ou tput setting s are cha nge d.
Refer to PAR. 3.4.10.
ATE-DMG OPER 042314 1-5
Page 20
1.6.1.2 CROWBAR CIRCUIT
An overvoltage crowbar circuit protects the load from momentary or long term overvoltages. The
crowbar conducts across the power supply output and the AC POWER SWITCH/CIRCUIT
BREAKER is tripped if such overvoltage occurs. The setting of the front panel LEVEL control
determines the threshold between the operating voltage of the power supply and the level at
which the crowbar circuit will be activated. The crowbar level is set from the front panel (refer to
PAR. 3.3). This feature is used as a hardware backup protection in case of overvoltage.
1.6.2 NON-VOLATILE STORAGE OF PROGRA MMED SEQUENCE S OR ACTIVE SETTINGS
The ATE-DMG Power Supply contains 40 memory locations that can be used either to preprogram a sequence of output values or to store the active settings. For programming sequences
each memory location accommodates six parameters: output voltage, output current, Overvoltage, Overcurrent, Time (how long the parameters are in effect) and the next address in the
sequence. Values are stored in the non-volatile memory, and are retained when the unit is
turned off. Refer to PAR. 3.4.12.
The same 40 memory locations are also available to save the active programmed settings
(V SET, I SET, OV SET and OC SET). The saved setting can be recalled by specifying the
memory location.
1.6.3 USER-DEFINED VOLTAGE/CURRENT LIMITS
The ATE-DMG output can be programmed not to exceed user-defined values. For example, the
ATE 25-40DMG, which has a maximum capacity of 25V, 40A, can be limited to 5.5V, 20A for
working with circuitry that might be damaged by higher le vels. Once the limits are set, the power
supply becomes, in effect a 5.5V, 20A supply and values exceeding the limit values will not be
accepted. Refer to PAR. 3.4.11.
1.7 EQUIPMENT SUPPLIED
The unit is shipped with a standard Power Cord, 115 VAC (USA, standard configuration plug).
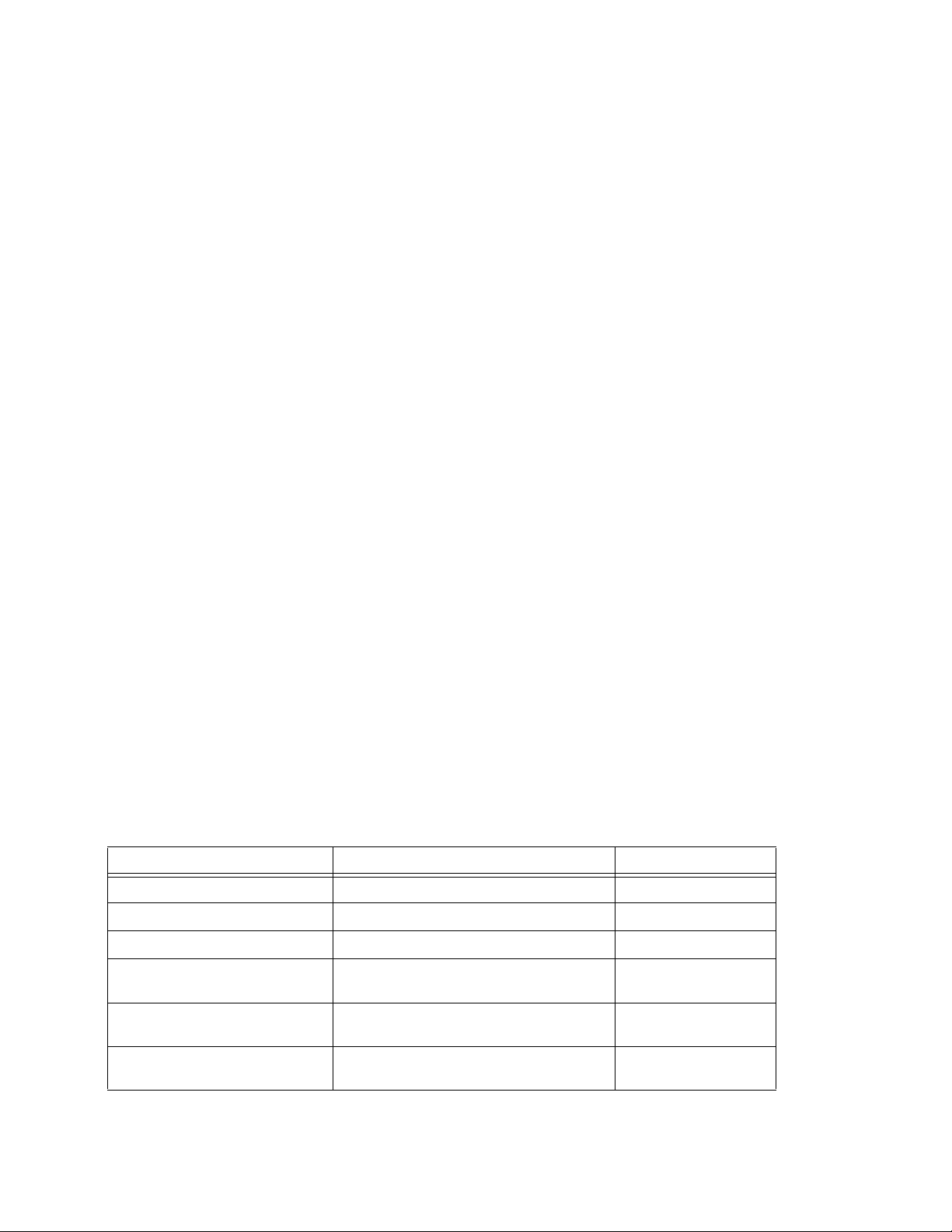
1.8 ACCESSORIES
Accessories for the ATE-DMG Power Supply are listed in Table 1-6 .
TABLE 1-6. ACCESSORIES
ITEM FUNCTION
IEEE 488 Cable, (1 meter long) Connects ATE-DMG power supply to GPIB bus 118-0916
IEEE 488 Cable, (2 meter long) Connects ATE-DMG power supply to GPIB bus 118-0917
IEEE 488 Cable, (4 meter longs) Connects ATE-DMG power supply to GPIB bus 118-0918
Ribbon Cable Used for connections to Remote Analog Pro-
gramming connector A11J5 (see PAR. 3.5)
Housing for discrete wires Used for connections to Remote Analog Pro-
gramming connector A11J5 (see PAR. 3.5)
Pins Used for connections to Remote Analog Pro-
gramming connector A11J5 (see PAR. 3.5)
(Molex 22-55-2101) or
(Digikey WM2522-ND)
(Molex 0016020083) or
(Digikey WM9139CT-ND)
PART NUMBER
142-0246
(AMP 746285-1 )
1-6 ATE-DMG OPER 042314
Page 21
1.9 SAFETY
!
There are no operator serviceable parts inside the case. Service must be referred to authorized
personnel. Using the power supply in a manner not specified by Kepco. Inc. may impair the protection provided by the power supply. Observe all safety precautions noted throughout this manual. Table 1-7 lists symbols used on the power supply or in this manual where applicable.
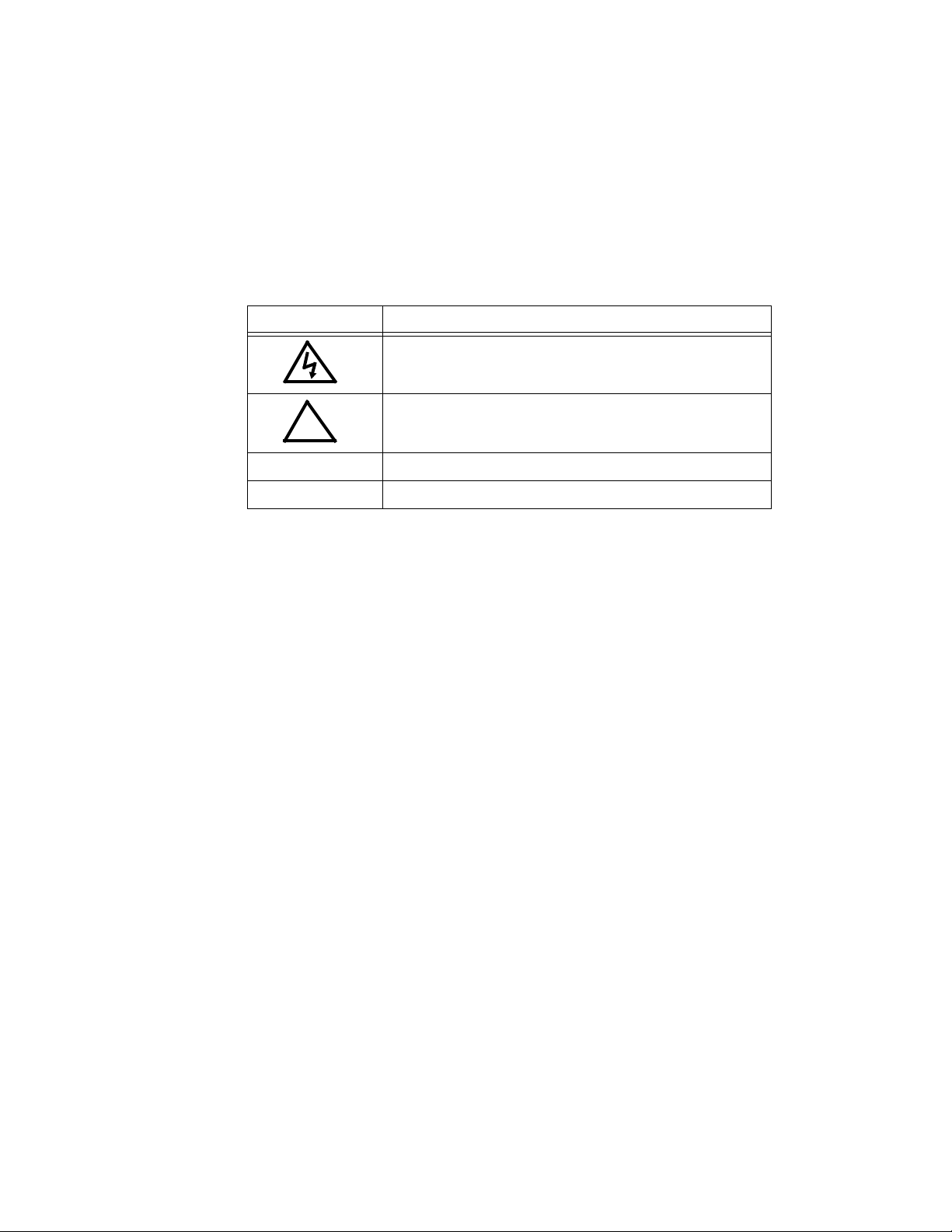
TABLE 1-7. SAFETY SYMBOLS
SYMBOL MEANING
CAUTION: RISK OF ELECTRIC SHOCK.
CAUTION: REFER TO REFERENCED PROCEDURE.
WARNING INDICATES THE POSSIBILITY OF BODILY INJURY OR DEATH.
CAUTION INDICATES THE POSSIBILITY OF EQUIPMENT DAMAGE.
ATE-DMG OPER 042314 1-7
Page 22
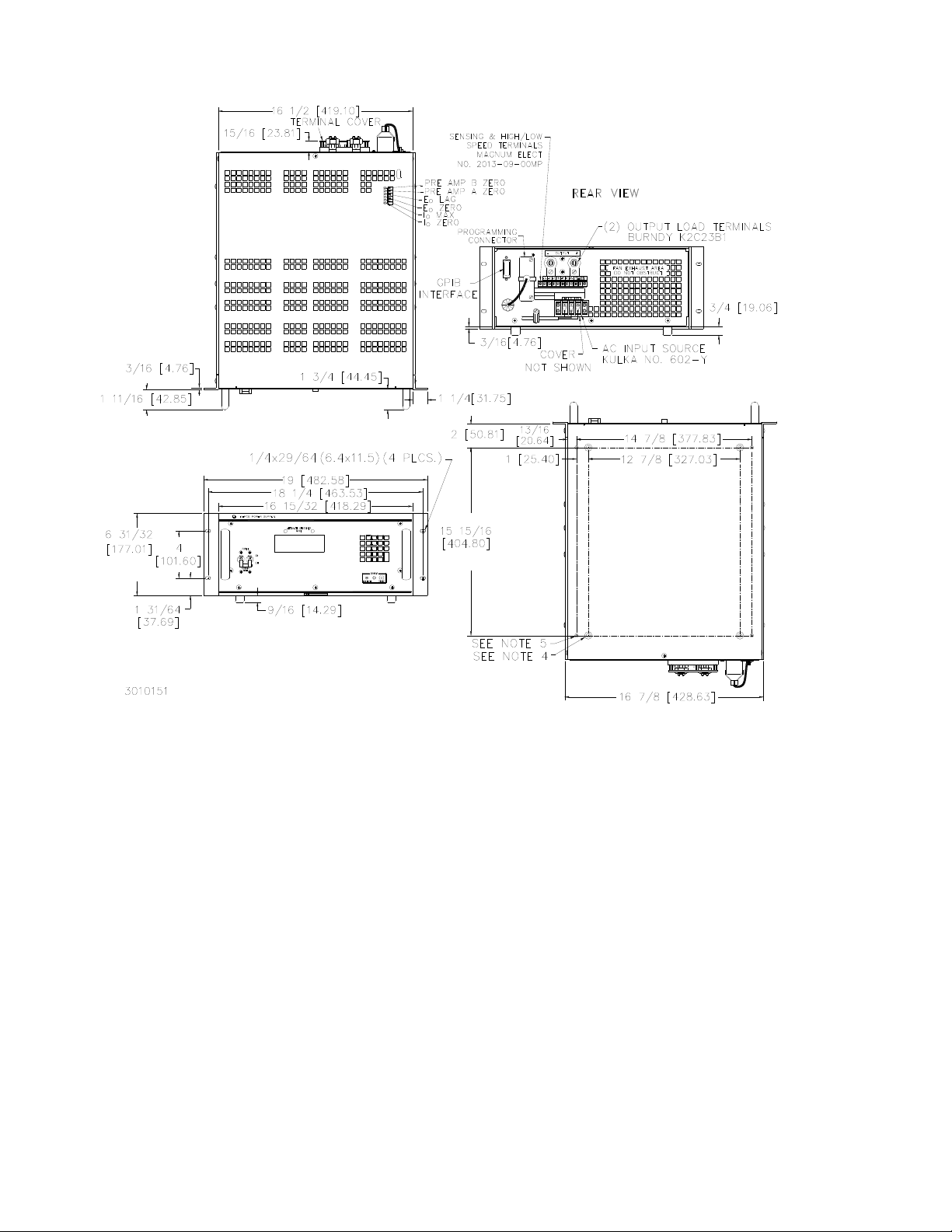
FIGURE 1-2. MECHANICAL OUTLINE DRAWING (SHEET 1 OF 2)
1-8 ATE-DMG OPER 042314
Page 23
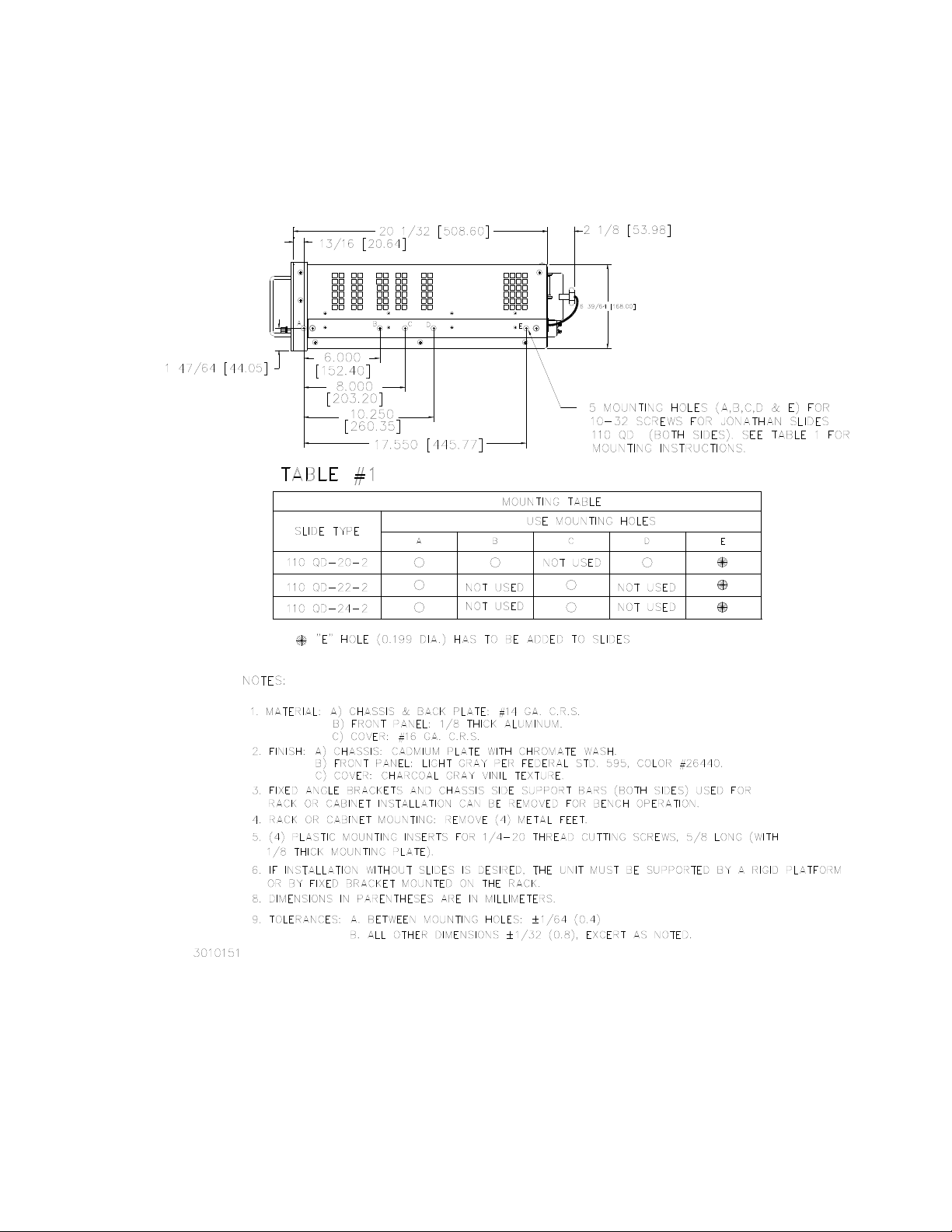
FIGURE 1-2. MECHANICAL OUTLINE DRAWING (SHEET 2 OF 2)
ATE-DMG OPER 042314 1-9/(1-10 Blank)
Page 24

Page 25

SECTION 2 - INSTALLATION
2.1 UNPACKING AND INSPECTION
This instrument has been thoroughly inspected and tested prior to packing and is ready for
operation. After carefully unpacking, inspect for shipping damage before attempting to operate.
Perform the preliminary operational check as outlined in PAR. 2.5 below. If any indication of
damage is found, file an immediate claim with the responsible transport service.
2.2 TERMINATIONS AND CONTROLS
a) Front Panel: Refer to Table 2-1 and Figure 2-1.
b) Rear panel: Refer to Table 2-4 and Figure 2-2.
c) Internal Controls: See Table 2-3 and Figure 2-3.
TABLE 2-1. FRONT PANEL CONTROLS, INDICATORS AND TERMINATIONS
FIGURE 2-1
INDEX NO.
CONTROL OR TERMINATION FUNCTION
1 A-C Power switch/circuit breaker Serves as a-c power switch and turns a-c power off upon overload or over-
2 Liquid Crystal Display (LCD) 2 x 16 character display with LED backlight. Shows voltage, current mode,
3 “V” Mode indicator Energizes in Voltage Mode.
4 “I” Mode Indicator Energizes in Current Mode.
5 Keypad Used to for digital control of all local functions. See PAR. 3.4.1.4 for details.
6 DISARM pushbutton Push to set Crowbar trigger level
7 CROWBAR indicator Lights when crowbar is triggered “ON.”
8 LEVEL control Adjusts trigger level of crowbar circuit.
voltage (hardware induced).
settings, menu, program, etc. See PAR. 3.4.1.3 for details,.
ATE-DMG 042314 2-1
Page 26
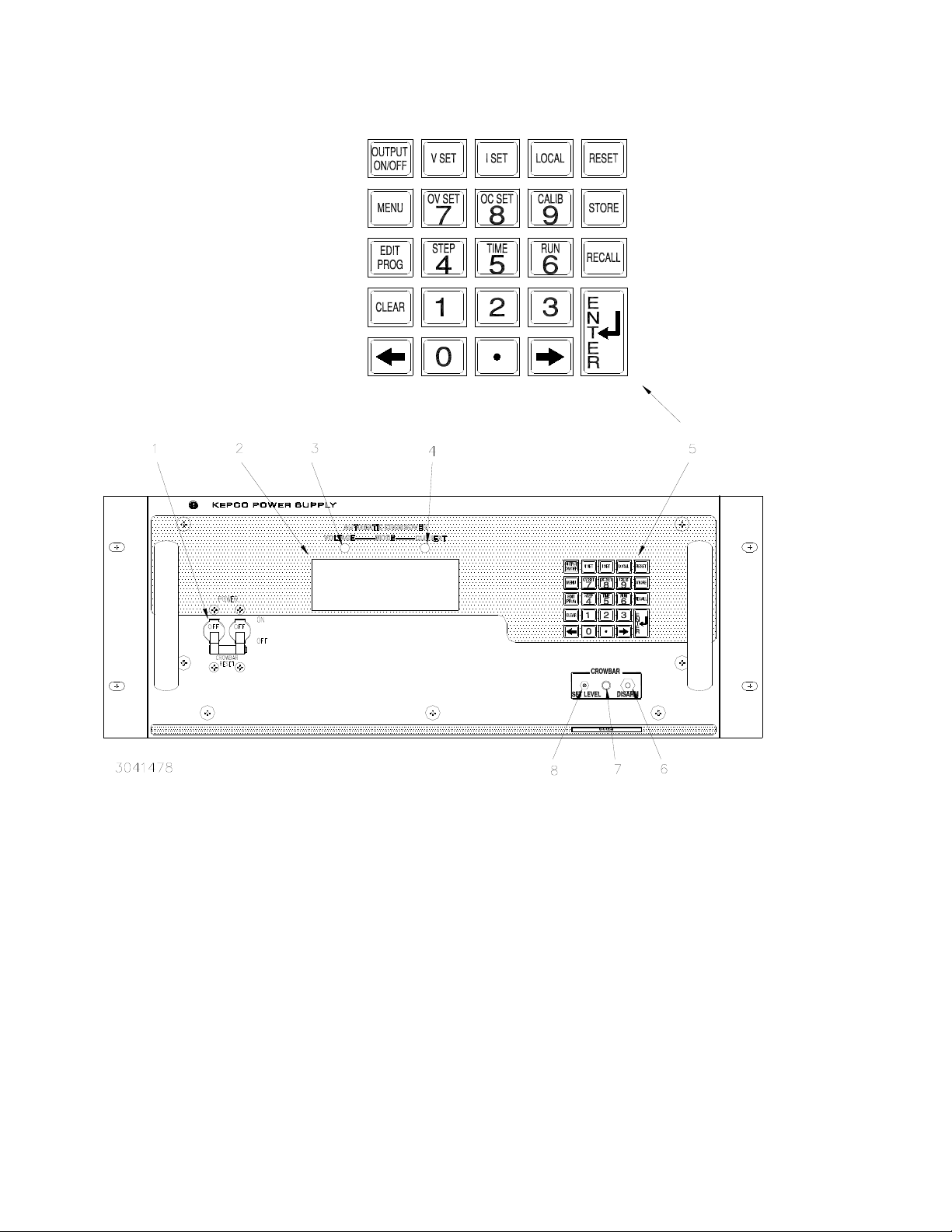
FIGURE 2-1. ATE-DMG FULL RACK SERIES FRONT PANEL
2-2 ATE-DMG 042314
Page 27
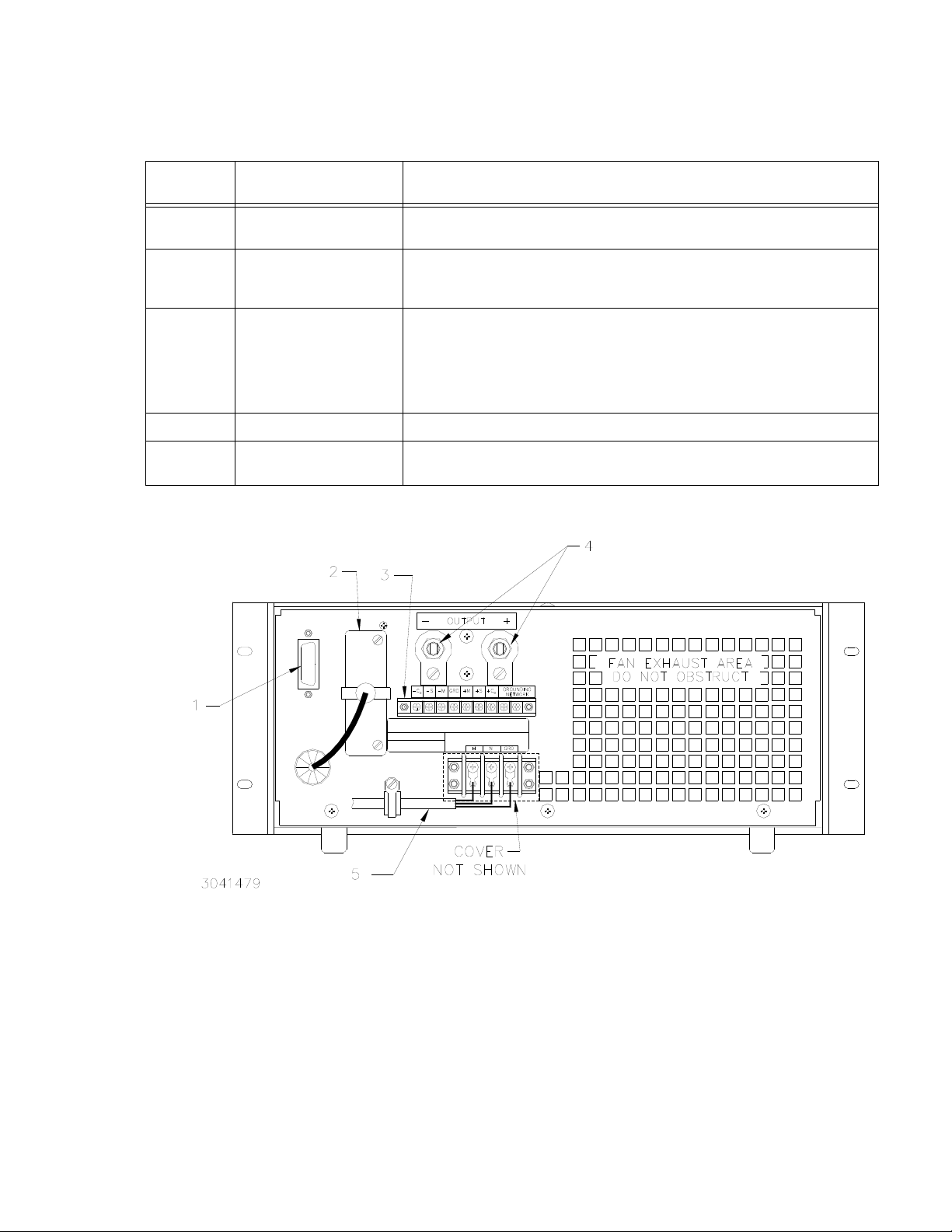
FIGURE 2-2
INDEX NO.
TABLE 2-2. REAR PANEL TERMINATIONS
TERMINATION FUNCTION
1 GPIB (IEEE 488) Interface
connector
2 Interconnection Assembly Used to gain access to internal circuitry for fast mode conversion, troubleshooting,
3 Rear Panel Barrier Strip Nine terminals provided:
4 Output terminals Used to connect load
5 Source power terminal
block
Allows digital control of power supply and provides digital indication of status and
power supply output. See Table 2-4 for input/output pin assignments.
and parallel/serial connections. Can also be used with PC-12 connector (wired) for
troubleshooting.
1, 7: Co (–) and Co (+) used to connect external output capacitor.
2, 6: S (–) and S (+) used to connect external sensing leads.
3, 5: M (–) and (+) used for output monitor connections.
4: Ground
8, 9: Used to connect or disconnect internal grounding network (see PAR. 2.6.1.2)
Used to connect source power; accepts 3-wire a-c input cord (supplied).
FIGURE 2-2. ATE-DMG FULL RACK SERIES REAR PANEL
ATE-DMG 042314 2-3
Page 28
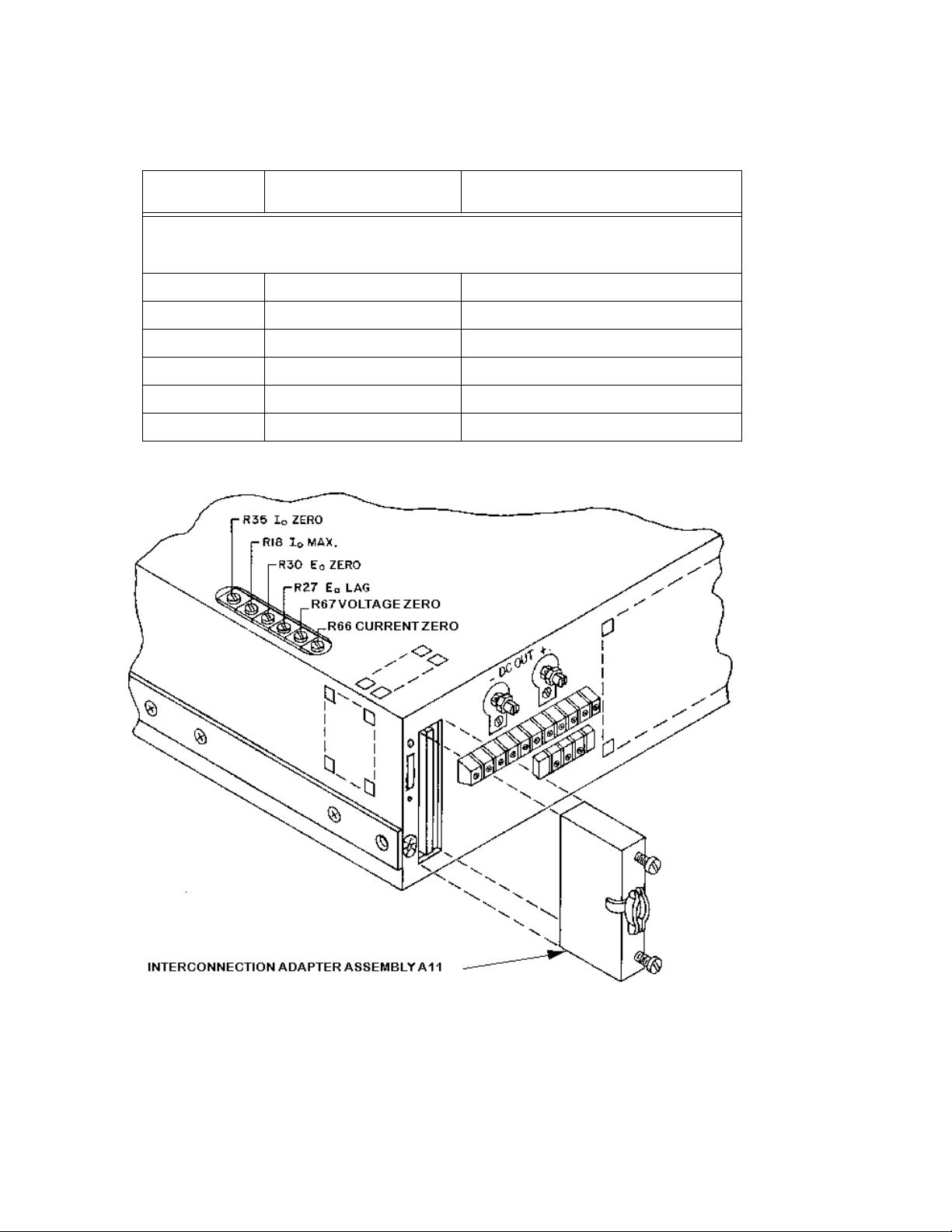
TABLE 2-3. INTERNAL CONTROLS AND THEIR FUNCTIONS
REFERENCE
DESIGNATION
Adjustment of any internal control will affect digital control of the output voltage
and invalidate factory calibration (refer Calibration, Section 4).
R18 lo MAX Maximum Output Current
R27 Eo LAG Voltage Channel Stability Control
R30 Eo ZERO Voltage Channel Zero Control
R35 lo ZERo Current Channel Zero Control
R68 PREAMP CURRENT ZERO Offset Zero Control for CURRENT PREAMP
R67 PREAMP VOLTAGE ZERO Offset Zero Control for VOLTAGE PREAMP
CONTROL PURPOSE
CAUTION:
FIGURE 2-3. LOCATION OF INTERNAL CONTROLS
2-4 ATE-DMG 042314
Page 29
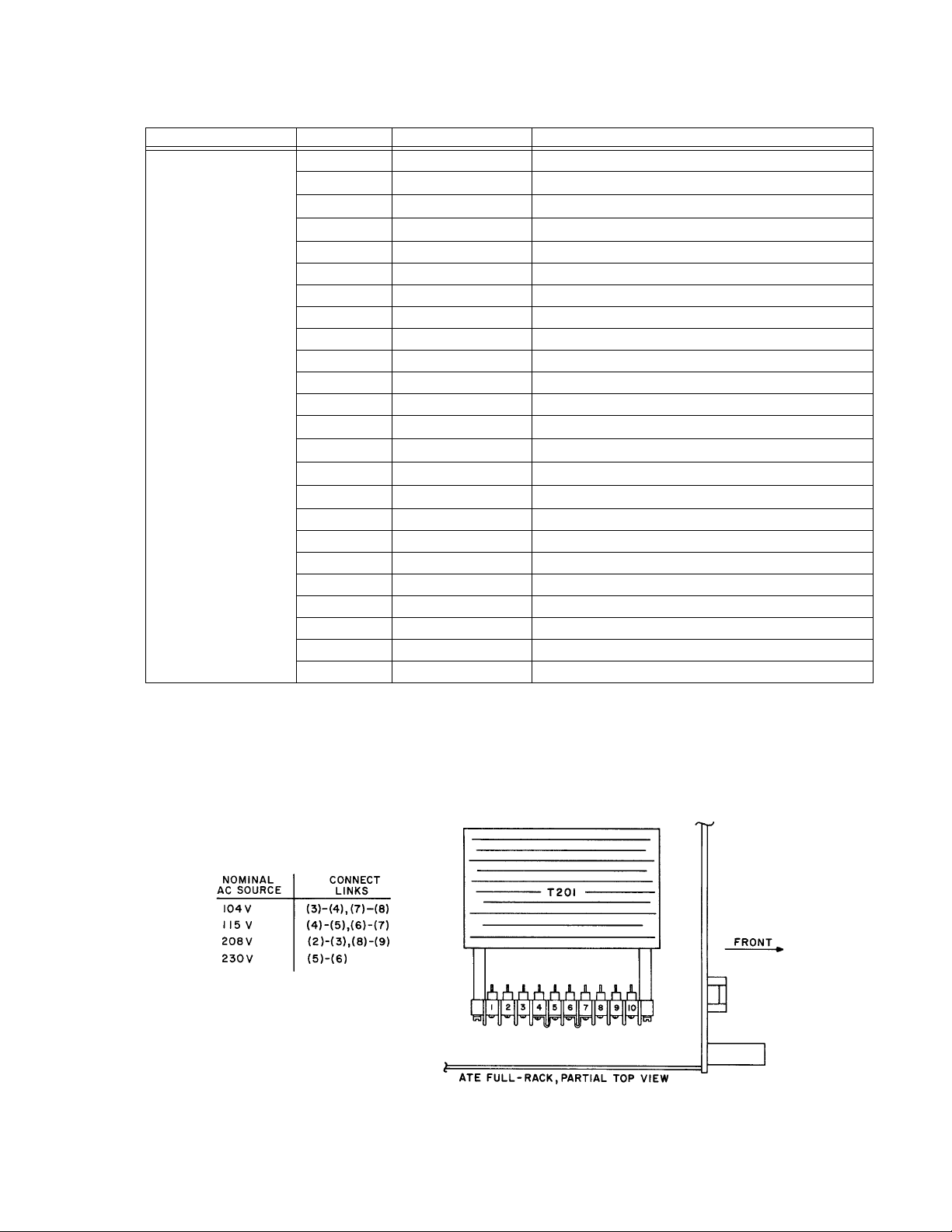
TABLE 2-4. INPUT/OUTPUT PIN ASSIGNMENTS FOR REMOTE CONTROL
CONNECTOR PIN SIGNAL NAME FUNCTION
I/O Line
I/O Line
I/O Line
I/O Line
I/O Line
I/O Line
I/O Line
I/O Line
IEEE 488
PORT
1
2
3
4
5 EOI End or Identify
6 DAV Data Valid
7 NRFD Not Ready for Data
8 NDAC Not Data Accepted
9 IFC Interface Clear
10 SRQ Service Request
11 ATN Attention
12 SHIELD Shield
13
14
15
16
17 REN Remote Enable
18 GND Ground (signal common)
19 GND Ground (signal common)
20 GND Ground (signal common)
21 GND Ground (signal common)
22 GND Ground (signal common)
23 GND Ground (signal common)
24 LOGIC GND Logic Ground
D
I01
DI02
DI03
DI04
I05
D
DI06
I07
D
DI08
2.3 SOURCE POWER REQUIREMENTS
This power supply is normally configured for operation on a single phase, nom inal 115V a-c line.
For conversion to other a-c source volt ages, refe r to Figure 2-4. Select your nominal source vo ltage and change the links on the barrier strip of T201 according to the table pr ovided in Figure 2-
4. The circuit breaker (CB101) remains equally effective at all input voltages.
FIGURE 2-4. A-C INPUT SOURCE VOLTAGE SELECTION, ATE-DMG FULL RACK SERIES
ATE-DMG 042314 2-5
Page 30

2.4 COOLING
Loc CV
0.000A0.000V
NOTE: indicates blinking colon (:), Command Entry status
indicates blinking equal sign (=), Data Entry status
The power transistors and rectifiers in the ATE power supplies are maintained within their operating temperature range by means of special heat sink assemblies, cooled by internal fans.
SIDE PANEL OPENINGS AND THE TOP OF THE CASE MUST BE KEPT CLEAR FROM
OBSTRUCTIONS TO INSURE PROPER AIR CIRCULATION. Periodic cleaning of the interior
of the power supply is recommended. If the power supply is rack mounted, or installed into confined spaces, care must be taken that the ambient temperature (the temperature immediately
surrounding the power supply) does not rise ab o ve th e limit spec ifie d (re fe r to Table 1-2).
2.5 PRELIMINARY OPE RATIONAL CHECK
A simple operational check after unpacking and before equipment installation is advisable to
ascertain whether the power supply has suffered damage resulting from shipping.
Refer to Figures 2-1 and 2-2 for location of operating controls and electrical connections. Tables
2-1 and 3-1 explain the functions of operating controls/indicators an d keypad keys, respectively.
1. With POWER switch set to off position, connect the power supply to source power.
2. With no load connected, set POWER switch to the ON position. Each time the unit is turned
on an internal self-test is performed. If the test is successful the indications of step 3 are visible.
3. The alphanumeric display (LCD) indicates the model and GPIB address. Af ter appro ximately
2 seconds, the display changes to: the power on default values: Local mode, Constant Voltage (CV) mode, 0.000V, 0.000A, output disabled, command entry status ( see Figure 2-5).
Overcurrent and Overvoltage protection are set to the maximum values (see Table 1-4), but
are not displayed.
FIGURE 2-5. LCD POWER ON DEFAULTS
NOTE: Six keys with dual functions are labeled with both a command and a num ber. The com-
mand label is referred to when the unit is in command entry status; the number is
referred to when the unit is in dat a entry status.
4. Press OUTPUT ON/OFF key to enable the output.
5. Connect a digital voltmeter (DVM) to the (+) and (–) terminals at the rear panel and verify
DVM reads 0V.
6. Press VSET key. Verify bottom line of LCD reads Vset nn (where nn = voltage setting).
2-6 ATE-DMG 042314
Page 31

7. Use number keys to enter rated maximum voltage (e.g. for ATE 25-40DMG, 25V is the rated
maximum voltage) and press ENTER. Output voltage will be displayed at bottom left of LCD.
8. Use
2.6 INSTALLATION (Refer to Figure 1-2.)
The Power Supply is intended to be rack-mounted; the (4) bottom feet must be removed.
For all installations into confined spaces, care must be taken that the temperature immediately
surrounding the unit does no t exceed the maximum sp ecified ambient temperat ure (see Table
1-2).
2.6.1 GROUNDING
2.6.1.1 A-C (SAFETY) GROUND
The power supply is equipped with a 3-wire safety line cord and polarized plug. The third
(green) wire in the line cord is connected to the chassis and the case of the unit. If a 2-terminal
receptacle in combination with an adapter is used, it is imperative that the chassis of the power
supply be returned to a-c ground with a separate lead. A grounding terminal is provided (at the
rear barrier strip) for this purpose.
2.6.1.2 ISOLATION FROM GROUND.
and
ify DVM voltage reading agrees with displayed voltage on LCD within 0.01% of rated maximum (see associated instruction manual). If the LCD reads VsetMAX= (value), you are
entering a value higher than the maximum voltage setting; see PAR. 3.4.11.
keys as necessary to adjust output precisely to rated maximum voltage. Ver-
The d-c output is isolated from the a-c source and from any direct connection to chassis or
ground. The maximum output voltage that can be supported between either output terminals
and chassis ground is 500V (d-c or peak). Either side of the output may be grounded.
A resistor/capacitor network is connected from the negative monitor terminal to the metal chassis of the power supply. If this internal network is not desired, the connection to the chassis can
be opened by removing the link (8)-(9) on TB201 (see Figure 2-2).
2.7 FAST MODE CONVERSION OF THE ATE POWER SUPPLY
Power supplies designed to operate in a voltage, as well as in a current stabilizing mode, often
represent a compromise between the conflicting requirements of a good voltage and a good
current source. A good voltage source must have low output impedance, good output voltage
stability and good dynamic stability in the presence of loads with capacitive and/or inductive
content. It achieves these design goals by relying to a great extent upon a large output capacitor
having a very low terminal impedance, large energy storing ability and great resistance to rapid
voltage changes.
Unfortunately, the requirements for a good current source are quite opposite to that of the voltage source described above. A current source should have high output impedance and its terminal voltage must be able to assume rapidly any value as may be needed to keep the output
current at the predetermined level, while the load is changing.
To satisfy these conflicting requirements, the ATE power supply was designed for quick manual
change-over from the “slow” mode to the “fast” mode of operation. In the “slow” mode, the ATE
power supply approaches an ideal voltage source. Heavy output and feedback capacitors pro-
ATE-DMG 042314 2-7
Page 32

vide for low output noise, excellent voltage stability and good transient response. In the “fast”
mode, the output and main feedback capacitors are completely removed, thereby providing the
characteristics of a wide-band amplifier, ideal for applications requiring a current st abilizer or for
high speed voltage or current programming.
2.7.1 PRECAUTIONS.
The output capacitor, and to a lesser extent, the feedback capacitor of a power supply, control
the programming speed and the current mode recovery time. T he removal of these cap acitors in
the fast mode results in greatly impr oved po wer supply performance in these areas. The power
supply's dynamic stability, however, is reduced, making the output sensitive to the load phase
angle. For this reason, the load presented to the power supply in the fast mode must not contain
excessive capacitance (limit: 1000pF). Also, with the output and main feedback capacitors
removed, there will be an increase in output noise, mainly high frequency noise and pickup, so
that external shielding of programming leads and good grounding practices assume added
importance in the fast mode of operation.
2.7.2 LAG NETWORK ADJUSTMENT
The ATE power supply operating in the “fast” mode, is dynamically stabilized by means of an
internal lag network (E
LAG, R27, see Figure 2-3 for location). This control should be adjusted,
O
for each application, by monitoring the load with an oscilloscope and turning the LAG control for
best output response and maximum dynamic stability under all operating conditions.
2.7.3 CROWBAR OPERATION, FAST MODE
The crowbar circuit in the ATE power supply is not completely removed in the “fast” operating
mode, but continues to offer protection against d-c voltage surges which may harm the load.
NOTE: For fast mode operation into a load interrupted by contactors or relays (“Arcing Load”),
a small, high-frequency-type capacitor may be required across the contacts of the
interrupting device, or the power supply output terminals, or directly across the load
terminals. A ceramic disc capacitor (0.01.F) has been found to be adequate to prevent spurious triggering of the overvoltage circuit
2.7.4 MANUAL CHANGE-OVER, SLOW/FAST MODE
The ATE power supply is normally delivered for operation in the “slow” mode. By changing
jumper connections at the rear of the power supply, the user can convert from the “slow” mode
to the “fast” mode or vice versa. The following steps are illustrated in Figure 2-6.
1. Remove Links (1)-(2) and (6)-(7) on TB201. This removes the output capacitor (C
2. At the rear panel, loosen two screws and disconnect interconnection adapter A11.
3. Gain access to A11 jumpers by removing two screws securing connector A11J1 to the shell.
4. Remove jumper on adapter assemb ly A11 between J3 pins 1 and 2;
5. Install jumpers between J3 pins 3 and 4 and between J3 pin s 5 and 6 . NOTE: Spare jumpers
located on J5
).
O
6. Reassemble PC card to A11 and reconnect A11 at rear panel.
2-8 ATE-DMG 042314
Page 33

FIGURE 2-6. REQUIRED STEPS FOR ATE “FAST MODE” CONVERSION
NOTE: NUMBERS IN CIRCLES REFER TO STEPS OF PAR. 2.7.4.
2.8 OPERATING CONFIGURATION
The operating configuration can be determin ed by pressing MENU on the front panel keypad six
times (with the unit in command entry status). The LCD top line reads ATE-VVAA (VV is
Vmax, AA is Imax, e.g., for the ATE 100-10DMG, top line reads 10010). The LCD bottom line
displays a 6-digit number (facto ry calib r ation da te ) fo llowe d by a 3- dig it n u mb e r, followed by the
firmware version number.
ATE-DMG 042314 2-9/(2-10 Blank)
Page 34

Page 35

SECTION 3 - OPERATION
3.1 GENERAL
Interconnections between an a-c power source and a stabilized power supply, and between the
power supply and its load are as critical as the interface between oth er types of electronic eq uipment. If optimum performance is expected, certai n rules fo r the intercon nection of source, power
supply and load must be observed by the user. These rules are described in detail in the following paragraphs.
3.1.1 SAFETY GROUNDING
National and international safety rules dictate the grounding of the metal cover and case of any
instrument connected to the a-c power source.
KEEP INSTRUMENT GROUNDED WHILE IT IS CONNECTED TO THE
A-C POWER SOURCE.
Kepco power supplies with a flexible a-c power cord are equipped with a 3-prong safety plug,
which must be connected to a grounded a-c power outlet.
3.1.2 D-C (OUTPUT) GROUNDING
WARNING
Connections between the power suppl y an d th e lo ad (l oad a nd sen sing co nnectio ns), a s well as
connections to the power supply amplifiers (programming connections) may, despite all precautions such as shielding, twisting of wire-pairs, etc., “pickup” radiated noise of a wide frequency
spectrum. To minimize these undesired effects, one side of the power supply output/load circuit
should be grounded.
Successful d-c grounding depends on careful analysis of the individual situation and only general guide lines can be provided here. One of the ma jor points, however, is to avoid GROUND
LOOPS. Ground loops are created when two (or more) points are groun ded along the output circuit. Due to the wire impedance between the separated grounded points, a noise voltage is
developed which subsequently is superimposed on the load. The only way to avoid ground
loops is to investigate the output circuit (including the connected load) carefully by means of an
ohmmeter for any resistance to ground. A single d-c ground point can be selected only if the
output circuit is completely isolated. A single point is selected along the power supply output/load circuit and this point is returned to ground with a single wire. The exact location of this
“best” d-c ground-point is entirely dependent on the application at hand. For single, isolated
loads, the d-c ground-point may be located directly at one of the output terminals of the power
supply which may be connected to ground. If error sensing is employed, d-c ground can be
established at the remote load. In case of an internally grounded load, the d-c ground is automatically established directly at the load.
ATE Power Supplies have one side of the output returned to the case over a resistor/capacitor
combination (refer to Section 2, PAR. 2.6.1). In those cases, therefore, where the load is inter-
nally grounded, or where the signal ground must be established elsewhere, the resistor/capacitor combination must be removed from the power supply case in order to avoid ground loop
problems. If there is a choice in selecting either the positive or the negative output of the power
supply for the d-c ground point, both sides should be tried, and preference given to the ground
point producing the least noise. Output ripple specifications (as measured at the output) are,
ATE-DMG 042314 3-1
Page 36

however, equally valid for either output side grounded. Care should be taken in measuring the
ripple and noise at the power supply output or at the load , Me a sur in g de vice s wh ich are a-c line
operated often introduce ripple and noise into the circuit.
In the case where the load must be kept completely off ground (d-c isolated) or it must be operated above ground potential, grounding can be accomplished by means of a suitable capacitor
connected from either side of the power supply output to the signal ground. The size of the
capacitor should be carefully selected. A value betwee n 0.1 and 1 micro farad ha s been fo und to
be successful in many cases.
3.1.3 POWER SUPPLY/LOAD INTERFACE
The general function of a voltage or current stabilized power supply is to deliver the rated output
quantities to the connected load. The load may have any conceivable characteristic: It may be
fixed or variable; it may have predominantly resistive, cap acitive, or inductive parameters; it may
be located very close to the power supply or it may be a considerable distance away. The power
supply designer cannot anticipate every con ceivable application , location or nature of the load.
The product must be designed for the widest possible application range and performance specifications at the output terminals of the power supply. The aim of the following paragraphs is to
aid the user in the final use of the product: The interface of the power supply and the load.
The perfect interface between a power source and it s load would mean that the specified performance at the output terminals w ould be transfer red without impairment to any load, regardle ss
of its characteristics, distance from the power supp ly o r environment. To approach this ideal, the
power supply must satisfy certain requirements, interconnecting rules must be closely followed
and Ohm's Law , as well a s basic a-c theory must be considere d in selectin g the inter face wiring.
3.1.3.1 LOAD WIRE SELECTION
The stabilized d-c power supply is definitely not an ideal voltage or current source with zero output impedance (VOLTAGE MODE) or infinite output impedance (CURRENT MODE) at all frequencies: All voltage sources have some amount of impedance which increases with frequency
and all current sources have an output impedance which decreases with frequency (refer to Fig-
ure 3-1).
FIGURE 3-1. TYPICAL OUTPUT IMPEDANCE VS. FREQUENCY PLOT FOR STABILIZED D-C SOURCES
3-2 ATE-DMG 042314
Page 37

NOTE: Load connections for application requiring solely stabilized output current are not as
critical as those requiring stabilized output voltage:
a. D-C wire drops do not influence the current stabilizing action, but must be sub-
tracted from the available compliance voltage.
b. Wire inductance is “swamped-out” by the action of the output capacity. Emphasis in
the following paragraphs is therefore placed on the power supply as a voltage
source, rather than a current source.
A more realistic model for a voltage stabilized power supply must, for example, include a series
resistance, representing the small d-c and low frequency source impedance, in series with an
inductance, representing the source impedance at higher frequencies. Load wire selection
should therefore proceed with those facts in mind. The load wire size should not only be
selected for minimum voltage drop (Error Sensing, as discussed below, will take care of that),
but also the series inductance of the load wire must b e kept as small as pos sible compared to
the source inductance of the power supply (Error Sensing cannot compensate for this). Thes e
dynamic considerations are espe cia lly imp or tant if:
1. The load is constantly changing in value.
2. The load is switched “on” and “off.”
3. The output of the power supply is step programmed.
4. The load has a primarily reactive characteristic.
5. All other cases where the dynamic output response of the p ower supply is considered important.
3.2 LOAD CONNECTION
3.2.1 GENERAL
Kepco has provided a group of terminals on the programming connector PC-12 and on the barrier strip (TB210) at the rear of the power supply, which permit maximum fl exibility in power supply/load interface techniques. Although all applications tend to exhibit their own problems, th e
basic interconnections described may be used as a general guide in the interconnection
between power supply and load.
The Kepco power supply is shipped from the factory with several jumper links (see Figure 3-2,
connected to the barrier strip (TB201). These links may be removed and replaced at will,
depending on the method of connecting the load. Positioned as shown in Figure 3-2, the links
are connected for local error sensing. Links on the barrier strip must be tightened. LOOSE
LINKS AT THE BARRIER STRIP WlLL CAUSE MALFUNCTION OF THE POWER SUPPLY.
ATE-DMG 042314 3-3
Page 38

FIGURE 3-2. STANDARD JUMPER LINK CONNECTIONS FOR LOCAL (FRONT PANEL) CONTROL OF
OUTPUT VOLTAGE, OUTPUT CURRENT AND VP CROWBAR LEVEL (SLOW MODE)
Note: Connection diagrams in Section 3 are applicable for full-rack ATE power supplies.
These diagrams represent partial views of the ATE rear panel. The AC source input,
interconnection adapter assembly A11 and the GPIB connector are deleted to simplify
the presentation.
3.2.2 LOAD CONNECTION, METHOD I (LOCAL ERROR SENSING) (SEE FIGURE 3-3.)
The most basic power supply interconnection, to primarily resistive, relatively constant loads,
located close to the power supply, or for loads requiring stabilized current exclusively, consists
of a 2-wire connection from the rear output terminals. Load wire is selected as described previously (refer to PAR. 3.1.3.1). The load leads should be tightly twisted to reduce “pick- up” from
stray magnetic fields. After the grounding rules have been applied (refer to PAR’s. 3.1.1 to
3.1.2), the power supply can be connected to the a-c source and operation may commence.
3-4 ATE-DMG 042314
Page 39

FIGURE 3-3. LOAD CONNECTION METHOD I, LOCAL ERROR SENSING
3.2.3 LOAD CONNECTION, METHOD II (REMOTE ERROR SENSING)
To avoid excessive output effects at remote loads, error sensing must be used. A twisted,
shielded pair of wire from the sensing terminals directly to the load will compensate for load wire
voltage drops up to 0.5 volt per wire (refer to Figure 3-4). Observe pola rities: The negative sens-
ing wire must go to the negative load wire, and the positive sensing wire goes to the positive
load wire.
NOTE: For long wire runs, twisting each sensing wire with its associated load wire may give
improved results in some cases.
ATTENTION
When using remote error sensing with large capacitive Ioads and long
Ioad and sensing wires, low frequency oscillations may be observed at
the Ioad. To eliminate the problem the FEEDBACK CAPACITOR should
be disconnected from the (–) OUTPUT SENSING terminal and reconnected to the (–) OUTPUT MONITOR terminal. Remove jumper (1)-(2) on
the REAR PROGRAMMING CONNECTOR. Connect a short wire from
pin 2 to the REAR BARRIER-STRIP (TR201-3).
This method of load interconnection is suitable for loads which do not require rapid changes in
voltage or current, or for programming with gradually changing wavefor ms (sine wave, triangular
wave shapes, etc.). See PAR. 3.2.4 for load connections suitable for rapid (step) changes in the
load or in programming.
ATE-DMG 042314 3-5
Page 40

FIGURE 3-4. LOAD CONNECTION, METHOD II USING REMOTE ERROR SENSING.
3.2.4 LOAD CONNECTION, METHOD III
This method is suitable if step changes in the load are expected if, for example, the load is rapidly changing in value and maximum dynamic performance is expected directly at the load terminals. In these cases, the output capacitor is disconnected at the power supply and brought
with a heavy, twisted-wire pair directly to the remote load (refer to Figure 3-5).
FIGURE 3-5. LOAD CONNECTION, METHOD III
3-6 ATE-DMG 042314
Page 41

3.3 OVERVOLTAGE CROWBAR, SETUP AND CHECK
The overvoltage crowbar circuit protects the load from momentary or long-term overvoltages.
The crowbar SCR conducts across the power supply output, and the A-C POWER
SWITCH/CIRCUIT BREAKER is tripped if such overvoltages occur. The setting of the front
panel LEVEL control determines the “threshold” between the actual operating voltage of the
power supply and the level at which the crowbar circuit will be activated. The LEVEL control can
be set from 3 volts to 1 10% of the rated output voltage. The LEVEL control may be adjusted very
close to the operating voltage (minimum threshold = 2% of rated output voltage or 0.5 volt,
whichever is greater). The operation of the crowbar circuit can be checked without actually trig-
gering the crowbar. All operating controls are accessib le at the front panel (refer to Section 2,
Figure 2-1).
3.3.1 SETUP AND CHECK PROCEDURE
1. Without connecting the load to the power supply turn Crowbar LEVEL control fully clockwise.
2. Turn A-C POWER SWITCH/CIRCUIT BREAKER on. Press VSET key, then use the keypad
to enter the desired value at which the crowbar must trigger (NOT to the actual operating
voltage), then press ENTER.
3. Depress the DISABLE button (and keep it depressed) white turning the LEVEL control coun-
terclockwise, until the crowbar INDICATOR energizes (simulated crowbar action).
4. With the DISABLE button still depressed, press VSET key, then use the keypad to enter the
actual operating voltage and press ENTER key. Release the DISABLE button.
NOTE: This last adjustment established the “threshold” i.e., the difference voltage between the
output voltage and the voltage at which the power supply will “crowbar.” For minimum
“false triggering” use the largest threshold your load ca n tolerate.
5. To check the adjusted crowbar trigger level, depress DISARM push button. Press VSET key ,
then use the keypad to enter the voltage trip point, minus 1%, then press ENTER.
6. Depress the
key and note the voltage at which the crowbar INDICATOR lamp energizes.
Correct LEVEL adjustment as described above if necessary. Use VSET to reduce power
supply output voltage to its operating value.
NOTE:1 Readjustment of the LEVEL control may be required after load and power supply have
reached thermal equilibrium.
NOTE:2)If an exact crowbar point at a remote load must be established, remote error sensing,
as described in PAR. 3.2.3 must be used.
3.4 LOCAL MODE OPERATION (KEYPAD OPERATION)
The following paragraphs explaining local mode operation include a description of the interaction between the LCD and the front panel keypad ( see PAR. 3.6 for remote mode programming).
Each key of the front panel is described, with a reference to a p aragraph d eta iling the use o f that
key. Local operation of the ATE-DMG Power Supply is accomplished via the 24 key keypad on
the front panel. All indications are provided by the 2-line LCD.
ATE-DMG 042314 3-7
Page 42

3.4.1 FRONT PANEL KEYPAD AND LCD (SEE FIGURE 2-1)
The front panel keypad is comprised of 24 key, 13 dedicated to command functions, 5 dedicated
to data functions, and 6 keys that have both command and data functions When the power supply is in command entry status the command functions are effective; when the power supply is
in data entry status the data functions are effective.
3.4.1.1 COMMAND ENTRY STATUS
Indicated by blinking colon (:) on bottom line of LCD; the power supply is waiting for a command
to be entered; data will not be accepted (accompanied by brief audible buzz). The LCD indicates
the actual voltage and current at the output terminals. When the output is disabled (LCD bottom
line reads Output OFF), the power supply is in Command entry status even though the blinking
colon is not visible.
NOTE: The blinking colon is indicated by in this manual.
3.4.1.2 DATA ENTRY STATUS
Indicated by blinking equal sign (=) on bottom line of LCD; the power supply is waiting for data
to be entered. A command will not be accepted (accompanied by brief audible buzz). Enter new
value (the
without changing setting.
NOTE: The blinking equal sign is indicated by in this manual.
key erases data entered). Press ENTER to accept new setting, or CLEAR to exit
3.4.1.3 DISPLAY (LCD)
The LCD is a 2-line display with a capacity of 16 characters per line. The info rmation is gener ally
arranged as follows (information that does not follow this format is self-explanatory).
• Top left: Loc/Rem Remote/Local Status
• Top right CV/CC Constant voltage mode/constant current
• Bottom left:
In command entry n.nnnV Output voltage
In data entry: (parameter) e.g. OVset if OV SET key was pressed.
• Bottom middle: Command entry status
• Bottom right:
In command entry n.nnnA Output current
In data entry: n.nnn Present value of parameter, replaced by
3.4.1.4 KEYPAD FUNCTIONS
Keypad functions are listed in Table 3-1. Six keys have dual functions, depending on whether
the power supply is in command entry status (waiting for a command to be entered), or data
entry status (waiting for a number to be entered) . Command entry st atus is indicted by a blinking
colon and data entry status is indicated by a blinking equal sign .
mode
Data entry status
data entered
3-8 ATE-DMG 042314
Page 43

NOTE: Keys with dual functions are labeled with both a command and a number. The com-
mand label is referred to when the unit is in command entry status; the number is
referred to when the unit is in data entry status.
TABLE 3-1. KEY FUNCTIONS
KEY
OUTPUT
ON/OFF
V SET Command Entry
I SET Command Entry
LOCAL Command Entry
RESET Command Entry
MENU Command Entry
OV SET
7
POWER SUPPLY
STATUS ACTIVE
Command Entry
Command Entry
Data Entry
DESCRIPTION
If bottom line of LCD reads Output OFF, press to enable the output. If output is on (voltage and current measurements displayed on bottom line of
LCD), press to disable the output.
Press to set output voltage. After V SET is pressed, previous setting is displayed. Data entry required to enter new value of output voltage; press
ENTER to accept displayed value.
Press to set output current. After I SET is pressed, previous setting is displayed. Data entry required to enter new value of output current; press
ENTER to accept displayed value.
If the power supply is in remote mode, keypad is disabled except for
LOCAL key. Press to enable keyp ad. If LCD reads KEYPAD LOCKED, The
LOCAL key is disabled and can only be unlocked by remote operation.
Press to restore the power on default values: CV mode, output voltage = 0,
output current = minimum (1-2% of I
and overcurrent values per associated instruction manual. Also resets overvoltage or overcurrent condition.
Press to enter Menu commands: press repeatedly to scroll through Menu
functions: (1) set LCD contrast, (2) GPIB address, (3) DCL Control,
(4) Speaker on/off, (5) Calibration password, (6) previous calibration values, (7) factory calibration values, (8) view firmware serial number, (9) set
maximum voltage, (10) set maximum current, (11)protection delay. Press
ENTER or RESET to exit Menu.
Press to set overvoltage protection value. Data entry required to enter the
overvoltage protection value; press ENTER to accept displayed value.
Press to enter number 7. 3.4.1.2
), output enabled, overvoltage
Omax
REFERENCE
PARAGRAPH
3.4.6
3.4.8
3.4.8
3.4.3
3.4.7
(1) 3.4.4,
(2) 3.6.3,
(3) 3.6.2,
(4) 3.4.5,
(5) 3.4.16,
(6) 3.4.16,
(7) 3.4.16
(8) 2.8,
(9, 10) 3.4.11
(11) 3.4.10,
3.4.9
OC SET
8
CALIB
9
STORE Command Entry
EDIT PROG Command Entry
STEP
4
ATE-DMG 042314 3-9
Command Entry
Data Entry
Command Entry
Data Entry
Command Entry
Data Entry
Press to set overcurrent protection value. Data entry required to enter new
overcurrent protection value; press ENTER to accept displayed value.
Press to enter number 8. 3.4.1.2
Press to enter Calibration status. Requires password entry; instructions
appear on LCD.
Press to enter number 9. 3.4.1.2
Press to store present values of output voltage and current and overvoltage
and overcurrent protection. Data entry required to select memory location
where values are to be stored
Press to select the starting memory location to be edited. Then use
or
to view or modify the parameters of a specific memory location or to cre-
ate a new program.
Press to select starting address of program to be executed one step at a
time.
Press to enter number 4. 3.4.1.2
3.4.9
Section 4
3.4.12
3.4.15.3
Page 44

TABLE 3-1. KEY FUNCTIONS (CONTINUED)
KEY
TIME
5
RUN
6
RECALL Command Entry
CLEAR Data Entry
1Data Entry
2Data Entry
3Data Entry
ENTER Data Entry
POWER SUPPLY
STATUS ACTIVE
Command Entry
Data Entry
Command Entry
Data Entry
Command Entry
Data Entry
0Data Entry
DESCRIPTION
Press to edit time value for specific memory location. Select memory location (data entry), then enter time value, 0.01 to 2.5 seconds (data entry).
Press to enter number 5. 3.4.1.2
Press to run a program. Requires data entry to select starting location.
Press ENTER to accept displayed value.
Press to enter number 6. 3.4.1.2
Press to recall previously stored values of output voltage and current, and
overvoltage and overcurrent protection. Data entry required to select memory location containing values to be recalled; press ENTER to accept displayed value.
Press to exit Data Entry status; any numbers entered are lost. Restores
Command Entry status
Press to enter number 1. 3.4.1.2
Press to enter number 2. 3.4.1.2
Press to enter number 3. 3.4.1.2
Press to accept data entered and return to Command Entry status. 3.4.8
— In CV (constant voltage), press to decrease output voltage by increment
equal to voltage resolution (
— In CC (constant current), press to decrease output current by increment
equal to current resolution (
— In EDIT PROG status, changes the parameter displayed on LCD for a
specific memory location and decrements memory location displayed on
LCD.
Erases number to left, or decreases value shown (e.g. Display Contrast setting).
Press to enter number 0. 3.4.1.2
.0.025% of E
.0.025% of I
O
O
max).
max).
REFERENCE
PARAGRAPH
3.4.15.2
3.4.13
3.4.8
3.4.8,
3.4.8
( . ) Data Entry
Command Entry
Data Entry
Press to enter decimal point 3.4.1.2
— In CV (constant voltage), press to increase output voltage by increment
equal to voltage resolution (
— In CC (constant current), press to increase output current by increment
equal to current resolution (
— In EDIT PROG status, changes the parameter displayed on LCD for a
specific memory location and increments memory location displayed on
LCD
Not used. —
.0.025% of E
.0.025% of I
O
O
max).
max).
3.4.8,
3.4.2 TURNING THE POWER SUPPLY ON
Pressing the upper half ( | ) of the POWER switch turns the power supply on; pressing the lower
half of the switch ( O ) shuts the power supply o ff. When the power supply is turned on, the LCD
first shows the power supply type, e.g., Kepco ATE25-40 GPIB addr. = nn, where nn is the
GPIB address (factory default GPIB address = 6).The LCD then shows the power on defaults
(see Figure 3-6). The defaults are: output enabled, voltage mode, output voltage set to zero,
output current set to a minimum v alue (1-2% of I
max). Power on defaults also include setting
O
maximum values for overcurrent and overvoltage protection indicated in Table 1-4.
3-10 ATE-DMG 042314
Page 45

FIGURE 3-6. LCD POWER ON DEFAULTS
Loc CV
0.000A0.000V
NOTE: indicates blinking colon (:), Command Entry status
indicates blinking equal sign (=), Data Entry status
3.4.3 SETTING LOCAL MODE
When the power supply is turned on, it is automatically set to Local mode. If remote commands
are accepted over the GPIB bus, the power supply will automatically go into Remote mode (Rem
at the upper left of the LCD). Pressing the LOCAL key will restore Local mode. When in Remote
mode, all keys except LOCAL are disabled.
The ATE-DMG incorporates a “keypad lockout” command which allows the LOCAL key to be
disabled during remote operation, preventing inadvertent setting of the power supply to Local
mode. If the keypad is locked, it must be unlocked either by a remote command (see Appendix
B, PAR. B.87), or cycling the power supply off then on.
3.4.4 ADJUSTING LCD CONTRAST
With the power supply in command entry status , press MENU key. Press
increase or decrease contrast for optimum viewing. The contrast can also be set directly by
entering a number from 1 to 9. Press ENTER or CLEAR to exit menu.
3.4.5 ENABLING/DISABLING AUDIBLE BEEPS
With the power supply in command entry status , press MENU key three times. The top line
indicates if the speaker is on or off (the factory default setting is speaker on). Enter 1 to enable
the speaker, or 0 to disable the speaker. Press ENTER or CLEAR to exit menu.
3.4.6 ENABLING/DISABLING DC OUTPUT POWER
When the power supply is turned on, the output is automatically enabled, and the bottom line of
the LCD gives voltage and current measurements at the output. To disable the output, press the
red OUTPUT ON/OFF key; the lower line of the LCD reads: Output OFF. When the output is
disabled, voltage and current are programmed to zero; the power supply remains in Command
Entry status. Pressing the OUTPUT ON/OFF key again enables the output: the previously programmed values of voltage and current are restored and the LCD displays the mode (CV or CC)
and actual values of output voltage and current.
3.4.7 RESET
RESET overrides all other local commands to reset the power supply to the power on defaults:
output enabled, voltage mode, output voltage set to zero, output current set to a minimum value
(1-2% of I
1-4. The power supply remains in command entry status.
max), overcurrent and overvoltage protection set to the maximum values per Table
O
or key to
ATE-DMG 042314 3-11
Page 46

3.4.8 SETTING OUTPUT VOLT AGE OR CURRENT
V SET and I SET set output voltage and current limit, respectively, when the unit is in constant
voltage (CV) mode and set voltage limit and output current, re spectively, when the unit is in constant current (CC) mode. The mode (CV or CC) is determined by the load together with the programmed settings. As long as the voltage across the load produce s a current that is less than or
equal to the I SET value, the unit operates in CV mode (voltage programmed to V SET value,
current limited by I SET value). If the load changes to the point that current through the load
reaches the I SET value, the unit automatically enters CC mode (current programmed to I SET
value, voltage limited by V SET value).
With the power supply in command entry status , press V SET (voltage) or I SET (current) key
to put the power supply in data entry status . The lower right side of the LCD shows the programmed setting in effect when the key is pressed. Press ENTER or CLEAR to exit without
changing setting. Enter new value (the
accept new setting or CLEAR to exit without changing setting.
key erases data just entered) and press ENTER to
With the power supply in command entry status , an alternative is to use
key (decrease) to change the output by the minimum increment (.0.025% of EOmax for voltage,
.0.025% of I
they control output voltage. The
has been reached. The
If the value entered exceeds the maximum setting, the LCD bottom line flashes VsetMAX=nn V
or IsetMAX=n.n A where n.n is the maximum setting (see PAR.3.4.11). The unit returns to
waiting for a value that does not exceed the maximum.
3.4.9 SETTING OVERVOLTAGE OR OVERCURRENT PROTECTION
With the power supply in command entry status , press OV SET (overvoltage) or OC SET
(overcurrent) to put the power supply in data entry status . The lower right side of the LCD
shows the programmed setting in effect when the key is pressed. Press ENTER or CLEAR to
exit without changing setting. Enter new value and press ENTER to accept new setting (the
key erases data just entered), or CLEAR to exit without changing setting. To recover from over-
voltage or overcurrent condition, press RESET; this restor es the power on defaults (see PAR.
3.4.7).
Ta ble 1-4 lists the maximum settings for overvoltage and overcurrent protection. Overvoltage
and overcurrent settings are recommended to be left set to the factory default values or should
be at least 1% higher than the expected output voltage or output current.
An additional 5% in overvoltage and overcurrent protection above the digitally controlled setting
is provided to allow the user when using external references to utilize the headroom of the basic
A TE powe r supply. The ATE power supply can provide at least 1% add itional volt age o r current
as long as the total unit power is not exceeded. Total power varies from 600 watts to 1080 watts
depending on model. (total power = nominal voltage * nominal current)
max for current). In CC mode, these keys control output current; in CV mode
O
key has no effect after the maximum (or programmed limit)
key has no effect when the value is 0.
(increase) or
3.4.10 CHANGING PROTECTION DELAY
The overvoltage and overcurrent protection normally trips immediately upon detection of an
overvoltage/overcurrent condition. Howe ver, changing output settings (particularly with reactive
loads) large transients can cause inadvertent tripping of the protection. For this reason, tripping
3-12 ATE-DMG 042314
Page 47

of the overvoltage/overcurrent protection can be delayed ap proximately 8 seconds af ter the output is changed.
With the power supply in command entry status , press MENU key e leven times. LCD reads
Prot. Delay Count nn where nn is the active setting. A count of 0 means no delay, a
count of 255 (highest value) means approximately 8 seconds delay (a count of 30 provides a
delay of 1 second).
3.4.11 CHANGING MAXIMUM VOLTAGE OR CURRENT VALUE
The maximum values of voltage and current a re determined by the model, e.g., 25V and 40A for
the A TE 25- 40DMG. These values can be lowered by the user, e.g., to prevent inadvertent damage to a specific circuit under test. Changing th e maximum value s of the ATE 25-40DMG to 10V
and 1A, effectively makes the unit a 10V 1A power supply.
With the power supply in command entry status , press MENU key nine (voltage) or ten (current) times. The LCD reads New MAXIMUM Vset (or Iset) nn where nn is the maximum
value setting to be changed. Press ENTER or CLEAR to exit menu without changing setting.
Press number keys to enter new value and press ENTER. Press ENTER again to exit the menu
and return to command status .
If a value is entered that is higher than the rated maximum for the power supply, the bottom line
of the LCD flashes Vset or Iset MAX = nn where nn is the rated maximum of the power sup-
ply. The unit remains in data entry status waiting for a value equal to or less than the rated
maximum. Press CLEAR to exit without changing the value.
Once the maximum value has been changed, if a value higher than the new maximum is
attempted to be programmed, the LCD flashes Vset (or Iset) MAX = nn where nn is the pro-
grammed maximum.
NOTES: 1. If the programmed output value is higher than the new maximum value established
with the MENU key, the output will be limited to the new maximum value.
2. The front panel CURRENT control provides secondary limiting. To disable limiting
from the CURRENT control, rotate fully counterclockwise.
3.4.12 STORING POWER SUPPLY OUTPUT SETTINGS
The programmed settings of voltage, current, overvoltage protection and overcurrent protection
can be stored in one of the 40 memory locations available for local programming (see PAR.
3.4.15).
With the power supply in command entry status , press STORE key. The LCD reads STORE
mem nn where nn is the memory location where the settings are to be store d. Press ENTER
or CLEAR to exit without changing setting. Enter memory location (from 1 to 40) and press
ENTER. The programmed voltage, current, ov ervoltage protection and overcurrent protection
settings in effect when ENTER is pressed are stored in the selected memory location. To recall
stored settings, see PAR. 3.4.13
3.4.13 RECALLING STORED OUTPUT SETTINGS
With the power supply in command entry status , press RECALL. The LCD reads RECALL
mem nn where nn is the memory location holding the settings to be retrieved. Press ENTER
or CLEAR to exit without changing setting. Enter memory location (from 1 to 40) and press
ATE-DMG 042314 3-13
Page 48

ENTER. The stored settings for voltage, current, overvoltage protection and overcurrent protection replace the current values, and the unit returns to command entry status.
3.4.14 ENABLING REMOTE ANALOG CONTROL
The power supply may be controlled by extern al an alo g voltages (see PAR. 3.5), but the featur e
must be enabled first. With the power supply in command entry status , press MENU key until
LCD reads Extern. Ref On or Extern. Ref Off and the bottom line reads 0=Off,
1=On. Enter 1 (enable) or 0 (disable), then press ENTER to enable or disable the feature. Refer
to PAR. 3.5 for using this feature.
3.4.15 LOCAL MODE PROGRAMMING OF THE POWER SUPPLY.
Local mode programming offers the user 4 0 memory loc ation s that can b e used to pr ogram the
power supply. Each location defines values for output voltage, output current, overcurrent protection, overvoltage protection, time duration (between 0.1 and 2.5 seconds) for the programmed settings, and the address of the next memory location in the program.
NOTE: When programming sequential voltage levels, it is important to set the Overvoltage to
accommodate the highest voltage of the sequ ence. Otherwise, when going fro m higher
to lower voltage levels, the overvoltage protection will trip and shut down the unit.
3.4.15.1 CREATING OR MODIFYING A PROGRAM (PROGRAM EDIT MODE)
Creating a program and modifying an existing program are identica l except that a pr ogram modification requires only selected parameters to be changed rather than all new parameter values.
With the power supply in command entry status , press EDIT PROG key . The top line in dicates
the STARTaddr. nn, where nn is one of 40 memory location. To select a different address,
enter new value and press ENTER.
The top line of the LCD indicates the active memory location, e.g. ViewVAL Mem <n> where n
is the memory location previously chosen. The bottom line of the LCD indicates the parameter
on the left (Iset, Vset, OVset, OCset, TIMEval, NEXT STEP), the parameter’s value on the
right, and data entry status in the middle. To modify time values see PAR.3.4.15.1.1.
Press ENTER to accept displayed value, or enter new value and press ENTER to accept new
setting (the LCD displays the next parameter). Press CLEAR to exit Program Edit mode without
changing value. Use
parameter or memory location. For a program to run once, then stop, see PAR. 3.4.15.6; to
cycle a program continuously, see 3.4.15.4. After all program values have been set, press
CLEAR or ENTER to exit Program Edit mode. Setting up a program can be made easier by
copying the Memory Location Worksheet (Table 3-3) and filling in the values before programming the power supply.
3.4.15.1.1 MODIFYING PROGRAMMED TIME INTERVAL
The TIME key offers a quick an d easy way to change th e time for any memory locatio n. With the
power supply in command entry status , press TIME key. The LCD displays TIMEval nn
where nn is the time value set for the selected location. Press ENTER to accept displayed
value, or enter new value (between 0.01 and 300 seconds) and press ENTER to acc ept new
value or press CLEAR to exit without changing value. The unit returns to command entry status
. Refer to P AR. 3.4.15.1.2 if accuracy of time values is important.
or key to scroll forward (or backward) to view next (or previous)
3-14 ATE-DMG 042314
Page 49

3.4.15.1.2 TIME INTERVAL ACCURACY
The accuracy of the time interval is ±2.5%. For setting time intervals from 0.01 to 2. 50 s ec on d s,
the unit will accept times that are accurate to 0.01 second. (e.g., 2.49 seconds). For setting time
intervals between 2.50 seconds and 50 seconds the second decimal place is ignored, providing
accuracy to 0.1 second (e.g., entering 2.79 is accepted as 2.7). When the time interval is greater
than 50 seconds, the decimal is ignored and the time increment is in full seconds.
3.4.15.1.3 DISPLAY PROGRAM OPTION
When running a program, if the Display Program option is on, the LCD will display the mode
(Loc/Rem RunPg CV/CC) and active voltage and current values (programmed). if the Display
Program option is turned off, the LCD displays the message **PROGRAM RUNNING**. Since
the accuracy of the time intervals is affected by whether this option is on or off, it is recommended that this option be turned off when accurate time intervals are im portant; othe rw ise this
option should be turned on.
With the power supply in command entry status , press MENU key 11 times. The LCD top line
reads DispPrg ON or OFF. Choosing ON displays the programmed values, choosing OFF
displays the **PROGRAM RUNNING** message. Press ENTER or CLEAR to exit without
changing setting. Enter 0 (OFF) or 1 (ON) and press ENTER or CLEAR to menu.
3.4.15.2 RUNNING A PROGRAM
With the power supply in command entry status , press RUN key. The LCD bottom line indicates the start address of the program. Press ENTER key to run the program starting with that
address. To change the starting address, enter new value and press ENTER to run the program.
Press CLEAR to exit without running the program
3.4.15.3 STEPPING THROUGH A PROGRAM
The STEP function is useful for examining a program that has just been created or edited before
running in real-time. With the power supply in command entry status , press STEP key. The
LCD bottom line indicates the start address of the program; press ENTER to begin stepping at
that address. To change the starting address, enter new value and press ENTER to begin stepping at the new address, press CLEAR to exit without stepping through the program.
The LCD top line shows LOC to indicate local mode, aa
just executed, bb is the NEXT STEP location, and shows CV (constant voltage) or CC (constant
current) to indicate the actual operating mode. The LCD bottom line shows the output voltage
and current measurements for the location just executed, and indicates command status.
Press STEP to execute location bb. The LCD will again display the location just executed, voltage and current measurements, and the NEXT STEP location. Continue to press STEP to execute the program one step at a time, or press CLEAR to exit Step function.
3.4.15.4 CYCLING A PROGRAM
To cycle a program, modify the program (see PAR. ) and go to the last memory location to be
executed and set the NEXT STEP address to the Starting address, causing the program to loop
and repeat indefinitely. For example, if the last location is 14, and the starting location is 05,
press EDIT PROG, enter 14, then press ENTER. Press
bb where aa is the memory location
until LCD reads ViewVAL Mem14
ATE-DMG 042314 3-15
Page 50

NEXT STEP . Enter 5 and press ENTER. When the program runs, it will start at location 05,
continue to 14, then loop back to the location 05, and repeat indefinitely.
TABLE 3-2. MEMORY LOCATION WORKSHEET
MEMORY
LOCATION
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
I SET
(Current)
(A)
V SET
(Voltage)
(V)
OCset
(Overcurrent
Protection)
(A)
OV set
(Overvoltage
Protection)
(V)
TIMEval
(0. to 300 Sec)
(Sec)
NEXT STEP
(Next location
to execute)
3-16 ATE-DMG 042314
Page 51

3.4.15.5 RUNNING A PROGRAM ONCE
To set up a program to stop after running onc e, modify the program (see PAR. ) and go to the
last memory location to be executed and set the NEXT STEP address to 0. For example, with
the power supply in command entry status , press EDIT PROG. Enter the last memory location
you want executed (e.g. 14), then press ENTER. Press
Mem14 NEXT STEP . Enter 0 and press ENTER. The program will now stop after memory
location 14 is executed. When the program stops, the power supply will continue to provide the
output specified by the last location (in the above example, location 14).
3.4.15.6 STOPPING A PROGRAM
To set up a program to stop after running once, set the NEXT STEP address of the last memory
location to be executed to 0. For example, with the power supply in command entry status ,
press EDIT PROG. Enter the last memory location you want executed (e.g. 14), then press
ENTER. Press
key until LCD reads ViewVAL Mem14 NEXT STEP . Enter 0 and press
ENTER. The program will now stop after memory location 14 is executed.
3.4.15.7 STOPPING A RUNNING PROGRAM
There are three ways to stop a program that is running:
• Press CLEAR key: the program immediately stops at the step (location) that was being
executed when the key was pressed. The power supply output remains at the values
specified by that step.
key until LCD reads ViewVAL
• Press RESET key: The program stops and power on defaults are restored (see PAR.
3.4.7).
• Press OUTPUT ON/OFF key: the output is disabled (programmed to zero) an d the program immediately stops at the step (location) that was being executed when the key was
pressed. Pressing the OUTPUT ON/OFF key again restores the output to the values
specified by the step in effect when the program was stopped.
3.4.15.8 SAMPLE PROGRAM
Ta ble 3-3 shows a sample program designed to cycle continuously; if the NEXT STEP value for
location 3 is set to 00, the program will run once and stop.
TABLE 3-3. SAMPLE PROGRAM (MODEL ATE 25-40DMG)
MEMORY
LOCATION
1 2.1 4.3 11 11 1.5 02
2 1.2 5.0 1.3 5.2 1.8 03
3 4.5 6.2 4.8 6.4 1.0 01
I SET
(Current)
(A)
V SET
(Voltage)
(V)
OCset
(Overcurrent
Protection)
(A)
OV set
(Overvoltage
Protection)
(V)
TIMEval
(0. to 2.5)
(Sec)
NEXT STEP
(Next location
to execute)
3.4.16 CALIBRATION
Refer to associated Service Manual for calibration of specific ATE-DMG models.
ATE-DMG 042314 3-17
Page 52

3.5 ANALOG REMOTE PROGRAMMING
The ATE-DMG has the capability to control the output using external d-c analog reference voltages. Analog references for both voltage and current are required to produce an output. Two
uncommitted amplifiers (preamps ”A” and “B”) included in the unit can be used for signal conditioning. Each preamp has an inverting input (–), non-inverting input (+), and output, and a zero
adjustment, the preamps are accessible via A11J5 pins as shown in Figures 2-3 and 3-7 and
listed in Table 3-4. To gain access to A11J5, loosen two screws at the rear pan el and discon nect
interconnection adapter A11, then remove two screws securing connector A11J1 to the shell.
FIGURE 3-7. A11 ASSEMBLY CONNECTOR AND PIN LOCATIONS
TABLE 3-4. CONNECTOR A11J5 PIN FUNCTIONS
PIN FUNCTION PIN FUNCTION
1 VEXT 6 GND
2 CEXT 7 PREAMP “B” IN (+)
3 PREAMP “A” OUT 8 GND
4 PREAMP “A” IN (–) 9 PREAMP “B” IN (–)
5 PREAMP “A” IN (+) 10 PREAMP “B” OUT
(For further details about Preamp “A” and “B” go to www.kepcopower.com/support and download the Operator manual for ATE 1/4 Rack, 1/2 Rack 3/4 Rack or Full Rack, and refer to PAR’s
3-37 through 3-84.)
Connections to A11J5 can be made via discrete wires, a flat ribbon cable not exceeding 1 foot in
length or by discrete wires terminated into crimp style pins inserted into a 5x2 housing (not sup plied). Recommended parts (ribbon cable, housing for discrete wires and pins) are listed as
accessories in Table 1-6).
NOTE: When making connections to A11J5, move unused jumper to a single pin of connector
J3 (DO NOT SHORT J3 PINS).
3-18 ATE-DMG 042314
Page 53

1. Connect a 0 to 10V voltage reference to A11J5 pin 1 (pin 6 common); 0V programs the output voltage to zero, 10V programs output voltage to full scale.
2. Connect a 0 to 1V current reference to A11J5 pin 2 (pin 8 common), 0V programs the output
current to zero, 1V programs output current to full scale.
3. Enable the external reference feature from either the front panel (P AR. 3.4.14) or usin g GPIB
commands (see PAR. B.12).
To access the external reference feature from the front panel, with the power supply in command entry status, press MENU key until the top line of the display reads Extern. Ref On or
Extern. Ref Off. and the bottom line reads 0=Off, 1=On. Enter 1 to enable or 0 to disable and
press ENTER to enable or disable the feature.
3.6 DIGITAL REMOTE MODE PROGRAMMING
ATE-DMG Power Supplies ma y be pr og r amm ed ov er a co n tro l b us usin g SC PI (Standard Commands for Programmable Instruments). SCPI provides a common lang uage conformin g to IEEE
488.2 for instruments used in an automatic test system. The control bus used must be the IEEE
488 standard communication bus (General Purpo se Interface Bus, GPIB). Refer to Table 2-4 for
input/output signal allocations.) Most powe r supply functions available from the keypad can be
programmed via remote commands, in addition to some that are not available from the keypad
(e.g. triggering, and local lockout).
This section includes a discussion of GPIB bus protocols (PAR. 3.6.1), instructions for changing
the GPIB address (PAR. 3.6.3), followed by a detailed explanation of SCPI programming (PAR.
3.7)
3.6.1 IEEE 488 (GPIB) BUS PROTOCOL
Table 3-5 defines the interface capabilities of the ATE-DMG power supply (Talker/Listener) relative to the IEEE 488 (GPIB) bus (reference document ANSI/IEEE Std 488: IEEE Standard Digital
Interface for Programmable Instrumentation) communicating with a Host Computer—Controller
(Talker/Listener). Tables 3-6 and 3-7 define the messages sent to the ATE-DMG, or received by
the ATE-DMG, via the IEEE 488 bus in IEEE 488 command mode when ATN is asserted and
IEEE 488 data mode, respectively. These messages are enabled during the “handshake” cycle,
with the ATE-DMG power supply operating as either a Talker or a Listener.
ATE-DMG 042314 3-19
Page 54

TABLE 3-5. IEEE 488 (GPIB) BUS INTERFACE FUNCTIONS
FUNCTION
Source Handshake SH1 Complete Capability (Interface can receive multiline messages)
Acceptor Handshake AH1 Complete Capability (Interface can receive multiline messages)
Talker T6
Listener L4 Basic listener, unaddress if MTA (My Talk Address) (one-byte address).
Service Request SR1
Remote/Local RL1
Parallel Poll PP0 No Capability
Device Clear DC1
Device Trigger DT1 Respond to *TRG and <GET> trigger functions.
Controller C0 No Capability
SUBSET
SYMBOL
Basic talker, serial poll, unaddress if MLA (My Listen Address) (one-byte
address)
Complete Capability. The interface sets the SRQ line true if there is an
enabled service request condition.
Complete capability. Interface selects either local or remote information. In
local mode the ATE-DMG executes front panel commands, but can be set
to remote mode via IEEE 488 bus. When in Remote mode all front panel
keys are disabled except LOCAL. LOCAL key can be disabled using keypad lockout command (see Appendix B, PAR. B.87) so that only the controller or a power on condition can restore Local mode.
Complete Capability. ATE-DMG accepts DCL (Device Clear) and SDC
(Selected Device Clear).
COMMENTS
TABLE 3-6. IEEE 488 (GPIB) BUS COMMAND MODE MESSAGES
MNEMONIC
DCL Device Clear Received
GET Group Execute Trigger Received
GTL Go To Local Received
IFC Interface Clear Received
LLO Local Lockout Received
MLA My Listen Address Received
MTA My Talk Address Received
OTA Other Talk Address Received (Not Used)
RFD Ready for Data Received or Sent
SDC Selected Device Clear Received
SPD Serial Poll Disable Received
SPE Serial Poll Enable Received
SRQ Service Request Sent
UNL Unlisten Received
MESSAGE
DESCRIPTION
COMMENTS
UNT Untalk Received
3-20 ATE-DMG 042314
Page 55

TABLE 3-7. IEEE 488 (GPIB) BUS DATA MODE MESSAGES
MNEMONIC MESSAGE DESCRIPTION COMMENTS
DAB
END
EOS
RQS
STB
Data Byte Received or Sent
End Received or Sent
End of String Received or Sent
Request Service Sent
Status Byte Sent
3.6.2 DCL CONTROL
The device clear (DCL) and select ed device clear can be set to operate in tw o modes. In the
“output = 0V” mode, when the device clear is received, the output of the power supply is set to
zero volts. In the “output unchanged” mode sending DCL or selected DCL has no effect on output voltage and current as required by IEEE specification 488.2. The factory default value is
“output unchanged” mode. NOTE: When set to “output = 0V” mode, the power supply will power
up with OUTPUT set to OFF.
To change the DCL mode the unit must be in command entry mode , then depress the MENU
key three times. The top line of the display will show the current setting: either DCL OUTP =
0V or DCL = OUTP UNCHNG. Depress 1 for “output unchanged” mode where the output is unaffected by DCL; depress 0 for “output = 0V” mode where DCL sets the outp ut to 0 volts.
3.6.3 CHANGING THE GPIB ADDRESS
When the power supply is in local mode, command entry status , press MENU key twice. The
top line of the LCD indicates the current GPIB address. Enter new value and press ENTER to
accept new setting, or CLEAR to exit without changing setting.
3.6.4 ENABLING REMOTE ANALOG CONTROL
Before using the remote analog control feature (see PAR. 3.5_ which allows an external reference to control output voltage and current, the feature must first be enabled, either from the
front panel (see PAR. 3.4.14) or by using the following commands and queries via the remote
interface: DIAG:EXT (see PAR. B.12), DIAG:EXT? (see PAR. B.13), CURR:MODE (see PAR.
B.54), CURR:MODE? (see PAR. B.55), VOLT:MODE (See PAR. B.68) and VOLT:MODE? (See
PAR. B.69).
3.6.5 PROGRAMMING TECHNIQUES TO OPTIMIZE PERFORMANCE
Kepco's auto-crossover digital supplies can operate in either voltage mode with current limit, or
current mode with voltage limit. The operating mode is determined by the voltage and current
commands received, as well as the load. Each time voltage and current commands are
received, the unit must evaluate the commands and the load conditions to determine the proper
operating mode. Reducing the number of times this evaluation must be made is desirable
because Kepco's digital auto-crossover supplies employ two separate feedback loops. Each
time there is a potential mode change, ther e is always a n uncontrolled period of a f ew millisec onds while the two feedback loops compete for control of the output. By changing only the
active parameter (e.g., voltage for voltage mode), there is no doubt as to what the operating
ATE-DMG 042314 3-21
Page 56

mode will be, so the unit is never uncontrolled, response is quick and no transients are possible.
Recommended programming techniques are:
1. Minimize programmed mode (voltage or current) change s. Unle ss abso lutely re quir ed by the
test parameters, allow the power supply to automatically switch modes as determined by the
load. This will improve response time and reduce undesirable transients. For those power
supplies that employ relays (Kepco's MBT with “R” option, MAT and MST) this will also
increase the life of the relay.
2. Once the mode (voltage or curr ent) is programmed, program the active parameter t o zero
and the complementary limit parameter to the maximum anticipated for application. Then
program only the active parameter. The active parameter is the parameter that controls the
output, e.g., voltage controls the output in voltage mode.
3. Never program both the active and complementary limit parameter to zero. This can result in
long response times. Set the active parameter to zero and the complementary limit parameter to a minimum, e.g., 10% of maximum, to ensure that the active mode is defined.
3.7 SCPI PROGRAMMING
SCPI (Standard Commands for Programmable Instruments) is a programming language conforming to the protocols and standards established by IEEE 488.2 (reference document
ANSI/IEEE Std 488.2, IEEE S tandard Codes, Formats, Protocols, and Common Commands). SCPI commands are sent to the ATE-DMG Power Supply as ASCII output strings within the selected programming language (PASCAL, BASIC, etc.) in accordance with the manufacturer’s
requirements for the particular GPIB controller card used.
Different programming languages (e.g., BASIC, C, PASCAL, etc.) have different ways of representing data that is to be put on the IEEE 488 bus. It is up to the programmer to determine how
to output the character sequence required for the programming language used. Address inf ormation (GPIB address) must be included before the command sequence. (See PAR.3.6.3 to
establish the ATE-DMG Power Supply GPIB address.)
3.7.1 SCPI MESSAGES
There are two kinds of SCPI messages: program messages from controller to power supply,
and response messages from the power supply to the controller. Program messages consist of
one or more properly formatted commands/queries and instruct the power supply to perform an
action; the controller may send a program message at any time. Response messages consist of
formatted data; the data can contain information regarding operating parameters, power supply
state, status, or error conditions.
3.7.2 COMMON COMMANDS/QUERIES
Common commands and queries are defined by the IEEE 488.2 standard to perform overall
power supply functions (such as ide ntification, status, or synchronization) unrelated to specific
power supply operation (such as setting voltage/current). Common commands and queries are
preceded by an asterisk (*) and are defined and explained in Appendix A (see Table 4-4). Refer
also to syntax considerations (PARs 3.4.3 through 3.4.6).
3.7.3 SCPI SUBSYSTEM COMMAND/QUERY STRUCTURE
Subsystem commands/queries ar e related to specific power supply functions (such as s etting
output voltage, current limit, etc.) Figure 3-8 is a tree diagram illustrating the structure of SCPI
3-22 ATE-DMG 042314
Page 57

subsystem commands used in the ATE-DMG Power Supply with the “root” at the left side, and
specific commands forming the branches. The following paragraphs introduce the subsystems;
subsystem commands are defined and explained in Appendix B.
3.7.3.1 ABORT SUBSYSTEM
This subsystem allows pending trigger levels to be cancelled.
3.7.3.2 DIAG SUBSYSTEM
This subsystem is used to enable/disable external analog control of the output.
3.7.3.3 DISPLAY SUBSYSTEM
This subsystem controls the second line of the LCD. The first line will always display the LOCal
or REMote operation status and the constant Voltage (CV) or constant Current functioning mode
(CC).
3.7.3.4 INITIATE SUBSYSTEM
This subsystem enables the trigger system. When a trigger is enabled, the triggering action will
occur upon receipt of a GPIB <GET>, *TRG or TRIGger command. If a trigger circuit is not
enabled, all trigger commands are ignored.
3.7.3.5 LIST SUBSYSTEM
The LIST subsystem is represented by the 40 memory locations (groups of settings) which are
stored in the nonvolatile memory. Each setting contains values for: Current, Voltage, Overcurrent, Overvoltage, Next memory location, and Time. The range for the first four values is the
maximum available range for the specific power supply. The Next memory location is the
address of the next group of settings and is betwe en 1 a nd 40. A valu e of 0 mea ns end of chain.
The Time setting is between 0.01 and 300 seconds. In order to access one of the 40 memory
locations an index value must be provided. The 40 memory locations can be very useful in
remote mode using the *RCL command (see Appendix A, PAR. A.10.)
3.7.3.6 MEASURE SUBSYSTEM
This query subsystem returns the voltage and current measured at the power supply's output
terminals.
3.7.3.7 OUTPUT SUBSYSTEM
This subsystem controls the power supply's voltage and current outputs
3.7.3.8 PROTECTION SUBSYSTEM
This subsystem allows overvoltage/overcurrent protection tripping to be delayed to prevent brief
transients (caused by application of power to a reactive load) from tripping overvoltage/overcurrent protection.
3.7.3.9 STATUS SUBSYSTEM
This subsystem programs the power supply status register. The power supply has two groups of
status registers: Operation and Questionable. Each group consist s of thr ee register s: Cond ition,
Enable, and Event.
ATE-DMG 042314 3-23
Page 58

3.7.3.10 TRIGGER SUBSYSTEM
This subsystem controls the remote triggering of the power supply.
3.7.3.11 [SOURCE:]VOLTAGE AND [SOURCE:]CURRENT SUBSYSTEMS
These subsystems program the output voltage and current of the power supply.
3.7.3.12 CALIBRATE SUBSYSTEM
The ATE-DMG series of power supplies support software-assisted calibration. A full calibration
consist of a voltage calibration and a current calibration. Both voltage and current calibrations
consist of a zero and a full scale calibration. There are two ways to perform the calibration:
locally using the front panel keys, or remotely sending commands through the GPIB bus. These
two ways cannot be combined.
In order to enter the calibration mode the correct calibration access code (password) must be
entered. If the password has been forgotten call the factory and a secret password (which has
been assigned to your power supply) will be provided. During the calibration, new calibration
data is computed which is than stored in the non volatile memory.
The following equipment is required for calibration: Digital Voltmeter (DVM) with 6 digits Dc
accuracy. Shunt 0.01 to 0.1 Ohm, 0.04%, minimum 100A, power > 100W (200W recommended).
Because the voltage measured will be used as reference for calibration, the DVM itself must be
calibrated accurately. During voltage calibration, the voltage, overvoltage and voltage readback
are calibrated and during current calibration the current, overcurrent and current readback are
calibrated. The normal procedure is to calibrate voltage first and then current. However, you do
not have to do a complete calibra tion each time . If required, you may calibrate only the v oltage
or the current and then proceed to saving the calibration results. For volt age calibra tion all loads
must be disconnected and the sense terminals connected to the corresponding output terminals. The digital voltmeter will be connected to the output of the power supply. For current calibration after disconnecting all loads an appropriate shunt resistor will be connected across
output terminals and the digital voltmeter will be connected across the sense terminals of the
shunt resistor.
3.7.4 PROGRAM MESSAGE STRUCTURE
SCPI program messages (comm ands from controller to power su pply) consist of one or more
message units ending in a message terminator (required by Kepco power modules). The message
terminator is not part of the syntax; it is defined by the way your programming language indicates the end of a line (“newline” character). The message unit is a keyword consisting of a single command or query word followed by a message terminator (e.g., CURR?<newline> or
TRIG<end-of-line>). The message unit may include a data parameter after the keyword separated by a space; the parameter is usually numeric (e.g., CURR 5<newline>), but may also be a
string (e.g., OUTP ON<newline>). Figure 3-9 illustrates the message structure, showing how
message units are combined. The following subparagraphs explain each component of the
message structure.
NOTE: An alternative to using the mess age stru cture for multiple messages defined in the fol-
lowing paragraphs is to send each command as a sep arate line. In this case each command must use the full syntax shown in Appendix B.
3-24 ATE-DMG 042314
Page 59

ABORt subsystem
ABORt
INITiate subsystem
INITiate
[:IMMediate]
:CONTinuous bool
:CONTinuous?
CALibrate subsystem
CALibrate
:STATus <boolean> ,password
:STATus?
:VOLTage
:LEVel (MIN | MAX, ZERO)
[:DATA] val
GAIN (UP | DOWN)
:CURRent
:LEVel (MIN | MAX, ZERO)
[:DATA] val
GAIN (UP | DOWN)
:ZERO
:SAVE
DISPlay subsystem
DISPlay
:CONTrast 0 to 1
:CONTrast?
[:WINDow]:TEXT[:DATA] “....”
[:WINDow]:TEXT[:DATA]?
[:WINDow]:STATe (0 | 1)
[:WINDow]:STATe?
DIAG subsystem
:
:DIAG:EXT <value>
:DIAG:EXT?
PROGram subsystem
:PROGram (RUN | STOP)
:STATe
:STATe?
MEASure subsystem
MEASure
[:SCALar]:CURRent[:DC]?
[:SCALar]:[VOLTage][:DC]?
OUTPut subsystem
OUTPut
[:STATe] ON or OFF
[:STATe]?
ROOT : (colon)
STATus subsystem
STATus
:OPERation
:CONDition?
:ENABle val
:ENABle?
[:EVENt]?
:PRESet
:QUEStionable
:CONDition?
:ENABle val
:ENABle?
[:EVENt]?
:VOLTage
:CONDition?
:ENABle val
:ENABle?
:[:EVENt]?
:CURRent
:CONDition?
:ENABle val
:ENABle?
:[:EVENt]?
SYSTem subsystem
SYSTem
:ERRor
[:NEXT]?
:CODE?
[:NEXT]?
:ALL?
:PASSword
[:CENAble] (code)
:STATe?
:CDISenable (code)
:NEW (OLD | NEW)
:SECUrity
:IMMediate
:LANGuage(SCPI | COMPatibility)
:BEEP
:VERSion?
:KLOCk <boolean>
:KLOCk?
INSTRument subsystem
INSTrument
:CATalog?
:NSELect val
:NSELect?
[:SELect] val
[:SELect]?
:STATe?
:STATe (ON | OFF)
[SOURce:] subsystem
[SOURce:]
VOLTage
[:LEVel]
[:IMMediate]
[:AMPLitude] val
[:AMPLitude]? MIN, MAX
:TRIGgered
[:AMPLitude] val
[:AMPLitude]? MIN, MAX
:PROTection
:MODE
:MODE?
:TRIPped?
:CLEar
:LIMit
:HIGH val
:HIGH? MIN, MAX
CURRent
[:LEVel]
[:IMMediate]
[:AMPLitude] val
[:AMPLitude]? MIN, MAX
:TRIGgered
[:AMPLitude] val
[:AMPLitude]? MIN, MAX
:MODE
:MODE?
:PROTection
:TRIPped?
:CLEar
:LIMit
:HIGH val
:HIGH? MIN, MAX
FUNCtion
:MODE VOLTage CURRent
:MODE?
LIST subsystem
LIST
:CURRent
[:LEVel] val
[:LEVel]?
:PROTection val
:PROTection?
:VOLTage
[:LEVel] val
[:LEVel]?
:PROTection val
:PROTection?
:INDex val
:INDex?
:SEQuence
:STARt val
:STARt ?
:NEXT val
:NEXT?
:DWELl val
:DWELl?
FIGURE 3-8. TREE DIAGRAM OF SCPI COMMANDS USED WITH ATE-DMG POWER SUPPLY
ATE-DMG 042314 3-25
Page 60

3.7.4.1 KEYWORD
CURR:LEV 3.5;:OUTP ON;:CURR?<NL>
MESSAGE TERMINATOR
KEYWORD
QUERY INDICATOR
ROOT SPECIFIER
MESSAGE UNIT SEPARATOR
DATA
KEYWORD
KEYWORD
KEYWORD SEPARATOR
KEYWORD
MESSAGE UNIT SEPARATOR
DATA
MESSAGE UNIT
DATA SEPARATOR
DATA SEPARATOR
ROOT SPECIFIER
Keywords are instructions recognized by a decoder within the ATE-DMG, referred to as a
“parser.” Each keyword describes a command function; all keywords used by the ATE-DMG are
listed in Figure 3-8.
Each keyword has a long form and a short form. For the long form the word is spelled out completely (e.g. STATUS, OUTPUT, VOLTAGE, and TRIGGER are long form keywords). For the
short form only the first three or four letters of the long form are used (e.g., STAT, VOLT, OUTP,
and TRIG). The rules governing short form keywords are presented in Table 3-8.
TABLE 3-8. RULES GOVERNING SHORTFORM KEYWORDS
IF NUMBER OF LETTERS IN
LONGFORM KEYWORD IS:
4 OR FEWER (DOES NOT MATTER) ALL LONG FORM LETTERS MODE
5 OR MORE
AND FOURTH LETTER
IS A VOWEL?
NO
YES
THEN SHORT FORM
CONSISTS OF:
THE FIRST FOUR
LONG FORM LETTERS
THE FIRST THREE
LONG FORM LETTERS
EXAMPLES
MEASure, OUTPut, EVENt
LEVel, IMMediate, ERRor
3-26 ATE-DMG 042314
FIGURE 3-9. MESSAGE STRUCTURE
Page 61

You must use the rules above when using keywords. Using an arbitrary short form such as
ENABL for ENAB (ENABLE) or IMME for IMM (IMMEDIATE) will result in an error. Regardless
of which form chosen, you must include all the letters required by that form.
To identify the short form and long form in this manual, keywords are written in upper case letters to represent the short form, followed by lower case letters indicating the long form (e.g.,
IMMediate, EVENt, and OUTPut). The parser, however, is not sensitive to case (e.g., outp,
OutP, OUTPUt, ouTPut, or OUTp are all valid).
3.7.4.2 KEYWORD SEPARATOR
If a command has two or more keywords, adjacent keywords must be separated by a colon (:)
which acts as the keyword separator (e.g., CURR:LEV:TRIG). The colon can also act as a root
specifier (PAR. 3.7.4.7).
3.7.4.3 QUERY INDICATOR
The question mark (?) following a keyword is a query indicator. This changes the command into
a query. If there is more than one keyword in the command, the query indicator follows the last
keyword. (e.g., VOLT? and MEAS:CURR?).
3.7.4.4 DATA
Some commands require data to accompany the keyword either in the form of a numeric value
or character string. Data always follows the last keyword of a command or query (e.g.,
VOLT:LEV:TRIG 14 or SOUR:VOLT? MAX
3.7.4.5 DATA SEPARATOR
Data must be separated from the last keyword by a space (e.g., VOLT:LEV:TRIG 14 or
SOUR:VOLT? MAX
3.7.4.6 MESSAGE UNIT SEPARATOR
When two or more message units are combined in a program messag e, they must be sep arated
by a semicolon (;) (e.g., VOLT 15;MEAS:VOLT? and CURR 12; CURR:TRIG 12.5).
3.7.4.7 ROOT SPECIFIER
The root specifier is a colon (:) that precedes the first keyword of a program message. This
places the parser at the root (top left, Figure 3-8) of the command tree. Note the difference
between using the colon as a keyword separator and a root specifier in the following examples:
VOLT:LEV:IMM 16 Both colons are keyword separators.
:CURR:LEV:IMM 4 The first colon is the root specifier, the other two are keyword separators.
VOLT:LEV 6;:CURR:LEV 15 The second colon is the root specifier, the first and third are key-
word separators
:INIT ON;:TRIG;:MEAS:CURR?;VOLT? The first three colons are root specifiers.
ATE-DMG 042314 3-27
Page 62

3.7.4.8 MESSAGE TERMINATOR
The message terminator defines the end of a message. One message terminator is permitted:
• new line (<NL>), ASCII 10 (decimal) or 0A (hex)
NOTE: Kepco power supplies require a message terminator at the end of each program mes-
sage. The examples shown in this manual assume a message terminator will be added
at the end of each message. Where a message terminator is shown it is represented
as <NL> regardless of the actual terminator character.
3.7.5 UNDERSTANDING THE COMMAND STRUCTURE
Understanding the command structure requires an understanding of the subsystem command
tree illustrated in Figure 3-8. The “root” is located at the top left corner of the diagram. The
parser goes to the root if:
• a message terminator is recognized by the parser
• a root specifier is recognized by the parser
Optional keywords are enclosed in brackets [ ] for identification; optional keywords can be omitted and the power supply will respond as if they were included in the message. The root level
keyword [SOURce] is an optional keyword. Starting at the root, there are various branches or
paths corresponding to the subsystems. The root keywords for the ATE-DMG Power Supply are
:ABORt, :CALibrate, :DISPlay, :INITiate, :LIST, :MEASure, :OUTPut, [:SOURce], :STATus,
:SYSTem and :TRIGger. Because the [SOURce] keyword is option al, the parser moves the path
to the next level, so that VOLTage, CURRent, and FUNCtion commands are at the root level.
Each time the parser encounters a keyword separator, the parser moves to the next indented
level of the tree diagram. As an example, the STATus branch is a root level branch that has
three sub-branches: OPERation, PRESet, and QUEStionable. The following illustrates how
SCPI code is interpreted by the parser:
STAT:PRES<NL>
The parser returns to the root due to the message terminator.
STAT:OPER?;PRES<NL>
The parser moves one level in from STAT. The next command is expected at the level defined
by the colon in front of OPER?. Thus you can combine the following message units
STAT:OPER? and STAT:PRES;
STAT:OPER:COND?;ENAB 16<NL>
After the OPER:COND? message unit, the parser moves in one level from OPER, allowing the
abbreviated notation for STAT:OPER:ENAB.
3-28 ATE-DMG 042314
Page 63

3.7.6 PROGRAM MESSAGE SYNTAX SUMMARY
• Common commands begin with an asterisk (*).
• Queries end with a question mark (?).
• Program messages consist of a roo t keyword a nd, in some ca ses, one o r more message
units separated by a colon (:) followed by a message t ermina tor. Several message units
of a program message may be separated by a semicolon (;) without repeating the root
keyword.
• If a program message has more than one message unit, then a colon (:) must precede
the next keyword in order to set the parser back to the root (otherwise the next keyword
will be taken as a subunit of the previous message unit).
e.g., the command meas:volt?;curr? will read output voltage and output current
since both volt? and curr? are interpreted as subunits of the meas command.
• Several commands may be sent as one message; a line feed terminates the message.
Commands sent together are separated by a semicolon (;). The firs t command in a message starts at the root, therefor a colon (:) at the beginning is not mandatory.
e.g., the command meas:volt?;:curr? will read output voltage and programmed current since the colon preceding curr? indicates that curr? is not part of the meas command and starts at the root.
• UPPER case letters in mnemonics are mandatory (short form). Lower case letters may
either be omitted, or must be specified completely (long form)
e.g., INSTrument (long form) has the same effect as INST (short form).
• Commands/queries may be given in upper/lower case (long form)
e.g., SoUrCe is allowed.
• Text shown between brackets [ ] is optional.
e.g., :[SOUR]VOLT:[LEV] TRIG has the same effect as :VOLT TRIG
3.7.7 SCPI PROGRAM EXAMPLES
Refer to Appendix B, Figures B-1 through B-8 for examples illustrating the use of SCPI commands.
Figure 3-10 is an example of a program using SCPI commands to program the ATE-DMG
Power Supply . The pr ogram illustrated is for a configuration using an IBM PC or compatible with
a National Instruments GPIB interface card. (It will be necessary to consult the manufacturer’s
data to achieve comparable functions with an interface card from a different manufacturer.) This
program sets output voltage (Voltage mode) or voltage limit (Current mode) to 5V, and current
limit (Voltage mode) or output current (Current mode) to 1A, then reads the measured (actual)
voltage and current, then prints the measurements.
ATE-DMG 042314 3-29
Page 64

/**************************************************************************/
/* Sample Program For KEPCO power supply, using National Instruments */
/* GPIB interface card and IBM PC or compatible computer */
/**************************************************************************/
#include <stdio.h>
#include "decl.h"
char rd_str[80]; // Input buffer
char dat_str[80]; // Output buffer
int bd,adr;
main() {
adr = ibfind("DEV6"); // Open DEV6 (defined by IBCONF)
bd = ibfind ("GPIB0"); // Open GPIB card
ibsic (bd); // Send Interface Clear
ibsre(bd,1); // Set remote line true
strcpy(dat_str,"VOLT 5;CURR 1"); // Define a set command
strcat(dat_str,"\r\n"); // Append delimiter
ibwrt(adr,dat_str,strlen(dat_str)); // Send string to power supply
strcpy(dat_str,"MEAS:VOLT?;CURR?"); // Define a measure command
strcat(dat_str,"\r\n"); // Append delimiter
ibwrt(adr,dat_str,strlen(dat_str)); // Send string to power supply
strset(rd_str,'\0'); // Clear input buffer
ibrd(adr,rd_str,64); // Read result of measure
printf("received : %s\n",rd_str); // Print voltage and current
}
FIGURE 3-10. TYPICAL EXAMPLE OF ATE-DMG POWER SUPPLY PROGRAM USING SCPI COMMANDS
3-30 ATE-DMG 042314
Page 65

APPENDIX A - IEEE 488.2 COMMAND/QUERY DEFINITIONS
TABLE A-2. STANDARD EVENT STATUS ENABLE REGISTER AND
STANDARD EVENT ST ATUS REGISTER BITS
CONDITION PON NU CME EXE DDE QUE NU OPC
BIT 76543210
VALUE1286432168421
PON Power On
NU (Not Used)
CME Command Error
EXE Execution Error
DDE Device Dependent Error
QUE Query Error
OPC Operation Complete
A.1 INTRODUCTION
This appendix defines the IEEE 488.2 commands and queries used with the ATE Power Supply
These commands and queries are preceded by an aster isk (*) and ar e defined and explaine d in Figures A-1 through A-14, arranged in alphabetical order. Table A-1 provides a quick reference of all
IEEE 488.2 commands and queries supported in the ATE Power Supply.
COMMAND PAR. COMMAND PAR.
*CLS A.2 *RST A.11
*ESE, ? A.3, A.4 *SAV A.12
*ESR? A.5 *SRE, ? A.13, A.14
*IDN? A.6 *STB? A.15
*OPC, ? A.7, A.8 *TRG A .1 6
*OPT A.9 *TST? A.17
*RCL A.10
TABLE A-1. IEEE 488.2 COMMAND/QUERY INDEX
A.2 *CLS — CLEAR STATUS COMMAND
*CLS
Syntax: *CLS
Description: Clears status data. Clears the error queue of the instrument. It also clears the following registers
without affecting the corresponding Enable Registers: Standard Event Status Register (ESR), Operation Status Event Register, Questionable Status Event Register, and Status Byte Register (STB).
Related commands: *OPC *OPC?. (See example, Figure A-1.)
A.3 *ESE — STANDARD EVENT STATUS ENABLE COMMAND *ESE
Syntax: *ESE <integer> where <integer> = positive whole number: 0 to 255 per Table A-2.
Default Value: 0
Description: This command programs the standard Event Status Enable register bits. The contents function
as a mask to determine which events of the Event Status Register (ESR) are allowed to set the ESB
(Event Summary Bit) of the Status Byte Register. Enables the Standard events to be summarized in
the Status Byte register (1 = set = enable function, 0 = reset = disable function). All of the enabled
events of the standard Event Status Enable register are logically ORed to cause ESB (bit 5) of the St atus Byte Register to be set (1 = set = enable, 0 = reset = disable)
. (See example, Figure A-1.)
ATE-DMG 042314 A-1
Page 66

A.4 *ESE? — STANDARD EVENT STATUS ENABLE QUERY *ESE?
Syntax: *ESE? Return value: Integer> value per Table A-2.
Description: Returns the mask stored in the Standard Event Status Enable Register. Contents of Standard
Event Status Enable register (*ESE) determine which bits of Standard Event Status register (*ESR)
are enabled, allowing them to be summarized in the Status Byte register (*STB). All of the enabled
events of the Standard Event Status Enable Register are logically ORed to cause ESB (bit 5) of the
Status Byte Register to be set (1 = set = enable function, 0 = reset = disable function). (See example,
Figure A-1.)
A.5 *ESR? — EVENT STATUS REGISTER QUERY *ESR?
Syntax: *ESR?
Return value: <integer> (Value = contents of Event S tatus register as defined in Table A-2.)
Description: Causes the power supply to return the contents of the Standard Event Status register. After it
has been read, the register is cleared. The Standard Event Status register bit configuration is
defined in Table A-2 (1 = set, 0 = reset). The error bits listed in Table A-2 are also related to error
codes produced during parsing of messages and to errors in the power su pply. (See example, Figure
A-1.)
A.6 *IDN? — IDENTIFICATION QUERY *IDN?
Syntax: *IDN?
Return value: Character string
Description: Identifies the instrument. This query requests identification. The power supply returns a string
which contains the manufacturer name, the model, the serial number and the firmware level. The
character string contains the following fields: <Manufacturer>, <Model>, <Serial Number>, <Firmware
revision> where: <Manufacturer> = KEPCO, <Model> = ATE-VV -AA (VV is Vmax, AA is Imax, e.g.
100-10 or 6-100), <Serial Number> = MM,DD,YY-SSS (MM - month, DD - day, YY- year, SSS - serial
number in that day) <Firmware revision>=n.m (n.m revision, e.g, 1.0) (See example, Figure A-1.)
A.7 *OPC — OPERATION COMPLETE COMMAND *OPC
Syntax: *OPC
Description: Causes power supply to set status bit 0 (Operation Complete) when pending operations are
complete This command sets Standard Event Status Register bit 0 (see Table A-2) to “1” when all previous commands have been executed and changes i n output level have been completed. This command does not prevent processing of subsequent commands, but bit 0 will not be set until all pending
operations are completed. (1 = set = enable function, 0 = reset = disable function). (See example, Figure A-1.) As an example, the controller sends command(s), then sends *OPC. If controller then sends
*ESR?, the power supply responds with either a “0” (if the power supply is busy executing the programmed commands), or a “1” (if the previously programmed commands are complete). (See example, Figure A-1.)
A.8 *OPC? — OPERATION COMPLETE QUERY *OPC?
Syntax: *OPC?
Return value: <1> (ASCII) placed in output queue when power supply has completed operation.
Description: Indicates when pending operations have been completed.When all pending operations are com-
plete (all previous commands have been executed and changes in output level have been completed)
a “1” is placed in the Output Queue. Subsequent commands are inhibited until the pending operations
are completed. *OPC? is intended to be used at the end of a command line so that the application program can monitor the bus for data until it receives the “1” from the power supply Output Queue. (See
example, Figure A-1.)
A-2 ATE-DMG 042314
Page 67

A.9 *OPT? — OPTIONS QUERY
*OPT?
Syntax: *OPT?
Returns string determined by power supply model.
Description: Causes the power supply to return an ASCII string which defines the functionality of the power
supply. The functionality is defined as follows:
STRING DATA MEANING
CAL Support for CALibrate command is present.
RL3
MEM Indicates the number of memory steps supported.
DSM Indicates the number of characters supported for user messages on LCD.
LST Indicates LIST command i s equ ivalent to *SAV.
Hardware switch controlling remote/local is functional. Unit can be used to t ake measur ement s in local
mode, but all other functions require the unit to be in remote mode (REN must be asserted).
A.10 *RCL — RECALL COMMAND *RCL
Syntax: *RCL <integ er> (1 to 40)
Description: Restores power supply to previously defined levels of output voltage, output current, overvolt-
age protection, and overcurrent protection.This command selects one of the 40 power supply
memory locations, each of which stores values for output current, output voltage, overvoltage protection, and overcurrent protection. The following parameters are affected by *RCL: CURR[:LEV][:IMM]
VOLT[:LEV][:IMM] CURR:PROT[:LEV] VOLT:PROT[:LEV]. The recall function also sets the unit
to operating parameters to SCPI compatible mode, or device clear operation and ou tput on or off. If
the recall value was not initialized by the * SAV command, but from an edit save or front panel save,
the output condition will remain unchanged along with the language preferences. (See example, Figure A-1.)
A.11 *RST — RESET COMMAND *RST
Syntax: *RST
Description: Reset s powe r supp ly to the po wer on d efault s tate. The power supply is programmed to the power
on values of the following parameters: CURR[:LEV][:IMM] = 0, VOLT[:LEV][:IMM] = 0,
CURR:PROT[:LEV] = max overcurrent value (see Table 1-2, VOLT:PROT[:LEV] = (maximum overvoltage value (see Table 1-2), OUTP[:STAT] = OFF. If the power supply is in either an overvoltage or overcurrent state, this condition is reset by *RST. (See example, Figure A-1.)
A.12 * SAV — SAVE COMMAND *SAV
Syntax: *SAV <integer> (1 to 40)
Description: Saves the present state of output voltage, output current, overvoltage and overcurrent to the
specified memory location. This command stores the present state of the power supply to one of 40
memory locations. The following parameters are stored by *SAV: CURR[:LEV][:IMM],
VOLT[:LEV][:IMM], CURR:PROT[:LEV], and VOLT:PROT[:LEV]. The *SAV command also saves the
language status and output on/off state. The stored values can be restored by the *RCL command.
(See example, Figure A-1.)
ATE-DMG 042314 A-3
Page 68

*CLS Power supply clears status data.
*ESE 60 Power supply enables bits 5, 4, 3 and 2, allowing command error, execution
error, device dependent error and query error to set the Event Status
Summary bit when an STB command is executed.
*ESE? Returns 60, (value of the mask) verifying that bits 5, 4, 3 and 2 are enabled.
*ES Unknown command will set command error (Bit 5).
*ESR? Returns 32 (bit 5 set), indicating Command Error has occurred since the last
time the register was read.
*IDN? Power supply returns: KEPCO,ATE-100-10, 082495-001, 1.0.
*OPC Allows status bit 0 to be set when pending operations complete
VOLT 21;CURR 3 Sets output voltage to 21V, output current to 3A
*SAV33 The present state of the power supply is stored in memory location 33.
*ESR? Returns 129 (128 + 1, power on, bit 7 = 1, operation complete, bit 1 = 1)
*ESR? Returns 0 (event status register cleared by prior *ESR?)
VOLT 15;CURR 5;*OPC? Sets output voltage to 15V, output current to 5A, puts “1” on output bus when
command operations are complete.
*RCL33 Values in memory location 33 recalled (21V, 3A).
*RST Power supply reset to power on default state.
*SRE 40 When ESB or QUES bits are set (Table A-3), the Request for Service bit will
be set.
*SRE? Returns the value of the mask (40).
*STB? For example, the Power supply responds with 96 (64 + 32) if MSS and the
Event Status Byte (Table A-3) summary bit have been set. The power supply
returns 00 if no bits have been set.
VOLT 25 Power supply voltage commanded to 25V.
VOL T:TRIG 12 Programs power supply voltage to 12V when *TRG received.
INIT Trigger event is initialized.
*TRG Power supply reverts to commanded output voltage of 12V.
*TST? Power supply executes self test and responds with 0 if test completed
successfully, with 1 if test failed.
A.13 *SRE — SERVICE REQUEST ENABLE COMMAND *SRE
Syntax: *SRE<intege r> where <integer> = value from 0 - 255 per Table A-3, except bit 6 cannot be pro-
Description: Sets the condition of the Service Request Enable register.
grammed.
determines which events of the Status Byte Register are summed into the MSS (Master Status Summary) and RQS (Request for Service) bits. RQS is the service request bit that is cleared by a serial
poll, while MSS is not cleared when read. A “1” (1 = set = enable, 0 = re set = disable) in an y Service
Request Enable register bit position enables the corresponding Status Byte bit to set the RQS and
MSS bits. All the enabled Service Request Enable register bits then are logically ORed to cause Bit 6
of the Status Byte Register (MSS/RQS) to be set. Related Commands: *SRE?, *STB?. (See example, Figure A-1.)
FIGURE A-1. GPIB COMMANDS
The Service Request Enable register
A-4 ATE-DMG 042314
Page 69

A.14 *SRE? — SERVICE REQUEST ENABLE QUERY
TABLE A-3. SERVICE REQUEST ENABLE AND STATUS BYTE REGISTER BITS
CONDITION OPER
MSS
RQS
ESB MAV QUES
ERR
QUE
NU NU
BIT 7 6543210
VALUE 128 64 32 16 8 4 2 1
OPER Operation Status Summary
MSS Master Status Summary
RQS Request for Service
ESB Event Status Byte summary
MAV Message available
QUES QUEStionable Status Summary
ERR QUE 1 or more errors occurred (see
PAR. B.84)
NU (Not Used)
*SRE?
Syntax: *SRE? Response: <integer> = value from 0 - 255 per Table A-3.
Description: Reads the Service Enable Register. Used to determine which events of the Status Byte Reg ister are
programmed to cause the power supply to generate a service request (1 = set = function enabled, 0 =
reset = function disabled). Related Commands: *SRE, *STB? (See example, Figure A-1.)
A.15 *STB? — STATUS BYTE REGISTER QUERY *STB?
Syntax: *STB? Response: <integer> value from 0 to 255 per Table A-3.
Description: Reads Status Byte Register without clearing it. This Query reads the Status Byte Register (bit 6 =
MSS) without clearing it (1 = set = function enabled, 0 = reset = function disa bled). The register is
cleared only when subsequent action clears all set bits. MSS is set when the power suppl y has one
ore more reasons for requesting service. (A serial poll also reads the Status Byte Register, except that
bit 6 = RQS, not MSS; and RQS will be reset.) Related Commands: *SRE, *SRE?. (See example, Figure A-1.)
A.16 *TRG — TRIGGER COMMAND *TRG
Syntax: *TRG
Description: Triggers the power supply to be commanded to prep rogrammed values of output current and
voltage. When the trigger is armed (checked by examining WTG bit in Status Operational Condition
register) *TRG generates a trigger signal. The trigger will change the output of the power supply to the
output voltage and current levels specified by VOLT:TRIG and CURR:TRIG command s and clear the
WTG bit in the Status Operation
Condition register. If INIT:CONT has been issued, the trigger
subsystem is immediately rearmed for subsequent triggers, and the WTG bit is again set to
1. *TRG or GET are both addressed commands (only devices selected as listeners will execute the command).
example, Figure A-1.)
Related Commands: ABOR, INIT, TRIG, CURR:TRIG, VOLT:TRIG. (See
A.17 *TST? — SELF TEST QUERY
Syntax: *TST? Returned value: 0 or 1 (0 = pass test, 1 = fail test)
Description: Power Supply test.This query causes the power supply to do a self test and provide the controller
with pass/fail results. A cyclic redundancy check (CRC) is performed on non-volatile RAM. A “1” is
returned if there is an error.
ATE-DMG 042314 A-5/(A-6 Blank)
*TST?
Page 70

Page 71

APPENDIX B - SCPI COMMAND/QUERY DEFINITIONS
B.1 INTRODUCTION This appendix defines the SCPI subsystem commands and queries used with the
ATE Power Supply. Subsystem commands are defined in PAR. B.2 through B.96, arranged in
groups as they appear in the tree diagram, Figure 3-7. Table B-1 provides a quick reference of
all SCPI subsystem commands and queries used in the Interface Card.
TABLE B-1. SCPI SUBSYSTEM COMMAND/QUERY INDEX
COMMAND PAR. COMMAND PAR.
ABORt B.2 READ:VOLT? B.49
CAL:VOLT:GAIN B.3 [SOUR:]CURR[:LEV][:IMM][:AMP], ? B.50, B.51
CAL:CURR[:DATA] B.4 [SOUR:]CURR:LIM:HIGH, ? B.52, B.53
CAL:PASS, ? B.5 [SOUR:]CURR:PROT[:LEV], ? B.56, B.57
CAL:CURR:GAIN B.6 [SOUR:]CURR:PROT:CLE B.58
CAL:STAT, ? B.7, B.8 [SOUR:]CURR:PROT:TRIP B.59
CAL:VOLT:LEV B.9 [SOUR:]CURR[:LEV]:TRIG[:AMP], ? B.60, B.61
CAL:VOLT[:DATA] B.10 [SOUR:]VOLT[:LEV][:IMM][:AMP], ? B.62, B.63
CAL:ZERO B.11 [SOUR:]VOLT[:LEV]:TRIG[:AMP]? B.64, B.65
DIAG:EXT, ? B.12, B.13 [SOUR:]VOLT:LIM:HIG H , ? B.66, B.67
DISP:CONT, ? B.14, B.15 [SOUR:]VOLT:PROT:LEV, ? B.70, B.71
DISP:MODE, ? B.16, B.17 [SOUR:]VOLT:PROT:CLE B.72
DISP:TEXT, ? B.18, B.19 [SOUR:]VOLT:PROT:TRIP? B.73
INIT[:IMM] B.20 [SOUR:]FUNC:MODE? B.74
INIT:CONT, ? B.21, B.22 STAT:OPER:COND? B.75
INST:STAT B.23 STAT:OPER:ENAB, ? B.76, B.77
[SOUR:]LIST:CURR, ? B.24, B.25 STAT:OPER[:EVENT]? B.78
[SOUR:]LIST:CURR:PROT, ? B.26, B.27 STAT:PRES B.79
[SOUR:]LIST:DWELL, ? B.28, B.29 STAT:QUES[:EVENT]? B.80
[SOUR:]LIST:IND, ? B.30, B.31 STAT:QUES:COND? B.81
[SOUR:]LIST:SEQ:NEXT, ? B.32, B.3 3 STAT:QUES:ENAB, ? B.82, B.83
[SOUR:]LIST:SEQ:START, ? B.34, B.35 SYST:ERR? B.84
[SOUR:]LIST:VOLT, ? B.36, B.37 SYST:ERR:CODE? B.85, B.86
[SOUR:]LIST:VOLT:PROT, ? B.38, B.39 SYST:KLOCK, ? B.87, B.88
MEAS:CURR? B.40 SYST:LANG, ? B.89, B.90
MEAS:VOLT? B.41 SYST:P ASS CEN, DIS B.91, B.92
OUTP[:STAT], ? B.42, B.43 SYST:PASS:STAT B.93
OUTP:PROT:DEL, ? B.44, B.45 SYST:SEC B.94
PROG:ST AT, ? B.46, B.47 SYST:SET B.95
READ:CURR? B.48 SYST:VERS? B.96
ATE-DMG 042314 B-1
Page 72

B.2 ABORt COMMAND ABOR
NOTE: Power supply assumed to be operating in constant voltage mode.
OUTP ON Output enabled.
OUTP? Power supply returns “1” (output enabled).
VOLT 21; CURR 1.5 Power supply output programmed to go to 21V, current limit 1.5A
INIT:CONT ON Continuous triggers enabled.
INIT:CONT? Power supply returns “1.”
VOLT:TRIG 15;CURR:TRIG 3 Power supply output programmed to return to 15V, current limit
3A upon receipt of trigger.
*TRG Power supply output returns to 15V,current limit 3A.
VOLT 21; CURR 5E-2 Power supply output programmed to go to 21V, current limit 0.05A
MEAS:VOLT? If actual value of output voltage is 20.9V, power supply
returns 2.09E+1.
MEAS:CURR? If actual value of output current is 0.0483A, power supply
returns 4.83E-2.
FUNC:MODE? Returns VOLT if power supply operating in constant voltage
mode, CURR for constant current mode.
CURR:TRIG? Returns 3 (current value established by CURR:TRIG.
VOL T:TRIG? Returns 15 (voltage value established by VOLT:TRIG.
ABOR Pending trigger levels changed to 21V, 0.05A (immediate
values)
VOLT 17; CURR 2 Power supply output programmed to go to 17V, 2A.
*TRG Power supply output returns to 21V, current limit 0.05A.
INIT:CONT 0 Triggers disabled.
INIT:CONT? Power supply returns “0.”
OUTP OFF Output disabled.
OUTP? Returns 0 (output disabled).
MEAS:VOLT? Returns 0. (measured output voltage).
VOLT? Returns 17.(programmed output voltage)/
CURR? Returns 1.5 (programmed current)
CURR? MAX Returns 10 (assuming maximum allowable current for power
supply being addressed is1 10A, i.e. ATE 100-10DMG).
CURR? MIN Returns 0 (minimum allowable current).
CURR:PROT 2.6 Current protection set to 2.6A.
CURR? Returns 1.5, indicating programmed current value = 1.5A.
CURR:PROT? Returns 2.6 , indicating programmed overcurrent protection
current value = 2.6A.
CURR:PROT? MAX For ATE 100-10DMG, returns 11A (see Table 1-2) .
SYST:VERS? Returns 2003.0.
Syntax: Short Form: ABOR Long Form: ABORt
Description: Cancels previously stored trigger levels, resets WTG. Th e ABORt comma nd cancels any pe nding
trigger levels previously stored by the CURR:TRIG or VOLT:TRIG commands. The pending level is set
equal to the corresponding immediate value. ABORt also resets the WTG (Wait TriGger) bit in the
Operation Condition status register. If INIT:CONT ON has been programmed, the trigger system rearms itself immediately after ABORt, thereby setting WTG. WTG is bit 5 in the STATUS OPERATION
CONDITION register. The ABORt is executed each time power is turned on. Related Commands:
INIT, *RST, *TRG. (See example, Figure B-1.)
B-2 ATE-DMG 042314
FIGURE B-1. PROGRAMMING THE OUTPUT
Page 73

B.3 CALibrate:CURRent:LEVel COMMAND
SYST:PASS:CEN:1234 Sets Password Enable state.
CAL:STAT ON Power supply enters Calibrate status.
CAL:STAT? Returns 00 indicating power supply in Calibrate status.
CAL:VOLT:LEV MIN Voltage Zero Calibration selected.
CAL:VOLT 1 Output voltage increased
CAL:VOLT:LEV MAX Voltage Full Scale Calibration selected, voltage zero values
stored in volatile memory
CAL:VOLT 0 Output voltage decreased.
CAL:ZERO Output voltage and current set to zero. Voltage maximum
and values established; analog to digital conversion values
read calculations performed. Voltage and current output
set to zero.
--- * User connects shunt and connects DVM to it.
CAL:CURR:LEV MIN Current Ze ro Calibration selected.
CAL:CURR 1 Output current increased
CAL:CURR:LEV MAX Current Full Scale Calibration selected, current zero values
stored in volatile memory
CAL:CURR 0 Output current decreased.
CAL:SAVE Calibration values saved. current maximum values calculated
based on power supply settings an measurements. The
non-volatile current calibration constants are moved to
area of non-volatile memory reserved for previous
calibration data. New volatile constants are stored in
memory.
CAL:STAT 0 Power supply exits Calibrate mode.
CAL:ST AT? Returns 0 indicating power supply not in Calibrate status
Syntax: Short Form: CAL:CURR:LEV {MIN | MAX} Long Form: CALibrate:CURRent:LEVel {MIN | MAX}
Description: Selects Current calibration, only effective with power supply in Calibrate status.
CAL:CURR:LEV MIN selects Current Zero Calibration. CAL:CURR:LEV MAX selects Current Full
Scale Calibration. Normally Current Zero is done first, then Current Full Scale Calibration. Related
Commands: CAL:STAT, CAL:PASS, CAL:VOL T, CAL:CURR, CAL:ZERO, CAL:SAVE. (See example,
Figure B-2.)
CAL:CURR:LEV
B.4 CALibrate:CURRent[:DATA] COMMAND CAL:CURR
Syntax: Short Form: CAL:CURR[:DATA] {0 | 1 | 2 | 3} Long Form: CALibrate:CURRent[:DATA] {0 | 1 | 2 | 3}
Description: Increases or decreases output current during calibration only. CAL:CURR[:DATA] 0 decreases
output current by small increment. CAL:CURR[:DATA] 1 increases output current by small increment.
CAL:CURR[:DATA] 2 decreases output current by large increment. CAL:CURR[:DATA] 3 increases
output current by large increment. This command is used during current calibratio n to adjust the output current for current zero calibration as well as full scale current calibration. Output current is monitored on a calibrated digital multimeter (reading voltage at the sense terminals of the shunt resistor)
and increased or decreased as required using this command.This command is only effective if Calibration status and either Current Zero or Current Full Scale calibration are active. This command is
equivalent to the on the front panel left and right arrow keys for fine adjustment and the 1 and 3 keys
for coarse adjustment. Related Commands: CAL:STAT, CAL:PASS, CAL:VOLT, CAL:CURR,
CAL:ZERO, CAL:SAVE. (See example, Figure B-2.)
ATE-DMG 042314 B-3
FIGURE B-2. USING CALIBRATION COMMANDS AND QUERIES
Page 74

B.5 CALibrate:PASSword COMMAND CAL:PASS
Syntax: Short Form: CAL:PASS new_password (new_password is 4 digits)
Long Form: CALibrate:PASSword new_password (new_password is 4 digits)
Description: Changes the password used to put the power supply in Calibrate status. To execute this com-
mand, the power supply must be in Calibrate status (see CAL:STAT).
password = 4 digits, required to enter Calibrate status. Related Commands: CAL:PASS, CAL:VOLT,
CAL:CURR, CAL:ZERO, CAL:SAVE. (See example, Figure B-2.)
B.6 CALibrate:SAVE COMMAND CAL:SAVE
Syntax: Short Form: CAL:SAVE Long Form: CALibrate:SAVE
Description: Saves computed calibration values in non-volatile memory. The Analog to Digital (A/D) converter
is read to establish the final values of the calibration state. For example, if VOLT:MAX was the last calibration state, the voltage A/D converter is read and the volts per step multiplier is calculated. The voltage per step for the voltage Digital to Analog (D/A) converter is also calculated and the non-volatile
memory is updated from the volatile calibration constants. Previous values are not lost, and can be
restored using Local mode (see Service Manual applicable to specific model). This command should
be the last command before exiting Calibrate status. CAL:STAT, CAL:PASS, CAL:VOLT, CAL:CURR,
CAL:ZERO, CAL:SAVE. (See example, Figure B-2.)
B.7 CALibrate:STATus COMMAND CAL:STAT
Syntax: Short Form: CAL:STAT <boolean>[,password]
Long Form: CALibrate:STATus <boolean>[,password]
where boolean = 0 or OFF, 1 or ON, password = 4 digits, required if<boolean = 1 or ON>
Description: Sets the power supply to Calibrate status. <boolean> 1 o r ON causes power supply to enter Ca li-
brate status. <boolean> 0 or OFF causes power supply to exit Calibrate status. Upon entering Calibrate status the current calibration constants are stored in the volatile memory. If the state is 0, the
non-volatile calibration constants are supplied to the ASC working calibration.
password = 4 digits, required to enter Calibrate status. If the wrong password is entered, error message -224 is posted to the queue. Related Commands: CAL:PASS, CAL:VOLT, CAL:CURR,
CAL:ZERO, CAL:SAVE. (See example, Figure B-2.)
B.8 CALibrate:STATus? QUERY CAL:STAT?
Syntax: Short Form: CAL:STAT? Long Form: CALibrate:STATus?
Return Value: <boolean> (boolean = 0 or OFF, 1 or ON)
Description: Identifies whether the power supply is in Calibrate status. 1 indicates power supply is in Calibrate
status. 0 indicates power supply is not in Calibrate status. (See example, Figure B-2.)
B.9 CALibrate:VOL Tage:LEVel COMMAND CAL:VOLT:LEV
Syntax: Short Form: CAL:VOLT:LEV {MIN | MAX} Long Form: CALibrate:VOLTage:LEVel {MIN | MAX}
Description: Selects Voltage calibration, only effective with power supply in Calibrate status.
CAL:VOLT:LEV MIN selects Voltage Zero Calibration. CAL:VOLT:LEV MAX selects Voltage Full Scale
Calibration. Normally Voltage Zero is done first, then Voltage Full Scale Calibration. CAL:VOLT:MAX
causes the maximum value to be read and saved in the working calibration table at the end of the calibration sequence. The power supply then raises the output level to maximum and waits for
CAL:VOLT[:DATA] commands. Related Commands: CAL:STAT, CAL:PASS, CAL:VOLT, CAL:CURR,
CAL:ZERO, CAL:SAVE. (See example, Figure B-2.)
B-4 ATE-DMG 042314
Page 75

B.10 CALibrate:VOLTage[:DATA] COMMAND
Syntax: Short Form: CAL:VOLT[:DA TA] {0 | 1 | 2 | 3} Long Form: CALibrate:VOLTage[:DATA] {0 | 1 | 2 | 3}
CAL:VOLT
Description:
Increases or decreases output voltage during calibration only.
CAL:VOLT[:DATA] 0 decreases output voltage by small increment. CAL:VOLT[:DATA] 1 increases output voltage by small increment. CAL:VOLT[:DATA] 2 decreases output voltage by large increment.
CAL:VOLT[:DATA] 3 increases output voltage by large increment. This command is used during voltage calibration to adjust the output voltage for voltage zero calibration as well as full scale voltage calibration. Output voltage is monitored on a calibrated digital multimeter and increased or decreased as
required using this command. This command is only effective if Calibration status and either Voltage
Zero or Voltage Full Scale calibration are active. This command is equivalent to the front panel left and
right arrow keys for fine adjustment and the 1 and 3 keys for coarse adjustment. Related Commands:
CAL:ST AT, CAL:PASS, CAL:VOL T, CAL:CURR, CAL:ZERO, CAL:SAVE. (See example, Figure B-2.)
B.11 CALibrate:ZERO COMMAND CAL:ZERO
Syntax: Short Form: CAL:ZERO Long Form: CALibrate:ZERO
Description: Sets output to zero while calibration equipment connections are changed.This command is used when
changing from Voltage to Current calibration or vice-versa. CAL:ZERO sets output voltage and current
to zero. The user then connects or disconnects the shunt resistor or the digital voltmeter from the output terminals of the power supply as required for the subsequent Voltage or Current calibration. The
next command should select the new parameter to be calibrated. Related Commands: CAL:STAT,
CAL:VOLT, CAL:CURR, CAL:SAVE. (See example, Figure B-2.)
B.12 DIAG:EXT COMMAND DIAG:EXT
Syntax: Short Form: DIAG:EXT <value>
Long Form: DIAG:EXT <value>
where <value> xx
HEX
Description: DIAG:EXT 01 initializes external analog control and 03 sets VOLT:MODE and CURR:MODE to
EXTERNAL DIAG:EXT 00 turns off the external analog control feature). Setting is stored in
NVRAM and retained upon subsequent power up.
B.13 DIAG:EXT? QUERY DIAG:EXT?
Syntax: Short Form: DIAG:EXT?
Long Form: DIAG:EXT]?
Return Value: 00
Description: Returns 00 when external analog control feature is disabled. Returns 0 1 when ex ternal analog
control feature is enabled. Returns 03 when external analog control feature is enabled upon
power up.
HEX
, 01
HEX
or 03
HEX
B.14 DISPlay:CONTrast COMMAND DISP:CONT
Syntax: Short Form: DISP:CONT <num_value> (0 to 1)
Long Form: DISPlay:CONTrast <num_value> (0.0 to 1.0)
Description: Sets the contrast of the front panel LCD. The contrast value from (0.1 to 0.9) is stored in the non-
volatile memory and is retained when the power supply is turned off. A contrast value of 0 is best when
looking up at the display, 1 is best when looking down at the display. Values in between provide adjustment for optimum viewing. Setting the values to 0.1 or 0.9 are not reported back and are rounded to 0
or 1 respectively. Related Commands: DISP:CONT?. (See example, Figure B-3.)
ATE-DMG 042314 B-5
Page 76

FIGURE B-3. USING DISPLAY COMMANDS
DISP:CONT 0.9 S ets LCD contrast value to 0.9.
DISP:CONT? Returns 0.9.
DISP:MODE NORM Changes LCD to Normal metering mode.
DISP:MODE? Returns NORMAL.
DISP:MODE TEXT Changes LCD to Text mode.
DISP:TEXT “**ATE IS IN USE” Second line of display reads **ATE IS IN USE.
DISP:MODE? Returns “TEXT”
DISP:TEXT? Returns “**ATE IS IN USE”
B.15 DISPlay:CONTrast? QUERY DISP:CONT?
Syntax: Short Form: DISP:CONT? Long Form: DISPlay:CONTrast?
Return Value: Numerical value from 0 to 1 indicating contrast setting.
Description: Identifies LCD contrast setting. Returns 0 if LCD is at minimum setting, 1 if at maximum setting. and
returns values between 0.2 through 0.8 for other contrast settings. Related Commands: DISP:CONT.
(See example, Figure B-3.)
B.16 DISPlay:MODE COMMAND DISP:MODE
Syntax: Short Form: DISP:MODE NORM or DISP:MODE TEXT
Long Form: DISPlay:MODE NORMal or DISPlay:MODE TEXT
Description: Switches the LCD display between Normal and Text mode. Switches the display between its nor-
mal metering mode and a mode in which it displays text sent by the user on the secon d line. The
default status at power up or after *RST is NORMal. In order to display text on the second line the display mode has to be changed to TEXT. Related Commands: DISP:MODE?, DISP:TEXT,
DISP:TEXT?, *RST. (See example, Figure B-3.)
B.17 DISPlay:MODE? QUERY DISP:MODE?
Syntax: Short Form: DISP:MODE? Long Form: DISPlay:MODE?
Return Value: NORMAL or TEXT.
Description: Identifies the LCD mode. Returns NORMAL when the display is in normal mode, TEXT wh en the dis-
play is in text mode. Related Commands: DISP:MODE, DISP:TEXT, *RST. (See example, Figure B-3.)
B.18 DISPlay:TEXT COMMAN D DISP:TEXT
Syntax: Short Form: DISP:TEXT[:DATA] <char_string> Long Form: DISPlay:TEXT [:DATA] <char_string>
Description: Allows entry of character string to be viewed when LCD display is set to Text mode. Allows for
character strings of maximum 16 characters to be displayed (on the second line of the LCD) when the
display mode is TEXT, e.g., DO NOT TOUCH or ATE IS IN USE, etc. The LCD has the following character set: A to Z, 0 to 9 and special characters as < > + - / = : ... If the message exceeds the display
capacity only the first 16 characters will be displayed and no error message will be gen erated. Upon
executing *RST, character string set to 16 spaces:” “. Related Commands: DISP:TEXT?,
DISP:MODE, DISP:MODE?, *RST. (See example, Figure B-3.)
B.19 DISPlay:TEXT? QUER Y DISP:TEXT?
Syntax: Short Form: DISP:TEXT? Long Form: DISPlay:TEXT]?
Return Value: Character string displayed on second line of LCD display.
Description: Returns the text displayed on second line of LCD in TEXT mode. When the display set to TEXT
B-6 ATE-DMG 042314
mode, returns the character string entered by DISP:TEXT . If the display set to NORMAL mode, returns
information displayed on second line of display. (This can be used to see the monitored values presently being displayed on the second line of the LCD.) Related Commands: DISP:MODE, DISP:TEXT,
*RST. (See example, Figure B-3.)
Page 77

B.20 INITiate[:IMMediate]
Syntax: Short Form: INIT:[IMM] Long Form: INITiate[:IMMediate]
Description: Enables a single trigger. If INIT:CONT is OFF, then INIT[:IMM] arms the trigger system for a sing le
trigger. If INIT:CONT is ON, then the trigger system is continuously arme d and INIT[:IMM] is redundant. This command enables a single trigger. A GPIB <GET>, *TRG or command completes the
sequence. Upon receipt of the <GET> or *TRG command, the power supply will return to the programmed values of voltage and current established by the VOLT:TRIG and CURR:TRIG commands.
After a GPIB <GET> or *TRG command has been received, subsequent GPIB <GET>, *TRG commands have no effect unless preceded by INIT or INIT:CONT ON. Related Commands: <GET>, *RST,
*TRG. (See example, Figure B-1.)
COMMAND INIT[:IMM]
B.21 INITiate:CONTinuous COMMAND INIT:CONT
Syntax: Short Form: INIT:CONT {ON | OFF} or {1 | 0} (1 = on, 0 = off)
Long Form: INITiate:CONTinuous {ON | OFF} or {1 | 0} (1 = on, 0 = off)
Description: INIT:CONT ON enab les continuous triggers.; INIT:CONT OFF disables continuou s triggers. If
INIT:CONT is OFF, then INIT[:IMM] arms the trigger system for a single trigger. If INIT:CONT is ON,
then the trigger system is continuously armed and INIT[:IMM] is redundant. Executing *RST command
sets INIT:CONT to OFF. (See example, Figure B-1.)
B.22 INITiate:CONTinuous QUERY INIT:CONT?
Syntax: Short Form: INIT:CONT? Long Form: INITiate:CONTinuous?
Return Value: 1 or 0
Description: Determines whether continuous triggers are enabled or disabled. Power supply returns value of
INIT:CONT flag: “1” = continuous triggers are enabled (INIT:CONT ON); “0” = continuous triggers disabled (INIT:CONT OFF). (See example, Figure B-1.)
B.23 INSTrument:STATe COMMAND INST:STAT
Syntax: Short Form: INST:STAT <val> Long Form: INSTrument:STATe <val>
Description: Operation is identical to OUTPut:STATe command (PAR. B.42) and is provided for compatibility with
other vendors products.
B.24 LIST:CURRent COMMAND LIST:CURR
Syntax: Short Form: LIST:CURR[:LEV] <exp_value> Long Form: LIST:CURRent[:LEVel] <exp_value>
<exp_value> = digits with decimal point and Exponent, e.g., 2.71E+1 for 27.1
Description: Sets the current (Amp s) value for the memory location selected by LIST:IND. If the value is out of
the acceptable current range for the power supply model, an error message: -222,”Data out of range”
is posted in the output queue. The current value is stored in non-volatile memory and is retained when
the power supply is turned off. Related Commands: LIST:IND. LIST:IND?, LIST:CURR?. (See example, Figure B-4.)
B.25 [SOUR:]LIST:CURRent? QUERY LIST:CURR?
Syntax: Short Form: LIST:CURR[:LEV]? Long Form: LIST:CURRent[:LEVel]?
Return Value: <exp_value> = digits with decimal point and Exponent, e.g., 2.71E+1 for 27.1
Description: Returns current value (Amps) stored in indexed memory location selected by LIST :IND. Related
Commands: LIST:IND. LIST:IND?, LIST:CURR. (See example, Figure B-4.)
ATE-DMG 042314 B-7
Page 78

B.26 [SOUR:]LIST:CURRent:PROTect COMMAND LIST:CURR:PROT
LIST:IND 21 Selects memory location 21.
LIST:IND? Returns 21.
LIST:CURR 2.35E-1 Sets output current value of memory location 21 to 0.235A.
LIST:CURR? Returns 2.35E-1.
LIST:CURR:PROT 0.67E+1 Sets current protection value of memory location 21 to 6.7A.
LIST:CURR:PROT? Returns 0.67E+1.
LIST:VOLT:PROT 2.77E+1 Sets voltage protection value of memory location 21 to 27.7V.
LIST:VOLT:PROT? Returns 2.77E+1.
LIST:DWEL 0.6 Sets memory location 21 time value to 0.6 second. During program
execution, after parameters specified by memory location 21 have
been applied for 0.6 second, power supply will switch to parameters
specified by memory location 21 sequence number.
LIST:SEQ:NEXT 39 Sets memory location sequence number to 39. During program
execution, when memory location 21 is complete, the next location
to be executed will be 39.
LIST:SEQ:NEXT? Returns 39.
LIST:IND 22 Selects memory location 22.
LIST:IND? Returns 22.
LIST:VOLT 1.256E+2 Sets output voltage value of memory location 22 to 125.6V.
LIST:VOLT? Returns 1.256E+2.
LIST:SEQ:STA R 21 Sets memory location 21 as the starting location for executing a
program.
LIST:SEQ:STAR? Returns 21.
Syntax: Short Form: LIST:CURR:PROT<num_value> Long Form: LIST:CURRent:PROTect <num_value>
<num_value> = digits with decimal point and Exponent
Description: Sets the current protection (Amps) value for the memory location selected by LIST:IND. If the
value is out of the acceptable current range for the power supply model, an error message: -222,”Data
out of range” is posted in the output queue. The current value is stored in non-volatile memory and is
retained when the power supply is turned off. Related Commands: LIST:IND. LIST:IND?,
LIST:CURR:PROT?. (See example, Figure B-4.)
FIGURE B-4. USING LIST COMMANDS AND QUERIES
B.27 [SOUR:]LIST:CURRent:PROTect? QUERY LIST:CURR:PROT?
Syntax: Short Form: LIST:CURR[:LEV]? Long Form: LIST:CURRent[:LEVel]?
Description: Returns current protection value (Amps) stored in indexed memory location selected by
B.28 [SOUR :]LI S T:DWELl COMMAND LIST:DWEL
Syntax: Short Form: LIST:DWEL <value> (0.01 to 300) Long Form: LIST:DWELl <value> (0.01 to 300)
Description: Determines the execution time duration during a programmed sequence for the memory loca-
B-8 ATE-DMG 042314
Return Value: <exp_value> = digits with decimal point and Exponent, e.g., 2.71E+1 for 27.1
LIST:IND. Related Commands: LIST:IND. LIST:IND?, LIST:CURR. (See example, Figure B-4.)
tion selected by LIST:IND. Sets time value (from 0.01 to 300) in seconds for memory location
selected by LIST:IND. A value of 0 means that this memory location will be skipped during the RUN
command (LOCal mode). The time value is stored in non-volati le memory and is retained when the
power supply is turned off. Related Commands: LIST:IND. LIST:IND?, LIST:DWEL?, LIST:SEQ. (See
example, Figure B-4.)
Page 79

B.29 [SOUR:]LIST:DWELl? QUERY
Syntax: Short Form: LIST:DWEL? Long Form: LIST:DWELl?
Return Value: <value> (0.01 to 300)
LIST:DWEL?
B.30 [SOUR:]LIST:INDex COMMAND LIST:IND
Syntax: Short Form: LIST:IND <int_value> (from 1 to 40) Long Form: LIST:INDex <int_value> (from 1 to 40)
Description: Selects one 40 memory locations for viewing or modification of parameter selected by subse-
quent LIST:CURR, LIST:CURR:PROT, LIST:VOLT, LIST:VOLT:PROT commands or queries. The
index value (the selected memory location) is stored in non-volatile memory an d is retained when the
power supply is turned off. Related Commands: LIST:IND?. (See example, Figure B-4.)
B.31 [SOUR:]LIST:INDex? QUERY LIST:IND?
Syntax: Short Form: LIST:IND? Long Form: LIST:INDex?
Return Value: <int_value> 1 to 40
Description: Returns index value. Identifies which one 40 memory locations has been selected for viewing or
modification by subsequent LIST:CURR, LIST:CURR:PROT , LIST:VOLT, LIST :VOLT:PROT commands
or queries. Related Commands: LIST:IND?. (See example, Figure B-4.)
B.32 [SOUR:]LIST:SEQuence:NEXT COMMAND LIST:SEQ:NEXT
Syntax: Short Form: LIST:SEQ:NEXT <int_value> (0 to 40)
Long Form: LIST:SEQuence:NEXT <int_value> (0 to 40)
Description: Determines the next memory location to be addressed during a programmed sequence.Sets
sequence number (from 1 to 40) of next memory location to be addressed. Sequence number is set
for memory location selected by LIST:IND. Setting sequence number to 0 indicates the end of the program chain, and the programmed sequence will stop. The sequence number is stored in non-volati le
memory and is retained when the power supply is turned off. Related Commands: LIST:IND.
LIST:IND?, LIST:SEQ?. (See example, Figure B-4.)
B.33 [SOUR:]LIST:SEQuence:NEXT? QUERY LIST:SEQ:NEXT?
Syntax: Short Form: LIST:SEQ:NEXT? Long Form: LIST:SEQuence:NEXT?
Return Value: <int_value> (0 to 40)
Description: Returns sequence number stored in memory location selected by LIST:IND. Related Com-
mands: LIST:IND. LIST:IND?, LIST:SEQ. (See example, Figure B-4.)
B.34 [SOUR:]LIST:SEQuence:STARt COMMAND LIST:SEQ:STAR
Syntax: Short Form: LIST:SEQ:STAR <int_value> (1 to 40)
Long Form: LIST:SEQuence:STARt <int_value> (1 to 40)
Description: Determines the first memory location (start of sequence) to be addressed during a pro-
grammed sequence. Sets memory location (from 1 to 40) of first memory location to be addressed
when a program (chain of memory locations) is executed. Thi s is the start address for the STEP and
RUN commands (LOCal mode). The starting sequence number is stored in non-volatil e memory and
is retained when the power supply is turned off. Related Commands: LIST:SEQ:STAR?. (See example, Figure B-4.)
B.35 [SOUR:]LIST:SEQuence:STARt? QUERY LIST:SEQ:STAR?
Syntax: Short Form: LIST:SEQ:STAR? Long Form: LIST:SEQuence:STARt?
Return Value: <int_value) between 1 and 40
Description: Identifies the starting address for program execution. Returns the starting sequence location set
by LIST:SEQ:STAR command. Related Commands: LIST:SEQ:STAR. (See example, Figure B-4.)
ATE-DMG 042314 B-9
Page 80

B.36 [SOUR:]LIST:VOLTage COMMAND LIST:VOLT
Syntax: Short Form: LIST:VOLT[:LEV] <exp_value> Long Form: LIST:VOLTage[:LEVel] <exp_value>
<exp_value> = digits with decimal point and Exponent, e.g., 2.71E+1 for 27.1
Description: Sets the voltage value for the memory location selected by LIST:IND. If the value is out of the
acceptable voltage range for the power supply model, an error message: -222,”Data out of range” is
posted in the output queue. The voltage value is stored in non-vola tile memory and is retained when
the power supply is turned off. Related Commands: LIST:IND. LIST:IND?, LIST:VOLT? (See example,
Figure B-4.)
B.37 [SOUR:]LIST:VOLTage? QUERY LIST:VOLT?
Syntax: Short Form: LIST :VO LT[:LEV]? Long Form: LIST:VOLTage[:LEVel]?
Return Value: <exp_value> = digits with decimal point and Exponent, e.g., 2.71E+1 for 27.1
Description: Returns voltage value stored in indexed memory location selected by LIST:IND. Rel ated Com-
mands: LIST:IND. LIST:IND?, LIST:VOLT. (See example, Figure B-4.)
B.38 [SOUR:]LIST:VOLTage:PROTect COMMAND LIST:VOLT:PROT
Syntax: Short Form: LIST:VOLT:PROT<exp_value> Long Form: LIST:VOLTage:PROTect <exp_value>
<exp_value> = digits with decimal point and Exponent, e.g., 2.71E+1 for 27.1
Description: Sets the voltage protection value for the indexed memory loc ation selected by LIST:IND.If the
value is out of the acceptable voltage range for the power supply model, an error message: -222,”Data
out of range” is posted in the output queue. The voltage value is stored in non-volatile memory and is
retained when the power supply is turned off. Related Commands: LIST:IND. LIST:IND?,
LIST:VOLT:PROT?. (See example, Figure B-4.)
NOTE: When programming sequential voltage levels, it is important to set the Overvoltage to accommo-
date the highest voltage of the sequence. Otherwise, when going from higher to lower voltage
levels, the overvoltage protection will trip and shut down the unit because the overvoltage setting
registers faster than the power supply can attain the lower voltage.
B.39 [SOUR:]LIST:VOLTage:PROTect QUERY LIST:VOLT:PROT?
Syntax: Short Form: LIST:VOLT[:LEV]? Long Form: LIST:VOLTage[:LEVel]?
Return Value: <num_value> (digits with decimal point and Exponent)
Description: Returns voltage protection value stored in indexed memory location selected by LIST:IND.
Related Commands: LIST:IND. LIST:IND?, LIST:VOLT. (See example, Figure B-4.)
B.40 MEASure[:SCALar]:CURRent[:DC]? QUERY MEAS:CURR?
Syntax: Short Form: MEAS[:SCAL]:CURR[:DC]? Long Form: MEASure[:SCALar]:CURRent[:DC]?
Return Value: <num_value> (digits with decimal point and Exponent)
Description: Measures actual current. This query returns the actual value of output current (measured at the out-
put terminals) as determined by the programmed value of voltage and current and load con ditions.
NOTE: The SCPI convention for this command allows the controller to establish the range and accuracy of the measurement if nn,nn is added after the question mark; the power su pply a ccepts this format but sets the command warning bit (13) in the status questionable register and ignores the extra
characters. (See example, Figure B-1.)
B.41 MEASure[:VOLTage][:SCALar][:DC]? QUERY MEAS:VOLT?
Syntax: Short Form: MEAS[:SCAL]:VOLT[:DC]? Long Form: MEASure[][:SCALar]:VOLTage[:DC]?
Description: Measures actual voltage. This query returns the actual value of output voltage (measured at the out-
put terminals) as determined by the programmed value of voltage and current and load con ditions.
NOTE: The SCPI convention for this command allows the controller to establish the range and accu-
B-10 ATE-DMG 042314
Page 81

racy of the measurement if nn,nn is added after the question mark; the power suppl y accepts this format but sets the command warning bit (13) in the status questionable register and ignores the extra
characters. (See example, Figure B-1.)
B.42 OUTPut[:STATe] COMMAND OUTP
Syntax: Short Form: OUTP[:STAT] <boolean> Long Form: OUTPut[:STATe] <boolean>
<boolean>=(0 or OFF, 1 or ON)
Description: Enables or disables the power supply output. Upon power up the output is enabled (OUTP ON).
When OUTP OFF is executed, the programmed values of voltage and current are saved, then voltage
and current are programmed to 0. When OUTP ON is executed, the power supply output is restored to
the previously saved programmed values. The saved values of voltage and current can be viewed by
VOLT? and CURR? queries. Related Commands: OUTP?. (See example, Figure B-1.)
B.43 OUTPut[:STATe] QUERY OUTP?
Syntax: Short Form: OUTP[:STAT]? Long Form: OUTPut[:STATe]?
Return Value: <int_value> (0 or 1)
Description: Indicates whether power supply output is enabled or disabled. Returns 0 if output disabled,
returns 1 if output enabled. Related Commands: OUTP. (See example, Figure B-1.)
B.44 OUTPut:PR OTection:DELay COMMAND OUTP:PROT:DEL
Syntax: Short Form: OUTP:PROT:DEL <n.n> Long Form: OUTPut:PROTection:DELay <n.n>
where n.n = seconds
Description: Delays tripping of overvoltage/overcurrent protection. The overvoltage and overcurrent protection
can be programmed to trip immediately upon detection of an overvoltage/overcurrent condition, or can
be delayed approximately 8 seconds. This delay is set in increments of 0.033 milliseconds If delay is
programmed, overcurrent/overvoltage protection trips only if condition still present at end of delay. A
count of 0 means no delay, the maximum delay possible is 8.50 seconds.
B.45 OUTP ut :PROTection:DELay QUERY OUTP:PROT:DEL?
Syntax: Short Form: OUTP:PROT:DEL? Long Form: OUTPut:PROTection:DELay?
Return Value: <integer 1 to 8.5>
Description: Returns value of overvoltage/overcurrent delay. A count of 0 means no delay, The maximum value
is 8.5. The delay constants are set in -.033 milliseconds per internal value. Related Commands:
OUTP:PROT:DEL. (See example, Figure B-5.)
B.46 PROGram:SELect:STATe COMMAND PROG:SEL:STAT
Syntax: Short Form: PROG:SEL:STAT {RUN | STOP}
Long Form: PROGram:SELect:STATe {RUN | STOP}
Description: Starts or stops user programmed sequence. Program sequence is preprogrammed using LIST
commands, starting address is established by LIST:SEQ:STAR. When PROG:SEL:STAT command is
executed the keyboard is locked until the program stops running. *RST command aborts a program
that is running. Related commands: PROG:SEL:STAT?, LIST:CURR, LIST:CURR:PROT, LIST:VOLT,
LIST:VOLT:PROT, LIST:DWEL, LIST:SEQ:NEXT, LIST:SEQ:STAR
B.47 PROGram:SELect:STATe? QUERY PROG:SEL:STAT?
Syntax: Short Form: PROG:SEL:STAT? Long Form: PROGram:SELect:STATe?
Return value: <boolean> (0 = stopped, 1 = running)
Description: Indicates status of user programmed sequence. 1 returned when program is running. 0 returned
when program is stopped. Related commands: PROG:STAT
ATE-DMG 042314 B-11
Page 82

B.48 READ[:SCALar]:CURR ent[:D C]? QUER Y READ:CURR?
Syntax: Short Form: READ[:SCAL]:CURR[:DC]? Long Form: READ[:SCALar]:CURRent[:DC]?
Return Value: <num_value> (digits with decimal point and Exponent)
Description: Measures actual current. Same as MEAS:CURR? (see PAR. B.40)
B.49 READ[:VOLTage][:SCALar][:DC]? QUERY READ:VOLT?
Syntax: Short Form: READ[:SCAL]:VOLT[:DC]? Long Form: READ[:SCALar]:VOLTage[:DC]?
Description: Measures actual voltage. Same as MEAS:VOLT? (see PAR. B.41)
B.50 [SOURce:]CURRent[:LEVel][:IMMediate][:AMPlitude] COMMAND CURR
Syntax: Short Form: [SOUR:]CURR[:LEV][:IMM][:AMP] <exp_value>
Long Form: [SOURce:]CURRent[:LEVel][:IMMediate][:AMPlitude] <exp_value>
<exp_value> = digits with decimal point and Exponent, e.g., 2.71E+1 for 27.1
Description: Set s programmed curren t level at powe r supply output. This command programs output current to
a specific value; actual output current will depend on load con ditions. If the value exceeds the maximum for the model being programmed, error message -222,”Data out of range” is posted in output
queue. If value programmed exceeds the CURR:LIM:HIGH value, a value corresponding to the current limit will be programmed. Related Commands: *RCL, *SAV, CURR:LIM:HIGH. (See example, Figure B-1.)
B.51 [SOURce:]CURRent[:LEVel][:IMMediate][:AMPlitude] QUERY CURR?
Syntax: Short Form: [SOUR:]CURR[:LEV][:IMM][:AMP]? MIN, MAX
Long Form: [SOURce:]CURRent[:LEVel][:IMMediate][:AMPlitude]? MIN, MAX
Return Value:<exp_value> = digits with decimal point and Exponent, e.g., 2.71E+1 for 27.1
Description: Returns either the programmed value, maximum value, or minimum value of current. The
CURR? query returns the programmed value of current. Actual output current will depend on load conditions. The CURR?MAX query returns the maximum current allowed for a particular model. CURR?
Returns programmed current value. CURR? MAX returns maximum current allowed for power supply.
CURR? MIN returns minimum current allowed for power supply (always 0). Related Commands:
CURR. (See example, Figure B-1.)
B.52 [SOURce:]CURRent:LIMit:HIGH Command CURR:LIM:HIGH
Syntax: Short Form: [SOUR:]CURR:LIM:HIGH <exp_value>
Long Form: [SOURce:]CURRent:LIMit:HIGH <exp_value>
<exp_value> = digits with decimal point and Exponent, e.g., 2.71E+1 for 27.1
Description: Sets limit for maximum power supply output current. If the value is out of the acceptable current
range for the power supply model, error message -222,”Data out of range” is posted in the output
queue. If the user tries to set an output current value larger than the CURR:LIM:HIGH setting, a value
corresponding to the current limit will be programmed and error message -301,”Value bigger than
limit” is posted in the output queue. NOTE: If the current limit is changed, any previously established
trigger levels higher than the new limit must be reprogrammed to be lower than the new limit; otherwise triggers will cause the output to exceed the new limit. Once the limit is established, the unit will
not accept trigger values higher than the programmed limit. Related Commands: CURR. (See example, Figure B-5.)
B.53 [SOURce:]CURRent:LIMit:HIGH ? Query CURR:LIM:HIGH?
Syntax: Short Form: [SOUR:]CURR:LIM:HIGH? Long Form: [SOURce:]CURRent:LIMit:HIGH?
Return Value:<exp_value> = digits with decimal point and Exponent, e.g., 2.71E+1 for 27.1
Description: Returns value representing current limit set by CURR:LIM:HIGH command. Related Commands:
CURR:LIM:HIGH, CURR. (See example, Figure B-5.)
B-12 ATE-DMG 042314
Page 83

B.54 [SOURce:]CURRent:[:LEVel]MODE COMMAND
NOTES: 1. Power supply assumed to be operating in constant voltage mode.
2. Examples below are intended only to illustrate command functions. Refer to PAR. 3.6.5 for
programming techniques to optimize performance.
VOLT 21; CURR 1.1 Power supply programmed to voltage limit 21V, 1.1A.
CURR? Returns 1.1.
CURR:LIM:HIGH 3.3 Current limit set to 3.3A.
CURR:LIM:HIGH? Returns 3.3.
CURR 4.2 Power supply output current programmed to 3.3A.
SYST:ERR? Error message -301 “Value bigger than limit.”
CURR? Returns 3.3.
OUTP:PROT:DEL 0 Protection will trip immediately upon detection of overvoltage or
overcurrent condition.
OUTP:PROT:DEL? Returns 0.
CURR:PROT:TRIP? 0 indicating overcurrent protection not tripped.
--- OVERCURRENT CONDITION (1 SECOND) OCCURS.
CURR:PROT:TRIP? 1 indicating overcurrent protection tripped.
CURR:PROT:CLE Overcurrent condition cleared.
CURR:PROT:TRIP? 0 indicating overcurrent condition not tripped.
CURR? Returns small value (approx. 1% of full scale current rating).
OUTP:PROT:DEL 7.47 Protection will trip if overvoltage or overcurrent condition still
present approx. 0.575 seconds after detection.
OUTP:PROT:DEL? Returns 7.50.
CURR 2.5 Power supply output current programmed to 2.5A
--- OVERCURRENT CONDITION (1 SECOND) OCCURS.
(After 10 seconds)
CURR:PROT:TRIP? 0 indicating overcurrent condition not tripped.
CURR? Returns 2.5.
Syntax: Short Form: [SOUR:]CURR[:LEV]:MODE {FIX | EXT}
Long Form: [SOURce:]CURRent[:MODE {FIXed | EXTernal}
Description: Establishes whether control of the output current is via keypad or GPIB commands (FIXED) or
via external analog 0 to 1V reference (EXTERNAL). Setting is stored in NVRAM and retained up on
subsequent power up.
CURR:MODE
B.55 [SOURce:]CURRent:[:LEVel]MODE? QUERY CURR:MODE?
Syntax: Short Form: [SOUR:]CURR[:LEV]:MODE?
Long Form: [SOURce:]CURRent[:LEVel]MODE]?
Return Value: FIXED or EXTERNAL
Description: Returns FIXED or EXTERNAL depending on whether current control is from the keypad or
GPIB interface (FIXED) or from an external analog reference voltage (EXTERNAL).
B.56 [SOURce:]CURRent:PROTection[:LEVel] COMMAND CURR:PROT
Syntax: Short Form: [SOUR:]CURR:PROT[:LEV] <exp_value>
Long Form: [SOURce:]CURRent:PROTection[:LEVel] <exp_value>
<exp_value> = digits with decimal point and Exponent, e.g., 2.71E+1 for 27.1
Description: Sets overcurrent protection level for power supply . If the value is out of the acceptable overcurrent
range for the power supply model, error message -222,”Data out of range” is posted in the output
queue. If the power supply output exceeds the current protection level programmed, then th e power
supply output is disabled (programmed to 0) and th e OV bit in the Ques tionable Conditi on status register is set. An overcurrent condition can be cleared with the CURR:PROT:CLE command. The current
protection level can be programmed independently of the outp ut current level. Setting cu rrent protection to a value lower than the output current causes the current protection mechanism to tri gger after
the delay established by OUTP:PROT:DEL command. (See example, Figure B-5.)
ATE-DMG 042314 B-13
FIGURE B-5. PROGRAMMING CURRENT
Page 84

B.57 [SOURce:]CURRent:PROTection[:LEVel]? QUERY CURR:PROT?
Syntax: Short Form: [SOUR:]CURR:PROT[:LEV]? {MIN | MAX}
Long Form: [SOURce:]CURRent:PROTection[:LEVel]? {MIN | MAX}
Return Value: <exp_value> = digits with decimal point and Exponent, e.g., 2.71E+1 for 27.1
Description: Returns value representing current protection level.CURR:PROT? returns value set by
CURR:PROT. CURR:PROT?MAX returns maximum current protection value (see Table 1-2). This
value is determined at the factory and ca nnot be changed by the user. CURR:PROT?MIN returns the
minimum current protection value (always 0). (See example, Figure B-5.)
B.58 [SOURce:]CURRent:PROTection:CLEar COMMAND CURR:PROT:CLE
Syntax: Short Form: [SOUR:]CURR:PROT:CLE Long Form: [SOURce:]CURRent:PROTection:CLEar
Description: Clears overcurrent condition.Output programmed to 0V; current limit programmed to small value
(approximately 1% of full scale current rating). Overcurrent Protection Tripped is reset so that
CURR:PROT:TRIP? returns 0. Related Commands: CURR:PROT, CURR:PROT:TRIP? (See example, Figure B-5.)
B.59 [SOURce:]CURRent:PROTection:TRIPped? QUERY CURR:PROT:TRIP?
Syntax: Short Form: [SOUR:]CURR:PROT:TRIP? Long Form: [SOURce:]CURRent:PROTection:TRIPped?
Return Value: 0 or 1.
Description: Identifies whether overcurrent condition was detected. 0 if overcurrent protection tripped. 1 if
overcurrent protection not tripped. Related Commands: CURR:PROT, CURR:PROT:CLE. (See example, Figure B-5.)
B.60 [SOURce:]CURRent:[:LEVel]TRIGgered[:AMPlitude] COMMAND CURR:TRIG
Syntax: Short Form: [SOUR:]CURR[:LEV]:TRIG[:AMP] <exp_value>
Long Form: [SOURce:]CURRent[:LEVel]:TRIGgered[:AMPlitude] <exp_value>
<exp_value> = digits with decimal point and Exponent, e.g., 2.71E+1 for 27.1
Description: Programs current value to be transferred to output by *TRG commands. Actual output current
will depend on load conditions. If the value exceeds the maximum for the model being programmed,
error message -222,”Data out of range” is posted in output queue. If value exceeds CURR:LIM:HIGH
value, a value corresponding to the current limit will be programmed. Related Commands: CURR.
(See example, Figure B-1.)
B.61 [SOURce:]CURRent:[:LEVel]TRIGgered[:AMPlitude]? QUERY CURR:TRIG?
Syntax: Short Form: [SOUR:]CURR[:LEV]:TRIG[:AMP]?
Long Form: [SOURce:]CURRent[:LEVel]:TRIGgered[:AMPlitude]?
Return Value: <exp_value> = digits with decimal point and Exponent, e.g., 2.71E+1 for 27.1
Description: Returns the current value established by CURR:TRIG command. (See examp le, Figu re B-1.)
B.62 [SOURce:]VOLTage[:LEVel][:IMMediate][:AMPlitude] COMMAND VOLT
Syntax: Short Form: [SOUR:]VOLT[:LEV][:IMM][:AM P] <exp_value>
Long Form: [SOURce:]VOLTage[:LEVel][:IMMediate][:AMPlitude] <exp_value>
<exp_value> = digits with decimal point and Exponent, e.g., 2.71E+1 for 27.1
Description: Sets programmed voltage level at power supply output. This command programs output voltage
to a specific value; actual output voltage will depend on load conditions. If the value exceeds the maximum for the model being programmed, error message -222,”Data out of range” is posted in output
queue. If value programmed exceeds the VOLT:LIM:HIGH value, a value corresponding to the voltage
limit will be programmed. Related Commands: *RCL, *SAV, VOL T:LIM:HIGH. (See example, Figure B-
1.
B-14 ATE-DMG 042314
Page 85

B.63 [SOURce:]VOLTage[:LEVel][:IMMediate][:AMPlitude]? QUERY
Syntax: Short Form: [SOUR:]VOLT[:LEV][:IMM][:AMP]? {MIN | MAX}
Long Form: [SOURce:]VOLTage[:LEVel][:IMMediate][:AMPlitude]? {MIN | MAX}
Description: Identifies programmed voltage, maximum allowable voltage, or minimum voltage (always 0).
The VOLT? query returns the programmed value of voltage. Actual output voltage will depend on load
conditions. The VOLT?MAX query returns the maximum voltage allowed for a particular model (e.g.,
25V for ATE100-10DMD). VOLT ?MIN returns minimum voltage allowed for power supply (always 0).
Related Commands: VOLT. (See example, Figure B-6
VOLT?
B.64 [SOURce:]VOLTage:[:LEVel]TRIGgered[:AMPlitude] COMMAND VOLT:TRIG
Syntax: Short Form: [SOUR:]VOLT[:LEV]:TRIG[:AMP] <exp_value>
Long Form: [SOURce:]VOLTage[:LEVel]:TRIGgered[:AMPlitude] <exp_value>
<exp_value> = digits with decimal point and Exponent, e.g., 2.71E+1 for 27.1
Description: Programs voltage value to be transferred to output by *TRG commands. Actual output voltage
will depend on load conditions. If the value exceeds the maximum for the model be ing programmed,
error message -222,”Data out of range” is posted in output queue. If value exceeds VOLT:LIM:HIGH
value, a value corresponding to the voltage limit will be programmed. (See example, Figure B-1.)
B.65 [SOURce:]VOLTage:[:LEVel]TRIGgered[:AMPlitude]? QUERY VOLT:TRIG?
Syntax: Short Form: [SOUR:]VOLT[:LEV]:TRIG[:AMP]?
Long Form: [SOURce:]VOLTage[:LEVel]:TRIGgered[:AMPlitude]?
Return Value: <exp_value> = digits with decimal point and Exponent, e.g., 2.71E+1 for 27.1
Description: Returns value representing voltage value to be programmed by *TRG command established by
VOLT:TRIG command). (See example, Figure B-1.)
B.66 [SOURce:]VOLTage:LIMit:HIGH COMMAND VOLT:LIM:HIGH
Syntax: Short Form: [SOUR:]VOLT:LIM:HIGH <exp_value>
Long Form: [SOURce:]VOLTage:LIMit:HIGH <exp_value>
<exp_value> = digits with decimal point and Exponent, e.g., 2.71E+1 for 27.1
Description: Sets volt age limit for power supply output. If the value is out of the acceptable voltage range for the
power supply model, error message -222,”Data out of range” is posted in the output queue. If the user
tries to set an output voltage level larger than the VOLT:LIM:HIGH setting, a value corresponding to
the voltage limit will be programmed and error message -301,”Value bigger than limit” is posted in the
output queue. NOTE: If the voltage limit is changed, any previously established trigger levels higher
than the new limit must be reprogrammed to be lower than the new limit; otherwise triggers will cause
the output to exceed the new limit. Once the limit is established, th e unit will not accep t trigger val ues
higher than the programmed limit. Related Commands: VOLT. (See example, Figure B-6.)
B.67 [SOURce:]VOLTage:LIMit:HIGH? QUERY VOLT:LIM:HIGH?
Syntax: Short Form: [SOUR:]VOLT:LIM:HIGH? Long Form: [SOURce:]VOLTage:LIMit:HIGH?
Return Value: <exp_value> = digits with decimal point and Exponent, e.g., 2.71E+1 for 27.1
Description: Returns value representing voltage limit set by VOLT:LIM:HIGH command. Related Commands:
VOLT:LIM:HIGH, VOLT. (See example, Figure B-6.)
B.68 [SOURce:]VOLTage:[:LEVel]MODE COMMAND VOLT:MODE
Syntax: Short Form: [SOUR:]VOLT[:LEV]:MODE {FIX | EXT}
Long Form: [SOURce:]VOLTage[:MODE {FIXed | EXTernal}
Description: Establishes whether control of the output voltage is via keypad or GPIB commands (FIXED) or
via external analog 0 to 10V reference (EXTERNAL). Setting is stored in NVRAM and retained upon
subsequent power up.
ATE-DMG 042314 B-15
Page 86

B.69 [SOURce:]VOLTage:[:LEVel]MODE? QUERY VOLT:MODE?
NOTES: 1. Power supply assumed to be operating in constant voltage mode.
2. Examples below are intended only to illustrate command functions. Refer to PAR. 3.6.5 for
programming techniques to optimize performance.
VOLT 21; CURR 1.1 Power supply programmed to 21V, 1.1A.
VOLT 2.157E1 Power supply programmed to go to 21.57V.
VOLT? Returns 2.157E1, indicating programmed voltage = 2.157V.
VOLT? MAX For ATE 100-10DM, returns 100 (100V).
VOLT? MIN Returns 0 (minimum allowable voltage).
VOLT:PROT 2.365E+1 Voltage protection set to 23.65V.
VOLT? Returns 21.57, indicating programmed voltage value = 21.57V.
VOLT:PROT? Returns 2.365+E1, (programmed overvoltage protection = 23.65V
VOLT:PROT? MAX For ATE 100-10DMG, returns 110.
VOL T:PROT:TRIP? 0 indicating overvoltage protection not tripped.
--- OVERVOLTAGE CONDITION OCCURS.
VOLT:PROT:TRIP? 1 indicating overvoltage protection tripped.
VOLT:PROT:CLE Overvoltage condition cleared.
VOLT:PROT:TRIP? 0 indicating overvoltage condition not tripped.
VOLT? Returns 0, programmed voltage value = 0V.
VOLT 21; CURR 1.1 Power supply programmed to go to 21V, 1.1A.
VOLT? Returns 21.
VOLT:LIM:HIGH 5 Voltage limit set to 5V.
VOLT:LIM:HIGH? Returns 5 .
VOLT 33 Power supply programmed to 5V.
SYST:ERR? Error message -301 “Value bigger than limit.”
VOLT? Returns 5.
Syntax: Short Form: [SOUR:]VOLT[:LEV]:MODE?
Long Form: [SOURce:]VOLTage[:LEVel]MODE]?
Return Value: FIXED or EXTERNAL
Description: Returns FIXED or EXTERNAL depending on whether voltage control is from the keypad or
GPIB interface (FIXED or from an external analog reference voltage (EXTERNAL).
B.70 [SOURce:]VOLTage:PROTection[:LEVel] COMMAND VOLT:PROT
Syntax: Short Form: [SOUR:]VOLT:PROT[:LEV] <exp_value>
Long Form: [SOURce:]VOLTage:PROTection[:LEVel] <exp_value>
<exp_value> = digits with decimal point and Exponent, e.g., 2.71E+1 for 27.1
Description: Sets overvoltage protection level for power supply.If the value is out of the acceptable overvoltage
range for the power supply model, error message -222,”Data out of range” is posted in the output
queue. If the power supply output exceeds the voltage protection level p rogrammed, then the power
supply output is disabled (programmed to 0) and the OV bit in the Questionable Condition status register is set. An overvoltage condition can be cleared with the VOLT:PROT:CLE command. The voltage
protection level can be programmed independently of the output voltage level. Setting voltage protection to a value lower than the output voltage causes the voltage protection mechanism to trigger immediately. (See example, Figure B-6.)
B.71 [SOURce:]VOLTage:PROTection[:LEVel]? QUERY VOLT:PROT?
Syntax: Short Form: [SOUR:]VOLT:PROT[:LEV] MIN, MAX
Description: Identifies overvoltage protection setting, maximum allowable overvoltage protection, or mini-
B-16 ATE-DMG 042314
Long Form: [SOURce:]VOLTage:PROT e ction[:LEVel] MIN, MAX
Return Value: <exp_value> = digits with decimal point and Exponent, e.g., 2.71E+1 for 27.1
mum overvoltage protection. VOLT:PROT? returns value set by VOLT:PROT. VOLT:PROT? MAX
FIGURE B-6. PROGRAMMING VOLTAGE
Page 87

returns maximum voltage protection value (see Table 1-2); this value is determined at the factory and
TABLE B-2. OPERATION CONDITION REGISTER, OPERATION ENABLE REGISTER,
AND OPERATION EVENT REGISTER BITS
CONDITION NU CC NU CV NU WTG NU CAL
BIT 15-11 10 9 8 7 - 6 5 4 - 1 0
VALUE
32,768 -
2048
1024 512 256 128 - 64 32 16 -2 1
CAL - INTERFACE COMPUTING NEW CALIBRATION
CONSTANTS
CC - POWER SUPPLY IN CONSTANT CURRENT MODE
CV - POWER SUPPLY IN CONSTANT VOLTAGE MODE
NU - NOT USED
WTG WAIT FOR TRIGGER (SET BY INIT SUBSYSTEM)
cannot be changed by the user. VOLT:PROT? MIN returns the minimum voltage protection value
(always 0). (See example, Figure B-6.)
B.72 [SOURce:]VOLTage:PROTection:CLEar COMMAND VOLT:PROT:CLE
Syntax: Short Form: [SOUR:]VOLT:PROT:CLE Long Form: [SOURce:]VOLTage:PROTection:CLEar
Description: Clears overvoltage condition. Output programmed to 0V; current limit programmed to small value
(approximately 1% of full scale current rating). Overvoltage Protection Tripped is reset so that
VOLT:PROT:TRIP? returns 0. Related Commands: VOLT:PROT, VOLT:PROT:TRIP?. (See example,
Figure B-6.)
B.73 [SOURce:]VOLTage:PROTection:TRIPped? QUERY VOLT:PROT:TRIP?
Syntax: Short Form: [SOUR:]VOLT:PROT:TRIP? Long Form: [SOURce:]VOLTage:PROTection:TRIPped?
Return Value: 0 or 1
Description: Identifies whether overvoltage condition was detected. Returns 0 if overvoltage protection tripped;
1 if overvoltage protection not tripped. Related Commands: VOLT:PROT, VOLT:PROT:CLE. (See
example, Figure B-6.)
B.74 [SOURce:]FUNCtion:MODE? QUERY FUNC:MODE?
Syntax: Short Form: FUNC:MODE? Long Form: [SOURce:]FUNCtion:MODE?
Return Value: VOLT or CURR
Description: Identifies the operating mode of the power supply. VOLT = Constant Voltage mode (CV).
CURR = Constant Current mode (CC). (See example, Figure B-1.)
B.75 STATus:OPERation:CONDition QUERY STAT:OPER:COND?
Syntax: Short Form: STAT:OPER:COND? Long Form: STATus:OPERation:CONDition?
Return Value: <int_value> 0 to 1313 (1 + 32 + 256 + 1024).
Description: Returns the value of the Operation Condition Register (see Table B-2). The Operation Condition
Register contains unlatched real-time information about the operating conditions of the power supply.
Bit set to 1 = function enabled (active, true); bit reset to 0 = function disabled (inactive, false). (See
example, Figure B-7.)
B.76 STATus:OPEReration:ENABle COMMAND STAT:OPER:ENAB
Syntax: Short Form: STAT:OPER:ENAB <int_value> 0 to 1313 (1 + 32 + 256 + 1024)
Long Form: STATus:OPERation:ENABle <int_value> 0 to 1313 (1 + 32 + 256 + 1024)
Description: Sets Operation Enable Register. The Operation Enable Register is a mask for enabling specific bits
in the Operation Event Register which will cause the operation summary bit (bit 7) of the Status Byte
register to be set Bit set to 1 = function enabled (active , true); bit reset to 0 = fu nction disabled (inac-
ATE-DMG 042314 B-17
tive, false). The operation summary bit is the logical OR of all the enabled bits in the Operation Event
register. (See example, Figure B-7.)
Page 88

B.77 STATus:OPEReration:ENABle? QUERY STAT:OPER:ENAB?
NOTE:The power supply is assumed to be operating in cV (constant voltage) mode.
STAT:OPER:ENAB 1056Mask enabled for CC, WTG and bits.
STAT:OPER:ENAB? Returns 1056 (32 + 1024) (CC, WTG bits set).
STAT:QUES:ENAB 3 Mask enabled for OV and OC bits (1 + 2).
STAT:QUES:ENAB? Returns 3 (1 + 2) indicating OV and OC bits are enabled.
STAT:PRES Operation Condition and Questionable Condition registers are
reset.
INIT:CONT ON Continuous triggers enabled.
STAT:OPER:COND? Power supply returns 288 (256 + 32) to indicate that power
supply is constant voltage mode and Wait For Trigger is true.
STAT:OPER? Returns 10 57, e.g ., indi cating that since the last reading of the
Operation Event Register the power supply has entered
Constant Current mode, the Wait Trigger was set.
STAT:OPER? Returns 0 indicating no changes since previous reading of the
Operation Event register.
STAT:QUES? Returns 0 (no qu estionable conditions occurred since previous
reading
--- (SHORT OUTPUT) OVERCURRENT CONDITION OCCURS
STAT:QUES? Returns 2 (overcurrent protection tripped since the last
STAT:QUES? query).
STAT:QUES:COND? Returns 2, (Power supply still in overcurrent protection state).
STAT:QUES? Returns 0, (Register cleared by previous STAT:QUES?).
STAT:QUES:COND? Returns 2, (Power supply still in overcurrent protection state).
— (REMOVE SHORT FROM OUTPUT)
CURR:PROT:CLE Overcurrent condition cleared.
STAT:QUES:COND? Returns 0, (register cleared by CURR:PROT:CLE).
SYST:ERR? Power supply returns 0,“No error” message.
Syntax: Short Form: STAT:OPER:ENAB? Long Form: STATus:OPERation:ENABle?
Return Value: <int_value> 0 to 1313 (1 + 32 + 256 + 1024).
Description: Reads Operation Enable Register (see Table B-2). Returns value of Operation Enable Register bits.
Bit set to 1 = function enabled (active, true); bit reset to 0 = function disabled (inactive, false). (See
example, Figure B-7.)
B.78 STATus:OPERation[:EVENt] QUERY STAT:OPER?
Syntax: Short Form: STAT:OPER[:EVEN]? Long Form: STATus:OPERation[:EVENt]?
Return Value: <int_value> 0 to 1313 (1 + 32 + 256 + 1024).
Description: Indicates changes in conditions monitored by Operational Even t Register. Returns the value of
the Operation Event register. The Operation Event register is a read-only register which holds
(latches) all events that occur. Reading the Operation Event register clears it. (See example, Figure B-
7.)
B.79 STATus:PRESet COMMAND STAT:PRES
Syntax: Short Form: STAT:PRES Long Form: STATus:PRESet
Description: Disables reporting of all status event s. This command sets all bits of the Operation Condition (Table
B-2) and Questionable Condition Registers to 0, preventing all status events from being reported.
(See example, Figure B-7.)
B-18 ATE-DMG 042314
FIGURE B-7. USING STATUS COMMANDS AND QUERIES
Page 89

B.80 STATus:QUEStionable[:EVENt]? QUERY
TABLE B-3. QUESTIONABLE EVENT REGISTER, QUESTIONABLE CONDITION REGISTER
AND QUESTIONABLE CONDITION ENABLE REGISTER BITS
CONDITION NU OC OV
BIT 15 - 2 1 0
VALUE 32,768 - 4 2 1
OC - OVERCURRENT PROTECTION TRIPPED
OV - OVERVOLTAGE PROTECTION TRIPPED
NU - NOT USED
Syntax: Short Form: STAT:QUES[EVEN]? Long Form: STATus:QUEStionable[EVENT]?
Return Value: <int_value> actual register value
Description: Indicates questionable events that occurred since previous STAT:QUES? query. Returns the
value of the Questionable Event register (see Table B-3). The Questionable Event register is a
read-only register which holds (latches) all events. Reading the Questionable Event register clears it.
(See example, Figure B-7.)
STAT:QUES?
B.81 STATus:QUEStionable:CONDition? QUERY STAT:QUES:COND?
Syntax: Short Form: STAT:QUES:COND? Long Form: STATus:QUEStionable:CONDition?
Return Value: <int_value> actual register value
Description: Returns the value of the Questionable Condition Register (see Table B-3). The Questionable
Condition Register contains unlatched real-time information about questionable conditions of the
power supply. Bit set to 1 = condition (active, true); bit reset to 0 = condition (inactive, false). (See
example, Figure B-7.)
B.82 STATus:QUEStionable:ENABle COMMAND STAT:QUES:ENAB
Syntax: Short Form: STAT:QUES:ENAB <int_value> Long Form: STATus:QUESionable:ENABle <int_value>
Function: Programs Questionable Condition Enable Register.
Description: Programs Questionable Condition Enable Register (see Table B-3).The Questionable Condition
Enable Register determines which conditions are allowed to set the Questiona ble Conditio n Register;
it is a mask for enabling
able summary bit (bit 3) of the Status Byte register to be set. The questionable summary bit is the logical OR of all the enabled bits in the Questionable Event register
(active, true); bit reset to 0 = function disabled (inactive, false)
specific bits in the Questionable Event regi ster that can cause the question-
. Bit set to 1 = function enabled
. (See example, Figure B-7.)
B.83 STATus:QUEStionable:ENABle? QUERY STAT:QUES:ENAB?
Syntax: Short Form: STAT:QUES:ENAB? Long Form: STATus:QUESionable:ENABle?
Return Value: <int_value> actual register value
Description: Reads Questionable Condition Enable Register (see Table B-3). Power supply returns value of
Questionable Condition Enable Register, indicating which conditions are being monitored. Bit set to 1
= function enabled (active, true); bit reset to 0 = function disabled (inactive, false). Related Commands: STAT:QUES?. (See example, Figure B-7.)
B.84 SYSTem:ERRor[:NEXT]? QUERY SYST:ERR?
Syntax: Short Form: SYST:ERR[:NEXT]? Long Form: SYSTem:ERRor[:NEXT]?
Return Value: <int_value,string>
Description: Posts error messages to the output queue. Returns the next error number followed by its corre-
sponding error message string from the instrument error queue. The error queue is a FIFO (first in first
out) buffer that stores errors as they occur. As it is read, each error is removed from the queue and the
next error message is made available. When all errors have been read, the query returns 0,”No error”.
ATE-DMG 042314 B-19
If more than 15 errors are accumulated, it will overflow. The oldest errors stay in the queue but the
most recent errors are discarded. The last error in the queue will be -350 ,”Too many errors.” Error
messages are defined in Table B-4.
Page 90

B.85 SYSTem:ERRor:CODE? QUERY SYST:ERR:CODE?
Syntax: Short Form: SYST:ERR:CODE?] Long Form: SYSTem:ERRor:CODE?
Description: Returns the three character error code without the ASCII definition string. The error codes are defined
in table B-4 (See example, Figure B-1.)
B.86 SYSTem:ERRor:CODE:ALL? QUERY SYST:ERR:CODE:ALL?
Syntax: Short Form: SYST:ERR:CODE:ALL?] Long Form: SYSTem:ERRor:CODE:ALL?
Return Value:
Description: Returns a comma-separated list of all error codes. A maximum of 15 codes will be returned; if the
queue is empty, the power supply returns 0.
B.87 SYSTem:KLOCk COMMAND SYST:KLOC
Syntax: Short Form: SYST:KLOC <boolean> Long Form: SYSTem:KLOCk <boolean>
<boolean> (0 or OFF, 1 or ON)
Description: Locks (ON or 1) or unlocks (OFF or 0) the keypad. With the keypad unlocked the power supply
enters Remote mode as soon as a command or query is received. Once in Remote mode (with keypad unlocked) the front panel keys are disabled with the exception of the LOCAL key , which is used to
return to Local mode.
After sending a SYST:KLOC ON (keypad lock) command, all front panel keys, including LOCAL, are
disabled. The power supply is now in the “local lockout” state. Local lockout can a lso be entered by
sending the GPIB <LLO> code (hex 11) to the power supply. The power supply remains in “local lockout” until a SYST:KLOC OFF command is received. Related Commands: SYST:KLOCK?. (See example, Figure B-8.)
B.88 SYSTem:KLOCk? QUERY SYST:KLOC?
Syntax: Short Form: SYST:KLOC? Long Form: SYSTem:KLOCk?
Return Value: <int_value> 0 or 1
Description: Identifies whether keypad is locked or unlocked. 0 = keypad unlocked, local operation possible by
pressing LOCAL key. 1 = keypad locked, LOCAL key disabled, only remote operation possible.
Related Commands: SYST:KLOCK. (See example, Figure B-8.)
B.89 SYSTem:LANGuage? QUERY SYST:LANG?
Syntax: Short Form: SYST:LANG? Long Form: SYSTem:LANGuage?
Return Value: <string> SCPI or COMP
Description: Identifies whether unit responds to older command formats. SCPI means the unit will not respond
to older formats such as LIST:TIME. COMP means the unit will respond to older formats such as
LIST:TIME for compatible operation with software written for ATE power supplies up to Revision 1.
B.90 SYSTem:LANGuage COMMAND SYST:LANG
Syntax: Short Form: SYST:LANG {COMP | SCPI} Long Form: SYSTem:LANGuage {COMP | SCPI}
Description:Determines whether unit responds to older command formats. Sending
SYST:LANG COMP causes the unit to respond to older formats such as LIST:TIME for compatible
operation with software written for ATE power supplies up to Revision 1. SYST:LANG COMP has been
selected at the factory to permit the VISA demonstration program (which uses older comman d formats) to operate. SYST:LANG SCPI disables responses to older command formats.
B-20 ATE-DMG 042314
Page 91

TABLE B-4. ERROR MESSAGES
ERROR MESSAGE
0,“No error” None No error.
ESR ERROR BIT SET
(SEE PAR. A.5)
EXPLANATION
-100,“Command error”
-102,”Syntax error”
-103,”Invalid separator”
Command Error bit 5
Command Error bit 5
Command Error bit 5
Command and data understood, but more information included which is not recognized.
First 4 characters recognized, subsequent characters not recognized.
For example, VOLT.PROT received instead of
VOLT:PROT.
-108,”Parameter Not Allowed Error” Command Error bit 5 Volt12 sequence, channel number is invalid.
-109,”Missing parameter” Command Error bit 5 For example, VOLT instead of VOLT 21.
-111,”Header separator error” Command Error bit 5 Missing space between volt and value or ; missing.
-113,”Undefined header”
Command Error bit 5
First 4 characters could not be identified as legal
command.For example, command VLT instead of
VOLT.
-120,”Numeric data error”
Command Error bit 5
Expected number but other characters were
detected.
-121,”Invalid character in number” Command Error bit 5 Volt 1,500 (comma not allowed).
-123,”Exponent too large” Command Error bit 5 Exponent E+3 or greater is invalid.
-141,”Invalid character data”
-150,”String data error”
Command Error bit 5
Command Error bit 5
For example OUTP OFD or OUTP STOP instead of
OUTP OFF.
Invalid characters were detected in numeric entry.
For example E.1 instead of E+1 or 4d3 instead of
4.3.
-203,”Command protected” Execution error bit 4 Command only valid in password Cenable state.
-221,”Settings conflict” Execution error bit 4 Invalid password from syst:pass:cen command.
-222,“Data out of range” Execution error bit 4 Value exceeds power supply rating.
-223,”Data format error” Execution error bit 4 M ultiple decimals in digit, Multiple E, etc.
-224,“Illegal parameter value” Execution error bit 4 For example, OUTP 2 instead of OUTP 1.
-241,”Hardware missing” Execution error bit 4 Requesting device 2 status (INST:NSEL 2).
-282,”Illegal program name” Execution error bit 4 Executing prog:run without LIST:SEQ command.
-301,”Value bigger than limit” Device Error bit 3 Requesting a time of 301 which is bigger than limit.
-311,”Memory error” Device Error bit 3 Power-up NV RAM error.
-314,”Save/recall memory error” Device Error bit 3 Using cell other than 1 - 41 for SAV and RCL.
-341,”Non Volatile Mem. CRC error”
Device Error bit 3
Power supply constants may be corrupted; recalibration may be necessary.
-350, “Queue overflow” Query Error bit 2 More than 15 errors are in queue.
-410,”Query interrupted”
Query Error bit 2
New command sent before data from previous
query read. Previous query data lost.
-430, “Query Deadlocked” Query Error bit 2 Over 255 characters received in single input string.
ATE-DMG 042314 B-21
Page 92

B.91 SYSTem:PASSword:CENable COMMAND SYST:PASS:CEN
Syntax: Short Form: SYST:PASS:CEN <val> Long Form: SYSTem:PASSword:CENable <val>
Description: Sets the password enable state if the value matches the current password. This command allows
other commands such as *SAV 41 to operate.
B.92 SYSTem:PASSword:CDISable COMMAND SYST:PASS:CDIS
Syntax: Short Form: SYST:PASS:CDIS <val> Long Form: SYSTem:PASSword:CDISable <val>
Description: Clears the password enable state if the value matches the current password.
B.93 SYSTem:PASSword:STATe? QUERY SYST:PASS:STAT?
Syntax: Short Form: SYST:PASS:STAT? Long Form: SYSTem:PASSword:STATe?
Return Value: <int_value> 0 or 1
Description: Returns a 1 if the password state is enabled or a 0 if it is disabled.
B.94 SYSTem:SECurity:IMMediate COMMAND SYST:SEC:IMM
Syntax: Short Form: SYST:SEC:IMM Long Form: SYSTem:SECurity:IMMediate
Description: Initializes all NVRAM variable to factory defaults. This includes all memory steps to be set to 0 volts,
1.28% of full scale current, overvoltage and overcurrent to be set to Iomax+10%, time value to be set
to 0, and next step equal to 0.).It also initializes the power -up state to have DC Output Control off (see
DCL Control, PAR 3.5.2). The calibration password is reset per Table B-5. Use master password (see
below, Table B-6) If password has been lost. Related Commands: SYST:PASS:CEN must be sent
prior to this command
TABLE B-5. FACTORY DEFAULT CALIBRATION PASSWORDS
MODEL PASSWORD
ATE 6-100DMG 6100
ATE 15-50DMG 1550
ATE 25-40DMG 2540
ATE 36-30DMG 3630
ATE 55-20DMG 5520
ATE 75-15DMG 7515
ATE 100-10DMG 1001
ATE 150-7DMG 1507
.
TABLE B-6. MASTER PASSWORDS
MODEL PASSWORD MODEL PASSWORD MODEL PASSWORD
ATE 6-
100DMG
ATE 1550DMG
ATE 2540DMG
..17
..26
..35
ATE 36-
30DM
ATE 5520DMG
ATE 7515DMG
..44
..52
..69
ATE 100-
10DMG
ATE 150-
7DMG
..78
..86
B-22 ATE-DMG 042314
Page 93

B.95 SYSTem:SET COMMAND
SYST:VERS? Returns 2003.0.
SYST:KLOC ON keypad locked, only remote control possible.
SYST:KLOC? Returns 1 indicating keypad locked.
SYST:KLOC OFF keypad unlocked, pressing LOCAL key allows Local mode
operation.
SYST:KLOC? Returns 0 indicating keypad unlocked.
Syntax: Short Form: SYST:SET {CM0 | CM1 | DC0 | DC1 | LF0 | LF1 | STR | RLX)
Long Form: SYSTem:SET {CM0 | CM1 | DC0 | DC1 | LF0 | LF1 | STR | RLX)
Description: Sending SYST:SET CM1 sets the unit to operate in compatible mode and have all GPIB functions
compatible with software version 1.2 and lower units. Sending SYST:SET CM0 sets the unit to be fully
SCPI 1997 compliant.
Sending SYST:SET DC1 causes Device Clear to be identical to *RST command. Sending SYST:SET
DC0 causes Device Clear to have no effect on output voltage, output current or output on/off state.
Sending SYST:SET LF1 causes the power supply to respond with line feed if re ad occurs with output
buffer empty. Sending LF0 causes the power not to send a line feed if read occurs w ith output buffer
empty (SCPI 1997 compliant).
Sending SYST:SET RLX allows the power supply to accept special debug and troubleshoo ting commands (for KEPCO use only - e.g., after sending SYST:SET RLX the power supply will respond to the
$vda? command by returning the value of the internal D/A converter for voltage). Sending SYST:SET
STR disables the special debug and troubleshooting commands.
Related Commands:
SYST:PASS:CEN - the password must be enabled prior to saving the SYST:SET configuration using
the *SAV41 command.
*SAV41 - this command saves the configuration established by SYST:SET and OUTP commands and
restores it upon power up.
SYST:SET
B.96 SYSTem:VERSion QUERY SYST:VERS?
Syntax: Short Form: SYST:VERS? Long Form: SYSTem:VERSion?
Return Value: <int_value>.<int_value> (YYYY.V)
Description: Identifies SCPI Version implemented. Returns SCPI Version number:
YYYY = year, V = Revision number for specified year. (See example, Figure B-8.)
FIGURE B-8. USING SYSTEM COMMANDS AND QUERIES
ATE-DMG 042314 B-23/(B-24 Blank)
Page 94

 Loading...
Loading...