

Page 1
JUMO dTRON 316
JUMO dTRON 308 JUMO dTRON 304
JUMO dTRON 308
JdTRON 304
JdTRON 308
JdTRON 316
JdTRON 304 plast
JdTRON 308 plast
Kompaktregler
mit Programmfunktion
B 70.3041.2
Schnittstellenbeschreibung
07.06/00442142
Page 2

Page 3

Inhalt
1 Einleitung 5
1.1 Vorwort .......................................................................................................... 5
1.2 Typografische Konventionen ....................................................................... 6
1.2.1 Warnende Zeichen ......................................................................................... 6
1.2.2 Hinweisende Zeichen ..................................................................................... 6
1.2.3 Darstellungsarten ........................................................................................... 6
2 Protokollbeschreibung 7
2.1 Master-Slave-Prinzip .................................................................................... 7
2.2 Übertragungsmodus (RTU) ......................................................................... 7
2.3 Geräteadresse .............................................................................................. 8
2.4 Zeitlicher Ablauf der Kommunikation ........................................................ 8
2.4.1 Zeitlicher Ablauf einer Datenanfrage ............................................................ 10
2.4.2 Kommunikation während der internen Bearbeitungszeit des Slaves ........... 11
2.4.3 Kommunikation während der Antwortzeit des Slaves ................................. 11
2.5 Aufbau der Datenblöcke ............................................................................ 11
2.6 Fehlerbehandlung ...................................................................................... 11
2.7 Checksumme (CRC16) ............................................................................... 13
2.8 Schnittstelle ................................................................................................ 14
2.8.1 Konfiguration ................................................................................................ 14
2.8.2 Abschlusswiderstand der seriellen Schnittstelle RS422/485 ....................... 14
2.8.3 Stromschnittstelle ........................................................................................ 15
3 Funktionen 17
3.1 Lesen von n Worten ................................................................................... 17
3.2 Schreiben eines Worts ............................................................................... 18
3.3 Schreiben von n Worten ............................................................................ 19
Page 4

Inhalt
4 Datenfluß 21
5 Adresstabellen 23
5.1 Prozeßdaten ................................................................................................ 23
5.2 Sollwerte ..................................................................................................... 25
5.3 Reglerparameter ........................................................................................ 25
5.4 Konfiguration .............................................................................................. 26
5.5 Programm übertragen ............................................................................... 27
5.6 Kommandos ................................................................................................ 28
5.7 Gerätekennung ........................................................................................... 29
Page 5

1.1 Vorwort
1 Einleitung
Lesen Sie diese Betriebsanleitung, bevor Sie das Gerät in Betrieb nehmen. Bewahren Sie die Betriebsanleitung an einem für alle Benutzer jederzeit zugänglichen Platz auf.
Bitte unterstützen Sie uns, diese Betriebsanleitung zu verbessern.
Für Ihre Anregungen sind wir dankbar.
Alle erforderlichen Einstellungen sind im vorliegenden Hand-
H
buch beschrieben. Sollten bei der Inbetriebnahme trotzdem
Schwierigkeiten auftreten, bitten wir Sie, keine unzulässigen
Manipulationen vorzunehmen. Sie könnten Ihren Garantieanspruch gefährden!
Bitte setzen Sie sich mit der nächsten Niederlassung oder mit
dem Stammhaus in Verbindung.
E
Bei technischen Rückfragen
Telefon-Support Deutschland:
Telefon:+49 661 6003-300 oder -653 oder -899
Telefax: +49 661 6003-881729
E-Mail: service@jumo.net
Österreich:
Telefon:+43 1 610610
Telefax: +43 1 6106140
E-Mail: info@jumo.at
Schweiz:
Telefon:+41 1 928 24 44
Telefax: +41 1 928 24 48
E-Mail: info@jumo.ch
Bei Rücksendungen von Geräteeinschüben, Baugruppen
oder Bauelementen sind die Regelungen nach DIN EN 100
015 „Schutz von elektrostatisch gefährdeten Bauelementen“
einzuhalten. Verwenden Sie nur dafür vorgesehene ESD-Ver-
packungen für den Transport.
Bitte beachten Sie, daß für Schäden, die durch ESD verursacht werden, keine Haftung übernommen werden kann.
ESD=Elektrostatische Entladungen
5
Page 6

1 Einleitung
1.2 Typografische Konventionen
1.2.1 Warnende Zeichen
Die Zeichen für Vo r s i c h t und Achtung werden in dieser Betriebsanleitung
unter folgenden Bedingungen verwendet:
Vorsicht Dieses Zeichen wird benutzt, wenn es durch ungenaues
V
Achtung Diese Zeichen wird benutzt, wenn es durch ungenaues
*
Achtung Diese Zeichen wird benutzt, wenn Vorsichtsmaßnahmen
E
Befolgen oder Nichtbefolgen von Anweisungen zu Personenschäden kommen kann!
Befolgen oder Nichtbefolgen von Anweisungen zu Beschädigungen von Geräten oder Daten kommen kann!
bei der Handhabung elektrostatisch entladungsgefährdeter Bauelemente zu beachten sind.
1.2.2 Hinweisende Zeichen
Hinweis Dieses Zeichen wird benutzt, wenn Sie auf etwas Beson-
)
Verweis Dieses Zeichen weist auf weitere Informationen in ande-
Ö
abc
1
Fußnote Fußnoten sind Anmerkungen, die auf bestimmte Textstel-
deres aufmerksam gemacht werden sollen.
ren Handbüchern, Kapiteln oder Abschnitten hin.
len Bezug nehmen. Fußnoten bestehen aus zwei Teilen:
Kennzeichnung im Text und Fußnotentext.
Die Kennzeichnung im Text geschieht durch hochstehen-
de fortlaufende Zahlen.
Der Fußnotentext (2 Schriftgrade kleiner als die Grund-
schrift) steht am unteren Seitenende und beginnt mit einer
Zahl und einem Punkt.
1.2.3 Darstellungsarten
0x0010 Hexadezi-
malzahl
6
Eine Hexadezimalzahl wird durch ein vorgestelltes „0x“
gekennzeichnet (hier: 16 dezimal).
Page 7
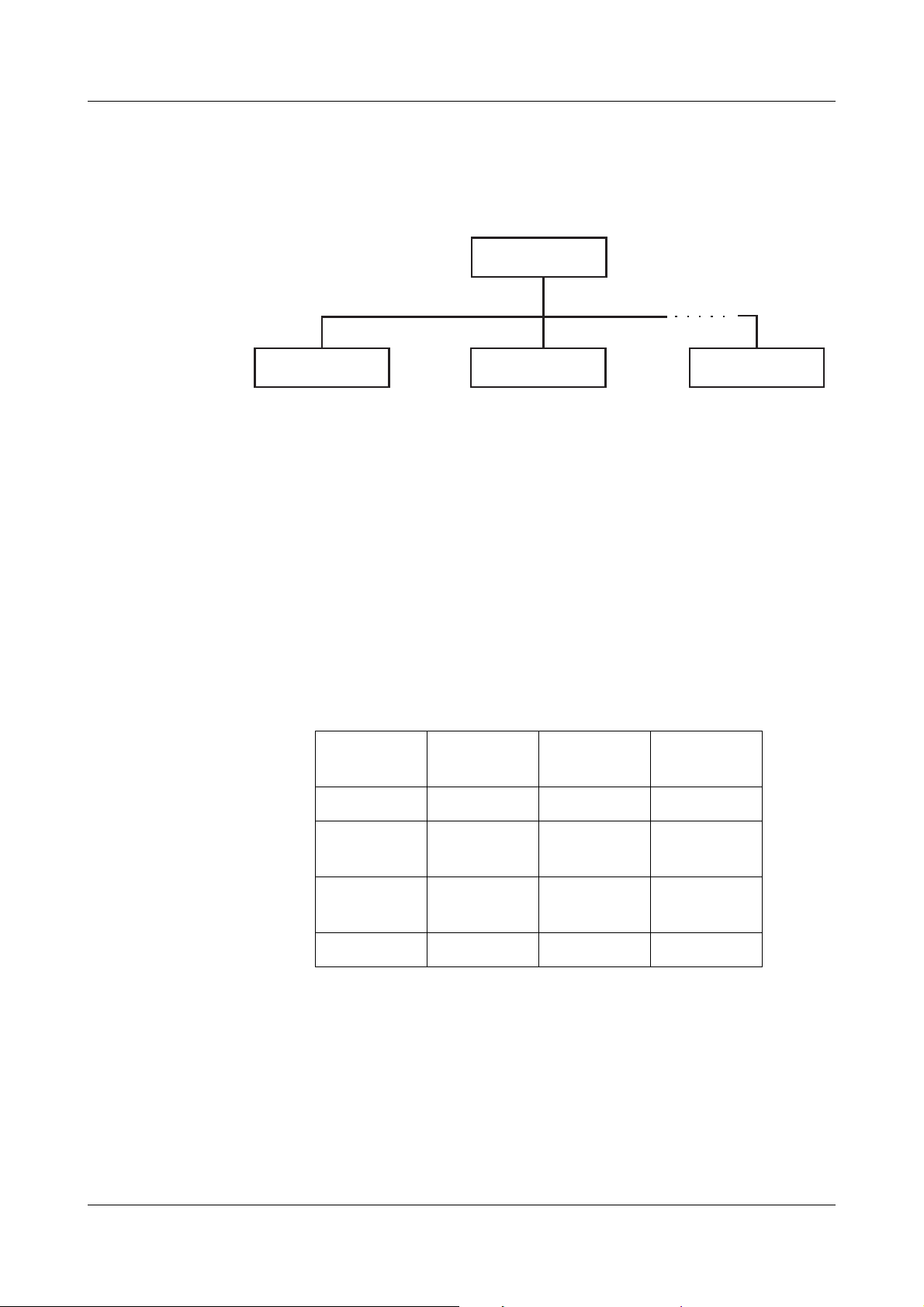
2.1 Master-Slave-Prinzip
Die Kommunikation zwischen einem PC (Master) und einem Gerät (Slave) mit MOD-Bus findet nach dem Master-Slave-Prinzip in Form von
Datenanfrage/Anweisung - Antwort statt.
Slave 1 Slave 2 Slave n
Der Master steuert den Datenaustausch, die Slaves haben lediglich Antwortfunktion. Sie werden anhand ihrer Geräteadresse identifiziert.
2.2 Übertragungsmodus (RTU)
Als Übertragungsmodus wird der RTU-Modus (Remote Terminal Unit)
verwendet. Die Übertragung der Daten erfolgt im Binärformat (hexadezimal) mit 8 Bits. Das LSB (least significant bit, engl. das niederwertigste
Bit) wird zuerst übertragen. Die Betriebsart ASCII-Modus wird nicht unterstützt.
2 Protokollbeschreibung
Master
Datenformat
Mit dem Datenformat wird der Aufbau eines übertragenen Zeichen be-
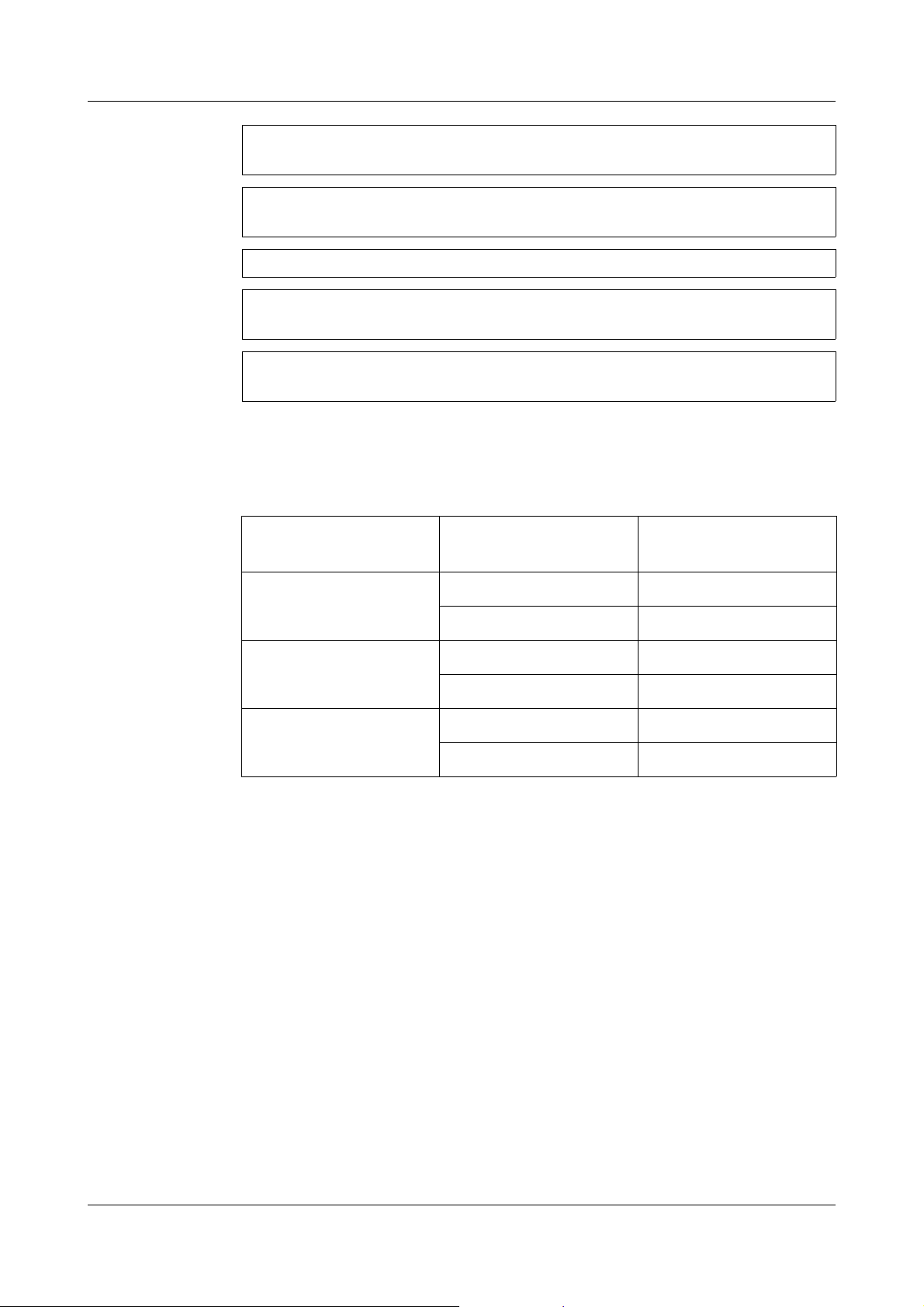
schrieben. Es sind folgende Möglichkeiten des Datenformats gegeben:
Datenwort Paritätsbit Stoppbit
1/2 Bit
8 Bit — 1 9
8 Bit gerade
(even)
8 Bit ungerade
(odd)
8 Bit — 2 10
110
110
Bitanzahl
7
Page 8

2 Protokollbeschreibung
2.3 Geräteadresse
Die Geräteadresse des Slaves ist zwischen 0 und 254 einstellbar. Die
Geräteadresse 0 ist reserviert.
Über die RS422-/485-Schnittstelle können maximal 31 Sla-
H
Man unterscheidet zwei Möglichkeiten des Datenaustausches:
Query Datenanfrage/Anweisung des Masters an einen Slave über die entspre-
chende Geräteadresse.
Der angesprochene Slave antwortet.
Broadcast Anweisung des Masters an alle Slaves über die Geräteadresse 0. Die
angeschlossenen Slaves antworten nicht. So kann z. B. allen Slaves ein
bestimmter Sollwert übertragen werden. Die richtige Übernahme des
Wertes durch die Slaves sollte in diesem Fall durch anschließendes
Auslesen des Sollwertes kontrolliert werden.
Eine Datenanfrage mit der Geräteadresse 0 ist nicht sinnvoll.
ves angesprochen werden.
2.4 Zeitlicher Ablauf der Kommunikation
Anfang und Ende eines Datenblocks sind durch Übertragungspausen
gekennzeichnet. Zwischen zwei aufeinanderfolgenden Zeichen darf maximal das Dreifache der Zeit zum Übertragen eines Zeichens vergehen.
Die Zeichenübertragungszeit (Zeit für die Übertragung eines Zeichens)
ist abhängig von der Baudrate und dem verwendeten Datenformat
(Stoppbits und Paritätsbit).
Bei einem Datenformat von 8 Datenbits, keinem Paritätsbit und einem
Stoppbit ergibt sich:
Zeichenübertragungszeit [ms] = 1000 * 9 Bits/Baudrate
Bei den anderen Datenformaten ergibt sich:
Zeichenübertragungszeit [ms]
= 1000 * (8 Bits+Paritätsbit+Stoppbit(s)) Bits/Baudrate
8
Page 9
2 Protokollbeschreibung
Ablauf
Übertragungszeit = n Zeichen * 1000 * x Bits/Baudrate
Bearbeitung der Datenanfrage durch den Slave (≤250ms)
Übertragungszeit = n Zeichen * 1000 * x Bits/Baudrate
Beispiel Kennzeichen für Datenanfrage- oder Antwort-Ende bei Datenformat 10/
9 Bits
Wartezeit = 3 Zeichen * 1000 * 10 Bits/Baudrate
Baudrate [Baud] Datenformat [Bit] Wartezeit [ms]
Datenanfrage vom Master
Kennzeichen für Datenanfrage-Ende
3 Zeichen * 1000 * x Bits/Baudrate
Antwort des Slaves
Kennzeichen für Antwort-Ende
3 Zeichen * 1000 * x Bits/Baudrate
(3 Zeichen)
38400 10 0.79
90.71
19200 10 1.57
91.41
9600 10 3.13
92.82
9
Page 10
2 Protokollbeschreibung
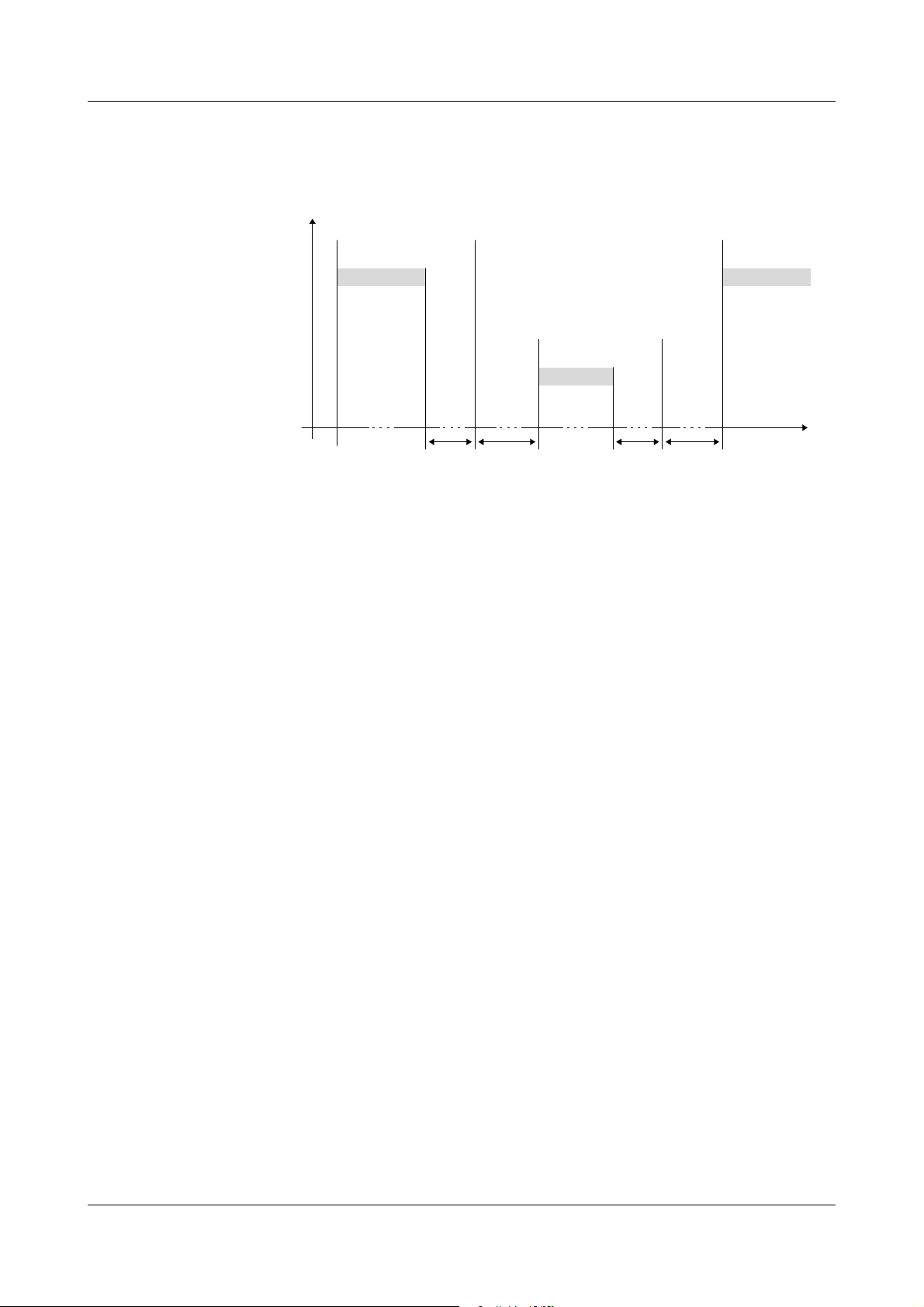
2.4.1 Zeitlicher Ablauf einer Datenanfrage
Zeitschema Eine Datenanfrage läuft nach folgendem Zeitschema ab:
Master
Slave
Slave
Datenanfrage
Datenanfrage
Antwort
Antwort
t
0
t
1
t
0
t
2
t0Endekennzeichen = 3 Zeichen
(die Zeit ist von der Baudrate abhängig)
t1Diese Zeit ist von der internen Bearbeitung abhängig.
Die maximale Bearbeitungszeit liegt bei 250 ms.
In dem Regler kann unter dem Menüpunkt „Schnittstelle“
H
eine minimale Antwortzeit eingestellt werden. Diese eingestellte Zeit wird mindestens eingehalten, bevor eine Antwort
gesendet wird (0…500 ms). Wird ein kleiner Wert eingestellt,
so kann die Antwortzeit größer sein als der eingestellte Wert
(die interne Bearbeitungszeit ist länger), der Regler antwortet
dann unmittelbar nachdem die interne Bearbeitung abgeschlossen ist. Eine eingestellte Zeit von 0 ms bedeutet, daß
der Regler mit der maximal möglichen Geschwindigkeit antwortet.
Datenanfrage
DatenanfrageMaster
t
10
Die minimal einstellbare Antwortzeit wird bei der RS485-Schnittstelle vom Master benötigt, um die Schnittstellentreiber von Senden auf Empfangen umzustellen. Bei der RS422-Schnittstelle wird
dieser Parameter nicht benötigt.
t2Diese Zeit braucht der Regler, um von Senden wieder auf Empfan-
gen umzuschalten. Diese Zeit muß der Master einhalten, bevor er
eine neue Datenanfrage stellt. Sie muß immer eingehalten werden,
auch wenn die neue Datenanfrage an ein anderes Gerät gerichtet
ist.
RS422-Schnittstelle: t2 = 1ms
RS485-Schnittstelle: t2 = 10ms
Page 11

2 Protokollbeschreibung
2.4.2 Kommunikation während der internen Bearbeitungszeit des Slaves
Während der internen Bearbeitungszeit des Slaves dürfen vom Master
keine Datenanfragen gestellt werden. In dieser Zeit gestellte Datenanfragen werden vom Slave ignoriert.
2.4.3 Kommunikation während der Antwortzeit des Slaves
Während der Antwortzeit des Slaves dürfen vom Master keine Datenanfragen gestellt werden. In dieser Zeit gestellte Datenanfragen führen dazu, daß alle gerade auf dem Bus befindlichen Daten ungültig werden.
2.5 Aufbau der Datenblöcke
Alle Datenblöcke haben die gleiche Struktur:
Datenstruktur
SlaveAdresse
1 Byte 1 Byte x Byte 2 Bytes
Jeder Datenblock enthält vier Felder:
Slave-Adresse Geräteadresse eines bestimmten Slaves
Funktionscode Funktionsauswahl (Lesen, Schreiben von Worten)
Datenfeld Enthält die Informationen:
Checksumme Erkennung von Übertragungsfehlern
Funktionscode
- Wortadresse
- Wortanzahl
- Wortwert
Datenfeld Checksumme
2.6 Fehlerbehandlung
Fehlercodes Es existieren drei Fehlercodes:
CRC16
1 ungültige Funktion
2 ungültige Parameteradresse
8 Schreibzugriff auf Parameter verweigert
11
Page 12

2 Protokollbeschreibung
Antwort im
Fehlerfall
Beispiel Datenanfrage:
Sonderfälle In folgenden Fehlerfällen antwortet der Slave nicht:
SlaveAdresse
1 Byte 1 Byte 1 Byte 2 Bytes
Der Funktionscode wird mit 0x80 verODERt, d. h., das MSB (most significant bit, engl. das höchstwertige Bit) wird auf 1 gesetzt.
01 03 40 00 00 04 CRC16
Antwort:
01 83 02 CRC16
- die Checksumme (CRC16) ist nicht korrekt
- die Anweisung des Masters ist unvollständig oder überdefiniert
Funktion
XX OR 80h
Fehlercode Checksumme
CRC16
- die Anzahl der zu lesenden Worte oder Bits ist Null
12
Page 13

2.7 Checksumme (CRC16)
Anhand der Checksumme (CRC16) werden Übertragungsfehler erkannt.
Wird bei der Auswertung ein Fehler festgestellt, antwortet das entsprechende Gerät nicht.
Berechnungsschema
CRC = 0xFFFF
CRC = CRC XOR ByteOfMessage
For (1 bis 8)
while (nicht alle ByteOfMessage bearbeitet);
2 Protokollbeschreibung
CRC = SHR(CRC)
if (rechts hinausgeschobenes Flag = 1)
then else
CRC = CRC XOR
0xA001
Beispiel Datenanfrage: Lesen von zwei Worten ab Adresse 0x00CE
(CRC16 = 0xA592)
07 03 00 CE 00 02 A5 92
CRC16
Antwort: (CRC16 = 0xADF5)
07 03 04 00 00 41 C8 AD F5
W o r t 1 W o r t 2 C R C 1 6
13
Page 14

2 Protokollbeschreibung
2.8 Schnittstelle
2.8.1 Konfiguration
Die Regler der plast-Serie haben erweiterte Einstellungen, die gekennzeichnet sind.
Weiterhin sind diese Regler auch mit einer Stromschnittstelle ausrüstbar.
MOD-Bus r422 ➔
Symbol Wert/Auswahl Beschreibung
0
Protokollart
Protocol
Baudrate
Baud rate
Datenformat
Data format
Geräteadresse
Device adress
Minimale Antwortzeit (Setup) 0…500ms Zeitspanne, die von der Anfrage eines Gerätes in einem Da-
Prot
bdrt
dFt
Adr
1.Arburg ist ein eingetragenes Warenzeichen der Fa. Arburg GmbH Co, D-Loßburg
0…1 …255 Adresse im Datenverbund
Werkseitige Einstellungen sind fett dargestellt.
MOD-Bus
1
MOD-Bus integer
2
MOD-Bus-Master (nur plast-Ausführung)
3
Arburg1 (nur plast-Ausführung)
0
9600 Baud
1
19200 Baud
2
38400 Baud
3
4800 Baud (nur plast-Ausführung)
0
8 Datenbits, 1 Stoppbit, keine Parität
1
8 Datenbits, 1 Stoppbit, ungerade Parität
2
8 Datenbits, 1 Stoppbit, gerade Parität
3
8 Datenbits, 2 Stoppbits, keine Parität
tenverbund bis zur Antwort des Reglers mindestens vergeht.
2.8.2 Abschlusswiderstand der seriellen Schnittstelle RS422/485
Für einen störungsfreien Betrieb mehrerer Geräte in einer Linienstruktur müssen deren
interne Abschlusswiderstände am Anfang und am Ende aktiviert werden
h Geräteeinschub mit Druck auf die geriffelten Flächen nach vorne herausziehen
h Mit einem Kugelschreiber alle weißen Schalter in die gleiche Richtung drücken
Busabschlusswiderstand aktiv:
kein Busabschluss
(werkseitig)
h Geräteeinschub wieder ins Gehäuse einstecken
h Alle 5 Schalter nach unten drücken
h Alle 5 Schalter nach oben drücken
.
14
Page 15

Kontrolle h Tasten P + I drücken
Rechts neben der grünen Anzeige „VErS“ wird „ON“ für aktive oder „OF“ für inaktive
Abschlusswiderstände angezeigt.
2.8.3 Stromschnittstelle (nur plast-Serie )
Die Option "Stromschnittstelle" des Reglers hat die Möglichkeit, den in
einer Stromschleife fließenden Strom zu unterbrechen (Senden) oder
die Schaltvörgänge in der Stromschleife "mitzuhören" (Empfangen).
Steuerung
-
Stromquelle
20mA
+
2 Protokollbeschreibung
I in
Regler 1
I out
I in
Regler 2
I out
Sender/
Empfänger
I in
Regler n
I out
15
Page 16

2 Protokollbeschreibung
16
Page 17

Die folgenden Funktionen stehen für das Gerät zur Verfügung:
Funktionsnummer Funktion
0x03 oder 0x04 Lesen von n Worten
0x06 Schreiben eines Worts
0x10 Schreiben von n Worten
3.1 Lesen von n Worten
Mit dieser Funktion werden n (n≤32) Worte ab einer bestimmten Adresse gelesen.
3 Funktionen
Datenanfrage
Antwort
Beispiel Lesen der 2 Sollwerte des Reglers
SlaveAdresse
1 Byte 1 Byte 2 Bytes 2 Bytes 2 Bytes
SlaveAdresse
1 Byte 1 Byte 1 Byte x Byte 2 Bytes
Wortadresse = 0x3100 (Sollwert W1)
Datenanfrage:
01 03 31 00 00 04 4AF5
Antwort:
Funktion
0x03 oder 0x04
Funktion
0x03 oder 0x04
Adresse
erstes Wort
Anzahl
gelesener
Bytes
Wortanzahl
(max. 32)
Wortwert(e)
Checksumme
CRC16
Checksumme
CRC16
01 03 08 0000 41C8 0000 4120 4A9E
Sollwert 1
(25.0)
Sollwert 2
(10.0)
17
Page 18

3 Funktionen
3.2 Schreiben eines Worts
Bei der Funktion Wortschreiben sind die Datenblöcke für Anweisung
und Antwort identisch.
Anweisung
Antwort
Beispiel Schreibe Grenzwert Limitkomparator 1 = 275
SlaveAdresse
1 Byte 1 Byte 2 Bytes 2 Bytes 2 Bytes
SlaveAdresse
1 Byte 1 Byte 2 Bytes 2 Bytes 2 Bytes
Wortadresse = 0x0077
Anweisung: Schreiben des ersten Teils des Wertes
01 06 00 77 80 00 5810
Antwort (wie Anweisung):
01 06 00 77 80 00 5810
Funktion
0x06
Funktion
0x06
Wortadresse Wortwert Checksumme
Wortadresse Wortwert Checksumme
CRC16
CRC16
Anweisung: Schreiben des zweiten Teils des Wertes
01 06 00 78 43 89 F945
Antwort (wie Anweisung):
01 06 00 78 43 89 F945
18
Page 19

3.3 Schreiben von n Worten
Mit dieser Funktion werden n (n≤32) Worte ab einer bestimmten Adresse geschrieben.
3 Funktionen
Anweisung
Antwort
SlaveAdresse
1 Byte 1 Byte 2 Bytes 2 Bytes 1 Byte x Byte 2 Bytes
Slave-
Adresse
Funktion
0x10
Funktion
Adresse
erstes Wort
0x10
Wortanzahl
max. 127
Adresse
erstes
Byteanzahl
Wort-
anzahl
Wortwert(e)
Checksumme
Checksumme
CRC16
CRC16
Wort
1 Byte 1 Byte 2 Bytes 2 Bytes 2 Bytes
Beispiel Schreibe Proportionalbereich Pb1 = 20 des zweiten Parametersatzes
Wortadresse = 0x3014
Anweisung:
01 10 30 14 00 02 04 00 00 41 A0 9779
Antwort:
01 10 30 14 00 02 0ECC
19
Page 20

3 Funktionen
20
Page 21

System
4 Datenfluß
FlashSpeicher
RAM
Regler
Bei Kommunikation über das Setup-Interface ist die Schnitt-
H
Im folgenden sind alle Prozeßwerte (Variablen) mit ihren Adressen, dem
Datentyp und der Zugriffsart beschrieben.
Hierbei bedeutet:
R/O Zugriff nur lesend
R/W Zugriff schreibend und lesend
char, byteByte (8 Bit)
int Integer (16 Bits)
Bit x Bit Nr. x
stelle RS422/485 inaktiv.
SystemProzessor
MOD-Bus
Bytereihenfolge
long Long-Integer (4 Byte)
float Float-Wert (4 Byte) nach IEEE 754
Aufgrund der plattformabhängigen Darstellung von Gleitkommazahlen
und Long-Werten, müssen die Bytes in die für den MODBUS entsprechende Reihenfolge gebracht werden.
Bitte ermitteln Sie, in welcher Reihenfolge Float-Werte in Ihrem System
(PC, SPS usw.) gespeichert werden.
Single-float-Format (32bit) nach Standard IEEE 754
SEEEEEEE EMMMMMMM MMMMMMMM MMMMMMMM
S - Vorzeichen-Bit
E - Exponent (2er-Komplement)
M - 23Bit normalisierte Mantisse
MOD-Bus-float-Format
MOD-Bus-Adresse x MOD-Bus-Adresse x+1
MMMMMMMM MMMMMMMM SEEEEEEE EMMMMMMM
21
Page 22

4 Datenfluß
Beispiel: Übertragung der Gleitkommazahl 3000
PC (Master): 00 80 3B 45
MODBUS: 8000453B
Byte 1 2 3 4
Long-Werte
Beispiel: Übertragung der Zahl 66051
PC (Master): 03 02 01 00
MODBUS: 00010203
Byte 1 2 3 4
22
Page 23

5.1 Prozeßdaten
5 Adresstabellen
Adresse Datentyp/
Bitnummer
0x001F INT R/O Programmstatus
Bit 1 R/O Programmhalt (=0x0002)
Bit 2 R/O Grundstellung/Programmstopp = 1 (=0x0004)
Bit 5 R/O Automatikbetrieb (=0x0020)
Bit 6 R/O Programmendesignal = 1 (=0x0040)
Bit 7 R/O Toleranzbandsignal = 1 (=0x0080)
0x0020 INT R/O Reglerstatus
Bit 4 R/O Handbetrieb = 1 (=0x1000)
Bit 7 R/O Selbstoptimierung aktiv = 1 (=0x8000)
0x0021 INT R/O Binärausgänge 1 … 10
Bit 0 R/O Binärausgang 1 (=0x0001)
Bit 1 R/O Binarausgang 2 (=0x0002)
Bit 2 R/O Binärausgang 3 (=0x0004)
Bit 3 R/O Binarausgang 4 (=0x0008)
Bit 4 R/O Binärausgang 5 (=0x0010)
Bit 5 R/O Binarausgang 6 (0x0020)
Bit 6 R/O Binärausgang 7 (=0x0040)
Bit 7 R/O Binarausgang 8 (=0x0080)
Bit 8 R/O Binärausgang 9 (=0x0100)
Bit 9 R/O Binarausgang 10 (=0x0200)
0x0023 INT R/O Binäreingänge 1 … 6
Bit 0 R/O Binäreingang 1 (=0x0001)
Bit 1 R/O Binäreingang 2 (=0x0002)
Bit 2 R/O Binäreingang 3 (=0x0004)
Bit 3 R/O Binäreingang 4 (=0x0008)
Bit 4 R/O Binäreingang 6 (=0x0010)
Bit 5 R/O Binäreingang 5 (=0x0020)
Bit 5 R/O Binäreingang 8 (=0x0040)
Bit 5 R/O Binäreingang 7 (=0x0080)
0x0024 INT R/O Limitkomparator (Schaltzustände 0 = aus/1 = ein)
Bit 0 R/O 1. Limitkomparator (=0x0001)
Bit 1 R/O 2. Limitkomparator (=0x0002)
Bit 2 R/O 3. Limitkomparator (=0x0004)
Bit 3 R/O 4. Limitkomparator (=0x0008)
0x0025 INT R/O Steuerkontakte 1...4
Bit 0 R/O Steuerkontakt 1 (=0x0001)
Bit 1 R/O Steuerkontakt 2 (=0x0002)
Bit 2 R/O Steuerkontakt 3 (=0x0004)
Zugriff Signalbezeichnung
(Schaltzustände 0 = aus/1 = ein)
(Schaltzustände 0 = offen/1 = geschlossen)
23
Page 24

5 Adresstabellen
Adresse Datentyp/
Bitnummer
Bit 3 R/O Steuerkontakt 4 (=0x0008)
0x0026 INT R/O Binärsignale
Bit 0 R/O Steuerkontakt 1 (=0x0001)
Bit 1 R/O Steuerkontakt 2 (=0x0002)
Bit 2 R/O Steuerkontakt 3 (=0x0004)
Bit 3 R/O Steuerkontakt 4 (=0x0008)
Bit 4 R/O Timer 1 (=0x0010)
Bit 5 R/O Timer 2 (=0x0020)
Bit 8 R/O 1. Limitkomparator (=0x0040)
Bit 9 R/O 2. Limitkomparator (=0x0080)
Bit 10 R/O 3. Limitkomparator (=0x0100)
Bit 11 R/O 4. Limitkomparator (=0x0200)
Bit 12 R/O Logik-Formel 1 (=0x0400)
Bit 13 R/O Logik-Formel 2 (=0x0800)
0x0027 INT R/W Ansteuerung der Binärausgänge
Bit 0 R/W Ausgang 1 (=0x8001)
... R/W
Bit 9 R/W Ausgang 10 (=0x8200)
Bit 15 R/W Aktivierung = 1 (=0x8000)
0x0028 FLOAT R/O Analogeingang 1 [mV]
0x002A FLOAT R/O Analogeingang 2 [mV
0x0030 FLOAT R/O interner Pt100 [Ohm]
0x0034 INT R/O Abtastzeit
0x0035 FLOAT R/O Analogeingang 1 [Grad]
0x0037 FLOAT R/O Analogeingang 2 [Grad]
0x003D FLOAT R/O Mathematik 1
0x003F FLOAT R/O Mathematik 2
0x0041 FLOAT R/O Rampenendwert (W)
0x0043 FLOAT R/O Istwert gefiltert
0x0045 FLOAT R/O Istwert ungefiltert
0x0047 FLOAT R/W Sollwert
0x0049 FLOAT R/O Stellgrad -100 … 100% (Anzeigewert)
0x004B FLOAT R/O Stellgrad heizen 0 … 100%
0x004D FLOAT R/O Stellgrad kühlen -100 … 0%
0x004F FLOAT R/O Regeldifferenz
0x0053 INT R/O Schaltstellung Heizen (1 = Kontakt geschlossen/EIN)
0x0054 INT R/O Schaltstellung Kühlen (1 = Kontakt geschlossen/EIN)
0x0055 INT R/O Parametersatznummer 0...1
0x0056 INT R/W Handstellgrad
0x0057 INT R/O Abschnittsnummer (1 … 8)
0x0058 INT R/O Abschnittsanzahl (1...8)
0x0059 FLOAT R/O Programm-Sollwert
Zugriff Signalbezeichnung
24
Page 25

5 Adresstabellen
Adresse Datentyp/
Bitnummer
0x005B LONG R/O Programmlaufzeit (in Sekunden)
0x005D LONG R/O Programmrestzeit (in Sekunden)
0x0061 LONG R/O Abschnittslaufzeit
0x0063 LONG R/O Abschnittsrestzeit
0x0067 LONG R/O Timerlaufzeit von Timer 1
0x0069 LONG R/O Timerlaufzeit von Timer 2
0x006B LONG R/O Timerlaufzeit von Timer 3
0x006D LONG R/O Timerlaufzeit von Timer 4
Zugriff Signalbezeichnung
5.2 Sollwerte
Adresse Datentyp/
Bitnummer
0x3100 FLOAT R/W Sollwert W1
0x3102 FLOAT R/W Sollwert W2
0x3104 FLOAT R/W Sollwert W3
0x3106 FLOAT R/W Sollwert W4
Zugriff Signalbezeichnung
Bei der Veränderung der Sollwerte über die Schnittstelle erfolgt keine Überprüfung
A
A
der Sollwertgrenzen.
Schreiboperationen auf diese Parameter bewirken ein Abspeichern im EEPROM.
Diese Speicherbausteine haben nur eine begrenzte Anzahl von Schreibzyklen
(ca. 10000), weshalb bei häufiger Programmierung diese Funktion abgeschaltet
werden kann. Die Parameterwerte sind dann nur im flüchtigen Speicher (RAM) gespeichert und nach einem Netzausfall verloren.
v Setup/Nur Setup/Undokumentierte Parameter/Bitparameter/
Parameter 2 setzen
5.3 Reglerparameter
Adresse Datentyp/
Bitnummer
0x3000 FLOAT R/W Parametersatz 1: Pb1
0x3002 FLOAT R/W Parametersatz 1: Pb2
0x3004 INT R/W Parametersatz 1: dt
0x3005 INT R/W Parametersatz 1: rt
0x3006 FLOAT R/W Parametersatz 1: Cy1
0x3008 FLOAT R/W Parametersatz 1: Cy2
0x300A FLOAT R/W Parametersatz 1: db
0x300C FLOAT R/W Parametersatz 1: HyS1
Zugriff Signalbezeichnung
25
Page 26

5 Adresstabellen
Adresse Datentyp/
Bitnummer
0x300E FLOAT R/W Parametersatz 1: HyS2
0x3010 INT R/W Parametersatz 1: tt
0x3011 INT R/W Parametersatz 1: y0
0x3012 INT R/W Parametersatz 1: y1
0x3013 INT R/W Parametersatz 1: y2
0x3014 FLOAT R/W Parametersatz 2: Pb1
0x3016 FLOAT R/W Parametersatz 2: Pb2
0x3018 INT R/W Parametersatz 2: dt
0x3019 INT R/W Parametersatz 2: rt
0x301A FLOAT R/W Parametersatz 2: Cy1
0x301C FLOAT R/W Parametersatz 2: Cy2
0x301E FLOAT R/W Parametersatz 2: db
0x3020 FLOAT R/W Parametersatz 2: HyS1
0x3022 FLOAT R/W Parametersatz 2: HyS2
0x3024 INT R/W Parametersatz 2: tt
0x3025 INT R/W Parametersatz 2: y0
0x3026 INT R/W Parametersatz 2: y1
0x3027 INT R/W Parametersatz 2: y2
Zugriff Signalbezeichnung
Schreiboperationen auf diese Parameter bewirken ein Abspeichern im EEPROM.
A
Diese Speicherbausteine haben nur eine begrenzte Anzahl von Schreibzyklen
(ca. 10000), weshalb bei häufiger Programmierung diese Funktion abgeschaltet
werden kann. Die Parameterwerte sind dann nur im flüchtigen Speicher (RAM) gespeichert und nach einem Netzausfall verloren.
v Setup/Nur Setup/Undokumentierte Parameter/Bitparameter/
Parameter 2 setzen
5.4 Konfiguration
Adresse Datentyp/
Bitnummer
0x0077 FLOAT R/W 1. Limitkomparator Grenzwert AL
0x0079 FLOAT R/W 1. Limitkomparator Schaltdifferenz
0x007B INT R/W 1. Limitkomparator Einschaltverzögerung
0x007C INT R/W 1. Limitkomparator Auschaltverzögerung
0x007D FLOAT R/W 2. Limitkomparator Grenzwert AL
0x007F FLOAT R/W 2. Limitkomparator Schaltdifferenz
0x0081 INT R/W 2. Limitkomparator Einschaltverzögerung
0x0082 INT R/W 2. Limitkomparator Auschaltverzögerung
0x0083 FLOAT R/W 3. Limitkomparator Grenzwert AL
0x0085 FLOAT R/W 3. Limitkomparator Schaltdifferenz
0x0087 INT R/W 3. Limitkomparator Einschaltverzögerung
Zugriff Signalbezeichnung
26
Page 27

5 Adresstabellen
Adresse Datentyp/
Bitnummer
0x0088 INT R/W 3. Limitkomparator Auschaltverzögerung
0x0089 FLOAT R/W 4. Limitkomparator Grenzwert AL
0x008B FLOAT R/W 4. Limitkomparator Schaltdifferenz
0x008D INT R/W 4. Limitkomparator Einschaltverzögerung
0x008E INT R/W 4. Limitkomparator Auschaltverzögerung
0x008F FLOAT R/W Rampenfunktion Steigung
0x00B9 INT R/W Alarmtext (1-2)
0x00BA INT R/W Alarmtext (3-4)
Zugriff Signalbezeichnung
Schreiboperationen auf diese Parameter bewirken ein Abspeichern im EEPROM.
A
Diese Speicherbausteine haben nur eine begrenzte Anzahl von Schreibzyklen
(ca. 10000), weshalb bei häufiger Programmierung diese Funktion abgeschaltet
werden kann. Die Parameterwerte sind dann nur im flüchtigen Speicher (RAM) gespeichert und nach einem Netzausfall verloren.
v Setup/Nur Setup/Undokumentierte Parameter/Bitparameter/
Parameter 2 setzen
5.5 Programm übertragen
Adresse Datentyp/
Bitnummer
0x0091 FLOAT R/W Abschnittssollwert 1
0x0093 LONG R/W Abschnittszeit 1
0x0095 FLOAT R/W Abschnittssollwert 2
0x0097 LONG R/W Abschnittszeit 2
0x0099 FLOAT R/W Abschnittssollwert 3
0x009B LONG R/W Abschnittszeit 3
0x009D FLOAT R/W Abschnittssollwert 4
0x009F LONG R/W Abschnittszeit 4
0x00A1 FLOAT R/W Abschnittssollwert 5
0x00A3 LONG R/W Abschnittszeit 5
0x00A5 FLOAT R/W Abschnittssollwert 6
0x00A7 LONG R/W Abschnittszeit 6
0x00A9 FLOAT R/W Abschnittssollwert 7
0x00AB LONG R/W Abschnittszeit 7
0x00AD FLOAT R/W Abschnittssollwert 8
0x00AF LONG R/W Abschnittszeit 8
0x00B1 INT R/W Steuerkontakte Abschnitt 1
0x00B2 INT R/W Steuerkontakte Abschnitt 2
0x00B3 INT R/W Steuerkontakte Abschnitt 3
0x00B4 INT R/W Steuerkontakte Abschnitt 4
Zugriff Signalbezeichnung
(1=EIN; Bit 0=Steuerkontakt 1; Bit 3=Steuerkontakt 4)
27
Page 28

5 Adresstabellen
Adresse Datentyp/
Bitnummer
0x00B5 INT R/W Steuerkontakte Abschnitt 5
0x00B6 INT R/W Steuerkontakte Abschnitt 6
0x00B7 INT R/W Steuerkontakte Abschnitt 7
0x00B8 INT R/W Steuerkontakte Abschnitt 8
Zugriff Signalbezeichnung
Schreiboperationen auf diese Parameter bewirken ein Abspeichern im EEPROM.
A
Diese Speicherbausteine haben nur eine begrenzte Anzahl von Schreibzyklen
(ca. 10000), weshalb bei häufiger Programmierung diese Funktion abgeschaltet
werden kann. Die Parameterwerte sind dann nur im flüchtigen Speicher (RAM) gespeichert und nach einem Netzausfall verloren.
v Setup/Nur Setup/Undokumentierte Parameter/Bitparameter/
Parameter 2 setzen
5.6 Kommandos
Adresse Datentyp/
Bitnummer
0x006F INT R/W Binarfunktionen "Programmregler"
Bit 1 R/W Programmhalt (=0x0002)
Bit 2 R/W Programmabbruch (=0x0004)
Bit 3 R/W Programmstart (=0x0008)
Bit 8 R/W Abschnittswechsel (=0x0100)
0x0070 INT R/W Binärfunktionen "Regler"
Bit 1 R/W Rampe anhalten (=0x0002)
Bit 2 R/W Rampe abbrechen (=0004)
Bit 4 R/W Handbetrieb aktivieren (=0x0010)
Bit 5 R/W Automatikbetrieb (=0x0020)
Bit 6 R/W Regler aus (=0x0040)
Bit 7 R/W Starten der Selbstoptimierung (=0x0080)
Bit 13 R/W Abbruch der Selbstoptimierung (=0x2000)
0x0071 INT R/W Binärfunktionen "Bedienung"
Bit 4 R/W Anzeigen aus mit Tastaturverriegelung (=0x010)
Bit 5 R/W Quittierung der Limitkomparatoren (=0x0020)
Bit 6 R/W Textanzeige (=0x0040)
0x0072 INT R/W Binarfunktionen "Timer"
Bit 1 R/W Timer 1 anhalten (=0x0002) (nur über Schnittstelle)
Bit 2 R/W Timer 1 abbrechen (0=0004)
Bit 3 R/W Timer 1 starten (=0x0008)
Bit 9 R/W Timer 2 anhalten (=0x0200) (nur über Schnittstelle)
Bit 10 R/W Timer 2 abbrechen (0=0400)
Bit 11 R/W Timer 2 starten (=0x0800)
Zugriff Signalbezeichnung
28
Page 29

5 Adresstabellen
Adresse Datentyp/
Bitnummer
0x0073 INT R/W Sollwertumschaltung (0=ausgeschaltet)
0x0074 INT R/W Parametersatzumschaltung (0=ausgeschaltet)
0x3200 FLOAT W/O Sollwert
0x3202 FLOAT W/O Istwert
0x3004 FLOAT W/O Mathematik 1
0x3006 FLOAT W/O Mathematik 2
0x3008 INT W/O Logik 1+2
Bit 0 W/O Logik 1 (=0x0081)
Bit 1 W/O Logik 2 (=0x0082
Bit 7 W/O Aktivierung (=0x0080)
Zugriff Signalbezeichnung
1…4=W1…W4
1=P1
2=P2
5.7 Gerätekennung
Adresse Datentyp/
Bitnummer
0x4000 INT R/O Optionssteckplatz 1+2
Bit 0...7 R/O Steckplatz 2
Bit 8...15 R/O Steckplatz 1
0x4001 INT R/O Optionssteckplatz 3
Bit 8...15 R/O Steckplatz 3
0x4009 INT R/O Geräteformat
Bit 0 R/O 1=Typ 70.3041 (48mm x 48mm)
Bit 1 R/O 1=Typ 70.3042/43 (48mm x 96mm)
Bit 2 R/O 1=Typ 70.3044 (96mm x 96mm)
Zugriff Signalbezeichnung
29
Page 30

5 Adresstabellen
30
Page 31

Page 32

JUMO GmbH & Co. KG
Hausadresse:
Moltkestraße 13 - 31
36039 Fulda, Germany
Lieferadresse:
Mackenrodtstraße 14
36039 Fulda, Germany
Postadresse:
36035 Fulda, Germany
Telefon: +49 661 6003-727
Telefax: +49 661 6003-508
E-Mail: mail@jumo.net
Internet: www.jumo.net
JUMO Mess- und Regelgeräte
Ges.m.b.H.
Pfarrgasse 48
1232 Wien, Austria
Telefon: +43 1 610610
Telefax: +43 1 6106140
E-Mail: info@jumo.at
Internet: www.jumo.at
JUMO Mess- und Regeltechnik AG
Laubisrütistrasse 70
8712 Stäfa, Switzerland
Telefon: +41 44 928 24 44
Telefax: +41 44 928 24 48
E-Mail: info@jumo.ch
Internet: www.jumo.ch
 Loading...
Loading...