

Hydac HLT 1100 User Manual

Benutzerhandbuch (Originalanleitung)
User Manual (Translation of original instruction)
Linear-Wegsensoren Serie HLT 1100
mit CANopen Schnittstelle
Linear Transducer Series HLT 1100
with CANopen Interface
Zusätzliche Sicherheitshinweise
•
Installation • Installation
•
Inbetriebnahme
•
Konfiguration / Parametrierung
•
Fehlerursachen und Abhilfen
•
Software/Support CD:
•
Mat. Nr. 3505546 Mat. No. 3505546
Mat. Nr. 669824 Stand: 07.10.2010
Additional safety instructions
•
Commissioning
•
Configuration / Parameterization
•
Causes of faults and remedies
•
Software/Support CD:
•
CANopen - Schnittstellenbeschreibung
Vorwort
Diese Dokumentation muss ständig am Einsatzort verfügbar sein.
Bitte beachten Sie, dass die in dieser Dokumentation gemachten Angaben der
Gerätetechnik zu dem Zeitpunkt der Literaturerstellung entsprechen. Abweichungen
bei technischen Angaben, Abbildungen und Maßen sind deshalb möglich.
Entdecken Sie beim Lesen dieser Dokumentation Fehler oder haben weitere
Anregungen und Hinweise, so wenden Sie sich bitte an:
HYDAC ELECTRONIC GMBH
Technische Dokumentation
Hauptstraße 27
66128 Saarbrücken
-DeutschlandTel: +49(0)6897 / 509-01
Fax: +49(0)6897 / 509-1726
Email: electronic@hydac.com
Urheberrechtsschutz
Dieses Handbuch, einschließlich den darin enthaltenen Abbildungen, ist
urheberrechtlich geschützt. Drittanwendungen dieses Handbuchs, welche von den
urheberrechtlichen Bestimmungen abweichen, sind verboten. Die Reproduktion,
Übersetzung sowie die elektronische und fotografische Archivierung und Veränderung
bedarf der schriftlichen Genehmigung durch den Hersteller. Zuwiderhandlungen
verpflichten zu Schadenersatz.
Änderungsvorbehalt
Jegliche Änderungen, die dem technischen Fortschritt dienen, vorbehalten.
Schreibweisen
Kursive oder fette Schreibweise steht für den Titel eines Dokuments oder wird zur
Hervorhebung benutzt.
Courier-Schrift zeigt Text an, der auf dem Bildschirm / Display sichtbar ist und
Menüauswahlen von Software.
< > weist auf Tasten der Tastatur Ihres Computers hin (wie etwa
<RETURN>).
Marken
CANopen ist ein eingetragenes Warenzeichen der CAN in Automation e.V.
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 2 von 63

CANopen - Schnittstellenbeschreibung
Inhaltsverzeichnis
Inhaltsverzeichnis..........................................................................................................................3
1 Allgemeines.................................................................................................................................6
1.1 Geltungsbereich .................................................................................................................6
1.2 Referenzen.........................................................................................................................7
1.3 Verwendete Abkürzungen / Begriffe....................................................................................8
2 Zusätzliche Sicherheitshinweise ...............................................................................................9
2.1 Symbol- und Hinweis-Definition..........................................................................................9
2.2 Ergänzende Hinweise zur bestimmungsgemäßen Verwendung ..........................................9
2.3 Organisatorische Maßnahmen............................................................................................10
3 Elektrische Kenndaten ...............................................................................................................11
4 CANopen Informationen.............................................................................................................12
4.1 CANopen – Kommunikationsprofil ......................................................................................13
4.2 Prozess- und Service-Daten-Objekte..................................................................................14
4.3 Objektverzeichnis (Object Dictionary).................................................................................15
4.4 CANopen Default Identifier, COB-ID...................................................................................15
4.5 Übertragung von SDO Nachrichten.....................................................................................16
4.5.1 SDO-Nachrichtenformat......................................................................................16
4.5.2 Lese SDO............................................................................................................18
4.5.3 Schreibe SDO .....................................................................................................19
4.6 Netzwerkmanagement, NMT ..............................................................................................20
4.6.1 Netzwerkmanagement-Dienste............................................................................21
4.6.1.1 NMT-Dienste zur Gerätekontrolle...................................................................................................21
4.6.1.2 NMT-Dienste zur Verbindungsüberwachung .................................................................................22
4.7 Layer setting services (LSS) und Protokolle........................................................................23
4.7.1 LSS-Modes und Dienste......................................................................................24
4.7.2 Übertragung von LSS-Diensten ...........................................................................26
4.7.2.1 LSS-Nachrichtenformat..................................................................................................................26
4.7.3 Switch mode Protokolle.......................................................................................26
4.7.3.1 Switch mode global Protokoll..........................................................................................................26
4.7.3.2 Switch mode selective Protokoll......................................................................................................27
4.7.4 Configuration Protokolle......................................................................................28
4.7.4.1 Configure Node-Id Protokoll............................................................................................................28
4.7.4.2 Configure bit timing parameters Protokoll.......................................................................................29
4.7.4.3 Activate bit timing parameters Protokoll..........................................................................................30
4.7.4.4 Store configuration Protokoll...........................................................................................................30
4.7.5 Inquire LSS-Address Protokolle...........................................................................31
4.7.5.1 Inquire Identity Vendor-ID Protokoll ................................................................................................31
4.7.5.2 Inquire Identity Product-Code Protokoll ..........................................................................................31
4.7.5.3 Inquire Identity Revision-Number Protokoll.....................................................................................32
4.7.5.4 Inquire Identity Serial-Number Protokoll..........................................................................................32
4.7.5.5 Inquire Node-ID Protokoll................................................................................................................33
4.7.6 Identification Protokolle .......................................................................................34
4.7.6.1 LSS identify remote slave Protokoll.................................................................................................34
4.7.6.2 LSS identify slave Protokoll.............................................................................................................35
4.7.6.3 LSS identify non-configured remote slave Protokoll........................................................................35
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 3 von 63

CANopen - Schnittstellenbeschreibung
4.7.6.4 LSS identify non-configured slave Protokoll....................................................................................35
4.7.6.5 LSS fastscan Protokoll ...................................................................................................................35
4.8 Geräteprofil ........................................................................................................................36
5 Installation / Inbetriebnahmevorbereitung................................................................................37
5.1 Anschluss...........................................................................................................................38
5.2 Einschalten der Versorgungsspannung...............................................................................38
5.3 Einstellen der Node-ID und Baudrate mittels LSS-Dienste..................................................38
5.3.1 Konfiguration der Node-ID, Ablauf .......................................................................38
5.3.2 Konfiguration der Baudrate, Ablauf......................................................................39
6 Inbetriebnahme...........................................................................................................................40
6.1 CAN – Schnittstelle.............................................................................................................40
6.2 EDS-Datei ..........................................................................................................................40
Profilspezifische Prozessdaten-Objekte .....................................................................................41
7.1 Erstes Sende-Prozessdaten-Objekt (asynchron) .................................................................41
7.2 Zweites Sende-Prozessdaten-Objekt (synchron).................................................................41
8 Kommunikationsspezifische Standard-Objekte (CiA DS-301)..................................................42
8.1 Objekt 1000h: Gerätetyp.....................................................................................................43
8.2 Objekt 1001h: Fehlerregister ..............................................................................................43
8.3 Objekt 1003h: Vordefiniertes Fehlerfeld..............................................................................44
8.4 Objekt 1005h: COB-ID SYNC Nachricht .............................................................................44
8.5 Objekt 1008h: Hersteller Gerätenamen...............................................................................45
8.6 Objekt 1009h: Hersteller Hardwareversion..........................................................................45
8.7 Objekt 100Ah: Hersteller Softwareversion...........................................................................45
8.8 Objekt 100Ch: Guard-Time (Überwachungszeit).................................................................45
8.9 Objekt 100Dh: Life-Time-Faktor (Zeitdauer-Faktor) ............................................................45
8.10 Objekt 1010h: Parameter abspeichern..............................................................................46
8.11 Objekt 1011h: Parameter zurücksetzen ............................................................................47
8.12 Objekt 1018h: Identity Objekt............................................................................................48
8.13 Objekt 1F80: NMT-Startup (read / write)...........................................................................48
9 Parametrierung und Konfiguration............................................................................................49
Standardisierter Encoder-Profilbereich (CiA DS-406)................................................................49
9.1 Objekt 6000h: Betriebsparameter .......................................................................................50
9.2 Objekt 6005h: Einstellung der Messschritte ........................................................................50
9.3 Objekt 6010h: Presetwert ...................................................................................................51
9.4 Objekt 6020h: Positionswert ...............................................................................................52
9.5 Objekt 6030h: Geschwindigkeitswert ..................................................................................52
9.6 Objekt 6200h: Cyclic-Timer ................................................................................................53
9.7 Objekt 6500h: Betriebsstatus..............................................................................................53
9.8 Objekt 6501h: Mess-Schritt, linear ......................................................................................53
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 4 von 63

CANopen - Schnittstellenbeschreibung
9.9 Objekt 6503h: Alarme.........................................................................................................54
9.10 Objekt 6504h: Unterstützte Alarme ...................................................................................55
9.11 Objekt 6505h: Warnungen................................................................................................55
9.12 Objekt 6506h: Unterstützte Warnungen ............................................................................55
9.13 Objekt 6507h: Profil- und Softwareversion........................................................................56
9.14 Objekt 6508h: Betriebszeit................................................................................................56
9.15 Objekt 650Ah: Modul-Identifizierung................................................................................56
9.16 Objekt 650Bh: Serien-Nummer.........................................................................................56
9.17 Objekt 650Ch: Offsetwert .................................................................................................56
10 Emergency-Meldung.................................................................................................................57
11 Übertragung des Mess-System-Positionswertes....................................................................58
12 Fehlerursachen und Abhilfen...................................................................................................60
12.1 SDO-Fehlercodes.............................................................................................................60
12.2 Emergency-Fehlercodes...................................................................................................60
12.2.1 Objekt 1001h: Fehlerregister .............................................................................61
12.2.2 Objekt 1003h: Vordefiniertes Fehlerfeld, Bits 0 – 15..........................................61
12.3 Alarm-Meldungen .............................................................................................................62
12.4 Sonstige Störungen ..........................................................................................................62
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 5 von 63

CANopen - Schnittstellenbeschreibung
1 Allgemeines
Das vorliegende Benutzerhandbuch beinhaltet folgende Themen:
• Ergänzende Sicherheitshinweise zu den bereits in der Montageanleitung
definierten grundlegenden Sicherheitshinweisen
• Elektrische Kenndaten
• Installation
• Inbetriebnahme
• Konfiguration / Parametrierung
• Fehlerursachen und Abhilfen
Da die Dokumentation modular aufgebaut ist, stellt dieses Benutzerhandbuch eine
Ergänzung zu anderen Dokumentationen wie z.B. Produktdatenblätter,
Maßzeichnungen, Prospekte und der Montageanleitung etc. dar.
Das Benutzerhandbuch kann kundenspezifisch im Lieferumfang enthalten sein, oder
kann auch separat angefordert werden.
1.1 Geltungsbereich
Dieses Benutzerhandbuch gilt ausschließlich für folgende Mess-System-Baureihen
mit CANopen Schnittstelle:
• HLT 1100
Die Produkte sind durch aufgeklebte Typenschilder gekennzeichnet und sind
Bestandteil einer Anlage.
Es gelten somit zusammen folgende Dokumentationen:
• anlagenspezifische Betriebsanleitungen des Betreibers,
• dieses Benutzerhandbuch,
• und die bei der Lieferung beiliegende
Montageanleitung: Mat. Nr. 669822
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 6 von 63
CANopen - Schnittstellenbeschreibung
1.2 Referenzen
ISO 11898: Straßenfahrzeuge, Austausch von Digitalinformation - Controller Area
1.
Network (CAN) für Hochgeschwindigkeits-Kommunikation, November 1993
2. Robert Bosch GmbH, CAN-Spezifikation 2.0 Teil A und B, September 1991
3. CiA DS-201 V1.1, CAN im OSI Referenz-Model, Februar1996
4. CiA DS-202-1 V1.1, CMS Service Spezifikation, Februar 1996
5. CiA DS-202-2 V1.1, CMS Protokoll Spezifikation, Februar 1996
6. CiA DS-202-3 V1.1, CMS Verschlüsselungsregeln, Februar 1996
7. CiA DS-203-1 V1.1, NMT Service Spezifikation, Februar 1996
8. CiA DS-203-2 V1.1, NMT Protokoll Spezifikation, Februar 1996
9. CiA DS-204-1 V1.1, DBT Service Spezifikation, Februar 1996
10. CiA DS-204-2 V1.1, DBT Protokoll Spezifikation, Februar 1996
11. CiA DS-205-1 V1.1, LMT Service Spezifikation, Februar 1996
12. CiA DS-205-2 V1.1, LMT Protokoll Spezifikation, Februar 1996
CiA DS-206 V1.1, Empfohlene Namenskonventionen für die Schichten,
13.
Februar 1996
CiA DS-207 V1.1, Namenskonventionen der Verarbeitungsschichten,
14.
Februar 1996
CiA DS-301 V3.0, CANopen Kommunikationsprofil auf CAL basierend,
15.
Oktober 1996
16. CiA DS-406 V2.0, CANopen Profil für Encoder, Mai 1998
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 7 von 63
CANopen - Schnittstellenbeschreibung
1.3 Verwendete Abkürzungen / Begriffe
HLT 1100 Linear-Absolutes-Mess-System für Zylinderintegration
EG Europäische Gemeinschaft
EMV Elektro-Magnetische-Verträglichkeit
ESD Elektrostatische Entladung (Electro Static Discharge)
IEC Internationale Elektrotechnische Kommission
VDE Verein Deutscher Elektrotechniker
CAN-spezifisch
CAN Application Layer. Die Anwendungsschicht für CAN-
CAL
CAN
CiA
CMS
COB
COB-ID
DBT
basierende Netzwerke ist im
CiA-Draft-Standard 201 ... 207 beschrieben.
Controller Area Network. Datenstrecken-Schicht-Protokoll für
serielle Kommunikation, beschrieben in der ISO 11898.
CAN in Automation. Internationale Anwender- und Herstellervereinigung e.V.: gemeinnützige Vereinigung für das
Controller Area Network (CAN).
CAN-based Message Specification. Eines der Serviceelemente in der Anwendungsschicht im CAN Referenz-Model.
Communication Object (CAN Message). Übertragungseinheit
im CAN Netzwerk. Daten müssen in einem COB durch das
CAN Netzwerk gesendet werden.
COB-Identifier. Eindeutige Zuordnung des COB. Der Identifier
bestimmt die Priorität des COB´s im Busverkehr.
Distributor. Eines der Serviceelemente in der Anwendungsschicht im CAN Referenz-Model. Es liegt in der Verantwortung
des DBT´s, COB-ID´s an die COB´s zu verteilen, die von der
CMS benutzt werden.
EDS
LSS
NMT
PDO
SDO
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 8 von 63
Electronic-Data-Sheet (elektronisches Datenblatt)
Layer Setting Services. Eines der Serviceelemente in der
Anwendungsschicht im CAN Referenz-Model. Wird benötigt,
um Parameter in den einzelnen Schichten zu konfigurieren.
Network Management. Eines der Serviceelemente in der Anwendungsschicht im CAN Referenz-Model. Führt die Initialisierung, Konfiguration und Fehlerbehandlung im Busverkehr aus.
Process Data Object. Objekt für den Datenaustausch zwischen
mehreren Geräten.
Service Data Object. Punkt zu Punkt Kommunikation mit
Zugriff auf die Objekt-Datenliste eines Gerätes.
CANopen - Schnittstellenbeschreibung
2 Zusätzliche Sicherheitshinweise
2.1 Symbol- und Hinweis-Definition
Warnung
bedeutet, dass Tod, schwere Körperverletzung oder erheblicher Sachschaden
eintreten können, wenn die entsprechenden Vorsichtsmaßnahmen nicht getroffen
werden.
Vorsicht
bedeutet, dass eine leichte Körperverletzung oder ein Sachschaden eintreten kann,
wenn die entsprechenden Vorsichtsmaßnahmen nicht getroffen werden.
Hinweis
bezeichnet wichtige Informationen bzw. Merkmale und Anwendungstipps des verwendeten Produkts.
2.2 Ergänzende Hinweise zur bestimmungsgemäßen Verwendung
Das Mess-System ist ausgelegt für den Betrieb an CANopen Netzwerken nach dem
internationalen Standard ISO/DIS 11898 und 11519-1 bis max. 1 MBaud. Das Profil
entspricht dem "CANopen Device Profile für Encoder CiA DS-406 V2.0A".
Die technischen Richtlinien zum Aufbau des CANopen Netzwerks der CANNutzerorganisation CiA sind für einen sicheren Betrieb zwingend einzuhalten.
Zur bestimmungsgemäßen Verwendung gehört auch:
das Beachten aller Hinweise aus diesem Benutzerhandbuch,
das Beachten der Montageanleitung, insbesondere das dort enthaltene Kapitel
"Grundlegende Sicherheitshinweise" muss vor Arbeitsbeginn gelesen und
verstanden worden sein
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 9 von 63

CANopen - Schnittstellenbeschreibung
2.3 Organisatorische Maßnahmen
• Dieses Benutzerhandbuch muss ständig am Einsatzort des Mess-Systems
griffbereit aufbewahrt werden.
• Das mit Tätigkeiten am Mess-System beauftragte Personal muss vor Arbeits-
beginn
- die Montageanleitung, insbesondere das Kapitel "Grundlegende
Sicherheitshinweise",
- und dieses Benutzerhandbuch, insbesondere das Kapitel "Zusätzliche
Sicherheitshinweise",
gelesen und verstanden haben.
Dies gilt in besonderem Maße für nur gelegentlich, z.B. bei der
Parametrierung des Mess-Systems, tätig werdendes Personal.
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 10 von 63

CANopen - Schnittstellenbeschreibung
................................
...........................
...................
......................
................................
.......................
................................
.............................
..............................
................................
...........................
....................
...................
......................
................................
................................
3 Elektrische Kenndaten
Versorgungsspannung:
Stromaufnahme ohne Last:
Messprinzip: ................................
Auflösung: ................................
Ausgabedaten:
CANopen: ................................
Busankopplung:
CAN Spezifikation 2.0A:
Kommunikations-Profil:
Geräte-Profil:
LSS: ................................
Node-ID: ................................
Baudrate: ................................
Anschluss: ................................
Besondere Merkmale:
EMV: ................................
12 / 24 V DC
< 100 mA
magnetostriktiv
0,1 mm
Position – 32 Bit Integer
Geschwindigkeit – 16 Bit Integer
EN 50325-4
ISO 11898-1, ISO 11898-2
11-Bit Identifier
CiA DS 301 V4.2
CiA DS 406 V3.2
CiA DS 305 V2.2
1…127
20, 50, 125, 250, 500, 800, 1000 kbit/s
Kupferleitung 4 x 0,5 mm²
Programmierung nachfolgender Parameter
über den CAN-BUS:
- Knotenadresse
- Baudrate
- Zählrichtung
- Presetwert
- PDO mapping
EN 61326/ISO 14982/ISO 7637/ISO 11452/EN 50121
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 11 von 63
CANopen - Schnittstellenbeschreibung
4 CANopen Informationen
CANopen wurde von der CiA entwickelt und ist seit Ende 2002 als europäische Norm
EN 50325-4 standardisiert.
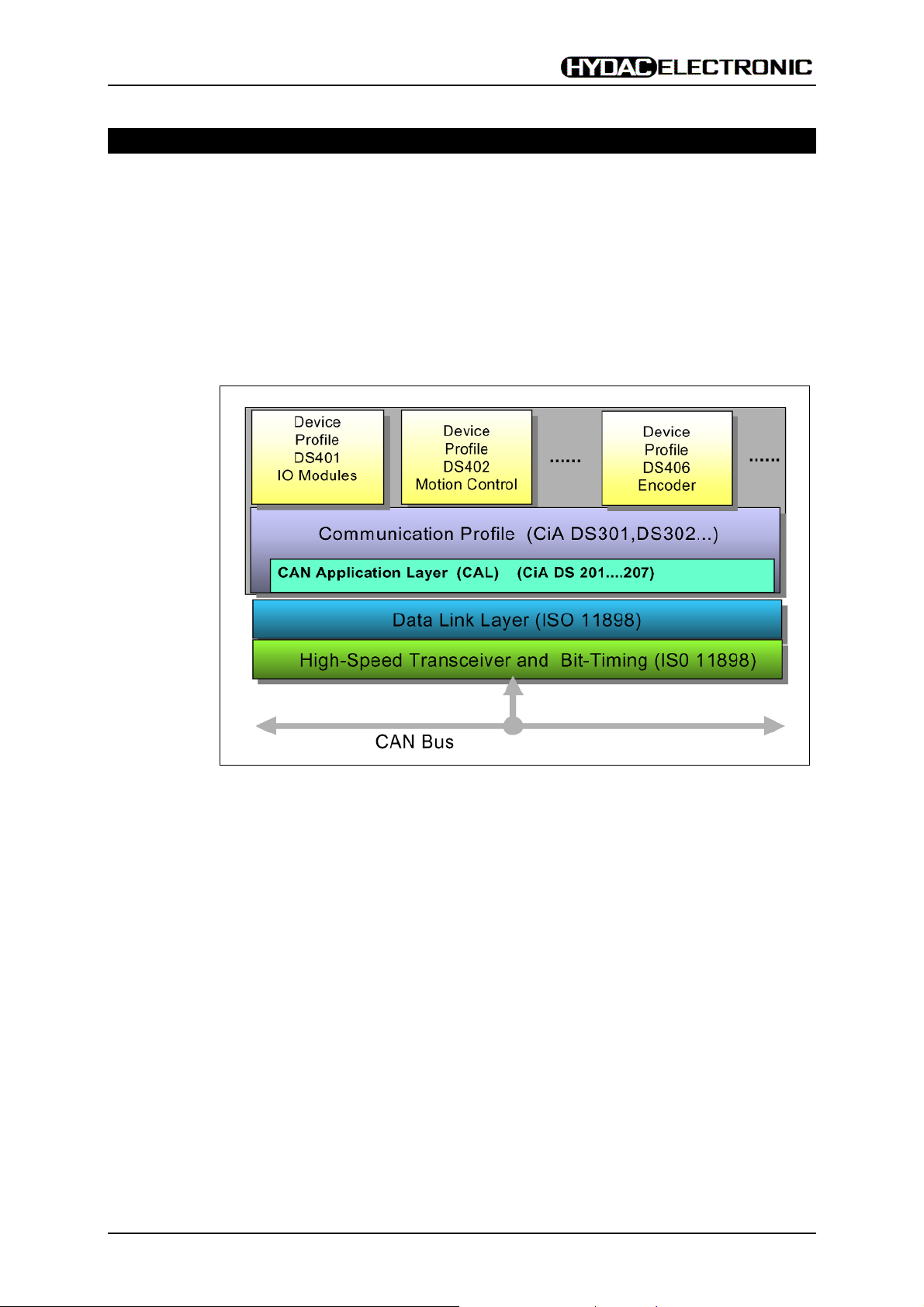
CANopen verwendet als Übertragungstechnik die Schichten 1 und 2 des ursprünglich
für den Einsatz im Automobil entwickelten CAN-Standards (ISO 11898-2). Diese
werden in der Automatisierungstechnik durch die Empfehlungen des CiA
Industrieverbandes hinsichtlich der Steckerbelegung, Übertragungsraten erweitert.
Im Bereich der Anwendungsschicht hat CiA den Standard CAL (CAN Application
Layer) hervorgebracht.
Abbildung 1: CANopen eingeordnet im ISO/OSI-Schichtenmodell
Bei CANopen wurde zunächst das Kommunikationsprofil sowie eine "Bauanleitung"
für Geräteprofile entwickelt, in der mit der Struktur des Objektverzeichnisses und den
allgemeinen Kodierungsregeln der gemeinsame Nenner aller Geräteprofile definiert
ist.
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 12 von 63
CANopen - Schnittstellenbeschreibung
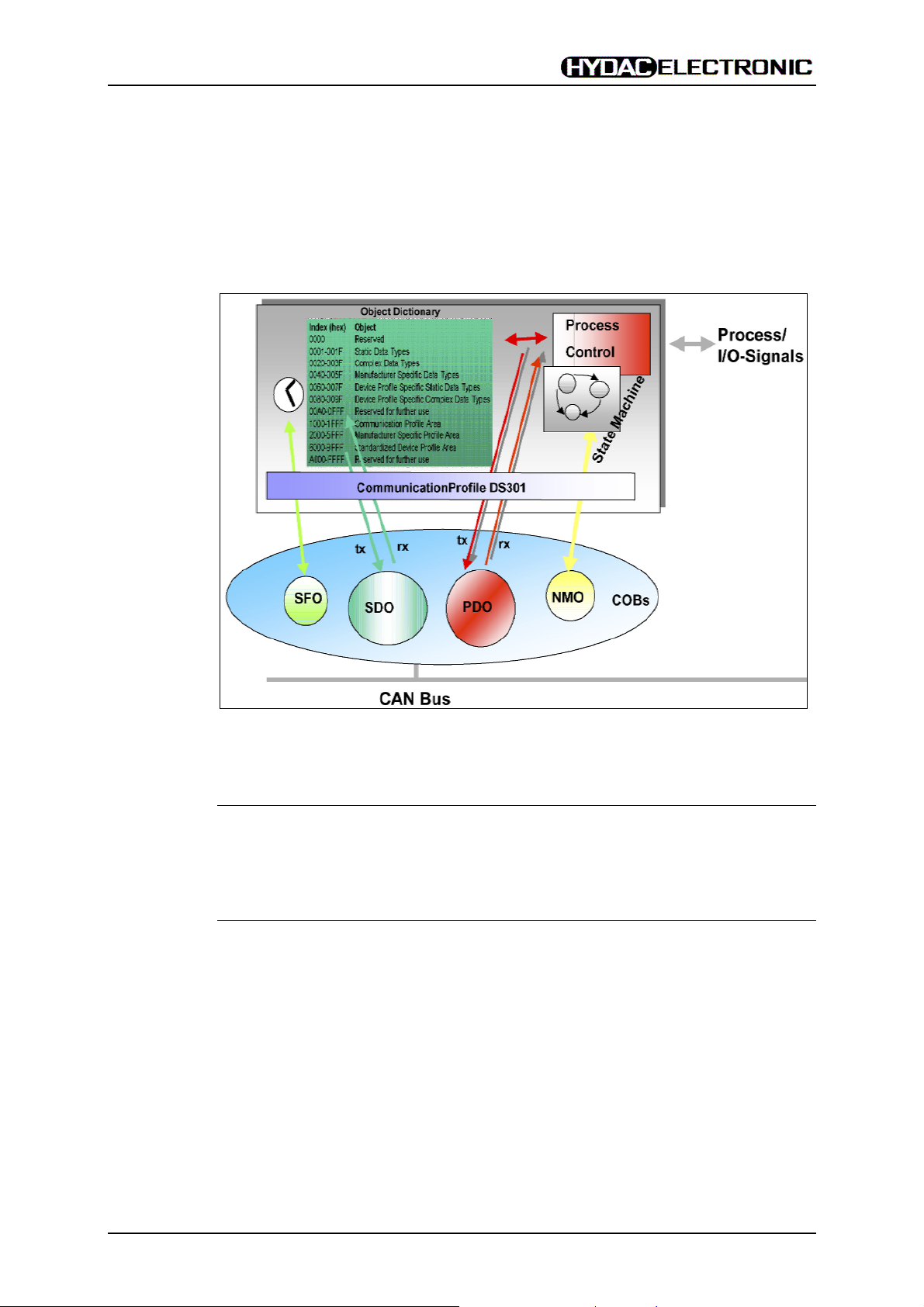
4.1 CANopen – Kommunikationsprofil
Das CANopen Kommunikationsprofil (dokumentiert in CiA DS-301) regelt, wie die
Geräte Daten miteinander austauschen. Hierbei werden Echtzeitdaten (z.B.
Positionswert) und Parameterdaten (z.B. Zählrichtung) unterschieden. CANopen
ordnet diesen, vom Charakter her völlig unterschiedlichen Datenarten, jeweils
passende Kommunikationselemente zu.
Abbildung 2: Kommunikationsprofil
Special Function Object (SFO)
- Synchronization (SYNC)
- Emergency (EMCY) Protokoll
Network Management Object (NMO)
z.B.
- Life / Node-Guarding
- Boot-Up,…
- Error Control Protokoll
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 13 von 63
CANopen - Schnittstellenbeschreibung
niederpriore Identifier
SDO
Datenarten Kommunikationsprofil
4.2 Prozess- und Service-Daten-Objekte
Prozess-Daten-Objekt (PDO)
Prozess-Daten-Objekte managen den Prozessdatenaustausch, wie z.B. die zyklische
Übertragung des Positionswertes.
Der Prozessdatenaustausch mit den CANopen PDOs ist "CAN pur", also ohne
Protokoll-Overhead. Die Broadcast-Eigenschaften von CAN bleiben voll erhalten.
Eine Nachricht kann von allen Teilnehmern gleichzeitig empfangen und ausgewertet
werden.
Vom Mess-System werden die beiden Sende-Prozess-Daten-Objekte 1800h für
asynchrone (ereignisgesteuerte) Positionsübertragung und 1801h für die synchrone
(auf Anforderung) Positionsübertragung verwendet.
Service-Daten-Objekt (SDO)
Service-Daten-Objekte managen den Parameterdatenaustausch, wie z.B. das
azyklische Ausführen der Presetfunktion.
Für Parameterdaten beliebiger Größe steht mit dem SDO ein leistungsfähiger
Kommunikationsmechanismus zur Verfügung. Hierfür wird zwischen dem
Konfigurationsmaster und den angeschlossenen Geräten ein Servicedatenkanal für
Parameterkommunikation ausgebildet. Die Geräteparameter können mit einem
einzigen Telegramm-Handshake ins Objektverzeichnis der Geräte geschrieben
werden bzw. aus diesem ausgelesen werden.
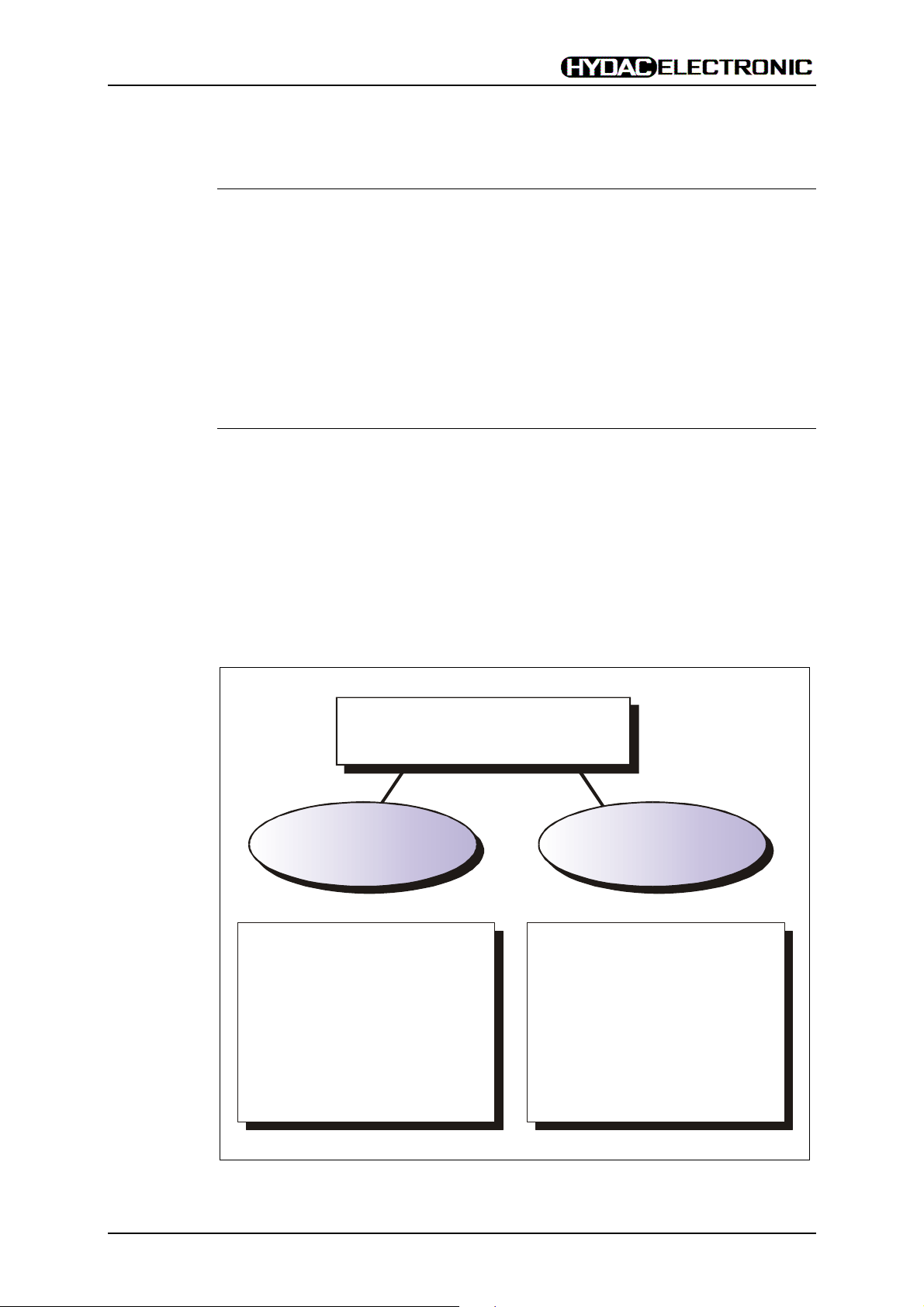
Wichtige Merkmale von SDO und PDO
CiA DS-301 CANopen
PDO
?
Echtzeitdaten
hochpriore Identifier
?
max. 8 Bytes
?
Format vorher vereinbart
?
CAN pur
?
keine Bestätigung
?
System-Parameter
Daten auf mehrere
Telegramme verteilt
Daten durch Index
adressiert
bestätigende Dienste
Abbildung 3: Gegenüberstellung von PDO/SDO-Eigenschaften
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 14 von 63
CANopen - Schnittstellenbeschreibung
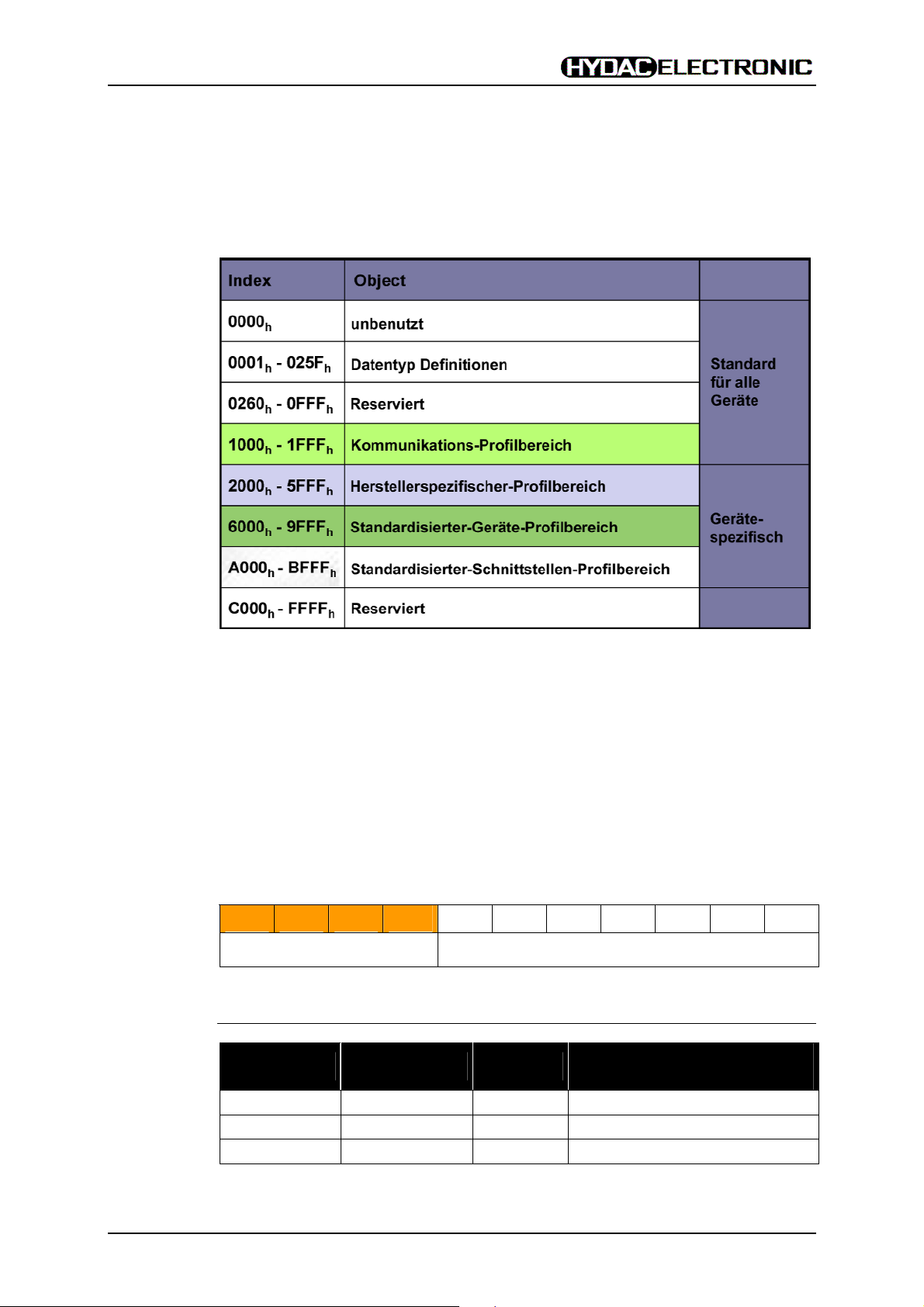
4.3 Objektverzeichnis (Object Dictionary)
Das Objektverzeichnis strukturiert die Daten eines CANopen-Gerätes in einer
übersichtlichen tabellarischen Anordnung. Es enthält sowohl sämtliche
Geräteparameter als auch alle aktuellen Prozessdaten, die damit auch über das SDO
zugänglich sind.
Abbildung 4: Aufbau des Objektverzeichnisses
4.4 CANopen Default Identifier, COB-ID
CANopen-Geräte können ohne Konfiguration in ein CANopen–Netzwerk eingesetzt
werden. Lediglich die Einstellung einer Busadresse und der Baudrate ist erforderlich.
Aus dieser Knotenadresse leitet sich die Identifierzuordnung für die
Kommunikationskanäle ab.
COB-Identifier = Funktions-Code + Node-ID
10 0
1 2 3 4 1 2 3 4 5 6 7
Funktions-Code Node-ID
Beispiele
Objekt Funktions-Code COB-ID
Index Kommunikations-
Parameter
NMT 0000bin 0 –
SYNC 0001bin 80h 1005
PDO1 (tx) 0011bin 181h – 1FFh 1800h
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 15 von 63
CANopen - Schnittstellenbeschreibung
4.5 Übertragung von SDO Nachrichten
Die Übertragung von SDO Nachrichten geschieht über das CMS "MultiplexedDomain" Protokoll (CIA DS-202-2).
Mit SDOs können Objekte aus dem Objektverzeichnis gelesen oder geschrieben
werden. Es handelt sich um einen bestätigten Dienst. Der so genannte SDO Client
spezifiziert in seiner Anforderung „Request“ den Parameter, die Zugriffsart
(Lesen/Scheiben) und gegebenenfalls den Wert. Der so genannte SDO Server führt
den Schreib- oder Lesezugriff aus und beantwortet die Anforderung mit einer Antwort
„Response“. Im Fehlerfall gibt ein Fehlercode Auskunft über die Fehlerursache.
Sende-SDO und Empfangs-SDO werden durch ihre Funktionscodes unterschieden.
Das Mess-System (Slave) entspricht dem SDO Server und verwendet folgende
Funktionscodes:
Funktionscode COB-ID Bedeutung
11 (1011 bin) 0x580 + Node ID
12 (1100 bin) 0x600 + Node ID
Tabelle 1: COB-IDs für Service Data Object (SDO)
Slave SDO Client
SDO Client Slave
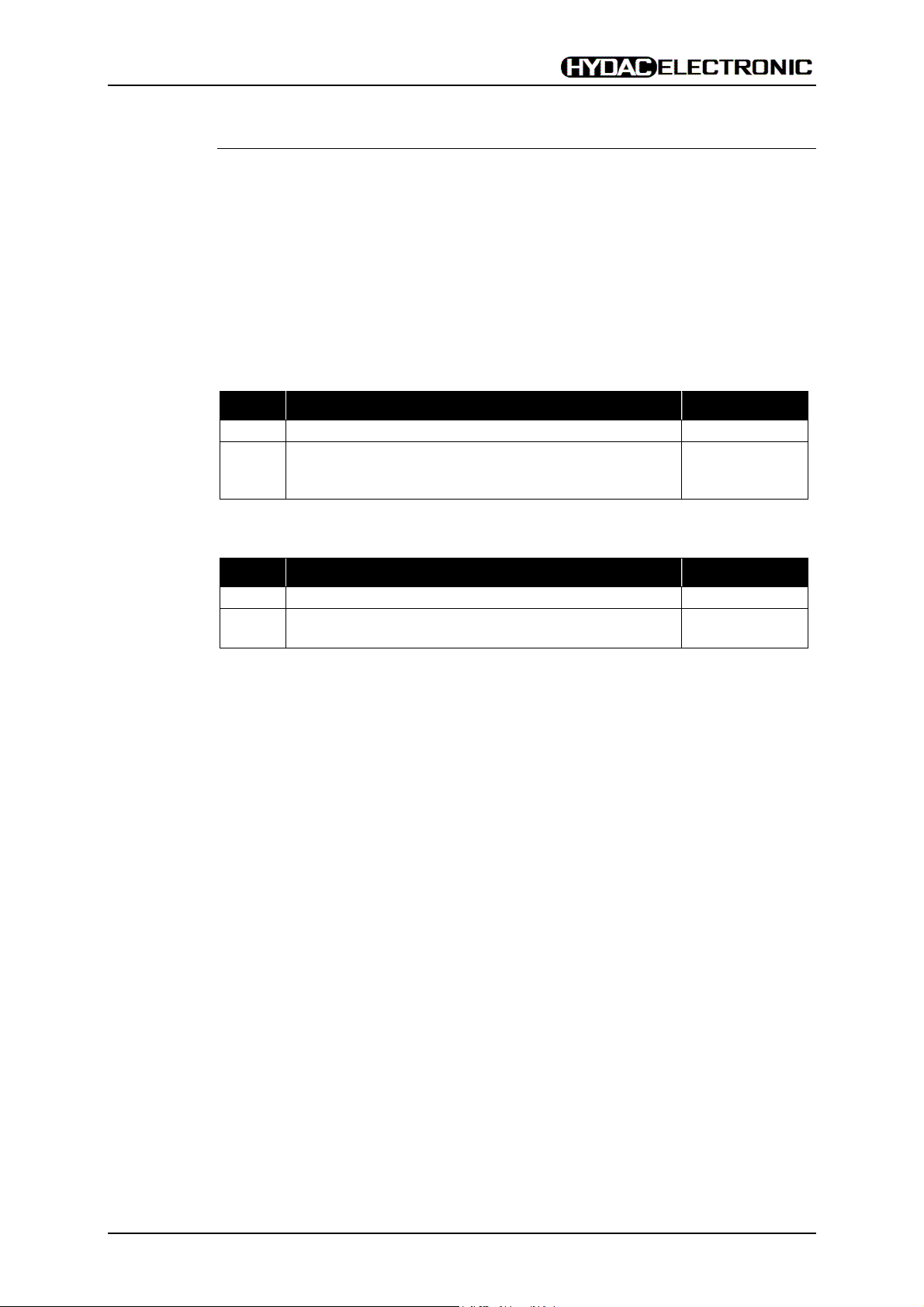
4.5.1 SDO-Nachrichtenformat
Der maximal 8 Byte lange Datenbereich einer CAN-Nachricht wird von einem SDO
wie folgt belegt:
CCD Index Subinde
Byte 0 Byte 1, Low Byte 2, High Byte 3 Byte 4 Byte 5 Byte 6 Byte 7
Tabelle 2: SDO-Nachricht
Der Kommando-Code (CCD) identifiziert bei der SDO Request, ob gelesen oder
geschrieben werden soll. Bei einem Schreibauftrag wird zusätzlich die Anzahl der zu
schreibenden Bytes im CCD kodiert.
Bei der SDO Response zeigt der CCD an, ob die Request erfolgreich war. Im Falle
eines Leseauftrags gibt der CCD zusätzlich Auskunft über die Anzahl der gelesenen
Bytes:
CCD Bedeutung Gültig für
0x23 4 Byte schreiben SDO Request
0x2B 2 Byte schreiben SDO Request
0x2F 1 Byte schreiben SDO Request
0x60 Schreiben erfolgreich SDO Response
0x80 Fehler SDO Response
0x40 Leseanforderung SDO Request
0x43 4 Byte Daten gelesen SDO Response auf Leseanforderung
0x4B 2 Byte Daten gelesen SDO Response auf Leseanforderung
0x4F 1 Byte Daten gelesen SDO Response auf Leseanforderung
Tabelle 3: Kommando-Codes für SDO
Im Fall eines Fehlers (SDO Response CCD = 0x80) enthält der Datenbereich einen
4-Byte-Fehlercode, der über die Fehlerursache Auskunft gibt. Die Bedeutung der
Fehlercodes ist aus der Tabelle 10, Seite 60 zu entnehmen.
Daten
x
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 16 von 63
CANopen - Schnittstellenbeschreibung
Segment Protokoll, Datensegmentierung
Manche Objekte beinhalten Daten, die größer als 4 Byte sind. Um diese Daten lesen
zu können, muss das „Segment Protokoll“ benutzt werden.
Zunächst wird der Lesevorgang wie ein gewöhnlicher SDO-Dienst mit dem
Kommando-Code = 0x40 eingeleitet. Über die Response wird angezeigt, um wie viele
Datensegmente es sich handelt und wie viele Bytes gelesen werden können. Mit
nachfolgenden Leseanforderungen können dann die einzelnen Datensegmente
gelesen werden. Ein Datensegment besteht jeweils aus 7 Bytes.
Beispiel für das Lesen eines Datensegmentes:
Telegramm 1
CCD Bedeutung Gültig für
0x40 Leseanforderung, Einleitung SDO Request
1 Datensegment vorhanden
0x41
Die Anzahl der zu lesenden Bytes steht in den
Bytes 4 bis 7.
SDO Response
Telegramm 2
CCD Bedeutung Gültig für
0x60 Leseanforderung SDO Request
0x01
Kein weiteres Datensegment vorhanden.
Die Bytes 1 bis 7 beinhalten die angeforderten Daten.
SDO Response
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 17 von 63
CANopen - Schnittstellenbeschreibung
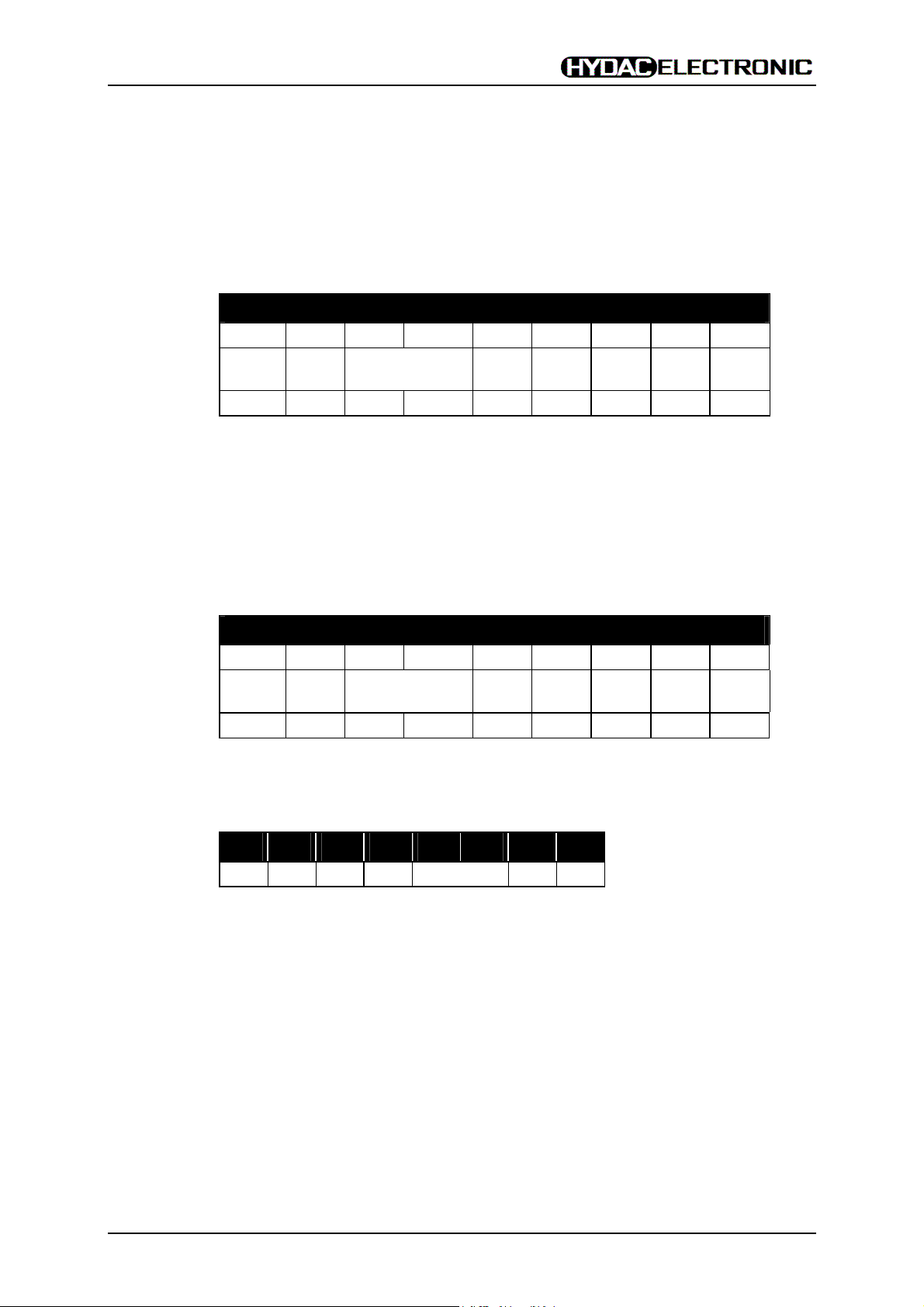
4.5.2 Lese SDO
„Domain Upload“ einleiten
Anforderungs-Protokoll-Format:
COB-Identifier = 600h + Node-ID
Lese SDO´s
Byte 0 1 2 3 4 5 6 7
Inhalt
Das „Lese-SDO“ Telegramm muss an den Slave gesendet werden.
Der Slave antwortet mit folgendem Telegramm:
Antwort-Protokoll-Format:
Code Index
40h Low High Byte 0 0 0 0
COB-Identifier = 580h + Node-ID
Lese SDO´s
Sub-
index
Daten 0Daten 1Daten 2Daten
3
Byte 0 1 2 3 4 5 6 7
Inhalt
Format-Byte 0:
MSB LSB
7 6 5 4 3 2 1 0
0 1 0 0 n 1 1
n = Anzahl der Datenbytes (Bytes 4-7), welche keine Daten beinhalten.
Wenn nur 1 Datenbyte (Daten 0) Daten enthält, ist der Wert von Byte 0 = "4Fh".
Ist Byte 0 = 80h, wird die Übertragung abgebrochen.
Code Index
4xh Low High Byte Daten Daten Daten Daten
Sub-
index
Daten 0Daten 1Daten 2Daten
3
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 18 von 63
CANopen - Schnittstellenbeschreibung
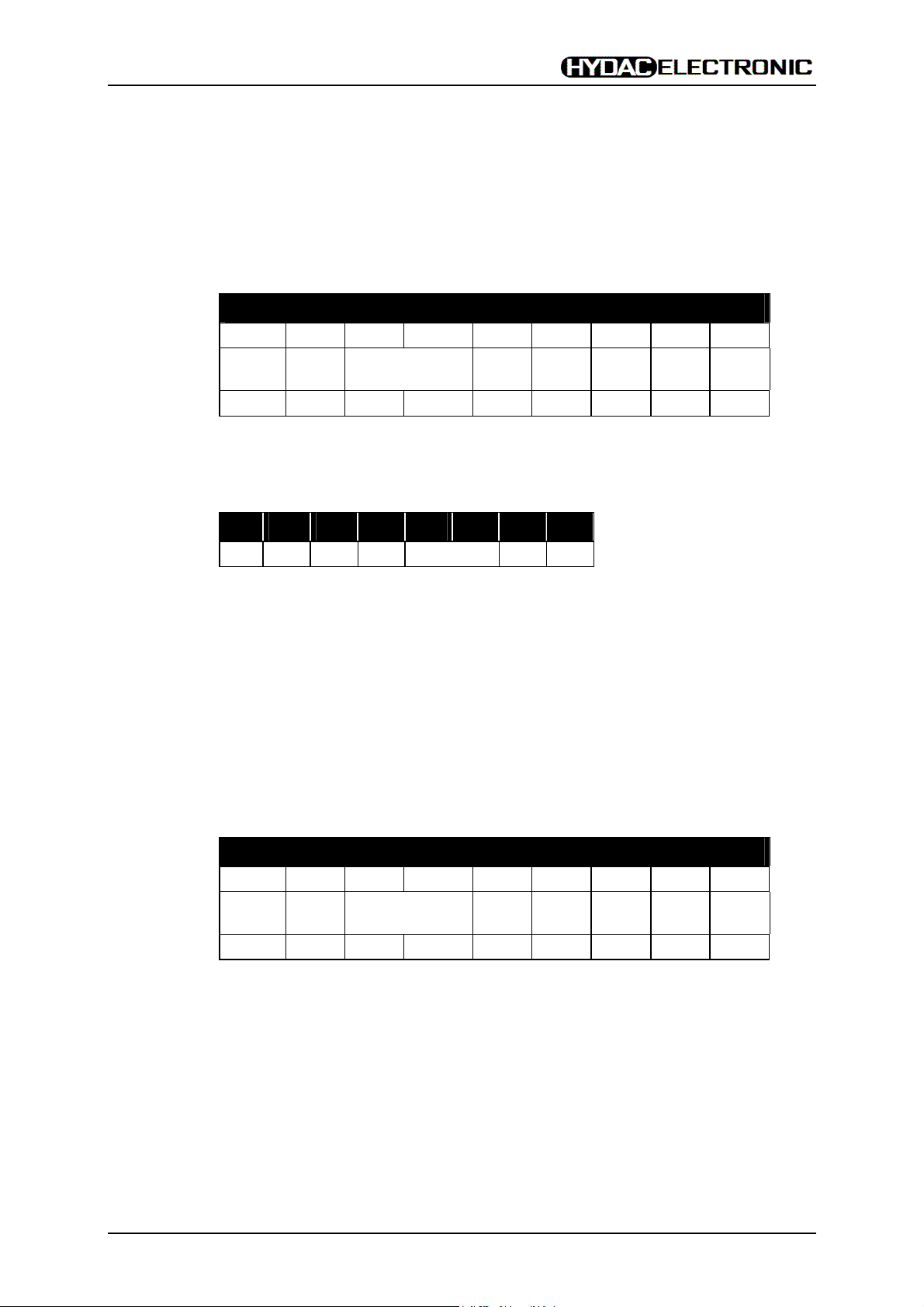
4.5.3 Schreibe SDO
„Domain Download“ einleiten
Anforderungs-Protokoll-Format:
COB-Identifier = 600h + Node-ID
Schreibe SDO´s
Byte 0 1 2 3 4 5 6 7
Inhalt
Format-Byte 0:
MSB LSB
Code Index
2xh Low High Byte 0 0 0 0
Sub-
index
Daten 0Daten 1Daten 2Daten
3
7 6 5 4 3 2 1 0
0 0 1 0 n 1 1
n = Anzahl der Datenbytes (Bytes 4-7), welche keine Daten beinhalten.
Wenn nur 1 Datenbyte (Daten 0) Daten enthält, ist der Wert von Byte 0 = "2Fh".
Das „Schreibe-SDO“ Telegramm muss an den Slave gesendet werden.
Der Slave antwortet mit folgendem Telegramm:
Antwort-Protokoll-Format:
COB-Identifier = 580h + Node-ID
Lese SDO´s
Byte 0 1 2 3 4 5 6 7
Inhalt
Code Index
60h Low High Byte 0 0 0 0
Sub-
index
Daten 0Daten 1Daten 2Daten
3
Ist Byte 0 = 80h, wird die Übertragung abgebrochen.
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 19 von 63
CANopen - Schnittstellenbeschreibung
Stop
Power ON oder Hardware-Reset
(10)
(11)
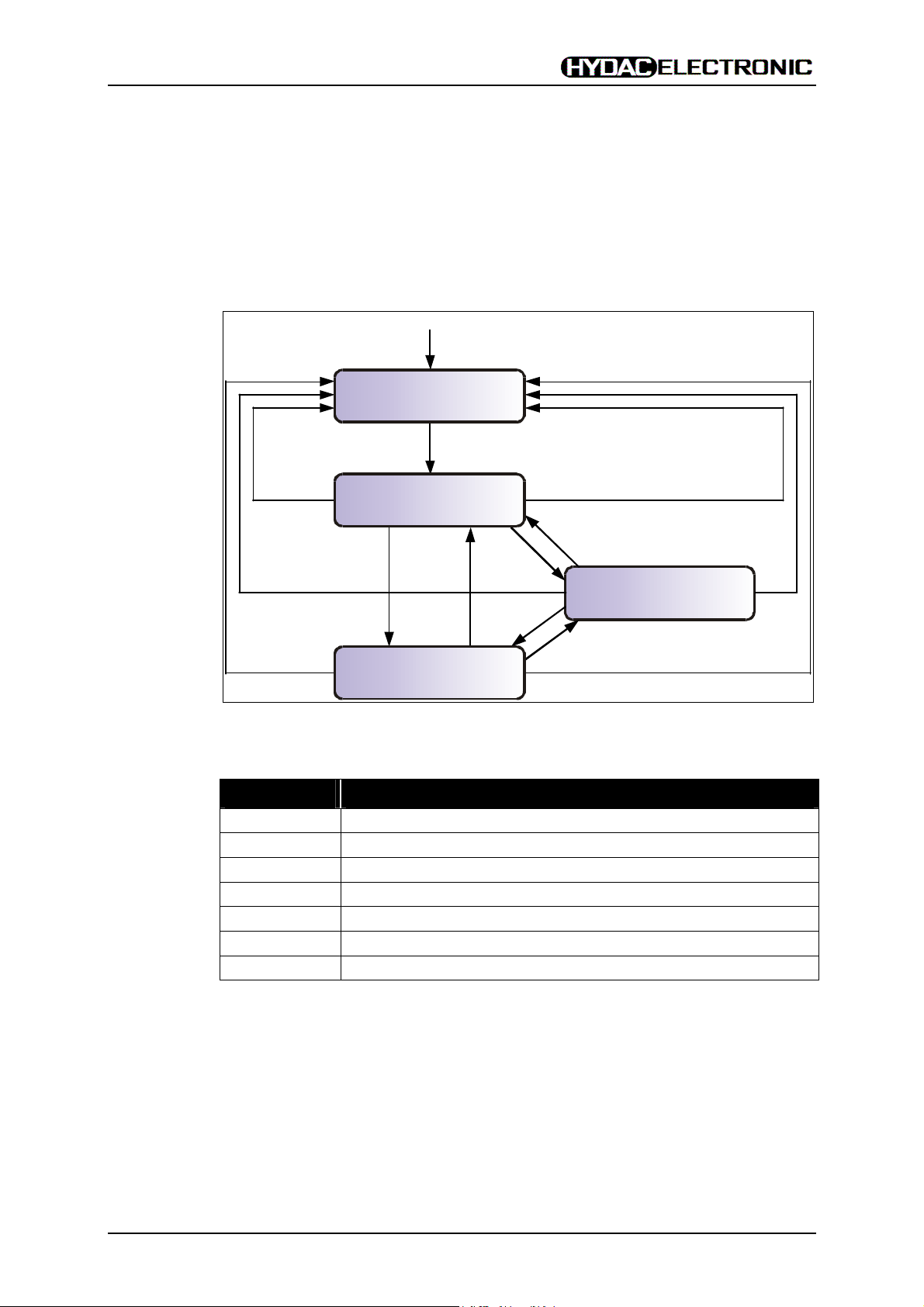
4.6 Netzwerkmanagement, NMT
Das Netzwerkmanagement unterstützt einen vereinfachten Hochlauf (Boot-Up) des
Netzes. Mit einem einzigen Telegramm lassen sich z.B. alle Geräte in den
Betriebszustand (Operational) versetzen.
Das Mess-System befindet sich nach dem Einschalten zunächst im "VorBetriebszustand", (2).
(1)
Initialisierung
(2)
(14)
Vor-Betriebszutand
(7)
(13)
(4)
(3)
(12)
Betriebszustand
Abbildung 5: Boot-Up-Mechanismus des Netzwerkmanagements
Zustand Beschreibung
(1) Automatische Initialisierung nach dem Einschalten
(2) Beendigung der Initialisierung --> Vor-Betriebszustand
(3),(6) Start_Remote_Node --> Betriebszustand
(4),(7) Enter_PRE-OPERATIONAL_State --> Vor-Betriebszustand
(5),(8) Stop_Remote_Node --> Stop
(9),(10),(11) Reset_Node --> Reset Knoten
(12),(13),(14) Reset_Communication --> Reset Kommunikation
(5)
(6)
(8)
(9)
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 20 von 63
CANopen - Schnittstellenbeschreibung
4.6.1 Netzwerkmanagement-Dienste
Das Network Management (NMT) hat die Aufgabe, Teilnehmer eines CANopen-
Netzwerks zu initialisieren, die Teilnehmer in das Netz aufzunehmen, zu stoppen und
zu überwachen.
NMT-Dienste werden von einem NMT-Master initiiert, der einzelne Teilnehmer
(NMT-Slave) über deren Node ID anspricht. Eine NMT-Nachricht mit der Node ID 0
richtet sich an alle NMT-Slaves.
Das Mess-System entspricht einem NMT-Slave.
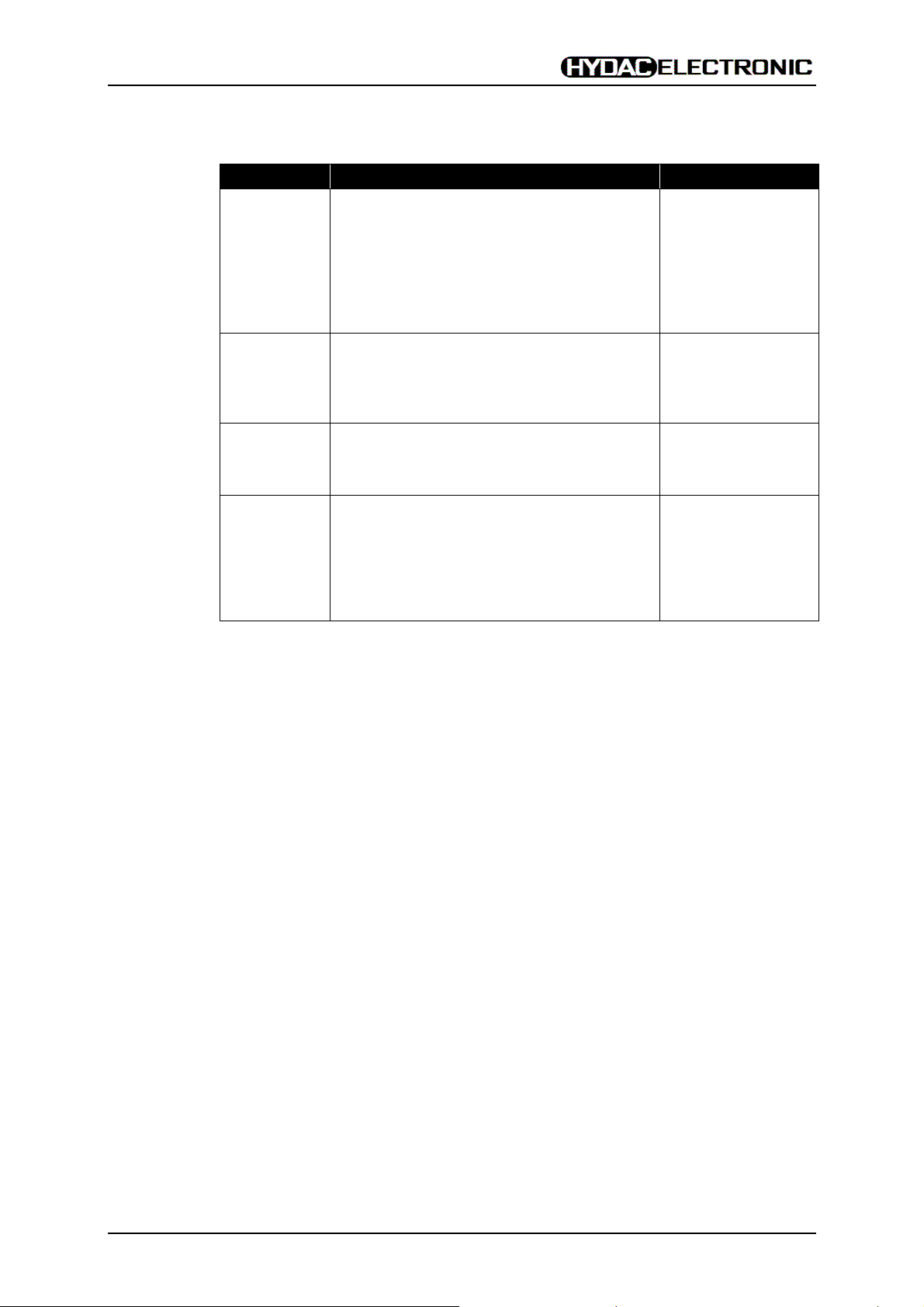
4.6.1.1 NMT-Dienste zur Gerätekontrolle
Die NMT-Dienste zur Gerätekontrolle verwenden die COB-ID 0 und erhalten so die
höchste Priorität.
Vom Datenfeld der CAN-Nachricht werden nur die ersten beiden Byte verwendet:
CCD Node ID
Byte 0 Byte 1
Folgende Kommandos sind definiert:
CCD Bedeutung Zustand
- Automatische Initialisierung nach dem Einschalten (1)
- Beendigung der Initialisierung --> PRE-OPERATIONAL (2)
Start Remote Node
0x01
Teilnehmer soll in den Zustand OPERATIONAL wechseln und
(3),(6)
damit den normalen Netzbetrieb starten
Stop Remote Node
Teilnehmer soll in den Zustand STOPPED übergehen und
0x02
damit seine Kommunikation stoppen. Eine aktive
(5),(8)
Verbindungsüberwachung bleibt aktiv.
Enter PRE-OPERATIONAL
0x80
Teilnehmer soll in den Zustand PRE-OPERATIONAL gehen.
(4),(7)
Alle Nachrichten außer PDOs können verwendet werden.
Reset Node
Werte der Profilparameter des Objekts auf Default-Werte
0x81
setzen. Danach Übergang in den Zustand RESET
(9),(10),
(11)
COMMUNICATION.
Reset Communication
Teilnehmer soll in den Zustand RESET COMMUNICATION
0x82
gehen. Danach Übergang in den Zustand INITIALIZATION,
(12),(13),
(14)
erster Zustand nach dem Einschalten.
Tabelle 4: NMT-Dienste zur Gerätekontrolle
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 21 von 63
CANopen - Schnittstellenbeschreibung
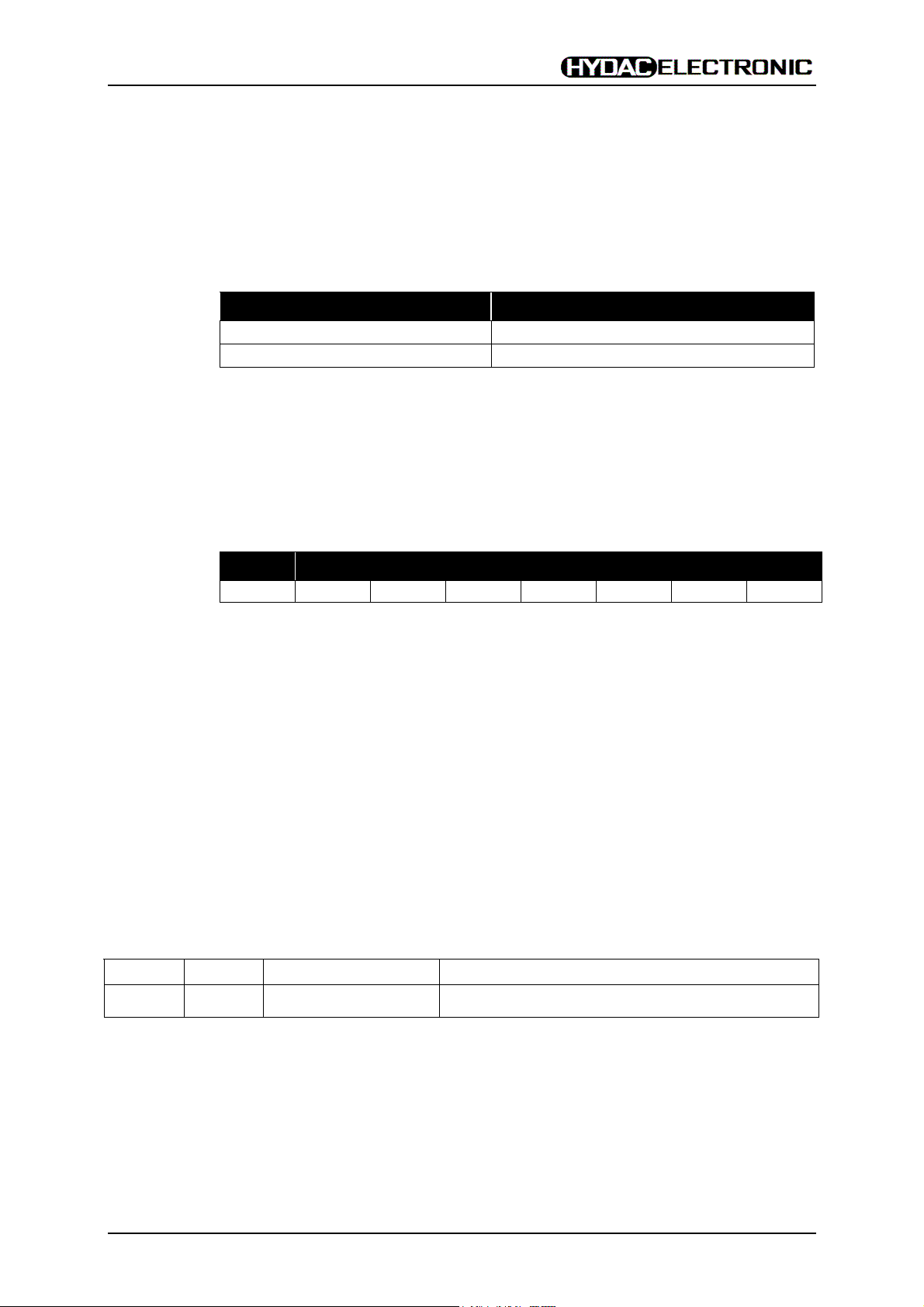
4.6.1.2 NMT-Dienste zur Verbindungsüberwachung
Mit der Verbindungsüberwachung kann ein NMT-Master den Ausfall eines NMT-Slave
und/oder ein NMT-Slave den Ausfall des NMT-Master erkennen:
• Node Guarding und Life Guarding:
Mit diesen Diensten überwacht ein NMT-Master einen NMT-Slave
Das Node Guarding wird dadurch realisiert, dass der NMT-Master in regelmäßigen
Abständen den Zustand eines NMT-Slave anfordert. Das Toggle-Bit 2
Guarding Protocol“ toggelt nach jeder Abfrage:
Beispiel:
0x85, 0x05, 0x85 … --> kein Fehler
0x85, 0x05, 0x05 … --> Fehler
Ist zusätzlich das Life Guarding aktiv, erwartet der NMT-Slave innerhalb eines
bestimmten Zeitintervalls eine derartige Zustandsabfrage durch den NMT-Master. Ist
dies nicht der Fall, wechselt der Slave in den PRE-OPERATIONAL Zustand.
Die NMT-Dienste zur Verbindungsüberwachung verwenden den Funktionscode
1110 bin, also die COB-ID 0x700+Node ID.
7
im „Node
Index Beschreibung
0x100C Guard Time [ms]
0x100D Life Time Factor
Tabelle 5: Parameter für NMT-Dienste
Spätestens nach Ablauf des Zeitintervalls
Life Time = Guard Time x Life Time Factor
[ms]
erwartet der NMT-Slave eine Zustandsabfrage durch
den Master.
Ist die Guard Time = 0, wird der entsprechende
NMT-Slave nicht vom Master überwacht.
Ist die Life Time = 0, ist das Life Guarding
abgeschaltet.
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 22 von 63

CANopen - Schnittstellenbeschreibung
4.7 Layer setting services (LSS) und Protokolle
Die LSS-Dienste und Protokolle, dokumentiert in CiA DS-305 V2.2, unterstützen das
Abfragen und Konfigurieren verschiedener Parameter des Data Link Layers und des
Application Layers eines LSS-Slaves durch ein LSS-Master über das CAN Netzwerk.
Unterstützt werden folgende Parameter:
- Node-ID
- Baudrate
- LSS-Adresse, gemäß dem Identity Objekt 1018h
Der Zugriff auf den LSS-Slave erfolgt dabei über seine LSS-Adresse, bestehend aus:
– Vendor-ID
– Produkt-Code
– Revisions-Nummer und
– Serien-Nummer
Das Mess-System unterstützt folgende Dienste:
Switch mode services
Y Switch mode selective
einen bestimmten LSS-Slave ansprechen
Y Switch mode global
alle LSS-Slaves ansprechen
Configuration services
Y Configure Node-ID
Node-ID konfigurieren
Y Configure bit timing parameters
Baudrate konfigurieren
Y Activate bit timing parameters
Baudrate aktivieren
Y Store configured parameters
konfigurierte Parameter speichern
Inquiry services
Y Inquire LSS-address
LSS-Adresse anfragen
Y Inquire Node-ID
Node-ID anfragen
Identification services
Y LSS identify remote slave
Identifizierung von LSS-Slaves innerhalb eines bestimmten Bereichs
Y LSS identify slave
Rückmeldung der LSS-Slaves auf das vorherige Kommando
Y LSS identify non-configured remote slave
Identifizierung von nicht-konfigurierten LSS-Slaves, Node-ID = FFh
Y LSS identify non-configured slave
Rückmeldung der LSS-Slaves auf das vorherige Kommando
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 23 von 63
CANopen - Schnittstellenbeschreibung
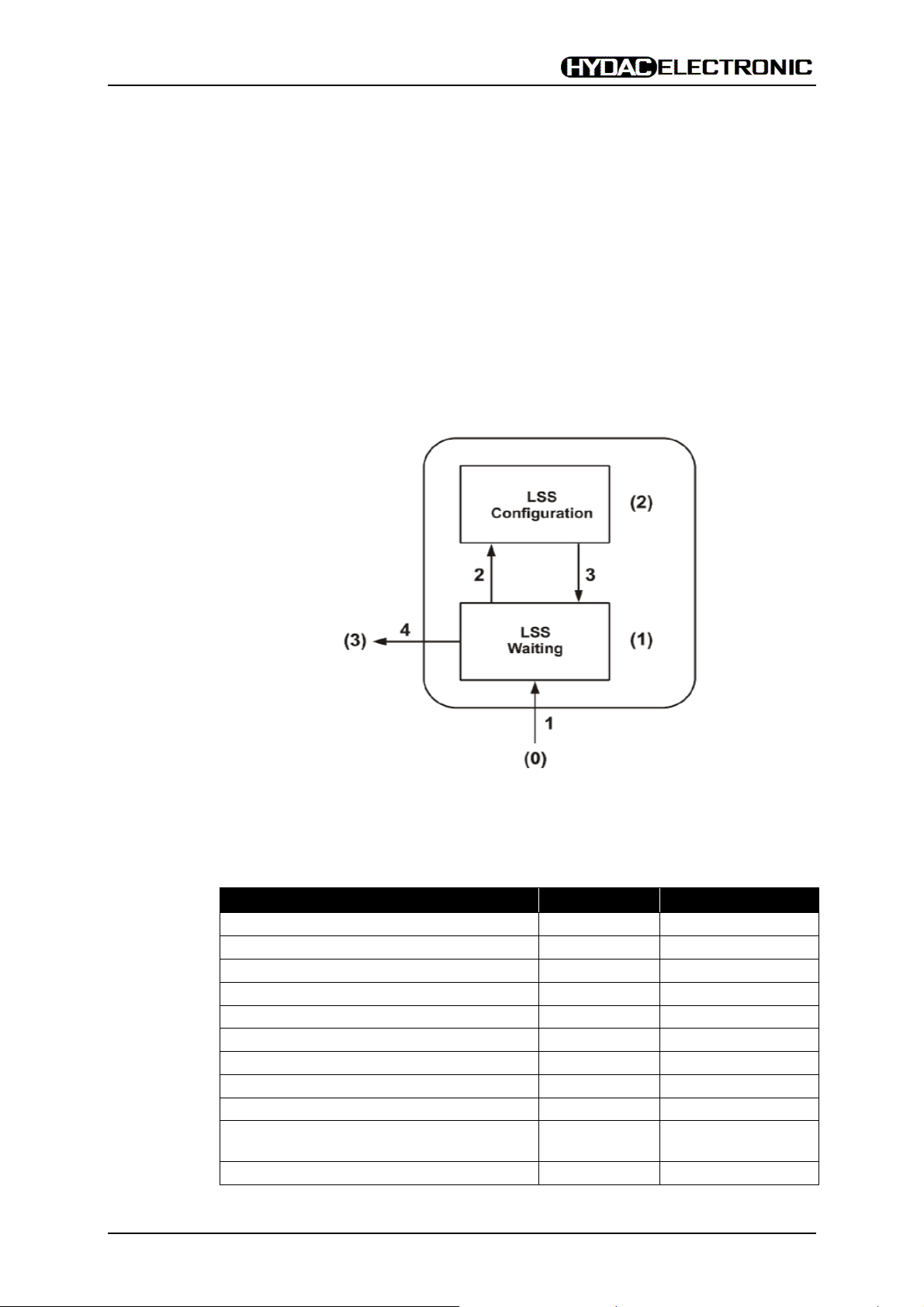
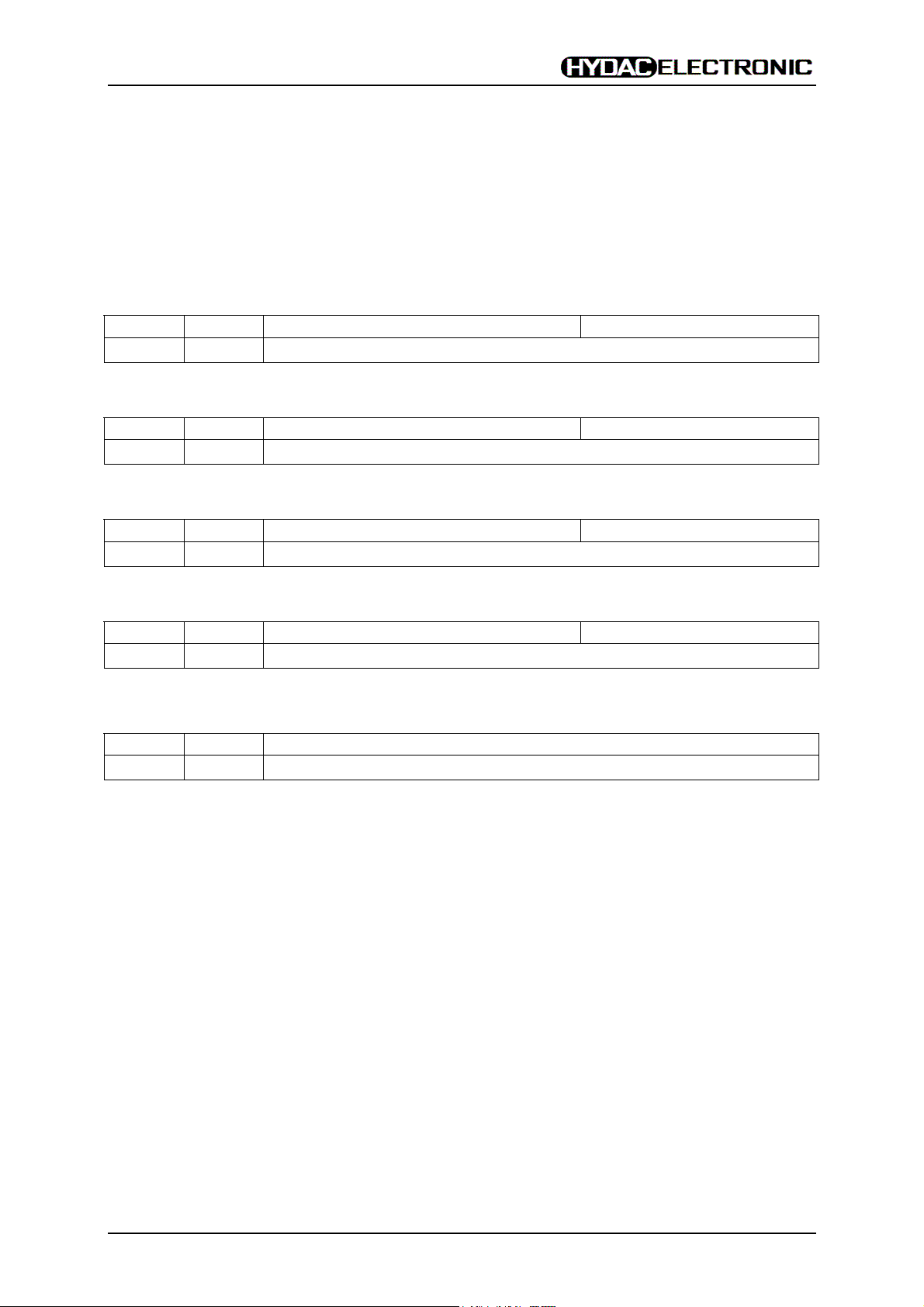
4.7.1 LSS-Modes und Dienste
Der LSS entspricht einer Zustandsmaschine und definiert das Verhalten eines LSSSlaves.Gesteuert wird die Zustandsmaschine durch LSS COBs erzeugt durch einen
LSS-Master, oder NMT COBs erzeugt durch einen NMT-Master, oder lokale
NMTZustandsübergänge.
Die LSS-Modes unterstützen folgende Zustände:
(0) Initial: Pseudo-Zustand, zeigt die Aktivierung des FSAs an
(1) LSS waiting: Unterstützung aller Dienste wie unten angegeben
(2) LSS configuration: Unterstützung aller Dienste wie unten angegeben
(3) Final: Pseudo-Zustand, zeigt die Deaktivierung des FSAs an
Abbildung 6: LSS-Modes
Zustandsverhalten der unterstützten Dienste
Dienste Waiting Configuration
Switch mode global Ja Ja
Switch mode selective Ja Nein
Activate bit timing parameters Nein Ja
Configure bit timing parameters Nein Ja
Configure Node-Id Nein Ja
Store configuration Nein Ja
Inquire LSS-address Nein Ja
LSS identify remote slave Ja Ja
LSS identify slave Ja Ja
LSS identify non-configuration remote
slave
Ja Ja
LSS identify non-configured slave Ja Ja
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 24 von 63
CANopen - Schnittstellenbeschreibung
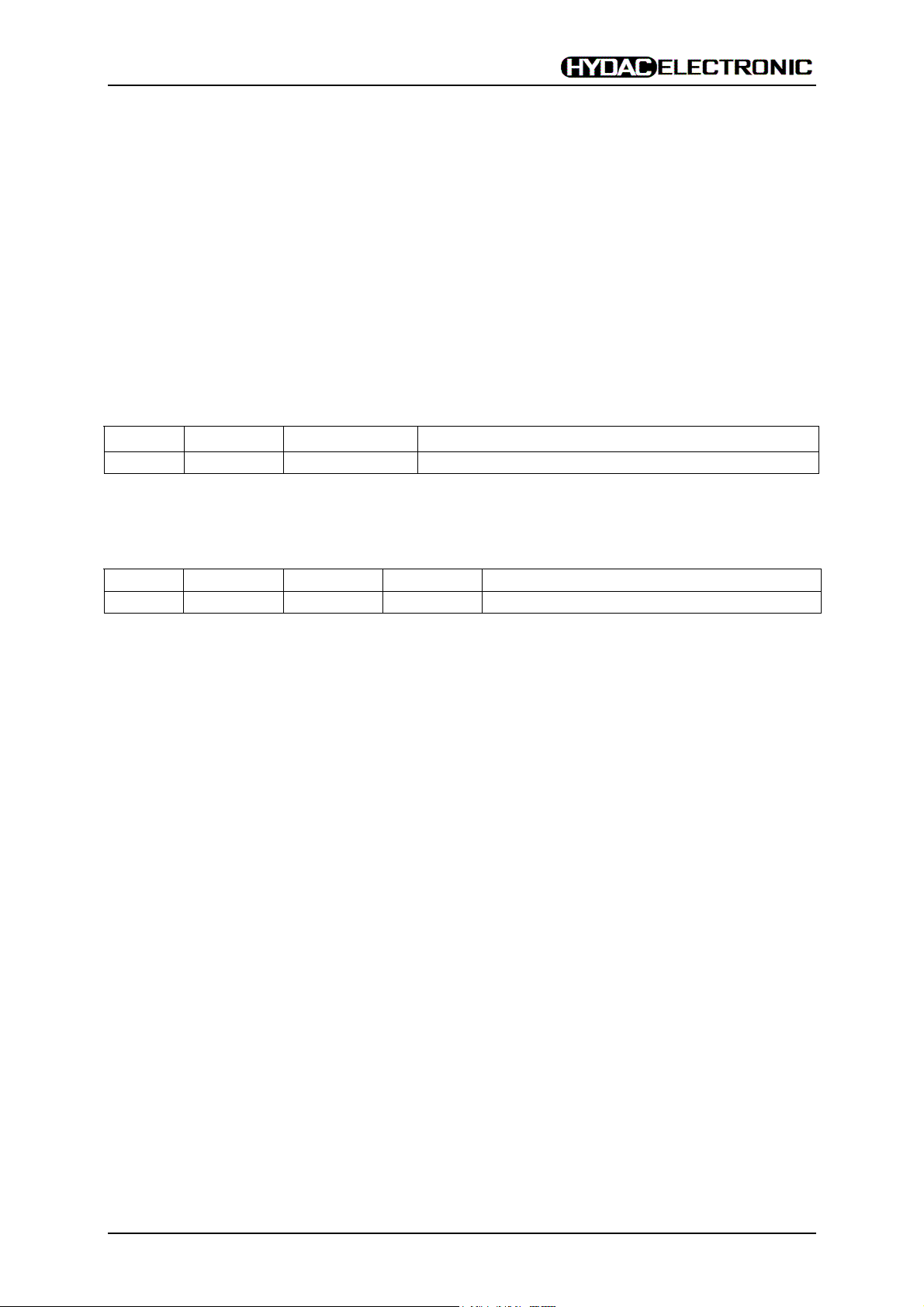
LSS FSA Zustandsübergänge
Übergang Ereignisse Aktionen
Automatischer Übergang nach der
Initialisierung beim Eintritt entweder in den
1
2
NMT PRE OPERATIONAL Zustand oder
NMT STOPPED Zustand, oder NMT RESET
COMMUNICATION Zustand mit Node-ID =
FFh.
LSS 'switch state global' Kommando mit
Parameter 'configuration_switch' oder 'switch
state selective' Kommando
keine
keine
3
4
Sobald das LSS FSA weitere Zustandsübergänge im NMT FSA von NMT PRE
OPERATIONAL auf NMT STOPPED und umgekehrt erfährt, führt dies nicht zum
Wiedereintritt in den LSS FSA.
LSS 'switch state global' Kommando mit
Parameter 'waiting_switch'
Automatischer Übergang, wenn eine
ungültige Node-ID geändert wurde und die
neue Node-ID erfolgreich im nichtflüchtigen
Speicher abgelegt werden konnte UND der
Zustand LSS waiting angefordert wurde.
keine
keine
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 25 von 63
CANopen - Schnittstellenbeschreibung
4.7.2 Übertragung von LSS-Diensten
Über die LSS-Dienste fordert der LSS-Master die einzelnen Dienste an, welche dann
durch den LSS-Slave ausgeführt werden. Die Kommunikation zwischen LSS-Master
und LSS-Slave wird über die implementierten LSS-Protokolle vorgenommen.
Ähnlich wie bei der SDO-Übertragung, werden auch hier zwei COB-IDs für das
Senden und Empfangen benutzt:
COB-ID Bedeutung
0x7E4
0x7E5
Tabelle 6: COB-IDs für LSS Services
4.7.2.1 LSS-Nachrichtenformat
Der maximal 8 Byte lange Datenbereich einer CAN-Nachricht wird von einem LSSDienst wie folgt belegt:
CS Daten
Byte 0 Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7
Tabelle 7: LSS-Nachricht
Byte 0 enthält die Command-Specifier (CS), danach folgen 7 Byte für die Daten.
LSS-Slave LSS-Master
LSS-Master LSS-Slave
4.7.3 Switch mode Protokolle
4.7.3.1 Switch mode global Protokoll
Das angegebene Protokoll hat den Switch mode global service implementiert
und steuert das Zustandsverhalten des LSS-Slaves. Über den LSS-Master können
alle LSS-Slaves im Netzwerk in den Waiting Mode oder Configuration Mode
gebracht werden.
LSS-Master --> LSS-Slave
COB-ID CS Mode Reserved by CiA
0x7E5 04
0 1 2 3 4 5 6 7
0 = Waiting Mode
1 = Configuration Mode
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 26 von 63
CANopen - Schnittstellenbeschreibung
4.7.3.2 Switch mode selective Protokoll
Das angegebene Protokoll hat den Switch mode selective service
implementiert und steuert das Zustandsverhalten des LSS-Slaves. Über den LSSMaster kann nur der LSS-Slave im Netzwerk in den Configuration Mode gebracht
werden, dessen LSS- Adressattribute der LSS-Adresse entsprechen.
LSS-Master --> LSS-Slave
COB-ID CS Vendor-Id Reserved by CiA
0x7E5 64 LSB MSB
COB-ID CS Product-Code Reserved by CiA
0x7E5 65 LSB MSB
COB-ID CS Revision-Number Reserved by CiA
0x7E5 66 LSB MSB
0 1 2 3 4 5 6 7
0 1 2 3 4 5 6 7
0 1 2 3 4 5 6 7
0 1 2 3 4 5 6 7
COB-ID CS Serial-Number Reserved by CiA
0x7E5 67 LSB MSB
LSS-Slave --> LSS-Master
0 1 2 3 4 5 6 7
COB-ID CS Reserved by CiA
0x7E4 68
Error Code
0: Ausführung erfolgreich
1…254: Reserved
255: Applikationsspezifischer Fehler aufgetreten
Specific Error
Wenn Error Code = 255 --> applikationsspezifischer Fehler aufgetreten,
sonst reserviert durch die CiA
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 27 von 63
CANopen - Schnittstellenbeschreibung
4.7.4 Configuration Protokolle
4.7.4.1 Configure Node-Id Protokoll
Das angegebene Protokoll hat den Configure NMT-Address service implementiert. Über
den LSS-Master kann die Node-ID eines einzelnen LSS-Slaves im Netzwerk
konfiguriert werden. Hierbei darf sich nur ein LSS-Slave im Configuration Mode
befinden. Zur Speicherung der neuen Node-ID muss das Store configuration protocol
an den LSS-Slave übertragen werden. Um die neue Node-ID zu aktivieren, muss der
NMT-Dienst Reset Communication (0x82) aufgerufen werden.
LSS-Master --> LSS-Slave
COB-ID CS Node-ID Reserved by CiA
0x7E5 17 1…127 und 255
0 1 2 3 4 5 6 7
LSS-Slave --> LSS-Master
COB-ID CS
0 1 2 3 4 5 6 7
Error Code Spec. Error
Reserved by CiA
0x7E4 17
Error Code
0: Ausführung erfolgreich
1…254: Reserved
255: applikationsspezifischer Fehler aufgetreten
Specific Error
Wenn Error Code = 255 --> applikationsspezifischer Fehler aufgetreten,
sonst reserviert durch die CiA
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 28 von 63
CANopen - Schnittstellenbeschreibung
4.7.4.2 Configure bit timing parameters Protokoll
Das angegebene Protokoll hat den Configure bit timing parameters
service implementiert. Über den LSS-Master kann die Baudrate eines einzelnen
oder aller LSS-Slaves im Netzwerk konfiguriert werden. Zur Speicherung der neuen
Baudrate muss das Store configuration protocol an den LSS-Slave
übertragen werden.
LSS-Master --> LSS-Slave
COB-ID CS
0x7E5 19 0 0…7
LSS-Slave --> LSS-Master
COB-ID CS
0x7E4 19
0 1 2 3 4 5 6 7
Table Selector Table Index
0 1 2 3 4 5 6 7
Error Code Spec. Error
Reserved by CiA
Reserved by CiA
Table Selector
0: Standard CiA Baudraten-Tabelle
Table Index
0: 1 Mbit/s
1: 800 kbit/s
2: 500 kbit/s
3: 250 kbit/s
4: 125 kbit/s
5: reserved
6: 50 kbit/s
7: 20 kbit/s
Error Code
0: Ausführung erfolgreich
1: selektierte Baudrate nicht unterstützt
2…254: Reserved
255: applikationsspezifischer Fehler aufgetreten
Specific Error
Wenn Error Code = 255 --> applikationsspezifischer Fehler aufgetreten,
sonst reserviert durch die CiA
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 29 von 63
CANopen - Schnittstellenbeschreibung
4.7.4.3 Activate bit timing parameters Protokoll
Das angegebene Protokoll hat den Activate bit timing parameters service
implementiert und aktiviert die über Configure bit timing parameters
protocol festgelegte Baudrate bei allen LSS-Slaves im Netzwerk, die sich im
Configuration Mode befinden.
LSS-Master --> LSS-Slave
COB-ID CS Switch Delay [ms] Reserved by CiA
0x7E5 21 LSB MSB
0 1 2 3 4 5 6 7
Switch Delay
Der Parameter Switch Delay definiert die Länge zweier Verzögerungsperioden
(D1, D2) mit gleicher Länge. Damit wird das Betreiben des Busses mit
unterschiedlichen Baudratenparametern verhindert.
Nach Ablauf der Zeit D1 und einer individuellen Verarbeitungsdauer wird die
Umschaltung intern im LSS-Slave vorgenommen. Nach Ablauf der Zeit D2 meldet
sich der LSS-Slave wieder mit CAN-Nachrichten und der neu eingestellten
Baudrate.
Es gilt:
Switch Delay > längste vorkommende Verarbeitungsdauer eines LSS-Slaves
4.7.4.4 Store configuration Protokoll
Das angegebene Protokoll hat den Store configured parameters service
implementiert. Über den LSS-Master können die konfigurierten Parameter eines
einzelnen LSS-Slaves im Netzwerk in den nichtflüchtigen Speicher abgelegt werden.
Hierbei darf sich nur ein LSS-Slave im Configuration Mode befinden.
LSS-Master --> LSS-Slave
0 1 2 3 4 5 6 7
COB-ID CS Reserved by CiA
0x7E5 23
LSS-Slave --> LSS-Master
COB-ID CS
0 1 2 3 4 5 6 7
Error Code Spec. Error
Reserved by CiA
0x7E4 23
Error Code
0: Ausführung erfolgreich
1: Store configuration nicht unterstützt
2…254: Reserved
255: applikationsspezifischer Fehler aufgetreten
Specific Error
Wenn Error Code = 255 --> applikationsspezifischer Fehler aufgetreten,
sonst reserviert durch die CiA
HYDAC ELECTRONIC GMBH
07.10.2010 Mat. Nr. 669824 Seite 30 von 63
 Loading...
Loading...