

IDEC FC5A-F2M2, FC5A-F2MR2 User Manual

FC5A
SERIES
FC9Y-B1283
PID Module
User’s Manual
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

㩷
FC5A MicroSmart PID Module User’s Manual FC9Y-B1283 i
SAFETY PRECAUTIONS
㩷
•㩷Read this user’s manual to make sure of correct operation before starting installation, wiring, operation,
maintenance, and inspection of the FC5A series MicroSmart PID modules.
• All MicroSmart modules are manufactured under IDEC’s rigorous quality control system, but users must add a
backup or failsafe provision to the control system using the MicroSmart in applications where heavy damage or
personal injury may be caused in case the MicroSmart should fail.
• In this user’s manual, safety precautions are categorized in order of importance from Warning to Caution.
㩷
Warning
• Turn off the power to the MicroSmart before starting installation, removal, wiring, maintenance, and inspection of
the MicroSmart. Failure to turn power off may cause electrical shocks or fire hazard.
• Special expertise is required to install, wire, program, and operate the MicroSmart. People without such expertise
must not use the MicroSmart.
• Emergency stop and interlocking circuits must be configured outside the MicroSmart. If such a circuit is
configured inside the MicroSmart, failure of the MicroSmart may cause a malfunction of the control system,
damage, or accidents.
• Install the MicroSmart according to the instructions described in this user’s manual. Improper installation will
result in disattachment, failure, or malfunction of the MicroSmart.
㩷
Caution
• The MicroSmart
is designed for installation in a cabinet. Do not install the MicroSmart outside a cabinet.
• Install the MicroSmart
in environments described in this user’s manual. If the MicroSmart is used in places where
the
MicroSmart is subjected to high-temperature, high-humidity, condensation, corrosive gases, excessive
vibrations, and excessive shocks, then electrical shocks, fire hazard, or malfunction will result.
• The environment for using the
MicroSmart is “Pollution degree 2.” Use the MicroSmart in environments of pollution
degree 2 (according to IEC 60664-1).
• Prevent the
MicroSmart from being dropped while moving or transporting the MicroSmart, otherwise damage or
malfunction of the
MicroSmart will result.
• Prevent metal fragments and pieces of wire from dropping inside the MicroSmart housing. Put a cover on the
MicroSmart modules during installation and wiring. Ingress of such fragments and chips may cause fire hazard,
damage, or malfunction.
• Use a power supply matching the rated value. Use of an incorrect power supply may cause fire hazard.
• Use an IEC 60127-approved fuse on the power line outside the
MicroSmart. This is required when equipment
containing the
MicroSmart is destined for Europe.
• Use an IEC 60127-approved fuse on the output circuit. This is required when equipment containing the
MicroSmart
is destined for Europe.
• Use an EU-approved circuit breaker. This is required when equipment containing the
MicroSmart is destined for
Europe.
• Make sure of safety before starting and stopping the
MicroSmart or when operating the MicroSmart to force
outputs on or off. Incorrect operation on the
MicroSmart may cause machine damage or accidents.
Warning notices are used to emphasize that improper operation may
cause severe personal injury or death.
㩷
Caution notices are used where inattention might cause personal injury
or damage to equipment.
㩷
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

ii FC5A MicroSmart PID Module User’s Manual FC9Y-B1283
• If relays or transistors in the MicroSmart output modules should fail, outputs may remain on or off. For output signals
which may cause serious accidents, provide a monitor circuit outside the
MicroSmart.
• Do not connect the ground wire directly to the
MicroSmart. Connect a protective ground to the cabinet containing
the
MicroSmart using an M4 or larger screw. This is required when equipment containing the MicroSmart is
destined for Europe.
• Do not disassemble, repair, or modify the
MicroSmart modules.
• When disposing of the
MicroSmart
, do so as an industrial waste.
㩷
㩷
㩷
㩷
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

㩷
FC5A MicroSmart PID Module User’s Manual FC9Y-B1283 iii
ABOUT THIS MANUAL
㩷
Thank you for purchasing FC5A series MicroSmart PID Module. This user’s manual primarily describes system
configuration, specifications, installation, programming, application examples, and trouble shooting of the PID
module. Read this user’s manual to ensure the correct understanding of the entire functions of the PID module.
NOTICE
1.
This publication is not to be, nor any parts of it, photocopied, reprinted, sold, transferred, or rented out
without
the specific written permission and consent of IDEC.
2. The contents of
this user’s manual are subject to change without notice.
3.
Care has been taken to ensure that the contents of this user ’s manual
are correct, but if there are any doubts,
mistakes or questions, please inquire our sales department.
㩷
㩷
MicroSmart Modules
Category
Modules
MicroSmart
(FC5A Series MicroSmart)
FC5A series MicroSmart pentra
FC5
Series
CPU
Modules
All
-in-One Type
FC5A-C10R2, FC5A-C10R2C, FC5A-C16R2, FC5A-C16R2C,
FC5A-C24R2, FC5A-C24R2C
Slim
Typ e
FC5A-D16RK1, FC5A-D16RS1, FC5A-D32K3, FC5A-D32S3,
FC5A-D12K1E, FC5A-D12S1E
PID Modules
FC5A-F2MR2, FC5A-F2M2
Expansion Communication Modules
FC5A-SIF2, FC5A-SIF4
Memory Cartridge
FC4A-PM32, FC4A-PM64, FC4A-PM128
Expansion Modules
Expansion I/O module, Function module
Expansion I/O Modules
Input modules, Output modules, Mixed I/O modules
Function Modules
Analog modules, AS-Interface master module, PID module
Communication
Expansion Modules
HMI base module, expansion RS232C communication module,
expansion RS485 communication module
Option
al Modules
HMI module, Memory cartridge, Clock cartridge, RS232C communication
adapter, RS485 communication adapter
WindLDR
Application software [WindLDR]
㩷
㩷
Caution
㩷
㩷
IMPORTANT INFORMATION
Under no circumstances shall IDEC Corporation be held liable or responsible for indirect or consequential damages resulting
from the use of or the application of IDEC PLC compone
nts, individually or in combination with other equipment.
All persons using these components must be willing to accept responsibility for choosing the correct component to suit their
application and for choosing an application appropriate for the component
, individually or in combination with other
equi
pment.
All diagrams and examples
in this user’s manual are for illustrative purposes only. In no way does including these dia
grams
and examples in this manual constitute a guarantee as to their suitability for any specific application. To test and approve all
programs, prior to installation, is the responsibility of the end user
.
The PID modules is used by connecting to the FC5A series CPU module.
Use this product after thoroughly understanding the specifications of the FC5A
series CPU module.
㩷
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

iv FC5A MicroSmart PID Module User’s Manual FC9Y-B1283
REVISION HISTORY
㩷
Revision history of this user’s manual is described here.
Date
Manual No.
Description
March, 2011
FC9Y-B1283-0
First print
㩷
㩷
㩷
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

㩷
FC5A MicroSmart PID Module User’s Manual FC9Y-B1283 v
RELATED MANUALS
㩷
The following manuals related to the FC5A series MicroSmart are available. Refer to them in conjunction with this
manual.
Type No.
Manual Name
Description
FC9Y㵥B1283
FC5A Series
PID Module
User's Manual
(this manual)
Describes PID Module specifications and functions.
FC9Y㵥B1268
FC5A Series
MicroSmart Pentra
User's Manual
Basic Volume
Describes module specifications, installation instructions, wiring instru
ctions,
basic operation, special function, device addresses, instruction list, basic
in
structions, analog modules, user communication, data link communication,
Modbus ASCII/RTU communication, and troubleshooting.
FC9Y㵥B1273
FC5A Series
MicroSmart Pentra
U
ser's Manual
Advanced Volume
Describes instruction list, move instructions, data comparison instructions,
binary arithmetic instructions, boolean computation instructions, shift/rotate
instructions, data conversion instructions, week programmer instruction
s,
inte
rface instructions, program branching instructions, refresh instructions,
interrupt control instructions, coordinate conversion instructions,
average
instructions, pulse output instructions, PID instructions, dual/teaching
timer
instructions, i
ntelligent module access instructions, trigonometric function
instructions, log
arithm/power instructions, file data processing
instructions, clock
instructions, computer link communication, modem communication,
Modbus
TCP communication, expansion RS232C/RS485 c
ommunication
modules, and
AS
㵥
Interface master modules.
FC9Y㵥B1278
FC5A Series
MicroSmart Pentra
User's Manual
Web Server CPU
Module Volume
Describes FC5A Slim Type Web Server CPU Module specifications and
fun
ctions.
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

vi FC5A MicroSmart PID Module User’s Manual FC9Y-B1283
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

㩷
FC5A MicroSmart PID Module User’s Manual FC9Y-B1283 vii
TABLE OF CONTENTS
㩷
CHAPTER 1: GENERAL INFORMATION...................................................................................... 1-1
About the PID Modules.................................................................................................................................... 1-1
Quantity of Applicable PID modules................................................................................................................ 1-1
Applicable CPU and WindLDR version ........................................................................................................... 1-2
Confirming System Program Version .............................................................................................................. 1-2
CHAPTER 2: MODULE SPECIFICATIONS................................................................................... 2-1
PID Module...................................................................................................................................................... 2-1
Specifications................................................................................................................................................... 2-3
Dimensions...................................................................................................................................................... 2-6
CHAPTER 3: INSTALLATION AND WIRING .................................................................................3-1
Mounting Hole Layout for Direct Mounting on Panel Surface ......................................................................... 3-1
Terminal Connection........................................................................................................................................ 3-3
Terminal Arrangement ..................................................................................................................................... 3-4
Type of Protection............................................................................................................................................ 3-5
Power Supply for PID Modules ....................................................................................................................... 3-6
CHAPTER 4: PID MODULE MAIN FUNCTIONS ..........................................................................4-1
Temperature Control Using the PID Module.................................................................................................... 4-1
Fixed Value Control ......................................................................................................................................... 4-3
Auto-Tuning (AT)/Auto-Reset .......................................................................................................................... 4-6
Program Control .............................................................................................................................................. 4-9
Heating/Cooling Control ................................................................................................................................ 4-14
Difference Input Control................................................................................................................................. 4-14
Cascade Control............................................................................................................................................ 4-15
CHAPTER 5: DEVICE ALLOCATION OF PID MODULE ................................................................5-1
Device Allocation of PID Module ..................................................................................................................... 5-1
Program Size................................................................................................................................................... 5-2
Valid Devices................................................................................................................................................... 5-2
Control Register............................................................................................................................................... 5-2
Control Relay................................................................................................................................................... 5-3
Data Register Allocation - Block 0 Read Only Parameters............................................................................. 5-7
Data Register Allocation - Block 1 Write Only Parameters............................................................................ 5-10
Data Register Allocation - Blocks 2, 3 Basic Parameters (SHOT Action) ..................................................... 5-17
Data Register Allocation - Blocks 4, 5 Initial Setting Parameters (SHOT Action) ......................................... 5-19
Data Register Allocation - Blocks 10-19 CH0 Program Parameters (SHOT Action)..................................... 5-22
Data Register Allocation - Blocks 30-39 CH1 Program Parameters (SHOT Action)..................................... 5-24
CHAPTER 6: CONFIGURING PID MODULE USING WINDLDR .................................................... 6-1
Procedure to configure the PID module .......................................................................................................... 6-1
Expansion Modules Configuration Dialog Box ................................................................................................ 6-6
PID Module Configuration Dialog Box............................................................................................................. 6-7
PID Module Configuration - Input Parameters List (CH0 and CH1)................................................................ 6-8
PID Module Configuration - Control Parameters List (CH0 and CH1) .......................................................... 6-13
PID Module Configuration - Output Parameters List (CH0 and CH1)........................................................... 6-17
PID Module Configuration - Program Parameters List (CH0 and CH1)........................................................ 6-19
PID Module Configuration - I/O Function Selections..................................................................................... 6-21
PID Module Configuration - Input Parameters Details .................................................................................. 6-24
PID Module Configuration - Control Parameters Details............................................................................... 6-34
PID Module Configuration - Output Parameters Details................................................................................ 6-45
PID Module Configuration - Program Parameters Details ............................................................................ 6-47
Monitoring PID Module.................................................................................................................................. 6-52
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

viii FC5A MicroSmart PID Module User’s Manual FC9Y-B1283
CHAPTER 7: APPLICATION EXAMPLES.....................................................................................7-1
Application Example 1 ..................................................................................................................................... 7-1
Application Example 2 ..................................................................................................................................... 7-8
Application Example 3 ................................................................................................................................... 7-15
CHAPTER 8: TROUBLESHOOTING ............................................................................................ 8-1
The PID Module Power LED (PWR) is OFF or Flashing................................................................................. 8-1
The PID Module output does not operate normally......................................................................................... 8-2
Hunting phenomenon is occurring while in ON/OFF control action ................................................................ 8-3
Hunting phenomenon is occurring while in PID, PI, PD, or P control action................................................... 8-3
The PID Module input does not operate normally. .......................................................................................... 8-4
Loop break alarm turns on even though the actuator operates normally........................................................ 8-6
Program control is terminated earlier than the configured time. ..................................................................... 8-6
CHAPTER 9: APPENDIX ........................................................................................................... 9-1
PID Module Function References ................................................................................................................... 9-1
Output Action ................................................................................................................................................... 9-5
Factory Default Settings of the PID Module .................................................................................................... 9-9
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
GENERAL INFORMATION
㩷
FC5A MicroSmart PID Module User’s Manual FC9Y-B1283 1-1㩷
1: GENERAL INFORMATION
This chapter describes general information and specifications of the FC5A series PID modules. Make effective
use of the PID modules after reading and understanding thoroughly functions and characteristics.
㩷
About the PID Modules
The PID module performs control actions to eliminate the deviation between the set point (SP) and process
variable (PV). The PID module, which is an expansion module, is required to connect to the FC5A series CPU
for use. Depending on the difference of output specifications, the
PID modules are categorized into two types,
and can be used by connecting to a FC5A slim type CPU, or 24-I/O all-in-one type CPU (except 12V DC CPU).
The input channel can accept voltage, current, thermocouple or resistance thermometer signals. The output
channel generates relay output, non-contact voltage (for SSR drive), or current signals.
To configure the PID modules, the Expansion Modules Configuration dialog box in WindLDR is used.
The following table shows the PID module type numbers.
PID Module Type Numbers㩷
Module Type
I/O Points㩷
I/O Signal㩷
Type No.㩷
Relay Output
2 inputs㩷
㩷
㩷
Thermocouple
[K, J, R, S, B, E, T, N, PL-㩷II, C (W/Re5-26)
]
Resistance thermometer (
Pt100, JPt100)
Voltage
(0 to 1V DC, 0 to 5V DC, 1 to 5V DC, 0 to 10V DC)
Current (0 to 20mA DC, 4 to 20mA DC)㩷
FC5A-F2MR2
2 outputs㩷
Relay contact㩷
Non
-Contact Voltage
(for SSR drive)/
Current
Output
2 inputs㩷
㩷
Thermocouple
[K, J, R, S, B, E, T, N, PL-㩷II, C (W/Re5-26)
]
Resistance thermometer (
Pt100, JPt100)
Voltage
(0 to 1V DC, 0 to 5V DC, 1 to 5V DC, 0 to 10V DC)
Current (0 to 20mA DC, 4 to 20mA DC)㩷
FC5A-F2M2
2 outputs㩷
Non-contact voltage(for SSR drive)/Current㩷
Quantity of Applicable PID modules
The maximum number of PID modules that can be connected to the MicroSmart CPU differs depending on the
CPU type. The following table shows the maximum number of the PID modules.
㩷
Type
All-in-One Type
Slim Type
FC5A
MicroSmart CPU
FC5A
-C10R2
FC5A
-C10R2C
FC5A
-C10R2D
FC5A
-C16R2
FC5A
-C16R2C
FC5A
-C16R2D
FC5A
-C24R2D
FC5A
-C24R2
FC5A-C24R2C
FC5A-D16RK1
FC5A
-D16RS1
FC5A
-D32K3
FC5A
-D32S3
FC5A
-D12K1E
FC5A-D12S1E
Number of PID Modules
4
7
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

GENERAL INFORMATION㩷
㩷
1-2 FC5A MicroSmart PID Module User’s Manual FC9Y-B1283
Applicable CPU and WindLDR version
PID modules can be used with the following FC5A CPU module system program version and WindLDR version
as listed below.㩷
Type
All-in-One Type
Slim Type
FC5A MicroSmart CPU
FC5A
-C10R2
FC5A
-C1
0R2C
FC5A
-C10R2
D
FC5A
-C16R2
FC5A-C16R2C
FC5A
-C16R2
D
FC5A
-C24R2
D
FC5A
-C24R2
FC5A-C24R2C
FC5A-D16RK1
FC5A
-D16RS1
FC5A
-D32K3
FC5A
-D32S3
FC5A
-D12K1E
FC5A-D12S1E
CPU
System Program Version
230 or higher *1
WindLDR
Ver si on
6.40 or higher
*1: The PID module can be used with FC5A-D12K1E/-S1E with the system program version 100 or higher.
Confirming System Program Version
The system program version can be confirmed using WindLDR.
1. Connect a PC to port 1 or 2 of the FC5A CPU using serial computer link cable I/F (FC2A-KC4C) or USB
cable HG9Z-XCM2A for FC5A-D12x1E CPU.
2. From the WindLDR menu bar, select Online > Monitor.
3. From the WindLDR menu bar, select PLC > Status. The PLC Status dialog box appears and system
program version is shown.
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

MODULE SPECIFICATIONS㩷
㩷
FC5A MicroSmart PID Module User’s Manual FC9Y-B1283 2-1㩷
2: MODULE SPECIFICATIONS
This chapter describes parts names, functions, specifications, and dimensions of the PID modules.㩷
㩷
PID Module
Parts Description㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
LED Details
(1) Module Label Indicates the PID module type No. and specifications.
(2) Power LED (PWR) ON : Power is normally supplied.
㩷 Flashes : External power supply (24V DC) error.
OFF : Power is not supplied.
(12) Expansion Connector
(1) Module Label
(2) Power LED (PWR)
(3)
Control Output LED (OUT0, OUT1)
(4)
Event Output LED (EVT0, EVT1)
(5)
Auto-tuning (AT)/Auto-reset
LED (AT0, AT1)
(6)
Manual Mode LED (MT0, MT1)
(7)
Fixed Value Control Mode/Program
Control Mode LED (F/P0, F/P1)
(8)
Program Control RUN/HOLD LED
(R/H0, R/H1)
(9) External SP Enable/Disable LED (R/L)
(10) Terminal No.㩷
(11) Cable Terminal
㩿㪉㪀㩷
㩿㪊㪀
㩷
㩿㪋㪀
㩷
㩿㪌㪀
㩷
㩿㪍㪀
㩷
㩿㪎㪀
㩷
㩿㪏㪀
㩷
㩿㪐㪀
㩷
㩿㪊㪀
㩷
㩿㪋㪀
㩷
㩿㪌㪀
㩷
㩿㪍㪀
㩷
㩿㪎㪀
㩷
㩿㪏㪀
㩷
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
MODULE SPECIFICATIONS
㩷
2-2 FC5A MicroSmart PID Module User’s Manual FC9Y-B1283㩷
(3) Control Output LED (OUT0, OUT1)
ON : Control output is turned on.
OFF : Control output is turned off.
Flashes : When current output is used, the LED flashes in a cycle of 125 ms
according to the duty ratio of the output manipulated variable (MV).
When output manipulated variable (MV) is 20%, the LED turns on for
25 ms and off for 100 ms continuously.
(4) Event Output LED (EVT0, EVT1)
ON : Any alarm out of alarm 1 to alarm 8, loop break alarm is triggered.
OFF : None of the alarms is triggered.
(5) Auto-tuning (AT)/Auto-reset LED (AT0, AT1)
Flashes : Auto-tuning (AT) or auto-reset is performing.
OFF : Auto-tuning (AT) or auto-reset is stopped.
(6) Manual Mode LED (MT0, MT1)
ON : Manual mode
OFF : Auto mode
(7) Fixed Value Control Mode/Program Control Mode LED (F/P0, F/P1)
ON : Program control mode
OFF : Fixed value control mode
(8) Program Control RUN/HOLD LED (R/H0, R/H1)
ON : Program control is performing, or while in fixed value control enabled.
Flashes : Program control is held, or power is restored.
OFF : Program control is stopped, or while in fixed value control disabled.
(9) External SP Enable/Disable LED (R/L)
ON : External SP input is enabled.
OFF : External SP input is disabled.
(10) Terminal No. Indicates terminal numbers.
(11) Cable Terminal Spring clamp type terminal for connecting a cable.
(12) Expansion Connec
tor Connects to the CPU module and other expansion modules.
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

MODULE SPECIFICATIONS㩷
㩷
FC5A MicroSmart PID Module User’s Manual FC9Y-B1283 2-3㩷
Specifications
PID Module Specifications
Rating㩷
Type No.
FC5A-F2MR2
FC5A-F2M2
Rated
Scale
Thermocouple
Type Measurement Range
Input Value
of LSB
K
-200 to 1370°C
-328 to 2498°F
1°C (°F)
K (with decimal point)
-200.0 to 400.0°C
-328.0 to 752.0°F
0.1°C (°F)
J
-200 to 1000°C
-328 to 1832°F
1°C (°F)
R
0 to 1760°C
32 to 3200°F
1°C (°F)
S
0 to 1760°C
32 to 3200°F
1°C (°F)
B
0 to 1820°C
32 to 3308°F
1°C (°F)
E
-200 to 800°C
-328 to 1472°F
1°C (°F)
T
-200.0 to 400.0°C
-328.0 to 752.0°F
0.1°C (°F)
N
-200 to 1300°C
-328 to 2372°F
1°C (°F)
PL-II
0 to 1390°C
32 to 2534°F
1°C (°F)
C(W/Re5-26)
0 to 2315°C
32 to 4199°F
1°C (°F)
Resistance Thermometer
Type Measurement Range
Input Value
of LSB
Pt100
-200 to 850°C
-328 to 1562°F
1°C (°F)
Pt100 (with decimal point)
-200.0 to 850.0°C
-328.0 to 1562.0°F
0.1°C (°F)
JPt100
-200 to 500°C
-328 to 932°F
1°C (°F)
JPt100(with decimal point)
-200.0 to 500.0°C
-328.0 to 932.0°F
0.1°C (°F)
Current/Voltage
Type Measurement Range
Input Value
of LSB
4 to 20mA DC
-2000 to 10000 (12000 increments) *1
1.333μ
0 to 20mA C
-2000 to 10000 (12000 increments) *1
1.666μA
0 to 1V DC
-2000 to 10000 (12000 increments) *1
0.083mA
0 to 5V DC
-2000 to 10000 (12000 increments) *1
0.416mA
1 to 5V DC
-2000 to 100 0 (12000 increments)
*1
0.333mA
0 to 10V DC
-2000 to 10000 (12000 increments) *1
0.833mA
*1: Linear conversion possible
Input
Input
type
Thermocouple
K, J, R, S, B, E, T, N, PL-II, C (W/Re5-26)
External resistance: 100Ω maximum
However, B input, External resistance: 40Ω
maximum
Resistance
Thermometer
Pt100, JPt100, 3-wire type
Allowable conductor resistance (per wire):
10Ω maximum
Sensor (detection) current: 0.2A
Current
0 to 20mA DC, 4 to 20mA DC
Input impedance: 50Ω
Maximum permanent allowed overload (No
damage): 50mA maximum
Voltag e
0 to 1V DC
Input impedance: 1MΩ minimum
Maximum permanent allowed overload (No
damage): 5V DC maximum
Allowable output impedance: 2kΩ maximum
0 to 5V DC, 1 to 5V DC, 0 to 10V DC
Input impedance: 100kΩ minimum
Maximum permanent allowed overload (No
damage): 15V DC maximum
Allowable output impedance: 100Ω maximum
Power Supply Voltage
24V DC (External power), 5V DC (Internal power)
Allowable Voltage Range
20.4 to 28.8V DC
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

MODULE SPECIFICATIONS
㩷
2-4 FC5A MicroSmart PID Module User’s Manual FC9Y-B1283㩷
㩷
General Specifications㩷
Type No.
FC5A-F2MR2
FC5A-F2M2
Connector
Connector on
Mother Board
Input : F6018-17P (Fujicon)
Output : F6018-11P (Fujicon)
Connector
Inse
r
tion/Removal
Durability
㩷
Input Specifications㩷
Type No.
FC5A-F2MR2
FC5A-F2M2
Maximum Error at 25
°C
Thermocouple
±0.2% of full scale or ±2°C (4°F),
whichever is greater
However, R, S inputs, 0 to 200
°C (0 to 400°
F):
±6
°C (12°F)
B input
, 0 to 300°C (0 to 600°F):
Accuracy is
n
ot guaranteed.
K
, J, E, T, N inputs, Less than 0°C (32°F):
±0.4% of full scale
Resistance
Thermometer
±0.1% of full scale or ±1°C (2°F), whichever is
greater
Voltage, Current
±0.2% of full scale
Input
Accuracy (at 0 to 55
°C)
Thermocouple
±0.7% of full scale
However, R,
S input, 0 to 200°C (0 to 400°F
):
±6
°C (12°F)
B input, 0 to 300
°C (0 to 600°F): Accuracy is
not gu
aranteed.
K, J, E, T, N input
s, Less than 0°C (32°F):
±0.9% of full scale
Resistance
Thermometer
±0.6% of full scale
Voltage, Current
±0.7% of full scale
Data Accuracy
Maximum error at 25°C±Minimum digital resolution of each input range
Cold Junction Temperature
Compensation Accuracy
±1°C at 0 to 55°C
Sampling Period
125 ms
㩷
Output Specifications㩷
Type No.
FC5A-F2MR2
FC5A-F2M2
Control
Output
Relay output 1a
Rated load
:
5A 250V AC (resistive load)
5A 30V DC (resistive load)
3A 250V AC (inductive load
cosφ=0.4)
Non-contact voltage (for SSR drive)
12V DC±15%
C
urrent :
4 to 20mA DC
㩷
Program Control Specifications㩷
Type No.
FC5A-F2MR2
FC5A-F2M2
Time Setting Accuracy
±0.5% of setting time
Progressing Time Error
After Power is Restored
Maximum 6 minutes
Non-volatile Memory
Write Limit
1,000,000 times
㩷
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

MODULE SPECIFICATIONS㩷
㩷
FC5A MicroSmart PID Module User’s Manual FC9Y-B1283 2-5㩷
Insulation, Dielectric Strength
㩷
Insulation, Dielectric Strength㩷
Type No.
FC5A-F2MR2
FC5A-F2M2
Is
olation
Photocoupler-isolated between input and internal circuit
Photocoupler
-isolated between input and power circuit
Photocoupler
-isolated between input and internal circuit
Photocoupler-isolated between output and internal circuit
Dielectric
Strength
Output terminal - External power:
1500kV AC 5mA
for 1 minute
Output
terminal - In
ternal power:
1500kV AC 5mA fo
r 1 minute
Input
power - Output power:
1500kV AC 5mA
for 1 minute
FG
- External power:
548V AC 5mA for 1 minute
Input terminal
-
External power:
548V AC 5mA for 1 minute
Input terminal
- In
ternal power
548V AC 5mA for 1 minute
Output terminal
- External
power:
2500V AC 5mA for 1 minute
Output terminal
- In
ternal power
2500V AC 5mA for 1 minute
External power
-In
ternal power
548V AC 5mA for 1 minute
Input terminal
-
Output terminal
548V AC 5mA for 1 minute
FG
- External power:
548V AC 5mA for 1 minute
I/O terminal
- External power:
548V AC 5mA for 1 minute
I/O terminal
- Internal power:
548V AC 5mA for 1 minute
External power
- Internal power:
548V AC 5mA for 1 minute
Input terminal
- Output terminal:
548V AC 5mA for 1 minute
㩷
㩷
Other㩷
Type No.
FC5A-F2MR2
FC5A-F2M2
Power Consumption
Approx. 3.5W maximum
Module Power
Consumption
(Interior)
5V DC
65mA
24V DC
0mA
Ambient Temperature
0 to 55°C (No icing)
Ambient Humidity
10 to 95%RH (Non-condensing)
Weight
Approx. 140g
Environmental
Specifications㩷
Conforms to RoHS directive.㩷
Recommended Cable㩷
Twisted pair cable㩷
㩷
㩷
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

MODULE SPECIFICATIONS
㩷
2-6 FC5A MicroSmart PID Module User’s Manual FC9Y-B1283㩷
㩷
Dimensions
(All dimensions in mm)
* 8.5mm when the clamp is pulled out
4.5
㪁
㩷
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

INSTALLATION AND WIRING
㩷
FC5A MicroSmart PID Module User’s Manual FC9Y-B1283 3-1㩷
3: INSTALLATION AND WIRING
This chapter describes how to install and wire the PID modules. For general methods and precautions for
installation and wiring of the PID modules, see chapter 3 in the FC5A MicroSmart user’s manual (FC9Y-B1268).
Be sure to use the PID modules properly after understanding installation and wiring thoroughly.㩷
㩷 Caution㩷 • Assemble the CPU module and PID modules before installing them on a DIN
rail.
Otherwise, they may break.
• Do not lay out or wire the modules while power is supplied to them. Otherwise,
they
may be damaged.
• When installing modules, follow the instructions described in the FC5A
MicroSmart
user’s manual. If there are flaws in the installation, it may cause
disattachment,
failure or malfunction.㩷
㩷
Mounting Hole Layout for Direct Mounting on Panel Surface
To mount the PID module on a panel surface,
use the direct mounting strip and two M4 screws
(6 or 8 mm long).
For details about the direct mounting strip, see the
FC5A MicroSmart user’s manual (FC9Y-B1268).㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
(All dimensions in mm)㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
Direct mounting strip
FC4A-PSP1P
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

INSTALLATION AND WIRING㩷
㩷
3-2 FC5A MicroSmart PID Module User’s Manual FC9Y-B1283㩷
Example: Mounting hole layout for FC5A-C24R2 and four PID modules
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
(All dimensions in mm)
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

INSTALLATION AND WIRING
㩷
FC5A MicroSmart PID Module User’s Manual FC9Y-B1283 3-3㩷
Terminal Connection
㩷 Caution • Make sure that the operating conditions and environments are within the
specified㩷
values.
•Be sure to connect the grounding wire to a proper ground, otherwiseelectrical
shocks may be caused.
• Do not touch live terminals, otherwise electrical shocks may be caused.
• Do not tou
ch terminals immediately after power is turned off, otherwise electrical
shocks may be caused.
•
When using ferrules, insert a wire to the bottom of the ferrule and crimp the ferrule.
• When connecting a stranded wire or two solid wires to single-pole term
inal block, be
sure to use a ferrule. Otherwise the wire may slip off the terminal block.㩷
㩷
㩷
㩷
㩷
To cramp the following ferrules, use the specified crimping tool (CRIMPFOX ZA 3).
For 1-cable connection For 2-cable connection
For 1-cable connection㩷
Phoenix Type
Cable Size
AI 1-8 RD
UL1007AWG18
AI 0.5-8 WH
UL1015AWG22
For 2-cable connection㩷
Phoenix Type
Cable Size
AI-TWIN2x0.75-8 GY
UL1007AWG18
AI-TWIN2x0.5-8 WH
UL1015AWG22
Note: The above ferrules, crimping tool, and screwdriver are made by Phoenix Contact and are available from Phoenix
Contact.
Ferrule for
Terminal block㩷
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

INSTALLATION AND WIRING㩷
㩷
3-4 FC5A MicroSmart PID Module User’s Manual FC9Y-B1283㩷
Terminal Arrangement
Caution • Connect an IEC 60127-approved fuse appropriate for the applied voltage and
current draw, at the position shown in the diagram. (This is required when
equipment containing the MicroSmart is destined for Europe.)
• Do not connect a thermocouple to hazardous voltage (60V DC, 42.4V DC peak
or
higher).
• Be sure to check the wiring before the power is turned on.
Faulty wiring may result in
damage to the PID module.㩷
• Applicable electric cables are listed below.
Cable size AWG16: Single-cable
Cable size AWG18, AWG22: Single-cable/Twisted cable
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
*1: OUT0 is a connection example of relay output.
OUT1 is a connection example of non-contact voltage/current output. The PID module having both outputs
is non-existent.
㩷
㩷
㩷
㩷
+
-
NC
+
NC
-
+
-
NC
-
NC -
NC NC NC -
L
L
+
FG
NCB-
+
-
TC
A
B
B
RTD
+
-
+
-
+
-
+
-
TC
A
B
B
RTD
+
-
+
-
+
-
-
-
NC
NC
+
”
+
’
+
-
NC
-
B
’
A
B
+
”
+
’
+
-B
’
A
DC DC DC
DC DC DC
24V DC
IN0
IN1
OUT1
OUT0
Channel
Terminal
No.
Terminal
No.
Channel
L
0 to 5V
4 to 20mA
1 to 5V
0 to 10V
0 to 20mA
0 to 1V
0 to 5V
4 to 20mA
1 to 5V
0 to 10V
0 to 20mA
0 to 1V
Fuse (50V-1.2A)
*1
*1
DC : Voltage/Current
RTD
: Resistance thermometer
TC : Thermocouple
: Load
: Analog
current input instru
ment
: Fuse
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

INSTALLATION AND WIRING
㩷
FC5A MicroSmart PID Module User’s Manual FC9Y-B1283 3-5㩷
Output Circuit
Type of Protection
Input Circuits㩷
FC5A-F2MR2䇮FC5A-F2M2
㩷
㩷
Output Circuits
㩷
FC5A-F2MR2
㩷
㩷
㩷
㩷
㩷
FC5A-F2M2 [Non-contact Voltage Output (for SSR drive)] FC5A-F2M2 (Current Output)
㩷
㩷
㩷
(A)
(B)
(B)
+
mA
5V
160k
Multiplexer
Input Selection Signal
Input
20M 15k 15k
5040k
100
Output Circuit
Current
Detection
+
-
Output Circuit
Short Circuit
Protected
+
-
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

INSTALLATION AND WIRING㩷
㩷
3-6 FC5A MicroSmart PID Module User’s Manual FC9Y-B1283㩷
Power Supply for PID Modules
When supplying power to the PID modules, take the following into consideration.
㩷
Using the same power supply for the MicroSmart CPU and the PID module is recommended to suppress the
influence of noise. If the same power source is used for the PID module and MicroSmart CPU module, after the
MicroSmart CPU is started to run, the PID module performs initialization for a maximum of 5 seconds. During
this period, each parameter has an indefinite value. Design the user program to make sure that each parameter
is referred in the CPU module after the PID module operating status is changed to 0001h (Normal operation).
㩷
Wiring of Power Line and I/O Lines for the PID Module㩷
Separate the I/O lines, particularly resistance thermometers, from the power line as much as possible to
suppress the influence of noise.
㩷
㩷
㩷
㩷
㩷
㩷㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
Separate the I/O lines
from the power line
as much as possible.
㩷
DC : Voltage/Current
RTD
: Resistance thermometer
TC : Thermocouple
: Load
: Analog
current input instrument
: Fuse
+
-
NC
+
NC
-
+
-
NC
-
NC -
NC NC NC -
L
L
+
-
FG
NC
B
-
+
-
TC
A
B
B
RTD
+
-
+
-
+
-
+
-
TC
A
B
B
RTD
+
-
+
-
+
-
-
-
NC
NC
+
”
+
’
+
-
NC
-
B
’
A
B
+
”
+
’
+
-B
’
A
DC DC DC
DC DC DC
24V DC
IN0
IN1
OUT1
OUT0
Channel
Terminal
No.
Terminal
No.
Channel
L
0 to 5V
4 to 20mA
1 to 5V
0 to 10V
0 to 20mA
0 to 1V
0 to 5V
4 to 20mA
1 to 5V
0 to 10V
0 to 20mA
0 to 1V
Fuse (50V-1.2A)
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

PID MODULE MAIN FUNCTIONS
㩷
FC5A MicroSmart PID Module User’s Manual FC9Y-B1283 4-1㩷
4: PID MODULE MAIN FUNCTIONS
This chapter describes the temperature control, fixed value control, auto-tuning (AT), program control,
heating/cooling control, difference input control, and cascade control of the PID module.
Temperature Control Using the PID Module
Temperature Control Configuration Example Using the PID Module
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
A. Sensor
Measures temperature of the control target. Thermocouple, resistance thermometer, voltage input,
or current input can be used as the sensor.
B. PID module
Receives the temperature measured by the sensor as the process variable (PV), and calculates the
output manipulated variable (MV) so that temperature difference (deviation) between the process
variable (PV) and the set point (SP) can be eliminated. The output manipulated variable (MV) is
outputted to the actuator as a control signal. Relay output, non-contact voltage output, or current
output can be used as the control signal.
C. Actuator
Receives a control signal from the PID module and turns on the load power supply to the heater.
Electromagnetic switches, SSR, or power controllers can be used as the actuator.
Optimal Temperature Control
The ideal temperature control, as shown in Figure 1, is to control the temperature to correspond with the
set point (SP) regardless of any disturbances. There should be no overshoot or response delay of time
until the temperature reaches the set point (SP).
㩷
Figure 1. Ideal Temperature Control Figure 2. Optimal Temperature Control
B. PID Module
A. Thermocouple
Control Target, such
as Electric
Furnace
or Constant
Temperature Oven.㩷
Heater
C. Actuator
200V AC
Temperature
Set point (SP)
Time
Temperature
Set point (SP) B
Time
Set point (SP) A
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

PID MODULE MAIN FUNCTIONS㩷
㩷
4-2 FC5A MicroSmart PID Module User’s Manual FC9Y-B1283㩷
In reality, the ideal temperature control shown in Figure 1 on the previous page is almost impossible to
achieve due to a number of complicated factors such as thermal capacity, static characteristics, dynamic
characteristics and disturbances.
Figure 2 is regarded as an optimal temperature control result. Depending on the usage and objective, for
some temperature control applications, suppression of overshoot is required even if the temperature
rises very slowly as shown in Figure 3. For some temperature control applications, it is necessary to
stabilize the temperature as quickly as possible by raising the temperature rapidly even if overshoot is
generated as shown in Figure 4. In general, however, Figure 2 is regarded as an optimal temperature
control. The PID module is designed to raise the process variable (PV) to the set point (SP) as quickly as
possible in order to stabilize the process variable (PV) at the set point (SP) so as to perform the optimal
temperature control. If the temperature fluctuates due to sudden disturbances, the PID module responds
to the fluctuation with speedy response in the shortest possib le time and performs quick control to
stabilize the temperature.
㩷
㩷
㩷
㩷
㩷
㩷
Figure 3. Stable but slow temperature rise control㩷
㩷
㩷
㩷
㩷
㩷
㩷
Figure 4. The temperature rises rapidly; however, the control stabilizes after overshoot and undershoot.
㩷
Characteristics of the Control Target
To perform optimal temperature control, it is necessary to have a good knowledge of the thermal
characteristics of the PID module, sensors, actuators as well as control targets. For example, the PID
module controls a constant temperature oven and its temperature can rise up to 100°C. Even if the set
point (SP) of the PID modules is configured as 200°C, the temperature of the constant temperature oven
rise only up to 100 °C due to its static characteristic.
The characteristic of the control target is determined by the combination of the following 4 factors.
1. Thermal capacity:
This represents how the target is easily heated, and has a relation with the volume size of the control
target.
2. Static characteristic:
This represents the capability of heating, and is determined by the size of the heater capacity.
3. Dynamic characteristic:
This represents the rising characteristic (transitional response) during initial heating. This is a
complicated process involving heater capacity, furnace capacity size and sensor location.
4. Disturbance:
Any change in control temperature causes disturbance. For example, the change of ambient
temperature or supply voltage can cause disturbance.
㩷
㩷
㩷
㩷
㩷
㩷
㩷
Temperature
Set point (SP)
Time
Time
Temperature
Set point (SP)
Characteristics of Control Target㩷
Thermal Capacity㩷
Static 㩷
Characteristic㩷
Disturbance㩷
Dynamic 㩷
Characteristic㩷
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

PID MODULE MAIN FUNCTIONS
㩷
FC5A MicroSmart PID Module User’s Manual FC9Y-B1283 4-3㩷
Fixed Value Control
The PID module provides 2 control modes, one is the fixed value control and the other is the program control.
The fixed value control is a standard temperature control which performs to eliminate the deviation between
the single set point (SP) and process variable (PV). The program control allows you to define the set point
(SP) that changes as the time progresses so that the process variable (PV) can be controlled to match the set
point (SP) changing as the time progresses. For detail about the program control, see 4-9.
Control actions that can be used for fixed value control and program control are described below.
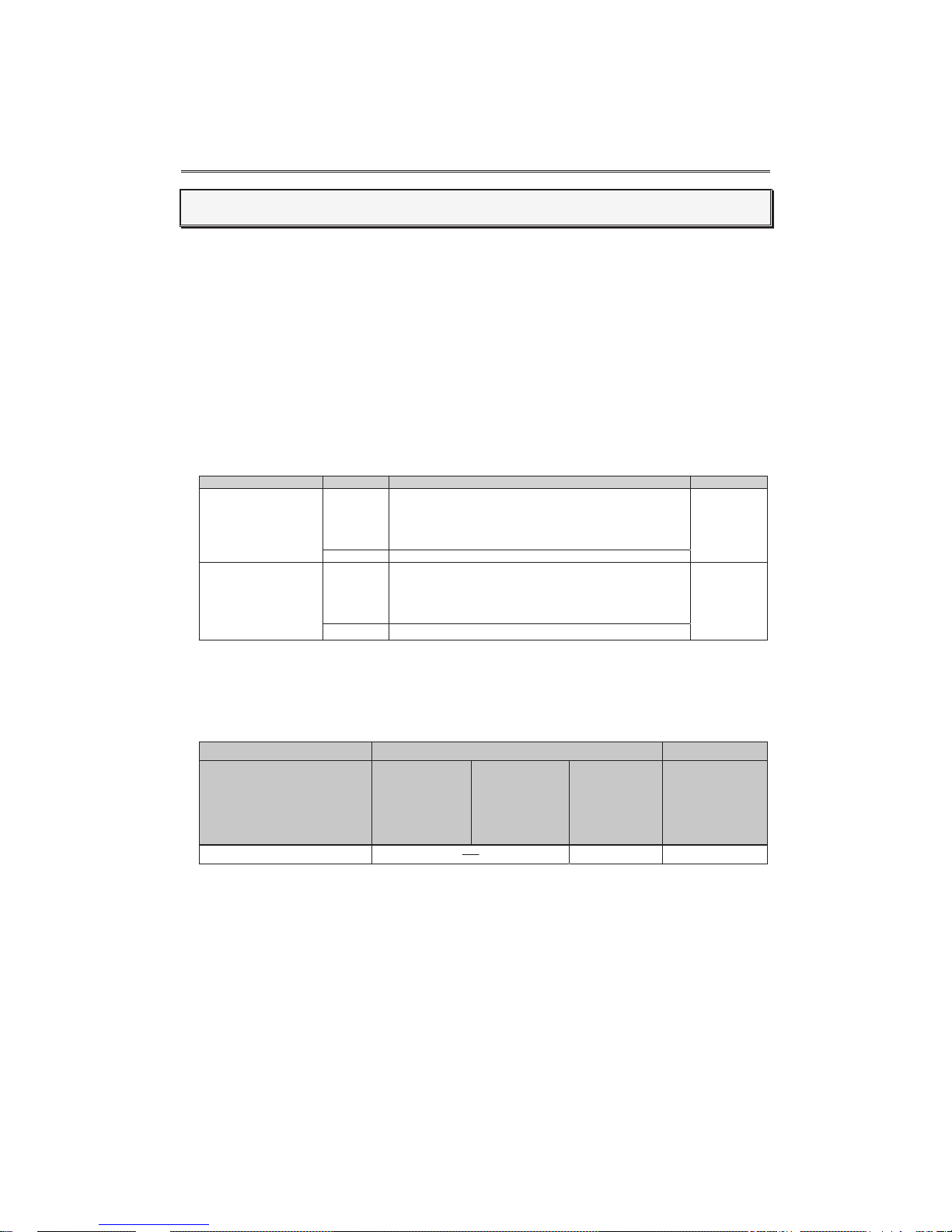
ON/OFF Control Action
In the ON/OFF control action, when the process variable (PV) is lower than the set point (SP), the control
output is turned on, and when the process variable (PV) exceeds the set point (SP), the control output is
turned off. Overshoot, undershoot, and hunting are generated. ON/OFF control is suitable for processes
which do not require accuracy.㩷
If the proportional band or proportional gain of the PID module parameter is set to 0, the control action
becomes ON/OFF control.
Overshoot, Undershoot
As the temperature of the control target
rises as shown in the figure on the right,
the process variable (PV) sometimes
exceeds the set point (SP) greatly.
This is called overshoot. If the process
variable (PV) drops below the set point
(SP), this is called undershoot.
Hunting
The control result oscillates as shown
in the figure on the right. This is the㩷
the hunting.
㩷
㩷
㩷
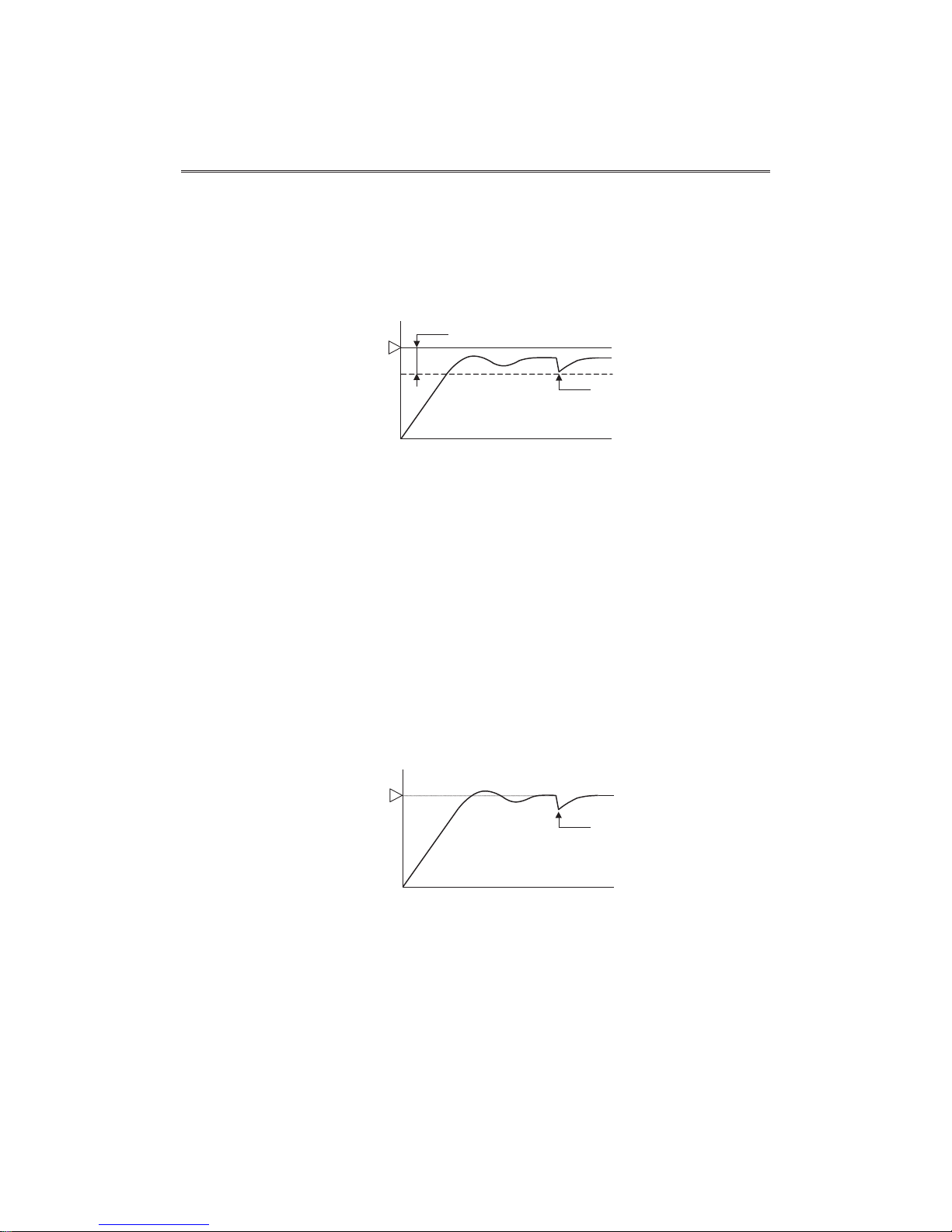
P Control Action (Proportional Action)
P control action outputs the manipulated variable (MV) in proportion to the deviation between the process
variable (PV) and the set point (SP) within the proportional band. The control output is ON until the
process variable (PV) reaches the point A that is determined by the proportional band. If the process
variable (PV) exceeds the point A (enters the proportional band), the control output starts turn on/off
according to the control period and the manipulated variable (MV). If the process variable (PV) exceeds
the set point (SP), the control output is completely turned off. While the process variable (PV) rises from
the point A to the set point (SP), the control output ON time decreases and the control output OFF time
increases. Compared to ON/OFF control action, there is no overshoot in P control action, and hunting
becomes less frequent; however, the offset is generated. The P control action is suitable for processes
such as gas pressure control or level control, in which there is no dead time.
If the integral time and derivative time of the PID module parameter are set to 0, the control action
becomes the P control action.
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
Set Point (SP)
Temperature
Time
Control Output
ON
OFF
Undershoot
Overshoot
Hunting
Set Point (SP)
Temperature
Time
Proportional Band
Offset
Point A
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

PID MODULE MAIN FUNCTIONS㩷
㩷
4-4 FC5A MicroSmart PID Module User’s Manual FC9Y-B1283㩷
• If the proportional band is narrowed (Proportional gain is made larger)
Because the control output starts turning on/off at around the set point (SP), the time until the process
variable (PV) reaches the set point (SP) is shortened, and the offset is small; however, hunting is
frequent. If the proportional band is greatly narrowed, the control action becomes similar to the ON/OFF
control action.
• If the proportional band is broadened (Proportional gain is made smaller)
Because the control output starts turning on/off at the significantly low temperature from the set point
(SP), overshoot or hunting is reduced; however, it takes time for the process variable (PV) to reach to
the set point (SP), and the offset between the process variable (PV) and the set point (SP) becomes
broadened.
The offset caused by the P control action can be corrected by configuring the reset value. If the reset
value is configured, the proportional band range can be shifted as shown in the figure below. The reset
value can be automatically calculated by the auto-reset function.
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
PI Control Action (Proportional + Integral Action)
I (Integral) action automatically corrects the offset caused by P control action, and temperature control is
performed at the set point (SP). However, it takes time for the process variable (PV) to be stable if the
process variable (PV) is changed rapidly due to disturbance. PI control action is suitable for the
processes in which the temperature slowly changes.
If the derivative time of the PID module parameter is set to 0, the control action becomes the PI control
action.
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
• If the integral time is shortened too much, the integral action becomes strong. The offset can be
corrected in a shorter time; however, hunting with a long cycle may be caused.
• If the integral time is extended too much, the integral action becomes weak and it takes time to correct
the offset.
㩷
Output Manipulated
Variable
100
50
㩷㩷㪇㩷
Proportional Band
Set Point (SP)
㪘㩷
㪙㩷
㪚㩷
Proportional band area that
can be
configured with reset
function.
Offset can be corrected within
±proportional band from the
set point (SP).
Output Manipulated Variable
A: 100%
B: 50%
C: 0%
Set Point (SP)
Temperature
Time
Proportional Band
Disturbance
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
PID MODULE MAIN FUNCTIONS
㩷
FC5A MicroSmart PID Module User’s Manual FC9Y-B1283 4-5㩷
PD Control Action (Proportional + Derivative Action)
Compared with P action, the response to rapid㩷temperature change due to disturbance is faster, the
temperature control can be stabilized in a shorter time, and transitional response characteristic can be
improved in PD control action. PD control action is suitable for the processes in which the temperature
rapidly changes.
If the integral time of the PID module parameter is set to 0, the control action becomes the PD control
action.
• If the derivative time is shortened, the derivative action becomes weak. The response to the rapid
temperature change becomes slower. Because the action to suppress the rapid temperature rises
becomes weaker, the time for the process variable (PV) to reach the set point (SP) is shortened;
however, overshoot can occur.
• If the derivative time is extended, the derivative action becomes strong. The response to the rapid
temperature change becomes faster. Because the action to suppress the rapid temperature rises
becomes strong, the time for the process variable (PV) to reach the set point (SP) is extended; however,
overshoot can be decreased.
The offset caused by the PD control action can be corrected by configuring the reset value. The reset
value can be automatically calculated by the auto-reset function.
PID Control Action (Proportional + Integral + Derivative Action)
P action suppresses the overshoot and the hunting, I action corrects the offset, and D action corrects
rapid temperature change due to disturbance in shorter time. Thus, using PID control action, optimal
temperature control can be performed. The proportional band, integral time, derivative time, and ARW
can be automatically calculated by the auto-tuning (AT).
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
㩷
Set Point (SP)
Temperature
Time
Proportional Band
Disturbance
Set Point (SP)
Temperature
Time
Disturbance
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

PID MODULE MAIN FUNCTIONS㩷
㩷
4-6 FC5A MicroSmart PID Module User’s Manual FC9Y-B1283㩷
(1) (2) (3)
SP
AT
SP+20
(4)
(4)
Time
Temperature
C
SP-20
C
SP-20
SP
AT
(1) (2) (3)
(4)
Temperature
Time
C
Auto-Tuning (AT)/Auto-Reset
The optimal temperature control parameters differ depending on the characteristics of the process to control.
For PID control action, the proportional band, integral time, derivative time, and ARW are automatically
configured by performing auto-tuning (AT). For P control or PD control action, the reset value is automatically
configured by performing auto-reset.
㩷 Caution㩷 • Perform auto-tuning (AT)/auto-reset during the trial run.
• If the auto-tuning (AT) is performed near the ambient temperature,
sufficient
fluctuations cannot be given to the process, and auto-tuning (AT)
may fail. In
such case, configure the P, I, D, and ARW values manually.
• Perform auto-reset when the process variable (PV) is stabilized within
the
proportional band.
• Once auto-tuning (AT)/auto-reset is performed, it is un
necessary to perform
auto-tuning (AT)/auto-reset again as long as the process is unchanged.
• When voltage or current input is selected and the auto-tuning (AT
) is performed,
fluctuations are given to the process at the set point (SP)
regardless of AT bias.
• During program control, f
luctuations are given to the process as soon as
auto-tuning (AT) is started.㩷
Auto-tuning (AT)
In order to configure P (proportional band), I (integral time), D (derivative time), and ARW (Anti-Reset
Windup) automatically with optimal values, the auto-tuning (AT) can be performed. The auto-tuning (AT)
gives temperature fluctuation to the process to calculate those parameters . To perform an optimal
auto-tuning (AT), temperature fluctuation is given to the process when the process variable (PV) reaches
near the set point (SP). By setting the AT bias, the temperature to start giving fluctuation can be configured.
The relation between the set point (SP), AT bias, auto-tuning (AT) starting point, and fluctuation starting point
are shown below.
[Process variable (PV) ≤ Set point (SP) - AT bias value]
When AT bias is set to 20°C, the PID module starts giving the temperature fluctuation to the process at the
temperature 20°C lower from the set point (SP).
㩷㩷 (1) Fluctuation period. PID parameters are
measured.
(2) PID parameters are calculated and auto
tuning (AT) is finished.
(3) Temperature is controlled with the PID
parameters configured with auto-tuning (AT).
(4) AT bias value (20°C)
▲ AT: Auto-tuning (AT) perform bit is turned on
[Set point (SP) - AT bias value < Process variable (PV) < Set point (SP) + AT bias value]
The PID module starts giving the temperature fluctuation to the process when the process variable (PV)
reaches the set point (SP).
㩷㩷 (1) Fluctuation period. PID parameters are
measured.
(2) PID parameters are calculated and auto
tuning (AT) is finished.
(3) Temperature is controlled with the PID
parameters configured with auto-tuning (AT).
㩷㩷 (4) AT bias value (20°C)㩷
㩷
㩷㩷 ▲ AT: Auto-tuning (AT) perform bit is turned on
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com

PID MODULE MAIN FUNCTIONS
㩷
FC5A MicroSmart PID Module User’s Manual FC9Y-B1283 4-7㩷
SP+20
SP
AT
Temperature
(4)
Time
(1) (2) (3)
C
SP
Time
Temperature
Offset Span
Offset is Corrected.
Auto-reset is Performed.
[Process variable (PV) ≥ Set point (SP) + AT bias value]
When AT bias is set to 20°C, the PID module starts giving the temperature fluctuation to the process at
the temperature 20°C higher from the set point (SP).
㩷㩷 㩷
㩷㩷 (1) Fluctuation period. PID parameters are
measured.
(2) PID parameters are calculated and auto
tuning (AT) is finished.
(3) Temperature is controlled with the PID
parameters configured with auto-tuning (AT).
㩷㩷 (4) AT bias value (20°C)㩷
㩷㩷 ▲ AT: Auto-tuning (AT) perform bit is turned on㩷
Auto-reset
During the P control or PD control action, the deviation (offset) between the process variable (PV) and the
set point (SP) is generated when the process variable (PV) is stabilized. By performing auto-reset, the reset
value can automatically be calculated to correct the offset. It is required to perform auto-reset when the
process variable (PV) is stabilized within the proportional band. When the auto-reset is completed, the CPU
module automatically reads all parameters including the calculated reset value from the PID mo dule and
stores those parameters in the data registers. It is unnecessary to perform the auto-reset again as long as
the process is unchanged.
When the proportional band (P) is set to 0 or 0.0, the reset value is cleared.
Auto-tuning (AT)/Auto-reset Perform/Cancel
The Auto-tuning (AT)/Auto-reset function can be performed or cancelled by turning on/off the operation
parameter bits allocated to each channel. For the operation parameter bits, see page 5-10.
㩷
Perform Auto-tuning (AT)
To perform auto-tuning (AT), turn on the control enable/disable bit (Bit0) and auto-tuning (AT)/auto-reset
bit (Bit1) of the operation parameter. P, I, D and ARW values will automatically be configured.
When auto-tuning (AT) is performed during the program control, P, I, D and ARW values of the current
step are configured. While auto-tuning (AT) is performed, the Auto-tuning (AT)/Auto-reset LED (AT0/AT1)
flashes.
When auto-tuning (AT) is completed, the operation parameter Bit1 is automatically turned off, and the
CPU module reads all parameters of the AT performed channel from the PID module and store those
parameters in the data registers. If any parameters in the data registers of the CPU module have been
changed but have not been written to the PID module, those parameters will be overwritten with the
parameters read from the PID module when auto-turning (AT) is finished.
Phone: 800.894.0412 - Fax: 888.723.4773 - Web: www.clrwtr.com - Email: info@clrwtr.com
 Loading...
Loading...