

Hyundai Hi4aHV051001FME1 User Manual

Hi4aHV051001FME1
HYUNDAI ROBOT
Function Manual
HRView
The information presented in the manual is the property of HHI.
Any copy or even partial is not allowed without prior written authorization from HHI.
It may not be provided to the third party, nor used for any other purposes.
HHI reserves the right to modify without prior notification.
Printed in Korea - Oct. 2005. 1st Edition
Copyright ⓒ 2005 by Hyundai Heavy Industries Co., Ltd.

Contents
1. Overview ................................................................................................ 1-1
1.1. HRView Overview..........................................................................................1-2
1.2. Function.........................................................................................................1-2
1.3. Ethernet Communication ...............................................................................1-3
1.4. Caution ..........................................................................................................1-3
2. HRView Installation Method .................................................................. 2-1
2.1. User Environment ..........................................................................................2-2
2.2. Installation .....................................................................................................2-3
3. Controller Parameter Setup .................................................................. 3-1
3.1. Hi3 Controller.................................................................................................3-3
3.2. Hi3TB Controller ............................................................................................3-4
3.3. Hi4a Controller...............................................................................................3-6
4. Cabling Method...................................................................................... 4-1
5. HRView Operating Guide ...................................................................... 5-1
5.1. Run and End..................................................................................................5-2
5.2. Password Input for Ethernet Access..............................................................5-3
5.3. Communication Setup and Connection .........................................................5-4
5.4. List Indication, Transfer and Deletion of Files................................................5-5
5.5. Other Functions .............................................................................................5-6
6. Etc. Setting............................................................................................. 6-1
i

7. Transferable Files (in case of Hi4a Controller) ....................................7-1
8. Troubleshooting.....................................................................................8-1
9. Release note...........................................................................................9-1
Figure Contents
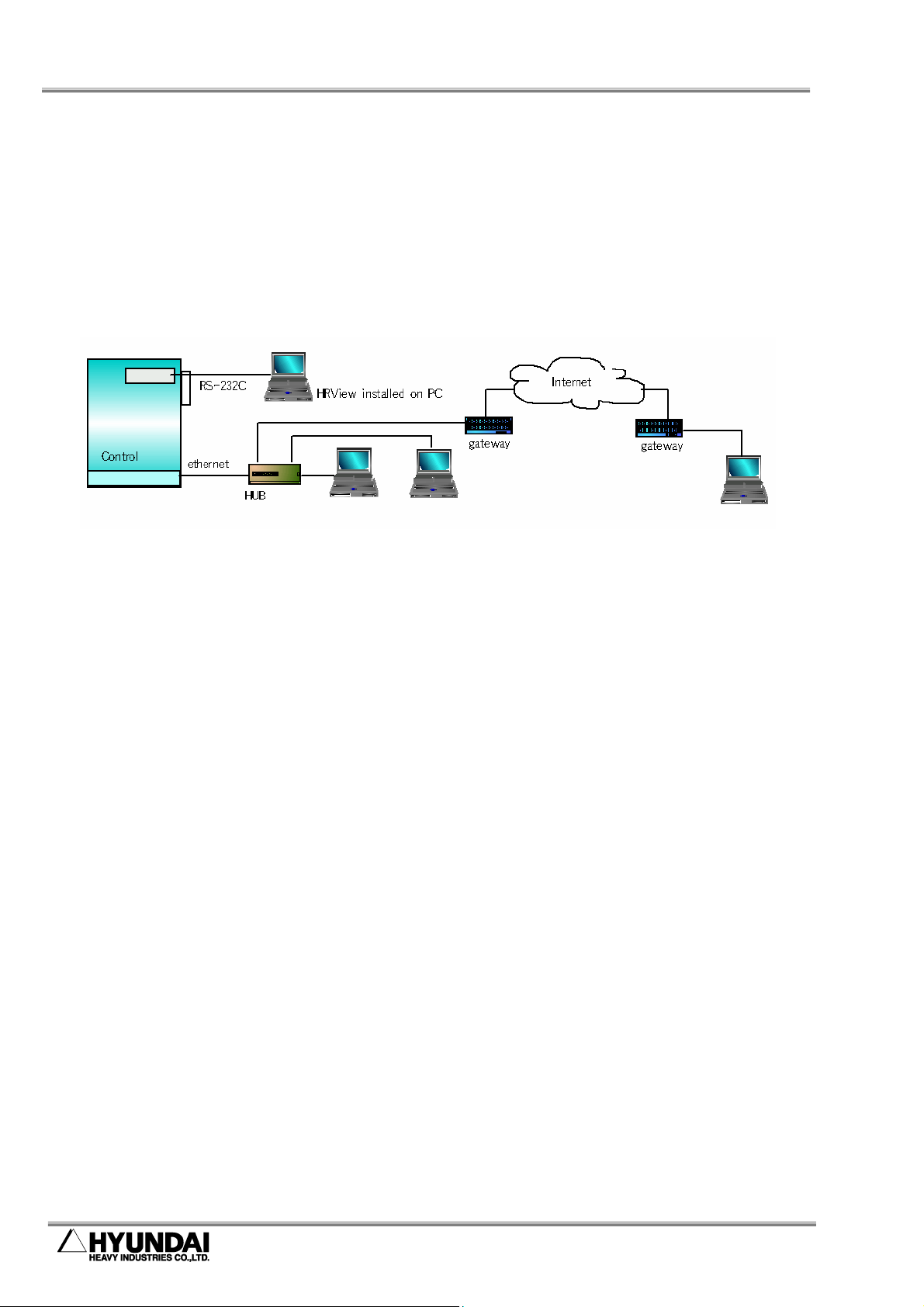
Fig 1.1 Use of HRView............................................................................................. 1-2
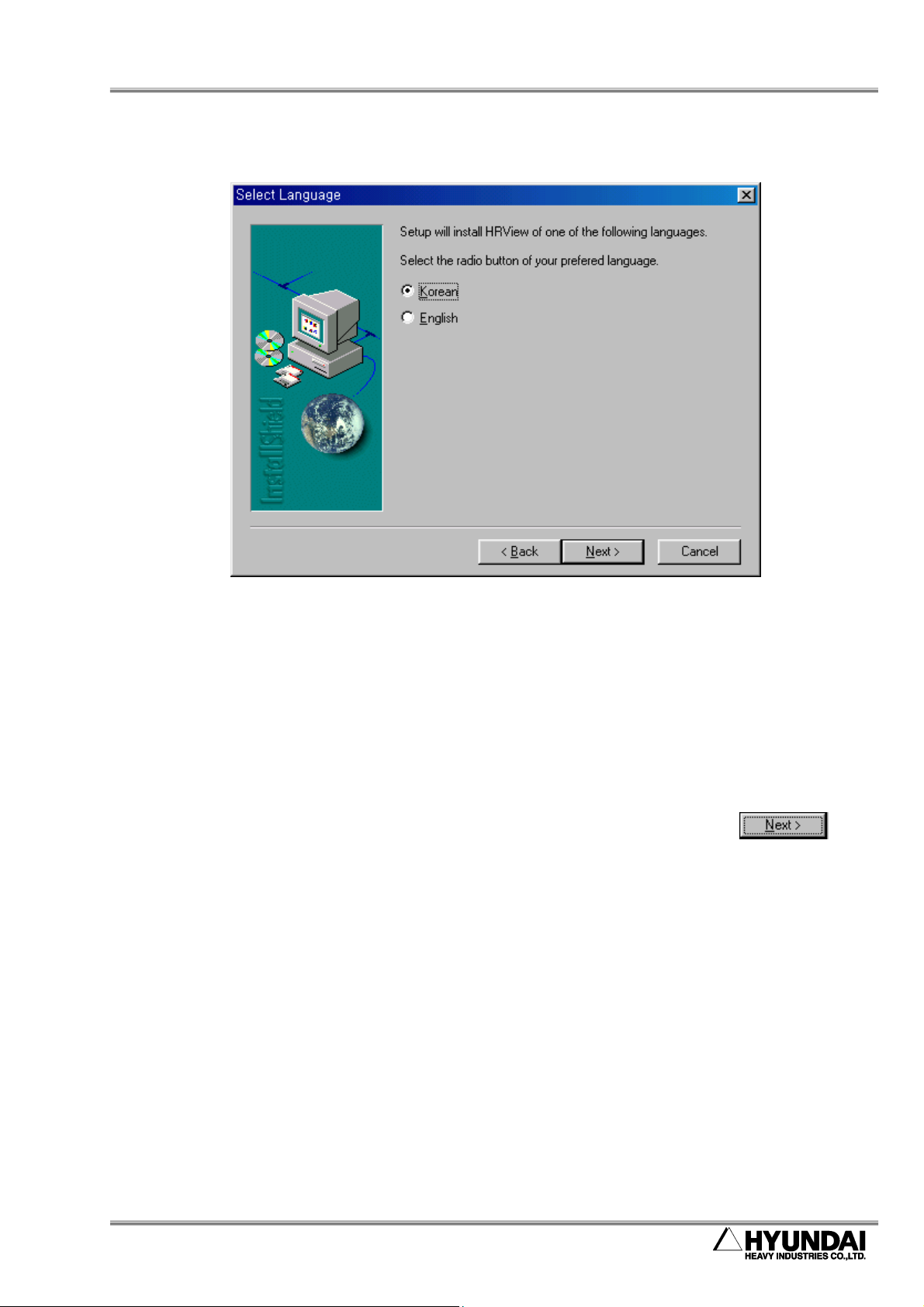
Fig 2.1 HRView installation screen .......................................................................... 2-3
Fig 4.1 Cabling method............................................................................................ 4-2
Fig 5.1 HRView main dialog box.............................................................................. 5-2
Fig 5.2 ID and password input dialog box................................................................ 5-3
Fig 5.3 Communication setup dialog box................................................................. 5-4
Fig 5.4 List indication, transfer and deletion of files ................................................. 5-5
Fig 6.1 Etc. setting dialog box.................................................................................. 6-2
Table Contents
Table 2-1 HRView user environment........................................................................ 2-2
Table 7-1 Transferable file types (in case of Hi4a controller) ................................... 7-2
ii

HRView Function Manual 1. Overview
1. Overview
1-1
1. Overview HRView Function Manual
1.1. HRView Overview
HRView is software for transmission and reception of files contained in HHI’s Hi3, Hi3TB and
Hi4 robot controllers via RS-232C cable or Ethernet to and from external PCs. Ethernet is
available only for Hi3TB.
Fig 1.1 Use of HRView
1.2. Function
This program can perform the following jobs for Hi3, Hi3TB and Hi4 robot controllers.
(1) Viewing file list(s) in the controller
(2) Storing certain file(s) of the controller in PC (backup)
(3) Retrieving certain files of PC to the controller (restore)
(4) Deleting certain files of the controller or PC
(5) Editing controller files stored in PC (calling Notepad, one of Windows utilities)
(6) Changing file format (step number, version, etc.)
1-2

HRView Function Manual 1. Overview
1.3. Ethernet Communication
Communication function through Ethernet can be used only when Ethernet interface board
(BD473), one of the options of Hi3TB robot controller is attached. (For Ethernet file
transmission and reception of Hi4 robot controller, use FTP function.)
1.4. Caution
More than two HRViews cannot be connected at the same time to the controller through
Ethernet. As long as first connected HRView remains, other HRViews cannot be connected.
Also, HRViews from two channels, RS-232C and Ethernet cannot simultaneously access to
the controller.
1-3


HRView Function Manual 2. HRView Installation Method
2. HRView Installation Method
2-1
patible PC, 16MB, VGA 640x480 256 colors
01 and higher can be used.
2. HRView Installation Method HRView Function Manual
2.1. User Environment
Table 2-1 HRView user environment
H/W
O/S Window 95/98/ME/NT/2000/XP
Robot controller
Pentium or higher com
and more recommended
Hi3 controller system main S/W V07.02-
However, Ethernet is available only in Hi3TB.
2-2
HRView Function Manual 2. HRView Installation Method
2.2. Installation
Fig 2.1 HRView installation screen
Insert HRView disk and run setup.exe. Then, InstallShield Wizard starts.
Select language in the first dialog box. If Korean is selected, Korean HRView is installed. If
English is selected, English HRView is installed.
Continue to set installation directory and program icon directory by clicking . Then
appropriate files are copied to the directory, and installation is completed.
2-3


HRView Function Manual 3. Controller Parameter Setup
3. Controller Parameter Setup
3-1

3. Controller Parameter Setup HRView Function Manual
Hi3 controller has two serial ports. One is for T/P, and the other serial port #1 is for HRView.
Ethernet is not available.
Hi3TB and Hi4a robot controllers have four serial ports. Two of them can be used for HRView.
Serial port #1 in condition setup is RS-232C port attached to controller cabinet front. In case
of Hi3TB, serial port #2 is connected to RJ-45 port through Ethernet adopter. (Check the
option applied to the robot controller to be used.)
Except the following setup, additional manipulation for communication is not necessary.
Controller can be in the any mode or any manipulation status. While the motor is on and the
robot performs a job, HRView can be used. This is called “Hot Save/Load” function.
Controller performs transmission and reception internally according to HRView request signal
through Ethernet or RS-232C cable. These details are not indicated on the teach pendant
screen.
3-2
>_
Save
>_
Service
Previous
Done
HRView Function Manual 3. Controller Parameter Setup
3.1. Hi3 Controller
(1) To use Ethernet: Ethernet is not available.
(2) For RS-232C use:
Condition setup and controller parameter should be the same as follows. The
Baudrate of the Serial Port 1 should have the same setup as HRView setup. However,
the rest of the communication options should be the same as follows.
Constant Setup Group (1) → 『13: Serial Port』 → 『3: Serial Port 1』
08:09:05 *** Serial Port 1 *** A:0 S:4
Baudrate = <38400,19200,9600,4800,2400>
Character length = <7,8> bit
Stop bit = <1,2> bit
Parity bit = <Disable,Odd,Even>
Echo = <Disable,Enable>
Press [Enable]+[Arrow].
Condition Set → 『27: Serial Port 1』: Set as FileMng
08:09:05 *** Condition Set *** A:0 S:4
1: Mode =<1Step,1Cycle,Continuous>
2: Start=<Internal,External,Remote>
3: External program =<Disable,Enable>
4: Robot lock =<Disable,Enable>
7: Search range =[0.0]
8: Search reference Pt. record=<Off,On>
9: Speed rate=[100] Gun =<DSBL,ENBL>
13: Rec speed type=<Standard,[%],[mm/s]>
23: Step go/back max.speed = [250]mm/s
27: Serial port #1 =<FileMng,Sens>
Press [Enable]+[Arrow].
Next
3-3
 Loading...
Loading...