


Fronius prints on elemental chlorine free paper (ECF) sourced from certified sustainable forests (FSC).
/ Perfect Charging / Perfect Welding / Solar Energy
Drive EasyTwin
操作说明书
ZH
系统扩展
42,0426,0194,ZH 005-25052020

2

尊敬的读者:
引言 感谢您对我公司的信任并祝贺您使用高科技的 Fronius 产品。您正在阅读的这本使用说明
可以帮助您熟悉该产品。通过仔细阅读该说明,您将了解到 Fronius 产品的多种用途。只
有这样您才能充分发挥它的优点。
同时也请遵守产品安全规程,以确保使用场所中的安全。谨慎使用产品有助于提高其使用
寿命与可靠性。这是取得良好效果的基本前提。
ZH
安全标志说明
危险!
表示存在直接危险。
► 若不予以避免,将导致死亡或严重的人身伤害。
警告!
表示存在潜在危险的情况。
► 若不予以避免,可能会导致死亡或严重的人身伤害。
小心!
表示可能导致财产损失或人身伤害的情况。
► 若不予以避免,可能会导致轻微的人身伤害和/或财产损失。
注意
!
表示可能会导致不良后果及设备损坏。
3

4

目录
安装和调试 ................................................................................
Standard 和 PowerLiner 型号..............................................................
在机器人上安装 CrashBox Drive EasyTwin ..........................................................................................
连接直颈................................................................................
将管组固定在弹簧平衡器悬挂装置上........................................................
连接管组................................................................................
在 Robacta Drive EasyTwin 中安装送丝软管.................................................
穿入填充焊丝............................................................................
安全规范 ..................................................................................
概述....................................................................................
符合规定的使用..........................................................................
环境条件................................................................................
运营商的责任............................................................................
操作人员的责任..........................................................................
电源连接................................................................................
保护您自己和他人........................................................................
噪音排放值规定..........................................................................
来自有毒气体和蒸汽的危险................................................................
火花飞溅产生的危险......................................................................
由电源电流和焊接电流产生的危险..........................................................
弯曲焊接电流............................................................................
EMC 设备分级...........................................................................
EMC 措施...............................................................................
EMF 措施 ...............................................................................
特殊危害................................................................................
保护气体要求............................................................................
来自保护气体气瓶的危险..................................................................
安装位置和运输期间的安全措施............................................................
正常操作中的安全措施....................................................................
调试、维护和维修........................................................................
安全技术检查............................................................................
废料处理................................................................................
安全标志................................................................................
数据保护................................................................................
版权....................................................................................
概述 ......................................................................................
关于这些操作说明书......................................................................
比较 Drive EasyTw in 与 TimeTwin Digital............................................................................................
Drive EasyTwin 优势 .....................................................................
Drive EasyTwin 功能原理 .................................................................
首电源和尾电源..........................................................................
Drive EasyTwin 应用领域 .................................................................
机器人尺寸标注..........................................................................
焊枪清洗站..............................................................................
系统要求 ..................................................................................
Drive EasyTwin 的系统要求和最低配备 .....................................................
Drive EasyTwin 机械要求 .................................................................
操作元件和接口 ............................................................................
Drive EasyTwin 驱动单元控制装置 .........................................................
焊接技术方面 ..............................................................................
Drive EasyTwin 的保护气体 ...............................................................
Drive EasyTwin 的气流 ...................................................................
接地连接................................................................................
焊接电路电感 L,焊接电路电阻 r ..........................................................................................................
伸出....................................................................................
焊枪倾角................................................................................
电弧组合选项............................................................................
PCS/脉冲 ..................................................................................
符号....................................................................................
熔滴过渡................................................................................
ZH
7
7
8
9
9
10
10
11
14
14
14
14
15
15
15
15
16
16
16
17
18
18
18
19
19
20
20
20
21
21
21
22
22
22
22
23
23
23
23
23
24
24
24
24
26
26
26
27
27
28
28
28
28
28
28
29
29
30
30
30
5

特性与优势..............................................................................
潜在应用,应用领域......................................................................
焊接参数标准值 ............................................................................
相对于工件针对角焊缝对齐焊枪............................................................
相对于工件针对搭接接头对齐焊枪..........................................................
Drive EasyTwin 的应用领域 - 钢,直径 1.2 mm - 1.0 mm ....................................................................
焊接技术选项............................................................................
维护、保养和废料处理 ......................................................................
概要....................................................................................
示例:填充金属消耗......................................................................
开始切换前/启动前 .......................................................................
在 25 小时的燃弧时间后 ..................................................................
在 50 小时的燃弧时间后 ..................................................................
处置....................................................................................
磨损件更换 ................................................................................
准备更换送丝辊和喷嘴....................................................................
更换进气喷嘴............................................................................
更换送丝辊..............................................................................
30
30
31
31
31
32
32
34
34
34
34
34
34
34
35
35
37
37
6

安装和调试
ZH
Standard 和
PowerLiner 型号
使用 Drive EasyTwin 焊接工艺时,可按照两种不同的方式送入填充焊丝。
对于 Standard 型号,填充焊丝从卷筒中朝着 Robacta Drive EasyTwin 的方向通过送丝机进
行送丝。送丝软管通过专用夹具连接至管组,并使用弹簧平衡器悬挂装置进行悬挂。
对于 PowerLiner 型号,填充焊丝从卷筒中朝着 Robacta Drive EasyTwin 的方向直接进行送
丝。PowerLiner 软管通过 Velcro® 扣带连接至管组,并使用弹簧平衡器悬挂装置进行悬
挂。
7

在机器人上安装
1
2
4
6
CrashBox Drive
EasyTwin
1 2
3 4
3
5 6
5
8

连接直颈
2
1
2
2
1 2
1
可能的倾角:
x = 5° / 25° / 45° / 65°
ZH
将管组固定在弹簧
平衡器悬挂装置上
使用 Velcro® 紧固带将管组固定在弹簧
平衡器悬挂装置上
- 如果管组长 6 m > 至少使用 3 个适
当放置的弹簧平衡器悬挂装置
Standard 型号
使用夹具(项目编号:44,0350,3952)
将送丝软管固定在管组上,相距约 50
cm 的位置。
重要说明!必须使用夹具将送丝软管固
定在管组上,距离 Robacta Drive Ea-
syTwin 装置前方 20 cm 的位置。
PowerLiner 型号
使用 Velcro® 紧固带(项目编号:
42,0300,2589)将 PowerLiner 固定在
管组上,相距约 50 cm 的位置。
9

使用 Velcro® 紧固带将 PowerLiner 置
3
1
3
6
9
2
于与 Robacta Drive EasyTwin 的接口处
连接管组 将首管组(仅前管组中包含排气管路和输气管路)连接至首电源(安装控制箱的位
置)
将尾电缆(仅尾管组中包含控制线路)连接至尾电源
2
将冷却剂管路连接到冷却单元
将排气管路连接至控制箱
4
将输气管路连接至控制箱
5
将控制线路连接至控制箱
将 LocalNet 线路连接至控制箱和尾电源
7
将压缩空气管路连接至控制箱
8
将送气管路连接至控制箱(最低 30 l/min)
在 Robacta Drive
EasyTwin 中安装送
丝软管
只须在第一次使用该装置时安装送丝软管。
1 2
1
10

3 4
4
2
4
3
现在必须穿入填充焊丝(请参阅第 11 页中图 3“穿入填充焊丝”)
ZH
穿入填充焊丝
注意
!
出于技术方面的考虑,仅必须使用原装配件中提供的内衬。
1 2
1
3
4
3
*
全开
11

5 6
6
5
7
7
1
7
12

2 3
9
11
12
13
8
4 5
10
ZH
6 7
***
设置接触压力(3 个环必须可见)
13

安全规范
概述 该设备按照当前技术水平以及公认的安全技术规范制造。但是如果错误操作或错误使用,
仍将
- 威胁操作人员或第三方人员的人身安全、
- 造成设备损坏和操作人员的其他财产损失、
- 影响设备的高效运作。
所有与设备调试、操作、保养和维修相关的人员都必须
- 训练有素、
- 具备焊接方面的知识且
- 完整阅读并严格遵守本操作说明书。
应始终将操作说明书保存在设备的使用场所。作为对操作说明书的补充,还应遵守与事故
防范和环境保护相关的通用及当地的现行规定。
设备上的所有安全和危险提示
- 保持为可读状态
- 不得损坏
- 不得去除
- 不得遮盖,覆盖或涂盖。
安全和危险提示在设备上的位置,参见设备操作说明书的“概述”一章。
接通设备前要排除可能威胁安全的故障。
这关系到您的切身安全!
符合规定的使用 只能按照“符合规定的使用”一章所述的内容使用该设备。
设备仅限使用功率铭牌上指定的焊接工艺。
其他用途或其他使用方式都被视为不符合规定。制造商对由此产生的损失不负有责任。
符合规定的使用还包括
- 完整阅读并遵守操作说明书中的所有提示
- 完整阅读并遵守所有安全和危险提示
- 坚持检修和保养工作。
设备不得用于以下用途:
- 管道除霜
- 电池/蓄电池充电
- 发动机启动
设备仅限工商企业使用。制造商不对在家庭使用引起的损失负责。
制造商对焊接缺陷或焊接错误不负有责任。
环境条件 在指定的范围以外使用或存放设备都被视为不符合规定。制造商对由此产生的损失不负有
责任。
环境温度范围:
- 运行时:-10 °C 至 + 40 °C(14 °F 至 104 °F)
- 运输和存放时:-20 °C 至 + +55 °C(-4 °F 至 131 °F)
14
相对空气湿度:
- 40 °C (104 °F) 时,最高为 50 %
- 20 °C (68 °F) 时,最高为 90 %
环境空气:无尘、无酸、无腐蚀性气体或物质等。
海拔:最高 2000 米 (6561 ft.8.16 in.)

运营商的责任 运营商需保证只由下列专人使用设备:
- 熟悉操作安全和事故防范基本规定并接受过设备操作指导
- 阅读、理解该操作说明书中内容,尤其是“安全规程”一章,并签字确认
- 接受过焊接效果要求的相关培训。
必须定期检查该操作人员是否具备安全操作意识。
操作人员的责任 所有被授权开展与该设备相关工作的人员,都有责任在开始工作之前
- 了解操作安全和事故防范基本规定
- 阅读该操作说明书中内容,尤其是“安全规程”一章,并签字确认本人已充分理解
并将确实遵守。
离开工作场所前确保即使在无人值守的状况下也不会出现人员伤亡和财产损失。
电源连接 具有较高额定值的设备可能会因其电流消耗而影响电源的供电质量。
这可能会在以下几个方面对许多设备类型造成影响:
- 连接限制
*)
-
最大许用电源阻抗的相关标准
*)
-
最小短路功率要求的相关标准
*)
公共电网接口处
请参阅“技术数据”
ZH
在这种情况下,工厂操作人员或使用该设备的人员应检查设备是否能够正常连接,并在适
当情况下与供电公司就此事进行沟通。
重要!请确保电源连接已正确接地
保护您自己和他人 操作设备的人员可能面临诸多危险,例如:
- 火花及金属碎片飞溅
- 电弧辐射,会造成眼部及皮肤损伤
- 身处具有危害性的电磁场中可能危及心脏起搏器使用者的生命
- 由于电源电流和焊接电流而引起触电死亡
- 更大的噪音污染
- 有害的焊接烟尘和气体
操作设备时必须穿着合适的防护服。防护服必须具备以下特性:
- 防火
- 绝缘且干燥
- 覆盖全身、无破损且状态良好
- 安全头盔
- 无卷脚的长裤
防护服包含多种不同的物品。操作人员应:
- 使用防护面罩或正规滤光镜以保护眼部和面部,防止受到紫外线、高温及火花损伤
- 佩戴具备侧面保护(防护面罩后方)功能的正规护目镜
- 穿着结实且在潮湿环境下也能提供绝缘保护的鞋
- 佩戴合适的手套(绝缘且隔热)以保护双手
- 佩戴耳部护具以降低噪音危害并防止受伤
15

任何设备运行过程中或进行焊接时,应使所有人员(特别是儿童)远离工作区域。但是,
如果附近有人,应当:
- 确保其注意到全部危险(电弧刺眼危险、火花飞溅致伤危险、有害焊接烟尘、噪音、
由电源电流和焊接电流产生的潜在危险等)
- 提供适合的保护装置
- 或者,布设适当的安全网/安全幕。
噪音排放值规定 根据 EN 60974-1,在标准负荷时按照最大允许的作业点运转后,设备在空转以及冷却阶段
发出的最大声功率级 <80dB(A)(以 1pW 为参照值)。
无法规定焊接(和切割)时规定工位的放射值,因为这受工艺和环境限制。放射值取决于
各种不同的参数,比如焊接工艺(MIG/MAG 焊接、TIG 焊接)、选择的电流类型(直流
电、交流电)、功率范围、焊缝金属的类型、工件的共振方式和工作场所环境等等。
来自有毒气体和蒸
汽的危险
焊接期间产生的烟尘含有有害气体和蒸汽。
国际癌症研究机构的 118 种致癌因子专题论文中指出,焊接烟尘含有致癌物质。
使用烟源排烟系统和室内排烟系统。
若可能,请使用带有综合排烟装置的焊枪。
让您的头部远离焊接烟尘和气体。
针对烟尘和有害气体采取以下预防措施:
- 切勿吸入烟尘和有害气体。
- 使用适当的装置将烟尘和有害气体从工作区域中排出。
确保足够的新鲜空气供应量。确保通风流量至少为每小时 20 m³。
如果通风不足,请佩戴具有供氧功能的焊接面罩。
如果对抽吸能力是否足够存有任何疑问,应将测得的有害物质排放值与允许的极限值进行
比较。
以下组成部分是确定焊接烟尘毒性的主要因素:
- 用于工件的金属
- 电极
- 药皮
- 清洁剂、脱脂剂等
- 所使用的焊接工艺
有关上面列出的组成部分,请查阅相应材料安全数据表和制造商说明书。
有关暴露场景、风险管理措施以及确定工作条件的建议,请参阅 European Welding
Association 网站 (https://european-welding.org) 中的 Health & Safety 部分。
将易燃蒸汽(例如溶剂蒸气)置于电弧辐射范围之外。
如果未进行焊接操作,请关闭保护气体气瓶阀或主供气源。
火花飞溅产生的危险火花飞溅会引发火灾和爆炸。
不得在可燃材料附近焊接。
可燃材料必须远离电弧至少 11 米 (36 ft. 1.07 in.) ,或使用经过检验的覆盖物遮盖起来。
准备好适当的、经过检查的灭火器。
16

火花和灼热的金属部件也可能通过细小裂缝和开口进入邻近区域。采取相应的措施,避免
由此产生的受伤和火灾危险。
如果没有按照相应的国家和国际标准进行预处理,则不得在有火灾和爆炸危险的区域以及
封闭的罐、桶或管道中进行焊接。
不允许在存放过气体、燃料、矿物油和类似物品的容器上进行焊接。这些物质的残留会造
成爆炸危险。
ZH
由电源电流和焊接
电流产生的危险
电击可能会危及生命或致人死亡。
切勿触摸设备内外的带电装备组件。
进行 MIG/MAG 焊接和 TIG 焊接时,焊丝、焊丝盘、送丝辊和所有与焊丝接触的金属件均带
电。
应始终将送丝机置于充分绝缘的表面上,或始终使用适当的绝缘送丝机支架。
请确保放置具有良好绝缘性的干燥底座或防护罩,以保护您和他人远离大地或接地电位。
该底座或防护罩必须足以覆盖身体与大地或接地电位之间的整个区域。
所有电缆和引线必须连接牢固、完好无损、绝缘并且尺寸适当。立即更换松动的连接以及
烧焦、损坏或尺寸不足的电缆和引线。
每次使用前,请通过手柄确保电源紧密连接。
如果电源线带有卡口式接头,则需围绕纵轴将电源线至少旋转 180° 并予以预紧。
切勿在身体或身体各部位的周围缠绕电缆和引线。
电极(电焊条、钨极、焊丝等)
- 不得浸入冷却液体中
- 不得在接通电源时触摸电极。
在两个电源的焊接电极之间,其中一个电源的开路电压可能会翻倍。在某些情况下,同时
触摸两个电极的电位可能会致人死亡。
安排有资格的电工定期检查电源线,以保证保护接地线能正常工作。
防护等级为 1 的设备需要一个带有保护接地线的电源和一个带有保护接地线触点的连接系
统才能正常工作。
只有在遵守所有有关保护隔离的国家法规时,才允许使用无保护接地线的电源和无保护接
地线触点的插座操作设备。
否则,将视为重大过失。对于因此类误用所导致的任何损失,制造商概不负责。
如有必要,请为工件提供适当的接地。
关闭未使用的设备。
高空作业时,请系好安全带。
操作设备之前,请将其关闭并拔出电源插头。
为设备附上清晰易懂的警告标识,以防他人再次插上电源插头而重新开启该设备。
打开设备之后:
- 为所有带电部件放电
- 确保设备中的所有部件均处于断电状态。
如果需要使用带电装备组件,则应指定另一个人在适当的时候关闭电源开关。
17

弯曲焊接电流 如果忽略以下说明,则会产生弯曲焊接电流并导致以下后果:
- 火灾隐患
- 连接至工件的零件过热
- 对保护接地线造成无法弥补的损坏
- 设备及其它电气设备的损坏
确保使用工件夹具夹紧工件。
将工件夹具尽可能固定在靠近焊接区域的位置。
将设备放置在与导电环境充分绝缘的位置,例如与导电地板或导电支架绝缘。
如果要使用配电板、双头支架等,请注意以下事项:未使用焊枪/焊钳的焊条同样带电。
确保未使用的焊枪/焊钳具有充分的绝缘保护。
在自动化 MIG/MAG 应用领域中,确保只将绝缘后的焊丝从焊丝筒、大型送丝机卷盘或焊丝
盘引至送丝机。
EMC 设备分级 放射等级 A 的设备:
- 规定仅用于工业区
- 如果应用于其他区域,可能引发线路连接和放射故障。
放射等级 B 的设备:
- 满足居民区和工业区的放射要求。也适用于使用公用低压线路供电的居民区。
根据功率铭牌或技术数据对 EMC 设备进行分级。
EMC 措施 有时,即使装置的辐射符合相关标准限值,仍可能影响指定的应用区域(例如,在同一位
置存在敏感性设备或装置安装的地点接近收音机或电视机时)。
此时,操作员必须采取相应措施来纠正这种情况。
按照国家及国际法规,检查和评估附近装置的抗干扰性。以下设备很可能易受该装置的干
扰:
- 安全设备
- 电力、信号和数据传输线路
- IT 和电信设备
- 测量与校准设备
用于规避 EMC 问题的保障措施:
1. 干线供电
- 如果在输电干线连接正常的情况下,发生电磁干扰,则须采取附加措施(如,使
用合适的线路滤波器)。
2. 焊接用电源线
- 必须尽可能短
- 必须彼此接近(以避免 EMF 问题)
- 必须与其他电源线保持一定距离
3. 等电位连接
4. 工件接地
- 如有必要,可使用合适的电容器建立接地连接。
5. 如有必要,可采取屏蔽措施
- 遮蔽附近的其他装置
- 遮蔽整个焊接装配
18

EMF 措施 电磁场可能造成未知的健康损害:
- 影响附近人员的健康,如心脏起搏器和听力辅助设备的佩戴者
- 如果心脏起搏器佩戴者需要在该设备周围逗留,或在焊接过程中靠近,必须提前征求
医生意见
- 出于安全原因,焊接电缆和焊接工头部/躯干之间应保持尽可能远的距离
- 焊接电缆和综合管线不得扛在肩膀上,也不得绕在身体和躯干上
特殊危害 请保持手、头发、衣物和工具远离运转中的部件。例如:
- 风扇
- 齿轮
- 辊
- 轴
- 焊丝盘和填充焊丝
请勿将手伸入旋转中的焊丝驱动器齿轮或驱动部件中。
仅当进行保养或维修时方可打开/取下盖板和侧板。
操作期间
- 请确保所有盖板已处于闭合状态,并且所有侧板均已安放就位。
- 始终保持所有盖板和侧板处于闭合状态。
从焊枪中脱离的填充焊丝很可能造成人身伤害(扎手、脸和眼睛受伤等)。
ZH
因此,请始终使焊枪(带有送丝机的装置)远离身体并佩戴合适的护目镜。
焊接期间或焊接完成后,请勿触摸工件 - 存在灼伤的隐患。
冷却时,残渣会崩离工件。因此,重新加工工件时,也必须佩戴指定的保护装置,并采取
相应措施确保其他人员也能受到充分保护。
焊枪和其他具有高工作温度的部件必须冷却之后才能进行处理。
对于存在火灾或爆炸危险的区域,应采用特殊规程 - 遵守相关的
国家及国际法规。
在容易发生触电危险的区域(如,锅炉附近)工作时所用的电源必须附有“安全”标
志。而且,电源不得位于这些区域之内。
冷却剂外溢存在烫伤隐患。断开冷却剂进流或回流管路连接前,先关闭冷却装置。
遵守冷却剂安全数据表中的信息来处理冷却剂。冷却剂安全数据表可从服务中心处获取或
从制造商的网站下载。
通过起重机运输这些装置时,只能使用制造商提供的合适承载设备。
- 使用链条和/或绳索挂住承载设备的所有悬挂点。
- 链条和绳索与垂直方向的角度尽量保持最小。
- 移除气缸和送丝机(MIG/MAG 和 TIG 装置)。
如果焊接期间送丝机与起重机支架相连,则应始终使用合适且绝缘的送丝机起重附件
(MIG/MAG 和 TIG 装置)。
如果设备带有背带或手柄,则此设备仅专用于用手携带。如果使用起重机、平衡式叉车或
其他机械起重设备进行运输,则不使用背带。
必须定期测试与设备或其部件连接的所有起重附件(如带子、手柄、链条等)的情况
(如,是否存在机械损坏、腐蚀,或由其他环境因素引起的变化)。
测试间隔与测试范围必须至少符合适用的国家标准和指令。
如果将法兰盘用于保护气体接口,则可能会在不知不觉中泄露无色无味的保护气体。组装
之前,用合适的铁氟龙胶带密封用于保护气体接口法兰盘的设备侧螺纹。
19

保护气体要求 受污染的保护气体不但会损坏设备,而且还会降低焊接质量,尤其是在使用环形干线的情
况下。
请满足下列保护气体质量要求:
- 固体颗粒大小 < 40 µm
- 压力凝点 < -20 °C
- 最大含油量 < 25 mg/m³
必要时使用滤清器。
来自保护气体气瓶
的危险
保护气体气瓶包括加压气体,并且如果受到损坏时能够爆炸。因为保护气体气瓶是焊接设
备的一部分,所以操作时必须极为小心。
保护好含有压缩气体的保护气体气瓶,以使其远离环境过热、机械碰撞、残渣、明火、火
花和电弧。
根据说明书垂直安装保护气体气瓶且连接牢固,以防止其翻倒。
请保持保护气体气瓶远离任何焊接电路或其他电路。
切勿在保护气体气瓶上悬挂焊枪。
切勿触摸带有电极的保护气体气瓶。
存在爆炸的隐患 - 切勿尝试焊接增压的保护气体气瓶。
仅使用适于手动应用的保护气体气瓶和正确适当的附件(调节器、软管和管接头)。仅使
用状态良好的保护气体气瓶和附件。
当打开保护气体气瓶的阀时,请将面部转向一侧。
如果未进行焊接操作,请关闭保护气体气瓶阀。
如果未连接保护气体气瓶,则请将阀截球形保留在气瓶的原位上。
必须遵守制造商的说明书和关于保护气体气瓶和附件适用的国家及国际法规。
安装位置和运输期
间的安全措施
倾倒的设备可轻易致死。将该设备放置在坚实、平整的表面上使其保持平稳
- 所允许的最大倾角为 10°。
适用于存在火灾或爆炸危险的室内的特殊规定
- 遵守相关的国家和国际规定。
采用内部规范和检查程序,确保工作场所环境整洁,布局井然有序。
只能安装和操作防护等级符合功率铭牌所示要求的设备。
安装设备时,应确保留有 0.5 m (1 ft. 7.69 in.) 的周围间距,以保证冷却空气的自由流
通。
运输设备时,请遵守相关的国家及本地指导方针以及事故防范规定。尤其应遵守针对运输
期间产生的风险而制定的指导方针。
不要抬起或运输运行的设备。请在运输或抬起前关闭设备。
运输设备之前,请排出所有冷却剂,然后拆下以下部件:
- 送丝机
- 焊丝盘
- 保护气体气瓶
在运输设备之后与调试设备之前,必须目检设备有无损坏。在设备试运行之前,必须由经
培训的技术服务人员对所有损坏部位进行维修。
20

正常操作中的安全
措施
只在所有安全装置完全有效时操作设备。如果有任何安全装置无法正常工作,则将产生以
下风险
- 操作人员或第三方伤亡
- 设备损坏以及操作员的其它物资损失
- 设备工作效率低下
启动设备之前,必须对所有不能正常工作的安全装置进行维修。
切勿略过或禁用安全装置。
启动设备之前,需确保不会对他人造成危险。
至少每周对设备进行一次检查,主要检查有无明显的损坏以及安全装置的功能是否正常。
始终安全地固定好保护气体气缸,且如果使用起重机运输设备,则需事先将气缸移除。
只有制造商的原装冷却剂适用于我们的设备,这是其属性(电传导性、防冻剂、材料兼容
性、阻燃性等)决定的。
仅使用制造商提供的适用原装冷却剂。
不要将制造商提供的原装冷却剂与其它冷却剂相混合。
仅将制造商的系统组件连接到冷却回路。
制造商对因使用其他系统组件或其他冷却剂而造成的损失不承担任何责任。此外,也不会
受理任何保修索赔。
ZH
冷却液 FCL 10/20 未点燃。在一定条件下,乙醇基冷却剂可能会点燃。将冷却剂置于其原
装、密封的容器中运输并远离所有着火源。
使用过的冷却剂必须根据相关国家和国际法规进行合理处置。冷却剂安全数据表可从服务
中心处获取或从制造商的网站下载。
在开始焊接之前且系统仍处于已冷却状态时检查冷却剂液位。
调试、维护和维修 无法保证外购件在设计和制造上都符合对其所提要求,或者无法保证其符合安全要求。
- 只能使用原厂备用件和磨损件(此要求同样适用于标准零件)。
- 不要在未经生产商同意的情况下对设备进行任何改造、变更等。
- 必须立即更换状况不佳的工件。
- 订购时,请指定设备的准确名称和部件编号(如备件清单所示),以及序列号。
可使用压紧螺钉实现保护接地线的连接,以使壳体部件接地。
仅使用编号正确的原装压紧螺钉,并使用规定的扭矩拧紧。
安全技术检查 制造商有责任每 12 个月至少进行一次设备安全检查。
制造商建议,以相同的时间间隔(每 12 个月)定期进行焊接电源校准。
以下情况,建议由经过认证的专业电工进行安全检查:
- 更改之后
- 加装或改装之后
- 修理、维护和保养之后
- 至少每 12 个月。
在安全检查时须遵照国家和国际标准及条例。
您可以在服务站点索取有关安全检查和校准的详细信息。服务点将根据您的需求提供必要
的资料。
21
废料处理 绝不能将此设备扔在家庭垃圾里!按照欧洲有关旧电气和电子设备的 机械指令以及所执行
的国内法律,报废的电气工具必须分开搜集并做环保的废旧利用。请务必将您的旧设备返
还给您的经销商或从当地经过授权的收集和废品处理系统收集信息。无视该欧洲规定,可
能会对环境和您的健康造成潜在的影响!
安全标志 带有 CE 标志的设备符合低压和电磁兼容性指令的基本要求(例如,EN 60 974 系列的相关
产品标准)。
伏能士特此声明该设备符合指令 2014/53/EU。可在以下地址找到欧盟符合性声明的全文:
http://www.fronius.com
带有 CSA 测试标志的设备符合加拿大和美国相关标准的要求。
数据保护 如果用户对装置出厂前的设置进行了更改,则由用户自己负责对该数据进行安全保护。生
产商对个人设置被删除的情况不承担任何责任。
版权 该操作说明书的版权归制造商所有。
文字和插图在操作说明书付印时符合当时的技术水平。生产商保留更改权。本操作说明书
的内容不构成顾客的任何权利。我们非常欢迎有关操作说明书的改进建议以及对其中错误
的提示。
22

概述
关于这些操作说明书这些操作说明书介绍了“Drive EasyTwin”焊接工艺。
ZH
比较 Drive EasyTw
in 与 TimeTwin
Digital
通常,按照 DVS 数据表 0909 - 第 1 部分对以下内容进行区分
- 双丝焊:采用两条具有相同焊接电势的填充焊丝进行焊接
- 串联多弧焊(伏能士:TimeTwin Digital):采用两条具有单独焊接电势的填充焊丝
进行焊接
TimeTwin Digital Drive EasyTwin
焊接电势 单独 单独
可有选择地控制电弧 是 是
可有选择地设置电弧长度 是 是
脉冲电弧期间的电弧偏吹 低 低
飞溅 低 低
脉冲/脉冲电弧组合 可行 可行
脉冲/标准电弧组合 可行 可行
标准/脉冲电弧组合 可行 可行
标准/标准电弧组合 可行 *) 可行 *)
可单独控制送丝机 是 否
*) 表示不建议使用
Drive EasyTwin 优势- 借助前拉驱动装置,避免了管组中出现滑脱。从而产生稳定的电弧
- 磨损件较少 - 维修成本低
- 该系统完全不需要从内衬到直颈的部分
- 设计简单 - 所需的机器人尺寸较小
- 便于调节基体和填充金属以及保护气体的电源特性
- 电弧短,所需熔池小,因此焊接速度高
- 可进行混合操作(如脉冲电弧/标准电弧)
- 它与 TPS 4000/5000 共享相同的菜单导航,因此便于操作
Drive EasyTwin 功
能原理
- 在保护气体环境下,在同一熔池中焊接两条填充焊丝。
- 送丝操作通过共用的前拉驱动装置执行。
- 前拉驱动装置通过一个控制单元进行控制。
- 放入同一焊枪中的两条填充焊丝应能够使用两个相互独立的焊接电势。
- Drive EasyTwin 焊接工艺仅适用于卷筒的填充金属。
23

(1)
(1)
(2)
(3)
(4) (4)
(1) 送丝软管 1 和 2
(2) 焊丝卷筒 1 和 2
(3) 电源 1 和 2
(4) 单独的焊接电势
首电源和尾电源 这两个电源在“Drive EasyTwin”焊接工艺中被称为首电源和尾电源。
- 焊接方向由焊丝对确定。
- 根据焊接方向,首电源的填充焊丝为前置填充焊丝。
(3)
Drive EasyTwin 应
用领域
机器人尺寸标注 标注机器人尺寸时,请注意以下内容:
焊枪清洗站 为保证自动化 Drive EasyTwin 焊接工艺的最佳性能,建议使用焊枪清洗站,例如:
24
Drive EasyTwin 仅适用于自动化应用,例如:
- 在铁路车辆制造业中,用于焊接长焊缝和型材
- 在造船业中,用于焊接角焊缝和型材
- 在汽车制造业中,用于焊接搭接接头和焊接轮辋
- 在集装箱建造中,用于焊接对接焊缝、长焊缝、搭接接头和环形焊缝
- 在设备建造中,用于焊接 V、X 和角焊缝
- 用于焊接起重装置上的端接焊缝
- 用于焊接推土机上以及特殊机器构造中的 HV 和角焊缝
- 用于堆焊
- 机器人上的焊枪夹持器必须牢固。带有 CrashBox 的 Drive EasyTwin 焊枪重 ??? kg。
- 机器人管组和送丝软管必须经过机器人电池中的平衡器。

Robacta Reamer Twin
机械焊枪清洗装置,适合所有母材,例如钢、铝、铬镍不锈钢、铜等。
Robacta TC 1000 Twin 或 Robacta TC 2000 Twin
电磁式焊枪清洗装置,适用于铁磁母材。
ZH
25
系统要求
Drive EasyTwin 的
系统要求和最低配
备
焊枪:
1 x Robacta Twin Compact PB ED
驱动装置:
1 x Robacta Drive EasyTwin
焊枪管组:
1 x Robacta Drive EasyTwin W/FB
Drive EasyTwin 机
械要求
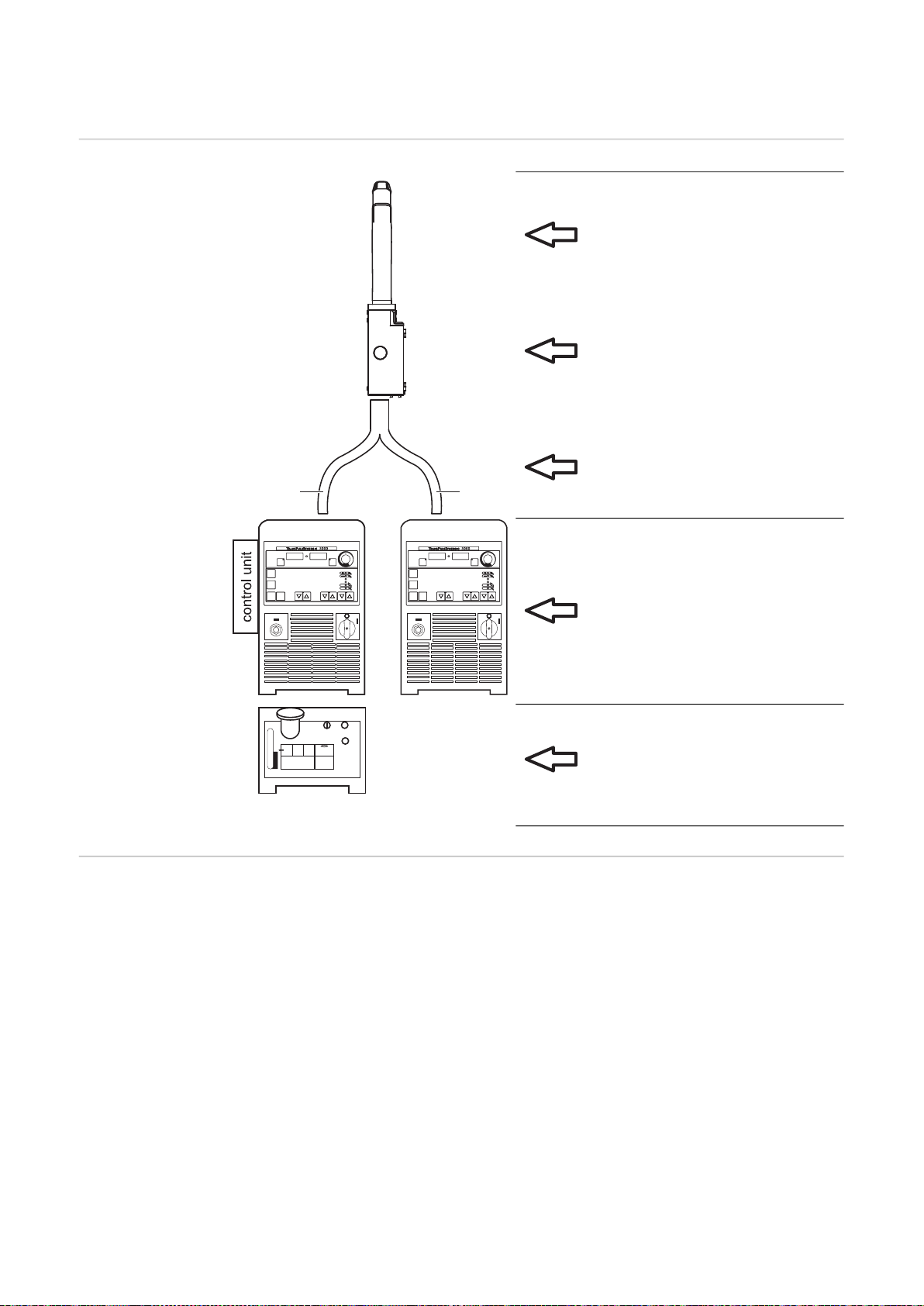
gas line /
blow out line
LEADING TRAILING
想要实现稳定且可重复的“Drive EasyTwin”焊接工艺,必须满足以下机械要求:
- 对机器人或专用机器(例如直线滑架)的精确焊枪导向
- 精确的接头制备
- 低部件公差
- 低偏差的焊缝导向系统
- 使用该系统后,第 3 根轴上不需要送丝机
control line
电源:
2 x TPS 5000(+ 变型)
1 x 控制单元
冷却单元:
1 x FK 4000-R FC
26

操作元件和接口
(3)
(1) (2)
Drive EasyTwin 驱
动单元控制装置
编号 功能
(1)
(2)
ZH
气体测试按钮
位于压力调节器上,用于设置所需气流
穿丝按钮
用于在无气流或电流的情况下将填充焊丝穿入到焊枪管组中
以预设的移动送丝速度穿入填充焊丝:
注意
!
请勿回抽过长的填充焊丝,因为回抽时填充焊丝无法自动缠绕。
编号 功能
(3)
焊丝回抽按钮
焊丝回抽按钮仅适用于 PowerLiner 型号。
回抽填充焊丝时不能流入气体或电流
以预设的焊丝回抽速度回抽填充焊丝
27
焊接技术方面
Drive EasyTwin 的
保护气体
Drive EasyTwin 的
气流
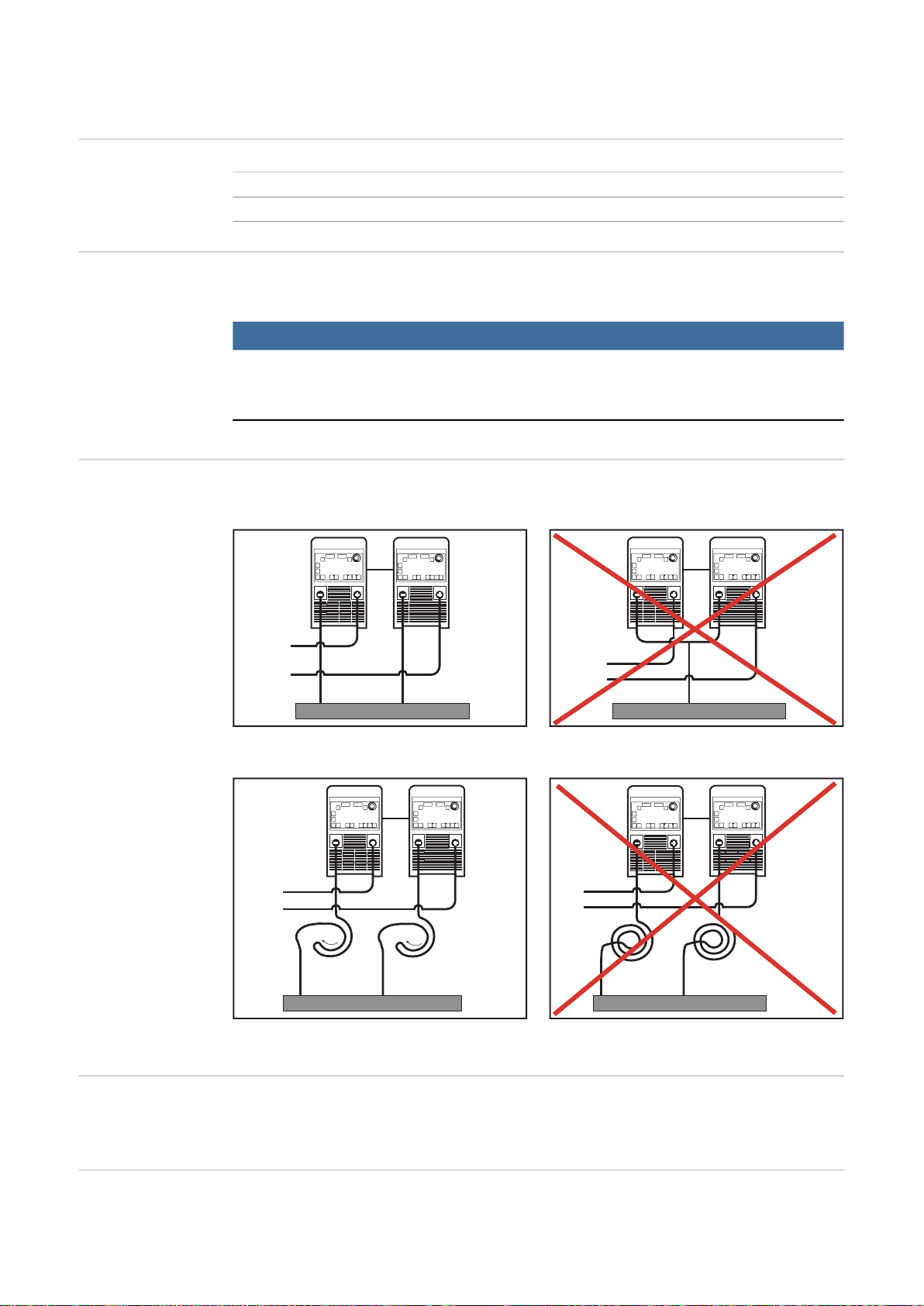
接地连接 为每个电源使用单独的接地电缆:
材料 保护气体
非合金和低合金钢 ArCO
- 总气流速率至少为 30 l/min
注意
!
由于设置选项减少(同步),建议采用活性气体所占比例较低的保护气体,例如 96% 氩气
/4% 氧气或 90% 氩气/10% CO2。这样可以减少飞溅,进而极大地降低磨损。
、ArO2 和 ArCO2O2 的混合气体
2
焊接电路电感 L,
焊接电路电阻 r
单独的接地电缆 共用接地电缆、接地插座
接地电缆成圈放置 接地电缆盘绕
必须为“Drive EasyTwin”焊接工艺的每个电源的焊接电路电感 L 和焊接电路电阻 r 单独
进行校正。
伸出 伸出并分隔填充焊丝:
28
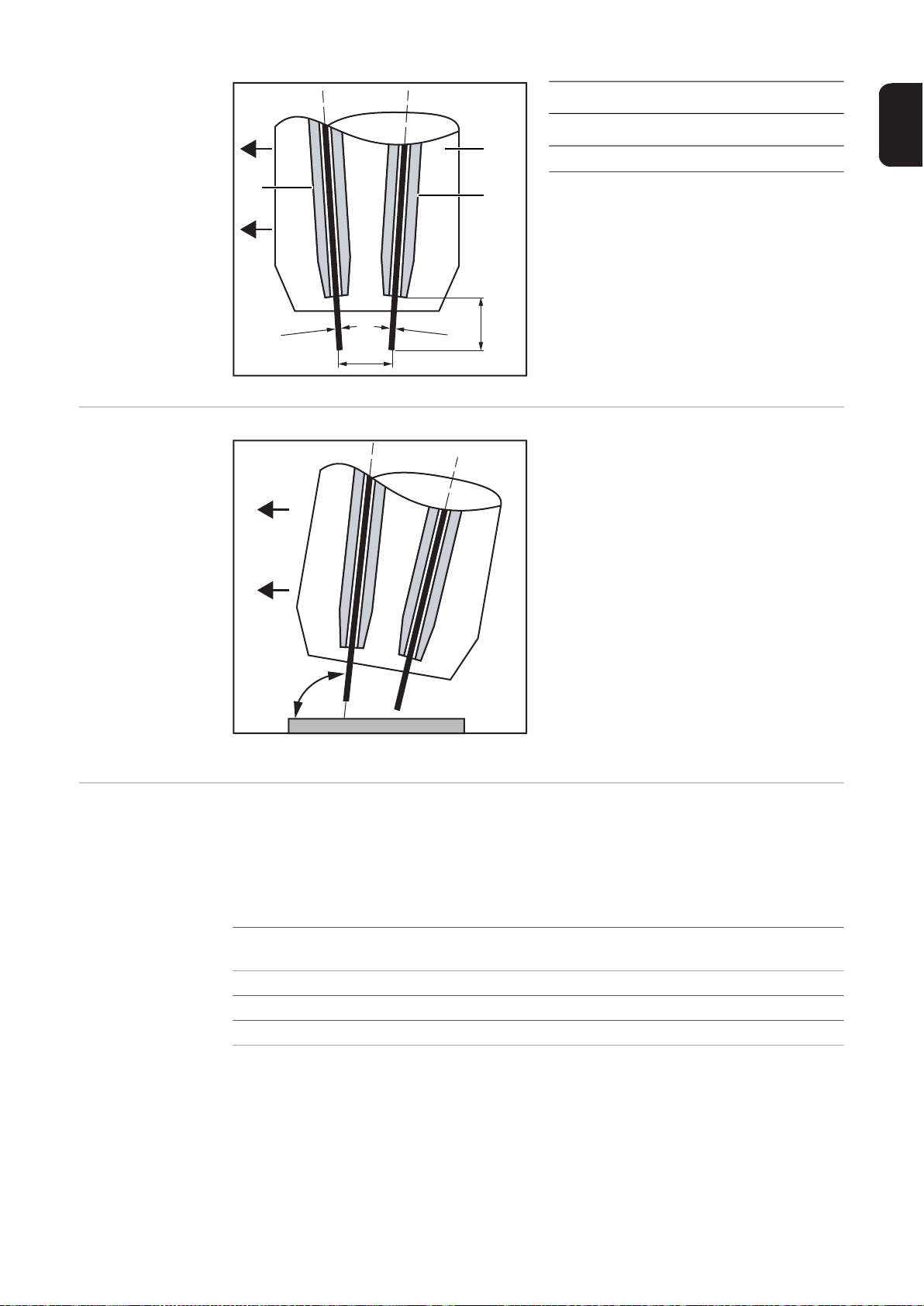
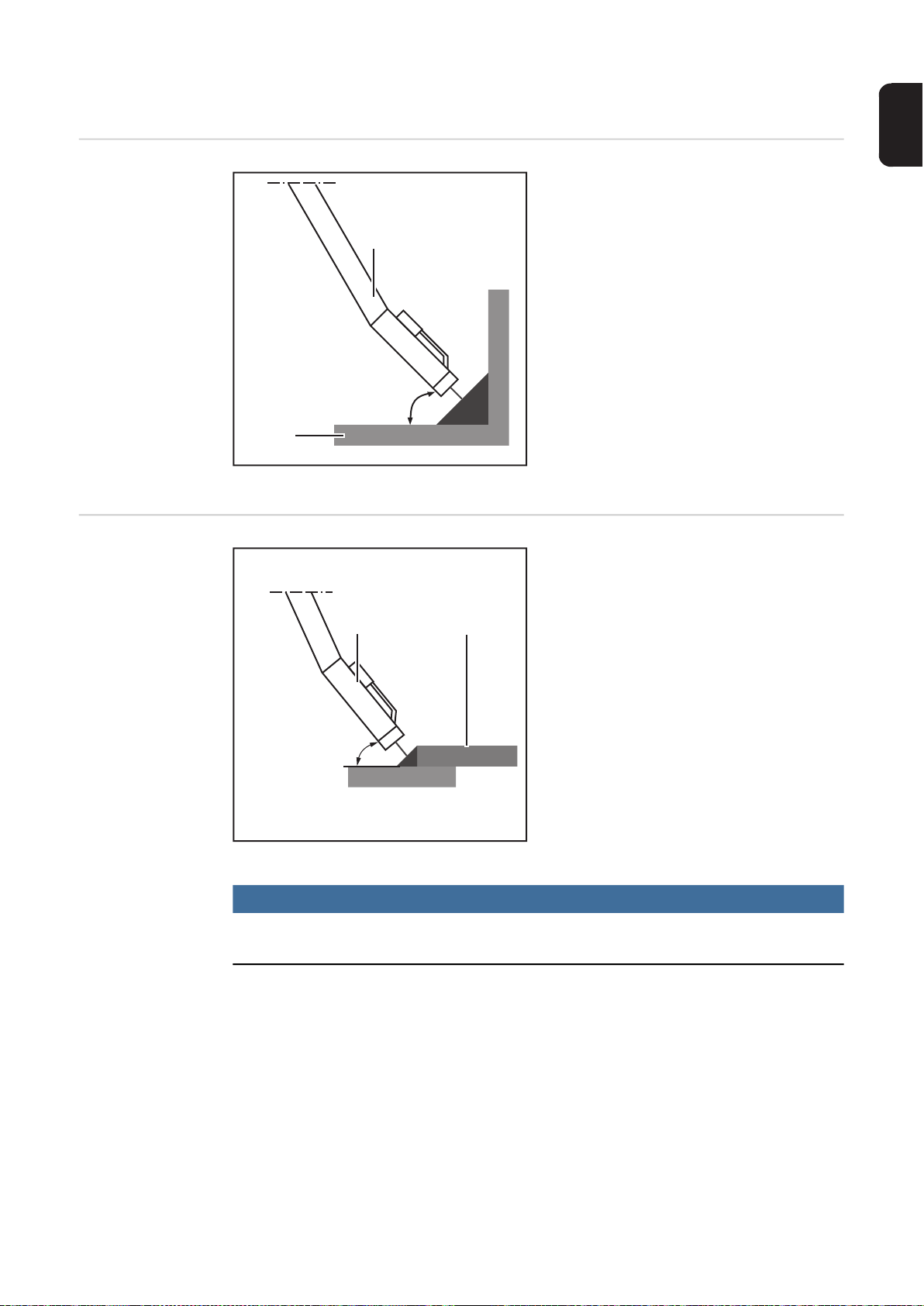
(1) 气体喷嘴
Ø 1,2 mm
Ø 1,0 mm
18 mm
~8 mm
(1)
(2)
(3)
90 - 100°
焊枪倾角
(2) 尾电源
(3) 首电源
选择焊枪倾角,以便根据焊接方向,首填
充焊丝(= 首电源的电极)垂直放置或稍稍
前倾。
ZH
垂直至稍稍前倾的焊枪倾角
电弧组合选项 在“Drive EasyTwin”焊接工艺中可组合使用不同类型的电弧。
焊接方向取决于焊丝对(Ø 1.2 mm 首电源/Ø 1.0 尾电源)和焊枪的构造。
电弧组合选项脉冲 - 脉冲仅适用于 LHSB TPS 安装套件。
首填充焊丝
(= 首电源)
尾填充焊丝
(= 尾电源)
脉冲 脉冲
非脉冲直流 脉冲
PCS
脉冲
29
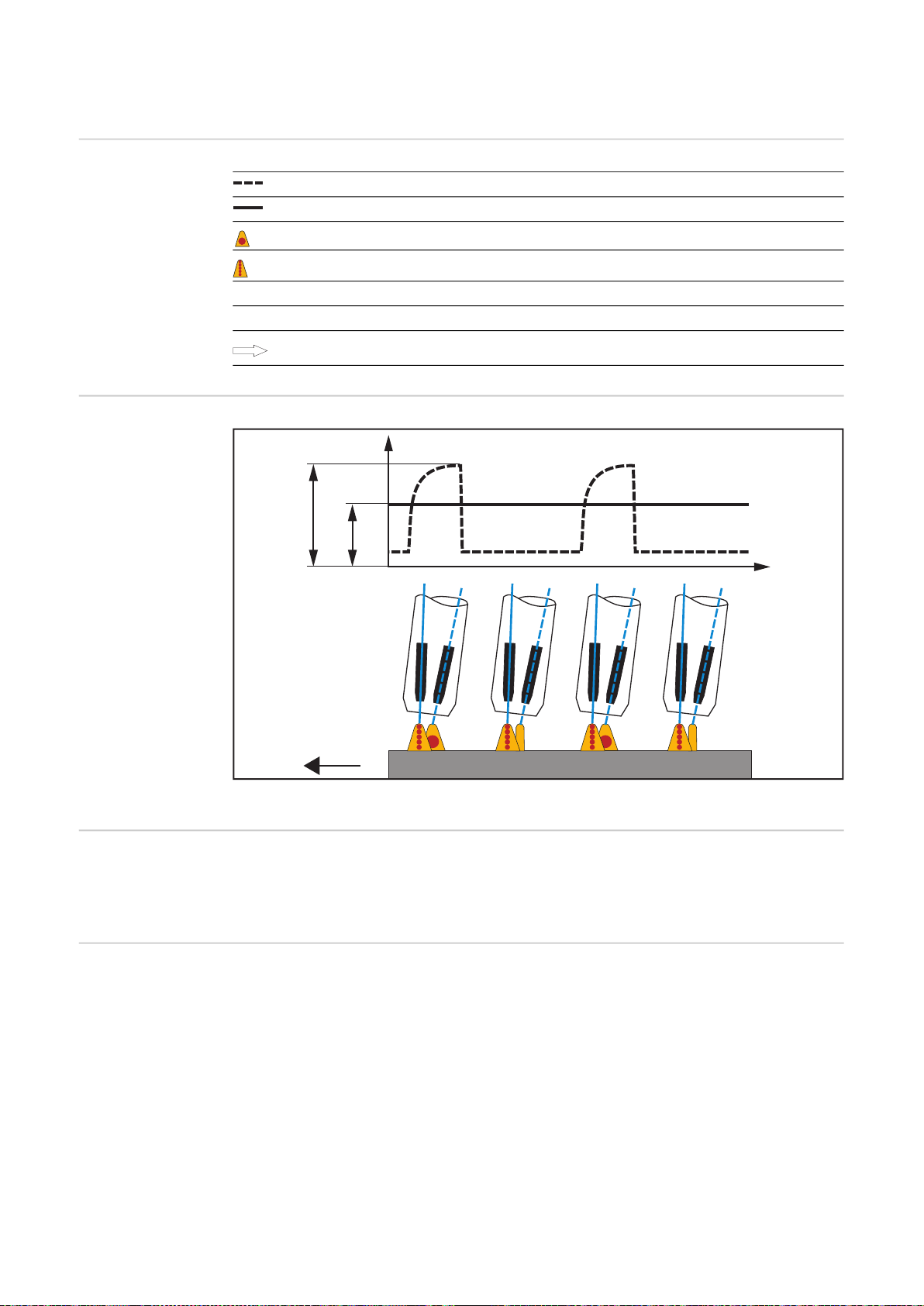
PCS/脉冲
I (A)
t (s)
I
T
I
L
符号
熔滴过渡
尾填充焊丝
首填充焊丝
主动式脉冲电弧(带熔滴过渡)
被动式脉冲电弧(无熔滴过渡)
I
L
I
T
首电源的焊接电流
尾电源的焊接电流
焊接方向
PCS/
脉冲:焊接电流/时间曲线与熔滴过渡示意图
特性与优势 - 通过首填充焊丝的 PCS 电弧可增加熔深
- 可焊接大焊缝横截面
- 尾填充焊丝的脉冲电弧提高了焊缝外观美感
潜在应用,应用领域PCS/脉冲电弧组合适用于焊接钢材。
30
焊接参数标准值
35 - 40°
(1)
(2)
55 - 75°
(1)
(2)
ZH
相对于工件针对角
焊缝对齐焊枪
相对于工件针对搭
接接头对齐焊枪
- 相对于工件 (2) 对齐焊枪 (1),如左图
所示
- 焊枪 (1) 偏离焊接方向 5°
焊枪/工件侧视图
- 相对于工件 (2) 对齐焊枪 (1),如左图
所示
- 焊枪 (1) 偏离焊接方向 5°
焊枪/工件侧视图
注意
!
如果上图内的焊缝中出现凹槽,则按照下图调整焊枪对齐方式可以防止这些凹槽出现。
31

Drive EasyTwin 的
68,5°
应用领域 - 钢,直
径 1.2 mm - 1.0 mm
Drive EasyTwin 特性范围介于 Vd.= 5 m/min(一个电源)至 Vd.= 15 m/min 之间。
此范围取决于以下内容
- 在 Vd. = 15 m/min 时,填充金属 1.0 为负载容量的绝对上限
- 由于仅有一台送丝电机,因此具有过载保护
工作范围为 Vd.= 10.5 m/min 至 Vd.= 15 m/min 之间。
低于 10 m/min. 的 Vd. 范围仅适用于上下坡。
介于 Vd.= 8.5 m/min 至 Vd.= 10.5 m/min 之间的范围为过渡范围,在此范围内 1.2 mm 填充
金属(首电源)将变为已改进的喷射电弧。该变更发生在 Vd.= 9 m/min 或 Vd.= 10 m/min
时,具体取决于所用的保护气体(特性)。应避免在此范围内选择生产参数。
焊接技术选项
重要!
对于列出的所有应用,焊缝长度最长为 5 m。
单层角焊缝/PA 位置:
薄板厚度: 小于 3 mm
a 维单层:
a3:
a6:
如果需要大于 6 mm 的 a 维,建议使用多层技术。
单层角焊缝/PB 位置:
薄板厚度: 小于 3 mm
a 维单层:
a3:
a4.5:
如果需要大于 4.5 mm 的 a 维,建议使用多层技术。
a3 - a6
Vs-2 m/min
Vs-0.5 m/min
a3 - a4.5
Vs-2 m/min
Vs-1.2 m/min
多层角焊缝/PB 位置:
32

单层端接焊缝/PA 位置:
搭接接头/PB 位置:
搭接接头/PB 位置:
薄板厚度: 小于 3 mm
a 维多层:
可能的熔敷效率:最高 13.5 kg
薄板厚度:
3 mm 厚的薄板:
6 mm 厚的薄板:
如果没有熔池支持,将无法实现 100% 根部形成。
薄板厚度:
2 mm 厚的薄板:
2.5 mm 厚的薄板:
薄板厚度:
a3 - a4.5
3 - 6 mm
Vs-3.2 m/min
Vs-1.8 m/min
1.5 - 2.5 mm
Vs-3.3 m/min
Vs-2.5 m/min
2.5 - 3.5 mm
Vs-2 - 2.5 m/min
ZH
焊接位置如图所示
在此列出的参数为标准值,在实际中由于存在与坡口有关的因素(磁场、规模等),因而
可能会发生变化,最大变化幅度为 +/- 20%。因此,对于临界情况需始终进行焊接试验。
33

维护、保养和废料处理
概要 该装置通常不需要维修。但是,要使该设备在未来几年内保持良好的运行状况,必须遵守
几个保养和维修注意事项。
示例:填充金属消耗抽样计算,钢填充金属的消耗:
Vd. 速度 = 12 m/min(填充金属 1.2 + 1.0)= 10.8 kg/h 熔敷效率 -> 近似为 10 kg/h
当燃弧时间为 50 小时,
10 kg/h x 50 h = 500 kg 填充金属 = 2 x 250 kg 焊丝卷筒
开始切换前/启动
前
在 25 小时的燃弧时
间后
在 50 小时的燃弧时
间后
处置 根据适用的国家和当地法规对冷却剂进行处置。
- 检查焊枪磨损件:
- 气体喷嘴
- 触头
- 气体分配器
- 飞溅防护装置...
- 对内衬进行气体净化
- 对 Robacta Drive EasyTwin 驱动单元进行气体净化
- 检查送丝辊
如果送丝辊出现磨损,则必须更换压力辊的轴座和双辊的反向轴承(请参阅“磨损件更
换”)。
34

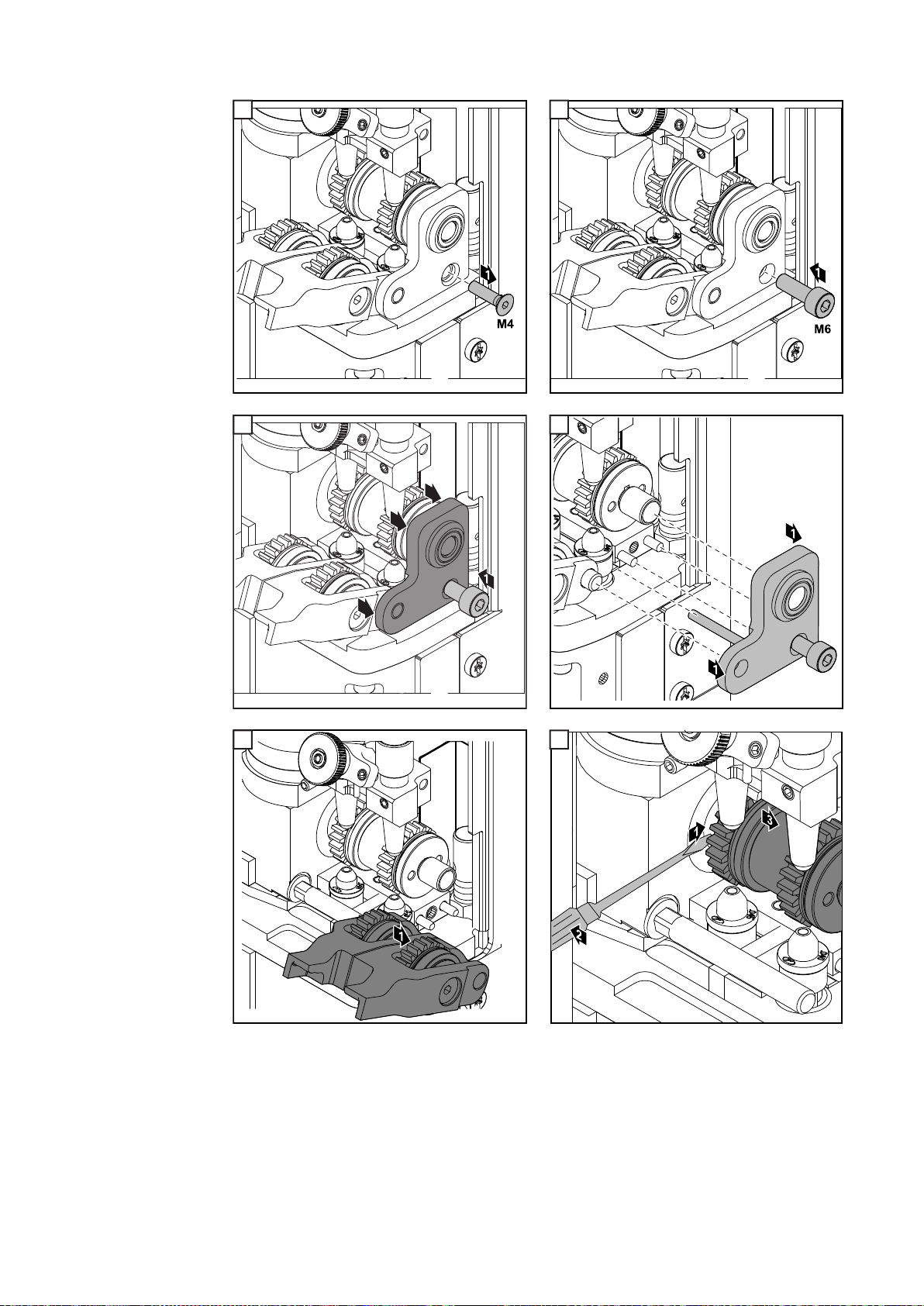
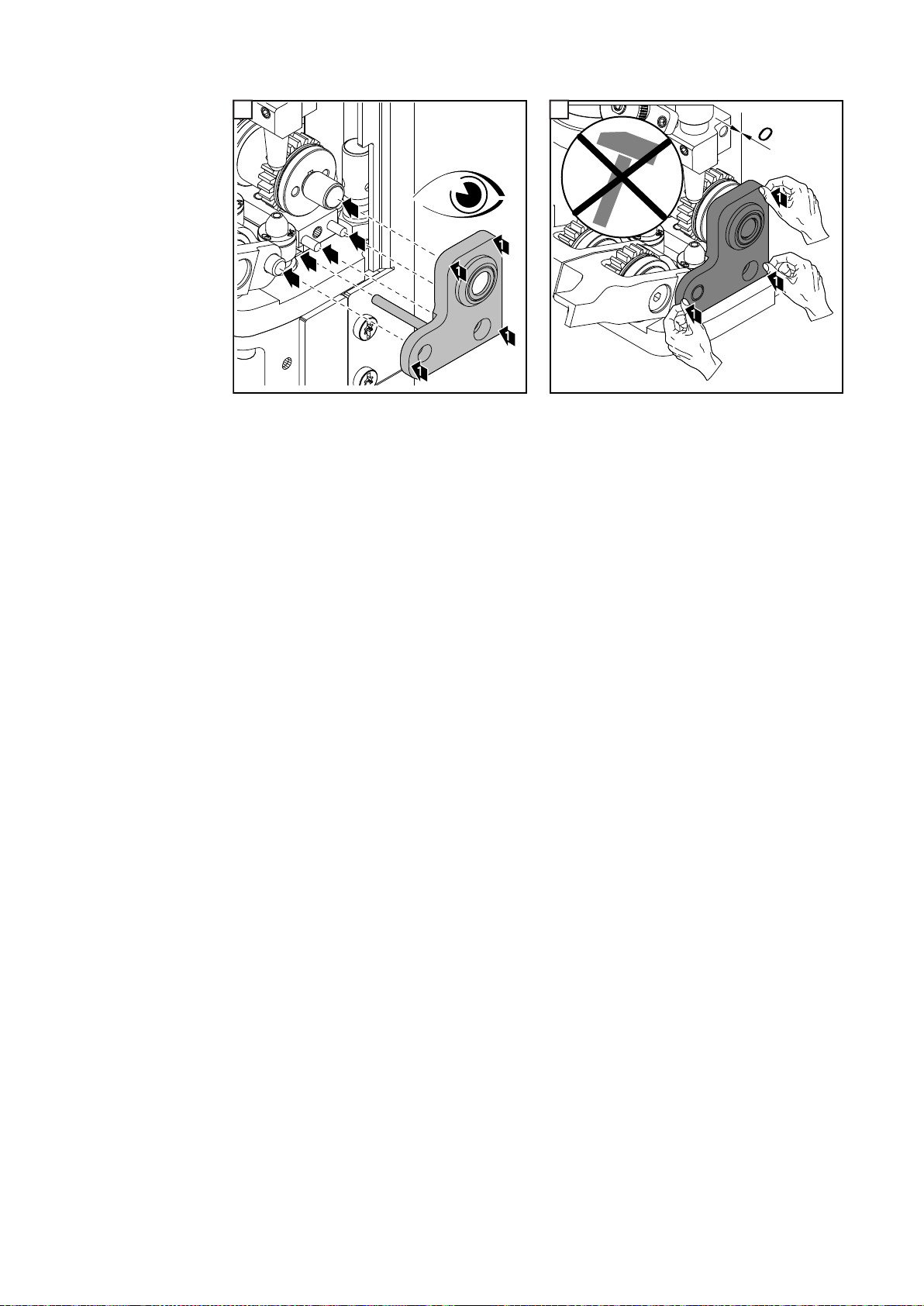
磨损件更换
2
3
4
6
ZH
准备
更换送丝辊和
喷嘴
1 2
1
3
4
*
全开
5 6
5
35
7 8
8
10
12
7
9 10
9
11 12
11
36

更换进气喷嘴
121
2
3
4
1 2
ZH
现在必须穿入填充焊丝(请参阅第 12 页中图 5“穿入填充焊丝”)
更换送丝辊
1 2
3 4
37
5 6
6
5
现在必须穿入填充焊丝(请参阅第 12 页中图 5“穿入填充焊丝”)
38

ZH
39

FRONIUS INTERNATIONAL GMBH
Froniusstraße 1
A-4643 Pettenbach
AUSTRIA
contact@fronius.com
www.fronius.com
Under www.fronius.com/contact you will find the addresses
of all Fronius Sales & Service Partners and locations.
 Loading...
Loading...