

Page 1
Networking and Data Communications Library
TR3271
Management
Programming
Manual
Abstract This manual describes the control-and-inquiry interface and the event messages available to an
application program controlling or monitoring the TR3271 subsystem. This manual is for programmers.
Part Number 14948
Tandem Computers Incorporated
Page 2
Document History Edition Part Number Product Version Operating System Version Date
First Edition 14948 TR3271 C20 GUARDIAN 90C20 March 1989
New editions incorporate any updates issued since the previous edition.
Copyright All rights reserved. No part of this document may be reproduced in any form, including photocopying or
translation to another language, without the prior written consent of Tandem Computers Incorporated.
Copyright 1989 Tandem Computers Incorporated.
Page 3

CONTENTS
PREFACE ..................................................... vii
NOTATION CONVENTIONS ......................................... ix
SECTION 1. INTRODUCTION .................................... 1-1
Brief Overview of TR3271 .................................. 1-1
Objects Controlled by the Subsystem ....................... 1-1
Required Management Functions ............................. 1-2
Relationship With Other Subsystems ........................ 1-4
Subsystem Architecture .................................... 1-5
SECTION 2. MANAGEMENT PROGRAMMING FOR TR3271 ............... 2-1
How a Management Application Fits Into the Architecture ... 2-2
Commands .................................................. 2-4
Event Messages ........................................... 2-10
Communicating With the TR3271 Subsystem .................. 2-11
SECTION 3. ELEMENTS OF SPI MESSAGES FOR THE SUBSYSTEM ...... 3-1
Definition Files .......................................... 3-2
Naming Rules and Guidelines for Applications .............. 3-4
Common Syntax Elements for the Subsystems ................. 3-4
Command Numbers ......................................... 3-4
Object Types ............................................ 3-5
Object Names ............................................ 3-6
Event Numbers ........................................... 3-7
Subjects of Event Messages .............................. 3-7
Tokens .................................................. 3-8
Constructs Involving Multiple Tokens ................... 3-11
Components of a Command, Response and Event ............ 3-11
SECTION 4. SPI PROGRAMMING CONSIDERATIONS FOR TR3271 ....... 4-1
Building the Command Buffer ............................... 4-1
Discontinuing a Command in Progress ....................... 4-2
Receiving and Decoding the Response Buffer ................ 4-3
Error Handling ............................................ 4-4
Security .................................................. 4-4
Command Protocol .......................................... 4-5
iii
Page 4

CONTENTS
SECTION 5. COMMON DEFINITIONS .............................. 5-1
SPI Standard Definitions .................................. 5-1
EMS Standard Definitions .................................. 5-9
Data-Communications Standard Definitions ................. 5-11
Common Definitions for the TR3271 Subsystem .............. 5-17
TR3271 Buffer Declarations ............................. 5-17
TR3271 Predefined Token and Field Values ............... 5-18
TR3271 Simple Tokens ................................... 5-18
TR3271 Extensible Structured Tokens .................... 5-19
TR3271 Tokens in Error Lists ........................... 5-19
TR3271 Tokens in Event Messages ........................ 5-20
SECTION 6. COMMANDS AND RESPONSES .......................... 6-1
Commands by Object Type ................................... 6-4
Sensitive and Nonsensitive Commands ....................... 6-6
Command Descriptions ...................................... 6-6
ABORT Command ........................................... 6-8
ADD Command ............................................ 6-13
ALTER Command .......................................... 6-20
CONNECT Command ........................................ 6-31
DELETE Command ......................................... 6-36
DISCONNECT Command ..................................... 6-41
GETVERSION Command ..................................... 6-46
INFO Command ........................................... 6-50
LISTOBJECTS Command .................................... 6-63
LOAD Command ........................................... 6-68
RESET Command .......................................... 6-72
RESETSTATS Command ..................................... 6-76
START Command .......................................... 6-84
STATISTICS Command ..................................... 6-89
STATUS Command ......................................... 6-97
STOP Command .......................................... 6-108
SWITCH Command ........................................ 6-114
TRACE Command ......................................... 6-119
SECTION 7. TR3271 EVENT MANAGEMENT ......................... 7-1
Subsystem Processes That Report Events .................... 7-1
Critical Events ........................................... 7-3
Event-Management Programming .............................. 7-3
Event-Message Descriptions ................................ 7-4
3: ZTR3-EVT-IOBUS-ERR ................................... 7-6
4: ZTR3-EVT-CIU-ERR .................................... 7-10
6: ZTR3-EVT-OBJ-STARTED ................................ 7-15
7: ZTR3-EVT-OBJ-STOPPED ................................ 7-18
67: ZTR3-EVT-SUBDEV-ERR ................................ 7-21
74: ZTR3-EVT-INTL-ERR .................................. 7-24
90: ZTR3-EVT-PROC-ABEND ................................ 7-27
106: ZTR3-EVT-INSUFF-BUF ............................... 7-31
112: ZTR3-EVT-DISCARD-ERR .............................. 7-34
141: ZTR3-EVT-CLIP-DWLOAD .............................. 7-37
147: ZTR3-EVT-CSS-PROBE-ERR ............................ 7-40
157: ZTR3-EVT-CSS-FRAME-ERR ............................ 7-44
iv
Page 5

CONTENTS
158: ZTR3-EVT-CSS-UNEXP-BRKPT .......................... 7-48
160: ZTR3-EVT-CSS-LIU-CONFIG-ERR ....................... 7-51
164: ZTR3-EVT-CSS-LINE-ERR ............................. 7-54
165: ZTR3-EVT-CSS-SUBDEV-ERR ........................... 7-58
-1: ZCOM-EVT-CPU-SWITCH ................................ 7-62
-2: ZCOM-EVT-PATH-SWITCH ............................... 7-65
-3: ZCOM-EVT-SUMSTATE-CHG .............................. 7-69
Examples of Filters ...................................... 7-72
Example 1 .............................................. 7-72
Example 2 .............................................. 7-73
APPENDIX A. ERROR NUMBERS AND ERROR LISTS .................. A-1
Notation Used ............................................. A-1
2: ZTR3-ERR-CLIP-PROB ................................. A-3
3: ZTR3-ERR-TARGET-OBJ-NOT-FOUND ...................... A-4
4: ZTR3-ERR-ATTR-CONFL-SU ............................. A-5
5: ZTR3-ERR-NOT-PTP-SU ................................ A-7
6: ZTR3-ERR-ALRDY-USING-ADDR .......................... A-8
7: ZTR3-ERR-NO-OBJ-IN-SEL-STATE ....................... A-9
8: ZTR3-ERR-OPENED-SU-EXIST .......................... A-10
10: ZTR3-ERR-TARGET-OBJNAME-INV ....................... A-11
11: ZTR3-ERR-NO-OWNER ................................. A-12
12: ZTR3-ERR-CONN-EXIST ............................... A-13
13: ZTR3-ERR-SU-OPENED ................................ A-14
APPENDIX B. TR3271 SUBSYSTEM DDL ........................... B-1
v
Page 6

CONTENTS
FIGURES
1-1. TR3271 Subsystem Architecture ......................... 1-6
2-1. How an Application Fits Into the Architecture ......... 2-3
TABLES
2-1. TR3271 Programmatic Commands .......................... 2-4
2-2. SCF Commands and Programmatic Commands ................ 2-6
2-3. CMI Commands and Programmatic Commands ................ 2-8
4-1. Command Protocol Summary State Changes ................ 4-5
5-1. SPI Standard Definitions .............................. 5-2
5-2. EMS Standard Definitions .............................. 5-9
5-3. Data-Communications Standard Definitions ............. 5-12
6-1. Commands and Their Symbolic Names ..................... 6-2
7-1. TR3271 Event Messages ................................. 7-2
vi
Page 7

PREFACE
In the Tandem environment, TR3271 provides application programs
with the ability to communicate with IBM hosts and IBM
3270-family devices. This manual provides subsystem-specific
information for application programmers using the managementprogramming interfaces to manage the TR3271 subsystem. The
management-programming interfaces are based on the Subsystem
Programmatic Interface (SPI). This manual describes the controland-inquiry interface and the Event Management Service (EMS)
interface available to an application program for subsystemmanagement purposes.
This manual is intended for application programmers in one of the
following categories:
• TAL, COBOL85, and C programmers who are writing management
applications that communicate with the TR3271 subsystem.
• TACL users who are writing macros and routines to perform
management functions on the TR3271 subsystem.
This manual serves as a reference manual for the development of
management applications. The seven sections and two appendixes
of this manual contain information as follows:
• Section 1 introduces the TR3271 subsystem and the objects
it controls. It also describes the required management
functions, the relationship of the subsystem to other
subsystems, and the architecture of the TR3271 subsystem.
• Section 2 describes management programming. This section
describes the purpose of management programming and how
applications fit into the Distributed Systems Management
(DSM) architecture. It also contains tables of TR3271
programmatic commands and a comparison of programmatic and
operator commands.
• Section 3 describes the elements of SPI messages.
vii
Page 8

PREFACE
• Section 4 describes SPI programming considerations for the
subsystem. This description includes information about building the command buffer, canceling commands, receiving and
decoding response buffers, error handling, version
compatibility, and security.
• Section 5 summarizes standard SPI definitions, EMS
definitions, and data-communications definitions used by the
subsystem in multiple commands, responses, or event messages.
These definitions include token codes, token maps, token
types, token values, field types, and field values.
• Section 6 describes all available commands and associated
responses when communicating with the TR3271 subsystem.
• Section 7 describes event management for applications communi-
cating with the TR3271 subsystem. This section contains
information on how to obtain event messages reported by the
subsystem, a description of each event message that can be
issued by the subsystems, and examples of filters that could
be used by an application.
• Appendix A describes the error numbers and error lists that
can be issued by the TR3271 subsystem.
• Appendix B is a listing of the TR3271 subsystem's DDL.
To use this manual, you should be familiar with Tandem system
architecture, have a reading knowledge of DDL, and have a working
knowledge of TR3271 and the language in which you are working:
TAL, COBOL85, TACL, and C. In addition, you should be familiar
with distributed systems management. Therefore, before using
this manual, you must be familiar with the material covered in
the following Tandem manuals:
•
Data Definition Language (DDL) Reference Manual
•
Device-Specific Access Methods--AM3270/TR3271
•
Introduction to Distributed Systems Management
•
Distributed Systems Management (DSM) Programming Manual
•
Communications Management Programming Manual
•
Event Management System (EMS) Manual
viii
Page 9

NOTATION CONVENTIONS
The following list summarizes the conventions used in this
manual, including the boxed descriptions of programmatic
commands, event messages, and error lists in this manual.
Notation Meaning
UPPERCASE Uppercase letters represent names from the
LETTERS definition files, SCF commands, or CMI commands;
enter these names exactly as shown.
lowercase Lowercase letters represent words that are part of
letters the notation.
Ellipsis An ellipsis immediately following a pair of brackets
... or braces indicates that you can repeat the enclosed
syntax items any number of times.
The following notation appears to the right of the description
of a token or field within a command, response, or event-message
box.
Command Message
!{} You must specify this token or field.
!... You can repeat this token or field.
!
name
Specify or omit this token or field depending on the
token, field, or value identified by
name
. See the text
for the exact nature of the dependency.
!{a} You must choose only one of the set of tokens or
fields that are indicated by !{a}, where a is the same
uppercase letter of the alphabet; for example, !{A}.
![a] You can choose zero or one of the set of tokens or
fields that are indicated by ![a], where a is the same
uppercase letter of the alphabet; for example, ![A].
!{a}... You must choose at least one--and you can choose more
than one--of the set of tokens or fields indicated by
!{a}..., where a is the same uppercase letter of the
alphabet; for example, !{A}... .
![a]... You can choose zero or one or more of the set of tokens
or fields indicated by ![a]..., where a is the same
uppercase letter of the alphabet; for example, ![A]... .
ix
Page 10

NOTATION CONVENTIONS
Response Message
!{} This token or field is always present.
!... This token or field can occur multiple times.
!
name
The presence or absence of this token or field depends
on the token, field, or value identified by
the text for the exact nature of the dependency.
Event Message
!... This token or field can occur multiple times.
!
name
The presence or absence of this token or field depends
on the token, field, or value identified by
the text for the exact nature of the dependency.
name
name
. See
. See
x
Page 11
SECTION 1
INTRODUCTION
This section describes management concepts applicable to the
TR3271 subsystem in the 6100 CSS environment. Although the
utilities available in a non-6100 environment are mentioned, this
section is oriented to the application programmer responsible for
managing the TR3271 subsystem in the 6100 CSS environment. Some
of the concepts discussed are the types of objects controlled
by the TR3271 subsystem and the available monitoring and control
functions.
BRIEF OVERVIEW OF TR3271
In the Tandem environment, the TR3271 access method allows
an application program to access a host computer. The host
computer can be an IBM host or a Tandem host. TR3271 emulates
one or more 3270-family controllers with multiple terminals or
printers attached. TR3271 has two distinct configurations. In
one configuration, TR3271 communicates with an application (for
example, EM3270) that allows non-3270 terminals to access an IBM
host. In the other configuration, TR3271 can be linked to AM3270
to provide pass-through function using the pass-through protocol
(PTP). While in pass-through mode, data can be passed between an
AM3270 device and a host by means of TR3271 without requiring an
intervening application program.
OBJECTS CONTROLLED BY THE SUBSYSTEM
The TR3271 subsystem controls a process, line, and subdevices
(SUs). The SU object can be added using various interfaces,
but cannot be defined to SYSGEN. The PROCESS and LINE objects,
1-1
Page 12

INTRODUCTION
Required Management Functions
on the other hand, are defined at system-generation time, but
can be dynamically added or deleted using Configuration Utility
Program (COUP) commands available through the Dynamic System
Configuration (DSC) facility. Refer to the
Configuration Manual
for details.
Dynamic System
In the TR3271 subsystem, a Tandem system communicates with an
individual physical device by means of physical communications
lines. Each communications line is controlled by an I/O process
that is referred to by its process object name. In TR3271, each
I/O process controls one line. Therefore, you can identify a
process by using the name associated with the line controlled by
the process.
A line can have as many as 253 subordinate subdevices. Once
a subdevice is added and started, an application accesses the
subdevice--with the exception of pass-through protocol (PTP)
subdevices--through file-system requests such as OPEN and performs poll and select operations using READ and WRITE.
PTP subdevices are handled differently from other subdevices.
Once added and started, a TR3271 PTP subdevice must be connected
to an AM3270 PTP subdevice using the CONNECT command through
the control-and-inquiry interface or the CONTROL CONNECT command
through the Communications Management Interface (CMI). Data
transfer between AM3270 and TR3271 occurs without an intervening
application. The application on the host does not explicitly use
the OPEN, READ, and WRITE file-system requests for data transfer
because they rely on the message-system interface.
A line within an TR3271 subsystem can be identified by its
unique line object name. Each subdevice can be identified by its
subdevice object name. You must assign a unique name to each
subdevice configured on a single line. Subdevices on separate
lines can have identical names; therefore, you must use the line
name in addition to the subdevice name to reference a specific
subdevice. For details on object names, see "Object Names" in
Section 3, "Elements of SPI messages for the Subsystem."
REQUIRED MANAGEMENT FUNCTIONS
Management of a subsystem involves monitoring and controlling the
objects defined in the subsystem, and monitoring and handling
events occurring in the subsystem.
The ability to monitor the TR3271 subsystem is significant. With
the information made available to you through monitoring, you
can make decisions needed to maintain a productive computing
environment.
1-2
Page 13

INTRODUCTION
Required Management Functions
Monitoring your subsystem includes such tasks as the following:
• Obtaining the version level of the subsystem software
• Obtaining current attribute values for a line and subdevices
• Obtaining the names of lines and subdevices known to the
subsystem
• Obtaining the current values of the statistics counters for
lines and subdevices
• Obtaining information about the current states of the line and
subdevices
• Retrieving information about events occurring in the subsystem
After gaining this information, you can make informed decisions
for controlling your subsystem. Action can be taken either
programmatically or interactively with the available commands.
Controlling your subsystem includes such tasks as the following:
• Terminating the operation of a line and subdevices
• Adding subdevices to the subsystem
• Changing certain attributes of a line and subdevices
• Establishing or clearing the link between a TR3271 subdevice
and an AM3270 subdevice when using the pass-through configuration
• Removing subdevices from the subsystem
• Downloading the Communications Line Interface Processor (CLIP)
• Placing the CLIP in the boot state
• Obtaining the current values of the statistics counters for a
line and subdevices
• Resetting the statistics counters
• Initiating the operation of a line and subdevices
• Changing the system resources used by a process or a line
• Tracing the activity on a line
• Taking remedial action, if necessary, in response to event
information previously retrieved
1-3
Page 14
INTRODUCTION
Relationship With Other Subsystems
RELATIONSHIP WITH OTHER SUBSYSTEMS
The TR3271 subsystem is closely related to the AM3270 subsystem.
The two subsystems can be linked by connecting an AM3270
subdevice with a TR3271 subdevice. When linked in this way,
data from AM3270 terminals can be passed to the host through
TR3271, and data from the host can be passed to the AM3270
terminals through AM3270 without the necessity for an intervening
application program.
You can selectively switch an AM3270 terminal between the control
of a PATHWAY application and the control of TR3271 connected to
an IBM host. Of course, there must be communication between
the PATHWAY application and the user application associated with
TR3271 to determine which is the controlling application.
1-4
Page 15
INTRODUCTION
Subsystem Architecture
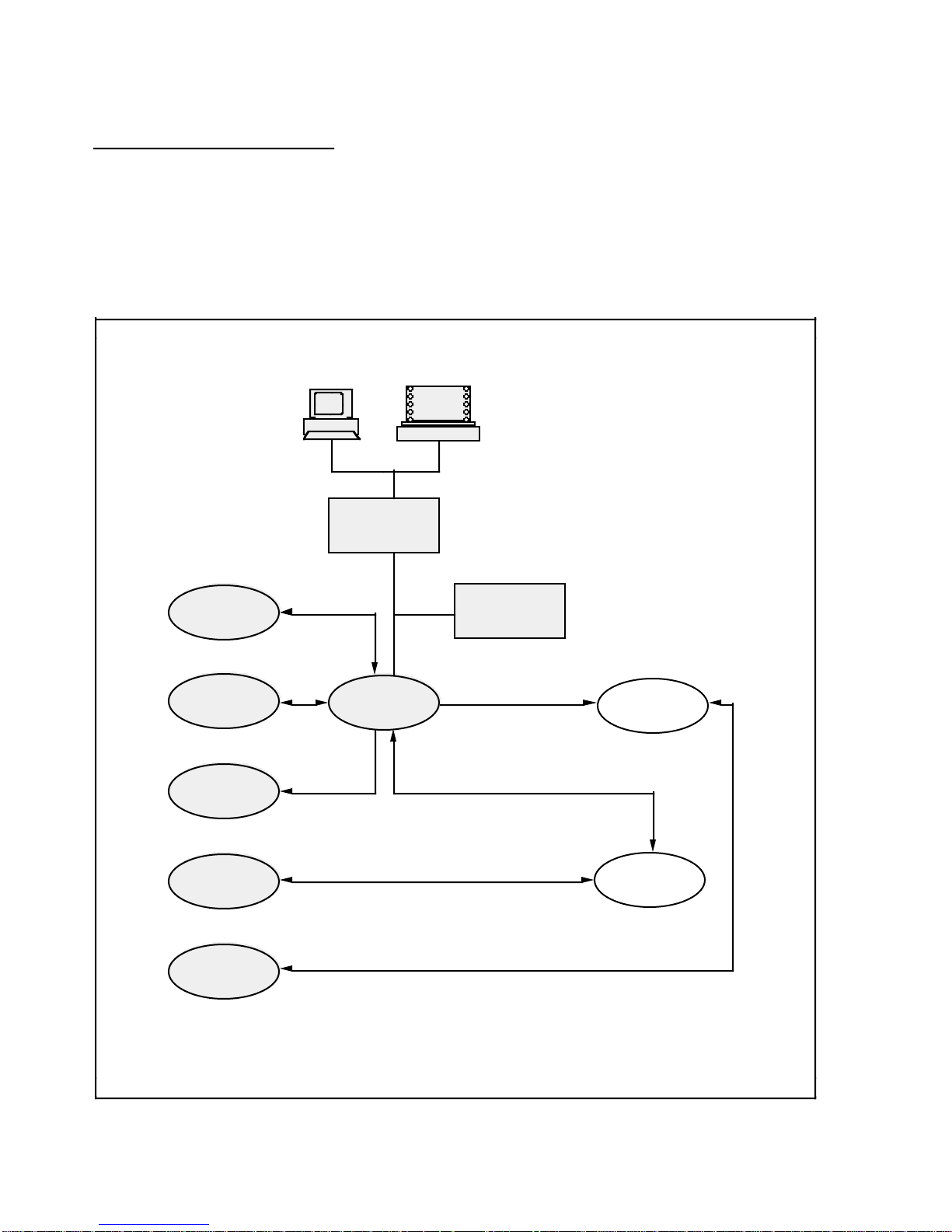
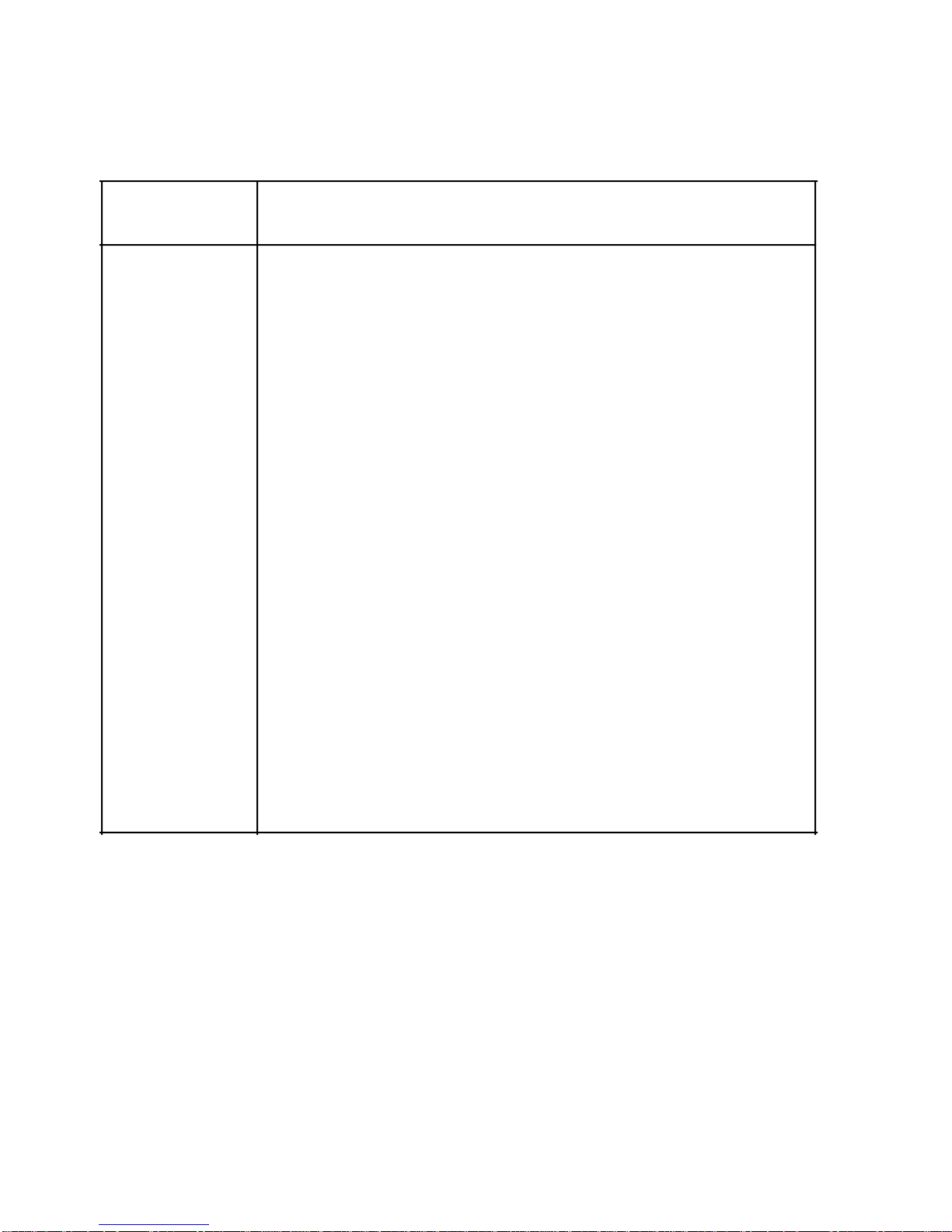
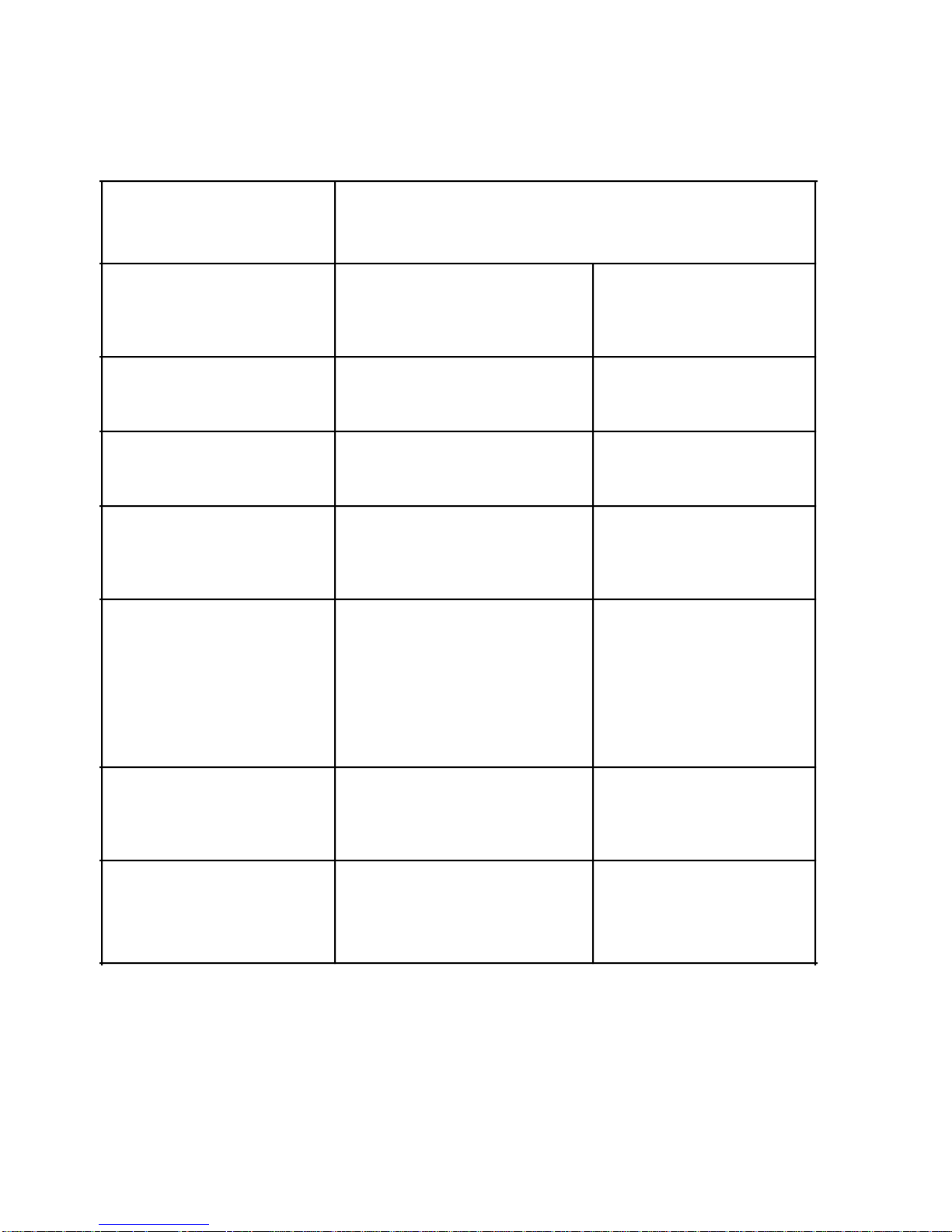
SUBSYSTEM ARCHITECTURE
The TR3271 subsystem consists of one process controlling one
line. However, the subsystem can be combined to provide a passthrough function between AM3270 terminals and a host by means of
TR3271. Figure 1-1 illustrates the architecture of the TR3271
subsystem and the various interfaces to the subsystem.
3270 Terminals
and Printers
Interactive
Interfaces
CMI
CUP
COUP
SCF
3271 Cluster
Controller
$TR
Line
TR3271
I/O Process
Host
Programmatic
Interfaces
EMS
SCP
VIEWPOINT
Figure 1-1. TR3271 Subsystem Architecture
S8009-001
1-5
Page 16

INTRODUCTION
Subsystem Architecture
You can manage the TR3271 subsystem through both interactive and
programmatic interfaces. The interactive interfaces for managing
the TR3271 subsystem are the following:
• The Subsystem Control Facility (SCF), which can be used to
monitor, configure, and control the TR3271 subsystem. SCF
provides an operator interface to the Subsystem Control Point
(SCP) which provides an interface to the TR3271 subsystem.
SCF can be used for the TR3271 subsystem only in 6100 CSS
environments.
• The Communications Management Interface (CMI), which can be
used to configure and control the line and subdevices, as well
as to obtain information from the TR3271 subsystem about the
line and subdevices. This interface can be used only in the
6100 Communications Subsystem (6100 CSS) environment and is
being replaced with SCF.
• The Configuration Utility Program (COUP), which can be used to
dynamically add or delete processes and lines.
• VIEWPOINT, which can be used to monitor event messages that
display at the VIEWPOINT console.
The programmatic interfaces for managing the TR3271 subsystem are
the following:
• The control-and-inquiry interface, which provides control and
inquiry capability to an application program. An application
program can send a command to a subsystem to control the
subsystem or to obtain information.
• The Event Management Service (EMS) interface which provides
event-management capability to an application program. This
interface allows an application program to retrieve event
messages previously sent to EMS by the subsystem.
The programmatic management interfaces use SPI message formats
and conventions and can only be used in a 6100 CSS environment.
When selecting the interfaces that would best serve your management needs, determine the features and capabilities of each and
the environment in which they will be used.
1-6
Page 17

SECTION 2
MANAGEMENT PROGRAMMING FOR TR3271
You can manage the TR3271 subsystem interactively or programmatically. For 6100 CSS environments, the Subsystem Control Facility
(SCF), the Communications Management Interface (CMI), and
VIEWPOINT provide interactive subsystem management, while the
control-and-inquiry interface and the Event Management Service
(EMS) interface provide programmatic subsystem management. Note
that although the Configuration Utility Program (COUP) is an
interactive interface, it will not be compared with the controland-inquiry interface. COUP has limited application to the
TR3271 subsystem; you can only add or delete a process or line
using this facility.
The division of management tasks between operator control and
programmatic control depends upon the subsystem configuration,
the subsystem environment, and your needs as a subsystem user.
To determine the most effective division of management tasks,
you must be familiar with the functions available to you in both
the interactive and programmatic interfaces. The interactive
functions available depend on the interactive interface you
are using, SCF or CMI. Tables later in this section show
the commands available programmatically and those available
interactively.
2-1
Page 18
MANAGEMENT PROGRAMMING FOR TR3271
How a Management Application Fits Into the Architecture
Managing a subsystem programmatically can mean a more efficient
use of resources as follows:
• If routine management tasks are performed programmatically
instead of interactively, the human operator can spend more
time on tasks that require more judgment and creativity.
• Where appropriate, a management application can standardize
responses to errors or other information obtained from the
subsystem. This standardization allows you to establish
procedures without having to train several operators to use
the procedures.
• A single management application can communicate with several
subsystems using an SPI interface instead of using several
different types of interactive interfaces, each providing
different capabilities.
• You have more latitude in responding to errors returned by
the subsystem. A management application can be designed to
take immediate remedial action to selected reported errors as
compared to the delay between the time the error is reported
and the operator responds.
• You can customize a management application to respond to the
specific needs of your computer system or network.
HOW A MANAGEMENT APPLICATION FITS INTO THE ARCHITECTURE
A management application uses Subsystem Programmatic Interface
(SPI) messages to communicate with the TR3271 subsystem. SPI
messages are passed between the management application and
the TR3271 subsystem by means of the Subsystem Control Point
(SCP) or the EMS interface. The function of an SPI message
determines whether the message is passed through SCP or EMS.
SCP is a management process that provides the control-andinquiry interface. EMS is a collection of processes, tools,
and interfaces that support the reporting and retrieval of event
information.
The control-and-inquiry interface differs from the EMS interface
in key areas. Most notably, the control-and-inquiry interface
requires a management application to initiate the communication
with the subsystem by sending a command through SCP to the
subsystem. The subsystem then returns the appropriate response
to the application through SCP. This means that the exchange of
a command and response between your application and the subsystem
is bidirectional and occurs synchronously.
2-2
Page 19
MANAGEMENT PROGRAMMING FOR TR3271
How a Management Application Fits Into the Architecture
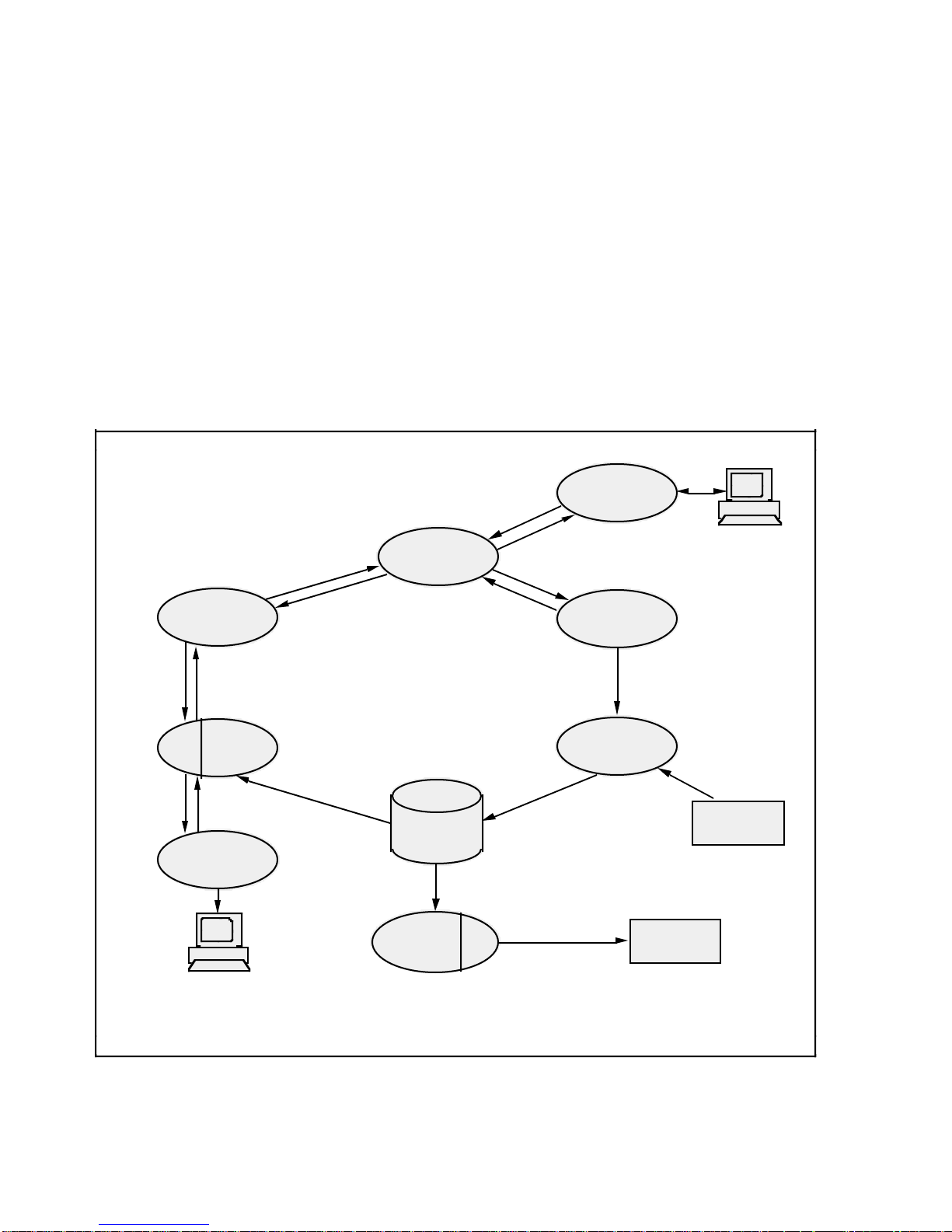
The EMS interface requires the subsystem to initiate the communication. The subsystem reports event information when events
happen, not in response to a request from a management application. The communication between EMS and your management application is unidirectional and occurs asynchronously. A management
application using EMS can monitor events that occur in the TR3271
subsystem. The application can thereby handle problems occurring
in the subsystem or track the current status of the subsystem.
An application can then retrieve the event messages from the
consumer distributor process. If you want your application to
retrieve only specific information, you can write a filter.
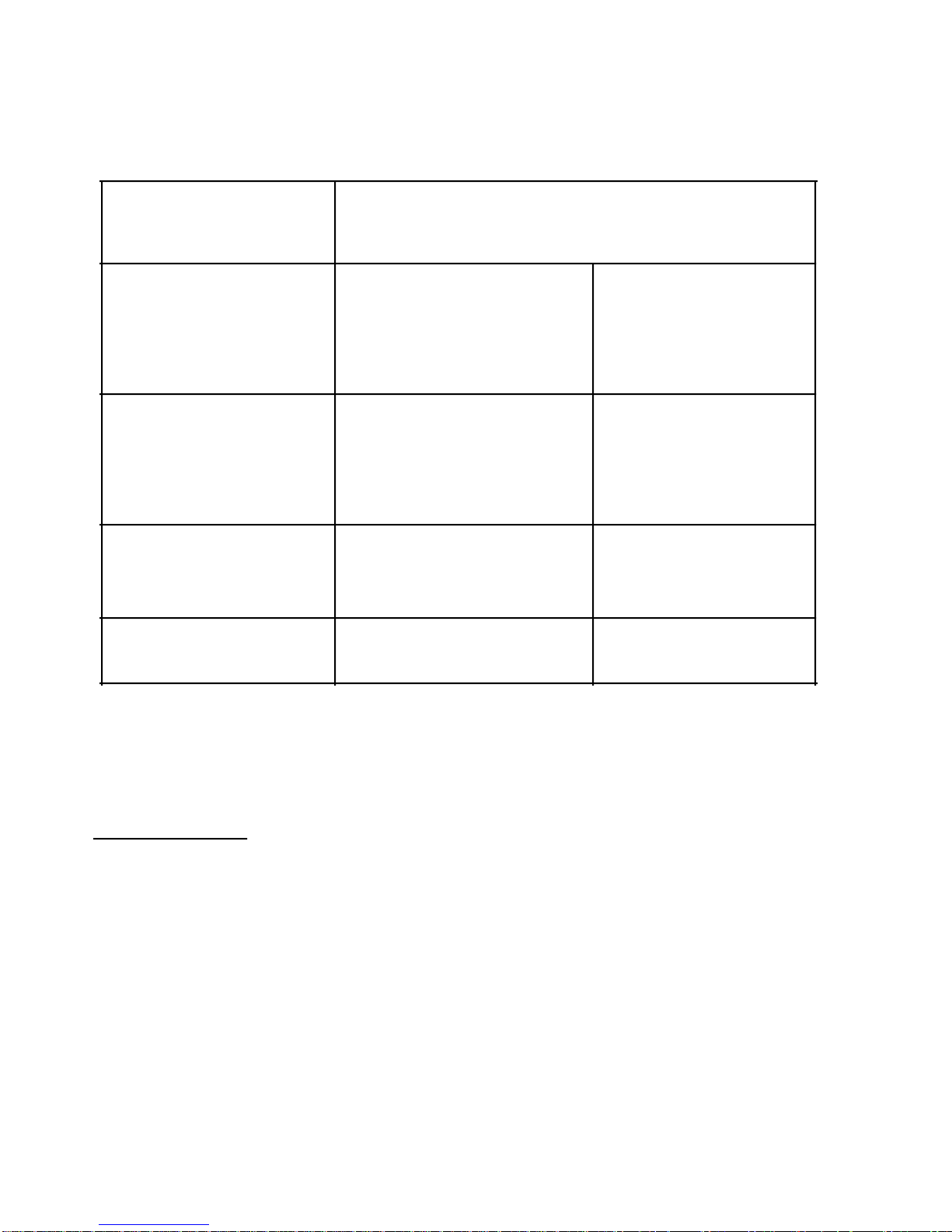
Figure 2-1 illustrates how a management application fits into the
TR3271 subsystem architecture.
SCF User
Retrieve
Event
Filter
Return
Event
Management
Application
Return
Event
Consumer
Distributor
Retrieve
Event
VIEWPOINT
TCP
Commands
Event
Messages
Commands
SCP
Responses Responses
Event
Log
Event
Messages
Compatibility
Distributor
Filter
Commands
Event
Messages
Event Messages/
Console Messages
Responses
Subsystem
SCF
TR3271
Event
Messages
EMS
Collector
($0)
Messages
Event
Other
Subsystems
Console
VIEWPOINT
User
Figure 2-1. How an Application Fits Into the Architecture
S8009-002
2-3
Page 20
MANAGEMENT PROGRAMMING FOR TR3271
Commands
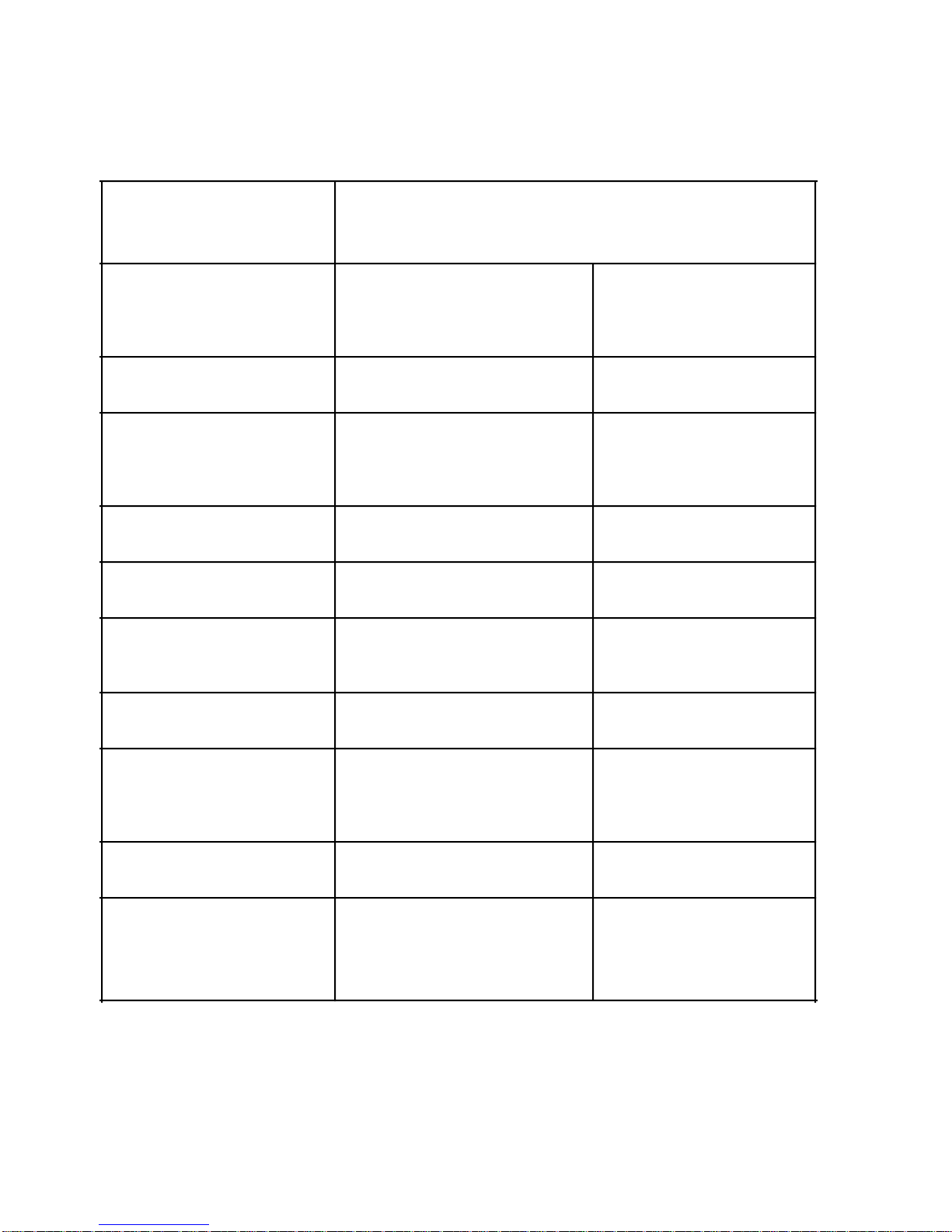
COMMANDS
Table 2-1 lists and briefly describes the commands that a
management application can send to the TR3271 subsystem using
the control-and-inquiry interface. For detailed descriptions of
these commands as they relate to the TR3271 subsystem, refer to
Section 6, "Commands and Responses." For a description of these
commands as they relate to all data-communications subsystems,
or for information about using SPI messages to communicate
with data-communications subsystems in general, refer to the
Communications Management Programming Manual
.
Table 2-1. TR3271 Programmatic Commands (Page 1 of 2)
COMMAND DESCRIPTION
ABORT Terminates the operation of a line and
subdevices immediately.
ADD Adds a subdevice to the TR3271
subsystem.
ALTER Changes the values of the attributes of a
line or subdevice.
CONNECT Establishes a link between a TR3271 subdevice
and an AM3270 subdevice when in
pass-through mode.
DELETE Removes subdevices from the TR3271 subsystem.
DISCONNECT Breaks the link between a TR3271 subdevice and
an AM3270 subdevice when in pass-through
mode.
GETVERSION Returns the version level and version banner
for the TR3271 subsystem.
INFO Returns the current values of the attributes
of lines and subdevices.
2-4
Page 21
MANAGEMENT PROGRAMMING FOR TR3271
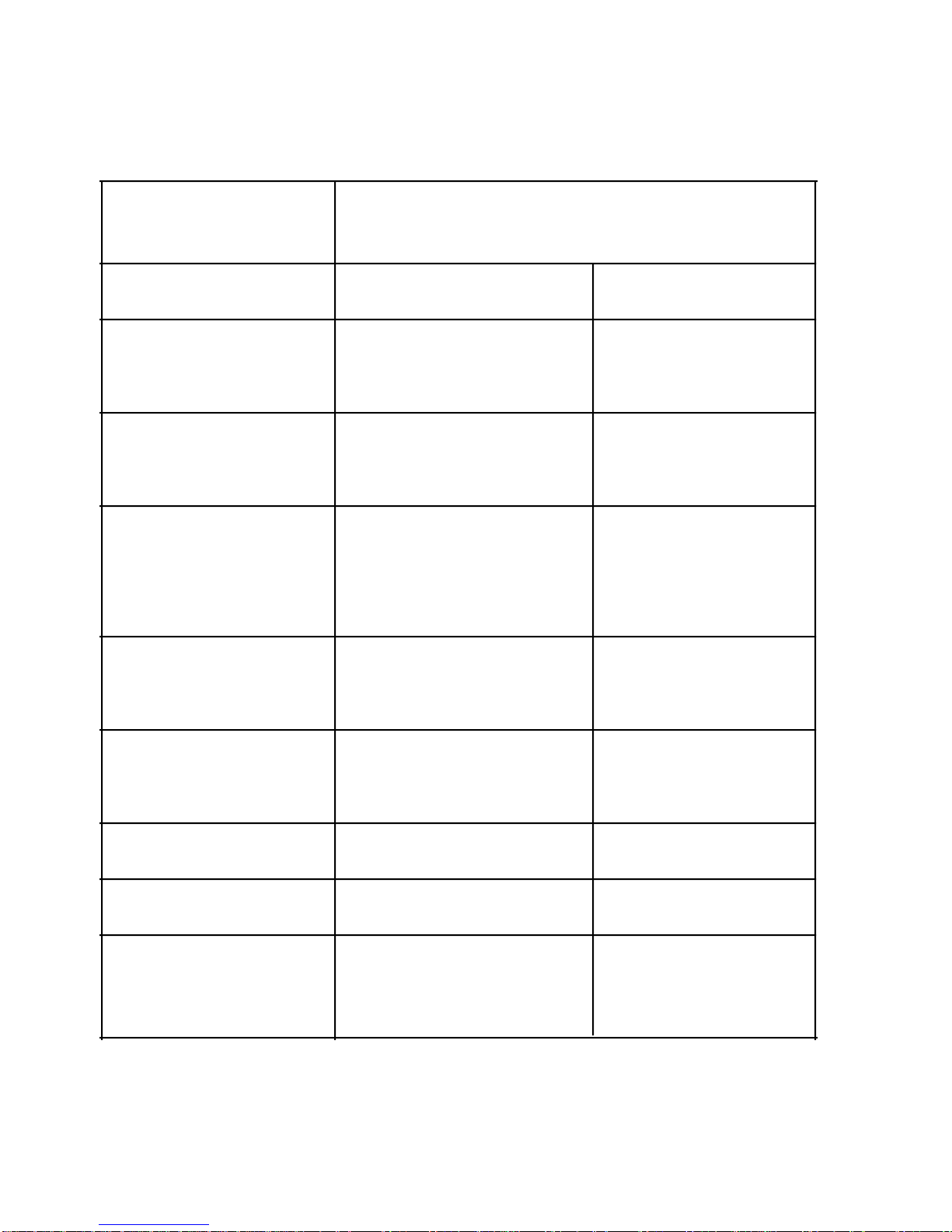
Commands
Table 2-1. TR3271 Programmatic Commands (Page 2 of 2)
COMMAND DESCRIPTION
LISTOBJECTS Returns the names of a line and subdevices
known to the TR3271 subsystem.
LOAD Initiates a download of the Communications
Line Interface Processor (CLIP).
RESET Places the CLIP in the boot state.
RESETSTATS Returns statistical information about a line
and subdevices and then resets the statistics
counters to the subsystem default values.
START Initiates the operation of a line and
subdevices.
STATISTICS Returns statistical information about a line
and subdevices.
STATUS Returns information about the current state of
a line and subdevices.
STOP Terminates the operation of a line and
subdevices.
SWITCH Changes the system resources used by a process
or a line.
TRACE Initiates, modifies, or terminates trace mode
on a line.
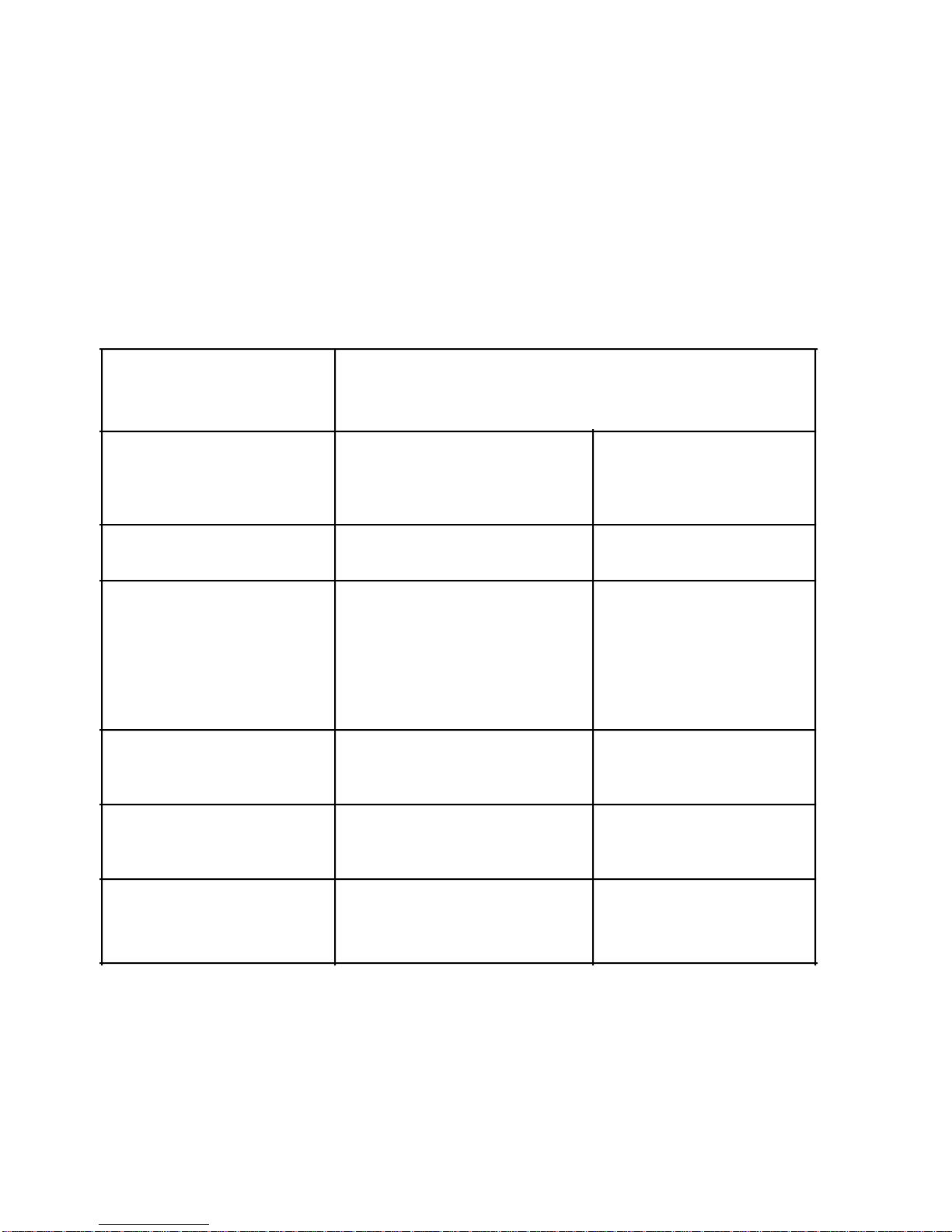
Table 2-2 shows the correspondence between the Subsystem Control
Facility (SCF) commands a human operator issues to control and
monitor the TR3271 subsystem and the programmatic commands a
management application sends to the subsystem. For clarity, the
table contains the command and object names in the form that you
must use in applications. However, later in this manual, for
example in the text and headings for the command descriptions,
the commands and object types appear in a shortened form (that
is, without the ZCOM-CMD- and ZCOM-OBJ- prefixes).
2-5
Page 22
MANAGEMENT PROGRAMMING FOR TR3271
Commands
Table 2-2. SCF Commands and Programmatic Commands (Page 1 of 2)
SCF COMMAND PROGRAMMATIC COMMAND
AND OBJECT TYPE AND OBJECT TYPE
ABORT LINE ZCOM-CMD-ABORT ZCOM-OBJ-LINE
ABORT SU ZCOM-CMD-ABORT ZCOM-OBJ-SU
ADD SU ZCOM-CMD-ADD ZCOM-OBJ-SU
ALTER LINE ZCOM-CMD-ALTER ZCOM-OBJ-LINE
ALTER SU ZCOM-CMD-ALTER ZCOM-OBJ-SU
BOOT LINE ZCOM-CMD-RESET ZCOM-OBJ-LINE
CONNECT SU ZCOM-CMD-CONNECT ZCOM-OBJ-SU
DELETE SU ZCOM-CMD-DELETE ZCOM-OBJ-LINE*
ZCOM-CMD-DELETE ZCOM-OBJ-SU
DISCONNECT SU ZCOM-CMD-DISCONNECT ZCOM-OBJ-SU
INFO LINE ZCOM-CMD-INFO ZCOM-OBJ-LINE
INFO SU ZCOM-CMD-INFO ZCOM-OBJ-SU
LOAD LINE ZCOM-CMD-LOAD ZCOM-OBJ-LINE
NAMES LINE ZCOM-CMD-LISTOBJECTS ZCOM-OBJ-LINE
ZCOM-OBJ-SU
ZCOM-OBJ-NULL
* The LINE object can be specified, but the SUB
modifier must be present. The only valid value
for the SUB modifier is ZCOM-VAL-SUB-ONLY.
2-6
Page 23
MANAGEMENT PROGRAMMING FOR TR3271
Commands
Table 2-2. SCF Commands and Programmatic Commands (Page 2 of 2)
SCF COMMAND PROGRAMMATIC COMMAND
AND OBJECT TYPE AND OBJECT TYPE
PRIMARY PROCESS ZCOM-CMD-SWITCH ZCOM-OBJ-PROC
START LINE ZCOM-CMD-START ZCOM-OBJ-LINE
START SU ZCOM-CMD-START ZCOM-OBJ-SU
STATS LINE ZCOM-CMD-STATISTICS ZCOM-OBJ-LINE
STATS SU ZCOM-CMD-STATISTICS ZCOM-OBJ-SU
STATS LINE, ZCOM-CMD-RESETSTATS ZCOM-OBJ-LINE
RESET
STATS SU, ZCOM-CMD-RESETSTATS ZCOM-OBJ-SU
RESET
STATUS LINE ZCOM-CMD-STATUS ZCOM-OBJ-LINE
STATUS SU ZCOM-CMD-STATUS ZCOM-OBJ-SU
STOP LINE ZCOM-CMD-STOP ZCOM-OBJ-LINE
STOP SU ZCOM-CMD-STOP ZCOM-OBJ-SU
SWITCH LINE ZCOM-CMD-SWITCH ZCOM-OBJ-LINE
TRACE LINE ZCOM-CMD-TRACE ZCOM-OBJ-LINE
VERSION ZCOM-CMD-GETVERSION ZCOM-OBJ-NULL
VERSION PROCESS
VERSION LINE ZCOM-OBJ-PROC
For detailed descriptions of the SCF commands, refer to the
Subsystem Control Facility (SCF) Reference Manual
.
2-7
Page 24
MANAGEMENT PROGRAMMING FOR TR3271
Commands
Table 2-3 shows the correspondence between the Communications
Management Interface (CMI) commands a human operator issues to
control and monitor the TR3271 subsystem and the programmatic
commands a management application sends to the subsystems. For
clarity, the table contains the command and object names in the
form that you must use in applications.
Table 2-3. CMI Commands and Programmatic Commands (Page 1 of 3)
CMI COMMAND PROGRAMMATIC COMMAND
AND OBJECT TYPE AND OBJECT TYPE
ABORT LINE ZCOM-CMD-ABORT ZCOM-OBJ-LINE
ABORT SU ZCOM-CMD-ABORT ZCOM-OBJ-SU
ADD SUB ZCOM-CMD-ADD ZCOM-OBJ-SU
ALTER LINE ZCOM-CMD-ALTER ZCOM-OBJ-LINE
ALTER PROCESS, ZCOM-CMD-SWITCH ZCOM-OBJ-LINE
PATH
ALTER PROCESS, ZCOM-CMD-SWITCH ZCOM-OBJ-PROC
CPU
ALTER SU ZCOM-CMD-ALTER ZCOM-OBJ-SU
CONTROL SU, ZCOM-CMD-CONNECT ZCOM-OBJ-SU
CONNECT
CONTROL LINE, ZCOM-CMD-LOAD ZCOM-OBJ-LINE
LOAD
CONTROL LINE, ZCOM-CMD-RESET ZCOM-OBJ-LINE
RESET
2-8
Page 25
MANAGEMENT PROGRAMMING FOR TR3271
Commands
Table 2-3. CMI Commands and Programmatic Commands (Page 2 of 3)
CMI COMMAND PROGRAMMATIC COMMAND
AND OBJECT TYPE AND OBJECT TYPE
DELETE SU ZCOM-CMD-DELETE ZCOM-OBJ-LINE*
ZCOM-CMD-DELETE ZCOM-OBJ-SU
CONTROL SU, ZCOM-CMD-DISCONNECT ZCOM-OBJ-SU
DISCONNECT
None ZCOM-CMD-GETVERSION ZCOM-OBJ-NULL
ZCOM-OBJ-PROC
INFO LINE ZCOM-CMD-INFO ZCOM-OBJ-LINE
INFO SU ZCOM-CMD-INFO ZCOM-OBJ-SU
INFO LINE, ZCOM-CMD-LISTOBJECTS ZCOM-OBJ-LINE
NAMES
INFO SU, ZCOM-CMD-LISTOBJECTS ZCOM-OBJ-SU
NAMES
None ZCOM-CMD-LISTOBJECTS ZCOM-OBJ-NULL
START LINE ZCOM-CMD-START ZCOM-OBJ-LINE
START SU ZCOM-CMD-START ZCOM-OBJ-SU
STATUS LINE ZCOM-CMD-STATUS ZCOM-OBJ-LINE
STATUS SU ZCOM-CMD-STATUS ZCOM-OBJ-SU
* The LINE object can be specified, but the SUB
modifier must be present. The only valid value
for the SUB modifier
is ZCOM-VAL-SUB-ONLY.
2-9
Page 26
MANAGEMENT PROGRAMMING FOR TR3271
Event Messages
Table 2-3. CMI Commands and Programmatic Commands (Page 3 of 3)
CMI COMMAND PROGRAMMATIC COMMAND
AND OBJECT TYPE AND OBJECT TYPE
STATUS LINE, ZCOM-CMD-STATISTICS ZCOM-OBJ-LINE
DETAIL
STATUS SU, ZCOM-CMD-STATISTICS ZCOM-OBJ-SU
DETAIL
STATUS LINE, ZCOM-CMD-RESETSTATS ZCOM-OBJ-LINE
RESET
STATUS SU, ZCOM-CMD-RESETSTATS ZCOM-OBJ-SU
RESET
STOP LINE ZCOM-CMD-STOP ZCOM-OBJ-LINE
STOP SUBDEVICE ZCOM-CMD-STOP ZCOM-OBJ-SU
TRACE LINE ZCOM-CMD-TRACE ZCOM-OBJ-LINE
For detailed descriptions of the CMI commands, refer to the
Communications Management Interface (CMI) Operator’s Guide
.
EVENT MESSAGES
An event message describes an event that has occurred in a
subsystem, such as a hardware error or a software error. All
event messages are in SPI message format.
All event messages issued by the TR3271 subsystem are sent to
the EMS collector process ($0). These event messages are then
placed into the user-specified log files. Once placed into the
log files, the consumer distributor process can read the event
messages and retrieve the selected events for the management
application.
2-10
Page 27
MANAGEMENT PROGRAMMING FOR TR3271
Communicating With the TR3271 Subsystem
The management application retrieves event messages by sending
commands in SPI message format to an EMS consumer distributor.
To select event messages, you can write a filter that is specific
to your needs. If no filter is used, all event messages in
the log file are passed to the management application by the
consumer distributor. Figure 2-1 illustrates the flow of data
between the TR3271 subsystem and a management application in the
EMS environment. For detailed descriptions of event messages
and event management as they relate to the TR3271 subsystem,
refer to Section 7, "Event Management." For a description of
event messages and event management in general, refer to the
Event Management Service (EMS) Manual
monitor event through VIEWPOINT. Reffer to the
. Note that an operator can
VIEWPOINT Manual
for details.
COMMUNICATING WITH THE TR3271 SUBSYSTEM
A management application communicates with the TR3271 subsystem
by means of SCP or the EMS distributor process. When communicating with SCP or EMS, an application calls SPI procedures to
build messages to be sent to the subsystem and to retrieve
messages sent from the subsystem. However, to send and receive
SPI messages, and to establish and terminate communication with
SCP or the EMS distributor process, an application must use the
GUARDIAN 90 file system. How you use the GUARDIAN 90 file system
depends on the language in which your application is written.
If your application is written in TAL, you use the file-system
procedures directly to send and receive the SPI messages. If
your application is written in COBOL85--COBOL 74 does not support
SPI--you use the file-system procedures indirectly by invoking
them through COBOL85 verbs. If your application is written in
TACL, you use the file-system procedures indirectly by invoking
them through TACL built-ins.
2-11
Page 28

MANAGEMENT PROGRAMMING FOR TR3271
Communicating With the TR3271 Subsystem
Regardless of the language you are using, the tasks an application must perform when communicating with either SCP or the EMS
distributor process are as follows:
1. Establish communication with SCP or the EMS distributor
process.
2. Call SPI procedures to build a message.
3. Send the message to SCP or the EMS distributor process.
4. Receive the response.
5. Check for error codes and handle any error.
6. Decode the response.
7. Take appropriate action and return to step 2, if necessary.
8. Terminate communication with SCP or the EMS distributor
process.
All data-communications subsystems must use the same message
protocol for communicating with SCP. For details on this
protocol, refer to the
Manual
Manual
and the
Distributed Systems Management (DSM) Programming
. For details on communicating with the EMS distributor
Communications Management Programming
process for the TR3271 subsystem, refer to Section 7, "Event
Management." For general information about communicating with
the EMS distributor process, refer to the
Service (EMS) Manual
.
Event Management
2-12
Page 29
SECTION 3
ELEMENTS OF SPI MESSAGES FOR THE SUBSYSTEM
The Subsystem Programmatic Interface (SPI) procedures facilitate
the communication between a management application and the TR3271
subsystem. These procedures allow a management application to
build commands in SPI message format to be sent through SCP
to the subsystem. These procedures also allow a management
application to decode the responses from the subsystem that have
been sent through SCP in SPI message format. However, GUARDIAN
90 procedures, not SPI procedures, are used to transport SPIformatted commands and responses between a management application
and SCP, and between SCP and a subsystem. For details on message
transport, refer to the
Programming Manual
.
Distributed Systems Management (DSM)
NOTE
SCP is responsible for the communication between SCP and
the TR3271 subsystem. Your management application needs to
be concerned only with the steps enumerated in Section 2,
"Management Programming for TR3271."
SPI procedures are also used to obtain complete event messages
from the Event Management Service (EMS) distributor process.
The EMS procedure EMSGET is used to extract tokens from event
messages, and the EMS procedure EMSTEXT is used to obtain text
versions of event messages. Like commands and responses sent
through SCP, event messages are sent and received in SPI message
format.
3-1
Page 30
ELEMENTS OF SPI MESSAGES FOR THE SUBSYSTEM
The commands sent to the subsystem and the responses and event
messages received from the subsystem are made up of tokens.
The concept of tokens is described in the
Management Manual
. See Section 5, "Common Definitions," in this
Distributed Systems
manual for an explanation of tokens present in multiple commands,
responses, or event messages for the TR3271 subsystem.
This manual does not attempt to give a complete explanation
of tokens; it provides subsystem-specific information about the
tokens used to communicate with the TR3271 subsystem. General
information about tokens can be found in the
Management (DSM) Programming Manual
, and information about tokens
Distributed Systems
common to all data-communications subsystems can be found in the
Communications Management Programming Manual
.
DEFINITION FILES
Definition files supplied by Tandem provide declarations of
commonly needed tokens and other variables, as well as structures
and values. The declaration names in these files have a standard
form that identifies the definition file they come from and
what the declaration defines. In addition, each source of
definitions, such as the TR3271 subsystem or SPI, has associated
with it a set of five definition files: one in TAL, one in
COBOL85, one in TACL, one in C, and one in DDL. The definition
files in TAL, COBOL85, and TACL are derived from the definition
file in DDL.
To include the definition files in your management application,
use the mechanism that is appropriate for the programming
language in which the application is written. Some of the
mechanisms are as follows:
• In TAL, source in the definition files using ?SOURCE compiler
directives.
• In COBOL85, copy the definition files into your program using
COPY statements.
• In TACL, load the definition files using LOAD commands.
The definitions in a COBOL85 definition file are grouped into
sections to enable COBOL85 programmers to declare multiple copies
of structures in the definition file. When programming in TAL,
always source in the entire definition file, and when using TACL,
always load the entire file. For further information on how a
management application accesses definition files, refer to the
Distributed Systems Management (DSM) Programming Manual
.
3-2
Page 31

ELEMENTS OF SPI MESSAGES FOR THE SUBSYSTEM
Definition Files
A management application that communicates with the TR3271
subsystem must include the following definition files in the
appropriate programming language, where
xxx
represents one of
four specific abbreviations for COBOL85, TAL, TACL, C, or DDL and
subsys
represents a subsystem identifier:
• The SPI definition file, ZSPIDEF.ZSPI
• The EMS definition file, ZSPIDEF.ZEMS
xxx
.
xxx
. This definition
file is needed only if the application retrieves event
messages or controls its EMS distributor environment
• The data-communications definition file, ZSPIDEF.ZCOM
• The TR3271 definition file, ZSPIDEF.ZTR3
• If the application communicates with other subsystems, the
definition file ZSPIDEF.Z
subsysxxx
for each of the other
xxx
.
xxx
.
subsystems must also be included.
An example of the definition files needed by an TR3271 application written in COBOL85 that retrieves event messages is as
follows:
ZSPIDEF.ZSPICOB SPI definitions
ZSPIDEF.ZEMSCOB EMS definitions
ZSPIDEF.ZCOMCOB Data-communications definitions
ZSPIDEF.ZTR3COB TR3271 definitions
These files are located on the disk volume chosen by your site.
The default disk volume used by the INSTALL program is $SYSTEM.
Section 5, "Common Definitions," lists the SPI, EMS, and datacommunications standard definitions used by the TR3271 subsystem.
For detailed descriptions of these standard definitions, refer
to the
the
Management Programming Manual
Distributed Systems Management (DSM) Programming Manual
Event Management Service (EMS) Manual
, and the
Communications
, respectively. The declarations in
,
the TR3271 definition files are described in this manual and are
listed in Appendix B.
NOTE
This manual uses DDL to describe all tokens. For a quick
explanation of DDL, refer to the appendix "Overview of
DDL for SPI" in the
Programming Manual
Distributed Systems Management (DSM)
. If you are programming in TAL or TACL,
substitute a circumflex (^) for each hyphen in a definition
name as it appears in this manual. For example, ZCOM-OBJSU becomes ZCOM^OBJ^SU in TAL and TACL.
3-3
Page 32

ELEMENTS OF SPI MESSAGES FOR THE SUBSYSTEM
Naming Rules and Guidelines for Applications
NAMING RULES AND GUIDELINES FOR APPLICATIONS
All items in definition files are assigned symbolic names as
well as numbers. Use the symbolic names to prevent transcription
errors and to improve readability. Tandem uses names beginning
with the letter Z for all definitions and all component fields of
structures in its definition files. To avoid present and future
conflicts with names defined by Tandem, do not begin any name you
define in your application with uppercase or lowercase Z.
COMMON SYNTAX ELEMENTS FOR THE SUBSYSTEMS
The remainder of this section contains subsystem-specific information about elements of commands, responses, and event messages.
For more complete information about these elements as they relate
to data-communications subsystems, refer to the
Management Programming Manual
.
Communications
Command Numbers
Command numbers specify a command to the TR3271 subsystem or a
response to a management application. The management application
uses a symbolic name to express the command number to the
TR3271 subsystem and the subsystem uses the symbolic name to
identify the corresponding response. The symbolic name is of
the form ZCOM-CMD-
name
, where
name
identifies the command. For
example, ZCOM-CMD-ADD identifies the ADD command in all datacommunications subsystems, including the TR3271 subsystem.
The command number specified by the management application is
stored in the header of the command message. The subsystem
and management application can read the command number from
the header using the token ZSPI-TKN-COMMAND in the SSGET SPI
procedure.
Your management application does not normally use the token
ZSPI-TKN-COMMAND to place the command number into the message
header since the command number to be specified is already known.
Instead, to place the command number into the message header,
your management application only needs to use the symbolic name
of the form ZCOM-CMD-
name
, which is the value of the token ZSPI-
TKN-COMMAND, in the SSPUT SPI procedure.
3-4
Page 33

ELEMENTS OF SPI MESSAGES FOR THE SUBSYSTEM
Command Numbers
Although all data-communications subsystems must use symbolic
names of the form ZCOM-CMD-
name
, each subsystem defines which
command numbers it supports. The TR3271 subsystem supports the
following commands:
ABORT LOAD
ADD RESET
ALTER RESETSTATS
CONNECT START
DELETE STATISTICS
DISCONNECT STATUS
GETVERSION STOP
INFO SWITCH
LISTOBJECTS TRACE
These commands are described in Section 6, "Commands and
Responses."
Object Types
Object-type numbers represent the object type (class) of an
object. The value of the object-type number is subsystemspecific and has a symbolic name. The symbolic name of the value
is of the form ZCOM-OBJ-
type
, where
type
identifies the object
type. For example, ZCOM-OBJ-SU identifies the subdevice object
type in data-communications subsystems, including the TR3271
subsystem.
Note that object-type numbers are part of the header of each
command and response. The header token named ZSPI-TKN-OBJECTTYPE contains the object-type number. However, if there are
multiple objects in a response or an object is returned within
a data list, an object-type number is contained in the ZCOM-TKNOBJTYPE token. The symbolic name of the value is also of the
form ZCOM-OBJ-
type
, where
type
identifies the object type.
The TR3271 subsystem supports the following object types:
PROCESS
LINE
SU
NULL
The objects controlled by the TR3271 subsystem are organized in
a hierarchy by object type. In descending order, the hierarchy
is PROCESS, LINE, and SU. The NULL object type is not within
the hierarchy and applies to only two commands, GETVERSION and
LISTOBJECTS.
3-5
Page 34

ELEMENTS OF SPI MESSAGES FOR THE SUBSYSTEM
Object Names
Object Names
An object name identifies a specific object. The object
specified by an object name belongs to one of the object types
PROCESS, LINE, or SU. The NULL object type does not have an
object name associated with it.
In the TR3271 subsystem, there is a one-to-one correspondence
between a process and a line. Therefore, you can identify a
process by using the same object name associated with the line
controlled by the process.
When you assign an object name to a line, you must assign a
unique name. The name must be preceded by a dollar sign ($)
and can have a maximum of seven alphanumeric characters, not
including the dollar sign. The first character following the
dollar sign must always be a letter. An example of a valid
object name for a line is $TR3271A.
When you assign an object name to a subdevice, you must assign
a unique name to each subdevice on a single line. The name
must be preceded by a pound sign (#) and can have a maximum of
seven alphanumeric characters, not including the pound sign. The
first character following the pound sign must always be a letter.
Subdevices on separate lines can have identical object names;
therefore, the line name and a period must precede the subdevice
name to reference a specific subdevice. An example of a valid
object name for a subdevice is $TR3271A.#TERM1.
Some TR3271 commands can affect multiple objects. You must use
the subordinate-modifier token, ZCOM-TKN-SUB, to indicate that a
command affects multiple objects.
The select-state modifier, ZCOM-TKN-SEL-SUMSTATE, allows your
management application to select objects based on their summary
state. Your management application can use the select-state
modifier only in the STATUS command. In fact, for the STATUS
command, the TR3271 subsystem allows your management application
to use the subordinate-modifier token, the select-state modifier
token, or both to indicate that a command affects multiple
objects.
Note that the TR3271 subsystem does not support object-name
templates.
3-6
Page 35

ELEMENTS OF SPI MESSAGES FOR THE SUBSYSTEM
Event Numbers
Event Numbers
Event numbers identify event messages issued by the TR3271
subsystem and most event numbers correspond to the numbers that
identify console messages which are described in the manual
Operator Messages: Console Format
. Each event message that can
be reported by the TR3271 subsystem has a different event number
assigned to it. The TR3271 event numbers and their associated
event messages are described in Section 7, "Event Management."
An event number is part of the header of an event message.
The header token named ZEMS-TKN-EVENTNUMBER contains the event
number. The value of the event number is subsystem-specific and
also has a symbolic name. Because event numbers represent unique
events for a particular subsystem, you must know both the event
number and the three-character abbreviation of the subsystem that
created the event. The symbolic name of event numbers are of
the form Z
abbreviation for the subsystem and
subsys
-EVT-
event
, where
subsys
event
is a three-character
identifies the event.
The TR3271 subsystem is represented by the abbreviation TR3.
Subjects of Event Messages
The subject of an event message is always preceded by the ZEMSTKN-SUBJECT-MARK token and is made up of two parts: the logical
device name and the logical device number of the subsystem
process reporting the event. The logical device name is a
32-byte file name in the internal format, which includes the name
of the system node. The ZEMS-TKN-LDEVNAME token contains the
logical device name. The logical device number is an unsigned
integer and is contained by the ZEMS-TKN-LDEV token.
The application obtains the subject of an event message by
passing the ZEMS-TKN-SUBJECT token to the EMSGET procedure.
Refer to the
Event Management Service (EMS) Manual
for details on
obtaining subjects of event messages.
3-7
Page 36

ELEMENTS OF SPI MESSAGES FOR THE SUBSYSTEM
Tokens
Tokens
The TR3271 subsystem uses tokens for parameters in commands,
responses to commands, and elements of event messages. Each
token has a token code and token value associated with it. A
token code is an identifying tag that programs refer to by name,
and a token value is a data item that programs also refer to by
name. The token code has two parts: a token type that specifies
the data type and length of the token value, and a token number
that uniquely identifies the token for the subsystem. See "Token
Types" in this section for a list of the token types used in the
TR3271 subsystem.
The actual token value can be in one of the following forms:
• A single field, such as an integer or a character string
• A fixed structure
• An extensible structure
Tokens that have a token value that is a single field or a
fixed structure are called simple tokens. Tokens that have a
token value that is an extensible structure are called extensible
structured tokens.
Simple Tokens
Simple tokens are tokens whose values are single fields or fixed
structures. The token codes for the simple tokens used by the
TR3271 subsystem are represented by symbolic names of the form
Z
subsys
abbreviation and
-TKN-
name
, where
name
identifies the token code. For example,
subsys
is a three-character subsystem
the token code ZEMS-TKN-LDEV identifies a simple token that
contains a logical device number. They are considered simple
tokens because you do not need a map to decode or build the
structure.
3-8
Page 37

ELEMENTS OF SPI MESSAGES FOR THE SUBSYSTEM
Tokens
Extensible Structured Tokens
Extensible structured tokens--tokens whose values are extensible
structures--are identified by special token codes called token
maps. The structures are defined in a DDL definition associated
with each token map. The token maps for the extensible
structured tokens used by the TR3271 subsystem are represented
by symbolic names of the form Z
is a three-character subsystem abbreviation and
subsys
-MAP-
name
, where
name
subsys
identifies
the token map. For example, the token map ZTR3-MAP-INFO-SU
identifies an extensible structured token that contains all the
configuration parameters for a subdevice.
All TR3271 commands can contain extensible structured tokens
and all of the commands contain the ZCOM-MAP-REQID token map.
Currently, only the ADD and ALTER commands use extensible
structured tokens defined by the TR3271 subsystem within the
command buffer. These extensible structured tokens are declared
in the definition files for the TR3271 subsystem. Note that
extensible structured tokens do not appear in any event message
issued by the TR3271 subsystem.
Responses to the following TR3271 commands can contain extensible
structured tokens:
INFO
RESETSTATS
STATISTICS
STATUS
Token Types
The token types used by the TR3271 subsystem are represented by
symbolic names of the form Z
three-character subsystem abbreviation and
subsys
-TYP-
name
, where
name
identifies the
subsys
is a
token type. The token types used by the TR3271 subsystem are as
follows:
ZSPI-TYP-INT
ZSPI-TYP-BOOLEAN ZSPI-TYP-INT-PAIR
ZSPI-TYP-BYTE ZSPI-TYP-INT2
ZSPI-TYP-BYTE-PAIR ZSPI-TYP-INT4
ZSPI-TYP-BYTESTRING ZSPI-TYP-LIST
ZSPI-TYP-CHAR ZSPI-TYP-MARK
ZSPI-TYP-CHAR8 ZSPI-TYP-SSCTL
ZSPI-TYP-CHAR50 ZSPI-TYP-SSID
ZSPI-TYP-CRTPID ZSPI-TYP-STRING
3-9
Page 38

ELEMENTS OF SPI MESSAGES FOR THE SUBSYSTEM
Tokens
ZSPI-TYP-ENUM ZSPI-TYP-TIMESTAMP
ZSPI-TYP-FNAME ZSPI-TYP-TOKENCODE
ZSPI-TYP-FNAME32 ZSPI-TYP-UINT
The TR3271 subsystem does not define any private token types;
that is, no token types have names of the form ZTR3-TYP-
name
.
Predefined Value Names
The predefined values used by the TR3271 subsystem are represented by symbolic names Z
three-character subsystem abbreviation and
subsys
-VAL-
name
, where
name
subsys
is a
identifies the
predefined value. For example, the predefined value ZTR3-VALSSID represents the subsystem ID of the TR3271 subsystem that
is present in all commands and responses associated with the
TR3271 subsystem. The predefined value names used by the TR3271
subsystem are as follows:
ZCOM-VAL-BUFLEN ZTR3-VAL-VERSION
ZTR3-VAL-EVT-BUFLEN ZSPI-VAL-FALSE
ZCOM-VAL-MAXBUFLEN ZSPI-VAL-TANDEM
ZTR3-VAL-SSID ZSPI-VAL-TRUE
For descriptions of these predefined value names, see the
subsection "Predefined Token and Field Values" in Section 5,
"Common Definitions"
Field Types
The field types used by the TR3271 subsystem are represented
by symbolic names of the form Z
is a three-character subsystem abbreviation and
subsys
-DDL-
name
, where
name
subsys
identifies
the field type. For example, the field type ZSPI-DDL-BOOLEAN
represents the Boolean data type. Some field types are defined
by SPI; others are private field types defined by the subsystem.
The field types that can be used by the TR3271 subsystem are as
follows:
ZSPI-DDL-BOOLEAN ZSPI-DDL-FNAME32
ZSPI-DDL-BYTE ZSPI-DDL-INT
ZSPI-DDL-CHAR ZSPI-DDL-INT-PAIR
ZSPI-DDL-CHAR6 ZSPI-DDL-INT2
ZSPI-DDL-CHAR8 ZSPI-DDL-INT4
ZSPI-DDL-CRTPID ZSPI-DDL-TIMESTAMP
ZSPI-DDL-ENUM ZSPI-DDL-UINT
ZSPI-DDL-FNAME
3-10
Page 39

ELEMENTS OF SPI MESSAGES FOR THE SUBSYSTEM
Constructs Involving Multiple Tokens
Constructs Involving Multiple Tokens
The TR3271 subsystem supports two kinds of constructs that
involve multiple tokens: data lists and error lists. For the
TR3271 subsystem, these constructs are found only in responses
from the subsystem. A data list begins with the token ZSPI-TKNDATALIST, while an error list begins with the token ZSPI-TKNERRLIST; both end with the token ZSPI-TKN-ENDLIST.
A data list is used in a response to enclose information about
one object or, in some cases, a related group of objects.
An error list is used in a response to enclose information about
an error or warning.
For details on these two constructs, refer to the
Systems Management (DSM) Programming Manual
.
Distributed
Components of a Command, Response and Event
For general information about components of a command, response,
or event message, refer to the
Programming Manual
.
Communications Management
For information on the tokens associated with each TR3271
command, response or event message, see Section 6, "Commands and
Responses," and Section 7, "Event Management," in this manual.
For information about consideratins for building and retrieving
SPI buffers, see Section 4, "SPI Programming Considerations for
TR3271."
3-11
Page 40

SECTION 4
SPI PROGRAMMING CONSIDERATIONS FOR TR3271
The
Communications Management Programming Manual
discusses general programming considerations for writing applications that
use the Subsystem Programmatic Interface (SPI) to communicate
with data-communications subsystems like the TR3271 subsystem.
This section discusses SPI programming considerations that are
specific to the TR3271 subsystem.
BUILDING THE COMMAND BUFFER
The following programming considerations apply when an application builds the command buffer for an TR3271 command.
The recommended buffer length in bytes for a command is a
predefined value with the symbolic name ZCOM-VAL-MAXBUFLEN.
The subsystem does not support multiple commands in a single
request message. However, some of the commands can contain the
subordinate-modifier token, so one command can affect multiple
objects.
The subsystem does not support continuation of a command across
multiple messages, but it does support the special case of
receiving multiple reply messages using the context token, as
described in the
Manual
.
Distributed Systems Management (DSM) Programming
4-1
Page 41

SPI PROGRAMMING CONSIDERATIONS FOR TR3271
Discontinuing a Command in Progress
The command buffers for all commands can contain extensible
structured tokens. An extensible structured token that is to
appear in a command should always be initialized by the SPI
procedure SSNULL to ensure that every field of the token is
initialized to its null value. This action is important because
an operation will be performed if a field contains a value other
than its null value. For example, in the ALTER command, if
a field of the extensible structured token that describes the
line attributes contains a value other than its null value, that
value is assigned to the attribute corresponding to that field.
Using SSNULL is important even when every field of an extensible
structured token will have a value assigned to it, so that the
application will continue to work if it is compiled with new
definition files that add new fields to the token.
The only tokens that can appear more than once in a command are
ZSPI-TKN-COMMENT and ZCOM-TKN-TRACE-OPT. ZSPI-TKN-COMMENT is the
comment token, described in the
(DSM) Programming Manual
. ZCOM-TKN-TRACE-OPT is a token used
Distributed Systems Management
in the TRACE command and is described in Section 5, "Common
Definitions."
If any of the other tokens in a command appear more than once, an
error is returned.
DISCONTINUING A COMMAND IN PROGRESS
General programming considerations for discontinuing a command
in progress are discussed in the
Programming Manual
.
Communications Management
The subsystem supports the use of the token ZSPI-TKN-ALLOWTYPE, which allows an application to specify, in a command
operating on multiple objects, whether the subsystem should
continue immediately to the next object if it failed on the
previous one. If no value is specified for this token, the
TR3271 subsystem continues to the next object only if no errors
or warnings occurred on the previous one. The possible values
for this token are ZSPI-VAL-WARN-AND-NORM and ZSPI-VAL-NORM-ONLY.
When the TR3271 subsystem discontinues a command because of an
error or warning, it immediately sends a reply message to the
application. The reply message contains a context token. The
application can choose to resend the command, causing the TR3271
subsystem to proceed to the next object, or to abandon the
command.
4-2
Page 42

SPI PROGRAMMING CONSIDERATIONS FOR TR3271
Receiving and Decoding the Response Buffer
RECEIVING AND DECODING THE RESPONSE BUFFER
The following programming considerations apply when an application receives and decodes the response buffer.
In responses to TR3271 commands that operate on objects, a
response record always contains response information for the
operation of the command on a single object.
The subsystem supports multiple response records in a single
reply message. The number of response records returned in one
reply message is controlled by the value of the header token
ZSPI-TKN-MAXRESP in the command. The supported values of the
token ZSPI-TKN-MAXRESP are 0, -1, and n (any value greater than
0).
If multiple response records are to be returned in one reply
message, the recommended buffer size in bytes for the response is
a predefined value with the symbolic name ZCOM-VAL-MAXBUFLEN. If
a single response record is to be returned in each reply message,
the recommended buffer size in bytes for the response is the
predefined value ZCOM-VAL-BUFLEN.
The subsystem supports multiple response records over multiple
messages (continuation) by returning a context token when a
response is continued.
The subsystem also supports the use of the token ZSPI-TKNRESPONSE-TYPE, which allows an application to specify, in a
command operating on multiple objects, which kinds of response
records should be returned--one for every object, or only those
for objects on which errors or warnings occurred. If no value is
specified for this token, the subsystems return a response record
for every object.
Note that for commands such as the INFO command whose purpose
is to return information, using ZSPI-TKN-RESPONSE-TYPE to request
the return of only those response records for objects on which
errors or warnings occurred can result in no information being
returned.
The responses to the INFO, RESETSTATS, STATISTICS, and STATUS
commands each contain an extensible structured token that returns
the requested information.
The object-name token ZCOM-TKN-OBJNAME can appear more than once
in a response record returned by the LISTOBJECTS command. This
is the only case where a token might appear multiple times in a
response record.
4-3
Page 43

SPI PROGRAMMING CONSIDERATIONS FOR TR3271
Error Handling
ERROR HANDLING
General programming considerations for handling errors that occur
when using the management-programming interfaces are discussed in
the
Communications Management Programming Manual
.
In the programmatic control-and-inquiry interface to the
subsystem, there are two values for the return token that
indicate that the response record does not contain an error
list. One is the value ZSPI-ERR-OK, which means that no error
or warning occurred. The other is a ZCOM error number that
signifies the "empty" response record. This value, ZCOM-ERREMPT-RSP, is returned, for example, when an application requests
through ZSPI-TKN-RESPONSE-TYPE that only response records for
objects on which errors or warnings occurred be returned, and the
command finishes processing without encountering any errors or
warnings.
Error-handling considerations for specific commands are described
in Section 6, "Commands and Responses." The error numbers
returned by the subsystems are described in Appendix A.
SECURITY
Security for the subsystems is handled by SCP, as described in
the
Communications Management Programming Manual
.
Some of the commands are sensitive commands, meaning that they
can be issued only by certain users. When an application that
is not allowed to issue sensitive commands attempts to issue
one, SCP returns an error. For more information on sensitive
commands, refer to Section 6, "Commands and Responses."
4-4
Page 44

SPI PROGRAMMING CONSIDERATIONS FOR TR3271
Command Protocol
COMMAND PROTOCOL
Table 4-1 shows the state transitions of objects as a result of
some of the TR3271 commands.
Table 4-1. Command Protocol Summary State Changes
COMMAND OLD STATE NEW STATE
START STOPPED STARTED
ABORT STARTED STOPPED
STOP STARTED STOPPED
CONNECT STARTED STARTED
DISCONNECT STARTED STARTED
4-5
Page 45

SECTION 5
COMMON DEFINITIONS
The management interfaces to the TR3271 subsystem use definitions
from four sources: SPI standard definitions, EMS standard
definitions, data-communications standard definitions, and TR3271
subsystem-specific definitions. Many of the definitions are used
in multiple commands, responses, event messages, or error lists.
This section contains general information that applies to all
uses of the common definitions in the interfaces to the TR3271
subsystem. Information about a definition that is specific to
a particular command, response, event message, or error list is
given in the description for that item.
All definitions in this section are represented in DDL.
Structures, both fixed and extensible, are defined by using DDL
DEF statements. For a quick explanation of DDL as it applies
to SPI, refer to the appendix "Overview of DDL for SPI" in the
Distributed Systems Management (DSM) Programming Manual
.
SPI STANDARD DEFINITIONS
Definitions whose names begin with ZSPI- are Subsystem
Programmatic Interface (SPI) standard definitions. These definitions are available to all subsystems that support SPI
procedures.
Table 5-1 lists only those SPI standard definitions that are
used in the management-programming interfaces to the TR3271
subsystem. It does not list SPI error numbers or definitions
used only in error lists associated with those error numbers.
For a description of all SPI standard definitions, refer to the
Distributed Systems Management (DSM) Programming Manual
.
5-1
Page 46

COMMON DEFINITIONS
SPI Standard Definitions
The SPI definitions applicable to the TR3271 subsystem consist of
the following:
• Header tokens
• Simple tokens
• Names of token and field values
• Token types
• Fixed structures
Table 5-1. SPI Standard Definitions (Page 1 of 2)
Header Tokens Other Simple Tokens
ZSPI-TKN-CHECKSUM ZSPI-TKN-ALLOW-TYPE
ZSPI-TKN-COMMAND ZSPI-TKN-COMMENT
ZSPI-TKN-HDRTYPE ZSPI-TKN-CONTEXT
ZSPI-TKN-LASTERR ZSPI-TKN-DATALIST
ZSPI-TKN-LASTERRCODE ZSPI-TKN-ENDLIST
ZSPI-TKN-LASTPOSITION ZSPI-TKN-ERRLIST
ZSPI-TKN-MAX-FIELD-VERSION ZSPI-TKN-MANAGER
ZSPI-TKN-MAXRESP ZSPI-TKN-RESPONSE-TYPE
ZSPI-TKN-OBJECT-TYPE ZSPI-TKN-RETCODE
ZSPI-TKN-SERVER-VERSION ZSPI-TKN-SERVER-BANNER
ZSPI-TKN-SSID
ZSPI-TKN-USEDLEN
Special Tokens Value Names
ZSPI-TKN-ADDR ZSPI-SSN-ZTR3
ZSPI-TKN-CLEARERR ZSPI-VAL-FALSE
ZSPI-TKN-COUNT ZSPI-VAL-TANDEM
ZSPI-TKN-DATA-FLUSH ZSPI-VAL-TRUE
ZSPI-TKN-DEFAULT-SSID
ZSPI-TKN-DELETE
ZSPI-TKN-INITIAL-POSITION
ZSPI-TKN-LEN
ZSPI-TKN-NEXTCODE
ZSPI-TKN-NEXTTOKEN
ZSPI-TKN-OFFSET
ZSPI-TKN-RESET-BUFFER
5-2
Page 47

COMMON DEFINITIONS
SPI Standard Definitions
Table 5-1. SPI Standard Definitions (Page 2 of 2)
Token Types Fixed Structures
ZSPI-TYP-BOOLEAN ZSPI-DDL-BOOLEAN
ZSPI-TYP-BYTE ZSPI-DDL-BYTE
ZSPI-TYP-BYTE-PAIR ZSPI-DDL-CHAR
ZSPI-TYP-BYTESTRING ZSPI-DDL-CHAR6
ZSPI-TYP-CHAR ZSPI-DDL-CHAR8
ZSPI-TYP-CHAR8 ZSPI-DDL-CRTPID
ZSPI-TYP-CHAR50 ZSPI-DDL-ENUM
ZSPI-TYP-CRTPID ZSPI-DDL-EXIOADDR
ZSPI-TYP-ENUM ZSPI-DDL-FNAME
ZSPI-TYP-FNAME ZSPI-DDL-FNAME32
ZSPI-TYP-FNAME32 ZSPI-DDL-INT
ZSPI-TYP-INT ZSPI-DDL-INT-PAIR
ZSPI-TYP-INT-PAIR ZSPI-DDL-INT2
ZSPI-TYP-INT2 ZSPI-DDL-INT4
ZSPI-TYP-INT4 ZSPI-DDL-TIMESTAMP
ZSPI-TYP-LIST ZSPI-DDL-UINT
ZSPI-TYP-MARK
ZSPI-TYP-SSCTL
ZSPI-TYP-SSID
ZSPI-TYP-STRING
ZSPI-TYP-TIMESTAMP
ZSPI-TYP-TOKENCODE
ZSPI-TYP-UINT
All SPI standard definitions are fully described in the
Distributed Systems Management (DSM) Programming Manual
.
Information about these definitions that is specific to the
TR3271 subsystem is given below.
ZSPI-SSN-ZTR3 specifies the subsystem number assigned to the
TR3271 subsystem. This value name is defined as a constant in
the SPI DDL file, ZSPIDEF.ZSPIDDL.
5-3
Page 48

COMMON DEFINITIONS
SPI Standard Definitions
ZSPI-TKN-ALLOW-TYPE within a command buffer indicates the conditions under which processing of a set of objects will continue.
This token applies to commands that apply to multiple objects.
The ALLOW-TYPE token controls whether the subsystem continues to
the next object of a set when there is an error or warning during
processing of the object. It does not control the response when
the tokens within a command message are incorrect or missing.
The TR3271 subsystem provides full support for the ALLOW-TYPE
token; that is, your management application can specify any of
the following values:
ZSPI-VAL-NORM-ONLY The subsystem continues to process
the next object in the set if the
command completed successfully on
the previous object. There cannot
be an error list in the response
buffer. This is the default value.
ZSPI-VAL-WARN-AND-NORM The subsystem continues to process
the next object in the set
even though warnings occurred
during processing of the command
on the previous object. A warning
is indicated by a zero value in
the RETCODE token, but an error
list is present.
ZSPI-VAL-ERR-WARN-AND-NORM The subsystem continues to process
the next object in the set
despite errors or warnings that
have occurred during processing
of the command on the previous
object.
ZSPI-TKN-CHECKSUM provides checksum protection against accidental
corruption of the SPI buffer between calls to the SPI procedures.
The possible values are:
ZSPI-VAL-FALSE indicates that there is no checksum
protection.
ZSPI-VAL-TRUE indicates that there is checksum
protection.
ZSPI-TKN-COMMAND specifies the command number of a TR3271 command. The value of this token is always ZCOM-CMD-
name
specifies the command to be performed. The commands
name
, where
supported by TR3271 are described in Section 6, "Commands and
Responses."
5-4
Page 49

COMMON DEFINITIONS
SPI Standard Definitions
ZSPI-TKN-COMMENT allows your management application to include
information of its own which is not acted upon by the TR3271
subsystem or returned by the subsystem. A management application
can include as many as 80 bytes of comment in every command. If
the comment exceeds this number of bytes and causes a a command
to be too large for the server's read buffer, the server is not
responsible. The TR3271 subsystem only guarantees 80 bytes.
ZSPI-TKN-CONTEXT indicates to your management application whether
there are more objects to process and consequently more responses
to receive. This token applies only when a command references
more than one object. The TR3271 subsystem places information in
this token which it requires to continue execution of the command
at the next object. Your management application copies the
context token into a duplicate of the original command message
and sends it to the subsystem. The server then processes the
next object in the set, where it left off.
Once all the objects in the set are processed, the ZSPI-TKNCONTEXT is not placed in the reply by the subsystem. Its absence
indicates that all objects of the set have been processed.
Note that if the TR3271 subsystem receives a command with the
context token and there are no more objects to be processed, the
subsystem returns a return code that is the empty response.
The contents of the ZSPI-TKN-CONTEXT are not to be used by your
management application; the contents are only to be reflected
back to the subsystem in a command. Only one context token can
be present in a command.
ZSPI-TKN-DATALIST indicates the beginning of a data list within
a response. The presence of this token depends on the value of
ZSPI-TKN-MAXRESP. If the value of ZSPI-TKN-MAXRESP is nonzero,
the response tokens, excluding header tokens and the ZSPI-TKNCONTEXT token, are enclosed in a data list. There can be
multiple data lists within a single response buffer; however,
each data list contains information about a separate object.
ZSPI-TKN-ENDLIST indicates the end of a data list or an error
list within a response.
ZSPI-TKN-ERRLIST indicates the beginning of an error list. All
information about warnings or errors, except ZSPI-TKN-RETCODE
must be enclosed in an error list. An error list is only
present if the return code is nonzero; the empty response does
not contain an error list. The contents of an error list are
owned by the server returning the error list. The exception is a
nested error list, which may have a different owner.
5-5
Page 50

COMMON DEFINITIONS
SPI Standard Definitions
ZSPI-TKN-HDRTYPE indicates whether the SPI buffer is for an event
message or a command. If the buffer is for a command, the value
of this token is ZSPI-VAL-CMDHDR; if the buffer is for an event
the value of this token is ZSPI-VAL-EVTHDR.
ZSPI-TKN-MAX-FIELD-VERSION contains the highest version associated with the nonnull fields within an extensible structured
token. This value is compared to the server version. If the
server version is lower than the value of the ZSPI-TKN-MAX-FIELDVERSION, then the command is rejected. The subsystem needs to be
a more recent version.
ZSPI-TKN-MANAGER is an optional token in all TR3271 commands.
Since the subsystem does not use a manager process, if the token
is present, the TR3271 subsystem ignores it.
ZSPI-TKN-MAXRESP within a command buffer indicates the maximum
number of responses your management application can accept
in a response buffer. The MAXRESP token default value is
provided when a management application uses the SSINIT procedure.
However, if a managment application chooses to specify a value
other than the default value for the MAXRESP token, the management application must specify a value using the SSPUT procedure.
The TR3271 subsystem provides full support for the MAXRESP token;
that is, the management application can specify any of the
following values:
-1 As many responses as will fit in the response buffer
can be returned. Each response will be enclosed in
a data list.
0 Only one response will be returned. The response will
not be enclosed in a data list. This is the default.
n As many as n responses will be returned. Each response
will be enclosed in a data list.
ZSPI-TKN-OBJECT-TYPE specifies the object-type number of a TR3271
object. The value of this token for the TR3271 subsystem is
always ZCOM-OBJ-
name
, where
name
specifies the object. The
valid object types for this subsystem are PROC, LINE, SU, and
NULL. The object types associated with a command vary with each
command. Refer to Section 6, "Commands and Responses," to learn
which objects are valid for a specific command.
5-6
Page 51

COMMON DEFINITIONS
SPI Standard Definitions
ZSPI-TKN-RESPONSE-TYPE specifies which types of responses the
management application wants returned. This token can apply to
all commands supported by the TR3271 subsystem. The RESPONSETYPE token controls whether the subsystem returns a response
for every object or returns only responses for objects that
experience an error or warning. A management application can
specify any of the following values:
ZSPI-VAL-ERR-AND-WARN The subsystem returns responses
about objects for which something
unusual has happened. This
includes errors and warnings.
ZSPI-VAL-ERR-WARN-AND-NORM The subsystem returns responses
about every object the command
applies to.
ZSPI-TKN-RETCODE is the return token, which specifies whether
a command completed successfully. If the command completed
successfully, including when a command completes with a warning,
the value of this token is zero. Note that if the empty
response is returned, the value of this token is nonzero even
though the command has completed successfully. If the command
did not complete successfully, the value of this token indicates
the reason the command failed. The meaning of each error
number is subsystem-specific and possibly command-specific. For
descriptions of all TR3271 error numbers, refer to Appendix A.
For descriptions of all common data-communications error numbers,
refer to the
Communications Management Programming Manual
.
ZSPI-TKN-SERVER-BANNER contains the server-banner string for the
TR3271 subsystem. This token is returned only for the GETVERSION
command. The server banner for TR3271 is:
TR3271- T9372C20 - 15FEB89
ZSPI-TKN-SERVER-VERSION specifies the server version of the
TR3271 subsystem. This token is required in both the command
buffer and the response buffer. The SSINIT procedure initializes
the command buffer with this token using the value defined in
the subsystem's DDL file. The value used for TR3271 is ZTR3-VALVERSION. The subsystem provides the value of this token for
purposes of comparison. The value provided by the subsystem must
be at least as current as the value provided by SSINIT. If it is
not as current, the subsystem rejects the command.
5-7
Page 52

COMMON DEFINITIONS
SPI Standard Definitions
ZSPI-TKN-SSID specifies the subsystem ID. This token is required
in both the command and the response. The SSINIT procedure
initializes the command buffer with this token using the value
defined in the subsystem's DDL file. The value used for TR3271
is ZTR3-VAL-SSID. ZTR3-VAL-SSID has the following structure
definition:
def ZTR3-VAL-SSID tacl ssid.
02 Z-FILLER type character 8
value is ZSPI-VAL-TANDEM.
02 Z-OWNER redefines Z-FILLER
type ZSPI-DDL-CHAR8.
02 Z-NUM type ZSPI-DDL-INT
value is ZSPI-SSN-ZTR3.
02 Z-VSN type ZSPI-DDL-UINT
value is ZTR3-VAL-VERSION.
end.
ZSPI-TKN-USEDLEN specifies the length of the used portion of the
command message. The value of this token is used to verify that
the entire message has been read by the server. The value is
compared to the count-read value supplied by the file-system. If
the value of the ZSPI-TKN-USEDLEN is greater than the count-read
value, then the TR3271 subsystem rejects the command because the
command length was too long.
ZSPI-VAL-TANDEM indicates that the destination subsystem is on a
Tandem system. The requester must assign this value to the owner
field of the ZSPI-TKN-SSID token before sending a command to a
Tandem system.
5-8
Page 53

COMMON DEFINITIONS
EMS Standard Definitions
EMS STANDARD DEFINITIONS
Definitions whose names begin with ZEMS- are Event Management
Service (EMS) standard definitions. These definitions are
available to all subsystems that support EMS and can be found in
the EMS DDL file, ZSPIDEF.ZEMSDDL.
Table 5-2 lists only those EMS standard definitions that are used
in the management-programming interfaces to the TR3271 subsystem.
It does not list EMS error numbers or definitions used only in
error lists. For a description of all EMS standard definitions,
refer to the
Event Management Service (EMS) Manual
.
The EMS definitions used by the TR3271 subsystem consist of the
following:
• Header tokens
• Simple tokens
• Extensible structured tokens
Table 5-2. EMS Standard Definitions
Header Tokens Other Simple Tokens
ZEMS-TKN-CONSOLE-PRINT ZEMS-TKN-CU
ZEMS-TKN-CPU ZEMS-TKN-LDEV
ZEMS-TKN-CRTPID ZEMS-TKN-LDEVNAME
ZEMS-TKN-EMPHASIS ZEMS-TKN-SUBJECT-MARK
ZEMS-TKN-EVENTNUMBER
ZEMS-TKN-GENTIME Extensible
ZEMS-TKN-LOGTIME Structured Tokens
ZEMS-TKN-PIN
ZEMS-TKN-SYSTEM ZEMS-MAP-EXIOADDR
ZEMS-TKN-USERID
All EMS standard definitions are fully described in the
Management System (EMS) Manual
. Information about these defini-
Event
tions that is specific to the TR3271 subsystem is given below.
5-9
Page 54

COMMON DEFINITIONS
EMS Standard Definitions
ZEMS-MAP-EXIOADDR is a Tandem internal extensible structured
token. This token specifies the physical I/O address. This I/O
I/O address scheme supersedes the subchannel-type I/O addresses
previously supported using the ZEMS-TKN-CU.
ZEMS-TKN-CONSOLE-PRINT specifies whether the event messages are
processed by the compatibility distributor for printing on the
consoe. The value of this token for the TR3271 subsystem is
always ZSPI-VAL-TRUE. The ZSPI-VAL-TRUE value causes all TR3271
event messages to print on the operator console.
ZEMS-TKN-CPU specifies the CPU of the TR3271 subsystem reporting
the event.
ZEMS-TKN-CRTPID specifies the process ID of the TR3271 subsystem
reporting the event.
ZEMS-TKN-CU specifies the controller and unit number of the
object reprting the event. This token is present in the event
message buffer only if the controller used by the I/O process
uses the subchannel-type I/O addressing scheme. The information
in this token is repeated in the ZEMS-MAP-EXIOADDR token. This
token is volatile and is used for backward compatibility.
ZEMS-TKN-EMPHASIS specifies whether the event message is considered critical. If the value of the token is ZSPI-VAL-TRUE, the
event is considered critical; if the value is ZSPI-VAL-FALSE, the
event is not considered critical. The description of each event
message states whether the event is critical or not.
ZEMS-TKN-EVENTNUMBER specifies the event number of a TR3271 event
message. Most of the event numbers are equivalent to console
message numbers in releases of GUARDIAN 90 earlier than C00.
These event numbers and their associated event messages are
described in Section 7, "Event Management."
ZEMS-TKN-GENTIME is the time, in Greenwich Mean Time (GMT), that
the subsystem created the event message.
ZEMS-TKN-LDEV specifies the logical device number of the TR3271
line that is the subject of the event message.
ZEMS-TKN-LDEVNAME is the subject token of every TR3271 event
message. This token specifies the name of the TR3271 line that
is the subject of the event message. This token is always
preceded by the ZEMS-TKN-SUBJECT-MARK token.
ZEMS-TKN-LOGTIME is the time, in GMT, that the EMS collector
wrote the event message to its log files.
5-10
Page 55

COMMON DEFINITIONS
Data-Communications Standard Definitions
ZEMS-TKN-PIN is the PIN of the TR3271 subsystem that reported the
event.
ZEMS-TKN-SYSTEM is the EXPAND system number of the system (node)
on which the event was reported.
ZEMS-TKN-USERID specifies the user ID of the TR3271 subsystem
process.
DATA-COMMUNICATIONS STANDARD DEFINITIONS
Definitions whose names begin with ZCOM- are data-communications
standard definitions. These definitions are available to all
data-communications subsystems, such as TR3271, and are found in
the ZSPIDEF.ZCOMDDL definition file. Refer to "Definition Files"
in Section 3 for details.
Table 5-3 lists only those data-communications standard definitions that are used in the management-programming interfaces
to the TR3271 subsystem. It does not list data-communications
error numbers or definitions used only in error lists. For a
description of all data-communications standard definitions and
error numbers, refer to the
Manual
. The data-communications definitions used by the TR3271
Communications Management Programming
subsystem consist of the following:
• Simple tokens
• Extensible structured tokens
• Object types
• Fixed structures
• Command numbers
• Names of token and field values
5-11
Page 56

COMMON DEFINITIONS
Data-Communications Standard Definitions
Table 5-3. Data-Communications Standard Definitions
Simple Tokens Command Numbers
ZCOM-TKN-CAUSE-CPU-SWITCH ZCOM-CMD-ABORT
ZCOM-TKN-CAUSE-PATH-SWITCH ZCOM-CMD-ADD
ZCOM-TKN-CAUSE-SUMSTATE-CHG ZCOM-CMD-ALTER
ZCOM-TKN-CMD-TIMEOUT ZCOM-CMD-CONNECT
ZCOM-TKN-NEW-CPU ZCOM-CMD-DELETE
ZCOM-TKN-NEW-PATH ZCOM-CMD-DISCONNECT
ZCOM-TKN-OBJNAME ZCOM-CMD-GETVERSION
ZCOM-TKN-OBJSTATE ZCOM-CMD-INFO
ZCOM-TKN-OBJTYPE ZCOM-CMD-LISTOBJECTS
ZCOM-TKN-OLD-OBJSTATE ZCOM-CMD-LOAD
ZCOM-TKN-OLD-CPU ZCOM-CMD-RESET
ZCOM-TKN-OLD-PATH ZCOM-CMD-RESETSTATS
ZCOM-TKN-SEL-SUMSTATE ZCOM-CMD-START
ZCOM-TKN-SUB ZCOM-CMD-STATISTICS
ZCOM-TKN-SWITCH-CPU ZCOM-CMD-STATUS
ZCOM-TKN-SWITCH-PATH ZCOM-CMD-STOP
ZCOM-TKN-TARGET-MGR ZCOM-CMD-SWITCH
ZCOM-TKN-TARGET-OBJNAME ZCOM-CMD-TRACE
ZCOM-TKN-TARGET-OBJTYPE
ZCOM-TKN-TRACE-OPT
Extensible Object Types
Structured Tokens
ZCOM-OBJ-LINE
ZCOM-MAP-REQID ZCOM-OBJ-NULL
ZCOM-MAP-TRACE-MODIF ZCOM-OBJ-PROCESS
ZCOM-OBJ-SU
Fixed Structures Value Names
ZCOM-DDL-REQID ZCOM-VAL-PATH-A
ZCOM-DDL-TRACE-MODIF ZCOM-VAL-PATH-B
ZCOM-VAL-PATH-UNDEF
ZCOM-VAL-SUB-ALL
ZCOM-VAL-SUB-NONE
ZCOM-VAL-SUB-ONLY
ZCOM-VAL-SUMSTATE-DIAG
ZCOM-VAL-SUMSTATE-STARTED
ZCOM-VAL-SUMSTATE-STOPPED
All data-communications standard definitions are fully described
in the
Communications Management Programming Manual
. Information
about these definitions that is specific to the TR3271 subsystem
is given below. Definitions are listed in alphabetical order.
5-12
Page 57

COMMON DEFINITIONS
Data-Communications Standard Definitions
ZCOM-MAP-REQID provides security checking additional to the
sensitive/nonsensitive command implementation. This token contains the GUARDIAN 90 Process ID and the PAID of the application
issuing the command. The REQID is valid only if the requester
is the SUPER.SUPER user ID. If the user is not the SUPER.SUPER
user ID and the management application specifies ZCOM-MAP-REQID
in the command, or duplicates the token in the command buffer,
the command is rejected with a security violation. The contents
of the token are as follows:
ZCOM-MAP-REQID
def ZCOM-MAP-REQID.
02 ZCRTPID type ZSPI-DDL-CRTPID.
02 ZPAID type ZSPI-DDL-INT.
end.
ZCOM-MAP-TRACE-MODIF is the extensible structured token sent in
the TRACE command by the management application; it contains the
trace parameters that control the initiation of the trace file,
the selection of the trace environment, and termination of trace
mode. The initiation and selection is handled in one ZCOMMAP-TRACE-MODIF token. When the trace is to be terminated, the
management application sends another ZCOM-MAP-TRACE-MODIF token
with the ZSTOP field containing the value ZSPI-VAL-TRUE. The
contents of the token are as follows:
ZCOM-MAP-TRACE-MODIF
def ZCOM-DDL-TRACE-MODIF. !All fields are required.
02 ZSTOP type ZSPI-DDL-BOOLEAN.
02 ZPRIM type ZSPI-DDL-BOOLEAN.
02 ZREC-SIZE type ZSPI-DDL-INT.
02 ZCNT type ZSPI-DDL-INT2.
02 ZXDS-PAGES type ZSPI-DDL-INT.
02 ZCOLL type ZSPI-DDL-BOOLEAN.
02 FNAME type ZSPI-DDL-FNAME32.
end.
5-13
Page 58

COMMON DEFINITIONS
Data-Communications Standard Definitions
ZCOM-OBJ-LINE specifies the line object type.
ZCOM-OBJ-NULL is used as the object type in commands that do not
require an object-name token. Only two commands use the NULL
object, GETVERSION and LISTOBJECTS.
ZCOM-OBJ-PROC specifies the process (PROC) object type for the
TR3271 I/O process running on a Tandem NonStop system.
ZCOM-OBJ-SU specifies the subdevice (SU) object type for the
TR3271 subsytem. The SU object can be opened in the GUARDIAN 90
environment.
ZCOM-TKN-CMD-TIMEOUT is the maximum amount of time the management
application wants to wait for a response from the TR3271
subsystem. If the specified time elapses before a response
is received, SCP cancels the command that was sent to the
TR3271 subsystem and sends the error ZCOM-ERR-CMD-TIMED-OUT to
the management application. If this token is not present in the
command buffer, no timeout is applied. Duplicate occurrences of
this token are not allowed.
ZCOM-TKN-OBJNAME contains the name of a TR3271 object.
The object name of a LINE object is the name of a specific line
configured on a single system. These names are assigned when the
line is congifured, and they are unique within a system.
The object name of an SU object is the name of a specific
subdevice configured on a single line and must be unique within
the line.
The NULL object has no object name.
The object name of a PROC object is the object name of the line
controlled by the process.
The object-name token is required in all TR3271 commands for
which the object type is not ZCOM-OBJ-NULL. If the object type
for a command is ZCOM-OBJ-NULL, the object-name token must not be
present.
ZCOM-TKN-OBJTYPE contains the object type of an TR3271 object.
This token is present in every response. The possible values
are ZCOM-OBJ-PROC, ZCOM-OBJ-LINE, and ZCOM-OBJ-SU, ZCOM-OBJ-NULL.
This token occurs only in responses. However, the values are
the same as the object type specified in the command header token
ZSPI-TKN-OBJECT-TYPE.
The ZCOM-TKN-OBJTYPE can be present in data lists and error
lists. It indicates the object type for which information is
being returned, or the object type experiencing the error.
5-14
Page 59

COMMON DEFINITIONS
Data-Communications Standard Definitions
ZCOM-TKN-SEL-SUMSTATE specifies whether an object is selected
based on its current summary state. This modifier consists of
two fields, an enumerated field that indicates the summary state,
and a Boolean field that indicates whether objects currently in
that summary state are to be included in the information returned
by the subsystem. The STATUS command is the only TR3271 command
that supports the select-state modifier.
ZCOM-TKN-SUB indicates whether or not objects subordinate to the
object whose name appears in the object-name token are to be
affected by the command.
This token can appear in all TR3271 commands. If the object type
is ZCOM-OBJ-SU or ZCOM-OBJ-PROC, only the ZCOM-VAL-SUB-ALL and
ZCOM-VAL-SUB-NONE values are accepted. These values, however,
have no effect on the command. The command is processed as if
the modifier were not present. If the value ZCOM-VAL-SUB-ONLY is
specified for the SU or PROC object, the command is rejected.
If the object type is ZCOM-OBJ-LINE, the possible values of the
subordinate modifier vary with each command. In all commands
that accept ZCOM-OBJ-LINE as the object type, the value ZCOM-VALSUB-NONE is accepted. This value has no effect on the command.
If the value ZCOM-VAL-SUB-ONLY is specified, only the objects
subordinate to the line are affected. The objects subordinate
to an TR3271 line are the subdevices on the line. If the
value ZCOM-VAL-SUB-ALL is specified, the objects subordinate to
the line as well as the LINE object itself are affected by the
command.
ZCOM-TKN-SWITCH-CPU specifies that the TR3271 process is to be
switched to another CPU. The value of this token indicates the
target CPU. If it is a single port environment, the path is also
changed.
ZCOM-TKN-SWITCH-PATH specifies that the path to the
Communications Interface Unit (CIU) is to be switched to the
backup path. The value of this token indicates the target path.
ZCOM-TKN-TARGET-MGR specifies the name of the manager controlling
the AM3270 subdevice to which you want to build or tear down a
link. If your management application does not provide a value,
the value of the ZSPI-TKN-MANAGER token is used by the subsystem.
The value of the ZCOM-TKN-TARGET-MGR token, if specified, should
always be the line name associated with the AM3270 subsystem to
which you want to establish a connection.
ZCOM-TKN-TARGET-OBJNAME specifies the name of the AM3270 subdevice to which you want to build or tear down a link. This token
is required.
5-15
Page 60
COMMON DEFINITIONS
Data-Communications Standard Definitions
ZCOM-TKN-TARGET-OBJTYPE specifies the type of object to which you
want to build or or tear down a link. This token is required and
must have the value ZCOM-OBJ-SU.
ZCOM-TKN-TRACE-OPT indicates what items are to be traced by the
TRACE command. For information on the possible values of this
token, refer to the TRACE command in Section 6. SCP creates a
bit mask from the trace options specified and sends it to the CMP
Trace Collector (CMPTC).
ZCOM-VAL-PATH-A is a value that represents Communications
Interface Unit (CIU) path A. It can occur as a value of
the token ZCOM-TKN-SWITCH-PATH and of the field ZPATH of the
extensible structured token ZTR3-MAP-STATUS-LINE.
ZCOM-VAL-PATH-B is a value that represents Communications
Interface Unit (CIU) path B. It can occur as a value of
the token ZCOM-TKN-SWITCH-PATH and of the field ZPATH of the
extensible structured token ZTR3-MAP-STATUS-LINE.
ZCOM-VAL-PATH-UNDEF is a value that appears in the EMS event
ZCOM-EVT-PATH-SWITCH when the Communications Interface Unit (CIU)
path is first activated. The event indicates the path has been
switched from being undefined to path A or path B. This value
may also appear in the information returned for the line when the
STATUS command is issued. This value indicates the path has not
yet been activated.
ZCOM-VAL-SUB-ALL is a value of the token ZCOM-TKN-SUB indicating
that the command affects both the named line and all its
subordinate subdevices. If this value is specified for the PROC
or SU object, the command is treated as if the modifier is not
present in the command buffer.
ZCOM-VAL-SUB-NONE is a value of the token ZCOM-TKN-SUB indicating
that the command affects only the named line. The subdevices
subordinate to the line are not affected. If this value is
specified for the PROC or SU object, the command is treated as if
the modifier is not present in the command buffer.
ZCOM-VAL-SUB-ONLY is a value of the token ZCOM-TKN-SUB indicating
that the command affects only the subdevices subordinate to the
named line. The line itself is not affected. This value is not
valid for the PROC or SU object.
ZCOM-VAL-SUMSTATE-DIAG is a value of the field ZSTATE of the
extensible structured tokens ZTR3-MAP-STATUS-LINE. It indicates
that a TR3271 line is in the DIAGNOSING summary state.
ZCOM-VAL-SUMSTATE-STARTED is a value of the field ZSTATE of the
extensible structured tokens ZTR3-MAP-STATUS-LINE and ZTR3-MAPSTATUS-SU. It indicates that a TR3271 line or subdevice is in
the STARTED summary state.
5-16
Page 61

COMMON DEFINITIONS
TR3271 Buffer Declarations
ZCOM-VAL-SUMSTATE-STOPPED is a value of the field ZSTATE of the
extensible structured tokens ZTR3-MAP-STATUS-LINE and ZTR3-MAPSTATUS-SU. It indicates that a TR3271 line or subdevice is in
the STOPPED summary state.
COMMON DEFINITIONS FOR THE TR3271 SUBSYSTEM
Definitions whose names begin with ZTR3- are TR3271 definitions.
The definitions that appear in several commands or responses
are described in this section. Information that is specific
to particular commands or responses is discussed in Section 6,
"Commands and Responses." Definitions are listed in alphabetical
order within each category.
TR3271 Buffer Declarations
The TR3271 subsystem provides the following buffer declarations
for message buffers that can be used with the SPI procedures.
All applications should use one of these declarations for a
buffer of the recommended size.
ZTR3-DDL-MSG-BUFFER is a message buffer whose size is that
recommended for command messages and for responses in which each
reply message contains a single response record.
def ZTR3-DDL-MSG-BUFFER.
02 Z-MSGCODE type ZSPI-TYP-INT.
02 Z-BUFLEN type ZSPI-TYP-UINT.
02 Z-OCCURS type ZSPI-DDL-UINT.
02 Z-FILLER type ZSPI-DDL-BYTE
occurs 0 to ZCOM-VAL-BUFLEN times
depending on Z-OCCURS.
end.
5-17
Page 62

COMMON DEFINITIONS
TR3271 Predefined Token and Field Values
ZTR3-DDL-MSG-MAXBUF is a message buffer whose size is that
recommended for responses in which each reply message contains
multiple response records.
def ZTR3-DDL-MSG-MAX-BUF.
02 Z-MSGCODE type ZSPI-TYP-INT.
02 Z-BUFLEN type ZSPI-TYP-UINT.
02 Z-OCCURS type ZSPI-DDL-UINT.
02 Z-FILLER type ZSPI-DDL-BYTE
occurs 0 to ZCOM-VAL-MAXBUFLEN times
depending on Z-OCCURS.
end.
TR3271 Predefined Token and Field Values
The TR3271 subsystem defines the following token and field
values.
ZTR3-VAL-EVT-BUFLEN is the buffer size in bytes for event
messages issued by the TR3271 subsystem.
ZTR3-VAL-SSID is the subsystem ID for the TR3271 subsystem. Its
structure definition is given earlier in this section, under "SPI
Standard Definitions."
For more information about ZTR3-VAL-SSID, refer to the discussion
of the subsystem ID in the
Programming Manual
.
Distributed Systems Management (DSM)
ZTR3-VAL-VERSION is the version number of this version of the
TR3271 subsystem. This value is a 16-bit unsigned integer; the
left byte contains the letter part of the version as an ASCII
uppercase alphabetic character, and the right byte contains the
numeric part of the version as an unsigned integer value.
TR3271 Simple Tokens
The TR3271 subsystem only defines simple tokens that appear in
event messages. These tokens include internal tokens, which
appear in the ZTR3-EVT-INTERNAL-ERROR (74) event message. All
the simple tokens defined by the TR3271 subsystem are listed
below in the subsection "Tokens in Event Messages."
5-18
Page 63

COMMON DEFINITIONS
TR3271 Tokens in Error Lists
TR3271 Extensible Structured Tokens
The extensible structured tokens defined by the TR3271 subsystem
are as follows:
ZTR3-MAP-ADD-SU ZTR3-MAP-INFO-SU
ZTR3-MAP-ALTER-LINE ZTR3-MAP-STATS-LINE
ZTR3-MAP-ALTER-SU ZTR3-MAP-STATS-SU
ZTR3-MAP-RSTATS-LINE ZTR3-MAP-STATUS-LINE
ZTR3-MAP-RSTATS-SU ZTR3-MAP-STATUS-SU
ZTR3-MAP-INFO-LINE
These tokens are described with the commands and responses they
appear in. See Section 6, "Commands and Responses."
TR3271 Tokens in Error Lists
The TR3271 subsystem defines several error numbers. See
Appendix A for detailed descriptions. The error numbers for
TR3271 are as follows:
ZTR3-ERR-ALRDY-USING-ADDR
ZTR3-ERR-ATTR-CONFL-SU
ZTR3-ERR-CLIP-PROB
ZTR3-ERR-CONN-EXIST
ZTR3-ERR-NO-OBJ-IN-SEL-STATE
ZTR3-ERR-NO-OWNER
ZTR3-ERR-NOT-PTP-SU
ZTR3-ERR-OPENED-SU-EXIST
ZTR3-ERR-SU-OPENED
ZTR3-ERR-TARGET-OBJ-NOT-FOUND
ZTR3-ERR-TARGET-OBJNAME-INV
5-19
Page 64

COMMON DEFINITIONS
TR3271 Tokens in Event Messages
TR3271 Tokens in Event Messages
The TR3271 subsystem defines the following simple tokens in event
messages. The internal tokens are indicated with an asterisk
(*).
ZTR3-TKN-ABENDNUM ZTR3-TKN-FRAME-ERR
ZTR3-TKN-ADDR-CTL ZTR3-TKN-P-REG*
ZTR3-TKN-CIU-STATUS ZTR3-TKN-PROBE-ERR
ZTR3-TKN-CLIP-FUNC ZTR3-TKN-SU
ZTR3-TKN-CLIP-STATUS ZTR3-TKN-TYPE-SEQ
ZTR3-TKN-CLIP-SU ZTR3-TKN-X1*
ZTR3-TKN-CONFIG-ERR ZTR3-TKN-X2*
ZTR3-TKN-E-REG* ZTR3-TKN-X3*
ZTR3-TKN-FILE-ERR ZTR3-TKN-X4*
The tokens defined by the TR3271 subsystem that appear in event
messages are described in Section 7, "Event Management," within
the description of the event in which they appear.
5-20
Page 65

SECTION 6
COMMANDS AND RESPONSES
This section describes each of the commands and responses in the
programmatic command interface to the TR3271 subsystem. Each
description includes the syntax, object types, command tokens,
response tokens, operational notes, and error handling associated
with the commands.
In this section, command numbers, object types, tokens, and token
values are represented in DDL. For a quick explanation of DDL
as it applies to SPI, refer to the appendix "Overview of DDL
for SPI" in the
Distributed Systems Management (DSM) Programming
Manual
The commands available in the programmatic interface allow an
application to do the following:
• Change the attributes of TR3271 objects
• Start and stop the operation of TR3271 objects
• Add a subdevice to or remove a subdevice from the TR3271
subsystem
• Obtain attribute values
• Obtain statistical and status information
• Obtain information about the object names known to the TR3271
subsystem
• Trace the activity of a TR3271 line
• Change the system resources used by a TR3271 process or line
6-1
Page 66

COMMANDS AND RESPONSES
• Establish or break a link between a TR3271 subdevice and an
AM3270 subdevice
• Initiate a download of a Communications Line Interface
Processor (CLIP)
• Obtain the version of the TR3271 subsystem
Table 6-1 lists the commands that are available in the programmatic control-and-inquiry interface to the TR3271 subsystem and
gives their symbolic names.
Table 6-1. Commands and Their Symbolic Names (Page 1 of 3)
SYMBOLIC NAME OF
COMMAND COMMAND AND OBJECT
ABORT ZCOM-CMD-ABORT ZCOM-OBJ-LINE
ZCOM-OBJ-SU
ADD ZCOM-CMD-ADD ZCOM-OBJ-SU
ALTER ZCOM-CMD-ALTER ZCOM-OBJ-LINE
ZCOM-OBJ-SU
CONNECT ZCOM-CMD-CONNECT ZCOM-OBJ-SU
DELETE ZCOM-CMD-DELETE ZCOM-OBJ-LINE*
ZCOM-OBJ-SU
DISCONNECT ZCOM-CMD-DISCONNECT ZCOM-OBJ-SU
GETVERSION ZCOM-CMD-GETVERSION ZCOM-OBJ-NULL
ZCOM-OBJ-PROC
6-2
Page 67

COMMANDS AND RESPONSES
Table 6-1. Commands and Their Symbolic Names (Page 2 of 3)
SYMBOLIC NAME OF
COMMAND COMMAND AND OBJECT
INFO ZCOM-CMD-INFO ZCOM-OBJ-LINE
ZCOM-OBJ-SU
LISTOBJECTS ZCOM-CMD-LISTOBJECTS ZCOM-OBJ-LINE
ZCOM-OBJ-NULL
ZCOM-OBJ-SU
LOAD ZCOM-CMD-LOAD ZCOM-OBJ-LINE
RESET ZCOM-CMD-RESET ZCOM-OBJ-LINE
RESETSTATS ZCOM-CMD-RESETSTATS ZCOM-OBJ-LINE
ZCOM-OBJ-SU
START ZCOM-CMD-START ZCOM-OBJ-LINE
ZCOM-OBJ-SU
STATISTICS ZCOM-CMD-STATISTICS ZCOM-OBJ-LINE
ZCOM-OBJ-SU
STATUS ZCOM-CMD-STATUS ZCOM-OBJ-LINE
ZCOM-OBJ-SU
6-3
Page 68

COMMANDS AND RESPONSES
Commands by Object Type
Table 6-1. Commands and Their Symbolic Names (Page 3 of 3)
SYMBOLIC NAME OF
COMMAND COMMAND AND OBJECT
STOP ZCOM-CMD-STOP ZCOM-OBJ-LINE
ZCOM-OBJ-SU
SWITCH ZCOM-CMD-SWITCH ZCOM-OBJ-LINE
ZCOM-OBJ-PROC
TRACE ZCOM-CMD-TRACE ZCOM-OBJ-LINE
* The LINE object can be specified, but it must be specified
with the subordinate modifier.
COMMANDS BY OBJECT TYPE
The TR3271 subsystem recognizes four object types in commands.
One or more object types are valid for each command. Three
of the object types have a hierarchical relationship. For
TR3271 subsystems these three object types are PROC, LINE, and
SU (subdevice), where SU is subordinate to LINE and LINE is
subordinate to PROC. This subordinate arrangement means that
the subordinate objects can, in some instances, be controlled or
monitored by specifying the subordinate modifier.
NOTE
A process controls one line, but a line can control
multiple subdevices.
The fourth object type recognized by the subsystem is the NULL
object type. The NULL object type is not included in the objecttype hierarchy and is specified only when an object type is
unnecessary, such as in the GETVERSION command.
6-4
Page 69

COMMANDS AND RESPONSES
Commands by Object Type
The TR3271 subsystem accepts the PROC object type only in the
following commands:
GETVERSION
SWITCH
The TR3271 subsystem accepts the LINE object type only in the
following commands:
ABORT RESETSTATS
ALTER START
DELETE STATISTICS
INFO STATUS
LISTOBJECTS STOP
LOAD SWITCH
RESET TRACE
The TR3271 subsystem accepts the SU object type only in the
following commands:
ABORT LISTOBJECTS
ADD RESETSTATS
ALTER START
CONNECT STATISTICS
DELETE STATUS
DISCONNECT STOP
INFO
The TR3271 subsystem accepts the NULL object type only in the
following commands:
GETVERSION
LISTOBJECTS
6-5
Page 70

COMMANDS AND RESPONSES
Sensitive and Nonsensitive Commands
SENSITIVE AND NONSENSITIVE COMMANDS
Commands can be divided into two categories: sensitive and
nonsensitive. Sensitive commands can change the state of the
specified object; nonsensitive commands cannot change the state
of the specified object. Because sensitive commands change the
state of the specified object, sensitive commands can be issued
only by users in the SUPER user group or users in the same group
as the owner of the process with which the target object is
associated. Nonsensitive commands can be issued by any valid
user.
The sensitive commands available to a TR3271 subsystem user are
as follows:
ABORT RESET
ADD RESETSTATS
ALTER START
CONNECT STOP
DELETE SWITCH
DISCONNECT TRACE
LOAD
The nonsensitive commands available to a TR3271 subsystem user
are as follows:
GETVERSION STATISTICS
INFO STATUS
LISTOBJECTS
COMMAND DESCRIPTIONS
On the following pages, each command and its response is
described in detail. The command descriptions appear in alphabetical order.
Within each command description, there is a box that contains the
symbolic name of the command number, the symbolic names of all
object types accepted by the command, a list of tokens that can
be present in the command buffer, and a list of tokens that can
be present in the response buffer.
6-6
Page 71

COMMANDS AND RESPONSES
Command Descriptions
With the exception of the tokens ZSPI-TKN-DATALIST, ZSPI-TKNERRLIST, and ZSPI-TKN-ENDLIST, the order of the tokens in the
lists of tokens in the command buffer and response buffer is not
necessarily the order in which they will actually appear in a
command or response.
• The token ZSPI-TKN-DATALIST, if present in a response, always
appears at the beginning of a response record.
• The token ZSPI-TKN-ERRLIST, if present in a response, always
appears at the beginning of an error list
• The token ZSPI-TKN-ENDLIST always appears at the end of a
response record started by the token ZSPI-TKN-DATALIST or of
an error list started by the token ZSPI-TKN-ERRLIST.
The list of tokens in the response buffer, except for the context
token ZSPI-TKN-CONTEXT, represents the tokens that can be present
in one reply message that consists of a single response record
or multiple response records. For more information on such
responses, and for information on the context token, refer to the
Distributed Systems Management (DSM) Programming Manual
.
The notation used in the box for simple tokens is a shorthand
version of the essential information given in the DDL TOKEN-CODE
statement. Extensible structured tokens are defined by using DDL
DEF statements.
For each token in the command and response buffers, and for
each field of an extensible structured token in the command and
response buffers, the box contains an indication of whether or
not the token or field must be present in the command and of
other dependencies. See "Notation Conventions" at the beginning
of this manual for a description of the notation scheme used.
Error lists are indicated in the box by following the token
ZSPI-TKN-ERRLIST by an ellipsis (...) and the ZSPI-TKN-ENDLIST.
The tokens following the ZSPI-TKN-DATALIST, including the token
ZSPI-TKN-ERRLIST, are indented to show that they are contained
within the data list. The value of the token ZSPI-TKN-MAXRESP
determines whether data lists are used in a response. For
more information on data lists and error lists, refer to the
Distributed Systems Management (DSM) Programming Manual
.
Following the box, the tokens in the command buffer and the
tokens in the response buffer are described in the same order as
they appear in the box.
6-7
Page 72

COMMANDS AND RESPONSES
ABORT Command
ABORT Command
The ABORT command terminates the operation of the specified
object and clears any existing connection to the object. When
the subsystem finishes processing the command, the specified
object is placed in the STOPPED summary state. You can abort a
line or a subdevice, but not a process.
When you use the ABORT command, note that the termination is
done without regard to processing currently in progress for
the specified object. All activities being performed by the
object are halted, and files and listings might be left in an
inconsistent or incomplete state. If you issue this command
while the line is in the DIAG summary state, the TR3271 subsystem
returns an error.
When your management application issues the ABORT command for a
line, the subsystem checks for the optional subordinate-modifier
token.
• If the value of the modifier is ZCOM-VAL-SUB-ONLY, only the
subdevices attached to the specified line are aborted.
• If the value of the modifier is ZCOM-VAL-SUB-ALL, the subsys-
tem aborts all the associated subdevices and then aborts the
line.
• If the value is ZCOM-VAL-SUB-NONE, or if the subordinate
modifier is not present, the subsystem checks the state of the
subordinate subdevices. The subordinate subdevices must be in
the STOPPED summary state. If any of the subdevices are in
the STARTED summary state, the TR3271 subsystem rejects the
command and returns an error.
When your management application issues the ABORT command for
a subdevice, the subsystem aborts only the specified subdevice.
The SU object has no subordinates. However, your management
application can specify the subordinate modifier with the value
ZCOM-VAL-SUB-NONE. This value causes the subsystem to abort
only the specified subdevice. If your management application
specifies the ZCOM-VAL-SUB-ONLY or ZCOM-VAL-SUB-ALL value, the
TR3271 subsystem returns an error.
If your management application needs to abort a pass-through
protocol (PTP) subdevice, it is recommended that you disconnect
the subdevice first to avoid losing data.
6-8
Page 73
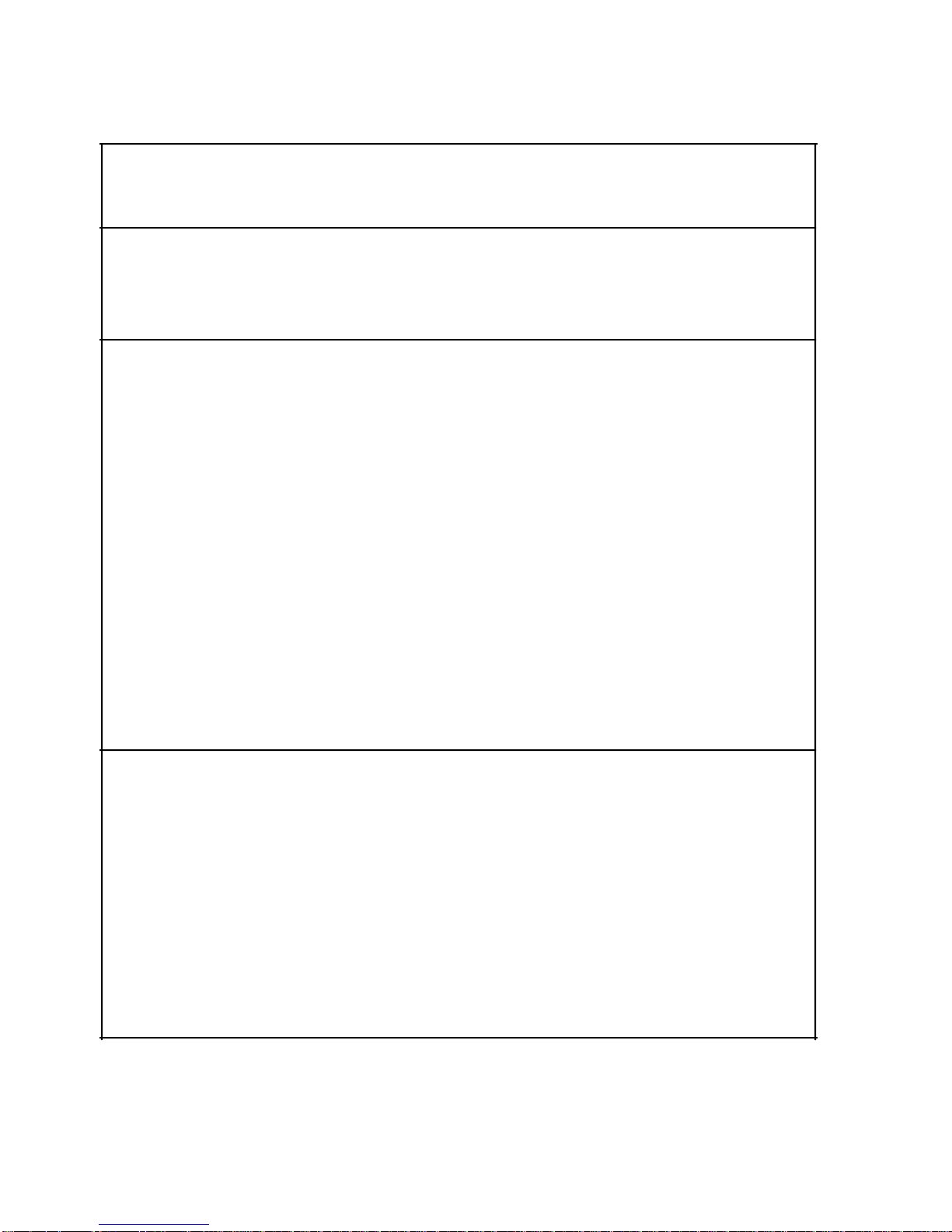
COMMANDS AND RESPONSES
ABORT Command
Command
ZCOM-CMD-ABORT
Object Type
ZCOM-OBJ-LINE
or
ZCOM-OBJ-SU
Tokens in Command Buffer
ZCOM-TKN-OBJNAME token-type ZSPI-TYP-STRING. !{}
ZCOM-MAP-REQID !MAP is optional, but if present,
!fields are required.
def ZCOM-DDL-REQID.
02 ZCRTPID type ZSPI-DDL-CRTPID.
02 ZPAID type ZSPI-DDL-INT.
end.
ZCOM-TKN-CMD-TIMEOUT token-type ZSPI-TYP-TIMESTAMP.
ZCOM-TKN-SUB token-type ZSPI-TYP-ENUM.
ZSPI-TKN-MANAGER token-type ZSPI-TYP-FNAME32.
ZSPI-TKN-SSID token-type ZSPI-TYP-SSID. !{}
ZSPI-TKN-MAXRESP token-type ZSPI-TYP-INT.
ZSPI-TKN-CONTEXT token-type ZSPI-TYP-BYTESTRING.
ZSPI-TKN-RESPONSE-TYPE token-type ZSPI-TYP-ENUM.
ZSPI-TKN-ALLOW-TYPE token-type ZSPI-TYP-ENUM.
ZSPI-TKN-COMMENT token-type ZSPI-TYP-STRING.
Tokens in Response Buffer
ZSPI-TKN-SERVER-VERSION token-type ZSPI-TYPE-INT. !{}
ZSPI-TKN-SSID token-type ZSPI-TYP-SSID. !{}
ZSPI-TKN-DATALIST token-type ZSPI-TYP-LIST. !...
ZCOM-TKN-OBJNAME token-type ZSPI-TYP-STRING. !{}
ZCOM-TKN-OBJTYPE token-type ZSPI-TYP-ENUM. !{}
ZSPI-TKN-ERRLIST token-type ZSPI-TYP-LIST. !...
...
ZSPI-TKN-ENDLIST token-type ZSPI-TYP-SSCTL.
ZSPI-TKN-RETCODE token-type ZSPI-TYP-ENUM. !{}
ZSPI-TKN-ENDLIST token-type ZSPI-TYP-SSCTL.
ZSPI-TKN-CONTEXT token-type ZSPI-TYP-BYTESTRING.
6-9
Page 74

COMMANDS AND RESPONSES
ABORT Command
Tokens in Command Buffer
ZCOM-TKN-OBJNAME specifies the name of a TR3271 line or subdevice
that is to be terminated. Your application must provide this
token in the command. This token is described in "DataCommunications Standard Definitions" in Section 5 and the
Communications Management Programming Manual
.
ZCOM-MAP-REQID and ZCOM-TKN-CMD-TIMEOUT are standard datacommunications tokens that your application can optionally provide. These tokens are described in "Data-Communications
Standard Definitions" in Section 5 and the
Management Programming Manual
.
Communications
ZCOM-TKN-SUB specifies whether subordinates are to be affected by
the ABORT command. For the ABORT command, the possible values of
this token are as follows:
ZCOM-VAL-SUB-ALL If the object type is LINE, terminate the
named line and all its subordinate subdevices.
If the object type is SU, terminate the named
subdevice.
ZCOM-VAL-SUB-ONLY If the object type is LINE, terminate the
subdevices subordinate to the named line, but
do not terminate the line. This value is not
valid with the SU object type.
ZCOM-VAL-SUB-NONE If the object type is LINE, terminate the
named line only if the subordinate subdevices
are currently in the STOPPED summary state.
If the object type is SU, terminate the named
subdevice.
If the subordinate modifier is not present, the subsystem treats
the command as if the ZCOM-VAL-SUB-NONE value has been used.
This token is also described in "Data-Communications Standard
Definitions" in Section 5 and the
Programming Manual
.
Communications Management
(ZSPI-TKN-) MANAGER, SSID, MAXRESP, CONTEXT, RESPONSE-TYPE,
ALLOW-TYPE, and COMMENT are standard SPI tokens. With the
exception of the ZSPI-TKN-SSID token, which your management
application must pass to SSINIT, these tokens are optional.
These tokens are described in "SPI Standard Definitions" in
Section 5 and the
Programming Manual
Distributed Systems Management (DSM)
.
6-10
Page 75

COMMANDS AND RESPONSES
ABORT Command
Tokens in Response Buffer
ZSPI-TKN-DATALIST indicates the beginning of a data list. This
token is described in "SPI Standard Definitions" in Section 5 and
the
Distributed Systems Management (DSM) Programming Manual
.
ZCOM-TKN-OBJNAME specifies the name of a TR3271 line or subdevice
that was terminated by the command. Unless there is an error
that prevents the ABORT command from being attempted at all,
this token is present in every response record. ZCOM-TKN-OBJNAME
is described in "Data-Communications Standard Definitions" in
Section 5 and in the
Manual
.
Communications Management Programming
ZCOM-TKN-OBJTYPE specifies the type of object that was terminated. This token can have the value ZCOM-OBJ-LINE or ZCOMOBJ-SU. This token is described in "Data-Communications Standard
Definitions" in Section 5 and the
Programming Manual
.
Communications Management
ZSPI-TKN-ERRLIST indicates the beginning of an error list.
Within the error list, the object experiencing the error is
listed. See "SPI Standard Definitions" in Section 5 for details.
ZSPI-TKN-RETCODE specifies the return code for the command. This
token is described in "SPI Standard Definitions" in Section 5
and the
Distributed Systems Management (DSM) Programming Manual
.
For details on the data-communications error numbers and their
associated error lists, see "Common Error Numbers and Error
Lists" in the
Communications Management Programming Manual
.
The possible nonzero values of RETCODE in response to the ABORT
command are as follows:
ZCOM-ERR-EMPT-RSP (-33)
ZCOM-ERR-TKN-REQ (-29)
ZCOM-ERR-TKN-DUP (-27)
ZCOM-ERR-TKN-CODE-INV (-26)
ZCOM-ERR-SUB-NOT-FOUND (-25)
ZCOM-ERR-SSID-INV (-24)
ZCOM-ERR-SECUR-VIOL (-22)
ZCOM-ERR-OBJNAME-INV (-19)
ZCOM-ERR-OBJ-NOT-SUPP (-18)
ZCOM-ERR-OBJ-NOT-FOUND (-17)
ZCOM-ERR-OBJ-ALRDY-IN-SUMSTATE (-16)
ZCOM-ERR-FNAME-INV (-9)
ZCOM-ERR-CMD-TIMED-OUT (-7)
ZCOM-ERR-CMD-MISMATCH (-4)
ZCOM-ERR-CMD-INV-IN-SUMSTATE (-3)
6-11
Page 76

COMMANDS AND RESPONSES
ABORT Command
ZCOM-ERR-TKN-VAL-INV (-30)
Your management application specified the SU object and the
the SUB modifier with a value ZCOM-VAL-SUB-ONLY. The SU
object accepts only the value ZCOM-VAL-SUB-NONE or ZCOM-VALSUB-ALL for the SUB modifier.
ZSPI-TKN-ENDLIST indicates the end of a data list or an error
list. See "SPI Standard Definitions" in Section 5 for details.
ZSPI-TKN-CONTEXT specifies whether there are more reply messages
to be received for a response. If this token is present, the
response continues to the next reply message. If this token is
not present, the reply message is the last to be received. See
"SPI Standard Definitions" in Section 5 for details.
Operational Notes
• ABORT is a sensitive command.
• When the command is completed, the line and subdevices are
placed in the STOPPED summary state.
• The line must be in the STARTED summary state when this
command is issued.
• If you abort a pass-through protocol (PTP) SU, the SU is
disconnected from the AM3270 subdevice on the other end.
• For more controlled termination of lines and subdevices, use
the STOP command.
• To initiate the operation of lines and subdevices, use the
START command.
• Use the STATUS command to determine the summary states of the
objects.
6-12
Page 77

COMMANDS AND RESPONSES
ADD Command
ADD Command
The ADD command adds a subdevice to the TR3271 subsystem. You
can add only a subdevice; this command is not valid for the PROC
or LINE object type. The line must be in the STARTED or STOPPED
summary state when you attempt to add a subdevice. If the line
is not in one of these summary states, the TR3271 subsystem
returns an error. When the subsystem finishes processing the
command (without errors), the subdevice is placed in the STOPPED
summary state. To start the added subdevice, use the START
command.
When your management application issues the ADD command for
a subdevice, the subsystem checks the configurable attributes
provided in the command. These attributes are defined in
ZTR3-MAP-ADD-SU. If the attributes are valid, the subsystem
verifies that the subdevice is not already defined and that the
number of subdevices defined on the line is not greater than 253.
If either of these checks fails, the subsystem returns an error.
Typically, a line can support 255 subdevices, but there are two
subdevices reserved with the names #ZSPI and #DEBUG.
Command
ZCOM-CMD-ADD
Object Type
ZCOM-OBJ-SU
Tokens in Command Buffer
ZTR3-MAP-ADD-SU !{}
def ZTR3-DDL-ADD-SU.
02 ZADDR type ZSPI-DDL-INT-PAIR. !{}
02 ZPROTO type ZSPI-DDL-ENUM. !{}
02 ZRECSIZE type ZSPI-DDL-INT. !{}
02 ZXPARENT type ZSPI-DDL-BOOLEAN.
02 ZTYPE type ZSPI-DDL-INT-PAIR !{}
end.
ZCOM-TKN-OBJNAME token-type ZSPI-TYP-STRING. !{}
ZCOM-MAP-REQID !MAP is optional, but if present,
!fields are required.
>
6-13
Page 78

COMMANDS AND RESPONSES
ADD Command
def ZCOM-DDL-REQID.
02 ZCRTPID type ZSPI-DDL-CRTPID.
02 ZPAID type ZSPI-DDL-INT.
end.
ZCOM-TKN-CMD-TIMEOUT token-type ZSPI-TYP-TIMESTAMP.
ZSPI-TKN-MANAGER token-type ZSPI-TYP-FNAME32.
ZSPI-TKN-SSID token-type ZSPI-TYP-SSID. !{}
ZSPI-TKN-MAXRESP token-type ZSPI-TYP-INT.
ZSPI-TKN-RESPONSE-TYPE token-type ZSPI-TYP-ENUM.
ZSPI-TKN-ALLOW-TYPE token-type ZSPI-TYP-ENUM.
ZSPI-TKN-COMMENT token-type ZSPI-TYP-STRING.
Tokens in Response Buffer
ZSPI-TKN-SERVER-VERSION token-type ZSPI-TYP-INT. !{}
ZSPI-TKN-MANAGER token-type ZSPI-TYP-FNAME32.
ZSPI-TKN-SSID token-type ZSPI-TYP-SSID. !{}
ZSPI-TKN-DATALIST token-type ZSPI-TYP-LIST.
ZCOM-TKN-OBJNAME token-type ZSPI-TYP-STRING. !{}
ZCOM-TKN-OBJTYPE token-type ZSPI-TYP-ENUM. !{}
ZSPI-TKN-ERRLIST token-type ZSPI-TYP-LIST. !...
...
ZSPI-TKN-ENDLIST token-type ZSPI-TYP-SSCTL.
ZSPI-TKN-RETCODE token-type ZSPI-TYP-ENUM. !{}
ZSPI-TKN-ENDLIST token-type ZSPI-TYP-SSCTL.
Tokens in Command Buffer
ZTR3-MAP-ADD-SU is the extensible structured token that defines
the configurable attributes for the subdevice that is to be
added. It has the token number ZTR3-TNM-ADD-SU and the DDL
definition ZTR3-DDL-ADD-SU. This token must be in the command,
and duplicate occurrences are not allowed.
Each attribute is defined in a separate field. An optional field
can use the default value provided by SSNULL, but your management
application must assign values to the required fields. The only
optional field is ZXPARENT. The fields in the ZTR3-MAP-ADD-SU
token are as follows:
ZADDR is a pair of integers that specifies the address to
be assigned to the subdevice. The first integer is the
controller address. The second integer is the subdevice
address. Both integers should be in the range 0 through 31.
This is a required field.
6-14
Page 79

COMMANDS AND RESPONSES
ADD Command
ZPROTO specifies the protocol to be used by the subdevice.
This required field must be assigned one of the following
values:
ZTR3-VAL-PROTO-CRT The CRT protocol will be used.
ZTR3-VAL-PROTO-PTP The pass-through protocol (PTP) will be
used
Refer to the
Device-Specific Access Methods--AM3270/TR3271
manual for more information about these protocols.
ZRECSIZE specifies the maximum number of bytes the subdevice
can send or receive in a record. This is a required field.
The recommended record size depends on the protocol used and
the type of subdevice as follows:
CRT terminal Use the defined screen size as the record
size. The record size is used for reference
only.
PTP subdevice The TR3271 I/O process allocates the
buffer based on the value of this field.
Use the defined screen size as follows:
Screen Size Record Size
480 512
960 1024
1920 2048
2560 3072
3440 4096
3564 4096
ZXPARENT is a Boolean value that controls transparent-text
mode for the named subdevice. If the value is ZSPI-VAL-TRUE,
transparent-text mode is enabled for the subdevice; if the
value is ZSPI-VAL-FALSE, it is not. The default is ZSPIVAL-FALSE. Transparent-text mode can only be enabled if the
TR3271 line is configured with the EBCDIC character set and
transparent-text mode enabled.
When using pass-through mode, the TR3271
subdevice should have the same record size
as the AM3270 subdevice that is on the
other end of the connection.
6-15
Page 80

COMMANDS AND RESPONSES
ADD Command
ZTYPE is a pair of integers that specifies the device type
and subtype of the subdevice to be added. The first integer
is the device type, which depends on the protocol being
used. The second integer is the subtype, which depends on the
terminal being represented. The possible integer pairs are as
follows:
(10,x) The subdevice uses the CRT protocol. The
value of x is an integer in the 1 through 5 range
and is associated with the following screen sizes.
ZTYPE screen size
(10,1) 12 x 40
(10,2) 24 x 80
(10,3) 32 x 80
(10,4) 43 x 80
(10,5) 12 x 80
(60,x) The subdevice is a pass-through protocol (PTP)
subdevice. The value of x can have the value
of 1 or 2. Subtype 1 indicates a CRT subdevice,
and subtype 2 indicates a printer.
ZCOM-TKN-OBJNAME specifies the subdevice that is to be added.
Your application must provide this token in the command. This
token is described in "Data-Communications Standard Definitions"
in Section 5, "Common Definitions," and the
Management Programming Manual
.
Communications
ZCOM-MAP-REQID and ZCOM-TKN-CMD-TIMEOUT are standard datacommunications tokens that your application can optionally provide. These tokens are described in "Data-Communications
Standard Definitions" in Section 5 and the
Management Programming Manual
.
Communications
(ZSPI-TKN-) MANAGER, SSID, MAXRESP, RESPONSE-TYPE, ALLOW-TYPE,
and COMMENT are standard SPI tokens. With the exception of the
ZSPI-TKN-SSID token, which your management application must pass
to SSINIT, these tokens are optional. These tokens are described
in "SPI Standard Definitions" in Section 5 and the
Systems Management (DSM) Programming Manual
.
Distributed
6-16
Page 81

COMMANDS AND RESPONSES
ADD Command
Tokens in Response Buffer
ZSPI-TKN-DATALIST indicates the beginning of a data list. This
token is described in "SPI Standard Definitions" in Section 5 and
the
Distributed Systems Management (DSM) Programming Manual
.
ZCOM-TKN-OBJNAME specifies the name of the TR3271 subdevice that
was added to the subsystem by the command. Unless there is an
error that prevents the ADD command from being attempted at all,
this token is present in every response record. ZCOM-TKN-OBJNAME
is described in "Data-Communications Standard Definitions" in
Section 5 and the
Communications Management Programming Manual
.
ZCOM-TKN-OBJTYPE specifies the type of object that was added.
You can add only a subdevice; therefore, the value of this token
must be ZCOM-OBJ-SU. This token is described in Section 5,
"Common Definitions," and the
Programming Manual
.
Communications Management
ZSPI-TKN-ERRLIST indicates the beginning of an error list. This
token is described in "SPI Standard Definitions" in Section 5 and
the
Distributed Systems Management (DSM) Programming Manual
.
ZSPI-TKN-RETCODE specifies the return code for the command. This
token is described in "SPI Standard Definitions" in Section
5 and the
Distributed Systems Management Programming Manual
.
For details on the data-communications error numbers and their
associated error lists, see "Common Error Numbers and Error
Lists" in the
Communications Management Programming Manual
. For
details on the TR3271 error numbers and associated error lists,
see Appendix A in this manual.
The possible nonzero values of RETCODE in response to the ADD
command are as follows:
ZCOM-ERR-EMPT-RSP (-33)
ZCOM-ERR-VAL-REQ (-31)
ZCOM-ERR-TKN-VAL-INV (-30)
ZCOM-ERR-TKN-REQ (-29)
ZCOM-ERR-TKN-LEN-INV (-28)
ZCOM-ERR-TKN-DUP (-27)
ZCOM-ERR-TKN-CODE-INV (-26)
ZCOM-ERR-SSID-INV (-24)
ZCOM-ERR-SECUR-VIOL (-22)
ZCOM-ERR-OBJNAME-INV (-19)
ZCOM-ERR-OBJ-NOT-SUPP (-18)
ZCOM-ERR-OBJ-ALRDY-DEF (-15)
ZCOM-ERR-NO-MEM-SPACE (-14)
ZCOM-ERR-FNAME-INV (-9)
ZCOM-ERR-CMD-TIMED-OUT (-7)
6-17
Page 82

COMMANDS AND RESPONSES
ADD Command
ZCOM-ERR-MAX-LIMIT-EXCEEDED (-12)
Your management application attempted to add more than 253
subdevices on a single line. Typically, you can define as
many as 255 subdevices; however, two subdevices are reserved:
#ZSPI and #DEBUG.
ZCOM-ERR-CMD-MISMATCH (-4)
Your management application tried to add a process or a line
by using the object type ZCOM-OBJ-PROC or ZCOM-OBJ-LINE. The
command is valid only for the object type ZCOM-OBJ-SU.
ZCOM-ERR-CMD-INV-IN-SUMSTATE (-3)
Your management application tried to add a subdevice while the
line was in the DIAGNOSING summary state. The line must be
in the STOPPED or STARTED summary state to process the ADD
command.
ZTR3-ERR-ALRDY-USING-ADDR (6)
Your management application attempted to add a subdevice at an
address already in use by another object. Reissue the command
using a value for the ZADDR field that has not been previously
assigned.
ZTR3-ERR-CLIP-PROB (2)
Your management application attempted to add a subdevice but
the operation failed because of an internal CLIP problem.
Check event messages 165 and 164 for CLIP information and
contact your Tandem representative.
ZSPI-TKN-ENDLIST indicates the end of a data list or an error
list. This token is described in "SPI Standard Definitions"
in Section 5 and the
Programming Manual
Distributed Systems Management (DSM)
.
Operational Notes
• ADD is a sensitive command.
• When the command is successfully completed, the subdevice is
placed in the STOPPED summary state.
• The line must not be in the DIAG summary state when this
command is issued.
6-18
Page 83

COMMANDS AND RESPONSES
ADD Command
• The name given to a subdevice must be unique on the line.
• You can add a maximum of 253 subdevices to a line.
• To remove a subdevice, stop the SU, then use the DELETE
command.
• To add a line or a process, use the Dynamic System
Configuration (DSC) facility.
6-19
Page 84

COMMANDS AND RESPONSES
ALTER Command
ALTER Command
The ALTER command changes attribute values associated with the
specified object. You can change attributes for a line and a
subdevice, but not a process.
Command
ZCOM-CMD-ALTER
Object Type
ZCOM-OBJ-LINE
or
ZCOM-OBJ-SU
Tokens in Command Buffer
ZTR3-MAP-ALTER-LINE !{A}
!OBJ-LINE
def ZTR3-DDL-ALTER-LINE. !Specify one or more fields.
02 ZBCCTYPE type ZSPI-DDL-ENUM.
02 ZCHARSET type ZSPI-DDL-ENUM.
!ZCTL-SET
!ZXLATE
02 ZCTL-RTS type ZSPI-DDL-BOOLEAN.
02 ZCTL-SET type ZSPI-DDL-ENUM.
02 ZDEBUG type ZSPI-DDL-BOOLEAN.
02 ZDROP-RTS type ZSPI-DDL-BOOLEAN.
02 ZINIT-STATUS type ZSPI-DDL-INT2.
02 ZMULTI-BLOCK type ZSPI-DDL-BOOLEAN.
02 ZOFFLINE-TIMER type ZSPI-DDL-TIMESTAMP.
02 ZPROG type ZSPI-DDL-FNAME.
02 ZREAD-CMD type ZSPI-DDL-ENUM.
02 ZRETRY type ZSPI-DDL-INT.
02 ZSYNCS type ZSPI-DDL-INT.
02 ZTEST-INTVL type ZSPI-DDL-TIMESTAMP.
02 ZTHRES type ZSPI-DDL-INT.
02 ZTIMEOUT type ZSPI-DDL-TIMESTAMP.
02 ZXLATE type ZSPI-DDL-BOOLEAN.
02 ZXPARENT type ZSPI-DDL-BOOLEAN.
02 ZWACK-DELAY type ZSPI-DDL-TIMESTAMP.
02 ZXLATE-IN type ZSPI-DDL-CHAR
occurs 256 times.
02 ZXLATE-OUT type ZSPI-DDL-CHAR
occurs 256 times.
end.
6-20
>
Page 85

COMMANDS AND RESPONSES
ALTER Command
ZTR3-MAP-ALTER-SU !{A}
!OBJ-SU
def ZTR3-DDL-ALTER-SU. !Specify one or more fields.
02 ZADDR type ZSPI-DDL-INT-PAIR.
02 ZPROTO type ZSPI-DDL-ENUM.
02 ZRECSIZE type ZSPI-DDL-INT.
02 ZXPARENT type ZSPI-DDL-BOOLEAN.
02 ZTYPE type ZSPI-DDL-INT-PAIR.
end.
ZCOM-TKN-OBJNAME token-type ZSPI-TYP-STRING. !{}
ZCOM-MAP-REQID !MAP is optional, but if present,
!fields are required.
def ZCOM-DDL-REQID.
02 ZCRTPID type ZSPI-DDL-CRTPID.
02 ZPAID type ZSPI-DDL-INT.
end.
ZCOM-TKN-CMD-TIMEOUT token-type ZSPI-TYP-TIMESTAMP.
ZSPI-TKN-MANAGER token-type ZSPI-TYP-FNAME32.
ZSPI-TKN-SSID token-type ZSPI-TYP-SSID. !{}
ZSPI-TKN-MAXRESP token-type ZSPI-TYP-INT.
ZSPI-TKN-RESPONSE-TYPE token-type ZSPI-TYP-ENUM.
ZSPI-TKN-ALLOW-TYPE token-type ZSPI-TYP-ENUM.
ZSPI-TKN-COMMENT token-type ZSPI-TYP-STRING.
Tokens in Response Buffer
ZSPI-TKN-SERVER-VERSION token-type ZSPI-TYP-INT. !{}
ZSPI-TKN-SSID token-type ZSPI-TYP-SSID. !{}
ZSPI-TKN-DATALIST token-type ZSPI-TYP-LIST.
ZCOM-TKN-OBJNAME token-type ZSPI-TYP-STRING. !{}
ZCOM-TKN-OBJTYPE token-type ZSPI-TYP-ENUM. !{}
ZSPI-TKN-ERRLIST token-type ZSPI-TYP-LIST. !...
...
ZSPI-TKN-ENDLIST token-type ZSPI-TYP-SSCTL.
ZSPI-TKN-RETCODE token-type ZSPI-TYP-ENUM. !{}
ZSPI-TKN-ENDLIST token-type ZSPI-TYP-SSCTL.
6-21
Page 86

COMMANDS AND RESPONSES
ALTER Command
Tokens in Command Buffer
ZTR3-MAP-ALTER-LINE is the extensible structured token that
defines the configurable attributes that are to be altered for
the line. It has the token number ZTR3-TNM-ALTER-LINE and the
DDL definition ZTR3-DDL-ALTER-LINE. This token must be in the
command when the specified object is ZCOM-OBJ-LINE. It cannot
be in the command when the object is ZCOM-OBJ-SU. Duplicate
occurrences of this token are not allowed.
Each attribute is defined in a separate field. At least one
field must be specified. The fields in the ZTR3-MAP-ALTER-LINE
extensible structured token are as follows:
ZBCCTYPE The block check character (BCC) type to be
used by the line. The value ZTR3-VAL-BCC-LRC8
indicates that the longitudinal redundancy check
(LRC8) will be used. The value ZTR3-VAL-BCCCRC16 indicates that the cyclic redundancy check
(CRC16) will be used. The value ZTR3-VAL-BCCCCITT indicates that the International Telegraph
and Telephone Consultative Committee check will
be used. The default value is ZTR3-VAL-BCCCRC16.
ZCHARSET The character set to be used. The value
ZTR3-VAL-CHAR-ASCII indicates the ASCII character
set will be used. The value ZTR3-VAL-CHAR-EBCDIC
indicates the EBCDIC character set will be used.
The default value is ZTR3-VAL-CHAR-EBCDIC.
ZCTL-RTS A Boolean variable that specifies whether the
Carrier Detect (CD) signal is dropped before the
Request To Send (RTS) signal is raised. If the
value is ZSPI-VAL-TRUE, CD is dropped before RTS
is raised. If the value is ZSPI-VAL-FALSE, CD
is not dropped before RTS is raised. The default
value is ZSPI-VAL-FALSE.
ZCTL-SET An enumerated value that specifies the bisyn-
chronous control set. The value ZTR3-VAL-CTLSET-ASCII indicates that the ASCII control set
will be used. The value ZTR3-VAL-CTL-SET-EBCDIC
indicates that the EBCDIC control set will be
used. The default value is ZTR3-VAL-CTL-SETEBCDIC.
ZDEBUG A Boolean variable that enables the CLIP DEBUG
interface. If the value is ZSPI-VAL-TRUE, the
interface is enabled. If the value is ZSPI-VALFALSE, the interface is not enabled. The default
value is ZSPI-VAL-FALSE.
6-22
Page 87

COMMANDS AND RESPONSES
ALTER Command
ZDROP-RTS A Boolean variable that specifies whether the
Request To Send (RTS) signal is dropped when
the software switches from a write operation to
a read operation. If the value is ZSPI-VALTRUE, the signal will be dropped when switching
operations. If the value is ZSPI-VAL-FALSE, the
RTS signal will not be dropped. The default
value is ZSPI-VAL-FALSE.
ZINIT-STATUS A 32-bit integer that specifies the initial IBM
status that the TR3271 subsystem returns when it
receives a SELECT for a subdevice that has not
been OPENed or CONNECTed. The possible values
are as follows:
0 The TR3271 subsystem responds with
a Wait for acknowledgement (WACK)
indicating that the subdevice
is busy. The subdevice remains busy
until an application OPENs or
CONNECTs the subdevice. Note that
this can have a cyclic effect; the
host front-end might resend a SELECT
each time it receives a WACK from
the TR3271 subsystem.
%177776 The TR3271 subsystem does not
respond to SELECTs. Consequently,
the host times out the subdevice
provided the subdevice has not been
OPENed or CONNECTed before the
timeout period elapses.
%177777 The TR3271 subsystem responds with
an ACK0 and acknowledges data from
the host. Although acknowledged,
the data is discarded because it was
unsolicited. An event message 112
is sent to the EMS log indicating
that data has been discarded (see
the description of event message 112
in Section 7, "Event Management").
Data from the host continues to be
discarded until an application OPENs
or CONNECTs the subdevice.
6-23
Page 88

COMMANDS AND RESPONSES
ALTER Command
%value If the value of this field is any
16-bit octal value other than 0,
%177776, or %177777, the TR3271
subsystem responds with a RVI. The
value in this field is interpreted
as IBM Status/Sense information.
The TR3271 subsystem will send these
bytes to the host when the host,
after receiving the RVI, polls the
subsystem. The value must be in the
correct format. Refer to Appendix C
in the
Methods--AM3270/TR3271
Device-Specific Access
for a list
of appropriate values.
ZMULTI-BLOCK A Boolean variable that specifies whether the
TR3271 subsystem supports multiple block transmissions. If the value is ZSPI-VAL-TRUE, the
subsystem supports multiple block transmissions;
if the value is ZSPI-VAL-FALSE, it does not. The
default is ZSPI-VAL-FALSE.
ZOFFLINE-TIMER A timestamp that specifies the period of time,
in .01 seconds, that the TR3271 subsystem waits
to receive a signal from the host. If the
TR3271 subsystem does not receive anything within
this interval, the host is considered down and a
timeout error is reported. The value must be in
the 0 through 5:27:67 range. The default is 0,
wait forever.
ZPROG A 32-byte file name that identifies the program
file that is to be downloaded to the CLIP. The
default is $SYSTEM.CSS00.C9315P00.
ZREAD-CMD An enumerated value that specifies whether the
TR3271 subsystem accepts the Read Buffer and
Read Modified command from the host. The value
ZTR3-VAL-READ-NONE causes the subsystem to reject
the Read Buffer and Read Modified commands. The
value ZTR3-VAL-READ-ALL causes the subsystem to
accept both the Read Buffer and Read Modified
commands. ZTR3-VAL-READ-RDMOD causes the subsystem to accept the Read Modified command, but
reject the Read Buffer command.
The Read Buffer command is supported only for
CRT subdevices. If your management application
specifies the ZTR3-VAL-READ-ALL for PTP
subdevices, Read Buffer commands are rejected.
This restriction is imposed by the protocol used
by PTP subdevices. The default value for this
field is ZTR3-VAL-READ-NONE.
6-24
Page 89

COMMANDS AND RESPONSES
ALTER Command
ZRETRY An integer that specifies the number of times the
TR3271 retransmits data as a result of data link
errors before returning an error. The value must
be in the 1 through 14 range. The default is 3.
ZSYNCS An integer that specifies the number of SYN
characters that precede each frame. The value
must be in the 1 through 14 range. The default
is 3.
ZTEST-INTVL A timestamp that specifies the interval, in .01
seconds, at which the status probe is issued to
the CLIP. The value must be in the range 0
through 5:27:67. If the value is 0, no status
probe will be issued. The default is :10 (10
seconds).
ZTHRES An integer that specifies the statistics thresh-
old values. This value defines the number of
frames to be transmitted and received before line
quality is checked. The value must be in the
0 through 32767 range. If the value is 0, the
threshold is ignored. The default is 0.
ZTIMEOUT A timestamp that specifies the line I/O timeout
value, in .01 seconds. This value defines how
long the I/O process waits before retrying when
a data link error occurs. The value must be in
the range 00:00.6 through 00:10. The default is
00:02.7.
ZXLATE A Boolean variable that specifies whether the
TR3271 subsystem translates inbound and outbound
data. If the value is ZSPI-VAL-TRUE, the TR3271
subsystem translates inbound data (from the line)
from EBCDIC to ASCII, and translates outbound
data (to the line) from ASCII to EBCDIC. If
the value is ZSPI-VAL-FALSE, the TR3271 subsystem
does not translate characters. The default is
ZSPI-VAL-TRUE. The value of ZXLATE must be TRUE
if ZXLATE-IN and ZXLATE-OUT, as well as ZCHAR-SET
(value EBCDIC) and ZCTL-SET (value EBCDIC), are
used.
ZXPARENT A Boolean variable that controls transparent-
text mode for the named line. If the value is
ZSPI-VAL-TRUE, transparent-text mode is enabled
for the line; if the value is ZSPI-VAL-FALSE,
it is not. The default is ZSPI-VAL-FALSE.
Transparent-text mode can only be enabled if the
line is configured with the EBCDIC character set.
6-25
Page 90

COMMANDS AND RESPONSES
ALTER Command
ZWACK-DELAY A timestamp that specifies the period of time,
in .01 seconds, that the TR3271 subsystem waits
before sending a wait for acknowledgement (WACK)
to the host in response to a SELECT. The value
must be in the 0 through 32767 range. The
default is 0.
ZXLATE-IN A character value that must occur 256 times, once
for each ASCII character. The character values
together make up the translation table used for
inbound data. Note that the ZXLATE field must
have the value ZSPI-VAL-TRUE for this translation
table to be in effect.
ZXLATE-OUT A character value that must occur 256 times, once
for each ASCII character. The character values
together make up the translation table used for
outbound data. Note that the ZXLATE field must
have the value ZSPI-VAL-TRUE for this translation
table to be in effect.
ZTR3-MAP-ALTER-SU is the extensible structured token that defines
the configurable attributes that are to be altered for a
subdevice. It has the token number ZTR3-TNM-ALTER-SU and the DDL
definition ZTR3-DDL-ALTER-SU. This extensible structured token
must be in the command when the specified object is ZCOM-OBJ-SU.
It cannot be in the command when the object is ZCOM-OBJ-LINE.
Duplicate occurrences of the token are not allowed.
Each attribute is defined in a separate field. At least one
field must be specified. The fields in the ZTR3-MAP-ALTER-SU
token are as follows:
ZADDR A pair of integers that specifies the address to be
assigned to the subdevice. The first integer is the
address of the control unit. The second integer is the
address of the subdevice. Both integers should be in
the range 0 through 31.
ZPROTO An enumerated value that specifies the protocol to be
used by the subdevice. There is no default value. You
can assign one of the following values:
ZTR3-VAL-PROTO-CRT The CRT protocol will be
used.
ZTR3-VAL-PROTO-PTP The pass-through protocol
6-26
(PTP) will be used.
Page 91

COMMANDS AND RESPONSES
ALTER Command
ZRECSIZE An integer that specifies the maximum number of bytes
the subdevice can send or receive in a record. The
recommended record size depends on the protocol used
and the type of subdevice as follows:
CRT terminal Use the defined screen size as
the record size.
PTP subdevice Use the defined screen size as
follows:
Screen Size Record Size
480 512
960 1024
1920 2048
2560 3072
3440 4096
3564 4096
ZXPARENT A Boolean variable that controls transparent-text mode
for the named subdevice. If the value is ZSPIVAL-TRUE, transparent-text mode is enabled for the
subdevice; if the value is ZSPI-VAL-FALSE, it is not.
The default is ZSPI-VAL-FALSE.
Transparent-text mode can only be enabled if the TR3271
line is configured with the EBCDIC character set and
control set, and transparent-text mode is enabled for
the line.
ZTYPE A pair of integers that specifies the device type
and subtype of the subdevice to be altered. The
first integer is the device type, which depends on
the protocol being used. The second integer is
the subtype, which depends on the terminal being
represented. The possible integer pairs are as
follows:
(10,x) The subdevice uses the CRT protocol.
The value of x is an integer in the
range 1 through 5 and is
associated with the following
screen sizes:
ZTYPE Screen Size
(10,1) 12 x 40
(10,2) 24 x 80
(10,3) 32 x 80
(10,4) 43 x 80
(10,5) 12 x 80
6-27
Page 92

COMMANDS AND RESPONSES
ALTER Command
(60,x) The subdevice is a pass-through
protocol (PTP) subdevice. The value
of x can have the value of 1 or 2.
Subtype 1 indicates a CRT subdevice,
and subtype 2 indicates a printer.
ZCOM-TKN-OBJNAME specifies the line or subdevice whose attribute
values are to be altered. Your application must provide this
token in the command. This token is described in "DataCommunications Standard Definitions" in Section 5, "Common
Definitions," and the
Communications Management Programming
Manual
ZCOM-MAP-REQID and ZCOM-TKN-CMD-TIMEOUT are standard datacommunications tokens that your application can optionally provide. These tokens are described in "Data-Communications
Standard Definitions" in Section 5 and the
Management Programming Manual
.
Communications
(ZSPI-TKN-) MANAGER, SSID, MAXRESP, RESPONSE-TYPE, ALLOW-TYPE,
and COMMENT are standard SPI tokens. With the exception of the
ZSPI-TKN-SSID token, which your management application must pass
to SSINIT, these tokens are optional. These tokens are described
in "SPI Standard Definitions" in Section 5 and the
Systems Management (DSM) Programming Manual
.
Distributed
Tokens in Response Buffer
ZSPI-TKN-DATALIST indicates the beginning of a data list. This
token is described in "SPI Standard Definitions" in Section
5, "Common Definitions," and the
(DSM) Programming Manual
.
Distributed Systems Management
ZCOM-TKN-OBJNAME specifies the name of a TR3271 line or subdevice
that was altered by the command. Unless there is an error that
prevents the ALTER command from being attempted at all, this
token is present in every response record. ZCOM-TKN-OBJNAME
is described in "Data-Communications Standard Definitions" in
Section 5 and the
Communications Management Programming Manual
.
ZCOM-TKN-OBJTYPE specifies the type of object that was altered.
This token has the value ZCOM-OBJ-LINE or ZCOM-OBJ-SU. This
token is described in Section 5, "Common Definitions," and the
Communications Management Programming Manual
.
ZSPI-TKN-ERRLIST indicates the beginning of an error list. This
token is described in "SPI Standard Definitions" in Section 5 and
the
Distributed Systems Management (DSM) Programming Manual
.
6-28
Page 93

COMMANDS AND RESPONSES
ALTER Command
ZSPI-TKN-RETCODE specifies the return code for the command. This
token is described in "SPI Standard Definitions" in Section 5
and the
Distributed Systems Management (DSM) Programming Manual
.
For details on the data-communications error numbers and their
associated error lists, see "Common Error Numbers and Error
Lists" in the
Communications Management Programming Manual
. For
details on the TR3271 error number and their associated error
lists, see Appendix A in this manual.
The possible nonzero values of RETCODE in response to the ALTER
command are as follows:
ZCOM-ERR-VAL-REQ (-31)
ZCOM-ERR-TKN-VAL-INV (-30)
ZCOM-ERR-TKN-LEN-INV (-28)
ZCOM-ERR-TKN-DUP (-27)
ZCOM-ERR-TKN-CODE-INV (-26)
ZCOM-ERR-SSID-INV (-24)
ZCOM-ERR-SECUR-VIOL (-22)
ZCOM-ERR-OBJNAME-INV (-19)
ZCOM-ERR-OBJ-NOT-FOUND (-17)
ZCOM-ERR-FNAME-INV (-9)
ZCOM-ERR-CMD-TIMED-OUT (-7)
ZCOM-ERR-OBJ-NOT-SUPP (-18)
Your management application has tried to alter an object that
is not supported by the TR3271 subsystem. The supported
objects are PROC, LINE and SU. For the ALTER command, you
must specify the value ZCOM-OBJ-LINE or ZCOM-OBJ-SU.
ZCOM-ERR-NO-MEM-SPACE (-14)
The subsystem cannot alter the subdevice at this time because
the necessary memory for the line or subdevice control block
cannot be allocated.
ZCOM-ERR-CMD-MISMATCH (-4)
Your management application tried to alter a process by using
the value ZCOM-OBJ-PROC. The command is valid only for the
value ZCOM-OBJ-LINE or ZCOM-OBJ-SU.
ZCOM-ERR-CMD-INV-IN-SUMSTATE (-3)
Your management application tried to alter a line or subdevice
while the line was in the DIAG summary state. This summary
state prevents processing of the ALTER command.
6-29
Page 94

COMMANDS AND RESPONSES
ALTER Command
ZTR3-ERR-ALRDY-USING-ADDR (6)
Your management application attempted to alter the address of
a subdevice, but the address specified in ZADDR is already in
use by another subdevice. The ZADDR field must have a value
not previously assigned.
ZTR3-ERR-ATTR-CONFL-SU (4)
An SU attribute conflicts with a LINE attribute. The ZXPARENT
field for an SU is defined as ZSPI-VAL-TRUE, but the LINE
attributes defined by the ZCHARSET, ZCTL-SET, ZXLATE, and
ZXPARENT fields are not properly specified.
ZSPI-TKN-ENDLIST indicates the end of a data list or an error
list. This token is described in "SPI Standard Definitions"
in Section 5 and the
Programming Manual
Distributed Systems Management (DSM)
.
Operational Notes
• ALTER is a sensitive command.
• When the command is completed, the line and subdevice remain
in the same state as they were before the command was
executed.
• The LINE and SU objects must be in the STOPPED summary state
before their attributes can be altered, except when changing
the DEBUG attribute in the token ZTR3-MAP-ALTER-LINE.
• To obtain attributes values of a line or subdevice, use the
INFO command.
6-30
Page 95

COMMANDS AND RESPONSES
CONNECT Command
CONNECT Command
The CONNECT command creates a link between a TR3271 subdevice and
a TR3271 subdevice. Only subdevices can be connected. Once this
command is successfully completed, data can pass between TR3271
terminals and an IBM host through the TR3271 subsystem.
When you use the CONNECT command, the subsystem checks that both
the TR3271 subdevice and the target AM3270 subdevice are in the
STARTED summary state. In addition, they must both be defined as
PTP subdevices. If the TR3271 subdevice is not already defined
as a PTP subdevice, you can redefine it using either the ZPROTO
field in the ALTER command described in this manual, or the
ALTER command described in the
Reference Manual
. If the AM3270 subsystem is not supported by
Subsystem Control Facility (SCF)
DSM, you can use the CMI ALTER SUBDEVICE command. Refer to
the
Communications Management (CMI) Operator’s Guide
for more
information.
The lines for the TR3271 and targeted AM3270 subdevice must be in
the STARTED summary state.
Command
ZCOM-CMD-CONNECT
Object Type
ZCOM-OBJ-SU
Tokens in Command Buffer
ZCOM-TKN-OBJNAME token-type ZSPI-TYP-STRING. !{}
ZCOM-TKN-TARGET-MGR token-type ZSPI-TYP-FNAME32.
ZCOM-TKN-TARGET-OBJNAME token-type ZSPI-TYP-STRING. !{}
ZCOM-TKN-TARGET-OBJTYPE token-type ZSPI-TYP-ENUM. !{}
ZCOM-MAP-REQID !MAP is optional, but if present,
!fields are required.
def ZCOM-DDL-REQID.
02 ZCRTPID type ZSPI-DDL-CRTPID.
02 ZPAID type ZSPI-DDL-INT.
end.
ZCOM-TKN-CMD-TIMEOUT token-type ZSPI-TYP-TIMESTAMP.
ZSPI-TKN-MANAGER token-type ZSPI-TYP-FNAME32.
ZSPI-TKN-SSID token-type ZSPI-TYP-SSID. !{}
>
6-31
Page 96

COMMANDS AND RESPONSES
CONNECT Command
ZSPI-TKN-MAXRESP token-type ZSPI-TYP-INT.
ZSPI-TKN-RESPONSE-TYPE token-type ZSPI-TYP-ENUM.
ZSPI-TKN-ALLOW-TYPE token-type ZSPI-TYP-ENUM.
ZSPI-TKN-COMMENT token-type ZSPI-TYP-STRING.
Tokens in Response Buffer
ZSPI-TKN-SERVER-VERSION token-type ZSPI-TYP-INT. !{}
ZSPI-TKN-SSID token-type ZSPI-TYP-SSID. !{}
ZSPI-TKN-DATALIST token-type ZSPI-TYP-LIST.
ZCOM-TKN-OBJNAME token-type ZSPI-TYP-STRING. !{}
ZCOM-TKN-OBJTYPE token-type ZSPI-TYP-ENUM. !{}
ZSPI-TKN-ERRLIST token-type ZSPI-TYP-LIST. !...
...
ZSPI-TKN-ENDLIST token-type ZSPI-TYP-SSCTL.
ZSPI-TKN-RETCODE token-type ZSPI-TYP-ENUM. !{}
ZSPI-TKN-ENDLIST token-type ZSPI-TYP-SSCTL.
Tokens in Command Buffer
ZCOM-TKN-OBJNAME specifies the TR3271 subdevice that is to be
connected to the target subdevice. Your application must
provide this token in the command. This token is described in
"Data-Communications Standard Definitions" in Section 5 and the
Communications Management Programming Manual
.
ZCOM-TKN-TARGET-MGR specifies the name of the manager controlling
the AM3270 subdevice to which you want to establish a link.
If your management application does not provide a value, the
TR3271 subsystem derives the line name from the ZCOM-TKN-TARGETOBJNAME token. The value of the ZCOM-TKN-TARGET-MGR token, if
specified, should always be the line name associated with the
AM3270 subsystem to which you want to establish a connection.
ZCOM-TKN-TARGET-OBJNAME specifies the name of the AM3270 subdevice to which you want to build a link. This token is required.
ZCOM-TKN-TARGET-OBJTYPE specifies the type of object to which you
want to build a link. This token is required and must have the
value ZCOM-OBJ-SU.
6-32
Page 97

COMMANDS AND RESPONSES
CONNECT Command
ZCOM-MAP-REQID and ZCOM-TKN-CMD-TIMEOUT are standard datacommunications tokens that your application can optionally provide. These tokens are described in "Data-Communications
Standard Definitions" in Section 5 and the
Management Programming Manual
.
Communications
(ZSPI-TKN-) MANAGER, SSID, MAXRESP, CONTEXT, RESPONSE-TYPE,
ALLOW-TYPE, and COMMENT are standard SPI tokens. With the
exception of the ZSPI-TKN-SSID token, which your management
application must pass to SSINIT, these tokens are optional.
These tokens are described in "SPI Standard Definitions" in
Section 5 and the
Programming Manual
Distributed Systems Management (DSM)
.
Tokens in Response Buffer
ZSPI-TKN-DATALIST indicates the beginning of a data list. This
token is described in "SPI Standard Definitions" in Section 5 and
the
Distributed Systems Management (DSM) Programming Manual
.
ZCOM-TKN-OBJNAME specifies the name of the TR3271 subdevice that
was trying to build a link to the AM3270 subdevice. Unless
there is an error that prevents the CONNECT command from being
attempted at all, this token is present in every response record.
ZCOM-TKN-OBJNAME is described in "Data-Communications Standard
Definitions" in Section 5 and the
Programming Manual
.
Communications Management
ZCOM-TKN-OBJTYPE specifies the type of TR3271 object that attempted to build a link. The only valid value for this token
is ZCOM-OBJ-SU. This token is described in "Data-Communications
Standard Definitions" in Section 5, "Common Definitions," and the
Communications Management Programming Manual
.
ZSPI-TKN-ERRLIST indicates the beginning of an error list. This
token is described in "SPI Standard Definitions" in Section 5 and
the
Distributed Systems Management (DSM) Programming Manual
.
ZSPI-TKN-RETCODE specifies the return code for the command. This
token is described in "SPI Standard Definitions" in Section 5
and the
Distributed Systems Management (DSM) Programming Manual
.
For details on the data-communications error numbers and their
associated error lists, see "Common Error Numbers and Error
Lists" in the
Communications Management Programming Manual
. For
details on the TR3271 error numbers and their associated error
lists, see Appendix A in this manual.
6-33
Page 98

COMMANDS AND RESPONSES
CONNECT Command
The possible nonzero values of RETCODE in response to the CONNECT
command are as follows:
ZCOM-ERR-EMPT-RSP (-33)
ZCOM-ERR-TKN-VAL-INV (-30)
ZCOM-ERR-TKN-REQ (-29)
ZCOM-ERR-TKN-DUP (-27)
ZCOM-ERR-TKN-CODE-INV (-26)
ZCOM-ERR-SSID-INV (-24)
ZCOM-ERR-SECUR-VIOL (-22)
ZCOM-ERR-OBJNAME-INV (-19)
ZCOM-ERR-FNAME-INV (-9)
ZCOM-ERR-CMD-TIMED-OUT (-7)
ZCOM-ERR-PATH-DOWN (-20)
There has been an unexpected loss of the link between the
AM3270 and TR3271 subdevice.
ZCOM-ERR-OBJ-NOT-SUPP (-18)
Your management application has tried to build a link either
from an object that is not supported by the TR3271 subsystem,
or to an object not supported by the AM3270 subsystem. The
CONNECT command is valid only for the object type ZCOM-OBJ-SU.
ZCOM-ERR-OBJ-NOT-FOUND (-17)
Your application has tried to build a link from a TR3271
subdevice that does not exist. Issue the LISTOBJECTS command
to determine the subdevices that exist and reissue the CONNECT
command with an appropriate subdevice.
ZCOM-ERR-CMD-MISMATCH (-4)
Your management application tried to build a link from a
process or line by using the object type ZCOM-OBJ-PROC or
ZCOM-OBJ-LINE, respectively. The command is valid only for
the object type ZCOM-OBJ-SU.
ZCOM-ERR-CMD-INV-IN-SUMSTATE (-3)
Your management application tried to connect a subdevice while
the target AM3270 subdevice or the TR3271 subdevice was not
in the STARTED summary state. Or, the line associated with
one of the subdevices is in the DIAGNOSING or STOPPED summary
state.
ZTR3-ERR-TARGET-OBJ-NOT-FOUND (3)
Your management application tried to build a link to an AM3270
subdevice that does not exist.
6-34
Page 99

COMMANDS AND RESPONSES
CONNECT Command
ZTR3-ERR-NOT-PTP-SU (5)
Your management application tried to build a link from or to
a subdevice that is not a PTP subdevice. The subdevices that
you connect must both be capable of using the pass-through
protocol.
ZTR3-ERR-TARGET-OBJNAME-INV (10)
The object name for the target AM3270 subdevice does not
comply with the valid format.
ZSPI-TKN-ENDLIST indicates the end of a data list or an error
list. This token is described in "SPI Standard Definitions"
in Section 5 and the
Programming Manual
Distributed Systems Management (DSM)
.
Operational Notes
• CONNECT is a sensitive command.
• The line and subdevice must be in the STARTED summary state
when this command is issued.
• When the command is completed, the lines and subdevices remain
in the STARTED summary state.
• To disconnect the link between the AM3270 and TR3271
subdevices, use the DISCONNECT command.
6-35
Page 100
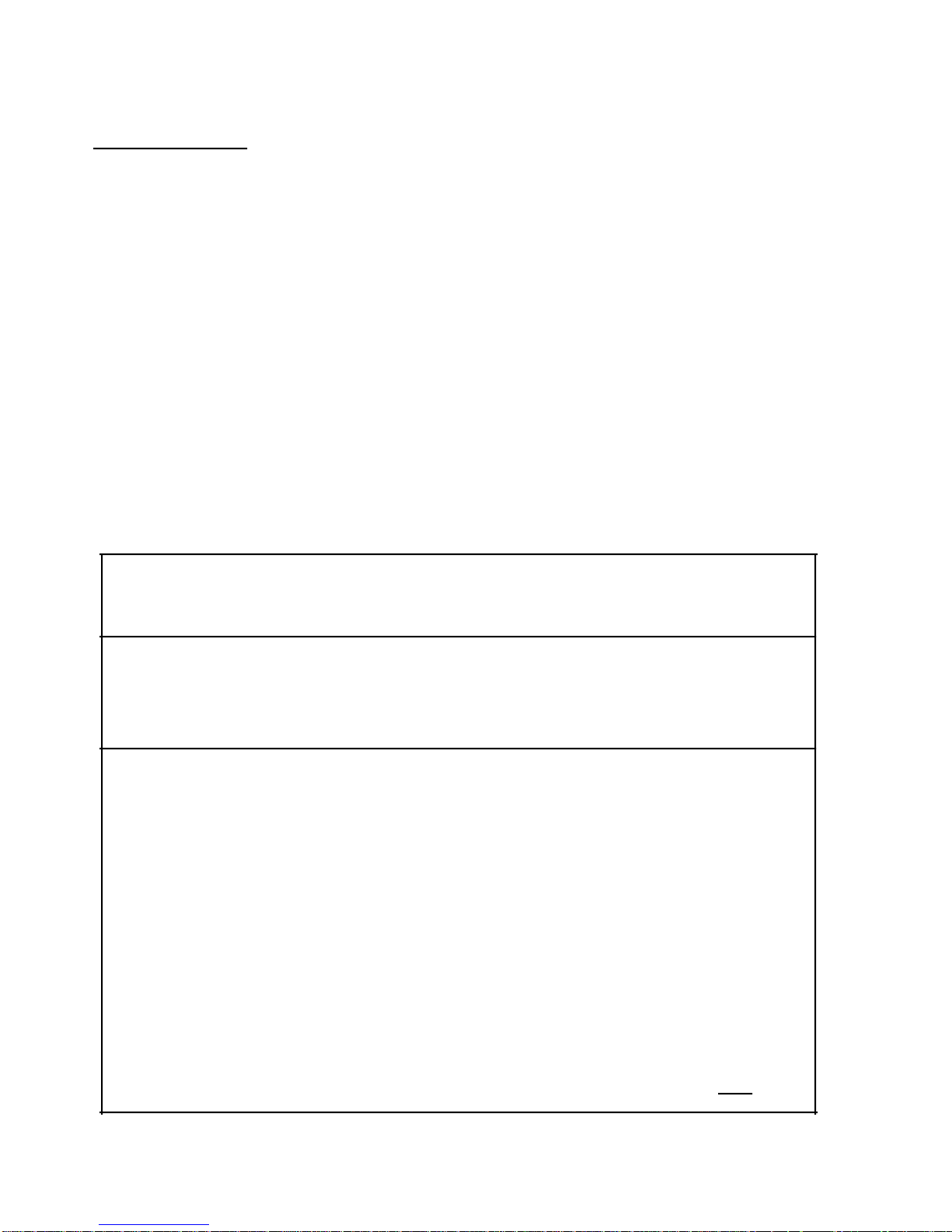
COMMANDS AND RESPONSES
DELETE Command
DELETE Command
The DELETE command removes subdevices from the TR3271 subsystem.
You can delete subdevices, but not a process or line.
When you use the DELETE command, the subdevices to be deleted
must be in the STOPPED summary state. In addition, when your
management application issues the DELETE command using the LINE
object, the subsystem checks for the subordinate-modifier token.
This token must be present and its value must be ZCOM-VAL-SUBONLY. If the token is not present, the subsystem returns an
error.
When your management application issues the DELETE command
using the SU object, the subsystem deletes only the specified
subdevice. Although the subordinate modifier can be present for
the SU object, the only valid values are ZCOM-VAL-SUB-NONE and
ZCOM-VAL-SUB-ALL. If your management application specifies the
subordinate modifier with the value ZCOM-VAL-SUB-ONLY value for a
subdevice, the subsystem returns an error.
Command
ZCOM-CMD-DELETE
Object Type
ZCOM-OBJ-LINE
or
ZCOM-OBJ-SU
Tokens in Command Buffer
ZCOM-TKN-OBJNAME token-type ZSPI-TYP-STRING. !{}
ZCOM-MAP-REQID !MAP is optional, but if present,
!fields are required.
def ZCOM-DDL-REQID.
02 ZCRTPID type ZSPI-DDL-CRTPID.
02 ZPAID type ZSPI-DDL-INT.
end.
ZCOM-TKN-CMD-TIMEOUT token-type ZSPI-TYP-TIMESTAMP.
ZCOM-TKN-SUB token-type ZSPI-TYP-ENUM.
ZSPI-TKN-MANAGER token-type ZSPI-TYP-FNAME32.
ZSPI-TKN-SSID token-type ZSPI-TYP-SSID. !{}
6-36
>
 Loading...
Loading...