

Janome JSR4400N SCARASeries, JS4400N SCARA Series, JSG GANTRY Series, JR2000N Series Operation Manual
JANOME SCARA/GANTRY ROBOT
JS/JSR4400N/JSG Series
JANOME DESKTOP ROBOT
JR2000N Series
Operation Manual
Features II
(Variables/Commands/Functions)
Thank you for purchasing a Janome Robot.
z Read this manual thoroughly in order to ensure proper use of this robot. Be
sure to read “For Your Safety” before you use the robot. The information will
help you protect yourself and others from possible dangers during operation.
z After having read this manual, keep it in a handy place so that you or the
operator can refer to it whenever necessary.
z This manual is written according to IEC 62079.
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
xxiii
CONTENTS
Features II
FOR YOUR SAFETY ______________________________________________________________ i
PREFACE ____________________________________________________________________ xxi
CONTENTS __________________________________________________________________ xxiii
EXPRESSION STRUCTURE_______________________________________________________ 1
COMMAND LIST ________________________________________________________________ 3
VARIABLE LIST _________________________________________________________________ 8
FUNCTION LIST _______________________________________________________________ 11
SYSTEM FLAG LIST ____________________________________________________________ 14
VARIABLES ___________________________________________________________________ 18
Free Variables: #mv, #mkv, #nv, #nkv, #sv, #skv _____________________________________ 18
Input Variables: #sysIn1..., #genIn1..., #handIn1... ____________________________________ 19
Output Variables: #sysOut1..., #genOut1..., #handOut1... ________________________________ 20
Down Timer: #downTimer1 – #downTimer10 ________________________________________ 21
Point Job Start Height: #jobStartHight______________________________________________ 22
Pallet: #palletFlag (1 – 100), #palletCount (1 – 100) ___________________________________ 23
Workpiece Adjustment: #workAdj_X, #workAdj_Y, #workAdj_Z, #workAdj_R, #workAdj_Rotation _
__________________________________________________________________________
25
Point Coordinates: #point_X,#point_Y,#point_Z, #point_R,#point_TagCode ________________ 27
Designated Point Coordinates: #P_X, #P_Y, #P_Z, #P_R, #P_TagCode __________________ 28
Designated Point Coordinates in Designated Programs: #prog_P_X, #prog_P_Y, #prog_P_Z,
#prog_P_R, #prog_P_TagCode__________________________________________________
29
FUNCTIONS __________________________________________________________________ 30
Robot System Functions________________________________________________________ 30
Arithmetic System Functions ____________________________________________________ 33
String System Functions________________________________________________________ 34

Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
xxiv
ON/OFF OUTPUT CONTROL _____________________________________________________ 36
Output to I/O: set, reset, pulse, invPulse____________________________________________ 36
Output after X Seconds: delaySet, delayReset _______________________________________ 39
Sound a Buzzer: onoffBZ _______________________________________________________ 40
Blink the LED (Green): onoffGLED________________________________________________ 41
Blink the LED (Red): onoffRLED__________________________________________________ 42
Output Values from I/O: dataOut, dataOutBCD ______________________________________ 43
Motor Power ON, Servo Motor ON and OFF: motorPowerON, servoON, servoOFF __________ 44
IF BRANCH, WAIT CONDITION ___________________________________________________ 45
if Branch: if, then, else, endIf_____________________________________________________ 45
Wait Condition: waitCond, waitCondTime, timeUp, endWait ____________________________ 47
CONDITION ___________________________________________________________________ 49
Condition Settings: ld, ldi, and, ani, or, ori, anb, orb ___________________________________ 49
DELAY, DATA IN, WAIT START ___________________________________________________ 52
Time Delay: delay_____________________________________________________________ 52
Waiting for a Start Signal: waitStart, waitStartBZ _____________________________________ 54
Input from I/O: dataIn, dataInBCD_________________________________________________ 56
PALLET CONTROL _____________________________________________________________ 57
Pallet Command: loopPallet, resPallet, incPallet _____________________________________ 57
EXECUTION FLOW CONTROL ___________________________________________________ 60
Subroutine Call for Jobs according to Point Types: callBase ____________________________ 60
Subroutine Call for Point Job Data: callJob__________________________________________ 62
End the Point Job: returnJob ____________________________________________________ 64
Subroutine Call for a Program: callProg ____________________________________________ 65
Subroutine Call for a Point String: callPoints_________________________________________ 69
End a Program: endProg _______________________________________________________ 70
Assigning the Returned Value of a Function: returnFunc _______________________________ 71
Jump to the Specified Point: goPoint, goRPoint, goCRPoint ____________________________ 72
Jumping to a Specified Command Line: jump, Label __________________________________ 74
FOR, DO-LOOP ________________________________________________________________ 75
for, do-loop: for, next, exitFor, do, loop, exitDo _______________________________________ 75
MOVE________________________________________________________________________ 77
Move the Z-Axis Alone: upZ, downZ, movetoZ_______________________________________ 77

Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
xxv
Linear Movement in CP Drive by Point Job: lineMove, lineMoveStopIf_____________________ 79
Mechanical Initialization by Point Job: initMec _______________________________________ 81
Position Error Detection: checkPos________________________________________________ 82
LCD, 7SLED___________________________________________________________________ 83
Display the Specified Strings on the Teaching Pendant: clrLCD, clrLineLCD, outLCD, eoutLCD _ 83
Display the Desired Number on the 7SLED: sys7SLED, out7SLED_______________________ 84
COM INPUT/OUTPUT ___________________________________________________________ 85
COM Input/Output: outCOM, eoutCOM, inCOM, setWTCOM, cmpCOM, ecmpCOM, clrCOM,
shiftCOM____________________________________________________________________
85
PC Communication: stopPC, startPC ______________________________________________ 89
VARIABLE, COMMENT, SYSTEM CONTROL ________________________________________ 90
Variable Declaration and Assignment: declare, let ____________________________________ 90
Comment Insertion: rem, crem ___________________________________________________ 92
Change a Program Number by Point Job: setProgNum________________________________ 93
Change a Sequencer Number by Point Job: setSeqNum_______________________________ 94
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
1
EXPRESSION STRUCTURE
Expression
An expression is fixed numbers (string type and numeric type), variables, functions, and operators
combined.
Fixed Number
There are two types of fixed numbers, numeric type (e.g. 125, 2.0, 2e15) and string type (e.g. "ABC").
Numeric type fixed numbers are handled as 8-byte real type (double type), and string type fixed
numbers are handled as 255-byte.
For string type fixed numbers, characters can be specified in hexadecimal code using the % symbol.
e.g. eoutCOM port2,"%0D%0A" : Output CR・LF code.
If there is any character other than 0 – 9, A – F, and a second % symbol after the first %, the second %
is treated as a character.
e.g. eoutCOM port2,"%G01" : Output %G01.
If there is any character from 0 – 9 and A – F, enter %% to output %.
e.g. eoutCOM port2,"%%300" : Output %300.
Variable
A variable is a container into which numeric and string values are placed.
You can use the built-in variables (which are built into the robot as a function) and the user-defined
variables (which can be freely defined by the user).
User-defined variables other than local variables (variables effective only in defined point job data
which are defined by the declare command) are defined in the Customizing mode. (See the operation
manual Features IV for details of the Customizing mode.)
Boolean type (boo): 1-bit variable which holds only 1 (true) or 0 (false)
Numeric type (num): 8-byte real type (double type) variable
String type (str): 255-byte variable
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
2
Function
A function returns a converted value if values or strings are given.
You can use the built-in functions (which are built into the robot as a function) and the user-defined
functions (which can be freely defined by the user).
The user-defined functions are defined in the Customizing mode. (See the operation manual Features
IV for details of the Customizing mode.)
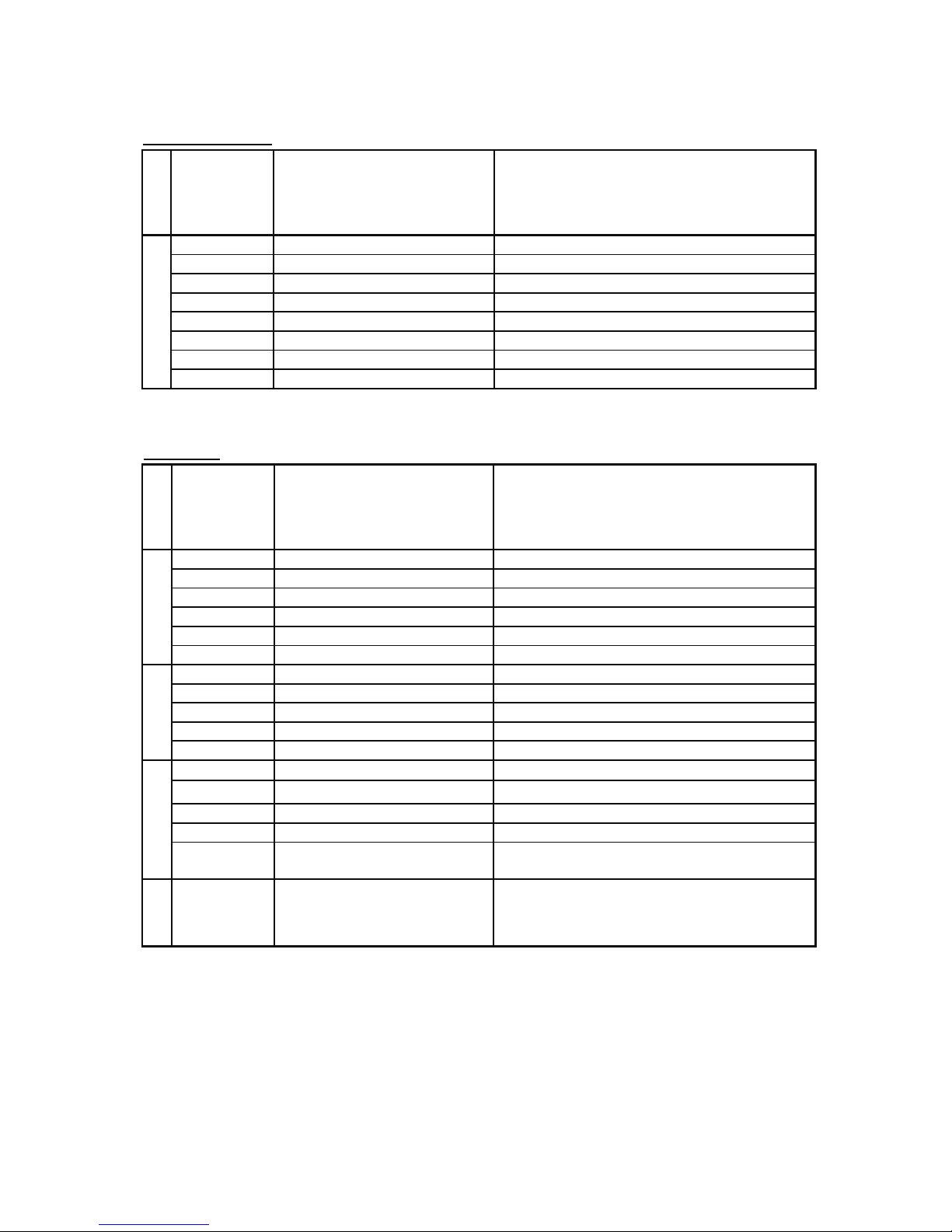
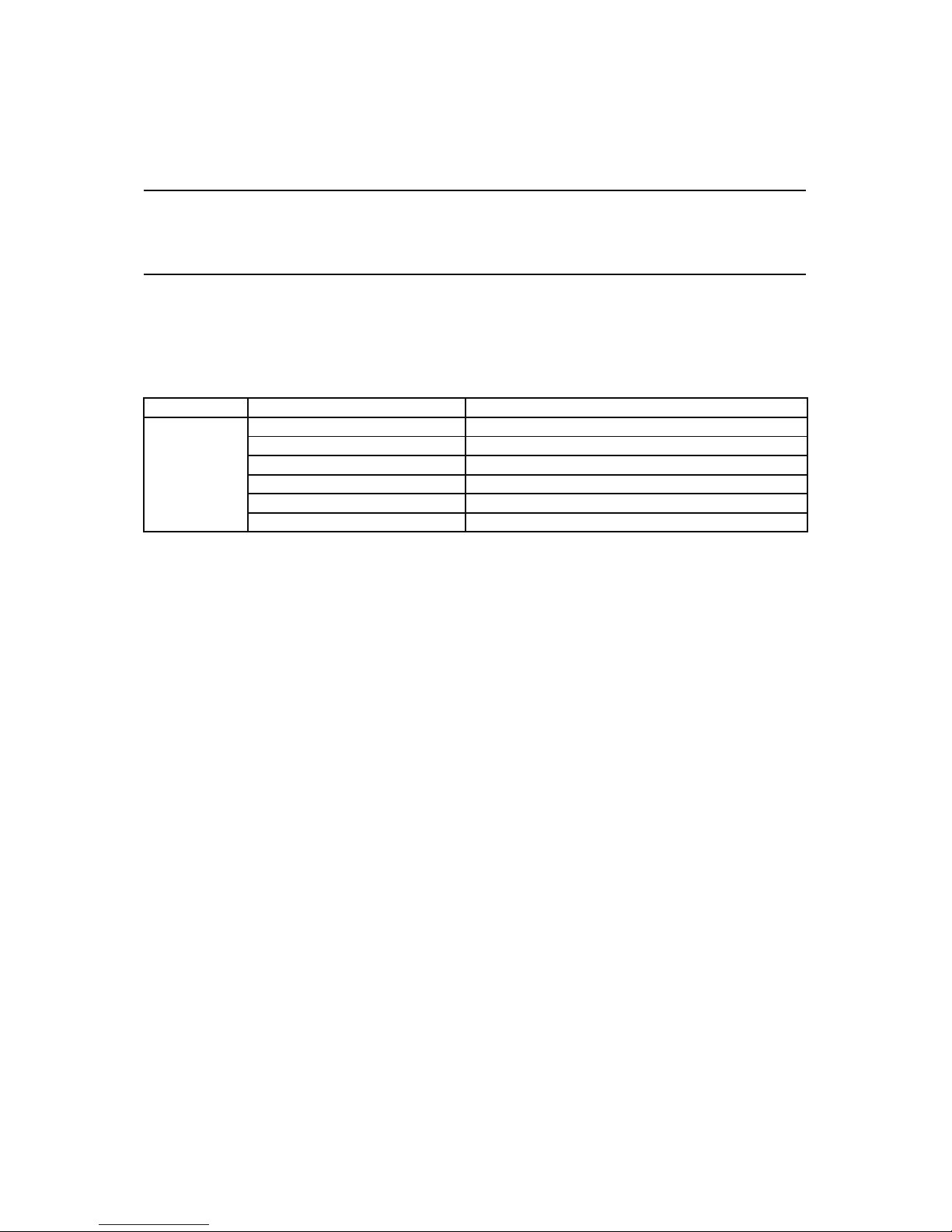
Operator
Operator Description
Value
+
Adds the left and right values.
num
-
Deducts the right value from the left value.
num
*
Multiplies the left and right values.
num
/
Divides the left value by the right value.
num
&
Combines the left and right values. e.g. "A" & "B" Æ "AB"
str
=
Assigns the right value to a left value.
num,str
>
Returns 1 if the left value is larger than the right value.
Returns 0 if the left value is smaller than or the same as the right value.
num,str
<
Returns 1 if the left value is smaller than the right value.
Returns 0 if the left value is larger than or the same as the right value.
num,str
>=, =>
Returns 1 if the left value is larger than or the same as the right value.
Returns 0 if the left value is smaller than the right value.
num,str
<=, =<
Returns 1 if the left value is smaller than or the same as the right value.
Returns 0 if the left value is larger than the right value..
num,str
<>, ><
Returns 1 if the left value is not equal to the right value.
Returns 0 if they are equal.
num,str
==
Returns 1 if the left value is equal to the right value.
Returns 0 if they are not equal.
num,str
The priority of operators is as follows:
1. Expressions in brackets
2. Functions and variables
3. “Independent” + and -
4. * and /
5. +, -, and &
6. >, >=, =>, =<, <=, <, <>, and >< (Relational operator)
7. = (Assignment operator)
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
3
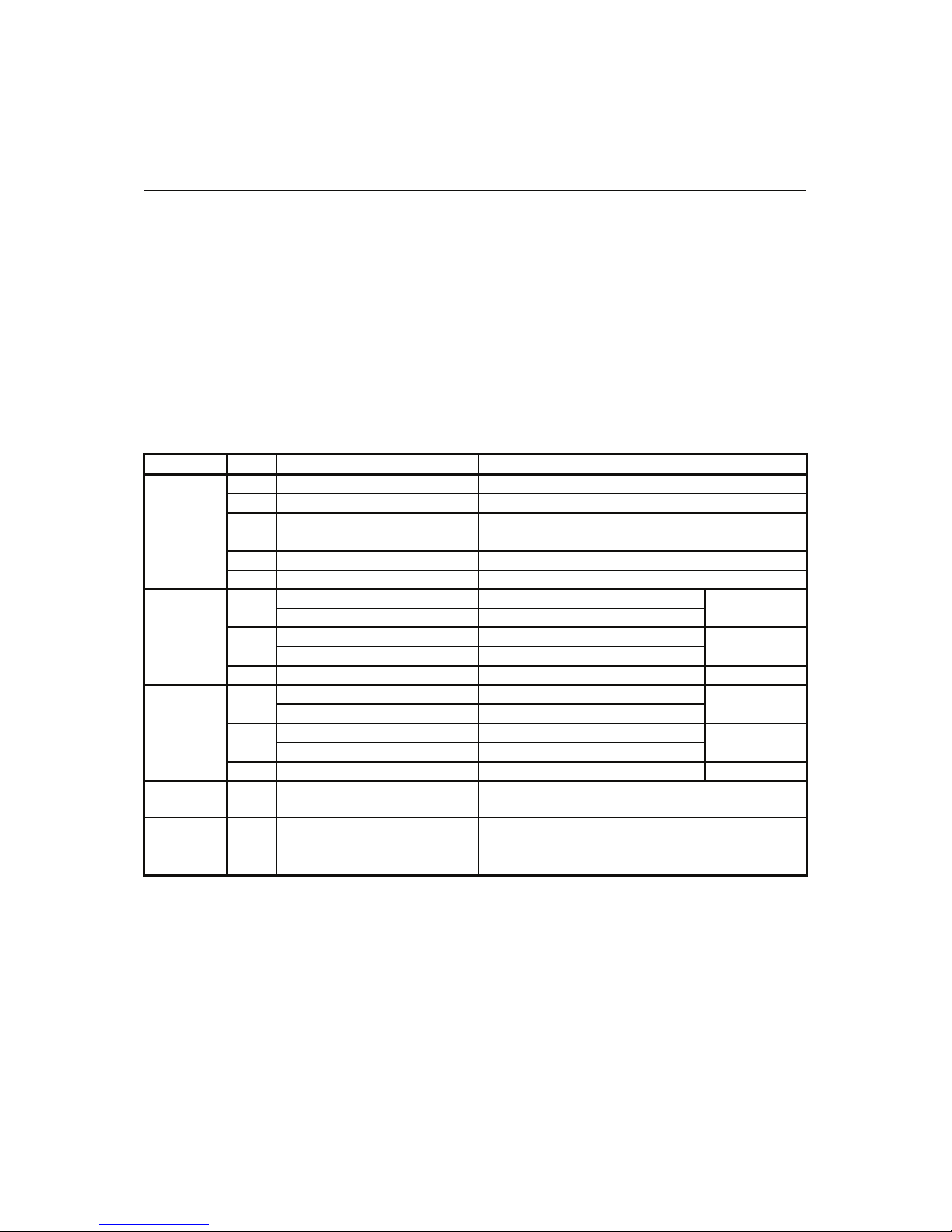
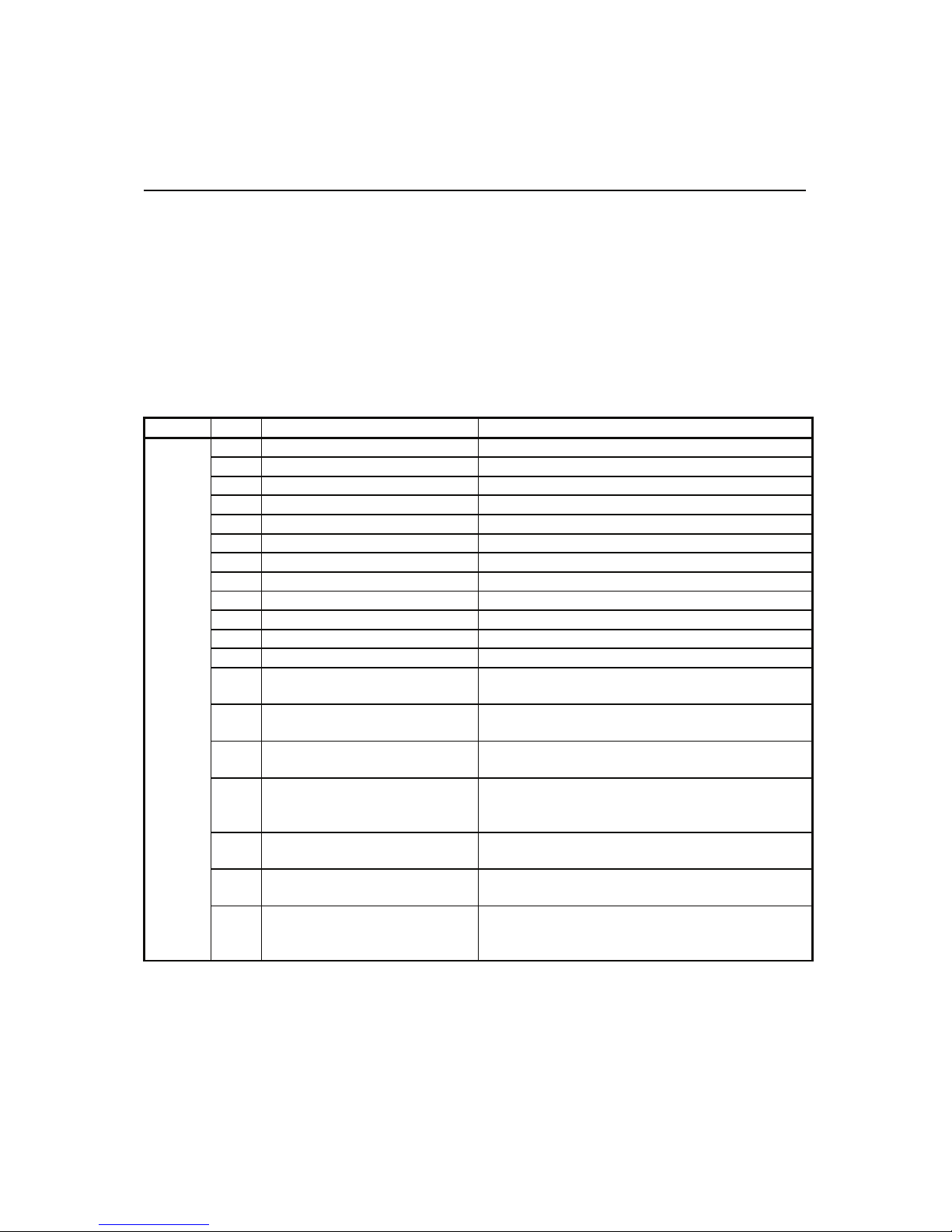
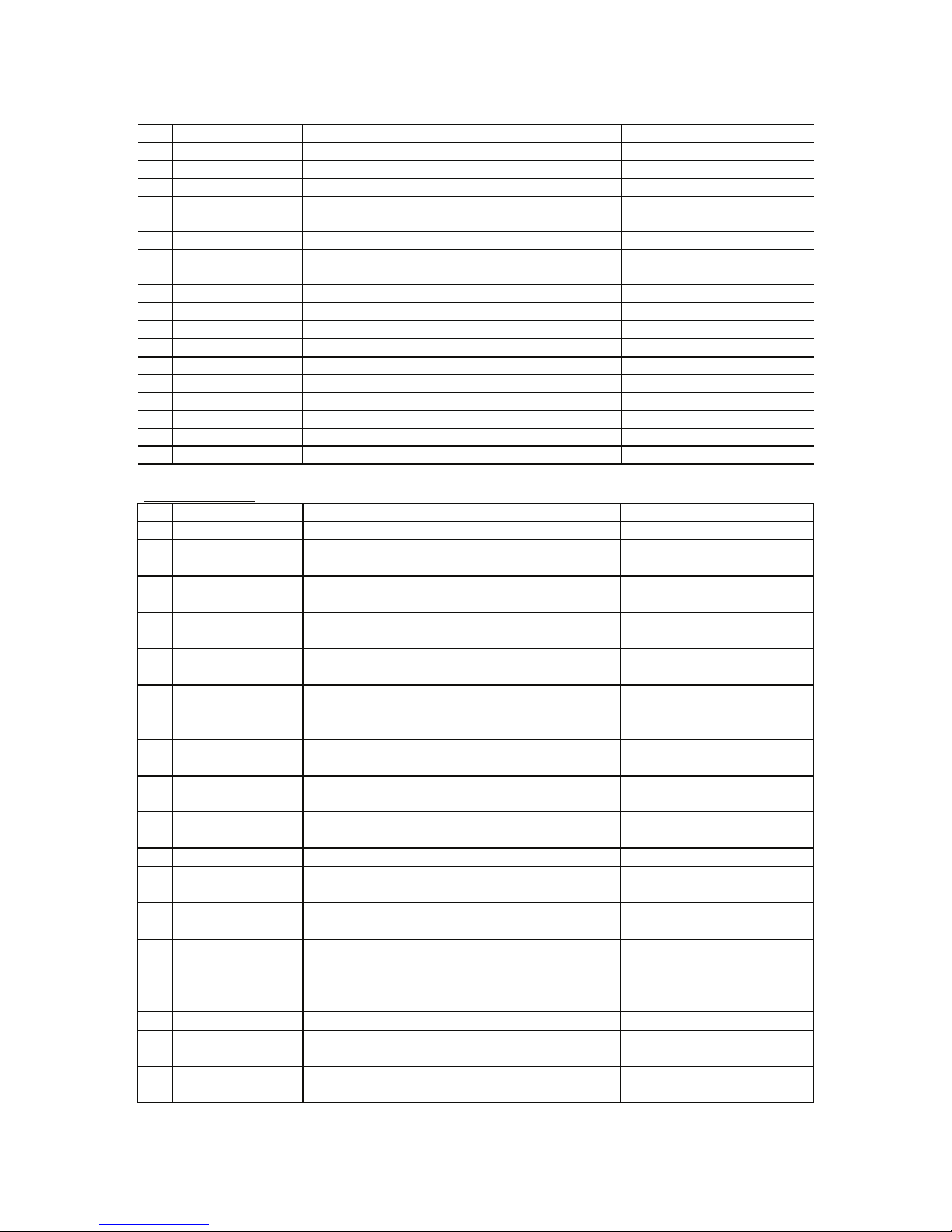
COMMAND LIST
Point Job Data
Category
Command Necessary Parameter Description
set Output Destination Output ON.
reset Output Destination Output OFF.
pulse Output Destination, Pulse Width Output ON pulses of predetermined length.
invPulse Output Destination, Pulse Width Output OFF pulses of predetermined length.
delaySet Output Destination, Delay Time Output ON after the predetermined delay time.
delayReset Output Destination, Delay Time Output OFF after the predetermined delay time.
onoffBZ ON Time, OFF Time Sound the buzzer on and off.
onoffGLED ON Time, OFF Time
Flash the green LED on the front of the
JR2000N Series robot (or on the operation box
for the JSR4400N robot).
onoffRLED ON Time, OFF Time
Flash the red LED on the front of the JR2000N
Series robot (or on the operation box for the
JSR4400N robot).
dataOut
Output Data, Output Bit
Number, Output Destination
Output numeric data or a tag code assigned to
a point to the I/O.
dataOutBCD
Output Value, Output Bit
Number, Output Destination
Output numeric data or a tag code assigned to
a point to the I/O in BCD (binary-coded
decimal).
motorPowerON –
servoON Axis
Turn on the designated Axis servomotor.
(Available only for the JS and JSG Series)
ON/OFF Output Control
servoOFF Axis
Turn off the designated Axis servomotor.
(Available only for the JS and JSG Series)
if – Conditional branching
then
–
Perform if true.
else
–
Perform if false.
endIf
–
End of conditional branching
waitCondTime Wait Time Wait for conditions for a designated period.
timeUp
–
Perform when time is up.
endWait
–
End of wait condition
if Branch, Wait Condition
waitCond
–
Wait for conditions.
If you assign point job data that includes any of the highlighted ( ) commands
to a CP passing point, the commands will be ignored.
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
4
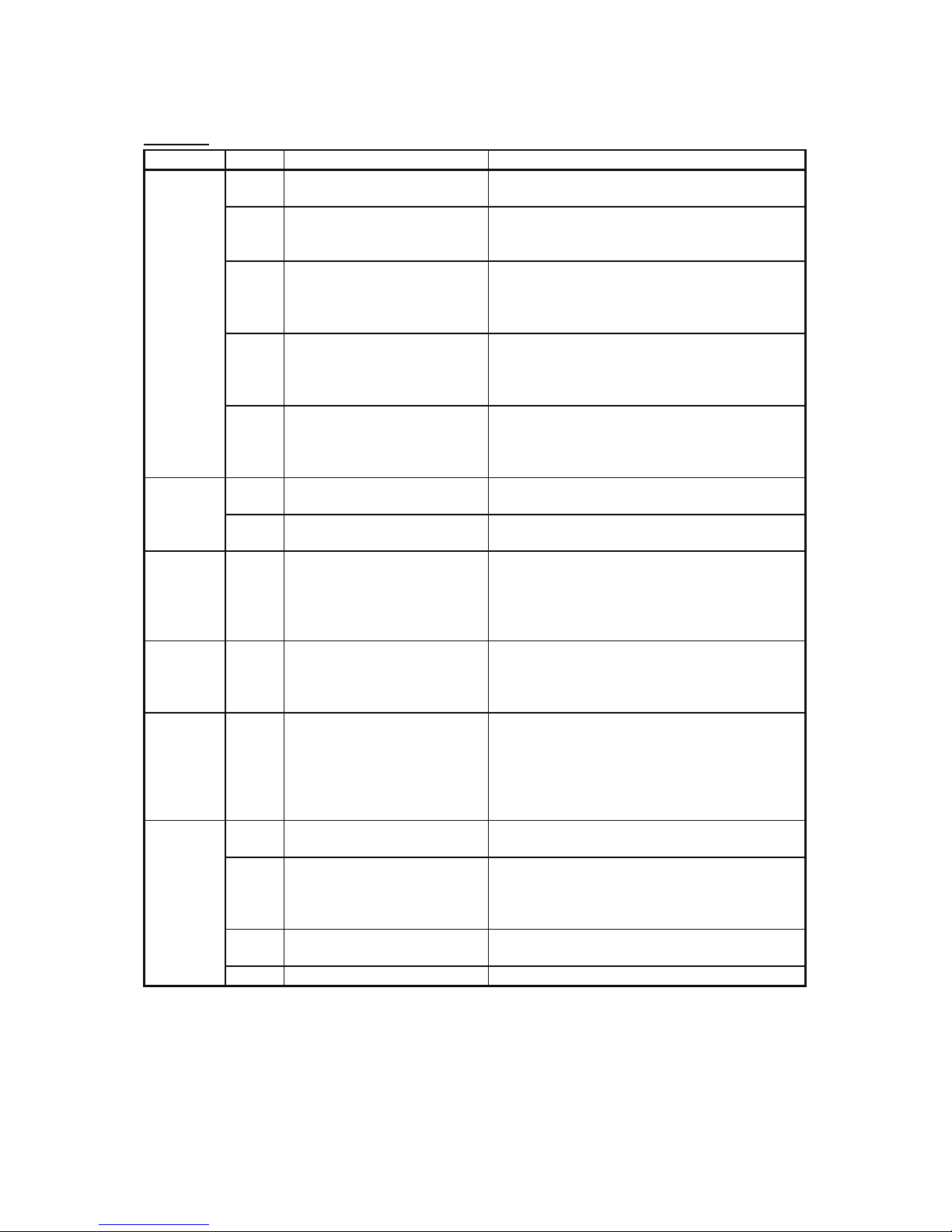
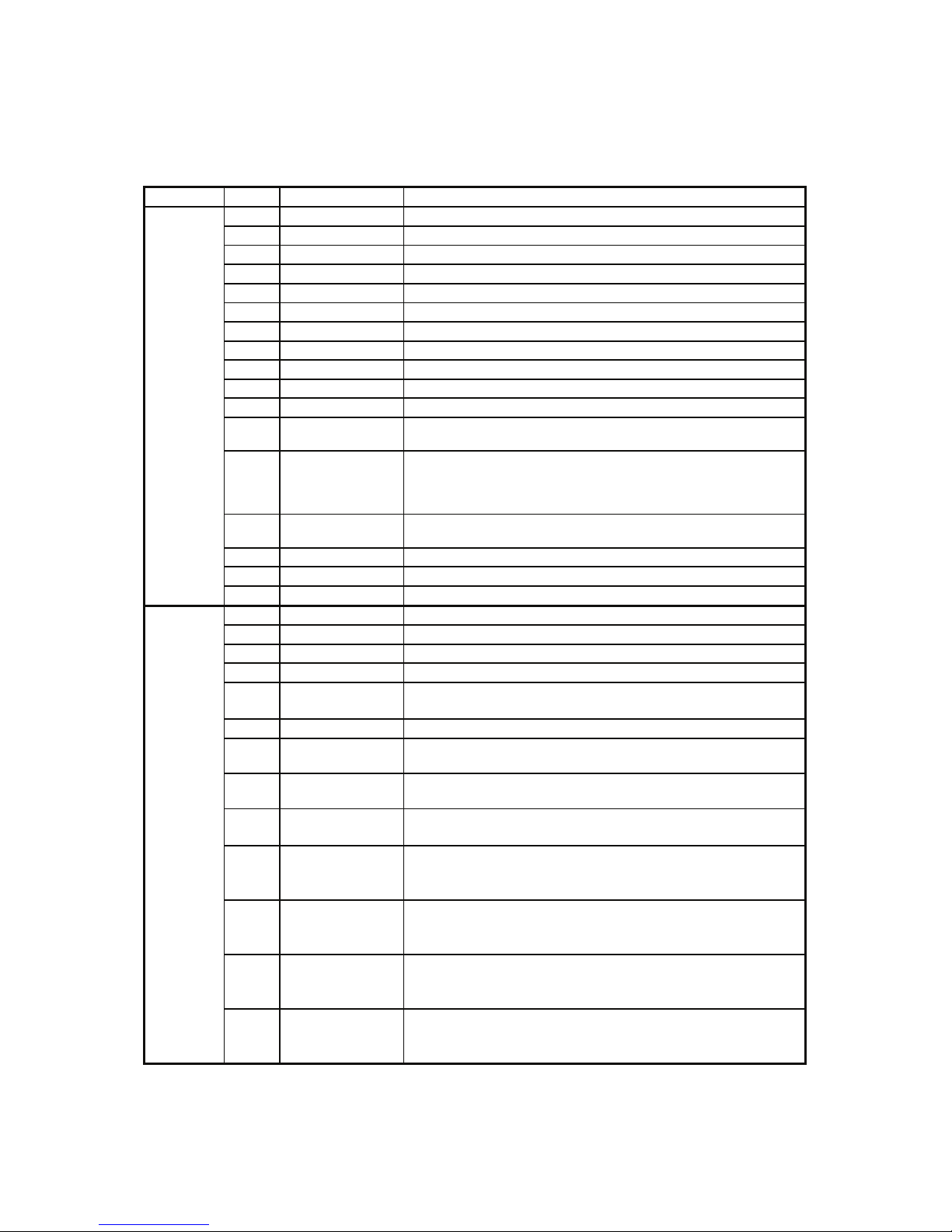
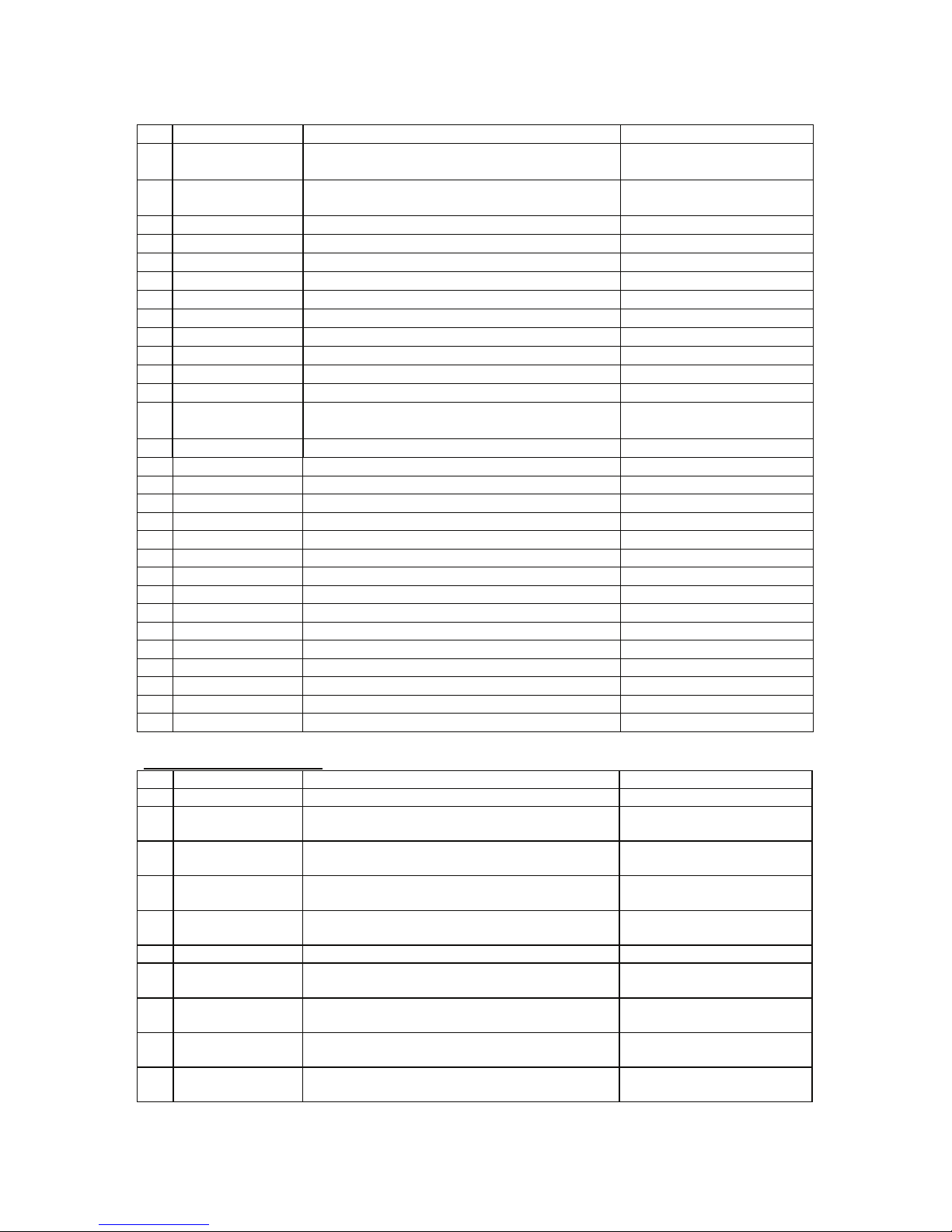
Category
Command Necessary Parameter Description
ld Boolean variable or Expression
Input ON.
ldi Boolean variable or Expression
Input OFF.
and Boolean variable or Expression
Input serial ON.
ani Boolean variable or Expression
Input serial OFF.
or Boolean variable or Expression
Input parallel ON.
ori Boolean variable or Expression
Input parallel OFF.
anb –
Serial connection of blocks
Condition
orb –
Parallel connection of blocks
delay
Delay Time Stop for a specified time.
dataIn
Numeric Variable Name, Input
Bit Number, Input Source
Read out numeric data from the I/O.
dataInBCD
Numeric Variable Name, Input
Bit Number, Input Source
Read numeric data in BCD from the I/O.
waitStart –
Wait for a start signal.
Delay
waitStartBZ
–
Wait for a start signal while acknowledging an
error with an alarm buzzer.
loopPallet
Pallet Routine Number, go Point
Number
Pallet loop
resPallet Pallet Routine Number
Reset the pallet counter.
Pallet
incPallet Pallet Routine Number
Increase the pallet counter number. (+1)
callBase
–
Call a user-defined point job from a point to
which a point job number is set.
callJob
Point Job Number
Call a point job data subroutine specified by
number.
callPoints
Variable Name (Identifier)
Perform a specified point string (defined in the
Customizing mode).
returnJob
– End of point job
returnFunc
Return Value (Expression)
Terminate the function by assigning the value
of the specified expression as a return value.
(This command is valid in functions only.)
callProg
Program Number
Call a program subroutine specified by
number.
endProg
– End of program
goPoint
PTP Condition Number, go Point
Number
Jump to a specified point.
goRPoint
PTP Condition Number, Relative
go Point Number
Jump to a relatively-specified point.
goCRPoint
PTP Condition Number, Relative
go Point Number
Jump to a selected destination point while
running in the CP drive.
jump
Label Number Jump to a specified label.
Execute Flow Control
Label
Label Number Label
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
5
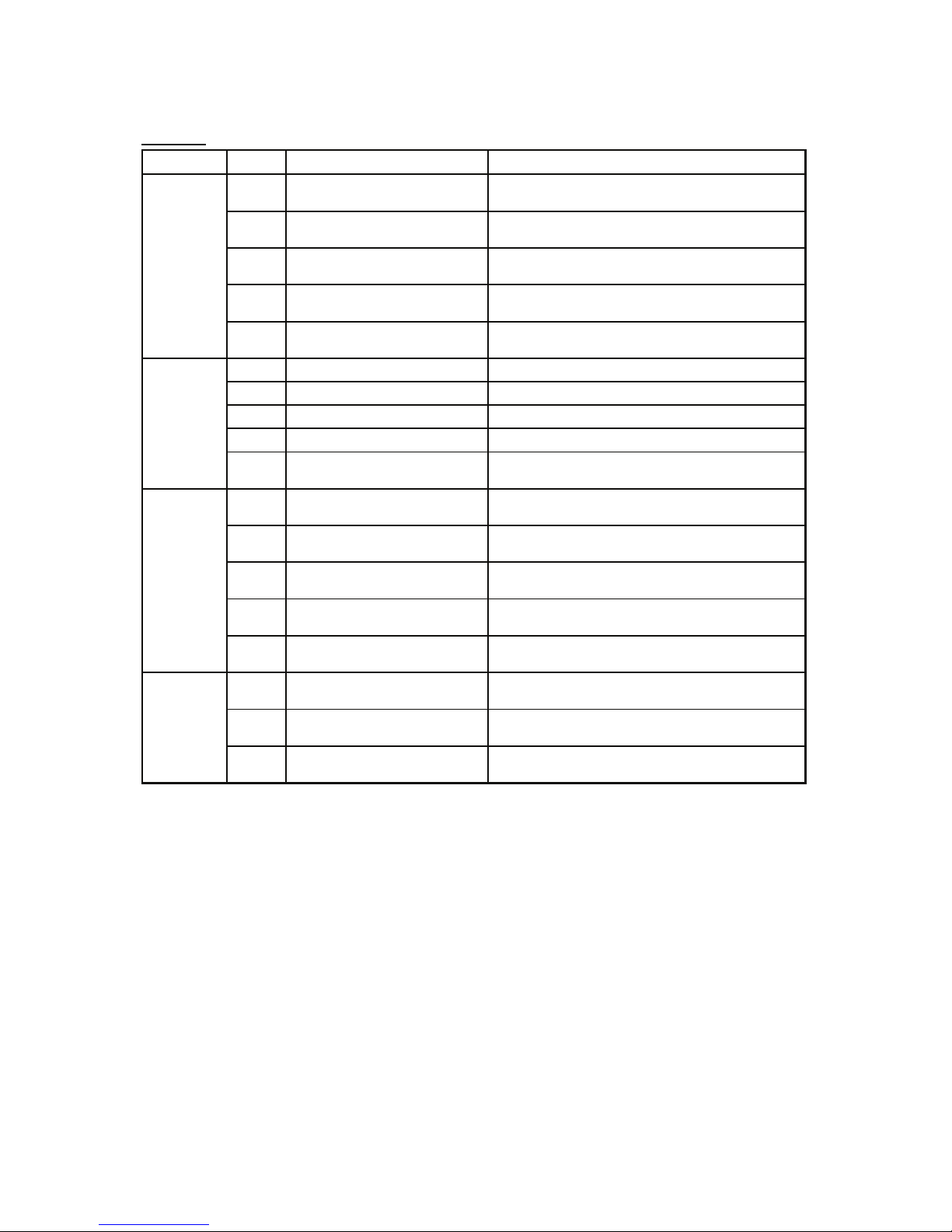
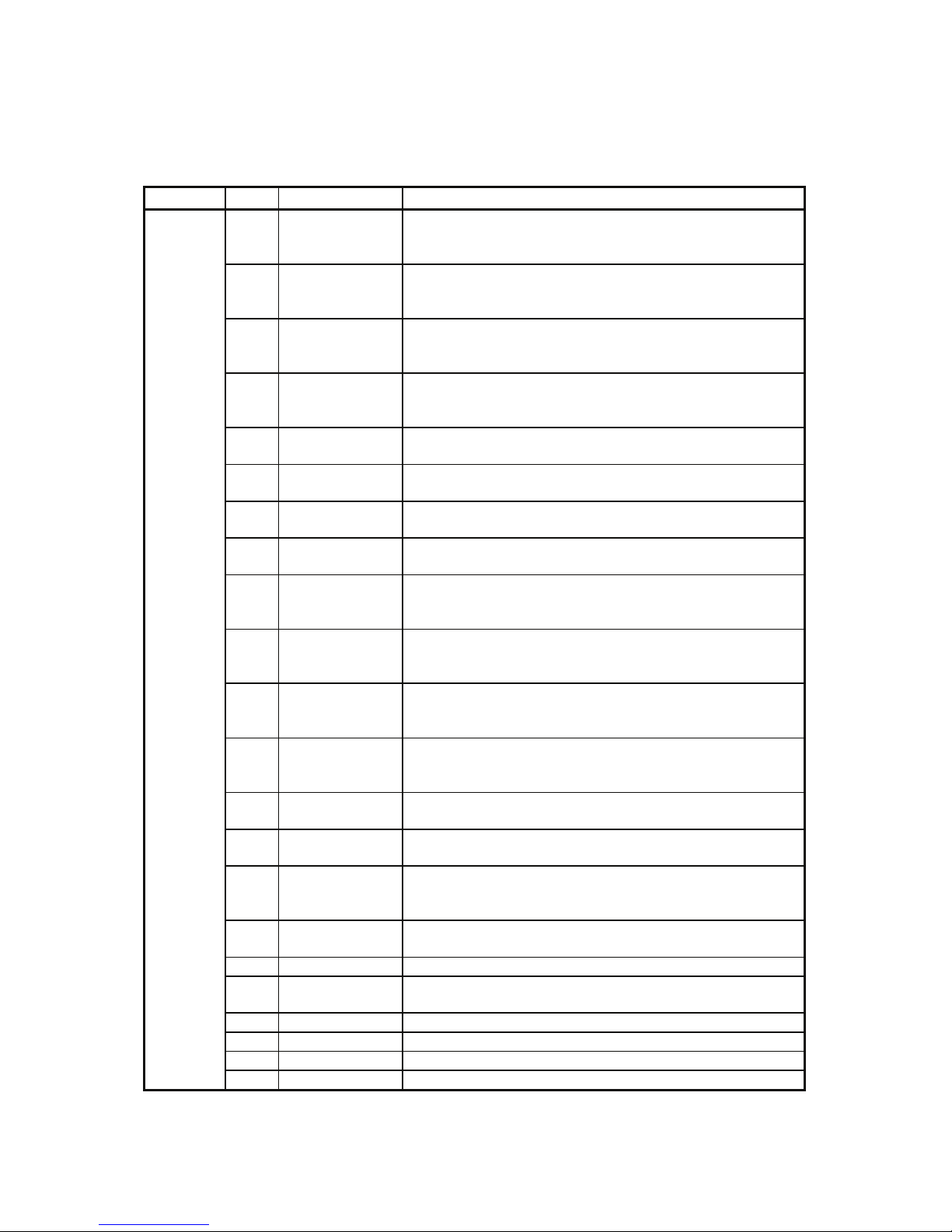
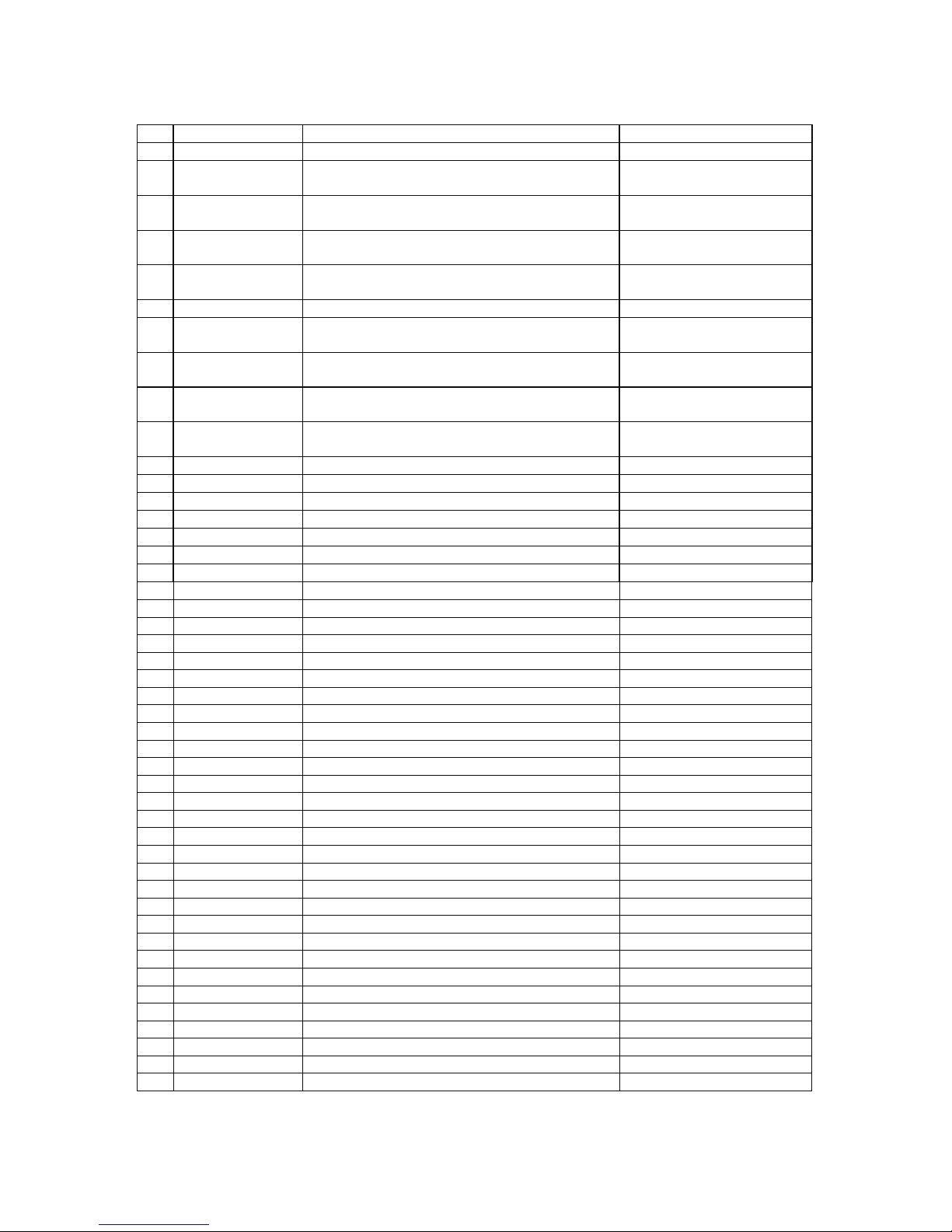
Category
Command Necessary Parameter Description
for
Variable Name, Initial Value,
End Value, Step Value
next –
Repeat commands between for and next until
the specified variable changes from the initial
value to the end value.
exitFor –
Break from for loop.
do –
loop –
Repeat commands between do and loop.
For, do-loop
exitDo –
Break from do loop.
upZ Speed, Distance Z Up
downZ Speed, Distance Z Down
movetoZ Speed, Distance Z Move
lineMove
Line Speed, (X, Y, Z) Distance,
R Rotate Angle
Make an Axis move a specified distance
(relative distance) at a specified speed in the
CP line drive. (Relative move command)
Entering this command will display the
specified shifting speed and distance of each
Axis as follows:
e.g. lineMoveSpeed 20
lineMoveX 10
lineMoveY 20
lineMoveZ 0
lineMoveR 0
lineMoveStopIf
– Terminate the movement of an Axis made by
lineMove if the conditions are met.
endLineMove – End of lineMoveStopIf condition statements.
initMec
Axis
Return the specified Axis to its initial position.
(Perform mechanical initialization.) (Available
only for the JR2000N and JSR4400N Series)
Move
checkPos
– Detect a position error. (Available only for the
JR2000N Series)
clrLCD
– Clear the LCD display.
clrLineLCD
Clear Line (1 – 13) Clear a specified line on the LCD display.
outLCD
Display Line (1 – 13), Display
Column (1 – 40), Display Data
Display strings on the LCD display.
eoutLCD
Display Line (1 – 13), Display
Column (1 – 40), Display Data
Display the result of the string expression on
the LCD display.
sys7SLED –
Returns the 7 segment LED display changed
by out7SLED to the previous program number.
(Available only for the JR2000N Series and
JSR4400N Series)
LCD Control
out7SLED Type, Output Value
Output 7 segment LED. (Available only for the
JR2000N Series and JSR4400N Series)
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
6
Category
Command Necessary Parameter Description
outCOM Input/Output, Output Data Output the string from the COM.
eoutCOM Input/Output, Output Data
Output the result of the string expression from
the COM.
setWTCOM Input/Output, Wait Time
Set [Wait Time] (time-out period) for receiving
data from the COM.
inCOM
Variable Name, Input/Output,
Character Length
Assign the receive data from the COM to the
specified variable.
cmpCOM Input/Output, Compare Data
Compare the receive data and string. The result
is entered into the system flags (sysFlag(1) –
sysFlag(20)).
ecmpCOM Input/Output, Compare Data
Compare the receive data and string expression.
The result is entered into the system flags
(sysFlag(1) – sysFlag(20)).
clrCOM Input/Output Clear the COM receive buffer.
shiftCOM Input/Output, Shift Number
Shift data received from the COM. Delete data
from the top by the specified [Shift Number].
stopPC – Stop the PC communication of the COM1.
COM Input/Output
startPC – Start the PC communication of the COM1.
declare Variable Type, Variable Name
Local variable declaration
let Expression
Assign the l-value to the r-value.
The symbols +, -, *, /, =, (, ), & can be used.
rem Output Data
One line comment
crem Output Data
Comment at the end of a command line
setProgNum Program Number
Change the program number.
z Do not carry out this command while the
robot is running. Use the command
callProgram if you change the program to
be run while the robot is running.
Variable, Comment, System Control
setSeqNum Sequencer Number
Change the sequencer number in the system
data.
cameraWadj Work Adjustment Number
Take an image with a camera and calculate the
offset from the data gained according to the
[Workpiece Adjustment] setting.
wCameraWadj
Work Adjustment Number,
Shot Number
Use this command when calculating offset using
two camera images according to the [Workpiece
Adjustment].
ca m er a Too l Tool Nu mbe r
Take an image with a camera and calculate
[TCP-X] and [TCP-Y] from the data gained
according to the [Point Tool Data Settings].
cameraPallet Pallet Routine Number
Take an image with a camera and set the
number of gained marks and the coordinates as
the number and the coordinates of the [Pallet
Routine] to be performed.
Camera, Z Adjustment
takeZWadj Work Adjustment Number
Calculate the Z offset from the data gained by
the distance or touch-sensitive sensor according
to the [Workpiece Adjustment] settings.
z For the [Camera, Z Adjustment] command category, refer to the Camera & Sensor Functions
operation manual.
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
7
Execute Condition
Category
Command Necessary Parameter Description
ld Boolean variable or expression Input ON.
ldi Boolean variable or expression Input OFF.
and Boolean variable or expression Input serial ON.
ani Boolean variable or expression Input serial OFF.
or Boolean variable or expression Input parallel ON.
ori Boolean variable or expression Input parallel OFF.
anb – Serial connection of blocks
Condition
orb – Parallel connection of blocks
Sequencer
Category
Command Necessary Parameter Description
ld Boolean variable Input ON.
ldi Boolean variable Input OFF.
and Boolean variable Input serial ON.
ani Boolean variable Input serial OFF.
or Boolean variable Input parallel ON.
Calculate
ori Boolean variable Input parallel OFF.
out Output Destination Coil drive
set Output Destination
Set the coil drive hold command.
reset Output Destination
Reset the coil drive hold command.
pls Output Destination
Output the rising edge of pulse.
Coil
plf Output Destination
Output the falling edge of pulse.
anb –
Parallel connection of serial circuit block
orb –
Serial connection of parallel circuit block
mps –
Store data in process of calculation.
mrd –
Read out data in process of calculation.
Connection
mpp –
Read out and reset data in process of
calculation.
Others
nop – No operation
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
8
VARIABLE LIST
You can use the built-in variables (which are built into the robot as a function), and the user-defined
variables (which can be freely defined by the user).
User-defined variables other than local variables (variables effective only in defined point job data
which are defined by the declare command) are defined in the Customizing mode. (See the operation
manual Features IV for details of the Customizing mode.)
Boolean type (boo): 1-bit variable which holds only 1 (true) or 0 (false)
Numeric type (num): 8-byte real type (double type) variable
String type (str): 255-byte variable
Category Type Identifier Description
boo #mv (1 – 99) Boolean variable
boo #mkv (1 – 99) Boolean variable (Keeping variable)*
num #nv (1 – 99) Numerical variable
num #nkv (1 – 99) Numerical variable (Keeping variable)*
str #sv (1 – 99) String variable
Free
Vari able
str #skv (1 – 99) String variable (Keeping variable)*
#sysIn1 – 15 (JS and JSG Series)
boo
#sysIn1 – 16 (JR2000N and JR4400N Series)
I/O-SYS
#genIn1 – 18 (JS and JSG Series)
boo
#genIn1 – 8 (JR2000N and JR4400N Series)
I/O-1
Input
Vari able
boo #handIn1 – 4 (Available only for JS Series) I/O-H
#sysOut1 – 14 (JS and JSG Series)
boo
#sysOut1 – 16 (JR2000N and JR4400N Series)
I/O-SYS
#genOut1 – 22 (JS and JSG Series)
boo
#genOut1 – 8 (JR2000N and JR4400N Series)
I/O-1
Output
Vari able
boo #handOut1 – 4
(Available only for JS Series) I/O-H
System
Flag
boo #sysFlag(1) – #sysFlag(999) Refer to “SYSTEM FLAG LIST” on Page 14.
set #FBZ : Sound the buzzer.
reset #FBZ : Stop the buzzer.
Buzzer boo #FBZ
(onoffBZ : Turn the buzzer on and off.)
*: Variables which hold their values even if the robot is turned off are collectively referred to as
keeping variables in the operation manuals.
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
9
Variables
Category Type Identifier Description
num #downTimer1 – 10
The assigned value will be decreased
automatically (by msec).
num #jobStartHight
Start a point job from a position above the Zcoordinate determined by the assigned value.
(Invalid in the CP drive)
num #jobStartX
Start a point job from a position at a distance
from the X-coordinate determined by the
assigned value.
(Invalid in the CP drive)
num #jobStartY
Start a point job from a position at a distance
from the Y-coordinate determined by the
assigned value.
(Invalid in the CP drive)
Special
Vari able
num #jobStartR
Start a point job from a position at a distance
from the R-coordinate determined by the
assigned value.
(Invalid in the CP drive)
boo #palletFlag (1 – 100)
Pallet flag
(Corresponds to Pallet Routine Nos. 1 – 100.)
Pallet
Routine
num #palletCount (1 – 100)
Pallet counter
(Corresponds to Pallet Routine Nos. 1 – 100.)
Workpiece
Adjustment
num
#workAdj_X (1 – 100)
#workAdj_Y (1 – 100)
#workAdj_Z (1 – 100)
#workAdj_R (1 – 100)
#workAdj_Rotation (1 – 100)
Adjustment value of each Axis in [Workpiece
Adjustment] settings
(Corresponds to Work Adjustment Nos. 1 –
100.)
Tool Data num
#tool_X (1 – 100)
#tool_Y (1 – 100)
#tool_Z (1 – 100)
#tool_R (1 – 100)
TCP value of each Axis in [Point Tool Data
Settings] settings.
(Corresponds to Tool Nos. 1 – 100.)
PTP
Condition
num #priorityPTPCondNum
PTP condition number
The PTP condition number set by using this
variable has
priority over other PTP condition
numbers in the PTP drive (even at the points
to which the additional function data [PTP
Condition] is set).
boo #seqT (1 – 99)
Add 1 when #seqTCount reaches the
specified value or greater.
num
#seqTCount (1 – 50):
Integrating timer
#seqTCoun (51 – 99):
Unintegrating timer
One counter can count 0.001 – 2,147,483,647
seconds (by 0.001 second).
boo #seqC (1 – 99)
Add 1 when #seqCCount reaches the
specified value or greater.
Sequencer
num #seqCCount (1 – 99) One counter can count 1 – 2,147,483,647.
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
10
Variables
Category Type Identifier Description
num #point_X
X-coordinate value of the point currently
performed
num #point_Y
Y-coordinate value of the point currently
performed
num #point_Z
Z-coordinate value of the point currently
performed
num #point_R
R-coordinate value of the point currently
performed
Current
Point
Coordinates
num #point_TagCode
Tag code value of the point currently
performed
num #P_X (1 – last point number) X-coordinate value of the specified point
num #P_Y (1 – last point number) Y-coordinate value of the specified point
num #P_Z (1 – last point number) Z-coordinate value of the specified point
num #P_R (1 – last point number) R-coordinate value of the specified point
Specified
Point
Coordinates
num
#P_TagCode (1 – last point
number)
Tag code value of the specified point
num
#prog_P_X (1 – 255, 1 – last
point number)
X-coordinate value of the specified point in the
specified program
num
#prog_P_Y (1 – 255, 1 – last
point number)
Y-coordinate value of the specified point in the
specified program
num
#prog_P_Z (1 – 255, 1 – last
point number)
Z-coordinate value of the specified point in the
specified program
num
#prog_P_R (1 – 255, 1 – last
point number)
R-coordinate value of the specified point in the
specified program
Specified
Program,
Specified
Point
Coordinates
num
#prog_P_TagCode (1 – 255,
1 – last point number)
Tag code value of the specified point in the
specified program
num #point_CondNum
Condition setting variable number set to the
point currently performed
num
#P_CondNum (1 – last point
number)
Condition setting variable number set to the
specified point
Condition
Number
num
#prog_P_CondNum (1 –
255, 1 – last point number)
Condition setting variable number set to the
specified point in the specified program
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
11
FUNCTION LIST
You can use the built-in functions (which are built into the robot as a function) and the user-defined
functions (which can be freely defined by the user).
The user-defined functions are defined in the Customizing mode. (See the operation manual Features
IV for details of the Customizing mode.)
x, y: Numerical value or numerical variable
n, m: Numeric value becomes larger than a certain value through rounding or truncation
a, b: String or string variable
Category Type Identifier Description
num currentMainProgNumber () Currently performed main program number
num currentSubProgNumber () Currently performed sub program number
num currentPointNumber () Currently performed point number
num currentArmX () Current X-coordinate [mm]
num currentArmY () Current Y-coordinate [mm]
num currentArmZ () Current Z-coordinate [mm]
num currentArmR () Current R-coordinate [deg]
num currentCmdArmX () Current command X-coordinate [mm]
num currentCmdArmY () Current command Y-coordinate [mm]
num currentCmdArmZ () Current command Z-coordinate [mm]
num currentCmdArmR () Current command R-coordinate [deg]
num numCOM (COM port number) Data byte count of COM receiving port
num isConditionData (n)
Display whether the specified condition data
number is available (1) or not (0).
str strCenterLCD (a)
Adjust the strings on the teaching pendant LCD
(centering).
str strRightLCD (a)
Adjust the strings on the teaching pendant LCD
(right justification).
str strPlusRLCD (a,b)
Teaching pendant LCD: Right priority; Items on
the right are displayed in full if there is an
overlap.
str strPlusLLCD (a,b)
Teaching pendant LCD: Left priority; Items on the
left are displayed in full if there is an overlap.
num getSystemPTPmoveTime ()
Valid only for [Job while Moving].
Time required for the current PTP drive [sec]
Robot
System
num getSystemPTPrestTime ()
Valid only for [Job while Moving].
Time left before the current PTP drive ends
(reaching the destination) [sec]
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
12
x, y: Numerical value or numerical variable
n, m: Numeric value becomes larger than a certain value through rounding or truncation
a, b: String or string variable
Category Type Identifier Description
num abs (x)
Absolute value
num max (x,y) Maximum value
num min (x,y) Minimum value
num degrade (x) Conversion from degree to radian (x*π/180)
num raddeg (x) Conversion from radian to degree (x*180/π)
num sqrt (x) Square root
num sin (x) Sine
num cos (x) Cosine
num tan (x) Tangent
num atan (x) Arctangent
num atan2 (x,y) Arctangent
num int (x)
Maximum integer that does not exceed x.
e.g. int (1.3) Æ 1, int (-1.3) Æ -2
num ip (x)
Integer part of x: sgn (x)*int (abs(x))
(If x is a negative number, sgn (x) becomes -1. If x is a
positive number, sgn (x) becomes +1.)
e.g. ip (1.3) Æ 1, ip (-1.3) Æ -1
num fp (x)
Decimal part of x: x-ip (x)
e.g. fp (1.3) Æ 0.3, fp (-1.3) Æ -0.3
num mod (x,y) Value of x modulo y: x-y*int (x/y)
num remainder (x,y) Remainder of dividing x by y: x-y*ip (x/y)
Arithmetic
System
num pow (x,y) x to the power of y
str chr (x)
Return a string (1 character) with the given character code.
num ord (a) Return the top character code. Other codes are ignored.
num len (a) Return the string length (non-multibyte).
num strPos (a,b) Return the first part string position in a matching b.
str strMid (a,n,m)
Return the strings n – m counted from the top of the given
string a.
str str (x) Convert a numeric value to a decimal digit string.
str strBin (n,m)
Convert a numeric value to a binary string.
m: Number of binary string digits
str strHex (n,m)
Convert a numeric value to a hexadecimal string.
m: Number of hexadecimal string digits
str str1SI (x)
Round a numeric value to a 1-byte signed integer to convert
it to a 1-byte string. (1-byte Signed Integer)
str str2SIBE (x)
Round a numeric value to a 2-byte signed integer to convert
it to a 2-byte string using the Big Endian byte order. (2-byte
Signed Integer Big Endian)
str str2SILE (x)
Round a numeric value to a 2-byte signed integer to convert
it to a 2-byte string using the Little Endian byte order.
(2-byte Signed Integer Little Endian)
str str4SIBE (x)
Round a numeric value to a 4-byte signed integer to convert
it to a 4-byte string using the Big Endian byte order. (4-byte
Signed Integer Big Endian)
String
System
str str4SILE (x)
Round a numeric value to a 4-byte signed integer to convert
it to a 4-byte string using the Little Endian byte order.
(4-byte Signed Integer Little Endian)
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
13
x, y: Numerical value or numerical variable
n, m: Numeric value becomes larger than a certain value through rounding or truncation
a, b: String or string variable
Category Type Identifier Description
str str4FBE (x)
Regard a numeric value as a float to convert it to a 4-byte
string using the Big Endian byte order. (4-byte Signed Float
Big Endian)
str str4FLE (x)
Regard a numeric value as a float to convert it to a 4-byte
string using the Little Endian byte order. (4-byte Signed
Float Big Endian)
str str8DBE (x)
Regard a numeric value as a float to convert it to an 8-byte
string using the Big Endian byte order. (8-byte Signed Float
Big Endian)
str str8DLE (x)
Regard a numeric value as a float to convert it to an 8-byte
string using the Little Endian byte order. (8-byte Signed
Float Little Endian)
num val (a)
Regard a string as a decimal digit string to convert it to a
numeric value.
num valBin (a)
Regard a string as a binary string (sequence of “0”, “1”) to
convert it to a numeric value.
num valHex (a)
Regard a string as a hexadecimal string (sequence of “0” –
“1”, “A” – “F”, or “a” – “f”) to convert it to a numeric value.
num val1SI (a)
Convert the top character to a 1-byte signed integer. (1-byte
Signed Integer)
num val2SIBE (a)
Convert the top 2 characters to a 2-byte signed integer
using the Big Endian byte order. (2-byte Signed Integer
Big Endian)
num val2SILE (a)
Convert the top 2 characters to a 2-byte signed integer
using the Little Endian byte order. (2-byte Signed Integer
Little Endian)
num val4SIBE (a)
Convert the top 4 characters to a 4-byte signed integer
using the Big Endian byte order. (4-byte Signed Integer Big
Endian)
num val4SILE (a)
Convert the top 4 characters to a 4-byte signed integer
using the Little Endian byte order. (4-byte Signed Integer
Little Endian)
num val4FBE (a)
Convert the top 4 characters to a float using the Big Endian
byte order. (4-byte Float Big Endian)
num val4FLE (a)
Convert the top 4 characters to a float using the Little
Endian byte order. (4-byte Float Little Endian)
num val8DBE (a)
Convert the top 8 characters to a double-precision float
using the Big Endian byte order. (8-byte Double Big
Endian)
num val8DLE (a)
Convert the top 8 characters to a double-precision float
using the Little Endian byte order. (8-byte Little Big Endian)
num valSum (a) Return the sum of a string code from top to bottom.
num valCRC (a)
Remainder of dividing a string (bit string) by a generator
polynomial X
16+X12+X5
+1
str bitNot (a) Bit invert
str bitAnd (a,b) Bit logical conjunction
str bitOr (a,b) Bit logical add
String
System
str bitXor (a,b) Bit exclusive disjunction
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
14
SYSTEM FLAG LIST
You can use the system flags as Boolean valuables. If conditions are met, “1” (true) is automatically
assigned to a system flag. If conditions are not met, “0” (false) is assigned. You can refer to the
assigned values whenever necessary.
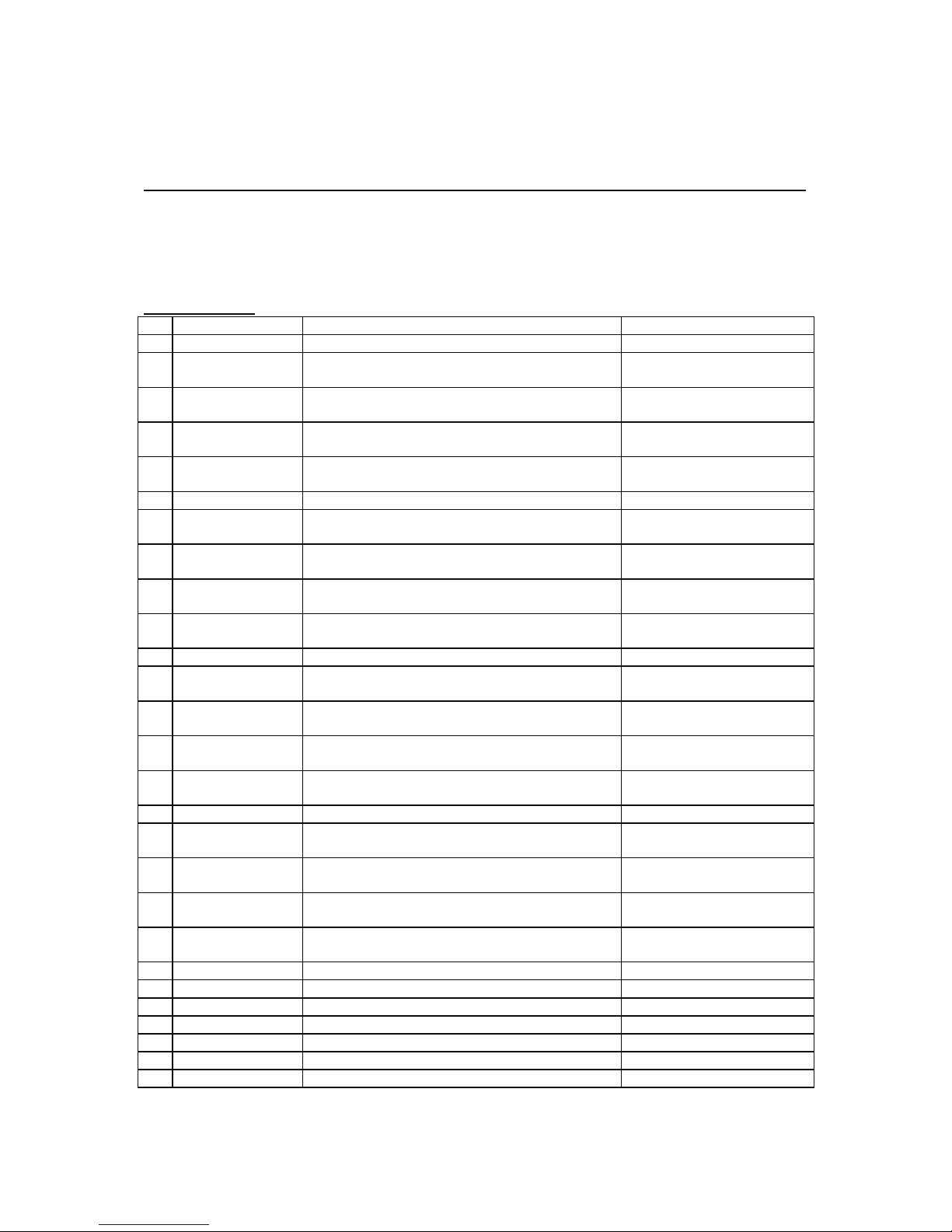
JR2000N Series
No. Identifier Description Condition “1” (True)
01 #FisCOM1 COM1 receive data existence Exists
02 #FltCOM1
Result of COM1 receive data compare command
(cmpCOM)
Constant > Receive data
03 #FeqCOM1
Result of COM1 receive data compare command
(cmpCOM)
Constant = Receive data
04 #FgtCOM1
Result of COM1 receive data compare command
(cmpCOM)
Constant < Receive data
05 #FtimeOutCOM1
COM1 receive data compare command
(cmpCOM) timeout
Timeout
06 #FisCOM2 COM2 receive data existence Exists
07 #FltCOM2
Result of COM2 receive data compare command
(cmpCOM)
Constant > Receive data
08 #FeqCOM2
Result of COM2 receive data compare command
(cmpCOM)
Constant = Receive data
09 #FgtCOM2
Result of COM2 receive data compare command
(cmpCOM)
Constant < Receive data
10 #FtimeOutCOM2
COM2 receive data compare command
(cmpCOM) timeout
Timeout
11 #FisCOM3 COM3 receive data existence Exists
12 #FltCOM3
Result of COM3 receive data compare command
(cmpCOM)
Constant > Receive data
13 #FeqCOM3
Result of COM3 receive data compare command
(cmpCOM)
Constant = Receive data
14 #FgtCOM3
Result of COM3 receive data compare command
(cmpCOM)
Constant < Receive data
15 #FtimeOutCOM3
COM3 receive data compare command
(cmpCOM) timeout
Timeout
16 #FisCOM4 COM4 receive data existence Exists
17 #FltCOM4
Result of COM4 receive data compare command
(cmpCOM)
Constant > Receive data
18 #FeqCOM4
Result of COM4 receive data compare command
(cmpCOM)
Constant = Receive data
19 #FgtCOM4
Result of COM4 receive data compare command
(cmpCOM)
Constant < Receive data
20 #FtimeOutCOM4
COM4 receive data compare command
(cmpCOM) timeout
Timeout
30 #FinitMecError State of mechanical initialization command error Mechanical initialization error
31 #FcameraError State of camera data error Error
32 #FtakeZError State of Z height data (takeZWadj) error Error
33 #FlMoveOutRange Relative move command range Out of range
34 #FlMoveStop Condition stop state of relative move command Stopped by the stop condition
35 #FcheckPosError Result of the position error detect command Position error
36 #FdataInBCDError State of dataInBCD command error Error
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
15
No. Identifier Description Condition “1” (True)
60 #FstartSW Start switch ON (Pressed)
61 #FincSW Program number selection key (+) ON (Pressed)
62 #FdecSW Program number selection key (–) ON (Pressed)
63 #FemgSW EMG direct input
ON (The emergency stop
switch is pressed.)
64 #Fios I/O-S direct input Circuit open (Disconnected)
71 #Fsensor1 Initial X position sensor ON
72 #Fsensor2 Initial Y position sensor ON
73 #Fsensor3 Initial Z position sensor ON
74 #Fsensor4 Initial R position sensor ON
76 #Fdrvoz1 X driver 0-phase Close
77 #Fdrvoz2 Y driver 0-phase Close
78 #Fdrvoz3 Z driver 0-phase Close
79 #Fdrvoz4 R driver 0-phase Close
91 #FenableSW Enable switch ON (Pressed)
92 #FspmodeSW Special mode switch ON
93 #FspareSW Spare switch ON
94 #FmotorPower State of the power to the motor ON
JR4400N Series
No. Identifier Description Condition “1” (True)
01 #FisCOM1 COM1 receive data existence Exists
02 #FltCOM1
Result of COM1 receive data compare command
(cmpCOM)
Constant > Receive data
03 #FeqCOM1
Result of COM1 receive data compare command
(cmpCOM)
Constant = Receive data
04 #FgtCOM1
Result of COM1 receive data compare command
(cmpCOM)
Constant < Receive data
05 #FtimeOutCOM1
COM1 receive data compare command
(cmpCOM) timeout
Timeout
06 #FisCOM2 COM2 receive data existence Exists
07 #FltCOM2
Result of COM2 receive data compare command
(cmpCOM)
Constant > Receive data
08 #FeqCOM2
Result of COM2 receive data compare command
(cmpCOM)
Constant = Receive data
09 #FgtCOM2
Result of COM2 receive data compare command
(cmpCOM)
Constant < Receive data
10 #FtimeOutCOM2
COM2 receive data compare command
(cmpCOM) timeout
Timeout
11 #FisCOM3 COM3 receive data existence Exists
12 #FltCOM3
Result of COM3 receive data compare command
(cmpCOM)
Constant > Receive data
13 #FeqCOM3
Result of COM3 receive data compare command
(cmpCOM)
Constant = Receive data
14 #FgtCOM3
Result of COM3 receive data compare command
(cmpCOM)
Constant < Receive data
15 #FtimeOutCOM3
COM3 receive data compare command
(cmpCOM) timeout
Timeout
16 #FisCOM4 COM4 receive data existence Exists
17 #FltCOM4
Result of COM4 receive data compare command
(cmpCOM)
Constant > Receive data
18 #FeqCOM4
Result of COM4 receive data compare command
(cmpCOM)
Constant = Receive data
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
16
No. Identifier
Description Condition “1” (True)
19 #FgtCOM4
Result of COM4 receive data compare command
(cmpCOM)
Constant < Receive data
20 #FtimeOutCOM4
COM4 receive data compare command
(cmpCOM) timeout
Timeout
30 #FinitMecError State of mechanical initialization command error Mechanical initialization error
31 #FcameraError State of camera data error Error
32 #FtakeZError State of Z height data (takeZWadj) error Error
33 #FlMoveOutRange Relative move command range Out of range
34 #FlMoveStop Condition stop state of relative move command Stopped by the stop condition
35 #FcheckPosError Result of the position error detect command Position error
36 #FdataInBCDError State of dataInBCD command error Error
60 #FstartSW Start switch ON (Pressed)
61 #FincSW Program number selection key (+) ON (Pressed)
62 #FdecSW Program number selection key (–) ON (Pressed)
63 #FemgSW EMG direct input
ON (The emergency stop
switch is pressed.)
64 #Fios I/O-S direct input Circuit open (Disconnected)
66 #FmponSW Power ON switch ON (Pressed)
68 #FmdSW1 Select key switch 1 ON
69 #FmdSW2 Select key switch 2 ON
71 #Fsensor1 Initial X position sensor ON
72 #Fsensor2 Initial Y position sensor ON
73 #Fsensor3 Initial Z position sensor ON
74 #Fsensor4 Initial R position sensor ON
76 #Fdrvoz1 X driver 0-phase Close
77 #Fdrvoz2 Y driver 0-phase Close
78 #Fdrvoz3 Z driver 0-phase Close
79 #Fdrvoz4 R driver 0-phase Close
91 #FenableSW Enable switch ON (Pressed)
92 #FspmodeSW Special mode switch ON
93 #FspareSW Spare switch ON
94 #FmotorPower State of the power to the motor ON
JS Series and JSG Series
No. Identifier Description Condition “1” (True)
01 #FisCOM1 COM1 receive data existence Exists
02 #FltCOM1
Result of COM1 receive data compare command
(cmpCOM)
Constant > Receive data
03 #FeqCOM1
Result of COM1 receive data compare command
(cmpCOM)
Constant = Receive data
04 #FgtCOM1
Result of COM1 receive data compare command
(cmpCOM)
Constant < Receive data
05 #FtimeOutCOM1
COM1 receive data compare command
(cmpCOM) timeout
Timeout
06 #FisCOM2 COM2 receive data existence Exists
07 #FltCOM2
Result of COM2 receive data compare command
(cmpCOM)
Constant > Receive data
08 #FeqCOM2
Result of COM2 receive data compare command
(cmpCOM)
Constant = Receive data
09 #FgtCOM2
Result of COM2 receive data compare command
(cmpCOM)
Constant < Receive data
10 #FtimeOutCOM2
COM2 receive data compare command
(cmpCOM) timeout
Timeout
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
17
No. Identifier Description Condition “1” (True)
11 #FisCOM3 COM3 receive data existence Exists
12 #FltCOM3
Result of COM3 receive data compare command
(cmpCOM)
Constant > Receive data
13 #FeqCOM3
Result of COM3 receive data compare command
(cmpCOM)
Constant = Receive data
14 #FgtCOM3
Result of COM3 receive data compare command
(cmpCOM)
Constant < Receive data
15 #FtimeOutCOM3
COM3 receive data compare command
(cmpCOM) timeout
Timeout
16 #FisCOM4 COM4 receive data existence Exists
17 #FltCOM4
Result of COM4 receive data compare command
(cmpCOM)
Constant > Receive data
18 #FeqCOM4
Result of COM4 receive data compare command
(cmpCOM)
Constant = Receive data
19 #FgtCOM4
Result of COM4 receive data compare command
(cmpCOM)
Constant < Receive data
20 #FtimeOutCOM4
COM4 receive data compare command
(cmpCOM) timeout
Timeout
30 #FinitMecError State of mechanical initialization command error Mechanical initialization error
31 #FcameraError State of camera data error Error
32 #FtakeZError State of Z height data (takeZWadj) error Error
33 #FlMoveOutRange Relative move command range Out of range
34 #FlMoveStop Condition stop state of relative move command Stopped by the stop condition
35 #FcheckPosError Result of the position error detect command Position error
36 #FdataInBCDError State of dataInBCD command error Error
63 #FemgSW EMG direct input ON (Pressed)
64 #Fios IOS direct input Circuit open (Disconnected)
66 #FmponSW Power ON switch ON (Pressed)
68 #FmdSW1 Select key switch 1 ON
69 #FmdSW2 Select key switch 2 ON
91 #FenableSW Enable switch ON (Pressed)
92 #FspmodeSW Special mode switch ON
93 #FspareSW Spare switch ON
94 #FmotorPower Motor power state ON
121 #FsvReady1 J1/X servo ready Ready
122 #FsvReady2 J2/Y servo ready Ready
123 #FsvReady3 J3/Z servo ready Ready
124 #FsvReady4 J4/R servo ready Ready
126 #FsvAlarm1 J1/X servo alarm Servodriver error
127 #FsvAlarm2 J2/Y servo alarm Servodriver error
128 #FsvAlarm3 J3/Z servo alarm Servodriver error
129 #FsvAlarm4 J4/R servo alarm Servodriver error
131 #FsvPos1 J1/X servo finish positioning Positioning finished
132 #FsvPos2 J2/Y servo finish positioning Positioning finished
133 #FsvPos3 J3/Z servo finish positioning Positioning finished
134 #FsvPos4 J4/R servo finish positioning Positioning finished
136 #FencOz1 J1/X encoder zero phase
Close
137 #FencOz2 J2/Y encoder zero phase
Close
138 #FencOz3 J3/Z encoder zero phase
Close
139 #FencOz4 J4/R encoder zero phase
Close
141 #FencBattery1 J1/X battery warning Battery run out
142 #FencBattery2 J2/Y battery warning Battery run out
143 #FencBattery3 J3/Z battery warning Battery run out
144 #FencBattery4 J4/R battery warning Battery run out
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
18
VARIABLES
Free Variables: #mv, #mkv, #nv, #nkv, #sv, #skv
A variable is a container into which numeric and strings values are placed.
You can use the built-in variables listed below freely. Variable declaration is unnecessary when using
these variables.
Identifier Description
#mv (1 – 99) Boolean variable
#mkv (1 – 99) Boolean variable (Keeping variable)*
#nv (1 – 99) Numerical variable
#nkv (1 – 99) Numerical variable (Keeping variable)*
#sv (1 – 99) String variable
Free Variable
#skv (1 – 99) String variable (Keeping variable)*
*: Variables which hold their values even if the robot is turned off are collectively referred to as
keeping variables in the operation manuals.
#mv (1 – 99) and #mkv (1 – 99): Boolean variable
A Boolean variable is a variable that can hold a value of 1-bit 0 or 1. It can be used as a condition
operation expression (ld, ldi) or assignment expression (let) parameter.
z Boolean type free variables, #mv (1 – 99) and #mv (1 – 99), can also be used in sequencer
programs
#nv (1 – 99) and #nkv (1 – 99): Numeric variable
These are double type numeric variables that can be used as assignment expression (let) parameters.
#sv (1 – 99) and #skv (1 – 99): String variable
These can hold up to 255 bytes. When used as assignment expression (let) parameters, assignment
by = and connection by & are possible.
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
19
Input Variables: #sysIn1..., #genIn1..., #handIn1...
An input variable is a Boolean variable that can only be referred to. You cannot enter a value into it.
It corresponds to the I/O-SYS, I/O-1, and I/O-H input pins. When an ON signal comes, the input
variable becomes “1” (true).
Category
Identifier
(JS and JSG Series)
Identifier
(JR2000N and
JSR4400N Series)
Connector Description
#sysIn1 – #sysIn15 #sysIn1 – #sysIn16 I/O-SYS Boolean variable for reference only
#genIn1 – #genIn18 #genIn1 – #genIn8 I/O-1 Boolean variable for reference only
Input
Variable
#handIn1 – #handIn4
-
I/O-H Boolean variable for reference only
Some of the #sysIn1 – #sysIn15, and 16 (I/O-SYS) pins have pre-assigned functions.
e.g. #sysIn1: Start (When this signal is turned on, the robot starts operation.)
If you wish to use
the #sysIn1 – #sysIn15, and 16 (I/O-SYS) pins for functions other than the
pre-assigned ones, switch the function to [Free] in the [IO-SYS Function Assignment] settings ([Run
Mode Parameter] menu).
z The JSG, JR2000N, and JSR4400N Series are not equipped with I/O-H. Identifiers #handIn1 –
#handIn4 are activated for the JS Series only. Note that if you are using I/O-U (option) for the JS
Series, any commands from the robot to I/O-H are deactivated.
z For details of the I/O-SYS pre-assigned functions, see the External Control I (I/O-SYS) operation
manual.
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
20
Output Variables: #sysOut1..., #genOut1..., #handOut1...
An output variable is a Boolean variable.
Output variables correspond to the I/O-SYS, I/O-1, and I/O-H output pins. When an ON signal is
output, the output variables become “1” (true).
Category
Identifier
(JS and JSG Series)
Identifier
(JR2000N and
JSR4400N Series)
Connector Description
#sysOut1 – #sysOut14 #sysOut1 – #sysOut16 I/O-SYS Boolean variable
#genOut1 – #genOut18 #genOut1 – #genOut8 I/O-1 Boolean variable
Output
Variable
#handOut1 – #handOut4
-
I/O-H Boolean variable
Some of the #sysOut1 – #sysOut14, 15 and 16 (I/O-SYS) pins have pre-assigned functions.
e.g. #sysIn1: Ready for Start (When this signal is turned on, the robot can start operation.)
If you wish to use
the #sysOut1 – #sysOut14, 15 and 16 (I/O-SYS) pins for functions other than the
pre-assigned ones, switch the function to [Free] in [IO-SYS Function Assignment] settings ([Run Mode
Parameter] menu).
z The JSG, JR2000N, and JSR4400N Series are not equipped with I/O-H. Identifiers #handOut1 –
#handOut4 are activated for the JS Series only. Note that if you are using I/O-U (option) for the JS
Series, any commands from the robot to I/O-H are deactivated.
z For details of the I/O-SYS pre-assigned functions, see the External Control I (I/O-SYS) operation
manual.
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
21
Down Timer: #downTimer1 – #downTimer10
A numeric variable: The assigned value (using a let command) is decreased automatically (by msec).
You can assign another value during the countdown.
The maximum value that can be assigned is 2,147,483,647 (msec).
Category Identifier Description
Special
Vari able
#downTimer1 –
#downTimer 10
The assigned value is decreased automatically (by msec).
For example, create the following point job data and set it to a point as [Job while CP Moving]. The
hexadecimal CR code is output to COM2 every 0.5 seconds while it moves in the CP drive.
if
ld #downTimer1 == 0
then
eoutCOM port2,"%0D"
#downTimer1 = 500
If
#downTimer1=0
Then
Output a hexadecimal code CR from COM2 and
assign 500 (0.5sec) to #downTimer1.
z In this case, you need to assign a value to #downTimer1 in advance (e.g. during a point job).
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
22
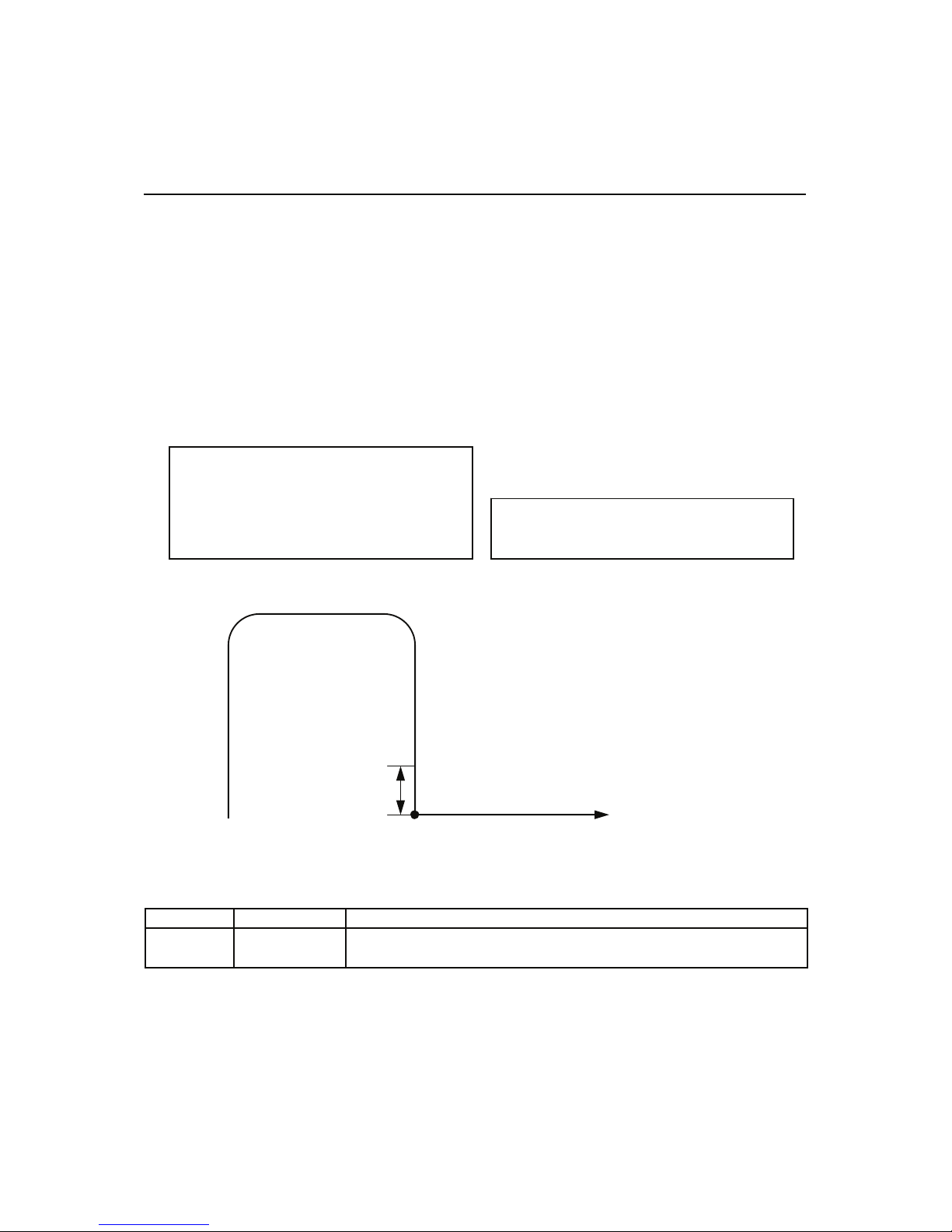
Point Job Start Height: #jobStartHight
When a value is assigned to the variable “#jobStartHight” (using a let command) and the variable is
set as [Job before Moving] or [Job while Moving], the point job starts from a position that is higher than
the set Z-coordinate by the assigned value.
Do not set point job data that includes #jobStartHight as the [Point Job] because the robot Axis or Arm
has already reached the point job start position. Also, since this variable acts only on the set point, the
point job start position of the next point does not change.
e.g.
Category Identifier Description
Special
Vari able
#jobStartHight
The point job is started from a position that is higher than the set Z
coordinate by the assigned value. (Deactivated during the CP drive)
[Point Job] (Point Job Data 12) is started from a
position 2.5mm higher than the preset height.
2.5mm
P1
P01
Type: CP Start Point
Job before Moving: Point Job Data 3
Point Job: Point Job Data 12
#jobStartHight 25
Point Job Data 3
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
23
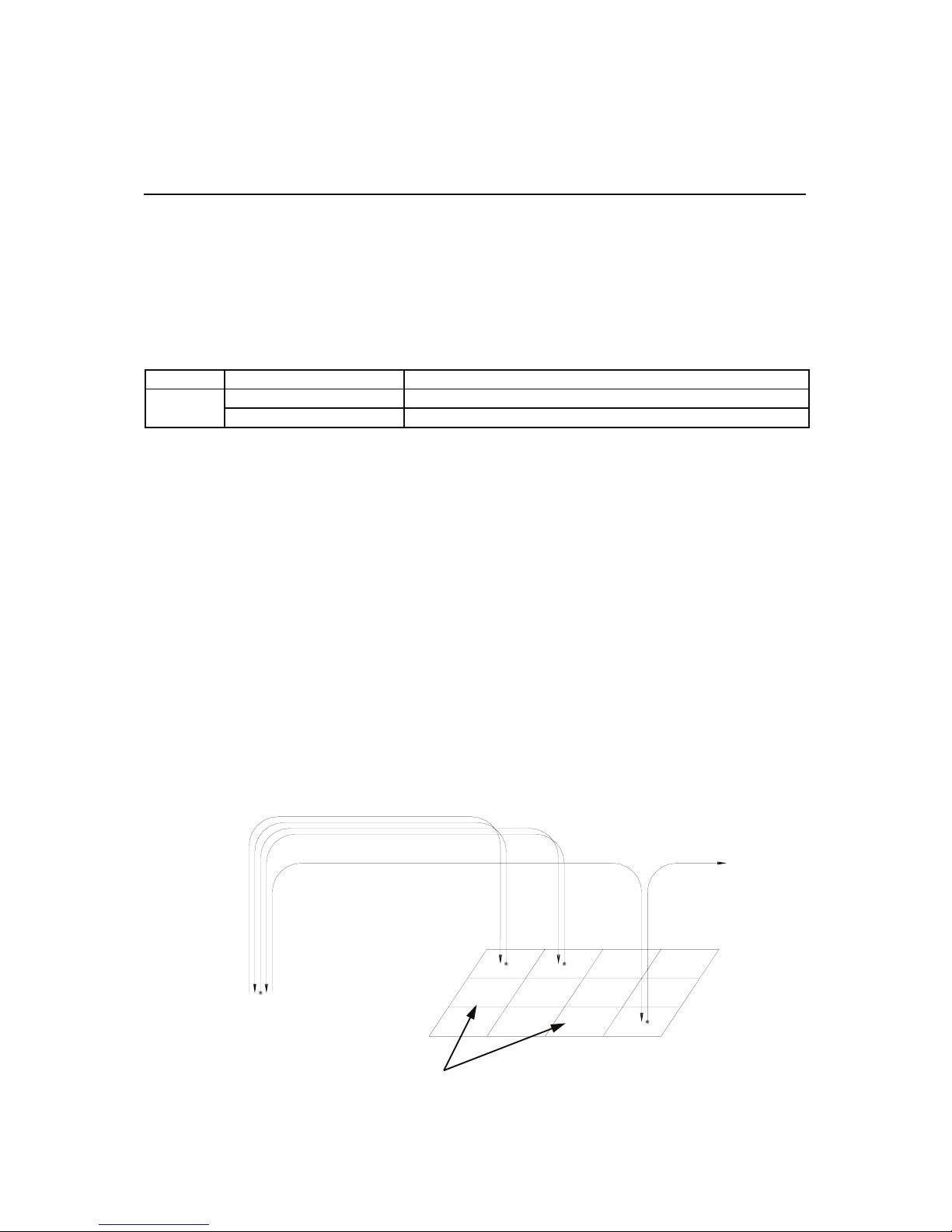
Pallet: #palletFlag (1 – 100), #palletCount (1 – 100)
#palletCount (1 – 100) is a numeric variable and #palletFlag (1 – 100) is a Boolean variable.
Each variable retains the value of the corresponding pallet counter and pallet flag (1 (true) when the
pallet counter is full) in additional function data [Pallet Routine].
By using these variables, you can move to the next point during a pallet job or skip the designated
pallet.
Category Identifier Description
#palletFlag (1 – 100) Pallet flag (Corresponds to Pallet 1 – 100.)
Pallet
#palletCount (1 – 100) Pallet counter (Corresponds to Pallet 1 – 100.)
z #palletFlag (1 – 100) does not become “1” (true) even if a value which fills the counter is assigned
to #palletCount (1 – 100).
For example, you can skip a designated pallet during a pallet job.
The robot picks up a workpiece at P1, places it on a pallet (set at P2) and moves to the next point (P3) when
the pallet becomes full. However, there are two points (P2-5 and P2-11) on the pallet where a workpiece is
not placed.
In this example, the [Pallet Routine Number] is [3] and the tool unit is connected according to the
following settings:
Picking up a workpiece: #handOut1 is ON.
Placing a workpiece: #handOut1 is OFF.
Points where a workpiece is not placed
P2-1(P0) P2-2
P1
To P 3
P2-12
●
●
P2-5
P2-11
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
24
Point job data set to P1
set #handOut1
Pick up workpiece.
Point job data set to P2
if
ld #palletCount(3) == 5
or #palletCount(3) == 11
else
reset #handOut1
endIf
loopPallet 3,1
If
#palletCount (3) is
other than 5 (P2-5) and 11 (P2-11),
Place (release) a workpiece.
Add 1 to the counter of Pallet 3.
If the counter reaches maximum, go to the next
command. (In this example, the point job is over
because there are no more commands.)
If not, shift to Point 01 (P1).
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
25
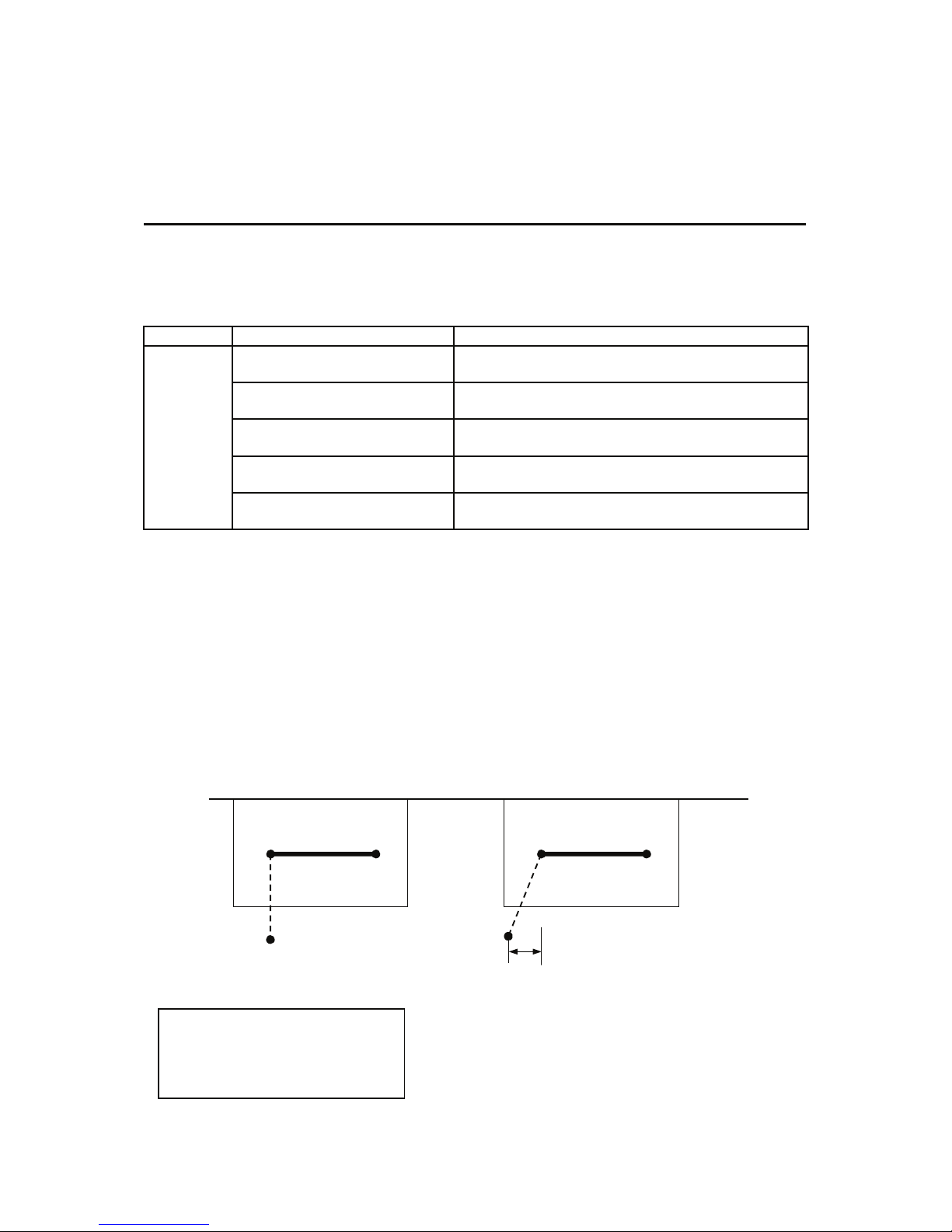
Workpiece Adjustment: #workAdj_X, #workAdj_Y,
#workAdj_Z, #workAdj_R, #workAdj_Rotation
These numeric variables hold the adjustment amount and rotation adjustment amount of each Axis in
additional function data [Workpiece Adjustment].
Category Identifier Description
#workAdj_X (1 – 100)
Workpiece adjustment amount in the X direction
(Corresponds to Workpiece Adjustment 1 – 100.)
#workAdj_Y (1 – 100)
Workpiece adjustment amount in the Y direction
(Corresponds to Workpiece Adjustment 1 – 100.)
#workAdj_Z (1 – 100)
Workpiece adjustment amount in the Z direction
(Corresponds to Workpiece Adjustment 1 – 100.)
#workAdj_R (1 – 100)
Workpiece adjustment amount in the R direction
(Corresponds to Workpiece Adjustment 1 – 100.)
Workpiece
Adjustment
#workAdj_Rotation (1 – 100)
Workpiece adjustment amount by the rotating angle
(Corresponds to Workpiece Adjustment 1 – 100.)
For example, you can perform a line dispensing between P2 – P3.
At P1, the workpiece adjustment amount (workpiece offset value) is received from the sensor connected to
COM.
In this example, the [Workpiece Adjustment] is [6] and the tool unit is connected according to the
following settings:
Starting dispensing: #handOut1 is ON.
Stopping dispensing: #handOut1 is OFF.
Point job data set to P1
declare str hosei
inCom hosei,port1,10
#workAdj_X(6) = hosei
Declaration of a string type local variable hosei
Receive a work adjustment amount from COM1 to hosei.
Assign the value in hosei to #workAdj_X(6).
(#workAdj_X(6) is the X direction adjustment amount of
Workpiece Adjustment 6)
CP Start Point
P3
CP End Point
P1
CP Start Point
P3
CP End Point
P1
Workpiece adjustment amount
Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
26
Point job data set in P2 ([Workpiece Adjustment] is set to this point.)
set #handOut1
Start dispensing.
Point job data set in P3
reset #handOut1
Stop dispensing.
z The [Workpiece Adjustment] set to a [CP Start Point] point is activated until the tool unit reaches a
[CP End Point] point.
 Loading...
Loading...