

Page 1

DOC023.52.90447
RTC112 SD-Module
Real Time Control System for Sludge Dewatering
User manual
07/2013, Edition 1A
© HACH-LANGE GmbH, 2013. All rights reserved. Printed in Germany.
Page 2

Page 3
Table of contents
Section 1 Technical data ........................................................................................................................ 7
Section 2 General information............................................................................................................... 9
2.1 Safety information............................................................................................................................... 9
2.1.1 Hazard notices in this manual.................................................................................................... 9
2.1.2 Warning labels ........................................................................................................................... 9
2.2 Areas of application .......................................................................................................................... 10
2.3 Scope of delivery .............................................................................................................................. 10
2.4 Instrument overview.......................................................................................................................... 11
2.5 Theory of operation........................................................................................................................... 12
2.5.1 Theory of operation of the RTC Module................................................................................... 12
2.5.2 Input signals............................................................................................................................. 12
2.5.3 Parameters for configuration.................................................................................................... 12
2.5.4 Operating modes ..................................................................................................................... 13
Section 3 Installation............................................................................................................................ 17
3.1 Installation of the RTC Module ......................................................................................................... 17
3.1.1 Supply voltage of the RTC Module ..........................................................................................17
3.2 Connection of process measurement instruments for the TSS concentration.................................. 17
3.2.1 Power supply of the sc sensors and the sc1000 controller...................................................... 17
3.3 sc1000 controller connection ............................................................................................................ 17
3.4 Connection to the automation unit on the plant side.........................................................................18
Section 4 Parameterization and operation ......................................................................................... 21
4.1 Operating the sc controller................................................................................................................ 21
4.2 sc1000 setup .................................................................................................................................... 21
4.3 Menu structure.................................................................................................................................. 21
4.3.1 DIAGNOSIS............................................................................................................................. 21
4.4 Configuration of RTC112 SD-Module parameters on the sc1000 controller .................................... 21
4.4.1 RTC112 SD-Module open and closed-loop controller ............................................................. 21
4.5 Select sensors .................................................................................................................................. 26
4.6 PRESELECT PROG......................................................................................................................... 29
4.6.1 POLYMER DOSING CONTROL.............................................................................................. 29
4.6.2 FEED FLOW CONTROL .........................................................................................................29
4.6.3 CLOSED-LOOP EFFLUENT CONTROL................................................................................. 29
4.6.4 CLOSED-LOOP FILTRATE CONTROL .................................................................................. 29
3
Page 4

Table of contents
4.7 CONTROL PARAMETER .................................................................................................................30
4.7.1 FACTOR POLYMER DOSING.................................................................................................30
4.7.2 POLYMER CONCENTRATION ...............................................................................................30
4.7.3 MANUAL POLYMER DOSING.................................................................................................30
4.7.4 MANUAL FEED FLOW ............................................................................................................30
4.7.5 MAX DECREASE CLOSED L ..................................................................................................30
4.7.6 MAX INCREASE CLOSED L ...................................................................................................30
4.7.7 SET-POINT TSS ......................................................................................................................30
4.7.8 P GAIN TSS .............................................................................................................................31
4.7.9 INTEGRAL TIME TSS..............................................................................................................31
4.7.10 DERIVATIVE TIME TSS ........................................................................................................31
4.7.11 SET-POINT FILT....................................................................................................................31
4.7.12 P GAIN FILT...........................................................................................................................31
4.7.13 INTEGRAL TIME FILT ...........................................................................................................31
4.7.14 DERIVATIVE TIME FILT........................................................................................................31
4.8 INPUT/OUTPUT LIMITS ...................................................................................................................31
4.8.1 FEED FLOW LOW ...................................................................................................................31
4.8.2 FEED FLOW HIGH ..................................................................................................................32
4.8.3 FEED FLOW SMOOTHING .....................................................................................................32
4.8.4 LIMIT TSS IN LOW ..................................................................................................................32
4.8.5 LIMIT MAX TSS IN HIGH.........................................................................................................32
4.8.6 TSS IN SMOOTHING...............................................................................................................32
4.8.7 LIMIT TSS OUT LOW ..............................................................................................................32
4.8.8 LIMIT TSS OUT HIGH..............................................................................................................32
4.8.9 TSS OUT SMOOTHING...........................................................................................................33
4.8.10 POLYMER DOSING MINIMUM .............................................................................................33
4.8.11 POLYMER DOSING MAXIMUM ............................................................................................33
4.9 INPUTS .............................................................................................................................................33
4.9.1 MIN FEED FLOW.....................................................................................................................33
4.9.2 MAX FEED FLOW....................................................................................................................33
4.9.3 0/4...20 mA...............................................................................................................................33
4.9.4 MIN POLYMER FLOW.............................................................................................................33
4.9.5 MAX POLYMER FLOW............................................................................................................33
4.9.6 0/4...20 mA...............................................................................................................................34
4.10 OUTPUTS .......................................................................................................................................34
4.10.1 MIN FEED FLOW...................................................................................................................34
4.10.2 MAX FEED FLOW..................................................................................................................34
4.10.3 0/4...20 mA.............................................................................................................................34
4.10.4 MIN POLYMER FLOW...........................................................................................................34
4.10.5 MAX POLYMER FLOW..........................................................................................................34
4.10.6 0/4...20 mA.............................................................................................................................34
4.10.7 CONTROL CYCLE.................................................................................................................34
4.10.8 MIN RUNTIME .......................................................................................................................34
4
Page 5

Table of contents
4.11 Displayed measurement values and variables ............................................................................... 34
Section 5 Maintenance ......................................................................................................................... 37
5.1 Maintenance schedule...................................................................................................................... 37
Section 6 Troubleshooting................................................................................................................... 39
6.1 Error messages ................................................................................................................................ 39
6.2 Warnings........................................................................................................................................... 39
6.3 Wear parts ........................................................................................................................................ 39
Section 7 Replacement parts and accessories.................................................................................. 41
7.1 Replacement parts............................................................................................................................ 41
Section 8 Contact information............................................................................................................. 43
Section 9 Warranty and liability........................................................................................................... 45
Appendix A MODBUS address setting ............................................................................................... 47
Appendix B Configuration of the network modules.......................................................................... 49
B.1 RTC112 SD-Module Profibus/MODBUS telegram .......................................................................... 49
Index ...................................................................................................................................................... 51
5
Page 6

Table of contents
6
Page 7
Section 1 Technical data
These are subject to change without notice.
Embedded PC (compact industrial PC)
Processor
Flash memory 2 GB compact flash card
Internal working memory 256 MB DDR-RAM (not expandable)
Interfaces 1× RJ 45 (Ethernet), 10/100 Mbit/s
Diagnostic LED
Expansion slot 1× CompactFlash type II slot with ejector mechanism
Clock
Operating system Microsoft Windows
Control software TwinCAT PLC Runtime or TwinCAT NC PTP Runtime
System bus 16 bit ISA (PC/104 standard)
Power supply Via system bus (through power supply module CX1100-0002)
Max. power loss 6 W (including the system interfaces CX1010-N0xx)
Analog inputs 0/4 to 20 mA for input of the feed flow rate and the polymer flow rate
Number of inputs
Internal resistance 80 ohm + diode voltage 0.7 V
Pentium®1, MMX compatible, 500 MHz clock rate
1× power, 1× LAN speed, 1× LAN activity, TC status,
1× flash access
Internal, battery-buffered clock for time and date (battery can be
replaced)
®2
CE or Microsoft Windows Embedded Standard
One-channel: 2 (KL3011)
Two-channel: 4 (KL3011)
Signal current 0/4 to 20 mA
Common mode voltage (U
Measurement error (for entire measurement
range)
Voltage surge resistance 35 V DC
Electrical isolation 500 V
Analog outputs Output of the polymer dosing, output of the feed flow rate
Number of outputs
Supply voltage
Signal current 0/4 to 20 mA
Working resistance <500 ohm
Measurement error
Resolution 12 bit
Conversion time Approximately 1.5 ms
) 35 V max.
CM
< ± 0.3 % (from end value of measurement range)
One-channel: 2 (KL4012)
Two-channel: 4 (KL4012)
24 V DC via the power contacts
(Alternatively, 15 V DC with bus termination KL9515)
± 0.5 LSB linearity error
± 0.5 LSB offset error
± 0.1 % (relative to the measuring range end value)
(K-bus/signal voltage)
eff
Electrical isolation 500 V
(K-bus/field voltage)
eff
7
Page 8
Technical data
Digital outputs Control of polymer pump: feed flow rate and fault messages
Number of outputs
One-channel: 4 (KL2134)
Two-channel: 8 (KL2408)
Nominal load voltage 24 V DC (–15 % / +20 %)
Load type ohmic, inductive lamp load
Max. output current 0.5 A (short-circuit proof) per channel
Reverse polarity protection Yes
Electrical isolation 500 V
(K-bus/field voltage)
eff
Equipment properties
Dimensions (W × H × D)
One-channel: 191 × 120 × 96 mm (7.52 × 4.72 × 3.78 in)
Two-channel: 227 × 120 × 96 mm (8.94 × 4.72 × 3.78 in)
Mass Approximately 0.9 kg (approximately 1.98 lb)
Environmental conditions
Working temperature 0 to 50 °C (32 to 122 °F)
Storage temperature –25 to +85 °C (–13 to 185 °F)
Relative humidity 95 %, non-condensing
Miscellaneous
Pollution Degree
Protection Class
Installation Category
Maximum Altitude
2
1
II
2000 m (6,562 ft.)
Protection class IP20
Installation DIN rail EN 50022 35 × 15.0
1
Pentium is a registered trademark of the Intel Corporation.
2
Microsoft Windows is a brand name for operating systems of the Microsoft Corporation.
1.
8
Page 9
Section 2 General information
2.1 Safety information
Please read the entire manual carefully before unpacking, assembling or operating the
instrument. Pay attention to all hazard and warning notices. Failure to do so could result in
serious injury to the operator or damage to the instrument.
To prevent damage to or impairment of the device's protection equipment, the device may
only be used or installed as described in this manual.
2.1.1 Hazard notices in this manual
DANGER
Indicates a potentially or imminently hazardous situation that, if not avoided, can result in death or
serious injury.
WARNING
Indicates a potentially or imminently dangerous situation that, if it is not avoided, can lead to
death or to serious injuries.
CAUTION
Indicates a possible dangerous situation that can have minor or moderate injuries as the result.
Indicates a situation that, if it is not avoided, can lead to damage to the device. Information that
requires special emphasis.
Note: Information that supplements points in the main text.
2.1.2 Warning labels
Observe all labels and tags attached to the instrument. Failure to do so may result in
personal injury or damage to the instrument.
This symbol may be attached to the device and refers to operation and/or safety notes in the user manual.
This symbol may be found on an enclosure or barrier within the product and indicates a risk of electric shock
and/or death by electrocution.
Electrical equipment marked with this symbol may no longer be disposed of in unsorted domestic or industrial
waste in Europe after August 12, 2005. In conformity with the provisions in force (EU Directive 2002/96/EC),
consumers in the EU must return old electrical devices to the manufacturer for disposal from this date, at no
charge to the consumer.
Note: You obtain instructions on the correct disposal of all (marked and not marked) electrical products that
were supplied or manufactured by Hach-Lange at your relevant Hach-Lange sales office.
NOTICE
9
Page 10
General information
2.2 Areas of application
The RTC112 SD-Module (Real Time Controller for Sludge Dewatering) is an open and
closed-loop control unit for universal applications. It can be used by mechanical sludge
dewatering devices, such as centrifuges in wastewater treatment plants.
The RTC112 SD-Module
• Optimizes polymer consumption
• Uniformly manages the concentration of solids in dewatered sludge
1-channel Open/closed-loop controller for one dewatering system
2-channel Open/closed-loop controller for two dewatering systems
The use of an RTC Module does not release the operator from the responsibility of maintaining
the system. No guarantees as to the functionality or operational safety of the system.
In particular, the operator must make sure that instruments connected to the RTC
open/closed-loop controller are always fully functional.
To make sure these instruments supply correct, reliable measurement values, regular
maintenance work (for example, cleaning of the sensor and laboratory comparative
measurements) is essential! (Refer to the user manual for the relevant instrument.)
Table 1 Versions of the RTC112 SD-Module
NOTICE
2.3 Scope of delivery
The combination of pre-assembled components supplied by the manufacturer does not represent
a standalone functional unit. In accordance with EU guidelines, this combination of
pre-assembled components is not supplied with a CE mark, and there is no EU declaration of
conformity for the combination.
However, the conformity of the combination of components with the guidelines can be proved
through technical measurements.
Each RTC Module is supplied with:
• SUB-D connector (9 pin)
• User manual
• Ferrite core
Check that the order is complete. All listed components must be present. If anything is
missing or damaged, contact the manufacturer or distributor immediately.
NOTICE
10
Page 11
2.4 Instrument overview
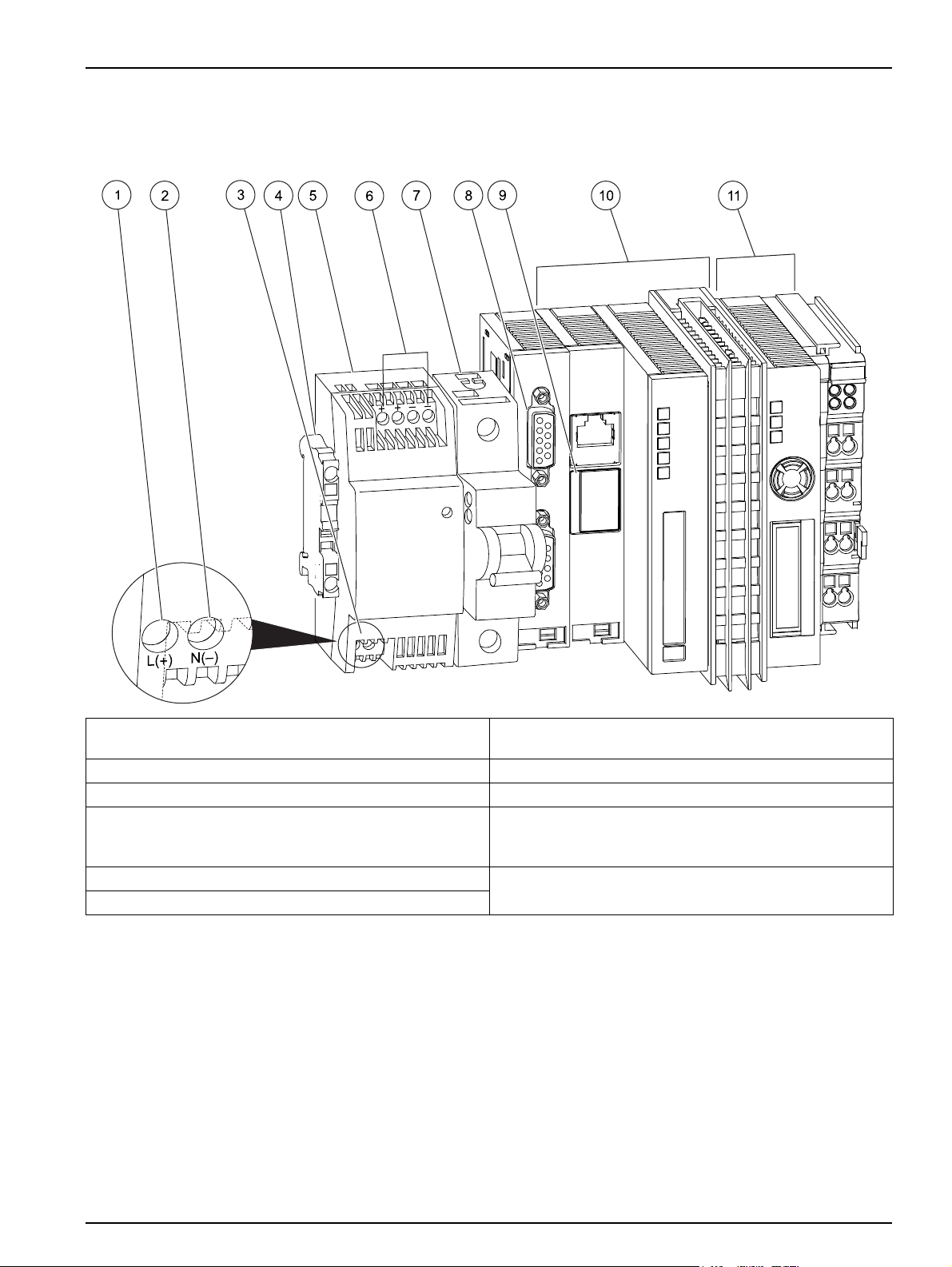
Figure 1 Base module RTC 100-240 V version
General information
1 L(+) 7 Automatic circuit breaker (ON/OFF switch for item 10
and 11 without fuse function)
2 N(–) 8 sc1000 connection: RS485 (CX1010-N041)
3 Input AC 100–240 V / Input DC 95 V–250 V 9 Battery compartment
4 PE (protective earth) 10 CPU base module, consisting of Ethernet port with
battery compartment (CX1010-N000), CPU module with
CF card (CX1010-0021) and passive aeration element
5 24 V transformer (Specification section 3.1.1, page 17) 11 Power supply module, consisting of bus coupler
6 Output DC 24 V, 0,75 A
Note: All components are pre-wired.
(CX1100-0002) and terminal module 24V.
11
Page 12
General information
2
1
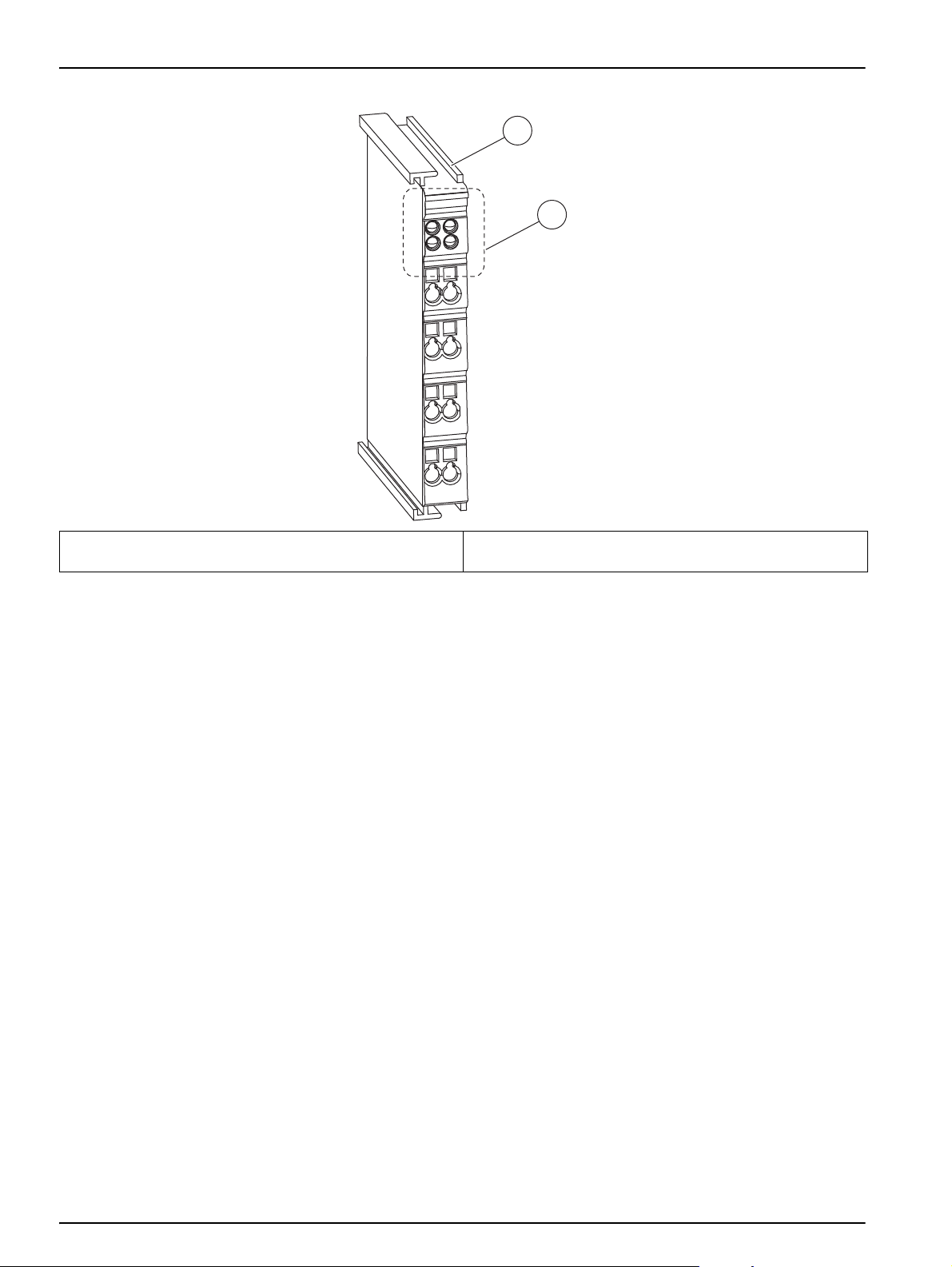
Figure 2 Design of the analog and digital input and output modules
1 Input- or Output- Module or Bus Termination Module
analog or digital
Note: The number of green LEDs indicates the number of channels.
2 LED area with installed LEDs or free LED installation
2.5 Theory of operation
2.5.1 Theory of operation of the RTC Module
The RTC112 SD-Module outputs analog (0/4–20 mA) and digital (0/24 V) signals for the
polymer dosing rate or the feed flow rate of mechanical sludge dewatering devices. Digital
fieldbus signals from sc1000 communication cards can also be used.
2.5.2 Input signals
The most important input signals are:
• Sludge influent TSS concentration (concentration of solids)
2.5.3 Parameters for configuration
• Feed flow rate of the dewatering system
• Thickened sludge TSS concentration (optional)
• Status of the thickened sludge pump (on/off)
spaces
12
The most important parameters for configuration are:
• The required specific polymer dosing [g polymer/kg TSS]
• The target TSS concentration in dewatered sludge or
• The target TSS concentration in centrate
Page 13
In a closed-loop circuit, TSS measurement is required in centrate or dewatered sludge. The
program of the RTC112 SD-Module has to be adjusted to the type of measurement location that
is being used for the closed loop part of the RTC. This is done by executing *.bat files on the CF
card of the RTC. Make_Filtrate.bat has to be executed for applications where centrate TSS is
measured and Make_Effluent for applications where dewatered/thickened sludge is measured.
Note: Never retrieve the CF-card from the RTC unit while power is on!
2.5.4 Operating modes
The RTC112 SD-Module can be operated as a combined open-loop and closed-loop
controller. Several variants can be configured.
1. Configuration of a fixed polymer rate [L/h] with a fixed feed flow rate [m
2. Configuration of a specific polymer dosing rate [g polymer/kg TSS]. One of the
following settings is adjusted:
a. The polymer flow rate according to the TSS concentration and the feed flow rate
• Based on the actual feed flow rate [L/h] and TSS concentration [g/L] in the feed
General information
NOTICE
3
/h].
(Figure 3).
flow, the polymer dosing rate [L/h] is calculated for the required specific dosing
rate.
Or:
b. The feed flow rate according to the specified polymer dosing rate and the
measured TSS concentration of the influent (Figure 4).
• Based on the measurement value of the TSS concentration from the influent [g/L]
and the configurable specified polymer dosing rate [L/h], the feed flow rate [m
is calculated such that it corresponds to the pre-defined specific polymer dosing
rate [g/kg].
3. Both variants 2a and 2b can be combined with one of the closed-loop controllers
described below:
a. Closed-loop control of the TSS concentration in the dewatered sludge
• The specific polymer dosing rate is adjusted according to the difference between
the target and actual TSS concentration in the dewatered sludge. Higher TSS
concentrations lead to a reduction of the dose and lower concentrations will lead
to higher dose rates than preset in the open-loop part of the RTC.
b. Closed-loop control of the TSS concentration in the centrate or filtrate
• The specific polymer dosing rate is adjusted according to the difference between
the target and actual TSS concentration in the centrate. Higher TSS
concentrations lead to an increase of the dose and lower concentrations will lead
to a decrease of the dose rates preset in the open-loop part of the RTC.
3
/h]
13
Page 14
General information
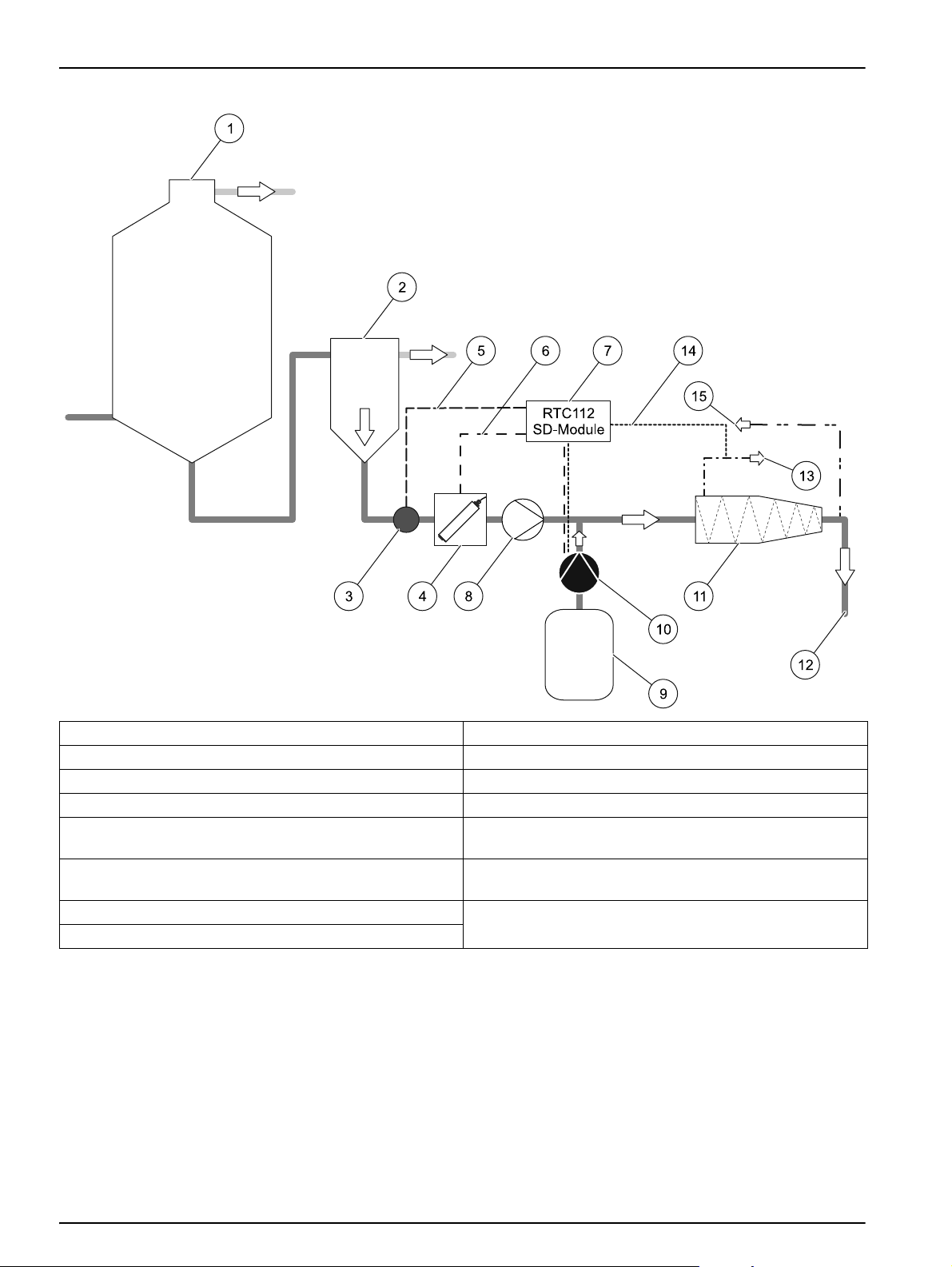
Figure 3 Adjustment of the polymer dosing rate to the influent TSS load
1 Digester 9 Polymer supply
2 Static thickener 10 Pump for open-loop control of the polymer dosing rate
3 Measurement of the feed flow rate 11 Mechanical sludge dewatering device
4 TSS measurement from the influent 12 Dewatered sludge
5 Open-loop control of the polymer dosing rate (feed flow
rate measurement value)
6 Open-loop control of the polymer dosing rate (influent
TSS concentration measurement value)
7 RTC112 SD-Module 15 Option: Measurement of the TSS concentration in the
8 Pump for the feed flow rate (constant)
13 Centrate
14 Option: Measurement of the TSS concentration in the
centrate
dewatered sludge instead of centrate
14
Page 15
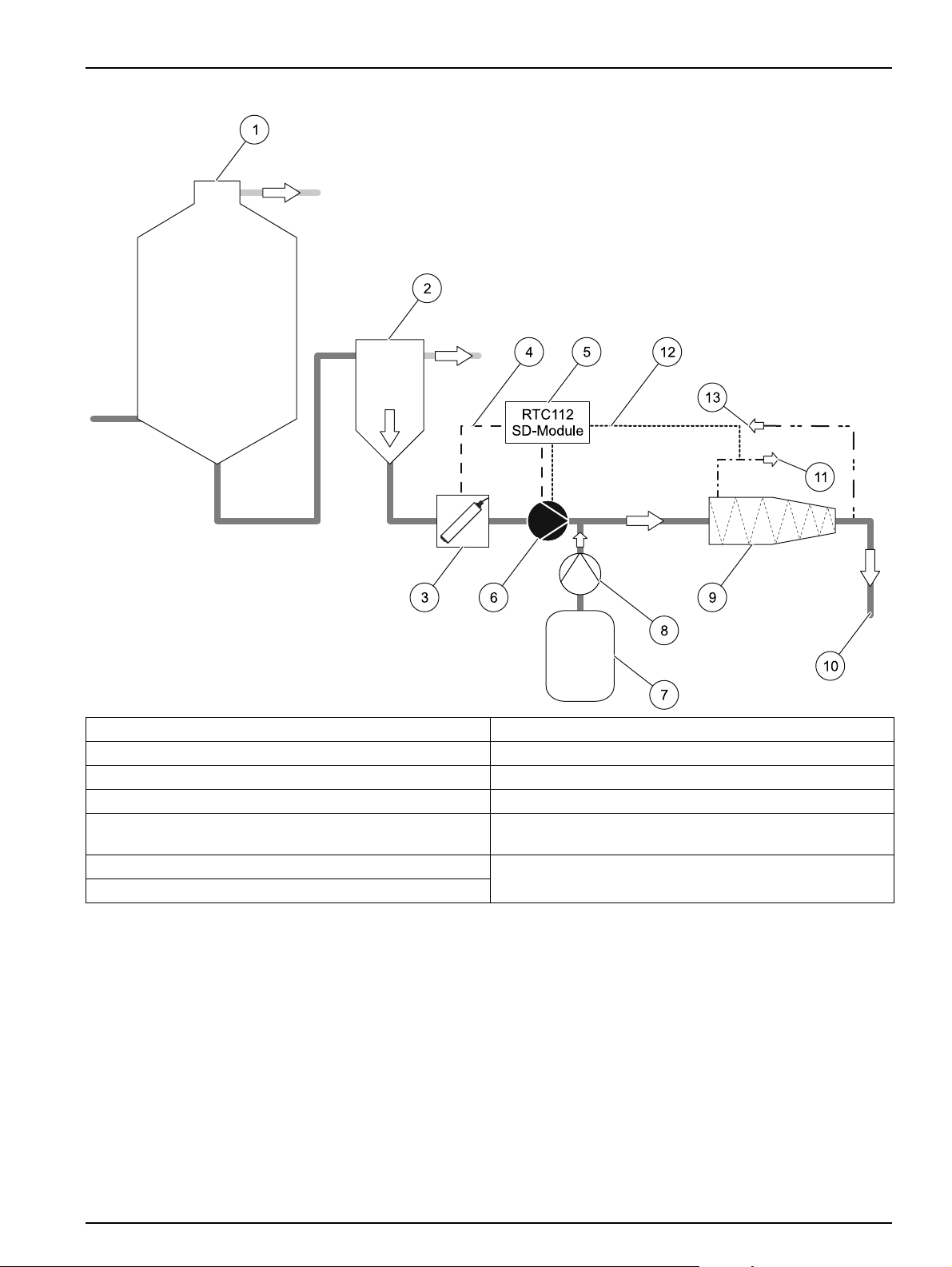
Figure 4 Adjustment of the feed flow rate to fixed polymer dosing rate
General information
1 Digester 8 Pump for polymer dosing (constant)
2 Static thickener or sludge storage 9 Mechanical sludge dewatering device
3 TSS measurement from the influent 10 Dewatered sludge
4 Open-loop control for the feed flow rate 11 Centrate
5 RTC112 SD-Module 12 Option: Measurement of the TSS concentration in the
centrate
6 Pump for open-loop control of the feed flow rate 13 Option: Measurement of the TSS concentration in the
7 Polymer supply
dewatered sludge instead of centrate
15
Page 16

General information
16
Page 17

Section 3 Installation
Only qualified experts may perform the tasks described in this section of the manual, while
adhering to all locally valid safety regulations.
Always lay cables and hoses so that they are straight and do not pose a tripping hazard.
Before the power supply is switched on, refer to the instructions in the relevant manuals.
3.1 Installation of the RTC Module
Only install the RTC Module on a DIN rail. The module must be attached horizontally, with
at least 30 mm (1.2 in.) space at the top and bottom to make sure that the passive
aeration element can function correctly.
When used indoors, the RTC Module must be installed in a control cabinet. When used
outdoors, the RTC Module requires a suitable enclosure that provides the technical
specifications indicated in Section 1.
DANGER
CAUTION
CAUTION
The RTC Module is operated via the sc1000 controller (see the user manual for the
sc1000 controller).
Note: The software version of the sc1000 controller must be V3.20 or above.
3.1.1 Supply voltage of the RTC Module
Table 2 Supply voltage of the RTC Module
Voltage 24 V DC (–15 % / +20 %), max. 25 W
Recommended fuse C2
With 110–230 V option 110–230 VAC, 50-60 Hz, approximately 25 VA
Note: An external deactivation switch is recommended for all installations.
3.2 Connection of process measurement instruments for the TSS concentration
The measurement signals of the sc sensors for the measurement of the concentration of
solids (e. g. SOLITAX sc) are provided to the RTC112 SD-Module via the RTC
communication card (YAB117) in the sc1000 probe module.
3.2.1 Power supply of the sc sensors and the sc1000 controller
See operating instructions of the respective sc sensors and the sc1000 controller.
3.3 sc1000 controller connection
Connect the SUB-D plug supplied to a dual-core, sheathed data cable (signal or bus
cable). For additional information regarding the data cable connection, refer to the
enclosed assembly instructions.
17
Page 18
Installation
3.4 Connection to the automation unit on the plant side
The one-channel and two-channel versions of the RTC112 SD-Module are equipped with
various modules that must be connected to the plant automation system.
• The feed flow rate must be provided to the RTC112 SD-Module as a 0/4 to 20 mA
signal.
• The polymer flow rate must be provided (on both versions) to the RTC112 SD-Module
as a 0/4 to 20 mA signal.
• The polymer pump can be operated in pulse/pause mode (PWM).
• The status signals and fault indications are output as 0 V/24 V signals.
• Measurement errors are shown 5 minutes after the error occurs. In the event of a new
startup (return of power supply), the unit is set back to ON (24 V) after approximately
1 minute and 40 seconds if there are no measurement errors.
• In the event of a new startup (return of power supply), the RTC operating signal is set
back to ON (24 V) after approximately 1 minute and 25 seconds.
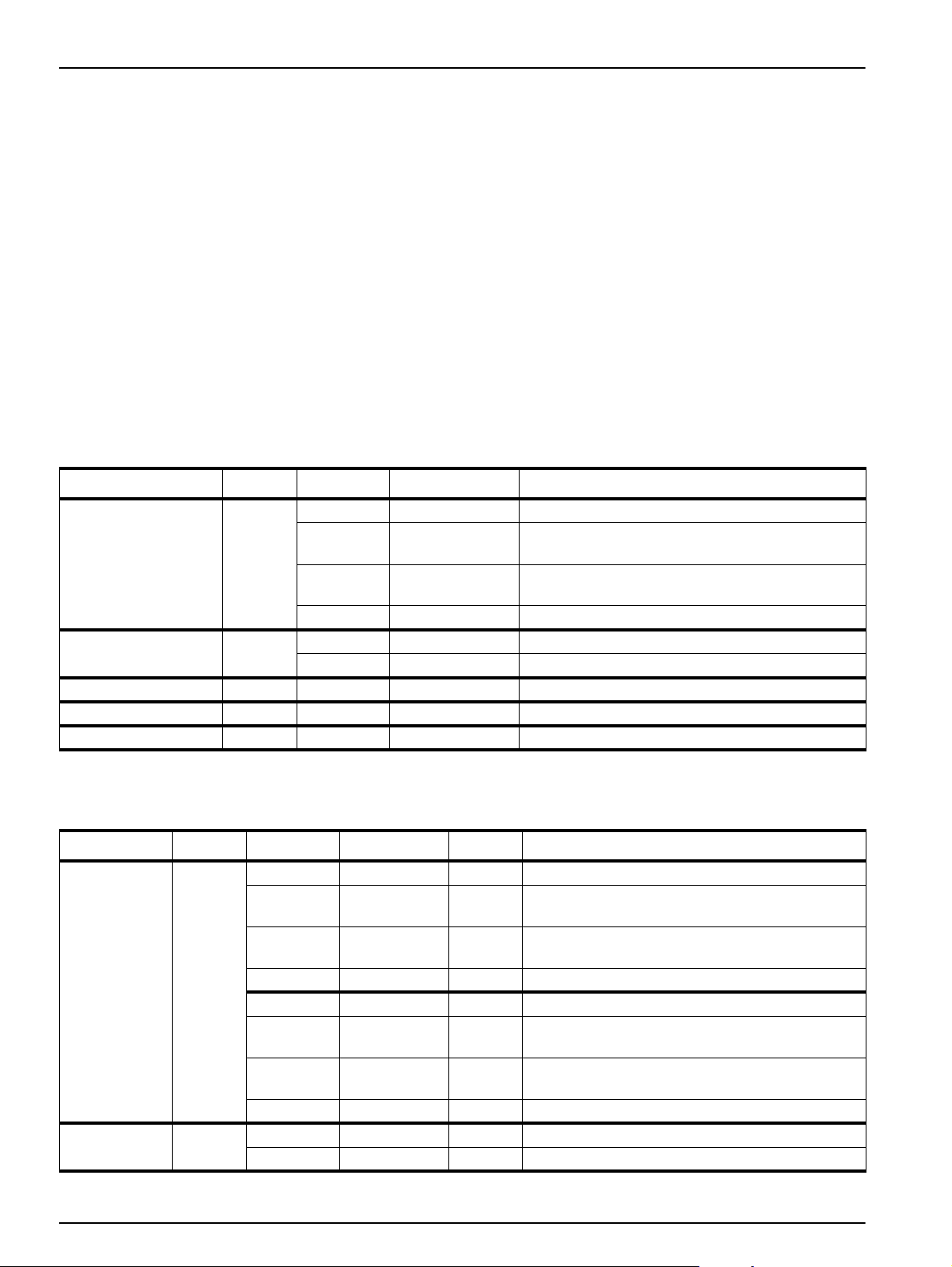
Table 3 Connections for the 1-channel RTC112 SD-Module
Module Name Connection Signal Function
1 +24 V/0 V Polymer pump on/off (24 V/0 V); (LED a)
5 +24 V/0 V
4x digital output
2x analog output KL4012
1x analog input KL3011 1(+) - 2(-) 0/4 to 20 mA Input of the feed flow rate
1x analog input KL3011 1(+) - 2(-) 0/4 to 20 mA Input of the polymer flow rate
Bus termination KL9010 Bus termination
1
KL2134
4 +24 V/0 V
8 +24 V/0 V RTC operational (24 V), RTC faulty (0 V), (LED d)
1(+) - 3(-) 0/4 to 20 mA Output of the polymer pump flow rate
5(+) - 7(-) 0/4 to 20 mA Output of the feed flow rate
Closed-loop control of the feed flow rate
active/inactive (24 V/0 V); (LED c)
Input signals OK (24 V), input signal faulty (0 V);
(LED b)
1
Ground to connection 3 and 7 or to the supply voltage connections
Table 4 Connections for the 2-channel RTC112 SD-Module
Module Name Connection Signal Channel Function
1 +24 V/0 V 1 Polymer pump on/off (24 V/0 V) (LED a)
Closed-loop control of the feed flow rate
active/inactive (24 V/0 V) (LED e)
Input signals OK (24 V), input signal faulty (0 V)
(LED b)
Closed-loop control of the feed flow rate
active/inactive (24 V/0 V) (LED g)
Input signals OK (24 V), input signal faulty (0 V)
(LED d)
8x digital
1
output
2x analog
output
KL2408
KL4012
5 +24 V/0 V 1
2 +24 V/0 V 1
6 +24 V/0 V 1 RTC operational (24 V), RTC faulty (0 V) (LED f)
3 +24 V/0 V 2 Polymer pump on/off (24 V/0 V) (LED c)
7 +24 V/0 V 2
4 +24 V/0 V 2
8 +24 V/0 V 2 RTC operational (24 V), RTC faulty (0 V) (LED h)
1(+) - 3(-) 0/4 to 20 mA 1 Output of the polymer pump flow rate
5(+) - 7(-) 0/4 to 20 mA 1 Output of the feed flow rate
18
Page 19

Table 4 Connections for the 2-channel RTC112 SD-Module
Module Name Connection Signal Channel Function
2x analog
output
1x analog input KL3011 1(+) - 2(-) 0/4 to 20 mA 1 Input of the feed flow rate
1x analog input KL3011 1(+) - 2(-) 0/4 to 20 mA 1 Input of the polymer flow rate
1x analog input KL3011 1(+) - 2(-) 0/4 to 20 mA 2 Input of the feed flow rate
1x analog input KL3011 1(+) - 2(-) 0/4 to 20 mA 2 Input of the polymer flow rate
Bus termination KL9010 Bus termination
1
Ground to connection to the supply voltage connections
KL4012
1(+) - 3(-) 0/4 to 20 mA 2 Output of the polymer pump flow rate
5(+) - 7(-) 0/4 to 20 mA 2 Output of the feed flow rate
Installation
19
Page 20

Installation
Figure 5 Connections and corresponding LEDs for digital output card KL2408 (2 channel option
only)
a LED a e LED e
b LED b f LED f
c LED c g LED g
d LED d h LED h
1 Connector 1 9 Connector 5
2 Connector 2 10 Connector 6
3 Connector 3 11 Connector 7
4 Connector 4 12 Connector 8
20
Page 21

Section 4 Parameterization and operation
4.1 Operating the sc controller
The RTC Module can only be operated via the sc1000 controller
in conjunction with the RTC communication card. Before the RTC
Module is used, the user must be familiar with the functionality of
the sc1000 controller. Learn how to navigate through the menu
and perform the relevant functions.
4.2 sc1000 setup
1. Open the MAIN MENU.
2. Select
3. Select
4. Select
RTC MODULES / PROGNOSYS and confirm.
RTC MODULES and confirm.
RTC and confirm.
4.3 Menu structure
4.3.1 DIAGNOSIS
DIAGNOSIS
RTC
ERROR LIST
WARNING LIST
REMINDER LIST
Possible error messages:
RTC MISSING, RTC CRC, CHECK CONFIG, RTC FAILURE
Possible warning messages:
MODBUS ADDRESS, PROBE SERVICE
Note: Refer to Section 6 Troubleshooting, page 39 for a list of all
possible error and warning messages together with a description of all
necessary countermeasures to be taken.
4.4 Configuration of RTC112 SD-Module parameters on the sc1000 controller
The following menu items are in the SC1000 SETUP menu.
4.4.1 RTC112 SD-Module open and closed-loop controller
RTC MODULES / PROGNOSYS
RTC MODULES
RTC
CONFIGURE
SELECT SENSOR
Select the sensors installed for the open/closed-loop controller
(refer to section 4.5, page 26).
21
Page 22

Parameterization and operation
4.4.1 RTC112 SD-Module open and closed-loop controller (Continued)
RTC MODULES / PROGNOSYS
RTC MODULES
RTC
PRESELECT PROG.
CHANNEL 1
Based on the feed flow rate [m³/h] and measured TSS
POLYMER DOSING
CONTROL
FEED FLOW CONTROL
CLOSED-LOOP EFFLUENT
CONTROL
CLOSED-LOOP FILTRATE
CONTROL
CHANNEL 2 As per channel one
CONTROL PARAMETER
CHANNEL 1
FACTOR POLYMER
DOSING
POLYMER CONCENTRATION
MANUAL POLYMER
DOSING
MANUAL FEED FLOW
concentration [g/L] from the influent, the polymer dosing rate
[L/h] is calculated such that it corresponds to the target specific
polymer dosing rate [g/kg].
Based on the measured TSS concentration [g/L] and a fixed
polymer dosing rate [L/h], the feed flow [m
that it corresponds to the specific polymer dosing rate [g/kg].
If activated, the specific polymer dosing rate FACTOR
POLYMER DOSING is adjusted based on the difference
between the target and actual TSS concentration in the
dewatered sludge.
The change in the specific dosing rate affects the polymer
dosing rate [L/h] in the POLYMER DOSING CONTROL module
or affects the feed flow rate in the FEED FLOW CONTROL
module.
If activated, the specific polymer dosing rate FACTOR
POLYMER DOSING is adjusted based on the difference
between the target and actual TSS concentration in the
filtrate/centrate.
The change in the specific dosing rate affects the polymer
dosing rate [L/h] in the POLYMER DOSING CONTROL module
or affects the feed flow rate in the FEED FLOW CONTROL
module.
Note: Activation and deactivation of CLOSED-LOOP
EFFLUENT CONTROL and CLOSED-LOOP FILTRATE
CONTROL have to be prepared by executing the relevant
*bat-files on the RTC CF-card (see section 2.5.3).
Required specific polymer dosing [g/kg]. This parameter
determines how many grams of polymer per kilogram of TSS
are fed by the machine.
Polymer concentration [g/L] fed via the polymer pump. g/L
The RTC outputs the polymer flow rate [L/h] if
• FEED FLOW CONTROL is activated
• No open-loop control mode (see above) is activated
• The TSS measurement from the influent reports an error, or
• The flow measurement from the influent reports an error.
The RTC outputs the feed flow rate [m³/h] if
• POLYMER DOSING CONTROL is activated
• No open-loop control mode (see above) is activated
• The TSS measurement from the influent reports an error, or
• The flow measurement from the influent reports an error
3
/h] is calculated such
Activation/
deactivation
Activation/
deactivation
Activation/
deactivation
Activation/
deactivation
g/kg
L/h
m³/h
22
Page 23

Parameterization and operation
4.4.1 RTC112 SD-Module open and closed-loop controller (Continued)
RTC MODULES / PROGNOSYS
RTC MODULES
RTC
MAX DECREASE CLOSED
L
MAX INCREASE CLOSED L
SET-POINT TSS
P GAIN TSS
INTEGRAL TIME TSS
DERIVAT IVE TIME TSS
SET-POINT FILT
P GAIN FILT
INTEGRAL TIME FILT
This value defines the maximum decrease of the specific
polymer dosing rate FACTOR POLYMER DOSING [g/kg] if
CLOSED-LOOP EFFLUENT CONTROL is selected.
This value defines the maximum increase of the specific
polymer dosing rate FACTOR POLYMER DOSING [g/kg] if
CLOSED-LOOP EFFLUENT CONTROL is selected.
Required setpoint of the TSS concentration in the thickened
sludge.
Note: This parameter is only considered if CLOSED-LOOP
EFFLUENT CONTROL is activated.
Proportional gain for the PID closed-loop controller for the TSS
concentration in the thickened sludge.
Note: This parameter is only considered if CLOSED-LOOP
EFFLUENT CONTROL is activated.P GAIN TSS [L/g] is divided
by 100 before it is multiplied by the deviation of the actual TSS
concentration [g/L] from the required TSS setpoint [g/L] .
Integral time for the PID closed-loop controller for the TSS
concentration in the thickened sludge.
Note: This parameter is only considered if CLOSED-LOOP
EFFLUENT CONTROL is activated. INTEGRAL TIME TSS is set
to "0" to deactivate the integral part of the PI open-loop
controller.
Derivative time for the PID closed-loop controller for the TSS
concentration in the thickened sludge.
Note: This parameter is only considered if CLOSED-LOOP
EFFLUENT CONTROL is activated.
Required setpoint of the TSS concentration in the
centrate/filtrate.
Note: This parameter is only considered if CLOSED-LOOP
FILTRATE CONTROL is activated.
Proportional gain for the PID closed-loop controller for the TSS
concentration in the centrate/filtrate.
Note: This parameter is only considered if CLOSED-LOOP
EFFLUENT CONTROL is activated.
P GAIN FILT [L/g] is divided by 100 before it is multiplied by the
deviation of the actual TSS concentrat ion fr om the requ ire d TSS
setpoint.
Integral time for the PID closed-loop controller for the TSS
concentration in the centrate/filtrate.
Note: This parameter is only considered if CLOSED-LOOP
EFFLUENT CONTROL is activated.
INTEGRAL TIME TSS is set to "0" to deactivate the integral part
of the PID open-loop controller.
g/kg
g/kg
g/L
L/g
min
min
g/L
L/g
min
23
Page 24

Parameterization and operation
4.4.1 RTC112 SD-Module open and closed-loop controller (Continued)
RTC MODULES / PROGNOSYS
RTC MODULES
RTC
Derivative time for the PID closed-loop controller for the TSS
DERIVATIVE TIME FILT
CHANNEL 2 As per channel one
INPUT/OUTPUT LIMITS
CHANNEL 1
FEED FLOW LOW
FEED FLOW HIGH
FEED FLOW SMOOTHING
LIMIT TSS IN LOW
LIMIT MAX TSS IN HIGH
TSS IN SMOOTHING
LIMIT TSS OUT LOW
LIMIT TSS OUT HIGH
TSS OUT SMOOTHING
POLYMER DOSING
MINIMUM
POLYMER DOSING
MAXIMUM
CHANNEL 2 As per channel one
concentration in the centrate/filtrate.
Note: This parameter is only considered if CLOSED-LOOP
FILTRATE CONTROL is activated.
3
Feed flow rate input signals below this value [m
this value (to avoid low flow peaks).
Feed flow rate input signals above this value [m3/h] are set to
this value (to avoid high flow peaks).
Feed flow measurement values are smoothed in line with this
parameter.
TSS measurement values from the influent that are below this
value [g/L] are set to this value (to avoid low peaks).
TSS measurement values from the influent that are above this
value [g/L] are set to this value (to avoid high peaks).
The TSS measurement values from the influent are smoothed in
line with this parameter.
The TSS values of the dewatered sludge or centrate sludge that
are below this value [g/L] are set to this value (to avoid low
peaks).
The TSS values of the dewatered sludge or centrate sludge that
are above this value [g/L] are set to this value (to avoid high
peaks).
The TSS measurement values from the effluent are smoothed in
line with this parameter.
When FEED FLOW CONTROL is activated, measurement
values for the polymer dosing rate that are below this value
[m³/h] are set to this value (to avoid low peaks in the dosing
flow).
Any RTC calculation above this value [g/L] is set to this value
and delivered to the polymer pump.
When FEED FLOW CONTROL is activated, measurement
values for the polymer dosing rate that are above this value
[m³/h] are set to this value (to avoid high peaks in the dosing
flow).
/h] are set to
min
m
m
min
g/L
g/L
min
g/L
g/L
min
L/h
L/h
3
/h
3
/h
24
Page 25

Parameterization and operation
4.4.1 RTC112 SD-Module open and closed-loop controller (Continued)
RTC MODULES / PROGNOSYS
RTC MODULES
RTC
INPUTS
CHANNEL 1
MIN FEED FLOW
MAX FEED FLOW
0/4...20mA
MIN POLYMER FLOW
MAX POLYMER FLOW
0/4...20mA
CHANNEL 2 As per channel one
OUTPUTS
CHANNEL 1
MIN FEED FLOW Minimum feed flow rate [m³/h] in accordance with 0/4 mA. m³/h
MAX FEED FLOW Maximum feed flow rate [m³/h] in accordance with 20 mA. m³/h
0/4...20mA
MIN POLYMER FLOW
MAX POLYMER FLOW
0/4...20mA
CONTROL CYCLE
MIN RUNTIME
CHANNEL 2 As per channel one
Minimum flow rate [m³/h] from the influent in accordance with
the 0/4 mA measurement signal.
Maximum flow rate [m³/h] from the influent in accordance with
the 20 mA measurement signal.
Transfer range of 0/4 to 20 mA current loop (as set in connected
flow measuring instrument).
Minimum polymer dosing in [L/h] in accordance with the 0/4 mA
measurement signal.
Maximum polymer dosing in [L/h] in accordance with the 20 mA
measurement signal.
Transfer range of 0/4 to 20 mA current loop (as set on
connected flow measuring instrument).
Transfer range of 0/4 to 20 mA current loop (as set on
connected flow measuring instrument).
Minimum polymer pump delivery rate in accordance with
0/4 mA.
Maximum polymer pump delivery rate in accordance with
20 mA.
Transfer range of 0/4 to 20 mA current loop (as set on
connected flow measuring instrument).
Pulse/pause mode for the polymer pump open-loop control for
dosing rates beneath the minimum polymer flow rate (MIN
POLYMER FLOW). The on/off duration in pulse/pause mode
can be affected by the duration of the CONTROL CYCLE. For
example, with a CONTROL CYCLE of 100 seconds and a
dosing control value of 60 %, the polymer pump is regularly
switched on for 60 seconds and switched off for 40 seconds.
Short cycle times increase the switching frequency but enable
more precise adaptation to individual requirements. CONTROL
CYCLE should be divisible by MIN RUNTIME and produce a
whole number.
The minimum ON time in pulse/pause dosing mode. The pump
is not activated for periods shorter than this. The MIN RUNTIME
must be shorter than the duration of the CONTROL CYCLE.
m³/h
m³/h
L/h
L/h
L/h
L/h
s
s
25
Page 26

Parameterization and operation
4.4.1 RTC112 SD-Module open and closed-loop controller (Continued)
RTC MODULES / PROGNOSYS
RTC MODULES
RTC
MODBUS
ADDRESS
DATA ORDER
DATALOG INTRVL Indicates the interval in which the data is saved in the log file. [min]
SET DEFAULTS Restores the factory settings.
MAINTENANCE
RTC DATA
RTC MEASUREMEN
RT C AC TUAT VAR
DIAG/TEST
EEPROM Hardware test
RTC COMM TO Communication time-out
RTC CRC Communication check sum
MODBUS ADDRESS
Start address of an RTC within the MODBUS network. Default
setting: 41–61
Specifies the register order within a double word. Presetting:
NORMAL
Specifies the value measured by the RTC, e. g. the influent
measurement.
Specifies the variable calculated by the RTC, e. g. whether the
aeration should be switched on or off.
Address displayed where the communication actually takes
place. Presetting: 41
4.5 Select sensors
1. To select sensors and their sequence for the RTC Module,
press RTC > CONFIGURE > SELECT SENSOR.
26
Page 27

Figure 6 Select sensor
Parameterization and operation
1ENTER — Saves the setting and returns to the
CONFIGURE menu.
2 CANCEL — Returns to the CONFIGURE menu without
saving.
3ADD — Adds a new sensor to the selection.
2. Press
A selection list of all subscribers to the sc1000 network
opens.
3. Press the required sensor for the RTC Module and confirm
by pressing
Sensors in black type are available for the RTC Module.
Sensors in red type are not available for the RTC Module.
Note: Sensors marked (p) are available for PROGNOSYS if these
sensors have been selected in conjunction with an RTC (refer to the
PROGNOSYS user manual).
4 DELETE — Removes a sensor from the selection.
5UP/DOWN — Moves the sensors up or down.
ADD (Figure 6, item 3).
ENTER below the selection list.
27
Page 28

Parameterization and operation
4. The selected sensor is shown in the sensor list.
Press
ADD (Figure 6, item 3) to open the selection list again.
5. Select the second sensor for the RTC Module and confirm
by pressing
Note: Previously selected sensors are shown in gray.
ENTER below the selection list.
The selected sensors are shown in the sensor list.
6. To sort the sensors in the order specified for the RTC
Module, press the sensor and use the arrow keys to move it
(Figure 6, item 5).
Press
DELETE (Figure 6, item 4) to remove an incorrect
sensor from the sensor list again.
7. Press ENTER (Figure 6, item 1) to confirm the list once it is
finished.
28
Page 29

4.6 PRESELECT PROG
4.6.1 POLYMER DOSING CONTROL
4.6.2 FEED FLOW CONTROL
Parameterization and operation
Based on the measured feed flow rate [m³/h] and the measured
TSS concentration [g/L] from the influent, the polymer dosing rate
[L/h] is calculated such that the setpoint corresponds to the
specific polymer dosing rate [g/kg].
Note: This open-loop control mode can only be activated if FEED FLOW
CONTROL is deactivated.
Note: The polymer flow rate is controlled via the RTC.
Based on the measured TSS concentration [g/L] and the
specified polymer dosing rate [L/h], the feed flow rate is
calculated such that it corresponds with the specific polymer
dosing rate [g/kg] (FACTOR POLYMER DOSING).
Note: This open-loop control mode can only be activated if POLYMER
DOSING CONTROL is deactivated.
Note: The feed flow rate is controlled via the RTC.
4.6.3 CLOSED-LOOP EFFLUENT CONTROL
If activated, the specific polymer dosing rate FACTOR POLYMER
DOSING is adjusted based on the difference between the target
and actual TSS concentration in the dewatered sludge.
If FEED FLOW CONTROL is activated, the TSS load fed with the
sludge thickening is adjusted based on the difference between
the target and actual TSS concentration in the filtrate.
Note: This closed-loop control can only be activated if POLYMER
DOSING CONTROL (section 4.6.1) or FEED FLOW CONTROL
(section 4.6.2) is activated.
4.6.4 CLOSED-LOOP FILTRATE CONTROL
If activated, the specific polymer dosing rate FACTOR POLYMER
DOSING is adjusted based on the difference between the target
and actual TSS concentration in the filtrate/centrate.
The change in the specific dosing rate affects the polymer dosing
rate [L/h] in the POLYMER DOSING CONTROL module or
affects the feed flow rate in the FEED FLOW CONTROL module.
Note: Activation and deactivation of CLOSED-LOOP EFFLUENT
CONTROL and CLOSED-LOOP FILTRATE CONTROL have to be
prepared by executing the relevant *bat-files on the RTC CF-card (see
section 2.5.3).
29
Page 30

Parameterization and operation
4.7 CONTROL PARAMETER
4.7.1 FACTOR POLYMER DOSING
4.7.2 POLYMER CONCENTRATION
4.7.3 MANUAL POLYMER DOSING
Required specific polymer dosing [g/kg]. This parameter
determines how many grams of polymer per kilogram of TSS are
fed by the system.
Polymer concentration [g/L] fed via the polymer pump.
The RTC outputs the polymer dosing rate [L/h] if
• FEED FLOW CONTROL is activated
• No open-loop control mode (section 4.6.1 to section 4.6.3) is
activated
• The TSS measurement from the influent reports an error, or
• The flow measurement from the influent reports an error.
4.7.4 MANUAL FEED FLOW
4.7.5 MAX DECREASE CLOSED L
4.7.6 MAX INCREASE CLOSED L
4.7.7 SET-POINT TSS
The RTC outputs the feed flow rate [m3/h] if
• POLYMER DOSING CONTROL is activated
• No open-loop control mode (section 4.6.1 to section 4.6.3) is
activated
• The TSS measurement at the inlet reports an error, or
• The flow measurement from the influent reports an error.
This value defines the maximum decrease of the specific polymer
dosing rate FACTOR POLYMER DOSING [g/kg] if
CLOSED-LOOP EFFLUENT CONTROL is selected.
This value defines the maximum increase of the specific polymer
dosing rate FACTOR POLYMER DOSING [g/kg] if
CLOSED-LOOP EFFLUENT CONTROL is selected.
Required setpoint of the TSS concentration in the dewatered
sludge.
30
Note: · This parameter is only considered if CLOSED-LOOP EFFLUENT
CONTROL (section 4.6.3) is activated.
Page 31

4.7.8 P GAIN TSS
4.7.9 INTEGRAL TIME TSS
4.7.10 DERIVATIVE TIME TSS
4.7.11 SET-POINT FILT
Parameterization and operation
Proportional gain for the PID closed-loop controller for the TSS
concentration in the dewatered sludge.
Note: P GAIN TSS [L/g] is divided by 100 before it is multiplied by the
deviation of the actual TSS concentration from the required TSS
setpoint.
Integral time for the PID closed-loop controller for the TSS
concentration in the dewatered sludge.
Note: INTEGRAL TIME TSS is set to "0" to deactivate the integral part of
the PI open-loop controller.
Derivative time for the PID closed-loop controller for the TSS
concentration in the dewatered sludge.
Required setpoint of the TSS concentration in the centrate/filtrate.
4.7.12 P GAIN FILT
4.7.13 INTEGRAL TIME FILT
4.7.14 DERIVATIVE TIME FILT
Note: This parameter is only considered if CLOSED-LOOP FILTRATE
CONTROL is activated.
Proportional gain for the PID closed-loop controller for the TSS
concentration in the centrate/filtrate.
Note: This parameter is only considered if CLOSED-LOOP EFFLUENT
CONTROL is activated.
P GAIN FIL T [L/g] is divided by 100 before it is multiplied by the deviation
of the actual TSS concentration from the required TSS setpoint.
Integral time for the PID closed-loop controller for the TSS
concentration in the centrate/filtrate.
Note: This parameter is only considered if CLOSED-LOOP EFFLUENT
CONTROL is activated.
INTEGRAL TIME TSS is set to "0" to deactivate the integral part of the
PID open-loop controller.
Derivative time for the PID closed-loop controller for the TSS
concentration in the centrate/filtrate.
4.8 INPUT/OUTPUT LIMITS
4.8.1 FEED FLOW LOW
Note: This parameter is only considered if CLOSED-LOOP FILTRATE
CONTROL is activated.
Feed flow rate input signals below this value [m3/h] are set to this
value. This means that very low feed flow rates can be avoided.
31
Page 32

Parameterization and operation
4.8.2 FEED FLOW HIGH
4.8.3 FEED FLOW SMOOTHING
Feed flow rate input signals above this value [m3/h] are set to this
value. This avoids load peaks.
Feed flow measurement values are smoothed in line with this
parameter.
SMOOTHING = 1: The signal for the flow rate measurement
is not smoothed.
SMOOTHING = 2: Smoothing is performed over 3 minutes.
SMOOTHING = 3: Smoothing is performed over 5 minutes.
SMOOTHING = 5: Smoothing is performed over 12 minutes.
SMOOTHING = 10: Smoothing is performed over
25 minutes.
Example:
With the setting SMOOTHING = 2, it takes 3 minutes for the
smoothed value to reach 95 % of the final value after an abrupt
change in the feed flow rate.
4.8.4 LIMIT TSS IN LOW
4.8.5 LIMIT MAX TSS IN HIGH
4.8.6 TSS IN SMOOTHING
4.8.7 LIMIT TSS OUT LOW
TSS measurement values from the influent that are below this
value [g/L] are set to this value (to avoid low peaks).
Measurement values from the influent that are above this value
[g/L] are set to this value (to avoid high peaks).
TSS measurement values from the influent are smoothed in line
with this parameter.
SMOOTHING = 1: The signal is not smoothed.
SMOOTHING = 2: Smoothing is performed over 3 minutes.
SMOOTHING = 3: Smoothing is performed over 5 minutes.
SMOOTHING = 5: Smoothing is performed over 12 minutes.
SMOOTHING = 10: Smoothing is performed over
25 minutes.
TSS measurement values for the dewatered sludge or centrate
that are below this value [g/L] are set to this value (to avoid low
peaks).
4.8.8 LIMIT TSS OUT HIGH
32
TSS measurement values for the dewatered sludge or centrate
that are above this value [m
peaks).
3
/h] are set to this value (to avoid high
Page 33

4.8.9 TSS OUT SMOOTHING
4.8.10 POLYMER DOSING MINIMUM
Parameterization and operation
TSS measurement values from the effluent are smoothed in line
with this parameter.
SMOOTHING = 1: The signal is not smoothed.
SMOOTHING = 2: Smoothing is performed over 3 minutes.
SMOOTHING = 3: Smoothing is performed over 5 minutes.
SMOOTHING = 5: Smoothing is performed over 12 minutes.
SMOOTHING = 10: Smoothing is performed over
25 minutes.
RTC calculations below this value [g/L] are set to this value and
transferred to the polymer pump.
4.8.11 POLYMER DOSING MAXIMUM
4.9 INPUTS
4.9.1 MIN FEED FLOW
4.9.2 MAX FEED FLOW
4.9.3 0/4...20 mA
Note: When FEED FLOW CONTROL is activated, measurement values
for the polymer dosing rate that are below this value [m
value (to avoid low peaks in the dosing flow).
RTC calculations above this value [g/L] are set to this value and
transferred to the polymer pump.
Note: When FEED FLOW CONTROL is activated, measurement values
for the polymer dosing rate that are above this value [m
value (to avoid high peaks in the dosing flow).
Minimum flow rate [m³/h] from the influent in accordance with the
0/4 mA measurement signal.
Maximum flow rate [m³/h] from the influent in accordance with the
20 mA measurement signal.
3
/h] are set to this
3
/h] are set to this
4.9.4 MIN POLYMER FLOW
4.9.5 MAX POLYMER FLOW
Transfer range of the 0/4 to 20 mA current loop (as set in
connected flow measuring instrument).
Minimum polymer dosing in [L/h] in accordance with the 0/4 mA
measurement signal.
Maximum polymer dosing in [L/h] in accordance with the 20 mA
measurement signal.
33
Page 34

Parameterization and operation
4.9.6 0/4...20 mA
4.10 OUTPUTS
4.10.1 MIN FEED FLOW
4.10.2 MAX FEED FLOW
4.10.3 0/4...20 mA
4.10.4 MIN POLYMER FLOW
Transfer range of the 0/4 to 20 mA current loop (as set in
connected flow measuring instrument).
Minimum feed flow rate [m³/h] in accordance with 0/4 mA.
Maximum feed flow rate [m³/h] in accordance with 20 mA.
Transfer range of 0/4 to 20 mA current loop (as set in connected
flow measuring instrument).
Minimum polymer pump delivery rate in accordance with 0/4 mA.
4.10.5 MAX POLYMER FLOW
4.10.6 0/4...20 mA
4.10.7 CONTROL CYCLE
4.10.8 MIN RUNTIME
Maximum polymer pump delivery rate in accordance with 20 mA.
Transfer range of 0/4 to 20 mA current loop (as set in connected
flow measuring instrument).
Pulse/pause mode for the polymer pump open-loop control for
dosing rates beneath the minimum polymer flow rate (MIN
POLYMER FLOW). The on/off duration in pulse/pause mode can
be affected by the duration of the CONTROL CYCLE. For
example, with a CONTROL CYCLE of 100 seconds and a dosing
control value of 60 %, the polymer pump is switched on for
60 seconds and switched off for 40 seconds. Short cycle times
increase the switching frequency but enable more precise
adaptation to individual requirements.
Note: CONTROL CYCLE must be divisible by MIN RUNTIME and
produce a whole number.
Minimum ON time in pulse/pause dosing mode. The pump is
activated for this runtime at the very least. The MIN RUNTIME
must be shorter than the duration of the CONTROL CYCLE.
4.11 Displayed measurement values and variables
The following measurement values and variables are shown on
the sc1000 display and transferred via fieldbus (refer to
section Appendix B).
34
Page 35

Parameterization and operation
RTC112 SD-Module,
one-channel
Measurement 1 Qin 1 m
Measurement 2 Qavg 1 m
Parameter Unit Description
3
/h Flow rate from the influent
3
/h Average flow rate
Measurement 3 Qdos1 L/h Polymer flow rate
Measurement 4 TSin 1 g/L TSS concentration from the influent
Measurement 5 TSef 1 g/L TSS concentration from the effluent
Actuat var 6 Pdos1 L/h Polymer dosing
Actuat var 7 Fact 1 g/kg Specific polymer dosing
3
Actuat var 8 Feed 1 m
RTC112 SD-Module,
two-channel
Parameter Unit Description
Measurement 1 Qin 1 m
Measurement 2 Qavg 1 m
/h Feed flow rate
3
/h Flow rate from the influent 1
3
/h Average flow rate
Measurement 3 Qdos 1 L/h Polymer flow rate 1
Measurement 4 TSin 1 g/L TSS concentration from the influent 1
Measurement 5 TSef 1 g/L TSS concentration in the effluent 1
3
Measurement 6 Qin 2 m
Measurement 7 Qavg 2 m
/h Flow rate from the influent 2
3
/h Average flow rate
Measurement 8 Qdos 2 L/h Polymer flow rate 2
Measurement 9 TSin 2 g/L TSS concentration from the influent 2
Measurement 10 TSef 2 g/L TSS concentration in the effluent 2
Actuat var 11 Pdos 1 L/h Polymer dosing 1
Actuat var 12 Fact 1 g/kg Specific polymer dosing 1
3
Actuat var 13 Feed 1 m
/h Feed flow rate 1
Actuat var 14 Pdos2 L/h Polymer dosing 2
Actuat var 15 Fact 2 g/kg Specific polymer dosing 2
3
Actuat var 16 Feed 2 m
/h Feed flow rate 2
35
Page 36

Parameterization and operation
36
Page 37

Section 5 Maintenance
Multiple hazards
Only qualified personnel must conduct the tasks described in this section of the manual.
5.1 Maintenance schedule
Interval Maintenance task
DANGER
Visual inspection
Battery 5 years
Application-specific Check for contamination and corrosion
Replacement by manufacturer's service department (Section 8,
page 43)
37
Page 38

Maintenance
38
Page 39

Section 6 Troubleshooting
6.1 Error messages
Possible RTC errors are displayed by the sc controller.
Displayed errors Cause Resolution
Supply RTC with voltage
RTC MISSING
RTC CRC
CHECK CONFIG
RTC FAILURE
INFLOW1 NOT G. Influent measurement signal faulty Test sensor, check cable connections
INFLOW2 NOT G. Influent measurement signal faulty Test sensor, check cable connections
No communication between RTC and RTC
communication card
Interrupted communication between RTC and
RTC communication card
The sensor selection of the RTC was deleted
by deleting or selecting a new sc1000
participant.
Brief general read/write error on the CF card,
mostly caused by a brief interruption to the
power supply.
Test connection cable
Reset the sc1000 and the RTC (switch so it is
completely voltage free and switch back on)
Make sure +/- connections of the connector
cable between RTC and RTC communication
card in the sc1000 are installed correctly.
From MAIN MENU > RTC MODULES /
PROGNOSYS > RTC MODULES > RTC >
CONFIGURE > SELECT SENSOR, select the
correct sensor for the RTC again and confirm.
Acknowledge error. If this message is shown
frequently, eliminate the cause of the power
disruptions. If necessary, inform the service
team of the manufacturer (Section 8, page 43).
6.2 Warnings
Possible RTC sensor warnings are displayed by the sc controller.
Displayed warnings Cause Resolution
The RTC menu SET DEFAULTS was opened.
MODBUS ADDRESS
PROBE SERVICE A configured sensor is in service status. The sensor must exit service status.
This deleted the MODBUS address of the RTC
in the sc1000.
Go to MAIN MENU > RTC MODULES /
PROGNOSYS > RTC MODULES > RTC >
CONFIGURE > MODBUS > ADDRESS and
set the correct MODBUS address.
6.3 Wear parts
Designation Quantity Service life
Battery 1
~5 years
39
Page 40

Troubleshooting
40
Page 41
Section 7 Replacement parts and accessories
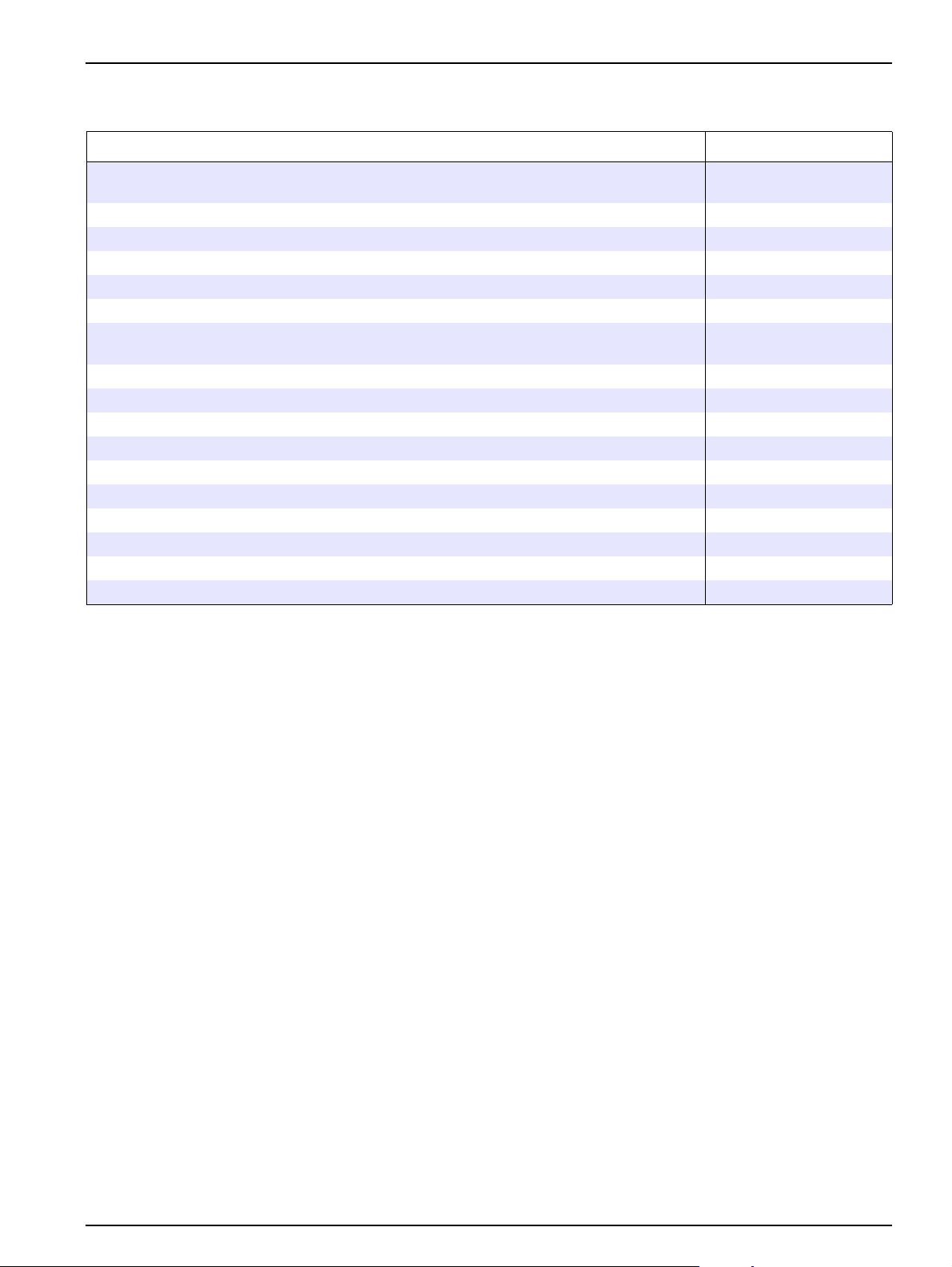
7.1 Replacement parts
Description Cat. No
DIN rail NS 35/15, punched according to DIN EN 60715 TH35, made of galvanized steel.
Length: 35 cm (13.78 in.)
Transformer 90–240 V AC/24 V DC 0.75 A, module for DIN rail assembly LZH166
Terminal for 24 V connection without power supply LZH167
Terminal for protective earth LZH168
SUB-D connector LZH169
C2 circuit breaker LZH170
CPU base module with Ethernet port, passive ventilation element. (CX1010-0021) and
RS422/485 connection module (CX1010-N031)
Power supply module, consisting of a bus coupler and a 24 V terminal module (CX1100-0002) LZH172
Digital output module 24 V DC (4 outputs) (KL2134) LZH174
Analog output module (2 outputs) (KL4012) LZH176
Analog input module (1 input) (KL3011) LZH177
Digital input module 24 V DC (2 inputs) (KL1002) LZH204
Digital output module 24 V DC (8 outputs) (KL2408) LZH205
Bus termination module (KL9010) LZH178
RTC communication card YAB117
CF card type RTC-Module LZY748-00
Ferrite core LZH216
LZH165
LZH171
41
Page 42

Replacement parts and accessories
42
Page 43

Section 8 Contact information
HACH Company
World Headquarters
P.O. Box 389
Loveland, Colorado
80539-0389 U.S.A.
Tel (800) 227-HACH
(800) -227-4224
(U.S.A. only)
Fax (970) 669-2932
orders@hach.com
www.hach.com
HACH LANGE GMBH
Willstätterstraße 11
D-40549 Düsseldorf
Tel. +49 (0)2 11 52 88-320
Fax +49 (0)2 11 52 88-210
info@hach-lange.de
www.hach-lange.de
HACH LANGE GMBH
Rorschacherstrasse 30a
CH-9424 Rheineck
Tel. +41 (0)848 55 66 99
Fax +41 (0)71 886 91 66
info@hach-lange.ch
www.hach-lange.ch
Repair Service in the
United States:
HACH Company
Ames Service
100 Dayton Avenue
Ames, Iowa 50010
Tel (800) 227-4224
(U.S.A. only)
Fax (515) 232-3835
HACH LANGE LTD
Pacific Way
Salford
GB-Manchester, M50 1DL
Tel. +44 (0)161 872 14 87
Fax +44 (0)161 848 73 24
info@hach-lange.co.uk
www.hach-lange.co.uk
HACH LANGE FRANCE
S.A.S.
8, mail Barthélémy Thimonnier
Lognes
F-77437 Marne-La-Vallée
cedex 2
Tél. +33 (0) 820 20 14 14
Fax +33 (0)1 69 67 34 99
info@hach-lange.fr
www.hach-lange.fr
Repair Service in Canada:
Hach Sales & Service
Canada Ltd.
1313 Border Street, Unit 34
Winnipeg, Manitoba
R3H 0X4
Tel (800) 665-7635
(Canada only)
Tel (204) 632-5598
Fax (204) 694-5134
canada@hach.com
HACH LANGE LTD
Unit 1, Chestnut Road
Western Industrial Estate
IRL-Dublin 12
Tel. +353(0)1 460 2522
Fax +353(0)1 450 9337
info@hach-lange.ie
www.hach-lange.ie
HACH LANGE NV/SA
Motstraat 54
B-2800 Mechelen
Tel. +32 (0)15 42 35 00
Fax +32 (0)15 41 61 20
info@hach-lange.be
www.hach-lange.be
Repair Service in
Latin America, the
Caribbean, the Far East,
Indian Subcontinent, Africa,
Europe, or the Middle East:
Hach Company World
Headquarters,
P.O. Box 389
Loveland, Colorado,
80539-0389 U.S.A.
Tel +001 (970) 669-3050
Fax +001 (970) 669-2932
intl@hach.com
HACH LANGE GMBH
Hütteldorfer Str. 299/Top 6
A-1140 Wien
Tel. +43 (0)1 912 16 92
Fax +43 (0)1 912 16 92-99
info@hach-lange.at
www.hach-lange.at
DR. LANGE NEDERLAND
B.V.
Laan van Westroijen 2a
NL-4003 AZ Tiel
Tel. +31(0)344 63 11 30
Fax +31(0)344 63 11 50
info@hach-lange.nl
www.hach-lange.nl
HACH LANGE APS
Åkandevej 21
DK-2700 Brønshøj
Tel. +45 36 77 29 11
Fax +45 36 77 49 11
info@hach-lange.dk
www.hach-lange.dk
HACH LANGE LDA
Av. do Forte nº8
Fracção M
P-2790-072 Carnaxide
Tel. +351 214 253 420
Fax +351 214 253 429
info@hach-lange.pt
www.hach-lange.pt
HACH LANGE KFT.
Vöröskereszt utca. 8-10.
H-1222 Budapest XXII. ker.
Tel. +36 1 225 7783
Fax +36 1 225 7784
info@hach-lange.hu
www.hach-lange.hu
HACH LANGE AB
Vinthundsvägen 159A
SE-128 62 Sköndal
Tel. +46 (0)8 7 98 05 00
Fax +46 (0)8 7 98 05 30
info@hach-lange.se
www.hach-lange.se
HACH LANGE SP. ZO.O.
ul. Krakowska 119
PL-50-428 Wrocław
Tel. +48 801 022 442
Zamówienia: +48 717 177 707
Doradztwo: +48 717 177 777
Fax +48 717 177 778
info@hach-lange.pl
www.hach-lange.pl
HACH LANGE S.R.L.
Str. Că
minului nr. 3,
et. 1, ap. 1, Sector 2
RO-021741 Bucureşti
Tel. +40 (0) 21 205 30 03
Fax +40 (0) 21 205 30 17
info@hach-lange.ro
www.hach-lange.ro
HACH LANGE S.R.L.
Via Rossini, 1/A
I-20020 Lainate (MI)
Tel. +39 02 93 575 400
Fax +39 02 93 575 401
info@hach-lange.it
www.hach-lange.it
HACH LANGE S.R.O.
Zastrčená 1278/8
CZ-141 00 Praha 4 - Chodov
Tel. +420 272 12 45 45
Fax +420 272 12 45 46
info@hach-lange.cz
www.hach-lange.cz
HACH LANGE
8, Kr. Sarafov str.
BG-1164 Sofia
Tel. +359 (0)2 963 44 54
Fax +359 (0)2 866 15 26
info@hach-lange.bg
www.hach-lange.bg
HACH LANGE SPAIN S.L.U.
Edificio Seminario
C/Larrauri, 1C- 2ª Pl.
E-48160 Derio/Bizkaia
Tel. +34 94 657 33 88
Fax +34 94 657 33 97
info@hach-lange.es
www.hach-lange.es
HACH LANGE S.R.O.
Roľnícka 21
SK-831 07 Bratislava –
Vaj nory
Tel. +421 (0)2 4820 9091
Fax +421 (0)2 4820 9093
info@hach-lange.sk
www.hach-lange.sk
HACH LANGE SU
ANALİZ SİSTEMLERİ
LTD. ŞTİ.
Ilkbahar mah. Galip Erdem
Cad. 616 Sok. No:9
TR-Oran-Çankaya/ANKARA
Tel. +90312 490 83 00
Fax +90312 491 99 03
bilgi@hach-lange.com.tr
www.hach-lange.com.tr
43
Page 44

Contact information
HACH LANGE D.O.O.
Fajfarjeva 15
SI-1230 Domžale
Tel. +386 (0)59 051 000
Fax +386 (0)59 051 010
info@hach-lange.si
www.hach-lange.si
HACH LANGE OOO
Finlyandsky prospekt, 4A
Business Zentrum “Petrovsky
fort”, R.803
RU-194044, Sankt-Petersburg
Tel. +7 (812) 458 56 00
Fax. +7 (812) 458 56 00
info.russia@hach-lange.com
www.hach-lange.com
ΗΑCH LANGE E.Π.Ε.
Αυλίδος 27
GR-115 27 Αθήνα
Τηλ . +30 210 7777038
Fax +30 210 7777976
info@hach-lange.gr
www.hach-lange.gr
HACH LANGE D.O.O.
Ivana Severa bb
HR-42 000 Varaždin
Tel. +385 (0) 42 305 086
Fax +385 (0) 42 305 087
info@hach-lange.hr
www.hach-lange.hr
HACH LANGE MAROC
SARLAU
Villa 14 – Rue 2 Casa
Plaisance
Quartier Racine Extension
MA-Casablanca 20000
Tél. +212 (0)522 97 95 75
Fax +212 (0)522 36 89 34
info-maroc@hach-lange.com
www.hach-lange.ma
44
Page 45

Section 9 Warranty and liability
The manufacturer warrants that the supplied product is free of material and manufacturing
defects, and undertakes to repair or to replace any defective parts without charge.
The warranty period is 24 months. If a maintenance contract is taken out within 6 months
of purchase, the warranty period is extended to 60 months.
With the exclusion of further claims, the supplier is liable for defects, including the lack of
assured properties, as follows: all parts that, within the warranty period calculated from the
day of the transfer of risk, can be demonstrated to have become unusable or that can only
be used with significant limitations owing to circumstances prior to transfer of risk, in
particular due to incorrect design, substandard materials or inadequate finish, shall be
repaired or replaced at the supplier's discretion. The identification of such defects must be
reported to the supplier in writing as soon as possible, but no later than 7 days after the
discovery of the fault. If the customer fails to notify the supplier, the product is considered
approved despite the defect. Further liability for indirect or direct damages is not accepted.
If device-specific maintenance- or inspection work prescribed by the supplier is to be
performed within the guarantee period by the customer (maintenance) or by the supplier
(inspection) and these requirements are not met, claims for damages that result from
non-observance of these requirements are void.
Further claims, in particular for consequential damages, cannot be made.
Wear and damage caused by improper handling, incorrect installation or non-designated
use are excluded from this clause.
The process instruments of the manufacturer have proven their reliability in many
applications and are therefore often used in automatic control loops to enable the most
economical and efficient operation of the relevant process.
To avoid or limit consequential damage, it is therefore recommended that the control loop
be designed such that an instrument malfunction results in an automatic changeover to
the backup control system. This guarantees the safest operating condition both for the
environment and the process.
45
Page 46

Warranty and liability
46
Page 47

Appendix A MODBUS address setting
The same slave address must be set for MODBUS communication on the sc1000
controller display and in the RTC module. Since 20 slave numbers are reserved for
internal purposes, the following numbers are available for assignment:
1, 21, 41, 61, 81, 101…
The start address 41 is preset at the factory.
NOTICE
If this address is to be or must be changed because, for example, it has already been allocated
for another RTC, the changes must be made both on the sc1000 controller and on the CF card of
the RTC module.
This can only be done by the manufacturer service department (Section 8)!
47
Page 48

48
Page 49

Appendix B Configuration of the network modules
B.1 RTC112 SD-Module Profibus/MODBUS telegram
Table 5 RTC112 SD-Module, one-channel
Register Parameter Unit Description
3
MEASUREMENT 1 Qin 1 m
MEASUREMENT 2 Qavg 1 m
MEASUREMENT 3 Qdos1 L/h Polymer flow rate
MEASUREMENT 4 TSin 1 g/L TSS concentration in the inflow
MEASUREMENT 5 TSef 1 g/L TSS concentration in the outflow
ACTUAT VAR 6 Pdos1 L/h Polymer dosing
ACTUAT VAR 7 Fact 1 g/kg Specific polymer dosing
AC TUAT VAR 8 Fee d 1 m
Table 6 RTC112 SD-Module, two-channel
Register Parameter Unit Description
MEASUREMENT 1 Qin 1 m3/h Flow rate in inflow 1
MEASUREMENT 2 Qavg 1 m
MEASUREMENT 3 Qdos 1 L/h Polymer flow rate 1
MEASUREMENT 4 TSin 1 g/L TSS concentration in inflow 1
MEASUREMENT 5 TSef 1 g/L TSS concentration in outflow 1
MEASUREMENT 6 Qin 2 m
MEASUREMENT 7 Qavg 2 m
MEASUREMENT 8 Qdos 2 L/h Polymer flow rate 2
MEASUREMENT 9 TSin 2 g/L TSS concentration in inflow 2
MEASUREMENT 10 TSef 2 g/L TSS concentration in outflow 2
ACTUAT VAR 11 Pdos 1 L/h Polymer dosing 1
ACTUAT VAR 12 Fact 1 g/kg Specific polymer dosing 1
ACTUAT VAR 13 Feed 1 m
ACTUAT VAR 14 Pdos2 L/h Polymer dosing 2
ACTUAT VAR 15 Fact 2 g/kg Specific polymer dosing 2
ACTUAT VAR 16 Feed 2 m
/h Flow rate in the inflow
3
/h Average flow rate
3
/h Feed flow rate
3
/h Average flow rate
3
/h Flow rate from the influent 2
3
/h Average flow rate
3
/h Feed flow rate 1
3
/h Feed flow rate 2
49
Page 50

50
Page 51

Index
Numerics
1-channel version ..................................................... 18
2-channel version ..................................................... 18
A
Address setting ........................................................ 47
aeration element ...................................................... 11
B
Battery compartment ................................................ 11
C
Closed-loop controller behavior ............................... 12
Concentration of solids
SOLITAX sc .......................................................... 17
TSS ....................................................................... 17
Control cycle ............................................................ 25
D
DIN rail ..................................................................... 17
E
Embedded PC ............................................................ 7
Error messages ........................................................ 39
Ethernet port ............................................................ 11
Expansion slot ............................................................ 7
F
Feed flow rate ............................................................ 7
Flash memory ............................................................ 7
Module
bus termination ..................................................... 12
input ...................................................................... 12
output .................................................................... 12
O
Open-loop control ..................................................... 13
feed flow ......................................................... 22, 29
Open-loop controller
polymer dosing ................................................ 22, 29
Operating system ....................................................... 7
Output
analog ..................................................................... 7
digital ...................................................................... 8
Output module .......................................................... 12
P
Polymer consumption optimization .......................... 10
Polymer dosing .......................................................... 7
manual ............................................................ 22, 30
specific ...................................................... 12, 22, 30
Polymer flow rate ....................................................... 7
Polymer pump ............................................................ 8
S
Safety information ...................................................... 9
Slave address .......................................................... 47
Sludge thickening ..................................................... 10
Smoothing ................................................................ 33
Supply voltage .......................................................... 17
I
Input
analog ..................................................................... 7
Input module ............................................................ 12
Interfaces ................................................................... 7
M
Maintenance schedule ............................................. 37
T
Technical data ............................................................ 7
Theory of operation .................................................. 12
Thickened sludge pump ........................................... 12
TSS concentration
influent .................................................................. 12
thickened sludge ................................................... 12
W
Warning labels ........................................................... 9
Warnings .................................................................. 39
Warranty and liability ................................................ 45
51
Page 52

Index
52
 Loading...
Loading...