


Motor controller
Description
Mounting and
installationTyp
CMMS-AS-...
Description
564 228
en 0708NH
[737 765]


Edition __________________________________________________ en 0708NH
Description _____________________________________ P.BE-CMMS-AS-HW-EN
Order No. ___________________________________________________ 564 228
(Festo AG & Co KG., D-73726 Esslingen, 2008)
Internet: 0Hhttp://www.festo.com
E-mail: service_international@festo.com
The copying, distribution and utilization of this document as well as the communication of
its contents to others without expressed authorization is prohibited. Offenders will be held
liable for the payment of damages. All rights reserved, in particular the right to register
patents, utility models and designs.
Festo P.BE-CMMS-AS-HW-EN en 0708NH 3

Index of revisions
Author:
Name of manual:
P.BE-CMMS-AS-HW-EN
File name:
File location:
Consec. no.
Description
Index of revisions
Date of change
001
Creation
0708NH
10.07.2008
4 Festo P.BE-CMMS-AS-HW-EN en 0708NH

Table of contents
Table of contents
1. General data ......................................................................................................... 9
1.1 Documentation .................................................................................................... 9
1.2 Type code CMMS-AS-C4-3A ................................................................................. 9
1.3 Scope of delivery ............................................................................................... 10
2. Safety instructions for electrical drives and controllers ...................................... 11
2.1 Symbols used .................................................................................................... 11
2.2 General Information ........................................................................................... 12
2.3 Hazards due to improper use ............................................................................. 13
2.4 Safety instructions ............................................................................................. 14
2.4.1 General safety information ................................................................. 14
2.4.2 Safety instructions for assembly and maintenance ............................. 16
2.4.3 Protection aganst touching electric components ................................ 17
2.4.4 Protection by low voltage (PELV) against electric shock ...................... 19
2.4.5 Protection against dangerous movements .......................................... 19
2.4.6 Protection aganst touching hot components ...................................... 20
2.4.7 Protection during handling and installation ........................................ 20
3. Product description ............................................................................................. 22
3.1 General data ...................................................................................................... 22
3.2 Performance characteristics ............................................................................... 22
3.3 Interfaces .......................................................................................................... 24
3.3.1 Overview of interfaces ........................................................................ 24
3.3.2 I/O functions and device control ......................................................... 24
3.3.3 Analogue setpoint specification ......................................................... 25
3.3.4 RS232 interface (diagnosis/ parameterization interface) .................... 26
3.3.5 Interfaces for direct synchronous operation ....................................... 32
3.3.6 Multi-firmware strategy ...................................................................... 38
3.3.7 Synchronisation interface ................................................................... 38
3.3.8 Motor feedback .................................................................................. 38
3.3.9 Brake chopper (Brake control) ............................................................ 39
3.3.10 Feedback from motor (angle encoder) ................................................ 39
3.3.11 Control interface X1 ............................................................................ 39
3.3.12 Incremental encoder interface [X10] ................................................... 41
3.3.13 Serial parameterization interface RS232 and RS485 – X5 ................... 41
3.3.14 SD cardholder X12.............................................................................. 41
3.3.15 SD memory card ................................................................................. 41
3.4 Field bus interface ............................................................................................. 42
3.4.1 FHPP .................................................................................................. 43
Festo P.BE-CMMS-AS-HW-EN en 0708NH 5

Table of contents
3.4.2 CAN bus ............................................................................................. 44
3.4.3 PROFIBUS .......................................................................................... 45
3.4.4 DeviceNet ........................................................................................... 45
3.5 Function overview .............................................................................................. 46
3.5.1 Operating modes ................................................................................ 46
3.5.2 Timing diagram operation mode switchover ....................................... 47
3.5.3 Setpoint processing ........................................................................... 47
3.5.4 I²T function......................................................................................... 48
3.5.5 Positioning controller ......................................................................... 48
3.5.6 Homing run ........................................................................................ 50
3.5.7 Timing diagrams for homing run ......................................................... 52
3.5.8 Trajectory generator ........................................................................... 54
3.5.9 I/O sequence control .......................................................................... 55
3.5.10 Safety functions, error messages........................................................ 57
3.5.11 Behaviour when switching off enable ................................................. 57
3.5.12 Oscilloscope function ......................................................................... 59
3.5.13 Jog and teach function I/O .................................................................. 60
3.5.14 Route program with position record linking with switchover
positioning/torque control ................................................................. 65
3.5.15 On-the-fly measurement ..................................................................... 70
3.5.16 Endless positioning ............................................................................ 70
3.5.17 Adjustment to the axis and motor construction set ............................. 70
4. Functional safety engineering ............................................................................. 72
4.1 General information and intended use ............................................................... 72
4.2 Integrated "Safe standstill" function ................................................................. 74
4.2.1 General information / description of "Safe standstill" ........................ 74
4.2.2 Secure stopping brake control ............................................................ 76
4.2.3 Functional method / timing ................................................................ 77
4.2.4 Application examples ......................................................................... 80
5. Mechanical installation ...................................................................................... 84
5.1 Important instructions ....................................................................................... 84
5.2 Assembly ........................................................................................................... 85
6. Electrical installation .......................................................................................... 87
6.1 Device view ....................................................................................................... 87
6.2 Interfaces .......................................................................................................... 89
6.3 Entire CMMS-AS system..................................................................................... 90
6.4 Interfaces and plug assignments ....................................................................... 92
6.4.1 I/O interface [X1] ................................................................................ 92
6.4.2 Encoder motor – EnDat 2.1 and 2.2 (X2) ............................................. 95
6.4.3 Field bus CAN [X4] .............................................................................. 97
6 Festo P.BE-CMMS-AS-HW-EN en 0708NH

Table of contents
6.4.4 RS232/RS485 [X5] .............................................................................. 97
6.4.5 Motor connection [X6] ........................................................................ 97
6.4.6 Power supply [X9] ............................................................................... 98
6.4.7 Synchronisation control [X10] ............................................................ 99
6.4.8 SD card [X12] .................................................................................... 100
6.4.9 Plug assignments for Safe standstill [X3] .......................................... 100
6.4.10 Field bus settings and boot loader .................................................... 100
6.5 Instructions on safe and EMC-compliant installation ....................................... 101
6.5.1 Explanations and terms .................................................................... 101
6.5.2 Connection instructions .................................................................... 102
6.5.3 General information on EMC ............................................................. 102
6.5.4 EMC areas: second environment....................................................... 103
6.5.5 EMC-compliant wiring ....................................................................... 103
6.5.6 Operation with long motor cables ..................................................... 104
6.5.7 ESD protection ................................................................................. 104
7. Preparations for commissioning ....................................................................... 106
7.1 General connection instructions ...................................................................... 106
7.2 Tools / material ............................................................................................... 106
7.3 Connecting the motor ...................................................................................... 106
7.4 Connect the CMMS-AS motor controller to the power supply ........................... 107
7.5 Connecting a PC ............................................................................................... 107
7.6 Checking readiness for operation..................................................................... 107
7.7 Timing diagram Switch-on sequence diagram .................................................. 108
8. Service functions and error messages ............................................................... 109
8.1 Protective and service functions ...................................................................... 109
8.1.1 Overview .......................................................................................... 109
8.1.2 Short-circuit monitoring of the end stage/overload current and short-
circuit monitoring ............................................................................. 109
8.1.3 Voltage monitoring for the intermediate circuit ................................ 109
8.1.4 Temperature monitoring for motor and power section, Temperature
monitoring for the heat sink ............................................................. 110
8.1.5 Monitoring the encoder .................................................................... 110
8.1.6 I²t monitoring ................................................................................... 110
8.1.7 Power monitoring for the brake chopper .......................................... 110
8.2 Operating mode and error messages ............................................................... 110
8.2.1 Operating mode and error display .................................................... 110
8.2.2 Error messages ................................................................................ 111
A. Technical specifications .................................................................................... 115
A.1 General information ......................................................................................... 115
Festo P.BE-CMMS-AS-HW-EN en 0708NH 7

Table of contents
A.2 Operation and display components ................................................................. 116
A.2.1 Status display .................................................................................. 116
A.2.2 Control elements .............................................................................. 116
A.3 Interfaces ........................................................................................................ 117
A.3.1 Power supply [X9] ............................................................................. 117
A.3.2 Motor connection [X6] CMMS-AS ...................................................... 118
A.3.3 Brake output .................................................................................... 118
A.3.4 Incremental encoder input [X2] ......................................................... 118
A.3.5 Incremental sensor interface [X10] ................................................... 119
A.3.6 RS232/RS485 [X5] ............................................................................ 119
A.3.7 CAN bus [X4]..................................................................................... 119
A.3.8 I/O interface [X1] .............................................................................. 119
B. Glossary ............................................................................................................ 122
8 Festo P.BE-CMMS-AS-HW-EN en 0708NH

1. General data
CMM
S
AS
C4
3A
Series
CMM
Motor Controller
Version
S
Standard
Motor technology
AS
AC-Servo
Rated motor current
C4
4A
Input voltage
3A
230 VAC Power section
1. General data
1.1 Documentation
This product manual is intended to help you safely work with the servo motor controller of
the CMMS-ST series. It contains safety instructions that have to be observed.
This document provides information on:
- mechanical fitting
- electrical installation and an
- overview of the range of functions.
See the following manuals on the CMMS product family for further information:
- CANopen manual “P.BE-CMMS-CO-…”: Description of the implemented CAN-
open protocol according to DSP402
- PROFIBUS manual “ P.BE-CMMS-FHPP-PB-…”: Description of the implemented
PROFIBUS-DP protocol.
- DeviceNet manual “P.BE-CMMS-FHPP-DN-…”: Description of the implemented
DeviceNet protocol.
- FHPP manual “P.BE-CMM-FHPP-…”: Description of the implemented Festo pro-
files for handling and positioning.
1.2 Type code CMMS-AS-C4-3A
Motor controller for servo motor controller for servo motors, 4 A nominal current, 230V AC
Festo P.BE-CMMS-AS-HW-EN en 0708NH 9

1. General data
Number
Delivery
1
Motor controller CMMS-AS-C4-3A
1
Operating packet (configuration software, documentation, S7 module, GSD, EDS, firmware)
1
NEKM-C-4 plug assortment
1.3 Scope of delivery
The delivery includes:
Table 1.1 Scope of delivery
10 Festo P.BE-CMMS-AS-HW-EN en 0708NH

2. Safety instructions for electrical drives and controllers
Information
Please note
Important information and remarks.
Caution
Failure to comply can result in severe property damage.
Warning
Failure to comply can result in property damage and personal injury.
Warning
DANGER !
Considerable damage to property and injury to human beings may
occur if these instructions are not observed.
Warning
Dangerous voltage
The safety instructions contain reference to dangerous voltages
which may occur.
Accessories
Environment
2. Safety instructions for electrical drives and
controllers
2.1 Symbols used
Festo P.BE-CMMS-AS-HW-EN en 0708NH 11

2. Safety instructions for electrical drives and controllers
Please note
Before initial start-up, read through the 211HSafety instructions for electrical drives and controllers starting on page 212H11 and the chapter 213H6.5
214HInstructions on safe and EMC-compliant
installation page 215H101.
Please note
Only trained and qualified personnel should be allowed to handle
the electric systems.
These safety instructions must be observed at all times.
2.2 General Information
Festo AG & Co.KG is not liable for damage caused by failure to observe the warning instructions in these operating instructions.
If the documentation in the language in question cannot be understood fully, please contact your vendor and inform them.
Proper and safe operation of the motor controller requires correct transport, storage,
mounting and installation as well as project planning, taking into account the risks, protection and emergency measures, as well as careful operation and maintenance.
Trained and qualified personnel
For the purpose of this manual and the warning instructions on the product itself, technicians working with this product must be adequately familiar with the setting up, mounting,
commissioning and operation of the product as well as with all warnings and precautionary
measures in accordance with the operating instructions in this product manual, and must
be sufficiently qualified for this task:
- Training and instructions on or authorization to switch on and switch off de-
vices/systems in accordance with technical safety standards, and to earth and
mark them appropriately in accordance with the application requirements.
- Training or instructions in using and maintaining suitable safety equipment in
accordance with technical safety standards.
- Training in first aid.
The following instructions must be read before the first start-up of the sytem in order that
bodily injuries and/or damage to property can be avoided.
12 Festo P.BE-CMMS-AS-HW-EN en 0708NH

2. Safety instructions for electrical drives and controllers
Do not try to install or commission the motor controller before
you have carefully read through all safety instructions for elec-
tric drives and controllers in this documentation.
You must read through these safety instructions and all other user
instructions before working with the motor controller.
If you do not have any user instructions for the motor controller,
please contact your responsible sales representative.
Request that the operating instructions be sent immediately to
the responsible person so that the motor controller can be op-
erated correctly and safely.
These safety instructions must also be provided if the motor controller is sold, lent and/or passed on to third parties.
For safety and guarantee reasons, the user is not permitted to open
the motor controller.
The prerequisite for faultless functioning of the motor controller is
skilled project planning.
Warning
DANGER !
Incorrect handling of the motor controller and failure to observe the
specified warning instructions, as well as unskilled interference
with the safety devices can lead to damage to property, bodily injury, electric shock or in extreme cases to death.
Warning
DANGER !
High electric voltage and high working current!
Danger of death or serious bodily injury due to electric shock!
2.3 Hazards due to improper use
Festo P.BE-CMMS-AS-HW-EN en 0708NH 13

2. Safety instructions for electrical drives and controllers
Warning
DANGER !
High electric voltage due to incorrect connection!
Danger of death or bodily injury due to electric shock!
Warning
DANGER !
Surfaces of the device housing may be hot!
Danger of injury Danger of burns!
Warning
DANGER !
Dangerous movements!
Danger of death, serious bodily injury or damage to property due to
unintentional movement of the motors!
Warning
The motor controller corresponds to protection class IP20 as well
as degree of contamination 2.
Care must be taken that the surroundings correspond to this
protection and contamination class (see chapter 5.1)
Warning
Use only accessories and spare parts which are approved of by
the manufacturer.
Warning
The motor controllers must be connected to the mains network
in accordance with EN standards and VDE/appropriate national
regulations, so that they can be disconnected with suitable un-
coupling devices (e.g. main switch, fuse, circuit breaker).
Warning
For switching the control contacts, gold contacts or contacts with
high contact pressure should be used.
2.4 Safety instructions
2.4.1 General safety information
14 Festo P.BE-CMMS-AS-HW-EN en 0708NH

2. Safety instructions for electrical drives and controllers
Precautionary measures must be taken for preventing interference
to switching systems, e.g. switching protective switches and relays
with RC elements or diodes.
You must observe the safety regulations and directives of the country in which the device is to be used.
Warning
The environmental conditions specified in the product docu-
mentation must be observed.
Safety-critical applications are not permitted if they are not explicitly approved by the manufacturer.
For instructions on safe and EMC-compliant installation, see
Chapter 216H6.5 217HInstructions on safe and EMC-compliant
installation (page 218H101).The instructions for EMC-compliant in-
stallation.
The manufacturer of the system or machine is responsible for ensuring that the limit values required by the national regulations are
observed.
Warning
The technical specifications as well as the connection and installation conditions for the motor controller can be found in this product
manual. These specifications must be observed at all times.
Warning
DANGER !
The general installation and safety regulations for working on
high-current systems (e.g. DIN, VDE, EN, IEC or other national
and international regulations) must be observed.
Failure to observe these regulations can lead to bodily injury, death
or considerable damage to property.
The following precautionary measures also apply without claim to
completeness:
VDE 0100
Regulations for setting up high-voltage systems up
to 1,000 volts
EN 60204-1
Electrical equipment for machines.
EN 50178
Equipping high-voltage systems with electronic
Festo P.BE-CMMS-AS-HW-EN en 0708NH 15

2. Safety instructions for electrical drives and controllers
operating media.
EN ISO 12100
Safety of machines – basic concepts, general
guidelines
EN 1050
Safety of machines – guidelines for risk evaluation
EN 1037
Safety of machines – avoiding unintentional starting
EN 954-1
Safety-relevant parts of controllers
Warning
The operation, maintenance and/or commissioning of the motor
controller may only be carried out by trained qualified personnel
and with electrical appliances suited for this work.
Warning
The series-supplied motor holding brake or an external motorholding brake controlled by the drive controller alone is not suitable for protecting human beings.
Vertical axes must be additionally secured against falling or
sliding down when the motor is switched off with e.g.
- mechanical locking of the vertical axis,
- external braking, safety catch or clamping devices or
- sufficient weight compensation of the axis.
Warning
The internal brake resistance can cause dangerous intermediate
circuit voltage during operation and up to several minutes after the
motor controller is switched off. If touched, this can lead to fatal or
serious injuries.
Before carrying out maintenance work, make sure that the
power supply is switched off and locked and that the intermedi-
ate circuit is discharged.
Switch the electrical equipment free of voltage via the main
switch and make sure that it cannot be switched on again. Wait
until the intermediate circuit is discharged after
- maintenance work and repairs
- cleaning
- long periods out of use
2.4.2 Safety instructions for assembly and maintenance
For assembling and maintaining the system, the relevant DIN, VDE, EN and IEC regulations,
as well as all national and local safety and accident prevention regulations must always be
observed. The system manufacturer or the user is responsible for ensuring that these regulations are observed.
Avoiding accidents, bodily injury and/or material damage:
16 Festo P.BE-CMMS-AS-HW-EN en 0708NH

2. Safety instructions for electrical drives and controllers
Warning
Proceed carefully with mounting. During mounting as well as later
during drive operation, make sure that that no drill shavings, metal
dust or mounting parts (screws, nuts, pieces of wire) can fall into
the motor controller.
Ensure that the external power supply of the controller (mains voltage 230 V) is switched off.
The intermediate circuit or the 230 V mains voltage must always be
switched off before the 24 V logic power supply is switched off.
Warning
Other work in the vicinity of the machine must only be carried
out when the AC or DC supply is switched off and locked.
Switched-off final stage or switched-off controller enable are not
suitable locking conditions. In the event of a fault, this could lead
to unintentional movement of the drive.
Warning
Carry out commissioning with a free-running motor, in order to
avoid mechanical damage, e.g. due to incorrect direction of rotation.
Warning
Electronic devices are never fail-proof.
The user is responsible for ensuring that his system is brought into
a safe state if the electric device fails.
Warning
DANGER !
The motor controller and, in particular, the brake resistance can
take on high temperatures, which can cause severe bodily burns on
contact.
2.4.3 Protection aganst touching electric components
This section concerns only devices and drive components with voltages over 50 V. It is
dangerous to touch components with voltages of more than 50 V, as this can cause an
Festo P.BE-CMMS-AS-HW-EN en 0708NH 17

2. Safety instructions for electrical drives and controllers
Warning
Dangerous voltage
High voltage!
Danger of death or serious bodily injury due to electric shock!
Warning
Before switching the device on, fit the covers and protective
screens so that the device cannot be touched.
For built-in devices, make sure that there is an external housing,
such as a control cabinet, to ensure that the electric components
cannot be touched.
The standards EN 60204-1 and EN 50178 must be observed.
Warning
Ensure that the minimum copper cross section is used for the entire
length of the protective earth conductor in accordance with standard EN 60204.
Warning
Before commissioning, also for brief measuring and test pur-
poses, always connect the protective conductor to all electric
devices or connect to an earth cable in accordance with the
connection diagram.
Otherwise, high voltages may occur on the housing. These could
cause an electric shock.
Warning
Do not touch the electrical connection points of the components
when the device is switched on.
Warning
Before touching electric components with voltages over 50 V,
disconnect the device from the mains or voltage source.
Protect the device against being switched on again.
electric shock. When electric devices are operated, certain components in these devices
are always under dangerous tension.
For operation the relevant DIN, VDE, EN und IEC regulations, as well as all national and
local safety and accident prevention regulations must always be observed. The system
manufacturer or the user is responsible for ensuring that these regulations are observed.
18 Festo P.BE-CMMS-AS-HW-EN en 0708NH

2. Safety instructions for electrical drives and controllers
Warning
During installation note the amount of intermediate circuit volt-
age, especially with regard to insulation and protective meas-
ures.
Make sure that the earthing, the cross section size of the conductor
and the corresponding short-circuit protection are correct.
Normen (standards)
- international: IEC 60364-4-41
- European: EN 50178
Warning
DANGER !
High electric voltage due to incorrect connection!
Mortal danger, danger of injury from electric shock.
Causes
- Unsafe or faulty circuitry or cabling
- Faults in operating the components
- Faults in the measured value and signal generators
- Faults or non-EMC-compliant components
- Faults in the software in the higher-order control sys-
tem
2.4.4 Protection by low voltage (PELV) against electric shock
Voltages from 5 to 50 V on the connections and terminals of the motor controller are protective small voltages which can be touched without danger in accordance with the following standards:
Devices, electrical components and cables may only be connected to connections and terminals from 0 to 50 V, providing they have protective low voltage (PELV = Protective Extra
Low Voltage).
Connect only voltages and current circuits which have reliable separation of dangerous
voltages. Such separation is achieved e.g. with isolating transformers, reliable optocouplers or battery operation separate from the mains network.
2.4.5 Protection against dangerous movements
During initial start-up, the safety functions used, e.g. "Safe standstill", must be checked
for proper functioning.
The user shall establish a regular inspection of the safety function.
Dangerous movements can be caused by incorrect control of connected motors. There are
various causes:
These faults can occur immediately after the device is switched on or after an uncertain
period of operation.
Festo P.BE-CMMS-AS-HW-EN en 0708NH 19

2. Safety instructions for electrical drives and controllers
Warning
DANGER !
Dangerous movements!
Danger of injury or death, serious bodily injury or material damage.
Warning
DANGER !
Surfaces of the device housing may be hot! (up to approx. 85°C, see
8.1.4).
Danger of injury Danger of burns!
Warning
Danger of burns!
Do not touch the surface of the housing in the vicinity of heat
sources.
After switching devices off, leave them for 10 minutes to cool
down before touching them.
If you touch hot parts of the device such as the housing, which contains the heat sink and resistors, you may burn yourself.
The monitoring functions in the drive components exclude to a large extent the possibility
of incorrect operation of the connected drives. WIth regard to the protection of human
beings, especially the danger of bodily injury and/or material damage, one must not rely
on these circumstances alone. Until the fitted monitoring functions become effective, you
must reckon with at least one incorrect drive movement, the extent of which depends on
the type of control and on the operating state.
For the above-mentioned reasons, the protection of human beings must be ensured with
the aid of monitoring systems or by measures which are of higher order than the system.
These measures are foreseen depending on the specific features of a danger and fault
analysis by the system manufacturer. The safety regulations applicable to the system must
be observed here as well. Undesired movements of the machine or other incorrect functions can occur as a result of switching off, avoiding or failing to activate safety devices.
2.4.6 Protection aganst touching hot components
2.4.7 Protection during handling and installation
Handling and assembling certain components in an unsuitable manner can under circumstances cause injury.
20 Festo P.BE-CMMS-AS-HW-EN en 0708NH

2. Safety instructions for electrical drives and controllers
Warning
DANGER !
Danger of injury as a result of incorrect handling
Bodily injury caused by squeezing, cutting, impact!
Warning
Observe the general regulations on setting up and safety when
handling and mounting.
Use suitable mounting and transport devices.
Take suitable measures to prevent clamping and squashing of
fingers.
Use only suitable tools. If specified, use special tools.
Use lifting devices and tools in a correct manner.
If necessary, use suitable protective equipment (e.g. protective
glasses, safety shoes, safety gloves).
Do not stand under hanging loads.
Wipe up spilt liquids on the floor to avoid slipping.
The following safety measures apply here:
Festo P.BE-CMMS-AS-HW-EN en 0708NH 21

3. Product description
3. Product description
3.1 General data
The CMMS-AS series of servo positioning controllers are intelligent AC servo converters
with extensive parameterisation possibilities and expansion options. This allows flexible
use in a wide range of different applications.
The servo positioning controller CMMS-AS is intended for operation of the servo motor
series EMMS-AS with digital absolute value decoders in singleturn and multiturn design.
Point-to-point positioning or master-slave applications are possible in both a single and
multiple-axis synchronised contour drive. With a higher-level multiple axis controller,
communication can take place via the integrated CAN interface.
The parameterisation tool FCT (Festo Configuration tool) makes possible simple operation and start-up of the servo positioning controller. Graphic depictions and pictograms
make intuitive parameterization possible.
3.2 Performance characteristics
Compactness
Smallest dimensions
Can be arrayed directly next to each other
Full integration of all components for controllers and power section, including RS232
and CANopen interface.
Integrated brake chopper
Integrated EMC filters
Automatic triggering for a holding brake integrated into the motor.
Conformance to the current CE and EN standards without additional external measures
(up to 15m of motor cable length)
Encoder interface
High-resolution Heidenhain incremental encoder, absolute value encoder (multiturn
and singleturn) with EnDat.
Input / Output
Freely programmable I/O`s
High resolution 12 bit analogue input
Jog/Teach mode
Simple coupling to a higher-level controller via I/O
Synchronous operation
Master/slave operation
Extension and field bus module
PROFIBUS DP
22 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
DeviceNet
Integrated CANopen interface
Open interface in accordance with CANopen
Festo Profile for Handling and Positioning (FHPP)
Protocol in accordance with the CANopen standards DS 301 and DSP 402
Contains "Interpolated position mode" for multiple-axis applications
Motion control
Operation as torque, speed or position controller
Integrated positioning control
Time-optimised (trapezoidal shape) or jerk-free positioning (S shape)
Absolute and relative movements
Point-to-point positioning with and without smooth transitions
Location synchronisation
Electronic gear
64 Position sets
8 Driving profiles
A wide range of homing methods
Integrated sequence control
Automatic sequence of position records without higher-level controller
Linear and cyclical position sequences
Adjustable delay times
Branches and waiting positions
Definable stop positions for uncritical standstill points
Integrated safety functions
Integrated "Safe standstill" in accordance with EN 954-1 safety category 3 in the basic
unit
Protection against unexpected starting up
Two-channel switch-off of the final stage
Certification of BG (in preparation)
Reduction of the external wiring
Shorter reaction times in case of error
Faster restart, intermediate circuit stays charged
Interpolating multi-axis movement
With an appropriate controller, the CMMS-AS can perform contour runs with interpolation
via CANopen.
To do this, position setpoints are specified by the controller in a fixed time slot pattern.
In between, the servo positioning controller independently interpolates the data values
between two support points.
Parameterization program "Festo Configuration Tool FCT"
Simplest start-up and diagnosis
Festo P.BE-CMMS-AS-HW-EN en 0708NH 23

3. Product description
Setpoint interface /
Interface
Setpoint specification via
Function
Operating mode
Analogue inputs
X1 (+ 10 V)
Analogue setpoing specification
with 12-bit resolution
Regulating torque
Speed control
Pulse direction of interface
X1 (24 V)
or
X10 (5 V)
CW/CCW (Cycle CW / Cycle CCW)
CLK / DIR (Cycle / Direction)
Synchronisation
A/B tracking signals
X10 (5 V RS422)
Encoder
- Input (slave)
- Emulation (mas-
ter)
Synchronisation
Digital inputs/outputs
X1 (24 VDC)
Record selection
Jog-teach mode
Linked position records
Start and stop functions
Positioning controller
CANopen field bus
X4 (CAN)
Direct mode
Reference run (homing)
Jog mode
Record selection
Interpolated position mode
Regulating torque
Speed control
Position control
Positioning controller
Confiuration Configuration of Motor Controller, Motor and Axis
Automatic adjustment of all controller parameters with use of Festo Mechanics
4-channel oscilloscope function
English and German
3.3 Interfaces
3.3.1 Overview of interfaces
Table 3.1 Interfaces
3.3.2 I/O functions and device control
Digital inputs
The digital inputs provide the elementary control functions.
To allow positioning targets to be saved, the CMMS-AS motor controller has a target table,
in which positioning targets can be saved and called up later. Six digital inputs allow you
to select the targets, another input is used as the start input. Two inputs are used to enable the hardware-side output stage and the controller.
24 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
Mode
Function
Mode 0
Positioning
Mode 1
Jog function
Mode 2
Travel program
Mode 3
Synchronisation
Limit switch
The limit switches serve to limit the range of motion for safety reasons. During homing,
one of the two limit switches can serve as reference points for positioning control.
Sample input
If a Field bus is used for activation, a high-speed sampling input is available for timecritical tasks for various applications (position sensing, special applications, ...).
Analogue input
The motor controller CMMS-AS has an analogue input for input levels in the range of +10 V
to -10 V. The input is designed as a difference input (12 bit) to ensure a high degree of
protection against interference. The analogue signals are quantified and digitalised by the
analogue-digital converter at a resolution of 12 bits. These analogue signals serve to specify setpoints (speed or torque) for the control.
Basic functions
The existing digital inputs are already allocated to the basic functions in standard applications. The analogue input AIN0 is also available as a digital input for use of further functions such as the jog function, route program and synchronisation.
MODE switching allows you to switch between the following default settings:
Table 3.2 Mode switching
3.3.3 Analogue setpoint specification
The analogue setpoint specification +/- 10VDC can be configured as setpoint specification
for
- Speed setpoint value
- Torque setpoint value
Festo P.BE-CMMS-AS-HW-EN en 0708NH 25

3. Product description
The connection plan shows the switch position in the active operating state.
*) The limit switches are set by default to opener (configuration over FCT)
Parameter
Signal level
In accordance with RS232 specification
or RS485 specification
Baud rate
9600 baud to 115k baud
ESD protection
ESD protected (16kV) driver
Connection
Null modem standard, X5
Connection
over X5 / DSUB 9 pin / pin
Necessary triggering with analogue setpoint specification
3.3.4 RS232 interface (diagnosis/ parameterization interface)
The RS232 interface is intended as a configuration interface.
Table 3.3 Parameters of the RS232 interface
26 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
Parameters
Value
Baud rate
9600 Baud
Data bits
8
Parity
None
Stop bits
1
Parameter
Value,
Flow control
None
Emulation
VT100
ASCII configuration
- Sent characters finish with line feed
- Output entered characters locally (local echo)
- During reception, attach line feed to the end of
the line
Command
Syntax
Reply
New initialisation of the servo positioning controller
RESET!
None (bootup message)
Save the current parameter set and all position sets in the
non-volatile flash memory.
SAVE!
DONE
Setting the baud rate for serial communication
BAUD9600
BAUD19200
BAUD38400
BAUD57600
BAUD115200
Unknown command
Any
ERROR!
Read the version number of the CM (Configuration Management) release of the firmware
VERSION?
2300:VERSION:MMMM.SSSS*)
The RS485 interface is on the same plug connector as the RS232 interface. Communication
must be activated separately by the user. RS232 messages can also be received when
RS485 communication is activated, which means that the device can be accessed for configuration at all times.
After reset, the serial interface always has the following basic settings.
Table 3.4 Default parameters
To be able to operate an interface with a terminal program, such as for test purposes, the
following settings are required (recommendations):
Table 3.5 Setting for terminal program
Please note that, immediately after a reset, the motor controller independently issues a
bootup message via the serial interface. A reception program on the controller must either
process or reject these received characters.
General commands
Festo P.BE-CMMS-AS-HW-EN en 0708NH 27

3. Product description
Command
Syntax
Reply
*)MMMM: Main version of the CM release (hexadecimal format)
SSSS: Subversion of the CM release (hexadecimal format)
Command
Syntax
Reply
Reading a CO
OR:nnnn
nnnn:HHHHHHHH or OR:EEEEEEEE
Writing a CO
OW:nnnn:HHHHHHHH
OK! or OW:EEEEEEEE
Reading a lower limit of a CO
ON:nnnn
nnnn:HHHHHHHH or ON:EEEEEEEE
Reading an upper limit of a CO
OX:nnnn
nnnn:HHHHHHHH or OX:EEEEEEEE
Reading an actual value of a CO
OI:nnnn
nnnn:HHHHHHHH or OI:EEEEEEEE
*)nnnn: Number of the communication object (CO), 16 bit (hexadecimal format)
HHHHHHHH: 32 bit data / values (hexadecimal format)
EEEEEEEE: Return value in case of an access fault
Return value
Meaning
0x0000 0002
Data are less than the lower limit, data were not written
0x0000 0003
Data are greater than the upper limit, data were not written
0x0000 0004
Data are less than the lower limit, the data were limited to the lower limit and then accepted
0x0000 0005
Data are greater than the upper limit, the data were limited to the upper limit and then
accepted
0x0000 0008
Data are outside the valid value range and were not written
0x0000 0009
Data are currently outside the valid value range and were not written
Command
Syntax
Reply
Activate controller enable. To do this, the controller enable logic must be set to "DIN5 and RS232".
OW:0061:00000001
OK! or OW:EEEEEEEE
1)
Deactivate controller enable. To do this, the controller
enable logic must be set to "DIN5 and RS232".
OW:0061:00000002
OK! or OW:EEEEEEEE1)
Deactivate end stage. To do this, the controller enable
logic must be set to "DIN5 and RS232".
OW:0061:00000003
OK! or OW:EEEEEEEE1)
Acknowledge fault
OW:0030:00010000
OK!
Table 3.6 General commands
Parameter commands
The exchange of parameters and data takes place over "communication objects" (CO).
They are used in a fixed syntax. Special return values are defined for errors in a write or
read access.
Table 3.7 Parameter commands
The meaning of the return values is the following.
Table 3.8 Return values
Function commands
28 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
Command
Syntax
Reply
1) Faulty return values can be called up due to an inappropriately set controller enable logic, an intermediate circuit that is not loaded, etc.
Operating mode
Syntax
Response
Regulating torque
OW:0030:00000004
OK! or OW:EEEEEEEE
Speed control
OW:0030:00000008
Positioning
OW:0030:00000002
Please note
Before activating the RS485 interface, please make sure that you
are using a completely wired null modem cable. All pins of the cable must be occupied according to the following specification (see
chapter 6.4.4).
Pin
Brief description
Designation
Signal direction
Description
1
DCD
Data carrier detect
Transfer device --> end
device
Data carrier signal was recorded by
transfer device
2
RxD
Receive (x) Data
Transfer device --> end
device
Line at the end device that receives a
data bit from the transfer device.
3
TxD
Transmit (x) Data
End device --> Transfer
device
Line at the end device that sends a
data bit to the transfer device.
4
DTR
Data terminal ready
End device --> Transfer
device
End device is ready for use
5
GND
Ground (earth)
None
Reference potential at 0 V
6
DSR
Data set ready
Transfer device --> end
device
Transfer device is ready for use
7
RTS
Request to send
End device --> Transfer
device
End device displays that the remote
station should send (send request)
8
CTS
Clear to send
Transfer device --> end
device
Transfer device shows reception
readiness (send permission)
Table 3.9 Function commands
Setting the operating mode
Due to a necessary synchronisation of internal processes, the change of operation mode
can require some cycle times of the controller. We therefore recommend that you always
verify and wait for reception of the desired operation mode.
Table 3.10 Operating mode
Faulty return values can be called up due to invalid values that do not come from the
above-named group. The current operation mode can be read by using the "OR" command.
Control via RS485
Festo P.BE-CMMS-AS-HW-EN en 0708NH 29

3. Product description
Pin
Brief description
Designation
Signal direction
Description
9
RI
Ring indicator
Transfer device --> end
device
Transfer device receives a ring – or
call sign on the telephone line
Table 3.11 Design of a null modem line
Configuration in the FCT
For configuration, the following settings are required in the "Work station" window:
- On the "Application data" page in the "Operating modes selection" tab, set the
control interface to "RS485".
- On the page "Controller, control interface", do not activate the mode selection
Then, with the "Download" buttons, load the changed configurations into the motor controller and save them permanently with the "Save" button.
With a "Reset" (or switching off and back on) of the motor controller, the new configuration is activated.
Command syntax under RS485
The control of the step motor controller via RS485 takes place with the same objects as
with RS232. Only the syntax of the commands to read/write the objects is expanded in
comparison to the RS232.
Syntax: XTnn:HH……HH:CC
Meanings:
XT: Fixed constants
HH……HH: Data (normal command syntax)
nn: Node number, identical to the CANopen node number (setting via DIP switch
30 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
Note
The reply sends the following characters to the first five charac-
ters: "XRnn:" with nn = node number of the device
All devices react to the node number 00 as "Broadcast". In this
way, each device can be addressed without knowing the node
number.
The commands of type "OW", "OR" etc. support an optional
check sum. This check sum is formed without the first five char-
acters.
The bootup message of the boot loader as well as the bootup
message of the firmware are sent in the RS232 mode.
Example "Profile position mode" via RS232
With the CAN access simulated via RS232, the motor controller can also be operated in the
CAN "Profile position mode". The following describes the sequence in principle.
1. Changing of the controller enable logic
The controller enable logic can be changed via the COB 6510_10. Since the simulation of the CAN interface over RS232 can be completely taken over, the enable logic
can also be changed to DINs + CAN.
Command: =651010:0002
As a result, the release can be granted via the CAN control word (COB 60040_00).
Command: =604000:0006 Command "Shutdown"
Command: =604000:0007 Command "Switch On / Disable Operation"
Command: =604000:000F Commando "Enable Operation"
2. Activation of the "Profile position mode"
The positioning mode is activated via the COB 6060_00 (Mode of Operation). This
must be written once, since all internal sectors must be set correctly thereby.
Command: =606000:0001 Profile Position Mode
3. Write position parameters
The target position can be written over the COB 607A_00 (target position). The target position is thereby written in "position units". That means, it depends on the set
CAN factor group. The default setting here is 1 / 216 revolutions. (16 bit portion before the point, 16 bit portion after the point.
Command: =607100:00058000 Target position 5.5 revolutions
The speed of travel can be written via the COB 6081_00 (profile velocity), the final
speed via the COB 6082_00 (end velocity).
The speeds are thereby written in "speed units". That means, they depend on the
set CAN factor group.
The default setting here is 1 / 2
12 bit portion after the point.
Command: =608100:03E80000 Speed of travel 1000 RPM
The acceleration can be written via the COB 6083_00 (profile acceleration), the deceleration via the COB 6084_00 (profile deceleration) and the quick stop ramp via
the COB 6085 (quick stop deceleration).
The acceleration is thereby written in "acceleration units". That means, they depend
on the set CAN factor group.
The default setting here is 1 / 28 revolutions/min/s. (24 bit portion before the point,
8 bit portion after the point.
Command: =608400:00138800 Acceleration 5000 RPM/s
Festo P.BE-CMMS-AS-HW-EN en 0708NH 31
12
revolutions/min. (20 bit portion before the point,

3. Product description
Note
5V DC Pulse-direction signals over X10
24V DC Pulse-direction signals over X1
4. Start positioning
Positioning is started via the CAN control word (COB 6040_00):
- Controller enable is controlled via bit 0..3 (see above).
- The positioning is started over a rising edge at bit 4.
The following settings are taken over thereby
- Bit 5 establishes whether an ongoing positioning is ended first before the new po-
sitioning task is taken over (0), or whether the ongoing positioning should be cancelled (1)
- Bit 6 establishes whether the positioning should be carried out absolutely (0) or
relatively (1).
Command: =604000:001F Start absolute positioning or
Command: =604000:005F Start relative positioning
5. Operation over RS485
If the CMMS-ST is operated over RS485, control can take place just as with operation
over RS232. If required, the node number is simply written in front of the command.
The node number is set via the DIP switches.
Command: XT07:=607100:000A0000 Target position 10 revolutions send to
node 7
3.3.5 Interfaces for direct synchronous operation
The motor controller permits a master-slave mode, which hereafter is designated synchronisation. The controller can function either as a master or slave.
If the motor controller works as master, it can provide (RS422) A/B signals to the incremental encoder output (X10).
When the motor controller is to operate as a slave, various inputs and signal forms are
available for synchronisation.
X10 [5V RS422] A/B, CW/CCW, CLK/DIR
X1 [24V]: CW/CCW, CLK/DIR).
Using software, the incremental encoder interface can be configured as both output and
input (master or slave). Additionally, two inputs for the connection of 5V pulse-direction
signals (CLK / DIR), (CW / CCW) are planned on the plug connector.
24 VDC pulse-direction signals are carried out via X1 Din2 and Din3.
Output: Generation of incremental encoder signals (X10)
Based on the encoder data, the motor controller generates the tracking signals A, B as well
as the zero pulse of an incremental encoder. The number of lines can be set in the FCT with
values between 32 … 2048.
32 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
Please note
To avoid rounding errors, the number of lines per revolutionshould
contain the factor 2n. (32,64 ….2048)
Voltage
Input
Cycle rate
5 V
X10
500 kHz
24V
X1
up to 20 kHz
Please note
With setting of synchronization via FCT, the controller only reacts
via the synchronisation interface. All other functions of the positioning operating mode are no longer available.
Changes to this interface only become effective after a "Reset"(download, secure, reset).
An RS422 power driver provides the signals to X10 differentially.
Input: Processing of incremental encoder or pulse-direction signals (X10)
The signals are evaluated optionally as A / B tracking signals of an incremental encoder or
as pulse / direction signals (CW/CCW or CLK/DIR) of a stepping motor control. The signal
form is selected in the FCT. The number of steps per revolution can be parameterized. Beyond that, an additional electronic gear can be parameterized.
The following signals can be evaluated:
A/B tracking signals
CLK/DIR – pulse/direction
CW/CCW pulse
Input: Processing of pulse-direction signals 24V DC (X1)
CLK/DIR – pulse/direction
CW/CCW pulse
24V DC pulse-direction signals are carried out via X1 DIN2 and DIN3.
Cycle rate pulse-direction signals
Table 3.12 Maximum input frequency
Activation of synchronization
Synchronization can be set in various ways.
With the FCT parameterization software, through selection of the control interface
"Synchronization" on the "Application data" page in the "Operating modes selection"
tab
Via X1 (digital I/O interface) through selection of mode 3
Festo P.BE-CMMS-AS-HW-EN en 0708NH 33

3. Product description
Please note
After the change of configuration with FCT with the "Download"
buttons, load the changed configurations into the motor controller
and save them permanently with the "Save" button.
With a "Reset" (or switching off and back on) of the motor controller, the new configuration is activated.
To ensure flexibility of the controller, synchronization should be switched on over the I/O
interface.
34 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
The connection plan shows the switch position in the active operating state.
*) The limit switches are set by default to opener (configuration over FCT)
Necessary I/O triggering during synchronisation via I/O mode 3
Festo P.BE-CMMS-AS-HW-EN en 0708NH 35

3. Product description
The connection plan shows the switch position in the active operating state.
*) The limit switches are set by default to opener (configuration over FCT)
36 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
ENABLE
START
STOP
Drive is moving
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
DOUT0: READY
DOUT1: MC
DOUT3: ERROR
DOUT2:
Speed
reached
t1 t1 txtx
t
mc
t1 =1.6 ms
tx = x ms (dependent on ramps)
tmc = x ms (dependent on MC window)
I/O timing diagrams
Fig. 3.1Signal sequence with Synchronisation selection operation mode / during activation of synchronisation through START (DIN8)
The signal MC is set as long as the drive is at a standstill during active synchronisation
(DIN8:START set). That is, the MC signal is set as long as the window for "DZ = 0" has not
been left.
Festo P.BE-CMMS-AS-HW-EN en 0708NH 37

3. Product description
Parameter
Value
Communication protocol
Heidenhain EnDat 2.1 (without analogue track) and 2.2
Signal level DATA, SCLK
5 V differential / RS422 / RS485
Angle resolution / number of
lines incr. encoder
controller-internal up to 16 bit / revolution
Cable length
L 25 m
Cable design in accordance with Heidenhain specification
Limit frequency SCLK
1 MHz
Generator supply
from the controller, 5 V –0% / +5%
IA = 200 mA max.
For the feedback message "Speed reached", the comparison speed is set to zero and only
a message range is placed in the message window.
General Information
The general limitations and settings via FCT are also valid during synchronisation.
Axle limitations, speeds, accelerations, message windows, etc.
During resynchronisation on a forward-running master, the message "Setpoint
achieved" comes as soon as the speed within the set message window is reached. If
overshooting occurs during the catch-up phase or the message window is set too low,
the message may come several times or flicker.
3.3.6 Multi-firmware strategy
A firmware update can be achieved using any desired customer firmware through the builtin SD card reader. Automatic Boadloader.
3.3.7 Synchronisation interface
The following synchronisation signals can be processed:
- Pulse / direction signals (CLK / DIR) via interfaces X1 and X10
- CW / CCW signals via interfaces X1 and X10
- A / B signals via interface X10
Signals with a level of 5 V can be processed via the X10 interface.
Interface X1 is intended for a signal level of 24 V. MODE3 synchronisation must be activated via DIN9=1 and DIN12=1.
3.3.8 Motor feedback
Position return takes place purely digitally via EnDat.
EnDat interface V2.x for single and multiturn encoders
38 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
Parameter
Value
Sense lines for power supply
not supported
Signal:
Description
AMON
AIN0 / #AIN0
Analogue output for monitor purposes
Differential analogue input with 12-bit resolution.
Alternatively, the differential analogue input can be parameterized with the function
Mode and Stop. (DIN12 and DIN13) (dependent on the parameterized control interface).
DOUT0...DOUT3
Digital outputs with 24 V level,
DOUT0 is permanently occupied with the function "Ready for operation".
Additional outputs can be configured (Target reached, Axis in motion, Target speed
achieved.....)
Table 3.13 Signal description of encoder motor EnDat 2.1 and 2.2 (X2)
3.3.9 Brake chopper (Brake control)
A brake chopper with a braking resistor is integrated in the power output stage. If the permitted load capacity of the intermediate circuit is exceeded during the energy recovery, the
braking energy may be converted to heat by the internal braking resistor. The brake chopper is actuated with software control. The internal braking resistor is protected against
overloading via software and hardware.
3.3.10 Feedback from motor (angle encoder)
The CMMS-AS has a connection for an angle encoder mounted on the motor shaft. This
encoder is used for commutation of a 3-phase synchronous motor and as an actual-value
recorder for the built-in speed and position controller.
The controller supports the following encoders:
ENDAT 2.1 encoder – exclusively digital angle information
ENDAT 2.2 encoder – digital angle information and service parameters (temperature)
3.3.11 Control interface X1
The control interface X1 is planned as D-Sub 25-pin. The following signals are available:
Festo P.BE-CMMS-AS-HW-EN en 0708NH 39

3. Product description
Signal:
Description
DIN0...DIN13
Digital inputs for 24 V level, following functions:
(The inputs are occupied in their function, dependent on the mode selection)
Mode 0:
1 x End stage enable (DIN4)
1 x Controller enable / Acknowledge error (DIN5)
2 x Limit switches (DIN6 + DIN7)
6 x Position selection (DIN0-3, DIN10, 11)
1 x Start positioning (DIN8)
2 x MODE switchover (DIN9 , 12)
1x Stop (DIN13)
Mode 1:
2 x Jog mode. (DIN10, 11)
1x Teach (DIN8)
Mode 2:
1x Stop route program (DIN3)
1x Start route program (DIN8)
2x Next for route program, step criterion (DIN 10, 11)
Mode 3:
2x Pulse/direction (CLK/DIR or CW/CCW on DIN2, 3)
1x Start sync (DIN8)
Table 3.14 Control interface X1
The digital inputs are designed to be configurable:
Mode 0: Standard assignment
Mode 1: Special assignment for jog and teach mode
Mode 2: Special assignment for the route program
Mode 3: Special assignment for synchronisation
To be able to switch between different I/O configurations, DIN12 and DIN9 can also be
configured as als selector signals.
As a result, a maximum of four different I/O assignments can be selected. These are described in the tables Table 6.2 Pin allocation: I/O interface [X1] Mode 0, Table 6.3 Pin allocation: I/O interface [X1] Mode 1, Table 6.4 Pin allocation: I/O interface [X1] Mode 2and
Table 6.5 Pin allocation: I/O interface [X1] Mode 3.
40 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
3.3.12 Incremental encoder interface [X10]
Using software, the incremental encoder interface can be configured both as input and as
output. Additionally, two inputs for the connection of 5V pulse-direction signals (CLK /
DIR), (CW / CCW) are planned on the plug connector.
Encoder emulation of the incremental encoder – [X10] is output:
From the rotational angle determined via the encoder at the motor, the controller generates the tracking signals A, B as well as the zero pulse of an incremental encoder. The signals A, B, and N equal those of an incremental encoder.
Angle resolution / Number of lines Output
The number of lines is continuously switchable. The following numbers of lines are supported: 2048 - 32 lines per revolution. The switchover only becomes effective after a RESET
of the controller. An RS422 line driver provides the signals to X10 differentially.
Synchronization – [X10] is input:
Using software, the X10 interface can be configured as an input for processing of incremental encoder or pulse-direction signals.
The signals are evaluated optionally as A / B tracking signals of an incremental encoder or
as pulse / direction signals (CW/CCW or CLK/DIR) of a stepping motor control. The signal
form is selected via software. The number of steps per revolution can be parameterized.
Beyond that, an additional electronic gear can be parameterized.
3.3.13 Serial parameterization interface RS232 and RS485 – X5
It permits parameterization of the controller as well as downloading of the parameter set
and firmware through an RS232 zero modem interface with up to 115 KBit/s.
The interface can be used either as an RS232 interface or alternatively as an RS 485 interface. Simultaneous use is not possible, since both interfaces use the same UART in the
DSP.
3.3.14 SD cardholder X12
To permit saving of control parameters as well as the complete controller firmware, a connection possibility for an SD memory card (popular storage medium for digital cameras)
has been incorporated. The connection has been designed as a "push-push" holder for
reasons of quality perception.
3.3.15 SD memory card
Via the SD memory card, parameter records can be loaded or firmware can be downloaded.
A menu in the configuration software allows you to specify a set of parameters on the
memory card, and load it or save it.
Festo P.BE-CMMS-AS-HW-EN en 0708NH 41

3. Product description
Also, a configuration word in the parameter record can be used to specify whether firmware and/or a parameter record is to be loaded from the memory card automatically on
activation.
If automatic firmware download (DIP switch 8 = 1) is activated or there is no valid firmware
in the controller, a check is performed on initialisation whether an SD memory card is inserted, and if so, initialises it. If there is a firmware file on the card, it is checked first
(checksum test). If no fault is found, the firmware is transferred from the card to the controller and saved in the FLASH program.
If the Load automatic parameter record is activated via the commissioning software, the
system checks whether a card is inserted when the firmware is started and it is initialised if
applicable. Depending on the setting, a certain or the latest parameter record file is loaded
and saved in the data flash.
3.4 Field bus interface
With CMMS-AS, different field busses can be used. By default, the CAN bus is permanently
integrated in the controller with the CMMS-AS. Optionally, the PROFIBUS or DeviceNet can
be used via plug-in modules. But only one field bus can be active at any given time.
For all field busses, the Festo Profile for Handling and Positioning (FHPP) has been implemented as the communication protocol. Additionally, for the CAN bus, the communication
protocol based on the CANopen profile in accordance with the CiA Draft Standard DS-301
and the drive profile in accordance with the CiA Draft Standard DSP-402 have been implemented.
Independent of the field bus, a factor group can be used so that application data can be
transferred into user-specific units.
42 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
The connection plan shows the switch position in the active operating state.
*) The limit switches are set by default to opener (configuration over FCT)
Required I/O connection for field bus control
3.4.1 FHPP
FHPP makes it possible to achieve a uniform control concept regardless of the field bus
used. The user therefore no longer be concerned with the specific characteristics of the
respective busses or controllers (PLC), but receives a preparameterized profile in order to
place his drive into operation in the shortest possible time and control it.
Among the operation types, FHPP distinguishes between record selection and direct operation.
With record selection, the position records stored in the controller are used.
In direct operation,
the positioning mode,
speed control or
force control
can be employed.
These can be dynamically switched over in direct operation as needed.
Additional information can be found in the FHPP manual P.BE−CMM−FHPP−SW−EN.
Festo P.BE-CMMS-AS-HW-EN en 0708NH 43
3. Product description
3.4.2 CAN bus
The CAN bus is permanently integrated in the controller and can be parameterized and
activated/deactivated via the DIP switches on the front side. With the DIP switches, the
node address and baud rate can be set visibly from the outside. In addition, a termination
resistor can be switched on and the CAN bus switched on or off. The controller supports
baud rates up to 1Mbit/s.
If the communication protocol FHPP is used, the above-mentioned operating modes are
available.
Alternatively, if the CANopen protocol in accordance with DS301 with application profile
DSP402 is activated,
the positioning mode (CiA: profile position mode),
homing mode (CiA: homing mode),
interpolated position mode (CiA: interpolated position mode)
speed control (CiA: profile velocity mode) and
force mode (CiA: torque profile mode)
can be used.
Communication can take place optionally over SDOs (service data objects) and/or PDOs
(process data objects). Two PDOs are available for each sending direction (transmit/receive).
Contour control with linear interpolation
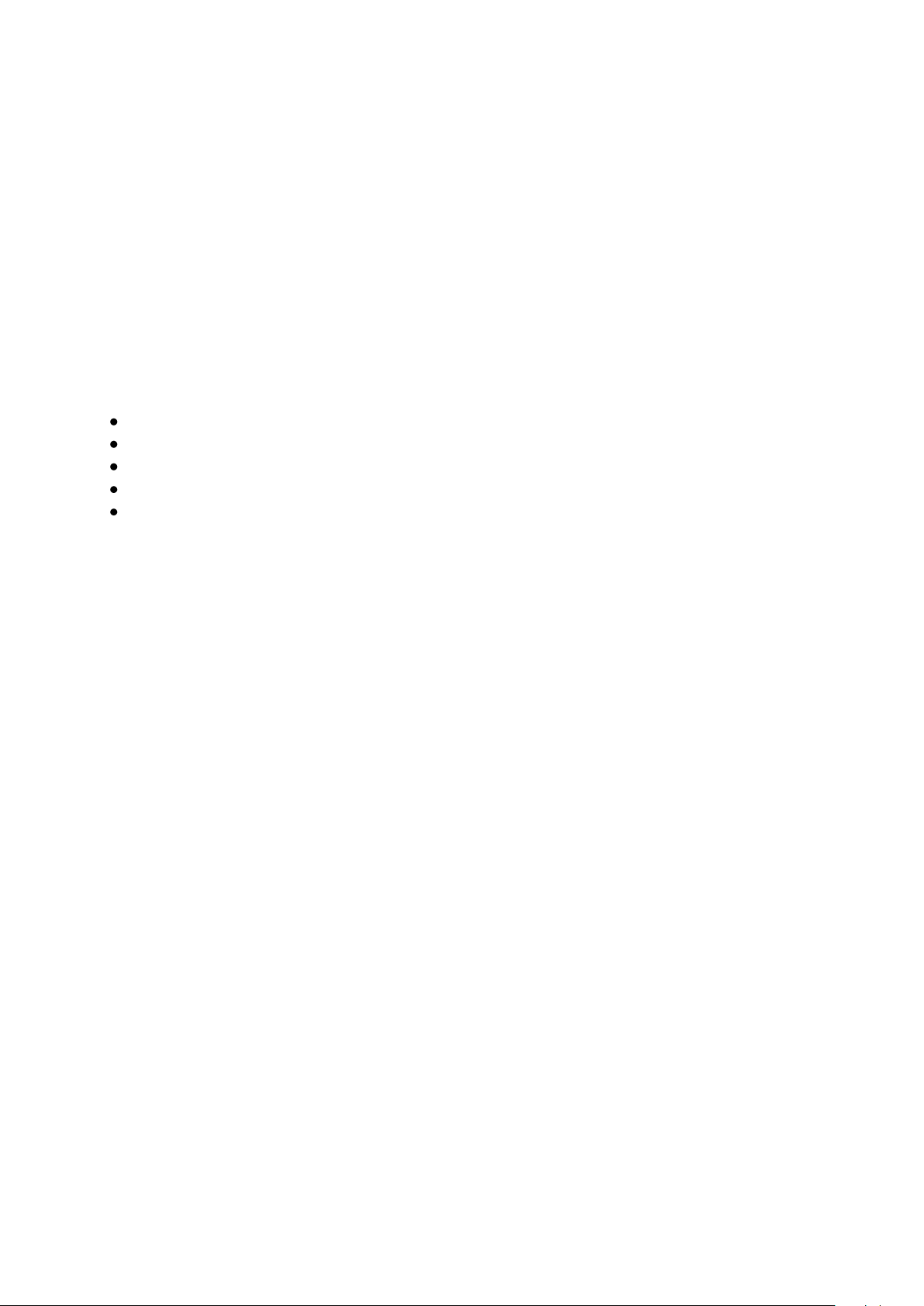
With the "interpolated position mode", a contour control can be implemented in a multiaxis application of the controller. For this, position setpoints are specified by a higherorder control system in a fixed time slot pattern. If the time slot pattern of the position
setpoints is greater than the internal position controller cycle time of the controller, the
controller automatically interpolates the data values between two prescribed position
setpoints. The controller also calculates a corresponding speed pilot control.
44 Festo P.BE-CMMS-AS-HW-EN en 0708NH
3. Product description
1 Position setpoint
time slot pattern
2 Position control
cycle time
3 Interpolated
sequence of the
position
4 Interpolated
sequence of the
position
1 2 3
4
Fig. 3.2Interpolated position mode
3.4.3 PROFIBUS
The controller is connected to the PROFIBUS with a corresponding expansion module
(CAMC-PB), which can be plugged into the expansion slot X7. If the module is plugged in, it
automatically becomes active the next time the controller is switched on.
The slave address is configured over the DIP switches on the front side of the controller.
Baud rates up to 12 MBaud are supported.
FHPP with the above-described control and operating modes is used as communication
protocol.
3.4.4 DeviceNet
The controller is connected to the DeviceNet network with a corresponding expansion
module (CAMC-PB), which can be plugged into the expansion slot X7. If the module is
plugged in, it automatically becomes active the next time the controller is switched on.
The MAC-ID and baud rate are configured over the DIP switches on the front side of the
controller.
Baud rates up to 500 kBaud are supported.
FHPP with the above-described control and operating modes is used as communication
protocol.
Festo P.BE-CMMS-AS-HW-EN en 0708NH 45

3. Product description
Operating mode
Function
Setpoint interface /
Interface
Setpoint specification via
Regulating torque
Analogue setpoint
X1
Field bus
Direct mode
Speed control
Analogue
X1
CW/CCW signals
X1 (24V / Mode3)
X10 (5 V)
CLK/DIR
Pulse/direction signals
X1 (24V / Mode3)
X10 (5 V)
Field bus
Direct mode
Master/Slave
A/B signals +
I/O (start synchronisation)
X10
X1 (Mode3)
Position control
Field bus
Interpolated position
mode
Field bus
Direct mode
Positioning controller
I/O
Record selection
Field bus
Direct mode
Field bus
Record selection
Homing run
I/O
Record selection
Field bus
Direct mode
Field bus
Record selection
Jog mode
I/O Field bus
Direct mode
Teach-in function
via I/O
3.5 Function overview
3.5.1 Operating modes
- Setpoint specification via incremental encoder signals, suitable for frequencies
up to 500 kHz
- Analogue speed specification with 12-bit resolution
- Reference point
- Simple connection via digital I/Os to a higher-order control system, e.g. a PLC.
- Jolt-limited or time-optimised positioning absolutely or relative to a reference
point via the integrated trajectory generator.
- Position specification via the integrated fieldbus CANopen with automatic in-
terpolation between the setpoints
Table 3.15 Operating modes
46 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
ENABLE
STOP
DIN12
1
0
1
0
1
0
1
0
0
1
0
1
0
1
0
1
0
DIN9
1
0
1
DOUT0: READY
DOUT1: MC
DOUT2: ACK
DOUT3: ERROR
21 1 3 4 1
t1 t1 t1 t1 t1
t1 =1.6 ms
1) Positioning
2) Sequences / Route program
3) Jog / Teach
4) Synchronisation
3.5.2 Timing diagram operation mode switchover
Fig. 3.3 Timing for activation of the individual operating modes
3.5.3 Setpoint processing
Setpoint selectors allow you to switch setpoints from a range of sources to the corresponding controllers. The following setpoint selectors are implemented in the firmware:
- Selector for the speed setpoint
- Auxiliary value selector, whose setpoint is added to the speed setpoint.
The position of the setpoint selectors is saved in non-volatile parameters.
Depending on the prefix, the speed setpoint is disabled via the signal of the corresponding
limit switch input. The limit switch inputs also affect the ramp generator for the speed setpoint.
The speed setpoint (without the auxiliary setpoint) is reached via a setpoint ramp. Four
acceleration ramps can be parameterized in the range of up to approx. 10 s. The setpoint
ramp can be deactivated.
Festo P.BE-CMMS-AS-HW-EN en 0708NH 47

3. Product description
3.5.4 I²T function
An integrator monitors the current² time integral of the CMMS-AS controller. As soon as
the configured time expires, a warning is sent and the maximum current is limited to the
nominal current.
3.5.5 Positioning controller
A positioning control system is set above the current controller. Up to 64 positions (homing + 63 positions) can be selected and run via a trajectory generator. There are also volatile position data records for positioning via the field bus.
The position records are made up of a position value and a motion profile. The following
parameters can be set for the eight motion profiles:
- Positioning speed
- Acceleration
- Delay
- Smoothing
- Time
- Start delay
- Final speed
- Wait for current positioning, reject or ignore initial instruction.
From every position record, any other position record can be started directly. You can transition to a new position record without first coming to a standstill.
The parameter records can be called up via:
- Digital inputs (position record 0 ... 63)
- RS232 interface (for test purposes only) or a
- field bus interface
48 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
The connection plan shows the switch position in the active operating state.
*) The limit switches are set by default to opener (configuration over FCT)
Required I/O connection for positioning (mode 0)
Festo P.BE-CMMS-AS-HW-EN en 0708NH 49

3. Product description
Run to
Positive
method
Negative
method
Graphical representation
Dec.
Hex
Dec.
Hex
Limit switch with zero pulse
evaluation
2
02 1 01
Negativer
Endschalter
Index Impuls
1
Fixed stop with zero pulse
evaluation
-2
FE
-1
FF
Index Impuls
-1
Limit switch
18
12
17
11
Fixed stop
-18
EE
-17
EF
-17
Zero pulse
34
22
33
21
Save current position
35
23
35
23
3.5.6 Homing run
You can choose either of the following methods, which are based on DS402.
Table 3.16 Homing run methods
50 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
Homing method
1
Negative limit switch with index pulse.
If negative limit switch inactive:
Run at search speed in negative direction to the negative limit switch.
Run at crawl speed in positive direction until the limit switch becomes inactive, then on to
first index pulse. This position is saved as a reference point.
If configured: Run at travel speed to axis zero point.
2
Positive limit switch with index pulse.
If positive limit switch inactive:
Run at search speed in positive direction to the positive limit switch.
Run at crawl speed in negative direction until the limit switch becomes inactive, then on
to first index pulse. This position is saved as a reference point.
If configured: Run at travel speed to axis zero point.
-1
Negative stop with index pulse 1)
Run at search speed in negative direction to stop.
Run at crawl speed in positive direction to next index pulse. This position is saved as a
reference point.
If configured: Run at travel speed to axis zero point.
-2
Positive stop with index pulse 1)
Run at search speed in positive direction to stop.
Run at crawl speed in negative direction to next index pulse. This position is saved as a
reference point.
If configured: Run at travel speed to axis zero point.
17
Negative limit switch
If negative limit switch inactive:
Run at search speed in negative direction to the negative limit switch.
Run at crawl speed in positive direction until limit switch becomes inactive. This position
is saved as a reference point.
If configured: Run at travel speed to axis zero point.
18
Positive limit switch
If positive limit switch inactive:
Run at search speed in positive direction to the positive limit switch.
Run at crawl speed in negative direction until limit switch becomes inactive. This position
is saved as a reference point.
If configured: Run at travel speed to axis zero point.
-17
Negative stop
1)2)
Run at search speed in negative direction to stop. This position is saved as a reference
point.
If configured: Run at travel speed to axis zero point.
-18
Positive stop
1)2)
Run at search speed in positive direction to stop. This position is saved as a reference
point.
If configured: Run at travel speed to axis zero point.
33
Index pulse in a negative direction
Run at crawl speed in negative direction to index pulse. This position is saved as a refer-
ence point.
If configured: Run at travel speed to axis zero point.
Festo P.BE-CMMS-AS-HW-EN en 0708NH 51

3. Product description
Homing method
34
Index pulse in a negative direction
Run at crawl speed in positive direction to index pulse. This position is saved as a refer-
ence point.
If configured: Run at travel speed to axis zero point.
35
Current position
The current position is saved as the reference point.
If configured: Run at travel speed to axis zero point.
Note: If the reference system is shifted, runs to the limit switch or fixed stop are possible. The
are therefore generally used for rotating axes.
Controller
release
START
1
0
1
0
1
0
1
0
1
0
1
0
1
0
Limit switch E0
1
0
DOUT0: READY
DOUT1: MC
DOUT2: ACK
DOUT3: ERROR
Statusword:
referenced
1
Limit switch E1
0
1
0
– +
t1 t1 tx
tx
tx
tx
t1 =1.6 ms
tx = x ms (dependent on ramps)
Table 3.17 Explanation of the homing methods
3.5.7 Timing diagrams for homing run
52 Festo P.BE-CMMS-AS-HW-EN en 0708NH
Fig. 3.4Signal sequence with start of the homing run and with positive design

3. Product description
Controller
release
START
1
0
1
0
1
0
1
0
1
0
1
0
1
0
Limit switch E0
1
0
DOUT0: READY
DOUT1: MC
DOUT2: ACK
DOUT3: ERROR
Statusword:
referenced
1
Limit switch E1
0
Drive is moving
1
0
neg pos
t1 t1 tx txtx tx
t1 =1.6 ms
tx = x ms (dependent on ramps)
Fig. 3.5Signal sequence with faulty interruption (contour error, ...)
Festo P.BE-CMMS-AS-HW-EN en 0708NH 53

3. Product description
Controller
release
START
1
0
1
0
1
0
1
0
1
0
1
0
1
0
Limit switch E0
1
0
DOUT0: READY
DOUT1: MC
DOUT2: ACK
DOUT3: ERROR
Statusword:
referenced
1
Limit switch E1
0
1
0
– +
STOP
1
0
t1 t1 t1tx txtx tx
t1 =1.6 ms
tx = x ms (dependent on ramps)
Fig. 3.6Signal sequence with interruption through STOP input
With a start signal for a positioning set via DIN8, field bus or RS232
interface, the selected positioning set is loaded into the trajectory generator.
Based on the data record loaded, the necessary internal pre-calculations are made.
The pre-calculations can take up to 5 ms. The following programmable possibilities
are available for processing the start signal:
The trajectory generator sends the following messages:
54 Festo P.BE-CMMS-AS-HW-EN en 0708NH
3.5.8 Trajectory generator
- A start signal detected during an ongoing positioning run is ignored (ignoring).
- After a start signal is detected during an ongoing positioning run, the run con-
tinues to the end (waiting).
- After a start signal is detected, positioning is cancelled and the drive runs at a
constant speed. After pre-calculation is completed, the drive runs to the new
target position (interrupting).
- Target reached, (Default: digital output DOUT1 - MC)
- Remaining distance reached.

3. Product description
T
Conditions
Actions of the user
T1
RESET / Power ON
T2
Time out has expired or the firmware download is complete.
T3
The initialisation has been carried out successfully.
T4 DIN4=1 and DIN5=1
T25
T24
T23
T20
T21
T18
T19
T17
T16
T15
T13
T12
T10
T11
T9
T8
T6
T5
T4
T3
T2
T1
RESET
Power ON
Boot program
Firmware
download
Initialization
Operational
Initialise SD card
Load save SD card parameters
From all except
RESET / Power ON
Fault status
Acknowledge error
Activate end
stage
Torque control
Speed control
Positioning controller
Jog mode
Homing run
Deactivate
end stage
3.5.9 I/O sequence control
Festo P.BE-CMMS-AS-HW-EN en 0708NH 55

3. Product description
T
Conditions
Actions of the user
T5
"Torque control" was selected in the commissioning
software.
Setpoint specification via AIN0/AGND
T6
"Speed control" was selected in the commissioning software.
Setpoint specification via AIN0/AGND
T8
"Positioning" was selected in the commissioning software.
Set selection via
DIN0 … DIN3, DIN10, DIN11
Start for the positioning process:
DIN8=1
T9
All parameters for the jog mode were set in the commissioning software (e.g. max. speed, acceleration ...).
Selection I/O mode:
DIN9=0, DIN12=1
Jog +: DIN10=1
Jog -: DIN11=1
T10 Selection I/O mode:
DIN9=0, DIN12=1
T11
Selection of the homing method and configuration of the
speeds and accelerations in the commissioning software.
Selection of positioning record 0
Start for positioning process:
DIN8=1
T12
The drive is referenced.
T13 DIN5=0
T15 DIN5=0
T16 DIN5=0
T17 DIN4=0
T18 Write or read request to SD card such
as:
- Load parameters
- Save parameters
- Download firmware.
T19
The SD card was initialised successfully.
T20
"Load from SD after restart" was selected in the commissioning software.
T21
Parameter record was loaded
T22
A fault has occurred which causes the end stage to be
switched off
T23
T24 Edge controlled fault acknowledgement
DIN5: 1 - 0
T25
The error was acknowledged and no other errors are
pending.
Table 3.18 I/O sequence control
56 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
Controller
enable
START
Drive is moving
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
Holding brake
current-carrying
1
0
DOUT0: READY
DOUT1: MC
DOUT2: ACK
DOUT3: ERROR
Output stage
release
1
0
t1
t1
tx
Output stage
switched on
t1 =1.6 ms
tx = x ms (dependent on brake ramps)
3.5.10 Safety functions, error messages
The following conditions are monitored for safe operation of the CMMS-AS:
- Safe standstill, EN 954/Cat 3 and IEC 61508
- End stage temperature,
- Motor temperature,
- Intermediate circuit voltage to minimum and maximum value,
- Initialisation errors,
- Check-sum error on parameter transfer,
- Communication error,
- Contour error
- Homing run,
- Overload current / short circuit in the power end stage,
- Encoder system,
- Watchdog (processor monitoring).
3.5.11 Behaviour when switching off enable
Fig. 3.7 Behaviour when switching off controller enable
Festo P.BE-CMMS-AS-HW-EN en 0708NH 57

3. Product description
Controller
released
START
Drive is moving
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
Holding brake
current-carrying
1
0
DOUT0: READY
DOUT1: MC
DOUT2: ACK
DOUT3: ERROR
Output stage
release
1
Output stage switched
on 0
t1 t1 txt1
t1 =1.6 ms
tx = x ms (dependent on brake ramps)
Fig. 3.8Behaviour when switching off end-stage enable
58 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
Controller
release
START
Intermediate circuit
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
Holding brake
current-
carrying
1
0
DOUT0: READY
DOUT1: MC
DOUT2: ACK
DOUT3: ERROR
Output stage
release
1
Output stage
switched on 0
Drive is moving
1
0
t1 t1 tx t1
t1 =1.6 ms
tx = x ms (ZK discharges)
Fig. 3.9Behaviour during interruption of the intermediate circuit supply (error: end stage
off immediately)
3.5.12 Oscilloscope function
The oscilloscope function implemented in the controller is an important aid for optimising
the controller settings by the person placing it into operation, without using a separate
measuring device. The function permits recording of important signal sequences over time.
It consists of three blocks:
The initialisation part, which runs at low priority and performs pre-calculations for the actual measurement process.
The data transfer section also has low priority. It is integrated into the time slice of serial
communication.
The measuring section runs at a high priority in the rule interrupt and records the measuring channels. If the trigger condition occurs, the measurement process is cancelled after a
defined number of scan steps.
Two channels with 256 16-bit values each can be recorded. Capable of parameterization
are:
Festo P.BE-CMMS-AS-HW-EN en 0708NH 59
- Trigger source (current, speed, position, rotor location, end stage voltage, con-
touring error, controller enable, limit switch, positioning started, motion com-

3. Product description
Please note
The positions are saved on the SD card only through FCT. And so
when jog/teach (without FCT) is used, an SD card may not be
plugged in or "Read from SD after restart" must be inactive, otherwise, when the controller is restarted, the old values will be read off
the SD card again.
plete, contouring error (message), general error, end stage active, homing run
active)
- Trigger level
- Trigger option (auto, normal, force, rising / falling edge)
- Measurement frequency
3.5.13 Jog and teach function I/O
The jog / teach mode is parameterized via the parameterization surface (FCT) or via the
CANopen object. It can then be activated via the digital inputs for MODE 1. If the jog /
teach mode is activated, two additional digital inputs are used to control the motor. The
jog control overrides the current control system in this mode.
With position control, the motor is run continuously with the parameterized profile (jog
mode) (positive / negative) if there is a positive signal to the digital input.
The digital input DIN8 serves to take over the set target position. The condition of the digital inputs DIN0 to DIN3 is thereby evaluated and the target position saved at the corresponding location.
General Information
The first 15 positions of the position record table can be taught. (Pos.1-15) With Din8, the
current position is taken over into the position record, which is selected with Din0-Din3.
Final saving of the taught positions in permanent memory takes place with falling edge
from Din5 controller enable.
Activating jog/teach function
The jog/teach function is started in I/O operation through selection of mode 1.
60 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
The connection plan shows the switch position in the active operating state.
*) The limit switches are set by default to opener (configuration over FCT)
Necessary I/O triggering with jog/teach (mode 1)
Festo P.BE-CMMS-AS-HW-EN en 0708NH 61

3. Product description
Settings in the FCT
The parameters set here are valid for jogging via I/O interface and jogging via FCT. The
acceleration also applies with "single step" over FCT.
62 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
ENABLE
START/TEACH
STOP
DIN10: Jog +
Drive is moving
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
neg
DIN11: Jog -
1
0
pos
DOUT0: READY
DOUT1: MC
DOUT2: ACK-TEACH
DOUT3: ERROR
t1
t1tx
tx
t1 =1.6 ms
tx = x ms (dependent on brake ramps)
I/O timing diagrams
Fig. 3.10 Signal sequence with jogging positive and negative
Festo P.BE-CMMS-AS-HW-EN en 0708NH 63

3. Product description
ENABLE
START/TEACH
STOP
DIN10: Jog +
Drive is moving
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
–
DIN11: Jog -
1
0
– – –+ + –
DOUT0: READY
DOUT1: MC
DOUT2: ACK-TEACH
DOUT3: ERROR
t1 t1tx tx t1 tx t1 t1tx tx
t1 =1.6 ms
tx = x ms (dependent on brake ramps)
Fig. 3.11Signal sequence when both signals are activated simultaneously / briefly staggered
64 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
ENABLE
START / TEACH
STOP
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
–
1
0
+
(1)
(1)
DIN0 - DIN3
1
0
(1)
DOUT0: READY
DOUT1: MC
DOUT2: ACK-TEACH
DOUT3: ERROR
t1 t1tx tx t1 t1 t1
DIN11: Jog -
DIN10: Jog +
t1 =1.6 ms
tx = x ms (dependent on brake ramps)
(1) Setting of the target position to be programmed
Fig. 3.12 Behaviour with teach input
The route program allows multiple positioning jobs to be linked in a sequence. These positions are travelled to one after another. The characteristics of the route program are:
Festo P.BE-CMMS-AS-HW-EN en 0708NH 65
3.5.14 Route program with position record linking with switch-
over positioning/torque control
All 63 position records of the position record table can be set in the route program.
Besides linear sequences, ring-shaped linkages are also allowed. (endless linkage)
For each route program step, a free following position can be set.
As step criterion, 2 digital inputs are available as Next 1 and Next 2.
There are 7 possibilities to jump into the route program with I/O control, that is, 7 dif-
ferent sequences are possible. Under FHPP, the entry is freely selectable and the number limited only by the maximum number of position sets.
The program lines of the route program are worked off every 1,6 ms. This ensures that
an output set by the route program remains set for at least 1.6 ms.
The route program can be controlled via digital inputs. Digital inputs in which the lev-
els (high/low) are evaluated must remain stable for at least 1.6 ms (cycle time of the
sequence control for the route program).

3. Product description
Value
Condition
Abb.
Description
0 - End
No automatic continuation.
1
Motion
complete
MC
Continues when the motion complete condition is fulfilled (tolerance window). Thus the axis is at a standstill for a moment during positioning.
4
Standstill
STS
Continues when the drive reaches a standstill and the programmed time
has expired. Standstill here does not just meajn the end of the position
record (MC), but also running to the block at any desired location.
5
Time
TIM
Continues when the programmed time has expired.
Time measurement begins with the start of the position record.
6
NEXT (positive edge)
NRI
Continues immediately after a positive edge at DIN10 (NEXT1) or DIN11
(NEXT2).
7
NEXT (negative
edge)
NFI
Continues immediately after a negative edge at DIN10 (NEXT1) or DIN11
(NEXT2).
9
NEXT (positive edge)
waiting
NRS
Continues after the motion complete message and a positive edge on
DIN10 (NEXT1) or DIN11 (NEXT2).
10
NEXT (negative
edge)
waiting
NFS
Continues after the motion complete message and a negative edge on
DIN10 (NEXT1) or DIN11 (NEXT2).
Please note
The time specification for STS and TIM is the time entered in the
motion profile. The time begins with execution of the position record.
From every position record, any other position record can be started directly. You can
transition to a new position record without first reaching end speed = 0.
Step criteria
Table 3.19 Step criteria for the route program
66 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
Please note
Position records containing an end speed <> 0 must NOT be used for
individual records, since the end speed condition can only be
reached in linkages.
Speed profiles with end speed <> 0
Activation of set linkage
Set linkage is started in I/O operation through selection of mode 2.
Festo P.BE-CMMS-AS-HW-EN en 0708NH 67

3. Product description
The connection plan shows the switch position in the active operating state.
*) The limit switches are set by default to opener (configuration over FCT)
Required I/O connection for set linkage (mode 2)
With removal of Din3 "Stop route program", the ongoing route program is stopped at the
current position. If Din3 returns, the route program is automatically continued from this
position.
With removal of Din9 "Mode switchover", the ongoing route program is ended. The ongoing position record is still run to the end.
With removal of Din13 "Stop", the route program is interrupted. The route program must
be restarted.
68 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
ENABLE
START
STOP
Positioning
record
Drive is moving
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
DOUT0: READY
DOUT1: MC
DOUT2: ACK
DOUT3: ERROR
t1 t1 t1 t1 t1 tx
(1)
t1 =1.6 ms
tx = x ms (dependent on positioning)
(1) Applies for positioning records with end speed = 0
ENABLE
START
STOP
Positioning
record
Drive is moving
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
DOUT0: READY
DOUT1: MC
DOUT2: ACK
DOUT3: ERROR
t1 t1 t1 t1 t1 txt1
t1 =1.6 ms
tx = x ms (dependent on brake ramps)
I/O timing diagrams
Fig. 3.13 Signal sequence at the start of a sequence
Festo P.BE-CMMS-AS-HW-EN en 0708NH 69

3. Product description
ENABLE
START
STOP
Positioning
record
Drive is moving
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
HALT
1
0
DOUT0: READY
DOUT1: MC
DOUT2: ACK
DOUT3: ERROR
t1 t1 t1 t1 t1tx tx
tx tx
t1 =1.6 ms
tx = x ms (dependent on brake ramps)
Fig. 3.14 Signal sequence with interruption through Stop input
Fig. 3.15 Signal sequence with interruption and continuation through HALT input
3.5.15 On-the-fly measurement
The actual position can be recorded at any given time via high-speed input DIN9. The rising
or falling edge is evaluated for this (can be parameterized). The maximum delay time in
position recording is in the range of a few microseconds. A field bus connection can be
used to access the saved position data.
3.5.16 Endless positioning
Endless positioning in one direction (rotary axis applications) can be implemented without
a problem (in the range +/-32767 revolutions). The limit switch input can be used as a
reference switch input.
3.5.17 Adjustment to the axis and motor construction set
Preset parameter records are provided to the user. For optimal operation of the motor-axis
combination, optimization of the control parameters must always be carried out.
All drive components and sizes of the entire mechanical construction set are available for
the motor series EMMS-AS.
70 Festo P.BE-CMMS-AS-HW-EN en 0708NH

3. Product description
EMMS-AS servo motors to be operated at the CMMS-AS:
EMMS-AS -40-M, -55-S -TS / -TM / -TSB / -TMB
EMMS-AS -70-S, -70-M, -100-S -RS / -RM / -RSB / -RMB
Festo P.BE-CMMS-AS-HW-EN en 0708NH 71

4. Functional safety engineering
Category 1)
Summary of requirements
System behaviour 2)
Principles for achieving
safety
B
The safety-relevant components
and/or protection mechanisms, and
your own components, must be
designed, built, selected, assembled
and combined in such a way as to
conform with the relevant standards
so that they can withstand the expected influences.
The occurrence of a fault
can lead to a loss of the
safety function.
Primarily characterised
by the selection of components.
1
The requirements of category B
must be satisfied.
Proven components and safety principles must be used.
The occurrence of a fault
can lead to a loss of the
safety function, but the
probability of a fault occurring is less than for category
B.
2
The category B requirements have
to be fulfilled and proven safety
principles must be used. The safety
function must be checked by the
machine controller at suitable intervals.
The occurrence of a fault
between such checks can
lead to a loss of the safety
function.
The loss of the safety function will be detected by the
next check.
Primarily characterised
by the structure
4. Functional safety engineering
4.1 General information and intended use
The CMMS-AS family of servo positioning controllers supports the "Safe standstill" safety
function, providing protection against unexpected motion as per the requirements of the
EN 954-1, Category 3 standard.
Bringing the machine to a standstill must be carried out and ensured by the machine control system. This especially applies to vertical axes without self-limiting mechanics or
counterbalancing.
Based on a danger / risk analysis, as per the machine directives EN ISO 12100, EN 954-1
and EN 1050, the machine manufacturer must plan a safety system for the entire machine,
including all integrated components. This also included the electric drives.
The EN 954-1 standard defines the controller requirements in five different categories
based on the level of risk (see Table 4.1).
72 Festo P.BE-CMMS-AS-HW-EN en 0708NH

4. Functional safety engineering
Category 1)
Summary of requirements
System behaviour 2)
Principles for achieving
safety
3
The category B requirements have
to be fulfilled and proven safety
principles must be used. Safetyrelevant parts must be equipped as
follows:
- A single fault in any component
must not lead to a loss of the
safety function.
- Single faults must be recog-
nised as soon as this is reasonable possible.
When this one fault occurs,
the safety function is still
preserved.
Some, but not all faults will
be detected.
The occurrence of a number
of undetected faults together can lead to a loss of
the safety function.
Primarily characterised
by the structure
4
The category B requirements have
to be fulfilled and proven safety
principles must be used. Safetyrelated components must be constructed as two-channel systems
with constant self-monitoring and
full error recognition!
When faults occur, the
safety function must always
be preserved.
The faults must be detected
early enough to prevent a
loss of the safety function.
1)
The category is not intended to define any sort sequence or hierarchical arrangement of safetyrelated requirements.
2)
Risk analysis is used to determine whether a complete or partial loss of safety function(s) due to
faults is acceptable.
Handling
Definition (EN 60204-1)
Danger case
EMERGENCYSTOP
Electrical safety in case of emergency by
switching off the electrical energy to all or
part of the installation.
EMERGENCY-OFF is to be used where a risk
of electric shock or other electrical risk exists.
EMERGENCYSTOP
Functional safety in case of emergency by
bringing a machine or movable parts to a
standstill.
EMERGENCY-STOP is used to stop a process
or a motion if this represents a danger.
Table 4.1 Description of the category requirements as per EN 954-1
Among other issues, the EN 60204-1 standard deals with the handling of emergencies and
defines the terms EMERGENCY-OFF and EMERGENCY--STOP (see Table 4.2).
Table 4.2 EMERGENCY-OFF and EMERGENCY-STOP as per EN 60204-1
Electrical isolation does not occur with the "Safe standstill" function. This does not provide protection from an electric shock. In the sense of the standards, an EMERGENCY-OFF
system cannot be implemented via "Safe standstill" because this requires the complete
system to be switched off via a mains power isolator of some kind (main power switch or
mains circuit breaker).
The EN 60204-1 standard describes three Stop categories that can be used for shutdowns,
depending on the results of a risk analysis (see Table 4.3).
Festo P.BE-CMMS-AS-HW-EN en 0708NH 73

4. Functional safety engineering
Stop category
Type
Handling
0
Uncontrolled shutdown through immediate switching off of the energy.
EMERGENCY-OFF or EMERGENCY-STOP
1
Controlled shutdown through switching
off of the energy when a standstill has
been reached.
EMERGENCY-STOP
2
Controlled standstill without switching
off of the energy.
Not suitable for EMERGENCY-OFF or
EMERGENCY-STOP
Warning
The "Safe standstill" function does not provide protection against
electric shock but rather only against dangerous motion!
Measure
- Circuit breaker between the mains grid and the drive
system (mains breaker)
- Circuit breaker between the power unit and the drive
motor (motor breaker)
- Secure pulse blocker (blocking of impulses to the
power semiconductors, integrated into the CMMS-AS)
Advantages
- Fewer external components, e.g. circuit breakers
- Less cabling effort and less space required in the
switching cabinet
- and thus lower cost
Table 4.3 Stop categories
4.2 Integrated "Safe standstill" function
4.2.1 General information / description of "Safe standstill"
With "Safe standstill" the energy supply to the device is reliably interrupted. The drive
may not generate torque and thus cannot make any dangerous movements. With suspended loads, additional measures must be taken to ensure that the load does not fall
(e.g. mechanical holding brake). Monitoring of the standstill position is not required in the
"Safe standstill" state.
There are 3 suitable measures for implementing "Safe standstill":
The use of the integrated solution (secure pulse blocker) offers several advantages:
Another advantage is the availability of the system. The integrated solution allows the
intermediate circuit of the servo controller to remain charged. This means no waiting time
when the system is restarted.
74 Festo P.BE-CMMS-AS-HW-EN en 0708NH

4. Functional safety engineering
Caution
If the "Safe standstill" function is not required, then pins 1 and 2 of
[X3] must be bridged.
1. Switch-off path:
End stage enable via [X1] (blocking of the PWM signals; the IGBT
drivers no longer receive pulse patterns).
Fig. 4.1 "Safe standstill" block schematic as per EN 954-1 Category 3
For "Safe standstill" as per EN 954-1 Category 3, a second channel is required, i.e. motion
must be reliably prevented via two separate, completely independent paths. These two
paths for interrupting the energy supply supply to the drive with the reliable impulse block,
are called switch-off paths:
Festo P.BE-CMMS-AS-HW-EN en 0708NH 75

4. Functional safety engineering
2. Switch-off path:
Interruption of the supply for the six end stage IGBTs via[X3] using a
relay (the IGBT optocoupler drivers are removed from the power
supply via a relay, thus preventing the PWM signals from reaching
the IGBTs).
A plausibility check between the relay control for the end stage
driver supply and the monitoring of the driver supply is performed
by the microprocessor. This is used for error detection of the pulse
blocker and also for suppressing error messages occurring in normal operation
E 05-2 ("Driver supply undervoltage").
Potential-free feedback contact:
The integrated "Safe standstill" circuitry also has a potential-free
feedback contact ([X3] Pins 5 and 6) for the existence of the driver
supply. This is a normally closed contact. It must be connected to
(e.g.) the higher level control system. At suitable intervals (e.g. PLC
cycle time or at every "Safe standstill" request), the PLC must perform a plausibility check between the relay control for the driver
supply and the feedback contact (contact open = driver supply present).
If an error occurs in the plausibility check, the control system must
prevent further operation by (e.g.) removing the controller enable or
switching off the mains circuit breaker.
1. Channel
The holding brake is controlled by DIN5 (controller enable) in normal operation (see following timing diagram). The 1st "end stage
enable" switch-off path affects the brake driver via the microprocessor and removes power from the holding brake (brake applied).
2. Channel
The 2nd "Relay control for driver supply" switch-off path directly
controls a MOSFET that activates the holding brake (brake applied).
Caution
The user is responsible for the dimensioning and the reliable functioning of the holding brake. The functioning of the brake must be
ensured via a suitable braking test.
4.2.2 Secure stopping brake control
When "Safe standstill" is activated, power is removed from the holding brake via two
channels (brake engaged); (see block schematic).
76 Festo P.BE-CMMS-AS-HW-EN en 0708NH

4. Functional safety engineering
t
t
t
t
t
t
t
t1
t1
t1
t1
t
t
t
t
t
t
t
t
t
t
t
Triggering of pulse amplifier supply relay (optocoupler driver)
X3.2 (24V)
X3.2 (0V)
Supply of pulse amplifiers (optocoupler driver)
“ON“ (15V)
“OFF”
Floating feedback contact for driver supply
(X3.5/6)
open
closed
Output stage enabling (X1, DIN4)
“ON”
Timing of output
stage enabling
variable
Controller enabling (X1, DIN5)
Holding brake control (X6.1/2)
Released
(24V)
Fixed
(0V)
Internal output stage enabling
(controlled by µP)
Set speed "n"
n=0
n
“H”
“H
”
“H”
Seven-segment
display
Delay until brake is
released!
Delay until brake is
applied!
Timing of "safe stop"
activation variable.
To be determined by user,
e.g. by means of safety
switching devices, depending
on application.
2. shut-down path
1. shut-down path
Discharge curve of
electrolytic capacitors for the
supply of the pulse amplifiers
"safe stop""safe stop"
“OFF”
“ON”
“OFF”
Can be set via FCT
Both ramps ca be set
separately via FCT
4.2.3 Functional method / timing
The following timing diagram illustrates the functional method of "Safe standstill" together with controller enabling and the stopping brake:
Fig. 4.2 "Safe standstill" timing as per EN 954-1 Category 3
Festo P.BE-CMMS-AS-HW-EN en 0708NH 77

4. Functional safety engineering
Please note
The "Safe standstill" state is shown in GREY compared to the functional operation!
Starting state:
- The 24V supply is switched on and the intermediate
circuit is charged.
- The servo controlled is in the "Safe standstill" state.
This state is indicated by a flashing "H" on the 7segment display.
Description of the timing diagram:
This timing diagram is based on the example of speed regulation using the controller enable DIN 5 at [X1]. For field bus applications, the controller enable is additionally controlled
via the respective field bus. Depending on the application, the operating mode is also parameterizable via the parameterizing software.
Restart after activated "Safe standstill"
In order to switch the servo controller end stage active once more, and thus operate the
connected motor, the following steps must occur:
1. The relay control for switching the end stage driver power supply (2nd switch-off path)
must be supplied with 24V between pin 2 and pin 3 of [X3] at time t1.
2. The driver supply is then charged.
3. The potential-free feedback contact ([X3] Pins 5 and 6) for plausibility checking of the
driver supply relay control opens a maximum of 20 ms after t1 (t2-t1) and the driver
supply is switched off.
4. Approx. 10 ms after the feedback contact opens, the "H" on the display goes out at
time t3.
5. The time for the end stage enable ([X1], DIN4) is largely freely selectable (t4-t1). The
enable may occur at the same time as the relay is controlled, but it must occur
approx.10 µs (t5-t4) before the rising edge of the controller enable ([X1], DIN5), depending on the application.
6. The rising edge of the controller enable at time t5 releases the motor holding brake (if
present) and the end stage enable occurs. The brake can only be released when the relay for switching the driver supply is engaged, since this controls a MOSFET in the
holding brake circuit. Using the parameterizing software, a travel start delay time (t6t5) can be set that regulates the drive at a speed of "0" for the specified time before
moving, after this delay, at the defined speed at time t6. The travel start delay time is
set to ensure that the brake has actually released before motion begins. For motors
without a holding brake, this time can be set to 0.
7. At time t7 the drive has reached the set speed. The requires ramp settings can be pa-
rameterized using the FCT parameterizing software.
78 Festo P.BE-CMMS-AS-HW-EN en 0708NH

4. Functional safety engineering
Warning
DANGER !
Activating "Safe standstill" during operation causes the drive to
slowly come to a stop. For drives with a holding brake, this is applied. It is therefore essential to ensure that the brake system can
stop the drive motion.
The holding brake is always applied when the "braking ramp time +
set switch-off delay" has expired, even when the drive has not
come to a stop within this time!
4. From time t10 the "Safe standstill" can be activated (driver supply relay and end
stage enable switched off at the same time). Time (t11-t10) depends on the application and must be defined by the user.
5. When the driver supply relay control signal is removed (t11), the capacitors in this
circuit area discharge. Approx. 80 ms (t12-t11) after removal of the driver supply relay control, signal the feedback contact closes ([X3], Pin 5 and 6).
6. At time t13, an "H" is displayed on the 7-segment display of the servo controller to
indicate a "Safe standstill". This occurs at least 30 ms after the the potential-free
feedback contact closes (t13-t12).
Activation of "safe standstill"
The following steps show how you can bring a rotating drive into the "Safe standstill"
state:
1. Before "Safe standstill" is activated (i.e. the driver supply relay "OFF" and the end
stage enable "OFF"; both switch-off paths block the PWM signals), the drive should be
brought to a standstill by removing the controller enable. Depending on the application, the braking ramp (t9-t8) is parameterizable using the parameterizing software
("Emergency stop braking").
2. After reaching a speed of 0, the drive is controlled at this setpoint for a parameteriz-
able switch-off delay time (t10-t9). This adjustable time is the delay required to apply
the motor holding brake. This time depends on the holding brake used and must be
parameterized by the user. For applications without a holding brake, this time can be
set to 0.
3. After this time, the internal end stage enable is switched off by the microprocessor
(t10).
Festo P.BE-CMMS-AS-HW-EN en 0708NH 79

4. Functional safety engineering
Inputs Outputs
PLC
+24V
+24V
+24V
+24V
0V
0V
Driver supply of
output stage
0V
[X3] SAFE STANDSTILL / SUPPLY 24V
[X1] I/O communication
Mains input
24 V Input
24V-Input
µP
1
2
3
4
5
6
Triggering of relay
n.c.
NC1
NC2
Controller enabling
Output stage driver supply
Power
contactor
L
N
DIN5: Controller enabling
DIN4: Output stage enabling
CMMS-AS
EMERGENCY
STOP
switching
device
EN954-1 KAT3
with delay
K1
EMERGENCY
STOP request
EMERGENCY STOP
requested
21
9
1
2
6
7
Drawn contact
position:
EMERGENCY
STOP requested
or supply voltage
switched off
Feedback driver supply
Output stage enabling
[X9.] Power supply
4.2.4 Application examples
Emergency stop circuit
Fig. 4.3 Emergency stop circuit as per EN 954-1 Category 3 and Stop Category 0 as per EN
60204-1
Mode of operation:
The EMERGENCY-STOP request causes the EMERGENCY-STOP switching device to block
the end stage enable and the relay control for the IGBT end stage driver supply. The drive
runs to a standstill and, if present, the motor holding brake is engaged.
The drive is in the "Safe standstill" state.
The EMERGENCY-STOP switching device is approved for safety category 3 as per EN954-1.
80 Festo P.BE-CMMS-AS-HW-EN en 0708NH

4. Functional safety engineering
Warning
DANGER !
The brakes of the system must be designed to be capable of stopping the drive motion.
A higher-level control system monitors the "EMERGENCY-STOP request" and "Driver supply feedback" signals and checks them for plausibility. If an error occurs the mains circuit
breaker is switched off.
The intermediate circuit voltage is maintained and is immediately available for the drive
after the EMERGENCY-STOP switching device is deactivated and the controller is enabled
once more.
Connection of the motor and the optional holding brake is not shown here and can be
found in chapter 6 Electrical installation.
Festo P.BE-CMMS-AS-HW-EN en 0708NH 81

4. Functional safety engineering
Inputs Outputs
PLC
+24V
+24V
+24V
0V
0V
L
N
Safety door
switch
EN954-1 KAT3
with delay
K1
Safety door open
Request for standstill as per EN 60204-1 (stop category 1)
open
closed
Safety door monitor
Drawn contact
position: Safety
door open or
supply voltage
switched
off
Driver supply of
output stage
0V
[X3] SAFE STANDSTILL / SUPPLY 24V
[X1] I/O communication
Mains input
24V Input
24V-Input
µP
1
2
3
4
5
6
Triggering of relay
n.c.
NC1
NC2
DIN5: Controller enabling
DIN4: Output stage enabling
CMMS-AS
21
9
1
2
6
7
[X9.] Power supply
Power
contactor
Controller enabling
Output stage driver supply
Output stage enabling
Feedback driver supply
Protective door monitoring
Fig. 4.4 Protective door monitoring as per EN 954-1 Category 3 and Stop Category 1 as per
EN 60204-1
Mode of operation:
The request to bring the motor to standstill sets the controller enable to low.
The drive slows to a speed of 0 using the defined braking ramp (parameterizable using the
Festo Configuration Tool―). After the ramp time has expired (including the switch-off de-
82 Festo P.BE-CMMS-AS-HW-EN en 0708NH

4. Functional safety engineering
Warning
DANGER !
The brakes of the system must be designed to be capable of stopping the drive motion.
lay for the holding brake if present), the control signal for the driver supply relay and the
end stage enable are removed by the higher-level control system.
The higher-level control system monitors the "Protective door open", "End stage drive
supply output" and "Driver supply feedback" signals and checks them for plausibility. If
an error occurs the mains circuit breaker is switched off.
Opening the protective door also interrupts the end stage enable and the control signal for
the driver supply relay. The drive is in the "Safe standstill" state and is protected against
restarting.
The protective door switching device is approved for safety category 3 as per EN954-1.
The intermediate circuit voltage is maintained and is immediately available for the drive
after the protective door is closed.
If the protective door is opened without s standstill request, the drive runs to a stop as per
EN 60204-1 stop category 0 and, if present, the motor holding brake is engaged. The drive
is then in the "Safe standstill" state and is protected against restarting.
A door position switch can also be used that keeps the protective door closed until the
drive has stopped or the "Driver supply feedback" signal indicates a safe state and the
plausibility check is successful. However, the "Safe standstill" state, providing protection
from restarting, is only reached when the protective door is actually opened (not shown).
Another possibility is to use a protective door switching device with delayed contacts.
Opening the protective door directly affects the controller enable, whose falling edge
causes a controlled standstill using a defined braking ramp. The "End stage enable" and
"End stage driver supply" signals are then switched off after a delay by the safety component. The switch-off delay must match the braking ramp time (not shown)
Festo P.BE-CMMS-AS-HW-EN en 0708NH 83

5. Mechanical installation
Please note
Using the CMMS-AS motor controller only as a device to be
mounted in a control cabinet
The mounting position is vertical with the power supply lines
[X9] leading upwards
Mount with the clip to the control cabinet plate
Mounting clearance:
For sufficient ventilation, 100 mm of clearance to other assem-
blies is required above and below the device.
The motor controllers of the CMMx series are designed such
that they can be mounted on a heat-dissipating mounting panel
if used as intended and installed correctly. We wish to point out
that excessive heating can lead to premature aging and/or
damage to the device. If the CMMS-AS motor controller is sub-
ject to high thermal loads, a mounting clearance (hole interval) -
of 70 mm is required!
5. Mechanical installation
5.1 Important instructions
84 Festo P.BE-CMMS-AS-HW-EN en 0708NH

5. Mechanical installation
Fig. 5.1 Motor controller CMMS-AS: Installation clearance
5.2 Assembly
There are mounting clips at the top and bottom of the CMMS-AS servo positioning controller. They are used to attach the motor controller vertically to a control cabinet mounting
plate. The clips are part of the radiator profile, ensuring an optimal heat transfer to the
control cabinet plate.
Festo P.BE-CMMS-AS-HW-EN en 0708NH 85

5. Mechanical installation
Please use size M5 screws to attach the CMMS-AS motor con-
troller.
Fig. 5.2 Motor controller CMMS-AS: Assembly
86 Festo P.BE-CMMS-AS-HW-EN en 0708NH

6. Electrical installation
1 Status display
2 S1: Field bus settings and boot loader
3 Technology module (optional)
4 M1: SD memory card
5 X4: CAN bus
6 X5: RS232/485
4 1 2 3 5
6
6. Electrical installation
6.1 Device view
Fig. 6.1 View CMMS-AS Front
Festo P.BE-CMMS-AS-HW-EN en 0708NH 87

6. Electrical installation
1 Earthing screw
2 X9 power supply
3 X10 increment generator output
4 X1 I/O interface
1 X3 safe standstill
2 X2 increment generator input
3 X6 motor connection
4 Screened connection
4 1 2
3
1 2 3
4
Fig. 6.2Top view CMMS-AS
Fig. 6.3Bottom view CMMS-AS
88 Festo P.BE-CMMS-AS-HW-EN en 0708NH

6. Electrical installation
6.2 Interfaces
X9:
For operation of the motor controller CMMS-AS, the input voltage supply is connected to
the plug X9 at L1 (pin 1) and N (pin 2). The PE is connected to Pin 5. In the CMMS-AS plugin, the low-voltage monitoring must be adapted to the input voltage supply.
For the control section, a 24 V- voltage source is needed, which is attached to the +24 V
and 0 V terminals of the X9 plug.
An external brake resistance is connected to the contacts ZK+ and BR-CH.
X6:
The motor is connected to terminals U, V and W.
The motor temperature sensor (PTC, SI sensor or N/C contact) is connected to the +MTdig
and -MTdig terminals. (KTY81 ... KTY84 can be used as analogue temperature sensors. Not
in the FCT and not with EMMS-AS motors).
The motor brake is connected to the terminals Br+ and Br-.
The motors' protective conductor is connected to PE of the X6 plug.
The motor shield is conncected to the housing of the CMMS-AS using the shield connector.
X2:
The connection of the shaft encoder via the 15-pin D-sub plug to [X2] is roughly shown
schematically in the illustration Fig. 6.4.219H
The motor controller must first be wired completely. Only then can the operating voltages
be activated for the input voltage supply and the control section. If the polarity of the operating voltage connections is reversed, or if the operating voltage is too high or the operating voltage and motor connections are reversed, the CMMP-AS servo positioning controller will be damaged.
Festo P.BE-CMMS-AS-HW-EN en 0708NH 89

6. Electrical installation
Components
- 24V power pack for control voltage supply (see Chap-
ter A.3.1)
- Power supply (see Chapter A.3.1)
- Motor controller CMMS-AS
- Motor EMMS-AS
- Cable set consisting of motor and encoder line NEBM-
6.3 Entire CMMS-AS system
A complete CMMS-AS motor controller system is shown in 220HFehler! Verweisquelle konnte
nicht gefunden werden.. To operate the motor controller, the following components are
needed:
A PC with a serial connection cable is required for parameterizing.
90 Festo P.BE-CMMS-AS-HW-EN en 0708NH

6. Electrical installation
1 Main switch
2 Fuse
3 Power pack for
control voltage
4 CMMS-AS
5 PC
6 EMMS-AS
6
1 2 3 4 5
Fig. 6.4 Complete structure of CMMS-AS with motor and PC
Festo P.BE-CMMS-AS-HW-EN en 0708NH 91

6. Electrical installation
Mode
DIN9
DIN12
Mode 0 – Positioning
0 0 Mode 1 – Jog mode
0 1 Mode 2 – Route program
1 0 Mode 3 – Synchronisation
1
1
Pin
Designation
Value
Mode = 0 - Positioning
1
AGND
0 V
Screen for analogue signals
2
AIN0 /
DIN12
±10 V
Digital I/O control interface:
DIN 12 mode selection (high active)
Analogue input control interface:
Setpoint input 0, differential, maximum 30 V input voltage
3
DIN10
Record selection 4 (high active)
4
+VREF
+10 V ±4 %
Reference output for setpoint potentiometer
5
free 6 GND24
Ass.GND
Reference potential for digital inputs and outputs
7
DIN1
Record selection 1 (high active)
8
DIN3
Record selection 3 (high active)
9
DIN5
Controller release EN (high active)
10
DIN7
Limit switch 1
11
DIN9
Digital I/O control interface: Mode selection (high active)
Control interface field bus:
Sample input (high speed input)
12
DOUT1
24 V 100 mA
Output freely programmable – default: Motion complete (high active)
13
DOUT3
24 V 100 mA
Output freely programmable – default: Error (low active)
14
AGND
0 V
Reference potential for the analogue signals
6.4 Interfaces and plug assignments
6.4.1 I/O interface [X1]
Mode switching allows allows assignment of the X1 interface more than once.
As a result, a maximum of four different I/O assignments can be selected. These are described in the tables Table 6.2 Pin allocation: I/O interface [X1] Mode 0, Table 6.3 Pin allocation: I/O interface [X1] Mode 1, Table 6.4 Pin allocation: I/O interface [X1] Mode 2and
Table 6.5 Pin allocation: I/O interface [X1] Mode 3.
Table 6.1 Mode switching
92 Festo P.BE-CMMS-AS-HW-EN en 0708NH

6. Electrical installation
Pin
Designation
Value
Mode = 0 - Positioning
15
#AIN0 /
DIN13
Ri = 20 k
Control interface digital I/O:stop input (low active)
Analogue input control interface:
Reference potention setpoint input 0, differential
16
DIN11
Record selection 5 (high active)
17
AMON0
±10 V ±4 %
Analogue monitor output 0
18
+ 24 V
24 V 100 mA
24 V feed-in feed-out
19
DIN0
Record selection 0 (high active)
20
DIN2
Record selection 2 (high active)
21
DIN4
End stage enable (high active)
22
DIN6
Limit switch 0
23
DIN8
Start for the positioning process (high active)
24
DOUT0
24 V 100 mA
Ready for operation output (high active)
25
DOUT2
24 V 100 mA
Output freely programmable – default: Start ack (low active)
Pin
Designation
Value
Mode = 1 - Jog mode
1
AGND
0 V
Screen for analogue signals
2
DIN12
24 V
Mode switch "1" = Jog mode
3
DIN10
Jog + (high active)
4
+VREF
+10 V ±4 %
Reference output for setpoint potentiometer
5
Free
6
GND24
Reference potential for digital inputs and outputs
7
DIN1
Record selection 1 (high active)
8
DIN3
Record selection 3 (high active)
9
DIN5
Controller release/EN (high active)
(Taught positions are saved with neg. edge)
10
DIN7
Limit switch 1
11
DIN9
SAMP
Digital I/O control interface:
Mode selection "0" = jog mode (high active)
Control interface field bus:
Sample input (high speed input)
12
DOUT1
24 V 100 mA
Output freely programmable - default motion complete (high active)
13
DOUT3
24 V 100 mA
Output freely programmable - default error (low active)
14
AGND
0 V
Reference potential for the analogue signals
15
DIN13
Stop input (low active)
16
DIN11
Jog – (high active)
Table 6.2 Pin allocation: I/O interface [X1] Mode 0
Festo P.BE-CMMS-AS-HW-EN en 0708NH 93

6. Electrical installation
Pin
Designation
Value
Mode = 1 - Jog mode
17
AMON0
±10 V ±4 %
Analogue monitor output 0
18
+ 24 V
24 V 100 mA
24 V feed-in feed-out
19
DIN0
Record selection 0 (high active)
20
DIN2
Record selection 2 (high active)
21
DIN4
End stage enable (high active)
22
DIN6
Limit switch 0
23
DIN8
Teach (high active)
24
DOUT0
24 V 100 mA
Ready for operation output (high active)
25
DOUT2
24 V 100 mA
Teach ack
Pin
Designation
Value
Mode = 2 - Route program
1
AGND
0 V
Screen for analogue signals
2
DIN12
Mode switch "0" = route program
3
DIN10
Next 1
4
+VREF
+10 V ±4 %
Reference output for setpoint potentiometer
5
Free
6
GND24
Reference potential for digital inputs and outputs
7
DIN1
Record selection 1 (high active)
8
DIN3
Stop route program
9
DIN5
Controller release (high active)
10
DIN7
Limit switch 1
11
DIN9
Mode switch "1" = route program
12
DOUT1
24 V 100 mA
Output freely programmable
default motion complete (high active)
13
DOUT3
24 V 100 mA
Output freely programmable - default error (low active)
14
AGND
0 V
Reference potential for the analogue signals
15
DIN13
Stop input (low active)
16
DIN11
Next 2
17
AMON0
±10 V ±4 %
Analogue monitor output 0
18
+ 24 V
24 V 100 mA
24 V feed-in feed-out
19
DIN0
Record selection 0 (high active)
20
DIN2
Record selection 2 (high active)
21
DIN4
End stage enable (high active)
22
DIN6
Limit switch 0
23
DIN8
Start route program
Table 6.3 Pin allocation: I/O interface [X1] Mode 1
94 Festo P.BE-CMMS-AS-HW-EN en 0708NH

6. Electrical installation
Pin
Designation
Value
Mode = 2 - Route program
24
DOUT0
24 V 100 mA
Ready for operation output (high active)
25
DOUT2
24 V 100 mA
Output freely programmable - default start ack (high active)
Pin
Designation
Value
Mode = 3 - Synchronisation
1
AGND
0 V
Screen for analogue signals
2
DIN12
Mode switch slave synchronisation "1" = synchronisation
3
DIN10
4
+VREF
+10 V ±4 %
Reference output for setpoint potentiometer
5
Free
6
GND24
Reference potential for digital inputs and outputs
7
DIN1
Record selection 1 (high active)
8
DIN3
24 V
Direction_24 /CCW
9
DIN5
Controller release (high active)
10
DIN7
Limit switch 1
11
DIN9
Mode switch slave synchronisation "1" = synchronisation
12
DOUT1
24 V 100 mA
Output freely programmable - default motion complete (high active)
13
DOUT3
24 V 100 mA
Output freely programmable - default error (low active)
14
AGND
0 V
Reference potential for the analogue signals
15
DIN13
Stop input (low active)
16
DIN11
17
AMON0
±10 V ±4 %
Analogue monitor output 0
18
+ 24 V
24 V 100 mA
24 V feed-in feed-out
19
DIN0
Record selection 0 (high active)
20
DIN2
24 V
Pulse_24 / CW
21
DIN4
End stage enable (high active)
22
DIN6
Limit switch 0
23
DIN8
Start synchronisation
24
DOUT0
24 V 100 mA
Ready for operation output (high active)
25
DOUT2
24 V 100 mA
Setpoint reached output (high active)
Table 6.4 Pin allocation: I/O interface [X1] Mode 2
Table 6.5 Pin allocation: I/O interface [X1] Mode 3
6.4.2 Encoder motor – EnDat 2.1 and 2.2 (X2)
Only encoders with digital EnDat 2.1 or 2.2 interface with a maximum power consumption
of 200 mA are supported.
Festo P.BE-CMMS-AS-HW-EN en 0708NH 95

6. Electrical installation
Pin
Designation
Value
Specification
1
MT+
+3.3 V / 3 mA
Motor temperature sensor, NC, PTC, KTY...
Not occupied with NEBM lines
2
U_SENS-
5V –0% / +5%
I
max
= 200mA
Connected internally with pin 3
3
GND
0V
Reference potential for encoder supply and motor temperature sensor
4
n.c.
5
#DATA
5Vss
RI 120
Bidirectional RS485 data cable (differential) Zero impulse
transmission with HYPERFACE
6
#SCLK
5Vss
RI 120
Cycle output RS485 (differential) for data transfer via the
EnDat interface
7
n.c. 8 n.c.
9
U_SENS+
5V –0% / +5%
I
max
= 200mA
Connected internally with pin 10
10
US
5V –0% / +5%
I
max
= 200mA
Operating voltage for EnDat encoder
11
n.c.
12
DATA
5Vss
RI 120
Bidirectional RS485 data cable (differential) Zero impulse
transmission with HYPERFACE
13
SCLK
5Vss
RI 120
Cycle output RS485 (differential) for data transfer via the
EnDat interface
14
n.c.
15
n.c.
Operating voltage for the encoders is taken from the internal +5 V logic supply. An adjustment to maximum power of the voltage drops on the encoder connection cable is not
planned (and for EnDat 2.2/22 encoder also not necessary).
The tolerance of the encoder supply voltage is limited downward in order to operate older
Heidenhain encoders with EnDat 2.2/01 interface. But depending on power consumption
and cable length, it may be necessary to double the wiring of the supply lines.
Example:
Encoder wiring with the cross section of 0.5 mm²
Cable length of 25 m, (= 50 m line to and from)
Double wiring
Voltage drop with single wiring U
0.18 V
diff
Table 6.6 Pin occupancy encoder motor-EnDat 2.1 and 2.2 (X2)
96 Festo P.BE-CMMS-AS-HW-EN en 0708NH

6. Electrical installation
Pin
Designation
Value
Specification
1 - 2
CANL
5 V, Ri = 60 Ohm
CAN-low signal line
3
GND
0 V
CAN-GND, electrically connected to GND in the controller
4 - - - 5
Screened
-
Connection for the cable screen
6
GND
0 V
CAN-GND, electrically connected to GND in the controller
7
CANH
5 V, Ri = 60 Ohm
CAN-high signal line
8 - - - 9 - -
-
Pin
Designation
Value
Specification
1 - 2
RS232_RxD
10 V, Ri > 2 kOhm
Reception line
3
RS232_ TxD
10 V, Ra < 2 kOhm
Transmission line
4
RS485_A
-
-
5
GND
0 V
RS232/485 GND, galvanically connected to GND in
the controller
6 - - - 7 - - - 8
+5 V_Fuse
5 V
Via PTC on plug
9
RS485_B
-
-
Type on controller
Counterplug
Plugged/optional plug
set
Material number
Combicon 8-pin socket
MSTB 2.5/8-ST-5.08 BK
Blanking plug kit
547 452
6.4.3 Field bus CAN [X4]
Table 6.7 Pin allocation: Field bus CAN [X4]
6.4.4 RS232/RS485 [X5]
Table 6.8 Pin allocation: RS232/RS485 [X5]
6.4.5 Motor connection [X6]
Table 6.9 Plug version: Motor connection [X6]
Festo P.BE-CMMS-AS-HW-EN en 0708NH 97

6. Electrical installation
Pin no.
Designation
Value
Specification
1
BR-
0V brake
Motor holding brake, signal level dependent on
switch condition
2
BR+
24V brake
3 -MTdig
0V Temp.
Motor temperature sensor, NC, NO, PTC, KTY.
For EMMS-AS motors PTC
4
+MTdig
+3.3V / 5mA
5
PE
PE motor
connection
PE connection in the motor cable
6
W
See technical specifications
Connection for the three motor phases *
7 V 8
U
*The motor cable screen is fitted to the controller housing (The fastening flange is specially shaped for
this)
Type on controller
Counterplug
Plugged/optional plug
set
Material number
Combicon 7-pin socket
MSTB 2.5/7-G-ST-5.08
BK
Plugged
547 452
Pin no.
Designation
Value
Specification
1
L1
230 V AC compare with
A.3.1
Mains voltage connection for ZK
2
N
3
ZK+
max. 400 V DC
compare with A.3.1
ZK+ connection for external brake resistance, not
short-circuit-proof
against L1, N and PE!
4
BR-CH
0 V / 400 V,
max. 4 A
R
BR
> 100
Connection for external brake resistance against ZK+
5
PE
PE
PE connection of the mains power supply
6
24V
+24V / 1A
Supply for the control portion with DCDC converter,
DOUT0 to DOUT3 and holding brake, max. 1A
7
0V
GND
Common reference potential for the logic power supply and the control section
Table 6.10 Pin allocation: Motor connection [X6]
6.4.6 Power supply [X9]
Table 6.11 Plug version: Power supply [X9]
98 Festo P.BE-CMMS-AS-HW-EN en 0708NH

6. Electrical installation
Pin
Designation
Value
Specification
1
A/CLK/CW
5 V, Ri = 120 Ohm
Incremental encoder signal A
Pulse CLK
Cycles clockwiseCW
Positive polarity in accordance with RS422
2
B/DIR/CCW
5 V, Ri = 120 Ohm
Incremental encoder signal B
Direction DIR,
Cycles counterclockwise CCW
Positive polarity in accordance with RS422
3 N 5 V, Ri = 120 Ohm
Incremental encoder zero pulse N, positive polarity
acc. to RS422
4
GND
-
Reference GND for the encoder
5
VCC
+5 V +-5%, 100 mA
Auxiliary supply, max. load 100 mA, short-circuit
proof
6
A-/CLK-/CW-
5 V, Ri = 120 Ohm
Incremental encoder signal A
Pulse CLK
Cycles clockwise CW
Negative polarity in accordance with RS422
7
B-/DIR-/CCW-
5 V, Ri = 120 Ohm
Incremental encoder signal B
Direction DIR,
Cycles counterclockwise CCW
Negative polarity in accordance with RS422
8
N-
5 V, Ri = 120 Ohm
Incremental encoder zero pulse N, negative polarity
acc. to RS422
9
GND
-
Screen for the connecting cable
Table 6.12 Pin allocation: Power supply [X9]
6.4.7 Synchronisation control [X10]
The interface is bidirectional. It allows A/B tracking signals to be output in the "master
axis" mode, or alternatively processing of A/B, CLK/DIR or CW/CCW control signals in the
"slave axis" mode.
Table 6.13 Pin allocation: Incremental encoder output / pulse, direction input [X10]
Festo P.BE-CMMS-AS-HW-EN en 0708NH 99

6. Electrical installation
Pin no.
Designation
Value
Specification
1
24V
24V DC
24V DC feed-in feed-out
2
REL
0V / 24V DC
Setting and resetting the relay for interrupting the driver supply
3
0V
0V
[GND 24V DC *)]
Reference potential for PLC
[Reference potential for the 24V DC power supply and for the PLC
*)]
4
NOT
CONNECT
ED
-
5
NC1
Max. 60V AC
30V DC
2 A
Potential-free feedback contact for driver supply,
normally closed contact.
6
NC2
DIP
switches
Meaning
1
Node number
2 3 4 5 6 7 8
Bootloader (If the switch is set to ON, the system searches for new firmware on the SD card)
9
Baud rate
6.4.8 SD card [X12]
The optional SC card is intended for downloading firmware or saving parameters. The interface is allocated in accordance with the SD card specifications. Alternatively, an MMC
card can be used.
Type on device
1 x12-pin SD card slot
6.4.9 Plug assignments for Safe standstill [X3]
Table 6.14 Plug assignments for Safe standstill [X3]
6.4.10 Field bus settings and boot loader
100 Festo P.BE-CMMS-AS-HW-EN en 0708NH
 Loading...
Loading...