

Hitachi WJ200-004M, WJ200-007M Quick Reference Manual

Thu Jul 21 2011 14:14 GMT+0900
NT3261_Cover1.indd 1 11/07/27 18:03
1
UL Cautions, Warnings and Instructions xii
Warnings and Cautions for Troubleshooting and Maintenance
The warnings and instructions in this section summarize the procedures necessary to ensure an
inverter installation complies with Underwriters Laboratories
guidelines.
WARNING: Use 60/75C Cu wire only.
WARNING: Suitable for use on a circuit capable of delivering not more than 100,000 rms
Symmetrical Amperes, 120V maximum.
WARNING: When protected by J class Fuses, or when Protected by Type E
Combination Motor
Controller Having An Interrupting Rating Not Less Than 100,000 rms Symmetrical Amperes, 120
Volts Maximum.
WARNING: Install device in pollution degree 2 environment.
WARNING: Maximum Surrounding Air Temperature 45C (004M),50C(007M).
WARNING: Solid state motor overload protection is provided in each model
WARNING: Integral solid state short circuit protection does not provide branch circuit protection.
Branch circuit protection must be provided in accordance with the National Electric Code and any
additional local codes
2
Terminal symbols and Screw size
Inverter Model Screw Size
Required
Torque (N-m)
Wire range
WJ200-004M M3.5 1.2 AWG12 (3.3mm2)
WJ200-007M M4 1.4 AWG10 (5.3mm2)
Fuse Sizes
The inverter shall be connected with a UL Listed Cartridge Nonrenewable fuse, rated 600Vac
with the current ratings as shown in the table below or Type E Combination Motor Controller
marking is to indicate that the unit shall be connected with, LS Industrial System Co., Ltd, Type E
Combination Motor Controller MMS Series with the ratings as shown in the table below:
Inverter Model
Fuse (UL-rated, class J, 600V ,
Maximum allowable current)
Type E C.M.C.
WJ200-004M
WJ200-007M
50A, AIC 200kA
MMS-32H,
120 V, 40 A
3
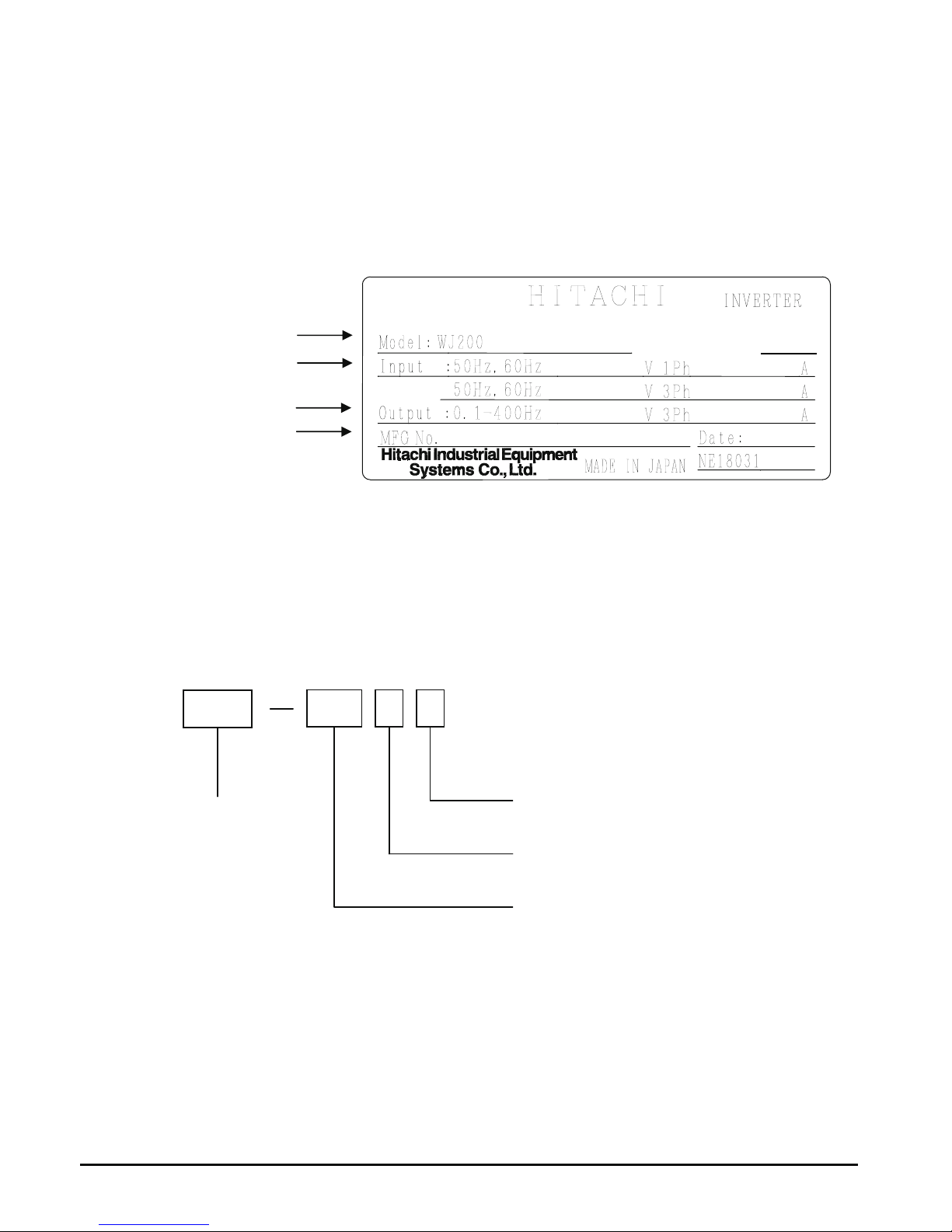
Inverter Specification Label
The Hitachi WJ200 inverters have product labels located on the right side of the housing,
as pictured below. Be sure to verify that the specifications on the labels match your power
source, and application safety requirements.
Inverter Specification Label
The model number for a specific inverter contains useful information about its operating
characteristics. Refer to the model number legend below:
100-120
200-240
14.0
3. 0
1104
14A_T12345_A_-001
-004MF
Model name
Input ratings
Output ratings
MFG number
Ver:2.0
WJ200
004 M F
Series name
Configuration type
F=with keypad
Input voltage:
M=Single-phase 100V class
A
pplicable motor capacity in kW
004=0.4kW
007=0.75kW
4
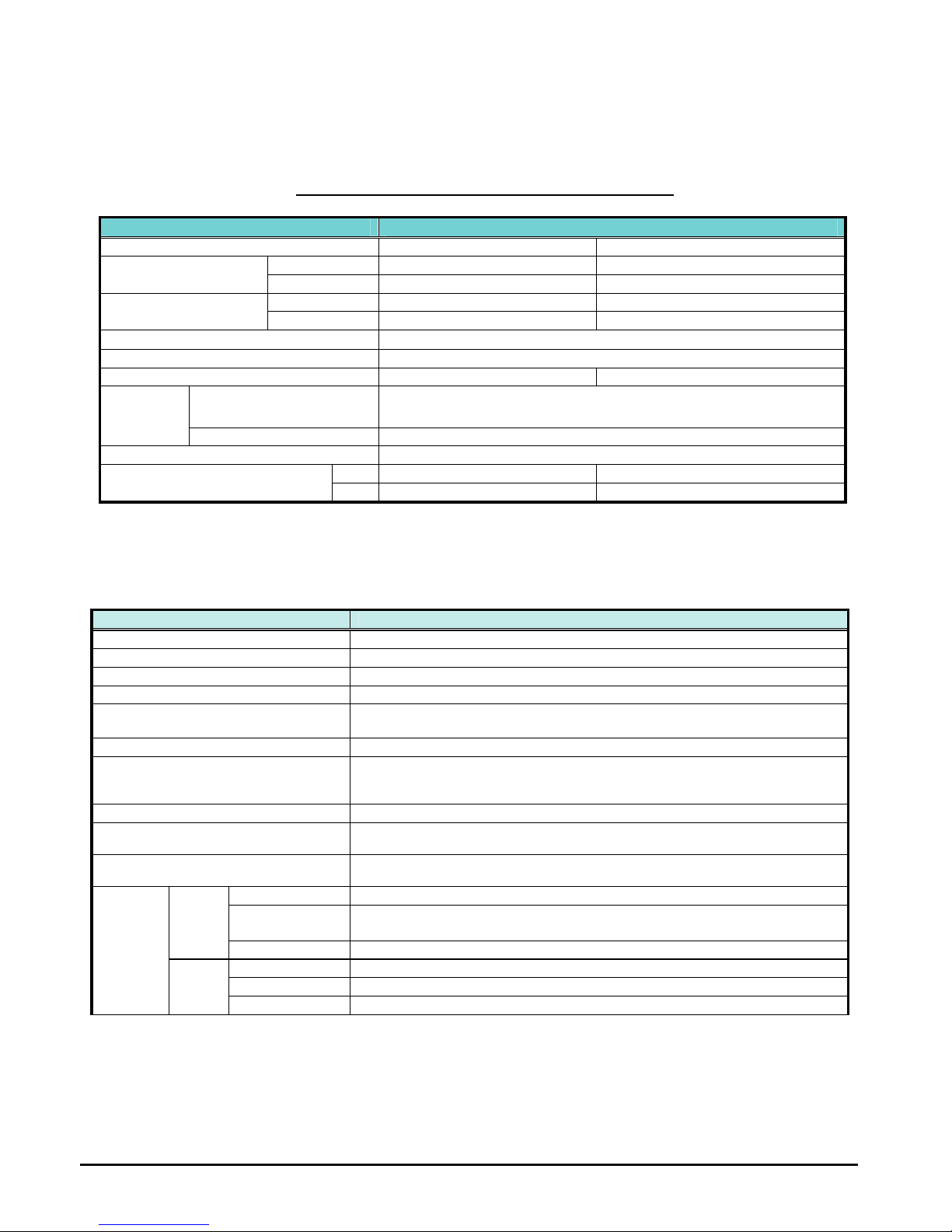
WJ200 Inverter Specifications
Model-specific tables for the Single-phase 100V class inverters
The following tables are specific to WJ200 inverters for the Single-phase 100V class model
groups. Note that “General Specifications” on page in this chapter
apply to both voltage
class groups. Footnotes for all specification tables follow the table below.
Item Single-phase 100V class Specifications
WJ200 inverters, 100V models 004MF 007MF
kW 0.4 0.75 Applicable motor size
HP
1/2 1
100V 1.0 1.7 Rated capacity (kVA)
120V 1.2 2.0
Rated input voltage
Single-phase: 100V to 120V 10%, 50/60Hz 5%
Rated output voltage *3 Three-phase: 200 to 240V (proportional to input voltage)
Rated output current (A) *12 3.0 (2.6) 5.0 (4.0)
Without resistor *6
100%:
50Hz
50%:
60Hz
Braking
With resistor 150%
DC braking Variable operating frequency, time, and braking force
kg 1.1 1.6 Weight
lb 2.4 3.5
General Specifications
The following table applies to Single-phase 100V class WJ200 inverters.
Item General Specifications
Protective housing *1
IP20
Control method
Sinusoidal Pulse Width Modulation (PWM) control
Carrier frequency
2kHz to 15kHz (derating required depending on the model)
Output frequency range *4
0.1 to 400Hz
Frequency accuracy
Digital command: 0.01% of the maximum frequency
Analog command: 0.2% of the maximum frequency (25C 10C)
Frequency setting resolution
Digital: 0.01Hz; Analog: max. frequency/1000
Volt./Freq. characteristic
V/f control (constant torque, reduced torque, free-V/F): base freq. 30Hz~400Hz
adjustable,
Sensorless vector control, Closed loop control with motor encoder feedback
Overload capacity
60 sec. @150%
Acceleration/deceleration time
0.01 to 3600 seconds, linear and S-curve accel/decel, second accel/decel
setting available
Starting torque *5
200% @0.5Hz (IM: sensorless vector control)
50% @10% of base frequency (PM: sensorless vector control)
Operator panel
Up and Down keys / Value settings
External signal
*7
0 to 10 VDC (input impedance 10k Ohms), 4 to 20mA (input impedance 100
Ohms), Potentiometer (1k to 2k Ohms, 2W)
Freq.
setting
Via network
RS485 ModBus RTU, other network option
Operator panel
Run/Stop (Forward/Reverse run change by command)
External signal
Forward run/stop, Reverse run/stop
Input
signal
FWD/
REV run
Via network
RS485 ModBus RTU, other network option
5
Item General Specifications
Intelligent input terminal
Seven terminals,
sink/source changeable
by a short bar
68 functions assignable
FW (forward run command), RV (reverse run command), CF1~CF4 (multi-stage
speed setting), JG (jog command), DB (external braking), SET (set second
motor), 2CH (2-stage accel./decel. command), FRS (free run stop command),
EXT (external trip), USP (startup function), CS (commercial power switchover),
SFT (soft lock), AT (analog input selection), RS (reset), PTC (thermistor thermal
protection), STA (start), STP (stop), F/R (forward/reverse), PID (PID disable),
PIDC (PID reset), UP (remote control up function), DWN (remote control down
function), UDC (remote control data clear), OPE (operator control), SF1~SF7
(multi-stage speed setting; bit operation), OLR (overload restriction), TL (torque
limit enable), TRQ1 (torque limit changeover1), TRQ2 (torque limit
changeover2), BOK (Braking confirmation), LAC (LAD cancellation), PCLR
(position deviation clear), ADD (add frequency enable), F-TM (force terminal
mode), ATR (permission of torque command input), KHC (Cumulative power
clear), MI1~MI7 (general purpose inputs for EzSQ), AHD (analog command
hold), CP1~CP3 (multistage-position switches), ORL (limit signal of zero-return),
ORC (trigger signal of zero-return), SPD (speed/position changeover),
GS1,GS2 (STO inputs, safety related signals),
485 (Starting communication
signal), PRG (executing EzSQ program), HLD (retain output frequency), ROK
(permission of run command), EB (rotation direction detection of B-phase),
DISP (display limitation), NO (no function)
Intelligent output terminal
48 functions assignable
RUN (run signal), FA1~FA5 (frequency arrival signal), OL,OL2 (overload
advance notice signal), OD (PID deviation error signal), AL (alarm signal), OTQ
(over/under torque threshold), UV (under-voltage), TRQ (torque limit signal),
RNT (run time expired), ONT (power ON time expired), THM (thermal warning),
BRK (brake release), BER (brake error), ZS (0Hz detection), DSE (speed
deviation excessive), POK (positioning completion), ODc (analog voltage input
disconnection), OIDc (analog current input disconnection), FBV (PID second
stage output), NDc (network disconnect detection), LOG1~LOG3 (Logic output
signals), WAC (capacitor life warning), WAF (cooling fan warning), FR (starting
contact), OHF (heat sink overheat warning), LOC (Low load), MO1~MO3
(general outputs for EzSQ), IRDY (inverter ready), FWR (forward operation),
RVR (reverse operation), MJA (major failure), WCO (window comparator O),
WCOI (window comparator OI), FREF (frequency command source), REF (run
command source), SETM (second motor in operation), EDM (STO (safe torque
off) performance monitor), OP (option control signal), NO (no function)
Monitor output (analog)
Output freq., output current, output torque, output voltage, input power, thermal
load ratio, LAD freq., heat sink temperature, general output (EzSQ)
Output
signal
Pulse train output
(0~10Vdc, 32kHz max.)
[PWM output]
Output freq., output current, output torque, output voltage, input power, thermal
load ratio, LAD freq., heat sink temperature, general output (EzSQ)
[Pulse train output]
Output frequency, output current, pulse train input monitor
Alarm output contact
ON for inverter alarm (1c contacts, both normally open or closed available.)
Other functions
Free-V/f, manual/automatic torque boost, output voltage gain adjustment, AVR
function, reduced voltage start, motor data selection, auto-tuning, motor
stabilization control, reverse running protection, simple position control, simple
torque control, torque limiting, automatic carrier frequency reduction, energy
saving operation, PID function, non-stop operation at instantaneous power
failure, brake control, DC injection braking, dynamic braking (BRD), frequency
upper and lower limiters, jump frequencies, curve accel and decel (S, U,
inversed U,EL-S), 16-stage speed profile, fine adjustment of start frequency,
accel and decel stop, process jogging, frequency calculation, frequency
addition, 2-stage accel/decel, stop mode selection, start/end freq., analog input
filter, window comparators, input terminal response time, output signal
delay/hold function, rotation direction restriction, stop key selection, software
lock, safe stop function, scaling function, display restriction, password function,
user parameter, initialization, initial display selection, cooling fan control,
warning, trip retry, frequency pull-in restart, frequency matching, overload
restriction, over current restriction, DC bus voltage AVR
Protective function
Over-current, over-voltage, under-voltage, overload, brake resistor overload,
CPU error, memory error, external trip, USP error, ground fault detection at
power on, temperature error, internal communication error, driver error,
thermistor error, brake error, safe stop, overload at low speed, modbus
communication error, option error, encoder disconnection, speed excessive,
EzSQ command error, EzSQ nesting error, EzSQ execution error, EzSQ user
trip
Temperature
Operating (ambient): -10 to 40C(*8), / Storage: -20 to 65C(*9)
Operating
environment
Humidity
20 to 90% humidity (non-condensing)
6
Item General Specifications
Vibration *10
5.9m/s2 (0.6G), 10 to 55 Hz
Location
Altitude 1,000m or less, indoors (no corrosive gasses or dust)
Coating color
Black
Options
Remote operator unit, cables for the units, braking unit, braking resistor,
fieldbus
Footnotes for the preceding table and the tables that follow:
Note1: The protection method conforms to JIC C 0920.
Note2: The applicable motor refers to Hitachi standard 3-phase motor (4p). When using other
motors, care must be taken to prevent the rated motor current (50/60Hz) from exceeding the
rated output current of the inverter.
N
ote3: The output voltage decreases as the main supply voltage decreases (except when using
the AVR function). In any case, the output voltage cannot exceed the input power supply voltage.
In any case, the output voltage cannot exceed two times the input power supply voltage
Note4: To operate the motor beyond 50/60Hz, consult the motor manufacturer for the maximum
allowable rotation speed.
Note5: At the rated voltage when using a Hitachi standard 3-phase, 4-pole motor.
Note6: The braking torque via capacitive feedback is the average deceleration torque at the
shortest deceleration (stopping from 50/60Hz as indicated). It is not continuous regenerative
braking torque. The average deceleration torque varies with motor loss. This value decreases
when operating beyond 50Hz. If a large regenerative torque is required, the optional
regenerative braking unit and a resistor should be used.
Note7: The frequency command is the maximum frequency at 9.8V for input voltage 0 to
10VDC, or at 19.6mA for input current 4 to 20mA. If this characteristic is not satisfactory for
your application, contact your Hitachi representative.
Note8: If the inverter is operated outside the region shown in the graph in the derating curve,
the inverter may be damaged or its service life may be shortened. Set B083 Carrier Frequency
Adjustment in accordance with the expected output current level. See derating curve section
for the detailed information of the inverter operating range.
Note9: The storage temperature refers to the short-term temperature during transportation.
Note10: Conforms to the test method specified in JIS JIS C 60068-2-6 :2010(IEC
60068-2-6:2007). For the model types excluded in the standard specifications, contact your
Hitachi sales representative.
Note11: Watt losses are calculated values based on specification of main semi-conductors. You
must take suitable margin when designing cabinet based on these values. Otherwise there is a
possibility of heating trouble.
Note12: “When the ambient temperature exceeds 40C, output current must be limited to the
value in ( ).
Signal Ratings
Detailed ratings are in “Control Logic Signal Specifications” in Page 16.
Signal / Contact Ratings
Built-in power for inputs 24VDC, 100mA maximum
Discrete logic inputs 27VDC maximum
Discrete logic outputs 50mA maximum ON state current, 27 VDC maximum OFF state voltage
Analog output 10bit / 0 to 10VDC, 2mA
Analog input, current 4 to 19.6 mA range, 20mA nominal
Analog input, voltage
0 to 9.8 VDC range, 10VDC nominal, input impedance 10k
+10V analog reference 10VDC nominal, 10mA maximum
Alarm relay contacts 250 VAC, 2.5A (R load) max., 0.2A (I load, P.F.=0.4) max.
100 VAC, 10mA min
30 VDC, 3.0A (R load) max., 0.7A (I load, P.F.=0.4) max.)
5 VDC, 100mA min.
7
Basic System Description
A motor control system will obviously include a motor and inverter, as well as a circuit
breaker or fuses for safety. If you are connecting a motor to the inverter on a test bench
just to get started, that’s all you may need for now. But a system can also have a variety of
additional components. Some can be for noise suppression, while others may enhance the
inverter’s braking performance. The figure and table below show a system with all the
optional components you might need in your finished application.
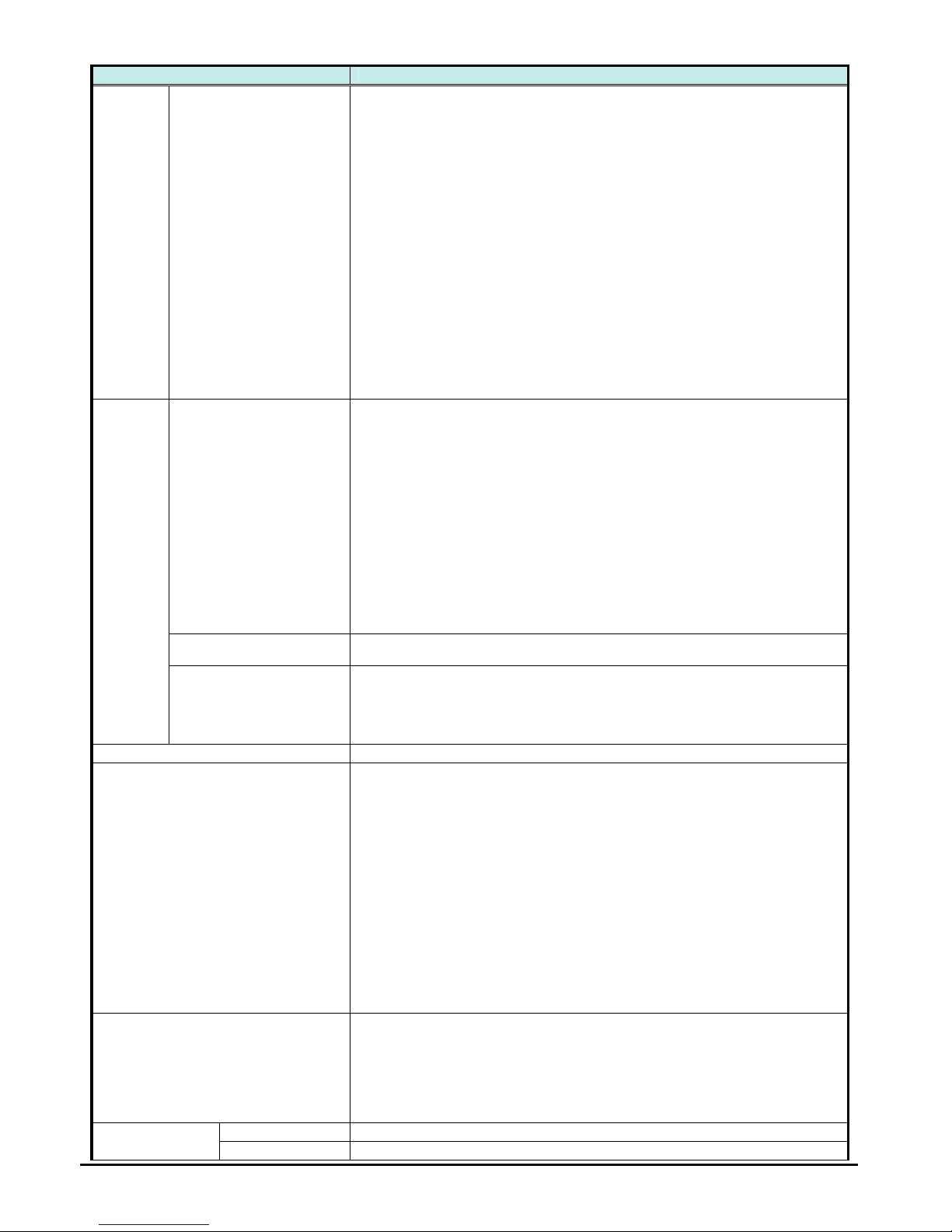
Name Function
Breaker /
disconnect
A molded-case circuit breaker (MCCB), ground fault
interrupter (GFI), Type E Combination Motor
Controller(Type E C.M.C) or a fused disconnect device.
NOTE: The installer must refer to the NEC and local codes
to ensure safety and compliance.
Radio noise filter
Electrical noise interference may occur on nearby
equipment such as a radio receiver. This magnetic choke
filter helps reduce radiated noise (can also be used on
output).
Radio noise filter
Electrical noise interference may occur on nearby
equipment such as a radio receiver. This magnetic choke
filter helps reduce radiated noise (can also be used on
input).
Output-side
AC Reactor
This reactor reduces the vibration in the motor caused by
the inverter’s switching waveforms, by smoothing the
waveform to approximate commercial power quality. It is
also useful to reduce harmonics when wiring from the
inverter to the motor is more than 10m in length.
From power supply
Breaker,
MCCB or
GFI
M
Thermal
switch
L1 N
T1 T2 T3
Inverter
GND

8
Determining Wire and Fuse Sizes
The maximum motor currents in your application determines the recommended wire size.
The following table gives the wire size in AWG. The “Power Lines” column applies to the
inverter input power, output wires to the motor, the earth ground connection, and any other
components shown in the “Basic System Description” on page 7. The “Signal Lines”
column applies to any wire connecting to the two green connectors just inside the front
cover panel.
Motor Output Wiring Applicable equipment
kW HP
Inverter Model
Power
Lines
Signal Lines
Fuse (UL-rated,
class J, 600V ,
Maximum
allowable
current)
Typ e E
C.M.C.
0.4 1/2
WJ200-004MF
AWG12 /
3.3mm2
50A
MMS-32H,
120 V, 40 A
0.75
1
WJ200-007MF
AWG10 /
5.3mm
2
18 to 28
AWG / 0.14
to 0.75 mm
2
shielded wire
(see Note 4)
50A
MMS-32H,
120 V, 40 A
Note 1: Field wiring must be made by a UL-Listed and CSA-certified closed-loop terminal
connector sized for the wire gauge involved. Connector must be fixed by using
the crimping tool specified by the connector manufacturer.
Note 2: Be sure to consider the capacity of the circuit breaker to be used.
Note 3: Be sure to use a larger wire gauge if power line length exceeds 66ft. (20m).
Note 4: Use 18 AWG / 0.75mm
2
wire for the alarm signal wire ([AL0], [AL1], [AL2]
terminals).
Note 5: Type E Combination Motor Controller marking is to indicate that the unit shall be
connected with, LS Industrial System Co., Ltd, Type E Combination Motor
Controller MMS Series .
9
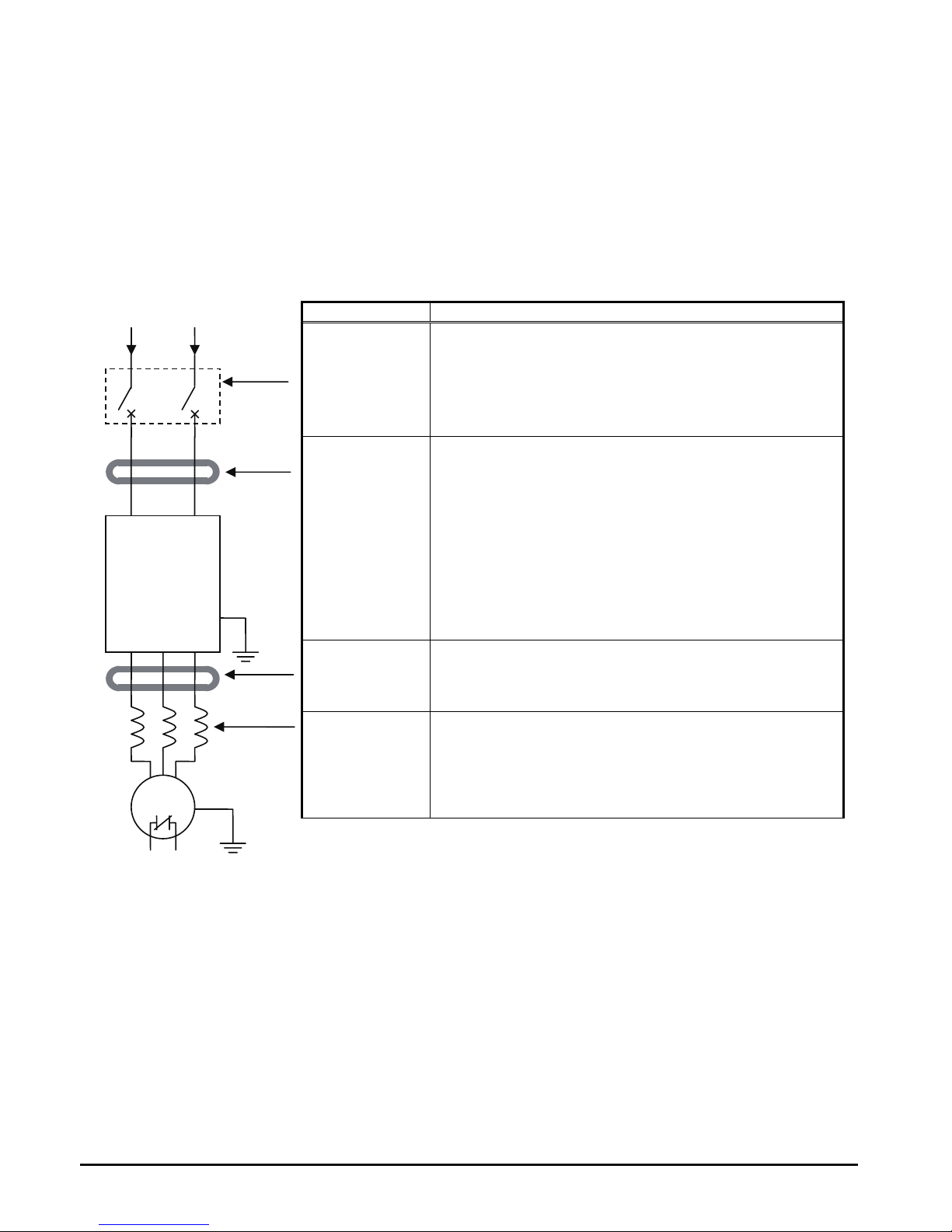
Wire the Inverter Input to a Supply
In this step, you will connect wiring to the input of the inverter. This Inverter is single-phase
power only. The power connection terminals are [L1] and [N]. So you must refer to the
specifications label (on the side of the inverter) for the acceptable power source
types!
Single-phase inverter models will have no connection to the [S/L2] terminal.
This is only used for three-phase models.
Note the use of ring lug connectors is
recommended
for a secure connection.
Single-phase 100V 0.4kW
Single-phase 100V 0.75kW
NOTE: An inverter powered by a portable power generator may
cause a distorted power
waveform, overheating the generator. In general, the generator capacity should be five
times that of the inverter (kVA).
Chassis Ground (M4)
Chassis Ground (M4)
Single-phase
L1
Power input Output to Motor
N U/T1 V/T2 W/T3
RB
P/+
-
Single-phase
Power input Output to Motor
L1
N U/T1 V/T2 W/T3
RB P/+
-
10
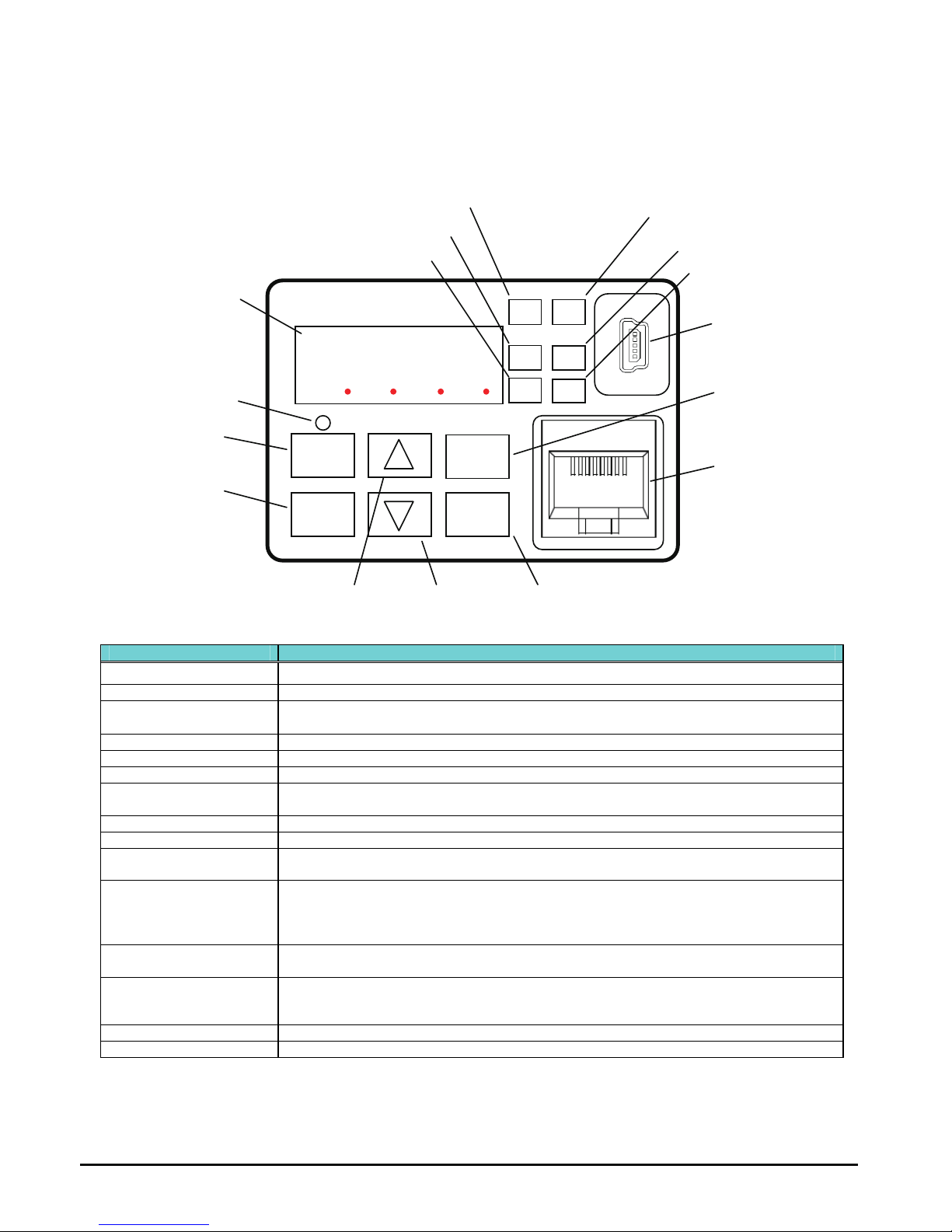
Using the Front Panel Keypad
Please take a moment to familiarize yourself with the keypad layout shown in the figure
below. The display is used in programming the inverter’s parameters, as well as monitoring
specific parameter values during operation.
Key and Indicator Legend
Items Contents
(1) POWER LED Turns ON (Green) while the inverter is powered up.
(2) ALARM LED Turns ON (Red) when the inverter trips.
(3) Program LED
¾ Turns ON (Green) when the display shows changeable parameter.
¾ Blinks when there is a mismatch in setting.
(4) RUN LED Turns ON (Green) when the inverter is driving the motor.
(5) Monitor LED [Hz] Turns ON (Green) when the displayed data is frequency related.
(6) Monitor LED [A] Turns ON (Green) when the displayed data is current related.
(7) Run command LED
Turns ON (Green) when the RUN command source is set to the operator. (Run key is
effective.)
(8) 7-seg LED Shows each parameter, monitors etc.
(9) RUN key Makes inverter run.
(10) STOP/RESET key
¾ Makes inverter stop, according to parameter setup.
¾ Reset the inverter when it is in trip situation
(11) ESC key
¾ Go to the top of next function group, when a function mode is shown
¾ Cancel the setting and return to the function code, when a data is shown
¾ Moves the cursor to a digit left, when it is in digit-to-digit setting mode
¾ Pressing for 1 second leads to display data of d001, regardless of current display.
(12) Up key
(13) Down key
¾ Increase or decrease the data.
¾ Pressing the both keys at the same time gives you the digit-to-digit edit.
(14) SET key
¾ Go to the data display mode when a function code is shown
¾ Stores the data and go back to show the function code, when data is shown.
¾ Moves the cursor to a digit right, when it is in digit-to-digit display mode
(15) USB connector Connect USB connector (mini-B) for using PC communication
(16) RJ45 connector Connect RJ45 jack for remote operator
1
2
RUN
ESC
STOP/
RESET
SET
8888
RUN
Hz A
PWR
ALM
PRG
(1) POWER LED
(2) ALARM LED
(8) 7-seg LED
(4) RUN LED
(10) STOP/RESET key
(15) USB connector
(3) Program LED
(16) RJ45 connector
(14) SET key
(13) Down key (12) Up key
(11) ESC key
(9) RUN key
(7) Run command LED
(5) Monitor LED [Hz]
(6) Monitor LED [A]
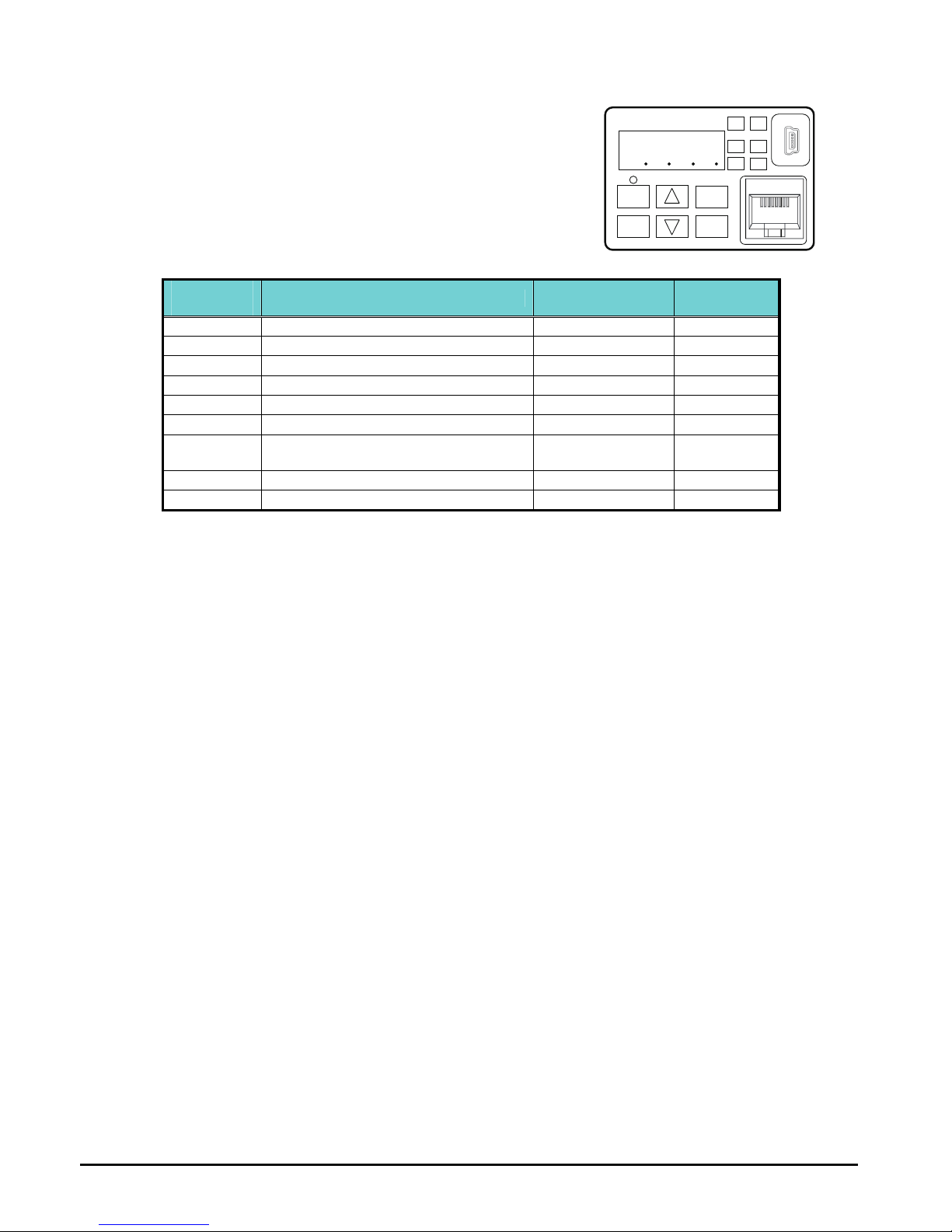
11
Keys, Modes, and Parameters
The purpose of the keypad is to provide a way to
change modes and parameters. The term function
applies to both monitoring modes and parameters.
These are all accessible through function codes that are
primary 4-character codes. The various functions are
separated into related groups identifiable by the
left-most character, as the table shows.
Function
Group
Type (Category) of Function Mode to Access
PRG LED
Indicator
“d” Monitoring functions Monitor
“F” Main profile parameters
Program
z
“A” Standard functions
Program
z
“b” Fine tuning functions
Program
z
“C” Intelligent terminal functions
Program
z
“H” Motor constant related functions
Program
z
“P” Pulse train input, torque, EzSQ, and
communication related functions
Program
z
“U” User selected parameters
Program
z
“E” Error codes
You can see from the following page how to monitor and/or program the parameters.
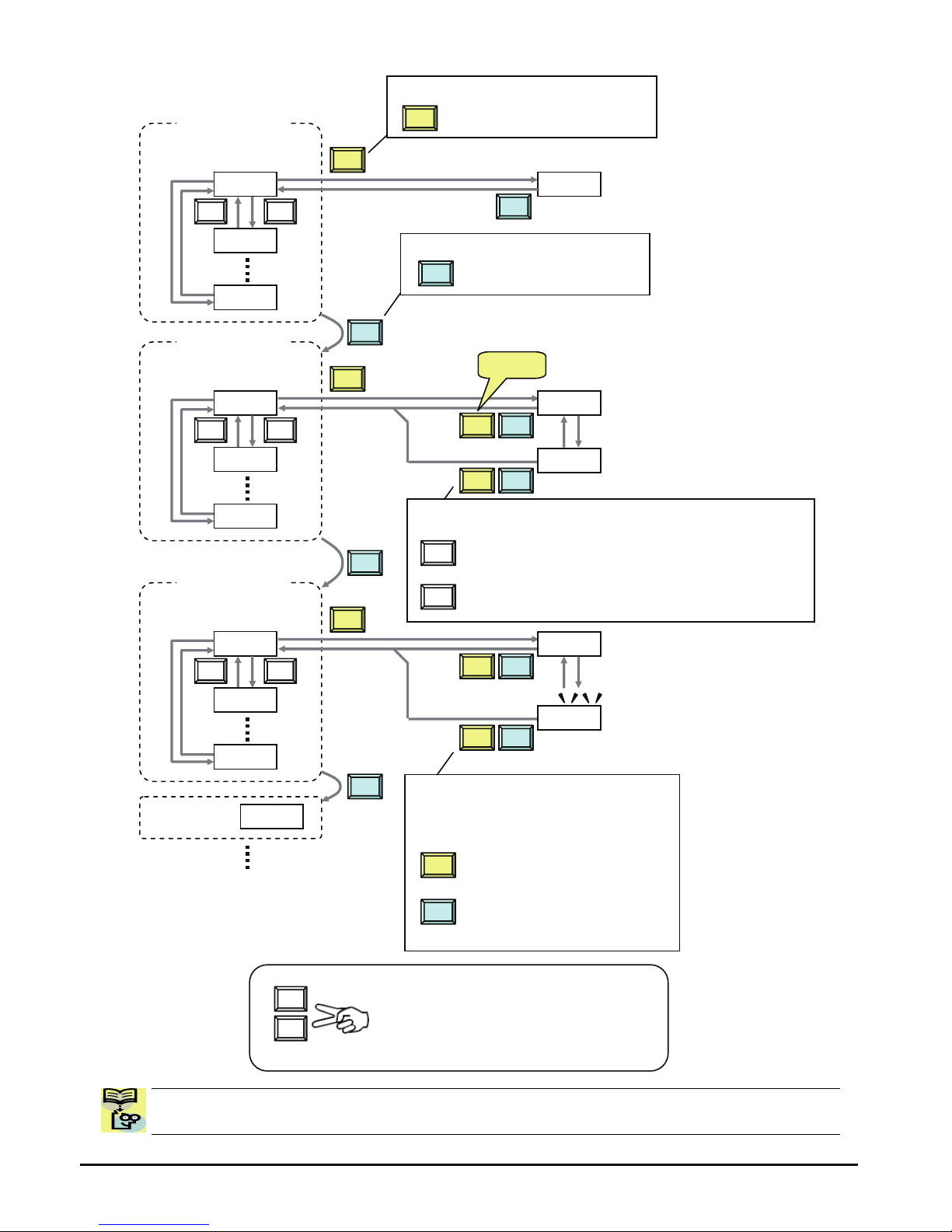
Keypad Navigation Map
The WJ200 Series inverter drives have many programmable functions and parameters.
Chapter 3 will cover these in detail, but you need to access just a few items to perform the
powerup test. The menu structure makes use of function codes and parameter codes to
allow programming and monitoring with only a 4-digit display and keys and LEDs. So, it is
important to become familiar with the basic navigation map of parameters and functions in
the diagram below. You may later use this map as a reference.
1
2
RUN
ESC
STOP/
RESET
SET
8888
RUN
Hz
A
PWR
ALM
PRG
12
NOTE: Pressing the [ESC] key will make the display go to the top of next function group,
regardless the display contents. (e.g. A021 Æ [ESC] Æ b001)
U
V
Press the both up and down key at the same
time in func. code or data display, then
single-digit edit mode will be enabled.
Refer to 2-34 for further information.
d001
V U
ESC
SET
Group "d"
Func. code display
0.00
d002
d104
F001
V U
Group "F"
Func. code display
F002
F004
50.00
50.01
SET
SET ESC
SET ESC
Save
A001
V U
Group "A"
Func. code display
A002
A165
00
01
SET
SET ESC
SET ESC
Data display
When data is changed, the display
starts blinking, which means that
new data has not been activated yet.
: Saves the data in EEPROM and
returns to func. code display.
: Cancels the data change and
returns to func. code display.
SET
ESC
Group "b"
b001
ESC
Func. code display
: Jumps to the next group
ESC
Func. code display
: Moves to data display
SET
ESC
ESC
Data display (F001 to F003)
Data does not blink because of real time synchronizing
: Saves the data in EEPROM
and returns to func. code display.
: Returns to func. code display without saving data.
SET
ESC
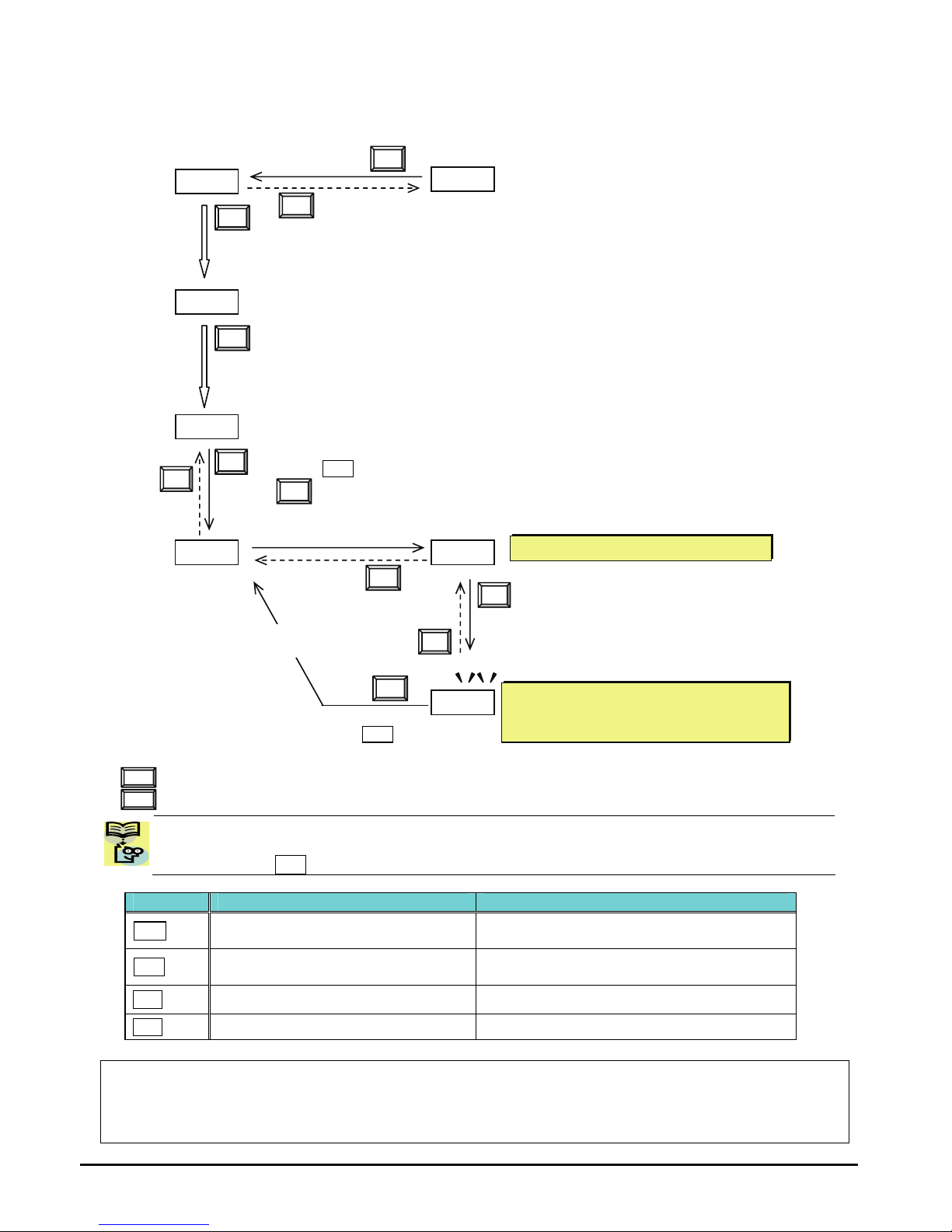
13
[Setting example]
After power ON, changing from 0.00 display to change the b083 (carrier frequency) data.
Function code dxxx are for monitor and not possible to change.
Function codes Fxxx other than F004 are reflected on the performance just after changing the data
(before pressing SET key), and there will be no blinking.
When a function code is shown… When data is shown…
ESC key Move on to the next function group
Cancels the change and moves back to the
function code
SET key Move on to the data display
Fix and stores the data and moves back to
the function code
U key
Increase function code Increase data value
V key
Decrease function code Decrease data value
Note
Keep pressing for more than 1 second leads to d001 display, regardless the display situation. But note that
the display will circulates while keep pressing the [ESC] key because of the original function of the key.
(e.g. F001 Æ A001 Æ b001 Æ C001 Æ …Æ displays 50.00 after 1 second)
b001
b083 5.0
Display is lit solidy
12.0
F001
d001
0.00
c Data of d001 will be shown on the
display after the first power ON
d Press [ESC] key to show
the function code
e Press [ESC] key to move
on to the function group F001
f Press [ESC] key twice to move
on to the function group b001.
g Press Up key to change increase
function code (b001
Æ b083)
h Press SET key to display the data of b083
i Press SET key to set
and save the data
When data is changed, the display
starts blinking, which means that new
data has not been activated yet.
ESC
U
V
SET
ESC
ESC
SET
ESC
U
V
:Fix and stores the data and moves back to the function code
:Cancels the change and moves back to the function code
SET
ESC
SET
i Press up key to increase the
data (5.0 Æ 12.0)
14
Connecting to PLCs and Other Devices
Hitachi inverters (drives) are useful in many types of applications. During installation, the
inverter keypad (or other programming device) will facilitate the initial configuration. After
installation, the inverter will generally receive its control commands through the control
logic connector or serial interface from another controlling device. In a simple application
such as single-conveyor speed control, a Run/Stop switch and potentiometer will give the
operator all the required control. In a sophisticated application, you may have a
programmable logic controller (PLC) as the system controller, with several connections to
the inverter.
It is not possible to cover all the possible types of application in this manual. It will be
necessary for you to know the electrical characteristics of the devices you want to connect
to the inverter. Then, this section and the following sections on I/O terminal functions can
help you quickly and safely connect those devices to the inverter.
CAUTION: It is possible to damage the inverter or other devices if your application
exceeds the maximum current or voltage characteristics of a connection point.
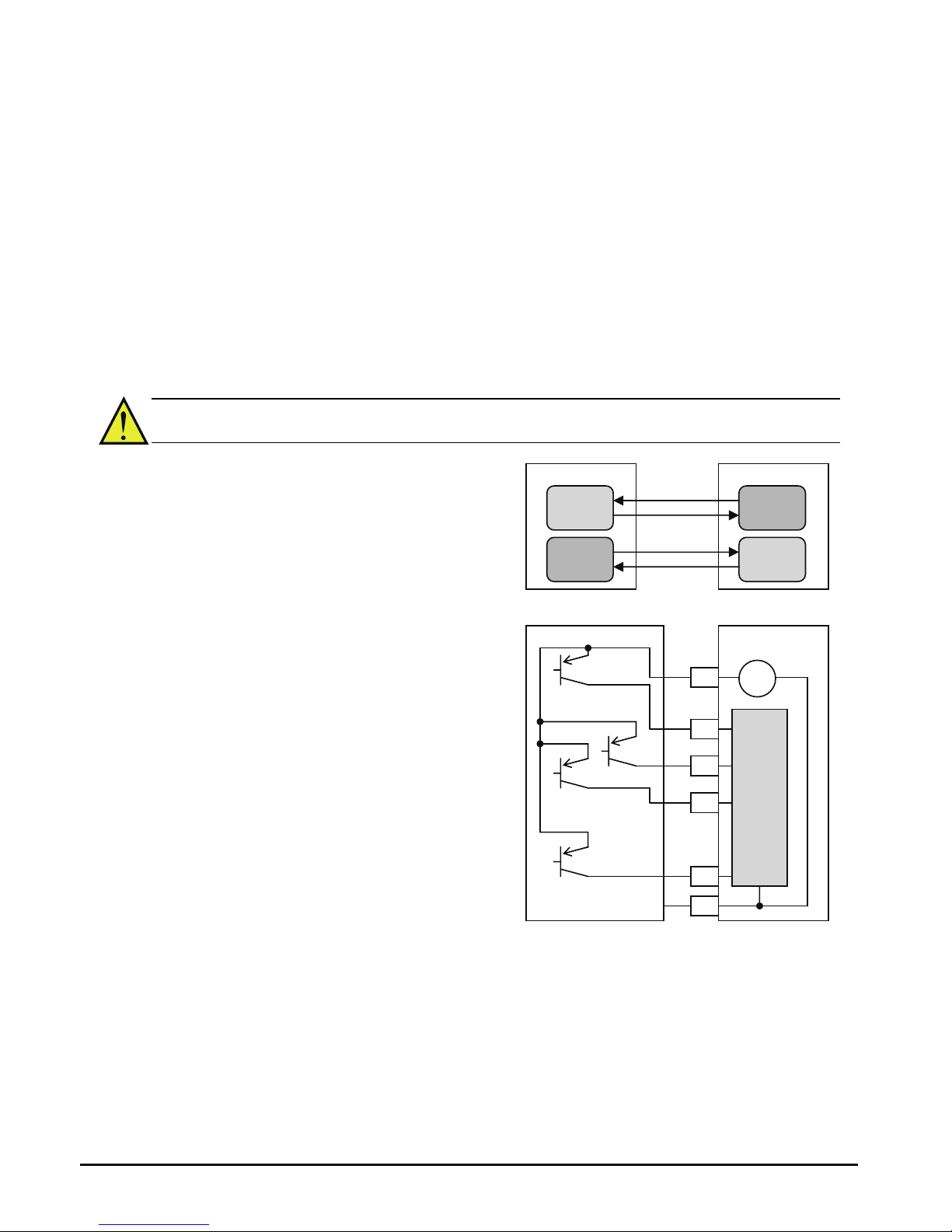
The connections between the inverter and
other devices rely on the electrical input/output
characteristics at both ends of each connection,
shown in the diagram to the right.
The inverter’s configurable inputs accept either
a sourcing or sinking output from an external
device (such as PLC). This chapter shows the
inverter’s internal electrical component(s) at
each I/O terminal. In some cases, you will
need to insert a power source in the interface
wiring.
In order to avoid equipment damage and get
your application running smoothly, we
recommend drawing a schematic of each
connection between the inverter and the other
device. Include the internal components of
each device in the schematic, so that it makes
a complete circuit loop.
After making the schematic, then:
1. Verify that the current and voltage for each
connection is within the operating limits of
each device.
2. Make sure that the logic sense (active high or active low) of any ON/OFF connection is
correct.
3. Check the zero and span (curve end points) for analog connections, and be sure the
scale factor from input to output is correct.
4. Understand what will happen at the system level if any particular device suddenly
loses power, or powers up after other devices.
Other device
Input
circuit
Output
circuit
WJ200 inverter
Input
circuit
Output
circuit
signal
return
signal
return
Other device WJ200 inverter
Input
circuits
P24
1
2
3
7
L
24V
+ -
GND
…
…
15
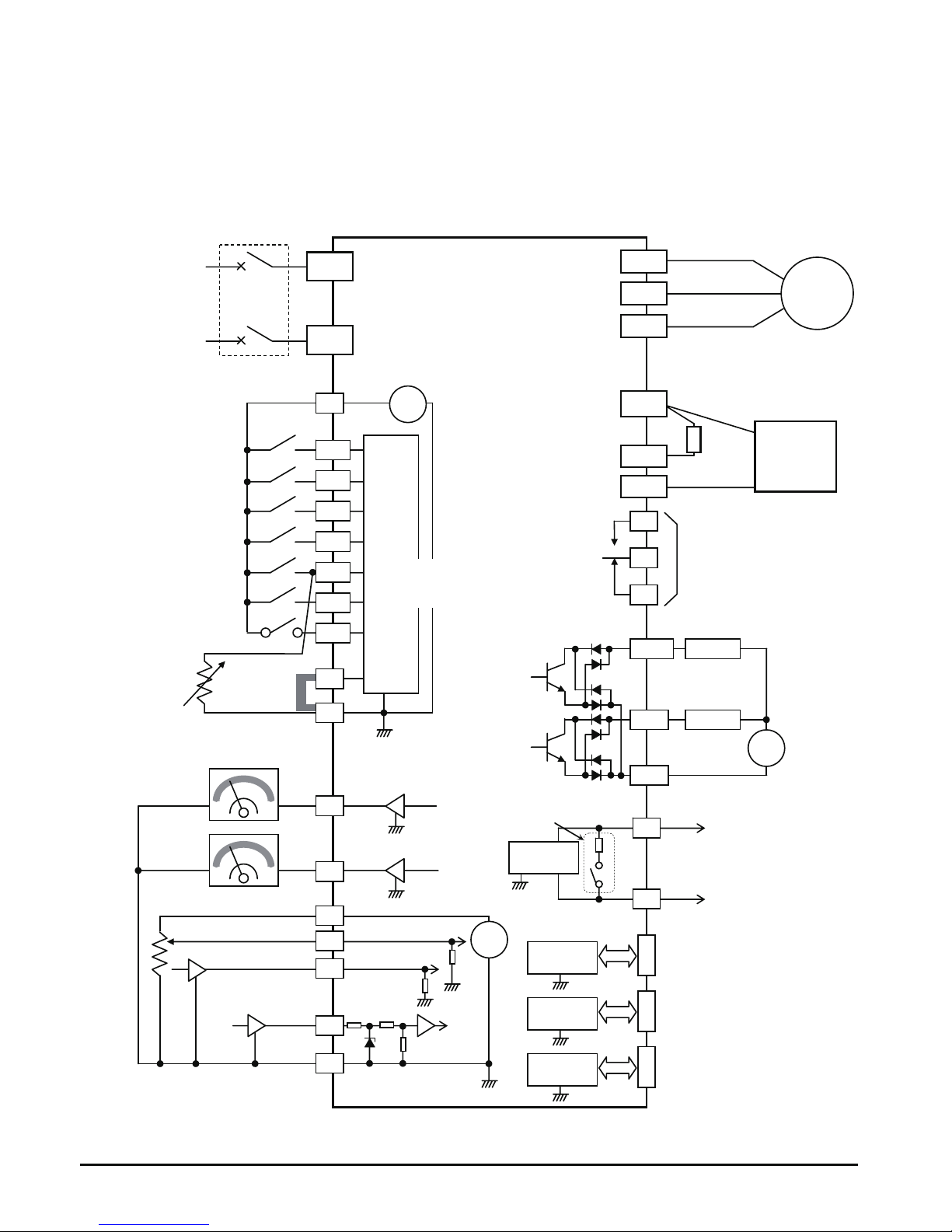
Example Wiring Diagram
The schematic diagram below provides a general example of logic connector wiring, in
addition to basic power and motor wiring converted in Chapter 2. The goal of this chapter
is to help you determine the proper connections for the various terminals shown below for
your application needs.
Breaker, MCCB
or GFI
Power source,
1-phase,
inverter model
Input
circuits
24V
P24
+ -
1
2
3/GS1
4/GS2
5/PTC
Forward
Thermistor
Intelligent inputs,
7 terminals
GND for logic inputs
NOTE: For the wiring
of intelligent I/O and
analog inputs, be sure
to use twisted pair /
shielded cable. Attach
the shielded wire for
each signal to its
respective common
terminal at the inverter
end only.
Input impedance of
each intelligent input is
4.7k
[5] configurable as
discrete input or
thermistor input
AM
Meter
H
L
A
nalog reference
0~10VDC
4~20mA
GND for analog signals
WJ200
Moto
r
P/+
L1
N
U(T1)
V(T2)
W(T3)
-
AL1
AL0
AL2
Relay contacts,
type 1 Form C
6
7/EB
EO
Meter
Pulse train input
24Vdc 32kHz max.
RB
Brake
resistor
(optional)
11/ EDM
Load
Freq. arrival signal
Open collector output
Output circuit
GND for logic outputs
12
Load
+
CM2
L
L
+
O
OI
EA
A
pprx.10k
10Vdc
A
pprx.100
RS485
transceiver
RJ45 port
(Optional operator port)
USB
transceiver
USB (mini-B) port
(PC communication port)
USB power: Self power
L
L
Option port
controller
Option port connector
L
L
L
L
L
SP
SN
RS485
transceiver
Termination resistor (200)
(Change by slide switch)
Serial communication port
(RS485/ModBus)
L
PLC
Short bar
(Source type)
NOTE: Common for
RS485 is “L”.
Braking
unit (optional)
16
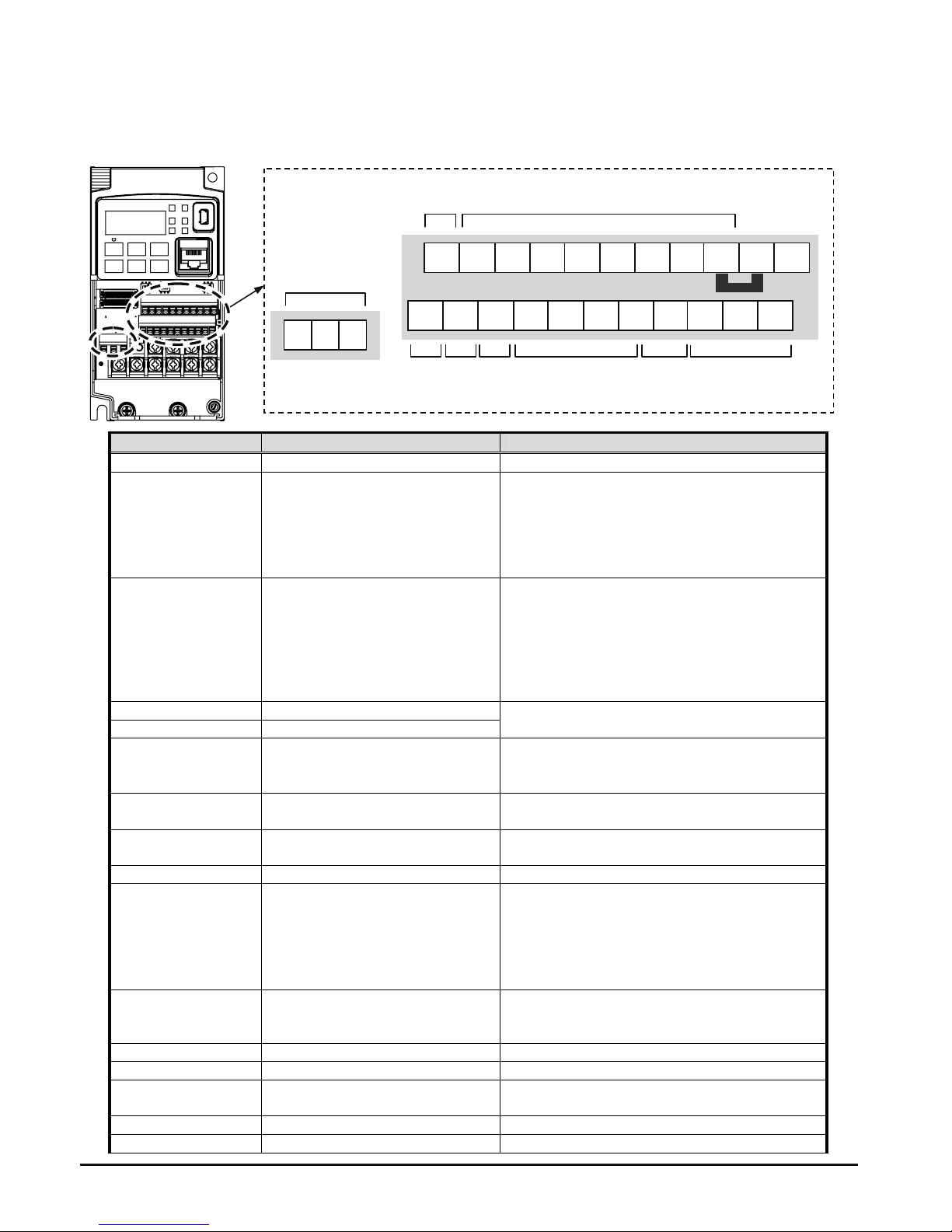
Control Logic Signal Specifications
The control logic connectors are located just behind the front housing cover. The relay
contacts are just to the left of the logic connectors. Connector labeling is shown below.
Terminal Name Description Ratings
P24 +24V for logic inputs 24VDC, 100mA. (do not short to terminal L)
PLC Intelligent input common To change to sink type, remove the short bar
between [PLC] and [L], and connect it
between [P24] and [L]. In this case,
connecting [L] to [1]~[7] makes each input
ON. Please remove the short bar when using
external power supply.
1
2
3/GS1
4/GS2
5/PTC
6
7/EB
Discrete logic inputs
(Terminal [3],[4],[5] and [7]
have dual function. See
following description and
related pages for the details.)
27VDC max. (use PLC or an external supply
referenced to terminal L)
GS1(3) Safe stop input GS1
GS2(4) Safe stop input GS2
Functionality is based on ISO13849-1
See appendix for the details.
PTC(5) Motor thermistor input Connect motor thermistor between PTC and
L terminal to detect the motor temperature.
Set 19 in C005.
EB(7) Pulse train input B 2kHz max.
Common is [PLC]
EA Pulse train input A 32kHz max.
Common is [L]
L (in upper row) *1 GND for logic inputs Sum of input [1]~[7] currents (return)
11/EDM Discrete logic outputs [11]
(Terminal [11] has dual
function. See following
description and related pages
for the details.)
50mA max. ON state current,
27 VDC max. OFF state voltage
Common is CM2
In case the EDM is selected, the functionality
is based on ISO13849-1
4VDC max. ON state voltage depression
12 Discrete logic outputs [12] 50mA max. ON state current,
27 VDC max. OFF state voltage
Common is CM2
CM2 GND for logic output 100 mA: [11], [12] current return
AM Analog voltage output 0~10VDC 2mA maximum
EO Pulse train output 10VDC 2mA maximum
32kHz maximum
L (in bottom row) *2 GND for analog signals Sum of [OI], [O], and [H] currents (return)
OI Analog current input 4 to 19.6 mA range, 20 mA nominal,
Analog
out
p
ut
Logic inputs
Logic
out
p
ut
Short bar
PLC
Analog
in
p
ut
Pulse
Train
input
Pulse
Train
out
put
RS485
comm.
RS485
comm.
P24 1 L 3 2
5 4 6
SN 7
12 11 AM CM2
OI L H O EA
SP EO
AL2AL1A
L0
Relay
contacts
17
Terminal Name Description Ratings
input impedance 100
O Analog voltage input 0 to 9.8 VDC range, 10 VDC nominal,
input impedance 10 k
H +10V analog reference 10VDC nominal, 10mA max.
SP, SN Serial communication terminal For RS485 Modbus communication.
AL0, AL1, AL2 *3 Relay common contact 250VAC, 2.5A (R load) max.
250VAC, 0.2A (I load, P.F.=0.4) max.
100VAC, 10mA min.
30VDC, 3.0A (R load) max.
30VDC, 0.7A (I load, P.F.=0.4) max.
5VDC, 100mA min.
Note 1: The two terminals [L] are electrically connected together inside the inverter.
Note 2: We recommend using [L] logic GND (to the right) for logic input circuits and [L]
analog GND (to the left) for analog I/O circuits.
Note 3: Refer to page 39 for details of trip signals.
Wiring sample of control logic terminal (source logic)
Note: If relay is connected to intelligent output, install a diode across the relay coil
(reverse-biased) in order to suppress the turn-off spike.
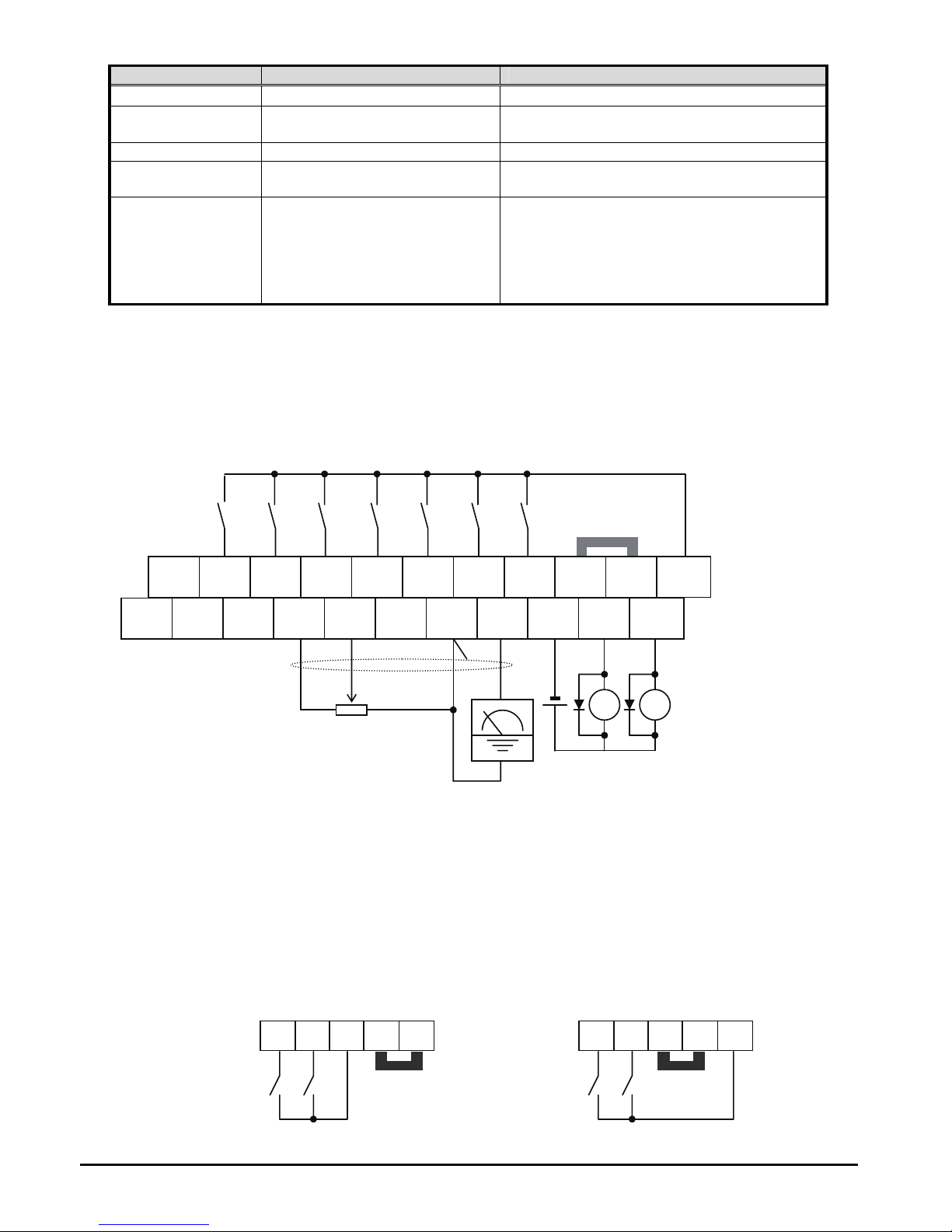
Sink/source logic of intelligent input terminals
Sink or source logic is switched by a short bar as below.
SP EO EA H O OI L AM CM2 12 11/EDM
Freq. meter
Variable resistor
for freq. setting
(1k
-2k
)
Short bar
(
source logic
)
RY
SN 7/EB 6 5/PTC 4/GS2 3/GS1
1 L PLC P24
RY
Short bar
PLC P24
L 1 2
Sink logic
Short bar
PLC P24 L
1 2
Source logic
18
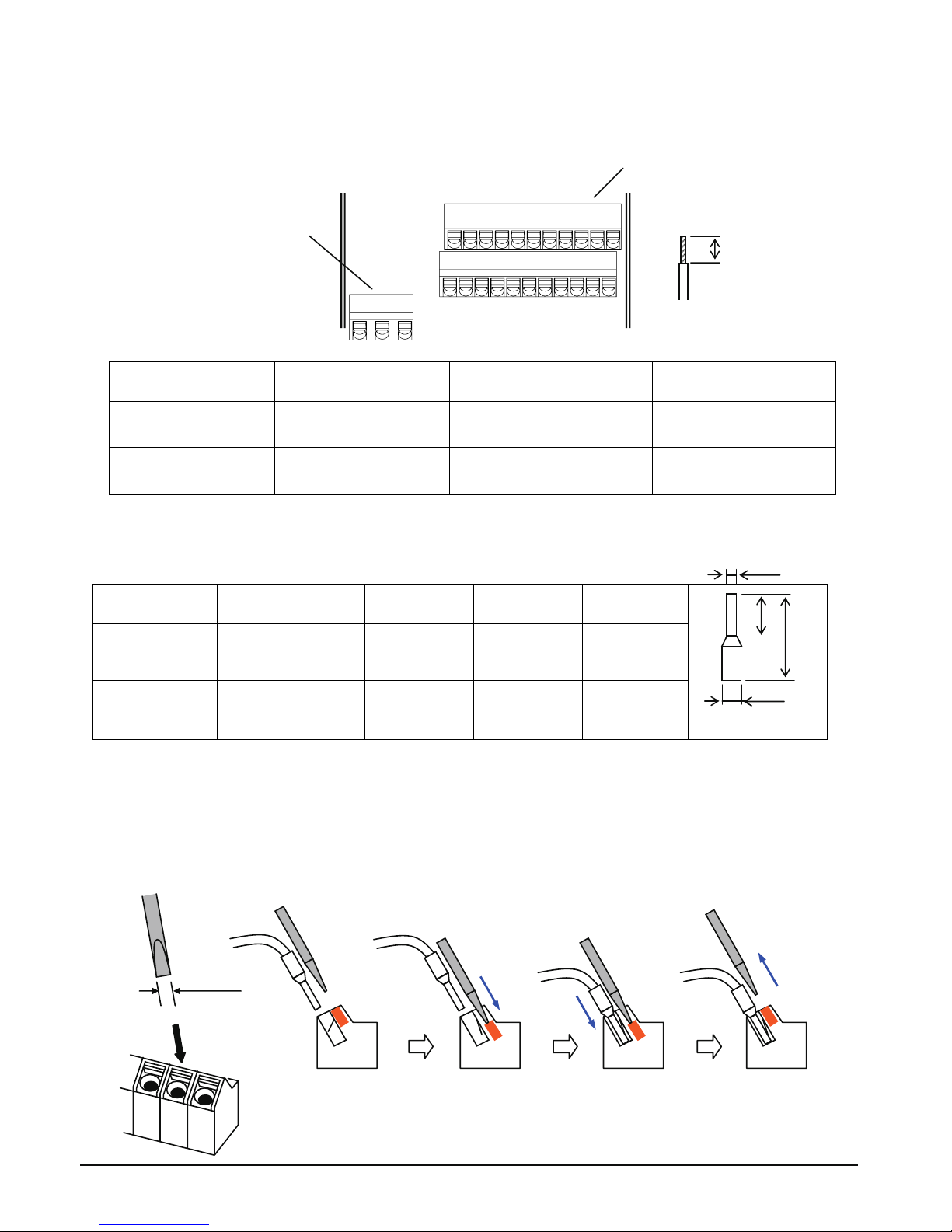
Wire size for control and relay terminals
Use wires within the specifications listed below. For safe wiring and reliability, it is recommended
to use ferrules, but if solid or stranded wire is used, stripping length should be 8mm.
Solid
mm
2
(AWG)
Stranded
mm2 (AWG)
Ferrule
mm2 (AWG)
Control logic
terminal
0.2 to 1.5
(AWG 24 to 16)
0.2 to 1.0
(AWG 24 to 17)
0.25 to 0.75
(AWG 24 to 18)
Relay terminal
0.2 to 1.5
(AWG 24 to 16)
0.2 to 1.0
(AWG 24 to 17)
0.25 to 0.75
(AWG 24 to 18)
Recommended ferrule
For safe wiring and reliability, it is recommended to use following ferrules.
* Supplier: Phoenix contact
Crimping pliers: CRIPMFOX UD 6-4 or CRIMPFOX ZA 3
How to connect?
(1) Push down the orange actuating lever by a slotted screwdriver (width 2.5mm max.).
(2) Insert the conductor.
(3) Pull out the screwdriver then the conductor is fixed.
Wire size
mm
2
(AWG)
Model name of
ferrule *
L [mm] Φd [mm] ΦD [mm]
0.25 (24) AI 0.25-8YE 12.5 0.8 2.0
0.34 (22) AI 0.34-8TQ 12.5 0.8 2.0
0.5 (20) AI 0.5-8WH 14 1.1 2.5
0.75 (18) AI 0.75-8GY 14 1.3 2.8
Control logic terminal
Relay output terminal
8mm
Push down the
orange actuating
lever.
2.5mm
Insert in the
conductor.
Pull out the
screwdriver to fix
the conductor.
8
L
Φd
ΦD
19
Intelligent Terminal Listing
Intelligent Inputs
Use the following table to locate pages for intelligent input material in this chapter.
Input Function Summary Table
Symbol Code Function Name Page
FW 00 Forward Run/Stop
RV 01 Reverse Run/Stop
CF1 02 Multi-speed Select, Bit 0 (LSB)
CF2 03 Multi-speed Select, Bit 1
CF3 04 Multi-speed Select, Bit 2
CF4 05 Multi-speed Select, Bit 3 (MSB)
JG 06 Jogging
DB 07 External DC braking
SET 08 Set (select) 2nd Motor Data
2CH 09 2-stage Acceleration and Deceleration
FRS 11 Free-run Stop
EXT 12 External Trip
USP 13 Unattended Start Protection
CS 14 Commercial power source switchover
SFT 15 Software Lock
AT 16 Analog Input Voltage/Current Select
RS 18 Reset Inverter
PTC 19 PTC thermistor Thermal Protection
STA 20 Start (3-wire interface)
STP 21 Stop (3-wire interface)
F/R 22 FWD, REV (3-wire interface)
PID 23 PID Disable
PIDC 24 PID Reset
UP 27 Remote Control UP Function
DWN 28 Remote Control Down Function
UDC 29 Remote Control Data Clearing
OPE 31 Operator Control
SF1~SF7 32~38 Multi-speed Select,Bit operation Bit 1~7
OLR 39 Overload Restriction Source Changeover
TL 40 Torque Limit Selection
TRQ1 41 Torque limit switch 1
TRQ2 42 Torque limit switch 2
BOK 44 Brake confirmation
LAC 46 LAD cancellation
PCLR 47 Pulse counter clear
ADD 50 ADD frequency enable
F-TM 51 Force Terminal Mode
ATR 52 Permission for torque command input
KHC 53 Clear watt-hour data
MI1~MI7 56~62 General purpose input (1)~(7)
AHD 65 Analog command hold
CP1~CP3 66~68 Multistage-position switch (1)~(3)
ORL 69 Limit signal of zero-return
ORG 70 Trigger signal of zero-return
SPD 73 Speed/position changeover
GS1 77 STO1 input (Safety related signal)
GS2 78 STO2 input (Safety related signal)
485 81 Starting communication signal
PRG 82 Executing EzSQ program
HLD 83 Retain output frequency
ROK 84 Permission of Run command
EB 85 Rotation direction detection (phase B)
20
Use the following table to locate pages for intelligent input material in this chapter.
Input Function Summary Table
Symbol Code Function Name Page
DISP 86 Display limitation
NO 255 No assign
Intelligent Outputs
Use the following table to locate pages for intelligent output material in this chapter.
Input Function Summary Table
Symbol Code Function Name Page
RUN 00 Run Signal
FA1 01 Frequency Arrival Type 1–Constant Speed
FA2 02 Frequency Arrival Type 2–Over frequency
OL 03 Overload Advance Notice Signal
OD 04 PID Deviation error signal
AL 05 Alarm Signal
FA3 06 Frequency Arrival Type 3–Set frequency
OTQ 07 Over/under Torque Threshold
UV 09 Undervoltage
TRQ 10 Torque Limited Signal
RNT 11 Run Time Expired
ONT 12 Power ON time Expired
THM 13 Thermal Warning
BRK 19 Brake Release Signal
BER 20 Brake Error Signal
ZS 21 Zero Hz Speed Detection Signal
DSE 22 Speed Deviation Excessive
POK 23 Positioning Completion
FA4 24 Frequency Arrival Type 4–Over frequency
FA5 25 Frequency Arrival Type 5–Set frequency
OL2 26 Overload Advance Notice Signal 2
ODc 27 Analog Voltage Input Disconnect Detection
OIDc 28 Analog Voltage Output Disconnect Detection
FBV 31 PID Second Stage Output
NDc 32 Network Disconnect Detection
LOG1~3 33~35 Logic Output Function 1~3
WAC 39 Capacitor Life Warning Signal
WAF 40 Cooling Fan Warning Signal
FR 41 Starting Contact Signal
OHF 42 Heat Sink Overheat Warning
LOC 43 Low load detection
MO1~3 44~46 General Output 1~3
IRDY 50 Inverter Ready Signal
FWR 51 Forward Operation
RVR 52 Reverse Operation
MJA 53 Major Failure Signal
WCO 54 Window Comparator for Analog Voltage Input
WCOI 55 Window Comparator for Analog Current Input
FREF 58 Frequency Command Source
REF 59 Run Command Source
SETM 60 2nd Motor in operation
EDM 62
STO (Safe Torque Off) Performance Monitor
(Output terminal 11 only)
OP 63 Option control signal
no 255 Not used
21
Using Intelligent Input Terminals
Terminals [1], [2], [3], [4], [5], [6] and [7] are identical, programmable inputs for general use.
The input circuits can use the inverter’s internal (isolated) +24V field supply or an external
power supply. This section describes input circuits operation and how to connect them
properly to switches or transistor outputs on field devices.
The WJ200 inverter features selectable sinking or sourcing inputs. These terms refer to the
connection to the external switching device–it either sinks current (from the input to GND)
or sources current (from a power source) into the input. Note that the sink/source naming
convention may be different in your particular country or industry. In any case, just follow
the wiring diagrams in this section for your application.
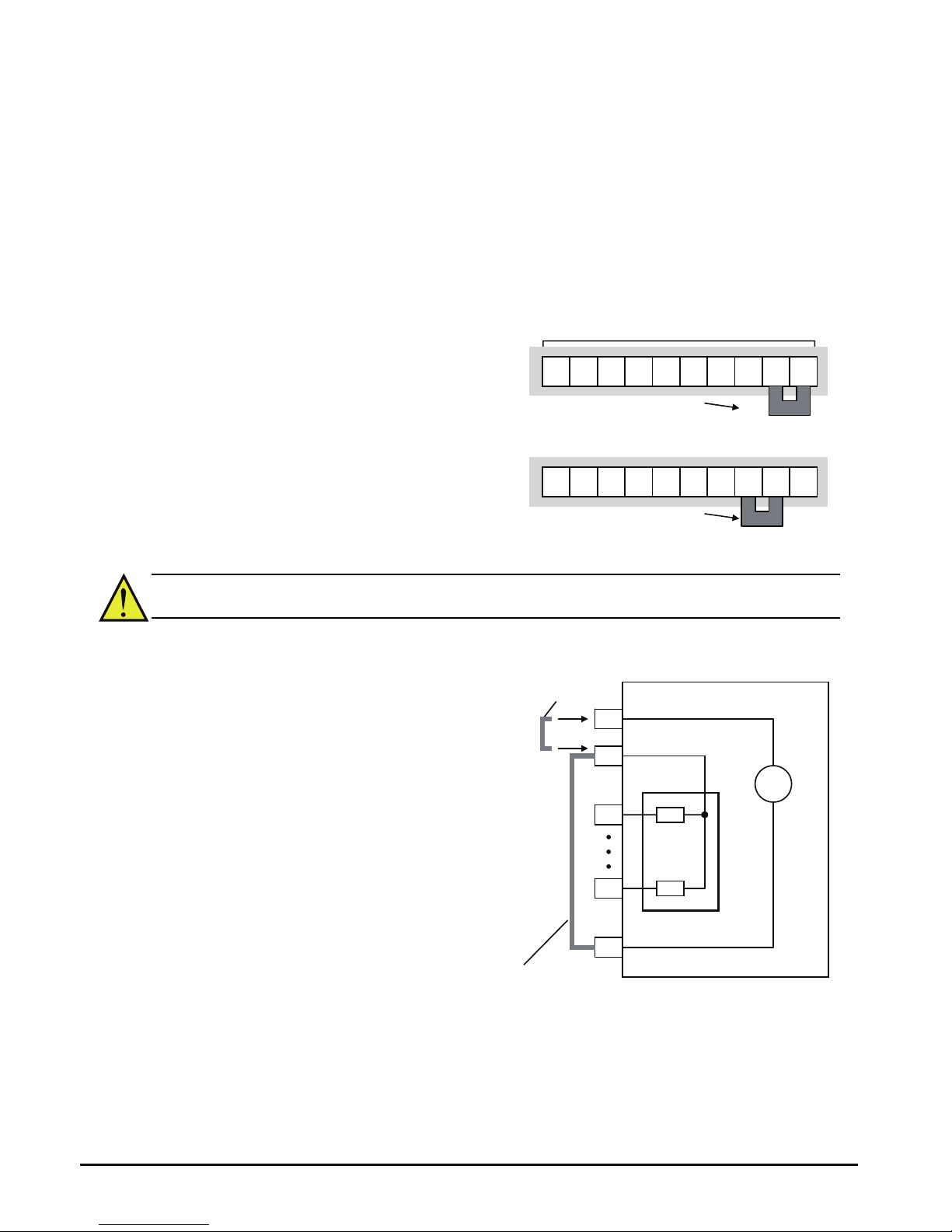
The inverter has a short bar (jumper) for
configuring the choice of sinking or sourcing
inputs. To access it, you must remove the
front cover of the inverter housing. In the
figure to the top right, the short bar is shown
as attached to the logic terminal block
(connector). If you need to change to the
source type connection, remove the short bar
and connect it as shown in the figure at the
bottom right.
CAUTION: Be sure to turn OFF power to the inverter before changing the short circuit bar
position. Otherwise, damage to the inverter circuitry may occur.
[PLC] Terminal Wiring – The [PLC]
terminal (Programmable Logic Control
terminal) is named to include various
devices that can connect to the inverter’s
logic inputs. In the figure to the right, note
the [PLC] terminal and the short bar
(jumper). Locating the short bar between
[PLC] and [L] sets the input logic source
type, which is the default setting for EU
and US versions. In this case, you
connect input terminal to [P24] to make it
active. If instead you locate the short bar
between [PLC] and [P24], the input logic
will be sink type. In this case, you
connect the input terminal to [L] to make
it active.
The wiring diagram on the following pages show the four combinations of using sourcing or
sinking inputs, and using the internal or an external DC supply.
WJ200 inverter
P24
1
7
L
24V
PLC
Input
circuits
+
-
Logic GND
Input common
Short bar for
sink logic
Short bar for
source logic
Logic inputs
5 4 3 2 1 L
PLC P24
Source logic connection
Short bar
7 6
5 4 3 2 1 L
PLC P24
Sink logic connection
Short bar
7 6
22
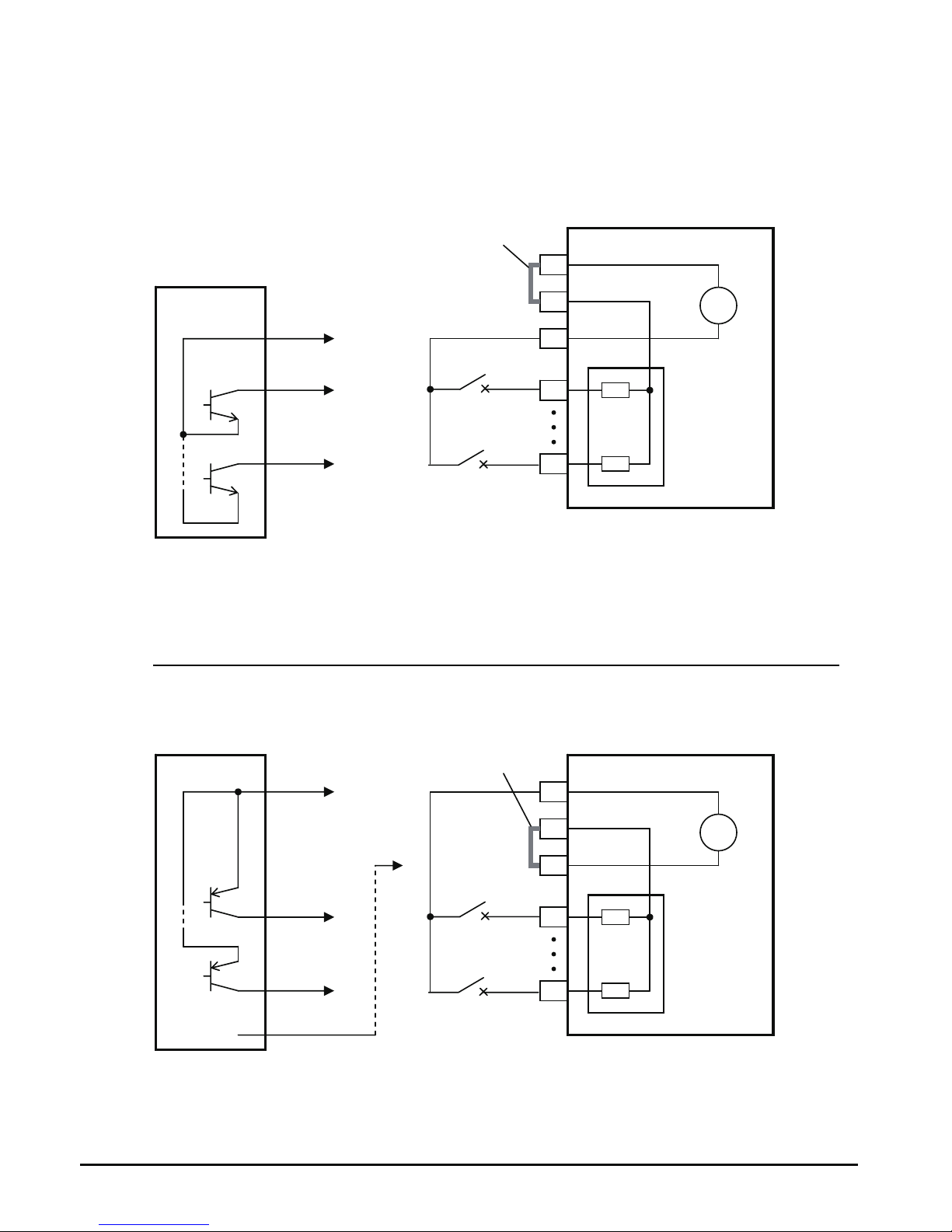
The two diagrams below input wiring circuits using the inverter’s internal +24V supply.
Each diagram shows the connection for simple switches, or for a field device with
transistor outputs. Note that in the lower diagram, it is necessary to connect terminal [L]
only when using the field device with transistors. Be sure to use the correct connection of
the short bar shown for each wiring diagram.
Sinking Inputs, Internal Supply
Short bar = [PLC] – [P24] position
GND
7
1
Field device
Open collector outputs,
NPN transistors
WJ200
P24
1
7
24V
PLC
Input
circuits
+
Logic GND
Input common
Short bar
Input switches
L
Sourcing Inputs, Internal Supply
Short bar = [PLC] – [L] position
Common to
[P24]
7
1
Field device
PNP transistor
sousing outputs
WJ200
P24
1
7
24V
PLC
Input
circuits
+
Logic GND
Input common
Short bar
Input switches
L
GND
to PNP bias
circuits
23
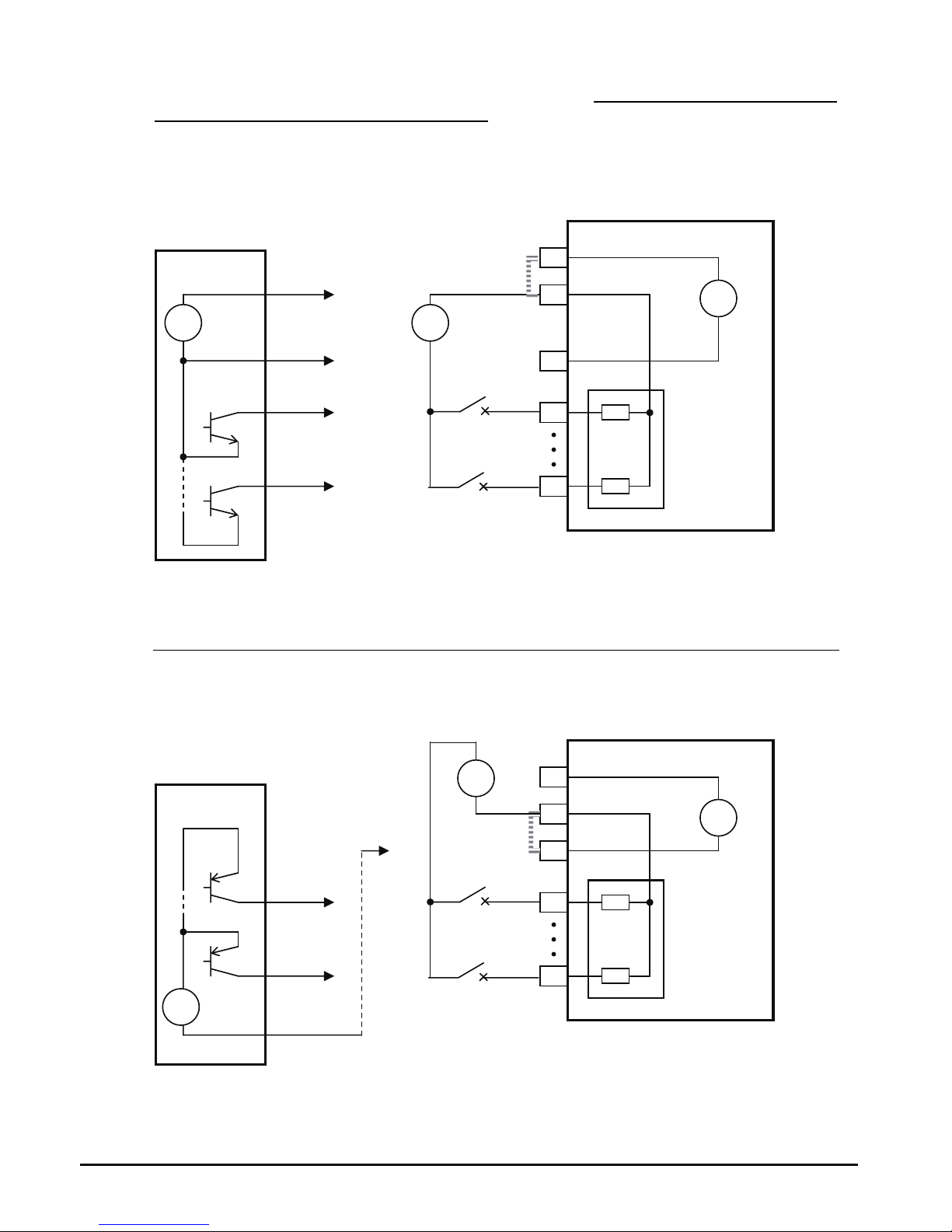
The two diagrams below show input wiring circuits using an external supply. If using the
“Sinking Inputs, External Supply” in below wiring diagram, be sure to remove the short bar,
and use a diode (*) with the external supply. This will prevent a power supply contention in
case the short bar is accidentally placed in the incorrect position. For the “Sourcing Inputs,
External Supply”, please connect the short bar as drawn in the diagram below.
Sinking Inputs, External Supply
Short bar = Removed
GND
7
1
Field device
Open collector outputs,
NPN transistors
WJ200
P24
1
7
24V
PLC
Input
circuits
+
Logic GND
Input common
Input switches
L
24V
+
+
24V
*
* Note: Make sure to remove the short circuit bar in case of
using an external power supply.
Sourcing Inputs, External Supply
Short bar = Removed
7
1
Field device
WJ200
P24
1
7
24V
PLC
Input
circuits
+
Input common
Input switches
L
GND
PNP transistor
sourcing outputs
24V
+
24V
+
 Loading...
Loading...