

Grieve Corporation ACS350 Installation Manual

ACS350
User’s Manual
ACS350 Drives (0.37…11 kW, 0.5…15 HP)

ACS350 Drive manuals
OPTION MANUALS (delivered with optional equipment)
FCAN-01 CANopen Adapter Module User’s Manual
3AFE68615500 (EN)
FDNA-01 DeviceNet Adapter Module User’s Manual
3AFE68573360 (EN)
FMBA-01 Modbus Adapter Module User’s Manual
3AFE68586704 (EN)
FPBA-01 PROFIBUS DP Adapter Module User’s Manual
3AFE68573271 (EN)
FRSA-00 RS-485 Adapter Board User’s Manual
3AFE68640300 (EN)
MFDT-01 FlashDrop User’s Manual
3AFE68591074 (EN)
MPOT-01 Potentiometer Module Instructions for Installation
and Use
3AFE68591082 (EN, DA, DE, ES, FI, FR, IT, NL, PT, RU, SV)
MTAC-01 Pulse Encoder Interface Module User’s Manual
3AFE68591091 (EN)
MUL1-R1 Installation Instructions for ACS150 and ACS350
3AFE68642868 (EN, DA, DE, ES, FI, FR, IT, NL, PT, RU, SV)
MUL1-R3 Installation Instructions for ACS150 and ACS350
3AFE68643147 (EN, DA, DE, ES, FI, FR, IT, NL, PT, RU, SV)
MAINTENANCE MANUALS
Guide for Capacitor Reforming in ACS50/150/350/550
3AFE68735190 (EN)

ACS350 Drives
0.37…11 kW
0.5…15 HP
User’s Manual
© 2006 ABB Oy. All Rights Reserved.
3AFE68462401 Rev C
EN
EFFECTIVE: 01.11.2006

Safety
What this chapter contains
The chapter contains the safety instructions which you must follow when installing,
operating and servicing the drive. If ignored, physical injury or death may follow, or
damage may occur to the drive, motor or driven equipment. Read the safety
instructions before you work on the drive.
Use of warning symbols
There are two types of safety warnings throughout this manual:
Danger; electricity warns of high voltage which can cause physical
injury and/or damage to the equipment.
5
General danger warns about conditions, other than those caused by
electricity, which can result in physical injury and/or damage to the
equipment.
Installation and maintenance work
These warnings are intended for all who work on the drive, motor cable or motor.
WARNING! Ignoring the following instructions can cause physical injury or death, or
damage to the equipment.
Only qualified electricians are allowed to install and maintain the drive!
• Never work on the drive, motor cable or motor when input power is applied. After
disconnecting the input power, always wait for 5 minutes to let the intermediate
circuit capacitors discharge before you start working on the drive, motor or motor
cable.
Always ensure by measuring with a multimeter (impedance at least 1 Mohm) that:
1. There is no voltage between the drive input phases U1, V1 and W1 and the
ground.
2. There is no voltage between terminals BRK+ and BRK- and the ground.
• Do not work on the control cables when power is applied to the drive or to the
external control circuits. Externally supplied control circuits may carry dangerous
voltage even when the input power of the drive is switched off.
• Do not make any insulation or voltage withstand tests on the drive.
• If a drive whose EMC filter or varistors are not disconnected is installed on an IT
system [an ungrounded power system or a high resistance-grounded (over
30 ohms) power system], the system will be connected to earth potential through
Safety

6
the EMC filter capacitors or varistors of the drive. This may cause danger or
damage the drive.
• If a drive whose EMC filter or varistors are not disconnected is installed on a
corner grounded TN system, the drive will be damaged.
Note:
• Even when the motor is stopped, dangerous voltage is present at the power
circuit terminals U1, V1, W1 and U2, V2, W2 and BRK+ and BRK-.
WARNING! Ignoring the following instructions can cause physical injury or death, or
damage to the equipment.
• The drive is not field repairable. Never attempt to repair a malfunctioning drive;
contact your local ABB representative or Authorized Service Center for
replacement.
• Make sure that dust from drilling does not enter the drive during the installation.
Electrically conductive dust inside the drive may cause damage or lead to
malfunction.
• Ensure sufficient cooling.
Operation and start-up
These warnings are intended for all who plan the operation, start up or operate the
drive.
WARNING! Ignoring the following instructions can cause physical injury or death, or
damage to the equipment.
• Before adjusting the drive and putting it into service, make sure that the motor
and all driven equipment are suitable for operation throughout the speed range
provided by the drive. The drive can be adjusted to operate the motor at speeds
above and below the speed provided by connecting the motor directly to the
power line.
• Do not activate automatic fault reset functions if dangerous situations can occur.
When activated, these functions will reset the drive and resume operation after a
fault.
• Do not control the motor with an AC contactor or disconnecting device
(disconnecting means); use instead the control panel start and stop keys
and or external commands (I/O or fieldbus). The maximum allowed number
of charging cycles of the DC capacitors (i.e. power-ups by applying power) is two
per minute and the maximum total number of chargings is 15 000.
Note:
Safety
• If an external source for start command is selected and it is ON, the drive will start
immediately after an input voltage break or fault reset unless the drive is
configured for 3-wire (a pulse) start/stop.
• When the control location is not set to local (LOC not shown on the display), the
stop key on the control panel will not stop the drive. To stop the drive using the
control panel, press the LOC/REM key and then the stop key .
LOC
REM
7
Safety

8
Safety

Table of contents
ACS350 Drive manuals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Safety
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Use of warning symbols . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Installation and maintenance work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Operation and start-up . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Table of contents
About the manual
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Compatibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Intended audience . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Categorization according to the frame size . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Installation and commissioning flowchart . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
9
Hardware description
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Overview: Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Type code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Mechanical installation
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Unpacking the drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Before installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Mounting the drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Planning electrical installation
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Motor selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
AC power line connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Supply disconnecting device . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Thermal overload and short-circuit protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Selecting the power cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Protecting the relay output contact and attenuating disturbances in case of inductive loads . . . . . 29
Residual current device (RCD) compatibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Selecting the control cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Connection of a motor temperature sensor to the drive I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Table of contents

10
Routing the cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Electrical installation
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Checking the insulation of the assembly . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Connecting the power cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Connecting the control cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Installation checklist
Checklist . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Start-up, control with I/O and ID Run
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
How to start up the drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
How to control the drive through the I/O interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
How to perform the ID Run . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Control panels
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
About control panels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Compatibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Basic Control Panel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Assistant Control Panel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Application macros
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Overview of macros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Summary of I/O connections of application macros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
ABB Standard macro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3-wire macro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Alternate macro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Motor Potentiometer macro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Hand/Auto macro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
PID Control macro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Torque Control macro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
User macros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Program features
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Start-up Assistant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Local control vs. external control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Reference types and processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
Reference trimming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Table of contents
11
Programmable analog inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Programmable analog output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Programmable digital inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Programmable relay output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Frequency input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Transistor output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Actual signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Motor identification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Power loss ride-through . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
DC Magnetising . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Maintenance trigger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
DC Hold . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
Speed compensated stop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
Flux Braking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
Flux Optimisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Acceleration and deceleration ramps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Critical Speeds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Constant speeds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Custom U/f ratio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Speed controller tuning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
Speed control performance figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Torque control performance figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Scalar control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
IR compensation for a scalar controlled drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Programmable protection functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Preprogrammed faults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
Operation limits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
Power limit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
Automatic resets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
Supervisions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
Parameter lock . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
PID control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
Sleep function for the process PID (PID1) control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Motor temperature measurement through the standard I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Control of a mechanical brake . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
Jogging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Timed functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Timer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
Counter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
Sequence programming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
Actual signals and parameters
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
Terms and abbreviations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
Fieldbus addresses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
Fieldbus equivalent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
Default values with different macros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
01 OPERATING DATA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
03 FB ACTUAL SIGNALS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
Table of contents

12
04 FAULT HISTORY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
10 START/STOP/DIR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
11 REFERENCE SELECT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
12 CONSTANT SPEEDS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
13 ANALOGUE INPUTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
14 RELAY OUTPUTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
15 ANALOGUE OUTPUTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
16 SYSTEM CONTROLS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
18 FREQ IN & TRAN OUT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
19 TIMER & COUNTER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
20 LIMITS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
21 START/STOP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
22 ACCEL/DECEL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
23 SPEED CONTROL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
24 TORQUE CONTROL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
25 CRITICAL SPEEDS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
26 MOTOR CONTROL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
29 MAINTENANCE TRIG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
30 FAULT FUNCTIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
31 AUTOMATIC RESET . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
32 SUPERVISION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
33 INFORMATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
34 PANEL DISPLAY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
35 MOTOR TEMP MEAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
36 TIMED FUNCTIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
40 PROCESS PID SET 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
41 PROCESS PID SET 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205
42 EXT / TRIM PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206
43 MECH BRK CONTROL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208
50 ENCODER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
51 EXT COMM MODULE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
52 PANEL COMM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
53 EFB PROTOCOL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210
54 FBA DATA IN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212
55 FBA DATA OUT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212
84 SEQUENCE PROG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212
98 OPTIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
99 START-UP DATA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
Fieldbus control with embedded fieldbus
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
System overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
Setting up communication through the embedded modbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 229
Drive control parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230
The fieldbus control interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232
Fieldbus references . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233
Modbus mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 239
Communication profiles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242
Table of contents

13
Fieldbus control with fieldbus adapter
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251
System overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251
Setting up communication through a fieldbus adapter module . . . . . . . . . . . . . . . . . . . . . . . . . . . 252
Drive control parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253
The fieldbus control interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254
Communication profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255
Fieldbus references . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 256
Fault tracing
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257
Safety . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257
Alarm and fault indications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257
How to reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257
Fault history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257
Alarm messages generated by the drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 258
Alarms generated by the Basic Control Panel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
Fault messages generated by the drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262
Embedded fieldbus faults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267
Maintenance and hardware diagnostics
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 269
Safety . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 269
Maintenance intervals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 269
Fan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 269
Capacitors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 270
Control panel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 270
LEDs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271
Technical data
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273
Ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273
Power cable sizes and fuses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 276
Power cables: terminal sizes, maximum cable diameters and tightening torques . . . . . . . . . . . . 277
Dimensions, weights and noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277
Input power connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 278
Motor connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 278
Control connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 279
Brake resistor connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 279
Efficiency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 279
Cooling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 279
Degrees of protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 279
Ambient conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 280
Materials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 280
CE marking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281
C-Tick marking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281
Table of contents

14
Applicable standards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281
UL marking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282
IEC/EN 61800-3 (2004) Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282
Compliance with the IEC/EN 61800-3 (2004) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283
Product protection in the USA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283
Brake resistors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284
Dimensions
Frame sizes R0 and R1, IP20 (cabinet installation) / UL open . . . . . . . . . . . . . . . . . . . . . . . . . . . 288
Frame sizes R0 and R1, IP20 / NEMA 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 289
Frame size R2, IP20 (cabinet installation) / UL open . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 290
Frame size R2, IP20 / NEMA 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291
Frame size R3, IP20 (cabinet installation) / UL open . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292
Frame size R3, IP20 / NEMA 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293
Table of contents

About the manual
What this chapter contains
The chapter describes the intended audience and compatibility of this manual. It also
contains a flowchart of steps for checking the delivery and installing and
commissioning the drive. The flowchart refers to chapters/sections in this manual.
Compatibility
The manual is compatible with the ACS350 drive firmware version 2.41a. See
parameter 3301 FW VERSION.
Intended audience
This manual is intended for persons who plan the installation, install, commission,
use and service the drive. Read the manual before working on the drive. The reader
is expected to know the fundamentals of electricity, wiring, electrical components
and electrical schematic symbols.
15
This manual is written for readers worldwide. Both SI and imperial units are shown.
Special US instructions for installations in the United States are given.
Categorization according to the frame size
The ACS350 is manufactured in frame sizes R0...R3. Some instructions, technical
data and dimensional drawings which only concern certain frame sizes are marked
with the symbol of the frame size (R0...R3). To identify the frame size of your drive,
see the rating table on page 273 in chapter Technical data.
About the manual

16
Installation and commissioning flowchart
Tas k See
Identify the frame size of your drive: R0…R3. Technical data: Ratings on page 273
Plan the installation: select the cables, etc.
Check the ambient conditions, ratings and required
cooling air flow.
Unpack and check the drive. Mechanical installation: Unpacking the drive on
If the drive will be connected to an IT (ungrounded) or
corner grounded system, check that the internal EMC
filter and varistors are not connected.
Install the drive on a wall or in a cabinet. Mechanical installation on page 21
Route the cables. Planning electrical installation: Routing the
Check the insulation of the input cable and the motor
and the motor cable.
Planning electrical installation on page 25
Technical data on page 273
page 21
Hardware description: Type code on page 19
Electrical installation: Connecting the power
cables on page 34
cables on page 30
Electrical installation: Checking the insulation of
the assembly on page 33
About the manual
Connect the power cables. Electrical installation: Connecting the power
cables on page 34
Connect the control cables. Electrical installation: Connecting the control
cables on page 36
Check the installation. Installation checklist on page 39
Commission the drive. Start-up, control with I/O and ID Run on page
41
Hardware description
What this chapter contains
The chapter describes the construction and type code information in short.
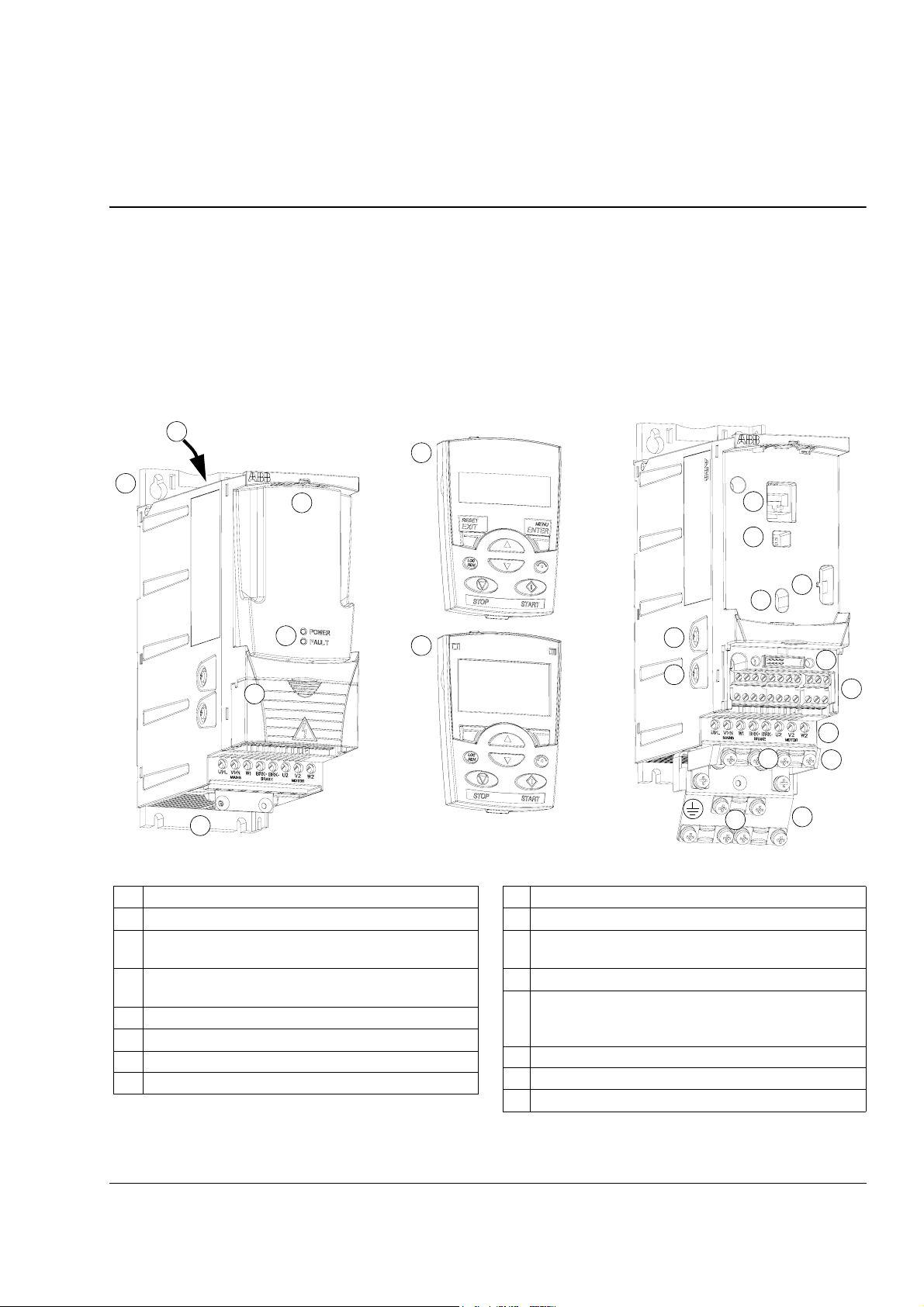
Overview
The ACS350 is a wall or cabinet mountable drive for controlling AC motors. The
construction of frame sizes R0…R3 varies to some extent.
1
3b
2
3a
17
5
6
8
EMC VAR
4
2
1 Cooling outlet through top cover
2 Mounting holes
3 Panel cover (a) / Basic Control Panel (b) / Assistant
Control Panel (c)
4 Terminal cover (or optional potentiometer unit
MPOT-01)
5 Panel connection
6 Option connection
7 FlashDrop connection
8 Power OK and Fault LEDs (see LEDs on page 271)
3c
7
8
EMC VAR
9
10
16
16
11
12
13
14
15
Covers off (R0 and R1)Covers on (R0 and R1)
9 EMC filter grounding screw (EMC)
10 Varistor grounding screw (VAR)
11 Fieldbus adapter (serial communication module)
connection
12 I/O connections
13 Input power connection (U1, V1, W1), brake resistor
connection (BRK+, BRK-) and motor connection (U2,
V2, W2)
14 I/O clamping plate
15 Clamping plate
16 Clamps
Hardware description
18
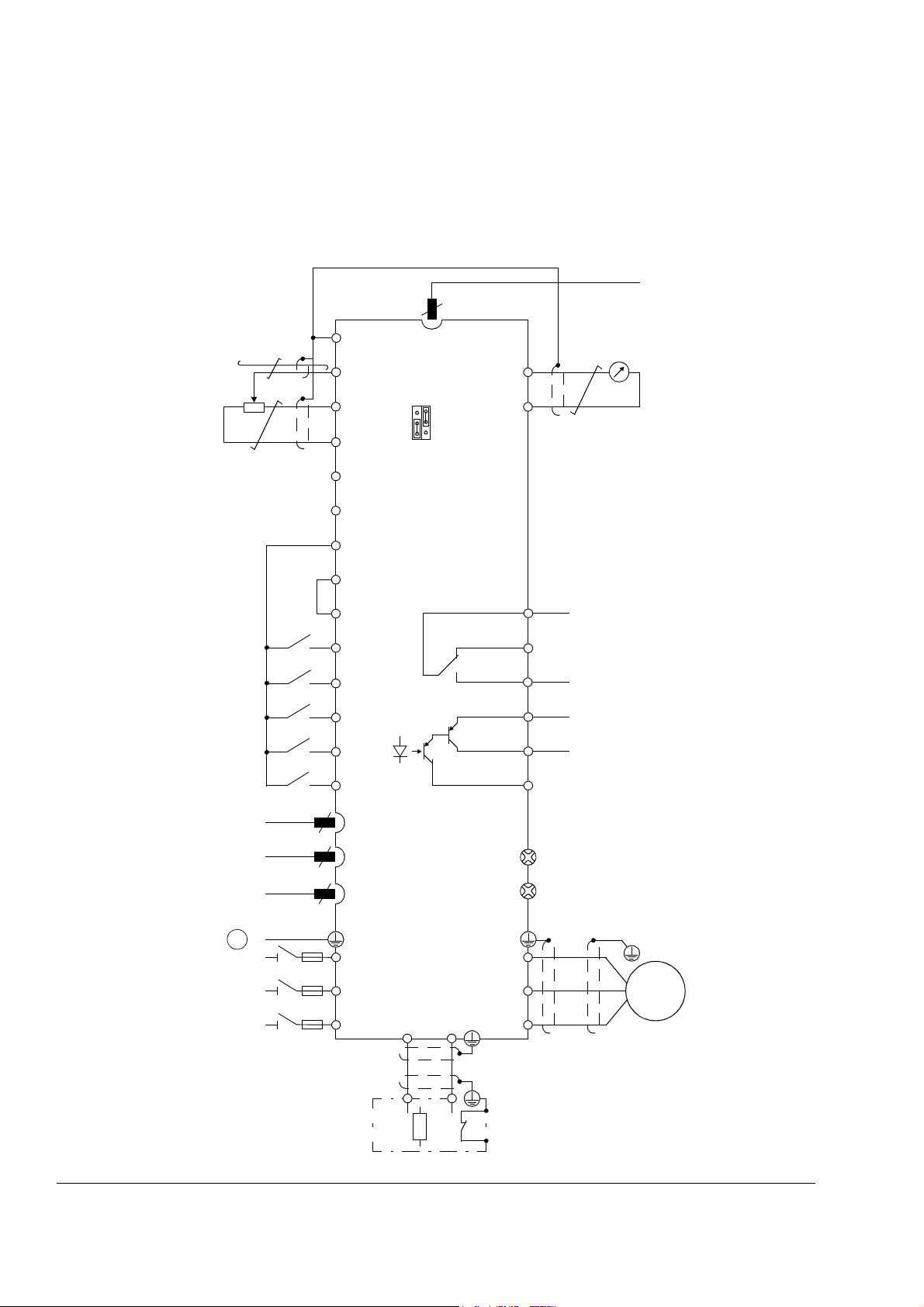
Overview: Connections
The diagram gives an overview of connections. I/O connections are parameterable.
The diagram shows the default I/O connections for the ABB standard macro. See
chapter Application macros for I/O connections for the different macros and chapter
Electrical installation for installation in general.
reference, 0…10 V
common
+10 VDC, max 10 mA
1…10
kohm
Control panel (RJ-45)
8
SCRScreen
max. 500 ohm
AI1Output frequency/speed
AI1
mA
AI2
V
GNDAnalog input circuit
+10VReference voltage
AI2Not in use by default
AO
GND
Modbus RTU (RS-232)
Output frequency
0…20 mA
Analog output circuit
common
Analog input circuit common
Aux. voltage output
+24 VDC, max. 200 mA
Aux. voltage output common
Digital input common
Stop/Start
Forward/Reverse
Constant speed
selection
Constant speed
selection
Acceler. and
PROGRAMMABLE DIGITAL
FlashDrop
Encoder
Fieldbus adapter
DeviceNet, PROFIBUS DP,
CANopen,
Modbus RTU (RS-485)
3-phase power supply
deceler. selection
INPUTS (ABB Standard
macro defaults shown)
1)
PE
L1
L2
L3
10
6
6
GND
+24 V
GND
DCOM
DI1
DI2
DI3
DI4
DI5
U1
V1
Brake chopper
W1
BRK+ BRK-
ROCOM
RONC
RONO
DOSRC
DOOUT
DOGND
EMC
VAR
U2
V2
W2
PROGRAMMABLE RELAY
AND DIGITAL OUTPUTS
Relay output
250 VAC / 30 VDC
Digital output, transistor type
30 VDC, max. 100 mA
EMC filter grounding screw
Varistor grounding screw
M
AC motor
3 ~
1)
DI5 can also be used as a
frequency input.
Hardware description
t°
Brake resistor
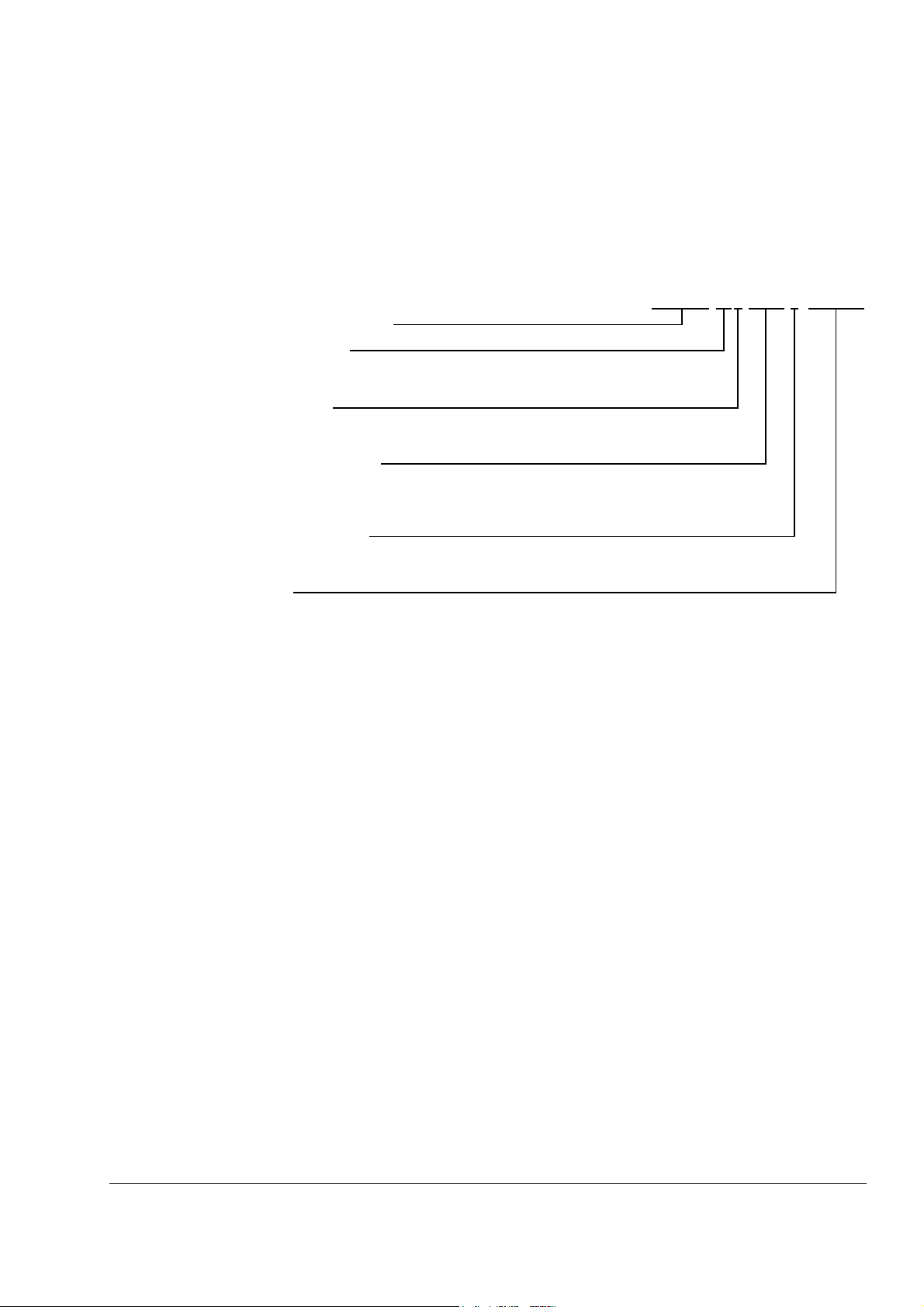
Type code
19
The type code contains information on the specifications and configuration of the
drive. You find the type code on the type designation label attached to the drive. The
first digits from the left express the basic configuration, for example ACS350-03E08A8-4. The optional selections are given after that, separated by + signs, for
example +J404. The explanations of the type code selections are described below.
ACS350-03E-08A8-4+J404+...
ACS350 product series
1-phase/3-phase
01 = 1-phase input
03 = 3-phase input
Configuration
E = EMC filter connected, 50 Hz frequency
U = EMC filter disconnected, 60 Hz frequency
Output current rating
In format xxAy, where xx indicates the integer part and y the fractional part,
e.g. 08A8 means 8.8 A.
For more information, see section Ratings on page 273.
Input voltage range
2 = 200…240 VAC
4 = 380…480 VAC
Options
J404 = ACS-CP-C Basic Control Panel
J400 = ACS-CP-A Assistant Control Panel (Area 1: Language support for EN, EN (AM), DE, IT, ES, PT,
NL, FR, DA, FI, SV)
J416 = ACS-CP-L Assistant Control Panel (Area 2: Language support for EN, DE, RU, PL, TR, CS)
J402 = MPOT-01 Potentiometer
K451 = FDNA-01 DeviceNet
K454 = FPBA-01 PROFIBUS DP
K457 = FCAN-01 CANopen
K458 = FMBA-01 Modbus RTU
Hardware description

20
Hardware description

Mechanical installation
What this chapter contains
The chapter describes the mechanical installation procedure of the drive.
Unpacking the drive
The drive (1) is delivered in a package that also contains the following items (frame
size R1 shown in the figure):
• plastic bag (2) including clamping plate (also used for I/O cables in frame size
R3), I/O clamping plate (for frame sizes R0…R2), fieldbus option ground plate,
clamps and screws
• panel cover (3)
• mounting template, integrated into the package (4)
• user’s manual (5)
21
• possible options (fieldbus, potentiometer, encoder, all with instructions, Basic
Control Panel or Assistant Control Panel).
1
4
2 53
P
O
W
E
R
F
A
U
L
T
Mechanical installation

22
Delivery check
Check that there are no signs of damage. Notify the shipper immediately if damaged
components are found.
Before attempting installation and operation, check the information on the type
designation label of the drive to verify that the drive is of the correct type. The type
designation label is attached to the left side of the drive. An example label and
explanation of the label contents are shown below.
,38/2SHQW\SH
N:+3 61<::5;;;;
8 a«9
3
, $ $)(
I «+]
8 a«89
, $PLQ
I «+]
Type designation label
$&6($
OOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOO
2
OOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOO
1 Type code, see section Type code on page 19
1
2 Degree of protection (IP and UL/NEMA)
3 Nominal ratings, see section Ratings on page 273.
4
4 Serial number of format YWWRXXXXWS, where
5
6
Y: 5…9, A, … for 2005…2009, 2010, …
WW: 01, 02, 03, … for week 1, week 2, week 3, …
R: A, B, C, … for product revision number
XXXX: Integer starting every week from 0001
5 ABB MRP code of the drive
6 CE marking and C-Tick and C-UL US marks (the label
of your drive shows the valid markings)
Before installation
The ACS350 may be installed on the wall or in a cabinet. Check the enclosure
requirements for the need to use the NEMA 1 option in wall installations (see chapter
Technical data).
The drive can be mounted in three different ways, depending on the frame size:
a) back mounting (all frame sizes)
b) side mounting (frame sizes R0…R2)
c) DIN rail mounting (all frame sizes).
The drive must be installed in an upright position. Check the installation site
according to the requirements below. Refer to chapter Dimensions for frame details.
Requirements for the installation site
See chapter Technical data for the allowed operation conditions of the drive.
Wall
The wall should be as close to vertical and even as possible, of non-flammable
material and strong enough to carry the weight of the drive.
Floor
The floor/material below the installation should be non-flammable.
Free space around the drive
The required free space for cooling above and below the drive is 75 mm (3 in.). No
free space is required on the sides of the drive, so they can be mounted side by side.
Mechanical installation

Mounting the drive
Mount the drive
Note: Make sure that dust from drilling does not enter the drive during the
installation.
With screws
1. Mark the locations for the holes using e.g. the mounting template cut out from the
package. The locations of the holes are also shown in the drawings in chapter
Dimensions. The number and location of the holes used depend on how the drive
is mounted:
a) back mounting (frame sizes R0…R3): four holes
b) side mounting (frame sizes R0…R2): three holes; one of the bottom holes is
located in the clamping plate.
2. Fix the screws or bolts to the marked locations.
3. Position the drive onto the screws on the wall.
4. Tighten the screws in the wall securely.
23
On DIN rail
1. Click the drive to the rail as shown in Figure a below. To detach the drive, press
the release lever on top of the drive as shown in Figure b.
ab
Fasten clamping plates
See Figure a below.
1. Fasten the clamping plate to the plate at the bottom of the drive with the provided
screws.
Mechanical installation

24
2. Fasten the I/O clamping plate to the clamping plate (frame sizes R0…R2) with the
provided screws.
a b
1
2
2
1
Attach the optional fieldbus module
See Figure b above.
5
8
6
4
4
7
7
3
3
3. Connect the power and control cables as instructed in chapter Electrical
installation.
4. Place the fieldbus module on the option ground plate and tighten the grounding
screw on the left corner of the fieldbus module. This fastens the module to the
option ground plate.
5. If the terminal cover is not already removed, push the recess in the cover and
simultaneously slide the cover off the frame.
6. Snap the fieldbus module attached to the option ground plate in position so that
the module is plugged to the connection on the drive front and the screw holes in
the option ground plate and the I/O clamping plate are aligned.
7. Fasten the option ground plate to the I/O clamping plate with the provided screws.
8. Slide the terminal cover back in place.
Mechanical installation
Planning electrical installation
What this chapter contains
The chapter contains the instructions that you must follow when selecting the motor,
cables, protections, cable routing and way of operation for the drive. If the
recommendations given by ABB are not followed, the drive may experience
problems that the warranty does not cover.
Note: The installation must always be designed and made according to applicable
local laws and regulations. ABB does not assume any liability whatsoever for any
installation which breaches the local laws and/or other regulations.
Motor selection
Select the 3-phase AC induction motor according to the rating table on page 273 in
chapter Technical data. The table lists the typical motor power for each drive type.
25
AC power line connection
Use a fixed connection to the AC power line.
WARNING! As the leakage current of the device typically exceeds 3.5 mA, a fixed
installation is required according to IEC 61800-5-1.
Supply disconnecting device
Install a hand-operated input disconnecting device (disconnecting means) between
the AC power source and the drive. The disconnecting device must be of a type that
can be locked to the open position for installation and maintenance work.
• Europe: To meet the European Union Directives, according to standard
EN 60204-1, Safety of Machinery, the disconnecting device must be one of the
following types:
- a switch-disconnector of utilization category AC-23B (EN 60947-3)
- a disconnector having an auxiliary contact that in all cases causes switching
devices to break the load circuit before the opening of the main contacts of the
disconnector (EN 60947-3)
- a circuit breaker suitable for isolation in accordance with EN 60947-2.
• Other regions: The disconnecting device must conform to the applicable safety
regulations.
Planning electrical installation
26
Thermal overload and short-circuit protection
The drive protects itself and the input and motor cables against thermal overload
when the cables are dimensioned according to the nominal current of the drive. No
additional thermal protection devices are needed.
WARNING! If the drive is connected to multiple motors, a separate thermal overload
switch or a circuit breaker must be used for protecting each cable and motor. These
devices may require a separate fuse to cut off the short-circuit current.
The drive protects the motor cable and motor in a short-circuit situation when the
motor cable is dimensioned according to the nominal current of the drive.
Input power cable (AC line cable) short-circuit protection
Always protect the input cable with fuses or circuit breakers. Size the fuses
according to local safety regulations, appropriate input voltage and the rated current
of the drive (see chapter Technical data).
When placed at the distribution board, standard IEC gG fuses or UL type T fuses will
protect the input cable in short-circuit situations, restrict drive damage and prevent
damage to adjoining equipment in case of a short circuit inside the drive.
Operating time of the fuses and circuit breakers
Check that the operating time of the fuse or circuit breaker is below 0.5
seconds. The operating time depends on the type, the supply network impedance
and the cross-sectional area, material and length of the supply cable.The US fuses
must be of the “non-time delay” type.
For fuse ratings, see chapter Technical data.
Circuit breakers
The protective characteristics of circuit breakers depend on the supply voltage as
well as the type, construction and settings of the breakers. There are also limitations
pertaining to the short-circuit capacity of the supply network. Your local ABB
representative can help you in selecting the breaker type when supply network
characteristics are known.
Planning electrical installation
Selecting the power cables
General rules
Dimension the input power and motor cables according to local regulations.
• The cable must be able to carry the drive load current. See chapter Technical
data for the rated currents.
27
• The cable must be rated for at least 70
the conductor in continuous use. For US, see section Additional US requirements
on page 28.
• The conductivity of the PE conductor must be equal to that of the phase
conductor (same cross-sectional area).
• 600 VAC cable is accepted for up to 500 VAC.
• Refer to chapter Technical data for the EMC requirements.
A symmetrical shielded motor cable (see the figure below) must be used to meet the
EMC requirements of the CE and C-tick marks.
A four-conductor system is allowed for input cabling, but a shielded symmetrical
cable is recommended.
Compared to a four-conductor system, the use of a symmetrical shielded cable
reduces electromagnetic emission of the whole drive system as well as motor
bearing currents and wear.
Alternative power cable types
Power cable types that can be used with the drive are presented below.
Motor cables
(recommended for input cables also)
Symmetrical shielded cable: three phase conductors,
a concentric or otherwise symmetrically constructed
PE conductor and a shield
PE conductor
and shield
Shield
°C maximum permissible temperature of
Note: A separate PE conductor is required if the
conductivity of the cable shield is not sufficient for the
purpose.
Shield
PE
Allowed as input cables
A four-conductor system: three phase conductors and
a protective conductor
PE
Shield
PEPE
Planning electrical installation

28
Motor cable shield
To function as a protective conductor, the shield must have the same cross-sectional
area as the phase conductors when they are made of the same metal.
To effectively suppress radiated and conducted radio-frequency emissions, the
shield conductivity must be at least 1/10 of the phase conductor conductivity. The
requirements are easily met with a copper or aluminium shield. The minimum
requirement of the motor cable shield of the drive is shown below. It consists of a
concentric layer of copper wires with an open helix of copper tape. The better and
tighter the shield, the lower the emission level and bearing currents.
Insulation jacket Copper wire screen Helix of copper tape
Inner insulation
Cable core
Additional US requirements
Type MC continuous corrugated aluminium armor cable with symmetrical grounds or
shielded power cable is recommended for the motor cables if metallic conduit is not
used.
The power cables must be rated for 75°C (167°F).
Conduit
Where conduits must be coupled together, bridge the joint with a ground conductor
bonded to the conduit on each side of the joint. Bond the conduits also to the drive
enclosure. Use separate conduits for input power, motor, brake resistors and control
wiring. Do not run motor wiring from more than one drive in the same conduit.
Armored cable / shielded power cable
Six-conductor (three phases and three ground) type MC continuous corrugated
aluminium armor cable with symmetrical grounds is available from the following
suppliers (trade names in parentheses):
• Anixter Wire & Cable (Philsheath)
• BICC General Corp (Philsheath)
• Rockbestos Co. (Gardex)
• Oaknite (CLX).
Shielded power cables are available from Belden, LAPPKABEL (ÖLFLEX) and
Pirelli.
Planning electrical installation
29
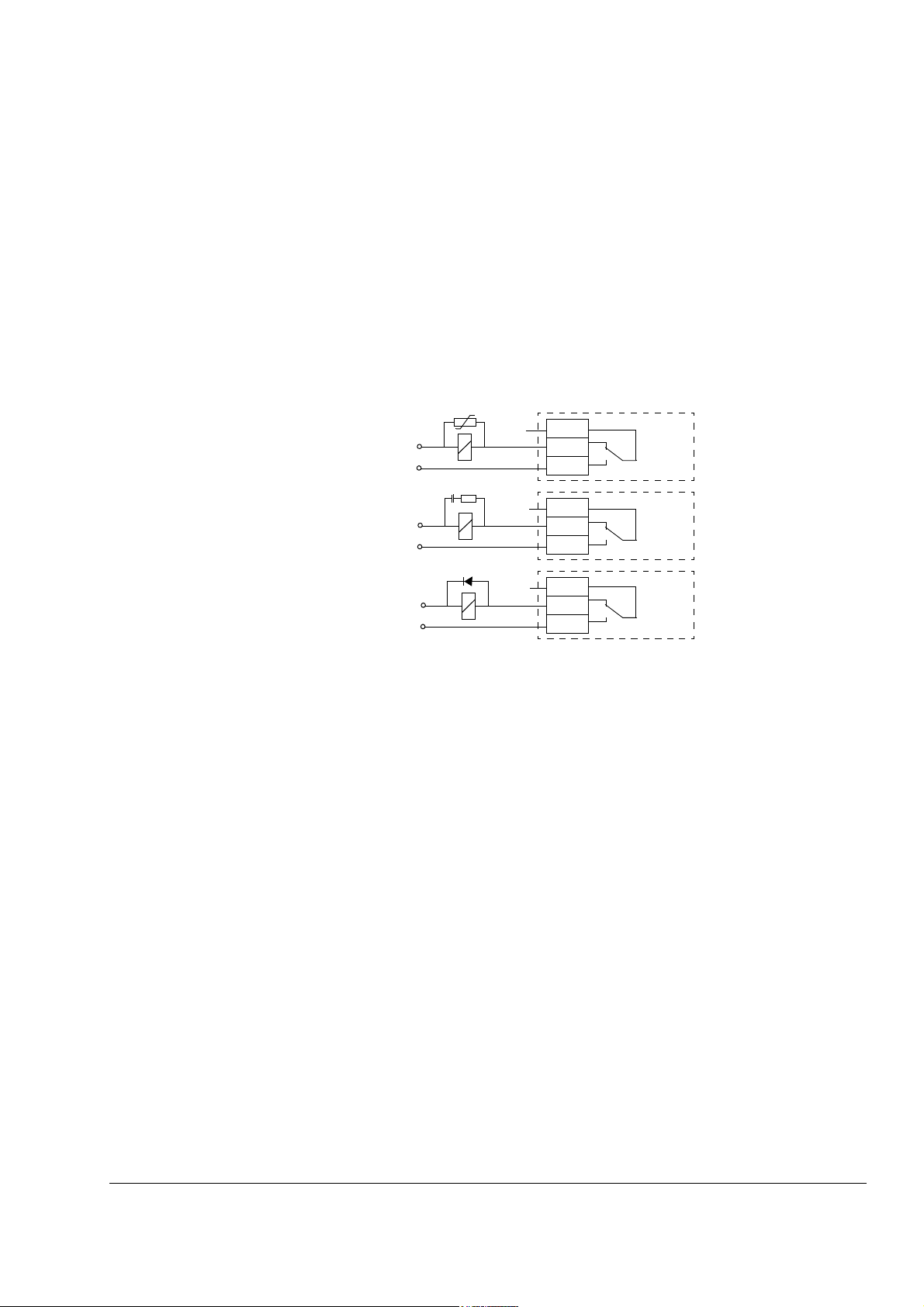
Protecting the relay output contact and attenuating disturbances in case of inductive loads
Inductive loads (relays, contactors, motors) cause voltage transients when switched
off.
Equip inductive loads with noise attenuating circuits [varistors, RC filters (AC) or
diodes (DC)] in order to minimize the EMC emission at switch-off. If not suppressed,
the disturbances may connect capacitively or inductively to other conductors in the
control cable and form a risk of malfunction in other parts of the system.
Install the protective component as close to the inductive load as possible. Do not
install protective components at the I/O terminal block.
Varist or
Drive
230 VAC
RC filter
230 VAC
relay
output
Drive
relay
output
Diode
24 VDC
Residual current device (RCD) compatibility
ACS350-01x drives are suitable to be used with residual current devices of Type A,
ACS350-03x drives with residual current devices of Type B. For ACS350-03x drives,
other measures for protection in case of direct or indirect contact, such as separation
from the environment by double or reinforced insulation or isolation from the supply
system by a transformer, can also be applied.
Selecting the control cables
All analog control cables and the cable used for the frequency input must be
shielded.
Use a double-shielded twisted pair cable (Figure a, e.g. JAMAK by NK Cables) for
analog signals. Employ one individually shielded pair for each signal. Do not use
common return for different analog signals.
Drive
relay
output
Planning electrical installation

30
A double-shielded cable is the best alternative for low-voltage digital signals, but a
single-shielded or unshielded twisted multipair cable (Figure b) is also usable.
However, for frequency input, always use a shielded cable.
a
A double-shielded twisted
multipair cable
Run analog and digital signals in separate cables.
Relay-controlled signals, providing their voltage does not exceed 48 V, can be run in
the same cables as digital input signals. It is recommended that the relay-controlled
signals are run as twisted pairs.
Never mix 24 VDC and 115/230 VAC signals in the same cable.
Relay cable
The cable type with braided metallic screen (e.g. ÖLFLEX by LAPPKABEL) has
been tested and approved by ABB.
Control panel cable
In remote use, the cable connecting the control panel to the drive must not exceed
3 m (10 ft). The cable type tested and approved by ABB is used in control panel
option kits.
A single-shielded twisted
multipair cable
b
Connection of a motor temperature sensor to the drive I/O
Please refer to section Motor temperature measurement through the standard I/O on
page 120 for information on connecting a motor temperature sensor to the drive I/O.
Routing the cables
Route the motor cable away from other cable routes. Motor cables of several drives
can be run in parallel installed next to each other. It is recommended that the motor
cable, input power cable and control cables be installed on separate trays. Avoid
long parallel runs of motor cables with other cables to decrease electromagnetic
interference caused by the rapid changes in the drive output voltage.
Where control cables must cross power cables make sure that they are arranged at
an angle as near to 90 degrees as possible.
The cable trays must have good electrical bonding to each other and to the
grounding electrodes. Aluminium tray systems can be used to improve local
equalizing of potential.
Planning electrical installation
 Loading...
Loading...