

Page 1
ROBO Cylinder
Radial Cylinder
RCP4 Actuator
Slider Type
Operation Manual
Sixth Edition
Standard type Motor straight type, RCP4-RA5C, RA6C, RA7C
Standard type Motor reversing type, RCP4-RA5R, RA6R, RA7R
Clean Room type Motor straight type, RCP4CR-SA5C, SA6C SA7C
Page 2

Page 3

Please Read Before Use
Thank you for purchasing our product.
This Operation Manual explains the handling methods, structure and maintenance of this product, among others,
providing the information you need to know to use the product safely.
Before using the product, be sure to read this manual and fully understand the contents explained herein to
ensure safe use of the product.
The CD or DVD that comes with the product contains Operation Manuals for IAI products.
When using the product, refer to the necessary portions of the applicable Operation Manual by printing them out
or displaying them on a PC.
After reading the Operation Manual, keep it in a convenient place so that whoever is handling this product can
reference it quickly when necessary.
[Important]
x This Operation Manual is original.
x The product cannot be operated in any way unless expressly specified in this Operation Manual. IAI shall
assume no responsibility for the outcome of any operation not specified herein.
x Information contained in this Operation Manual is subject to change without notice for the purpose of product
improvement.
x If you have any question or comment regarding the content of this manual, please contact the IAI sales office
near you.
x Using or copying all or part of this Operation Manual without permission is prohibited.
x The company names, names of products and trademarks of each company shown in the sentences are
registered trademarks.
Page 4

Page 5

Table of Contents
Safety Guide..................................................................................................................................................1
Caution in Handling .......................................................................................................................................8
Names of the Parts........................................................................................................................................9
1. Specification Check.............................................................................................................................. 11
1.1 Checking the Product ................................................................................................................. 11
1.1.1 Parts ............................................................................................................................11
1.1.2 Related Operation Manuals for the Each Controller Supported by this Product .......... 11
1.1.3 How to Read the Model Nameplate............................................................................. 11
1.1.4 How to Read the Model Number .................................................................................12
1.2 Specification ...............................................................................................................................13
1.2.1 Speed ..........................................................................................................................13
1.2.2 Maximum Acceleration and Transportable Weight.......................................................16
1.2.3 Driving System • Position Detector ..............................................................................36
1.2.4 Positioning Precision ...................................................................................................36
1.2.5 Current Limit Value and Pressing Force ......................................................................37
1.2.6 Allowable Load Moment of Actuator ............................................................................39
1.2.7 Duty Ratio in Continuous Operation ............................................................................40
1.3 Options .......................................................................................................................................41
1.3.1 Brake Type (Model No. : B) .........................................................................................41
1.3.2 Reversed-home Specification (Model No. : NM)..........................................................41
1.3.3 Motor Left Reversed, Motor Right Reversed (Model No. : ML, MR) ............................41
1.3.4 Vacuum Joint on Other Side (Model No. : VR) ............................................................41
1.4 Motor • Encoder Cables..............................................................................................................42
1.4.1 Motor • Encoder Integrated Cables..............................................................................42
1.4.2 Motor • Encoder Integrated Cables Robot Type ..........................................................43
2. Installation ............................................................................................................................................44
2.1 Transportation.............................................................................................................................44
2.2 Installation and Storage • Preservation Environment ..................................................................46
2.3 Installation ..................................................................................................................................47
2.3.1 General Rules on Installation.......................................................................................47
2.3.2 Installation of Main Unit ...............................................................................................48
2.4 Clean-Room Type.......................................................................................................................54
2.4.1 Reference for Vacuuming Capacity .............................................................................54
2.4.2 Vacuum Joint ...............................................................................................................54
3. Connecting with Controller ...................................................................................................................55
4. Maintenance Inspection .......................................................................................................................59
4.1 Inspection Items and Schedule...................................................................................................59
4.2 External Visual Inspection ..........................................................................................................59
4.3 Cleaning .....................................................................................................................................59
4.4 Internal Inspections ....................................................................................................................60
4.5 Internal Cleaning ........................................................................................................................60
Page 6

4.6 Grease Supply............................................................................................................................61
4.6.1 What Grease to Use on the Standard Type .................................................................61
4.6.2 What Grease to Use on the Clean Room Type............................................................61
4.6.3 How to apply grease....................................................................................................62
4.7 Procedure for Stainless Steel Sheet Replacement and Adjustment............................................64
4.7.1 Preparation..................................................................................................................64
4.7.2 Procedure for Replacement and Tuning ......................................................................65
4.8 Procedure for Belt Replacement and Tuning..............................................................................67
4.8.1 Inspection of the Belt ...................................................................................................67
4.8.2 Belts to be used...........................................................................................................67
4.8.3 Replacement of the Belt ..............................................................................................68
4.9 Motor Replacement Process ......................................................................................................70
4.9.1 RCP4-SA5C, SA6C, SA7C, RCP4CR-SA5C, SA6C, SA7C........................................70
4.9.2 RCP4-SA5R, SA6R, SA7R..........................................................................................72
5. External Dimensions ............................................................................................................................74
5.1 RCP4-SA5C ...............................................................................................................................74
5.2 RCP4-SA6C ...............................................................................................................................75
5.3 RCP4-SA7C ...............................................................................................................................76
5.4 RCP4-SA5R ...............................................................................................................................77
5.5 RCP4-SA6R ...............................................................................................................................78
5.6 RCP4-SA7R ...............................................................................................................................79
5.7 RCP4CR-SA5C ..........................................................................................................................80
5.8 RCP4CR-SA6C ..........................................................................................................................81
5.9 RCP4CR-SA7C ..........................................................................................................................82
6. Life .......................................................................................................................................................83
7. Warranty...............................................................................................................................................84
7.1 Warranty Period..........................................................................................................................84
7.2 Scope of the Warranty................................................................................................................84
7.3 Honoring the Warranty................................................................................................................84
7.4 Limited Liability ...........................................................................................................................84
7.5 Conditions of Conformance with Applicable Standards/Regulations, Etc., and Applications ......85
7.6 Other Items Excluded from Warranty..........................................................................................85
Change History............................................................................................................................................86
Page 7
Safety Guide
“Safety Guide” has been written to use the machine safely and so prevent personal injury or property
damage beforehand. Make sure to read it before the operation of this product.
Safety Precautions for Our Products
The common safety precautions for the use of any of our robots in each operation.
No.
1 Model Selection Ɣ This product has not been planned and designed for the application where high
Operation
Description
level of safety is required, so the guarantee of the protection of human life is
impossible. Accordingly, do not use it in any of the following applications.
1) Medical equipment used to maintain, control or otherwise affect human life or
physical health.
2) Mechanisms and machinery designed for the purpose of moving or transporting
people (For vehicle, railway facility or air navigation facility)
3) Important safety parts of machinery (Safety device, etc.)
Ɣ Do not use the product outside the specifications. Failure to do so may
considerably shorten the life of the product.
Ɣ Do not use it in any of the following environments.
1) Location where there is any inflammable gas, inflammable object or explosive
2) Place with potential exposure to radiation
3) Location with the ambient temperature or relative humidity exceeding the
specification range
4) Location where radiant heat is added from direct sunlight or other large heat
source
5) Location where condensation occurs due to abrupt temperature changes
6) Location where there is any corrosive gas (sulfuric acid or hydrochloric acid)
7) Location exposed to significant amount of dust, salt or iron powder
8) Location subject to direct vibration or impact
Ɣ For an actuator used in vertical orientation, select a model which is equipped with
a brake. If selecting a model with no brake, the moving part may drop when the
power is turned OFF and may cause an accident such as an injury or damage on
the work piece.
Description
1
Page 8
No.
Operation
Description
Description
2 Transportation Ɣ When carrying a heavy object, do the work with two or more persons or utilize
equipment such as crane.
Ɣ When the work is carried out with 2 or more persons, make it clear who is to be the
leader and who to be the follower(s) and communicate well with each other to
ensure the safety of the workers.
Ɣ When in transportation, consider well about the positions to hold, weight and
weight balance and pay special attention to the carried object so it would not get hit
or dropped.
Ɣ Transport it using an appropriate transportation measure.
The actuators available for transportation with a crane have eyebolts attached or
there are tapped holes to attach bolts. Follow the instructions in the operation
manual for each model.
Ɣ Do not step or sit on the package.
Ɣ Do not put any heavy thing that can deform the package, on it.
Ɣ When using a crane capable of 1t or more of weight, have an operator who has
qualifications for crane operation and sling work.
Ɣ When using a crane or equivalent equipments, make sure not to hang a load that
weighs more than the equipment’s capability limit.
Ɣ Use a hook that is suitable for the load. Consider the safety factor of the hook in
such factors as shear strength.
Ɣ Do not get on the load that is hung on a crane.
Ɣ Do not leave a load hung up with a crane.
Ɣ Do not stand under the load that is hung up with a crane.
3 Storage and
Preservation
Ɣ The storage and preservation environment conforms to the installation
environment. However, especially give consideration to the prevention of
condensation.
Ɣ Store the products with a consideration not to fall them over or drop due to an act
of God such as earthquake.
4 Installation and
Start
(1) Installation of Robot Main Body and Controller, etc.
Ɣ Make sure to securely hold and fix the product (including the work part). A fall, drop
or abnormal motion of the product may cause a damage or injury.
Also, be equipped for a fall-over or drop due to an act of God such as earthquake.
Ɣ Do not get on or put anything on the product. Failure to do so may cause an
accidental fall, injury or damage to the product due to a drop of anything,
malfunction of the product, performance degradation, or shortening of its life.
Ɣ When using the product in any of the places specified below, provide a sufficient
shield.
1) Location where electric noise is generated
2) Location where high electrical or magnetic field is present
3) Location with the mains or power lines passing nearby
4) Location where the product may come in contact with water, oil or chemical
droplets
2
Page 9

No.
Operation
Description
4 Installation and
Start
Description
(2) Cable Wiring
Ɣ Use our company’s genuine cables for connecting between the actuator and
controller, and for the teaching tool.
Ɣ Do not scratch on the cable. Do not bend it forcibly. Do not pull it. Do not coil it
around. Do not insert it. Do not put any heavy thing on it. Failure to do so may
cause a fire, electric shock or malfunction due to leakage or continuity error.
Ɣ Perform the wiring for the product, after turning OFF the power to the unit, so that
there is no wiring error.
Ɣ When the direct current power (+24V) is connected, take the great care of the
directions of positive and negative poles. If the connection direction is not correct,
it might cause a fire, product breakdown or malfunction.
Ɣ Connect the cable connector securely so that there is no disconnection or
looseness. Failure to do so may cause a fire, electric shock or malfunction of the
product.
Ɣ Never cut and/or reconnect the cables supplied with the product for the purpose of
extending or shortening the cable length. Failure to do so may cause the product
to malfunction or cause fire.
(3) Grounding
Ɣ The grounding operation should be performed to prevent an electric shock or
electrostatic charge, enhance the noise-resistance ability and control the
unnecessary electromagnetic radiation.
Ɣ For the ground terminal on the AC power cable of the controller and the grounding
plate in the control panel, make sure to use a twisted pair cable with wire thickness
0.5mm
2
(AWG20 or equivalent) or more for grounding work. For security
grounding, it is necessary to select an appropriate wire thickness suitable for the
load. Perform wiring that satisfies the specifications (electrical equipment technical
standards).
Ɣ Perform Class D Grounding (former Class 3 Grounding with ground resistance
100: or below).
3
Page 10
No.
4 Installation and
Operation
Description
Start
Description
(4) Safety Measures
Ɣ When the work is carried out with 2 or more persons, make it clear who is to be the
leader and who to be the follower(s) and communicate well with each other to
ensure the safety of the workers.
Ɣ When the product is under operation or in the ready mode, take the safety
measures (such as the installation of safety and protection fence) so that nobody
can enter the area within the robot’s movable range. When the robot under
operation is touched, it may result in death or serious injury.
Ɣ Make sure to install the emergency stop circuit so that the unit can be stopped
immediately in an emergency during the unit operation.
Ɣ Take the safety measure not to start up the unit only with the power turning ON.
Failure to do so may start up the machine suddenly and cause an injury or damage
to the product.
Ɣ Take the safety measure not to start up the machine only with the emergency stop
cancellation or recovery after the power failure. Failure to do so may result in an
electric shock or injury due to unexpected power input.
Ɣ When the installation or adjustment operation is to be performed, give clear
warnings such as “Under Operation; Do not turn ON the power!” etc. Sudden
power input may cause an electric shock or injury.
Ɣ Take the measure so that the work part is not dropped in power failure or
emergency stop.
Ɣ Wear protection gloves, goggle or safety shoes, as necessary, to secure safety.
Ɣ Do not insert a finger or object in the openings in the product. Failure to do so may
cause an injury, electric shock, damage to the product or fire.
Ɣ When releasing the brake on a vertically oriented actuator, exercise precaution not
to pinch your hand or damage the work parts with the actuator dropped by gravity.
5 Teaching Ɣ When the work is carried out with 2 or more persons, make it clear who is to be the
leader and who to be the follower(s) and communicate well with each other to
ensure the safety of the workers.
Ɣ Perform the teaching operation from outside the safety protection fence, if
possible. In the case that the operation is to be performed unavoidably inside the
safety protection fence, prepare the “Stipulations for the Operation” and make sure
that all the workers acknowledge and understand them well.
Ɣ When the operation is to be performed inside the safety protection fence, the
worker should have an emergency stop switch at hand with him so that the unit
can be stopped any time in an emergency.
Ɣ When the operation is to be performed inside the safety protection fence, in
addition to the workers, arrange a watchman so that the machine can be stopped
any time in an emergency. Also, keep watch on the operation so that any third
person can not operate the switches carelessly.
Ɣ Place a sign “Under Operation” at the position easy to see.
Ɣ When releasing the brake on a vertically oriented actuator, exercise precaution not
to pinch your hand or damage the work parts with the actuator dropped by gravity.
* Safety protection Fence : In the case that there is no safety protection fence, the
movable range should be indicated.
4
Page 11
No.
Operation
Description
Description
6 Trial Operation Ɣ When the work is carried out with 2 or more persons, make it clear who is to be the
leader and who to be the follower(s) and communicate well with each other to
ensure the safety of the workers.
Ɣ After the teaching or programming operation, perform the check operation one
step by one step and then shift to the automatic operation.
Ɣ When the check operation is to be performed inside the safety protection fence,
perform the check operation using the previously specified work procedure like the
teaching operation.
Ɣ Make sure to perform the programmed operation check at the safety speed.
Failure to do so may result in an accident due to unexpected motion caused by a
program error, etc.
Ɣ Do not touch the terminal block or any of the various setting switches in the power
ON mode. Failure to do so may result in an electric shock or malfunction.
7 Automatic
Operation
Ɣ Check before starting the automatic operation or rebooting after operation stop
that there is nobody in the safety protection fence.
Ɣ Before starting automatic operation, make sure that all peripheral equipment is in
an automatic-operation-ready state and there is no alarm indication.
Ɣ Make sure to operate automatic operation start from outside of the safety
protection fence.
Ɣ In the case that there is any abnormal heating, smoke, offensive smell, or
abnormal noise in the product, immediately stop the machine and turn OFF the
power switch. Failure to do so may result in a fire or damage to the product.
Ɣ When a power failure occurs, turn OFF the power switch. Failure to do so may
cause an injury or damage to the product, due to a sudden motion of the product in
the recovery operation from the power failure.
5
Page 12
No.
8 Maintenance
Operation
Description
and Inspection
Description
Ɣ When the work is carried out with 2 or more persons, make it clear who is to be the
leader and who to be the follower(s) and communicate well with each other to
ensure the safety of the workers.
Ɣ Perform the work out of the safety protection fence, if possible. In the case that the
operation is to be performed unavoidably inside the safety protection fence,
prepare the “Stipulations for the Operation” and make sure that all the workers
acknowledge and understand them well.
Ɣ When the work is to be performed inside the safety protection fence, basically turn
OFF the power switch.
Ɣ When the operation is to be performed inside the safety protection fence, the
worker should have an emergency stop switch at hand with him so that the unit
can be stopped any time in an emergency.
Ɣ When the operation is to be performed inside the safety protection fence, in
addition to the workers, arrange a watchman so that the machine can be stopped
any time in an emergency. Also, keep watch on the operation so that any third
person can not operate the switches carelessly.
Ɣ Place a sign “Under Operation” at the position easy to see.
Ɣ For the grease for the guide or ball screw, use appropriate grease according to the
Operation Manual for each model.
Ɣ Do not perform the dielectric strength test. Failure to do so may result in a damage
to the product.
Ɣ When releasing the brake on a vertically oriented actuator, exercise precaution not
to pinch your hand or damage the work parts with the actuator dropped by gravity.
Ɣ The slider or rod may get misaligned OFF the stop position if the servo is turned
OFF. Be careful not to get injured or damaged due to an unnecessary operation.
Ɣ Pay attention not to lose the cover or untightened screws, and make sure to put
the product back to the original condition after maintenance and inspection works.
Use in incomplete condition may cause damage to the product or an injury.
* Safety protection Fence : In the case that there is no safety protection fence, the
movable range should be indicated.
9 Modification and
Dismantle
Ɣ Do not modify, disassemble, assemble or use of maintenance parts not specified
based at your own discretion.
10 Disposal Ɣ When the product becomes no longer usable or necessary, dispose of it properly
as an industrial waste.
Ɣ When removing the actuator for disposal, pay attention to drop of components
when detaching screws.
Ɣ Do not put the product in a fire when disposing of it.
The product may burst or generate toxic gases.
11 Other Ɣ Do not come close to the product or the harnesses if you are a person who
requires a support of medical devices such as a pacemaker. Doing so may affect
the performance of your medical device.
Ɣ See Overseas Specifications Compliance Manual to check whether complies if
necessary.
Ɣ For the handling of actuators and controllers, follow the dedicated operation
manual of each unit to ensure the safety.
6
Page 13
Alert Indication
The safety precautions are divided into “Danger”, “Warning”, “Caution” and “Notice” according to the
warning level, as follows, and described in the Operation Manual for each model.
Level Degree of Danger and Damage Symbol
Danger
Warning
Caution
Notice
This indicates an imminently hazardous situation which, if the product is not
handled correctly, will result in death or serious injury.
This indicates a potentially hazardous situation which, if the product is not
handled correctly, could result in death or serious injury.
This indicates a potentially hazardous situation which, if the product is not
handled correctly, may result in minor injury or property damage.
This indicates lower possibility for the injury, but should be kept to use this
product properly.
Danger
Warning
Caution
Notice
7
Page 14
Caution in Handling
1. Do not attempt to establish the settings for the speed and acceleration/deceleration
above the allowable range.
An operation with speed and acceleration/deceleration beyond the allowable range may cause an
abnormal noise, vibration, malfunction or shortened life.
2. Set the allowable load moment within the allowable range.
An operation with the load beyond the allowable load moment may cause an abnormal noise, vibration,
malfunction or shortened life. If it is extreme, flaking may occur on the guide.
3. Set the overhang length within the allowable range.
Attaching a load with an overhang length above the allowable range may cause vibration and abnormal
noise.
4. If back and forth operations are performed repeatedly in short distance, it may wear
out the film of grease.
Continuous back and forth operation within a distance less than 30mm may cause wear of grease.
As a reference, have approximately 5 cycles of back and forth operation in a distance more than 50mm
in every 5,000 to 10,000 cycles to regenerate the oil film. Keep using the actuator with the grease worn
out may cause malfunction. If it is extreme, flaking may occur on the guide.
5. Do not attempt to hit the slider against an abstacle with high speed.
It may destroy the coupling.
6. Make sure to attach the actuator properly by following this instruction manual.
Using the product with the actuator not being certainly retained or affixed may cause abnormal noise,
vibration, malfunction or shorten the product life.
7. Ensure use of the product in the specified conditions, environments and ranges.
An operation out of the specified conditions may cause a drop in performance or malfunction of the
product.
8
Page 15
Names of the Parts
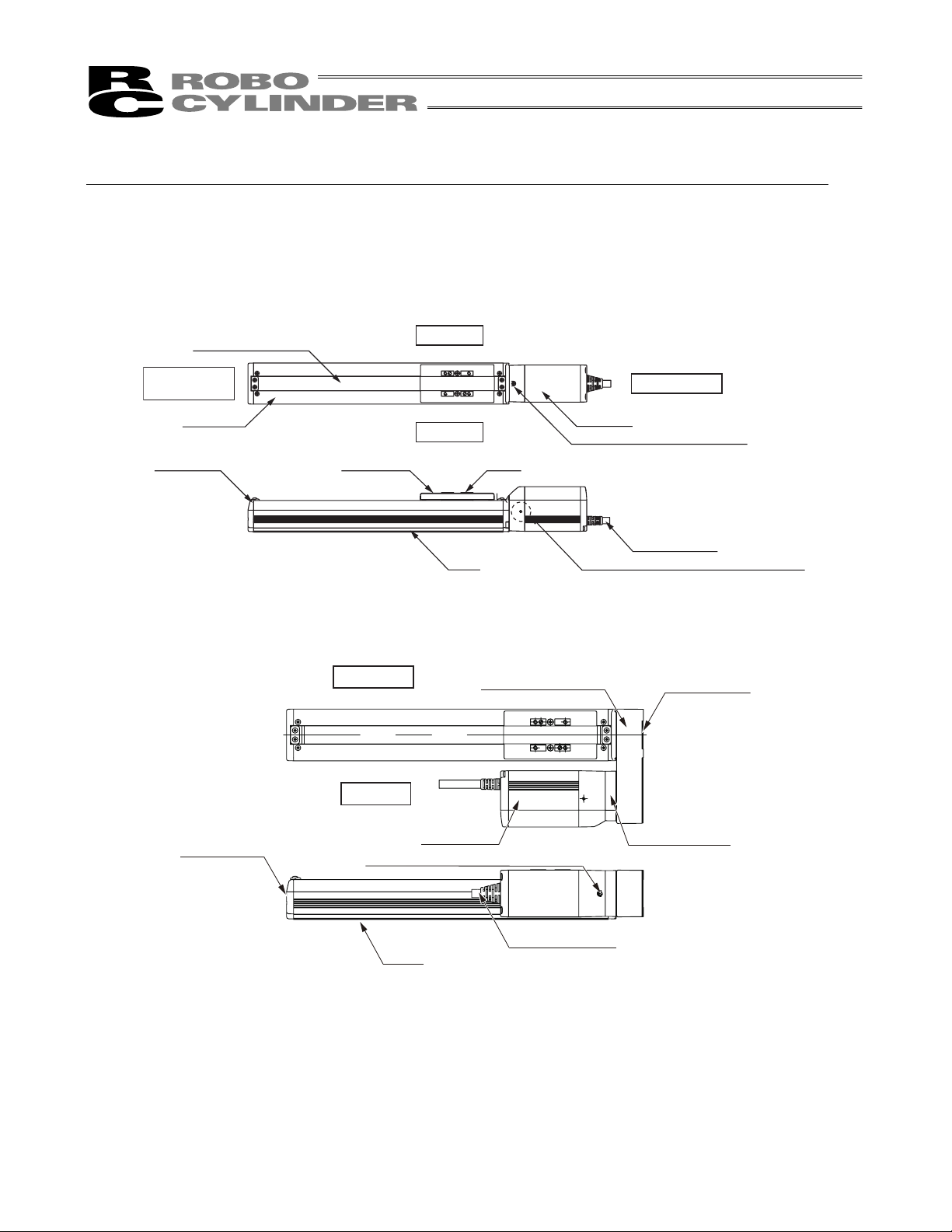
In this Operation Manual, the left and right sides are indicated by looking at the actuator from the motor end,
with the actuator placed horizontally, as shown in the figure below.
1. Standard Type Motor Straight Type RCP4
Stainless Steel Sheet
Opposite Side
of the Motor
Side Cover
Front Cover Slider Cover
Right Side
Left Side
Slider
Base
2. Standard Type Motor Reversing Type RCP4
Right Side
Reversing Bracket
Motor Side
Motor Unit
Screw for motor unit attachment
Actuator Cable
Tapped hole for ground cable connection
Pulley Cover
Left Side
Front Cover
Motor Unit
Screw for Motor Unit Attachment
Pulley Bracket
Actuator Cable
Base
The direction of the motor is either left reversed: ML (shown in figure above) or right reversed: MR.
9
Page 16
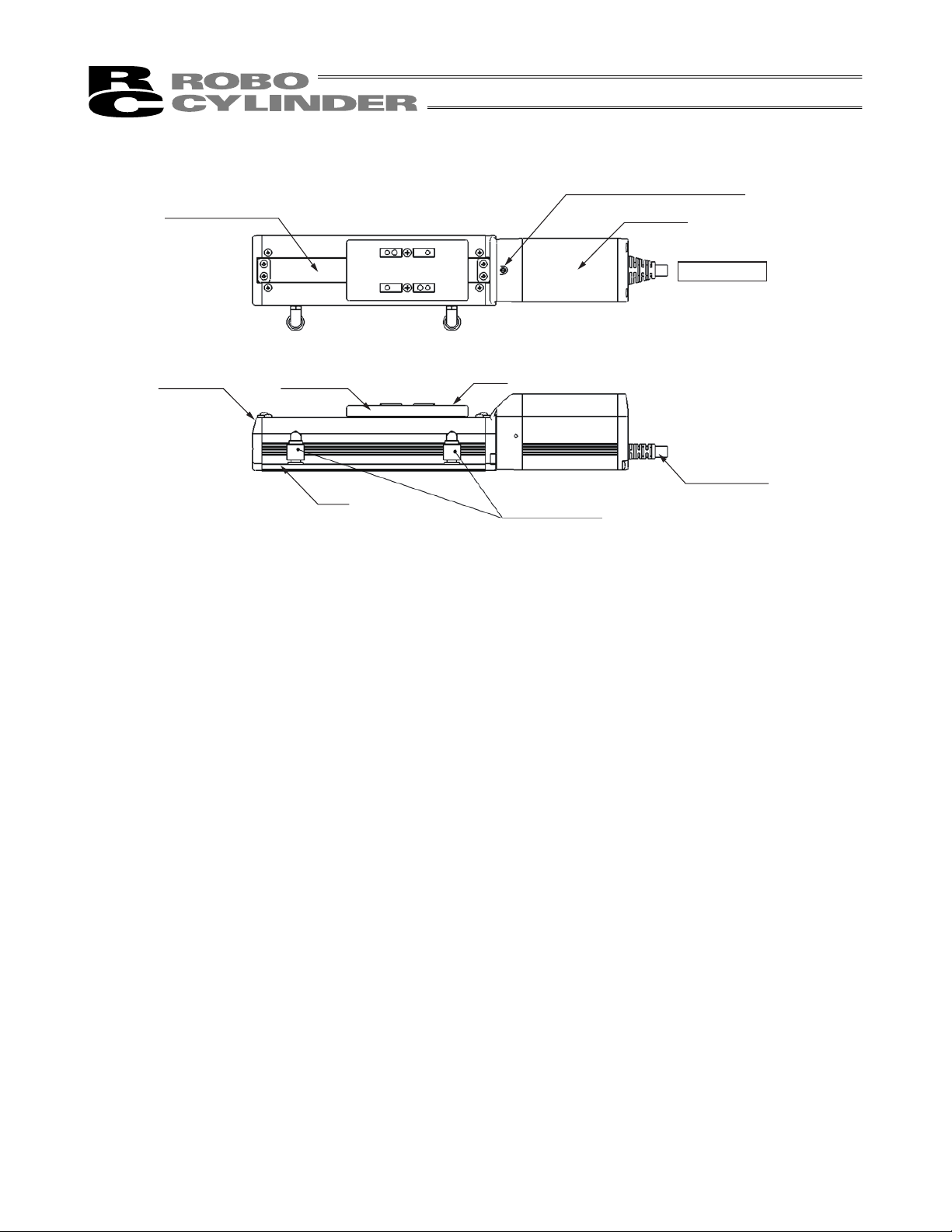
3. Clean Room Type Motor Straight Type RCP4CR
Screw for motor unit attachment
Stainless Steel Sheet
Motor Unit
Motor Side
Front Cover Slider Cover
Base
Slider
Actuator Cable
Air Vacuum Joint
10
Page 17
1. Specification Check
r
1.1 Checking the Product
The standard configuration of this product is comprised of the following parts.
See the component list for the details of the enclosed components. If you find any fault or missing parts,
contact your local IAI distributor.
1.1.1 Parts
No. Name Model number Quantity Remarks
Refer to “How to Read the Model
1 Actuator
Accessories
2 Motor • encoder cables
3 In-house made seals 1
4 First Step Guide 1
5 Operation Manual (CD/DVD) 1
6 Safety Guide 1
Note 1 The motor • encoder cables supplied vary depending on the controller used. [Refer to 1.4, “Motor •
Encoder Cables.”]
(Note 1)
Nameplate” and “How to Read the Model
Number.”
1
1.1.2 Related Operation Manuals for the Each Controller Supported by this Product
1
1. Checking the Product
Shown below is a list of the instruction manuals for the controllers related to this product which is recorded in
Instruction Manual (DVD).
No. Name Control No.
1 Operation Manual for PCON-CA Controller ME0289
2 Operation Manual for RC PC Software RCM-101-MW/RCM-101-USB ME0155
3 Operation Manual for CON-PTA/PDA/PGA ME0295
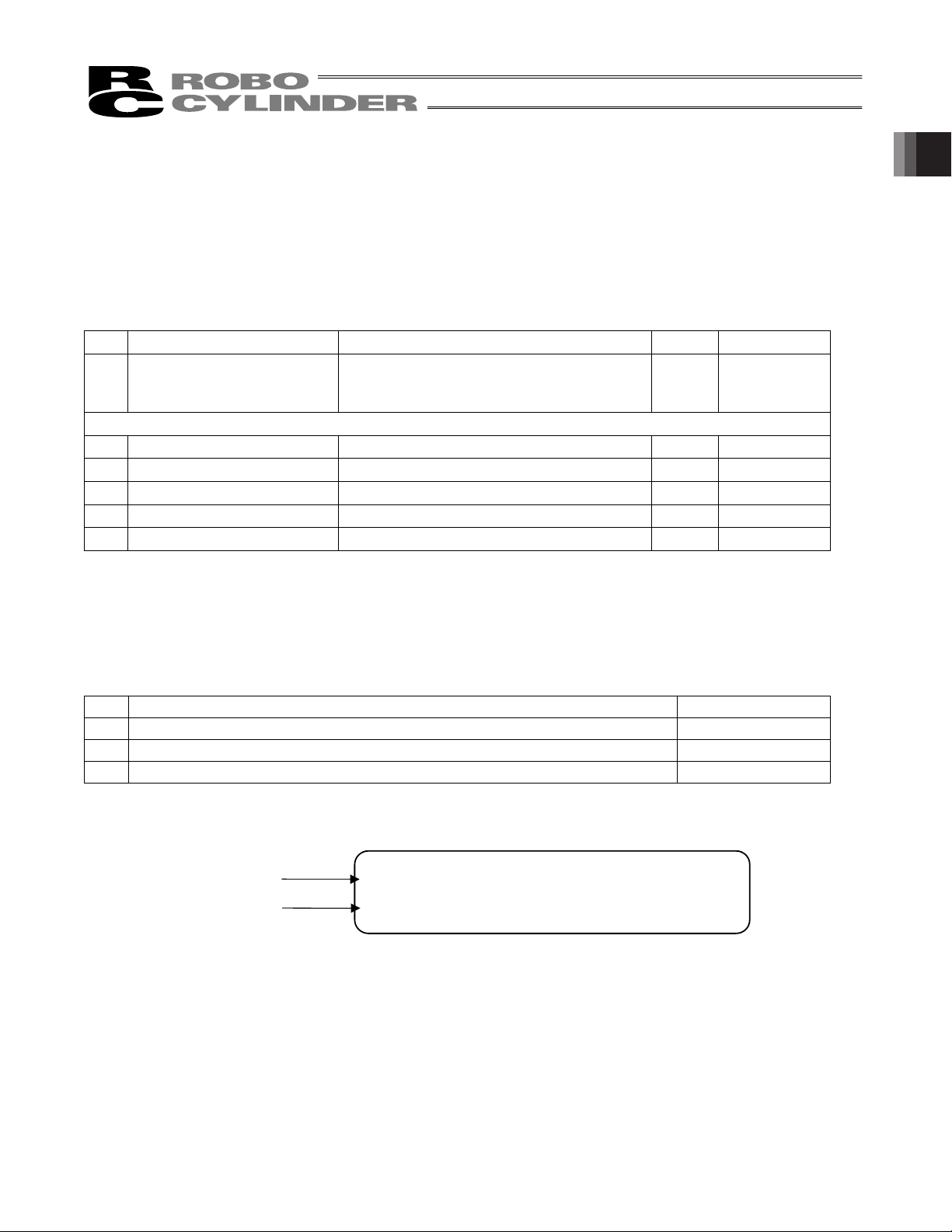
1.1.3 How to Read the Model Nameplate
Model
Serial numbe
MODEL RCP4-SA5C-I-42P-3-50-P3-P-B
SERIAL No.000090266 MADE IN JAPAN
11
Page 18
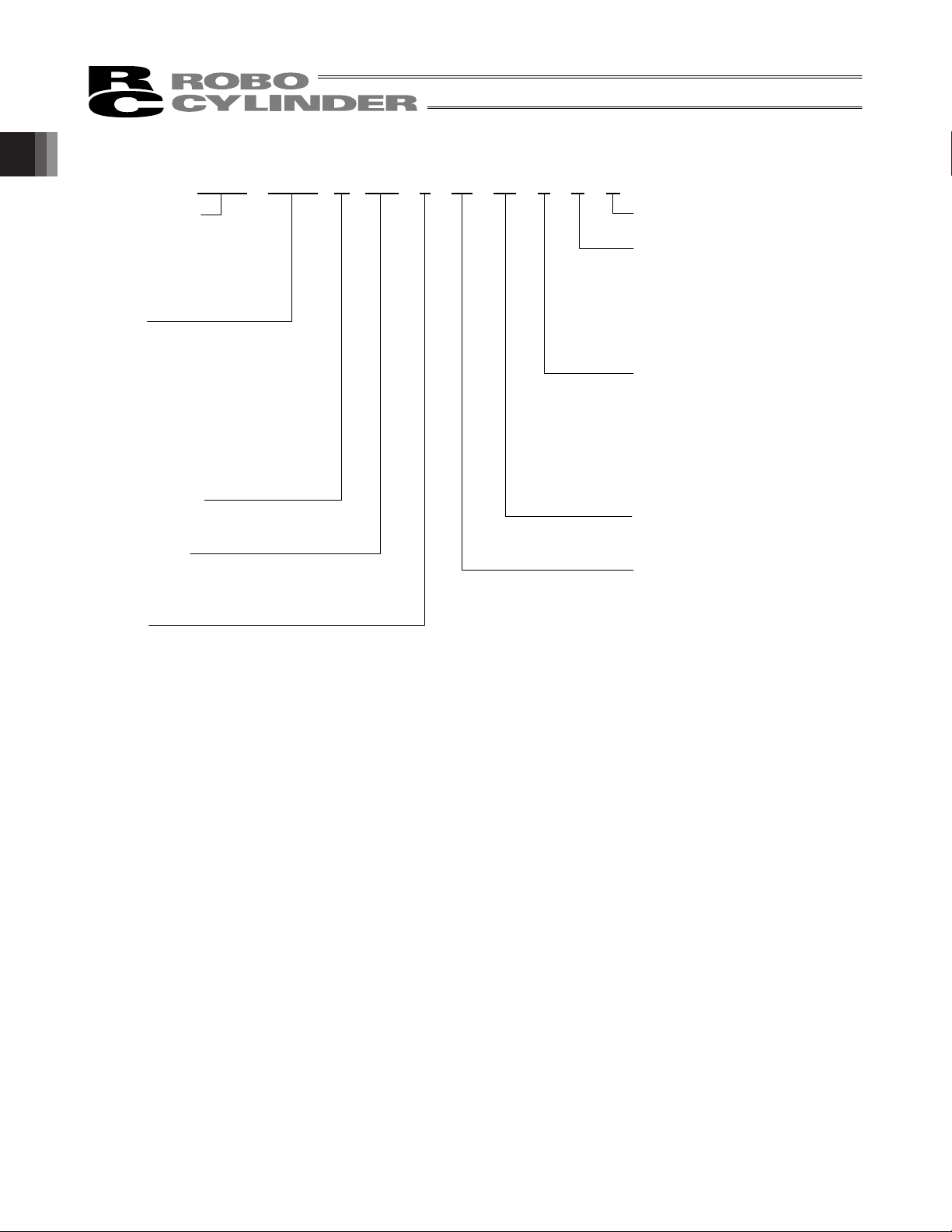
1.1.4 How to Read the Model Number
<Series name>
Standard Type
RCP4
Clean Room Type
RCP4CR
<Type>
Motor straight type
1. Checking the Product
SA5C
SA6C
SA7C
Motor reversing type
SA5R
SA6R
SA7R
<Encoder type>
I : Incremental
<Motor type>
42P : 42Ƒ
56P : 56Ƒ
RCP4 í SA5C í I í 42P í 3 í 50 í P3 í P í B í **
Identification for IAI use only
(Note 1)
<Options>
B : Brake
NM : Reversed-home specification
ML : Motor Left Reversed
MR : Motor Right Reversed
VR : Air Vacuum Joint on Other Side
<Cable length>
N : None
P : 1m
S : 3m
M : 5m
XƑƑ : Length specification
RƑƑ : Robot cable
<Controller>
P3 : PCON-CA
<Stroke>
[Refer to 1.2 Specification]
<Lead>
SA5C, SA6C
SA5R, SA6R
3/6/12/20
SA7C, SA7R
4/8/16/24
Note 1 Identification for IAI use only : It may be displayed for IAI use. It is not a code to show the model
type.
12
Page 19
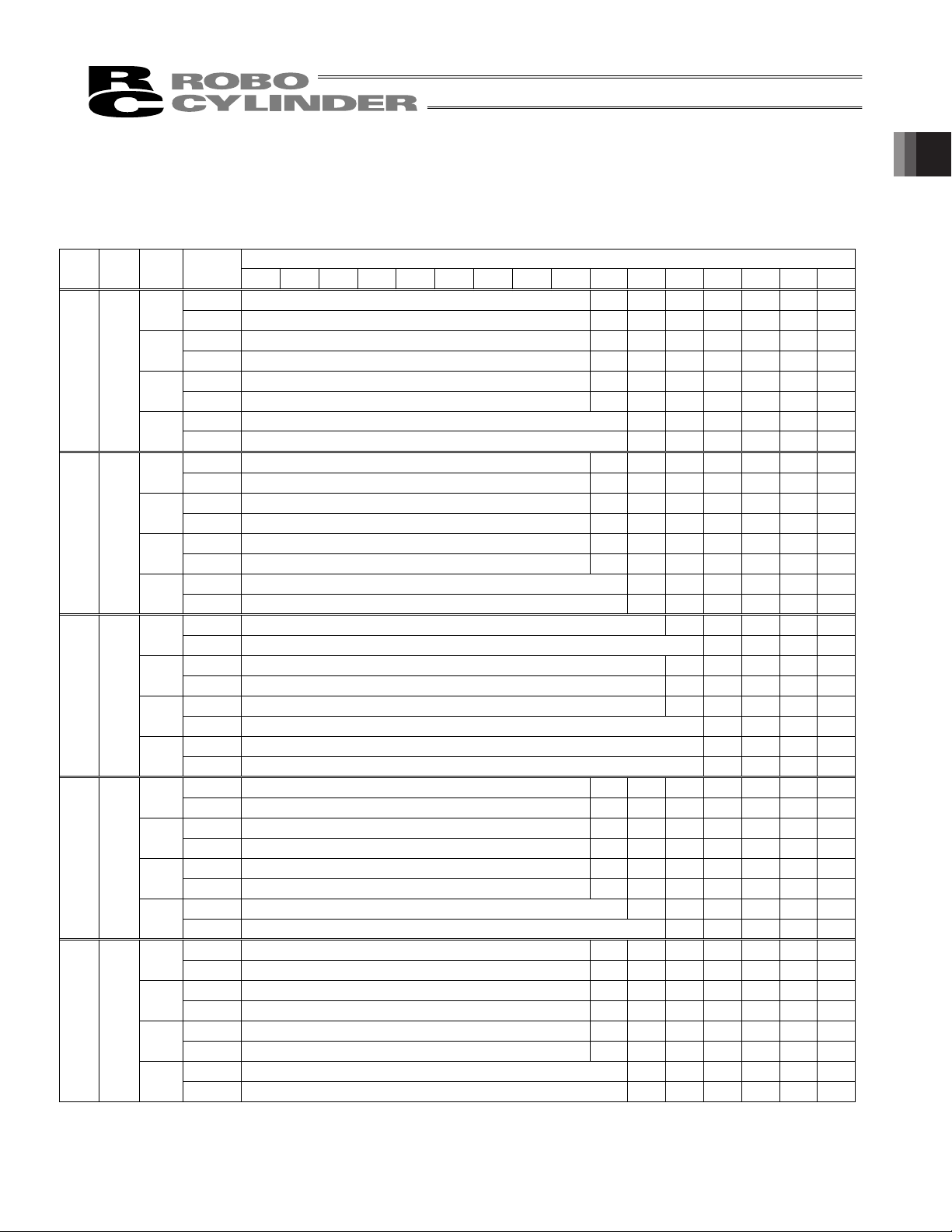
1.2 Specification
1.2.1 Speed
[When high-output setting is effective]
Motor
Lead
Type
Type
SA5C 42P
SA6C 42P
SA7C 56P
SA5R 42P
SA6R 42P
Horizontal
[mm]
/ Vertical
Horizontal 225 195 165 140 120 105 90 80
3
Vertical 225 195 165 140 120 105 90 80
Horizontal 450 395 335 285 245 215 185 165
6
Vertical 450 395 335 285 245 215 185 165
Horizontal 900 795 665 570 490 425 375 330
12
Vertical 900 795 665 570 490 425 375 330
Horizontal 1440 1225 1045 900 785 690 610
20
Vertical 1280 1225 1045 900 785 690 610
Horizontal 225 195 165 140 120 105 90 80
3
Vertical 225 195 165 140 120 105 90 80
Horizontal 450 395 335 285 245 215 185 165
6
Vertical 450 395 335 285 245 215 185 165
Horizontal 900 795 670 570 490 430 375 335
12
Vertical 900 795 670 570 490 430 375 335
Horizontal 1440 1230 1045 905 785 690 615
20
Vertical 1280 1230 1045 905 785 690 615
Horizontal 245 215 185 160 145 125
4
Vertical 210 185 160 145 125
Horizontal 490 430 375 325 290 255
8
Vertical 490 430 375 325 290 255
Horizontal 980 865 750 655 580 515
16
Vertical 840 750 655 580 515
Horizontal 1200 1155 1010 890 790
24
Vertical 1200 1155 1010 890 790
Horizontal 225 195 165 140 120 105 90 80
3
Vertical 225 195 165 140 120 105 90 80
Horizontal 450 395 335 285 245 215 185 165
6
Vertical 450 395 335 285 245 215 185 165
Horizontal 900 795 665 570 490 425 375 330
12
Vertical 800 795 665 570 490 425 375 330
Horizontal 1440 1225 1045 900 785 690 610
20
Vertical 1120 1045 900 785 690 610
Horizontal 225 195 165 140 120 105 90 80
3
Vertical 225 195 165 140 120 105 90 80
Horizontal 450 395 335 285 245 215 185 165
6
Vertical 450 395 335 285 245 215 185 165
Horizontal 900 795 670 570 490 430 375 335
12
Vertical 900 795 670 570 490 430 375 335
Horizontal 1280 1230 1045 905 785 690 615
20
Vertical 1280 1230 1045 905 785 690 615
50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800
1. Checking the Product
Speed limits (Unit: mm/s)
Stroke [mm]
13
Page 20
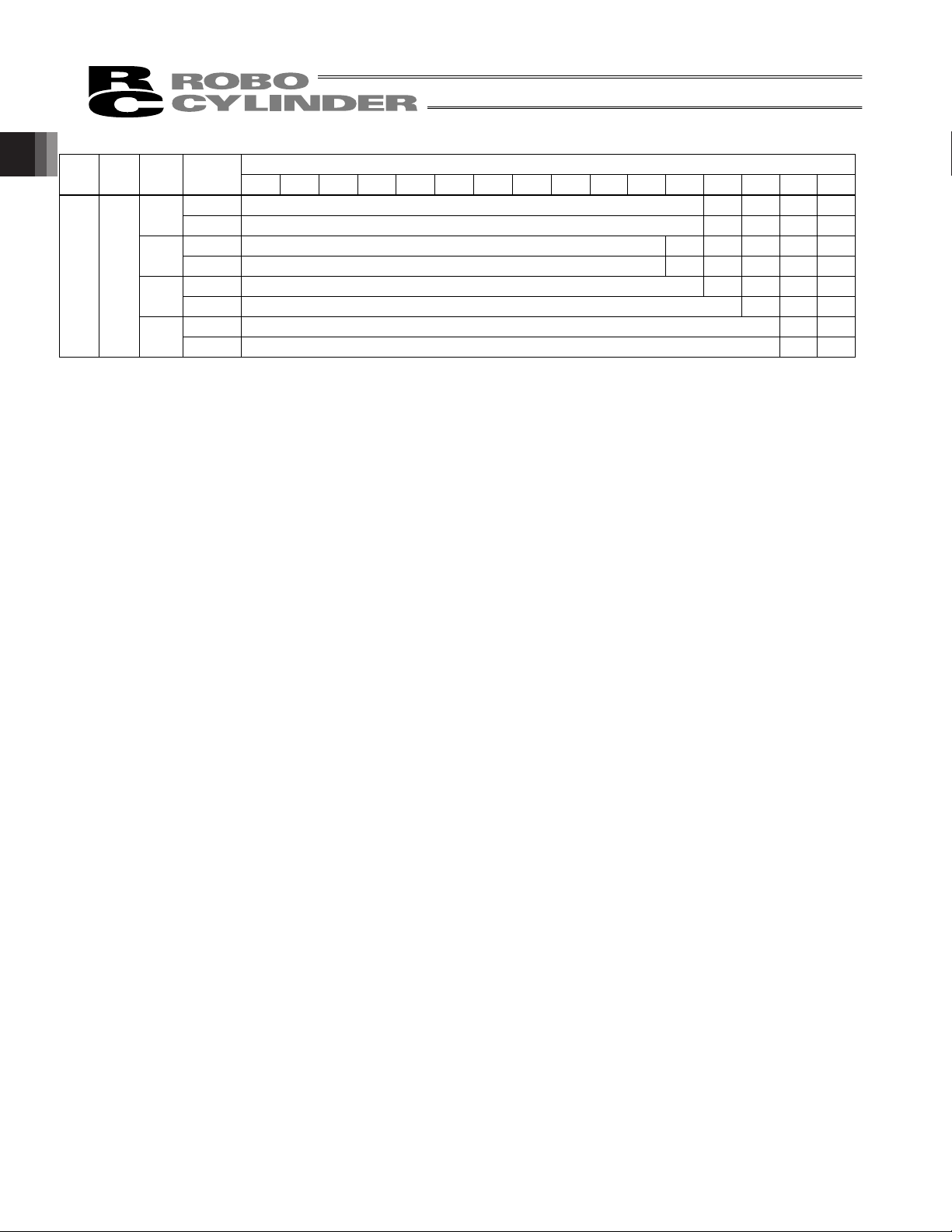
Motor
Lead
Type
Type
SA7R 56P
Horizontal
[mm]
/ Vertical
Horizontal 210 185 160 145 125
4
Vertical 210 185 160 145 125
Horizontal 490 430 375 325 290 255
8
Vertical 490 430 375 325 290 255
Horizontal 840 750 655 580 515
16
Vertical 700 655 580 515
Horizontal 1000 890 790
24
Vertical 1000 890 790
1. Checking the Product
Stroke [mm]
50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800
14
Page 21
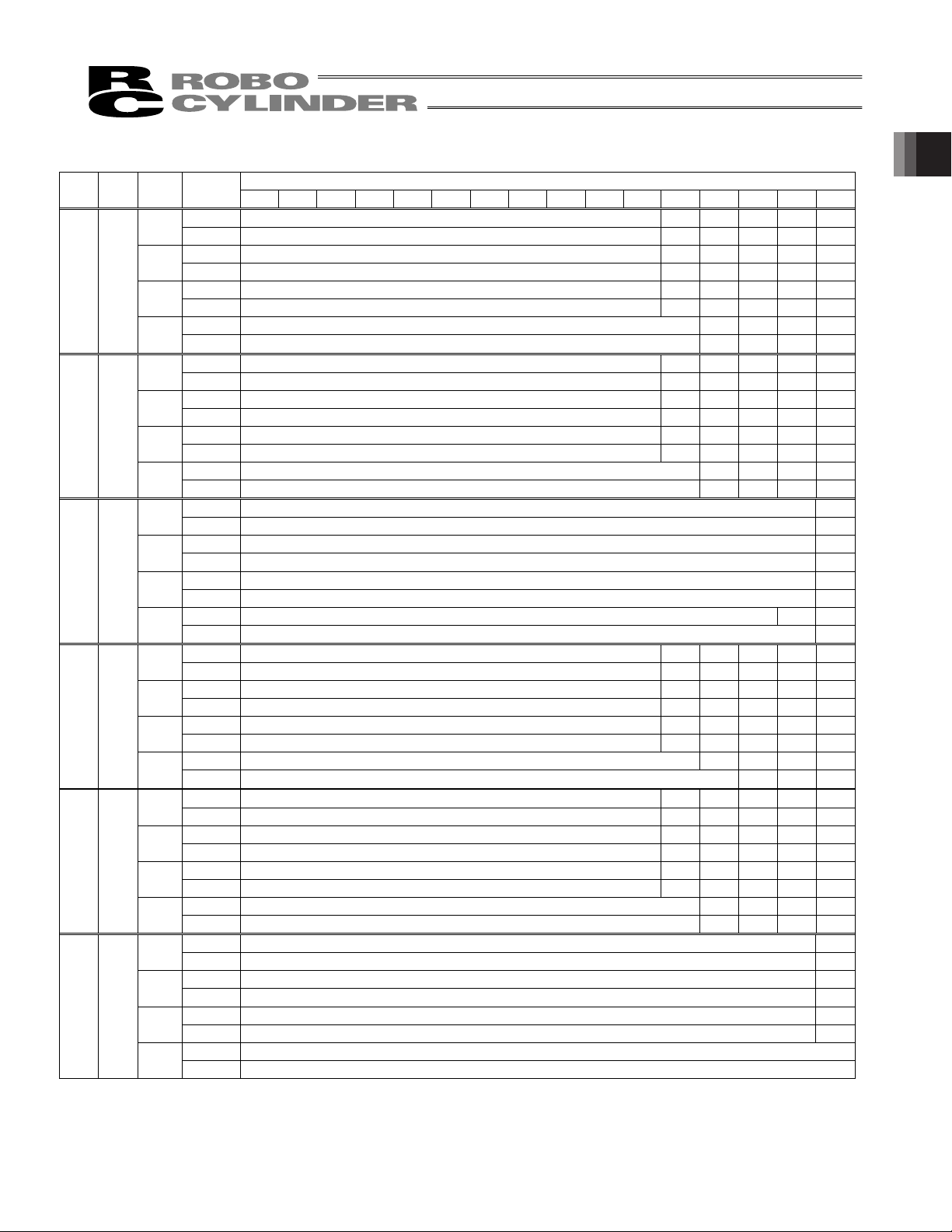
[When high-output setting is ineffective]
Motor
Lead
Type
Type
SA5C 42P
SA6C 42P
SA7C 56P
SA5R 42P
SA6R 42P
SA7R 56P
Horizontal
[mm]
/ Vertical
Horizontal 150 140 120 105 90 80
3
Vertical 150 140 120 105 90 80
Horizontal 300 285 245 215 185 165
6
Vertical 300 285 245 215 185 165
Horizontal 600 570 490 425 375 330
12
Vertical 600 570 490 425 375 330
Horizontal 960 900 785 690 610
20
Vertical 960 900 785 690 610
Horizontal 150 140 120 105 90 80
3
Vertical 150 140 120 105 90 80
Horizontal 300 285 245 215 185 165
6
Vertical 300 285 245 215 185 165
Horizontal 600 570 490 430 375 335
12
Vertical 600 570 490 430 375 335
Horizontal 960 905 785 690 615
20
Vertical 960 905 785 690 615
Horizontal 140 125
4
Vertical 140 125
Horizontal 280 255
8
Vertical 280 255
Horizontal 560 515
16
Vertical 560 515
Horizontal 1000 890 790
24
Vertical 800 790
Horizontal 150 140 120 105 90 80
3
Vertical 150 140 120 105 90 80
Horizontal 300 285 245 215 185 165
6
Vertical 300 285 245 215 185 165
Horizontal 600 570 490 425 375 330
12
Vertical 600 570 490 425 375 330
Horizontal 960 900 785 690 610
20
Vertical 800 785 690 610
Horizontal 150 140 120 105 90 80
3
Vertical 150 140 120 105 90 80
Horizontal 300 285 245 215 185 165
6
Vertical 300 285 245 215 185 165
Horizontal 600 570 490 430 375 335
12
Vertical 600 570 490 430 375 335
Horizontal 960 905 785 690 615
20
Vertical 960 905 785 690 615
Horizontal 140 125
4
Vertical 140 125
Horizontal 280 255
8
Vertical 280 255
Horizontal 560 515
16
Vertical 560 515
Horizontal 600
24
Vertical 400
50 100 150 200 250 300 350 400 450 500 550 600 650 700 750 800
Speed limits (Unit: mm/s)
Stroke [mm]
1. Checking the Product
15
Page 22
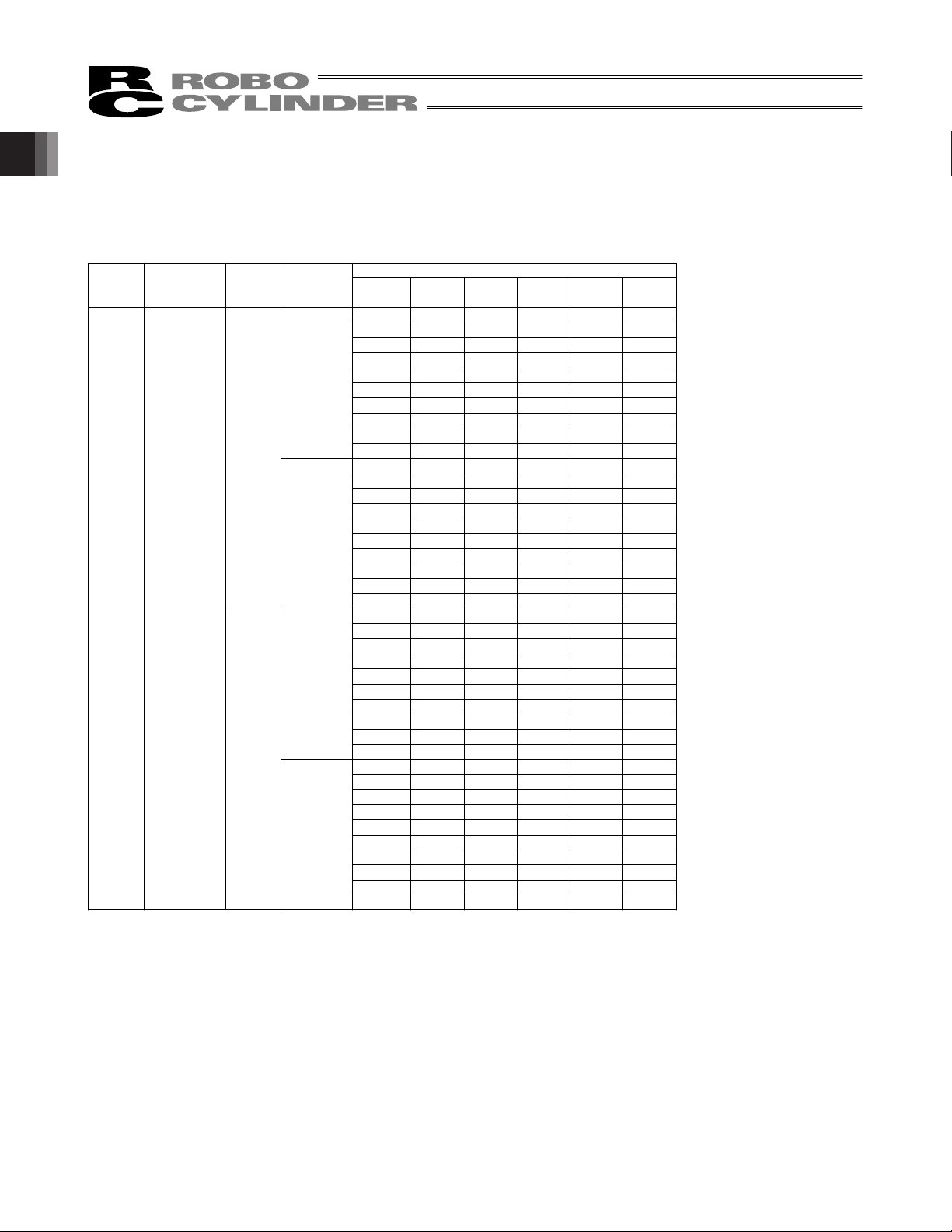
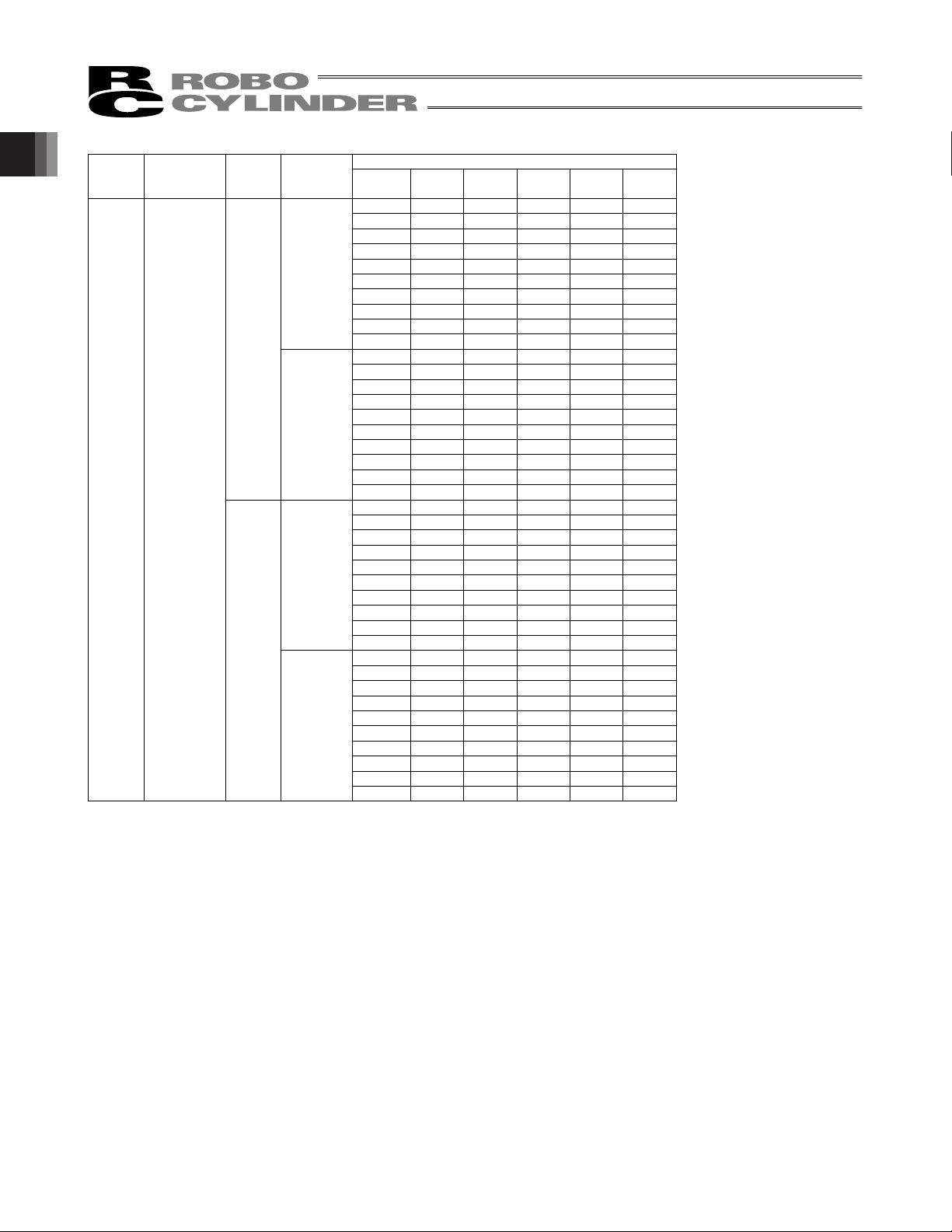
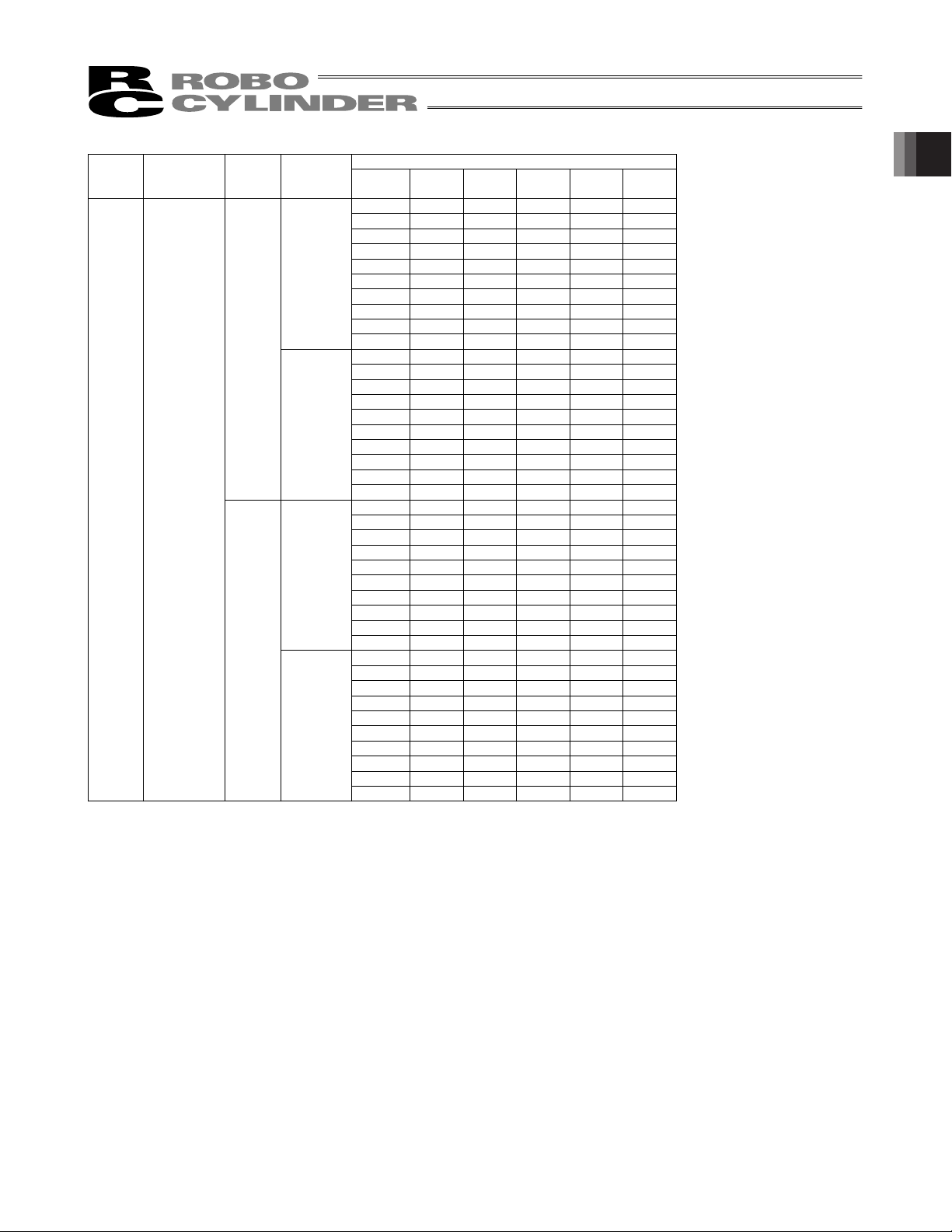
1.2.2 Maximum Acceleration and Transportable Weight
If the transportable weight is smaller than as specified, the acceleration/deceleration can be raised beyond
the applicable level.
[When high-output setting for motor straight type is effective]
Type Motor Type
1. Checking the Product
SA5C 42P
Lead
[mm]
3
6
Horizontal
/ Vertical
Horizontal
Vertical
Horizontal
Vertical
Payload capacity by acceleration/deceleration [kg]
Velocity
[mm/s]
25 20 20 18 18 14
50 20 20 18 18 14
75 20 20 18 18 14
100 20 18 18 16 12
125 20 18 18 16 12
150 20 18 18 12 10
175 20 18 14 10 6
200 20 18 8 – –
225 20 6 – – –
25 12 12 12 – –
50 12 12 12 – –
75 12 12 12 – –
100 12 12 12 – –
125 12 12 12 – –
150 12 11 10 – –
175 11 9 8 – –
200 9 7 6 – –
225 6 5 – – –
50 18 18 14 14 12
100 18 18 14 14 12
150 18 18 14 14 12
200 18 18 14 14 12
250 18 18 14 14 12
300 18 18 14 14 10
350 18 18 12 11 8
400 18 14 10 7 6
450 16 10 6 4 2
50 6 6 6 – –
100 6 6 6 – –
150 6 6 6 – –
200 6 6 6 – –
250 6 6 5.5 – –
300 6 5.5 5 – –
350 6 4.5 4 – –
400 4.5 3.5 3 – –
450 3.5 2 2 – –
0.1G 0.3G 0.5G 0.7G 1.0G
0 20 20 18 18 14
0 12 12 12 – –
0 18 18 14 14 12
0 6 6 6 – –
16
Page 23

Type Motor Type
SA5C 42P
Lead
[mm]
12
20
Horizontal
/ Vertical
Horizontal
Vertical
Horizontal
Vertical
Payload capacity by acceleration/deceleration [kg]
Velocity
[mm/s]
100 9 9 9 9 8
200 9 9 9 9 8
300 9 9 9 9 8
400 9 9 9 9 8
500 9 9 9 8 6.5
600 9 9 9 6 4
700 9 9 8 4 2.5
800 䋭 7 5 2 1
900 䋭 5 3 1 1
100 2.5 2.5 2.5 – –
200 2.5 2.5 2.5 – –
300 2.5 2.5 2.5 – –
400 2.5 2.5 2.5 – –
500 2.5 2.5 2.5 – –
600 2.5 2.5 2.5 – –
700 2.5 2.5 2 – –
800 – 1.5 1 – –
900 –
160 6.5 6.5 5 5 4
320 6.5 6.5 5 5 4
480 6.5 6.5 5 5 4
640 6.5 6.5 5 5 4
800 6.5 6.5 5 4 3
960 – 6.5 5 3 2
1120 – 6 3 2 1.5
1280 – – 1 1 1
1440 – – 1 0.5 –
160 1 1 1 – –
320 1 1 1 – –
480 1 1 1 – –
640 1 1 1 – –
800 1 1 1 – –
960 – 1 1 – –
1120 – 0.5 0.5 – –
1280 – – 0.5 – –
1440 – – 䋭 – –
0.1G 0.3G 0.5G 0.7G 1.0G
0 9 9 9 9 8
0 2.5 2.5 2.5 – –
0.5 0.5 – –
0 6.5 6.5 5 5 4
0 1 1 1 – –
1. Checking the Product
17
Page 24
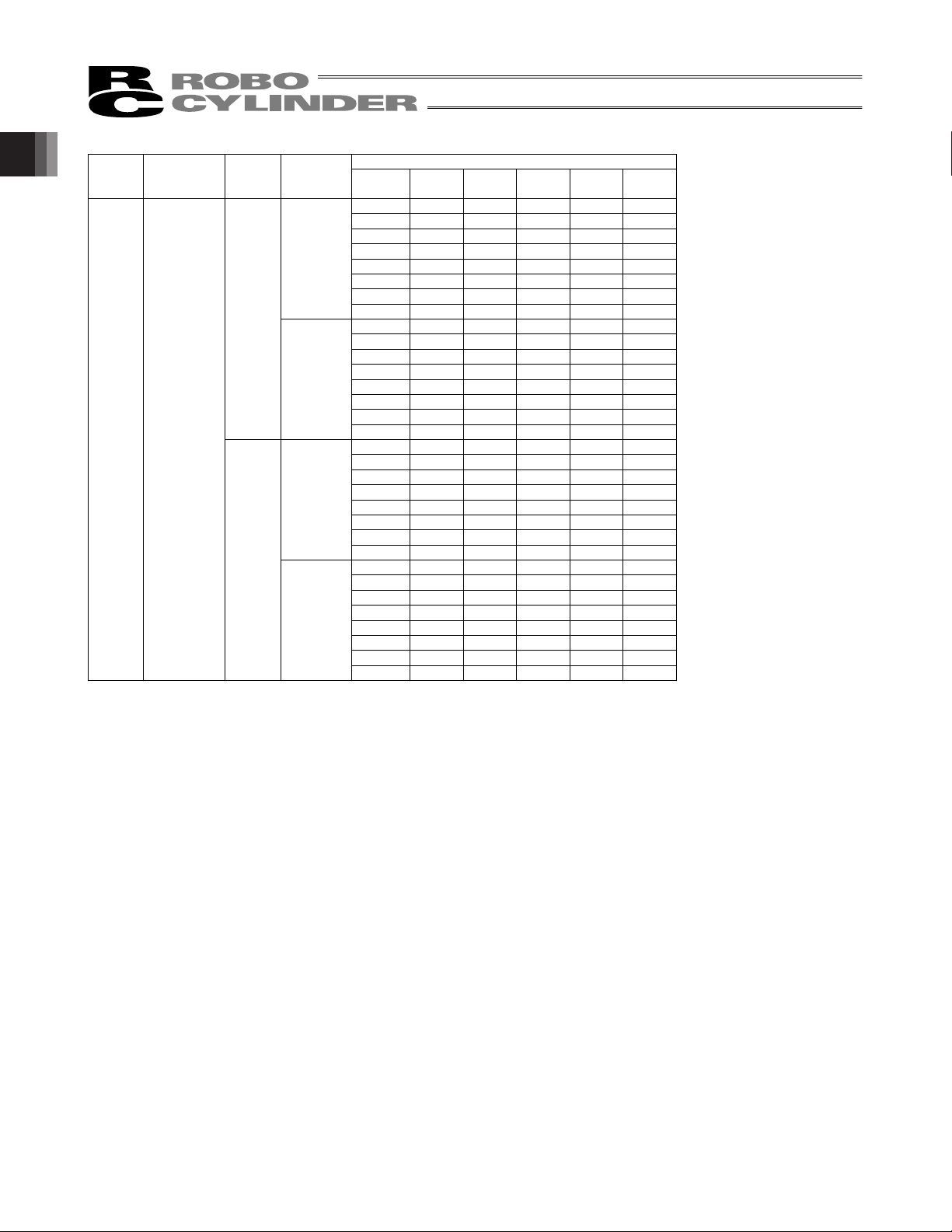
Type Motor Type
1. Checking the Product
SA6C 42P
Lead
[mm]
3
6
Horizontal
/ Vertical
Horizontal
Vertical
Horizontal
Vertical
Payload capacity by acceleration/deceleration [kg]
Velocity
[mm/s]
25 25 25 25 25 25
50 25 25 25 25 25
75 25 25 25 25 25
100 25 25 25 25 25
125 25 25 25 25 25
150 25 25 25 25 22.5
175 25 25 25 20 19
200 25 25 20 18 16
225 25 18 16 15 12
25 12 12 12 – –
50 12 12 12 – –
75 12 12 12 – –
100 12 12 12 – –
125 12 12 12 – –
150 12 11 10 – –
175 11 9 8 – –
200 9 7 6 – –
225 6 5 – –
50 25 25 20 16 14
100 25 25 20 16 14
150 25 25 20 16 14
200 25 25 20 16 14
250 25 25 20 16 14
300 25 25 20 15 11
350 25 20 14 12 9
400 25 16 10 8 6.5
450 18 12 6 5 2.5
50 6 6 6 – –
100 6 6 6 – –
150 6 6 6 – –
200 6 6 6 – –
250 6 6 5.5 – –
300 6 5.5 5 – –
350 6 4.5 4 – –
400 4.5 3.5 3 – –
450 3.5 2 2 – –
0.1G 0.3G 0.5G 0.7G 1.0G
0 25 25 25 25 25
0 12 12 12 – –
0 25 25 20 16 14
0 6 6 6 – –
–
18
Page 25
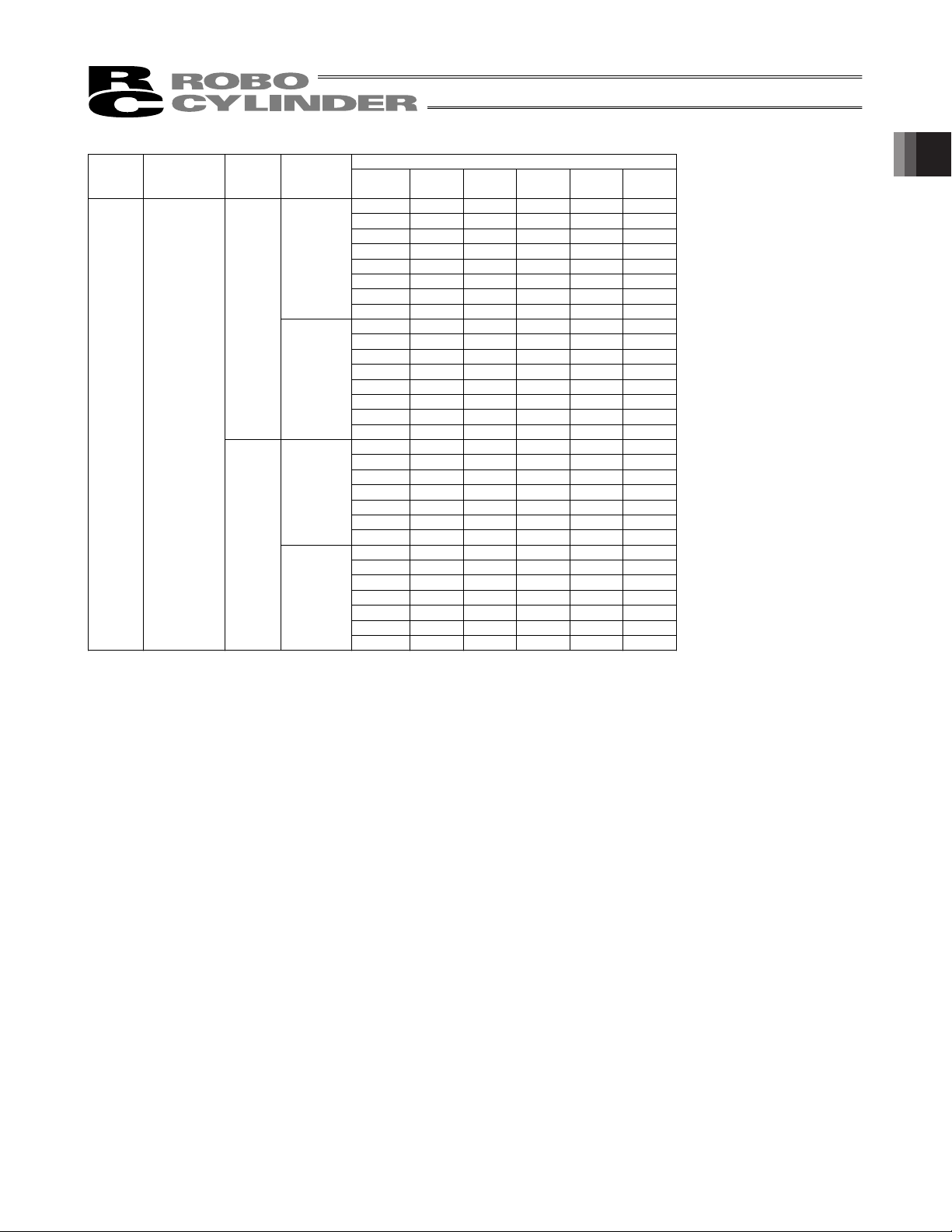
Type Motor Type
SA6C 42P
Lead
[mm]
12
20
Horizontal
/ Vertical
Horizontal
Vertical
Horizontal
Vertical
Payload capacity by acceleration/deceleration [kg]
Velocity
[mm/s]
100 15 15 12.5 11 10
200 15 15 12.5 11 10
300 15 15 12.5 11 10
400 15 14 11 10 8.5
500 15 13 10 8 6.5
600 15 12 9 6 4
700 12 10 8 4 2.5
800 10 7 5 2 1
900 – 5 3 1 1
100 2.5 2.5 2.5 – –
200 2.5 2.5 2.5 – –
300 2.5 2.5 2.5 – –
400 2.5 2.5 2.5 – –
500 2.5 2.5 2.5 – –
600 2.5 2.5 2.5 – –
700 2.5 2.5 2 – –
800 2 1.5 1 – –
900 – 0.5 0.5 –
160 10 10 9 7 6
320 10 10 9 7 6
480 10 10 9 7 6
640 10 10 8 6 5
800 10 9 6.5 4.5 3
960 – 8 5 3.5 2
1120 – 6.5 3 2 1.5
1280 – – 1 1 1
1440 – – 1 0.5 –
160 1 1 1 – –
320 1 1 1 – –
480 1 1 1 – –
640 1 1 1 – –
800 1 1 1 – –
960 – 1 1 – –
1120 – 0.5 0.5 – –
1280 – – 0.5 – –
1440 – – – – –
0.1G 0.3G 0.5G 0.7G 1.0G
0 15 15 12.5 11 10
0 2.5 2.5 2.5 – –
0 10 10 9 7 6
0 1 1 1 – –
1. Checking the Product
–
19
Page 26
Type Motor Type
1. Checking the Product
SA7C 56P
Lead
[mm]
4
8
Horizontal
/ Vertical
Horizontal
Vertical
Horizontal
Vertical
Payload capacity by acceleration/deceleration [kg]
Velocity
[mm/s]
35 45 45 45 40 40
70 45 45 45 40 40
105 45 45 45 40 35
140 45 45 35 30 25
175 45 30 18 – –
210 45 8 – – –
245 35 – – – –
35 25 25 25 – –
70 25 25 25 – –
105 22 20 19 – –
140 16 14 12 – –
175 11 9 7.5 – –
210 8 – – – –
245 – – – – –
70 45 45 45 40 40
140 45 45 40 38 35
210 45 40 35 30 24
280 40 30 25 20 15
350 35 20 9 4 –
420 25 7 – – –
490 15 – – – –
70 16 16 16 – –
140 16 16 16 – –
210 11 10 9.5 – –
280 9 8 7 – –
350 7 5 4 – –
420 5 2 – – –
490 2 – – – –
0.1G 0.3G 0.5G 0.7G 1.0G
0 45 45 45 40 40
0 25 25 25 – –
0 45 45 45 40 40
0 16 16 16 – –
20
Page 27
Type Motor Type
SA7C 56P
Lead
[mm]
16
24
Horizontal
/ Vertical
Horizontal
Vertical
Horizontal
Vertical
Payload capacity by acceleration/deceleration [kg]
Velocity
[mm/s]
140 40 40 35 28 27
280 40 38 35 25 24
420 35 25 20 15 10
560 25 20 15 10 6
700 20 15 10 5 3
840 – 9 4 2 2
980 – 4 – – –
140 8 8 8 – –
280 8 8 8 – –
420 6 5 4.5 – –
560 5 4 3 – –
700 4 3 2 – –
840 – 1 – – –
980 – – – – –
200 20 20 18 16 14
400 20 20 18 16 14
600 20 16 15 10 9
800 16 12 10 7 4
1000 – 8 4.5 4 2
1200 – 5.5 2 2 1
200 3 3 3 – –
400 3 3 3 – –
600 3 3 3 – –
800 – 3 2.5 – –
1000 – 2 1.5 – –
1200 – 1 1 – –
0.1G 0.3G 0.5G 0.7G 1.0G
0 40 40 35 28 27
0 8 8 8 – –
0 20 20 18 16 14
0 3 3 3 – –
1. Checking the Product
21
Page 28
[When high-output setting for motor reversing type is effective]
Type Motor Type
1. Checking the Product
SA5R 42P
Lead
[mm]
3
6
Horizontal
/ Vertical
Horizontal
Vertical
Horizontal
Vertical
Payload capacity by acceleration/deceleration [kg]
Velocity
[mm/s]
25 20 20 18 18 14
50 20 20 18 18 14
75 20 20 18 18 14
100 20 18 18 16 12
125 20 18 18 16 12
150 20 18 18 12 10
175 20 18 14 10 6
200 20 18 8 㧙 㧙
225 20 6 㧙 㧙 㧙
25 12 12 12 㧙 㧙
50 12 12 12 㧙 㧙
75 12 12 12 㧙 㧙
100 12 12 12 㧙 㧙
125 12 12 12 㧙 㧙
150 12 11 10 㧙 㧙
175 11 9 8 㧙 㧙
200 9 7 6 㧙 㧙
225 5 3 㧙 㧙 㧙
50 18 18 14 14 12
100 18 18 14 14 12
150 18 18 14 14 12
200 18 18 14 14 12
250 18 18 14 14 12
300 18 18 14 14 10
350 18 18 12 11 8
400 18 14 10 7 6
450 16 10 6 4 2
50 6 6 6 㧙 㧙
100 6 6 6 㧙 㧙
150 6 6 6 㧙 㧙
200 6 6 6 㧙 㧙
250 6 6 5.5 㧙 㧙
300 6 5.5 5 㧙 㧙
350 5.5 4.5 4 㧙 㧙
400 4.5 3.5 3 㧙 㧙
450 2.5 2 1.5 㧙 㧙
0.1G 0.3G 0.5G 0.7G 1.0G
0 20 20 18 18 14
0 12 12 12 㧙 㧙
0 18 18 14 14 12
0 6 6 6 㧙 㧙
22
Page 29

Type Motor Type
SA5R 42P
Lead
[mm]
12
20
Horizontal
/ Vertical
Horizontal
Vertical
Horizontal
Vertical
Payload capacity by acceleration/deceleration [kg]
Velocity
[mm/s]
100 9 9 9 9 8
200 9 9 9 9 8
300 9 9 9 9 8
400 9 9 9 9 8
500 9 9 9 8 6.5
600 9 9 9 6 4
700 9 9 8 4 2.5
800 㧙 7 5 2 1
900 㧙 5 3 1 1
100 2.5 2.5 2.5 㧙 㧙
200 2.5 2.5 2.5 㧙 㧙
300 2.5 2.5 2.5 㧙 㧙
400 2.5 2.5 2.5 㧙 㧙
500 2.5 2.5 2.5 㧙 㧙
600 2.5 2.5 2.5 㧙 㧙
700 2.5 2 1.5 㧙 㧙
800 㧙 1 0.5 㧙 㧙
900 㧙 㧙 㧙 㧙 㧙
160 6.5 6.5 5 5 4
320 6.5 6.5 5 5 4
480 6.5 6.5 5 5 4
640 6.5 6.5 5 5 4
800 6.5 6.5 5 4 3
960 㧙 6.5 5 3 2
1120 㧙 6 3 2 1.5
1280 㧙 㧙 1 1 1
1440 㧙 㧙 1 0.5 㧙
160 1 1 1 㧙 㧙
320 1 1 1 㧙 㧙
480 1 1 1 㧙 㧙
640 1 1 1 㧙 㧙
800 1 1 1 㧙 㧙
960 㧙 1 1 㧙 㧙
1120 㧙 0.5 0.5 㧙 㧙
1280 㧙 㧙 㧙 㧙 㧙
1440 㧙 㧙 㧙 㧙 㧙
0.1G 0.3G 0.5G 0.7G 1.0G
0 9 9 9 9 8
0 2.5 2.5 2.5 㧙 㧙
0 6.5 6.5 5 5 4
0 1 1 1 㧙 㧙
1. Checking the Product
23
Page 30

Type Motor Type
1. Checking the Product
SA6R 42P
Lead
[mm]
3
6
Horizontal
/ Vertical
Horizontal
Vertical
Horizontal
Vertical
Payload capacity by acceleration/deceleration [kg]
Velocity
[mm/s]
25 25 25 25 25 25
50 25 25 25 25 25
75 25 25 25 25 25
100 25 25 25 25 25
125 25 25 25 25 25
150 25 25 25 25 22.5
175 25 25 25 20 19
200 25 25 20 18 12
225 25 18 16 6 4
25 12 12 12 㧙 㧙
50 12 12 12 㧙 㧙
75 12 12 12 㧙 㧙
100 12 12 12 㧙 㧙
125 12 12 12 㧙 㧙
150 12 11 10 㧙 㧙
175 11 9 8 㧙 㧙
200 9 7 6 㧙 㧙
225 5 3 㧙 㧙 㧙
50 25 25 20 16 14
100 25 25 20 16 14
150 25 25 20 16 14
200 25 25 20 16 14
250 25 25 20 16 14
300 25 25 20 15 11
350 25 20 14 12 9
400 25 16 10 8 6.5
450 18 12 6 5 2.5
50 6 6 6 㧙 㧙
100 6 6 6 㧙 㧙
150 6 6 6 㧙 㧙
200 6 6 6 㧙 㧙
250 6 6 5.5 㧙 㧙
300 6 5.5 5 㧙 㧙
350 5.5 4.5 4 㧙 㧙
400 4.5 3.5 3 㧙 㧙
450 2.5 2 1.5 㧙 㧙
0.1G 0.3G 0.5G 0.7G 1.0G
0 25 25 25 25 25
0 12 12 12 㧙 㧙
0 25 25 20 16 14
0 6 6 6 㧙 㧙
24
Page 31

Type Motor Type
SA6R 42P
Lead
[mm]
12
20
Horizontal
/ Vertical
Horizontal
Vertical
Horizontal
Vertical
Payload capacity by acceleration/deceleration [kg]
Velocity
[mm/s]
00 15 15 12.5 11 10
200 15 15 12.5 11 10
300 15 15 12.5 11 10
400 15 14 11 10 8.5
500 15 13 10 8 6.5
600 15 12 9 6 4
700 12 10 8 4 2.5
800 10 7 5 2 1
900 㧙 4 2 1 㧙
00 2.5 2.5 2.5 㧙 㧙
200 2.5 2.5 2.5 㧙 㧙
300 2.5 2.5 2.5 㧙 㧙
400 2.5 2.5 2.5 㧙 㧙
500 2.5 2.5 2.5 㧙 㧙
600 2.5 2.5 2.5 㧙 㧙
700 2.5 2.5 1.5 㧙 㧙
800 2 1 0.5 㧙 㧙
900 㧙 㧙 㧙 㧙 㧙
160 10 10 9 7 6
320 10 10 9 7 6
480 10 10 9 7 6
640 10 10 8 6 5
800 10 9 6.5 4.5 3
960 㧙 8 5 3.5 2
1120 㧙 6 3 2 1.5
1280 㧙 㧙 1 0.5 0.5
160 1 1 1 㧙 㧙
320 1 1 1 㧙 㧙
480 1 1 1 㧙 㧙
640 1 1 1 㧙 㧙
800 1 1 1 㧙 㧙
960 㧙 1 1 㧙 㧙
1120 㧙 0.5 0.5 㧙 㧙
1280 㧙 㧙 㧙 㧙 㧙
0.1G 0.3G 0.5G 0.7G 1.0G
0 15 15 12.5 11 10
0 2.5 2.5 2.5 㧙 㧙
0 10 10 9 7 6
0 1 1 1 㧙 㧙
1. Checking the Product
25
Page 32

Type Motor Type
1. Checking the Product
SA7R 56P
Lead
[mm]
4
8
Horizontal
/ Vertical
Horizontal
Vertical
Horizontal
Vertical
Payload capacity by acceleration/deceleration [kg]
Velocity
[mm/s]
35 45 45 45 40 40
70 45 45 45 40 40
105 45 45 45 40 35
140 45 45 35 30 25
175 45 30 16 㧙 㧙
210 40 㧙 㧙 㧙 㧙
35 25 25 25 㧙 㧙
70 25 25 25 㧙 㧙
105 22 20 19 㧙 㧙
140 16 14 12 㧙 㧙
175 11 7 5 㧙 㧙
210 4 㧙 㧙 㧙 㧙
70 45 45 45 40 40
140 45 45 40 38 35
210 45 40 35 30 24
280 40 30 25 20 15
350 35 20 9 4 㧙
420 25 7 㧙 㧙 㧙
490 13 㧙 㧙 㧙 㧙
70 16 16 16 㧙 㧙
140 16 16 16 㧙 㧙
210 11 10 9.5 㧙 㧙
280 9 8 7 㧙 㧙
350 7 5 4 㧙 㧙
420 5 1 㧙 㧙 㧙
490 1 㧙 㧙 㧙 㧙
0.1G 0.3G 0.5G 0.7G 1.0G
0 45 45 45 40 40
0 25 25 25 㧙 㧙
0 45 45 45 40 40
0 16 16 16 㧙 㧙
26
Page 33

Type Motor Type
SA7R 56P
Lead
[mm]
16
24
Horizontal
/ Vertical
Horizontal
Vertical
Horizontal
Vertical
Payload capacity by acceleration/deceleration [kg]
Velocity
[mm/s]
140 40 40 35 28 27
280 40 38 35 25 24
420 35 25 20 15 10
560 25 20 15 10 6
700 20 15 8 5 3
840 㧙 6 2 㧙 㧙
140 8 8 8 㧙 㧙
280 8 8 8 㧙 㧙
420 6 5 4.5 㧙 㧙
560 5 4 3 㧙 㧙
700 3 2 1.5 㧙 㧙
840 㧙 㧙 㧙 㧙 㧙
200 20 20 18 16 14
400 20 20 18 16 14
600 20 16 15 10 9
800 16 12 10 6 4
1000 㧙 8 4.5 2 1
200 3 3 3 㧙 㧙
400 3 3 3 㧙 㧙
600 3 3 3 㧙 㧙
800 㧙 3 2.5 㧙 㧙
1000 㧙 1 1 㧙 㧙
0.1G 0.3G 0.5G 0.7G 1.0G
0 40 40 35 28 27
0 8 8 8 㧙 㧙
0 20 20 18 16 14
0 3 3 3 㧙 㧙
1. Checking the Product
27
Page 34

[When high-output setting for motor straight type is ineffective]
Type Motor Type
1. Checking the Product
SA5C 42P
Lead
[mm]
3
6
12
20
Horizontal /
Vertical
Horizontal
Vertical
Horizontal
Vertical
Horizontal
Vertical
Horizontal
Vertical
Payload capacity by acceleration/deceleration [kg]
Velocity
[mm/s]
25 – 16 16 16 16
50 – 16 16 16 16
75 – 16 16 16 14
100 – 16 16 14 12
125 – 16 13 11 10
150 – 16 10 9 8
25 10 10 10 – –
50 10 10 10 – –
75 10 10 10 – –
100 10 9 8 – –
125 7 6 6 – –
150 5 4.5 3 – –
50 – 13 13 13 12
100 – 13 13 13 12
150 – 13 13 13 12
200 – 13 13 13 12
250 – 13 10 8 7
300 – 13 9 5 4
50 5 5 5 – –
100 5 5 5 – –
150 5 5 5 – –
200 5 4.5 4 – –
250 4 4 3 – –
300 3 2.5 2 – –
100 – 8 6 5.5 5
200 – 8 6 5.5 5
300 – 8 6 5.5 5
400 – 8 6 4 3.5
500 – 7 5 2 1.5
600 – 5 4 2 1.5
100 2 2 2 – –
200 2 2 2 – –
300 2 2 2 – –
400 2 2 1.5 – –
500 1.5 1.5 1 – –
600 1 1 0.5 – –
160 – 5 4 3 3
320 – 5 4 3 3
480 – 4.5 4 3 3
640 – 4 3.5 2 2
800 – 3 2.5 1 1
960 – 2 2 1 0.5
160 0.5 0.5 – – –
320 0.5 0.5 – – –
480 0.5 0.5 – – –
640 0.5 0.5 – – –
800 0.5 0.5 – – –
960 – 0.5 – – –
0.1G 0.2G 0.3G 0.5G 0.7G
0 – 16 16 16 16
0 10 10 10 – –
0 – 13 13 13 12
0 5 5 5 – –
0 – 8 6 5.5 5
0 2 2 2 – –
0 – 5 4 3 3
0 0.5 0.5 – – –
28
Page 35

Type Motor Type
SA6C 42P
Lead
[mm]
3
6
12
20
Horizontal /
Vertical
Horizontal
Vertical
Horizontal
Vertical
Horizontal
Vertical
Horizontal
Vertical
Payload capacity by acceleration/deceleration [kg]
Velocity
[mm/s]
0 – 19 19 19 19
25 – 19 19 19 19
50 – 19 19 19 19
75 – 19 19 19 19
100 – 19 16 14 12
125 – 18 14 11 10
150 – 16 13 10 9
0 10 10 10 – –
25 10 10 10 – –
50 10 10 10 – –
75 10 10 10 – –
100 10 9 8 – –
125 7 6 6 – –
150 5 4.5 3 – –
0 – 16 15 13 12
50 – 16 15 13 12
100 – 16 15 13 12
150 – 16 15 13 12
200 – 16 15 13 12
250 – 15 12 10 7
300 – 13 12 6 4
0 5 5 5 – –
50 5 5 5 – –
100 5 5 5 – –
150 5 5 5 – –
200 5 4.5 4 – –
250 4 4 3 – –
300 3 2.5 2 – –
0 – 8.5 8.5 7 6
00 – 8.5 8.5 7 6
200 – 8.5 8.5 7 6
300 – 8.5 8.5 7 6
400 – 8 7 4 3.5
500 – 7 6 3 2
600 – 6 6 2 1.5
0 2 2 2 – –
00 2 2 2 – –
200 2 2 2 – –
300 2 2 2 – –
400 2 2 1.5 – –
500 1.5 1.5 1 – –
600 1 1 0.5 – –
0 – 6 6 4 4
160 – 6 6 4 4
320 – 6 6 4 4
480 – 5 5 3 3
640 – 4 4 2 2
800 – 3 3 1 1
960 – 2 2 1 0.5
0 0.5 0.5 – – –
160 0.5 0.5 – – –
320 0.5 0.5 – – –
480 0.5 0.5 – – –
640 0.5 0.5 – – –
800 0.5 0.5 – – –
960 – 0.5 – – –
0.1G 0.2G 0.3G 0.5G 0.7G
1. Checking the Product
29
Page 36

Type Motor Type
1. Checking the Product
SA7C 56P
Lead
[mm]
4
8
16
24
Horizontal /
Vertical
Horizontal
Vertical
Horizontal
Vertical
Horizontal
Vertical
Horizontal
Vertical
Payload capacity by acceleration/deceleration [kg]
Velocity
[mm/s]
0 – 40 – – –
35 – 40 – – –
70 – 40 – – –
105 – 40 – – –
140 – 40 – – –
0 – 15 – – –
35 – 15 – – –
70 – 15 – – –
105 – 10 – – –
140 – 5 – – –
0 – – 40 – –
70 – – 40 – –
140 – – 40 – –
210 – – 25 – –
280 – – 10 – –
0 – 10 – – –
70 – 10 – – –
140 – 7 – – –
210 – 4 – – –
280 – 1.5 – – –
0 – – 35 – –
140 – – 35 – –
280 – – 25 – –
420 – – 15 – –
560 – – 7 – –
0 – 5 – – –
140 – 5 – – –
280 – 3 – – –
420 – 1.5 – – –
560 – 0.5 – – –
0 – – 18 – –
200 – – 18 – –
400 – – 18 – –
600 – – 10 – –
800 – – 5 – –
1000 – – 1.5 – –
0 – 2 – – –
200 – 2 – – –
400 – 2 – – –
600 – 1.5 – – –
800 – 1 – – –
1000 – – – – –
0.1G 0.2G 0.3G 0.5G 0.7G
30
Page 37

[When high-output setting for motor reversing type is ineffective]
Type Motor Type
SA5R 42P
Lead
[mm]
3
6
Horizontal
/ Vertical
Horizontal
Vertical
Horizontal
Vertical
Payload capacity by acceleration/deceleration [kg]
Velocity
[mm/s]
25 㧙 16 16 16 16
50 㧙 16 16 16 16
75 㧙 16 16 16 14
100 㧙 16 16 14 12
125 㧙 16 13 11 10
150 㧙 16 10 9 8
25 10 10 10 㧙 㧙
50 10 10 10 㧙 㧙
75 10 10 10 㧙 㧙
100 10 9 8 㧙 㧙
125 7 6 6 㧙 㧙
150 5 4.5 3 㧙 㧙
50 㧙 13 13 13 12
100 㧙 13 13 13 12
150 㧙 13 13 13 12
200 㧙 13 13 13 12
250 㧙 13 10 8 7
300 㧙 13 9 5 4
50 5 5 5 㧙 㧙
100 5 5 5 㧙 㧙
150 5 5 5 㧙 㧙
200 5 4.5 4 㧙 㧙
250 4 4 3 㧙 㧙
300 2.5 2 1.5 㧙 㧙
0.1G 0.2G 0.3G 0.5G 0.7G
0 㧙 16 16 16 16
0 10 10 10 㧙 㧙
0 㧙 13 13 13 12
0 5 5 5 㧙 㧙
1. Checking the Product
31
Page 38

Type Motor Type
1. Checking the Product
SA5R 42P
Lead
[mm]
12
20
Horizontal
/ Vertical
Horizontal
Vertical
Horizontal
Vertical
Payload capacity by acceleration/deceleration [kg]
Velocity
[mm/s]
100 㧙 8 6 5.5 5
200 㧙 8 6 5.5 5
300 㧙 8 6 5.5 5
400 㧙 8 6 4 3.5
500 㧙 7 5 2 1.5
600 㧙 5 4 2 1.5
100 2 2 2 㧙 㧙
200 2 2 2 㧙 㧙
300 2 2 2 㧙 㧙
400 2 2 1.5 㧙 㧙
500 1.5 1.5 1 㧙 㧙
600 1 0.5 0.5 㧙 㧙
160 㧙 5 4 3 3
320 㧙 5 4 3 3
480 㧙 4.5 4 3 3
640 㧙 4 3.5 2 2
800 㧙 3 2.5 1 1
960 㧙 2 2 1 0.5
160 0.5 0.5 㧙 㧙 㧙
320 0.5 0.5 㧙 㧙 㧙
480 0.5 0.5 㧙 㧙 㧙
640 0.5 0.5 㧙 㧙 㧙
800 0.5 0.5 㧙 㧙 㧙
0.1G 0.2G 0.3G 0.5G 0.7G
0 㧙 8 6 5.5 5
0 2 2 2 㧙 㧙
0 㧙 5 4 3 3
0 0.5 0.5 㧙 㧙 㧙
32
Page 39

Type Motor Type
SA6R 42P
Lead
[mm]
3
6
Horizontal
/ Vertical
Horizontal
Vertical
Horizontal
Vertical
Payload capacity by acceleration/deceleration [kg]
Velocity
[mm/s]
25 㧙 19 19 19 19
50 㧙 19 19 19 19
75 㧙 19 19 19 19
100 㧙 19 16 14 12
125 㧙 18 14 11 10
150 㧙 16 13 10 9
25 10 10 10 㧙 㧙
50 10 10 10 㧙 㧙
75 10 10 10 㧙 㧙
100 10 9 8 㧙 㧙
125 7 6 6 㧙 㧙
150 5 4.5 3 㧙 㧙
50 㧙 16 15 13 12
100 㧙 16 15 13 12
150 㧙 16 15 13 12
200 㧙 16 15 13 12
250 㧙 15 12 10 7
300 㧙 13 12 6 4
50 5 5 5 㧙 㧙
100 5 5 5 㧙 㧙
150 5 5 5 㧙 㧙
200 5 4.5 4 㧙 㧙
250 4 4 3 㧙 㧙
300 2.5 2 1.5 㧙 㧙
0.1G 0.2G 0.3G 0.5G 0.7G
0 㧙 19 19 19 19
0 10 10 10 㧙 㧙
0 㧙 16 15 13 12
0 5 5 5 㧙 㧙
1. Checking the Product
33
Page 40

Type Motor Type
1. Checking the Product
SA6R 42P
Lead
[mm]
12
20
Horizontal
/ Vertical
Horizontal
Vertical
Horizontal
Vertical
Payload capacity by acceleration/deceleration [kg]
Velocity
[mm/s]
00 㧙 8.5 8.5 7 6
200 㧙 8.5 8.5 7 6
300 㧙 8.5 8.5 7 6
400 㧙 8 7 4 3.5
500 㧙 7 6 3 2
600 㧙 6 6 2 1.5
00 2 2 2 㧙 㧙
200 2 2 2 㧙 㧙
300 2 2 2 㧙 㧙
400 2 2 1.5 㧙 㧙
500 1.5 1.5 1 㧙 㧙
600 1 0.5 0.5 㧙 㧙
160 㧙 6 6 4 4
320 㧙 6 6 4 4
480 㧙 5 5 3 3
640 㧙 4 4 2 2
800 㧙 3 3 1 1
960 㧙 2 1.5 0.5 㧙
160 0.5 0.5 㧙 㧙 㧙
320 0.5 0.5 㧙 㧙 㧙
480 0.5 0.5 㧙 㧙 㧙
640 0.5 0.5 㧙 㧙 㧙
800 0.5 0.5 㧙 㧙 㧙
960 㧙 㧙 㧙 㧙 㧙
0.1G 0.2G 0.3G 0.5G 0.7G
0 㧙 8.5 8.5 7 6
0 2 2 2 㧙 㧙
0 㧙 6 6 4 4
0 0.5 0.5 㧙 㧙 㧙
34
Page 41

Type Motor Type
SA7R 56P
SA7R 56P
Lead
[mm]
4
8
16
24
Horizontal
/ Vertical
Horizontal
Vertical
Horizontal
Vertical
Horizontal
Vertical
Horizontal
Vertical
Payload capacity by acceleration/deceleration [kg]
Velocity
[mm/s]
35 㧙 40 㧙 㧙 㧙
70 㧙 40 㧙 㧙 㧙
105 㧙 40 㧙 㧙 㧙
140 㧙 22 㧙 㧙 㧙
35 㧙 15 㧙 㧙 㧙
70 㧙 15 㧙 㧙 㧙
105 㧙 10 㧙 㧙 㧙
140 㧙 3 㧙 㧙 㧙
70 㧙 㧙 40 㧙 㧙
140 㧙 㧙 40 㧙 㧙
210 㧙 㧙 25 㧙 㧙
280 㧙 㧙 6 㧙 㧙
70 㧙 10 㧙 㧙 㧙
140 㧙 7 㧙 㧙 㧙
210 㧙 4 㧙 㧙 㧙
280 㧙 1 㧙 㧙 㧙
140 㧙 㧙 35 㧙 㧙
280 㧙 㧙 25 㧙 㧙
420 㧙 㧙 15 㧙 㧙
560 㧙 㧙 4 㧙 㧙
140 㧙 5 㧙 㧙 㧙
280 㧙 3 㧙 㧙 㧙
420 㧙 1.5 㧙 㧙 㧙
560 㧙 0.5 㧙 㧙 㧙
200 㧙 㧙 18 㧙 㧙
400 㧙 㧙 9 㧙 㧙
600 㧙 㧙 1 㧙 㧙
200 㧙 2 㧙 㧙 㧙
400 㧙 1.5 㧙 㧙 㧙
0.1G 0.2G 0.3G 0.5G 0.7G
0 㧙 40 㧙 㧙 㧙
0 㧙 15 㧙 㧙 㧙
0 㧙 㧙 40 㧙 㧙
0 㧙 10 㧙 㧙 㧙
0 㧙 㧙 35 㧙 㧙
0 㧙 5 㧙 㧙 㧙
0 㧙 㧙 18 㧙 㧙
0 㧙 2 㧙 㧙 㧙
1. Checking the Product
Caution: Do not attempt to establish the settings for the acceleration/deceleration above the
allowable range. It may cause vibration, malfunction or shortened life. Setting of
acceleration/deceleration above the ratings may cause creeping or slippage of the coupling.
35
Page 42

1.2.3 Driving System • Position Detector
Type Motor Type Lead
SA5C
SA5R
1. Checking the Product
SA6C
SA6R
SA7C
SA7R
1.2.4 Positioning Precision
42P
42P
56P
3
6
12
20
3
6
12
20
4
8
16
24
No. of
Encoder
Pulses
800
Ball Screw Type
Type Diameter Accuracy
Rolled
Rolled
Rolled
I10mm
I10mm
I12mm
C10
C10
C10
Type lead Item Tolerance
SA5C
SA5R
SA6C
SA6R
SA7C
SA7R
It is the accuracy when product is shipped out from the factory. It does not include the consideration of
time-dependent change.
3, 6, 12
20
3, 6, 12
20
4, 8, 16
24
Positioning repeatability
Backlash
Positioning repeatability
Backlash
Positioning repeatability
Backlash
Positioning repeatability
Backlash
Positioning repeatability
Backlash
Positioning repeatability
Backlash
±0.02mm
0.1mm or less
±0.03mm
0.1mm or less
±0.02mm
0.1mm or less
±0.03mm
0.1mm or less
±0.02mm
0.1mm or less
±0.03mm
0.1mm or less
36
Page 43

1.2.5 Current Limit Value and Pressing Force
Ɣ SA5C, SA6C, SA5R, SA6R
Current Limit Value Lead 3 Lead 6 Lead 12 Lead 20
20% 106 53 26 16
30% 159 79 40 24
40% 211 106 53 32
50% 264 132 66 40
60% 317 159 79 48
70% 370 185 93 56
* These are the reference values at 20mm/s of pressing speed.
SA5C/SA6C/SA5R/SA6R Current Limiting Values and Pressing Force
400
350
300
250
200
150
Pressing Force [N]
100
50
Lead 3
Lead 6
Lead 12
Lead 20
[N]
1. Checking the Product
0
0 10 20 30 40 50 60 70 80
Current-Limiting Value [%]
37
Page 44

Ɣ SA7C, SA7R
Current Limit Value Lead 4 Lead 8 Lead 16 Lead 24
* These are the reference values at 20mm/s of pressing speed.
1. Checking the Product
800
700
600
500
400
300
Pressing Force [N]
200
[N]
20% 192 96 48 32
30% 288 144 72 48
40% 385 192 96 64
50% 481 240 120 80
60% 577 288 144 96
70% 673 336 168 112
SA7C/SA7R Current Limiting Values and Pressing Force
Lead 4
Lead 8
Lead 16
100
Lead 24
0
0 10 20 30 40 50 60 70 80
Current-Limiting Value [%]
Caution: (1) The relation of the pressing force and current limiting value is a reference. There will be a
little variance in the actual pressing force.
(2) If the current limiting value is low, the pressing force may largely vary.
(3) The movement speed at the pressing operation is fixed to 20mm/s.
The graph shows the values when pressing with 20mm/s, and it differs if the speed
changes.
38
Page 45

1.2.6 Allowable Load Moment of Actuator
Type
Allowable overhang load [L]
Ma Mb Mc Ma Mb Mc
Static load moment [Nxm] Allowable load moment [Nxm]
SA5C
SA5R
SA6C
SA6R
SA7C
SA7R
18.6 26.6 47.5 4.9 6.8 11.7
38.3 54.7 81.0 8.9 12.7 18.6
50.4 71.9 138.0 13.9 19.9 38.3
Ma direction: 150mm
Mb or Mc direction: 150mm
Ma direction: 220mm
Mb or Mc direction: 220mm
Ma direction: 230mm
Mb or Mc direction: 230mm
For the dynamic allowable load moment, provided under assumption that the operation life is 5,000km.
[Refer to 6. Life]
Ma direction
Mb direction
Mc direction
Ma direction
Direction of moment
Mb or Mc direction
L
Direction of allowable overhang
L
1. Checking the Product
For the calculation of Ma and Mc moments, consider the position indicated with an arrow as the datum
point.
SA5C SA6C SA7C
52
39
58
40
73
43
Caution: An operation beyond the allowable moment and overhang load length would not only
generate abnormal noise and vibration, but also may shorten the life of actuator
extremely.
39
Page 46

1.2.7 Duty Ratio in Continuous Operation
Continuous operation is available with the duty ratio 100%.
Duty ratio is the rate of operation expressed in % that presents the time of the actuator being operated in 1
cycle of operation.
1. Checking the Product
40
Page 47

1.3 Options
1.3.1 Brake Type (Model No. : B)
The brake is a mechanism designed to prevent the slider from dropping on a vertically installed actuator
when the power or servo is turned OFF.
Use the brake to prevent the installed load, etc., from being damaged due to the falling slider.
1.3.2 Reversed-home Specification (Model No. : NM)
The standard home position is on the motor side. However, the motor position will be reversed if it is
desirable in view of the layout of the system, etc.
(Note) The home position is adjusted at the factory before shipment. If you wish to change the home after
the
delivery of your actuator, you must return the actuator to IAI for adjustment.
1.3.3 Motor Left Reversed, Motor Right Reversed (Model No. : ML, MR)
From the view of the motor side, the type with the motor reversed to the left is ML, and the motor reversed to
the right is MR.
1. Checking the Product
ML MR
(Left Reversed) (Right Reversed)
1.3.4 Vacuum Joint on Other Side (Model No. : VR)
The joints are allocated on the right side of the body from the view of the motor side
(which is the other side of the standard type).
For the standard type, the joints are allocated on the left side of the body from the view of the motor side.
41
Page 48

1.4 Motor • Encoder Cables
1.4.1 Motor • Encoder Integrated Cables
CB-CA-MPAƑƑƑ
Connector : 1-1827863-1
1. Checking the Product
Contact : 1827570-2
(25)(30)
L
Connection diagram
CN1
1-1827863-1(AMP)
Pin No. Pin No.
A1
B1
A2
B2
A3
B3
A4
B4
A6
B6
A7
B7
A8
B8
A5
B5
A9
B9
A10
B10
A11
B11
Symbol
φA/U
VMM/V
OR(AWG22/19)
GN(AWG22/19)
φ_A/W
φB/-
BR(AWG22/19)
VMM/-
GY(AWG22/19)
φ_B/-
RD(AWG22/19)
LS+/BK+
LS-/BK-
-/A+
-/A-
A+/B+
A-/B-
B+/Z+
B-/ZBK+/LS+
BK-/LSLS_GND
VPS
VCC
GND
―
FG
Color
BL(AWG22/19)
BK(AWG26)
YW(AWG26)
BL(AWG26)
OR(AWG26)
GN(AWG26)
BR(AWG26)
GY(AWG26)
RD(AWG26)
BL(AWG26)
OR(AWG26)
GN(AWG26)
BR(AWG26) BR(AWG26)
GY(AWG26)
RD(AWG26)
―
BK
PADP-24V-1-S(JST)
1
2
5
3
4
6
7
8
11
12
13
14
15
16
9
10
20
18
17
19
21
22
23
24
CN2
Symbol
φA/U
BL(AWG22/19)
VMM/V
OR(AWG22/19)
GN(AWG22/19)
φ_A/W
φB/-
BR(AWG22/19)
VMM/-
GY(AWG22/19)
φ_B/-
RD(AWG22/19)
LS+/BK+
BK(AWG26)
LS-/BK-
YW(AWG26)
BL(AWG26)
-/A+
-/A-
OR(AWG26)
A+/B+
GN(AWG26)
A-/B-
BR(AWG26)
B+/Z+
GY(AWG26)
B-/Z-
RD(AWG26)
BL(AWG26)
BK+/LS+
BK-/LS-
OR(AWG26)
LS_GND
GN(AWG26)
VPS
VCC
GY(AWG26)
GND
RD(AWG26)
―
―
―
FG
(25) (15) (30)
Color
―
―
―
BK
CN2CN1
Connector : PADP-24V-1-S
Contact
SPND-002T-C0.5 (AWG26)
SPND-001T-C0.5 (AWG22)
42
Page 49

1.4.2 Motor • Encoder Integrated Cables Robot Type
CB-CA-MPAƑƑƑ-RB
(30)
Connector :
1-1827863-1
Contact :
1827570-2
(25)
CN1
1-1827863-1(AMP)
Pin No.
Symbol
A1
φA/U
B1
VMM/V
φ_A/W
A2
B2
φB/-
A3
VMM/-
φ_B/-
B3
A4
LS+/BK+
B4
LS-/BK-
A6
-/A+
B6
-/A-
A7
A+/B+
B7
A-/B-
A8
B+/Z+
B8
B-/Z-
A5
BK+/LS+
B5
BK-/LSLS_GND
A9
B9
VPS
A10
VCC
B10
GND
A11
―
B11
FG
Color
BK(AWG22/19)
WT(AWG22/19)
BR(AWG22/19)
GN(AWG22/19)
YW(AWG22/19)
RD(AWG22/19)
OR
(AWG25)
GY
(AWG25)
WT
(AWG25)
YW
(AWG25)
RD
(AWG25)
GN
(AWG25)
BK
(AWG25)
BR
(AWG25)
BK
(AWG25)
BR
AWG25)
GN
(AWG25)
RD
(AWG25)
WT
(AWG25)
YW
(AWG25)
―
L
Connection diagram
PADP-24V-1-S (
Pin No.
11
12
13
14
15
16
10
20
18
17
19
21
22
23
24
1
2
5
3
4
6
7
8
9
CN2
Symbol
φA/U
VMM/V
φ_A/W
φB/-
VMM/-
φ_B/-
LS+/BK+
LS-/BK-
-/A+
-/A-
A+/B+
A-/B-
B+/Z+
B-/ZBK+/LS+
BK-/LS-
LS_GND
VPS
VCC
GND
―
―
―
FG
(25) (15) (30)
JST)
Color
BK(AWG22/19)
WT(AWG22/19)
BR(AWG22/19)
GN(AWG22/19)
YW(AWG22/19)
RD(AWG22/19)
OR
(AWG25)
GY
(AWG25)
WT
(AWG25)
YW
(AWG25)
RD
(AWG25)
GN
(AWG25)
BK(AWG25)
BR
(AWG25)
BK
(AWG25)
BR
(AWG25)
GN
(AWG25)
RD
(AWG25)
WT
(AWG25)
YW
(AWG25)
―
―
―
Shield
CN2CN1
Connector :
PADP-24V-1-S
Contact
SPND-002T-C0.5 (AWG26)
SPND-001T-C0.5 (AWG22)
1. Checking the Product
43
Page 50

2. Installation
2.1 Transportation
[1] Handling of Robot
When transporting the unassembled actuator alone, pay attention to the items specified below.
2. Installation
(1) Handling of the Packed Product
Please handle packages carefully during transport to ensure that product is not damaged by bumping or dropping.
x Never attempt to move heavy packages by yourself.
x Always set packages down on a level surface.
x Never climb on top of packages.
x Never place heavy objects or objects where the load is concentrated in one place on top of packages,
as this may cause deformation.
(2) Handling the Actuator After Unpacking
Do not carry an actuator by motor unit and a cable or attempt to move it by pulling the cable.
When transporting the unassembled actuator, pay attention to the items specified below.
When unpacking the actuator and handling it thereafter, always hold it by the base.
Never hold an actuator by the stainless sheet.
x Be careful not to bump the actuator into anything when moving it, paying particular care to the side
covers.
x Do not attempt to force any part of the actuator. Take particular care not to force the stainless sheet.
Warning: Never hold the actuator by the stainless sheet.
Supplement) For the names of each part of the actuator,
refer to "Name of the Parts.”
44
Page 51

[2] Handling in Assembled Condition
When transporting the actuator with its axes already assembled, take note of the following items.
(1) Shipping from IAI Already Assembled
After assembly at IAI, your machine undergoes a shipping inspection, is packed in a crate with skids, and
finally shipped.
If any of the combined actuators is a slider, the slider is securely fastened in place to prevent unexpected
movement during shipping. Combined units have the ends of their actuators fastened so as to prevent
them from moving significantly due to external vibration.
x
The crate is not designed to withstand dropping or collision. Please handle it carefully. It is also not built to have
items stacked on it, so please avoid placing heavy objects on top of the crate.
x When lifting the package using belts or the like, be sure to pass the belts around the reinforcement frames under
the
skids. The same applies for lifting the package with a forklift; please ensure that the forks are placed under the
skids.
x When setting the package down, do not let the package receive an impact upon contacting the floor.
(2) Handling After Unpacking
Please adhere to the following instructions when handling the assembled unit, whether it was shipped
preassembled at IAI or assembled on your site.
x Secure the slider so that it does not move unexpectedly during transport.
x If the end of the actuator is protruding, fasten it down properly so that it does not move significantly due to
external vibration. When transporting the assembly without the ends of the actuators fastened, do not
subject the assembly to an impact of 0.3 G or more.
x When using belts or the like to lift an assembly consisting of an actuator and peripheral equipment, make
sure the belts are not passed around the actuator itself or otherwise do not touch the actuator.
x Make sure the belts support the actuator load by its base by using appropriate cushioning materials.
x Lift the end of the Y-axis with a separate belt, ensuring that the assembly remains level. At this time, also
make sure the load is not placed on the screw cover.
x Make sure the load is not placed on the brackets, covers, or connector box.
Also make sure the cables are not pinched or deformed excessively.
2. Installation
[3] Handling after Assembly with Peripheral Equipment
When the machine assembled at IAI is transported as an assembly, also follow the handling precautions in
5.2.2, “Handling after Unpacking.”
45
Page 52

2.2 Installation and Storage • Preservation Environment
[1] Installation Environment
The actuator should be installed in a location other than those specified below.
In general, the installation environment should be one in which an operator can work without protective gear.
Also provide sufficient work space required for maintenance inspection.
x Where the actuator receives radiant heat from strong heat sources such as heat treatment furnaces
x Where the ambient temperature exceeds the range of 0 to 40qC
2. Installation
x Where the temperature changes rapidly and condensation occurs
x Where the relative humidity exceeds 85% RH
x Where the actuator receives direct sunlight
x Where the actuator is exposed to corrosive or combustible gases
x Where the ambient air contains a large amount of powder dust, salt or iron (at level exceeding what is
normally expected in an assembly plant)
x Where the actuator is subject to splashed water, oil (including oil mist or cutting fluid) or chemical
solutions
x Where the actuator receives impact or vibration
If the actuator is used in any of the following locations, provide sufficient shielding measures:
x Where noise generates due to static electricity, etc.
x Where the actuator is subject to a strong electric or magnetic field
x Where the actuator is subject to ultraviolet ray or radiation
[2] Storage • Preservation Environment
x The storage and preservation environment should comply with the same standards as those for the
installation environment. In particular, when the machine is to be stored for a long time, pay close attention
to environmental conditions so that no dew condensation forms.
x Unless specially specified, moisture absorbency protection is not included in the package when the
machine is delivered. In the case that the machine is to be stored and preserved in an environment where
dew condensation is anticipated, take the condensation preventive measures from outside of the entire
package, or directly after opening the package.
x For storage and preservation temperature, the machine withstands temperatures up to 60qC for a short
time, but in the case of the storage and preservation period of 1 month or more, control the temperature to
50qC or less.
x Storage and preservation should be performed in the horizontal condition. In the case it is stored in the
packaged condition, follow the posture instruction if any displayed on the package.
46
Page 53

2.3 Installation
This chapter explains how to install the actuator on your mechanical system.
2.3.1 General Rules on Installation
Follow the information below when installing the actuator, as a rule.
Do pay attention to these items (except with custom-order models).
{ : Possible U : Daily inspection is required u : Not possible
Model
SA5C, SA6C, SA7C
SA5R, SA6R, SA7R
Horizontal Vertical Sideways Ceiling mount
Horizontal
installation
{ {
Vertical installation Sideway installation
2. Installation
Ceiling mount
installation
U U
Caution: 1. When the unit is installed vertically oriented, attempt to put the motor up unless there is a
special reason. Putting the motor on the lower side would not cause a problem in an
ordinary operation. However, it may rarely cause a problem, when it is not operated for a
long period, depending on the surrounding environment (especially high temperature),
caused by the grease being separated and the base oil flowing into the motor unit.
2. Can be installed sideways or ceiling mount, but the actuators must be checked daily. If
the actuator is installed sideways or ceiling mount, the stainless sheet may be slacked or
displaced. If the actuator is used continuously while the stainless sheet is slacked or
displaced, the stainless sheet may break or other problems may occur. Check the
actuator daily and if the stainless sheet is found slacked or displaced, make installation
adjustment of the stainless sheet. [Refer to 4.7 Procedure for Stainless Steel Sheet
Replacement and Adjustment.]
47
Page 54

2.3.2 Installation of Main Unit
䎃
The surface to mount the main unit should be a machined surface or a plane that possesses an equivalent
accuracy and the flatness should be within 0.05mm. Also, the platform should have a structure stiff enough
to install the unit so it would not generate vibration or other abnormality.
䎃
Also consider enough space necessary for maintenance work such as actuator replacement and inspection.
There are datum surfaces for attachment on the base.
The flatness of the slider movement is designed to be 0.05mm/m at maximum to the datum surface.
2. Installation
On the rear side of the actuator, there are tapped holes and through holes for attachment and reamed hole
and oblong hole for positioning. See the appearance drawings for the details of the position and diameters.
[Refer to 5. External Dimensions]
Utilize the reamed holes when repeatability in the attachment after detaching is required. However, when
small tunings such as the perpendicularity is required, consider such things like to use one reamed hole.
[1] Using the Tapped Holes on the Bottom of the Base
This actuator has the tapped holes for mounting so it can be fixed from the bottom of the base.
(Note that tapped hole size depends on the model. Please see the diagrams below and 13,1 "External
Dimensions.")
Also, there are reamed holes and a slotted hole for positioning pins.
Oblong Hole
Tapped Hole
Reamed Hole
Through Hole
Tightening Torque
Model
Name
SA5C
SA5R
SA6C
SA6R
SA7C
SA7R
Tapped
Hole Size
M4 7mm
M5 9mm
M5 9mm
Tapped Holes Depth
In the case that steel
is used for the bolt
seating surface:
3.59N㨯m
(0.37kgf㨯m)
7.27N㨯m
(0.74kgf㨯m)
7.27N㨯m
(0.74kgf㨯m)
In the case that
aluminum is used for
the bolt seating
surface:
1.76N㨯m
(0.18kgf㨯m)
3.42N㨯m
(0.35kgf㨯m)
3.42N㨯m
(0.35kgf㨯m)
Reamer Hole [mm]
I4H7 Depth 5.5
I4H7 Depth 5.5
I4H7 Depth 5.5
Tightening screws
x Use hexagonal socket head bolts for the male threads for installing the base.
x Use of high-tension bolts meeting at least ISO 10.9 is recommended.
x The length of thread engagement should be 1.8 times more than the nominal diameter, and pay attention
not to stick the screw out inside the actuator.
Caution: Be careful when selecting the bolt length. If bolts of inappropriate lengths are used, the
tapped holes may be damaged, actuator mounting strength may become insufficient, or
contact with driving parts may occur, resulting in lower precision or unexpected accidents.
48
Page 55

[2] Using the Through Holes on the Top of the Base
There are through holes equipped on the base so the unit can be attached from the top of the base.
Detach the side covers on the sides when installing.
(Remove 4 attachment screws (+) with a Philips screwdriver.)
Attempt not to drop the bolts, tools, etc. on the stainless steel sheet when tightening the bolts. Please avoid
making a dent mark or scratches.
䎃
Apply the socket head cap screw indicated in the table below suitable for the platform material.
䎃
Model
Name
SA5C
SA5R
SA6C
SA6R
SA7C
SA7R
I4.5 drilled hole, I8 counter boring depth 4.5
I4.5 drilled hole, I8 counter boring depth 4.5
I6 drilled hole, I9.5 counter boring depth 5.5
Through Holes Mounting Screw Tightening Torque
M4
M4
M5
1.76N㨯m
(0.18kgf㨯m)
1.76N㨯m
(0.18kgf㨯m)
3.42N㨯m
(0.35kgf㨯m)
䎃
Tightening screws
x Use hexagonal socket head bolts for the male threads for installing the base.
x Use of high-tension bolts meeting at least ISO 10.9 is recommended.
x For the effective engagement length between the bolt and female thread, provide at least the applicable
value specified below:
Female thread is made of steel material ĺ Same length as the nominal diameter
Female thread is made of aluminum ĺ 1.8 times of nominal diameter
2. Installation
Caution: Be careful when selecting the bolt length. If bolts of inappropriate lengths are used, actuator
mounting strength may become insufficient, or contact with driving parts may occur, resulting
in lower precision or unexpected accidents.
49
Page 56

[3] When Utilizing Attachment Holes on the Bracket for Motor-Reversed Type
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
There are tapped holes prepared on the reversing bracket. (See the table below for the detailed
dimensions.)
2. Installation
䎃
Tightening screws
x Use hexagonal socket head bolts for the male threads for installing the base.
x Use of high-tension bolts meeting at least ISO 10.9 is recommended.
x Make sure to have the effective length of thread engagement at least approximately 1.8 times of the
nominal diameter of bolts and screws.
䎃
Model
Name
SA5R M5 15mm
SA6R M5 15mm
SA7R M6 14mm
Attachment
Holes
Attachment Hole
Depth
A B C
SA5R 37 26 M5 Depth 15
SA6R 37 28 M5 Depth 15
SA7R 48 33 M6 Depth 14
Tightening Torque
3.42N䱏m
(0.35kgf䱏m)
3.42N䱏m
(0.35kgf䱏m)
5.36 N䱏m
(0.55kgf䱏m)
Caution: Be careful when selecting the bolt length. If bolts of inappropriate lengths are used, the
attachment holes may be damaged, actuator mounting strength may become insufficient, or
contact with driving parts may occur, resulting in lower precision or unexpected accidents.
䎃
[Caution for Installation]
Please note the following caution notes when installing the unit with using the tapped holes on the
reversing bracket.
Do not attempt to affix the unit only with the tapped holes on the reversing bracket.
Do not apply external force to the main body.
There may be caused vibration due to the operating condition or installation environment, which may
result in operational failures or components malfunction.
50
Page 57

᳓ᐔ
ု⋥ ᄤษ
Availability of installation for each installation posture is as shown below:
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
When using the unit in the horizontal or vertical orientation, have a pedestal to support the body to avoid
external force being applied to the unit.
䎃
䎃
䎃
䎃
䎃
䎃
䎃
Installation Posture
Horizontal Vertical Mount
u u u
{ {
Horizontal
u
Supports
With No Supported
With Support
Vertical
Support Block
ᡰᜬบ
Mount
2. Installation
51
Page 58

[4] Attachment of Transported Object
䎃
x There are tapped holes on the top surface of the slider. Affix the work part (transported object) here.
x The way to affix follows the installation of the main unit.
x There are two reamed holes on the top surface of the slider. Use these reamed holes if repeatability of
attaching and detaching is required. Also, if small tuning such as perpendicularity is required, use one of
the reamed holes for the tuning.
x Refer to the following table for the screwed depth and reamed depth. Screwing further than indicated in
the table may destroy the tapped hole or lower the reinforcement of the attachment of the work part, result
2. Installation
in the drop of the accuracy or an unexpected accident.
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
Tightening screws
x Use hexagonal socket head bolts for the male threads for installing.
x Use of high-tension bolts meeting at least ISO 10.9 is recommended.
x Make sure to have the effective length of thread engagement at least approximately 1.8 times of the
nominal diameter of bolts and screws.
䎃
Reamed Hole Pitch Tolerance: ±0.02
Model Name A B C D E
SA5C
SA5R
SA6C
SA6R
SA7C
SA7R
26 19 30
31 32 50
39 32 50
I4H7 depth 6
I5H7 depth 6.5
I5H7 depth 10
M4 depth 9 M4 1.76N㨯m (0.18kgf㨯m)
M5 depth 9 M5 3.42N㨯m (0.35kgf㨯m)
M5 depth 10 M5 3.42N㨯m (0.35kgf㨯m)
±0.02
Mounting screw
Mounting Screw Tightening Torque
Caution: Pay attention when selecting the screw length. Selection of inappropriate length of screws
may cause a breakage of tapped holes or insufficient strength of attachment for
transportation.
52
Page 59

[5] Mounting Surface
䎃
䎃
䎃
䎃
䎃
䎃
䎃
x The platform to install the actuator should possess a structure that ensures enough stiffness, and should
be free from vibration.
x The surface where the actuator will be mounted should be a machined surface or that with an accuracy
equivalent to it, and the flatness should be 0.05mm/m or below.
x Ensure a room for maintenance work.
x The side and bottom surfaces of the base on the actuator work as the datum surfaces for the side of the
slider.
x Use these surfaces as the datum surfaces for mounting.
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
䎃
Datum surface
Datum surface
2. Installation
Because the side and bottom faces of the base provide reference surfaces for slider
travel as shown in the above diagram, conduct installation based on the position of
these sides when precision is required.
䎃
Follow the diagram below when installing the device using the reference surface.
䎃
R0.3 or less
Model Name A Dimensions (mm)
SA5/6 2 to 4 or less
SA7 2 to 5 or less
53
Page 60

2.4 Clean-Room Type
x Cleanroom type can have the performance to comply with Cleanroom Class 10 (0.1ȝm) by vacuuming the
air at the two vacuum joints. The table below shows the reference of vacuuming capacity at the maximum
speed for each model.
Have the pipe layout to make the vacuum performance at the two points get even.
x Have all the base attachment holes at the bottom of the unit closed when using the unit. If there is a
through hole on the body, it can drop the cleanliness.
2. Installation
2.4.1 Reference for Vacuuming Capacity
2.4.2 Vacuum Joint
A quick joint structure is applied to the vacuum joint so an air tube available in the market can be easily
joined.
Model
RCP4CR-SA5C
RCP4CR-SA6C
RCP4CR-SA7C
Lead Vacuuming Capacity
[mm] Nl/min (L/min)
3 15 (16)
6 30 (32)
12 50 (54)
20 80 (86)
3 15 (16)
6 30 (32)
12 50 (54)
20 80 (86)
4 30 (32)
8 40 (43)
16 70 (75)
24 90 (97)
54
Model Air Tube Outer Diameter
RCP4CR-SA5C
RCP4CR-SA6C
RCP4CR-SA7C
I6
I8
Page 61

3. Connecting with Controller
As the connection cable for the controller and RCP4 (this actuator), use the IAI-dedicated controller and
dedicated connection cable.
This section explains the wiring method for a single axis.
x If the dedicated connection cable cannot be secured, reduce the load on the cable by allowing it to deflect
only by the weight of the cable or wire it in a self-standing cable hose, etc., having a large radius.
x Do not cut and reconnect the dedicated connection cable for extension or shorten the cable.
x Do not pull on the dedicated connection cable or bend it forcibly.
x The actuator cable coming out of the motor unit is not meant to be bent. Fix the cable so it would not be
bent repeatedly.
Please consult with IAI if you require a different kind of cable than the one supplied.
Dedicated connection cable
RCP4-XX
(connects controller and RCP4)
3. Connecting with Controller
Dedicated controller
• PCON-CA
Robot cable
r=84mm or mere (Movable Use)
Standard cable
r=84mm or mere (Fixed Use)
Dedicated connection cable
Motor-encoder cable: CB-CA-MPA□□□
Motor-encoder cable robot cable: CB-CA-MPA□□□- RB
*) □□□ indicates the cable length. Up to 20m can be specified.
Example) 080 = 8 m
55
Page 62

Warning: For wiring, please follow the warnings stated below. When constructing a system as the
machinery equipment, pay attention to the wiring and connection of each cable so they are
conducted properly. Not following them may cause not only a malfunction such as cable
breakage or connection failure, or an operation error, but also electric shock or electric
leakage, or may even cause a fire.
• Use dedicated cables of IAI indicated in this instruction manual. Contact us if you wish to have a change
to the specifications of the dedicated cables.
• Make sure to turn the power off in the process of power line or cable connection or disconnection.
• Do not attempt to cut a dedicated cable with connectors on both ends to extend, shorten or re-joint it.
• Hold the dedicated cable to avoid mechanical force being applied to the terminals and connectors.
• Use a cable pipe or duct to have an appropriate protection when there is a possibility of mechanical
damage on a dedicated cable.
• In case a dedicated cable is to be used at a moving part, make sure to lay out the cable without applying
any force to pull the connector or extreme bend on the cable. Do not attempt to use the cable with a
bending radius below the allowable value.
3. Connecting with Controller
• Make certain that the connectors are plugged properly. Insufficient connection may cause an operation
error, thus it is extremely risky.
• Do not lay out the cables to where the machine runs over them.
• Pay attention to the cable layout so it would not hit peripherals during an operation. In case it does, have
an appropriate protection such as a cable track.
• When a cable is used hanging on the ceiling, prevent an environment that the cable swings with
acceleration or wind velocity.
• Make sure there is not too much friction inside the cable storage equipment.
• Do not apply radiated heat to power line or cables.
• Do not bend the cable in the area from the connector tip inward to 150mm on both ends.
CB-CA-MPAƑƑƑ, CB-CA-MPAƑƑƑ-RB
150mm 150mm
• Have a sufficient radius for bending, and avoid a bend concentrating on one point.
Steel Strap
(Piano Wire)
Tie them up softly.
56
Page 63

• Do not let the cable bend, kink or twist.
• Do not pull the cable with a strong force.
• Pay attention not to concentrate the twisting force to one point on a cable.
3. Connecting with Controller
• Do not pinch, drop a heavy object onto or cut the cable.
• When a cable is fastened to affix, make sure to have an appropriate force and do not tighten too much.
Do not use spiral tube in any
position where cables are bent
frequently.
57
Page 64

• PIO line, communication line, power and driving lines are to be put separately from each other and do
not tie them together. Arrange so that such lines are independently routed in the duct.
• If using a cable track, arrange the wiring so that there is no entanglement or kink of the cables in the
cable carrier or flexible tube, and do not bind the cables so that the cables are relatively free. (Arrange
the wiring so the cables are not to be pulled when bent.)
3. Connecting with Controller
• The occupied volume rate for the cables, etc., inside the cable track should be 60% or less.
Power Line
Duct
I/O Line
(Flat Cable, etc.)
Cable Track
Cable
58
Page 65

4. Maintenance Inspection
4.1 Inspection Items and Schedule
Follow the maintenance inspection schedule below.
It is assumed that the equipment is operating 8 hours per day.
If the equipment is running continuously night and day or otherwise running at a high operating rate, inspect
more often as needed.
External visual inspection Internal inspection Greasing
Start of work inspection
1-month inspection
6-month inspection
12-month inspection
Every 6 months thereafter
Every 12 months thereafter
{
{
{ {
{ { {
{
{ { {
*1 Grease film may run out if the actuator is moved back and forth continuously over a distance of 30 mm or
less. As a guide, perform a back-and-forth operation five times or so over a distance of 50 mm or more
after a back-and-forth operation over such short distance has been repeated 5,000 to 10,000 times. This
will restore oil film.
4.2 External Visual Inspection
*1
4. Maintenance Inspection
An external visual inspection should check the following things.
Main unit Loose actuator mounting bolts, other loose items
Cables Scratches, proper connections
Stainless sheet Scratches
Overall Irregular noise, vibration
Ɣ As a rule of thumb, the stainless sheet should last for about 5000 km of slider motion.
However, under certain conditions, the stainless sheet may need to be replaced earlier.
Generally, replacing the stainless sheet will require that you bring the unit to our plant or have one of our
technicians come to your plant to perform the replacement.
Ɣ If the actuator is installed vertically, certain conditions may cause grease to drip from the guide. Please
ensure that proper cleaning is performed and grease is replenished.
4.3 Cleaning
Ɣ Clean exterior surfaces as necessary.
Ɣ Use a soft cloth to wipe away dirt and buildup.
Ɣ Do not blow too hard with compressed air as it may cause dust to get in through the gaps.
Ɣ Do not use oil-based solvents as they can harm lacquered and painted surfaces.
Ɣ To remove severe buildup, wipe gently with a soft cloth soaked in a neutral detergent or alcohol.
59
Page 66

4.4 Internal Inspections
Turn OFF the power, remove the side cover and have a visual inspection.
When inspecting the interior, check the following items.
Main unit Loose mounting bolts, other loose items
Guide section Lubrication, buildup
Visually inspect the interior of the equipment. Check whether dust or other foreign matter has gotten inside
and check the lubrication state.
The lubrication may have turned brown. This is not a problem as long as the travel surfaces shine as though
they are wet.
If the grease is mixed with dust and does not have a shiny appearance, or if the grease has lost its efficacy
due to prolonged use, then clean each section and reapply grease.
The procedure for internal inspections is outlined below.
1) Loosen the screws on the side cover and detach the side cover.
2) Check inside.
4. Maintenance Inspection
3) After finishing the inspection, assemble back in the reverse order. When attaching the side cover, push
up the stainless steel sheet firmly so excess force would not be applied to the stainless steel sheet.
Caution: When checking inside the equipment, be careful not to forcibly bend the stainless sheet or
scratch it.
Do not tug on the stainless sheet or in any way attempt to reposition it.
Change in the attached condition may cause the sheet to be mounted unevenly or impact the
product life. In such cases, please contact IAI Sales Engineer Department.
Keep in mind that the edges of the stainless sheet can cause injuries. Always wear gloves
when working on it.
4.5 Internal Cleaning
Ɣ Use a soft cloth to wipe away dirt and buildup.
Ɣ Do not blow too hard with compressed air as it may cause dust to get in through the gaps.
Ɣ Do not use oil-based solvents, neutral detergent or alcohol.
60
Page 67

4.6 Grease Supply
䎃
䎃
4.6.1 What Grease to Use on the Standard Type
[1] What Grease to Use on the Guides
IAI uses the following grease in our plant.
Guide Idemitsu Kosan Daphne Eponex Grease No. 2
Other companies also sell similar types of grease. For details, give the above grease name to the
manufacturer you want to purchase from and ask what corresponding product they have available.
Here are some examples of similar products.
Showa Shell Oil Albania Grease No. 2
Mobil Oil Mobilax 2
Warning: Never use anything other than synthetic poly- olefin grease. Mixing poly- grease with other
grease not only reduces the performance of the grease, it may even cause damage to the
actuator.
4. Maintenance Inspection
[2] What Grease to Use on the Ball Screw
IAI uses the following grease in our plant.
Ball Screw Kyodo Yushi Multitemp LRL 3
Warning: Never use anything other than synthetic poly- olefin grease. Mixing poly- grease with other
grease not only reduces the performance of the grease, it may even cause damage to the
actuator.
4.6.2 What Grease to Use on the Clean Room Type
On the guide and ball screws, the urea based grease that has great low particle-emission, stable torque
characteristics, brilliant lubrication and anti-dust effect equivalent to the lithium based grease is applied. The
grease described below is applied when the product is shipped out from our factory.
The following grease is applied when the product is shipped out from IAI factory.
Guide, Ball Screw Kuroda Precision Industries C Grease
Warning: Never use anything other than synthetic poly- olefin grease. Mixing poly- grease with other
grease not only reduces the performance of the grease, it may even cause damage to the
actuator.
61
Page 68

4.6.3 How to apply grease
(1) Remove the screws and detach the side covers on both sides.
Side Cover Attachment
Screws
4. Maintenance Inspection
Side Cover Attachment
Screws
Opposite Side of the Motor
Motor Side
Side Cover
After Side Covers are Detached
(2) On the guide part, insert a spatula between the slider and the base or apply grease with a grease
injector while moving the slider back and forth.
Apply grease on both sides.
Wipe off the excess grease at the end.
62
Page 69

(3) To grease ball screws, first clean, then put some grease on your finger and apply while moving the slider
back and forth.
In this process, pay attention to the stainless steel sheet so that you would not touch and make it
deformed.
When finished, wipe off excess grease.
(4) Attach the side covers after grease supply is finished.
If you touch the edge of the stainless sheet in the attaching process, the sheet may get damaged or
wavy which result in shortening life or earlier wear-out.
To avoid touching the edge of the sheet, insert a spacer (approximately 0.1 to 0.2mm) between the
sheet and cover to push up the sheet, and then push in the cover.
4. Maintenance Inspection
Caution: x Do not damage the stainless steel sheet by bending it forcefully during the check inside.
Also you may get hurt on the edge of the stainless steel sheet. Wear gloves when you work
on it.
The front cover is supporting the ball screw. Do not detach it.
If the front cover loses its tuned condition, it may cause an increase of slider resistance,
shorten production life and abnormal noise due to the center of the axis being off the right
position.
x In case the grease got into your eye, immediately go see the doctor to get appropriate care.
After finishing the gease supply work, wash your hands carefully with water and soap to
rinse the grease off.
63
Page 70

4.7 Procedure for Stainless Steel Sheet Replacement and Adjustment
In this section, explains how to replace and adjust the stainless steel sheet.
The screws and other components detached for the replacement will be necessary when rebuild the product.
Prepare a storage box beforehand to keep the components in it.
4.7.1 Preparation
(1) Items required for replacing the stainless sheet
x Replacement stainless sheet
x Hex wrench
x Scale
(2) Caution for the stainless steel sheet tension
Degradation and wear-out of the stainless steel sheet relies on its tension of attachment.
If the stainless steel sheet is pulled with a huge force and the gap between the sheet and the slider cover
is large, there is a risk of metal fatigue.
On the other hand, if the tensile strength is too low, the stainless steel sheet would interfere with the
4. Maintenance Inspection
back side of the slider cover and make dust to be generated. Therefore it is necessary to have the
dedicated tuning tool to adjust the tension of the stainless steel sheet to have the appropriate gap
between the stainless steel sheet and slider cover.
(3) Names of the Parts
Stainless Sheet
Stainless Sheet
Retainer Plates
Stainless Sheet
Retainer Plates
Slider Cover
64
Page 71

4.7.2 Procedure for Replacement and Tuning
(1) Move the slider to the middle of the actuator
(2) Remove the screws affixing the slider cover.
For SA5C and SA5R there is a plate spring. Remove the spring.
Standard Type (RCP4-SA5C, SA6C, SA7C, SA5R, SA6R, SA7R)
Condition with Slider Covers Detached (the condition that the plate spring is also removed for SA5C and
SA5R)
Clean Room Type (RCP4CR-SA5C, SA6C, SA7C)
Condition with Slider Covers Detached
4. Maintenance Inspection
(3) With a screw driver, remove the 2 screws on each side and detach the holder plate and old stainless
steel sheet.
(4) Hold the new stainless steel sheet with the holder plate and the screws.
At this time, tighten the screws on the motor side properly and leave the other side loose.
Opposite Side of the Motor
Motor Side
Stainless Steel Sheet Holder Plate and Fixing Screws
Tighten on the motor side properly and leave the
other side loose.
65
Page 72

(5) Adjust the stainless steel sheet tension.
1) Adjust the tension of stainless steel sheet by moving back and forth. For Clean Type, make the roller
pressed down to touch the side covers. It is not necessary for Standard Type since there is no roller.
2) Tune the tension of the sheet so the distance between the peak of the sheet and the top surface of
the slider become as shown in the figure below and temporarily tighten the screws on the opposite
side of the motor to hold the stainless steel sheet.
Push down with approximately
2 to 2.5N (0.2 to 0.25kgf)
4. Maintenance Inspection
Distance between Peak of Stainless Steel Sheet and Slider Top Surface
(6) Slide the slider in the whole range of the stroke for several times to ensure there is no touch of the slider
to the stainless steel sheet, and check the tension at the same time.
For those such as low lead type or brake-equipped type that cannot be moved with hand, turn on the
power supply to the controller and move the slider in approximately 20mm/s using either the teaching
pendant or PC software.
Standard Type
Clean Room Type
Distance between slider top surface
and peak of stainless steel sheet (H)
Slider top
surface
Type H [mm]
RCP4-SA5C, SA6C
RCP4-SA5R, SA6R
0.5 to 1.0
RCP4-SA7C, SA7R 1.0 to 2.0
RCP4CR-SA5C, SA6C 0.5 to 1.0
RCP4CR-SA7C 2.0 to 3.0
Push down with approximately
2 to 2.5N (0.2 to 0.25kgf)
66
Page 73

4.8 Procedure for Belt Replacement and Tuning
Applicable Untis : RCP4-SA5R, SA6R, SA7R
4.8.1 Inspection of the Belt
For inspection work, detach the pulley cover with 1.5mm-sized hex wrench and carry it out by visual.
Pulley Cover
Screw
The replacement period cannot be determined in general because the durability of the deceleration belt can
be greatly influenced by the conditions of operation.
It generally has life of hundreds of times for bending movement.
The timing belt requires replacement regularly under the following conditions as a reference since
degradation such as abrasion proceeds as the time passes for usage.
x When remarkable abrasion is confirmed on the teeth or edges of the belt
x When the belt is swelled for such reasons as oil being attached on
x When damage is confirmed such as crack on the tooth or back of the belt
Also, since it is difficult to confirm the degradation of the core wires to retain the strength of the teethed belt
by visual or looseness caused by being elongated, it is recommended to set regular replacement periods in
advance in case the product is used under such conditions that gives the core wires great fatigue due to
high acceleration and deceleration speed.
4. Maintenance Inspection
4.8.2 Belts to be used
The following belt is applied when the product is shipped out from IAI factory.
SA5R/SA6R x 60S2M196GB Rubber Bare back type (Mitsuboshi Belting Ltd.)
SA7R x 100S3M237GB Rubber Bare back type (Mitsuboshi Belting Ltd.)
67
Page 74

4.8.3 Replacement of the Belt
[Items Required for Replacemet Work]
x Belt for Replacement
x Hex wrench
1.5mm, 2.5mm (SA5R/SA6R) or 3mm (SA7R) - sized
x Tension gauge (that is available for pulling with 80N)
x Long cable band (thin string)
[Procedures]
1) Remove the three screws holding the pulley cover with a 1.5mm-sized hex wrench to detach the pulley
cover.
4. Maintenance Inspection
Pulley Cover
Screw
2) Loosen the four screws holding the pulley on the motor side with a 2.5mm-sized (SA5R/SA6R) or
3mm-sized (SA7R) hex wrench.
If the belt is required to be replaced, replace it.
Belt
Screw
68
Page 75

3) Adjust the belt tension.
Hand a cable band (thin string) on the edge of the motor unit and pull it on a tension gauge with the specified
load (specified value of the belt tension).
When the load reached the specified, tighten the screws with a 2.5mm-sized (SA5R/SA6R) or 3mm-sized
(SA7R) hex wrench to hold the unit in the place.
Cable band (thin string)
Screw
Belt Tension
Belt Tension
Belt Tension
SA5R, SA6R 25 to 30N
SA7R 80 to 90N
SA5R, SA6R Tightening Torque : 152 N • cm
SA7R Tightening Torque : 323 N • cm
4) Tighten the three screws to hold the pulley cover with a 1.5mm-sized hex wrench to attach the pulley
cover.
4. Maintenance Inspection
Tightening Torque : 25.4 N • cm
Pulley Cover
Screw
69
Page 76

4.9 Motor Replacement Process
4.9.1 RCP4-SA5C, SA6C, SA7C, RCP4CR-SA5C, SA6C, SA7C
[Items required for replacing the motor]
x Motor Unit for Replacement
x Hex wrench set
3mm-sized
4. Maintenance Inspection
[Procedure]
1) Remove the screw affixing the actuator and the motor unit with a 3mm hex wrench.
For Fixed screws actuator and Motor Unit
2) Detach the motor unit.
70
Page 77

3) Make the profiles on the actuator side and motor unit side aligned so the projection matches to the slit.
4. Maintenance Inspection
Make the projection and slit matched
with each other.
Apply grease to the coupling part.
TL101Y grease made by NOK
4) Attach the motor unit for replacement with the projection being matched with the slit.
5) Tighten the screw to affix the motor unit to the actuator with 3mm hex wrench.
Tightening Torque : 350 N • cm
71
Page 78

4.9.2 RCP4-SA5R, SA6R, SA7R
[Items Required for Replacement Work]
x Motor Unit for Replacement
x Hex Wrench Set
3mm-sized
4. Maintenance Inspection
[Procedure]
1) Remove the screw affixing the actuator and the motor unit with a 3mm hex wrench.
Fixing screw for actuator and motor unit
2) Detach the motor unit.
72
Page 79

3) Make the profiles on the actuator side and motor unit side aligned so the projection matches to the slit.
4. Maintenance Inspection
Make the projection and slit matched
with each other.
Apply grease to the coupling part.
TL101Y grease made by NOK
4) Attach the motor unit for replacement with the projection being matched with the slit.
5) Tighten the screw to affix the motor unit to the actuator with 3mm hex wrench.
Fixing screw for actuator and motor unit
Tightening Torque : 350 N • cm
73
Page 80

5. External Dimensions
5.1 RCP4-SA5C
Datum Surface
Detail: X
32
20 66
50
52
φ8
φ4.5
5
3 4.5
(Attachment hole and datum surface)
Datum Point for
Ma and Mc Moments Offset
50
57.5
40
X
5. External Dimensions
5
0+0.012
4
Detail Diagram Y
Scale 2 : 1
2-φ4 H7 depth 6
L
18
3
ME MESE SE
39
H-Oblong Hole, depth 5.5
(from bottom of base)
D-M depth 7
26
Y
Stroke
B×100P
J (Reamed hole and slotted hole)
A
G 106 (146)7
9 15.515.5
30
26
(Reamer pitch ±0.02)
94 19
4-M4 depth 9
19
±0.02
3
26
22.5
2- φ 4H7 depth 5.5
(from bottom of base)
F-φ4.5, Through
φ8 Counterbore, depth 4.5 (from other side)
24
2050C×100P
62
20 (300) (13)
98 (138)K
Grounding Tap, M3, depth 6
(Same on opposite side)
Affixing Cable
Allowable Bending = R50
47 2.52.5
(27)
L Mass [kg]
Stroke
w/o
Brake
With
Brake
A B C D F G H J K
50 279 319 73 0 0 4 4 166 0 0 181 1.5 1.7
100 329 359 100 0 0 4 4 216 1 85 231 1.6 1.9
150 379 419 100 0 1 4 6 266 1 85 281 1.8 2.0
200 429 469 200 1 1 5 6 316 1 185 331 1.9 2.1
250 479 519 200 1 2 6 8 366 1 185 381 2.1 2.3
300 529 569 300 2 2 8 8 416 1 285 431 2.2 2.4
350 579 619 300 2 3 8 10 466 1 285 481 2.4 2.6
400 629 669 400 3 3 10 10 516 1 385 531 2.5 2.7
450 679 719 400 3 4 10 12 566 1 385 581 2.6 2.9
500 729 769 500 4 4 12 12 616 1 485 631 2.8 3.0
550 779 819 500 4 5 12 14 666 1 485 681 2.9 3.2
600 829 869 600 5 5 14 14 716 1 585 731 3.1 3.3
650 879 919 600 5 6 14 16 766 1 585 781 3.2 3.5
700 929 969 700 6 6 16 16 816 1 685 831 3.4 3.5
750 979 1019 700 6 7 16 18 866 1 685 881 3.5 3.7
800 1029 1069 800 7 7 18 18 916 1 785 931 3.7 3.9
74
w/o
Brake
With
Brake
Page 81

5.2 RCP4-SA6C
Datum Surface
φ8
5
φ4.5
(Attachment hole and datum surface)
59.5
Detail: X
Datum Point for
Ma and Mc Moments Offset
53
43
X
0+0.012
4
Detail Diagram Y
Scale 2 : 1
5 4.5
39
23 88
40
56
58
H-Oblong Hole, depth 5.5
(from bottom of base)
D-M5 depth 9
5
2- φ5H7 depth 6
31
(Reamer pitch
18
3 3
ME
31
Y
Stroke
J (Reamed hole and slotted hole)
K
G 106 (146)7
L
B × 100P
C× 100P
21 19.519.5
50
±0.02)
115 18.5
75A
4-M5 depth 9
32
±0.02
98 (138)
MESE SE
28
22.5
Grounding Tap, M3, depth 6
(Same on opposite side)
F-φ4.5, Through
φ8 Counterbore, depth 4.5 (from other side)
E-φ4H7, depth 5.5
(from bottom of base)
20
25
20 (300)
(13)
Affixing Cable
Allowable Bending = R50
(27)
5. External Dimensions
47 5.55.5
Stroke
w/o
Brake
With
Brake
A B C D E F G H J K
w/o
Brake
50 299.5 339.5 0 0 1 4 2 4 186.5 0 0 201.5 2.0 2.2
100 349.5 389.5 100 0 1 6 3 4 236.5 1 85 251.5 2.1 2.3
150 399.5 439.5 100 0 2 6 3 6 286.5 1 85 301.5 2.3 2.5
200 449.5 489.5 200 1 2 8 3 6 336.5 1 185 351.5 2.4 2.6
250 499.5 539.5 200 1 3 8 3 8 386.5 1 185 401.5 2.6 2.8
300 549.5 589.5 300 2 3 10 3 8 436.5 1 285 451.5 2.7 3.0
350 599.5 639.5 300 2 4 10 3 10 486.5 1 285 501.5 2.9 3.1
400 649.5 689.5 400 3 4 12 3 10 536.5 1 385 551.5 3.0 3.3
450 699.5 739.5 400 3 5 12 3 12 586.5 1 385 601.5 3.2 3.4
500 749.5 789.5 500 4 5 14 3 12 636.5 1 485 651.5 3.4 3.6
550 799.5 839.5 500 4 6 14 3 14 686.5 1 485 701.5 3.5 3.7
600 849.5 889.5 600 5 6 16 3 14 736.5 1 585 751.5 3.7 3.9
650 899.5 939.5 600 5 7 16 3 16 786.5 1 585 801.5 3.8 4.1
700 949.5 989.5 700 6 7 18 3 16 836.5 1 685 851.5 4.0 4.2
750 999.5 1039.5 700 6 8 18 3 18 886.5 1 685 901.5 4.1 4.4
800 1049.5 1089.5 800 7 8 20 3 18 936.5 1 785 951.5 4.3 4.5
L Mass [kg]
With
Brake
75
Page 82

5.3 RCP4-SA7C
Datum Surface
6
5.5 5.5
(Attachment hole and datum surface)
Datum Point for
Ma and Mc Moments Offset
76
64
50
X
φ6
Detail: X
48
9 30 9
71
73
5. External Dimensions
5
0
+0.012
4
Detail Diagram Y
Scale 2 : 1
2-φ5 H7 depth 10
φ9.5
K
21.5
3 3
ME MESE SE
43
H-Oblong Hole, depth 5.5
(from bottom of base)
D-M5 depth 9
40
Y
10 143.5 (193.5)
Stroke
B ×100 P
C ×100P
J (Reamed hole and slotted hole)
G
39
(Reamer pitch ±0.02)
20 20 20
L
4-M5 depth 10
32
±0.02
50
126
80A
22
F-φ 6, Through
φ 9.5 Counterbore, depth 5.5 (from other side)
30
133 (183)
21
Grounding Tap, M3, depth 6
32
(Same on opposite side)
E- φ4H7 depth 6
(from bottom of base)
25.5
20
Affixing Cable
Allowable Bending = R50
(300)
(13)
(27)
61 66
Stroke
w/o
Brake
With
Brake
A B C D E F G H J K
50 352.5 402.5 0 0 1 4 2 4 199 0 0 219.5 3.4 3.9
100 402.5 452.5 100 0 1 6 3 4 249 1 85 269.5 3.6 4.1
150 452.5 502.5 100 0 2 6 3 6 299 1 85 319.5 3.8 4.3
200 502.5 552.5 200 1 2 8 3 6 349 1 185 369.5 4.1 4.6
250 552.5 602.5 200 1 3 8 3 8 399 1 185 419.5 4.3 4.8
300 602.5 652.5 300 2 3 10 3 8 449 1 285 469.5 4.6 5.1
350 652.5 702.5 300 2 4 10 3 10 499 1 285 519.5 4.8 5.3
400 702.5 752.5 400 3 4 12 3 10 549 1 385 569.5 5.1 5.6
450 752.5 802.5 400 3 5 12 3 12 599 1 385 619.5 5.3 5.8
500 802.5 852.5 500 4 5 14 3 12 649 1 485 669.5 5.6 6.1
550 852.5 902.5 500 4 6 14 3 14 699 1 485 719.5 5.8 6.3
600 902.5 952.5 600 5 6 16 3 14 749 1 585 769.5 6.1 6.5
650 952.5 1002.5 600 5 7 16 3 16 799 1 585 819.5 6.3 6.8
700 1002.5 1052.5 700 6 7 18 3 16 849 1 685 869.5 6.5 7.0
750 1052.5 1102.5 700 6 8 18 3 18 899 1 685 919.5 6.8 7.3
800 1102.5 1152.5 800 7 8 20 3 18 949 1 785 969.5 7.0 7.5
76
L Mass [kg]
w/o
Brake
With
Brake
Page 83

5.4 RCP4-SA5R
Datum Point for
Ma and Mc Moments Offset
32
20 66
L
(300)
K
2-φ4 H7 depth 6
4-M4 depth 9
20
94
30
19
±0.02
9 15.515.5
(28.5)
116 (156)
18
3
(13)
(28)
0.5
Stroke
Affixing Cable
Allowable Bending = R50
27.5
19
3
MESEME SE
Grounding Tap, M3, depth 6
(32.5)
(Same on opposite side)
26
(Reamer pitch ±0.02)
5. External Dimensions
4-M5 depth 15
39
50
40
50
X
(10)
52
56.5
118.5
47
2.5
H-Oblong Hole, depth 5.5
(from bottom of base)
D-M4 depth 7
Y
37
φ4H7 depth 5.5
(from bottom of base)
B×100P
26
C×100P 50 20
J (Reamed hole and slotted hole)
A
G7 35.5
F-φ4.5 Through
φ8 Counterbore, depth 4.5 (from other side)
24
62
37
26
Mass [kg]
Stroke L A B C D F G H J K
w/o
Brake
With
Brake
50 208.5 73 0 0 4 4 166 0 0 181 1.5 1.7
100 258.5 100 0 0 4 4 216 1 85 231 1.6 1.9
150 308.5 100 0 1 4 6 266 1 85 281 1.8 2.0
200 358.5 200 1 1 6 6 316 1 185 331 1.9 2.1
250 408.5 200 1 2 6 8 366 1 185 381 2.1 2.3
300 458.5 300 2 2 8 8 416 1 285 431 2.2 2.4
350 508.5 300 2 3 8 10 466 1 285 481 2.4 2.6
400 558.5 400 3 3 10 10 516 1 385 531 2.5 2.7
450 608.5 400 3 4 10 12 566 1 385 581 2.6 2.9
500 658.5 500 4 4 12 12 616 1 485 631 2.8 3.0
550 708.5 500 4 5 12 14 666 1 485 681 2.9 3.2
600 758.5 600 5 5 14 14 716 1 585 731 3.1 3.3
650 808.5 600 5 6 14 16 766 1 585 781 3.2 3.5
700 858.5 700 6 6 16 16 816 1 685 831 3.4 3.6
750 908.5 700 6 7 16 18 866 1 685 881 3.5 3.7
800 958.5 800 7 7 18 18 916 1 785 931 3.7 3.9
77
Page 84

5.5 RCP4-SA6R
39
23 88
40
53
43
X
56
58
121.5
5. External Dimensions
Datum Point for
Ma and Mc Moments Offset
1.5
(7)
56.5
4.5 47
H-Oblong Hole, depth 5.5
(from bottom of base)
18
3
ME SE
D-M4 depth 7
Y
L
Stroke
(28)
(13)
31
Affixing Cable
Allowable Bending = R50
F-φ4.5 Through
φ8 Counterbore, depth 4.5 (from other side)
J (Reamed hole and slotted hole)
K
2-φ5H7 depth 6
4-M5 depth 9
(300) 116 (156)
B×100P
C×100P 20
A
G7 35.5
115 18.5
50
32
±0.02
21
19.5
20
(28.5)
75 25
27.5
3
SE ME
19.5
Grounding Tap, M3, depth 6
(32.5)
(Same on opposite side)
E-φ4H7 depth 5.5
(from bottom of base)
31
(Reamer pitch ±0.02)
4-M5 depth 15
37
28
37
Stroke L A B C D E F G H J K
w/o
Brake
50 229 0 0 1 4 2 4 186.5 0 0 201.5 2.0 2.2
100 279 100 0 1 6 3 4 236.5 1 85 251.5 2.1 2.3
150 329 100 0 2 6 3 6 286.5 1 85 301.5 2.3 2.5
200 379 200 1 2 8 3 6 336.5 1 185 351.5 2.4 2.6
250 429 200 1 3 8 3 8 386.5 1 185 401.5 2.6 2.8
300 479 300 2 3 10 3 8 436.5 1 285 451.5 2.7 3.0
350 529 300 2 4 10 3 10 486.5 1 285 501.5 2.9 3.1
400 579 400 3 4 12 3 10 536.5 1 385 551.5 3.0 3.3
450 629 400 3 5 12 3 12 586.5 1 385 601.5 3.2 3.4
500 679 500 4 5 14 3 12 636.5 1 485 651.5 3.4 3.6
550 729 500 4 6 14 3 14 686.5 1 485 701.5 3.5 3.7
600 779 600 5 6 16 3 14 736.5 1 585 751.5 3.7 3.9
650 829 600 5 7 16 3 16 786.5 1 585 801.5 3.8 4.1
700 879 700 6 7 18 3 16 836.5 1 685 851.5 4.0 4.2
750 929 700 6 8 18 3 18 886.5 1 685 901.5 4.1 4.4
800 979 800 7 8 20 3 18 936.5 1 785 951.5 4.3 4.5
Mass [kg]
With
Brake
78
Page 85

5.6 RCP4-SA7R
Datum Point for
48
9 30 9
Ma and Mc Moments Offset
21.5
(13)
(28)
Stroke
2-φ5H7 depth 10
4-M5H7 depth 10
Affixing Cable
Allowable Bending = R50
K
L
32
20(300)
126
50
±0.02
20 20 20
148.5(198.5)
(55)
33
22
33
MESEME SE
(37)
Grounding Tap, M3, depth 6
(Same on opposite side)
39
(Reamer pitch ±0.02)
5. External Dimensions
4-M6 depth 14
43
64
50
156
(7.75)
75.25
2.5 61 0.5
H-Oblong Hole, depth 5.5
D-M5 depth 9
(from bottom of base)
B×100P
F-φ6 Through
φ9.5 Counterbore, depth 5.5 (from other side)
E-φ4H7 depth 6
(from bottom of base)
X
71
73
40
Y
J (Reamed hole and slotted hole)
A
G10
30C×100P
80 25.5
43.5
Stroke L A B C D E F G H J K
50 252.5 0 0 1 4 2 4 199 0 0 219.5 3.4 3.9
100 302.5 100 0 1 6 3 4 249 1 85 269.5 3.6 4.1
150 352.5 100 0 2 6 3 6 299 1 85 319.5 3.8 4.3
200 402.5 200 1 2 8 3 6 349 1 185 369.5 4.1 4.6
250 452.5 200 1 3 8 3 8 399 1 185 419.5 4.3 4.8
300 502.5 300 2 3 10 3 8 449 1 285 469.5 4.6 5.1
350 552.5 300 2 4 10 3 10 499 1 285 519.5 4.8 5.3
400 602.5 400 3 4 12 3 10 549 1 385 569.5 5.1 5.6
450 652.5 400 3 5 12 3 12 599 1 385 619.5 5.3 5.8
500 702.5 500 4 5 14 3 12 649 1 485 669.5 5.6 6.1
550 752.5 500 4 6 14 3 14 699 1 485 719.5 5.8 6.3
600 802.5 600 5 6 16 3 14 749 1 585 769.5 6.0 6.5
650 852.5 600 5 7 16 3 16 799 1 585 819.5 6.3 6.8
700 902.5 700 6 7 18 3 16 849 1 685 869.5 6.5 7.0
750 952.5 700 6 8 18 3 18 899 1 685 919.5 6.8 7.3
800 1002.5 800 7 8 20 3 18 949 1 785 969.5 7.0 7.5
Mass [kg]
w/o
Brake
With
Brake
48
33
48
79
Page 86

5.7 RCP4CR-SA5C
Datum Surface
Detail: X
32
20 66
50
52
5
Scale 2 : 1
φ8
φ4.5
18.9
5
3 4.5
(Attachment hole and datum surface)
Datum Point for
Ma and Mc Moments Offset
50
57.5
40
X
0
+0.012
5. External Dimensions
4
Detail Diagram Y
2-φ4 H7 depth 6
19
26
(Reamer pitch ±0.02)
L
20
3
ME
SE
39
Ø 40
D-M4 depth 7
26
Y
Stroke
Range of joint rotation
H-Oblong Hole, depth 5.5
(from bottom of base)
J (Reamed hole and slotted hole)
C×100P
A
G 106(146)7
2- φ 4H7 depth 5.5
(from bottom of base)
B×100P
9 15.515.5
±0.02
30
90 21
2050
4-M4 depth 9
98(138)K
3
ME
SE
26
Grounding Tap, M3, depth 6
22.5
3332
F-φ4.5, Through
φ8 Counterbore, depth 4.5 (from other side)
24
62
(Same on opposite side)
20
(300)
Affixing Cable
Allowable Bending = R50
Fitting Location : Opposite Side
Fitting Location : Standard
* Tube outer diameters : φ6
(13)
(28)
47 2.52.5
Stroke
w/o
Brake
With
Brake
A B C D F G H J K
w/o
Brake
50 279 319 73 0 0 4 4 166 0 0 181 1.5 1.7
100 329 369 100 0 0 4 4 216 1 85 231 1.6 1.9
150 379 419 100 0 1 4 6 266 1 85 281 1.8 2.0
200 429 469 200 1 1 6 6 316 1 185 331 1.9 2.1
250 479 519 200 1 2 6 8 366 1 185 381 2.1 2.3
300 529 569 300 2 2 8 8 416 1 285 431 2.2 2.4
350 579 619 300 2 3 8 10 466 1 285 481 2.4 2.6
400 629 669 400 3 3 10 10 516 1 385 531 2.5 2.7
450 679 719 400 3 4 10 12 566 1 385 581 2.6 2.9
500 729 769 500 4 4 12 12 616 1 485 631 2.8 3.0
550 779 819 500 4 5 12 14 666 1 485 681 2.9 3.2
600 829 869 600 5 5 14 14 716 1 585 731 3.1 3.3
650 879 919 600 5 6 14 16 766 1 585 781 3.2 3.5
700 929 969 700 6 6 16 16 816 1 685 831 3.4 3.6
750 979 1019 700 6 7 16 18 866 1 685 881 3.5 3.7
800 1029 1069 800 7 7 18 18 916 1 785 931 3.7 3.9
L Mass [kg]
With
Brake
80
Page 87

5.8 RCP4CR-SA6C
Datum Surface
φ8
5
φ4.5
(Attachment hole and datum surface)
59.5
Detail: X
Datum Point for
Ma and Mc Moments Offset
53
43
X
0.012
0
+
4
Detail Diagram Y
Scale 2 : 1
5 4.5
39
23 88
40
56
18.9
58
5
18
3
ME
Ø 40
Range of joint rotation
H-Oblong Hole, depth 5.5
(from bottom of base)
D-M5 depth 9
31
Y
2-φ5 H7 depth 6
31
(Reamer pitch ±0.02)
Stroke
F-φ4.5, Through
φ8 Counterbore, depth 4.5 (from other side)
J (Reamed hole and slotted hole)
K
B×100P
C×100P
G 106(146)7
21 19.519.5
4-M4 depth 9
32
±0.02
50
L
3332
20
25
75A
98(138)
18.5115
3
MESE SE
28
22.5
Grounding Tap, M3, depth 6
(Same on opposite side)
2- φ 4H7 depth 5.5
(from bottom of base)
20
(300)
Affixing Cable
Allowable Bending = R50
(13)
(28)
Fitting Location : Opposite Side
Fitting Location : Standard
47 5.55.5
* Tube outer diameters : φ6
5. External Dimensions
Stroke
w/o
Brake
With
Brake
A B C D E F G H J K
w/o
Brake
50 299.5 339.5 0 0 1 4 2 4 186.5 0 0 201.5 2.0 2.2
100 349.5 389.5 100 0 1 6 3 4 236.5 1 85 251.5 2.1 2.3
150 399.5 439.5 100 0 2 6 3 6 286.5 1 85 301.5 2.3 2.5
200 449.5 489.5 200 1 2 8 3 6 336.5 1 185 351.5 2.4 2.6
250 499.5 539.5 200 1 3 8 3 8 386.5 1 185 401.5 2.6 2.8
300 549.5 589.5 300 2 3 10 3 8 436.5 1 285 451.5 2.7 3.0
350 599.5 639.5 300 2 4 10 3 10 486.5 1 285 501.5 2.9 3.1
400 649.5 689.5 400 3 4 12 3 10 536.5 1 385 551.5 3.0 3.3
450 699.5 739.5 400 3 5 12 3 12 586.5 1 385 601.5 3.2 3.4
500 749.5 789.5 500 4 5 14 3 12 636.5 1 485 651.5 3.4 3.6
550 799.5 839.5 500 4 6 14 3 14 686.5 1 485 701.5 3.5 3.7
600 849.5 889.5 600 5 6 16 3 14 736.5 1 585 751.5 3.7 3.9
650 899.5 939.5 600 5 7 16 3 16 786.5 1 585 801.5 3.8 4.1
700 949.5 989.5 700 6 7 18 3 16 836.5 1 685 851.5 4.0 4.2
750 999.5 1039.5 700 6 8 18 3 18 886.5 1 685 901.5 4.1 4.4
800 1049.5 1089.5 800 7 8 20 3 18 936.5 1 785 951.5 4.3 4.5
L Mass [kg]
With
Brake
81
Page 88

5.9 RCP4CR-SA7C
Datum Surface
6
5.5 5.5
8 32 8
50
0
+0.012
4
Detail Diagram Y
Scale 2 : 1
Detail: X
48
71
73
5
(Attachment hole and datum surface)
Datum Point for
Ma and Mc Moments Offset
76
64
X
5. External Dimensions
(Reamer pitch ±0.02)
20 20 20
±0.02
32
L
2-φ5 H7 depth 10
φ9.5
φ6
39
20.5
3 3
ME MESE SE
43
(25.5)
D-M5 depth 9
40
Y
10 143.5 (193.5)
Stroke
φ 46
Range of joint rotation
H-Oblong Hole, depth 5.5
(from bottom of base)
J (Reamed hole and slotted hole)
B×100P
C×100P
G
4-M5 depth 10
50
40.540
F-φ6, Through
φ9.5 Counterbore, depth 5.5 (from other side)
30
80A
133(183)K
21128
21
32
Grounding Tap, M3, depth 6
(Same on opposite side)
E- φ 4H7 depth 6
(from bottom of base)
25.5
(300)
20
Affixing Cable
Allowable Bending = R50
(13)
(28)
Fitting Location : Opposite Side
Fitting Location : Standard
61 66
* Tube outer diameters : φ8
Stroke
w/o
Brake
With
Brake
A B C D E F G H J K
w/o
Brake
50 352.5 402.5 0 0 1 4 2 4 199 0 0 219.5 3.4 3.9
100 402.5 452.5 100 0 1 6 3 4 249 1 85 269.5 3.6 4.1
150 452.5 502.5 100 0 2 6 3 6 299 1 85 319.5 3.8 4.3
200 502.5 552.5 200 1 2 8 3 6 349 1 185 369.5 4.1 4.6
250 552.5 602.5 200 1 3 8 3 8 399 1 185 419.5 4.3 4.8
300 602.5 652.5 300 2 3 10 3 8 449 1 285 469.5 4.6 5.1
350 652.5 702.5 300 2 4 10 3 10 499 1 285 519.5 4.8 5.3
400 702.5 752.5 400 3 4 12 3 10 549 1 385 569.5 5.1 5.6
450 752.5 802.5 400 3 5 12 3 12 599 1 385 619.5 5.3 5.8
500 802.5 852.5 500 4 5 14 3 12 649 1 485 669.5 5.6 6.1
550 852.5 902.5 500 4 6 14 3 14 699 1 485 719.5 5.8 6.3
600 902.5 952.5 600 5 6 16 3 14 749 1 585 769.5 6.0 6.5
650 952.5 1002.5 600 5 7 16 3 16 799 1 585 819.5 6.3 6.8
700 1002.5 1052.5 700 6 7 18 3 16 849 1 685 869.5 6.5 7.0
750 1052.5 1102.5 700 6 8 18 3 18 899 1 685 919.5 6.8 7.3
800 1102.5 1152.5 800 7 8 20 3 18 949 1 785 969.5 7.0 7.5
L Mass [kg]
With
Brake
82
Page 89

6. Life
The mechanical life of the actuator is represented by that of the guide receiving the greatest moment load.
The “rated load” is one factor that relates to the traveling life.
There are two types of “rated load,” namely “static rated load” and “dynamic rated load.”
x “Static rated load” : Load which, when applied to a stationary actuator, leaves a minor pressure mark
on the contract surface.
x “Dynamic rated load” : Load which applies after a specified traveling distance under a load based on a
specific probability of survival at which the guide does not break
Guide manufacturers indicate the life of a guide using a dynamic rated load when the provability of survival
after 50 km of traveling is 90%.
In the case of general industrial machinery, however, you should understand the specific life also for the
purpose of maintenance. Also, the life of a guide has a sufficient allowance relative to a radial load, and
receives the greatest impact by a moment load offset from the center of the guide.
The life is designed to ensure a traveling life of 5,000 km under a load corresponding to the allowable load
moment and at a load coefficient of 1.2 (safety factor).
[For the dynamic allowable load moment, refer to 2, “Specification”]
The calculation formula for allowable load moment at a traveling life of 5,000 km is shown below:
C
: Allowable load moment
IA
f
: Load coefficient (= 1.2)
5000km
W
M50: Dynamic rated moment when the probability of survival after
50 km of traveling is 50%
6. Life
The life at the actual moment is calculated by the formula below:
L : Traveling live (probability of survival: 90%)
C
5000km
: Allowable dynamic moment
IA
P : Actual moment
83
Page 90

7. Warranty
7. Warranty
7.1 Warranty Period
One of the following periods, whichever is shorter:
y 18 months after shipment from our company
y 12 months after delivery to the specified location
y 2,500 hours of operation
7.2 Scope of the Warranty
Our products are covered by warranty when all of the following conditions are met. Faulty products covered
by warranty will be replaced or repaired free of charge:
(1) The breakdown or problem in question pertains to our product as delivered by us or our authorized
dealer.
(2) The breakdown or problem in question occurred during the warranty period.
(3) The breakdown or problem in question occurred while the product was in use for an appropriate
purpose under the conditions and environment of use specified in the Operation Manual and catalog.
(4) The breakdown or problem in question was caused by a specification defect or problem, or by the poor
quality of our product.
Note that breakdowns due to any of the following reasons are excluded from the scope of warranty:
[1] Anything other than our product
[2] Modification or repair performed by a party other than us (unless we have approved such
modification or repair)
[3] Anything that could not be easily predicted with the level of science and technology available at the
time of shipment from our company
[4] A natural disaster, man-made disaster, incident or accident for which we are not liable
[5] Natural fading of paint or other symptoms of aging
[6] Wear, depletion or other expected result of use
[7] Operation noise, vibration or other subjective sensation not affecting function or maintenance
Note that the warranty only covers our product as delivered and that any secondary loss arising from a
breakdown of our product is excluded from the scope of warranty.
7.3 Honoring the Warranty
As a rule, the product must be brought to us for repair under warranty.
7.4 Limited Liability
(1) We shall assume no liability for any special damage, consequential loss or passive loss such as a loss
of expected profit arising from or in connection with our product.
(2) We shall not be liable for any program or control method created by the customer to operate our
product or for the result of such program or control method.
84
Page 91

7.5 Conditions of Conformance with Applicable Standards/Regulations, Etc., and Applications
(1) If our product is combined with another product or any system, device, etc., used by the customer, the
customer must first check the applicable standards, regulations and/or rules. The customer is also
responsible for confirming that such combination with our product conforms to the applicable standards,
etc. In such a case we will not be liable for the conformance of our product with the applicable
standards, etc.
(2) Our product is for general industrial use. It is not intended or designed for the applications specified
below, which require a high level of safety. Accordingly, as a rule our product cannot be used in these
applications. Contact us if you must use our product for any of these applications:
[1] Medical equipment pertaining to maintenance or management of human life or health
[2] A mechanism or mechanical equipment intended to move or transport people (such as a vehicle,
railway facility or aviation facility)
[3] Important safety parts of mechanical equipment (such as safety devices)
[4] Equipment used to handle cultural assets, art or other irreplaceable items
(3) Contact us at the earliest opportunity if our product is to be used in any condition or environment that
differs from what is specified in the catalog or Operation Manual.
7.6 Other Items Excluded from Warranty
The price of the product delivered to you does not include expenses associated with programming, the
dispatch of engineers, etc. Accordingly, a separate fee will be charged in the following cases even during the
warranty period:
7. Warranty
[1] Guidance for installation/adjustment and witnessing of test operation
[2] Maintenance and inspection
[3] Technical guidance and education on operating/wiring methods, etc.
[4] Technical guidance and education on programming and other items related to programs
85
Page 92

Change History
Revision Date Description of Revision
September 2011
November 2011
January 2012
February 2012
Change History
March 2012
First edition
Second edition
Pg. 31 Caution note added regarding cable
Third edition
Pg. 1, 3, 4 Contents changed in Safety Guide. Caution notes added for when
working with two or more persons.
Pg. 26 Sideway installation { ĺ 䂦
Ceiling mount installation { ĺ 䂦
Fourth edition
Pg. 12 Graph added for stroke and maximum speed limits when high-output
setting is ineffective
Pg. 19 to 21 Graph added for maximum acceleration and transportable weight
when high-output setting is ineffective
Pg. 51 to 53 Mass added
Fifth edition
Pg. 7 Caution note added saying “Do not crash the slider to an obstacle with
high speed”
Pg. 31 Note added to tell platform should have a structure with enough
stiffness
Pg. 31, 32 Note changed to 1.8 times more of the nominal diameter for the length
of thread engagement on aluminum
August 2012
Sixth edition
Revised overall.
Contents added in Standard type, Motor reversing type and Clean room type
motor straight type.
86
Page 93

Page 94

Manual No.: ME3717-6A (August 2012)
Head Office: 577-1 Obane Shimizu-KU Shizuoka City Shizuoka 424-0103, Japan
TEL +81-54-364-5105 FAX +81-54-364-2589
website: www.iai-robot.co.jp/
Technical Support available in USA, Europe and China
Head Office: 2690 W. 237th Street, Torrance, CA 90505
TEL (310) 891-6015 FAX (310) 891-0815
Chicago Office: 1261 Hamilton Parkway, Itasca, IL 60143
TEL (630) 467-9900 FAX (630) 467-9912
Atlanta Office: 1220 Kennestone Circle, Suite 108, Marietta, GA 30066
TEL (678) 354-9470 FAX (678) 354-9471
website: www.intelligentactuator.com
Ober der Röth 4, D-65824 Schwalbach am Taunus, Germany
TEL 06196-88950 FAX 06196-889524
SHANGHAI JIAHUA BUSINESS CENTER A8-303, 808, Hongqiao Rd. Shanghai 200030, China
TEL 021-6448-4753 FAX 021-6448-3992
website: www.iai-robot.com
The information contained in this document is subject to change without notice for purposes of
product improvement.
Copyright © 2012. Aug. IAI Corporation. All rights reserved.
12.08.000
 Loading...
Loading...