

Feima FM2000 Users manual

Quickstart Guide V 1.0
© All rights reserved. Shenzhen Feima Robotics Co., Ltd. (www.feimarobotics.com)
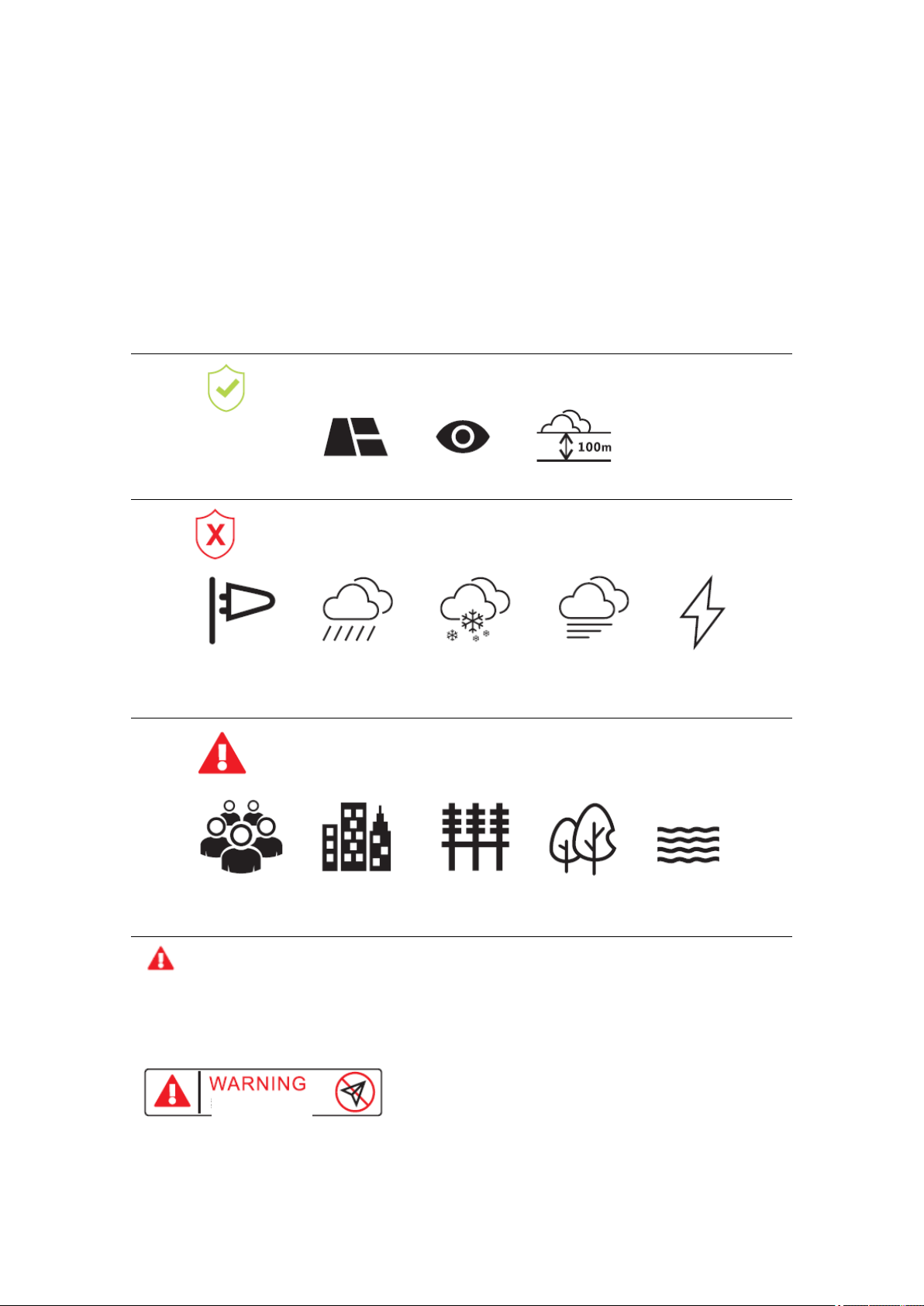
Requirements for Flight Environment
1. Never fly in bad weather conditions, such as gale (Grade 4 or higher), snow, rain and fog.
2. Fly in broad space with no tall buildings nearby, for reinforced concrete buildings will affect
compass and shield GPS signal, which finally results in unsafe flight due to poor positioning
performance or failure in positioning.
3. While flying, please keep the aircraft in sight and away from obstacles, the crowd and water
surface.
4. Never fly at the region with high-tension wire, transformer and communication base station,
launching tower, satellite antenna, high iron stand and steel bar for fear of interfering signal.
While flying, please keep the aircraft in broad space and in sight and control flying speed.
Never fly in bad weather conditions, such as gale (Grade 4 or higher), snow, rain, lightening and
fog.
While flying, please keep away from tall buildings, electrical tower, signal tower, high iron stand
and steel bar, tall trees, the crowd and water surface.
If the aircraft flies above 3,500 m altitude, the properties may be affected by decline of
aircraft battery and dynamical system properties due to environmental factors so be careful with it.
GPS positioning of aircraft is not available in arctic and antarctic circle but the user can fly aircraft
with visual positioning system.
No flying
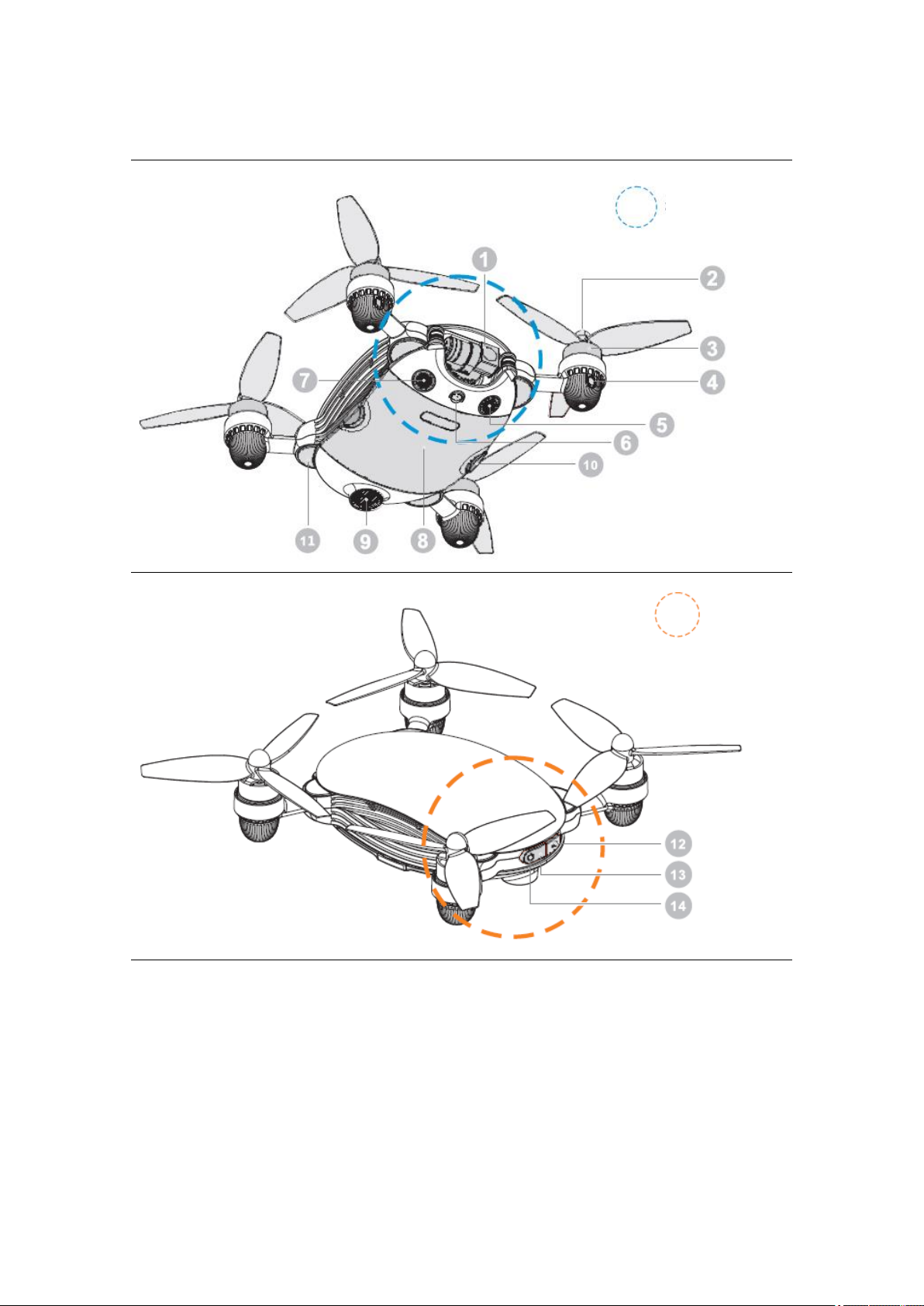
About your J.ME
① Two axial stabilized cloud platform
⑥ Optical flow module
⑪Status indicator
② Blade
⑦ Built-in microphone
⑫ USB interface
③ Power motor
⑧ Intelligent battery
⑬ Power key
④ Obstacle avoidance module
⑨ Ultrasonic module
⑭ Power indicator
⑤ Built-in speaker
⑩ Battery safety buckle
While installing battery, please ensure ⑩ battery safety buckle is installed in place!
The head
The tail
Preparation
Downloading APP J.ME Fly
J.ME Fly is the supporting intelligent APP developed for intelligent aircraft J.ME and the user can
realize various functions of aircraft with J.ME Fly, such as intelligent flight control, shooting and
recording, photo and video editing and social sharing; it can bring the user with unprecedented
perfect intelligent flying experience.
Before using this product, you need to download and install J.ME
Fly App by scanning the QR code on the right and enter
downloading page or explore J.ME Fly App at App Store or
Android market.
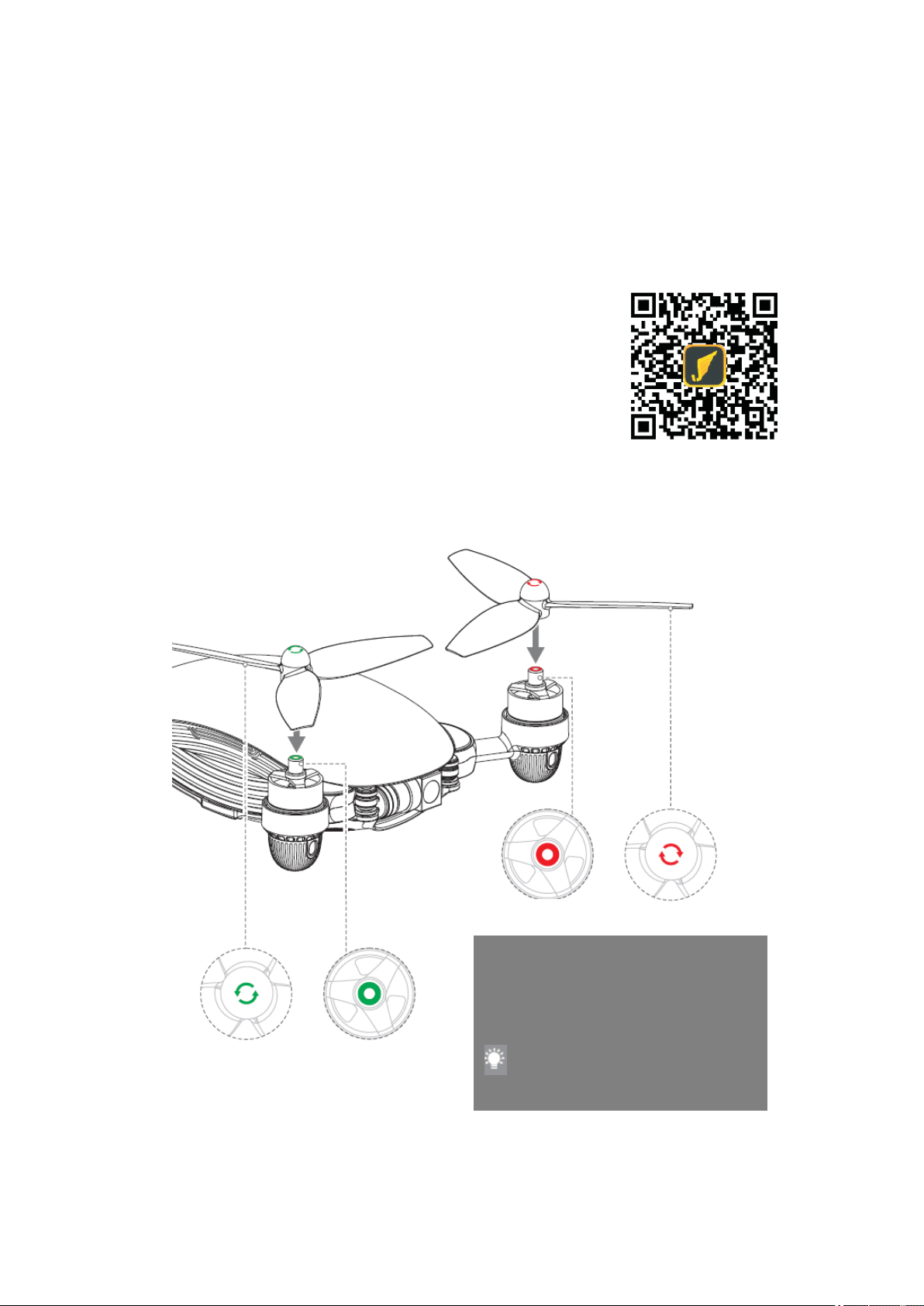
Installing the Propeller
Remove the self-locking propeller attached in packing box and identify the positive and negative
propeller according to color marked on top.
Contra-rotating propeller
Contra-rotating motor
Forward-rotating motor
Forward-rotating propeller
The color at the top of motor thread
column and that at the top of propeller
are corresponding to each other so please
rotate propeller at arrow direction.
The indication color is subject to
material object!
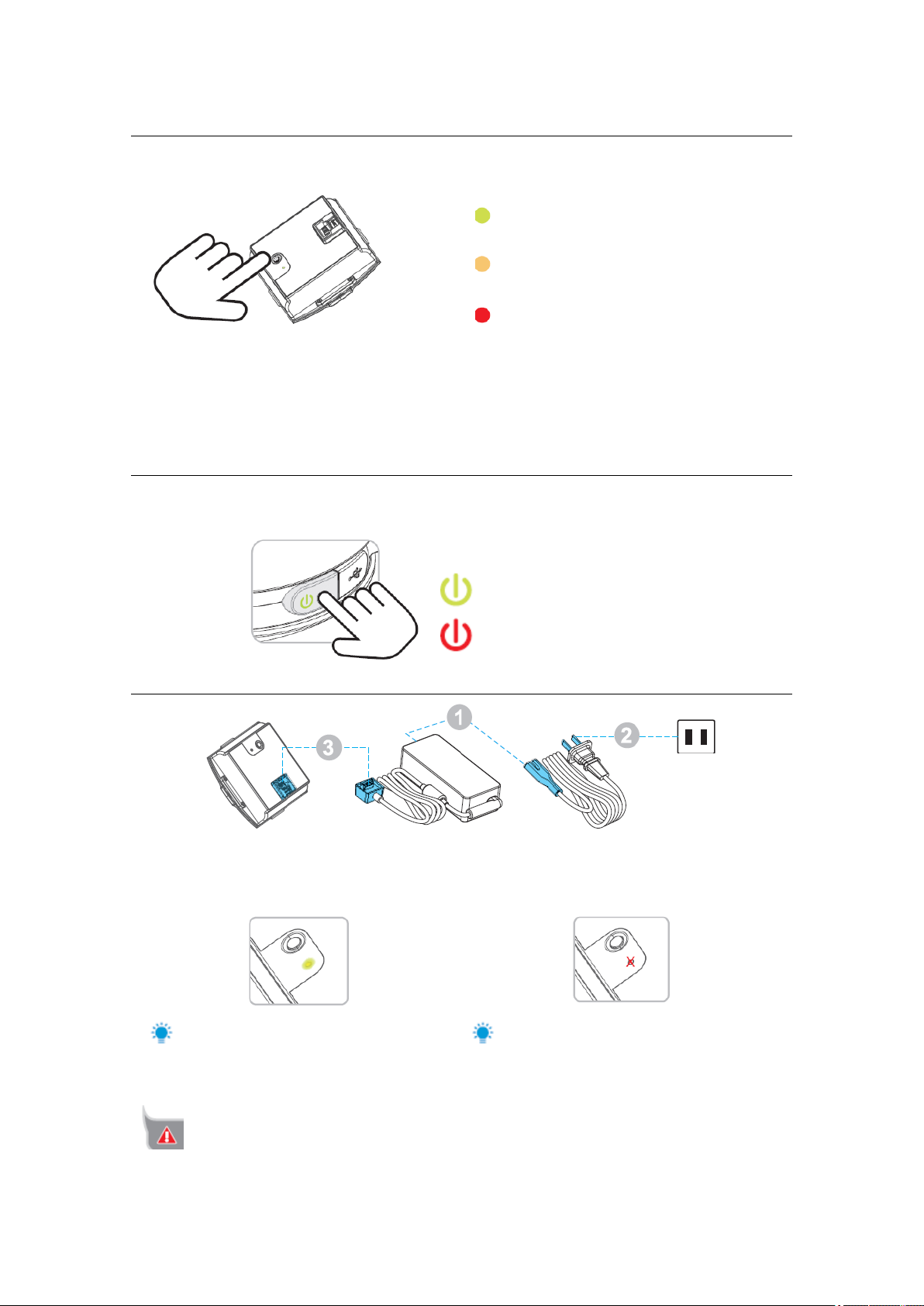
Battery Power Check
Short press the power checking button and the power indicator will display the current battery
volume.
Green on 91%~100%
Green flashing 76%~90%
Yellow on 61%~75%
Yellow flashing 46%~60%
Red on 31%~45%
Red flashing 16%~30%
Red quick flashing 0%~15%
The intelligent battery is provided with 1 power checking button and one 3-color LED indicator as
well as battery cell protection function so that the corresponding countermeasures will be done in
case of over-voltage, under-voltage, over-current and over-heat of battery cell; the power checking
button is not able to start battery power supply.
Working electric power check
Short press power key and the power indicator can display volume based on status definition in
intelligent battery and extinguish in 3 s.
Green on The volume is sufficient.
Flashing in Red for 3 times and then off
Low Battery
Charging
① Connect power cord and adapter;
② Connect the power cord plug to power socket;
③ Connect the power adapter and intelligent battery to start charging.
In charging, the power indicator will be
on and current volume will be displayed.
If the power indicator is off, it means the
intelligent battery is charged fully so please
stop charging by disconnecting the adapter.
Please avoid unattended charging.
Power supply socket
Aircraft preparation
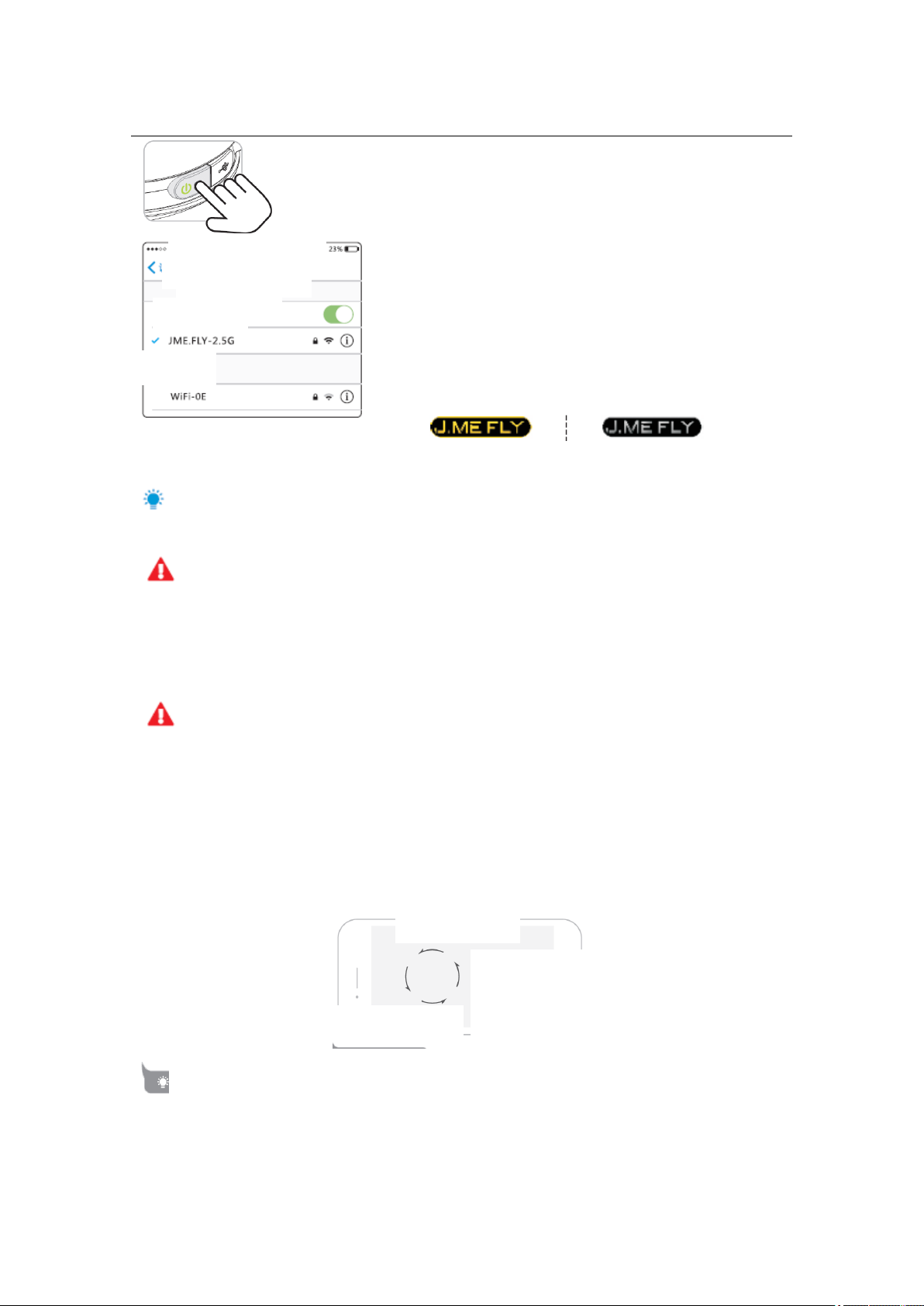
Aircraft startup and shutdown
Short press power switch and long press it for 3s and
the aircraft will start up or shut down.
Connect aircraft and J.ME Fly
If the aircraft is started up, connect corresponding
Wi-Fi signal with mobile equipment and the default
name of Wi-Fi is JME-XXXXX (you can check it on
packing box) and the default password is jme12345.
After the mobile phone is connected to Wi-Fi, please
open J.ME Fly and check connection status.
Normal connection status Abnormal connection status
If it displays abnormal connection, please reconfirm Wi-Fi connection status.
Compass Calibration
Calibrate the compass each time after starting up J.ME power supply; otherwise, the system
may not be able to work normally and it may affect flight safety; the compass can be disturbed by
other electronic equipment easily, resulting in abnormal data, affecting flight and even causing
flight accident. The frequent calibration can keep the compass at the best working conditions and
the user can prepare flight after calibrating compass.
Tips:
Calibrate compass by keeping it 1 m above ground;
Never calibrate at high magnetic field, such as magnetic mineral, parking lot and
underground reinforced concrete buildings;
Please avoid taking any magnetic article, such as key or mobile phone while calibrating;
Calibrate by keeping off large block of metal;
If the yellow lamp of aircraft indicator still flickers after calibration, check APP display and
calibrate compass again.
Calibrate the compass through 3 circles.
China Telecom
Wireless LAN
Wireless LAN
Selecting network
Setting
Horizontal calibration
Compass calibration
Put compass on ground horizontally.
Avoid too fast rotating speed.
Rotate anticlockwise.
Start calibration.

Calibration Steps
Please select an open site and calibrate based on steps below.
1. Enter J.ME FLY setting interface, select the “enter flying setting page” at top right corner
and slide to “compass calibration” interface to calibrate.
2. Click “Start Calibration”; if the red aircraft status indicator becomes normally on, the compass
calibration procedure starts and then operate following coordinate in the diagram below and
following steps.
Rotate the aircraft body by 360 along Axis Z, and the yellow indicator lamp will turn on after
completion;
Rotate the aircraft body by 360 along Axis Y, and the green indicator lamp will turn on after
completion;
Rotate the aircraft body by 360 along Axis X, the red indicator lamp at head will turn on and
the green indicator lamp at tail will flicker after completion.
Re-calibration is needed if:
The compass data are abnormal and the yellow indicator lamp flickers;
The flight site is far away from last one calibrated by compass;
The structure of aircraft is changed;
During flying, the aircraft drifts seriously or is not able to fly in a straight line; or
Battery is changed.
For more about compass calibration, please check relevant teaching videos.
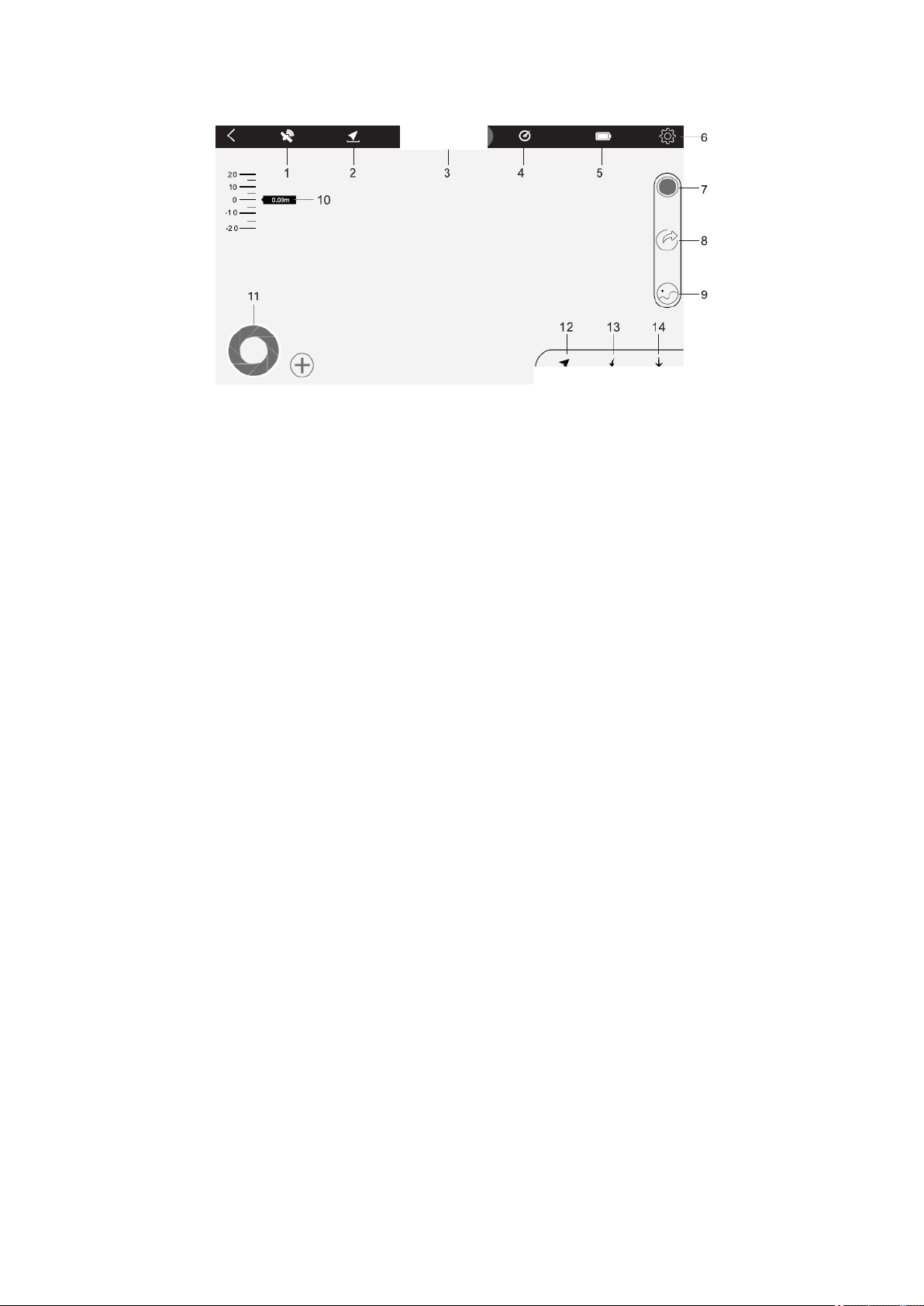
Main Interface
Connected
Intelligent flight Return flight Landing

1 GPS information status: GPS icon is used for displaying strength of GPS signal;
if the GPS satellites reach 12 grids or above, the aircraft will enter safe flying
status.
2 Distance: The horizontal distance between aircraft and return point
3 Connection status of aircraft: It is used for identifying connection status between
APP and aircraft.
4 Flight speed: flying speed of aircraft
5 Battery status: Displaying real-time remaining volume of intelligent battery
6 General setting: Click the button to enter relevant parameter and configuration
interfaces of aircraft.
7 Start and stop recording
8 Video sharing button: The users can upload the videos shot by aircraft to social
network site, MicroBlog or moments directly.
9 Media library: The users can edit and process the works shot in media library
before uploading.
10 Height scale: The height of current position of aircraft from flying ground.
11 Shutter button: Shooting photos
12 Selection of intelligent flight mode: voice control, motion control, visual tracing
and visual surrounding are available.
13 Return: The aircraft will return from current position to the original takeoff point
and land off.
14 Land: The aircraft lands to the ground vertically from current position and shuts
down motor.
Flight Restriction Interface
Instant locking: Double click to stop the propeller immediately to brake under emergencies; then aircraft will land directly;
operate with care
Height restriction
Flight protection
Distance restriction
Virtual fence
On Off
Intelligent obstacle avoidance
On Off
Return height
Restrict the aircraft to fly within horizontal distance and ground height from takeoff point.
 Loading...
Loading...