

Page 1

TM
MDS Mercury Series
Reference Manual
Wireless IP/Ethernet Transceiver
Covering AP and Remote Units
DRAFT
MDS 05-4446A01, Rev. 02
AUGUST 2008
Page 2

Page 3
TABLE OF CONTENTS
1 PRODUCT OVERVIEW AND APPLICATIONS............ 1
1.1 ABOUT THIS MANUAL.........................................................................................................3
1.1.1 Start-Up Guide ...........................................................................................................................3
1.1.2 Online Access to Manuals ..........................................................................................................3
1.1.3 Conventions Used in This Manual ..............................................................................................3
1.2 PRODUCT DESCRIPTION...................................................................................................4
1.2.1 Model Offerings ..........................................................................................................................6
1.2.2 GE MDS P23 Protected Network (Redundant) Configuration ....................................................7
1.2.3 External GPS PPS Option ..........................................................................................................7
1.3 APPLICATIONS ....................................................................................................................7
1.3.1 Mobile/Fixed Data System .........................................................................................................8
1.3.2 Wireless LAN ..............................................................................................................................8
1.3.3 Point-to-Point LAN Extension .....................................................................................................9
1.3.4 Serial Radio Network Connectivity .............................................................................................9
1.3.5 Multiple Protocols and/or Services ...........................................................................................10
1.3.6 Wireless LAN with Mixed Services ...........................................................................................11
1.3.7 Upgrading Older Wireless Network with Serial Interfaces ........................................................12
1.4 NETWORK DESIGN CONSIDERATIONS.......................................................................... 12
1.4.1 Extending Network Coverage with Repeaters ..........................................................................12
1.4.2 Protected Network Operation using Multiple Access Points .....................................................14
1.4.3 Collocating Multiple Radio Networks ........................................................................................15
1.5 GE MDS CYBER SECURITY SUITE..................................................................................16
1.6 ACCESSORIES.................................................................................................................. 17
2 TABLETOP EVALUATION AND TEST SETUP....... 19
2.1 OVERVIEW.........................................................................................................................21
2.2 STEP 1
2.3 STEP 2
05-4446A01, Rev. C Mercury Reference Manual i
—
CONNECT THE ANTENNA PORTS................................................................... 21
—
CONNECT THE PRIMARY POWER ..................................................................22
Page 4
2.4 STEP 3
2.5 STEP 4
2.5.1 Getting Started .........................................................................................................................23
2.5.2 Procedure .................................................................................................................................23
2.5.3 Basic Configuration Defaults ....................................................................................................23
2.6 STEP 5
2.7 STEP 6
—
CONNECT PC TO THE TRANSCEIVER............................................................ 23
—
REVIEW TRANSCEIVER CONFIGURATION.................................................... 23
—
CONNECT LAN OR SERIAL DATA EQUIPMENT.............................................. 24
—
CHECK FOR NORMAL OPERATION.................................................................26
3 EMBEDDED MANAGEMENT SYSTEM................... 29
3.1 MS INTRODUCTION.......................................................................................................... 31
3.1.1 Differences in the User Interfaces ............................................................................................31
3.2 ACCESSING THE MENU SYSTEM ...................................................................................33
3.2.1 Methods of Control ...................................................................................................................34
3.2.2 PC Connection and Log In Procedures ....................................................................................34
3.2.3 Navigating the Menus ...............................................................................................................38
3.3 BASIC OVERVIEW OF OPERATION.................................................................................40
3.3.1 Starting Information Screen ......................................................................................................40
3.3.2 Main Menu ................................................................................................................................42
3.4 CONFIGURING NETWORK PARAMETERS .....................................................................43
3.4.1 Network Configuration Menu ....................................................................................................43
3.4.2 Ethernet Port Configuration Menu ............................................................................................51
3.4.3 Bridge Configuration .................................................................................................................52
3.4.4 SNMP Agent Configuration .......................................................................................................53
3.4.5 AP Location Push Config Menu ................................................................................................55
3.4.6 SNTP Server Configuration ......................................................................................................57
3.5 RADIO CONFIGURATION.................................................................................................. 58
3.5.1 Radio Configuration Menu .......................................................................................................58
3.5.2 Serial Port Configuration ..........................................................................................................67
3.6 MODBUS / TCP SERVER CONFIGURATION ................................................................... 80
3.6.1 Modbus/TCP in Mercury Transceivers
3.6.2 Menu Selections .......................................................................................................................80
An Overview .............................................................80
—
3.7 SECURITY CONFIGURATION MENU............................................................................... 85
3.7.1 Device Security Menu ..............................................................................................................86
3.7.2 Wireless Security Menu ............................................................................................................87
ii
Mercury Reference Manual 05-4446A01, Rev. C
Page 5

3.7.3 IEEE 802.1x Device Authentication ..........................................................................................89
3.7.4 Manage Certificates .................................................................................................................91
3.8 REDUNDANCY CONFIGURATION (AP ONLY)................................................................. 93
3.9 GPS CONFIGURATION (REMOTE ONLY)........................................................................98
3.10 DEVICE INFORMATION MENU.....................................................................................100
3.11 PERFORMANCE INFORMATION MENU....................................................................... 101
3.12 MAINTENANCE/TOOLS MENU..................................................................................... 113
3.12.1 Auto Firmware Upgrade Menu (AP Only) .............................................................................124
3.13 PERFORMANCE OPTIMIZATION.................................................................................. 127
3.13.1 Proper Operation
—
What to Look For ......................................................................... 129
4 TROUBLESHOOTING & RADIO
MEASUREMENTS.................................................. 133
4.1 TROUBLESHOOTING......................................................................................................135
4.1.1 Interpreting the Front Panel LEDs ..........................................................................................135
4.1.2 Troubleshooting Using the Embedded Management System ................................................136
4.1.3 Using Logged Operation Events ............................................................................................139
4.1.4 Alarm Conditions ....................................................................................................................140
4.1.5 Correcting Alarm Conditions ...................................................................................................141
4.1.6 Logged Events .......................................................................................................................142
4.2 RADIO (RF) MEASUREMENTS....................................................................................... 143
4.2.1 Antenna System SWR and Transmitter Power Output ...........................................................143
For Directional Antennas ...........................................................................144
4.2.2 Antenna Aiming
—
5 PLANNING A RADIO NETWORK.......................... 147
5.1 INSTALLATION PLANNING ............................................................................................. 149
5.1.1 General Requirements ...........................................................................................................149
5.1.2 Site Selection .........................................................................................................................151
5.1.3 Terrain and Signal Strength ....................................................................................................151
5.1.4 Antenna & Feedline Selection ................................................................................................151
5.1.5 How Much Output Power Can be Used? ...............................................................................155
5.1.6 Conducting a Site Survey .......................................................................................................155
05-4446A01, Rev. C Mercury Reference Manual iii
Page 6

5.1.7 A Word About Radio Interference ...........................................................................................156
5.2 dBm-WATTS-VOLTS CONVERSION CHART..................................................................158
-
6 TECHNICAL REFERENCE..................................... 159
6.1 DATA INTERFACE CONNECTORS .................................................................................161
6.1.1 LAN Port .................................................................................................................................161
6.1.2 COM1 Port .............................................................................................................................162
6.2 SPECIFICATIONS............................................................................................................ 162
6.3 NOTES ON SNMP............................................................................................................165
6.3.1 Overview ................................................................................................................................165
7 GLOSSARY OF TERMS & ABBREVIATIONS....... 169
Copyright Notice
This publication is protected by U.S.A. copyright law. Copyright 2008, GE MDS. All rights
reserved.
ISO 9001 Registration
GE MDS adheres to the internationally-accepted ISO 9001 quality system standard.
To our Customers
We appreciate your patronage. You are our business. We promise to serve and anticipate your
needs. We will strive to give you solutions that are cost effective, innovative, reliable and of the
highest quality possible. We promise to build a relationship that is forthright and ethical, one that
builds confidence and trust.
Related Materials on the Internet
tion notes, firmware upgrades and other updated information is available on the GE MDS Web site
at www.GEmds.com.
About GE MDS
—Data sheets, frequently asked questions, case studies, applica-
Over two decades ago, GE MDS began building radios for business-critical applications. Since
then, we have installed thousands of radios in over 110 countries. To succeed, we overcame
impassable terrain, brutal operating conditions and disparate, complex network configurations. We
also became experts in wireless communication standards and system applications worldwide. The
result of our efforts is that today, thousands of utilities around the world rely on GE MDS-based
wireless networks to manage their most critical assets.
iv
Mercury Reference Manual 05-4446A01, Rev. C
Page 7
The majority of GE MDS radios deployed since 1985 are still installed and performing within our
customers’ wireless networks. That's because we design and manufacture our products in-house,
according to ISO 9001 which allows us to control and meet stringent global quality standards.
Our durable products and comprehensive solutions has made GE MDS the wireless leader in indus-
trial automation—including oil and gas production and transportation, water/wastewater treat-
ment, supply and transportation, electric transmission and distribution and many other utility
applications. GE MDS is also at the forefront of wireless communications for private and public
infrastructure and online transaction processing. Now is an exciting time for GE MDS and our customers as we look forward to further demonstrating our abilities in new and emerging markets.
As your wireless needs change you can continue to expect more from GE MDS. We’ll always put
the performance of your network above all. Visit us at www.GEmds.com for more information.
OPERATIONAL & SAFETY NOTICES
RF Exposure
Professional installation required. The transceiver described here emits radio frequency
energy. Although the power level is low, the concentrated energy from a directional
antenna may pose a health hazard. Do not allow people to come closer than 20 cm
(7.87 inches) to the antenna when the transmitter is operating. This calculation is
based on an 18 dBi panel antenna. Additional information on RF exposure is on the
Internet at
www.fcc.gov/oet/info/documents/bulletins
.
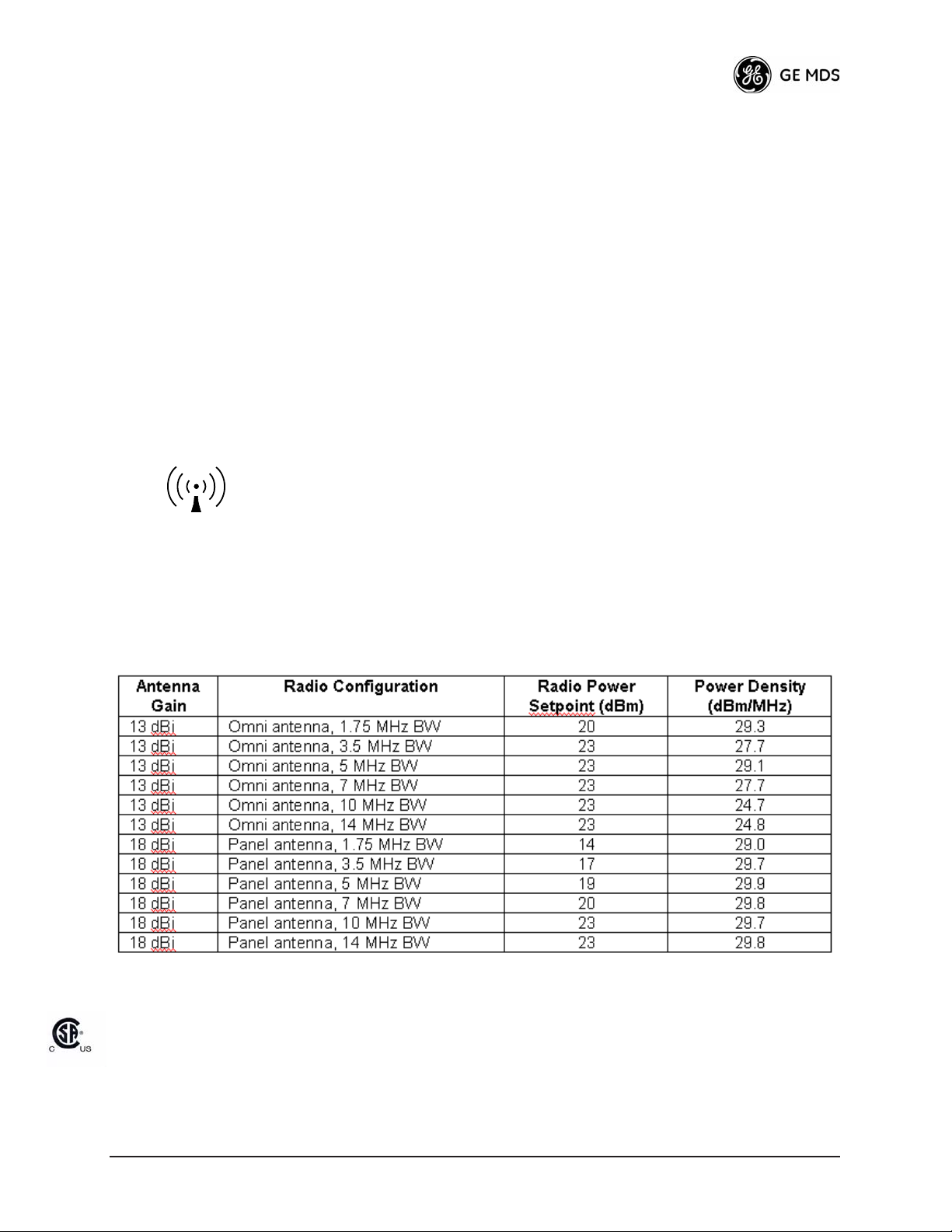
ERP Compliance
To maintain regulatory compliance for Effective Radiated Power (ERP) of 1-Watt per MHz, the
following table of transmit power settings must be observed for the listed bandwidths and antenna
types approved. Consult the factory for other antenna options of lower gain.
CSA/
This product is approved for use in Class 1, Division 2, Groups A, B, C & D Hazardous Locations. Such locations are
defined in Article 500 of the National Fire Protection Association (NFPA) publication
the National Electrical Code.
The transceiver has been recognized for use in these hazardous locations by the Canadian Standards Association
(CSA) which also issues the US mark of approval (CSA/
C22.2 No. 213-M1987.
05-4446A01, Rev. C Mercury Reference Manual v
Notice
us
NFPA 70
). The CSA Certification is in accordance with CSA STD
US
, otherwise known as
Page 8
CSA Conditions of Approval: The transceiver is not acceptable as a stand-alone unit for use in the hazardous locations
described above. It must either be mounted within another piece of equipment which is certified for hazardous
locations, or installed within guidelines, or conditions of approval, as set forth by the approving agencies. These
conditions of approval are as follows:
The transceiver must be mounted within a separate enclosure which is suitable for the intended application.
The antenna feedline, DC power cable and interface cable must be routed through conduit in accordance with the
National Electrical Code.
Installation, operation and maintenance of the transceiver should be in accordance with the transceiver’s installation
manual, and the National Electrical Code.
Tampering or replacement with non-factory components may adversely affect the safe use of the transceiver in hazardous locations, and may void the approval.
A power connector with screw-type retaining screws as supplied by GE MDS must be used.
Do not disconnect equipment unless power has been switched off or the area is known to
be non-hazardous.
EXPLOSION
HAZARD!
Refer to Articles 500 through 502 of the National Electrical Code (NFPA 70) for further
information on hazardous locations and approved Division 2 wiring methods.
FCC Part 15 Notices
The transceiver series complies with Part 15 of the FCC Rules. Operation is subject to the following two conditions:
(1) this device may not cause harmful interference, and (2) this device must accept any interference received, including
interference that may cause undesired operation. This device is specifically designed to be used under Section 15.247
of the FCC Rules and Regulations. Any unauthorized modification or changes to this device without the express
approval of Microwave Data Systems may void the users authority to operate this device. Furthermore, the Mercury
Series is intended to be used only when installed in accordance with the instructions outlined in this manual. Failure
to comply with these instructions may also void the users authority to operate this device.
Part 15 rules also require that the Effective Isotropic Radiated Power (EIRP) from a Mercury Series installation not
exceed 36 dBm. Refer to
Antenna & Feedline Selection
on Page 151 for more information.
Manual Revision and Accuracy
This manual was prepared to cover a specific version of firmware code. Accordingly, some screens and features may
differ from the actual unit you are working with. While every reasonable effort has been made to ensure the accuracy
of this publication, product improvements may also result in minor differences between the manual and the product
shipped to you. If you have additional questions or need an exact specification for a product, please contact our Customer Service Team using the information at the back of this guide. In addition, manual updates can often be found on
the GE MDS Web site at www.GEmds.com.
Environmental Information
The manufacture of this equipment has required the extraction and use of natural resources. Improper disposal may
contaminate the environment and present a health risk due to hazardous substances contained within. To avoid dissemination of these substances into our environment, and to limit the demand on natural resources, we encourage you to
use the appropriate recycling systems for disposal. These systems will reuse or recycle most of the materials found in
this equipment in a sound way. Please contact GE MDS or your supplier for more information on the proper disposal
of this equipment.
vi
Mercury Reference Manual 05-4446A01, Rev. C
Page 9
PRODUCT OVERVIEW
1
1 Chapter Counter Reset Paragraph
Contents
1.1 ABOUT THIS MANUAL............................................................... 3
1.2 PRODUCT DESCRIPTION .........................................................4
1.3 APPLICATIONS........................................................................... 7
AND APPLICATIONS
1.1.1 Start-Up Guide ..............................................................................3
1.1.2 Online Access to Manuals .............................................................3
1.1.3 Conventions Used in This Manual ................................................3
1.2.1 Model Offerings .............................................................................6
1.2.2 GE MDS P23 Protected Network (Redundant) Configuration .......7
1.2.3 External GPS PPS Option .............................................................7
1.3.1 Mobile/Fixed Data System ............................................................8
1.3.2 Wireless LAN ................................................................................8
1.3.3 Point-to-Point LAN Extension ........................................................9
1.3.4 Serial Radio Network Connectivity ................................................9
1.3.5 Multiple Protocols and/or Services ..............................................10
1.3.6 Wireless LAN with Mixed Services ..............................................11
1.3.7 Upgrading Older Wireless Network with Serial Interfaces ..........12
1.4 NETWORK DESIGN CONSIDERATIONS ................................ 12
1.4.1 Extending Network Coverage with Repeaters ............................12
1.4.2 Protected Network Operation using Multiple Access Points .......14
1.4.3 Collocating Multiple Radio Networks ...........................................15
1.5 GE MDS CYBER SECURITY SUITE ........................................16
1.6 ACCESSORIES......................................................................... 17
05-4446A01, Rev. C Mercury Reference Manual 1
Page 10
2 Mercury Reference Manual 05-4446A01, Rev. C
Page 11

1.1 ABOUT THIS MANUAL
This Reference Manual is one of two publications provided for users of
the Mercury SeriesTM transceiver system. It contains detailed product
information, an overview of common applications, a screen-by-screen
review of the menu system, technical specifications, suggested settings
for various scenarios, and detailed troubleshooting information. This
manual should be available to all personnel responsible for network
design, setup, commissioning and troubleshooting.
1.1.1 Start-Up Guide
The Mercury Series Start-Up Guide (Part No. 05-4558A01) is a com-
panion publication to the Reference Manual. It is a smaller book, with a
specific purpose—to guide an installer in the basic steps for getting a
transceiver on the air and communicating with other units in a network.
It provides only the essential information installers require for getting
their equipment up and running in the shortest time possible.
1.1.2 Online Access to Manuals
In addition to printed manuals, many users need access to documents
electronically. This is especially useful when you need to access documentation while traveling, or want to share a document with another
user in the field. Electronic documents also allow searching for a specific term or subject, especially in larger manuals.
Access manuals for our equipment anytime from our Web site at
www.GEmds.com. Simply click the Downloads tab at the top of the home
page and select Product Manuals from the drop-down list. A search
window appears to help you locate the manual you need.
®
Online manuals are provided as PDF files in the Adobe
Acrobat® stan-
dard. If necessary, download the free reader for PDF files from
www.adobe.com.
1.1.3 Conventions Used in This Manual
On-Screen Menu Items
On-screen menu items or command entries are presented in a distinctive
font to set them apart from regular text (for example:
Address, Password). You will find this font most often in Chapter 3,
where the menu system is discussed in detail. When variable settings or
a range of options are available for a menu option, the items are presented inside brackets, with the default setting (if any) shown last after
a semicolon:
[
available settings or range; default setting]
Network Name, IP
05-4446A01, Rev. C Mercury Reference Manual 3
Page 12

Menu Strings
To help show the path to a menu selection, navigation strings are used
in several places in this manual. For example, suppose you want to view
or set the Network Name assigned to your system. This item is located
in the Network Configuration Menu, so the navigation string in the text
would appear as shown:
Main Menu>>Network Configuration>>Net work Name
By following this order of menus, you can quickly reach the desired
menu.
1.2 PRODUCT DESCRIPTION
The GE MDS Mercury SeriesTM transceiver is an easy-to-install wireless
solution offering extended range, secure operation, and multi-megabit
performance in a compact and rugged package. The transceiver is ideally suited for demanding applications in fixed or mobile environments,
where reliability and range are paramount.
The transceivers are commonly used to convey text documents,
graphics, e-mail, video, Voice over IP (VoIP), and a variety of other
application data between mobile, fixed-point, and WAN/LAN-based
entities.
Based on multi-carrier Orthogonal Frequency Division Multiplexing
(OFDM), the transceiver features high speed/low latency, basic Quality
of Service (QoS) for prioritizing traffic, Ethernet and serial encapsulation, and network roaming. It also provides enhanced security features
including AES encryption and IEEE 802.1x Device Authentication,
making the Mercury system the best combination of security, range, and
speed of any industrial wireless solution on the market today.
Invisible place holder
Figure 1-1. The GE MDS Mercury SeriesTM Transceiver
(Remote unit shown, AP is similar in appearance)
Rugged Packaging
The transceivers are housed in a compact and rugged die cast-aluminum
case that need only be protected from direct exposure to the weather.
4 Mercury Reference Manual 05-4446A01, Rev. C
Page 13

This one enclosure contains all necessary components for radio operation and data communications.
Simple Installation Mercury Transceivers are designed for rapid and trouble-free installa-
tion. For basic services, you simply connect the antennas (900 MHz and
GPS, as required), connect your data equipment, apply primary power,
and set some operating parameters. No license is required for operation
in the USA, Canada, and many other countries. Check requirements for
your region before placing the equipment into service.
Most installations employ an omni-directional antenna at the Access
Point (AP) location and mobile stations. Fixed Remote stations often
employ a directional antenna aimed at the AP. Regardless of the type
used, antennas are a vital part of the system and must be chosen and
installed correctly. Refer to INSTALLATION PLANNING on
Page 149 for guidance on choosing suitable antennas and installation
sites.
Secure Operation Data network security is a vital issue in today’s wireless world. Mercury
transceivers provide multiple tools to help you build a network that min-
imizes the risk of eavesdropping and unauthorized access. Some are
inherent in the radio’s operation, such as the use of 900 MHz
spread-spectrum transmissions; others include data encryption,
enabling/disabling channels, and password protection.
Security is not a one-step process that can simply be turned on and forgotten. It must be practiced and enforced at multiple levels,
24 hours-a-day and 7 days-a-week. See “GE MDS CYBER SECURITY
SUITE” on Page 16 for more information about the transceiver’s secu-
rity tools.
Robust Radio
Operation
The transceivers are designed for operation in the license-free 900 MHz
Industrial, Scientific, and Medical (ISM) band. They provide reliable
communications over long distances, even in the presence of weak signals or interference.
Mobile range depends on many factors, including terrain, building density, antenna gain, and speed of travel. The unit is designed for successful application in a variety of mobile environments, and offers the
best combination of range, speed and robustness available in an industrial wireless package today. By using multiple Access Points, a network
can be created that provides consistent, reliable coverage over a large
metropolitan area. See “SPECIFICATIONS” on Page 162 for more
information on transmission range.
Flexible Services Users with a mix of equipment having Ethernet and serial data interfaces
can use this equipment via a Remote transceiver. The transceiver provides services in data networks that are migrating from legacy
serial/EIA-232-based hardware to the faster and more easily interfaced
Ethernet protocol.
05-4446A01, Rev. C Mercury Reference Manual 5
Page 14
Flexible
Management
You can locally or remotely configure, commission, troubleshoot, and
maintain the transceiver. Four different modes of access are available:
local RS-232 console terminal, local or remote IP access (via Telnet or
SSH), web browser (HTTP, HTTPS), and SNMP (v1/v2/v3).
The text-based interfaces (RS-232 console, Telnet, and SSH) are implemented in the form of easy-to-follow menus, and the terminal server
provides a wizard to help you configure the units correctly.
Transceiver
Features
The transceiver’s design makes the installation and configuration easy,
while allowing for future changes.
• Industrial-Grade Product—Extended temperature range for
trouble-free operation in extreme environments.
• Robust Radio Communications—Designed to operate over long
distances in dense, high-interference environments.
• Robust Network Security—Prevents common attack schemes
and hardware from gaining access or control of the network.
Common attack events are logged and reported by alarms.
• High Speed—1.5 Mbps is over 100-times faster than 9.6 kbps
radios.
• Plug-and-Play Connectivity—AP or Remote configuration
requires minimal setup.
• Built-in GPS Receiver—GPS technology is used for timing and
location data. The only external equipment needed for this functionality is a GPS antenna (several types are available from GE
MDS).
1.2.1 Model Offerings
The transceiver comes in two primary models—Access Point and
Remote. Unique hardware is used for each model. Of the Remote radios,
there are two sub-types available—Standard Remote and Max
Remote, both of which support Ethernet and serial services. Table 1-1
summarizes each radio’s interface services.
Table 1-1. Transceiver Models and Data Interface Services
Model Sub-Type
Access Point N/A Yes Yes No No
Remote Standard Remote Yes Yes No No
Max Remote Yes Yes Yes Yes
NOTES
1.COM1 provides access to the embedded Management System for all units.
Ethernet/LAN
1
COM1
1
USB Integrated WiFi
Access Point or Remote?—Identification Tip
The outward appearance of AP and Remote radios is nearly identical,
however, the hardware for each type is different and they are not inter-
changeable. An quick way to identify them is to observe the color of the
6 Mercury Reference Manual 05-4446A01, Rev. C
Page 15
gasket seal in the center of the radio case. APs have a black gasket,
while Remote units have a yellow gasket.
In addition to gasket color, a label on the top of each radio identifies it
as an AP or Remote unit. If the label shows an –A suffix, it is an AP. If
it shows a –R suffix, it is a Remote.
1.2.2 GE MDS P23 Protected Network (Redundant)
Configuration
For mission-critical applications, a Protected Network Station is also
offered. This unit incorporates two Access Points, two power supplies,
and a switchover logic board that automatically selects between Transceiver A and Transceiver B as the active radio. Figure 1-2 shows the
protected chassis. For system-level information on this product, refer to
MDS publication 05-4161A01.
Invisible place holder
Figure 1-2. MDS P23 Protected Network Station
(incorporates two transceivers, with automatic switchover)
1.2.3 External GPS PPS Option
The External GPS Precise Positioning Service (PPS) option allows for
an external GPS device to provide the PPS input to the Mercury. This is
useful in installations where multiple radios require GPS timing. This
option prevents each Mercury from requiring its own GPS antenna.
Refer to the electrical specifications in the External GPS PPS Option
section on Page 164. This option is only available in hardware revision
1.0.2 or later.
1.3 APPLICATIONS
The following sections provide illustrations of typical transceiver installations. This is an overview only. A Network Administrator should be
involved in all installation planning activities.
05-4446A01, Rev. C Mercury Reference Manual 7
Page 16

Mercury AP
C
)
C
)
M
DS NETview MS®
Mercury
Computer
Server
(Ethernet)
Control Center
WAN
Mercury
remote
Router
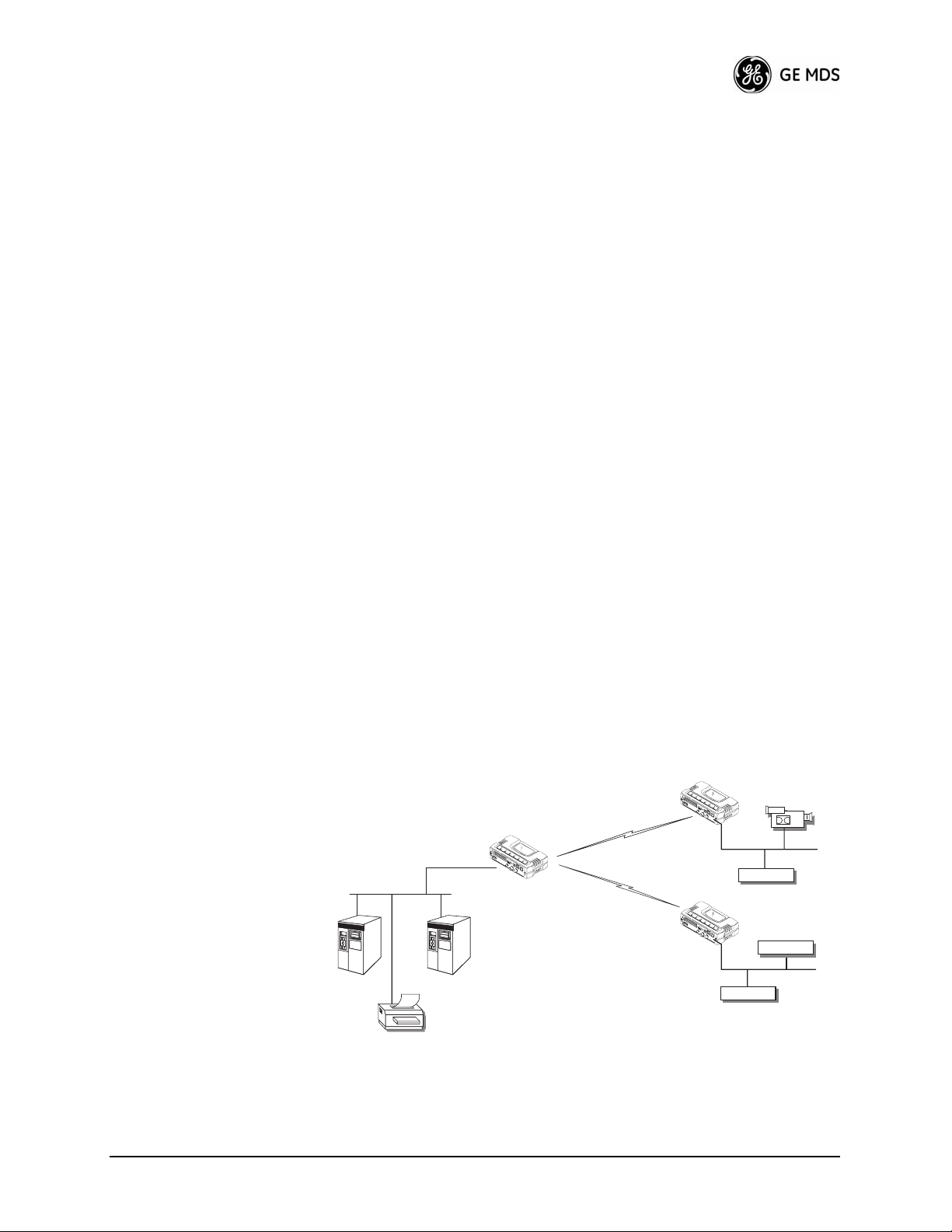
1.3.1 Mobile/Fixed Data System
Mercury transceivers support high-speed data communications in a
mobile environment. In this application, Remote radios “roam” between
different Access Points, providing seamless transitions and continuous
coverage throughout a municipal area. Figure 1-3 shows an example of
an integrated system employing both mobile and fixed Mercury transceivers.
Invisible place holder
remote
Video
RTU/PLC
(Ethernet)
Long Range WLAN
MDS 4790
Master Radio
Licensed Serial/IP Integration
Mercury
remote
Mercury
remote
RS-232
Mobile DataMobile Data
Figure 1-3. Integrated Mobile/Fixed Application
Surveillance
MDS 4710
MDS 4710
RS-232
RS-232
RTU/PL
(Serial
RTU/PL
(Serial
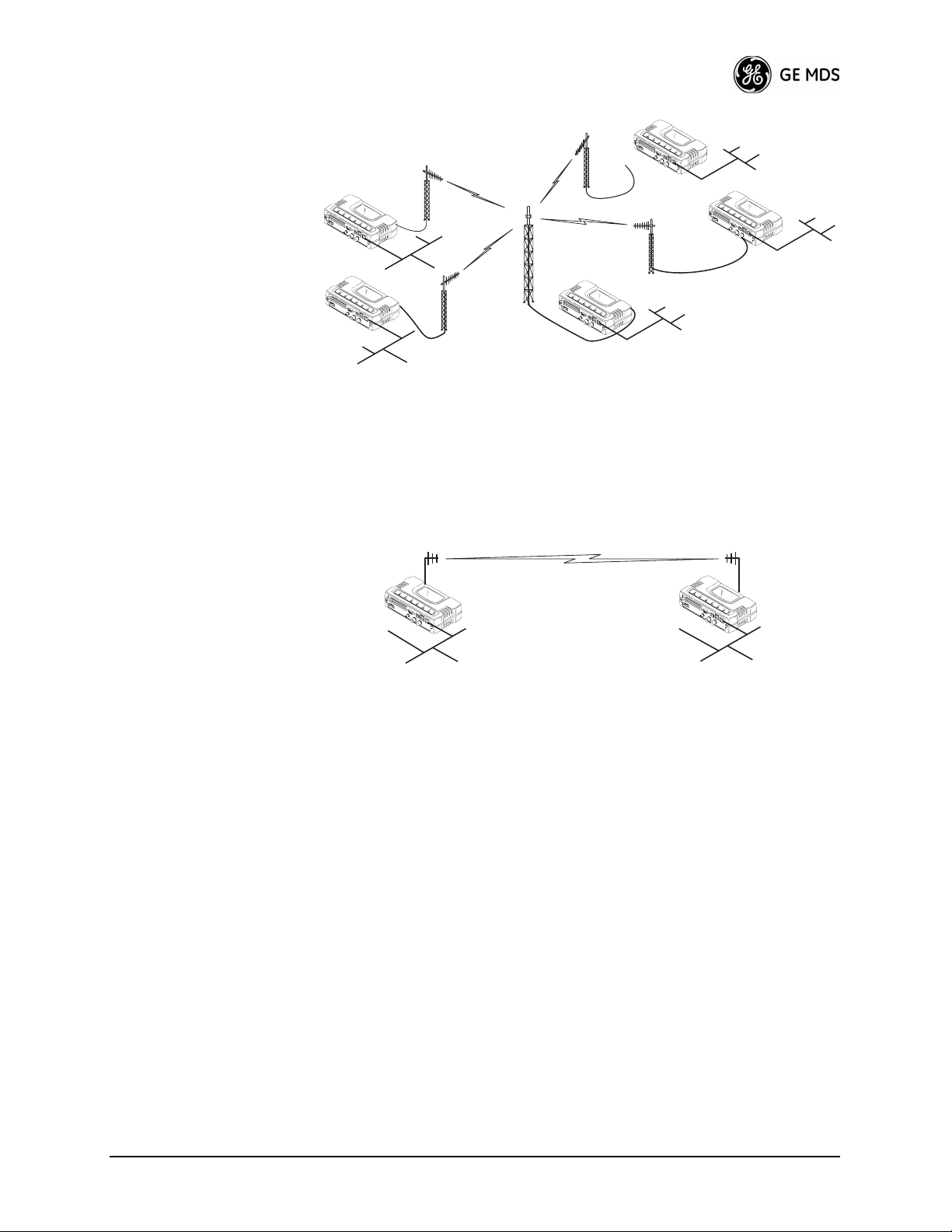
1.3.2 Wireless LAN
The wireless LAN is a common application of the transceiver. It consists
of a central control station (Access Point) and one or more associated
Remote units, as shown in Figure 1-4. A LAN provides communications
between a central WAN/LAN and remote Ethernet segments. The operation of the radio system is transparent to the computer equipment connected to the transceiver.
The Access Point is positioned at a location from which it communicates
with all Remote units in the system. Commonly, this is a high location
on top of a building or communications tower. Messages are exchanged
at the Ethernet level. This includes all types of IP traffic.
A Remote transceiver can only communicate over-the-air to an Access
Point (AP). Peer-to-peer communications between Remotes can only
take place indirectly via the AP. In the same fashion, an AP can only
communicate over-the-air to associated Remote units. Exception: Two
APs can communicate with each other “off-the-air” through their
Ethernet connectors using a common LAN/WAN.
8 Mercury Reference Manual 05-4446A01, Rev. C
Page 17
Invisible place holder
Remote
R
LAN
Remote
emote
LAN
LAN
WAN/LAN
Access Point
Remote
LAN
Figure 1-4. Typical Wireless LAN
1.3.3 Point-to-Point LAN Extension
A point-to-point configuration (Figure 1-5) is a simple arrangement
consisting of an Access Point and a Remote unit. This provides a communications link for transferring data between two locations.
Invisible place holder
Access Point
Remote
LAN/WAN
LAN
Figure 1-5. Typical Point-to-Point Link
1.3.4 Serial Radio Network Connectivity
The transceiver provides a path for serial devices to migrate to
IP/Ethernet systems. Many radio networks in operation today still rely
on serial networks at data rates of 9600 bps or less. These networks can
use the transceiver as a means to continue using the serial service, while
allowing the infrastructure to migrate to an IP format.
A Remote transceiver with its serial port connected to a GE MDS
serial-based radio, such as the MDS x790/x710, MDS TransNET and
others, provides a path for bringing the data from the older radio into the
IP/Ethernet environment of a Mercury-based system.
05-4446A01, Rev. C Mercury Reference Manual 9
Page 18
Invisible place holder
N
N
Serial Conn.
MDS 4710 Remote
Serial
Device
NETWORK
ROUTER
MS Control
Point
HUB
ROUTER
SCADA Host
Modbus/IP
Access Point
Remote Serial
Remote Serial
Remote Serial
Serial Conn.
Serial Conn.
MDS 4790
Master
MDS 9790
Master
MDS 9810
MDS 4710 Remote
MDS 9710 Remote
MDS 9710 Remote
MDS 9810 Remote
Master
MDS 9810 Remote
Serial
Device
Serial
Device
Serial
Device
Serial
Device
Serial
Device
Figure 1-6. Backhaul Network
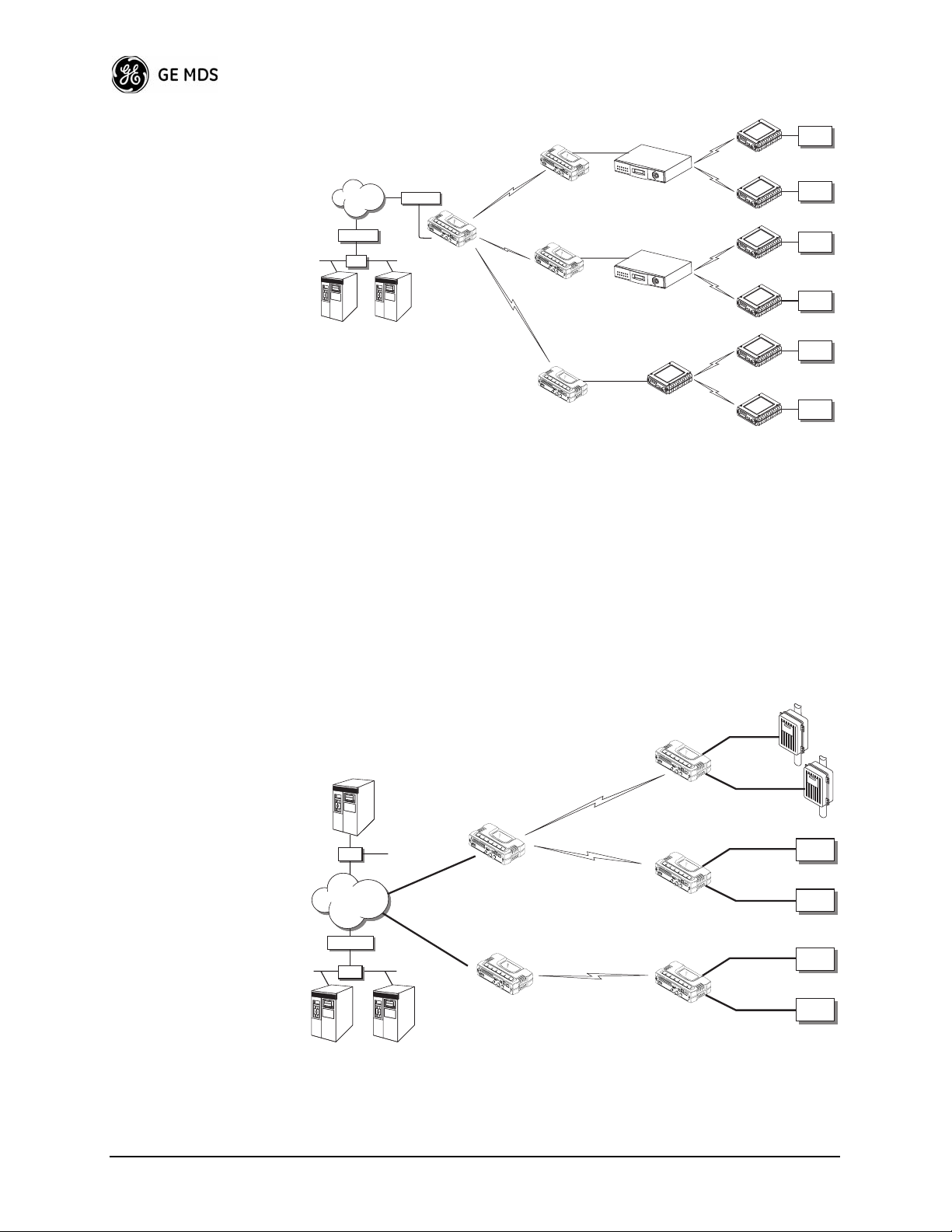
1.3.5 Multiple Protocols and/or Services
Prior to the introduction of Ethernet/IP-based radios, two radios were
often used to service two different types of devices (typically connected
to different SCADA hosts). A Mercury radio provides this capability
using a single remote unit. The unit’s serial port can be connected via IP
to different SCADA hosts, transporting different (or the same) protocols. Both data streams are completely independent, and the transceiver
provides seamless simultaneous operation as shown in Figure 1-7.
Invisible place holder
Remote Serial
SCADA Host
Modbus/IP
HUB
HUB
Access Point
Remote Serial
WAN
ETview
ROUTER
HUB
HUB
SCADA Host
Total Flow
Access Point
Remote Serial
Figure 1-7. Multiple Protocol Network
RTU
EIA-232
Flow Meter
EIA-232
EIA-232
EIA-232
EIA-232
EIA-232
Serial
Device
Serial
Device
Serial
Device
Serial
Device
10 Mercury Reference Manual 05-4446A01, Rev. C
Page 19
By using a single radio, the cost of deployment is cut in half. Beyond
N
requiring only one radio instead of two, the biggest cost reduction comes
from using half of the required infrastructure at the remote site: one
antenna, one feedline, one lightning protector and ancillary hardware.
Other cost reductions come from the system as a whole, such as reduced
management requirements. And above all, the radio provides the potential for future applications that run over Ethernet and IP, such as video
for remote surveillance.
1.3.6 Wireless LAN with Mixed Services
The transceiver is an excellent solution for a long-range industrial wireless LAN. It offers several advantages over commercial solutions, primarily improved performance over extended distances. The rugged
construction of the radio and its extended temperature range make it an
ideal solution even in harsh locations. In extreme environments, a
simple NEMA enclosure is sufficient to house the unit.
The transceiver trades higher speed for longer range. Commercial
802.11a/b/g solutions are designed to provide service to relatively small
areas such as offices, warehouses and homes. They provide high data
rates but have limited range. The Mercury transmits at a higher power
level, uses a different frequency band, has higher sensitivity, and a narrower channel to concentrate the radio energy, reaching farther distances. It is designed for industrial operation from the ground up.
IP-based devices that may be used with the transceiver include new,
powerful Remote Terminal Units (RTUs) and Programmable Logic
Controllers (PLCs). These, as well as other devices, may be used in
applications ranging from SCADA/telemetry monitoring, web-based
video, security monitoring, and Voice over IP. Figure 1-8 shows a typical wireless IP network.
Invisible place holder
Remote Bridge
Access Point
Remote Bridge
MS Control
Point
SCADA Host
Modbus/IP
Printer
Figure 1-8. Extended-Range LAN with Mixed Applications
IP Camera
IP/Ethernet
IP/Ethernet
IP/Ethernet
05-4446A 01, Rev. C Mercury Reference Manual 11
Page 20
1.3.7 Upgrading Older Wireless Network with Serial
Interfaces
Millions of wireless data products have been installed in the last two
decades for licensed and license-free operation, many of them manufactured by GE MDS. There are several ways that these systems can benefit
from incorporating Mercury equipment. The chief advantages are inter-
face flexibility (serial and Ethernet in one unit), and higher data
throughput. By taking advantage of its built-in serial and Ethernet interfaces, the transceiver is well suited to replace leased lines, dial-up lines,
or existing 900 MHz “multiple address” data transceivers.
Replacing Legacy Wireless Products
In most cases, legacy radio transceivers supporting serial-interface
equipment can be replaced with Mercury transceivers. Legacy equipment can be connected to the transceiver through the COM1 port with a
DB-25 to DB-9 cable wired for EIA-232 signaling. The COM1 port acts
as a Data Communications Equipment (DCE) port.
NOTE: Several previous GE MDS-brand products had non-standard
signal lines on their interface connectors (for example, to
control sleep functions and alarm lines). These special functions are not provided nor supported by the Mercury transceiver. Consult equipment manuals for complete pinout
information.
1.4 NETWORK DESIGN
CONSIDERATIONS
1.4.1 Extending Network Coverage with Repeaters
What is a Repeater System?
A repeater works by re-transmitting data from outlying remote sites to
the Access Point, and vice-versa. It introduces some additional
end-to-end transmission delay but provides longer-range connectivity.
In some geographical areas, obstacles can make communications difficult. These obstacles are commonly large buildings, hills, or dense
foliage. These obstacles can often be overcome with a repeater station.
Option 1—Using two transceivers to form a repeater station
(back-to-back repeater)
Although the range between fixed transceivers can be up to 40 km (25
miles) over favorable terrain, it is possible to extend the range considerably by connecting two units together at one site in a “back-to-back”
fashion, creating repeater as shown in Figure 1-9. Use this arrangement
whenever the objective is to utilize the maximum range between sta-
12 Mercury Reference Manual 05-4446A01, Rev. C
Page 21
tions. In this case, using high-gain Yagi antennas at each location pro-
e
vides more reliable communications than their counterparts—
omnidirectional antennas.
Invisible place holder
Overview
Remot
LAN
Remote
LAN
POINT-TO-POINT LINK
Remote
LAN/WAN
Access
Point
REPEATER
Access
Point
Ethernet
Crossover Cable
Remote
LAN
Figure 1-9. Typical LAN with a Repeater Link
Two transceivers may be connected “back-to-back” through the LAN
ports to form a repeater station. If the transceivers are connected directly
to each other, you must use an Ethernet cross-over cable. This configuration is sometimes required in a network that includes a distant Remote
that would otherwise be unable to communicate directly with the Access
Point station due to distance or terrain.
The geographic location of a repeater station is especially important.
Choose a site that allows good communication with both the Access
Point and the outlying Remote site. This is often on top of a hill,
building, or other elevated terrain from which both sites can be “seen”
by the repeater station antennas. A detailed discussion on the effects of
terrain is given in Section 5.1.2, Site Selection (beginning on Page 151).
The following paragraphs contain specific requirements for repeater
systems.
Antennas Two antennas are required at this type of repeater station—one for each
radio. You must take measures to minimize the chance of interference
between these antennas. One effective technique for limiting interfer-
ence is to employ vertical separation. In this arrangement, assuming
both antennas are vertically polarized, one antenna is mounted directly
over the other, separated by at least 10 feet (3 meters). This takes advantage of the minimal radiation exhibited by most antennas directly above
and below their driven elements.
Another interference reduction technique is to cross-polarize the
repeater antennas. If one antenna is mounted for polarization in the vertical plane, and the other in the horizontal plane, an additional 20 dB of
attenuation is achieved. The corresponding stations should use the same
antenna orientation when cross-polarization is used.
Network Name The two radios that are wired together at the repeater site must have dif-
ferent network names. For information on how to set or view the net-
05-4446A01, Rev. C Mercury Reference Manual 13
Page 22

work names, see “STEP 3—CONNECT PC TO THE TRANSCEIVER”
on Page 23.
TDD Sync Mode To avoid interference between the two APs that form a repeater station,
they should be synchronized so that they will transmit at the same time
and receive at the same time. This eliminates the possibility of one AP
transmitting while another is trying to receive.
This can be accomplished by setting the
Frequency Configuration menu to GPS Required. See Frequency Control
TDD Sync Mode parameter in the
Menu on Page 60 for details.
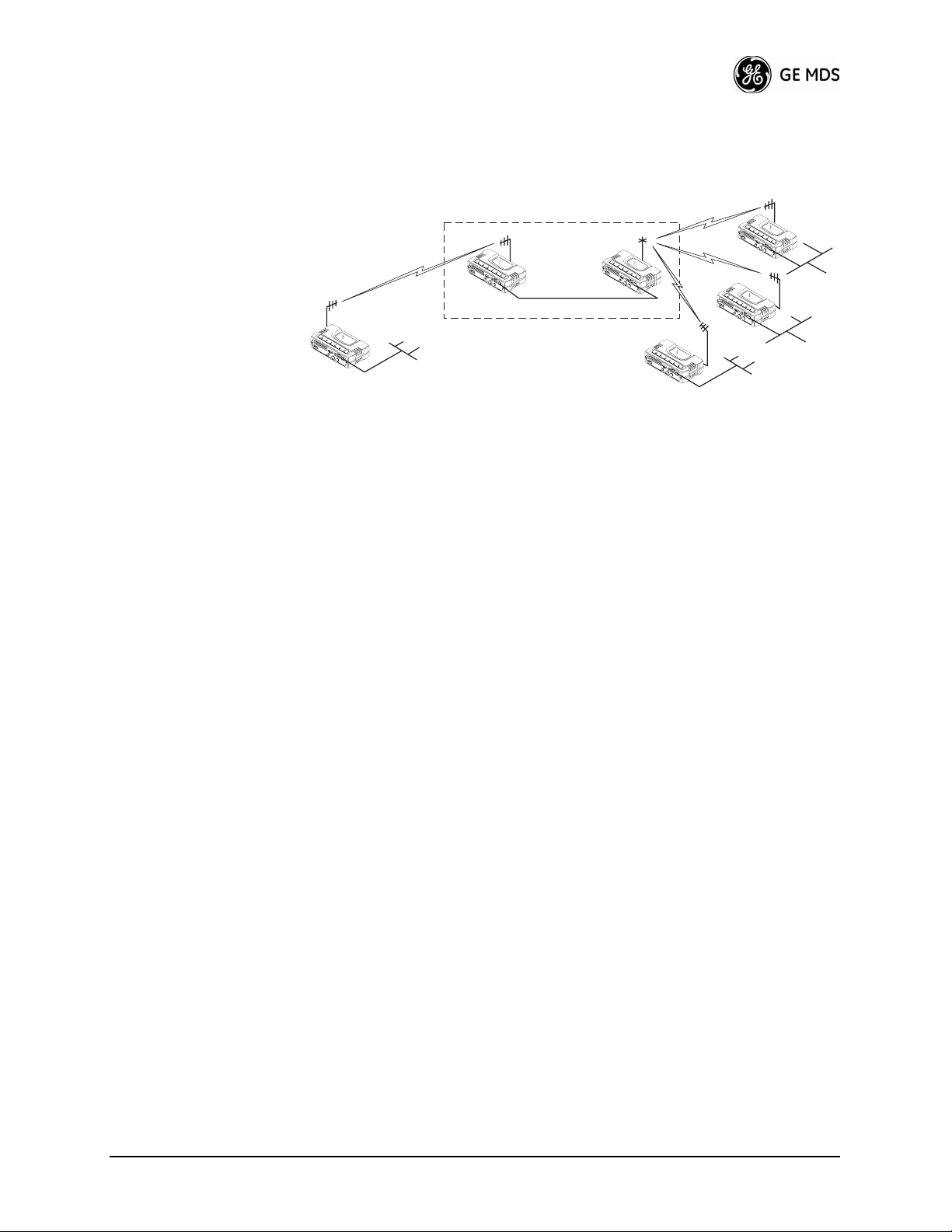
Option 2—Using the AP as a Store-and-Forward Packet
Repeater
You can extend a wireless network by using the Access Point as a
repeater to re-transmit the signals of all stations in the network. (See
Figure 1-10 on Page 14.)
Invisible place holder
Remote
LAN/WAN
Remote
Access Point
REPEATER
Remote
Remote
LAN
LAN
LAN
Figure 1-10. Typical Store-and-Forward Repeater Arrangement
As with the conventional repeater described in Option 1 above, the location of a store and forward repeater is also important. A site must be
chosen that allows good communication with both the Access Point and
the outlying Remote site. This can be on the top of a hill, building, or
other elevated terrain from which all sites can be “seen” by the repeater
station antenna. A detailed discussion on the effects of terrain is given
in Section 5.1.2, Site Selection (beginning on Page 151).
1.4.2 Protected Network Operation using Multiple
Access Points
Although GE MDS transceivers have a very robust design and have
undergone intensive testing before being shipped, it is possible for isolated failures to occur. In mission-critical applications, down time can
be virtually eliminated by using some, or all, of the following configurations:
In a point-to-multipoint scenario, the Access Point services multiple
remotes. A problem in the Access Point will have an effect on all
remotes, since none will have access to the network. When operation of
the network does not tolerate any down time, it is possible to set up a
14 Mercury Reference Manual 05-4446A01, Rev. C
Page 23
protected configuration for the Access Point to greatly reduce the possibility of this occurrence.
Two or more Access Points can be configured identically, each with its
own independent antenna. In this scenario, Remotes will associate with
one of the available Access Points. In case of a failure of that AP, the
Remotes will quickly associate with another Access Point, re-establishing connectivity to the end devices. Because only one Access Point
operates at any given time, collisions between APs is not possible.
1.4.3 Collocating Multiple Radio Networks
Many networks can operate in relatively close physical proximity to one
another provided reasonable measures are taken to assure the radio
signal of one Access Point is not directed at the antenna of the second
Access Point.
The Network Name and the Association Process
The Network Name is the foundation for building individual radio networks. Remotes in a network with the same network name as an Access
Point (AP) unit are “associated” with that AP.
Co-Location for
Multiple Networks
The use of a different Network Name does not guarantee an interference-free system. It does, however, assure that only data destined for a
unique network is passed through to that network.
It may be desirable to co-locate Access Points at one location to take
advantage of an excellent location that can serve two independent networks. Configure each network with a unique Network Name, and
install each AP’s antenna with at least 10 feet of vertical separation to
minimize RFI.
To co-locate APs, configure them with Time Division Duplex (TDD)
Sync set to
GPS Required. Configure all APs that are within range of each
other with the same pattern, but with a unique Hop Pattern Offset. For
more information, see “Frequency Control Menu” on Page 60.
NOTE: Transceivers are shipped with the Network Name set to
MDS-Mercury as a factory default.
Can radio frequency interference (RFI) disrupt my wireless
network?
When multiple radio networks operate in close physical proximity to
other wireless networks, individual units may not operate reliably under
weak signal conditions and may be influenced by strong radio signals on
adjacent bands. This radio frequency interference cannot be predicted
with certainty, and can only be determined by experimentation. If you
need to co-locate two units, start by using the largest possible vertical
antenna separation between the two AP antennas on the same support
05-4446A01, Rev. C Mercury Reference Manual 15
Page 24
structure. If that does not work, consult with your factory representative
about other techniques for controlling radio frequency interference
between the radios. (See “A Word About Radio Interference” on
Page 156 for more details.)
1.5 GE MDS CYBER SECURITY SUITE
Today, the operation and management of an enterprise is increasingly
dependent on electronic information flow. An accompanying concern
becomes the cyber security of the communication infrastructure and the
security of the data itself.
The transceiver is capable of dealing with many common security
issues. Table 1-2 profiles security risks and how the transceiver provides
a solution for minimizing vulnerability.
Table 1-2. Security Risk Management
Security Vulnerability GE MDS Cyber Security Solution
Unauthorized access to the backbone
network through a foreign remote radio
“Rogue” AP, where a foreign AP takes
control of some or all remote radios and
thus remote devices
Dictionary attacks, where a hacker runs a
program that sequentially tries to break a
password.
Denial of service, where Remote radios
could be reconfigured with bad
parameters, bringing the network down.
Airsnort and other war-driving hackers in
parking lots, etc.
Eavesdropping, intercepting messages
• IEEE 802.1x device authentication
• Approved Remotes List (local)
Only those remotes included in the
AP list will associate
• IEEE 802.1x device authentication
• Approved AP List
A remote will only associate to those
APs included in its local authorized
list of APs
• Failed-login lockdown
After five tries, the transceiver
ignores login requests for 5 minutes.
Critical event reports (traps) are
generated as well.
•Remote login with SSH or HTTPS
•Local console login
•Disabled HTTP and Telnet to allow
only local management services
•900 MHz operation is not
interoperable with standard 802.11
wireless cards
•The transceiver cannot be put in a
promiscuous mode
•Proprietary data framing
•AES-128 encryption
16 Mercury Reference Manual 05-4446A01, Rev. C
Page 25
Table 1-2. Security Risk Management
Security Vulnerability GE MDS Cyber Security Solution
Unprotected access to configuration via
SNMPv1
Intrusion detection
•Implement SNMPv3 secure
operation
• Provid e s ear ly warnin g vi a SN MP
through critical event reports
(unauthorized, logging attempts,
etc.)
• Unauthorized AP MAC address
detected at Remote
• Unauthorized Remote MAC
address detected at AP
• Login attempt limit exceeded
(Accessed via: Telnet, HTTP, o r
local)
• Successful login/logout
(Accessed via: Telnet, HTTP, o r
local)
1.6 ACCESSORIES
The transceiver can be used with one or more of the accessories listed in
Table 1-3. Contact the factory for ordering details.
Table 1-3. Accessories
Accessory Description GE MDS
Part No.
AC Power
Adapter Kit
OmniDirectional
Antennas
Yagi Antenna
(Directional)
GPS Receiving
Antennas
TNC Male-to-N
Female Adapter
TNC Male-to-N
Female Adapter
Cable
Ethernet RJ-45
Crossover
Cable (CAT5)
A small power supply module designed for
continuous service. UL approved. Input:
120/220; Output: 13.8 Vdc @ 2.5 A
Rugged antennas well suited for use at Access
Point installations. Consult with your factory
Sales Representative for details
Rugged antennas well suited for use at fixed
Remote sites. Consult with your factory Sales
Representative for details.
A variety of fixed and mobile GPS antennas
(active and passive) are available. Consult with
your factory Sales Representative for details.
One-piece RF adaptor plug. 97-1677A161
Short length of coaxial cable used to connect the
radio’s TNC antenna connector to a Type N
commonly used on large diameter coaxial
cables.
Cable assembly used to cross-connect the
Ethernet ports of two transceivers used in a
repeater configuration.
(Cable length ≈ 3 ft./1M)
01-3682A02
--
--
--
97-1677A159
(3 ft./1m)
97-1677A160
(6 ft./1.8m)
97-1870A21
05-4446A01, Rev. C Mercury Reference Manual 17
Page 26
Table 1-3. Accessories (Continued)
Accessory Description GE MDS
Part No.
2-Pin Power
Plug
Ethernet RJ-45
Straight-thru
Cable (CAT5)
EIA-232
Shielded Data
Cable
EIA-232
Shielded Data
Cable
Flat-Surface
Mounting
Brackets &
Screws
Fuse Internal fuse, 5.0 Ampere 29-1784A04
DIN Rail
Mounting
Bracket
COM1 Interface
Adapter
Bandpass Filter Antenna system filter that helps eliminate
Ethernet Surge
Suppressor
Mates with power connector on transceiver.
Screw terminals provided for wires, threaded
locking screws to prevent accidental disconnect.
Cable assembly used to connect an Ethernet
device to the transceiver. Both ends of the cable
are wired identically.
(Cable length ≈ 3 ft./1M)
Shielded cable terminated with a DB-25 male
connector on one end, and a DB-9 female on the
other end. Two lengths available (see part
numbers at right).
Shielded cable terminated with a DB-9 male
connector on one end, and a DB-9 female on the
other end, 6 ft./1.8m long.
Brackets: 2″ x 3″ plates designed to be screwed
onto the bottom of the unit for surface-mounting
the radio.
Bracket screws: 6-32/1/4″ with locking
adhesive. (Industry Standard MS 51957-26)
Bracket used to mount the transceiver to
standard 35 mm DIN rails commonly found in
equipment cabinets and panels.
DB-25(F) to DB-9(M) shielded cable assembly
(6 ft./1.8 m) for connection of equipment or other
EIA-232 serial devices previously connected to
“legacy” units. (Consult factory for other lengths
and variations.)
interference from nearby paging transmitters.
Surge suppressor for protection of Ethernet port
against lightning.
73-1194A39
97-1870A20
97-3035L06
(6 ft./1.8m)
97-3035L15
(15 ft./4.6m)
97-1971A03
82-1753-A01
70-2620-A01
03-4022A03
97-3035A06
20-2822A02
29-4018A01
18 Mercury Reference Manual 05-4446A01, Rev. C
Page 27
TABLETOP EVALUATION
2
2 Chapter Counter Reset Paragraph
Contents
2.1 OVERVIEW ............................................................................... 21
2.2 STEP 1—CONNECT THE ANTENNA PORTS......................... 21
2.3 STEP 2—CONNECT THE PRIMARY POWER......................... 22
2.4 STEP 3—CONNECT PC TO THE TRANSCEIVER.................. 23
2.5 STEP 4—REVIEW TRANSCEIVER CONFIGURATION........... 23
2.6 STEP 5—CONNECT LAN OR SERIAL DATA EQUIPMENT.... 24
AND TEST SETUP
2.5.1 Getting Started ............................................................................23
2.5.2 Procedure ....................................................................................23
2.5.3 Basic Configuration Defaults .......................................................23
2.7 STEP 6—CHECK FOR NORMAL OPERATION....................... 26
05-4446A01, Rev. C Mercury Reference Manual 19
Page 28
20 Mercury Reference Manual 05-4446A01, Rev. C
Page 29
2.1 OVERVIEW
)
GE MDS recommends that you set up a “tabletop network” to verify the
basic operation of the transceivers. This allows experimenting with network designs, configurations, or network equipment in a convenient
location. This test can be performed with any number of radios.
When you are satisfied that the network is functioning properly in a
benchtop setting, perform the field installation. Complete information
for field installation, including mounting dimensions and antenna selection, is provided in INSTALLATION PLANNING on Page 149.
NOTE: It is important to use a “Network Name” that is different from
any currently in use in your area during the testing period.
To simulate data traffic over the radio network, connect a PC or LAN to
the Ethernet port of the Access Point and PING each transceiver several
times.
2.2 STEP 1—CONNECT THE
ANTENNA PORTS
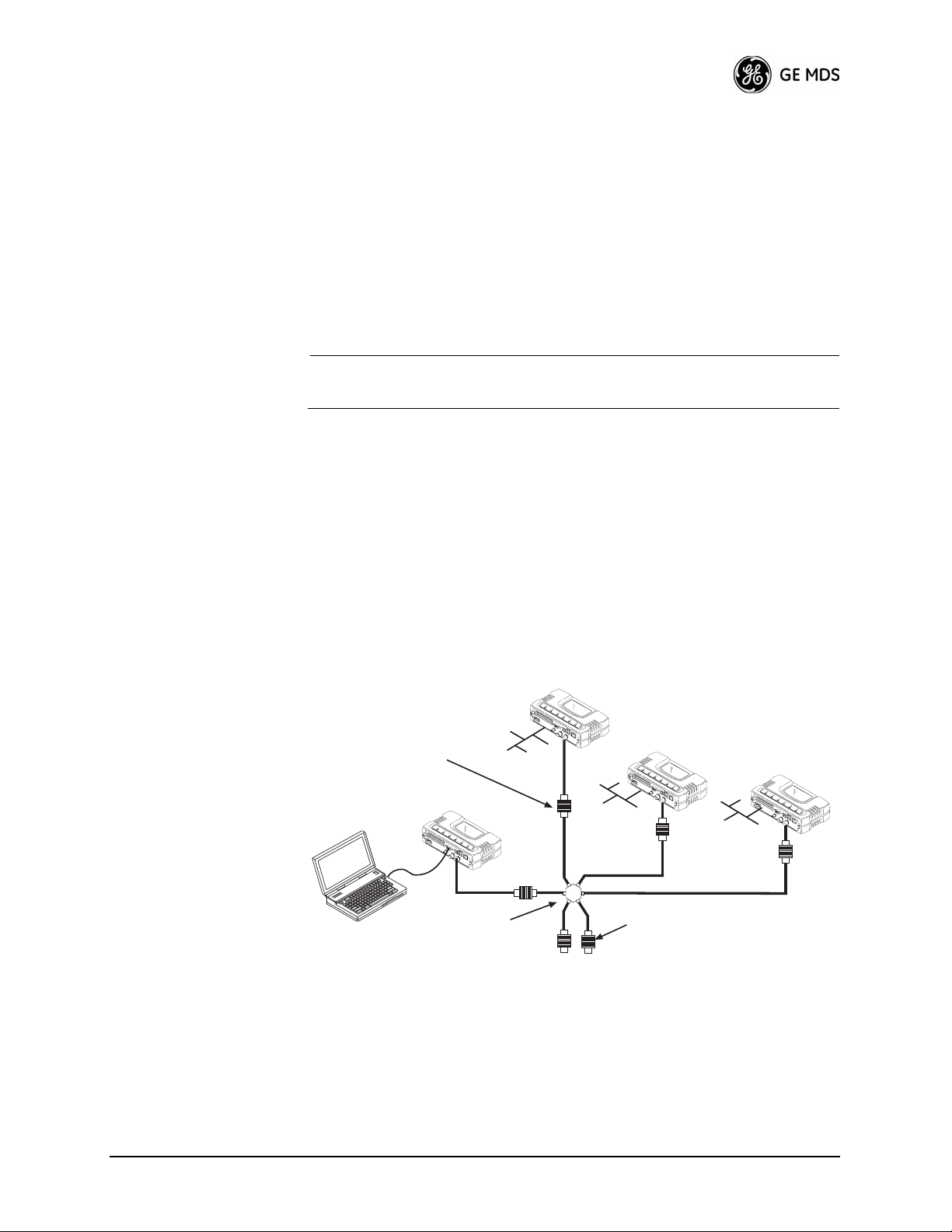
Figure 2-1 shows the tabletop arrangement. Connect the antenna ports
of each transceiver as shown. This provides stable radio communications between each unit and prevents interference to nearby electronic
equipment.
Invisible place holder
Remote
POWER ATTENUATORS
• Fixed or adjustable
• 2W Minimum Rating
Access Point
NON-RADIATING ATTENUA TORS
COMPUTER
POWER DIVIDER
• Install on unused divider ports (if any
• 2W Minimum Rating
Figure 2-1. Typical Setup for Tabletop-Testing of Radios
Remote
Remote
05-4446A01, Rev. C Mercury Reference Manual 21
Page 30
NOTE: Use attenuation between all units in the test setup. The amount
of attenuation required depends on the number of units tested
and the desired signal strength (RSSI) at each transceiver
during the test. In no case should a signal greater than –50 dBm
be applied to any transceiver in the test setup. GE MDS recommends an RF power output level of +20 dBm from the AP.
Remote power is not setable. (See “Radio Configuration
Menu” on Page 58.)
2.3 STEP 2—CONNECT THE PRIMAR Y
POWER
The primary power at the transceiver’s power connector must be within
10.5–30 Vdc and be capable of continuously providing 30 Watts. Typ-
ical power consumption for 13.8 Vdc and 24 Vdc operation are listed in
SPECIFICATIONS on Page 162.
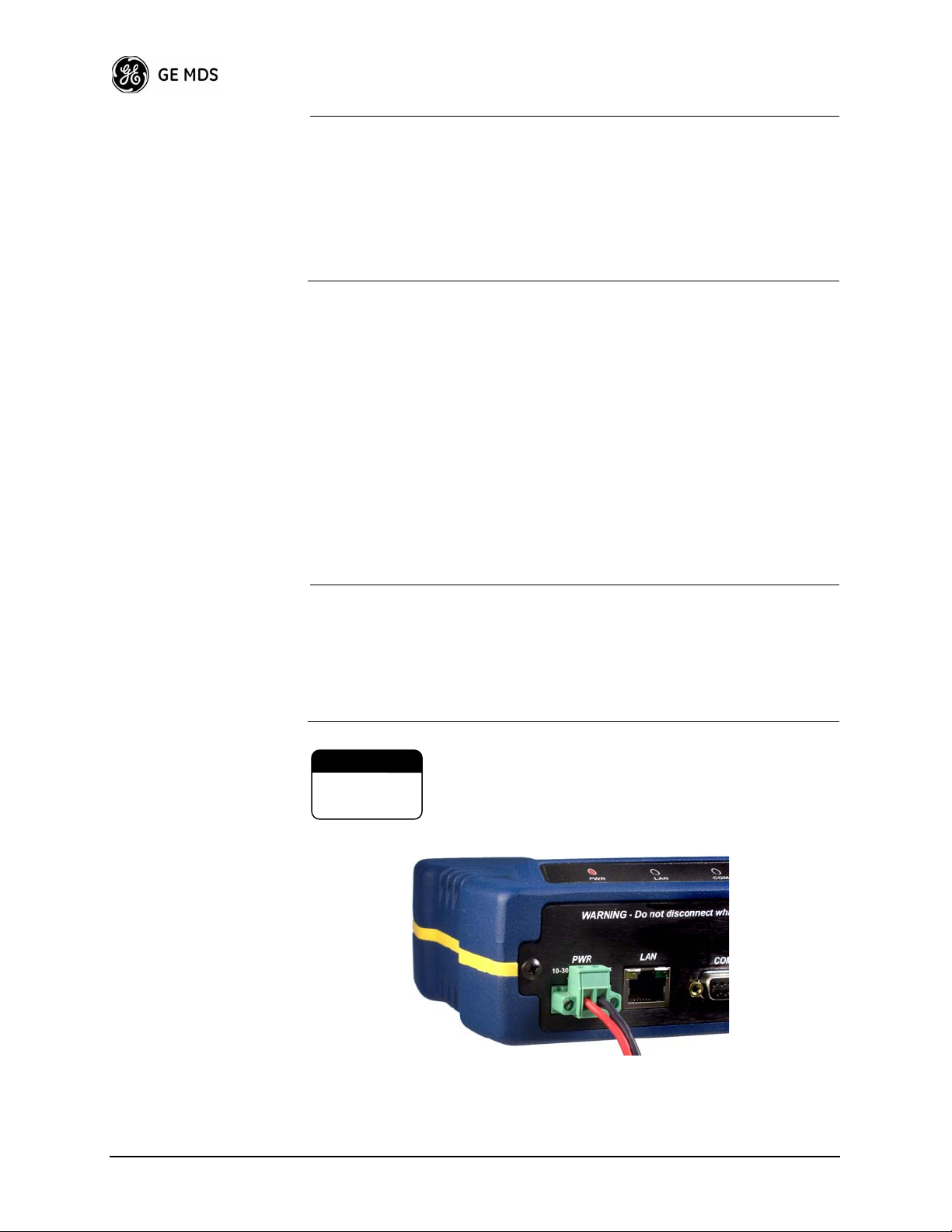
A Phoenix two-pole power connector with screw-terminals is provided
with each unit. Strip the wire leads to 6 mm (0.25"). Be sure to observe
proper polarity with the positive lead (+) on the left and negative (–) on
the right, as shown in Figure 2-2.
NOTE: The transceiver typically requires about 30 seconds to power up, and
might require several minutes to associate with another unit, if GPS
is required for time synchronization.
GPS is required for all configurations except when “Free Run”
single-channel (non-frequency hopping) operation is used, which
might be possible in some low-interference environments.
CAUTION
POSSIBLE
EQUIPMENT
DAMAGE
Only use the transceiver with negative-ground power
systems. Make sure the polarity of the power source
is correct.
Invisible place holder
Figure 2-2. Power Connector
(Polarity: Left +, Right –)
22 Mercury Reference Manual 05-4446A01, Rev. C
Page 31

2.4 STEP 3—CONNECT PC TO THE
TRANSCEIVER
Connect a PC’s Ethernet port to the LAN port using an Ethernet crossover cable. The LAN LED should light. Alternatively, you can use a
serial cable to connect to the COM1 port (Figure 2-3 on Page 25).
2.5 STEP 4—REVIEW TRANSCEIVER
CONFIGURATION
2.5.1 Getting Started
Start by logging into the Access Point radio. This is done first because
the Remotes are dependent on the AP’s beacon signal to achieve an
“associated” state.
Once the Access Point is up and running, move the computer connection
to each of the Remote units, log-in at each unit, review their configuration, set their IP addresses, Network Name, and frequency configuration, then wait for each AP to achieve an associated state.
With all units associated, you will be ready to connect and test your data
services.
2.5.2 Procedure
The following is a summary of the configuration procedure that must be
done on each unit in the system. Key parameters are shown on the
Embedded Management System overview (Figure 3-1 on Page 32). A
lists of parameters is located in two tables—Table 4-5 on Page 140 and
Table 4-7 on Page 142. Detailed information on using the Management
System can be found in MS INTRODUCTION on Page 31.
NOTE: The Management System supports the use of “configuration
files” to help consistently configure multiple units. These are
explained in Configuration Scripts Menu on Page 119.
2.5.3 Basic Configuration Defaults
Table 2-1 provides a selection of key operating parameters, their range,
and default values. All of these are accessible through a terminal emulator connected to the
nected to the LAN port (see Figure 5-1 on Page 149 for hookup).
NOTE: Access to the transceiver’s Management System and changes
to all parameters requires entering a security password.
COM1 serial port or through a Web browser con-
05-4446A01, Rev. C Mercury Reference Manual 23
Page 32

Table 2-1. Basic Configuration Defaults
Item Menu Location Default Values/Range
Network Name Main Menu>>
IP Address Main Menu>>
RF Output
Power
Unit Password Main Menu>>
Radio Configuration>>
Network Name
Network Configuration>>
IP Address
Main Menu>>
Radio Configuration>>
Transmit Power
Device Information>>
User Password
MDS-Mercury • 1–15 alphanumeric
192.168.1.1 Contact your network
+30 dBm (1.0
Watt)
admin
(lower case)
characters
• Case-sensitive;
can be mixed case
administrator
AP: -30 to +30 dBm
RM: 0 to +30 dBm
(Max. 1.0 Watt)
• 1–13 alphanumeric
characters
• Case-sensitive;
can be mixed case
For benchtop evaluation, configure:
• Frequency Mode = Single Channel
• Single Frequency Channel = 0
• RF Bandwidth = 1.75
• TDD Sync = Free Run
For more information on configuring these parameters, see “Frequency
Control Menu” on Page 60.
A unique IP address and subnet are required to access all IP-based management interfaces (telnet, SSH, SNMP, and Web), either through the
LAN port or remotely over-the-air.
2.6 STEP 5—CONNECT LAN OR
SERIAL DATA EQUIPMENT
Connect a local area network to the LAN port or a serial device to the
COM1 (DCE) port. The LAN port supports any Ethernet-compatible
equipment. This includes devices that use Internet Protocol (IP).
Figure 2-3 on Page 25 shows the interface connectors on the front panel
of the transceiver.
NOTE: The use of shielded Ethernet cable is recommended for
connection to the radio’s
emission standards without shielded cable, but shielding
reduces the possibility of interference in sensitive environments, and is in keeping with good engineering practice.
ETH port. The radio meets regulatory
24 Mercury Reference Manual 05-4446A01, Rev. C
Page 33

LAN PORT
DC POWER INPUT
(10—30 VDC, 2.5A)
Figure 2-3. Transceiver Interface Connectors
LED INDICATOR
COM1
SERIAL PORT
GPS ANTENNA
CONNECTION
PANEL
RX2 ANTENNA
PORT
ANTENNA PORT
TX/RX1
• LED INDICATOR PANEL—Displays the basic operating status of
the transceiver. Section 2.7 on page 26 contains detailed information.
• COM1 SERIAL PORT— DB-9 connector used for management
of the transceiver using a connected PC. MS INTRODUCTION
on Page 31 provides complete connection details.
• LAN PORT—Connection point for Ethernet Local Area Net-
work. The connector has integrated LEDs to indicate signal
activity as follows: A steady green LED indicates that a link has
been achieved; a flashing green LED indicates data activity; and
a yellow LED indicates 100 Mbps operation.
• PWR— DC power connection for the transceiver. Power source
must be 10 Vdc to 30 Vdc, negative ground, and capable of providing at least 25 watts.
Invisible place holder
GPS ANTENNA PORT— Coaxial connector (SMA-type) for
•
connection of a GPS receiving antenna. Provides 3.5 Vdc output
for compatibility with powered (active) GPS antennas. Do not
short this connector, as you might cause damage to the internal
power supply. The GPS receiving antenna’s gain must be
16 dBi or less.
NOTE: GPS functionality is required on all Access Points and
Remotes except when “Free Run” single-channel (non-frequency
hopping) operation is used, which might be possible in some
low-interference environments.
• RX2 ANTENNA PORT— Reserved for future functionality. Coax-
ial connector (TNC-type) for attachment of a second 900 MHz
receiving antenna used in space diversity arrangements.
• TX/RX1 ANTENNA PORT— Coaxial connector (TNC-type) for
attachment of the main station antenna (transmit and receive).
05-4446A01, Rev. C Mercury Reference Manual 25
Page 34

2.7 STEP 6—CHECK FOR NORMAL
OPERATION
Once the data equipment is connected, you can check the transceiver for
normal operation.
Observe the LEDs on the top cover for the proper indications. In a normally operating system, you will see the following LED indications
within 45seconds of start-up:
• PWR—Lit continuously
• LINK—On, or blinking intermittently to indicate traffic flow
• LAN—On, or blinking intermittently to indicate traffic flow
Figure 2-4 shows a close-up view of the transceiver’s LED Indicator
panel. Table 2-2 provides details on each LED function.
Invisible place holder
Figure 2-4. LED Indicator Panel
If the radio network seems to be operating properly based on observation of the unit’s LEDs, use the PING command to verify the link integrity with the Access Point.
Table 2-2. Transceiver LED Functions
LED Label Activity Indication
PWR ON Primary power (DC) present
Blinking Unit in “Alarmed” state
OFF Primary power (DC) absent
LAN* ON LAN detected
Blinking Data TX/RX
COM1
(MGT System)
OFF LAN not detected, or excessive
Blinking Data TX/RX
OFF No data activity
traffic present
26 Mercury Reference Manual 05-4446A01, Rev. C
Page 35

Table 2-2. Transceiver LED Functions (Continued)
LED Label Activity Indication
GPS ON Internal GPS receiver is
synchronized with the satellite
network.
LINK
(Access Point)
LINK
(Remote)
Blinking AP modem is synchronizing
OFF Internal GPS receiver is not
ON Default state
OFF Not transmitting. Usually
ON Associated to AP
OFF Not associated with AP
with the GPS timing.
synchronized with the satellite
network.
occurs while waiting for GPS
sync.
* The LAN connector has two integrated LEDs to indicate signal activity
as follows: A steady green LED indicates that a link has been
achieved; a flashing green LED indicates data activity, and a yellow
LED indicates 100 Mbps operation.
05-4446A01, Rev. C Mercury Reference Manual 27
Page 36

28 Mercury Reference Manual 05-4446A01, Rev. C
Page 37

EMBEDDED
3
3 Chapter Counter Reset Paragraph
Contents
3.1 MS INTRODUCTION................................................................. 31
3.2 ACCESSING THE MENU SYSTEM.......................................... 33
3.3 BASIC OVERVIEW OF OPERATION........................................ 40
3.4 CONFIGURING NETWORK PARAMETERS............................ 43
MANAGEMENT SYSTEM
3.1.1 Differences in the User Interfaces ...............................................31
3.2.1 Methods of Control ......................................................................34
3.2.2 PC Connection and Log In Procedures .......................................34
3.2.3 Navigating the Menus .................................................................38
3.3.1 Starting Information Screen .........................................................40
3.3.2 Main Menu ..................................................................................42
3.4.1 Network Configuration Menu .......................................... ... .... ... ...43
3.4.2 Ethernet Port Configuration Menu ...............................................51
3.4.3 Bridge Configuration ...................................................................52
3.4.4 SNMP Agent Configuration .........................................................53
3.4.5 AP Location Push Config Menu ..................................................55
3.4.6 SNTP Server Configuration .........................................................57
3.5 RADIO CONFIGURATION ........................................................58
3.5.1 Radio Configuration Menu ........................................................58
3.5.2 Serial Port Configuration ............................. ... ... .... ... ... ...... .... ... ...67
3.6 MODBUS / TCP SERVER CONFIGURATION.......................... 80
3.6.1 Modbus/TCP in Mercury Transceivers—An Overview ................80
3.6.2 Menu Selections ..........................................................................80
3.7 SECURITY CONFIGURATION MENU...................................... 85
3.7.1 Device Security Menu .................................................................86
3.7.2 Wireless Security Menu ..............................................................87
3.7.3 IEEE 802.1x Device Authentication ............................................89
3.7.4 Manage Certificates ....................................................................91
3.8 REDUNDANCY CONFIGURATION (AP ONLY)........................ 93
05-4446A01, Rev. C Mercury Reference Manual 29
Page 38

3.9 GPS CONFIGURATION (REMOTE ONLY)...............................98
3.10 DEVICE INFORMATION MENU ............................................ 100
3.11 PERFORMANCE INFORMATION MENU .............................101
3.12 MAINTENANCE/TOOLS MENU.............................................113
3.12.1 Auto Firmware Upgrade Menu (AP Only) .... ... .... ... ... ... ... .... ... .124
3.13 PERFORMANCE OPTIMIZATION ........................................127
3.13.1 Proper Operation—What to Look For ...........................................129
30 Mercury Reference Manual 05-4446A01, Rev. C
Page 39

3.1 MS INTRODUCTION
The transceiver’s embedded management system is accessible through
the COM1 (serial) port, the LAN (Ethernet) port, and using over-the-air
Ethernet. Telnet, SSH, HTTP/HTTPS, and SNMP are the
Ethernet-based interfaces. Essentially, the same capabilities are available through any of these paths.
For support of SNMP software, a set of MIB files is available for download from the GE MDS Web site at www.GEmds.com. An overview of
SNMP commands can be found at SNMP Agent Configuration section
on Page 53 of this manual.
The transceiver’s Management System and its functions are divided into
seven functional groups as listed below.
• Section 3.3, BASIC OVERVIEW OF OPERATION (beginning
on Page 40)
• Section 3.4, CONFIGURING NETWORK PARAMETERS
(beginning on Page 43)
• Section 3.5, RADIO CONFIGURATION (beginning on Page
58)
• Section 3.7, SECURITY CONFIGURATION MENU (beginning
on Page 85)
• Section 3.13, PERFORMANCE OPTIMIZATION (beginning on
Page 127)
• Section 3.12, MAINTENANCE/TOOLS MENU (beginning on
Page 113)
Each of these sections has a focus that is reflected in its heading. The
section you are now reading provides information on connecting to the
Management System, how to navigate through it, how it is structured,
and how to perform top-level configuration tasks. Figure 3-1 on Page 32
shows a top-level view of the Management System (MS).
3.1.1 Differences in the User Interfaces
Although there are slight differences in navigation among the user interfaces, the content is very similar. You will notice a few differences in
capabilities as the communications tool is driven by limitations of the
access channel. Figure 3-2 and Figure 3-3 on Page 33 show examples of
the Starting Information Screen as seen through a console terminal and
a web-browser, respectively.
05-4446A01, Rev. C Mercury Reference Manual 31
Page 40

ls
Reprogramming
Starting Information Screen
Config. Scripts
Ping Utility
Auth. Codes
Reset to Defaults
Radio Test
F/W Versions
F/W Upgrade
Maintenance/Too
Wireless Ntwk Stat.
Intl. Radio Stat. (RM)
Date
Performance Trend
Time
Date Format
Device Names
UTC Time Offset
Console Bd. Rt.
Packet Statistics
Event Log
Information
Performance
Model
Device
Serial Number
GPS Status
Uptime
Information
(Read-Only Status)
MAIN MENU
Redundancy Config.
Redundancy
Ntwk Event Triggers
Configuration (AP)
Security
Configuration
RADIUS
Device Security
Wireless Security
Radio
Network Name
Configuration
Transmit Power
Network
Ntwk. Intfc. Config
Configuration
Ethernet Port Config
Radio Event Triggers
Hdwr Event Triggers
Red. Config. Options
Force Switchover
Configuration
Manage Certif.
Receive Pwr. (AP)
Freq. Control
Adv. Config.
Bridge Configuration
SNMP Agent Config. (AP)
AP Location Info (RM)
SNTP Server Config.
GPS
Stream GPS to Console
Send GPS via UDP
GPS UDP Server IP Address
Configuration (RM)
NOTES
• Chart shows top-level view only. See Reference Manual for details.
• Not all menu items are-user configurable
GPS UDP Server UDP Port
• Spacebar is used to make some menu selections
• AP = Access Point Only
• RM = Remote Only
Figure 3-1. Embedded Management System—Top-Level Flowchart
32 Mercury Reference Manual 05-4446A01, Rev. C
Page 41

Figure 3-2. View of MS with a text-based program—
(Console Terminal shown—Telnet has similar appearance)
Invisible place holder
Figure 3-3. View of the MS with a Browser
(Selections at left provide links to the various menus)
3.2 ACCESSING THE MENU SYSTEM
The radio has no external controls or adjustments. All configuration,
diagnostics, and control is performed electronically using a connected
PC. This section explains how to connect a PC, log into the unit, and
gain access to the built-in menus.
05-4446A01, Rev. C Mercury Reference Manual 33
Page 42

3.2.1 Methods of Control
Access the unit’s configuration menus in one of several ways:
• Local Console—This is the primary method used for the exam-
ples in this manual. Connect a PC directly to the
using a serial communications cable and launch a terminal communications program such as HyperTerminal (found on most
PCs by selecting
tions>>HyperTerminal
Start>>Programs>>Accessories>>Communica-
). This method provides text-based access to
the unit’s menu screens. Console control is a hardware-based
technique, and is intended for local use only (maximum recommended cable length of 50 ft./15 m).
• Telnet or SSH*—Connect a PC to the unit’s LAN port, either
directly or via a network, and launch a Telnet session. This
method provides text-based access to the unit’s menu screens in
a manner similar to a Local Console session. You can run Telnet
sessions locally or remotely through an IP connection.
• Web Browser*—Connect a PC to the unit’s LAN port, either
directly or via a network, and launch a web browser session (for
example, Internet Explorer, Firefox, etc.). Enter the IP address
of the device to be managed into the browser’s address field.
COM1 port
This method provides a graphical representation of each screen,
just as you would see when viewing an Internet web site. The
appearance of menu screens differs slightly from other methods
of control, but the content and organization of screen items is
similar. Web browser sessions may be run locally or remotely
using an IP connection.
* When connecting directly to a radio, a crossover cable is required. When
connecting using a network, switch, or rout e r, a straight-through cable is required.
3.2.2 PC Connection and Log In Procedures
The following steps describe how to access the radio’s menu system.
These steps require a PC to be connected to the unit’s
as shown in Figure 3-4 on Page 35.
COM1 or LAN port
34 Mercury Reference Manual 05-4446A01, Rev. C
Page 43

Invisible place holder
DCE
(
DTE
)
Transceiver
To COM1 or LAN Port
PC Running Terminal Session
(115,200 bps, 8N1)
Figure 3-4. PC Configuration Setup
(see text)
Starting a Local
Console Session
(Recommended for
first-time log-in)
1. Connect a serial communications cable between the PC and the
COM1 port. If necessary, a cable may be constructed for this
unit’s
purpose as shown in Figure 3-5.
Invisible place holder
DB-9 MALE
TO MDS PRODUCT)
RXD
TXD
GND
2
3
5
Figure 3-5. Serial Communications Cable (DB-9M to DB-9F)
(Maximum Recommended Cable Length 50 feet/15 meters)
DB-9 FEMALE
(TO COMPUTER
RXD
2
TXD
3
GND
5
2. Launch a terminal emulation program such as HyperTerminal and
configure the program with the following settings:
• 115,200 bps data rate
• 8 data bits, no parity
• One stop bit, and no flow-control
• Use ANSI or VT100 emulation.
TIP: The HyperTerminal communications program can be accessed on
most PCs by selecting this menu sequence:
ries>>Communications>>HyperTerminal
.
Start>>Programs>>Accesso-
NOTE: If the unit is powered-up or rebooted while connected to a
terminal, you will see a series of pages of text information
relating to the booting of the unit’s processor. Wait for the
log-in screen before proceeding.
3. Press the key to receive the login: prompt.
05-4446A01, Rev. C Mercury Reference Manual 35
4. Enter the username (default username is admin). Press .
ENTER
ENTER
Page 44

5. Enter your password (default password is admin). For security, your
password keystrokes do not appear on the screen. Press .
ENTER
NOTE: Passwords are case sensitive. Do not use punctuation mark
characters. You may use up to 13 alpha-numeric characters.
The unit responds with the Starting Information Screen (Figure 3-6).
From here, you can review basic information about the unit or press
G to
proceed to the Main Menu.
Invisible place holder
Starting a Telnet
Session
Figure 3-6. Starting Information Screen—Local Console Session
NOTE: This method requires that you know the IP address of the unit
beforehand. If you do not know the address, use the Local
Console method (above) and access the Starting Information
Screen. The address is displayed on this screen.
1. Connect a PC to the unit’s
cable or via a network with a straight-through cable. The
LAN port, either directly with a crossover
LAN LED
lights to indicate an active connection.
NOTE: When using Ethernet to access the unit, you might need to
change your computer’s IP address to be on the same subnet as
the radio. You can identify or verify the unit’s IP address by
using a Local Console session to communicate with the radio
through its COM1 Port and viewing the Starting Information
Screen.
2. Start the Telnet program on your computer, targeting the IP address
of the unit to which you are connected, and press .
ENTER
36 Mercury Reference Manual 05-4446A01, Rev. C
Page 45

TIP: You can start a Telnet session on most PCs by selecting: Start>>Pro-
grams>>Accessories>>Command Prompt. At the command prompt
window, type the word telnet, followed by the unit’s IP address
(e.g., telnet 10.1.1.168). Press to receive the Telnet log in
ENTER
screen.
NOTE: Never connect multiple units to a network with the same IP
address. Address conflicts will result in improper operation.
Starting a Web
Browser Session
3. Enter your username (default username is admin). Press .
ENTER
Next, the Password: prompt appears. Enter your password (default
password is admin). For security, your password keystrokes will not
appear on the screen. Press .
ENTER
The unit responds with a Starting Information Screen (see
Figure 3-6 on Page 36). From here, you can review basic informa-
tion about the unit or press G to proceed to the Main Menu.
NOTE: Passwords are case sensitive. Do not use punctuation mark
characters. You may use up to 13 alpha-numeric characters.
NOTE: Web access requires that you know the IP address of the unit
you are connecting to. If you do not know the address, start a
Local Console session (see Starting a Local Console Session
(Recommended for first-time log-in) on Page 35) and access
the Starting Information Screen. The IP address is displayed
on this screen.
1. Connect a PC to the unit’s LAN port, either directly or using a
network. If connecting directly, use an Ethernet crossover cable; if
connecting using a network, use a straight-through cable. The LAN
LED lights to indicate an active connection.
2. Launch a Web-browser session on your computer (i.e., Internet
Explorer, Firefox, etc.).
3. Type the unit’s IP address and press .
ENTER
4. A log-in screen is displayed (Figure 3-7 on Page 38) where you
enter a user name and password to access the unit’s menu system.
Note that the default entries are made in lower case. (Default User
Name: admin; Default Password: admin)
05-4446A01, Rev. C Mercury Reference Manual 37
Page 46

Invisible place holder
Figure 3-7. Log-in Screen when using a Web Browser
NOTE: Passwords are case sensitive. Do not use punctuation mark
characters. You may use up to 13 alpha-numeric characters.
5. Click OK. The unit responds with a startup menu screen similar to
that shown in Figure 3-8. From here, you can review basic information about the unit or click one of the menu items at the left side of
the screen.
Invisible place holder
Figure 3-8. Starting Information Screen—Web Browser Example
3.2.3 Navigating the Menus
Via Terminal Telnet or SSH Sessions
Recommended for first-time log-in
Local Console, Telnet, and SSH sessions use multi-layered text menu
systems that are nearly identical. To move further down a menu tree,
you type the letter assigned to an item of interest. This takes you to an
38 Mercury Reference Manual 05-4446A01, Rev. C
Page 47

associated screen where settings may be viewed or changed. In most
cases, pressing the key moves the screen back one level in the
ESCAPE
menu tree.
In general, the top portion of menu screens show read-only information
(with no user selection letter). The bottom portion of the screen contains
parameters you can select for further information, alteration of values,
or to navigate to other submenus.
NOTE: Early versions of PuTTY might not operate when using SSH
to connect to the transceiver. The latest version (0.60 at the
time of publication) does work with the transceiver’s internal
server. Both the latest released and the latest development
snapshot can be downloaded from:
www.chiark.greenend.org.uk/~sgtatham/putty/.
When you arrive at a screen with user-controllable parameter fields, you
select the menu item by pressing an associated letter on the keyboard. If
there is a user definable value, the field will clear to the right of the menu
item and you can type the value you wish to use. Follow this action by
pressing the key to save the changes. If you make a mistake or
change your mind before pressing the key, simply press
ENTER
ENTER ESCAPE
to restore the previous value.
Logging Out Via
Terminal Emulator
or Telnet
In some cases, when you type a letter to select a parameter, you will see
a prompt at the bottom of the screen that says Choose an Option. In these
screens, press the keyboard’s to step through the available
selections. When the desired option appears, press the key to
SPACEBAR
ENTER
choose that selection. In some cases, you can change several parameters
and then save them with a single keystroke. Use the key to
ESCAPE
cancel the action and restore the previous values.
From the Main Menu screen, press Q to quit and terminate the session.
NOTE: To maintain security, it is best to log-out of the menu system
entirely when you are done working with it. If you do not log
out, the session automatically ends after 10 minutes of inactivity.
Navigating via Web Browser
Navigating with a Web browser is straightforward with a framed “home
page.” The primary navigation menu is permanently located on the
left-hand side of this page. Simply click the desired menu item to make
it active.
Logging Out Via
Web Browser
Click Logout in the left-hand frame of the browser window. The
right-hand frame changes to a logout page. Follow the remaining
instructions on this screen.
05-4446A01, Rev. C Mercury Reference Manual 39
Page 48

NOTE: In the menu descriptions that follow, parameter options/range,
and any default values are displayed at the end of the text
between square brackets. Note that the default setting is
always shown after a semicolon:
[available settings or range; default setting]
3.3 BASIC OVERVIEW OF OPERATION
3.3.1 Starting Information Screen
Once you have logged into the Management System, the Starting Information Screen (Figure 3-9) appears with an overview of the transceiver
and its current operating conditions.
Figure 3-9. Starting Information Screen
(AP screen shown; Remote similar, differences noted below)
• Device Mode—Operating mode of the unit as it relates to the radio
network.
Device Name—This is a user-defined parameter that appears in
•
the heading of all pages. (To change it, see Network Configura-
tion Menu on Page 43.)
•
Current IP Address—Unit’s IP address [169.254.0.2]
• Device Status—Condition of the unit’s operation as follows:
At Access Point:
Operational—Unit operating normally.
•
• Initializing—This is the first phase after boot-up.
• Synchronizing—Unit is waiting for the GPS receiver to obtain
a satellite fix and for its internal clock to synchronize to the
GPS timing signals.
40 Mercury Reference Manual 05-4446A01, Rev. C
Page 49

• Alarmed—The unit is has detected one or more alarms that
have not been cleared.
At Remote:
• Scanning—The unit is looking for an Access Point beacon
signal.
• Ranging—Unit is adjusting power, timing, and frequency
with an AP.
• Connecting—The unit has found a valid beacon signal for its
network.
• Authenticating—Device is attempting device authentication.
• Associated —The unit has successfully synchronized and
associated with an Access Point.
• Alarmed—The unit is has detected one or more alarms that
have not been cleared.
NOTE: If an alarm is present when this screen is displayed, an “A)”
appears to the left of the Device Status field. Pressing the “A”
key on your keyboard takes you directly to the “Current
Alarms” screen.
• Associated Remotes (AP Only)—Indicates the number of
Remotes that have achieved association with the AP.
• Connection Status (Remote Only)—Indicates whether the
Remote has an RF connection with an AP.
• Satellite Fix Status—Indicates whether internal GPS receiver has
achieved synchronization with GPS satellite signals.
• Uptime—Elapsed time since the transceiver was last booted up.
• Firmware Version—Version of firmware that is currently active in
the unit.
• Hardware Version— Hardware version of the transceiver’s printed
circuit board.
• Serial Number—Make a record of this number. Provide this number when purchasing Authorization Codes to upgrade unit capabilities in the future. (See “Authorization Codes” on Page 123.)
05-4446A01, Rev. C Mercury Reference Manual 41
Page 50

3.3.2 Main Menu
The Main Menu is the entry point for all user-controllable features. The
transceiver’s Device Name appears at the top of this and all other screens
as a reminder of the unit you are currently controlling.
Figure 3-10. Main Menu (AP)
(AP screen shown; Remote similar, differences noted below)
• Starting Information Screen—Select this item to return to the Starting Information screen described above.
• Network Configuration—Tools for configuring the data network
layer of the transceiver. (See “CONFIGURING NETWORK
PARAMETERS” on Page 43)
• Radio Configuration—Tools to configure the wireless (radio)
layer of the transceiver. (See “RADIO CONFIGURATION” on
Page 58)
• Serial Port Configuration—Menus for tailoring the COM1 port for
data mode operation (data only). (See “Serial Port Configura-
tion” on Page 67)
• Security Configuration—Tools to configure the security services
available with the transceiver’s environment. (See “SECURITY
CONFIGURATION MENU” on Page 85)
Redundancy Configuration—(AP Only) Allows setting of the cri-
•
teria for switchover in the event of loss of associated Remotes
or excessive packet receive errors.
•
GPS Configuration—(Remote Only) View/set parameters related
to GPS streaming location output. (See “GPS CONFIGURA-
TION (REMOTE ONLY)” on Page 98)
Device Information—Top level device fields such as model, serial
•
number, date/time, etc. (See “DEVICE INFORMATION
MENU” on Page 100)
42 Mercury Reference Manual 05-4446A01, Rev. C
Page 51

• Performance Information—Status information relating to the radio
and data layer’s performance in the radio network.
(See “PERFORMANCE INFORMATION MENU” on
Page 101)
• Maintenance/Tools—Tools for upgrading firmware code and testing major unit capabilities. (See “MAINTENANCE/TOOLS
MENU” on Page 113)
3.4 CONFIGURING NETWORK
PARAMETERS
3.4.1 Network Configuration Menu
The Network Configuration Menu is the home of several parameters that
you should review and set as necessary before placing a transceiver into
service.
Figure 3-11. Network Configuration Menu
• Network Interface Config—Presents a menu where you can view or
set various parameters (VLAN Status, IP Configuration, and
DHCP Server Configuration).
• Ethernet Port Config—Presents a menu for defining the status of
the Ethernet port (enabled or disabled), port follows association,
and Ethernet filtering configuration. Detailed explanations of
this menu are contained in Ethernet Port Configuration Menu on
Page 51.
• Bridge Configuration—View/set options for Ethernet Bridge oper-
ation.
• SNMP Agent Config—View/set SNMP configuration parameters.
See “SNMP Agent Configuration” on Page 53 for more infor-
mation.
05-4446A01, Rev. C Mercury Reference Manual 43
Page 52

• AP Location Push Config—Presents a submenu for configuring an
AP to automatically force connected remotes to receive the AP
Locations file from the AP. See “AP Location Push Config
Menu” on Page 55 for details.
• SNTP Server—Address of SNTP server (RFC 2030) from which
the transceiver will automatically get the time-of-day. You can
also manually set the date and time. A Mercury unit tries to get
the time and date from the SNTP server only if an IP address is
configured. It will continue to retry every minute until it succeeds.
The transceivers use UTC (Universal Time Coordinated) with a
configurable time offset. [0]
NOTE: The Mercury gets time of day data from the GPS receiver if the
receiver gets a satellite fix.
Network Interface Configuration Submenu
Figure 3-12. Network Interface Configuration Submenu
Invisible place holder
• VLAN Status—This selection is used to enable or disable virtual
LAN operation. For details, refer to VLAN Configuration Menu
on Page 45. [
enable, disabled; disabled]
• IP Configuration—This selection presents a submenu for config-
uring the local IP address of the transceiver. Detailed explana-
tions are provided in the section titled IP Configuration Menu
on Page 50.
• DHCP Server Config—Menu for configuration of DHCP services
by the Access Point. DHCP provides “on-the-fly” IP address
assignments to other LAN devices, including Mercury Series
units. For details, refer to DHCP Server Configuration (Data
and Mgmt) on Page 48.
44 Mercury Reference Manual 05-4446A01, Rev. C
Page 53

VLAN Configuration Menu
The VLAN Configuration menu (Figure 3-13) becomes active and vis-
ible when you enable VLAN Status on the Network Interface Configuration Menu, and you press the Enter key.
CAUTION:The VLAN Status parameter must be consistent at both the
Access Point and Remote radios in order for data to flow
correctly. Failure to do so might result in data not being transported correctly even when the radios are in an associated state
and able to communicate over-the-air.
About Virtual LAN in
Mercury
A VLAN is essentially a limited broadcast domain, meaning that all
members of a VLAN receive broadcast frames sent by members of the
same VLAN but not frames sent by members of a different VLAN. For
more information, refer to the IEEE 802.1Q standard.
The transceiver supports port-based VLAN at the Ethernet interface and
over the air, according to the IEEE 802.1Q standard. When VLAN Status
is enabled, the wireless port of both AP and remote radios act as a trunk
port.
The Ethernet port of an Access Point radio is normally configured as a
trunk port. This type of port expects incoming frames to have a VLAN ID
tag and sends outgoing frames with a VLAN tag as well.
The Ethernet port of a Mercury radio can be configured as an access port
or as a trunk port.
When the Ethernet port of a Mercury radio is configured as VLAN
Access Port, the radio tags incoming traffic with a VLAN ID, and strips
the tag before sending traffic out. This VLAN is known as the DATA
VLAN. Additionally, a second VLAN is assigned for other traffic that
is terminated at the radio, such as SNMP, TFTP, ICMP, Telnet, and so
on. This is known as the MANAGEMENT VLAN. Traffic directed to
the integrated terminal server that handles the serial ports is assigned to
the DATA VLAN.
When the Ethernet port of a remote radio is configured as a VLAN
trunk, the radio expects all incoming Ethernet frames to be tagged, and
passes all outgoing frames as received from the wireless link, with the
unchanged VLAN tag.
05-4446A01, Rev. C Mercury Reference Manual 45
Page 54

Network Interface Configuration Menu—VLAN Items
Figure 3-13. VLAN Configuration Menu
Invisible place holder
• VLAN Status—Defines whether the radio handles Ethernet
frames in “extended” 802.1Q mode or in “normal” mode in the
Ethernet port. If configured with a trunk port, the Mercury
passes all tagged traffic regardless of the VLAN ID. The Mercury only uses the Data VLAN ID parameter when the ETH port is
configured as an Access Port.
[enabled, disabled; disabled]
• VLAN Ethport Mode—Defines if the Ethernet port acts as a trunk
port or as an access port. Auto mode defines the port as a trunk
port in an AP, or an access port in a Remote radio.
[Auto, Trunk, Access; Auto]
• Management VLAN ID—Defines the VLAN ID for traffic directed
to the radio itself, other than the terminal server process. This
VLAN ID is used for filtering and for tagging purposes.
1-4094; 2]
[
• Data VLAN ID—Defines the VLAN ID assigned to traffic directed
to and from the Ethernet port and the terminal server process in
the radio. This VLAN ID is used for filtering and tagging purposes. [1-4094; 3]
• Default Route IF—Defines the VLAN that contains the default
gateway in the radio. [
MGMT, DATA; MGMT]
• Management VLAN Mode—Applies the VLAN tag to management
frames. [Tagged, Native; Tagged].
• Management VLAN Subnet Config—Presents a screen where you
can set the IP Address Mode, Static IP Address, and Static IP
Netmask (see Figure 3-14 on Page 47).
• DHCP Server Config (Mgmt)—Presents a screen where you can
view or set the DHCP server status and address information for
management functions (see Figure 3-15 on Page 48).
46 Mercury Reference Manual 05-4446A01, Rev. C
Page 55

• Data VLAN Subnet Config—Presents a screen where you can view
or set the IP mode and address information (see Figure 3-17 on
Page 49).
• DHCP Server Config (Data)—Presents a screen where you can view
or set DHCP server status and address information for data
functions (see Figure 3-16 on Page 49).
Management VLAN
Subnet
Configuration Menu
Invisible place holder
Figure 3-14. Management VLAN Subnet Configuration Menu
NOTE: Changes to any of the following parameters while communi-
cating over the network (LAN or over-the-air) might cause a
loss of communication with the unit you are configuring. You
must re-establish communication using the new IP address.
• IP Address Mode—Defines the source of the IP address of this
device. Only static IP addressing mode is available when VLAN
Status is enabled. [Static, Dynamic; Static]
Static IP Address—The IPv4 local IP address. [192.168.1.1]
•
• Static IP Netmask—The IPv4 local subnet mask. This value is
used when the radio attempts to send a locally initiated message,
either from the terminal server, or from a management process.
[255.255.0.0]
The lower three lines of the screen (
Current IP Gateway) show the current addressing configured at the trans-
Current IP Address, Current IP Netmask,
ceiver. Current IP Gateway only displays on this screen if Default Route IF
on the
Management.
Network Interface Config menu (Figure 3-13 on Page 46) is set to
Selecting option I from the menu in Figure 3-13 on Page 46 displays the
screen shown in Figure 3-17 on Page 49. Note that the IP address is different even though it is the same physical unit. This is because this IP
address is defined for a different VLAN.
05-4446A01, Rev. C Mercury Reference Manual 47
Page 56
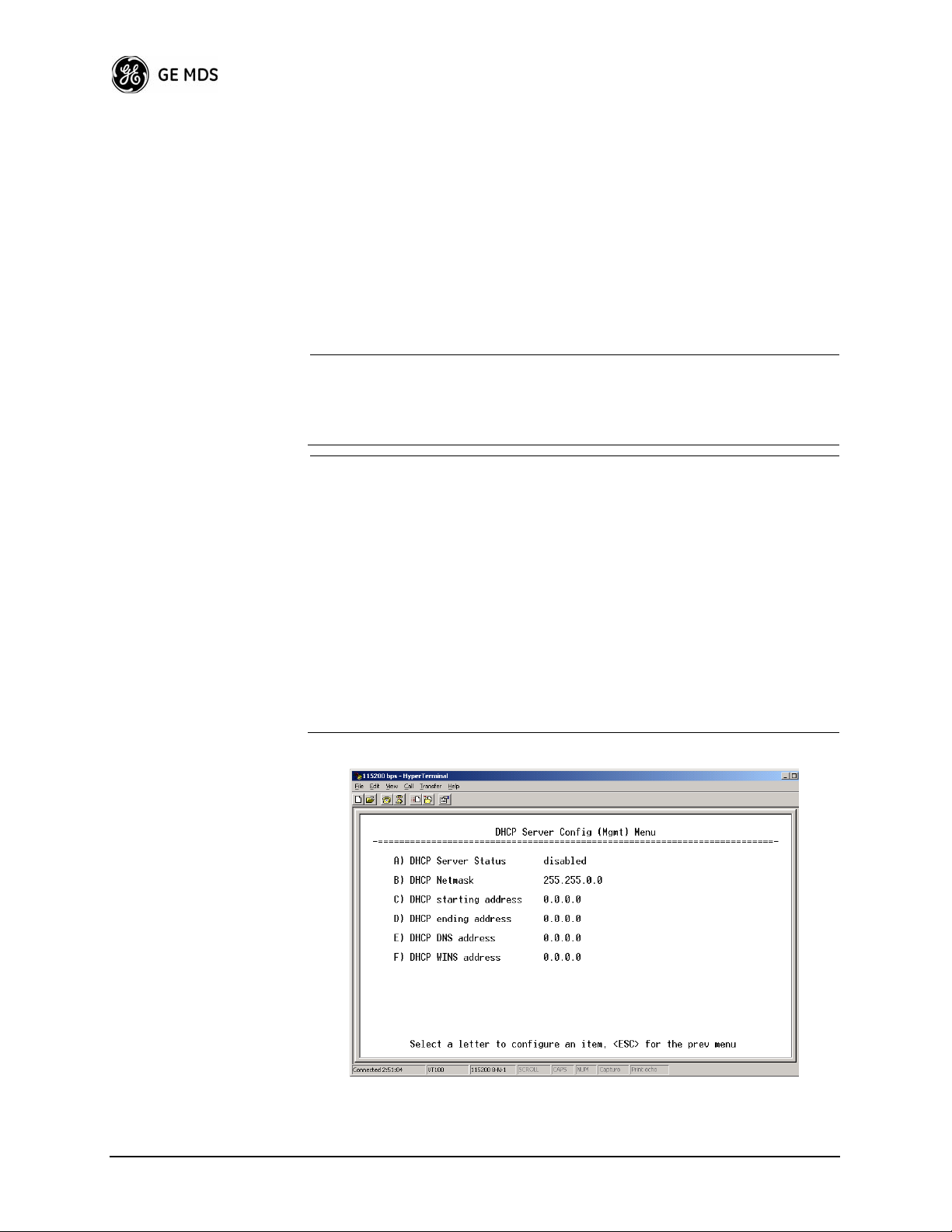
DHCP Server
Configuration
(Data and Mgmt)
A transceiver can provide automatic IP address assignments to other IP
devices in the network by providing DHCP (Dynamic Host Configuration Protocol) services. This service eliminates setting an individual
device IP address on Remotes in the network, but it requires some planning of the IP address range. One drawback to network-wide automatic
IP address assignments is that SNMP services might become inaccessible as they are dependent on fixed IP addresses.
You can make a network of radios with the DHCP-provided IP address
enabled or with DHCP services disabled. In this way, you can accommodate locations for which a fixed IP address is desired.
NOTE: There should be only one active DHCP server in a network. If
more than one DHCP server exists, network devices might
randomly get their IP address from different servers every time
they request one.
NOTE: Combining DHCP and IEEE 802.1x device authentication
might result in a non-working radio if the DHCP server is
located at a Remote radio. If possible, place the DHCP server
at the AP location.
A DHCP server can be run at a Remote, but it is not recommended if 802.1x Device Authentication is in use and if the AP
gets its IP address from the DHCP server on the Remote. In
this case, the Remote cannot authenticate to allow the AP to
get its address, because the AP needs an address to do perform
802.1x device authentication. This results in an unsolvable
condition where the AP needs to get an IP address from DHCP
at the Remote, but it can’t get the address until it is authenticated.
Invisible place holder
Figure 3-15. DHCP Server Configuration (Mgmt) Menu
48 Mercury Reference Manual 05-4446A01, Rev. C
Page 57

Invisible place holder
Figure 3-16. DHCP Server Configuration (Data) Menu
• DHCP Server Status—Enable/Disable the response to DHCP
requests to assign an IP address. [Disabled/Enabled; Disabled]
• DHCP Netmask—IP netmask to be assigned along with the IP
address in response to a DHCP request. [0.0.0.0]
• DHCP starting address—Lowest IP address in the range of
addresses provided by this device. [0.0.0.0]
• DHCP ending address—Highest IP address in the range of
addresses provided by this device. A maximum of 256
addresses is allowed in this range. [0.0.0.0]
• DHCP DNS address—Domain Name Server address provided by
this service.
• DHCP WINS address—Windows Internet Naming Service server
address provided by this service.
Data VLAN Subnet
Configuration Menu
Figure 3-17. Data VLAN Subnet Configuration Menu
05-4446A01, Rev. C Mercury Reference Manual 49
Invisible place holder
Page 58

• IP Address Mode—Defines the source of this device’s IP address.
Only static IP addressing mode is available when VLAN Status
is enabled [Static; Static]
• IP Address—The IPv4 local IP address. [192.168.1.1]
• IP Netmask—The IPv4 local subnet mask. This value is used
when the radio attempts to send a locally initiated message,
from either the terminal server or the management process.
[255.255.0.0]
• IP Gateway—The IPv4 address of the default gateway device,
typically a router. [0.0.0.0]
The lower three lines of the screen (Current IP Address, Current IP Netmask,
and Current IP Gateway) show the current addressing configured at the
transceiver. Current IP Gateway only displays on this screen if Default Route
on the Network Interface Config menu (Figure 3-13 on Page 46) is set to
IF
Data.
Invisible place holder
IP Configuration Menu
Figure 3-18. IP Configuration Menu
CAUTION: Changes to the following parameters while communicating
over the network (LAN or over-the-air) might cause a loss of
communication with the unit being configured. You must
re-establish communication using the new IP address.
•
IP Address Mode—Defines the source of this device’s IP address.
Static, Dynamic; Static]
[
•
Static IP Address (User Review Recommended)—Essential for connec-
tivity to the transceiver’s MS using the
LAN port. Enter any valid
IP address that is unique within the network. This field is unnecessary if DHCP is enabled. [
50 Mercury Reference Manual 05-4446A01, Rev. C
192.168.1.1]
Page 59

• Static IP Netmask—The IPv4 local subnet mask. This field is
unnecessary if DHCP is enabled. [255.255.0.0]
• Static IP Gateway—The IPv4 address of the network gateway
device, typically a router. This field is unnecessary if DHCP is
enabled. [0.0.0.0]
The lower three items on the screen (Current IP Address, Netmask and Gateway) show the actual addressing at the transceiver whether it was obtained from static configuration or from
a DHCP server.
3.4.2 Ethernet Port Configuration Menu
The transceiver allows for special control of the Ethernet interface, to
allow traffic awareness and availability of the backhaul network for
redundancy purposes.
NOTE: The transceiver’s network port supports 10BaseT and
100BaseT connections. Confirm that your hub/switch is
capable of auto-switching data rates.
To prevent excessive Ethernet traffic from degrading performance, place the transceiver in a segment, or behind routers.
Figure 3-19. Ethernet Port Configuration Menu
• Ethernet Port Enable—Allows enabling/disabling Ethernet traffic
for security purposes. Setting it to
enabled, disabled; enabled]
[
enabled enables the port.
• Ethernet Port Phy Rate—The Ethernet port’s configured speed.
• Eth Port Follows Association (Remote Only)—When enabled, the
Ethernet port is disabled when not associated.
[
enabled, disabled; disabled]
05-4446A01, Rev. C Mercury Reference Manual 51
Page 60

• Ethernet Filtering Config—Allows enabling/disabling filtering and
specifying of Ethernet addresses.
Ethernet Filtering Configuration Menu
Figure 3-20. Ethernet Filtering Configuration Menu
Invisible place holder
• Enable Filtering—Activates Ethernet filtering.
[enabled, disabled; disabled]
• Address 1, 2, 3, 4—Ethernet address fields. When filtering is
enabled, the Mercury only accepts traffic on its Ethernet port
from the configured addresses.
[Valid IP address string]
3.4.3 Bridge Configuration
Figure 3-21. Bridge Configuration Menu
Invisible place holder
• Bridge Priority—View/set the priority of the bridge in the spanning tree.
[0-65535; 32769]
52 Mercury Reference Manual 05-4446A01, Rev. C
Page 61

• Bridge Hello Time—View/set spanning tree hello time. This
parameter affects how often the bridge sends a spanning tree
Bridge Protocol Data Unit (BPDU). [1-10 seconds; 2 seconds]
• Bridge Forward Delay—View/set spanning tree forwarding delay.
Affects how long the bridge spends listening and learning after
initialization. [4-30 seconds; 5 seconds].
3.4.4 SNMP Agent Configuration
The transceiver contains over 100 custom SNMP-manageable objects as
well as the IETF standard RFC1213 for protocol statistics, also known
as MIB II. You can use off-the-shelf SNMP managers to access the
transceiver’s SNMP Agent’s MIB, such as Castle Rock Computing
SNMPc™ and Hewlett Packard OpenView™. The transceiver’s SNMP
agent supports SNMPv1, v2, and v3.
The objects are split into nine MIB files for use with your SNMP manager. There are textual conventions, common files, and specific files.
This allows the flexibility to change areas of the MIB and not affect
other existing installations or customers.
• msdreg.mib—MDS sub-tree registrations
• mds_comm.mib—MDS Common MIB definitions for objects
and events common to the entire product family
• mercury_reg.mib—MDS sub-tree registrations
• mercurytrv1.mib—SNMPv1 enterprise-specific traps
• mercurytrv2.mib—SNMPv2 enterprise-specific traps
• mercury_comm.mib— MIB definitions for objects and events
common to the entire Mercury Series
• mercury_ap.mib—MIB definitions for objects and events for an
Access Point transceiver
mercury_rem.mib—Definitions for objects and events for a
•
Remote radio
•
mercury_sec.mib—For security management of the radio system
NOTE: SNMP management requires that the proper IP address,
network, and gateway addresses are configured in each associated network transceiver.
In addition, some management systems might require that you
compile the MIB files in the order shown above.
05-4446A01, Rev. C Mercury Reference Manual 53
Page 62

Invisible place holder
Figure 3-22. SNMP Server Configuration Menu
This menu provides configuration and control of vital SNMP functions.
• Read Community String—SNMP community name with
SNMPv1/SNMPv2c read access. This string can contain up to
30 alpha-numeric characters.
• Write Community String—SNMP community name with
SNMPv1/SNMPv2c write access. This string can contain up to
30 alpha-numeric characters.
• Trap Community String—SNMP community name with
SNMPv1/SNMPv2c trap access. This string can contain up to
30 alpha-numeric characters.
• V3 Authentication Password—Authentication password stored in
flash memory. This is used when the Agent is managing passwords locally (or initially for all cases on reboot). This is the
SNMPv3 password used for Authentication (currently, only
MD5 is supported). This string can contain up to 30
alpha-numeric characters.
V3 Privacy Password—Privacy password stored in flash memory.
•
Used when the SNMP Agent is managing passwords locally (or
initially for all cases on reboot). This is the SNMPv3 password
used for privacy (DES encryption). This string can contain
between 8 and 30 alpha-numeric characters.
• SNMP Mode—This specifies the mode of operation of the radio’s
SNMP Agent. The choices are:
v3_only, v1-v2, and v1-v2-v3. If the mode is disabled, the Agent
does not respond to any SNMP traffic. If the mode is
v2_only, or v3_only, the Agent responds only to that version of
SNMP traffic. If the mode is
responds to the specified version of SNMP traffic. [
disabled, v1_only, v2_only,
v1_only,
v1-v2 or v1-v2-v3, the Agent
v1-v2-v3]
54 Mercury Reference Manual 05-4446A01, Rev. C
Page 63

• Trap Version—This specifies which version of SNMP is used to
encode the outgoing traps. The choices are v1_traps, v2_traps,
and v3_traps. When v3_traps is selected, v2-style traps are sent,
but with a v3 header. [v1_traps, v2_traps, v3_traps]
• Auth Traps Status—Indicates whether or not traps are generated
for failed authentication of an SNMP PDU. [Disabled/Enabled;
Disabled
]
• SNMP V3 Passwords—Determines whether v3 passwords are
managed locally or via an SNMP Manager. The different behaviors of the Agent, depending on the mode selected, are described
in SNMP Mode above.
• Trap Manager #1–#4— Table of up to four locations on the network to which traps are sent. [Any standard IP addre ss]
NOTE: The number in the upper right-hand corner of the screen is the
SNMP Agent’s SNMPv3 Engine ID. Some SNMP Managers
may need to know this ID in order interface with the transceiver’s SNMP Agent. The ID only appears on the screen
when SNMP Mode is either v1-v2-v3 or v3_only.
NOTE: For more SNMP information, see “NOTES ON SNMP” on
Page 165.
3.4.5 AP Location Push Config Me nu
This menu configures the AP for updating connected remotes with the
AP Locations File loaded on the AP.
Invisible place holder
Figure 3-23. AP Location Push Config Menu
• TFTP Host Address—IP address of the TFTP server that holds the
AP locations file. [
• Transfer Options—Menu for configuring the TFTP transfer.
any valid IP address; 0.0.0.0]
05-4446A01, Rev. C Mercury Reference Manual 55
Page 64

• AP Locations Filename—Name of the AP Locations file on the
server. [any valid filename string; ap_locations.txt]
• Auto AP Location Download—A setting to force connected
remotes to download immediately the AP Locations file on the
AP. Remotes that associate to an AP with this feature will also
download the file.
• Retrieve Text File—Download AP Locations text file from the
server.
• Send T e xt Fil e—Upload the local AP Locations file to the server.
• View AP Location File—Allows on-screen review of the AP Locations file. An example screen is shown in Figure 3-24.
Invisible place holder
Figure 3-24. AP Location Text File
AP Locations File Syntax and Guidelines
The AP Locations file is used by the Remote radio to determine which
Access Point to connect to when operating in Hopping w/ Hand-offs mode.
The AP Locations file is a simple text file containing information about
the location and configuration of all Access Points that the Remote can
associate with. The file is filled in by creating “AP definition blocks”
using tags and labels. The <AP> tag is used to begin a definition block
and the </AP> tag ends the block. Within the block, you can declare several parameters using a LABEL=VALUE syntax. The possible labels
are:
NAME—The name of the AP. Typically set to the Device Name
•
configured on the AP
• LAT—GPS Latitude of the AP in decimal degrees
• LONG—GPS Longitude of the AP in decimal degrees
• OFFSET—Pattern Offset configured on the AP
• BW—Bandwidth (1.75 or 3.5) configured on the AP
• DUR—Frame duration (10 or 20) configured on the AP
• MAC—The “Wireless MAN Address” configured on the AP
• CHANNELS—Specifies which channels are being used by the AP
56 Mercury Reference Manual 05-4446A01, Rev. C
Page 65

• GROUP—Name of a grouping of Access Points. A Remote configured with Eth Follows Association enabled does not disable its
wired port when moving between APs of the same group.This
is useful when two or more APs are on the same subnet.
• MODE—Single or Hopping. Specifies the Frequency Mode of the
AP.
• SINGLE_CHAN—Specifies the AP’s Single Frequency mode
channel.
The MAC label may appear twice if a P23 redundant Access Point is
installed at that location. In this case, one MAC statement provides the
MAC address of the A radio and the other MAC statement provides the
MAC address of the B radio. The CHANNELS statement only needs to be
present if the channel selection feature is used at the Access Point to
limit which channels are active. If all channels are used, you can leave
out the CHANNELS statement. You can leave out the BW statement for
APs that are configured to 1.75 MHz bandwidth. You can also leave out
the DUR statement for APs that are configured with a 20 millisecond
frame duration.
The following shows the syntax of the AP Locations file:
# Mercury Remote AP Locations file
# These lines are comments
# The following line defines the beginning of an AP definition block
<AP>
NAME=MyAccessPoint
LAT=43.11790
LONG=-77.61270
OFFSET=3
BW=1.75
DUR=20
MAC=00:06:3D:00:01:23
CHANNELS=1,3,5,7,9,11,13
# The following line defines the end of the AP definition block
</AP>
3.4.6 SNTP Server Configuration
The Simple Network Time Protocol (SNTP) allows the Mercury to
obtain time of day data from a network server.
NOTE: The Mercury can also obtain time of day data from the GPS
receiver, if the receiver has a satellite fix.
05-4446A01, Rev. C Mercury Reference Manual 57
Page 66

Invisible place holder
Figure 3-25. SNTP Server Entry (on Network Configuration Menu)
When SNTP Server is selected (item H), the area to the right of the parameter becomes active, allowing you to enter a valid SNTP server address.
Press the Return key to make the address entry active.
3.5 RADIO CONFIGURATION
There are two primary layers in the transceiver network—radio and
data. Since the data layer is dependent on the radio layer working properly, configure and set the radio items before proceeding. This section
explains the Radio Configuration Menu, (Figure 3-26 for AP,
Figure 3-27 for Remote).
3.5.1 Radio Configuration Menu
Figure 3-26. Radio Configuration Menu
(From Access Point)
58 Mercury Reference Manual 05-4446A01, Rev. C
Page 67

Figure 3-27. Radio Configuration Menu
(From Remote Unit)
• Network Name—The user-defined name for the wireless network.
[Any 40 character string; MDS-Mercury]
• Transmit Power (AP Only)—Sets/displays RF power output level
in dBm. This setting should reflect local regulatory limitations
and losses in antenna transmission line. (See “How Much Out-
put Power Can be Used?” on Page 155 for information on how
to calculate this value.) [0–30; 30]
• Max Transmit Power (Remote Only)—Sets/displays maximum RF
power output level in dBm of the Remote. Power level is still
controlled by the AP, but it is limited to the maximum level set
here. This setting should reflect local regulatory limitations and
losses in antenna transmission line. (See “How Much Output
Power Can be Used?” on Page 155 for information on how to
calculate this value.) [0–30; 30]
• Receive Power (AP Only)—View/set the receiver gain setpoint
for the expected strength of incoming signals from Remotes.
This setting indicates at what level (in dBm) the AP expects to
hear the Remote stations. A setting of -70 would set the AP
receiver’s gain to a relatively low level, while a setting of -85
would be a comparatively high gain setting. [
-100 to -20; -75]
• Frequency Control—Opens a submenu where you can view or set
frequency mode bandwidth, channel and other parameters as
described in Frequency Control Menu below.
• Advanced Configuration—Opens a submenu where you can view
or set modulation, protection/hysteresis margins, data compression, ARQ settings, and other parameters as described in
Advanced Configuration Menu on Page 65.
05-4446A01, Rev. C Mercury Reference Manual 59
Page 68

Frequency Control Menu
The items shown on this menu vary depending on the Frequency Mode
Selection (Single Channel, Static Hopping, Hopping w/Hand-offs). Examples
of all three screens are provided below, followed by a description of the
menu items.
Invisible place holder
Figure 3-28. Frequency Control Menu
(Single Channel Freq. Mode)
Invisible place holder
Figure 3-29. Frequency Control Menu
(Static Hopping Freq. Mode)
60 Mercury Reference Manual 05-4446A01, Rev. C
Page 69

Invisible place holder
Figure 3-30. Frequency Control Menu
(Hopping w/Hand-offs Freq. Mode [Remote only])
• Frequency Mode—The unit can operate on one selected frequency or frequency hop. Remotes have the option of using a
static hopping configuration or using the AP locations file to
select an AP and perform hand-offs. For more information on
hand-offs, see Table 3-2 on Page 64. Changing this parameter
requires a radio reboot.
[Static Hopping, Hopping with Hand-offs, Single Channel;
Single Channel]
NOTE: Frequency Mode Static Hopping on Access Points requires
TDD Sync Mode GPS Required.
Channel/Frequency Allocations for Single Channel operation
are shown in Table 3-1. The transceiver utilizes up to 14 channels (0-13) depending on the bandwidth used (1.75 MHz or
3.5 MHz).
Table 3-1. Channel/Frequency Allocations
Channel 1.75 MHz B/W 3.5 MHz B/W
0 903.000000 904.000000
1 904.800000 907.600000
2 906.600000 911.400000
3 908.600000 915.000000
4 910.400000 918.600000
5 912.200000 922.400000
6 914.000000 926.000000
7 916.000000
8 917.800000
9 919.600000
05-4446A01, Rev. C Mercury Reference Manual 61
Page 70

Table 3-1. Channel/Frequency Allocations
Channel 1.75 MHz B/W 3.5 MHz B/W
10 921.400000
11 923.400000
12 925.200000
13 927.000000
• RF Bandwidth—View/set the radio’s RF operating bandwidth.
Radios are factory-configured for either 1.75 MHz or 3.5 MHz
maximum bandwidth. Determine the factory configuration of a
radio by viewing the “CONFIG” number on the label at the bottom of the radio. 1.75 MHz units will have a Configuration
string starting with HGA/R9N1, and 3.5 MHz units will have a
string starting with HGA/R9N3.
The bandwidth setting on this menu does not necessarily have
to match the configured bandwidth of the radio, but it is limited
by it. That is, you can set a 3.5 MHz radio to either 1.75 or 3.5,
but you can only set a 1.75 MHz radio to 1.75. Note that setting
a 3.5 MHz bandwidth radio to operate at 1.75 MHz bandwidth
will cause a slight degradation of interference rejection capability. [1.75MHz, 3.5MHz]
• Hop Pattern—Selects a pre-defined series of channels that is followed when hopping.
• Hop Pattern Offset—Inserts an offset into the hop pattern that is
synchronized with the GPS. For example, if the offset is 0, then
the start of the pattern is aligned with the GPS timing. If the offset is 3, then the fourth hop of the pattern is aligned with the
GPS timing. All of the APs that are part of a network should use
the same pattern and each one should have its own offset.
In the diagram below, one Remote is configured for static hopping and will only associate with AP1 because they are both
62 Mercury Reference Manual 05-4446A01, Rev. C
Page 71
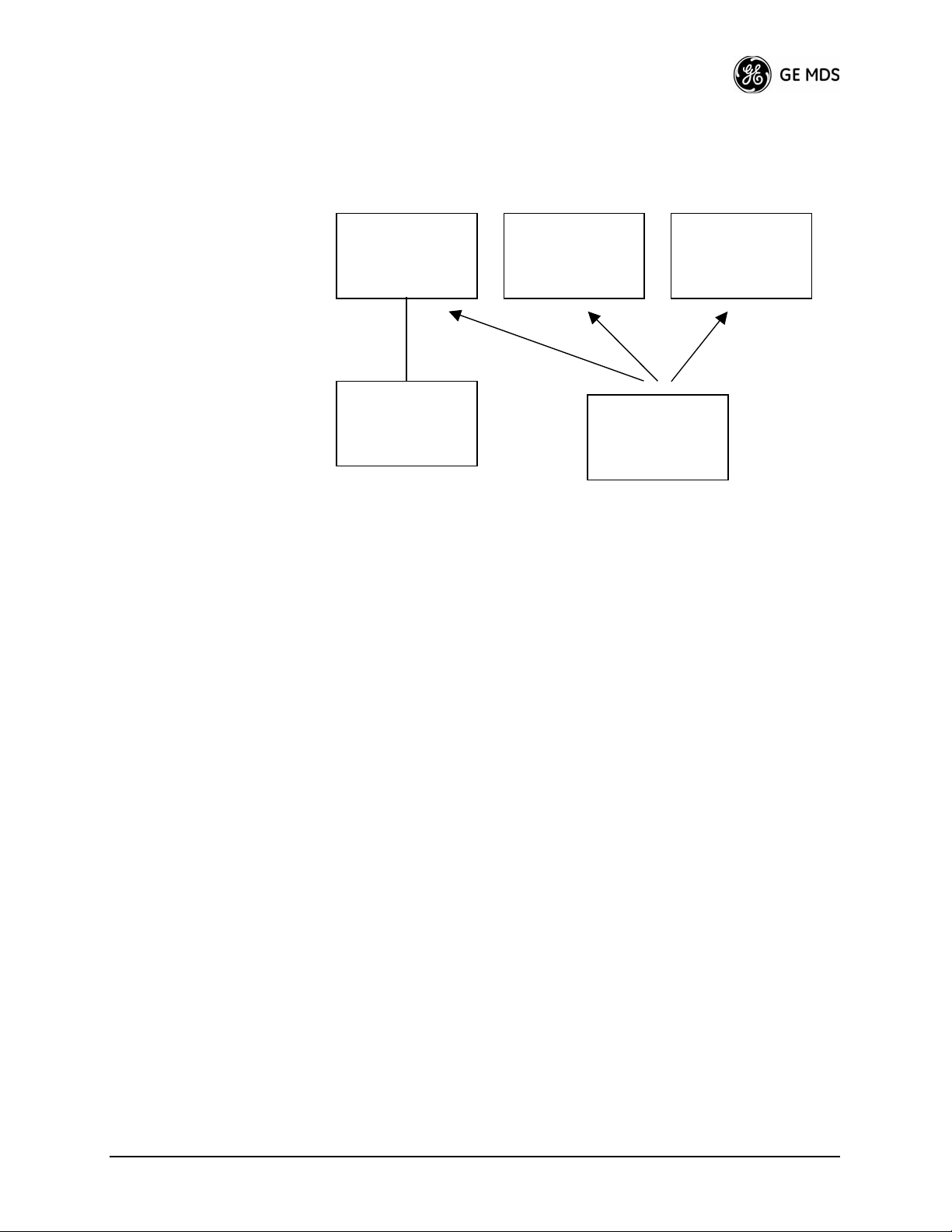
using Offset 0. The hand-off configured Remote, using its AP
Locations file, may connect to AP1, AP2, or AP3. The Remote
does this by determining the Offset for each AP, then configuring its radio.
AP 1
Pattern A
Offset 0
AP 2
Pattern A
Offset 1
AP 3
Pattern A
Offset 2
RM
Static Hopping
Offset 0
RM
Hopping w/
Hand-offs
Current AP—Shows the name of the AP that the Remote is trying
•
to associate with.
•
Advanced Control—Provides access to frequency setup parame-
ters.
• TDD Sync Mode—Indicates if the Access Point’s transmissions
should synchronize with the GPS timing. Configure this parameter to GPS Required when the AP is configured for Static Hopping.
TDD Sync Mode (Time-Division Duplex) is useful in eliminating same-network interference for multiple-AP installations.
When enabled, all AP transmissions are synchronized using
GPS timing information. The result is that no AP transmits
while another is receiving, which prevents AP-to-AP interference. Changing this parameter requires a radio reboot.
Free Run, GPS Required; Free Run] Note: Do not use the Prefer GPS
[
setting.
• Channel Selection—Opens a submenu where you can specify
channel usage.
•
Single Frequency Channel—The RF frequency that the integrated
radio will operate on when in single frequency (non-hopping)
mode. [
0 to 6 for 3.5-MHz, 0 to 13 for 1.75-MHz; 0].
• Frame Duration—Defines the over-the-air media access control
framing. [
5, 8, 10, or 20 msec; 20 msec]
• Hardware Filter—This field provides a read-only indication of the
maximum bandwidth of the radio. [1.75 MHz or 3.5 MHz]
Hand-Off Mode
Parameters
In a mobile or portable application, a Remote radio needs to move and
associate with different APs depending on its location. The process by
which the Remote ends the connection with one AP and begins a connection with another AP is called “hand-off.” Table 3-2 lists the
05-4446A01, Rev. C Mercury Reference Manual 63
Page 72

hand-off parameters for Remote transceivers and explains how they
operate under different signal conditions.
Table 3-2. Remote Hand-Off Parameters
Strict
Distance
Description The Remote
AP(s) Used
(see note below Table 3-2)
Max. Scanning
Seconds
RSSI
Threshold
SNR Threshold N/A N/A Applicable Applicable Applicable
Distance
Threshold
Blacklist Time N/A Applicable Applicable Applicable Applicable
always chooses
the closest AP
regardless of
connection
status, RSSI,
etc.
Only closest. Closest 3 APs. Closest 3 APs. Closest 3 APs;
N/A Applicable Applicable Applicable Applicable
N/A N/A Applicable Applicable Applicable
N/A N/A N/A Applicable Applicable
Strict
Connection
The Remote will
only choose a
new AP when
the modem link
is lost.
Strict
Signal
The Remote
chooses a new
AP when the
modem link is
lost or when the
RSSI or SNR
falls below the
threshold. The
Remote then
chooses the
closest AP.
Signal and
Distance
Operates the
same way as the
Strict SIgnal
method except
that the current
AP is abandoned
only if the next
AP is within the
distance
threshold.
AP must be
within Distance
Threshold.
Signal, Distance, and
Bearing
Operates the
same way as the
Signal and
Distance method
except that the
current AP is
abandoned only
if the bearing is
away from the
current AP.
Closest 3 APs;
AP must be
within Distance
Threshold.
NOTE: In Table 3-2 on Page 64, modes using the “Closest 3 APs” first
attempt to connect to the closest AP. If after the maximum
number of scanning seconds (Max. Scanning Seconds) a link is
not established, then the next closest AP is chosen. If after
another maximum number of scanning seconds a link is not
established, then the third closest AP is chosen. If a link still is
not established, the Remote again chooses the closest AP and
continues this cycle until it is associated to one of the APs.
NOTE: In Table 3-2 on Page 64, modes which use the RSSI and SNR
Thresholds
use them in an “or” logic fashion. That is, if the
RSSI is below the set threshold OR the SNR is below
threshold, the Remote drops the current AP.
64 Mercury Reference Manual 05-4446A01, Rev. C
Page 73

Advanced Configuration Menu
Figure 3-31. Advanced Configuration Menu
Invisible place holder
• Adaptive Modulation—Enables automatic selection of modulation
and FEC rate based on SNR. [enabled, disabled; enabled]
• Protection Margin—A number of decibels of SNR added to the
minimum SNR required for a given modulation and FEC rate.
See “Modulation Protection and Hysteresis Margins” on
Page 66 for more information. [0-50; 3]
• Hysteresis Margin—A number of decibels of SNR added to the
maximum SNR required before shifting to the next higher modulation and FEC rate. See “Modulation Protection and Hyster-
esis Margins” on Page 66 for more information. [0-50; 3]
• Data Compression—This setting determines whether over-the-air
data packets will be compressed. [enabled, disabled; enabled]
• Max Modulation—Sets the highest modulation speed the transceiver will use.
[BPSK, QPSK-1/2, QPSK-3/4, 16QAM-1/2, 16QAM-3/4, 64QAM-2/3,
64QAM-3/4; QAM16-3/4
]
• Cyclic Prefix—Amount of additional information added to the
over-the-air packets to mitigate the effects of channel multipath.
1/4, 1/8, 1/16,1/32; 1/ 16 ]
[
• Channel Type—This parameter, available on Access Point units,
must be set appropriately according to the signal conditions of a
network. For installations with strong signals, low interference,
and minimal fading, set the Channel Type parameter to Static.
This setting is generally appropriate for Access Points whose
Remotes are in fixed locations. It supports a large offered payload with high packet rates.
For installations with significant interference and fading or
nomadic/mobile Remotes, set the Channel Type parameter to
Dynamic. [Static, Dynamic; Static]
05-4446A01, Rev. C Mercury Reference Manual 65
Page 74

• ARQ—Enables the Automatic Repeat Request function.
[enable, disable; enabled]
• ARQ Window Size—The maximum number of blocks to send
before receiving an acknowledgement. [1–1024; 512]
• ARQ Block Size—ARQ is applied to payload data in blocks of this
4–2040; 256]
size. [
•
ARQ Block Lifetime—ARQ blocks are valid for this length of
time. [0–655; 655]
• ARQ Transmitter Delay—The length of time the transmitter waits
before repeating an unacknowledged packet.
[1–655; 35]
• ARQ Receiver Delay—The length of time the receiver waits before
repeating an unacknowledged packet. [1–655; 35]
• Downlink Percentage—The percentage of link time given to
downstream traffic. It should be set to 50% when Adaptive Split is
set to enabled. [10-90%; 50%]
• Adaptive Split—The adaptive split feature provides improved
link utilitization and throughput for burst payload traffic. The
Mercury is a TDD system and normally allocates 50% of its
capacity to the downlink and 50% to the uplink. When adaptive
split is enabled, the Media Access Controller (MAC) in the
Access Point monitors the traffic flow continuously in the
downlink and uplink directions. The MAC auotmatically modifies the downlink split in response to the traffic load. When
more traffic is flowing upstream, the downlink split changes to
allocate additional capacity to the uplink. When more traffic is
flowing downstream, the downlink gets additional capacity. If
TDD synchronization is used to synchronize Access Points and
minimize inter-Access Point interference, Adaptive Split should
be disabled. [enabled, disabled; enabled]
Modulation
Protection and
Hysteresis Margins
Table 3-3 on Page 67 shows the relationship between the radio’s Protec-
tion Margin, Hysteresis Margin, and the SNR range allowed for each
form of modulation.
Column A lists the available modulation types for the radio, while columns B and C show the minimum SNR range required to operate in each
modulation. For example, an SNR of 5.8 dB in Column B is required for
QPSK modulation with an FEC rate of 1/2. An SNR of 8.4 dB is
required for QPSK modulation with an FEC rate of 3/4.
Columns B and C have a Hysteresis Margin of 0 dB. This means there
is no overlap between the maximum SNR for BPSK (5.8 dB) and the
minimum SNR for QPSK-1/2 (5.8 dB).
Columns D and E show the SNR ranges with a Protection Margin and
Hysteresis Margin of 3 dB. The Protection Margin is added to each
value in Columns B and C to get the corresponding value in Columns D
and E. The Hysteresis Margin is then added to the Max SNR value.
66 Mercury Reference Manual 05-4446A01, Rev. C
Page 75

For example, the third SNR value in Column D is 11.4 dB (8.4 + 3 =
11.4 dB), and the third SNR value in Column E is 17.1 (11.1 + 3 + 3 =
17.1 dB). Note that with a Hysteresis Margin of 3 dB, there is an overlap
of 3 between the Max SNR of one modulation and the Min SNR of the
next higher modulation.
In this case, if a link is operating with an SNR of 15 dB, then QPSK-3/4
modulation is used. The SNR must go above 17.1 dB before the link
shifts up to 16QAM-1/2 modulation. Conversely, the SNR will need to
drop below 11.4 dB before the link shifts down to QPSK-1/2.
The blank entries (--) in the table indicate infinite SNR (i.e., the top of
the range). For example, in columns B and C, 64QAM-3/4 modulation
is used for all SNR values from 20 dB and up.
Table 3-3. Adaptive Modulation Protection and Hysteresis Margins
A B C D E F G
Protection 0 Protection 3 Protection 5
Hysteresis 0 Hysteresis 3 Hysteresis 3
Min SNR Max SNR Min SNR Max SNR Min SNR Max SNR
BPSK 3.3 5.8 3.3 11.8 3.3 13.8
QPSK-1/2 5.8 8.4 8.8 14.4 10.8 16.4
QPSK-3/4 8.4 11.1 11.4 17.1 13.4 19.1
16QAM-1/2 11.1 14.4 14.1 20.4 16.1 22.4
16QAM-3/4 14.4 18.4 17.4 24.4 19.4 26.4
64QAM-2/3 18.4 20 21.4 26 23.4 28
64QAM-3/4 20 -- 23 -- 25 --
3.5.2 Serial Port Configuration
Overview
The transceiver includes an embedded serial device server that provides
transparent encapsulation over IP. In this capacity, it acts as a gateway
between serial and IP devices. Two common scenarios are PC applications using IP to talk to remote devices, and serial PC applications
talking to remote serial devices over an IP network. These data services
are available from the COM1 port of the radio.
COM1 Port–Dual
Purpose Capability
05-4446A01, Rev. C Mercury Reference Manual 67
The COM1 port is used as a local console connection point and to pass
serial data with an external device. Setting the
COM1 port status to Enable
prevents access to the Management System (MS) through this port.
However, the MS can still be accessed via the LAN port using Telnet or
a web browser.
Page 76

NOTE: To restore the COM1 port to support Management System
services, connect a terminal to the port, select the proper baud
rate (115,200 is default), and enter an escape sequence (+++) to
reset it to the console mode.
There is a configuration parameter for the console baud rate and
another parameter for the serial data baud rate. These items can
be different, so when switching out of data mode to console
mode, the port might also change its baud rate.
TCP vs. UDP TCP and UDP services are used by the transceiver’s embedded serial
device server. TCP provides a connection-oriented link with end-to-end
acknowledgment of data, but with some added overhead. UDP provides
a connectionless best-effort delivery service with no acknowledgment.
Most polled protocols are best served by UDP service as the protocol
itself has built-in error recovery mechanisms. UDP provides the needed
multidrop operation by means of multicast addressing.
On the other hand, TCP services are best suited for applications without
a recovery mechanism (error-correction) and must have the guaranteed
delivery that TCP provides in spite of the extra overhead. The
IP-to-Serial Application Example on Page 75 shows how to do this.
Serial Encapsulation Transparent encapsulation, or IP tunneling, provides a mechanism to
encapsulate serial data in an IP envelope. All bytes received through the
serial port are put into the data portion of a TCP or UDP packet (TCP or
UDP are user-configurable options). In the same manner, all data bytes
received in a TCP or UDP packet are output through the serial port.
When the radio receives data through the serial port, it is buffered until
the packet is received completely. There are two events that signal an
end-of-packet to the radio: a period of time since the last byte was
received, or a number of bytes that exceed the buffer size. Both of these
triggers are user-configurable.
One radio can perform serial data encapsulation (IP-to-Serial) and talk
to a PC. You can use two radios together (or one radio and a terminal
server) to provide a serial-to-serial channel. For more information, see
“IP-to-Serial Application Example” on Page 75 and Point-to-Point
Serial-to-Serial Application Example on Page 76.
TCP Client vs. TCP
Server
On a TCP session there is a server side and a client side. You can configure the transceiver to act as either a server or a client. The server
always waits for requests from clients.
The client mode attempts to establish a connection to a server (typically
running on a PC) whenever it receives data on the serial port. There is
also a Client/Server mode, where the client establishes a connection
when data is received on the serial port and the server is not currently
handling a connection.
68 Mercury Reference Manual 05-4446A01, Rev. C
Page 77

UDP Multicast IP provides a mechanism to perform a limited broadcast to a specific
group of devices. This is known as multicast addressing. Multicast
addressing requires the use of a specific branch of IP addresses set apart
by the Internet Assigned Numbers Authority (IANA) for this purpose.
UDP multicast is generally used to transport polling protocols typically
used in SCADA applications where multiple remote devices will
receive and process the same poll message.
As part of the Multicast implementation, the radio sends IGMP membership reports and IGMP queries, and responds to membership queries. It
defaults to V2 membership reports, but responds to both V1 and V2 queries.
The Point-to-Multipoint Serial-to-Serial Application Example on
Page 76 shows how to provide multicast services.
Data Buffering Data buffering is always active regardless of the selected mode. If you
connect EIA-232 serial devices to the transceiver, review these parameters carefully.
Serial Configuration Wizard
GE MDS recommends the Serial Configuration Wizard, available
through the Serial Port Configuration Menu, for configuration of the serial
terminal services. The wizard uses a step-by-step process, eliminates
possible conflicting settings, and streamlines complex configurations.
Serial Port
Configuration Menu
You can bypass the wizard by selecting option B) View Current Settings
and adjusting the individual settings of the appropriate parameter.
Invisible place holder
Figure 3-32. Serial Port Configuration Menu
05-4446A01, Rev. C Mercury Reference Manual 69
Page 78

Figure 3-33. Serial Configuration Wizard
• Begin Wizard—Tool for configuring serial ports using a
step-by-step process.
• View Current Settings—Displays all setable options. Varies
depending on the selected IP protocol.
Configuring for UDP
Point-to-Multipoint
Invisible place holder
Figure 3-34. UDP Point-to-Multipoint Menu
Use UDP point-to-multipoint to send a copy of the same packet to multiple destinations, such as in a polling protocol.
•
Status—Enable/Disable the serial data port.
• Mode—The type of IP port offered by the transceiver’s serial
device server. [
TCP, UDP; TCP]
70 Mercury Reference Manual 05-4446A01, Rev. C
Page 79

• RX IP Port—Receive IP data from this source and pass it
through to the connected serial device. The port number must
be used by the application connecting to local TCP or UDP
socket. [Any valid IP port; 30010]
• TX IP Address (used instead of Local IP Address when using
UDP Point-to-Multipoint)— Configure with a valid Multicast address (224.0.0.0–239.255.255.255). IP packets
received with a matching destination address are processed
by this unit. [Any legal IP address; 0.0.0.0]
• TX IP Port (used instead of Local IP Port when using UDP
Point-to-Multipoint)—This port number must match the
number used by the application connecting to local TCP or
UDP socket. [1-64,000; 30010]
• Talkback Enable—Talkback is a mode where the radio returns
a serial message received within a time-out period back to the
last address of an incoming UDP message. If the time-out
expires, the unit sends the serial data to the configured
address. [Enable, Disable; Disabled]
• Baud Rate—Data rate (payload) for the COM port, in
bits-per-second. [1,200–115,200; 19200]
• Byte Format—Formatting of data bytes, representing data bits,
parity and stop bits. [7N1, 7E1, 7O1, 8N1, 8E1, 8O1, 8N1, 7N2, 7E2,
7O2, 8N2, 8E2, 8O2; 8N1]
• Buffer Size—Maximum amount of characters that the Remote
end buffers locally before transmitting data through the serial
port. [1–255; 255]
• Inter-Packet Delay—Amount of time that signal the end of a
message, measured in tenths of a second. [default = 1 (that is,
1/10th of a second)
]
• Commit Changes and Exit Wizard—Save and execute changes
made on this screen (shown only after changes have been
entered).
05-4446A01, Rev. C Mercury Reference Manual 71
Page 80

Invisible place holder
Figure 3-35. UDP Point-to-Point Menu
Configuring for UDP
Point-to-Point
Use UDP point-to-point configuration to send information to a single
device.
• Status—Enable/Disable the serial data port.
• IP Protocol—UDP Point-to-Point. This is the type of IP port
offered by the transceiver’s serial device server.
[TCP, UDP; TCP]
• Remote IP Address—Data received through the serial port is
sent to this IP address. To reach multiple Remotes in the network, use UDP Point-to-Multipoint.
[Any legal IP address; 0.0.0.0]
• Remote IP Port—The destination IP port for data packets
received through the serial port on the transceiver.
[1–64,000; 30010]
• Local IP Port—Port number where data is received and passed
through to the serial port. The application connecting to this
transceiver must use this port number.
[1–64,000; 30010,]
• Packet Redundancy Mode—For proper operation, all radios’
Serial Packet Redundancy mode must match (Single Packet
mode vs. Packet Repeat mode). This is because a transceiver,
when in Packet Repeat mode, sends 12 extra characters
(sequence numbers, etc.) to control the delivery of the
repeated data. Misconfigurations might result in undesired
operation.
• Data Baud Rate—Data rate (payload) for the COM port, in
bits-per-second. [
1,200–115,200; 19200]
• Byte Format—Formatting of data bytes. Data bits, parity and
stop bits. [
8E2, 8O2; 8N1
7N1, 7E1, 7O1, 8N1, 8E1, 8O1, 8N1, 7N2, 7E2, 7O2, 8N2,
]
72 Mercury Reference Manual 05-4446A01, Rev. C
Page 81

• Commit Changes and Exit Wizard—Save and execute changes
made on this screen (shown only after changes have been
entered).
Configuring for TCP
Mode
Invisible place holder
Figure 3-36. TCP Client Menu (Remote)
• Status—Enable/Disable the serial data port.
• IP Protocol—TCP Client. This is the type of IP port offered by
the transceiver’s serial device server. [TCP, UDP; TCP]
• Primary Host Address—The IP address to be used as a destina-
tion for data received through the serial port.
[Any legal IP address; 0.0.0.0]
• Primary IP Port—The destination IP port for data packets
received through the serial port on the transceiver.
[Any valid IP port; 30010]
• Secondary Host Address—The IP address to be used as a desti-
nation for data received through the serial port, in case the
primary host address is not available.
Any legal IP address; 0.0.0.0]
[
• Secondary IP Port—The destination IP port for data packets
received through the serial port on the transceiver, used along
with the secondary host address above.
[Any valid IP port; COM1: 30010]
• Outgoing Connection’s Inactivity Timeout—Amount of time (in
seconds) that the transceiver waits for data before terminating the TCP session. [
0–600; 600]
• Data Baud Rate—Data rate (payload) for the COM port, in
bits-per-second. [1,200–115,200; 19200]
• Byte Format—Interface signaling parameters. Data bits, parity
and stop bits.
7N1, 7E1, 7O1, 8N1, 8E1, 8O1, 8N1, 7N2, 7E2, 7O2, 8N2, 8E2, 8O2;
[
]
8N1
05-4446A01, Rev. C Mercury Reference Manual 73
Page 82

• Buffer Size—Maximum amount of characters that the Remote
end buffers locally before transmitting data through the serial
port. [1–255; 255]
• Inter-Frame Packet Delay—A measurement representing the
end of a message, measured in tenths of a second.
[default = 1 (that is, 1/10th of a second)]
• Commit Changes and Exit Wizard—Save and execute changes
made on this screen (shown only after changes have been
entered).
Invisible place holder
Figure 3-37. TCP Server Menu (AP)
• Status—Enable/Disable the serial data port.
• IP Protocol—TCP Server. This is the type of IP port offered by
the transceiver’s serial device server.
TCP, UDP; TCP]
[
• Local Listening IP Port—Receive IP data from this source and
pass it through to the connected serial device. The application connecting to the local TCP or UDP socket must use this
port number.
[Any valid IP port; 30010]
• Baud Rate—Data rate (payload) for the COM port, in
bits-per-second. [
1,200–115,200; 19200]
• Byte Format—Interface signaling parameters. Data bits, parity
and stop bits.
7N1, 7E1, 7O1, 8N1, 8E1, 8O1, 8N1, 7N2, 7E2, 7O2, 8N2, 8E2, 8O2;
[
]
8N1
• Buffer Size—Maximum amount of characters that the Remote
end buffers locally before transmitting data through the serial
port. [1–255; 255]
• Inter-Packet Delay—Amount of time that signal the end of a
message, measured in tenths of a second. [default = 1 (that is,
1/10th of a second)
]
74 Mercury Reference Manual 05-4446A01, Rev. C
Page 83

• Commit Changes and Exit Wizard—Save and execute changes
192.168.0.10 192.168.0.1 192.168.0.2
made on this screen (shown only after changes have been
entered).
IP-to-Serial Application Example
You must choose UDP or TCP to establish communications. This
depends on the type of device you are communicating with at the other
end of the IP network. In this example, we will use TCP to illustrate its
use.
In TCP mode, the transceiver remains in a passive mode, offering a
socket for connection. Once a request is received, data received at the
serial port is sent through the IP socket and vice versa, until the connection is closed or the link is interrupted. In this mode, the transceiver
behaves the same, whether it is an Access Point or a Remote.
(See Figure 3-38 and Table 3-4)
NOTE: The TCP session has a timeout of 10 minutes (600 seconds). If
inactive for that time, the session is closed. The transceiver
offers the port again for connection after this time expires.
Establishing a
Connection
From the PC, establish a TCP connection to the IP address of the
Remote transceiver and to the IP port as configured above (30010). Use
a Telnet client application to establish this connection. Data can now be
sent between the PC and the RTU or other connected device.
Invisible place holder
Ethernet
Crosssover
Computer
or Network
Access Point
Figure 3-38. IP-to-Serial Application Diagram
Table 3-4. Serial Port Application Configuration
IP-to-Serial Connection
Transceiver
Location
Access Point None is required None is required
Remote Unit IP Address 192.168.0.2
Menu Item Setting
Status Enabled
IP Protocol TCP
Baud Rate 9,600 (Example)
Flow Control None
Local IP Port 30010
LA
N
COM
1
COM
2
Remote
PW
R
LIN
K
EIA-232
RTU
05-4446A01, Rev. C Mercury Reference Manual 75
Page 84

Point-to-Point Serial-to-Serial Application Example
Once you have configured the transceivers, they begin processing data
presented at the COM ports. Data presented at the Access Point’s COM
port is packetized and sent via UDP to the Remote. Upon receiving the
packet, the Remote strips the data out of the UDP packet and sends it out
its COM port. Likewise, data presented at the Remote’s COM port is
packetized, sent to the Access Point, stripped, and sent out the Access
Point’s COM port. This configuration does not use multicast addressing.
192.168.0.10 192.168.0.1 192.168.0.2
Invisible place holder
LA
N
COM
1
COM
2
EIA-232
Terminal
or Computer
Access Point
Figure 3-39. Point-to-Point Serial-to-Serial Application Diagram
Table 3-5. Serial Port Application Configuration
Transceiver Location Menu Item Setting
Access Point (COM1)
Remote Unit (COM1) Status Enabled
Status Enabled
Data Baud Rate 9,600 (Example)
SIFD 4
IP Protocol UDP
Remote IP
Address
Remote IP Port 30010
Local IP Port 30010
Data Baud Rate 9,600 (Example)
Flow Control X-ON/X-OFF (Example)
SIFD 4 (Characters)
IP Protocol UDP
Remote IP
Address
Remote IP Port 30010
Local IP Port 30010
PW
R
LIN
K
Remote
EIA-232
RTU
192.168.0.2
(IP address of the Remote radio)
192.168.0.1
(IP address of the AP)
Point-to-Multipoint Serial-to-Serial Application Example
The operation and data flow for this mode is very similar to
Point-to-Point serial-to-serial application, except that it uses multicast
addressing. The primary difference is that data presented at the Access
Point’s COM port is packetized and sent using UDP to all of the
Remotes. Upon receiving the packet, all of the Remotes strip the data
from the UDP packet and send it out their
presented at any of the Remotes’
76 Mercury Reference Manual 05-4446A01, Rev. C
COM ports is packetized, sent to the
COM ports. Likewise, data
Page 85

Access Point, stripped, and sent out the Access Point’s COM port (see
Figure 3-40, Table 3-6, Figure 3-41, and Figure 3-42 on Page 78).
Invisible place holder
192.168.0.2
192.168.0.10 192.168.0.1
192.168.0.3
EIA-232
Terminal
or Computer
Access Point
192.168.0.4
Figure 3-40. Point-to-Multipoint Serial-to-Serial Application
Diagram
LA
N
COM
1
COM
2
PW
R
LIN
K
LA
N
COM
1
COM
2
PW
R
LIN
K
EIA-232
Remote
EIA-232
RTU
RTU
Remote
LA
N
COM
1
COM
2
PW
R
LIN
K
EIA-232
Remote
RTU
Invisible place holder
Table 3-6. Serial Port Application Configuration
Transceiver Location Menu Item Setting
Access Point (COM1) Status Enabled
Baud Rate 9600 (Example)
Flow Control Disabled
IP Protocol UDP
Remote IP Address 224.254.1.1—
Multicast Address
Remote IP Port 30010
Local IP Port 30010
Remote Units (COM1)
Enable Enabled
Baud Rate 2,400 (Example)
Flow Control Hardware (Example)
IP Protocol UDP
Remote IP Address 192.168.0.1
Remote IP Port 30010
Local IP Port 30010
Local Multicast
Address
224.254.1.1 —
Multicast Address
1. This address is an example only. Any Class D IP address
(224.0.0.0–239.255.255.255) will work.
1
2
05-4446A01, Rev. C Mercury Reference Manual 77
Page 86

Figure 3-41. Serial Port Configuration—Access Point
Figure 3-42. Radio Serial Port Configuration—Remote
Mixed Modes
In this example, the TCP mode does not involve the Access Point. Thus,
the transceiver in a single network can run in both modes at the same
time. In other words, you can configure some Remotes for TCP mode
and others (along with the Access Point) for UDP mode.
In this configuration, the Host PC can use both data paths to reach the
RTUs. This is helpful when a mixed collection of RTUs is present where
some RTUs can operate in a broadcast form while others cannot (see
Figure 3-43 on Page 79 and Table 3-7 on Page 79).
78 Mercury Reference Manual 05-4446A01, Rev. C
Page 87

Operation and Data
Flow
• Communicate with RTU A by Telneting to Remote 1, port 30010.
• Communicate with RTU B by Telneting to Remote 2, port 30010.
• Communicate with RTUs C and D by sending and receiving data
from the Access Point’s
COM port.
• All communication paths can be used simultaneously.
Invisible place holder
LA
N
COM
1
COM
2
PW
R
LIN
K
Remote 1
Access Point
Transceiver
LA
N
COM
1
COM
2
PW
R
LIN
K
Remote 2
Ethernet
Terminal
or Computer
Crosssover
EIA-232
LA
N
COM
1
COM
2
PW
R
LIN
K
Remote 3
LA
N
COM
1
COM
2
PW
R
LIN
K
Remote 4
Figure 3-43. Mixed-Modes Application Diagram
Table 3-7. Serial Port Application Configuration
Transceiver Location Menu Item Setting
Access Point Status Enabled
Baud Rate 9,600
Flow Control Disabled
IP Protocol UDP
Send to Address A multicast IP address such as
224.254.1.1
Send to Port 30010
Receive on Port 30010
Receive on Address 0.0.0.0 (Not Used)
Remote Units 1 & 2 (COM1) Status Enabled
Baud Rate 2,400
Flow Control Disabled
IP Protocol TCP
Receive on Port 30010
Remote Units 3 & 4 (COM1) Status Enabled
Baud Rate 9,600
Flow Control Disabled
IP Protocol UDP
Send to Address IP address of the AP
Send to Port 30010
RTU–A
EIA-232
EIA-232
RTU–C
EIA-232
EIA-232
RTU–B
RTU–D
05-4446A01, Rev. C Mercury Reference Manual 79
Page 88

Table 3-7. Serial Port Application Configuration (Continued)
Transceiver Location Menu Item Setting
Receive on Port 30010
Receive on Address 224.254.1.1
(The multicast IP address used
for the AP’s Send To Address
above)
3.6 MODBUS / TCP SERVER
CONFIGURATION
Modbus is a serial communications protocol developed by Schneider
Electric (Modicon) for communication between programmable logic
controllers (PLCs), remote terminal units (RTUs) and other industrial
electronic devices. It has become an established standard in the industry,
and is now used by many manufacturers of industrial data equipment.
Mercury Series transceivers running version 2.2.0 firmware or later
include Modbus functionality. This section of the addendum contains an
overview of the Modbus/TCP Server and provides menu details for
using this feature. You should also review Configuring for TCP Mode
section on Page 73.
NOTE: This material assumes you have an understanding of Ethernet
networking, TCP/IP, and Modbus serial protocols. Refer to the
following web site for additional information:
www.modicon.com/TECHPUBS/intr7.html.
NOTE: Modbus/TCP functionality is provided on the COM1 port of
the transceiver only.
3.6.1 Modbus/TCP in Mercury Transceivers—An
Overview
The transceiver implements a Modbus/TCP server that bridges
Modbus/TCP to either: Modbus RTU or Modbus/ASCII. It does not
function as a Modbus/TCP client.
The transceiver converts Modbus/TCP requests to either RTU or ASCII
serial Modbus packets and sends them to the configured serial port. It
waits up to the timeout period for a reply on the serial port, and if one
arrives, it converts the response back to Modbus/TCP and sends it to the
connected Modbus/TCP client.
3.6.2 Menu Selections
Connect a PC to the transceiver as described in STEP 3—CONNECT PC
TO THE TRANSCEIVER section on Page 23, and access the embedded
80 Mercury Reference Manual 05-4446A01, Rev. C
Page 89

management system. Follow the steps below to proceed with
Modbus/TCP configuration.
1. From the Serial Configuration Wizard opening screen (Figure 3-44
on Page 81), select A to begin the wizard.
Invisible place holder
Figure 3-44. Configuration Wizard Opening Screen
2. Choose the IP protocol you wish to use (TCP, UDP, or Mod-
bus/TCP) by selecting the appropriate letter from the menu.
Figure 3-45. IP Protocol Selection Screen
3. On the next screen (Figure 3-46 on Page 82), choose the listening
port you wish to use for the Modbus/TCP server. The default is port
502. Press N to continue.
05-4446A01, Rev. C Mercury Reference Manual 81
Page 90

Figure 3-46. Modbus/TCP Server Listening Port
4. On the next screen (Figure 3-47), press A to change the Modbus
serial format, then press the space bar to toggle between the available formats (MODBUS/RTU or MODBUS/ASCII). Press B to enter the
Modbus serial timeout value in milliseconds. Press N to continue the
wizard.
NOTE: The only difference between Modbus/RTU and
Modbus/ASCII is the form of the framing sequence, error
check pattern, and address interpretation.
Figure 3-47. Choose Modbus Serial Format and Timeout Value
Note: Modbus Timeout setting is in milliseconds
as displayed in the example above.
82 Mercury Reference Manual 05-4446A01, Rev. C
, not seconds
Page 91

5. When the next screen appears (Figure 3-48), press A to select the
desired data baud rate and B to select the data byte format. Press N to
continue.
Figure 3-48. Select Data Baud Rate and Byte Format
6. The screen shown in Figure 3-49 appears next. Press A to select the
Buffer Size of message packets, and B to select the Inter-Frame
Delay. Press N to continue with the wizard.
Invisible place holder
Figure 3-49. Buffer Size and Inter-Frame Delay Values
7. On the next screen (Figure 3-50 on Page 84), select A and use the
spacebar to enable the serial port for data communication. Press N to
continue the wizard.
05-4446A01, Rev. C Mercury Reference Manual 83
Page 92

Invisible place holder
Figure 3-50. Serial Port Status Screen
8. Review all settings on the summary screen shown in Figure 3-51. If
all settings are correct, press X to confirm and exit the wizard. If not,
select the letter of the item(s) you wish to change.
Invisible place holder
Figure 3-51. Serial Configuration—Summary Screen
This completes the menu selections for Modbus/TCP operation.
84 Mercury Reference Manual 05-4446A01, Rev. C
Page 93

3.7 SECURITY CONFIGURATION
MENU
The transceiver’s security features are grouped into four major categories and are accessible from the Security Configuration Menu (see
Figure 3-52). These categories are:
Device Security—Contains settings for controlling access to the radio
itself for configuration and management.
Wireless Security—Controls how and when radios communicate with
each other, as well as how data traffic is handled.
RADIUS Configuration—Deals with IEEE 802.1x device authentication
and authorization using a central server.
Manage Certificates (Remote only)—Allows setting of certificate types,
download paths, and TFTP parameters.
Invisible place holder
Figure 3-52. Security Configuration Menu
Selecting any of the Security Configuration Menu items opens a submenu where you can view or change settings. Examples of these screens
and more detailed descriptions of their contents are provided below.
05-4446A01, Rev. C Mercury Reference Manual 85
Page 94

3.7.1 Device Security Menu
The Device Security Menu (Figure 3-53) controls how the radios can be
accessed either locally or remotely for configuration and management.
Invisible place holder
Figure 3-53. Device Security Menu
• Telnet Access—Controls Telnet access to the transceiver’s management system. [enabled, disabled; enabled]
• SSH Access—Controls access to the Secure Shell (SSH) server.
[enabled, disabled; enabled]
• HTTP Mode—Controls access to the transceiver’s management
system via the web server. [disabled, HTTP, HTTPS; HTTP]
• HTTP Auth Mode—Selects the mode used for authenticating a
web user. [Basic Auth, MD5 Digest; Basic Auth]
• User Auth Method—View/set the method of authentication for
users. [Local, Radius; Local]
• User Auth Fallback—View/set method of authentication to use if
the RADIUS server is unavailable. [None, Local; None]
• User Passwords—Allows changing of Administrative and Guest
passwords. When selected, a new screen appears (Figure 3-54
on Page 87).
86 Mercury Reference Manual 05-4446A01, Rev. C
Page 95

User Passwords Menu
Figure 3-54. User Passwords Menu
Invisible place holder
To change the Administrator or Guest password, select the appropriate
menu item (A or B). A flashing cursor appears to the right. From here,
type the new password, which can be any alpha-numeric string up to 13
characters long. The change is asserted when you press the Return key.
• Change Admin Password—Allows you to set a new password.
[any alpha-numeric string up to 13 characters; admin]
• Change Guest Password—Allows you to set a new password.
[any alpha-numeric string up to 13 characters; guest]
TIP: For enhanced security, consider using misspelled words, a combi-
nation of letters and numbers, and a combination of upper and
lower case letters. Also, the more characters used (up to 13), the
more secure the password. These strategies help protect against
sophisticated hackers who use a database of common words (for
example, dictionary attacks) to determine a password.
3.7.2 Wireless Security Menu
The features in the Wireless Security menu (Figure 3-55 on Page 88)
control the communication of data across the wireless link. You can
authenticate the radios locally via a list of authorized radios, or remotely
via a centralized IEEE 802.1x device authentication server. This server
provides a centralized authentication mechanism based on standards.
05-4446A01, Rev. C Mercury Reference Manual 87
Page 96

Invisible place holder
Figure 3-55. Wireless Security Menu
• Device Auth Mode—View/set the device’s authentication method.
[None, Local, IEEE 802.1X; None]
• Data Encryption—Controls the over-the-air payload data’s
AES-128 bit encryption. [enable, disable; disabled]
• Encryption Phrase—View/set the phrase used to generate encryption keys when encrypting over-the-air payload.
[any alpha-numeric string of 8 to 15 characters; <empty>]
• Max Remotes (AP only)—The maximum number of remotes an
AP can associate with.
• Approved Remotes (AP only)—Launches a submenu where you
can view, add, or delete approved Remotes. (See Figure 3-56.)
Approved Remotes
Submenu
Setting the Device Auth Mode to Local forces an AP to check the Approved
Remotes List before establishing a radio link. A Remote must be in the
list before the AP associates and grants authorization. Before enabling
this option, at least one entry must already exist in the
Remotes list.
88 Mercury Reference Manual 05-4446A01, Rev. C
View Approved
Page 97

Invisible place holder
Figure 3-56. Approved Remotes Submenu
• Add Remote—Enter the MAC address of Remote.
[Any valid 6-digit hexadecimal MAC address; 00:00:00:00:00:00]
• Delete Remote—Enter the MAC address of Remote. For security
purposes, you should delete a stolen or deprovisioned radio
from this list.
• Add Associated Remotes—Add all currently associated remotes to
the approved remote list. Alternatively, you can enter each
Remote MAC manually.
• Delete All Remotes—Remove (complete purge) all Remotes from
current list.
• View Approved Remotes—Listing of approved Remotes by MAC
address. These radios are authorized to join this AP. If a Remote
is not in this list, it cannot associate with this AP.
3.7.3 IEEE 802.1x Device Authentication
This section covers the configuration needed for the radios to access the
IEEE 802.1x device authentication server, which provides Device Level
Security and for Wireless Access Security. GE MDS does not provide
the server software.
Operation of Device Authentication
Device authentication forces the radio to authenticate before allowing
user traffic to traverse the wireless network. When Device Security is
configured to use IEEE 802.1x as the Authentication Method, Remote
radios need three types of certificates: public (client), private, and root
(Certificate Authority). These files are unique to each Remote radio and
must first be created at the server and then installed into each unit via
TFTP. The certificate files must be in DER format.
Device authentication uses the serial number of each radio as the
Common Name (CN) in its certificate and in its RADIUS identity field.
05-4446A01, Rev. C Mercury Reference Manual 89
Page 98

Each Access Point and Remote radio must be identified/recognized by
the device authentication server through the Common Name (Serial
number) and IP address entries.
NOTE: Consult your network administrator for assistance in configu-
ration, or for help with other issues that may arise.
To activate device authentication, select Device Auth Method and set
RADIUS as the active mode. The behavior of this setting differs
depending on whether it is implemented on an Access Point or a Remote
transceiver. An explanation of these behaviors is given below:
Access Point: When Device Auth Method is set to RADIUS, the AP disasso-
ciates all associated Remotes and waits for the device authentication
server to authenticate the Remotes before allowing data from them to
pass. When approval is received from the authentication server, data
from the Remote passes.
Remote: When
Device Auth Method is set to RADIUS, the Remote halts any
data it is passing, and requests Authentication from the device authentication server. If accepted, data is transmitted.
Operation of User Authentication
User Authentication controls authentication of users who can manage
the device. This is in contrast to Device Authentication (above), which
authenticates devices that can participate in the data network. When user
authentication is set to Local or RADIUS, you must enter a valid user name
and password before you can manage the radio. In RADIUS mode, both
of these fields can be up to 40 characters long. In Local mode the user
name is admin and the password can be up to 13 characters long.
When set to
RADIUS, all logins to the local configuration services must
be authenticated via the device authentication server, including Telnet
and SSH (Secure Shell) sessions. Authentication must be accepted
before access to the radio menu is granted.
90 Mercury Reference Manual 05-4446A01, Rev. C
Page 99

RADIUS Configuration Menu
Figure 3-57. Radius Configuration Menu
Invisible place holder
• Auth Server Address—The IP address of the authentication
server. [any valid IP address; 0.0.0.0]
• Auth Server Port—The UDP Port of the authentication server.
[1812, 1645, 1812]
• Auth Server Shared Secret—User authentication and Device
authentication require a common shared secret to complete an
authentication transaction. This entry must match the string
used to configure the appropriate files on the authentication
server.
[<empty>; any alpha-numeric string up to 16 characters]
• User Auth Mode—RADIUS Authentication algorithm.
[PAP, CHAP, EAP; PAP]
NOTE: CHAP is more secure than PAP. PAP may display the login
password in log files at the authentication server while CHAP
will encrypt the login password.
3.7.4 Manage Certificates
Use Certificate generation software to generate certificate files, then
install these files into each Remote unit using TFTP. This is done using
the Manage Certificates Menu (Figure 3-58 on Page 92).
The certificate files must be in DER format. The Common Name (CN)
field in the public certificate file must match the serial number of the
unit it is installed on.
05-4446A01, Rev. C Mercury Reference Manual 91
Page 100

Invisible place holder
Figure 3-58. Manage Certificates Menu
• TFTP Host Address—(Telnet/Terminal only)—IP address of the computer on which the TFTP server resides. This same IP address is
used in other screens/functions (reprogramming, logging, etc.).
Changing it here also changes it for other screens/functions.
[Any valid IP address; 127.0.0.1].
• Transfer Options—A menu for configuring the TFTP transfer.
(See Figure 3-59 on Page 93.)
Three certificate files (Root CA, Client, and Private Key) must be
present in each of the Remote radios. Use the commands described
below to install these files into each Remote radio:
• Certificate Type—Selects one of the three certificate file types
mentioned above. [Root CA, Client, Private Key; Root CA]
• Certificate Filename—Specifies the software path and filename
for downloading certificates.
Retrieve Certificate—Initiates the retrieval of the certificate file
•
from the storage location. A successful installation issues a
status message.
plete
Com-
NOTE: It is imperative that the three certificate files are installed
correctly into the Remote radio, in their respective file types.
If they are not, the Remote is un-authenticated for data traffic.
Consult your network administrator for more information.
92 Mercury Reference Manual 05-4446A01, Rev. C
 Loading...
Loading...