

Page 1
CENTRALE DI COMANDO UNIVERSALE 230V~
230V~ UNIVERSAL CONTROL UNIT
CENTRALE DE COMMANDE UNIVERSELLE 230V~
CENTRAL DE MANDO UNIVERSAL 230V~
UNIVERSALSTEUERGERÄT 230V~
JA466
ISTRUZIONI PER L’USO – NORME DI INSTALLAZIONE
USE AND INSTALLATION INSTRUCTIONS
INSTRUCTIONS POUR L’EMPLOI – NORMES D’INSTALLATION
INSTRUCCIONES PARA EL USO – NORMAS DE INSTALACIÓN
BETRIEBSANLEITUNG - INSTALLATIONSVORSCHRIFTEN
Page 2
AVVERTENZE PER L’INSTALLATORE
OBBLIGHI GENERALI PER LA SICUREZZA
1) ATTENZIONE! È importante per la sicurezza delle persone seguire attentamente tutta l’istruzione. Una errata installazione o un errato uso del prodotto
può portare a gravi danni alle persone.
2) Leggere attentamente le istruzioni prima di iniziare l’installazione del prodotto.
3) I materiali dell’imballaggio (plastica, polistirolo, ecc.) non devono essere
lasciati alla portata dei bambini in quanto potenziali fonti di pericolo.
4) Conservare le istruzioni per riferimenti futuri.
5) Questo prodotto è stato progettato e costruito esclusivamente per l’utilizzo
indicato in questa documentazione. Qualsiasi altro utilizzo non espressamente indicato potrebbe pregiudicare l’integrità del prodotto e/o rappresentare fonte di pericolo.
6) GENIUS declina qualsiasi responsabilità derivata dall’uso improprio o diverso
da quello per cui l’automatismo è destinato.
7) Non installare l’apparecchio in atmosfera esplosiva: la presenza di gas o fumi
infiammabili costituisce un grave pericolo per la sicurezza.
8) Gli elementi costruttivi meccanici devono essere in accordo con quanto
stabilito dalle Norme EN 12604 e EN 12605.
Per i Paesi extra-CEE, oltre ai riferimenti normativi nazionali, per ottenere un
livello di sicurezza adeguato, devono essere seguite le Norme sopra riportate.
9) GENIUS non è responsabile dell’inosservanza della Buona Tecnica nella costruzione delle chiusure da motorizzare, nonché delle deformazioni che
dovessero intervenire nell’utilizzo.
10) L’installazione deve essere effettuata nell’osservanza delle Norme EN 12453
e EN 12445. Il livello di sicurezza dell’automazione deve essere C+E.
11) Prima di effettuare qualsiasi intervento sull’impianto, togliere l’alimentazione
elettrica.
12) Prevedere sulla rete di alimentazione dell’automazione un interruttore
onnipolare con distanza d’apertura dei contatti uguale o superiore a 3 mm.
È consigliabile l’uso di un magnetotermico da 6A con interruzione onnipolare.
13) Verificare che a monte dell’impianto vi sia un interruttore differenziale con
soglia da 0,03 A.
14) Verificare che l’impianto di terra sia realizzato a regola d’arte e collegarvi
le parti metalliche della chiusura.
15) L’automazione dispone di una sicurezza intrinseca antischiacciamento costituita da un controllo di coppia. E' comunque necessario verificarne la sogli
di intervento secondo quanto previsto dalle Norme indicate al punto 10.
16) I dispositivi di sicurezza (norma EN 12978) permettono di proteggere eventuali aree di pericolo da Rischi meccanici di movimento, come ad Es.
schiacciamento, convogliamento, cesoiamento.
17) Per ogni impianto è consigliato l’utilizzo di almeno una segnalazione luminosa nonché di un cartello di segnalazione fissato adeguatamente sulla struttura dell’infisso, oltre ai dispositivi citati al punto “16”.
18) GENIUS declina ogni responsabilità ai fini della sicurezza e del buon funzionamento dell’automazione, in caso vengano utilizzati componenti dell’impianto non di produzione GENIUS.
19) Per la manutenzione utilizzare esclusivamente parti originali GENIUS.
20) Non eseguire alcuna modifica sui componenti facenti parte del sistema
d’automazione.
21) L’installatore deve fornire tutte le informazioni relative al funzionamento
manuale del sistema in caso di emergenza e consegnare all’Utente
utilizzatore dell’impianto il libretto d’avvertenze allegato al prodotto.
22) Non permettere ai bambini o persone di sostare nelle vicinanze del prodotto
durante il funzionamento.
23) Tenere fuori dalla portata dei bambini radiocomandi o qualsiasi altro datore
di impulso, per evitare che l’automazione possa essere azionata involontariamente.
24) Il transito tra le ante deve avvenire solo a cancello completamente aperto.
25) L’Utente utilizzatore deve astenersi da qualsiasi tentativo di riparazione o
d’intervento diretto e rivolgersi solo a personale qualificato.
26) Tutto quello che non è previsto espressamente in queste istruzioni non è
permesso
IMPORTANT NOTICE FOR THE INSTALLER
GENERAL SAFETY REGULATIONS
1) ATTENTION! To ensure the safety of people, it is important that you read
all the following instructions. Incorrect installation or incorrect use of the
product could cause serious harm to people.
2) Carefully read the instructions before beginning to install the product.
3) Do not leave packing materials (plastic, polystyrene, etc.) within reach of
children as such materials are potential sources of danger.
4) Store these instructions for future reference.
5) This product was designed and built strictly for the use indicated in this
documentation. Any other use, not expressly indicated here, could compromise the good condition/operation of the product and/or be a source of
danger.
6) GENIUS declines all liability caused by improper use or use other than that for
which the automated system was intended.
7) Do not install the equipment in an explosive atmosphere: the presence of
inflammable gas or fumes is a serious danger to safety.
8) The mechanical parts must conform to the provisions of Standards EN 12604
and EN 12605.
For non-EU countries, to obtain an adequate level of safety, the Standards
mentioned above must be observed, in addition to national legal regulations.
9) GENIUS is not responsible for failure to observe Good Technique in the
construction of the closing elements to be motorised, or for any deformation
that may occur during use.
10) The installation must conform to Standards EN 12453 and EN 12445. The safety
level of the automated system must be C+E.
11) Before attempting any job on the system, cut out electrical power.
12) The mains power supply of the automated system must be fitted with an allpole switch with contact opening distance of 3mm or greater. Use of a 6A
thermal breaker with all-pole circuit break is recommended.
13) Make sure that a differential switch with threshold of 0.03 A is fitted upstream
of the system.
14) Make sure that the earthing system is perfectly constructed, and connect
metal parts of the means of the closure to it.
15) The automated system is supplied with an intrinsic anti-crushing safety device
consisting of a torque control. Nevertheless, its tripping threshold must be
checked as specified in the Standards indicated at point 10.
16) The safety devices (EN 12978 standard) protect any danger areas against
mechanical movement Risks, such as crushing, dragging, and shearing.
17) Use of at least one indicator-light is recommended for every system, as well
as a warning sign adequately secured to the frame structure, in addition to
the devices mentioned at point “16”.
18) GENIUS declines all liability as concerns safety and efficient operation of the
automated system, if system components not produced by GENIUS are used.
19) For maintenance, strictly use original parts by GENIUS.
20) Do not in any way modify the components of the automated system.
21) The installer shall supply all information concerning manual operation of the
system in case of an emergency, and shall hand over to the user the warnings
handbook supplied with the product.
22) Do not allow children or adults to stay near the product while it is operating.
23) Keep remote controls or other pulse generators away from children, to
prevent the automated system from being activated involuntarily.
24) Transit through the leaves is allowed only when the gate is fully open.
25) The user must not attempt any kind of repair or direct action whatever and
contact qualified personnel only.
26) Anything not expressly specified in these instructions is not permitted.
CONSIGNES POUR L'INSTALLATEUR
RÈGLES DE SÉCURITÉ
1) ATTENTION! Il est important, pour la sécurité des personnes, de suivre à la
lettre toutes les instructions. Une installation erronée ou un usage erroné
du produit peut entraîner de graves conséquences pour les personnes.
2) Lire attentivement les instructions avant d'installer le produit.
3) Les matériaux d'emballage (matière plastique, polystyrène, etc.) ne doivent
pas être laissés à la portée des enfants car ils constituent des sources
potentielles de danger.
4) Conserver les instructions pour les références futures.
5) Ce produit a été conçu et construit exclusivement pour l'usage indiqué dans
cette documentation. Toute autre utilisation non expressément indiquée
pourrait compromettre l'intégrité du produit et/ou représenter une source
de danger.
6) GENIUS décline toute responsabilité qui dériverait d'usage impropre ou
différent de celui auquel l'automatisme est destiné.
7) Ne pas installer l'appareil dans une atmosphère explosive: la présence de
gaz ou de fumées inflammables constitue un grave danger pour la sécurité.
8) Les composants mécaniques doivent répondre aux prescriptions des Normes
EN 12604 et EN 12605.
Pour les Pays extra-CEE, l'obtention d'un niveau de sécurité approprié exige
non seulement le respect des normes nationales, mais également le respect
des Normes susmentionnées.
9) GENIUS n'est pas responsable du non-respect de la Bonne Technique dans la
construction des fermetures à motoriser, ni des déformations qui pourraient
intervenir lors de l'utilisation.
10) L'installation doit être effectuée conformément aux Normes EN 12453 et EN
12445. Le niveau de sécurité de l'automatisme doit être C+E.
11) Couper l'alimentation électrique avant toute intervention sur l'installation.
12) Prévoir, sur le secteur d'alimentation de l'automatisme, un interrupteur
omnipolaire avec une distance d'ouverture des contacts égale ou supérieure
à 3 mm. On recommande d'utiliser un magnétothermique de 6A avec
interruption omnipolaire.
13) Vérifier qu'il y ait, en amont de l'installation, un interrupteur différentiel avec
un seuil de 0,03 A.
14) Vérifier que la mise à terre est réalisée selon les règles de l'art et y connecter
les pièces métalliques de la fermeture.
15) L'automatisme dispose d'une sécurité intrinsèque anti-écrasement, formée
d'un contrôle du couple. Il est toutefois nécessaire d'en vérifier le seuil
d'intervention suivant les prescriptions des Normes indiquées au point 10.
16) Les dispositifs de sécurité (norme EN 12978) permettent de protéger des
zones éventuellement dangereuses contre les Risques mécaniques du
mouvement, comme l'écrasement, l'acheminement, le cisaillement.
Page 3
ITALIANO
CENTRALE DI COMANDO UNIVERSALE 230V~
ISTRUZIONI PER LUSO NORME DI INSTALLAZIONE
1. CARATTERISTICHE GENERALI
La centrale è stata ideata, progettata e costruita con lo scopo di gestire nella massima sicurezza possibile, un
qualsiasi accesso automatizzato ( battente a una o due ante, scorrevole, scorrevoli contrapposti, barriera
automatica, barriere automatiche contrapposte, basculanti ad 1 o 2 motori in parallelo) . Un innovativo e facile
metodo di programmazione di funzioni e tempi tramite lutilizzo di tre tasti ed un display a due cifre, permette
di effettuare con la massima precisione, la regolazione di tutti i parametri di funzionamento. Una serie di led
permette il controllo immediato dello stato degli ingressi, delle uscite ed eventuali avarie del circuito.
La conformità ai rigidi standard Europei di riferimento (CE) è inoltre garanzia di qualità e di affidabilità del
prodotto.
2. CARATTERISTICHE TECNICHE
Tensione di alimentazione 230 V~ - 50/60 Hz
Potenza assorbita max 1600W
Carico max motori 2 x 700W
Carico max lampeggiatore 80W
Carico max luce di cortesia 40W
Carico max accessori 24 V~ 15W
Carico max luce spia 24 V~ 3W
Carico max elettroserratura 12 V~ 24W
Fusibili di protezione 5
Applicazioni Battente ad una e due ante
Scorrevole e scorrevoli contrapposti
Barriera e barriere contrapposte
Basculanti ad uno o due motori
Programmazione Tre tasti e display digitale
Gestore delle funzioni Microprocessore con watch-dog
Parametri di riferimento Memorizzati in EE-PROM
Ingressi in morsettiera Apertura pedonale / Apertura totale /Apre e chiude uomo presente /
Fotocellule apertura e chiusura / Costa / Finecorsa apertura e chiusura /
STOP / Alimentazione rete / Antenna
Connettore per radiocomando Schede radioriceventi
Uscite in morsettiera Motori 1 e 2 /Alimentazione accessori 24 V~/ Luce di cortesia /
Lampeggiatore / Luce spia / Elettroserratura 12V~
Temperatura ambiente -20°C +55°C
Caratteristiche contenitore 305 x 225 x 125 mm. IP55
3. PREDISPOSIZIONI E NOTE GENERALI
ATTENZIONE: E importante per la sicurezza delle persone seguire attentamente tutte le avvertenze e istruzioni
presenti in questo libretto. Una errata installazione o un errato uso del prodotto può portare a gravi danni
alle persone.
Verificare che a monte dellimpianto vi sia un adeguato interruttore
differenziale come prescritto dalla normativa vigente e prevedere sulla rete
di alimentazione un magnetotermico con interruzione onnipolare.
Per la messa in opera dei cavi elettrici utilizzare adeguati tubi rigidi e/o
flessibili.
Separare sempre i cavi di collegamento degli accessori a bassa tensione da
quelli di alimentazione a 230 V~. Per lalimentazione dellapparecchiatura
bisogna prevedere dei cavi con sezione minima 1.5 mm². Per evitare qualsiasi
interferenza utilizzare guaine separate.
Montare sulla scatola adeguati pressacavi per il passaggio cavi con grado
di protezione minimo IP54.
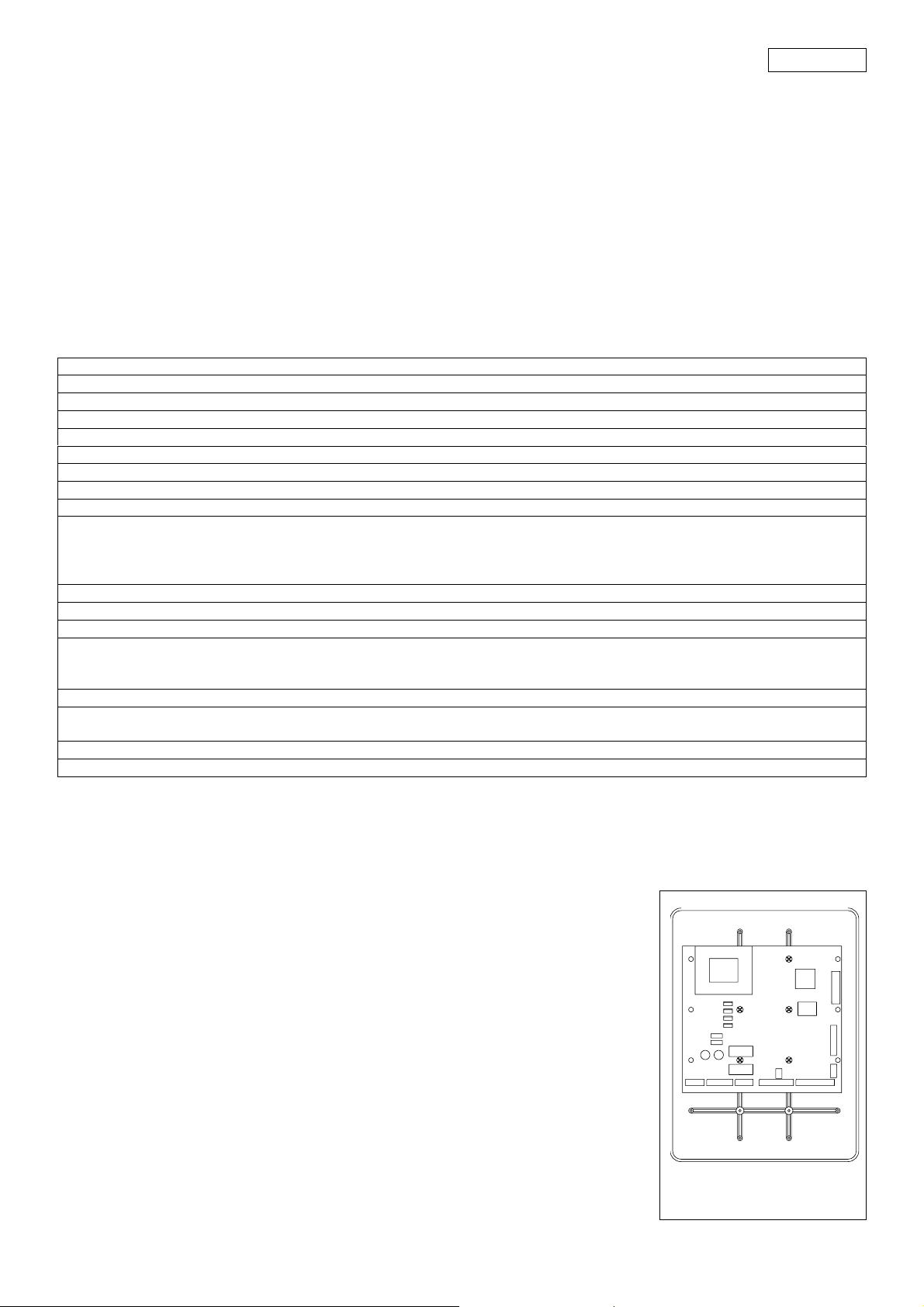
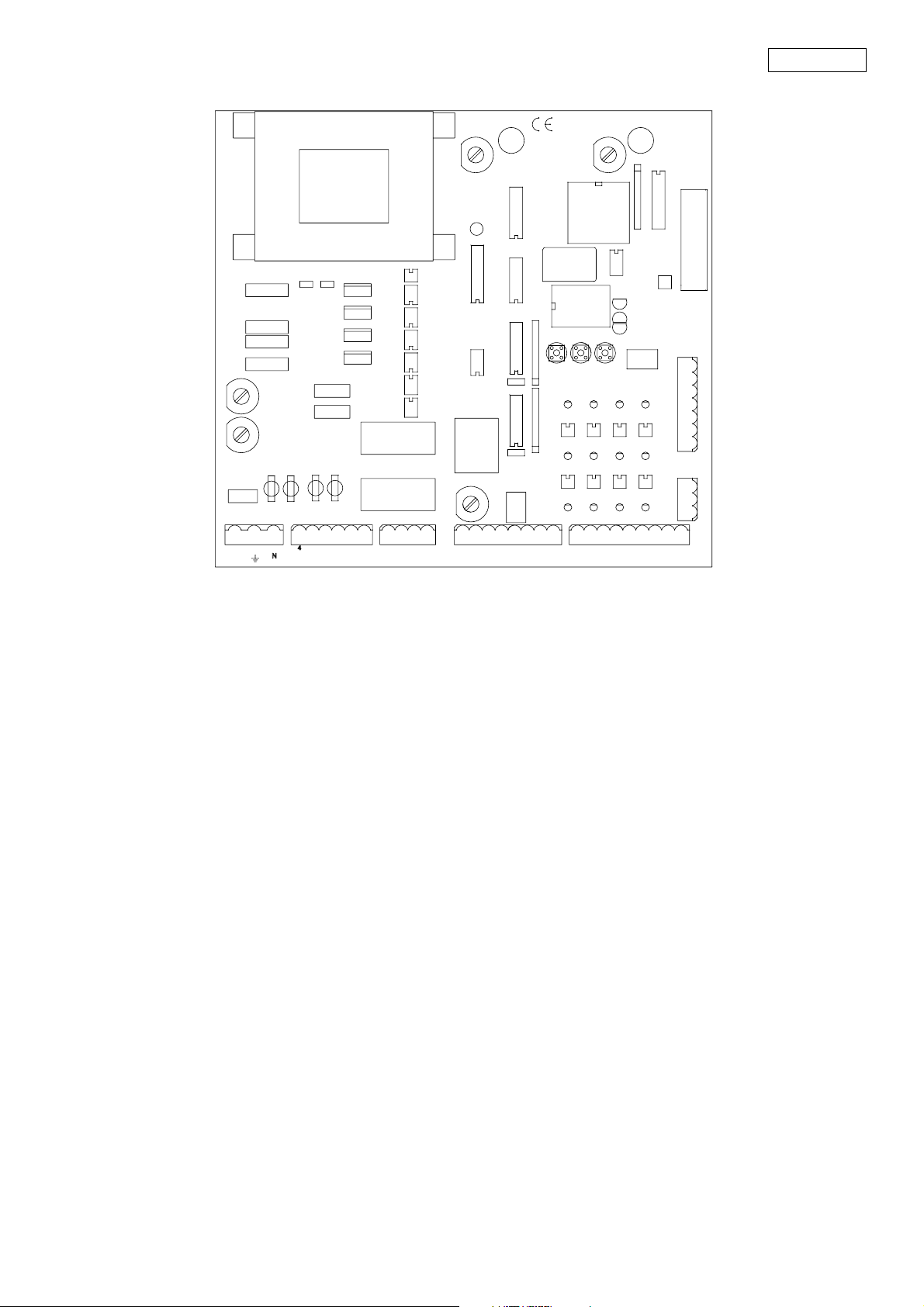
Per il fissaggio della centrale nel contenitore stagno, posizionare la centrale
come in fig.1 e fissarla con n.5 viti Ø4.2x13 autofilettanti (fornite), ponendo i
distanziali tra scheda e guide del contenitore stagno.
Importante: i condensatori di avviamento devono sempre essere collegati
sugli appositi faston sulla scheda (COND.MOT1, COND.MOT2) e mai
direttamente in morsettiera sulle uscite motori OP,CL MOT1 e MOT2.
1
Fig.1
Page 4
ITALIANO
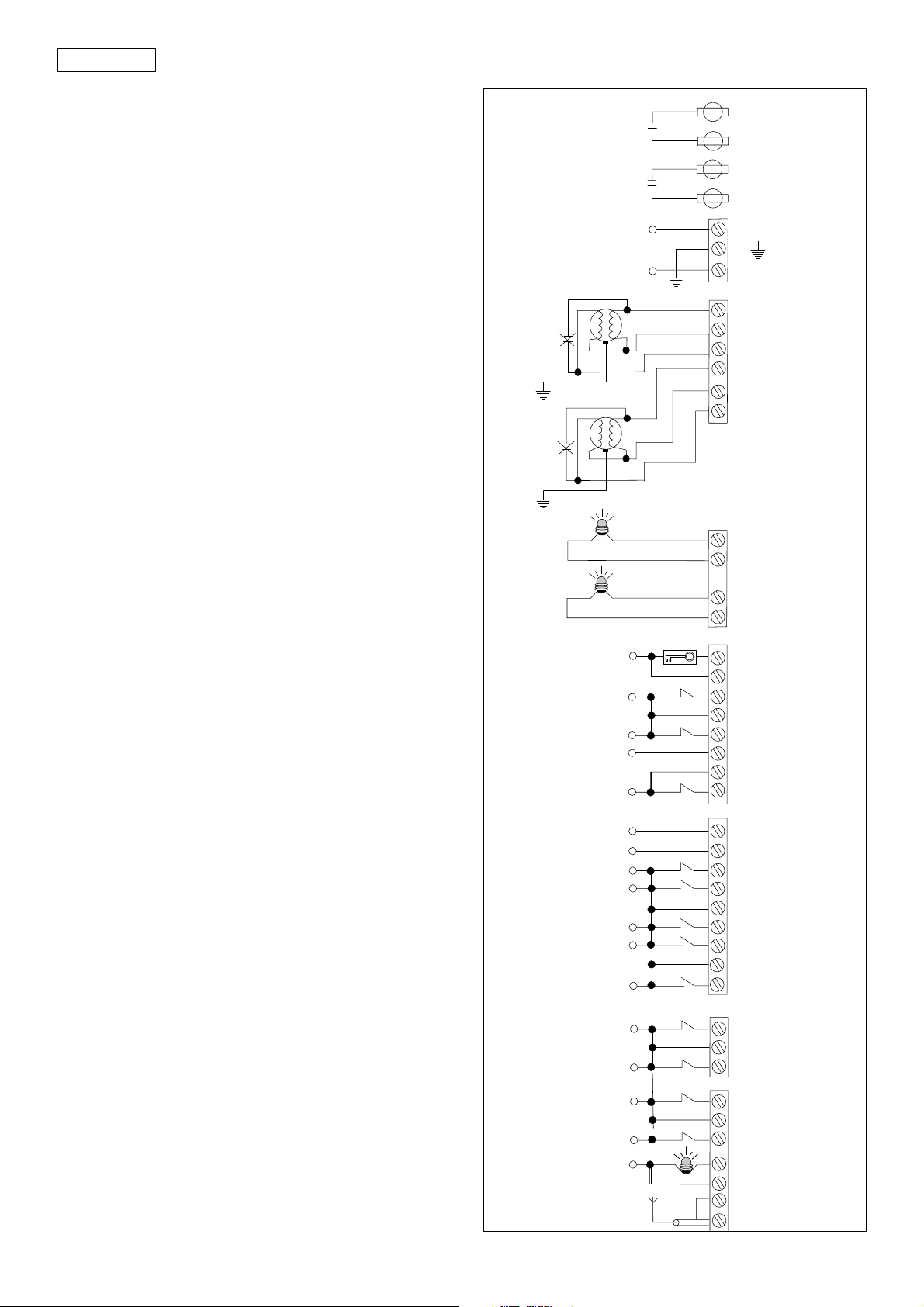
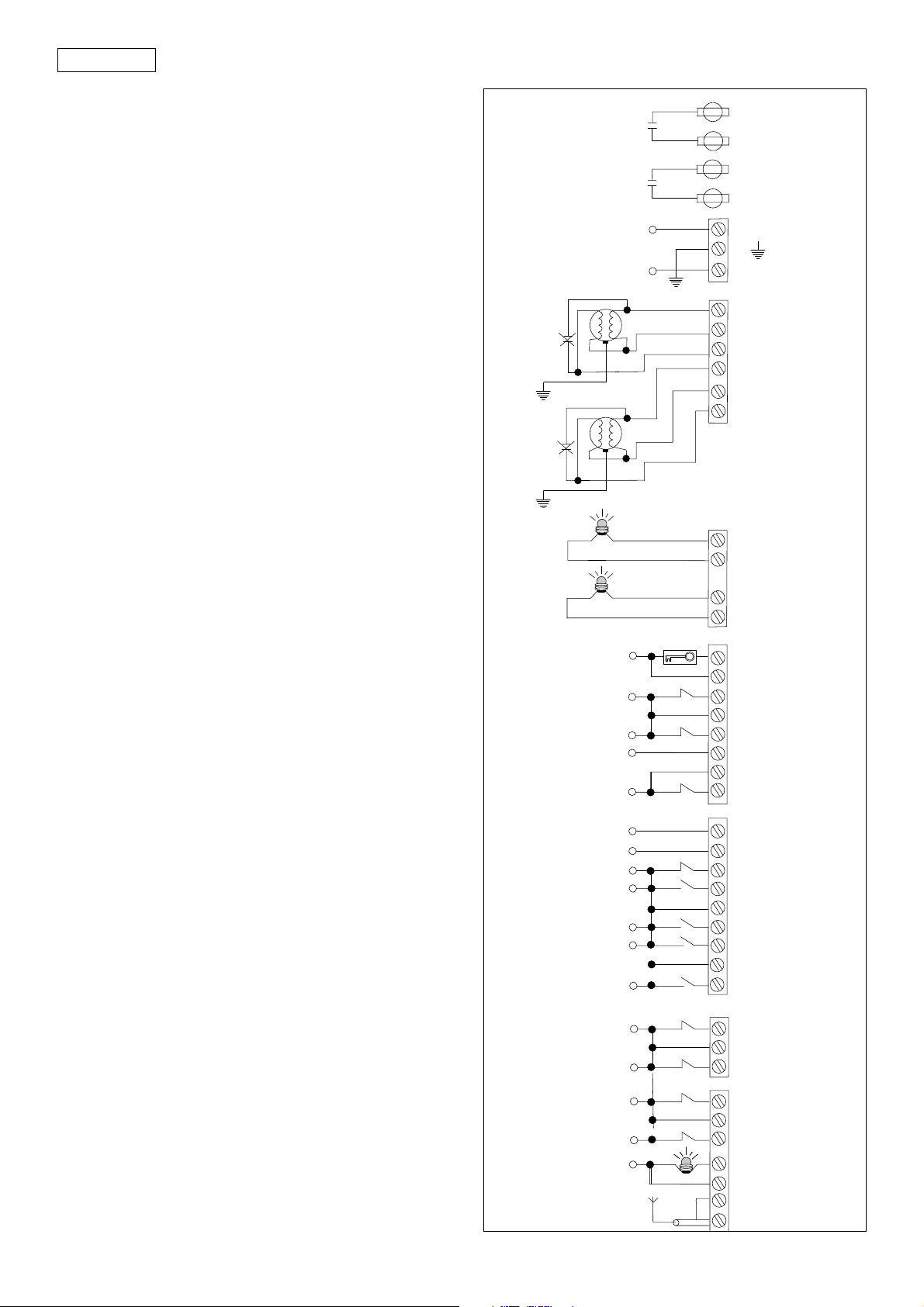
4. COLLEGAMENTI
FASTON PER CONDENSATORI
(COND.MOT1) Collegamento del condensatore di
avviamento del motore 1
(COND.MOT2) Collegamento del condensatore di
avviamento del motore 2
MORSETTIERA DI POTENZA M1
(1) Linea 230V~
(2) Terra
(3) Neutro
MORSETTIERA DI POTENZA M2
(4-5-6) Motore 1. Attenzione: non collegare il
condensatore di avviamento direttamente
sulluscita motore 1 ma sui faston cond. M1
(7-8-9) Motore 2. Attenzione: non collegare il
condensatore di avviamento direttamente
sulluscita motore 2 ma sui faston cond. M2
MORSETTIERA DI POTENZA M3
(10-11) Lampeggiatore. 230V~ - max 80W
(12-13) Luce di cortesia. 230V~ - max 40W
MORSETTIERA DI SEGNALE M4
(14-15) Elettroserratura. 12V~ - max 24W
(16) Fotocellula in chiusura
(17) Comune
(18) Fotocellula in apertura
(19) Comando autotest sicurezze +24Vdc
(20) Comune
(21) Costa di protezione
MORSETTIERA DI SEGNALE M5
(22) Alimentazione accessori esterni 24V~
(23) Comune
(24) Pulsante di STOP
(25) Pulsante di START
(26) Comune
(27) Pulsante apertura pedonale
(28) Pulsante apertura uomo presente
(29) Comune
(30) Pulsante chiusura uomo presente
MORSETTIERA DI SEGNALE M6
(31) Finecorsa chiusura motore 1
(32) Comune
(33) Finecorsa apertura motore 1
MORSETTIERA DI SEGNALE M7
(34) Finecorsa chiusura motore 2
(35) Comune
(36) Finecorsa apertura motore 2
(37-38) Spia automazione aperta. 24V~ - max 3W
(39-40) Antenna radio esterna. Da non utilizzare se
sulla scheda ricevente è già prevista la
morsettiera per lantenna esterna
COND MOT1
COND MOT2
(1) L
(2)
(3) N
(4) OP
(5) COM
(6) CL
(7) OP
(8) COM
(9) CL
(10) LAMP
(11) LAMP
(12) LAMP
(13) EXT
(14) EL-SER
(15) EL-SER
(16) FTC
(17) COM
(18) FTO
(19) TST
(20) COM
(21) CST
(22) 24V
(23) COM
(24) STP
(25) STA
(26) COM
(27) PED
(28) OPU
(29) COM
(30 ) CLU
(31) FC1
(32) COM MOT1
(33) FC2
(34) FC3
(35) COM MOT2
(36) FC4
(37) SP.CA
(38) SP.CA
(39) COM-ANT
(40) SIG-ANT
2
Page 5
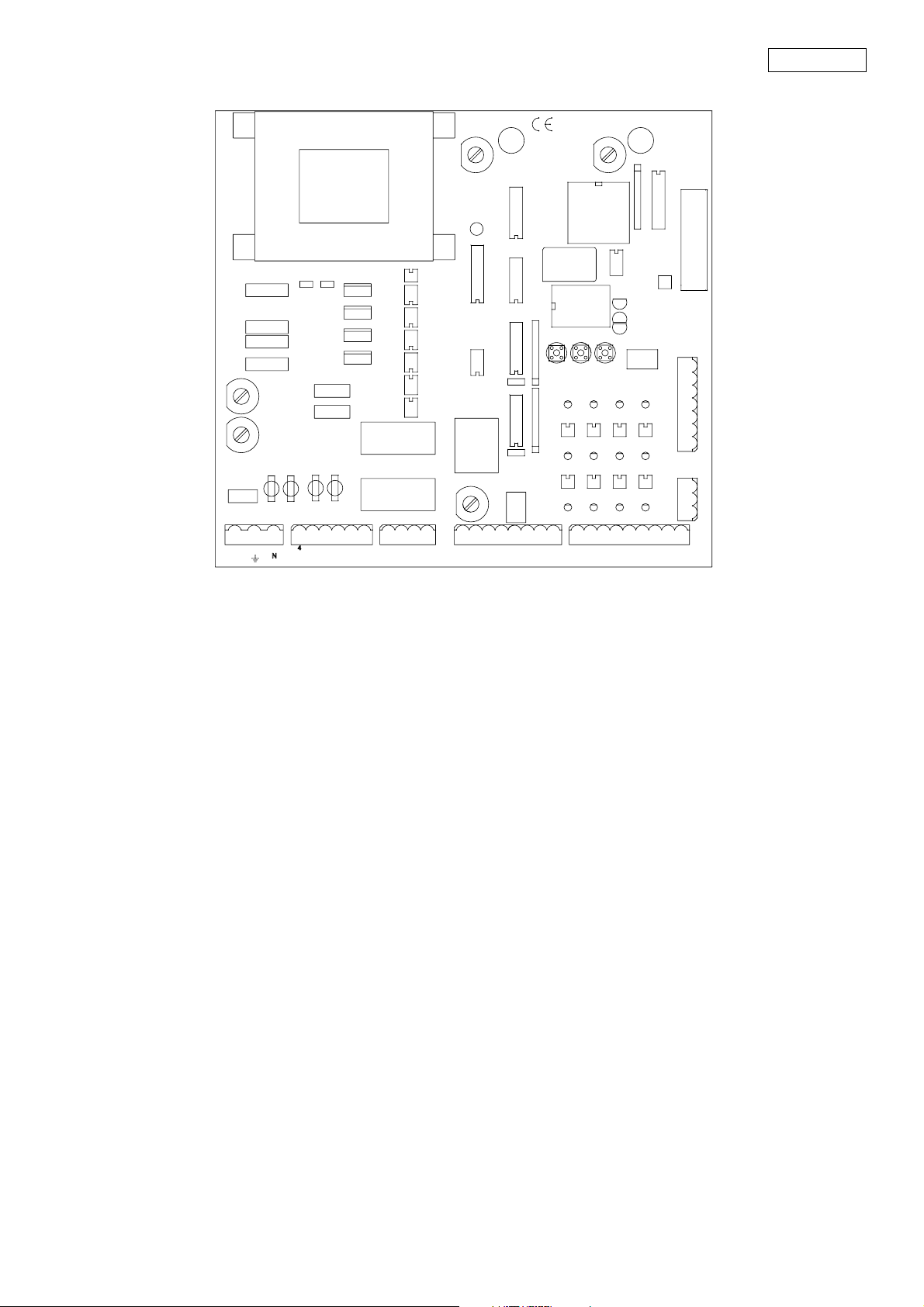
5. LAYOUT CENTRALE
F4
1A 250V F
F1
8A 250V F
COND. MOT1
M1
OP=MOTOR 1
CL=MOTOR 1&2
JP1 JP2
COND. MOT2
M2
M3
F2
315mA 250V F
2A 250V T
F5
ITALIANO
A466
F3
1A 250V F
M8
JP3
M7
- + ENTER
FC4 FC3 FC2 FC1
STA PED OPU CLU
FTC FTO CST STP
M4
M5
ANT
COM SIG
24V~
SP.CA
MOT2
34 35 36 37 38 39 40
FC3 COM FC4
M6
MOT1
31 32 33
FC1 COM FC2
1 2 3
L N
4 5 6 7 8 9
OP COM CL
OP COM CL
MOT1
MOT2
10 11 12 13
LAMP
LAMP
EXT
14 15 16 17 18 19 20 21
EL-SER
FTC COM FTO TST COM CST
12V~
22 23 24 25 26 27 28 29 30
24~ COM STP STA COM PED OPU COM CLU
6. JUMPER SELEZIONE MOTORE 1 O MOTORI 1 E 2
A seconda del tipo di cancello (una anta o due ante) spostare il Jumper JP1-JP2 nel seguente modo:
OP = (Circuito aperto) solo motore 1 per cancelli ad unanta CL = (Circuito chiuso) motori 1 e 2 per cancelli
a due ante
7. INSERIMENTO SCHEDA RICEVENTE
La centrale è predisposta per alloggiare una ricevente mono o bicanale. Per procedere allinstallazione togliere
lalimentazione elettrica e inserire la ricevente nellapposito connettore M8 sulla centrale. Seguire poi le istruzioni
della ricevente per la memorizzazione del telecomando. Una volta memorizzato il telecomando, questo agisce
come un qualsiasi pulsante sul comando di START.
Quando nel connettore M8 è inserita un ricevente bicanale, è possibile, per mezzo dei jumper JP3, attivare o
disattivare il secondo canale sullapertura pedonale
8. PROGRAMMAZIONE DELLA CENTRALE
Eseguire tale programmazione regolando i parametri con lobiettivo di garantire la massima sicurezza
dellaccesso automatizzato. A programmazione conclusa, eseguire più volte manovre di comando via radio
o manuali di apertura e chiusura dellaccesso automatizzato verificando il corretto funzionamento sia della
automazione che delle relative sicurezze.
A tale scopo leggere il paragrafo relativo al funzionamento della centrale. Allaccensione la centrale verifica
lintegrità della memoria EEPROM in cui sono memorizzati i parametri di Default o lultima programmazione
eseguita correttamente. Se viene riscontrato un guasto della memoria EEPROM o una perdita dei parametri
memorizzati la centralina visualizza sul display la scritta EE (EEPROM ERROR), se invece la EEPROM è integra la
centralina si imposta ai valori di Default o allultima programmazione eseguita correttamente ed il display è
spento. Per accedere al menù di programmazione occorre tenere premuto il pulsante di ENTER per 3 secondi,
dopodichè compare la scritta EP . Tale scritta permane per 5 secondi, durante i quali se si tiene premuto il
pulsante + per almeno 2 secondi, si carica automaticamente la programmazione di Default. Scaduti i 5
secondi la centralina punta alla funzione 1 ed è possibile procedere alla programmazione delle singole funzioni
operando come segue:
Selezionare la funzione da programmare premendo uno dei due tasti + (AVANTI) o - (INDIETRO); il tasto
di - decrementa e il tasto di + incrementa.
Premere il tasto di ENTER per cambiare il valore della funzione. A questo punto il display lampeggia; è ora
possibile cambiare il valore impostato premendo i tasti di + (incrementa valore), e - (decrementa il
valore).
3
Page 6
ITALIANO
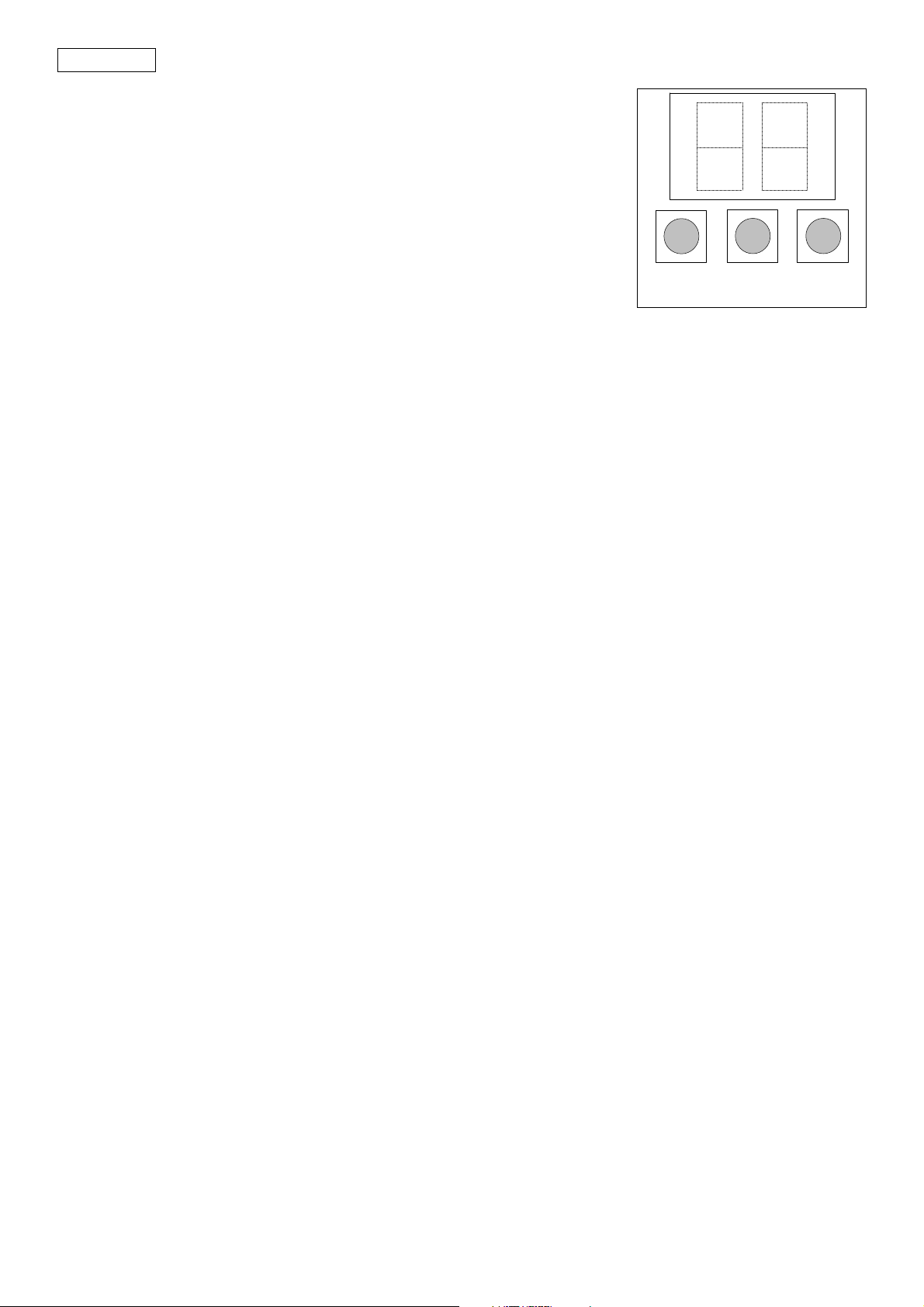
- + ENTER
Premere il tasto di ENTER per confermare il valore della funzione desiderato
Se si vogliono programmare altre funzioni ripetere le operazioni elencate
precedentemente.
Per uscire dal menù di programmazione occorre puntare alla funzione 99 di
fine programmazione e premere il pulsante di ENTER. A questo punto la
centralina verifica la congruenza dei parametri settati; nel caso di
programmazione corretta compare la scritta FP (Fine Programmazione) per
3 secondi dopodichè il display si spegne. Nel caso invece di conflitto tra i
parametri viene fatto lampeggiare il numero di una delle funzioni
potenzialmente sbagliate. Per correggere il valore delle funzioni sbagliate
rientrare nel menù di programmazione premendo il pulsante di ENTER per
3 secondi. Fino a che la programmazione della centralina non è stata
eseguita correttamente non sarà possibile eseguire alcuna manovra.
9. FUNZIONI DA PROGRAMMARE
FUNZIONE 1 Tipo di Applicazione
Questa funzione permette di impostare il tipo di Applicazione con lo scopo di abilitare solo le funzioni collegate
al tipo di applicazione.
Valore 1 = Cancello a battente ad unanta (motore 1)
Valore 2 = Cancello a battente a due ante (motori 1 e 2)
Valore 3 = Cancello scorrevole (motore 1)
Valore 4 = Cancelli scorrevoli contrapposti (motori 1 e 2)
Valore 5 = Barriera automatica (motore 1)
Valore 6 = Barriere automatiche contrapposte (motore 1 e 2)
Valore 7 = Basculante ad 1 motore (motore 1)
Valore 8 = Basculante a 2 motori in parallelo (motori 1 e 2)
FUNZIONE 2 Finecorsa
Questa funzione permette di gestire i finecorsa in chiusura ed apertura.
Impostare i valori:
Valore 0 = Finecorsa non presenti (evita di dover ponticellare i morsetti relativi ai quattro finecorsa)
Valore 1 = Presenti solo finecorsa in chiusura (1 Finecorsa per applicazione ad 1 motore, 2 Finecorsa per
applicazione a 2 motori)
Valore 2 = Presenti solo finecorsa in apertura. (1 Finecorsa per applicazione ad 1 motore, 2 Finecorsa per
applicazione a 2 motori)
Valore 3 = Presenti finecorsa sia in chiusura che in apertura. (2 Finecorsa per applicazione ad 1 motore, 4
Finecorsa per applicazione a 2 motori)
FUNZIONE 3 - Regolazione forza motore 1 (TRIAC)
Questa funzione consente di regolare la forza del motore 1 dal livello minimo (30%) al valore massimo (100%).
Disabilitare il Controllo ostacolo (impostare valore 0 della funzione 5)
Tenendo conto dei fattori ambientali e di installazione impostare il valore più appropriato
Impostare i valori tenendo presente che:
Valore 1 = valore minimo impostabile (30%)
Valore 10 = valore massimo impostabile (100%)
Nota bene: al momento dello spunto iniziale se abilitato, la forza motore è al massimo per il tempo impostato
con la funzione 8. Prima di eseguire ogni manovra viene eseguito un test che verifica lintegrità dei Triac ed il
corretto collegamento dei motori; in caso di esito negativo compare sul display il messaggio E0 (si veda a
tale proposito il paragrafo Messaggi errore sul display).
FUNZIONE 4 - Regolazione forza motore 2 (TRIAC)
Questa funzione consente di regolare la forza del motore 2 dal livello minimo (30%) al valore massimo (100%).
Disabilitare il Controllo ostacolo (impostare valore 0 della funzione 5).
Tenendo conto dei fattori ambientali e di installazione impostare il valore più appropriato.
Impostare i valori tenendo presente che :
Valore 1 = valore minimo impostabile (30%)
Valore 10 = valore massimo impostabile (100%)
Nota bene: al momento dello spunto iniziale se abilitato, la forza motore è al massimo per il tempo impostato
con la funzione 8. Prima di eseguire ogni manovra viene eseguito un test che verifica lintegrità dei Triac ed il
corretto collegamento dei motori; in caso di esito negativo compare sul display il messaggio E0 (si veda a
tale proposito il paragrafo Messaggi errore sul display).
4
Page 7

ITALIANO
FUNZIONE 5 - Controllo ostacolo
Il controllo ostacolo stabilisce il comportamento dellautomazione allintervento del rilevamento ostacolo.
Valore 0 = NON ABILITATO
Valore 1 = STOP dellautomazione . In questa configurazione svolge la funzione dei finecorsa, qualora non siano
presenti.
Valore 2 = STOP ed INVERTE il senso di marcia dellautomazione.
Valore 3 = STOP ed INVERTE il senso di marcia dellautomazione per 2 secondi. Per ripristinare il movimento, dare
unulteriore impulso di comando.
FUNZIONE 6 - Sensibilità del controllo ostacolo sia in apertura che in chiusura del motore 1
Con questa funzione si può regolare la sensibilità di rilevazione dellostacolo in apertura, permettendo larresto
dellautomazione in presenza di un ostacolo che ostruisca la manovra (FUNZIONE 5).
Regolare la forza motore Funzioni 3 e 4 al valore minimo necessario a movimentare laccesso automatizzato.
Regolare la sensibilità tenendo presente che:
Valore 1 = massima sensibilità, ovvero occorre una bassa resistenza per rilevare lostacolo.
Valore 6 = minima sensibilità, ovvero occorre una forte resistenza per rilevare lostacolo.
FUNZIONE 7 - Sensibilità del controllo ostacolo sia in apertura che in chiusura del motore 2
Con questa funzione si può regolare la sensibilità di rilevazione dellostacolo in apertura, permettendo larresto
dellautomazione in presenza di un ostacolo che ostruisca la manovra (FUNZIONE 5).
Regolare la forza motore Funzioni 3 e 4 al valore minimo necessario a movimentare laccesso automatizzato.
Regolare la sensibilità tenendo presente che:
Valore 1 = massima sensibilità, ovvero occorre una minima resistenza per rilevare lostacolo.
Valore 6 = minima sensibilità, ovvero occorre una forte resistenza per rilevare lostacolo.
FUNZIONE 8 Spunto allavvio della manovra di apertura e di chiusura
Questa funzione permette di settare la presenza dello spunto in partenza in decimi di secondo.
Valore 0 = Nessuno spunto
Valori da 1 a 99 = Spunto in decimi di secondo allinizio di ogni manovra alla massima Forza (100%).
Es.10=1 secondo di spunto.
FUNZIONE 9 Extra tempo di 2 secondi al termine della manovra di apertura e di chiusura
Valore 0 = Disabilitato
Valore 1 = Extra tempo al termine della sola manovra di apertura
Valore 2 = Extra tempo al termine della sola manovra di chiusura
Valore 3 = Extra tempo al termine delle manovre di apertura e chiusura
FUNZIONE 10 Chiusura automatica
Valore 0 = chiusura automatica disabilitata
Valore 1 = chiusura automatica abilitata
FUNZIONE 11 Funzione Passo_Passo
Questa funzione serve per abilitare diverse sequenze di funzionamento passo-passo ed è attiva sia sulle manovre
pedonali che su quelle totali.
Impostare i valori:
Valore 0 = APRE lautomazione compie loperazione dapertura e dopo il tempo di sosta (funzione 27) richiude
Valore 1 = APRE/CHIUDE
Valore 2 = APRE/STOP/CHIUDE
Valore 3 = APRE/STOP/CHIUDE/STOP
FUNZIONE 15 - Tempo di pre-lampeggio
Questa funzione permette di impostare il tempo di prelampeggio del lampeggiante prima di ogni manovra.
Valore 0 = Mancanza di prelampeggio
Valori da 1 a 99 = prelampeggio compreso tra 1 e 99 secondi.
FUNZIONE 16 - Tempo di accensione Luce di Cortesia
Questa funzione permette di impostare il tempo di accensione della luce di cortesia.
Valore 0 = La luce si spegne al termine di ogni manovra
Valori da 1 a 99 = valore corrispondente a metà del tempo di accensione della luce di cortesia.
Es. 45=90 secondi
5
Page 8

ITALIANO
FUNZIONE 20 - Fotocellula in apertura
Questa funzione permette di regolare lutilizzo di una fotocellula in apertura. Nessun effetto in fase di chiusura.
Impostare i valori:
Valore 0 = sicurezza in apertura non presente (serve per evitare di ponticellare i morsetti relativi).
Valore 1 = STOP allintervento della fotocellula e al disimpegno riprende il movimento in apertura.
Nota bene: se la fotocellula è impegnata al momento della ricezione di un impulso, questo verrà ignorato.
FUNZIONE 21 Costa di protezione
Questa funzione permette di regolare lutilizzo di una ulteriore protezione in apertura e chiusura (ad esempio
una costa pneumatica, una fotocosta, una costa a filo, etc...).
Impostare i valori:
Valore 0 = sicurezza non presente (serve per evitare di ponticellare i morsetti relativi)
Valore 1 = STOP allintervento della costa ed inversione del moto per 2 secondi. Per riprendere il ciclo è
necessario fornire un nuovo impulso.
Nota bene: se la costa è impegnata al momento della ricezione di un impulso, questo verrà ignorato.
FUNZIONE 22 - Fotocellula in chiusura
Questa funzione permette di regolare lutilizzo della fotocellula di sicurezza in chiusura. Nessun effetto in fase
di apertura. Impostare i valori:
Valore 0 = Fotocellula in chiusura non presente (serve per evitare di ponticellare i morsetti relativi)
Valore 1 = STOP in fase di chiusura ed inversione del moto.
Valore 2 = STOP in fase di chiusura ed al disimpegno inversione del moto.
Nota bene: se la fotocellula è impegnata al momento della ricezione di un comando di apertura ad accesso
completamente chiuso, il comando verrà eseguito, in tutti gli altri casi i comandi ricevuti a fotocellula
impegnata verranno ignorati.
FUNZIONE 23 Ingresso di Stop
Questa funzione permette di abilitare o meno lingresso di Stop.
Impostare i valori:
Valore 0 = Pulsante di Stop non presente (serve per evitare di ponticellare i morsetti relativi)
Valore 1 = Stop abilitato. La sua attivazione blocca la manovra, per riprendere il ciclo è necessario fornire un
nuovo impulso. Finchè lingresso di Stop è attivo viene ignorato qualsiasi comando.
FUNZIONE 25 - Tempo di Lavoro del motore 1
Questa funzione permette di regolare il tempo massimo di lavoro del motore 1 uguale sia in apertura che in
chiusura; non è escludibile perchè ha la funzionalità di proteggere il motore in caso di malfunzionamento dei
Finecorsa o del rilevamento ostacolo.
Valori da 1 a 99 = valore corrispondente a metà del tempo lavoro. Es. 10=20 secondi
Nota bene: se viene selezionato un rallentamento a tempo questo ha inizio allo scadere del tempo di lavoro
impostato.
FUNZIONE 26 - Tempo di Lavoro del motore 2
Questa funzione permette di regolare il tempo massimo di lavoro del motore 2 uguale sia in apertura che in
chiusura; non è escludibile perchè ha la funzionalità di proteggere il motore in caso di malfunzionamento dei
Finecorsa o del rilevamento ostacolo.
Valori da 1 a 99 = valore corrispondente a metà del tempo lavoro. Es. 10=20 secondi
Nota bene: se viene selezionato un rallentamento a tempo questo ha inizio allo scadere del tempo di lavoro
impostato.
FUNZIONE 27 Tempo di Sosta
Questa funzione permette di regolare il tempo di sosta prima della chiusura automatica.
Impostare i valori :
Valore 0 = Tempo di Sosta nullo
Valori compresi tra 1 e 99 = questo valore corrisponde alla metà del tempo di sosta in secondi prima della
chiusura automatica. Es. 20=40 secondi.
FUNZIONE 28 - Tempo di Recupero Inversione
La centrale è dotata di un encoder a tempo per entrambi i motori. Questa funzione consente di impostare il
tempo di Recupero in caso di Inversione che viene sommato al Tempo Residuo di manovra. Ciò consente di
evitare che, in caso di inversioni ripetute, lautomazione non completi correttamente la manovra.
Valore 0 = Tempo di recupero nullo
Valori da 1 a 99 = Tempo di Recupero compreso tra 1 e 99 secondi
6
Page 9

ITALIANO
FUNZIONE 30 Tempo di rallentamento dei motori 1 e 2 in apertura
Valore 0 = non abilitato
Valori da 1 a 99 = tempo di rallentamento impostabile da 1 a 99 decimi di secondo a partire dal finecorsa o
dal termine del tempo massimo di lavoro dei motori 1 e 2 (funzione 31). Es. 50=5 secondi di rallentamento.
FUNZIONE 31 Tipo di rallentamento in apertura
Valore 0 = il tempo di rallentamento (funzione 30) è calcolato a partire dallo scadere del tempo di lavoro
massimo dei motori (funzioni 25 e 26)
Valori 1= il tempo di rallentamento (funzione 30) è calcolato a partire dallintervento del finecorsa in apertura.
FUNZIONE 32 Tempo di rallentamento dei motori 1 e 2 in chiusura
Valore 0 = non abilitato
Valori da 1 a 99 = tempo di rallentamento impostabile da 1 a 99 decimi di secondo a partire dal finecorsa o
dal termine del tempo massimo di lavoro dei motori 1 e 2 (funzione 33). Es. 50=5 secondi di rallentamento.
FUNZIONE 33 Tipo di rallentamento in chiusura
Valore 0 = il tempo di rallentamento (funzione 32) è calcolato a partire dallo scadere del tempo di lavoro
massimo dei motori (funzioni 25 e 26)
Valori 1= il tempo di rallentamento (funzione 32) è calcolato a partire dallintervento del finecorsa in chiusura.
FUNZIONE 34 Forza motore in fase di rallentamento
Con questa funzione si imposta il livello della forza motore durante la fase di rallentamento.
Valore 1 = Forza motore minima
Valore 2 = Forza motore intermedia
Valore 3 = Forza motore massima
Nota bene: per automazioni a battente con motori di bassa potenza (minore di 150W) si consiglia il valore 3.
FUNZIONE 45 Tempo di sfasamento in apertura tra il motore 2 ed il motore 1
Questa funzione permette di impostare il tempo di ritardo di attivazione del motore 2 rispetto al motore 1 in fase
dapertura:
Valore 0 = sfasamento disabilitato
Valore da 1 a 99 = sfasamento compreso tra 1 e 99 secondi
FUNZIONE 46 Tempo di sfasamento in chiusura tra il motore 1 ed il motore 2
Questa funzione permette di impostare il tempo di ritardo di attivazione del motore 1 rispetto al motore 2 in fase
di chiusura.
Valore 0 = sfasamento disabilitato
Valore da 1 a 99 = sfasamento compreso tra 1 e 99 secondi
FUNZIONE 50 Elettroserratura
Questa funzione permette di impostare il funzionamento dellelettroserratura.
Valore 0 = Esclusa
Valore 1 = Attiva per 3 secondi prima di ogni manovra in apertura
Valore 2 = Colpo di Inversione di 1 secondo ed attivazione dellelettroserratura per 3 secondi prima di ogni
manovra in apertura.
FUNZIONE 60 - Autotest delle sicurezze
Questa funzione serve per testare le sicurezze prima di ogni manovra; tale funzione è realizzabile con fotocellule
predisposte. Nel caso il test dia esito negativo (una delle sicurezze non funziona correttamente) lautomazione
non esegue il comando ricevuto.
Impostare i valori:
Valore 0 = autotest disabilitato
Valore 1 = autotest abilitato fotocellula chiusura.
Valore 2 = autotest abilitato fotocellula apertura.
Valore 3 = autotest abilitato per entrambe le fotocellule.
FUNZIONE 70 Funzione di frenata
Valore 0 = funzione di frenata disabilitata
Valore 1 = funzione di frenata abilitata sui motori 1 e 2 sia in apertura che in chiusura.
Nota bene: questa funzione è attiva solo per le applicazioni con cancelli scorrevoli (funzione 1 impostata a 3
o 4)
FUNZIONE 99 Funzione di Fine Programmazione
Per uscire dal menù di programmazione puntare a questa funzione e premere il pulsante di ENTER.
Nota bene: la centrale non consente di accedere al menù di programmazione durante lesecuzione di un ciclo
di funzionamento. Solo se la centrale è stata programmata correttamente è possibile eseguire delle manovre.
7
Page 10
ITALIANO
10. ELENCO DELLE FUNZIONI VARIABILI
FUNZIONE DESCRIZIONE Min/Max Def ault
Applicazione
1 = Cancello a battente ad un anta
2 = Cancello a battente a due ante
1
3 = Cancello scorrevole
4 = Cancelli scorrevoli contrapposti
5 = Barriera Automatica
6 = Barriere Automatiche contrapposte
7 = Basculante ad 1 motore
8 = Basculante a 2 motori in parallelo
Finecorsa dei motori 1 e 2
0 = Assenti
2
1 = Presente Finecorsa Ch iusura
2 = Presente Fin ecorsa Apertura
3 = Presenti Finecorsa Apertura e Chiusura
Regolazione Forza motore 1
3
Regolazione Forza motore 2
4
Azione Controllo Ostacolo
0 = NON ABILITATO
5
1 = STOP (in assenza di Finecorsa ne svolge la funzione)
2 = STOP/INVERTE
=
3
STOP/INVERT E per 2 second i
Sensibilità Controllo Ostacolo del motore 1
6
Sensibilità Controllo Ostacolo del motore 2
7
Spunto allavvio del la manovra di apertura e di chiusu ra in decimi di secondo
0 = Assente
8
1 - 99= Spunto allaccensione a max Forza compreso tra 1 e 99 decimi di secondo
Extra tempo al termine dellapertura e della chiusura
0 = Assente
9
1 = Spunto di 2sec al termine della manovra di apertura
2 = Spunto di 2sec al termine della manovra di chiusura
3 = Spunto al termine del la manovra d i chiusura e a pertura
Chiusura automatica
0 = disabilitata
10
1 = abilitata
Comando Passo-Passo
0 = APRE
11
1 = APRE/CHIUDE
2 = APRE/STOP/CHIUDE
3 = APRE/STOP/CHIUDE/STOP
Tempo di pre-lampeggio in secondi
0 = Assente
15
1 99 = compreso tra 1 e 99 s econdi
Tempo accensione Luce di Cor tesia in secondi (x2)
0 = Nullo
16
1 99 = compreso tra 2 e 198 s econdi
FOTOCELLULA in Apertura
0 = Non presente
20
1 = STOP e riparte dopo disimpegno
COSTA
0 = Non presente
21
1 = STOP ed inverte per 2 secondi
FOTOCELLULA in Chiusura
0 = Non presente
22
1 = STOP/inverte
2 = STOP/inv erte al disimpeg no della fotoce llula
Comando di STOP
0 = STOP non presente
23
1 = STOP presente
Tempo di lavoro del motore 1 (x2) in secondi
25
1 99 = compreso tra 2 e 198 s econdi
Tempo di lavoro del motore 2 (x2) in secondi
26
1 99 = compreso tra 2 e 198 s econdi
Tempo di sosta per Chiusura Automatica (x2) in se condi
0 = Nullo
27
1 99 = compreso tra 2 e 198 s econdi
Tempo recupe ro inversio ne per te mpo residuo in secondi
0 = Nullo
28
1 99 = compreso tra 1 e 99 s econdi
Tempo di rallentamento in apertura dei motori 1 e 2 in decimi di secondo
0 = non abilitato
30
Da 1 a 99 = da 1 a 99 decimi di sec ondo
Tipo di rallentamento in apertura sui motori 1 e 2
0 = parte a tempo allo scadere del tempo di lavoro massimo
31
1 = parte dallintervento dei finecorsa in apertura
Tempo di rallentamento in chiusura dei motori 1 e 2 in decimi di secondo
0 = non abilitato
32
Da 1 a 99 = da 1 a 99 decimi di sec ondo
Tipo di rallentamento in chiusura sui motori 1 e 2
0 = parte a tempo allo scadere del tempo di lavoro massimo
33
1 = parte dallintervento dei finecorsa in chiusura
Forza dei M otori dura nte il ra llentam ento
1= Forza minima
34
2= Forza intermedia
3= Forza massima
Tempo di Sfasamento in apertura tra il motore 2 ed il motore 1 in secondi
0 = Nullo
45
1 99 = compreso tra 1 e 99 s econdi
Tempo di Sfasamento in chiusura tra il motore 1 ed il motore 2 in secondi
0 = Nullo
46
1 99 = compreso tra 1 e 99 s econdi
Elettroserratura
0 = Assente
50
1 = Attiva per 3 secondi prima di ogni manovra di apertura
2 = Colpo di Ariete in apertura per 1 secondo e attiva per 3 secondi
Test fotocellule ad inizio manovra
0 = Disabilitato
60
1 = Abilitato fotocellula chiusura
2 = Abilitato fotocellula apertura
3 = Abilitato sulle fotocellule dapertura e di chiusura
Funzione di frenata
0 = disabilitata
70
1 = Abilitata sui motori 1 e 2 sia in apertura che in chiusura.
Funzione di Fine Programmazione
99
(1=30% 10=100%)
(1=30% 10=100%)
a Forza Lavoro (funzioni 3 e 4)
1 ¸ 8
0 ¸ 3
1 ¸ 10
1 ¸ 10
0 ¸3
1¸ 6
1¸ 6
0 ¸ 99
0 ¸ 3
0 ¸ 1
0 ¸ 3
0 ¸ 99
0 ¸ 99
0 ¸ 1
0 ¸ 1
0 ¸ 2
0 ¸ 1
1 ¸ 99
1 ¸ 99
0 ¸ 99
0 ¸ 99
0 ¸ 99
0 ¸ 1
0 ¸ 99
0 ¸ 1
1 ¸ 3
0 ¸ 99
0 ¸ 99
0 ¸ 2
0 ¸ 3
0 ¸ 1
10 (1s)
45 (90 s)
10 (20 s)
10 (20 s)
10 (20 s)
2
0
6
6
0
6
6
0
0
3
0
0
0
0
0
0
0
0
0
0
3
2
5
0
0
0
8
Page 11

ITALIANO
11. MESSAGGI DI ERRORE
A fine programmazione la centralina verifica la congruenza dei parametri settati; nel caso di programmazione
corretta compare la scritta FP (Fine Programmazione) per 3 secondi dopodichè il display si spegne.
Nel caso invece di conflitto tra i parametri viene fatto lampeggiare il numero di una delle funzioni potenzialmente
sbagliate. Per correggere il valore delle funzioni sbagliate rientrare nel menù di programmazione premendo il
pulsante di ENTER per 3 secondi. Fino a che la programmazione della centralina non è stata eseguita
correttamente non sarà possibile eseguire alcuna manovra.
Il display inoltre segnala inoltre anche i seguenti errori:
EE = guasto della memoria EEPROM o una perdita dei parametri memorizzati.
E consigliato riportarsi ai parametri di Default (vedi paragrafo Programmazione della Centrale). A questo
punto riprogrammare la centrale come prima della segnalazione di test fallito. In caso di ulteriore esito negativo
occorre chiamare lassistenza per sostituire il dispositivo difettoso.
E0 = triac in cortocircuito, motori in cortocircuito, motori scollegati od errato collegamento dei medesimi.
Controllare i collegamenti ed il corretto funzionamento dei motori collegati ai relativi morsetti. Se i collegamenti
sono corretti, togliere e ridare lalimentazione. Nel caso il problema persista, controllare che i motori non siano
in cortocircuito. Se ancora il problema persiste, contattare lassistenza.
E1 = test della fotocellula in chiusura fallito, controllare i collegamenti ed il corretto funzionamento dei dispositivi
collegati al morsetto FTC tramite il led corrispondente presente sulla scheda. Nel caso di malfunzionamento,
sostituire il dispositivo difettoso.
E2 = test della fotocellula in apertura fallito, controllare i collegamenti ed il corretto funzionamento dei dispositivi
collegati al morsetto FTO tramite il led corrispondente presente sulla scheda. Nel caso di malfunzionamento,
sostituire il dispositivo difettoso.
12. DESCRIZIONE DEL FUNZIONAMENTO DELLA CENTRALINA
12.1 ACCENSIONE
Allaccensione la centralina verifica lintegrità della memoria EEPROM in cui sono memorizzati i parametri di
Default o lultima programmazione eseguita correttamente. Se viene riscontrato un guasto della memoria
EEPROM, o una perdita dei parametri memorizzati, la centralina visualizza sul display la scritta EE o un altro
messaggio di errore, in questo caso leggere il praragrafo relativo.
Se invece la EEPROM è integra la centralina si imposta ai valori di Default o allultima programmazione eseguita
correttamente ed il display è spento. A questo punto la centralina è pronta ad eseguire i comandi.
N.B. Quando la centralina viene accesa, non viene eseguita alcuna manovra se non dopo il ricevimento di un
comando volontario da parte dellutilizzatore
12.2 COMANDI CONTRASTANTI
In presenza di comandi contrastanti contemporanei, la centralina non ne esegue nessuno.
12.3 REGOLAZIONE DELLA FORZA MOTORE
Regolare la forza motore 1 tramite la FUNZIONE 3 e del motore 2 tramite la FUNZIONE 4. Al valore 1
corrisponde la forza minima impostabile (30% forza massima) Al valore 1 corrisponde la forza minima
impostabile (30% Forza Massima), al valore 10 la forza massima. Durante la fase di rallentamento la forza dei
motori è regolata mediante la Funzione 34. (1 = Forza Minima, 3 = Forza Massima).
Per cancelli a battente con motori di piccola potenza (< 150W) per la Funzione 34 è consigliato il valore 3.
12.4 REGOLAZIONE DELLA SENSIBILITA DI RILEVAZIONE OSTACOLI
Escludere i finecorsa (se presenti), lasciare andare a fine manovra lautomazione e verificare il corretto
funzionamento della FUNZIONE 6 rilevazione ostacolo del motore 1, rifare la medesima operazione
verificando il funzionamento della FUNZIONE 7 rilevazione ostacolo del motore 2. Regolare il valore delle
sopracitate funzioni per garantire un adeguato valore di sicurezza dellaccesso automatizzato.
N.b.: durante la fase di spunto allavvio e di rallentamento la funzione di rilevamento ostacolo non è attiva.
9
Page 12

ITALIANO
12.5 RALLENTAMENTO DEI MOTORI
La centrale universale consente di eseguire il rallentamento dei motori al termine delle manovre di apertura e
chiusura. Tramite le Funzioni 31 e 33 è possibile selezionare la partenza del rallentamento a partire
dallintervento del finecorsa (valore 1) o dallo scadere del tempo di lavoro massimo dei due motori (Funzioni
25 e 26). La Funzione 31 è relativa alla manovra di apertura mentre la funzione 33 è relativa alla manovra di
chiusura; è possibile impostare una partenza del rallentamento da finecorsa in un senso di marcia e a tempo
nel senso opposto. La durata del rallentamento è regolabile in decimi di secondo mediante le Funzioni 30
(apertura) e 32 (chiusura), tra 1 e 99 decimi di secondo (0.1 e 9.9 secondi).
Per applicazioni con rallentamento a partire da finecorsa (cancelli scorrevoli) è consigliato porre il tempo
massimo di lavoro 2-3 secondi in più rispetto alla effettiva durata della manovra, ed il tempo di rallentamento
compreso tra 5 e 20 decimi di secondo in modo che il finecorsa non oltrepassi la sua battuta.
Per applicazioni con rallentamento con partenza a tempo (battente ad anta) è consigliato;
misurare la durata della manovra in assenza di rallentamento.
Porre il tempo massimo di lavoro ( funz. 25 e 26) un paio di secondi in meno rispetto alla durata misurata.
Porre il tempo di rallentamento (funz.30 e 32) compreso tra 50 e 99 decimi di secondo in modo che lanta
arrivi sicuramente in battuta.
Regolare la Forza dei Motori durante il rallentamento al livello desiderato, mediante la Funzione 34, (1 =
minima, 2 = intermedia, 3 = massima). Per applicazioni a battente con motori di piccola potenza è consigliato
il valore 3.
12.6 FRENATURA
La centrale universale è in grado di eseguire la frenatura dei motori al momento del loro arresto (Funzione 70).
Questa opzione è attiva solo per applicazioni a scorrevole (Funzione 1 settata al valore 3 o 4), e consente di
eliminare linerzia dello scorrevole al momento del suo arresto, in questo modo si evita la fuoriuscita dei
finecorsa dalla loro battuta al termine delle manovre di apertura e chiusura, inoltre in caso di inversione
provocata dallintervento di una sicurezza, larresto dello scorrevole è immediato.
12.7 ENCODER A TEMPO
La centrale universale è dotata di un encoder a tempo realizzato a livello software che le consente di monitorare
costantemente la posizione dellautomazione. In particolare nel caso di uninterruzione della manovra la
centrale pone il tempo massimo di lavoro pari al tempo residuo di manovra, evitando che ad esempio le ante
rimangano a lungo in battuta sui portanti surriscaldando inutilmente i motori. Per evitare che a causa dellinerzia
lautomazione non completi correttamente la manovra, è consigliato settare il tempo di recupero inversione
(Funzione 34) al valore più appropriato (in genere compreso tra 1 e 5 secondi) a seconda del tipo di
applicazione.
12.8 ARRESTO MOTORE
Può avvenire nei seguenti casi:
Mancanza di alimentazione
Intervento del relativo finecorsa (apertura contatto N.C.)
Intervento della FUNZIONI 5 di controllo ostacolo
Intervento di una delle sicurezze (fotocellule o costa).
Fine del tempo massimo di lavoro impostato con le FUNZIONI 25 - 26.
Attivazione del pulsante di STOP (apertura del contatto N.C. di stop) In questo caso per ripristinare il
movimento, sbloccare il pulsante di Stop e dare un ulteriore comando via Radio o manuale.
Comandi di STOP effettuati via Radio o tramite il comando Passo-Passo.
12.9 MANOVRA AD UOMO PRESENTE
Premere il pulsante di Apertura Uomo Presente per eseguire lapertura ed il pulsante di Chiusura Uomo Presente
per eseguire la chiusura dellaccesso automatizzato. Tali comandi (chiusura dei contatti N.O.) devono essere
mantenuti volontariamente dalloperatore. Nel caso di intervento di una sicurezza o dei finecorsa lautomazione
si arresta.
12.10 MANOVRA DAPERTURA
Dare un comando via radio (canale 1) o tramite il comando Passo-Passo.
Pre-lampeggio del segnalatore luminoso per il tempo impostato con la FUNZIONE 15
La centralina esegue il test del TRIAC e delle sicurezze relative al movimento dapertura (solo se il morsetto TST
è collegato e la FUNZIONE 60 è impostata su un valore > 0).
Il motore viene alimentato per il tempo di spunto allavvio con una forza del 100%; dopo tale spunto la forza
motore viene portata al valore impostato nella FUNZIONI 3 e 4.
10
Page 13

ITALIANO
12.11 MANOVRA DI CHIUSURA
La chiusura può avvenire automaticamente dopo il tempo impostato nella FUNZIONE 27, o tramite i comandi
Passo-Passo o Pedonale.
Pre-lampeggio del segnalatore luminoso per il tempo impostato con la FUNZIONE 15
La centralina esegue il test del TRIAC e delle sicurezze relative al movimento di chiusura (solo se il morsetto TST
è collegato e la FUNZIONE 60 è impostata ad un valore 1 o 3 ).
Il motore viene alimentato per il tempo di Spunto allavvio con una forza del 100%; dopo tale spunto la forza
motore viene portata al valore impostato nella FUNZIONE 3 e 4.
12.12 MANOVRA DAPERTURA PEDONALE
Il comando dapertura pedonale può essere fornito sia manualmente che via radio (CH2). La centralina
esegue:
Apertura completa di una sola anta per cancelli a due ante battente sullanta del motore 1,
Apertura per 10 secondi per cancello scorrevole,
Apertura totale di una sola anta per cancelli scorrevoli contrapposti,
Apertura totale di una sola barriera per barriere contrapposte,
Comando non attivo per tutti gli altri tipi di accessi automatici.
12.13 SELEZIONE MOTORI
I jumper JP1 e JP2 devono essere inseriti nel caso di funzionamento a 2 motori
12.14 SELEZIONE SECONDO CANALE
Se nel connettore M8 è inserita una ricevente bicanale, è possibile, tramite il jumper JP3, rendere attivo il secondo
canale della ricevente stessa sullapertura pedonale dellautomazione: JP3 inserito = secondo canale attivo
sullapertura pedonale; JP3 disinserito = secondo canale non attivo sullapertura pedonale.
Programmare le funzioni della centralina come indicato al paragrafo Programmazione della centralina.
12.15 SICUREZZE
Collegare i dispositivi previsti per la migliore sicurezza possibile sulla automazione su cui viene installata la
centrale
Il collegamento al morsetto TST (autotest) si effettua solo se si installano dispositivi con funzione di autotest
incorporata.
Al morsetto STP (stop) dovrà essere collegato un pulsante del tipo a sblocco manuale.
Al morsetto FTC collegare la fotocellula in chiusura. Tale fotocellula serve per proteggere laccesso automatizzato
in fase di chiusura dellautomazione, nessun effetto in fase di apertura. In fase di chiusura inverte o ferma il
movimento ed inverte al disimpegno (selezionabile). Se impegnata inibisce qualsiasi comando di chiusura. Ad
accesso chiuso non inibisce i comandi di apertura.
Al morsetto FTO collegare la fotocellula in apertura. Tale fotocellula serve per proteggere laccesso automatizzato
in fase di apertura dellautomazione, nessun effetto in fase di chiusura. In fase di apertura ferma e al disimpegno
riprende il movimento, se impegnata inibisce qualsiasi impulso.
Al morsetto CST collegare la costa di protezione. Tale sicurezza serve per proteggere maggiormente laccesso
automatizzato rispetto al solo utilizzo delle Fotocellule. Se impegnata inibisce qualsiasi impulso, durante le fasi
di apertura/chiusura se impegnata inverte il moto per 2sec e va in STOP. Solo un successivo impulso fa riprendere
il movimento fino a completamento del ciclo impostato.
Durante le manovre ad Uomo Presente lintervento di una sicurezza (se abilitata) o dei finecorsa (se abilitati)
bloccano lautomazione.
12.16 FUSIBILI DI PROTEZIONE
Protezione del motore
I motori ed i circuiti di potenza sono protetti da fusibile da 8A rapido (formato 5x20).
Protezione dalle sovratensioni tramite Varistore
Protezione dellelettroserratura
Fusibile da 2A ritardato (formato 5x20).
Protezione del lampeggiatore e luce di cortesia
Fusibile da 1A rapido (formato 5x20).
Protezione dellalimentazione accessori
Fusibile da 1A rapido (formato 5x20).
Protezione della logica
Fusibile da 315mA rapido (formato 5x20).
Reset automatico
Nel caso di funzionamento anomalo del microprocessore, un circuito indipendente di reset automatico (watch-
dog), ripristina il controllo della centralina riportandola alle condizioni iniziali di accensione.
11
Page 14
ITALIANO
12.17 LED DI CONTROLLO
Sulla scheda sono riportati dei LED di controllo dello stato degli ingressi di comando e sicurezza:
LED ACCESSO = contatto in morsettiera N.C.
LED SPENTO = contatto in morsettiera N.A.
Per verificare che gli ingressi si trovano nel loro corretto stato tenere presente che:
Quando di fornisce un comando il LED corrispondente passa dallo stato Spento allo stato Acceso
Quando interviene una sicurezza il LED passa dalla stato Acceso allo stato Spento
Lo stato dei LED relativi ai finecorsa dipende dalla posizione dellaccesso automatico:
- Accesso automatico aperto = LED FC1 e FC3 accesi , e LED FC2 e FC4 spenti
- Accesso automatico chiuso = LED FC2 e FC4 accesi , e LED FC1 e FC3 spenti
FTC (LD1) Fotocellula di sicurezza in chiusura OPU (LD7) Comando apertura uomo presente
FTO (LD2) Fotocellula di sicurezza in apertura CLU (LD8) Comando di chiusura uomo presente
CST (LD3) Costa di sicurezza FC1 (LD9) Finecorsa in chiusura del motore 1
STP (LD4) STOP FC2 (LD10) Finecorsa in apertura del motore 1
STA (LD5) Comando passo-passo FC3 (LD11) Finecorsa in chiusura del motore 2
PED (LD6) Comando dapertura pedonale FC4 (LD12) Finecorsa in apertura del motore 2
13. GUIDA ALLINSTALLAZIONE
Si riporta di seguito una tabella, indicante per i vari tipi di applicazione, una programmazione guida
utilizzabile come traccia per una rapida programmazione della centrale.
Funzione Battente
1
2
3 (°)
4 (°)
5 (*)
6 (°)
7 (°)
8 (°)
9
10 (*)
11 (°)
15 (°) 00000000
16 (°)
20 (°)
21 (°)
22 (°)
23 (°)
25 (°)
26 (°)
27 (°)
28 (*)
30 (*)
31 (°)
32 (*)
33 (°)
34 (°)
45 (°) -2------
46 (°)
50 (°)
60 (°)
70
1 anta
12345678
00333300
33664444
-3-6-4--
0 ( 1) 0 (1) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2)
33553333
-3-5-3--
00000000
00000033
0 (2) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2)
33333333
45 45 45 45 45 45 45 45
00000000
00000000
11221111
00000000
8 8 10 10 6 6 10 10
-8-10-6- -
00000000
3 (2) 3 (2) 3 (3) 3 (3) 3 (1) 3 (1) 3 (1) 3 (1)
0 (50) 0 (50) 0 (10) 0 (10) 0 (20) 0 (20) 0 (20) 0 (20)
00110000
0 (50) 0 (50) 0 (10) 0 (10) 0 (20) 0 (20) 0 (20) 0 (20)
00110000
33333333
-5------
00000000
00000000
--11----
Battente
2 ante
Scorrevole Scorrevoli
Contrappos
Barriera Barriere
Contrappos
Basculante Basculanti
parallele
NOTE:
- : Funzione impostata automaticamente dalla centrale
(*) : Si consiglia:
a) di impostare inizialmente il valore 0 per controllare il corretto collegamento dei motori e movimento
dellautomazione,
b) di impostare il valore indicato tra parantesi come valore di partenza,
c) di procedere per successivi aggiustamenti.
(°) : Funzione da settare in funzione dellapplicazione, del peso e dimensioni dellautomazione, degli accessori
e sicurezze collegate.
12
Page 15
ENGLISH
230V~ UNIVERSAL CONTROL UNIT
USE AND INSTALLATION INSTRUCTIONS
1. GENERAL CHARACTERISTICS
The control unit was created, designed and built to control any automated access appliance as safely as
possible (swing single or two leaf gates, sliding gates, opposing sliding gates, automatic barrier, opposing
automatic barriers, up-and-over doors with one or two motors in parallel). An innovative, easy functions and
time programming method using three keys and a two-digit display ensures high precision adjustment of all
operational parameters. A set of LEDs enables immediate control of the status of inputs, outputs and of any circuit
faults.
Furthermore, conformity to rigid European reference standards (CE) is a guarantee of the products quality and
reliability.
2. TECHNICAL SPECIFICATIONS
Power supply 230 V~ - 50/60 Hz
Max absorbed power 1600W
Motors max. load 2 x 700W
Flashing lamp max. load 80W
Courtesy light max. load 40W
Accessories max. load 24 V~ 15W
Indicator-light max. load 24 V~ 3W
Electric lock max. load 12 V~ 24W
Protection fuses 5
Applications Swing single or two leaf gate
Sliding or opposing sliding gate
Barrier and opposing barriers
Up-and-over doors with one or two motors
Programming Three keys and digital display
Functions controller Microprocessor with watch-dog
Reference parameters Stored in EE-PROM
Terminal board inputs Pedestrian opening / Total opening /
Open and close when person present / Open and close photocells / Edge /
Open and Close limit-switch / STOP / Mains power / Antenna
Radio control connector Radio receiver cards
Terminal board outputs Motors 1 and 2 /24 V~ accessories supply/ Courtesy light /
Flashing lamp / Indicator-light/12V~ electric lock
Ambient temperature -20°C +55°C
Enclosure characteristics 305 x 225 x 125 mm. IP55
3. PREPARATIVE MEASURES AND GENERAL NOTES
IMPORTANT: To ensure peoples safety, all warnings and instructions in this booklet must be carefully
observed. Incorrect installation or incorrect use of the product could cause serious harm to people.
Make sure there is an adequate differential switch upstream of the system as
specified by current laws, and install a thermal breaker with all-pole switching
on the electrical power mains.
To lay cables, use adequate rigid and/or flexible tubes.
Always separate connection cables of low voltage accessories from the 230
V~ power supply cables. To supply power to the appliance, use cables with
a minimum cross-section of 1.5 mm2. To prevent any interference whatever,
use separate sheaths.
Fit adequate cable clamps on the box, to minimum protection class of IP54.
To secure the control unit in the sealed enclosure, position it as shown in fig.
1 and secure it with 5 ø4.2x13 self-tapping screws (supplied), fitting the spacers
between the card and the guides of the enclosure.
Important : the starting capacitors must be always connected to the
appropriate Fastons on the card (COND.MOT1, COND.MOT2) and never
directly to the motor outputs OP, CL MOT1 and MOT2 on the terminal board.
Fig.1
13
Page 16
ENGLISH
4. CONNECTIONS
FASTONS FOR CAPACITORS
(COND.MOT1) Connection of starting capacitor of
motor 1.
(COND.MOT2) Connection of starting capacitor of
motor 2.
POWER TERMINAL BOARD M1
(1) 230V~ line
(2) Earth
(3) Neutral
POWER TERMINAL BOARD M2
(4-5-6) Motor 1. Important: do not connect the starting
capacitor directly to the output of motor 1 but to
the Fastons of capacitor M1.
(7-8-9) Motor 2. Important: do not connect the starting
capacitor directly to the output of motor 2 but to
the Fastons of capacitor M2.
POWER TERMINAL BOARD M3
(10-11) Flashing lamp 230V~ - max 80W
(12-13) Courtesy light. 230V~ - max 40W
SIGNALS TERMINAL BOARD M4
(14-15) Electric lock. 12V~ - max 24W
(16) Closing photocell
(17) Common contact
(18) Opening photocell
(19) +24Vdc safety devices self-test command
(20) Common contact
(21) Prot ection edge
SIGNALS TERMINAL BOARD M5
(22) 24V~ power supply to external accessories
(23) Common contact
(24) STOP push-button
(25) START push-button
(26) Common contact
(27) Pedestrians opening push-button
(28) Person present opening push-button
(29) Common contact
(30) Person present closing push-button
SIGNALS TERMINAL BOARD M6
(31) Motor 1 closing limit-switch
(32) Common contact
(33) Motor 1 opening limit-switch
SIGNALS TERMINAL BOARD M7
(34) Motor 2 closing limit-switch
(35) Common contact
(36) Motor 2 opening limit-switch
(37-38) Automation indicator-light open. 24V~ - max 3W
(39-40) External radio antenna. Do not use if a terminal
board for the external antenna is installed on the
receiver card.
COND MOT1
COND MOT2
(1) L
(2)
(3) N
(4) OP
(5) COM
(6) CL
(7) OP
(8) COM
(9) CL
(10) LAMP
(11) LAMP
(12) LAMP
(13) EXT
(14) EL-SER
(15) EL-SER
(16) FTC
(17) COM
(18) FTO
(19) TST
(20) COM
(21) CST
(22) 24V
(23) COM
(24) STP
(25) STA
(26) COM
(27) PED
(28) OPU
(29) COM
(30 ) CLU
(31) FC1
(32) COM MOT1
(33) FC2
(34) FC3
(35) COM MOT2
(36) FC4
(37) SP.CA
(38) SP.CA
(39) COM-ANT
(40) SIG-ANT
14
Page 17
5. LAY-OUT OF CONTROL UNIT
OP=MOTOR 1
CL=MOTOR 1&2
JP1 JP2
F4
1A 250V F
F1
8A 250V F
COND. MOT1
M1
COND. MOT2
ENGLISH
A466
F3
1A 250V F
F2
315mA 250V F
- + ENTER
FC4 FC3 FC2 FC1
STA PED OPU CLU
2A 250V T
F5
M2
M3
M4
FTC FTO CST STP
M5
M8
JP3
M7
ANT
COM SIG
24V~
SP.CA
MOT2
34 35 36 37 38 39 40
FC3 COM FC4
M6
MOT1
31 32 33
FC1 COM FC2
1 2 3
L N
4 5 6 7 8 9
OP COM CL
OP COM CL
MOT1
MOT2
10 11 12 13
LAMP
LAMP
EXT
14 15 16 17 18 19 20 21
EL-SER
FTC COM FTO TST COM CST
12V~
22 23 24 25 26 27 28 29 30
24~ COM STP STA COM PED OPU COM CLU
6. JUMPER SELECTION FOR MOTOR 1 OR MOTORS 1 AND 2
Depending on the type of gate (one or two wings), shift jumper JP1-JP2 as follows: OP - (Open circuit) only for
motor 1 for single-section gates. CL - (Closed circuit) motors 1 and 2 for two-section gates.
7. FITTING THE RECEIVER CARD
The control unit is designed to house a single- or twin-channel receiver. Installation procedure: turn off power
and fit the receiver in connector M8 on the control unit. This done, observe the receiver instructions concerning
memory storage of the radio control. Once the radio control has been stored, it activates the START command
just like any push-button.
If a twin-channel receiver is installed on connector M8, you can activate or disable the second channel for
pedestrian opening by using jumper JP3.
8. PROGRAMMING THE CONTROL UNIT
Program by setting parameters to ensure maximum safety of the automated access appliance. When you have
finished programming, execute the opening and closing commands of the automated access appliance
several times (by radio or manual control) to check if both automation and the relevant safety devices are
operating correctly.
To this end, read the paragraph on operation of the control unit. At power-up, the control unit checks the
condition of the EEPROM memory storing the Default parameters or of the last correctly executed programming
operation. If a fault on the EEPROM memory or a loss of stored parameters is detected, the control units display
shows the message EE (EEPROM ERROR); if instead, the EEPROM is in good condition, the control unit sets itself
on the Default values or on the last correctly executed programming operation, and the display goes off. To
access the programming menu, press the ENTER push-button for 3 seconds and the letters EP appear. These
letters remain on view for 5 seconds and, if you hold down the + push-button for at least 2 seconds during this
period, the Default programming is loaded automatically. When the 5 seconds have elapsed, the control unit
points the function 1, and the individual functions can then be programmed according to the following
procedure:
Select the function you wish to program by pressing one of the two keys + (FORWARD) or (BACK); key -
is used to reduce, and key + is used to increase.
Press the ENTER key to change the value of the function. The display now flashes; you can now change the
set value by pressing keys + (to increase value), and - ( to reduce value).
Press the ENTER key to confirm the value of the function you require.
If you wish to program other functions, repeat the operations listed above.
15
Page 18
ENGLISH
- + ENTER
To exit the programming menu, point the end-of-programming function 99
and press the ENTER push-button. The control unit now checks if the set
parameters correspond if programming was correct, the letters FP (End of
Programming) appear for 3 seconds, and then the display goes off. If, instead,
the parameters do not correspond, the number of one of the potentially
incorrect functions is displayed in flashing mode. To correct the value of the
incorrect functions, return to the programming menu and press the ENTER
push-button for 3 seconds. No manoeuvre is possible until the control unit has
been correctly programmed.
9. FUNCTIONS TO BE PROGRAMMED
FUNCTION 1 Type of Application
This function makes it possible to set the type of Application with the aim of enabling only functions connected
to the type of application.
Value 1 = Swing single-leaf gate (motor 1)
Value 2 = Swing two-leaf gate (motors 1 and 2)
Value 3 = Sliding gate (motor 1)
Value 4 = Opposing sliding gates (motors 1 and 2)
Value 5 = Automatic barrier (motor 1)
Value 6 = Opposing automatic barriers (motor 1 and 2)
Value 7 = Up-and- over door with 1 motor (motor 1)
Value 8 = Up-and-over door with 2 motors in parallel (motors 1 and 2)
FUNCTION 2 Limit-switches
This function enables control of opening and closing limit-switches.
Set the following values:
Value 0 = Limit-switches not present (this avoids having to jump connect the terminals of the four limit-switches.
Value 1 = Only closing limit-switches present (1 Limit-switch for the 1 motor application, and 2 limit-switches for
the 2 motor application)
Value 2 = Only opening limit-switches present. (1 Limit-switch for the 1 motor application, and 2 limit-switches for
the 2 motor application)
Value 3 = Limit-switches present for both closing and opening. (2 Limit-switches for the 1 motor application, and
4 limit-switches for the 2 motor application)
FUNCTION 3 Motor 1 power adjustment (TRIAC)
This function serves to adjust the power of motor 1 in the range from 30% min. to 100% max.
Disable the Obstacle control (set value 0 of function 5).
Set the most appropriate value, taking into account ambient and installation factors.
Set the values, taking the following into account:
Value 1 = minimum settable value (30%)
Value 10 = maximum settable value (100%)
NB.: at the initial thrust level, if enabled, motor power is at maximum for the time set with function 8. Before any
manoeuvre is executed, a test is run to check the condition of the TRIACS and verify if the motors are connected
correctly. If the test is unsuccessful, the EO message is shown on the display (in this connection, see paragraph
Error messages on display).
FUNCTION 4 Motor 2 power adjustment (TRIAC)
This function serves to adjust the power of motor 2 in the range from 30% min. to 100% max.
Disable Obstacle Control (set value 0 of function 5).
Set the most appropriate value, taking into account ambient and installation factors.
Set values, taking the following into account:
Value 1 = minimum settable value (30%)
Value 10 = maximum settable value (100%)
NB.: at the initial thrust level, if enabled, motor power is at maximum for the time set with function 8. Before any
manoeuvre is executed, a test is run to check the condition of the TRIACS and verify if the motors are connected
correctly. If the test is unsuccessful, the EO message is shown on the display (in this connection, see paragraph
Error messages on display).
16
Page 19

ENGLISH
FUNCTION 5 Obstacle control
The obstacle control establishes the reaction of the automatic system when the obstacle detection device
operates.
Value 0 = NOT ENABLED
Value 1 = STOP of automatic system. In this configuration, it operates like the limit-switches, if they are not
available.
Value 2 = STOP and then the operating direction of the automatic system is REVERSED.
Value 3 = STOP and then the operating direction of the automatic system is REVERSED for 2 seconds. Give a further
command pulse to restore movement.
FUNCTION 6 Sensitivity of obstacle control of motor 1 at both opening and closing
This function makes it possible to adjust obstacle detection sensitivity at opening, allowing the automatic system
to stop if an obstacle obstructs the manoeuvre (FUNCTION 5).
Adjust the motor power Functions 3 and 4 to the minimum value required to move the automated access
facility.
Adjust sensitivity, taking into account the following:
Value 1 = maximum sensitivity, i.e. a low level of resistance is required to detect the obstacle.
Value 6 = minimum sensitivity, i.e. a high level of resistance is required to detect the obstacle.
FUNCTION 7 Sensitivity of obstacle control of motor 2 at both opening and closing
This function makes it possible to adjust obstacle detection sensitivity at opening, allowing the automatic system
to stop if an obstacle obstructs the manoeuvre (FUNCTION 5).
Adjust the motor power Functions 3 and 4 to the minimum value required to move the automated access
facility.
Adjust sensitivity, taking into account the following:
Value 1 = maximum sensitivity, i.e. a low level of resistance is required to detect the obstacle.
Value 6 = minimum sensitivity, i.e. a high level of resistance is required to detect the obstacle.
FUNCTION 8 Thrust at start of opening and closing
This function enables thrust to be set in tenths of a second, when starting.
Value 0 = No thrust
Values from 1 to 99 = Initial thrust time in tenths of seconds at start of every manoeuvre at maximum Power (100%)
e.g. 10=1 second thrust
FUNCTION 9 Thrust for 2 seconds at end of opening and closing manoeuvre
Value 0 = Thrust disabled
Value 1 = Extra time at end of opening only
Value 2 = Extra time at end of closure only
Value 3 = Extra time at end of both opening and closure
FUNCTION 10 Automatic closing
Value 0 = automatic closing disabled
Value 1 = automatic closing enabled
FUNCTION 11 Stepped function (radio receiver channel 1 and STA input of terminal 25)
This function is used to enable different types of stepped operating sequences and is active for both pedestrian
and total manoeuvres.
Set the following values:
Value 0 = OPEN: the automatic system executes the opening operation and closes after pause time (FUNCTION
27) has elapsed.
Value 1 = OPEN/CLOSE
Value 2 = OPEN/STOP/CLOSE
Value 3 = OPEN/STOP/CLOSE/STOP
FUNCTION 15 Pre-flashing time
This function enables you to set flashing lamp pre-flashing time before every manoeuvre.
Value 0 = No pre-flashing
Values 1 to 99 = pre-flashing in range from 1 to 99 seconds
FUNCTION 16 Courtesy Light ON time
This function enable you to set the light ON time of the courtesy light.
Value 0 = The light goes off at the end of each manoeuvre.
Values 1 to 99 = this value corresponds to half the ON time of the courtesy light.
E.G. 45=90 seconds.
17
Page 20

ENGLISH
FUNCTION 20 Opening photocell
This function enables you to adjust the use of a photocell at opening. It has no effect at closing.
Set the following values:
Value 0 = opening safety device not present (to avoid jumper connecting the relevant terminals).
Value 1 = STOP when photocell tripped opening movement restarted when cell no longer shadowed.
NB.: if the photocell is shadowed when the pulse is received, the pulse is ignored.
FUNCTION 21 Protective edge
This function enables you to adjust use of a further protective device at opening and closing (e.g. a pneumatic
edge, a photo-edge, a wire edge, etc).
Set the following values:
Value 0 = safety device not present (to avoid jumper connecting the relevant terminals).
Value 1 = STOP when the edge is tripped, the direction is then reversed for 2 seconds. A new pulse must be
supplied to restart the cycle.
NB.: if the edge is activated when the pulse is received, the pulse is ignored.
FUNCTION 22 Closing safety photocell
This function enables you to adjust the use of the safety photocell at closing. It has no effect at opening. Set the
following values:
Value 0 = Closing safety photocell not present (to avoid jumper connecting the relevant terminals).
Value 1 = STOP at closure and reverse direction.
Value 2 = STOP at closure and direction reversing when released.
N.B.: If the photocell is shadowed when an opening command is received when access is fully closed, the
command will be executed in all other cases, commands received when photocell is shadowed will be
ignored.
FUNCTION 23 Stop Input
This function makes available the Stop input enabling option.
Set the following values:
Value 0 = Stop push-button not present (to avoid jumper connecting the relevant terminals).
Value 1 = Stop enabled. If this is activated, the manoeuvre is stopped a new pulse must be supplied to restart
the cycle. All commands are ignored while the Stop input is activated.
FUNCTION 25 Motor 1 work time
This function enables you to adjust the maximum work time of motor 1 so that it is equal at both opening and
closing it cannot be over-ridden because it protects the motor in the event of malfunctions of the Limit-switches
or obstacle detector.
Values 1 to 99 = value corresponding to half of work time, e.g. 10=20 sec.
NB.: if timed deceleration is selected, it begins when set time has elapsed.
FUNCTION 26 Motor 2 work time
This function enables you to adjust the maximum work time of motor 2 so that it is equal at both opening and
closing it cannot be over-ridden because it protects the motor in the event of malfunctions of the Limit-switches
or obstacle detector.
Values 1 to 99 = value corresponding to half of work time, e.g. 10=20 sec.
NB.: if timed deceleration is selected, it begins when set time has elapsed.
FUNCTION 27 Pause time
This function enables you to adjust pause time before automatic closure.
Set the following values:
Value 0 = Nil pause time.
Values 1 to 99 = this value corresponds to half the pause time in seconds before automatic closure. e.g. 20=40
seconds.
FUNCTION 28 Reversing Recovery Time
The control unit has a timed encoder for both motors. This function enables you to set Reversing Recovery time,
which is added to Remaining Time of manoeuvre. This prevents the automatic system from not completing the
manoeuvre correctly, in case of repeated reversing.
Value 0 = Nil recovery time.
Values 1 to 99 = Recovery time in range 1 to 99 sec.
18
Page 21

ENGLISH
FUNCTION 30 Deceleration time of motors 1 and 2 at opening.
Value 0 = not enabled.
Values 1 to 99 = deceleration time settable from 1 to 99 tenths of a second starting from the limit-switch or from
end of maximum work time of motors 1 and 2 (function 31).
E.g. 50=5 seconds of deceleration.
FUNCTION 31 Type of deceleration at opening
Value 0 = deceleration time (function 30) is calculated from end of maximum work time of the motors (functions
25 and 26).
Values 1 = deceleration time (function 30) is calculated from tripping of the opening limit-switch.
FUNCTION 32 Deceleration time of motors 1 and 2 at closing
Value 0 = not enabled.
Values 1 to 99 = deceleration time settable from 1 to 99 tenths of a second starting from the limit-switch or from
end of maximum work time of motors 1 and 2 (function 33).
E.g. 50=5 seconds of deceleration.
FUNCTION 33 Type of deceleration at closing
Value 0 = deceleration time (function 32) is calculated from end of the maximum work time of the motors
(functions 25 and 26)
Values 1 = deceleration time (function 32) is calculated from tripping of the closing limit-switch.
FUNCTION 34 Motor power at deceleration
This function is set for motor power during deceleration.
Value 1 = Minimum motor power
Value 2 = Intermediate motor power
Value 3 = Maximum motor power
N.B.: For swing-leaf automatic systems operating on low capacity motors (below 150W), value 3 is recommended.
FUNCTION 45 - Opening delay time between motor 2 and motor 1
This function makes it possible to set the activation delay time of motor 2 with respect to motor 1 at opening:
Value 0 = delay disabled.
Values 1 to 99 = delay in range from 1 to 99 seconds
FUNCTION 46 - Closing delay time between motor 1 and motor 2
This function makes it possible to set the activation delay time of motor 1 with respect to motor 2 at closing:
Value 0 = delay disabled.
Value 1 to 99 = delay in range 1 to 99s.
FUNCTION 50 Electric lock
This function makes it possible to set operation of the electric lock.
Value 0 = OFF.
Value 1 = Active for 3s before every opening manoeuvre.
Value 2 = a 1-second Reversing stroke and 3 seconds activation of the electric lock before every opening
manoeuvre.
FUNCTION 60 Safety devices auto-test
This function is used to test safety devices before every manoeuvre; this function will operate if photocells are
suitably equipped. If the test result is negative (e.g. one of the safety devices is inefficient), the automatic system
will not execute the received command.
Set the following values:
Value 0 = auto-test disabled.
Value 1 = auto-test enabled for closing photocell.
Value 2 = auto-test enabled for opening photocell.
Value 3 = auto-test enabled for both photocells.
FUNCTION 70 Braking function
Value 0 = braking function disabled.
Value 1 = braking function enabled for motors 1 and 2 both at opening and closing.
N.B.: this function is active only for applications with sliding gates (function 1 set to 3 or 4).
FUNCTION 99 End-of-Programming function
To exit the programming menu, point this function and press the ENTER push-button.
N.B.: The control unit forbids access to the programming menu while an operation cycle is being executed.
Manoeuvres can only be executed if the control unit was correctly programmed.
19
Page 22

ENGLISH
10. LIST OF VARIABLE FUNCTIONS
FUNCTION DESCRIPTION Min/Max Pre-set
Application
1 = Swing single-leaf gate
2 = Swing two-leaf gate
1
3 = Sliding gate
4 = Opposing sliding gates
5 = Automatic Barrier
6 = Opposing Automatic Ba rriers
7 = Up-and-over door with 1 motor
8 = Up-and-over door with 2 motors in parallel
Limit-switch of motors 1 and 2
0 = Absent
1 = Closing Lim it-switch pres ent
2
2 = Opening L imit-switch present
3 = Opening and Closing Limit-switches present
Motor 1 power adjustment
3
Motor 2 power adjustm ent
4
Obstacle Control Action
0 = NOT ENABLED
5
1 = STOP (if no limit-switch supplied, it operates like a limit-switch)
2 = STOP/REVERSE
3 = STOP/REVERSE for 2 sec onds
Motor 1 Obstacle Control Sensitivity
6
Motor 2 Obstacle Control Sensitivity
7
Thrust at start of opening and closing
0 = Absent
8
1 99 = Thrust at power-up at max Power in range 1 to 99 tenths of sec
Extra time at end of opening and closing
0 = Absent
1 = Thrust for 2 sec at end of opening
9
2 = Thrust for 2 sec at end of closing
3 = Thrust at end of opening and closing
Automatic closing
0 = disabled
10
1 = enabled
Stepped Command
0 = OPEN
1 = OPEN/CLOSE
11
2 = OPEN/STOP/CLOSE
3 = OPEN/STOP/CLOSE/STOP
Pre-flashing time
0 = Absent
15
1 99 = in range 1 to 99 s econds
Courtesy Light ON time
0 = Nil
16
1 99 = in range 2 to 198 s econds
Opening PHOTOCELL
0 = Not pres ent
20
1 = STOP and restart after release
EDGE
0 = Not pres ent
21
1 = STOP and reverse for 1 second
Closing PHOTOCELL
0 = Not pres ent
22
1 = STOP/reverse
1 = STOP/reverse when photocell released
STOP command
0 = STOP not present
23
1 = STOP present
Work time of motor 1 (x2) in seconds
25
1 99 = in range 2 to 198 s econds
Work time of motor 2 (x2) in seconds
26
1 99 = in range 2 to 198 s econds
Pause time for Automatic Closing (x2) in seconds
0 = Nil
27
1 99 = in range 2 to 198 s econds
Reversing time recover y for remaining time in secon ds
0 = Nil
28
1 99 = in range 1 to 99 s econds
Opening deceleration time of motors 1 and 2 in tenths of a second
0 = not enabled
30
From 1 to 99 = from 1 to 99 tenths of a second
Type of opening deceleration of motors 1 and 2
0 = timed s tart when max imum work t ime elapses
31
1 =starts when opening limit-switches are tripped.
Closing deceleration time of motors 1 and 2 in tenths of a second
0 = not enabled
32
From 1 to 99 = from 1 to 99 tenths of a second
Type of closing deceleration of motors 1 and 2
0 = timed s tart when max imum work t ime elapses
33
1 = starts when closing limit-switches are tripped.
Motor power during deceleration
1 = Minimu m power
34
2 = Intermediate power
3 = Maximu m power
Opening delay time between motor 2 and motor 1 in seconds
0 = Nil
45
1 99 = in range 1 to 99 s econds
Closing delay time between motor 1 and motor 2 in seconds
0 = Nil
46
1 99 = in range 1 to 99 s econds
Electric lock
0 = Absent
50
1 = Active for 3 s before every ope ning manoeuvre.
2 = Over-pushing-stroke at opening for 1 s and active for 3 s
Photocell Test at start of manoeuvre
0 = Disabled
60
1 = Enabled for closing photocell
2 = Enabled for opening photocell
3 = Enabled for opening and closing photocells
Braking functi on
70
0 = disabled
1 = Enabled for motors 1 and 2 both at opening and closing.
End-of-Programming Function
99
(1 = 30% 10= 100%)
(1 = 30% 10= 100%)
at Work Power (functions 3 and 4)
_
1 ¸ 8
0 ¸ 3
1 ¸ 10
1 ¸ 10
0 ¸3
1¸ 6
1¸ 6
0 ¸ 99
0 ¸ 3
0 ¸ 1
0 ¸ 3
0 ¸ 99
0 ¸ 99
0 ¸ 1
0 ¸ 1
0 ¸ 2
0 ¸ 1
1 ¸ 99
1 ¸ 99
0 ¸ 99
0 ¸ 99
0 ¸ 99
0 ¸ 1
0 ¸ 99
0 ¸ 1
1 ¸ 3
0 ¸ 99
0 ¸ 99
0 ¸ 2
0 ¸ 3
0 ¸ 1
10 (1s)
45 (90s)
10 (20 s)
10 (20 s)
10 (20 s)
2
0
6
6
0
6
6
0
0
3
0
0
0
0
0
0
0
0
0
0
3
2
5
0
0
0
20
Page 23

ENGLISH
11. ERROR MESSAGES
At end of programming, the control unit checks if the set parameters correspond if programming was correct,
the letters FP (End of Programming) appear for 3 seconds, and then the display goes off.
If, instead, the parameters do not correspond, the number of one of the potentially incorrect functions is
displayed in flashing mode. To correct the value of the incorrect function, return to the programming menu and
press the ENTER push-button for 3 seconds. No manoeuvre is possible until the control unit has been correctly
programmed.
The display also signals the following errors:
EE = fault on the EEPROM memory or loss of stored parameters,
We advise you to return to the Default parameters (See paragraph: Programming of the Control Unit). At this
point, you should re-program the control unit to its settings before the failed test was reported. If the result is
negative once gain, call in the service department to replace the faulty device.
EO = Triac short-circuit, motors short-circuit, disconnected or badly connected motors. Check the connections,
and also the efficiency of the motors connected to the relevant terminals. If the connections are correct, turn
power OFF and then ON again. If the problem continues, check if the motors are short-circuited. If the problem
still persists, contact the service department.
E1 = test of closing photocell failed: check connections and efficiency of the devices connected to the FTC
terminal, by referring to the relevant LED on the card. In the event of a malfunction, replace the faulty device.
E2 = test of opening photocell failed: check connections and efficiency of the devices connected to the FTO
terminal, by referring to the relevant LED on the card. In the event of a malfunction, replace the faulty device.
12. DESCRIPTION OF CONTROL UNIT OPERATION
12.1 POWER-UP
At power-up, the control unit checks the condition of the EEPROM memory storing the Default parameters or of
the last correctly executed programming operation. If a fault of the EEPROM memory is detected, or stored
parameters were lost, the control units display shows the letters EE or other error message in this case, read the
relevant paragraph.
If, instead, the EEPROM is efficient, the control unit sets itself to the Default values or to the last correctly executed
programming operation, and the display goes off. The control unit is now ready to execute commands.
N.B.: when the control unit is powered up, no manoeuvre is performed unless a voluntary command from the user
is received.
12.2 CONTRASTING COMMANDS
If two simultaneous, contrasting commands are received, the control unit does not execute either of them.
12.3 MOTOR POWER ADJUSTMENT
Adjust power of motor 1 with FUNCTION 3, and of motor 2 with FUNCTION 4.
Value 1 corresponds to minimum settable power (30% of maximum power). Value 1 corresponds to minimum
settable power (30% of Maximum Power), and value 10 corresponds to maximum power. At deceleration, the
power of the motors is adjusted by Function 34 (1 = Minimum Power, 3= Maximum Power). For swing-leaf
automatic gates operating on low capacity motors (<150W), value 3 is recommended for Function 34.
12.4 SENSITIVITY ADJUSTMENT OF OBSTACLE DETECTION DEVICE
Disable limit-switches (if supplied), allow the automatic system to finish its manoeuvre, check efficiency of
FUNCTION 6 obstacle detection of motor 1 and repeat the operation, checking efficiency of FUNCTION
7 - obstacle detection of motor 2 . Adjust the value of the above functions to ensure a sufficient degree of safety
for automated access.
N.B.: the obstacle detection function is not enabled during starting thrust and deceleration.
21
Page 24

ENGLISH
12.5 MOTOR DECELERATION
The universal control unit makes it possible to decelerate motors after opening and closing. By using Functions
31 and 33, deceleration start time can be selected as from tripping of the limit-switch (value 1) or when
the maximum work time of the two motors (Functions 25 and 26) has elapsed. Function 31 is used for opening
and function 33 for closing. Deceleration start time can be set in a given direction as from tripping of the limit-
switch, and in the opposite direction on a timed basis. Deceleration duration can be adjusted in tenths of a
second by means of Function 30 (opening) and 32 (closing), in the range from 1 to 99 tenths of a second
(0.1 to 9.9 seconds).
For applications with deceleration activated by tripping of the limit-switch (sliding gates), we advise setting
maximum work time 2-3 seconds longer than the effective duration of the manoeuvre, and deceleration time
in the range of 5 to 20 tenths of a second so that the limit-switch does not go beyond its stop point.
For applications with timed deceleration start (swing single leaf), we advise the following:
measure duration of manoeuvre with any deceleration;
set maximum work time (functions 25 and 26) at about two seconds less than measured duration;
set deceleration time (functions 30 and 32) in the range of 50 to 99 tenths of a second, so that the leaf is sure
to reach its stop point.
Adjust the Power of the Motors during deceleration to the required level, using Function 34 (1 = minimum, 2
= intermediate, 3 = maximum ). For swing leaf applications operating on low capacity motors, value 3 is
recommended.
12.6 BRAKING
The universal control unit is able to brake the motors when being stopped (Function 70). This option is active only
for sliding gate applications (Function 1 set to value 3 or 4), and eliminates the inertia of the sliding gate when
stopping. In this way, the limit-switches are prevented from coming out of their stop point at end of opening and
closing. Furthermore, if a safety device causes reversing, the gate is stopped immediately.
12.7 TIMED ENCODER
The universal control unit is equipped with timed encoder software enabling it to constantly monitor the position
of the automatic system. In particular, if a manoeuvre is interrupted, the control unit sets maximum work time
equal to the remaining manoeuvre time, thus preventing the leaves staying in contact with their stop points for
a long time and thus needlessly overheating the motors. To prevent the automatic system not completing the
manoeuvre correctly, due to inertia, we advise you to set the reversing recovery time (Function 34) at the most
appropriate value (usually from 1 to 5 seconds) according to type of application.
12.8 MOTOR STOP
This can occur in the following cases:
Power failure
Tripping of the relevant limit-switch (N.C. contact opens)
Obstacle control FUNCTION 5 has operated.
Tripping of one of the safety devices (photocell or edge).
End of maximum work time set with FUNCTIONS 25-26:
STOP push-button activated (N.C. stop contact opened). In this case, to restore movement, release the Stop
push-button and give a further command manually or by Radio.
STOP commands given by Radio or by the Stepped command.
12.9 PERSON PRESENT MANOEUVRE
Press the Person Present Opening push-button to open, and the Person Present Closing push-button to close
automated access. These commands (closing of N.O. contacts) must be maintained voluntarily by the
operator. If a safety device or limit-switch is tripped, the automatic system stops.
12.10 OPENING MANOEUVRE
Give a command via radio (channel 1) or with the Stepped command.
The indicator-light pre-flashes for time set with FUNCTION 15.
The control unit executes the test of the TRIAC and the safety devices for the opening movement (only if the TST
terminal is connected and FUNCTION 60 is set on a > 0 value).
The motor is powered for initial thrust time at 100% power; after this initial thrust, motor power is changed to the
value set in FUNCTIONS 3 and 4.
22
Page 25

ENGLISH
12.11 CLOSING MANOEUVRE
Closing can be executed automatically after the time set in FUNCTION 27 has elapsed or with the Stepped
or Pedestrian commands.
The indicator-light pre-flashes for time set with FUNCTION 15.
The control unit executes the test of the TRIAC and the safety devices for the closing movement (only if the TST
terminal is connected and FUNCTION 60 is set to value 1 or 3).
The motor is powered for initial thrust time at 100% power; after this initial thrust, motor power is changed to the
value set in FUNCTIONS 3 and 4.
12.12 PEDESTRIAN OPENING MANOEUVRE
The pedestrian opening command can be given either manually or by radio (CH2). The control unit executes
the following:
It fully opens one leaf (motor 1 swing leaf) only of a swing two-leaf gate,
It opens a sliding gate for 10 seconds,
It fully opens one leaf only of opposing sliding gates,
It fully opens one barrier only of opposing barriers,
The command is inactive for all other types of automatic accesses.
12.13 SELECTION OF MOTORS
Jumpers JP1 and JP2 must be ON if operating on 2 motors.
12.14 SELECTION OF SECOND CHANNEL
If a twin-channel receiver is fitted to the M8 connector, the second channel of the receiver can be activated by
jumper JP3, for pedestrian opening of automation: JP3 ON = second channel active for pedestrian opening;
JP3 OFF = second channel inactive for pedestrian opening.
Program the control unit functions as indicated in paragraph: Programming the control unit.
12.15 SAFETY DEVICES
Connect the devices designed to provide optimum safety on the automatic system on which the control unit
is installed.
Connection to the TST (autotest) terminal is necessary only if devices with an in-built autotest function are
installed.
A manual release push-button must be connected to the STP (stop) terminal.
Connect the closing photocell to the FTC terminal. This photocell is used to protect the automated access when
the automatic system is closing, but has no effect on opening. At closing, it reverses or stops movement and
reverses at release (selectable). If engaged, it disables any closing command. When access is closed, it does
not disable the opening commands.
Connect the opening photocell to the FTO terminal. This photocell is used to protect automated access when
the automatic system is opening, but has no effect on closing. At opening it stops and, at release, restarts
movement if engaged, it disables any pulse.
Connect the protective edge to the CST terminal. This safety devices provides extra protection for automated
access, compared to using Photocells only. If engaged, it disables any pulse. If engaged during opening/
closing, it reverses direction for 2 secs and goes into STOP status. Only a further pulse restarts movement until the
set cycle is completed.
If, during the Person Present manoeuvre, the safety device (if enabled) or the limit-switches (if enabled) are
tripped, the automatic system is blocked.
12.16 FUSES
Protection of motor
Motors and power circuits are protected by an 8A rapid fuse (5x20 format).
Protection against over-voltage is provided by a Varistor.
Protection of electric lock
2A delayed Fuse (5x20 format).
Protection of flashing lamp and courtesy light
1A rapid Fuse (5x20 format).
Protection for accessories power supply
1A rapid Fuse (5x20 format).
Protection of logic
315mA rapid Fuse (5x20 format).
Automatic reset
In the event of a microprocessor malfunction, an independent automatic reset circuit (watch-dog), restores
control of the control unit, returning it to its initial conditions at power-up.
23
Page 26
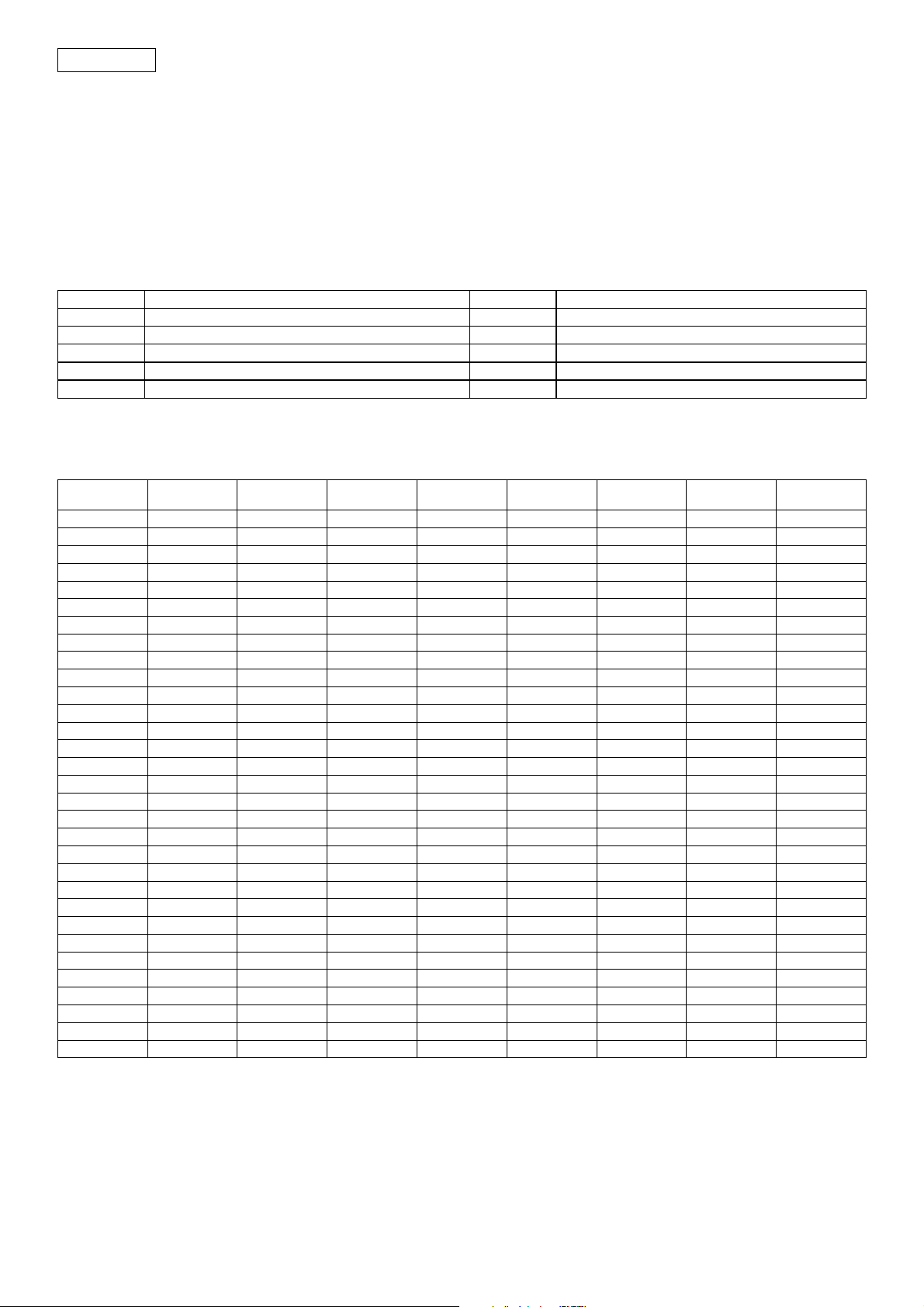
ENGLISH
12.17 CONTROL LEDs
The chart below shows the LEDs controlling the status of the command and safety inputs:
LED LIGHTED = contact in an N.C. terminal board
LED OFF = contact in an N.O. terminal board
To check if the inputs are in correct status, remember that:
When a command is given, the corresponding LED changes from OFF status to Lighted status.
When a safety device is tripped, the LED changes from Lighted status to OFF status.
The status of the limit-switch LEDs depends on the position of the automated access:
Automated access open = LEDs FC1 and FC3 lighted , and LEDs FC2 and FC4 OFF.
Automated access closed = LEDs FC2 and FC4 lighted , and LEDs FC1 and FC3 OFF.
FTC (LD1) Closing safety photocell OPU (LD7) Person present opening command
FTO (LD2) Opening safety photocell CLU (LD8) Person present closing command
CST (LD3) Safety edge FC1 (LD9) Closing limit-switch of motor 1
STP (LD4) STOP FC2 (LD10) Opening limit-switch of motor 1
STA (LD5) Stepped command FC3 (LD11) Closing limit-switch of motor 2
PED (LD6) Pedestrian opening command FC4 (LD12) Opening limit-switch of motor 2
13. INSTALLATION GUIDE
The following table provides guided programming for different types of application. It can be used for rapid
programming of the control unit.
Function 1 leaf swing 2-leaf swing Sliding Opposing
1
2
3 (°)
4 (°)
5 (*)
6 (°)
7 (°)
8 (°)
9
10 (*)
11 (°)
15 (°)
16 (°)
20 (°)
21 (°)
22 (°)
23 (°)
25 (°)
26 (°)
27 (°)
28 (*)
30 (*)
31 (°)
32 (*)
33 (°)
34 (°)
45 (°)
46 (°)
50 (°)
60 (°)
70
12345678
00333300
33664444
-3-6-4- -
0 ( 1) 0 (1) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2)
33553333
-3-5-3- -
00000000
00000033
0 (2) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2)
33333333
00000000
45 45 45 45 45 45 45 45
00000000
00000000
11221111
00000000
8 8 10 10 6 6 10 10
-8-10-6- -
00000000
3 (2) 3 (2) 3 (3) 3 (3) 3 (1) 3 (1) 3 (1) 3 (1)
0 (50) 0 (50) 0 (10) 0 (10) 0 (20) 0 (20) 0 (20) 0 (20)
00110000
0 (50) 0 (50) 0 (10) 0 (10) 0 (20) 0 (20) 0 (20) 0 (20)
00110000
33333333
-2------
-5------
00000000
00000000
--11----
sliding gates
Barrier Opposing
barriers
Up-and-over Parallel up-
and-overs
NOTES:
- :Function automatically set by the control unit
(*) :Recommended use:
a) initially set to 0 in order to check if the motors are connected correctly and to also check the automatic
system;
b) set the value in brackets as the starting value;
c) execute the next adjustments.
(°) :This function is set according to application, weight and dimensions of the automatic system, accessories
and connected safety devices.
24
Page 27

FRANÇAIS
CENTRALE DE COMMANDE UNIVERSELLE 230V~
INSTRUCTIONS POUR LEMPLOI NORMES DINSTALLATION
1. CARACTERISTIQUES GENERALES
La centrale a été conçue, développée et mise au point dans le but de gérer dans les meilleures conditions de
sécurité possibles, un accès automatisé quelconque (portail battant à un ou deux vantaux, coulissant,
coulissants opposés, barrière automatique, barrières automatiques opposées, portes basculantes à 1 ou 2
moteurs en parallèle). Une méthode de programmation facile et innovante des fonctions et des temps utilisant
trois touches et un afficheur à deux chiffres, permet deffectuer avec la plus grande précision, le réglage de tous
les paramètres dutilisation. Une série de led permet le contrôle immédiat de létat des entrées, des sorties et des
pannes éventuelles du circuit.
2. CARACTERISTIQUES TECHNIQUES
Tension dalimentation 230 V~ - 50/60 Hz
Puissance maxi absorbée 1600W
Charge maxi moteurs 2 x 700W
Charge maxi clignotant 80W
Charge maxi éclairage de courtoisie 40W
Charge maxi accessoires 24 V~ 15W
Charge maxi voyant-témoin 24 V~ 3W
Charge maxi électroserrure 12 V~ 24W
Fusibles de protection 5
Applications Portail battant à un ou deux vantaux
Coulissant et coulissants opposés
Barrière et barrières opposées
Portes basculantes à un ou deux moteurs
Programmation Trois touches et afficheur électronique
Gérant des fonctions Microprocesseur avec watch-dog
Paramètres de référence Mémorisés dans lEE-PROM
Entrées bornier Ouverture accès piéton / Ouverture totale / Ouvre et ferme homme mort /
Photocellules ouverture et fermeture / Bord / Fin de course ouverture et de
fermeture / STOP / Alimentation réseau / Antenne
Connecteur pour radiocommande Cartes pour récepteurs radio
Sorties bornier Moteurs 1 et 2 / Alimentation accessoires 24 V~ / Eclairage de courtoisie /
Clignotant / Voyant-témoin / Electroserrure 12V~
Température dutilisation -20°C +55°C
Caractéristiques boîtier 305 x 225 x 125 mm IP55
3. PREDISPOSITIONS ET REMARQUES GENERALES
ATTENTION: Il est important, pour assurer la sécurité des personnes, de respecter attentivement toutes les
précautions et les instructions de cette brochure. Une installation erronée ou un usage impropre du produit
peut conduire à des dommages importants aux personnes.
Vérifier quun interrupteur différentiel approprié est placé en amont de
linstallation, conformément aux normes en vigueur, et prévoir un
magnétothermique avec interruption omnipolaire sur le réseau dalimentation.
Utiliser des tubes rigides et/ou flexibles pour la mise en place des câbles
électriques.
Toujours séparer les câbles dalimentation des accessoires à basse tension
des câbles dalimentation à 230 V~. Pour lalimentation de lappareillage,
il faut prévoir des câbles avec une section minimale de 1,5 m2. Utiliser des
gaines séparées pour éviter toute interférence.
Monter sur la boîte des serre-câbles appropriés pour le passage des câbles
avec un degré de protection minimum IP54.
Pour la fixation de la centrale dans le boîtier étanche, positionner la centrale
comme lindique la fig. 1 et la fixer avec 5 vis autotaraudeuses Æ 4,2x13
(fournies), en plaçant les entretoises entre la carte et les guides du boîtier
étanche.
Important: les condensateurs de démarrage doivent toujours être connectés
sur les connecteurs de la carte (COND.MOT1, COND.MOT2) et jamais
directement sur le bornier sur les sorties des moteurs OP, CL MOT1 et MOT2.
Fig.1
25
Page 28
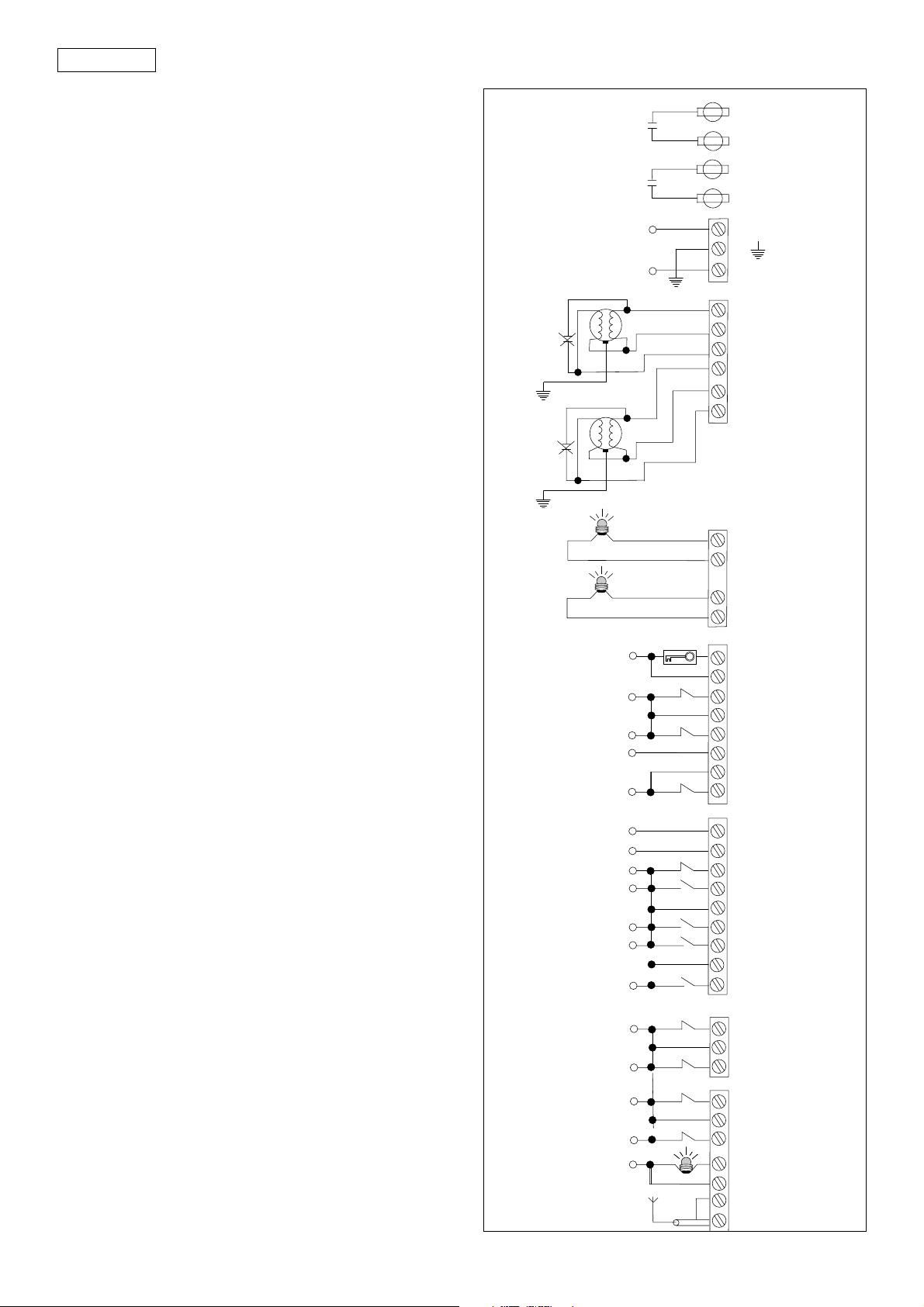
FRANÇAIS
4. CONNEXIONS
CONNECTEURS POUR CONDENSATEURS
(COND.MOT1) Connexion du condensateur de
démarrage du moteur 1
(COND.MOT2) Connexion du condensateur de
démarrage du moteur 1
BORNIER DE PUISSANCE M1
(1) Ligne 230V~
(2) Terre
(3) Neutre
BORNIER DE PUISSANCE M2
(4-5-6) Moteur 1. Attention: ne pas connecter le
condensateur de démarrage directement sur
la sortie moteur 1mais sur les connecteurs
pour cond. M1
(7-8-9) Moteur 2. Attention: ne pas connecter le
condensateur de démarrage directement sur
la sortie moteur 2 mais sur les connecteurs
pour cond. M2
BORNIER DE PUISSANCE M3
(10-11) Clignotant 230V~ - maxi 80W
(12-13) Eclairage de courtoisie 230V~ - maxi 40W
BORNIER DE SIGNAL M4
(14-15) Electroserrure 12V~ - maxi 24W
(16) Photocellule en fermeture
(17) Commun
(18) Photocellule en ouverture
(19) Commande auto-test des sécurités +24Vcc
(20) Commun
(21) Bord de protection
BORNIER DE SIGNAL M5
(22) Alimentation accessoires externes 24V~
(23) Commun
(24) Poussoir de STOP
(25) Poussoir de START
(26) Commun
(27) Poussoir douverture piétonne
(28) Poussoir douverture homme mort
(29) Commun
(30) Poussoir de fermeture homme mort
BORNIER DE SIGNAL M6
(31) Fin de course de fermeture moteur 1
(32) Commun
(33) Fin de course douverture moteur 1
BORNIER DE SIGNAL M7
(34) Fin de course de fermeture moteur 2
(35) Commun
(36) Fin de course douverture moteur 2
(37-38) Voyant automatique ouvert 24V~ - maxi 3W
(39-40) Antenne radio externe. A ne pas utiliser si sur
la carte du récepteur on a déjà prévu un
bornier pour lantenne externe.
COND MOT1
COND MOT2
(1) L
(2)
(3) N
(4) OP
(5) COM
(6) CL
(7) OP
(8) COM
(9) CL
(10) LAMP
(11) LAMP
(12) LAMP
(13) EXT
(14) EL-SER
(15) EL-SER
(16) FTC
(17) COM
(18) FTO
(19) TST
(20) COM
(21) CST
(22) 24V
(23) COM
(24) STP
(25) STA
(26) COM
(27) PED
(28) OPU
(29) COM
(30 ) CLU
(31) FC1
(32) COM MOT1
(33) FC2
(34) FC3
(35) COM MOT2
(36) FC4
(37) SP.CA
(38) SP.CA
(39) COM-ANT
(40) SIG-ANT
26
Page 29

5. SCHEMA DE LA CENTRALE
F4
1A 250V F
F1
8A 250V F
COND. MOT1
M1
OP=MOTOR 1
CL=MOTOR 1&2
JP1 JP2
COND. MOT2
M2
M3
F2
315mA 250V F
2A 250V T
F5
FRANÇAIS
A466
F3
1A 250V F
M8
JP3
M7
- + ENTER
FC4 FC3 FC2 FC1
STA PED OPU CLU
FTC FTO CST STP
M4
M5
ANT
COM SIG
24V~
SP.CA
MOT2
34 35 36 37 38 39 40
FC3 COM FC4
M6
MOT1
31 32 33
FC1 COM FC2
1 2 3
L N
4 5 6 7 8 9
OP COM CL
OP COM CL
MOT1
MOT2
10 11 12 13
LAMP
LAMP
EXT
14 15 16 17 18 19 20 21
EL-SER
FTC COM FTO TST COM CST
12V~
22 23 24 25 26 27 28 29 30
24~ COM STP STA COM PED OPU COM CLU
6. CAVALIER SÉLECTION MOTEUR 1 OU MOTEURS 1 ET 2
Suivant le type de portail (1 vantail ou 2 vantaux), enlever le cavalier JP1-JP2 comme suit: OP = (Circuit ouvert)
moteur 1 seulement pour portail à un vantail. CL = (Circuit fermé) moteurs 1 et 2 pour portail à deux vantaux.
7. INSERTION DE LA CARTE RECEPTEUR
La centrale est prédisposée pour loger un récepteur monocanal ou bicanal. Pour réaliser linstallation, couper
le courant et insérer le récepteur dans le connecteur M8 de la centrale. Respecter ensuite les instructions du
récepteur pour la mémorisation de la télécommande. Une fois que la télécommande a été mémorisée, celle-
ci agit comme un poussoir quelconque sur le dispositif de commande START.
Quand un récepteur bicanal est inséré dans le connecteur M8, il est possible, au moyen des pontets JP3, dactiver
ou de désactiver le deuxième canal sur louverture piétonne.
8. PROGRAMMATION DE LA CENTRALE
Réaliser cette programmation en réglant les paramètres avec lobjectif de garantir la plus grande sécurité de
laccès automatisé. En fin de programmation, exécuter plusieurs fois des manuvres de commande via radio
ou manuelles douverture et de fermeture de laccès automatisé en vérifiant le fonctionnement correct aussi
bien de lautomation que des sécurités correspondantes.
Dans ce but, lire le paragraphe correspondant au fonctionnement de la centrale. A la mise en marche, la
centrale vérifie le bon état de la mémoire EEPROM dans laquelle sont mémorisés les paramètres de Défaut ou
bien la dernière programmation correctement réalisée. Si on relève une panne de la mémoire EEPROM ou une
perte des paramètres mémorisés, la centrale affiche à lécran le message EE (EEPROM ERROR); si en revanche,
la EEPROM est en bon état, la centrale se règle aux valeurs de Défaut ou à la dernière programmation
correctement effectuée et lafficheur est éteint. Pour accéder au menu de programmation, il faut maintenir le
poussoir RETOUR enfoncé pendant 3 secondes, après quoi apparaît le message EP. Ce message reste à
lécran pendant 5 secondes durant lesquelles si on maintient le poussoir + enfoncé pendant 2 secondes au
moins, la programmation de Défaut se charge automatiquement. A lexpiration des 5 secondes la centrale
pointe la fonction 1 et il est possible de procéder à la programmation des fonctions concernées comme suit:
Sélectionner la fonction à programmer en appuyant sur une des deux touches + (AVANT) ou
(ARRIERE); la touche - diminue et la touche + augmente.
Appuyer sur la touche ENTER pour modifier la valeur de la fonction. Maintenant, lafficheur clignote et il
est possible de modifier la valeur programmée en appuyant sur les touches + (augmente valeur) et -
(diminue valeur).
Appuyer sur la touche ENTER pour confirmer la valeur de la fonction souhaitée
Si on souhaite programmer dautres fonctions, répéter les opérations décrites précédemment.
27
Page 30
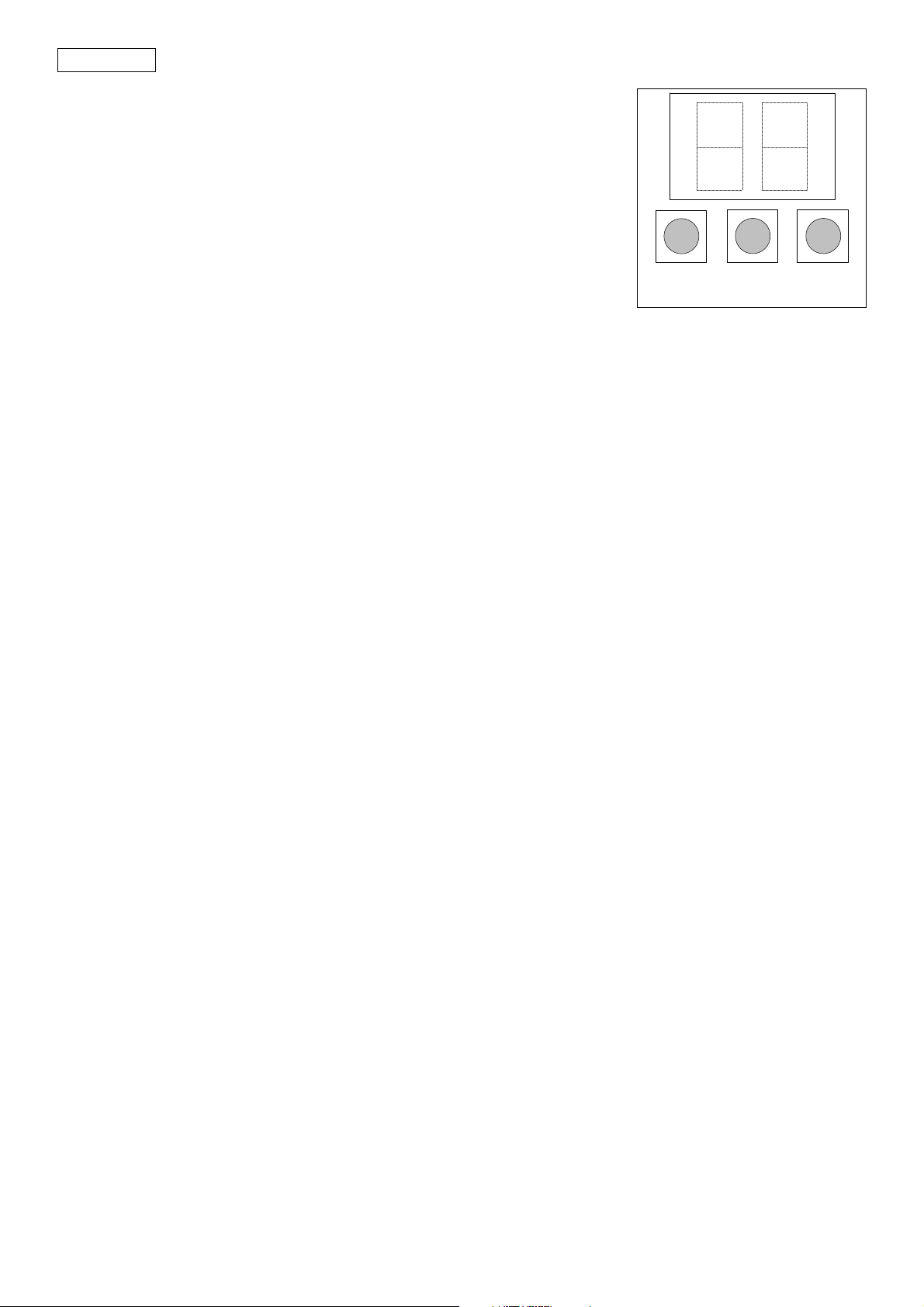
FRANÇAIS
- + ENTER
Pour sortir du menu de programmation, il faut pointer la fonction 99 de fin de
programmation et appuyer sur le poussoir de ENTER. Maintenant, la
centrale vérifie la congruence des paramètres programmés; en cas de
programmation correcte, le message FP apparaît (Fin de Programmation)
pendant 3 secondes après quoi lafficheur séteint. Au contraire, en cas de
conflit entre les paramètres, le numéro dune des fonctions potentiellement
erronées se met à clignoter. Pour corriger la valeur des fonctions erronées,
revenir au menu de programmation en appuyant sur le poussoir ENTER
pendant 3 secondes. Tant que la programmation de la centrale na pas été
correctement réalisée, toute manuvre sera impossible.
8. FONCTIONS A PROGRAMMER
FONCTION 1 Type dApplication
Cette fonction permet de programmer le type dApplication dans le but de valider uniquement les fonctions
liées au type dapplication.
Valeur 1 = Portail battant à un vantail (moteur 1)
Valeur 2 = Portail battant à deux vantaux (moteurs 1 et 2)
Valeur 3 = Portail coulissant (moteur 1)
Valeur 4 = Portails coulissants opposés (moteurs 1 et 2)
Valeur 5 = Barrière automatique (moteur 1)
Valeur 6 = Barrières automatiques opposées (moteur 1 et 2)
Valeur 7 = Porte basculante à 1 moteur (moteur 1)
Valeur 8 = Porte basculante à 2 moteurs en parallèle (moteurs 1 et 2)
FONCTION 2 Fin de course
Cette fonction permet de gérer les fins de courses en fermeture et en ouverture.
Programmer les valeurs
Valeur 0 = Fins de course non présents (évite de devoir ponter les bornes relatives aux quatre fins de course)
Valeur 1 = Fins de course présents seulement en fermeture (1 Fin de course pour lapplication à 1 moteur, 2 Fins
de course pour lapplication à 2 moteurs)
Valeur 2 = Fins de course présents seulement en ouverture (1 Fin de course pour lapplication à 1 moteur, 2 Fins
de course pour lapplication à 2 moteurs)
Valeur 3 = Fins de course présents en fermeture et en ouverture (2 Fins de course pour lapplication à 1 moteur,
4 Fins de course pour lapplication à 2 moteurs)
FONCTION 3 Réglage force du moteur 1 (TRIAC)
Cette fonction permet de régler la force du moteur 1 du niveau minimum (30%) à la valeur maximale (100%)
Invalider le Contrôle de présence (programmer la valeur 0 de la fonction 5)
En tenant compte des facteurs liés à lenvironnement et à linstallation, programmer la valeur la mieux
appropriée
Programmer les valeurs en tenant compte du fait que:
Valeur 1 = valeur minimale programmable (30%)
Valeur 10 = valeur maximale programmable (100%)
Nota bene: au moment de la poussée initiale, si elle est validée, la force du moteur est au maximum pendant
le temps programmé avec la fonction 8. Avant toute manuvre, un test qui vérifie la fiabilité des Triac et la
parfaite connexion des moteurs est effectué; en cas de résultat négatif, lafficheur visualise le message «EO» (voir
à ce propos, le paragraphe Messages derreur sur lafficheur).
FONCTION 4 Réglage force du moteur 2 (TRIAC)
Cette fonction permet de régler la force du moteur 2 du niveau minimum (30%) à la valeur maximale (100%)
Invalider le Contrôle de présence (programmer la valeur 0 de la fonction 5)
En tenant compte des facteurs liés à lenvironnement et à linstallation, programmer la valeur la mieux
appropriée
Programmer les valeurs en tenant compte du fait que:
Valeur 1 = valeur minimale programmable (30%)
Valeur 10 = valeur maximale programmable (100%)
Nota bene: au moment de la poussée initiale, si elle est validée, la force du moteur est au maximum pendant
le temps programmé avec la fonction 8. Avant toute manuvre, un test qui vérifie la fiabilité des Triac et la
parfaite connexion des moteurs est effectué; en cas de résultat négatif, lafficheur visualise le message «EO» (voir
à ce propos, le paragraphe Messages derreur sur lafficheur).
28
Page 31

FRANÇAIS
FONCTION 5 Contrôle de présence
Le contrôle de présence détermine le comportement de lautomation lorsquintervient la détection de
présence.
Valeur 0 = NON VALIDEE
Valeur 1 = STOP de lautomation. Dans cette configuration il exerce la fonction des fins de course si ces fins de
course nexistent pas.
Valeur 2 = STOP et INVERSE le sens de marche de lautomation.
Valeur 3 = STOP et INVERSE le sens de marche de lautomation pendant 2 secondes. Pour rétablir le mouvement,
donner une ultérieure impulsion de commande.
FONCTION 6 Sensibilité du contrôle de présence aussi bien en ouverture quen fermeture du
moteur 1
Avec cette fonction on peut régler la sensibilité de détection de présence en ouverture, en permettant larrêt
de lautomation en présence dun obstacle qui entrave la manuvre (FONCTION 5).
Régler la force du moteur Fonctions 3 et 4 à la valeur minimale nécessaire pour actionner laccès automatisé.
Régler la sensibilité en tenant du compte du fait que:
Valeur 1 = sensibilité maximale, cest-à-dire quune faible résistance est nécessaire pour détecter la présence.
Valeur 6 = sensibilité minimale, cest-à-dire quune forte résistance est nécessaire pour détecter la présence.
FONCTION 7 Sensibilité du contrôle de présence aussi bien en ouverture quen fermeture du
moteur 2
Avec cette fonction on peut régler la sensibilité de contrôle de présence en ouverture, en permettant larrêt de
lautomation en présence dun obstacle qui entrave la manuvre (FONCTION 5).
Régler la force du moteur Fonctions 3 et 4 à la valeur minimum nécessaire pour actionner laccès automatisé.
Régler la sensibilité en tenant du compte du fait que:
Valeur 1 = sensibilité maximale, cest-à-dire quune faible résistance est nécessaire pour relever la présence.
Valeur 6 = sensibilité minimale, cest-à-dire quune forte résistance est nécessaire pour détecter la présence.
FONCTION 8 Poussée initiale de la manuvre douverture et fermeture.
Cette fonction permet de régler la présence de la poussée au démarrage en dixièmes de seconde.
Valeur 0 = Aucune poussée.
Valeurs de 1 à 99 = Poussée en dixièmes de seconde au début de chaque manuvre à la Force maximale
(100%).
Par ex.: 10 = 1 seconde de poussée.
FONCTION 9 Hors-temps de 2 secondes au terme de la manuvre douverture et de fermeture
Valeur 0 = Invalidé
Valeur 1 = Hors temps au terme de la seule manuvre douverture
Valeur 2 = Hors temps au terme de la seule manuvre de fermeture
Valeur 3 = Hors temps au terme de la manuvre douverture et de fermeture
FONCTION 10 Fermeture automatique
Valeur 0 = fermeture automatique invalidée
Valeur 1 = fermeture automatique validée
FONCTION 11 Fonction Pas à Pas
Cette fonction sert à valider différentes séquences de fonctionnement pas à pas; elle est active aussi bien sur
les manuvres piétonnes que sur les manuvres totales.
Programmer les valeurs:
Valeur 0 = OUVRE lautomation effectue lopération douverture et referme après le temps de pause (FONCTION
27)
Valeur 1 = OUVRE/FERME
Valeur 2 = OUVRE/STOP/FERME
Valeur 3 = OUVRE/STOP/FERME/STOP
FONCTION 15 Temps de pré-clignotement
Cette fonction permet de programmer le temps de pré-clignotement du clignotant avant toute manuvre.
Valeur 0 = Absence de pré-clignotement
Valeur de 1 à 99 = pré-clignotement compris entre 1 et 99 secondes.
FONCTION 16 Temps dallumage de lEclairage de Courtoisie
Cette fonction permet de programmer le temps dallumage de léclairage de courtoisie.
Valeur 0 = Léclairage séteint au terme de chaque manuvre
Valeurs de 1 à 99 = valeur correspondant à la moitié du temps dallumage de léclairage de courtoisie.
Par ex.: 45 = 90 secondes.
29
Page 32

FRANÇAIS
FONCTION 20 Photocellule en ouverture
Cette fonction permet de régler lutilisation dune photocellule en ouverture. Aucun effet en phase de fermeture.
Programmer les valeurs:
Valeur 0 = sécurité en ouverture non présente (permet déviter de ponter les bornes correspondantes).
Valeur 1 = STOP à lintervention de la photocellule et le mouvement reprend en ouverture à la désactivation.
Nota bene: si la photocellule est activée au moment de la réception dune impulsion, celle-ci sera ignorée.
FONCTION 21 Bord de protection
Cette fonction permet de régler lutilisation dune ultérieure protection en ouverture et fermeture (par exemple
un bord pneumatique, un bord à photocellule, un bord à fil, etc.). Programmer les valeurs:
Valeur 0 = sécurité non présente (permet déviter de ponter les bornes correspondantes)
Valeur 1 = STOP à lintervention du bord et inversion du mouvement pendant 2 secondes. Pour reprendre le
cycle, il est nécessaire de fournir une nouvelle impulsion.
Nota bene: si le bord est activé au moment de la réception dune impulsion, celle-ci sera ignorée.
FONCTION 22 Photocellule en fermeture
Cette fonction permet de régler lutilisation de la photocellule de sécurité en fermeture. Aucun effet en phase
douverture.
Programmer les valeurs:
Valeur 0 = Photocellule en fermeture non présente (permet déviter de ponter les bornes correspondants)
Valeur 1 = STOP en phase de fermeture et inversion du mouvement.
Valeur 2 = STOP en phase de fermeture et inversion du mouvement à la désactivation
Nota bene: si la photocellule est activée au moment de la réception dune commande douverture avec
laccès complètement fermé, la commande sera exécutée; dans tous les autres cas, les commandes reçues
lorsque la photocellule est activée, seront ignorées.
FONCTION 23 Entrée de Stop
Cette fonction permet de valider ou non lentrée de Stop.
Programmer les valeurs:
Valeur 0 = Poussoir de Stop non présent (permet déviter de ponter les bornes correspondantes)
Valeur 1 = Stop validé. Son activation bloque la manuvre; pour reprendre le cycle, il est nécessaire de fournir
une nouvelle impulsion. Tant que lentrée de Stop est active, toute commande est ignorée.
FONCTION 25 Temps de Fonctionnement du moteur 1
Cette fonction permet de régler le temps maximum de fonctionnement du moteur 1 qui est le même aussi bien
en ouverture quen fermeture; elle ne peut être exclue parce quelle a pour fonction de protéger le moteur en
cas de mauvais fonctionnement des Fins de course ou de la détection de présence.
Valeurs de 1 à 99 = Valeur correspondant à la moitié du temps de travail. Par ex.: 10 = 20 secondes.
Nota bene: si un ralentissement à temps est sélectionné, celui-ci débute à lexpiration du temps de travail
programmé.
FONCTION 26 Temps de Fonctionnement du moteur 2
Cette fonction permet de régler le temps maximum de fonctionnement du moteur 2 qui est le même aussi bien
en ouverture quen fermeture; elle ne peut être exclue parce quelle a pour fonction de protéger le moteur en
cas de mauvais fonctionnement des Fins de course ou de la détection de présence.
Valeurs de 1 à 99 = Valeur correspondant à la moitié du temps de travail. Par ex.: 10 = 20 secondes.
Nota bene: si un ralentissement à temps est sélectionné, celui-ci débute à lexpiration du temps de travail
programmé.
FONCTION 27 Temps de Pause
Cette fonction permet de régler le temps de pause avant la fermeture automatique.
Programmer les valeurs:
Valeur 0 = Temps de Pause nul
Valeurs comprises entre 1 et 99 = cette valeur correspond à la moitié du temps de pause en secondes avant la
fermeture automatique. Par ex.: 20 = 40 secondes.
FONCTION 28 Temps de Récupération de lInversion
La centrale est dotée dun codeur à temps pour les deux moteurs. Cette fonction permet de programmer le
temps de Récupération en cas dInversion, qui est ajouté au Temps Résiduel de manuvre. Cela permet déviter
que lautomation ne complète pas correctement la manuvre en cas dinversions répétées.
Valeur 0 = Temps de récupération nul
Valeurs de 1 à 99 = Temps de Récupération compris entre 1 et 99 secondes
30
Page 33

FRANÇAIS
FONCTION 30 Temps de ralentissement des moteurs 1 et 2 en ouverture
Valeur 0 = non validée
Valeurs de 1 à 99 = temps de ralentissement programmable de 1 à 99 dixièmes de seconde à partir du fin de course ou
du terme du temps maximum de fonctionnement des moteurs 1 et 2 (fonction 31). Par ex.: 50 = 5 secondes de ralentissement.
FONCTION 31 Type de ralentissement en ouverture
Valeur 0 = le temps de ralentissement (fonction 30) est calculé à partir de lexpiration du temps de travail
maximum des moteurs (fonctions 25 et 26).
Valeur 1= le temps de ralentissement (fonction 30) est calculé à partir de lintervention du fin de course en ouverture.
FONCTION 32 Temps de ralentissement des moteurs 1 et 2 en fermeture
Valeur 0 = non validé
Valeurs de 1 à 99 = temps de ralentissement programmable de 1 à 99 dixièmes de seconde à partir du fin de
course ou du terme du temps maximum de fonctionnement des moteurs 1 et 2 (fonction 33). Par ex.: 50 = 5
secondes de ralentissement.
FONCTION 33 Type de ralentissement en fermeture
Valeur 0 = le temps de ralentissement (fonction 32) est calculé à partir de lexpiration du temps de
fonctionnement maximum des moteurs (fonctions 25 et 26).
Valeur 1= le temps de ralentissement (fonction 32) est calculé à partir de lintervention du fin de course en fermeture.
FONCTION 34 Force du moteur en phase de ralentissement.
On choisit, avec cette fonction, le niveau de la force du moteur durant la phase de ralentissement.
Valeur 1 = force du moteur minimum
Valeur 2 = force du moteur intermédiaire
Valeur 3 = force du moteur maximum
Nota bene: pour des automations à battant avec des moteurs à faible puissance (inférieure à 150 W) nous
conseillons la valeur 3.
FONCTION 45 Temps de décalage en ouverture entre le moteur 2 et le moteur 1
Cette fonction permet de programmer le temps de retard de lactivation du moteur 2 par rapport au moteur
1 en phase douverture:
Valeur 0 = décalage invalidé
Valeurs de 1 à 99 = décalage compris entre 1 et 99 s.
FONCTION 46 Temps de décalage en fermeture entre le moteur 1 et le moteur 2
Cette fonction permet de programmer le temps de retard de lactivation du moteur 1 par rapport au moteur
2 en phase de fermeture:
Valeur 0 = décalage invalidé
Valeurs de 1 à 99 = décalage compris entre 1 et 99 s.
FONCTION 50 Electroserrure
Cette fonction permet de programmer le fonctionnement de lélectroserrure.
Valeur 0 = Exclue
Valeur 1 = Active pendant 3 secondes avant toute manuvre en ouverture
Valeur 2 = Coup dinversion de 1 seconde et activation de lélectroserrure pendant 3 secondes avant toute
manuvre en ouverture.
FONCTION 60 Auto-test des sécurités.
Cette fonction sert à tester les sécurités avant toute manuvre; cette fonction est réalisable avec des
photocellules prédisposées. En cas de résultat négatif du test (une des sécurités ne fonctionne pas correctement)
lautomation nexécute pas la commande reçue. Programmer les valeurs :
Valeur 0 = auto-test invalidé
Valeur 1 = auto-test validé pour photocellule en fermeture.
Valeur 2 = auto-test validé cellule pour photo-électrique en ouverture.
Valeur 3 = auto-test validé pour les deux photocellules.
FONCTION 70 Fonction de freinage
Valeur 0 = fonction de freinage invalidée
Valeur 1 = fonction de freinage validée sur les moteurs 1 et 2 aussi bien en ouverture quen fermeture.
Nota bene: cette fonction est active uniquement pour les applications avec des portails coulissantes (fonction
1 programmée à 3 ou 4).
FONCTION 99 Fonction de Fin de Programmation
Pour sortir du menu de programmation, pointer cette fonction et appuyer sur le poussoir ENTER.
Nota bene: la centrale nautorise pas laccès au menu de programmation durant lexécution dun cycle de
fonctionnement. Il est possible dexécuter des manuvres uniquement si la centrale a été correctement programmée.
31
Page 34

FRANÇAIS
10. LISTE DES FONCTIONS VARIABLES
FONCTION DESCRIPTION Min/MaxI Pré-programmé
1
2
3
4
5
6
7
8
9
10
11
15
16
20
21
22
23
25
26
27
28
30
31
32
33
34
45
46
50
60
70
99
Application
1 = Portail battant à un vantail
2 = Portail battant à deux vantaux
3 = Portail coulissant
4 = Portai ls coulissan ts opposés
5 = Barrière Automatique
6 = Barrières Automatiques opposées
7 = Porte b asculante à 1 moteur
8 = Porte b asculante à 2 m oteurs en p arallèle
Fins de course des moteurs 1 et 2
0 = Absents
1 = Fin de c ourse présent en Fermeture
2 = Fin de c ourse présent en Ouverture
3 = Fin de c ourse présents en Ouverture et en Fermetu re
Réglage Force du moteur 1
Réglage Force du moteur 2
Action du contrôle de Pr ésence
0 = NON VALIDE
1 = STOP (en labsence du fin de course il en réalise la fonction)
2 = STOP/INVERSE
3 =
STOP/INVERSE pendant 2 secondes
Sensibilité du Contrôle de Présence du moteur 1
Sensibilité du Contrôle de Présence du moteur 2
Poussée initia le de la man uvre douverture et de fermeture
0 = Absent
1 - 99= Poussée à lallumage à la Force maxi comprise entre 1 e t 99 dixièmes de seconde
Hors temps au terme de louverture et de la fermeture
0 = Absent
1 = Poussée de 2 s au terme de la manuvre douverture
2 = Poussée de 2 s au terme de la manuvre de fermeture
3 = Poussée au terme de la m anuvre de f ermeture et do uverture
Fermeture automatique
0 = invalidée
1 = validée
Commande Pas à Pas
0 = OUVRE
1 = OUVRE/FERME
2 = OUVRE/STOP/FERME
3 = OUVRE/STOP/FERME/STOP
Temps de pré-clignotement
0 = Absent
1 99 = compris entre 1 e t 99 secondes
Temps dallumage Eclairage de Courtoisie
0 = Nul
1 99 = compris entre 2 e t 198 secondes
PHOTOCELLULE en Ouverture
0 = Non présente
1 = STOP et repart après désactivation
BORD
0 = Non présent
1 = STOP/inverse pendant 2 secondes
PHOTOCELLULE en Fermeture
0 = Non présent
1 = STOP/inverse
2 = STOP/inverse à la désactivation de la photocellule
Commande de STOP
0 = STOP non présent
1 = STOP présent
Temps de fonctionnement du moteur 1 (x2) en secondes
1 99 = compris entre 2 e t 198 secondes
Temps de fonctionnement du moteur 2 (x2) en secondes
1 99 = compris entre 2 e t 198 secondes
Temps de pause pour la Ferm eture Automatique (x 2) en secondes
0 = Nul
1 99 = compris entre 2 e t 198 secondes
Temps de récupéra tion Inversion po ur le temps résiduel en secondes
0 = Nul
1 99 = compris entre 1 e t 99 secondes
Temps de ralentissement en o uverture des moteurs 1 et 2 en dixièmes de seconde
0 = non validé
De 1 à 99 = de 1 à 99 dixièmes de secon de
Temps de ralentissement en ouverture sur les moteurs 1 et 2
0 = démarre à temps à l expiration du temps de f onctionnement maxi mum
1 = démarre à partir de lintervention des fins de course en ouverture
Temps de ralentissement en ferm eture des moteurs 1 et 2 en dixièmes de seconde
0 = non validé
De 1 à 99 = de 1 à 99 dixièmes de secon de
Temps de ralentissement en fermeture sur les moteurs 1 et 2
0 = démarre à temps à l expiration du temps de f onctionnement maxi mum
1 = démarre à partir de lintervention des fins de course en fermeture
Force des Moteurs durant le ralent issement
1 = Force mi nimale
2 = Force intermédiaire
3 = Force ma ximale
Temps de Décalage en ouverture entre le moteur 2 et le moteur 1 en secondes
0 = Nul
1 99 = compris entre 1 e t 99 s
Temps de Décalage en fermeture entre le moteur 1 et le moteur 2 en secondes
0 = Nul
1 99 = compris entre 1 e t 99 s
Electroserrure
0 = Absente
1 = Active pendant 3 secondes avant toute manuvre douverture
2 = Coup de Bélier en ouverture pendant 1 s et active pendant 3 s
Essai de photocellules en début de manuvre
0 = Invalidé
1 = Validé sur photocellule en fermeture
2 = Validé sur photocellule en ouverture
3 = Validé sur les photocellules douverture et de fermeture
Fonction de freinage
0 = Invalidée
1 = Validée sur les moteurs 1 et 2 aussi bien en ouverture quen fermeture
Fonction de Fin de Programmation
( 1= 30 % 10= 100%)
( 1= 30 % 10 = 100%)
à la Force de Fonctionnement (fonctions 3 et 4)
_
1 ¸ 8
0 ¸ 3
1 ¸ 10
1 ¸ 10
0 ¸3
1¸ 6
1¸ 6
0 ¸ 99
0 ¸ 3
0 ¸ 1
0 ¸ 3
0 ¸ 99
0 ¸ 99
0 ¸ 1
0 ¸ 1
0 ¸ 2
0 ¸ 1
1 ¸ 99
1 ¸ 99
0 ¸ 99
0 ¸ 99
0 ¸ 99
0 ¸ 1
0 ¸ 99
0 ¸ 1
1 ¸ 3
0 ¸ 99
0 ¸ 99
0 ¸ 2
0 ¸ 3
0 ¸ 1
10 (1s)
45 (90 s)
10 (20 s)
10 (20 s)
10 (20 s)
2
0
6
6
0
6
6
0
0
3
0
0
0
0
0
0
0
0
0
0
3
2
5
0
0
0
32
Page 35

FRANÇAIS
11. MESSAGES DERREUR
En fin de programmation, la centrale vérifie la congruence des paramètres programmés; en cas de programmation
correcte, le message FP (Fin de Programmation) apparaît pendant 3 secondes après quoi lafficheur séteint.
Au contraire, en cas de conflit entre les paramètres, le numéro dune des fonctions potentiellement erronées se
met à clignoter. Pour corriger la valeur des fonctions erronées, revenir au menu de programmation en appuyant
sur le poussoir ENTER pendant 3 secondes. Tant que la programmation de la centrale na pas été correctement
réalisée, toute manuvre sera impossible.
En outre, lafficheur signale également les erreurs suivantes:
EE = panne de la mémoire EEPROM ou une perte des paramètres mémorisés.
Nous conseillons de se reporter aux paramètres de Défaut (voir paragraphe Programmation de la Centrale).
Maintenant programmer à nouveau la centrale telle quelle était avant la signalisation de lessai qui a échoué.
Dans le cas dun nouveau résultat négatif, il faut appeler le service dassistance pour remplacer le dispositif
défectueux.
E0 = triac en court-circuit, moteurs en court-circuit, moteurs déconnectés ou connexion erronée de ces derniers.
Contrôler les connexions et le fonctionnement correct des moteurs connectés aux bornes correspondantes. Si
les connexions sont correctes, couper et rétablir le courant. Si le problème persiste, contrôler que les moteurs ne
sont pas en court-circuit. Si le problème persiste encore, contacter le service dassistance.
E1 = essai manqué de la photocellule en fermeture, contrôler les connexions et le fonctionnement correct des
dispositifs connectés à la borne FTC par lintermédiaire dune led correspondante présente sur la carte. En cas
de mauvais fonctionnement, remplacer le dispositif défectueux.
E2 = essai manqué de la photocellule en ouverture, contrôler les connexions et le fonctionnement correct des
dispositifs connectés à la borne FTO par lintermédiaire de la led correspondante présente sur la carte. En cas
de mauvais fonctionnement, remplacer le dispositif défectueux.
12. DESCRIPTION DU FONCTIONNEMENT DE LA CENTRALE
12.1 MISE EN MARCHE
A la mise en marche, la centrale vérifie lefficacité de la mémoire EEPROM dans laquelle sont mémorisés les
paramètres de Défaut ou bien la dernière programmation correctement réalisée. Si une panne de la mémoire
EEPROM, ou une perte des paramètres mémorisés sont relevés, la centrale affiche à lécran le message EE ou
un autre message derreur; dans ce cas, lire le paragraphe correspondant.
Si au contraire la EEPROM est efficace, la centrale se règle aux valeurs de Défaut ou à la dernière programmation
correctement réalisée et lafficheur est éteint. La centrale est maintenant prête à exécuter les commandes.
N.B. Quand la centrale est mise en marche, aucune manuvre nest exécutée, si ce nest après la réception
dune commande volontaire de la part de lutilisateur.
12.2 COMMANDES OPPOSEES
En présence de commandes opposées simultanées, la centrale nen exécute aucune.
12.3 REGLAGE DE LA FORCE DU MOTEUR
Régler la force du moteur 1 par lintermédiaire de la FONCTION 3 et du moteur 2 par lintermédiaire de la
FONCTION 4. A la valeur «1» correspond la force minimale programmable (30 % de la Force maximale), à la
valeur «10» la force maximale. Durant la phase de ralentissement la force des moteurs est réglée par la Fonction
«34». («1» = Force Minimale, «3» = Force Maximale).
Pour les portail battants avec des moteur de faible puissance (< 150 W) nous conseillons la valeur 3 pour la
fonction «34».
12.4 REGLAGE DE LA SENSIBILITE DE LA DETECTION DE PRESENCE
Exclure les fins de course (si présents), laisser lautomation arriver en fin de manuvre et vérifier le fonctionnement
correct de la FONCTION 6 détection de présence du moteur 1, effectuer à nouveau la même opération en
vérifiant le fonctionnement de la FONCTION 7 détection de présence du moteur 2. Régler la valeur des
fonctions citées ci-dessus pour garantir une valeur de sécurité correcte de laccès automatisé.
N.B.: durant la phase de poussée initiale la fonction de détection de présence nest pas active.
33
Page 36

FRANÇAIS
12.5 RALENTISSEMENT DES MOTEURS
La centrale universelle permet de réaliser le ralentissement des moteurs au terme des manuvres douverture
et de fermeture. A laide des Fonctions «31» et «33» on peut sélectionner lactivation du ralentissement à partir
de lintervention du fin de course (valeur «1») ou de lexpiration du temps de fonctionnement maximum des deux
moteurs (Fonctions 25 et 26). La Fonction 31 concerne la manuvre douverture tandis que la Fonction 33
concerne la manuvre de fermeture; on peut programmer une activation du ralentissement à partir du fin de
course dans un sens de marche et à temps dans le sens opposé. La durée du ralentissement est réglable en
dixièmes de seconde avec les Fonctions «30» (ouverture) et «32» (fermeture) entre 1 et 99 dixièmes de seconde
(0,1 et 9,9 secondes).
Pour des applications avec un ralentissement à partir du fin de course (portails coulissants) nous conseillons de
placer le temps maximal de fonctionnement sur 2-3 secondes en plus par rapport à la durée effective de la
manuvre et le temps de ralentissement compris entre 5 et 20 dixièmes de seconde de telle sorte que le fin de
course ne dépasse pas son butoir.
Pour des applications avec ralentissement et démarrage à temps (portail battant à 1 vantail) nous conseillons:
mesurer la durée de la manuvre sans ralentissement,
établir le temps maximum de fonctionnement (Fonctions 25 et 26) deux secondes en moins par rapport à la durée
mesurée,
établir le temps de ralentissement (Fonctions 30 et 32) compris entre 50 et 99 dixièmes de seconde de telle sorte
que le vantail arrive sur le butoir de manière sûre.
Régler la force des moteurs durant le ralentissement au niveau souhaité, à laide de la fonction «34» (1
=minimum, 2 = intermédiaire, 3 = maximum). Pour des applications à vantail avec des moteurs de faible
puissance nous conseillons la valeur 3.
12.6 FREINAGE
La centrale universelle est en mesure deffectuer le freinage des moteurs au moment de leur arrêt (Fonction 70).
Cette fonction est active uniquement pour des applications à coulissement (Fonction 1 programmée sur la
valeur 3 ou 4) et permet déliminer linertie du coulissement au moment de son arrêt: on évite ainsi la sortie du
fin de course de son butoir au terme des manuvres douverture et de fermeture; de plus, en cas dinversion
provoquée par lintervention dune sécurité, larrêt du portail coulissant est immédiat.
12.7 CODEUR A TEMPS
La centrale universelle est équipée dun codeur à temps, réalisé au niveau du logiciel qui lui permet dexercer
un monitorage constant sur la position de lautomation. Plus spécifiquement dans le cas dune interruption de
la manuvre, la centrale fixe le temps maximum de fonctionnement, équivalant au temps résiduel de
manuvre, en évitant, par exemple, que les vantaux butent longuement sur les supports et surchauffent
inutilement les moteurs. Pour éviter quen raison de linertie lautomation ne complète pas correctement la
manuvre, nous conseillons de programmer le temps de récupération dinversion (Fonction «34») sur la valeur
la plus appropriée (comprise en général entre 1 et 5 secondes) en fonction du type dapplication.
12.8 ARRET DU MOTEUR
Il peut se produire dans les cas suivants:
Coupure de courant
Intervention du fin de course correspondant (ouverture contact N.F.)
Intervention de la FONCTION 5 de contrôle de présence
Intervention dune des sécurités (photocellules ou bord).
Fin du temps maximum de fonctionnement programmé avec les FONCTIONS 25 26.
Activation du poussoir STOP (ouverture du contact N.F. de stop) Dans ce cas, pour rétablir le mouvement,
débloquer le poussoir Stop et envoyer une autre commande via Radio ou manuelle.
Commandes STOP effectuées via Radio ou par lintermédiaire de la commande Pas à Pas.
12.9 MANUVRE HOMME MORT
Appuyer sur le poussoir dOuverture Homme Mort pour procéder à louverture et le poussoir de Fermeture
Homme Mort pour procéder à la fermeture de laccès automatisé. Ces commandes (fermeture des contacts
N.O.) doivent être maintenus volontairement par lopérateur. Lautomation se bloque en cas dintervention
dune sécurité ou des fins de course.
12.10 MANUVRE DOUVERTURE
Envoyer une commande via radio (canal 1) ou par lintermédiaire de la commande Pas à Pas.
Pré-clignotement du signaleur lumineux pendant le temps programmé avec la FONCTION 15
La centrale effectue le test du TRIAC et des sécurités relatives au mouvement douverture (seulement si la borne
TST est connectée et si la FONCTION 60 est programmée sur une valeur > 0.
Le moteur est alimenté pendant le temps de démarrage avec une force de 100%; après ce démarrage, la force
du moteur est portée à la valeur programmée dans la FONCTION 3 et 4.
34
Page 37

FRANÇAIS
12.11 MANUVRE DE FERMETURE
La fermeture peut se produire automatiquement après le temps programmé dans la FONCTION 27, ou par
lintermédiaire de commandes Pas à Pas ou Accès Piéton.
Pré-clignotement du signaleur lumineux pendant le temps programmé avec la FONCTION 15.
La centrale effectue le test du TRIAC et des sécurités relatives au mouvement douverture (seulement si la borne
TST est connectée et si la FONCTION 60 est programmée sur une valeur 1 ou 3).
Le moteur est alimenté pendant le temps de démarrage avec une force de 100%; après ce démarrage, la force
du moteur est portée à la valeur programmée dans la FONCTION 3 et 4.
12.12 MANUVRE DOUVERTURE DE LACCES PIETON
La commande douverture piétonne peut être fournie aussi bien manuellement que via radio (CH2). La centrale
exécute:
Ouverture complète dun seul vantail pour les portails à deux vantaux battant sur le vantail du moteur 1.
Ouverture pendant 10 secondes pour le portail coulissant,
Ouverture totale dun seul vantail pour les portails coulissants opposés,
Ouverture totale dune seule barrière pour les barrières opposées,
Commande non active pour tous les autres types daccès automatiques.
12.13 SELECTION DES MOTEURS
Les pontets JP1 et JP2 doivent être insérés en cas de fonctionnement à 2 moteurs.
12.14 SELECTION DU DEUXIEME CANAL
Si dans le connecteur M8 est connecté un récepteur bicanal, il est possible, par lintermédiaire du pontet JP3,
de rendre actif le canal du récepteur sur louverture de laccès piéton de lautomation: JP3 inséré = deuxième
canal actif sur louverture de laccès piéton; JP3 déconnecté = deuxième canal non actif sur louverture de
laccès piéton.
Programmer les fonctions de la centrale comme lindique le paragraphe Programmation de la centrale.
12.15 SECURITES
Connecter les dispositifs prévus pour la plus grande sécurité possible à lautomation sur laquelle est installée la
centrale.
La connexion à la borne TST (auto-test) peut être effectuée uniquement si on installe des dispositifs avec une
fonction dauto-test incorporée.
Il faudra connecter un poussoir du type à déblocage manuel à la borne STP (stop).
Connecter la photocellule en fermeture à la borne FTC. Cette photocellule sert à protéger laccès automatisé
en phase de fermeture de lautomation, aucun effet en phase douverture. En phase de fermeture elle inverse
ou arrête le mouvement et linverse à la désactivation (peut être sélectionné). Si elle est activée, elle inhibe toute
commande de fermeture. Si laccès est fermé, elle ninhibe pas les commandes douverture.
Connecter la photocellule en ouverture à la borne FTO. Cette photocellule sert à protéger laccès automatisé
en phase douverture de lautomation, aucun effet en phase de fermeture. En phase de fermeture elle arrête
le mouvement, et à la désactivation elle reprend le mouvement; si elle est activée, elle inhibe toute impulsion.
Connecter le bord de protection à la borne CST. Cette sécurité sert à protéger davantage laccès automatisé
par rapport à la seule utilisation des Photocellules. Si elle activée, elle inhibe toute impulsion, durant les phases
douverture/fermeture; si elle est engagée, elle inverse le mouvement pendant 2 s et va en STOP. Seule une
impulsion successive produit une reprise du mouvement jusquà ce que le cycle programmé soit terminé.
Durant les manuvres Homme Mort, lintervention dune sécurité (si validée) ou des fins de course (si validés)
bloquent lautomation.
12.16 FUSIBLES DE PROTECTION
Protection du moteur
Les moteurs et les circuits de puissance sont protégés par un fusible de 8A rapide (format 5x20).
Protection contre les survoltages par lintermédiaire dune Varistance.
Protection de lélectroserrure
Fusible de 2A retardé (format 5x20).
Protection du clignotant et de léclairage de courtoisie
Fusible de 1A rapide (format 5x20)
Protection de lalimentation des accessoires
Fusible de 1A rapide (format 5x20)
Protection de la logique
Fusible de 315mA rapide (format 5x20).
Remise à zéro automatique
En cas de fonctionnement anormal du microprocesseur, un circuit indépendant de remise à zéro automatique
(watch-dog), rétablit le contrôle de la centrale en la reportant aux conditions initiales de mise en marche.
35
Page 38

FRANÇAIS
12.17 LED DE CONTROLE
Sur la carte sont reportées des LED de contrôle de létat des entrées de commande et de sécurité:
LED ALLUMEE = contact sur le bornier N.F.
LED ETEINTE = contact sur le bornier N.O.
Pour vérifier que les entrées se trouvent dans leur état correct, tenir compte du fait que:
Quand on envoie une commande, la LED correspondante passe de létat Eteint à létat Allumé.
Quand une sécurité intervient, la LED passe de létat Allumé à létat Eteint.
Létat des LED relatives aux fins de course dépend de la position de laccès automatique:
Accès automatique ouvert = LED FC1 et FC3 allumées, et LED FC2 et FC4 éteintes
Accès automatique fermé = LED FC2 et FC4 allumées, et LED FC1 et FC3 éteintes
FTC (LD1) Photocellule de sécurité en fermeture OPU (LD7) Commande douverture homme mort
FTO (LD2) Photocellule de sécurité en ouverture CLU (LD8) Commande de fermeture homme mort
CST (LD3) Bord de sécurité FC1 (LD9) Fin de course en fermeture du moteur 1
STP (LD4) STOP FC2 (LD10) Fin de course en ouverture du moteur 1
STA (LD5) Commande pas à pas FC3 (LD11) Fin de course en fermeture du moteur 2
PED (LD6) Commande douverture de laccès piéton FC4 (LD12) Fin de course en ouverture du moteur 2
13. INSTRUCTIONS POUR LINSTALLATION
Le tableau suivant indique, pour les différentes catégories dapplication, une «programmation-guide», à utiliser
comme référence pour une programmation rapide de la Centrale.
Fonction Battant
1
2
3 (°)
4 (°)
5 (*)
6 (°)
7 (°)
8 (°)
9
10 (*)
11 (°)
15 (°)
16 (°)
20 (°)
21 (°)
22 (°)
23 (°)
25 (°)
26 (°)
27 (°)
28 (*)
30 (*)
31 (°)
32 (*)
33 (°)
34 (°)
45 (°)
46 (°)
50 (°)
60 (°)
70
1 vantail
12345678
00333300
33664444
-3-6-4- -
0 ( 1) 0 (1) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2)
33553333
-3-5-3- -
00000000
00000033
0 (2) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2)
33333333
00000000
45 45 45 45 45 45 45 45
00000000
00000000
11221111
00000000
8 8 10 10 6 6 10 10
-8-10-6- -
00000000
3 (2) 3 (2) 3 (3) 3 (3) 3 (1) 3 (1) 3 (1) 3 (1)
0 (50) 0 (50) 0 (10) 0 (10) 0 (20) 0 (20) 0 (20) 0 (20)
00110000
0 (50) 0 (50) 0 (10) 0 (10) 0 (20) 0 (20) 0 (20) 0 (20)
00110000
33333333
-2------
-5------
00000000
00000000
--11----
NOTA BENE:
- : Fonction programmée automatiquement par la Centrale.
(*) : nous conseillons:
a) de programmer initialement la valeur «0» pour contrôler la parfaite connexion des moteurs et le mouvement
de lautomation,
b) de programmer la valeur indiquée entre parenthèses comme valeur de départ,
c) deffectuer des réajustements successifs.
(°) : Fonction à programmer en fonction de lapplication, du poids et des dimensions de lautomation, des
accessoires et des sécurités connectées.
Battant
2 vantaux
Coulissant Coulissants
opposés
Barrière Barrières
opposées
Porte
basculante
Portes
basculantes
parallèles
36
Page 39

ESPAÑOL
CENTRAL DE MANDO UNIVERSAL 230V~
INSTRUCCIONES PARA EL USO NORMAS DE INSTALACIÓN
1. CARACTERÍSTICAS GENERALES
La central ha sido ideada, proyectada y fabricada con el objeto de controlar, con la mayor seguridad posible,
cualquier acceso automatizado (batientes de una o de dos hojas, correderas, correderas contrapuestas,
barrera automática, barreras automáticas contrapuestas, basculantes de 1 ó 2 motores en paralelo). Un
innovador y fácil método de programación de funciones y tiempos mediante la utilización de tres teclas y un
display de dos cifras, permite regular con la máxima precisión todos los parámetros de funcionamiento. Una
serie de diodos permite el control inmediato del estado de las entradas, de las salidas y de los posibles fallos
del circuito. La conformidad con los rígidos estándares Europeos de referencia (CE) es garantía de calidad y
fiabilidad del producto.
2. CARACTERÍSTICAS TÉCNICAS
Tensión de alimentación 230 V~ - 50/60 Hz
Potencia absorbida máxima 1600W
Carga máxima motores 2 x 700W
Carga máxima intermitente 80W
Carga máxima luz de techo 40W
Carga máxima accesorios 24 V~ 15W
Carga máxima luz testigo 24 V~ 3W
Carga máxima electrocierre 12 V~ 24W
Fusibles de protección 5
Aplicaciones Batiente de una y de dos hojas
Correderas y correderas contrapuestas
Barrera y barreras contrapuestas
Basculantes de uno o dos motores
Programación Tres teclas y display digital
Gestor de las funciones Microprocesador con watch-dog
Parámetros de referencia Memorizados en EE-PROM
Entrada en regleta de conexiones Apertura peatonal / Apertura total / Abre y cierra presencia operador /
Fotocélulas apertura y cierre / Borde sensible / Fin de carrera apertura y
cierre / STOP / Alimentación red / Antena
Conector para mando a distancia Tarjetas radiorreceptoras
Salidas en regleta de conexiones Motores 1 y 2 /Alimentación accesorios 24 V~/ Luz de techo / Intermitente /
Luz testigo / Electrocierre 12V~
Temperatura ambiente -20°C +55°C
Características del contenedor 305 x 225 x 125 mm. IP55
3. PREDISPOSICIONES Y NOTAS GENERALES
ATENCIÓN: Es importante para la seguridad de las personas seguir atentamente todas las advertencias e
instrucciones presentes en este manual. Una incorrecta instalación o un uso incorrecto del producto puede
ocasionar graves daños a las personas
Comprueben que equipo arriba esté instalado un adecuado interruptor
diferencial como establecido por la normativa vigente y prevean en la línea
de alimentación un magnetotérmico con interrupción omnipolar.
Para la colocación de los cables eléctricos, utilicen adecuados tubos rígidos
y/o flexibles.
Separen siempre los cables de conexión de los accesorios a baja tensión de
los cables de alimentación a 230 V~. Para la alimentación del equipo utilicen
cables con sección mínima de 1.5 mm². Para evitar cualquier interferencia,
utilicen vainas separadas.
Monten en la caja un adecuado prensacables para el paso de los cables
con un grado de protección mínimo IP54.
Para la fijación de la central en el contenedor estanco, posicionen la central
como se indica en la fig. 1 y fíjenla con 5 tornillos Ø4.2x13 autorroscantes
(suministrados en dotación), colocando los separadores entre la tarjeta y las
guías del contenedor estanco.
Importante: los condensadores de arranque siempre han de estar conectados en
los específicos faston en la tarjeta (COND.MOT1, COND.MOT2) y nunca directamente
en regleta de conexiones en las salidas motores OP,CL MOT1 y MOT2.
Fig.1
37
Page 40

ESPAÑOL
4. CONEXIONES
FASTON PARA CONDENSADORES
(COND.MOT1) Conexión del condensador de
arranque del motor 1
(COND.MOT2) Conexión del condensador de
arranque del motor 2
REGLETA DE CONEXIONES DE POTENCIA M1
(1) Línea 230V~
(2) Tierra
(3) Neutro
REGLETA DE CONEXIONES DE POTENCIA M2
(4-5-6) Motor 1. Atención: no conecten el
condensador de arranque directamente en
la salida motor 1 sino en los faston cond. M1
(7-8-9) Motor 2. Atención: no conecten el
condensador de arranque directamente en
la salida motor 2 sino en los faston cond. M2
REGLETA DE CONEXIONES DE POTENCIA M3
(10-11) Intermitente. 230V~ - máx. 80W
(12-13) Luz de techo. 230V~ - máx. 40W
REGLETA DE CONEXIONES DE SEÑAL M4
(14-15) Electrocierre. 12V~ - máx. 24W
(16) Fotocélula en cierre
(17) Común
(18) Fotocélula en apertura
(19) Comando autotest disp. de seguridad +24Vdc
(20) Común
(21) Bord e sensible de protección
REGLETA DE CONEXIONES DE SEÑAL M5
(22) Alimentación accesorios externos 24V~
(23) Común
(24) Pulsador de STOP
(25) Pulsador de START
(26) Común
(27) Pulsador de apertura peatonal
(28) Pulsador de apertura presencia operador
(29) Común
(30) Pulsador de cierre presencia operador
REGLETA DE CONEXIONES DE SEÑAL M6
(31) Fin de carrera cierre motor 1
(32) Común
(33) Fin de carrera apertura motor 1
REGLETA DE CONEXIONES DE SEÑAL M7
(34) Fin de carrera cierre motor 2
(35) Común
(36) Fin de carrera apertura motor 2
(37-38) Luz testigo automatismo abierto. 24V~ - máx. 3W
(39-40) Antena radio externa. No debe utilizarse si en
la tarjeta receptora ya está prevista la regleta
de conexiones para la antena externa
COND MOT1
COND MOT2
(1) L
(2)
(3) N
(4) OP
(5) COM
(6) CL
(7) OP
(8) COM
(9) CL
(10) LAMP
(11) LAMP
(12) LAMP
(13) EXT
(14) EL-SER
(15) EL-SER
(16) FTC
(17) COM
(18) FTO
(19) TST
(20) COM
(21) CST
(22) 24V
(23) COM
(24) STP
(25) STA
(26) COM
(27) PED
(28) OPU
(29) COM
(30 ) CLU
(31) FC1
(32) COM MOT1
(33) FC2
(34) FC3
(35) COM MOT2
(36) FC4
(37) SP.CA
(38) SP.CA
(39) COM-ANT
(40) SIG-ANT
38
Page 41

5. LAYOUT DE LA CENTRAL
1A 250V F
8A 250V F
COND. MOT1
M1
OP=MOTOR 1
CL=MOTOR 1&2
JP1 JP2
F4
F1
COND. MOT2
M2
M3
F2
315mA 250V F
2A 250V T
F5
ESPAÑOL
A466
F3
1A 250V F
M8
JP3
M7
- + ENTER
FC4 FC3 FC2 FC1
STA PED OPU CLU
FTC FTO CST STP
M4
M5
ANT
COM SIG
24V~
SP.CA
MOT2
34 35 36 37 38 39 40
FC3 COM FC4
M6
MOT1
31 32 33
FC1 COM FC2
1 2 3
L N
4 5 6 7 8 9
OP COM CL
OP COM CL
MOT1
MOT2
10 11 12 13
LAMP
LAMP
EXT
14 15 16 17 18 19 20 21
EL-SER
FTC COM FTO TST COM CST
12V~
22 23 24 25 26 27 28 29 30
24~ COM STP STA COM PED OPU COM CLU
6. PUENTE DE SELECCION DEL MOTOR 1 O DE LOS MOTORES 1 Y 2
Dependiendo del tipo de portón (de una hoja o de dos hojas) desplazar el puente JP1-JP2 como se indica a
continuación: OP = (Circuito abierto) sólo motor 1 para portones de una hoja. CL = (Circuito cerrado) motores
1 y 2 para portones de dos hojas.
7. INTRODUCCIÓN DE LA TARJETA RECEPTORA
La central está adaptada para alojar una receptora mono o bicanal. Para la instalación, quiten la
alimentación eléctrica e introduzcan la receptora en el específico conector M8 ubicado en la central. A
continuación sigan las instrucciones de la receptora para la memorización del mando a distancia. Una vez
memorizado el mando a distancia, el mismo actúa como un pulsador cualquiera de mando de START.
Cuando en el conector M8 está introducida una receptora bicanal, es posible, por medio de los jumper JP3,
activar o desactivar el segundo canal en la apertura peatonal
8. PROGRAMACIÓN DE LA CENTRAL
Efectúen dicha programación regulando los parámetros con el objetivo de garantizar la máxima seguridad del
acceso automatizado. Concluida la programación, realicen varias maniobras de mando - por radio o bien
manuales de apertura y cierre del acceso automatizado comprobando el correcto funcionamiento tanto del
automatismo como de los correspondientes dispositivos de seguridad.
A tal fin lean el párrafo relativo al funcionamiento de la central. Cuando se enciende, la central verifica la
integridad de la memoria EEPROM en la cual están memorizados los parámetros de Defecto o la última
programación efectuada correctamente. Si se localiza un fallo de la memoria EEPROM o una pérdida de los
parámetros, la central visualiza en el display el mensaje EE (EEPROM ERROR), si por el contrario, la EEPROM está
íntegra, la central se configura a los valores de Defecto o a la última programación efectuada correctamente,
y el display está apagado. Para acceder al menú de programación, hay que mantener presionado el pulsador
de ENTER durante 3 segundos, seguidamente aparecerá el mensaje EP . Dicho mensaje permanece por 5
segundos, durante los cuales si se mantiene presionado el pulsador + por al menos 2 segundos, se carga
automáticamente la programación de Defecto. Transcurridos los 5 segundos, la central se sitúa en la función
1 y ahora ya se puede proceder a programar cada función efectuando las siguientes operaciones:
Seleccionen la función que se ha de programar presionando una de las dos teclas + (ADELANTE) o
(ATRÁS); la tecla - decrementa y la tecla + incrementa.
Presionen la tecla ENTER para cambiar el valor de la función. Ahora el display emitirá una luz intermitente
y se podrá cambiar el valor programado presionado las teclas + (incrementa el valor), y - (decrementa
el valor).
Presionen la tecla ENTER para confirmar el valor de la función deseado
39
Page 42

ESPAÑOL
- + ENTER
Si se desean programar otras funciones, repitan las operaciones descritas
anteriormente.
Para salir del menú de programación hay que colocarse en la función 99 de
fin de programación y presionar el pulsador ENTER. Ahora la central
verificará la congruencia de los parámetros configurados; si la programación
es correcta aparecerá le mensaje FP (Fin Programación) durante 3 segundos,
transcurridos los cuales el display se apaga. Si se detecta un conflicto entre
los parámetros, el número de una de las funciones potencialmente incorrectas
parpadeará. Para corregir el valor de las funciones incorrectas entren de
nuevo en el menú de programación presionado el pulsador ENTER durante
3 segundos. Hasta que la programación de la central no se haya efectuado
correctamente, no se podrá efectuar ninguna maniobra.
9. FUNCIONES QUE SE HAN DE PROGRAMAR
FUNCIÓN 1 Tipo de Aplicación
Esta función permite programar el tipo de Aplicación con el objeto de habilitar exclusivamente las funciones
conectadas al tipo de aplicación.
Valor 1 = Verja con batiente de una hoja (motor 1)
Valor 2 = Verja con batiente de dos hojas (motores 1 y 2)
Valor 3 = Verja corredera (motor 1)
Valor 4 = Verjas correderas contrapuestas (motores 1 y 2)
Valor 5 = Barrera automática (motor 1)
Valor 6 = Barreras automáticas contrapuestas (motores 1 y 2)
Valor 7 = Basculante de 1 motor (motor 1)
Valor 8 = Basculante de 2 motores en paralelo (motores 1 y 2)
FUNCIÓN 2 Fin de carrera
Esta función permite controlar los fines de carrera en cierre y apertura.
Programen los valores:
Valor 0 = Fines de carrera no presentes (evita tener que puentear los bornes relativos a los cuatro fines de carrera)
Valor 1 = Presentes sólo los fines de carrera en cierre (1 Fin de carrera para aplicación a 1 motor, 2 Fines de carrera
para aplicación a 2 motores)
Valor 2 = Presentes sólo los fines de carrera en apertura. (1 Fin de carrera para aplicación a 1 motor, 2 Fines de
carrera para aplicación a 2 motores)
Valor 3 = Presentes fines de carrera tanto en cierre como en apertura. (2 Fines de carrera para aplicación a 1
motor, 4 Fines de carrera para aplicación a 2 motores)
FUNCIÓN 3 Regulación de la fuerza motor 1 (TRIAC)
Esta función permite regular la fuerza del motor 1 desde el nivel mínimo (30%) hasta el valor máximo (100%).
Deshabiliten el Control obstáculo (programen el valor 0 de la función 5)
Teniendo en cuenta los factores ambientales y de instalación, programen el valor más apropiado
Programen los valores teniendo presente que:
Valor 1 = valor mínimo que puede programarse (30%)
Valor 10 = valor máximo que puede programarse (100%)
Nota: en el momento de arranque inicial, si estuviera habilitada, la fuerza motor está al máximo durante el
tiempo programado con la función 8. Antes de efectuar cualquier maniobra, se efectúa un test que comprueba
la integridad de los Triac y la correcta conexión de los motores; en caso de resultado negativo, en el display
aparece el mensaje E0 (véase a tal fin el párrafo Mensajes de error en el display).
FUNCIÓN 4 Regulación de la fuerza motor 2 (TRIAC)
Esta función permite regular la fuerza del motor 2 desde el nivel mínimo (30%) hasta el valor máximo (100%).
Deshabiliten el Control obstáculo (programen valor 0 de la función 5)
Teniendo en cuenta los valores ambientales y de instalación, programen el valor más apropiado
Programen los valores teniendo presente que:
Valor 1 = valor mínimo que puede programarse (30%)
Valor 10 = valor máximo que puede programarse (100%)
Nota: en el momento de arranque inicial, si estuviera habilitada, la fuerza motor está al máximo durante el
tiempo programado con la función 8. Antes de efectuar cualquier maniobra, se efectúa un test que comprueba
la integridad de los Triac y la correcta conexión de los motores; en caso de resultado negativo, en el display
aparece el mensaje E0 (véase a tal fin el párrafo Mensajes de error en el display).
40
Page 43

ESPAÑOL
FUNCIÓN 5 - Control obstáculo
El control obstáculo establece el comportamiento del automatismo cuando interviene la detección del
obstáculo.
Valor 0 = NO HABILITADO
Valor 1 = STOP del automatismo. En esta configuración tiene la función de los fines de carrera, en caso de que
no estuvieran presentes.
Valor 2 = STOP e INVIERTE el sentido de marcha del automatismo.
Valor 3 = STOP e INVIERTE el sentido de marcha del automatismo durante 2 segundos. Para restablecer el
movimiento, den un impulso de mando.
FUNCIÓN 6 Sensibilidad del control obstáculo tanto en apertura como en cierre del motor 1
Con esta función se puede regular la sensibilidad de detección del obstáculo en apertura, permitiendo la
parada del automatismo en presencia de un obstáculo que obstruya la maniobra (FUNCIÓN 5).
Regulen la fuerza motor Funciones 3 y 4 al valor mínimo necesario para mover el acceso automatizado.
Regulen la sensibilidad teniendo presente que:
Valor 1 = máxima sensibilidad, es decir, se necesita una débil resistencia para detectar el obstáculo.
Valor 6 = mínima sensibilidad, es decir, se necesita una fuerte resistencia para detectar el obstáculo.
FUNCIÓN 7 - Sensibilidad del control obstáculo tanto en apertura como en cierre del motor 2
Con esta función se puede regular la sensibilidad de detección del obstáculo en apertura, permitiendo la
parada del automatismo en presencia de un obstáculo que obstruya la maniobra (FUNCIÓN 5).
Regulen la fuerza motor Funciones 3 y 4 al valor mínimo necesario para mover el acceso automatizado.
Regulen la sensibilidad teniendo presente que:
Valor 1 = máxima sensibilidad, es decir, se necesita una débil resistencia para detectar el obstáculo.
Valor 6 = mínima sensibilidad, es decir, se necesita una fuerte resistencia para detectar el obstáculo.
FUNCIÓN 8 Punto de arranque de la maniobra de apertura y de cierre
Esta función permite configurar la presencia del punto de arranque en salida en décimas de segundo.
Valor 0 = Ningún punto de arranque
Valores de 1 a 99 = Punto de arranque en décimas de segundos al inicio de cada maniobra a la máxima fuerza
(100%)
Ej.10=1 segundo de punto de arranque
FUNCIÓN 9 Tiempo extra de 2 segundos al final de la maniobra de apertura y cierre
Valor 0 = Deshabilitado
Valor 1 = Tiempo extra al final de la maniobra de apertura
Valor 2 = Tiempo extra al final de la maniobra de cierre
Valor 3 = Tiempo extra al final de las maniobras de apertura y de cierre
FUNCIÓN 10 Cierre automático
Valor 0 = cierre automático deshabilitado
Valor 1 = cierre automático habilitado
FUNCIÓN 11 Función Paso_Paso
Esta función sirve para habilitar diferentes secuencias de funcionamiento paso-paso y es activa tanto en las
maniobras peatonales como en las totales.
Programen los valores:
Valor 0 = ABRE el automatismo cumple la operación de apertura y transcurrido el tiempo de parada (FUNCIÓN
27) cierra de nuevo
Valor 1 = ABRE/CIERRE
Valor 2 = ABRE/STOP/CIERRA
Valor 3 = ABRE/STOP/CIERRA/STOP
FUNCIÓN 15 - Tiempo de pre-destello
Esta función permite programar el tiempo de predestello del intermitente antes de efectuar ninguna maniobra.
Valor 0 = Falta de predestello
Valores de 1 a 99 = predestello comprendido entre 1 y 99 segundos
FUNCIÓN 16 - Tiempo de encendido de la luz de techo
Esta función permite programar el tiempo de encendido de la luz de techo.
Valor 0 = La luz se apaga al final de cada maniobra
Valores de 1 a 99 = valor correspondiente a la mitad del tiempo de encendido de la luz de techo.
Ej. 45 = 90 segundos
41
Page 44

ESPAÑOL
FUNCIÓN 20 Fotocélula en apertura
Esta función permite regular la utilización de una fotocélula en apertura. Ningún efecto en fase de cierre.
Programen los valores:
Valor 0 = dispositivo de seguridad en apertura no presente (sirve para evitar puentear los bornes correspondientes).
Valor 1 = STOP cuando interviene la fotocélula y cuando se libera reanuda el movimiento en apertura.
Nota: si la fotocélula está ocupada en el momento de la recepción de un impulso, el mismo se ignorará.
FUNCIÓN 21 Borde sensible de protección
Esta función permite regular la utilización de una ulterior protección en apertura y cierre (por ejemplo un borde
de protección neumático, un borde protección fotoeléctrico, un borde de protección a ras, etc...).
Programen los valores:
Valor 0 = dispositivo de seguridad no presente (sirve para evitar puentear los correspondientes bornes)
Valor 1 = STOP cuando interviene el borde de protección e inversión del movimiento durante 2 segundos. Para
reanudar el ciclo hay que proporcionar un nuevo impulso.
Nota: si la fotocélula está ocupada en el momento de la recepción de un impulso, el mismo se ignorará.
FUNCIÓN 22 Fotocélula en cierre
Esta función permite regular la utilización de la fotocélula en cierre. Ningún efecto en fase de apertura.
Programen los valores:
Valor 0 = Fotocélula en cierre no presente (sirve para evitar puentear los correspondientes bornes)
Valor 1 = STOP en fase de cierre e inversión del movimiento.
Valor 2 = STOP en fase de cierre y al liberarse inversión del movimiento.
Nota: Si la fotocélula está ocupada en el momento de la recepción de un mando de apertura con el acceso
completamente cerrado, el mando se ejecutará, en todos los demás casos los mandos recibidos con la
fotocélula ocupada se ignorarán.
FUNCIÓN 23 Entrada de Stop
Esta función permite habilitar o no la entrada de Stop.
Programen los valores:
Valor 0 = Pulsador de Stop no presente (sirve para evitar puentear los correspondientes bornes)
Valor 1 = Stop habilitado. Su activación bloquea la maniobra, para reanudar el ciclo hay que proporcionar
un nuevo impulso. Mientras la entrada de Stop está activa, se ignora cualquier otro mando.
FUNCIÓN 25 - Tiempo de Trabajo del motor 1
Esta función permite regular el tiempo máximo de trabajo del motor 1 igual tanto en apertura como en cierre;
no puede excluirse porque tiene la función de proteger el motor en caso de fallo del funcionamiento de los
fines de carrera o de la detección obstáculo.
Valores de 1 a 99 = valor correspondiente a la mitad del tiempo de trabajo. Ej.10=20 segundos
Nota: si se selecciona una deceleración a tiempo, la misma sólo inicia cuando se agota el tiempo de trabajo
programado.
FUNCIÓN 26 - Tiempo de Trabajo del motor 2
Esta función permite regular el tiempo máximo de trabajo del motor 2 igual tanto en apertura como en cierre;
no puede excluirse porque tiene la función de proteger el motor en caso de fallo del funcionamiento de los
fines de carrera o de la detección obstáculo.
Valores de 1 a 99 = valor correspondiente a la mitad del tiempo de trabajo. Ej.10=20 segundos
Nota: si se selecciona una deceleración a tiempo, la misma sólo inicia cuando se agota el tiempo de trabajo
programado.
FUNCIÓN 27 Tiempo de Parada
Esta función permite regular el tiempo de parada antes del cierre automático.
Programe los valores:
Valor 0 = Tiempo de Parada nulo
Valores comprendidos entre 1 y 99 = este valor corresponde a la mitad del tiempo de parada en segundos antes
del cierre automático. Ej. 20=40 segundos.
FUNCIÓN 28 - Tiempo de Recuperación Inversión
La central está provista de un encoder a tiempo para ambos motores. Esta función permite programar el tiempo
de Recuperación en caso de inversión que se suma al Tiempo Restante de maniobra. Esto permite evitar que,
en caso de inversiones repetidas, el automatismo no complete correctamente la maniobra
Valor 0 = Tiempo de recuperación nulo
Valores de 1 a 99 = Tiempo de Recuperación comprendido entre 1 y 99 segundos
42
Page 45

ESPAÑOL
FUNCIÓN 30 Tiempo de deceleración de los motores 1 y 2 en apertura
Valor 0 = no habilitado
Valores de 1 a 99 = tiempo de deceleración programable de 1 a 99 décimas de segundo a partir del fin de
carrera o de la finalización del tiempo máximo de trabajo de los motores 1 y 2 (función 31). Ej. 50=5 segundos
de deceleración.
FUNCIÓN 31 Tipo de deceleración en apertura
Valor 0 = el tiempo de deceleración (función 30) está calculado a partir de la finalización del tiempo de trabajo
máximo de los motores (funciones 25 y 26)
Valores 1= el tiempo de deceleración (función 30) está calculado a partir de la intervención del fin de carrera en apertura.
FUNCIÓN 32 Tiempo de deceleración de los motores 1 y 2 en cierre
Valor 0 = no habilitado
Valores de 1 a 99 = tiempo de deceleración programable de 1 a 99 décimas de segundo a partir del fin de
carrera o de la finalización del tiempo máximo de trabajo de los motores 1 y 2 (función 33) Ej. 50=5 segundos
de deceleración.
FUNCIÓN 33 Tipo de deceleración en cierre
Valor 0 = el tiempo de deceleración (función 32) está calculado a partir de la finalización del tiempo de trabajo
máximo de los motores (funciones 25 y 26)
Valores 1= el tiempo de deceleración (función 32) está calculado a partir de la intervención del fin de carrera
en cierre.
FUNCIÓN 34 Fuerza motor en fase de deceleración
Con esta función se selecciona el nivel de la fuerza motor durante la fase de deceleración.
Valor 1 = Fuerza motor mínima
Valor 2 = Fuerza motor intermedia
Valor 3 = Fuerza motor máxima
Nota: para automatismos de batiente con motores de baja potencia (inferior a 150W) se aconseja el valor 3.
FUNCIÓN 45 Tiempo de desincronización en apertura entre el motor 2 y el motor 1
Esta función permite programar el tiempo de retardo de activación del motor 2 respecto al motor 1 en fase de apertura:
Valor 0 = desincronización deshabilitada
Valor de 1 a 99 = desincronización comprendida entre 1 y 99 s
FUNCIÓN 46 Tiempo de desincronización en cierre entre el motor 1 y el motor 2
Esta función permite programar el tiempo de retardo de activación del motor 1 respecto al motor 2 en fase de cierre:
Valor 0 = desincronización deshabilitada
Valor de 1 a 99 = desincronización comprendida entre 1 y 99 s
FUNCIÓN 50 Electrocierre
Esta función permite programar el funcionamiento del electrocierre.
Valor 0 = Excluida
Valor 1 = Activa durante 3 s antes de cualquier maniobra de apertura
Valor 2 = Golpe de inversión de 1 segundo y activación del electrocierre durante 3 segundos antes de toda
maniobra de apertura
FUNCIÓN 60 - Autotest de los dispositivos de seguridad
Esta función sirve para testar los dispositivos de seguridad antes de toda maniobra; esta función puede
efectuarse con fotocélulas preparadas. Si el test tiene un resultado negativo (uno de los dispositivos de
seguridad no funciona correctamente) el automatismo no ejecuta el mando recibido.
Programen los valores:
Valor 0 = autotest deshabilitado
Valor 1 = autotest habilitado fotocélula cierre.
Valor 2 = autotest habilitado fotocélula apertura.
Valor 3 = autotest habilitado para ambas fotocélulas.
FUNCIÓN 70 Función de frenado
Valor 0 = función de frenado deshabilitada
Valor 1 = función de frenado habilitada en los motores 1y 2 tanto en apertura como en cierre.
Nota: Esta función sólo es activa para las aplicaciones con verjas correderas (función 1 programada a 3 ó 4)
FUNCIÓN 99 Función de Fin de Programación
Para salir del menú de programación sitúense en esta función y presionen el pulsador ENTER.
Nota: La central no permite acceder al menú de programación durante la ejecución de un ciclo de
funcionamiento. Sólo si la central se ha programado correctamente se pueden efectuar maniobras.
43
Page 46

ESPAÑOL
10. LISTA DE LAS FUNCIONES VARIABLES
FUNCIÓN DESCRIPCIÓN Mín/Máx
Aplicación
1 = Verja de batien te de una hoja
2 = Verja de batien te de dos hojas
1
3 = Verja c orredera
4 = Verjas correderas contrapuestas
5 = Barrera Automática
6 = Barreras Auto máticas contrapuestas
7 = Basculante de 1 motor
8 = Bascula nte de 2 motor es en parale lo
Fin de carrera de los motores 1 y 2
0 = Ausente
1 = Presente Fin de carrera Cierre
2
2 = Presente F in de carrera Ap ertura
3 = Presente s Fin de ca rrera Apertur a y Cierre
Regulación Fuerza motor 1
3
Regulación Fuerza motor 2
4
Acción Control Obstáculo
0 = NO HABILITADO
5
1 = STOP (si fa lta el fin de ca rrera cumple con d icha función)
2 = STOP/INVIERTE
STOP/INVIE RTE durante 2 segund os
3 =
Sensibilidad Control Obstáculo del motor 1
6
Sensibilidad Control Obstáculo del motor 2
7
Punto de arranque al inicio de la maniobra de apertura y cierre
0 = Ausente
8
1 - 99= Punto de arranque a máxima fuerza comprendido entre 1 y 99 décimas de segundos
Tiempo extra al final de la maniobra de apertura y cierre
0 = Ausente
1 = Punto de arranque de 2 segundos cuando finaliza la maniobra de apertura
9
2 = Punto de arranque de 2 segundos cuando finaliza la maniobra de cierre
3 = Punto de arranque cuando finaliza la maniobra de cierre y apertura
Cierre automático
0 = deshabilitada
10
1 = habilitada
Mando Paso-Paso
0 = ABRE
11
1 = ABRE/CIERRA
2 = ABRE/STOP/CIERRA
3 = ABRE/STOP/CIERRE/STOP
Tiempo de pre-destello
0 = Ausente
15
1 99 = comprendido entre 1 y 99 segundos
Tiempo encendido Luz de Techo
0 = Nulo
16
1 99 = comprendido entre 2 y 198 segundos
FOTOCÉLULA en Apertura
0 = No presente
20
1 = STOP y parte de nuevo tras la liberación
BORDE SENSIBLE DE PROTECCIÓN
0 = No presente
21
1 = STOP e invierte durante 2 segundos
FOTOCÉLULA en Cierre
0 = No presente
22
1 = STOP/invierte
2 = STOP/invierte cuando se libera la fotocélula
Mando de STOP
0 = STOP no presente
23
1 = STOP presente
Tiempo de trabajo del motor 1 (x2) en segundos
25
1 99 = comprendido entre 2 y 198 segundos
Tiempo de trabajo del motor 2 (x2) en segundos
26
1 99 = comprendido entre 2 y 198 segundos
Tiempo de parada para Cierre Automático (x2) en segundos
0 = Nulo
27
1 99 = comprendido entre 2 y 198 segundos
Tiempo de recuperación inversión durante el tiempo restante en segundos
0 = Nulo
28
1 99 = comprendido entre 1 y 99 segundos
Tiempo de deceleración en apertura de los motores 1 y 2 en décimas de segundos
0 = no habilitado
30
De 1 a 99 = de 1 a 99 décimas de segundos
Tipo de deceleración en apertura de los motores 1 y 2
0 = parte a tiempo cuando finaliza el tiempo de trabajo máximo
31
1 = parte desde la intervención de los fines de carrera en apertura
Tiempo de deceleración en cierre de los motores 1 y 2 en décimas de segundos
0 = no habilitado
32
De 1 a 99 = de 1 a 99 décimas de segundos
Tipo de deceleración en cierre de los motores 1 y 2
0 = parte a tiempo cuando finaliza el tiempo de trabajo máximo
33
1 = parte desde la intervención de los fines de carrera en cierre
Fuerza de los motores durante la deceleración
1 = Fuerza mínima
34
2 = Fuerza inte rmedia
3 = Fuerza máxima
Tiempo de Desincronización en apertura entre el motor 2 y el motor 1 en segundos
0 = Nulo
45
1 99 = comprendido entre 1 y 99 segundos
Tiempo de Desincronización en cierre entre el motor 1 y el motor 2 en segundos
0 = Nulo
46
1 ¸ 99 = comprendido entre 1 y 99 segundos
Electrocierre
0 = Ausente
50
1 = Activo durante 3 segundos antes de cada ma niobra de apertura
2 = Golpe d e ariete en ap ertura durante 1 segundo y activo dura nte 3 segundo s
Test fotocélulas a inicio de la maniobra
0 = Deshabilitado
60
1 = Habilitado fotocélula cierre
2 = Habilitado fotocélula apertura
3 = Habilitado en las fotocélulas de apertura y de cierre
Función de frenado
0 = Deshabilitada
70
1 = Habilitada en los motores 1 y 2 tanto en apertura como en cierre durante la fase di STOP.
Función de Fin Programación
99
(1=30% 10=100%)
(1=30% 10=100%)
a Fuerza Trabajo (funciones 3 y 4)
1 ¸ 8
0 ¸ 3
1 ¸ 10
1 ¸ 10
0 ¸3
1¸ 6
1¸ 6
0 ¸ 99
0 ¸ 3
0 ¸ 1
0 ¸ 3
0 ¸ 99
0 ¸ 99
0 ¸ 1
0 ¸ 1
0 ¸ 2
0 ¸ 1
1 ¸ 99
1 ¸ 99
0 ¸ 99
0 ¸ 99
0 ¸ 99
0 ¸ 1
0 ¸ 99
0 ¸ 1
1 ¸ 3
0 ¸ 99
0 ¸ 99
0 ¸ 2
0 ¸ 3
0 ¸ 1
Pre-programado
2
0
6
6
0
6
6
10 (1s)
0
0
3
0
45 (90 s)
0
0
0
0
10 (20 s)
10 (20 s)
10 (20 s)
0
0
0
0
0
3
2
5
0
0
0
44
Page 47

ESPAÑOL
11. MENSAJES DE ERROR
Finalizada la programación la central comprueba la congruencia de los parámetros configurados; si la
programación es correcta aparecerá le mensaje FP (Fin Programación) durante 3 segundos, transcurridos los
cuales el display se apaga.
Si se detecta un conflicto entre los parámetros, el número de una de las funciones potencialmente incorrectas
parpadeará. Para corregir el valor de las funciones incorrectas entren de nuevo en el menú de programación
presionado el pulsador ENTER durante 3 segundos. Hasta que la programación de la central no se haya
efectuado correctamente, no se podrá efectuar ninguna maniobra.
El display también indica los siguientes errores:
EE = fallo de la memoria EEPROM o pérdida de los parámetros memorizados.
Se aconseja remitirse a los parámetros de Defecto (véase párrafo Programación de la Central). Ahora hay
que programar de nuevo la central como se hallaba antes de la señalización de test fallida. Si el resultado
negativo persistiera, hay que llamar al servicio de asistencia técnica para sustituir el dispositivo defectuoso.
E0 = triac en cortocircuito, motores en cortocircuito, motores desconectados o incorrecta conexión de los
mismos. Comprueben las conexiones y el correcto funcionamiento de los motores conectados a los relativos
bornes. Si las conexiones son correctas, quiten y vuelvan a dar la alimentación. Si el problema persiste,
comprueben que los motores no estén en cortocircuito. Si persiste todavía el inconveniente, pónganse en
contacto con el servicio de asistencia.
E1 = test de la fotocélula en cierre fallido, comprueben las conexiones y el correcto funcionamiento de los
dispositivos conectados con el borne FTC por medio del diodo correspondiente presente en la tarjeta. Si se
verificara un fallo en el funcionamiento, cambien el dispositivo defectuoso.
E2 = test de la fotocélula en apertura fallido, comprueben las conexiones y el correcto funcionamiento de los
dispositivos conectados con el borne FTO por medio del diodo correspondiente presente en la tarjeta. Si se
verificara un fallo en el funcionamiento, cambien el dispositivo defectuoso.
12. DESCRIPCIÓN DEL FUNCIONAMIENTO DE LA CENTRAL
12.1 ENCENDIDO
Cuando se enciende, la central verifica la integridad de la memoria EEPROM en la cual están memorizados
los parámetros de Defecto o la última programación efectuada correctamente. Si se localiza un fallo de la
memoria EEPROM o una pérdida de los parámetros memorizados, la central visualiza en el display el mensaje
EE u otro mensaje de error, en este caso lean el correspondiente párrafo.
Si por el contrario, la EEPROM está íntegra, la central se configura a los valores de Defecto o a la última
programación efectuada correctamente, y el display está apagado. Ahora la central ya está lista para
ejecutar los mandos.
Nota: Cuando se enciende la central, no se efectúa ninguna maniobra si no se recibe un mando voluntario por
parte del usuario
12.2 MANDOS OPUESTOS
Si se dan simultáneamente mandos opuestos, la central no ejecuta ninguno.
12.3 REGULACIÓN DE LA FUERZA MOTOR
Regulen la fuerza motor 1 mediante la FUNCIÓN 3 y del motor 2 mediante la FUNCIÓN 4. Al valor 1
corresponde la fuerza mínima programable (30% fuerza Máxima), al valor 10 la fuerza máxima. Durante la
fase de deceleración la fuerza de los motores está regulada mediante la Función 34. (1 = Fuerza Mínima,
3 = Fuerza Máxima).
Para verjas de batientes con motores de pequeña potencia (< 150W) para la Función 34 se aconseja el valor
3.
12.4 REGULACIÓN DE LA SENSIBILIDAD DE DETECCIÓN DE OBSTÁCULOS
Excluyan los fines de carrera (si estuvieran presentes), dejen que el automatismo vaya a final de maniobra y
comprueben el correcto funcionamiento de la FUNCIÓN 6 detección del obstáculo del motor 1, realicen la
misma operación comprobando el funcionamiento de la FUNCIÓN 7 detección del obstáculo del motor 2.
Regulen el valor de las citadas funciones para garantizar un adecuado valor de seguridad del acceso
automatizado.
Nota: durante la fase de punto de arranque y de deceleración, la función de detección del obstáculo no es
activa.
45
Page 48

ESPAÑOL
12.5 DECELERACIÓN DE LOS MOTORES
La central universal permite efectuar la deceleración de los motores al final de las maniobras de apertura y
cierre. Mediante las funciones 31 y 33 se puede seleccionar la activación de la deceleración a partir de la
intervención del fin de carrera (valor 1) o cuando se agota el tiempo de trabajo máximo de los dos motores
(Funciones 25 y 26). La Función 31 es relativa a la maniobra de apertura, mientras que la función 33 es relativa
a la maniobra de cierre; se puede programar una activación de la deceleración de los fines de carrera en un
sentido de marcha y a tiempo en el sentido opuesto. La duración puede regularse en décimas de segundo
mediante las Funciones 30 (apertura) y 32 (cierre), entre 1 y 99 décimas de segundo (0.1 y 9.9 segundos).
Para aplicaciones con deceleración a partir de los fines de carrera (verjas correderas) se aconseja programar
el tiempo máximo de trabajo 2-3 segundos más respecto a la efectiva duración de la maniobra, y el tiempo
de deceleración comprendido entre 5 y 20 décimas de segundo de modo que el fin de carrera no sobrepase
su tope.
Para aplicaciones con deceleración con activación a tiempo (batiente y hojas) se aconseja medir la duración
de la maniobra en ausencia de deceleración.
Programar el tiempo máximo de trabajo (func. 25 y 26) un par de segundos menos respecto a la duración
medida.
Programar el tiempo de deceleración (func.30 y 32) comprendido entre 50 y 99 décimas de segundo a fin
de asegurar que la hoja llegue hasta el tope.
Regulen la Fuerza de los Motores durante la deceleración al nivel deseado, mediante la Función 34, (1 =
mínima, 2 = intermedia, 3 = máxima). Para aplicaciones de batiente con motores de pequeña potencia se
aconseja el valor 3.
12.6 FRENADO
La central universal puede efectuar el frenado de los motores en el momento de su parada (Función 70). Esta
opción es activa para aplicaciones correderas (Función 1 programada al valor 3 ó 4), y permite eliminar la
inercia del corredero en el momento de su parada, de este modo se evita la salida de los fines de carrera de
su tope al final de las maniobras de apertura y de cierre, además, en caso de inversión provocada por la
intervención de un dispositivo de seguridad, la parada del corredero es inmediata.
12.7 ENCODER A TIEMPO
La central universal está provista de un encoder a tiempo realizado a nivel software que le permite monitorizar
constantemente la posición del automatismo. Más concretamente, en caso de una interrupción de la
maniobra, la central pone el tiempo máximo de trabajo igual al tiempo restante de maniobra, evitando que,
por ejemplo, las hojas permanezcan mucho tiempo en el tope sobre los portantes, sobrecalentando inútilmente
los motores. Para evitar que debido a la inercia el automatismo no complete la maniobra, se aconseja
programar el tiempo de recuperación inversión (Función 34) al valor más apropiado (por lo general está
comprendido entre 1 y 5 segundos) en función del tipo de aplicación.
12.8 PARADA MOTOR
Puede verificarse en los siguientes casos:
Falta de alimentación
Intervención del correspondiente fin de carrera (apertura contacto N.C.)
Intervención de las FUNCIONES 5 de control obstáculo
Intervención de uno de los dispositivos de seguridad (fotocélulas o bordes sensibles de protección).
Fin del tiempo máximo de trabajo programado con las FUNCIONES 25 - 26.
Activación del pulsador de STOP (apertura del contacto N.C. de stop) En este caso para restablecer el
movimiento, desbloqueen el pulsador de Stop y den un ulterior mando por Radio o manual.
Mandos de STOP efectuados por Radio o por medio del mando Paso-Paso.
12.9 MANIOBRA DE PRESENCIA OPERADOR
Presionen el pulsador de Apertura Presencia operador para efectuar la apertura, y el pulsador de Cierre
Presencia Operador para efectuar el cierre del acceso automatizado. Dichos mandos (cierre de los contactos
N.O.) deben ser mantenidos voluntariamente por el operador. Si interviene un dispositivo de seguridad o de
los fines de carrera, el automatismo se detiene.
12.10 MANIOBRA DE APERTURA
Den un mando por radio (canal 1) o por medio del mando Paso-Paso.
Pre-destello del indicador luminoso durante el tiempo programado con la FUNCIÓN 15
La central efectúa el test del TRIAC y de los dispositivos de seguridad relativos al movimiento de apertura (sólo
si el borne TST está conectado y la FUNCIÓN 60 está programada a un valor > 0).
El motor es alimentado durante el tiempo de punto de arranque con una fuerza del 100%; después de dicho
momento de arranque la fuerza motor se coloca al valor programado en las FUNCIONES 3 y 4.
46
Page 49

ESPAÑOL
12.11 MANIOBRA DE CIERRE
El cierre puede efectuarse automáticamente tras el tiempo programado en la FUNCIÓN 27, o por medio de
los mandos Paso-Paso o Peatonal.
Pre-destello del indicador luminoso durante el tiempo programado con la FUNCIÓN 15
La central efectúa el test del TRIAC y de los dispositivos de seguridad relativos al movimiento de cierre (sólo si
el borne TST está conectado y la FUNCIÓN 60 está programada a un valor 1 ó 3 El motor es alimentado
durante el tiempo de punto de arranque con una fuerza del 100%; después de dicho momento de arranque
la fuerza motor se coloca al valor programado en las FUNCIONES 3 y 4.
12.12 MANIOBRA DE APERTURA PEATONAL
El mando de apertura peatonal puede efectuarse tanto manualmente como por radio (CH2). La central realiza
las siguientes operaciones:
Apertura completa de una única hoja para verjas de dos hojas de batientes para la hoja del motor 1.
Apertura durante 10 segundos para verjas correderas.
Apertura total de una única hoja para verjas correderas contrapuestas.
Apertura total de una única barrera para barreras contrapuestas.
Mando no activo para todos los demás tipos de accesos automáticos.
12.13 SELECCIÓN MOTORES
Los jumper JP1 y JP2 deben estar activados en caso de funcionamiento con 2 motores.
12.14 SELECCIÓN SEGUNDO CANAL
Si en el conector M8 está activado un receptor bicanal, se puede, por medio del jumper JP3, hacer activo el
segundo canal del receptor en la apertura peatonal de la automación: JP3 activado = segundo canal activo
en la apertura peatonal; JP3 desactivado = segundo canal no activo en la apertura peatonal.
Programen las funciones de la central como se indica en el párrafo Programación de la central.
12.15 DISPOSITIVOS DE SEGURIDAD
Conecten los dispositivos previstos para obtener la mejor seguridad posible en el automatismo en el cual se
instala la central.
La conexión al borne TST (autotest) se efectúa sólo si se instalan dispositivos con función de autotest
incorporada.
Al borne STP (stop) deberá conectarse un pulsador del tipo con desbloqueo manual.
Al borne FTC hay que conectar la fotocélula en cierre. Dicha fotocélula sirve para proteger el acceso
automatizado, ningún efecto en fase de apertura. En fase de cierre interviene el movimiento e invierte cuando
se libera (seleccionable). Si está ocupada inhibe cualquier mando de cierre. Con el acceso cerrado no inhibe
los mandos de apertura.
Al borne FTO deberá conectarse la fotocélula en apertura. Dicha fotocélula sirve para proteger el acceso
automatizado en fase de apertura de la automación, ningún efecto en fase de cierre. En fase de apertura
detiene y cuando se libera reanuda el movimiento, si está ocupada inhibe cualquier impulso.
Al borne CST hay que conectar el borde sensible de protección. Dicho dispositivo de seguridad sirve para
proteger aún más el acceso automatizado respecto a la utilización exclusivamente de las Fotocélulas. Si está
ocupada inhibe cualquier impulso, durante las fases de apertura/cierre, si está ocupada, invierte el movimiento
durante 2 segundos y va en STOP. Sólo un sucesivo impulso hace que reanude el movimiento hasta completar
el ciclo programado.
Durante las maniobras con presencia operador, la intervención de uno de los dispositivos de seguridad (si
estuviera habilitado) o de los fines de carrera (si estuvieran habilitados) bloquea el automatismo.
12.16 FUSIBLES DE PROTECCIÓN
Protección del motor
Los motores y los circuitos de potencia están protegidos con fusible de 8A rápido (formato 5x20).
Protección contra las sobretensiones por medio de Varistor
Protección del electrocierre
Fusible de 2A retardado (formato 5x20).
Protección del intermitente y luz de techo
Fusible de 1A rápido (formato 5x20).
Protección de la alimentación accesorios
Fusible de 1A rápido (formato 5x20).
Protección de la lógica
Fusible de 315mA rápido (formato 5x20).
Reset automático
En caso de funcionamiento anómalo del microprocesador, un circuito independiente de reset automático
(watch-dog), restablece el control de la central colocándola en las condiciones iniciales de encendido.
47
Page 50

ESPAÑOL
12.17 DIODO DE CONTROL
En la tarjeta se encuentran los DIODOS de control del estado de las entradas de mando y de seguridad:
DIODO ENCENDIDO = contacto en regleta de conexiones N.C.
DIODO APAGADO = contacto en regleta de conexiones N.A.
Para comprobar que las entradas se encuentren en su estado correcto, tengan presente que:
Cuando se proporciona un mando, el DIODO correspondiente pasa del estado Apagado al estado
Encendido
Cuando interviene un dispositivo de seguridad el DIODO pasa del estado Encendido al estado Apagado
El estado de los DIODOS relativos a los fines de carrera depende de la posición del acceso automático:
Acceso automático abierto = DIODOS FC1 y FC3 encendidos, y DIODOS FC2 y FC4 apagados
Acceso automático cerrado = DIODOS FC2 e FC4 encendidos, y DIODOS FC1 y FC3 apagados
FTC (LD1) Fotocélula de seguridad en cierre OPU (LD7) Mando apertura presencia operador
FTO (LD2) Fotocélula de seguridad en apertura CLU (LD8) Mando de cierre presencia operador
CST (LD3) Borde sensible de seguridad FC1 (LD9) Fin de carrera en cierre del motor 1
STP (LD4) STOP FC2 (LD10) Fin de carrera en apertura del motor 1
STA (LD5) Mando paso-paso FC3 (LD11) Fin de carrera en cierre del motor 2
PED (LD6) Mando de apertura peatonal FC4 (LD12) Fin de carrera en apertura del motor 2
13. GUÍA A LA INSTALACIÓN
Seguidamente se incluye una tabla que indica, para los diferentes tipos de aplicación, una programación
guía que puede utilizarse como referencia para una rápida programación de la central.
Función Batiente
1
2
3 (°)
4 (°)
5 (*)
6 (°)
7 (°)
8 (°)
9
10 (*)
11 (°)
15 (°)
16 (°)
20 (°)
21 (°)
22 (°)
23 (°)
25 (°)
26 (°)
27 (°)
28 (*)
30 (*)
31 (°)
32 (*)
33 (°)
34 (°)
45 (°)
46 (°)
50 (°)
60 (°)
70
1 hoja
12345678
00333300
33664444
-3-6-4- -
0 ( 1) 0 (1) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2)
33553333
-3-5-3- -
00000000
00000033
0 (2) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2)
33333333
00000000
45 45 45 45 45 45 45 45
00000000
00000000
11221111
00000000
8 8 10 10 6 6 10 10
-8-10-6--
00000000
3 (2) 3 (2) 3 (3) 3 (3) 3 (1) 3 (1) 3 (1) 3 (1)
0 (50) 0 (50) 0 (10) 0 (10) 0 (20) 0 (20) 0 (20) 0 (20)
00110000
0 (50) 0 (50) 0 (10) 0 (10) 0 (20) 0 (20) 0 (20) 0 (20)
00110000
33333333
-2------
-5------
00000000
00000000
--11----
NOTAS:
- : Función programada automáticamente por la central
(*) : Se aconseja:
a) programar inicialmente el valor 0 para controlar la correcta conexión de los motores y el movimiento del
automatismo,
b) programar el valor indicado entre paréntesis como valor de partida,
c) proceder con sucesivos ajustes.
(°) : Función que debe configurarse en función de la aplicación, del peso y de las dimensiones del
automatismo, de los accesorios y dispositivos de seguridad conectados.
Batiente
2 hojas
Corredero Correderos
Contrapues.
Barrera Barreras
Contrapues.
Basculante Basculantes
paralelas
48
Page 51

DEUTSCH
UNIVERSALSTEUERGERÄT 230V~
BETRIEBSANLEITUNG - INSTALLATIONSVORSCHRIFTEN
1. ALLGEMEINE EIGENSCHAFTEN
Das Steuergerät wurde geplant, entwickelt und gebaut, um in größtmöglicher Sicherheit jede Art automatisierter
Zugänge/Zufahrten zu steuern (ein- und zweiflügelige Tore, Schiebetore, entgegengesetzte Schiebetore,
automatische Schranken, entgegengesetzte automatische Schranken, Kipptore mit 1 oder 2 parallelgeschalteten
Motoren). Eine innovative und leichte Programmierung der Funktionen und Zeiten mittels drei Tasten und einem
zweistelligen Display ermöglicht eine max. Präzision bei der Einstellung aller Betriebsparameter. Über eine Reihe
von LED-Dioden ist die sofortige Zustandskontrolle der Eingänge, Ausgänge und eventueller Betriebsstörungen
des Kreises möglich. Die Übereinstimmung mit den strengsten Europäischen Standards (CE) gewährleistet
Qualität und Zuverlässigkeit des Produkts.
2. TECHNISCHE DATEN
Anschlussspannung 230 V~ - 50/60 Hz
Max. Leistungsaufnahme 1600W
Max. Motorbelastung 2 x 700W
Max. Belastung Blinkleuchten 80W
Max. Belastung Beleuchtung 40W
Max. Belastung Zubehör 24 V~ 15W
Max. Belastung Kontrollleuchten 24 V~ 3W
Max. Belastung Elektroschloss 12 V~ 24W
Sicherungen 5
Anwendungen Ein- oder zweiflügelige Tore
Schiebetor und entgegengesetzte Schiebetore
Schranke und entgegengesetzte Schranken
Kipptore mit einem oder zwei Motoren
Programmierung Drei Tasten und Digitaldisplay
Funktionssteuerung durch Mikroprozessor mit Watch-dog
Bezugsparameter In EE-PROM gespeichert
Eingänge an der Klemmenleiste Fußgängeröffnung / Totalöffnung /
Totmann-Funktion / Öffnungs- und Schließphotozellen / Fühlerleiste / Endschalter
öffnen-schliessen / STOP / Netzversorgung / Antenne
Steckverbinder für Funksteuerung Funkempfängerkarte
Ausgänge an der Klemmenleiste Motor 1 und 2 / 24 V~ - Zubehörversorgung / Beleuchtung /
Blinkleuchte / Kontrollleuchte / 12V~ -Elektroschloss
Raumtemperatur
Gehäuse 305 x 225 x 125 mm. IP55
-20°C +55°C
3. VOREINSTELLUNGEN UND ALLGEMEINE HINWEISE
ACHTUNG: Für die Sicherheit der Personen ist es unerlässlich, alle in diesem Handbuch beschriebenen
Hinweise und Anleitungen zu befolgen. Eine fehlerhafte Installation oder eine nicht korrekte Verwendung des
Produkts kann schwere Personen- und Sachschäden verursachen.
Sicherstellen, dass vor dem Anlageneingang ein geeigneter und den geltenden Sicherheitsvorschriften
entsprechender Differentialschalter installiert ist; im Versorgungsnetz ist ein
thermomagnetischer Schalter mit Unterbrechung aller Phasen vorzusehen.
Zum Verlegen der Kabel sind geeignete feste und/oder flexible Röhre zu
verwenden.
Die Anschlusskabel der Niederspannungsgeräte sind stets von jenen mit 230
V~ -Speisung getrennt zu halten. Für die Versorgung des Geräts sind Kabel mit
Mindestquerschnitt von 1.5 mm² zu verwenden. Um jegliche Interferenz zu
vermeiden, sind getrennte Kabelmäntel zu benutzen.
Am Gehäuse sind geeignete Kabelhalter für den Durchgang der Kabel mit
Mindestschutzgrad IP54 vorzusehen.
Zur Befestigung des Steuergeräts im wasserdichten Gehäuse ist das Steuergerät
gemäß Abb. 1 zu positionieren und mit den 5 mitgelieferten, selbstschneidenden
Schrauben Ø4.2x13 zu befestigen. Dabei sollten Abstandstücke zwischen der
Karte und den Führungen des dichten Gehäuses eingesetzt werden.
Wichtig: Die Startkondensatoren müssen immer an den entsprechenden
Flachsteckern auf der Karte (KOND. MOT1, KOND. MOT2) und nie direkt an
der Klemmenleiste an den Motorenausgängen OP, CL MOT1 und MOT2
angeschlossen werden.
Abb.1
49
Page 52

DEUTSCH
4. ANSCHLÜSSE
FLACHSTECKER FÜR KONDENSATOREN
(KOND. MOT.1) Anschluss des Startkondensators Motor 1
(KOND. MOT.2) Anschluss des Startkondensators Motor 2
LEISTUNGSKLEMMENBRETT M1
(1) Leitung 230V~
(2) Erde
(3) Mittelleiter
LEISTUNGSKLEMMENBRETT M2
(4-5-6) Motor 1. Achtung: Den Startkondensator an
den Flachsteckern Kond. M1 anschließen und
nicht direkt Ausgang Motor 1
(7-8-9) Motor 2. Achtung: Den Startkondensator an
den Flachsteckern Kond. M2 anschließen und
nicht direkt Ausgang Motor 2
LEISTUNGSKLEMMENBRETT M3
(10-11) Blinkleuchte 230V~ - max. 80W
(12-13) Beleuchtung 230V~ - max. 40W
SIGNAL-KLEMMENLEISTE M4
(14-15) Elektroschloss 12V~ - max. 24W
(16) Schließphotozelle
(17) Gemeinsame Leitung
(18) Öffnungsphotozelle
(19) Selbsttest der Sicherheitsvorrichtungen +24Vdc
(20) Gemeinsame Leitung
(21) Schutzfühlerleiste
SIGNAL-KLEMMENLEISTE M5
(22) Versorgung der externen Zubehöre 24V~
(23) Gemeinsame Leitung
(24) STOP-Taste
(25) START-Taste
(26) Gemeinsame Leitung
(27) Taste für Fußgängeröffnung
(28) Taste zum Öffnen, wenn Person anwesend
(29) Gemeinsame Leitung
(30) Taste zum Schließen, wenn Person anwesend
SIGNAL-KLEMMENLEISTE M6
(31) Schließendschalter Motor 1
(32) Gemeinsame Leitung
(33) Öffnungsendschalter Motor 1
SIGNAL-KLEMMENLEISTE M7
(34) Schließendschalter Motor 2
(35) Gemeinsame Leitung
(36) Öffnungsendschalter Motor 2
(37-38) Kontrollleuchte Automatikvorrichtung offen
24V~ - max. 3W
(39-40) Externe Funkantenne. Nicht zu verwenden,
wenn auf der Empfängerkarte schon die
Klemmenleiste für die externe Antenne
vorgesehen ist.
COND MOT1
COND MOT2
(1) L
(2)
(3) N
(4) OP
(5) COM
(6) CL
(7) OP
(8) COM
(9) CL
(10) LAMP
(11) LAMP
(12) LAMP
(13) EXT
(14) EL-SER
(15) EL-SER
(16) FTC
(17) COM
(18) FTO
(19) TST
(20) COM
(21) CST
(22) 24V
(23) COM
(24) STP
(25) STA
(26) COM
(27) PED
(28) OPU
(29) COM
(30 ) CLU
(31) FC1
(32) COM MOT1
(33) FC2
(34) FC3
(35) COM MOT2
(36) FC4
(37) SP.CA
(38) SP.CA
(39) COM-ANT
(40) SIG-ANT
50
Page 53
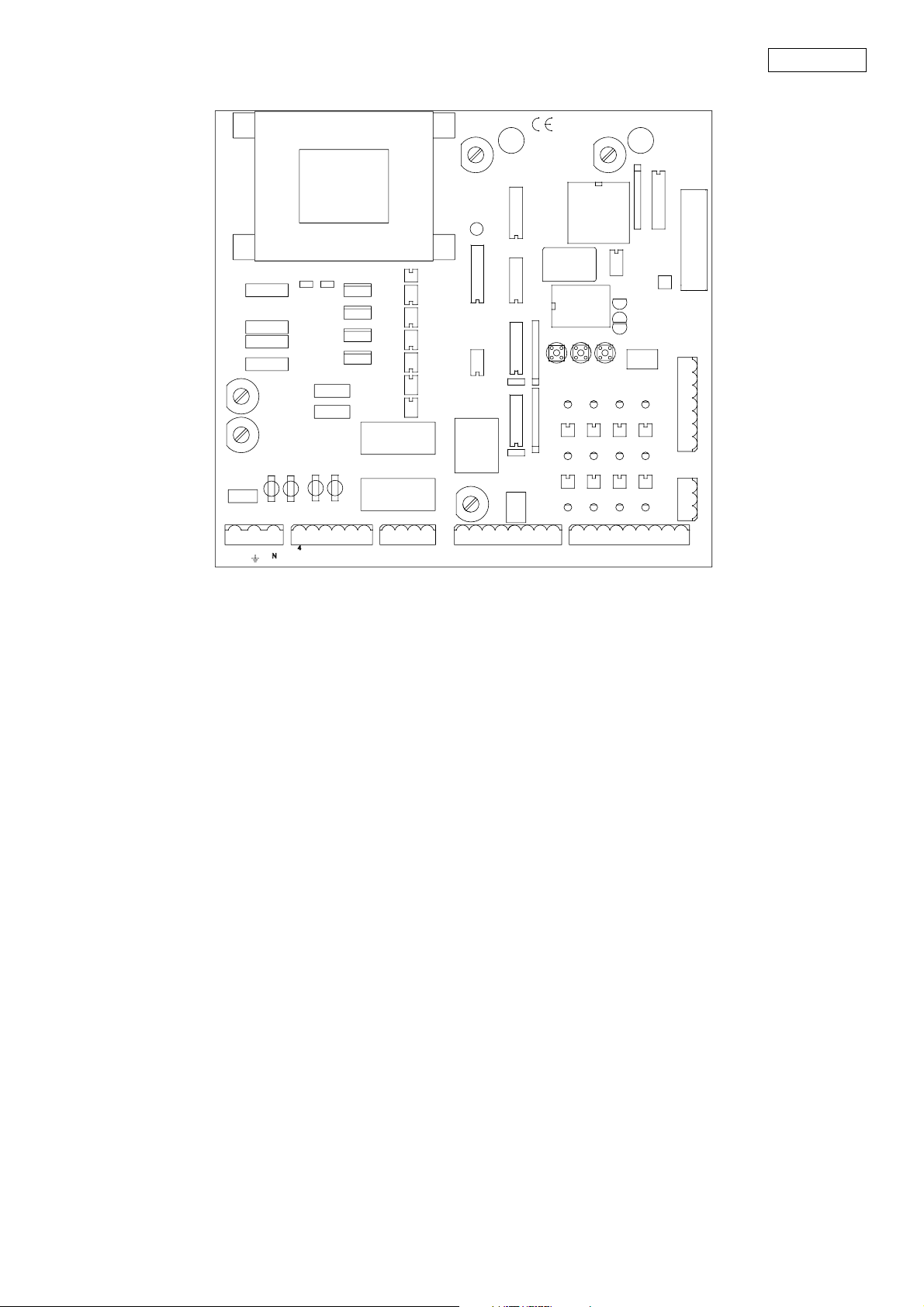
5. ANSICHT DER STEUERUNG
F4
1A 250V F
F1
8A 250V F
COND. MOT1
M1
OP=MOTOR 1
CL=MOTOR 1&2
JP1 JP2
COND. MOT2
M2
M3
F2
315mA 250V F
2A 250V T
F5
DEUTSCH
A466
F3
1A 250V F
M8
JP3
M7
- + ENTER
FC4 FC3 FC2 FC1
STA PED OPU CLU
FTC FTO CST STP
M4
M5
ANT
COM SIG
24V~
SP.CA
MOT2
34 35 36 37 38 39 40
FC3 COM FC4
M6
MOT1
31 32 33
FC1 COM FC2
1 2 3
L N
4 5 6 7 8 9
OP COM CL
OP COM CL
MOT1
MOT2
10 11 12 13
LAMP
LAMP
EXT
14 15 16 17 18 19 20 21
EL-SER
FTC COM FTO TST COM CST
12V~
22 23 24 25 26 27 28 29 30
24~ COM STP STA COM PED OPU COM CLU
6. JUMPER ZUR WAHL VON MOTOR 1 ODER MOTOREN 1 UND 2
Je nach Art des Tors (Ein- oder Zweiflügel) Jumper JP1-JP2 folgendermaßen verschieben: OP = (Kreislauf offen)
nur Motor 1 für Tore mit einem Flügel. CL = (Kreislauf geschlossen) Motoren 1 und 2 für Tore mit zwei Flügeln.
7. INSTALLATION DES FUNKEMPFÄNGERS
Das Steuergerät ist zum Einsetzen eines Empfängers mit 1 oder 2 Kanälen vorgesehen. Vor der Installation ist die
Stromversorgung abzutrennen; nun den Empfänger am eigenen Steckverbinder M8 auf dem Steuergerät
anschließen. Zum Speichern der Fernsteuerung sind die Anleitungen des Empfängergeräts zu befolgen.
Nachdem die Fernsteuerung gespeichert worden ist, funktioniert diese wie eine beliebige Taste auf der START-
Steuerung.
Wird am Steckverbinder M8 ein Empfänger mit 2 Kanälen angeschlossen, kann über die Steckverbindung JP3 der
zweite Kanal für die Öffnung für Fußgänger aktiviert oder deaktiviert werden.
8. PROGRAMMIEREN DER STEUERUNG
Diese Programmierung ist zur Gewährleistung der maximalen Sicherheit der/des automatischen Zufahrt/
Zugangs durch Einstellen der Parameter vorzunehmen. Nach Beendigung des Programmiervorgangs ist manuell
oder mittels Fernsteuerung die Automatikanlage mehrmals zu öffnen und zu schließen, um den korrekten Betrieb
der Automatikvorrichtung und der entsprechenden Sicherheitsvorrichtungen zu überprüfen.
Dazu ist der Abschnitt über den Betrieb des Steuergeräts aufmerksam zu lesen. Beim Einschalten überprüft das
Steuergerät die Unversehrtheit des EEPROM-Speichers, in dem die Default-Parameter oder die zuletzt korrekt
durchgeführte Programmierung gespeichert sind. Wird eine Störung im EEPROM-Speicher oder ein Verlust der
gespeicherten Parameter festgestellt, zeigt das Steuergerät am Display die Meldung EE (EEPROM ERROR) an; ist
der EEPROM intakt, stellt sich das Steuergerät auf die Defaultwerte oder auf die zuletzt korrekt durchgeführte
Programmierung ein und das Display bleibt ausgeschaltet. Um auf das Programmierungsmenü zuzugreifen, ist
3 Sekunden lang die ENTER-Taste gedrückt zu halten, wonach die Meldung EP erscheint. Diese Meldung
wird 5 Sekunden lang angezeigt. Während dieses Zeitraums wird durch Druck der Taste + für eine Dauer von
mindestens 2 Sekunden automatisch die Defaultprogrammierung geladen. Nach Ablauf der 5 Sekunden geht
das Steuergerät auf die Funktion 1 über und die Programmierung der einzelnen Funktionen kann folgenderweise
vorgenommen werden:
Durch Betätigen einer der zwei Tasten + (NÄCHSTES) oder (ZURÜCK) die zu programmierende Funktion
wählen; die Taste - verringert und die Taste + steigert den Wert.
Die ENTER-Taste drücken, um den Wert der Funktion zu ändern. Das Display blinkt; nun kann der
eingegebene Wert mit den Tasten + (steigert den Wert) und - (verringert den Wert) geändert werden.
Zum Bestätigen des gewünschten Wertes der Funktion die ENTER-Taste drücken.
51
Page 54

DEUTSCH
- + ENTER
Zum Programmieren weiterer Funktionen ist diese Vorgang zu wiederholen.
Zum Verlassen des Programmierungsmenüs muss die Funktion 99, Beendigung
der Programmierung, aufgerufen und mit ENTER bestätigt werden. Nun prüft
das Steuergerät die Übereinstimmung der eingegebenen Parameter; ist die
Programmierung korrekt, erscheint 3 Sekunden lang die Meldung FP (Ende der
Programmierung), dann erlischt das Display. Im Falle von Konflikten zwischen
den Parametern, blinkt die Nummer der potentiell fehlerhaften Funktion. Zum
Korrigieren der falschen Werte der betreffenden Funktion ist durch 3 Sekunden
langes Drücken der ENTER-Taste in das Programmierungsmenü
zurückzukehren. Solange die Programmierung des Steuergeräts nicht korrekt
durchgeführt worden ist, ist die Durchführung jeder Bewegung unterbunden.
9. ZU PROGRAMMIERENDE FUNKTIONEN
FUNKTION 1 Anwendungsart
Diese Funktion ermöglicht die Eingabe der Anwendungsart zur ausschließlichen Freigabe der mit dieser
Anwendungsart verbundenen Funktionen.
Wert 1 = Einflügeliges Tor (Motor 1)
Wert 2 = Zweiflügeliges Tor (Motoren 1 und 2)
Wert 3 = Schiebetor (Motor 1)
Wert 4 = entgegengesetzte Schiebetore mit einem oder zwei Motoren (Motor 1 und 2)
Wert 5 = Automatische Schranke (Motor 1)
Wert 6 = Automatische entgegengesetzte Schranken (Motor 1 und 2)
Wert 7 = Kipptor mit 1 Motor (Motor 1)
Wert 8 = Kipptor mit 2 parallelgeschalteten Motoren (Motor 1 und 2)
FUNKTION 2 Endschalter
Diese Funktion erlaubt die Steuerung der Schließ- und Öffnungsendschalter.
Folgende Werte eingeben:
Wert 0 = Endschalter nicht vorhanden (verhindert das Überbrücken der Klemmen der vier Endschalter).
Wert 1 = Nur Schließendschalter vorhanden (1 Endschalter für Anwendung mit 1 Motor, 2 Endschalter für
Anwendung mit 2 Motoren).
Wert 2 = Nur Öffnungsendschalter vorhanden (1 Endschalter für Anwendung mit 1 Motor, 2 Endschalter für
Anwendung mit 2 Motoren).
Wert 3 = Sowohl Schließ- als auch Öffnungsendschalter vorhanden (2 Endschalter für Anwendung mit 1 Motor,
4 Endschalter für Anwendung mit 2 Motoren).
FUNKTION 3 Einstellung Antriebskraft Motor 1 (TRIAC)
Diese Funktion ermöglicht die Einstellung der Antriebskraft von Motor 1 vom Mindestwert (30%) zum max. Wert
(100%).
Die Hinderniskontrolle deaktivieren (in der Funktion 5 den Wert 0 eingeben).
Unter Berücksichtigung der Umgebungs- und der Installationsbedingungen den geeignetsten Wert eingeben.
Unter Berücksichtigung nachstehender Angaben die Werte eingeben:
Wert 1 = Mindestwert, der eingegeben werden kann (30%)
Wert 10 = Max. Wert, der eingegeben werden kann (100%)
Anmerkung: Beim Anlassstoß ist die Antriebskraft, wenn diese Funktion aktiviert ist, für die in Funktion 8
eingegebene Dauer maximal. Vor der Ausführung jedes Bewegungsvorganges wird ein Test ausgeführt, bei dem
die Unversehrtheit der Triac und der korrekte Anschluß der Motoren überprüft werden. Bei negativem Ergebnis
erscheint auf dem Display die Meldung E0 (siehe diesbezüglich Abschnitt Fehlermeldung auf Display).
FUNKTION 4 - Einstellung Antriebskraft Motor 2 (TRIAC)
Diese Funktion erlaubt die Einstellung der Antriebskraft von Motor 2 vom Mindestwert (30%) zum max. Wert (100%).
Die Hinderniskontrolle deaktivieren (in der Funktion 5 den Wert 0 eingeben).
Unter Berücksichtigung der Umgebungs- und der Installationsbedingungen den geeignetsten Wert eingeben.
Unter Berücksichtigung nachstehender Angaben die Werte eingeben:
Wert 1 = Mindestwert, der eingegeben werden kann (30%)
Wert 10 = Max. Wert, der eingegeben werden kann (100%)
Anmerkung: Beim Anlassstoß ist die Antriebskraft, wenn diese Funktion aktiviert ist, für die in Funktion 8
eingegebene Dauer maximal. Vor der Ausführung jedes Bewegungsvorganges wird ein Test ausgeführt, bei dem
die Unversehrtheit der Triac und der korrekte Anschluß der Motoren überprüft werden. Bei negativem Ergebnis
erscheint auf dem Display die Meldung E0 (siehe diesbezüglich Abschnitt Fehlermeldung auf Display).
52
Page 55

DEUTSCH
FUNKTION 5 - Hinderniskontrolle
Die Hinderniskontrolle bestimmt das Verhalten der Automatikvorrichtung nach dem Eingriff der Hinderniserfassung.
Wert 0 = NICHT AKTIVIERT
Wert 1 = STOP der Automatikvorrichtung . In dieser Konfiguration übt sie die Funktion eines Endschalters aus, sollte
dieser nicht vorhanden sein.
Wert 2 = STOP und UMKEHRUNG der Bewegungsrichtung der Automatikvorrichtung.
Wert 3 = STOP und 2 Sekunden lange UMKEHRUNG der Bewegungsrichtung der Automatikvorrichtung. Zur
Wiederherstellung der Bewegung ist ein weiterer Steuerimpuls erforderlich.
FUNKTION 6 - Empfindlichkeit der Hinderniskontrolle sowohl beim Öffnen als auch beim Schließen
von Motor 1
Mit dieser Funktion kann die Empfindlichkeit der Hinderniserfassung beim Öffnen eingestellt werden. Dadurch
kann der Stop der Automatikvorrichtung bei Vorhandensein eines Hindernisses, das die Bewegung behindert,
gewährleistet werden (FUNKTION 5).
Die Antriebskraft des Motors Funktionen 3 und 4 auf den für die Bewegung des Tors notwendigen Mindestwert
einstellen.
Bei der Empfindlichkeitseinstellung folgendes berücksichtigen:
Wert 1 = Max. Empfindlichkeit, d.h. es bedarf eines geringen Widerstands, um das Hindernis zu erfassen.
Wert 6 = Mindestempfindlichkeit, d.h. es bedarf eines hohen Widerstands, um das Hindernis zu erfassen.
FUNKTION 7 - Empfindlichkeit der Hinderniskontrolle sowohl beim Öffnen als auch beim Schließen
von Motor 2
Mit dieser Funktion kann die Empfindlichkeit der Hinderniserfassung beim Öffnen eingestellt werden. Dadurch
kann der Stop der Automatikvorrichtung bei Vorhandensein eines Hindernisses, das die Bewegung behindert,
gewährleistet werden (FUNKTION 5).
Die Antriebskraft des Motors Funktionen 3 und 4 auf den für die Bewegung des Tors notwendigen Mindestwert
einstellen.
Bei der Empfindlichkeitseinstellung folgendes berücksichtigen:
Wert 1 = Max. Empfindlichkeit, d.h. es bedarf eines geringen Widerstands, um das Hindernis zu erfassen.
Wert 6 = Mindestempfindlichkeit, d.h. es bedarf eines hohen Widerstands, um das Hindernis zu erfassen.
FUNKTION 8 Anlassstoß bei Beginn des Öffnungs- und des Schließvorgangs
Mi dieser Funktion kann der Anlassstoß bei Beginn der Bewegung in Zehntelsekunden eingestellt werden.
Wert 0 = Kein Anlassstoß
Werte von 1 bis 99 = Stoß, angegeben in Zehntelsekunden, zu Beginn jedes Bewegungsvorgangs mit maximaler
Antriebskraft (100%) Bsp.10 = 1 Sekunde Stoß
FUNKTION 9 Extrazeit von 2 Sekunden am Abschluß des Öffnungs- und Schließvorgangs
Wert 0 = aus
Wert 1 = Extrazeit lediglich zum Abschluß des Öffnungsvorgangs
Wert 2 = Extrazeit lediglich zum Abschluß des Schließvorgangs
Wert 3 = Extrazeit lediglich zum Abschluß der Öffnungs- und Schließvorgänge
FUNKTION 10 Automatische Schließung
Wert 0 = automatische Schließung deaktiviert
Wert 1 = automatische Schließung aktiviert
FUNKTION 11 Funktion Schrittbetrieb
Diese Funktion dient zur Aktivierung verschiedener Betriebsabfolgen im Schrittbetrieb und ist sowohl bei den
Bewegungsvorgängen für Fußgänger als auch bei den vollständigen Bewegungen aktiv.
Nachstehende Werte eingeben:
Wert 0 = ÖFFNEN der Automatikvorrichtung: führt den Öffnungsvorgang durch und schließt das Tor nach der
Pausezeit wieder (FUNKTION 27)
Wert 1 = ÖFFNEN/SCHLIESSEN
Wert 2 = ÖFFNEN/STOP/SCHLIESSEN
Wert 3 = ÖFFNEN/STOP/SCHLIESSEN/STOP
FUNKTION 15 - Vorblinkzeit
Diese Funktion ermöglicht die Einstellung der Vorblinkzeit der Blinkleuchte vor jeder Bewegung.
Wert 0 = Kein Vorblinken
Werte zwischen 1 und 99 = Dauer der Vorblinkzeit zwischen 1 und 99 Sekunden
FUNKTION 16 - Einschaltzeit der Beleuchtung
Mit dieser Funktion wird die Einschaltzeit der Beleuchtung eingestellt.
Wert 0 = Das Licht schaltet sich nach jedem Bewegungsvorgang aus
Werte von 1 bis 99 = der eingegebene Wert entspricht der Hälfte der tatsächlichen Einschaltzeit der Beleuchtung.
Bsp. 45 = 90 Sekunden
53
Page 56

DEUTSCH
FUNKTION 20 - Öffnungsphotozelle
Mit dieser Funktion wird die Verwendungseinstellung einer Öffnungsphotozelle eingegeben. Keine Auswirkung
auf die Schließphase. Nachstehende Werte eingeben:
Wert 0 = Keine Öffnungssicherheitsvorrichtung vorhanden (dient dazu, die Überbrückung der entspr. Klemmen
zu vermeiden).
Wert 1 = STOP nach Eingriff der Photozelle und Wiederaufnahme der Öffnungsbewegung nach Freigabe.
Anmerkung: ist die Photozelle bei Empfang eines Impulses abgedeckt, wird dieser ignoriert.
FUNKTION 21 Schutzfühlerleiste
Diese Funktion erlaubt die Einstellung des Einsatzes einer zusätzlichen Sicherheitsvorrichtung beim Öffnen und
Schließen (z.B. eine pneumatische Fühlerleiste, eine Photofühlerleiste, eine Drahtfühlerleiste usw. ..).
Nachstehende Werte eingeben:
Wert 0 = Keine Sicherheitsvorrichtung vorhanden (dient dazu, die Überbrückung der entspr. Klemmen zu
vermeiden).
Wert 1 = STOP nach Eingriff der Fühlerleiste und 2 Sekunden lange Bewegungsumkehrung. Zur Wiederaufnahme
des Zyklus ist ein neuer Impuls nötig.
Anmerkung: Ist die Fühlerleiste bei Empfang eines Impulses nicht frei, wird dieser ignoriert.
FUNKTION 22 Schließphotozelle
Mit dieser Funktion wird der Einsatz einer Schließ-Sicherheitsphotozelle reguliert. Keinerlei Wirkung auf den
Öffnungsvorgang. Nachstehende Werte eingeben:
Wert 0 = Keine Schließphotozelle vorhanden (dient dazu, die Überbrückung der entspr. Klemmen zu vermeiden).
Wert 1 = STOP während des Schließvorgangs und Bewegungsumkehrung.
Wert 2 = STOP während des Schließvorgangs und Bewegungsumkehrung nach Freigabe.
Anmerkung: Ist die Photozelle beim Empfang eines Steuerungsimpulses zur Öffnung bei völlig geschlossenem Tor
abgedeckt, wird die Steuerung ausgeführt. In allen anderen Fällen werden alle Steuerungen ignoriert, die bei
abgedeckter Photozelle empfangen werden.
FUNKTION 23 Stop-Eingang
Diese Funktion ermöglicht die Aktivierung oder Deaktivierung des Stop-Eingangs.
Nachstehende Werte eingeben:
Wert 0 = STOP-Taste nicht vorhanden (dient dazu, die Überbrückung der entspr. Klemmen zu vermeiden).
Wert 1 = Stop aktiviert. Seine Aktivierung blockiert den Bewegungsvorgang. Zur Wiederaufnahme des Zyklus ist
ein neuer Impuls erforderlich. Solange der Stop-Eingang aktiv ist, wird jede Steuerung ignoriert.
FUNKTION 25 - Betriebszeit von Motor 1
Mit dieser Funktion ist die Einstellung der max. Betriebszeit von Motor 1 möglich; diese ist sowohl beim Öffnen als
beim Schließen gleich. Diese Betriebszeit kann nicht ausgeschaltet werden, da sie eine Schutzfunktion für den
Motor bei Störungen der Endschalter oder der Hinderniserfassung darstellt.
Werte von 1 bis 99 = der eingegebene Wert entspricht der Hälfte der tatsächlichen Betriebszeit. Bsp. 10 = 20
Sekunden. Anmerkung: wird eine zeitliche Verzögerung eingestellt, so beginnt diese nach Ablauf der eingestellten
Betriebszeit.
FUNKTION 26 - Betriebszeit von Motor 2
Mit dieser Funktion ist die Einstellung der max. Betriebszeit von Motor 2 möglich; diese ist sowohl beim Öffnen als
beim Schließen gleich. Diese Betriebszeit kann nicht ausgeschaltet werden, da sie eine Schutzfunktion für den
Motor bei Störungen der Endschalter oder der Hinderniserfassung darstellt.
Werte von 1 bis 99 = der eingegebene Wert entspricht der Hälfte der tatsächlichen Betriebszeit. Bsp. 10 = 20
Sekunden. Anmerkung: wird eine zeitliche Verzögerung eingestellt, so beginnt diese nach Ablauf der eingestellten
Betriebszeit.
FUNKTION 27 Pausezeit
Diese Funktion erlaubt die Einstellung der Pausezeit vor der automatischen Schließung.
Nachstehende Werte eingeben:
Wert 0 = Pausezeit gleich Null
Werte zwischen 1 und 99 = dieser Wert entspricht der Hälfte der Pausezeit, angegeben in Sekunden, bevor der
automatische Schließungsvorgang beginnt. Bsp. 20 = 40 Sekunden
FUNKTION 28 - Nachholzeit der Bewegungsumkehrung
Das Steuergerät ist mit einem Zeitencoder für beide Motoren ausgestattet. Diese Funktion erlaubt die Eingabe
der Nachholzeit im Falle einer Bewegungsumkehrung, die zur Restzeit des Bewegungsvorgangs addiert wird.
Dadurch kann verhindert werden, dass die Automatikvorrichtung im Falle wiederholter Umkehrungen die
Bewegungsvorgänge nicht vollständig ausführt.
Wert 0 = Nachholzeit gleich Null
Werte von 1 bis 99 = Nachholzeit zwischen 1 und 99 Sekunden
54
Page 57

DEUTSCH
FUNKTION 30 Soft-Stop der Motoren 1 und 2 beim Öffnen
Wert 0 = nicht aktiviert
Werte von 1 bis 99 = Die Zeit für den Soft-Stop kann zwischen 1 und 99 Zehntelsekunden ab dem Endschalter oder
ab dem Ablauf der max. Betriebszeit der Motoren 1 und 2 (Funktion 31) eingestellt werden. Bsp. 50 = Dauer des
Soft-Stops 5 Sekunden.
FUNKTION 31 Soft-Stop beim Öffnen
Wert 0 = die Dauer des Soft-Stops (Funktion 30) wird ab dem Ablauf der max. Betriebszeit der Motoren kalkuliert
(Funktionen 25 und 26).
Wert 1= Die Dauer des Soft-Stops (Funktion 30) wird ab dem Eingriff des Endschalters beim Öffnen kalkuliert.
FUNKTION 32 Soft-Stop der Motoren 1 und 2 beim Schließen
Wert 0 = nicht aktiviert
Werte von 1 bis 99 = Die Zeit für den Soft-Stop kann zwischen 1 und 99 Zehntelsekunden ab dem Endschalter oder
ab dem Ablauf der max. Betriebszeit der Motoren 1 und 2 (Funktion 33) eingestellt werden. Bsp. 50 = Dauer des
Soft-Stops 5 Sekunden.
FUNKTION 33 Soft-Stop beim Schließen
Wert 0 = die Dauer des Soft-Stops (Funktion 32) wird ab dem Ablauf der max. Betriebszeit der Motoren kalkuliert
(Funktionen 25 und 26).
Wert 1= die Dauer des Soft-Stops (Funktion 32) wird ab dem Eingriff des Endschalters beim Schließen kalkuliert.
FUNKTION 34 Antriebskraft des Motors in der Soft-Stopphase
Mit dieser Funktion wird die Stufe der Antriebskraft des Motors während der Soft-Stopphase eingestellt.
Wert 1 = Mindestantriebskraft Motor
Wert 2 = Mittlere Antriebskraft Motor
Wert 3 = Maximale Antriebskraft Motor
Anmerkung: Für Automatisierungen auf Flügeltoren mit Motoren mit geringer Leistung (weniger als 150W) wird
der Wert 3 empfohlen.
FUNKTION 45 Verzögerungszeit beim Öffnen zwischen Motor 2 und Motor 1
Diese Funktion ermöglicht die Einstellung der Verzögerungszeit für die Aktivierung des Motors 2 gegenüber dem
Motor 1 in der Öffnungsphase:
Wert 0 = Verzögerung deaktiviert
Wert von 1 bis 99 = Verzögerung zwischen 1 und 99 Sekunden
FUNKTION 46 Verzögerungszeit beim Schließen zwischen Motor 1 und Motor 2
Diese Funktion ermöglicht die Einstellung der Verzögerungszeit für die Aktivierung des Motors 1 gegenüber dem
Motor 2 in der Schließphase:
Wert 0 = Verzögerung deaktiviert
Wert von 1 bis 99 = Verzögerung zwischen 1 und 99 Sekunden
FUNKTION 50 Elektroschloss
Diese Funktion ermöglicht den Betrieb des Elektroschlosses einzustellen.
Wert 0 = Aus
Wert 1 = Vor jedem Öffnungsvorgang für eine Dauer von 3 Sekunden aktiv
Wert 2 = Bewegungsumkehrschub von 1 Sekunde und Aktivierung des Elektroschlosses für eine Dauer von 3
Sekunden vor jedem Öffnungsvorgang
FUNKTION 60 - Selbsttest der Sicherheitsvorrichtungen
Diese Funktion dient der Überprüfung der Sicherheitsvorrichtungen vor jedem Bewegungsvorgang. Diese
Funktion kann mit entsprechenden Photozellen ausgeführt werden. Ergibt die Überprüfung ein negatives
Ergebnis (eine der Sicherheitsvorrichtungen funktioniert nicht korrekt), führt die Automatisierung die übertragene
Steuerung nicht aus.
Nachstehende Werte eingeben:
Wert 0 = Selbsttest deaktiviert
Wert 1 = Selbsttest für Schließphotozelle aktiviert.
Wert 2 = Selbsttest für Öffnungsphotozelle aktiviert.
Wert 3 = Selbsttest für beide Photozellen aktiviert.
FUNKTION 70 Bremsfunktion
Wert 0 = Bremsfunktion deaktiviert
Wert 1 = Bremsfunktion während der Öffnung und der Schließung auf Motor 1 und 2 aktiviert.
Anmerkung: diese Funktion ist lediglich bei Anwendungen mit Schiebetoren aktiv (Funktion 1, eingestellt auf 3 oder 4).
FUNKTION 99 Funktion Beenden der Programmierung
Um das Programmierungsmenü zu verlassen, ist diese Funktion aufzurufen und mit der ENTER-Taste zu bestätigen.
Anmerkung: Das Steuergerät unterbindet während der Ausführung eines Betriebszyklus den Zugriff auf das
Programmierungsmenü. Nur bei korrekt programmiertem Steuergerät können Bewegungen durchgeführt werden.
55
Page 58
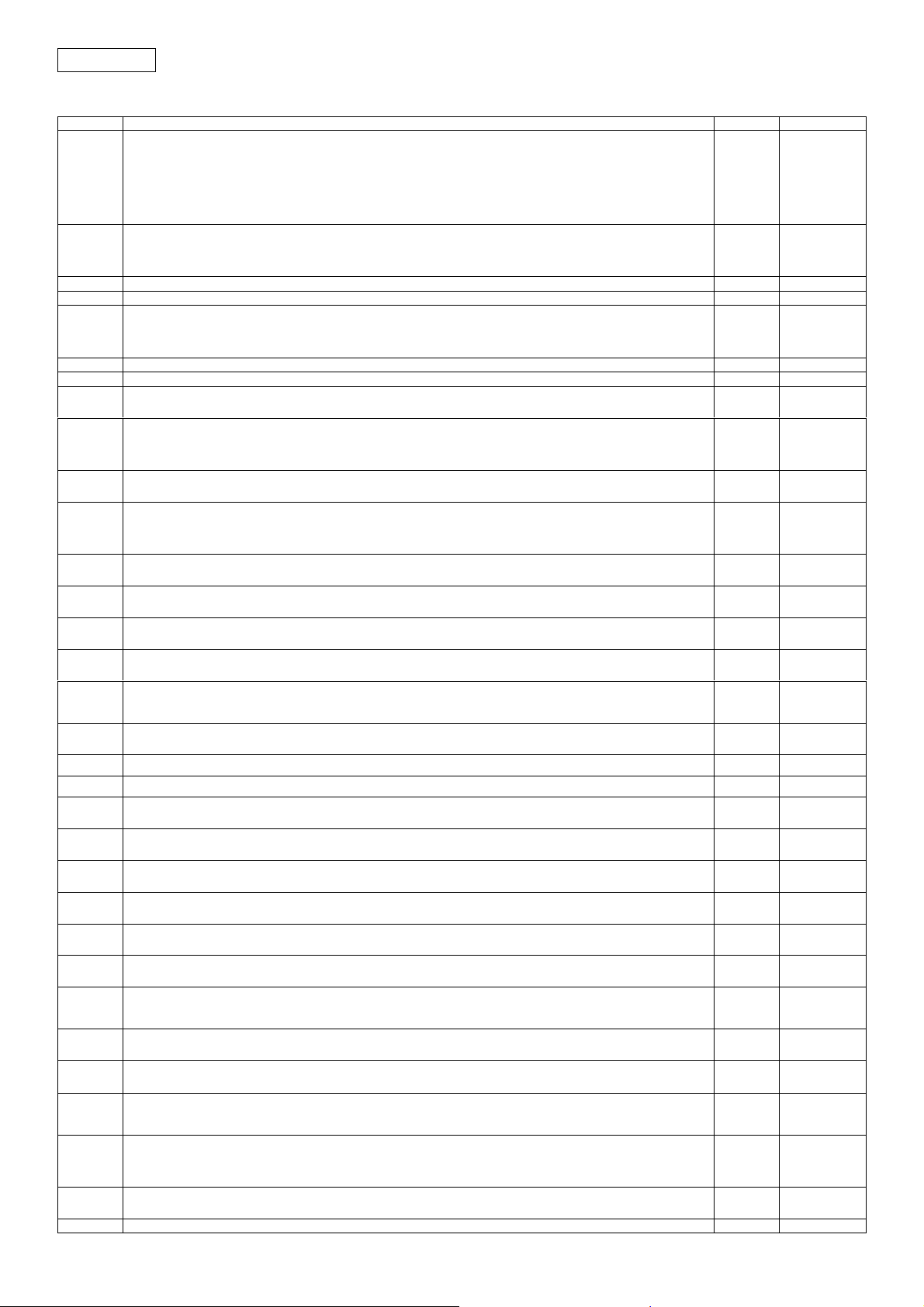
DEUTSCH
10. LISTE DER VERÄNDERBAREN FUNKTIONEN
FUNKTION BESCHREIBUNG Min./Max. Voreingestellt
Anwendungsart
1 = Einflügeliges Tor
2 = Zweiflügeliges Tor
3 = Schiebetor
1
4 = Entgegengesetzte Schiebetore
5 = Automatische Schranken
6 = Entgegengesetzte automatische Schranken
7 = Kipptor mit 1 Motor
8 = Kipptor mit 2 par allelgeschalteten Motore n
Endschalter der Moto ren 1 und 2
0 = nicht vorhanden
1 = Schließendschalter vorhanden
2
2 = Öffnungsendschalter vorhanden
3 = Schließ- und Öffnungsendschalter vorhanden
Einstellung Antriebskraft Motor 1
3
Einstellung Antriebskraft Motor 2
4
Aktivieren der Hinderniskontrolle
0 = NICHT AKTIVIERT
5
1 = STOP (übernimmt bei Nichtvorhandensein des Endschalters dessen Funktion)
2 = STOP/UMKEHRUNG
STOP/UMKEHRUNG für 2 Sekunden
3 =
Empfindlichkeit der Hinderniskontrolle von Motor 1
6
Empfindlichkeit der Hinderniskontrolle von Motor 2
7
Anlassstoß bei Öffnungs- und Schließvorgang
0 = Nicht vorhanden
8
1 - 99= Anlassstoß bei Einschalten mit max. Antr iebskraft zwischen 1 und 99 Zehntelsekunden.
Extrazeit nach Abschl uß des Öffnungs- und Schließvorgan gs
0 = Nicht vorhanden
9
1 = Anlassstoß von 2 Sek. nach Abschluß des Öffnungsvorgangs
2 = Anlassstoß von 2 Sek. nach Abschluß des Schließvorgangs
3 = Anlassstoß nach Abschluß des Schließ- und Öffnungsvorgangs
Automatische Schließung
0 = deaktiviert
10
1 = aktiviert
Schrittbetrieb - Steuerung
0 = ÖFFNEN
11
1 = ÖFFNEN/SCHLIESSEN
2 = ÖFFNEN/STOP/SCHLIESS EN
3 = ÖFFNEN/ STOP/SCHLIE SSEN/STOP
Vorblinkzeit
0 = Nicht vorhanden
15
1 99 = zwischen 1 und 99 Se kunden
Einschaltzeit Beleuchtung
0 = gleich Null
16
1 99 = zwischen 2 und 198 Sekunden
Öffnungsphotozelle
0 = Nicht vorhanden
20
1 = STOP und Neustart nach Freigabe
FÜHLERLEISTE
0 = Nicht vorhanden
21
1 = STOP und Umkehr für eine Dauer von 2 Sekunden
Schließphotozelle
0 = Nicht vorhanden
22
1 = STOP/Umkehrung
2 = STOP/Umkehrung nach Freigabe der Photozelle
STOP-Steuerung
0 = STOP nicht vorhanden
23
1 = STOP vorhanden
Betriebszeit von Motor 1 (x2) in Sekunden
25
1 99 = zwischen 2 und 198 Sekunden
Betriebszeit von Motor 2 (x2) in Sekunden
26
1 99 = zwischen 2 und 198 Sekunden
Pausezeit für automatische Schließung (x2 ) in Sekunden
0 = gleich Null
27
1 99 = zwischen 2 und 198 Sekunden
Nachholzeit der Bewegungsumkehrung für Restzeit in Sekunden
0 = gleich Null
28
1 99 = zwischen 1 und 99 Se kunden
Soft-Stop beim Öffnen der Motoren 1 und 2in Zehntelsekunden
0 = nicht freigegeben
30
Von 1 bis 99 = Von 1 bis 99 Zehntelsekunden
Soft-Stop beim Öffnen an den M otoren 1 und 2
0 = startet getaktet ab dem Ablauf der max. Betriebszeit
31
1 = der Soft-Stop wird bei Eingriff der Endschalter beim Öffnen aktiviert
Soft-Stop beim Schließen dei Motoren 1 und 2in Zehntelsekunden
0 = nicht freigegeben
32
Von 1 bis 99 = Von 1 bis 99 Zehntelsekunden
Soft-Stop beim Schließen auf den Motoren 1 und 2
0 = startet getaktet ab dem Ablauf der max. Betriebszeit
33
1 = der Soft-Stop wird bei Eingriff der Endschalter beim Schließen aktiviert
Antriebskraft der Motoren beim Soft-Stop
1 = Mindestantriebskraft
34
2 = mittlere Antriebskr aft
3 = maximale Antriebskraft
Verzögerung beim Öffnen zwischen Motor 2 und Motor 1 in Sekunden
0 = gleich Null
45
1 99 = zwischen 1 und 99 Se kunden
Verzögerung beim Schließen zwischen Motor 1 und Motor 2 in Sekunden
0 = gleich Null
46
1 ¸ 99 = zwischen 1 und 99 Sek.
Elektroschloss
0 = Nicht vorhanden
50
1 = vor jedem Öffnungsvorgang für eine Dauer von 3 Sekunden aktiv
2 = 1 Sek. Rückschlag beim Öffnen und aktiv für eine Dauer von 3 Sek.
Photozellentest bei Bewegungsbeginn
0 = Deaktiviert
60
1 = für Schließphotozelle aktiviert
2 = für Öffnungsphotozelle aktiviert
3 = für Öffnungs- und Schließphotozellen aktiviert
Bremsfunktion
0 = deaktiviert
70
1 = auf den Motoren 1 und 2 sowohl beim Öffnen als beim Schließen aktiviert.
Funktion Beendigen der Programmierung
99
(1 = 30% 10 =100%)
(1 = 30% 10 =100%)
bei Betriebskraft (Funktionen 3 und 4)
_
1 ¸ 8
0 ¸ 3
1 ¸ 10
1 ¸ 10
0 ¸3
1¸ 6
1¸ 6
0 ¸ 99
0 ¸ 3
0 ¸ 1
0 ¸ 3
0 ¸ 99
0 ¸ 99
0 ¸ 1
0 ¸ 1
0 ¸ 2
0 ¸ 1
1 ¸ 99
1 ¸ 99
0 ¸ 99
0 ¸ 99
0 ¸ 99
0 ¸ 1
0 ¸ 99
0 ¸ 1
1 ¸ 3
0 ¸ 99
0 ¸ 99
0 ¸ 2
0 ¸ 3
0 ¸ 1
2
0
6
6
0
6
6
10 (1s)
0
0
3
0
45 (90 s)
0
0
0
0
10 (20 s)
10 (20 s)
10 (20 s)
0
0
0
0
0
3
2
5
0
0
0
56
Page 59

DEUTSCH
11. FEHLERMELDUNG
Nach Beendigung der Programmierung prüft das Steuergerät die Übereinstimmung der eingegebenen Parameter;
bei korrekter Programmierung erscheint für eine Dauer von 3 Sekunden die Meldung FP (Beendigung der
Programmierung). Anschließend erlischt das Display.
Im Falle von Konflikten zwischen den Parametern, blinkt die Nummer der potentiell fehlerhaften Funktion. Zum
Korrigieren der falschen Werte wird die ENTER-Taste für eine Dauer von 3 Sekunden gedrückt, und man kehrt
in das Programmierungsmenü zurück. Solange die Programmierung des Steuergeräts nicht korrekt durchgeführt
worden ist, wird die Durchführung jeder Bewegung unterbunden.
Das Display zeigt außerdem folgende Fehler an:
EE = Fehler des EEPROM Speichers oder Verlust der gespeicherten Parameter.
Es ist empfehlenswert auf die Defaultparameter zurückzugreifen (siehe Abschnitt Programmierung des
Steuergeräts). Nun kann das Steuergerät wie vor der Anzeige des fehlgeschlagenen Tests neu programmiert
werden. Bei erneut negativ ausfallender Überprüfung sollte man sich an den Kundendienst wenden, um die
defekte Vorrichtung auszuwechseln.
E0 = Kurzschluss auf Triac, Kurzschluss auf den Motoren, Motoren nicht angeschlossen oder falscher Anschluss
der selben. Die Anschlüsse und den korrekten Betrieb der an die entspr. Klemmen angeschlossenen Motoren
prüfen. Sind die Anschlüsse korrekt ausgeführt, so ist die Stromversorgung zu unterbrechen und wieder
einzuschalten. Besteht das Problem weiter, ist zu prüfen, ob ein Kurzschluss auf den Motoren vorliegt. Dauert das
Problem weiter an, so sollte man sich an den Kundendienst wenden.
E1 = Test der Schließphotozelle fehlgeschlagen; die Anschlüsse und anhand der entspr. LED-Diode auf der Karte
den korrekten Betrieb der Vorrichtungen, die an die Klemme FTC angeschlossen sind, prüfen. Bei Betriebsstörungen
ist die defekte Vorrichtung zu ersetzen.
E2 = Test der Öffnungsphotozelle fehlgeschlagen; die Anschlüsse und anhand der entspr. LED-Diode auf der
Karte den korrekten Betrieb der Vorrichtungen, die an die Klemme FTO angeschlossen sind, prüfen. Bei
Betriebsstörungen ist die defekte Vorrichtung zu ersetzen.
12. BETRIEBSBESCHREIBUNG DES STEUERGERÄTS
12.1 EINSCHALTEN
Beim Einschalten überprüft das Steuergerät die Unversehrtheit des EEPROM-Speichers, in dem die Default-
Parameter oder die letzte korrekt vorgenommene Programmierung gespeichert sind. Wird eine Störung im
EEPROM-Speicher oder ein Verlust der gespeicherten Parameter festgestellt, zeigt das Steuergerät auf dem
Display die Meldung EE oder eine andere Fehlermeldung an; in diesem Fall ist der entsprechende Abschnitt
darüber zu lesen.
Ist das EEPROM hingegen intakt, stellt sich das Steuergerät auf die Defaultwerte oder auf die zuletzt korrekt
durchgeführte Programmierung ein und das Display bleibt ausgeschaltet. Das Steuergerät ist betriebsbereit und
kann die eingegebenen Steuerungen durchführen.
Anmerkung: Beim Einschalten des Steuergeräts wird kein Bewegungsvorgang durchgeführt, wenn seitens des
Benutzers keine absichtliche Steuerungseingabe erfolgt.
12.2 GEGENSÄTZLICHE STEUERUNGEN
In Anwesenheit gleichzeitiger, gegensätzlicher Steuerungen führt das Steuergerät keine der eingegebenen
Steuerungen durch.
12.3 EINSTELLUNG DER ANTRIEBSKRAFT DES MOTORS
Die Antriebskraft von Motor 1 in der FUNKTION 3 und von Motor 2 in der FUNKTION 4 einstellen. Dem Wert
1 entspricht eine einstellbare Mindestantriebskraft (30% der maximalen Antriebskraft), während der Wert 10 sich
auf die maximale Antriebskraft bezieht. Während des Soft-Stops wird die Antriebskraft des Motors über die
Funktion 34 reguliert. (1 = Mindestantriebskraft, 3 = maximale Antriebskraft).
Für Flügeltore mit Motoren mit geringer Leistung (<150 W) wird für die Einstellung der Funktion 34 der Wert 3
empfohlen.
12.4 EMPFINDLICHKEITSEINSTELLUNG BEI DER HINDERNISERFASSUNG
Die Endschalter (soweit vorhanden) ausschalten, die Automatikvorrichtung bis zum Endanschlag laufen lassen
und den korrekten Betrieb der FUNKTION 6 Hinderniserfassung von Motor 1 überprüfen; den Vorgang zur
Überprüfung der FUNKTION 7 Hinderniserfassung von Motor 2 wiederholen. Den Wert obiger Funktionen
einstellen, um einen entsprechenden Sicherheitswert an der/dem automatisierten Zufahrt/Zugang zu gewährleisten.
Anmerkung: während der Schubphase beim Anlaufen und beim Soft-Stop ist die Funktion für die Hinderniserfassung
nicht aktiv.
57
Page 60

DEUTSCH
12.5 SOFT-STOP DER MOTOREN
Das Universalsteuergerät ermöglicht die Ausführung eines Soft-Stops der Motoren zum Abschluß der Öffnungs-
und Schließbewegungen. Über die Funktionen 31 und 33 kann der Start des Soft-Stops bei Eingriff des
Endschalters (Wert 1) oder nach Ablauf der maximalen Betriebszeit der beiden Motoren (Funktionen 25 und
26) angewählt werden. Die Funktion 31 bezieht sich auf den Öffnungsvorgang, während die Funktion 33 die
Schließbewegung reguliert. Der Start des Soft-Stops kann in einer Bewegungsrichtung mit Bezug auf den
Endschalter und in der anderen Bewegungsrichtung hinsichtlich der Zeit eingestellt werden. Die Dauer des Soft-
Stops wird über die Funktionen 30 (Öffnung) und 32 (Schließung) zwischen 1 und 99 Zehntelsekunden, d.h.
zwischen 01, und 9,9 Sekunden, eingestellt.
Bei Anwendungen mit Soft-Stop bei Eingriff des Endschalters (Schiebetore) wird die Einstellung einer maximalen
Betriebszeit empfohlen, die 2-3 Sekunden über der tatsächlichen Dauer des Bewegungsvorgangs liegt. Die Dauer
des Soft-Stops sollte zwischen 5 und 20 Zehntelsekunden liegen, um zu vermeiden, daß der Enschalter seinen
Anschlag überschreitet. Bei Anwendungen mit zeitlich geregeltem Soft-Stop (Flügeltore) wird die Messung der
Dauer des Bewegungsvorgangs ohne Soft-Stop empfohlen.
Eine maximale Betriebszeit (Funktionen 25 und 26) einstellen, die zwei Sekunden unter der gemessenen
Zeitdauer liegt. Die Dauer des Soft-Stops (Funktionen 30 und 32) zwischen 50 und 99 Zehntelsekunden
einstellen, um zu gewährleisten, daß der Flügel in jedem Falle den Anschlag erreicht.
Die Antriebskraft der Motoren während des Soft-Stops mit der Funktion 34 (1 = Mindestantriebskraft, 2 = mittlere
Antriebskraft, 3 = maximale Antriebskraft) auf den gewünschten Wert einstellen. Für Anwendungen mit Flügeln,
die mit Motoren mit geringen Leistungen betrieben werden, wird die Einstellung des Wertes 3 empfohlen.
12.6 BREMSUNG
Das Universalsteuergerät ist in der Lage, zum Zeitpunkt des Anhaltens derselben, die Bremsung der Motoren
auszuführen (Funktion 70). Diese Option ist lediglich für Anwendungen mit Schiebetoren verfügbar (Funktion 1,
eingestellt auf die Werte 3 oder 4) und ermöglicht die Ausschaltung der Trägheitskraft des Schiebetors beim
Anhalten. Auf diese Weise wird ein Überschreiten der Endschalter bei Abschluß der Öffnungs- und Schließvorgänge
über deren Anschläge hinaus vermieden. Darüber hinaus erfolgt im Falle einer Bewegungsumkehr, die durch
einen Eingriff einer Sicherheitsvorrichtung verursacht wurde, der unverzüglichen Stop des Schiebetors.
12.7 ZEITENCODER
Das Universalsteuergerät ist mit einem Software-Zeitencoder ausgestattet, der eine konstante Überwachung der
Position der Automatisierung ermöglicht. Insbesondere Im Falle einer Unterbrechung des Bewegungsvorgangs
stellt das Steuergerät die maximale Betriebszeit auf die Restzeit des Bewegungsvorgangs ein, um zu vermeiden,
daß die Flügel für einen längeren Zeitraum auf den Anschlägen aufliegen und dabei die Motoren überhitzen.
Um zu vermeiden, daß die Automatisierung aufgrund der Trägheit den Bewegungsvorgang nicht vollständig
und korrekt ausführt, wird empfohlen, die Nachholzeit bei Bewegungsumkehr (Funktion 34) auf den jeweils für
die Anwendung geeigneten Wert (im Allgemeinen zwischen 1 und 5 Sekunden) einzustellen.
12.8 ANHALTEN DES MOTORS
Dies kann in den folgenden Fällen auftreten:
Unterbrechung der Stromversorgung;
Eingriff des entsprechenden Endschalters (Öffnen des Ruhestromkontakts);
Eingriff der FUNKTION 5 - Hinderniserfassung;
Eingriff einer der Sicherheitsvorrichtungen (Photozellen oder Fühlerleiste);
Ablauf der in den FUNKTIONEN 25 - 26 eingegebenen Maximalbetriebszeit;
Aktivieren der STOP-Taste (Öffnen des Ruhestromkontakts Stop) In diesem Fall ist die Bewegung
wiederherzustellen, die Stop-Taste freizugeben und erneut eine Funksteuerung oder eine manuelle Steuerung
einzugeben.
STOP-Steuerung über Funk oder mittels Schrittbetrieb -Steuerung.
12.9 ÖFFNEN UND SCHLIESSEN BEI TOTMANN-FUNKTION
Zum Öffnen der Automatikvorrichtung die Taste Öffnung Person anwesend und zum Schließen die Taste
Schließen Person anwesend betätigen. Diese Steuerungen (Schließen der Arbeitskontakte) müssen vom Benutzer
dauerhaft gedrückt werden. Im Falle des Eingreifens einer Sicherheitsvorrichtung oder eines Endschalters, hält
die Automatisierung an.
12.10 ÖFFNUNGSVORGANG
Einen Steuerungsbefehl mittels Funksteuerung (Kanal 1) oder eine Schrittbetrieb- Steuerung eingeben.
Es erfolgt ein Vorblinken der Blinkleuchte für die Dauer der in der FUNKTION 15 eingestellten Zeit.
Das Steuergerät führt den Test des TRIAC und der Öffnungs-Sicherheitsvorrichtungen durch (nur wenn die Klemme
TST angeschlossen ist und die FUNKTION 60 auf einen Wert > 0 eingestellt ist).
Der Motor wird über die Dauer des Anlaufmoments mit 100%iger Kraft gespeist; nach diesem Anlaufmoment wird
die Antriebskraft des Motors auf den in den FUNKTIONEN 3 und 4 eingegebenen Wert reduziert.
58
Page 61

DEUTSCH
12.11 SCHLIESSVORGANG
Das Schließen kann automatisch nach der in der FUNKTION 27 eingegebenen Zeit oder durch die Schrittbetrieb-
oder die Fußgänger Steuerung erfolgen.
Die Blinkleuchte führt über die Dauer der in der FUNKTION 15 eingestellten Zeit einen Vorblinkzyklus durch.
Das Steuergerät führt den Test des TRIAC und der Schließ- Sicherheitsvorrichtungen durch (nur wenn die Klemme
TST angeschlossen ist und die FUNKTION 60 auf dem Wert 1 oder 3 eingestellt ist).
Der Motor wird über die Dauer des Anlaufmoments mit 100%iger Kraft gespeist; nach diesem Anlaufmoment wird
die Antriebskraft des Motors auf den in den FUNKTIONEN 3 und 4 eingegebenen Wert reduziert.
12.12 FUSSGÄNGER - ÖFFNUNGSVORGANG
Die Öffnungssteuerung für den Fußgängerzugang kann sowohl manuell als auch über Funksteuerung (CH2)
angesteuert werden. Das Steuergerät führt folgende Öffnungsvorgänge durch:
Vollständige Öffnung lediglich eines Flügels bei zweiflügeligen Toren. Geöffnet wird der durch den Motor
1 angetriebene Flügel.
10 Sekunden langes Öffnen des Schiebetors;
Komplettes Öffnen eines Flügels bei entgegengesetzten Schiebetoren;
Komplettes Öffnen einer Schranke bei entgegengesetzten Schranken;
Nicht aktivierte Steuerung bei allen anderen Arten von automatischen Zufahrten/Zugängen.
12.13 WAHL DER MOTOREN
Werden 2 Motoren betrieben, sind die Jumper JP1 und JP2 einzuschalten.
12.14 WAHL DES ZWEITEN KANALS
Wenn in den Steckverbinder M8 ein Empfänger mit zwei Kanälen eingesteckt ist, kann mittels dem Jumper JP3
der zweite Kanal des Empfängers auf Fußgängeröffnung aktiviert werden: JP3 eingesteckt = zweiter Kanal für
Fußgängeröffnung aktiviert; JP3 nicht eingesetzt = zweiter Kanal nicht für Fußgängeröffnung aktiviert.
Die Steuergerätfunktionen sind anhand der Anweisungen im Abschnitt Programmieren des Steuergeräts zu
programmieren.
12.15 SICHERHEITSVORRICHTUNGEN
An der Automatikvorrichtung, an der das Steuergerät installiert wird, die für die größtmögliche Sicherheit
vorgesehenen Sicherheitsvorrichtungen anschließen.
Der Anschluss an die Klemme TST (Selbsttest) ist nur vorzunehmen, wenn Vorrichtungen mit eingebauter
Selbsttestfunktion installiert werden.
An die Klemme STP (Stop) ist eine Taste mit manueller Freigabe der selben anzuschließen.
An die Klemme FTC ist die Schließphotozelle anzuschließen. Diese Photozelle dient zum Schutz der automatisierten
Zufahrt während des Schließzyklus der Automatikvorrichtung und bleibt während des Öffnungszyklus wirkungslos.
Während des Schließzyklus kehrt sie die Bewegung um oder unterbindet vorübergehend die Bewegung, die nur
nach der Freigabe (wählbar) umgekehrt wird. Wenn die Photozelle abgedeckt ist, verhindert sie jede
Schließsteuerung. Bei geschlossener Zufahrt unterbindet sie jedoch nicht die Öffnungssteuerungen.
An die Klemme FTO ist die Öffnungsphotozelle anzuschließen. Diese Photozelle dient zum Schutz der automatisierten
Zufahrt während des Öffnungszyklus der Automatikvorrichtung und bleibt während des Schließzyklus wirkungslos.
Während des Öffnungszyklus stoppt sie die Bewegung und bei Freigabe nimmt sie die Bewegung wieder auf.
Wenn die Photozelle abgedeckt ist, verhindert sie jede Steuerung.
An die Klemme CST ist die Schutzfühlerleiste anzuschließen. Diese Sicherheitsvorrichtung dient zum zusätzlichen
Schutz der automatisierten Zufahrt gegenüber der alleinigen Verwendung der Photozellen. Wenn sie
abgedeckt ist, unterbindet sie jede Steuerung; während des Öffnungs- und Schließzyklus kehrt sie, wenn sie
abgedeckt ist, die Bewegung 2 Sek. lang um und schaltet auf STOP. Nur durch einen weiteren Impuls wird die
Bewegung zur Beendigung des eingegebenen Zyklus wieder aufgenommen.
Während des Zyklus Totmann wird die Automatikvorrichtung durch den Eingriff einer der Sicherheitsvorrichtungen
(wenn aktiviert) oder der Endschalter (wenn aktiviert) blockiert.
12.16 SICHERUNGEN
Schutz des Motors
Die Motoren und Leistungskreise sind durch 8A-Schnellsicherungen (Format 5x20) geschützt.
Schutz gegen Überspannungen durch Varistor.
Schutz des Elektroschlosses : Träge 2A-Sicherung (Format 5x20).
Schutz der Blinkleuchte und der Beleuchtung : 1A-Schnellsicherung (Format 5x20).
Schutz der Zubehörversorgung : 1A-Schnellsicherung (Format 5x20).
Schutz der Logik : 315mA-Schnellsicherung (Format 5x20).
Automatische Rücksetzung
Bei anomalem Betrieb des Mikroprozessors, setzt ein unabhängiger Kreis das Steuergerät automatisch zurück
(watch-dog) und stellt die Kontrolle des Steuergeräts durch Zurücksetzen in den Ausgangszustand beim
Einschalten wieder her.
59
Page 62
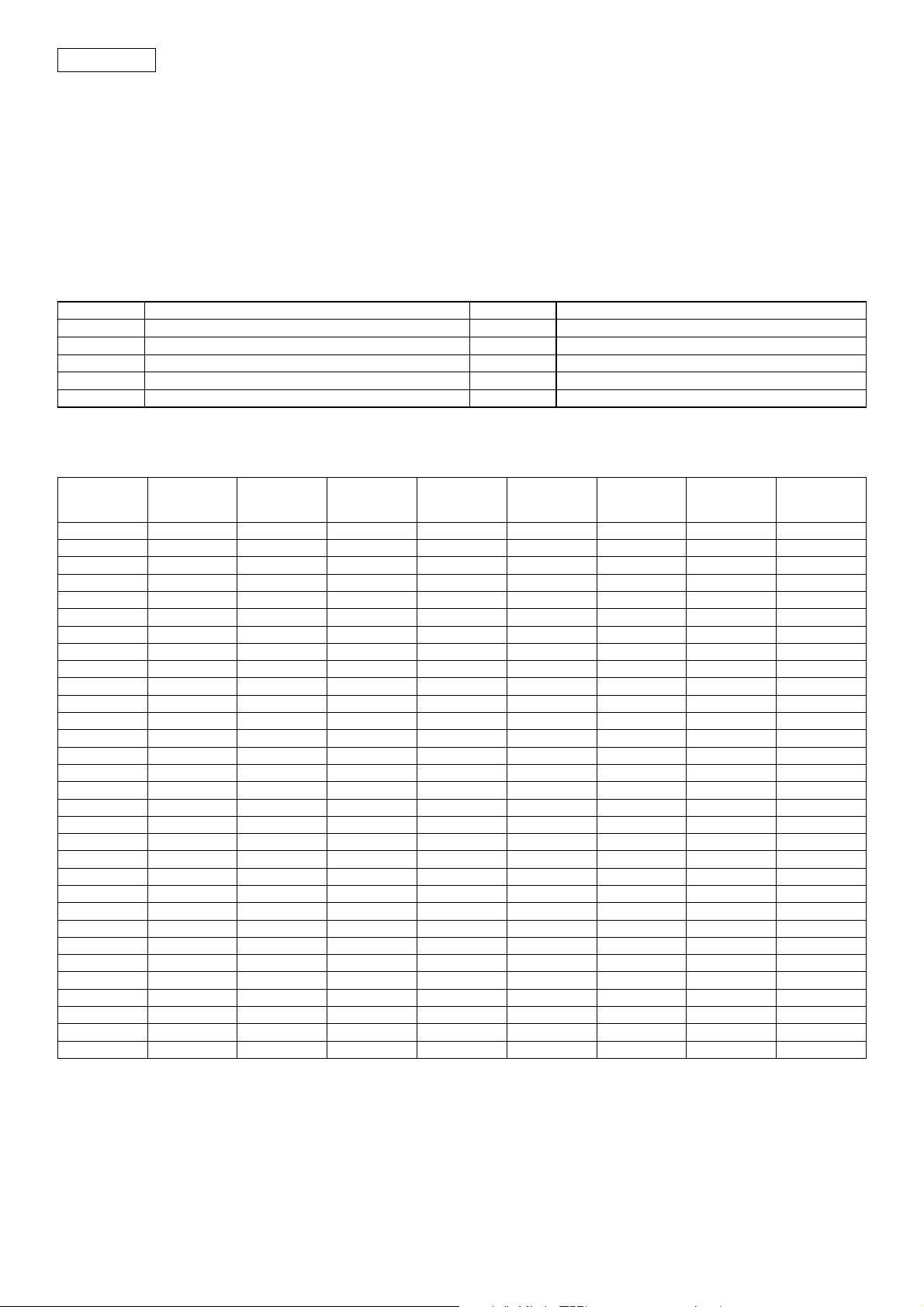
DEUTSCH
12.17 KONTROLL-LED-DIODEN
Auf der Karte befinden sich LED-Dioden für die Zustandkontrolle der Steuereingänge und der Sicherheitsvorrichtungen:
LED-DIODE EINGESCHALTET = Kontakt in der Klemmenleiste Ruhestromkontakt
LED-DIODE AUSGESCHALTET = Kontakt in der Klemmenleiste Arbeitskontakt
Bei der Prüfung, ob sich die Eingänge in ihrem korrekten Zustand befinden, ist zu berücksichtigen, dass:
Wird eine Steuerung eingegeben, die entsprechende LED-Diode von Ausgeschaltet auf Eingeschaltet schaltet.
greift eine Sicherheitsvorrichtung, die entsprechende LED-Diode von Eingeschaltet auf Ausgeschaltet schaltet.
Der Zustand der LED-Dioden der jeweiligen Endschalter hängt vom Zustand der automatischen Zufahrt ab:
Automatische Zufahrt offen = LED-Dioden FC1 und FC3 eingeschaltet, LED-Dioden FC2 und FC4 ausgeschaltet.
Automatische Zufahrt geschlossen= LED-Dioden FC2 und FC4 eingeschaltet, LED-Dioden FC1 und FC3
ausgeschaltet.
FTC (LD1) Schließ-Sicherheitsphotozelle OPU (LD7) Öffnungssteuerung Totmann
FTO (LD2) Öffnungs-Sicherheitsphotozelle CLU (LD8) Schließsteuerung Totmann
CST (LD3) Sicherheitsfühlerleiste FC1 (LD9) Schließ-Endschalter von Motor 1
STP (LD4) STOP FC2 (LD10) Öffnungs-Endschalter von Motor 1
STA (LD5) Schrittbetrieb-Steuerung FC3 (LD11) Schließ-Endschalter von Motor 2
PED (LD6) Steuerung für Fußgängeröffnung FC4 (LD12) Öffnungs-Endschalter von Motor 2
13. INSTALLATIONSANWEISUNGEN
Die im folgenden aufgeführte Tabelle gibt die verschiedenen Anwendungsarten sowie einen
Programmierungsführer an, der als Anhaltspunkt für eine schnelle Programmierung des Steuergeräts dient.
Funktion Einflügeliges
1
2
3 (°)
4 (°)
5 (*)
6 (°)
7 (°)
8 (°)
9
10 (*)
11 (°)
15 (°)
16 (°)
20 (°)
21 (°)
22 (°)
23 (°)
25 (°)
26 (°)
27 (°)
28 (*)
30 (*)
31 (°)
32 (*)
33 (°)
34 (°)
45 (°)
46 (°)
50 (°)
60 (°)
70
Tor
12345678
00333300
33664444
-3-6-4- -
0 ( 1) 0 (1) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2)
33553333
-3-5-3- -
00000000
00000033
0 (2) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2) 0 (2)
33333333
00000000
45 45 45 45 45 45 45 45
00000000
00000000
11221111
00000000
8 8 10 10 6 6 10 10
-8-10-6- -
00000000
3 (2) 3 (2) 3 (3) 3 (3) 3 (1) 3 (1) 3 (1) 3 (1)
0 (50) 0 (50) 0 (10) 0 (10) 0 (20) 0 (20) 0 (20) 0 (20)
00110000
0 (50) 0 (50) 0 (10) 0 (10) 0 (20) 0 (20) 0 (20) 0 (20)
00110000
33333333
-2-- --- -
-5-- --- -
00000000
00000000
--11----
ANMERKUNGEN:
- :automatisch vom Steuergerät eingestellte Funktion
(*) :Es wird empfohlen:
a) zu Beginn den Wert 0 einzustellen, um den korrekten Anschluß der Motoren und die Bewegungsabläufe
der Automatisierung zu überprüfen,
b) die in Klammern angegebenen Werte als Ausgangswerte einzustellen,
c) nachfolgend Nachregulierungen auszuführen.
(°) :Funktion ist je nach Art der Anwendung, des Gewichts und der Abmessungen der Automatisierung sowie
des angeschlossenen Zubehörs und der eingesetzten Sicherheitsvorrichtungen einzustellen.
Zweiflügelige
s Tor
Schiebetor Entgegenges
etzte
Schiebetore
Schranke entgegenge
setzte
Schranken
Kipptor Parallele
Kipptore
60
Page 63

17) On recommande que toute installation soit doté au moins d'une signalisation
lumineuse, d'un panneau de signalisation fixé, de manière appropriée, sur la
structure de la fermeture, ainsi que des dispositifs cités au point “16”.
18) GENIUS décline toute responsabilité quant à la sécurité et au bon
fonctionnement de l'automatisme si les composants utilisés dans l'installation
n'appartiennent pas à la production GENIUS.
19) Utiliser exclusivement, pour l'entretien, des pièces GENIUS originales.
20) Ne jamais modifier les composants faisant partie du système d'automatisme.
21) L'installateur doit fournir toutes les informations relatives au fonctionnement
manuel du système en cas d'urgence et remettre à l'Usager qui utilise
l'installation les "Instructions pour l'Usager" fournies avec le produit.
22) Interdire aux enfants ou aux tiers de stationner près du produit durant le
fonctionnement.
23) Eloigner de la portée des enfants les radiocommandes ou tout autre
générateur d'impulsions, pour éviter tout actionnement involontaire de
l'automatisme.
24) Le transit entre les vantaux ne doit avoir lieu que lorsque le portail est
complètement ouvert.
25) L'Usager qui utilise l'installation doit éviter toute tentative de réparation ou
d'intervention directe et s'adresser uniquement à un personnel qualifié.
26) Tout ce qui n'est pas prévu expressément dans ces instructions est interdit.
ADVERTENCIAS PARA EL INSTALADOR
REGLAS GENERALES PARA LA SEGURIDAD
1) ¡ATENCION! Es sumamente importante para la seguridad de las personas
seguir atentamente las presentes instrucciones. Una instalación incorrecta
o un uso impropio del producto puede causar graves daños a las personas.
2) Lean detenidamente las instrucciones antes de instalar el producto.
3) Los materiales del embalaje (plástico, poliestireno, etc.) no deben dejarse al
alcance de los niños, ya que constituyen fuentes potenciales de peligro.
4) Guarden las instrucciones para futuras consultas.
5) Este producto ha sido proyectado y fabricado exclusivamente para la
utilización indicada en el presente manual. Cualquier uso diverso del previsto podría perjudicar el funcionamiento del producto y/o representar fuente
de peligro.
6) GENIUS declina cualquier responsabilidad derivada de un uso impropio o
diverso del previsto.
7) No instalen el aparato en atmósfera explosiva: la presencia de gas o humos
inflamables constituye un grave peligro para la seguridad.
8) Los elementos constructivos mecánicos deben estar de acuerdo con lo
establecido en las Normas EN 12604 y EN 12605.
Para los países no pertenecientes a la CEE, además de las referencias
normativas nacionales, para obtener un nivel de seguridad adecuado, deben
seguirse las Normas arriba indicadas.
9) GENIUS no es responsable del incumplimiento de las buenas técnicas de
fabricación de los cierres que se han de motorizar, así como de las
deformaciones que pudieran intervenir en la utilización.
10) La instalación debe ser realizada de conformidad con las Normas EN 12453
y EN 12445. El nivel de seguridad de la automación debe ser C+E.
11) Quiten la alimentación eléctrica antes de efectuar cualquier intervención
en la instalación.
12) Coloquen en la red de alimentación de la automación un interruptor
omnipolar con distancia de apertura de los contactos igual o superior a 3
mm. Se aconseja usar un magnetotérmico de 6A con interrupción omnipolar.
13) Comprueben que la instalación disponga línea arriba de un interruptor
diferencial con umbral de 0,03 A.
14) Verifiquen que la instalación de tierra esté correctamente realizada y
conecten las partes metálicas del cierre.
15) La automación dispone de un dispositivo de seguridad antiaplastamiento
constituido por un control de par. No obstante, es necesario comprobar el
umbral de intervención según lo previsto en las Normas indicadas en el punto
10.
16) Los dispositivos de seguridad (norma EN 12978) permiten proteger posibles
áreas de peligro de Riesgos mecánicos de movimiento, como por ej.
aplastamiento, arrastre, corte.
17) Para cada equipo se aconseja usar por lo menos una señalización luminosa
así como un cartel de señalización adecuadamente fijado a la estructura
del bastidor, además de los dispositivos indicados en el “16”.
18) GENIUS declina toda responsabilidad relativa a la seguridad y al buen
funcionamiento de la automación si se utilizan componentes de la instalación
que no sean de producción GENIUS.
19) Para el mantenimiento utilicen exclusivamente piezas originales GENIUS
20) No efectúen ninguna modificación en los componentes que forman parte
del sistema de automación.
21) El instalador debe proporcionar todas las informaciones relativas al
funcionamiento del sistema en caso de emergencia y entregar al usuario del
equipo el manual de advertencias que se adjunta al producto.
22) No permitan que niños o personas se detengan en proximidad del producto
durante su funcionamiento.
23) Mantengan lejos del alcance los niños los telemandos o cualquier otro
emisor de impulso, para evitar que la automación pueda ser accionada
involuntariamente.
24) Sólo puede transitarse entre las hojas si la cancela está completamente
abierta.
25) El usuario no debe por ningún motivo intentar reparar o modificar el producto,
debe siempre dirigirse a personal cualificado.
26) Todo lo que no esté previsto expresamente en las presentes instrucciones
debe entenderse como no permitido
HINWEISE FÜR DEN INSTALLATIONSTECHNIKER
ALLGEMEINE SICHERHEITSVORSCHRIFTEN
1) ACHTUNG! Um die Sicherheit von Personen zu gewährleisten, sollte die
Anleitung aufmerksam befolgt werden. Eine falsche Installation oder ein
fehlerhafter Betrieb des Produktes können zu schwerwiegenden
Personenschäden führen.
2) Bevor mit der Installation des Produktes begonnen wird, sollten die Anleitungen
aufmerksam gelesen werden.
3) Das Verpackungsmaterial (Kunststoff, Styropor, usw.) sollte nicht in Reichweite
von Kindern aufbewahrt werden, da es eine potentielle Gefahrenquelle
darstellt.
4) Die Anleitung sollte aufbewahrt werden, um auch in Zukunft Bezug auf sie
nehmen zu können.
5) Dieses Produkt wurde ausschließlich für den in diesen Unterlagen
angegebenen Gebrauch entwickelt und hergestellt. Jeder andere
Gebrauch, der nicht ausdrücklich angegeben ist, könnte die Unversehrtheit
des Produktes beeinträchtigen und/oder eine Gefahrenquelle darstellen.
6) Die Firma GENIUS lehnt jede Haftung für Schäden, die durch unsachgemäßen
oder nicht bestimmungsgemäßen Gebrauch der Automatik verursacht
werden, ab.
7) Das Gerät sollte nicht in explosionsgefährdeten Umgebungen installiert
werden: das Vorhandensein von entflammbaren Gasen oder Rauch stellt ein
schwerwiegendes Sicherheitsrisiko dar.
8) Die mechanischen Bauelemente müssen den Anforderungen der Normen
EN 12604 und EN 12605 entsprechen.
Für Länder, die nicht der Europäischen Union angehören, sind für die
Gewährleistung eines entsprechenden Sicherheitsniveaus neben den
nationalen gesetzlichen Bezugsvorschriften die oben aufgeführten Normen
zu beachten.
9) Die Firma GENIUS übernimmt keine Haftung im Falle von nicht fachgerechten
Ausführungen bei der Herstellung der anzutreibenden Schließvorrichtungen
sowie bei Deformationen, die eventuell beim Betrieb entstehen.
10) Die Installation muß unter Beachtung der Normen EN 12453 und EN 12445
erfolgen. Die Sicherheitsstufe der Automatik sollte C+E sein.
11) Vor der Ausführung jeglicher Eingriffe auf der Anlage ist die elektrische
Versorgung abzunehmen.
12) Auf dem Versorgungsnetz der Automatik ist ein omnipolarer Schalter mit
Öffnungsabstand der Kontakte von über oder gleich 3 mm einzubauen.
Darüber hinaus wird der Einsatz eines Magnetschutzschalters mit 6A mit
omnipolarer Abschaltung empfohlen.
13) Es sollte überprüft werden, ob vor der Anlage ein Differentialschalter mit
einer Auslöseschwelle von 0,03 A zwischengeschaltet ist.
14) Es sollte überprüft werden, ob die Erdungsanlage fachgerecht ausgeführt
wurde. Die Metallteile der Schließung sollten an diese Anlage angeschlossen
werden.
15) Die Automation verfügt über eine eingebaute Sicherheitsvorrichtung für den
Quetschschutz, die aus einer Drehmomentkontrolle besteht. Es ist in jedem
Falle erforderlich, deren Eingriffsschwelle gemäß der Vorgaben der unter
Punkt 10 angegebenen Vorschriften zu überprüfen.
16) Die Sicherheitsvorrichtungen (Norm EN 12978) ermöglichen den Schutz
eventueller Gefahrenbereiche vor mechanischen Bewegungsrisiken, wie
zum Beispiel Quetschungen, Mitschleifen oder Schnittverletzungen.
17) Für jede Anlage wird der Einsatz von mindestens einem Leuchtsignal empfohlen
sowie eines Hinweisschildes, das über eine entsprechende Befestigung mit
dem Aufbau des Tors verbunden wird. Darüber hinaus sind die unter Punkt
“16” erwähnten Vorrichtungen einzusetzen.
18) Die Firma GENIUS lehnt jede Haftung hinsichtlich der Sicherheit und des
störungsfreien Betriebs der Automatik ab, soweit Komponenten auf der
Anlage eingesetzt werden, die nicht im Hause GENIUS hergestellt wurden.
19) Bei der Instandhaltung sollten ausschließlich Originalteile der Firma GENIUS
verwendet werden.
20) Auf den Komponenten, die Teil des Automationssystems sind, sollten keine
Veränderungen vorgenommen werden.
21) Der Installateur sollte alle Informationen hinsichtlich des manuellen Betriebs
des Systems in Notfällen liefern und dem Betreiber der Anlage das
Anleitungsbuch, das dem Produkt beigelegt ist, übergeben.
22) Weder Kinder noch Erwachsene sollten sich während des Betriebs in der
unmittelbaren Nähe der Automation aufhalten.
23) Die Funksteuerungen und alle anderen Impulsgeber sollten außerhalb der
Reichweite von Kindern aufbewahrt werden, um ein versehentliches
Aktivieren der Automation zu vermeiden.
24) Der Durchgang oder die Durchfahrt zwischen den Flügeln darf lediglich bei
vollständig geöffnetem Tor erfolgen.
25) Der Betreiber sollte keinerlei Reparaturen oder direkte Eingriffe auf der
Automation ausführen, sondern sich hierfür ausschließlich an qualifiziertes
Fachpersonal wenden.
26) Alle Vorgehensweisen, die nicht ausdrücklich in der vorliegenden Anleitung
vorgesehen sind, sind nicht zulässig
Page 64

DICHIARAZIONE CE DI CONFORMITÁ
EC COMPLIANCE DECLARATION
DÉCLARATION CE DE CONFORMITÉ
Fabbricante: GENIUS s.r.l.
Indirizzo: Via Padre Elzi, 32
Dichiara che: L'apparecchiatura elettronica JA466
• è conforme ai requisiti essenziali di sicurezza
Note aggiuntive:
questi prodotti sono stati sottoposti a test in una configurazione tipica omogenea (tutti i prodotti di costruzione GENIUS s.r.l.).
Grassobbio, 1 Marzo 2002
24050 - Grassobbio
BERGAMO - ITALIA
delle seguenti direttive:
73/23 CEE e successiva modifica 93/68/CEE.
89/336 CEE e successiva modifica 92/31 CEE e
93/68/CEE
L’Amministratore Delegato
D. Gianantoni
DECLARACIÓN CE DE CONFORMIDAD
Fabricante: GENIUS s.r.l.
Dirección: Via Padre Elzi, 32
Declara que: El equipo electrónico JA466
24050 - Grassobbio
BERGAMO - ITALIA
• Cumple los requisitos esenciales de seguridad
de las siguientes directivas:
73/23 CEE y sucesiva modificación 93/68 CEE,
89/336 CEE y sucesivas modificaciones 92/31 CEE y
93/68 CEE.
Manufacturer: GENIUS s.r.l.
Address: Via Padre Elzi, 32
Declares that: the JA466 electronic
• complies with the essential safety requirements of
Notes:
these products have been subject to testing procedures carried
out under standardised conditions (all products manufactured
by GENIUS s.r.l.).
Grassobbio, 1 March 2002
24050 - Grassobbio
BERGAMO - ITALY
the following Directives:
73/23 EEC and subsequent amendment 93/68 EEC.
89/336 EEC and subsequent amendments 92/31 EEC
and 93/68 EEC.
Managing Director
D. Gianantoni
EG-KONFORMITÄTSERKLÄRUNG
Hersteller: GENIUS s.r.l.
Adresse: Via Padre Elzi, 32
erklärt: das elektronisch Gerät JA466
24050 - Grassobbio
BERGAMO - ITALIEN
• entspricht den wesentlichen
Sicherheitsbestimmungen folgender Richtlinien:
73/23 EWG und nachträgliche Änderung 93/68 EWG
89/336 EWG und nachträgliche Änderung 92/31 EWG
sowie 93/68 EWG
Fabricant: GENIUS s.r.l.
Adresse: Via Padre Elzi, 32
Déclare que: L'appareillage électronique JA466
Note supplémentaire:
ces produits ont été soumis à des essais dans une configuration
typique homogène (tous les produits sont fabriqués par GENIUS
s.r.l.).
Grassobbio, le 1 Mars 2002
Le descrizioni e le illustrazioni del presente manuale non sono
impegnative. GENIUS si riserva il diritto, lasciando inalterate le
caratteristiche essenziali dell’apparecchiatura, di apportare in
qualunque momento e senza impegnarsi ad aggiornare la
presente pubblicazione, le modifiche che essa ritiene convenienti per miglioramenti tecnici o per qualsiasi altra esigenza di
carattere costruttivo o commerciale.
The descriptions and illustrations contained in the present
manual are not binding. GENIUS reserves the right, whils leaving the main features of the equipments unaltered, to undertake any modifications to holds necessary for either technical
or commercial reasons, at any time and without revising the
present publication.
Les descriptions et les illustrations du présent manuel sont
fournies à titre indicatif. GENIUS se réserve le droit d’apporter à
tout moment les modifications qu’elle jugera utiles sur ce
produit tout en conservant les caractéristiques essentielles,
sans devoir pour autant mettre à jour cette publication .
24050 - Grassobbio
BERGAMO - ITALIE
• est conforme aux règles de sécurité visées par les
directives suivantes:
73/23 CEE, modifiée 93/68 CEE.
89/336 CEE, modifiée 92/31 CEE et 93/68 CEE.
L’Administrateur Délégué
D. Gianantoni
Nota:
los productos mencionados han sido sometidos a pruebas en
una configuración típica homogénea (todo productos
fabricado por GENIUS s.r.l.).
Grassobbio, 1º de Marzo de 2002.
Administrador Delegado
D. Gianantoni
GENIUS s.r.l.
Via Padre Elzi, 32
24050 - Grassobbio
BERGAMO-ITALY
tel. 0039.035.4242511
fax. 0039.035.4242600
info@geniusg.com
www.geniusg.com
Anmerkung:
die o.g. produkte sind in einer typischen und einheitlichen weise
getestet (alle von GENIUS s.r.l. gebaute produkte).
Grassobbio, 1 März 2002
Der Geschäftsführer
D. Gianantoni
Timbro rivenditore: / Distributor’s stamp: / Timbre de l’agent: /
Sello del revendedor: / Fachhändlerstempel:
Las descripciones y las ilustraciones de este manual no
comportan compromiso alguno. GENIUS se reserva el derecho,
dejando inmutadas las características esenciales de los
aparatos, de aportar, en cualquier momento y sin
comprometerse a poner al día la presente publicación, todas
las modificaciones que considere oportunas para el
perfeccionamiento técnico o para cualquier otro tipo de
exigencia de carácter constructivo o comercial.
Die Beschreibungen und Abbildungen in vorliegendem
Handbuch sind unverbindlich. GENIUS behält sich das Recht
vor, ohne die wesentlichen Eigenschaften dieses Gerätes zu
verändern und ohne Verbindlichkeiten in Bezung auf die
Neufassung der vorliegenden Anleitungen, technisch bzw,
konstruktiv / kommerziell bedingte Verbesserungen
vorzunehmen.
I0466 REV.1
 Loading...
Loading...