

Page 1

GE
Grid Solutions
869
Motor Protection System
Motor Protection, Control and Management
Instruction manual
Product version: 1.7x
GE publication code: 1601-0450-A7 (GEK-119649F)
*1601-0450-A7*
Page 2

© 2016 GE Multilin Incorporated. All rights reserved.
GE Multilin 869 Motor Protection System instruction manual for revision 1.7x.
869 Motor Protection System, EnerVista, EnerVista Launchpad, and EnerVista 8 Series
Setup softw
are are registered trademarks of GE Multilin Inc.
The contents of this manual are the property of GE Multilin Inc. This documentation is
f
urnished on license and may not be reproduced in whole or in part without the permission
of GE Multilin. The content of this manual is for informational use only and is subject to
change without notice.
Part number: 1601-0450-A7 (December 2016)
Note
May contain components with FCC ID: XF6-RS9110N1122
and IC ID: 8407A-RS9110N1122.
Page 3
Table of Contents
1.INTRODUCTION
Overview .............................................................................................................................................. 1 - 1
Description of the 869 Motor Protection System.............................................................. 1 - 2
Security Overview............................................................................................................................ 1 - 6
869 Order Codes............................................................................................................................... 1 - 7
Specifications..................................................................................................................................... 1 - 9
Device .............................................................................................................................................................1 - 9
Protection......................................................................................................................................................1 - 9
Control......................................................................................................................................................... 1 - 17
Monitoring.................................................................................................................................................. 1 - 18
Recording................................................................................................................................................... 1 - 19
User-Programmable Elements ........................................................................................................ 1 - 21
Metering...................................................................................................................................................... 1 - 22
Inputs ........................................................................................................................................................... 1 - 24
Outputs........................................................................................................................................................ 1 - 26
Power Supply............................................................................................................................................ 1 - 27
Communications .................................................................................................................................... 1 - 28
Testing & Certification.......................................................................................................................... 1 - 28
Physical ....................................................................................................................................................... 1 - 30
Environmental.......................................................................................................................................... 1 - 30
Cautions and Warnings ..............................................................................................................1 - 30
Safety words and definitions ............................................................................................................1 - 30
General Cautions and Warnings..................................................................................................... 1 - 31
Must-read Information................................................................................................................1 - 33
Storage........................................................................................................................................................ 1 - 34
For Further Assistance.................................................................................................................1 - 34
Repairs......................................................................................................................................................... 1 - 34
2.INSTALLATION
Mechanical Installation................................................................................................................. 2 - 1
Product Identification..............................................................................................................................2 - 1
Dimensions...................................................................................................................................................2 - 2
Mounting ....................................................................................................................................................... 2 - 3
Standard Panel Mount.............................................................................................................................2 - 4
Draw-out Unit Withdrawal and Insertion ......................................................................................2 - 5
Removable Power Supply......................................................................................................................2 - 6
Removable Magnetic Module .............................................................................................................. 2 - 7
Arc Flash Sensor ........................................................................................................................................ 2 - 8
Sensor Fiber Handling & Storage.......................................................................................................2 - 8
Sensor Installation.....................................................................................................................................2 - 8
Electrical Installation ...................................................................................................................... 2 - 9
Typical Wiring Diagram ..........................................................................................................................2 - 9
Terminal Identification ......................................................................................................................... 2 - 12
Wire Size......................................................................................................................................................2 - 17
Phase Sequence and Transformer Polarity ............................................................................... 2 - 17
Ground and Sensitive Ground CT Inputs ..................................................................................... 2 - 18
Zero-Sequence CT Installation ......................................................................................................... 2 - 19
Differential CT Inputs ............................................................................................................................ 2 - 20
Voltage Inputs..........................................................................................................................................2 - 21
Control Power........................................................................................................................................... 2 - 22
Contact Inputs ......................................................................................................................................... 2 - 23
Output Relays........................................................................................................................................... 2 - 24
Serial Communications ....................................................................................................................... 2 - 26
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL I
Page 4
IRIG-B............................................................................................................................................................2 - 27
3.INTERFACES
Front Control Panel Interface......................................................................................................3 - 2
Graphical Display Pages....................................................................................................................... 3 - 2
Working with Graphical Display Pages........................................................................................... 3 - 3
Single Line Diagram.................................................................................................................................3 - 6
LED Status Indicators .............................................................................................................................. 3 - 7
Home Screen Icons.................................................................................................................................. 3 - 8
Relay Messages ......................................................................................................................................... 3 - 9
Target Messages....................................................................................................................................... 3 - 9
Self-Test Errors.........................................................................................................................................3 - 10
Out of Service............................................................................................................................................3 - 14
Flash Messages........................................................................................................................................3 - 14
Label Removal..........................................................................................................................................3 - 14
Software Interface ........................................................................................................................ 3 - 15
EnerVista 8 Series Setup Software..................................................................................................3 - 15
Hardware & Software Requirements ............................................................................................3 - 15
Installing the EnerVista 8 Series Setup Software .....................................................................3 - 16
Upgrading the Software......................................................................................................................3 - 18
Connecting EnerVista 8 Series Setup software to the Relay ..............................................3 - 18
Using the Quick Connect Feature ...................................................................................................3 - 18
Configuring Ethernet Communications........................................................................................3 - 20
Connecting to the Relay ......................................................................................................................3 - 21
Working with Setpoints & Setpoints Files....................................................................................3 - 22
Engaging a Device..................................................................................................................................3 - 22
Entering Setpoints ..................................................................................................................................3 - 22
File Support................................................................................................................................................3 - 24
Using Setpoints Files..............................................................................................................................3 - 24
Downloading & Saving Setpoints Files..........................................................................................3 - 25
Adding Setpoints Files to the Environment.................................................................................3 - 25
Creating a New Setpoints File...........................................................................................................3 - 26
Upgrading Setpoints Files to a New Revision............................................................................3 - 26
Printing Setpoints....................................................................................................................................3 - 27
Loading Setpoints from a File ...........................................................................................................3 - 28
Uninstalling Files and Clearing Data..............................................................................................3 - 29
Quick Setup................................................................................................................................................3 - 29
Upgrading Relay Firmware ................................................................................................................3 - 32
Loading New Relay Firmware...........................................................................................................3 - 32
Advanced EnerVista 8 Series Setup Software Features .......................................................3 - 35
FlexCurve Editor.......................................................................................................................................3 - 35
Transient Recorder (Waveform Capture).....................................................................................3 - 36
Protection Summary .............................................................................................................................3 - 40
Offline Settings File Conversion........................................................................................................3 - 42
Convert SR 469 Files..............................................................................................................................3 - 42
Convert 369 Files.....................................................................................................................................3 - 43
Conversion Summary Report............................................................................................................3 - 43
Results Window .......................................................................................................................................3 - 44
4.SETPOINTS
Setpoints Main Menu ......................................................................................................................4 - 1
Setpoints Entry Methods........................................................................................................................ 4 - 2
Common Setpoints................................................................................................................................... 4 - 3
Logic Diagrams.......................................................................................................................................... 4 - 4
Setpoints Text Abbreviations............................................................................................................... 4 - 5
Device.....................................................................................................................................................4 - 6
Custom Configuration ............................................................................................................................ 4 - 7
Real-time Clock.......................................................................................................................................... 4 - 9
II 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 5

PTP Configuration......................................................................................................................................4 - 9
Clock..............................................................................................................................................................4 - 11
SNTP Protocol ...........................................................................................................................................4 - 12
Security ....................................................................................................................................................... 4 - 13
Basic Security ...........................................................................................................................................4 - 14
CyberSentry...............................................................................................................................................4 - 16
Communications .................................................................................................................................... 4 - 23
Modbus Protocol.....................................................................................................................................4 - 23
RS485............................................................................................................................................................4 - 28
WiFi................................................................................................................................................................4 - 28
USB ................................................................................................................................................................4 - 31
Ethernet Ports...........................................................................................................................................4 - 31
Routing.........................................................................................................................................................4 - 33
DNP Protocol.............................................................................................................................................4 - 36
DNP / IEC104 Point Lists ......................................................................................................................4 - 37
IEC 60870-5-104 .....................................................................................................................................4 - 40
IEC 60870-5-103 .....................................................................................................................................4 - 41
IEC 61850....................................................................................................................................................4 - 42
Remote Modbus Device.......................................................................................................................4 - 44
Transient Recorder ................................................................................................................................ 4 - 46
Data Logger .............................................................................................................................................. 4 - 48
Fault Reports ............................................................................................................................................ 4 - 50
Event Data ................................................................................................................................................. 4 - 52
Flex States.................................................................................................................................................. 4 - 52
Programmable LEDs ............................................................................................................................. 4 - 52
Programmable Pushbuttons............................................................................................................. 4 - 55
Front Panel ................................................................................................................................................ 4 - 59
Display Properties...................................................................................................................................4 - 59
Default Screens........................................................................................................................................4 - 60
Resetting..................................................................................................................................................... 4 - 60
Installation................................................................................................................................................. 4 - 61
System.................................................................................................................................................4 - 62
Current Sensing....................................................................................................................................... 4 - 63
Voltage Sensing ...................................................................................................................................... 4 - 64
Power System .......................................................................................................................................... 4 - 65
Motor............................................................................................................................................................ 4 - 66
Setup.............................................................................................................................................................4 - 66
Variable Frequency Drives..................................................................................................................4 - 71
Preset Values ............................................................................................................................................4 - 76
Switching Device .................................................................................................................................... 4 - 77
FlexCurves ................................................................................................................................................. 4 - 80
Inputs...................................................................................................................................................4 - 82
Contact Inputs ......................................................................................................................................... 4 - 82
Virtual Inputs ............................................................................................................................................ 4 - 85
Analog Inputs ........................................................................................................................................... 4 - 87
Remote Inputs.......................................................................................................................................... 4 - 92
Outputs ...............................................................................................................................................4 - 93
Output Relays........................................................................................................................................... 4 - 93
Output Relay 1 (F1) Trip........................................................................................................................4 - 94
Output Relay 2 (F4) programmed as Close.................................................................................4 - 97
Auxiliary Output Relays........................................................................................................................4 - 98
Output Relay 3 (F7) Start Inhibit .......................................................................................................4 - 99
Virtual Outputs.......................................................................................................................................4 - 100
Analog Outputs .....................................................................................................................................4 - 101
Protection .......................................................................................................................................4 - 103
Motor Elements .....................................................................................................................................4 - 105
Percent Differential.............................................................................................................................4 - 105
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL III
Page 6

Thermal Model.......................................................................................................................................4 - 112
Current Unbalance..............................................................................................................................4 - 134
Mechanical Jam ...................................................................................................................................4 - 139
Undercurrent..........................................................................................................................................4 - 142
Loss of Excitation.................................................................................................................................4 - 145
Overload Alarm.....................................................................................................................................4 - 151
Short Circuit............................................................................................................................................4 - 153
Ground Fault ..........................................................................................................................................4 - 156
Acceleration Time................................................................................................................................4 - 160
Underpower............................................................................................................................................4 - 163
2-Speed Motor.......................................................................................................................................4 - 166
Speed2 Thermal Model .....................................................................................................................4 - 166
Speed2 Acceleration ..........................................................................................................................4 - 168
Speed2 Undecurrent ..........................................................................................................................4 - 170
Current Elements ................................................................................................................................. 4 - 172
Inverse Time Overcurrent Curves.................................................................................................4 - 172
Percent of Load-To-Trip....................................................................................................................4 - 180
Phase Time Overcurrent Protection............................................................................................4 - 180
Phase Instantaneous Overcurrent Protection........................................................................4 - 184
Phase Directional Overcurrent Protection ...............................................................................4 - 186
Neutral Time Overcurrent Protection.........................................................................................4 - 189
Neutral Instantaneous Overcurrent Protection.....................................................................4 - 192
Neutral Directional Overcurrent Protection ............................................................................4 - 195
Ground Time Overcurrent Protection.........................................................................................4 - 200
Ground Instantaneous Overcurrent Protection.....................................................................4 - 202
Negative Sequence Instantaneous Overcurrent Protection...........................................4 - 204
Voltage Elements .................................................................................................................................4 - 207
Phase Reversal......................................................................................................................................4 - 207
Undervoltage Curves .........................................................................................................................4 - 210
Phase Undervoltage Protection....................................................................................................4 - 211
Phase Overvoltage Protection.......................................................................................................4 - 214
Auxiliary Undervoltage......................................................................................................................4 - 217
Auxiliary Overvoltage Protection.................................................................................................. 4 - 220
Neutral Overvoltage Protection ....................................................................................................4 - 223
Negative Sequence Overvoltage Protection...........................................................................4 - 226
Volts per Hertz.......................................................................................................................................4 - 228
Impedance Elements ......................................................................................................................... 4 - 234
Out-of-step .............................................................................................................................................4 - 234
Power Elements ....................................................................................................................................4 - 240
Directional Power.................................................................................................................................4 - 240
Reactive Power .....................................................................................................................................4 - 246
Frequency Elements ...........................................................................................................................4 - 249
Underfrequency....................................................................................................................................4 - 249
Overfrequency.......................................................................................................................................4 - 252
Frequency Rate of Change..............................................................................................................4 - 255
Monitoring...................................................................................................................................... 4 - 259
Breaker...................................................................................................................................................... 4 - 259
Trip and Close Circuit Monitoring .................................................................................................4 - 259
Breaker Arcing Current......................................................................................................................4 - 267
Breaker Health ......................................................................................................................................4 - 270
Broken Rotor Bar.................................................................................................................................. 4 - 274
Stator Inter-Turn Fault....................................................................................................................... 4 - 279
Functions .................................................................................................................................................4 - 284
Power Factor..........................................................................................................................................4 - 284
Demand....................................................................................................................................................4 - 289
Pulsed Outputs......................................................................................................................................4 - 297
Digital Counters ....................................................................................................................................4 - 300
Harmonic Detection ........................................................................................................................... 4 - 304
IV 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 7
Speed .........................................................................................................................................................4 - 307
RTD Temperature .................................................................................................................................4 - 312
RTD Trouble.............................................................................................................................................4 - 317
Loss of Communications ..................................................................................................................4 - 318
Control..............................................................................................................................................4 - 320
Setpoint Group.......................................................................................................................................4 - 320
Start Supervision...................................................................................................................................4 - 323
Thermal Inhibit......................................................................................................................................4 - 323
Maximum Starting Rate....................................................................................................................4 - 326
Time Between Starts ..........................................................................................................................4 - 327
Restart Delay..........................................................................................................................................4 - 329
Reduced Voltage Starting.................................................................................................................4 - 330
Switching Device Control..................................................................................................................4 - 334
Trip Bus......................................................................................................................................................4 - 337
Breaker Failure ......................................................................................................................................4 - 339
Setup..........................................................................................................................................................4 - 340
Initiate .......................................................................................................................................................4 - 342
Arc Flash Protection ............................................................................................................................4 - 344
VT Fuse Failure.......................................................................................................................................4 - 346
FlexLogic .........................................................................................................................................4 - 348
Timers ........................................................................................................................................................4 - 357
Non-volatile Latches...........................................................................................................................4 - 358
FlexLogic Equation...............................................................................................................................4 - 359
Viewing FlexLogic Graphics............................................................................................................ 4 - 361
FlexElements...........................................................................................................................................4 - 362
Testing..............................................................................................................................................4 - 370
Simulation................................................................................................................................................4 - 370
Setup..........................................................................................................................................................4 - 371
Pre-Fault...................................................................................................................................................4 - 372
Fault ...........................................................................................................................................................4 - 372
Post-Fault ................................................................................................................................................4 - 373
Test LEDs ..................................................................................................................................................4 - 374
Contact Inputs .......................................................................................................................................4 - 374
Output Relays.........................................................................................................................................4 - 374
5.STATUS
Motor...................................................................................................................................................... 5 - 1
Breakers ............................................................................................................................................... 5 - 3
Last Trip Data..................................................................................................................................... 5 - 4
Arc Flash............................................................................................................................................... 5 - 4
Contact Inputs...................................................................................................................................5 - 4
Output Relays .................................................................................................................................... 5 - 5
Virtual Inputs......................................................................................................................................5 - 5
Virtual Outputs .................................................................................................................................. 5 - 6
Flex State ............................................................................................................................................. 5 - 6
Communications.............................................................................................................................. 5 - 7
GOOSE Rx and Tx.......................................................................................................................................5 - 7
Information .......................................................................................................................................5 - 10
Main CPU .................................................................................................................................................... 5 - 10
Comms CPU .............................................................................................................................................. 5 - 10
Hardware Versions ................................................................................................................................5 - 11
Environment ............................................................................................................................................. 5 - 11
Device Status ...................................................................................................................................5 - 12
Clock.....................................................................................................................................................5 - 13
PTP Status..........................................................................................................................................5 - 13
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL V
Page 8

6.METERING
Summary ..............................................................................................................................................6 - 4
Motor ......................................................................................................................................................6 - 5
Percent Differential Current ................................................................................................................. 6 - 5
Motor Load................................................................................................................................................... 6 - 5
Speed.............................................................................................................................................................. 6 - 6
Broken Rotor Bar....................................................................................................................................... 6 - 6
Stator Inter-Turn Fault............................................................................................................................ 6 - 7
Short Circuit................................................................................................................................................. 6 - 7
Impedance...........................................................................................................................................6 - 8
Positive Sequence Impedance............................................................................................................ 6 - 8
Currents.................................................................................................................................................6 - 8
Voltages .............................................................................................................................................6 - 10
Frequency .........................................................................................................................................6 - 11
Harmonics 1(Harmonics 2)........................................................................................................6 - 12
Harmonic Detection ..................................................................................................................... 6 - 13
Power...................................................................................................................................................6 - 14
Energy .................................................................................................................................................6 - 15
Power Factor....................................................................................................................................6 - 16
Current Demand 1.........................................................................................................................6 - 16
Power Demand...............................................................................................................................6 - 17
Directional Power ..........................................................................................................................6 - 17
Arc Flash ............................................................................................................................................6 - 17
RTDs .....................................................................................................................................................6 - 18
RTD Maximums...............................................................................................................................6 - 18
Analog Inputs...................................................................................................................................6 - 19
FlexElements.................................................................................................................................... 6 - 19
7.RECORDS
8.MAINTENANCE
A.APPENDIX A
Events.....................................................................................................................................................7 - 1
Transient Records.............................................................................................................................7 - 2
Fault Reports.......................................................................................................................................7 - 2
Data Logger.........................................................................................................................................7 - 2
Motor Start Records ........................................................................................................................7 - 3
Motor Start Statistics.......................................................................................................................7 - 4
Learned Data......................................................................................................................................7 - 4
Remote Modbus Device.................................................................................................................7 - 7
Breakers................................................................................................................................................7 - 9
Breaker Arcing Current........................................................................................................................... 7 - 9
Breaker Health ........................................................................................................................................... 7 - 9
Digital Counters.................................................................................................................................7 - 9
Remote Modbus Device..............................................................................................................7 - 10
Environmental Health Report .....................................................................................................8 - 1
Motor Health Report........................................................................................................................8 - 3
General Maintenance .....................................................................................................................8 - 6
In-service Maintenance ......................................................................................................................... 8 - 6
Out-of-service Maintenance................................................................................................................ 8 - 6
Unscheduled Maintenance (System Interruption) ..................................................................... 8 - 6
Application Notes .............................................................................................................................A - 1
Contactor Current Supervision........................................................................................................... A - 1
VI 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 9

B.APPENDIX B
Warranty..............................................................................................................................................B - 1
Revision history................................................................................................................................. B - 1
Major Updates ............................................................................................................................................B - 2
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL VII
Page 10

VIII 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 11
GE
Grid Solutions
869 Motor Protection System
Chapter 1: Introduction
Introduction
The Multilin 869 relay is a microprocessor-based unit intended for the management and
primary protection of medium and large sized motors. Base relay models provide thermal
overload and overcurrent protection plus a number of current and voltage based backup
functions.
Overview
The relay features an enhanced thermal model with custom curves, current unbalance
biasing, voltage dependent curves and running and stopped exponential cooling curves.
An optional RTD module allows for the thermal model RTD bias function. Motor start and
supervision functions include thermal inhibit, maximum starting rate, time between starts,
restart delay, acceleration time, and emergency restart. Mechanical jam, current
unbalance elements and VFD application support are also included as basic functions.
Stator differential, sensitive directional power and phase/neutral directional elements are
more advanced features.
These relays contain many innovative features. To meet diverse utility standards and
indus
specific user needs. This flexibility will naturally make a piece of equipment difficult to
learn. To aid new users in getting basic protection operating quickly, setpoints are set to
typical default values and advanced features are disabled. These settings can be
reprogrammed at any time.
Programming can be accomplished with the front panel keys and display. Due to the
numer
programming and provide a more intuitive interface, setpoints can be entered with a PC
running the EnerVista 8 Setup software provided with the relay. Even with minimal
computer knowledge, this menu-driven software provides easy access to all front panel
functions. Actual values and setpoints can be displayed, altered, stored, and printed. If
settings are stored in a setpoint file, they can be downloaded at any time to the front panel
program port of the relay via a computer cable connected to the serial port of any
personal computer.
try requirements, these features have the flexibility to be programmed to meet
ous settings, this manual method can be somewhat laborious. To simplify
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 1–1
Page 12
DESCRIPTION OF THE 869 MOTOR PROTECTION SYSTEM CHAPTER 1: INTRODUCTION
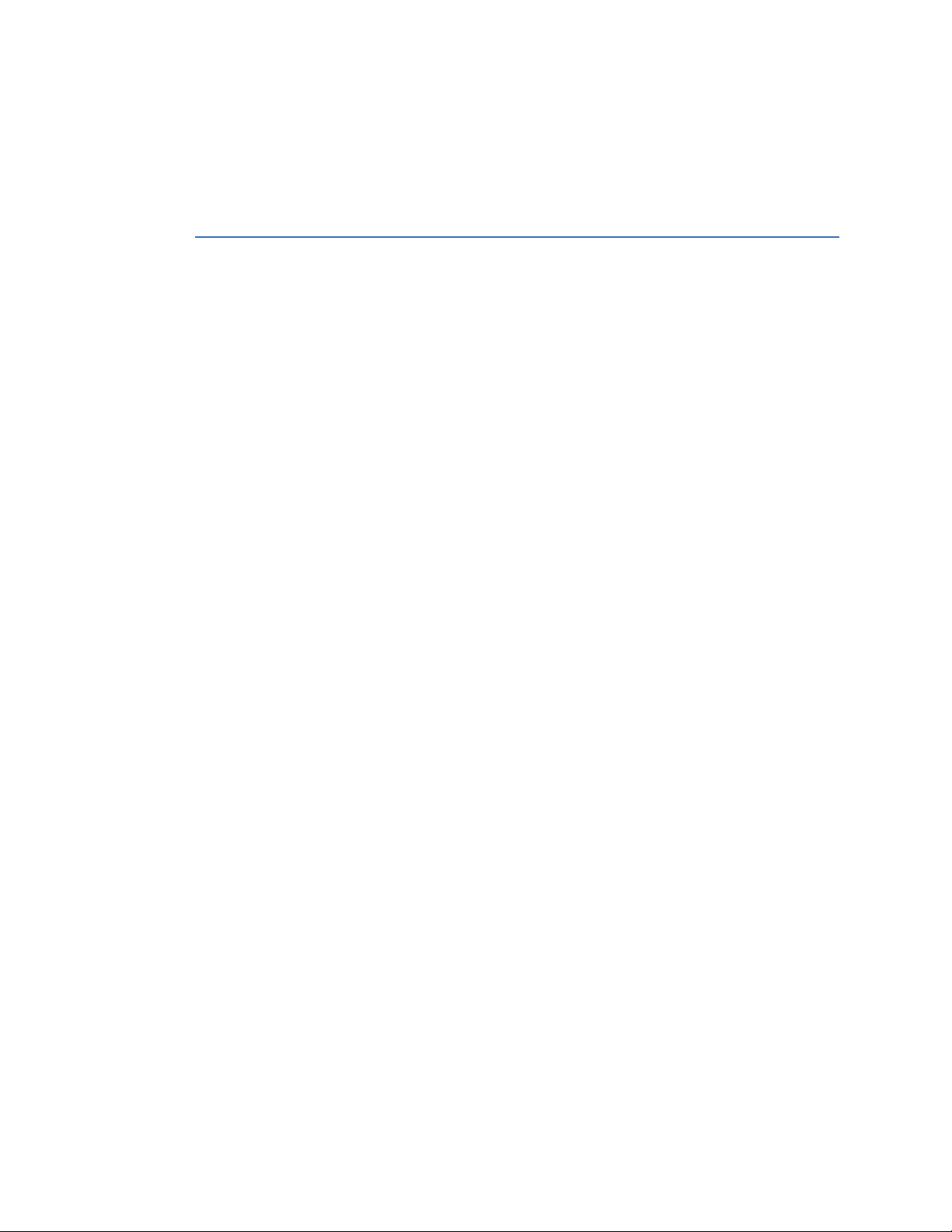
A summary of the available functions and a single-line diagram of protection and control
features is shown below. For a complete understanding of each feature operation, refer to
Chapter 4: Setpoints. The logic diagrams include a reference to every setpoint related to a
feature and show all logic signals passed between individual features. Information related
to the selection of settings for each setpoint is also provided.
Description of the 869 Motor Protection System
CPU
Relay functions are controlled by two pr
microprocessor that measures all analog signals and digital inputs and controls all output
relays, and a Freescale MPC8358 32-bit microprocessor that controls all the advanced
Ethernet communication protocols.
Analog Input and Waveform Capture
Magnetic transformers are used to scale-down the incoming analog signals from the
sour
ce instrument transformers. The analog signals are then passed through a 11.5 k Hz
low pass analog anti-aliasing filter. All signals are then simultaneously captured by sample
and hold buffers to ensure there are no phase shifts. The signals are converted to digital
values by a 16-bit A/D converter before finally being passed on to the CPU for analysis.
The 'raw' samples are scaled in software, then placed into the waveform capture buffer,
thus em
the EnerVista 8 Series Setup software for display and diagnostics.
Frequency
Frequency measurement is accomplished by m
of the composite signal of three-phase bus voltages, line voltage or three-phase currents.
The signals are passed through a low pass filter to prevent false zero crossings. Frequency
tracking utilizes the measured frequency to set the sampling rate for current and voltage
which results in better accuracy for the Discrete Fourier Transform (DFT) algorithm for offnominal frequencies.
The main frequency tracking source uses three-phase bus voltages. The frequency
track
three-phase currents signal if the frequency detected from the three-phase voltage inputs
is declared invalid. The switching will not be performed if the frequency from the
alternative reference signal is detected invalid. Upon detecting valid frequency on the
main source, the tracking will be switched back to the main source. If a stable frequency
signal is not available from all sources, then the tracking frequency defaults to the nominal
system frequency.
Phasors, Transients, and Harmonics
All waveforms are processed eight times every cycle through a DC decaying removal filter
and a Disc
and all harmonics removed. This results in an overcurrent relay that is extremely secure
and reliable and one that will not overreach.
Processing of AC Current Inputs
The DC Decaying Removal Filter is a short window digital filter, which removes the DC
decaying
This is done for all current signals used for overcurrent protection; voltage signals use the
same DC Decaying Removal Filter. This filter ensures no overreach of the overcurrent
protection.
The Discrete Fourier Transform (DFT) uses exactly one cycle of samples to calculate a
phasor qua
components are removed. All subsequent calculations (e.g. power, etc.) are based upon the
ulating a digital fault recorder. The waveforms can be retrieved from the relay via
ing is switched automatically by an algorithm to the alternative reference source, i.e.,
rete Fourier Transform (DFT). The resulting phasors have fault current transients
component from the asymmetrical current present at the moment a fault occurs.
ntity which represents the signal at the fundamental frequency; all harmonic
ocessors: a Freescale MPC5125 32-bit
easuring the time between zero crossings
1–2 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 13
CHAPTER 1: INTRODUCTION DESCRIPTION OF THE 869 MOTOR PROTECTION SYSTEM
892825A3.CDR
Phase CT
RTD
27P
59P
59N
59_2
VTFF
81U
81O
4
87S
METERING
TRANSIENT RECORDER
EVENT RECORDER
FAULT REPORT
TRIP
52
CLOSE
MONITORING
50BF
51P
50P
67P
50_2
50LR
49
2
212
22
BUS
Breaker
32
2
869
Motor Protection System
Neutral CT
M
50G/N
51G/N
67N
86
55
START
3
3
Ground CT
1
Differential
core
balance CT
3
37
47
12
50G
51G
Internal Summation Percent Differential
Core Balance Percent Differential
81R
2
40
40Q
78
24
current and voltage phasors, such that the resulting values have no harmonic
components. RMS (root mean square) values are calculated from one cycle of samples
prior to filtering.
Protection Elements
All voltage, current and frequency protection elements are processed eight times every
cycle to determine if a pickup has occurred or a timer has expired. The voltage and current
protection elements use RMS current/voltage, or the magnitude of the phasor.
Figure 1-1: Single Line Diagram
Table 1-1: ANSI Device Numbers and Functions
ANSI Device Description
12/14 Over Speed Protection/ Under Speed Protection
24 Volts Per Hertz
27P (2) Phase Undervoltage
32 (2) Directional Power
37 Undercurrent
37P Underpower
40 Loss of Excitation
40Q Reactive Power
46 Current Unbalance
47 Voltage Reversal
49 Thermal Model
50BF Breaker Failure
50G Ground Instantaneous Overcurrent
50SG Ground Fault
50N (2) Neutral Instantaneous Overcurrent
50P (2) Phase Instantaneous Overcurrent
50_2 Negative Sequence Instantaneous Overcurrent
51G Ground Time Overcurrent
51N Neutral Time Overcurrent
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 1–3
Page 14
DESCRIPTION OF THE 869 MOTOR PROTECTION SYSTEM CHAPTER 1: INTRODUCTION
ANSI Device Description
51P Phase Time Overcurrent
52 AC Circuit Breaker
55 (2) Power Factor
59N Neutral Overvoltage
59P (2) Phase Overvoltage
59X Auxiliary Overvoltage
59_2 Negative Sequence Overvoltage
67N Neutral Directional Element
67P Phase Directional Element
78 Out-of-Step Protection
81O (2) Overfrequency
81U (4) Underfrequency
81R Frequency Rate of Change
86 Start Inhibit
87S Stator Differential
VTFF Voltage Transformer Fuse Failure
Table 1-2: Other Device Functions
Description
Analog Input
Analog Output
Arc Flash Protection
2
Breaker Arcing Current (I
Switching Device Control
Breaker Health
Output Relays
Demand
Digital Counters
Event Recorder
Fault Report
FlexLogic Equations
IEC 61850 Communications
Metering: current, voltage, power, PF, energy, frequency, harmonics, THD
Modbus User Map
Non-volatile Latches
Setpoint Groups (6)
Stator Inter-Turn Fault
Trip Bus (6)
Transient Recorder (Oscillography)
Trip and Close Coil Monitoring
User-programmable LEDs
User-programmable Pushbuttons
Virtual Inputs (32)
Virtual Outputs (32)
Mechanical Jam
Overload Alarm
Short Circuit
t)
1–4 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 15
CHAPTER 1: INTRODUCTION DESCRIPTION OF THE 869 MOTOR PROTECTION SYSTEM
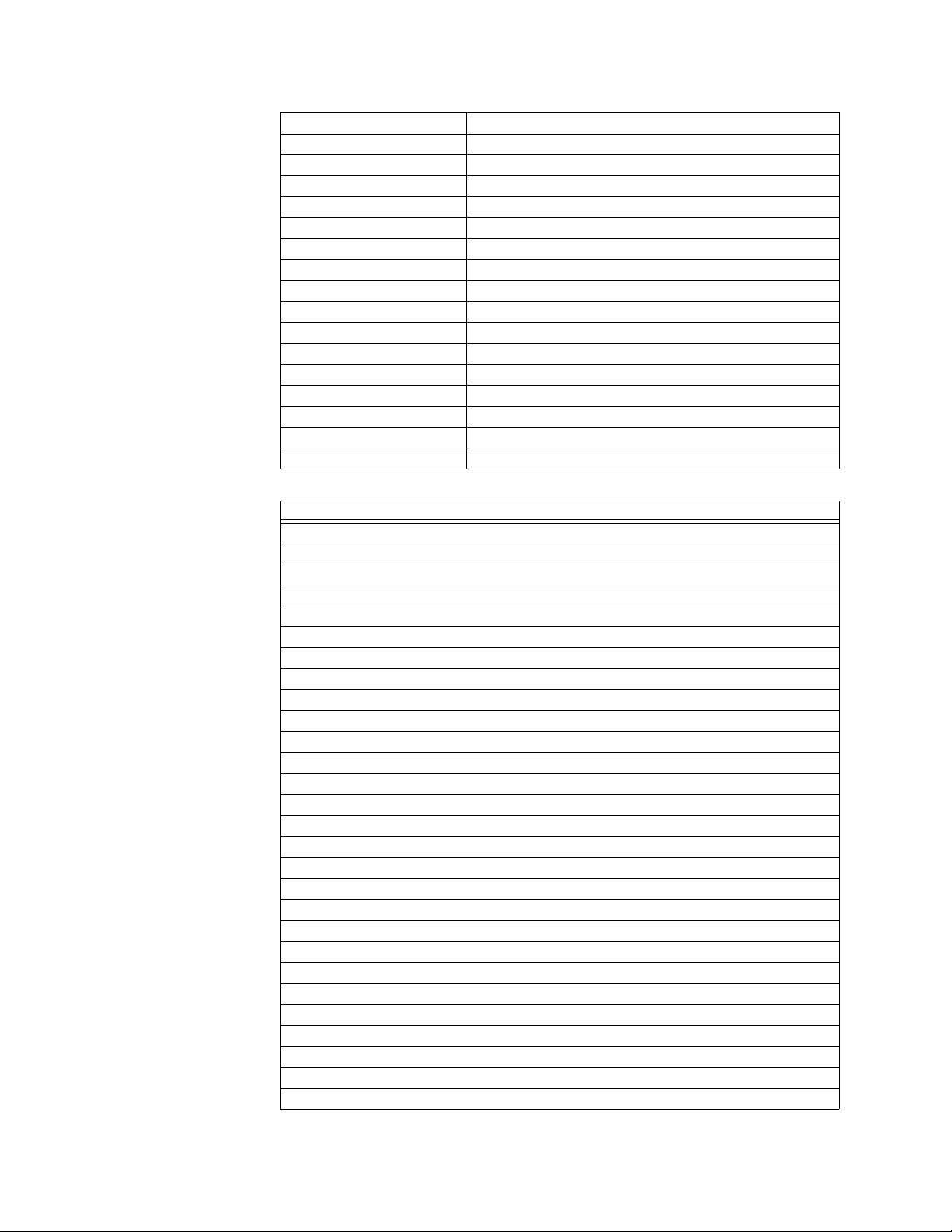
Level 1 Level 2
Level 1 Level 2
Setpoints
Device
System
Inputs
Outputs
Protection
Monitoring
Control
FlexLogic
S
tatus
Breakers
S ches
Contact Inputs
Output Relays
Virtual Inputs
Virtual Outputs
Targets
Motor
Metering
Records
Events
Transients
Motor Start Records
Breakers
Dig Counters
Clear Records
Currents
oltages
Frequenc
Harmonics
Power
Energy
V
y
RTDs
Data Logger
Fault Reports
Motor Start Statistics
Current Demand
Power Demand
Motor Learned Data
Directional Power
Arc Flash
Arc Flash
Testing
PTP Status
Clock
Device Status
Information
Communications
Flex States
Last Trip Data
Motor
Power Factor
Analog Inputs
RTD Maximums
FlexElements
Description
Acceleration Time
Phase Reversal
Broken Rotor Bar
Reduced Voltage Starting
RTD Temperature
Motor Start Records
Motor Start Statistics
Motor Learned Data
Motor Health Report
Data Logger
Figure 1-2: Main Menu Hierarchy
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 1–5
Page 16
SECURITY OVERVIEW CHAPTER 1: INTRODUCTION
Security Overview
The following security features are available:
BASIC SECURITY
The basic security feature is present in the default offering of the 869 relay. The
FASTPATH:
869 introduces the notion of roles for different lev
names with associated passwords stored on the device. The following roles are available
at present: Administrator, Operator, Factory and Observer, with a fixed permission
structure for each one. Note that the Factory role is not available for users, but strictly used
in the manufacturing process.
The 869 can still use the Setpoint access switch feat
done only by an Administrator. Setpoint access is controlled by a keyed switch to offer
some minimal notion of security.
CYBERSENTRY
The CyberSentry Embedded Security feature is a software option that provides advanced
security ser
vices. When the software option is purchased, the Basic Security is
automatically disabled.
CyberSentry provides security through the following features:
• An Authentication, Authorization, Accounting (AAA) Remote Authentication Dial-In
User Ser
vice (RADIUS) client that is centrally managed, enables user attribution, and
uses secure standards based strong cryptography for authentication and credential
protection.
• A Role-Based Access Control (RBAC) system that provides a permission model that
ows access to 869 device operations and configurations based on specific roles
all
and ind
ividual user accounts configured on the AAA server. At present the defined
roles are: Administrator, Operator and Observer.
• Strong encryption of all access and configuration network messages between the
EnerV
ista software and 869 devices using the Secure Shell (SSH) protocol, the
Ad
vanced Encryption Standard (AES), and 128-bit keys in Galois Counter Mode (GCM)
as specified in the U.S. National Security Agency Suite B extension for SSH and
approved by the National Institute of Standards and Technology (NIST) FIPS-140-2
standards for cryptographic systems.
• Security event reporting through the Syslog protocol for supporting Security
Informa
tion Event Management (SIEM) systems for centralized cyber security
monitoring.
There are two types of authentication supported by CyberSentry that can be used to
acc
ess the 869 device:
• Device Authentication – in which case the authentication is performed on the
869 device itself, using the predefined roles as users (No RADIUS involvement).
– 869 authentication using local roles may be done either from the front panel or
ough EnerVista.
thr
• Server Authentication - in which case the authentication is done on a RADIUS server,
using
individual user accounts defined on the server. When the user accounts are
created, they are assigned to one of the predefined roles recognized by the 869
– 869 authentication using RADIUS server may be done only through EnerVista.
WiFi and USB do not currently support CyberSentry security. For this reason WiFi is
disabled by default if the CyberSentry option is purchased. The user can enable WiFi, but
be aware that doing so violates the security and compliance model that CyberSentry is
supposed to provide.
els of authority. Roles are used as login
ure, but enabling the feature can be
1–6 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 17

CHAPTER 1: INTRODUCTION 869 ORDER CODES
When both 869 device and server authentication are enabled, the 869 automatically
directs authentication requests to the 869 device or the respective RADIUS server, based
on user names. If
the user ID credential does not match one of the device local accounts,
the 869 automatically forwards the request to a RADIUS server when one is provided. If a
R
ADIUS server is provided, but is unreachable over the network, server authentication
requests are denied. In this situation, use local 869 device accounts to gain access to the
869 system.
USER ROLES
User Access Levels are used to grant varying perm
issions to specific user roles. User roles
are used by both Basic Security and CyberSentry.
The following user roles are supported:
• Administrat
or: The Administrator role has complete read and write access to all
settings and commands. The role does not allow concurrent access. The Administrator
role also has an operand to indicate when it is logged on.
• Operat
or: The Operator role is present to facilitate operational actions that may be
programmed and assigned to buttons on the front panel. The Operator has read/write
access to all settings under the command menu/section. The Operator can view
settings from EnerVista or the front panel but does not have the ability to change any
settings. This role is not a concurrent role.
• Obser
ver: The Observer role has read-only access to all 869 settings. This role allows
concurrent access. The Observer is the default role if no authentication has been done
to the device. This role can download settings files and records from the device.
• F
actory: This is an internal non-user accessible role used for manufacturing
diagnostics. The ability to enable or disable this role is a security setting that the
Administrator controls.
GENERAL RULES FOR USER ROLES WITH CYBERSENTRY
1. The only concurrent role is Observer. If the user is logged in through serial, front panel,
or over the network, that counts as the role being logged in for concurrency reasons.
2. Both EnerVista and the front panel provide a one-step logoff. For the front panel, the
root menu has a logoff command. From EnerVista right-clicking on a device and
providing a logoff function from the context menu is sufficient.
3. The EnerVista Login Screen has “User Name:” and “Password:” fields for the default
remote (Radius) authentication, but when a “Local Authentication” checkbox is
selected the “User Name:” field changes to a drop down menu where the user can
select one of the predefined roles on the 869.
869 Order Codes
NOTE:
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 1–7
Support of some of the features described in the "Setpoints" section are order code
dependent. The 8 Series unit is ordered with a number of required and optional modules.
Each of these modules can be supplied in a number of configurations specified at the time
of ordering.
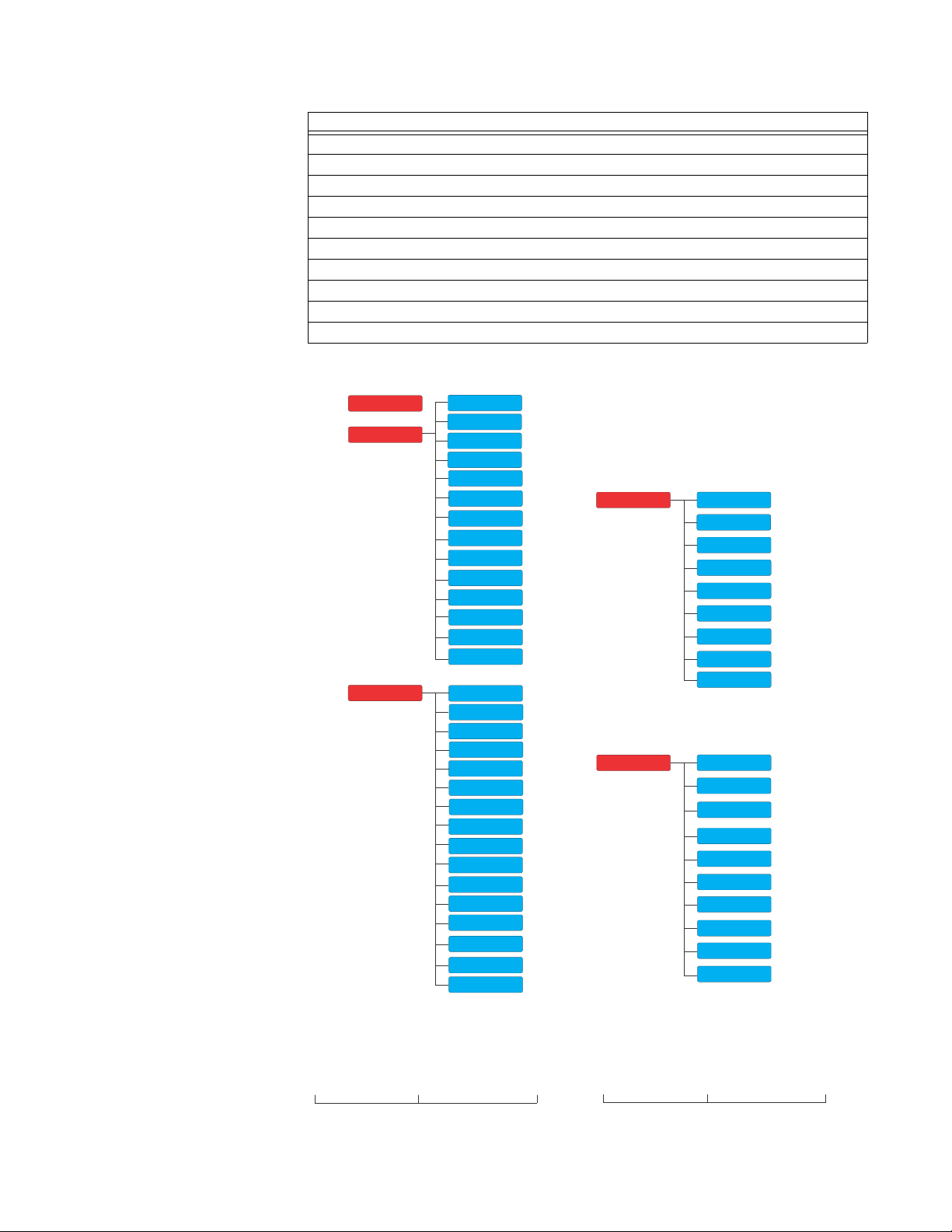
The information to specify an 869 relay is provided in the following Order Code figure:
Page 18
869 ORDER CODES CHAPTER 1: INTRODUCTION
892800B8.PDF
869 E ** ** ** H * * A * N G * * * * * * * * * N
Interface 869 | | | |||||||||||||||||| 869 Motor Protection System
Language E | | | | | | | | | | | | | | | | | | | | English
Phase Currents ³
Slot J Bank 1/2
P1| |||||||||||||||||| 1A 3-phase current inputs (J1)
P5| |||||||||||||||||| 5A 3-phase current inputs (J1)
Phase Currents ³
Slot K Bank 1
NN | | | | | | | | | | | | | | | | | | No phase current inputs
P1 | | | | | | | | | | | | | | | | | | 1A 3-phase current inputs (K1)
P5 | | | | | | | | | | | | | | | | | | 5A 3-phase current inputs (K1)
Ground Currents G1 ||||||||||||||||| 1A ground input (J1)
G5||||||||||||||||| 5A ground input (J1)
B1|||||||||||||||||
1A ground (J1) + 50:0.025A
(K1, included with current protection M option only)
B5|||||||||||||||||
5A ground (J1) + 50:0.025A
(K1, included with current protection M option only)
0B||||||||||||||||| 50:0.025A (J1), only available if NN is selected for Slot K Bank 1
Power Supply L | | | | | | | | | | | | | | | | 24 to 48 V DC
H | | | | | | | | | | | | | | | | 110 to 250 V DC/110 to 230 V AC
Slot B - LV
IO
N||||||||||||||| None
R||||||||||||||| 6 X RTDS (PT100, NI100, NI120)
S||||||||||||||| 6 X RTDS (PT100, NI100, NI120, CU10)
Slot C- LV IO
N | | | | | | | | | | | | | | None
R | | | | | | | | | | | | | | 6 X RTDS (PT100, NI100, NI120)
S | | | | | | | | | | | | | | 6 X RTDS (PT100, NI100, NI120, CU10)
Slot F - HV IO A
||||||||||||||||||||||||||2 Form A (Vmon), 3 Form C, 7 Digital Inputs (Low/High Voltage, Int/Ext
Supply)
Slot G - HV
IO
N | | | | | | | | | | | | None
A |
||||||||||||||||||||||2 Form A (Vmon), 3 Form C, 7 Digital Inputs (Low/High Voltage, Int/Ext
Supply)
L | | | | | | | | | | | | 7 DcmA O/P + 4 DcmA I/P + 1 RTD (PT 100, NI 100, NI 120)
Slot H - HV
IO
N||||||||||| None (High Voltage I/O)
F||||||||||| 10 Digital Inputs + 4 Arc Flash Inputs
A
||||||||||||||||||||||2 Form A (Vmon), 3 Form C, 7 Digital Inputs (Low/High Voltage, Int/Ext
Supply)
Faceplate M | | | | | | | | | | Basic = Membrane Keypad
G | | | | | | | | | | Standard = Rugged Keypad
Current Protection S | | | ||||||
Basic configuration: 14, 19, 37, 38, 46, 49, 50P, 50N, 50G, 50_2, 50LR,
51P, 51N, 51G, 66, 86
M
||||||||||||||||||Standard configuration: Basic configuration +67P, 67N, 87 (2nd CT Bank
required for 87)
Voltage Monitoring and Protection S
||||||||||||||||Standard Voltage Monitoring & Protection: 24, 27P, 40, 40Q, 47, 59P, 59N,
59X, 81O, 81U, VTFF
P
||||||||||||||||Advanced Voltage Monitoring & Protection: Standard Voltage
Monitoring & Protection +32, 55, 59_2, 78, 81R
Control B | ||||||
Basic control: Setpoint Group Control, Breaker/Contactor Control, Virtual
Inputs, Trip Bus
F||||||| Standard control: Basic control + FlexLogic, 50BF
Monitoring B||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Basic monitoring: Motor Health Report, Motor Start Report, Motor
Learned Data, Data Logger, Breakers Coil Monitoring, Breaker Arcing,
Harmonics, THD, Demand
C
||||||||||||Standard monitoring: Basic monitoring + Breaker Health Report, Broken
Rotor Bar
A | | | | | | Advanced: Standard + Harmonic Detection, Stator Inter-Turn Fault
Communications S E
||||||||Standard = USB, 1xRS485: Modbus RTU, DNP3.0, IEC60870-5-103 +
1xEthernet Copper: Modbus TCP, DNP3.0
1E
||||||||Advanced = USB, 1xRS485: Modbus RTU, DNP3.0, IEC60870-5-103 +
2xEthernet, Modbus TCP/IP, DNP3.0, IEC 60870-5-104, SNTP, 1588
1P|||| Advanced communications + PRP
2A|||| Advanced communications + IEC 61850
2E|||| Advanced communications + PRP + IEC 61850
Advanced Communications Connector N | | | None
S | | | ST, Multi-mode 1310 nm
C | | | RJ45, Copper 10/100M
Wireless Communication N | | None
W| | WiFi 802.11
Security B | Basic security
A | Advanced security: CyberSentry Level 1
Future Option N Not Available
Figure 1-3: 869 Order Codes
1–8 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 19
CHAPTER 1: INTRODUCTION SPECIFICATIONS
FASTPATH:
Harsh Environment Coating is a standard feature on all 8 Series units.
Advanced security is only available with advanced communications (1E, 1P, 2A, 2E). When
the advanced communications option is selected, the Ethernet port on the main CPU is
disabled.
The “A” option on Slot H is only available if the “L” option is selected on Slot G.
Specifications
To obtain the total operating time, i.e. from the presence of a trip condition to initiation of a
trip, add 8 ms output relay time to the operate times listed below.
Device
CUSTOM CONFIGURATIONS
Config Mode:.........................................................Simplified, Regular
Protection
ARC FLASH HS PHASE/GROUND INSTANTANEOUS OVERCURRENT HS 50P/50G
Current:....................................................................Phasor Magnitude (special high speed algorithm)
Pickup Level:..........................................................0.050 to 30.000 x CT in steps of 0.001 x CT
Dropout Level: ......................................................97 to 98% of Pickup
Level Accuracy:....................................................For 0.1 to 0.2 x CT: ± 0.2% of reading or 1.5% of rated,
whichever is greater
For > 0.2 x CT: ± 1.5% of reading
Operate Time:.......................................................4 ms at >6 x Pickup at 60 Hz
5 ms at >6 x Pickup at 50 Hz
4-8 ms at > (3-6) x Pickup at 60 Hz
4-10 ms at > (3-6) x Pickup at 50 Hz
PERCENT DIFFERENTIAL (87S)
Methods: .................................................................Internal summation and Core balance
Pickup Level:..........................................................0.05 to 1.00 x CT in steps of 0.01
Slope 1 and 2:.......................................................1 to 100% in steps of 1
Break 1:....................................................................0.50 to 2.00 x CT in steps of 0.01
Break 2:....................................................................2.00 to 30.00 x CT in steps of 0.01
Operate Time:.......................................................<16 ms at >3 × Pickup at 60 Hz;
<20 ms at >3 × Pickup at 50 Hz
THERMAL MODEL (49)
Thermal Overload Curves: ..............................Motor curve, FlexCurve, Standard Motor curve with voltage
dependent function, FlexCurve with voltage dependent
function, IEC curve
Motor Curve Time Multiplier:.........................0.00 to 25.00 in steps of 0.01
FlexCurve Time Multiplier: ..............................0.00 to 600.00 in steps of 0.01
IEC Curve Time Constant: ...............................0 to 1000 in steps of 1
Thermal Overload Pickup:...............................Overload factor x FLA
Overload Factor (OL):.........................................1.00 to 1.50 in steps of 0.01
Motor Full Load Current (FLA):.......................1 to 5000 A in steps of 1
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 1–9
Page 20

SPECIFICATIONS CHAPTER 1: INTRODUCTION
Standard Overload Curve, Cutoff
Effect:.................................................................
Standard Overload Curve, Shift
Effect:.................................................................
Motor Rated Voltage:........................................1 to 50000 V in steps of 1
Thermal Model Biasing: ...................................Current Unbalance, RTDs
Thermal Model Update Rate: ........................ 1 power cycle
Stopped/Running Cool Time Constants: .1 to 1000 min. in steps of 1
Stopped/Running Cool Time Constant
Decay:.................................................................Exponential
Hot/Cold Safe Stall Ratio:................................ 0.01 to 1.00 in steps of 0.01
Current Accuracy:............................................... Per phase current inputs
Current Source:.................................................... True RMS
Timer Accuracy:..................................................±100 ms or ±2%, whichever is greater
Timer Accuracy for Voltage Dependent
Overload:...........................................................±100 ms or ±4%, whichever is greater
CURRENT UNBALANCE (46)
Unbalance: ............................................................Unbal = (I2 / I1) x A
A
= (I
A
factor
factor
avg
= 1 if l
/ FLA) if l
avg
Trip/Alarm Pickup Level:..................................4.0 to 50.0% in steps of 0.1%
Trip Operating Curves: .....................................Def inite Time: T=TDM sec
Inverse Time: T= (TDM/[Unbal]
Trip Pickup Delay: ...............................................0.00 to 180.00 s in steps of 0.01 s when Trip Curve = Definite
Time
Trip Time Dial Multiplier (TDM):.....................0.00 to 180.00 in steps of 0.01 when Trip Curve = Inverse
Curve
Trip Maximum Time: .........................................0.00 to 1000.00 s in steps of 0.01 s
Trip Minimum Time:........................................... 0.00 to 1000.00 s in steps of 0.01 s
Trip Reset Time:................................................... 0.00 to 1000.00 s in steps of 0.01 s
Alarm Time Delay:.............................................. 0.00 to 180.00 s in steps of 0.01 s
Single Phasing Pickup Level: .........................unbalance level > 40% or when I
in any phase is less than the cutoff current
Single Phasing Time Delay:............................2 seconds
Pickup Accuracy:................................................. ±2%
Operate Time: ...................................................... <2 cycles at 1.10 x pickup (NOTE 1)
Timing Accuracy:................................................ ±3% of delay setting time or ± 20 ms, whichever is greater
Element: ..................................................................Trip and Alarm
Single Phasing Element: .................................. Trip
factor
>= FLA
x 100%
< FLA
avg
2
) sec
>=25%FLA and current
avg
MECHANICAL JAM
Operating Condition:......................................... Phase Overcurrent
Arming Condition:............................................... Motor not starting
Pickup Level: .........................................................1.00 to 10.00 x FLA in steps of 0.01
Dropout Level:......................................................97 to 98% of Pickup
Level Accuracy:.................................................... For 0.1 to 2.0 x CT: ±0.5% of reading; at > 2.0 x CT rating:
±1.5% of reading
Pickup Delay: ........................................................0.10 to 180.00 s in steps of 0.01
Dropout Delay:.....................................................0.00 to 180.00 s in steps of 0.01
Timer Accuracy:..................................................±3% of delay setting time or ±20 ms, whichever is greater
1–10 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 21

CHAPTER 1: INTRODUCTION SPECIFICATIONS
UNDERCURRENT (37)
Operating Parameter:.......................................Per-phase current Ia, Ib, Ic
Pickup Level:..........................................................0.10 to 0.95 x FLA in steps of 0.01 x FLA
Dropout Level: ......................................................102 to 103% of Pickup
Level Accuracy:....................................................For 0.1 to 2.0 x CT: ±0.5% of reading or ±0.4% of rated,
whichever is greater
Trip Pickup Delay:................................................0.00 to 180.00 s in steps of 0.01 s
Trip Dropout Delay:............................................0.00 to 180.00 s in steps of 0.01 s
Alarm Pickup Delay:...........................................0.00 to 180.00 s in steps of 0.01 s
Alarm Dropout Delay: .......................................0.00 to 180.00 s in steps of 0.01 s
Operate Time:.......................................................<45 ms at 60 Hz; <50 ms at 50 Hz
Timer Accuracy:...................................................±3% of delay setting or ± 2 power cycles (whichever is
greater) from pickup to operate
OVERLOAD ALARM
Operating Parameter:.......................................Average phase current (RMS)
Pickup Level:..........................................................0.50 to 3.00 x FLA in steps of 0.01 x FLA
Dropout Level: ......................................................97 to 98% of Pickup
Level Accuracy:....................................................For 0.1 to 2.0 x CT: ±0.5% of reading or ±0.4% of rated,
whichever is greater; For > 2.0 × CT rating ±1.5% of reading
Pickup Delay:.........................................................0.00 to 180.00 s in steps of 0.01 s
Dropout Delay: .....................................................0.00 to 180.00 s in steps of 0.01 s
Timer Accuracy:...................................................±3% of delay setting or ± ½ cycle (whichever is greater) from
pickup to operate
SHORT CIRCUIT
Inputs:.......................................................................RMS Phase Currents
Pickup Level:..........................................................1.00 to 30.00 x CT in steps of 0.01 x CT
Dropout Level: ......................................................97 to 98% of Pickup
Pickup Delay:.........................................................0.00 to 180.00 s in steps of 0.01 s
Level Accuracy:....................................................For 1.0 to 2.0 x CT: ±0.5% of reading or ±0.4% of rated,
whichever is greater For > 2.0 x CT: ±1.5% of reading
Operate Time:.......................................................<16 ms @ 60Hz (I > 2.0 x PKP), with 0 ms time delay
<20 ms @ 50Hz (I > 2.0 x PKP), with 0 ms time delay
Timer Accuracy:...................................................±3% of delay setting or ±1/2 cycle (whichever is greater)
from pickup to operate
Elements: ................................................................Trip or Alarm
GROUND FAULT (50G)
Pickup Level :.........................................................For 1A/5A Ground CT Type: 0.01 to 10.00 x CT in steps of 0.01
x CT;
For 50/0.025 Ground CT Type: 0.50 to 15.00 A in steps of
0.01A
Dropout Level: ......................................................97 to 98% of Pickup
Alarm Pickup Delay:...........................................0.00 to 180.00 s in steps of 0.01 s
Trip Pickup Start Delay: ....................................0.00 to 180.00 s in steps of 0.01 s
Trip Pickup Run Delay:......................................0.00 to 180.00 s in steps of 0.01 s
Magnitude Accuracy: ........................................50:0.025A CT: ± 5% of reading or ± 0.2A (in primary)
whichever is greater
1A/5A CT: For 0.1 to 2.0 x CT: ± 0.5% of reading or ± 0.4% of
rated, whichever is greater; For > 2.0 x CT: ± 1.5% of reading
Operate Time:.......................................................<16 ms @ 60Hz (I > 2.0 x PKP), with 0 ms time delay
<20 ms @ 50Hz (I > 2.0 x PKP), with 0 ms time delay
Timing Accuracy:................................................±3% of delay setting at ±1 cycle (whichever is greater) from
pickup to operate
ACCELERATION TIME (37P)
Acceleration Current: ........................................1.00 to 10.00 x FLA in steps of 0.01
Operating Mode: .................................................Definite Time, Adaptive
Timing Accuracy:................................................±100 ms or ±0.5% of total time (whichever is greater),
applicable to definite time mode only
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 1–11
Page 22
SPECIFICATIONS CHAPTER 1: INTRODUCTION
UNDERPOWER
Operating Condition:......................................... Three-phase real power
Number of Elements:........................................1, alarm and trip stages
Trip/Alarm Pickup Level:..................................1 to 25000 kW in steps of 1
Pickup Level Accuracy: ....................................±1.0% of reading
Hysteresis:.............................................................. 3%
Trip/Alarm Pickup Delay:.................................0 to 180.00 s in steps of 0.01
Timer Accuracy: ..................................................±3% of delay time or ±10 ms, whichever is greater, pick up to
operate
Operate Time: ...................................................... <45 ms at 60 Hz; <50 ms at 50 Hz (NOTE 1)
PHASE/NEUTRAL/GROUND TIME OVERCURRENT (51P/N/G)
Current:.................................................................... Phasor or RMS
Pickup Level: .........................................................0.050 to 30.000 x CT in steps of 0.001 x CT
Dropout Level:......................................................97 to 98% of Pickup
Level Accuracy:.................................................... For 0.1 to 2.0 x CT: ±0.5% of reading or ±0.4% of rated,
whichever is greater;
For > 2.0 x CT: ±1.5% of reading
Curve Shape:......................................................... IEEE Extremely/Very/Moderately Inverse;
ANSI Extremely/Very/Normally/Moderately Inverse;
Definite T ime, IEC A/B/C and Short Inverse;
IAC Extremely/Very/Inverse/Short Inverse;
FlexCurve A/B/C/D, I
2
t, I4t
Curve Multiplier: ..................................................0.05 to 600.00 in steps of 0.01
Reset Time: ............................................................Instantaneous, Timed
Curve Timing Accuracy: .................................. Currents > 1.03 to 20 x pickup: ± 3% of operate time or ± ½
cycle (whichever is greater) from pickup to operate
Voltage Restrained Function (51V): ............ Modifies Pickup from 0.1 < V < 0.9 VT Nominal in a fixed
linear relationship
FASTPATH:
Add 1.5 cycles to the curve time to obtain the TOC operating time, i.e., from fault inception
until operation.
PHASE/NEUTRAL/GROUND INSTANTANEOUS OVERCURRENT (50P/N/G)
Current (for Phase IOC only): .........................Phasor or RMS
Current (for Neutral/Ground IOC only):..... Fundamental Phasor Magnitude
Pickup Level: .........................................................0.050 to 30.000 x CT in steps of 0.001 x CT
Dropout Level:......................................................97 to 98% of Pickup
Level Accuracy:.................................................... For 0.1 to 2.0 x CT: ±0.5% of reading or ±0.4% of rated,
whichever is greater
For > 2.0 x CT: ±1.5% of reading
Operate Time: ...................................................... <12 ms typical at 3 × Pickup at 60 Hz (Phase/Ground IOC)
<16 ms typical at 3 × Pickup at 60 Hz (Neutral IOC)
<15 ms typical at 3 × Pickup at 50 Hz (Phase/Ground IOC)
<20 ms typical at 3 × Pickup at 50 Hz (Neutral IOC)
NOTE:
Operating time specifications given above are applicable when RMS inputs are used.
Typical times are average operate times over multiple test cases.
Timer Accuracy: ..................................................±3% of delay setting or ± ¼ cycle (whichever is greater) from
pickup to operate
1–12 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 23

CHAPTER 1: INTRODUCTION SPECIFICATIONS
NEGATIVE SEQUENCE INSTANTANEOUS OVERCURRENT (50_2)
Current:....................................................................I_2 Fundamental Phasor Magnitude
Pickup Level:..........................................................0.050 to 30.000 x CT in steps of 0.001 x CT
Dropout Level: ......................................................97 to 98% of Pickup
Level Accuracy:....................................................For 0.1 to 2.0 x CT: ±0.5% of reading or ± 0.4% of rated,
whichever is greater
For > 2.0 x CT: ± 1.5% of reading
Pickup Time Delay: .............................................0.000 to 6000.000 s in steps of 0.001 s
Dropout Time Delay: .........................................0.000 to 6000.000 s in steps of 0.001 s
Overreach:..............................................................< 2%
Operate Time:.......................................................< 12 ms typical at 3 x Pickup at 60 Hz
< 15 ms typical at 3 x Pickup at 50 Hz
Timer Accuracy:...................................................±3% of delay setting or ± ¼ cycle (whichever is greater) from
pickup to operate
PHASE DIRECTIONAL OVERCURRENT (67P)
Relay Connection:...............................................90º(Quadrature)
Quadrature Voltage:..........................................ABC phase seq.: phase A (Vbc), phase B (Vca), phase C (Vab);
ACB phase seq.: phase A (Vcb), phase B (Vac), phase C (Vba)
Polarizing Voltage Threshold:........................0.050 to 3.000 x VT in steps of 0.001 x VT
Current Sensitivity Threshold: .......................0.05 x CT
Characteristic Angle:.........................................0º to 359º in steps of 1°
Angle Accuracy:...................................................± 2º
Operation Time (FlexLogic™ operands):..Reverse to Forward transition: < 12 ms, typically;
Forward to Reverse transition: <8 ms, typically
NEUTRAL DIRECTIONAL OVERCURRENT (67N)
Directionality:........................................................Co-existing forward and reverse
Polarizing: ...............................................................Voltage, Current, Dual
Polarizing Voltage:..............................................V_0 or VX
Polarizing Current:..............................................Ig
Operating Current: .............................................I_0
Level Sensing:.......................................................3 x (|I_0| – K x |I_1|), Ig
Restraint, K: ...........................................................0.000 to 0.500 in steps of 0.001
Characteristic Angle:.........................................-90º to 90º in steps of 1°
Limit Angle: ............................................................40º to 90º in steps of 1°, independent for forward and
reverse
Angle Accuracy:...................................................±2º
Pickup Level:..........................................................0.050 to 30.000 x CT in steps of 0.001 x CT
Dropout Level: ......................................................97 to 98% of Pickup
Operate Time (no direction transition):.....< 16 ms at 3 x Pickup at 60 Hz
< 20 ms at 3 x Pickup at 50 Hz
PHASE REVERSAL
Phase Reversal Condition: ..............................V2/V1=100% when phase to phase voltages are greater than
50% of VT
Configuration:.......................................................ABC or ACB phase rotation
Pickup/Dropout Time Delay:..........................0.00 to 180.00 s in steps of 0.01 s
Timer Accuracy:...................................................±3% of delay setting or ±1% cycle (whichever is greater)
from pickup to operate
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 1–13
Page 24

SPECIFICATIONS CHAPTER 1: INTRODUCTION
PHASE UNDERVOLTAGE (27P)
Voltage: ...................................................................Fundamental Phasor Magnitude
Minimum Voltage: ..............................................0.00 to 1.50 x VT in steps of 0.01 x VT
Pickup Level: .........................................................0.00 to 1.50 x VT in steps of 0.01 x VT
Dropout Level:......................................................102 to 103% of Pickup
Level Accuracy:.................................................... ±0.5% of reading from 10 to 208 V
Phases Required for Operation:................... Any one, Any two, All three
Undervoltage Curves:.......................................Definite Time, GE IAV Inverse Time or FlexCurves A/B/C/D
Pickup Time Delay:.............................................0.000 to 6000.000 s in steps of 0.001s
Operate Time: ...................................................... < 20 ms at 0.90 x pickup at 60 Hz
< 25 ms at 0.90 x pickup at 50 Hz
Curve Timing Accuracy: .................................. at < 0.90 x pickup: ± 3.5% of curve delay or ± ½ cycle
(whichever is greater) from pickup to operate
PHASE OVERVOLTAGE (59P)
Voltage: ...................................................................Fundamental Phasor Magnitude
Pickup Level: .........................................................0.02 to 3.00 x VT in steps of 0.01 x VT
Dropout Level:......................................................97 to 98% of Pickup
Level Accuracy:.................................................... ±0.5% of reading from 10 to 208 V
Phases Required for Operation:................... Any one, Any two, All three
Pickup Time Delay:.............................................0.000 to 6000.000 s in steps of 0.001s (Definite T ime)
Dropout Time Delay: .........................................0.000 to 6000.000 s in steps of 0.001s (Definite Time)
Pickup Accuracy:................................................. Per phase voltage input channel error
Operate Time: ...................................................... < 25 ms at 1.1 x pickup at 60Hz
< 30 ms at 1.1 x pickup at 50Hz
Timer Accuracy: ..................................................± 3% of delay setting or ± ¼ cycle (whichever is greater) from
pickup to operate
AUXILIARY OVERVOLTAGE (59X)
Operating Parameter: ......................................Vx (Phasor)
Pickup Level: .........................................................0.00 to 3.00 x VT in steps of 0.01 x VT
Dropout Level:......................................................97 to 98% of Pickup
Level Accuracy:.................................................... ±0.5% of reading from 10 to 240 V
Overvoltage Curves:..........................................Definite T ime, Inverse Time, FlexCurves A/B/C/D
Pickup Time Delay:.............................................0.000 to 6000.000 s in steps of 0.001s
Dropout Time Delay: .........................................0.000 to 6000.000 s in steps of 0.001s
Pickup Accuracy:................................................. ‘Auxiliary voltage input channel error
Operate Time: ...................................................... < 30 ms at 1.1 x pickup at 60Hz
Curve Timing Accuracy: .................................. at >1.1 x PKP: 3.5% of operate time ± ½ cycle (whichever is
greater) from pickup to operate
Timer Accuracy:..................................................± 3% of operate time or ± ½ cycle (whichever is greater)
NEUTRAL OVERVOLTAGE (59N)
Operating Parameter: ......................................3V_0 calculated from phase to ground voltages
Pickup Level: .........................................................0.02 to 3.00 x VT in steps of 0.01 x VT
Dropout Level:......................................................97 to 98% of Pickup
Level Accuracy:.................................................... ±0.5% of reading from 10 to 208 V
Neutral Overvoltage Curves:.........................Definite time, FlexCurve A,B,C,D
Pickup Time Delay:.............................................0.000 to 6000.000 s in steps of 0.001 s (Definite T ime)
Dropout Time Delay: .........................................0.000 to 6000.000 s in steps of 0.001 s (Definite Time)
Operate Time: ...................................................... < 25 ms at 1.1 x pickup at 60Hz
< 30 ms at 1.1 x pickup at 50Hz
Curve Timing Accuracy: ..................................at > 1.1 x Pickup: ± 3% of curve delay or ± 1 cycle (whichever
is greater) from pickup to operate
1–14 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 25

CHAPTER 1: INTRODUCTION SPECIFICATIONS
NEGATIVE SEQUENCE OVERVOLTAGE (59_2)
Operating Parameter:.......................................V_2
Pickup Level:..........................................................0.00 to 3.00 x VT in steps of 0.01 x VT
Dropout Level: ......................................................97 to 98% of Pickup
Level Accuracy:....................................................± 0.5% of reading from 10 to 208 V
Pickup Time Delay: .............................................0.000 to 6000.000 s in steps of 0.001 s
Dropout Time Delay: .........................................0.000 to 6000.000 s in steps of 0.001 s
Operate Time:.......................................................< 25 ms at 1.1 x pickup at 60 Hz
< 30 ms at 1.1 x pickup at 50 Hz
Timer Accuracy:................................................... ± 3% of delay setting or ± ¼ cycle (whichever is greater)
from pickup to operate
VOLTS PER HERTZ (24)
Voltages: .................................................................Phasor only
Pickup Level:..........................................................0.80 to 4.00 in steps of 0.01 pu
Dropout Level: ......................................................97 to 98% of pickup
Level Accuracy:....................................................±0.02 pu
Timing Curves: .....................................................Definite T ime; IEC Inverse A/B/C; FlexCurves A, B, C, and D
TD Multiplier: .........................................................0.05 to 600.00 s in steps of 0.01
Reset Delay:...........................................................0.00 to 6000.000 s in steps of 0.01
Timer Accuracy:...................................................±3% of operate time or ±15 cycles (whichever is greater) for
values greater than 1.1 x pickup
Number of Elements: ........................................1
FASTPATH:
DIRECTIONAL POWER (32)
Measured Power: ................................................3-phase
Number of Stages:..............................................2
Characteristic Angle:.........................................0º to 359º in steps of 1°
Calibration Angle: ...............................................0.00º to 0.95º in steps of 0.05°
Power Pickup Range:.........................................–1.200 to 1.200 x Rated Power in steps of 0.001
Pickup Level Accuracy:.....................................± 1% or ± 0.001 x Rated Power, whichever is greater
Hysteresis:..............................................................2% or 0.001 x Rated Power, whichever is greater
Pickup Time Delay: .............................................0.000 to 6000.000 s in steps of 0.001 s
Operate Time:.......................................................< 55 ms at 1.1 x pickup at 60 Hz
< 65 ms at 1.1 x pickup at 50 Hz (NOTE 1)
Timer Accuracy:...................................................± 3% of delay setting or ± ¼ cycle (whichever is greater) from
pickup to operate
Positive/Negative var Trip/Alarm Pickup
Level:....................................................................1 to 25000 kvar in steps of 1 kvar
UNDERFREQUENCY (81U)
Pickup Level:..........................................................20.00 to 65.00 Hz in steps of 0.01
Dropout Level: ......................................................Pickup + 0.03 Hz
Pickup Time Delay: .............................................0.000 to 6000.000 s in steps of 0.001s
Dropout Time Delay: .........................................0.000 to 6000.000 s in steps of 0.001s
Minimum Operating Voltage:........................0.000 to 1.250 x VT in steps of 0.001 x VT
Minimum Operating Current: ........................0.000 to 30.000 x CT in steps of 0.001 x CT
Level Accuracy:....................................................± 0.001 Hz
Timer Accuracy:...................................................± 3% of delay setting or ± ¼ cycle (whichever is greater) from
pickup to operate
Operate Time:.......................................................typically 7.5 cycles at 0.1 Hz/s change
typically 7 cycles at 0.3 Hz/s change
typically 6.5 cycles at 0.5 Hz/s change
Typical times are average Operate Times including variables such as frequency change
instance, test method, etc., and may vary by ± 0.5 cycles.
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 1–15
Page 26
SPECIFICATIONS CHAPTER 1: INTRODUCTION
OVERFREQUENCY (81O)
Pickup Level: .........................................................20.00 to 65.00 Hz in steps of 0.01
Dropout Level:......................................................Pickup - 0.03 Hz
Pickup Time Delay:.............................................0.000 to 6000.000 s in steps of 0.001 s
Dropout Time Delay: .........................................0.000 to 6000.000 s in steps of 0.001 s
Minimum Operating Voltage:........................ 0.000 to 1.250 x VT in steps of 0.001 x VT
Level Accuracy:.................................................... ± 0.001 Hz
Timer Accuracy: ..................................................± 3% of delay setting or ± ¼ cycle (whichever is greater) from
pickup to operate
Operate Time: ...................................................... typically 7.5 cycles at 0.1 Hz/s change
typically 7 cycles at 0.3 Hz/s change
typically 6.5 cycles at 0.5 Hz/s change
FASTPATH:
Typical times are average Operate Times including variables such as frequency change
instance, test method, etc., and may vary by ± 0.5 cycles.
FREQUENCY RATE OF CHANGE (81R)
df/dt Trend:............................................................Increasing, Decreasing, Bi-directional
df/dt Pickup Level:..............................................0.10 to 15.00 Hz/s in steps of 0.01 Hz/s
df/dt Dropout Level: ..........................................96% of Pickup Level
df/dt Level Accuracy:........................................80 mHz/s or 3.5%, whichever is greater
Minimum Frequency:........................................20.00 to 80.00 Hz in steps of 0.01 Hz
Maximum Frequency:....................................... 20.00 to 80.00 Hz in steps of 0.01 Hz
Minimum Voltage Threshold: ........................0.000 to 1.250 x VT in steps of 0.001 x VT
Minimum Current Threshold: ........................0.000 to 30.000 x CT in steps of 0.001 x CT
Pickup Time Delay:.............................................0.000 to 6000.000 s in steps of 0.001 s
Timer Accuracy: ..................................................± 3% of delay setting or ± ¼ cycle (whichever is greater) from
pickup to operate
95% Settling Time for df/dt: ..........................< 24 cycles
Operate Time: ...................................................... typically 10 cycles at 2 × Pickup
RTD PROTECTION
Pickup:...................................................................... 1°C to 250°C in steps of 1°C
Hysteresis:.............................................................. 2°C
Timer Accuracy:..................................................<2 s
Elements:................................................................Trip and Alarm
FLEXELEMENTS
Number of elements:........................................8
Operating signal: ................................................Any analog actual value, or two values in a differential mode
Operating signal mode:...................................Signed, or Absolute value
Operating mode:.................................................Level, Delta
Comparison direction:......................................Over, Under
Pickup Level: .........................................................-30.000 to 30.000 pu in steps of 0.001 pu
Hysteresis:.............................................................. 0.1 to 50.0% in steps of 0.1%
Delta dt:...................................................................40 msec to 45 days
Pickup and dropout delays:...........................0.000 to 6000.000 s in steps of 0.001 s
(NOTE 1) When the setpoint “Motor Load Filter Interval” is programmed as non-zero, it
might increase the trip/alarm times by 16.7 ms (or 20 ms at 50 Hz) for each additional cycle
in the filter interval for the following protection elements: Acceleration Time, Current
Unbalance, Mechanical Jam, Overload Alarm, Thermal Model, Undercurent, Power Factor,
and Underpower.
1–16 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 27

CHAPTER 1: INTRODUCTION SPECIFICATIONS
Control
MAXIMUM STARTING RATE
Monitored Time Interval:.................................1 to 300 minutes in steps of 1
Maximum Number of Starts:.........................1 to 16 starts in steps of 1
Timer Accuracy:...................................................±2s or ±1% of total time (whichever is greater)
TIME BETWEEN STARTS
Time Between Starts:........................................0 to 300 minutes in steps of 1
Timer Accuracy:...................................................±2s or ±1% of total time (whichever is greater)
RESTART DELAY
Restart Delay: .......................................................0 to 65000 seconds in steps of 1
Timer Accuracy:...................................................±2s or ±1% of total time (whichever is greater)
REDUCED VOLTAGE START
Mode:........................................................................Current Only, Current and Timer, Current or Timer
Start Current Level: ............................................0.25 to 3.00 of FLA, in steps of 0.01
Start Timer:............................................................1.0 to 600.0 s in steps of 0.1
TRIP BUS
Number of Elements: ........................................6
Number of Inputs:...............................................16
Pickup Time Delay: .............................................0.000 to 6000.000 s in steps of 0.001 s
Dropout Time Delay: .........................................0.000 to 6000.000 s in steps of 0.001 s
Operate Time:.......................................................< 2 ms at 60 Hz
Timer Accuracy:...................................................± 3% of delay time or ± ¼ cycle (whichever is greater) from
pickup to operate
BREAKER FAILURE
Mode:........................................................................3-pole
Current Supervision:..........................................phase and neutral current (fundamental phasor magnitude)
Current Supervision Pickup:...........................0.050 to 30.000 x CT in steps of 0.001 x CT
Current Supervision Dropout: .......................97 to 98% of pickup
Current Supervision Accuracy: .....................For 0.1 to 2.0 x CT: ± 0.5% of reading or ± 0.4% of rated
(whichever is greater),
For > 2.0 x CT: ± 1.5% of reading
Time Delay: ............................................................0.000 to 6000.000 s in steps of 0.001 s
Timer Accuracy:...................................................± 3% of delay setting or ± ¼ cycle (whichever is greater) from
pickup to operate
Reset Time: ............................................................< 10 ms typical at 2 x Pickup at 60 Hz
< 12 ms typical at 2 x Pickup at 50 Hz
ARC FLASH SENSOR/FIBER
Number of Point Sensors: ...............................4
Detection Radius:................................................180 degree
Maximum Fiber Length (Point Sensor): .....18 ft
Fiber Size:................................................................1000 um
Mode:........................................................................Multi-mode
Connector:..............................................................Small Media Interface (SMI)
Fiber Type:..............................................................Plastic Optical Fiber
Bend Radius: .........................................................>25 mm
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 1–17
Page 28

SPECIFICATIONS CHAPTER 1: INTRODUCTION
Monitoring
BREAKER ARCING CURRENT
Mode:........................................................................ 3-pole
Principle: .................................................................accumulates breaker duty (I
Initiation:.................................................................any operand
Alarm Threshold:.................................................0 to 50000 kA2-cycle in steps of 1 kA2-cycle
Timer Accuracy: ..................................................± 3% of delay setting or ± ¼ cycle (whichever is greater) from
pickup to operate
BREAKER FAILURE
Mode:........................................................................ 3-pole
Current Supervision:.......................................... phase and neutral current (fundamental phasor magnitude)
Current Supervision Pickup:........................... 0.050 to 30.000 x CT in steps of 0.001 x CT
Current Supervision Dropout: .......................97 to 98% of pickup
Current Supervision Accuracy:..................... For 0.1 to 2.0 x CT: ± 0.5% of reading or ± 0.4% of rated
(whichever is greater),
For > 2.0 x CT: ± 1.5% of reading
Time Delay:............................................................0.000 to 6000.000 s in steps of 0.001 s
Timer Accuracy: ..................................................± 3% of delay setting or ± ¼ cycle (whichever is greater) from
pickup to operate
Reset Time: ............................................................< 10 ms typical at 2 x Pickup at 60 Hz
< 12 ms typical at 2 x Pickup at 50 Hz
BREAKER HEALTH
Timer Accuracy:..................................................± 3% of delay setting or ± 1 cycle (whichever is greater) from
pickup to operate
BROKEN ROTOR BAR
Operating Parameter: ......................................Fundamental Phasor Magnitude
Pickup Level: .........................................................-60db to -12db in steps of -1dB
Dropout Level:......................................................97 to 98% of Pickup
CLOSE CIRCUIT MONITOR (CCM)
Applicable Voltage:............................................20 to 250 VDC
Trickle Current:.....................................................1 to 2.5 mA
Timing Accuracy:................................................ ± 3 % or ± 4 ms, whichever is greater
DEMAND
Measured Values:...............................................Phase A/B/C present and maximum current
Measurement Type:........................................... Thermal Exponential, 90% response time (programmed): 5,
10, 15, 20, 30 minutes
Block Interval / Rolling Demand, time interval (programmed):
5, 10, 15, 20, 30 minutes
Current Pickup Level: ........................................ 10 to 10000 in steps of 1 A
Dropout Level:......................................................96-98% of Pickup level
Level Accuracy:.................................................... ± 2%
FAULT REPORTS
Number of Reports: ...........................................15
Captured Data: ....................................................Pre-fault and fault phasors for all CT and VT banks, pre-fault
and fault trigger operands, user-programmable analog
channels 1 to 32
2
t) during fault
HARMONIC DETECTION
Operating Parameter: ......................................Current 2nd, 3rd, 4th, 5th harmonic or THD per phase
Timer Accuracy:..................................................Harmonics: ±3% of delay setting or ±1/4 cycle (whichever is
greater) from pickup to operate
THD: ±3% of delay setting or ±3 cycles (whichever is greater)
from pickup to operate
1–18 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 29

CHAPTER 1: INTRODUCTION SPECIFICATIONS
POWER FACTOR (55)
Switch-In Level:....................................................0.01 Lead to 1 to 0.01 Lag in steps of 0.01
Dropout Level: ......................................................0.01 Lead to 1 to 0.01 Lag in steps of 0.01
Delay:........................................................................0.000 to 6000.000 s in steps of 0.001 s
Minimum Operating Voltage:........................0.00 to 1.25 x VT in steps of 0.01 x VT
Level Accuracy:....................................................± 0.02
Timer Accuracy:...................................................± 3% of delay setting or ± 1¼ cycle (whichever is greater)
from pickup to operate
SPEED PROTECTION
Configuration:.......................................................Assign to any contact input
Operating Range:................................................50 to 120% of Rated RPM
Minimum Pulse Width:......................................>8% of a revolution
Level Accuracy:....................................................±1% of rated speed
Timer Accuracy:...................................................±3% of delay setting or ±2 power cycles (whichever is
greater) from pickup to operate
Element:...................................................................Trip and Alarm
STATOR TURN FAULT
Operating Parameter:.......................................I_2, V_1, V_2
Pickup Level Stage1/Stage2:.........................0.001 to 10.000 in steps of 0.001
Level Accuracy:....................................................For 1.0 to 2.0 x CT: ±0.5% of reading or ±0.4% of rated,
whichever is greater For > 2.0 x CT: ±1.5% of reading
Dropout Level: ......................................................97 to 98% of Pickup
Pickup Delay Stage1/Stage2:........................0.01 to 600.00 in steps of 0.01
Operate Time:.......................................................<16 ms at 3 x pickup at 60 Hz
Timer Accuracy:...................................................±3% of operate time or ± 1/4 cycle (whichever is greater)
TRIP CIRCUIT MONITOR (TCM)
Applicable Voltage: ............................................20 to 250 VDC
Trickle Current:.....................................................1 to 2.5 mA
Timing Accuracy:................................................± 3 % or ± 4 ms, whichever is greater
Recording
EVENT DATA
Number of Records:...........................................1024 (matches the existing Event Recorder)
Data Storage:........................................................Non-volatile memory
Time-tag Accuracy: ...........................................One microsecond
Settings:...................................................................64 Configurable FlexAnalog parameters,
Event Selector
Actuals:....................................................................Selected Event Number,
Timestamp of Selected Event,
Cause of Selected Event,
64 Configurable FlexAnalog values
Commands: ...........................................................None (using existing Clear Event Recorder)
MOTOR START STATISTICS
Number of records:............................................5
Content:...................................................................Start Date/Time, Start Acceleration Time, Start Effective
Current, Start Peak Current
Number of records:............................................Non-volatile memory
MOTOR START RECORDS
Length:.....................................................................6 records, each containing a total of 60 seconds of motor
starting data
Trigger:.....................................................................Motor starting status
Trigger Position:...................................................1 second pre-trigger duration
Sample Rate:.........................................................1 sample/200 ms
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 1–19
Page 30

SPECIFICATIONS CHAPTER 1: INTRODUCTION
MOTOR LEARNED DATA
Number of records:............................................ 250
Content:................................................................... Learned/last acceleration time, learned/last starting current,
learned/last start TCU, learned average load, learned
average real power, learned average reactive power, learned
average power factor, average run time (days/hours/
minutes), maximum speed, analog input minimum/
maximum values, RTD maximum temperature
D
ata Storage: ....................................................... .LDR File, CSV Format
Learned acceleration time accuracy: ....... 3%
Learned starting current accuracy:...........1%
Learned average motor load accuracy:..1%
Learned average power accuracy:............1%
TRANSIENT RECORDER
Default AC Channels: ........................................ 8 currents + 4 voltages
Configurable Channels: ...................................16 analog and 32 digital channels
Sampling Rate:..................................................... 128/c, 64/c, 32/c, 16/c, 8/c
Trigger Source:..................................................... Any element pickup, dropout or operate, digital input or
output change of state, FlexLogic operand
Trigger Position:................................................... 0 to 100%
Storage Capability: ............................................Non-volatile memory
DATA LOGGER
Data Logger channels:..................................... 16
Data Logger Rate: ..............................................1 cycle, 1 sec., 30 sec., 1 min., 15 min., 30 min., 1 hour
Inputs: ......................................................................Any analog parameter from the list of available analog
parameters
Data Collection Mode:......................................Continuous, Triggered
Trigger Source:..................................................... Any digital flag from the list of digital flags
Trigger Position:................................................... 0 to 50% in steps of 1%
Channel 1(16) Mode:.......................................... Sample, Min, Max, Mean
EVENT RECORDER
Number of events:.............................................. 1024
Header:....................................................................relay name, order code, firmware revision
Content:................................................................... any element pickup, any element operate, digital input
change of state, digital output change of state, self-test
events
Data Storage: .......................................................non-volatile memory
Time-tag Accuracy:...........................................to one microsecond
LAST TRIP DATA
Number of Records: ..........................................1
Data Storage: .......................................................Non-volatile memory
Time-tag Accuracy:...........................................One microsecond
Actuals:....................................................................Event Number of Last Trip,
Timestamp of Last Trip,
Cause of Last Trip,
64 Configurable FlexAnalog values
Commands:...........................................................Clear Last Trip Data
1–20 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 31

CHAPTER 1: INTRODUCTION SPECIFICATIONS
User-Programmable Elements
FLEXLOGIC
Lines of code:........................................................1024
Supported operations: .....................................NOT, XOR, OR (2 to 16 inputs), AND (2 to 16 inputs), NOR (2 to
16 inputs), NAND (2 to 16 inputs), latch (reset-dominant),
edge detectors, timers
Inputs:.......................................................................any logical variable, contact, or virtual input
Number of timers:............................................... 32
Pickup delay: .........................................................0 to 60000 (ms, sec., min.) in steps of 1
Dropout delay:......................................................0 to 60000 (ms, sec., min.) in steps of 1
Timer accuracy:................................................... ±3% of delay setting or ±¼ cycle (whichever is greater) from
pickup to operate
FLEXELEMENTS
Number of elements: ........................................8
Operating signal:.................................................Any analog actual value, or two values in a differential mode
Operating signal mode: ...................................Signed, or Absolute value
Operating mode: .................................................Level, Delta
Comparison direction: ......................................Over, Under
Pickup Level:..........................................................-30.000 to 30.000 pu in steps of 0.001 pu
Hysteresis:..............................................................0.1 to 50.0% in steps of 0.1%
Delta dt: ...................................................................40 msec to 45 days
Pickup and dropout delays: ...........................0.000 to 6000.000 s in steps of 0.001 s
FLEXSTATES
Number of States:...............................................256 logical variables grouped under 16 Modbus addresses
Programmability: ................................................Any FlexLogic operand, any digital input , any virtual input,
any remote input
NON-VOLATILE LATCHES
Type:..........................................................................Set-dominant or Reset-dominant
Range: ......................................................................16 individually programmed
Output:.....................................................................Stored in non-volatile memory
Execution sequence: .........................................As input prior to protection, control and FlexLogic
FLEXCURVES
Number: ..................................................................4 (A through D)
Reset points:..........................................................40 (0.00 to 0.98 x pickup)
Operate points: ....................................................80 (1.03 to 20.0 x pickup)
Time delay:.............................................................0 to 200,000,000 ms in steps of 1 ms
Saturation level:...................................................20 times the pickup level
USER-PROGRAMMABLE LEDS
Number: ..................................................................12
Programmability: ................................................any logic variable, contact, or virtual input
Reset mode:........................................................... self-reset or latched
USER-PROGRAMMABLE PUSHBUTTONS
Number of pushbuttons:.................................3
Mode:........................................................................Self-reset, latched
Display message:................................................1 line of 25 characters maximum
Dropout timer:......................................................0.000 to 60.000 s in steps of 0.005
Auto-reset timer:.................................................0.2 to 600.0 s in steps of 0.1
Hold timer:..............................................................0.0 to 10.0 s in steps of 0.1
Timer accuracy:................................................... ±3% of delay setting or ±¼ cycle (whichever is greater) from
pickup to operate
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 1–21
Page 32

SPECIFICATIONS CHAPTER 1: INTRODUCTION
Metering
MOTOR
Motor Metered Values
Parameters:...........................................................Motor Load, Thermal Model Biased Load, Filtered Motor
Load, Filtered RMS Phase A, B, C Currents, Filtered Phasor
Magnitude Phase A, B, C Currents
RMS Accuracy: .....................................................± 0.25% of reading or ± 0.2% of rated (whichever is greater)
from 0.1 to 2.0 x CT
± 1% of reading > 2.0 x CT
Magnitude Accuracy:........................................± 0.5% of reading or ± 0.2% of rated (whichever is greater)
from 0.1 to 2.0 x CT
RMS PARAMETERS
Currents
Parameters:...........................................................Phase A, B, C, Neutral, Ground
Accuracy:................................................................ ± 0.25% of reading or ± 0.2% of rated (whichever is greater)
from 0.1 to 2.0 x CT
± 1% of reading > 2.0 x CT
Voltages
Parameters:...........................................................Wye VTs: A-n, B-n, C-n, A-B, B-C, C-A, Average Phase, Neutral
and Residual
Delta VTs: A-B, B-C, C-A, Neutral and Residual
Accuracy:................................................................ ± 0.5% of reading from 15 to 208 V
± 1% for open Delta connections
Real Power (Watts)
Range:......................................................................-214748364.8 kW to 214748364.7 kW
Parameters:...........................................................3-phase; per phase if VT is Wye
Accuracy:................................................................ ± 1.0% of reading or 0.2 kW (whichever is greater) at -0.8 <
PF ≤ -1.0 and 0.8 < PF < 1.0
Reactive Power (Vars)
Range:......................................................................-214748364.8 kvar to 214748364.7 kvar
Parameters:...........................................................3-phase; per phase if VT is Wye
Accuracy:................................................................ ± 1.0% of reading or 0.2 kvar (whichever is greater) at -0.2 <
PF ≤ 0.2
Apparent Power (VA)
Range:......................................................................0 kVA to 214748364.7 kVA
Parameters:...........................................................3-phase; per phase if VT is Wye
Accuracy:................................................................ ± 1.0% of reading or 0.2 kVA (whichever is greater)
Power Factor
Parameters:...........................................................3-phase; per phase if VT is Wye
Range:......................................................................0.01 Lag to 1.00 to 0.01 Lead
Accuracy:................................................................ ± 0.02 for 50 Hz and 60 Hz; ± 0.05 for 25 Hz
Watt-hours (positive and negative)
Range:......................................................................- 2147483.648 MWh to 2147483.647 MWh
Parameters:...........................................................3-phase only
Update Rate:.........................................................50 ms
Accuracy:................................................................± 2.0% of reading
Var-hours (positive and negative)
Range:......................................................................- 2147483.648 Mvarh to 2147483.647 Mvarh
Parameters:...........................................................3-phase only
Update Rate:.........................................................50 ms
Accuracy:................................................................± 2.0% of reading
1–22 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 33

CHAPTER 1: INTRODUCTION SPECIFICATIONS
PHASORS
Current
Parameters: ...........................................................Phase A, B, C, Neutral and Ground
Magnitude Accuracy: ........................................± 0.5% of reading or ± 0.2% of rated (whichever is greater)
from 0.1 to 2.0 x CT
± 1.0% of reading > 2.0 x CT
Angle Accuracy:...................................................2° (3° for 25 Hz)
For 50:0.025 CT between 0.5A to 15A:
CBCT Angle Accuracy:.......................................± 25°
Voltages
Parameters: ...........................................................Wye VTs: A-n, B-n, C-n, A-B, B-C, C-A, Average Phase, Neutral
and Residual;
Delta VTs: A-B, B-C, C-A, Neutral and Residual
Magnitude Accuracy: ........................................± 0.5% of reading from 15 to 208 V;
± 1% for open Delta connections;
± 10% for 25 Hz with 150 V <V < 208V
Angle Accuracy:...................................................0.5° (15 V <V < 208 V)
FREQUENCY
Range: ......................................................................2.000 to 90.000 Hz
Accuracy at:...........................................................V = 15 to 208 V: ± 0.01 Hz (input frequency 15 to 70 Hz);
I = 0.1 to 0.4 x CT: ± 0.020 Hz (input frequency 15 to 70 Hz);
I > 0.4 x CT: ± 0.01 Hz (input frequency 15 to 70 Hz)
CURRENT AND VOLTAGE HARMONICS
Parameters: ...........................................................Magnitude of each harmonic and THD
Range: ......................................................................2
nd
to 25th harmonic: per-phase displayed as % of f1
fundamental frequency
THD: per-phase displayed as % of f
1
DEMAND
Measured Values: ...............................................Phase A/B/C present and maximum current
Measurement Type:...........................................Thermal Exponential, 90% response time (programmed): 5,
10, 15, 20, 30 minutes
Block Interval / Rolling Demand, time interval (programmed):
5, 10, 15, 20, 30 minutes
Current Pickup Level:.........................................10 to 10000 in steps of 1 A
Dropout Level: ......................................................96-98% of Pickup level
Level Accuracy:....................................................± 2%
FASTPATH:
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 1–23
Factory tested at 25°C
Page 34

SPECIFICATIONS CHAPTER 1: INTRODUCTION
Inputs
AC CURRENTS
CT Rated Primary:...............................................1 to 12000 A
CT Rated Secondary:......................................... 1 A or 5 A based on relay ordering
Burden:.................................................................... < 0.2 VA at rated secondary
Conversion Range:.............................................Standard CT: 0.02 to 46 x CT rating RMS symmetrical
CBCT (50:0.025): 0 to 15 A
Short Term CT Withstand: ..............................1 second at 100 x rated current
2 seconds at 40 x rated current
continuous 3 x rated current
CBCT (50:0.025) Withstand:............................continuous 150 mA
AC VOLTAGE
VT Range: ...............................................................10 to 260 V
Nominal Frequency:..........................................20 to 65 Hz
Burden:.................................................................... <0.25 VA at 120 V
Conversion Range:.............................................1 to 275 V
Voltage Withstand: ............................................ continuous at 260 V to neutral
1 min/hr at 420 V to neutral
ANALOG INPUTS
Current Input (mA DC):......................................0 to 1mA, 0 to 5mA, 0 to 10mA, 0 to 20mA, 4 to 20mA
(configurable)
Input Impedance: ...............................................375 Ω ± 10%
Conversion range:..............................................0 to +21 mA DC
Accuracy:................................................................± 1% of full scale,
Type: .........................................................................Passive
Analog Input Supply:.........................................+24 V DC at 100 mA max.
Sampling Interval: ..............................................Typically 500 ms
FREQUENCY
Nominal frequency setting: ...........................50 Hz, 60 Hz
Sampling frequency:.........................................64 samples per power cycle
128 samples per power cycle (available for transient
recorder
Tracking frequency range:.............................3 to 72 Hz
ARC FLASH SENSOR/FIBER
Number of Point Sensors:...............................4
Detection Radius: ...............................................180 degree
Maximum Fiber Length (Point Sensor):.....18 ft
Fiber Size: ...............................................................1000 um
Mode:........................................................................ Multi-mode
Connector: .............................................................Small Media Interface (SMI)
Fiber Type:.............................................................. Plastic Optical Fiber
Bend Radius:.........................................................>25 mm
CONTACT INPUTS
Number of Inputs: ..............................................Based on relay ordering
Type: .........................................................................Wet or Dry
Wet Contacts:....................................................... 300 V DC maximum
Selectable thresholds:......................................17, 33, 84, 166 VDC
Tolerance:............................................................... ±20%
Recognition time:................................................ 1 ms (typical)
Debounce time: ................................................... 0.0 to 16.0 ms in steps of 0.5 ms
Continuous current draw (burden):............2 mA
1–24 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 35

CHAPTER 1: INTRODUCTION SPECIFICATIONS
CLOCK
Setup:........................................................................Date and Time, Daylight Saving Time, UTC (Coordinated
Universal Time)
Backup Retention: ..............................................1 hour
IRIG-B INPUT
Auto-detect: ..........................................................DC and AM
Amplitude Modulation:.....................................1 V to 10 V pk-to-pk
DC Shift:...................................................................TTL
Input Impedance:................................................40 kΩ
Isolation:..................................................................2 kV
RTD INPUTS
Types (3-wire):.......................................................100 Ω Platinum, 120 Ω Nickel, 100 Ω Nickel, 10 Ω Copper
Sensing current:...................................................5 mA
Range: ......................................................................–40 to +250°C (-40 to +482°F)
Accuracy:................................................................±2°C (±4°F)
Isolation:..................................................................36 V pk-pk (a group of RTDs to ground)
Lead Resistance: .................................................25 Ohms max. per lead for platinum or nickel and 3 Ohms
max. per lead for copper RTDs
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 1–25
Page 36

SPECIFICATIONS CHAPTER 1: INTRODUCTION
Outputs
ANALOG OUTPUTS
Range (configurable):........................................ 0 to 1mA, 0 to 5mA, 0 to 10mA, 0 to 20mA, 4 to 20mA
Max. load resistance:........................................10 kΩ @ 1 mA,
600 Ω @ 20 mA
Accuracy:................................................................± 1% of full scale
Isolation: ................................................................. 500V DC for one minute (functional isolation between analog
inputs and output group; and each group of chassis)
Driving Signal: ......................................................any Analog quantity
Sampling Interval: ..............................................Typically 500 ms
Upper and lower limit
(for the driving signal): ...............................-90 to 90 pu in steps of 0.001
TRIP/CLOSE OUTPUT RELAYS
(Relays #1 and #2 from Slot F, Relays #9 and
Type: .........................................................................FORM-A
Configuration: ......................................................2 (two) electromechanical
Contact material:................................................silver-alloy
Operate time:........................................................ <8 ms
Continuous current:........................................... 10 A
Make and carry for 0.2s:.................................. 30 A per ANSI C37.90
Break (DC inductive, L/R=40 ms):................. 24 V / 1 A
48 V / 0.5 A
125 V / 0.3 A
250 V / 0.2 A
Break (DC resistive): ...........................................24 V / 10 A
48 V / 6 A
125 V / 0.5 A
250 V / 0.3 A
Break (AC inductive):.......................................... 720 VA @ 250 VAC Pilot duty A300
Break (AC resistive):............................................ 277 VAC / 10 A
Operation Mode: ................................................. Self-Reset, Latched, Pulsed, Non-Failsafe, Failsafe
FORM-A VOLTAGE MONITOR
Applicable voltage: ............................................20 to 250 VDC
Trickle current: .....................................................1 to 2.5 mA
Timer acurracy:...................................................± 3% of operate time or ± 1/4 cycle (whichever is greater)
#10 from Slot G)
1–26 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 37

CHAPTER 1: INTRODUCTION SPECIFICATIONS
AUXILIARY OUTPUT RELAYS
(Relays #3, #4 and the Critical Failure Relay from Slot F, and Relays #11, #12 and #16 from
ot G)
Sl
Type:..........................................................................FORM-C
Configuration:.......................................................electromechanical
Contact material: ................................................silver-alloy
Operate time:........................................................<8 ms
Continuous current:...........................................10 A
Make and carry for 0.2s:..................................30 A per ANSI C37.90
Break (DC inductive, L/R=40 ms):.................24 V / 1 A
48 V / 0.5 A
125 V / 0.3 A
250 V / 0.2 A
Break (DC resistive):............................................24 V / 10 A
48 V / 6 A
125 V / 0.5 A
250 V / 0.3 A
Break (AC inductive):..........................................720 VA @ 250 VAC Pilot duty A300
Break (AC resistive):............................................277 VAC / 10 A
Operation Mode:..................................................Self-Reset, Latched, Pulsed, Non-Failsafe, Failsafe
Breaking Capacity: .............................................For Form-C relays the following ratings are applied to meet
UL508 requirements: 1 second “ON”/10 seconds “OFF” per
output relay at maximum rating
FASTPATH:
For 2 IO_A module configuration the following ratings are applied to meet UL508
requirements: 1 second “on”/ 10 seconds “off” per output relay at max rating.
PULSED OUTPUTS
Mode:........................................................................3-phase positive and negative active energy measurement,
Principle:..................................................................Pulsed output is energized for one second and then de-
Power Supply
POWER SUPPLY
Nominal DC Voltage: .........................................125 to 250 V
Minimum DC Voltage: .......................................88 V
Maximum DC Voltage:......................................300 V
Nominal AC Voltage:..........................................100 to 240 V at 50/60 Hz
Minimum AC Voltage:........................................88 V at 50 to 60 Hz
Maximum AC Voltage: ......................................265 V at 50 to 60 Hz
Voltage loss ride through:...............................20 ms duration
POWER SUPPLY (FOR “L” DC ONLY OPTION)
Nominal DC Voltage: .........................................24 V to 48 V
Minimum DC Voltage: .......................................20 V
Maximum DC Voltage:......................................60 V
POWER CONSUMPTION
Typical:.....................................................................20 W / 40 VA
Maximum:...............................................................34 W / 70 VA
3-phase positive and negative reactive energy
measurements
energized for one second after the programed energy
increment.
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 1–27
Page 38

SPECIFICATIONS CHAPTER 1: INTRODUCTION
Communications
ETHERNET – BASE OFFERING
Modes: .....................................................................10/100 Mbps
One Port:.................................................................RJ45
Protocol:..................................................................Modbus TCP
ETHERNET – CARD OPTION “C” - 2X COPPER (RJ45) PORTS
Modes: .....................................................................10/100 MB
Two Ports:............................................................... RJ45 (with this option both enabled ports are on the
communications card; the Ethernet port located on the base
CPU is disabled)
Protocols:................................................................ Modbus TCP, DNP3.0, IEC60870-5-104, IEC 61850, IEC 61850
GOOSE, IEEE 1588, SNTP, IEC 62439-3 clause 4 (PRP)
ETHERNET – CARD OPTION “S” - 2X ST FIBER PORTS
Modes: .....................................................................100 MB
Two Ports:............................................................... ST (with this option both enabled ports are on the
communications card; the Ethernet port located on the base
CPU is disabled)
Protocols:................................................................ Modbus TCP, DNP3.0, IEC60870-5-104, IEC 61850, IEC 61850
GOOSE, IEEE 1588, SNTP, IEC 62439-3 clause 4 (PRP)
Wavelength:..........................................................1310nm
Typical link distance:.........................................4 km
USB
Standard specification:....................................Compliant with USB 2.0
Protocols:................................................................ Modbus TCP, TFTP
SERIAL
RS485 port: ............................................................ Isolated
Baud rates: ............................................................Supports 9600, 19200, 38400, 57600, and 115200 kbps
Response time: ....................................................10 ms typical
Parity: .......................................................................None, Odd, Even
Protocol:..................................................................Modbus RTU, DNP 3.0, IEC 60870-5-103
Maximum distance:...........................................1200 m (4000 feet)
Isolation: .................................................................2 kV
WIFI
Standard specification:....................................IEEE802.11bgn
Range:......................................................................30 ft (direct line of sight)
REMOTE MODBUS DEVICE PROFILE
Device Name: ....................................................... BSG3 (13 alphanumeric characters maximum)
IP Address: .............................................................0.0.0.0 – standard Ethernet address
Slave Address:......................................................254 (1 to 254)
Modbus Port:......................................................... 502 (0 to 10000, default 502)
Poll Rate: ................................................................. 3 minute (OFF, 3 to 120 minutes), the continuous mode poll
interval is defined as the poll rate interval
Trigger:..................................................................... Off (any FlexLogic Operand), the trigger mode is based on
the FlexLogic operand designed to trigger the poll
Testing & Certification
APPROVALS
Applicable Council Directive According to
1–28 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 39

CHAPTER 1: INTRODUCTION SPECIFICATIONS
CE compliance Low voltage directive EN60255-27
EMC Directive EN60255-26
R&TTE Directive ETSI EN300 328 ETSI EN301 489-1 ETSI
North America cULus UL508, e57838 NKCR, NRGU
ISO Manufactured under a registered
TESTING AND CERTIFICATION
Test Reference Standard Test Level
Dielectric voltage withstand EN60255-5/IEC60255-27 2.3 kV
Impulse voltage withstand EN60255-5/IEC60255-27 5 kV
Insulation resistance IEC60255-27 500 VDC
Damped Oscillatory IEC61000-4-18 2.5 kV CM, 1 kV DM, 1 MHz
Electrostatic Discharge EN61000-4-2 Level 4
RF immunity EN61000-4-3 Level 3
Fast Transient Disturbance EN61000-4-4 Class A and B
Surge Immunity EN61000-4-5 Level 3
Conducted RF Immunity EN61000-4-6 Level 3
Power Frequency Immunity IEC60255-26 Class A & B
Voltage variation, interruption and
Ripple DC
Radiated & Conducted Emissions CISPR11 /CISPR22 Class A
Sinusoidal Vibration IEC60255-21-1 Class 1
Shock & Bump IEC60255-21-2 Class 1
Seismic IEC60255-21-3 Class 2
Power magnetic Immunity IEC61000-4-8 Level 5
Pulse Magnetic Immunity IEC61000-4-9 Level 4
Damped Magnetic Immunity IEC61000-4-10 Level 4
Voltage Dip & interruption IEC61000-4-11 0, 40, 70, 80% dips,
Harmonic Immunity IEC61000-4-13 Class 3
Conducted RF Immunity 0-150kHz IEC61000-4-16 Level 4
Ingress Protection IEC60529 IP54 front
Environmental (Cold) IEC60068-2-1 -40C 16 hrs
Environmental (Dry heat) IEC60068-2-2 85C 16hrs
Relative Humidity Cyclic IEC60068-2-30 6 day humidity variant 2
EFT IEEE/ANSI C37.90.1 4kV, 5 kHz
Damped Oscillatory IEEE/ANSI C37.90.1 2.5 kV, 1 MHz
Dielectric Between contacts IEEE C37.90 1500Vrms
Make and Carry IEEE C37.90 30A /200 ops
Electrostatic Discharge (ESD) IEEE/ANSI C37.90.3 8kV CD/ 15 kV AD
Product Safety IEC60255-27 As per Normative sections
Rated Burden, IEC60255-1 Sec 6.10
Contact Performance IEC60255-1 Sec 6.11
quality program
IEC60255-26 PQT levels based on
EN301-489-17
C22.2.No 14, e57838 NKCR7, NRGU7
ISO9001
IEC61000-4-29,
IEC61000-4-11 and
IEC61000-4-17
250/300 cycle interrupts
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 1–29
Page 40

CAUTIONS AND WARNINGS CHAPTER 1: INTRODUCTION
Physical
DIMENSIONS
Size: ........................................................................... Refer to Chapter 2
Weight: .................................................................... 9 kg [20.0 lbs]
Environmental
Ambient temperatures:
Storage/Shipping: -40°C to 85°C
Operating: -40°C to 60°C
Humidity: Operating up to 95% (non condensing) @ 55°C (As per
Altitude: 2000m (standard base reference evaluated altitude)
Pollution Degree: II
Overvoltage Category: II
Ingress Protection: IP54 Front
Insulation Class: 1
Noise: 0 dB
IEC60068-2-30 Variant 2, 6 days)
5000m (maximum achievable altitude)
DANGER:
IMPORTANT:
CAUTION:
FASTPATH:
Cautions and Warnings
Before attempting to install or use the device, review all safety indicators in this document
to help prevent injury, equipment damage, or downtime.
Safety words and definitions
The following symbols used in this document indicate the following conditions
Indicates a hazardous situation which, if not avoided, will result in death or serious
injury.
Indicates a hazardous situation which, if not avoided, could result in death or serious
injury.
Indicates a hazardous situation which, if not avoided, could result in minor or
moderate injury.
Indicates practices not related to personal injury.
1–30 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 41

CHAPTER 1: INTRODUCTION CAUTIONS AND WARNINGS
General Cautions and Warnings
The following general safety precautions and warnings apply.
CAUTION:
Before attempting to use the equipment, it is important that all danger and caution
indicators are reviewed.
If the equipment is used in a manner not specified by the manufacturer or functions
abnormally, proceed with caution. Otherwise, the protection provided by the
equipment may be impaired and can result in impaired operation and injury.
CAUTION:
CAUTION:
Hazardous voltages can cause shock, burns or death.
Installation/service personnel must be familiar with general device test practices,
electrical awareness and safety precautions must be followed.
Before performing visual inspections, tests, or periodic maintenance on this device or
associated circuits, isolate or disconnect all hazardous live circuits and sources of
electric power.
Failure to shut equipment off prior to removing the power connections could expose
you to dangerous voltages causing injury or death.
Ensure that all connections to the product are correct so as to avoid accidental risk of
shock and/or fire, for example from high voltage connected to low voltage terminals.
Follow the requirements of this manual, including adequate wiring size and type,
terminal torque settings, voltage, current magnitudes applied, and adequate isolation/
clearance in external wiring from high to low voltage circuits.
Use the device only for its intended purpose and application.
Ensure that all ground paths are un-compromised for safety purposes during device
operation and service.
All recommended equipment that should be grounded and must have a reliable and
un-compromised grounding path for safety purposes, protection against
electromagnetic interference and proper device operation.
Equipment grounds should be bonded together and connected to the facility’s main
ground system for primary power.
Keep all ground leads as short as possible.
In addition to the safety precautions mentioned all electrical connections made must
respect the applicable local jurisdiction electrical code.
It is recommended that a field external switch, circuit breaker be connected near the
equipment as a means of power disconnect. The external switch or circuit breaker is
selected in accordance with the power rating.
This product itself is not Personal Protective Equipment (PPE). However, it can be used
in the computation of site specific Arc Flash analysis when the arc flash option is
ordered. If a new appropriate Hazard Reduction Category code for the installation is
determined, user should follow the cautions mentioned in the arc flash installation
section.
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 1–31
Page 42

CAUTIONS AND WARNINGS CHAPTER 1: INTRODUCTION
follow the cautions mentioned in the arc flash installation section.If a new appropriate Har
The critical fail relay must be connected to annunciate the status of the device when
the Arc Flash option is ordered.
Ensure that the control power applied to the device, the AC current, and voltage input
match the ratings specified on the relay nameplate. Do not apply current or voltage in
excess of the specified limits.
Only qualified personnel are to operate the device. Such personnel must be thoroughly
familiar with all safety cautions and warnings in this manual and with applicable
country, regional, utility, and plant safety regulations.
Hazardous voltages can exist in the power supply and at the device connection to
current transformers, voltage transformers, control, and test circuit terminals. Make
sure all sources of such voltages are isolated prior to attempting work on the device.
Hazardous voltages can exist when opening the secondary circuits of live current
transformers. Make sure that current transformer secondary circuits are shorted out
before making or removing any connection to the current transformer (CT) input
terminals of the device.
For tests with secondary test equipment , ensure that no other sources of voltages or
currents are connected to such equipment and that trip and close commands to the
circuit breakers or other switching apparatus are isolated, unless this is required by
the test procedure and is specified by appropriate utility/plant procedure.
When the device is used to control primary equipment, such as circuit breakers,
isolators, and other switching apparatus, all control circuits from the device to the
primary equipment must be isolated while personnel are working on or around this
primary equipment to prevent any inadvertent command from this device.
CAUTION:
FASTPATH:
FASTPATH:
Use an external disconnect to isolate the mains voltage supply.
LED transmitters are classified as IEC 60825-1 Accessible Emission Limit (AEL) Class
1M. Class 1M devices are considered safe to the unaided eye. Do not view directly with
optical instruments.
To ensure the settings file inside the relay is updated, wait 30 seconds after a setpoint
change before cycling power.
This product is rated to Class A emissions levels and is to be used in Utility, Substation
Industrial environments. Not to be used near electronic devices rated for Class B levels.
1–32 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 43

CHAPTER 1: INTRODUCTION MUST-READ INFORMATION
Must-read Information
The following general statements apply and are repeated in the relevant sections of the
manual.
FASTPATH:
• WiFi and USB do not currently support CyberSentry security. For this reason WiFi is
disabled by default if the CyberSentry option is purchased. The user can enable WiFi,
but be aware that doing so violates the security and compliance model that
CyberSentry is supposed to provide.
• Before upgrading firmware, it is very important to save the current 869 settings to a
ile on your PC. After the firmware has been upgraded, it is necessary to load this file
f
back into the 869.
• The SNTP, IRIG-B and PTP settings take effect after rebooting the relay.
• Commands may be issued freely through other
protocols than Modbus (i.e., DNP, IEC
104, and, IEC 61850) without user authentication or encryption of data taking place,
even if the relay has the advanced security feature enabled.
• Note that the factory role password may not be changed.
• In 869 both DNP and IEC104 protocol can work at
the same time, but the user has to
consider that there is only one point map. So, both protocols use the same configured
points.
• The 52b contact is closed when the breaker i
s open and open when the breaker is
closed.
• The Phase Directional element responds to the forward load current. In the case of a
ing reverse fault, the element needs some time – in the order of 8 ms – to
follow
change the directional signal. Some protection elements such as Instantaneous
Overcurrent may respond to reverse faults before the directional signal has changed.
A coordination time of at least 10 ms must therefore be added to all the instantaneous
protection elements under the supervision of the Phase Directional element . If current
reversal is a concern, a longer delay – in the order of 20 ms – is needed.
• The same curves used for the time overcurrent elements are used for Neutral
Disp
lacement. When using the curve to determine the operating time of the Neutral
Displacement element, substitute the ratio of neutral voltage to Pickup level for the
current ratio shown on the horizontal axis of the curve plot.
• If the 3-phase VT uses a delta connection and FREQUENCY INPUT is set to J2-3VT, the
posit
ive sequence voltage is used as the supervision voltage. In such condition, the
true supervision level is internally changed to 1/sqrt(3) of the user setting since the
base of VT here is the phase-phase voltage.
• To monitor the trip coil circuit integrity, use the relay terminals “FA_1 NO” and “FA_1
OM” to connect the Trip coil, and provide a jumper between terminals “FA_1 COM”
C
and “FA_1 OPT/V” voltage monitor).
• In Power factor monitoring, SWITCH-IN and SWITCH-OUT are mutually exclusive
settings.
• The relay is not approved as, or intended to be, a revenue metering instrument. If used
in a peak load contr
ol system, the user must consider the accuracy rating and method
of measurement employed, and the source VTs and CTs, in comparison with the
electrical utility revenue metering system.
• In bulk oil circuit breakers, the interrupting time for currents is less than 25% of the
errupting rating and can be significantly longer than the normal interrupting time.
int
• For future reference, the user is advised to take a printout of the conversion report
imm
ediately after the conversion. All conversion reports are removed and become
inaccessible if the user closes or re-launches the 8 Series Setup software.
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 1–33
Page 44

FOR FURTHER ASSISTANCE CHAPTER 1: INTRODUCTION
Storage
Store the unit indoors in a cool, dry place. If possible, store in the original packaging. Follow
the storage temperature range outlined in the Specifications.
Use the factory-provided dust caps on all Arc Flash sensor fiber and connectors when not
in use, t
o avoid dust contamination in the transceiver and sensor plugs.
For Further Assistance
For product support, contact the information and call center as follows:
GE Grid Solutions
650 Markland Street
Markham, Ontario
Canada L6C 0M1
Worldwide telephone: +1 905 927 7070
Europe/Middle East/Africa telephone: +34 94 485 88 54
North America toll-free: 1 800 547 8629
Fax: +1 905 927 5098
Worldwide e-mail:
Europe e-mail: multilin.tech.euro@ge.com
Website: http://www.gegridsolutions.com/multilin/
multilin.tech@ge.com
Repairs
The firmware and software can be upgraded without return of the device to the factory.
For issues not solved by troubleshooting, the process to return the device to the factory for
r
epair is as follows:
• Contact a GE Grid Solutions Technical Suppor
the first chapter.
• Obtain a Return Materials Authorization (RMA) number fr
Center.
• Verify that the RMA and Commercial Invoice received have the correct information.
• Tightly pack the unit in a box with bubble wrap, foam material, or styrofoam inserts or
packaging pea
you place the box in a larger box that contains at least 5 cm of cushioning material.
• Ship the unit by courier or freight forwarder, along with the Commercial Invoice and
, to the factory.
RMA
• Customers are responsible for shipping costs to the factory, regardless of whether the
unit is under w
• Fax a copy of the shipping information to the GE Grid Solutions service department .
Use the detailed return procedure outlined at
https://www.gegridsolutions.com/multilin/support/ret_proc.htm
The current warranty and return information are outlined at
https://www.gegridsolutions.com/multilin/warranty.htm
nuts to cushion the item(s). You may also use double boxing whereby
arranty.
t Center. Contact information is found in
om the Technical Support
1–34 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 45

GE
LISTED
C
US
L
U
E57838
IND. CONT. EQ.
2D58
R
MADE IN
CANADA
0RWRU Protection System
Model: 8-EP5NNG5HNNANNGSSBSNNNB
Serial Number: MJAXXXXXXX
POWER SUPPLY RATINGS:
Nominal: 100 to 240V 125 to 250V
Range: 88 to 265V (50/60Hz) 88 to 300V
Power Consumption: 20W Typ, 34W/70VA Max
Input /Output Ratings: Refer to Manual
Instruction Manual: GEK-1196
Pollution Degree 2 / Degré de pollution 2
Technical Support:
Worldwide: +1 905 927 7070
North America: 1 800 547 8629
www.gegridsolutions.com/multilin/
650 Markland Street, Markham
ON, Canada L6C 0M1
MFG. Date: Mar. 11, 2016
g
~
~
Multilin 8
g
!&%%+
!&%%
Grid Solutions
869 Motor Protection System
Chapter 2: Installation
Mechanical Installation
Installation
This section describes the mechanical installation of the system, including dimensions for
mounting and information on module withdrawal and insertion.
Product Identification
The product identification label is located on the side panel of the 869. This label indicates
the product model, serial number, and date of manufacture.
Figure 2-1: Product Label
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 2–1
Page 46

MECHANICAL INSTALLATION CHAPTER 2: INSTALLATION
>@
>@
>@
>@
>@
>@
Dimensions
The dimensions (in inches [millimeters]) of the 869 are shown below. Additional dimensions
for mounting, and panel cutouts, are shown in the following sections.
Figure 2-2: 869 Dimensions
2–2 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 47

CHAPTER 2: INSTALLATION MECHANICAL INSTALLATION
Needle nose pliers
Mounting
The unit can be mounted two ways: standard panel mount or optional tab mounting, if
required.
• S
tandard panel mounting:
From the front of the panel, slide the empty case into the cutout . From the rear of the
panel, sc
panel mount section).
• Option
The “V” tabs are located on the sides of the case and appear as shown in the
follow
about 90°. Use caution and do not bend and distort the wall of the enclosure adjacent
to the tabs. The relay can now be inserted and can be panel wired.
Figure 2-3: “V” Tabs Located on Case Side
rew the case into the panel at the 8 screw positions (see figures in Standard
al tab mounting:
ing figure. Use needle nose pliers to bend the retaining "V" tabs outward to
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 2–3
Page 48

MECHANICAL INSTALLATION CHAPTER 2: INSTALLATION
Standard Panel Mount
CAUTION:
The standard panel mount and cutout dimensions are illustrated below.
To avoid the potential for personal injury due to f ire hazards, ensure the unit is
mounted in a safe location and/or within an appropriate enclosure.
Figure 2-4: Standard panel mount
Figure 2-5: Panel cutout dimensions
2–4 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 49

CHAPTER 2: INSTALLATION MECHANICAL INSTALLATION
67(3
6&$/(
67(3
+$1'/(72%(/,)7('72
326,7,21:+,/(6/,',1*
'5$:28781,7,172
&$37,9(81,7
67(3
0$,17$,1+$1'/(/,)7('326,7,21
817,/'5$:28781,7
,6)8//<,16(57('
386++$1'/('2:1
$1'7,*+7(17+(6&5(:
:,7+,1/%72548(
+$1'/(6+28/'%()/86+
:,7+)52173$1(/685)$&(
Draw-out Unit Withdrawal and Insertion
Unit withdrawal and insertion may only be performed when control power has been
removed from the unit.
FASTPATH:
Turn off control power before drawing out or re-inserting the relay to prevent maloperation.
Follow the steps outlined in the diagrams below to insert and withdraw the Draw-out unit.
Figure 2-6: Unit withdrawal and insertion diagram
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 2–5
Page 50

MECHANICAL INSTALLATION CHAPTER 2: INSTALLATION
Removable Power Supply
Follow the steps outlined in the Insert or Remove Power Supply diagram to insert (#1) or
remove (#2) the power supply from the unit.
Figure 2-7: Insert or Remove the Power Supply
Figure 2-8: Unlatch Module (location is marked by arrow)
2–6 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 51

CHAPTER 2: INSTALLATION MECHANICAL INSTALLATION
Removable Magnetic Module
Follow the steps outlined in the diagram below to insert or remove the magnetic module
from the unit.
Figure 2-9: Insert or Remove the Magnetic Module
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 2–7
Page 52

MECHANICAL INSTALLATION CHAPTER 2: INSTALLATION
Arc Flash Sensor
The Arc Flash sensor houses the fiber optics and metal membrane that are used to detect
the arc flash. Two mounting screw holes are provided to affix the sensors to the panel.
CAUTION:
Sensor Fiber Handling
& Storage
CAUTION:
If the 8 Series is used in the computation for reducing the Hazard Reduction Category
code, operands for sensor failures must be assigned to an auxiliary output relay which
must be connected into the control logic of the breaker equipment to ensure safe
operations when the output relay is asserted. In the event of this assertion, the Hazard
Reduction Category code cannot be maintained unless backup protection is continuing
to maintain it.
Arc Flash sensor fiber is pressure sensitive and must be handled carefully to avoid
damage. Read the following guidelines fully before proceeding.
Care must be taken when handling the Arc Flash sensor fiber, which can be damaged if
twisted, bent, or clamped tightly during installation.
• Do not bend sensor fiber sharply, or with a radius of less than 25 mm (1 inch). Sharp
bends can dam
age the fiber. Do not pull or tug loops of sensor fiber, as sharp bends
may result.
• Do not clamp sensor fiber tightly during installation. Sensor fiber should be held in
pl
ace loosely for the best long-term performance. Avoid over-tightening ties which
may deform or break the sensor fiber.
• Do not pull or tug sensor fiber with force, as this may cause internal damage or
separat
e the fiber from the cable connector.
• Do not twist the sensor fiber, as twisting can damage the fiber resulting in
andard performance.
subst
• Do not attach sensor fiber directly to the bus.
• Avoid surface temperatures above 70 °C or 158 °F to prolong the life of the fiber.
• Secure all sensor fibers (loosely but securely) away from any moving parts.
• Use the factory-provided dust caps on all Arc Flash sensor fiber and connectors when
not in use,
to avoid dust contamination in the transceiver and sensor plugs.
Sensor Installation
FASTPATH:
2–8 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Figure 2-10: AF Sensor - front, side and top view
Review the sensor fiber handling guidelines above.
Page 53

CHAPTER 2: INSTALLATION ELECTRICAL INSTALLATION
Sensor fiber should be held in place loosely for the best long-term performance. Avoid
over-tightening ties which may deform or break the sensor fiber.
Before installing the AF sensor unit, ensure that all other drilling and installation is
complete to minimize possible damage to the sensitive unit .
To install the AF sensor and route the sensor fiber, follow these steps:
1. Choose a location for the sensor clear of any obstructions that could shield the sensor
from arc flash light.
2. Mount the sensor securely, using the mounting screw holes.
3. Once the sensor is securely mounted, carefully route the sensor fiber from the AFS
sensor to the base unit, minimizing loops and curves for the strongest possible signal.
4. Secure all sensor fibers (loosely but securely) away from any moving parts.
FASTPATH:
Both the AF sensor connections (CH 1 through CH 4) and the sensor cables are shipped
with dust caps in place to avoid dust contamination. The small rubber dust caps must
be removed before operation.
Electrical Installation
Typical Wiring Diagram
The following illustrates the electrical wiring of the Draw-out unit.
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 2–9
Page 54

ELECTRICAL INSTALLATION CHAPTER 2: INSTALLATION
&211(&7,21
:<(97
',5(&7,212)32:(5)/2:)25326,7,9(:$776
326,7,9(',5(&7,212)/$**,1*9$56
0RWRU3URWHFWLRQ6\VWHP
&&
&217
&2,/
6723
67$57
&217$&725$33/,&$7,21
7(50,1$/6,'(&7V
7\SLFDODX[LOLDU\
FRQWDFWVFRQQHFWLRQ
E
D
%5($.(5$33/,&$7,21
&/26(
&2,/
75,3
&2,/
E
D
67$57
%5($.(5
3KDVH&
3KDVH%
3KDVH$
02725
,16758&7,21
0$18$/
,1387:,5,1*,1
6((*5281'
6723
9
)
&20021
',*,7$/,1387
',*,7$/,1387
',*,7$/,1387
',*,7$/,1387
',*,7$/,1387
',*,7$/,1387
',*,7$/,1387
)
)
)
)
)
)
)
)
6/27'
6/27(
G1
G2 G3 G4 G5 G6 G7 G8 G9
G10G11 G12
G13
G14 G15
G16 G17
G18 G19
G20 G21 G22 G23 G24
'&P$,2
$1$/2*287387
$1$/2*,1387
57'
SHIELD
SHIELD
SHIELD
RETURN
HOT
COMP
RESERVED
RESERVED
RETURN
RETURN
$0%,(17
7(03(5$785(
RESERVED
RESER
VED
RESERVED
+
',*,7$/,1387
',*,7$/,1387
',*,7$/,1387
',*,7$/,1387
',*,7$/,1387
',*,7$/,1387
',*,7$/,1387
+
+
+
+
+
+
+
+
9
+
&20021
',*,7$/,1387
+
+
',*,7$/,1387
',*,7$/,1387
6/27*,2B/237,21$/
&+
&+
&+
&+
),%(5,1387
),%(5,1387
),%(5,1387
),%(5,1387
&
&
&
&
&
&
&
&
&
&
&
&
&
&
&
&
&
&
6+,(/'
5(7851
&203
+27
&203
+27
5(7851
&203
+27
+27
5(6(59('
6+,(/'
&203
5(7851
&203
+27
&203
+27
57'
57'
57'
57'
57'
57'
57'
57'
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
6+,(/'
5(7851
&203
+27
&203
+27
5(7851
&203
+27
+27
5(6(59('
6+,(/'
&203
5(7851
&203
+27
&203
+27
57'
57'
57'
57'
57'
57'
57'
57'
57'
6/27%25&,2B525,2B6237,21$/
683325762+0&233(557'$6:(//
&855(17,13876
6/27-
6/27.
9
*+
&20021
',*,7$/,1387
',*,7$/,1387
',*,7$/,1387
',*,7$/,1387
',*,7$/,1387
',*,7$/,1387
',*,7$/,1387
*+
*+
*+
*+
*+
*+
*+
*+
6/27*25+,2B$237,21$/
$1<0($685('
250(7(5('
$1$/2*3$5$0(7(5
2873876
6/27+,2B$,6$9$,/$%/(:+(16/27*,6:,7+,2B/
$1<0($685('25
0(7(5('$1$/2*3$5$0(7(5
,13876
&$%/(6+,(/'72%(*5281'('
$73/&&20387(5(1'21/<
1(875$/6,'(&7V
$SGI
Figure 2-11: Typical wiring diagram
FASTPATH:
2–10 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
The TRIP output relay mode depends on the Breaker/Contactor selection. If the selection is
“Breaker” the relay is in a non-failsafe mode, if the selection is “Contactor” the relay is in a
failsafe mode.
Page 55

CHAPTER 2: INSTALLATION ELECTRICAL INSTALLATION
89$1.cdr
J1 J2 J3 J4 J5 J6 J7 J8
F13
F14
F15
F16
F17
F18
F19
F20
DIGITAL INPUTS
DIGITAL INPUT 1
DIGITAL INPUT 2
DIGITAL INPUT 3
DIGITAL INPUT 4
DIGITAL INPUT 5
DIGITAL INPUT 6
DIGITAL INPUT 7
COMMON
CURRENT INPUTS
SLOT F: I/O_A
SLOT J
PHASE A PHASE B PHASE C GROUND
I
B
N
ICI
G
I
A
NN
SEE GROUND
INPUT WIRING IN
INSTRUCTION MANUAL
N
F21 +24 V
MOTOR
Phase A
Phase B
Phase C
MAIN
CONTACTOR
CONTACTOR APPLICATION
WITH WYE- DELTA OPEN
TRANSITION STARTER OPTION
TRIP
CLOSE/ AUX
START INHIBIT
AUXILIARY
CRITICAL
FAILURE
RELAY
F3
F4
F5
F6
F7
F8
F9
F10
F11
F12
F22
F23
F24
V
V
OUTP UT R EL AY S
F1
F2
WYE
CONTACTOR
(52)
DELTA CONTACTOR
52a
52b
Typical auxiliary
contacts connection
START
STOP
CONT
COIL
CC
+
DC
WC
WYE
COIL
DELTA
COIL
-
MAIN
TERMINAL SIDE CTs
869
89$1.cdr
J1 J2 J3 J4 J5 J6 J7 J8
CURRENT INPUTS
SLOT J
PHASE A PHASE B PHASE C
GROUND
I
B
N
I
CIG
I
A
NN
TERMINAL SIDE CTs
N
Phase A
Phase B
Phase C
SWITCHING
DEVICE (52)
MOTOR
TERMINAL SIDE CTs
H
H
H
L
L
L
Notes: Speed 1 = L & Speed 2 = H
Ground CT
These defaults are applied in Enervista when you are creating a set point file. If settings
are done using the relay’s HMI, the user must ensure that the “Operation” set point for the
breaker or contactor is as noted above.
Figure 2-12: Typical wiring diagram (contactor application with open transition wyedelta starter)
Figure 2-13: Speed2 Motor wiring diagram
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 2–11
Page 56

ELECTRICAL INSTALLATION CHAPTER 2: INSTALLATION
NOTE
SCREW
WASHER
LOWER
TERMINAL
DIVIDER
TERMINAL
BLOCK
1
2
3
Terminal Identification
All the terminal strips are labeled with a slot letter to identify the module slot position and
numbers to identify the terminals within the module.
CAUTION:
NOTE:
Make sure that the first letter on the terminal strip corresponds to the slot location
identified on the chassis silkscreen.
Terminal Connections
When installing two lugs on one terminal, both lugs must be “right side up” as shown in the
picture below. This is to ensure the adjacent lower terminal block does not interfere with
the lug body.
Figure 2-14: Orient the Lugs Correctly
Figure 2-15: Correct Installation Method
2–12 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 57

CHAPTER 2: INSTALLATION ELECTRICAL INSTALLATION
Figure 2-16: INCORRECT INSTALLATION METHOD (lower lug reversed)
A broad range of applications are available for the 869 relays. As such, it is not possible to
pr
esent typical connections for all possible schemes. The information in this section covers
the important aspects of interconnections, in the general areas of instrument transformer
inputs, other inputs, outputs, communications and grounding. The figure below shows the
rear terminal layout of the 869 Platform.
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 2–13
Page 58

ELECTRICAL INSTALLATION CHAPTER 2: INSTALLATION
AB
C
D
K
J
PORT 1
F
G
H
1
2
345
6
7
8910
2
3
1
2
345
6
7
8910
11
12131415161718
12
345
6
7
89101112131415161718192021222324
123456789101112131415161718192021222324
123456789101112131415161718192021222324
1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
1
2
345
6
7
8910
11
12131415161718
Tx4
Rx4
Tx5
Rx5
PORT 5
PORT 4
E
BASIC
COMMS
I/OPSU
ADV
COMMS
AC ANALOG INPUTS
BANK - J2
BANK - K2
BANK - K1
BANK - J1
I/O
Figure 2-17: Rear Terminal Layout of the 8 Series Platform
Table 2-1: Power Supply
H - HV Power Supply
Terminal Description
1 Line
2 Neutral
3 Ground
2–14 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 59

CHAPTER 2: INSTALLATION ELECTRICAL INSTALLATION
Table 2-2: Power Supply
L - LV Power Supply
Terminal Description (DC Voltage input polarity)
1 +ve (positive)
2 -ve (negative)
3 Ground
Table 2-3: Comms
SE - Comms - Basic Ethernet 1E/1P/2E/2A - Comms - Advanced Ethernet
Terminal Description Terminal Description
1 IRIG-B (+) 1 IRIG-B (+)
2 IRIG-B (-) 2 IRIG-B (-)
3 RS485_1 (+) 3 RS485_1 (+)
4 RS485_1 (-) 4 RS485_1 (-)
5 RS485_1 COM 5 RS485_1 COM
6 RESERVED 6 RESERVED
7 RESERVED 7 RESERVED
8 RESERVED 8 RESERVED
9 RESERVED 9 RESERVED
10 RESERVED 10 RESERVED
RJ45 ETHERNET RJ45 NOT USED
Table 2-4: HV IO
A - HV I/O - 2 FA (Vmon), 3FC, 7 Contact Inputs
Terminal Description
1 FA_1 COM TRIP
2 FA_1 NO TRIP
3 FA_1 OPT/V TRIP
4 FA_2 COM CLOSE/AUX
5 FA_2 NO CLOSE/AUX
6 FA_2 OPT/V CLOSE/AUX
7 FC_1 NC AUX
8 FC_1 COM AUX
9 FC_1 NO AUX
10 FC_2 NC AUX
11 FC_2 COM AUX
12 FC_2 NO AUX
13 CONTACT IN_1
14 CONTACT IN_2
15 CONTACT IN_3
16 CONTACT IN_4
17 CONTACT IN_5
18 CONTACT IN_6
19 CONTACT IN_7
20 CONTACT IN COM
21 DC +24
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 2–15
Page 60

ELECTRICAL INSTALLATION CHAPTER 2: INSTALLATION
22 FC_3 NC Critical Fail Relay
23 FC_3 COM Critical Fail Relay
24 FC_3 NO Critical Fail Relay
Table 2-5: AC Analog
AC Inputs - 4 X 1/5A CT, 4 VT (J Slot) AC Inputs - 4 X 1/5A CT, 1x50:0.025A (K Slot)
Terminal Description Terminal Description
1 CT1_IN 1 CT5_IN
2 CT1_RETURN 2 CT5_RETURN
3 CT2_IN 3 CT6_IN
4 CT2_RETURN 4 CT6_RETURN
5 CT3_IN 5 CT7_IN
6 CT3_RETURN 6 CT7_RETURN
7 CT4_IN 7 CBCT_IN (or 50:0.025_IN)
8 CT4_RETURN 8 CBCT_RETURN (or
50:0.025
9 VT1_IN 9 RESERVED
10 VT1_RETURN 10 RESERVED
11 VT2_IN 11 RESERVED
12 VT2_RETURN 12 RESERVED
13 VT3_IN 13 RESERVED
14 VT3_RETURN 14 RESERVED
15 VT4_IN 15 RESERVED
16 VT4_RETURN 16 RESERVED
_RETURN)
Table 2-6: RTD Inputs
Terminal Description
1 RTD1_HOT
2 RTD1_COMP
3 RTD1/2_RETURN
4 RTD2_HOT
5 RTD2_COMP
6 RTD3_HOT
7 RTD3_COMP
8 RTD3/4_RETURN
9 SHIELD
10 RTD4_HOT
11 RTD4_COMP
12 RTD5_HOT
13 RTD5_COMP
14 RTD5/6_RETURN
15 RTD6_HOT
16 RTD6_COMP
17 SHIELD
18 RESERVED
2–16 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 61

CHAPTER 2: INSTALLATION ELECTRICAL INSTALLATION
CAUTION:
Wire Size
Use the following guideline when selecting wires or lugs to connect to terminal strips A, B,
C, D, E, F, G, H, and terminal blocks J, K. Note that the first two bullets are applicable to
terminal blocks J and K only:
2
• 12 AWG to 22 AWG (3.3 mm
to 0.3 mm2): Single wire termination with/without 9.53
mm (0.375”) maximum diameter ring terminals.
• 14 AWG to 22 AWG (2.1 mm
2
to 0.3 mm2): Multiple wire termination with 9.53 mm
(0.375”) maximum diameter ring terminals. Two ring terminals maximum per circuit.
• Suggested wiring screw tightening torques are: terminal strips A-H tighten to 4.5 in-lbs
(0.5 N-m) and t
erminal blocks J, K to 15 in-lb (1.7 N-m).
Figure 2-18: Fiber Connector Types (S - ST)
Phase Sequence and Transformer Polarity
For correct operation of the relay features, follow the instrument transformer polarities,
shown in the Typical Wiring Diagram above. Note the solid square markings that are
shown with all instrument transformer connections. When the connections adhere to the
drawing, the arrow shows the direction of power flow for positive watts and the positive
direction of lagging vars. The phase sequence is user programmable for either ABC or ACB
rotation.
The 869 relay has four (4) current inputs in each J slot and K slot. Three of them are used
for c
onnecting to the phase CT phases A, B, and C. The fourth input is a ground input that
can be connected to either a ground CT placed on the neutral from a Wye connected
transformer winding, or to a “donut” type CT measuring feeder ground fault current.
869 relay CT inputs are grouped into terminal block assembly, mounted on the rear of the
chas
sis. There are no internal ground connections on the current inputs. Current
transformers with 1 to 12000 A primaries may be used.
Verify that the relay’s nominal input current of 1 A or 5 A matches the secondary rating
of the connected CTs. Unmatched CTs may result in equipment damage or inadequate
protection.
CAUTION:
IMPORTANT: The phase and ground current inputs correctly measure up to 46 times the
current input’s nominal rating. Time overcurrent curves become horizontal lines for
currents above 20 × PKP.
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 2–17
Page 62

ELECTRICAL INSTALLATION CHAPTER 2: INSTALLATION
89$1.cdr
869
J1
J2
J3
J4
J5
J7J6J8J7 J8
MOTOR
GROUND GROUND
Ground and Sensitive Ground CT Inputs
There are two dedicated ground inputs referred to throughout this manual as the Ground
Current (1A/5A secondary) and the Sensitive Ground (50:0.025) inputs.
Before planning to make any ground connections, be aware that the relay automatically
cal
culates the neutral (residual) current from the sum of the three phase current phasors,
which is used by the Neutral IOC and TOC which are both suitable for the ground fault
detection.
The following figures show two possible ground connections using the ground current
input
(Terminals J7 and J8) and sensitive ground connections using the sensitive ground
current input (Terminals K7 and K8).
The ground input (Terminals J7 and J8) is used in conjunction with a zero sequence CT (core
bal
ance) as a source, or in the neutral of wye-connected source CTs. When using the
residual connection, set the Ground CT Primary setpoint to a value equal to the Phase CT
Primary setpoint. Note that only 1A and 5A secondary CTs may be used for the residual
connection.
Figure 2-19: Ground Current Input Connections
Alternatively, the 50:0.025 ground CT input has been designed for sensitive ground current
ection on high resistance grounded systems where the GE Digital Energy 50:0.025 core-
det
balance CT is to be used.
For example, in mining applications where ear
th leakage current must be measured for
personnel safety, primary ground current as low as 0.5 A primary may be detected with the
GE Digital Energy 50:0.025 CT. Only one ground CT input tap must be used on a given unit.
Note that when this CT input is selected for the Ground Fault function, fixed ratio of
50:0.025 A is used by the relay.
2–18 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 63

CHAPTER 2: INSTALLATION ELECTRICAL INSTALLATION
894078A2.cdr
K7 K8
MACHINE
SENSITIVE
GROUND
I
sg
SENSITIVE GROUND INPUT
WITH ZERO SEQUENCE CT
GE 50:0.025
core-balance CT
Ground connection to neutral
must be on the source side
UNSHIELDED CABLE
LOAD
ABCN G
Ground
outside CT
Source
LOAD
SHIELDED CABLE
996630A5
AB C
Source
To ground;
must be on
load side
Stress cone
shields
Figure 2-20: Sensitive Ground Current Input Connections
Zero-Sequence CT Installation
The figure below shows the various CT connections and the exact placement of a Zero
Sequence current CT, so that ground fault current can be detected. Twisted pair cabling on
the Zero Sequence CT is recommended.
Figure 2-21: Zero Sequence (Core Balance) CT Installation
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 2–19
Page 64

ELECTRICAL INSTALLATION CHAPTER 2: INSTALLATION
J1 J2 J3 J4 J5 J6 J7 J8
CURRENT INPUTS
SLOT J
PHASE A PHASE B PHASE C GROUND
I
B
N
ICI
G
I
A
NN
NEUTRAL SIDE CTsTERMINAL SIDE CTs
N
MOTOR
Phase A
Phase B
Phase C
SWITCHING
DEVICE (52)
K1 K2 K3 K4 K5 K6 K7 K8
CURRENT INPUTS
PHASE A PHASE B PHASE C GROUND
I
B
N
I
C
I
G
I
A
NNN
SLOT K
89$1.cdr
Differential CT Inputs
Wiring diagrams for two differential input options are depicted in the following figures.
Figure 2-22: Internal Summation Percent Differential Wiring
Figure 2-23: Core Balance Percent Differential Wiring
2–20 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 65

CHAPTER 2: INSTALLATION ELECTRICAL INSTALLATION
AB C
X
X
AB C
VV V
V
V
VV V
J9
J10
J11
J12
J13
J14 J16
J15
VOLTAGE INPUTS
SLOT J
OPEN DELTA VT
CONNECTION
Phase A
Phase B
Phase C
SWITCHING DEVICE (52)
8-Series
MOTOR
Voltage Inputs
The 869 relays have four channels for AC voltage inputs, each with an isolating
transformer. Voltage transformers up to a maximum 5000:1 ratio may be used. The
nominal secondary voltage must be in the 10 to 240 V range.
The 869 supports wye and delta (or open delta) VT connections. The typical open delta VT
wir
ing diagram is shown in the following figure: Open Delta VT Connections. The typical
wye VT wiring diagram is shown in the figure: Typical Wiring diagram.
Figure 2-24: Open Delta VT Connections
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 2–21
Page 66

ELECTRICAL INSTALLATION CHAPTER 2: INSTALLATION
Control Power
Control power is supplied to the relay such that it matches the relay’s installed power
supply range.
CAUTION:
CAUTION:
Control power supplied to the relay must match the installed power supply range. If the
applied voltage does not match, damage to the unit may occur. All grounds MUST be
connected for normal operation regardless of control power supply type.
For more details, please refer to the Power Supply subsection located in the Introduction
chapter.
The relay should be connected directly to the ground bus, using the shortest practical
path. A tinned copper, braided, shielding and bonding cable should be used. As a
minimum, 96 strands of number 34 AWG should be used. Belden catalog number 8660
is suitable.
Figure 2-25: Control Power Connection
2–22 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 67

CHAPTER 2: INSTALLATION ELECTRICAL INSTALLATION
INPUT
SIGNAL
SWITCH
(DRY)
INPUT
SIGNAL
SWITCH
(WET)
EXTERNAL
DC POWER
SUPPLY
Contact Inputs
Depending on the order code, the 869 relay has a different number of contact inputs which
can be used to operate a variety of logic functions for circuit switching device control,
external trips, blocking of protection elements, etc. The relay has ‘contact inputs’ and
‘virtual inputs’ that are combined in a form of programmable logic to facilitate the
implementation of various schemes.
The voltage threshold at which the contact inputs detect a closed contact input is
pr
ogrammable as 17 V DC for 24 V sources, 33 V DC for 48 V sources, 84 V DC for 110 to
125 V sources, and 166 V DC for 250 V sources.
Wet or Dry input signal types can be connected to contact input terminals as shown in the
f
igure: Wet and Dry Contact Input Wiring Examples.
FASTPATH:
Dry inputs use an internal +24V that is supplied by the
set to 17V for the inputs to be recognized using the internal +24V.
The same type of input signal must be connected to all contact inputs on the same contact
input card.
Figure 2-26: Wet and Dry Contact Input Wiring Examples
869. The voltage threshold must be
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 2–23
Page 68

ELECTRICAL INSTALLATION CHAPTER 2: INSTALLATION
Output Relays
The locations of the output relays have a fixed assignment for the platform called the
master identifier. I/O options that include inputs occupy the fixed assigned output
locations so in these cases the relay assignment maps to the master identifier.
The critical output relay is reserved as Relay_8 and it is omitted and is not programmable.
Table 2-7: Master Identifier and Example of 2 x IO for “A” I/O option
Master Identifier 2 x IO for “A” I/O option example
TERM # SLOT F SLOT G or H TERM # SLOT F SLOT G or H
1 RELAY_1 RELAY_9 1 RELAY_1 RELAY_9
2 RELAY_1 RELAY_9 2 RELAY_1 RELAY_9
3 RELAY_1 RELAY_9 3 RELAY_1 RELAY_9
4 RELAY_2 RELAY_10 4 RELAY_2 RELAY_10
5 RELAY_2 RELAY_10 5 RELAY_2 RELAY_10
6 RELAY_2 RELAY_10 6 RELAY_2 RELAY_10
7 RELAY_3 RELAY_11 7 RELAY_3 RELAY_11
8 RELAY_3 RELAY_11 8 RELAY_3 RELAY_11
9 RELAY_3 RELAY_11 9 RELAY_3 RELAY_11
10 RELAY_4 RELAY_12 10 RELAY_4 RELAY_12
11 RELAY_4 RELAY_12 11 RELAY_4 RELAY_12
12 RELAY_4 RELAY_12 12 RELAY_4 RELAY_12
13 RELAY_5 RELAY_13 13 Digital In_1 Digital In_8
14 RELAY_5 RELAY_13 14 Digital In_2 Digital In_9
15 RELAY_5 RELAY_13 15 Digital In_3 Digital In_10
16 RELAY_6 RELAY_14 16 Digital In_4 Digital In_11
17 RELAY_6 RELAY_14 17 Digital In_5 Digital In_12
18 RELAY_6 RELAY_14 18 Digital In_6 Digital In_13
19 RELAY_7
20 RELAY_7 RELAY_15 20 Common Common
21 RELAY_7 RELAY_15 21 +24V +24V
22 RELAY_8 RELAY_16 22 RELAY_8 RELAY_16
23 RELAY_8 RELAY_16 23 RELAY_8 RELAY_16
24 RELAY_8 RELAY_16 24 RELAY_8 RELAY_16
RELAY_15 19 Digital In_7 Digital In_14
Table 2-8: Example for 2 x I/O for “A” I/O option
TERM # MASTER 869 TERM # MASTER 869
1 RELAY_1 TRIP 1 RELAY_9 TRIP
2 RELAY_1 TRIP 2 RELAY_9 TRIP
3 RELAY_1 TRIP 3 RELAY_9 TRIP
4 RELAY_2 CLOSE/AUX2 4 RELAY_10 CLOSE/AUX2
5 RELAY_2 CLOSE/AUX2 5 RELAY_10 CLOSE/AUX2
6 RELAY_2 CLOSE/AUX2 6 RELAY_10 CLOSE/AUX2
7 RELAY_3 START INH 7 RELAY_11 START INH
8 RELAY_3 START INH 8 RELAY_11 START INH
9 RELAY_3 START INH 9 RELAY_11 START INH
10 RELAY_4 AUX 4 10 RELAY_12 AUX 4
11 RELAY_4 AUX 4 11 RELAY_12 AUX 4
12 RELAY_4 AUX 4 12 RELAY_12 AUX 4
13 RELAY_5 Digital In_1 13 RELAY_13 Digital In_1
2–24 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 69

CHAPTER 2: INSTALLATION ELECTRICAL INSTALLATION
TERM # MASTER 869 TERM # MASTER 869
14 RELAY_5 Digital In_2 14 RELAY_13 Digital In_2
15 RELAY_5 Digital In_3 15 RELAY_13 Digital In_3
16 RELAY_6 Digital In_4 16 RELAY_14 Digital In_4
17 RELAY_6 Digital In_5 17 RELAY_14 Digital In_5
18 RELAY_6 Digital In_6 18 RELAY_14 Digital In_6
19 RELAY_7 Digital In_7 19 RELAY_15 Digital In_7
20 RELAY_7 Common 20 RELAY_15 Common
21 RELAY_7 +24V 21 RELAY_15 +24V
22 RELAY_8 CRITICAL FR 22 RELAY_16 CRITICAL FR
23 RELAY_8 CRITICAL FR 23 RELAY_16 CRITICAL FR
24 RELAY_8 CRITICAL FR 24 RELAY_16 CRITICAL FR
Table 2-9: Example I/O for “F” I/O option
TERM # MASTER SLOT H
1 RELAY_9 Digital In_1
2 RELAY_9 Digital In_2
3 RELAY_9 Digital In_3
4 RELAY_10 Digital In_4
5 RELAY_10 Digital In_5
6 RELAY_10 Digital In_6
7 RELAY_11 Digital In_7
8 RELAY_11 Digital In_8
9 RELAY_11 Digital In_9
10 RELAY_12 Digital In_10
11 RELAY_12 Common
12 RELAY_12 +24V
Table 2-10: Example I/O for “L” I/O option
TERM # MASTER SLOT G TERM # MASTER SLOT G
1 RELAY_9 Analog Out_1 10 RELAY_12 Digital In_1
2 RELAY_9 Analog Out_2 11 RELAY_12 Digital In_2
3 RELAY_9 Analog Out_3 12 RELAY_12 Digital In_3
4 RELAY_10 Analog Out_4 13 RELAY_13 Digital In_4
5 RELAY_10 Analog Out_5 14 RELAY_13 Return
6 RELAY_10 Analog Out_6 15 RELAY_13 Shield
7 RELAY_11 Analog Out_7 16 RELAY_14 Reserved
8 RELAY_11 Return 17 RELAY_14 Reserved
9 RELAY_11 Shield 18 RELAY_14 Reserved
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 2–25
Page 70

ELECTRICAL INSTALLATION CHAPTER 2: INSTALLATION
SCADA, PLC, OR
PERSONAL COMPUTER
COM
ISOLATION
DATA
8-Series IED
SHIELD
892780A4.CDR
UP TO 32, 8-Series
OR OTHER IEDs,
MAXIMUM CABLE
LENGTH OF
1200 m (4000 ft.)
LAST
DEVICE
(*) TERMINATING IMPEDANCE AT EACH END
(typically 120 ohms and 1 nF)
TWISTED PAIR
Z (*)
T
RS485 +
RS485 -
COMMON
RS485 +
RS485 -
COMMON
IED
RS485 +
IED
RS485 -
COMMON
GROUND THE SHIELD AT THE
SCADA/PLC/COMPUTER ONLY
OR THE 8-Series ONLY
DATA
ISOLATION
D3
D4
D5
Z (*)
T
Serial Communications
One two-wire RS485 port is provided. Up to 32 8 Series IEDs can be daisy-chained together
on a communication channel without exceeding the driver capability. For larger systems,
additional serial channels must be added. Commercially available repeaters can also be
used to add more than 32 relays on a single channel. Suitable cable should have a
characteristic impedance of 120 ohms and total wire length should not exceed 1200
meters (4000 ft).
Voltage differences between remote ends of the
For this reason, surge protection devices are internally installed across all RS485
terminals.Internally, an isolated power supply with an opto-coupled data interface is used
to prevent noise coupling.
Figure 2-27: RS485 wiring diagram
communication link are not uncommon.
CAUTION:
2–26 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
To ensure that all devices in a daisy-chain are at the same potential, it is imperative
that the common terminals of each RS485 port are tied together and grounded only
once, at the master or at the 869. Failure to do so may result in intermittent or failed
communications.
The source computer/PLC/SCADA system should have similar transient protection devices
installed, either internally or externally. Ground the shield at one point only, as shown in the
figure above, to avoid ground loops. Correct polarity is also essential. The 869 IEDs must be
wi
red with all the positive (+) terminals connected together and all the negative (–)
terminals connected together. Each relay must be daisy-chained to the next one. Avoid
star or stub connected configurations. The last device at each end of the daisy-chain
should be terminated with a 120 ohm ¼ watt resistor in series with a 1 nF capacitor across
the positive and negative terminals. Some systems allow the shield (drain wire) to be used
as a common wire and to connect directly to the COM terminal; others function correctly
only if the common wire is connected to the COM terminal, but insulated from the shield.
Observing these guidelines ensure a reliable communication system immune to system
transients.
Page 71

CHAPTER 2: INSTALLATION ELECTRICAL INSTALLATION
GE MULTILIN
8-SERIES
IRIG-B(-)
RECEIVER
TO OTHER DEVICES
SHIELDED CABLE
GPS SATELLITE SYSTEM
GPS CONNECTION
OPTIONAL
IRIG-B(+)
D1
D2
+
–
892781A3.CDR
IRIG-B
TIME CODE
GENERATOR
(DC SHIFT OR
AMPLITUDE MODULATED
SIGNAL CAN BE USED)
IRIG-B
IRIG-B is a standard time code format that allows time stamping of events to be
synchronized among connected devices within 1 millisecond. The IRIG-B time code
formats are serial, width-modulated codes which can be either DC level shift or amplitude
modulated (AM) form. The type of form is auto-detected by the 869 relay. Third party
eq
uipment is available for generating the IRIG-B signal; this equipment may use a GPS
satellite system to obtain the time reference so that devices at different geographic
locations can also be synchronized.
Figure 2-28: IRIG-B connection
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 2–27
Page 72

ELECTRICAL INSTALLATION CHAPTER 2: INSTALLATION
2–28 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 73

GE
Grid Solutions
869 Motor Protection System
Chapter 3: Interfaces
Interfaces
There are two methods of interfacing with the 869.
• Interfacing via the relay keypad and display.
• Interfacing via the EnerVista 8 Series Setup software.
This section provides an overview of the interfacing methods available with the 869 using
relay control panel and EnerVista 8 Series Setup software. For additional details on
the
int
erface parameters (for example, settings, actual values, etc.), refer to the individual
chapters.
FIRST ACCESSING THE RELAY
When first accessing the relay, log in as Administrator either through the front panel or
through EnerVista connected serially (so that no IP address is required). Use the default
password.
Basic Security
If the relay is in the commissioning phase and you want to bypass authentication, switch
the “Setpoint access” setting on or assign it to a contact input. Once the setting is on, you
have complete administrator access from the front panel. If a contact input is chosen, the
access is also conditional on the activation of the respective contact input.
For more information on setpoint access and other security features available with basic
security, r
CyberSentry
If logging in through EnerVista, choose Device authentication and login as Administrator.
Note: If the relay is in the commissioning phase and the user wants to bypass
authentic
to the front panel in the same way as with basic security (see the “Basic Security” section).
For more information on security features available with CyberSentry, refer to the
CyberSen
efer to the Basic Security section in the Setpoints chapter.
ation, the user may use the setpoint access feature to gain administrative access
try security section in the Setpoints chapter.
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 3–1
Page 74

FRONT CONTROL PANEL INTERFACE CHAPTER 3: INTERFACES
ESCAPE
ENTER HELP
IN SERVICE
TRIP
ALARM
PICK UP
START INHIBIT
GROUND FAULT
HOT RTD
START
RESET
STOP F1
STOPPED
STARTING
LOCAL MODE
OVERLOAD
TARGETS STATUS METERING SETPOINTS RECORDS
Navigation
Pushbuttons
Menu tabs associated
with pushbuttons for
screen navigation
Pushbuttons for
setpoints, and Up/ Down
value selections
“HELP”:help with
setting selection
“ESCAPE”:return to
previous menu
“Home”:r
eturn to
Home or default screens
“ENTER”:enter selected
setting
“RESET”: reset latched targets,
LEDs, output relays
LEDs #1and LED #4 (non-
programmable)
LED#2,LED #3,
and LEDs 5 to 14
(programmable)
Function PBs with LEDs
(programmable)
USB port
Display
LED labels
TEST MODE
MESSAGE
RUNNING
Front Control Panel Interface
The relay provides an easy to use faceplate for menu navigation using 5 navigation
pushbuttons and a high quality graphical display. Conveniently located on the panel is a
group of 7 pushbuttons for Up/Down value selection, Enter, Home, Escape, Help, and Reset
functions. The faceplate also includes 3 programmable function pushbuttons with LEDs.
Fourteen other status LEDs are available, 12 of which are programmable.
Figure 3-1: 869 Front Control Panel
3–2 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Graphical Display Pages
The front panel liquid crystal display (LCD) allows visibility under various lighting conditions.
When the keypad and display are not being used and there are no active Targets, the
Home screen with system information is displayed after a user-defined period of inactivity.
Pressing the Escape key during the display of the default message, returns the display to
the previous display screen. Any Trip, Alarm, or Pickup operation causing a new active
Target is displayed immediately, automatically overriding the Home screen.
Page 75

CHAPTER 3: INTERFACES FRONT CONTROL PANEL INTERFACE
Level 1 Level 2
Level 1 Level 2
Setpoints
Device
System
Inputs
Outputs
Protection
Monitoring
Control
FlexLogic
S
tatus
Breakers
S ches
Contact Inputs
Output Relays
Virtual Inputs
Virtual Outputs
Targets
Motor
Metering
Records
Events
Transients
Motor Start Records
Breakers
Dig Counters
Clear Records
Currents
oltages
Frequenc
Harmonics
Power
Energy
V
y
RTDs
Data Logger
Fault Reports
Motor Start Statistics
Current Demand
Power Demand
Motor Learned Data
Directional Power
Arc Flash
Arc Flash
Testing
PTP Status
Clock
Device Status
Information
Communications
Flex States
Last Trip Data
Motor
Power Factor
Analog Inputs
RTD Maximums
FlexElements
Figure 3-2: 869 Display Page Hierarchy
Working with
Graphical Display
Pages
The display contains five main menu items labeled Targets, Status, Metering, Setpoints,
and Records located at the bottom of the screen. Choosing each main menu item displays
the corresponding sub-menu.
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 3–3
Page 76

FRONT CONTROL PANEL INTERFACE CHAPTER 3: INTERFACES
TARGETS STATUS METERING
SETPOINTS
RECORDS
Figure 3-3: Typical paging operation from the Main Menu
3–4 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
There are two ways to navigate throughout the 869 menu: using the pushbuttons
corr
esponding to the soft tabs from the screen, or by selecting the item from the list of
items on the screen using the “Up” and “Down” pushbuttons to move the yellow
highlighted line, and pressing the pushbutton “Enter”.
Figure 3-4: Tab Pushbuttons
The tab pushbuttons are used to enter the menu corresponding to the label on the tabs. If
e than 5 tabs exist, the first and the last tab are labelled with arrows to allow you to
mor
scroll to the other tabs.
Page 77

CHAPTER 3: INTERFACES FRONT CONTROL PANEL INTERFACE
<< NIOC 2 NIOC 3
NIOC 4
>>
ESCAPE
ENTER
HELP
RESET
ENTER
ESCAPE
RESET
Figure 3-5: Keypad Pushbuttons
Each Keypad pushbutton serves the following function:
The Home pushbut
ton is used to display the home screen, and all screens defined under
the Front Panel/Screens menu as default screens.
The Ent
er pushbutton has a dual function. It is used to display a sub-menu when an item is
highlighted. It is also used to save the desired value for any selected setpoint.
, and Down pushbuttons are used to select/highlight an item from a menu, as well
The Up
as select a value from the list of values for a chosen item.
The Escape pushb
utton is used to display the previous menu. This pushbutton can also be
used to cancel a setpoint change.
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 3–5
The Re
set pushbutton clears all latched LED indications, target messages, and latched
output relays, providing the conditions causing these events are not present.
Page 78

FRONT CONTROL PANEL INTERFACE CHAPTER 3: INTERFACES
SLD Breaker/Contactor Symbol Color Motor Status
BKR1/Contactor
Open LED
Open
Color
Close
Color
Not
Configured
Unknown Disconnected Stopped
Starting
Running Overload Tripped
Not Assigned
Red Green Green Red Orange
OFF
Red Green Green Red Orange
Orange
Red Green Green Red Orange
Red
Red Green Green Red Orange
Green
Green Red Red Green Orange
To change/view an item on from the 869 menus:
1. Use the pushbuttons that correspond to the tabs (Targets, Status, Metering, Setpoints,
Recor
ds) on the screen to select a menu.
2. Use the Up and Down pushbuttons to highlight an item.
3. Press Enter to view a list of values for the chosen item. (Some items are view-only.)
4. Use the Up and Down pushbuttons to highlight a value.
5. Press Enter to assign the highlighted value to the item.
Single Line Diagram
BKR1 LED setting for Breaker symbol color configuration
In all 8 Series devices the breaker symbol color is configurable through the first LED
assi
gned to operate with the BKR 1 Open operand.
Single Line Diagram for 869
The 869 has a single line diagram (SLD) that repre
sents the power system. The single line
diagram provided is pre-configured to show:
• Breaker status
• AC input connection
• System voltage
Accompanying the single line diagram are typical metered values associated with the
power syst
The single line diagram is configured as the default menu but this can
em.
be changed under
Setpoints > Device > Front Panel > Default Screen.
Figure 3-6: SLD and typical metered values screen
The breaker status icon changes state according to the breaker status input and the color
of the icon cha
nges in accordance with the LED color setting.
The breaker status and motor status is based on the following logic.
Figure 3-7: Breaker/Contactor and Motor status color
3–6 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 79

CHAPTER 3: INTERFACES FRONT CONTROL PANEL INTERFACE
IN SERVICE
TRIP
ALARM
PICK UP
START INHIBIT
GROUND FAULT
HOT RTD
STOPPED
STARTING
LOCAL MODE
OVERLOAD
TEST MODE
MESSAGE
RUNNING
In 869, the switching device can be configured as Breaker or Contactor ( System > Motor >
Setup). If the switching device is configured as Breaker then the SLD Breaker color is
specified by the LED assigned for BKR 1 Open. If the switching device is configured as
Contactor, then the SLD Contactor color is specified by the LED assigned for Contactor
Open.
If the switching device is first configured as a Breaker (Contactor) and LED X is assigned for
Br
eaker (Contactor) and later the switching device is changed to Contactor (Breaker) then
• user must re-configure LED X for Contactor (Br
eaker), otherwise previous Breaker
(Contactor) LED configuration will be applied to select the SLD Contactor (Breaker)
Color.
The parameters displayed in the Front panel screen example are as follows.
Parameter Input for the value
Load Cur Metering\Generator\General\Load Current
Unbln Metering\Generator\General\Unbalance Current
Volt (L-L) Metering\Ph VT Bnk1-J2\J2 V AVG L-L
Freq Metering\Frequency 1-J\J2-3VT Frequency
V/ Hz Metering\Volts per Hertz\Volts Per Hertz 1
S: Metering\Power 1\Pwr1 Apparent
P: Metering\Power 1\Pwr1 Real
Q: Metering\Power 1\Pwr1 Reactive
PF Metering\Power 1\Pwr1 PF
LED Status Indicators
Front panel LED details:
• Number of LEDs: 17
• Programmability: any logic variable, or virtual input
• Reset mode: self-reset or latched
The 869 front panel provides two columns of 7 LED indicators each, and 3 LED pushbutton
ndicators. The “IN-SERVICE” (LED 1) and the “PICKUP” (LED 4) indicators from the first LED
i
column are non-programmable LEDs. The bottom 3 LED indicators from the first column,
and the 7 LED indicators from the second LED column are fully programmable. The
indicators “TRIP” (LED 2), and “ALARM” (LED 3), are also programmable, and can be
triggered by either a selection of FlexLogic operand assigned in their own menu, or by the
operation of any protection, control or monitoring element with function selected as Trip,
Alarm, or Latched Alarm.
The RESET key is used to reset any latched LED indicator or Target Message once the
cond
ition has been cleared (latched conditions can also be reset via the RESETTING menu).
Figure 3-8: Typical LED Indicator Panel
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 3–7
Page 80

FRONT CONTROL PANEL INTERFACE CHAPTER 3: INTERFACES
• IN SERVICE:
– Green color = Relay powered up, passed sel
f-test has been programmed, and
ready to serve. This LED indicates that control power is applied, all monitored
inputs, outputs, and internal systems are OK, and that the device has been
programmed.
– Red color = Relay failed self test, has not been programmed, or out of service
• TRIP:
This LED indicates that the element selected to produce a trip has operated. This
icator always latches; as such, a Reset command must be initiated to allow the
ind
latch to be reset.
ARM:
• AL
This LED indicates that the FlexLogic™ operand serving as an Alarm switch has
ed. Latching of the indicator depends on the selected protection function. A
operat
Reset command must be initiated to allow the latch to be reset.
CKUP:
• PI
This LED indicates that at least one element is picked up. This indicator is never
latc
hed.
• TEST M
ODE
This LED indicates that the relay has been set into Test Mode.
• MESSA
GE
This LED indicates the presence of Target Messages detected by the relay.
Breaker status indication is based on the breaker’s 52a and 52b contacts. With both
ts wired to the relay and configured, closed breaker status is determined by closed
contac
52a contact and opened 52b contact. Vice-versa the open breaker status is determined by
opened 52a contact and closed 52b contact. If both 52a and 52b contacts are open, due
to a breaker being racked out from the switchgear, both the Breaker Open and Breaker
Closed LED Indicators will be off.
The Event Cause indicators in the first column are described as follows:
Events Cause LEDs are turned ON or OFF by protection elements that have their respective
tar
get settings selected as either “Self-Reset” or “Latched”. If a protection element target
setting is “Self-Reset”, then the corresponding Event Cause LEDs remain ON as long as the
operate operand associated with the element remains asserted. If a protection element
target setting is “Latched”, then the corresponding Event Cause LEDs turn ON when the
operate operand associated with the element is asserted and will remain ON until the
RESET button on the front panel is pressed after the operand is reset.
Default labels are installed on every 869. A custom LED template is available for editing
and printing,
refer to publication GET-20035 from
http://www.gegridsolutions.com/multilin.
The default labels can be replaced by user-printed labels. User customization of LED
operation has maximum benefit in installations where languages other than English are
used to communicate with operators.
FASTPATH:
For LED and Pushbutton programming details, please refer to Section 4: Setpoints > Device
> Front Panel.
Home Screen Icons
The next figure shows the icons available on the front screen. For descriptions of these
screen icons see the following tables.
3–8 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 81

CHAPTER 3: INTERFACES FRONT CONTROL PANEL INTERFACE
Figure 3-9: Home Screen Icons
Table 3-1: Security Icon
Security State Security Icon Color
User not logged in Icon is green and locked
User logged in Icon is red and unlocked
Table 3-2: Setpoint Group Icon
Description
Identifies the active setpoint group
Table 3-3: Wifi Icon
Wifi State Wifi Icon Color
Disabled Icon is grey and crossed by a red line
Disconnected Grey
Connecting Orange
Connected Green
NOTE:
Target Messages
Table 3-4: File Saving Icon
Description
Indicates that a setting is being saved on the relay (i.e., when changing one of relay settings).
Icon is ON (relay is saving to flash memory)
Icon is OFF (relay is not saving to flash memory)
Do not remove power from the relay whenever the File saving icon is ON. When power is
removed the data being saved can also be lost.
Table 3-5: Active Target Icon
Description
When the target auto navigation setting is disabled, the message LED and the Active Target icon are
the only indication of active target messages.
Table 3-6: Breaker Health Icon
Description
The Breaker Health icon is blue when the setting for the breaker health function is not disabled.
When the setting i
Relay Messages
Targets are messages displayed on the screen when any change of state of protection,
control, monitoring, or digital signal takes place. For the user’s convenience, the targets for
major motor protection elements are set to Latched by default . The user can disable
targets for any particular element by selecting and entering the setting “Disabled” within
the element’s menu.
s disabled the icon is grey.
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 3–9
Page 82

FRONT CONTROL PANEL INTERFACE CHAPTER 3: INTERFACES
Target Messages are displayed in order of their activation, whereas in cases of
simultaneous activation, they are displayed in the order outlined below (from highest to
lowest priority):
1. Targets generated by pressing programmable pushbutton
2.
Targets generated by Contact inputs
3. Targets generated by Protection, Control and Monitoring elements
4. Targets generated by communications.
In cases where the Pickup and Operate flags from an element are detected at the same
time, the
Pickup flag is not displayed. The Operate flag is displayed instead.
LED #6, from the first column of LEDs, is factory configured to be triggered by the FlexLogic
and ANY TARGET, to indicate the presence of at least one target message. This LED is
oper
labeled as “MESSAGE”. The LED can be programmed to any other FlexLogic operand by
choice.
MESSAGE TIMEOUT:
The timeout applies to each screen that is different than the default screen to which the
user navi
gates. Examples include viewing, metering, or navigating to a screen with setting,
etc. If no further navigation is performed, no pushbutton is touched, and/or no target is
initiated for the time specified in the message timeout setpoint, the display goes back to
the default screen (the metering summary screen).
The target message interrupts the message timeout. It overrides it. The message timeout
star
ts timing after each target message, and if no more activity is recorded for the
specified time, the display goes back to the default screen.
Pressing a programmable pushbutton activates a new screen with a Target Message
corr
esponding to the programmed PB action. The PB Target Message is displayed for 10
seconds then defaults to the screen that was displayed before pressing the pushbutton.
The PB Target Message is recorded in the list with other generated Target Messages.
Target Messages can be cleared either by pressing the PB corresponding to the tab
“CLE
AR”, or by initiating a RESET command. The “CLEAR” command clears only the Target
Messages, while initiating a RESET clears not only the Target Messages, but also any
latched LEDs and output relays.
CAUTION:
Self-Test Errors
The relay performs self-diagnostics at initialization (after power up), and continuously as a
background task to ensure that the hardware and software are functioning correctly.
There are two types of self-test warnings indicating either a minor or major problem. Minor
errors indicate a problem with the relay that does not compromise protection and control
functionality of the relay. Major errors indicate a problem with the relay which takes it out
of service.
Self-Test Warnings may indicate a serious problem with the relay hardware!
Upon detection of a minor problem, the relay does the following:
• Displays a detailed description of the error on the relay display as a target message
• Records the minor self-test error in the Event Recorder
•Flashes the “ALARM” LED
Upon detection of a major problem, the
relay does the following:
• De-energizes critical failure relay
• De-energizes all output relays
• Blocks protection and control elements
• Turns the "IN SERVICE" LED to red
• Flashes the "ALARM" LED
• Displays “Major Self-test error” with the error code as a target message
• Records the major self-test failure in the Event Recorder
3–10 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 83

CHAPTER 3: INTERFACES FRONT CONTROL PANEL INTERFACE
NOTE:
The Critical Failure Relay (Output Relay 8) is energized when the relay is in-service, and no
major error is present
Under both conditions, the targets cannot be cleared if the error is still active.
Figure 3-10: Minor Errors
Figure 3-11: Major Errors
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 3–11
Page 84

FRONT CONTROL PANEL INTERFACE CHAPTER 3: INTERFACES
Table 3-7: Minor Self-test Errors
Self-test Error
Message
1
Order Code Error Hardware doesn’t
CPU S/N Invalid CPU card doesn’t have
Slot“$” IO S/N
2
Invalid
Comms S/N Invalid Comms card doesn’t
CPanel S/N Invalid Control Panel doesn’t
PSU S/N Invalid Power Supply Unit
RTC Error The CPU cannot read
Product Serial
Invalid
Comm Alert #1 Communication error
Comm Alert #2 Every 1 second
Comm Alert #3 Every 1 second
FLASH Error The permanent storage
SPI Error Communication error
Invalid MAC
Address
Calibration Error Unit has default
WiFi Default
Settings
Link Error Primary
Link Error
Secondary
Description of Problem How Often the Test is
What to do
Performed
Every 1 second If alert doesn’t self-reset then
match order code
valid data to match the
order code.
IO card located in slot $
Every 1 second
Every 1 second
contact factory. Otherwise
monitor re-occurrences as
errors are detected and selfreset
doesn’t have valid data
to match the order
code.
Every 1 second
have valid data to
match the order code.
Every 1 second
have valid data to
match the order code.
Every 1 second
doesn’t have valid data
to match the order
code.
Every 1 second
the time from the real
time clock
The product serial
Every 1 second
number doesn’t match
the product type
Every 1 second
between CPU and
Comms board
Every 1 second
memory has been
corrupted
Every 1 second
between CPU and LEDs,
Keypad or peripheral
memory devices
MAC address is not in
Every 1 second
the product range
Boot-up and Every 1
calibration values
SSID and Passphrase is
second
Every 1 second Set SSID and Passphrase
the factory default
3
Port 1 or Port 4
(depending on order
code) is not connected
Every 1 second Ensure Ethernet cable is
connected, check cable
functionality (i.e. physical
damage or perform
continuity test), and ensure
master or peer device is
functioning. If none of these
apply, contact the factory.
Port 5 is not connected Every 1 second Ensure Ethernet cable is
connected, check cable
functionality (i.e. physical
damage or perform
continuity test), and ensure
master or peer device is
functioning. If none of these
apply, contact the factory.
3–12 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 85

CHAPTER 3: INTERFACES FRONT CONTROL PANEL INTERFACE
NOTE
Self-test Error
Messag
1
e
Traffic Error
Primary
Description of Problem How Often the Test is
Performed
Abnormally high
Every 1 second Contact site IT department to
amount of Broadcast
and Uni-cast traffic on
What to do
check network for
malfunctioning devices
port 1 or port 4
Traffic Error
Seconda
ry
Abnormally high
amount of Broadcast
and Uni-cast traffic on
Every 1 second Contact site IT department to
check network for
malfunctioning devices
port 5
Ambient
emperature >80C
T
The ambient
temperature
surrounding the
product has exceeded
Every 1 second Inspect mounting enclosure
for unexpected heat sources
(i.e loose primary cables) and
remove accordingly
80C
Event Rate High Abnormally high
ounts of events
am
have been generated
so the relay has
stopped logging to
Every 1 second Ensure settings are not set
close to nominal ratings.
Ensure Flexlogic equations
do not have impractical
timing for status events
prevent further issues
IRIG-B Failure A bad IRIG-B input
signal has been
det
ected
Every 1 second Ensure IRIG-B cable is
connected, check cable
functionality (i.e. physical
damage or perform
continuity test), ensure IRIGB receiver is functioning, and
check input signal level (it
may be less than
specification). If none of
these apply, contact the
factory.
Version Mismatch CPU and Comms do not
have the same r
evision
on firmware
Boot-up and Every 1
second
Ensure that both the CPU
and Comms FW was
uploaded during the
upgrade process
SelfTestFWUpdate The updating of the
irmware failed
f
Every 1 second Re-try uploading firmware. If
the upload doesn’t work a
second time contact factory
Remote CAN IO
match
Mis
The value of the cards
in the slots detected by
the Remote IO does not
Every 1 second. A
failure is declared after
60 consecutive failures
Fix the remote CANBUS IO
mismatch.
match the value
validated by the user
configuration
1. – Failure is logged after the detection of 5 consecutive failures
2. $ – is the slot ID (i.e., F, G, H etc.)
3.To disable Link Error Primary target when not in-use with SE order code, change IP
address to 127.0.0.1
Table 3-8: Major Self-test Errors
Self-test Error
e
Messag
Latched
Target
Message
Relay Not
No PRODUCT SETUP
Ready
Major Self-Test
(err
or code)
NOTE:
When a total loss of power is present, the Critical Failure Relay (Output Relay 8) is de-
Yes Unit hardware failure
Description of
Problem
STALLATION
IN
setting indicates
relay is not in a
programmed state.
detected
How Often the Test
What to do
is Performed
On power up and
whenever the
PRODUCT SETUP
INSTALLATION
setting is altered.
Program all required
settings and then set the
PRODUCT SETUP
INSTALLATION setting to
“Ready”.
Every 1 second Contact the factory and
supply the failure code as
noted on the display.
energized.
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 3–13
Page 86

FRONT CONTROL PANEL INTERFACE CHAPTER 3: INTERFACES
Out of Service
Flash Messages
Label Removal
When the relay is shipped from the factory, the DEVICE IN SERVICE is set to “Not Ready”.
The IN SERVICE LED will be orange and the critical fail relay will be de-energized but this will
not be classified as a major self-test. An out of service event will be generated in the event
recorder.
Flash messages are warning, error, or general information messages displayed in response
to pressing certain keys. The factory default flash message time is 5 seconds.
The following procedure describes how to use the label removal tool.
1. Bend the tabs of the tool upwards as shown in the image.
2. Slide the label removal tool under the LED label as shown in the next image. Make sure
the bent tabs are pointing away from the relay. Move the tool inside until the tabs
enter the pocket.
3. Remove the tool with the LED label.
3–14 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 87

CHAPTER 3: INTERFACES SOFTWARE INTERFACE
The following describes how to remove the user-programmable pushbutton label from the
869 front panel.
1. Slide the label tool under the user-programmable pushbutton label as shown in the
next image. Make sure the bent tab is pointing away from the relay.
2. Remove the tool and user-programmable pushbutton label as shown in image.
Software Interface
EnerVista 8 Series Setup Software
Hardware & Software
Requirements
Although settings can be entered manually using the control panel keys, a PC can be used
to download setpoints through the communications port. The EnerVista 8 Series
Setup software is available from GE Multilin to make this as convenient as possible. With
EnerV
ista 8 Series Setup software running, it is possible to:
• Program and modify settings
• Load and save setting files to and from a disk
• Read actual values
• Monitor status
• Read pre-trip data and event records
• Get help on any topic
• Upgrade the 869 firmware
The EnerVista 8 Series Setup software allows immediate access to all 869 features with
sy to use pull down menus in the familiar Windows environment. This section provides
ea
the necessary information to install EnerVista 8 Series Setup software, upgrade the relay
f
irmware, and write and edit setting files.
The EnerVista 8 Series Setup software can run without a 869 connected to the computer.
In this case, set
communi
add
ition, measured values, status and trip messages can be displayed with the actual
value screens.
The following requirements must be met for the software.
• Dual-core processor
• Microsoft Windows™ 7 or 8.1; 32-bit or 64-bit is installed and running properly.
• At least 1 GB of free hard disk space is available.
• At least 2 GB of RAM is installed.
• 1280 x 800 display screen
tings may be saved to a file for future use. If a 869 is connected to a PC and
cations are enabled, the 869 can be programmed from the setting screens. In
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 3–15
Page 88

SOFTWARE INTERFACE CHAPTER 3: INTERFACES
The software can be installed from either the GE EnerVista CD or the GE Multilin website at
http://www.gegridsolutions.com/.
Installing the
EnerVista 8 Series
Setup Software
After ensuring the minimum requirements indicated earlier, use the following procedure to
install the EnerVista 8 Series Setup software from the enclosed GE EnerVista CD.
1. Insert the GE EnerVista CD into your CD-ROM drive.
2. Click the Install Now button and follow the installation instructions to install the nocharge EnerVista software on the local PC.
3. When installation is complete, start the EnerVista Launchpad application.
4. Click the IED Setup section of the LaunchPad toolbar.
5. In the EnerVista Launchpad window, click the Add Product button and select the
869 Protection System as shown below. Select the Web option to ensure the most
recent software release, or select CD if you do not have a web connection, then click
the Add Now button to list software items for the 869.
6. EnerVista Launchpad obtains the latest installation software from the Web or CD and
automatically starts the installation process. A status window with a progress bar is
shown during the downloading process.
3–16 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 89

CHAPTER 3: INTERFACES SOFTWARE INTERFACE
7. Select the complete path, including the new directory name, where the EnerVista 8
Series Setup software is being installed.
8. Click on Next to begin the installation. The files are installed in the directory indicated,
the USB driver is loaded into the computer, and the installation program automatically
creates icons and adds the EnerVista 8 Series Setup software to the Windows start
menu.
9. The 869 device is added to the list of installed IEDs in the EnerVista Launchpad
window, as shown below.
If you are going to communicate from your computer to the 869 Relay using the USB
port:
10. Plug the USB cable into the USB port on the 869 Relay then into the USB port on your
computer.
11. Launch EnerVista 8 Series Setup software from LaunchPad.
12. In EnerVista > Device Setup:
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 3–17
Page 90

SOFTWARE INTERFACE CHAPTER 3: INTERFACES
Upgrading the
Software
Connecting EnerVista 8 Series Setup software to the Relay
Using the Quick
Connect Feature
13. Select USB as the Interface type.
14. Select the Read Order Code button.
The latest EnerVista software and firmware can be downloaded from:
https://www.gegridsolutions.com/
After upgrading, check the version number under Help > About. If the new version does
not display, try uninstalling the software and reinstalling the new versions.
The Quick Connect button can be used to establish a fast connection through the front
panel USB port of a relay, or through the Ethernet port. The following window appears
when the QuickConnect button is pressed:
3–18 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 91

CHAPTER 3: INTERFACES SOFTWARE INTERFACE
As indicated by the window, the "Quick Connect" feature can quickly connect the software
to a front port if the USB is selected in the interface drop-down list. Select “USB” and press
the Connect button. Ethernet or WiFi can also be used as the interface for Quick Connect
as shown next.
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 3–19
Page 92

SOFTWARE INTERFACE CHAPTER 3: INTERFACES
When connected, a new Site called “Quick Connect” appears in the Site List window.
The Site Device has now been configured via t
he Quick Connect feature for either USB or
Ethernet communications. Proceed to Connecting to the Relay next, to begin
communications.
Configuring Ethernet
Communications
FASTPATH:
Before starting, verify that the Ethernet cable is properly connected to the RJ-45 Ethernet
port.
869 supports a maximum of 3 TCP/IP sessions.
1. Install and start the latest version of the EnerVista 8 Series Setup software (available
from the GE EnerVista CD or Website). See the previous section for the installation
procedure.
2. Click on the Device Setup button to open the Device Setup window and click the Add
Site button to define a new site.
3. Enter the desired site name in the "Site Name" field. If desired, a short description of
the site can also be entered. In this example, we will use “Substation 1” as the site
name.
4. The new site appears in the upper-left list.
5. Click the Add Device button to define the new device.
6. Enter the desired name in the "Device Name" field, and a description (optional).
3–20 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 93

CHAPTER 3: INTERFACES SOFTWARE INTERFACE
7. Select “Ethernet” from the Interface drop-down list. This displays a number of
interface parameters that must be entered for proper Ethernet functionality.
Connecting to the
Relay
8. Enter the IP address, slave address, and Modbus port values assigned to the 869 relay
(from the SETPOINTS > DEVICE > COMMUNICATIONS menu).
9. Click the Read Order Code button to connect to the 869 and upload the order code. If
a communications error occurs, ensure that the Ethernet communication values
correspond to the relay setting values.
10. Click OK when the relay order code has been received. The new device will be added
to the Site List window (or Online window) located in the top left corner of the main
EnerVista 8 Series Setup software window.
The 869 Site Device has now been configured for Ethernet communications. Proceed to
the following
Now that the communications parameters have been properly configured, the user can
easily communicate with the relay.
1. Expand the Site list by double clicking on the site name or clicking on the «+» box to
list the available devices for the given site.
2. Desired device trees can be expanded by clicking the «+» box. The following list of
headers is shown for each device:
Device Definition
Status
Metering
Quick Setup
Setpoints
section to begin communications.
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 3–21
Page 94

SOFTWARE INTERFACE CHAPTER 3: INTERFACES
Records
Maintenance.
3. Expand the SETPOINTS > DEVICE > FRONT PANEL list item and double click on Display
Properties or Default Screens to open the settings window as shown next:
Working with Setpoints & Setpoints Files
Engaging a Device
Entering Setpoints
4. The settings window opens with a corresponding status indicator on the lower left of
the window.
5. If the status indicator is red, verify that the serial, USB, or Ethernet cable is properly
connected to the relay, and that the relay has been properly configured for
communications (steps described earlier).
The settings can now be edited, printed, or changed. Other setpoint and command
wi
ndows can be displayed and edited in a similar manner. "Actual Values" windows are
also available for display. These windows can be arranged, and resized, if desired.
The software may be used in on-line mode (relay connected) to directly communicate with
a relay. Communicating relays are organized and grouped by communication interfaces
and into sites. Sites may contain any number of relays selected from the product series.
The System Setup page is used as an example to illustrate entering setpoints. In this
example, we are changing the voltage sensing setpoints.
1. Establish communications with the relay.
2. Select the Setpoint > System > Voltage Sensing menu item.
3. Select the Aux. VT Secondary setpoint by clicking anywhere in the parameter box. This
displays three arrows: two to increment/decrement the value and another to launch
the numerical keypad.
3–22 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 95

CHAPTER 3: INTERFACES SOFTWARE INTERFACE
4. Clicking the arrow at the end of the box displays a numerical keypad interface that
allows the user to enter a value within the setpoint range displayed near the top of the
keypad: Click = to exit from the keypad and keep the new value. Click on X to exit from
the keypad and retain the old value.
5. For setpoints requiring non-numerical pre-set values (e.g. Phase VT Connection
below), clicking anywhere within the setpoint value box displays a drop-down
selection menu arrow. Select the desired value from this list.
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 3–23
Page 96

SOFTWARE INTERFACE CHAPTER 3: INTERFACES
6. In the Setpoints > System Setup > Voltage Sensing dialog box, click on Save to save
the values into the 869. Click YES to accept any changes and exit the window. Click
Restore to retain previous values. Click Default to restore Default values.
7. For setpoints requiring an alphanumeric text string (e.g. "relay name"), the value may
be entered directly within the setpoint value box.
File Support
Using Setpoints Files
Opening any file automatically launches the application or provides focus to the already
opened application.
New files are automatically added to the tree.
The software interface supports three ways of handling changes to relay settings:
• In off-line mode (relay disconnected) to create or edit relay settings files for later
load to communicating relays.
down
• Directly modifying relay settings while connected to a communicating relay, then
saving
the settings when complete.
• Creating/editing settings files while connected t
them to the relay when complete.
Settings files are organized on the basis of file names assigned by the user. A settings file
ns data pertaining to the following types of relay settings:
contai
• Device Definition
•Relay Setup
•System Setup
•Protection
• Control
• Inputs/Outputs
• Monitoring
•Flexlogic
• Quick setup
• Protection summary
• IEC 61850 configurator
• Modbus user map
Factory default values are supplied and can be restored after any changes.
The 869 displays relay setpoints with the same hierarchy as the front panel display.
o a communicating relay, then saving
3–24 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 97

CHAPTER 3: INTERFACES SOFTWARE INTERFACE
Downloading & Saving
Setpoints Files
Adding Setpoints Files
to the Environment
Back up a copy of the in-service settings for each commissioned unit, so as to revert to the
commissioned settings after inadvertent, unauthorized, or temporary setting changes are
made, after the settings default due to firmware upgrade, or when the unit has to be
replaced. This section describes how to backup settings to a file and how to use that file to
restore settings to the original relay or to a replacement relay.
Setpoints must be saved to a file on the local PC before performing any firmware
upgra
des. Saving setpoints is also highly recommended before making any setpoint
changes or creating new setpoint files.
The setpoint files in the window are accessed in the Files Window. Use the following
pr
ocedure to download and save setpoint files to a local PC.
1. Ensure that the site and corresponding device(s) have been properly defined and
conf
igured as shown in Connecting to the Relay, above.
2. Select the desired device from the site list.
3. Select the Read Device Settings from the online menu item, or right-click on the
device and select Read Device Settings to obtain settings information from the
device.
4. After a few seconds of data retrieval, the software requests the name and destination
path of the setpoint file. The corresponding file extension is automatically assigned.
Press Receive to complete the process. A new entry is added to the tree, in the File
pane, showing path and file name for the setpoint file.
The EnerVista 8 Series Setup software provides the capability to review and manage a
large group of setpoint files. Use the following procedure to add an existing file to the list.
1. In the offline pane, right-click on Files and select the Add Existing Settings File item
as shown:
2. The Open dialog box will appear, prompting the user to select a previously saved
setpoint file. As for any other MS Windows® application, browse for the file to be
added then click Open. The new file and complete path will be added to the file list.
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 3–25
Page 98

SOFTWARE INTERFACE CHAPTER 3: INTERFACES
Creating a New
Setpoints File
The software allows the user to create new setpoint files independent of a connected
device. These can be uploaded to a relay at a later date. The following procedure illustrates
how to create new setpoint files.
1. In the Offline pane, right click and select the New Settings File item. The following box
NOTE:
Upgrading Setpoints
Files to a New
Revision
appears, allowing for the configuration of the setpoint file for the correct firmware
version. It is important to define the correct firmware version to ensure that setpoints
not available in a particular version are not downloaded into the relay.
2. Select the Firmware Version, and Order Code options for the new setpoint file.
3. For future reference, enter some useful information in the Description box to facilitate
the identification of the device and the purpose of the file.
4. To select a file name and path for the new file, click the button beside the File Name
box.
5. Select the file name and path to store the file, or select any displayed file name to
replace an existing file. All 869 setpoint files should have the extension ‘.cid’ (for
example, ‘869 1.cid’).
6. Click OK to complete the process. Once this step is completed, the new file, with a
complete path, is added to the 869 software environment.
File names for setting files cannot have a decimal point other than the one that is added in
front of CID.
It is often necessary to upgrade the revision for a previously saved setpoint file after the
869 firmware has been upgraded. This is illustrated in the following procedure:
1. Establish communications with the 869 relay.
2. Select the Status > Information > Main CPU menu item and record the Firmware
Version.
3–26 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
Page 99

CHAPTER 3: INTERFACES SOFTWARE INTERFACE
3. Load the setpoint file to be upgraded into the EnerVista 8 Series Setup software
environment as described in the section, Adding Setpoints Files to the Environment.
4. In the File pane, select the saved setpoint file.
5. From the main window menu bar, select the Offline > Edit Settings File Properties
menu item and note the File Version of the setpoint file. If this version is different from
the Firmware Revision noted in step 2, select a New File Version that matches the
Firmware Revision from the pull-down menu.
6. For example, if the firmware revision is J0J08AA150.SFD (Firmware Revision 1.50) and
the current setpoint file revision is 1.10, change the New File Version to “1.5x”.
7. Enter any special comments about the setpoint file in the "Description" field.
8. Select the desired firmware version from the "New File Version" field.
9. When complete, click OK to convert the setpoint file to the desired revision. See
Loading Setpoints from a File below, for instructions on loading this setpoint file into
the 869.
Printing Setpoints
The software allows the user to print partial or complete lists of setpoints. Use the following
procedure to print a list of setpoints:
1. Select a previously saved setpoints file in the File pane or establish communications
with a device.
2. If printing from an online device, select the Online > Print Device Information menu
item. If printing from a previously saved setpoints file, select the Offline > Print
Settings File menu item.
869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL 3–27
Page 100

SOFTWARE INTERFACE CHAPTER 3: INTERFACES
3. The Print/Export Options dialog box appears. Select Setpoints in the upper section
and select either Include All Features (for a complete list) or Include Only Enabled
Features (for a list of only those features which are currently used) in the filtering
section and click OK.
4. Setpoint lists can be printed in the same manner by right clicking on the desired file (in
the file list) or device (in the device list) and selecting the Print Device Information or
Print Settings File options.
Loading Setpoints
from a File
CAUTION:
3–28 869 MOTOR PROTECTION SYSTEM – INSTRUCTION MANUAL
An error message occurs when attempting to upload a setpoint file with a revision
number that does not match the relay firmware. If the firmware has been upgraded
since saving the setpoint file, see Upgrading Setpoints Files to a New Revision for
instructions on changing the revision number of a setpoint file.
The following procedure illustrates how to load setpoints from a file. Before loading a
setpoints file, it must first be added to the 869 environment as described in the section,
Addin
g Setpoints Files to the Environment.
1. Select the previously saved setpoints file from the File pane of the 869 software main
window.
 Loading...
Loading...