

Hydac HIT 1500, HIT 1000 Protocol Manual

ProtokollBeschreibung
Protocol Description
CANopen
HIT 1000 / HIT 1500
(Originalanleitung /
(Translation of original instructions)
Mat Nr..: 669962 Stand: 17.11.2016 D / E

Protokoll-Beschreibung CANopen HIT 1000 / 1500 Seite 2
Inhaltsverzeichnis
1 Einleitung ...................................................................................................................... 6
2 Funktionen des HIT 1000 / 1500 CANopen ................................................................. 6
3 Übertragungsraten ....................................................................................................... 7
4 CAN-Frames ................................................................................................................. 7
5 Node-ID ....................................................................................................................... .. 7
6 Übertragungsdienste ................................................................................................... 7
6.1 Service Data Object (SDO) ......................................................................................... 7
6.2 Process Data Object (PDO) ........................................................................................ 8
6.3 Synchronisation Object (S Y NC) .................................................................................. 9
6.4 Emergency Object (EMCY) ........................................................................................10
6.5 Heartbeat ...................................................................................................................10
6.6 Network Management Services (NMT) ......................................................................11
6.7 Boot Up Protocol ........................................................................................................11
7 Datenfluss im HIT 1000 / 1500 CANopen ...................................................................12
7.1 Sensor Unit ................................................................................................................12
7.2 Calibration & Scaling .................................................................................................12
7.3 Filter & Fusion ...........................................................................................................12
7.4 Transmission Unit ......................................................................................................12
8 Das Object Dictionary .................................................................................................13
8.1 Aufbau des Object Dictionary .....................................................................................13
8.2 Struktur des gerätespezifischen Teils nach DS410 ....................................................13
9 Einträge im Object Dictionary ....................................................................................14
9.1 Communication Profile Specific Entries (DS301) .......................................................14
9.1.1 Index 1000h: DeviceType (read only) ................................................................. 14
9.1.2 Index 1001h: ErrorRegister (read only) ............................................................... 14
9.1.3 Index 1003h: Pre-defined error field (read only) .................................................. 14
9.1.4 Index 1005h: SyncMessageIdentifier (read write) ............................................... 14
9.1.5 Index 1008h: ManufacturerDeviceName (const) ................................................. 14
9.1.6 Index 1009h: ManufacturerHardwareVersion (const) .......................................... 14
9.1.7 Index 100Ah: ManufacturerSoftwareVersion (const) ........................................... 14
9.1.8 Index 1010h: StoreParameters ........................................................................... 14
9.1.9 Index 1011h: RestoreDefaultParameters ............................................................ 15
9.1.10Index 1014h: CobIdEmergencyMessage (read write) ......................................... 15
9.1.11Index 1017h: ProducerHeartbeatTime (read write) ............................................. 15
9.1.12Index 1018h: IdentityObject ................................................................................ 16
9.1.13Index 1029h: Error behaviour ............................................................................. 16
9.1.14Index 1800h / 1801h / 1802h / 1803h: TPDO communication parameter ............ 16
Stand 17.11.2016 HYDAC ELECTRONIC GMBH Mat.-Nr.: 669962

Protokoll-Beschreibung CANopen HIT 1000 / 1500 Seite 3
9.1.15Index 1A00h / 1A01h / 1A02h / 1A03h: TPDO mapping parameter ..................... 17
9.1.16Index 1F80h: NMT-Startup (read / write) ............................................................. 18
9.2 Device Profile Specific Entries (DS410) .....................................................................18
9.2.1 Index 6000h: Resolution (read only) ................................................................... 18
9.2.2 Index 6010h: Slope long16 (read only) Statische Neigung .................................. 19
9.2.3 Index 6011h: Slope long16 operating parameter (read write) .............................. 19
9.2.4 Index 6020h: Slope lateral16 (read only) Statische Neigung ............................... 19
9.2.5 Index 6021h: Slope lateral16 operating parameter (read write) ........................... 19
9.3 Manufacturer Specific Entries ....................................................................................19
9.3.1 Index 2001h: NodeID .......................................................................................... 19
9.3.2 Index 2002h: Baudrate ....................................................................................... 19
9.3.3 Index 5130h: Skalierte Beschleunigungswerte .................................................... 20
9.3.4 Index 5131h: Skalierte Drehratenwerte ............................................................... 20
9.3.5 Index 5132h: Neigung im Raum (bewegungskompensiert) ................................. 20
9.3.6 Index 5000h: Status der Neigungsmessung ........................................................ 21
9.3.7
Weitere Indizes im Bereich 2000h bis 5FFFh (reserved) ..................................... 21
10 Layer setting services (LSS) und Protokolle .............................................................22
10.1Finite state automaton, FSA.......................................................................................23
10.2Übertragung von LSS-Diensten .................................................................................24
10.2.1LSS-Nachrichtenformat....................................................................................... 24
10.3Switch mode Protokolle .............................................................................................25
10.3.1Switch mode global Protokoll .............................................................................. 25
10.3.2Switch mode selective Protokoll .......................................................................... 25
10.4Configuration Protokolle .............................................................................................26
10.4.1Configure Node-Id Protokoll ................................................................................ 26
10.4.2Configure bit timing parameters Protokoll ........................................................... 26
10.4.3Activate bit timing parameters Protokoll .............................................................. 27
10.4.4Store configuration Protokoll ............................................................................... 28
10.5Inquire LSS-Address Protokolle .................................................................................28
10.5.1Inquire Identity Vendor-ID Protokoll .................................................................... 28
10.5.2Inquire Identity Product-Code Protokoll ............................................................... 29
10.5.3Inquire Identity Revision-Number Protokoll ......................................................... 29
10.5.4Inquire Identity Serial-Number Protokoll .............................................................. 30
10.5.5Inquire Node-ID Protokoll .................................................................................... 30
10.6Identification Protokolle ..............................................................................................31
10.6.1LSS identify remote slave Protokoll..................................................................... 31
10.6.2LSS identify slave Protokoll ................................................................................ 32
10.6.3LSS identify non-configured remote slave Protokoll ............................................ 32
10.6.4LSS identify non-configured slave Protokoll ........................................................ 32
11 Anschluss ....................................................................................................................33
11.1Einschalten der Versorgungsspannung .....................................................................33
11.2Einstellen der Node-ID und Baudrate mittels LSS-Dienste .........................................33
11.2.1Konfiguration der Node-ID, Ablauf ...................................................................... 33
11.2.2Konfiguration der Baudrate, Ablauf ..................................................................... 34
Stand 17.11.2016 HYDAC ELECTRONIC GMBH Mat.-Nr.: 669962

Protokoll-Beschreibung CANopen HIT 1000 / 1500 Seite 4
12 Inbetriebna h me ...........................................................................................................35
12.1CAN – Schnittstelle ....................................................................................................35
12.2EDS-Datei ..................................................................................................................35
Stand 17.11.2016 HYDAC ELECTRONIC GMBH Mat.-Nr.: 669962

Protokoll-Beschreibung CANopen HIT 1000 / 1500 Seite 5
Vorwort
Für Sie, den Benutzer unseres Produktes, haben wir in dieser
Dokumentation die wichtigsten Hinweise zum Bedienen und Warten
zusammengestellt.
Sie dient Ihnen dazu, das Produkt kennen zu lernen und seine
bestimmungsgemäßen Einsatzmöglichkeiten optimal zu nutzen.
Diese Dokumentation muss ständig am Einsatzort verfügbar sein.
Bitte beachten Sie, dass die in dieser Dokumentation gemachten Angaben
der Softwaretechnik zu dem Zeitpunkt der Literaturerstellung entsprechen.
Entdecken Sie beim Lesen dieser Dokumentation Fehler oder haben
weitere Anregungen und Hinweise, so wenden Sie sich bitte an:
HYDAC ELECTRONIC GMBH
Technische Dokumentation
Hauptstraße 27
66128 Saarbrücken
-DeutschlandTel: +49(0)6897 / 509-01
Fax: +49(0)6897 / 509-1726
Email: electronic@hydac.com
Die Redaktion freut sich über Ihre Mitarbeit.
„Aus der Praxis für die Praxis“
Stand 17.11.2016 HYDAC ELECTRONIC GMBH Mat.-Nr.: 669962

Protokoll-Beschreibung CANopen HIT 1000 / 1500 Seite 6
1 Einleitung
Die Neigungsgeber der Familie HIT 1000 / 1500 CANopen entsprechen dem CANopen
Standard gemäß folgenden Profilen und Standards:
[1] CiA DS301, Version: 4.2.0 (21 February 2011)
CANopen application layer and communication profile
[2] CiA DS302, Version: 4.1 (02 February 2009)
Additional application layer functions - Part 2: Network management
[3] CiA DS303, Version: 1.4 (14.08.2006)
Additional specification - Part 2: Representation of SI units and prefix
[4] CiA DS305, Version: 2.2 (26 August 2008)
Layer setting services (LSS) and protocols
[5] CiA DS410, Version 1.3.0 (23 February 2010)
Device profile for inclinometer
Dieses Handbuch beschreibt die vom HIT 1000 / 1500 CANopen unterstützten
Funktionen. Dabei werden Grundkenntnisse von CAN und CANopen vorausgesetzt.
Die genaue Funktionsweise ist in den oben genannten Dokumenten beschrieben. Da
diese in Englisch abgefasst sind, werden die in diesem Handbuch beschriebenen
Dinge, zur besseren Zuordnung, mit dem in der Spezifikation genannten englischen
Begriff bezeichnet und kursiv dargestellt.
2 Funktionen des HIT 1000 / 1500 CANopen
• Berechnung der Neigung aus den Beschleunigungskomponenten in 3
Raumachsen mit Tiefpassfunktion bei HIT 1000 und HIT 1500 (statische
Neigungsmessung)
• Berechnung der Neigung durch Fusion von Beschleunigungs- und
Drehratenkomponenten bei HIT 1500 (bewegungskompensierte
Neigungsmessung, hochdynamisch)
• Umrechnung der Neigungswerte in Euler-Winkel (Einheit °, ein- oder
zweiachsig)
• Übertragung der aktuellen Neigungswerte als PDO bei folgenden Ereignissen:
• Synchron über empfangene SYNC-Objekte
• Asynchron zyklisch im Bereich von 5 Millisekunden bis >1 Minute
Stand 17.11.2016 HYDAC ELECTRONIC GMBH Mat.-Nr.: 669962

Protokoll-Beschreibung CANopen HIT 1000 / 1500 Seite 7
3 Übertragungsraten
Der HIT 1000 / 1500 CANopen unterstützt folgende Übertragungsraten (Baudraten):
• 1000 kbit/s
• 800 kbit/s
• 500 kbit/s
• 250 kbit/s
• 125 kbit/s
• 50 kbit/s
• 20 kbit/s
• 10 kbit/s
Das Timing entspricht der DS301, Bit rates and timing.
Die verwendete Übertragungsrate ist in einem nicht-flüchtigen Speicher hinterlegt.
Sie ist im Auslieferzustand auf 250 kbit/s eingestellt und kann über den CAN-Bus
geändert werden (Siehe Object Dictionary Index 2002h).
4 CAN-Frames
Der HIT 1000 / 1500 CANopen unterstützt die in der Spezifikation geforderten 11-bit
Standard–Frames mit 11-bit Identifier sowie 29-bit Frames mit 29-bit Identifier.
5 Node-ID
Zum Betrieb des HIT 1000 / 1500 CANopen in einem CANopen-Netzwerk ist es
notwendig, dass eine innerhalb des Netzes einmalige Node-ID eingestellt wird.
Die eingestellte Node-ID ist in einem nicht-flüchtigen Speicher hinterlegt und kann über
den CAN-Bus (siehe Object Dictionary Index 2001h) eingestellt werden.
Im Auslieferzustand ist die Adresse 1 eingestellt.
6 Übertragungsdienste
6.1 Service Data Object (SDO)
Bei CANopen werden alle Daten eines Gerätes (Einstellparameter und Messdaten) in
einem Object Dictionary unter einem definierten Index abgelegt. Verschiedene Einträge
des Object Dictionary werden mit einem Subindex noch weiter untergliedert. Mit den
SDOs können nun andere Netzteilnehmer das Object Dictionary des HIT 1000 / 1500
CANopen auslesen oder beschreiben.
Der HIT 1000 / 1500 CANopen übernimmt dabei die Rolle eines Servers, das Gerät,
das die Daten auslesen oder beschreiben will, die eines Clients.
Zum Transfer von Daten muss der HIT 1000 / 1500 CANopen ein Receive-SDO
besitzen, mit dem er Daten empfängt und ein Transmit-SDO, mit dem er die Daten
sendet. Ablauf des Datentransfers:
Stand 17.11.2016 HYDAC ELECTRONIC GMBH Mat.-Nr.: 669962
Protokoll-Beschreibung CANopen HIT 1000 / 1500 Seite 8
Auslesen des Object Dictionary :
1. Ein Gerät (Client) sendet das Receive-SDO des HIT 1000 / 1500 CANopen
(Server).
In diesem SDO befindet eine Kennung, dass das Object Dictionary gelesen werden
soll, sowie der gewünschte Index und Subindex.
2. Der HIT 1000 / 1500 CANopen (Server) sendet sein Transmit-SDO. In diesem
befinden sich ebenfalls der Index und der Subindex, sowie die gelesenen Daten.
Beschreiben des Object Dictionary :
1. Ein Gerät (Client) sendet das Receive-SDO des HIT 1000 / 1500 CANopen
(Server).
In diesem SDO befinden eine Kennung, dass das Object Dictionary beschrieben
werden soll, sowie der gewünschte Index, Subindex und die einzuschreibenden
Daten.
2. Der HIT 1000 / 1500 CANopen (Server) sendet sein Transmit-SDO. In diesem
befinden sich ebenfalls der Index und der Subindex, sowie eine Kennung, dass das
Object Dictionary beschrieben wurde.
Sollte dabei ein Fehler auftreten, z.B. dass der angegebene Index nicht existiert, oder
dass versucht wurde einen read only Eintrag zu beschreiben, oder dass die Daten
nicht innerhalb des Gültigkeitsbereiches lagen, so enthält das Transmit-SDO eine
entsprechende Abort SDO Transfer - Kennung und einen entsprechenden Abort Code
(siehe [1])
Die jeweilige COB-ID des SDO entspricht dem in der DS301 festgelegten Pre defined
Connection Set und ist nicht änderbar.
COB-IDs für Service Data Objects
SDO COB-ID
Receive – SDO 600h+Node-ID
Transmit – SDO 580h+Node-ID
6.2 Process Data Object (PDO)
Die Datenübertragung mittels SDOs ist zwar sehr flexibel, hat aber für die Übertragung
von Messwerten oder Stellgrößen einige Nachteile: Es kann nur ein Datum gelesen
werden, die Daten müssen erst mit einem SDO angefordert werden und dadurch dass
der jeweilige Index und Subindex mit übertragen wird, steigt der so genannte Overhead
weiter.
Aus diesem Grund definiert CANopen so genannte Process Data Objects. Diese
enthalten nur die notwendigen Nutzdaten. Es gibt zwei Arten von PDOs:
1. Transmit-PDOs
Hiermit kann ein Messgerät seine Messwerte senden.
2. Receive-PDOs
Hiermit können einem Stellglied oder einer Regelungseinheit die Stellgrößen
übertragen werden.
Stand 17.11.2016 HYDAC ELECTRONIC GMBH Mat.-Nr.: 669962
Protokoll-Beschreibung CANopen HIT 1000 / 1500 Seite 9
Welche Daten sich nun in einem PDO befinden, wird durch das so genannte PDO-
Mapping festgelegt. Dieses PDO-Mapping ist im Object Dictionary hinterlegt (siehe
Object Dictionary, Index 1A00h, 1A01h, 1A02h, 1A03h).
Mit welcher ID und bei welchem Ereignis ein PDO übertragen wird, ist in dem PDOTransmission Type festgelegt. Diese Einstellungen befinden sich ebenfalls im Object
Dictionary hinterlegt (siehe Object Dictionary, Index 1800h, 1801h, 1802h, 1803h).
Ereignisse, die zum Senden eines PDOs führen:
1. Empfang eines SYNC Objektes (Synchroner Transfer).
2. Ablauf einer einstellbaren Zykluszeit im Bereich von 5 Millisekunden bis >1 Minute
(Zyklischer Transfer).
Der HIT 1000 / 1500 CANopen implementiert mehrere Transmit-PDO, welche die
aktuellen Sensor- bzw. Prozesswerte beinhalten.
Die DS410 sieht als Standardeinstellung die Übertragung der aktuellen Messwerte als
16-bit oder 32-bit Wert vor.
Der HIT 1000 / 1500 CANopen implementiert nur die Übertragung als 16-bit Wert.
6.3 Synchronisation Object (SYNC)
SYNC Objekte dienen zur Realisierung eines synchronen Datentransfers. Ein SYNC
Objekt ist im Prinzip eine CAN Nachricht mit einem definierten Identifier, ohne Daten.
CANopen unterscheidet zwischen SYNC Producer und SYNC Consumers. SYNC
Producer sind Geräte am Bus, die in einstellbaren Zeitabständen ein SYNC senden.
SYNC Consumers sind Geräte, die auf den Empfang eines SYNC reagieren. In einem
CANopen Netzwerk können mehrere SYNC Objekte existieren. Unterschieden werden
die einzelnen SYNC Objekte anhand der SYNC-ID, welche dem verwendeten CAN
Identifier entspricht. Die verwendete SYNC-ID ist im Object Dictionary hinterlegt.
Der HIT 1000 / 1500 CANopen bietet die Funktionalität eines SYNC Consumers. Bei
entsprechender Einstellung des PDO Transmission Type wird beim Empfang eines
SYNC ein PDO gesendet. Die SYNC-ID ist auf 80h voreingestellt und kann im Object
Dictionary geändert werden (siehe Object Dictionary, Index 1005h). Unter PDO
Transmission Type kann die Anzahl der empfangenen SYNC Objekte, die zum Senden
eines PDO, führt eingestellt werden.
Stand 17.11.2016 HYDAC ELECTRONIC GMBH Mat.-Nr.: 669962
Protokoll-Beschreibung CANopen HIT 1000 / 1500 Seite 10
6.4 Emergency Object (EMCY)
EMCY Objekte werden beim Auftreten eines Fehlers gesendet. EMCY Objekte
enthalten einen Emergency Error Code, den Inhalt des Error register sowie ein
Manufacturer specific Error Field. Ist ein gemeldeter Fehler beseitigt oder
verschwunden, so wird dies ebenfalls durch ein spezielles EMCY Objekt gemeldet.
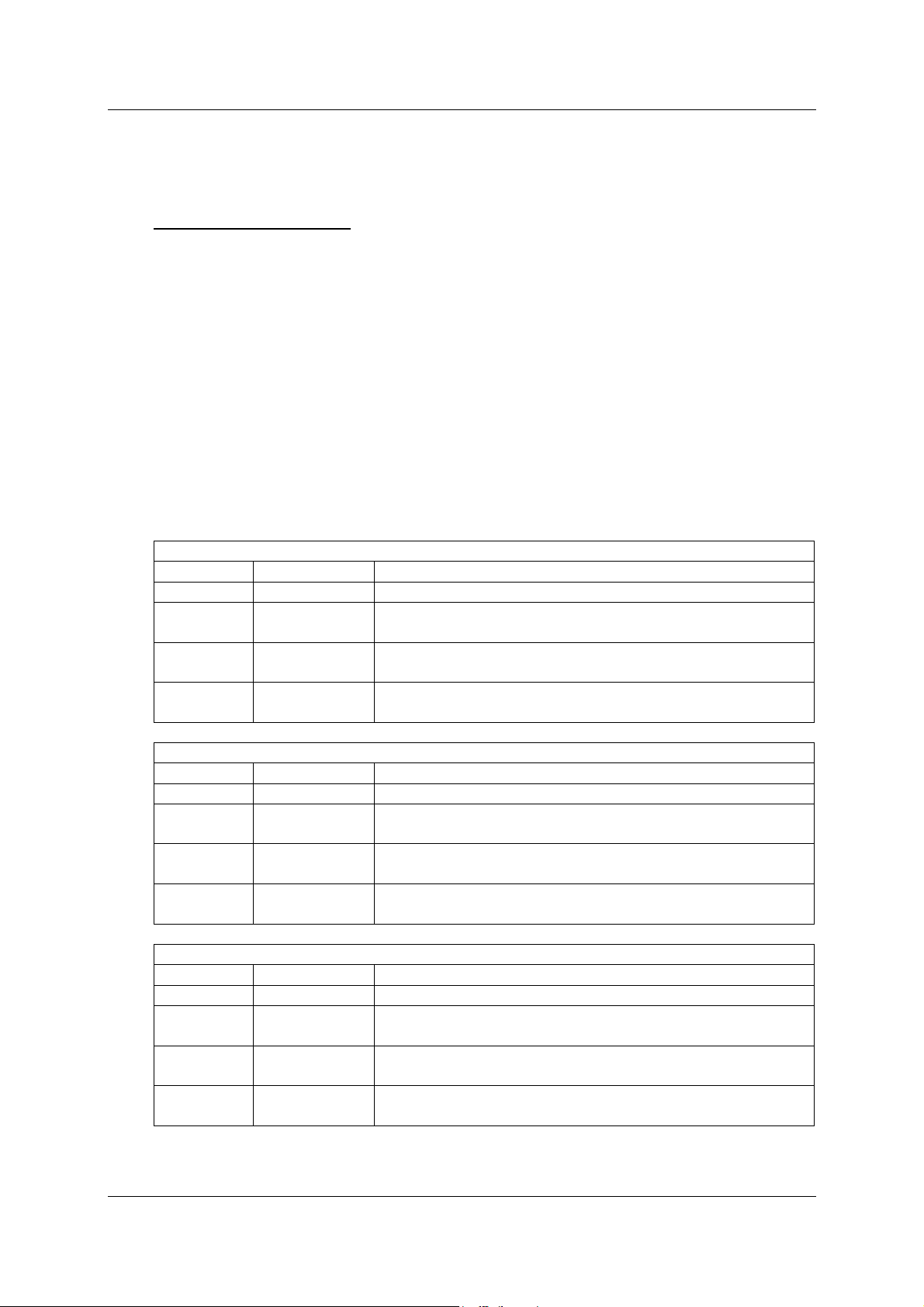
Eine Emergency-Nachricht wird gesendet, wenn ein Fehler auftritt oder dieser Fehler
wieder verschwindet. Die Nachricht ist folgendermaßen aufgebaut:
Fehler Emergency
ErrorCode
Kein Fehler 0000h 0000h
Fehler beim
FF00h 0001h
Laden des
User-Setup
Controllerfehler FF00h 0002h
Manufacturer
SpecificErrorField
Fehler Kategorie
Fehler beseitigt
Herstellerspezifischer
Fehler (Bit 7)
Herstellerspezifischer
Fehler (Bit 7)
Reserviert N/A 0003h N/A
Reserviert N/A 0004h N/A
CAN Error
Passive
Recovered
from Bus-off
8120h 0005h
8140h 0006h
Kommunikationsfehler
(Bit 4)
Kommunikationsfehler
(Bit 4)
Das EMCY Objekt hat die voreingestellte ID 80h+Node-ID und kann im Object
Dictionary geändert werden (siehe Object Dictionary, Index 1014h).
6.5 Heartbeat
Mit dem Heartbeat Protocol kann eine Überwachung der einzelnen Teilnehmer
durchgeführt werden. CANopen unterscheidet zwischen folgenden Funktionen:
1. Heartbeat Producer
sendet in zyklischen Abständen ein Heartbeat Objekt.
2. Heartbeat Consumer
überwacht das Senden von bestimmten Heartbeat Objekten.
Die Zykluszeit ist im Object Dictionary in Millisekunden einstellbar. Eine Zeitangabe
von 0 bedeutet „Heartbeat nicht aktiv“.
Mit dem Heartbeat Objekt wird immer der Status des Heartbeat Producers als Byte mit
übertragen.
Stand 17.11.2016 HYDAC ELECTRONIC GMBH Mat.-Nr.: 669962
Protokoll-Beschreibung CANopen HIT 1000 / 1500 Seite 11
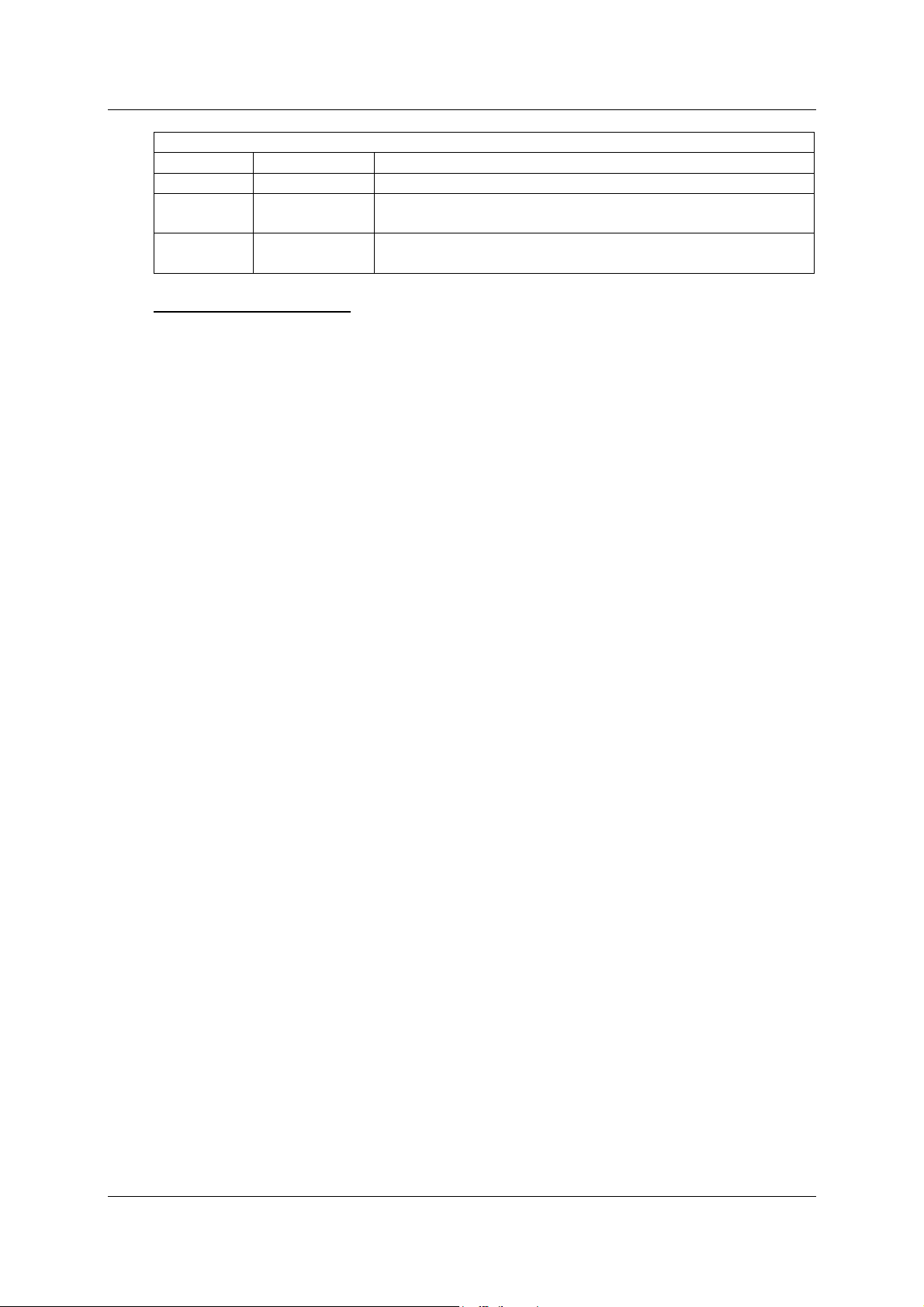
A
Bedeutung des Heartbeat- Objektinhaltes
Wert Status
nmerkung
0 BOOTUP Das Gerät hat gebootet.
4 STOPPED Das Gerät ist gestoppt.
5 OPERATIONAL Das Gerät arbeitet normal.
127 PRE-OPERATIONAL Das Gerät sendet keine PDOs, kann aber SDOs
bearbeiten.
Der HIT 1000 / 1500 CANopen kann als Heartbeat Producer arbeiten. Die ID des
Heartbeat ist 700h + Node-ID. Die Zeit ist mit 0 (nicht aktiv) voreingestellt und kann
geändert werden (siehe Object Dictionary, Index 1017h).
6.6 Network Management Services (NMT)
NMT Objekte dienen dazu Geräte zu starten, zu stoppen oder zurückzusetzen.
CANopen unterscheidet zwischen folgenden Funktionalitäten:
1. NMT Master
steuert andere Knoten.
2. NMT Slave
wird von einem Master gesteuert.
In einem CANopen Netzwerk existiert nur ein NMT Objekt mit dem Identifier 0. Es
werden immer 2 Bytes übertragen. Das erste Byte enthält den Command Specifier, der
den Befehl repräsentiert, das zweite Byte enthält die Node-ID des Knotens, der diesen
Befehl ausführen soll. Ein Wert von 0 bedeutet, dass dieser Befehl für alle Knoten gilt.
Folgende Befehle sind möglich:
NMT Befehle
1. Start Remote Node
Der Knoten wechselt in den Zustand Operational.
2. Stop Remote Node
Der Knoten wechselt in den Zustand Stopped.
3. Enter Pre-Operational
Der Knoten wechselt in den Zustand Pre-Operational.
4. Reset Node
Der "Device Profile Specific"-OD-Bereich wird zurückgesetzt, die Baudrate wird
gegebenenfalls neu initialisiert und wechselt dann in den Zustand Reset
Communication.
5. Reset Communicatiuon
Die Kommunikationseinheit des Knotens wird zurückgesetzt und danach
wechselt der Knoten in den Zustand Pre-Operational.
Der HIT 1000 / 1500 CANopen arbeitet als NMT Slave und unterstützt alle NMT
Dienste.
6.7 Boot Up Protocol
Wenn ein NMT Slave nach der Initialisierung in den Zustand Pre-operational wechselt,
sendet er jeweils ein Boot Up Objekt. Dies ist im Prinzip nichts anders als ein
Heartbeat Objekt mit dem Status 0.
Beim HIT 1000 / 1500 CANopen ist diese Funktion realisiert.
Stand 17.11.2016 HYDAC ELECTRONIC GMBH Mat.-Nr.: 669962
Protokoll-Beschreibung CANopen HIT 1000 / 1500 Seite 12
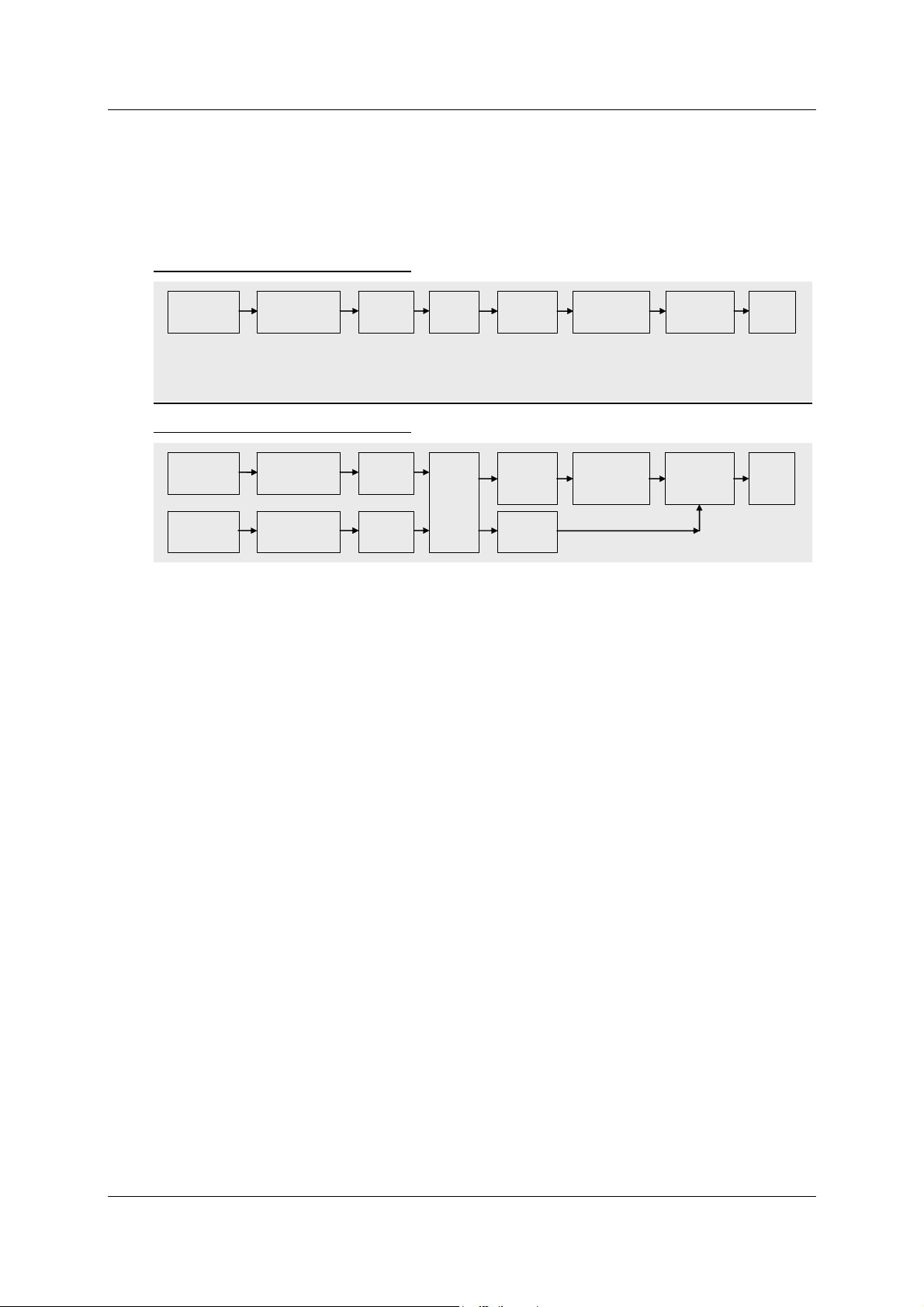
7 Datenfluss im HIT 1000 / 1500 CANopen
Nachfolgende Bilder zeigen den Datenfluss innerhalb des HIT 1000 / 1500 CANopen,
sowie die jeweiligen Indizes des Object Dictionary.
Datenfluss im HIT 1000 CANopen
Acceleration
Sensor
3D
Calibration
Scaling
T-Compensation
Field Value
5130h
Filter
Operating
Parameters
6011h/6021h
Process Values
6010h
6020h
Transmission
Unit
CAN
Message
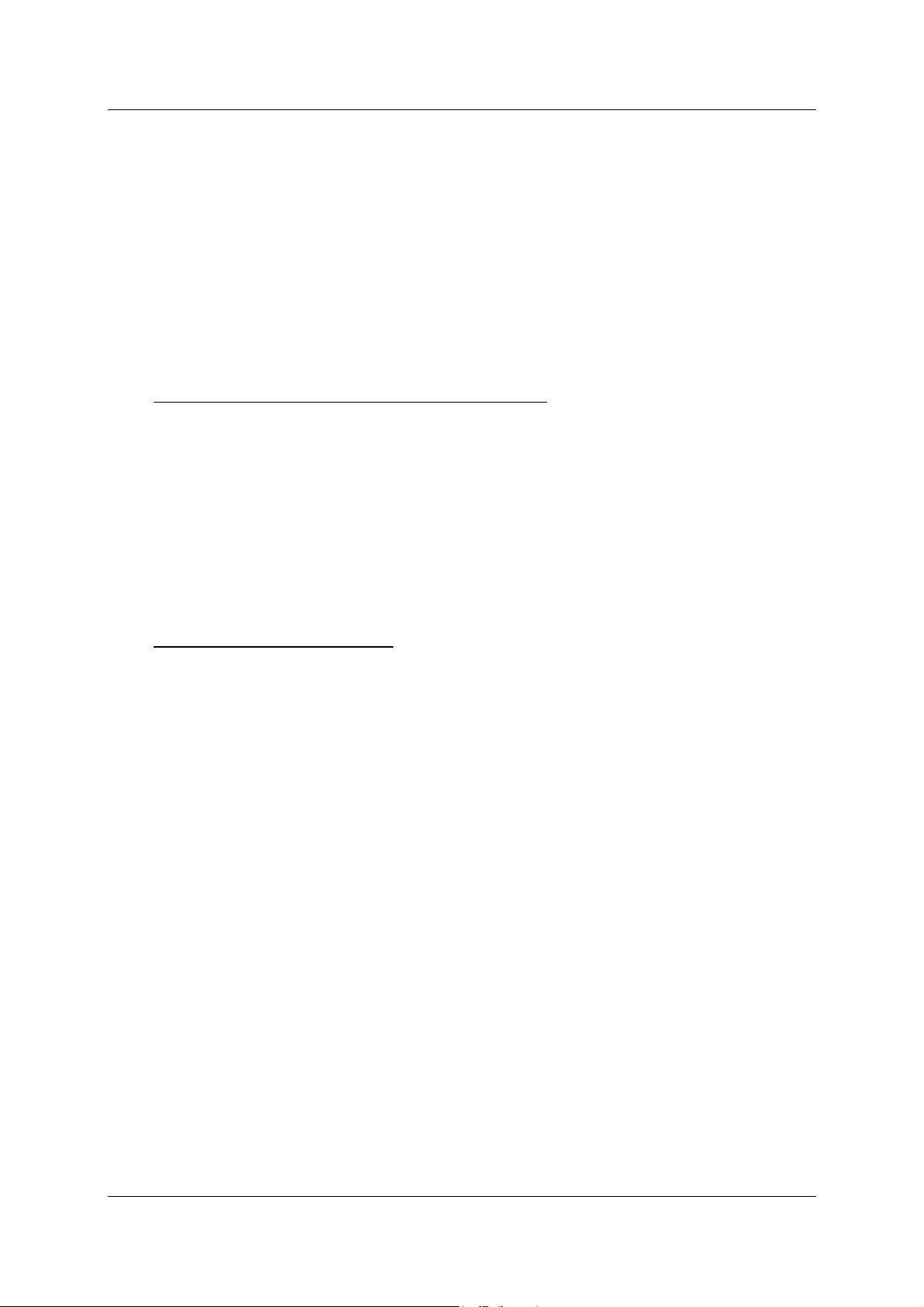
Datenfluss im HIT 1500 CANopen
Acceleration
Sensor
Turn Rate
Sensor
3D
3D
Calibration
Scaling
T-Compensation
Calibration
Scaling
T-Compensation
Field Value
5130h
Field Value
5131h
Filter
&
Fusion
Operating
Parameters
6011h
6021h
Process
Value
5132h
Process Values
6010h
6020h
Transmission
Unit
CAN
Message
7.1 Sensor Unit
Die Sensoreinheit erfasst die Neigung gegen die Horizontale und die Drehrate. Die
Messwerte werden in digitaler Form bereitgestellt.
Der Typ der Sensoreinheit (Inclination Transducer) ist in Sensor Type hinterlegt.
7.2 Calibration & Scaling
Die Sensorwerte werden in Calibration & Scaling aufbereitet und stehen als FieldValue
zur Verfügung.
7.3 Filter & Fusion
Die kalibrierten Sensorwerte werden in Filter & Fusion gefiltert (HIT 1000 und HIT1500)
und fusioniert (nur HIT 1500) und stehen nach der Operating Parameters Einheit als
ProcessValue zur Verfügung.
7.4 Transmission Unit
Tritt eines der folgenden Ereignisse ein, so wird in Abhängigkeit des eingestellten
TransmissionType der Wert des PDO gesendet.
1. Der EventTimer ist abgelaufen (zyklische Übertragung).
2. Ein oder mehrere Sync Objekte wurden empfangen (synchrone Übertragung).
Stand 17.11.2016 HYDAC ELECTRONIC GMBH Mat.-Nr.: 669962
Protokoll-Beschreibung CANopen HIT 1000 / 1500 Seite 13
8 Das Object Dictionary
8.1 Aufbau des Object Dictionary
Im Object Dictionary sind, wie bereits mehrfach erwähnt, alle Daten hinterlegt. In den
folgenden Kapiteln sind die vom HIT 1000 / 1500 CANopen unterstützten Einträge
aufgeführt. Die Angabe des Index erfolgt spezifikationsgemäß immer in hexadezimaler
Notation, ohne dass die hexadezimale Darstellung extra angezeigt wird. Bei jedem
Eintrag ist auch die Zugriffsart angegeben. CANopen unterscheidet dabei folgende
Zugriffsarten:
Zugriffsarten (Acces Type) für das Object Dictionary
1. const
Kann nur gelesen werden und liefert immer den gleichen Wert.
2. read only
Kann nur gelesen werden, der Wert kann sich aber während des Betriebes ändern.
3. write only
Der Eintrag kann nur geschrieben werden.
4. read write
Der Eintrag kann geschrieben und gelesen werden.
CANopen unterscheidet innerhalb des Data Dictionary folgende Bereiche:
Bereiche des Object Dictionary:
1. Index 0000h .. 1FFFh: Communication profile specific entries
Einstellungen, die für alle CANopen-Geräte gelten. Diese Einträge sind in der
DS301 und DS302 festgelegt.
2. Index 6000h .. 9FFFh: Device profile specific entries
Gerätespezifische Daten, die in einer Draft Standard festgelegt sind.
Der HIT 1000 / 1500 CANopen hat das Geräteprofil DS410 realisiert.
3. Index 2000h .. 5FFFh: Manufacturer specific entries
Herstellerspezifische zusätzliche Daten, die in keiner Spezifikation festgelegt sind.
8.2 Struktur des gerätespezifischen Teils nach DS410
Der HIT 1000 / 1500 CANopen implementiert die DS410. Diese beschreibt das
Verhalten und die Funktionalität von Neigungsgebern (inclinometer).
Stand 17.11.2016 HYDAC ELECTRONIC GMBH Mat.-Nr.: 669962
Protokoll-Beschreibung CANopen HIT 1000 / 1500 Seite 14
9 Einträge im Object Dictionary
Im Folgenden sind die vom HIT 1000 / 1500 CANopen realisierten Funktionalitäten
aufgezeigt. Eine detaillierte Beschreibung der Einträge kann in [1] und [5] nachgelesen
werden.
9.1 Communication Profile Specific Entries (DS301)
9.1.1 Index 1000h: DeviceType (read only)
Enthält die Nummer des verwendeten Geräteprofiles, hier die Nummer 410, sowie die
profilspezifische Erweiterung, hier eine 2, für die Unterstützung von 2 Achsen mit 16Bit
maximaler Auflösung.
9.1.2 Index 1001h: ErrorRegister (read only)
Enthält den aktuellen Fehlerzustand (siehe EMCY, sowie [1]).
9.1.3 Index 1003h: Pre-defined error field (read only)
Hier werden die Fehler bereitgestellt, die im CANopen Gerät aufgetreten sind, und
mittels emergency object signalisiert wurden (siehe CiA 301)
9.1.4 Index 1005h: S yncMessageIdentifier (read write)
Hier kann die COB-ID für das SYNC-Objekt eingestellt werden.
9.1.5 Index 1008h: ManufacturerDeviceName (const)
Liefert den Gerätenamen als Zeichenkette. („HIT1000“).
9.1.6 Index 1009 h: ManufacturerHardwareVersion (const)
Liefert die Hardwareversion als Zeichenkette (z.B. „01.03“).
9.1.7 Index 100Ah: ManufacturerSoftwa reVersion (const)
Liefert die Softwareversion als Zeichenkette (z.B. „03.02“). Die beiden ersten Zeichen
bezeichnen die Version, die letzten beiden Zeichen den Revisionsstand.
9.1.8 Index 1010h: StoreParameters
Durch Einschreiben der Zeichenkette „save“ (65766173h) werden die aktuellen
Einstellungen in den nicht flüchtigen Speicher übertragen.
Der HIT 1000 / 1500 CANopen speichert Einstellungen nicht automatisch wenn sie
geändert werden, sondern nur auf Anforderung.
ACHTUNG: Geänderte Einstellungen müssen mit StoreParameters explizit
gesichert werden, sonst gehen sie beim Abschalten des Gerätes oder bei den
NMT-Befehlen Reset Node und Reset Communication verlor en.
Stand 17.11.2016 HYDAC ELECTRONIC GMBH Mat.-Nr.: 669962
Protokoll-Beschreibung CANopen HIT 1000 / 1500 Seite 15
CANopen bietet die Möglichkeit mit Hilfe verschiedener Subindizes verschiedene
Parameterbereiche zu sichern.
Unterstützt wird hier Subindex 1, 2, 3 und 4.
Nähere Informationen sind [1] zu entnehmen.
Achtung: Die Einstellungen der Baudrate und der NodeID bleiben bei
StoreAllParameters erhalten.
Verwendete Subindizes:
0: LargestSubindexSupported (read only)
1: StoreAllParameters (read write)
2: StoreCommunicationParamters (read write) (index von 1000h to 1FFFh)
3: StoreApplicationParamteres (read write) (index von 6000h to 9FFFh)
4: StoreLssParameters (read write) (index von 2000h to 20FFh)
9.1.9 Index 1011h: RestoreDefaultParame ters
Durch Einschreiben der Zeichenkette „load“ (64616F6Ch) werden die werksseitigen
Voreinstellungen in den nicht flüchtigen Speicher übertragen.
Der HIT 1000 / 1500 CANopen arbeitet allerdings bis zum Abschalten oder bis zur
Ausführung der Befehle Reset Node und Reset Communication noch mit den aktuellen
Einstellungen weiter.
CANopen bietet die Möglichkeit mit Hilfe verschiedener Subindizes verschiedene
Parameterbereiche zu restaurieren.
Unterstützt wird hier Subindex 1, 2, 3 und 4.
Nähere Informationen sind [1] zu entnehmen.
Achtung: Die Einstellungen der Baudrate und der NodeID bleiben bei
RestoreAllParameters erhalten.
Verwendete Subindizes:
0: LargestSubindexSupported (read only)
1: RestoreAllParameters (read write)
2: RestoreCommunicationParamters (read write) (index von 1000h to 1FFFh)
3: RestoreApplicationParamteres (read write) (index von 6000h to 9FFFh)
4: RestoreLssParameters (read write) (index von 2000h to 20FFh)
9.1.10 Index 1014h: CobIdEmergencyMessage (read write)
Hier kann die COB-ID für das EMCY-Objekt eingestellt werden (siehe EMCY).
9.1.11 Index 1017h: ProducerHeartbeatTime (read write)
Hier kann die Heartbeat - Zeit in Millisekunden eingestellt werden. Der Wert 0
bedeutet, dass diese Funktion nicht aktiv ist (siehe Heartbeat).
Stand 17.11.2016 HYDAC ELECTRONIC GMBH Mat.-Nr.: 669962
Protokoll-Beschreibung CANopen HIT 1000 / 1500 Seite 16
9.1.12 Index 1018h: IdentityObject
Das Identity Objekt identifiziert den HIT 1000 / 1500 CANopen. Die Identifikation
besteht aus vier 32bit-Zahlen. Die Kombination dieser 4 Zahlen ergibt eine weltweit
eindeutige Identifikation eines Gerätes.
Verwendete Subindizes:
0: LargestSubindexSupported (read only)
1: VendorID (read only)
Eindeutiger Herstellercode (DAh für HYDAC ELECTRONIC GmbH)
2: ProductCode (read only)
Produktcode der Hydac Electronic (z.B: 924854)
3: RevisionNumber (read only)
Revisionsnummer des Gerätes.
4: SerialNumber (read only)
Seriennummer des Gerätes
9.1.13 Index 1029h: Error behaviour
Verwendete Subindizes:
0: Nr of Error Classes (read ony)
1: Communication Error (read write)
0 : Change to NMT state Pre-operational
1 : No change of the NMT state
2 : Change to NMT state Stopped
2: Specific Error Class (read write)
0 : Change to NMT state Pre-operational
1 : No change of the NMT state
2 : Change to NMT state Stopped
9.1.14 Index 1800h / 1801h / 1802h / 1803h: TPDO communication
parameter
Diese Einträge legen die PDO-Übertragung fest. Im Einzelnen sind dies:
Parameter zur PDO-Übertragung
1. COB-ID
Legt den Identifier für das PDO fest. Das höchstwertigste Bit (Bit31) des Eintrages
gehört nicht mehr zur ID und hat die Bedeutung „disable PDO“. Ist dieses Bit
gesetzt, so ist die Übertragung des PDO gesperrt.
2. Transmission Type
Legt den Übertragungstyp fest.
Werte zwischen 0 und 240 bedeuten eine synchrone Übertragung. Die Zahl steht
für die Anzahl der SYNC Objekte, die empfangen werden müssen, bis das PDO
gesendet wird.
Der Wert 254 bedeutet eine herstellerspezifische Übertragung und der Wert 255
eine geräteprofilspezifische Übertragung. Bei 254 und 255 wird das PDO zyklisch
gesendet, sofern eine Zeit (Event Time) ungleich 0 eingestellt ist.
3. Inhibit Time
Dieser Wert legt das minimale Intervall für die PDO Übertragung fest, wenn als
transmission type FEh and FFh gewählt wurde. Der Wert ist als Vielfaches von
100µs definiert. Der Wert 0 schaltet die inhibit time ab.
4. Reserved – ohne Bedeutung
Stand 17.11.2016 HYDAC ELECTRONIC GMBH Mat.-Nr.: 669962
Protokoll-Beschreibung CANopen HIT 1000 / 1500 Seite 17
5. Event Time
Legt die Zykluszeit für asynchrone Übertragungen bei Transmission Type 254 und
255 in Millisekunden fest. Der Wert 0 bedeutet keine zeitgesteuerte Übertragung.
Verwendete Subindizes:
0: LargestSubindexSupported (read only)
1: COBIDUsedByPDO (read write)
2: TransmissionType (read write)
3: InhibitTime (read write)
4: Reserved
5: EventTimer(read write)
9.1.15 Index 1A00h / 1A01h / 1A02h / 1A03h: TPDO mapping parameter
Mit diesen Einträgen wird festgelegt, welche Daten mit dem PDO übertragen werden.
Subindex 0 gibt die Anzahl der Daten im PDO an. Unter Subindex 1 ist der Index und
Subindex sowie die Anzahl der Bits des ersten Datums hinterlegt, entsprechendes gilt
für die Subindizes 2 bis 8.
Im Auslieferzustand hat der HIT 1000 / 1500 CANopen folgende Einträge:
Index 1A00h Statische Neigung (HIT 1000 und HIT1500)
Subindex Inhalt Bedeutung
0 3 Drei Werte werden im PDO übertragen.
1 60100010h Der erste Wert im PDO ist der Wert von Index 6010h,
Subindex 0 mit einer Breite von 10h (=16 bit)
2 60200010h Der zweite Wert im PDO ist der Wert von Index 6020h,
Subindex 0 mit einer Breite von 10h (=16 bit)
3 50000008h Der dritte Wert im PDO ist der Status der
Neigungsmessung
Index 1A01h Skalierte Beschleunigungswerte (HIT 1000 und HIT1500)
Subindex Inhalt Bedeutung
0 3 Drei Werte werden im PDO übertragen.
1 51300110h Der erste Wert im PDO ist der Wert von Index 5130h,
Subindex 1 mit einer Breite von 10h (=16 bit)
2 51300210h Der zweite Wert im PDO ist der Wert von Index 5130h,
Subindex 2 mit einer Breite von 10h (=16 bit)
3 51300310h Der dritte Wert im PDO ist der Wert von Index 5130h,
Subindex 3 mit einer Breite von 10h (=16 bit)
Index 1A02h Skalierte Drehratenwerte (nur HIT 1500)
Subindex Inhalt Bedeutung
0 3 Drei Werte werden im PDO übertragen.
1 51310110h Der erste Wert im PDO ist der Wert von Index 5131h,
Subindex 1 mit einer Breite von 10h (=16 bit)
2 51310210h Der zweite Wert im PDO ist der Wert von Index 5131h,
Subindex 2 mit einer Breite von 10h (=16 bit)
3 51310310h Der dritte Wert im PDO ist der Wert von Index 5131h,
Subindex 3 mit einer Breite von 10h (=16 bit)
Stand 17.11.2016 HYDAC ELECTRONIC GMBH Mat.-Nr.: 669962
Protokoll-Beschreibung CANopen HIT 1000 / 1500 Seite 18
Index 1A03h Neigung bewegungskompensiert (nur HIT 1500)
Subindex Inhalt Bedeutung
0 2 Zwei Werte werden im PDO übertragen.
1 51320110h Der erste Wert im PDO ist der Wert von Index 5132h,
Subindex 1 mit einer Breite von 10h (=16 bit)
2 51320210h Der zweite Wert im PDO ist der Wert von Index 5132h,
Subindex 2 mit einer Breite von 10h (=16 bit)
Verwendete Subindizes:
0: NumberOfMappedApplicationObjectsInPDO (read write)
Es sind die Werte 0 bis 8 zulässig.
Entsprechend wird kein PDO übertragen, oder ein PDO mit bis zu 8 Werten.
ObjectToBeMapped (1 bis 8) (read write)
Beim HIT 1000 / 1500 CANopen folgende Werte zulässig:
10010008h = Error Register 8bit-Breite
10020020h = Manufacturer Status Register 32bit-Breite
50000008h = Status Neigung 8bit-Breite
51300110h = Prozesswert Beschleunigung in Richtung der X-Achse (siehe 9.3.3)
51300210h = Prozesswert Beschleunigung in Richtung der Y-Achse
51300310h = Prozesswert Beschleunigung in Richtung der Z-Achse
51310110h = Prozesswert Drehrate um die X-Achse (siehe 9.3.4)
51310210h = Prozesswert Drehrate um die Y-Achse
51310310h = Prozesswert Drehrate um die Z-Achse
51320110h = Prozesswert kompensierte Neigung (wie Slope long16 s.u.)
51320210h = Prozesswert kompensierte Neigung (wie Slope lateral16 s.u.)
60100010h = Prozesswert Slope long16 mit 16bit-Breite (DS410 vgl. [5])
60200010h = Prozesswert Slope lateral16 mit 16bit-Breite (DS410 vgl. [5])
9.1.16 Index 1F80h: NMT-Startup (read / write)
Wird Bit 2 gesetzt, so wird automatisch bei Erreichen des „Pre-Operational“ Status in
den „Operational“ Status gewechselt (DS302).
Erlaubte Werte sind: 08h und 0Ch
9.2 Device Profile Specific Entries (DS410)
9.2.1 Index 6000h: Resolution (read only)
Dieser Eintrag enthält die Auflösung der Neigungswerte in Winkelgrad.
Der HIT 1000 / 1500 CANopen liefert den Wert 0Ah zurück.
Gemäß DS410 entspricht das einer Auflösung von 0,01° (siehe [5]).
Stand 17.11.2016 HYDAC ELECTRONIC GMBH Mat.-Nr.: 669962
Protokoll-Beschreibung CANopen HIT 1000 / 1500 Seite 19
–
9.2.2 Index 6010h: Slope long16 (read only) Statische Neigung
Dieser Eintrag enthält die Neigung in longitudinaler Richtung als vorzeichenbehafteter
16Bit Wert (siehe [5]).
9.2.3 Index 6011h: Slope long16 operating parameter (read write)
Dieser Eintrag enthält die Informationen zur Interpretation des Messwerts
SlopeLong16.
Der HIT 1000 / 1500 CANopen liefert standardmäßig den Wert 00h zurück (siehe [5]).
Bit 7
1 Bit 0 Funktion
0 0
0 1
Invertierung aus
Invertierung ein
9.2.4 Index 6020h: Slope lateral16 (read only) Statische Neigung
Dieser Eintrag enthält die Neigung in lateraler Richtung als vorzeichenbehafteter 16Bit
Wert (siehe [5] – nur bei zweiachsigen Geräten)
9.2.5 Index 6021h: Slope lateral16 operating parameter (read write)
Dieser Eintrag enthält die Informationen zur Interpretation des Messwerts
SlopeLateral16 (siehe 9.2.3).
Der HIT 1000 / 1500 CANopen liefert standardmäßig den Wert 00h zurück (siehe [5]).
9.3 Manufacturer Specific Entries
9.3.1 Index 2001 h: NodeID
Unter diesem Index ist die Node-ID hinterlegt.
Verwendete Subindizes:
0: NumberOfEntries (read only)
1: CurrentNodeId (read only)
2: DemandedNodeId (read write)
Damit die neue NodeId wirksam wird, muss erst der Befehl StoreLssParameters
übertragen werden und danach der Knoten neu gestartet werden.
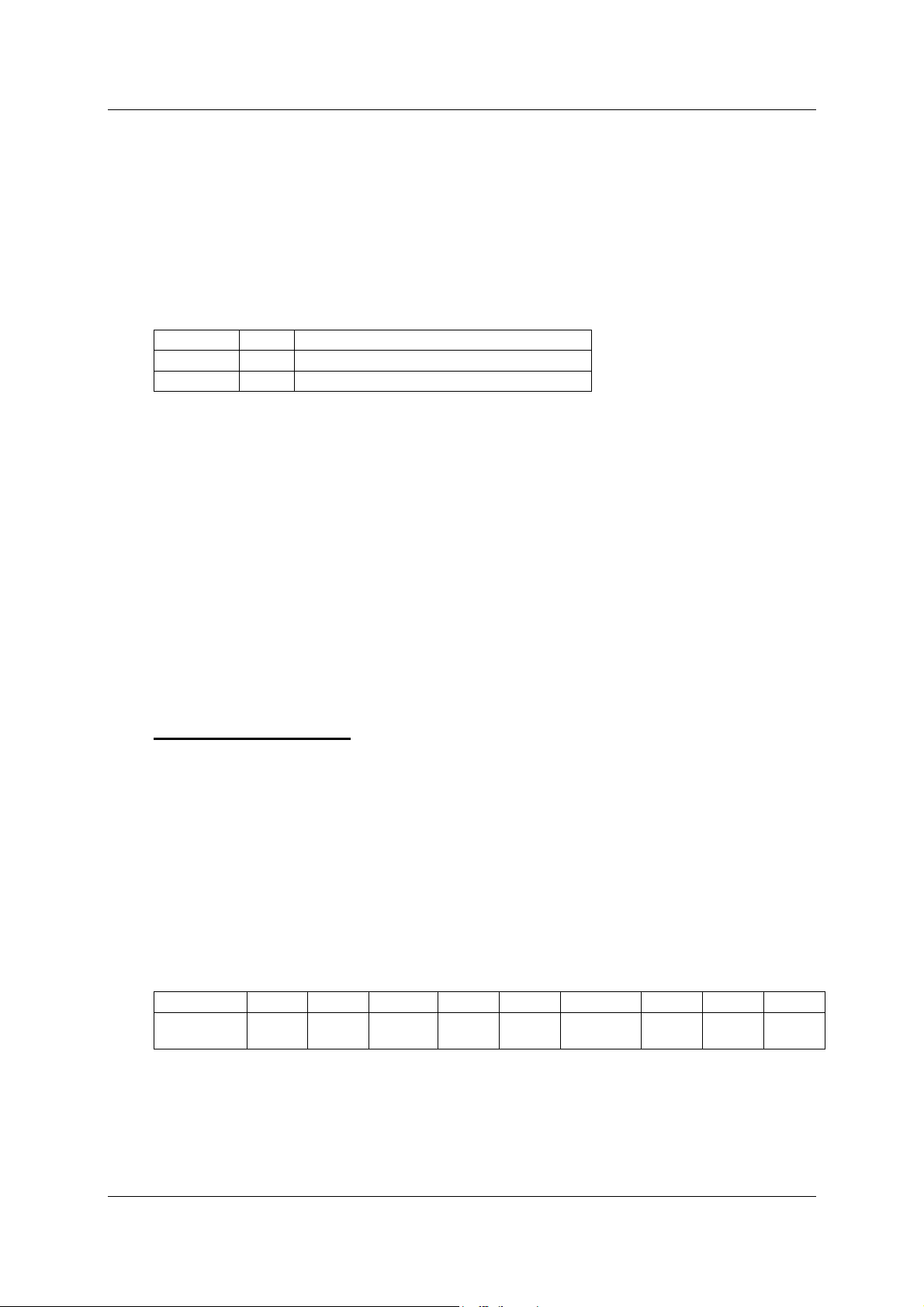
9.3.2 Index 2002h: Baudrate
Unter diesem Index ist die Baudrate hinterlegt.
Die Zuordnung des Eintrages zu der Baudrate entspricht der DS305, Layer Setting
Services and Protocols.
Eintrag 0 1 2 3 4 5 6 7 8
Baudrate
1000
kbit/s
800
kbit/s
500
kbit/s
250
kbit/s
125
kbit/s
reserved
50
kbit/s
Damit die neue Baudrate wirksam wird, muss erst der Befehl StoreLssParameters
übertragen werden und danach der Knoten neu gestartet werden.
20
kbit/s
10
kbit/s
Stand 17.11.2016 HYDAC ELECTRONIC GMBH Mat.-Nr.: 669962
Protokoll-Beschreibung CANopen HIT 1000 / 1500 Seite 20
Verwendete Subindizes:
0: NumberOfEntries (read only)
1: CurrentBaudrate (read only)
2: DemandedBaudrate (read write)
9.3.3 Index 5130h: Skalierte Beschleunigungswerte
Unter diesem Index ist der aktuelle Prozesswert für die Komponente der
Erdbeschleunigung in Richtung der X, Y und Z-Achse des Neigungsgebers
hinterlegt.
Die Werte sind in 1/100 m/s
Der Prozesswert 981 entspricht 9,81 m/s
2
skaliert.
2
= 1g.
Verwendete Subindizes:
0: NumberOfEntries (read only)
1: X-Komponente Int16 (read only)
2: Y-Komponente Int16 (read only)
3: Z-Komponente Int16 (read only)
9.3.4 Index 5131h: Skalierte Drehratenwerte
Unter diesem Index ist der aktuelle Prozesswert für die Drehrate um die X, Y und ZAchse des Neigungsgebers hinterlegt (im Bogenmaß).
Die Werte sind in 0,2 Millirad/s skaliert. 2 π/s entspricht einer Umdrehung/s.
Ein Prozesswert von 15000 entspricht demnach einer Drehrate von 3 rad/s.
Verwendete Subindizes:
0: NumberOfEntries (read only)
1: X-Komponente Int16 (read only)
2: Y-Komponente Int16 (read only)
3: Z-Komponente Int16 (read only)
Die nachfolgende Zeichnung zeigt den positiven Drehsinn um eine gedachte Achse
9.3.5 Index 5132h: Neigung im Raum (bewegungskompensiert)
Unter diesem Index ist der aktuelle Prozesswert für die kompensierte Neigung gegen
die Horizontale in X, Y und Z hinterlegt.
Der Wert hat eine Auflösung von 0,01° (vgl. Index 6010h / 6020h)
Verwendete Subindizes:
0: NumberOfEntries (read only)
1: Entsprechend Slope long16 Komponente Int16 (read only)
2: Entsprechend Slope lateral16 Komponente Int16 (read only)
Stand 17.11.2016 HYDAC ELECTRONIC GMBH Mat.-Nr.: 669962
Protokoll-Beschreibung CANopen HIT 1000 / 1500 Seite 21
–
9.3.6 Index 5000h: Status der Neigungsmessung
Unter diesem Index ist der Status der Neigungsmessung hinterlegt.
Verwendete Subindizes:
0: Status Uint8 (read only)
Die Codierung ist bitweise wie folgt:
Bit 7
Reserviert
Immer 0
3 Bit 2 Bit 1 Bit 0
Schwerer
Fehler
Gerät in
Bewegung
Sensor-Temperatur
außerhalb Regelbereich
9.3.7 Weitere Indizes im Bereich 2000h bis 5FFFh (reserved)
Die Indizes in diesem Bereich enthalten wichtige Werkseinstellungen und dürfen
kundenseitig nicht verändert werden!
Achtung: Jeder Eingriff kann zur Fehlfunktion des Neigungsgebers führen!
Stand 17.11.2016 HYDAC ELECTRONIC GMBH Mat.-Nr.: 669962

Protokoll-Beschreibung CANopen HIT 1000 / 1500 Seite 22
10 Layer setting services (LSS) und Protokolle
Die LSS-Dienste und Protokolle, dokumentiert in CiA DS305 V2.2, siehe [4],
unterstützen das Abfragen und Konfigurieren verschiedener Parameter des Data Link
Layers und des Application Layers eines LSS-Slaves durch ein LSS-Master über das
CAN Netzwerk.
Unterstützt werden folgende Parameter:
- Node-ID
- Baudrate
- LSS-Adresse, gemäß dem Identity Objekt 1018h
Der Zugriff auf den LSS-Slave erfolgt dabei über seine LSS-Adresse, bestehend aus:
- Vendor-ID
- Produkt-Code
- Revisions-Nummer und
- Serien-Nummer
Das Mess-System unterstützt folgende Dienste:
Switch mode services
● Switch mode selective
¾ einen bestimmten LSS-Slave ansprechen
● Switch mode global
¾ alle LSS-Slaves ansprechen
Configuration services
● Configure Node-ID
¾ Node-ID konfigurieren
● Configure bit timing parameters
¾ Baudrate konfigurieren
● Activate bit timing parameters
¾ Baudrate aktivieren
● Store configured parameters
¾ konfigurierte Parameter speichern
Inquiry services
● Inquire LSS-address
¾ LSS-Adresse anfragen
● Inquire Node-ID
¾ Node-ID anfragen
Identification services
● LSS identify remote slave
¾ Identifizierung von LSS-Slaves innerhalb eines bestimmten
Bereichs
● LSS identify slave
¾ Rückmeldung der LSS-Slaves auf das vorherige Kommando
● LSS identify non-configured remote slave
¾ Identifizierung von nicht-konfigurierten LSS-Slaves, Node-ID = FFh
● LSS identify non-configured slave
¾ Rückmeldung der LSS-Slaves auf das vorherige Kommando
Stand 17.11.2016 HYDAC ELECTRONIC GMBH Mat.-Nr.: 669962
 Loading...
Loading...