

Page 1

MICROSTEPPING MOTOR CONTROLLER WITH DUAL DAC
■ GENERAL DESCRIPTION ■ PACKAGE OUTLINE
NJU39612 is a dual 7-bit+sign; Digital-to-Analog Converter
(DAC) developed to be used in micro stepping applications
together with the dual stepper motor driver. The NJU39612
has a set of input registers connected to an 8-bit data port for
easy interfacing directly to a microprocessor. Two registers
are used to store the data for each seven-bit DAC, the eighth
bit being a sign bit (sign/magnitude coding).
NJU39612E2
■ FEATURES
• Analog control voltages from 3V down to 0.0V
• High-speed microprocessor interface
• Full -scale error ±1 LSB
NJU39612
• Fast conversion speed 3 µs
• Matches the dual stepper motor drivers
• Package EMP20
■ BLOCK DIAGRAM
WR
CS
A0
D7 - D0
RESET
POR
V
DD
E1
C
E2
C
R
DA- Data 1
E
D
R
DA- Data 2
E
D
R
V
Ref
NJU39612
D / A
D / A
Sign
DA
DA
Sign
1
1
2
2
Figure 1. Block Diagram
V
ss
Page 2
■ PIN CONFIGURATION
V
DA
Sign
VDD
WR
1
ref
2
1
3
1
4
5
NJU39612E2
20
19
18
17
16
Reset
DA
2
Sign
V
ss
CS
NJU39612
2
6
D7
D6
7
D5
8
D4
9
10
D3 D2
15
14
13
12
11
NC
A0
D0
D1
Figure 2. Pin configuration
■ PIN DESCRIPTION
Refer to figure 2.
EMP Symbol Description
1V
Ref
2DA1Digital-to-Analog 1, voltage output. Output between 0.0 V and V
3 Sign
4V
DD
5 WR Write, TTL/CMOS level, input for writing to internal registers. Data is clocked into flip flops on positive
6 D7 Data 7, TTL/CMOS level, input to set data bit 7 in data word.
7 D6 Data 6, TTL/CMOS level, input to set data bit 6 in data word.
8 D5 Data 5, TTL/CMOS level, input to set data bit 5 in data word.
9 D4 Data 4, TTL/CMOS level, input to set data bit 4 in data word.
10 D3 Data 3, TTL/CMOS level, input to set data bit 3 in data word.
11 D2 Data 2, TTL/CMOS level, input to set data bit 2 in data word.
12 D1 Data 1, TTL/CMOS level, input to set data bit 1 in data word.
13 D0 Data 0, TTL/CMOS level, input to set data bit 0 in data word.
14 A0 Address 0, TTL/CMOS level, input to select data transfer, A0 selects between cannel 1 (A0 = LOW) and
15 NC Not connected
16 CS Chip Select, TTL/CMOS level, input to select chip and activate data transfer from data inputs. LOW level
17 V
SS
18 Sign
19 DA
2
20 Reset Reset, digital input resetting internal registers. HIGH level = Reset, V
Voltage reference supply pin, 2.5 V nominal (3.0 V maximum)
- 1 LSB.
ref
Sign 1, TTL/CMOS level. To be connected directly to NJM377x phase input. Databit D7 is transfered non
1
inverted from NJU39612 data input.
Voltage Drain-Drain, logic supply voltage. Normally +5 V.
edge.
channel 2 (A0 = HIGH).
= chip is selected.
Voltage Source-Source. Ground pin, 0 V reference for all signals and measurements unless otherwise
noted.
Sign 2. TTL/CMOS level. To be connected directly to NJM377x phase input. Data bit D7 is transfered
2
non-inverted from NJU39612 data input.
Digital-to-Analog 2, voltage output. Output between 0.0 V and V
- 1 LSB.
ref
≥ 3.5 V = HIGH level. Pulled low
Res
internally.
Page 3
NJU39612
■ DEFINITION OF TERMS
Resolution
Resolution is defined as the reciprocal of the number of discrete steps in the DAC output. It is directly related to the
number of switches or bits within the DAC. For example, NJU39612 has 27, or 128, output levels and therefor has 7
bits resolution. Remember that this is not equal to the number of microsteps available.
Linearity Error
Linearity error is the maximum deviation from a straight line passing through the end points of the DAC transfer
characteristic. It is measured after adjusting for zero and full scale. Linearity error is a parameter intrinsic to the
device and cannot be externally adjusted.
Power Supply Sensitivity
Power supply sensitivity is a measure of the effect of power supply changes on the DAC full-scale output.
Settling Time
Full-scale current settling time requires zero-to-full-scale or full-scale-to-zero output change. Settling time is the
time required from a code transition until the DAC output reaches within ±1/2LSB of the final output value.
Full-scale Error
Full-scale error is a measure of the output error between an ideal DAC and the actual device output.
Differential Non-linearity
The difference between any two consecutive codes in the transfer curve from the theoretical 1LSB, is differential
non-linearity
Monotonic
If the output of a DAC increases for increasing digital input code, then the DAC is monotonic. A 7-bit DAC which is
monotonic to 7 bits simply means that increasing digital input codes will produce an increasing analog output.
NJU39612 is monotonic to 7 bits.
■ FUNCTIONAL DESCRIPTION
Each DAC channel contains one register and a D/A converter. A block diagram is shown on the first page.
The sign outputs generate the phase shifts, i.e., they reverse the current direction in the phase windings.
Data Bus Interface
NJU39612 is designed to be compatible with 8-bit microprocessors such as the 6800, 6801, 6803, 6808, 6809,
8051, 8085, Z80 and other popular types and their 16/32 bit counter parts in 8 bit data mode. The data bus interface consists of 8 data bits, write signal, chip select, and two address pins. All inputs are TTL-compatible (except
reset). The address pin control data transfer to the two internal D-type registers. Data is transferred according to
figure 7 and on the positive edge of the write signal.
Output
More
than 2
bits
Negative
difference
Input
Output
Less
than 2
bits
Positive
difference
Input
Output
Actual
Offset error
Endpoint
non-linearity
Full scale
Gain
error
Correct
Input
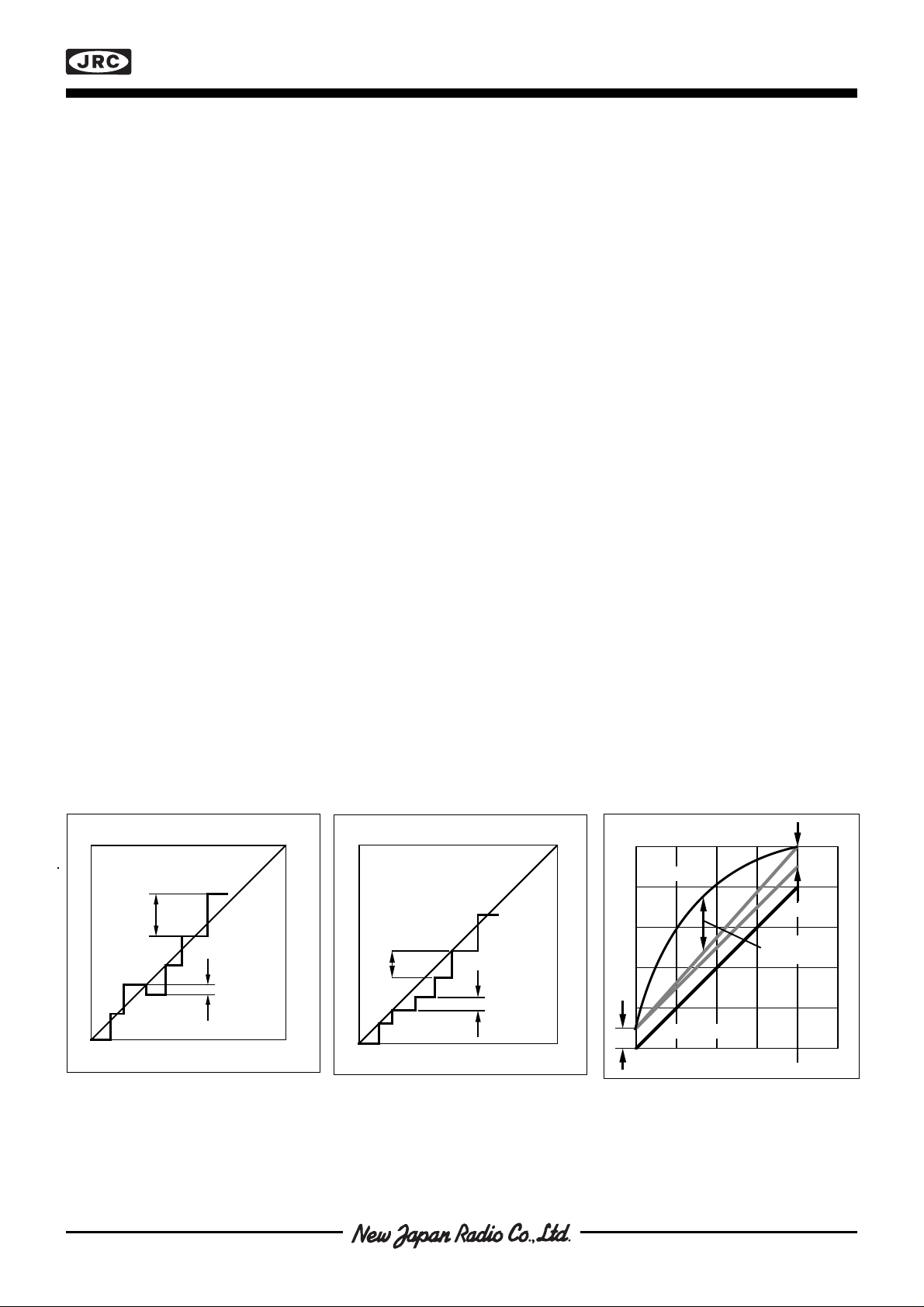
Figure 3. Errors in D/A conversion.
Differential non-linearity of more than
1 bit, output is non-monotonic.
Figure 4. Errors in D/A conversion.
Differential non-linearity of less than
1 bit, output is monotonic.
Figure 5. Errors in D/A conversion.
Non-linearity, gain and offset errors.
Page 4
NJU39612
Current Direction, Sign1 & Sign
2
These bits are transferred from D7 when writing in the respective DA register. A0 must be set according to the data
transfer table in figure 7.
DA1 and DA
2
These are the two outputs of DAC1 and DAC2. Input to the DACs are internal data bus (Q61 … Q01) and (Q62 … Q02).
Reference Voltage V
V
is the analog input for the two DACs. Special care in layout, gives a very low voltage drop from pin to resistor.
Ref
Any V
between 0.0 V and VDD can be applied, but output might be non-linear above 3.0 V.
Ref
Ref
Power-on Reset
This function automatically resets all internal flip flops at power-on. This results in VSS voltage at both DAC outputs
and all digital outputs.
Reset
If Reset is not used, leave it disconnected. Reset can be used to measure leakage currents from VDD.
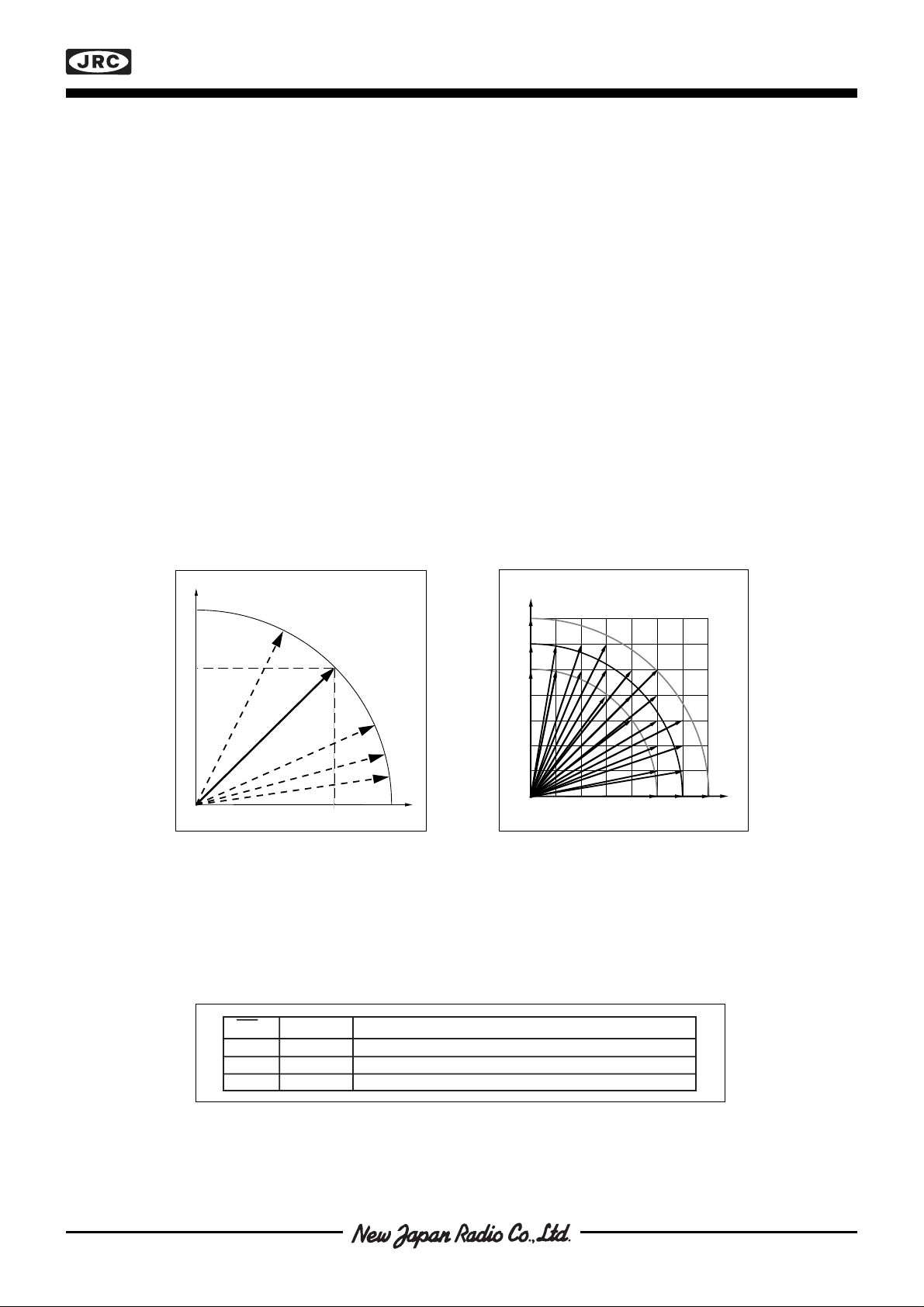
I [mA]
2
I
I [mA]
1
Figure 6a. Assuming that torque is
proportional to the current in resp.
winding it is possible to draw figure
8b.
CS A0 Data Transfer
0 0 D7 —> Sign1, (D6—D0) —> (Q61—Q01)
0 1 D7 —> Sign2, (D6—D0) —> (Q62—Q02)
1 X No Transfer
T [mNm]
2
T
max
T
nom
T
min
T [mNm]
1
Figure 6b. An example of accessible positions with a given torque
deviation/fullstep. Note that 1:st
µstep sets highest resolution. Data
points are exaggerated for illustration purpose.
TNom = code 127.
Figure 7. Table showing how data is transfered inside NJU39612.
Page 5

NJU39612
■ ABSOLUTE MAXIMUM RATINGS
Parameter Pin no. Symbol Min Max Unit
Voltage
Supply 4 V
Logic inputs 5-14,16 V
Reference input 1 V
DD
I
Ref
Current
Logic inputs 5-14,16 I
I
Temperature
Storage temperature T
Operating ambient temperature T
stg
opr
■ RECOMMENDED OPERATING CONDITIONS
Parameter Symbol Min Typ Max Unit
Supply voltage V
Reference voltage V
Rise and fall time of WR tr, t
DD
Ref
f
4.75 5.0 5.25 V
0 2.5 3.8 V
- - 1µs
- 6 V
-0.3 VDD+ 0.3 V
-0.3 VDD+ 0.3 V
-0.4 +0.4 mA
-55 +150 °C
-20 +85 °C
Page 6

NJU39612
■ ELECTRICAL CHARACTERISTICS
Electrical characteristics over recommended operating conditions.
Parameter Symbol Conditions Min Typ Max Unit
Logic Input
Reset logic HIGH input voltage V
Reset logic LOW input voltage V
Logic HIGH input voltage V
Logic LOW input voltage V
Reset input current I
Input current, other inputs I
IHR
ILR
IH
IL
VSS < VIR < VDD -0.01 - 1 mA
IR
VSS < VI < V
I
DD
Input capacitance -3 -pF
Internal Timing Characteristics
Address setup time t
Data setup time t
Chip select setup time t
Address hold time t
Data hold time t
Chip select hold time t
Write cycle length t
Reset cycle length t
WR
res
Valid for A0 60 - - ns
as
Valid for D0 - D7 60 - - ns
ds
cs
ah
dh
ch
Reference Input
Input resistance R
ref
Logic Outputs
Logic HIGH output current I
Logic LOW output current I
Write propagation delay t
Reset propagation delay t
OH
OL
pwr
pres
DAC Outputs Reset open, V
Nominal output voltage V
VO = 2.4 V - -13 -5 mA
VO = 0.4 V 2 5 - mA
From positive edge of WR. - 30 100 ns
Outputs valid, C
= 120 pF
load
From positive edge of Reset to - 60 150 ns
outputs valid, C
DA
= 120 pF
load
= 2.5 V
Ref
Resolution - 7 - Bits
Offset error - 0.2 0.5 LSB
Gain error - 0.1 0.5 LSB
Endpoint nonlinearity - 0.2 0.5 LSB
Differential nonlinearity - 0.2 0.5 LSB
Load error (V
, unloaded - VDA, loaded) - 0.1 0.5 LSB
DA
R
= 2.5 kohm, Code 127 to DAC
load
Power supply sensitivity Code 127 to DAC - 0.1 0.3 LSB
Conversion speed t
4.75 V < V
For a full-scale transition to ±0.5 LSB - 3 8 µs
DAC
of final value, R
< 5.25 V
DD
load
= 2.5 kohm, C
= 50 pF.
load
3.5 - - V
- - 0.1 V
2.0 - - V
- - 0.8 V
-1 - 1 µA
70 - - ns
--0ns
--0ns
--0ns
50 - - ns
80 - - ns
6 9 - kohm
0-V
Ref
- 1LSB V
Page 7

NJU39612
CS
A0
D0-D7
WR
DA
Sign
Figure 8. Timing
cs
t
as ah
t
ds
t
WR
tt
ch
t
t
dh
t
DAC
t
pwr
Reset
Sign
Figure 9. Timing of Reset
t
res
t
pres
Page 8

NJU39612
■ APPLICATIONS INFORMATION
How Many Microsteps?
The number of true microsteps that can be obtained depends upon many different variables, such as the number of
data bits in the Digital-to-Analog converter, errors in the converter, acceptable torque ripple, single- or double-pulse
programming, the motor’s electrical, mechanical and magnetic characteristics, etc. Many limits can be found in the
motor’s ability to perform properly; overcome friction, repeatability, torque linearity, etc. It is important to realize that
the number of current levels, 128 (27), is
(reference voltage levels) available from each driver stage. Combining a current level in one winding with any of
128 other current levels in the other winding will make up 128 current levels. So expanding this, it is possible to get
16,384 (128 • 128) combinations of different current levels in the two windings. Remember that these 16,384 micropositions are not all useful, the torque will vary from 100% to 0% and some of the options will make up the same
position. For instance, if the current level in one winding is OFF (0%) you can still vary the current in the other
winding in 128 levels. All of these combinations will give you the same position
Typical Application
The microstepper solution can be used in a system with or without a microprocessor.
Without a microprocessor, a counter addresses a ROM where appropriate step data is stored. Step and Direction
are the input signals which represent clock and up / down of counter. This is the ideal solution for a system where
there is no microprocessor or it is heavily loaded with other tasks.
With a microprocessor, data is stored in ROM / RAM area or each step is successively calculated. NJU39612 is
connected like any peripheral addressable device. All parts of stepping can be tailored for specific damping needs
etc. This is the ideal solution for a system where there is an available microprocessor with extra capacity and low
cost is more essential than simplicity. See typical application, figure 13.
not
the number of steps available. 128 is the number of current levels
but
a varying torque.
■ User Hints
Never disconnect ICs or PC Boards when power is supplied.
Select a motor that is rated for the current you need to establish desired torque. A high supply voltage will gain
better stepping performance even if the motor is not rated for the VMM voltage, the current regulation in the drivers
from New JRC will take care of it. A normal stepper motor might give satisfactory result, but while microstepping, a
“microstepping-adapted” motor is recommended. This type of motor has smoother motion due to two major differences, the stator / rotor teeth relationship is non-equal and the static torque is lower.
The NJU39612 can handle programs which generate microsteps at a desired resolution as well as quarter
stepping, half stepping, full stepping, and wave drive.
Ramping
Every drive system has inertia which must be considered in the drive system. The rotor and load inertia play a big
role at higher speeds. Unlike the DC motor, the stepper motor is a synchronous motor and does not change its
speed due to load variations. Examining a typical stepper motor’s torque-versus-speed curve indicates a sharp
torque drop-off for the “start-stop without error” curve. The reason for this is that the torque requirements increase
by the cube of the speed change. For good motor performance, controlled acceleration and deceleration should be
considered even though microstepping will improve overall performance.
Page 9

Time when motor is in
a compromise
position.
Time when micro
position is correct.
Write
signal.
Motor
position.
Writing to
channel 1.
Writing to
channel 2.
NJU39612
Double pulse write signal
Ideal data = desired position
Actual data = true position
Normal resolution
Write time = incorrect position
Figure 10. Double pulse programming, in- and output signals.
Time when motor is in
an intermediate
position.
Time when micro
position is almost
correct.
Write
signal.
Motor position. Note
that position is
a compromise.
Writing to
channel 1.
Writing to
channel 2.
always
Single pulse write signal
"Ideal data" = desired
position
Actual data = true position
Note increased resolution
Useful time = compromise position
with equally spaced angles
Useful time = correct
Time
position
Time
Useful time = almost
correct position
Figure 11. Single pulse programming, in- and output signals.
Page 10

NJU39612
■ Programming NJU39612
There are basically two different ways of programming the NJU39612. They are called “single-pulse programming”
and “double-pulse programming.” Writing to the device can only be accomplished by addressing one register at a
time. When taking one step, at least two registers are normally updated. Accordingly there must be a certain time
delay between writing to the first and the second register. This programming necessity gives some special stepping
advantages.
Double-pulse Programming
The normal way is to send two write pulses to the device, with the correct addressing in between, keeping the delay
between the pulses as short as possible. Write signals will look as illustrated in figure10. The advantages are:
• low torque ripple
• correct step angles between each set of double pulses
• short compromise position between the two step pulses
• normal microstep resolution
Single-pulse Programming
A different approach is to send one pulse at a time with an equally-spaced duty cycle. This can easily be accomplished and any two adjacent data will make up a microstep position. Write signals will look as in figure 11. The
advantages are:
• higher microstep resolution
• smoother motion
The disadvantages are:
• higher torque ripple
• compromise positions with almost-correct step angles
Page 11

NJU39612
Counter
PROM
CE
Clock Up/Dn
Step
D0-D7
Direction
Control Logic
Figure 12. Typical blockdiagram of an application without a microprocessor.
V (+5 V)
CC
0.1 F 0.1 F
NJU39612
A0
WR
CS
Vref
Voltage
Reference
NJM3777
+
10 F
V
MM
4
To
P
+2.5V
13
D0
6
D7
14
16
20
GND
(V )
CC MM
NJU39612
A0
5
WR
CS
RESET
1
VV
Ref
V
DD
SS
17
Sign
DA
Sign
DA
3
1
2
1
18
2
19
2
+5 V
10
11
8
15
14
17
12
12 k
4700 pF
Figure 13. Typical application in a microprocessor based system.
Phase
Dis
1
V
R1
Phase
Dis
2
V
R2
RC
13 5 20
V
CC
1
VV
NJM3777
2
11
6, 7,
18, 19
9
0.47 0.47
MM1 MM2
2
3
16
R
S
M
M
M
M
22
4
A1
2
B1
21
A2
23
B2
ECECGND
2
STEPPER
MOTOR
Pin numbers refer
to EMP package.
R
S
GND (V
)
The specifications on this databook are only
given for information , without any guarantee
as regards either mistakes or omissions.
The application circuits in this databook are
described only to show representative
usages of the product and not intended for
the guarantee or permission of any right
including the industrial rights.
 Loading...
Loading...