

GE Multilin MM300 Quick Start Manual

LISTED
52TL
IND.CONT. EQ.
E83849
GE
Grid Solutions
MM300
Motor Management System
MM300 Revision: 1.6x
Manual P/N: 1601-9022-AC
Manual Order Code: GEK-113336L
Quick Start Guide
*1601-9022-AC*
© 2016 GE Multilin Inc. All rights reserved.
The MM300 Motor Management System QuickStart Guide for revision 1.6x.
MM300 Motor Management System, EnerVista, EnerVista Launchpad, and EnerVista
MM300 Setup are registered trademarks of GE Multilin Inc.
The contents of this manual are the property of GE Multilin Inc. This documentation is
furnished on license and may not be reproduced in whole or in part without the permission
of GE Multilin Inc. The content of this manual is for informational use only and is subject to
change without notice.
Part number: 1601-9022-AC (April 2016)
Storage
Store the unit indoors in a cool, dry place. If possible, store in the original packaging. Follow
the storage temperature range outlined in the Specifications.
To avoid deterioration of electrolytic capacitors, power up units that are stored in a deenergized state once per year, for one hour continuously.
Warranty
For products shipped as of 1 October 2013, GE warrants most of its GE manufactured
products for 10 years. For warranty details including any limitations and disclaimers, see
our Terms and Conditions at
For products shipped before 1 October 2013, the standard 24-month warranty applies.
https://www.gegridsolutions.com/multilin/warranty.htm
Repairs
The firmware and software can be upgraded without return of the device to the factory.
For issues not solved by troubleshooting, the process to return the device to the factory for
repair is as follows:
• Contact a GE Grid Solutions Technical Support Center. Contact information is found in
the first chapter.
• Obtain a Return Materials Authorization (RMA) number from the Technical Support
Center.
• Verify that the RMA and Commercial Invoice received have the correct information.
• Tightly pack the unit in a box with bubble wrap, foam material, or styrofoam inserts or
packaging peanuts to cushion the item(s). You may also use double boxing whereby
you place the box in a larger box that contains at least 5 cm of cushioning material.
• Ship the unit by courier or freight forwarder, along with the Commercial Invoice and
RMA, to the factory.
Customers are responsible for shipping costs to the factory, regardless of whether the
unit is under warranty.
• Fax a copy of the shipping information to the GE Grid Solutions service department .
Use the detailed return procedure outlined at
https://www.gegridsolutions.com/multilin/support/ret_proc.htm
The current warranty and return information are outlined at
https://www.gegridsolutions.com/multilin/warranty.htm
This product cannot be disposed of as unsorted municipal waste in the European
Union. For proper recycling return this product to your supplier or a designated
collection point. For more information go to www.recyclethis.info.

TABLE OF CONTENTS
Table of Contents
OVERVIEW
Cautions and Warnings ....................................................................................................................... 3
Safety words and definitions......................................................................................................................3
General Safety Precautions - MM300.....................................................................................................3
For Further Assistance..........................................................................................................................4
INSTALLATION
Mechanical installation ........................................................................................................................1
Dimensions..........................................................................................................................................................1
Product identification .....................................................................................................................................2
Mounting ..............................................................................................................................................................2
Electrical installation .............................................................................................................................6
Module and terminal identification..........................................................................................................7
Full-voltage non-reversing starter ...........................................................................................................8
RS485 connections..........................................................................................................................................9
Phase current inputs (IO_A module) ..................................................................................................... 10
Phase voltage inputs (IO_B module).....................................................................................................12
Type IO_C module connections..............................................................................................................14
Type IO_D module connections .............................................................................................................15
Type IO_E module connections.............................................................................................................. 16
RTD sensor connections (IO_G module).............................................................................................. 16
Maintenance ...........................................................................................................................................17
In-service maintenance ............................................................................................................................. 17
Out-of-service maintenance....................................................................................................................18
Unscheduled maintenance (system interruption) ......................................................................... 18
Interfacing with the MM300.............................................................................................................18
MM300 graphical display pages............................................................................................................ 18
Introduction to the graphical control panel .....................................................................................20
Basic control panel....................................................................................................................................... 24
EnerVista MM300 Setup Software.................................................................................................25
Software requirements............................................................................................................................... 25
Troubleshooting the USB driver.............................................................................................................. 25
Installing the EnerVista MM300 Setup software............................................................................. 28
Upgrading the software.............................................................................................................................32
Connecting EnerVista MM300 Setup to the relay .................................................................32
Configuring serial communications ..................................................................................................... 32
Using the Quick Connect feature........................................................................................................... 33
Connecting to the relay.............................................................................................................................. 34
Working with setpoints and setpoint files.................................................................................35
Engaging a device......................................................................................................................................... 35
Entering setpoints .........................................................................................................................................35
File support....................................................................................................................................................... 36
Using setpoints files ..................................................................................................................................... 36
Downloading and saving setpoints files............................................................................................. 37
Adding setpoints files to the environment.........................................................................................37
Loading setpoints from a file ...................................................................................................................38
Uninstalling files and clearing data ...................................................................................................... 39
Upgrading relay firmware................................................................................................................39
Loading new relay firmware.................................................................................................................... 39
MM300 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE i

TABLE OF CONTENTS
ACTUAL VALUES
Actual values overview .........................................................................................................................1
SETPOINTS
Understanding setpoints......................................................................................................................1
Configuration setpoints ........................................................................................................................2
Motor setpoints................................................................................................................................................. 2
Current and voltage transformers........................................................................................................... 6
PROTECTION ELEMENTS
Thermal protection .................................................................................................................................1
Overload curve.................................................................................................................................................. 1
COMMUNICATIONS
Communications interfaces ...............................................................................................................1
SPECIFICATIONS
Protection specifications......................................................................................................................1
User interface specifications..............................................................................................................3
Metering and monitoring specifications.......................................................................................3
Control specifications............................................................................................................................4
Inputs specifications ..............................................................................................................................4
Outputs specifications...........................................................................................................................5
Power supply specifications...............................................................................................................6
Communications specifications .......................................................................................................6
Testing and certification.......................................................................................................................7
Physical specifications..........................................................................................................................8
Environmental specifications.............................................................................................................8
MM300 ORDER CODES
Example of an MM300 order code ..................................................................................................2
ii MM300 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE

GE
Grid Solutions
MM300 Motor Management System
Chapter 1: Overview
Overview
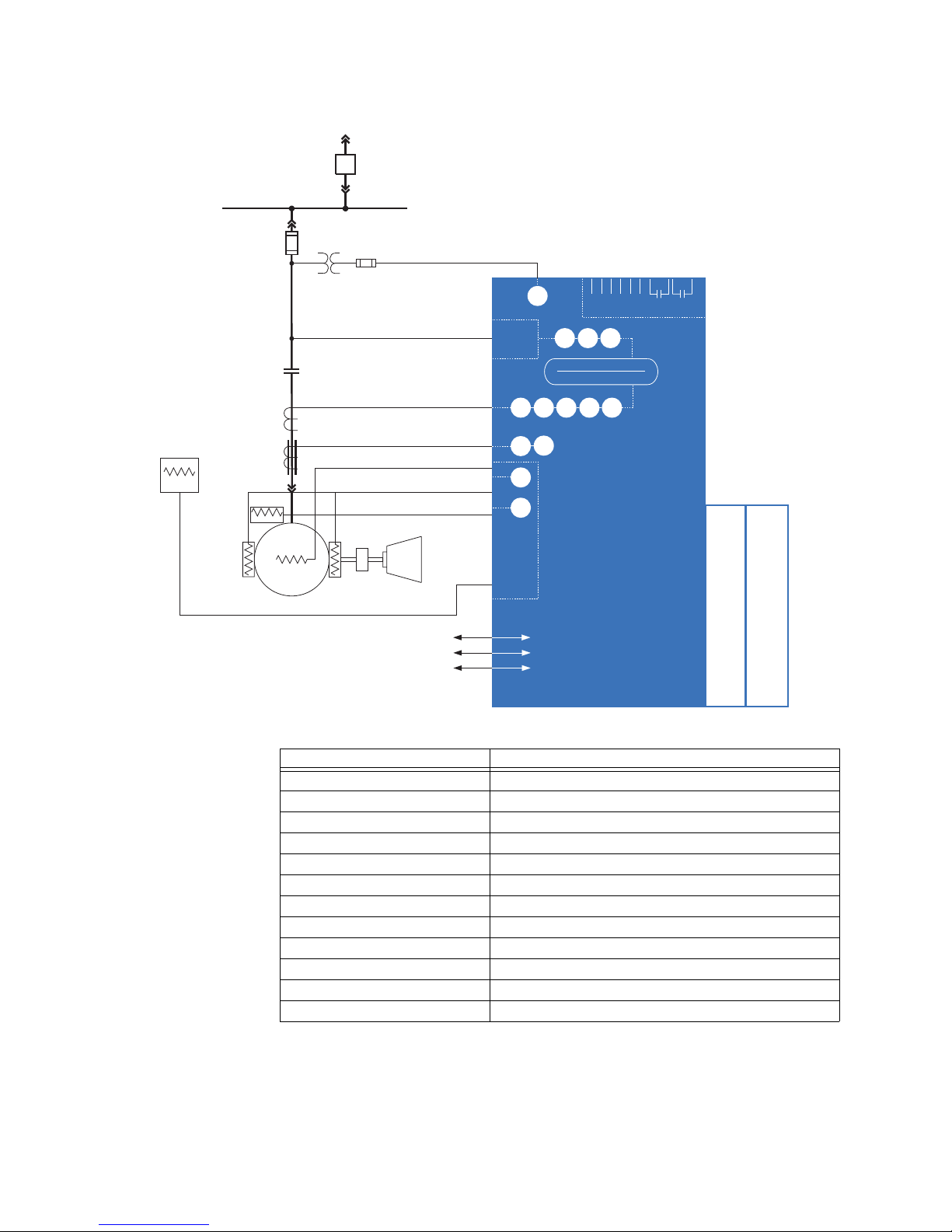
The MM300 is a modular motor protection and control system designed specifically for
low-voltage motor applications. The MM300 provides the following key benefits.
• Flexible protection, control, and communication options to suit any low-voltage motor
application.
• Small footprint designed specifically for IEC and NEMA MCC applications.
• Modular design reduces the number of spare components for maintenance and
testing.
• Integrated pushbuttons and LED indicators reduce external components and wiring.
• DIN rail and Panel Mounting.
• Multiple, simultaneous communication protocols allows simple integration into
monitoring and control systems.
• Optional basic control panel or graphical control panel interface provides local control
and access to system information.
• Automation FlexLogic™ for applications requiring more complex starter control, or
multi-starter scenarios with interlocking or programmable logic control.
MM300 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE 1
CHAPTER 1: OVERVIEW
RS485 - Modbus RTU
Ethernet - Modbus TCP/IP
Profibus/DeviceNet
52
27
59 47
METERING
V, A, W, va r, VA , PF, Hz
27X
51R
49
37
66 46
50G
51G
49
MOTOR
LOAD
Stator RTDs
Bearing RTDs
Phase CT 3
Ground CT 1
Power Fuse
BUS
MM300
MOTOR MANAGEMENT SYSTEM
Temperature
Thermistor
Control PT
Contactor
Control
fuse
Direct voltage inputs
(690 V AC maximum)
Ambient air
RTD
Expansion module,
two cards per module,
maximum of two modules
38
Optional
three-phase
voltage
card
Options:
Six inputs & two form-A outputs (max 5 cards)
?
?
Three-phase voltage card (max 1 card)
Options:
Three RTDs - 100 ohm Platinum (max 2 cards)
?
?
Four form-C contact outputs (max 4 cards)
853739A2.CDR
Six inputs and two outputs (standard)
Optional RTD card
Table 1-1: MM300 protection functions
ANSI device Description
27X Undervoltage, auxiliary input
27 Undervoltage, three-phase
37 Undercurrent and underpower
38 Bearing temperature RTD
46 Current unbalance
47 Voltage phase reversal
49 Thermal overload
50G Ground instantaneous overcurrent
51G Ground time overcurrent
51R Locked/stalled rotor, mechanical jam
59 Overvoltage, three-phase
66 Starts per hour and time between starts
2 MM300 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE

CHAPTER 1: OVERVIEW CAUTIONS AND WARNINGS
NOTE
Cautions and Warnings
Before attempting to install or use the device, review all safety indicators in this document
to help prevent injury, equipment damage, or downtime.
Safety words and definitions
The following symbols used in this document indicate the following conditions
DANGER:
Indicates a hazardous situation which, if not avoided, will result in death or serious
injury.
IMPORTANT:
CAUTION:
NOTE:
CAUTION:
Indicates a hazardous situation which, if not avoided, could result in death or serious
injury.
Indicates a hazardous situation which, if not avoided, could result in minor or
moderate injury.
Indicates practices not related to personal injury.
General Safety Precautions - MM300
Failure to observe and follow the instructions provided in the equipment manual(s)
could cause irreversible damage to the equipment and could lead to property damage,
personal injury and/or death.
Before attempting to use the equipment, it is important that all danger and caution
indicators are reviewed.
If the equipment is used in a manner not specified by the manufacturer or functions
abnormally, proceed with caution. Otherwise, the protection provided by the
equipment may be impaired and can result in Impaired operation and injury.
Caution: Hazardous voltages can cause shock, burns or death.
Installation/service personnel must be familiar with general device test practices,
electrical awareness and safety precautions must be followed.
Before performing visual inspections, tests, or periodic maintenance on this device or
associated circuits, isolate or disconnect all hazardous live circuits and sources of
electric power.
Failure to shut equipment off prior to removing the power connections could expose
you to dangerous voltages causing injury or death.
All recommended equipment that should be grounded and must have a reliable and
un-compromised grounding path for safety purposes, protection against
electromagnetic interference and proper device operation.
Equipment grounds should be bonded together and connected to the facility’s main
ground system for primary power.
Keep all ground leads as short as possible.
MM300 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE 3
FOR FURTHER ASSISTANCE CHAPTER 1: OVERVIEW
At all times, equipment ground terminal must be grounded during device operation
and service.
In addition to the safety precautions mentioned all electrical connections made must
respect the applicable local jurisdiction electrical code.
Before working on CTs, they must be short-circuited.
For Further Assistance
For product support, contact the information and call center as follows:
GE Grid Solutions
650 Markland Street
Markham, Ontario
Canada L6C 0M1
Worldwide telephone: +1 905 927 7070
Europe/Middle East/Africa telephone: +34 94 485 88 54
North America toll-free: 1 800 547 8629
Fax: +1 905 927 5098
Worldwide e-mail: multilin.tech@ge.com
Europe e-mail: multilin.tech.euro@ge.com
Website: http://www.gegridsolutions.com/multilin
4 MM300 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE
GE
Grid Solutions
MM300 Motor Management System
Chapter 2: Installation
Mechanical installation
Installation
This section describes the mechanical installation of the MM300 system, including
dimensions for mounting and information on module withdrawal and insertion.
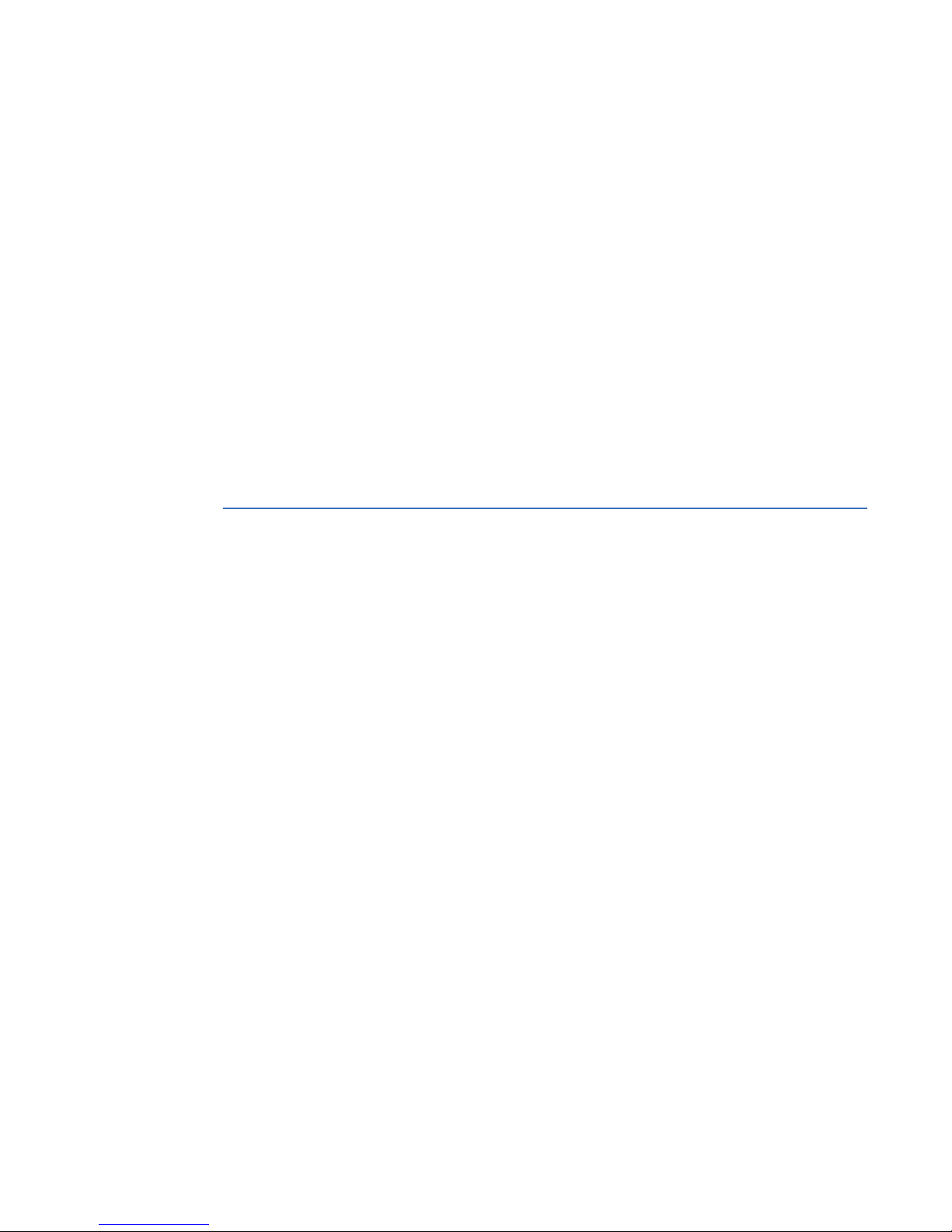
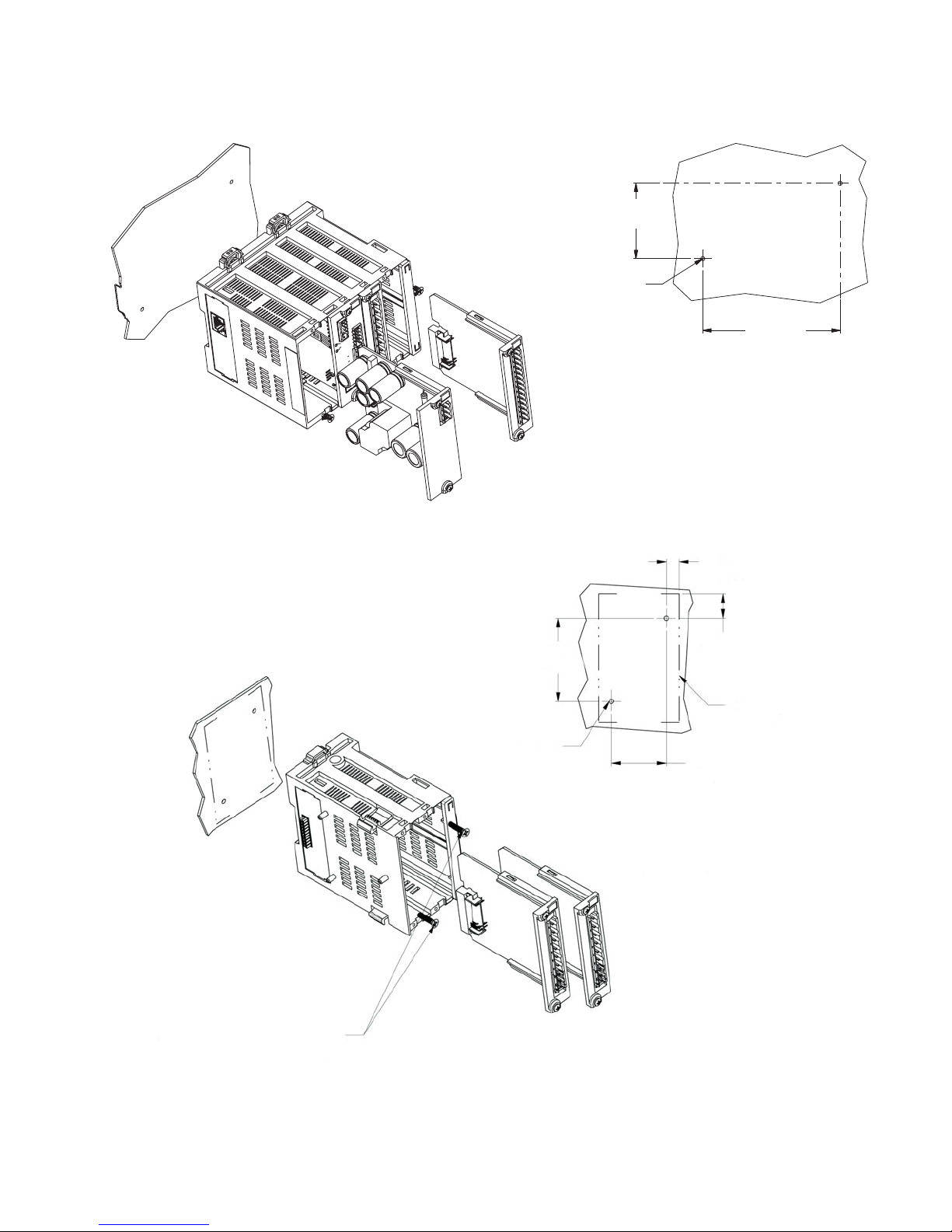
Dimensions
The MM300 is packaged in a modular arrangement.
The dimensions of the MM300 are shown below. Additional dimensions for mounting and
panel cutouts are shown in the following sections.
MM300 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE 1
MECHANICAL INSTALLATION CHAPTER 2: INSTALLATION
6.071”
(154,15 mm)
4.059”
(103,09 mm)
0.565”
(14,35 mm)
5.228”
(132,78 mm)
3.746”
(95,15 mm)
5.550”
(140,97 mm)
853724A1.CDR
PANEL
2.425”
(61.6 mm)
0.525”
(13.3 mm)
853748A1.CDR
Model:
Serial Number:
Firmware:
Mfg. Date:
Figure 2-1: MM300 dimensions
Product identification
The product identification label is located on the side panel of the MM300. This label
indicates the product model, serial number, firmware revision, and date of manufacture.
Figure 2-2: MM300 label
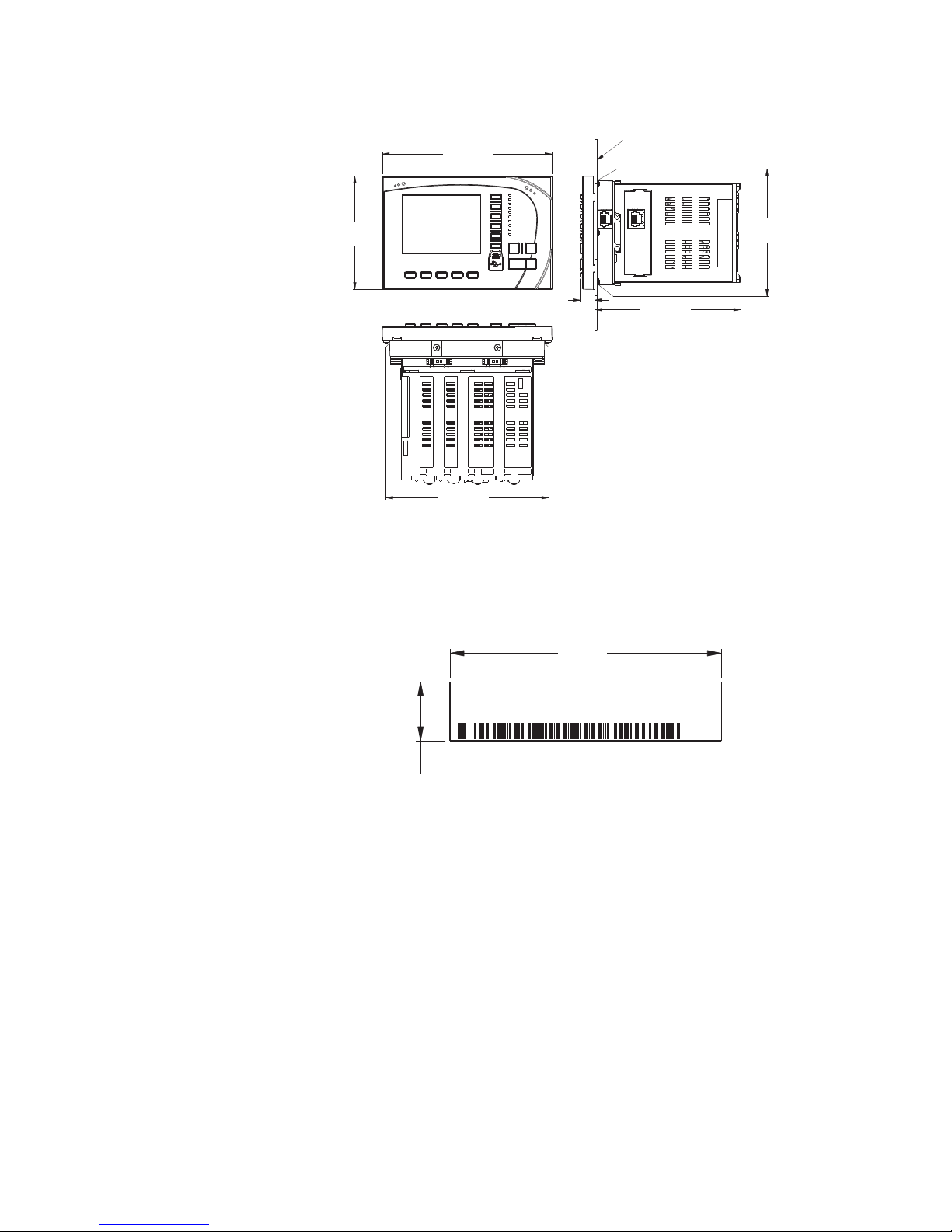
Mounting
The MM300 can be mounted three ways: standard panel mount, DIN rail mount , and screw
mount for high vibration environments.
The standard panel mount and cutout dimensions are illustrated below.
2 MM300 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE
CHAPTER 2: INSTALLATION MECHANICAL INSTALLATION
#4 - 40x3/8in SELF-TAP PAN HD PHILIPS
QTY: 6 (SUPPLIED); GE PART NO. 1402-0017
TIGHTENING TORQUE: 8 lb-in
REAR OF PANEL
CUTOUT AND
MOUNTING HOLES
INSTALL RELAY
FROM FRONT
OF THE PANEL
3.775”
(95,89 mm)
5.580”
(141,73 mm)
0.105”
(2,67 mm)
0.138”
(3,49 mm)
3.500”
(88,90 mm)
0.130”
(3,30 mm)
(QTY: 6)
5.790”
(147,07 mm)
1.750”
(44,45 mm)
853725A1.CDR
Figure 2-3: Base Unit standard panel mounting and cutout dimensions
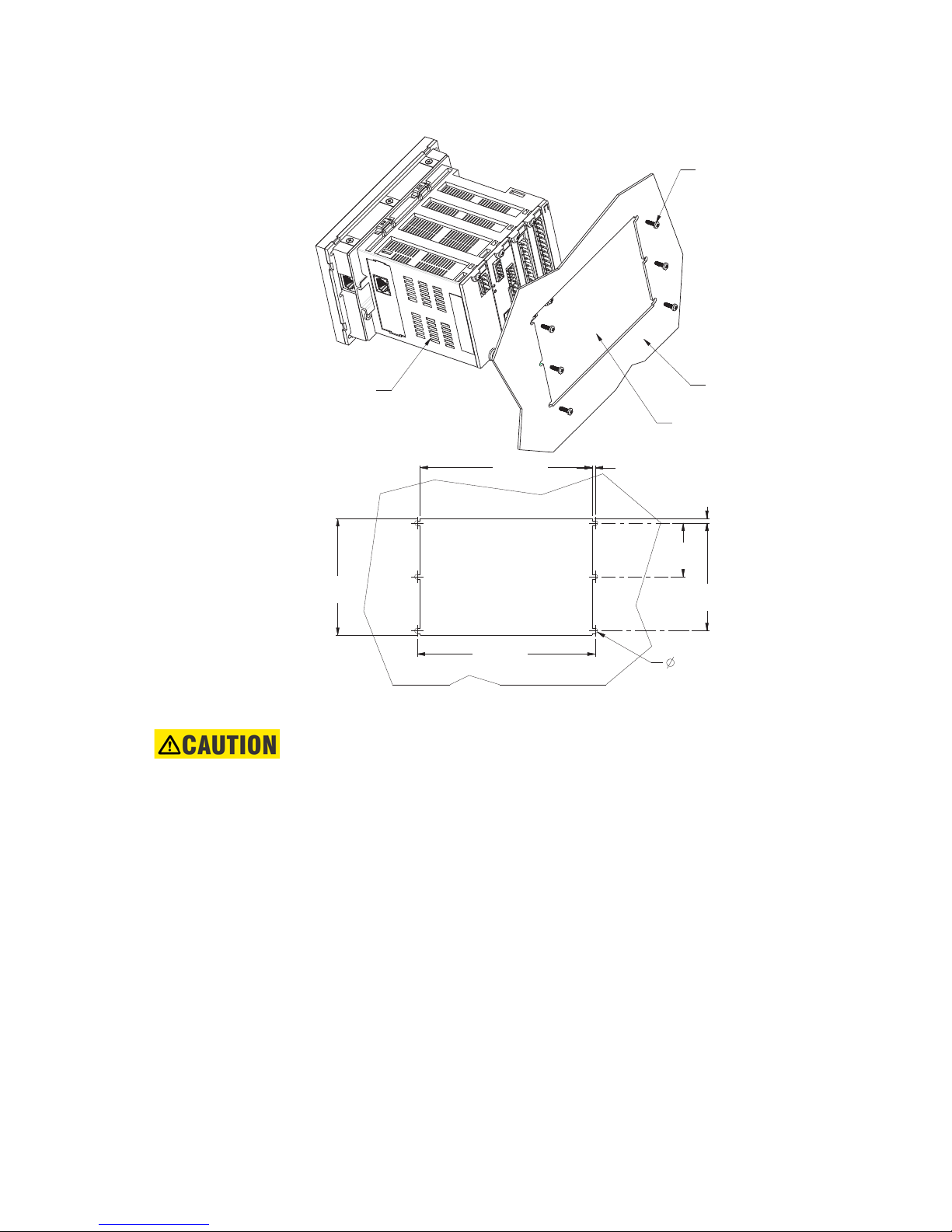
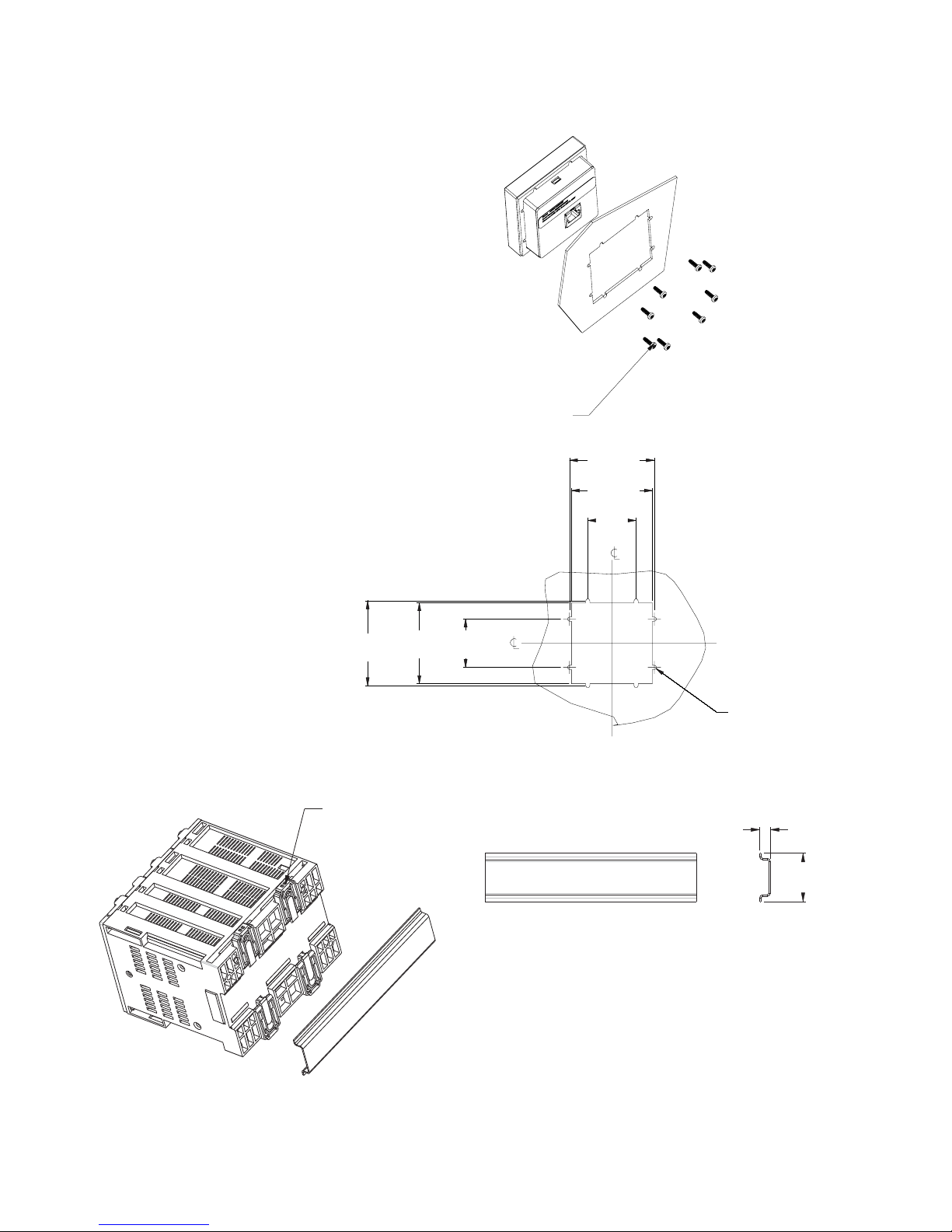
The DIN rail mounting is illustrated below. The DIN rail conforms to EN 50022.
CAUTION:
To avoid the potential for personal injury due to f ire hazards, ensure the unit is
mounted in a safe location and/or within an appropriate enclosure.
MM300 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE 3
MECHANICAL INSTALLATION CHAPTER 2: INSTALLATION
2.515"
63,88mm
[]
2.635"
66,93mm
[]
1.500"
38,10mm
[]
1.500"
38,10mm
[]
2.515"
63,88mm
[]
2.635"
66,93mm
[]
Ø
TypX8
.130"
3,30mm
[]
#4-40X3/8in SELF TAP PAN HD PHILIPS
QTY: 8; (SUPPLIED); GE PART# 1402-0017
TIGHTENING TORQUE: 7 lb-in
.
853825A1.cdr
SNAP-IN THE DIN CLIPS (QTY: 4)
FOR DIN RAIL MOUNTING
0.30”
(7,6 mm)
1.38”
(35,1 mm)
DIN 3 RAIL
853726A1.CDR
Figure 2-4: Basic Control Panel mounting and cutout dimensions
Figure 2-5: DIN rail mounting - Base and Expansion units
Screw mounts for high vibration environments are illustrated below.
4 MM300 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE
CHAPTER 2: INSTALLATION MECHANICAL INSTALLATION
MEETS VIBRATION REQUIREMENT OF
IEC 60255 SEC 21.1, 21.2, & 21.3
2.250”
(57,15 mm)
#6 -32 THREADED HOLE
QTY: 2
4.100”
(104,14 mm)
853727A1.CDR
#6-32X1/2 FT FLAT HEAD PHIL ZINC
QTY: 2; (SUPPLIED); GE PART # 1406-0117
TIGHTENING TORQUE: 10 lb. in.
0.356”
[9.03 mm]
0.672”
[17.06 mm]
1.500”
[38.10 mm]
EXPANSION UNIT
OUTLINE
2.285”
[58.04 mm]
#6-32 THREADED HOLE
QTY: 2
853755A1.cdr
Figure 2-6: Base Unit screw mounting
Figure 2-7: Expansion Unit screw mounting
MM300 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE 5

ELECTRICAL INSTALLATION CHAPTER 2: INSTALLATION
Expansion module
allows additional digital
inputs/outputs, RTDs, or
voltage inputs
Expansion module
to base unit with a single connector
•
•
•
I/O card includes:
two
contactor outputs
(form
-A)
six programmable inputs
single-phase VT input (60 to 300 V AC)
Optional three-phase
voltage module
RTDModule
with three RTD inputs
Three-phase and
residual ground CT
inputs
Optional TCP/IP
Ethernet
Core-balance ground CT input
RS485 communications
and thermistor input
Profibus or DeviceNet
Optional fieldbus protocols
Switched power supply
allows AC or DC control
voltage
853740A2.CDR
Electrical installation
This section describes the electrical installation of the MM300 system. An overview of the
MM300 terminal connections is shown below.
CAUTION:
MM300 is not to be used in any way other than described in this manual.
Figure 2-8: MM300 terminal connection overview
CAUTION:
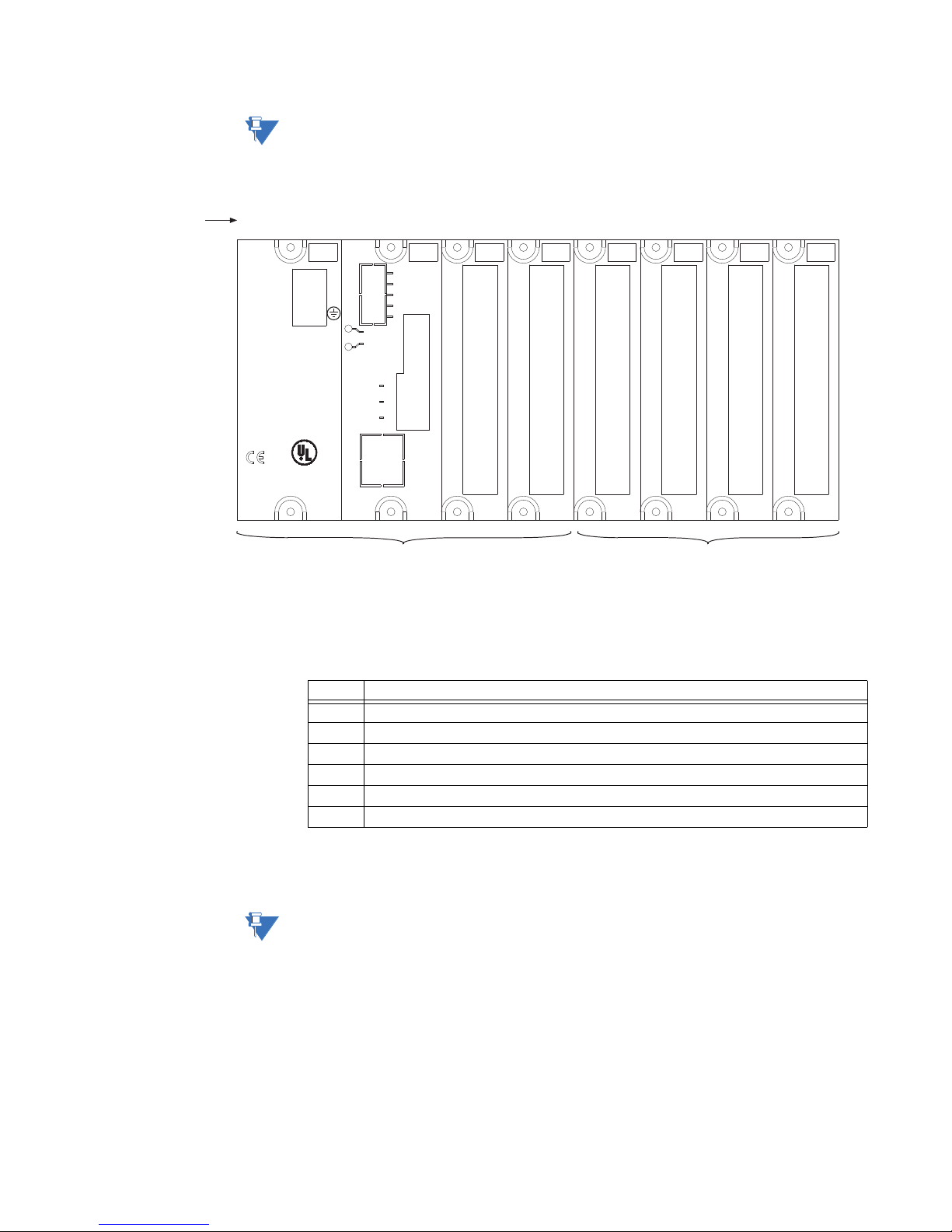
The MM300 can contain up to eight modules. The first four modules (slots A through D)
comprise the base unit, and the next four modules (slots E through H) comprise the
optional expanded unit.
Table 2-1: Module slot position
Slot Module types
Base Unit A Power supply module (High or Low)
B CPU module with communications (1 of 3 Comm Types)
C IO_C or IO_E module
D IO_A module
Expansion Modules E IO_B or IO_C or IO_E or IO_D or IO_G module
F IO_C or IO_E or IO_D or IO_G module
G IO_C or IO_E or IO_D or IO_G module
H IO_C or IO_E or IO_D or IO_G module
The following figure shows a typical module arrangement for an expanded unit .
Use gauge size appropriate for the voltage and current draw of the device.
Table 2-2: Gauge Sizes
CPU Card: Themistor, RS485 and Fieldbus 16 AWG (3.50mm pitch terminals)
PSU / CBCT /IO_C / IO_E / IO_D / IO_G 12 AWG (5.00mm pitch terminals)
IO_A / IO_B 12 AWG (7.62mm pitch terminals)
1. Wire gauge size remains constant; increased pitch distance reflects higher voltage rating.
1
1
6 MM300 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE
CHAPTER 2: INSTALLATION ELECTRICAL INSTALLATION
14
13
12
11
10
9
8
7
6
5
4
3
2
1
PSU
60-300 VAC
84-250 VDC
L
gMULTILIN
LISTED
IND.CONT.EQ.
52TL
E200434
Technical Support:
Tel: (905) 294-6222
(North America) 1-800-547-8629
Fax: (905) 201-2098
www.GEMultilin.com
N
MS
NS
THERM RS485
V-
10/100
ETHERNET
GROUND
CT I/P
I
L
C
H
V+
+
–
C
+
–
FIELD BUS
8
7
6
5
4
3
2
1
ABCDEFGH
Slot position
Base unit Expansion modules
853749A1.CDR
14
13
12
11
10
9
8
7
6
5
4
3
2
1
14
13
12
11
10
9
8
7
6
5
4
3
2
1
14
13
12
11
10
9
8
7
6
5
4
3
2
1
8
7
6
5
4
3
2
1
R
SG
NOTE:
It is recommended that you install a circuit disconnection system for control power, near
the device, which should be easily accessible after installation of the unit. This is in case an
emergency power shut-down of the unit is required.
Figure 2-9: Example of module arrangement
Module and terminal identification
The MM300 input/output and protection modules are labeled with the “IO_” prefix followed
by a one-character identifier as follows.
Table 2-3: Input/output module nomenclature
Module Description
IO_A CT module
IO_B VT module
IO_C Two 10 A form-A relays, six 60 to 300 V AC digital inputs, and Aux VT input module.
IO_D Four 10 A form-C relays module.
IO_E Two 10 A form-A relays, six 20 to 60 V DC digital inputs.
IO_G 3 RTD module.
The MM300 terminals are labeled with a three-character identifier. The first character
identifies the module slot position and the second character identifies the terminals within
NOTE:
MM300 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE 7
the module. For example, the first terminal in a module in slot C is identified as “C1”.
Do not confuse the slot designation with the module ordering designation. That is, terminal
“C1” does not imply an IO_C module. Rather, it indicates the first terminal of whatever
module is in slot C.
ELECTRICAL INSTALLATION CHAPTER 2: INSTALLATION
A
B
C
M M M
MOTOR
M
Stator Thermistor
M
Field Stop
Field Start
Reset
Core Balance CT
Contactor
MM300
Low Voltage
Motor
Manager
D2
D1
D8
D7
D6
D5
D4
D3
CT Module
PSU
C1
C2
C3
C4
C5
C6
C7
C8
I/O Module- Typ e C
C9
C10
C11
C12
C13
C14
I
C
I
B
I
A
Aux VT
+
-
Com
+
CPU
-
R
I
Surge G d
Core
Balance
Thermistor
RS485
CT2
CT3
G/F
CT1
RS485 Serial Link
Ground at one point
N
L
IN 1 IN 2 IN 3 IN 4 IN 5 IN 6 Com
Relay1 Relay2
LN
GE Multilin
853704A3.cdr
n
Gd
n
G
M
M
Field Stop
Field Start
Reset
MM300
Low Voltage
Motor
Manager
PSU
C1
C2
C3
C4
C5
C6
C7
C8
I/O Module- Type C
C9
C10
C11
C12
C13
C14
Aux VT
N
L
IN 1 IN 2 IN 3 IN 4 IN 5 IN 6 Com
Relay 1 Relay 2
LN
GE Multilin
853704B3.cdr
Low Voltage
DC Supply to
IO Type E
+
-
AC
Control Power
G
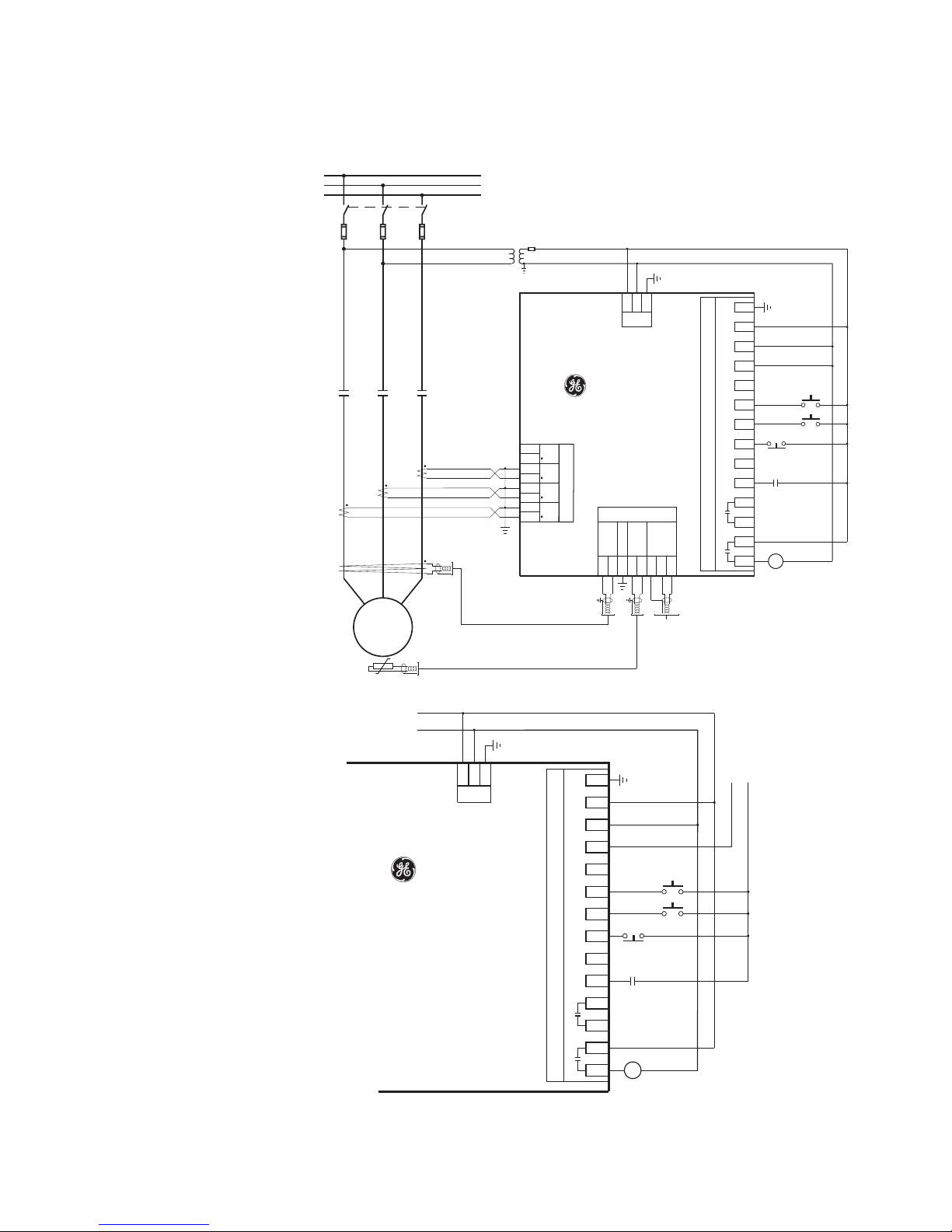
Full-voltage non-reversing starter
Figure 2-10: Full-voltage non-reversing starter wiring - IO_C
Figure 2-11: Full-voltage non-reversing starter control wiring - IO_E
8 MM300 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE
CHAPTER 2: INSTALLATION ELECTRICAL INSTALLATION
NOTE
SCADA, PLC, OR
PERSONAL COMPUTER
COM
OPTOCOUPLER
DATA
MM300 IED
SHIELD
853745A1.CDR
UP TO 32 MM300
OR OTHER IEDs,
MAXIMUM CABLE
LENGTH OF
1200 m (4000 ft.)
LAST
DEVICE
(*) TERMINATING IMPEDANCE AT E ACH END
(typically 120 ohms and 1 nF)
TWISTED PAIR
ZT(*)
RS485 +
RS485 -
COMMON
RS485 +
RS485 -
COMMON
IED
RS485 +
IED
RS485 -
COMMON
GROUND THE SHIELD AT THE
SCADA/PLC/COMPUTER ONLY
OR THE MM300 ONLY
DATA
OPTOCOUPLER
B1
B2
B3
ZT(*)
NOTE:
The above drawing applies only to a high-voltage power supply. If a low-voltage (DC)
power supply is used, an appropriate DC voltage source must be used for this power
supply.
.
The full-voltage non-reversing starter type is a full voltage or across-the-line non-reversing
starter.
When a start control is received, the pre-contactor relay (if any) is picked up for the set precontactor time. When the pre-contactor timer times out, relay1 picks up and seals-in,
picking up contactor M, which starts the motor. When a stop control is received, relay1
drops out, contactor M drops out, and the motor stops. The pre-contactor is omitted on
forced starts (for example, UVR Immediate, External Start).
NOTE:
Connect AUX VT to the Control Supply for correct operation of the UV Restart feature and
correct input readings.
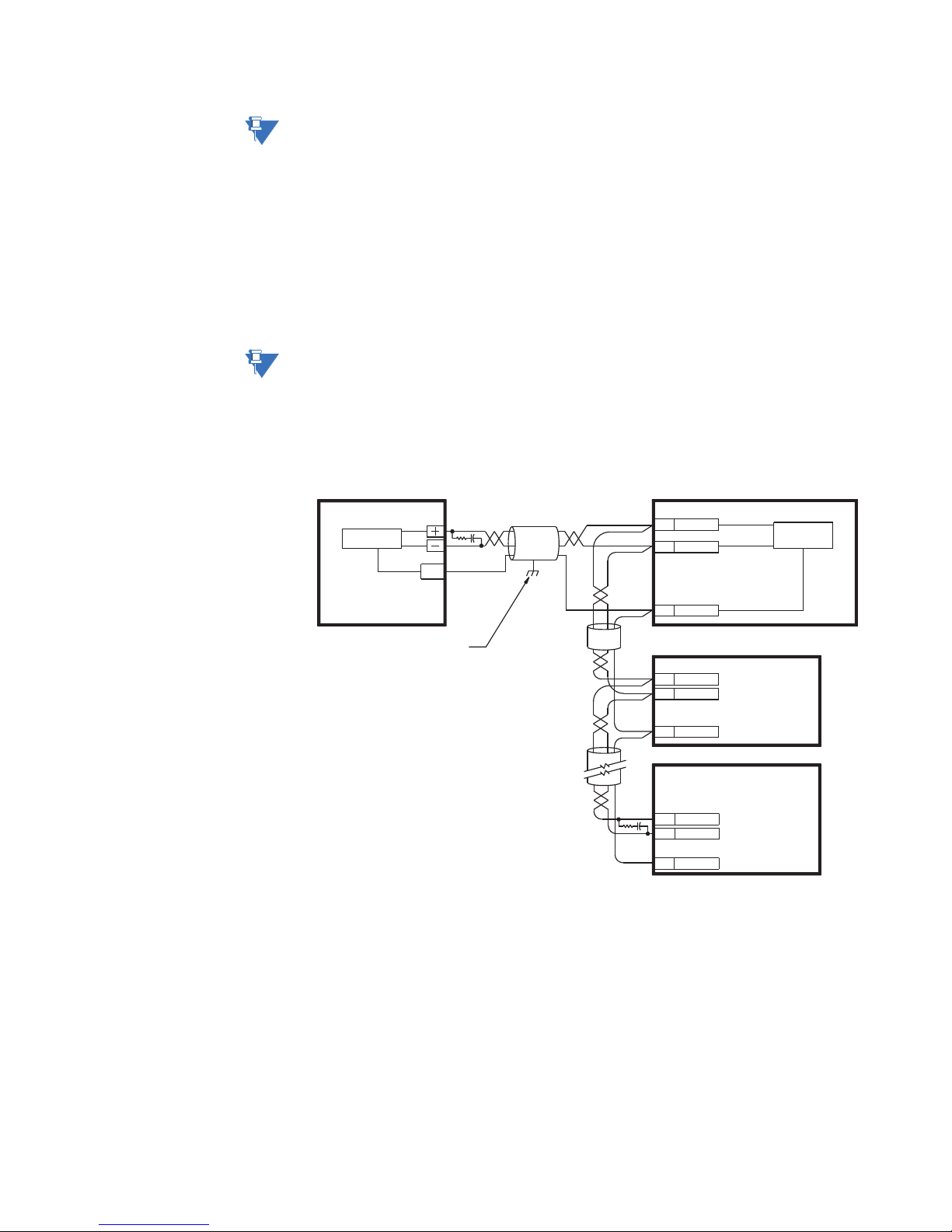
RS485 connections
Figure 2-12: Typical RS485 connection
One two-wire RS485 port is provided. Up to 32 MM300 IEDs can be daisy-chained together
on a communication channel without exceeding the driver capability. For larger systems,
additional serial channels must be added. Commercially available repeaters can also be
used to add more than 32 relays on a single channel. Suitable cable should have a
characteristic impedance of 120 ohms and total wire length should not exceed 1200
meters (4000 ft.). Commercially available repeaters will allow for transmission distances
greater than 1200 meters.
Voltage differences between remote ends of the communication link are not uncommon.
For this reason, surge protection devices are internally installed across all RS485 terminals.
Internally, an isolated power supply with an optocoupled data interface is used to prevent
noise coupling.
MM300 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE 9

ELECTRICAL INSTALLATION CHAPTER 2: INSTALLATION
Power flow
D1
D2
D4D3
Phase current inputs
D5
D6 D7
CT1 CT2 CT3
D8
G/F
D1
D2
D4D3
Phase current inputs
D5
D6 D7
CT1 CT2 CT3
D8
G/F
D1
D2 D4D3
Phase current inputs
D5
D6 D7
CT1 CT2 CT3
D8
G/F
Two CT Connection
Direct Connection
Residual Ground Connection
Power flowPower flow
Power flowPower flow
853753A1.cdr
CAUTION:
To ensure that all devices in a daisy-chain are at the same potential, it is imperative
that the common terminals of each RS485 port are tied together and grounded only
once, at the master or at the MM300. Failure to do so may result in intermittent or
failed communications.
The source computer/PLC/SCADA system should have similar transient protection devices
installed, either internally or externally. Ground the shield at one point only, as shown in
the figure above, to avoid ground loops.
Correct polarity is also essential. The MM300 IEDs must be wired with all the positive (+)
terminals connected together and all the negative (–) terminals connected together. Each
relay must be daisy-chained to the next one. Avoid star or stub connected configurations.
The last device at each end of the daisy-chain should be terminated with a 120 ohm ¼
watt resistor in series with a 1 nF capacitor across the positive and negative terminals.
Observing these guidelines will ensure a reliable communication system immune to
system transients.
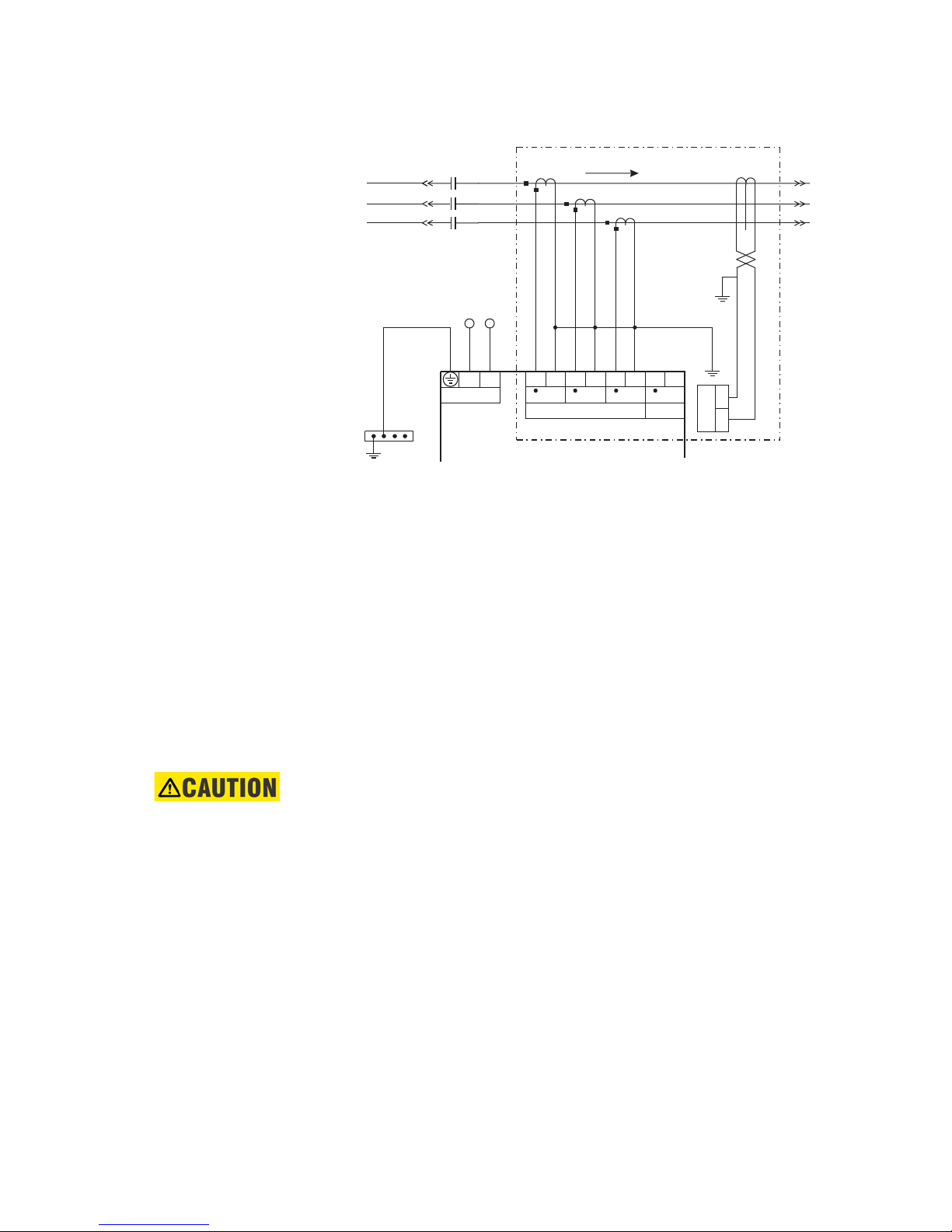
Phase current inputs (IO_A module)
Figure 2-13: Typical phase current input connections
10 MM300 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE
CHAPTER 2: INSTALLATION ELECTRICAL INSTALLATION
A
C
B
Power flow
–
+
D1
D2
D4D3
Phase current inputs
MM300
Motor Management System
To switchgear
ground bus
853744A2.CDR
D5
D6 D7
CT1 CT2 CT3
Control power
LN
D8
G/F
Contactor
R
I
CBCT /
50 : 0.025
Core Balance (Zero Sequence)
The MM300 has three channels for phase current inputs, each with an isolating
transformer. The phase CTs should be chosen so the FLA is not less than 50% of the rated
phase CT primary. Ideally, the phase CT primary should be chosen such that the FLA is
100% of the phase CT primary or slightly less, never more. This will ensure maximum
accuracy for the current measurements. The maximum phase CT primary current is 1000
A.
The ground CT connection can either be a zero sequence (core balance) installation or a
residual connection. Note that only 1 A and 5 A secondary CTs may be used for the
residual connection. The zero sequence connection is shown in the diagram above, and
this is recommended. Unequal saturation of CTs, CT mismatch, size and location of motor,
resistance of the power system, motor core saturation density, etc. may cause false
readings in the residually connected ground fault circuit. Refer to section 2.2.2.1 for CBCT
connection.
Note that if residual ground connection is selected, the CT primary setpoint used by the
Phase CT's will also be used by the residual ground calculations.
CAUTION:
Polarity of the phase CTs is critical for negative-sequence unbalance calculation,
power measurement, and residual ground current detection (if used).
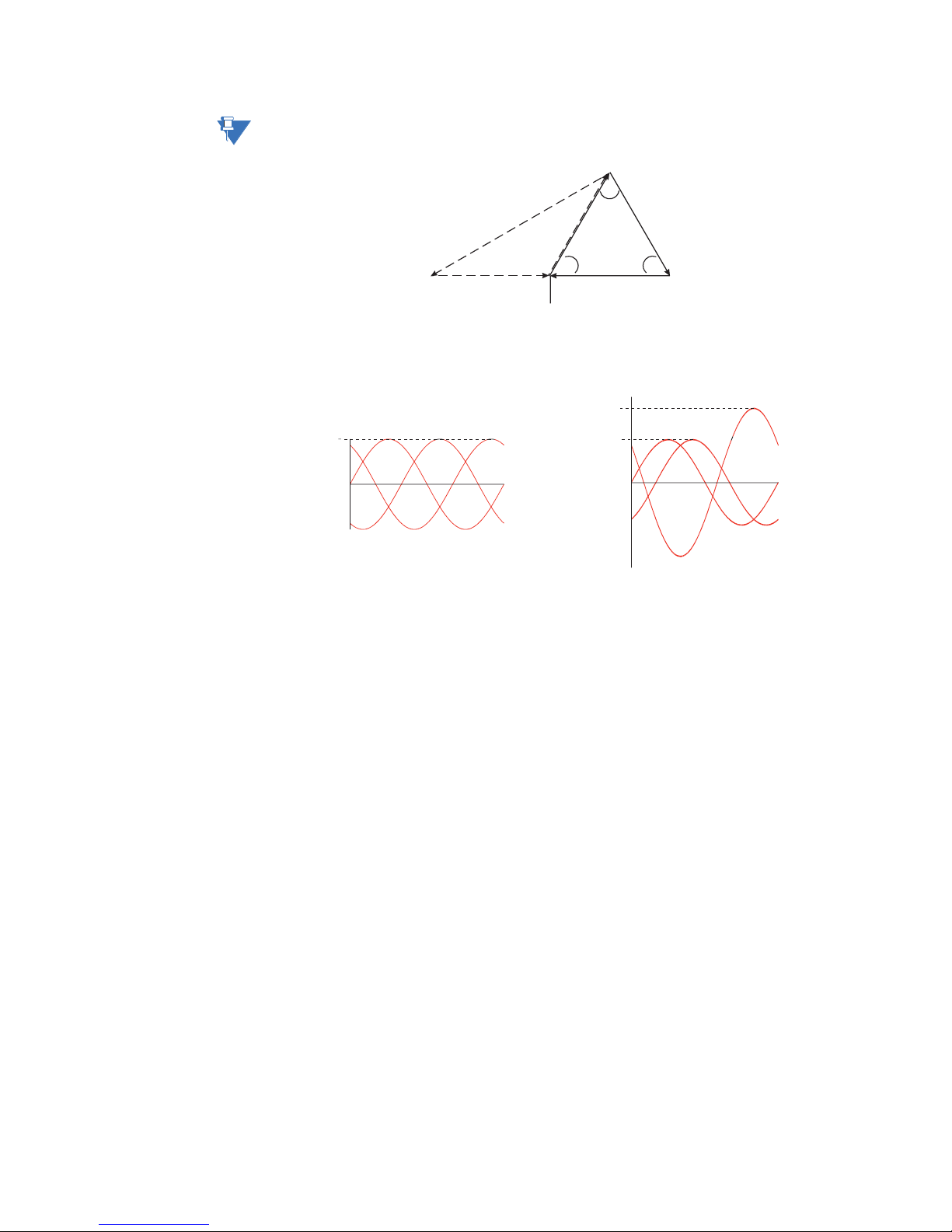
Two CT configuration Each of the two CTs acts as a current source. The current that comes out of the CT on
phase A flows into the interposing CT on the relay marked CT1. From there, the current
sums with the current that is flowing from the CT on phase C which has just passed
MM300 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE 11
through the interposing CT on the relay marked CT3. This summed current flows through
the interposing CT marked CT2 and from there, the current splits up to return to its
respective source (CT).
Polarity is very important since the value of phase B must be the negative equivalent of
A
Only one ground connection should be made as shown. If two ground connections are
made, a parallel path for current has been created.
In the two CT configuration, the currents will sum vectorially at the common point of the
two CTs. The diagram illustrates the two possible configurations. If one phase is reading
high by a factor of 1.73 on a system that is known to be balanced, simply reverse the
polarity of the leads at one of the two phase CTs (taking care that the CTs are still tied to
ground at some point). Polarity is important.
+ C in order for the sum of all the vectors to equate to zero.
ELECTRICAL INSTALLATION CHAPTER 2: INSTALLATION
853715A1.CDR
1.73
11
11
60°
60° 60°
808701A1.CDR
1
C
A
B
1.73
1
B
A
C
Two-phase CT currents
Two-phase CT currents,
180° out-of-phase
NOTE:
Change CT wiring only if the system is de-energized!
Figure 2-14: Two CT connection vector diagram
To illustrate the point further, the following diagram shows how the current in phases A
and C sum up to create phase "B".
Figure 2-15: Two CT connection currents
Once again, if the polarity of one of the phases is out by 180°, the magnitude of the
resulting vector on a balanced system will be out by a factor of 1.73.
On a three-wire supply, this configuration will always work and unbalance will be detected
properly. In the event of a single phase, there will always be a large unbalance present at
the interposing CTs of the relay. If for example phase A was lost, phase A would read zero
while phase B and C would both read the magnitude of phase C. If on the other hand,
phase B was lost, at the supply, phase A would be 180° out-of-phase with phase C and the
vector addition would equal zero at phase B.
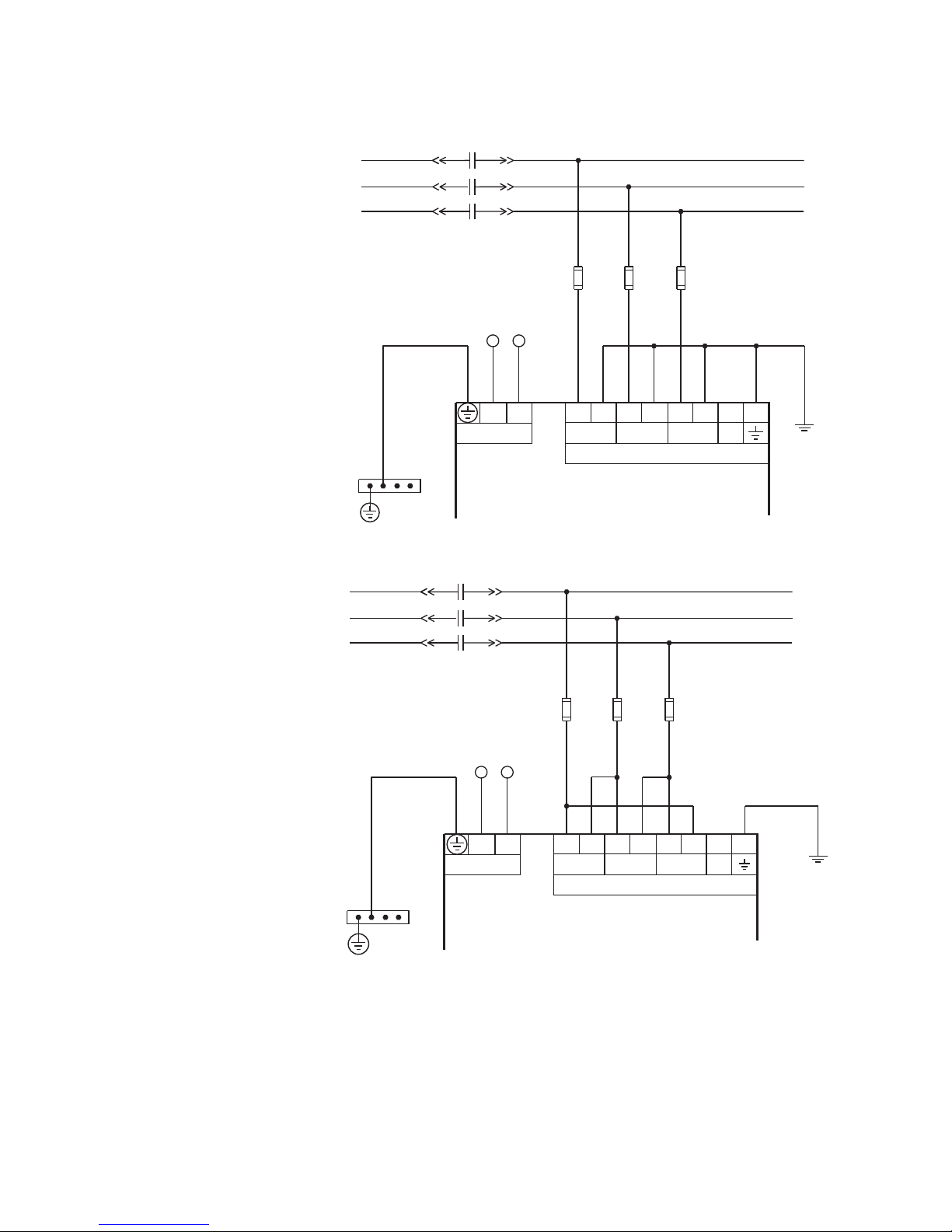
Phase voltage inputs (IO_B module)
The MM300 has three channels for AC voltage inputs. There are no internal fuses or ground
connections on the voltage inputs. Polarity is critical for correct power measurement and
voltage phase reversal operation.
12 MM300 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE
CHAPTER 2: INSTALLATION ELECTRICAL INSTALLATION
A
C
B
Contactor
–
+
FUSES - 100 ma typical
E1
E2 E4E3
Phase voltage inputs
MM300
Motor Management System
To switchgear
ground bus
853735A2.CDR
E5
E6 E7
VT1 VT2 VT3
Control power
LN
E8
N/C
A
C
B
Contactor
–
+
FUSES
E1
E2 E4E3
Phase voltage inputs
MM300
Motor Management System
To switchgear
ground bus
853736A2.CDR
E5
E6
VT1 VT2 VT3
Control power
LN
E7 E8
N/C
Figure 2-16: Wye voltage connection
Figure 2-17: Delta voltage connection
MM300 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE 13
ELECTRICAL INSTALLATION CHAPTER 2: INSTALLATION
NOTE
NOTE
NOTE
Contactors
~1
~2
~4
~3
853741A3.CDR
~5
~6
MM300
Motor Management System
~8
~9
~11
~10
~12
~13
~7
~14
Two form-A
contact outputs
CONTACT OUTPUT 2
CONTACT INPUT 1 +
Six contact
(digital) inputs
CONTACT OUTPUT 1
CONTACT INPUT 2 +
CONTACT INPUT 3 +
CONTACT INPUT 4 +
CONTACT INPUT 5 +
CONTACT INPUT 6 +
COMMON
VT INPUT
SURGE
L
N
AC
Control power
–
+
B
A
A
B
Type IO_C module connections
Figure 2-18: Typical wiring for type IO_C module
The IO_C module contains two form-A contact output relays, six digital inputs and control
voltage input.
Contact inputs can be programmed to any of the input functions, such as field stop or
process interlock. The exception is that contactor A status is fixed as the first contact input,
and contactor B status (where used) is fixed as the second contact input.
An AC auxiliary supply must be connected to terminals 12 and 13. This auxiliary voltage
(from slot C only) is also used for actual value indication, for auxiliary undervoltage, and for
undervoltage restart. When three-phase voltages are not available, it is also used to
calculate power quantities and is used as a phase angle reference.
When the IO_C module, located in slot C, senses an interruption to its auxiliary supply, it
raises an AC Low Aux Voltage Inhibit, and forces the input state of the contact inputs to
OFF, as the interruption prevents sensing the actual states.
The two contact outputs can be programmed to follow any one of the digital signals
NOTE:
NOTE:
NOTE:
14 MM300 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE
developed by the MM300, such as alarms and status signals. The exception is that the
contactor A relay is fixed as the first contact output, and contactor B relay is fixed as the
second contact output (where used).
Connect AUX VT to the Control Supply for correct operation of the UV Restart feature and
readings of inputs.
All IO_C cards must have the auxiliary input VT wired for proper input sensing. If the
auxiliary voltage on any IO-C module is too low, the contact inputs states for the affected
module will be forced to OFF.
Substitute the slot position of the input/output module (C, E, F, G, H) wherever the tilde
symbol “~” appears in the diagrams above.
CHAPTER 2: INSTALLATION ELECTRICAL INSTALLATION
Control
power
~1
~2
~4
~3
853742A1.CDR
~5
~6
MM300
Motor Management System
~8
~9
~11
~10
~12
~13
~7
~14
Four form-C
contact outputs
CONTACT OUTPUT 1
NOT USED
N
CONTACT OUTPUT 2
CONTACT OUTPUT 3
CONTACT OUTPUT 4
NOT USED
–
STOP
TRIP
COIL
+
START
CLOSE
COIL
52a
52b
L
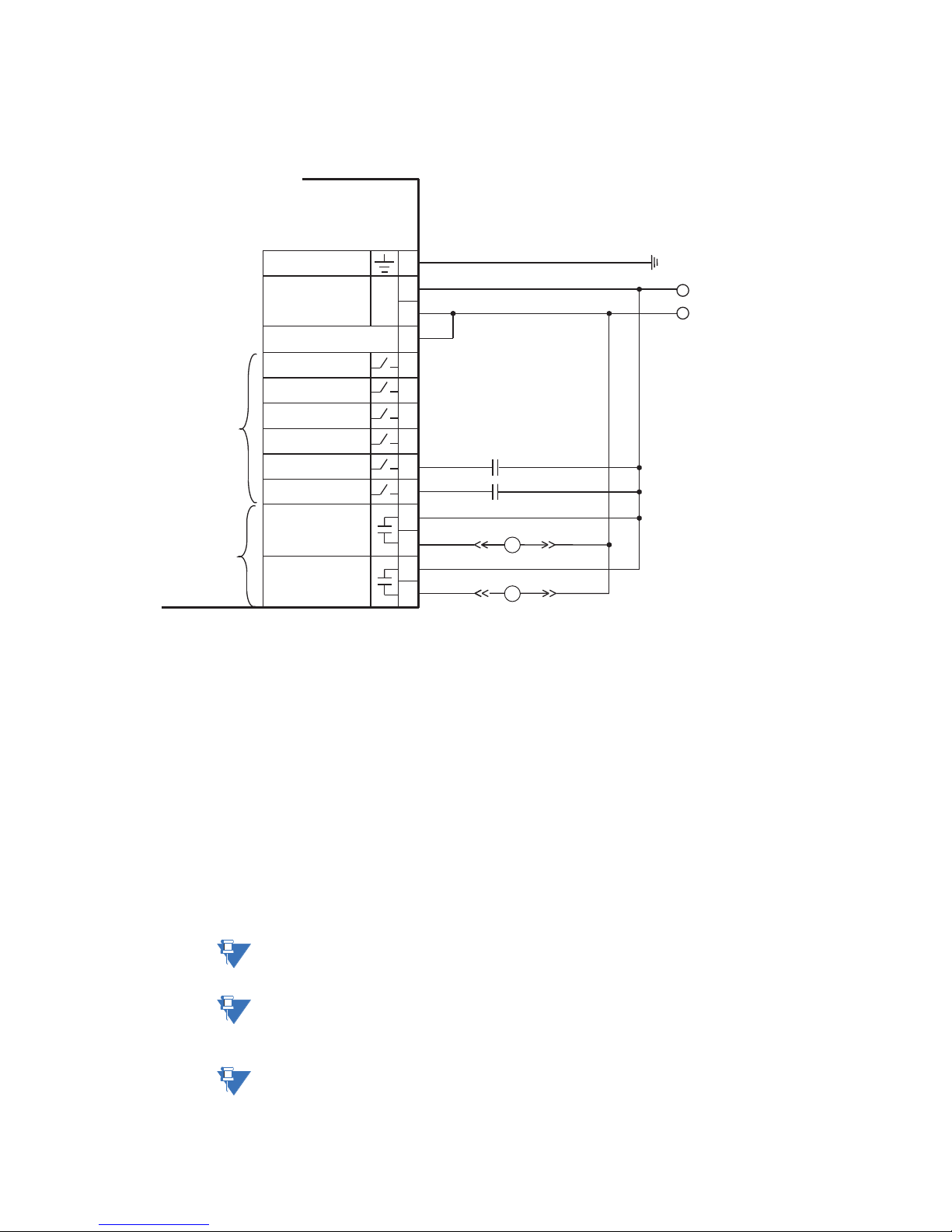
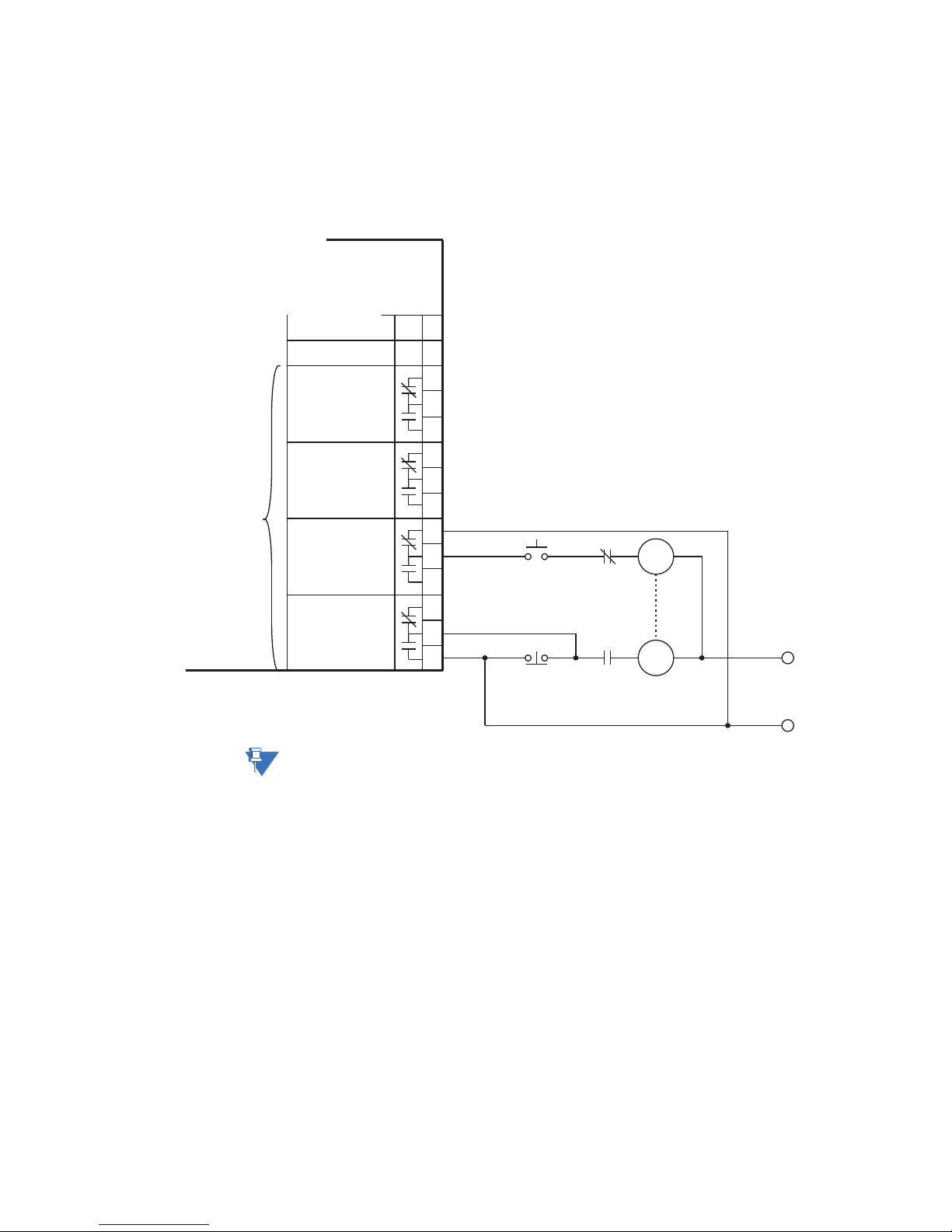
Type IO_D module connections
The IO_D module contains four form-C contact output relays.
In general, contact outputs can be programmed to follow any one of the digital signals
developed by the MM300, such as alarms and status signals.
Figure 2-19: Typical wiring for type IO_D contact output module
NOTE:
MM300 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE 15
Substitute the slot position of the input/output module (E, F, G, or H) wherever the tilde
symbol “~” appears in the diagrams above.
 Loading...
Loading...