

Page 1
Honeywell
应用说明书-AN219
装有 SiRFstar2t GPS 芯片集的
数字式罗盘参考设计
简介
直到最近,将 GPS 芯片与磁传感器结合起来,形成数字罗盘指
向特性还是一个单纯的电路问题。今天引入 SiRFstar2t 数字处
理器集成电路(IC)后,就有可能进行进一步的电路集成。这一
应用说明书介绍了最新的霍尼韦尔磁传感器产品。这些产品结
合 SiRF 技术 SiRFstar2t 构架,创造出基于 GPS 的导航发动机。
当 GPS 系统的信号受到暂时阻碍时,仍能导航甚至定位。
应用
将 GPS 定位与导航结合在一起的两个普遍应用就是行人导航
系统与车辆远程通信系统。行人导航系统用在手持 GPS 接收器
和无线电话中,当 GPS 卫星接收中断时,完成区位服务(LBS)
和室内导航功能。 车辆远程通信系统利用车辆方向和位置信
息等定位信息来获取供方信息。一般来说,确定了目的地的行
车路线图包括诸如当前的天气、施工改道等最新 LBS 信息和到
达时间交通状况预测。
行人导航
行人导航电路主要适用于低压供电电池,体积小,便于安装在
手机。采用 SiRFstar2t 芯片后,线路板上的 14 位 ADC 通道为
磁传感器信号提供了便利的数字插入指向,以发挥其指向和定
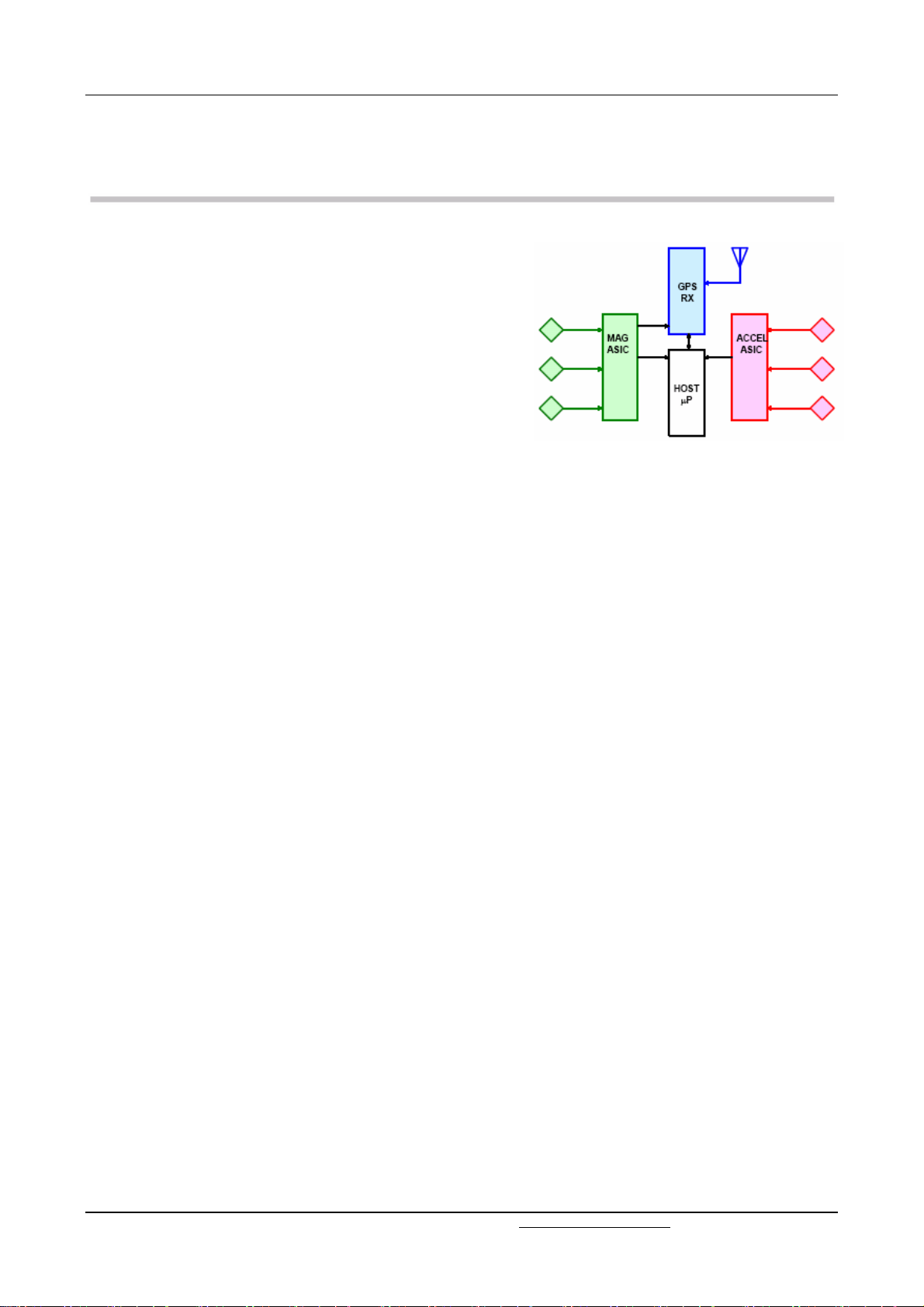
位特性。图 1 为行人导航系统的基本方框图。
位于行人导航系统的中心是主微处理机。这一处理器收集 GPS
的经度和纬度,磁传感器矢量幅值,MEMS(微型机电系统)
加速度计矢量幅值和任何系统状态数据。GPS 接收器通常由天
线、射频(RF)前端电路和解调器部分组成,产生航途基准点
数据流和接收器接收状态。大多数接收器使用两个芯片来转换
自几十颗绕地球旋转的 GPS 卫星的 1227.6MHz 信号(L2 下行
线路)。
上海:Tel:021-62370237 北京:Tel:010-84583280 广州: Tel:020-84101800 香港:Tel:00852-29536412 http://www.hone ywell-sensor.com.cn 11
三轴磁 MEMS
传感器 加速度计
图 1
行人导航系统
磁传感器的三条轴线将地球的外层磁场分成了 X、Y、
Z 三个矢量分量。这种磁场的三位表示法需要变为二
维,以形成航向罗盘方位(航向=arctan Y/X)。使用
从三轴 MEMS 加速度计输入的螺旋角和滚动角,倾
角补偿 X’,Y’的值可被转化成航向。磁传感器和
MEMS 加速度计的信号,要用特定用途集成电路
(ASICs)进行信号调节,然后再传送到主微处理机。
磁传感器 ASIC 输出通常是 X、Y、Z 磁性测量的模
拟表示,要求高分辨率数字化,以求获取精确航向输
出。为此,10-16 位模拟/数字转换器(ADC)电路或
被装在 GPS 解调器集成电路(IC)上或被装在主微
处理机上。这样,集成度高,而成本低。在这一特定
应用说明书中,SiRFstar2t 解调器集成电路(IC)为
外部传感器信号输入提供两个 14 位输入。在其它无
线电话芯片中,电话的 RF 解调器可以将 GPS 解调器
和传感器 ADC 输入结合起来。
行人导航的另一个方面是 MEMS 加速度计和加速度
计 ASIC 除了罗盘倾角补偿外,还起到另外一个作用,
即计算原始步数的计步器和计算诸如步进和步向的
应用计步器。
虽然计步对于用户健康是很方便的,但是室内导航依
靠的是利用统计学的知识在步速(或走,或跑,或爬
楼梯)的基础上预测步进。GPS 通过 GPS 航图基准
三轴
Page 2
点对脚步的每一个变化进行积极的远程追踪,然后再进行步进
预测。步向是统计计步数据的一部分,必须要对其进行分类。
前步、后步、侧步以及楼梯步都可能需要用来追踪人每走一步
引起的位置的变化。
由于无线电话可以放在诸如上衣口袋里,腰带上或是放在手提
包里,所以当电话听筒相对于用户的位置发生改变的时候,必
须不断更新步向。每走一步或每跨一步,就会有一个相应的罗
盘针指向。这样一来,从最后一个 GPS 航图基准点中获取的距
离和指向信息,通过室内航位推测法来进行导航。图 2 是典型
的一个行人在室内走动,手机装在上衣口袋里。
前进方向
由于人体是运动的,
所以人每迈一步,并
不能马上显示其方向。
每往前走一步都
可以估测出相应的
跨距和方向(航向)。
室内
室外
最后一个室外 GPS 航图基准点
图 2
室内行人导航
从上面这幅图我们可以看出,每走一步都会引起方向和位置的
变化。简单的运算使用从近来在航图基准点间的户外走动得出
的固定的跨距,更为复杂的运算则跟踪每时每刻的跨步,并根
据慢走、快走和跑步的步速来调整跨距。
车辆远程通信
远程通信将无线通信与导航装置结合起来,为车上司机或乘客
提供关于车辆的位置和方向信息。虽然逐圈地图和导航是“杀手
级应用”,指示方向允许适当的地图定向和额外的出栈进栈数据
流。远程通信出栈数据是司机或乘客需要的前方信息。加油和
饭店位置、旅游景点和网络内容“数据挖掘”等都是数据出栈的
典型例子。
Honeywell
进栈数据是当方向和位置发生变化时,人们自主或不
自主地发送的以地点为基础的内容。当地公司购买液
晶显示屏(LCD)控制板上的空间,刊登区位广告就
是典型的进栈数据。了解到你的前进方向和喜欢的品
牌后,产品和服务提供商就会据此往你的 LCD 上上
传横幅广告。
这些广告为远程通信服务提供商提供资助,从而用户
就可以免费或低价享受车辆远程通信服务。根据从
CAN-bus 上获得的车辆油量指示表的读数,弹出式广
告会登出你最喜欢的燃料品牌服务站(比如 BP 加油
站),告诉你下一个站点的位置和距离并提供当前燃
料价格和待售产品。图 3 是一个典型的远程通信系统
流程图。
地图信息更新
到达时间
交通状况 位置
未来天气情况 (通过 GPS 的 Lat,Long)
产品或服务的数据挖掘
旅游景点
网络权限
区位广告
航向
(通过罗盘的方向) (平台:轿车,卡车等)
图 3
远程通信系统流程图
远程通信方框图与行人导航图几乎相同,唯一的区别
在于,远程通信方框图中加速度计可以去掉,换成一
个或几个车轮转速传感器,用来计算车轮转数,并根
据当前的位置,估测每转一圈的距离。一般来说,
GPS 安装在车上比安装在室内无线电话上效果要好。
但是,茂密的植物、密封的桥梁、隧道和城市环境(高
楼大厦)会阻碍 GPS 信号的接收。
电路设计
谈到电路的细节问题,建议使用 HMC6042 双轴传感
器和 ASIC,以实现远程通信应用中最佳集成。图 4
是基本电路示意图,图中 SiRF GSP2t 跟踪器引擎 IC,
一端与 GRF2i 射频前端 IC 相连,一端与主机(主处
理器)相连。备用 GSP2t ADC 插脚(ADC2 和 ADC3)
与 HMC6042 X 和 Y 轴输出端插脚相连。除了集成电
路封装件以外,还需要两个 2.2 和 0.22 微法拉的低
ESR 陶瓷电容器,以产生置位脉冲和复位脉冲,来带
动传感器上的置位或重置带,进行定期消磁和偏置补
偿。
2 上海:Tel:021-62370237 北京:Tel:010-84583280 广州: Tel:020-84101800 香港:Tel:00852-29536412 http://www.honeywell-sensor.com.cn
Page 3

Honeywell
置位/重置
陶瓷
霍尼韦尔 HMC6042双轴磁传感器 IC是一种包括两块硅基片的
集成电路芯片,用来传感和调节信号。HMC6042 IC 包括
HMC1042 双轴传感器芯片和 ASIC 芯片,还有一对线性低磁场
磁传感器,当线性电压输出放大时,可以适应高达±6 高斯的磁
场。在部分饱和前,传感器能适应高达±20 高斯的外部磁场。
由于地球的天然磁场大约为±0.6 高斯,超过 20 高斯的磁场一
般都接近已被磁化的手持工具(螺丝刀,钳子等)、扬声器磁
体、电视机或视频监视器、测试设备电源变压器,或是焊接设
备或供电线路上的强电流电线。
如果传感器和整个电路组件暴露于这些高磁场中,在大多数情
况下,传感器的置位和重置脉冲将恢复磁传感器功能,罗盘针
将返回出厂设置。在极高的磁场中暴露时,电子部件的镍板上
上海:Tel:021-62370237 北京:Tel:010-84583280 广州: Tel:020-84101800 香港:Tel:00852-29536412 http://www.hone ywell-sensor.com.cn 33
V
V
图 4
示意图
会产生磁性,从而导致罗盘针指向失灵。因为部件释
放的磁通量,使外部地球表面磁场增大。使用商业消
磁棒(磁带消磁器)可以消除部件的剩磁。
在 HMR6042 磁传感器 IC 中,用来进行信号调节的
ASIC 接收来自传感器的毫伏输出信号,再将这些信
号放大约 225 倍,再将这些信号集中在 0 高斯半供电
水平(比如:3.3V 供电电压的 1.65V 供电电压)。
这个过程涉及到三个放大部分,其中为外部 Z 轴磁传
感器与第三输入信号相连。
HMR5003 ASIC 在每置位或重置带 400 mA 或更高的
电流下,需要产生 1-2 微秒长的置位和重置脉冲。由
于大多数应用中使用的电流限制供电电池,这些脉冲
由为 2.2 微法拉 C1 电容器充电的细流产生。电容器
用作 H-bridge MOSFET 带驱动支路的低能贮存器,
Page 4

Honeywell
为传感器置位/重置带提供电压。0.22 微法拉的电容器 C2 把脉
冲时间固定在 1 微秒左右,从而阻止直流电通过驱动器输出节
点进入带。在三轴应用中,置位/重置带连接使 Z 轴磁传感器的
置位/重置带平行于内部带。增加外部带时,电容器 C1 和 C2
的值要增加一倍(4.7uF 和 0.47uF)。
HMC6042 有两个正供电电压插脚(VDD1 和 VDD2),用 来 分
开传感器和放大器(VDD1)的电源与置位/重置带驱动器的电
源(VDD2)。通常情况下,置位与复位带驱动器可以永久地
连接到供电电池。这是因为脉冲施加后,驱动器几乎不用电。
置位/重置逻辑输入插脚(S/R IN)形成高压重置脉冲,用于低
压逻辑转换,然后再形成低压重置脉冲,用于高压逻辑返回。
这些逻辑变化之间一般间隔几毫秒。一般说来,当传感器桥的
每次脉冲偏置电压测定完成至少 500 毫秒后,ADC 才开始测
量。见 AN212 和 AN213 应用说明书,关于偏置和置位/重置带
功能部分。
为了节省电池能量,VDD1 连接可以在磁传感器测量周期断电,
以减少几毫安的供电。这种做法可使手机节省大量能量,但在
远程通信应用中并不一定具有优势。
置位/重置
置位/重置
陶瓷
4 上海:Tel:021-62370237 北京:Tel:010-84583280 广州: Tel:020-84101800 香港:Tel:00852-29536412 http://www.honeywell-sensor.com.cn
无线手机电路
对于无线手机和个人 GPS 接收器,SiRF GSP2t 和霍
尼韦尔 HMC6042 IC 的结合也可以发挥室内或行人
导航功能。然而手机可以任意改变位置,所以就要求
罗盘设计中使用三轴磁传感器和至少双轴 MEMS 加
速度计。为此,霍尼韦尔 HMC6042 IC 磁传感器中增
加了 HMC1041Z z 轴磁传感器成为第三轴。图 5 为手
机导航系统的完整系统示意图。
由于 SiRF GPS2t 跟踪引擎只有两个模/数转换器输入
端口,所以用一个外部微型模拟开关 IC 来完成
HMC6042 传感器 IC Y-Z 输入轴的多路传输。选用
SSOP-8 组件中日本东芝公司的 TC7W66FK 双模拟开
关,成本低,体积小,功能多。虽然图 5 中没有表示
出,但是诸如 MEMSIC MXD6020G 的 MEMS 加速
度计可以通过加速度计的两个脉宽调制(PWN)输出
插脚与主处理器(主机)相连。这些 PWM 输出插脚
通常输出运转频率为 100Hz,平均输出为工作循环的
V
V
V
V
图 5
示意图
Page 5

Honeywell
50%(手机呈水平状态)。当螺旋角和滚动角在±90°之间旋转
时,其输出为工作循环的 30%-70%。如果手机需要朝向正前方,
那么就需要三轴加速计。这样就能根据手机是出于水平还是垂
直位置来自动选择 XY 或 YZ 正向。
用加速度计进行脚步或步数测量并不是微不足道的,通过加速
度计中的专用电路或主处理器(主机)中的数字运算法则即可完
成,进而辨别加速度的突然变化,同时记下罗盘针倾角补偿的
螺旋角和滚动角的精确数值。霍尼韦尔拥有基于处理器的步进
或跨距测量的运算法则。可就生产许可问题进行接触。
系统和固件设计
正如前面几部分所述,室内导航的航位推测法是数字式罗盘、
GPS 和计步功能的复杂融合。定位误差的主要根源是罗盘航向
(误差的 75%)和跨距估计(误差的 25%)。所以对消费者电
子设备的合理定位,从最后一次 GPS 航图基准点出发的距离误
差为 5%是正常的。
为了提高定位的准确性,罗盘系统精确度在正常使用和适度倾
斜状态下应该接近 1°。由于罗盘误差累积很大程度上取决于螺
旋角和滚动角的精确度,所以所选择的 MEMS 加速度计必须有
足够的倾斜精确度,尽可能不要超出 1°的定位误差范围。在北
美地区,螺旋角误差或滚动角误差不足 0.25°,造成的罗盘指向
误差可能达到±0.5°。有竞争力的航位推测系统设计者为节省成
本,使用压电加速度计和廉价的磁传感器元件,从而导致罗盘
针精确度不到 2°,进而使室内导航系统不能发挥其应有的作
用。当处在密集的建筑物中,没有机会获得 GPS 航图基准点的
更新信息时,更是如此。
数字式罗盘固件并不是新手设计者由于设计时间短而进行的
尝试。在大多数情况下,需要花费几百到一千个小时完成固件
的开发和测试后,才能成功完成一个罗盘路径的设计。然后再
花差不多同样多的时间完成航位推测数据融合、GPS 和航位推
测定位的卡尔曼过滤以及计步数据库路径设计。图 6 为罗盘固
件的流程图表。
罗盘固件过程始于磁传感器数据获取的主要路径、数据修正和
方位估算。为提供最高的罗盘精确度,磁传感器的每条数据轴
上海:Tel:021-62370237 北京:Tel:010-84583280 广州: Tel:020-84101800 香港:Tel:00852-29536412 http://www.hone ywell-sensor.com.cn 55
初始化 求解 3D 加速度计
方程 倾斜数据
取得磁性 计算
数据 航向
双向数据 偏离角 GPS导出的
偏置 纠正 Lat,Long
桥偏置 置位/重置 偏离角 世界磁模
补偿 程序 纠正 型程序
航向
硬铁 校准 定位推算
补偿 程序 程序 位置
图 6
罗盘固件的流程图表
必须被迅速数据化。这既是为了节约电源,也是为了
避免行人在相邻时刻相邻方位的感应(快镜头)。同
时,为了快镜头的原因,也要求获得最佳螺旋角和滚
动角。
由于磁场测量在数值上是双向的,每根磁传感器轴
ADC 的值必须减去其 0 高斯 ADC 值。这样一来,负
值就可以用 2 的补码形式来表示。一般情况下,0 高
斯 ADC 值补偿大约是 ADC 范围的一半或是供电电
压一半的位置。
每根磁传感器轴的第二个偏置是桥偏置电压。虽然每
个传感器桥的偏置电压是恒定的,但是其值也随温度
而发生明显的变化。所以必须定期进行桥偏置计算,
ADC 中的桥必须从磁传感器数据中扣除。这一桥偏
置电压测量在应用说明 AN212 中有详细说明,但是
通常需要在脉冲重置和置位后进行测量。当计算测量
结果总和时,使地球磁场归零,只留下桥偏置。
最后一条磁传感器偏置路径是为了硬铁校准。虽然大
多数手机都不需要出厂值以外的校准,把远程通信接
收器装在仪表盘上或者把手机放到车辆的支架上,车
辆的底盘和发动机产生 1 高斯或 2 高斯的磁场,进而
与地球磁场相结合,使罗盘航向产生弯曲。要消除附
近从地球远磁场的硬铁辐射,通过设计固件路径,可
以校正每根传感器量测轴上的硬铁偏置。
Page 6

对于双轴远程通信应用,硬铁校准路径会促使司机以环形方式
驾驶,以获取每根轴的最大值和最小值。一个循环结束后,计
算每根轴的平均值并用作偏置,并把后来的数据集中在 0 高斯
点周围。在手机三轴应用中,也需要用同样的环形翻转,再加
上倒转位置,从而得出 Z 轴的平均值。
当磁传感器的三条轴都完成了这三种偏置后,把新校正过的磁
场值与螺旋角和滚动角插入到方位计算路径中。对于双轴设
计,方程式为反正切函数(Y/X),浮点处理器可直接计算反
正切函数的商。对于没有浮点发动机的微控制器来说,反正切
一定是控制器上的存储映像。
幸运的是反正切存储映像只需要映射 90°,因为函数在 360°中
重复 90°象限。记下 XY 的磁数据符号,90°映像可校正为正确
的象限。为了按大小排列存储映像,分辨率会把反正切函数推
入映像象限。对于分辨率为 1°的罗盘,大约有 90 个存储器方
位有反正切值,以与(Y/X)的商相符。所以要达到 0.1°的分
辨率,就需要 900 个存储器方位。要达到 0.5°方位分辨率,就
需要大约 180 个存储器方位。一般情况下,室内航向方位分辨
率为 0.1°,用 1°精度的罗盘。
对于三轴应用,要解两个扁率方程,把 XYZ 磁场值以及螺旋
角和滚动角转化成倾角偏置 X’ Y’,然后再进行最后的反正切
运算。方程式如下:
加速度计提供的螺旋角和滚动角为数字余弦 Φ 和余弦 θ 形式,
所以不再需要用三角函数存储映像。正弦值是 1 减去余弦值,
即可得到扁率方程(3D 到 2D)的所有数值。
到现在还没提到的就是加速度计校准问题,以得出准确的螺旋
角和滚动角。校准加速度计通常是生产厂家的工作,加速度计
角线性良好是很重要的。终端用户把手机或车辆放到已知的水
平面上,就可将螺旋角和滚动角归零,但是在加速度计中必须
要有非线性校正值。
Honeywell
如果加速度计未提供倾角校准,必须要在工厂条件下
进行一系列自动化倾角测试,用受激条件下测得的螺
旋角和滚动角来代替给线性校正值。当罗盘精确度为
1°,而要求螺旋角和滚动角精确度为 0.5°时,这种方
法就极其重要了。
结束语:
磁传感器和 GPS 系统相结合,很好的完成了从简单
到复杂的导航任务。GPS 接收器本身可以获取处于运
动状态的平台的方位信息。但是当运动减慢(就象交
通一样),通过航图基准点来推测方位就很不准确了。
当处于某一固定位置的人旋转身体时,手机中就必须
要有罗盘航行系统。
为了更好的描述不同级别的磁传感器和 GPS 的效用,
图 7 介绍了磁传感器三种等级的精确度。低档磁场传
感器可以被称为方位传感器,可用于基础地图导航和
4-8 个基础方位导航(东、西、南、北)。高精度磁
场传感器,可用于 LBS 定位和远程通信以及 16 个方
位导航,精确度高于±2°,需要进行航位推测、空中
和海上导航应用。虽然以前购买高精度导航系统要花
费几百美元,但是这一技术说明中的集成电路每个只
需几美元。
磁传感器精确度 GPS 和磁传感器应用
低档
(﹥±5°) 方位感应(不是罗盘)、正确
中档
(±2°-±5°) 基本的位置的服务和远程通
高精度(﹤±2°) 诸如航位推测法,轮船和飞机
如果还有其它问题,请拨打应用支持电话:
800-323-8295 (美国免费)或 763-954-2474
也可访问我们的网站:www.magneticsensor.com
读数说明的地图导航。
信的主要方位导航(东、西、
南、北)。
导航等导航级应用。
图7
精度等级
6 上海:Tel:021-62370237 北京:Tel:010-84583280 广州: Tel:020-84101800 香港:Tel:00852-29536412 http://www.honeywell-sensor.com.cn
 Loading...
Loading...