

GAUI GU-INS User Manual
User Manual
操作說明書
GAUI
Specifications
1.Dimensions:Main controller: 53.5 x 38.5 x 12mm
Weight:Main controller: 27g (w/o cables ), GPS system: 23g (with cable)
2.Frequency: 300Hz output to ESC
3.Operating temperature: -20~80°C
4.Operating modes: Rate (manual) mode, Auto balance mode, GPS positioning mode.
5.Rate (manual) mode: Max angular velocity: 300 degree/sec.
6.Auto balance mode: Max tilt angle: 60 degree.
7.GPS positioning mode:
a.Hovering accuracy: Horizontal: ±2m, Vertical: ±0.5m
b.Max yaw angular velocity: 250 degree/sec
c.Max tilt angle: 45 degree.
d.Max horizontal speed: 10 m/s,36 km/hr
e.Max vertical speed: 8 m/s (horizontal posture)
8.GU-INS provides pitch and rolls output signals, can work with different types of camera mounts.
9.Fail-safe functions: Automatic Go-Home, Signal lost Go-Home, Low voltage protection.
10.Suitable wind condition: < 10 m/s
規格
GPS system: 42 x 34 x 15mm
Index
索引
Note
注意事項
Index for LED Light Status
System Assembly
System Setting
System Tuning
GPS Navigation
Go-Home Function
Low Voltage Protection
系統組立
系統設定
系統校正
定位飛行
回航點
低電壓保護
Camera Gimbal Calibration
Firmware Update
更新程式
On Screen Display Interface(Option)
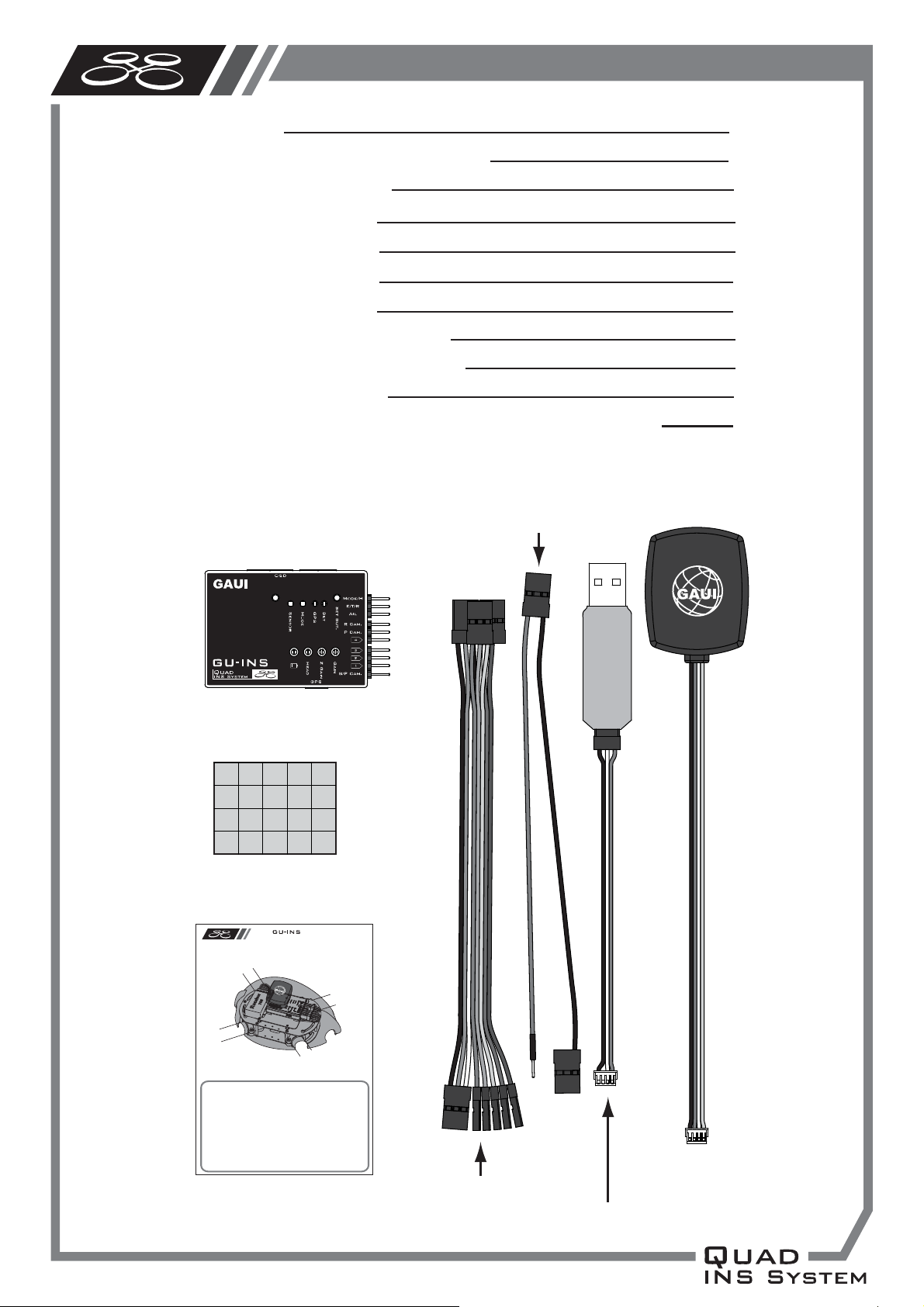
Content
內容物
燈號對照表
雲台校正
Two channel connection cable
數據顯示介面(選購品)
二通道連接線
P1
P2
P3~5
P6~7
P8~10
P11~15
P16~17
P18~19
P20~23
P24~25
P26~27
GU-INS main controller
GU-INS本體
Damper sponges
防震泡棉
規格
:
GPS antenna: 42 x 34 x 15mm
操作說明書
GAUI
User Manual
1.Dimensions:Main controller: 53.5 x 38.5 x 12mm
2.Frequency: 300Hz output to ESC
3.Operating temperature: -20~80°C
4.Operating modes: Rate (manual) mode, Auto balance mode, GPS positioning mode.
5.Rate (manual) mode: Max angular velocity: 300 degree/sec.
6.Auto balance mode: Max tilt angle: 60 degree.
7.GPS positioning mode:
8.GU-INS provides pitch and rolls output signals, can work with different types of camera mounts.
9.Fail-safe functions: Automatic Go-Home, Signal lost Go-Home, Low voltage protection.
10.Suitable wind condition: < 10 m/s
●Specifications
Weight:Main controller: 27g (w/o cables ), GPS antenna: 23g (with cable)
a.Hovering accuracy: Horizontal: ±2m, Vertical: ±0.5m
b.Max yaw angular velocity: 250 degree/sec
c.Max tilt angle: 45 degree.
d.Max horizontal speed: 10 m/s,36 km/hr
e.Max vertical speed: 8 m/s (horizontal posture)
User manual
使用說明書
Six channel connection cable
六通道連接線
USB cable
USB連接線
GPS system
GPS系統
Note
1.This product is NOT a toy, please keep away from crowd and buildings while flying.
本產品並非玩具,飛行時請遠離人群及公共設施。
2.Do not use this product for illegal purposes, user is responsible for following the law in each country.
請勿將本產品使用在不法用途,若觸犯法律須自行負責。
3.For your safety, please remove the propellers before setup and calibration procedures.
為了安全,在進行設定、校正時請移除螺旋槳。
4.The throttle calibration procedure is very importnat (P.6), it calibrates not only the signals of ESC, but
also central position of the transmitter. Therefore, do not move other sticks or switches except throttle
stick; if you change the transmitter, make sure you execute the throttle calibration procedures.
遙控器與GU-INS的訊號設定(P.6)非常重要,它除了設定電子變速器的高低訊號,同時也執行遙控器中立點
校正,所以設定時除了移動油門桿外不要碰觸其它動作;若有更換遙控器請務必再次執行訊號設定動作。
5.The calibration of magnetic north and due north needs to be done throughly (P.14), or the 500X will slant or
circle under GPS positioning mode.
磁北與正北的校正(P.14)需確實執行,否則在定位模式下會造成修正偏差,造成繞圈現象。
6.Under GPS positioning mode, all movements of the 500X are based on the speed signals of GPS.
Therefore, if the GPS signal is bad or interfered, the 500X will become uncontrollable. If so, please
switch back to auto-balance mode.
在GPS定位模式飛行時,所有的動作皆以GPS的速度訊號為基礎,因此若GPS訊號不良或受到干擾時會造成機。
體無法控制,若有此現象請切回自動平衡模式即可。
注意事項
7.Do not insert the GPS system indoor, the 500X will become uncontrollable due to bad signal reception.
(You can still apply altitude maintaining function under GPS positioning mode as long as you unplug the
GPS system.)
請勿在室內接上GPS系統,因為不良的訊號會造成機體無法控制。(只要不接GPS插頭,在室內仍可採用定位
模式來做定高度飛行。)
8.Fly the 500X in an open area, and keep away from buildings. The GPS signal might be interfered due to
signal refraction from buildings.
飛行時請在空曠場地,儘量避免接近建築物,因為GPS訊號有可能因為建築物的折射造成訊號偏移。
9.Under GPS positioning mode, please keep the 500X away from magnetic materials, such as hovering
above iron plate, the magnetometer inside the GU-INS will be interfered and result in instable
在GPS定位模式下請勿接近導磁物體,如在鐵板上空停懸,這會干擾系統裡的磁力計而造成頭向不穩。
10.Keep the GU-INS away from magnetic materials (irons, screws, motor and magnet), those will interfere
the GU-INS. (The screws of GU-INS are made of copper.)
GU-INS系統旁請勿靠近導磁物體(如鐵、螺絲、馬達及磁鐵),這些都會干擾GU-INS系統(GU-INS上下蓋採用
銅螺絲固定)。
11.If the 500X can not make a 360 degree turn, it means that the magnetometer of GU-INS is under
interference. Please keep away from sources of interference or execute the calibration process.
(Please visit GAUI official website for detail information.)
在GPS定位模式若無法360度轉向,這代表磁力計受到干擾,請遠離干擾源或進行校正(請上泰世網站)。
heading.
12.When it is windy, we suggest to take off and land with auto-balance mode. Under GPS positioning mode,
altitude maintaining function is more subceptible to interference.Therefore, it would be more dangerous
while the 500X is close to the ground.
風勢較大時,起飛及降落建議採用自動平衡模式,因為在定位模式下氣壓變化容易干擾高度指令,在接近
地面時比較危險。
13.You can activate the fail safe (F/S) function on your tansmitter, set AILE, ELEV, THRO, and RUDD stick to its
central position, and assign the F/S to activate “GPS positioning” and “HOME” function for further protection.
若你的遙控器有失聯保護功能,你可以將AILE、ELEV、THRO、RUDD設為搖桿的中間值,並且啟動定位模式
及回航點功能來多一層保護。
14.You can download the latest firmware from GAUI official website.
最新資料請上泰世網站下載更新。
1
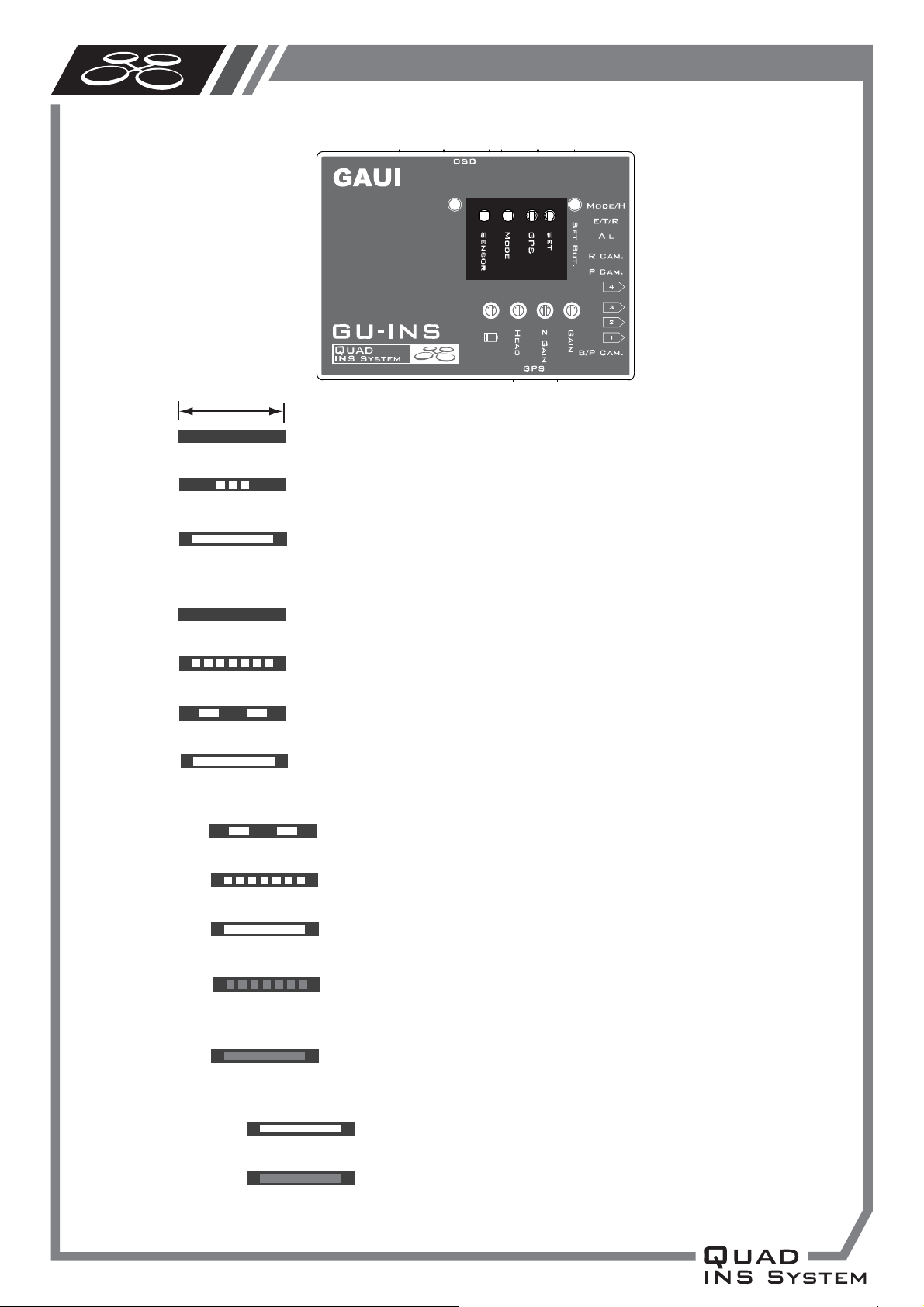
1 sec
Index for LED Light Status
燈號對照表
1.SET:
2.GPS:
3.MODE:
Off---- Normal
不亮----表示正常。
Flashes 3 times and turn off---- Setup is completed.
閃爍三下後停止----表示設定確認。
Solid---- Execute low voltage protection function.
恆亮----表示要執行低電壓保護。
Off---- GPS system is not inserted.
不亮----表示沒接GPS系統。
Fast flash---- Execute “HOME” function.
快閃----表示執行回航點指令。
Slow flash---- Searching for GPS signals.
慢閃----表示正在收尋GPS訊號。
Solid---- GPS signal searching procedure is completed.
恆亮----表示GPS定位完成。
Slow flash---- Manual mode.
慢閃----手動模式。
Fast flash---- Auto-balance mode.
快閃----自動平衡模式。
4.SENSOR:
Solid---- GPS positioning mode.
恆亮----定位模式。
Fast RED flash---- Battery voltage is too low, low voltage protection
function is activated.
快閃紅燈----表示電壓過低啟動保護措施。
Solid RED---- System error, please restart the system.
恆亮紅燈----表示內部封包有失聯,請重新開機。
Green ---- System ok.
亮綠燈----表示內部感測器數值正常。
Red ---- System error, please restart the system.
亮紅燈----表示內部感測器數值異常,請重新開機。
2

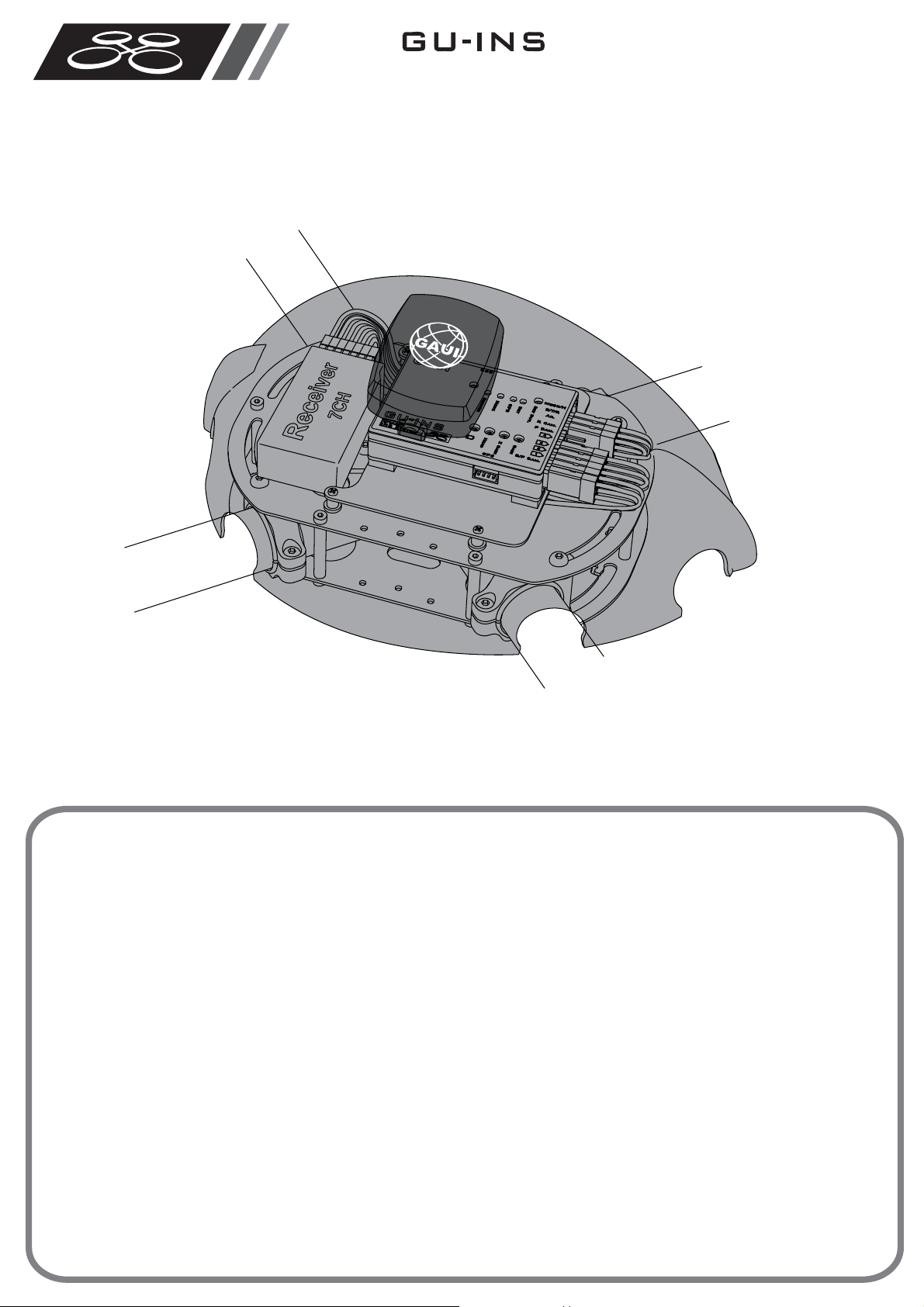
System Assembly
1.Install the damper sponges to the corners under GU-INS.
將防震泡棉貼於GU-INS本體的四個角落。
Front
系統組立
Back
2.Install the GU-INS to the center of the platform.
將它置中貼於500X的平台上。
Magnetometer
磁力計位置
3.Entwine the power cable about 4 circles as illustrated, and then insert it to the 4-in-1 power connector.
(This is to reduce magnetic interference generated by the current.)
將四個電子變速器的電源線如圖纏繞約四圈後再插入四合一接頭。(這是為了減低電流所產生的磁場干擾)
*Please keep GU-INS away from magnetic material interference.
*GU-INS附近要遠離磁鐵或導磁材料,以避免干擾內部的感測器。
3
System Assembly
系統組立
Green/Blue
(M
ODE
)
(H)
*The main controller of GU-INS is aeolotropic.
The arrow on GU-INS represents the direction
of the main controller.
*GU-INS本體具有方向性,
箭頭的方向代表前方。
4.Insert the 2 and 6 channel connection cables to the GU-INS main controller.
將六通道及二通道連接線插入GU-INS本體
Red/ /Black
(B)
CAM
(P
White/Red/Black
)
(AIL)
Red/Orange/Yellow
(E)
(T)
(R)
Nose Direction
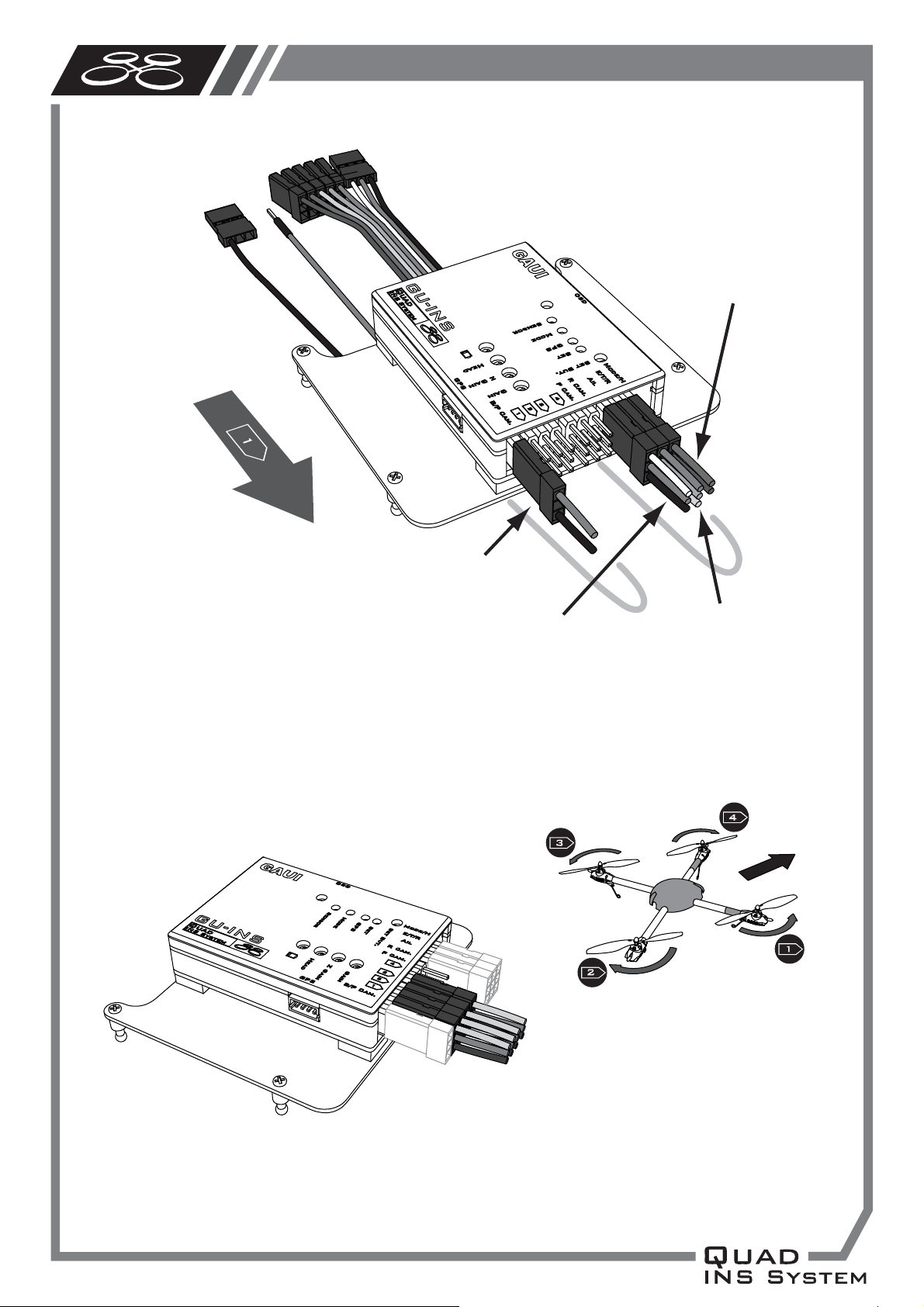
5.Insert ESC plugs (1~4) to the given sockets of GU-INS. (Notice the position and spinning
direction of the motors.)
將四個動力組的ESC接至GU-INS本體的四個插座裡。(注意位置及馬達旋轉方向)
4

System Assembly
系統組立
White/Red/Black
Red
Orange
Yellow
AILE
ELEV
THRO
RUDD
Green
Blue
Black
FLAP(Mode)
GEAR(Go Home)
AUX2(Camera Mount Pitch Axis)
6.Insert the plugs of receiver to GU-INS as illustrated.
如上圖依照順序將連接線接至接收機上。
Futaba
AILE
ELEV
THRO
RUDD
7.Create a model as “Airplane” in transmitter, confirm the “REV” setting as illustrated.
將遙控器設為飛機模式,並確認各家遙控器的命令值正反向。
Normal
Normal
Reverse
Normal
JR
Reverse
Reverse
Normal
Reverse
Hitech
Normal
Reverse
Normal
Normal
A
B
C
8.Assign “MODE” (green wire) to the 3-positions switch (A)
on the transmitter (as illustrated), “H” (blue wire) to the
2-positions switch (B) on the transmitter, and “P CAM” (black wire) to the side lever (C) of the transmitter.
將綠線(MODE)接至遙控器的三段開關(如A),藍線(H)接至兩段開關(如B),黑線(P CAM)接至旋扭開關(如C)。
5
System Setting
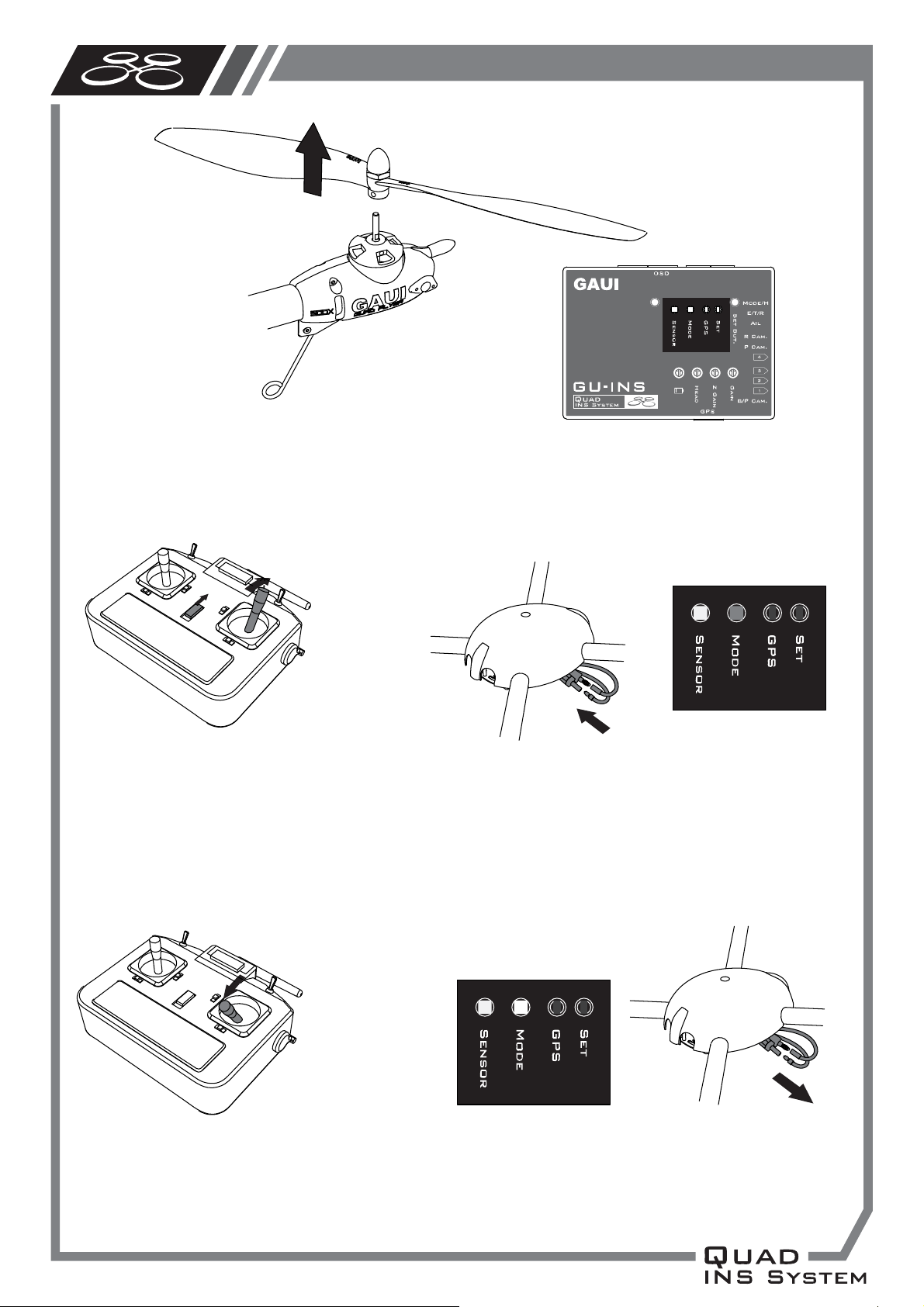
1.For your safety, before setup, please remove the propellers, and note the LED lights indications
on the GU-INS.
為了安全起見,請先將螺旋槳取下,並注意GU-INS的燈號變化。
系統設定
MODE 1
2.Turn on the transmitter, and move the
throttle stick to its top position.
先將遙控器的電源打開,同時把油門桿
撥到最大。
MODE 1
4.Then move the throttle stick to its lowest
position.
接下來把油門桿放到最低。
3.Connect the battery to the 500X, the motors will come up
with corresponding tones, and the LED light of “MODE”
lights “ Red flashing”.
將機體接上電源,此時馬達會有設定響聲,MODE燈號為
紅燈閃爍。
5.The motors will come up with corresponding tones, LED light
of “MODE” lights “Solid green”, and the calibration of ESCs
is completed.
此時馬達會有完成設定響聲,MODE燈號轉為綠燈,
接下來將機體電源移除,完成ESC指令校正。
6
System Setting
系統設定
Manual mode
Auto-balance mode
GPS positioning mode
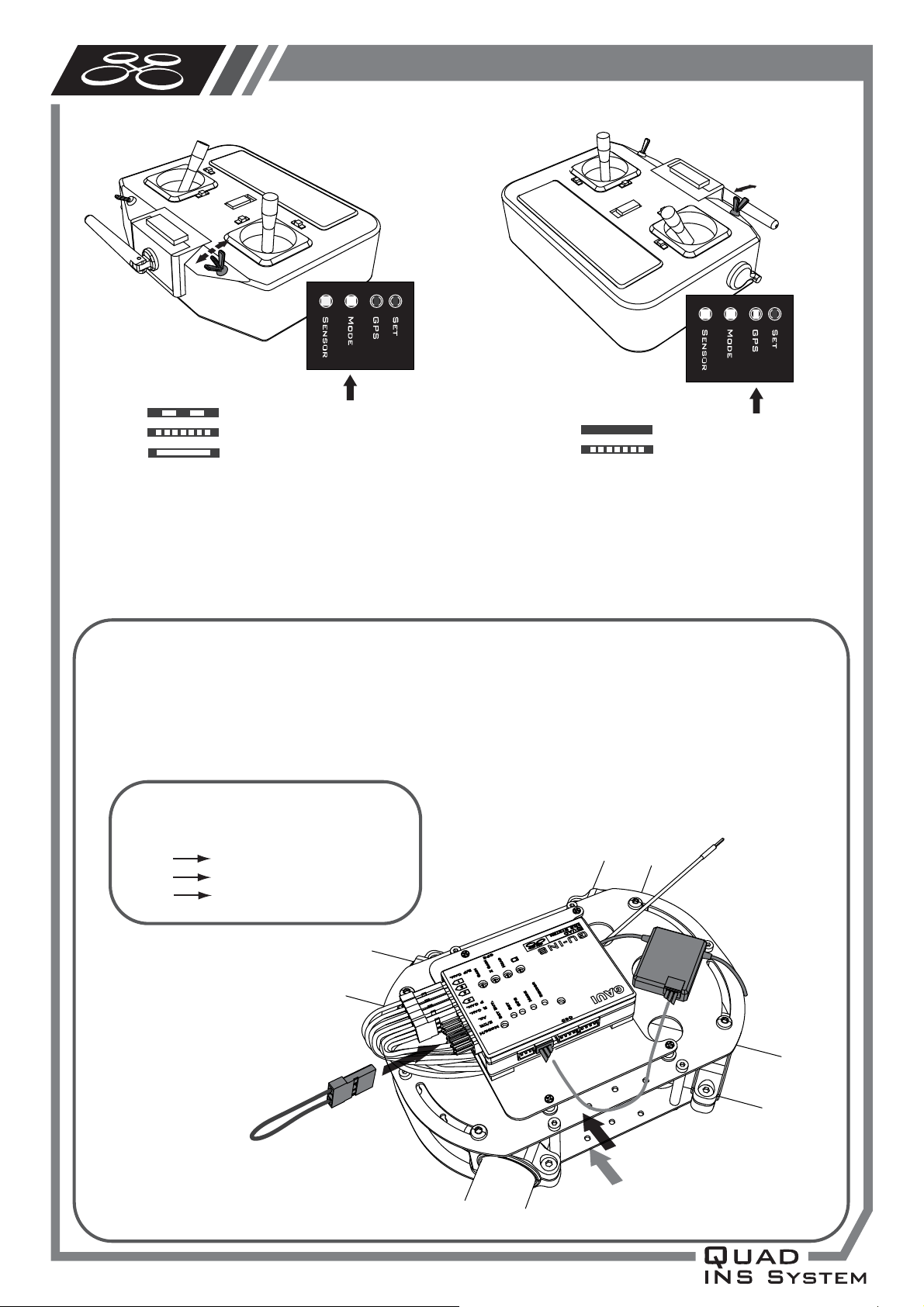
6.Then confirm the LED light of “MODE” and “GPS” in each fly mode; pay attention to the functionality of each
switch position (as illustrated).
接下來確認模式切換開關,請注意開關位置所代表的飛行模式(燈號如左上圖)及回航點的開關位置
(燈號如右上圖)
You can also connect 1~2 satellite receiver instead of standard receiver, 6 channel connection cable is
unnecessary while using satellite receiver. While setting the transmitter, please assign the functions
(Home, Mode, etc) to the 2 or 3 positions switch and levers, and confirm again how it works according
to the status of the LED lights.
你也可以接一至兩組衛星天線來取代標準接收機,此時六通道連接線已不需使用。
遙控器的設定除了前四個為標準搖桿指令其它三組請設在開關或旋鈕,最後再以燈號確認指令是否正確。
Ex: channel assignment for
JR DSX7 and DSX9:
若以JR遙控器DSX7、DSX9為例:
GEAR
FLAP
AUX2
Home function
Fly mode
Camera gimbal
模式切換
手動模式
自動平衡模式
回航點
雲台上下軸
定位模式
關閉
Off
“Home” function
啟動回航點
Insert the “Bind plug” to the “AIL” slot
before binding the transmitter
and GU-INS
(For your safety, please remove the propellers
before binding.)
*執行對頻前請先將對頻線插入GU-INS的AIL插槽。
(為了安全,請先將螺旋槳移除)
7
 Loading...
Loading...