

Page 1

Manual
33611 General Air-Module 2-6 S with Vario
Contents
1. Description.................................................................................................................................................................2
2. Warnings ...................................................................................................................................................................3
3. Mounting the Module in the Plane .............................................................................................................................4
4. Connection of sensors ...............................................................................................................................................5
5. Starting up .................................................................................................................................................................6
6. Operation ...................................................................................................................................................................6
6.1. Display LIPO CELL VOLTAGE ...............................................................................................................................7
6.2 Sensor 1/2 voltage...................................................................................................................................................8
6.3. Sensor 1/2 Temperature .........................................................................................................................................8
6.4. Vario Display ...........................................................................................................................................................9
6.5. RPM sensor / Fuel sensor ......................................................................................................................................9
7. Programming Warning thresholds ...........................................................................................................................10
7.2. Minimum Cell Voltage Sensor 1 (Page 3).............................................................................................................12
7.3. Maximum Cell Voltage Sensor 1 (Page 4)............................................................................................................12
7.4. Minimum Temperature Sensor 1 (Page 5) ............................................................................................................12
7.5. Maximum Temperatur Sensor 1 (Page 6) .............................................................................................................12
7.6. Minimum Cell Voltage Sensor 2 (Page 7).............................................................................................................13
7.7. Maximum Cell Voltage Sensor 2 (Page 8)............................................................................................................13
7.8. Minimum Temperature Sensor 2 (Page 9) ............................................................................................................13
7.9. Maximum Temperature Sensor 2 (Page 10) .........................................................................................................13
7.10. Maximum Current (Page 11) ..............................................................................................................................14
7.11. Maximum used Capacity (Page 12) ....................................................................................................................14
7.12. Minimum Voltage socket 1 (Page 13) .................................................................................................................14
7.13. Maximum Voltage socket 1 (Page 14) ................................................................................................................14
7.14. Minimum Altitude (Page 15) ...............................................................................................................................15
7.15. Maximum Altitude (Page 16) ..............................................................................................................................15
7.16. Sink rate per second (Page 17) ..........................................................................................................................15
7.17. Sink rate per 3 seconds (Page 18) .....................................................................................................................15
7.18. Climb rate per second (Page 19)........................................................................................................................16
7.19. Climb rate per 3 seconds (Page 20) ..................................................................................................................16
7.20. Minimum RPM (Page 21) ...................................................................................................................................16
7.21. Maximum RPM (Page 22) ..................................................................................................................................16
8. Setup Displays.........................................................................................................................................................17
8.1. Calibration of the temperature sensors ................................................................................................................17
8.2. Continous vario ....................................................................................................................................................18
8.3. Blade Number .....................................................................................................................................................19
8.4. Current Control ...................................................................................................................................................20
8.5. Settings and calibration of the precision fuel sensor (fuel settings)......................................................................22
9. Summary Signal tones ............................................................................................................................................25
10. Telemetry display ...................................................................................................................................................26
11. Firmware Update ..................................................................................................................................................27
12. Specications General Air-Modul ..........................................................................................................................28
13. EG declaration of conformity .................................................................................................................................29
14. Environmental Protection Notes ............................................................................................................................29
15. Warranty ................................................................................................................................................................30
GRAUPNER/SJ GmbH – Postfach 1242 – 73230 Kirchheim/Teck – www.graupner.de
Graupner HoTT 2.4
Page 2

thank you
for purchasing the General Air-Module for the Graupner HoTT 2.4 system.
If you do not have the Graupner HoTT 2.4 radio system this product will not work. This product is not compatible with any other 2.4GHz radio system.
Please read through this entire manual before you attempt the installation and usage of your Graupner HoTT
General Air-Module!
These operating instructions are part of this product. They contains important notes to the operation and
handling. Please take this into consideration when you pass on the product to third parties. Neglect of the
operating instructions and the safety instructions lead to expiring the warranty.
Graupner constantly work on the advancement of all remote control systems; changes of the scope of delivery in form, technology and equipment we must reserve ourselves therefore. Please have understanding
for the fact that from data and illustrations of this operating instructions no requirements can be derived.
Please keep these instructions for further reference!
1. Description
The Graupner-HoTT General Air-Module enables the wireless monitoring of for example the battery voltage,
power consumption, motor rpm, fuel consumption or altitude of the model in real time. The General AirModule can be programmed directly with all HoTT transmitters with integrated telemetry in the transmitter
display (some models such as MC-24 with update or modication).
the following transmitters must be programmed via SMaRt-BoX order no. 33700: mx-12 HoTT order
No. 4754, mx-16 HoTT order No. 4755, and mx-22 No. 4801/4802, mc-19 No. 4821 and mc-22 No. 4818
after conversion to HoTT. This differentiation between the transmitter models and the resulting operation is
explicitly mentioned at the appropriate point in the instructionsn (see also point 5).
For full functionality, additional sensors are necessary.
Informations available - Setup:
Altitude, min. Altitude, max.Altitude, negative/positive difference/s, negative/positive difference/3s
Battery voltage (total - single cell), Min./Max. voltage, Min./Max. cell voltage
Maximum current, used capacity
Temperature (optional Sensor 1/Sensor 2), Min./Max. Temperature
Fuel level, Min. fuel level,
RPM, Minimum/ Maximum RPM
Note: Any settings you make on the Transmitter or SMART-BOX will be stored in the General
Air-Moduleonly!
Since the General Air-Module can be updated via the USB connection, you always have the latest software
and can utilize future functions or languages. Firmware updates for the General Air-Module can be transferred via the DAT A or telemetry interface in conjunction with a PC running Windows XP , Vista or 7. For this you
also require the USB interface, Order No. 7168.6, the adapter lead, Order No. 7168.6A and a Y-cable Order
No. 3936.11 which are available separately.
The programs and les required for this are available from www.graupner.de in the Download area for the
corresponding products.
02 33611 General Air-Modul - Graupner HoTT 2.4
Page 3
SyMBolS anD theIR MeanIngS
2. Warnings
attentIon!
This symbol alerts you to the following notes, which users must observe. Ignoring or neglecting any point in these notes may have an adverse effect on the reliable operation of the
device, and the operator’s personal safety.
WaRnIng!
This symbol alerts you to the following notes, with which users must comply. Ignoring or
neglecting any point in these notes may have an adverse effect on the reliable operation of
the device, and the operator’s personal safety.
This symbol highlights information that should be considered by the user to ensure safe
operation of the unit.
This symbol alerts you to notes concerning the proper care of the charger, which users should
always observe in order to ensure that the device has an extended useful life.
P
This product isn‘t designed for use by children under the age of 14, it isn‘t a toy!
The controller‘s CE certicate doesn‘t unbind users from their obligation to use ultimate caution.
Should the motor refuse to start up, or after a crash, then you should immediately set the
transmitter‘s control stick to the OFF position to avoid any overload to the controller. Check
once again that the motor connections are correct. It may be necessary to shorten the leads,
and / or set a throttle pick-up delay, in order to prevent timing errors.
Use only motors delivered by GM-Racing or Graupner/SJ which are designed for the intended
range of voltages!
Use only high performance batteries by Graupner/SJ or GM-Racing. Using batteries with an
increased internal resistance may lead to the destruction of the controller! Do never use a
power supply!
Never leave your model unattended when a battery is connected. In case of a deciency this
may cause an outbreak of re on the model or its environment.
Neither the controller nor any other electronic components should ever come in touch with water. Protect the controller against dust, dirt, humidity, vibrations, or other dangerous elements.
Never run the motor on a separate battery. This will destroy the controller or the motor, and
leads to the loss of our warranty.
33611 General Air-Modul - Graupner HoTT 2.4 03
Page 4

Never mix up polarities. Use plug systems which offer protection against wrong polarity. Avoid
short-circuiting and blocking the motors.
All cables and connectors should have good insulation. Short-circuits may lead to the destruction of your motor.
Graupner/SJ-controllers are designed for use in battery-driven, radio-controlled models only;
any other use is not permissible. Using this device on a passenger-carrying model is forbidden!
Motors, gears or gearboxes, and propellers are dangerous objects. Never keep next to or in
front of the danger area of the drive!
Technical defects or failures of mechanical or electronic parts may lead to an unexpected
start-up of the motor, with parts of it ying off, maybe causing severe injuries.
Always check the service range of transmission of your model rst thing while it‘s still on the
ground (hold the model tightly!). Try again with motor on and also with fast changes of the
throttle stick.
Don‘t make any changes on the structure and design of your controller unless they are described in the manual.
Only those components and accessory parts which have been recommended by us may be
used. Use only genuine and matching Graupner/SJ connectors and accessory parts.
Make sure whenever you start connecting and operating the controller, that your transmitter
isswitched on, and has the throttle set to position “STOP”.
Limited warranty: Graupner Ltd cannot survey the proper application of the mounting and
using regulations, nor the working methods and conditions during the installation, use, operation, and servicing of the controller. Therefore Graupner Ltd cannot take on any liability for
any loss, damage, or costs resulting from an incorrect use or operation of the product, or
connected in any way with incorrect use or operation.
3. Mounting the Module in the Plane
Mount the General Air-Module at an appropriate location in the model. The vario sensor is already integrated in the module. This sensor detects changes in air pressure and calculates the resulting actual altitude.
Therefore, make sure that the sensor is wind-protected in the model and is not located directly in the ow
of the propeller. Likewise, it must not be mounted on an air-tight place, such in a sealed radio box. The best
way to x the General Air-Module with the mounting tabs or double sided tape on a wind-protected frame in
the model, the orientation of the sensor is not important.
04 33611 General Air-Modul - Graupner HoTT 2.4
Page 5
1
8
-
1
2
3
+
9
10
11
4
5
Note: the accuracy of the sensor also varies with alterations in ambient air pressure, e.g. due to sudden changes in weather conditions, as well as with changes in air
pressure which occur in the course of the day or during
an extended ight. It is not uncommon for minor uctuations in air
pressure to affect the accuracy of the sensor to the extent of about
10 to 20 m. These inaccuracies can also be caused by pressure
changes inside the fuselage itself (e.g. high pressure due to the forced propeller airow, or air owing into
the model during a ight).
4. Connection of sensors
The consumed current and capacity is measured only on connection 1 (IN) and 8 (OUT). Therefore, the
main battery for the motor (electric model - G3.5 connector) or the transmitter battery (Nitro model - JR
connector) must be connected to this connection. Use a connector system to replace the battery easily.
If you use a LIXX battery, the balancer can be plugged into socket 6 to monitor the individual cell voltage.
Caution: never connect batteries to both sockets (G3.5 and JR)! These are inter-connected, and
must only be used separately. Note also that the input voltage is present at the JR socket at output
8; do not connect the plug to the receiver if the voltage is higher than the maximum permissible
voltage for receiver or servos.
Note: All negative terminals are interconnected and not galvanically seperated.
Caution: Please ensure that the continuous current does not exceed the stated maximum for the
current sensor. You should also ensure that the motor start-up current is not so high that the shunt
resistors are overloaded! This can result in a break in the power supply, which would cause the
model to crash.
For this reason it is important to carry out a thorough check of the motor’s function and maximum current
drain: start cautiously, then increase to maximum load and eventually to a full battery charge, to ensure that
the current shunt resistors are not overloaded.
The “regulate current” function (see point 7.4.) can be used to limit the maximum current passing through
the model’s electronic speed controller. If the model’s current drain is above the peak current permitted for
the General Air module, then it is essential to use this function to prevent damage to the module or a break
in the power supply.
If high peak currents are likely, you must use the more powerful General Electric sensor, Order No. 33620,
or alternatively you might prefer to manage without current measurement altogether.
When measuring power system currents please note that the voltage fall-off at the shunt resistors can place
an increased load on the speed controller, and on the speed controller’s capacitors in particular. For safety
reasons you should therefore operate the controller on one or two cells fewer than the maximum stated
cell-count, i.e. not with the full count.
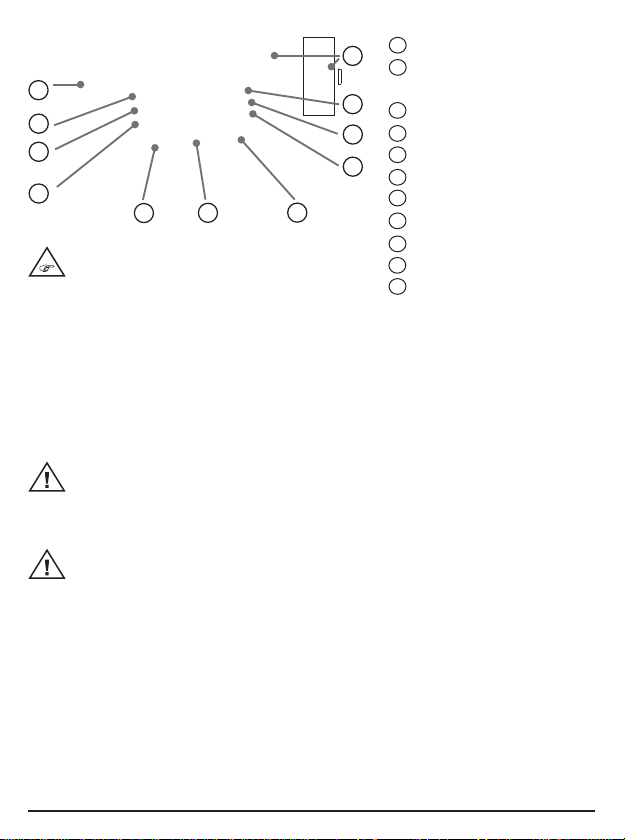
Connect any additional sensors to the corresponding sockets as shown in the illustration at the top.
33611 General Air-Modul - Graupner HoTT 2.4 05
6
7
Battery input max. 60 V DC / 40 A
2 Receiver / SMART-BOX and
Firmware-Update (T)
3 Control Out (output ESC)
4 Control In (input ESC)
5 Sensor 1 (33612 / 33613)
6 Balancer connector LiXX 2 - 6S
7 Sensor 2 (33612 / 33613)
8 Battery output
9 RPM sensor (33615 / 33616)
10 Fuel sensor (33614)
11 Control Switch (select switch for
current control)
Page 6
5. Starting up
Connect the General Air-Module (socket 2) with the 3-pin lead to socket marked „T“ of the receiver. The
connector system is polarised, look for the small camfer on the edges. Never use force - the plug should
engage easily and fully. The sockets are labeled accordingly: black wire (-), red wire (+) and orange wire (S).
Only for transmitters under 1 „exception“ with SMART-BOX:
Install the SMART-BOX at the mounting bracket of the transmitter as shown in the gure. Connect the box
then the 3-pin lead to the transmitter. Put one end of the cable into the DATA jack on the transmitter and the
other into the jack on the right side of the SMART-BOX. The connector system is polarised, look for the small
camfer on the edges. Never use force - the plug should engage easily and fully. The sockets are labeled
accordingly: black wire (-), red wire (+) and orange wire (S).
Note: You can connect the General Air-Module instead of the receiver directly to the jack on the
right side of the SMART-BOX. By doing this, the settings will be sent directly to the General Air-
Module (without using the radio control system) and the programming is much faster. A power supply for the SMART-BOX is neccessary (3.6 - 9 V), inserted on the left side. The connector system is reverse
polarised, look for the small camfer on the edges. Do not use force, the plug should click into place easily.
This sockets is labeled accordingly also. The black wire must be down (-), the red top (+).
6. operation
The operation of the General Air-Module is similar to the operation of the transmitter. You should also read
the manual of your remote control system, especially the chapter „telemetry“. The operation is done in
the transmitter menu „telemetry“ under the display SETTING & DATA VIEW. The sensor displays follow
the receiver displays (RX), i.e. the „Lipo Cell Voltage“ display follows after the last display servo test (RX
SERVO TEST).
Please note: the menus can only be selected when the receiver is switched on. When you switch
the receiver on, it may take a few seconds before the receiver display becomes active and can be
selected: > symbol appears at the top right corner of the transmitter display (TX).
There may be a slight delay in the screen’s response to inputs, since all the settings are transmitted directly
to the receiver by wireless means.
Operation with the SMART-BOX:
The SMART-BOX is operated by the four buttons on the top. Switch with the ESC and ENTER keys between
the different displays. With the DEC and INC buttons you can select the parameters in the display (INC
moves the cursor down, DEC up).
Switch on the transmitter. On the startup screen appears SETTING AND DATA VIEW / MODEL SELECT.
Move the arrow cursor with the INC or DEC buttons on SETTING AND DATA VIEW and then press ENTER
to display the parameters of the transmitter, receiver and telemetry sensors and / or program it, or select
MODEL SELECT to display the telemetry data graphically (see point 9). In MODEL SELECT display no
changes are possible.
After SETTING AND DATA VIEW have chosen, the „Lipo Cell Voltage“ display is available. The sensor displays follow the transmitter (TX) and receiver (RX) displays, i.e. the „Lipo Cell Voltage“ display follows after
the last display servo test (RX SERVO TEST).
06 33611 General Air-Modul - Graupner HoTT 2.4
Page 7
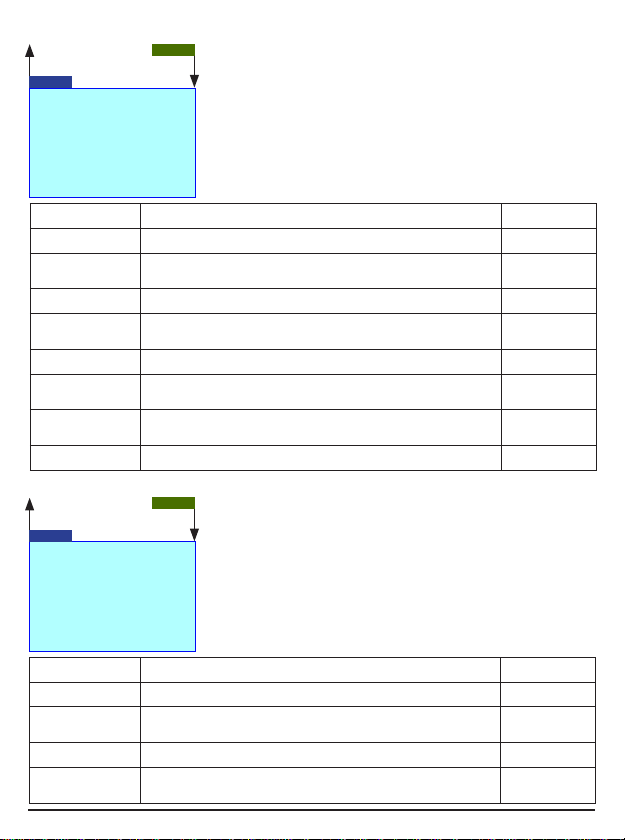
6.1. Display lIPo Cell Voltage
Please note: the labeling of the arrows of the following displays corresponds to the keys on top of the
SMART-BOX. This assignment is different depending on the remote control system.
SMaRt-BoX mx-12/16/20/32 hott mc-19/mc-22/mc-24/mx-24 hott
ENTER
ESC
INC
DEC
u
t
scroll: q value: p scroll: push Rotary + P value: Rotary P
scroll: p value: q scroll: push Rotary + Q value: Rotary Q
ENTER
CLEAR
INC+DEC Set push Rotary
The descriptive text describes also primarily the button layout and operation of the SMART-BOX, followed by
the buttons of the mx-16 HoTT as an example in parentheses. Please note that the button layout for example
of the HoTT mc-transmitters (order No. 4758, 4759) may differ. Read the manual of your remote control
system to become familiar with the telemetry operation.
ENTER
ESC
LiPo Cell Voltage >
Overall volt : 11.890V
Min 8.450V
1N 3.201V
3N 3.030V
5N 0.000V
Min 2.567V
Max 16.800V
2N 3.100V
4N 2.567V
6N 0.000V
Max 3.201V
The displays 6.1 to 6.5 are simple data displays, this parameters can
not be programmed.
Parameters which have different options in the Settings column of the
table can be adjusted. If there are no options, the screen simply displays the parameter data.
Parameter Description Setup
Overall Volt Current voltage of the battery connected to socket 6 Min. Minimum voltage of the battery connected to socket 6 since
Max. Maximum voltage of the battery connected to socket 6 since
the start
the start
-
-
1N - 6N Single cell voltage of the LiXX-battery connected to socket 6 Min. Minimum single cell voltage of the LiXX-battery connected to
Max Maximum single cell voltage of the LiXX-battery connected to
socket 6 since the start
socket 6 since the start
-
-
33611 General Air-Modul - Graupner HoTT 2.4 07
Page 8
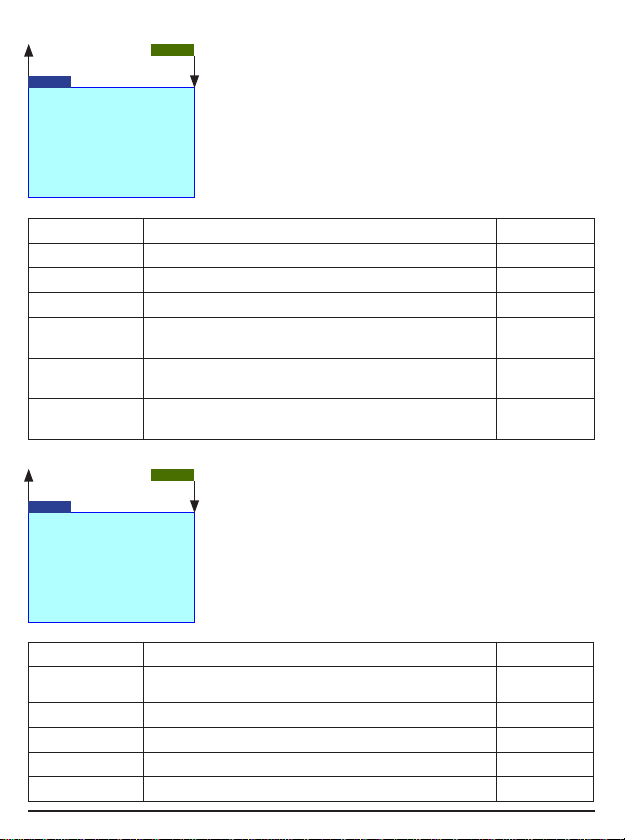
6.2 Sensor 1/2 voltage
DEC
Sensor 1 : 14.92V
Min 11.53V
Sensor 2 :
Min 5.60V
Current :
Max Current :
Capacity :
Voltage :
INC
Max 16.800V
7.49V
Max 8.40V
30.2 A
40.3 A
2345 mA
33.88V
Parameter Description Setup
Sensor 1 Current voltage of sensor 1 connected to socket 5 Min./Max. Minimum/Maximum voltage of sensor 1 connected to socket 5
since the start
Sensor 2 Current voltage of sensor 2 connected to socket 7 Min./Max. Minimum/Maximum voltage of sensor 2 connected to socket 7
since the start
Current Current of the battery connected to socket 1 Max. Current Maximum current of the battery connected to socket 1 since
Capacity Used capacity of the battery connected to socket 1 since the
the start
start
Voltage Current voltage of the battery connected to socket 1 -
6.3. Sensor 1/2 temperature
DEC
Sensor 1 : 25°C
Min 20°C
Sensor 2 :
Min 20°C
INC
Max : 60°C
160°C
Max : 260°C
-
-
-
-
Parameter Description Setup
Sensor 1 Current temperature of sensor 1 connected to socket 5 Min./Max. Minimum/Maximum temperature of sensor 1 connected to socket
5 since the start
-
Sensor 2 Current temperature of sensor 2 connected to socket 7 Min./Max. Minimum/Maximum temperature of sensor 2 connected to socket
7 since the start
-
08 33611 General Air-Modul - Graupner HoTT 2.4
Page 9
6.4. Vario Display
DEC
Altitude :
Min. :
Max. :
Diff./Sec :
Diff./ 3s :
Diff./10s :
INC
123.3 M
- 10 M
123 M
- 1.2 M
- 8 M
3 M
Note: The VARIO MODULE is set to the level 0 m after switching
on. The altitude displayed is not the absolute altitude above sea
level, but the relative height from the base!
In the rst row the climb-/sink rate in meter per second is displayed
on demand in synchronization with the warning tones alternating
with „Vario sensor“ , the vertical speed in meters per second. Sinking is represented by the negative sign.
Parameter Description Setup
Altitude Current Altitude (Meter) Min. Minimum Altitude since the start (Meter) Max. Maximum Altitude since the start (Meter) Diff. / Sec Climb-Sink rate (Meter per sec.) - sinking is displayed with
Diff. / 3s Climb-Sink rate (Meter per 3 sec.) - sinking is displayed with
Diff. / 10s Climb-Sink rate (Meter per 10 sec.) - sinking is displayed with
neg. sign
neg. sign
neg. sign
-
-
-
6.5. RPM sensor / Fuel sensor
INC
DEC
RPM (2blade) :
Max. :
Min. :
Fuel Gauge : 0%
Fuel Usag e : 0 mL
7200
16300
3500
With connected speed sensor, the current engine rpm is determined. Therefore, you must rst specify how many blades (or magnets with sensor order no. 33516) the propeller / rotor has to get
the correct rpm. In addition, you can set the minimum engine speed
at which the alarm should be triggered. See point 8.3. for setup.
When connected fuel sensor 33617/33618 of tank level and fuel
consumption is displayed.
Parameter Description Setup
RPM (2 blade) Current motor speed in revolutions per minute and the preset
blade number
-
Max. Maximum RPM since the start Min. Minimum RPM since the start Fuel Gauge Fuel Level since the start Fuel Usage Fuel Consumption since the start -
33611 General Air-Modul - Graupner HoTT 2.4 09
Page 10
7. Programming Warning thresholds
ENTER
ESC
LiPo Cell Voltage >
Overall volt : 11.890V
Min 8.450V
1N 3.201V
3N 3.030V
5N 0.000V
Min 2.567V
Max 16.800V
2N 3.100V
4N 2.567V
6N 0.000V
Max 3.201V
ENTER
General Air-Module <>
>Set Warning :
Save Sensor?
Factory Set?
Ver: S 1.100
ESC
DEC
General Air-Module <>
Set Warning :
>Save Sensor?
Factory Set?
Ver: S 1.100
page 1
No
No
INC
page 1
No
No
If you wish to carry out an adjustment, you must use the INC or DEC buttons (p
select the desired parameter (e.g. page 2) by moving the arrow cursor (INC or q moves the cursor down,
DEC oder p moves it up). Simultaneously pressing the INC and DEC (Set) buttons switches the parameter
to be adjusted to inverse video (white on black); this indicates that it can be programmed: pressing the INC
(p) button at this point increases the value, pressing the DEC (q) button reduces the value. When the adjustment is complete, save the selected setting by pressing the INC and DEC (Set) buttons simultaneously;
the dark background now disappears in order to conrm this action.
Display (Set Warning): shows the various „display pages“ with the possible adjustable parameters and the
associated adjustable warning thresholds (page 1, page 2, etc.). To switch between pages, press the INC
or DEC key (p or q).
or q) above the screen to
Factory Set: choosing „YES“, will reset the settings of the variable module to factory settings.
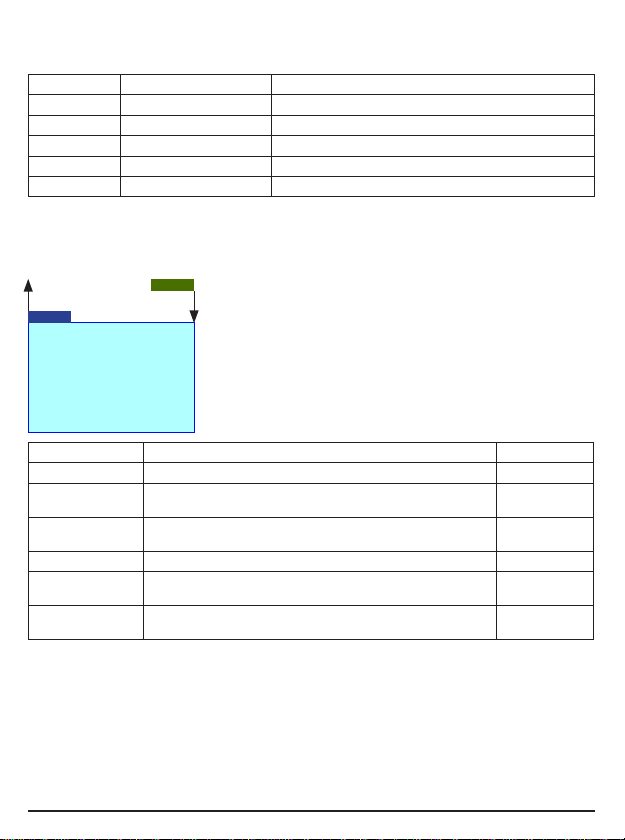
The following parameters can be set separately for all displays:
Warning time: sets whether and how long the warning signal is activated when reaching a certain value
for each display screen.
Repeat time: sets how often the warning signal is activated when reaching a certain value for each display
screen.
Signal tone: sets the signal tone melody. The warning sounds are combined with the warnings on the
display and the voice output. Therefore, they may not be changed.
Overview of the signal tones on page 18.
When a warning is activated, the corresponding message (eg. Min. height) is shown inverted in the
rst row of the associated display, which then appears alternately with the display VARIO SENSOR
and the selected Signal tone a - Z sounds.
you can stop the warning at any time by pressing one of the buttons on the top of the SMaRtBoX.
10 33611 General Air-Modul - Graupner HoTT 2.4
Page 11

Parameter Display page Description Setup
Warning Time Page 2 – page 24 Warning time OFF, 5, 10, 15, 20,
Repeat Time Page 2 – page 24 Repeat time Always, 1, 2, 3, 4, 5
25, 30 sec.
Minuten, One Time
Signal Tone Page 2 – page 24 Signal tone A - Z
Save Sensor Page 1 saves the setup to the General
Air-Module
YES / NO
Factory Set Page 1 Reset to factory settings YES / NO
If you wish to carry out an adjustment (point 7.1 to 7.22) you must use the INC (p) or DEC (q) buttons
above the screen to select „page 1 - Save Sensor“. Simultaneously pressing the INC and DEC buttons
(Set) switches the parameter to be adjusted to inverse video (white on black); this indicates that it can be
programmed: pressing the INC (p) button at this point increases the value to YES. When the adjustment is
complete, save the selected setting by pressing the INC and DEC buttons (Set) simultaneously; the dark
background now disappears in order to conrm this action.
If you do not want to save the adjustments, select NO.
Warning:
• Do not carry out any programming work on the sensors while the model is ying, otherwise
there is a real risk that your model will y out of control while you are not concentrating on it!
• If your model is tted with two or more receivers, it is absolutely essential that you do not carry
out programming work during a ight, as this can alter the settings in the receivers to which no telemetry
equipment is connected; in the worst case this could result in the model crashing.
For this reason always carry out programming on the ground, and check that only the receiver with connected sensors is powered on.
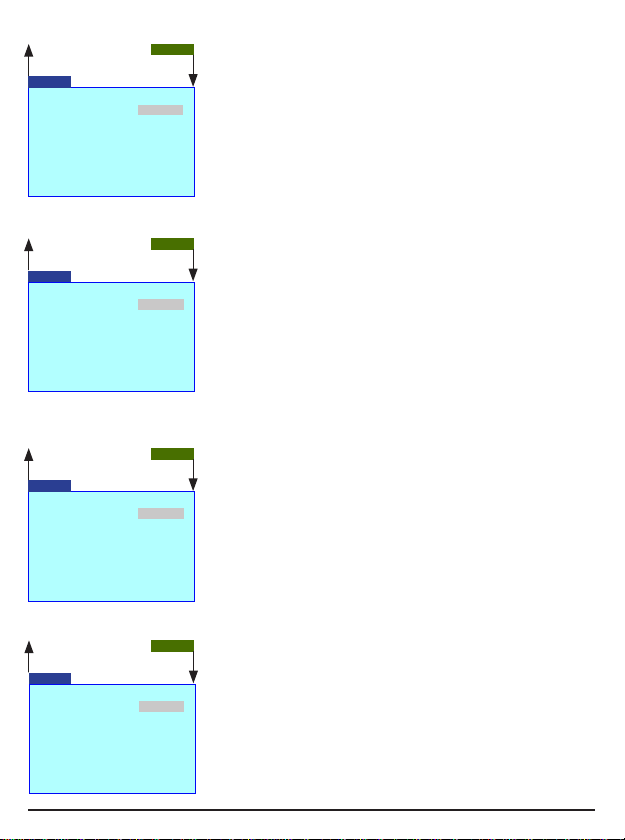
7.1. Minimum Cell Voltage (Page 2)
INC
DEC
Min. Cell Voltage
>Set Warning :
Voltage/Cell :
Warning Time :
Repeat Time :
Signal Tone :
Min. Voltage :
page 2
Off
Always
Q
0.000V
3.3V
The voltage of the battery connected to socket 6 is monitored. Warning
threshold set between 2.5 and 4.2 V (0.1 V steps).
Factory setting: 3.3 V, Signal Tone: Q
The bottom line shows the current measured value.
33611 General Air-Modul - Graupner HoTT 2.4 11
Page 12

7.2. Minimum Cell Voltage Sensor 1 (Page 3)
INC
DEC
Min. Sensor1 Voltage
>Set Warning :
Min Voltage :
Warning Time :
Repeat Time :
Signal Tone :
page 3
Off
Always
R
5.0V
The voltage of the battery connected to sensor 1 (socket 5) is monitored. Warning threshold set between 0 and 80.0 V (0.1 V steps).
Factory setting: 5.0 V, Signal Tone: R
Sensor 1 : 0.00V
7.3. Maximum Cell Voltage Sensor 1 (Page 4)
INC
DEC
Max. Sensor1 Voltage
>Set Warning :
Min Voltage :
Warning Time :
Repeat Time :
Signal Tone :
Sensor 1 :
page 4
30.0V
Off
Always
J
0.00V
The voltage of the battery connected to sensor 1 (socket 5) is monitored. Warning threshold set between 0 and 80.0 V (0.1 V steps).
Factory setting: 30.0 V, Signal Tone: J
7.4. Minimum temperature Sensor 1 (Page 5)
INC
DEC
Min. Sensor1 Temp
>Set Warning :
Temperature :
Warning Time :
Repeat Time :
Signal Tone :
Sensor 1 :
page 5
Off
Always
F
00°C
The temperature of the sensor 1 (socket 5) is monitored. Warning
threshold set between -20 and 200° C (1° C steps).
0°C
Factory setting: 0° C, Signal Tone: F
7.5. Maximum temperatur Sensor 1 (Page 6)
INC
DEC
Max. Sensor1 Temp
>Set Warning :
Temperature :
Warning Time :
Repeat Time :
Signal Tone :
Sensor 1 :
page 6
100°C
Off
Always
H
00°C
The temperature of the sensor 1 (socket 5) is monitored. Warning
threshold set between -20 and 200° C (1° C steps).
Factory setting: 100° C, Signal Tone: H
12 33611 General Air-Modul - Graupner HoTT 2.4
Page 13

7.6. Minimum Cell Voltage Sensor 2 (Page 7)
INC
DEC
Min. Sensor2 Voltage
>Set Warning :
Min Voltage :
Warning Time :
Repeat Time :
Signal Tone :
Sensor 2 :
page 7
Off
S
5.0V
Always
0.00V
The voltage of the battery connected to sensor 2 (socket 7) is monitored. Warning threshold set between 0 and 80.0 V (0.1 V steps).
Factory setting: 5.0 V, Signal Tone: S
7.7. Maximum Cell Voltage Sensor 2 (Page 8)
INC
DEC
Max. Sensor2 Voltage
>Set Warning :
Max Voltage :
Warning Time :
Repeat Time :
Signal Tone :
Sensor 2 :
page 8
30.0V
Off
Always
K
0.00V
The voltage of the battery connected to sensor 2 (socket 7) is monitored. Warning threshold set between 0 and 80.0 V (0.1 V steps).
Factory setting: 30.0 V, Signal Tone: K
7.8. Minimum temperature Sensor 2 (Page 9)
INC
DEC
Min. Sensor2 Temp
>Set Warning :
Temperature :
Warning Time :
Repeat Time :
Signal Tone :
Sensor 2 :
page 9
Off
Always
G
00°C
The temperature of the sensor 2 (socket 7) is monitored. Warning
threshold set between -20 and 200° C (1° C steps).
0°C
Factory setting: 0° C, Signal Tone: G
7.9. Maximum temperature Sensor 2 (Page 10)
INC
DEC
Max. Sensor2 Temp
>Set Warning :
Temperature :
Warning Time :
Repeat Time :
Signal Tone :
Sensor 2 :
page 10
100°C
Off
Always
I
00°C
The temperature of the sensor 2 (socket 7) is monitored. Warning
threshold set between -20 and 200° C (1° C steps).
Factory setting: 100° C, Signal Tone: I
33611 General Air-Modul - Graupner HoTT 2.4 13
Page 14
7.10. Maximum Current (Page 11)
DEC
Max. Current
>Set Warning :
Max Current :
Off
Warning Time :
Repeat Time :
W
Signal Tone :
0.0A
Current :
INC
page 11
40A
Always
If the module is connected between the power supply and the motor or
receiver battery, the power consumption of the connected equipment is
measured. You can program the maximum peak current at which the
alarm should be triggered, to avoid to overload the motor or battery.
Monitors the battery connected to port 1. The warning threshold is adjustable up to 50 A in 0.1 A steps.
Factory setting: 40 A, Signal Tone: W
7.11. Maximum used Capacity (Page 12)
INC
DEC
Max. Used Capacity
>Set Warning :
Max Capacity :
Warning Time :
Repeat Time :
Signal Tone :
Capacity :
page 12
2000mA
Off
Always
V
0 mA
If the module is connected between the power supply and the motor or
receiver battery, the power consumption of the connected equipment
is measured. You can program the max. used capacity at which the
alarm should be triggered, so you have enough remaining capacity for
a save landing.
Monitors the battery connected to port 1. The warning threshold is adjustable up to 30.000 mAh in 0.1 A steps.
Factory setting: 2000 mAh, Signal Tone: V
7.12. Minimum Voltage socket 1 (Page 13)
INC
DEC
Min. Power Voltage
>Set Warning :
Min Voltage :
Warning Time :
Repeat Time :
Signal Tone :
page 13
Off
Always
A
5.0V
The voltage of the battery connected to socket 1 is monitored. Warning
threshold set between 0 and 80.0 V (0.1 V steps).
Factory setting: 5.0 V, Signal Tone: P
7.13. Maximum Voltage socket 1 (Page 14)
INC
DEC
Max. Power Voltage
>Set Warning :
Max. Voltage :
Warning Time :
Repeat Time :
Signal Tone :
Voltage :
page 14
30.0V
Off
Always
X
0.00V
The voltage of the battery connected to socket 1 is monitored. Warning
threshold set between 0 and 80.0 V (0.1 V steps).
Factory setting: 30.0 V, Signal Tone: X
14 33611 General Air-Modul - Graupner HoTT 2.4
Page 15

7.14. Minimum altitude (Page 15)
INC
DEC
Min. Altitude
>Set Warning :
Min. ALT :
Warning Time :
Repeat Time :
Signal Tone :
Altitude :
page 15
Off
O
20m
Always
0.0m
7.15. Maximum altitude (Page 16)
INC
DEC
Max. Altitude
>Set Warning :
Max. ALT :
Warning Time :
Repeat Time :
Signal Tone :
Altitude :
page 16
500m
Off
Always
Z
0.0m
7.16. Sink rate per second (Page 17)
INC
DEC
Negative Difference1
>Set Warning :
Diff / Sec :
Warning Time :
Repeat Time :
Signal Tone :
Diff./Sec. :
page 17
- 10 m
Off
Always
C
0.0m
The Vario module is integrated into the General Air-Module, here you
have no additional sensors.
Minimum altitude of the model during operation, warning threshold set
between -500 and +3000 m in 1 m steps (based on the starting altitude
0 m)
Factory setting: 20 m, Signal Tone: O
The Vario module is integrated into the General Air-Module, here you
have no additional sensors.
Maximum altitude of the model during operation, warning threshold set
between -500 and +3000 m in 1 m steps (based on the starting altitude
0 m)
Factory setting: 500 m, Signal Tone: Z
The Vario module is integrated into the General Air-Module, here you
have no additional sensors.
Sink rate/s (negative Difference 1): Sink rate of the model per sec.
in Meter, warning threshold set between -50 and 0 m (based on the
starting altitude 0 m)
Factory setting: 10 m/Sec., Signal Tone: C
7.17. Sink rate per 3 seconds (Page 18)
INC
DEC
Negative Difference2
>Set Warning :
Diff / 3 Sec :
Warning Time :
Repeat Time :
Signal Tone :
Diff./ 3Sec. :
33611 General Air-Modul - Graupner HoTT 2.4 15
page 18
- 1 m
Off
Always
B
0.0m
The Vario module is integrated into the General Air-Module, here you
have no additional sensors.
Sink rate/s (negative Difference 2): Sink rate of the model per 3 sec.
in Meter, warning threshold set between -500 and 0 m (based on the
starting altitude 0 m)
Factory setting: 1 m/3 Sec., Signal Tone: B
Page 16

7.18. Climb rate per second (Page 19)
INC
DEC
Positive Difference1
>Set Warning :
Diff / Sec :
Warning Time :
Repeat Time :
Signal Tone :
Diff./Sec. :
page 19
10 m
Off
Always
N
0.0m
The Vario module is integrated into the General Air-Module, here you
have no additional sensors.
Climb rate/s (Positive Difference 1): Climb rate of the model per sec.
in Meter, warning threshold set between 0 and 50 m (based on the
starting altitude 0 m)
Factory setting: 10 m/Sec., Signal Tone: N
7.19. Climb rate per 3 seconds (Page 20)
INC
DEC
Positive Difference2
>Set Warning :
Diff / 3 Sec :
Warning Time :
Repeat Time :
Signal Tone :
Diff./ 3Sec. :
page 20
Off
Always
M
0.0m
7.20. Minimum RPM (Page 21)
DEC
Minimum RPM
>Set Warning :
Minimum rpm :
Warning Time :
Repeat Time :
Signal Tone :
RPM ( 2 ) :
page 21
500
Off
Always
T
0
The Vario module is integrated into the General Air-Module, here you
have no additional sensors.
Climb rate/3s (Positive Difference 2): Climb rate of the model per sec.
1 m
in Meter, warning threshold set between 0 and 500 m (based on the
starting altitude 0 m)
Factory setting: 1 m/3 Sec., Signal Tone: M
Monitors the optional speed sensor order no. 33615 or 33616 connec-
INC
ted to socket 9.
With connected speed sensor, the current engine rpm is determined.
Therefore, you must rst specify how many blades the propeller / rotor
has to get the correct rpm (see Section 7.3). In addition, you can set the
minimum engine speed at which the alarm should be triggered.
Blade number: adjustable from 1 to 6 blades
The warning threshold is adjustable from 0 to 200.000 rpm (1 blade)
with 10 rpm steps.
Factory setting: 500 rpm, Signal Tone: T
7.21. Maximum RPM (Page 22)
INC
DEC
Maximum RPM
>Set Warning :
Maximum rpm :
Warning Time :
Repeat Time :
Signal Tone :
RPM ( 2 ) :
page 22
7000
Off
Always
Y
0
Monitors the optional speed sensor order no. 33615 or 33616 connected to socket 9.
The warning threshold is adjustable from 0 to 200.000 rpm (1 blade)
with 10 rpm steps.
Factory setting: 7000 rpm, Signal Tone: Y
16 33611 General Air-Modul - Graupner HoTT 2.4
Page 17
7.22. Fuel reserve warning (Page 23)
INC
DEC
Minimum Fuel
>Set Warning :
Minimum Fuel :
Warning Time :
Repeat Time :
Signal Tone :
Fuel Gauge :
page 23
30%
Off
Always
U
0%
monitors connected to socket 10 optional precision fuel sensor No.
33618 or 33619.
The warning threshold is adjustable from 0 to 100%. in 1% increments.
Factory setting: 30% warning. U
8. Setup Displays
8.1. Calibration of the temperature sensors
ENTER
ESC
LiPo Cell Voltage >
Overall volt: 11.890V
Min
8.450V
Max
1N 3.201V
3N
5N 0.000V
Min 2.567V
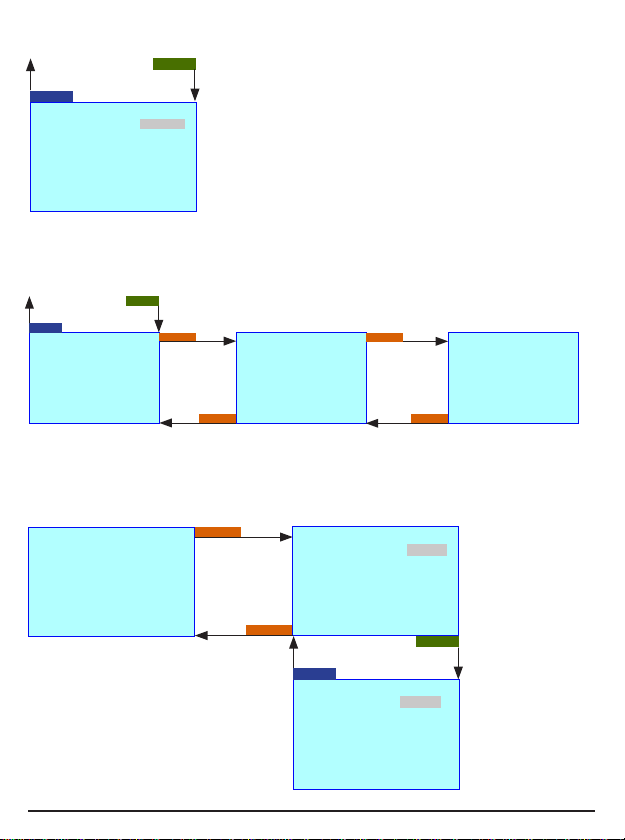
Go to the User Setup screen of the General Air-Module as in the diagram shown above. Select the User
Setup display as shown in the diagram. Press the INC and DEC buttons on the SMART-BOX (resp. Set)
simultaneously and select User Setup page 2. You can now calibrate the temperature of the sensors 1 and 2
in the range of -10 to +10 ° C to increase the accuracy of the display. To save the settings, go back to page
1 and choose ,Save Sensor‚ YES.
General Air-Module <
>User Setup :
Save to Sensor?
Factory Set?
3.030V
2N 3.100V
4N 2.567V
6N 0.000V
Max 3.201V
16.800V
ENTER
page 1
No
No
General Air-Module <>
>Set Warning:
Save Sensor?
Factory Set?
ESC
er: S 1.100
V
INC + DEC
ENTER
page 1
No
No
ESC
General Air-Module <
>User Setup :
Save Sensor?
Factory Set?
page 1
No
No
General Air-Module <
>User Setup :
Save Sensor?
Factory Set?
page 1
No
No
INC + DEC
DEC
Adjust Temperature
>User Setup :
Sensor1 Temp:
Sensor2 Temp:
33611 General Air-Modul - Graupner HoTT 2.4 17
page 2
30°C
30°C
INC
Page 18

8.2. Continous vario
The module provides two vario functions:
1. Continous Vario: is automatically launched when the menu telemetry VOICE TRIGGER, VARIO is a
switch has been set and then the graphical display of the ELECTRIC AIR MODULE is activated. This
function CONTINOUS VARIO shows the climb or descent of the model permanently by rising or falling
beeps.
2. Sensitivity Vario (only with the modules M-G1/M-G2, mx-12/16 order No. 4754/4755 or mc-19/22
HoTT 4758/4759) - output only trough modules buzzer: The climb or descent rate is predetermined
by the parameter sensitivity (SENSITIVITY). The sensitivity must be programmed before operation. You
can choose between: (OFF), 0.5 m / sec 3, 1 m / 3 s, 0.5 m / sec,. 1 m / sec. or 3 m / sec. Factory setting
is 1 m / sec. You should use one of these at the same time.
INC
DEC
Select Sensitivity
>User Setup :
Sensivity :
Average Num : 20
page 3
1 m/ 3s
Sensivity Setup
Select the User Setup display as shown in the diagram. Press the INC
and DEC buttons on the SMART-BOX (resp. Set) simultaneously and
select User Setup page 3. To save the selected settings, go back to
page 1 and choose ,Save Sensor‚ YES.
Parameter Description Setup
User Setup Setup page 1 - 2 (page)
Save to Sensor Save the setup to the General Air-Module YES / NO
Factory Set Reset to factory settings YES / NO
Sensitivity Sensitivity - Continous vario OFF, 0.5m/3s; 1 m/3s; 0.5 m/s;
Average Number Number of measurements of the sensor per
SenSItIVIty: select the climb or sink rate at which the Beep is activated.
Climbing is indicated by a high tone, sinking by a deep tone. The higher / lower the tone sounds, the greater/
smaller is the climb or sink rate.
Note: when SENSITIVITY is set to OFF, no beeps or voice announcements will be displayed.
See the following table.
If the setting is for example 1 m/sec., the tone (A) sounds when the model climbs more than 1 m per second.
Is the rate more than 2 m, the next higher note (B) sounds, etc. The actual climb or descent rate is displayed
in the Vario screen alternately in the top row. This display responds faster than the „Diff.“- information the
display below, so the values can differ.
Sec.
1m/s or 3.0 m/s
Factory setting 1 m/s
4 - 40
Factory setting: 20
18 33611 General Air-Modul - Graupner HoTT 2.4
Page 19
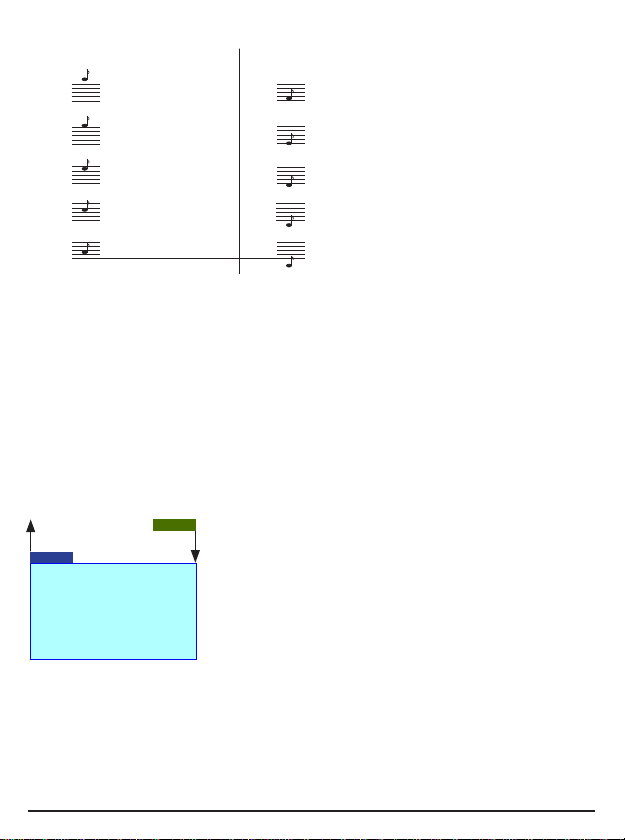
Climbing/sinking tone overview:
Climb rate:
5 m (E)
4 m (D)
3 m (C)
2 m (B)
1 m (A)
aVeRage nuMBeR: Number of measurements per second, is used to adjust the accuracy of the sensor.
More measurements increase the accuracy, while fewer measurements increase display speed.
Recommendation:
Sensitivity 0.5 m: approx. 20 measurements per Sec.
Sensitivity 1 m: approx. 4 measurements per Sec.
Climbing or sinking according to the setting „Sensitivity“ in the User setup is displayed alternately on the
top line in meter per sec., the associated melody also sounds. This display responds faster than the „Diff.“information the display below, so the values can differ.
Altitude level Beep:
when the following altitudes (starting from the starting altitude 0 m) are reached, the following tones will
sound:
20 / 40 / 60 / 80 / 100 m: low tone once (20 m) up to ve times (100 m)
200 / 400 / 650 / 800 / 1000 m: high tone once (200 m) up to ve times (1000 m)
2.5 m/3 sec. ; 5 m
2.5 m/sec. ; 5 m/sec. ; 15 m/sec.
2 m/3 sec. ; 4 m
2 m/sec. ; 4 m/sec. ; 12 m/sec.
1.5 m/3 sec. ; 3 m
1.5 m/sec. ; 3m/sec.;- 9 m/sec.
1 m/3 sec. ; 2 m
1 m/sec. ; 2 m/sec. ; 6 m/sec.
0.5 m/3 sec. ; 1 m
0.5 m/sec. ; 1 m/sec.;- 3 m/sec.
/3 sec.
/3 sec.
/3 sec.
/3 sec.
/3 sec.
Sink rate:
- 1 m
- 2 m
- 3 m
- 4 m
- 5 m
- 0.5 m/3 sec. ; - 1 m
- 0.5 m/sec. ; - 1 m/sec. ; - 3 m/sec.
- 1 m/3 sec. ; - 2 m
- 1 m/sec. ; - 2 m/sec. ; - 6 m/sec.
- 1.5 m/3 sec. ; - 3 m
- 1.5 m/sec. ; - 3m/sec. ; - 9 m/sec.
- 2 m/3 sec. ; - 4 m
- 2 m/sec. ; - 4 m/sec. ; - 12 m/sec.
- 2.5 m/3 sec.; - 5 m
- 2.5 m/sec. ; - 5 m/sec. ; - 15 m/sec.
/3 sec.
/3 sec.
/3 sec.
/3 sec.
/3 sec.
8.3. Blade number
DEC
Blade / Magnet Number
>User Setup :
Blade Number :
33611 General Air-Modul - Graupner HoTT 2.4 19
page 4
INC
With connected speed sensor, the current engine rpm is determined.
Therefore, you must rst specify how many blades (or magnets with
2
sensor order no. 33516) the propeller / rotor has to get the correct rpm.
In addition, you can set the minimum engine speed at which the alarm
should be triggered.
Blade number: adjustable from 1 to 6 blades
Page 20

8.4. Current Control
DEC
Current Control
>User Setup :
Current :
On [1500us] : 1500us
On Method : On
Stop[1100us] : 1100us
page 5
40 A
INC
In this display you can determine and limit the maximum current drawn
by the model’s power system.
If the model’s current drain is above the permitted peak current for the
General Air module, it is essential to use this function to prevent damage to the module or a break in the power supply, as this would be likely
to cause the model to crash (see also Point 3: connecting the sensors).
Parameter Description Setup
Current Maximum current 0 - 60 A
On [XXXXus] Current control activated 500 - 2500 us
On Method Current control enabled, is the current consumption
Stop ESC position when current consumption above the
above the CURRENT value, the ESC goes to STOP position until to the current consumption drops again
Current control disabled, IN signal CI is outputted as
CO without modication
CURRENT value
ON / OFF
500 - 2500 us
To save the settings, then go back to page 1 and choose among „Save sensor“ YES.
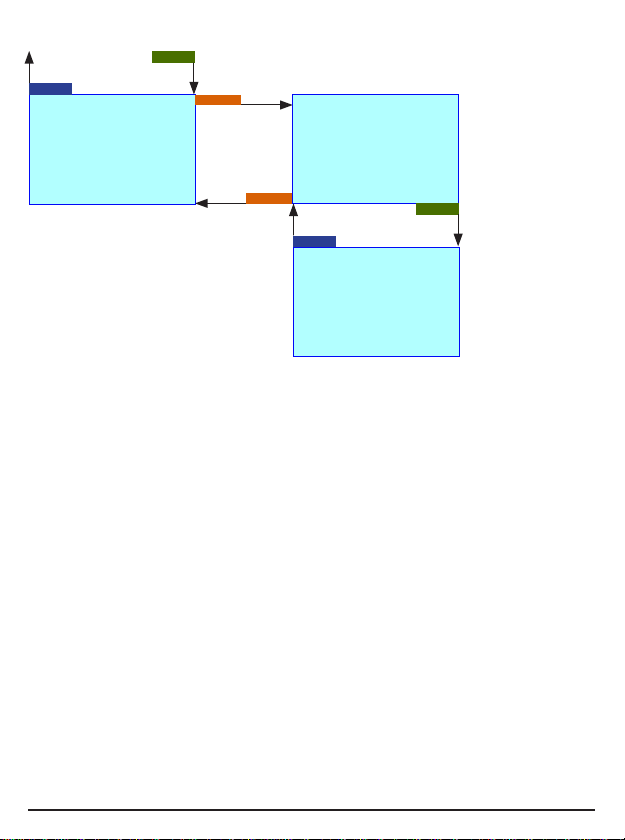
Connecting the components:
to drive motor (out)
Battery (In)
telemetry socket (t)
connect to telemetry socket of the receiver
electronic speed control
(Co)
Signal Input (CI)
ESC input from receiver
Balancer connector liXX
for single cell monitoring when using a LiXX-
battery
Note: the permitted maximum current for the lower
JR sockets is 15 A! This socket may only be used if the
model’s power system never
exceeds this value. If you
ignore this, the sensor circuit
board could be damaged!
Current control switch (CS)
ON/OFF per switching channel
• Use the three-core lead to connect the telemetry socket t on the General Air module to the telemetry
socket T on the receiver. Connect the electronic speed controller to the socket Co.
• Use a three-core lead to connect the socket CI on the General Air module to the recei-
ver socket to which the electronic speed controller would usually be connected.
• Current control can be activated and disabled from the transmitter: for this function you need one vacant swit-
20 33611 General Air-Modul - Graupner HoTT 2.4
Page 21

ched channel. Connect the associated receiver output to the socket CS on the General Air module using
a three-core lead.
• Finally connect the ight battery (IN) and the motor (OUT) to the sensor as shown above.
Programming the current limiter:
• The maximum current drawn by your drive motor can be programmed under CURRENT.
• Under ON [XXXXus] you should set the throttle position, at which the module’s current limiting function is
to begin. The higher the maximum current, the earlier the activation point for the current limiting function.
The value is programmed by setting the throttle stick to the appropriate position, then pressing the INC +
DEC buttons: the value is then accepted directly on the screen. The value can also be ne-tuned by
pressing the INC or DEC button.
• If you wish to be able to switch current limiting on and off from the transmitter using a switched channel
(socket CS connected), you must program a throttle stick position [XXXXus] under ON METHOD, since
this function is otherwise disabled.
• The </> position can be selected to suit different radio control systems, i.e. if servo reverse is required at
the electronic speed controller.
• Set whether current limiting is to be activated (ON) or disabled (OFF) at ON METHOD. If it is activated
and the maximum current is exceeded, the controller’s current is reduced to the throttle position pro grammed under STOP until such time as the current drain falls back below the set value. The current is
then raised again to the selected throttle position, etc. This means that you can y at one throttle position,
and the current limiting is carried out automatically by the General Air module; all you will notice is a slight
uctuation in motor power.
• Under STOP you can program the speed controller’s throttle position to which the current is reduced if the
set maximum current is exceeded; it is best to start with a position just above the neutral setting. Excep tion: if you are using a folding propeller, the controller must apply slight brake to ensure that the blades
fold back reliably.
• The value is programmed by setting the throttle stick to the appropriate position, then pressing the INC +
DEC buttons: the value is then accepted directly on the screen. The value can also be ne-tuned by
pressing the INC or DEC button.
• example:
Settings: maximum current (CURRENT): 40 A, ON [1500us], current limiting active (On Method: ON) and
controller position (STOP): 1400 us.
When you advance the throttle stick to the full-throttle position (e.g. 1900us) the motor current rises to 65
A. Since the position is above the set 1500us, and current limiting is active, the General Air module
reduces the motor current by lowering the position to the value programmed under STOP. Once the motor
current is below 40 A again, the module raises the throttle setting again to the value set by the throttle
stick (1900us).
33611 General Air-Modul - Graupner HoTT 2.4 21
Page 22

8.5. Settings and calibration of the precision fuel sensor (fuel settings)
DEC
Fuel settings
>User setup :
mL/P (slow) :
mL/P (fast) : 0.070
slow rate : 10.00
fast rate : 100.00
max. capacity : 500 ml
Reset Ctrl. : on
Display explanation Settings
ml/P (slow) Millilitres per pulse with "slow rate" in increments of 0.01 ml 0 - 500 ml
ml/P (fast) Millilitres per pulse with "fast rate" in increments of 0.01 ml 0 - 500 ml
slow rate slow pulse rate in increments of 0.01 Hz 0 -100 Hz
fast rate fast pulse rate in increments of 0.01 Hz 100 Hz
max. capacity maximum tank volume in ml 1 - 25000
Reset Ctrl. Resetting of consumption via "CS" switching channel "on" or "off"
33617/33618 Precision fuel sensor - connection of hoses and the sensor cable
Observe the fl ow direction speci ed on the underside of the sensor! This determines the input and
output side! Secure the hoses with hose clips.
Attention! Before installing the sensor and bringing it into operation, make sure you read the manual
enclosed with the sensor from start to nish!
Input =
e
hose from tank
Output =
a
hose to engine
The electrical connection of the sensor to the general module is established using the enclosed cable, as
shown opposite:
Make sure that the polarity is correct! (see illustration)
General module:
1
"Fuel" connector
Fuel sensor: "
2
connection socket"
INC
page 5
0.080
You can adjust the fuel sensor 33617/33618 in this display. You can
use the ml/P settings to calibrate the minimum (slow) and maximum
(fast) ow rate at the sensor, depending on which fuel type is used (see
diagrams). After refuelling, the fuel consumption indicator can be reset to the tank content via a switching channel of the receiver which is
connected to the "CS" socket of the General Air-Module. When you do
so, the switching function of the current limitation must be set to "off".
(see Point 8.3)
e
brown
red
yellow
2
a
1
22 33611 General Air-Modul - Graupner HoTT 2.4
Page 23
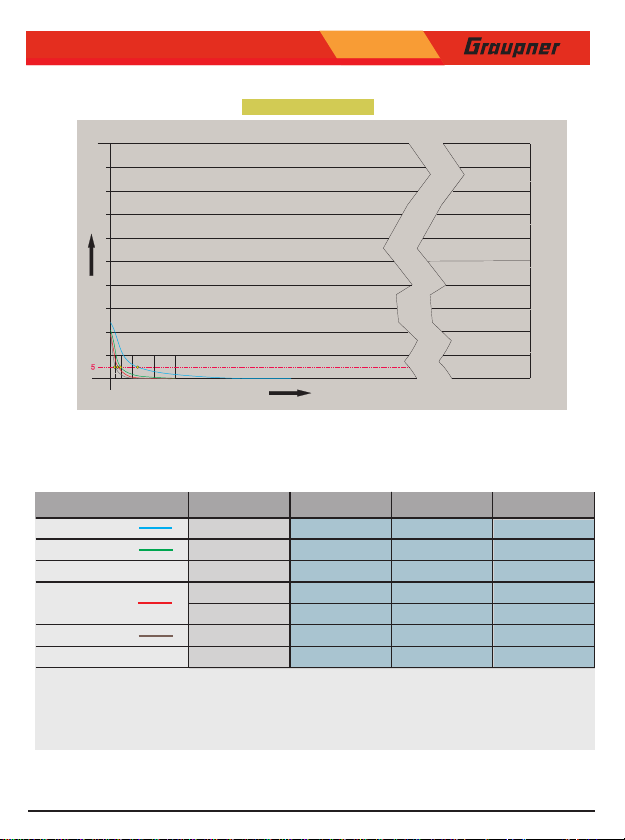
Precision fuel sensor
5
2
10 20 60
1000
Flow rate tolerances
Flow rate
[ml/min]
Order no. : #33617
30
Tolerance [%]
100
10
5
0
2
5
10 20 60
30
Flow rate tolerances
Order no. : #33617
1000
Flow rate
[ml/min]
Fuel sensor 1-1000 ml/min
Fuel
Petrol 1:50
Graupner SN25
Ethanol
Kerosene
Petroleum
Diesel
Heating oil
The setting values shown in the table are for guidance only and may vary slightly due to production fluctuations,
temperature and fuel composition.
Viscosity [mm2/s]
Density [kg/m
0.62
1.15
1.20
1.60
2.00
3.10
6.00
0.72
0.85
0.79
0.82
0.80
0.84
0.85
3
]
Setting value for 30 ml/min
Dm15 no. 33617
0.127 ml/imp
0.125 ml/imp
0.125 ml/imp
0.125 ml/imp
0.125 ml/imp
0.125 ml/imp
0.125 ml/imp
Setting value for 10 ml/min
Dm15 no. 33617
0.136 ml/imp
0.127 ml/imp
0.128 ml/imp
0.127 ml/imp
0.126 ml/imp
0.126 ml/imp
0.125 ml/imp
Every flow meter should therefore be calibrated once in its operating range.
33611 General Air-Modul - Graupner HoTT 2.4 23
Setting value for 5 ml/min
Dm15 no. 33617
0.148 ml/imp
0.131 ml/imp
0.132 ml/imp
0.132 ml/imp
0.130 ml/imp
0.132 ml/imp
0.128 ml/imp
Page 24

Precision fuel sensor
10
20
2000
Flow rate tolerances
Flow rate
[ml/min]
Order no. : #33618
40
Order no. : #33618
Tolerance [%]
100
10
5
0
10
40
20
Flow rate tolerances
Fuel sensor 1-1000 ml/min
Fuel
Density [kg/m
Petrol 1:50
Graupner SN25
Ethanol
Kerosene
Petroleum
Diesel
Heating oil
The setting values shown in the table are for guidance only and may vary slightly due to production fluctuations,
temperature and fuel composition.
Viscosity [mm2/s]
0.62
1.15
1.20
1.60
2.00
3.10
6.00
Every flow meter should therefore be calibrated once in its operating range.
0.72
0.85
0.79
0.82
0.80
0.84
0.85
3
]
Setting value for 40 ml/min
Dm15 no. 33617
0.126 ml/imp
0.125 ml/imp
0.125 ml/imp
0.125 ml/imp
0.125 ml/imp
0.125 ml/imp
0.125 ml/imp
Setting value for 20 ml/min
Dm15 no. 33617
0.136 ml/imp
0.130 ml/imp
0.131 ml/imp
0.129 ml/imp
0.128 ml/imp
0.127 ml/imp
0.126 ml/imp
Flow rate
2000
[ml/min]
Setting value for 10 ml/min
Dm15 no. 33618
0.149 ml/imp
0.137 ml/imp
0.139 ml/imp
0.134 ml/imp
0.133 ml/imp
0.132 ml/imp
0.128 ml/imp
24 33611 General Air-Modul - Graupner HoTT 2.4
Page 25

9. Summary Signal tones
A
O
page 15: Min. Altitude
B
C
page 18: sink rate per 3 sec.
page 17: sink rate per sec.
D
E
F
G
H
I
J
K
page 5: Min. temperature sensor 1
page 9: Min. temperature sensor 2
page 6: Max. temperature sensor 1
page 10: Max. temperature sensor 2
page 4: Max. voltage sensor 1
page 8: Max. voltage sensor 2
L
M
page 20: climb rate per 3 sec.
P
Q
R
S
T
U
V
W
X
Y
Z
page 13: Min. Power voltage
page 2: Min. cell voltage
page 3: Min. voltage sensor 1
page 7: Min. voltage sensor 2
page 21: Minimum RPM
page 23: Minimum fuel
page 12: Max. capacity
page 11: Max. current
page 14: Max. power voltage
page 22: Maximum RPM
page 16: Max. Altitude
N
33611 General Air-Modul - Graupner HoTT 2.4 25
page 19: climb rate per sec.
Page 26

10. telemetry display
If you select SIMPLE DATAVIEW the telemetry data can only be displayed, i.e. it cannot be programmed - in
contrast to SETTING AND DATAVIEW. However, the data is represented in graphic form, and this makes
it the preferable option when actually operating a model, as it is easier and quicker to read and assess.
You should also read the manual of your remote control system, especially the chapter „telemetry“. The
operation is done in the transmitter menu „telemetry“ under the display SETTING & DATA VIEW.
Please note: the menus can only be selected when the receiver is switched on. When you switch the receiver on, it may take a few seconds before the receiver display becomes active and can be selected: > symbol
appears at the top right corner of the transmitter display (TX). When the receiver is off, the error message
„Can‘t receive data“ appears.
There may be a slight delay in the screen’s response to inputs using the top buttons, since all the settings
are transmitted directly to the receiver by wireless means.
Operation with the SMART-BOX:
Switch the transmitter on: the start screen of the SMART-BOX displays SETTING AND DATA VIEW / MODEL
SELECT. Use the INC or DEC button to move the arrow cursor to MODEL SELECT, then press ENTER to
switch to the graphic representation of the telemetry display.
Please note: these menus can only be selected if the receiver is already switched on. After you switch the
receiver on, note that it may take several seconds before the display becomes active, and can be selected.
There may be a slight delay in the screen’s response to inputs using the top buttons, since all the settings
are transmitted directly to the receiver by wireless means.
Once you have selected MODEL SELECT , the Smart-Box displays the telemetry menu. Y ou must then select
the appropriate sensor using the arrow cursor, depending on whether you are operating a model aircraft
(AIRPLANE) or a model car (CAR).
It is possible to select any of the displays, but - as you would expect - the unit can only display those parameters for which sensors are actually installed in the model; all the other parameters display the value 0.
Use the INC (p) or DEC (q) button to move the arrow cursor to AIRPLANE (model aircraft) or CAR (model
car), then press ENTER (Set) to move to the corresponding telemetry display.
In the aircraft display (AIRPLANE) you can use the INC or DEC button to select one of the following graphic
displays:
ReCeIVeR: shows the same data as RX DATAVIEW
ReCeIVeR + geneRal MoDule: + two additional sensors. As RX DATAVIEW, As RX DATAVIEW, but
plus rotational speed (RPM), altitude (ALT), current
CELL.V
1:0.00
BATT1
0.0V
E FUEL F
2:0.00
3:0.00
4:0.00
T1 +20°C
BATT2
0.0V T2 +20°C
The right third of the display is shown alternately.
5:0.00
6:0.00
12500
BATT1
E FUEL F
0.0V
T1 +20°C
BATT2
0.0V T2 +20°C
ALT
+500m
0m
0m
POWER-V
12.5V
25.3A
80.0
|s
3s
m
Ah
26 33611 General Air-Modul - Graupner HoTT 2.4
Page 27

Parameter Description
BATT1 / BATT2 Battery 1 / Battery 2 (socket 5 / 7)
FUEL Fuel level / Fueltank Indicator (socket 10)
E / F Empty / Full
T1 / T2 Temperature of sensor 1 / sensor 2 (socket 5 / 7)
CELL.V Cell Volatge of cell 1 … max. 6 (socket 6)
>12500< Current RPM (socket 9)
ALT Current altitude
0m|s m/1 s climb / descent
0m|3s m/3 s climb / descent
POWER-V • current voltage of drive battery in V
Multiple sensors, for example GPS and General module, can be connected to the receiver via a Y-cable
order No. 3936.11 from software version V2.x or higher for the module, receiver and SMART-BOX.
Attention: When using the Y-cable plugged into the telemetry connector on the receiver for connecting multiple sensors, only the SIMPLE DATA VIEW or MODEL SELECT can be used, because only in this mode
the sensors are addressed correctly.
The SETTING AND DATAVIEW mode for programming can not be used!
First the sensors must individually programmed, for example directly with the SMART-BOX.
11. Firmware update
Since the General Air-Module can be updated via the USB connection, you always have the latest software
and can utilize future functions or languages. Firmware updates for the General Air-Module can be transferred via the DAT A or telemetry interface in conjunction with a PC running Windows XP , Vista or 7. For this you
also require the USB interface, Order No. 7168.6, the adapter lead, Order No. 7168.6A and a Y-cable Order
No. 3936.11 which are available separately.
The programs and les required for this are available from www.graupner.de in the Download area for the
corresponding products.
For detailed update instructions see the software package of Firmware_Upgrade_Studio as PDF le
also at www.graupner.de.
• electric current of drive battery in A
• Used capacity in mAh since the start
(socket 1)
33611 General Air-Modul - Graupner HoTT 2.4 27
Page 28

12. Specications General Air-Modul
max. 60 V DC
Input voltage
Current
Capacity
Temperature
Sensor 1 / 2
Voltage
Sensor 1 / 2
LiXX cell voltage
Altitude
RPM
Fuel display 0 %, 25 %, 50 %, 75 %, 100 %
resolution 10 mV
accurancy 1 %
Shunt resistance 0.0005 Ohm
continous current 40 A (G3.5 connector)
5 A (JR-connector)
peak current (1 s) 60 A (G3.5 connector)
15 A (JR-connector)
resolution 0.1 A
accurancy 1 %
max. 30.000 mAh
resolution 1 mAh
range - 20° C ~ 200° C
resolution 1° C
max. 60.00 V DC
resolution 10 mV
accurancy 1 %
Max. number of cells 6
resolution 10 mV
accurancy 1 %
range - 500 ~ 3000 m
resolution 0.1 m
range up to 200.000 rpm
resolution 10 rpm
The current version of this manual is available on the Graupner website www.graupner.de under
Order No. 33611
28 33611 General Air-Modul - Graupner HoTT 2.4
Page 29

13. eg DeClaRatIon oF ConFoRMIty
We hereby declare that the following product:
General Air-Module order.-no. 33611
conrms with the essential protective requirements as laid down in the directive for harmonising the statua-
tory directives of the member states concerning electro-magnetic interference 2004/108/EC.
This product has been tested for electro-magnetic interference in accordance with the following norms:
EN 61000-6-1
EN 61000-6-3
This declaration was produced by
Graupner/SJ GmbH
Henriettenstr. 96
73230 Kirchheim/Teck
and is valid for the manufacturer / importer of the product
73230 Kirchheim/Teck, den 20.12.2010 Ralf Helbing
Managing Director
14. environmental Protection notes
When this product comes to the end of its useful life, you must not dispose of it in the ordinary domestic
waste. The correct method of disposal is to take it to your local collection point for recycling electrical and
electronic equipment. The symbol shown here, which may be found on the product itself, in the operating
In case of R/C models, you have to remove electronic parts like servos, receiver or speed controller from the
product in question, and these parts must be disposed of with a corresponding collection point for electrical
scrap.
instructions or on the packaging, indicates that this is the case.
Individual markings indicate which materials can be recycled and re-used. You can make an
important contribution to the protection of our common environment by re-using the product,
recycling the basic materials or recycling redundant equipment in other ways.
Remove batteries from your device and dispose of them at your local collection point for
batteries.
If you don’t know the location of your nearest disposal centre, please enquire at your local council ofce.
33611 General Air-Modul - Graupner HoTT 2.4 29
Page 30

Wir gewähren auf dieses Erzeugnis eine /
15. Warranty
Die Fa.Graupner/SJ GmbH, Henriettenstrasse 96,
73230 Kirchheim/Teck gewährt ab dem Kaufdatum auf
dieses Produkt eine Garantie von 24 Monaten. Die Garantie
gilt nur für die bereits beim Kauf des Produktes vorhandenen
Material- oder Funktionsmängel. Schäden, die auf Abnützung, Überlastung, falsches Zubehör oder unsachgemäße
Behandlung zurückzuführen sind, sind von der Garantie
ausgeschlossen. Die gesetzlichen Rechte und Gewährleistunsansprüche des Verbrauchers werden durch diese Garantie nicht berührt. Bitte überprüfen Sie vor einer Reklamation
oder Rücksendung das Produkt genau auf Mängel, da wir
Ihnen bei Mängelfreiheit die entstandenen Unkosten in
Rechnung stellen müssen.
Graupner/SJ GmbH, Henriettenstrasse 96,
Kirchheim/Teck, Germany guarantees this product for a
period of 24 months from date of purchase. The guarantee
applies only to such material or operational defects witch
are present at the time of purchase of the product. Damage
due to wear, overloading, incompetent handling or the use
of incorrect accessories is not covered by the guarantee. The
user´s legal rights and claims under guarantee are not
af
fected by this guarantee. Please check the product
carefully for defects before you are make a claim or send the
item to us, since we are obliged to make a charge for our
cost if the product is found to be free of faults.
La société Graupner/SJ
73230 Kirchheim/Teck, Allemagne, accorde sur ce produit
une garantie de 24 mois à partir de la date d´achat. La garantie prend effet uniquement sur les vices de fonction-nement
et de matériel du produit acheté. Les dommages dûs à de
l´usure, à de la surcharge, à de mauvais accessoires ou à
d´une application inadaptée, sont exclus de la garantie.
Cette garantie ne remet pas en cause les droits et prétentions légaux du consommateur. Avant toute réclamation et
tout retour du produit, veuillez s.v.p. contrôler et noter
exactement les défauts ou vices.
Garantie-Urkunde
Warranty certifi cate / Certifi cat de garantie
Garantie von
warrantied for
garantie de
GmbH, Henriettenstrasse 96,
This product is /
24
73230
33611 General Air-Module
Sur ce produit nous accordons une
Monaten
months
mois
Servicestellen / Service / Service après-vente
Graupner-Zentralservice
Graupner/SJ GmbH
Henriettenstrasse 96
D-73230 Kirchheim / Teck
Die Adressen der Servicestellen außerhalb Deutschlands
entnehmen Sie bitte unserer Webseite www.graupner.de.
For adresses of service points outside of germany please
refer to www.graupner.de/en/.
Pour adresses des points de service situés en dehors de
l'Allemagne s'il vous plaît se référer à www.graupner.de/fr/.
Servicehotline
(+49) (0)7021/722-130
Montag - Donnerstag
7:30 -9:00 Uhr
9:15 -16:00 Uhr
Freitag
9:00 - 13:00 Uhr
Übergabedatum
Date of purchase/delivery
Date de remise
Name des Käufers
Owner´s name
Nom de I`acheteur
Straße, Wohnort
Complete adress
Adresse complète
Firmenstempel und Unterschrift des Einzelhändlers
Stamp and signature of dealer
Cachet et signature du vendeur
30 33611 General Air-Modul - Graupner HoTT 2.4
Page 31

notes
33611 General Air-Modul - Graupner HoTT 2.4 31
Page 32

Graupner/SJ GmbH
Henriettenstraße 96
D-73230 Kirchheim/Teck
Germany
www.graupner.de
Änderungen sowie Liefermöglichkeiten vorbehalten. Lieferung durch den Fachhandel.
Bezugsquellen werden nachgewiesen. Für Druckfehler kann keine Haftung übernommen
Specications and availability subject to change. Supplied through specialist model shops
only. We will gladly inform you of your nearest supplier. We accept no liability for printing
Sous réserve de modications et de possibilité de livraison. Livraison uniquement au
travers de magasins spécialisés en modélisme. Nous pourrons vous communiquer
l’adresse de votre revendeur le plus proche. Nous ne sommes pas responsables
Con riserva di variazione delle speciche e disponibilità del prodotto. Fornitura attraverso
rivenditori specializzati.Saremmo lieti di potervi indicare il punto vendita più vicino a voi.
d’éventuelles erreurs d’impression.
Si declina qualsiasi responsabilità per errori di stampa.
werden.
errors.
33611 / May 2014 - EN V1.8
 Loading...
Loading...