

Page 1
User Manual
Robot-TP-65M
MODEL:
Robot-TP-65M
Teach Pendant with 4-wire Resistive Type Touchscreen,
Deadman Switch, Emergency Button,
IP 64 Protection and RoHS
User Manual
Rev. 1.01 - 7 October, 2013
Page I
Page 2
Date Version Changes
Robot-TP-65M
Revision
7 October, 2013 1.01
17 June, 2013 1.00
Added Section
Initial release
3.3.2: Robot-TP-65M/K Connection
Page II
Page 3
Robot-TP-65M
COPYRIGHT NOTICE
The information in this document is subject to change without prior notice in order to
improve reliability, design and function and does not represent a commitment on the part
of the manufacturer.
In no event will the manufacturer be liable for direct, indirect, special, incidental, or
consequential damages arising out of the use or inability to use the product or
documentation, even if advised of the possibility of such damages.
This document contains proprietary information protected by copyright. All rights are
Copyright
reserved. No part of this manual may be reproduced by any mechanical, electronic, or
other means in any form without prior written permission of the manufacturer.
TRADEMARKS
All registered trademarks and product names mentioned herein are used for identification
purposes only and may be trademarks and/or registered trademarks of their respective
owners.
Page III
Page 4
Robot-TP-65M
Table of Contents
1 INTRODUCTION.......................................................................................................... 1
1.1 OVERVIEW.................................................................................................................. 2
1.2 MODEL VARIATION..................................................................................................... 2
1.3 FEATURES................................................................................................................... 2
1.4 EXTERNAL OVERVIEW................................................................................................ 3
1.4.1 Front Panel........................................................................................................ 3
1.4.1.1 LED Indicators............................................................................................ 3
1.4.1.2 Function Keys............................................................................................. 4
1.4.2 Rear Panel ......................................................................................................... 6
1.5 DIMENSIONS............................................................................................................... 7
1.6 SYSTEM SPECIFICATIONS............................................................................................ 8
2 UNPACKING ............................................................................................................... 10
2.1 UNPACKING...............................................................................................................11
2.1.1 Packing List ..................................................................................................... 12
3 INSTALLATION ......................................................................................................... 13
3.1 ANTI-STATIC PRECAUTIONS ...................................................................................... 14
3.2 INSTALLATION PRECAUTIONS................................................................................... 14
3.3 SYSTEM CONNECTION.............................................................................................. 15
3.3.1 Robot-TP-65M/K-ML Connection................................................................... 15
3.3.2 Robot-TP-65M/K Connection.......................................................................... 17
3.3.2.1 OSD Keypad Connector ........................................................................... 18
3.3.2.2 T ouch Connector....................................................................................... 18
3.3.2.3 VGA Connector......................................................................................... 19
3.3.2.4 Cable Pinouts............................................................................................ 19
3.4 CARRYING THE SYSTEM ........................................................................................... 21
3.5 EMERGENCY BUTTONS............................................................................................. 22
3.5.1 Deadman Switch .............................................................................................. 22
3.5.2 Emergency Stop Button.................................................................................... 22
A SAFETY PRECAUTIONS......................................................................................... 24
Page IV
Page 5

Robot-TP-65M
A.1 SAFETY PRECAUTIONS ............................................................................................ 25
A.1.1 General Safety Precautions............................................................................. 25
A.1.2 Anti-static Precautions.................................................................................... 26
A.1.3 Product Disposal............................................................................................. 27
A.2 MAINTENANCE AND CLEANING PRECAUTIONS........................................................ 27
A.2.1 Maintenance and Cleaning.............................................................................. 27
A.2.2 Cleaning Tools................................................................................................. 28
B HAZARDOUS MATERIALS DISCLOSURE ......................................................... 29
B.1 HAZARDOUS MATERIAL DISCLOSURE TABLE FOR IPB PRODUCTS CERTIFIED AS
ROHS COMPLIANT UNDER 2002/95/EC WITHOUT MERCURY ....................................... 30
Page V
Page 6
Robot-TP-65M
List of Figures
Figure 1-1: Robot-TP-65M Teach Pendant...................................................................................2
Figure 1-2: Front View....................................................................................................................3
Figure 1-3: LED Indicators.............................................................................................................3
Figure 1-4: Function Keys .............................................................................................................4
Figure 1-5: Rear View.....................................................................................................................6
Figure 1-6: Robot-TP-65M Dimensions (mm) ..............................................................................7
Figure 3-1: Robot-TP-65M/K-ML with Cable...............................................................................15
Figure 3-2: 37-pin Military Connector Pinout Locations...........................................................16
Figure 3-3: Robot-TP-65M/K with Cables...................................................................................17
Figure 3-4: OSD Keypad Connector Pinout Locations.............................................................18
Figure 3-5: Touch Connector Pinout Locations........................................................................18
Figure 3-6: VGA Connector Pinout Locations...........................................................................19
Figure 3-7: Hook Locations .........................................................................................................21
Figure 3-8: Carrying the Robot-TP-65M .....................................................................................21
Figure 3-9: Deadman Switch .......................................................................................................22
Figure 3-10: Emergency Stop Button.........................................................................................22
Page VI
Page 7
Robot-TP-65M
List of Tables
Table 1-1: LED Indicators ..............................................................................................................4
Table 1-2: Function Key Descriptions..........................................................................................5
Table 1-3: System Specifications..................................................................................................9
Table 3-1: 37-pin Military Connector Pinouts............................................................................17
Table 3-2: OSD Keypad Connector Pinouts...............................................................................18
Table 3-3: Touch Connector Pinouts..........................................................................................19
Table 3-4: VGA Connector Pinouts.............................................................................................19
Table 3-5: Cable Pinouts..............................................................................................................20
Page VII
Page 8
Robot-TP-65M
Chapter
1
1 Introduction
Page 1
Page 9

1.1 Overview
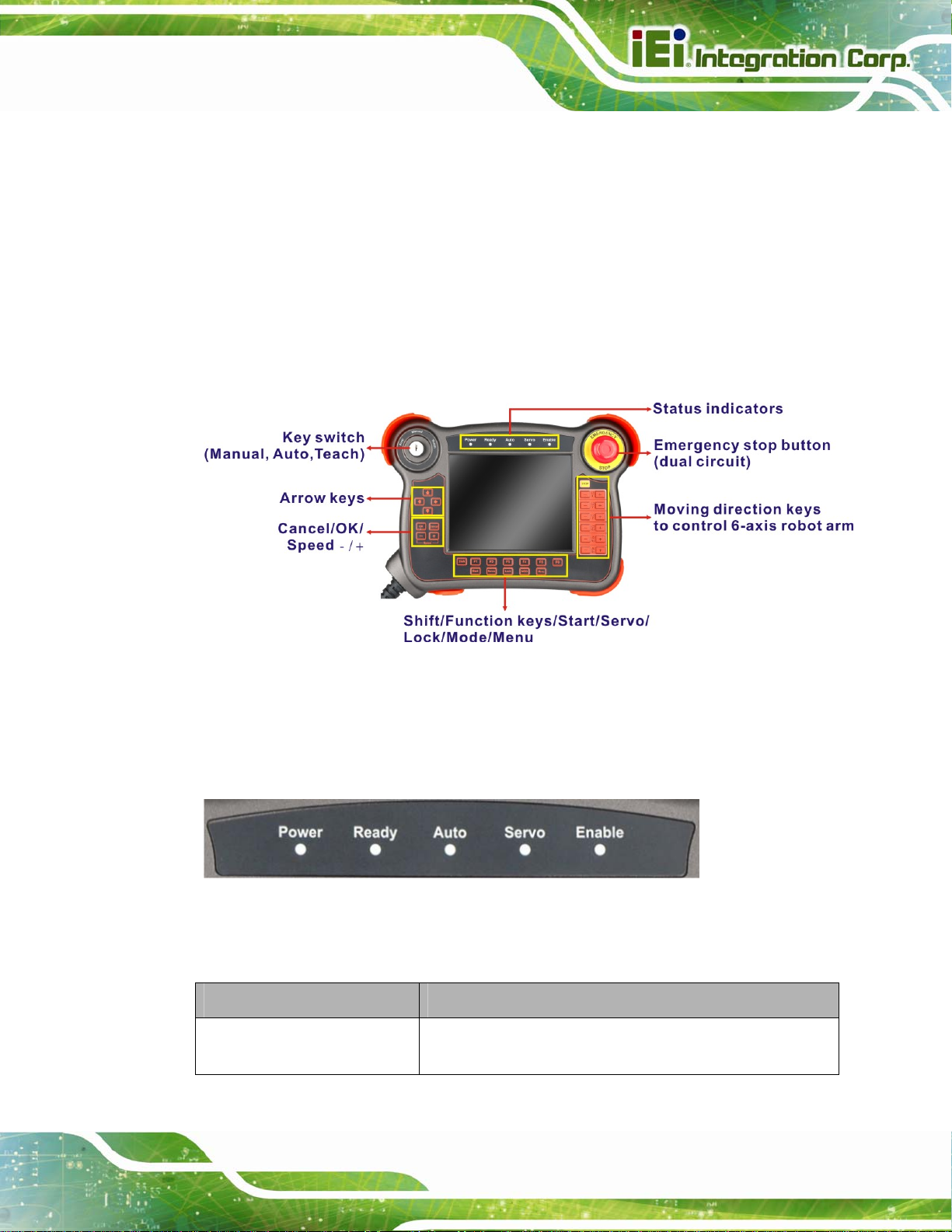
Figure 1-1: Robot-TP-65M Teach Pendant
The Robot-TP-65M is teach pendant with a 6.5” 4-wire resistive touchscreen. The
Robot-TP-65M
Robot-TP-65M is designed for easy and simplified integration into robot arm applications.
1.2 Model Variation
The Robot-TP-65M series has two models. The model variation is listed below:
Robot-TP-65M/K-ML: one cable with a 37-pin military connector for
connection
Robot-TP-65M/L: multiple cables for connection
1.3 Features
The Robot-TP-65M features are listed below:
High brightness LCD with LED backlight
4-wire resistive type touchscreen
6-meter long all-in-one cable allows easy installation
Completely dust and splash proof (IP 64) design
One meter drop resistance
Page 2
0°C~50°C extended operating temperature
Allow users to program with 33-key membrane keypad
Page 10
Robot-TP-65M
Equipped with an emergency stop and a 3-position deadman switch to
provide safe operation
1.4 External Overview
1.4.1 Front Panel
The front side of the Robot-TP-65M is a flat bezel panel TFT LCD screen surrounded by a
PC/ABS plastic frame. There are buttons and LED indicators located on the front panel.
The detailed information is described in the following sections.
Figure 1-2: Front View
1.4.1.1 LED Indicators
There are several LED indicators located along the top of the LCD screen (Figure 1-3).
Figure 1-3: LED Indicators
The descriptions of each LED indicator are listed below.
LED Indicator Description
Power
On: the robot is connected with a +12V power source
Off: the power cord is not attached or power supply failure
Page 3
Page 11
LED Indicator Description
Robot-TP-65M
Ready
Auto
Servo
Enable
Table 1-1: LED Indicators
On: the robot is turned on and ready to be operated
On: the Robot-TP-65M is in Auto mode
On: the servo is enabled
Off: the servo is disabled.
On: the deadman switch is pressed
Off: the deadman switch is not pressed
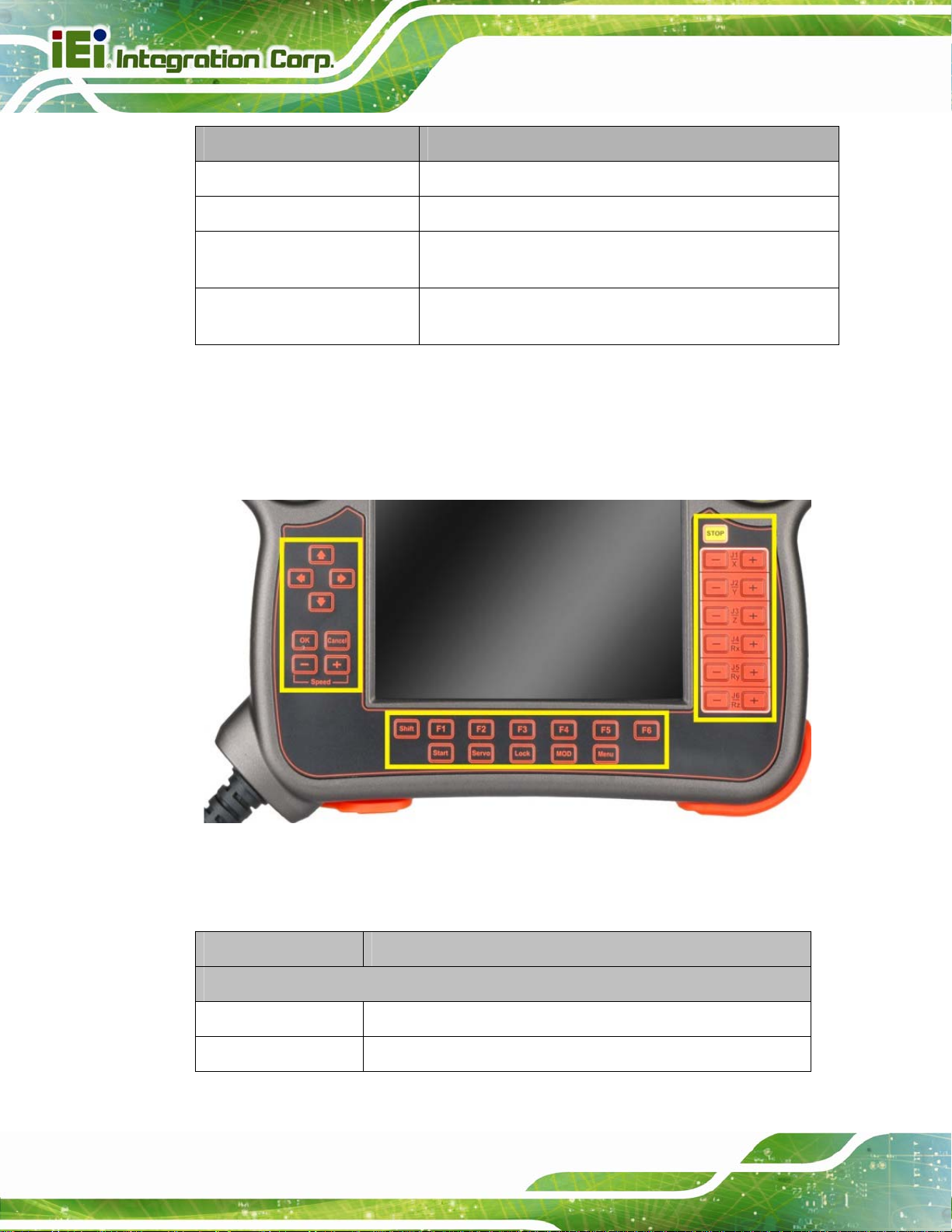
1.4.1.2 Function Keys
The function keys are located on the front side of the Robot-TP-65M (Figure 1-4).
Page 4
Figure 1-4: Function Keys
The function keys are described in
Key Function Key Description
Left
Arrow Keys
OK
Use the arrow keys to move the cursor on the screen.
Use the OK button to confirm.
Table 1-2:
Page 12
Robot-TP-65M
Cancel
Speed -/+
Right
Stop
Moving Direction
Keys
Bottom
F1 ~ F6
Shift
Use the Cancel button to cancel.
Use “-“ to decrease the speed.
Use “+“ to increase the speed.
Use the Stop button to stop the operation .
Use these keys to drive the robot arm manually in a designated
direction. The user have to hold down the deadman switch at
the same time when using these keys.
J1/X -/+: Motion in X direction
J2/Y -/+: Motion in Y direction
J3/Z -/+: Motion in Z direction
J4/Rx -/+: Rotation around X axis
J5/Ry -/+: Rotation around Y axis
J6/Rz -/+: Rotation around Z axis
F1 to F6 are function keys. These function keys can be
switched to F7 to F12 by pressing the Shift key.
Start
Servo
Lock
MOD
Menu
Table 1-2: Function Key Descriptions
Use the Start button to start the motor.
Use the Servo button to enable or disable servo. If enabled, the
Servo LED indicator on the top of the front panel will light up.
Use the Lock button to place the robot in machine lock
Use the MOD button to switch between joint, X-Y or tool
coordinate mode.
Use the Menu button to bring up the menu list.
NOTE:
Most of the front panel function buttons are active only when using the
optional operator HMI (Human Machine Interface).
Page 5
Page 13

1.4.2 Rear Panel
The rear panel provides access to the deadman switch. Refer to Figure 1-5.
Figure 1-5: Rear View
Robot-TP-65M
Page 6
Page 14

Robot-TP-65M
1.5 Dimensions
The Robot-TP-65M dimensions are shown below.
Figure 1-6: Robot-TP-65M Dimensions (mm)
Page 7
Page 15

1.6 System Specifications
The technical specifications for the Robot-TP-65M systems are listed in Table 1-4.
Specification Robot-TP-65M
LCD Size 6.5"
Max. Resolution 640 (W) x 480 (H)
Brightness (cd/m2) 800
Contrast Ratio 600:1
LCD Color 262K
Pixel Pitch (H x V) (mm) 0.207(H) x 0.207 (V)
Viewing Angle (H-V) 160° / 140°
Backlight MTBF (hr) 50,000 (LED backlight)
Touchscreen 4-wire resistive type touch screen
Robot-TP-65M
Touch controller: Penmount DMC6000
LED Indicators Five LEDs: Power, Ready, Auto, Servo, Enable
Keys Moving direction, OK, Cancel, Speed (-/+), Shift, Function Keys
(F1 ~ F6), Start, Servo, Lock, MOD, Menu, Stop, Cursor Keys
Emergency Stop Button For B contacts, four circuit outputs (forced disjunction type)
Switches Deadman Swit ch 3-position switch (off-on-off), two circuit outputs
Mode Selector Switch 3-position (Auto, Manual, Teach) keylock switch
Video Input VGA
I/O Touch Interface RS-232
Power Source 12 V DC input
Keypad Control Interface PS/2
OSD Control Software OSD
Construction Material PC + ABS plastic front frame
Front Panel Color Gray Pantone 8405C
Weight (N) 3.32 kg
Dimensions (W x H x D) (mm) 281 x 200 x 83
Operating Temperature 0ºC ~ 50ºC
Storage Temperature -25ºC ~ 65ºC
Humidity <90% (no-condensing)
IP level IP 64 compliant (6-side)
Page 8
Page 16

Robot-TP-65M
Vibration MIL-STD-810F
Drop Survival 1 m (38 inches), four corners, two sides
Power Requirement 12V DC
Power Consumption 6.6 W
Cable Length 6 m
Table 1-3: System Specifications
Page 9
Page 17

Robot-TP-65M
Chapter
2
2 Unpacking
Page 10
Page 18

Robot-TP-65M
2.1 Unpacking
To unpack the Robot-TP-65M, follow the steps below:
WARNING!
The front side LCD screen has a protective plastic cover stuck to the
screen. Only remove the plastic cover after the Robot-TP-65M has been
properly installed. This ensures the screen is protected during the
installation process.
Step 1: Use box cutters, a knife or a sharp pair of scissors that seals the top side of the
external (second) box.
Step 2: Open the external (second) box.
Step 3: Use box cutters, a knife or a sharp pair of scissors that seals the top side of the
internal (first) box.
Step 4: Lift the monitor out of the boxes.
Step 5: Remove both polystyrene ends, one from each side.
Step 6: Pull the plastic cover off the Robot-TP-65M.
Step 7: Make sure all the components listed in the pa cking list are present. Step 0:
Page 11
Page 19

2.1.1 Packing List
The Robot-TP-65M teach pendant is shipped with the following components:
Quantity Item Image
Standard
1 Robot-TP-65M teach pendant
1 Transfer cable
Robot-TP-65M
1 Belt
1 Utility CD
If any of these items are missing or damaged, contact the distributor or sales
representative immediately.
Page 12
Page 20

Robot-TP-65M
3 Installation
Chapter
3
Page 13
Page 21

3.1 Anti-static Precautions
WARNING:
Failure to take ESD precautions during the maintenance of the
Robot-TP-65M may result in permanent damage to the Robot-TP-65M
and severe injury to the user.
Electrostatic discharge (ESD) can cause serious damage to electronic components,
including the Robot-TP-65M. Dry climates are especially susceptible to ESD. It is
therefore critical that whenever the Robot-TP-65M is accessed internally, or any other
electrical component is handled, the following anti-static precautions are strictly adhered
to.
Robot-TP-65M
Wear an anti-static wristband: - Wearing a simple anti-static wristband can
help to prevent ESD from damaging the board.
Self-grounding: - Before handling the board touch any grounded conducting
material. During the time the board is handled, frequently touch any
conducting materials that are connected to the ground.
Use an anti-static pad: - When configuring the Robot-TP-65M, place it on an
antic-static pad. This re duces the possibility of ESD damaging the
Robot-TP-65M.
Only handle the edges of the PCB: - When handling the PCB, hold the PCB
by the edges.
3.2 Installation Precautions
When installing the Robot-TP-65M, please follow the precautions listed below:
Power turned off: When installing the Robot-TP-65M, make sure the power
is off. Failing to turn off the power may cause severe injury to the body and/or
damage to the system.
Page 14
Certified Engineers: Only certified engineers should install a nd modify
onboard functionalities.
Page 22

Robot-TP-65M
Anti-static Discharge: If a user open the rear panel of the Robot-TP-65M, to
configure the jumpers or plug in added peripheral devices, ground themselves
first and wear and anti-static wristband.
3.3 System Connection
The Robot-TP-65M series has two models: Robot-TP-65M/K-ML and Robot-TP-65M/K.
The only difference of these two models is that the Robot-TP-65M/K-ML has a 37-pin
military connector while the Robot-TP-65M/K has multiple cables and connectors for
connection. The following sections describe the system connection and connector pinouts
of these two models.
3.3.1 Robot-TP-65M/K-ML Connection
The Robot-TP-65M/K-ML has a 6-meter cable with a 37-pin military connector to be
connected to a robot controller.
Figure 3-1: Robot-TP-65M/K-ML with Cable
The pinout locations and pinouts of the 37-pin connector are described bel ow.
Page 15
Page 23

Robot-TP-65M
Figure 3-2: 37-pin Military Connector Pinout Locations
PIN NO. DESCRIPTION PIN NO. DESCRIPTION
1 Key SW. - Manual 20 RS-232 – SOUT
2 EMG2 21 -3 EMG1 22 RS-232 – RTS
4 PS/2 - KBDATA 23 PS/2 - GND
5 RS-232 - GND 24 LED - Servo
6 PS/2 - chassis 25 LED – Auto
7 RS-232 - chassis 26 GND
8 PS/2 - KBCLK 27 DDC – DAT
9 -(N) 28 DDC CLOCK
10 LED - Enable A R (Red+)
11 LED - Ready B GND (Red-)
12 +(P) C G (Green+)
13 3 SW.2 D GND (Green-)
14 3 SW.1 E B (Blue+)
Page 16
15 Key SW. - Teach F GND (Blue-)
16 +12V G VSYNC
17 GND H HSYNC
Page 24

Robot-TP-65M
18 RS/2 +5V J Copper Shielding Mesh
19 RS-232 – SIN
Table 3-1: 37-pin Military Connector Pinouts
3.3.2 Robot-TP-65M/K Connection
The Robot-TP-65M/K has following cables and connectors for connecting to a robot
controller:
OSD keypad connector (PS/2)
Touch connector (DB-9 male)
VGA connector (DB-15 male)
Cables:
o Monitor power
o EMG
o Key switch
o 3-way switch
o LED
Figure 3-3: Robot-TP-65M/K with Cables
The pinout locations and pinouts of these connectors are described in the following
sections.
Page 17
Page 25

3.3.2.1 OSD Keypad Connector
Figure 3-4: OSD Keypad Connector Pinout Locations
PIN NO. DESCRIPTION
1 KB_DATA
2 -3 GND
Robot-TP-65M
4 PS/2 VCC_IN 5V
5 KB_CLK
6 --
Table 3-2: OSD Keypad Connector Pinouts
3.3.2.2 Touch Connector
Figure 3-5: Touch Connector Pinout Locations
PIN NO. DESCRIPTION
1 --
Page 18
2 RS-232_RX
3 RS-232_TX
4 -5 GND
Page 26

Robot-TP-65M
6 -7 RS-232_RTS
8 -9 --
Table 3-3: Touch Connector Pinouts
3.3.2.3 VGA Connector
Figure 3-6: VGA Connector Pinout Locations
PIN NO. DESCRIPTION PIN NO. DESCRIPTION
1 RED 9 -2 GREEN 10 -3 BLUE 11 -4 -- 12 DDC_DATA
5 GND 13 HSYNC
6 (Shield) RED 14 VSYNC
7 (Shield) GREEN 15 DDC_CLOCK
8 --
Table 3-4: VGA Connector Pinouts
3.3.2.4 Cable Pinouts
NO. COLOR DESCRIPTION
Monitor
Power
1 White
2 Black
Vin-in (12V only)
GND
Page 19
Page 27

Robot-TP-65M
EMG
Key
Switch
3-Way
Switch
LED
1 Red
2 Yellow
1 Black
2 Brown
3 Orange
1 Green
2 Blue
1 Purple
2 Gray
3 White
4 Pink
EMG 1
EMG 2
3 SW.2
KEY SW-Teach
KEY SW-Manual
3 SW.2
3 SW.1
LED_Power (VCC 12~24V)
LED_Ready
LED_Auto
LED_Servo
5 Light green
6 White/Black
Table 3-5: Cable Pinouts
LED_Enable
LED_GND
Page 20
Page 28

Robot-TP-65M
3.4 Carrying the System
The package comes with a belt for the user to carry the Robot-TP-65M. To use the belt,
follow the steps below.
Step 1: Locate the hooks on the four corners of the Robot-TP-65M (
Figure 3-7: Hook Locations
Step 2: Choose either two hooks to install the belt.
Step 3: Carry the Robot-TP-65M as shown in
Figure 3-8.
Figure 3-7).
Figure 3-8: Carrying the Robot-TP-65M
Page 21
Page 29

3.5 Emergency Buttons
The Robot-TP-65M teach pendant has a deadman switch and an emergency button,
which are provided to stop the robot automatically and safely when the operator can no
longer operate the robot correctly with the teach pendant in the manual mode.
3.5.1 Deadman Switch
Robot-TP-65M
Figure 3-9: Deadman Switch
The deadman switch is located on the rear panel. It is a 3-position switch which is able to
react to the following three operating statuses:
(1) OFF: When the switch is not being pressed or is being pressed lightly
(2) ON: When the switch is being pressed with correct pressure
(3) OFF: When the switch is being pressed too strongly
3.5.2 Emergency Stop Button
Page 22
Figure 3-10: Emergency Stop Button
Page 30

Robot-TP-65M
The emergency stop button is located on the front panel. Push the button can stop the
robot operation immediately.
STOP: Push the emergency stop button to stop operation.
RESET:
o Pull the emergency stop button to reset or
o Turn the emergency stop button to rest
Page 23
Page 31

Robot-TP-65M
Appendix
A
A Safety Precautions
Page 24
Page 32

Robot-TP-65M
WARNING:
The precautions outlined in this chapter should be strictly followed.
Failure to follow these precautions may result in permanent damage to
the Robot-TP-65M.
A.1 Safety Precautions
Please follow the safety precautions outlined in the sections that follow:
A.1.1 General Safety Precautions
Please ensure the following safety precautions are adhered to at all times.
Follow the electrostatic precautions outlined below whenever the
Robot-TP-65M is opened.
Make sure the power is turned off and the power cord is disconnected
whenever the Robot-TP-65M is being installed, moved or modified.
Do not apply voltage levels that exceed the specified voltage range.
Doing so may cause fire and/or an electrical shock.
Electric shocks can occur if the Robot-TP-65M chassis is opened when the
Robot-TP-65M is running.
Do not drop or insert any objects into the ventilation openings of the
Robot-TP-65M.
If considerable amounts of dust, water, or fluids enter the Robot-TP-6 5M ,
turn off the power supply immediately, unplug the power cord, and contact the
Robot-TP-65M vendor.
DO NOT:
o Drop the Robot-TP-65M against a hard surface.
o Strike or exert excessive force onto the LCD panel.
o Touch any of the LCD panels with a sharp object
o In a site where the ambient temperature exceeds the rated temperature
Page 25
Page 33

A.1.2 Anti-static Precautions
WARNING:
Failure to take ESD precautions during the installation of the
Robot-TP-65M may result in permanent damage to the Robot-TP-65M
and severe injury to the user.
Electrostatic discharge (ESD) can cause serious damage to electronic components,
including the Robot-TP-65M. Dry climates are especially susceptible to ESD. It is
therefore critical that whenever the Robot-TP-65M is opened and any of the electrical
components are handled, the following anti-static precautions are strictly adhered to.
Wear an anti-static wristband: Wearing a simple ant i-static wristband can
Robot-TP-65M
help to prevent ESD from damaging any electrical component.
Self-grounding: Before handling any electrical component, touch any
grounded conducting material. During the time the electrical component is
handled, frequently touch any conducting materials that are connected to the
ground.
Use an anti-static pad: When configuring or working with an electrical
component, place it on an antic-static pad. This reduces the possibility of ESD
damage.
Only handle the edges of the electrical component: When handling the
electrical component, hold the electrical component by its edges.
Page 26
Page 34

Robot-TP-65M
A.1.3 Product Disposal
CAUTION:
Risk of explosion if battery is replaced by and incorrect type. Only
certified engineers should replace the on-board battery.
Dispose of used batteries according to instructions and local
regulations.
Outside the European Union - If you wish to dispose of used electrical and
electronic products outside the European Union, please contact your local
authority so as to comply with the correct disposal method.
Within the European Union:
EU-wide legislation, as implemented in each Member State, requires that
waste electrical and electronic products carrying the mark (left) must be
disposed of separately from normal household waste. This includes
monitors and electrical accessories, such as signal cables or power cords.
When you need to dispose of your display products, please follow the
guidance of your local authority, or ask the shop where you purchased the product. The
mark on electrical and electronic products only applies to the current European Union
Member States.
Please follow the national guidelines for electrical and electronic product disposal.
A.2 Maintenance and Cleaning Precautions
When maintaining or cleaning the Robot-TP-65M, please follow the guidelines below.
A.2.1 Maintenance and Cleaning
Prior to cleaning any part or component of the Robot-TP-65M, please read the details
below.
Page 27
Page 35

Except for the LCD panel, never spray or squirt liquids directly onto any other
components. To clean the LCD panel, gently wipe it with a piece of soft dry
cloth or a slightly moistened cloth.
Never use alcohol to clean the external chassis.
The interior of the Robot-TP-65M does not require cleaning. Keep fluids away
from the Robot-TP-65M interior.
Be cautious of all small removable components when vacuuming the
Robot-TP-65M.
Turn the Robot-TP-65M off before cleaning the Robot-TP-65M.
Never drop any objects or liquids through the openings of the Robot -TP-65M.
Be cautious of any possible allergic reactions to solvents or chemicals used
when cleaning the Robot-TP-65M.
Avoid eating, drinking and smoking within vicinity of the Robot-TP-65M.
A.2.2 Cleaning Tools
Robot-TP-65M
Some components in the Robot-TP-65M may only be cleaned using a product specifically
designed for the purpose. In such case, the product will be explicitly mentioned in the
cleaning tips. Below is a list of items to use when cleaning the Robot-TP-65M.
Cloth – Although paper towels or tissues can be used, a soft, clean piece of
cloth is recommended when cleaning the Robot-TP-65M.
Water – A cloth moistened with water can be used to clean the
Robot-TP-65M.
Using solvents – The use of solvents is not recommended when cleaning the
Robot-TP-65M as they may damage the plastic parts.
Vacuum cleaner – Using a vacuum specifically desig ned for computers is
one of the best methods of cleaning the Robot-TP-65M. Dust and dirt can
restrict the airflow in the Robot-TP-65M and cause its circuitry to corrode.
Cotton swabs - Cotton swaps moistened with water are excellent tools for
wiping hard to reach areas.
Foam swabs - Whenever possible, it is best to use lint free swabs such as
foam swabs for cleaning.
Page 28
Page 36

Robot-TP-65M
Appendix
B
B Hazardous Materials
Disclosure
Page 29
Page 37

Robot-TP-65M
B.1 Hazardous Material Disclosure Table for IPB Products
Certified as RoHS Compliant Under 2002/95/EC Without
Mercury
The details provided in this appendix are to ensure that the product is compliant with the
Peoples Republic of China (China) RoHS standards. The table below acknowledges the
presences of small quantities of certain materials in the product, and is appli cable to China
RoHS only.
A label will be placed on each product to indicate the estimated “Environmentally Friendly
Use Period” (EFUP). This is an estimate of the number of years that these substances
would “not leak out or undergo abrupt change.” This product may contain replaceable
sub-assemblies/components which have a shorter EFUP such as batteries and lamps.
These components will be separately marked.
Please refer to the table on the next page.
Page 30
Page 38

Robot-TP-65M
Toxic or Hazardous Substances and Elements Part Name
Lead
(Pb)
Housing
X
Display X
Printed Circuit
X
Mercury
(Hg)
O O O O
O O O O
O O O O
Board
Metal Fasteners X
Cable Assembly X
Fan Assembly X
Power Supply
X
O O O O
O O O O
O O O O
O O O O
Assemblies
Battery O
O O O O O
Cadmium
(Cd)
Hexavalent
Chromium
(CR(VI))
Polybrominated
Biphenyls
(PBB)
Polybrominated
Diphenyl Ethers
(PBDE)
X
X
X
O
X
X
X
O: This toxic or hazardous substance is contained in all of the homogeneous materials for the part is below
the limit requirement in SJ/T11363-2006
X: This toxic or hazardous substance is contained in at least one of the homogeneous materials for this part
is above the limit requirement in SJ/T11363-2006
Page 31
Page 39

Robot-TP-65M
此附件旨在确保本产品符合中国 RoHS 标准。以下表格标示此产品中某有毒物质的含量符
合中国 RoHS 标准规定的限量要求。
本产品上会附有”环境友好使用期限”的标签,此期限是估算这些物质”不会有泄漏或突变”的
年限。本产品可能包含有较短的环境友好使用期限的可替换元件,像是电池或灯管,这些元
件将会单独标示出来。
部件名称
壳体
显示
印刷电路板
金属螺帽
电缆组装
风扇组装
电力供应组装
电池
有毒有害物质或元素
铅
(Pb)
X
X
X
X
X
X
X
O
汞
(Hg)
O O O O
O O O O
O O O O
O O O O
O O O O
O O O O
O O
O O O O O
镉
(Cd)
六价铬
(CR(VI))
多溴联苯
(PBB)
多溴二苯醚
(PBDE)
X
X
X
O
X
X
O
O
X
O: 表示该有毒有害物质在该部件所有物质材料中的含量均在 SJ/T11363-2006 标准规定的限量要求以下。
X: 表示该有毒有害物质至少在该部件的某一均质材料中的含量超出 SJ/T11363-2006 标准规定的限量要求。
Page 32
 Loading...
Loading...