

LinkerKit LK-Temp2 | Raspberry Pi und Arduino
Artikelnummer
LK-Temp2
Spannungsversorgung
3.0V—5.5V
TemperaturMeßbereich
-55° bis 125°C [empfohlen max. 100°C]
Chipsatz
DS18B20
Kabellänge
1m
Features
9 Bit / 12 Bit Auflösung auswählbar
±0.5°C Empfindlichkeit von -10°C to +85°C
einmalige One-Wire ID im Chip eingebrannt
Eigenschaften
Wasserdicht, One-Wire, 1m langes Kabel
Sehr geehrter Kunde,
vielen Dank, dass Sie sich für unser Produkt entschieden haben.
Im Folgenden haben wir aufgelistet, was bei der Inbetriebnahme zu beachten ist:
dtoverlay=w1-gpio,gpiopin=4
sudo nano /boot/config.txt
sudo reboot
# coding=utf-8
# Benoetigte Module werden importiert und eingerichtet
import glob
import time
from time import sleep
import RPi.GPIO as GPIO
# An dieser Stelle kann die Pause zwischen den einzelnen Messungen
eingestellt werden
sleeptime = 1
# Der One-Wire EingangsPin wird deklariert und der integrierte PullUpWiderstand aktiviert
GPIO.setmode(GPIO.BCM)
GPIO.setup(4, GPIO.IN, pull_up_down=GPIO.PUD_UP)
# Nach Aktivierung des Pull-UP Widerstandes wird gewartet,
# bis die Kommunikation mit dem DS18B20 Sensor aufgebaut ist
print 'Warte auf Initialisierung...'
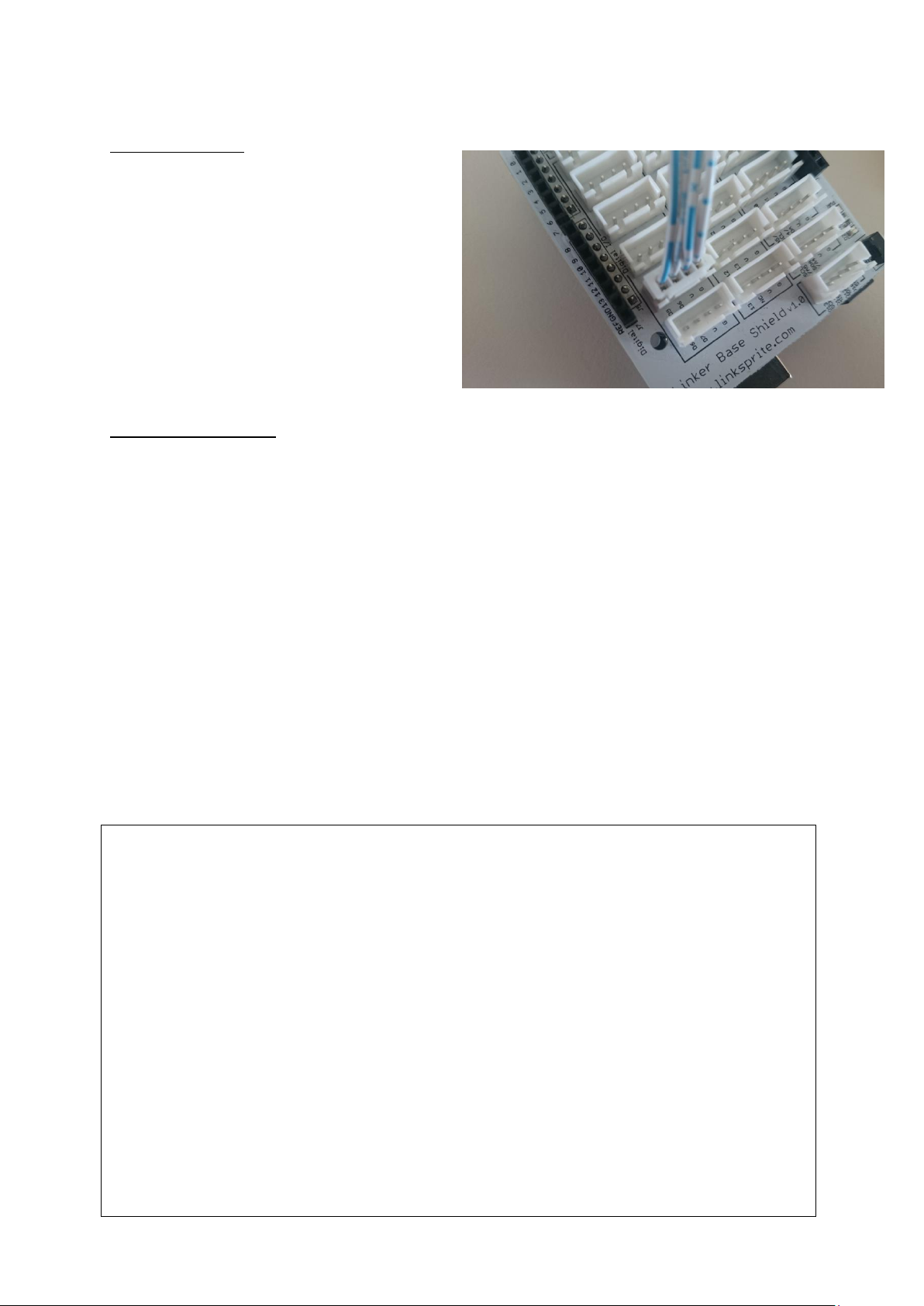
Anschlussbelegung
Das LinkerKit Modul muss am Digitalport mit der
Nummer 4 angeschlossen werden. Der
entsprechende LinkerKit Steckplatz lautet:
[ D4 | D5 | V | G ]
Codebeispiel Raspberry
Damit der Raspberry Pi mit dem One-Wire Bus, mit der Sensor DS18B20 seine
Messdaten digital sendet, kommunizieren kann, muss dieser vorerst aktiviert werden.
Hierbei muss die Datei "/boot/config.txt" editiert und um folgende Zeile ergänzt werden:
Die Datei können Sie editieren, indem Sie den Befehl...
... in die Konsole eingeben. Mit der Tastenkombination [STRG+X] können Sie das
Editieren beenden und mit [STRG+Y] abspeichern.
Nachdem Sie den Raspberry Pi mittels...
... neugestartet haben, können Sie das untenstehende Beispiel anwenden.
Programmierbeispiel in der Programmiersprache Python
base_dir = '/sys/bus/w1/devices/'
while True:
try:
device_folder = glob.glob(base_dir + '28*')[0]
break
except IndexError:
sleep(0.5)
continue
device_file = device_folder + '/w1_slave'
# Funktion wird definiert, mit dem der aktuelle Messwert am Sensor
ausgelesen werden kann
def TemperaturMessung():
f = open(device_file, 'r')
lines = f.readlines()
f.close()
return lines
# Zur Initialisierung, wird der Sensor einmal "blind" ausgelesen
TemperaturMessung()
# Die Temperaturauswertung: Beim Raspberry Pi werden erkennte one-Wire
Slaves im Ordner
# /sys/bus/w1/devices/ einem eigenen Unterordner zugeordnet. In diesem
Ordner befindet sich die Datei w1-slave
# in dem Die Daten, die über dem One-Wire Bus gesendet wurden gespeichert.
# In dieser Funktion werden diese Daten analysiert und die Temperatur
herausgelesen und ausgegeben
def TemperaturAuswertung():
lines = TemperaturMessung()
while lines[0].strip()[-3:] != 'YES':
time.sleep(0.2)
lines = TemperaturMessung()
equals_pos = lines[1].find('t=')
if equals_pos != -1:
temp_string = lines[1][equals_pos+2:]
temp_c = float(temp_string) / 1000.0
return temp_c
# Hauptprogrammschleife
# Die gemessene Temperatur wird in die Konsole ausgegeben - zwischen den
einzelnen Messungen
# ist eine Pause, deren Länge mit der Variable "sleeptime" eingestellt
werden kann
try:
while True:
print '---------------------------------------'
print "Temperatur:", TemperaturAuswertung(), "°C"
time.sleep(sleeptime)
except KeyboardInterrupt:
GPIO.cleanup()
Codebeispiel Arduino
// Benötigte Libraries werden importiert
#include <DallasTemperature.h>
#include <OneWire.h>
// Hier wird der Eingangs-Pin deklariert, an dem das Sensor-Modul angeschlossen
ist
#define KY001_Signal_PIN 4
// Libraries werden konfiguriert
OneWire oneWire(KY001_Signal_PIN);
DallasTemperature sensors(&oneWire);
void setup() {
// Initialisierung Serielle Ausgabe
Serial.begin(9600);
Serial.println("KY-001 Temperaturmessung");
// Sensor wird initialisiert
sensors.begin();
}
//Hauptprogrammschleife
void loop()
{
// Temperaturmessung wird gestartet...
sensors.requestTemperatures();
// ... und gemessene Temperatur ausgeben
Serial.print("Temperatur: ");
Serial.print(sensors.getTempCByIndex(0));
Serial.write(176); // UniCode-Angabe eines char-Symbols für das "°-Symbol"
Serial.println("C");
delay(1000); // 5s Pause bis zur nächsten Messung
}
Für das folgende Codebeispiel werden zwei zusätzliche Libraries benötigt:
- [OneWire Library] von Paul Stoffregen | veröffentlicht unter der MIT License
- [Dallas Temperature Control Library] von Miles Burton | veröffentlicht unter LGPL
Beide Libraries sind im Download-Paket enthalten und müssen vor dem Start der
Arduino IDE in den "library"-Ordner kopiert werden.
Diesen finden Sie standardmäßig unter dem folgenden Pfad Ihrer Windows-Installation:
C:\Benutzer\[Benutzername]\Dokumente\Arduino\libraries
CodeBeispiel Arduino
 Loading...
Loading...