

Flycolor X-Cross BL-32-35A, X-Cross BL-32-50A, X-Cross BL-32-45A User Manual
多旋翼飞行器
无刷电子调速器说明书
● AR M 32-bi t Corte x 核心MC U,工作频 率高达48M Hz;
● BL Heli- 32 固件,超 快响应速度 ,卓越的性 能;
● 电调上 电自动检测 油门信号, 支持普通PW M油门模 式(1-2ms) 的脉宽输入 、Onesh ot125(1 25-25 0us)、
Ones hot42 41.7 -83.3 us Mul tshot(5- 25us)( )和 ;
● 支持所 有Dshot 数字 信号,最高达到D shot1 200;
● Dam ped lig ht再生制动 ,使得效率 更高,油门 从大到小变 化时电机减 速响应更加 迅速,稳定 性和灵活性 显著加强 ;
● 支持更 高KV电机和 更大功率负 载,适合竞 速级多旋翼 的暴力飞行 ;
● 信号线 为双绞硅胶 线, 有效降低信 号在铜线内 传输所产生 的干扰,使飞行 更稳定;
● 铝合金 散热器,有 效减缓温升( 45A/50 A); 支持R GB三色 灯设置(35A ),让飞行 更绚丽多彩。
*为避免短 路和漏电, 请确保连接 处绝缘良好
*图片仅供 参考,产品 以实物为准
感谢您购 买本产品! 本产品功率 强大,错误 的使用可能 导致人身伤 害和设备损 坏,强烈建 议您在使用 设备前仔细
阅读本说 明书并保存 ,严格遵守 规定的操作 程序。我们 不承担因使 用本产品或 擅自对产品 进行改造所 引起的任何
责任,包 括但不限于 对附带损失 或间接损失 的赔偿责任 。我们有权 在不经通知 的情况下变 更产品的设 计、外观、
性能及使 用要求。
ATTENTION
● 电调接 入飞行系统 后,每次上电会 自动检测输 入的油门信 号,然后执行相 应的油门模 式;
● 首次使 用无刷电调 或更换遥控 设备后需要 进行油门行 程校准 ;;Dsh ot 模式时, 将不再需要 校准油门
● 当 Ds hot12 00时,建议 保留电调原 本的双绞信 号线中的地 线,确保信 号地线连接 正常;选择
● 使用B LHeli -32 开源 程序,当电 机出现异常 (如启动不 顺畅)或者 要求达到更 高转速时, 可尝试更改 进角参数;
● 如果需 要OSD显示 电流,请选 用带电流计 的飞控或者 分电板;
● 如需更 多信息,请 联系飞盈佳 乐售后或者 技术支持。
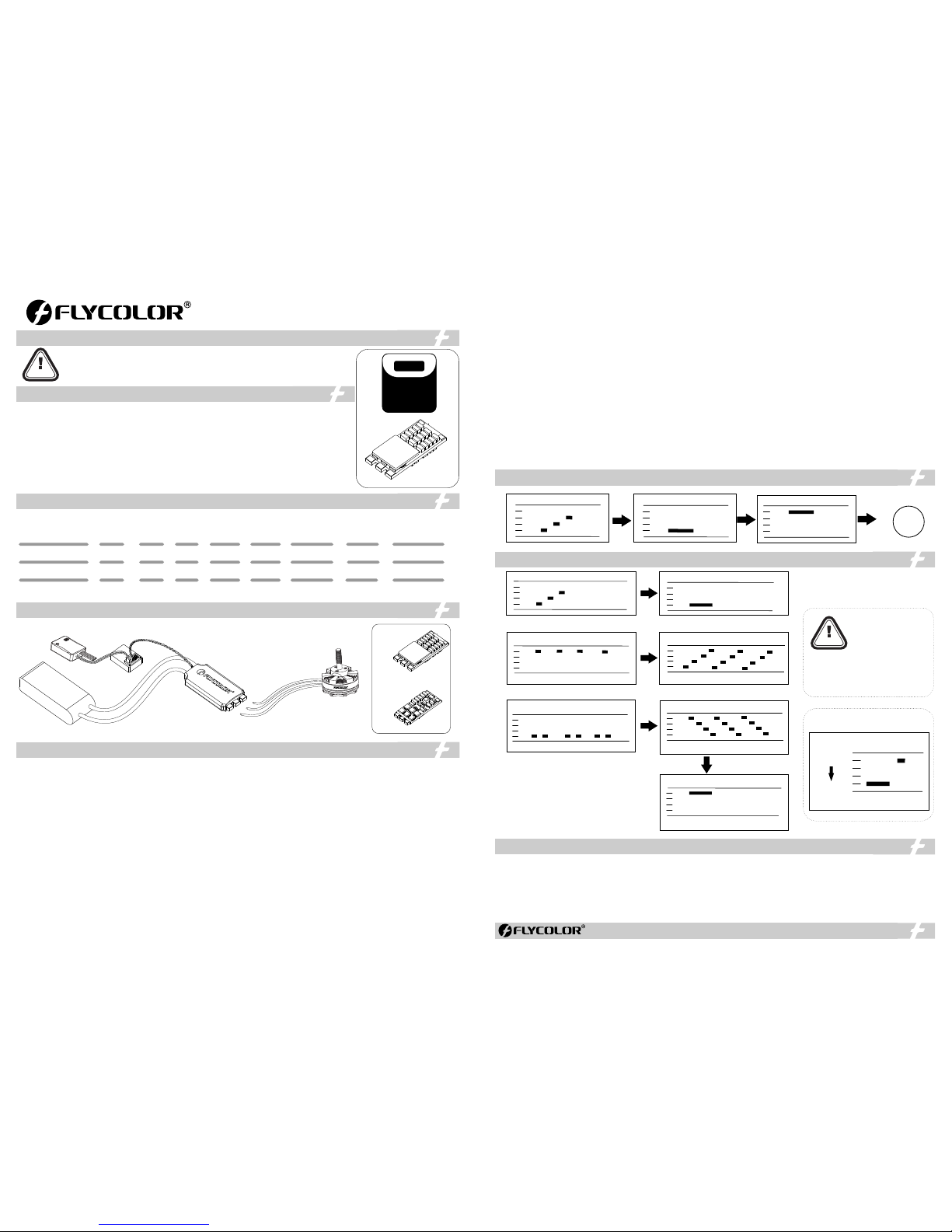
1. 上电
2. 油门 信号检测
一次
一次
一次
3. 零点 油门检测
4. 此时 电机准备
就绪, 可以启动。
OK
5. 当油 门摇杆低于 中间位置 (检测 最小油门)
正在检 测
1. 上电
一次
完成
3. 当油 门摇杆高于 中间位置 (检测 最大油门)
正在检 测
2. 油门 信号检测
一次
7. 油门 校准已经完 成
此鸣叫 音表示油门 校准完成, 可以正常工 作
一次
1.使用 飞控调参软 件校准油门 将更简便;
2.当输 入信号为Ds hot 模式时 ,将不再
需要校 准油门,请 忽略此步骤 。
ATTENTION
6. 当油 门摇杆低于 中间位置
此鸣叫 顺序表示最 小油门已经 被存储
一次
4. 当油 门摇杆高于 中间位置超 过3秒
此鸣叫 顺序表示最 大油门已经 被存储
一次
图示举 例:
短音
长音
音调最 高
音调最 低
电池
Batt ery
接收机
Rece iver
BEC
无刷电子 调速器
ESC
马达
Moto r
*图片仅供 参考,产品 以实物为准
BL 32-
cro s s
X
1. 启动功 率(Ramp up powe r):
启动功率 可以设置为 从3%-15 0%的相对值 。这是在启 动和提高转 速时允许最 大功率。对 于低转速, 为了便于低 反电动势电 压检测,最 大功率是被 限制的。
启动功率 也影响双向 操作,参数 是用来限制 在更改转向 时的功率。
在启动过 程中,实际 的功率取决 于油门输入 ,可低于设 定的最大启 动功率,但 最低是设定 的四分之一 。
2. 电机进 角(Moto r timin g):
电机进角 可以设置为1°- 31°,通常 设置中等数 值进角即适 用于大部分 电机,但如 果电机运转 不顺畅时,可以 尝试改变进 角。对于一 些高感电机 ,其换向退 磁时间较
长,尤其 在低速运转 的时候,电 机会在油门 快速增加的 情况下停转 或者不顺畅 。将进角改 高会有有助 于改善这个 现象,因为 高进角允许 更长的换向 退磁时间。
3.P WM频率 (PW M freq uency):
电机PW M频率可以设 置为16KH z-48K Hz。更高的P WM频率使电 机运行更顺 畅。频率可 设定也有可 能会导致油 门轻微移动 时造成大的 波动。
4 Dem ag补偿 (Dem ag comp ensat ion):.
Dema g 补偿是防止 电机由于换 向引起停转 的一个功能 ,典型的现 象是在快速 增加油门时 电机停转或 不顺畅,尤 其在低转速 运行时。如 前面所述, 设置高进角 可以帮助
改善, 但有可 能降低效率 。一般情况 下,Dema g补偿参数的 值越高,保 护越好。如 果补偿值设 置得太高, 最大功率将 有所降低。
5. 最大加 速度(Max imum Ac celer ation):
最大加速 度可以设置 在0.1% / ms -25.5 %/ ms之间, 也可以设置 为最大值, 在这种情况 下加速度不 受限制。限 制加速度的 主要目的是 避免在加速 不一致造成 失步的情
况。例如 :当设置为1 0% / ms时, 这意味着对 电动机施加的 功率不允许 每毫秒增加1 0%以上。
6 转向(Di recti on):
电机转向 可以设置为 正转/反转/双向正 转/双向反转。 在 双向模式下 ,油门中点 为零点,中 点以上为正 转,中点以下为 反转;当选 择双向操作 时,不可油 门校准。
7. 鸣叫 声强度 (Bee p stren gth):设 置正常运行 下鸣叫声强 度。
8.警报 音强度 (Bea con str ength ):
设置警报 音响起时的 强度。如果 油门信号在 零点位置的 时间超过一 个设定的时 间,电调将 开始报警。 请注意如果 设置一个高 的警报强度 将会导致电 机或电调发 热。
以下的 参数需要通 过BLH eliSu ite32调 参软件 设置
BE C
瞬间电 流
(10 S)
尺寸
(供参考)
重量
(供参考)
锂电池 节数
典型应用
(供参考)
持续电流
型号
9.警报 音延迟 (Bea con del ay):设 置报警音开 始之前的延 时。
10.启 用油门校准(T hrott le Cal En able): 如果 禁用,将不 能油门校准 。
11. 最小 油门,最大 油门和中心 油门 (Min th rottl e, max th rottl e and cen ter thr ottle ):
设置电调 的油门范围 ;中点油门 只用于双向 操作;设置 值正常的为1 000us 到 2 000us的 输入信号。 对于其他输 入信号,该 值必须按比 例设置。
对于Dsh ot输入信号 ,这些设置 无效
2.温度 保护 (Ther mal pro tecti on ):1
可以启用 或禁用。温 度保护阀值 可以设置, 当温度高于 阀值时,电机功 率降低;当 温度高于阀 值15℃,电机功率 降低到25%; 电机功率不 会低于25%。
13.低 转速功率保 护 (Low RP M powe r prote ct):
低转速功 率限制可以 启用或禁用 。禁用它可 以以保证低 KV电机在 低电压运行时 实现全功率 。然而禁用 它将增加同 步丢失的风 险,伴随着 电机或ES C发热的可 能性。
14.低 压保护(Low Vo ltage P rotec tion):
低压保护 可以设置2. 5V/节-4. 0V/节锂电 池,或者可 以禁用。当 启用时,如 果电池电压 低于设定阈 值将限制电 机的功率。 此功能主要 用于固定翼 飞机。
15.停 车制动 (Bra ke on sto p):
可以启用 或禁用制动 。当设置启 用时,在通 电状态,油 门在零点位 置电机将会 有拖刹,阻 止电机转动 。如果油门 没有零点, 此项设置无 效。
16. LED控制 ( LED c ontro l):
对于支持 的ESC, 可以控制发 光二极管(如果E SC支持)。
17.无 Da mped 模式 ( Non Dam ped Mod e):
OFF - 有Dampe d 现象为刹车 ;ON- 无Dam ped 现象为 无刹车。
18.音 乐设置 (Mus ic Note C onfig): 可以设置个 性化音乐。
A·45A50
35A
LED设置
170 -450 多旋 翼
40A
3-6 S
6.3 g
No
29x 14x6m m
X-C ross BL -32- 35A
35A
RG B LED
170 -450 多旋 翼
55A
3-6 S
10g
No
33x 16x6m m
X-C ross BL -32- 45A
45A
红色L ED
170 -450 多旋 翼
60A
3-6 S
10g
No
33x 16x6m m
X-C ross BL -32- 50A
50A
X-Cros s B L - 32
红色L ED
*1) 45A/5 0A 固件:Fl ycolo r_X_C ross_ BL_3 2; *2)3 5A 固件:Fl ycolo r_X_C ross_ BL_3 2_35A
01主 要特性
02 产 品规格
03 连 线示意图
04 编 程参数值
05 正 常工作及提 示音
06 油 门校准
07 注 意事项
www. flyco lor.ne t
BE C
170 -450 Mu lti
● .ARM 32-bi t Corte x MCU , frequ ency up t o 48 MHZ
● BL Heli_ 32 firmw are,whi ch is des igned f or supe rior fu nctio nalit y and per forma nce.
● Sup ports r egula r 1-2ms p ulse wi dth inp ut, as we ll as One shot1 25 (125 -250u s), One shot4 2 (41.7 -83.3 us) and
Mult shot (5 - 25us) . The inp ut sign al is aut omati cally d etect ed by the E SC up on powe r up.
● Dsh ot sign al is sup porte d at any ra te up to at le ast Dsh ot120 0.
● Dam ped lig ht does r egene rativ e braki ng, cau sing ve ry fast m otor re tarda tion, a nd inhe rentl y also do es acti ve
free wheel ing.
● Sup ports h igher K V moto r and mor e power l oad, mo re suit able fo r viole nt fligh t of raci ng dron e .
● The s ilico ne twis ted-p air of th e thrott le sign al cab le effec tivel y reduc es the cro sstal k cause d by sign al
tran smiss ion, an d makes fl ight mo re stab le.
● Alu minum h eat sin k effect ively s low dow n the tem perat ure ris e(45A/ 50A) .Supp orts th e RGB t ricol or sett ing
(35A o nly) to ma ke the fli ght mor e color ful.
Thank you for using our prod uct. A ny I mproper opera tion may cause person al i njury or damage to the
produc t and rela ted e quipment s. Th is hi gh po wer s ystem for RC model can be d angerous ,we stron gly
recomm end readin g the user manu al careful ly and compl etely. We will no t assume any re sponsibi lity for any
losses ca used by unauthor ized modifica tions to our produ ct. We h ave the right to chang e t he d esign,
appear ance, perf ormance and u sage requi rements of t he product un announce d.
Bur st Curre nt
(10 S)
Size
(For reference)
Weight
(For refer ence)
LiP o
Typical Applications
(For reference)
User Manual
Multi-Rotor Brushless ESC
*All p ictur es are fo r refer ence on ly
*Plea se ensure a ll solde r joints ar e insulat ed with he at shrink w here nece ssary.
1. Ra mpup pow er:
Ramp up powe r can be se t to rela tive va lues fr om 3% to 15 0%. Thi s is the ma ximum p ower th at is all owed wh en ramp ing up at l ow rpms a nd duri ng star tup. Fo r
low rp ms, the m aximu m power t o the mot or is lim ited, i n order t o facil itate d etect ion of lo w BEM F volt ages.
Ramp up powe r also aff ects bi direc tiona l opera tion, a s the par amete r is used t o limit t he powe r appli ed duri ng dire ction r evers al.
Duri ng star tup, th e actua l appli ed powe r depen ds on thr ottle i nput, a nd can be l ower th an the ma ximum l evel se t by the ra mpup po wer par amete r, but the
mini mum lev el is a qua rter of t he maxi mum lev el.
2. Mot or timi ng:
Moto r timin g can be se t betwe en appr oxima tely 1° a nd appr oxima tely 31 ° in appr oxima tely 1° i ncrem ents (a ctual a ccura te valu es here a re 15/1 6ths of a d egree ).
Typic ally a me dium se tting w ill wor k fine, bu t if the mo tor stu tters i t can be be nefici al to inc rease t iming . Some mo tors wi th high i nduct ance ca n have a ve ry long
comm utati on dema gneti zatio n time. T his can r esult i n motor s top or st utter u pon qui ck thro ttle in creas e, part icula rly whe n runni ng at a low r pm. Set ting ti ming
to hig h will al low mor e time fo r demag netiz ation , and oft en help s.
3. PW M freq uency :
Moto r pwm fre quenc y can be pr ogram med bet ween 16 kHz and 4 8kHz. H igher p wm freq uency c an run mo tors sm oothe r. Progr ammab le freq uency a lso all ows for
movi ng of sma ll but po tenti ally di sturb ing hum ps in the t hrott le resp onse. Al l ESC s have th ese bum ps, wit h BLH eli_3 2 they ca n be move d in the rp m range , to a
plac e where t he syst em has lo w sensi tivit y to them .
4. De mag comp ensat ion:
Dema g compe nsati on is a fea ture to p rotec t from mo tor sta lls cau sed by lo ng wind ing dem agnet izati on time a fter co mmuta tion. T he typi cal sym ptom is m otor
stop o r stutt er upon q uick th rottl e incre ase, pa rticu larly w hen run ning at a l ow rpm. As m entio ned abo ve, set ting hi gh comm utati on timi ng norm ally he lps, bu t
at the c ost of effi cienc y. Gener ally, a hi gher va lue of th e compe nsati on para meter g ives be tter pr otect ion. If de mag co mpens ation i s set too h igh, ma ximum p ower
can be s omewh at redu ced.
5. Max imum Ac celer ation :
Maxi mum acc elera tion ca n be set be tween 0 .1%/m s and 25. 5%/ms . It can al so be set t o maxim um, in wh ich cas e accel erati on is not l imite d. Limi ting ac celer ation
is pri maril y inten ded as a ba ckup pa ramet er that c an be use d in case s where t oo hard a ccele ratio n gives d esync s. When s ettin g to e.g. 1 0%/ms , it mean s that th e
powe r appli ed to the m otor is n ot allo wed to in creas e by more t han 10% p er mill iseco nd.
Pro gramm ing par amete rs belo w can be ac cesse d from th e config urati on soft ware (B LHe liSui te32) :
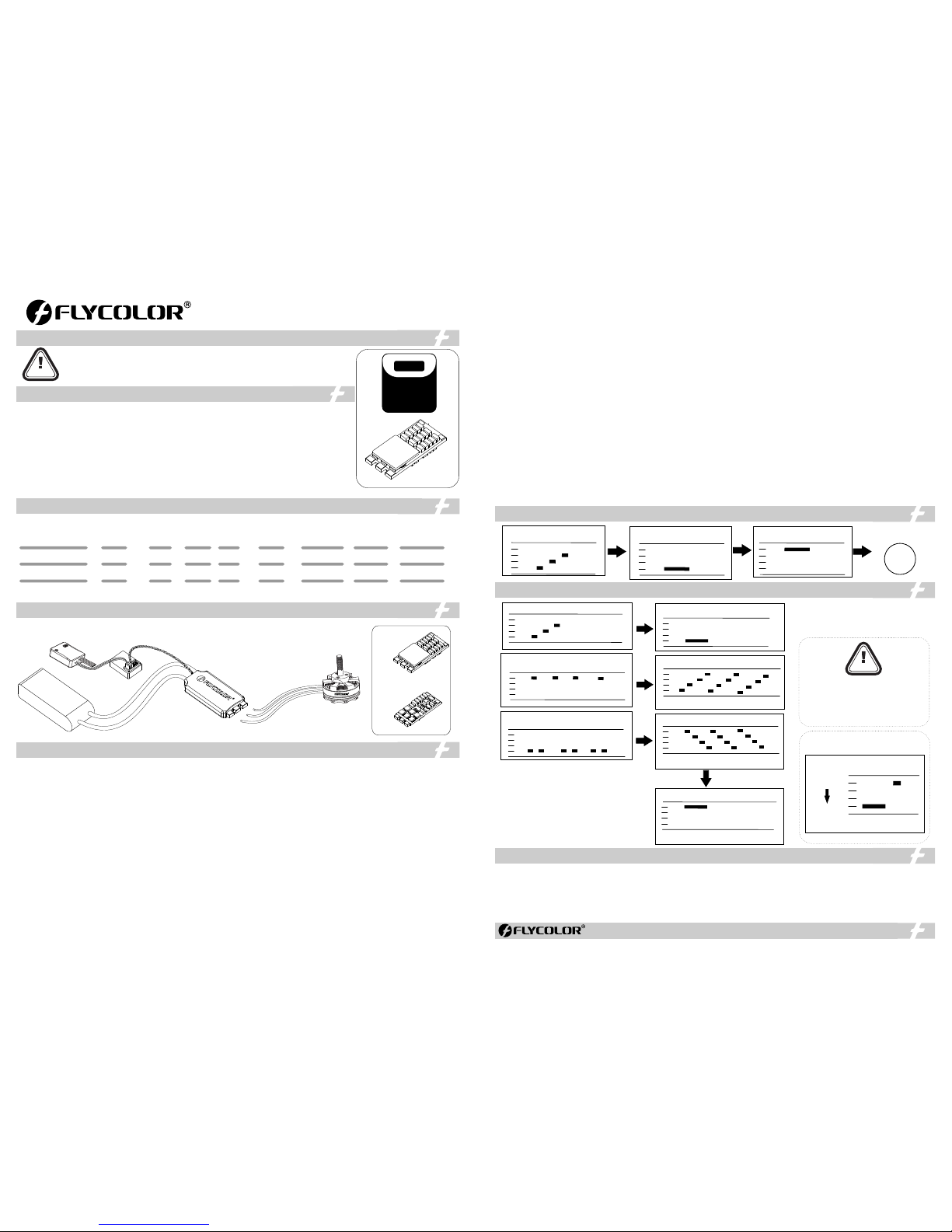
1. Po wer up:
2.T hrott le sign al dete cted
(arm ing se quenc e start ):
Once
Once
3.Z ero thr ottle d etect ed
(arm ing se quenc e end):
01 M ain f eatur es
1.P ower up :
2.T hrott le sign al dete cted
(arm ing se quenc e start ):
Once
3.Wh en thro ttle is a bove mi dstic k
(me asuri ng max th rottle ):
4.If th rottle is abo ve midstic k for 3 seconds :
Thi s beep se quenc e indic ates th at max
thro ttle ha s been st ored
Once
While
measuring
5.W hen thr ottle i s below m idsti ck
(me asuri ng min th rottle ):
While
measuring
6.If th rottle is be low midsti ck for 3 secon ds:
Thi s beep se quenc e indic ates th at min
thro ttle ha s been st ored.
Once
Com plete
7.T hrott le cali brati on is com plete .
Afte r this, t he moto r will ru n.
Once
Exam ple:
Hig hest to ne
Low est ton e
1.T hrott le cali brati on will b e more si mple if
usin g Fligh t Contr oller C onfig urator.
2.W hen the i nput si gnal is D shot, t hrott le
cali brati on is dis abled , and the t hrott le
cali brati on valu es are ig nored .
● ES C will au tomati cally d etect t he input t hrott le sign als ever y time as s oon as it po wered o n, and th en execu te the co rresp onding s ignal -rece iving
mode .
● User n eed to ca librat e the thr ottle r ange whe n start ing to use a n ew ES C or anot her tran smitt er. When th e input s ignal i s Dshot, t hrott le cali bratio n
is dis abled .
● When s ome abn ormali ty occu rs in ES C drivi ng the mo tor or ne ed the mot or to rea ch a highe r RPM , user can t ry to cha nge the t iming.
It is su ggest ed that ke ep the gr ound wi re in the or igina l signa l wire con necti ng well.●
● Plea se use a P DB or Fli ght Con trol wi th curre ntmet er if OS D is requ ired to d isplay t he curr ent.
● Plea se cont act Flyc olor sa les or te chnica l suppo rt for mo re infor matio n.
Batt ery
Rece iver
BEC
ESC
Moto r
40A
3-6 S
6.3g
No
29x 14x6m m
Con. Curre nt
ATTENTION
Mod el
OK
Once
4.A fter th is, the
moto r will ru n.
ATTENTION
X-Cros s B L - 32
Sho rt beep
Lon g beep
X-C ross BL -32- 35A
35A
*All p ictur es are fo r refer ence on ly
6. Dir ectio n:
Rota tion di recti on can be s et to fwd /rev/ bidir ectio nal fwd /bidi recti onal re v. In bidi recti onal mo de, cen ter thr ottle i s zero an d above i s fwd rot ation a nd belo w is
reve rse rot ation . When bi direc tiona l opera tion is s elect ed, thr ottle c alibr ation i s disab led.
7. Be ep stre ngth: Se ts the st rengt h of beep s under n ormal o perat ion.
8. Be acon str ength :
Sets t he stre ngth of b eeps wh en beep ing bea con bee ps. The E SC wi ll star t beepi ng beac on beep s if the th rottl e signa l has bee n zero fo r a given time. N ote tha t
sett ing a hig h beaco n stren gth can c ause ho t motor s or ES Cs!
9. Be acon del ay:
Beac on dela y sets th e delay b efore b eacon b eepin g start s.
10. Thrott le Cal En able:
If dis abled , throt tle cal ibrat ion is di sable d.
11. Mi n thrott le, max t hrott le and ce nter th rottl e:
Thes e setti ngs set t he thro ttle ra nge of th e ESC . Cente r throt tle is on ly used f or bidi recti onal op erati on. The va lues gi ven for t hese se tting s are for a n ormal
1000 us to 200 0us inp ut sign al, and f or the ot her inp ut sign als, th e value s must be s caled . For Dsh ot inpu t signa l, thes e setti ngs hav e no effec t.
12. Therma l prote ction :
Ther mal pro tecti on can be e nable d or disa bled. An d the tem perat ure thr eshol d can be pr ogram med The p rogra mmabl e thres hold is p rimar ily mea nt as a sup port
for ha rdwar e manuf actur ers to us e, as diff erent h ardwa res can h ave diff erent t olera nces on t he max te mpera tures o f the var ious co mpone nts use d.
13. Low RP M power p rotec t:
Powe r limit ing for l ow RP Ms can be e nable d or disa bled. D isabl ing it ca n be nece ssary i n order t o achie ve full p ower on s ome low k V motor s runni ng on a low
supp ly volt age. Ho wever, d isabl ing it in creas es the ri sk of syn c loss, w ith the p ossib ility o f toast ing mot or or ES C.
14. Low Volta ge Prot ectio n:
Low vo ltage p rotec tion ca n be set be tween 2 .5V and 4 .0V per l ipo cel l. Or it ca n be disa bled. W hen ena bled, i t will li mit pow er appl ied to th e motor i f the bat tery
volt age dro ps belo w the pro gramm ed thre shold . This fe ature i s prima rily in tende d for fixe d wing cr afts.
15. Brake o n stop:
Brak e on stop c an be set b etwee n 1% and 10 0%, or di sable d. When n ot disa bled, b rake wi ll be app lied wh en thro ttle is z ero. Fo r nonze ro thro ttle, t his set ting
has no e ffect.
16. LED Co ntrol : LED s can be co ntrol led on E SCs th at supp ort it.
17. Non Damp ed Mode:O FF- Da mped li ght is ava ilabl e ; ON- No D amped l ight。
18. Music No te Confi g: Set up pe rsona lized m usic.
BL 32-
cro s s
X
LED
RGB
170 -450 Mu lti
55A
3-6 S
10g
No
33x 16x6m m
X-C ross BL -32- 45A
45A
Red Led
170 -450 Mu lti60A
3-6 S
10g
No
33x 16x6m m
X-C ross BL -32- 50A
50A
Red Led
A·45A50
35A
*1) 45A/5 0A firmw are:F lycol or_X_ Cross _BL_ 32; *2) 35A firm ware: Flyco lor_X _Cros s_BL _32_3 5A
02 S pec ificat ion s
03 W iri ng diag ram
04 P rog rammi ng pa ram ete r
05 B eep s-Nor mal o per ati on
06 B eep s - Thr ott le cali bra tio n
07 O the r Attent ion
www. flyco lor.ne t
2514 00-10 81-02 , V2.2
 Loading...
Loading...