

Page 1
MARINE RADAR
MODEL
1932 MARK-2/1942 MARK-2
Page 2
A
(
C
9-52, Ashihara-cho,
Nishinomiya, Japan
Telephone: 0798-65-2111
Telefax: 0798-65-4200
ll rights reserved.
Printed in Japan
Your Local Agent/Dealer
FIRST EDITION : AUG. 1998
C : APR. 3, 2001
PUB. No. OME-34620
YOSH)
MODEL1932/1942 MARK-2
Page 3
SAFETY INSTRUCTIONS
DANGER
Stay away from transmitting scanner.
The radar scanner emits microwave radiation which can be harmful to the
human body, particularly the eyes. Never look directly into the scanner
radiator from a distance of less than 1 m when the radar is in operation.
Radio Frequency Radiation Hazard
The radar scanner emits electromagnetic radio frequency (RF) energy which can be
harmful, particularly to your eyes. Never look directly into the scanner aperture from a
close distance while the radar is in operation or expose yourself to the transmitting
scanner at a close distance.
point
2
exist are given in the table
Distance to
10 W/m2 point
Worst case 3.0 m
Worst case 2.5 m
Distances at which RF radiation levels of 100 and 10 W/m
below.
Note: If the scanner unit is installed at a close distance in front of the wheel house,
your administration may require halt of transmission within a certain sector of scanner
revolution. This is possible—Ask your FURUNO representative or dealer to provide
this feature.
MODEL
1932 MK-2
1942 MK-2
Radiator
type
XN10A
XN12A
Distance to
100 W/m
Worst case 0.2 m
2
Nil
i
Page 4
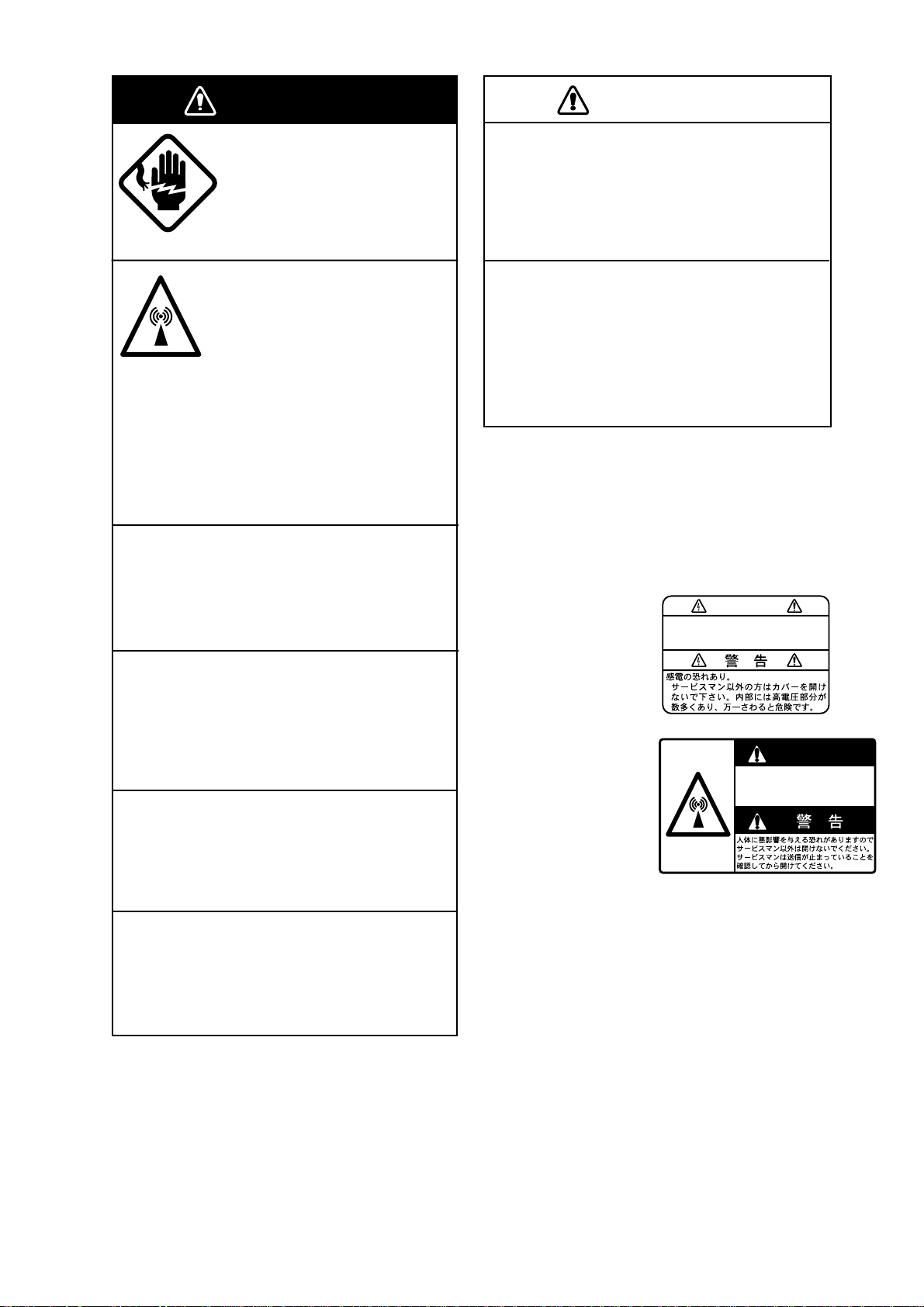
Two warning labels are attached to the display
unit and scanner unit. Do not remove these labels.
If labels are peeling off or are illegible, contact
a FURUNO agent or dealer.
WARNING
To avoid electrical shock, do not
remove cover. No user-serviceable
parts inside.
<Display Unit>
Name: Warning Label (1)
Type: 86-003-1011-0
Code no.: 100-236-230
WARNINGARNING
Radiation hazard. Only qualified
personnel should work inside scanner.
Confirm that TX has stopped before
opening scanner.
<Scanner Unit>
Name: Radiation Warning
Label
Type: 03-142-3201-0
Code no.: 100-266-890
WARNING
WARNING
CAUTIONCAUTION
Do not use the equipment for other than
its intended purpose.
Use of the equipment as a stepping stool,
for example, can result in personal injury
or equipment damage.
No one navigation device should ever be
solely replied upon for the navigation of
a vessel.
Always confirm position against all available
aids to navigation, for safety of vessel and
crew.
ELECTRICAL SHOCK HAZARD
Do not open the equipment.
Only qualified personnel
should work inside the
equipment.
Turn off the radar power
switch before servicing the
scanner unit. Post a warning sign near the switch
Do not disassemble or modify the
equipment.
indicating it should not be
turned on while the scanner
unit is being serviced.
Prevent the potential risk of
being struck by the rotating
scanner and exposure to
RF radiation hazard.
Fire, electrical shock or serious injury can
result.
Turn off the power immediately if water
leaks into the equipment or the equipment is emitting smoke or fire.
Continued use of the equipment can cause
fire or electrical shock.
Use the proper fuse.
Fuse rating is shown on the equipment.
Use of a wrong fuse can result in equipment
damage.
Keep heater away from equipment.
Heat can alter equipment shape and melt
the power cord, which can cause fire or
electrical shock.
ii
Page 5

FOREWORD
Congratulations on your choice of the
FURUNO MODEL 1932/1942 MARK-2 Marine Radar . We are confident you will see why
the FURUNO name has become synonymous with quality and reliability.
For over 50 years FURUNO Electric Company has enjoyed an enviable reputation for
innovative and dependable marine electronics equipment. This dedication to excellence
is furthered by our extensive global network
of agents and dealers.
Your radar is designed and constructed to
meet the rigorous demands of the marine environment. However, no machine can perform its intended function unless properly
installed and maintained. Please carefully
read and follow the recommended procedures for, operation and maintenance.
We would appreciate hearing from you, the
end-user, about whether we are achieving
our purposes.
Thank you for considering and purchasing
FURUNO equipment.
Features
Your radar has a large variety of functions,
all contained in a remarkably small cabinet.
The main features of the MODEL 1932/1942
MARK-2 are:
¡ Traditional FURUNO reliability and qual-
ity in a compact, lightweight and low-cost
radar.
¡ Durable brushless scanner motor.
¡ On-screen alphanumeric readout of all op-
erational information.
¡ Standard features include EBL (Electronic
Bearing Line), VRM (Variable Range
Marker), Guard Alarm, Display Off Center, and Echo Trail.
¡ Watchman feature periodically transmits
the radar to check for radar targets which
may be entering the alarm zone.
¡ Ship’s position in latitude and longitude
and Loran C Time Dif ferences, range and
bearing to a waypoint, and ship’s speed/
heading/course can be shown in the bottom text area. (Requires a navigation aid
which can output such data in IEC 61162
format.)
¡ Zoom feature provided.
¡ Optional Auto Plotter ARP-10 acquires
and automatically tracks 5 targets plus 5
targets manually , or 10 targets manually.
iii
Page 6

TABLE OF CONTENTS
FOREWORD.............................. iii
MENU TREE ............................... v
TABLE OF CONTENTS BY
INDICATION, MARKER............. vi
SYSTEM CONFIGURATION .... vii
1. PRINCIPLE OF OPERATION
1.1 What is Radar?............................... 1-1
1.2 How Ships Determined Position
Before Radar ................................. 1-1
1.3 How Radar Determines Range ...... 1-1
1.4 How Radar Determines Bearing..... 1-1
1.5 Radar W ave Speed and Scannner
Rotation Speed .............................. 1-1
1.6 The Radar Display ......................... 1-1
2. BASIC OPERATION
2.1 Control Description......................... 2-1
2.2 Turning the Radar On/Off............... 2-2
2.3 Transmitting.................................... 2-2
2.4 Stand-by......................................... 2-2
2.5 Selecting the Range....................... 2-3
2.6 Adjusting Picture Brilliance............. 2-3
2.7 Adjusting Receiver Sensitivity ........ 2-3
2.8 Adjusting the A/C SEA Control
(reducing sea clutter) ..................... 2-3
2.9 Adjusting the A/C RAIN Control
(reducing rain clutter)..................... 2-4
2.10 Erasing the Heading Marker,
North Marker................................ 2-5
2.11 Measuring the Range ................... 2-5
2.12 Measuring the Bearing................. 2-6
2.13 Using the Offset EBL.................... 2-6
2.14 Offcentering the Picture................ 2-7
2.15 Zoom ............................................ 2-8
3. MENU OPERATION
3.1 Basic Menu Operation.................... 3-1
3.2 Selecting the Presentation Mode ... 3-1
3.3 Magnifying Long Range Echoes
(echo stretch)................................. 3-2
3.4 Echo Trail ....................................... 3-2
3.5 Suppressing Radar Interference .... 3-3
3.6 Selecting Pulsewidth ...................... 3-4
3.7 Guard Alarm ................................... 3-4
3.8 Watchman ...................................... 3-5
3.9 Displaying Navigation Data............ 3-6
3.10 OTHER MENU Description.......... 3-7
3.11 Function Controls ......................... 3-8
3.12 Suppressing Noise ....................... 3-8
3.13 Adjusting Brilliance of Markers..... 3-8
3.14 Outputting Target Position............ 3-8
3.15 Dead Sector ................................. 3-8
4. FALSE ECHOES
4.1 Multiple Echoes.............................. 4-1
4.2 Side-lobe Echoes ........................... 4-1
4.3 Indirect Echoes .............................. 4-2
4.4 Blind and Shadow Sectors............. 4-2
4.5 SART (Search and Rescue
Transponder) ................................. 4-5
5. MAINTENANCE & TROUBLESHOOTING
5.1 Preventive Maintenance................. 5-1
5.2 Replacing the Fuse ........................ 5-1
5.3 T roubleshooting.............................. 5-2
5.4 Self Test.......................................... 5-3
5.5 Life Expectancy of Magnetron........ 5-3
6. OPERATION OF ARP-10
(OPTION)
6.1 General .......................................... 6-2
6.2 ARP-10 MENU Operation .............. 6-2
6.3 Acquiring T argets............................ 6-4
6.4 Displaying Target Data ................... 6-5
6.5 Mode and Length of Vectors .......... 6-6
6.6 Past Position Display...................... 6-6
6.7 Operational Warnings..................... 6-6
SPECIFICATIONS ................ SP-1
INDEX .....................................IN-1
Declaration of Conformity
(MODEL 1932 MARK-2)
Declaration of Conformity
iv
(MODEL 1942 MARK-2)
Page 7
MENU TREE
MENU KEY
RINGS (Off, 1, 2, 3, max)
EBL OFFSET (Off, On)
SHIFT (Off, On)
ZOOM (Off, On)
MODE (HU, CU, NU, TM)
DISP DATA
ECHO TRAIL (Off, On)
ECHO STRTCH (Off, ES1, ES2)
ARP-10 MENU
OTHER MENU
Panel Dimmer (1, 2, 3, 4)
1.
Mark Brill (1, 2, 3, 4)
2.
HD Mark (1, 2, 3, 4)
3.
Characters (1, 2, 3, 4)
4.
Trail Tone (Single, Multi)
5.
Int Reject (Off, 1, 2, 3)
6.
Pulselength (Short, Long)
7.
Noise Reject (Off, On)
8.
Trail Time
9.
(15S, 30S, 1M, 3M, 6M, 15M, 30M, Cont)
Tune (Auto, Manu)
10.
Disp Data (Off, Nav, ARP, All)
11.
WPT Mark (Off, On)
12.
EBL Ref (Rel, True)
13.
VRM Unit (nm, km, sm)
14.
Watchman (Off, 5M, 10M, 20M)
15.
STBY DISP (Norm, Econo, Nav)
16.
Guard Mode (In, Out)
17.
Own Position (L/L, TD)
18.
Cursor Posi (B/R, L/L)
19.
Alm Sense LV (Low, Mid, High)
20.
Dead Sector (Off, On)
21.
Range
22.
(1/8, 1/4, 1/2, 3/4, 1, 1.5,
2, 3, 4, 6, 8, 12, 16, 24,
Self Test
23.
Installation Setup
24.
: Defaut settings
(Options)
1. Display
2. All Cancel
3. Vector ref
4. Vector Length
5. History
6. CPA SET
7. TCPA SET
8. AUTO ACQ
36, 48) :1932 M2
36, 48, 64) :1942 M2
1.
Nav Talker (All, GPS, LC)
2.
Depth Unit (m, fa, ft)
3.
Temp Unit (¡C, ¡F)
4.
Hdg Sensor (Magnet, Gyro)
5.
Key Beep (Off, On)
6.
Scan Stop (Rotate, Stop)
7.
Dead Sector
8.
Tune/Video Adjustment
9.
Heading Alignment
10.
Sweep Timing Adjustment
11.
MBS Adjustment
12.
Ant Height (Low, Mid, High)
13.
STC Curve (Sharp, Std, Gntl)
14.
Ope Mode (Master, Slave)
15.
Hours in Use
16.
TX Hours
v
Page 8
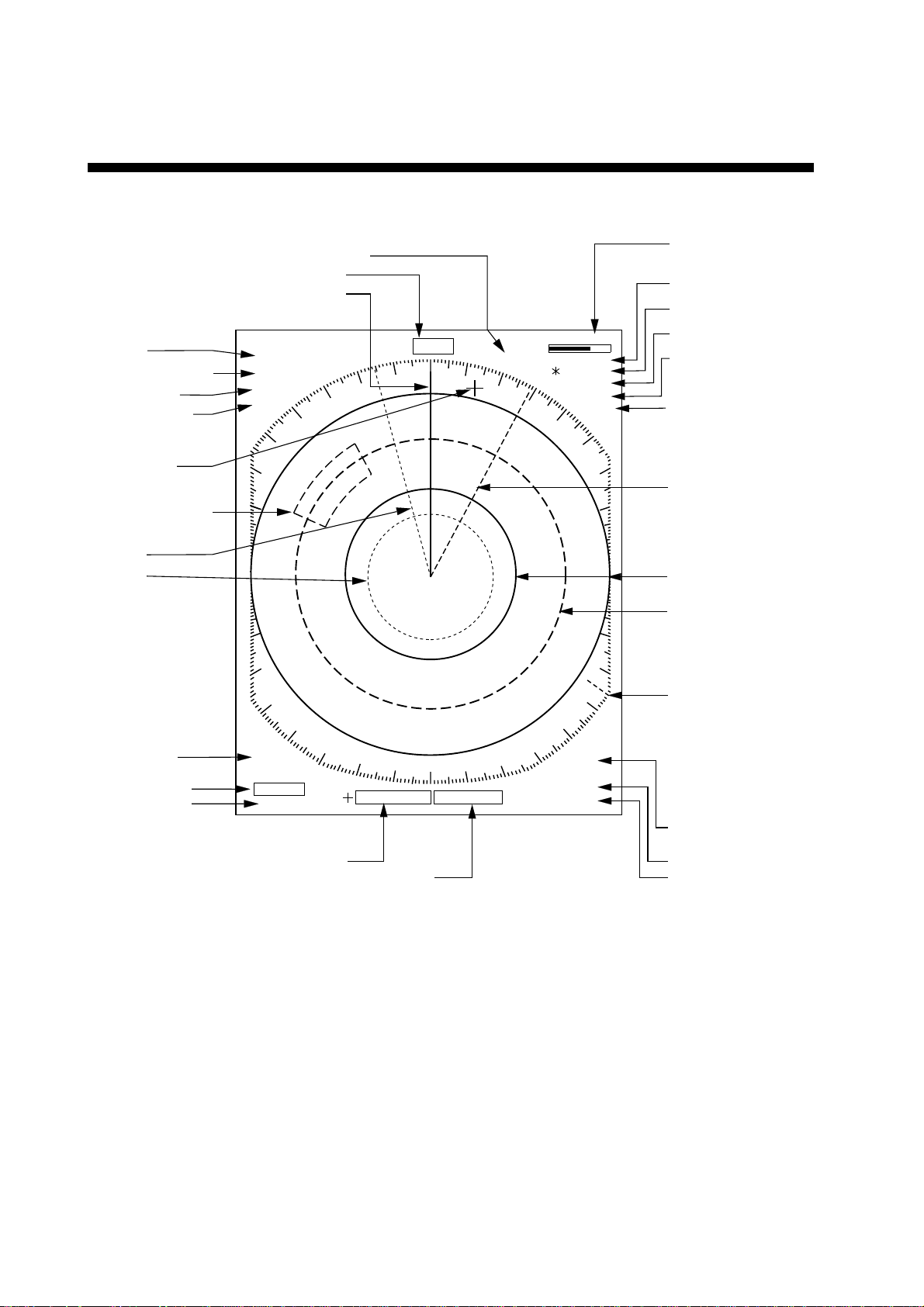
TABLE OF CONTENTS BY
INDICATION, MARKER
Echo trail elapsed time (P.3-3)
Heading (requires heading data)
Range (P.2-3)
Range ring interval (P.2-3)
Pulselength (P.2-3)
Display mode (P.3-1)
Cursor (P.2-5, 2-6)
Guard zone area (P.3-5)
EBL1 (P.2-6)
VRM1 (P.2-5)
Heading marker (P.2-5)
. 125
NM
.
0625
SP
HU
HDG 234.5¡
TRAIL
25 : 38
AUTO
30M
G (OUT)
ZOOM
ES1
OFFCENTER
Tuning indicator (P.3-7)
Echo trail time (P.3-3)
Guard Zone (P.3-4)
Zoom (P.2-8)
Echo Stretch (P.3-2)
Off center (P.2-7)
EBL2 (P.2-6)
Range ring (P.2-3, 2-5)
VRM2 (P.2-5)
A/C AUTO (P.2-4)
EBL1 bearing (P.2-6)
EBL2 bearing (P.2-6)
A/C
AUTO
EBL
345.6 R
¡
23.0 R
¡
Cursor bearing (P.2-6)
Cursor range (P.2-5)
13.5 R¡
0.142NM
North marker (P.2-5)
IR2
VRM
0.048NM
0.100NM
Interference rejector (P.3-3)
VRM1 range (P.2-5)
VRM2 range (P.2-5)
vi
Page 9
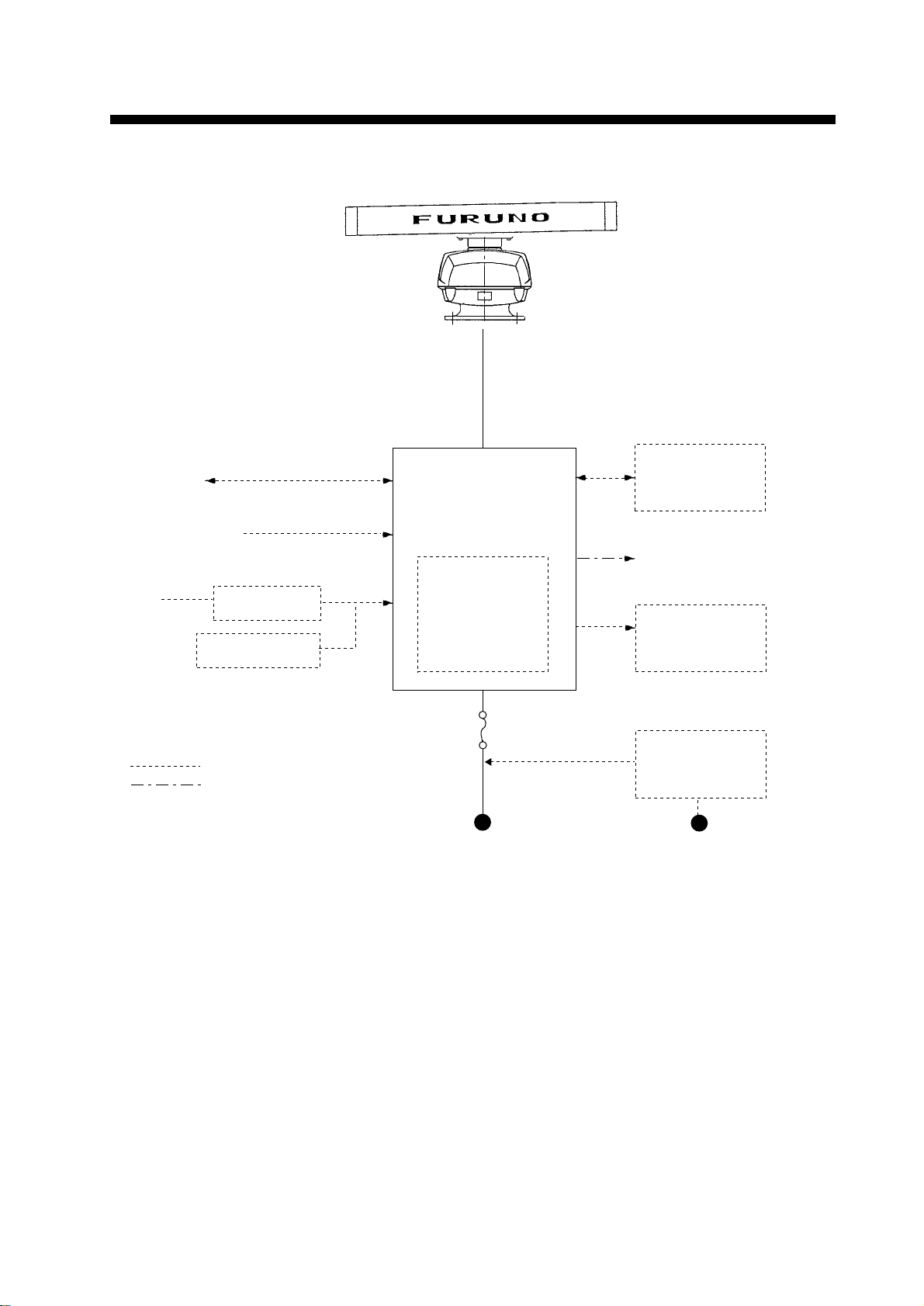
SYSTEM CONFIGURATION
Scanner Unit
MODEL 1932 MARK-2
XN10A-RSB-0070-064 (24 rpm)
XN10A-RSB-0073-064 (48 rpm)
MODEL 1942 MARK-2
XN12A-RSB-0070-059 (24 rpm)
XN12A-RSB-0073-059 (48 rpm)
Navigation
IEC 61162* (In/Out)
device
Video Sounder
Gyrocompass
*Equivalent to NMEA 0183
IEC 61162* (In/Out)
Gyro Converter
AD-100
Integrated Heading
Sensor PG-1000
: Option
: Local Supply
Display Unit
RDP-118
Auto Plotter
ARP-10
(24 rpm only)
12 VDC: 10A
24/32 VDC: 5A
12/24/32 VDC
Radar Plotter
RP-110
Remote Display
FMD-811/1800
External Alarm
Buzzer OP03-21
Rectifier
RU-3423
115/230 VAC
Note: Even though the display unit meets waterproof standard IPX-5, the connection of external buzzer, radar plotter and/or remote display can af fect waterproofness. W atertight integrity cannot be guaranteed. When these modification has been done, the display unit should
not be mounted where exposed.
vii
Page 10

1. PRINCIPLE OF OPERATION
1.1 What is Radar?
The term “RADAR” is an acronym meaning
Radio Detection And Ranging. Although the
basic principles of radar were developed during World War II, echoes as an aid to navigation is not a new development.
1.2 How Ships Determined Position Before Radar
Before the invention of radar, when running
in fog near a rugged shoreline, ships would
sound a short blast on their whistles, fire a
shot, or strike a bell. The time between the
origination of the sound and the returning of
the echo indicated how far the ship was from
the cliffs or the shore. The direction from
which the echo was heard indicated the relative bearing of the shore.
1.3 How Radar Determines Range
1.4 How Radar Determines Bearing
The bearing to a target found by the radar is
determined by the direction in which the radar scanner is pointing when it emits an electronic pulse and then receives a returning
echo. Each time the scanner rotates pulses
are transmitted in the full 360 degree circle,
each pulse at a slightly different bearing from
the previous one. Therefore, if one knows the
direction in which the signal is sent out, one
knows the direction from which the echo must
return.
1.5 Radar Wave Speed and
Scanner Rotation Speed
Note that the speed of the radar waves out
to the target and back again as echoes is
extremely fast compared to the speed of rotation of the scanner. By the time radar echoes have returned to the scanner, the amount
of scanner rotation after initial transmission
of the radar pulse is extremely small.
Radar determines the distance to the target
by calculating the time difference between the
transmission of a radar signal and the reception of the reflected echo. It is a known fact
that radar waves travel at a nearly constant
speed of 162,000 nautical miles per second.
Therefore the time required for a transmitted
signal to travel to the target and return as an
echo to the source is a measure of the distance to the target. Note that the echo makes
a complete round trip, but only half the time
of travel is needed to determine the one-way
distance to the target. This radar automatically takes this into account in making the
range calculation.
1.6 The Radar Display
The range and bearing of a target is displayed
on what is called a Plan Position Indicator
(PPI). This display is essentially a polar diagram, with the transmitting ship’s position at
the center. Images of target echoes are received and displayed at their relative bearings, and at their distance from the PPI center.
With a continuous display of the images of
targets, the motion of the transmitting ship is
also displayed.
1-1
Page 11
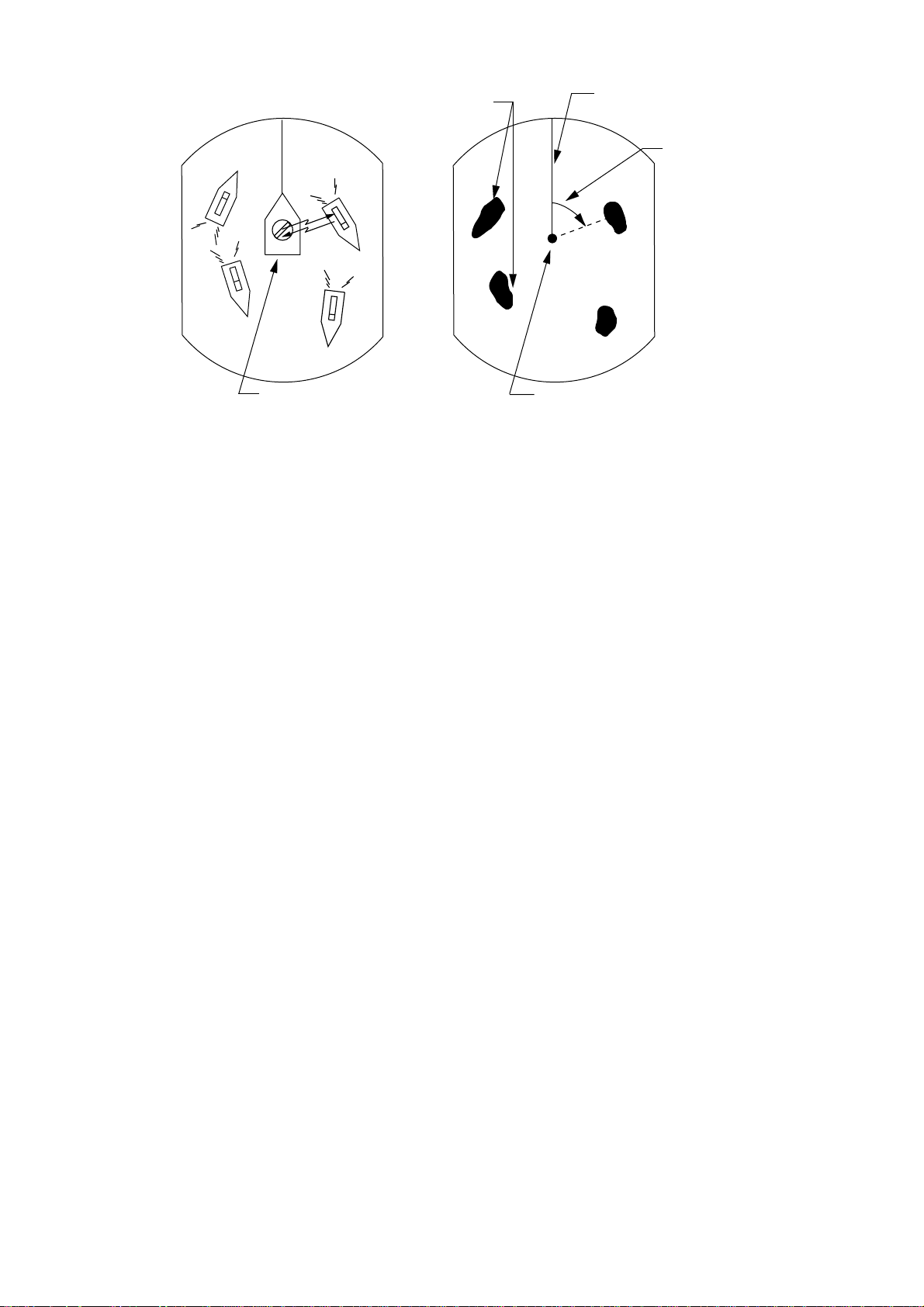
Targets
Heading marker
Range and bearing
of a target, relative
to own ship, are
A
D
A
readable on the PPI.
D
B
C
Own ship
(radar)
(A) Bird's eye view of situation
Figure 1-1 How radar works
B
C
Own ship
in center
(B) Radar picture of (A)
1-2
Page 12
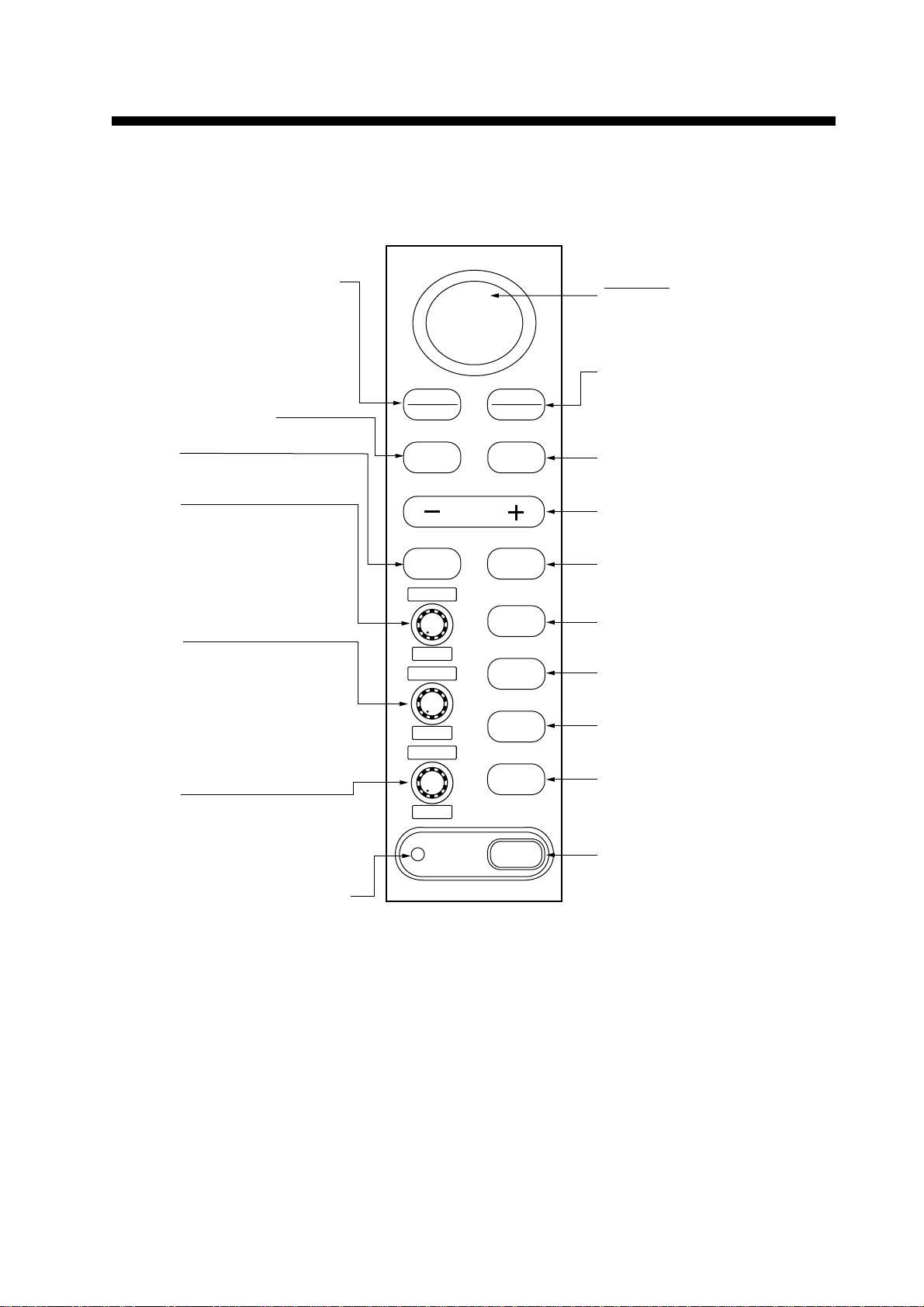
2.1 Control Description
2. BASIC OPERATION
Requires Auto Plotter ARP-10
Brief press:
Displays the data of target
selected with the cursor.
Long press:
Terminates plotting of the target
selected with the cursor.
Opens/closes menus.
Selects
EBL1/EBL2/VRM1/VRM2.
Control:
Adjusts sensitivity.
Switch:
Temporarily erases heading
marker (and north marker if
displayed).
Control:
Reduces sea clutter.
Switch*:
(Long press) Shifts your vessel s
position to cursor location.
(Brief press) Doubles size of
area between your vessel and
location selected by cursor.
Control:
Reduces rain clutter.
Switch*:
Displaces the EBL origin.
SELECT
CANCEL
MENU
RANGE
EBL/VRM
SELECT
GAIN
HM-OFF
A/C SEA
F1
A/C RAIN
F2
ACQ
ENTER
GUARD
EBL/VRM
CONTROL
TLL
A/C AUTO
BRILL
ST BY
TX
POWER
Omnipad
Shifts cursor, VRM and EBL;
selects items and options on
menu.
(1) Acquires the target selected
with the ominipad. (Requires
Auto Plotter ARP-10.)
(2) Registers selection on
menus.
Sets guard zone area.
Selects radar range.
Enables/erases
EBL1/EBL2/EBL3/EBL4.
Outputs target position data.
Automatically reduces sea and
rain clutters.
Adjusts display brilliance.
Sets radar in stand-by;
transmits radar pulse.
Turns power on/off.
Lights when the economy mode
is on.
*Default switch function.
Figure 2-1 Control panel
2-1
Page 13
2.2 Turning the Radar On/Off
2.4 Stand-by
Press the [POWER] key to turn the radar on
or off.
The control panel lights and a timer displays
the time remaining for warm up of the magnetron (the device which produces radar
pulses), counting down from 1:30 to 0:01.
2.3 Transmitting
After the power is turned on and the magnetron has warmed up, STBY (Stand-By) appears at the screen center. This means the
radar is now fully operational.
Press the [STBY TX] key to transmit.
When transmitting, any echoes from targets
appear on the display. This radar displays
echoes in eight tones of green according to
echo strength.
When you won’t be using the radar for an
extended period, but you want to keep it in a
state of readiness, place it in stand-by by
pressing the [STBY TX] key. The display
shows “STBY,” navigation data, or goes into
the economy mode depending on menu setting. (More on menu operation later.)
Economy mode
The CRT can be set to automatically turn itself off when in stand-by, to reduce power
consumption. This feature is called the
“economy mode.” Power consumption in the
economy mode is 28 W. When the economy
mode is on, the lamp next to the [POWER]
key lights.
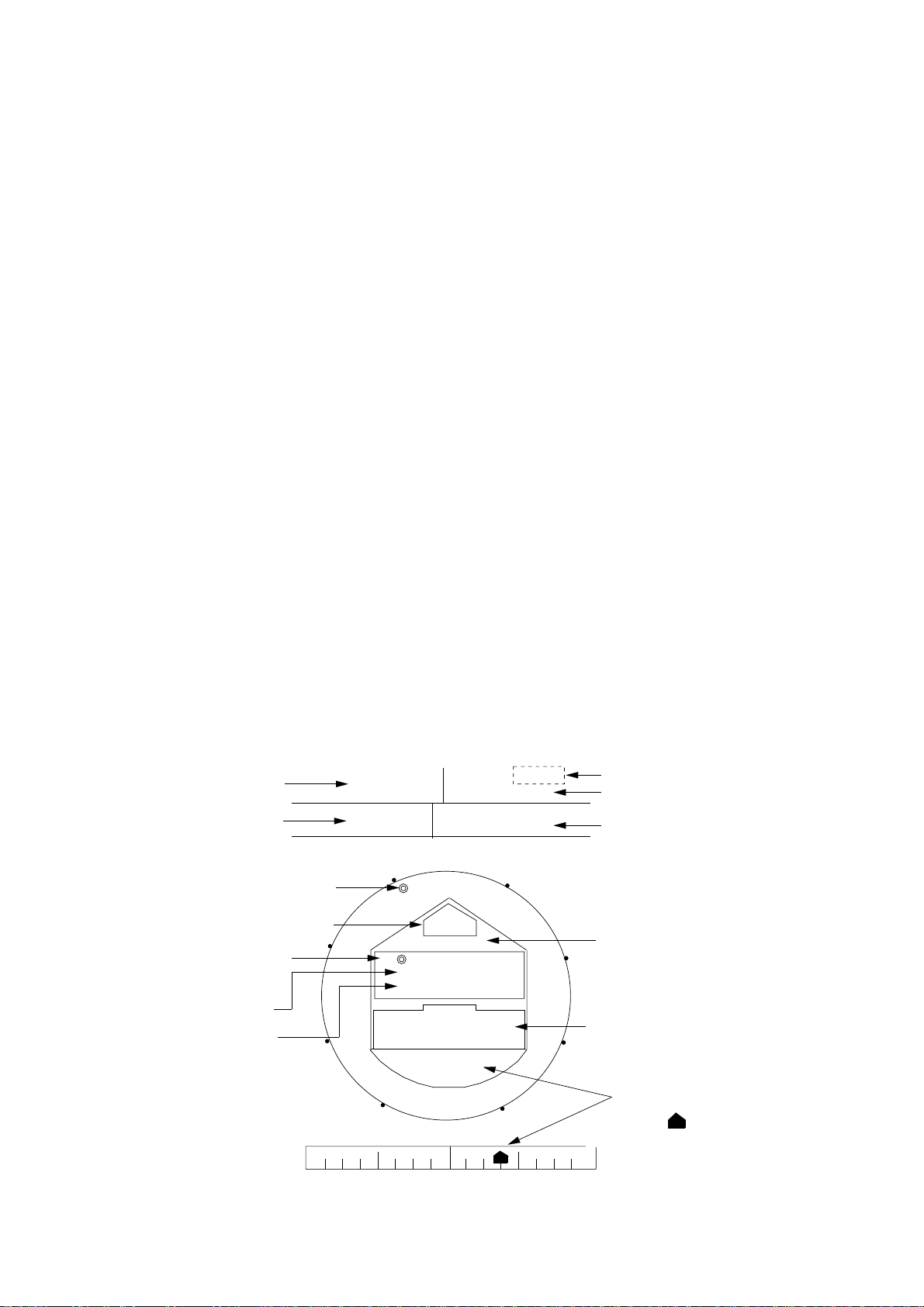
Navigation data display during
stand-by
If a navigation aid inputs navigation data to
this radar in IEC 61162 format, navigation
data can be displayed during stand-by. You
can turn the navigation data display on/off
through the menu. Figure 2-2 shows a typical navigation data display during stand-by.
Speed
Depth
TO Waypoint
bearing
Time-to-go to
TO Waypoint
Bearing to TO
Waypoint
Range to TO Waypoint
SPEED
10.5
kt
DEPTH TEMPERATURE
Heading
N
L
XTE
125
m
WPT TTG 01:08
BRG
RNG
LAT 30°00.00N
LON 135°00.00E
E
HDG
092.5°
CRS 180.0°M
45.0° M
12.0NM
OWN SHIP
TD 36378.1
59096.4
XTE
R 0.3NM
W
TRIP
000.3 nm
+17.3
ST-BY
°C
XTE
Figure 2-2 Typical navigation data display
during stand-by
Time-to-go to Stand-by
Trip distance since power on
Temperature
Course
S
Ship's position in latitude
and longitude and Loran
TDs
Cross Track Error
Mark " " shows
R
direction and amount of
error.
2-2
Page 14

Note1: Availability of a particular display item
depends on incoming data.
2.7 Adjusting Receiver Sensitivity
Note2: When Range to Waypoint reaches 0.1
nm, the WPT marker jumps to dead ahead
even though a difference may exist between
heading and BRG to WPT.
Note3: When cross track error exceeds 1 nm
on either side, the XTE mark starts blinking.
2.5 Selecting the Range
The range selected automatically determines
the range ring interval, the number of range
rings, pulselength and pulse repetition rate,
for optimal detection capability in short to long
ranges.
Y ou can select which ranges and pulselength
(for 1.5 and 3 mile ranges) to use through
the menu. The range, range ring interval and
pulselength appear at the top left-hand corner of the display.
The [GAIN] control adjusts the sensitivity of
the receiver. It works in precisely the same
manner as the volume control of a broadcast
receiver, amplifying the signals received.
The proper setting is such that the background noise is just visible on the screen. If
you set up for too little sensitivity, weak echoes may be missed. On the other hand excessive sensitivity yields too much
background noise; strong targets may be
missed because of the poor contrast between
desired echoes and the background noise on
the display.
T o adjust receiver sensitivity , transmit on long
range, and adjust the [GAIN] control so background noise is just visible on the screen.
2.8 Adjusting the A/C SEA
Control
To select a range;
Press the [- RANGE +] key. The range and
range ring interval appear at the top left corner of the display.
Tips for selecting the range
¡ When navigating in or around crowded
harbors, select a short range to watch for
possible collision situations.
¡ If you select a lower range while on open
water, increase the range occasionally to
watch for vessels that may be heading
your way.
2.6 Adjusting Picture Brilliance
The [BRILL] key adjusts the brilliance of the
radar picture in sixteen levels. The current
level momentarily appears on the screen
whenever the [BRILL] key is pressed.
(reducing sea clutter)
Echoes from waves can be troublesome, covering the central part of the display with random signals known as “sea clutter.” The
higher the waves, and the higher the scanner above the water, the further the clutter
will extend. Sea clutter appears on the display as many small echoes which might affect radar performance. (See the left-hand
figure in Figure 2-3.) When sea clutter masks
the picture, adjust the [A/C SEA] control to
reduce the clutter.
How the A/C SEA control works
The [A/C SEA] control reduces the amplification of echoes at short ranges (where clutter is the greatest) and progressively
increases amplification as the range increases, so amplification will be normal at
those ranges where there is no sea clutter.
2-3
Page 15

Adjusting the A/C SEA control
2.9 Adjusting the A/C RAIN
The proper setting of the A/C SEA should be
such that the clutter is broken up into small
dots, and small targets become distinguishable.
If the control is set too low, targets will be
hidden in the clutter , while if it is set too high,
both sea clutter and targets will disappear
from the display. In most cases adjust the
control until clutter has disappeared to leeward, but a little is still visible windward.
1. Confirm that the sensitivity is properly adjusted, and then transmit on short range.
2. Adjust the [A/C SEA] control so small targets are distinguishable but some clutter
remains on the display.
Control
(reducing rain clutter)
The vertical beamwidth of the scanner is designed to see surface targets even when the
ship is rolling. However, by this design the
scanner will also detect rain clutter (rain,
snow , hail, etc.) in the same manner as normal targets. Figure 2-4 shows the appearance of rain clutter on the display.
Adjusting A/C RAIN
When rain clutter masks echoes, adjust the
[A/C RAIN] control. This control splits up
these unwanted echoes into a speckled pattern, making recognition of solid targets
easier.
Sea clutter at
display center
A/C SEA control adjusted;
sea clutter suppressed.
Figure 2-3 How to adjust the A/C SEA
control
Tip for adjusting the A/C SEA
A common mistake is to over-adjust the circuit so all the clutter is removed. As an example set up for maximum A/C SEA. Y ou will
see how the center of the display becomes
dark. This dark zone can be dangerous (targets may be missed), especially if the sensitivity is not properly adjusted. Always leave a
little clutter visible on the display to be sure
weak echoes will not be suppressed. If there
is no clutter visible on the display , turn off the
circuit.
CAUTION
Appearance of
rain clutter
A/C RAIN control adjusted;
rain clutter suppressed.
Figure 2-4 Effect of A/C RAIN
Note: In addition to reducing clutter , the [A/C
RAIN] control can be used in fine weather to
clarify the picture when navigating in confined
waters. However , with the circuit activated the
receiver is less sensitive. Therefore, turn off
the circuit when its function is not required.
Automatic adjustments of A/C SEA
and A/C RAIN
Push the [A/C AUTO] key. “A/C AUTO” appears at the bottom left-hand corner of the
display when the A/C AUTO circuit is on. Y ou
can fine tune by adjusting the [A/C SEA], [A/
C RAIN] and [GAIN] controls.
2-4
Turn off the A/C SEA control when
its use is not required; the control
can erase weak targets.
Page 16

2.10 Erasing the Heading
Measuring range by VRM
Marker, North Marker
The heading marker or north marker (available with gyrocompass connection) may occasionally mask a target. To view the target,
you can temporarily erase the heading
marker and north marker by pressing and
holding down the [GAIN (HM OFF)] control.
Release the control to re-display the markers.
Heading
marker
North
marker
Figure 2-5 Heading marker and north marker
2.11 Measuring the Range
Y ou can measure the range to a target three
ways: by the range rings, by the cursor, and
by the VRM (Variable Range Marker).
1. Press the [EBL/VRM SELECT] key to circumscribe a VRM readout (at the bottom
right-hand corner). Each press of the key
selects the readout of EBL1, EBL2, VRM1
or VRM2 in that order.
EBL
345.6°R
23.0°R
VRM
5.3°NM
12.5°NM
Figure 2-6 Display bottom, showing
location of EBL and VRM readouts
2. Press the [EBL/VRM CONTROL] key to
enable control of the VRM by the
omnipad.
3. Operate the omnipad to place the outside
edge of the VRM on the inside edge of
the target. The omnipad must be operated within five seconds after pressing the
[EBL/VRM CONTROL] key , otherwise the
VRM cannot be operated.
4. Check the VRM readout at the bottom
right-hand corner of the display to find the
range to the target.
5. T o anchor the VRM, press the [EBL/VRM
CONTROL] key.
To erase the VRM, press and hold down the
[EBL/VRM CONTROL] key about two seconds.
Measuring range by range rings
Count the number of rings between the center of the display and the target. Check the
range ring interval and judge the distance of
the echo from the inner edge of the nearest
ring.
Measuring range by cursor
Operate the omnipad to place the cursor intersection on the inside edge of the target
echo. The range to the target, as well as the
bearing, appears at the bottom of the display .
Range
Range ring
interval
Target
Cursor
Cursor range
6.0 NM
2.0
4.0 NM
VRM
4.0 NM
3.0 NM
VRM1
VRM2
VRM1
range
VRM2
range
Figure 2-7 Measuring range by the cursor,
range rings and VRM
Note: You can display the range readout of
the VRM and cursor in nautical miles, statute miles or kilometers. For details see the
next chapter.
2-5
Page 17

2.12 Measuring the Bearing
There are two ways to measure the bearing
to a target: by the cursor, and by the EBL
(Electronic Bearing Line).
Measuring bearing by cursor
Operate the omnipad to bisect the target with
the cursor intersection. The bearing to the
target appears at the bottom of the display.
Note: The bearing readout for the EBL andthe
cursor can be displayed in relatiive or true
bearing (true bearing requires heading sensor input). For north up and course up display modes the bearing reference is always
true. For details see the next chapter.
Tips for measuring bearing
¡ Bearing measurements of smaller targets
are more accurate; the center of larger
target pips is not as easily identified.
Measuring bearing by EBL
1. Press the [EBL/VRM SELECT] key to circumscribe an EBL readout (at the bottom
left-hand corner). Each press of the key
selects the readout of EBL1, EBL2, VRM1
or VRM2 in that order.
2. Press the [EBL/VRM CONTROL] key to
enable control of the EBL by the omnipad.
3. Operate the omnipad to bisect the target
with the EBL. The omnipad must be operated within five seconds after pressing
the [EBL/VRM CONTROL] key , otherwise
the EBL cannot be operated.
4. Check the EBL readout at the bottom lefthand corner of the display to find the bearing to the target.
5. To anchor the EBL, press the [EBL/VRM
CONTROL] key.
To erase the EBL and its readout, press and
hold down the [EBL/VRM CONTROL] key
about two seconds.
6.0 NM
2.0
Target
Cursor
EBL1
¡ Bearings of stationary or slower moving
targets are more accurate than bearings
of faster moving targets.
¡ To minimize bearing errors keep echoes
in the outer half of the picture by changing the range scale; angular difference
becomes difficult to resolve as a target
approaches the center of the display.
2.13 Using the Offset EBL
The offset EBL provides two functions: predict collision course of a radar target and measure the range and the bearing between two
targets.
Predicting collision course
1. Operate the omnipad to place the cursor
on the center of the target.
2. Press the [EBL/VRM SELECT] key to
choose the EBL1 readout, and then press
the [EBL/VRM CONTROL] key.
3. Press the [MENU] key, select EBL OFFSET from the menu, and then press the
[ACQ/ENTER] key.
EBL2
Cursor
bearing
EBL1 bearing
EBL1 bearing
EBL
40.0° R
135.0° R
40.0°R 4.0 NM
Figure 2-8 How to measure bearing by EBL
and cursor
2-6
4. Press the [EBL/VRM CONTROL] key.
5. Oparate the omnipad so EBL1 passes
through the center of the target.
If the target tracks along the EBL towards the
center of the display (your vessel’s position),
the target may be on a collision course.
To cancel the offset EBL, select EBL OFFSET from the menu and press the [ACQ/
ENTER] key.
Page 18

EBL1 origin
Cursor Cursor
2 Press [F1] to offcenter
display.
1 Pleace cursor
where desired.
(initial position
of target)
Target moved
here.
6.0 NM
2.0
VRM1
Offset EBL
(EBL1)
EBL1
B
A
VRM1
EBL1
bearing
EBL
70.0° R
VRM
6.0 NM
VRM1
range
Figure 2-9 Predicting collision course by
using the offset EBL
Measuring range and bearing
between two targets
The procedure which follows shows how to
measure the range and bearing between target “A” and target “B” in Figure 2-10.
1. Operate the omnipad to place EBL1’s origin (cursor) on the center of target “A.”
2. Press the [EBL/VRM SELECT] key to
choose the EBL1 readout and then press
the [EBL/VRM CONTROL] key.
3. Press the [MENU] key, select EBL OFFSET from the menu, and then press the
[ACQ/ENTER] key . EBL1’s origin shifts to
cursor location.
4. Press the [EBL/VRM CONTROL] key.
5. Operate the omnipad to bisect target “B”
with EBL1. Check the EBL1 readout to
find the bearing between target “A” and
target “B.”
EBL1
bearing
70.0° R
VRM
4.5 NM
VRM1
range
Figure 2-10 Measuring the range and
bearing between two targets by using the
offset EBL
2.14 Offcentering the Picture
Your vessel’s position can be offcentered to
75% of the range in use to view the situation
around your vessel without changing the
range or size of targets.
1. Press the omnipad to set the cursor where
desired.
2. Press the [F1 (A/C SEA)] control if its function is set for SHIFT (default setting), or
select SHIFT from the menu.
OFFCENTER appears at the top right
corner of the display when the picture is
offcentered.
6. Press the [EBL/VRM SELECT] key to
choose the VRM1 readout. Operate the
omnipad to place the outside edge of
VRM1 on the inside edge of target “B.”
Check the VRM1 readout to find the range
between target “A” and target “B.”
7. T o cancel the offset EBL, select EBL OFFSET from the menu, and then press the
[ACQ/ENTER] key.
Figure 2-11 Offcentering the picture
Cancelling offcentered picture
Press the [F1 (A/C SEA)] control (if function
is SHIFT).
2-7
Page 19

2.15 Zoom
The zoom feature allows you to double the
size of the area between your vessel and any
location within the current range to take a
closer look at an area of interest.
1. Select location with the cursor.
2. Press and hold down the [F1 (A/C SEA)]
control about two seconds if its function
is set for ZOOM (default setting), or select ZOOM from the menu. Zoom appears
at the top right corner when the ZOOM
function is on.
Cursor
Cursor
1
Place cursor
where desired.
2
Press [F1] to zoom.
Figure 2-12 Zoom function
Note: Zoom is cancelled when range or presentation mode is changed.
Cancelling zoom
Press the [F1 (A/C SEA)] control again.
2-8
Page 20

3. MENU OPERATION
3.1 Basic Menu Operation
The menu mostly contains less-often used
functions which once preset do not require
regular adjustment. To open or close the
menu, press the [MENU] key . You can select
items and options from the menu with the
omnipad. The complete menu appears on
page v.
1. Press the [MENU] key to display the main
menu.
SSel by omnipad & press ENT.S
RINGS
MODE
Change brill
from 3 to max.
2. Press the omnipad to select item. For
example, select RINGS. A message appears at the bottom of the menu window.
EBL
OFFSET
DISP
DATA
SHIFT
ECHO
TRAIL
ARP-10
MENU
Figure 3-1 Main menu
ZOOM
ECHO
STRTCH
OTHER
MENU
3.2 Selecting the Presentation Mode
With heading sensor connection, this radar
provides four presentation modes: head-up,
course-up, north-up and true motion.
1. Press the [MENU] key.
2. Operate the omnipad to select “MODE.”
3. Press the [ACQ/ENTER] key.
The display and the display mode indication
at the top left-hand corner of the display
change in the sequence of HU (heading up),
CU (course up), NU (north up) and TM (true
motion) when the [ACQ/ENTER] key is
pressed. If there is no heading sensor connection, the display mode is always HU.
4. Press the [MENU] key to close the menu.
Note: The radar begins operation with last
selected display mode (except course up)
whenever the unit is turned on. Note however that head up is selected when course
up was the last used mode.
3. Press the [ACQ/ENTER] key to select setting. Each time this key is pressed,
the message changes. For the RINGS
menu, the message sequence is as
shown below.
Change brill from Off to 1.
Change brill from 1 to 2.
Change brill from 2 to 3.
Change brill from 3 to max.
Change brill from max to Off.
Figure 3-2 Messages for RINGS menu
Head up
The picture is oriented so the heading marker
is at the top of the display . This mode is useful for navigation in congested waters.
Course up
The course up mode shows ship’s heading
by the heading marker, at the top of the display . To get heading desired, steer vessel in
direction desired, and then show “CU” at the
top left-hand corner of the display.
4. Press the [MENU] key to close the menu.
3-1
Page 21

North up
North is at the top of the display and the heading marker moves with ship’s heading. This
mode is useful for determining ship’s position and as a navigation monitor on a nautical chart. The picture is stabilized against yaw
of vessel, thereby reducing smear of target
echoes.
Note1: This function magnifies not only targets but also sea clutter and radar interference. For this reason be sure the sea clutter
and radar interference are sufficiently suppressed before activating the echo stretch.
Note2: ES2 is not available on short range.
True motion
True motion displays own ship and moving
objects in their true motion.
3.3 Magnifying Long Range Echoes (echo stretch)
Normally, the reflected echoes from long
range targets appear on the display as
weaker and smaller blips even though they
are compensated by the radar’s internal circuitry. The echo stretch function magnifies
these small blips in all ranges. T wo types of
echo stretch are available: ES1 which
stretches echoes in bearing direction and
ES2 which stretches them in both range and
bearing directions.
3.4 Echo Trail
You can show the movement of all radar targets relative to your vessel in afterglow . This
function is useful for alerting you to possible
collision situations.
Starting echo trail
1. Press the [MENU] key to open the menu.
2. Select “ECHO TRAIL” by the omnipad.
3. Select “ACTIVATE” by pressing the [ACQ/
ENTER] key.
To turn the echo stretch on or off;
1. Press the [MENU] key to open the menu.
2. Select “ES.”
3. Each press of the [ACQ/ENTER] key
changes the echo stretch function status
in the sequence of ES1, ES2 and OFF.
ES1 or ES2 appears at the top right-hand
corner of the display when echo stretch
is on.
Bearing
direction
Echo stretch 1
Bearing
direction
Range
direction
Echo stretch 2
Figure 3-4 How the echo trail feature works
TRAIL, the echo trail time selected (on
“OTHERS MENU”) and elapsed time appear
at the top right-hand corner of the display.
Then, afterglow starts extending from all targets.
Note: Trails are restarted when range or
mode is changed or zoom or offcenter is
turned on.
3-2
Figure 3-3 Echo stretch
Page 22

[ OTHERS ]
Select item by omnipad
and press ENTER key.
1 . Panel Dimmer
2 . Mark Brill
3 . HD Mark
4 . Characters
5 . Trail Tone
6 . Int Reject
7 . Pulselength
8 . Noise Reject
9 . Trail Time
10. Tune
11. Disp Data
12. WPT Mark
13. EBL Ref
14. VRM Unit
15. Watchman
16. STBY Disp
17. Guard Mode
18. Own Position
19. Cursor Posi
20. Alm Sense LV
21. Dead Sector
22. Range
23. Self Test
24. Installation Setup
3
3
3
3
2
1M
ARP
sm
10M
Nav
Hig
4
4
4
4
3
All
20M
16
1
1
1
1
Single
Off
Short
Off
15S
Auto
Off
Off
Rel
nm
Off
Norm
In
L/L
R/B
Low
Off
1/8
1/4
4 6
2
2
2
2
Multi
1
Long
On
30S
Manu
Nav
On
True
km
5M
Econo
Out
TD
L/L
Mid
On
1
1.5
16 14
1/2
3/4
8 12
3M 6M 15M 30M Cont
2 3
48
64
*
*
*Max range
1932M2: 48
1942M2: 64
Fixed time trail
3.5 Suppressing Radar
1. When the elapsed time clock counts up
to the trail time selected, the elapsed time
display freezes.
2. The oldest portions of trails are erased
so only the latest trail, equal in length to
the trail time selected, is shown.
3. Trail continues.
For example, the one minute trail time is selected. When the elapsed time clock counts
up to 60 seconds, the elapsed time display
freezes at “60,” but the latest one minute of
trail are erased and then trail continuous.
Continuous trail
The maximum continuous trail time is 99 minutes and 59 seconds. When the elapsed time
clock counts up to that time the elapsed time
display is reset to zero and trail begins again.
Interference
Radar interference may occur when near another shipborne radar operating in the same
frequency band as your radar. Its on-screen
appearance is many bright dots either scattered at random or in the form of dotted lines
extending from the center to the edge of the
display. Figure 3-5 illustrates interference in
the form of curved spokes. Interference effects are distinguishable from normal echoes
because they do not appear in the same place
on successive rotations of the scanner .
Cancelling echo trail
Select “OFF (deactivate)” at “ECHO TRAIL”
on the menu.
Changing trail attributes
Trail gradation and trail time can be selected
on the OTHERS menu.
Table 3-1 Trail attributes
nimetI
liarT
enoT
emiTliarT
unemSREHTO
noitpircseD
ehtekiltsujemithtiw
.radar
Single
Multiple
.suounitnoc
Figure 3-5 Radar interference
Four levels of interference are available, including off; IR1, IR2, IR3 and OFF. IR3 provides the highest level of rejection.
1. Press the [MENU] key.
2. Select “OTHERS MENU” and press the
[ACQ/ENTER] key.
elgnisninwohsebnacsliarT
elpitluM.snoitadargelpitlumro
rennihtgnittegsliartstniap
IPPgolanananowolgretfa
51roftesebnacemitliarT
6,.nim3,.nim1,.ces03,.ces
ro,.nim03,.nim51,.nim
Figure 3-6 OTHERS menu
3-3
Page 23

3. Select “6. Int Reject.”
Selection of guard zone type
4. Select level desired by operating the
omnipad.
5. Press the [ACQ/ENTER] key.
6. Press the [MENU] key to close the menu.
IR1, IR2 or IR3 appears at the bottom right
corner on the display when the interference
rejection circuit is turned on.
3.6 Selecting Pulsewidth
Pulsewidth is the time in microseconds necessary to transmit a single radar pulse. The
longer the pulsewidth the greater the direction range capability, however range accuracy and range resolution are reduced.
Pulsewidth can be selected to short or long
on the 1.5 and 3 nautical mile ranges.
The guard alarm can be set to sound when a
target either enters or exits the guard zone.
Y ou can select which type of guard alarm you
want through the menu.
In alarm
The alarm sounds on targets entering the
guard zone. “G (IN)” appears at the top righthand corner when the In alarm is selected.
Out alarm
The alarm sounds on targets exiting the guard
zone. “G (OUT)” appears at the top right-hand
corner when the Out alarm is selected.
Dashed line:
no alarm
1. Press the [MENU] key.
2. Select “OTHER MENU” and press the
[ACQ/ENTER] key.
3. Select “7. Pulselength.”
4. Select Short or Long by pressing the
omnipad.
5. Press the [ACQ/ENTER] key to select.
6. Press the [MENU] key to close the menu.
3.7 Guard Alarm
The guard alarm allows the operator to set
the desired range and bearing for a guard
zone. When ships, islands, landmasses, etc.
violate the guard zone an audible alarm
sounds and the offending target blinks to call
the operator’s attention.
Guard
zone
IN ALARM
OUT ALARM
Figure 3-7 In and Out alarms
Selecting guard zone type
1. Press the [MENU] key, select “OTHERS
MENU,” and then press the [ACQ/ENTER] key.
2. Select “17. Guard Mode” and “In” (alarm
on target entering zone) or “Out” (alarm
on target exiting zone) by operating the
omnipad.
3. Press the [ACQ/ENTER] key.
4. Press the [MENU] key to close the menu.
Setting a guard zone
CAUTION
The guard alarm is a useful anti-collision
aid, but does not relieve the operator of the
responsibility to also keep a visual lookout
for possible collision situations. The alarm
should never be used as the sole means
for detecting possible collision situations.
3-4
1. Mentally create the guard zone you want
to set. Figure 3-8 shows an example.
2. Operate the omnipad to set the cursor on
point A (or B). Press the [GUARD] key.
“*G (IN)” or “*G (OUT),” with asterisk blinking, appears at the top right-hand corner
of the display. See Figure 3-8 (2). (The
asterisk indicates the guard zone is partially set.)
Page 24

3. Operate the omnipad to set the cursor on
point C (or D). See Figure 3-8 (3).
4. Press the [GUARD] key . The asterisk disappears. See Figure 3-8 (4).
Notes on the guard alarm
¡ The alarm is a useful anti-collision aid, but
does not relieve the operator of the responsibility to also keep a visual lookout
for possible collision situations.
Asterisk blinking
A
B
(1) Mentally create
the guard zone to set.
(4) Guard zone
completed.
Guard zone
to set
G (IN)
D
C
Guard
zone
A
Drag cursor
here.
(2) Drag cursor to
(3) Drag cursor to
* G (IN)
top left corner of
zone and press
[GUARD].
Drag cursor
here.
bottom right corner
of zone and press
[GUARD].
Figure 3-8 How to set the guard zone
Silencing the audible alarm
G (IN)
¡ When the radar range is less than one
half of the guard zone range, the guard
zone disappears and “G (IN)” or “G (OUT)”
appears in inverse video. If this happens,
raise range to re-display the guard zone.
¡ A target echo does not always mean a
landmass, reef, ships or surface objects
but can imply returns from sea surface or
precipitation. As the level of these returns
varies with environment, the operator
should properly adjust the A/C SEA, A/C
RAIN and GAIN to be sure the alarm system does not overlook target echoes.
C
3.8 Watchman
The watchman function periodically transmits
the radar for one minute to check for targets
in a guard zone. If it finds change in the zone
from the previous transmission it transmits
the radar continuously . This feature is useful
when you do not need the radar’s function
continuously but want to be alerted to radar
targets in a specific area.
Any radar targets violating the guard zone
will trigger the audible alarm. Y ou can silence
the audible alarm by pressing the [GUARD]
key . When this is done, “G(ACKN)” replaces
“G(IN).” This means the alarm is acknowledged. Press the key again to reactivate the
alarm. Y ou may select minimum echo stregth
which triggers the guard alarm. This can be
done at “20, Alm Sence Lv” on the “OTHER
MENU.”
Cancelling the guard zone and
guard alarm
Press and hold down the [GUARD] key until
the guard zone disappears.
Tx
1 min
Watchman
starts.
St-by
5, 10 or
20 min
Tx
1 min
St-by
5, 10 or
20 min
Figure 3-9 How watchman works
How watchman works
When the time selected for the watchman rest
period has elapsed, the radar automatically
transmits for one minute to check the condition inside the guard zone. If there is no
change, the radar goes into stand-by.
(“WATCHMAN” appears during stand-by.) If
there is change, the radar sounds the audible
alarm, cancels the watchman function and
transmits continuously.
3-5
Page 25

HDG 234.5¡
SP
HU
. 125
NM
.
0625
TRAIL
30M
ZOOM
ES1
AUTO
25:38
G (OUT)
VRM
0.048NM
0.100NM
13.5 R¡
0.142NM
A/C
AUTO
EBL
345.6 R
23.0 R
¡
¡
Waypoint Marker
Navigation
Data
OWN SHIP
34¡ 56. 12N
135¡ 34. 56E
SPD 35.0KT
WAYPOINT
0.09 NM
50.0¡M
TTG 00:20
+ CURSOR
34¡ 29. 98N
136¡ 35. 77E
TTG 01:00
Turning on watchman
1. Create a guard zone (usually 360 degrees) with the guard alarm function.
2. Press the [MENU] key.
3. Select “OTHERS MENU.”
4. Press the [ACQ/ENTER] key.
5. Select “15. W atchman.”
6. Operate the omnipad to select watchman
rest period; 5 minutes, 10 minutes or 20
minutes.
7. Press the [ACQ/ENTER] key.
(If the navigation input includes destination
data, the waypoint marker, shown by a
dashed ring with a line extending from it to
the screen center appears. This marker can
be turned on/off the “OTHER MENU”)
To turn navigation data on or off;
1. Press the [MENU] key.
2. Select “DISP DATA.”
3. Press the [ACQ/ENTER] key.
4. Press the [ACQ/ENTER] key to select the
navigation display.
8. Press the [MENU] key to close the menu.
“WATCHMAN” appears at the top of the
screen, the radar transmits for one minute to
check for targets inside the guard zone, and
then the CRT shuts off and the radar goes
into stand-by.
Cancelling watchman
Go into the “OTHERS” menu, and set “15.
Watchman” for OFF.
Note 1: Watchman can be used without a
guard zone.
Note 2: The alarm sounds just before the radar starts or stops transmitting.
3.9 Displaying Navigation Data
5. Press the [MENU] key to close the menu.
Figure 3-10 Typical navigation data display
Navigation data can be displayed at the
screen bottom if this radar receives navigation input in IEC 61162 format. Navigation
data includes
¡ Position in latitude and longitude or Lo-
ran-C time differences
¡ Range, bearing and time-to-go to both
waypoint selected on the navigator and
the cursor
¡ Speed.
3-6
Page 26

3.10 OTHER MENU Description
The table below summarizes the OTHER menu.
Table 3-2 OTHER MENU Description
metInoitpircseD
.1remmiDlenaP.thgilkcablenapfolevelstceleS
.2llirBkraM .rekramPWdnaenozdraug,rosruc,LBE,MRVfoecnaillirbstceleS
.3kraMDH.rekramgnidaehfoecnaillirbstceleS
.4*sretcarahC.sretcarahcfoecnaillirbstceleS
.5enoTliarT.sliartohcefoecnaillirbstceleS
.6tcejeRtnI.noitcejerecnerefretnifolevelstceleS
.7htgnelesluP.segnarelim3dna5.1rofhtgneleslupstceleS
.8tcejeResioN.esiontcejerot”nO“stceleS
.9emiTliarT.emitliartohceehtstceleS
.01enuT.gninutlaunamrocitamotuastceleS
;yllaunamenutoT
.11ataDpsiD.yalpsidotesruosnwodehttceleS
.21kraMTPW.rekramtniopyawehtyalpsidot”nO“stceleS
.31feRLBE.eurtroevitalerrofecnereferLBEstceleS
.41tinUMRV .msromk,mnrofrosrucdnaMRVfotinuecnatsidstceleS
.51namhctaW.fforo)doireptsertes(nonamhctawsnruT
.61psiDYBTS ro,atadnoitagivanro”YBTS“yalpsid;yb-dnatstaesuotyalpsidehttceleS
.71edoMdrauG enozdrauggniretnestegrat;mraladraugsreggirthcihwnoitidnoctceleS
.81noitisoPnwO.DTnraoLnoL/L;tamrofyalpsidnoitisoptceleS
.91isoProsruC.gnol/talrogniraeb/egnarniatadrosrucehtyalpsiD
.1
.2
.3
.)V9.11~0.1(rab
.4
.tceffe
.yek]RETNE[ehtsserP
.edomymonoceehtotniog
.dapinmoehtyb”unaM“tceleS
.gninutlaunamelbaneotyek]RETNE[ehtsserP
ehtetarepo,lortnoc]NIAG[ehtnwodgnidlohdnagnisserpelihW
rotacidnigninutehtgnivresbo,noitidnocgninuttsebniatbootdapinmo
nisigninutlaunamnehwrenrocdnah-thgirpotehttasraeppa”LAUNAM“
.)PRAdnavaNhtob(llAro,PRA,vaN;yalpsidotatadstceleS
.)tuo(enozdrauggnitixetegrat,)nI(
.02VLesneSmlA .mraladraugsreggirthcihwhtgnertsohcemaminimtceleS
.12rotceSdaeD.rotcesdaedehtyalpsidot”nO“tceleS
.22egnaR.esuotsegnartceleS
.32tseTfleS syalpsiddna,deepsnoitatorannetnaskcehc;MARdnaMOR,syektseT
.onmargorp
.42puteSnoitallatsnI.unemputesnoitallatsniehtotsyalpsiD
*Note: Level 1 and 2 are same brilliance while the menu is displayed. The brilliance changes
after the menu is erased.
3-7
Page 27

3.11 Function Controls
3.12 Suppressing Noise
The function controls (F1 and F2) work like
the auto-dialing feature of a telephone, automatically executing the function assigned to
them. The function can be turned off by pressing appropriate function control again.
Default settings
F1: Shift (brief press) or Zoom (long press)
F2: Ring brilliance
How to register menu items
1. Press the [MENU] key.
2. Press [A/C SEA] (F1) or [A/C RAIN] (F2)
to open the function menu.
[ SETTING FOR F1 KNOB ]
SSel by omnipad & press ENT.S
SHIFT/
ZOOM
RINGS
EBL
OFFSET
MODE
SHIFT ZOOM
DISP
DATA
ECHO
TRAIL
Electrical noise can be suppressed by turning on “8. NOISE REJ” on the OTHERS
menu.
3.13 Adjusting Brilliance of Markers
“2. Mark Brill” on the OTHER menu adjusts
the brilliance of markers other than the heading marker.
3.14 Outputting Target Position
Radar target position data can be output to a
navaid in IEC 61 162 format. Select the radar
target with the cursor, and then press and
hold down the [TLL] key to output the data.
This function requires position data and heading signal.
INT
REJECT
TRAIL
ON/OFF
GUARD
IN/OUT
PANEL
DIMMER
EBL
REF
OWN
POSITN
HIS
TORY
NOISE
REJ
TRAIL
TIME
ALARM
LEVEL
MARK
BRILL
VRM
UNIT
CUSOR
POSITN
COLLI
SION
PULSE
LENGTH
TRAIL
TONE
DEAD
SECTOR
CHARA
CTERS
NAV
TALKER
VECTOR
LENGTH
AUTO
ACQ
Figure 3-11 Function menu
3. Select function desired.
4. Press the [ACQ/ENTER] key.
ECHO
STRTCH
TUNE
A/M
WATCH
MAN
OTHER
MENU
WPT
MARK
VECTOR
REF
NO
FNCTN
3.15 Dead Sector
When the scanner is installed at a close distance in front of the wheelhouse the radar
should be set not to transmit within that area,
to prevent microwave hazard. Ask your
FURUNO representative ordealer to provide
this feature.
5. Press the [MENU] key to close the menu.
3-8
Page 28

4. FALSE ECHOES
Occasionally false echoes appear on the
screen at positions where there is no target.
In some cases the effects can be reduced or
eliminated. The operator should familiarize
himself or herself with the appearance and
effects of these false echoes, so as not to
confuse them with echoes from legitimate
contacts.
4.1 Multiple Echoes
Multiple echoes occur when a short range,
strong echo is received from a ship, bridge,
or breakwater . A second, a third or more echoes may be observed on the display at
double, triple or other multiples of the actual
range of the target as shown in Figure 4-1.
Multiple reflection echoes can be reduced
and often removed by decreasing the sensitivity or properly adjusting the A/C SEA.
True
echo
4.2 Side-lobe Echoes
Every time the scanner rotates, some radiation escapes on each side of the beam—
called “side-lobes.” If a target exists where it
can be detected by the side-lobes as well as
the main-lobe, the side-lobe echoes may be
represented on both sides of the true echo
at the same range, as shown in Figure 4-2.
Side-lobes show usually only at short ranges
and from strong targets. They can be reduced
through careful reduction of the sensitivity or
proper adjustment of the A/C SEA.
Main-lobe
Side-lobe
Sprious
target
Antenna
Figure 4-2 Side-lobe echoes
True echo
Own ship
Multiple
echo
Figure 4-1 Multiple echoes
4-1
Page 29

4.3 Indirect Echoes
4.4 Blind and Shadow Sectors
Indirect echoes may be returned from either
a passing ship or returned from a reflecting
surface on your own ship, for example, a
stack. In both cases, the echo will return from
a legitimate contact to the scanner by the
same indirect path. The echo will appear on
the same bearing of the reflected surface, but
at the same range as the direct echo. Figure
4-3 illustrates the effect of an indirect echo.
Indirect echoes may be recognized as follows:
• they usually occur in a shadow sector
• they appear on the bearing of the obstruc-
tion but at the range of the legitimate contact
• when plotted, their movements are usu-
ally abnormal, and
• their shapes may indicate they are not di-
rect echoes.
Direct
path
Target
Heading
marker
Funnels, stacks, masts, or derricks in the path
of antenna may reduce the intensity of the
radar beam. If the angle subtended at the
antenna is more than a few degrees a blind
sector may be produced. Within the blind
sector small targets at close range may not
be detected while larger targets at much
greater ranges may be detected. See Figure
4-4.
Indirect
path
Indirect
path
Obstruction
Scanner
Target
Bridge
Indirect
echo
(mast, funnel.
etc.)
Direct
path
Own
ship
True
echo
Figure 4-3 Indirect echoes
Indirect
echo
Heading
marker
Figure 4-4 Blind and shadow sectors
True
echo
Indirect
echo
4-2
Page 30

4.5 SART (Search and Rescue Transponder)
Showing SART marks on the radar
display
A Search and Rescue Transponder (SART)
may be triggered by any X-Band (3 cm) radar within a range of approximately 8 n.miles.
Each radar pulse received causes it to transmit a response which is swept repetitively
across the complete radar frequency band.
When interrogated, it first sweeps rapidly (0.4
µs) through the band before beginning a relatively slow sweep (7.5 µs) through the band
back to the starting frequency. This process
is repeated for a total of twelve complete
cycles. At some point in each sweep, the
SART frequency will match that of the interrogating radar and be within the pass band
of the radar receiver. If the SART is within
range, the frequency match during each of
the 12 slow sweeps will produce a response
on the radar display, thus a line of 12 dots
equally spaced by about 0.64 nautical miles
will be shown.
When the range to the SART is reduced to
about 1 nm, the radar display may show also
the 12 responses generated during the fast
sweeps. These additional dot responses,
which also are equally spaced by 0.64 nm,
will be interspersed with the original line of
12 dots. They will appear slightly weaker and
smaler than the original dots.
Screen A: When SART
is distant
Echo of SART
24 NM
Radar antenna
beamwidth
Screen B: When SART
is close
1.5 NM
Lines of 12 dots
are displayed in
concentric arcs.
Echo of
SART
To show the SART marks only on the radar
display, detune the radar receiver manualy.
This erases or weakens all normal radar echoes, but, the SART marks are not erased because the SART response signal scans over
all frequencies in the 9 GHz band. When the
radar approaches the SART in operation, the
SART marks will enlarge to large arcs, blurring a large part of the screen. Reduce the
sensitivity and adjust the sea clutter control
of the radar.
Summary to detect SART response
1. Use range scale of 6 or 12 nm as the
spacing between the SART responses is
about 0.6 nm (1125 m) to distinguish the
SART.
2. Turn off the automatic clutter suppression.
3. Turn off the Interference Rejector.
General remarks on receiving SART
Radar range scale
When looking for a SART it is preferable to
use either the 6 or 12 nautical mile range
scale. This is because the total displayed
length of the SART response of 12 (or 24)
dots may extend approximately 9.5 nautical
miles beyond the position of the SART and it
is necessary to see a number of response
dots to distinguish the SART from other responses.
Position of
SART
Own ship's
position
SART mark
9500 MHz
9200 MHz
Sweep start
length
Sweep time
s
7.5
95
s
Low speed sweep signal
High speed sweep signal
Figure 4-5 SART display
Own ship's
position
Radar receiver
bandwidth
Position of
SART
SART range errors
When responses from only the 12 low frequency sweeps are visible (when the SART
is at a range greater than about 1 nm), the
position at which the first dot is displayed may
be as mush as 0.64 nm beyond the true position of the SART. When the range closes
so that the fast sweep responses are seen
also, the first of these will be no more than
150 meters beyond the true position.
4-3
Page 31

5. MAINTENANCE & TROUBLESHOOTING
This chapter tells you how to keep your radar in good working order. Before reviewing
this chapter please read the safety information which follows.
DANGER
Turn off the power before
performing any maintenance or
troubleshooting procedure.
Hazardous voltages can shock, burn or cause death.
Only qualified personnel totally famillier with electrical
circuits should work inside the units.
RF RADIATION HAZARD
The radar scanner emits high frequency
radio radiation which can be harmful,
particularly to your eyes.
Never look directly into the scanner from a distance of
less than two feet when the radar is in operation as
you could injure the cornea of your eyes. Always
make sure the radar is set to stand-by or is turned off
before starting work on the scanner unit.
5.1 Preventive Maintenance
Regular maintenance is important for good
performance. Always keep the equipment as
free as possible from dirt, dust, and water
splashes. Make sure all screws securing the
components are properly tightened.
A maintenance program should be established and should at least include the items
listed in Table 5-1.
5.2 Replacing the Fuse
The fuse in the power cable protects the
equipment against reverse polarity of ship's
mains, overcurrent, and equipment fault. If
the fuse blows, find the cause before replacing it. Never use an incorrect fuse - serious
damage to the equipment may result and void
the warranty.
12V: 10A fuse
24/32V: 5A fuse
Use the proper fuse.
Use of a wrong fuse can result in
equipment damage.
Table 5-1 Recommended maintenance program
doirePmetItniopkcehCskrameR
6ot3
shtnom
desopxE
dnastun
nostlob
tinurennacs
.dedorroc
rennacS
rotaidar
ylivaehfimehtecalpeR
denesoolrodedorrocrofkcehC
,yrassecenfI.stlobdnastun
.ylkcihtmehttniaperdnanaelc
noskcarcdnatridrofkcehC
dluohstridkcihT.ecafrusrotaidar
htolctfoshtiwffodepiweb
afI.retawhserfhtiwdenepmad
thgilsaylppa,dnuofsikcarc
rodnuopmocgnilaesfotnuoma
yraropmetasaevisehda
.riaperrofllacneht,ydemer
CAUTION
desuebyamdnuopmocgnilaeS
llamsaylppA.tniapfodaetsni
stunneewtebesaergfotnuoma
nilavomerysaerofstlobdna
.erutuf
tnevloscitsalpesutonoD
uoyfI.gninaelcrof)enoteca(
morfecievomerotdeenrennacs
roremmahnedoowaesu,tinu
nokcarC.remmahdaehcitsalp
retawesuacyamtinueht
suoiresgnisuac,ssergni
.stiucriclanretniotsegamad
shtnom6
raey1ot
tinuyalpsiD
srotcennoc
.noisorroc
dnanoitcennocthgitrofkcehC
.tnemecalperrof
relaedruoytcatnoc,dedorrocfI
5-1
Page 32

5.3 Troubleshooting
Table 5-2 contains simple troubleshooting
procedures which you can follow to try to restore normal operation. If you cannot restore
normal operation, do not attempt to check
inside any unit of the radar system. Any repair work is best left to a qualified technician.
Table 5-2 Troubleshooting table
...fI...tuB...nehT
ehtdesserpuoy
nrutotyek]REWOP[
radarehtno
sahradareht
uoydnapudemraw
ehtdesserp
otyek]XTYBTS[
timsnart
detsujdaevahuoy
C/Ahtiwniageht
AESC/AdnaNIAR
ffo
thgilton
roopsitsartnoc
erasretcarahc
detrotsid
etator
dnasretcarahc
erasnoitacidni
lamronba
raeppastegrat
dnasnoitacidni(
)odsrekram
)odstegratdna
seodlenaplortnoceht
.elbacrewopniesufkcehc•
nosraeppagnihton
yalpsidroyalpsideht
.ecivrestseuqer•
tonseodrennacseht
.ecivrestseuqeR
.tes
ronesionrehtien
ronsnoitacidnirehtien
esion(raeppasrekram
.ecnaillirbehtgnitsujdayrt•
niebyammelborpeht•rennacs.tinu
-kcablenaplortnocehtgnitsujdayrt•
.unemSREHTOehtnognithgil
.degrahcsidevahyamyrettab•
ehtkcehcnaicinhcetdeifilauqaevah•
.egamadrofelbaclangiskcehc•
.egamadrofelbaclangiskcehc•
5-2
enillaidar(peewseht
ehtdnuoragnipeews
tonsi)yalpsid
htiwdezinorhcnys
rennacsnoitator
niegnahconsiereht
ytivitisnes
desserpsiyekasneppahgnihton.ecivrestseuqeR.ytluafebyamyek•
ehtniebyammelborpeht•rennacs
.ecivrestseuqeR.tinu
.ecivrestseuqer•
Page 33

5.4 Self Test
The self test facility checks the keyboard,
ROM and RAM for proper operation.
1. Press the [MENU] key.
2. Select “OTHER MENU”.
3. Select “23. Self T est” and press the [ACQ/
ENTER] key. The following display appears.
[ Self Test ]
Key test: Press each key and
check on-screen indication
lights.
ARP-10 TEST
ROM OK 18590271xx
RAM OK
SPEED OK NAV 0.0KT
COURSE OK 167.6°
TRIGGER NG
VIDEO NG
BP OK
HP OK
MIN-HIT 0003
SCAN-TIME 0854
MAN-ACQ 00
AUTO-ACQ 00
FE-DATA1 0000
FE-DATA2 0000
6. Press the [ACQ/ENTER] key to check the
display circuit. The following pattern
should appear.
Figure 5-2 Test pattern
7. To return to the Self T est menu, press the
[MENU] key.
8. To escape from the self test, press the
[MENU] key.
Program No.: 0359146-1XX
ROM : OK
RAM : OK
Hours in use: 000006.9H
Tx hours : 000001.1H
<Press MENU for OTHERS menu.>
Version no.
11 and after is available
with MARK-2 series.
Figure 5-1 Self test screen
4. The ROM and RAM are automatically
checked. If NG (No Good) appears to the
right of ROM or RAM indication, contact
your dealer for advice. ARP-10 TEST results appear only when optional ARP-10
board is mounted.
5. T o check the keyboard, press any key except [ACQ/ENTER] and [POWER] keys.
The pressed key's on-screen location
lights in black while the key is pressed, if
the key is operating properly.
5.5 Life Expectancy of Magnetron
The following table shows the life expectancy
of the magnetrons.
Table 5-3 Life expectancy of magnetrons
ledoMepyT.onedoCycnatcepxeefiL
2M23911753E725-731-000sruoh000,3-000,2
2M24919835GM641-531-000
)yb-dnatsgnidulcnI(
5-3
Page 34

6. OPERATION OF ARP-10 (OPTION)
WARNING
WARNING
No one navigational aid should be relied
upon for the safety of vessel and crew.
The navigator has the responsibility to
check all aids available to confirm
position. Electronic aids are not
a substitute for basic navigational
principles and common sense.
• This auto plotter automatically tracks an
automatically or manually acquired radar
target and calculates its course and
speed, indicating them by a vector. Since
the data generated by the auto plotter
are based on what radar targets are
selected, the radar must always be
optimally tuned for use with the auto
plotter, to ensure required targets will not
be lost or unwanted targets such as sea
returns and noise will not be acquired
and tracked.
• A target does not always mean a land mass, reef, ships or other surface vessels
but can imply returns from sea surface
and clutter. As the level of clutter changes
with environment, the operator should
properly adjust the A/C SEA, A/C RAIN
and GAIN controls to be sure target
echoes are not eliminated from the
radar screen.
CAUTION
The plotting accuracy and response of
this auto plotter meets IMO standards.
Tracking accuracy is affected by the
following:
• Tracking accuracy is affected by course
change. One to two minutes is required to
restore vectors to full accuracy after an
abrupt course change. (The actual
amount depends on gyrocompass
specifications.)
• The amount of tracking delay is inversely
proportional to the relative speed of the
target. Delay is on the order of 15–30
seconds for high relative speed; 30–60
seconds for low relative speed.
Display accuracy is affected by the
following:
• Echo intensity
• Radar transmission pulsewidth
• Radar bearing error
• Gyrocompass error
• Course change (own ship or target)
This ARPA board is not available with
42 rpm radar.
NOTICE
Heading data required for plotting function.
6-1
Page 35

6.1 General
MENU: opens/closes the main menu.
The Auto Plotter ARP-10 is an optional circuit board which is accommodated in the display unit of this radar (24 rpm only) radars. It
requires heading data to function.
The Auto Plotter permits manual or automatic
acquisition and automatic tracking of up to
10 radar targets. An internal microprocessor
calculates target data such as speed and
course and displays the results in alphanumeric data and by vector. To ensure the reliability of the displayed target data, the radar
must be properly adjusted for minimum sea
returns and noise.
Principal specifications
Acquisition and tracking
• Acquisition of up to 10 targets between
0.2 and 16 nm.
• Automatic tracking of up to 10 acquired
targets between 0.1 and 16 nm.
SELECT/CANCEL:
A long press terminates plotting of the target
selected with the cursor, and a brief press
displays the data of the target selected with
the cursor .
ACQ/ENTER: Acquires the target selected
with the cursor.
6.2 ARP-10 MENU Operation
The ARP-10 MENU contains the following
items.
Display: Turns on/off the plot symbols, past
positions and target data.
All Cancel: Cancels the tracking of all
targets.
Vector Ref: Selects relative or true vectors.
To select your choice, open the ARP-10
menu. Select “3 Vector Ref” to Relative or
Ture, and then, press the [ACQ/ENTER] key .
Vectors
Vector length: 30 s, 1, 3, 6, 15, 30 min.
Orientation: True velocity or relative ve-
locity
Past positions: 5 past positions at intervals
of 15, 30 s, 1, 2, 3, 6 min.
Alarm: Visual and audible alarms
against targets violating CP A/
TCPA limits, Visual alarm
against lost targets
Target discrimination: A target measuring
about 800 m or more in the radial or circumferential direction is regarded as a landmass
and not acquired or tracked. Echoes smaller
than about 800 m are regarded as true targets.
Keys used for auto plotter
The ARP-10 uses the following touchpad
keys. Given below is a brief description of
these keys.
Vector Length: Selects vector time.
History: Selects past position plot interval.
CPA Set: Selects CPA alarm limit. When a
target is predicted to come within this limit,
an audible alarm sounds and at the same time
the corresponding target symbol changes to
a blinking triangle.
Note: If the preset CPA limit is set at OFF, a
target which is on collision course will not
produce an alarm.
TCPA Set: Selects TCPA alarm limit.
Auto ACQ: Turns on/off Auto Acquisition Area.
Activating the auto plotter
To activate the Auto Plotter, follow the steps
shown below .
1. Adjust the GAIN, A/C SEA and A/C RAIN
controls for proper radar picture.
2. Press the [MENU] key to open the main
menu.
6-2
Page 36

3. Select “ARP-10 MENU.”
5. Select the menu item “1. Display.”
4. Press the [ACQ/ENTER] key to display
the ARP menu.
[ ARP MENU ]
Select item by omnipad
and press ENTER key.
1. Display
2 . All Cancel
3 . Vector Ref
4 . Vector Length
5 . History
6 . CPA Set
7 . TCPA Set
8 . Auto ACQ
Off On
Rel True
30S IM
3M 6M 15M 30M
Off 15S 30S 1M
2M 3M 6M
Off 0.5 1nm 2nm
3nm 5 nm 6nm
30S 1M 2M 3M
4M 5M 6M 12M
Off On
Figure 6-1 ARP Menu
Target under auto tracking but not
selected for cursor data reading
6. Select “On.”
7. Press the [ACQ/ENTER] key.
8. Press the [MENU] key to close the menu.
Deactivating the auto plotter
To deactivate the Auto Plotter;
1. Open the “ARP-10 MENU.”
2. Select the “1. Display.”
5. Select “Off.”
6. Press the [ACQ/ENTER] key.
7. Press the [MENU] key to close the menu.
Target Full
Mark
Lost Target
8
NM
AUTO TARGET
2
FULL
SP
HU
A/C
AUTO
EBL
°
345.6 R
23.0 R
°
TRUE VECTOR
15 MIN
HDG 234.5
13.5 R
BEARING 42.5°T
RANGE 5.36 NM
CPA 2 NM
°
°
0.142NM
AUTO
TRAIL
25:38
30M
G (OUT)
ZOOM
ES1
VRM
0.048NM
0.100NM
COURSE 287.8°T
SPEED 12.5 KT
TCPA 12:35
Target selected
for data reading
Auto
Acquisition
Area
Threatening
target
Auto Plotter
Data Area
Figure 6-2 ARPA display
6-3
Page 37

6.3 Acquiring Targets
Manual acquisition
Follow the steps below to manually acquire
a target. Up to 10 targets can be manually
acquired.
1. Place the cursor (+) on a target of interest by operating the omnipad.
2. Press the [ACQ/ENTER] key.
The plot symbol changes its shape according to the status as below. A vector appears
in about one minute after acquisition indicating the target's motion trend. If the target is
consistently detected for three minutes, the
plot symbol changes to a solid mark. If acquisition fails, the target symbol blinks and
disappears shortly thereafter .
SQUARE (dotted)
Immediately after acquisition - Plot symbol
shown in broken lines.
SQUARE (dotted with a vector)
One minute after acquisition - Vector still unreliable.
CIRCLE (Solid with a vector)
Note 3: When the auto acquisition mode
(Auto ACQ) is on, up to five targets can be
acquired. For details, see next section titled
Automatic Acquisition.
CAUTION
When a tracked target nears another
tracked target, the targets may be
"swapped." When two targets come close
to each other, one of the two can become
a "lost target." Should this happen,
reacquisition of the "lost target" is required
after the two targets have separated.
Automatic acquisition
The Auto Plotter ARP-10 can acquire up to
five targets automatically by setting the Auto
Acquisition area predefined in the system. If
Auto ACQ is selected after more than five targets have been manually acquired, only the
remaining capacity of targets can be automatically acquired. (For example; when
seven targets are acquired manually, and
then the Auto ACQ is switched on only three
targets can be acquired automatically .) When
five targets have been automatically acquired, "AUTO TARGET FULL" message
appears at top left corner on the display.
3 minutes after acquisition - Plot symbol
changes to a solid circle indicating the stable
tracking condition.
LARGE CIRCLE
The plot symbol of a target under tracking
becomes twice as large as the normal symbol when the target is selected for data reading.
Note 1: The target to be acquired should be
within 0.2 to 16 nm from own ship and not
obscured by sea or rain clutter for successful acquisition.
Note 2: When you want to acquire 11th target, cancel tracking of the one of less important targets.
Setting auto acquisition area
Auto acquisition area is predefined between
2.0 and 2.5 nm in range and 45° on either
side of the heading marker in bearing. If a
target come into this area, it is acquired automatically.
Figure 6-3 Auto acquisition area
6-4
Page 38

Follow the steps shown below to activate the
CAUTION
auto acquisition area.
1. Open the “ARP-10 MENU.”
4. Press the [ACQ/ENTER] key.
5. Press the [MENU] key to close the menu.
2. Select “8. Auto ACQ.”
3. Select “On.”
4. Press the [ACQ/ENTER] key.
5. Press the [MENU] key to close the menu.
Terminating Tracking of Targets
When the Auto Plotter has acquired 10 targets, no more acquisition occurs unless targets are lost. Should this happen, cancel
tracking of individual targets or all targets by
the procedure described below.
Individual targets
Place the cursor (+) on a target which you do
not want to be tracked any longer by operating the omnipad and press and hold down
the [SELECT/CANCEL] key.
All targets
All targets can be canceled from "ARP-10
MENU" at a time.
CAUTION
At the speed under 5 kts the target data is
displayed with a delay because of
filtration.
Place the cursor on a wanted target and press
the [SELECT/CANCEL] key . Data on the selected target is displayed at the bottom of the
screen. The symbol of the selected target
gets twice as large as the normal circle. The
data includes the following:
RNG/BRG (Range/Bearing): Range and
bearing from own ship to the last-plotted or
selected target position with suffix “T” (True)
or “M” (Magnetic). For true bearings suffix “T”
is used in case of gyrocompass input and suffix “M” is used in case of magnetic compass
input.
COURSE/SPEED (Course/Speed): Course
and speed are displayed for the last-plotted
or selected target with suffix “T” (True) or “M”
(Magnetic). For true bearings suffix “T” is used
in case of gyrocompass input and suffix “M”
is used in case of magnetic compass input.
1. Open the “ARP-10 MENU.”
2. Select “2. All Cancel.”
3. Press the [ACQ/ENTER] key.
6.4 Displaying Target Data
The Auto Plotter calculates motion trends
(range, bearing, course, speed, CPA and
TCP A) of all targets under tracking at the ARP
Data area.
To turn ARP data on;
1. Press the [MENU] key.
2. Select “DISP DATA.”
3. Press the [ACQ/ENTER] key to select the
message for “ARP” or “NAV” or “ARP.”
CPA (Closest Point of Approach): is the
closest range a target will approach to own
ship. Do not mix it with the operator preset
CPA alarm limit.
TCPA: The time to CPA measured with
present speeds of own ship and the targets.
Both CPA and TCPA are automatically calculated. When a target ship has passed clear
of own ship, the CPA is displayed and the
TCP A appears as “**.*”. TCPA is counted up
to 99.9 min. and beyond this it is indicated
as TCP A>99.9 min.
6-5
Page 39

6.5 Mode and Length of
6.7 Operational Warnings
Vectors
True or relative vector
(vector mode)
Target vectors are displayed relative to own
ships reading (Relative) or with reference to
North (True). Own ship does not have a vector in relative mode.
V ector length
From the ARP-10 MENU, Vector Length can
be set to 30 seconds, 1, 3, 6, 15 or 30 minutes and the selected vector time is indicated
on the screen.
The vector tip shows an estimated position
of the target after the selected vector time
elapses. It can be valuable to extend the vector length to evaluate the risk of collision with
any target.
6.6 Past Position Display
There are two main situations which cause
the ARP-10 to trigger visual and audible
alarms:
• CPA/TCPA alarm
• Lost target alarm
CPA/TCPA alarm
CAUTION
The CPA/TCPA alarm feature should
never be relied upon as a sole means for
detecting the risk of collision.
The navigator is not relieved of the
responsibility to keep visual lookout for
avoiding collisions, whether or not the
radar or other plotting aid is in use.
Visual and audible alarm are generated when
the predicted CPA and TCPA of any target
become less than their preset limits. The audible alarm continues for 10 seconds.
The Auto Plotter displays equally time-spaced
dots (maximum five dots) marking the past
positions of any targets being tracked.
If a target changes its speed, the spacing will
be uneven. If it changes course, its plotted
course will not be a straight line in TM mode.
To turn past position display an or off do the
following:
1. Open the ARP-10 menu.
2. Select History.
3. Select plot enterval among 15, 30 seconds, 1, 2, 3 or 6 minutes. Select OFF to
erose the past position display.
4. Press the [ACQ/ENTER] key.
5. Press the [MENU] key.
The ARP-10 continuously monitors the predicted range at the Closest Point of Approach
(CPA) and predicted time to CPA (TCPA) of
each tracked target to own ship.
When the predicted CPA of any target becomes smaller than a preset CP A alarm range
and its predicted TCPA less than a preset
TCPA alarm limit, the ARP-10 releases an
audible alarm. In addition, the target plot symbol changes to a triangle and flashes together
with its vector . The flashing of the triangle plot
symbol and vector remain on the screen until the dangerous situation is no longer present
or you intentionally terminate tracking of the
target by using the [SELECT/CANCEL] key.
Provided that this feature is used correctly , it
will help prevent the risk of collision by alerting you to threatening targets. It is important
that GAIN, A/C SEA, A/C RAIN and other
radar controls are properly adjusted and the
Auto Plotter is set up so that it can track targets effectively.
6-6
Page 40

CP A/TCP A alarm ranges must be set up properly taking into consideration the size, tonnage, speed, turning performance and other
characteristics of own ship.
Follow the steps shown below to set the CP A/
TCP A alarm ranges:
1. Open the “ARP-10 MENU.”
2. On the “CPA Set” line, select a CPA limit
desired. (Off, 0.5, 1, 2, 3, 5, 6 nm)
3. Press the [ACQ/ENTER] key.
4. On the “TCPA Set” line, select a TCPA
limit desired. (30s, 1, 2, 3, 4, 5, 6, 12M)
5. Press the [ACQ/ENTER] key.
6. Press the [MENU] key to close the menu.
Lost target alarm
When the system detects a loss of a tracked
target, the target symbol becomes a flashing
diamond.
6-7
Page 41

SPECIFICATIONS OF MARINE RADAR
MODEL 1932/1942 MARK-2
1. GENERAL
(1) Indication System PPI Da ylight display, ra ster scan, 8 tones in monochrome
(2) Range, Puls elength (PL ) & Pu lse Repeti tion Rate (PRR)
Range (nautical miles)
PL PRR 0.125 0.25 0.5 0.75 1 1.5 2 3 4 6 8 12 16 24 36 48 64
SP 2100 Hz 0.08 µs
MP 1200 Hz 0.3 µs
LP 600 Hz* 0.8 µs
*550 Hz on 48 nm range or more
Maximum Range; MODEL 1932 M2: 48 nm, MODEL 1942 M2: 64 nm
(3) Range Res olu tion 20 m
(4) Bearing Discrimination 1.9º
(5) Minimu m R ange 25 m (0.25 NM ra nge)
(6) Bear ing Accuracy Within 1º
(7) Bearing Resolution 4º
(8) R ange Ring Accur acy 0.9 % of range or 8 m, whic hever is t he great er
2. SCANNER UNIT
(1) R adia tor Slot ted waveguide arra y
(2) Polarization Horizontal
(3) Ant enna Rot ati on Speed 24 rpm or 48 r pm nominal
(4) Radiator Length M1932M2: 100 cm (XN10A), M1942M2: 120 cm (XN12A)
(5) Horizontal Beamwidth M1932M2: 2.4°, M1942M2: 1.9°
(6) Vertical Beamwidth M1932M2: 27°, M1942M2: 22°
(7) Sidelobe Attenuation Within ±20° of main- l obe: less t han -24 dB
Outside ±20° of main-lobe: less t han -30 dB
3. TRANSCEIVER MODULE
(1) Frequency 9410 MHz ±30MHz (X band)
(2) Modulation P0N
(3) Peak Output Power M1932M2: 4 kW nominal, M1942M2: 6 kW nominal
(4) Modulat or FET Switching Method
(5) Intermediate Frequency 60 MHz
(6) Tuning Automa tic or manual
(7) Receiver Front End MIC (Micr owave IC)
SP - 1
Page 42

(8) Bandwidth Tx pulselength 0.08 µs and 0.3 µs: 25 MHz
Tx pulselength 0.8 µs: 3 MHz
(9) Duplexer Circulator with diode limiter
4. DISPLAY UNIT
(1) Indication System PPI Daylight display, raster scan, 8 tones in monochrome
(2) Picture Tube 10 inch rectangular monochrome CRT
effective display area more than 150 mm
(3) Range, Range Interval, Number of Rings
Range (NM) 0.125 0.25 0.5 0.75 1 1.5 2 3 4 6 8 12 16 24 36 48 64
Ring Interval (NM) 0.0625 0.125 0.125 0.25 0.25 0.5 0.5 1 1 2 2 3 4 6 12 12 16
Number of Rings 2 2 4 3 4 3 4 3 4 3 4 4 4 4 3 4 4
Maximum Range; MODEL 1932 M2: 48 nm, MODEL 1942 M2: 64 nm
(4) Markers Heading Line, Bearing Scale, Range Rings,
Variable Range Marker (VRM1, VRM2),
Electronic Bearing Line (EBL1, EBL2),
Tuning Bar, Cursor, Parallel Cursor,
Alarm Zone, Waypoint Mark (navigation input required),
North Mark (heading sensor input required)
(5) Alphanumeric Indications Range, Range Ring Interval, Pulselength (SP, MP, LP),
Display Mode (HU,CU,NU,TM),
Interference Rejection (IR1,IR2,IR3),
VRM (1, 2), EBL (1, 2), Automatic A/C SEA (A/C AUTO),
Stand-by (ST-BY), Radar Alarm (G(IN), G(OUT), G(ACKN)),
Echo Stretch (ES1, ES2), Cursor Range, Bearing or L/L Position,
Echo Tailing (TRAIL), Trailing Time, Trailing Elapsed Time,
Navigation Data (navigation input required),
Heading (HDC, heading sensor input required)
(6) Input Data NMEA0183 (Ver.1.5/2.0), current loop
Own ship ’s position: GGA>RMC>RMA>GLL (accept GLL in NMEA Version 1.5 only)
Speed: RMC>RMA>VTG>VHW
Heading (True): HDT>HDG*1>HDM*1>VHW>VHW*1
Heading (Magnetic): HDM>HDG*1>HDT*1>VHW>VHW*1
Course (True): RMC>RMA>VTG
Course (Magnetic): VTG>RMC>RMA
Waypoint (Range, Bearing): RMB>BWC>BWR
Loran time difference: RMA>GLC>GTD
Water depth: DPT>DBT>DBK>DBS
SP - 2
Page 43

Water temperature: MTW>MDA
Time: ZDA
Cross track error: RMB>XTE>APB
*1: calculate by magnetic drift.
(7) Output Data NMEA0183 (Version1.5/2.0), RS-422
TLL (target data) and RSD
5. ENVIRONMENTAL CONDITI ON
(1) Ambient Temperature Scanner Unit: -25°C to +70°C
Display Unit: -15°C to +55°C
(2) Relative Humidity 95 % or less at +40°C
(3) Waterproofing Scanner Unit: IPX6
Display Unit: IPX4
6. POWER SUPPLY & POW ER CONSUMPTION
(1) Power Supply 12/24/32 VDC (10.8 to 41.6 VDC)
(2) Voltage and Current 24rpm: 12 VDC/7.5A, 24VDC/3.8A, 32VDC/2.8A
48rpm: 12 VDC/8.8A, 24VDC/4.4A, 32VDC/3.3A
(3) Power Consumption 24rpm: 70 W to 90 W (100 kt)
48rpm: 85 W to 105 W (70 kt)
7. DIMENSIONS AND MASS
See the Outline Drawings
8. COATING COLOR
(1) Display Unit Panel: N3.0
Chassis: 2.5GY5/1.5
(2) Scanner Unit N9.5
9. COMPASS SAFE DISTANCE
(1) M1932M2
Display Unit Standard: 1.1 m Steering: 0.8 m
Scanner Unit Standard: 1.0 m Steering: 0.8 m
(2) M1942M2
Display Unit Standard: 0.75 m Steering: 0.6 m
Scanner Unit Standard: 1.1 m Steering: 0.8 m
SP - 3
Page 44

Index
A
Acquisition............................................... 6-4
A/C AUTO key ......................................... 2-4
ACQ/ENTER key..................................... 6-2
A/C RAIN control.................................... 2-4
A/C SEA control .................................... 2-3
Auto plotter.............................................. 6-2
B
Bearing measurement............................. 2-6
Blind sectors............................................ 4-4
Brilliance........................................... 2-3, 3-8
BRILL key................................................ 2-3
C
Course Up ............................................... 3-1
CPA/TCPA alarm ..................................... 6-6
D
Dead sector............................................. 3-8
E
EBL ........................................................ 2-6
Echo stretch ............................................ 3-2
Echo trail ............................................... 3-2
Economy mode ....................................... 2-2
F
Function controls (F1, F2) ...................... 3-8
Fuse ........................................................ 5-1
G
Gain control............................................. 2-3
Guard alarm .......................................... 3-4
Guard alarm sensitivity............................ 3-5
Guard key......................................... 3-4, 3-5
Guard zone ............................................. 3-4
H
Head up................................................... 3-1
Heading marker....................................... 2-5
I
Indirect echoes........................................ 4-1
Interference ........................................... 3-3
L
Lost target alarm ..................................... 6-7
M
N
Navigation data .............................. 2-2, 3-6
Noise ....................................................... 3-8
North marker ........................................... 2-5
North up .................................................. 3-2
O
OTHERS menu ..................................... 3-7
Offcenter ................................................. 2-7
Offset EBL............................................... 2-6
P
POWER key ............................................ 2-2
Presentation mode .................................. 3-1
Power on/off ............................................ 2-2
Program No............................................. 5-3
Pulsewidth........................................ 2-3, 3-4
Pulselength ............................................. 2-3
R
Range key ............................................... 2-3
Range measurement............................... 2-5
Range rings............................................. 2-5
S
SART....................................................... 4-2
SELECT/CHANCEL key ......................... 6-2
Self Test (keyboard, RAM, ROM) ............ 5-3
Sensitivity ................................................ 2-3
Shadow Sectors ...................................... 4-2
Side-lobe Echoes .................................. 4-1
Stand-by.................................................. 2-2
ST BY/TX key.......................................... 2-2
System configuration................................. vii
T
TLL key ................................................... 3-8
Trail tone ................................................. 3-3
Trail time ................................................. 3-3
Transmitting ............................................ 2-2
Troubleshooting .................................... 5-3
V
Vector length ........................................... 6-6
Vector mode............................................ 6-6
VRM ........................................................ 2-5
W
Watchman ............................................... 3-5
Magnetron ............................................. 5-3
Maintenance............................................ 5-1
Multiple Echoes....................................... 4-1
Menu tree .................................................. v
Z
Zoom ....................................................... 2-8
IN-1
Page 45

Page 46

 Loading...
Loading...